

Application Note AP040085EN
Effective May 2018
PowerXL Series Trouble Shooting Guide
Introduction
The PowerXL Series drive provides feedback during a fault condition. For each fault code, this
document provides a brief description of what is occurring and the actions to take to resolve the
issue. Please see below for each specific fault code and the recommended actions.
Contact the Technical Resource Center (Technical Resource Center at 1-877-ETN-CARE or 1877-326-2273 option 2, option 6) for further information and assistance.
Fault Trouble Shooting
F1 Over Current Protection – There are 2 types of overcurrent conditions that occur when the
output current exceeds safe running conditions.
1. Output current exceeds 2.2 times the constant torque current rating of the drive,
a. When this occurs, the output PWM will shut down cycle by cycle. The output fre-
quency will start to drop to lower the current draw of the motor. After 2 sec, if the
motor current does not drop below the current limit level the drive PWM will shut
down and display fault.
2. Output current exceeds 2.8 times the constant torque current rating of the drive
a. When this occurs, the output PWM will be shut down and indicate over current
fault instantaneously.
All conditions will be addressed in the same way:
1. The first step is to remove the motor and start the drive. If the drive trips with nothing
connected, the drive has failed and will have to be repaired or replaced.
2. If the drive doesn’t trip, go through “checking the drives output voltages” at the bottom of this document. If the drive fails this test, repair or replace.
3. Insulation test the motor and the output run. If this tests alright, see if the motor can
be uncoupled.
4. If the drive trips on an uncoupled motor, connect a test motor to the drive and see if it
can run this motor. For this purpose, it is nice to have the test motor be the same
size as the original motor, although even a small motor will tell certain things. Run
the drive on a known good application. If the drive trips on the test motor or known
good application, repair and replace the drive.
5. If the drive can run the uncoupled motor, try to spin what the motor was coupled to by
hand to make sure it is not stuck. If it can spin the application, re-couple the motor
and try to start it again. The most likely place for the output to short is in the motor
connection box. It is not bad idea to have these connections reinsulated as a precaution. This problem can come and go but will normally get worse over time.
F2 Over Voltage Protection – The over voltage fault is taken from the DC bus (trip level is
460Vdc for 230VAC drives, 910Vdc for 480VAC, and 1100Vdc for 575VAC drives). Being taken
from the DC bus, this trip isn’t an extremely fast trip as the DC bus is filtered which will slow the
rise and fall of the DC bus. An over voltage fault can come from either the input or the output of
the drive, so to troubleshoot this we need to figure out where it is coming from. The over voltage
trip is turned on whether the drive is running or not.
Effective May 2018
Drive Rating
Voltage
230V
460V
Vin*1.35+30v,(240*1.1>Vin>208*0.85)
480V
910V
Vin*1.35+30v,(500*1.1>Vin>380*0.85)
575V
1100V
Vin*1.35+30v,(600*1.1>Vin>525*0.85)
For an over voltage to come from the output of the drive there is either regenerative feedback or
induced voltage. For there to be regenerative power, the drive either has to be running or there is
a PM motor (PM motors are not very common). If a PM motor is being used and the DC bus is
higher than it should be, see if the motor is spinning or power the drive down and check to see if
there is any voltage across the motor windings. With a PM motor, there should be an isolation
contactor on it to stop regenerative voltage from feeding back into the drive. For all asynchronous
motors, there has to be a magnetic field applied to the motor for it to regenerate power back into
the drive and it gets this field from the drive. This means that if the drive is not running there really
can’t be regenerative power. For a synchronous motor, there also needs to be a voltage applied
to the motor but this does not need to come from the drive so please make sure what the motor is
before troubleshooting.
For regenerative power to occur, the drive has to be going slower than what the application is.
This phenomenon normally occurs during ramp down of the unit. If the drive is set to ramp down
too fast, the motor will regenerate power back into the drive. If the over voltage controller is on in
the drive, the drive will speed up to try to shed the excess voltage. For example, on a 480V drive
when the DC bus reaches about 750VDC, the drive will speed up or it will reduce how fast it is
decelerating to try to keep the DC bus below this level. If the drives deceleration time is too fast,
the drive will not react fast enough and the drive will trip out on an over voltage trip. A trip that
comes from regenerative power will almost always have negative power and the drive will not be
at reference. These are normally pretty good indicators that regeneration is occurring.
