

Page 1

Instruction Manual for the USB MicroPower E-Logger
Patent Pending
Document Version 2.5, Model # MPR-CONN and MPR-LEADS
Thank you for your purchase! This instruction manual will guide you through the installation and operation of your
MicroPower E-Logger.
Please read the entire manual carefully before proceeding. If, after you read the manual (including the Troubleshooting
sections!) you have further questions or problems, please visit our web support page for additional support options, at
http://www.eagletreesystems.com/Support/support.html. Note that the latest version of this manual is available in PDF form
from the Support page of our website.
Please also fill out the registration form at the end of this manual if you did not purchase your MicroPower directly from
Eagle Tree Systems, so we can send you important update information.
Key Features
Here are a few of the features of the MicroPower:
• Logs pack current to +/- 100 amps and voltage from about 4.5 volts to 45 volts
• Current is measured with a true Hall Effects Sensor - NOT a resistance shunt like other units on the market!
• Great for bench monitoring of battery charging also!
• Accepts optional inexpensive sensors for Temperature, RPM (brushless, magnetic or optical), Airspeed, Altitude,
Servo Current, Throttle Movement, and more, available below
• All data is logged to permanent memory, which retains the data even when the power is removed
• Software computes Wattage, mAH, etc. for complete e-flight data.
• Fully Compatible with Windows Vista, 98SE, ME, Win2K and XP™
• Integrated USB with included cable (NOT a USB to serial port cable like other loggers)
• Supports simultaneous Temp and RPM sensors, or two Temps
• Weighs about 0.5 oz (17 grams). Version with Wire Leads weighs slightly more.
• Supports USB Live Mode, which lets you see what's happening in the model LIVE on the bench, on your PC
• Adjustable logging rate (1-10 samples/second) and lossless data compression for long log times
• Comes with our state of the art Windows virtual playback display and graphing
• Powerful Graphing software has advanced charting features, such as amps vs volts
• Internet Updatable firmware - as we add new features or (heaven forbid) have a firmware bug, the update is just a
download away! No need to ship hardware back and forth.
• Full support for English and Metric units
Intended Uses
The MicroPower was designed for use in Unmanned Radio Controlled models. Using the MicroPower for other purposes is not supported.
Further, using the MicroPower in situations where its use or failure could result in loss of life, bodily injury or property damage is expressly
prohibited.
Packing List
Your package should include the following: MicroPower (either with integrated connectors or with wire leads), Custom USB Cable, and CD-ROM.
Steps to Follow
Installation and use of the MicroPower E-Logger will be quite easy and enjoyable if you follow these few steps:
1. Read through the manual to understand the important warnings, determine what parameters you want to log, etc.
2. Install the MicroPower in your model, as described in the MicroPower Installation section below. Pay special attention to the polarity and
plug-in location of the sensors, since some of the plugs will fit in more than one location!
3. Install and configure the Windows software as described in the Windows installation section below.
4. IMPORTANT: Bench and range test your model as described in the “Using the MicroPower” section below.
Copyright © 2003-2005 Eagle Tree Systems, LLC
Page 2
5. Have fun!
Page 2
Installation of the MicroPower
IMPORTANT: Never let the sensor/USB prongs of the MicroPower touch bare battery pack leads, exposed parts of your ESC/BEC, or the
motor casing!! Doing so could destroy the MicroPower since these items may have high voltage present from your battery pack, and void
the warranty.
The below instructions and diagram guide you through the installation of the MicroPower.
Connecting the MicroPower to Your Model’s Power System
WARNING: High Voltages can cause electric shock. Be extremely careful when working with high
voltage packs! Work with high voltages at your own risk.
The MicroPower is normally connected so that the connectors or leads marked “Source” are connected to your battery pack, and the connectors or
leads marked “Load” are connected to your ESC’s power input. The red wires of the “wire lead” version of the MicroPower must be connected to
the positive side of the load and source (normally the red wires). For measuring current/voltage battery charging, it is ok to reverse the Source and
Load connections, so that current is flowing “backwards” through the MicroPower. The MicroPower will still measure current correctly in this
mode!
IMPORTANT: Do not leave your model’s power system connected to the MicroPower when the unit is not in use in the field. Always
disconnect the battery from your model when it is in storage.
