

EV6000 系列变频器用户 PLC 卡
用户手册
资料版本 V1.0
归档日期 2008-06-30
BOM 编码 31011906
艾默生网络能源有限公司为客户提供全方位的技术支持,用户可与就近的艾默生网络能源有限公司办事处
或客户服务中心联系,也可直接与公司总部联系。
艾默生网络能源有限公司
版权所有,保留一切权利。内容如有改动,恕不另行通知。
艾默生网络能源有限公司
地址:深圳市南山区科技工业园科发路一号
邮编:518057
公司网址:www.emersonnetworkpower.com.cn
客户服务热线:400-887-6510
客户服务投诉热线:0755-86010800
E-mail:info@emersonnetwork.com.cn
前言
感谢您购买艾默生网络能源有限公司开发生产的 EV6000 系列变频器用户 PLC 卡(型号:EVC-UPRG),在该产品
前,敬请您仔细阅读本手册,以便更清楚地掌握产品的特性,更安全地应用,充分利用本产品丰富的功能。
本手册主要描述 EV6000 系列变频器用户 PLC 卡的硬件规格、特性及使用方法,并有常见问题答疑、用户指令集汇
总等,便于参考。而关于本产品的用户程序开发环境的使用及用户程序设计方法,请参考本公司另外发行的
《ControlStar 编程软件用户手册》、《EC 系列小型可编程控制器编程手册》。关于 EV6000 变频器的使用方法请参考
《EV6000 系列通用变频器用户手册》。如需要,可向供应商咨询。
本手册适用于 EV6000 系列变频器用户 PLC 卡应用的学习、设计、安装、运行维护的技术工程人员。
专用名词定义
PLC:可编程控制器(Programmable Logic Controller)
开关信号:只有“ON”和“OFF”两种状态的输入或输出信号
高速脉冲:指频率较高的方波信号
计数器:指根据增减控制信号,每输入一个脉冲,计数值加 1 或减 1 的数值寄存器

目 录
第一章 安全信息 .................................................................................................................................................................1
1.1 安全定义.................................................................................................................................................................................1
1.2 安装注意事项.........................................................................................................................................................................1
1.3 使用注意事项.........................................................................................................................................................................1
1.4 报废注意事项.........................................................................................................................................................................1
第二章 产品概述 .................................................................................................................................................................2
2.1 外形结构及部件说明 .............................................................................................................................................................2
2.1.1 外形结构.....................................................................................................................................................................2
2.1.2 端子及指示灯说明.....................................................................................................................................................2
2.2 性能指标.................................................................................................................................................................................3
2.3 环境指标.................................................................................................................................................................................4
2.4 可靠性指标.............................................................................................................................................................................5
第三章 安装 ........................................................................................................................................................................6
3.1 注意事项.................................................................................................................................................................................6
3.2 安装尺寸.................................................................................................................................................................................6
3.3 机械安装.................................................................................................................................................................................6
3.3.1 附件说明.....................................................................................................................................................................6
3.3.2 安装步骤.....................................................................................................................................................................7
3.4 接线......................................................................................................................................................................................... 7
3.4.1 布线注意事项............................................................................................................................... ..............................7
3.4.2 信号电缆规格............................................................................................................................... ..............................8
3.4.3 连接信号输入线.........................................................................................................................................................8
3.4.4 连接信号输出线.......................................................................................................................................................10
第四章 输入/输出特性 .......................................................................................................................................................11
4.1 端子介绍...............................................................................................................................................................................11
4.2 开关量输入特性 ...................................................................................................................................................................11
4.2.1 输入端口规格............................................................................................................................... ............................11
4.2.2 输入端口中断功能...................................................................................................................................................11
4.2.3 高速计数功能............................................................................................................................... ............................12
4.3 开关量输出特性 ...................................................................................................................................................................13
第五章 通讯与组网............................................................................................................................................................14
5.1 通讯口说明...........................................................................................................................................................................14

5.1.2 CN4 端子 ...................................................................................................................................................................14
5.1.3 CN6 端子 ...................................................................................................................................................................15
5.2 通讯配线方式.......................................................................................................................................................................15
5.3 编程电缆...............................................................................................................................................................................16
5.4 自由口通讯协议 ...................................................................................................................................................................16
5.4.1 自由口参数设置.......................................................................................................................................................17
5.4.2 自由端口指令............................................................................................................................... ............................18
5.5 ModBus 通讯协议 .................................................................................................................................................................19
5.5.1 RTU 传输模式...........................................................................................................................................................19
5.5.2 支持的 ModBus 功能码 ........................................................................................................................................... 20
5.5.3 ModBus 参数设置 .....................................................................................................................................................21
5.5.4 ModBus 指令.............................................................................................................................................................21
5.6 ECbus 通讯协议 ....................................................................................................................................................................21
5.6.1 ECbus 简介 ................................................................................................................................................................21
5.6.2 ECbus 共享元件区 .................................................................................................................................................... 22
5.6.3 ECbus 的参数设置 .................................................................................................................................................... 22
第六章 ControlStar 快速入门 ............................................................................................................................................24
6.1 安装和卸载 ControlStar .......................................................................................................................................................24
6.2 ControlStar 编程工具 ............................................................................................................................................................25
6.3 应用举例...............................................................................................................................................................................25
6.3.1 进入编程环境............................................................................................................................... ............................26
6.3.2 建立工程...................................................................................................................................................................27
6.3.3 编写控制程序............................................................................................................................... ............................28
6.3.4 建立通讯连接............................................................................................................................... ............................28
6.3.5 下载程序...................................................................................................................................................................29
6.3.6 启动可编程控制器...................................................................................................................................................30
第七章 用户指令 ...............................................................................................................................................................31
7.1 触点逻辑指令.......................................................................................................................................................................31
7.1.1 LD:常开触点指令 ..................................................................................................................................................31
7.1.2 LDI:常闭触点指令 .................................................................................................................................................32
7.1.3 AND:常开触点与指令 ...........................................................................................................................................32
7.1.4 ANI:常闭触点与指令.............................................................................................................................................33
7.1.5 OR:常开触点或指令 ..............................................................................................................................................33
7.1.6 ORI:常闭触点或指令.............................................................................................................................................34
7.1.7 OUT:线圈输出指令................................................................................................................................................34
7.2 外设指令...............................................................................................................................................................................35

7.2.1 REFF:设置输入滤波常数指令...............................................................................................................................35
7.2.2 REF:I/O 立即刷新指令 ..........................................................................................................................................35
7.2.3 EROMWR:EEPROM 写指令.................................................................................................................................36
7.3 高速 IO 指令.........................................................................................................................................................................36
7.3.1 HCNT:高速计数器驱动指令 .................................................................................................................................37
7.3.2 DHSCS:高速计数比较置位指令 ...........................................................................................................................38
7.3.3 DHSCI:高速计数比较中断触发指令 .................................................................................................................... 39
7.3.4 DHSCR:高速计数比较复位指令...........................................................................................................................40
7.3.5 DHSZ:高速计数区间比较指令..............................................................................................................................41
7.3.6 DHST:高速计数表格比较指令..............................................................................................................................42
7.3.7 SPD:测频指令 ........................................................................................................................................................44
7.4 数据传输指令.......................................................................................................................................................................45
7.4.1 MOV:字数据传输指令...........................................................................................................................................45
7.4.2 DMOV:双字数据传输指令....................................................................................................................................45
7.5 整数算术运算指令 ...............................................................................................................................................................46
7.5.1 ADD:整数加法指令 ...............................................................................................................................................46
7.5.2 SUB:整数减法指令 ................................................................................................................................................46
7.5.3 MUL:整数乘法指令...............................................................................................................................................47
7.5.4 DIV:整数除法指令.................................................................................................................................................47
7.5.5 INC:整数加一指令.................................................................................................................................................48
7.5.6 DEC:整数减一指令............................................................................................................................... .................48
7.5.7 DADD:长整数加法指令 ........................................................................................................................................49
7.5.8 DSUB:长整数减法指令 ............................................................................................................................... ..........49
7.5.9 DMUL:长整数乘法指令 ........................................................................................................................................50
7.5.10 DDIV:长整数除法指令........................................................................................................................................50
7.5.11 DINC:长整数增一指令 ........................................................................................................................................51
7.5.12 DDEC:长整数减一指令 .......................................................................................................................................51
7.6 比较触点指令.......................................................................................................................................................................52
7.6.1 LD(=,<,>,<>,>=,<=):整数比较 LD 指令............................................................................................52
7.6.2 AND(=,<,>,<>,>=,<=):整数比较 AND 指令 .....................................................................................53
7.6.3 OR(=,<,>,<>,>=,<=):整数比较 OR 指令 ...........................................................................................54
7.6.4 LDD(=,<,>,<>,>=,<=):长整数比较 LDD 指令 ..................................................................................55
7.6.5 ANDD(=,<,>,<>,>=,<=):长整数比较 ANDD 指令 ...........................................................................56
7.6.6 ORD(=,<,>,<>,>=,<=):长整数比较 ORD 指令 .................................................................................57
7.7 变频器专用指令 ...................................................................................................................................................................58
7.7.1 FWD:本地变频器正转指令 ...................................................................................................................................58
7.7.2 REV:本地变频器反转指令....................................................................................................................................58

