

Page 1
Rev.4 EM083R1671F
SCARA-ROBOTER
G6-Serie
MANIPULATOR HANDBUCH
Page 2

MANIPULATOR HANDBUCH G6-Serie Rev.4
Page 3

SCARA-ROBOTER
G6-Serie Manipulator Handbuch
Rev.4
Copyright © 2007-2008 SEI KO EPSO N COR PO RATION. Alle Rechte vorbehalte n.
G6 Rev.4 i
Page 4

r
b
r
d
n
n
VORWORT
GARANTIE
Vielen Dank, dass Sie unsere Roboterprodukte erworben haben.
Dieses Handbuch beinhaltet die erforderlichen Informationen für die richtige Bedienung
des Manipulators.
Bitte lesen Sie dieses Handbuch und andere in Beziehung stehende Handbücher sorgfältig,
bevor Sie das Robotersystem installieren.
Bewahren Sie dieses Handbuch so auf, dass es jederzeit griffbereit ist.
Der Manipulator sowie alle Optionen werden vor Versand an den Kunden sehr strengen
Qualitätskontrollen, Tests und Untersuchungen unterzogen, um sicher zu stellen, dass das
System in einwandfreiem Zustand ist und unseren hohen Leistungsanforderungen genügt.
Alle Schäden bzw. Fehlfunktionen, die trotz normaler Betriebsbedingungen und
Handhabung entstanden sind, werden innerhalb der normalen Garantiezeit kostenlos
repariert. (Bitte informieren Sie sich bei Ihrem regionalen EPSON-Vertrieb über die
übliche Garantiezeit.)
Für die Reparatur folgender Schäden muss der Kunde aufkommen (selbst wenn sie
innerhalb der Garantiezeit auftreten):
1. Schäden oder Fehlfunktionen, die durch nachlässige Bedienung oder Bedienvorgänge
verursacht wurden, welche nicht in diesem Handbuch beschrieben sind.
Unerlaubte kundenseitige Modifikation oder Demontage.
2.
3. Schäden oder Fehlfunktionen, die durch unerlaubte Einstellungen oder
Reparaturversuche verursacht wurden.
4. Durch Naturkatastrophen (wie z. B. Erdbeben, Wasserschäden usw.) hervorgerufene
Schäden.
Warnungen, Vorsichtsgebote, Nutzung:
1. Wird der Manipulator oder mit diesem verbundene Ausrüstung außerhalb der dafü
estimmten Betriebsbedingungen und Produktspezifikationen betrieben, verfällt de
Garantieanspruch.
2. Sollten Sie sich nicht an die in diesem Handbuch dargelegten Warnungen un
Vorsichtsgebote halten, müssen wir die Verantwortung für Fehlfunktionen und Unfälle
zurückweisen, selbst wenn diese zu Verletzungen oder Todesfolge führen.
3. Wir können nicht alle möglichen Gefahren und die daraus resultierende
Konsequenzen vorhersehen, weshalb dieses Handbuch den Nutzer nicht vor alle
Gefahrmomenten warnen kann.
ii G6 Rev.4
Page 5
WARENZEICHEN
Microsoft, Windows, und das Windows-Logo sind Warenzeichen oder eingetragene
Warenzeichen der Microsoft Corporation in den USA und / oder in anderen Ländern.
Andere Marken und Produktnamen sind Warenzeichen oder eingetragene Warenzeichen
der jeweiligen Inhaber.
HINWEIS
Kein Teil dieses Handbuches darf ohne Genehmigung vervielfältigt oder reproduziert
werden.
Wir behalten uns vor, die in diesem Handbuch enthaltenen Informationen ohne
Vorankündigung zu ändern.
Bitte benachrichtigen Sie uns, wenn Sie in diesem Handbuch Fehler finden oder uns einen
inhaltsbezogenen Kommentar übermitteln wollen.
ANFRAGEN
Bei Reparaturen, Wartungsmaßnahmen oder Neueinstellungen, wenden Sie sich bitte an
Ihr EPSON Service-Center.
Sollten an dieser Stelle keine Information bezüglich Ihres Service-Centers angegeben sein,
wenden Sie sich bitte an Ihren regionalen EPSON-Vertrieb.
Bitte halten Sie folgende Informationen bereit, wenn Sie sich an uns wenden.
- Das Steuerungsmodell und die Seriennummer
- Das Manipulatormodell und die Seriennummer
- Die Softwareversion Ihres Roboters
- Die Beschreibung des Problems
SERVICE-CENTER
G6 Rev.4 iii
Page 6

HERSTELLER UND LIEFERANTEN
Suwa Minami Plant
TEL : : +81-(0)266-61-1802
FAX : : +81-(0)266-61-1846
Japan & Andere
SEIKO EPSON CO RPO R ATION
Factory Automation Systems Dept.
1010 Fujimi, Fujimi-machi,
Suwa-gun, Nagano, 399-0295
JAPAN
LIEFERANTEN
Factory Automation/Robotics
TEL : : +1-562-290-5900
FAX : : +1-562-290-5999
E-MAIL: : info@robots.epson.com
Factory Automation Division
TEL : : +49-(0)-2159-538-1391
FAX : : +49-(0)-2159-538-3170
E-MAIL: : robot.infos@epson.de
Nord- & Südamerika
Europa
EPSON AMERI CA, INC.
18300 Central Avenue
Carson, CA 90746
USA
EPSON DEUTSCHLAND GmbH
Otto-Hahn-Str.4
D-40670 Meerbusch
Deutschland
iv G6 Rev.4
Page 7
Bevor Sie das Handbuch lesen…
In diesem Abschnitt finden Sie die Informationen, die Sie benötigen, bevor Sie dieses
Handbuch lesen.
Zusammensetzung des Steuerungssystems
Manipulatoren der G6-Serie können mit den folgenden Kombinationen aus Steuerungen und
Software betrieben werden.
Die Betriebs-Methoden und Beschreibungen sind abhängig davon, welche Software Sie
verwenden, unterschiedlich. Die folgenden Zeichen sind bei Bedarf neben dem
entsprechenden Text eingefügt. Verwenden Sie die Beschreibungen, die Ihre verwendete
Software betreffen.
Steuerung : RC170
Software : EPSON RC+ 5.0 Ver. 5.1 oder höher
Für Details zu den Befehlen, sehen Sie bitte im Benutzerhandbuch oder in der
"Online-Hilfe" nach.
Steuerung EIN/AUS schalten
Wenn Sie die Anweisung „Die Steuerung EIN/AUS schalten“ in diesem Handbuch sehen,
schalten Sie alle Hardwarekomponenten EIN/AUS. Für die Zusammensetzung des
Steuerungssystems lesen Sie die Tabelle oben.
Form der Motoren
Die Form der Motoren, die für Ihren verwendeten Manipulator benutzt werden, kann sich
aufgrund der technischen Bedingungen von der Form der Motoren unterscheiden, die in
diesem Handbuch beschrieben werden.
Einstellungen in der Software
In diesem Handbuch werden Einstellungen beschrieben, die in der Software vorgenommen
werden. Die betreffenden Textabschnitte sind mit dem folgenden Icon markiert.
EPSON
RC+
Abbildungen in diesem Handbuch
Die Abbildungen des Manipulators in diesem Handbuch sind in der Regel Abbildungen
des Standard-Modells. Wenn nicht speziell darauf hingewiesen wird, gelten die Angaben
gleichermaßen für das Standard-Modell, das Reinraum-Modell und das Protected-Modell
(IP54 / IP65).
G6 Rev.4 v
Page 8

vi G6 Rev.4
Page 9

INHALTSVERZEICHNIS
Bevor Sie das Handbuch lesen… ...................................................................... v
Einrichten und Betrieb
1. Sicherheit (Safety) 3
1.1 Konventionen ............................................................................................ 3
1.2 Konstruktion und Installationssicherheit ................................................... 4
1.3 Betriebssicherheit ..................................................................................... 5
1.4 Not-Aus ..................................................................................................... 7
1.5 Manuelle Manipulatorbewegung im Not-Aus-Modus ............................... 8
1.6 Beschriftungen am Manipulator ................................................................ 9
2. Spezifikationen 11
2.1 Eigenschaften der Manipulatoren der G6-Serie ...................................... 11
2.2 Modellbezeichnung und Modellunterschiede ......................................... 12
2.3 Bauteilenamen und Außenabmessungen .............................................. 13
2.3.1 Tischplattenmontage .................................................................. 13
2.3.2 Wandmontage ............................................................................. 19
2.3.3 Deckenmontage .......................................................................... 25
2.4 Spezifikationen ....................................................................................... 31
2.5 Einstellen des Modells ............................................................................ 35
3. Umgebungen und Installation 36
3.1 Umgebungsbedingungen ....................................................................... 36
3.2 Basis-Tisch ............................................................................................. 38
3.3 Montageabmessungen ........................................................................... 40
3.4 Auspacken und Transport ...................................................................... 43
3.5 Installationsvorgang ................................................................................ 45
3.5.1 Tischplattenmontage .................................................................. 45
3.5.2 Wandmontage ............................................................................. 46
3.5.3 Deckenmontage .......................................................................... 47
3.5.4 Reinraum-Modell ........................................................................ 48
3.5.5 Protected-Modell......................................................................... 48
3.6 Anschluss der Kabel ............................................................................... 49
3.7 Anwenderkabel und Pneumatikschläuche ............................................. 52
3.8 Standortwechsel und Lagerung .............................................................. 55
3.8.1 Vorkehrungen für Standortwechsel und Lagerung ..................... 55
3.8.2 Tischplattenmontage .................................................................. 57
3.8.3 Wandmontage ............................................................................. 58
3.8.4 Deckenmontage .......................................................................... 59
G6 Rev.4 vii
Page 10

INHALTSVERZEICHNIS
4. Einstellung des Greifers 60
4.1 Anbringen eines Greifers ........................................................................ 60
4.2 Anbringen der Kameras und Vent ile ....................................................... 62
4.3 Einstellen von Weight (Gewicht) und Inertia (Trägheit) .......................... 63
4.3.1 Einstellen von Weight (Gewicht) ................................................. 63
4.3.2 Einstellen von Inertia (Trägheit) .................................................. 66
4.4 Vorkehrungen für die Aut o-B eschleunigung/Verzögerung
der 3. Achse .............................................................................................. 70
5. Arbeitsbereich 71
5.1 Einstellung des Arbeitsbereiches durch den Pu lse-Bereich
(für alle Achsen) ...................................................................................... 72
5.1.1 Max. Pulse-Bereich der 1. Achse ................................................... 72
5.1.2 Max. Pulse-Bereich der 2. Achse ................................................... 73
5.1.3 Max. Pulse-Bereich der 3. Achse ................................................... 74
5.1.4 Max. Pulse-Bereich der 4. Achse ................................................. 74
5.2 Arbeitsbereich-Einstellung durch mechanische Stopper ........................ 75
5.2.1 Einstellen der mech anischen Stopper der 1. Achse
und der 2. Achse ............................................................................ 76
5.2.2 Einstellen des mech anischen Stoppers d er 3. Achse .................... 80
5.3 Einstellen des kartesischen (rechteckigen) Bereichs im
X, Y-Koordinatensystem des Manipulators (für 1. und 2. Achse) ........... 83
5.4 Standard Arbeitsbereich .......................................................................... 83
Ersatzteilliste und Option
1. Sicherheit Wartung 89
2. Allgemeine Wartung 91
2.1 Zeitplan für die Inspektion ....................................................................... 91
2.2 Inspektionspunkt ..................................................................................... 92
2.2.1 Inspektion während der Strom AUSgescha ltet ist
(Manipulator außer Betrieb) ........................................................ 92
2.2.2 Inspektion während der Strom EINgesch alt et ist
(der Manipulator arbeitet) ............................................................ 93
2.3 Schmieren ............................................................................................... 94
2.4 Festziehen der Innensechskantschrauben ............................................. 95
2.5 Anpassen der Ursprungspositionen ........................................................ 96
2.6 Anordnung der Ersatzteile ....................................................................... 97
3. Abdeckung 98
3.1 Obere Arm-Abdeckung ............................................................................ 99
3.2 Untere Armabdeckung .......................................................................... 101
3.3 Abdeckung 1. Arm ................................................................................. 101
3.4 Anschlussplatte ..................................................................................... 102
3.5 Kabeldurchführungsplatte ..................................................................... 103
viii G6 Rev.4
Page 11

INHALTSVERZEICHNIS
4. Kabeleinheit 104
4.1 Austauschen der Kabeleinheit .............................................................. 105
4.2 Verkabelungspläne ................................................................................. 113
4.2.1 Signalkabel ................................................................................. 113
4.2.2 Stromkabel .................................................................................. 114
4.2.3 Anwenderkabel ........................................................................... 115
5. 1. Arm 116
5.1 Austausch des Motors der 1. Achse ...................................................... 118
5.2 Austausch des Untersetzungsgetriebes der 1. Achse .......................... 121
6. 2. Arm 125
6.1 Austausch des Motors der 2. Achse ..................................................... 127
6.2 Austausch des Untersetzungsgetriebes der 2. Achse .......................... 131
7. 3. Arm 134
7.1 Austausch des Motors der 3. Achse ..................................................... 136
7.2 Austausch des Zahnriemens ................................................................. 139
7.3 Austausch der Bremse .......................................................................... 142
8. 4. Arm 145
8.1 Austausch des Motors der 4. Achse ..................................................... 147
8.2 Austausch des Zahnriemens ................................................................. 150
8.3 Austausch der Bremse .......................................................................... 157
9. Faltenbälge 159
10. Kugelumlaufspindel 161
10.1 Schmieren der Kugelumlaufspindel ...................................................... 162
10.1.1 Standard-Modell ...................................................................... 162
10.1.2 Reinraum-Modell / Protected-Modell ....................................... 163
10.2 Austausch der Kugelumlaufspin del ....................................................... 165
11. Lithium-Batterie 170
11.1 Austausch der Batterie (Lithium-Batterie) ............................................. 171
11.2 Austausch der Batterie des Boards ...................................................... 171
12. LED 173
G6 Rev.4 ix
Page 12

INHALTSVERZEICHNIS
13. Kalibrierung 174
13.1 Über die Kalibrierung ........................................................................... 174
13.2 Kalibrierungsverfahren ........................................................................ 175
13.3 Genaue Kalibrierung der 2. Achse ...................................................... 181
14. Ersatzteilliste 183
x G6 Rev.4
Page 13

Einrichten und Betrieb
Dieser Band beinhaltet Informationen über das Einrichten und den Betrieb
der Manipulatoren der G6-Serie.
Bitte lesen Sie dieses Handbuch gründlich, bevor Sie den Manipulator
einrichten und betreiben.
Page 14