IMPORTANT: With the Integrated Connector version of the MicroPower, always ensure that the wiper prongs of all plugs are not bent or
damaged before connecting! A bent or damaged wiper prong could potentially collapse or fold over during connection, and contact the
other terminal of the connection, causing a short, or could
result in an unreliable connection.
Measuring Temperature with the
MicroPower
Up to two optional temperature sensors can be connected to
the MicroPower. Note that the second temperature sensor
plugs into the RPM port, so only one temperature can be
measured when RPM is being measured.
The temperature sensors are typically installed by placing the
wire loop around the your battery pack, ESC, BEC, or other
location, and cinching it in place by pulling the two rubber
stays snugly against the surface to be measured. Or, if you
have the Micro temp sensor, it can be slid under heat shrink,
taped on, or otherwise affixed.
NOTE: the secondary temperature channel has lower
resolution than the primary channel, at lower temperatures.
But, as temperature increases, the resolutions of the secondary
channel and the primary channel become very close (about 1
degree Fahrenheit).
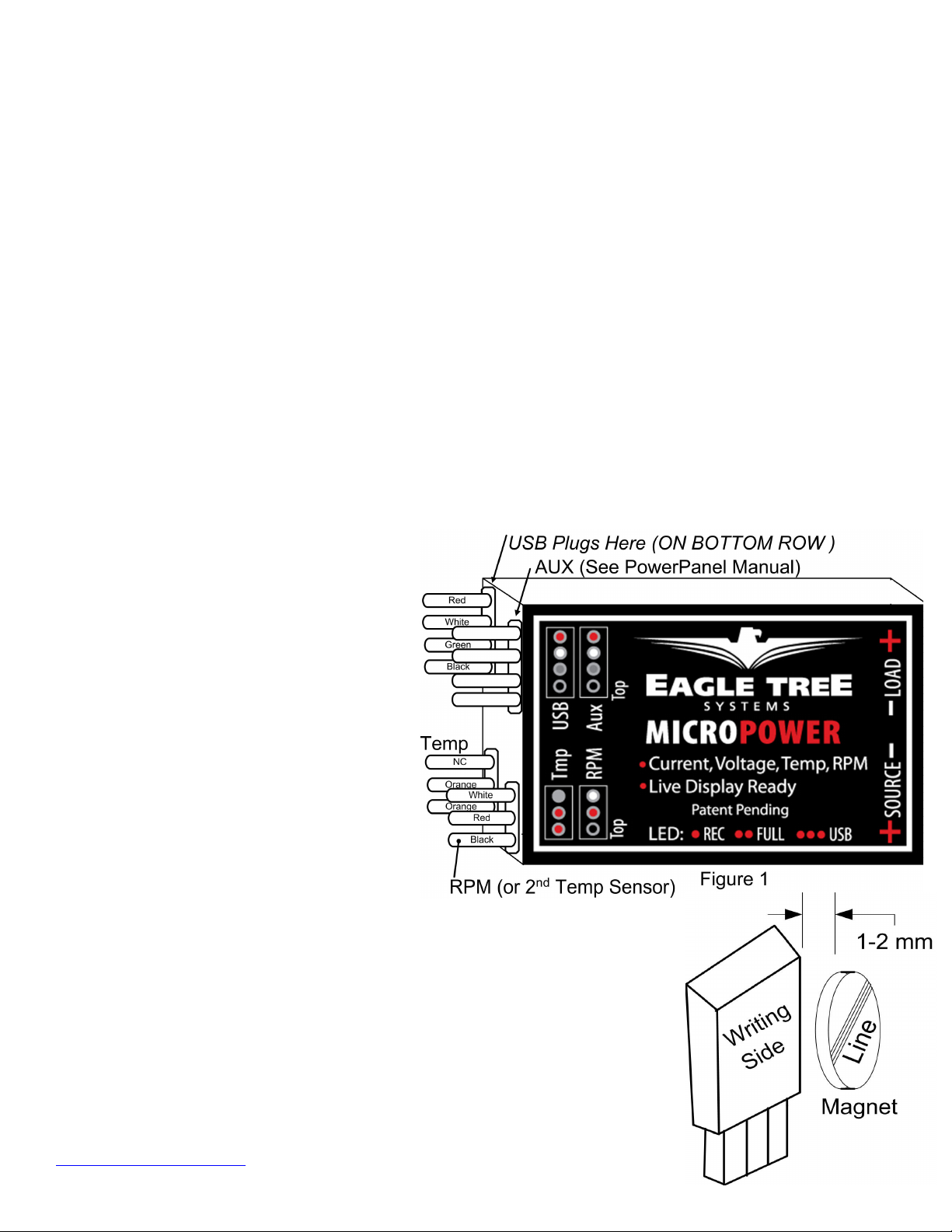
Plug the Futaba style connector from the temperature sensor into the MicroPower as shown in Figure 1. If a
second temperature sensor is used, this sensor plugs into the RPM slot, with the same polarity as the first
temperature sensor.
