

Page 1

Software de programação EPSON RC+ 7.0
Sistema robótico
Segurança e instalação
Leia primeiro este manual
Rev.16 EM208B4471F
Manipulador T3 T6
VT6
CPD-60433
Page 2

Instalação e segurança do sistema robótico (T,
VT/ EPSON RC+ 7.0)
Rev.16
Page 3
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 i
Sistema robótico Segurança e instalação
(T, VT / EPSON RC+ 7.0)
Rev.16
Copyright © 2017-2020 SEIKO EPSON CORPORATION. Todos os direitos reservados
Page 4

ii Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
PREFÁCIO
Obrigado por adquirir nossos produtos robóticos.
Este manual contém as informações necessárias para o uso correto do sistema
robótico.
Leia cuidadosamente este manual e os outros manuais relacionados antes de instalar
o sistema robótico.
Mantenha sempre este manual à mão para fácil acesso.
GARANTIA
O sistema robótico e suas partes opcionais são entregues a nossos clientes somente
após serem submetidos aos mais rígidos controles de qualidade, testes e inspeções
para certificar sua conformidade com nossos altos padrões de desempenho.
Os defeitos do produto resultantes do manuseio ou operação normal serão reparados
sem custos durante o período de garantia normal. (Entre em contato com o
fornecedor de sua região para informações sobre o período de garantia).
No entanto, os clientes serão cobrados pelos reparos nos seguintes casos (mesmo se
estes ocorrerem durante o período de garantia):
1.
Avaria ou mal funcionamento causado por uso inadequado que não esteja
descrito no manual, ou uso descuidado.
2.
Defeitos causados por desmontagem não autorizada realizada pelo cliente.
3.
Avaria devido a ajustes ou tentativas de reparo inadequadas.
4.
Avaria causada por desastres naturais, tal como terremoto, enchente, etc.
Avisos, Cuidados, Uso:
1.
Se o equipamento associado ao sistema robótico for utilizado fora das
condições de uso e especificações do produto descritas nos manuais, esta
garantia fica sem efeito.
2.
Se não forem seguidos os AVISOS e CUIDADOS contidos neste manual,
não poderemos nos responsabilizar por qualquer mau funcionamento ou
acidente, mesmo se o resultado for ferimento ou morte.
3.
Não podemos prever todos os perigos e consequências possíveis. Portanto,
este manual não pode avisar o usuário de todos os perigos possíveis.
Page 5

Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 iii
MARCAS REGISTRADAS
Microsoft, Windows, o logotipo Windows são marcas comerciais registradas ou
marcas comerciais da Microsoft Corporation nos Estados Unidos e/ou outros países.
Outras marcas e nomes de produtos são marcas comerciais ou marcas comerciais
registradas dos respectivos detentores.
REPRESENTAÇÃO DAS MARCAS REGISTRADAS NESTE MANUAL
Sistema operacional Microsoft® Windows® 8
Sistema operacional Microsoft® Windows® 10
Em todo este manual, Windows 8 e Windows 10 referem-se aos respectivos sistemas
operacionais acima. Em alguns casos, Windows refere-se genericamente ao
Windows 8 e Windows 10.
AVISO
Nenhuma parte deste manual pode ser copiada ou reproduzida sem autorização.
O conteúdo deste manual está sujeito a alteração sem aviso.
Favor notificar-nos se encontrar algum erro neste manual ou se tiver algum
comentário relacionado ao seu conteúdo.
FABRICANTE
Seiko Epson Corporation
3-3-5 Owa, Suwa-shi, Nagano, 392-8502
URL
: http://global.epson.com/company/
: http://www.epson.jp/prod/robots/
Toyoshina Plant
Robotics Solutions Operations Division
6925 Toyoshina Tazawa,
Azumino-shi, Nagano, 399-8285
Japão
TEL
: +81-(0)263-72-1530
FAX
: +81-(0)263-72-1685
Page 6

iv Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
FORNECEDORES (País/Região)
América do norte
e do sul
Epson America, Inc.
Factory Automation/Robotics
1650 Glenn Curtiss Street
Carson, CA 90746
EUA
TEL
: +1-562-290-5910
FAX
: +1-562-290-5999
E-MAIL
: info@robots.epson.com
Europa
Epson Deutschland GmbH
Robotic Solutions
Otto-Hahn-Str.4
D-40670 Meerbusch
Alemanha
TEL
: +49-(0)-2159-538-1800
FAX
: +49-(0)-2159-538-3170
E-MAIL
: info.rs@epson.de
URL:
: www.epson.de/robots
China
Epson (China) Co., Ltd.
Factory Automation/Robotics
4F, Tower 1, China Central Place,
81 Jianguo Road, Chaoyang District,
Beijing, 100025, PRC
TEL
: +86-(0)-10-8522-1199
FAX
: +86-(0)-10-8522- 1125
Taiwan
Epson Taiwan Technology & Trading Ltd.
Factory Automation Division
15F., No.100, Song Ren Road., Xinyi Dist., Taipei City, 11073
Taiwan
TEL
: +886-(0)-2-8786-6688
FAX
: +886-(0)-2-8786-6600
Page 7

Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 v
Coréia
Epson Korea Co., Ltd.
Marketing Team (Robot Business)
10F Posco Tower, Teheranro 134(Yeoksam-dong)
Gangnam-gu, Seoul, 06235
Coréia
TEL
: +82-(0)-2-3420- 6632
FAX
: +82-(0)-2-558-4271
Sudeste da Ásia
Epson Singapore Pte. Ltd.
Factory Automation System
1 HarbourFront Place, #03-02,
HarbourFront Tower One,
Singapore 098633
TEL
: +65-(0) -6586-5500
FAX
: +65-(0) -6271-2703
Índia
Epson India Pvt. Ltd.
Sales & Marketing (Factory Automation)
12th Floor, The Millenia, Tower A, No. 1,
Murphy Road, Ulsoor, Bangalore,
India 560008
TEL
: +91-80-4566-5000
FAX
: +91-80-4566-5005
Japão
Epson Sales Japan Corporation
Factory Automation Systems Department
29th floor, JR Shinjuku Miraina Tower, 4-1-6
Shinjuku, Shinjuku-ku, Tokyo 160-8801
Japan
TEL
: +81-(0)3- 5919-5257
FAX
: +81-(0)3- 5919-5402
Page 8
vi Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Sobre o descarte das baterias
O símbolo da lixeira com um X sobre ela indicando descarte proibido que pode ser
encontrado em nosso produto indica que este produto e as baterias incorporadas não
devem ser descartados através do fluxo de resíduos domésticos normal. Para evitar os
possíveis danos para o meio ambiente ou a saúde humana, separe este produto e suas
baterias de outros resíduos para assegurar que eles possam ser reciclados de modo
ambientalmente correto. Para mais detalhes sobre as instalações de coleta, entre em
contato com a agência governamental local ou o distribuidor onde você adquiriu este
produto. O uso dos símbolos químicos Pb, Cd ou Hg indica que esses metais são
utilizados na bateria.
Estas informações são aplicáveis somente aos clientes da União Europeia, de acordo
com a DIRETIVA 2006/66/EC DO PARLAMENTO E DO CONSELHO EUROPEU de 6
de setembro de 2006 sobre baterias e acumuladores e resíduos de baterias e
acumuladores, que revoga a Diretiva 91/157/EEC, e a legislação que a transpõe e
implementa nos vários sistemas legais nacionais.
Para outros países, entre em contato com o governo local para investigar a possibilidade
de reciclar seu produto.
O procedimento de remoção/substituição da bateria é descrito nos seguintes manuais:
Manual do manipulador Manutenção: Substituição da bateria de lítio
Somente para clientes da Califórnia
As baterias de lítio neste produto contêm material de perclorato - deve ser adotado
tratamento especial, consulte www.dtsc.ca.gov/hazardouswaste/perchlorate.
Page 9

Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 vii
Antes de ler este manual
"T" e “série T" descritos neste manual são os seguintes modelos.
Série T3
Série T6
"VT" e “série VT" descritos neste manual são os seguintes modelos.
Série VT6
Os manipuladores da série T e série VT podem usar o controle portátil (TP2,
TP3). Não conecte os outros dispositivos à porta TP exceto TP2 e TP3.
Conectar outros dispositivos pode resultar em mau funcionamento do
dispositivo uma vez que a atribuição de pinos é diferente.
Com respeito ao suporte de segurança para a conexão em rede:
A função de conexão em rede (Ethernet) em nossos produtos supõe o uso de
uma rede local tal como uma rede LAN de fábrica. Não conecte a uma rede
externa tal como a Internet.
Além disso, tome medidas de segurança tais como contra vírus da conexão
em rede instalando software antivírus.
Suporte de segurança para a memória USB:
Certifique-se de que a memória USB não esteja infectada com vírus ao
conectá-la ao controlador.
NOTA
NOTA
NOTA
NOTA
Page 10

viii Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Configuração do sistema de controle
O sistema do manipulador da série T é configurado por uma combinação dos
seguintes softwares.
T3-401S
Firmware do controlador
Ver.7.3.51.1 ou posterior
EPSON RC+ 7.0
Anterior à
Ver.7.3.0
!!!
Ver.7.3.1 ou
posterior
OK
T6-602S
Firmware do controlador
Ver.7.3.53.0 ou posterior
EPSON RC+ 7.0
Anterior à
Ver.7.3.3
!!!
Ver.7.3.4 ou
posterior
OK
OK: Compatível Todas as funções do EPSON RC+ 7.0 e do controlador ficam
disponíveis.
!!!: Compatível A conexão é OK. É recomendado usar as seguintes versões ou
posteriores. A exibição ou o controle podem não operar
corretamente.
T3-401S : EPSON RC+7.0 Ver.7.3.1
T6-602S : EPSON RC+7.0 Ver.7.3.4
Page 11

Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 ix
O sistema do manipulador da série VT é configurado por uma combinação
dos seguintes softwares.
Firmware do controlador
VT6-A901S, VT6-A901C, VT6-A901P
Ver.7.4.56.2 ou posterior
VT6-A901S-DC
Ver.7.4.57.1 ou posterior
EPSON RC+ 7.0
Anterior à Ver.7.4.6
!!!
Ver.7.4.7 ou posterior
OK
OK: Compatível Todas as funções do EPSON RC+ 7.0 e do controlador ficam
disponíveis.
!!!: Compatível A conexão é OK. É recomendado usar as seguintes versões ou
posteriores. A exibição ou o controle podem não operar
corretamente.
EPSON RC+ 7.0 Ver.7.4.7
Page 12
x Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
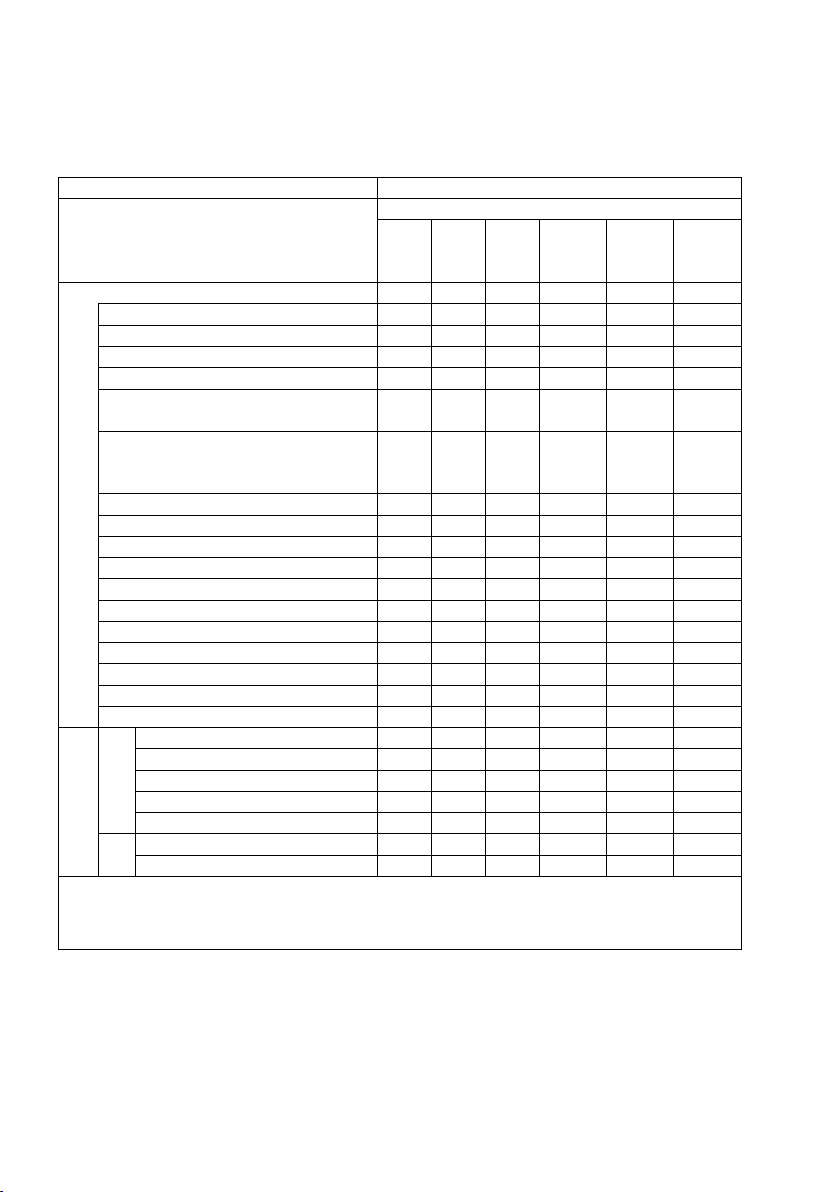
China RoHS
Esta folha e a etiqueta do período de uso de proteção ambiental são baseados nas
regulamentações na China. Não é preciso se preocupar com elas em outros países.
产品中有害物质的名称及含量
机器人型号名称
T VT
部件名称
有害物质
铅 汞 镉
六价铬
多溴
联苯
多溴
二苯醚
(Pb)
(Hg)
(Cd)
(Cr(VI))
(PBB)
(PBDE)
机器人部
× ○ ○ ○ ○
○
电机 (执行器单元、电机单元)
× ○ ○ ○ ○
○
减速机单元
× ○ ○ ○ ○ ○ 电磁制动器
× ○ ○ ○ ○
○
同步皮带
○ ○ ○ ○ ○
○
电池单元
(电池、电池固定架、电池基板)
× ○ ○ ○ ○
○
密封
(密封填料、油封、密封脂、
垫片、O型环)
× ○ ○ ○ ○
○
润滑脂
○ ○ ○ ○ ○
○
电缆 (M/C电缆、连接电缆)
× ○ ○ ○ ○
○
散热片
○ ○ ○ ○ ○
○
LED指示灯
○ ○ ○ ○ ○
○
电路板
× ○ ○ ○ ○
○
滚珠丝杠花键 (T系列)
○ ○ ○ ○ ○
○
制动解除开关
× ○ ○ ○ ○
○
外罩 ○ ○ ○ ○ ○ ○
扎带 ○ ○ ○ ○ ○ ○
原点标记
○ ○ ○ ○ ○ ○ 气管接头
× ○ ○ ○ ○
○
选
件
VT
相机板单元
× ○ ○ ○ ○
○
外部配线配套元件
○ ○ ○ ○ ○
○
工具适配器(ISO法兰)
○ ○ ○ ○ ○
○
相机安装板
○ ○ ○ ○ ○
○
可调机械挡块
○ ○ ○ ○ ○
○
T
相机安装板
× ○ ○ ○ ○
○
兼容板
× ○ ○ ○ ○
○
本表格依据SJ/T 11364的规定编制。
○:表示该有害物质在该部件所有均质材料中的含量在GB/T 26572规定的限量要求以下。
×:表示该有害物质至少在该部件的某一均质材料中的含量超出GB/T 26572规定的限量要求。
本产品中含有的有害物质的部件皆因全球技术发展水平限制而无法实现有害物质的替代。
产品环保使用期限的使用条件
关于适用于在中华人民共和国境内销售的本产品的环保使用期限,在遵守该产品的安全及使用注意事项的
条件下,从生产日期开始计算,在标志的年限内,本产品中含有的有害物质不会对环境造成严重污染或对人
身、财产造成严重损害。
附注: 本表格及环保使用期限标志依据中国的有关规定而制定,中国以外的国家/地区则无需关注。
Nota: Esta folha e a etiqueta do período de uso de proteção ambiental são baseados nas
regulamentações na China. Não é preciso se preocupar com elas em outros países.
Page 13
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 xi
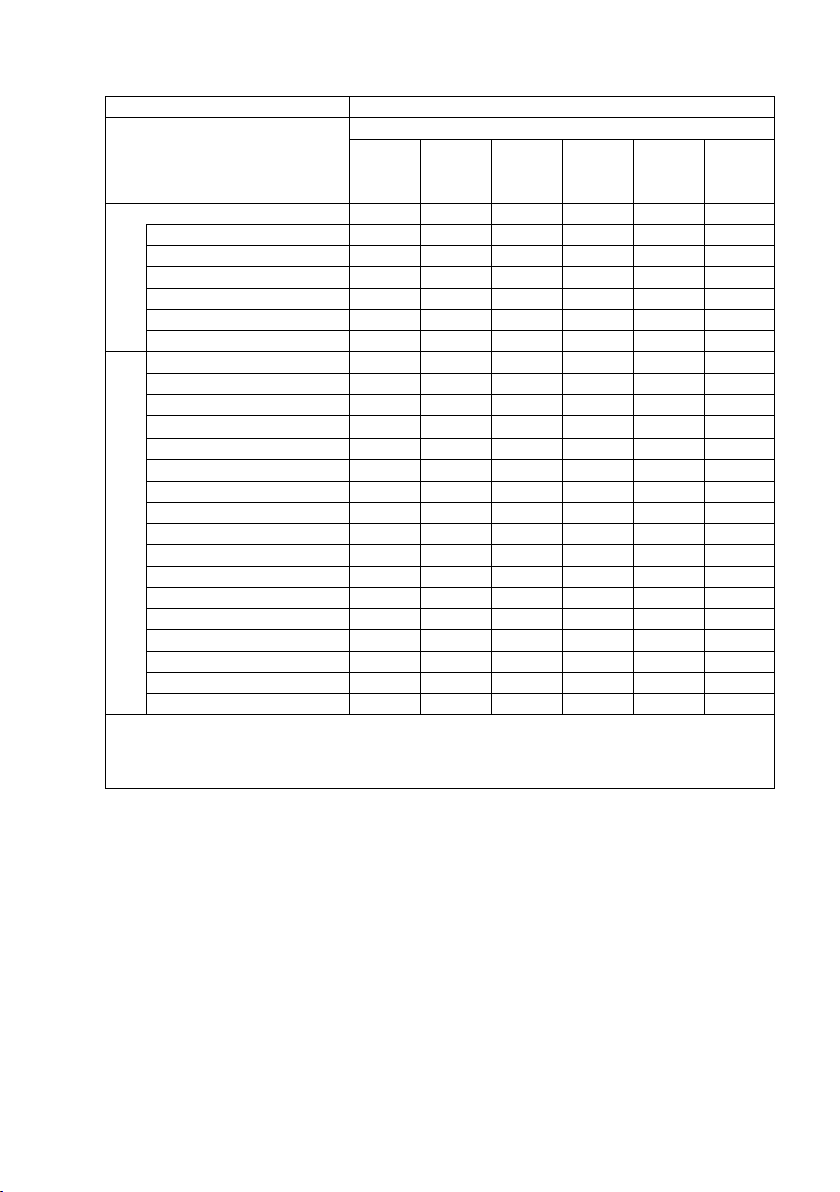
产品中有害物质的名称及含量
控制器型号名称
T VT
部件名称
有害物质
铅 汞 镉
六价铬
多溴
联苯
多溴
二苯醚
(Pb)
(Hg)
(Cd)
(Cr(VI))
(PBB)
(PBDE)
控制器部
× ○ ○ ○ ○
○
电路板 × ○ ○ ○ ○ ○
开关电源
× ○ ○ ○ ○
○
线束 × ○ ○ ○ ○ ○
存储卡 × ○ ○ ○ ○ ○
电池 ○ ○ ○ ○ ○ ○
连接器附件
× ○ ○ ○ ○
○
选
件
电路板 × ○ ○ ○ ○ ○
接线 × ○ ○ ○ ○ ○
接线端子
× ○ ○ ○ ○
○
紧急停止开关
× ○ ○ ○ ○
○
TP3 × ○ ○ ○ ○ ○
墙面安装金属件
× ○ ○ ○ ○
○
Kit Hot Plug
× ○ ○ ○ ○
○
CV1 × ○ ○ ○ ○ ○
CV2 × ○ ○ ○ ○ ○
相机 × ○ ○ ○ ○ ○
延长管 × ○ ○ ○ ○ ○
GigE相机PoE转换器
× ○ ○ ○ ○
○
GigE相机PoE交换集线器
× ○ ○ ○ ○
○
GigE相机三脚架适配器
× ○ ○ ○ ○
○
以太网交换机
× ○ ○ ○ ○
○
USB选件密钥
× ○ ○ ○ ○
○
电源插头
○ ○ ○ ○ ○
○
本表格依据SJ/T 11364的规定编制。
○:表示该有害物质在该部件所有均质材料中的含量在GB/T 26572规定的限量要求以下。
×:表示该有害物质至少在该部件的某一均质材料中的含量超出GB/T 26572规定的限量要求。
本产品中含有的有害物质的部件皆因全球技术发展水平限制而无法实现有害物质的替代。
产品环保使用期限的使用条件
关于适用于在中华人民共和国境内销售的本产品的环保使用期限,在遵守该产品的安全及使用注意事项
的条件下,从生产日期开始计算,在标志的年限内,本产品中含有的有害物质不会对环境造成严重污染或
对人身、财产造成严重损害。
附注: 本表格及环保使用期限标志依据中国的有关规定而制定,中国以外的国家/地区则无需关
注。
Nota: Esta folha e a etiqueta do período de uso de proteção ambiental são baseados
nas regulamentações na China. Não é preciso se preocupar com elas em outros
países.
Page 14