7.7.3 DFWD:本地变频器点动正转指令 ........................................................................................................................58
7.7.4 DREV:本地变频器点动反转指令 ......................................................................................................................... 59
7.7.5 DSTOP:本地变频器停车指令 ...............................................................................................................................59
7.7.6 STOPFAST:本地变频器紧急停运行指令.............................................................................................................59
7.7.7 STOPFREE:本地变频器自由停车指令.................................................................................................................60
7.7.8 RDF:本地变频器 F 型共享软元件实时读取 ........................................................................................................60
7.7.9 RDH:本地变频器 H 型共享软元件实时读取 .......................................................................................................61
7.7.10 WRF:本地变频器 F 型共享软元件实时写入......................................................................................................61
7.7.11 WRH:本地变频器 H 型共享软元件实时写入 ....................................................................................................62
第八章 数据交互与内部通讯 .............................................................................................................................................63
8.1 周期数据交互.......................................................................................................................................................................63
8.2 实时数据交互.......................................................................................................................................................................65
第九章 首次使用及运行保养 .............................................................................................................................................67
9.1 上电前检查...........................................................................................................................................................................67
9.2 上电运行操作.......................................................................................................................................................................67
9.3 运行/停止状态的转换 ..........................................................................................................................................................67
9.3.1 状态解释及模式选择...............................................................................................................................................67
9.3.2 如何进入运行状态(STOP→RUN) .....................................................................................................................68
9.3.3 如何进入停止状态(RUN→STOP) .....................................................................................................................68
9.4 例行保养...............................................................................................................................................................................69
第十章 常见问题及解决方案 .............................................................................................................................................70
10.1 故障现象及对策 .................................................................................................................................................................70
10.2 错误代码.............................................................................................................................................................................70
10.3 变频器错误代码 .................................................................................................................................................................71
附录一 指令速查表............................................................................................................................................................73
附录二 特殊寄存器............................................................................................................................................................77
1. 特殊辅助继电器.....................................................................................................................................................................77
2. 特殊数据寄存器.....................................................................................................................................................................81
3. 保留元件.................................................................................................................................................................................85
附录三 EV6000 功能码 .....................................................................................................................................................86
1. 扩展 PLC 卡参数....................................................................................................................................................................86
2. 功能码的分类.........................................................................................................................................................................89
第一章 安全信息
本章提供了使用 EV6000 系列变频器用户可编程控制卡(以下
简称 PLC 卡)所应注意的安全信息。使用产品前请仔细阅读
本章内容。
1.1 安全定义
由于没有按要求操作,可能造成死亡或者重伤的场
危险
注意
!
1.2 安装注意事项
合。
由于没有按要求操作,可能造成中等程度伤害或轻
伤,或造成损坏财物的场合。
危险
第一章 安全信息 1
!
注意
·搬运时,不要让操作面板和盖板受力,否则掉落有受伤或损坏财
物的危险。
·安装时,应该在能够承受变频器重量的地方进行安装,否则掉落
时有受伤或损坏财物的危险。
·严禁安装在水管等可能产生水滴飞溅的场合,否则有损坏财物的
危险。
·不要将螺钉、垫片及金属棒之类的异物掉进变频器内部,否则有
火灾及损坏财物的危险。
·如果变频器有损伤或部件不全时,请不要安装运转,否则有火灾、
受伤的危险。
·不要安装在阳光直射的地方,否则有损坏财物的危险。
·不要 将
·主回路端子与导线鼻子必须牢固连接,否则有损坏财物的危险。
·严禁将控制端子中TA、TB、TC、
接上交流
·高频信号的输入或输出电缆、传输模拟量信号的电缆应选用双绞
屏蔽电缆,以提高系统的抗扰性能。
· 接入
排布线,以减少干扰。
P1/PB
与(-)短接,否则有发生火灾和损坏财物的危险。
BRA、BRB、BRC
220V
信号,否则有损坏财物的危险。
PLC
的输入、输出信号线不要与其他强电或强干扰线路并
以外的端子
·请安装在金属等不可燃物体上,否则有发生火灾的危险。
·不要把可燃物放在附近,否则有发生火灾的危险。
·不要安装在含有爆炸性气体的环境里,否则有引发爆炸的危险。
·必须由具有专业资格的人进行配线作业,否则有触电的危险。
·确认输入电源处于完全断开的情况下,才能进行配线作业,否则
有触电的危险。
·必须将变频器的接地端子可靠接地,否则有触电危险。
·上电前必须将盖板盖好,否则有触电和爆炸的危险。
·存贮时间超过2年以上的变频器,上电时应先用调压器逐渐升压,
否则有触电和爆炸的危险。
·通电情况下,不要用手触摸端子,否则有触电的危险。
·不要用潮湿的手操作变频器,否则有触电的危险。
·应在断开电源10分钟后进行维护操作,此时充电指示灯彻底熄灭
或确认正负母线电压在
·只有专业人员才能更换零件,严禁将线头或将金属物遗留在机器
内,否则有发生火灾的危险。
·更换控制板后,必须正确设置参数,然后才能运行,否则有损坏
财物的危险。
·主回路接线用电缆鼻子的裸露部分,一定要用绝缘胶带包扎好,
否则有触电危险。
36V
以下,否则有触电的危险。
1.3 使用注意事项
在使用 PLC 卡时,请注意以下几点。
务必在 PLC 卡的外部电路中设置紧急制动电路、保护电路、
正反转操作的互锁电路和防止机器损坏的位置上限、下限的互
锁开关;
为使设备能安全运行,对重大事故相关的输出信号,请设计外
部保护电路和安全机构;
PLC 中的 CPU 检测到系统异常后可能会导致所有输出关闭;
当控制器部分电路故障时,可能导致其输出不受控制,为保证
设备能正常运转,需设计合适的外部控制电路;
PLC 的输出单元损坏时,会使其输出无法控制为 ON 或 OFF
状态;
注
PLC 设计应用于室内区域 B 和 C
的电气环境,其电源系统级
应有防雷保护装置,确保雷击过电压不会直接施加于 PLC 的
电源输入端或信号输入、控制输出端等端口,避免损坏设备。
注:参照 IEC61131-2 标准的 8.3.1 节分类说明。
1.4 报废注意事项
请按工业废弃物进行处理,或者按当地的环境保护规定处理。
EV6000 系列变频器用户 PLC 卡 用户手册
2 第二章 产品概述
变频器和 PLC 组成的系统可以实现更多复杂应用。用户通常需要外置的 PLC 控制变频器。EV6000 系列变频器用户可编
程控制卡(以下简称 PLC 卡)作为 EV6000 的扩展卡,可通过 EV6000 变频器内部控制板的 CN5 插槽与变频器直接相连,
既可实现 PLC 的功能,又具有更强的灵活性。PLC 卡具有 6 路开关量输入(包含两路高速输入),四路开路极电极源型
输出,两个 485 接口,提供了逻辑控制,运算及强大的组网通讯等功能。
2.1 外形结构及部件说明
2.1.1 外形结构
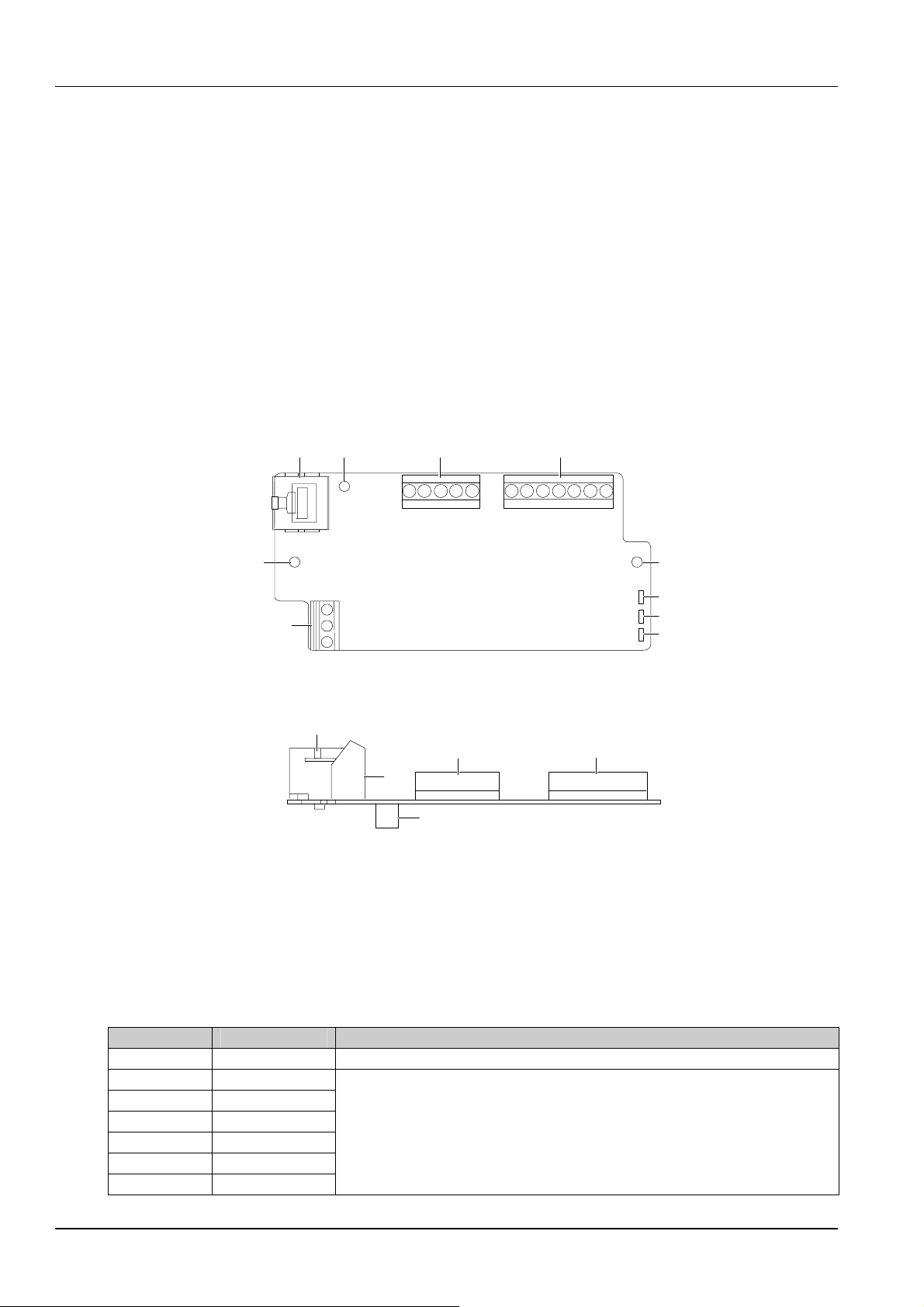
PLC 卡外形结构如图 2-1 所示。
第二章 产品概述
扎线孔
CN 3CN 4
COMY Y30 Y31Y32Y33 COMXX35 X34 X33X32 X31X30
CN 2
固定孔
PLC 卡的侧视图如下:
2.1.2 端子及指示灯说明
如图 2-1和图 2-2所示,PLC 卡提供了五个端子(CN2~CN6)和三个指示灯(DL1~DL3)。其具体说明如下。
1.CN2 端子
信号输入端子 CN2 包含 6 路输入和 COMX,其中两路支持高速输入。CN2 端子定义如下表所示。
CN 6
CN 4
485+
485-
GND
图2-1 PLC 卡外形结构图
CN 6
CN 5
图2-2 PLC 卡侧视图
CN 3
固定孔
DL 1指示灯
DL 2指示灯
DL 3指示灯
CN 2
表2-1 CN2 端子说明
端子名称 信号说明 功能说明
COMX 输入公共端
X30
X31
X32
X33
X34
X35
X30输入
X31输入
X32输入
X33输入
X34输入
X35输入
24V
与
电源正极连接表示支持漏型输入方式,与
开关量信号输入端子,将该端子与
COM
EV6000 系列变频器用户 PLC 卡 用户手册
24V
电源负极连接表示支持源型输入方式
端配合使用产生输入信号
第二章 产品概述 3
2.CN3 端子
信号输出端子 CN3 包含 4 路开路极电极源型输出和公共端 COMY。CN3 端子定义如表 2-2所示。
表2-2 CN3 端子说明
端子名称 信号说明 功能说明
COMY 输出公共端
Y30 输出
Y31 输出
Y32 输出
Y33 输出
Y30
Y31
Y32
Y33
开路集电极源型输出公共端
开路集电极源型输出端子
3.CN5 端子
CN5 是与 EV6000 连接的插头。
4.CN4 和 CN6 端子
CN4 和 CN6 为 RS485 通讯端口。其中 CN6 为 SMKDSP15 插座;CN4 为 RJ45 接口。具体详见5.1
注意
在本文中,串口 0 指 CN4,串口 1 指 CN6。
5.指示灯
PLC 卡正面右侧提供了三个指示灯,分别为 DL1,DL2 和 DL3。其说明如表 2-3所示。
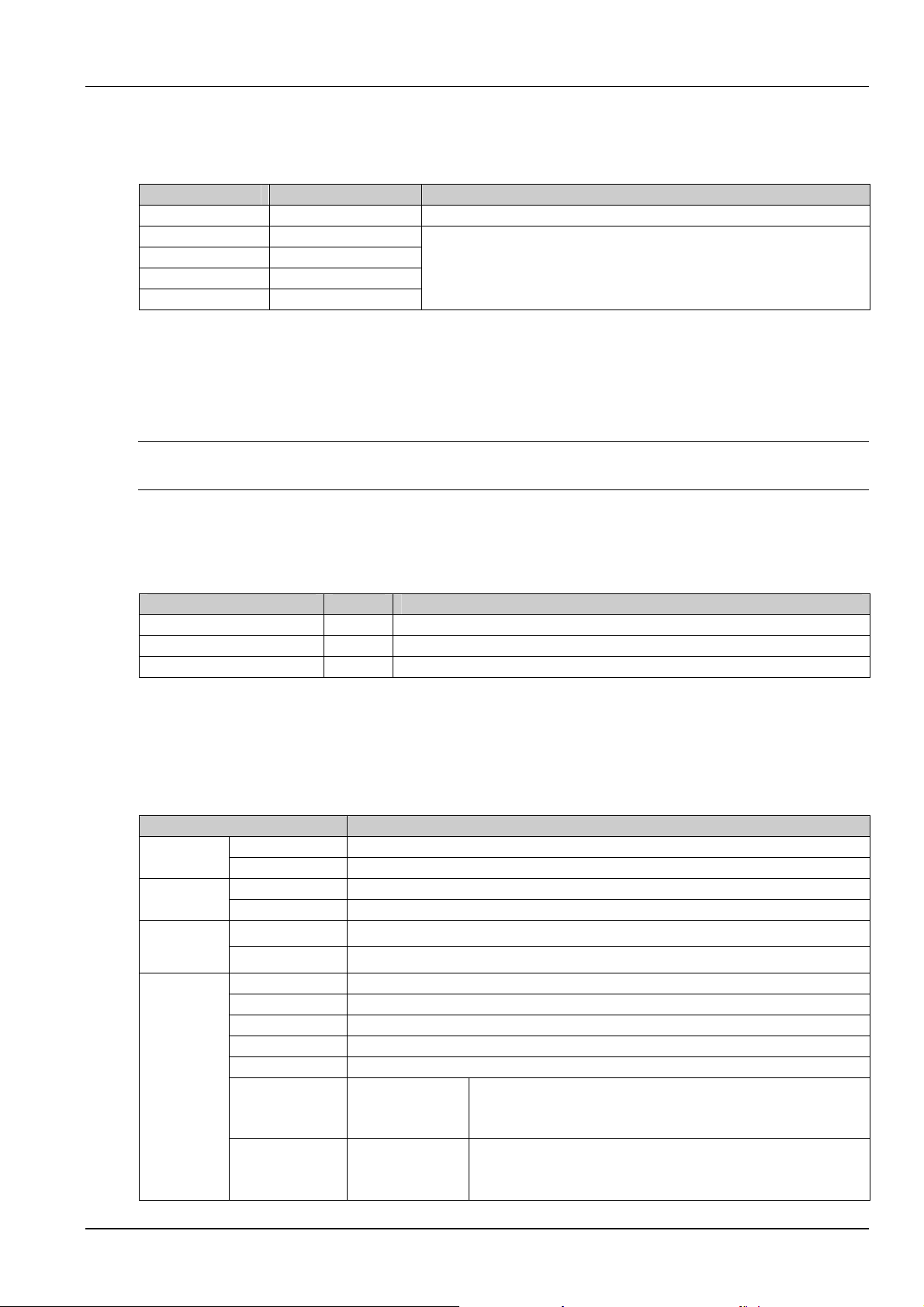
指示灯 颜色 说明
2.2 性能指标
PLC 卡的性能指标如表 2-4所示。
I/O配置
硬件
程序内存
指令速度
软元件配置
表2-3 指示灯说明
DL1 绿色 电源指示灯,通电时常亮
DL2 绿色 运行指示灯,用户程序运行时闪烁
DL3 红色 故障指示灯,有故障时亮
表2-4 PLC 卡性能指标
名称 指标及描述
输入点数
输出点数
用户程序容量
数据块大小
基本指令
应用指令
输入输出继电器
辅助继电器
局部辅助继电器
特殊辅助继电器
状态继电器
定时器
计数器
4
4096个D元件
1024点(M0~M1023
1024点(S0~S1023
256点(T0~T255
256点(C0~C255
6点
点
6k步
0.8
/指令
s
μ
几
~几百
s
μ
64入/64
64点(LM0~LM63)
256点(SM0~SM255
μ
出(输入X0~
/指令
s
)
)
X77
)
)
)
100ms
10ms
1ms
16
位普通增计数器(C0~
32
位普通增减计数器(
32
位高速计数器(
,输出Y0~
精度:T0~
T210~T251
精度:
T252~T255
精度:
Y77
)
T209
C200~C235)
C236~C255
C199)
)
通讯口说明
。
EV6000 系列变频器用户 PLC 卡 用户手册
4 第二章 产品概述
名称 指标及描述
软元件配置
数据寄存器
局部数据寄存器
变址寻址寄存器
特殊数据寄存器
F
H
外部输入中断
高速计数器中断
内部定时中断
中断资源
串口中断
PTO
失电中断
通讯口
通讯功能
通讯协议
高速计数器
输入滤波
子程序调用
特殊功能
用户程序保护
编程方式
注1:提供元件强制功能,方便调试和分析用户程序,提高调试效率。最多允许同时强制
注2:在运行过程中可在线修改用户程序,方便了重要生产场合用户程序的修改
64点(V0~V63
16点(Z0~Z15
256点(SD0~SD255
型共享软元件
型共享软元件
F0.0~F99.99
H0.0~H99.99
16
6个
3个
8
输出完成中断
1
ModBus
0
注
2
ControlStar
4096点(D0~D4095)
)
)
)
该元件与变频器功能码相对应,并同步更新。
用户程序中调用的最大数量需满足
个(中断触发边沿可由用户设定,对应于
个
X30~X35
4F+6H<930
端子的上升沿和下降沿)
2个
个
2
个异步串行通讯端口。
PORT0、PORT1:RS485
协议、自由口协议、
X30、X31
X30~X31
同时输入:频率总和
、2、4、8、16、32、64、
ECbus(N:N
单输入:
50kHz
60kHz
128、256、512ms
网络协议)
最多允许64个用户子程序,允许6级子程序嵌套。支持局部变量,每个子程序最多可提供16个
参数调用,支持变量别名
上载密码
下载密码
监控密码
其他保护措施
编程工具 需在
提供3种形式的密码,密码不超过8个字符,每个字符为字母数字组合,
区分大小写
提供禁止格式化、禁止上载、子程序密码保护等功能
IBM PC
微型机或兼容机中安装运行
128
个位元件和16个字元件。
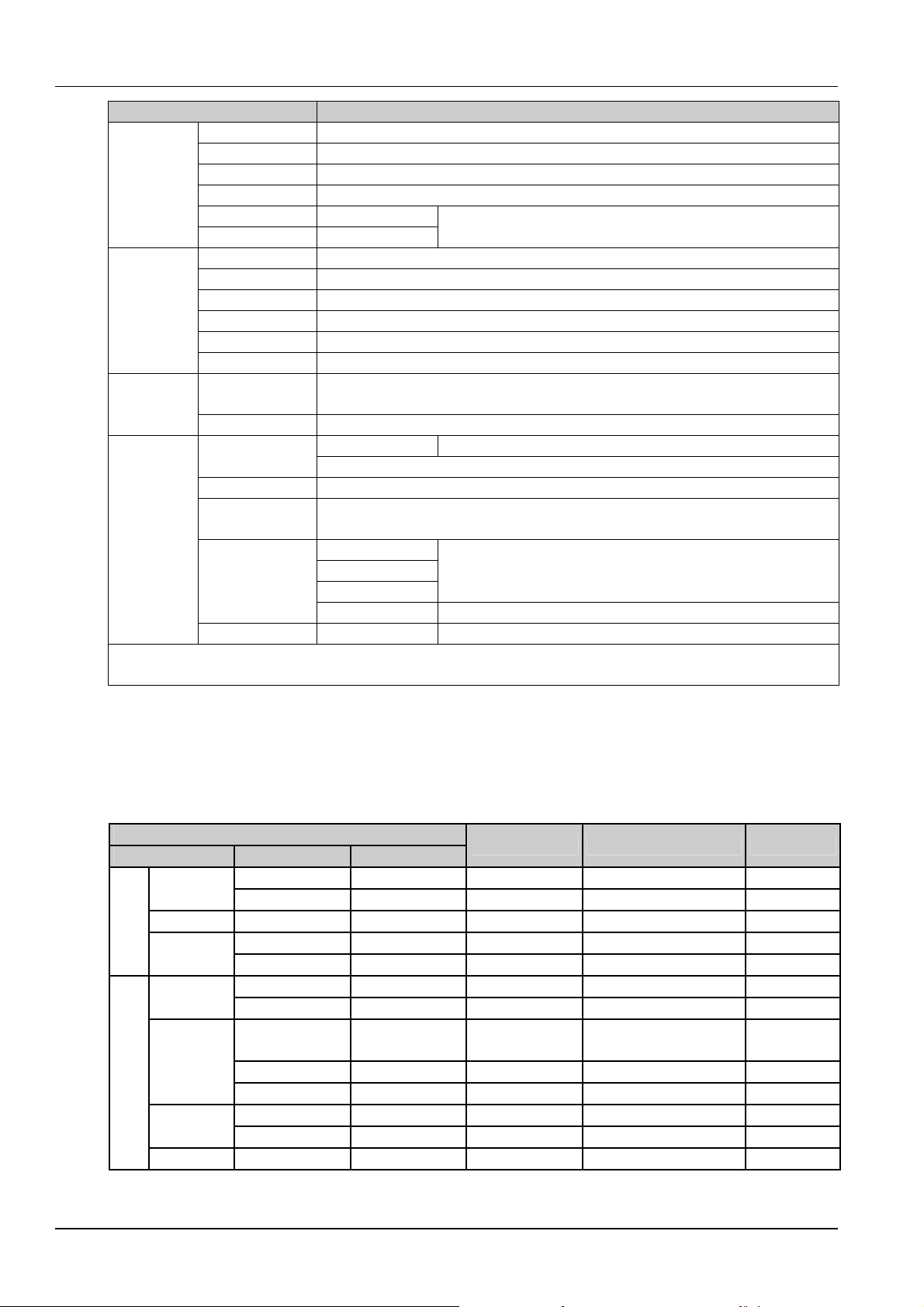
2.3 环境指标
环境指标如表 2-5所示。
种类 参数 单位
温度
气候
条件
机械
应力
湿度
气压
正弦振动
随机振动
冲击
跌落
环境参数
低温
高温
相对湿度
低气压
高气压
位移
加速度
加速度谱密度
频率范围
振动方向
类型
加速度
跌落高度
表2-5 工作、储存及运输环境条件要求
使用环境条件 运输环境条件 贮存环境条件
℃
℃
95(30±2℃) 95(40±2℃)
%
0
40 70 70
40
-
40
-
/
kPa 80 70 80
kPa 106 106 106
mm
2
m/s
m
2/s3
dB/Oct)
(
Hz /
3.5(5~9Hz)
10(9~150Hz)
/
/ /
/ /
5~20Hz:1.92dB
20~200Hz:-3dB
5~200
/
/
/ / X/Y/Z /
/ /
2
m/s
/ 180 /
半正弦
/
m / 1 /
EV6000 系列变频器用户 PLC 卡 用户手册
2.4 可靠性指标
PLC 卡可靠性规格如表 2-6所示。
30
15
表2-6 可靠性规格
量值 条件
万小时
万小时
地面固定使用,机械应力基本上接近零,有温度和湿度控制
地面固定使用,机械应力基本上接近零,没有温度和湿度控制
第二章 产品概述 5
EV6000 系列变频器用户 PLC 卡 用户手册
6 第三章 安装
PLC 卡是艾默生 EV6000 系列变频器的扩展可编程控制卡,通过 EV6000 变频器内部控制板的 CN5 插槽与变频器直接相
连。本章介绍了 PLC 卡的安装注意事项、安装尺寸和安装接线方法。
3.1 注意事项
PLC
·
卡设计适用于安装环境II标准、污染等级2的应用场合,因此,要求安装环境没有灰尘、油烟、导电性尘埃、腐蚀性气体或可
燃性气体等,不可暴露于高温、结露、风雨的环境;振动和冲击也会影响
·常用的安装方法是将
环境温度偏高,或附近有发热设备,电气柜的顶部或侧面需有强制空气对流装置,以保证设备不致于过热。
·在进行螺丝孔加工和接线时,不要使金属屑和电线头散落在
·避免带电状态进行接线、插拔电缆插头,这样容易导致电击,或导致电路损坏。
·安装和接线必须牢固可靠,接触不良可能导致误动作。
第三章 安装
危险
PLC
卡工作的稳定可靠,缩短使用寿命。
PLC
卡及与之配合使用的开关、接触器等设备安装于专用的电气柜内部,并保持合适的空气自然对流。若工作
PLC
卡表面或者调入变频器中,这样有可能引起火灾、故障、误操作。
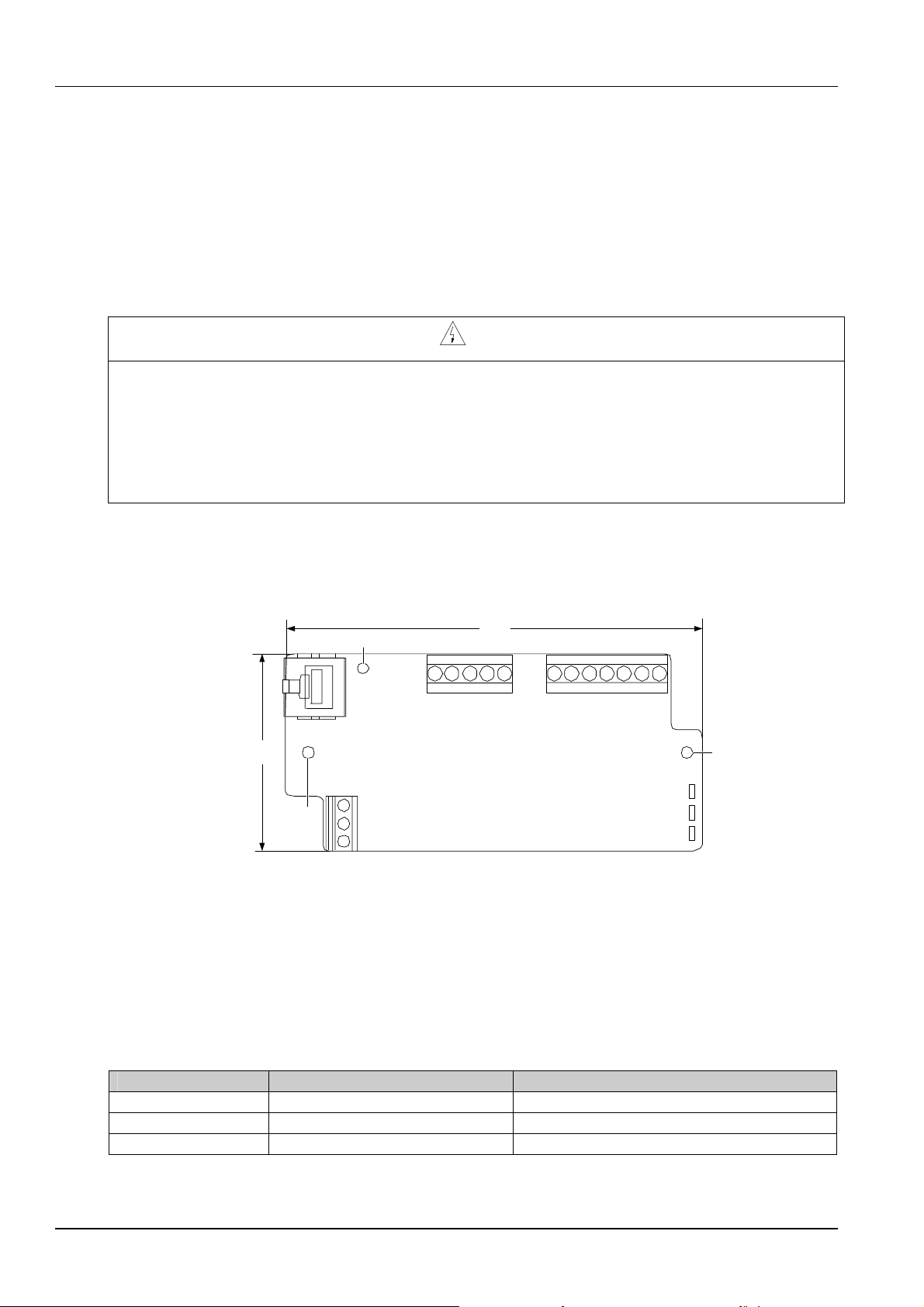
3.2 安装尺寸
PLC 卡外形尺寸与安装孔位尺寸如图 3-1所示。
3.3 机械安装
3.3.1 附件说明
55
Φ
固定孔
扎线孔
COMY Y30 Y31 Y32 Y33 COMXX35X34X33X32X31X30
3
485+
485-
GND
图3-1 PLC 卡的外形与安装尺寸(单位:mm)
120
固定孔
在安装过程中需要使用随机发货的 PLC 卡附件。详见表 3-1。
表3-1 附件说明
附件名称 规格 数量
铜螺柱
螺钉
用户手册
-
M3*8 两个
-
EV6000 系列变频器用户 PLC 卡 用户手册
两个
一本
3.3.2 安装步骤
PLC 卡安装在 EV6000 主控板 CN5 插槽(60 针)上。EV6000 变频器主控板的 CN5 插槽只可插一种扩展卡。安装 PLC
卡之前,请确认 CN5 插槽处于空闲状态。
具体的 PLC 卡安装操作步骤如下:
1.取下变频器的盖板。具体方法可参见《EV6000 系列通用变频器用户手册》。
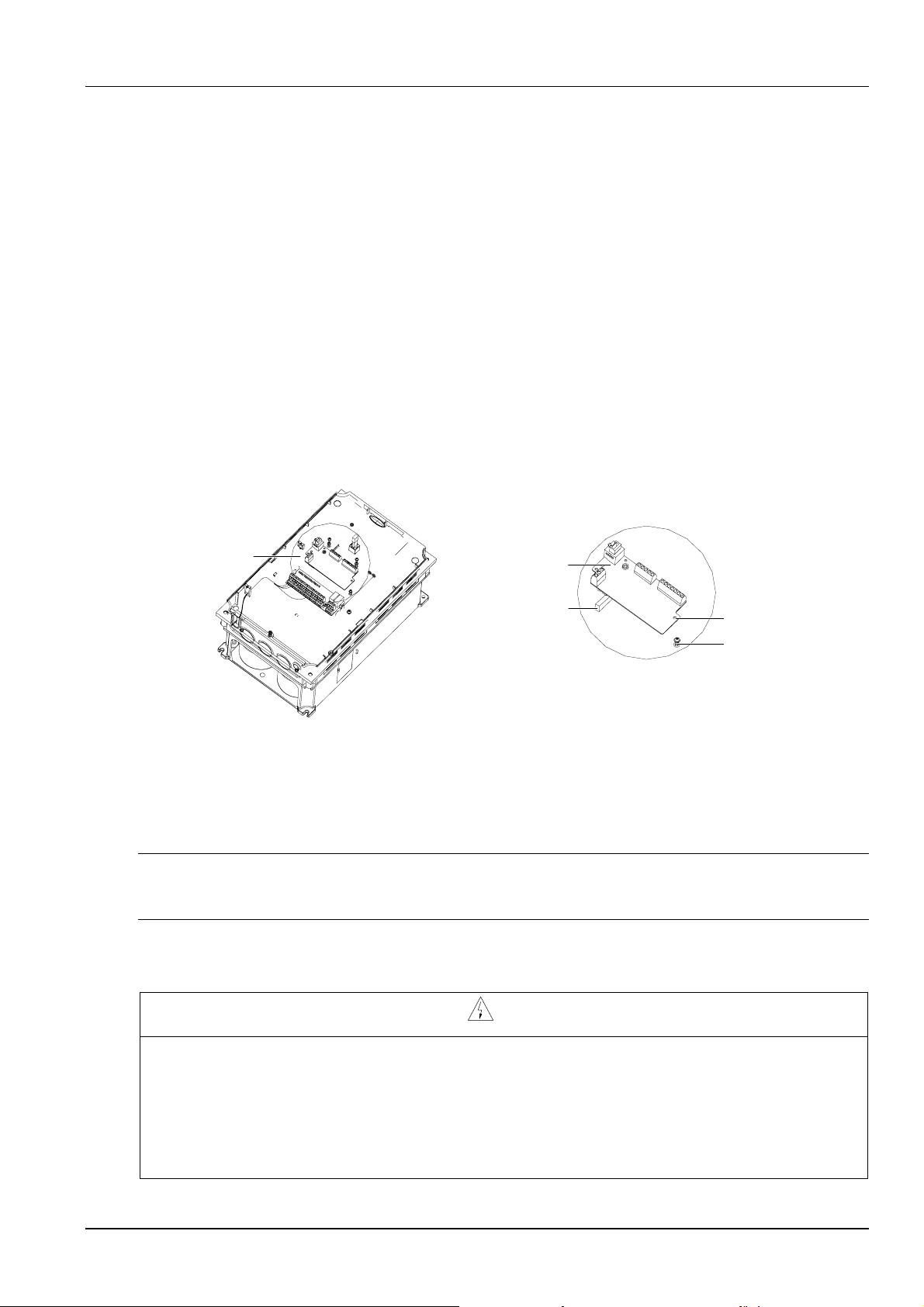
2.将两个短铜螺柱拧到主控板的支座上。见图 3-2。
3.将 PLC 卡 CN5 端子插入 EV6000 主控板 CN5 插槽上。见图 3-2。
4.用螺钉通过螺钉固定孔将 PLC 卡固定好。见图 3-2。
第三章 安装 7
5.参照3.4
接线
的说明,根据实际使用需要为 PLC 卡接线。
6.给变频器上电。
7.PLC 卡上的 DL1 灯(见2.1.2
的说明,根据实际使用需要对 PLC 卡进行调试。
门
端子及指示灯说明
)常亮后,参照
第五章 通讯与组网和第六章
8.调试完成后,合上变频器的盖板。具体方法可参见《EV6000 系列通用变频器用户手册》。
图 3-2为 PLC 卡的安装示意图。
A 处
PLC卡
CN5插槽
A 处放大
图3-2 安装示意图
ControlStar
螺钉固定孔
短铜螺柱
快速入
3.4 接线
PLC 卡的电源通过 CN5 端子由变频器提供。用户需要根据实际使用需要连接信号线。
注意
PLC 卡应用系统配线时往往有多个电缆端连接在同一个端子的情况,如 COMX、COMY 接线等。建议采用扩展接线排
方式进行连接扩展,并有相应的标识,可使连接方便可靠,布线简洁。
3.4.1 布线注意事项
·在进行螺丝孔加工和接线时,不要使金属屑和电线头掉入变频器中,这有可能引起火灾、故障、误操作。
·在安装布线完毕,立即清除异物,通电前请盖好变频器的端子盖板,避免引起触电。
·新购的
·避免带电状态进行接线、插拔电缆插头,否则容易导致电击或导致电路损坏。
·安装和接线必须牢固可靠,接触不良可能导致误动作。
·高频信号的输入或输出电缆应选用双绞屏蔽电缆,以提高系统的抗扰性能。
·
PLC
卡在安装工作结束后,需要保证通风面上没有异物,否则可能导致运行时散热不畅,引起火灾、故障、误操作。
PLC
卡的输入、输出信号线不要与其他强电或强干扰线路并排布线,以减少干扰。
危险
EV6000 系列变频器用户 PLC 卡 用户手册
8 第三章 安装
3.4.2 信号电缆规格
在进行 PLC 卡应用的配线时,建议使用多股铜导线,并预制绝缘端头,这样可保证接线质量。推荐选用导线的截面积和
型号如表 3-2所示。
线缆名称 导线截面要求 推荐导线型号 配合使用的接线端子及热缩管
输入输出信号线
推荐的电缆制备方式如图 3-3所示。
表3-2 推荐的 PLC 连接电缆导线型号
0.8~1.0mm² AWG18,AWG20 UT1-3或OT1-3
冷压端头,Φ3或Φ4 热缩管
将加工好的电缆头用螺丝固定在 PLC 卡的接线端子上,保证可靠连接。
3.4.3 连接信号输入线
接线方法说明
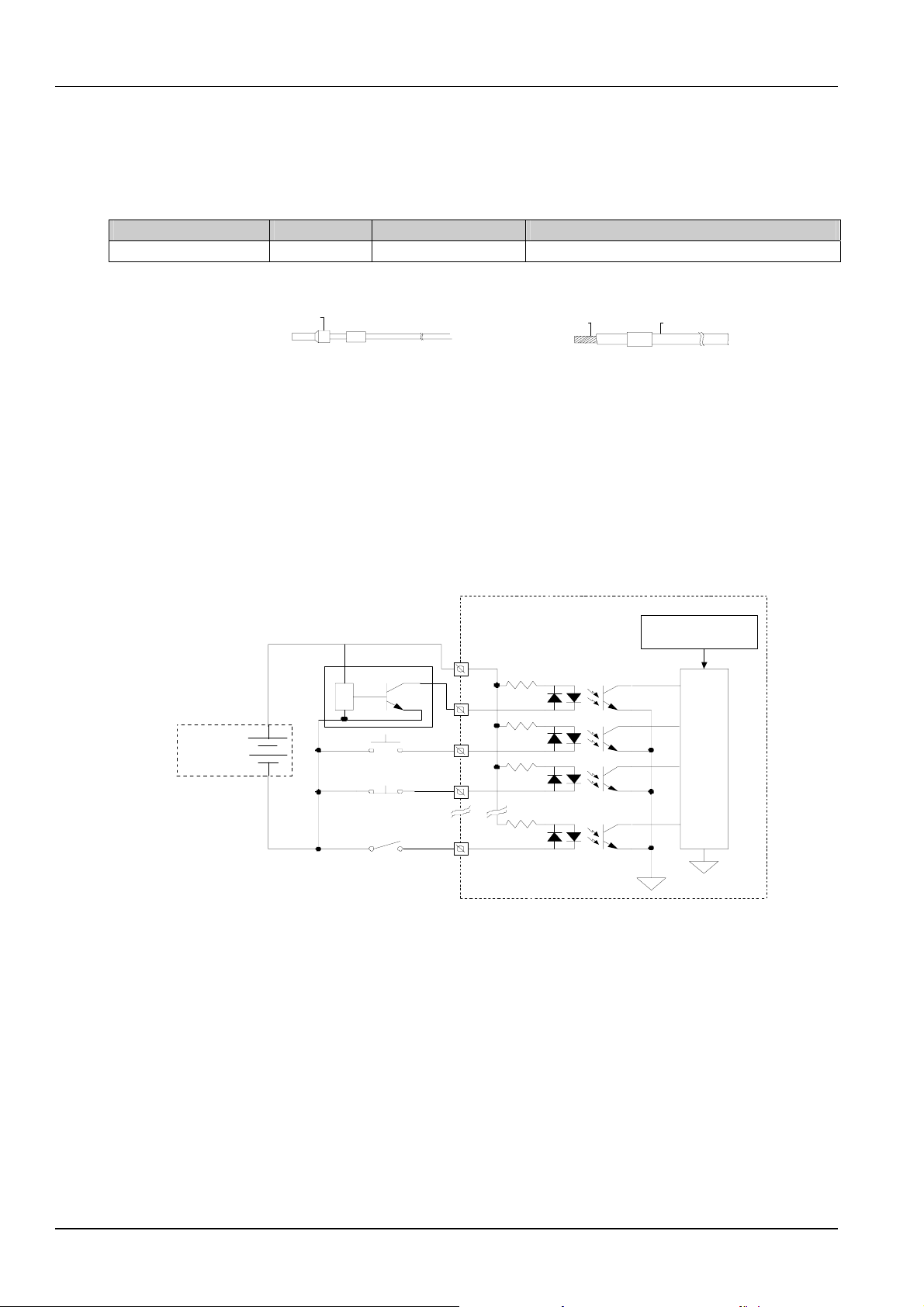
PLC 卡需要用户外部提供 24Vdc 电源。若要连接有源晶体管传感器的输出信号,需按集电极开路输出方式进行连接。PLC
卡端子排上的 COMX 端子用来选择信号的输入方式,可以设置为源型输入方式或漏型输入方式。将 COMX 端子与外部
提供 24Vdc 电源的正极端子相连,即设置为漏型输入方式,可以连接 NPN 型传感器。漏型输入方式的内部等效电路及
外部接线方式如图 3-4所示。
外部提供
24Vdc电源
H型预绝缘冷压端头
各
种
信
号
输
入
设
备
682
图3-3 PLC 信号电缆制备方式推荐
用户信号接线
传感器
COMX
X30
X31
X32
线头烫锡
PLC卡内部等效电路
导线
PG
内部逻辑电路工作电源
5V/GND
逻辑
处理
电路
Xn
图3-4 漏型输入方式的 PLC 卡内部等效电路
EV6000 系列变频器用户 PLC 卡 用户手册
第三章 安装 9
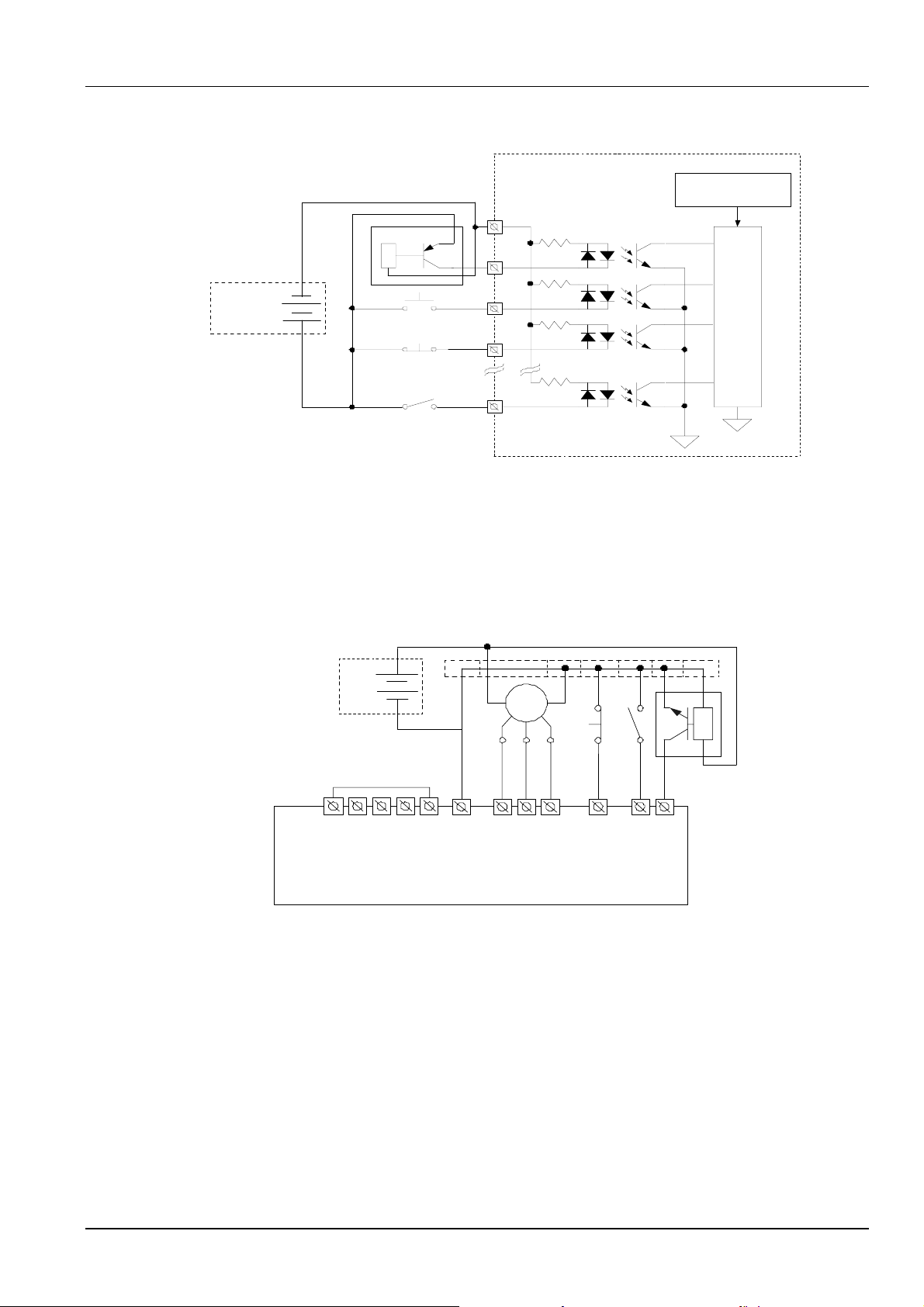
用户也可按照源型输入方式进行连接,将 COMX 端子与外部提供 24Vdc 电源的负极短接,就可以连接 PNP 传感器。源
型输入方式的内部等效电路及外部接线方式如图 3-5所示。
PLC卡内部等效电路
内部逻辑电路工作电源
/
GND
5V
逻辑
处理
电路
外部提供
24Vdc电源
各
种
信
号
输
入
设
备
用户信号接线
COMX
传感器
X30
X31
X32
Xn
图3-5 源型输入方式的 PLC 卡内部等效电路
需要注意的是,在 PLC 卡中,所有输入端口只能采用同一种输入方式(漏型或源型)。如果对于连接方式有不明之处,
请在购货时咨询供应商,寻求技术支持,以免造成设备损坏。
输入连接示例
图 3-6为 PLC 卡实现简单定位控制的示例。由编码器得到的位置信号通过 X30、X31 高速计数端子检测,开关信号等其
他用户信号则可分布于输入端口。
公共端可采用端子排连接
外部
提供
24Vdc
电源
Y30 Y31 Y 32 Y33COMY X30 X31 X32 X33 X34 X35
COMX
编码器
+24V VGND
传感器
EVC_UPRG
图3-6 PLC 卡的电气连接示例
EV6000 系列变频器用户 PLC 卡 用户手册
10 第三章 安装
3.4.4 连接信号输出线
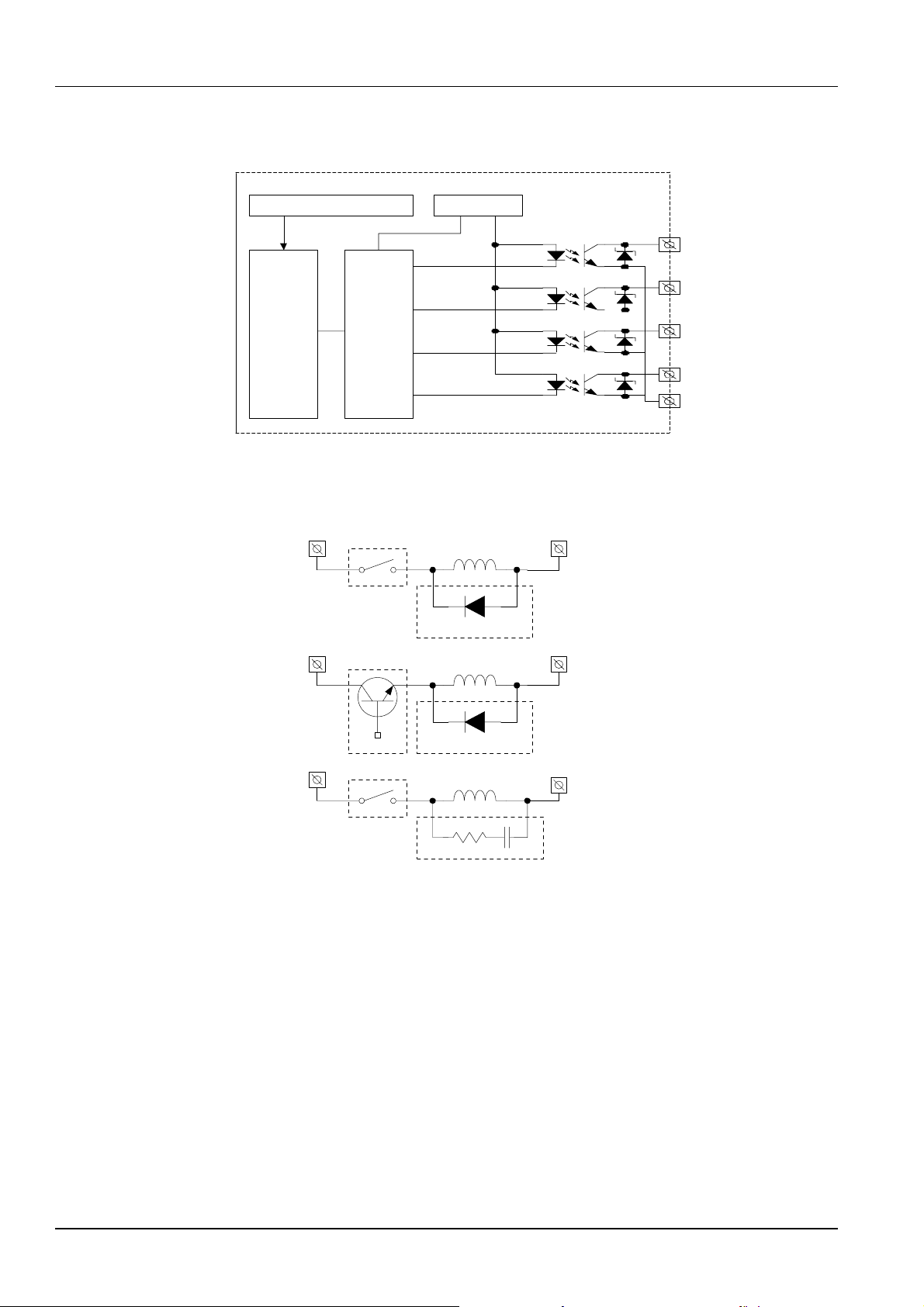
开路集电极源型输出部分的内部等效电路如图 3-7所示。
内部逻辑电路工作电源
可编程卡内部等效电路
5Vdc 电源
Y30
Y31
逻辑
处理
电路
输出
驱动
电路
Y32
Y33
COMY
图3-7 开路集电极源型输出部分内部等效电路
开路集电极源型输出级只能用于直流 24V 负载回路,且须注意电源极性。当驱动感性负载时,应考虑增加续流二极管,
如图 3-8所示。
24V+ 24V-
24V+ 24V-
AC-L
Yn
Yn
Yn
感性负载
续流二极管 1N4004
感性负载
续流二极管 1N4004
感性负载
AC-N
R=200欧姆,2W
RC
C=0.022uF,250AC
图3-8 PLC 卡输出触点的保护电路
EV6000 系列变频器用户 PLC 卡 用户手册
本章介绍了 PLC 卡的信号输入输出特性。
4.1 端子介绍
第四章 输入/输出特性 11
第四章 输入/输出特性
位于 PLC 卡上的输入端子和输出端子的分布及其定义请参见2.1
此外,PLC 卡还可直接使用变频器的输入端子和输出端子。具体见表 4-1及表 4-2。
端子地址 所属单板 EV6000 端子标识 功能说明
X1~X7
X10
X11
X20~X25
EV6000
EV6000
EV6000
EV6000的IO
端子地址 所属单板 EV6000端子标识 功能说明
Y1
Y2
Y11、Y12 EV6000
Y21、Y22 EV6000的IO
EV6000
EV6000
变频器端子的规格及使用方法请参考《EV6000 系列通用变频器用户手册》。
4.2 开关量输入特性
X1~X7
控制板
控制板
控制板
扩展卡
表4-2 PLC 卡使用的变频器输出端子定义
控制板
控制板
R1、R2
控制板
ER1、ER2
扩展卡
外形结构及部件说明
表4-1 PLC 卡使用的变频器输入端子定义
多功能输入端子
FWD 正转运行
REV 反转运行
EX1~EX6 扩展输入端子
Y1
Y2
开路集电极输出
继电器输出端子
扩展继电器输出端子
。
4.2.1 输入端口规格
PLC 卡开关量输入端口规格如表 4-3所示。
项目 规格
信号输入方式
电气参数
数字滤波
高速功能
公共接线端
检测电压
输入阻抗
输入为
输入为
4.2.2 输入端口中断功能
在需要对输入信号作出立即响应的应用系统中,可采用中断方式进行信号处理。X30~X35 输入端的上升沿和下降沿各
对应一个中断,对应于 12 个外部中断源。
源型/漏型方式,用户可通过
18Vdc~26.4Vdc
X30~X35
ON
OFF
外部回路电阻小于
外部回路电阻大于
X30~X35
256ms、512ms
X30~X31
要求小于
只有一个公共端,为
端口:
有数字滤波功能,滤波时间可在
可实现高速计数、中断、脉冲捕捉等功能;端口计数最高频率达
60kHz
表4-3 开关量输入端子 X 端口规格
COMX
端子进行选择
3.3kΩ
400Ω
24kΩ
0ms、2ms、4ms、8ms、16ms、32ms、64ms、128ms
之间,由用户编程设定
COMX
、
50kHz
,输入频率总和
EV6000 系列变频器用户 PLC 卡 用户手册
12 第四章 输入/输出特性
若将输入端作为中断方式处理,编程时需使能相应的中断控制标志,并编制好相应的中断用户程序。在使用时需要注意
以下几点:
z 当使用中断时,对应于该输入端的数字滤波功能不起作用,即相应端口的滤波时间自动设为 0;
z 当作为高速计数输入或中断输入时,建议相应输入端口的线缆采用双绞屏蔽线,并将屏蔽层接地(同 端子连接或
连接信号地),以提高抗扰性;
z 部分计数器需多个 X 输入端子配合实现,(如 C242、C244、C254 分别由 2、3、4 个端子组成,如表 4-4所示),当
使用了该类计数器后,这些端子不能再作为其他计数器的输入用,也不能作为普通输入方式使用;
z 计数器输入端口有相应的最高频率限制,当输入频率超过该限制后,可能导致计数不准,或系统无法正常运行,请
合理安排输入端口,选用合适的外部传感器。
4.2.3 高速计数功能
PLC 卡的内置高速计数器如下表所示,按计数器的编号(C)分配在输入 X30~X33。X30~X33 不可重复使用。
输入点 计数器
C236
计数器
C237
计数器
C242
计数器
C244
计数器
C246
计数器
C247
计数器
C249
计数器
C251 A相 B相
计数器
C252 A相 B相
计数器
C254 A相 B相
计数器
单相单端计
数输入方式
单相增减计
数输入方式
双相增减计
数输入方式
高速计数器按上表所示的方法,根据特定的输入执行动作,根据中断处理高速动作,计数的方法与 PLC 卡的扫描周期无
关。这类计数器是 32 位的增计数型/减计数型的计数器,根据不同的增计数/减计数切换的方法,可划分为以下三种类型。
表4-4 高速计数器分布表
X30 X31 X32 X33
增/减
增/减
增/减
增/减
增
增
增
50
50
复位
复位
减
减
减
50
复位
复位
30
复位
复位
启动
启动
启动
最高频率(KHz)
10
10
5
表4-5 计数器类型
项目 单相单端计数输入 单相增减计数输入 双相计数输入
SM236~SM244
计数方向的指
定方法
计数方向监控 通过
根据
ON/OFF
的
C244
作减计数/增计数
分别对应
C236
对应于增计数输入或减计数
~
输入的动作,计数器
C249
自动的增/减计数
SM246~SM254
C246
~
可以知道
C251~C254
计数器
输入处于ON,B相输入处于
A
相输入处于ON,B相输入处于ON→
C246~C254
根据输入做自动的增减计数:A相
的增计数(
高速计数器与 SM 辅助继电器的关系如下表所示。
表4-6 增计数/减计数切换用特殊辅助继电器编号
种类 计数器号 增/减设定
C236 SM236
C237 SM237
单相单端计数输入
C242 SM242
C244 SM244
表4-7 计数方向监控用特殊辅助继电器编号
种类 计数器号 增/减监视器
单相增减计数输入
双相计数输入
OFF→ON
OFF)/
C246 SM246
C247 SM247
C249 SM249
C251 SM251
C252 SM252
C254 SM254
时增计数;
OFF
减计数(ON)
时减计数
EV6000 系列变频器用户 PLC 卡 用户手册
4.3 开关量输出特性
PLC 卡输出类型为开路集电极源型输出型,电气规格如表 4-8所示。
项目 开路集电极源型输出
电源电压
电路绝缘
开路时漏电流
最小负载
最大输出电流
ON
OFF
输出公共端
熔断器保护
5Vdc~24Vdc
5mA(5Vdc~24Vdc)
电阻负载
响应时间
响应时间
感性负载
电灯负载
表4-8 输出端口规格
光耦绝缘
小于
0.3A/1点;0.8A/4点;
12W/24Vdc
1.5W/24Vdc
0.5ms
共用一个公共端
无
0.1mA/30Vdc
COMY
第四章 输入/输出特性 13
EV6000 系列变频器用户 PLC 卡 用户手册
14 第五章 通讯与组网
PLC 卡提供了 CN4 和 CN6 两个串行异步通讯端口。用户可以通过后台软件 ControlStar(V2.37)的系统块配置不同的通
讯协议。支持的通讯协议包括三种:自由口,ModBus 和 ECbus。自由口允许用户自定义各种通讯协议,以支持不同的
设备;ModBus 作为通用的通讯协议,广泛支持各种系统配置;ECbus 作为艾默生专用的通讯协议,专门用于艾默生 PLC
系统的内部通讯。本章详细介绍了两个通讯口,并分别介绍了基于三种通讯协议的 PLC 卡的通讯与组网方式。
5.1 通讯口说明
PLC 卡提供了两个串行异步通讯端口,分别为 CN4 和 CN6。通讯口特性如表 5-1所示。
信号电平 工作方式 提供协议 用途 支持的波特率(bps)
RS485
RS485
双工
半
第五章 通讯与组网
ModBus主站
ModBus从站
自由口协议
ECbus协议
表5-1 PLC 卡通讯口特性
可组网作为主站,控制其他设备
可组网作为从站设备;可与
PLC
相连工作
用户可自定义协议
与网络其它
件的数据互访
38400、19200、9600、4800、2400、1200
HMI
38400、19200、9600、4800、2400、1200
38400、19200、9600、4800、2400、1200
间实现部分元
115200、57600、38400、19200、9600、4800、2400
1200
、
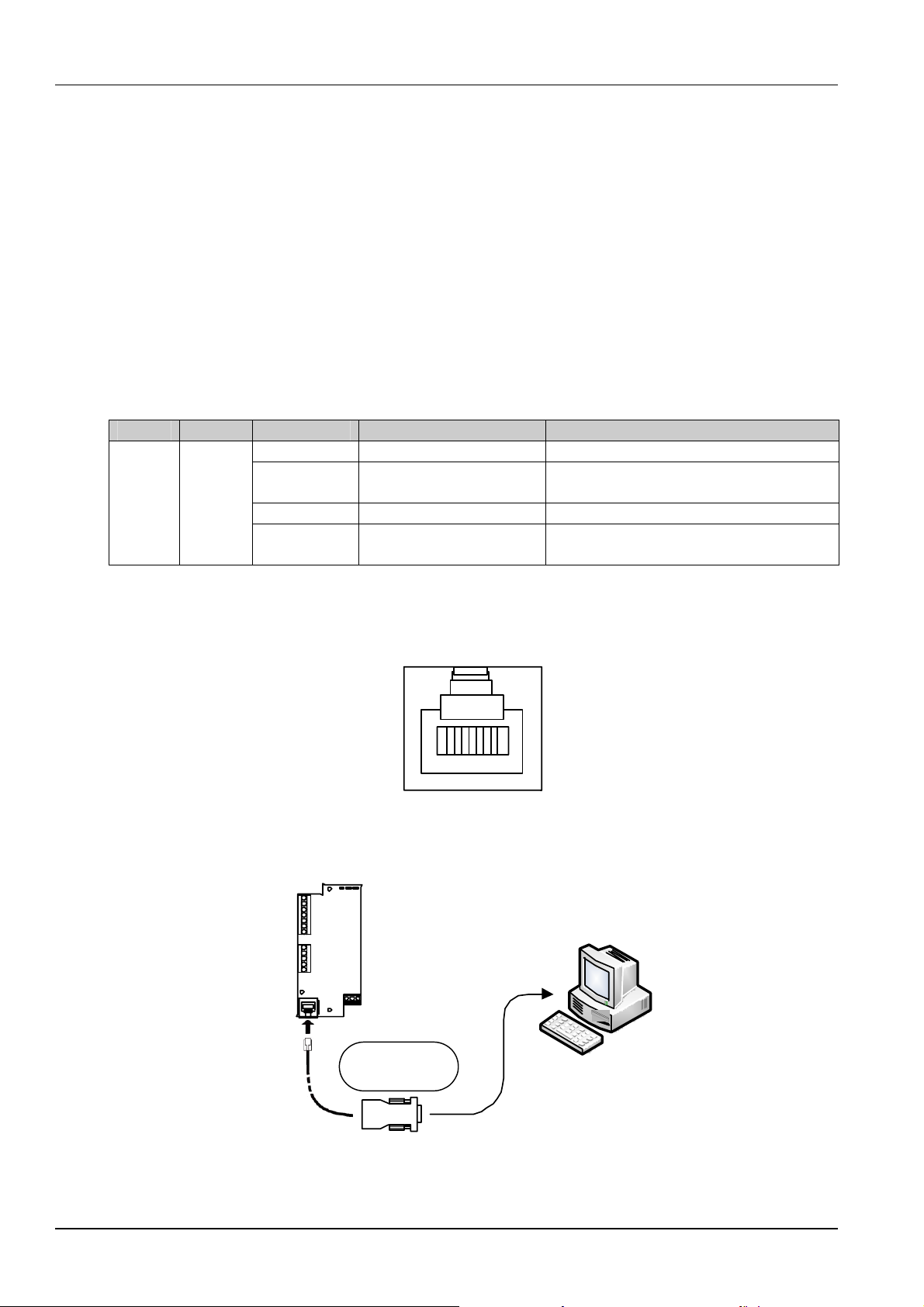
5.1.2 CN4 端子
CN4 为标准 RJ45 插座,其引脚排列参见下图。
用户可使用 CN4 通过带 RS232/485 加强绝缘隔离转换器的编程电缆(具体请参见5.3
并使用 ControlStar 软件进行编程(参见
第六章
RJ 45
RS485/RS232加强
RS 485/RS232
隔离转换器
绝缘隔离转换器
87654321
图5-1 RJ45 插座示意图
ControlStar
快速入门
编程电缆
)。连接方法如下图所示。
)将 PLC 卡和 PC 连接,
图5-2 PLC 卡与 PC 连接示意图
EV6000 系列变频器用户 PLC 卡 用户手册
CN4 作为用户编程的专用接口,采用 ModBus 协议与 PC 连接。用变频器的操作面板通过功能码 F65.00 可切换为默认波
特率。PLC 卡运行状态及 CN4 使用协议切换关系如表 5-2 所示。
功能码 F65.00 状态 CN4运行协议
1 运行
2(1→2)
2(0→2)
0 停止
5.1.3 CN6 端子
CN6 使用 SMKDSP15 插座。CN6 信号定义如下表所示:
端子序号 端子名称 信号说明
CN6 端口为螺丝固定的端子。通讯信号电缆可由用户自行制作,建议用户使用双绞屏蔽线作为通讯端口的连接电缆。
第五章 通讯与组网 15
表5-2 CN4 运行协议的模式切换
由用户程序及其系统配置决定,可为
运行
停止
强制切换为默认
若用户程序的系统设置为自由口协议,则停止后自动切换为默认
统设置的协议不变
ModBus
从站协议,波特率
表5-3 CN6 信号说明
1
2
485+ 485
485- 485
5 GND 数字地
ModBus
协议、自由端口协议、
38400,8
位数据位,不效验,站号为
ModBus
通讯+端
通讯-端
N:N
网络协议(
ECbus)
1
从站协议,否则保持系
CN6 采用 ModBus 协议或 RS485 端口自由协议,适合与具有通讯功能的生产设备连接使用(如变频器),从而对多台设
备进行组网控制。
5.2 通讯配线方式
PLC 卡提供给用户 RS485 串行通讯接口。通过以下几种配线方法,可以组成单主单从或单主多从的控制系统。利用
ControlStar(V2.37)软件可实现对 PLC 卡的编程以及实时监控。
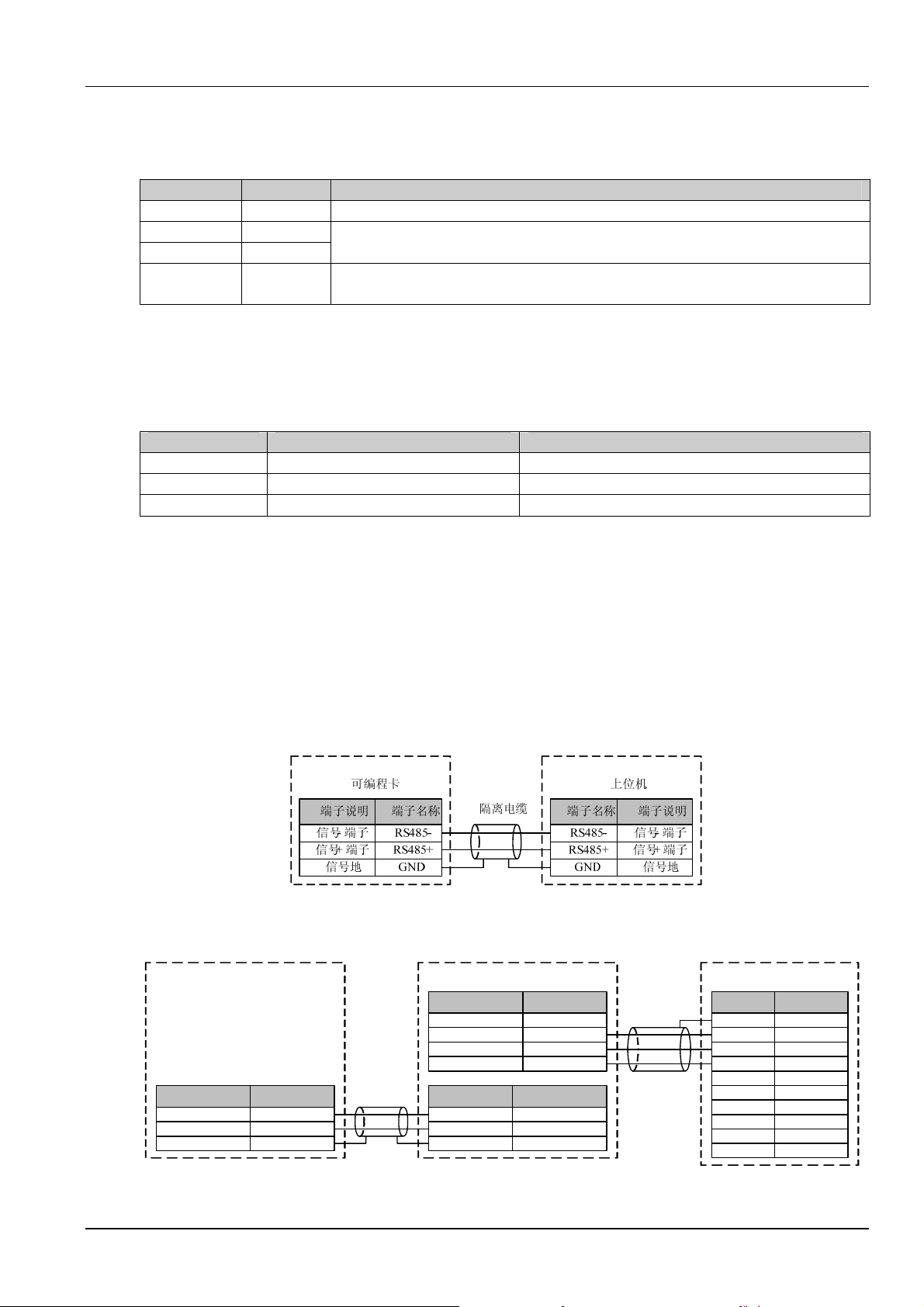
1.PLC 卡 RS485 接口与使用 RS485 接口的上位机的连接:
2.PLC 卡 RS485 接口与使用 RS232 接口的上位机的连接:
可编程卡
端子说明 端子名称
信号 - 端子 RS485-
信号 + 端子 RS485+
信号地 GND 信号地GND
图5-3 RS485-RS485 通讯配线
RS485/232 转换器
端子说明 端子名称
5V 电源正端 +5V
发送数据线 TXD
接收数据线 RXD
5V 电源地 GND
隔离电缆
端子说明端子名称
信号 - 端子RS485-
信号 + 端子RS485+
图5-4 RS485-(RS485/232)-RS232 通讯配线
屏蔽电缆
上位机
RS232(DB9)
引脚号信号
外壳PE
2RXD
3TXD
5GND
4DTR
6DSR
9RI
1CD
7RTS
8CTS
EV6000 系列变频器用户 PLC 卡 用户手册
16 第五章 通讯与组网
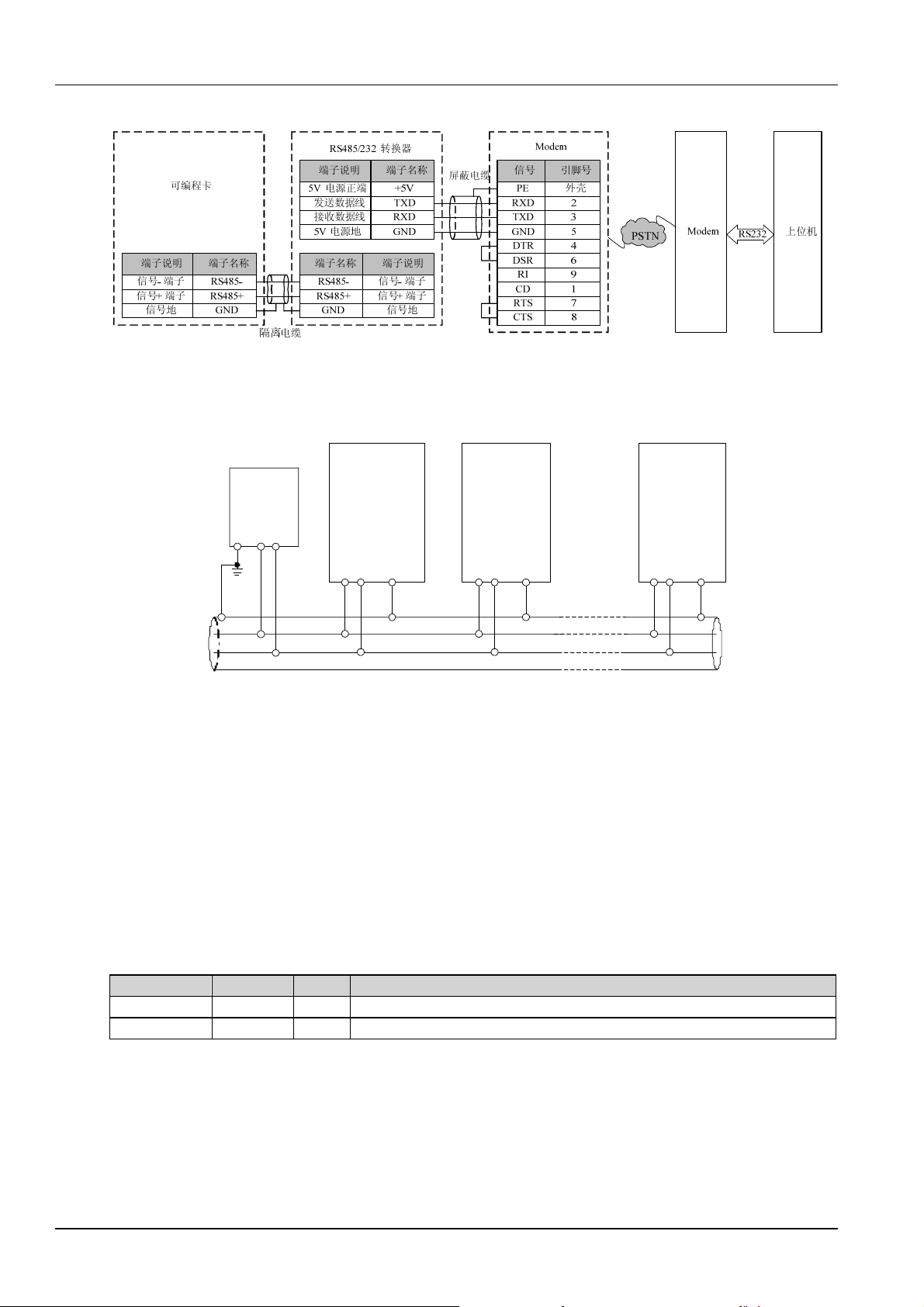
3.PLC 卡通过 MODEM 与上位机的远程连接:
图5-5 RS485-(RS485/232)-(Modem-公话网-Modem)-RS232 通讯配线
上图中,若与 MODEM 连接的上位机的接口为 RS485,则需要通过 RS232/RS485 转换器进行连接。
PLC 卡与多台变频器挂接在同一 RS485 系统中时,通讯所受干扰增加,配线方式非常重要,推荐用户按照以下方式接线:
如果采用以上配线仍不能正常通讯,可尝试采取以下措施:
1.通讯线上使用磁环。
2.如果使用了 RS485/RS232 转换模块,可考虑对转换模块单独供电。
3.若现场条件允许,可适当降低变频器载波频率。
5.3 编程电缆
供编程下载用的串行通讯电缆为 PLC 卡的选配件,用户可自备或向艾默生网络能源有限公司另行选购。
编程电缆两端插头分别为 RJ45 和 DB9 型,型号描述如表 5-4所示。
上位机
SG +RS485-
图5-6 PLC 卡与变频器多机通讯时推荐的接线图(变频器、电机全部良好接地)
PLC卡
+RS485- GND
EV6000
+RS485- GND
+RS485- GND
RS485电缆
EV6000
型号 名称 长度 描述
EVCUPRG11SL1
EVCUPRG11SL2
转接线
隔离编程电缆
5.4 自由口通讯协议
自由口协议是用户定义数据文件格式的通讯方式,可由指令实现数据的发送和接收。自由端口协议支持 ASCII 和二进制
两种数据格式。只有在 PLC 位于 RUN(运行)模式时才能使用自由端口通讯。
自由端口的通讯指令包括 XMT(自由口发送指令)、RCV(自由口接收指令)。
表5-4 PLC 编程电缆的型号
2.5m
2.5m
485/232
不包含
两端插头加强绝缘隔离,可热插拔,包含
转换模块,需要配合加强绝缘隔离
EV6000 系列变频器用户 PLC 卡 用户手册
485/232
转化模块使用
485/232
转换模块,适用于强干扰场合下的编程
5.4.1 自由口参数设置
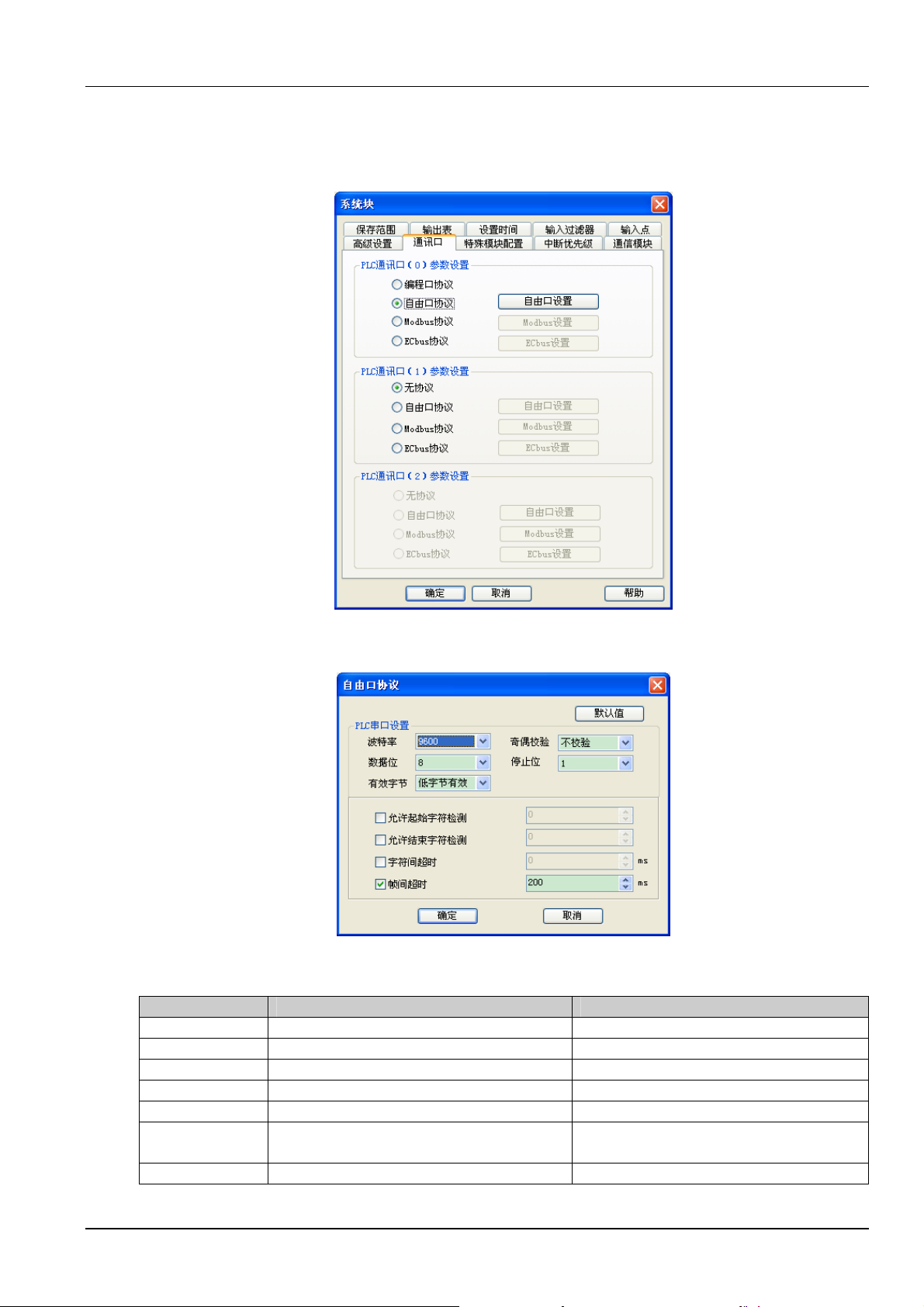
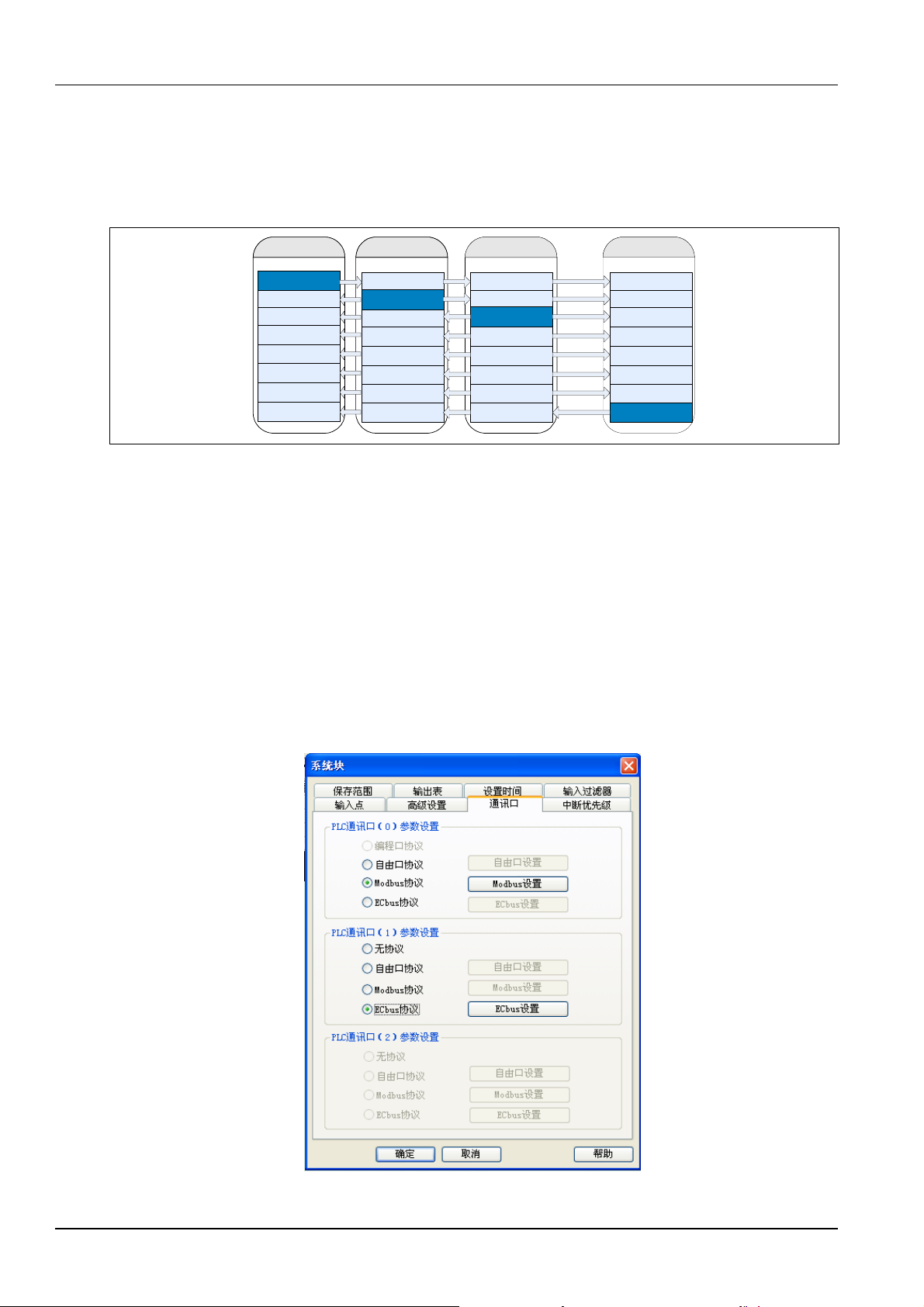
在系统块中选择通讯口选项,在 PLC 通讯口(0)参数设置或 PLC 通讯口(1)参数设置中选择自由口协议,从而激活
相应的自由口设置按钮,如下图所示:
第五章 通讯与组网 17
图5-7 通讯口通讯协议选择
点击任意一个自由口设置按钮,进入自由口参数设置界面,如下图所示:
图5-8 自由口协议参数设置
可配置内容如下:
选项 设置内容 注释
38400,19200,9600,4800,2400,1200
波特率
数据位
奇偶校验位
停止位
允许起始字符检测 允许或禁止,默认为禁止
起始字符检测
允许结束字符检测 允许或禁止,默认为禁止
0
设定7或8,默认为
设定为无校验、奇校验、偶校验,默认为无校验
设定1或2,默认为
255
~
(对应00~FF)
8
1
,默认为
9600-
-
-
-
-
检测到用户指定的起始字符,开始接收,并将接收到
的字符(包括起始字符)保存到用户指定的缓存区中
-
EV6000 系列变频器用户 PLC 卡 用户手册
18 第五章 通讯与组网
选项 设置内容 注释
结束字符检测
允许字符间超时时间 允许或禁止,默认为禁止
字符间超时时间
帧超时时间使能
帧超时时间
0
0~65535ms
0
5.4.2 自由端口指令
注意事项
自由端口指令 XMT 和 RCV 可以用来向指定的通讯口发送和接收数据。
需要注意的是,如果在某个端口上使用自由端口指令,需先在 ControlStar 软件的系统设置中,设置该通讯口使用自由端
口协议并设置通讯参数,设置完毕后下载系统设置到 PLC 中,并且重新启动才能生效。
程序示例
255
~
(对应00~FF)
有效或无效,默认为无效
65535ms
~
当接收到用户设定的结束字符,结束接收,并将结束
字符保存到缓存区内
-
当接收到的两个字符间的时间超过用户设定的字符
间超时时间,接收中止
-
RCV
当
的能流导通,并且通讯条件满足,从通讯串
口开始接收时计时,当计时时间到,还没有接收完一
帧,中止接收
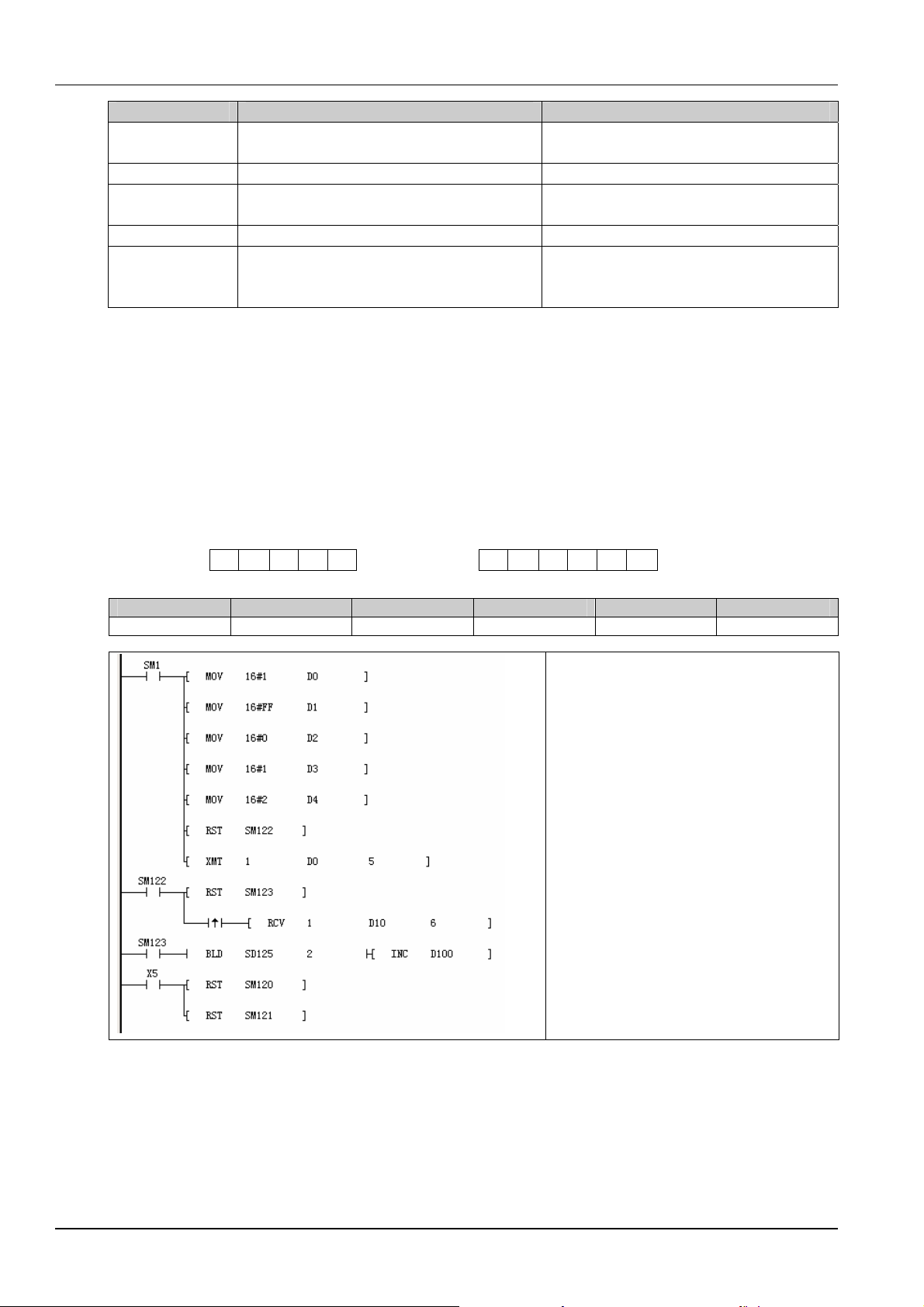
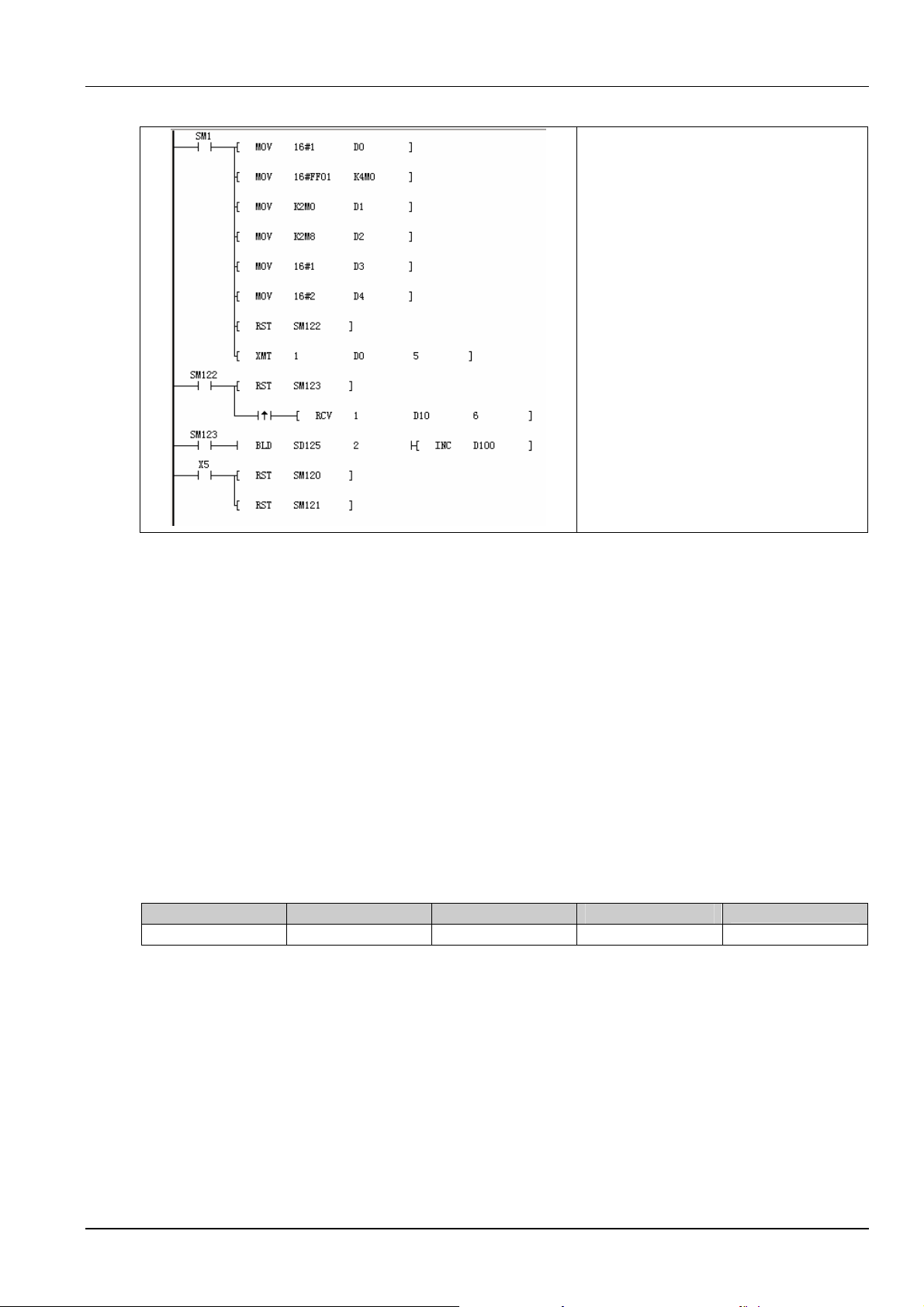
例程 1:通过通讯口 1 发送数据,然后接收数据,发送的数据为 5 个字节,接收的为 6 个字节。
发送的数据为: 01 FF 00 01 02 接收的数据为: 01 FF 02 03 05 FE
将接收到的数据保存到 D10 开始的地址,每一个字节保存到一个 D 元件中,保存的方式如下表所示。
01 FF 02 03 05 FE
D10 D11 D12 D13 D14 D15
1
.首先应该在系统块中将通讯口的设置修改成自由
口通讯,并设置波特率、奇偶校验位等参数。
2.SM1
D0
发送前复位
3
数据,接收的最大长度为6。
4
器(
5
一次能流有效时,将待发送的数据保存到
开始的通讯缓存区中,利用
SM122
(发送结束标志)。
.发送完成
.接收完成
SD125
.利用X5作为中断发送和接收的使能位
SM122
置位,利用上升沿,开始接收
SM123
置位,根据接收完成信息寄存
)的内容,进行相应的操作。
XMT
指令发送数据,
EV6000 系列变频器用户 PLC 卡 用户手册
例程 2:通过通讯口 1 发送数据,然后接收数据。
第五章 通讯与组网 19
和例程1不同的是,当要将一个字元件的高低字节
都发送出去的时候,首先要将这个字元件拆成高、
低字节两部分。
例如要发送D2这个字元件的内容,可先将它的高、
低字节分别存在D3和D4的低中,然后发送D3、
D4
。也可以采用先将数据保存到一个
本程序的
K2M0
为高字节、
K4M0
)的元件中,然后分别取高字节
K2M8
为低字节的方法
K4MX
(例如
5.5 ModBus 通讯协议
PLC 卡串口通讯可以选用 ModBus 通讯协议,RTU 通讯模式。可以设成主站或者从站。最多可以连接 31 个设备,地址
范围 1~31,支持广播。PLC 卡与后台软件 ControlStar 的连接采用的是 ModBus 通讯协议,当 F65.00 设置为 2 时,PLC
卡将串口 0 强制切换为 ModBus 从站协议,站号为 1,波特率为 38400,不效验。
5.5.1 RTU 传输模式
RTU 传输模式说明如下:
1.十六进制数据。
2.字符间间隔应该少于 1.5 个字符时间。
3.没有帧头和帧尾,帧间间隔至少为 3.5 个字符时间。
4.使用 CRC16 校验。
5.RTU 帧的最大帧长度是 256 个字节,帧结构如下所示。
帧构成 地址 功能码 数据
字节数
6.字符间隔时间计算:
通讯波特率为 19200,那么 1.5个字符时间=1/19200×11×1.5×1000=0.86ms
3.5 个字符间隔=1/19200×11×3.5×1000=2ms。
1 1 0~
252
CRC
2
EV6000 系列变频器用户 PLC 卡 用户手册
20 第五章 通讯与组网
5.5.2 支持的 ModBus 功能码
仅支持 ModBus 通讯协议中的功能码 01,02,03,05,06,08,15,16。
1.读写元件功能码和与元件对应关系:
功能码 功能码名称 Modicon 数据地址 可操作元件类型 注释
01 读线圈
02 读离散量输入
03 读寄存器
05 写单个线圈
06 写单个寄存器
15 写多个线圈
16 写多个寄存器
注:
1.0
表示线圈
2.1
表示离散量输入
3.4
表示寄存器
4.xxxx
5.0、1、4
6
.用户不应该使用功能码05,15对X元件写入。如果对X元件写入,并且写入的操作数和数据都是正确的,系统不会返回错误信
息,但系统不会对写入的命令作任何操作
2.PLC 元件与 ModBus 通讯协议地址的对应关系:
元件 类型 物理元件 协议地址 支持的功能码 注释
Y 位元件
X 位元件
M 位元件
SM 位元件
S 位元件
T 位元件
C 位元件
D 字元件
SD 字元件
Z 字元件
T 字元件
C 字元件
C 双字元件
注:
协议地址是在数据传输中使用的地址,协议地址与
的逻辑地址是从1开始的,也就是说协议地址+
据的逻辑地址是0:
01 01 07 D0 00 01 FD 47
表示范围1~
9999
。每一种类型有独立的逻辑地址范围1~
并不具备物理上的意义,不参与实际的寻址
Y0~Y377
(8进制编码)共
X0~X377
(8进制编码)共
M0~M1999 2000~3999 01、05、15
SM0~SM255 4400~4655 01、05、15
S0~S991 6000~6991 01、05、15
T0~T255 8000~8255 01、05、15 T
C0~C255 9200~9455 01、05、15 C
D0~D7999 0000~7999 03、06、16
SD0~SD255 8000~8255 03、06、16
Z0~Z15 8500~8515 03、06、16
T0~T255 9000~9255 03、06、16 T
C0~C199 9500~9699 03、06、16 C
C200~C255 9700~9811 03、16 C
2001
,在实际中对M0的读写是通过协议地址完成,例如对M0元件的读取帧(主站发出):
注
0
1
4
1
:xxxx Y、X、M、SM、S、T、C
注
2
:xxxx
注
3
:xxxx
0:xxxx
4:xxxx
0:xxxx
4:xxxx
注
4
D
X 读位
、SD、Z、T、
Y、M、SM、S、T、C
D、SD、Z、T、C
Y、M、SM、S、T、C
D、SD、Z、T、C
9999
(协议地址是从0开始的)
256点
256点
0000~0255 01、05、15
1200~01455
0000~0255
Modicon
1=Modicon
CRC校验码
读取的元件个数
起始地址。07D0的十进制为2000
功能码
站号
的数据的逻辑地址有对应关系,协议地址是从0开始,
的数据的逻辑地址,例如:M0协议地址是
01、05、15
02
读位
C
读字
写位
写字
写位
写字
输出的状态,元件编号为Y0~Y7,
Y10~Y17
输入的状态,支持两种地址,元件编
号同上
元件的状态
元件的状态
WORD
DWORD
2000
,它对应的
)的当前值
)的当前值
Modicon
Modicon
的数据
元件的当前值
元件(
元件(
的数
EV6000 系列变频器用户 PLC 卡 用户手册
5.5.3 ModBus 参数设置
设置系统块中的通讯口
在通讯口界面中有两个串口的选择,PORT0 和 PORT1。
设置 ModBus 通讯协议参数
在 ModBus 通讯协议操作数界面中,有个默认值按钮,默认值是 ModBus 通讯协议推荐的通讯设置。参数设置选项如下
表所示。
选项 设置内容
0
站号
38400,19200,9600,4800,2400,1200
波特率
数据位
奇偶校验位
停止位
ModBus主/从
传输模式
主模式超时时间
注:当操作数在系统块中设定并下载后,不是立即有效,必须运行一次,才能生效。
31
~
设定7或8,
设定为无校验、奇校验、偶校验
设定1或2,奇、偶校验时设定为1,无校验时设定为
可设为主站或从站,通讯口1可设为主站或从站,通讯口0不可设为主站
选择
主站等待从站响应的超时时间
ASCII模式7位,RTU模式8位
RTU
模式或
ASCII模式
2
第五章 通讯与组网 21
5.5.4 ModBus 指令
PLC 作为 ModBus 主站使用时,可以通过系统提供的 ModBus 指令发送 ModBus 数据帧并接收回复。当设置 PLC 为主站
时,在系统块中设置 ModBus 参数时,有个主模式的超时时间,为了能够保证接收数据的正确性,设置时应该确保这个
时间应该比 ModBus 从站的一个循环的扫描周期要长,并且有余量,例如 PLC 卡做从站,如果 PLC 卡的一个扫描周期
为 300ms 那么主站的主模式超时时间应该在 300ms 以上,设置 350ms 比较适合。
ModBus 指令的详细使用方法请参见《EC 系列小型可编程控制器编程手册》。请注意,PLC 卡两个串口都支持 ModBus
指令,而 EC 系列 PLC 只有串口 1 支持该指令。
5.6 ECbus 通讯协议
5.6.1 ECbus 简介
ECbus 是艾默生网络能源有限公司开发的一种小型 PLC 网络协议。ECbus 在物理层使用 RS485,PLC 可以通过通讯口 1
直接接入或者通过通讯口 0 经过 RS232/RS485 转换器接入。接入 ECbus 的 PLC 可以自动的互相交换部分 D 元件和 M 元
件的数值,这使得对网络中其它 PLC 的元件访问,变得如同访问自身元件那样简单方便。ECbus 中,PLC 间的数据访问
是完全对等的(N:N 通讯网络)。
ECbus 配置方便,大部分参数只需对 0 号 PLC 进行配置。支持在线修改网络参数。能够自动检测到新加入网络中的 PLC。
任何一个 PLC 从网络中断开,其它 PLC 会继续交换数据。通过 ECbus 中任何一台 PLC 的相关 SM 元件,可以监测到整
个网络的通讯情况。
EV6000 系列变频器用户 PLC 卡 用户手册
22 第五章 通讯与组网
5.6.2 ECbus 共享元件区
接入 ECbus 的多个 PLC 能够自动的互相交换网络中的部分 D 元件和 M 元件,这些 D 元件和 M 元件的个数和编号是固
定的,这些元件称为“共享元件区”。一旦 PLC 使用了 ECbus,共享元件区的值将会不停地自动刷新,从而使网络中每
个 PLC 的共享元件区的值保持相等。
如上图所示,接入 ECbus 的每个 PLC 在这个共享元件区中,都有属于自己的一个可写的发送区,ECbus 将自动将这个可
写发送区中的内容(特定编号的 D 元件和 M 元件的数值)广播给其它的 PLC,同时也接收其它 PLC 将它们的内容广播
给自己,存入到对应的只读发送区中。
由于共享元件区的元件个数是固定的(总共 64 个 D 元件、512 个 M 元件可共享),这些元件分配给多个 PLC。所以,接
入网络的 PLC 数量越少,每个 PLC 分配的元件个数就越多。
EC10 系列 PLC 的共享元件区 D7000~D7763,M1400~M1911,PLC 卡的共享元件区为 D3000~D3763,M500~M1011。
当 PLC 卡和 EC10 系列 PLC 接入同一个 ECbus 网络中,EVC-UPRG 的 D3000 对应 EC10 的 D7000,M500 对应 M1400。
5.6.3 ECbus 的参数设置
PLC
0
#
0#
发送区(写)
1#
接收区(读)
2#
接收区(读)
3#
接收区(读)
4#
接收区(读)
5#
接收区(读)
6#
接收区(读)
7#
接收区(读)
PLC
1
#
0#
接收区(读)
1#
发送区
(写)
2#
接收区(读)
3#
接收区(读)
4#
接收区(读)
5#
接收区(读)
6#
接收区(读)
7#
接收区(读)
0#
1#
2#
3#
4#
5#
6#
7#
图5-9 ECbus 共享元件区
PLC
2
#
接收区(读)
接收区(读)
发送区(写)
接收区(读)
接收区(读)
接收区(读)
接收区(读)
接收区(读)
...
PLC
7
#
0#
接收区(读)
1#
接收区(读)
2#
接收区(读)
3#
接收区(读)
4#
接收区(读)
5#
接收区(读)
6#
接收区(读)
7#
发送区(写)
在系统块中选择通讯口选项,在 PLC 通讯口(0)参数设置或 PLC 通讯口(1)参数设置中选择 ECbus 协议,激活相应
的 ECbus 设置按钮,如下图所示:
图5-10 通讯口通讯协议选择
EV6000 系列变频器用户 PLC 卡 用户手册
第五章 通讯与组网 23
点击 ECbus 设置按钮,进入 ECbus 协议设置界面,如下图所示:
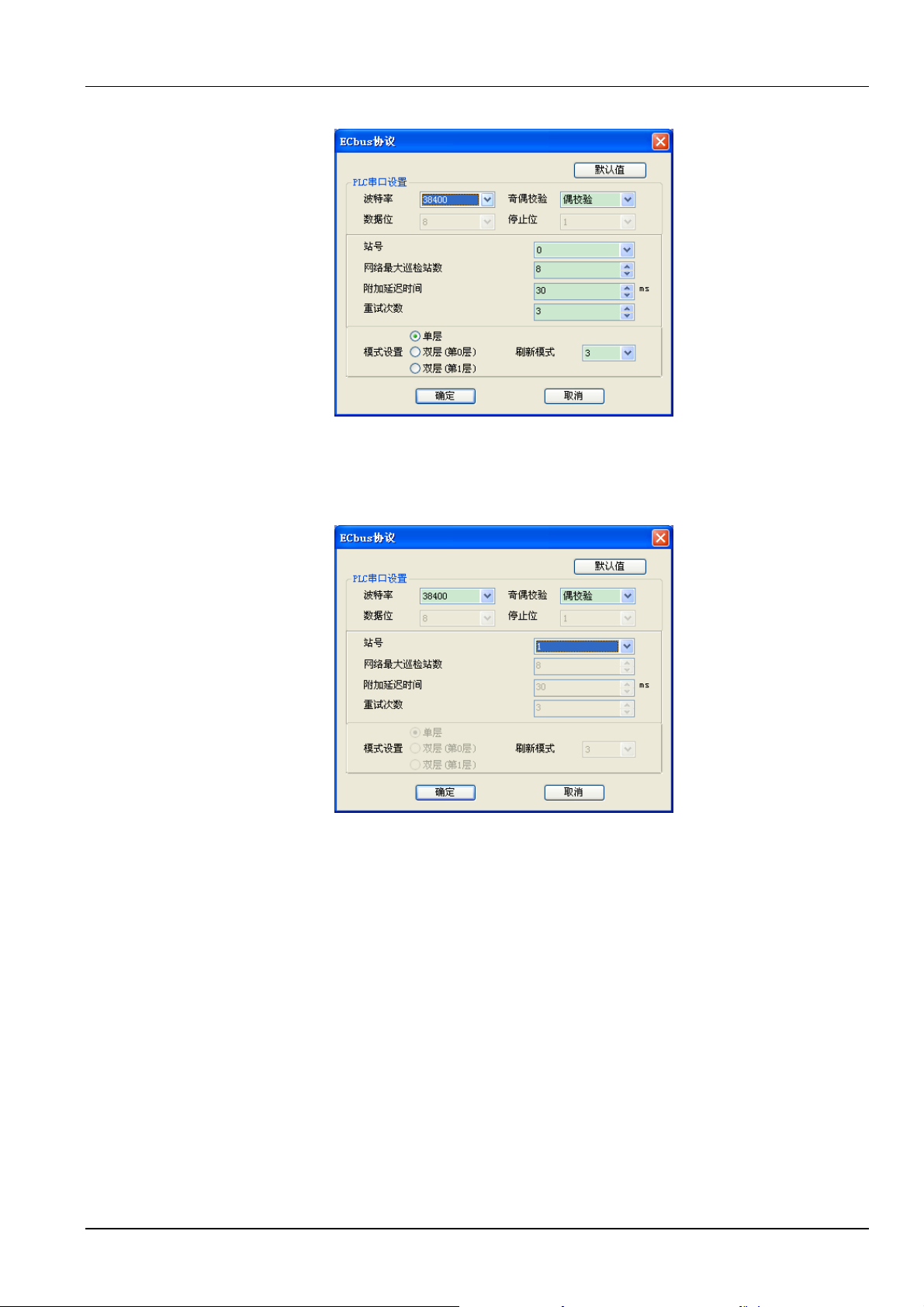
图5-11 ECbus 协议参数设置
如上图所示设置 ECbus 参数。站号的设置应该从 0 号开始,依次设置,不能将多台 PLC 设置为同一站号。0 号站是网络
的启动和设置站点。网络最大巡检站数、附加延迟时间、重试次数、模式设置等参数只需要对 0 号站进行设置。其它站
号的站点除了波特率和奇偶校验要与 0 号一致外,只需设置自己的站号,如下图所示:
图5-12 设置非 0 号站的参数
网络最大巡检站数指网络中一共使用的 PLC 总数。如果一共使用 6 台 PLC,请将其设为 6,同时将这 6 台 PLC 的站号
设为 0~5 号。如果希望在网络不中断的情况下,将来在网络中加入 2 个新的 PLC,可以将网络最大巡检站数设为 8,将
来加入的 PLC 站号分别设为 6 号和 7 号,那么当 6 号和 7 号接入网络时,会被 ECbus 在 1 秒内自动检测到,并纳入到
与 0~5 号的数据交换中。
ECbus 的具体应用请参考《EC 系列小型可编程控制器编程手册》。
EV6000 系列变频器用户 PLC 卡 用户手册