Note: the Temperature Sensor lead can be easily extended with a standard servo extension cable.
Measuring RPM with the MicroPower, Using the Hall RPM Sensor with
Magnets
NOTE: see the Optical or Brushless RPM Sensor instruction manuals if you are using the those sensors.
Installing the optional Hall RPM sensor and magnets is the most challenging part of installation, but is
relatively easy once a good mounting location is determined. Refer to our website’s Flight support page at
http://www.eagletreesystems.com for pictures of example installations.
Copyright © 2003-2005 Eagle Tree Systems, LLC
Page 3

To install our magnets, first find a suitable location on your motor or drivetrain to attach either one or two small magnets and RPM sensor.
Typically, the prop washer or prop hub are ideal locations for planes, and the car’s axle shaft is good for car installation. This will of course vary
with the construction of the model. Make sure the magnets are mounted on some structure that doesn’t “flop around,” as the magnets could hit the
sensor in this case. The RPM sensor must be mounted so that it does not move around, and is within 1-2 mm of the two magnets as they spin. On
typical plane installations, there’s usually a place where the back of the sensor can be glued to a flat surface under or over the hub which has the
magnets mounted. The RPM sensor kit includes four magnets. That provides you with up to 3 spares.
Installing Magnets
Once you have determined where to install the magnets, decide whether you will drill a hole so that the magnets will mount flush with the surface, or
if you will just glue the magnets to the surface. Though somewhat more difficult and permanent, mounting the magnet flush with the surface is the
best long term approach, since the mounting will be much more rugged, and the risk of imbalance due to not mounting the magnets exactly 180
degrees apart is reduced. In fact, if the magnet is mounted flush in another metal material, it is quite possible that no shaft imbalance will occur if
you only mount one of the magnets total.
To flush mount the magnets, drill a hole just slightly larger than the diameter of the magnet size you choose, and of the same depth as that magnet.
If you decide to surface mount the magnets, thoroughly clean this area and lightly scuff it to improve adhesion. Glue the magnets with the side
marked with a red line facing inward (hidden), using epoxy, or other strong, suitable glue. It’s important that the red line on the magnets faces
away from the sensor once the sensor is installed. The magnets should be glued 180 degrees apart to keep the shaft in balance.
Page 3
WARNING: make sure that the magnets are glued sufficiently so that they will not detach and create a hazard,
and always wear safety glasses when your motor is running! It is also a good idea to put a piece of heatshrink
tubing or electrical tape around the magnets, to further secure them.
Using Existing Magnets
Note: if your motor already has magnets mounted for some other purpose, there’s a good chance you can use them. Take one of the magnets
included with the RPM sensor kit, and put that magnet up against the previously mounted magnet. If the red line of the MicroPower magnet faces
down so that the sensor can be mounted facing the side of the magnet with no red line, mount the sensor with the printed side toward the magnet. If
the side of the magnet with the red line is visible when on top of the previous magnet, the polarity is reversed. This should work correctly if you
install our sensor backwards (printed side of sensor away from magnets).
Installing the RPM Sensor
Once the magnets are glued and completely dry, temporarily position the RPM sensor so that the side of the sensor with printing (or a colored dot)
is facing the side of the magnets WITHOUT the red line. The sensor now needs to be glued so that it is held rigidly into position. Before gluing,
put a small spacer (1-2 mm thick) between the sensor and one of the magnets to ensure proper spacing.
If desired, a small piece of brass tubing can be glued or heatshrunk to the back of the sensor to ease mounting and increase stability.