PowerXL Series Trouble Shooting Guide Application Note AP040085EN
The other place for a drive to get voltage from the output is induced voltage. This is most likely to
occur if the drive is powered up but not running. The source of this induced voltage is normally
from another running drive whose output is too close to the drive in question. This has been seen
to induce enough voltage to power up a drive with no input voltage applied. The best way to resolve this is to make sure that there is enough space between the outputs (12”). Running the outputs in shielded cable or putting a sine filter on the output of the drive (to eliminate the high frequency component) will allow the outputs to be run closer together.
The more likely place for an over voltage to come from is the input of the drive. There is not much
the drive can do about high input line voltages. If the drive is running, the over voltage controller
will try to bleed this off but it is not likely to succeed. There are a couple of events on the front of
the drive that will cause the DC bus to go up. The first event is high input voltage. To get roughly
what the DC bus should be for any given voltage multiply the measured input voltage by 1.414.
As an example, if the measured input is 476VAC, the DC bus should be about 673VDC. This will
lower as the power goes up as the drawing down of the DC bus slightly occurs and are dropping
voltage across the input reactor. With this formula to reach the trip limit on a 480V drive the input
voltage would have to be about 644VAC.
Another thing on the input that can cause a rise in DC voltage is if there is a ringing circuit crea ted. What happens here is that the drives RFI filters react with an external component to create a
tuned circuit. This is something that is not easily detected with a normal DMM. The drive is affected more greatly by this if it is not active. The most likely place to look for this is in any passive filters on the front end, normally a 5th harmonic filter. If there is a filter on the front end, deactivate
this filter and see if the problem goes away.
2 EATON CORPORATION www.eaton.com
PowerXL Series Trouble Shooting Guide Application Note AP040085EN
Effective May 2018
F3 Earth Fault Protection - The earth fault is a software function that monitors the sum of all of
the output currents. The drive is looking for this to be less than 15% of the motor nameplate current by default, but this value can be selected in the protections parameter group. The first step is
to disconnect the motor and run the drive. If the drive faults, more than likely the problem is in the
drive. The ground connections should be checked to make sure there is a solid ground as noise
can cause this fault. If the drive does not trip, it is best to try the drive on a test motor to see if it
can run this. If the drive trips on a test motor, the problem is likely to be in the drive and the drive
should be replaced. If the drive works on the test motor, hook back up to the motor in question
and monitor the output with a zero sum CT. If the zero sum current of the CT is above the trip
level set in the drive keypad but the drive is not tripping, this would also likely be the drive. If the
zero sum current is above the trip level and the drive is tripped the problem is outside of the drive,
the motor and its cabling should be checked out.
F5 Charge Switch Protection - The charge switch fault is a hardware function. There is a softstart circuit in the drive to make sure the hardware circuit is working correctly when power is on. If
soft-star
the
t circuit is not working based off the formula (V
x 1.414 -100 >V
nput
i
), the charge
dclink
switch fault will become active. When dealing with this fault, verify the input voltage levels line to
ine for each line (all should be equal). From there, check the DC bus voltage with a meter to ver-
l
ify voltage level, based off input voltage read it should be 1.414 times that value. If it is high, then
there is an issue internally with the power or input rectifiers. Static checks for the input rectifiers to
the DC bus should be performed.
F6 Emergency Stop Fault – The emergency fault is a fault that is fed into a digital input. First,
go into the programming and see what inputs are set for an emergency fault. It functions on a
closed contact. Once the assigned input is known, go into the monitoring menu and see which input is causing the fault. As an example, if DIN3 was programmed for emergency fault, go into
monitor menu and look at DIN1-3 to see if 3 is on or off. For it to be faulted, the input should be
on. The next step would be to check the voltage at this input to see if there is 24V. If there is,
troubleshoot the circuit that is supposed to supply this input. If there is nothing wrong with the circuit, it may be an issue with a blown input and the control board will have to be replaced. To be
sure, remove all external wiring and jumper 24V to the input to verify it functions properly.
F7 Saturation Fault
exceeds a threshold, the IC will trigger a fault. The fault is detected by the DSP IO pin. I
- The saturation fault is the drive looking at the voltage across the IGBT, if it
f the
voltage is showing a low level of 0.3V, the drive will see the IGBT in saturation or a short. This
problem is usually caused internally in the drive. Perform the static checks and DC balance
checks listed below. This should indicate the issue being inside or outside the drive.