Page 15
1. Sicherheit (Safety)
Die Installation sowie der Transport von Robotern und Roboterausrüstung darf nur von
qualifiziertem Personal in Übereinstimmung mit nationalen und örtlichen Vorschriften
durchgeführt werden. Lesen Sie dieses Handbuch und andere in Beziehung stehende
Handbücher, bevor Sie das Robotersystem installieren oder bevor Sie Kabel anschließen.
Bewahren Sie dieses Handbuch so auf, dass es jederzeit griffbereit ist.
1.1 Konventionen
Wichtige Sicherheitsaspekte sind in diesem Handbuch durch folgende Symbole
gekennzeichnet. Lesen Sie die Beschreibungen zu jedem Symbol.
WARNUNG
WARNUNG
Einrichten und Betrieb 1. Sicherheitshinweise
Dieses Symbol weist Sie auf die Gefahr schwerer
Verletzungen oder Lebensgefahr hin, die besteht, wenn
die zugehörigen Anweisungen nicht befolgt werden.
Dieses Symbol weist Sie auf die Gefahr möglicher
schwerster Verletzung oder Todesfolge durch elektrischen
Schlag hin, die besteht, wenn diese Anweisungen nicht
richtig befolgt werden.
Dieses Symbol weist Sie auf mögliche Personen- oder
Sachschäden an der Ausrüstung oder am System hin, die
VORSICHT
entstehen können, wenn die zugehörigen Anweisungen
nicht befolgt werden.
G6 Rev.4 3
Page 16
Einrichten und Betrieb 1. Sicherheitshinweise
1.2 Konstruktion und Installationssicherheit
Nur geschultes Personal darf das Robotersystem zusammenbauen und
installieren. Geschultes Personal ist Personal, das an Robotersystemschulungen
und Wartungsschulungen teilgenommen hat, die durch den Hersteller, Händler
oder örtlich einbezogene Firmen abgehalten werden. Geschultes Personal ist auch
das Personal, das die Handbücher vollständig versteht und über das Wissen und
die Qualifikationen verfügt, welche dem Stand des Personals entsprechen, das an
den Schulungen teilgenommen hat.
Um Sicherheit zu gewährleisten, muss eine Sicherheitsabschrankung für das
Robotersystem installiert werden. Für nähere Informationen zur
Sicherheitsabschrankung lesen Sie den Abschnitt V orkehrunge n für die I nsta llatio n
und den Aufbau im Kapitel Sicherheit im EPSON RC+ Benutz erhandbuch.
In den folgenden Abschnitten werden Sicherheitsvorkehrungen für das
Konstruktionspersonal beschrieben:
■
Personal, welches das Robotersystem mit diesem Produkt gestaltet und / oder
konstruiert, muss das Kapitel Sicherheit im EPSON RC+ Benutzerhandbuch
lesen, um die Sicherheitsanforderungen zu verstehen, bevor es das
Robotersystem gestaltet oder konstruiert. Der Zusammenbau und / oder die
Konstruktion des Robotersystems ohne die Sicherheitsanforderungen zu
verstehen, ist extrem gefährlich. Dies kann schwere Verletzungen und / oder
Schäden am Robotersystem zur Folge haben und ernste Sicherheitsprobleme
verursachen.
WARNUNG
■
Der Manipulator und die Steuerung müssen mit den Umgebungsbedingungen
betrieben werden, die in den entsprechenden Handbüchern beschrieben werden.
Dieses Produkt ist ausschließlich für den Gebrauch in normaler
Innenraumumgebung entworfen und hergestellt worden. Die Verwendung des
Produkts in einer Umgebung mit anderen als den vorgegebenen
Umgebungsbedingungen kann nicht nur die Lebensdauer des Produkts
verkürzen, sondern auch ernste Sicherheitsprobleme verursachen.
■
Das Robotersystem muss gemäß der Installationsanforderungen verwendet
werden, die in den Handbüchern beschrieben werden. Die Verwendung des
Robotersystems unter Nichterfüllung der Installationsanforderungen kann nicht
nur die Lebensdauer des Produkts verkürzen, sondern auch ernste
Sicherheitsprobleme verursachen.
Weitere Vorkehrungen für die Installation sind im Kapitel Einrichten und Betrieb
beschrieben: 3. Umgebungen und Installation. Bitte lesen Sie dieses Kapitel vor
der Installation der Roboter und der Roboterausrüstung sorgfältig durch, damit Sie
mit den Sicherheitsvorkehrungen bei der Installation vertraut sind.
4 G6 Rev.4
Page 17
1.3 Betriebssicherheit
In den folgenden Abschnitten werden Sicherheitsvorkehrungen für qualifiziertes
Bedienpersonal beschrieben:
■
Bitte lesen Sie sorgfältig den Abschnitt Sicherheitsbezogenen Anforderungen im
Kapitel Sicherheit des EPSON RC+ Benutzerhandbuchsdurch, bevor Sie das
Robotersystem in Betrieb nehmen. Der Betrieb des Robotersystems, ohne die
Sicherheitsanforderungen zu verstehen, ist extrem gefährlich und kann zu
schweren Verletzungen und / oder schweren Schäden an Geräten des
Robotersystem führen.
■
Betreten Sie den Arbeitsbereich des Manipulators nicht, während der Strom für
das Robotersystem eingeschaltet ist. Das Betreten des Arbeitsbereichs bei
eingeschaltetem Strom ist extrem gefährlich und kann ernste
Sicherheitsprobleme verursachen, da sich der Manipulator bewegen kann, auch
wenn es so aussieht, als wäre er angehalten.
■
Bevor Sie das Robotersystem betreiben, stellen Sie sicher, dass sich niemand
WARNUNG
innerhalb der Sicherheitsabschrankung aufhält. Das Robotersystem kann im
Teach-Modus betrieben werden, auch wenn sich jemand innerhalb der
Sicherheitsabschrankung aufhält.
Die Bewegung des Manipulators findet immer im begrenzten Status (niedrige
Geschwindigkeiten und Low Power) statt, um die Sicherheit des Bedieners nicht
zu gefährden. Während sich jemand im geschützten Bereich befindet, ist der
Betrieb des Manipulators extrem gefährlich und kann ernste Sicherheitsprobleme
verursachen, wenn der Manipulator sich unerwartet bewegt.
Einrichten und Betrieb 1. Sicherheitshinweise
WARNUNG
■
Drücken Sie den Not-Aus-Taster, wann immer sich der Manipulator während des
Robotersystem-Betriebes unnormal bewegt.
■
Um die Spannungsversorgung des Robotersystems abzustellen, ziehen Sie den
Netzstecker aus der Steckdose. Schließen Sie das Netzanschlusskabel an eine
geeignete Netzsteckdose an. Schließen Sie es NICHT direkt an die
Fabrik-Spannungsversorgung an.
■
Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung
und die damit zusammenhängende Ausrüstung AUS und trennen Sie dann den
Netzstecker von der Spannungsversorgung. Das Ausführen eines Austauschs
bei EINgeschalteter Spannung ist extrem gefährlich und kann zu einem
elektrischen Schlag und/oder zur Fehlfunktion des Robotersystems führen.
■
Die Motorstecker dürfen nicht abgezogen oder eingesteckt werden, solange
Spannung am Robotersystem anliegt. Das Einstecken oder Herausziehen der
Motorstecker bei anliegender Spannung ist extrem gefährlich und kann zu
schweren Verletzungen führen, da sich der Manipulator unnormal bewegen kann.
Es kann auch zu einem elektrischen Schlag und / oder einer Fehlfunktion des
Robotersystems führen.
G6 Rev.4 5
Page 18
Einrichten und Betrieb 1. Sicherheitshinweise
■
Wann immer möglich, sollte nur eine Person das Robotersystem betreiben.
Wenn es erforderlich ist, das Robotersystem mit mehr als einer Person zu
VORSICHT
betreiben, stellen Sie sicher, dass alle beteiligten Personen miteinander darüber
kommunizieren, was sie tun, und treffen Sie alle nötigen
Sicherheitsvorkehrungen.
6 G6 Rev.4
Page 19
1.4 Not-Aus
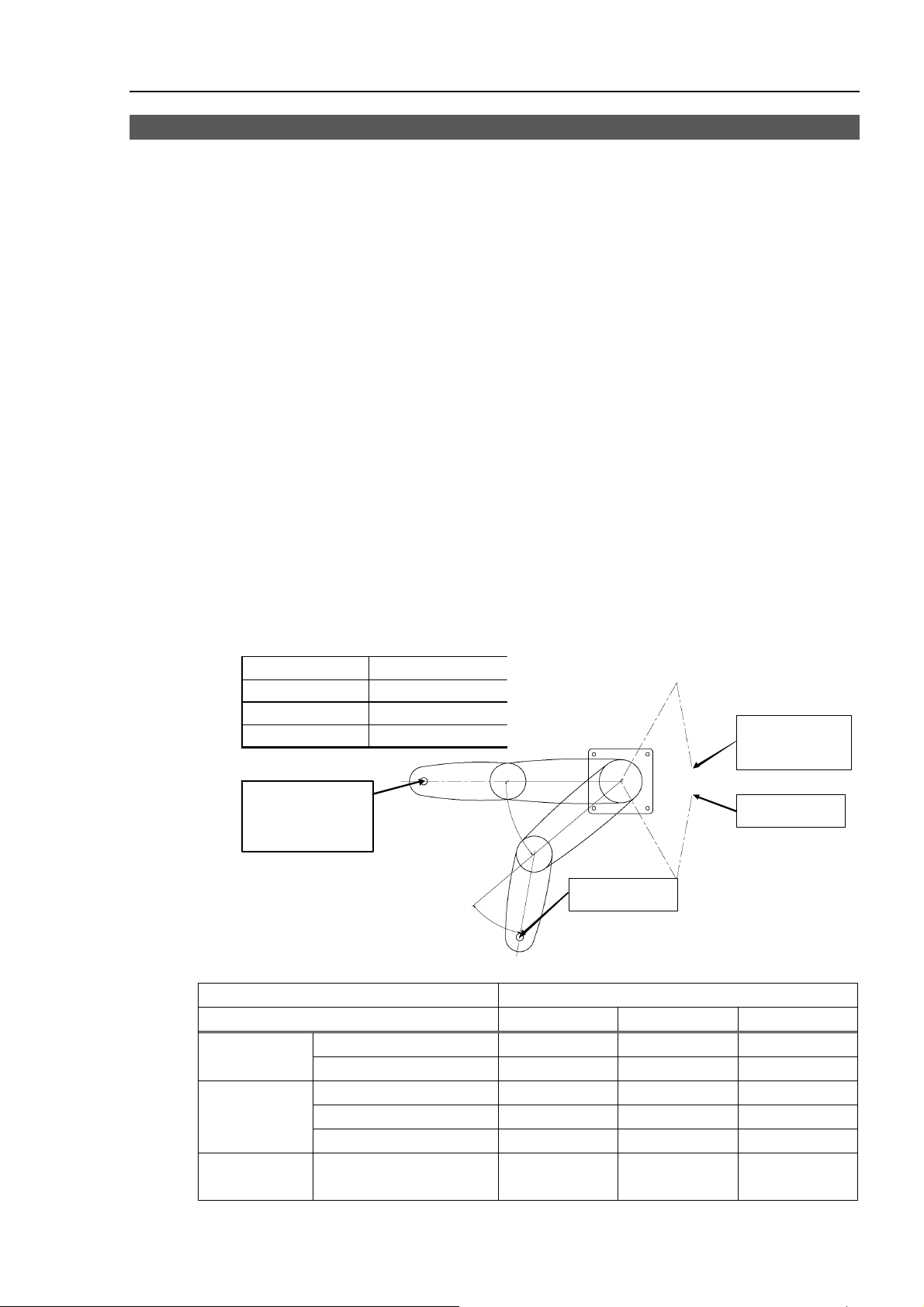
Freischwingende Strecke beim Not-Aus
Einrichten und Betrieb 1. Sicherheitshinweise
Wenn sich der Manipulator während des Betriebes unnormal bewegt, drücken Sie sofort
den Not-Aus-Taster. Der Taster stoppt die Stromversorgung des Motors, sodass der Arm
so schnell wie möglich mithilfe der generatorischen Bremse und der mechanischen
Bremse angehalten wird.
Vermeiden Sie es jedoch, den Not-Aus-Taster unnötig zu drücken, während der
Manipulator normal arbeitet. Andernfalls kann der Manipulator gegen die
Peripheriegeräte schlagen, da sich die Bewegungsbahn während des Anhaltens des
Robotersystems von der Bewegungsbahn im normalen Betrieb unterscheidet.
Um das System während des normalen Betriebes in den Not-Aus-Modus zu versetzen,
betätigen Sie den Not-Aus-Taster, wenn sich der Manipulator nicht bewegt.
Lesen Sie im Steuerungshandbuch nach, wie der Not-Aus-Stromkreis zu verdrahten ist.
Der betriebene Manipulator kann nicht unmittelbar, nachdem der Not-Aus-Taster gedrückt
wurde, anhalten.
Die freie Laufzeit / -weite und der freie Laufwinkel des Manipulators sind unten
dargestellt. Beachten Sie jedoch, dass die Werte abhängig von den folgenden
Bedingungen variieren.
Greifergewicht, Werkstückgewicht, Arbeitsposition,
Weight/Speed/Accel-Einstellungen, etc.
Messbedingungen
Accel-Einstellung 100
Speed-Einstellung 100
Last [kg] 6
Weight-Einstellung 6
Stelle, an der das
Not-Halt-Signal
eingegeben wird
1. Achse
2. Achse
Stoppposition
Startposition
der Bewegung
Zielpunkt
Steuerung RC170
Manipulator G6-45*** G6-55*** G6-65***
Freie Laufzeit
Freier
Laufwinkel
Freischwingende
Strecke
1. + 2. Achse [s] 0,6 0,7 0,8
3. Achse [s] 0,4 0,4 0,4
1. Achse [Grad] 35 40 45
2. Achse [Grad] 30 30 40
1. + 2. Achse [Grad] 65 70 85
3. Achse G6-**1** [mm]
G6-**3**
40
80
40
80
40
80
G6 Rev.4 7
Page 20
Einrichten und Betrieb 1. Sicherheitshinweise
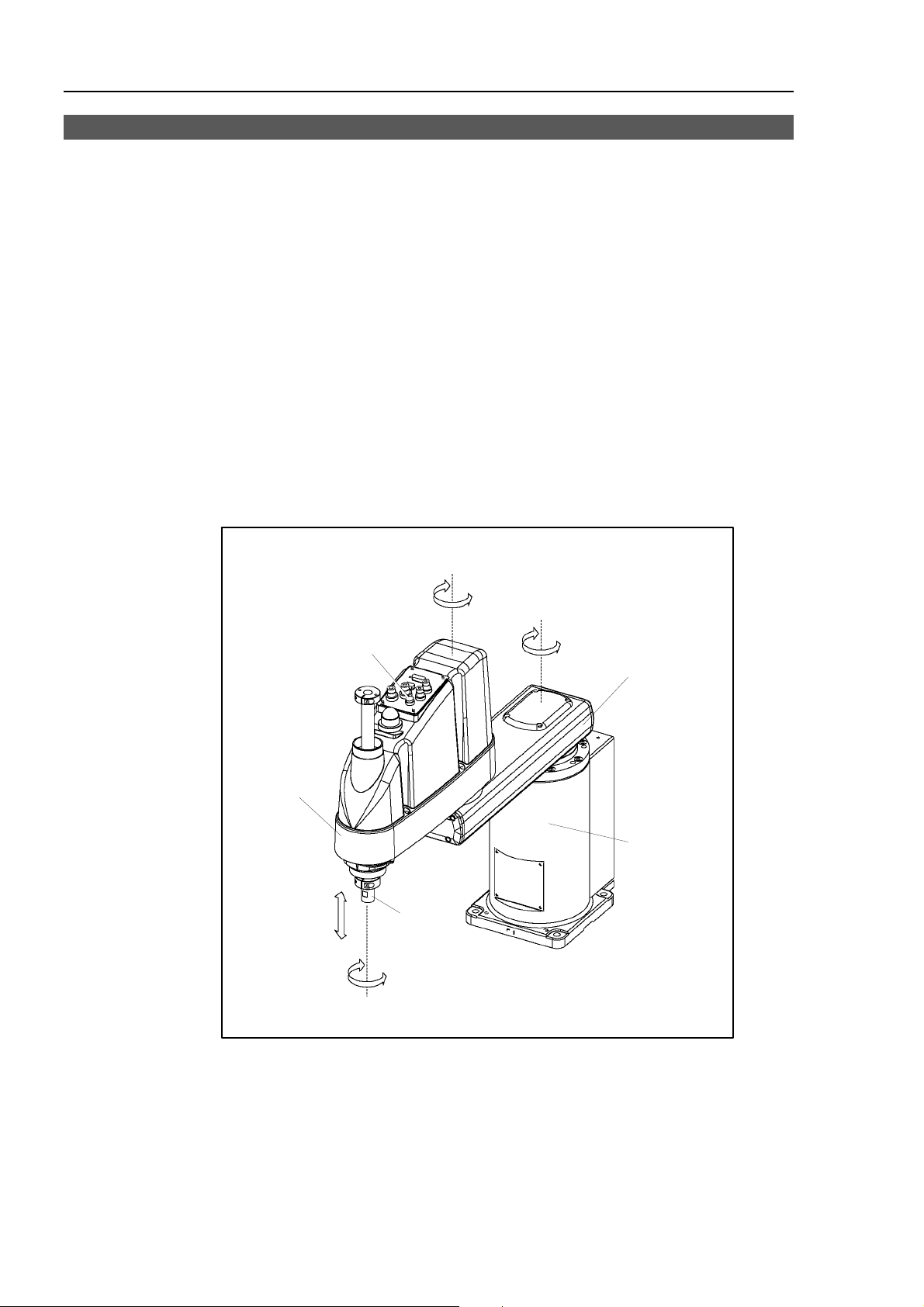
1.5 Manuelle Manipulatorbewegung im Not-Aus-Modus
Wenn sich das System im Not-Aus-Modus befindet, bewegen Sie den Arm oder die
Achse des Manipulators wie unten beschrieben.
1. Arm ............. Bewegen Sie den Arm manuell.
2. Arm ............. Bewegen Sie den Arm manuell.
3. Achse ........... Die Achse kann nicht manuell auf- oder abbewegt werden,
solange die elektromagnetische Bremse der Achse nicht gelöst
wird. Drücken Sie den Bremsfreigabetaster und bewegen Sie
die 3. Achse auf/ab.
4. Achse ......... G6-**1**:
Drehen Sie die Z-Achse von Hand.
G6-**3**:
Die Z-Achse kann nicht manuell gedreht werden, solange die
elektromagnetische Bremse der Z-Achse nicht gelöst wurde.
Bewegen Sie die Z-Achse, während Sie gleichzeitig den
Bremsfreigabetaster drücken.
3. und 4. Achse
Bremsfreigabetaster
2. Arm
3. Achse
(auf und ab)
2. Achse
(dreht)
−
+
Z-Achse
−
−
+
+
1. Achse
(dreht)
−
+
1. Arm
So cke l
4. Achse
(dreht)
HINWEIS
)
Der Bremsfreigabetaster ist mit den Bremsen der 3. und der 4. Achse verbunden. Wenn
dieser Taster im Not-Aus-Modus betätigt wird, werden gleichzeitig die Bremsen beider
Achsen gelöst. (G6-**1**: Bei diesem Modell hat die 4. Achse keine Bremse.)
Seien Sie vorsichtig, da sich die Z-Achse während der Betätigung des
Bremsfreigabetasters aufgrund des Gewichts eines Greifers absenken bzw. drehen
kann.
8 G6 Rev.4
Page 21
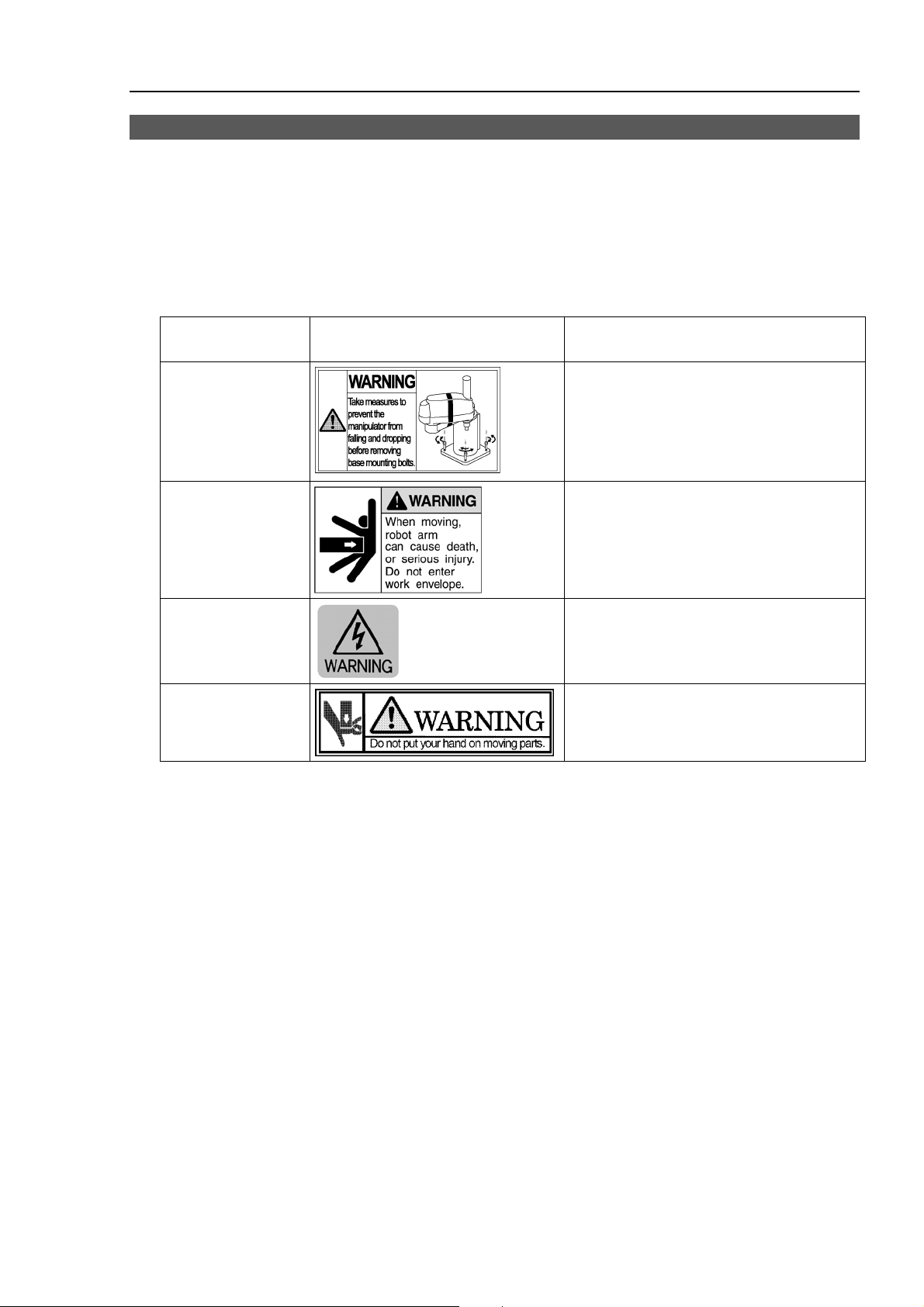
1.6 Beschriftungen am Manipulator
Die folgenden Aufkleber sind in der Nähe von Stellen am Manipulator angebracht, an
denen besondere Gefahr besteht.
Befolgen Sie die Beschreibungen und Warnungen auf den Aufklebern, um den
Manipulator sicher zu betreiben und zu warten.
Reißen Sie die Aufkleber nicht ab, beschädigen oder entfernen Sie sie nicht. Seien Sie
äußerst sorgsam, wenn Sie mit den Teilen oder Einheiten arbeiten, an welchen die
folgenden Aufkleber angebracht sind, oder wenn Sie sich in deren Nähe befinden:
Einrichten und Betrieb 1. Sicherheitshinweise
Position der
Aufkleber
A
Aufkleber HINWEIS
Bevor Sie die Sockel-Befestigungsschrauben
lösen, halten Sie den Arm und binden Sie ihn
fest, um Hände und Finger davor zu schützen,
im Manipulator eingeklemmt zu werden.
B
Es besteht gefährliche Spannung, während der
C
D
Manipulator eingeschaltet ist. Um einen
elektrischen Schlag zu vermeiden, berühren
Sie keine inneren elektrischen Teile.
Wenn sie zu nah an bewegliche Teile kommen,
können Hand oder Finger zwischen Z-Achse
und Abdeckung gequetscht werden.
G6 Rev.4 9
Page 22
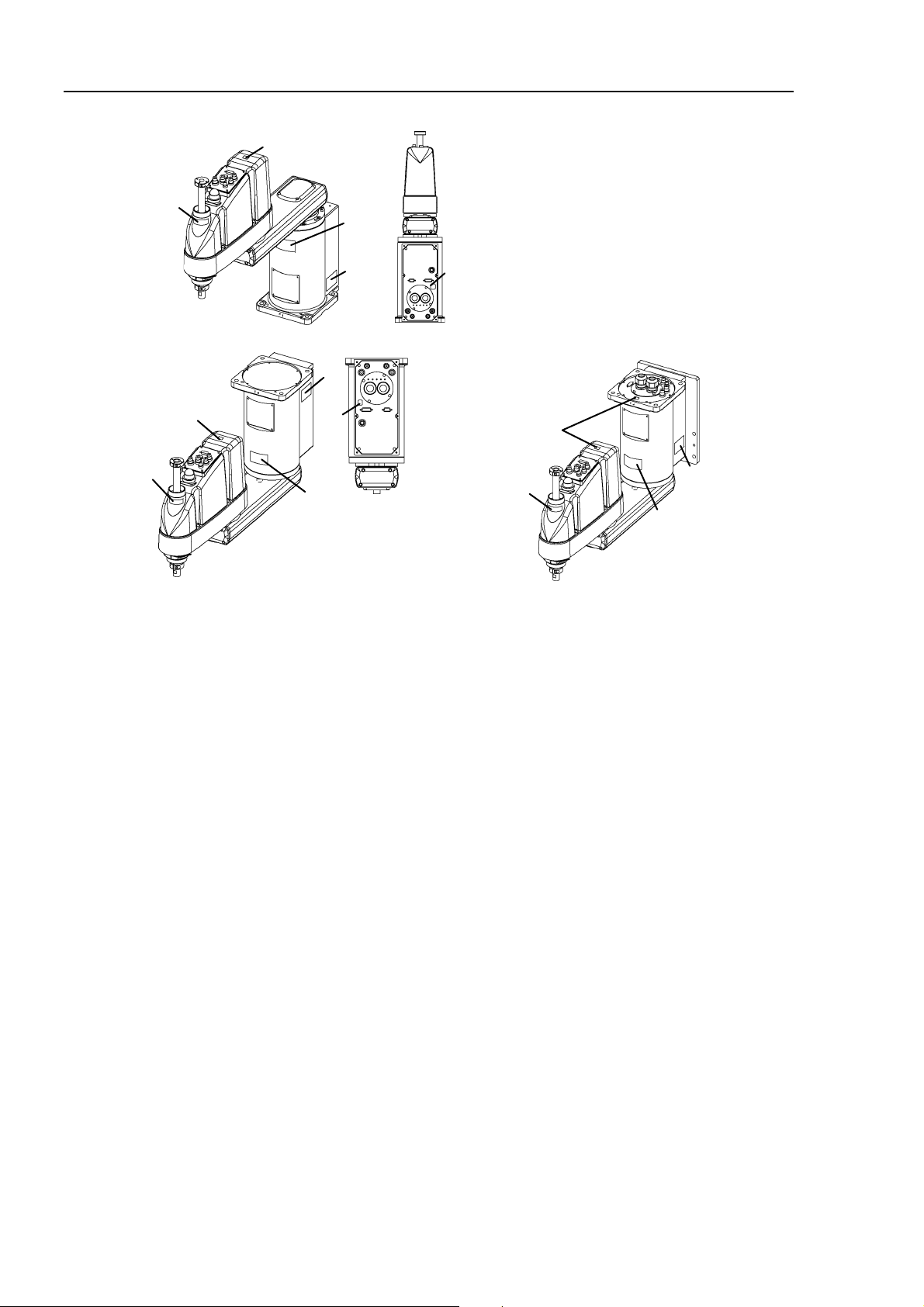
Einrichten und Betrieb 1. Sicherheitshinweise
R
Tischplattenmontage
G6-***S
D
C
B
HINWEIS
)
Auf Manipulatoren mit Faltenbälgen ist
der Aufkleber D als Warnung vor einer
Quetschgefahr für Hand und Finger nicht
angebracht.
A
C
Deckenmontage
G6-***S
C
A
C
B
Wandmontage
G6-***SW
C
D
A
B
10 G6 Rev.4
Page 23