After the sensor is glued and completely dry, remove the small spacer and rotate the drive train or propeller to ensure complete freedom of
movement. Also make sure that the sensor won’t vibrate and come in contact with the magnets during operation. If this happens, the sensor will be
destroyed, and the MicroPower could be damaged.
Once these steps are complete, plug the Futaba style connector on the sensor into the MicroPower as shown in figure 1. Note that a standard
Futaba style servo extension cable can be used to lengthen the RPM sensor wire if needed.
Using Existing RPM Sensors
Several of our customers have been able to use existing RPM sensors, such as governors or turbine sensors, with our products. The following steps
must be followed:
1) Determine the “pinout” of the existing sensor. Compatible sensors will have Power, Ground, and Signal connections. The MicroPower’s
RPM pinout, from left to right, is: Power (black wire), Ground (red wire), Signal (white wire).
2) Devise a “Y” cable to connect your existing sensor to it’\s connection, and also to the MicroPower’s RPM connection. NOTE: Power for
the sensor should come only from the connection the sensor is normally plugged into. So, only Gound and Signal wires should be routed
from the existing sensor to the MicroPower. The power wire of the Y cable between the sensor and the MicroPower should be cut before
connecting it to the MicroPower. This is necessary to avoid connecting the power of the existing sensor connection to the MicroPower’s
power connection.
3) Thoroughly test the system to make sure the sensor still works with whatever it was originally connected to, after Y’ing to the MicroPower.
Installing and Using the Windows™ Application
Installing the Windows Application
Copyright © 2003-2005 Eagle Tree Systems, LLC
Page 4

The supplied Windows application is compatible with USB equipped PCs running Vista, XP, Windows 98SE, Millennium, or Win 2K. The
application is not compatible with Windows 98 Original Edition (Gold), or NT 4, even if the PC has USB support.
NOTE: the application included on CD with the unit was current at the time of manufacture. Please check our MicroPower Support page on
http://eagletreesystems.com to see if there is a newer version of the app which may have addressed issues you could encounter.
To install the application, just place the CD in the CD-ROM drive. If AutoPlay is enabled on your PC, the setup program should run automatically.
If it does not run, click on My Computer, click on the icon for your CD-ROM drive, and click on the “Data Recorder” application icon in the drive
window.
Follow the Setup Wizard to install the MicroPower application. Once installation is complete, the MicroPower may be launched either from its
Desktop Icon, or by choosing the MicroPower application from the Start->Programs->Eagle Tree Systems folder.
Page 4
Setting up the MicroPower with the Application
Once the application is installed, follow the above steps to launch it. The first time the application is launched, the New Model Wizard will be
invoked.
The Wizard will prompt you to install the MicroPower using the supplied USB cable.
IMPORTANT: Make sure you connect the custom USB plug with the correct polarity, and into the correct connector
on the MicroPower, as shown in Figure 1.
When you do this for the first time, the behavior will be different depending on which version of Windows you are using:
Windows 98™: The MicroPower and application are not compatible with Windows 98.
Windows 98SE™ and Windows Millennium™: When the MicroPower is first connected to the USB port, the New Hardware Wizard will likely
appear. Follow the steps in the Wizard, choosing the options to allow Windows to find the appropriate drivers for the MicroPower – these drivers
are built into Windows. If the devices you already have on your computer haven’t required the installation of the USB drivers, Windows will
prompt you for your Windows CD to copy over the drivers. Once this process is complete, you may be asked to reboot the system. Reboot at this
point, then relaunch the MicroPower Application, and the New Model Wizard should start up again.
Windows 2000 ™ and Windows XP ™: When the MicroPower is first connected to the USB port, Windows should automatically install the
correct drivers without prompting you. If you should receive a Windows prompt, however, do what it says.
Once the MicroPower is correctly discovered and installed by Windows, continue on with the New Model Wizard, relaunching the app after reboot if
necessary.
Telling the MicroPower what to Log
The first time you run the app, you will be prompted to choose what parameters you wish the MicroPower to record. The more items you log, the
less record time will be available. A description of the parameters is below:
Pack Voltage: If this option is selected, Pack Voltage is logged.
Pack Current: If this option is selected, Pack Current is logged.
RPM: If this option is selected, the MicroPower logs the RPM of your model, if you have installed the optional RPM sensor.
Temperature 1: Choose this option if you want to record temperature from an optional temperature sensor.