F9 Under Voltage Fault – The under voltage fault is taken from the DC bus. This fault will only
cur if the drive is running and the DC bus gets to the one of 2 trip levels. One is based off the
oc
fault protection parameter (V
) and the other is a hard fault (V
uvtrip
). This problem predominate-
uvstop
ly is a loss of input power while the drive is running. The only thing in the drive that could cause
this fault would be an invalid reading of the DC bus. This is diagnosed by taking a DC bus reading
and comparing this to the monitored value of the drive. If these readings
aren’t close to each oth-
er, there may be a monitoring problem in the drive, which would require replacing the drive.
Drive Rating
Voltage
230V 190V 210V Vin*1.35-30v,(240*1.1>Vin>208*0.85)
480V 350V 390V Vin*1.35-30v,(500*1.1>Vin>380*0.85)
575V 500V 550V Vin*1.35-30v,(600*1.1>Vin>525*0.85)
Hard Trip
Undervoltage
Level
Resume
Point Trip
Level
User Select
EATON CORPORATION www.eaton.com 3

Effective May 2018
F10 Input Phase Fault - The input phase fault is looking for voltage in the rectified 3 phase inputs. The drive monitors all 3 phase voltages and performs a calculation for differential voltage
min and max values. If the differential max is greater than the differential min, the drive sees it as
it losing one of the phases. This is a relatively slow trip as the drive is capable of running with a
missing input phase for a short period of time. This trip can be turned off, but it is recommended
to have this on. The input current can rise up 1.73 times on a single phase if a phase is missing,
which forces the DC bus capacitors to filter out a ripple that goes down to 0VAC. For this fault,
the first thing to check is to make sure that all 3 phases are present on the input of the drive. If
they are not, troubleshoot upstream to see where one of the phases was lost. If all 3 phases are
present, reset the fault. If the fault resets, it may have been a temporary loss of a phase on the
input that the utilities have corrected. If the fault does not reset and all 3 phases are present on
the input of the drive, there is something wrong with the monitoring circuit of the drive. Turn off
this protection to see if the fault can be cleared. If there is something else monitoring the 3 phase
that can shut the drive down, the drive can be run this way. If there is no other monitoring circuitry
for the 3 phase, the drive should be repaired or replaced.
F11 Output Phase Fault – The output phase fault is looking for the loss of current draw or a significant difference in current draw on the output of the drive. The drive looks at the 3 filtered
output phase currents (U, V, W) and takes the maximum and minimum value of the 3 values. I
the maximum current value is greater than 3 times the current minimum and the current minimum
is greater than 0.03, the output phase fault will be triggered.
PowerXL Series Trouble Shooting Guide Application Note AP040085EN
f
The first thing to do with this fault is to disconnect the output of the drive and start the drive. If the
drive faults on output phase fault loss, there is something wrong with the current measurement on
the output of the drive. If it does not fault, ramp the drive up to max frequency and check the
voltage on the output of the drive. Normally if the fault is coming from the drive, it is because it is
not firing one of the phases. This can be seen by measuring the voltages on the output (they will
not be equal). If they are equal, run the drive on a test motor. Check the 3 phas
e currents on the
output and compare that to the monitored values of all 3 phases. If these are equal and everything looks good on a test motor, connect the original motor back up and try the same. If the
drive trips right away, fault monitoring can be disabled by going into the Protections Parameter
group and setting the Output Phase Fault Protection to "No Action", then using an oscilloscope
read the phase currents. If the currents are uneven at this point, check the motor and its
connections in the motor junction box.
F12 Brake Chopper Fault – The purpose of the brake chopper fault is to indicate when the brake
chopper is enabled. There is a resistor connected to see if it is functioning properly. The drive
sends 25% of its duty cycle output wave to the brake chopper. In addition, the drive captures the
feedback signal which will indicate if the brake chopper is working properly. If the feedback is different than the signal sent out, the drive will indicate a brake chopper fault. From here, it is suggested to check the brake resistor to be sure it ohms out correctly. If it does, perform static
checks on the brake as listed below.
F13 Drive Under Temperature – The trip level for the drive is at -10°C on both the IGBT’s and
power board. If the drive becomes too cold, there is the potential for condensation or frost to
build up on the circuit boards and connectors. There is a greater potential for shorting out the fine
pitch circuitry on the printed circuit boards so the drive will trip in its default settings. If the drive is
getting cold, it is suggested to bring the temperature of the drive up.