24 第六章 ControlStar 快速入门
第六章 ControlStar 快速入门
ControlStar 是艾默生公司为艾默生 PLC 开发的后台软件。用户可以自行登录网站www.emersonnetworkpower.com.cn下载。
在本章,我们首先简单介绍如何安装和卸载 ControlStar。然后通过一个简单的例子,介绍如何进入编程环境,编写程序
以及将程序下载到 PLC 卡中运行。具体的 ControlStar 使用说明请参见《ControlStar 编程软件用户手册》。
6.1 安装和卸载 ControlStar
计算机配置要求
ControlStar 编程软件要求在 IBM PC486 以上的微型机或兼容机上运行,支持 Microsoft 的 Windows 98、Windows Me、
Windows 2000 及 Windows XP 等操作系统。需要安装 ControlStar 的计算机的最低配置和推荐配置见表 6-1。
部件 最低配置 推荐配置
CPU 相当于
内存
显卡
通讯口
其它设备 艾默生
安装过程
Intel
64M 128M
可工作于
须有一个
640*480
DB9
PLC
Pentium 233
公司的
分辨率,
型插座输出的
卡专用编程电缆
表6-1 计算机最低配置和推荐配置
或以上级别的
256
色模式下
RS232
串行通讯口(或通过
CPU
相当于
可工作于
USB-RS232
Intel
800*600
Pentium 1G
公司的
分辨率,
转换器使用
或以上级别的
65535
色模式下
USB
接口,须另行配备转换器)
CPU
ControlStar 发布的安装包为单独的可执行程序,双击即显示图 6-1所示的安装启动界面。然后按照提示逐步安装即可。
图6-1 安装启动界面
安装完毕后,在开始菜单中会出现 ControlStar 程序组,同时会把 ControlStar 快捷方式放置在桌面上。
卸载
通过选择 ControlStar 程序组中的卸载 ControlStar 菜单或者在控制面板中使用添加/删除程序功能可以卸载本软件。
需要重新安装或升级 ControlStar 时,必须首先卸载旧版本的软件。为了避免版本升级可能带来的混乱,在安装和卸载的
过程中,软件会自动清理注册表中的相关数据,因此,在重新安装或者升级之后,先前定制过的菜单、工具栏、系统选
项等信息需要重新设置。
EV6000 系列变频器用户 PLC 卡 用户手册