xii Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Page 15

Índice
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 xiii
1. Segurança 1
1.1 Convenções ................................................................................. 1
1.2 Segurança do projeto e da instalação.......................................... 2
1.2.1 Manuais relevantes .......................................................... 2
1.2.2 Projetando um sistema robótico seguro ........................... 3
1.3 Segurança da operação ............................................................... 7
1.3.1 Requisitos relacionados à segurança ............................. 10
1.3.2 Nomes das peças / Movimento do braço ........................ 11
1.3.3 Modos de operação ........................................................ 15
1.4 Segurança da manutenção ........................................................ 16
1.5 Parada de emergência ............................................................... 19
1.5.1 Distância de movimento livre em emergência ................ 19
1.5.2 Como restaurar o modo de emergência ......................... 23
1.6 Rótulos ....................................................................................... 24
Manipulador da série T ............................................................ 24
Manipulador da série VT ......................................................... 26
1.7 Recursos de segurança ............................................................. 28
1.8 Especificações do manipulador ................................................. 31
Manipulador da série T ............................................................ 31
Manipulador da série VT ......................................................... 34
1.9 Configuração da faixa de movimento por batentes mecânicos .. 40
Manipulador da série T ............................................................ 40
Manipulador da série VT ......................................................... 40
1.10 Treinamento do usuário final .................................................... 44
2. Instalação 45
Exemplo de sistema ................................................................ 45
2.1 Descrição desde a desembalagem até a operação do
sistema robótico ................................................................... 48
2.2 Desembalagem .......................................................................... 49
2.2.1 Precauções de desembalagem ...................................... 49
2.3 Transporte .................................................................................. 50
2.3.1 Precauções de transporte .............................................. 50
2.3.2 Transporte do manipulador ............................................ 51
2.4 Instalação do manipulador ......................................................... 52
2.4.1 Precauções de instalação .............................................. 52
2.4.2 Ambiente ........................................................................ 53
2.4.3 Nível de ruído ................................................................. 55
2.4.4 Mesa base ...................................................................... 56
2.4.5 Procedimento de instalação ........................................... 57
2.5 Conexão ao conector EMERGENCY ......................................... 59
Page 16

Índice
xiv Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.5.1 Interruptor de porta de segurança e interruptor de
liberação do engate .................................................. 60
2.5.2 Interruptor da porta de segurança .................................. 61
2.5.3 Interruptor de liberação do engate ................................. 62
2.5.4 Verificação da operação do interruptor de
liberação do engate .................................................. 62
2.5.5 Interruptor de parada de emergência ............................. 63
2.5.6 Verificação da operação do interruptor de parada de
emergência ............................................................... 63
2.5.7 Atribuição de pinos ......................................................... 64
2.5.8 Diagramas de circuitos ................................................... 65
2.6 Fonte de energia, Cabo de energia, Disjuntor ........................... 68
2.6.1 Fonte de energia ............................................................ 68
2.6.2 Cabo de energia ............................................................. 70
2.7 Energia ...................................................................................... 72
2.7.1 Precauções ao ligar a energia ........................................ 72
2.7.2 Procedimento para ligar a energia ................................. 73
2.8 Salvamento do status padrão .................................................... 74
3. Primeira etapa 75
3.1 Instalação do software EPSON RC+ 7.0 ................................... 75
3.2 Conexão do PC de desenvolvimento e o manipulador .............. 78
3.2.1 Sobre a porta de conexão do PC de desenvolvimento .. 79
3.2.2 Precaução ...................................................................... 79
3.2.3 Configuração do software e verificação da conexão ...... 80
3.2.4 Cópia de segurança da condição inicial do manipulador ........ 81
3.2.5 Desconexão do PC de desenvolvimento e o manipulador ..... 81
3.2.6 Mover o manipulador para a posição inicial ................... 81
3.3 Criando seu primeiro programa ................................................. 87
4. Segunda etapa 94
4.1 Conexão com equipamento externo .......................................... 94
4.1.1 Controle remoto.............................................................. 94
4.1.2 Ethernet .......................................................................... 94
4.2 Conexão do PC de desenvolvimento e o manipulador por
Ethernet ........................................................................... 95
4.3 Conexão do controle portátil .................................................... 95
5. Manutenção geral 96
5.1 Programação para inspeção de manutenção .......................... 96
Page 17

Índice
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 xv
5.2 Reparo (Substituição de peças) ............................................... 99
5.3 Aperto de parafusos Allen ...................................................... 101
5.4 Engraxamento (manipulador da série T) ................................ 102
5.5 Manuseio e descarte de baterias de lítio ................................ 104
6. Manuais 106
Software 106
Opções 106
Manipulador .......................................................................... 107
7. Diretivas e normas 108
Page 18

Índice
xvi Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Page 19

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 1
1. Segurança
A instalação e transporte dos robôs e do equipamento robótico deve ser feita por
pessoal qualificado e de acordo com os códigos nacionais e locais.
Leia este manual e os outros manuais relacionados antes de instalar o sistema
robótico ou antes de conectar cabos.
Mantenha sempre este manual à mão para fácil acesso.
1.1 Convenções
Considerações de segurança importantes são indicadas em todo esse manual pelos
símbolos a seguir. Leia todas as descrições mostradas com cada símbolo.
ATENÇÃO
Este símbolo indica que existe um perigo de possível lesão
séria ou morte se as instruções associadas não forem seguidas
corretamente.
ATENÇÃO
Este aviso indica que existe o perigo de possível ferimento nas
pessoas causado por choque elétrico se as instruções
associadas não forem seguidas corretamente.
CUIDADO
Este aviso indica que existe o perigo de possível ferimento nas
pessoas ou dano físico no equipamento e nas instalações se as
instruções associadas não forem seguidas corretamente.
Page 20
1. Segurança
2 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
1.2 Segurança do projeto e da instalação
Somente pessoal treinado deverá projetar e instalar o sistema robótico. Pessoal
treinado é definido como aqueles que tiveram treinamento em sistemas robóticos
mantido pelo fabricante, distribuidor ou empresa representante local, ou aqueles que
entendem profundamente os manuais e tenham o mesmo nível de conhecimento e
aptidão que aqueles que completaram os cursos de treinamento.
Para garantir a segurança, deve ser instalado uma proteção de segurança para o sistema
robótico. Para detalhes sobre a proteção de segurança, consulte as Precauções de
instalação e de projeto no capítulo Segurança do Guia do usuário do EPSON RC+.
Os itens a seguir são precauções de segurança para o pessoal de projetos:
ATENÇÃO
■
O pessoal que projeta e/ou constrói o sistema robótico com este
produto deve ler o capítulo Segurança no Guia do usuário do EPSON
RC+ para entender os requisitos de segurança antes de projetar e/ou
construir o sistema robótico. Projetar e/ou construir o sistema
robótico sem entender os requisitos de segurança é extremamente
perigoso e pode resultar em sérias lesões corporais e/ou danos
severos ao equipamento do sistema robótico.
■
O sistema robótico deve ser usado dentro das condições ambientais
descritas nos respectivos manuais. Esse produto foi projetado e
fabricado estritamente para uso em um ambiente interno normal.
Usar o produto em um ambiente que exceda as condições
ambientais especificadas pode não só encurtar a vida útil do produto,
mas também causar sérios problemas de segurança.
■
O sistema robótico deve ser usado dentro dos requisitos de
instalação descritos nos manuais. Usar o sistema robótico fora dos
requisitos de instalação pode não só encurtar a vida útil do produto,
mas também causar sérios problemas de segurança.
Precauções adicionais para a instalação são mencionadas nos manuais seguintes.
Leia esse capítulo cuidadosamente para entender os procedimentos de instalação
seguros antes de instalar os robôs e o equipamento robótico.
1.2.1 Manuais relevantes
Consulte
Este manual: 2. Instalação
Manual do manipulador: Configuração e operação 3. Ambiente e instalação
Page 21

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 3
1.2.2 Projetando um sistema robótico seguro
É importante operar o manipulador de modo seguro. É também importante que os
usuários do manipulador prestem muita atenção à segurança do projeto geral do
sistema robótico.
Esta seção resume as condições mínimas que devem ser observadas ao utilizar o
manipulador Epson em seus sistemas robóticos.
Projete e fabrique sistemas robóticos de acordo com os princípios descritos nesta e
nas seções a seguir.
Condições ambientais
Observe cuidadosamente as condições para instalar o manipulador e sistemas
robóticos relacionados nas tabelas de “Condições Ambientais” incluídas nos
manuais de todos os equipamentos utilizados no sistema.
Layout do sistema
Ao projetar o layout de um sistema robótico, considere cuidadosamente a
possibilidade de erro entre o manipulador e o equipamento periférico. As paradas de
emergência exigem atenção particular, uma vez que um robô irá parar após seguir
um percurso diferente de seu percurso de movimento normal. O projeto do layout
deve fornecer margens suficientes de segurança. Consulte os manuais de cada
manipulador e certifique-se de que o layout assegure amplo espaço para o trabalho
de manutenção e inspeção.
Ao projetar um sistema robótico para restringir a área de movimento do manipulador,
faça-o de acordo com os métodos descritos em cada manual do manipulador. Utilize
paradas tanto por software como mecânicas como medidas para restringir o movimento.
Instale o interruptor de parada de emergência em um local próximo da unidade de
operação do sistema robótico onde o operador possa pressioná-lo e mantê-lo
pressionado facilmente em uma emergência.
Projeto do atuador da extremidade
Providencie fiação e tubulação que impeçam que o atuador da extremidade do
manipulador libere o objeto retido (a peça de trabalho) quando a energia do sistema
robótico é desligada.
Projete o atuador da extremidade do manipulador de tal modo que seu peso e
momento de inércia não excedam os limites admissíveis. O uso de valores que
excedam os limites admissíveis pode sujeitar o manipulador a cargas excessivas.
Isto não só encurtará a vida útil do robô, mas pode levar a situações inesperadamente
perigosas devido às forças externas adicionais aplicadas ao atuador da extremidade
e à peça de trabalho.
Projete o tamanho do atuador da extremidade com cuidado, uma vez que o corpo do
manipulador e o atuador da extremidade do robô podem interferir um no outro.
Page 22

1. Segurança
4 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Projeto do equipamento periférico
Ao projetar o equipamento que remove e supre peças e materiais para o sistema
robótico, certifique-se de que o projeto propicie segurança suficiente ao operador.
Se houver necessidade de remover e suprir materiais sem parar o manipulador,
instale um dispositivo de vaivém ou tome outras medidas para assegurar que o
operador não precise entrar em uma zona potencialmente perigosa.
Certifique-se de que uma interrupção no suprimento de energia (desligamento da
energia) do equipamento periférico não leve a uma situação perigosa. Tome medidas
que não só impeçam que uma peça de trabalho retida seja liberada conforme
mencionado em “Projeto do atuador da extremidade”, mas também assegure que o
equipamento periférico, além dos manipuladores, possa parar com segurança.
Verifique a segurança do equipamento para assegurar que quando a energia for
desligada a área fique segura.
Controle remoto
Para evitar que a operação por controle remoto seja perigosa, os sinais de início pelo
controlador remoto são permitidos somente quando o dispositivo de controle está
configurado para REMOTE, o modo TEACH está desativado e o sistema está
configurado para aceitar sinais remotos. Além disso, quando o controle remoto é
válido, a execução do comando de movimento e a saída de I/O ficam disponíveis
somente pelo controle remoto. Para a segurança do sistema geral, no entanto, são
necessárias medidas de segurança para eliminar os riscos associados à inicialização
e desligamento do equipamento periférico por controle remoto.
Parada de emergência
Cada sistema robótico precisa de equipamentos que permitam que o operador pare
imediatamente a operação do sistema. Instale um dispositivo de parada de
emergência que utilize a entrada da parada de emergência pelo controlador e todos
os outros equipamentos.
Durante a parada de emergência, a energia suprida para o motor que aciona o robô
é desligada e o robô é parado pelo freio dinâmico.
Assegure-se de que todos os componentes externos que desligam a energia em caso
de emergência sejam desligados pelo circuito de parada de emergência. Não projete
para desligar o controlador do robô usando saídas de todas as placas de I/O. Por
exemplo, se uma placa de I/O estiver defeituosa, o controlador não poderá desligar
os componentes externos. A parada de emergência no controlador é conectada
fisicamente para desconectar a energia do motor do robô, mas não os suprimentos
de energia externos.
Para detalhes sobre o sistema de proteção de segurança, consulte a próxima seção.
1.5 Parada de emergência
Page 23

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 5
Sistema de proteção de segurança
Para garantir a segurança, deve ser instalado um sistema de proteção de segurança
para o sistema robótico.
Ao instalar o sistema de proteção de segurança, observe rigorosamente os seguintes
pontos:
Consulte o manual de cada manipulador e instale o sistema de proteção de segurança
fora do espaço máximo. Considere cuidadosamente o tamanho do atuador da
extremidade e as peças de trabalho a serem retidas para que não haja nenhum erro
entre as partes móveis e o sistema de proteção de segurança.
Fabrique um sistema de proteção de segurança que resista às forças externas
calculadas (forças que serão adicionadas durante a operação e forças do ambiente
circundante).
Ao projetar o sistema de proteção de segurança, certifique-se de que ele seja livre
de quinas e projeções pontiagudas e que o próprio sistema de proteção de segurança
não represente um risco.
Certifique-se de que o sistema de proteção de segurança só possa ser removido
usando uma ferramenta.
Existem vários tipos de dispositivos de proteção de segurança, que incluem portas
de segurança, barreiras de segurança, cortinas de luz, portões de segurança e tapetes
de segurança. Instale a função de intertravamento no dispositivo de proteção de
segurança. O intertravamento da proteção de segurança deve ser instalado de modo
a ser forçado a funcionar no caso de falha do dispositivo ou outro acidente
inesperado. Por exemplo, quando usar uma porta com um interruptor como
intertravamento, não confie na força da mola do próprio interruptor para abrir o
contato. O mecanismo de contato deve abrir imediatamente no caso de um acidente.
Conecte o interruptor de intertravamento à entrada da proteção de segurança do
conector de EMERGÊNCIA do manipulador. A entrada da proteção de segurança
informa ao manipulador do robô que um operador pode estar dentro da área de
proteção de segurança. Quando a entrada da proteção de segurança é ativada, o
manipulador para imediatamente e entra no estado de pausa, assim como no estado
de operação proibida ou no estado restrito (estado de baixa potência).
Não entre na área de proteção de segurança exceto através do ponto onde o
intertravamento da proteção de segurança está instalado.
O intertravamento de proteção de segurança deve ser instalado de modo a poder
manter uma condição segura até ser liberado deliberadamente. A entrada da
liberação do engate é fornecida para o conector de EMERGÊNCIA no manipulador
para liberar a condição de engate do intertravamento da proteção de segurança. O
Page 24