If this is not possible, there is a cold weather feature that can be enabled to change the under
temperature trip to -30°C. The drive will trickle voltage to the motor when the temperature is between -20°C to -30°C for current to flow and warm up the heat sink in the drive. When in this situation and the drive is given a run command, it will send out a user specified voltage level for a
4 EATON CORPORATION www.eaton.com
PowerXL Series Trouble Shooting Guide Application Note AP040085EN
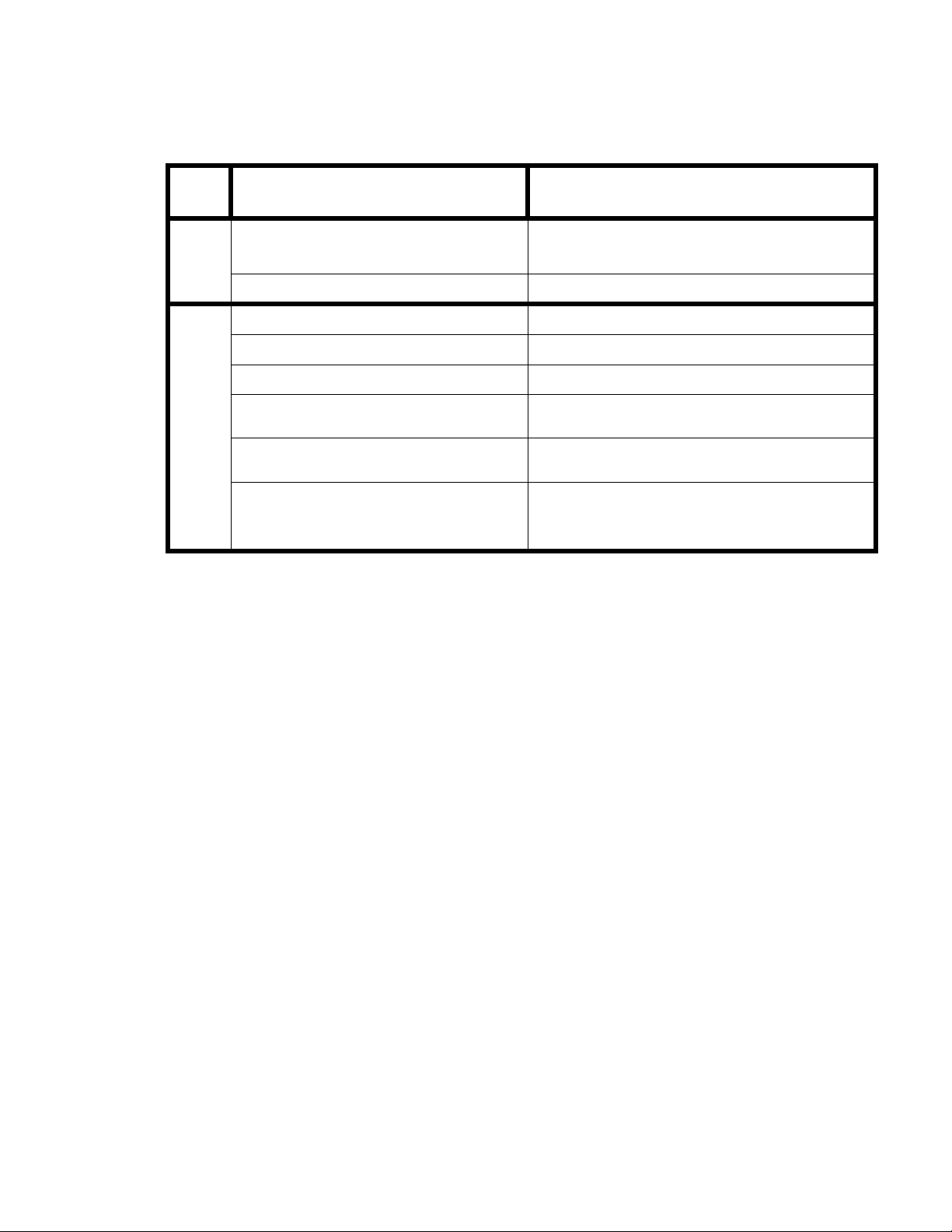
Mode
Conditions
Actions
Normal
mode
1. Shut down inverter PWM within 100ms,
2. Send drive under temperature fault to MCU.
Start normal
Cold
Weather
Mode
Under Temp Fault Override is Yes
Drives starts ignoring under temp condition until the drive is
powered down.