6.2 ControlStar 编程工具
PLC 卡的用户程序需在艾默生公司开发的 ControlStar 集成软件开发环境下进行编译下载。
集成化的 ControlStar 兼容 IEC61131-3 标准,可采用梯形图、指令表、顺序功能图编程,并提供了上/下载、监控、调试
及在线修改功能;编程环境提供了强大的指令向导和联机帮助功能。
ControlStar 的主界面基本包括七个部分,见图 6-2 所示。
第六章 ControlStar 快速入门 25
工程管理窗口
菜单
指令树窗口
图6-2 程序主界面
工具栏
信息窗口
工作区
状态栏
菜单
菜单包括了一组含有全部命令的子菜单。当鼠标停留在菜单项上时,菜单项功能的简短描述将显示在状态栏中。其中 PLC
子菜单提供了对 PLC 硬件操作的相关功能。工具子菜单提供了设置 ControlStar 相关属性和复杂指令的向导功能。
ControlStar 会随着当前打开的窗口的不同而显示不同的菜单。各子菜单的菜单项根据正在使用的功能也会有一定差别。
工具栏
本软件提供了几个工具栏,其中包含了常用操作的命令按钮。这些操作也可通过使用菜单项或预定义的快捷键来完成。
工具栏位于菜单栏的下方。默认情况下,所有的工具栏都是可见的。要想隐藏或显示某一工具栏,请在任意一个工具栏
上点击鼠标右键,在弹出的快捷菜单中选择/取消选择某个工具栏。
将鼠标光标放在任一图标上(而不点击它)停留片刻,会出现一个简短的描述文本,称为工具提示。这些工具提示包括
了当前图标的名称。如果工具提示没有出现,请在“选项”对话框中使能它们。
6.3 应用举例
本节以一个简单的跑马灯程序来介绍 ControlStar 的使用方法。用 PLC 卡的输出端 Y30、Y31、Y32 分别控制红、黄、绿
三种颜色的灯,输入端子 X30 作为启动开关。该程序作如下控制:当开关合上时,红黄绿三盏灯交替点亮,每盏灯的点
亮时间为 5 秒钟(使用精度为 100ms 的计时器 T0、T1、T2)。当开关打开时,三盏灯全灭。
EV6000 系列变频器用户 PLC 卡 用户手册

