

Page 1
SPARK
Manual del usuario
2017.06
V1.2
Page 2
Búsqueda por palabras clave
Busque palabras clave como "batería" e "instalar" para encontrar un tema. Si utiliza Adobe
Acrobat Reader para leer este documento, pulse Ctrl+F en Windows o Command+F en Mac
para iniciar la búsqueda.
Ver a un tema
Ver una lista completa de temas en el índice. Haga clic en un tema para navegar hasta esa
sección.
Impresión de este documento
Este documento admite la impresión en alta resolución.
Uso de este manual
Leyenda
Advertencia Importante Sugerencias Referencia
Leer antes del primer vuelo
Lea los siguientes documentos antes de utilizar el SPARK
1. Spark: Contenido del embalaje
2. Spark: Manual del usuario
3. Spark: Guía de inicio rápido
4. Spark: Renuncia de responsabilidad y directrices de seguridad
5. Spark: Directrices de seguridad de la Batería de Vuelo Inteligente
Le recomendamos ver todos los videotutoriales del sitio web ocial de DJITM y leer la Renuncia de
responsabilidad antes del primer vuelo. Prepárese para el primer vuelo leyendo la guía de inicio
rápido del Spark y consulte el manual del usuario para obtener más información.
TM
:
Videotutoriales
Vaya a la dirección que aparece a continuación o escanee el código QR situado
a la derecha para ver los videotutoriales del Spark, que muestran cómo utilizar la
aeronave de forma segura: http://www.dji.com/spark/info#video
Descargue la aplicación DJI GO 4
Asegúrese de utilizar la aplicación DJI GOTM 4 durante el vuelo.
Escanee el código QR de la derecha para descargar la última versión.
La versión para Android de DJI GO 4 es compatible con Android 4.4 o posterior.
La versión para iOS de DJI GO 4 es compatible con iOS 9.0 o posterior.
* Para mayor seguridad, se ha restringido el vuelo a una altura máx. de 30 m y una distancia máx. de 50
m cuando no está conectado o no ha iniciado sesión en la aplicación durante el vuelo, incluyendo la
aplicación DJI GO y el resto de aplicaciones compatibles con esta aeronave DJI.
Descargue DJI Assistant 2
Descargue DJI Assistant 2 en http://www.dji.com/spark/download
2017 DJI Todos los derechos reservados.
2
©
Page 3

Contenido
Uso de este manual
Leyenda
Leer antes del primer vuelo
Videotutoriales
Descargue la aplicación DJI GO 4
Descargue DJI Assistant 2
Perl del producto
Introducción
Características destacadas
Diagrama de la aeronave
Activación
Aeronave
Modos de vuelo
Indicadores de estado de la aeronave
Sistema de visión y Detección 3D
Regreso al punto de origen (RTH)
Modos de Vuelo Inteligente
Modo gestual
Registrador de vuelo
Montaje y desmontaje de las hélices
Batería de Vuelo Inteligente
Estabilizador y cámara
Control de la aeronave con un dispositivo móvil
Control remoto (opcional)
Perl del control remoto
Uso del control remoto
Vinculación del control remoto
Aplicación DJI GO 4
Equipment
Editor
SkyPixel
Me
2
2
2
2
2
2
6
6
6
7
7
9
9
10
11
13
16
23
26
26
27
30
31
36
36
37
38
41
41
44
44
44
2017 DJI Todos los derechos reservados.
©
3
Page 4

Vuelo
Requisitos del entorno de vuelo
Límites de vuelo y zonas de exclusión aérea
Lista de comprobación previa al vuelo
Despegue y aterrizaje automáticos
Arranque/parada de los motores (con el control remoto)
Prueba de vuelo
Calibración de la brújula
Actualizaciones de rmware
Apéndice
Especicaciones
Información postventa
46
46
46
47
48
48
49
49
50
53
53
55
2017 DJI Todos los derechos reservados.
4
©
Page 5
Perl del producto
En esta sección se presenta el
DJI Spark y se enumeran los
componentes de la aeronave.