1. Under Temp Fault Override is No,
2.
Start normal
1. Under Temp Fault Override is No,
2.
1. Shut down inverter PWM,
2. Fault drive under temperature and send to MCU.
1. Under Temp Fault Override is No,
2.
1. Warm-up at 0.5Hz, Cold Weather Voltage for the Cold
Weather Time
2. Warn drive under temperature and send to MCU.
1. Under Temp Fault Override is No,
2. In warm-up operation
3.
for 2s continuously
1. Start normal
2. Clear under temp warning to MCU
1. Under Temp Fault Override is No,
2. In warm-up operation
3.
4. Time out
1. Shut down inverter PWM within 100ms,
2. Fault drive under temperature and send to MCU.
3. Allow resetting fault and starting sequence again.
Effective May 2018
specified time to heat up the drive. If not able to warm up, the drive will fault out. If temperature
goes above -20°C, the drive will ramp up to normal running condition.
F14 Drive Over Temperature – The over temperature trip level is dependent on the frame size
drive, all of which are based of the IGBT and power board temperature level. There are multiple
temperatures that can be monitored through the PC tool or an external HMI though communications. The temperature display on the keypad is the larger value of the IGBT and power board
sensors.
FR1: trip at 96°C, fold back at 90°C
FR2: trip at 91°C, fold back at 85°C
FR3: trip at 94°C, fold back at 85°C
FR4: trip at 89°C, fold back at 78°C
FR5: trip at 88°C, fold back at 80°C
When an over temperature fault occurs, the first thing to do is check and see if the cooling fans
are working properly. Typically there will be a fan fault as well if the fan has failed. If the fans are
not spinning, verify voltage is getting to the fans. With a multi-meter, measure the voltage across
the fan connector. There should be 24Vdc on FR1-FR4 and 48Vdc on FR5-FR8 fans.
If the fans are working, check the air flow through the drive. If the air is restricted, it will be required to clean out the cooling tunnel. If there is air flow, check the temperature of the air to see if
it is hot or cold. If cool air is flowing, it would indicate the temperature sensors have failed. This
failure would require factory service to repair. Another thing to check would be the ambient air
temperature that the drive is located in. The drive is meant to be in a location that does not exceed 50°C ambient and is no more than 1000M above sea level. If either of these conditions is
exceeded, the drive requires de-rating which is found in the installation manual.
EATON CORPORATION www.eaton.com 5

Effective May 2018
Another thing to note with this fault is the drive will try to prevent the fault condition by dropping
the switching frequency once the fold back temperature is met (which varies based off frame
size). The switching frequency will back itself down more the closer it gets to the fault temperature.
F15 Motor Stall Fault – There are 4 settings that are used in the motor stall protection trip. The
settings are located in the protection group. There is parameters to enable the stall protection, set
the stall current, set the stall time limit, and set the stall frequency. The first thing is to make sure
that these settings are set correctly so a false trip isn’t occurring. The stall current should be set
to about an amp below the current limit setting. The time is how long it takes for the current to be
above the stall current before the fault occurs. The frequency setting enables the drive to only
look at this fault when the frequency is below this value. The fault func-tions if the current of the
drive has to be above the stall current longer than the stall time while be-ing below the stall
frequency.
This fault is indicative of a locked rotor. In the fault history, the drive would be in a current limit at
about 4 Hz. Check the application and see if the motor can spin. Another thing to check is that
there are no anti-backspin devices on the motor which if the drive is spinning the motor in reverse
it would be going into the ratchet. Uncoupling the motor and running it with the drive is also a test
that can eliminate the motor as the issue.
PowerXL Series Trouble Shooting Guide Application Note AP040085EN
It is also possible that the application is hard to get started. In this case, it is suggested to do an
ID run on the motor or ID run with auto torque boost. This will develop more torque when the application starts to get the motor to break free.
F16 Motor Thermal Protection – Motor over temperature is a calculated trip in the drive. There
are quite a few factors that the drive takes into consideration when it is calculating this trip. The
settings in the drive that affect this trip are: motor nameplate current, motor nameplate frequency,
motor ambient temperature factor, motor zero frequency current, motor heating time constant and
duty cycle.