26 第六章 ControlStar 快速入门
6.3.1 进入编程环境
ControlStar 安装完成后,在开始菜单中单击 ControlStar 图标即可启动该软件从而进入编程环境。编程环境主界面如图 6-3
所示。
图6-3 ControlStar 编程环境主界面
EV6000 系列变频器用户 PLC 卡 用户手册

6.3.2 建立工程
进入编程环境后,首先需要为编写的程序创建一个工程。点击文件/新建工程,软件弹出下面的对话框。
在本示例中,工程名为“Test01”,选择 PLC 类型为 EVC-UPRG,默认编辑器为梯形图,如下图所示:
第六章 ControlStar 快速入门 27
图6-4 新建工程对话框 1
图6-5 新建工程对话框 2
点击对话框中的确定按钮,即创建了一个新的工程。工程新建后,系统会自动打开工程中的主程序窗口,并进入程序编
辑状态。如图 6-6所示。
图6-6 主程序界面
EV6000 系列变频器用户 PLC 卡 用户手册

28 第六章 ControlStar 快速入门
6.3.3 编写控制程序
1.在编程环境中输入如图 6-7所示的梯形图程序。
2.程序编写完成后,在菜单条上点击文件/保存工程,即可保存当前编写的工程。
图6-7 输入梯形图程序
3.保存完成后,需要检查当前编写的程序是否有错误,并且编译为可以下载到可编程控制器中的目标文件。在菜单条
上点击 PLC 菜单中的全部编译菜单项,软件将当前程序进行全部编译,编译结果会显示在输出窗口中,如果没有错误
的话,显示如图 6-8。
6.3.4 建立通讯连接
在开始与 PLC 硬件进行通讯前,需要建立和 PLC 串口的通讯连接。首先将串口线的两端连接到计算机和可编程控制器
上,然后启动 ControlStar 应用程序。如果此时不能和 PLC 通讯或者需要使用不同的通讯速率,需要重新设置串口通讯
参数。选择工具/串口/串口配置菜单,会弹出如图 6-9所示的通讯设置窗口。
图6-8 编辑结果输出窗口
图6-9 通讯配置窗口
EV6000 系列变频器用户 PLC 卡 用户手册

第六章 ControlStar 快速入门 29
配置 ModBus协议时将弹出如图 6-10所示对话框。PLC 卡默认的通讯协议以及当 F65.00等于 2 时的通讯协议如下图所示:
图6-10 ModBus 协议配置
在串口下拉框中选择计算机实际连接的串口、输入波特率、PLC 站号等内容后,点击确定按钮保存设置结果。
对于 ModBus 协议设置,只能设置计算机串口而不能设置 PLC 串口。如需将 PLC 串口设置为 ModBus 协议,则应在系
统块中设置,然后下载运行才生效。此外,如果 ModBus 协议通讯时经常出现超时错误,可能是因为主模式超时时间设
置太短,可以通过提高波特率或者增加超时时间的方法解决。
串口线连接和通讯设置完成后,可以测试计算机是否可以和 PLC 正常通讯,点击 PLC/PLC 信息菜单项。如果通讯正常,
会弹出一个窗口显示当前连接的 PLC 的各种信息,如果多次使用本功能都提示“命令超时”,则说明串口连接或者设置
可能不正确,请重新检查硬件连接和通讯设置内容。
其余设置方法请参考《ControlStar 编程软件用户手册》。
6.3.5 下载程序
点击 PLC 菜单中的下载菜单项,下载程序时,必须要求 PLC 卡处于停止状态,如果 PLC 卡正在运行,软件会提示如下
的对话框。
点击确定按钮停止 PLC 的运行,软件会弹出如下的编译提示对话框。
图6-11 PLC 运行状态提示信息
图6-12 编译信息对话框
EV6000 系列变频器用户 PLC 卡 用户手册

30 第六章 ControlStar 快速入门
如果你在6.3.3
编写控制程序
如果编译后又修改了程序,选择是,更改后的程序将重新编译,编译完毕后,会出现下面的下载窗口:
根据需要,在下载选项中选择需要下载的内容。本示例只需要下载编写的应用程序,选中后点击下载按钮即开始下载。
下载过程中会显示进度条,完成后将会提示下载成功。
6.3.6 启动可编程控制器
程序下载完成后,需要启动 PLC 卡运行。在菜单条上 PLC 菜单中选择启动菜单项,或者通过键盘将 F65.00 设置为 1 来
启动 PLC 卡。在 PLC 卡正常运行后,闭合接在输入端子 X30 上的开关,就可以看到接在输出端子 Y30、Y31、Y32 的
三盏灯被轮流点亮。
的步骤 3 中对当前的程序进行了编译,并且编译通过后程序没有再进行任何更改,点击否。
图6-13 下载窗口
EV6000 系列变频器用户 PLC 卡 用户手册

第七章 用户指令
第七章 用户指令 31
PLC 卡的用户指令在艾默生 EC 系列 PLC 指令基础上有所删减,支持的指令请参考
卡新增和修改规格的指令进行描述,其余指令请参考《EC 系列小型可编程控制器编程手册》。
7.1 触点逻辑指令
7.1.1 LD:常开触点指令
梯形图:
指令列表:LD (S) 步长
操作数 类型 适用软元件
S BOOL X Y M S LM SM D C T
操作数说明
S:源操作数
功能说明
连接左母线,用于接通(状态 ON)或断
开(状态 OFF)能流。
LD
附录一 指令速查表
适用机型
使用示例
影响标志位
EC20 EC10 EC10A EVC-UPRG
1
。本章对于 PLC
变址
LD M0
OUT Y0
当 M0 为 ON 时,Y0 输出 ON。
注意事项
对于 EC10 系列和 EVC-UPRG 的触点逻辑指令,当操作数为
M1536~M2047 时,步长为各指令所指步长加 1。
对于 EVC-UPRG,支持通过 Dx.y 形式,直接访问 D 元件的 bit
位。其中 x 范围 0~4095,y 的范围 0~15。
EV6000 系列变频器用户 PLC 卡 用户手册

32 第七章 用户指令
7.1.2 LDI:常闭触点指令
梯形图:
LDI
指令列表:LDI (S) 步长
操作数 类型 适用软元件
S BOOL X Y M S LM SM D C T
操作数说明
S:源操作数
功能说明
连接左母线,用于接通(状态 OFF)或
断开(状态 ON)能流。
7.1.3 AND:常开触点与指令
适用机型
影响标志位
使用示例
当 M0 为 OFF 时,Y0 输出 ON。
EC20 EC10 EC10A EVC-UPRG
1
LDI M0
OUT Y0
注意事项
对于 EC10 系列和 EVC-UPRG 的触点逻辑指令,当操作数为
M1536~M2047 时,步长为各指令所指步长加 1。
对于 EVC-UPRG,支持通过 Dx.y 形式,直接访问 D 元件的 bit
位。其中 x 范围 0~4095,y 的范围 0~15。
变址
梯形图:
AND
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
指令列表:AND (S) 步长
操作数 类型 适用软元件
S BOOL X Y M S LM SM D C T
操作数说明
使用示例
S:源操作数
功能说明
将指定触点(S)的 ON/OFF 状态和当前能流作“与”
运算后,赋给当前能流。
当 M0 为 ON 且 M1 为 ON 时,Y0 输出 ON。
对于 EVC-UPRG,支持通过 Dx.y 形式,直接访问 D 元
件的 bit 位。其中 x 范围 0~4095,y 的范围 0~15。
1
变址
LD M0
AND M1
OUT Y0
EV6000 系列变频器用户 PLC 卡 用户手册

7.1.4 ANI:常闭触点与指令
第七章 用户指令 33
梯形图:
指令列表:ANI (S) 步长
操作数 类型 适用软元件
S BOOL X Y M S LM SM D C T
ANI
操作数说明
S:源操作数
功能说明
将指定的触点(S)的 ON/OFF 状态取反后,与当
前能流值作“与”运算计算后,赋给当前能流。
7.1.5 OR:常开触点或指令
梯形图:
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
1
使用示例
当 M0 为 ON 且 M1 为 OFF 时,Y0 输出 ON。
对于 EVC-UPRG,支持通过 Dx.y 形式,直接访问 D 元
件的 bit 位。其中 x 范围 0~4095,y 的范围 0~15。
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
变址
LD M0
ANI M1
OUT Y0
OR
指令列表:OR (S) 步长
操作数 类型 适用软元件
S BOOL X Y M S LM SM D C T
1
操作数说明
S:源操作数
使用示例
功能说明
将指定触点(S)的 ON/OFF 状态和当前能流作“或”
运算后,赋给当前能流。
当 M0 或 M1 为 ON 时,Y0 输出 ON。
对于 EVC-UPRG,支持通过 Dx.y 形式,直接访问 D 元
件的 bit 位。其中 x 范围 0~4095,y 的范围 0~15。
变址
LD M0
OR M1
OUT Y0
EV6000 系列变频器用户 PLC 卡 用户手册

34 第七章 用户指令
7.1.6 ORI:常闭触点或指令
梯形图:
指令列表:ORI (S) 步长
操作数 类型 适用软元件
S BOOL X Y M S LM SM D C T
ORI
操作数说明
S:源操作数
功能说明
将指定触点(S)的 ON/OFF 状态取反后和当前能流
值作“或”运算后,赋给当前能流。
7.1.7 OUT:线圈输出指令
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
1
使用示例
当 M1 为 ON 或 M2 为 OFF 时,Y0 输出 ON。
对于 EVC-UPRG,支持通过 Dx.y 形式,直接访问 D
元件的 bit 位。其中 x 范围 0~4095,y 的范围 0~15。
变址
LD M0
ORI M2
OUT Y0
梯形图:
OUT
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
指令列表:OUT (S
操作数 类型 适用软元件
S BOOL X Y M S LM SM D C T
操作数说明
S:源操作数
功能说明
将当前能流值赋给指定的线圈(D)。
)
步长
1
使用示例
LD M1
OUT Y0
当 M1 为 ON 时,Y0 输出 ON。
对于 EVC-UPRG,支持通过 Dx.y 形式,直接访问 D
元件的 bit 位。其中 x 范围 0~4095,y 的范围 0~15。
变址
EV6000 系列变频器用户 PLC 卡 用户手册

7.2 外设指令
7.2.1 REFF:设置输入滤波常数指令
第七章 用户指令 35
梯形图:
指令列表: REFF (S) 步长
操作数 类型 适用软元件 变址
KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
S WORD
常数
操作数说明
S:输入滤波常数
z EC20:设置范围:0~64ms,大于 64 的数据按 64 进
行处理。
z EC10:实际有效的数据为 0,8,16,32,64。当参数
小于 8 按 0 处理,当参数小于 16 按 8 处理,当参数
小于 32 按 16 处理,当参数小于 64 按 32 处理,如
为其它数据按 64 处理。
z EVC-UPRG:实际有效的数据为 0,2,4,8,16,32,
64,128,256,512。当参数小于 2 按 0 处理,当参数小
于 4 按 2 处理,当参数小于 8 按 4 处理,依次类推。
7.2.2 REF:I/O 立即刷新指令
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
3
功能说明
设置 X30~X35 的输入滤波常数。
注意事项
输入滤波常数仅对用做普通输入的端口有效,对用做高
速输入的端口无效。
使用示例
LD M0
REFF 30
M0 为 ON 时更改输入的滤波常数时间为 30ms。
梯形图:
指令列表: REF (D) (S) 步长
操作数 类型 适用软元件 变址
D BOOL X Y
S INT 常数
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
5
操作数说明
D:要刷新的起始 X/Y 软元件
指定起始软元件号为 8 的整数倍。如 X0,X10,X20…
或 Y0,Y10,Y20…,最低位为 0。其中
支持 X30 和 Y30
EVC-UPRG 只
S:要刷新的端口数量
刷新点数应为 8,16,……,256(8 的倍数,除此以外
的数值是错误的)
功能说明
通常,PLC 的输入和输出都是在用户程序结束后的执
行。在运算过程中,如果需要读取最新的输入状态或希
望立即更新输出状态时,可以使用该指令。
注意事项
1.对输入的端口(Xn,Yn)下标数应为 8 的整数倍。
2.刷新的(端口)数量也应该为 8 的整数倍。
3.在 FOR-NEXT 指令之间或 CJ 指令之间,一般使用
REF 立即处理。
4.在有输入输出动作的中断处理被执行中,在中断子
程序中进行输入输出刷新,获取最新的输入信息并且及
时输出运算结果,使用 REF 指令。
5.对继电器型的输出点要考虑到输出点的反应时间。
使用示例
LD M0
REF Y0 8
当 M0 为 ON 时,Y0 到 Y7 的状态马上输出,不受扫描
周期的影响。
EV6000 系列变频器用户 PLC 卡 用户手册

36 第七章 用户指令
7.2.3 EROMWR:EEPROM 写指令
梯形图:
指令列表: EROMWR (S1) (S2) 步长
操作数 类型 适用软元件 变址
S1 WORD D
S2 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
适用机型
影响标志位
EC20 EC10 EVC-UPRG
6
操作数说明
使用示例
S1:写入原件的起始地址(只能为 D6000~D6999,
EVC-UPRG 为 D3000~D3999)
其中
S2:写入元件的个数(S2<16,S1+S2<D7000,其
EVC-UPRG,S1+S2<D4000)
中
注意事项
一个写 EEPROM 指令操作会使扫描周期增加 2~
5ms,建议 EROMWR 指令操作数 1 起始地址为 6000
加 16 的倍数,如 D6000,D6016,D6032 等。
功能说明
1.通常,PLC 的一部分数据可以通过掉电保持功能
保存。在运算过程中,如果需要将中间数据保存至
EEPROM 时,可以使用该指令。
2.上升沿时指令执行。
3.不能同时执行两条该指令,当 SM196(EEPROM
写空闲标志)为 ON 时表示 EEPROM 写操作空闲,
为 OFF 时表示有 EROMWR 操作在执行。
示例用户程序完成了对两组 D 元件进行 EEPROM 写
操作;
通过 SM1 和 M1 使 M1000 在第二个扫描周期产生一
个上升沿,保证了第一条 EROMWR 指令的执行;
M1001 和 SM196 使第二条 EROMWR 指令产生上升
沿,指令执行。
7.3 高速 IO 指令
PLC 卡的 X30 和 X31 支持高速输入,支持的计数器如下表所示。
输入点 计数器
计数器
单相单端计
数输入方式
单相增减计
数输入方式
双相计数输
入方式
计数器
计数器
计数器
计数器
计数器
计数器
计数器
计数器
计数器
X30 X31 X32 X33
C236
C237
C242
C244
C246
C247
C249
C251 A相 B
C252 A相 B
C254 A相 B
增/减
增/减
增/减
增/减
增
增
增
50
复位
复位
减
减
减
相
相
相
EV6000 系列变频器用户 PLC 卡 用户手册
最高频率(KHz)
50
50
复位
复位
30
复位
复位
启动
启动
启动
10
10
5

7.3.1 HCNT:高速计数器驱动指令
第七章 用户指令 37
梯形图:
指令列表: HCNT (D) (S) 步长
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
7
操作数 类型 适用软元件 变址
D DINT C
S DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
操作数说明
D:指定计数器号,可设定范围:
C236~C255。EVC-UPRG 仅支
持部分计数器号。
S:指定比较常数,为 32 位的
有符号数据。数据范围:
-2147483648~2147483647。
功能说明
驱动指定的硬件高速计数器,
所有的高速计数器只有在持续
驱动的情况下,才能进行硬件
高速计数,同时根据 S 对高速
计数器的常开触点的动作进行
判断。
注意事项
HCNT 指令、SPD 指令、外部
输入中断以及脉冲捕捉存在硬
使用示例
对程序的操作实例的时序操作如下:
复位输入
起动输入
1
0
上升
454
3
2
已进行输出的情况
3
2
1
X10
X11
X12
X0
计数输入
当前值
C236输出接点
LD X10
OUT SM236
LD X11
RST C236
LD X12
HCNT C236 -5
下降
0
-1
-2
-3
-4
-5
-6
-7
-8
上升
1
-3
-4
-5
-6
-7
件冲突,要注意系统所有的高
速 IO 的使用条件,使用时请参
照高速 IO 指令说明。
1.X12 由 OFF 变为 ON 时初始化 C236 对应的硬件计数器,X0 为 C236 的脉冲
输入端,C236 对 X0 外部脉冲计数。X12 为 OFF 时 X0 为一般的输入点,C236
不能对 X0 的外部脉冲计数。
2.对触点的动作:当计数器 C236 的当前值由-6→-5 增加时,C236 的触点被
置位。当计数器 C236 的当前值由-5→-6 减少时,C236 的触点被复位。
3.当 X11 为 ON 时执行 RST 指令,C236 的数据清除,C236 的触点断开。
4.对高速计速器的数据和其触点状态在停电状况下由用户在上层软件中的系统
块中设置。
EV6000 系列变频器用户 PLC 卡 用户手册

38 第七章 用户指令
7.3.2 DHSCS:高速计数比较置位指令
梯形图:
指令列表: DHSCS (S1) (S2) (D) 步长
操作数 类型 适用软元件 变址
S1 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
S2 DINT C
D BOOL Y M S
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
10
操作数说明
S1:高速计数器要比较的数据,
为 32 位的 DINT 数据,数据范
围-2147483648~2147483647。
S2:高速计数器,高速计数器适
用范围为 C236~C255。
EVC-UPRG 仅支持部分计数器
号。
D:输出位元件对象,对 Y,M,
S马上置位输出不受扫描周期的
影响。
注意事项
1.DHSCS 指令动作必须要和
HCNT 指令配合使用,只有
HCNT 驱动后的高速计数器,
DHSCS 才能真正使用。
2.DHSCS 指令在脉冲输入时比
较结果动作。因此,即使使用
DMOV 或 MOV 指令等更改高
速计数器值 DHSCS 不会有动
功能说明
1.高速计数器只有在 HCNT 驱动指令的条件下根据计数输入 OFF→ON 以中断
方式计数,当高速计数器的值等于 DHSCS 指令中的 S1 时,D 所指定的位元件
马上置位,如果为 Y 元件,Y 元件马上输出。
2.在希望高速计数器当前值的比较置位立即向外部输出比较结果时,可以使用
该指令。
使用示例
LD M1
OUT SM236
LD M0
HCNT C236 1000
LD M2
DHSCS 2000 C236 Y10
LD C236
OUT Y11
1.M1 为 ON 时,C236 对 X0 由 OFF→ON 以中断的方式计数,当 C236 由 999
→1000 时 C236 触点置位,由 1001→1000 时 C236 触点复位。C236 的触点驱动
Y11 时,Y11 的执行由用户程序的扫描决定。
2.当 M2 为 ON 时,DHSCS 高速指令在满足注意事项所说的高速指令要求时,
当 C236 到 2000 时 Y10 马上输出,不受扫描周期影响。
3.当 M0 为 ON 时,SM236 驱动,C236 计数器减。当 M0 为 OFF 时,SM236
未驱动,C236 计数器增计数。
作。
3.DHSCS(DHSCI,DHSCR,
DHSZ,DHSP,DHST)和普通
指令一样可以多次使用,但这些
指令同时驱动的个数限制在总
计 6 条指令以下。对超过 6 条的
有效指令不执行,有效的指令按
指令的有效先后决定。
4.PLC 高速计数器的最大允许
频率。如使用 DHSCS,DHSCI,
DHSCR,DHSZ,DHSP,DHST
命令时,将受到很大的影响。
EV6000 系列变频器用户 PLC 卡 用户手册

7.3.3 DHSCI:高速计数比较中断触发指令
第七章 用户指令 39
梯形图:
指令列表: DHSCI (S1) (S2) (S3) 步长
操作数 类型 适用软元件 变址
S1 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
S2 DINT C
S3 WORD 常数
操作数说明
S1:高速计数器要比较的数据,
为 32 位的 DINT 数据,数据范
围-2147483648~2147483647。
S2:高速计数器,高速计数器适
用范围为 C236 ~ C255 。
EVC-UPRG 仅支持部分计数器
3.DHSCI(DHSCS,DHSCR,DHSZ,DHSP,DHST)和普通指令一样可以多
次使用,但这些指令同时驱动的个数限制在总计 6
有效指令不执行,有效的指令按指令的有效先后决定。
4.PLC 高速计数器的最大允许频率。如使用 DHSCS,DHSCI,DHSCR,DHSZ,
DHSP,DHST 命令时,将受到很大的影响。
使用示例
用户主程序如下:
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
10
条指令以下。对超过 6 条的
号。
S3:中断号。中断号范围:20~
25。
功能说明
高速计数器只有在 HCNT 驱动
指令的条件下根据计数输入
OFF→ON 以中断方式计数,当
高速计数器的值等于 DHSCI 指
令中的 S1 时,进入 S3 所指定的
中断子程序中。用户在中断子程
序中可以编写马上要执行的程
序。
注意事项
1. DHSCI 指令动作必须要和
HCNT 指令配合使用,只有
HCNT 驱动后的高速计数器,
DHSCI 才能真正使用。
2.DHSCI 指令在脉冲输入时比
较结果动作。因此,即使用
DMOV 或 MOV 指令等更改高
速计数器值 DHSCI 不会有动
作。
用户中断号为 20 的中断程序如下:
1.M1 为 ON 时,C236 对 X0 由 OFF→ON 以中断的方式计数(X0 的输入频率
参考高速 IO 的使用说明),当 C236 由 999→1000 时 C236 触点置位,由 1001→
1000 时 C236 触点复位。C236 的触点驱动 Y11 时,Y11 的执行由用户程序的扫
描决定。
2.当 M2 为 ON 时,DHSCI 高速指令在满足注意事项所说的高速指令要求时,
当 C236 到 2000 时中断号为 20 的中断子程序马上响应,执行在中断程序中的用
户程序。
3.当 M0 为 ON 时,SM236 驱动,C236 计数器减计数。当 M0 为 OFF 时,SM236
未驱动,C236 计数器增计数。
4.C236 在有脉冲输入的情况下,当 C236 为 2000 时进入中断号为 20 的中断程
序,在 M10 为 ON 时 Y20 驱动,但 Y20 的输出执行跟用户程序的扫描周期有关。
同时也判断 D0 的数据大于 100 时驱动 Y12 和清除 D0 的数据。
LD M1
OUT SM236
LD M0
DHSCI 2000 C236 20
LD C236
OUT Y11
LD M10
OUT Y20
LD>= D0 100
OUT Y12
MOV 0 D0
EV6000 系列变频器用户 PLC 卡 用户手册

40 第七章 用户指令
7.3.4 DHSCR:高速计数比较复位指令
梯形图:
指令列表: DHSCR (S1) (S2) (D) 步长
操作数 类型 适用软元件 变址
S1 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
S2 DINT C
D BOOL Y M S C
操作数说明
S1:高速计数器要比较的数据,
为 32 位的 DINT 数据,数据范
围-2147483648~2147483647。
S2:高速计数器,高速计数器适
用范围为 C236 ~ C255 。
EVC-UPRG 仅支持部分计数器
号。
D:输出位元件对象,对 Y,M,
HCNT 驱动后的高速计数器,DHSCR 才能真正使用。
2.DHSCR 指令在脉冲输入时比较结果动作。因此,即使使用 DMOV 或 MOV
指令等更改高速计数器值 DHSCR 不会有动作。
3.DHSCR(DHSCI
次使用,但这些指令同时驱动的个数限制在总计 6 条指令以下。对超过 6 条的
有效指令不执行,有效的指令按指令的有效先后决定。
4.PLC 高速计数器的最大允许频率。如使用 DHSCS,DHSCI,DHSCR,DHSZ,
DHSP,DHST 命令时,将受到很大的影响。具体参考高速 IO 使用的说明。
使用示例
S,C 马上复位输出不受扫描周
期的影响。对 C 元件只能是 S2
本身。
功能说明
高速计数器只有在 HCNT 驱动
指令的条件下根据计数输入
OFF→ON 以中断方式计数,当
高速计数器的值等于 DHSCR指
令中的 S1 时,D 所指定的位元
件马上复位,如果为 Y 元件,Y
元件马上输出。在希望高速计数
器当前值的比较复位立即向外
部输出比较结果时,使用
DHSCR 高速比较复位指令。
注意事项
1.DHSCR 指令动作必须要和
HCNT 指令配合使用,只有
1.M1 和 X7 同时为 ON 时,C255 对 X3 和 X4 的相位差以中断的方式计数(相
位差的输入频率参考高速 IO 的使用说明),当 C255 由 999→1000 时 C255 触点
置位,由 1001→1000 时 C255 触点复位。C255 的触点驱动 Y20 时,Y20 的执行
由用户程序的扫描周期决定。
2.当 M2 为 ON 时,DHSCR 高速指令在满足注意事项所说的高速指令要求时,
当 C255 到 2000 时 Y1 马上输出,不受扫描周期影响。
3.当 X3 的输入脉冲超前 X4,SM255 为 ON,当 X4 的输入脉冲超前 X3,SM255
为 OFF。
4.当 X7(C255 的启动信号)为 OFF 时,C255 计数器不能计数。
5.当 M1 和 X7 同时为 ON 时,如果 X5 为 ON,
辅助触点也被清除。
适用机型
影响标志位
EC20 EC10 EC10A EVC-UPRG
10
,DHSCS,DHSZ,DHSP,DHST)和普通指令一样可以多
LD SM255
OUT Y10
LD M1
HCNT C255 1000
LD C255
OUT Y20
LD M2
DHSCR 2000 C255 Y1
C255 计数器清 0,同时 C255
EV6000 系列变频器用户 PLC 卡 用户手册

7.3.5 DHSZ:高速计数区间比较指令
第七章 用户指令 41
梯形图:
指令列表: DHSZ (S1) (S2) (S3) (D)
操作数 类型 适用软元件 变址
S1 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
S2 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
S3 DINT C
D BOOL Y M S
操作数说明
S1:高速计数器要比较的数据 1,
为 32 位的 DINT 数据,数据范
围-2147483648~2147483647。
S2:高速计数器要比较的数据 2,
为 32 位的 DINT 数据,数据范
围-2147483648~2147483647。
S3:高速计数器,高速计数器适
用范围为 C236 ~ C255 。
EVC-UPRG 仅支持部分计数器
注意事项
1.DHSZ 指令动作必须要和 HCNT 指令配合使用,只有 HCNT 驱动后的高速计
数器,DHSZ 才能真正使用。
2.DHSZ 指令在脉冲输入时比较结果动作。因此,即使使用 DMOV 或 MOV 指
令等更改高速计数器值,DHSZ 也不会有动作。
3.DHSCZ(DHSCI,DHSCS,DHSCR,DHSP,DHST)和普通指令一样可以
多次使用,但这些指令同时驱动的个数限制在总计 6 条指令以下。对超过 6 条
的有效指令不执行,有效的指令按指令的有效先后决定。
4.PLC 高速计数器的最大允许频率。如使用 DHSCS,DHSCI,DHSCR,DHSZ,
DHSP,DHST 命令时,将受到很大的影响。具体参考高速 IO 使用的说明。
适用机型
影响标志位
步长
EC20 EC10
13
EC10A EVC-UPRG
号。
使用示例
D:输出位元件对象,对 Y,M,
S 的处理不受扫描周期的影响。
功能说明
1.高速计数器只有在 HCNT 驱
动指令的条件下根据计数输入
OFF→ON 以中断方式计数。
2.当高速计数器的值小于指令
中的 S1 时:D 所指定的位元件
置位,D 所指定的位元件+1 复
位,D 所指定的位元件+2 复位。
3.当高速计数器的值大于等于
S1 小于等于 S2 时:D 所指定的
位元件复位,D 所指定的位元件
+1 置位,D
所指定的位元件+2
复位。
4 .当高速计数器的值大于
DHSZ 指令中的 S2 时:D 所指
定的位元件复位,D 所指定的位
元件+1 复位,D 所指定的位元
件+2 置位。
5.如果为 Y 元件,Y 元件马上
输出相应的状态,输出动作与程
1.M0 和 X6 同时为 ON 时,C249 对 X0 由 OFF→ON 增计数,C249 对 X1 由
OFF→ON 减计数,(两相的输入频率参考高速 IO 的使用说明),当 C249 由 999
→1000 时 C249 触点置位,由 1001→1000 时 C249 触点复位。C249 的触点驱动
Y6 时,Y6 的执行由用户程序的扫描决定。
2.当 M1 为 ON 时,DHSZ 高速指令在满足注意事项所说的高速指令要求时,
Y10,Y11 和 Y12 的状态如下:
(1) C249<1000:Y10,Y12:ON;Y11:OFF。
(1) 2000≥C249≥1000:Y10,Y12:OFF;Y11:ON。
(2) C249
>2000:Y10,Y11:OFF;Y12:ON。
Y10,Y11,Y12的输出不受扫描周期影响。
3.当 M0 和 X6 同时为 ON 时,如果 X0 由 OFF→ON 增计数时 SM249 复位。
如果 X1 由 OFF→ON 减计数时 SM249 置位。
4.当 X6 为 OFF 时,C249 计数器不能计数。
5.当 M0 和 X6 同时为 ON 时,如果 X2 为 ON,C249 计数器清 0,同时 C249
辅助触点也被清除。
LD M0
HCNT C249 1000
LD M1
DHSZ 1500 2000 C249 Y10
LD SM249
OUT Y12
LD C249
OUT Y6
序扫描周期无关。
EV6000 系列变频器用户 PLC 卡 用户手册