Page 6

Perl del producto
Introducción
El DJI Spark es la cámara aérea más pequeña de DJI. Cuenta con una cámara estabilizada, Modos
de Vuelo Inteligente y un sistema anticolisión, todo ello en un bastidor ligero y plegable. El Spark,
equipado con un sistema de visión y un sistema de detección 3D, puede grabar vídeos 1080p y
hacer fotos de 12 megapíxeles, y dispone de modo QuickShot y control gestual. Con una velocidad
de vuelo máxima de 50 km/h (31 mph) y un tiempo de vuelo máximo de 16 minutos**, el Spark es
rápido y divertido, lo que convierte la fotografía dron en una actividad apasionante y sencilla.
Características destacadas
Spark es compatible con el control gestual y el control mediante dispositivos móviles, lo que facilita
considerablemente el pilotaje. Además, los usuarios que desean más opciones de control pueden
usar el control remoto opcional, que ofrece las funciones de vuelo más completas.
Cámara y estabilizador: Con el Spark, puede grabar vídeo 1080p a 30 fotogramas por segundo
y tomar fotografías de 12 megapíxeles con una claridad sin precedentes, todo ello estabilizado
gracias al estabilizador compacto integrado.
Controlador de vuelo: El controlador de vuelo de nueva generación se ha actualizado para ofrecer
una experiencia de vuelo más segura y able. La aeronave puede regresar automáticamente a su
punto de origen cuando se pierda la señal de transmisión o cuando el nivel de batería esté bajo.
Aparte de poder volar en modo estacionario en interiores a bajas altitudes, la aeronave también
puede detectar y evitar obstáculos que se interpongan en su camino, lo que aumenta la seguridad.
* Para conseguir la máxima velocidad de vuelo, es preciso manejar el Spark con un control remoto.
** El tiempo máximo de vuelo se determinó en ausencia de viento a una velocidad sostenida de 20 km/h
(12,4 mph). Este valor debe tomarse sólo a título de referencia.
2017 DJI Todos los derechos reservados.
6
©
Page 7
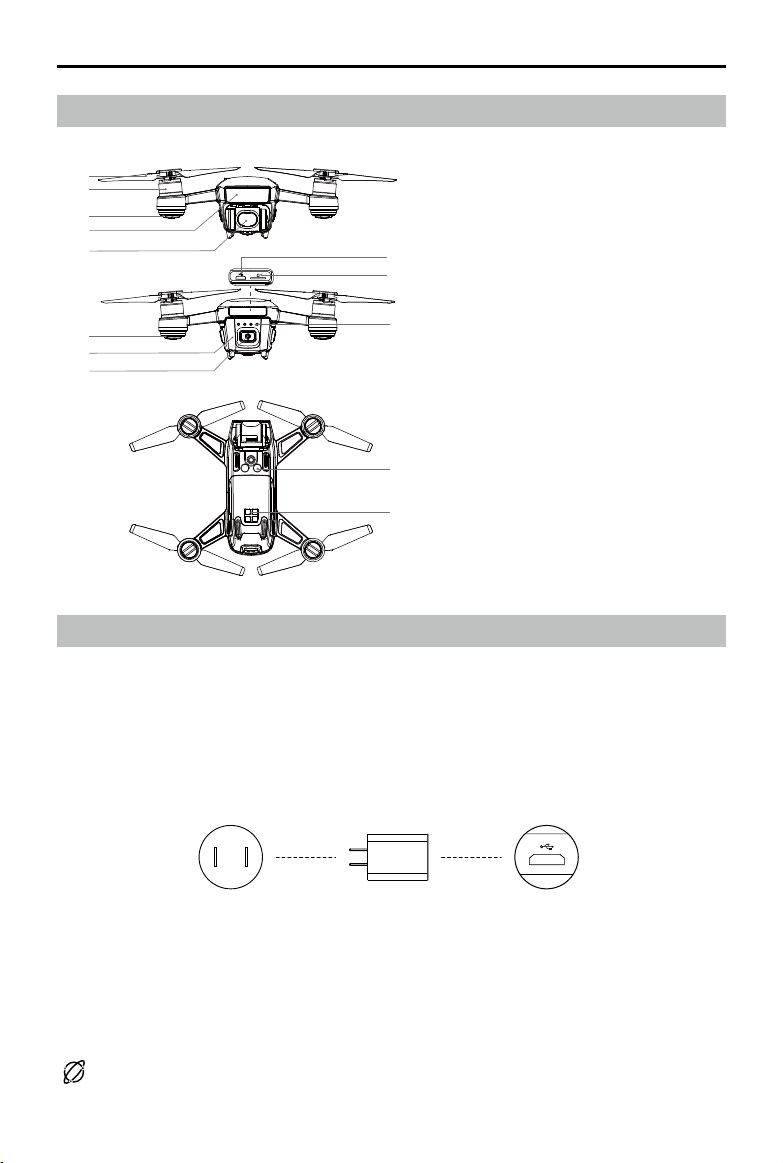
Diagrama de la aeronave
Spark Manual del usuario
1
2
3
4
5
6
7
8
1. Hélices
2. Motores
3. Indicadores LED delanteros
10
11
4. Sistema de detección 3D
5. Estabilizador y cámara
9
6. Indicadores de estado de la aeronave
7. Batería de Vuelo Inteligente
8. Botón de encendido
9. Indicadores del nivel de batería
13
10. Puerto Micro USB
11. Ranura para tarjeta microSD
12
12. Contacto de carga externo
13. Sistema de visión
Activación
Es necesario realizar el proceso de activación antes de usar la Batería de Vuelo Inteligente y la
aeronave por primera vez.