With the basic start-up, the 2 settings that are set during a start-up are the motor nameplate and
motor nameplate frequency. The other settings in the drive are defaulted for normal NEMA1 drip
proof motors. These parameters set up the heating curve of the drive. With these settings the
drive will allow running at 100% current on the motor continuously at 100% speed. One thing to
note is that the motor has a service factory of 1 when running with a VFD due to the high frequency heating of the VFD. Below is list of what each of the settings do to the curve:
Motor nameplate current: this sets the continuous current rating of the motor.
Motor nameplate frequency: on a motor that has a shaft driven fan this sets the frequency
at which the motor can continuously run motor nameplate current.
Motor ambient temp: when the drive first starts up, it uses its temp as the temp of the mo-
tor. When this setting is 0 it means the motor is at the same temp as the drive. If the motor is in a significantly different ambient temp than the drive, this parameter would be
used to correct for the temperature difference. An example of this would be if the motor is
on a roof out in the desert with an ambient outside of 110F whereas the drive is in an air
conditioned room at 70F this would suggest setting to about 15%.
Motor zero frequency current: This is the % of FLA that the motor can run at zero speed.
If the motor is cooled by an external blower or water jacket, this can be drastically
changed and put close to 100%. The thing that normally limits this is the cooling on the
motor.
6 EATON CORPORATION www.eaton.com

PowerXL Series Trouble Shooting Guide Application Note AP040085EN
Effective May 2018
Motor heating time constant: This is basically how long it takes the motor to heat up to
63% of 100% temp. Normally the bigger the motor the longer this time is. This value
should not be changed unless this number is provided from the motor manufacturer.
Motor duty cycle: This is the duty cycle of the motor. This should be on the nameplate of
the motor.
Motor over temperature fault is normally an application fault, although it is good to check all of the
above values to make sure they are correct. Check the parameters that are captured when the
drive faulted out. The main thing to look for is the frequency of the drive and the output current.
The default motor curves are calculating this for a shaft driven fan so full current can only be run
at full speed. What to look for is too much current for the speed that the drive is running at. The
trip level is at 105%. In most cases, the fault is due to simply drawing to much current for the
speed that the drive is running at which is an application problem.
F17 Motor Under Load Fault – The motor under load fault is based off 4 parameters that are
user settable. The parameters are located in the protections group. There is parameters to
enable under load protection, set the under load F
torque, set the under load F0 torque, and
nom
the under load time limit. The first thing would be to verify that these parameters are set correctly
for the application so there isn’t a false trip occurring. The Torque at F
should be the torque at
nom
the field weaken-ing point. The torque at F0 should be the torque level when the motor is running
at 5 Hz or basi-cally 0 speed. The time limit should be the amount of time it is allowed in this
region below the torque levels before it faults. The function is designed in that if the torque drops
below the squared torque curve based off the frequency level for the time limit the drive will fault.
In some cases, this fault can be due to improper setting for the application. If the application is set
correctly the fault is indicating a belt has broken or the load has dropped off and the motor could
be running away. First thing would be to go check the motor and load to be sure the application
is still operational.
F18 IP Conflict Fault – The IP conflict fault is due to multiple devices on the Ethernet network
having the same IP address. The current address on the drive is found in the Communication parameter group, the active IP address is the current IP address of the drive. To resolve this, either
change this IP address or find the other device with same IP and change that address.
F19 Power Board EEPROM fault – The power board EEPROM fault is an indication that the microprocessor failed the startup checks, and bad data was received. In this case, the drive lost
some of its programming. Power cycling the drive may resolve the data messages or try resetting
the drive to default parameters. There also could be a voltage disturbance and may be a single
occurrence. If the fault continues, a new control board is required.
F20 FRAM fault – The FRAM fault is an indication that the control board has bad data written to
stored memory. This fault may be able to be reset by reloading firmware to the drive or performing a factory reset to the parameters. If the fault continues, a new control board is required.
F21 Serial Flash Fault – The Serial flash is an indication that the control board has received bad
data from the serial flash memory chip. This fault may be able to be reset by reloading firmware
to the drive or performing a factory reset to the parameters. If the fault continues, a new control
board is required.
EATON CORPORATION www.eaton.com 7
 Loading...
Loading...