Einrichten und Betrieb 2. Spezifikationen
2. Spezifikationen
2.1 Eigenschaften der Manipulatoren der G6-Serie
Die Manipulatoren der G6-Serie sind Hochleistungs-Manipulatoren, die für hohe
Geschwindigkeit, hohe Genauigkeit, Platzeinsparung und ein sehr gutes
Preis-Leistungsverhältnis stehen. Die Manipulatoren der G6-Serie haben folgende
Eigenschaften:
Kompatibilität mit Manipulatoren der E2-Serie
Die Installation und die Montageabmessungen des Greifers für die G6-Serie sind mit
denen für die E2-Serie kompatibel.
Platzeinsparung
Kompakt durch Ausführung ohne Schläuche.
Erweiterter Arbeitsbereich
Verglichen mit dem Arbeitsbereich der E2-Serie wurde der Arbeitsbereich der G6-Serie
um 20 % erweitert.
Verbesserte Leistung
Die Anzahl der Anwenderkabel und der Pneumatikschläuche wurde erhöht.
Die Geschwindigkeit der 1., 2., 3. und 4. Achse wurde erhöht.
Die Zykluszeit wurde verbessert.
Erhöhte Nutzlast
Die Nutzlast wurde auf maximal 6 kg erhöht, damit der Manipulator für eine höhere
Arbeitsbelastung geeignet ist.
Verfügbar in verschiedenen Modellen
G6 Rev.4 11
Page 24
Einrichten und Betrieb 2. Spezifikationen
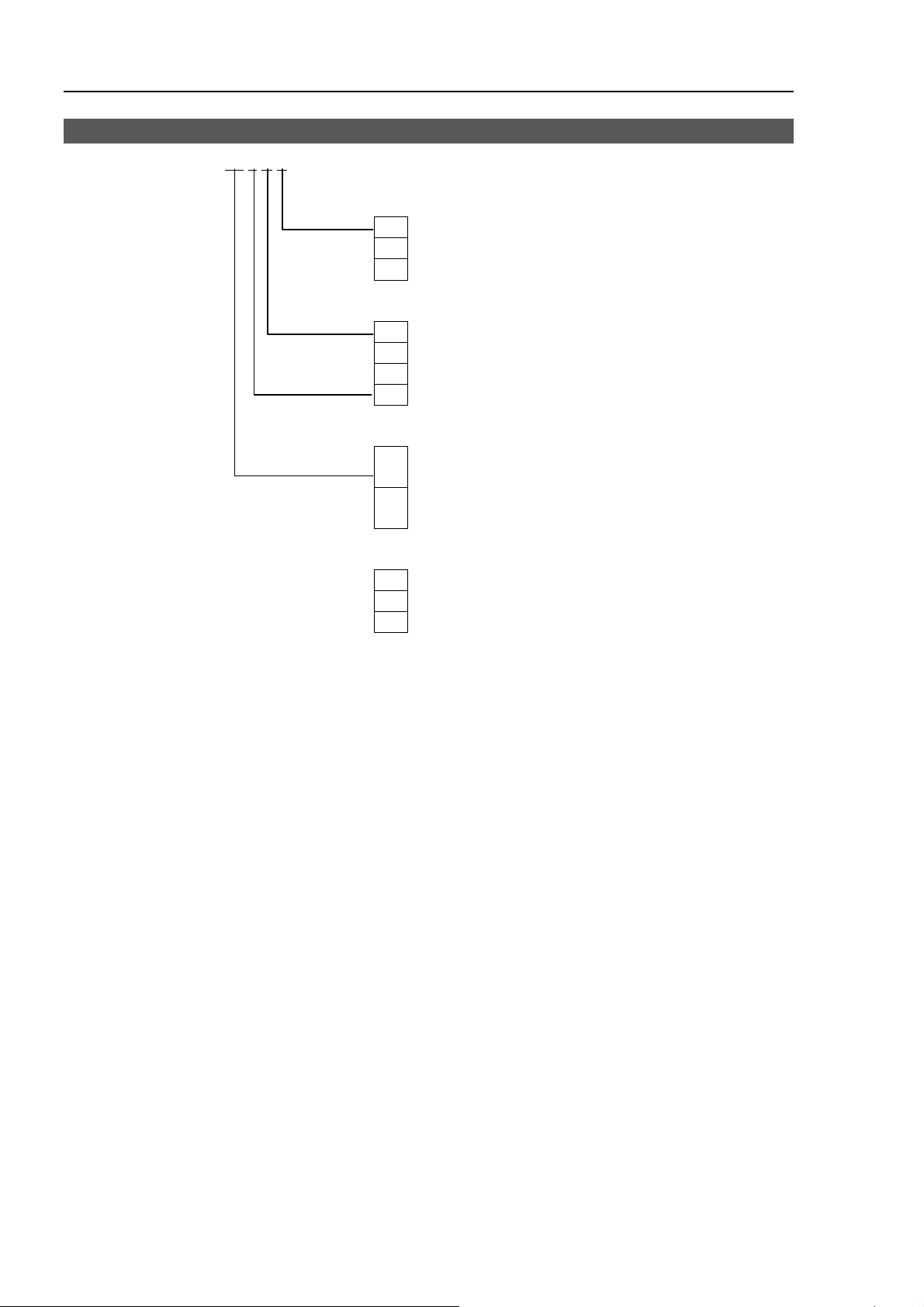
2.2 Modellbezeichnung und Modellunterschiede
G6-45 1 S □
Typ
□
: Tischplattenmontage
W : Wandmontage
R : Deckenmontage
Umgebung
S : Standard
C : Reinraum
D : Protected : IP54 (mit Faltenbalg-Option)
P : Protected : IP65
3. Achse Hub
: 180 mm (G6-***S* / D*)
1
150 mm (G6-***C* / P* / D* Faltenbalg-Option)
: 330 mm (G6-***S* / D*)
3
300 mm (G6-***C* / P* / D* Faltenbalg-Option)
Armlänge
45 :450 mm
55 :550 mm
65 :650 mm
Umgebung
Reinraum-Modell
Reinraum-Modell-Manipulatoren haben zusätzliche Vorrichtungen, die den Staub
reduzieren, der durch den Manipulator abgegeben wird, um den Gebrauch in
Reinraum-Umgebungen zu ermöglichen.
Protected-Modell (IP54 / IP65)
Die Protected-Modell-Manipulatoren werden unter widrigen Bedingungen mit Staub
und ölhaltigem Dunst betrieben.
G6-***D*
Standard G6-***D*-Manipulatoren haben keine Faltenbälge. Standard
G6-***D*-Manipulatoren (ohne Faltenbalg-Option) werden unter widrigen
Bedingungen mit ölhaltigem Dunst betrieben.
Wenn Sie Faltenbälge benötigen, wählen Sie bei der Bestellung einen Manipulator
mit Faltenbalg-Option.
Die Manipulatoren mit Faltenbälgen (Option) erfüllen die Anforderungen der
Schutzart IP54 (IEC 60529, JIS C0920).
G6-***P*
Die G6-***P*-Manipulatoren erfüllen die Anforderungen der Schutzart IP65 (IEC
60529, JIS C0920).
Für nähere Informationen zu den Spezifikationen lesen Sie Einrichten und Betrieb: 2.4
Spezifikationen.
12 G6 Rev.4
Page 25
Einrichten und Betrieb 2. Spezifikationen
r
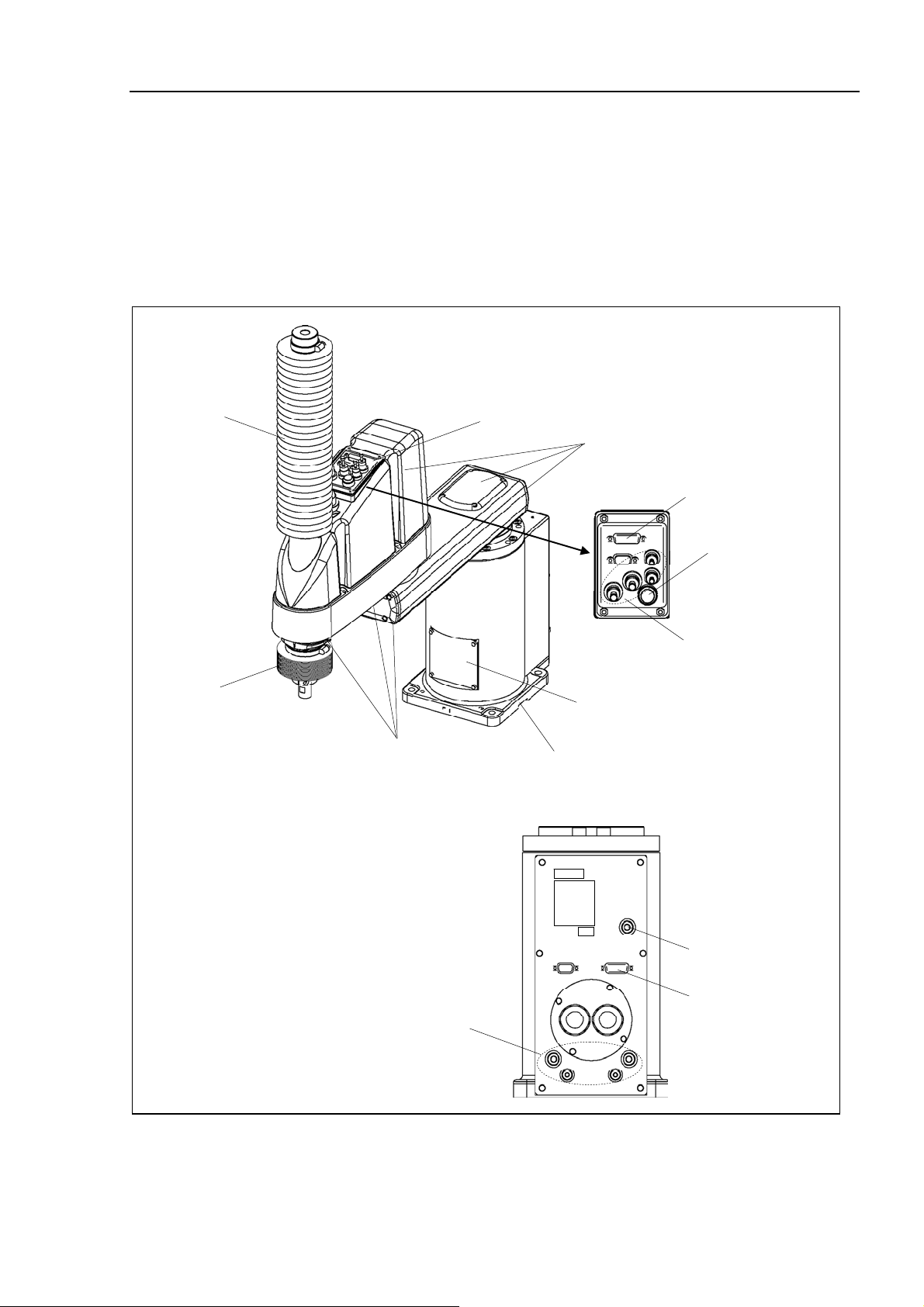
2.3 Bauteilenamen und Außenabmessungen
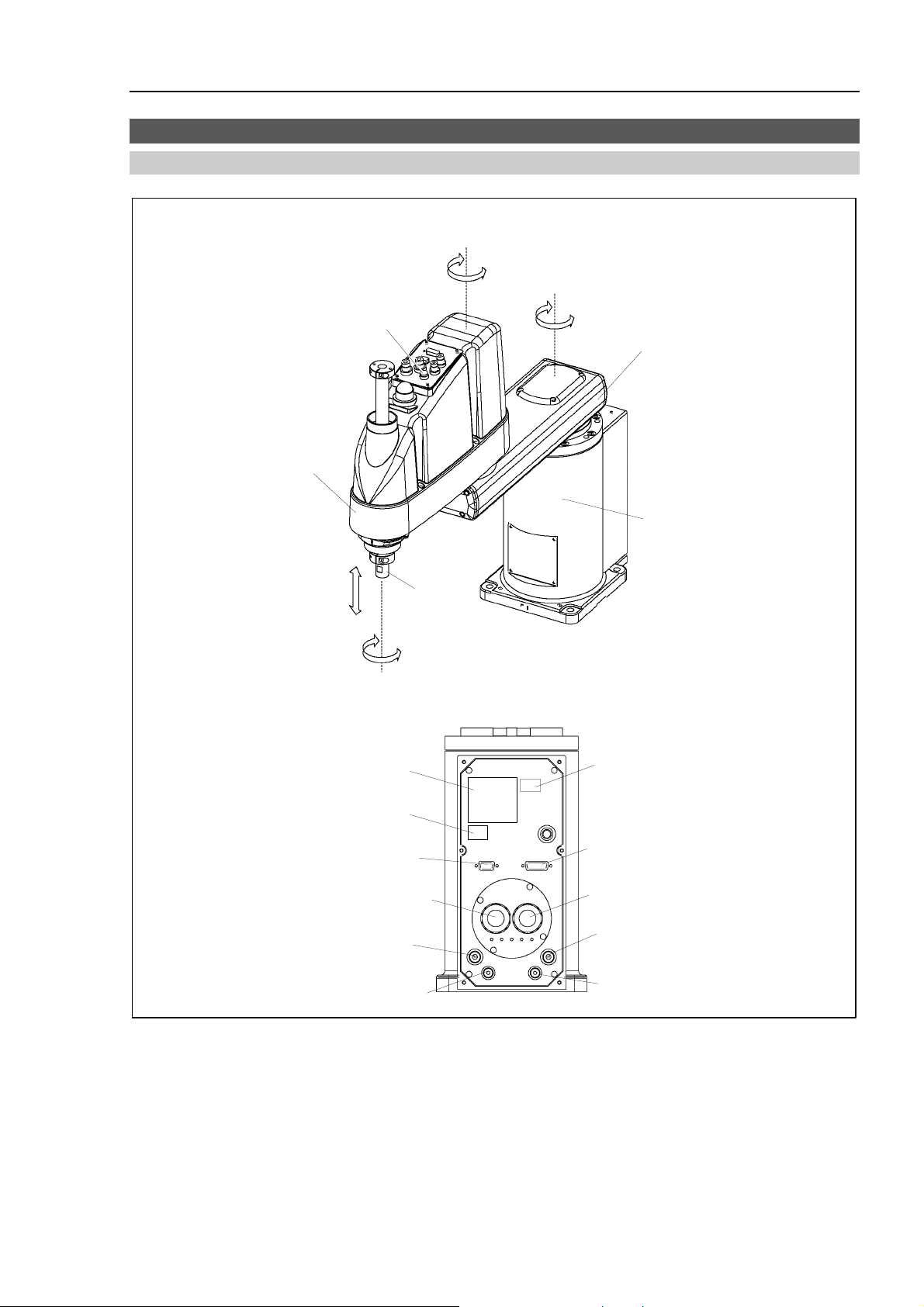
2.3.1 Tischplattenmontage
Standard-Modell G6-***S
3. u nd 4. Achse
Bremsfreigabetaster
2. Arm
2. Achse
(dreht)
−
+
1. Achse
(dreht)
−
+
1. Arm
Sockel
+
3. Achse
(auf und ab)
−
−
4. Ac hse
(dreht)
Signatur-Aufkleber
(Seriennummer des Manipulators)
CE-Aufklebe
Anwenderverkabelung
(9-Pin D-Sub-Anschluss)
Signalkabel
neumatikschnellkupplung (weiß)
für Pneumatikschlauch mit ø 6 mm
Pneumatikschnellkupplung (weiß)
für Pneumatikschlauch mi t ø 4
Z-Achse
+
MT-Aufkleber
(nur für Kundenspezifikation)
Anwenderverkabelung
(15-Pin D-Sub-Anschluss)
Stromkabel
Pneumatikschnellkupplung (schwarz)
für Pneumatikschlauch mit ø 6 mm
Pneumatikschnellkupplung (schwarz)
für Pneumatikschlauch mit ø 4 mm
E
Der Bremsfreigabetaster ist mit den Bremsen der 3. und der 4. Achse verbunden. Wenn dieser Taster
im Not-Aus-Modus betätigt wird, werden gleichzeitig die Bremsen beider Achsen gelöst.
(G6-**1**: Bei diesem Modell hat die 4. Achse keine Bremse.)
G6 Rev.4 13
Page 26
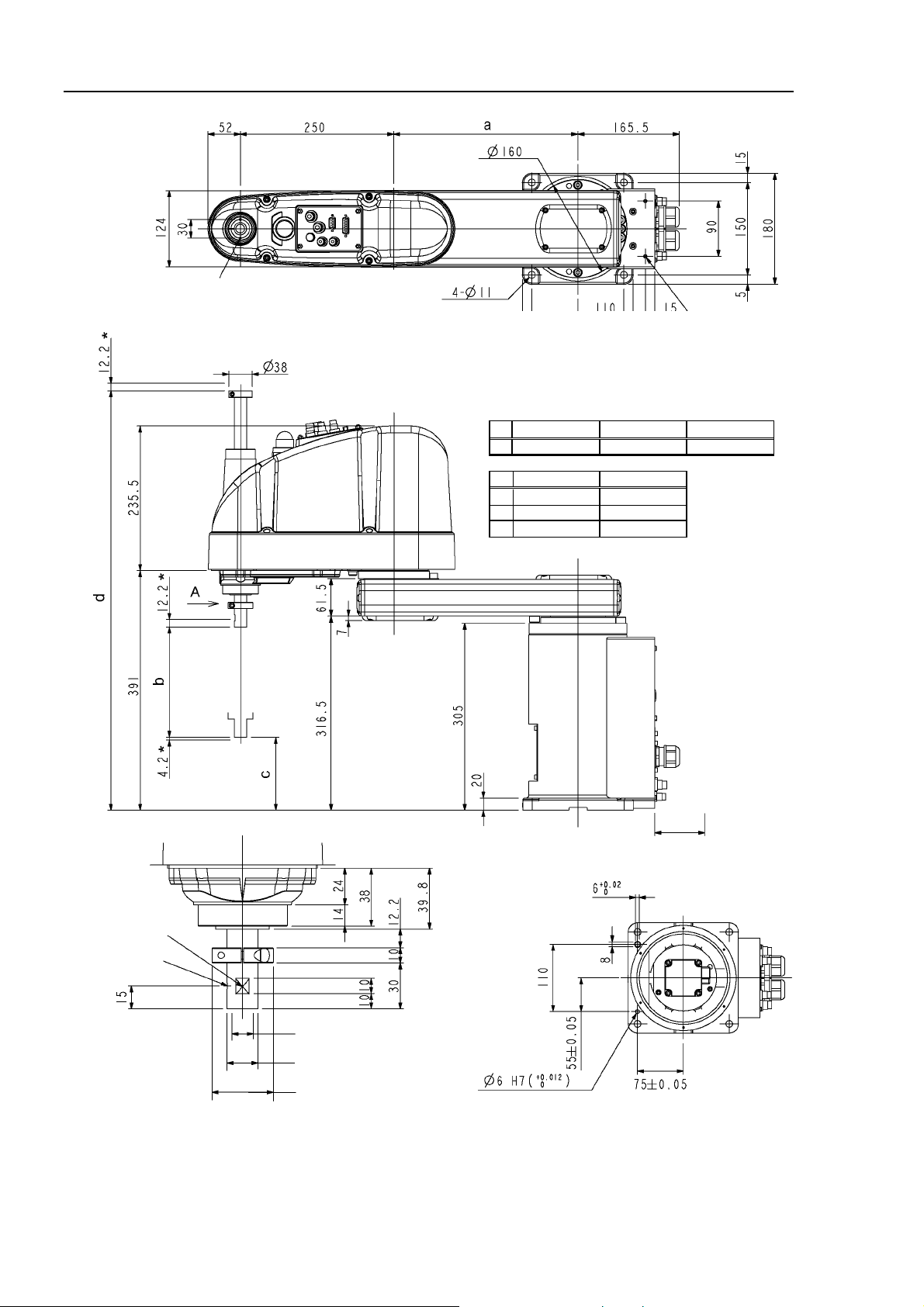
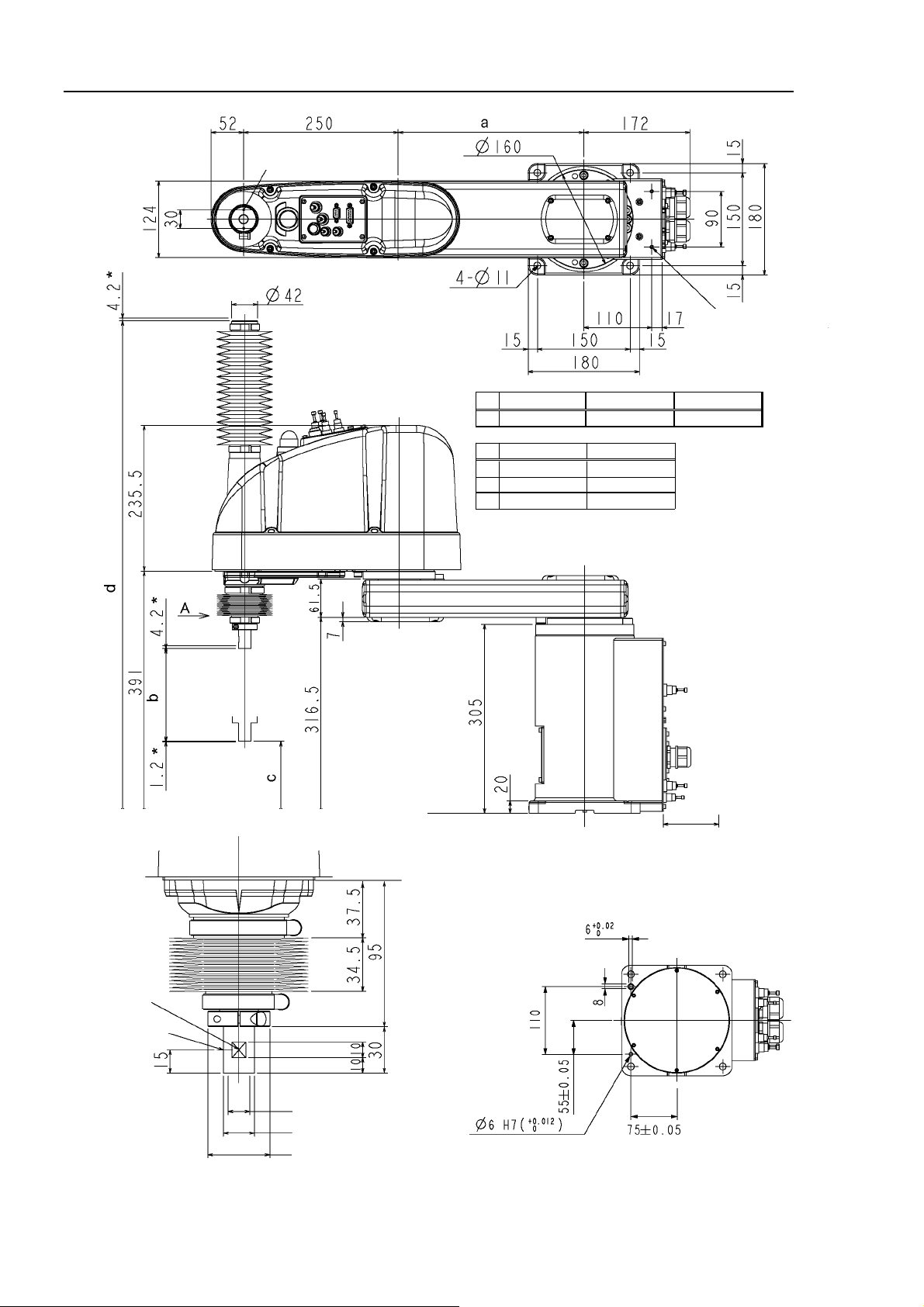
Einrichten und Betrieb 2. Spezifikationen
(
)
(
2-M4Tiefe 11
-M5 Tiefe 10
G6-45*S G6-55*S G6-65*S
a 200 300 400
G6-**1S G6-**3S
b 180 330
c 119 -31
d 684 834
(*) Zeigt H u bweite du rch mech anisch en Stopper a n.
90 oder mehr
Platz für Kabel
1 mm flacher
Sc hnitt
konische
Ö ffnung
ø4,90°
Max.ø 14 Durchgan gsbo hr un g
ø20 h7 Durchmesse r Z-Ach se
ø40 Du rc hmesse r mech anische r
Sto ppe r
Detail von “A”
Position der Kal ibrie rungspunkte der 3. und 4. Achse
Fuß beide Seiten Fase C0,5
Referenz-Durchgangsbohrung
Ansicht Sockelboden)
14 G6 Rev.4
Page 27
Einrichten und Betrieb 2. Spezifikationen
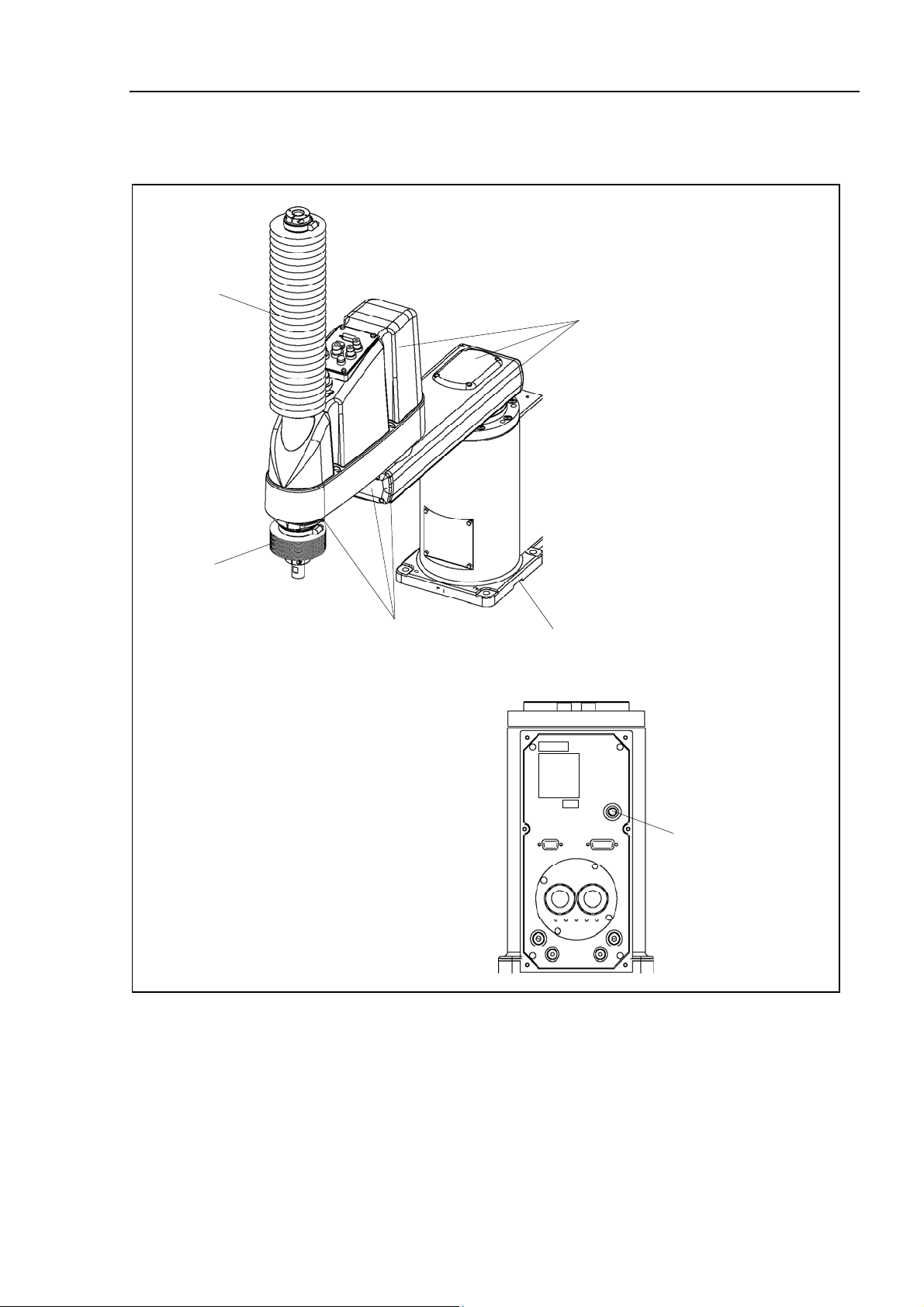
Reinraum-Modell G6-***C
Die folgende Abbildung zeigt die zusätzlichen Teile und Spezifikationen des Reinraum-Modells für die
Tischplattenmontage im Vergleich zum Standard-Modell, bezogen auf Äußerlichkeiten.
Oberer
Faltenbalg
Blechabdeckung
(gegen statische
Elektrizität)
Unterer
Faltenbalg
Blechabdeckung
(gegen statische
Elektrizität)
Abdeckung
als Oberfläche für die
Tischplattenmontage
Abluft-Ausgang
G6 Rev.4 15
Page 28
Einrichten und Betrieb 2. Spezifikationen
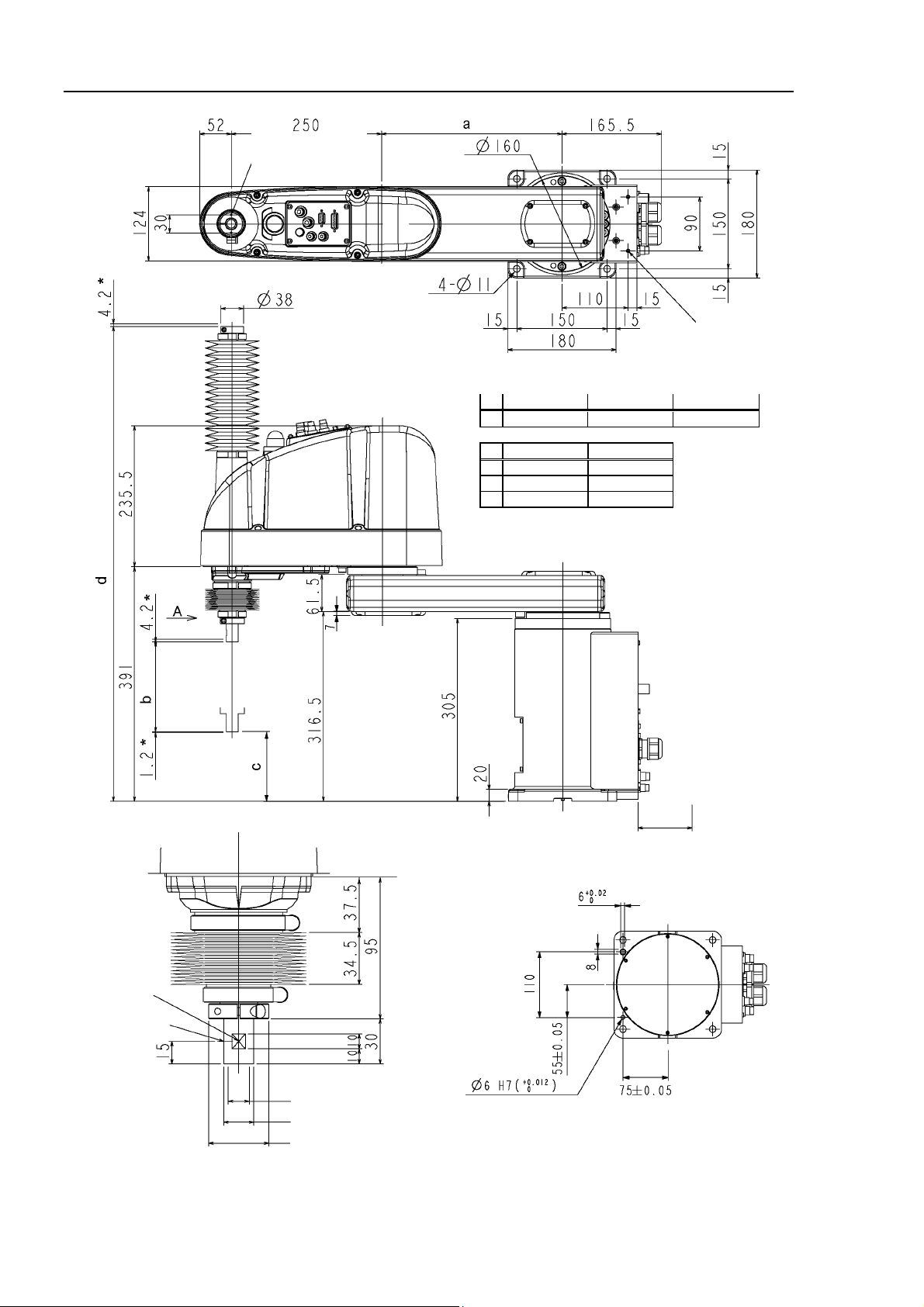
(
A
(
)
2-M4 Tiefe 11
2-M5 Tiefe 10
G6-45*C G6-55*C G6-65*C
a 200 300 400
G6-* *1C G6-** 3C
b 1 50 300
c116 -34
d 7 92 942
(*) Zeigt die Hubweite des mechanischen Stoppers an.
90 o der me hr
Pla tz für Ka bel
1 mm flacher
Schnitt
K onisch e
Öffn ung
ø4,90°
Ma x. ø14 Durchgang sbohrun g
ø2 0 h7 Durchmess e r Z - Ac h s e
ø4 0 Du rch mes ser m ech an isc her Stop pe r
Detail von “A”
Position der Kalibrierungspunkte der 3. und 4. Achse
Fuß beide Seiten Fase C0,5
Referenz-Durchgangsbohrung
nsicht Sockelboden)
16 G6 Rev.4
Page 29
Einrichten und Betrieb 2. Spezifikationen
Protected-Modell G6-***D/P
Die folgende Abbildung zeigt die zusätzlichen Teile und Spezifikationen des Protected-Modells für die
Tischplattenmontage im Vergleich zum Standard-Modell, bezogen auf Äußerlichkeiten.
Standard G6-***D*-Manipulatoren haben keine Faltenbälge. Wenn Sie Faltenbälge benötigen, wählen Sie
bei der Bestellung einen Manipulator mit Faltenbalg-Option. Die folgende Abbildung stellt einen
Manipulator mit Faltenbalg-Option dar.
Für die Kantenabmessungen der Arme eines standard G6-***D*-Manipulators (ohne Faltenbalg-Option) siehe
G6-***S.
Oberer
Faltenbalg
Unterer
Faltenbalg
nur G6-***P
Blechabdeckung
(ölbeständig)
Edelstahlplatte
nur G6-***P
Blechabdeckung (ölbeständig)
Anwenderverkabelung
(Protected-Modell)
3. und 4. Achse
Bremsfreigabetaster
(Protected-Modell)
Pneumatikschnellkupplungen mit
Abdeckung
(Protected-Modell)
Edelstahlplatte
Edelstahlplatte als Oberfläche zur
Tischplattenmontage
Abluft-Ausgang
Anwenderverkabelung
(Protected-Modell)
HINWEIS
)
Pneumatikschnellkupplungen mit
Abdeckung
(Protected-Modell)
Bei dem Protected-Modell sind alle äußeren Schrauben aus Edelstahl.
G6 Rev.4 17
Page 30
Einrichten und Betrieb 2. Spezifikationen
(
(
P
2-M4 Tiefe 11
2-M5 Tiefe 10
G6-45*D/P G6-55*D/P G6-65*D/P
a 200 300 400
G6 -** 1D/
b 150 300
c116 -34
d 7 95,5 94 5,5
G6-**3D/P
(*) Z ei gt die Hu bw ei te d urch m echan is che n St opper a n.
1 mm flache r
Sch ni tt
K oni sc he
Öff nung
ø4,90°
Max.ø14 Dur chg an gsbohr u ng
ø20 h7 Durchm esse r Z-Ac hse
ø40 Du r chm esser
mechanischer Stopper
Detail von “A”
Posi tion der Kalibrierungspunkte der 3 . und 4. Achse)
18
Fuß beid e S eite n Fase C0, 5
Referenz-Durchgangsbohrung
Ansicht Sockelboden)
90 oder mehr
Plat z für Kabel
G6 Rev.4
Page 31