1. Segurança
6 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
interruptor de liberação do engate do intertravamento da proteção de segurança deve
ser instalado fora da área de proteção de segurança e conectado à entrada de
liberação do engate.
É perigoso permitir que outra pessoa libere o intertravamento da proteção de
segurança por engano enquanto o operador estiver trabalhando dentro da área com
proteção de segurança. Para proteger o operador que está trabalhando dentro da área
de proteção de segurança, tome medidas para bloquear e sinalizar o interruptor de
liberação do engate.
Dispositivo sensor de presença
O intertravamento da proteção de segurança mencionado acima é um tipo de
dispositivo sensor de presença, uma vez que indica a possibilidade de alguém estar
no interior do sistema de proteção de segurança. No entanto, ao instalar um
dispositivo sensor de presença separadamente, faça uma avaliação de risco
satisfatória e preste bem atenção em sua confiabilidade.
Eis algumas precauções que devem ser observadas:
- Projete o sistema de modo que, quando o dispositivo sensor de presença não
for ativado ou uma situação perigosa ainda existir, nenhuma pessoa possa
entrar na área de proteção de segurança ou colocar as mãos dentro dela.
- Projete o dispositivo sensor de presença de modo que o sistema funcione
com segurança independentemente da situação.
- Se o manipulador para de funcionar quando o dispositivo sensor
de presença é ativado, é necessário assegurar que ele não inicie
novamente até que o objeto detectado tenha sido removido.
Certifique-se de que o manipulador não possa reiniciar automaticamente.
Restabelecimento da proteção de segurança
Assegure-se de que o robô só possa ser reiniciado através de operação cuidadosa
pelo lado de fora do sistema protegido. O manipulador nunca reiniciará
simplesmente restabelecendo o interruptor de intertravamento da proteção de
segurança. Aplique este conceito aos portões de intertravamento e ao dispositivo
sensor de presença para todo o sistema.
Painel de operação do manipulador
Ao usar o painel de operação do manipulador, ele deve ser instalado de modo a
operar o sistema robótico de fora da proteção de segurança.
Page 25
1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 7
1.3 Segurança da operação
Os itens seguintes são precauções de segurança para o pessoal de operação
qualificado:
ATENÇÃO
■
Leia cuidadosamente os Requisitos relacionados à segurança antes
de operar o sistema robótico. Operar o sistema robótico sem entender
os requisitos de segurança é extremamente perigoso e pode resultar
em sérias lesões corporais e/ou danos graves ao equipamento do
sistema robótico.
■
Não entre na área de operação do manipulador enquanto a energia
para o sistema robótico estiver ligada. Entrar na área de operação com
a energia ligada é extremamente perigoso e pode causar sérios
problemas de segurança pois o manipulador pode se mover mesmo se
parecer estar parado.
■
Antes de operar o sistema robótico, certifique-se de que ninguém
esteja dentro da área de proteção de segurança. O sistema robótico
pode ser operado no modo para ensinar mesmo quando alguém está
dentro da área de proteção de segurança.
O movimento do manipulador é sempre no estado restrito (velocidade
baixa e potência baixa) para garantir a segurança do operador. No
entanto, operar o sistema robótico enquanto alguém está dentro da
área de proteção de segurança é extremamente perigoso e pode
causar sérios problemas de segurança caso o manipulador se mova
inesperadamente.
■
Pressione imediatamente o interruptor de parada de emergência
sempre que o manipulador se mover de modo anormal enquanto o
sistema robótico estiver sendo operado. Continuar a operação do
sistema robótico enquanto o manipulador se move de modo anormal é
extremamente perigoso e pode resultar em sérias lesões corporais
e/ou mudanças graves no sistema robótico.
■
Se montar o manipulador em uma plataforma móvel e pressionar o
interruptor de parada de emergência com a finalidade de parar o
manipulador, assegure-se de projetar o sistema de modo que a
plataforma móvel também pare. Se a plataforma móvel não parar e
continuar o movimento, isto será extremamente perigoso e poderá
resultar em sérias lesões corporais e/ou danos graves ao equipamento
do sistema robótico, além de poder causar sérios problemas de
segurança.
■
Não opere o manipulador quando a plataforma móvel estiver se
movendo. Ao usar o manipulador, ele deve ser cercado por proteções
de segurança. Operar o manipulador enquanto a plataforma móvel
está se movendo pode resultar em sérias lesões corporais e/ou danos
graves ao equipamento do sistema robótico.
Page 26

1. Segurança
8 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
* A plataforma móvel indica o robô de coordenadas cartesianas, plataformas
com rodas, AGV, etc.
Neste manual, estes termos são designados como “plataforma móvel”.
ATENÇÃO
■
Para desligar a energia do sistema robótico, desconecte o plugue de
alimentação da fonte de energia. Conecte o cabo de energia a uma
tomada de energia. NÃO o conecte diretamente à fonte de energia da
fábrica.
■
Antes de executar qualquer procedimento de substituição, desligue o
sistema robótico e o equipamento relacionado e então desconecte o
plugue de alimentação da fonte de energia. Executar qualquer
procedimento de substituição com a alimentação de energia ligada é
extremamente perigoso e pode resultar em choque elétrico e/ou mau
funcionamento no sistema robótico.
■
Não conecte ou desconecte o motor enquanto a energia para o
sistema robótico está ligada. Conectar ou desconectar o motor com a
alimentação de energia ligada é extremamente perigoso e pode
resultar em sérias lesões corporais pois o manipulador pode se mover
de modo anormal e também pode resultar em choque elétrico e/ou
mau funcionamento no sistema robótico.
■
Ao usar manipulador especificado para CC, não conecte à fonte de
energia de CA. Conectar à fonte de energia de CA é extremamente
perigoso e pode resultar em choque elétrico e/ou mau funcionamento
no sistema robótico.
■
Ao usar manipulador especificado para CC e conectar à fonte de
energia de CC tal como bateria, fique atento à polaridade. Se conectar
o cabo do manipulador com a polaridade errada, isto pode resultar em
mau funcionamento do sistema robótico. Para detalhes sobre a
conexão, consulte o MANUAL DO MANIPULATOR de robôs de 6 eixos
Configuração e operação 3.6.2 Cabo de energia.
Page 27

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 9
CUIDADO
■
Sempre que possível, somente uma pessoa deverá operar o sistema
robótico. Se for necessário operar o sistema robótico com mais de uma
pessoa, assegure-se de que todas as pessoas envolvidas comuniquem-se
entre si sobre o que estão fazendo e tomem as precauções necessárias.
■
Robô SCARA
Articulação 1, 2 e 4:
Se as articulações forem operadas repetidamente com um ângulo de
operação menor que 5 graus, o manipulador poderá ficar danificado
prematuramente devido aos mancais não serem cobertos com graxa
durante o movimento. Para evitar a avaria prematura, mova as articulações
mais de 50 graus por cerca de cinco a dez vezes por dia.
Articulação 3:
Se o movimento para cima e para baixo da mão for de menos de 10 mm,
mova a articulação a metade do curso máximo por cerca de cinco a dez
vezes por dia.
■
Robô de 6 eixos
Cada articulação:
Se as articulações forem operadas repetidamente com um ângulo de
operação menor que 5 graus, o manipulador poderá ficar danificado
prematuramente devido aos mancais não serem cobertos com graxa
durante o movimento. Para evitar a avaria prematura, mova as
articulações mais de 30 graus por cerca de cinco a dez vezes por dia.
■
Pode ocorrer continuamente vibração (ressonância) dependendo da
combinação de velocidade de aceleração do robô, orientação do braço e
carga do atuador da extremidade. A vibração surge da frequência de
vibração natural do braço e pode ser controlada com as medidas abaixo.
Mudando a velocidade do manipulador
Mudando os pontos de ensino
Mudando a carga do atuador da extremidade
■
O manipulador pode estar quente devido ao aquecimento do motor ou
causas similares. Não toque no manipulador até que a temperatura
diminua. Além disso, confirme se a temperatura do manipulador diminuiu
e você não sente o calor ao tocá-lo. Em seguida execute o ensino ou
manutenção.
■
Ao montar o manipulador na plataforma móvel, assegure-se de parar o
manipulador enquanto a plataforma móvel está em operação. O
manipulador para quando os motores em todos os eixos são desligados
(estado sem servo). Se não puder desligar o motor, configure o modo de
potência para “Low” (Baixa) e execute o controle exclusivo da plataforma
móvel e o do manipulador de modo que eles não se movam
simultaneamente.
Page 28

1. Segurança
10 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
1.3.1 Requisitos relacionados à segurança
As tolerâncias e condições operacionais específicas de segurança estão contidas nos
manuais do manipulador, do controlador e dos outros dispositivos. Não deixe de ler
também aqueles manuais.
Para a instalação e operação do sistema robótico, certifique-se de cumprir os
regulamentos locais e nacionais aplicáveis.
As normas de segurança dos sistemas robóticos e outros exemplos são dados neste
capítulo.
Para assegurar que as medidas de segurança sejam satisfeitas, consulte também
essas normas.
(Nota: A lista abaixo é somente uma lista parcial das normas de segurança
necessárias).
EN ISO 10218-1
Robôs e dispositivos robóticos -- Requisitos de segurança para robôs
industriais -- Parte 1: Robôs
EN ISO 10218-2
Robôs e dispositivos robóticos -- Requisitos de segurança para robôs
industriais -- Parte 2: Sistemas robóticos e integração
ANSI/RIA R15.06
Padrão Nacional Americano para Robôs Industriais e Sistemas
Robóticos -- Requisitos de Segurança
EN ISO 12100
Segurança de máquinas -- Princípios gerais do projeto -- Avaliação dos
riscos e redução dos riscos
EN ISO 13849-1
Segurança de máquinas -- Peças de sistemas de controle relacionadas à
segurança -- Parte 1: Princípios gerais do projeto
EN ISO 13850
Segurança de máquinas -- Função de parada de emergência -- Princípios
gerais do projeto
EN ISO 13855
Segurança de máquinas -- Posicionamento das proteções de segurança
com relação às velocidades de aproximação de partes do corpo humano.
EN ISO 13857
Segurança de máquinas -- Distâncias de segurança para prevenir que
zonas de perigo sejam alcançadas pelos membros superiores e inferiores.
ISO14120 do EN
Segurança de máquinas -- Protetores -- Requisitos gerais para o projeto
e construção de protetores fixos e móveis
IEC 60204-1
EN 60204-1
Segurança de máquinas -- Equipamento elétrico de máquinas -- Parte 1:
Requisitos gerais
CISPR11
EN55011
Equipamentos industriais, científicos e médicos de radiofrequência -Características das perturbações eletromagnéticas -- Limites e métodos
de medição
IEC 61000-6-2
EN 61000-6-2
Compatibilidade eletromagnética (EMC) -- Parte 6-2: Normas genéricas
-- Imunidade para ambientes industriais
Page 29

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 11
1.3.2 Nomes das peças / Movimento do braço
Manipulador da série T
A faixa de movimento de cada braço é mostrada na figura abaixo. Tome
todas as precauções de segurança necessárias.
Articulação 3
Interruptor de liberação do freio
Articulação 1
(Rotação)
Articulação 2
(Rotação)
Articulação 3 (Para
cima/Para baixo)
Articulação 4
(Rotação)
Braço1
Braço 2
+
−
+
−
+
−
+
−
Eixo
Lâmpada LED
Unidade de
energia
Base
Conector de I/O da mão
(Ilustração: T3-401S)
Etiqueta de identificação
(No de série do manipulador)
Encaixe (azul) para tubo
pneumático de ø4 mm
Encaixe (azul) para tubo
pneumático de ø6 mm
Conector TP
Conector
EMERGENCY
Tampa da fonte de alimentação
(Dentro do conector de energia de CA
Conector de I/O (Entrada)
Conector de I/O (Saída)
Conector LAN
(Ethernet)
Porta do PC
para desenvolvimenmto
Interruptor RESET
Encaixe (branco) para
tubo pneumático de ø6
Porta da memória
Page 30

1. Segurança
12 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Quando o sistema é colocado no modo de emergência, empurre o braço ou a
articulação do manipulador manualmente como é mostrado abaixo:
Braço 1 Empurre o braço manualmente.
Braço 2 Empurre o braço manualmente.
Articulação 3 A articulação não pode ser movida para cima/para baixo
manualmente até que o freio solenoide aplicado à articulação
seja liberado. Mova a articulação para cima/para baixo enquanto
pressiona o interruptor de liberação do freio.
Articulação 4 Gire o eixo manualmente.
O interruptor de liberação do freio afeta somente a Articulação 3. Quando o
interruptor de liberação do freio é pressionado no modo de emergência, o freio da
Articulação 3 é liberado.
Tenha cuidado com o eixo enquanto o interruptor de liberação do freio está sendo
pressionado, pois o eixo pode ser abaixado pelo peso do atuador da extremidade.
Quando os erros a seguir estão ocorrendo, o freio do manipulador não é liberado
mesmo pressionando o interruptor de liberação do freio.
Verifique a conexão do cabo e remova as causas do erro. Em seguida, aplique a
energia novamente e libere o freio.
Erros: 1552, 2118, 4003, 4004, 4009, 4100, 4101, 4103, 4187, 4188, 4189, 4191,
4192, 4233, 4240, 4285-4292, 9633, 9640, 9691, 9685-9692
NOTA
NOTA
Page 31

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 13
Manipulador da série VT
A faixa de movimento de cada braço é mostrada na figura abaixo. Tome
todas as precauções de segurança necessárias
Articulação 1
Base
Braço 1 (Braço inferior)
Braço 2
Braço 4
Articulação 6
Articulação 3
Articulação 4
Articulação 5
Braço 4
Articulação 2
Braço 5
Braço 3
Braço superior (Braço 3 a 6)
Movimento da articulação
Articulação 1: O manipulador inteiro gira.
Articulação 2: O braço inferior vira.
Articulação 3: O braço superior oscila.
Articulação 4: O punho gira.
Articulação 5: O punho oscila.
Articulação 6: A mão gira.
Quando a lâmpada LED está acesa ou o controlador está ligado, a corrente está
sendo aplicada ao manipulador. (A lâmpada LED pode não ser vista dependendo da
postura do manipulador. Tenha muito cuidado).
Executar qualquer trabalho com a alimentação de energia ligada é extremamente
perigoso e pode resultar em choque elétrico e/ou funcionamento inadequado do
sistema robótico. Assegure-se de desligar a energia do controlador antes do trabalho
de manutenção.
NOTA
Page 32

1. Segurança
14 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Modelo padrão
Porta TP
Conector EMERGENCY
Tampa de fonte de energia
(Conector de energia dentro)
Conector de I/O (Entrada)
Conector de I/O (Saída)
Conector LAN (Ethernet)
Porta do PC de
desenvolvimento
Interruptor RESET
Porta MEMORY
Tampa OPTION
(Conector OPTION dentro)
Modelo para sala limpa
Porta TP
Conector EMERGENCY
Tampa de fonte de energia
(Conector de energia dentro)
Conector de I/O (Entrada)
Conector de I/O (Saída)
Conector LAN (Ethernet)
Porta do PC de
desenvolvimento
Interruptor RESET
Porta MEMORY
Tampa OPTION
(Conector OPTION dentro)
Porta de exaustão
(Encaixe para tubo
pneumático de ø12 mm)
Modelo com proteção
Porta TP
Conector EMERGENCY
Tampa da fonte de energia
Conector I/O
Conector LAN (Ethernet)
Porta do PC de desenvolvimento
Porta MEMORY
Tampa OPTION
(Conector OPTION dentro)
Page 33

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 15
1.3.3 Modos de operação
O sistema robótico possui três modos de operação.
Modo TEACH:
Esse modo permite o ensino de dados de ponto e
verificações próximas do robô usando o Controle portátil.
Nesse modo o robô opera no estado de potência baixa.
Modo AUTO
Esse modo permite a operação automática (execução do
programa) do sistema robótico para as operações de
fabricação e também programação, depuração, ajuste e
manutenção do sistema robótico.
Esse modo não pode operar os robôs ou executar
programas com a porta de segurança aberta.
Modo TEST
Esse modo permite a verificação de programas enquanto
o interruptor Enable for mantido pressionado e a proteção
de segurança estiver aberta.
Esta é uma função de verificação do programa em baixa
velocidade (T1: modo de desaceleração manual) que é
definido nos padrões de segurança.
Esse modo pode operar a função especificada com
múltiplas tarefas/tarefas únicas, múltplos
manipuladores/manipulador único em baixa velocidade.
Page 34