Activación de la Batería de Vuelo Inteligente
Todas las baterías se encuentran en modo de hibernación antes de su entrega para garantizar
la máxima seguridad. Utilice el cargador USB suministrado para cargar y activar la batería por
primera vez. Se recomienda cargar completamente la batería antes de cada vuelo.
Toma de alimentación
100~240 V
Cargador USB Puerto Micro USB
Activación de la aeronave
Inicie DJI GO 4, toque el icono en la esquina superior derecha, seleccione el código QR de la caja de
almacenamiento o del compartimento de la batería, y siga las instrucciones que se mostrarán para la
activación.
Utilice su cuenta DJI para activar la aeronave. La activación requiere conexión a Internet.
Internet
2017 DJI Todos los derechos reservados.
©
7
Page 8

Aeronave
En esta sección se presentan el
Controlador de Vuelo, el sistema de
detección 3D, el sistema de visión y la
Batería de Vuelo Inteligente.
2017 DJI Todos los derechos reservados.
8
©
Page 9
Aeronave
El Spark incluye un Controlador de Vuelo, un sistema de transmisión de vídeo, un sistema de
detección 3D, un estabilizador y cámara, un sistema de propulsión y una Batería de Vuelo
Inteligente. En esta sección se presentan las características del controlador de vuelo, el sistema de
transmisión de vídeo y otros componentes de la aeronave.
Modos de vuelo
El Spark cuenta con los siguientes modos de vuelo:
Modo P (posicionamiento):
utiliza el GPS y los Sistemas de Visión para situarse, estabilizarse automáticamente y navegar
entre obstáculos. Los Modos de Vuelo Inteligente, como QuickShot, TapFly y ActiveTrack, están
habilitados en este modo.
Cuando la detección frontal de obstáculos esté activada y haya luz suciente, el ángulo máximo
de vuelo será de 15° con una velocidad máxima de vuelo de 10,8 km/h (6,7 mph). Cuando la
detección frontal de obstáculos esté desactivada, el ángulo máximo de vuelo será de 15° y la
velocidad máxima de vuelo de 21,6 km/h (13,4 mph).
La aeronave pasará automáticamente a modo ATTI si la señal de GPS se debilita y las condiciones
de iluminación son insucientes para el sistema de visión; en este caso, no podrá evitar obstáculos
automáticamente y sólo utilizará el barómetro para ajustar la altitud de control. Los Modos de Vuelo
Inteligente no están disponibles en el modo ATTI.
Nota: El modo P requiere movimientos de palanca más amplios para alcanzar altas velocidades.
Modo S (Sport):
detectar y evitar obstáculos cuando se encuentre en modo Sport, ya que la detección frontal de
obstáculos estará desactivada. Los Modos de Vuelo Inteligente, el modo panorámico y la función
ShallowFocus no están disponibles en el modo Sport.
Nota: Las respuestas de la aeronave están optimizadas para una mayor agilidad y rapidez, lo que
hace que sea más sensible a los movimientos de la palanca.
La aeronave utiliza el GPS para el posicionamiento. La aeronave no podrá
El modo P funciona mejor cuando la señal GPS es fuerte. La aeronave
El sistema de detección 3D está desactivado en modo S (Sport), lo que signica que la
aeronave no podrá esquivar automáticamente los obstáculos en su ruta.