A
2.3.2 Wandmontage
Standard-Modell G6-***SW
3. und 4. Achse
Bremsfreigabetaster
2. Achse
(dreht)
−
Einrichten und Betrieb 2. Spezifikationen
MT-Aufkleber
(nur für Kun denspezifikation)
Signatur-
+
−
+
(Seriennummer des Manipulators)
CE-Kennzeichen
Sockel
1. Arm
ufkleber
HINWEIS
)
1. Achse
(dreht)
Stromkabel
Anwenderverkabelung
(15-Pin D-Sub-Anschluss)
Anwenderverkabelung
(9-Pin D-Sub-Anschluss)
neumatikschnellkupplung
schwarz) für Pneumatik-
chlauch mit ø 4 mm
Pneumatikschnellkupplung
(weiß) für Pneumatik-
schlauch mit ø 4 mm
Pneumatikschnellkupplung
(schwarz) für Pneu matikschlauch mit ø 6 mm
3. Achse
(auf und ab)
+
−
−
4. Achse
(dreht)
2. Arm
Z-Achse
+
Signalkabel
Pneumatikschnellkupplung
(weiß) für Pneumatikschlauch mit ø 6 mm
Der Bremsfreigabetaster ist mit den Bremsen der 3. und der 4. Achse verbunden. Wenn dieser Taster
im Not-Aus-Modus betätigt wird, werden gleichzeitig die Bremsen beider Achsen gelöst.
(G6-**1**: Bei diesem Modell hat die 4. Achse keine Bremse.)
G6 Rev.4 19
Page 32

Einrichten und Betrieb 2. Spezifikationen
-
-
(
(
)
(*) Zeigt d ie Hub we i te d es me cha ni schen S toppers an.
1 mm fl ach er
Sc hnitt
Konische
Öffnun g
ø4 ,9 0°
Max.ø14 Durchgangsbohrung
ø20 h7 D ur c hm esser Z-A chse
ø40 Durchmesser mechanischer
St opp er
Detail von “A”
Position der Kalibrierungspunkte der 3. und 4. Achse
G6
45*SW G6-55*SW G6-65*SW
a 200 300 400
G6
b 180 330
c -9 141
d 385 535
**1SW G6-**3SW
Detail von “B”
Platz für Kabel
Referenz-Durchgangsbohrung
Ansicht Sockelboden)
2-M5
Tiefe 10
90 od er meh r
20
G6 Rev.4
Page 33

Einrichten und Betrieb 2. Spezifikationen
Reinraum-Modell G6-***CW
Die folgende Abbildung zeigt die zusätzlichen Teile und Spezifikationen des Reinraum-Modells für die
Wandmontage im Vergleich zum Standard-Modell, bezogen auf Äußerlichkeiten.
Oberer
Faltenbalg
Blechabdeckung
(gegen statische
Elektrizität)
Unterer
Faltenbalg
Blechabdeckung
(gegen statische
Elektrizität)
Abluft-Ausgang
G6 Rev.4 21
Page 34

Einrichten und Betrieb 2. Spezifikationen
(
(
)
2-M4 Tiefe 11
1 mm flacher
Schnitt
Konische
Öffnung
ø4, 90°
(*) Zeigt Hubweite durch mechanischen Stopper an.
G6-45*CW G6-55*CW G6-65*CW
a 200 300 400
G6-**1CW G6-**3CW
b 150 300
c 99 149
d 526 676
2-M5 Tiefe 10
Deta i l of “B”
Platz für Kabe l
90 o der m eh r
Max.ø14 Durchgangsbohrung
ø20 h7 Durchm esse r Z-Achse
ø40 Durchmesser mechanischer Stopper
Detail von “A”
Position der Kalibrierungspunkte der 3. u nd 4. Achse
22
Referenz-Durchbohrung
Ansicht Sockelboden)
G6 Rev.4
Page 35

Einrichten und Betrieb 2. Spezifikationen
Protected-Modell G6-***DW / PW
Die folgende Abbildung zeigt die zusätzlichen Teile und Spezifikationen des Protected-Modells für die
Wandmontage im Vergleich zum Standard-Modell, bezogen auf Äußerlichkeiten.
Standard G6-***DW-Manipulatoren haben keine Faltenbälge. Wenn Sie Faltenbälge benötigen, wählen Sie
bei der Bestellung einen Manipulator mit Faltenbalg-Option. Die folgende Abbildung stellt einen
Manipulator mit Faltenbalg-Option dar.
Für die Kantenabmessungen der Arme eines standard G6-***DW-Manipulators (ohne Faltenbalg-Option)
siehe G6-***SW.
Edelstahlplatte
Edelstahlplatte
Oberer
Faltenbalg
Unterer
Faltenbalg
nur G6-***PW only
Blechabdeckung (ölbeständig)
Anwenderverkabelung
(Protected-Modell)
Pneumatikschnellkupplung
mit Abdeckung
(Protected-Modell)
nur G6-***PW
Blechabdeckung (ölbestä ndig)
Anwenderverkabelung
(Protected-Modell)
3. und 4. Achse
Bremsfreigabetaster
(Protected-Modell)
Pneumatikschnellkupplung mit
Abdeckung
(Protected-Modell)
Abluft-Ausgang
HINWEIS
)
Bei dem Protected-Modell sind alle äußeren Schrauben aus Edelstahl.
G6 Rev.4 23
Page 36

Einrichten und Betrieb 2. Spezifikationen
2-M4 Tiefe 11
1 mm flacher
Sch nitt
Konisch e
Öffn ung
ø4,90°
(* ) Ze i gt Hu bw ei te d urch mech an ischen Stop per a n.
G6- 4 5*DW /PW G6-55 *DW/P W G6 -65* DW /PW
a 200 300 400
G6-**1DW/PW G6- **3DW/PW
b 150 300
c 102,5 252,5
d 529,5 679,5
Detail von“B”
2-M5 Tiefe 10
Platz für Kabel
90 od er m ehr
Max. ø14 Du rc hga ng sbo hrun g
ø2 0 h7 Du rch messer Z-Achs e
ø4 0 Du rch me sser m echan isch er Stop per
Detail von “A”
Position der Kalibrierungspunkte der 3. und 4. Achse)
(
24
Referenz-Durchgangsbohrung
(Ansicht Sockelboden)
G6 Rev.4
Page 37

r
A
r
A
A
2.3.3 Deckenmontage
Standard-Modell G6-***SR
3. und 4. Achse
Bremsfreigabetaster
Einrichten und Betrieb 2. Spezifikationen
2. Achse
(dreht)
−
+
Sockel
1. Arm
−
+
+
3. Achse
(auf und ab)
−
4. Achse
(dreht)
Pneuma tikschnellkupplung
(schwarz) für Pneumatikschlauch mit ø 4 mm
Pneumatikschnellkupplung
(schwarz) für Pneumatikschlauch mit ø 6 mm
(15-Pin D-Sub-Anschluss)
(nur für Kundenspezifikation)
(Seriennummer des Manipulators)
Z-Achse
−
+
nwenderverkabelung
Signatur-
2. Arm
Stromkabel
MT-Aufklebe
ufklebe
1. Achse
(dreht)
Pneumatikschnellkupplung
(weiß) für Pneumatikschlauch mit ø 4 mm
Pneumatikschnellkupplung
(weiß) für Pneumatikschlauch mit ø 6 mm
Signalkabel
nwenderverkabelung
(9-Pin D-Sub-Anschluss)
CE-Kennzeichen
HINWEIS
)
Der Bremsfreigabetaster ist mit den Bremsen der 3. und der 4. Achse verbunden. Wenn dieser Taster
im Not-Aus-Modus betätigt wird, werden gleichzeitig die Bremsen beider Achsen gelöst.
(G6-**1**: Bei diesem Modell hat die 4. Achse keine Bremse.)
G6 Rev.4 25
Page 38

Einrichten und Betrieb 2. Spezifikationen
R
r
2-M4 Tiefe 11
(*) Zeigt die Hubweite durch den mechanischen Stopper an.
Detail of “B”
Platz für Kabe l
90 o der me hr
1 mm flacher
Schn itt
Koni sche
Öffnung
ø4,90°
Max.ø1 4 Du rch gangs bohrung
ø20 h7 Durchmesser Z-Achse
ø40 Durchmesser mechanische
St op per
G6-45*S
a 200 300 400
G6- * * 1S R G6-** 3SR
b 180 330
c -9 141
d 385 535
G6- 5 5* SR G6-65 *SR
2-M5 Tiefe 10
Detail von “A”
Position der Kalibrierungspunkte der 3. und 4. Achse)
(
26
G6 Rev.4
Page 39

Einrichten und Betrieb 2. Spezifikationen
Reinraum-Modell G6-***CR
Die folgende Abbildung zeigt die zusätzlichen Teile und Spezifikationen des Reinraum-Modells für die
Deckenmontage im Vergleich zum Standard-Modell, bezogen auf Äußerlichkeiten.
Oberer
Faltenbalg
Unterer
Faltenbalg
Abdeckung
für Oberfläche für
Deckenmontage
Blechabdeckung
(gegen statische
Elektrizität)
Blechabdeckung
(gegen statische
Elektrizität)
Abluft-Ausgang
G6 Rev.4 27
Page 40

Einrichten und Betrieb 2. Spezifikationen
R
R
2-M4 Tiefe 11
Platz für Kabel
90 od er m eh r
(*) Zeig t d ie Hub we it e d urch de n m ech an is chen
S top per an.
1 mm flacher
Schnitt
Konische
Öff nung
ø4,90°
Max.ø1 4 Durch gang sbo hr un g
ø2 0 h7 D u rch messer Z - Achs e
ø4 0 Durchmess er m ech ani sch er St opper
Detail von “ A”
Position der Kalibrierungspunkte der 3. und 4. Achse)
(
2-M5 Tiefe 10
Detail von “B”
G6-45*C
a 200 300 400
G6-**1C
b150 300
c99 249
d526 676
G6-55*CR G6-6 5* CR
G6-**3CR
28
G6 Rev.4
Page 41

Einrichten und Betrieb 2. Spezifikationen
A
t
Protected-Modell G6-***DR / PR
Die folgende Abbildung zeigt die zusätzlichen Teile und Spezifikationen des Protected-Modells für die
Deckenmontage im Vergleich zum Standard-Modell, bezogen auf Äußerlichkeiten.
Standard G6-***DR-Manipulatoren haben keine Faltenbälge. Wenn Sie Faltenbälge benötigen, wählen Sie
bei der Bestellung einen Manipulator mit Faltenbalg-Option. Die folgende Abbildung stellt einen
Manipulator mit Faltenbalg-Option dar.
Für die Kantenabmessungen der Arme eines standard G6-***DR-Manipulators (ohne Faltenbalg-Option) siehe
G6-***SR.
Oberer
Faltenbalg
Unterer
Faltenbalg
Edelstahlplatte
Edelstahlplatte
für Oberfläche für die
Deckenmontage
Edelstahlplatte
nur G6-***PR
Blechabdeckung (ölbeständig)
nwenderverkabelung
(Protected-Modell)
3. und 4. Achse
Bremsfreigabetaster
(Protected-Modell)
HINWEIS
)
nur G6-***PR
Blechabdeckung (ölbeständig)
Anwenderverkabelung
(Protected-Modell)
Abluft-Ausgang
Pneumatikschnellkupplung mi
Abdeckung
(Protected-Modell)
Bei dem Protected-Modell sind alle äußeren Schrauben aus Edelstahl.
Pneumatikschnellkupplung
mit Abdeckung
(Protected-Modell)
G6 Rev.4 29
Page 42

Einrichten und Betrieb 2. Spezifikationen
R
2
2-M4 Tiefe 11
Plat z für Kab el
90 oder mehr
(*) Zeigt Hubweite durch me cha ni sche n Sto ppe r an.
1 mm flac h er
Schnitt
K onisc he
Öff nung
ø4,90°
Max.ø14 Durchgangsbohrung
ø20 h7 D ur chmess e r Z-A chse
ø40 Durchmesser mechanischer Stopper
Detail von “A”
Position der Kalibrierungspunkte der 3. und 4. Achse)
(
2-M5 Tiefe 10
Detail von “B”
G6-45*DR/ PR G6-55* DR/ PR G6-65* DR/ PR
a 200 300 400
G6-** 1 DR/PR G6-**3 DR/P
b 1 50 30 0
c10
d 529,5 679,5
,5 252,5
30
G6 Rev.4
Page 43

Einrichten und Betrieb 2. Spezifikationen
2.4 Spezifikationen
Parameter G6-**** G6-****R G6-****W
Art der Montage Tischplatte Decke Wand
Umgebung
1, 2.
Arm
Armlänge
45 450 mm
55 550 mm
65 650 mm
1
3. Arm
3
Weight
(Gewicht der Kabel ausgenommen)
45/55 27 kg : 27,22 kg. 29 kg : 29,03 kg.
65 28 kg : 28,12 kg. 29,5 kg : 65 lb.
Antriebsmethode Alle Achsen
45
55
65
1 1100 mm/s
3 2,350 mm/s
Max.
Betriebsgeschwindigkeit *3
1, 2.
Achse
3. Achse
4. Achse
1, 2. Achse ±0,015 mm
Wiedergenauigkeit
3. Achse ±0,010 mm
4. Achse ±0,005 Grad
45
Max.
Arbeitsbereich
1. Achse
2. Achse
55
65
45
55/65
1
3. Achse
3
4. Achse ±360 Grad
45
Max.
Pulsebereich
(Pulse)
1. Achse
2. Achse
55
65
45
55/65
1
3. Achse
3
4. Achse ±1961226
*a : G6-45*** 2. Achse
G6-45*S* / D*
G6-45*C*/ P* / D* mit Faltenbalg-Option
Reinraum-Modell *1 /
180 mm : G6-**1S* / D*
150 mm : G6-**1C* / P* / D* mit Faltenbalg-Option
330 mm : G6-**3S* / D*
300 mm : G6-**3C* / P* / D* mit Faltenbalg-Option
AC Servomotor
6,440 mm/s
7,170 mm/s
7,900 mm/s
2400 Grad/s
±120 Grad ±105 Grad
±152 Grad
±142 bis 147,5 Grad *a ±130 Grad
±147,5 Grad
180 mm : G6-**1S* / D*
150 mm : G6-**1C* / P* / D* mit Faltenbalg-Option
330 mm : G6-**3S* / D*
300 mm : G6-**3C* / P* / D* mit Faltenbalg-Option
-1805881 bis +7048761
2585031 bis 2685156 *a ±2366578
-873814 bis +6116694 -436907 bis +5679787
±2685156
-1976708 : G6-**1S* / D*
-1647257 : G6-**1C* / P* / D mit Faltenbalg-Option
-1811982 : G6-**3S* / D*
-1647257 : G6-**3C* / P* / D* mit Faltenbalg-Option
Max. Arbeitsbereich
Z 0~–270
Z –270~–330
Z 0~-240
Z –240~–300
147,5 Grad
145 Grad
147,5 Grad
142 Grad
Protected-Modell *2
±135 Grad
±148 Grad
-1310720 bis +6553600
-1689373 bis +6932253
Max. Pulsebereich
±2685156 Pulse
±2639645 Pulse
±2685156 Pulse
±2585031 Pulse
G6 Rev.4 31
Page 44

Einrichten und Betrieb 2. Spezifikationen
Parameter G6-*****
Auflösung
Motorleistungsaufnahme
Nutzlast
4. Achse zulässiges
Trägheitsmoment *4
Hand
1. Achse
2. Achse
3.
Achse
1 0,0000911 mm/Pulse
3 0,0001821 mm/Pulse
4. Achse
1. Achse
2. Achse
3. Achse
4. Achse
Nennwert 3 kg
max. 6 kg
Nennwert 0,01 kg·m
max. 0,12 kg·m
Durchmesser der
Z-Achse
0,0000343 Grad/Pulse
0,0000549 Grad/Pulse
0,0001836 Grad/Pulse
400 W
400 W
200 W
100 W
2
2
ø 20 mm
Durchgangsbohrung ø 14 mm
3. Achse Abwärts-Kraft 150 N
Anwenderverkabelung elektrisch 24 (15 Pin + 9 Pin : D-Sub)
2 Pneumatikschläuche (ø 6 mm): 0,59 Mpa (6 kgf/cm
Anwenderanschlüsse
Pneumatik
psi)
2 Pneumatikschläuche (ø 4 mm) : 0,59 Mpa (6 kgf/cm
psi)
Umgebungstemper-
Umgebungsbedingungen
atur
Relative
Luftfeuchtigkeit
5 bis 40 °C (mit minimaler Temperaturschwankung)
10 % bis 80 % (nicht kondensierend)
Äquivalenter ununterbrochener
L
A-gewichteter
Schalldruckpegel *5)
= 70 dB(A)
Aeq
Verwendbare Steuerungen RC170
SPEED 1 bis (5) bis 100
ACCEL *6 1 bis (10) bis 120
Zuordenbarer W ert
( ) Standardwerte
MTBF 3 Jahre
Sicherheitsstandard
SPEEDS 1 bis (50) bis 2000
ACCELS 1 bis (200) bis 25000
FINE 0 bis (10000) bis 65000
WEIGHT 0,250 bis (3,250) 6,250
erfüllt ANSI/RIA R15.06
CE-konform
*1: Das Abluftsystem im Reinraum-Modell-Manipulator (
G6-***C*) saugt Luft aus dem Sockelinneren und
dem Inneren der Armabdeckung.
Ein Riss oder eine andere Öffnung im Grundgerät kann den Verlust des negativen Luftdrucks im äußeren
Teil des Armes verursachen, was zu einem erhöhten Staubaustritt führen kann.
Entfernen Sie nicht die Wartungsabdeckung auf der Vorderseite des Sockels.
Dichten Sie den Abluft-Ausgang und den Abluft-Schlauch mit Vinyl-Klebeband ab, sodass der Anschluss
luftdicht ist.
2
: 86
2
: 86
32 G6 Rev.4
Page 45