1. Segurança
16 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
1.4 Segurança da manutenção
Leia atentamente esta seção, Manutenção do manual do manipulador e outros
manuais relacionados para entender os procedimentos de manutenção seguros antes
de efetuar qualquer manutenção.
Somente pessoal autorizado que tenha tido o treinamento de segurança deve ter
permissão para fazer manutenção no sistema robótico. O treinamento de segurança
é o programa para o operador de robô industrial segundo as leis e regulamentos de
cada país.
O pessoal que tem o treinamento em segurança adquire conhecimento sobre os robôs
industriais (operações, ensino, etc.), conhecimento sobre inspeções e sobre as regras
e regulamentos relacionados. Somente pessoal que tenha completado o curso de
treinamento e manutenção de sistemas robóticos mantido pelo fabricante,
fornecedor ou empresa incorporada localmente deve ser autorizado a efetuar a
manutenção do sistema robótico.
ATENÇÃO
■
Não remova quaisquer peças que não estejam cobertas por este
manual. Siga estritamente o procedimento de manutenção conforme
descrito neste manual de Manutenção do manipulador. Remoção
incorreta de peças ou manutenção incorreta pode não só causar
funcionamento inadequado do sistema robótico, mas também sérios
problemas de segurança.
■
Fique afastado do manipulador enquanto a energia está ligada se você
não tiver feito os cursos de treinamento. Não entre na área de operação
enquanto a energia está ligada. Entrar na área de operação com a
energia ligada é extremamente perigoso e pode causar sérios
problemas de segurança pois o manipulador pode se mover mesmo se
parecer estar parado.
■
Quando você verificar a operação do manipulador após a substituição
de peças, não deixe de verificar enquanto estiver fora da área
protegida. Verificar a operação do manipulador estando dentro da área
protegida pode causar sérios problemas de segurança, pois o
manipulador pode se mover inesperadamente.
Page 35

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 17
■
Antes de operar o sistema robótico, certifique-se de que tanto os
interruptores de parada de emergência como os interruptores da
proteção de segurança funcionam corretamente. Operar o sistema
robótico quando os interruptores não estão funcionando corretamente
é extremamente perigoso e pode resultar em sérias lesões corporais
e/ou sérios danos ao sistema robótico pois os interruptores não podem
cumprir suas funções pretendidas em uma emergência.
ATENÇÃO
■
Conecte o cabo de energia a uma tomada de energia. NÃO o conecte
diretamente à fonte de energia da fábrica. Para desligar a energia do
sistema robótico, desconecte o plugue de alimentação da fonte de
energia. Executar qualquer trabalho enquanto o cabo de energia está
conectado à fonte de energia da fábrica é extremamente perigoso e
pode resultar em choque elétrico e/ou mau funcionamento no sistema
robótico.
■
Antes de executar qualquer procedimento de substituição, desligue o
manipulador e o equipamento relacionado e então desconecte o plugue
de alimentação da fonte de energia.
Executar qualquer procedimento de substituição com a energia ligada é
extremamente perigoso e pode resultar em choque elétrico e/ou mau
funcionamento no sistema robótico.
■
Certifique-se de conectar os cabos corretamente. Não aplique força
desnecessária aos cabos. (Não coloque objetos pesados sobre os
cabos. Não curve ou puxe os cabos aplicando força). O esforço
desnecessário nos cabos pode resultar em danos aos cabos,
desconexão e/ou falha nos contatos. Cabos danificados, desconexões
ou falhas de contato são extremamente perigosos e podem resultar em
choque elétrico e/ou funcionamento incorreto no sistema robótico.
Page 36

1. Segurança
18 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
CUIDADO
■
Use cuidadosamente álcool, vedação líquida e adesivo seguindo as
instruções respectivas e também as instruções abaixo. Usar
negligentemente álcool, vedação líquida ou adesivo pode causar
incêndio e/ou problemas de segurança.
- Nunca coloque álcool, vedação líquida ou adesivo próximo de fogo.
- Use álcool, vedação líquida ou adesivo em uma sala bem ventilada.
- Use equipamento de proteção, incluindo uma máscara, óculos de
proteção e luvas resistentes a óleo.
- Se álcool, vedação líquida ou adesivo entrar em contato com sua
pele, lave completamente a área com água e sabão.
- Se álcool, vedação líquida ou adesivo entrar em contato com seus
olhos ou boca, enxague os olhos ou lave a boca completamente com
água limpa e então procure imediatamente um médico.
CUIDADO
■
Use equipamento de proteção, incluindo uma máscara, óculos de
proteção e luvas resistentes a óleo durante o engraxamento. Se a
graxa entrar em contato com seus olhos, boca ou pele, siga as
instruções abaixo.
Se graxa entrar em contato com os seus olhos:
Lave-os completamente com água limpa e então consulte um
médico imediatamente.
Se graxa entrar em contato com sua boca:
Se engolir, não provoque vômito. Consulte um médico
imediatamente.
Se a graxa apenas entrar em contato com sua boca, lave-a
profundamente com água.
Se graxa entrar em contato com sua pele:
Lave completamente a área com água e sabão.
■
O manipulador pode estar quente devido ao aquecimento do motor ou
causas similares. Não toque no manipulador até que a temperatura
diminua. Além disso, confirme se a temperatura do manipulador
diminuiu e você não sente o calor ao tocá-lo. Em seguida execute o
ensino ou manutenção.
Page 37

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 19
1.5 Parada de emergência
1.5.1 Distância de movimento livre em emergência
Se o manipulador se mover de modo anormal durante a operação, pressione
imediatamente o interruptor de parada de emergência. Pressionar o interruptor de
parada de emergência imediatamente muda o manipulador para o movimento de
desaceleração e para-o na velocidade de desaceleração máxima.
No entanto, evite pressionar o interruptor de parada de emergência
desnecessariamente enquanto o manipulador estiver operando normalmente.
Pressionar o interruptor de parada de emergência aplica o freio e isso pode causar
desgaste na placa de fricção do freio, resultando no encurtamento da vida útil do
freio.
Ciclo de vida normal dos freios: Cerca de 2 anos (quando o freio é usado 100
vezes/dia)
Para colocar o sistema no modo de emergência durante a operação normal,
pressione o interruptor de parada de emergência quando o manipulador não está se
movendo.
Consulte o manual do manipulador para instruções de como conectar o circuito do
interruptor de parada de emergência.
Não desligue o manipulador enquanto ele está operando.
Se você tentar parar o manipulador em situações de emergência tal como em
“Proteção de segurança aberta”, certifique-se de parar o manipulador usando o
interruptor de parada de emergência.
Se o manipulador for parado desligando-o enquanto está operando, os seguintes
problemas podem ocorrer.
Redução da vida útil e danos na unidade da engrenagem de redução
Vão na posição das juntas
Além disso, se o manipulador foi forçado a ser desligado por blecautes e
ocorrências do tipo enquanto estava operando, certifique-se de verificar os
seguintes pontos após a restauração da energia.
Se a engrenagem de redução está danificada
Se as juntas estão em suas posições corretas
Se houver um vão na posição, faça a calibração consultando Manutenção:
Calibração no manual do manipulador. Além disso, o mesmo problema pode
acontecer se ocorrer erro e o manipulador parar em emergência durante a
operação. Verifique a condição do manipulador e execute a calibração se
necessário.
Page 38

1. Segurança
20 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Antes de usar o interruptor de Parada de Emergência, esteja ciente do seguinte.
- O interruptor de Parada de Emergência (E-STOP) deve ser usado para parar o
manipulador somente em caso de emergências.
- Para parar o manipulador que opera o programa exceto em uma emergência,
use os comandos Pause (interromper) ou STOP (parar o programa).
Os comandos Pause e STOP não desligam os motores. Portanto, o freio não
funciona.
- Para o sistema de proteção de segurança, não use o circuito do E-STOP.
- Quando o interruptor de parada de emergência é pressionado, uma grande
força é aplicada na mesa base. Ao montar o manipulador em plataforma móvel,
não esqueça de projetar o sistema de modo que ele não vire e o manipulador
não caia.
Para detalhes sobre o sistema de proteção de segurança, consulte os seguintes
manuais.
Guia do Usuário do EPSON RC+
2. Segurança - Precauções de instalação e projeto - Sistema de proteção de
segurança
Segurança e instalação
2.5 Conexão ao conector EMERGENCY
Para verificar problemas com os freios, consulte os seguintes manuais.
Manual do manipulador Manutenção
2.1.2 Ponto de inspeção - Inspeção com a energia ligada(Manipulador
operando)
Segurança e instalação
5.1.1 Manipulador - Inspeção com a energia ligada
(Manipulador operando)
Page 39

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 21
A operação do manipulador não pode parar imediatamente após o interruptor de
parada de emergência ser pressionado.
O tempo/ângulo/distância de movimento livre do manipulador são mostrados
abaixo. No entanto, lembre-se de que os valores variam de acordo com as
seguintes condições.
Peso do atuador da extremidade Peso Aceleração
Peso da peça de trabalho Velocidade Postura da operação
Manipulador da série T
Condições
para a
medição
T3-401S
T6-602S
Configuração
Accel
100
100
Configuração
Speed
100
100
Carga [kg]
3
6
Configuração
do peso
3
6
Articulação 1
Articulação 2
Ponto de parada
Ponto onde o
sinal de parada
de emergência
é inserido
Ponto alvo
Ponto inicial
da operação
T3-401S
T6-602S
Tempo de
movimento livre
Articulação 1 + Articulação 2 [s]
0,5
0,7
Articulação 3 [S]
0,2
0,2
Ângulo de
movimento livre
Articulação 1 []
55
65
Articulação 2 []
55
55
Articulação 1 + Articulação 2 []
110
120
Distância de
movimento livre
Articulação 3 [mm]
30
40
Page 40

1. Segurança
22 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Manipulador da série VT
Condições para a medição
Série VT
Configuração de ACCEL
100
Configuração de SPEED
100
Carga [kg]
6
Configuração de WEIGHT
6
VT6-A901**
Tempo de
movimento
livre
[seg.]
Braço 1
0,8
Braço 2
1,5
Braço 3
0,3
Braço 4
0,3
Braço 5
0,3
Braço 6
0,4
Ângulo de
movimento
livre
[]
Braço 1
Sobre a mesa
Teto
35
Parede
30
Braço 2
50
Braço 3
10
Braço 4
10
Braço 5
10
Braço 6
15
Page 41

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 23
1.5.2 Como restaurar o modo de emergência
Selecione a aba [Tools] – [Robot Manager] – [Control Panel] do EPSON RC+ e
então clique em <Reset>.
A página Control Panel contém botões para as operações básicas do robô, tal como
a ligação/desligamento dos motores e colocação do robô na posição de
estacionamento. Ela também mostra o status da parada de emergência, proteção de
segurança, motores e potência.
Page 42

1. Segurança
24 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
1.6 Etiquetas
Etiquetas são afixadas em torno dos locais do manipulador onde existem perigos
específicos.
Não deixe de obedecer às descrições e avisos nas etiquetas para operar e manter a
segurança do sistema robótico.
Não rasgue, danifique ou remova as etiquetas. Tenha extremo cuidado ao manusear
essas peças ou unidades às quais seguintes etiquetas estão afixadas bem como nas
áreas próximas:
Manipulador da série T
Local
Etiqueta
Nota
A
Antes de afrouxar os parafusos de
montagem da base, segure o braço e
prenda-o firmemente com uma faixa
para evitar que as mãos ou os dedos
sejam prensados no manipulador.
Para a instalação e transporte dos
robôs, siga as instruções deste
manual.
B
Não entre na área de operação
enquanto o manipulador está se
movendo. O braço do robô pode colidir
com o operador. Isso é extremamente
perigoso e pode resultar em sérios
problemas de segurança.
C
Existem voltagens perigosas
enquanto o manipulador está ligado.
Para evitar choques elétricos, não
toque em quaisquer peças elétricas
internas.
D
Você pode prender a mãos ou dedos
entre o eixo e a tampa ao aproximar
sua mão de peças móveis.
Page 43

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 25
T3
D B C
C C C C A
T6
D
B
C
C
C
C
A
Page 44

1. Segurança
26 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Manipulador da série VT
Local
Etiqueta
Nota
A
Antes de afrouxar os parafusos de
montagem da base, segure o braço e
prenda-o firmemente com uma faixa
para evitar que as mãos ou os dedos
sejam prensados no manipulador.
Para os procedimentos de transporte
e instalação, siga as etapas descritas
nesse manual.
B
Não entre na área de operação
enquanto o manipulador está se
movendo. O braço do robô pode
colidir com o operador. Isso é
extremamente perigoso e pode
resultar em sérios problemas de
segurança.
C
Existem voltagens perigosas
enquanto o manipulador está ligado.
Para evitar choques elétricos, não
toque em quaisquer peças elétricas
internas.
D
Ao liberar os freios, seja cuidadoso,
pois o braço pode cair devido ao seu
próprio peso.
E
Somente pessoal autorizado deverá
executar o trabalho de erguer e
operar e uma empilhadeira.
Quando essas operações são
executadas por pessoal não
autorizado, isso é extremamente
perigoso e pode resultar em sérias
lesões corporais e/ou danos graves
ao equipamento do sistema robótico.
Page 45

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 27
Local
Etiqueta
Nota
F
Você pode prender a mão ou os dedos
ao aproximar sua mão de peças
móveis.
C
C
C
B
C C C
C
C
F
D
A
E
C
G
Modelo com proteção
Modelo para sala limpa, padrão
Page 46

1. Segurança
28 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
1.7 Recursos de segurança
O sistema de controle do robô suporta os recursos de segurança descritos abaixo. No
entanto, é recomendado que o usuário siga estritamente o uso apropriado do sistema
robótico lendo completamente os manuais fornecidos antes de usar o sistema. Não ler e
entender o uso apropriado das funções de segurança é altamente perigoso.
Entre os seguintes recursos de segurança, o interruptor de parada de emergência e a
entrada da porta de segurança são particularmente importantes. Assegure-se de que
esses e outros recursos funcionem corretamente antes de operar o sistema robótico.
Para detalhes, consulte 2.5.1 Interruptor da porta de segurança e Interruptor de
liberação do engate.
Interruptor de parada de emergência
O conector EMERGENCY no manipulador possui terminais de entrada de parada
de emergência de expansão usados para conectar os interruptores de parada de
emergência.
Pressionar o interruptor de parada de emergência pode desligar imediatamente a
energia para o motor e o sistema robótico entrará na condição de parada de
emergência.
Categorias de parada da entrada de parada de emergência: Categoria 0 (consulte a
norma de segurança IEC60204-1)
Entrada da porta de segurança
Para ativar esse recurso, assegure-se de que o interruptor de entrada da porta de
segurança está conectado ao conector EMERGENCY no manipulador.
Quando a porta de segurança é aberta, normalmente o manipulador para imediatamente
a operação atual e o status da energia do manipulador é de operação proibida até que a
porta de segurança seja fechada e a condição engatada seja liberada. Para executar a
operação do manipulador enquanto a porta de segurança está aberta, você deve mudar a
chave seletora de modo no controle portátil para o modo “Teach”. A operação do
manipulador fica disponível somente quando o interruptor de ativação está ligado. Nesse
caso, o manipulador é operado no status de potência baixa.
Categorias de parada da entrada da porta de segurança: Categoria 1 (consulte o
padrão de segurança IEC60204-1)
Page 47

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 29
Modo de potência baixa
A potência do motor é reduzida nesse modo.
Executar uma instrução de mudança do estado de potência mudará o estado restrito
(potência baixa) independentemente da condição da porta de segurança ou do modo
de operação. O estado restrito (potência baixa) garante a segurança do operador
e reduz a possibilidade de destruição ou de danos ao equipamento periférico
causados pela operação descuidada.
Freio dinâmico
O circuito do freio dinâmico inclui relês que colocam em curto-circuito as
armaduras do motor. O circuito do freio dinâmico é ativado quando há uma entrada
de parada de emergência ou quando qualquer um dos erros seguintes é detectado:
desconexão do cabo do codificador, sobrecarga do motor, torque irregular do motor,
erro de velocidade do motor, erro do servo (transbordamento do posicionamento ou
da velocidade), processador irregular, erro de soma de verificação da memória e
condição de superaquecimento dentro do módulo de acionamento do motor.
Detecção de sobrecarga do motor
O circuito do freio dinâmico é ativado quando o sistema detecta que a carga no
motor excedeu a sua capacidade.
Detecção do torque do motor irregular (manipulador fora de controle)
O circuito do freio dinâmico é ativado quando é detectada irregularidade com o
torque do motor (saída do motor) (e nesse caso o manipulador está fora de controle).
Detecção de erro de velocidade do motor
O circuito do freio dinâmico é ativado quando o sistema detecta que o motor está
funcionando na velocidade incorreta.
Transbordamento do posicionamento - detecção de erro do servo
O circuito do freio dinâmico é ativado quando o sistema detecta que a diferença
entre a posição real do manipulador e a posição comandada excede a margem de
erro permitida.
Transbordamento da velocidade - detecção de erro do servo
O circuito do freio dinâmico é ativado quando a velocidade real do manipulador é
detectada indicando um erro de transbordamento (a velocidade real está fora da faixa
Page 48

1. Segurança
30 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
nominal).
Detecção de irregularidade no processador
A irregularidade no processador que controla o motor é detectada pelo watchdog
timer. O processador do sistema e o processador que controla o motor dentro do
manipulador também são projetados para verificar um ao outro quanto a quaisquer
discrepâncias. Se uma discrepância é detectada, o circuito do freio dinâmico é
ativado.
Detecção de erro de soma de verificação da memória
O circuito do freio dinâmico é ativado quando um erro de soma de verificação da
memória é detectado.
Detecção de superaquecimento no módulo acionador do motor
O circuito do freio dinâmico é ativado quando a temperatura do dispositivo de
energia dentro do módulo acionador do motor está acima do limite nominal.
Detecção de deposição do relé
O circuito do freio dinâmico é ativado quando a deposição do rele é detectada.
Detecção de sobrevoltagem
O circuito do freio dinâmico é ativado quando a voltagem do manipulador está
acima do limite normal.
Detecção de queda de voltagem da fonte de alimentação
O circuito do freio dinâmico é ativado quando é detectada queda da voltagem da
fonte de alimentação.
Detecção de anomalia da temperatura
A anomalia na temperatura do manipulador é detectada.
Page 49