Temperature 2: Choose this option if you want to record temperature from a secondary optional temperature sensor.
Setting the “Stop on Full” Feature
After you complete the New Model Wizard for the first time, you will be prompted to choose whether you want the MicroPower to write over its data
when its buffer becomes full, or to stop when the MicroPower is full. NOTE: You can change this setting later from the Tools menu.
Setting the “Set Capture Rate” Feature
The MicroPower can be adjusted to capture data in during the recording session at five different rates. The faster the capture rate, the more data is
obtained, but at the expense of record time. The default rate, ten samples/second, gives the best resolution, but the record times will be lower than
with lower sample rates. You may find that you can get plenty of record time even with the highest capture rate setting, however.
Copyright © 2003-2005 Eagle Tree Systems, LLC
Page 5

Note: You can change this setting later from the Tools menu.
A note on record time: The MicroPower uses advanced data compression to get the most data recorded as possible. When your model is sitting idle
before or after the session with the battery turned on, the MicroPower is still capturing data, but since not much is changing very little data is
recorded. But when the model is active more data is being recorded.
Page 5
Setting the “Choose What to Display on the PC Screen” Feature
The MicroPower Application can display several model parameters in both numeric and instrument format. Select the parameters you wish the
Application to display with this dialog box. Note that some of the parameters require optional accessories, available from Eagle Tree Systems.
Note: Select the “Metric” checkbox on this dialog if you want metric operation. Also, you can change this setting later from the Tools menu.
Using the MicroPower
Once the MicroPower and application is installed, it’s almost time to operate! Please read the important information below on MicroPower
operation before using it at the field in your model.
It is extremely unlikely that the MicroPower unit will affect your model’s radio range. But, as always after making an electronics change to your
model, it is very important that you range and function test your model once the MicroPower is installed to ensure that there is no impact on your
system. Make sure that your “antenna down” operating range is within the manufacturer’s specifications. See your Radio owner’s manual for the
correct procedure for your equipment. DO NOT OPERATE IF YOUR MODEL DOESN’T PASS THE ANTENNA DOWN RANGE
CHECK.
Additionally, you need to make sure that your Model’s power system is working correctly after adding any new hardware in-line, like the
MicroPower. This is especially critical in high amperage/voltage installations, of course. It’s important that you safely run your model in an
extended stationary “bench” test, similar in duration and power usage to your most aggressive modeling, to ensure there are no problems with any
connections, etc. DO NOT OPERATE YOUR MODEL IF YOU HAVE PROBLEMS DURING THIS EXTENDED STATIONARY TEST!
The MicroPower’s LED
The MicroPower’s LED indicates the device’s status.
Once the MicroPower is powered up in your model, it will repeatedly flash a sequence of one, two or three flashes every second or so. This flash rate
is longer or shorter depending on the capture rate. This flashing indicates the following:
One Flash - The MicroPower is actively recording. This is the normal power-up state.
Two Flashes – The MicroPower’s buffer is full. This will happen if you have selected the “stop on full” mode described above, when the memory
is filled to capacity with data.
Three Flashes – The MicroPower is connected to your PC’s USB connector, and has been recognized by the PC.
After Your Recording Session
After operating your model with the MicroPower, you can either remove the MicroPower from your model and take it to your PC, bring the model
with the MicroPower still in it to your PC, or (if you’re lucky) use a Laptop and connect to the MicroPower in the field.
After you connect the MicroPower to your PC’s USB interface, the LED should indicate USB connectivity with three repeating flashes as described
above.
Once the MicroPower is connected, launch the Application and click on the “Download” button. This will load the MicroPower’s Data Buffer into
the Application for playback and saving.
Use the play controls to play back the data. Note that the Slider can be dragged with the mouse by clicking and holding it then moving it to the
desired position.
The application displays the following information:
• Notifications – this window displays messages about the recording. The three most common messages are:
o Startup/Reset Detected – this indicates that the MicroPower has been turned on at the time specified
o MicroPower low battery restart – this indicates that the MicroPower has ‘rebooted’ because the power momentarily dropped
below around 4.5 volts. See the troubleshooting section if you frequently see this message.
• Length/Progress – when stopped, this readout indicates the total recording length. When playing back, this meter indicates current time
into the session.