42 第七章 用户指令
7.3.6 DHST:高速计数表格比较指令
梯形图:
指令列表: DHST (S1) (S2) (S3)
操作数 类型 适用软元件 变址
S1 DINT D
S2 INT 常数
S3 DINT C
适用机型
影响标志位
步长
EC20 EC10 EC10A EVC-UPRG
10
操作数说明
S1:表格比较的数据起始单元(D 元件起始号)。
后序列号相连的三个 D 元件
用于指定高速计数器
要比较的数据、Y 元件序号及其相应输出状态。
个序列号相连的 D 元件合称一个记录。
S2:要比较的记录数量,数据范围为 1~128
其
这四
注意事项
1.DHST 指令动作必须要和 HCNT 指令配合使用,
只有 HCNT 驱动后的高速计数器,DHST 才能正确执
行。
2.DHST 指令在脉冲输入时比较结果动作。因此,即
使使用 DMOV 或 MOV 指令等更改高速计数器值,
DHST 也不会有动作。
S3:高速计数器,适用范围为 C236 ~ C255 。
EVC-UPRG 仅支持部分计数器号
3.DHST(DHSCI,DHSCS,DHSCR,DHSP,DHSZ)
和普通指令一样可以多次使用,但这些指令同时驱动
功能说明
1.高速计数器只有在 HCNT 驱动指令的条件下,根
据计数输入 OFF→ON 以中断方式计数。
2.当高速计数器的值等于当前要比较记录的数据,
则按记录的数据输出相应的 Y 元件状态,输出的
对象只能为 Y 元件。
3.输出动作与扫描周期无关,当前记录指定的 Y
元件将立即输出指定的状态。
4.在希望用户程序按
Y 元件执行立即输出的操作
某个表格指定的比较数据和
时,使用 DHST 表格比
的个数限制在总计 6 条指令以下。对超过 6 条的有指
令不执行,有效的指令按指令的有效先后决定。
4.在用户的指令中如果 DHSP 为有效指令,DHST
就不执行。反之 DHST 为有效指令,DHSP 就不执行。
对用户程序中在同一时刻只能有一条指令(DHST 或
DHSP)有效。
5.PLC 高速计数器的最大允许频率。如使用 DHSCS,
DHSCI,DHSCR,DHSZ,DHSP,DHST 命令时,将
受到很大的影响。具体参考高速 I/O 使用的说明。
较输出指令。
EV6000 系列变频器用户 PLC 卡 用户手册

第七章 用户指令 43
使用示例
表格数据如下表所示:
比较数据
高位 低位
D100=0 D101=100 D102=0 D103=1 1 ↓
D104=0 D105=200 D106=1 D107=0 2 ↓
D108=0 D109=300 D110=2 D111=1 3 ↓
D112=0 D113=300 D114=3 D115=1
输出 Y 编号 置位/复位 操作流程
梯形图如下所示:
LD SM1
DMOV 100 D100
MOV 0 D102
MOV 1 D103
DMOV 200 D104
MOV 1 D106
MOV 0 D107
DMOV 300 D108
MOV 2 D110
MOV 1 D111
DMOV 100 D112
MOV 3 D114
MOV 1 D115
LD M0
HCNT C244 1000
LD M1
DHST D100 4 C244
LD M2
OUT SM244
LD C244
OUT Y10
4 ↓
返回到
1
1.用户程序的第一个扫描周期,对 D100→D115 赋初值,产生要比较的表格。
2.M0 和 X6 同时为 ON 时,C244 对 X0 由 OFF→ON 计数,(输入频率参考高速 IO 的使用说明),当 C244 由 999→1000
时 C244 触点置位,由 1001→1000 时 C244 触点复位。C244 的触点驱动 Y10 时,Y10 的执行由用户程序的扫描周期决定。
3.当 M1 为 ON 时,DHST 高速指令在满足注意事项所说的高速指令要求时,从表格的记录号 1 开始,在 1 号记录完成
后才进入 2 号记录的比较,每次只有在前次指令完成后才进入下条记录比较。当最后条记录比较完成重新回到第 1 条记
录比较,同时 SM185 置位。SD184 表示当前要比较的记录号,SD182 和 SD183 表示当前要比较的数据。对比较完成的
结果马上输出,不受扫描周期影响。
4.当 M2 为 ON 时,SM244 为 ON,C244 为减计数,如果 M2 为 OFF 时,SM244 为 OFF,C244 为增计数。
.当 X6 为 OFF 时,C244 计数器不能计数。
5
6.当 M0 和 X6 同时为 ON 时,如果 X2 为 ON,C244 计数器清 0,同时 C244 辅助触点也被清除。
EV6000 系列变频器用户 PLC 卡 用户手册

44 第七章 用户指令
n
7.3.7 SPD:测频指令
梯形图:
指令列表: SPD (S1) (S2) (D)
操作数 类型 适用软元件 变址
S1 BOOL X
S2 WORD 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
D WORD D V √
操作数说明
S1:输入点,可设定范围:X0~X5,EVC-UPRG 的设
适用机型
影响标志位
步长
M0
X0
EC20 EC10 EC10A EVC-UPRG
7
定范围为 X30,X31。
S2:输入点检测的单位时间,以 ms 为单位,操作数 S2>0。
D:检测脉冲数据保存单元,当计数超过 65535,自动溢
D11:现在值
D10:测定值
出处理。
功能说明
检测 X0~X5 在指定的时间(ms)内输入脉冲个数,将
1000ms 1000ms
结果存储在指定的软元件单元中。
注意事项
1.SPD 和 HCNT、外部输入中断、脉冲捕捉存在硬件冲
突。
2.SPD 的输入点只能为 X0~X5,其它的不支持。
1000
D12:已运行时间(ms)
输入X0
3.SPD 的脉冲输入频率最大为 10kHz,超过 10kHz 检
测有可能存在误差。
4.SPD 的输入脉冲频率必须参考系统总的脉冲频率输入
输出要求。
使用示例
LD SM0
PLSY 10000 0 Y0
LD M0
SPD X0 1000 D10
对程序的操作实例的时序操作如下:
N(fpn)
接近开关
脉冲/转数
1.M0 为 ON 时将 X0 指定的输入脉冲在 1000ms 内计数,
将计数的结果保存在 D10 的存储单元中,其中 D11 为在
1000ms 内的计数的现在值,D12 为 1000ms 内已运行的
时间。
2.D10 的数据和上图中的旋转速度成正比关系。
3.对 X0 的每次 OFF→ON 计数每隔 1000ms 后保存到
D10 中。
EV6000 系列变频器用户 PLC 卡 用户手册

7.4 数据传输指令
7.4.1 MOV:字数据传输指令
第七章 用户指令 45
梯形图:
指令列表:
操作数 类型 适用软元件
S INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
D INT KnY KnM KnS KnLM D SD C T V Z √
MOV
(S) (D)
适用机型
影响标志位
步长
EC20 EC10 EC10A EVC-UPRG
5
操作数说明
S:源操作数
D:目的操作数
注意事项
1.MOV 指令支持有符号和无符号两种整数。如果指令两个操作数都是软元件,
则数据类型都是有符号整数。如果指令的源操作数是有符号长整数,如(-10,
+100),则目的操作数也是有符号整数。如果源操作数是无符号的长整数,如
功能说明
当能流有效时,S 的内容赋给
(100,45535),则目的操作数也是无符号整数。
2.对应的软元件 C 只支持 C0~C199。
D,S 的值不变。
使用示例
LD X0
MOV D0 D10
当 X0=ON 时,D0 的内容赋给 D10,D10=500。
变址
7.4.2 DMOV:双字数据传输指令
梯形图:
指令列表:
操作数 类型 适用软元件
S DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
D DINT KnY KnM KnS KnLM D SD C V √
操作数说明
S:源操作数
D:目的操作数
功能说明
当能流有效时,S 的内容赋给
D,S 的值不变。
DMOV
(S) (D)
适用机型
影响标志位
步长
EC20 EC10 EC10A EVC-UPRG
7
注意事项
1.DMOV 指令支持有符号和无符号两种长整数。如果指令两个操作数都是软元
件,则数据类型都是有符号整数。如果指令的源操作数是有符号长整数,如(-
10,+100),则目的操作数也是有符号整数。如果源操作数是无符号的长整数,
如(100,45535),则目的操作数也是无符号整数。
2.对应的软元件 C 只支持 C200~C255。
使用示例
LD X0
DMOV D0 D10
当 X0=ON 时,(D0, D1)的内容赋给(D10, D11),(D10, D11)=50000。
变址
EV6000 系列变频器用户 PLC 卡 用户手册

46 第七章 用户指令
7.5 整数算术运算指令
7.5.1 ADD:整数加法指令
梯形图:
指令列表:
操作数 类型 适用软元件
S1 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
S2 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
D INT KnY KnM KnS KnLM D C T V Z √
ADD
(S1) (S2) (D)
操作数说明
S1:源操作数 1
S2:源操作数 2
D:目的操作数
功能说明
1.当能流有效时,S1 加 S2,运算结果赋予 D
2.运算结果(D)大于 32767 时,置进位标志位
(SM181)。运算结果等于 0 时,置零标志位(SM180)。
运算结果小于-32768 时,置借位标志位(SM182)。
7.5.2 SUB:整数减法指令
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
7
变址
使用示例
LD X0
ADD D0 D1 D10
当 X0=ON 时,D0(1000)加上 D1(2000)结果赋
。
给 D10,D10=3000。
梯形图:
指令列表:
操作数 类型 适用软元件
S1 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
S2 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
D INT KnY KnM KnS KnLM D C T V Z √
SUB
(S1) (S2) (D)
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
7
操作数说明
使用示例
S1:源操作数 1
S2:源操作数 2
D:目的操作数
LD X0
SUB D0 D1 D10
功能说明
1.当能流有效时,S1 减 S2,运算结果赋予 D
。
当 X0=ON 时,D0(1000)减去 D1(2000)结果赋
给 D10,D10=-1000。
2.当运算结果(D)大于 32767 时,置进位标志位
(SM181)。运算结果等于 0 时,置零标志位(SM180)。
运算结果小于-32768 时,置借位标志位(SM182)。
变址
EV6000 系列变频器用户 PLC 卡 用户手册

7.5.3 MUL:整数乘法指令
第七章 用户指令 47
梯形图:
指令列表:
操作数 类型 适用软元件
S1 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
S2 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
D DINT KnY KnM KnS KnLM D C V √
MUL
(S1) (S2) (D)
操作数说明
S1:源操作数 1
S2:源操作数 2
D:目的操作数
功能说明
当能流有效时,S1 乘 S2,运算结果赋予 D
7.5.4 DIV:整数除法指令
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
8
变址
注意事项
MUL 指令的运算结果是 32 位数据。
使用示例
LD X0
。
MUL D0 D1 D10
当 X0=ON 时,D0(1000)乘以 D1(2000)结果赋
给(D10,D11),(D10,D11)=2000000。
梯形图:
指令列表:
操作数 类型 适用软元件
S1 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
S2 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
D INT KnY KnM KnS KnLM D C T V Z √
DIV
(S1) (S2) (D)
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
7
操作数说明
S1:源操作数 1
S2:源操作数 2
注意事项
S2≠0,否则报 0 除错误,不执行除法运算。
使用示例
D:目的操作数
功能说明
当能流有效时,S1 除以 S2,运算结果赋予 D(D 包括两
个单元,第一个单元存储商值,第二个单元存储余值)。
LD X0
DIV D0 D1 D10
当 X0=ON 时,D0(2500)除以 D1(1000)结果赋给
(D10,D11)。D10=2,D11=500。
变址
EV6000 系列变频器用户 PLC 卡 用户手册

48 第七章 用户指令
7.5.5 INC:整数加一指令
梯形图:
指令列表:
操作数 类型 适用软元件
D INT KnY KnM KnS KnLM D C T V Z √
INC
(D)
操作数说明
D:目的操作数
功能说明
当能流有效时,D 自增 1。
7.5.6 DEC:整数减一指令
梯形图:
指令列表:
操作数 类型 适用软元件
D INT KnY KnM KnS KnLM D C T V Z √
DEC
(D)
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
3
变址
注意事项
本指令为循环加指令,范围为-32768~32767;C 元件的支持范围为:C0~
C199。
使用示例
LD X0
INC D0
当 X0=ON 时,D0(1000)自增 1,执行后 D0=1001。
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
3
变址
操作数说明
D:目的操作数
功能说明
当能流有效时,D 自减 1。
注意事项
本指令为循环减,范围为-32768~32767。
使用示例
当 X0=ON 时,D0(1000)自减 1,执行后 D0=999。
LD X0
DEC D0
EV6000 系列变频器用户 PLC 卡 用户手册

7.5.7 DADD:长整数加法指令
第七章 用户指令 49
梯形图:
指令列表:
操作数 类型 适用软元件
S1 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
S2 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
D DINT KnY KnM KnS KnLM D C V √
DADD
(S1) (S2) (D)
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
10
操作数说明
使用示例
S1:源操作数 1
S2:源操作数 2
D:目的操作数
功能说明
1.当能流有效时,S1 加 S2,运算结果赋予 D
。
2.当运算结果(D)大于 2147483647 时,置进位标
志位(SM181)。运算结果等于 0 时,置零标志位
LD X0
DADD D0 D2 D10
当 X0=ON 时,(D0,D1)的值(100000)加上(D2,D3)
的值(200000),结果赋给(D10,D11),(D10,D11)
=300000。
(SM180)。运算结果小于-2147483648 时,置借位
标志位(SM182)。
变址
7.5.8 DSUB:长整数减法指令
梯形图:
指令列表:
操作数 类型 适用软元件
S1 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
S2 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
D DINT KnY KnM KnS KnLM D C V √
操作数说明
S1:源操作数 1
S2:源操作数 2
D:目的操作数
功能说明
1.当能流有效时,S1 减 S2,运算结果赋予 D
2.当运算结果(D)大于 2147483647 时,置进位标
志位(SM181)。运算结果等于 0 时,置零标志位
(SM180)。运算结果小于-2147483648 时,置借位
标志位(SM182)
DSUB
(S1) (S2) (D)
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
10
变址
使用示例
LD X0
DSUB D0 D2 D10
当 X0=ON 时,(D0,D1)的值(100000)减去(D2,D3)
。
的值(200000),结果赋给(D10,D11),(D10,D11)
=-100000。
EV6000 系列变频器用户 PLC 卡 用户手册

50 第七章 用户指令
7.5.9 DMUL:长整数乘法指令
梯形图:
指令列表:
操作数 类型 适用软元件
S1 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
S2 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
D DINT KnY KnM KnS KnLM D C V √
DMUL
(S1) (S2) (D)
操作数说明
S1:源操作数 1
S2:源操作数 2
D:目的操作数
功能说明
当能流有效时,S1 乘 S2,运
算结果赋予 D
。
7.5.10 DDIV:长整数除法指令
梯形图:
指令列表:
操作数 类型 适用软元件
S1 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
S2 DINT 常数 KnX KnY KnM KnS KnLM KnSM D SD C V √
D DINT KnY KnM KnS KnLM D C V √
操作数说明
DDIV
(S1) (S2) (D)
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
10
变址
注意事项
DMUL 指令的运算结果是 32 位数据,可能会产生溢出,请用户注意。
使用示例
LD X0
DMUL D0 D2 D10
当 X0=ON 时,(D0,D1)的值(83000)乘以(D2,D3)的值(2000)结果赋给(D10,D11),
(D10,D11)=1660000000。
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
10
变址
注意事项
S1:源操作数 1
S2:源操作数 2
D:目的操作数
功能说明
当能流有效时,S1 除以 S2,运
算结果赋予 D(D 包括 4 个单
元,前两个单元存储商值,后
两个单元存储余值)
S2≠0,否则报 0 除错误,不执行除法运算。
使用示例
LD X0
DDIV D0 D2 D10
当 X0=ON 时,(D0,D1)的值(83000)除以(D2,D3)(2000)结果赋给(D10,D11)、
(D12,D13)。(D10,D11)=41,(D12,D13)=1000。
EV6000 系列变频器用户 PLC 卡 用户手册

7.5.11 DINC:长整数增一指令
第七章 用户指令 51
梯形图:
指令列表:
操作数 类型 适用软元件
D DINT KnY KnM KnS KnLM D C V √
DINC
(D)
操作数说明
D:目的操作数
功能说明
当能流有效时,D 自增 1。
7.5.12 DDEC:长整数减一指令
梯形图:
指令列表:
操作数 类型 适用软元件
D DINT KnY KnM KnS KnLM D C V √
操作数说明
DDEC
(D)
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
4
注意事项
1.本指令为循环加指令,范围为-2147483648~2147483647。
2.C 元件的支持范围为:C200~C255。
使用示例
LD X0
DINC D0
当 X0=ON 时,(D0,D1)的 值( 100000)自 增 1,执行后(D0,D1)=100001。
适用机型
影响标志位 零标志 进位标志 借位标志
步长
EC20 EC10 EC10A EVC-UPRG
4
注意事项
变址
变址
D:目的操作数
功能说明
当能流有效时,D 自减 1。
本指令为循环减,范围为-2147483648~2147483647。
使用示例
LD X0
DDEC D0
当 X0=ON 时,(D0,D1)的 值(100000)自减 1,执行后(D0,D1)=99999。
EV6000 系列变频器用户 PLC 卡 用户手册

52 第七章 用户指令
7.6 比较触点指令
7.6.1 LD(=,<,>,<>,>=,<=):整数比较 LD 指令
梯形图:
指令列表: LD= (S1) (S2)
LD< (S1) (S2)
LD> (S1) (S2)
LD<> (S1) (S2)
LD>= (S1) (S2)
LD<= (S1) (S2)
操作数 类型 适用软元件 变址
S1 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
S2 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
适用机型
影响标志位
步长
EC20 EC10 EC10A EVC-UPRG
5
操作数说明
S1:比较参数 1
S2:比较参数 2
功能说明
对 S1、S2 单元内容进行 BIN
比较,比较的结果用于驱动后
段运算。
使用示例
LD= D0 D1
OUT Y0
LD< D0 D1
OUT Y1
LD> D0 D1
OUT 2
LD<> D0 D1
OUT Y3
LD>= D0 D1
OUT Y4
LD<= D0 D1
OUT Y5
对 D0、D1 的数据进行 BIN 比较,比较的结果决定后段元件输出状态。
EV6000 系列变频器用户 PLC 卡 用户手册

7.6.2 AND(=,<,>,<>,>=,<=):整数比较 AND 指令
第七章 用户指令 53
梯形图:
指令列表: AND= (S1) (S2)
AND< (S1) (S2)
AND> (S1) (S2)
AND<> (S1) (S2)
AND>= (S1) (S2)
AND<= (S1) (S2)
操作数 类型 适用软元件 变址
S1 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
S1 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
适用机型
影响标志位
步长
EC20 EC10 EC10A EVC-UPRG
5
操作数说明
S1:比较参数 1
S2:比较参数 2
功能说明
对 S1、S2 单元内容进行 BIN
比较,比较的结果与其它节点
串联用于驱动后段运算。
使用示例
LD X0
AND= D0 D1
OUT Y0
LD X1
AND< D0 D1
OUT Y1
LD X2
AND> D0 D1
OUT Y2
LD X3
AND<> D0 D1
OUT Y3
LD X4
AND>= D0 D1
OUT Y4
LD X5
AND<= D0 D1
OUT Y5
对 D0、D1的数据进行 BIN 比较,比较的结果与其它节点串联决定后段元件输出
状态。
EV6000 系列变频器用户 PLC 卡 用户手册

54 第七章 用户指令
7.6.3 OR(=,<,>,<>,>=,<=):整数比较 OR 指令
梯形图:
指令列表: OR= (S1) (S2)
OR< (S1) (S2)
OR> (S1) (S2)
OR<> (S1) (S2)
OR>= (S1) (S2)
OR<= (S1) (S2)
操作数 类型 适用软元件 变址
S1 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
S1 INT 常数 KnX KnY KnM KnS KnLM KnSM D SD C T V Z √
适用机型
影响标志位
步长
EC20 EC10 EC10A EVC-UPRG
5
操作数说明
S1:比较参数 1
S2:比较参数 2
功能说明
对 S1、S2 单元内容进行比较,
比较的结果与其它节点并联用
于驱动后段运算。
使用示例
LD X0
OR= D0 D1
OUT Y0
LD X1
OR< D0 D1
OUT Y1
LD X2
OR<> D0 D1
OUT Y2
LD X3
OR>= D0 D2
OUT Y3
LD X4
OR>= D0 D1
OUT Y4
LD X5
OR<= D0 D1
OUT Y5
对 D0、D1 的数据进行比较,比较的结果与其它节点并联决定后段元件输出状态。
EV6000 系列变频器用户 PLC 卡 用户手册

7.6.4 LDD(=,<,>,<>,>=,<=):长整数比较 LDD 指令
第七章 用户指令 55
梯形图:
指令列表:LDD= (S1) (S2)
LDD< (S1) (S2)
LDD> (S1) (S2)
LDD<> (S1) (S2)
LDD>= (S1) (S2)
LDD<= (S1) (S2)
操作数 类型 适用软元件 变址
S1 DINT 常数
S2 DINT 常数
KnX KnY KnM KnS KnLM KnSM D SD C V
KnX KnY KnM KnS KnLM KnSM D SD C V
适用机型
影响标志位
步长
EC20 EC10 EC10A EVC-UPRG
7
操作数说明
S1:比较参数 1
S2:比较参数 2
功能说明
对 S1、S2 单元内容进行比较,
比较的结果用于驱动后段运
算。
使用示例
LD= D0 D2
OUT Y0
LD< D0 D2
OUT Y1
LD<> D0 D2
OUT Y2
LD>= D0 D2
OUT Y3
LD>= D0 D2
OUT Y4
LD<=D0 D2
OUT Y5
比较(D0,D1)和(D2,D3),比较结果决定后段元件输出状态。
√
√
EV6000 系列变频器用户 PLC 卡 用户手册

56 第七章 用户指令
7.6.5 ANDD(=,<,>,<>,>=,<=):长整数比较 ANDD 指令
梯形图:
指令列表: ANDD= (S1) (S2)
ANDD< (S1) (S2)
ANDD> (S1) (S2)
ANDD<> (S1) (S2)
ANDD>= (S1) (S2)
ANDD<= (S1) (S2)
操作数 类型 适用软元件 变址
S1 DINT 常数
S2 DINT 常数
操作数说明
KnX KnY KnM KnS KnLM KnSM D SD C V
KnX KnY KnM KnS KnLM KnSM D SD C V
使用示例
S1:比较参数 1
S2:比较参数 2
功能说明
对 S1、S2 单元内容进行比较,
比较的结果与其它节点串联用
于驱动后段运算。
适用机型
影响标志位
步长
EC20 EC10 EC10A EVC-UPRG
7
LD X0
LDD= D0 D2
OUT Y0
LD X1
LDD< D0 D2
OUT Y1
LD X2
LDD<> D0 D2
OUT Y2
LD X3
LDD<> D0 D2
OUT Y3
LD X4
LDD>= D0 D2
OUT Y4
LD X5
LDD<= D0 D2
OUT Y5
比较(D0,D1)和( D2,D3),比较的结果与其它节点串联决定后段元件输出状态。
√
√
EV6000 系列变频器用户 PLC 卡 用户手册

7.6.6 ORD(=,<,>,<>,>=,<=):长整数比较 ORD 指令
第七章 用户指令 57
梯形图:
指令列表: ORD= (S1) (S2)
ORD< (S1) (S2)
ORD> (S1) (S2)
ORD<> (S1) (S2)
ORD>= (S1) (S2)
ORD<= (S1) (S2)
操作数 类型 适用软元件 变址
S1 DINT 常数
S2 DINT 常数
KnX KnY KnM KnS KnLM KnSM D SD C V
KnX KnY KnM KnS KnLM KnSM D SD C V
适用机型
影响标志位
步长
EC20 EC10
7
EC10A EVC-UPRG
√
√
操作数说明
S1:比较参数 1
S2:比较参数 2
功能说明
对 S1、S2 单元内容进行比较,
比较的结果与其它节点并联用
于驱动后段运算。
使用示例
LD X0
ORD= D0 D2
OUT Y0
LD X1
ORD< D0 D2
OUT Y1
LD X2
ORD<> D0 D2
OUT Y2
LD X3
ORD>= D0 D2
OUT Y3
LD X4
ORD>= D0 D2
OUT Y4
LD X5
ORD<= D0 D2
OUT Y5
比较(D0,D1)和( D2,D3),比较的结果与其它节点并联决定后段元件输出状态。
EV6000 系列变频器用户 PLC 卡 用户手册

58 第七章 用户指令
7.7 变频器专用指令
7.7.1 FWD:本地变频器正转指令
梯形图:
指令列表: FWD
功能说明
控制本地变频器正转运行,上升沿执行。
注意事项
执行该指令时,必须将变频器的控制通道切换到总线控制,即 F05.00 设置为 3。当变频器工作在点动正转和点动反转时,
该指令无效,同样,当变频器正转和反转运行时,点动正转和点动反转指令无效。
7.7.2 REV:本地变频器反转指令
梯形图:
指令列表: REV
功能说明
适用机型
影响标志位
步长
适用机型
影响标志位
步长
EVC-UPRG
2
EVC-UPRG
2
控制本地变频器反转运行,上升沿执行。
注意事项
执行该指令时,必须将变频器的控制通道切换到总线控制,即 F05.00 设置为 3。当变频器工作在点动正转和点动反转时,
该指令无效,同样,当变频器正转和反转运行时,点动正转和点动反转指令无效。
7.7.3 DFWD:本地变频器点动正转指令
梯形图:
指令列表: DFWD
功能说明
当能流有效时,控制本地变频器点动正转运行。
注意事项
执行该指令时,必须将变频器的控制通道切换到总线控制,即 F05.00 设置为 3。当变频器工作在正转和反转时,该指令
无效,同样,当变频器电动正转和点动反转运行时,正转和反转指令无效。
适用机型
影响标志位
步长
EVC-UPRG
2
EV6000 系列变频器用户 PLC 卡 用户手册

7.7.4 DREV:本地变频器点动反转指令
第七章 用户指令 59
梯形图:
指令列表: DREV
功能说明
当能流有效时,控制本地变频器点动反转运行。
注意事项
执行该指令时,必须将变频器的控制通道切换到总线控制,即 F05.00 设置为 3。当变频器工作在正转和反转时,该指令
无效,同样,当变频器点动正转和点动反转运行时,正转和反转指令无效。
7.7.5 DSTOP:本地变频器停车指令
梯形图:
指令列表: DSTOP
适用机型
影响标志位
步长
适用机型
影响标志位
步长
EVC-UPRG
2
EVC-UPRG
2
功能说明
当能流有效时,控制本地变频器停止运行。
注意事项
执行该指令时,必须将变频器的控制通道切换到总线控制,即 F05.00 设置为 3。
7.7.6 STOPFAST:本地变频器紧急停运行指令
梯形图:
指令列表: STOPFAST
功能说明
当能流有效时,控制本地变频器停止运行。
注意事项
执行该指令时,无论变频器的处于何种控制通道,变频器都会紧急停车。
适用机型
影响标志位
步长
EVC-UPRG
2
EV6000 系列变频器用户 PLC 卡 用户手册

60 第七章 用户指令
7.7.7 STOPFREE:本地变频器自由停车指令
梯形图:
指令列表: STOPFREE
功能说明
当能流有效时,控制本地变频器自由停车。
注意事项
执行该指令时,无论变频器的处于何种控制通道,变频器都会自由停车。
7.7.8 RDF:本地变频器 F 型共享软元件实时读取
梯形图:
指令列表: RDF (S) (D)
操作数 类型 适用软元件 变址
S WORD F
D WORD D
操作数说明
适用机型
影响标志位
步长
适用机型
影响标志位
步长
EVC-UPRG
EVC-UPRG
10
S:指定需要实时读取的 F 型共享软元件;如 F05.12,F15.02。
D:返回的状态。
当刷新功能码正确完成时,返回状态值为零。
当刷新功能码失败时,置位 SM195,并在返回值中说明错误类型。
表7-1 实时刷新状态表
返回值 说明
0 刷新正确
1 非法共享软元件,指无该共享软元件的编号
2
3 连接变频器失败,即无法和变频器建立通讯
4 保留
共享软元件类型错误,指用F共享软元件访问H共享软元件。使用H共享软元件访问F共享软元件不显示错误,
但是返回值错误
功能说明
当能流有效时,将操作数 S 指定的功能码从变频器读入 PLC 卡中,并将刷新完成的状态写入操作数 D 中。
注意事项
当程序中多次调用实时刷新指令时,由于和变频器交互数据需要最多 2ms 的时间,只有当前一个实时刷新指令的数据交
互完全完成时,才会执行下一个实时刷新指令。
EV6000 系列变频器用户 PLC 卡 用户手册