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 31
1.8 Especificações do manipulador
Manipulador da série T
Item
T3-401S
T6-602S
Comprimento do braço
Braço 1, 2
400 mm
600 mm
Braço 1
225 mm
325 mm
Braço 2
175 mm
275 mm
Peso (cabos não incluídos)
16 kg: 35 lbs.
22 kg: 49 lbs.
Método de
acionamento
Todas as
articulações
Motor servo de CA
Velocidade de
operação máxima*1
Articulações 1, 2
3700 mm/s
4180 mm/s
Articulação 3
1000 mm/s
1000 mm/s
Articulação 4
2600/s
1800/s
Repetibilidade
Articulações 1, 2
0,02 mm
0,04 mm
Articulação 3
0,02 mm
0,02 mm
Articulação 4
0,02
0,02.
Faixa de movimento
máxima
Articulação 1
132
132.
Articulação 2
141
150
Articulação 3
150 mm
200 mm
Articulação 4
360
360
Faixa de pulsos
máxima
Articulação 1
− 95574 a 505174
− 152918 a 808278
Articulação 2
320854
341334
Articulação 3
−187734 a 0
− 245760 a 0
Articulação 4
71760
245760
Resolução
Articulação 1
0,000439 /pulso
0,000275 /pulso
Articulação 2
0,000439 /pulso
0,000439 /pulso
Articulação 3
0,000799 mm/pulso
0,000814 mm/pulso
Articulação 4
0,005017 /pulso
0,001465 /pulso
Capacidade nominal
do motor
Articulação 1
200 W
300 W
Articulação 2
100 W
200 W
Articulação 3
100 W
Articulação 4
100 W
Carga útil (Carga)
Nominal
1 kg
2 kg
Máx.
3 kg
6 kg
Momento de inércia
admissível na
Articulação 4*2
Nominal
0,003 kg·m2
0,01 kg·m2
Máx.
0,01 kg·m2
0,08 kg·m2
Mão
Diâmetro do eixo
ø 16 mm
ø 20 mm
Furo passante
ø 11 mm
ø 14 mm
Força descendente da Articulação 3
83 N
Conector de I/O da mão
15 pinos: D-sub
Tubo pneumático instalado
para uso do cliente
2 tubos pneumáticos (ø6 mm):
0,59 MPa (6 kgf/cm2: 86 psi)
1 tubo pneumático (ø4 mm):
0,59 MPa (6 kgf/cm2: 86 psi)
Furo de montagem
120 120 mm
150 150 mm
4-M8
Requisitos
ambientais
Temperatura
ambiente.
5 a 40 C
(com variação mínima da temperatura)
Page 50

1. Segurança
32 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Item
T3-401S
T6-602S
Umidade relativa
do ambiente
20 a 80% (sem condensação)
Nível de ruído *3
L
Aeq
= 70 dB (A) ou abaixo
Valor atribuível
( ) Valores padrão
Speed
1 a (5) a 100
1 a (5) a 100
Accel *4
1 a (10) a 120
1 a (10) a 120
SpeedS
0,1 a (50) a 2000
0,1 a (40) a 2000
AccelS
0,1 a (200) a 10000
0,1 a (200) a 10000
Fine
0 a (1250) a 65535
0 a (1250) a 65535
Weight
0,175 a (1,175) a 3,175
0,275 a (2,275) a 6,275
Controle de
movimento
Ambiente de
desenvolvimento
EPSON RC+ 7.0
Linguagem de
programação
SPEL+ (linguagem de robô multitarefas)
Controle da
articulação
Padrão Controle simultâneo de 4 articulações
Controle do servo de CA digital
Controle de
posicionamento
PTP (Controle ponto a ponto)
CP (Controle de percurso contínuo)
Controle de
velocidade
Movimento PTP : Programável em uma faixa de 1 a
100%
Movimento CP : Programável (Valor real a ser
inserido manualmente).
Controle de
aceleração/desacelera
ção
Movimento PTP : Programável em uma faixa de 1 a
100%; Automático
Movimento CP : Programável (Valor real a ser
inserido manualmente).
Interface externa
EMERGÊNCIA
PARADA DE EMERGÊNCIA:
Redundante (Categoria 3) Suportada para fonte de
energia interna/externa
Sistema de proteção de segurança:
Redundante (Categoria 3) Suportada para fonte de
energia externa
I/O
I/O padrão
(Traseira do
manipulador)
Entrada: 18 pontos
Saída 12 pontos
Não polar, Suportado tanto para Sink como Source
I/O remota
(As funções
remotas são
aplicadas
para I/O
padrão)
Entrada: 8 pontos
Programa: 3 pontos
Start, Stop, Pause, Continue, Reset
Saída 8 pontos
Ready, Running, Paused, ErrorEStopOn, SafeguardOn,
SError, Warning
I/O da mão
(Lado superior
do Braço 2)
Entrada: 6 pontos
Saída 4 pontos
Não polar, Suportado tanto para Sink como Source
Fonte de alimentação:
Até 24 V 500 mA
Fonte de alimentação:
Até 24 V 700mA
Page 51

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 33
Item
T3-401S
T6-602S
Interface
externa
Field bus escravo
(Opção)
Entrada: 256 pontos
Saída 256 pontos
Habilitada para adicionar somente mais um módulo
Porta de conexão do TP
Suportada para controle portátil (Opção: TP2, TP3)
Porta de conexão do PC
Conector USB B
Suportado para USB 2.0 High Speed / Full Speed
Porta de conexão
de memória USB
Conector USB A
Suportado para USB 2.0 High Speed / Full Speed
Porta Ethernet
Suportada para 10/100 Mbps
Disponível até 8 portas
Interruptor RESET
Habilitado para uso para restaurar o sistema
Exibição
LED de exibição do
modo
TEACH, AUTO, PROGRAM, TestMode, Error, E-STOP
Salvar status do controlador
Salva na memória USB
Salva no RC+ (PC)
Voltagem
100 a 240 VCA
Fase
Monofásico
Frequência
50 / 60 Hz
Interrupção de energia momentânea
Menos de 10 ms.
Capacidade nominal
660 VA
1.200 VA
Corrente de pico
(Quando a energia de CA é ligada)
Máx. 30 A
(Menos de 2 ms.)
Máx. 60 A
(Menos de 2 ms.)
Vazamento de corrente
Máx. 10 mA
Resistência de terra
Menos de 100
Padrão de segurança
Marcação CE
Diretiva EMC, Diretiva de maquinaria, Diretiva RoHS
Marcação KC / Marcação KCs
ANSI/RIA R15.06
NFPA 79
*1: No caso de comando PTP.
A velocidade de operação máxima para o comando CP é de 2000 mm/s no plano horizontal.
*2: No caso onde o centro de gravidade está no centro da Articulação 4.
Se o centro de gravidade não estiver no centro da Articulação 4, defina o parâmetro usando o comando
Inertia.
*3: Condições do manipulador durante a medição como segue:
Condições de operação : Sob carga nominal, movimento simultâneo das 4 articulações,
velocidade máxima, aceleração/desaceleração máxima e rendimento
de 50%.
Ponto de medição : Traseira do manipulador, 1000 mm além da faixa de movimento, 50
mm acima da superfície da base instalada.
*4: No uso geral, a configuração de Accel em 100 é a configuração ideal que mantém o equilíbrio da
aceleração e a vibração durante o posicionamento. Embora possam ser definidos valores maiores que 100
para Accel, é recomendado minimizar o uso de valores altos para movimentos necessários, uma vez que
operar o manipulador continuamente com uma configuração alta de Accel pode encurtar
consideravelmente a vida útil do produto.
Page 52

1. Segurança
34 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Manipulador da série VT
Item
Especificações
Número do modelo
VT6-
A901*
VT6-A901*R
VT6-A901*W
Nome do modelo
VT6L
Tipo de montagem *1
Montado sobre
a mesa
Montado no teto
Montado na
parede
Peso
CC
Padrão
40 kg: 89 lbs.
(não inclui o peso dos cabos)
CA
Padrão sala limpa
Proteção
42 kg: 92 lbs.
(inclui o peso dos cabos)
Método de acionamento
Todas as
articulações
Motor servo de CA
Velocidade
de operação
máxima *2
Articulação 1
166,2/s
Articulação 2
122,5/s
Articulação 3
141,2/s
Articula
ção 4
CA
Padrão
sala limpa
268,7/s
Proteção
188,1/s
CC
Padrão
Articulação 5
296,8/s
Articula
ção 6
CA
Padrão
sala limpa
293,2/s
Proteção
234,5/s
CC
Padrão
Velocidade sintética máxima
4563 mm/s
Repetibilidade
Articulações 1 a 6
0,1 mm
Faixa de movimento máxima
Articulação 1
170
30
Articulação 2
− 160 a + 65
Articulação 3
− 51 a + 190
Articulação 4
200
Articulação 5
125
Articulação 6
360
Faixa de pulsos máxima
Articulação 1
8488472
1497966
Articulação 2
− 9986438 a + 4056990
Articulação 3
− 2366604 a + 8816759
Articulação 4
8128764
Articulação 5
4599018
Articulação 6
13410735
Resolução
Articulação 1
0,0000200/pulso
Articulação 2
0,0000160/pulso
Articulação 3
0,0000215/pulso
Articulação 4
0,0000246 /pulso
Articulação 5
0,0000271/pulso
Articulação 6
0,0000268/pulso
Page 53

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 35
Item
Especificações
Capacidade nominal do
motor
Articulação 1
300 W
Articulação 2
300 W
Articulação 3
200 W
Articulação 4
100 W
Articulação 5
100 W
Articulação 6
100 W
Carga útil *3
Nominal.
3 kg
Máx.
6 kg
Momento admissível
Articulação 4
12 N·m (1,22 kgf·m)
Articulação 5
12 N·m (1,22 kgf·m)
Articulação 6
7 N·m (0,71 kgf·m)
Momento de inércia
admissível *4 (GD2/4)
Articulação 4
0,3 kg·m2
Articulação 5
0,3 kg·m2
Articulação 6
0,1 kg·m2
Requisitos ambientais *5
Temperatura ambiente
5 a 40 C
Umidade relativa
do ambiente
10 a 80 % de UR (sem condensação)
Vibração
4,9 m·s2 (0,5 G) ou menos
Nível de ruído *6
LAeq = 70 dB (A) ou abaixo
Ambiente
Padrão, Sala limpa *7, Proteção (IP67) *8
Valores padrão
(Valores de
configuração
máxima)
Speed
(5) 100
Accel *9
(5, 5) 120, 120
SpeedS
(50) 2000
AccelS *10
(200) 10000
Fine
(10000, 10000, 10000, 10000, 10000, 10000)
65535, 65535, 65535, 65535, 65535, 65535
Peso
3 (6)
Inertia
0,03 (0,1)
Controle de
movimento
Ambiente de
desenvolvimento
EPSON RC+ 7.0
Linguagem de programação
SPEL+ (linguagem de robô multitarefas)
Controle da articulação
Padrão Controle simultâneo de 6 articulações
Controle do servo de CA digital
Controle de posicionamento
PTP (Controle ponto a ponto)
CP (Controle de percurso contínuo)
Controle de velocidade
Movimento PTP : Programável em uma faixa de 1
a 100%
Movimento CP : Programável
(Valor real a ser inserido
manualmente).
Controle de
aceleração/desaceleração
Movimento PTP : Programável em uma faixa de 1
a 100%
Aceleração/desaceleração
automática
Movimento CP : Programável
(Valor real a ser inserido
manualmente).
Page 54

1. Segurança
36 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Item
Especificações
Interface
externa
EMERGÊNCIA
PARADA DE EMERGÊNCIA:
Redundante (Categoria 3) Suportada para fonte de
energia interna/externa
Sistema de proteção de segurança:
Redundante (Categoria 3) Suportada para fonte de
energia externa
Interface
externa
I/O
I/O padrão
(Traseira do
manipulador)
Entrada: 24 pontos
Saída 16 pontos
Não polar, Suportada tanto para Sink como Source
I/O remota
(As funções
remotas são
aplicadas
para I/O
padrão)
Entrada: 8 pontos
Programa, 3 pontos
Start, Stop, Pause, Continue, Reset
Saída 8 pontos
Ready, Running, Paused, ErrorEStopOn,
SafeguardOn, SError, Warning
Field bus escravo
(Opção)
Entrada: 256 pontos
Saída 256 pontos
Habilitada para adicionar somente mais um módulo
Porta de conexão do TP
Suportada para controle portátil (Opção: TP2, TP3)
Porta de conexão do PC
Conector USB B
Suportado para USB 2.0 High Speed / Full Speed
Porta de conexão
de memória USB
Conector USB A
Suportado para USB 2.0 High Speed / Full Speed
Porta Ethernet
Suportada para 10/100 Mbps
Disponíveis até 8 portas
Interruptor RESET
Habilitado para uso para restaurar o sistema
Exibição
LED de exibição do
modo
TEACH, AUTO, PROGRAM, TestMode, Error, ESTOP
Salvar status do controlador
Salva na memória USB
Salva no RC+ (PC)
Padrão de segurança
Marcação CE
Diretiva EMC, Diretiva de maquinaria, Diretiva
RoHS
Marcação KC/ Marcação KCs
(VT6-A901S, VT6-A901C, VT6-A901P)
ANSI/RIA R15.06
NFPA 79
Page 55

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 37
Manipulador especificado para CA
Item
Especificações
Modelo
VT6-A901S, VT6-A901C, VT6-A901P, VT6-A901SR, VT6A901SW
Voltagem
100 a 240 VCA
Fase
Monofásico
Frequência
50 / 60 Hz
Interrupção de energia momentânea
Menos de 10 ms.
Capacidade nominal
1.200 VA
Corrente de pico
(Quando a energia de CA é ligada)
Máx. 60A (Menos de 2 ms.)
Vazamento de corrente
Máx. 10 mA
Resistência de terra
Menos de 100
Manipulador especificado para CC
Item
Especificações
Modelo
VT6-A901S-DC
Voltagem
48 VCC
Voltagem disponível
43 a 60 VCC
(Tenha cuidado para não exceder o valor quando a voltagem
aumenta.)
Classificação máxima absoluta
72 VCC
Corrente de pico
(Quando a energia de CC é ligada)
Máx. 40A (menos de 10 ms.)
Capacidade nominal
1.200 W
Aterramento
O fio de terra e o fio de energia de CC (−) são conectados.
*1: Outros tipos de montagem exceto “Montado sobre a mesa”, “Montado no teto” e “Montado na parede”
estão fora da especificação. Somente a montagem sobre a mesa está disponível para o manipulador
especificado para CC, modelo para sala limpa e modelo com proteção.
*2: No caso de controle PTP
*3: Não aplique carga excedendo a carga útil máxima.
*4: Se o centro de gravidade estiver no centro de cada braço. Se o centro de gravidade não estiver no centro
de cada braço, defina a quantidade de excentricidade usando o comando INERTIA.
5: Para detalhes sobre os requisitos ambientais, consulte o seguinte manual.
MANUAL DO MANIPULADOR dos robôs de 6 eixos
Configuração e operação 3.1 Condições ambientais.
*6: As condições do manipulador na medição são como segue:
Condições de operação : Sob carga nominal, movimento simultâneo das 6 articulações, velocidade
máxima, aceleração/desaceleração máxima VT6L: rendimento de 50%
Ponto de medição : 1000 mm além da traseira do manipulador
Page 56

1. Segurança
38 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
*7: O sistema de exaustão no manipulador do modelo para sala limpa extrai ar do interior da base e do interior
da tampa do braço.
Uma fenda ou outra abertura na unidade base pode causar perda da pressão de ar negativa na parte externa
do braço, o que pode causar aumento da emissão de poeira.
Nível de limpeza
:
ISO Classe 4 (ISO14644-1)
Sistema de
exaustão
:
Conexão para tubo pneumático de ø12 mm
Vácuo de 60 L/min
Tubo exaustor
:
Diâmetro externo do tubo de poliuretano: ø12 mm (Diâmetro interno: ø8
mm)
*8 O nível de proteção para os manipuladores do modelo com proteção é IP67 (Padrão IEC). Os
manipuladores podem ser usados em ambiente onde exista a possibilidade de poeira, queda de água
e de óleo de corte solúvel em água caírem no manipulador.
No entanto, seja cuidadoso com o seguinte:
- O manipulador não é à prova de ferrugem. Não use o manipulador em ambiente onde existam
líquidos corrosivos.
- Fluidos que deteriorem os materiais de vedação, tais como solventes orgânicos, ácidos, bases
alcalinas e fluídos de corte com cloro, não podem ser usados
- O manipulador não pode ser usado para operações debaixo d’água.
<Referência>
- IP67 do padrão IEC
[Nível de proteção contra o ingresso de objetos sólidos]
Totalmente protegido contra poeira.
[Nível de proteção contra líquidos]
Proteção contra o ingresso de água em quantidade prejudicial quando o manipulador
é imerso em água por 30 minutos sob a condição de que o ponto mais alto do
manipulador fique localizado a 0,15 m abaixo da superfície da água e o ponto mais
baixo fique localizado 1 m abaixo da superfície da água. (Testado enquanto o
manipulador está parado).
*9: No uso geral, a configuração de Accel em 100 é a configuração ideal que mantém o equilíbrio da
aceleração e a vibração durante o posicionamento. Embora possam ser definidos valores maiores que
100 para Accel, é recomendado minimizar o uso de valores altos para movimentos necessários, uma
vez que operar o manipulador continuamente com uma configuração alta de Accel pode encurtar
consideravelmente a vida útil do produto.
Page 57

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 39
*10: O valor de configuração máximo de AccelS varia dependendo da carga. Consulte a tabela à direita
para detalhes.
A configuração de valor que exceda o máximo de AccelS causa um erro. Em tal caso, verifique o
valor configurado.
10000
8000
6000
4000
2000
0 1 2 3 4 5 6 (kg) Peso do atuador da extremidade
8000
3000
10000
2000
6000
Page 58