La velocidad y la distancia de frenado máximas de la aeronave aumentan
signicativamente en modo S (Sport). La distancia de frenado mínima requerida en
condiciones sin viento es de 30 metros.
La velocidad de descenso aumenta signicativamente en modo S.
La respuesta de la aeronave aumenta considerablemente en modo S (Sport), por lo
que bastará un pequeño desplazamiento de la palanca en el control remoto para que
la aeronave recorra una larga distancia. Preste atención y mantenga un espacio de
maniobra adecuado durante el vuelo.
El modo S sólo está disponible con el control remoto del Spark. El modo S estará
desactivado si la aeronave se controla con un dispositivo móvil.
Utilice el interruptor de modo de vuelo del control remoto para seleccionar los modos de
vuelo de la aeronave.
2017 DJI Todos los derechos reservados.
©
9
Page 10
Spark Manual del usuario
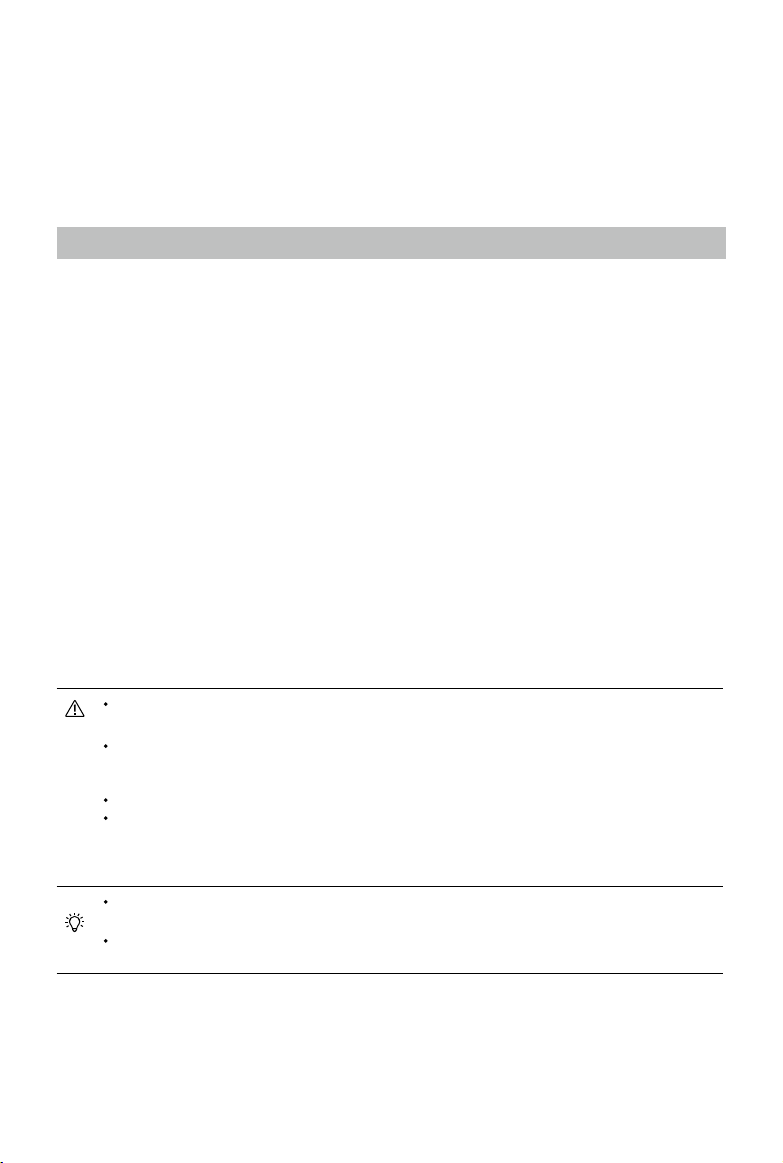
Indicadores de estado de la aeronave
El Spark tiene LED delanteros e indicadores de estado de la aeronave. Las posiciones de estos
LED se muestran en la imagen siguiente:
Indicadores LED delanteros
Indicadores de estado de la aeronave
Los LED delanteros indican la orientación de la aeronave y el estado de algunas funciones (consulte
la sección "Descripciones de funciones" del modo gestual para obtener más información). Los
LED delanteros se quedan encendidos en rojo cuando la aeronave se activa para indicar la parte
delantera (o morro) de la aeronave.