7.7.9 RDH:本地变频器 H 型共享软元件实时读取
第七章 用户指令 61
梯形图:
指令列表: RDH (S) (D)
操作数 类型 适用软元件 变址
S DWORD H
D WORD D
适用机型
影响标志位
步长
EVC-UPRG
12
操作数说明
S:指定需要实时读取的 H 型共享软元件:如 H01.02,H01.03
D:返回的状态。实时刷新状态表参见7.7.8 RDF
:本地变频器F型共享软元件实时读取
中的表 7-1。
当刷新功能码正确完成时,返回状态值为零。
当刷新功能码失败时,置 SM195,并在返回值中说明错误类型。
功能说明
当能流有效时,将操作数 S 指定的共享软元件从变频器读入 PLC 卡中,并将刷新完成的状态写入操作数 D 中。
注意事项
当程序中多次调用实时刷新指令时,由于和变频器交互数据需要最多 2ms 的时间,只有当前一个实时刷新指令的数据交
互完全完成时,才会执行下一个实时刷新指令。
7.7.10 WRF:本地变频器 F 型共享软元件实时写入
梯形图:
指令列表:WRF (S1) (S2) (D)
操作数 类型 适用软元件 变址
S1 WORD F
S2 WORD 常数 D SD
D WORD D
操作数说明
S1:指定需要实时写入的 F 型共享软元件。
S2:需要写入的数值。
D:返回的状态。实时刷新状态表参见7.7.8 RDF
当刷新功能码正确完成时,返回状态值为零。
当刷新功能码失败时,置 SM195,并在返回值中说明错误类型。
功能说明
:本地变频器F型共享软元件实时读取
适用机型
影响标志位
步长
EVC-UPRG
14
中的表 7-1。
当能流有效时,将操作数 S2 的数值写入到操作数 S1 指定共享软元件,刷新到变频器中,并将刷新完成的状态写入操作
数 D 中。
注意事项
当程序中多次调用实时刷新指令时,由于和变频器交互数据需要最多 2ms 的时间,只有当前一个实时刷新指令的数据交
互完全完成时,才会执行下一个实时刷新指令。
EV6000 系列变频器用户 PLC 卡 用户手册

62 第七章 用户指令
7.7.11 WRH:本地变频器 H 型共享软元件实时写入
梯形图:
指令列表:WRH (S1) (S2) (D)
操作数 类型 适用软元件 变址
S1 DWORD H
S2 DWORD 常数
D WORD D
D
适用机型
影响标志位
步长
EVC-UPRG
18
操作数说明
S1:指定需要实时写入的 H 型共享软元件。
S2:需要写入的数值。
D:返回的状态。实时刷新状态表参见7.7.8 RDF
:本地变频器F型共享软元件实时读取
中的表 7-1。
当刷新功能码正确完成时,返回状态值为零。
当刷新功能码失败时,置 SM195,并在返回值中说明错误类型。
功能说明
当能流有效时,将操作数 S2 的数值写入到操作数 S1 指定共享软元件,刷新到变频器中,并将刷新完成的状态写入操作
数 D 中。
注意事项
当程序中多次调用实时刷新指令时,由于和变频器交互数据需要最多 2ms 的时间,只有当前一个实时刷新指令的数据交
互完全完成时,才会执行下一个实时刷新指令。
EV6000 系列变频器用户 PLC 卡 用户手册

第八章 数据交互与内部通讯 63
第八章 数据交互与内部通讯
PLC 卡与 EV6000 变频器通过共享内存的方式实现数据交互,相对与通讯总线方式传输数据,速度更快,传输量更大,
可靠性更高。
PLC 卡和变频器可以通过两种方式实现功能码和共享软元件的交互:
1.实时数据交互
2.周期数据交互
当上电的时候,变频器所有的功能码会被上载到 PLC 卡中,形成一个功能码的映射区。如图 8-1 所示,当执行周期数据
交互和实时数据交互时,都会对功能码映射区的数值进行更新。
PLC程序
8.1 周期数据交互
在用户程序中,用户通过 MOV,ADD 等指令调用变频器功能码(即 F 型共享软元件和 H 型共享软元件)时,这些指令
所需要的源操作数从功能码映射区取得,需要刷新的功能码将记录在周期刷新堆栈中。在每个扫描周期内,PLC 卡运行
周期数据交互时,将所有需要刷新的功能码全部和变频器进行交互。
可编程控制卡
读功能码
操作功能码
实时数据交互
读
周期数据交互
功能码
映射区
周期交互
堆栈
图8-1 PLC 卡与变频器数据交互机制
周期数据交互
MDI
功能码
变频器
MDI 程序
图8-2 PLC 卡程序运行机制
周期数据交互周期取决于 PLC 的扫描周期。
PLC 卡运行周期>10ms
周期数据交互周期等于 PLC 卡扫描周期
PLC 卡运行周期<=10ms
周期数据交互周期等于 n 个 PLC 卡扫描周期,并且周期数据交互周期必须大于 10ms。
EV6000 系列变频器用户 PLC 卡 用户手册

64 第八章 数据交互与内部通讯
例如 PLC 卡扫描周期为 3ms,则周期数据交互周期可能为 12ms。
示例
该示例实现控制变频器的 Y1,Y2 输出,并设定变频器相关参数,控制变频器运行。
在第一个扫描周期,N0 行使用 SET 指令对 D100 的位进行操作,并使用 MOV 指令将写 F65.1 请求写入周期交互堆栈。
N2 行将需要使用的 H1.5 型共享软元件的值从 PLC 卡的功能码映射区读取,并将写请求写入周期交互堆栈。
用户程序执行完毕之后,PLC 卡将所有功能码的与变频器交互,该交互最短可在 10ms 内完成。
当 X32 输入有效时,通过 MOV 指令设置变频器的频率给定通道和控制通道,通过 DMOV 指令设置变频器的运行频率,
并运用 FWD 指令驱动变频器正向运行。
当 X33 输入有效时,DSTOP 指令将控制变频器停止。
EV6000 系列变频器用户 PLC 卡 用户手册

8.2 实时数据交互
周期数据交互受制于 PLC 卡的扫描周期,对于需要立即刷新的功能码,可以采用实时数据交互机制,该机制可以通过以
下指令实现:
RDF:本地变频器 F 型共享软元件实时读取
RDH:本地变频器 H 型共享软元件实时读取
WRF:本地变频器 F 型共享软元件实时写入
第八章 数据交互与内部通讯 65
WRH:本地变频器 H 型共享软元件实时写入
在执行以上四条指令的时,PLC 卡和变频器对指定的功能码进行交互,并最终将刷新完成情况返回到指定的 D 元件中。
如果刷新正确,则将该功能码值从变频器读入到 PLC 卡的功能码映射区。完成一次实时数据交互最长需要 2ms 的时间。
表8-2 实时刷新状态表
返回值 说明
0
1
2
3
4
刷新正确
非法共享软元件,指无共享软元件的编号
共享软元件类型错误,指用F共享软元件访问H共享软元件。使用H共享软元件访问F共享软元件不显
示错误,但是返回值错误。
连接变频器失败,即无法和变频器建立通讯
保留
由于实时数据交互只有一个信道,当程序中调用多条实时交互指令,并不是所有的交互指令会被立即执行;当只调用一
条该类指令但是扫描周期小于 2ms 时,并非所有周期都会执行该指令。只有当信道空闲时,才会执行指令;如果信道忙,
则会直接跳过。
例如 PLC 卡用户程序中包含以下指令。
……
EV6000 系列变频器用户 PLC 卡 用户手册

66 第八章 数据交互与内部通讯
如下图所示,当 M1 能流有效时,执行实时交互指令,此时信道由空闲变为忙,当信道为忙时,即使能流有效,其实时
交互指令也不会执行。当 M1 能流无效时,信道也不会立即转为空闲,必须完成上一次实时交互之后,信道才会转为空
闲,以供其他指令使用。
扫描周期
M1
信道
空闲
空闲
黑色代表信道忙
图8-3 指令执行时序示意图
示例
该示例使用实时刷新指令更改变频器功能码,并根据 PLC 卡的输入控制变频器的输出。
空闲
EV6000 系列变频器用户 PLC 卡 用户手册

在使用本产品前请阅读本手册的安全注意事项,严格按照前面描述的要求进行安装、配线,通电前逐项检查核实,确认
无误后方可上电试运行。
9.1 上电前检查
1.检查并确认用户信号输入线路连接在 PLC 输入接线端子上,信号特性符合输入端口的电气技术规范。
2.检查并确认输出端口,导线与导线之间,导线与电路板之间是否短路。
3.确保无异物掉入变频器內部,壳体散热通道畅通。
4.确保螺钉是否紧固。
5.若需使用上位机或人机界面(HMI),需将通讯信号电缆连接准确。
9.2 上电运行操作
第九章 首次使用及运行保养 67
第九章 首次使用及运行保养
1.接通变频器电源,PLC 卡的 POWER 灯应点亮。
2.启动 PC 上的 ControlStar 软件,将编制好的用户程序下载到 PLC。
3.下载程序校验完毕,使用变频器键盘将 F65.00 设置为 1,RUN 灯应点亮,若 ERR 灯点亮,表明用户程序或系统有错
误,请按《EVC-UPRGPLC 卡编程参考手册》的说明排除错误。
4.再把 PLC 卡外部系统的电源合上,进行系统调试。
9.3 运行/停止状态的转换
9.3.1 状态解释及模式选择
PLC 卡工作状态分为运行状态与停止状态。主模块提供多种运行停机控制方式:变频器键盘控制、ControlStar 编程环境、
通讯口(如 ModBus)、输入端 X30~X35 等,方便用户系统运行控制。
运行状态(RUN)
当 PLC 卡处于运行状态时,用户程序将被系统执行,即一个扫描周期完整地包含四个任务(执行用户程序→通讯→内务
→刷新 I/O)。
停止状态(STOP)
PLC卡处于停止状态时,系统不执行用户程序,但一个扫描周期中其他三个任务仍然被系统执行(通讯→内务→刷新 I/O)。
EV6000 系列变频器用户 PLC 卡 用户手册

68 第九章 首次使用及运行保养
模式选择
PLC 卡向用户提供了变频器键盘控制,可以进行通讯协议的切换和运行模式的选择。功能码 F65.00 的定义已在表 5-2中
描述,功能码 F65.00 与 PLC 卡运行状态及通讯协议的关系如表 9-1所示。
当前状态 键盘 F65.00 更改 切换后状态 描述
2
RUN
RUN
RUN
STOP
STOP
STOP
1
→
1
2
→
0
2
→
2
0
→
0
2
→
1
2
→
9.3.2 如何进入运行状态(STOP→RUN)
复位方式
F65.00 设置为 1,复位后(包括系统上电复位)系统自动进入运行状态。
注意:如果系统配置中“输入点控制模式”项有效,指定输入点的状态应为 ON,否则无法进入运行状态。输入点控制
模式描述见下面的介绍。
RUN
RUN
STOP
STOP
STOP
RUN
表9-1 模式切换
CN4
的协议切换为
CN4
的协议切换为用户在系统块中设定的协议
进入停止状态,协议切换同上
CN4
的协议切换为
CN4
的协议切换为用户在系统块中设定的协议
进入运行状态,协议切换同上
ModBus
ModBus
默认协议
默认协议
手动方式
在停止状态下,F65.00 由 0 更改为 1 或者由 2 更改为 1 时,系统进入运行状态。
通讯命令方式
在停止状态下,系统接收到 RUN 通讯命令后,进入运行状态。
输入点控制方式
在停止状态下,当系统检测到指定输入端口发生了 OFF→ON 状态变化时,PLC 卡进入运行状态。
需要注意的是,选用输入点控制方式时,应将系统配置中“输入点控制模式”项配置为有效,同时模式选择开关应处于
ON 位置。
9.3.3 如何进入停止状态(RUN→STOP)
复位方式
模式选择开关处于 F65.00 设置为 0,复位后(包括系统上电复位)系统自动进入停止状态。
如果系统配置中“输入点控制模式”项有效,指定输入点的状态应为 OFF,否则无法进入停止状态。
手动方式
在运行状态下,F65.00 设置为 0,系统进入停止状态。
通讯命令方式
在运行状态下,系统接收到 STOP 通讯命令后,进入停止状态。
指令控制方式
在运行状态下,当用户程序中 STOP 指令被有效地执行后,系统进入停止状态。
错误停止方式
系统检测到了有严重错误发生时(如用户程序错误,用户程序超时运行等),自动停止用户程序的执行。
EV6000 系列变频器用户 PLC 卡 用户手册

9.4 例行保养
例行保养检查应注意如下方面:
z 保证 PLC 卡工作环境的整洁,避免异物落入机内;
z 保持 PLC 卡良好的通风散热;
z 所有接线连接及接线端子固定牢固,状态良好。
第九章 首次使用及运行保养 69
EV6000 系列变频器用户 PLC 卡 用户手册

70 第十章 常见问题及解决方案
第十章 常见问题及解决方案
本章介绍了 PLC 卡常见的故障及其处理方法。
10.1 故障现象及对策
当 PLC 卡不能正常工作时,请依次检查:
1.电源线路的连接及相关开关和保护电器的状况,确保 PLC 已可靠供电。
2.用户端子的接线是否牢固。
3.模式选择是否正确。
若上述检查完成后仍无法工作,可参考表 10-1根据 PLC 工作状态及 I/O 状态指示灯进行分析。
现象 可能原因 处理对策
变频器电源失压或电压过低
POWER
不亮
POWER LED
ERR LED闪亮
RUN LED不亮
输出无法关闭(
不能下载、上载、监控 电缆连接不良,功能码
串行口不能控制其他设
备
LED
及其他
间歇闪亮 变频器电源线路接触不良
OFF)
变频器电源开关断开或熔断器熔断
均
变频器电源接线异常
变频器电源板损坏
用户程序有错
实际运行时间超过
功能码
将运行控制模式设为端子方式,而端子处于
OFF位置
被上位机设备遥控停机
系统错误停机
外部连线接触不良
电缆连接不良,或连接线路的信号属性错误,
TXD与RXD混淆
如
通讯主从机特性设定不一致,如波特率、校验、
数据位数、地址
通讯主从机使用协议不一致
WDT
F65.00不是1
表10-1 故障现象与对策列表
设置有误
设定时间
F65.00
检查电源状况,予以排除
检查开关、导线或熔断器状况,予以排除
检查并确认变频器是否正常工作
ControlStar
用
WDT
加大
将功能码
将设定的控制运行端子闭合
令上位机遥控开机
PLC
检查
使用艾默生公司
将信号线连接正确
将通讯参数设置为一致
将通讯协议设置为一致
环境重新编辑用户程序并除错后再下载
设定时间
F65.00
应用系统
1
设置为
PLC
下载专用通讯电缆
10.2 错误代码
错误代码及类型如表 10-2所示。
错误代码 含义 错误类型 说明
0 无错误发生
1~19
外设错误
20~25)
(
系统保留
20 本机
24
EEPROM
表10-2 错误代码及类型
I/O
严重错误
读写操作错误
/ /
/ /
系统错误
系统错误
EV6000 系列变频器用户 PLC 卡 用户手册
停止用户程序
错误灯常亮;消除本错误需停电检查硬件
错误灯闪烁
错误消失,自动清除

存储错误
40~45)
(
指令执行错误
(60~80)
指令执行错误
(60~80)
第十章 常见问题及解决方案 71
错误代码 含义 错误类型 说明
40 用户程序文件错误
41 系统配置文件错误
42 数据块文件错误
43 备份数据丢失错误
44 强制表丢失错误
45 用户信息文件错误
59
46
~
60 用户程序编译错误
61 用户程序运行超时
62 执行到非法的用户程序指令
63 指令操作数的元件类型非法
64 指令操作数数值非法
65 指令操作数元件编号范围超出 执行错误
66 子程序栈溢出
67 用户中断请求队列溢出
68 非法的标号跳转或子程序调用 执行错误
69 零除错误
70
71 保留
72
75
保留
栈定义非法
未定义用户子程序或中断子程
序
I/O
立即刷新出错
系统错误
系统错误
系统错误
系统错误
系统错误
系统错误
执行错误
执行错误
执行错误
执行错误
执行错误
执行错误
执行错误
执行错误
执行错误
/
执行错误
执行错误
停止用户程序(错误灯常亮)
消除条件:下载新程序/格式化
停止用户程序
错误灯常亮
消除条件:下载新系统配置文件/格式化
停止用户程序(错误灯常亮)
消除条件:下载新数据块文件/格式化
不停止用户程序(错误灯闪烁)
消除条件:清除元件/格式化/复位后检测无错
不停止用户程序(错误灯闪烁)
消除条件:清除元件/强制操作/格式化/复位后检测
无错
不停止用户程序(错误灯不指示)
消除条件:下载新程序和新数据块文件/格式化
停止用户程序(错误灯常亮)
停止用户程序(错误灯常亮)
停止用户程序(错误灯常亮)
停止用户程序(错误灯常亮)
不停止用户程序执行,错误灯不指示,但会在
SD20
当栈尺寸、栈中元素个数小于零
栈中元素个数大于栈尺寸限制
中指示错误类型代码
10.3 变频器错误代码
变频器错误代码表如表 10-3所示。
错误代码 含义 错误代码 含义
1
过热(
2
过热(
0 无异常记录
1 变频器加速运行过电流(
2 变频器减速运行过电流(
3 变频器恒速运行过电流(
4 变频器加速运行过电压(
5 变频器减速运行过电压(
6 变频器恒速运行过电压(
7 控制电压过电压(
8 输入侧缺相(
9 输出侧缺相(
10 功率模块保护(
11 散热器
12 散热器
13 变频器过载(
E008)
E009)
E010)
E011)
E012)
E013)
表10-3 变频器错误代码表
21
E001)
E002)
E003)
E004)
E005)
E006)
E007)
22
23
24
25
26
27
28
29
30
31
32
33
34
EV6000 系列变频器用户 PLC 卡 用户手册
PID
反馈丢失(
外部给定指令丢失(
键盘参数拷贝出错(
自整定不良(
PG
故障(
变频器掉载(
制动单元故障(
参数设定错误(
控制板
位置偏差计数器溢出(
扩展卡故障(
程序紊乱(
对地短路(
DEV
偏差过大故障(
E025)
24V
电源短路(
E032)
E033)
E021)
E024)
E026)
E027)
E028)
E031)
E022)
E023)
E029)
E030)
E034)

72 第十章 常见问题及解决方案
错误代码 含义 错误代码 含义
14 电机过载(
15 外部故障(
16
17 串行口通讯异常(
18 接触器异常(
19 电流检测电路异常(
20 系统干扰(
EEPROM
E014)
E015) 36~40
读写错误(
E018)
E020)
注:
①E007 在 18.5G/22G 及以下不检测,其余在停机后一直检测;
②E010 故障后 10 秒方可复位;
③若出现过流故障,需延时 6 秒才能复位;
④出现故障告警时键盘显示故障为 A×××(如:接触器故障时,若保护动作键盘显示 E018,若告警继续运行键盘显示
A018)
E016)
E017)
E019 )
霍尔或放大电路
35
41
42
43
44~50
超速(OS)故障(
保留
CCI
输入过流故障
断带故障
PLC
保留
复位故障
E035)
EV6000 系列变频器用户 PLC 卡 用户手册

附录一 指令速查表 73
附录一 指令速查表
PLC 卡支持以下 16 类指令。
基本指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
LD 常开触点指令
LDI 常闭触点指令
AND 常开触点与指令
ANI 常闭触点与指令
OR 常开触点或指令
ORI 常闭触点或指令
OUT 线圈输出指令
SET 线圈置位指令
RST 线圈清除指令
ANB 能流块与指令
ORB 能流块或指令
INV 能流取反指令
NOP 空操作指令
程序流控制指令
MPS
MRD
MPP
EU
ED
TON
TOF
TMON
TONR
CTU
CTR
DCNT
输出能流入栈指令
读输出能流栈顶值指令
输出能流栈出栈指令
上升沿检测指令
下降沿检测指令
接通延时计时指令
断开延时计时指令
不重触发单稳计时指令
记忆型接通延时计时指令
16
位计数器增计数指令
16
位计数器循环计数指令
32
位计数指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
LBL 跳转标号定义
CJ 条件跳转
SBR 用户子程序定义
CALL 用户子程序调用指令
CSRET 用户子程序条件返回指令
SRET 用户子程序返回
CFEND 用户主程序条件返回指令
FEND 用户主程序结束
CIRET 用户中断子程序条件返回
FOR
NEXT
MC
MCR
WDT
STOP
EI
DIFFERENT
循环指令
循环返回指令
主控
主控清除
用户程序看门狗清零
用户程序停止
中断使能指令
中断禁止指令
SFC 指令
指令
STL
SET Sxx
OUT Sxx
指令名称
SFC
SFC
SFC
状态装载指令
状态转移
状态跳转
F
支持
RST Sxx
RET
支持
H
指令
指令名称
SFC
SFC
状态清除
程序结束
支持
F
数据传输指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
MOV 字数据传输指令
DMOV 双字数据传输指令
BMOV 数据块传输指令
SWAP 高低字节交换指令
XCH 字交换指令
DXCH 双字交换指令
FMOV 数据块填充指令
O DFMOV
O WSFR
WSFL
PUSH
FIFO
LIFO
数据块双字填充指令
字串右移动指令
字串左移动指令
数据入栈指令
先入先出指令
后入先出指令
支持
H
EV6000 系列变频器用户 PLC 卡 用户手册

74 附录一 指令速查表
整数/长整数算术运算指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
ADD 整数加法指令
DADD 长整数加法指令
SUB 整数减法指令
DSUB 长整数减法指令
INC 整数增一指令
DINC 长整数增一指令
DEC 整数减一指令
DDEC 长整数减一指令
MUL 整数乘法指令
DMUL 长整数乘法指令
MUL和DMUL
注:
字/双字逻辑运算
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
WAND 字与指令
DWAND 双字与指令
WOR 字或指令
DWOR 双字或指令
位移动/旋转指令
O
指令部分支持
F/H
O DIV
O DDIV
O VABS
O DVABS
O NEG
O DNEG
O SQT
O DSQT
注
元件。
O WXOR
O DWXOR
O WINV
O DWINV
SUM
O注
DSUM
整数除法指令
长整数除法指令
整数绝对值指令
长整数绝对值指令
整数取负指令
长整数取负指令
整数算术平方根指令
长整数算术平方根指令
整数累加指令
长整数累加指令
字异或指令
双字异或指令
字取非指令
双字取非指令
O
注
O
O
O
O
O
O
O
O
O
O
O注
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
ROR
DROR
ROL
DROL
RCR
DRCR
RCL
16
位循环右移指令
32
位循环右移指令
16
位循环左移指令
32
位循环左移指令
16
位带进位循环右移指令
32
位带进位循环右移指令
16
位带进位循环左移指令
O DRCL
O SHR
O DSHR
O SHL
O DSHL
O SFTL
O SFTR
32
位带进位循环左移指令
16
位字右移指令
32
位右移指令
16
位左位移指令
32
位左位移指令
位串左移指令
位串右移指令
O
O
O
O
O
增强型位处理指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
DECO 解码指令
ENCO 编码指令
BITS 字中
ON
位统计指令
DBITS
ZRST
O ZSET
双字中ON位统计指令
批量位清零指令
批量位置位指令
O
高速 IO 指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
HCNT 高速计数器驱动指令
DHSCS 高速计数比较置位指令
DHSCR 高速计数比较复位指令
DHSCI 高速计数比较中断触发指令
DHSZ
DHST
SPD
高速计数区间比较指令
高速计数表格比较指令
测频指令
控制计算指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
PID
REFF 设置输入滤波常数指令
PID
功能指令
REF
EROMWR
I/O
立即刷新指令
EEPROM
写指令
EV6000 系列变频器用户 PLC 卡 用户手册

附录一 指令速查表 75
比较触点指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
LD= 整数比较
LDD= 长整数比较
LD> 整数比较
LDD> 长整数比较
LD>= 整数比较
LDD>= 长整数比较
LD< 整数比较
LDD< 长整数比较
LD<= 整数比较
LDD<= 长整数比较
LD<> 整数比较
LDD<> 长整数比较
AND= 整数比较
ANDD= 长整数比较
AND> 整数比较
ANDD> 长整数比较
AND>= 整数比较
ANDD>= 长整数比较
LD=指令
LD=指令
LD>指令
LD>指令
LD>=指令
LD>=指令
LD<指令
LD<指令
LD<=指令
LD<=指令
LD<>指令
LD<>指令
AND=指令
AND=指令
AND>指令
AND>指令
AND>=指令
AND>=指令
O AND<
O ANDD<
O AND<=
O ANDD<=
O AND<>
O ANDD<>
O OR=
O ORD=
O OR>
O ORD>
O OR>=
O ORD>=
O OR<
O ORD<
O OR<=
O ORD<=
O OR<>
O ORD<>
整数比较
长整数比较
整数比较
长整数比较
整数比较
长整数比较
整数比较
长整数比较
整数比较
长整数比较
整数比较
长整数比较
整数比较
长整数比较
整数比较
长整数比较
整数比较
长整数比较
AND<指令
AND<指令
AND<=指令
AND<=指令
AND<>指令
AND<>指令
OR=指令
OR=指令
OR>指令
OR>指令
OR>=指令
OR>=指令
OR<指令
OR<指令
OR<=指令
OR<=指令
OR<>指令
OR<>指令
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
数值转换指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
ITD 整数转换长整数指令
DTI 长整数转换整数指令
16
32
BCD
位
BCD
位
16位BCD
32位BCD
码转换字指令
码转换双字指令
16
位格雷码指令
BCD 字转换
DBCD 双字转换
BIN
DBIN
GRY 字转换为
码指令
码指令
O O DGRY
O O GBIN
DGBIN
SEGI
ASC
ITA
AT1
双字转换32位格雷码指令
16
位格雷码转换字指令
32
位格雷码转换双字指令
字转换7段码
ASCII
16
位16进制数转换
码指令
ASCII
进制指令
码转换指令
码数转换16位
ASCII
16
字触点指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
BLD 字位触点
BLDI 字位触点
BAND 字位触点
BANI 字位触点
BOR 字位触点
BORI 字位触点
BSET 字位线圈置位指令
BRST 字位线圈清除指令
BOUT 字位线圈输出指令
LD指令
LDI指令
AND指令
ANI指令
OR指令
ORI指令
O LD Dx.y
O LDI Dx.y
O AND Dx.y
O ANI Dx.y
O OR Dx.y
O ORI Dx.y
O SET Dx.y
O RST Dx.y
O OUT Dx.y
字位触点LD指令
字位触点
字位触点
字位触点
字位触点OR指令
字位触点
字位线圈置位指令
字位线圈清除指令
字位线圈输出指令
LDI指令
AND指令
ANI指令
ORI指令
EV6000 系列变频器用户 PLC 卡 用户手册

76 附录一 指令速查表
通讯指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
ModBus
XMT 自由口发送(
RCV 自由口接收(
EVFWD 变频器正转指令
EVRWV 变频器反转指令
EVDFWD 变频器点动正转指令
ModBus
数据校验指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
CCITT
CRC16
CCITT
CRC16
本地变频器指令
指令 指令名称 支持 F 支持 H 指令 指令名称 支持 F 支持 H
FWD 本地变频器正转指令
REV 本地变频器反转指令
DFWD
DREV
DSTOP 本地变频器停车指令
STOPFAST
本地变频器点动正转
指令
本地变频器点动反转
指令
本地变频器紧急停车
指令
主站通讯指令
XMT
RCV
校验指令
校验指令
EVDREV
)指令
)指令
EVSTOP
ECFRQ
EVWRT
EVRDST
LRC
STOPFREE
RDF
RDH
WRF
WRH
变频器点动反转指令
变频器停止指令
设置变频器频率指令
写单个寄存器值指令
读取变频器状态指令
LRC
校验指令
本地变频器自由停车指令
本地变频器F型共享软元
件实时读取
本地变频器H型共享软元
件实时读取
本地变频器F型共享软元
件实时写入
本地变频器H型共享软元
件实时写入
O
O
O
O
EV6000 系列变频器用户 PLC 卡 用户手册

附录二 特殊寄存器 77
附录二 特殊寄存器
特殊寄存器主要包括特殊辅助继电器和特殊数据寄存器。
1. 特殊辅助继电器
所有特殊辅助继电器,在 STOP→RUN 时被系统初始化。在系统设置中被设置的特殊辅助继电器将在前面的初始化完成
后,重新根据系统设置中的设置值赋值。特殊辅助继电器的特性如表 1~表 25 所示。
表1 PLC 状态
地址 名称 动作与功能 读写属性
RUN
状态下,始终为高,
STOP-RUN
当发生系统上电后置为高,当用户程序运行一个周期后置低
上电后或
/ /
检测到交流失电时置位(检测时间窗口长
如掉电情况消失清除该位
/ R
/ /
该位置位后,扫描时间恒定(只能通过系统块配置)
STOP-RUN
SM0 监控运行位
SM1 初始运行脉冲位 用户程序从
SM2 上电标志位
SM3 系统错误
SM4 保留
SM5 交流停电检测位
SM6 保留
SM7 保留
SM8 恒定扫描模式
SM9 输入点启动模式 该位置位后,设定的
地址 名称 动作与功能 读写属性
时钟
时钟
1s
时钟
时钟
时钟
10ms
100ms
1min
1hour
为周期的时钟振荡(半个周期翻转,用户程序运行时首个半个周期为0)
为周期的时钟振荡(半个周期翻转,用户程序运行时首个半个周期为0)
为周期的时钟振荡(半个周期翻转,用户程序运行时首个半个周期为0)
为周期的时钟振荡(半个周期翻转,用户程序运行时首个半个周期为0)
为周期的时钟振荡(半个周期翻转,用户程序运行时首个半个周期为0)
10ms
SM10
100ms
SM11
1s
SM12
1min
SM13
1hour
SM14
SM15 扫描周期振荡位 该位每一扫描周期翻转一次。(用户程序运行时首次周期为
地址 名称 动作与功能 读写属性
SM20 指令执行错误
SM21 指令元件编号下标溢出
SM22 指令参数非法
执行应用指令正确后清零;指令执行错误,置位。同时具体的错误类型代码填入
指令执行错误,置位。同时具体的错误类型代码填入
执行应用指令正确后清零;指令执行错误,置位。同时具体的错误类型代码填入
地址 名称 动作与功能 读写属性
SM40
SM41
SM42
SM43
SM44
SM45
SM46 保留
SM47 保留
SM48
X30
输入上升/下降沿中断使能标志位 置1时,使能进入X0上升沿(下降沿)中断
X31
输入上升/下降沿中断使能标志位 置1时,使能进入X1上升沿(下降沿)中断
X32
输入上升/下降沿中断使能标志位 置1时,使能进入X2上升沿(下降沿)中断
X33
输入上升/下降沿中断使能标志位 置1时,使能进入X3上升沿(下降沿)中断
X34
输入上升/下降沿中断使能标志位 置1时,使能进入X4上升沿(下降沿)中断
X35
输入上升/下降沿中断使能标志位 置1时,使能进入X5上升沿(下降沿)中断
PORT0
的字符发送中断使能标志位
STOP
状态下始终为零
,置高一个运行周期后置低
时检测有系统错误发生时置位,如无有任何系统错误发生,该位清零。 R
X
输入点ON时
表3 用户程序执行错误
/
/
置1时,允许
PLC
表2 时钟位
表4 中断控制
40ms
),延时停电检测时间(
STOP进入RUN
可由
SD05
,单位ms)后,
状态(只能通过系统块配置) R
0)
SD20
SD20
SD20
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R/W
R/W
R/W
R/W
R/W
R/W
R/W
EV6000 系列变频器用户 PLC 卡 用户手册