Einrichten und Betrieb 2. Spezifikationen
Wenn der Abluft-Durchfluss nicht ausreichend ist, kann der Staubpartikel-Austritt den angegebenen
maximalen Grad überschreiten.
Reinheitsgrad : ISO-Klasse 3 (ISO14644-1)
Nach früheren Normen: Reinheitsklasse: 10 bzw. deren Entsprechung
Staubmenge (Durchmesser 0,1 µm oder größer) in 28317 cm
3
(1cft)
Probeluft um den Mittelpunkt des Arbeitsbereiches herum: 10
Partikel oder weniger.)
Abluftsystem : Durchmesser
Abluft-Ausgang : Innendurchmesser: ø 12 mm / Außendurchmesser: ø 16 mm
Abluftschlauch : Polyurethan-Schlauch
Außendurchmesser: ø12 mm (Innendurchmesser: ø 8 mm)
oder Innendurchmesser ø 16 mm oder größer
3
Empfohlene Abluft-Durchflussmenge: ca. 1000 cm
/s (normal)
*2: IP (International Protection) für den Protected-Modell-Manipulator gibt den internationalen Standard für
den Schutzgrad gegen Staub und Wasser an.
Standard G6-***D*-Manipulatoren haben keine Faltenbälge. Der standard G6-***D*-Manipulator
(ohne Faltenbalg-Option) wird unter widrigen Bedingungen mit ölhaltigem Dunst betrieben.
Wenn Sie Faltenbälge benötigen, wählen Sie bei der Bestellung einen Manipulator mit Faltenbalg-Option.
Die Manipulatoren mit Faltenbälgen (Option) erfüllen die Anforderungen der Schutzart IP54 (IEC 60529,
JIS C0920).
Modell Schutzart
Staub : 5 Staub darf nicht in einer Menge eindringen, welche den
G6-***D*
mit
Faltenbalg-Option
IP54
Wasser
:
zufriedenstellenden Betrieb der Ausrüstung beeinträchtigt.
Wasser, das aus einer beliebigen Richtung gegen das Gehäuse
spritzt, darf keinen Schaden anrichten.
4
Staub : 6 Kein Eindringen von Staub.
G6-***P* IP65
Wasser
:
Wasser, das aus einer Düse aus einer beliebigen Richtung gegen
das Gehäuse spritzt, darf keinen Schaden anrichten.
5
*3: Beim PTP-Befehl. Die maximale Geschwindigkeit für den CP-Befehl beträgt 2,000 mm/s in der
horizontalen Ebene.
*4: Wenn der Schwerpunkt im Mittelpunkt der 4. Achse liegt. Wenn der Schwerpunkt nicht im Mittelpunkt
der 4. Achse liegt, stellen Sie den Parameter mit dem Inertia-Befehl ein.
*5: Für die Messung müssen die folgenden Bedingungen für den Manipulator erfüllt sein:
Betriebsbedingungen : Unter Nennlast, 4-Achsen simultane Bewegung, maximale Geschwindigkeit,
maximale Beschleunigung und 50 % Leistung.
Messpunkt : Gegenüber dem Manipulator, 1000 mm vom Arbeitsbereich entfernt, 50 mm
über der Installations-Oberfläche.
*6: Während des normalen Betriebs ist die Accel-Einstellung 100 die optimale Einstellung, die während der
Positionierung ein Gleichgewicht zwischen Beschleunigung und Vibration schafft.
G6 Rev.4 33
Page 46

Einrichten und Betrieb 2. Spezifikationen
Es ist jedoch möglich, dass Sie den Manipulator mit einer höheren Beschleunigung betreiben müssen, um
die Zykluszeit zu verkürzen, indem Sie die Vibration während der Positionierung reduzieren. Stellen Sie
in diesem Fall einen Accel-Wert größer 100 ein.
Wenn Sie einen höheren Wert einstellen, kann im Dauerbetrieb schneller ein Überlastungsfehler oder ein
Überhitzungsfehler auftreten. Ein hoher Accel-Wert wird nur für Bewegungen empfohlen, für die er
tatsächlich erforderlich ist.
34
G6 Rev.4
Page 47

2.5 Einstellen des Modells
Das Manipulator-Modell für Ihr System wurde vor der Lieferung in der Fabrik eingestellt.
Es ist normalerweise nicht erforderlich, das Modell einzustellen, wenn Sie Ihr System
erhalten.
■
Wenn es jedoch erforderlich ist, die Einstellung des Manipulator-Modells zu
ändern, stellen Sie sicher, dass dies fachgerecht erfolgt. Eine unsachgemäße
VORSICHT
HINWEIS
)
Einstellung des Manipulator-Modells kann zu einem fehlerhaften Betrieb oder
einem Ausfall des Manipulators führen und/oder Sicherheitsprobleme
verursachen.
Wenn ein MT-Aufkleber auf der Rückseite eines Manipulators angebracht ist, verfügt
dieser Manipulator über kundenspezifische Besonderheiten. Kundenspezifikationen
können eine andere Art der Konfiguration erfordern. Prüfen Sie die Nummer der
Kundenspezifikation auf dem MT-Aufkleber und wenden Sie sich an uns, wenn
erforderlich.
Das Manipulator-Modell kann in der Software eingestellt werden.
Siehe Kapitel Roboterkonfiguration im EPSON RC+ Ben ut zerhandbuch.
Einrichten und Betrieb 2. Spezifikationen
G6 Rev.4 35
Page 48

Einrichten und Betrieb 3. Umgebungen und Installation
3. Umgebungen und Installation
3.1 Umgebungsbedingungen
Eine geeignete Umgebung ist erforderlich, damit das Robotersystem richtig und sicher
funktioniert. Installieren Sie das Robotersystem in einer Umgebung, die folgende
Bedingungen erfüllt:
Parameter Bedingungen
Umgebungstemperatur *1 5 bis 40 °C (mit minimaler Temperaturschwankung)
Relative Luftfeuchtigkeit 10 bis 80% (keine Kondensation)
HINWEIS
)
Rauschen des ersten
Transienten
elektrostatische Störungen 6 kV oder weniger
Umgebung · Innen installieren.
Manipulatoren sind nicht geeignet für den Betrieb in rauen Umgebungen wie
beispielsweise in Lackierereien usw. Wenn Sie Manipulatoren in unangemessenen
Umgebungen verwenden, die nicht die oben genannten Bedingungen erfüllen, setzen Sie
sich bitte mit uns in Verbindung.
*1 Die angegebenen Umgebungstemperatur-Bedingungen gelten nur für die
Manipulatoren. Bezüglich der angeschlossenen Steuerung, siehe entsprechendes
Handbuch der Steuerung.
2 kV oder weniger
· Halten Sie direktes Sonnenlicht fern.
· Halten Sie Staub, öligen Rauch, Salzhaltiges,
Metallpulver
oder andere Fremdkörper fern.
· Halten Sie entflammbare oder ätzende Flüssigkeiten
und Gase fern.
· Halten Sie Wasser fern.
· Vermeiden Sie Stöße oder Vibrationen.
· Halten Sie Quellen elektrostatischer Störungen fern.
36 G6 Rev.4
Page 49

Einrichten und Betrieb 3. Umgebungen und Installation
Installieren Sie beim Protected-Modell-Manipulator das Robotersystem in einer
Umgebung, die folgende Bedingungen erfüllt:
Parameter Bedingungen
Umgebung · Innen installieren.
· Halten Sie direktes Sonnenlicht fern.
· Halten Sie Salzhaltiges und andere Fremdkörper fern.
· Halten Sie entflammbare oder ätzende Flüssigkeiten
(einschließlich Wasser)*² und Gase fern.
· Vermeiden Sie Stöße oder Vibrationen.
· Halten Sie Quellen elektrostatischer Störungen fern.
· Der Manipulator kann in einer Umgebung mit Staub, ölhaltigem
Dunst, Metallstaub oder anderen Fremdkörpern betrieben
werden.*³
*2 Das Manipulatorgehäuse besteht hauptsächlich aus Eisen und Aluminium. Es ist nicht
rostbeständig. Verwenden Sie den Manipulator nicht unter Bedingungen, in denen er
Wasser oder einer anderen ätzenden Flüssigkeit ausgesetzt werden kann.
*3 Die Verwendung jeglicher Fremdkörper, welche die Dichtleistung der Öldichtung aus
Nitrilkautschuk, der O-Ringe, der Verpackungsdichtung oder der Flüssigdichtung
beeinträchtigen könnten, sollte vermieden werden.
Besondere Umgebungsbedingungen
Die Schutzdichtungen sind am Protected-Modell-Manipulator angebracht, um das
Eindringen von Staub, Wasser etc. von außen zu verhindern. Befolgen Sie die folgenden
Sicherheitsmaßnahmen, die für die Einsatzumgebung getroffen werden müssen:
Die Manipulatoroberfläche ist grundsätzlich ölbeständig. Wenn der Manipulator jedoch
bei Ihrer Anwendung gegen das Eindringen von bestimmten Ölsorten geschützt sein muss,
wenden Sie sich bitte an Ihren Händler vor Ort.
Schnelle Temperatur- und Feuchtigkeitsveränderungen können zu einer Kondensation im
Inneren des Manipulators führen.
Wenn der Manipulator bei Ihrer Anwendung mit Lebensmitteln arbeitet, wenden Sie sich
bitte an Ihren Händler, um zu klären, ob der Manipulator den Lebensmitteln schadet.
Der Manipulator kann nicht in Umgebungen eingesetzt werden, in denen Säuren oder
Basen verwendet werden. In einer salzhaltigen Umgebung, in der sich leicht Rost bildet,
besteht die Gefahr, dass der Manipulator rostet.
Die Steuerung des Protected-Modell-Manipulators verfügt nicht über
Sicherheitseinrichtungen, wie sie in einer Umgebung mit Staub, Nässe oder Öl erforderlich
wären. Die Steuerung muss in einer Umgebung aufgestellt werden, die die angegebenen
Bedingungen erfüllt.
Installieren Sie einen Fehlerstromschutzschalter am Netzanschlusskabel der
■
Steuerung, um einen elektrischen Schlag oder einen Zusammenbruch der
WARNUNG
G6 Rev.4 37
Stromversorgung durch ein unerwartetes Wasserleck zu vermeiden. Sehen Sie
für jede Steuerung einen Fehlerstromschutzschalter vor. Für Details, lesen Sie
das Steuerungs-Handbuch.
Page 50

Einrichten und Betrieb 3. Umgebungen und Installation
3.2 Basis-Tisch
Ein Basis-Tisch zur Befestigung des Manipulators wird nicht mitgeliefert. Bitte fertigen
oder besorgen Sie selbst den Basis-Tisch für Ihren Manipulator. Die Form und die Größe
des Basis-Tisches unterscheiden sich abhängig von der Verwendung des Robotersystems.
Als Empfehlung listen wir hier einige Anforderungen an Manipulator-Tische auf.
Der Basis-Tisch muss nicht nur in der Lage sein, das Gewicht des Manipulators zu tragen,
er muss auch in der Lage sein, den dynamischen Bewegungen des Manipulators
standzuhalten, wenn der Manipulator mit maximaler Beschleunigung arbeitet. Stellen
Sie sicher, dass der Basis-Tisch ausreichend stabil ist, indem Sie verstärkende Materialien
wie Querstreben anbringen.
Die Drehmoment- und Reaktionskräfte, die durch die Bewegung des Manipulators erzeugt
werden, sind folgende:
Max. Drehmoment in horizontaler Ebene : 500 Nm
Max. horizontale Reaktionskraft : 2,500 N
Max. vertikale Reaktionskraft : 1,500 N
Die für die Montage des Manipulator-Sockels erforderlichen Gewindebohrungen sind
M12. Verwenden Sie Befestigungsschrauben mit Spezifikationen gemäß ISO898-1
Festigkeitsklasse: 10.9 oder 12.9.
Wegen der Abmessugen siehe Einrichten und Betrieb: 3.3 Montageabmessungen.
Die Platte für die Manipulator-Montagefläche sollte etwa 20 mm stark oder stärker sein
und aus Stahl bestehen, um die Vibrationen zu reduzieren. Die Oberflächenrauheit der
Stahlplatte sollte 25 μm oder weniger betragen.
Der Tisch muss am Boden oder an der Wand befestigt werden, um zu verhindern, dass er
sich bewegt.
Der Manipulator muss horizontal installiert werden.
Wenn Sie einen Nivellierer verwenden, um die Höhe des Basis-Tisches einzustellen,
verwenden Sie eine Schraube mit einem Durchmesser von mindestens M16.
Beachten Sie die folgenden Abbildungen, wenn Sie die Kabel durch die Bohrungen
führen.
[Einheit: mm]
95
47
26
53
18
Stromkabel-
anschluss
M/C-Kabel
Signalkabel-
anschluss
Entfernen Sie nicht die M/C-Kabel vom Manipulator.
HINWEIS
)
Für Umgebungsbedingungen bezüglich des Platzes, wenn Sie die Steuerung auf den
Basis-Tisch stellen, lesen Sie das Steuerungs-Handbuch.
38 G6 Rev.4
Page 51

WARNUNG
Einrichten und Betrieb 3. Umgebungen und Installation
■
Um die Sicherheit zu gewährleisten, muss eine Sicherheitsabschrankung für das
Robotersystem installiert sein.
Für nähere Informationen zur Sicherheitsabschrankung siehe das EPSON RC+
Benutzerhandbuch.
G6 Rev.4 39
Page 52

Einrichten und Betrieb 3. Umgebungen und Installation
3.3 Montageabmessungen
Der maximale Platz, der in den Abbildungen beschrieben ist, zeigt, dass der Radius des
Greifers 60 mm oder weniger beträgt. Wenn der Radius des Greifers mehr als 60 mm
beträgt, definieren Sie den Radius als Abstand zur Außenkante des maximalen Platzes.
Wenn eine Kamera oder ein elektromagnetisches Ventil über den Arm hinausragt, stellen
Sie den maximalen Bereich so ein, dass deren maximale Reichweite eingeschlossen ist.
Bitte achten Sie darauf, dass Sie außer dem Platz für die Montage des Manipulators, der
Steuerung und der Peripheriegeräte auch folgenden Platz berücksichtigen.
Platz zum Teachen
Platz für Wartung und Inspektion
(Stellen Sie sicher, dass Sie ausreichend Platz lassen, um die rückseitige
Abdeckung und die Wartungsabdeckung zu öffnen.)
Platz für Kabel
Der Mindestbiegeradius des Motorkabels beträgt 90 mm. Wenn Sie das Kabel anschließen,
halten Sie ausreichend Abstand zu Hindernissen. Lassen Sie zusätzlich ausreichend Platz
für andere Kabel, so dass diese nicht gewaltsam gebogen werden.
Stellen Sie sicher, dass der Abstand der Sicherheitsabschrankung zum maximalen
Arbeitsbereich mehr als 100 mm beträgt.
40 G6 Rev.4
Page 53

Tischplattenmontage
G6-45**
Einrichten und Betrieb 3. Umgebungen und Installation
G6-65**
G6-55* *
Mitt elpu nkt
der 3. Ach se
Ma x im a ler R aum
G6-45*
S / D C / P / D Faltenbälge
G6-55** G6-65**
a Länge des 1. Armes (mm) 200 300 400
b Länge des 2. Armes (mm) 250 250 250
c (Arbeitsbereich)
Z : 0 bis –270
Z : –270 bis –330
134,8
Z : 0 bis –240
143,5
Z : –240 bis
–300
134,8
153.9
161,2 232
d Arbeitsbereich der 1. Achse (Grad) 152 152 152
e Arbeitsbereich der 2. Achse (Grad)
Z : 0 bis –270
Z : –270 bis –330
147.5
Z : 0 bis –240
Z : –240 bis
145
–300
147.5
142
147,5 147,5
f (Mechanischer Stopper-Bereich) 124.4 133,8 207,5
1. Achse, Winkel in dem die Achse am
g
mechanischen Stopper anschlägt (Grad)
1. Achse, Winkel in dem die Achse am
h
mechanischen Stopper anschlägt (Grad)
HINWEIS
)
Im Z-Bereich: 0 bis -270 mm, der Bereich ist durch den Kollisionsbereich von Manipulatorkörper und
Arm begrenzt.
Z : 0 bis –270
Z : –270 bis –330
Die Faltenbälge für die G6-***D-Manipulatoren sind Optionen für die Auslieferung.
3.5 3,5 3,5
3
Z : 0 bis –270
Z : –270 bis
5.5
–330
3
8,5
6,3 6,3
G6 Rev.4 41
Page 54

Einrichten und Betrieb 3. Umgebungen und Installation
Wandmontage
G6-55**W
G6-45**W
G6-65**W
G6-55*
G6-45**W
CW/PW
SW / DW
Faltenbälge
/DW
G6-65**W
a Länge des 1. Armes (mm) 200 300 400
b Länge des 2. Armes (mm) 250 250 250
c (Arbeitsbereich) 195,5 161,2 172,1 232
d Arbeitsbereich der 1. Achse (Grad) 105 135 148
e Arbeitsbereich der 2. Achse (Grad) 130 147,5 145 147,5
f (Mechanischer Stopper-Bereich) 182,4 146,8 207,5
1. Achse, Winkel in dem die Achse am
g
mechanischen Stopper anschlägt (Grad)
2. Achse, Winkel in dem die Achse am
h
mechanischen Stopper anschlägt (Grad)
Deckenmontage
G6-45 **R
Die Faltenbälge für die G6-***DW-Manipulatoren sind Optionen für die Auslieferung.
G6-55**R
3,5 3,5 7,5
3,8 3,3 5,8 6,3
G6-65**R
G6-55*
G6-45**R
CR / PR
SR / DR
Faltenbälge
/ DR
G6-65**R
a Länge des 1. Armes (mm) 200 300 400
b Länge des 2. Armes (mm) 250 250 250
c (Arbeitsbereich) 195,5 161,2 172,1 232
d Arbeitsbereich der 1. Achse (Grad) 120 152 152
e Arbeitsbereich der 2. Achse (Grad) 130 147,5 145 147,5
f (Mechanischer Stopper-Bereich) 182,4 146.8 207,5
1. Achse, Winkel in dem die Achse am
g
mechanischen Stopper anschlägt (Grad)
2. Achse, Winkel in dem die Achse am
h
mechanischen Stopper anschlägt (Grad)
Die Faltenbälge für die G6-***DR-Manipulatoren sind Optionen für die Auslieferung.
5,5 3,5 3,5
3.8 3.3 5.8 6.3
42 G6 Rev.4
Page 55

3.4 Auspacken und Transport
DIE INSTALLATION MUSS VON QUALIFIZIERTEM MONTAGEPERSONAL
DURCHGEFÜHRT WERDEN UND ALLEN NATIONALEN UND LOKALEN
ANFORDERUNGEN ENTSPRECHEN.
■
Nur autorisiertes Personal darf einen hängenden Transport durchführen und
einen Kran oder Gabelstapler bedienen. Das Ausführen dieser Tätigkeiten
WARNUNG
durch nicht autorisiertes Personal ist extrem gefährlich und kann zu schweren
Verletzungen und / oder schweren Schäden an Geräten des Robotersystems
führen.
■
Verwenden Sie einen Hubwagen oder Ähnliches, um den Manipulator so zu
transportieren, wie er geliefert wurde.
■
Wenn Sie die Schrauben entfernt haben, die den Manipulator an der
Liefervorrichtung befestigen, kann der Manipulator umfallen. Passen Sie auf,
dass Sie Ihre Hände oder Finger nicht quetschen.
■
Der Manipulator ist mit einem Kabelbinder gesichert. Entfernen Sie den
Kabelbinder erst nach der Installation, um zu vermeiden, dass Sie Ihre Hände
oder Finger quetschen.
■
Um den Manipulator zu tragen, sind mindestens zwei Personen erforderlich, die
den Manipulator an der Liefervorrichtung befestigen oder ihn von Hand an den
Stellen halten, die in der Abbildung grau schattiert sind (Unterseite des 1. Armes
und Unterseite des Sockels).
Wenn Sie die Unterseite des Sockels von Hand halten, gehen Sie mit äußerster
Vorsicht vor, um zu verhindern, dass Ihre Hände oder Finger gequetscht werden.
VORSICHT
Einrichten und Betrieb 3. Umgebungen und Installation
Tischplattenm ontage
G6-45**/G6-55**
Ca. 27 kg : 60 lb.
G6-65**
Ca. 28 kg : 62 lb.
Wandmontage
G6-4 5**W /G6-5 5 **W
Ca. 29 kg : 64 lb.
G6-6 5**W
Ca. 29,5 kg : 65 lb.
Deckenmontage
G6-45**R/G6-55**R
Ca. 27 kg : 60 lb.
G6-65**R
Ca. 28 kg : 62 lb.
■
Passen Sie auf, dass Sie Ihre Hände oder Finger nicht quetschen, wenn Sie
unter den Sockel fassen.
G6 Rev.4 43
Page 56

Einrichten und Betrieb 3. Umgebungen und Installation
■
Stabilisieren Sie den Manipulator von Hand, wenn Sie ihn hochheben.
■
Wenn Sie den Manipulator über eine größere Entfernung transportieren,
VORSICHT
befestigen Sie ihn direkt an der Liefervorrichtung, sodass er nicht herunterfallen
kann.
Wenn erforderlich, verpacken Sie den Manipulator so, wie er geliefert wurde.
44 G6 Rev.4
Page 57

3.5 Installationsvorgang
In den folgenden Abschnitten wird die Installation des Standard-Modell-Manipulators
beschrieben.
3.5.1 Tischplattenmontage
3.5.2 Wandmontage
3.5.3 Deckenmontage
Wenn Ihr Manipulator ein Reinraum-Modell oder ein Protected-Modell ist, lesen Sie
den entsprechenden Abschnitt.
3.5.4 Reinraum-Modell
3.5.5 Protected-Modell
3.5.1 Tischplattenmontage
■
Installieren Sie den Manipulator für die Tischplattenmontage mit zwei oder mehr
Personen.
Das Gewicht des Manipulators wird im Folgenden aufgeführt. Passen Sie auf,
dass sich Ihre Hände, Finger oder Füße nicht verfangen und/oder dass kein
VORSICHT
Geräteschaden durch den Fall des Manipulators entsteht.
G6-45** : Circa 27 kg: 60 lb.
G6-55** : Circa 27 kg: 60 lb.
G6-65** : Circa 28 kg: 62 lb.
Einrichten und Betrieb 3. Umgebungen und Installation
Standard-Modell
HINWEIS
)
(1)
Befestigen Sie den Sockel mit vier
Schrauben auf dem Basis-Tisch.
Verwenden Sie Schrauben mit
Spezifikationen gemäß ISO898-1
Festigkeitsklasse: 10.9 oder 12.9.
(2) Schneiden Sie den Kabelbinder, der die
Z-Achse und die Armhalterung am Sockel
sichert, mit einem Seitenschneider durch.
(3) Entfernen Sie die Schrauben, die die in
Schritt (2) entfernten Kabelbinder sichern
-M8×40
Federscheibe
Unterle gscheibe
20 mm
Schraubenloch
(Tiefe mind. 20 mm)
Schraube
:M4 ×15
Tuc h
Kabelbinder
Schraube
:M5×15
G6 Rev.4 45
Page 58

Einrichten und Betrieb 3. Umgebungen und Installation
r
3.5.2 Wandmontage
■
Installieren Sie den Manipulator für die Wandmontage mit zwei oder meh
Personen.
Das Gewicht des Manipulators wird im Folgenden aufgeführt. Passen Sie auf,
dass sich Ihre Hände, Finger oder Füße nicht verfangen und/oder dass kein
Geräteschaden durch den Fall des Manipulators entsteht.
G6-45**W: Circa 29 kg: 64 lb.
WARNUNG
Standard-Modell
G6-55**W: Circa 29 kg: 64 lb.
G6-65**W: Circa 29.5 kg: 65 lb.
■
Wenn Sie den Manipulator an der Wand anbringen, stützen Sie ihn und sichern
Sie dann die Befestigungsschrauben. Das Entfernen der Stützen ohne die
Befestigungsschrauben ordnungsgemäß zu sichern, ist sehr gefährlich und kann
dazu führen, dass der Manipulator herunterfällt.
(1) Entpacken Sie den Manipulator, ohne die
Armstellung zu ändern.
(2)
HINWEIS
)
Befestigen Sie den Sockel mit vier
Schrauben an der Wand.
Verwenden Sie Schrauben mit
Spezifikationen gemäß ISO898-1
Festigkeitsklasse: 10.9 oder 12.9.
4-M12×40
Schraubenloch
(T iefe mind.
20 mm)
nterlegscheibe
Federscheibe
46 G6 Rev.4
Page 59