Los indicadores de estado de la aeronave comunican el estado del sistema del control de vuelo.
Consulte la tabla siguiente para obtener más información sobre los indicadores de estado de la
aeronave.
Descripción del indicador de estado de la aeronave
Normal
Parpadeo alternativo en rojo, verde y
amarillo
Parpadeo alternativo en amarillo y verde
Parpadeo lento en verde
×2 Parpadeo en verde dos veces
Parpadeo lento en amarillo
Parpadeo rápido en verde
Advertencia
Parpadeo rápido en amarillo
Parpadeo lento en rojo
Parpadeo rápido en rojo
Parpadeo en rojo
— Rojo jo
Parpadeo alternativo rápido en rojo y
amarillo
Encendiendo y ejecutando prueba de
autodiagnóstico
Calentando
Modo P con GPS
Modo P con sistema de visión
Sin GPS ni sistema de visión
Frenado
Pérdida de señal del control remoto
Advertencia de batería baja
Advertencia de batería baja crítica
Error de IMU
Error crítico
Es necesario calibrar la brújula
2017 DJI Todos los derechos reservados.
10
©
Page 11
Spark Manual del usuario
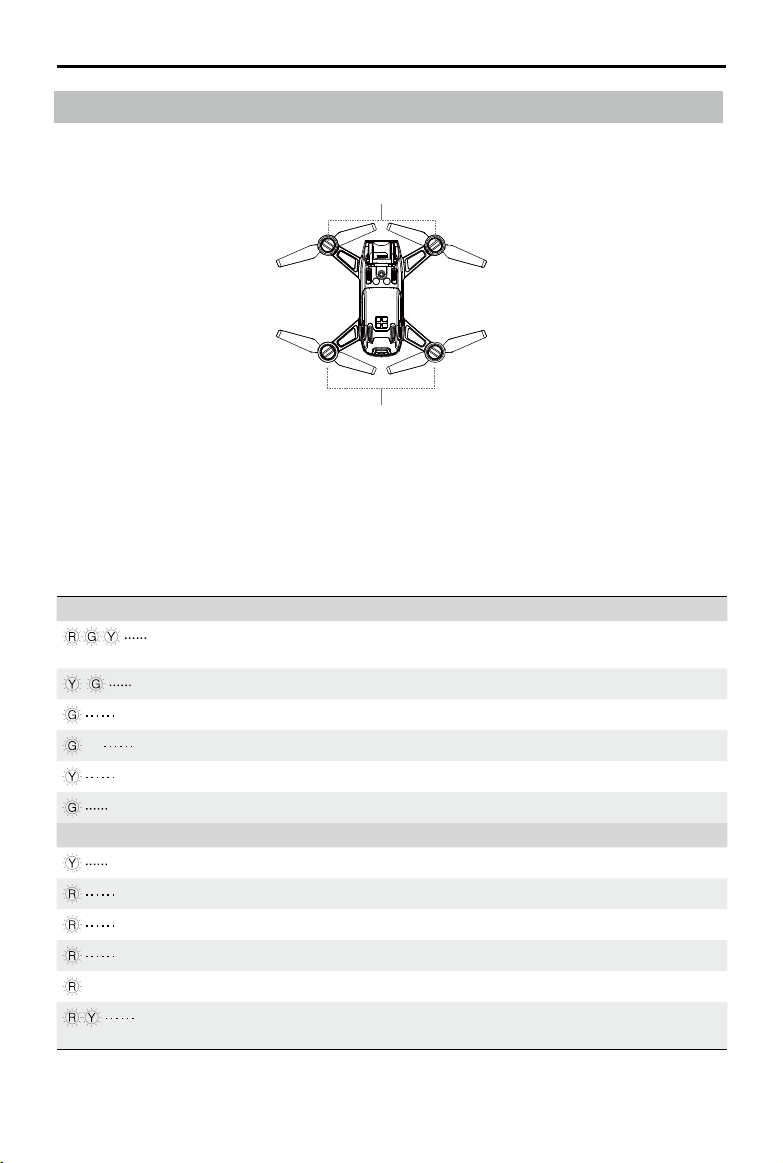
Sistema de visión y Detección 3D
El Spark está equipado con un sistema de detección 3D 1, compuesto por un módulo infrarrojo 3D
situado en la parte frontal de la aeronave, que se encarga de escanear en busca de obstáculos
durante el vuelo.