78 附录二 特殊寄存器
地址 名称 动作与功能 读写属性
SM49
SM50
SM51
SM52
SM53
SM54
SM55
SM56 交流电源失电中断
SM57 保留
SM58 保留
SM59 保留
SM60 保留
SM61 保留
SM62 保留
SM63 保留
SM64 保留
SM65 高速计数中断使能标志位
SM66 定时中断
SM67 定时中断
SM68 定时中断
PORT0
的字符接收中断使能标志位
PORT0
的帧发送中断使能标志位
PORT0
的帧接收中断使能标志位
PORT1
的字符发送中断使能标志位
PORT1
的字符接收中断使能标志位
PORT1
的帧发送中断使能标志位
PORT1
的帧接收中断使能标志位
地址号 名称 动作与功能 读写属性
SM90 输入
SM91 输入
SM92 保留
SM93 保留
SM94 保留
SM95 保留
SM96 保留
SM97 保留
X30
X31
地址 名称 动作与功能 读写属性
SM110 串口
SM111 串口
SM112 串口
SM113 串口
SM114 串口
SM118
SM119
0
0
0
0
0
串口0的
完成
串口0的
错误
发送使能标志
接收使能标志
发送完成标志
接收完成标志
空闲标志
0
使能标志位
1
使能标志位
2
使能标志位
脉冲捕捉监视位
脉冲捕捉监视位
ModBus
ModBus
的通讯
的通讯
置1时,允许
当使用
手动清零,以中止端口
送任务可以继续
当使用
手动清零,以中止端口
送任务可以继续
发送完成置位
接收完成置位
当串口没有通讯任务的时候,标志位置位
通讯完成时置位
通讯错误时置位
置1时,允许
置1时,允许
置1时,允许
置1时,允许
置1时,允许
置1时,允许
置1时,允许
/ /
/ /
/ /
/ /
/ /
/ /
/ R/W
/ R/W
置1时,使能进入
置1时,使能进入定时中断
置1时,使能进入定时中断
置1时,使能进入定时中断
表5 脉冲捕捉位
注:
STOP到RUN
1
.由
SPD
测频指令,端口的脉冲捕捉无效。在其它情况都有效。
2
X30~X31
.对
且没有高速比较指令时)是不超过
器中使用
XMT
RCV
DHSCS,DHSCI,DHSZ,DHSP,DHST
表6 自由端口(PORT0)
指令时该位被置位,当发送结束后该位将被自动清零。用户也可对其
指令时该位被置位,当接收结束后该位将被自动清零。用户也可对其
时清除。在本端口上有
脉冲的总输入数在硬件方式(脉冲捕捉,
0
的当前发送任务。当又有能流导通的时候,该端口的发
0
的当前发送任务。当又有能流导通的时候,该端口的发
0
1
2
HCNT
高速计数器驱动指令和
SPD
80k
,软件处理(在驱动了的高速计数
指令)是不超过
指令,
HCNT
30k
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R
R/W
R/W
EV6000 系列变频器用户 PLC 卡 用户手册

附录二 特殊寄存器 79
注意
SM112-SM114 是针对于适用 CN4 的所有通讯协议而言的一个接收、完成与空闲标志。比如:PLC 卡的 CN4 可用于 ECbus、
ModBus 及 FREEPORT 协议,无论采用那种协议,SM112-SM114 都适用。
表7 自由端口(PORT1)
地址 名称 动作与功能 读写属性
SM120 串口
SM121 串口
SM122 串口
SM123 串口
SM124 串口
1
发送使能
1
接收使能
1
发送完成标志
1
接收完成标志
1
空闲标志
XMT
当使用
的当前发送任务被中止,当又有能流导通的时候,继续发送任务
当使用
的当前接收任务被中止,当又有能流导通的时候,继续接收任务
发送完成置位
接收完成置位
当串口没有通讯任务的时候,标志位置位
指令时该位被置位,当发送结束后清除该位;当该位清零时,串口
RCV
指令时该位被置位,当接收结束后清除该位;当该位清零时,串口
1
R/W
1
R/W
R/W
R/W
R
注意
SM122-SM124 是针对于适用 CN6 的所有通讯协议而言的一个接收、完成与空闲标志。比如:PLC 卡的 CN6 可用于 ECbus、
ModBus 及 FREEPORT 协议,无论采用那种协议,SM122-SM124 都适用。
表8 ModBus 通讯
地址 名称 动作与功能 读写属性
SM130 保留
SM131 保留
SM132 保留
SM133 保留
SM134 保留
SM135 串口
SM136 串口
SM137 保留
SM138 保留
1的ModBus
1的ModBus
通讯完成
通讯错误
/ /
/ /
/ /
/ /
/ /
通讯完成时置位
通讯错误时置位
/ /
/ /
R/W
R/W
表9 ECbus 通讯
地址 名称 动作与功能 读写属性
SM140
SM141
SM142
SM143
SM144
SM145
SM146
SM147
SM148
SM149
SM150
SM151
SM152
SM153
SM154
SM155
SM156
SM157
SM158
0
号站通讯错误标志
1
号站通讯错误标志
2
号站通讯错误标志
3
号站通讯错误标志
4
号站通讯错误标志
5
号站通讯错误标志
6
号站通讯错误标志
7
号站通讯错误标志
8
号站通讯错误标志
9
号站通讯错误标志
10
号站通讯错误标志
11
号站通讯错误标志
12
号站通讯错误标志
13
号站通讯错误标志
14
号站通讯错误标志
15
号站通讯错误标志
16
号站通讯错误标志
17
号站通讯错误标志
18
号站通讯错误标志
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
EV6000 系列变频器用户 PLC 卡 用户手册

80 附录二 特殊寄存器
地址 名称 动作与功能 读写属性
SM159
SM160
SM161
SM162
SM163
SM164
SM165
SM166
SM167
SM168
SM169
SM170
SM171
19
号站通讯错误标志
20
号站通讯错误标志
21
号站通讯错误标志
22
号站通讯错误标志
23
号站通讯错误标志
24
号站通讯错误标志
25
号站通讯错误标志
26
号站通讯错误标志
27
号站通讯错误标志
28
号站通讯错误标志
29
号站通讯错误标志
30
号站通讯错误标志
31
号站通讯错误标志
地址 名称 动作与功能 读写属性
SM180 零标志位
SM181 进位
SM182 借位
SM185 表格比较标志
/
溢出标志位
地址 名称 动作与功能 读写属性
ASCII
SM186
指令存储方式标
志
地址 名称 动作与功能 读写属性
SM194
本地变频器连接错误
地址 名称 动作与功能 读写属性
SM196
EEPROM
地址号 对应计数器地址号 功能 读写属性
SM200 C200 R/W
SM201 C201 R/W
SM202 C202 R/W
SM203 C203 R/W
SM204 C204 R/W
SM205 C205 R/W
SM206 C206 R/W
SM207 C207 R/W
SM208 C208 R/W
SM209 C209 R/W
SM210 C210 R/W
SM211 C211 R/W
SM212 C212 R/W
SM213 C213
SM214 C214 R/W
SM215 C215
写空闲标志
当相关操作结果为零时,相关指令执行时打开该位。用户可手动清除、设置该位
当相关操作有进位时,相关指令执行时打开该位,用户可手动清除、设置该位
当相关操作有借位时,相关指令执行时对该位置位,用户可手动清除、设置该位
当整个表格记录完成时置位
每个字高低字节各存放1个
每个字的低字节存放1个
当发生本地变频器连接错误,该位置位。系统故障消除标志自动清除
EEPROM
当
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
/ R
表10 运算标志位
表11 ASCII 转换指令标志
ASCII码
ASCII码
表12 本地变频器标志
表13 EEPROM 标志
没有写处理时,置位
表14 增/减型计数器计数方向
SM2 _ _
当
SM2 _ _
当
SM2 _ _
当
为高电平,其对应的
为低电平,其对应的
为高电平,其对应的
C 2_ _
C 2_ _
C 2_ _
变为减型计数
变为增型计数
变为减型计数
R/W
R/W
R/W
R/W
R/W
R
R
R/W
R/W
EV6000 系列变频器用户 PLC 卡 用户手册

附录二 特殊寄存器 81
地址号 对应计数器地址号 功能 读写属性
SM216 C216 R/W
SM217 C217 R/W
SM218 C218 R/W
SM219 C219 R/W
SM220 C220 R/W
SM221 C221 R/W
SM222 C222 R/W
SM223 C223 R/W
SM224 C224 R/W
SM225 C225 R/W
SM226 C226 R/W
SM227 C227 R/W
SM228 C228 R/W
SM229 C229 R/W
SM230 C230 R/W
SM231 C231 R/W
SM232 C232 R/W
SM233 C233 R/W
SM234 C234 R/W
SM235 C235
SM2 _ _
当
为低电平,其对应的
C 2_ _
变为增型计数
表15 高速计数器的计数方向及监控
区分 地址号 名称 寄存器内容 读写属性
SM236 C236 R/W
单相单端
输入
单相增减
计数输入
双相计数
输入
SM237 C237 R/W
SM242 C242 R/W
SM244 C244
SM245 C245 R/W
SM247 C247 R/W
SM248 C248 R/W
SM249 C249 R/W
SM251 C251
其对应的
当两相单输入计数器和两相增减计数器的
其对应的
增型计数时,为低电平
SM2 _ _
变为高电平和低电平分别对应计数器的减和增
C2 _ _
SM2 _ _
变为高电平;
处于减型计数模式时,
R/W
R/W
R/W
2. 特殊数据寄存器
特殊数据寄存器的特性如表 16~表 24 所示。其中,SD50~SD55 以外的所有特殊数据寄存器,在 STOP→RUN 时被系
统初始化。保留的 SD,SM 表格中不列出,保留的 SD 元件读写属性默认为只读(R)。
表16 PLC 状态
地址 名称 动作与功能 读写属性 范围
EC20
20
:
类型
SD00
SD01 版本号
SD02 用户程序的容量
SD03 系统错误代码
SD04 保留
SD05
SD07 保留
SD08 保留
PLC
交流失电检测延迟时
间设置值
10
EC10
:
EVC-UPRG
111
:
100为1.00
例如:
例如:8表示8k步程序
存储发生的系统错误代码
/ R /
如设置值小于
如设置值大于
(只能通过系统块配置)
/ R /
/ R /
10ms按10ms处理
100ms按100ms处理
R /
R /
R /
R /
R
EV6000 系列变频器用户 PLC 卡 用户手册
10
~
100ms

82 附录二 特殊寄存器
地址 名称 动作与功能 读写属性 范围
SD09
SD10
SD11 保留
SD12 保留
设定运行控制的输入点
采用10进制(
PLC
卡
地址 名称 动作与功能 读写属性 范围
SD20 保留运行错误代码
SD21 保留运行错误代码
SD22 保留运行错误代码
SD23 保留运行错误代码
SD24 保留运行错误代码
地址 名称 动作与功能 读写属性 范围
SD30 当前扫描值
SD31 最小扫描时间
SD32 最大扫描时间
SD33
SD34
恒定扫描时间
设定值
用户程序超时
设定值
注意
1.SD30、SD31、SD32 有 1ms 的误差。
2.当恒定扫描时间设定值(SD33)与用户程序超时设定值(SD34)值相近时,受系统工况及用户程序影响,易发生用
户程序超时错误。建议用户程序超时设定值(SD34)大于恒定扫描时间设定值(SD33)5ms。
地址 名称 动作与功能 读写属性 范围
SD35 输入滤波调整常数
地址号 名称 寄存器内容 读写属性 范围
SD66 定时中断
SD67 定时中断
SD68 定时中断
注:系统在处理用户定时中断时有
X30
显示为0,
I/O
的点数
0
1
2
3
4
当前扫描时间(单位:ms)
扫描时间的最小值(单位:ms)
扫描时间的最大值(单位:ms)
初始值为
用户程序超时报警。
当用户程序某个扫描周期大于恒定扫描时,该周期恒定扫描模式自动失效,不作
报警处理。
SD33
当
(只能通过系统块配置)
初始值为
当
当
(只能通过系统块配置)
设定值大于
SD34
值小于
SD34
值大于
只能通过系统块配置,在0、2、4、8、16、32、64、
间选择
0
周期设置值 当值不在1~
1
周期设置值 当值不在1~
2
周期设置值 当值不在1~
1ms
X31
显示为1,最大到8)(只能通过系统块配置)
高字节:输入
低字节:输出
/ R /
/ R /
0ms,以1ms
100ms。
100
1000
误差,为了保证定时中断能正常工作,建议用户定时中断周期设置值大于等于
表17 运行错误代码 FIFO 区
按队列顺序,保留5条最近的运行错误类型代码,
SD20
总保存新近发生的错误的类型代码
表18 扫描时间
为单位,当恒定扫描时间大于用户监控超时设定值时,作
1000ms
时,按
时,按
表19 输入滤波时间常数设置
1000
时,按
100
处理。
1000
表20 定时中断周期
处理。
32767
32767
32767
处理。
范围内时该中断不触发
范围内时该中断不触发
范围内时该中断不触发
128、256、512ms
0
100
0
~
15
~
1000ms
1000ms
~
0
~
64
R
R /
R /
R /
R /
R /
R /
R /
R /
R /
R
R
之
R/W
R/W
R/W
R
1~32767ms
1~32767ms
1~32767ms
5ms
EV6000 系列变频器用户 PLC 卡 用户手册

附录二 特殊寄存器 83
表21 自由端口接收控制及状态(PORT0)
地址号 名称 寄存器内容 读写属性 范围
自由串口0模式状态字
SD110.0~SD110.2
SD110.3
SD110.4
SD110.5
SD110
SD110.6
SD110.7
SD110.8
SD110.9
SD110.10
SD110.11 保留
SD110.12
SD110.13
SD111 开始字符
SD112 结束字符
SD113 字符间超时时间
SD114 帧超时时间
SD115 接收完成信息代码
SD116 当前收到的字符
SD117 当前收到的字符总数
SD118 当前发送的字符
停止位
奇偶校验
奇偶校验允许
字符数据位
自由口接收开始模式
自由口接收结束模式
自由口字符间超时有效
自由口帧间超时有效
SD110.15
~
自由口波特率
/ R /
b2
000
001
010
011
100
101
0
1
0
1
0
1
每个字符的数据位
0
1
1
0
1
0
1
0
1
0
0
1
保留
/ R/W /
/ R/W /
默认
默认
第0位:用户终止接收置位
第1位:收到指定结束字置位
第2位:收到最大字符数置位
第3位:字符间超时置位
第4位:(帧)接收超时置位
第5位:奇偶检验错误,置位
第6~15位:保留,用户可忽略
/ R /
/ R /
/ R /
b0
、b1、
38,400
:
19,200
:
9,600
:
4,800
:
2,400
:
1,200
:
:1位停止位
:2位停止位
:偶校验
:奇校验
:不校验
:校验
:8位字符
:7位字符
:有特定起始字符
:无特定起始字符
:有特定结束字符
:无特定结束字符
:有字符间超时有效
:无字符间超时有效
:有帧间超时
:无帧间超时
:字元件低字节有效
:字元件高低字节有效
0ms
(忽略字符间超时)
0ms
(忽略帧超时)
波特率
波特率
波特率
波特率
波特率
波特率
/ /
/ /
/ /
/ /
/ /
/ /
/ /
/ /
/ /
/ /
/ /
/ /
R/W
R/W
R /
1~32767ms
1~32767ms
EV6000 系列变频器用户 PLC 卡 用户手册

84 附录二 特殊寄存器
地址号 名称 寄存器内容 读写属性 范围
自由端口1模式状态字
SD120.0~SD120.2
自由口波特率
SD120.3
停止位
SD120.4
SD120.5
SD120
SD121 开始字符
SD122 结束字符
SD123 字符间超时时间
SD124 帧超时时间
SD125 接收完成信息代码
SD126 当前收到的字符
SD127 当前收到的字符总数
SD128 当前发送的字符
SD120.6
每个字符的数据位
SD120.7
自由口接收起始字符模式
SD120.8
自由口接收结束字符模式
SD120.9
自由口字符间超时有效
SD120.10
自由口帧间超时有效
SD120.11 保留
SD120.12
SD120. 13
奇偶校验
奇偶校验允许
高低字节有效
SD120.15
~
表22 自由端口接收控制及状态(PORT1)
b2
000
001
010
011
100
101
0
1
0
1
0
1
每个字符的数据位
0
1
1
0
1
0
1
0
1
0
0
1
保留
/ R/W /
/ R/W /
默认
默认
第0位:用户终止接收置位
第1位:收到指定结束字置位
第2位:收到最大字符数置位
第3位:字符间超时置位
第4位:(帧)接收超时置位
第5位:奇偶检验错误时置位
第6~15位:保留,用户可忽略
/ R /
/ R /
/ R /
b0
、b1、
38,400
:
19,200
:
9,600
:
4,800
:
2,400
:
1,200
:
:1位停止位
:2位停止位
:偶校验
:奇校验
:不校验
:校验
:8位字符
:7位字符
:有特定起始字符
:无特定起始字符
:有特定结束字符
:无特定结束字符
:有字符间超时有效
:无字符间超时有效
:有帧间超时
:无帧间超时
:字元件低字节有效
:字元件高低字节有效
0ms
(忽略字符间超时)
0ms
(忽略帧超时)
波特率
波特率
波特率
波特率
波特率
波特率
R
/ /
/ /
/ /
/ /
/ /
/ /
/ /
/ /
/ /
/ /
/ /
/ /
R/W
R/W
R /
0~32767ms
0~32767ms
EV6000 系列变频器用户 PLC 卡 用户手册

附录二 特殊寄存器 85
表23 ModBus/ECbus 设定
地址号 名称 读写属性 范围
SD130 串口
SD131
SD132 串口
SD133
SD134 保留
SD135 串口
SD136
SD137 串口
SD138
SD139
串口0最大超时时间设定(发送之后和接收之前)
/ECbus
ECbus
串口1最大超时时间设定(发送之后和接收之前)
/ECbus
ECbus
ModBus
0
本站站号设定
附加延迟
0
重试次数
网络刷新模式(
1
本站站号设定
附加延迟
1
重试次数
网络刷新模式(串口1)
主站的错误代码(串口1)
PORT0)
R
R /
R
R
/
R
R /
R
R
R /
ECbus(0~31)
ModBus(0~100)、ECbus
1~13
(默认3)
ModBus(1~31)、ECbus(0~31)
ModBus(0~100)、ECbus
1~13
(默认3)
(默认为3)
(默认为3)
注意
串口 0 指 CN4,串口 1 指 CN6。
表24 DHSP 和 DHST 指令使用
地址号 名称 读写属性 范围
或
或
DHSP
表格要比较数据高位
DHSP
表格要比较数据低位
SD182
SD183
SD184 当前正执行表格的记录号
DHST
DHST
R/W /
R/W /
R/W /
3. 保留元件
起始地址 结束地址 说明
D3880 D3929
D3910 D3939
D3940 D3969
D3970 D3999
D3700 D3763
M500 M1011
D3000 D3999
表25 保留元件表
CN4
端口变频器指令发送缓存区
CN4
端口变频器指令接收缓存区
CN6
变频器指令发送缓存区
CN6
变频器指令接收缓存区
ECbus
ECbus
EROMWR
网络共享区
网络共享区
指令操作区
EV6000 系列变频器用户 PLC 卡 用户手册

86 附录三 EV6000 功能码
1. 扩展 PLC 卡参数
EV6000 系列变频器的功能参数按功能分类,每个功能组内包含若干功能码。本文列出了 F65 组即扩展 PLC 卡参数功能
码,其余功能码请参考《EV6000 系列通用变频器用户手册》。
功能码采用(功能码组号+功能码号)的方式标识,本手册其它内容中出现 F X.YZ 字样,含义是功能表中第“X”组中
第“YZ”号功能码,如“F15.08”表示为第 15 组功能的第 8 号功能码。
功能码表有八项内容,如下图所示:
附录三 EV6000 功能码
157
功能
码
23 4 6 8
名 称
LCD
画面显示
设 定 范 围
最小
单位
出厂
设定值
菜单模式
更
改
功能表的列内容说明如下:
列号 名称 说明
1 功能码
2 名称
3
4 设定范围
5 最小单位
6 出厂设定值
7 菜单模式
8 更改
注:
1
.“参数进制”分为十进制(
部分位的取值范围可以是十六进制的(
2
.表中“
3
.“出厂设定值”表明当进行恢复出厂参数操作时,功能码参数被刷新后的数值;但实际检测的参数值或记录值,则不会被刷新
LCD
画面显示
LCD
画面显示”只在使用
功能参数组及参数的编号
功能参数的完整名称
功能参数名称在操作面板
功能参数的有效设定值范围,在操作面板
功能参数设定值的最小单位
功能参数的出厂原始设定值
快捷菜单模式和基本菜单模式
功能参数的更改属性(即是否允许更改和更改条件):
“○”:表示该参数的设定值在变频器处于停机、运行状态中,均可更改;
“×”:表示该参数的设定值在变频器处于运行状态时,不可更改;
“* ”:表示该参数的数值是实际检测记录值,不能更改;
“—”:表示该参数是“厂家参数”,仅限于制造厂家设置,禁止用户进行操作
(变频器已对各参数的修改属性作了自动检查约束,可帮助用户避免误修改)
DEC
)和十六进制(
0~F)。
LCD汉/
英操作面板时有效。
LCD
液晶显示器上的简略说明文字
LCD
液晶显示器上显示
HEX
)两种,若参数采用十六进制表示,参数编辑时其每一位的数据彼此独立,
!
注意
变频器在出厂时,已禁止对除频率设定以外的功能参数的更改,如果用户需要更改参数,首先将
保护)中的参数由“
1
”改成“0”
F00.03
(参数写入
EV6000 系列变频器用户 PLC 卡 用户手册

附录三 EV6000 功能码 87
码
F65
:扩展
F65.00
F65.01
F65.02
F65.03
F65.04
F65.05
F65.06
F65.07
F65.08
F65.09
F65.10
F65.11
F65.12
F65.13
F65.14
名 称 LCD 画面显示 设 定 范 围
PLC
卡参数(23个)
PLC
卡状态
开关量输出端
子控制
PLC
开关输出端子控制
卡状态
bit0~1:
0:OFF;1:ON;2:TM
卡控制
个位:
十位:
二进制设定
0
:变频器控制
1:PLC
LED
BIT0~BIT3:Y1、Y2、R1、R2
LED
BIT0~BIT1:ER1、ER2
LED
百位:
BIT0:D0
模拟量输出端
子控制
模拟输出端子控制
二进制设定
0
:变频器控制
1:PLC
LED
BIT0~BIT1:AO1、AO2
LED
卡控制
个位:
十位:
BIT0~BIT3:EAO1、EAO2、EAO3、EAO4
X8
端子输入
频率
DO
端子输出
频率
开关量端子输
出
X8
端子输入频率
DO
端子输出频率
实际开关量端子输
出
0~100000Hz
100000Hz
注:
0~100000Hz
100000Hz
注:
LED
个位:
键盘显示仍为
键盘显示仍为
BIT0~BIT3:Y1、Y2、R1、R2
LED
十位:
BIT0~BIT1:ER1、ER2
个位:
十位:
扩展开关量输
入端子状态
二进制设定
0
:无效
1
:有效
ExDI端子
实际
LED
BIT0~BIT3:EX1~EX4
LED
BIT0~BIT1:EX5~EX6
个位:
十位:
处理后的扩展
开关量输入端
子状态
处理后
ExDI端子
二进制设定
0
:无效
1
:有效
LED
BIT0~BIT3:EX1~EX4
LED
BIT0~BIT1:EX5~EX6
EAI1
输入电
流
EAI2
输入电
流
调整后
输入电流
调整后
输入电流
AO1输出 AO1输出 0.0~100.0
AO2输出 AO2输出 0.0~100.0
EAO1输出 EAO1输出 0.0~100.0
EAI1
EAI2
EAI1
EAI2
调整
调整
输入电流
输入电流
EAI1
输入电流
EAI2
输入电流
0.000~1.000A 0.001A 0.000 ×
0.000~1.000A 0.001A 0.000 ×
0.000~1.000A 0.001A 0.000 ×
0.000~1.000A 0.001A 0.000 ×
%(相对满量程的百分比)
%(相对满量程的百分比)
%(相对满量程的百分比)
99999Hz
99999Hz
0.1% 0.0%
0.1% 0.0%
0.1% 0.0%
最小
单位
出厂
设定值
1 2 ×
1 0 ×
1 0 ×
1Hz 0 ×
1Hz 0 ×
1 00 ×
1 00 ×
1 00 ×
菜单模式 功能
Q B
×
×
×
更改
×
×
×
×
×
×
×
×
×
×
×
×
×
×
×
○
○
○
*
注
1
△
△
*
*
*
*
*
*
△
△
△
EV6000 系列变频器用户 PLC 卡 用户手册

88 附录三 EV6000 功能码
码
F65.15
F65.16
F65.17
F65.18
F65.19
F65.20
F65.21
F65.22
F65.23
F65.24
注1:
名 称 LCD 画面显示 设 定 范 围
EAO2输出 EAO2输出 0.0~100.0
EAO3输出 EAO3输出 0.0~100.0
EAO4输出 EAO4输出 0.0~100.0
%(相对满量程的百分比)
%(相对满量程的百分比)
%(相对满量程的百分比)
0~3FFH
bit0~1
:起停命令
PLC
令
卡控制命
PLC
卡控制命令
00
01
10
11
bit2
bit3
bit4
bit5
bit6
bit7:PLC
bit8
bit9
:停机
:正转
:反转
:运行,运行方向取自
:点动正转
:点动反转
:强迫停机
:自由停机
:紧急停机
:故障复位
:禁止运行
卡故障停机
0~1FFH
0
:无效
1
:设置了功能码
功能码设置标
志
PLC
主给定频
率数字设定
PLC
辅助给定
数字设定
PLC
转矩给定
PLC
位置数字
给定高位
PLC
位置数字
给定低位
F65.04
不可通过键盘更改,但可通过
功能码设置
PLC
PLC
PLC
PLC
PLC
主给定频率
辅助频率
转矩给定
位置给定高位
位置给定低位
-300.0%~+300.0% 0.1% 0.0%
bit0
bit1
bit2
bit3
bit4
bit5
bit6
bit7
bit8
F02.12~F02.11 0.01Hz 50.00 ×
0.00~1000.00Hz 0.01Hz 0.00 ×
0~150 1 0 ×
0~65535
低位设置后刷新
PLC
:设置
:设置
:设置
:设置
:设置
:设置
:设置
:设置
:设置
卡更改
F00.07
F02.00
F02.01
F02.05
F05.00
F05.02
F07.00
F07.01
F13.06
最小
单位
出厂
设定值
0.1% 0.0%
0.1% 0.0%
0.1% 0.0%
菜单模式 功能
Q B
×
×
×
更改
×
×
×
△
△
△
F05.01
1 0 ×
×
○
1 0 ×
×
1 0 ×
×
×
×
×
√
√
○
○
○
○
○
○
EV6000 系列变频器用户 PLC 卡 用户手册

附录三 EV6000 功能码 89
2. 功能码的分类
EV6000 系列变频器功能码根据数据长度的不同,可以分为 16 位长度功能码和 32 位长度功能码,分别对应 PLC 卡的 F
型共享软元件(16 位长度)和 H 型共享软元件(32 位长度),下表中列出了所有 H 型共享软元件,其余功能码都是 F
型共享软元件。
元件 名称 元件 名称 元件 名称
F01
组:状态显示参数
F01.01 主给定设定频率
F01.02 辅助给定设定频率
F01.03 设定频率
F01.04 频率指令(加减速后)
F01.05 输出频率
F01.12 电机估算频率
F01.13 电机实测频率
F02
组:频率/速度给定
F02.01 主给定频率数字设定
F02.05 辅助给定数字设定
F02.10 最大输出频率
F02.11 上限频率
F02.12 下限频率
F02.15 跳跃频率
F02.16 跳跃频率
F02.18 跳跃频率
F04
:加减速参数
F04.14 加减速时间
F10
:多段速参数
F10.00 多段频率
F10.01 多段频率
F10.02 多段频率
F10.03 多段频率
F10.04 多段频率
1范围
2
3
1和2
1
2
3
4
5
切换频率
F10.05 多段频率
F10.06
F10.07
F10.08
F10.09
F10.10
F10.11
F10.12
F10.13
F10.14
F12
F12.18
F15
F15.08
F15.10
F15.11
F15.13
F15.14
F29.01 电机
F29.03
F29.05
F29.09
F29.13
F29.15
F29:V/F
6
多段频率
多段频率
多段频率
多段频率
多段频率
多段频率
多段频率
多段频率
多段频率
闭环预置频率
:开关量输出端子
频率到达(
FDT1电平
FDT1滞后
FDT2电平
FDT2滞后
电机
电机
电机1基本运行频率
电机
电机
7
8
9
10
11
12
13
14
15
:过程闭环控制
FAR)
特性参数
1V/F频率3
1V/F频率2
1V/F频率1
2V/F频率3
2V/F频率2
检出宽度
F29.17
F29.21
F30
F30.02
F65
F65.03
F65.04
F65.20
F65.21
F80.03 异步电机额定频率
F80.16
F81
F81.03
F81.16
F90.03
F90.08
F90.13
2V/F频率1
电机
电机2基本运行频率
:纺织摆频参数
摆频预置频率
PLC
:扩展
X8
端子输入频率
DO
端子输出频率
PLC
主给定频率数字设定
PLC
辅助给定数字设定
F80
:电机1参数
同步电机额定频率
:电机2参数
异步电机额定频率
同步电机额定频率
F90
:故障记录
第1次故障时刻运行频率
第2次故障时刻运行频率
第3次故障时刻运行频率
卡参数
EV6000 系列变频器用户 PLC 卡 用户手册
 Loading...
Loading...