3.5.3 Deckenmontage
■
Installieren Sie den Manipulator für die Deckenmontage mit zwei oder mehr
Personen.
Das Gewicht des Manipulators wird im Folgenden aufgeführt. Passen Sie auf,
dass sich Ihre Hände, Finger oder Füße nicht verfangen und/oder dass kein
Geräteschaden durch den Fall des Manipulators entsteht.
G6-45**R: Circa 27 kg: 60 lb.
WARNUNG
Standard-Modell
G6-55**R: Circa 27 kg: 60 lb.
G6-65**R: Circa 28 kg: 62 lb.
■
Wenn Sie den Manipulator an der Decke anbringen, stützen Sie ihn und sichern
Sie dann die Befestigungsschrauben. Das Entfernen der Stützen ohne die
Befestigungsschrauben ordnungsgemäß zu sichern, ist sehr gefährlich und kann
dazu führen, dass der Manipulator herunterfällt.
(1) Entpacken Sie den Manipulator, ohne die
Armstellung zu ändern.
Einrichten und Betrieb 3. Umgebungen und Installation
HINWEIS
)
(2) Befestigen Sie den Sockel mit vier
Schrauben an der Decke.
Verwenden Sie Schrauben mit
Spezifikationen gemäß ISO898-1
Festigkeitsklasse: 10.9 oder 12.9.
Schraubenloch
(T iefe m in d. 20 m m)
Unterlegscheibe
Feder-
scheibe
4-M8×40
G6 Rev.4 47
Page 60

Einrichten und Betrieb 3. Umgebungen und Installation
3.5.4 Reinraum-Modell
(1) Entpacken Sie den Manipulator außerhalb des Reinraums.
(2) Befestigen Sie den Manipulator mit Schrauben an der Liefervorrichtung (z. B.
Palette), sodass er nicht herunterfällt.
(3) Entfernen Sie Staub auf dem Manipulator mit einem fusselfreien Tuch und etwas
Alkohol oder destilliertem Wasser.
(4) Tragen Sie den Manipulator in den Reinraum.
(5) Beachten Sie die Vorgehensweise für die Installation Ihres Manipulator-Modells und
installieren Sie den Manipulator.
(6) Schließen Sie einen Abluftschlauch am Abluft-Ausgang an.
3.5.5 Protected-Modell
Beachten Sie die Vorgehensweise für die Installation Ihres Manipulator-Modells und
installieren Sie den Manipulator. Wenn der Manipulator ein Protected-Modell ist,
beachten Sie Folgendes:
■
Schließen Sie nach der Installation des Manipulators das Stromkabel und das
Signalkabel sofort an den Manipulator an. Wenn der Manipulator nicht
WARNUNG
angeschlossen wird, kann dies zu einem elektrischen Schlag und / oder zu einer
Störung des Robotersystems führen, da die Schutzart IP54 / IP65 nicht
gewährleistet werden kann.
VORSICHT
■
Wenn der Manipulator unter bestimmten Umgebungsbedingungen betrieben wird
(widrige Bedingungen mit Staub und ölhaltigem Dunst), stellen Sie die Steuerung
nicht in einem Bereich auf, in dem dieselben Bedingungen herrschen, da die
Steuerung nicht der Schutzart IP54 / IP65 entspricht. Andernfalls kann die
Ausrüstung beschädigt oder eine Fehlfunktion der Steuerung verursacht werden.
48 G6 Rev.4
Page 61

3.6 Anschluss der Kabel
■
Um die Spannungsversorgung des Robotersystems zu unterbrechen, ziehen Sie
den Netzstecker aus der Steckdose. Schließen Sie das Netzanschlusskabel an
eine geeignete Netzsteckdose an. Schließen Sie es NICHT direkt an die
Fabrik-Spannungsversorgung an.
■
Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung
und die damit zusammenhängende Ausrüstung AUS und trennen Sie dann den
Netzstecker von der Spannungsversorgung.
Austauscharbeiten bei eingeschalteter Spannung sind extrem gefährlich und
können zu einem elektrischen Schlag und / oder eine Fehlfunktion des
WARNUNG
VORSICHT
Robotersystems führen.
■
Schließen Sie die Kabel richtig an. Setzen Sie die Kabel keinen unnötigen
mechanischen Beanspruchungen aus. (Stellen Sie keine schweren Objekte auf
die Kabel. Verbiegen oder ziehen Sie die Kabel nicht gewaltsam.) Eine
unnötige mechanische Beanspruchung der Kabel kann zu Schäden an den
Kabeln, zur Unterbrechung der Stromversorgung und / oder zu Kontaktfehlern
führen. Beschädigte Kabel, eine Unterbrechung der Stromversorgung oder
Kontaktfehler sind sehr gefährlich und können zu einem elektrischen Schlag und
/ oder einer Fehlfunktion des Robotersystems führen.
■
Wenn Sie den Manipulator mit der Steuerung verbinden, vergewissern Sie sich,
dass die Seriennummern auf jedem Gerät zusammenpassen. Eine
unsachgemäße Verbindung zwischen der Steuerung und dem Manipulator kann
nicht nur eine unzureichende Funktion des Robotersystems verursachen,
sondern auch zu ernsten Sicherheitsproblemen führen. Die Anschlussmethode
variiert entsprechend der verwendeten Software. Im Steuerungs-Handbuch
finden Sie nähere Informationen zur Verbindung.
Wenn ein Manipulator der G-Serie oder der E2-Serie an die Steuerung für die
PS-Serie (ProSix) angeschlossen wird, kann dies zu einem Ausfall des
Manipulators führen.
Einrichten und Betrieb 3. Umgebungen und Installation
Wenn der Manipulator ein Reinraum-Modell ist, beachten Sie Folgendes:
Wenn der Manipulator ein Reinraum-Modell ist, verwenden Sie ihn mit einem
Abluft-System. Für Details, lesen Sie Einrichten und Betrieb: 2.4 Spezifikationen.
Wenn der Manipulator ein Protected-Modell ist, beachten Sie Folgendes:
WARNUNG
G6 Rev.4 49
■
Schließen Sie nach der Installation des Manipulators das Stromkabel und das
Signalkabel sofort an den Manipulator an. Wenn der Manipulator nicht
angeschlossen wird, kann dies zu einem elektrischen Schlag und / oder zu einer
Störung des Robotersystems führen, da die Schutzart IP54 / IP65 nicht
gewährleistet werden kann.
Page 62

Einrichten und Betrieb 3. Umgebungen und Installation
■
Wenn der Manipulator unter bestimmten Umgebungsbedingungen betrieben wird
(widrige Bedingungen mit Staub und ölhaltigem Dunst), stellen Sie die Steuerung
VORSICHT
nicht in einem Bereich auf, in dem dieselben Bedingungen herrschen, da die
Steuerung nicht der Schutzart IP54 / IP65 entspricht. Andernfalls kann die
Ausrüstung beschädigt oder eine Fehlfunktion der Steuerung verursacht werden.
50 G6 Rev.4
Page 63

Kabelanschlüsse
Schließen Sie den Stromanschluss und den Signalanschluss der M/C-Kabel an die
Steuerung an.
Einrichten und Betrieb 3. Umgebungen und Installation
Stromanschluss
Signalanschluss
G6 Rev.4 51
Page 64

Einrichten und Betrieb 3. Umgebungen und Installation
3.7 Anwenderkabel und Pneumatikschläuche
■
Die Verdrahtung sollte ausschließlich von autorisiertem und zertifiziertem
Personal durchgeführt werden. Eine Verdrahtung durch nicht autorisiertes oder
VORSICHT
Elektrokabel
nicht zertifiziertes Personal kann zu Personenschäden und / oder zu Fehlfunktion
des Robotersystems führen.
Anwenderkabel und Pneumatikschläuche sind im Kabelschlauch enthalten.
Nennspannung
Zulässiger
Strom
Adernanzahl
AC/DC30 V 1 A 15 0,211 mm2
Hersteller Standard
Geeigneter
Anschluss
JAE
DA-15PF-N (Lötanschluss)
15 Pin
Gehäuse JAE
Geeigneter
Anschluss
JAE
DA-C8-J10-F2-1R
DE9PF-N (Lötanschluss)
9 Pin
Gehäuse JAE
DE-C8-J9-F2-1R
Nominaler
Querschnitt
Außendurchmesser Anmerkung
ø 8,3 ± 0,3 mm
(Anschluss
Befestigungsschraube: Nr. 4-40
NC)
(Anschluss
Befestigungsschraube: Nr. 4-40
NC)
abgeschirmt
Anschlüsse mit derselben Nummer, angegeben auf den Steckern an beiden Enden der
Kabel, werden miteinander verbunden.
Pneumatikschläuche
0,59 MPa (6 kgf/cm2 : 86 psi)
Pneumatikschnellkupplungen für ø 6 mm und 4 mm (Außendurchmesser)
Pneumatikschläuche befinden sich an beiden Enden der Pneumatikschläuche.
Wenn der Manipulator ein Protected-Modell ist, beachten Sie Folgendes:
■
Stellen Sie sicher, dass Sie Kabel und Schläuche verwenden, die IP54 bzw. IP65
entsprechen, wenn Sie den Manipulator in besonderen Umgebungsbedingungen
einsetzen (widrige Bedingungen mit Staub und ölhaltigem Dunst). Wenn Sie
nicht geschützte Kabel und Schläuche verwenden, kann dies zu einer
Beschädigung der Ausrüstung oder einem Ausfall des Manipulators führen, da
ein fehlerfreier Betrieb des Manipulators unter diesen Bedingungen nicht
VORSICHT
gewährleistet ist.
■
Setzen Sie die Kappe auf den Anwenderkabel-Anschluss, wenn Sie den
Anschluss nicht verwenden. Wenn Sie den Manipulator ohne die Kappe
betreiben, kann dies zu einer Beschädigung der Ausrüstung und / oder einem
Ausfall des Manipulators führen, wenn Staub oder ölhaltiger Dunst in den
Anschluss geraten.
Max. verwendbarer
pneumatischer Druck
Pneumatikschläuche
2
2
Außendurchmesser x
Innendurchmesser
ø 6 mm × ø 4 mm
ø 4 mm × ø 2,5 mm
52 G6 Rev.4
Page 65

Einrichten und Betrieb 3. Umgebungen und Installation
r
Teile aller Modelle
15-Pin D-Sub-Anschluss
9-Pin D-Sub-Anschluss
Pneumatikschnellkupplung
(schwarz) für Pneumatikschlauch mit ø6 mm
Pneumatikschnellkupplung
(weiß) für Pneumatikschlauch mit ø6 mm
Pneumatikschnellkupplung
(schwarz) für Pneumatikschlauch mit ø 4 mm
Pneumatikschnellkupplung
(weiß) für Pneumatikschlauch mit ø 4 mm
Bremsfreigabetas ter
Tischplattenmontage
Anwenderverkabelung
(9-Pin D-Sub-Anschluss)
Wandmontage
Pneumatikschnellkupplung
(weiß) für Pneumatikschlauch mit ø 6 mm
Pneumatikschnellkupplung
(weiß) für Pneumatikschlauch mit ø 4 mm
Pneumatikschnellkupplung (weiß)
für Pneumatikschlauch mit ø 6 mm
Pneumatikschnellkupplung
(schwarz) für Pneumatikschlauch mit ø 6 mm
Pneumatikschnellkupplung
(schwarz) für Pneumatikschlauch mit ø 4 mm
Pneumatikschnellkupplung (schwarz) fü
Pneumatikschlauch mit ø4 mm
Pneumatikschnellkupplung
(weiß) für Pn eumatikschlauch mit ø 4 mm
Anwenderverkabelung
(15-Pin D-Sub-Anschluss)
Pneumatikschnellkupplung
(schwarz) für Pneumatikschlauch mit ø 6 mm
Anwenderverkabelung
(15-Pin D-Sub-Anschluss)
Anwenderverkabelung
(9-Pin D-Sub-Anschluss)
G6 Rev.4 53
Page 66

Einrichten und Betrieb 3. Umgebungen und Installation
r
Deckenmontage
Pneumatikschnellkupplung (schwarz) fü
Pneumatikschlauch
mit ø 6 mm
Anwenderverkabelung
(15-Pin D-Sub-Anschluss)
Pneumatikschnellkupplung (schwarz) für
Pneumatikschlauch mit ø 4 mm
Pneumatikschnellkupplung (weiß)
für Pneumatikschlauch mit ø 4 mm
Pneumatikschnellkupplung
(weiß) für Pneumatikschlauch mit ø 6 mm
Anwenderverkabelung
(9-Pin D-Sub-Anschluss)
54 G6 Rev.4
Page 67

Einrichten und Betrieb 3. Umgebungen und Installation
3.8 Standortwechsel und Lagerung
3.8.1 Vorkehrungen für Standortwechsel und Lagerung
Beachten Sie Folgendes, wenn Sie den Standort des Manipulators wechseln, den
Manipulator lagern oder transportieren.
DIE INSTALLATION MUSS VON QUALIFIZIERTEM MONTAGEPERSONAL
DURCHGEFÜHRT WERDEN UND ALLEN NATIONALEN UND LOKALEN
ANFORDERUNGEN ENTSPRECHEN.
■
Nur autorisiertes Personal darf einen hängenden Transport durchführen und
einen Kran oder Gabelstapler bedienen. Das Ausführen dieser Tätigkeiten
WARNUNG
durch nicht autorisiertes Personal ist extrem gefährlich und kann zu schweren
Verletzungen und / oder schweren Schäden an Geräten des Robotersystems
führen.
■
Bevor Sie den Standort des Manipulators wechseln, knicken Sie den Arm ein und
sichern Sie ihn fest mit einem Kabelbinder, um Hände und Finger vor
Quetschungen am Manipulator zu schützen.
VORSICHT
■
Wenn Sie die Ankerschrauben entfernen, stützen Sie den Manipulator, um zu
verhindern, dass er umfällt. Das Entfernen der Befestigungsschrauben ohne
den Manipulator zu stützen kann dazu führen, dass er fällt und Ihre Hände,
Finger oder Füße quetscht.
■
Um den Manipulator zu tragen, brauchen Sie zwei oder mehr Personen, um den
Manipulator an der Liefervorrichtung zu befestigen oder die Unterseite des 1.
Arms, die Unterseite der Hauptkabelführung und den Boden des Sockels von
Hand zu halten. Wenn Sie die Unterseite des Sockels von Hand halten, gehen
Sie mit äußerster Vorsicht vor, um zu verhindern, dass Ihre Hände oder Finger
gequetscht werden.
Halten Sie den Manipulator nicht am Schlauchgelenk auf der Rückseite des
Sockels.
■
Stabilisieren Sie den Manipulator von Hand, wenn Sie ihn hochheben.
Instabiles Anheben ist extrem gefährlich und kann dazu führen, dass der
Manipulator herunterfällt.
Wenn Sie den Manipulator über eine größere Entfernung transportieren,
befestigen Sie ihn direkt an der Liefervorrichtung, sodass er nicht herunterfallen
kann.
Wenn erforderlich, verpacken Sie den Manipulator so, wie er geliefert wurde.
Wenn der Manipulator nach einer längeren Lagerung wieder für das
Robotersystem verwendet wird, führen Sie einen Testlauf des Robotersystems
durch, um zu überprüfen, ob es richtig funktioniert.
Transportieren und lagern Sie den Manipulator bei einer Temperatur zwischen
-25 °C und +55 °C.
Es wird eine Luftfeuchtigkeit zwischen 10 % und 90 % empfohlen.
G6 Rev.4 55
Page 68

Einrichten und Betrieb 3. Umgebungen und Installation
Wenn während des Transportes oder der Lagerung Kondensation am
Manipulator entsteht, schalten Sie die Spannungsversorgung erst ein, wenn die
Kondensation abgetrocknet ist.
Setzen Sie den Manipulator während des Transportes keinen Schlägen oder
Erschütterungen aus.
56 G6 Rev.4
Page 69

3.8.2 Tischplattenmontage
■
Wenn Sie den Manipulator für die Tischplattenmontage installieren oder seinen
Standort wechseln, benötigen Sie mindestens zwei Personen.
Das Gewicht des Manipulators wird im Folgenden aufgeführt. Passen Sie auf,
dass sich Ihre Hände, Finger oder Füße nicht verfangen und/oder dass kein
VORSICHT
HINWEIS
)
Geräteschaden durch den Fall des Manipulators entsteht.
G6-45**: Circa 27 kg: 60 lb.
G6-55**: Circa 27 kg: 60 lb.
G6-65**: Circa 28 kg: 62 lb.
(1) Schalten Sie die Spannungsversorgung an allen Geräte AUS und ziehen Sie die Kabel
heraus.
Entfernen Sie die mechanischen Stopper, wenn Sie diese verwenden, um den
Arbeitsbereich der 1. und 2. Achse zu begrenzen. Nähere Informationen zum
Arbeitsbereich finden Sie im Kapitel Einrichten und Betrieb: 5.2
Arbeitsbereich-Einst ell ung d urch mechanische Stopper.
Einrichten und Betrieb 3. Umgebungen und Installation
(2) Bedecken Sie den Arm mit einem Tuch, um Beschädigungen zu vermeiden.
Binden Sie das untere Ende der Z-Achse und des Arms, den Arm und den Sockel mit
einem Kabelbinder zusammen. Passen Sie auf, dass Sie sie nicht zu fest
zusammenbinden. Andernfalls kann die Z-Achse verbogen werden.
Beispiel für Armhalteposition
Schraube
: M4
×15
Tuch
Kabel-
binder
Schraube
: M5
×15
Unterlegscheibe
: M6
(3) Halten Sie die Unterseite des 1. Arms von Hand fest, um die Befestigungsschrauben
zu lösen.
Entfernen Sie anschließend den Manipulator vom Basis-Tisch.
Unterlegscheibe
: M5
G6 Rev.4 57
Page 70

Einrichten und Betrieb 3. Umgebungen und Installation
3.8.3 Wandmontage
■
Wenn Sie den Manipulator für die Wandmontage installieren oder seinen Standort
wechseln, benötigen Sie mindestens zwei Personen.
Das Gewicht des Manipulators wird im Folgenden aufgeführt. Passen Sie auf,
dass sich Ihre Hände, Finger oder Füße nicht verfangen und/oder dass kein
Geräteschaden durch den Fall des Manipulators entsteht.
G6-45**W: Circa 29 kg: 64 lb.
WARNUNG
HINWEIS
)
G6-55**W: Circa 29 kg: 64 lb.
G6-65**W: Circa 29.5 kg: 65 lb.
■
Wenn Sie den Manipulator von der Wand entfernen, stützen Sie den Manipulator
und entfernen Sie dann die Befestigungsschrauben. Das Entfernen der
Befestigungsschrauben ohne den Manipulator zu stützen, ist sehr gefährlich und
kann dazuführen, dass er herunterfällt.
(1) Schalten Sie die Spannungsversorgung an allen Geräte AUS und ziehen Sie die Kabel
heraus.
Entfernen Sie die mechanischen Stopper, wenn Sie diese verwenden, um den
Arbeitsbereich der 1. und 2. Achse zu begrenzen. Nähere Informationen zum
Arbeitsbereich finden Sie im Kapitel Einrichten und Betrieb: 5.2
Arbeitsbereich-Einst ell ung d urch mechanische Stopper.
(2) Bedecken Sie den Arm mit einem Tuch, um Beschädigungen zu vermeiden.
Binden Sie die Z-Achse und die Armhalterung wie in der unten stehenden Abbildung
zu sehen am Sockel fest.
Beispiel für Armhalteposition
Schraube
: M4×15
Unterlegscheibe
: M5
Tuc h
Schraube für mechanischen Stopper des 1. Arms
(3) Halten Sie die Unterseite des 1. Arms von Hand, um die Befestigungsschrauben zu
lösen. Entfernen Sie den Manipulator dann von der Wand.
Kabelbinder
Befestigungsschraube für Arm
58 G6 Rev.4
Page 71

3.8.4 Deckenmontage
■
Wenn Sie den Manipulator für die Deckenmontage installieren oder seinen
Standort wechseln, benötigen Sie mindestens zwei Personen.
Das Gewicht des Manipulators wird im Folgenden aufgeführt. Passen Sie auf,
dass sich Ihre Hände, Finger oder Füße nicht verfangen und/oder dass kein
Geräteschaden durch den Fall des Manipulators entsteht.
G6-45**R: Circa 27 kg: 60 lb.
WARNUNG
HINWEIS
)
G6-55**R: Circa 27 kg: 60 lb.
G6-65**R: Circa 28 kg: 62 lb.
■
Wenn Sie den Manipulator von der Decke entfernen, stützen Sie den Manipulator
und entfernen Sie dann die Befestigungsschrauben. Das Entfernen der
Befestigungsschrauben ohne den Manipulator zu stützen, ist sehr gefährlich und
kann dazuführen, dass er herunterfällt.
(1) Schalten Sie die Spannungsversorgung an allen Geräte AUS und ziehen Sie die Kabel
heraus.
Entfernen Sie die mechanischen Stopper, wenn Sie diese verwenden, um den
Arbeitsbereich der 1. und 2. Achse zu begrenzen. Nähere Informationen zum
Arbeitsbereich finden Sie im Kapitel Einrichten und Betrieb: 5.2
Arbeitsbereich-Einst ell ung d urch mechanische Stopper.
Einrichten und Betrieb 3. Umgebungen und Installation
(2) Bedecken Sie den Arm mit einem Tuch, um Beschädigungen zu vermeiden.
Binden Sie die Z-Achse und die Armhalterung wie in der unten stehenden Abbildung
zu sehen am Sockel fest.
Beispiel für Armhalteposition
Schraube
: M4×15
Unterlegscheibe
: M5
Tuc h
Schraube für mechanischen Stopper d es 1. Arms
(3) Halten Sie die Unterseite des 1. Arms von Hand, um die Befestigungsschrauben zu
lösen. Entfernen Sie den Manipulator dann von der Decke.
Kabelbinder
Befestigungsschraube für Arm
G6 Rev.4 59
Page 72

Einrichten und Betrieb 4. Einstellung der Greifer
r
n
a
n
d
t
r
m
4. Einstellung des Greifers
4.1 Anbringen eines Greifers
Die Benutzer sind für die Herstellung ihres eigenen Greifers/ihrer eigenen Greifer
verantwortlich. Bevor Sie einen Greifer anbringen, befolgen Sie diese Richtlinien.
■
Wenn Sie einen Greifer verwenden, der mit einer Greiferzange oder einer
Spannvorrichtung ausgestattet ist, schließen Sie Leitungen und/oder
Pneumatikschläuche richtig an, so dass die Greiferzange das Werkstück nicht
loslässt, wenn der Strom des Robotersystems AUSgeschaltet wird.
Unsachgemäßes Anschließen der Kabel und/oder Pneumatikschläuche kann das
VORSICHT
Robotersystem und/oder das Werkstück beschädigen, weil das Werkstück
losgelassen wird, wenn der Not-Aus-Taster gedrückt wird.
Die Ausgänge sind bei der Herstellung so eingestellt worden, dass sie
automatisch durch eine Stromunterbrechung, den Not-Aus-Taster oder die
anderen Sicherheitseigenschaften des Robotersystems ausschalten (0).
Z-Achse
- Bringen Sie einen Greifer am unteren Ende der Z-Achse an.
Die Abmessungen der Achse und die Gesamtabmessungen des Manipulators finden Sie
im Kapitel Einrichten und Betrieb: 2. Spezifikationen.
- Verschieben Sie nicht den mechanischen Stopper der Obergrenze an der unteren Seite
der Z-Achse. Anderenfalls kann der mechanische Stopper den Manipulator treffen,
wenn eine „Jump (Sprung)-Bewegung“ ausgeführt wird, und das Robotersystem kann
möglicherweise nicht richtig funktionieren.
- Verwenden Sie einen Klemmring mit einer M4-Schraube oder größer, um den Greife
an der Z-Achse zu befestigen.
Bremsfreigabetaster
- Die 3. und die 4. Achse (G6-**3**) könne
nicht manuell auf bzw. ab bewegt werden, d
die elektromagnetische Bremse auf die Achse
wirkt, während der Strom des Robotersystems
ausgeschaltet ist. Das bewahrt die Z-Achse
davor, an Peripheriegeräte anzuschlagen un
zu rotieren, für den Fall, dass die Z-Achse
durch das Gewicht des Greifers abgesenk
wird, wenn der Strom während des Betriebes
ausgeschaltet wird, oder wenn der Moto
ausgeschaltet wird, obwohl der Stro
eingeschaltet ist.
Die Z-Achse kann durch das
Gew i cht des Greife rs ab gesenkt
we r den .
Bremsfreigabetaster
Um die 3. Achse auf oder ab zu bewegen,
drehen Sie die 4. Achse.
60 G6 Rev.4
Page 73