Los componentes principales del sistema de visión se encuentran en la parte inferior del cuerpo
de la aeronave. Entre ellos se incluyen una cámara 2 y un módulo infrarrojo 3. El sistema de
visión utiliza datos de imagen y del módulo infrarrojo 3D para ayudar a la aeronave a mantener
su posición, lo que le permite volar en modo estacionario con gran precisión en interiores o en
entornos en los que no se disponga de señal GPS.
El sistema de detección 3D escanea constantemente en busca de obstáculos, lo que permite al
Spark evitar obstáculos en condiciones de baja iluminación.
2
1
Rango de detección
El rango de detección del sistema de detección 3D se indica a continuación. Tenga en cuenta que
la aeronave no puede detectar ni esquivar obstáculos que no estén dentro del rango de detección.
0,2 - 5 m
3
Uso del sistema de visión
El sistema de visión se activa automáticamente cuando se enciende la aeronave. No es necesario
realizar ninguna otra acción. El sistema de visión se puede utilizar en interiores donde no se
dispone de señal GPS. Al usar el sistema de visión, la aeronave puede volar en modo estacionario
con precisión incluso sin GPS.
2017 DJI Todos los derechos reservados.
©
11
Page 12
Spark Manual del usuario
Realice los pasos siguientes para utilizar el sistema de visión:
1. Asegúrese de que la aeronave está en modo P y sobre una supercie plana. Tenga en cuenta
que el sistema de visión no puede funcionar correctamente en supercies sin variaciones de
patrón claras.
2. Encienda la aeronave. La aeronave se pondrá en vuelo estacionario tras despegar. Los
indicadores de estado de la aeronave parpadearán dos veces en verde, lo que indica que el
sistema de visión está activo.
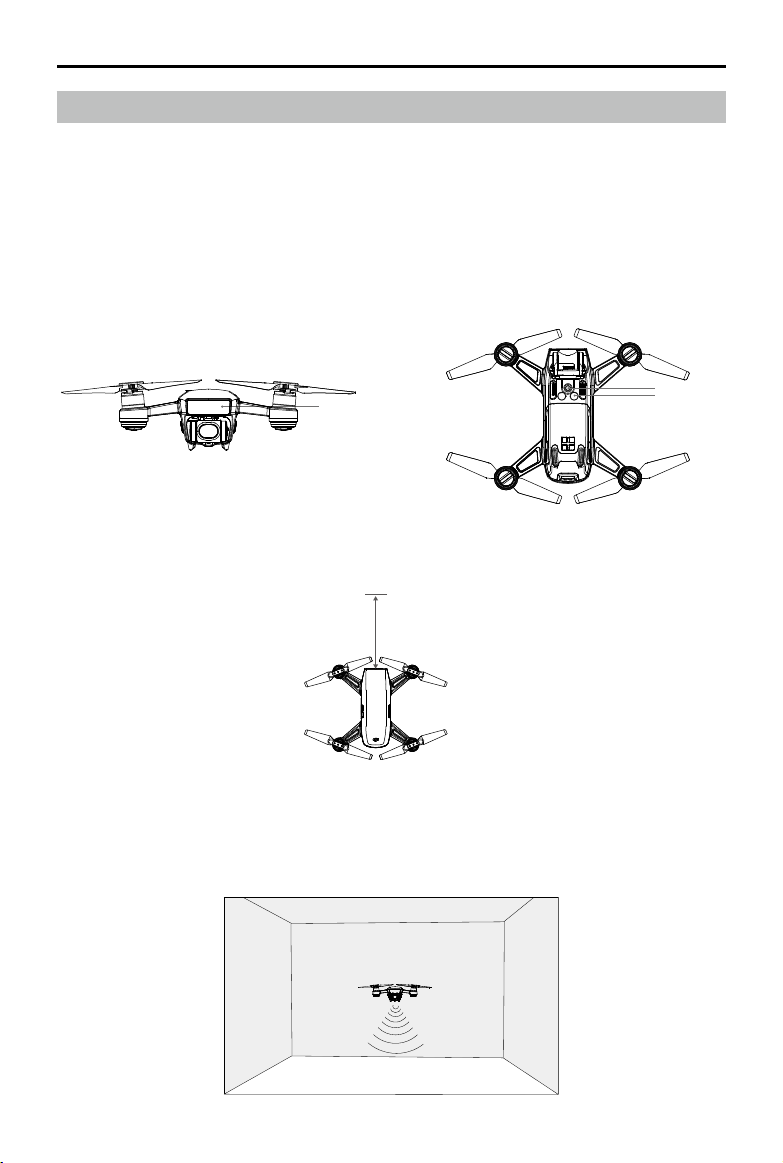
Por medio del sistema de detección 3D, la aeronave puede frenar activamente cuando se detecten
obstáculos delante. El sistema de detección 3D funciona mejor cuando la iluminación es adecuada,
y el obstáculo está claramente marcado o tiene una textura denida. La aeronave debe volar a no
más de 10,8 km/h (6,7 mph) para que la distancia de frenado sea suciente.