Copyright © 2003-2005 Eagle Tree Systems, LLC
Page 6

• Graphical and/or Numeric Pack Voltage – The application displays the current or max (when playback is stopped) pack
voltage readings in either gauge or numeric format.
• Graphical and/or Numeric Pack Current – The application displays the current or max pack amperage readings in either gauge or
numeric format.
• Pack Wattage – this gauge indicates the pack wattage during playback.
• Cumulative Amp-Hours – this numeric display indicates the cumulative AH used
• Graphical and/or Numeric Temperatures – The application can display up to two Temperature readings in either gauge or numeric
format.
• Graphical and/or Numeric RPM – The application displays RPM readings in either gauge or numeric format.
• Graphical and/or Numeric Speed(Cars Only) – The model’s speed, as computed from the RPM, can be displayed graphically and
numerically.
Page 6
Multiple Session Support
Depending on the length of your modeling sessions, it is often possible to record multiple runs into the MicroPower without having to clear the buffer
or overwrite data. The MicroPower application will split multiple sessions automatically for you. By clicking the “Sessions” option in either the
playback or graphing pages of the app, you can display a separate session, or all sessions simultaneously. When graphing all sessions
simultaneously, vertical gray bars on the graph indicate where sessions start.
Note that a new session is created in the logger each time it is powered off and on.
Saving Micropower Log Files
After downloading session data, if you wish to save the data to play back later or to share with friends, save the file with the File->Save Recorder
File menu. Note that the file is saved with a .FDR extension by default.
USB Live Mode Bench Testing
When the MicroPower is installed in your power system, and is also connected to your PC via the USB cable, clicking the Live Mode button in the
app will cause the numeric displays and gauges to display data live. Live Mode sessions can be recorded on the PC. To set up Live Mode
recording, click “Tools, Set Live Mode Options.” If Live Mode recording is enabled, you will be prompted to save the recorded data when you
stop live mode by clicking “Stop.”
Also, note that real time strip charting is also supported in Live Mode. To see real time strip charts, first turn on Live Mode recording. Then, click
“Graph Data” to launch the graph. Configure the parameters you want to see on the chart, and then click the Live Mode button. Live data will be
graphed on the chart!
Graphing/Spreadsheet Compatibility
The MicroPower application has extensive graphing capability built in. Just click on “Graph Data!” on the toolbar to graph loaded data. Click on
the HELP button on the graphing page for more information on graphing.
Also, the MicroPower’s Data File is compatible with Excel ™ spreadsheet software, and perhaps other spreadsheet brands. Using Excel™ is useful
for graphing the data output from the MicroPower.
To load in Excel, save the data file from “File->Save Recorder File,” and in Excel™ choose File->Open, and select “All Files” in the “Files of Type”
box. Navigate the Excel dialog box to the location you saved the .FDR data file, and click on the filename. Excel should then bring up the “Text
Import Wizard”. Choose the “Delimited” option, and on the next page choose “Delimited with Spaces”. The data should then load correctly in
Excel.
The format of each line of data in the file is:
First Line: Model Name
Second Line: Data about your Model’s setup. This line is needed to allow sharing of your session log files with others.
Third line: header indicating what each of the data fields represents. These columns are:
PackVolt*100 Amps*100 Temp1*10 Temp2*10 RPM IsEvent EventError EventData Timestamp
If “IsEvent “is 1, the record contains event data as well as regular data. Typical events are power-up (restart), and servo glitches. Ignore the nonevent fields when IsEvent is set to 1.
Event Codes in the “EventCode” field are as follows (the first one is 0). Note that “internal” errors should be reported to Eagle Tree Systems:
ERROR_BATTERY_LOW – battery has fallen below a safe level for an extended period of time,
ERROR_RESTART – the MicroPower has been power cycled normally,
ERROR_LOW_BAT_RESTART – the MicroPower has been restarted due to a brownout,
Timestamp indicates when each record was collected. The timestamp is in milliseconds.
Email us if you need more information on the file format.
Copyright © 2003-2005 Eagle Tree Systems, LLC
Page 7

Happy Modeling!!
Troubleshooting
Below is a list of problems that may be encountered, and steps to remedy them.
A good first step to troubleshooting, if you are able to connect your MicroPower to your PC, is to download our latest software and update the
MicroPower’s Firmware via “Tools, Firmware Control.” Doing this will ensure that you have the latest software and firmware available.