Einrichten und Betrieb 4. Einstellung der Greifer
n
u
(G6-**3**) Um einen Greifer anzubringen, schalten Sie die Steuerung EIN und
bewegen Sie die Achse auf bzw. ab oder drehen Sie die Achse, während Sie den
Bremsfreigabetaster drücken.
Dieser Knopf ist ein Taster; die Bremse wird nur gelöst, wenn der Knopf gedrückt
wird.
Die entsprechenden Bremsen der 3 .und 4. Achse (G6-**3**) werden gleichzeitig
gelöst.
- Seien Sie vorsichtig, da sich die Z-Achse während der Betätigung des
Bremsfreigabetasters aufgrund des Gewichts des Greifers absenken bzw. drehen kann.
- G6-**1**: Bei diesem Modell hat die 4. Achse keine Bremse.
Layouts
- Wenn Sie den Manipulator mit einem Greifer betreiben, kann der Greifer de
Manipulator aufgrund des Außendurchmessers des Greifers, der Größe des
Werkstückes oder der Position des Armes behindern. Wenn Sie Ihren Systemaufba
entwerfen, beachten Sie den Störbereich des Greifers.
G6 Rev.4 61
Page 74

Einrichten und Betrieb 4. Einstellung der Greifer
A
A
4.2 Anbringen der Kameras und Ventile
Der 2. Arm hat Gewindebohrungen, wie in der Abbildung unten dargestellt. Verwenden
Sie diese Bohrungen, um Kameras, Ventile oder andere Geräte anzubringen.
llgemeine Abmessungen
4-M4 Tiefe 8
6,7
2-M4 Tiefe 8
30
41 35 20
4-M4 Tiefe 8
Tischplattenmontage
90
96
8020
[Einheit: mm]
110
A
B
391
Von Sockel-
Montagefläche
282
Von Sockel-
Montagefläche
2-M5 Tiefe 10
28
90
2-M5 Tiefe 10
90
DeckenmontageWandmontage
48
302
Von S ock e l-
Montagefläche
Von Sockel-
282
Montagefläche
Von Referenzbohrung
B
A
62 G6 Rev.4
Page 75

Einrichten und Betrieb 4. Einstellung der Greifer
–
4.3 Einstellen von Weight (Gewicht) und Inertia (Trägheit)
Um eine optimale Manipulator-Leistung sicherzustellen, ist es wichtig zu überprüfen, ob
die Last (Gewicht des Greifers und Werkstücks) und das Masseträgheitsmoment der Last
innerhalb der maximalen Nennwerte für den Manipulator liegen, und dass die 4. Achse
nicht exzentrisch wird.
Wenn die Last oder das Trägheitsmoment die Nennwerte überschreitet oder wenn die Last
exzentrisch wird, befolgen Sie Schritte „4.3.1 Einstellen von Weight (Gewicht)" und „4.3.2
Einstellen von Inertia (Trägheit)" unten, um die Parameter einzustellen.
Durch das Einstellen der Parameter wird der Betrieb des Manipulators optimiert, die
Vibration reduziert, die Bewegungszeit verkürzt und die Kapazität für größere Lasten
verbessert. Zusätzlich wird durch das Einstellen der Parameter die anhaltende Vibration
reduziert, die erzeugt wird, wenn das Trägheitsmoment an Greifer und Werkstück größer
als die Standardeinstellung ist.
4.3.1 Einstellen von Weight (Gewicht)
■
Das Gesamtgewicht von Greifer und Werkstück darf 6 kg nicht überschreiten.
Die Manipulatoren der G6-Serie sind nicht dafür ausgelegt, eine Last zu tragen,
die größer ist als 6 kg.
VORSICHT
Stellen Sie die Weight-Parameter immer entsprechend der Last ein. Das
Einstellen eines Wertes, der kleiner ist als die tatsächliche Last, kann Fehler,
plötzliche Stoßbewegungen und ungenügende Funktion des Manipulators
verursachen und/oder die Lebensdauer der Teile/Mechanismen verkürzen.
Die zulässige Gewichtskapazität (Greifer und Werkstück) der G6-Serie beträgt 3 kg
Nennlast und 6 kg Maximallast. Wenn die Last (Gewicht von Greifer und Werkstück)
die Nennlast überschreitet, ändern Sie die Einstellung des Weight-Parameters.
Nachdem die Einstellung geändert wurde, wird die maximale Geschwindigkeit der
Beschleunigung/Verzögerung des Robotersystems entsprechend dem
„Weight-Parameter“ automatisch eingestellt.
Last an der Z-Achse
Die Last (Gewicht des Greifers und Werkstückes) an der Z-Achse kann durch die
Weight-Parameter eingestellt werden.
EPSON
RC+
Geben Sie einen Wert in das [Lastträgheit:]- Textfeld im [Inertia]-Feld ([Tools]
[Robotermanager]) ein. (Sie können den Inertia-Befehl auch im [Befehlseingabefenster]
ausführen.)
G6 Rev.4 63
Page 76

Einrichten und Betrieb 4. Einstellung der Greifer
0120100
0
04020
)
Last auf dem Arm
Wenn Sie eine Kamera oder andere Geräte am Arm anbringen, berechnen Sie das Gewicht
als Äquivalent zur Z-Achse. Addieren Sie dies dann zur Last und geben Sie das
Gesamtgewicht in den Weight-Parameter ein.
Äquivalenzformel
Wenn Sie das Gerät in der Nähe des 2. Arms anbringen:
Wenn Sie das Gerät am Ende des 2. Arms anbringen:
<Beispiel> Eine „1 kg"-Kamera ist am Ende des Armes der G10-Serie angebracht
M = 1
Automatische Geschwindigkeitseinstellung durch Weight
W
: äquivalentes Gewicht
M
M
: Gewicht der Kamera usw.
L
: Länge des 1. Armes
1
L
: Länge des 2. Armes
2
L
: Abstand vom Drehzentrum der 2. Achse zum Schwerpunkt
M
der Kamera usw.
(450 mm entfernt vom Drehzentrum der 2. Achse), welcher ein
Lastgewicht von „2 kg" hat.
= 350
L
2
= 450
L
M
= 1 × 4502/3502 = 1,65 → 1.7 (aufrunden)
W
M
W + W
= 2 + 1,7 = 3,7
M
Geben Sie „3,7” als Weight-Parameter ein.
= M (L1)2/(L1+L2)2
W
M
= M (LM)2/(L2)2
W
M
(%
14
* Der Prozentsatz im Diagramm
100 100 100
100
8
00
70
basiert auf der
Geschwindigkeit bei Nennlast
(3 kg) als 100 %.
70
6
0 1 2 3 4 5 6 (kg) Weight-Einstellung
64 G6 Rev.4
Page 77
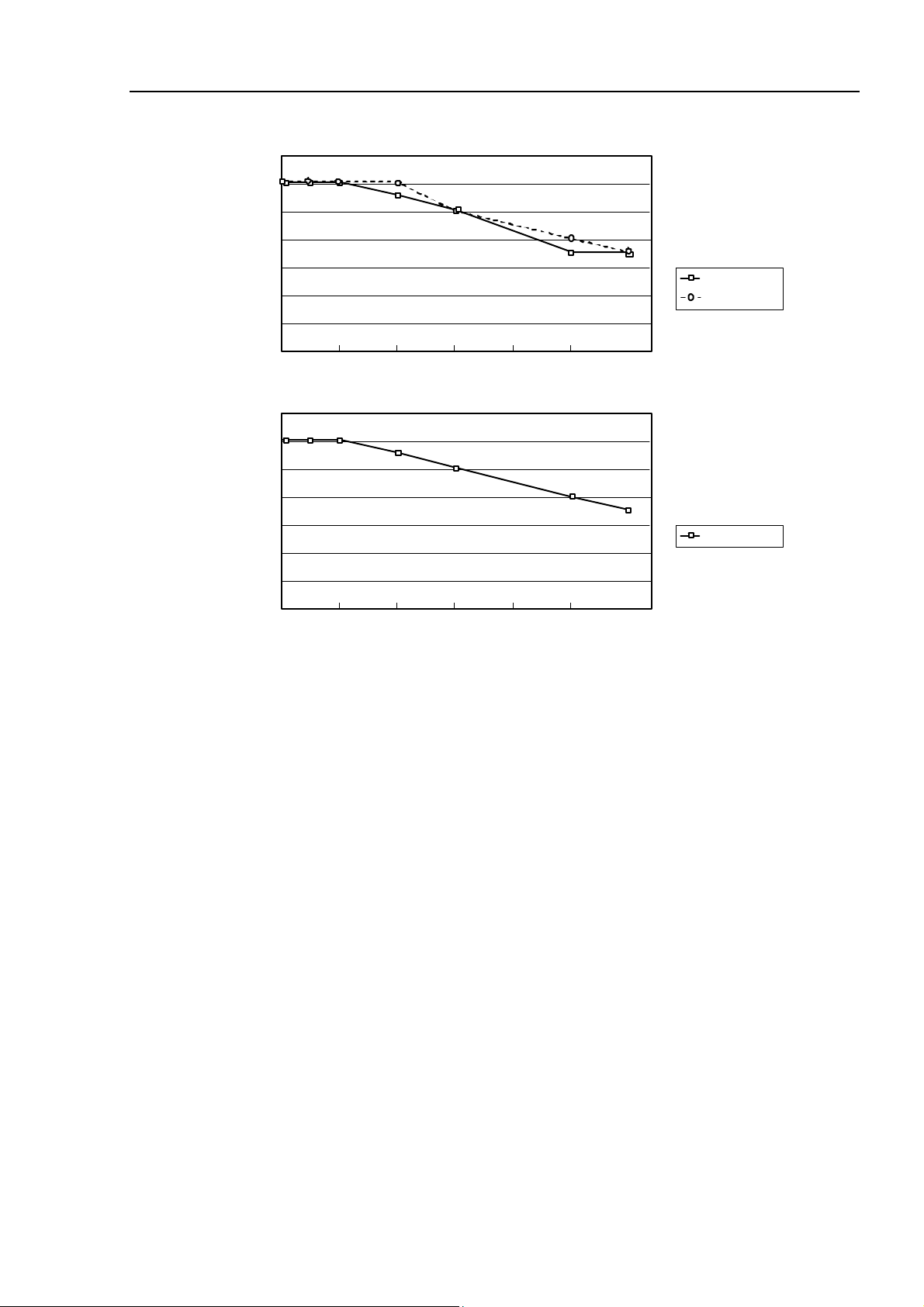
Einrichten und Betrieb 4. Einstellung der Greifer
Automatische Beschleunigungs-/Verzögerungs-Einstellung durch Weight
140
(%)
115
120
100
80
70
70
120
100
80
60
120 120
120
40
20
* Der Prozentsatz im Diagramm
basiert auf der Beschleunigung / Verzögerung bei
Nennlast (3 kg) als 100 %.
G6-45*S*
G6-55*S*
140
(%)
120
100
80
60
40
20
0 1 2 3 4 5 6 (kg)
* Der Prozentsatz im Diagramm
120
120
12 0
115
100
80
basiert auf der Beschleunigung / Verzögerung bei
Nennlast (3 kg) als 100 %.
70
0 1 2 3 4 5 6 (kg)
Weight-Einstellung
G6-65*S*
Weight-Einstellung
G6 Rev.4 65
Page 78

Einrichten und Betrieb 4. Einstellung der Greifer
–
4.3.2 Einstellen von Inertia (Trägheit)
Massenträgheitsmoment und die Inertia-Einstellung
Das Masseträgheitsmoment ist definiert als „das Verhältnis des Drehmoments, angewendet
auf einen starren Körper und dessen Widerstand gegen die Bewegung“. Dieser Wert wird
typischerweise als „Masseträgheitsmoment“, „Masseträgheit“ oder „GD
Wenn der Manipulator arbeitet, wenn zusätzliche Objekte (wie zum Beispiel ein Greifer)
an der Z-Achse angebracht sind, muss das Massenträgheitsmoment der Last bedacht
werden.
■
VORSICHT
Das Massenträgheitsmoment der Last (Gewicht von Greifer und Werkstück)
muss 0,12 kg wm
nicht dafür ausgelegt, mit einem Trägheitsmoment zu arbeiten, das größer ist als
0,12 kgwm
2
Stellen Sie den Parameter für das Trägheitsmoment entsprechend dem richtigen
Trägheitsmoment ein. Das Einstellen eines Wertes, der kleiner als das
tatsächliche Trägheitsmoment ist, kann Fehler, plötzliche Stoßbewegungen und
ungenügende Funktion des Manipulators verursachen und/oder die Lebensdauer
der Teile/Mechanismen verkürzen.
2
oder weniger betragen. Die Manipulatoren der G6-Serie sind
.
2
“ bezeichnet.
Das zulässige Massenträgheitsmoment für einen Manipulator der G6-Serie beträgt 0,01
2
in der Standardeinstellung und 0,12 kgwm2 in der Maximaleinstellung. Wenn das
kgwm
Massenträgheitsmoment den Nennwert überschreitet, ändern Sie die
Parameter-Einstellung für das Trägheitsmoment über den Inertia-Befehl. Nachdem die
Einstellung geändert wurde, wird die maximale Geschwindigkeit der
Beschleunigung/Verzögerung der 4. Achse entsprechend dem „Trägheitsmoment“-Wert
automatisch eingestellt.
Massenträgheitsmoment an der Z-Achse
Das Massenträgheitsmoment (Gewicht von Greifer und Werkstück) an der Z-Achse kann
durch den „Trägheitsmoment (Inertia)“-Parameter des Inertia-Befehls eingestellt werden.
EPSON
RC+
Automatische Beschleunigungs-/Verzögerungs-Einstellung der 4. Achse durch Inertia
(Trägheitsmoment)
Geben Sie einen Wert in das [Lastträgheit:]- Textfeld im [Inertia]-Feld ([Tools]
[Robotermanager]) ein. (Sie können den Inertia-Befehl auch im [Befehlseingabefenster]
ausführen.)
(%)
120
100
80
60
100 100
40
* Der Prozentsatz im Diagramm
basiert auf der Beschleunigung /
Verzögerung zum Nennträgheitsmoment (0,01 kg⋅m
2
) als 100 %.
40
20
15
20
0 0.02 0.04 0.06 0.08 0.10 0.12 (kg・m2) Trä gheitsmoment einst ellung
66 G6 Rev.4
Page 79

Einrichten und Betrieb 4. Einstellung der Greifer
–
Größe der Exzentrizität und Inertia-Einstellung
■
Die Größe der Exzentrizität der Last (Gewicht des Greifers und des Werkstücks)
muss 150 mm oder weniger betragen. Die Manipulatoren der G6-Serie sind
nicht dafür ausgelegt, mit einer Exzentrizitäts-Größe zu arbeiten, die 150 mm
überschreitet.
VORSICHT
Stellen Sie den Parameter der Größe der Exzentrizität immer entsprechend der
Größe der Exzentrizität ein. Das Einstellen eines Wertes, der kleiner ist als die
tatsächliche Größe der Exzentrizität kann Fehler, plötzliche Stoßbewegungen
und ungenügende Funktion des Manipulators verursachen und/oder die
Lebensdauer der Teile/Mechanismen verkürzen.
Die zulässige Größe der Exzentrizität der Last bei der G6-Serie ist 0 mm als Nennwert und
150 mm als Maximalwert. Wenn die Größe der Exzentrizität der Last den Nennwert
überschreitet, ändern Sie die Einstellung des Parameters der Größe der Exzentrizität des
Inertia-Befehls. Nachdem die Einstellung geändert wurde, wird die maximale
Geschwindigkeit der Beschleunigung/Verzögerung des Manipulators entsprechend der
„Größe der Exzentrizität“ automatisch eingestellt.
Drehzentrum
Größe der Exzentrizität
Größe der Exzentrizität der Last an der Z-Achse
Die Größe der Exzentrizität der Last (Gewicht des Greifers und des Arbeitsstückes) an der
Z-Achse kann durch den „exzentrische Quantität“-Parameter des Inertia-Befehls
eingestellt werden.
EPSON
RC+
Geben Sie einen Wert in das [Exzentrizität:]- Textfeld im [Inertia]-Feld ([Tools]
[Robotermanager]) ein. (Sie können den Inertia-Befehl auch im [Befehlseingabefenster]
ausführen.)
Position des Schwerpunktes der La st
Größe der Exzentrizität (150 mm oder
weniger)
G6 Rev.4 67
Page 80

Einrichten und Betrieb 4. Einstellung der Greifer
Automatische Beschleunigungs-/Verzögerungs-Einstellung durch Inertia (Größe der Exzentrizität).
120
(%)
100
80
60
40
20
10 0
60
40
* Der Prozentsatz im Diagramm
basiert auf der Beschleunigung /
Verzögerung bei Nennexzentrizität (0 mm) als 100 %.
20
0 50 100 150 (mm)
Das Massenträgheitsmoment berechnen
Beziehen Sie sich auf die folgenden Beispielformeln, um das Massenträgheitsmoment der
Last (Greifer und Werkstück) zu berechnen.
Das Massenträgheitsmoment der Gesamtlast wird berechnet aus der Summe jedes Teiles (a),
(b) und (c).
Werkstück (b)
Gesamt-
massenträg-
heitsmoment
Die Methoden zur Berechnung des Massenträgheitsmoments für (a), (b) und (c) sind im
Folgenden dargestellt. Berechnen Sie das Gesamtträgheitsmoment mithilfe der
Basis-Formeln.
(a) Massenträgheitsmoment eines rechteckigen Quaders
Massenträgheits-
=
moment Greifer
Drehzentrum
Schwerpunkt des rechteckigen Quaders Drehzentrum
Exzentrizitätseinstellung
3. Achse Z-Achse
Greifer (a)
Massenträgheits-
+
moment
Werkstück (b)
Werkstück (c)
Massenträgheits-
+
moment
Werkstück (c)
2
Masse (m)
L
h
m + m × L
b
2
+ h
b
12
2
68 G6 Rev.4
Page 81

Einrichten und Betrieb 4. Einstellung der Greifer
(b) Massenträgheitsmoment eines Zylinders
Schwerpunkt des Zylinders
Drehzentrum
r
Masse (m)
L
(c) Massenträgheitsmoment einer Kugel
Schwerpunkt der Kugel
Drehzentrum
r
Masse (m)
L
2
r
m + m × L
2
2
2
2
5
+ m × L2
m r
G6 Rev.4 69
Page 82

Einrichten und Betrieb 4. Einstellung der Greifer
)
4.4 Vorkehrungen für die Auto-Beschleunigung/Verzögerung der 3. Achse
Wenn Sie den Manipulator horizontal mit der 3. Achse (Z) an einer hohen Position
verfahren, ist die Bewegungszeit kürzer. Wenn die 3. Achse unter einen bestimmten
Punkt gelangt, wird die Auto-Beschleunigung/Verzögerung verwendet, um die
Beschleunigung/ Verzögerung zu reduzieren. (Siehe Abbildung unten.) Je höher die
Position der Z-Achse ist, desto schneller ist die Bewegungs-Berschleunigung/
Verzögerung. Es benötigt jedoch mehr Zeit, die 3. Achse auf und ab zu bewegen.
Stellen Sie die Position der 3. Achse auf die Manipulatorbewegung ein, nachdem Sie die
Beziehung zwischen der aktuellen Position und der Zielposition betrachtet haben. Die
Obergrenze für die 3. Achse während der horizontalen Bewegung kann mit dem
LimZ-Befehl eingestellt werden.
Automatische Beschleunigung/Verzögerung verglichen mit der Position der 3. Achse
120
(%
100
80
60
40
20
10 0
100
20
* Der Prozentsatz im Diagramm
basiert auf der Beschleunigung /
Verzögerung an der
Obergrenze der 3. Achse als
100 %.
0 -100 -200 -300 -400 (mm)
Höhe der Z-Achse
Wenn Sie den Manipulator horizontal verfahren, während die Z-Achse abgesenkt ist, kann
dies zu einem Überschwingen an der Zielposition führen.
70 G6 Rev.4
Page 83

5. Arbeitsbereich
■
Wenn Sie den Arbeitsbereich aus Gründen der Sicherheit begrenzen, müssen
VORSICHT
der Pulse-Bereich und die mechanischen Stopper immer gleichzeitig eingestellt
werden.
Der Arbeitsbereich wird bei Herstellung voreingestellt, wie in Einrichten und Betrieb: 5.4
Standar d Arbeitsber ei ch. Das ist der maximale Arbeitsbereich des Manipulators.
Es gibt die folgenden drei Methoden, den Arbeitsbereich einzustellen:
1. Einstellen durch den Pulse-Bereich (für alle vier Achsen)
2. Einstellen durch mechanische Stopper (für die 1. bis 3. Achse)
3. Einstellen des kartesischen (rechteckigen) Bereichs im X, Y Koordinatensystem
des Manipulators (für 1. und 2. Achse)
Einrichten und Betrieb 5. Arbeitsbereich
Bereich
Mechanischer
Stopper
Pulse-Bereich
Mechanischer
Stopper
Einstellung rechteckiger
Arbeitsbereich
Wenn der Arbeitsbereich wegen der Anordnungs-Effizienz oder der Sicherheit geändert
wurde, folgen Sie den Beschreibungen in 5.1 bis 5.3, um den Bereich einzustellen.
G6 Rev.4 71
Page 84

Einrichten und Betrieb 5. Arbeitsbereich
5.1 Einstellung des Arbeitsbereiches durch den Pulse-Bereich (für alle
Achsen)
Pulse sind die Basiseinheit der Manipulator-Bewegung. Der Arbeitsbereich des
Manipulators wird durch den Pulse-Bereich zwischen dem unteren Pulse-Limit und dem
oberen Limit jeder Achse gesteuert.
Pulse-Werte werden vom Encoder-Ausgang des Servomotors gelesen.
Für den maximalen Pulse-Bereich, lesen Sie die folgenden Abschnitte.
Der Pulse-Bereich muss innerhalb des mechanischen Stopper-Bereiches eingestellt
werden.
5.1.1 Max. Pulse-Bereich der 1. Achse
5.1.2 Max. Pulse-Bereich der 2. Achse
5.1.3 Max. Pulse-Bereich der 3. Achse
5.1.4 Max. Pulse-Bereich der 4. Achse
HINWEIS
)
Sobald der Manipulator einen Arbeitsbefehl erhalten hat, überprüft er, ob sich die
Zielposition, die durch den Befehl angegeben wurde, im Pulse-Bereich befindet, bevor er
arbeitet. Wenn die Zielposition außerhalb des einstellten Pulse-Bereiches liegt, tritt ein
Fehler auf und der Manipulator bewegt sich nicht.
EPSON
RC+
Der Pulse-Bereich kann im [Range]-Bereich eingestellt werden, welcher dargestellt wird,
wenn Sie [Tools]-[Robotermanager] auswählen. (Sie können den Range-Befehl auch im
[Befehlseingabefenster] ausführen.)
5.1.1 Max. Pulse-Bereich der 1. Achse
Die 0 (null) Pulse-Position der 1. Achse ist die Position, in welcher der 1. Arm in die
positive (+) Richtung auf der X-Koordinaten-Achse gerichtet ist.
Wenn der 0-Pulse der Startpunkt ist, ist der Wert gegen Uhrzeigersinn als der positive (+)
Wert definiert und der Wert im Uhrzeigersinn als der negative (-) Wert.
A A
+Y
+X 0 Pulse
B B
Armlänge Tischplattenmontage Deckenmontage Wandmontage
A
Max.
Arbeitsbereich
B
Max.
Pulsebereich
45
55
65
45
55
65
±152 Grad
-1805881 bis
+7048761
±120 Grad ±105 Grad
-873814 bis +6116694 -436907 bis +5679787
±135 Grad
±148 Grad
-1310720 bis +6553600
-1689373 bis +6932253
72 G6 Rev.4
Page 85