El rendimiento del sistema de visión y Detección 3D depende del tipo de supercie sobre
la que vuela la aeronave. La aeronave cambiará automáticamente del modo P al modo
ATTI si no están disponibles el GPS ni el sistema de visión. Tenga mucho cuidado al utilizar
el Spark en las siguientes situaciones:
Al volar a altas velocidades a una altura inferior a 0,5 metros.
Al volar sobre supercies monocromas (p. ej., negro puro, blanco puro, rojo puro o verde
puro).
Al volar sobre supercies muy reectantes.
Al volar sobre el agua o supercies transparentes.
Al volar sobre supercies u objetos en movimiento.
Al volar sobre una zona en la que la iluminación cambie con frecuencia o drásticamente.
Al volar sobre supercies extremadamente oscuras (< 10 lux) o brillantes (> 100 000 lux).
Al volar sobre supercies sin patrones ni textura denidos.
Al volar sobre supercies con patrones o texturas idénticos repetitivos (p. ej., baldosas).
Al volar sobre objetos pequeños o delgados (p. ej., ramas de árboles o cables eléctricos).
Al volar a velocidades superiores a 10,8 km/h (6,7 mph) a 2 metros sobre el suelo.
Mantenga los sensores limpios en todo momento. La suciedad u otros residuos pueden
afectar negativamente a su ecacia.
2017 DJI Todos los derechos reservados.
12
©
Page 13
Spark Manual del usuario
Regreso al punto de origen (RTH)
La función de regreso al punto de origen (RTH) hace que la aeronave vuelva al último punto de
origen registrado. Existen tres tipos de RTH: RTH inteligente, RTH por batería baja y RTH de
seguridad. En la siguiente sección se describen los tres tipos de RTH de forma detallada.
GPS
Si se había captado una señal GPS fuerte antes del despegue,
Punto de
origen
el punto de origen es la ubicación desde la que despegó
la aeronave. La intensidad de la señal GPS se indica con el
icono de GPS ( ). El indicador de estado de la aeronave
parpadeará rápidamente cuando se registre el punto de origen.
RTH inteligente
Active el RTH inteligente cuando haya señal GPS. Toque el botón RTH en DJI GO 4 y siga las
instrucciones que aparezcan en pantalla. Es posible desactivar inmediatamente el RTH inteligente
pulsando el icono Stop × de DJI GO 4.
También puede activar el RTH inteligente manteniendo pulsado el botón RTH en el control remoto.
Púlselo de nuevo para desactivarlo.
RTH por batería baja.
El RTH por batería baja se activa cuando la Batería de Vuelo Inteligente de DJI se agota hasta un
punto que pueda afectar al regreso seguro de la aeronave. Los usuarios deben hacer regresar
la aeronave al punto de origen o hacerla aterrizar inmediatamente cuando así se les indique.
DJI GO 4 mostrará un mensaje cuando se active un aviso de batería baja. Si no se realiza ninguna
acción después de la advertencia de 10 segundos, la aeronave regresará automáticamente al
punto de origen. El usuario puede cancelar el procedimiento RTH pulsando el botón RTH o el botón
de pausa de vuelo en el control remoto. Los umbrales para estas advertencias se determinan
automáticamente en función de la altitud actual de la aeronave y de su distancia al punto de origen.