If your particular issue is not addressed by this update, or by the suggestions below, please visit our web support page for additional support options,
at http://www.eagletreesystems.com/Support/support.html.
Page 7
Issue: My PC does not recognize the MicroPower.
Solution: Try to eliminate the problem in the following ways:
o Disconnect all other USB peripherals from your PC (if possible) and try the MicroPower again.
o Try the MicroPower on a different PC. If it works, there may be a misconfiguration with your PC.
o Try the MicroPower with a different USB cable, if you have one. If this works, your cable has been damaged.
o Try rebooting your PC – occasionally USB support gets disabled with some PCs.
o Try the other USB connector on you PC if it has two.
o Ensure that USB is enabled within your Operating System by checking in Device Manager. You’ll need to see your Windows™
documentation to determine how to do this on your particular OS version.
Issue: RPM is not working correctly (note: also see the Optical Sensor instruction manual if you are using the Optical Sensor)
Solutions:
• With the magnetic sensor, check to make sure your sensor to magnet gap is around 2mm or less.
• Check the magnet polarity mounting. The magnet should have been glued so that the red line faces down, away from the sensor, and the
writing on the sensor faces the magnet. If you inadvertently glued the magnet so that the red line is facing UP, flip the sensor over so the
"non printed" side faces the magnet.
• Make sure that under Choose What to Log in the app, you have checked RPM.
• Make sure that the RPM sensor is plugged into the correct slot on the MicroPower
• Connect the MicroPower to the computer and launch the app. Then, choose Tools->Live Mode. Make sure that the RPM gauge is
displayed, and spin the magnets, or wave the magnets by hand in front of the sensor. Try both sides of the magnets and both sides of the
sensor. See if the RPM reading jumps.
Issue: I have a fully charged battery, but the MicroPower frequently shows “Low Battery Restart” Notifications when playing back data.
Solution: The MicroPower shuts down immediately if the power goes below around 4.5 volts for more than a few milliseconds, and logs this
occurrence when the power returns to above 4.5 volts. If your battery’s voltage frequently drops this low, you may be underpowered, and may want
to consider getting a bigger battery.
Issue: the Current or Voltage being logged by the MicroPower appears incorrect.
Solutions:
• Make sure that the parameters you wish to log are checked under “Tools, Choose Parameters to be logged in Recorder”
• The MicroPower is factory calibrated using a highly accurate current and voltage measurement tool. If the current readings appear to be
slightly different than another meter you are accustomed to, it is easy to calibrate the MicroPower readings to your other meter’s readings
if desired. This is done by choosing “Tools, Calibrate Pack Voltage and Amperage” and entering the values your meter reads, and the
MicroPower reads. If you don’t desire to change the calibration on, say, voltage, but wish to change it for amperage, just leave the voltage
fields as 0, and the calibration for voltage will not change.
• If the MicroPower appears to be reading highly inaccurate voltages or currents, the first thing to try is to clear all calibration. This is done
running the calibration tool as described above, but entering the same values for the problem measurement. For example, if amperage is
way off, enter the same value (say, 5.0) for both the MicroPower amperage and the “my other meter” amperage, which will clear all
internal and user calibration.
Issue: the temperature appears to be logged incorrectly.
Solutions:
• Make sure that the parameters you wish to log are checked under “Tools, Choose Parameters to be logged in Recorder”
• It is normal for the Temperature 2 channel to have a wider spacing between temperature readings at room temperature, than the
temperature 1 channel. This largely disappears when temperature exceeds 100 degrees F.
MicroPower Specifications
Voltage Measurement: approx 5V to 45V
Voltage Resolution: 0.1V
Current Measurement: up to 100 Amps
Current Resolution: 0.1 Amp
Current Draw: approx 35 mA
Weight: Unit with Integrated Connectors: approx 0.56 oz (17 grams), Unit with Wire Leads: 0.7 oz (21 grams)
Temperature: Dual inputs, 0 degrees F to 424 degrees F (one temperature input when RPM is used)
RPM range: approx 100 RPM to 50,000+ RPM
Units of Measure supported: English and Metric
Copyright © 2003-2005 Eagle Tree Systems, LLC
Page 8

Measurements: approx 2.25” x 1” x 0.5” (57mm x 28mm x 13mm) including sensor pins
Length of Wires with Wire Lead Version: 2.5” (65mm)
Record Time: Varies with sample rate, parameters being recorded, and “activeness” of the model. Anywhere from around 20 minutes to hours is
attainable depending on these settings. Since we use lossless data compression, it is difficult to give a precise record time, but typically at the
fastest sample rate, logging all parameters, recordings span about 30 minutes.