1. Segurança
40 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
1.9 Configuração da faixa de movimento pelos batentes mecânicos
Os batentes mecânicos limitam fisicamente a área absoluta na qual o manipulador
não pode se mover.
Manipulador da série T
Tanto a Articulação 1 como a 2 possuem furos rosqueados nas posições
correspondentes ao ângulo para as configurações dos batentes mecânicos. Instale os
parafusos nos furos correspondentes ao ângulo que você deseja configurar.
A Articulação 3 pode ser configurada para qualquer distância menor que o curso
máximo.
Batente mecânico da
Articulação 2
(Fixo)
Batente mecânico da
Articulação 1 (Ajustável)
Batente mecânico da
Articulação 3
(Batente mecânico inferior)
(Não mova o batente
mecânico de limite superior).
Batente mecânico da
Articulação 1 (Fixo)
Batente mecânico da
Articulação 2
Manipulador da série VT
O uso dos batentes mecânicos ajustáveis (opção) limita fisicamente a área absoluta
na qual o manipulador pode se mover.
Não esqueça de antes desligar o manipulador.
Use parafusos em conformidade com o comprimento especificado e o
processamento da superfície (ex: galvanização com níquel) com alta resistência à
corrosão.
Especifique a faixa de pulsos novamente após mudar as posições dos batentes
mecânicos.
Para detalhes sobre a configuração da faixa de pulsos, consulte a seção
seguinte.
Configuração e operação 5.1 Configuração da faixa de movimento
pela faixa de pulsos (para todas as articulações).
Cerifique-se de configurar uma faixa de pulsos que não exceda os ângulos de
configuração do batente mecânico.
Page 59

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 41
Configuração da faixa de movimento da Articulação 1
Instale o batente mecânico ajustável (J1) no furo rosqueado correspondente ao
ângulo que você quer definir).
Parafuso Allen M4 × 28×1
Torque de aperto 4,0 ± 0,2 N·m (41 ± 2 kgf·cm)
a
b
Ângulo ()
170
−170 a +84
ou −84 a +170
Pulso
8488472
− 8488472 a +4194304,
ou −4194304 a +8488472
Batente mecânico ajustável (J1)
Não
aplicado
(padrão)
Aplicado
Page 60

1. Segurança
42 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Configuração da faixa de movimento da Articulação 2
Instale o batente mecânico ajustável (J2) no furo rosqueado correspondente ao
ângulo que você quer definir).
Parafuso Allen M4 × 16×1
Torque de aperto 4,0 ± 0,2 N·m (41 ± 2 kgf·cm)
c
d
Ângulo ()
−160, +65
−160 a +43
ou −148 a +65
Pulso
−9986438
+4056990.
−9986438 a +2683855
ou −9237455 a
+4056990
Batente mecânico ajustável
(J2)
Não aplicado
(padrão)
Aplicado
Page 61

1. Segurança
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 43
Configuração da faixa de movimento da Articulação 3
Instale o batente mecânico ajustável (J3) no furo rosqueado correspondente ao
ângulo que você quer definir).
Parafuso Allen M4 × 16×1
Torque de aperto 4,0 ± 0,2N·m (41 ± 2 kgf·cm)
e
f
Ângulo ()
−51, +190
−34 a +190
ou −51 a +173
Pulso
−2366604
+8816759.
−1577736 a +8816759
ou −2366604 a +8027891
Batente mecânico ajustável (J3)
Não aplicado
(padrão)
Aplicado
Page 62

1. Segurança
44 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
1.10 Treinamento do usuário final
As pessoas encarregadas da gestão da segurança deverão confirmar que os
operadores que programam, operam e fazem a manutenção do robô e do sistema
robótico tenham o treinamento adequado e tenham a experiência para conduzir o
trabalho de modo seguro.
O treinamento deve incluir pelo menos o seguinte:
- Estudo dos procedimentos de segurança regulamentares e recomendações
relacionadas à segurança dados pelos fabricantes de robôs e projetistas do sistema.
- Explicação clara do trabalho envolvido.
- Descrição de todos os equipamentos de controle necessários para o trabalho e suas
funções.
- Explicação dos perigos potenciais envolvidos no trabalho.
- Procedimentos de segurança do trabalho e métodos específicos para evitar perigos
potenciais.
- Testes da função e métodos de confirmação de que os dispositivos de segurança e
o intertravamento estão funcionando corretamente.
Page 63

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 45
2. Instalação
Este capítulo contém precauções para a instalação segura e precisa do sistema
robótico.
O fluxo de trabalho para instalar o sistema robótico é descrito em 2.1 Descrição
desde a desembalagem até a operação do sistema robótico. Para desembalagem,
transporte e instalação, consulte as seções respectivas e os manuais do manipulador.
Exemplo de sistema
*1 O EPSON RC+ 7.0 suporta os seguintes sistemas operacionais
Windows 8.1 Pro (EPSON RC+7.0 Ver.7.1.0 ou posterior)
Windows 10 Pro (EPSON RC+7.0 Ver.7.2.0 ou posterior)
*2 Qualquer um dos controles portáteis está disponível.
*3 Se for conectado a um manipulador da série T ou série VT, é necessário um
cabo de conversão dedicado.
Page 64

2. Instalação
46 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
T3, T6
Padrão
I/O Padrão
I/O Remota
Ethernet
I/O da mão
USB (para salvamento)
USB (para desenvolvimento)
ModBus
Fieldbus
Escravo
Opção
TP2
TP3
*2
*3
Opção: Controle portátil
Windows *1
Software
EPSON RC+ 7.0
USB 2.0
ou
Ethernet
Opção
Ilustração: T3-401S
Page 65

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 47
VT
Padrão
I/O Padrão
I/O Remota
Ethernet
USB para salvamento)
USB (para desenvolvimento)
ModBus
Fieldbus
Escravo
Opção
TP2
TP3
*2
*3
Opção: Controle portátil
Windows *1
Software
EPSON RC+ 7.0
USB 2.0
ou
Ethernet
Opção
Page 66

2. Instalação
48 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.1 Descrição desde a desembalagem até a operação do sistema robótico
Transporte
Desembalagem
Erro?
Instalação
Energização
Sim
Não
Procedimento para instalar o EPSON
RC+7.0 no PC de d esenvolvimento e
habilitar a operação do sistema robótico
Informações no manual para conectar
ou configurar o equipamento e as
opções
2. Instalação
Procedimento para instalar o Sistema
robótico e ligar a energia corretamente
4. Segundo passo
3. Primeiro passo
Page 67

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 49
2.2 Desembalagem
A instalação e o transporte dos manipuladores e do equipamento robótico deve ser
feita por pessoal qualificado e em conformidade com todos os códigos nacionais e
locais.
Usando um carrinho ou equipamento similar, transporte o manipulador nas
mesmas condições como ele foi entregue. Observe o seguinte ao desembalar o
manipulador.
2.2.1 Precauções de desembalagem
Procedimentos de transporte
: Somente pessoal autorizado deverá executar o trabalho de erguer e operar um
guindaste ou uma empilhadeira. Quando essas operações são executadas por
pessoal não autorizado, isso é extremamente perigoso e pode resultar em
sérias lesões corporais e/ou danos graves ao equipamento do sistema
robótico.
Vibração no transporte
: Evite vibração excessiva ou choques durante o transporte do manipulador.
Vibração excessiva ou choques podem causar danos ao equipamento e/ou
mau funcionamento do manipulador.
Parafuso de fixação
: Ao remover os parafusos de fixação, apoie o manipulador para prevenir
queda.
Remover os parafusos de fixação sem apoiar o manipulador pode prender
suas mãos, dedos ou pés se o manipulador vier a cair.
Prendedor de fios
: Não remova o prendedor de fios que seguram o braço até concluir a
instalação.
Você pode prender as mãos no manipulador quando o prendedor de fios for
removido antes de concluir a instalação.
Page 68

2. Instalação
50 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.3 Transporte
A instalação e o transporte dos manipuladores e do equipamento robótico deve ser
feita por pessoal qualificado e em conformidade com todos os códigos nacionais e
locais.
2.3.1 Precauções de transporte
Procedimentos de transporte
: Usando um carrinho ou equipamento similar, transporte o manipulador
nas mesmas condições em que ele foi entregue. Observe o seguinte ao
desembalar manipulador.
Somente pessoal autorizado deverá executar o trabalho de erguer e operar
um guindaste ou uma empilhadeira. Quando essas operações são
executadas por pessoal não autorizado, isso é extremamente perigoso e
pode resultar em sérias lesões corporais e/ou danos graves ao
equipamento do sistema robótico.
Vibração no transporte
: Evite vibração excessiva ou choques durante o transporte do
manipulador. Vibração excessiva ou choques podem causar danos ao
equipamento e/ou mau funcionamento do manipulador.
Parafuso de fixação
: Ao remover os parafusos de fixação, apoie o manipulador para prevenir
queda.
Remover os parafusos de fixação sem apoiar o manipulador pode prender
suas mãos, dedos ou pés se o manipulador vier a cair.
Lâmina
: O braço é preso com uma lâmina. Deixe a lâmina presa até concluir a
instalação de modo a não prender as mãos ou os dedos.
Procedimentos de içamento
: Estabilize o manipulador com as mãos ao içá-lo. O içamento instável é
extremamente perigoso e pode resultar em sérias lesões corporais e/ou
danos sérios ao equipamento do sistema robótico como a queda do
manipulador.
Page 69

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 51
2.3.2 Transporte do manipulador
Manipulador da série T
Para carregar o manipulador, providencie duas ou mais
pessoas para colocar e proteger o manipulador no
equipamento de entrega ou segure a parte inferior do
Braço 1 e a parte inferior das áreas da base (indicadas
em cinza na figura) com a mão.
Ao segurar a parte inferior da base com a mão, seja
muito cuidadoso para não prender suas mãos ou dedos.
T3-401S:
aprox. 16 kg: 35 lbs.
T6-602S:
aprox. 22 kg: 49 lbs.
Certifique-se de não segurar pela unidade de energia ao
carregar o manipulador.
(Ilustração: T3-401S)
Manipulador da série VT
Para transportar o manipulador, prenda-o ao
equipamento de entrega ou providencie pelo
menos 2 pessoas para segurá-lo com as
mãos.
Além disso, não segure a parte inferior da
base (a área sombreada na figura). Segurar a
área com as mãos é extremamente perigoso
e pode fazer com que suas mãos ou dedos
fiquem presos.
VT6-A901S*, VT6-A901C*:
aprox. 40 kg: 89 lbs.
VT6-A901P*:
aprox. 42 kg: 92 lbs.
NÃO segure a parte
inferior base com a mão.
Page 70

2. Instalação
52 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.4 Instalação do manipulador
A instalação e o transporte dos manipuladores e do equipamento robótico deve ser
feita por pessoal qualificado e em conformidade com todos os códigos nacionais e
locais.
2.4.1 Precauções de instalação
Instalação da proteção de segurança
: Para garantir a segurança, deve ser instalado uma proteção de segurança
para o sistema robótico. Para detalhes sobre a proteção de segurança,
consulte as Precauções de instalação e de projeto no capítulo Segurança
do Guia do usuário do EPSON RC+.
Espaço entre a proteção de segurança e o manipulador
: Instale o manipulador em um local com espaço suficiente de modo que
uma ferramenta ou uma peça de trabalho no atuador da extremidade não
alcance uma parede ou uma proteção de segurança quando o manipulador
estender totalmente os braços segurando uma peça de trabalho. Instalar o
manipulador em um local com espaço insuficiente é extremamente
perigoso e pode resultar em sérias lesões corporais e/ou danos graves ao
equipamento do sistema robótico, pois a ferramenta ou a peça de trabalho
pode colidir com uma parede ou uma proteção de segurança.
Verificação do manipulador antes da instalação
: Antes de instalar e operar o manipulador, assegure-se de que todas as
peças do manipulador estão no lugar e não tenham defeitos externos.
Peças faltantes ou defeituosas podem causar operação incorreta do
manipulador. A operação incorreta do manipulador é extremamente
perigosa e pode resultar em sérias lesões corporais e/ou danos graves ao
equipamento do sistema robótico.
Montagem na parede e montagem no teto
: Ao montar o manipulador em uma parede ou no teto, prenda o
manipulador a uma parede ou teto que tenham resistência e rigidez
suficientes. Montar o manipulador em uma parede ou teto que tenham
resistência e rigidez insuficientes é extremamente perigoso e pode resultar
em sérias lesões corporais e/ou danos graves ao equipamento do sistema
robótico pois o manipulador pode cair ou vibrar.
: Ao montar o manipulador em uma parede ou teto, para fins de segurança,
prenda o suporte à base do manipulador base para evitar que o
manipulador caia. Se o manipulador cair, isso é extremamente perigoso e
pode resultar em sérias lesões corporais e/ou danos graves ao equipamento
do sistema robótico.
Page 71

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 53
Plataforma móvel
: Ao montar o manipulador na plataforma móvel, existe um risco de o
manipulador cair. Seja cuidadoso com os itens seguintes e tome as
medidas para evitar a queda.
Rigidez da conexão entre a plataforma móvel e o manipulador
Aceleração/desaceleração da plataforma móvel e o manipulador
Faixa de movimento do manipulador
: Assegure-se de projetar a posição de montagem do manipulador de modo
que o centro de gravidade esteja sempre dentro da plataforma móvel
quando o manipulador agarra uma peça de trabalho usando uma
ferramenta. Para a posição de operação, crie um programa de operação de
modo que o centro de gravidade do manipulador fique sempre dentro da
plataforma móvel. Se o centro de gravidade não estiver dentro da
plataforma móvel, o manipulador pode cair.
Avaliação de riscos e medidas de segurança
: Esse manipulador não é um robô colaborativo. Assegure-se de executar uma
avaliação de riscos e tomar medidas de segurança tais como a proteção de
segurança e o interruptor de parada de emergência.
Operar o manipulador sem tomar as medidas de segurança, é extremamente
perigoso, poderá resultar em sérias lesões corporais e/ou danos graves ao
sistema robótico e poderá causar sérios problemas de segurança.
2.4.2 Ambiente
É necessário um ambiente adequado para o sistema robótico funcionar corretamente
e de modo seguro. Assegure-se de instalar o sistema robótico em um ambiente que
atenda as condições seguintes:
Item
Condições
Temperatura ambiente
5 ~ 40°C (com variação mínima da temperatura)
Umidade relativa do
ambiente
Série T
20 ~ 80% (sem condensação)
Série VT
10 ~ 80% (sem condensação)
Ruído de transiente
elétrico rápido
2 kV ou menos (Fio da fonte de energia)
1 kV ou menos (Fio de sinal)
Ruído eletrostático
4 kV ou menos
Ambiente
- Instalação em ambiente interno.
- Manter afastado da luz solar direta.
- Manter afastado de poeira, fumaça oleosa,
salinidade, pó de metal ou outros contaminantes.
- Manter afastado de solventes e gases inflamáveis
ou corrosivos.
- Manter afastado de água.
- Manter afastado de choques e vibrações.
- Manter afastado de fontes de ruído elétrico.
- Manter afastado de campos elétricos ou magnéticos
fortes.
Page 72

2. Instalação
54 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Os manipuladores não são adequados para operação em ambientes adversos tais
como áreas de pintura, etc. Ao usar os manipuladores em ambientes inadequados
que não atendam as condições acima, contate o fornecedor de sua região.
Para o manipulador do modelo com proteção, assegure-se de instalar o sistema
robótico em um ambiente que atenda as condições seguintes:
Item
Condições
Ambiente
- Instalação em ambiente interno.
- Manter afastado da luz solar direta.
- Manter afastado de salinidade ou outros
contaminantes.
- Manter afastado de solventes (inclusive água)
*1
e
gases inflamáveis ou corrosivos.
- Manter afastado de solventes orgânicos, ácidos,
álcalis, fluídos de corte clorados.
- Não usar na água.
- Manter afastado de choques e vibração.
- Manter afastado de fontes de ruído elétrico.
- Disponível sob ambientes com poeira, fumaça
oleosa e pó de metal *2.
*1 O corpo do manipulador é feito principalmente de ferro e alumínio. Ele não é à
prova de ferrugem. Não use o manipulador sob condições em que possa ficar
exposto à água ou a qualquer outro líquido corrosivo (incluindo água).
*2 Quaisquer contaminantes que podem deteriorar o desempenho das vedações de
óleo de borracha nitrílica, O-rings, gaxetas de vedação e gaxetas de líquido
deverão ser evitados.
Condições ambientais especiais
As vedações de proteção são montadas no manipulador com proteção para impedir a
entrada de poeira, água, etc. Siga as precauções no ambiente de uso descritas abaixo.
A superfície do manipulador tem resistência geral a óleo. No entanto, se seus
requisitos especificam que o manipulador deve suportar certos tipos de óleo, contate
o fornecedor de sua região.
Mudança rápida na temperatura e umidade pode causar condensação dentro do
manipulador.
Se os seus requisitos especificam que o manipulador manuseie alimentos, contate o
fornecedor de sua região para verificar se o manipulador irá danificar o alimento ou não.
O manipulador não pode ser usado em ambiente corrosivo onde são usados ácidos
ou alcalinos. Em um ambiente salgado onde a ferrugem é provável de ocorrer, o
manipulador é suscetível à ferrugem.
Ao montar o manipulador na plataforma móvel, assegure-se de usar a plataforma
móvel em aceleração baixa. Se usar a plataforma móvel em aceleração alta, isso
poderá causar que o manipulador faça uma parada de segurança.
Page 73

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 55
ATENÇÃO
■
Use um disjuntor de aterramento no cabo de energia dos
manipuladores para evitar choque elétrico e colapso do circuito por
curto-circuito.
■
Para manipulador com especificação de CC, use um protetor de circuito
para evitar choque elétrico e/ou mau funcionamento do sistema
robótico.
CUIDADO
■
Ao limpar o manipulador, não esfregue fortemente com álcool ou
benzina. Ele pode perder o brilho da face revestida.
2.4.3 Nível de ruído
Manipulador
Nível dB(A)
Condições de operação
Ponto de medição
Série T
70 ou
inferior
Carga nominal
movimento simultâneo
das 4 articulações
velocidade máxima
aceleração/desaceleração
máxima
taxa de utilização 50%
Traseira do
manipulador,
1.000 mm além da
faixa de movimento,
50 mm acima da
superfície da base
instalada
Série VT
70 ou
inferior
Sob carga nominal
Movimento simultâneo
de todas as articulações
velocidade máxima
aceleração/desaceleração
máxima
taxa de utilização 50%
1.000 mm além da
traseira do
manipulador
Page 74