5.1.2 Max. Pulse-Bereich der 2. Achse
Die 0 (null) Pulse-Position der 2. Achse ist die Position, in welcher der 2. Arm parallel
zum 1. Arm steht. Mit dem 0-Pulse als Startpunkt ist der Pulse-Wert gegen
Uhrzeigersinn als der positive (+) Wert definiert und der Wert im Uhrzeigersinn als der
negative (-) Wert.
Einrichten und Betrieb 5. Arbeitsbereich
0 Pulse
A A
B B
A
Max.
Arbeitsbereich
B
Max.
Pulsebereich
HINWEIS
)
Modell Tischplattenmontage Decken- / Wandmontage
G6-45*S* /
D*
G6-45*C* / P*
/ D*
Faltenbälge
G6-55*** / G6-65***
G6-45*S* /
D*
G6-45*C* / P*
/ D*
Faltenbälge
G6-55*** / G6-65***
Z : 0 bis –270 mm
Z : -270 bis -330 mm
Z : 0 bis -240 mm
Z : -240 bis -300 mm
Z : 0 bis -270 mm
Z : -270 bis -330 mm
Z : 0 bis -240 mm
Z : -240 bis -300 mm
Die Faltenbälge für die G6-***D-Manipulatoren sind Optionen für die Auslieferung.
±147.5 Grad
±145 Grad
±147.5 Grad
±142 Grad
±147,5 Grad
±2685156
±2369645
±2685156
±2585031
±2685156
±130 Grad
±2366578 °
Im Z-Bereich: 0 bis -270 mm, der Bereich ist durch den Kollisionsbereich von
Manipulatorkörper und Arm begrenzt.
G6 Rev.4 73
Page 86

Einrichten und Betrieb 5. Arbeitsbereich
5.1.3 Max. Pulse-Bereich der 3. Achse
Die 0 (null) Pulse-Position der 3. Achse ist die Position, in welcher sich die Z-Achse an
ihrer Obergrenze befindet.
Der Pulse-Wert ist immer negativ, da die 3. Achse immer unterhalb der 0 Pulse-Position
verfährt.
Obergrenze: 0 Pulse
Modell Hub der 3. Achse Niedrigster Pulse
G6-**1S* / D* 180 mm
G6-**3S* / D* 330 mm
G6-**1C* / P* / D* Faltenbälge 150 mm
G6-**3C* / P* / D* Faltenbälge 300 mm
Die Faltenbälge für die G6-***D*-Manipulatoren sind Optionen für die Auslieferung.
-1976708
-1811982
-1647257
-1647257
HINWEIS
)
Beim Reinraum-Modell
Faltenbalg-Option)
Achse eingestellt ist, nicht verändert werden.
kann der Arbeitsbereich, der mit dem mechanischen Stopper der 3.
(G6-***C*) und beim Protected-Modell (G6-*** P*/D* mit
5.1.4 Max. Pulse-Bereich der 4. Achse
Die 0 (null) Pulse-Position der 4. Achse ist die Position, in der die Fläche in der Nähe des
Endes der
S
tartpunkt ist der Pulse-Wert gegen Uhrzeigersinn als der positive (+) Wert definiert und
der Wert im Uhrzeigersinn als der negative (-).
Z-Achse dem Ende des 2. Arms gegenübersteht. Mit dem 0-Pulse als
+Y
gegen Uhrzeigersinn (+Wert)
+X 0 Pulse ±1941808 Pulse
im Uhrzeigersinn (-Wert)
74 G6 Rev.4
Page 87

Einrichten und Betrieb 5. Arbeitsbereich
(
r
)
5.2 Arbeitsbereich-Einstellung durch mechanische Stopper
Mechanische Stopper begrenzen physikalisch den absoluten Bereich, in welchem sich der
Manipulator bewegen kann.
Die 1. und die 2. Achse haben Gewindebohrungen an den Stellen, die den Winkeln für die
Einstellungen der mechanischen Stopper entsprechen. Ziehen Sie die Schrauben in den
Gewindebohrungen fest, die dem Winkel entsprechen, den Sie einstellen möchten.
Die 3. Achse kann auf jede Länge eingestellt werden, die kleiner als der maximale Hub ist.
Tischplattenmontage
Mechanischer Stopper der
3. Achse
(mechanischer Stopper der
Untergrenze)
(Verstellen Sie nicht den
mec hanischen Stopper
der Obergrenze.)
Mechanischer Stopper
der 2. Achse
(verstellbar)
Mechanischer Stopper
der 1. Achse (fest)
Mechanischer Stopper der
2. Achse (fest)
Mechanischer
Stopper der 1.
Achse (verstellbar)
Wandmontage
Mechanischer
Mechanischer Stopper der 1. Achse (f est)
Stopper der 1. Achse
verstel lba
Deckenmontage
Mechanischer Stopper
Mechanischer Stopper der 1. Achse (fest)
der 1. Achse
(verstellbar)
* Die Positionen der mechanischen Stopper, die sich von denen der Tischplattenmontage
unterscheiden, sind für die Wand- und die Deckenmontage aufgeführt.
G6 Rev.4 75
Page 88

Einrichten und Betrieb 5. Arbeitsbereich
5.2.1 Einstellen der mechanischen Stopper der 1. Achse und der 2. Achse
Die 1. und die 2. Achse haben Gewindebohrungen an den Stellen, die den Winkeln für die
Einstellungen der mechanischen Stopper entsprechen. Ziehen Sie die Schrauben in den
Gewindebohrungen fest, die dem Winkel entsprechen, den Sie einstellen möchten.
Mechanische Stopper 1. Achse
f
e
g
h
1. Achse
Montage
Tischplatte
Decke
Wand
Decke
Wand
Einstellwinkel
Pulse-Wert
Einstellwinkel
Pulse-Wert
Einstellwinkel
Pulse-Wert
d
c
b
a
Armlänge
45/55/65
55/65
65
55
45
45
a b c d e f g h i j k l
° +135°
+152
+60
° -148°
+148
+105
° -135°
+135
°
+120
° +20° +5° -5° -20° -60°
°
+75
° +30°
l
° +148° +135° +120° +105° +75° +60°
+152
7048761
3495254 3203983
436907
6932253 6553600 6116694 5679787 4805974 4369067
° +20° +5° -5° -20° -30° -60°
+30
2767076 2475805 2038898 1747627 873814
° -105° -120° -135° -148° -152°
-75
-436907 -873814 -1310720 -1689373
j
k
-30° -75°
i
-1805881
-105
° -152°
-135
°
°
-120
(°: Grad)
76 G6 Rev.4
Page 89

Einrichten und Betrieb 5. Arbeitsbereich
Mechanische Sto pper 2. Achse
o
2. Achse
Modell Armlänge m n o q r
Tischplatte / Decke / Wand
G6-45*S / D
Tischplatte
Decke / Wand
G6-45*C / P
/ D Faltenbälge
Die Faltenbälge für die G6-***D*-Manipulatoren sind Optionen für die Auslieferung.
Einstellwinkel
Pulse-Wert
Einstellwinkel
Pulse-Wert
+147.5° +145° +142° +130° +125° +100°
2685156 2639645 2585031 2366578 2275556 1820445
-100° -125° -130° -142° -145° -147.5°
-1820445 -2275556 -2366578 -2585031 -2639644 -2685156
n
m
55/65
45 (Z : 0 bis –270)
45 (Z :–270 bis –330)
45 (Z : 0 bis -240)
45 (Z :-240 bis -300)
45
p
q
°
+147.5
° -145°
+145
+147,5
+142
+130
+125
° ±100° -125°
° -147,5°
° -142°
° -130°
-147.5
(°: Grad)
°
G6 Rev.4 77
Page 90

Einrichten und Betrieb 5. Arbeitsbereich
d
d
(1) Schalten Sie die Steuerung aus.
(2) Schrauben Sie eine Innensechskantschraube in die dem Winkel entsprechende
(3) Schalten Sie die Steuerung EIN.
(4) Stellen Sie den Pulse-Bereich entsprechend der neuen Positionen der mechanischen
Gewindebohrung und ziehen Sie sie fest.
Joint
1
2
Stopper ein.
Innensechskantschraube
(durchgehendes Gewinde)
M10 × 20
M8 × 10
Anzahl
der
Schrauben
1 Schraube/
Seite
Empfohlenes
Anzugsmoment
12740 N⋅cm (1300 kgf⋅cm)
3,720 N⋅cm (380 kgf⋅cm)
HINWEIS
)
EPSON
RC+
(5) Verschieben Sie den Arm von Hand, bis er die mechanischen Stopper berührt und
(6) Betreiben Sie die geänderte Achse mit geringen Geschwindigkeiten, bis sie die
Stellen Sie sicher, dass Sie den Pulse-Bereich innerhalb der Positionen des
mechanischen Stopper-Bereiches einstellen.
Beispiel: G6-**1S*:
Der Winkel der 1. Achse wird zwischen –135 Grad und +135 Gra
eingestellt.
Der Winkel der 2. Achse wird zwischen -125 Grad und +125 Gra
eingestellt.
Führen Sie die folgenden Befehle im [Befehlseingabefenster] aus.
>JRANGE 1,-1310720,6553600 ' Stellt den Pulse-Bereich der 1. Achse
ein
>JRANGE 2,-2275556,+2275556 ' Stellt den Pulse-Bereich der 2. Achse ein
>RANGE ' Überprüft die Einstellung unter
Verwendung von Range
-1310720,6553600,-2275556,2275556,-1976708
,0,-1961226, 1961226
stellen Sie sicher, dass der Arm während des Betriebes nicht an ein Peripheriegerät
anschlägt.
Positionen des minimalen und maximalen Pulse-Bereiches erreicht. Stellen Sie
sicher, dass der Arm nicht an die mechanischen Stopper anschlägt. (Überprüfen Sie
die Position des mechanischen Stoppers und den Arbeitsbereich, den Sie eingestellt
haben.)
78 G6 Rev.4
Beispiel: G6-**1S*:
Der Winkel der 1. Achse wird zwischen –85 Grad und +115 Grad
eingestellt.
Der Winkel der 2. Achse wird zwischen -132 Grad und +132 Grad
eingestellt.
Page 91

Einrichten und Betrieb 5. Arbeitsbereich
r
r
EPSON
RC+
Führen Sie die folgenden Befehle im [Befehlseingabefenster] aus.
>MOTOR ON ' Schaltet den Motor EIN
>CP ON ' Schaltet in den Low-Power-Modus
>SPEED 5 ' Stellt eine niedrige Geschwindigkeit ein
>PULSE -1310720,0,0,0 ' Verfährt an die min. Pulse-Position der 1.
Achse
>PULSE 6553600,0,0,0 ' Verfährt an die max. Pulse-Position der 1.
Achse
>PULSE 262145,-2275556,0,0 ' Verfährt an die min. Pulse-Position der 2.
Achse
>PULSE 262145,2275556,0,0 ' Verfährt an die max. Pulse-Position de
2. Achse
Der Pulse-Befehl (Go Pulse-Befehl) verfährt alle Achsen gleichzeitig in die
angegebenen Positionen. Geben Sie sichere Positionen unter Berücksichtigung alle
Achsen an.
In diesem Beispiel wird die 1.Achse zum Mittelpunkt ihres Bewegungsbereiches
verfahren (Pulse-Wert: 262145) während die 2. Achse überprüft wird.
Wenn der Arm an die mechanischen Stopper anschlägt oder wenn ein Fehler auftritt,
nachdem der Arm an die mechanischen Stopper angeschlagen ist, setzen Sie den
Pulse-Bereich entweder auf einen engeren Bereich zurück oder erweitern Sie die
Positionen des mechanischen Stopper innerhalb der Grenzen.
G6 Rev.4 79
Page 92

Einrichten und Betrieb 5. Arbeitsbereich
5.2.2 Einstellen des mechanischen Stoppers der 3. Achse
HINWEIS
)
HINWEIS
)
Dieses Verfahren gilt nur für den Standard-Modell-Manipulator
G6-***S*)/Protected-Modell-Manipulator (G6-***D* ohne Faltenbalg-Option).
(
Beim Reinraum-Modell (
Faltenbalg-Option)
Achse eingestellt ist, nicht verändert werden.
(1)
Schalten Sie die Steuerung EIN und schalten Sie die Motoren mit dem Motor
OFF-Befehl AUS.
(2)
Drücken Sie die Z-Achse hoch, während
Sie den Bremsfreigabetaster der 3.Achse
drücken.
Drücken Sie die Z-Achse nicht bis zu
ihrer Obergrenze hoch, da es ansonsten
schwer ist, die obere Abdeckung des
Armes zu entfernen. Drücken Sie die
Z-Achse bis zu der Position hoch, in
welcher die Position des mechanische
Stoppers der 3. Achse geändert werden
kann.
Wenn Sie den Bremsfreigabetaster drücken, kann die Z-Achse durch das Gewicht
des Greifers abgesenkt werden. Halten Sie die Z-Achse mit der Hand fest,
während Sie den Taster drücken.
(3) Schalten Sie die Steuerung aus.
kann der Arbeitsbereich, der mit dem mechanischen Stopper der 3.
G6-***C*) und beim Protected-Modell (G6-***D* mit
Bremsfre igabetaster
Mechanischer
Stopper der
Untergrenze
2-M5×6
Lösen Sie Schraube (M4×15) am mechanischen Stopper der Untergrenze.
Ein mechanischer Stopper ist sowohl auf der Ober- als auch auf der Unterseite der 3.
HINWEIS
)
(4)
Achse angebracht. Es kann jedoch nur die Position des mechanischen Stoppers der
Untergrenze auf der Oberseite geändert werden. Entfernen Sie nicht den
mechanischen Stopper der Obergrenze auf der Unterseite, da hiermit der
Kalibrierungspunkt der 3. Achse durch den Stopp angegeben wird.
80 G6 Rev.4
Page 93

Einrichten und Betrieb 5. Arbeitsbereich
(5)
Das obere Ende der Z-Achse bestimmt
den maximalen Hub. Bewegen Sie den
Messen Sie diesen Abstand.
mechanischen Stopper der Untergrenze
um die Länge herunter, um welche Sie
den Hub begrenzen wollen.
Wenn zum Beispiel der mechanische
Stopper der Untergrenze auf „330
mm“ Hub eingestellt ist, ist der
Z-Koordinaten-Wert der Untergrenze
„-330“. Um den Wert auf „-100“ zu
ändern, bewegen Sie den mechanischen
Stopper der Untergrenze „230
mm“ herunter. Verwenden Sie eine
Schieblehre, um den Abstand zu messen,
wenn Sie den mechanischen Stopper
einstellen.
Ziehen Sie die beiden Schrauben (M4 × 15) für den mechanischen Stopper der
(6)
Untergrenze gut fest, sodass sie nicht in die Achsnut stoßen.
Empfohlenes Anzugsmoment: 490 N⋅cm (500 kgf⋅cm)
(7) Schalten Sie die Steuerung EIN.
G6 Rev.4 81
Page 94

Einrichten und Betrieb 5. Arbeitsbereich
r
N
(8)
Bewegen Sie die 3. Achse an ihre Untergrenze, während Sie den Bremsfreigabetaster
drücken. Überprüfen Sie dann die Position der Untergrenze. Senken Sie den
mechanischen Stopper nicht zu weit ab. Ansonsten erreicht die Achse keine
Zielposition.
RC+
(9)
Berechnen Sie den Untergrenzen-Pulsewert des Pulse-Bereiches mit der unten
dargestellten Formel und stellen Sie den Wert ein.
Das Ergebnis der Berechnung ist immer negativ, weil der Z-Koordinatenwert der
Untergrenze negativ ist.
(10)
Pulse-Untergrenze = Z-Koordinatenwert der Untergrenze / 25 x 4096 x 1.8
Beispiel: Wenn Sie den mechanischen Stopper um 230 mm absenken und den
Z-Koordinatenwert der Untergrenze auf „-100" in 330 mm Hub ändern:
(-100) / 25 × 4096 × 1,8 = -29491
Führen Sie den folgenden Befehl im [Befehlseingabefenster] aus.
>JRANGE 3,-29491,0 ' Stellt den Pulse-Bereich der 3. Achse ein
Verwenden Sie den Pulse-Befehl (Go Pulse-Befehl), um die 3. Achse mit
langsamer Geschwindigkeit in die Position der Untergrenze des Pulse-Bereiches
zu verfahren. Wenn der Bereich des mechanischen Stoppers kleiner ist als der
Pulse-Bereich, trifft die 3. Achse den mechanischen Stopper und ein Fehler tritt auf.
Wenn der Fehler auftritt, ändern Sie entweder den Pulse-Bereich auf einen engeren
Bereich oder erweitern Sie die Position des mechanischen Stoppers innerhalb der
Grenzen.
EPSON
Der Abstand zwischen der Pulse-Position der Untergrenze und dem mechanischen
Stopper sollte etwa 5 mm betragen.
EPSON
RC+
Wenn es schwierig zu überprüfen ist, ob die 3. Achse an einen mechanischen Stoppe
anschlägt, schalten Sie die Steuerung AUS und heben Sie die obere Armabdeckung an,
um von der Seite den Umstand zu prüfen, der das Problem verursacht hat.
ähere Informationen zum Entfernen der oberen Armabdeckung finden Sie im Kapitel
Wartung: 3.1 Obere Armabdeckung..
Beispiel: Wenn Sie den mechanischen Stopp um 230 mm absenken und den
Z-Koordinatenwert der Untergrenze auf „-100“ in 330 mm-Hub ändern
Führen Sie die folgenden Befehle im [Befehlseingabefenster] aus.
>MOTOR ON ' Schaltet den Motor EIN
>SPEED 5 ' Stellt eine niedrige Geschwindigkeit ein
>PULSE 0,0,-29491,0 ' Verfährt in die Pulse-Position der Untergrenze der
3.Achse.
(In diesem Beispiel sind alle Pulse, außer denen
der 3.Achse "0". Ersetzen Sie diese „0“en durch
andere Pulse-Werte, die eine Position bestimmen,
an welcher keine Beeinträchtigung besteht, auch
wenn die 3. Achse abgesenkt wird.)
HINWEIS
)
82 G6 Rev.4
Page 95

Einrichten und Betrieb 5. Arbeitsbereich
5.3 Einstellen des kartesischen (rechteckigen) Bereichs im
X, Y-Koordinatensystem des Manipulators (für 1. und 2. Achse)
Verwenden Sie diese Methode, um die Ober- und Untergrenzen der X- und Y-Koordinaten
zu setzen.
Diese Einstellung ist nur für die Software erforderlich. Daher ändert sie nicht den
physikalischen Bereich. Der maximale physikalische Bereich richtet sich nach der
Position der mechanischen Stopper.
EPSON
RC+
Stellen Sie die XYLim-Einstellung im [XYZ Limits]-Bereich ein, welcher dargestellt
wird, wenn Sie [Tools]-[Robotermanager] auswählen.
(Sie können den XYLim-Befehl auch im [Befehlseingabefenster] ausführen.)
5.4 Standard Arbeitsbereich
Die folgenden Arbeitsbereichsdiagramme zeigen die Standardspezifikation (Maximum).
Wenn jeder Achsmotor servogesteuert wird, bewegt sich der Mittelpunkt des niedrigsten
Punktes der 3. Achse (Z-Achse) in den Bereichen, die in der Abbildung dargestellt sind.
„Durch mechanischen Stopper begrenzter Bereich” ist der Bereich, in welchem der
Mittelpunkt des niedrigsten Punktes der 3. Achse bewegt werden kann, wenn sich kein
Achsmotor unter Servosteuerung befindet.
„Mechanischer Stopper” stellt den begrenzten Arbeitsbereich ein, so dass der Mittelpunkt
der 3. Achse nicht mechanisch über den Bereich hinaus bewegt werden kann.
„Maximaler Raum” ist der Bereich, der die weiteste Reichweite der Arme beinhaltet.
Wenn der maximale Radius des Greifers über 60 mm beträgt, addieren Sie „Durch
mechanischen Stopper begrenzter Bereich” und „Radius des Greifers”. Der Gesamtwert
bestimmt den maximalen Bereich.
G6 Rev.4 83
Page 96

Einrichten und Betrieb 5. Arbeitsbereich
Tischplattenmontage
G6-45**
G6 -55**
Ze nt rum der 3. Achs e
Arbe itsbere ic h
G6-65**
Ma x i maler Raum
Dur ch mecha ni sch en Stop per begre nzt er Bereich
Sockel-Montagefläche
(°: Grad)
a b c d e f g h j k
Z 0 bis –270
G6-45*S / D
G6-45*C / P
/ D
Faltenbälge
Z –270 bis
–330
Z 0 bis –240 147,5° 3° 134,8
Z –240 bis
–300
152° 3.5°
G6-55**
G6-65** 207,5 232 400 650 603,2 614
147,5° 3°
145° 5.5° 143,5
124.4
142° 8,5° 153,9
147,5° 6,3°
133,8 161,2 300 550 514,9 523
134,8
200 450 426,6 432
q r s
Z 0 bis –270 147.5°
G6-45*S / D
G6-45*C / P
/ D
Faltenbälge
G6-55**
G6-65** 147,5
Z –270 bis
–330
Z 0 bis –240 147.5°
Z –240 bis
–300
145°
150,5° 64,4
142°
147.5° 153,8°
73,8
m n p t
G6-**1S / D 180
G6-**3S / D 330 −31
G6-**1C / P / D Faltenbälge 150
G6-**3C / P / D Faltenbälge 300 −34
4,2 12,2
1,2 4,2
119
116
Die Faltenbälge für die G6-***D*-Manipulatoren sind Optionen für die Auslieferung.
HINWEIS
)
Im Z-Bereich: 0 bis -270 mm, der Bereich ist durch den Kollisionsbereich von Manipulatorkörper und
Arm begrenzt.
84 G6 Rev.4
Page 97

Wandmontage
G6-45**W
G6 -55* *W
Einrichten und Betrieb 5. Arbeitsbereich
Zent rum de r 3. Ach se
Arbeitsbereich
G6-65**W
Maximaler Raum
Durch m echa ni s ch en Stop per beg re nzter Bereich
Zentrum der SockelRe feren zbohr un g
(°: Grad)
G6-45**W 105°
G6-55*SW/DW
G6-55*CW/PW/DW Faltenbälge 145° 5,8° 172,1
a b c d e f g h
130° 3,8° 182,4 195,5 200 450
135°
3,5°
147.5° 3,3°
146,8
161,2
300 550
G6-65**W 148° 7,5° 147,5° 6,3° 207,5 232 400 650
j k q r s
G6-45**W 301,8 313,5 130° 133,8° 122,4
G6-55*SW/DW
G6-55*CW/PW/DW Faltenbälge 145°
462,1 474,7
147,5°
150,8° 86,8
G6-65**W 589,2 614 147,5° 153,8° 147,5
G6-**1SW/DW 180
G6-**3SW/DW Faltenbälge 330
G6-**1CW/PW/DW 150
G6-**3CW/PW/DW Faltenbälge 300
m n p t
4,2 12,2 160
1,2 4,2 193
Die Faltenbälge für die G6-***DW-Manipulatoren sind Optionen für die Auslieferung.
G6 Rev.4 85
Page 98

Einrichten und Betrieb 5. Arbeitsbereich
Deckenmontage
G6-45**R
G6-55**R
Zen trum de r 3. Ach s e Maxi m al er Ra um
Arbeitsbereich
G6-65**R
Du rch m echanisch en Sto pper be grenzt er Bre ich
a b c d e f g h j k
Sockel-Montage fl äche
(°: Grad)
G6-45**R 120° 5,5° 130° 3,8° 182,4 195,5 200 450 350 366,1
G6-55*SR/DR
G6-55*CR/PR/DR Faltenbälge 145° 5,8° 172,1
152° 3,5°
147,5° 3,3°
146,8
161,2
300 550 514,9 523
G6-65**R 147,5° 6,3° 207,5 232 400 650 603,2 614
q r s
G6-45**R 130° 133,8° 122,4
G6-55*SR/DR 147,5°
G6-55*CR/PR/DR Faltenbälge 145°
150,8° 86,8
G6-65**R 147,5° 153,8° 147,5
G6-**1SR/DR 180
G6-**3SR/DR Faltenbälge 330 141
G6-**1CR 150
G6-**3CR 300 249
G6-**1PR/DR 150 102,5
m n p t
4,2 12,2
−9
99
1,2 4,2
G6-**3PR/DR Faltenbälge 300 252,5
Die Faltenbälge für die G6-***DR-Manipulatoren sind Optionen für die Auslieferung.
86 G6 Rev.4
Page 99

Wartung
Diese Anleitung beinhaltet Wartungsprozeduren mit
Sicherheitsvorkehrungen für Manipulatoren der G6-Serie
Page 100

88
 Loading...
Loading...