Page 8
Limited Warranty
Eagle Tree Systems, LLC, warrants the MicroPower to be free from defects in materials and workmanship for a period of one (1) year from the date
of original purchase. This warranty is nontransferable. If your unit requires warranty service during this period, we will replace or repair it at our
option. Shipping cost to us is your responsibility.
To obtain warranty service, contact us by phone, fax or email to request an RMA number. No returns will be accepted without this number.
This limited warranty does not cover:
•
The Software included with the MicroPower. See the Software license agreement for more information on Software restrictions.
•
Problems that result from:
o
External causes such as accident, abuse, misuse, or problems with electrical power
o
Servicing not authorized by us
o
Usage that is not in accordance with product instructions
o
Failure to follow the product instructions
THIS WARRANTY GIVES YOU SPECIFIC LEGAL RIGHTS, AND YOU MAY ALSO HAVE OTHER RIGHTS WHICH VARY FROM STATE
TO STATE (OR JURISDICTION TO JURISDICTION). OUR RESPONSIBILITY FOR MALFUNCITONS AND DEFECTS IN HARDWARE IS
LIMITED TO REPAIR AND REPLACEMENT AS SET FORTH IN THIS WARRANTY STATEMENT. ALL EXPRESS AND IMPLIED
WARRANTIES FOR THE PRODUCT, INCLUDING, BUT NOT LIMITED TO, ANY IMPLIED WARRANTIES AND CONDITIONS OF
MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE, ARE LIMITED IN TIME TO THE TERM OF THE LIMITED
WARRANTY PERIOD AS DESCRIBED ABOVE. NO WARRANTIES, WHETHER EXPRESS OR IMPLIED, WILL APPLY AFTER THE
LIMITED WARRANTY PERIOD HAS EXPIRED. SOME STATES DO NOT ALLOW LIMITATIONS ON HOW LONG AN IMPLIED
WARRANTY LASTS, SO THIS LIMITATION MAY NOT APPLY TO YOU.
WE DO NOT ACCEPT LIABILITY BEYOND THE REMEDIES PROVIDED FOR IN THIS LIMITED WARRANTY OR FOR
CONSEQUENTIAL OR INCIDENTAL DAMAGES, INCLUDING, WITHOUT LIMITATION, ANY LIABILTY FOR THIRD-PARTY CLAIMS
AGAINST YOU FOR DAMAGES, FOR PRODUCTS NOT BEING AVAILABLE FOR USE, OR FOR LOST DATA OR LOST SOFTWARE.
OUR LIABILITY WILL BE NO MORE THAN THE AMOUNT YOU PAID FOR THE PRODUCT THAT IS THE SUBJECT OF A CLAIM. THIS
IS THE MAXIMUM AMOUNT FOR WHICH WE ARE RESPONSIBLE.
SOME STATES DO NOT ALLOW THE EXCLUSION OR LIMITATION OF INCIDENTAL OR CONSEQUENTIAL DAMAGES, SO THE
ABOVE LIMITATION OR EXCLUSION MAY NOT APPLY TO YOU.
Product Warranty Registration
Registering your product means that we can send you important updates and other notifications. Please fill out this form (or a copy) and mail or fax
it to Eagle Tree Systems. Or, email the info to sales@eagletreesystems.com. Note that if you purchased your item directly from Eagle Tree
Systems, this is not necessary.
Eagle Tree Systems Warranty Product Registration:
Name:__________________________________________________________________________
Address: ________________________________________________________________________
Phone: ________________________________ Email: ___________________________________
Product(s) Purchased: ________________________ Date Purchased:______________________
Where did you purchase your product?_________________________________________________
Where did you hear about our product? _______________________________________________
Any features or additions you would like to see? _________________________________________
Copyright © 2003-2005 Eagle Tree Systems, LLC
 Loading...
Loading...