2. Instalação
56 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.4.4 Mesa base
A mesa base para fixação do manipulador não é fornecida. Faça ou obtenha uma
mesa base para o seu manipulador. O formato e o tamanho da mesa base difere
dependendo do uso do sistema robótico. Para sua consulta, relacionamos aqui alguns
requisitos para a mesa do manipulador.
A mesa base deve não só poder sustentar o peso do manipulador, mas também
suportar o movimento dinâmico do manipulador quando ele opera na
aceleração/desaceleração máxima. Assegure que ela tenha resistência suficiente na
mesa base acoplando materiais de reforço tais como traves mestras.
A força de torque e reação produzidas pelo movimento do manipulador são as
seguintes:
T3
T6
VT6
Torque de reação máximo
na chapa horizontal
150
150
500
Força de reação horizontal
máxima
500
500
500
Força de reação vertical
máxima
900
900
3100
Os furos rosqueados necessários para montar a base do manipulador são M8. Use
parafusos de montagem com especificações em conformidade com a classe de
propriedade ISO898-1: 10.9 ou 12.9.
A chapa para a face de montagem do manipulador deve ter 20 mm de espessura ou
mais e ser feita de aço para reduzir a vibração. A aspereza da superfície da placa de
aço deverá ser de 25 μm ou menos.
A mesa deve ser presa ao piso ou parede para evitar que ela se mova.
Ao montar o manipulador na plataforma móvel, assegure-se de usar a plataforma
móvel em aceleração baixa. Se usar a plataforma móvel em aceleração alta, isso
poderá fazer com que o manipulador faça uma parada de segurança.
Assegure-se de projetar a posição de montagem do manipulador de modo que o
centro de gravidade esteja sempre dentro da plataforma móvel quando o
manipulador agarra uma peça de trabalho usando uma ferramenta. Para a posição de
operação, crie um programa de operação no qual o centro de gravidade do
manipulador fique sempre dentro da plataforma móvel. Se o centro de gravidade
não estiver dentro da plataforma móvel, o manipulador pode cair.
O manipulador deve ser instalado horizontalmente.
Ao usar um nivelador para ajustar a altura da mesa base, use um parafuso com
diâmetro M16.
Page 75

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 57
2.4.5 Procedimento de instalação
Quando o manipulador é do tipo para sala limpa, desembale fora da sala limpa.
Prenda o manipulador para não cair e então limpe a poeira no manipulador com um
pouco de álcool ou água destilada em um pano sem fiapos. Após isso, transporte o
manipulador para a sala limpa. Conecte um tubo exaustor à porta de exaustão após
a instalação.
CUIDADO
■
Instale o manipulador com duas pessoas ou mais.
Os pesos do manipulador são os seguintes. Seja cuidadoso para não
prender as mãos, dedos ou pés e/ou ter o equipamento danificado por
queda do manipulador.
T3-401S: aprox. 16 kg: 35 lbs.
T6-602S: aprox. 22 kg: 49 lbs.
VT6-A901S*, VT6-A901C*: aprox. 40 kg: 89 lbs.
VT6-A901P*: aprox. 42 kg: 92 lbs.
Série T
Prenda a base à mesa base
com quatro parafusos.
Use parafusos de montagem
com especificações em
conformidade com a classe
de propriedade ISO898-1:
10.9 ou 12.9.
Torque de aperto:
32,01,6 N· m
10 mm
4-M830
Furo de parafuso
(profundidade 20
mm ou mais)
Arruela de pressão
Arruela plana
(Ilustração:T3-401S)
Não esqueça de remover o prendedor de fios do protetor do batente mecânico.
Série VT
Prenda a base à mesa base com
quatro parafusos.
Use parafusos de montagem com
especificações em conformidade
com a ISO898-1 classe de
propriedade: 10.9 ou 12.9.
Torque de aperto:
32,0 1,6 N·m
Furo de parafuso
(Profundidade de
18 mm ou mais)
Arruela plana
Arruela de pressão
17 mm
4-M835
NOTA
Page 76

2. Instalação
58 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Aterramento
Siga as regulamentações locais para o aterramento. É recomendado que o tamanho
do núcleo do fio de aterramento seja de 5,5 mm2 ou mais.
Conecte diretamente a linha de terra ao manipulador usando os furos de parafusos
na figura abaixo.
Manipulador da série T
Furo de parafuso
(para aterramento)
(Ilustração: T3-401S)
Manipulador da série VT
Furo de parafuso M4
(para aterramento
(Ilustração: VT-6-A901S)
Para o manipulador com especificação de CC, conecte o fio terra e o fio de
alimentação de CC (−).
Page 77

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 59
2.5 Conexão ao conector EMERGENCY
Conecte um interruptor de proteção de segurança ou interruptor de parada de
emergência no conector EMERGENCY para fins de segurança.
Quando nada estiver conectado ao conector EMERGENCY, o controlador não
operará normalmente.
ATENÇÃO
■
Assegure-se de que a parada de emergência ou a porta de segurança
operam corretamente antes de operar, não só no carregamento, mas
também nas mudanças de uso, tal como opções adicionadas ou peças
substituídas por manutenção.
■
Antes de conectar o conector, certifique-se de que os pinos não estão
tortos. Conectar com os pinos tortos pode danificar o conector e
resultar em mau funcionamento do sistema robótico.
Manipulador da série T
Conector EMERGENCY
(Ilustração:T3-401S)
Page 78

2. Instalação
60 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Manipulador da série VT
Modelo padrão, Modelo para sala limpa
Modelo com proteção
2.5.1 Interruptor de porta de segurança e interruptor de liberação do
engate
O conector EMERGENCY possui terminais de entrada para o interruptor de porta
de segurança e para o interruptor de parada de emergência. Não deixe de usar esses
terminais de entrada para manter o sistema seguro.
Modelo para sala limpa, padrão
Conector
Padrão
Conector EMERGENCY
(Lado do manipulador)
D-Sub de 25 pinos fêmea (lado do cabo)
D-Sub de 25 pinos macho (lado da placa)
* O kit do cabo do conector E-STOP BOX, EMERGENCY, bloco de terminais e
conector EMERGENCY são oferecidos como opções.
Modelo com proteção
Conector
Padrão
Conector EMERGENCY
(Lado do Manipulador)
D-Sub de 25 pinos macho
Fixação com parafuso 4 - 40
Kit do conector EMERGENCY
(Lado do cabo)
D-Sub de 25 pinos fêmea
Tampa para D-Sub de 25 pinos
Parafuso de montagem 4 - 40
* O kit do conector EMERGENCY (lado do cabo) é incluído com a remessa.
(O diâmetro aplicável para cabos é 8,0 a 12,0 mm)
Page 79

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 61
2.5.2 Interruptor da porta de segurança
ATENÇÃO
■
O interruptor da porta de segurança deve estar funcionando enquanto
o sistema robótico é operado. Não opere o sistema sob condições em
que o interruptor não possa ser ligado/desligado (por exemplo,
cobrindo o interruptor uma fita). Operar o sistema robótico quando o
interruptor não estiver funcionando corretamente é extremamente
perigoso e pode causar sérios problemas de segurança pois a entrada
da porta de segurança não pode realizar a função para a qual foi
concebida.
Para manter uma zona de trabalho segura, uma proteção de segurança deve ser
montada em torno do Manipulador. A proteção de segurança deve ter um interruptor
de bloqueio na entrada da zona de trabalho. A porta de segurança que é descrita
nesse manual é uma das proteções de segurança e um interruptor da porta de
segurança é chamado de interruptor da porta de segurança. Conecte o interruptor de
porta de segurança ao terminal de entrada da porta de segurança do conector
EMERGENCY.
O interruptor de porta de segurança possui recursos de segurança tais como a
suspensão temporária do programa ou o status de operação proibida que é ativado
sempre que a porta de segurança é aberta.
Observe o seguinte ao projetar um interruptor de porta de segurança e a própria porta
de segurança.
- Para o interruptor de porta de segurança, selecione um interruptor que abra
assim que a porta de segurança for aberta e não por mola do próprio interruptor.
- O sinal da porta de segurança (entrada da porta de segurança) é projetado para
entrar com dois sinais redundantes. Se o sinal nas duas entradas diferirem em
dois segundos ou mais, o sistema considera isso como um erro crítico. Portanto,
assegure-se de que o interruptor de porta de segurança tenha dois circuitos
redundantes separados e que cada um se conecte a pinos específicos no conector
EMERGENCY no controlador.
- A porta de segurança deve ser projetada e instalada de modo que não feche
acidentalmente.
Page 80

2. Instalação
62 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.5.3 Interruptor de liberação do engate
O software do controlador engata as seguintes condições:
- A porta de segurança está aberta.
- O modo de operação é “TEACH”.
O conector EMERGENCY possui um terminal de entrada para um interruptor de
liberação do engate que cancela as condições engatadas.
Aberto : O interruptor de liberação do engate engata condições em que a porta
de segurança está aberta ou que o modo de operação é “TEACH”.
Fechado : O interruptor de liberação do engate libera as condições engatadas.
Quando o modo TEACH engatado é liberado enquanto a porta de segurança está
aberta, o status de energia do Manipulador é de operação proibida porque a porta de
segurança está aberta nesse momento.
Para executar a operação do manipulador, feche a porta de segurança novamente, e
então feche a entrada de liberação do engate.
2.5.4 Verificação do interruptor de liberação do engate
Após conectar o interruptor da porta de segurança e o interruptor de liberação do engate
ao conector EMERGENCY, verifique a operação do interruptor quanto à segurança,
seguindo os procedimentos descritos abaixo antes de operar o Manipulador.
(1) Ligue o controlador enquanto a porta de segurança está aberta para carregar o
software do controlador.
(2) Assegure-se de que “Safety” é exibido na barra de status do EPSON RC+ 7.0.
(3) Feche a porta de segurança e ligue o interruptor conectando à entrada de liberação
do engate. Assegure-se de que “Safety” fica acinzentado na barra de status.
A ativação do controlador pode falhar quando o interruptor da porta de segurança
é ativado durante a inicialização, imediatamente após ligar o controlador. Nesse caso,
retarde o momento da ativação do interruptor da porta de segurança.
A informação de que a porta de segurança está aberta pode ser engatada pelo
software baseado na condição da entrada da liberação do engate. Para executar a
condição, feche a porta de segurança e então feche a entrada de liberação do engate
da porta de segurança.
Aberto : O interruptor de liberação do engate engata a condição em que a porta
de segurança está aberta.
Fechado : O interruptor de liberação do engate não engata a condição de que a
porta de segurança está aberta.
A entrada de liberação do engate também funciona para reconhecer a mudança do
modo TEACH.
NOTA
NOTA
NOTA
Page 81

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 63
Para mudar a condição engatada do modo TEACH, mude a chave seletora do modo
no controle portátil para “Auto”. Em seguida, feche a entrada de liberação do engate.
2.5.5 Interruptor de parada de emergência
Se for desejado criar um interruptor de parada de emergência externos além da
parada de emergência do controle portátil, não deixe de conectar este interruptor de
parada de emergência ao terminal de entrada da parada de emergência no conector
EMERGENCY.
O interruptor de parada de emergência conectado deve respeitar o seguinte:
O interruptor de parada de emergência conectado deve ser compatível com o
seguinte e com o padrão de segurança relacionado (IEC60947-5-5, etc.):
- Ele deve ser um interruptor de botão de pressão que seja “normalmente
fechado”.
- Um botão que não retorne ou retome automaticamente.
- O botão deve ter o formato de cogumelo e ser vermelho.
- O botão deve ter um contato duplo que seja “normalmente fechado”.
O sinal do interruptor de parada de emergência é projetado para usar dois circuitos
redundantes. Se o sinal nos dois circuitos diferirem em dois segundos ou mais, o
sistema reconhece isso como um erro crítico. Portanto, assegure-se de que o
interruptor de parada de emergência tenha contatos duplos e instale o interruptor
consultando a seção 2.5.8: Diagramas de circuitos.
2.5.6 Verificação da operação do interruptor de parada de emergência
Uma vez que o interruptor de parada de emergência estiver conectado ao conector
EMERGENCY, continue o procedimento seguinte para se certificar que o
interruptor funciona corretamente. Por razões de segurança do operador, o
manipulador não deve ser ligado até que o teste seguinte seja completado.
(1) Ligue o manipulador para carregar o controlador enquanto pressiona o
interruptor de parada de emergência.
(2) Certifique-se de que o LED E-STOP do Manipulador está aceso.
(3) Assegure-se de que “EStop” é exibido na barra de status.
(4) Libere o interruptor de parada de emergência.
(5) Execute o comando RESET.
(6) Assegure-se de que o LED E-STOP está apagado e que “E-Stop”está
acinzentado na barra de status da janela principal.
NOTA
Page 82

2. Instalação
64 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.5.7 Atribuição de pinos
As atribuições de pinos no conector EMERGENCY são as seguintes: (D-Sub de 25
pinos macho)
No do
Pino
Sinal
Função
No do
Pino
Sinal
Função
1
ESW11
Contato do interruptor de
parada de emergência (1) *3
14
ESW21
Contato do interruptor de
parada de emergência (2) *3
2
ESW12
Contato do interruptor de
parada de emergência (1) *3
15
ESW22
Contato do interruptor de
parada de emergência (2) *3
3
ESTOP1+
Circuito de parada de emergência 1 (+) *4
16
ESTOP2+
Circuito de parada de emergência 2 (+) *4
4
ESTOP1−
Circuito de parada de emergência 1 (-) *4
17
ESTOP2−
Circuito de parada de emergência 2 (-) *4
5
Não usado
*1
18
SDLATCH1
Liberação do engate da porta de
segurança
6
Não usado
*1
19
SDLATCH2
Liberação do engate da porta de
segurança
7
SD11
Entrada da porta de segurança (1) *2
20
SD21
Entrada da porta de segurança (2) *2
8
SD12
Entrada da porta de segurança (1) *2
21
SD22
Entrada da porta de segurança (2) *2
9
24 V
Saída de +24 V
22
24 V
Saída de +24 V
10
24 V
Saída de +24 V
23
24 V
Saída de +24 V
11
24VGND
Saída de +24 V Terra
24
24VGND
Saída de +24 V Terra
12
24VGND
Saída de +24 V Terra
25
24VGND
Saída de +24 V Terra
13
Não usado
*1
*1 Não conecte nada a esses pinos.
*2 Um erro crítico ocorre se os valores da entrada da porta de segurança 1 e da porta de segurança 2 tiverem diferença
de dois ou mais segundos. Elas devem ser conectadas ao mesmo interruptor com dois jogos de contatos.
*3 Um erro crítico ocorre se os valores da entrada da parada de emergência 1 e da parada de emergência 2
tiverem diferença de dois ou mais segundos. Elas devem ser conectadas ao mesmo interruptor com dois
jogos de contatos.
*4 Não aplique voltagem reversa ao circuito de parada de emergência.
Carga nominal de saída do interruptor de parada de emergência
+30 V 0,3 A ou menos
Pinos 1-2, 14-15
Faixa de voltagem de entrada nominal da parada de emergência
Corrente de entrada nominal da parada de emergência
+24 V 10%
Entrada de 37,5 mA 10% /
+24 V
Pinos 3-4, 16-17
Faixa de voltagem de entrada nominal da porta de segurança
Corrente de entrada nominal da porta de segurança
+24 V 10%
Entrada de 10 mA/+24 V
Pinos 7-8, 20-21
Faixa de voltagem de entrada nominal da liberação do engate
Corrente de entrada nominal da liberação do engate
+24 V 10%
Entrada de 10 mA/+24 V
Pinos 18 -19
A resistência elétrica total dos interruptores de parada de emergência e seus circuitos deve ser de
1 ou menos.
CUIDADO
■
A saída de 24 V é para a parada de emergência. Não use para outros fins. Isso
pode resultar em mau funcionamento no sistema.
■
Não aplique voltagem reversa ao circuito de parada de emergência.
Isso pode resultar em mau funcionamento no sistema.
NOTA
Page 83

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 65
2.5.8 Diagramas de circuitos
Exemplo 1: Aplicação típica do interruptor de parada de emergência externo
+24V
+5V
Entrada 1 da porta
de emergência
+24V
Externo
Entrada 2 da porta de
emergência
Entrada de liberação
do engate
Entrada de liberação do engate
Fechado :Engate desativado
Aberto : Engate ativado
Controle do
circuito
principal
Entrada de
CA
Interruptores
de parada de
emergência de
uma unidade
de operação
(TP)
+24V
GND Externo
Interruptores de parada
de emergência externos
Acionador
do motor
+
−
Manipulador
9
10
22
23
1
2
14
15
3
16
4
17
11
12
24
25
7
8
20
21
18
19
Detecção da
parada de
emergência
Tenha
cuidado com a
polaridade da
voltagem
ESTOP1+
ESTOP2+
ESTOP1−
ESTOP2-
Page 84

2. Instalação
66 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
Exemplo 2: Aplicação típica do relé de segurança externo
* Para proteção do
circuito de parada de
emergência,
a capacidade do fusível
deve ser como segue:
- Atender a capacidade
do relé de segurança
externo
- 0,4A ou menos
Relé de segurança
externo (o diagrama
acima é simplificado
para representação)
+24V
GND
Externo
+24V
+5V
Entrada 1 da porta
de emergência
Entrada 2 da porta de
emergência
Entrada de liberação
do engate
Entrada de
CA
Acionador
do motor
+24V Externo
Fusível
+
−
+24V
Externo
Manipulador
9
10
22
23
1
2
14
15
3
16
4
17
11
12
24
25
7
8
20
21
18
19
+
Controle do
circuito
principal
Interruptor de parada
de emergência de
uma unidade de
operação (TP)
Detecção da
parada de
emergência
+24V
Externo
Entrada de liberação do engate Fechado :Engate desativado
Aberto :Engate ativado
+24V
GND Externo
+24V
GND
Externo
Page 85

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 67
Exemplo 3: Exemplo de conexão da plataforma móvel e da parada de
emergência
* Para proteção do circuito
de parada de emergência,
a capacidade do fusível
deve ser como segue:
- Atender a capacidade do
relé de segurança
externo
- 0,4A ou menos
+24V
+5V
Entrada 1 da porta
de segurança
+24V Externo
Entrada 2 da porta
de segurança
Entrada de liberação
do engate
Entrada de liberação do engate Fechado :Engate desativado
Aberto :Engate ativado
Circuito
Entrada de CA
Interruptor da
parada de
emergência de
uma unidade de
operação (TP)
+24V
GND Externo
Acionador do
motor
+24V Externo
Fusível
+
−
Emergency stop output
Manipulador
9
10
22
23
1
2
14
15
3
16
4
17
11
12
24
25
7
8
20
21
18
19
Detecção da parada
de emergência
+
+24V
GND Externo
Saída da parada
de emergência
Entrada da
parada de
emergência
Plataforma móvel
Page 86

2. Instalação
68 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.6 Fonte de energia, Cabo de energia, Disjuntor
ATENÇÃO
■
Não há interruptor de energia no manipulador. Tão logo o plugue
de energia é inserido na tomada, o sistema robótico liga.
Tenha cuidado com choques elétricos ao inserir o plugue de
energia.
2.6.1 Fonte de energia
Manipulador especificado para CA:
Assegure-se de que a energia atenda as especificações seguintes.
Item
Especificação
Voltagem
100 a 240 VCA
(A voltagem de entrada deverá estar dentro
de 10 da voltagem nominal).
Fase
Monofásico
Frequência
50/60 Hz
Interrupção de energia
momentânea
Menos de 10 ms.
Capacidade nominal
T3: 660 VA
T6, VT: 1.200 VA
Corrente de pico
(Quando a energia de CA é
ligada)
T3: aprox. 30 A
(Menos de 2 ms.)
T6, VT: aprox. 60A (Menos de 2 ms.)
Vazamento de corrente
Máx. 10 mA
Resistência de terra
Menos de 100
Manipulador especificado para CC:
Assegure-se de que a energia atenda as especificações seguintes.
Item
Especificação
Voltagem
48 VCC
Voltagem disponível
43 a 60 VCC
Classificação máxima absoluta
72 VCC
(Tenha cuidado para não exceder o valor
quando a voltagem aumenta).
Corrente de pico
(Quando a energia de CC é ligada)
Máx. 40A (menos de 10 ms.)
Capacidade nominal
1200 W
Aterramento
O fio de terra e o fio de energia de CC (−)
são conectados.
Page 87

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 69
Linha de energia de CA:
Instale um disjuntor de fuga para a terra ou um disjuntor.
Para a corrente elétrica nominal do disjuntor, consulte os valores de configuração
seguintes.
Manipulador
Energia
Corrente elétrica
nominal
Série T3
CA100V
10A
CA200V
5A
Série T6
Série VT (Especificação para
CA)
CA100V
20A
CA200V
10A
Linha de energia de CC:
Instale um protetor de circuito.
Para a corrente elétrica nominal do protetor de circuito, consulte os valores de
configuração seguintes.
Manipulador
Energia
Corrente elétrica
nominal
Série VT (Especificação para
CC)
CC48V
40A
Se você instalar um protetor de circuito, selecione um que manuseie o “pico de
corrente” mencionado acima.
A tomada de energia deverá ser instalada próximo do equipamento e deverá ser
facilmente acessível.
Page 88

2. Instalação
70 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.6.2 Cabo de energia
ATENÇÃO
■
Assegure-se de que as operações sejam efetuadas por pessoal
qualificado.
■
Não deixe de conectar o fio terra (verde/amarelo) do cabo de
energia ao terminal de terra da fonte de energia da fábrica.
Além disso, recomendamos aterrar diretamente através de um furo
na base para aterrar completamente o manipulador.
O equipamento deve ser sempre aterrado corretamente para evitar
o risco de choque elétrico.
■
Não deixe de conectar o fio marrom do cabo de energia de CC ao
terminal “+” e o fio azul ao “−”. Conectar em polaridade errada
resultará em mau funcionamento do manipulador.
■
Use sempre o plugue de energia ou um dispositivo de desconexão
para o cabo de conexão de energia. Nunca conecte o controlador
diretamente à fonte de energia da fábrica.
■
Selecione o plugue ou o dispositivo de desconexão que esteja em
conformidade com os padrões de segurança do país.
Ao conectar o conector do cabo de energia ao manipulador, assegure-se de inseri-lo
completamente.
Manipulador especificado para CA
Item
Especificação
Fio de energia de CA (2 cabos)
Preto, Branco
Fio terra
Verde/Amarelo
Comprimento do cabo
5 m
Terminal
Terminal sem solda redondo M4
Manipulador especificado para CC
Item
Especificação
Fio de energia de CC (+)
Marrom
Fio de energia de CC (−)
Azul
Comprimento do cabo
2 m
Terminal
Terminal sem solda redondo M4
Page 89

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 71
Use o prendedor de cabo na traseira do manipulador para fixar o cabo.
Manipulador da série T
Manipulador da série VT
(Somente para o modelo para sala
limpa, padrão)
(Ilustração: T3-401S)
(Ilustração: VT6-A901S)
NOTA
Page 90

2. Instalação
72 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.7 Energia
2.7.1 Precauções ao ligar a energia
Verifique o manipulador
: Antes de operar o manipulador, assegure-se de que todas as peças do
manipulador estão no lugar e não tenham defeitos externos. Se ocorrer um
erro, pare a operação e contate-nos.
Verifique os parafusos e suportes de transporte antes de ligar
: Antes de ligar a energia após a instalação, certifique-se de remover os
parafusos e suportes de transporte do manipulador. Ligar a energia enquanto
os parafusos e suportes de transporte estão presos pode resultar em danos ao
equipamento do manipulador.
Ativação da energia
: Prenda o manipulador antes de ligar a energia ou operar o manipulador. Ligar
a energia ou operar o manipulador que não esteja preso é extremamente
perigoso e pode resultar em sérias lesões corporais e/ou danos graves ao
equipamento do sistema robótico pois o manipulador pode cair.
Ao fornecer energia novamente
: Ao fornecer energia novamente para o manipulador, desligue o controlador e
aguarde 5 segundos ou mais. Então, ligue o manipulador novamente.
Page 91

2. Instalação
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 73
2.7.2 Procedimento para ligar a energia
(1) Verifique a conexão do conector EMERGENCY.
(2) Conecte o plugue de contorno do TP à porta TP.
(3) Conecte o cabo de energia ao manipulador
(4) Conecte o cabo de energia à tomada do suprimento de energia.
(5) O LED PROGRAM pisca por aproximadamente 30 segundos após o
controlador iniciar normalmente.
Se o LED ERROR acender ou piscar, certifique a conexão na etapa (1) a (4) e
ligue a energia novamente.
Se o LED ERROR ainda estiver aceso ou piscando, contate o fornecedor em
sua região.
Manipulador da série T
LED
(Ilustração: T3-401S)
Manipulador da série VT
LED
LED
Modelo padrão, Modelo para sala limpa
Modelo com proteção
Page 92

2. Instalação
74 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
2.8 Salvamento do status padrão
O manipulador já é configurado com o(s) manipulador(es) adquirido(s) na remessa.
No entanto, por via das dúvidas, recomendamos salvar o status do controlador
padrão. Uma memória USB é necessária para salvar o status do controlador.
Para o procedimento de armazenamento do status do controlador, consulte os
manuais seguintes.
Manual do manipulador da série T
Manual do manipulador da série VT
Configuração e operação 8. Porta de memória.
Page 93

3. Primeira etapa
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 75
3. Primeira etapa
Essa seção indica o procedimento para instalar o PC de desenvolvimento EPSON
RC+, e executar programas simples após conectar o PC de desenvolvimento e o
manipulador com um cabo USB.
Assegure-se de que o sistema robótico está instalado de modo seguro seguindo a
descrição em 1. Segurança e 2. Instalação. Então, opere o sistema robótico nos
procedimentos seguintes.
3.1 Instalação do software EPSON RC+ 7.0
O software EPSON RC+ 7.0 precisa ser instalado em seu PC de desenvolvimento.
(1) Insira o DVD de instalação do EPSON RC+ 7.0 na unidade de DVD.
(2) A seguinte caixa de diálogo será exibida. Clique em <Next>.
Page 94

3. Primeira etapa
76 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
(3) Digite seu nome de usuário e nome da empresa e clique em <Next>.
(4) Selecione a unidade de disco onde você quer instalar o EPSON RC+ 7.0 e
clique em <Next>.
O diretório de instalação é denominado EpsonRC70. Esse não pode ser
mudado.
NOTA
Page 95

3. Primeira etapa
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 77
(5) A caixa de diálogo para selecionar as opções a serem instaladas será
exibida. Marque as opções que você quer instalar e clique em <Next>.
(6) A caixa de diálogo para revisar as configurações será exibida. Se estiver
satisfeito com as configurações, clique em <Next>.
(7) Se necessário, instale “Windows Installer” e “Microsoft.NET Framework
3.5” no seu sistema. Isso pode levar vários minutos.
O Adobe Reader precisa ser instalado em seu PC para visualizar
os manuais do EPSON RC+ 7.0. Se o instalador não encontrar o Adobe
Reader em seu sistema, ele será instalado nesse momento. Siga as instruções
do instalador do Adobe. Não reinicialize o sistema depois de a instalação do
Adobe Reader ser concluída.
(8) Depois que a instalação for concluída, reinicialize seu computador.
A instalação do software EPSON RC+ 7.0 agora está concluída.
NOTA
Page 96

3. Primeira etapa
78 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
3.2 Conexão do PC de desenvolvimento e o manipulador
Conecte o PC de desenvolvimento e a porta de conexão do PC de desenvolvimento.
Manipulador da série T
Porta de conexão do PC de desenvolvimento
(llustração: T3-401S)
Manipulador da série VT
Modelo padrão, Modelo para sala limpa
Modelo com proteção
Page 97

3. Primeira etapa
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 79
- Para outros detalhes sobre a conexão entre o PC de desenvolvimento e o
Manipulador, consulte o Guia do usuário doEPSON RC+ 7.0. Comando de
comunicação do PC com o controlador.
- Certifique-se de instalar o EPSON RC +7.0 no PC de desenvolvimento
primeiro, então conecte o PC de desenvolvimento e o manipulador com o cabo USB.
Se o manipulador e o PC de desenvolvimento forem conectados sem instalar o
EPSON RC +7.0 no PC de desenvolvimento, aparecerá [Add New Hardware
Wizard]. Se esse assistente aparecer, clique no botão <Cancel>.
3.2.1 Sobre a porta de conexão do PC de desenvolvimento
A porta de conexão do PC de desenvolvimento suporta os seguintes tipos de USB.
- USB2.0 HighSpeed/FullSpeed (seleção automática da velocidade, ou modo
FullSpeed)
- - USB1.1 FullSpeed
Interface padrão: Especificação da USB Ver.2.0 compatível
(USB Ver.1.1 compatível com versões mais recentes)
Conecte o manipulador e o PC de desenvolvimento por um cabo USB para
desenvolver o sistema robótico ou definir a configuração do manipulador com o
software EPSON RC+ 7.0 instalado no PC de desenvolvimento.
A porta de conexão do PC de desenvolvimento suporta o recurso hot plugging. A
inserção e remoção dos cabos enquanto a energia para o PC de desenvolvimento e
para o manipulador está disponível. No entanto, o manipulador para quando o cabo
USB é removido enquanto o manipulador e o PC de desenvolvimento estão
conectados.
3.2.2 Precaução
Ao conectar o PC de desenvolvimento e o manipulador, certifique-se do seguinte:
- Conecte o PC de desenvolvimento e o manipulador com um cabo USB de no
máximo 5 m. Não use hub ou cabo de extensão USB.
- Certifique-se de que nenhum outro dispositivo exceto o PC de
desenvolvimento seja usado pela porta de conexão do PC de
desenvolvimento.
- Use um PC ou cabo USB que suporte o modo USB2.0 HighSpeed para operar
no modo USB2.0 HighSpeed.
- Não puxe ou dobre o cabo fortemente.
- Não aplique força excessiva ao conector.
- Quando o PC de desenvolvimento e o manipulador estiverem conectados, não
insira ou remova outros dispositivos USB do PC de desenvolvimento. A
conexão com o manipulador pode ser perdida.
NOTA
Page 98

3. Primeira etapa
80 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
3.2.3 Configuração do software e verificação da conexão
Seguem abaixo as etapas de conexão do PC de desenvolvimento e o manipulador.
(1) Certifique-se de que o EPSON RC+ 7.0 está instalado no manipulador
conectado no PC de desenvolvimento. (Instale o software quando ele não estiver
instalado).
(2) Conecte o PC de desenvolvimento e o manipulador usando um cabo USB.
(3) Ligue o manipulador.
(4) Inicie o software EPSON RC+ 7.0.
(5) Selecione o menu EPSON RC+ 7.0 -[Setup]-[PC to Controller
Communications] para exibir a caixa de diálogo [PC to Controller
Communications].
(6) Selecione “No.1 USB” e clique no botão <Connect>.
(7) Após a conexão do PC de desenvolvimento e o manipulador ser completada,
“Connected” (Conectado) é exibido em [Connection status]. Assegure-se de
que “Connected” é exibido e clique no botão <Close> para fechar a caixa de
diálogo [PC to Controller Communications].
A conexão do PC de desenvolvimento e o manipulador está concluída. Agora o
sistema robótico pode ser usado pelo EPSON RC+ 7.0.
Page 99

3. Primeira etapa
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16 81
3.2.4 Cópia de segurança da condição inicial do manipulador
Faça cópia de segurança dos dados do manipulador configurados antes da remessa.
Procedimento de cópia de segurança do projeto e configuração do sistema:
(1) No menu [Project] (Projeto), selecione [Copy] (Cópia).
(2) Mude [Destination Drive] (Unidade de disco de destino) para uma unidade arbitrária.
(3) Clique em <OK>. O projeto será copiado para a mídia externa.
(4) No menu [Tools] (Ferramentas), selecione [Controller] (Controlador).
(5) Clique no botão <Backup Controller> (Cópia de segurança do controlador).
(6) Selecione a unidade de disco arbitrária.
(7) Clique em <OK>. Será feita uma cópia de segurança da configuração do sistema
na mídia externa.
3.2.5 Desconexão do PC de desenvolvimento e o manipulador
A desconexão do PC de desenvolvimento e o manipulador é indicada.
(1) Selecione o menu EPSON RC+ 7.0 -[Setup]-[PC to Controller
Communications] para exibir a caixa de diálogo [PC to Controller
Communications].
(2) Clique no botão <Disconnect> (Desconectar).
O manipulador e o PC de desenvolvimento são desconectados e o cabo USB
pode ser removido.
Se o cabo USB for removido enquanto o manipulador e o PC de desenvolvimento
estiverem conectados, o manipulador para. Não deixe de clicar no botão
<Disconnect> na caixa de diálogo [PC to Controller Communications] antes de
remover o cabo USB.
3.2.6 Mover o manipulador para a posição inicial
O manipulador pode ser operado pelos métodos seguintes além de criar e executar
o programa.
Operação manual
Movimento de deslocamento pelo controle portátil
Execução de comandos pelo EPSON RC+
Movimento de deslocamento pelo EPSON RC+
Essa seção explica os métodos seguintes.
A: Operação manual
B: Execução de comando pelo EPSON RC+
C: Movimento de deslocamento pelo EPSON RC+
NOTA
Page 100

3. Primeira etapa
82 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.16
A: Operação manual
Mova manualmente o manipulador que está livre do controle do servo.
Para robôs SCARA:
Você pode mover a Articulação 3 com a mão enquanto o interruptor de liberação
do freio no manipulador estiver sendo pressionado com o controlador ligado.
As Articulações 1, 2 e 4 podem ser movidas manualmente.
Além disso, você pode mover o manipulador manualmente liberando o freio
solenoide pela janela de comando do EPSON RC+.
Para robôs de 6 eixos:
Os manipuladores podem ser movidos manualmente liberando o freio
eletromagnético pela janela de comando do EPSON RC+.
Para mais detalhes, consulte o seguinte manual.
MANUAL DO MANIPULADOR dos Robôs da série VT de 6 eixos
Configuração e operação 1.5.2 Liberação do freio pelo software
CUIDADO
■
Geralmente, libere o freio das articulações uma a uma. Tenho
cuidado extra se precisar liberar os freios de duas ou mais
articulações simultaneamente. Liberar os freios de duas ou mais
articulações simultaneamente pode resultar que as mãos ou dedos
sejam prensados e/ou danos no equipamento ou mau
funcionamento do manipulador a medida que os braços do
manipulador podem se mover em direções inesperadas.
■
Seja cuidadoso quanto ao braço cair ao liberar o freio. Enquanto o
freio está sendo liberado, o braço do manipulador cai com o próprio
peso. O braço em queda pode resultar em as mãos ou dedos serem
prensados e/ou danos ao equipamento ou mau funcionamento do
manipulador.
■
Antes de liberar o freio, assegure-se de manter o interruptor de
parada de emergência próximo de modo que você possa pressionar
imediatamente o interruptor de parada de emergência. De outro
modo, você não poderá parar imediatamente o braço em queda
devido a uma operação errada. O braço em queda podem causar
danos ao equipamento e/ou mau funcionamento do manipulador.
 Loading...
Loading...