El RTH por batería baja solamente se activará una vez por vuelo.
La aeronave aterrizará automáticamente si el nivel actual de la batería sólo llega para que la
aeronave aterrice desde la altitud actual.
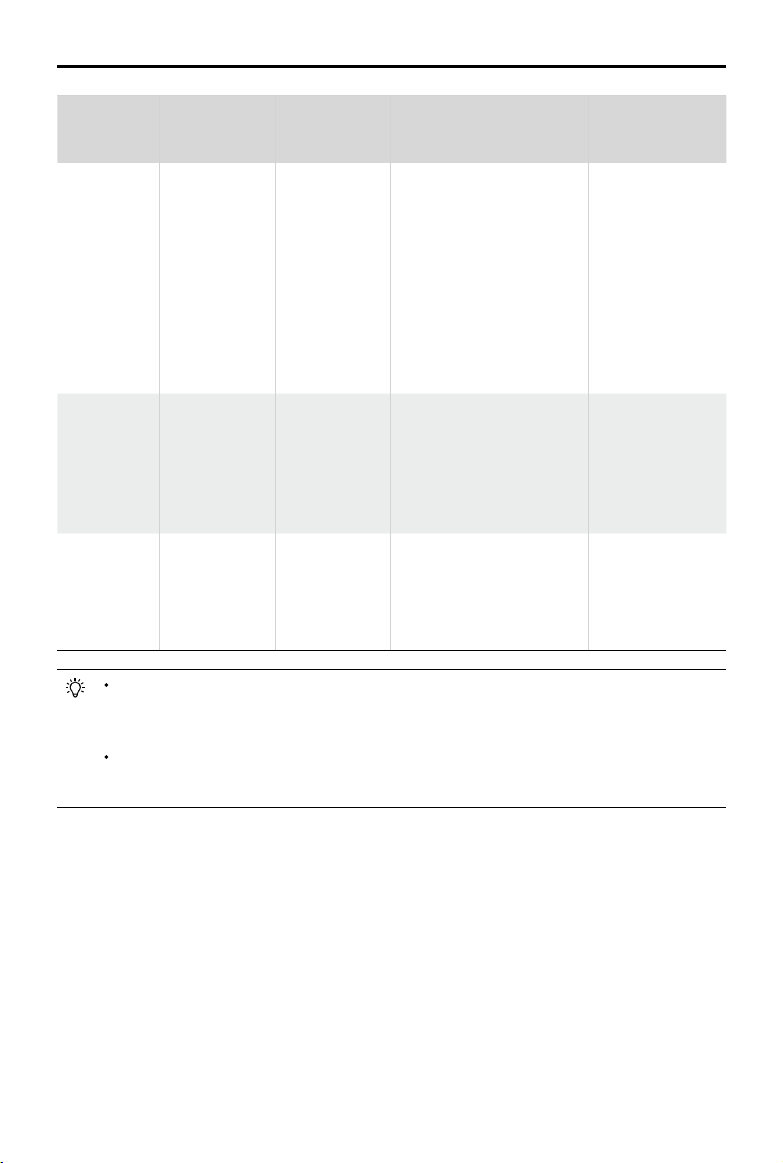
Descripción
El indicador de nivel de batería se muestra en DJI GO 4 y se describe a continuación:
Advertencia de nivel de batería
muy bajo (rojo)
Advertencia de nivel de
batería bajo (amarillo)
Nivel de batería
suciente (verde)
Tiempo de vuelo restante
Energía necesaria
para regresar al punto
de origen
Indicador de nivel de batería
12:29
2017 DJI Todos los derechos reservados.
©
13
Page 14
Spark Manual del usuario
Advertencia
del nivel de
batería
Advertencia
de nivel
de batería
bajo
Advertencia
de nivel de
batería baja
crítico
Tiempo
de vuelo
restante
estimado
Cuando se active la advertencia de nivel de batería muy bajo y la aeronave inicie el
aterrizaje automático, acelere con las palancas de control o los joysticks virtuales para
que la aeronave vuele en modo estacionario. Esto le permitirá conducirla a un lugar más
apropiado para el aterrizaje.
Las zonas de color y los marcadores en el indicador de nivel de batería reejan el tiempo
de vuelo restante estimado. Se ajustan automáticamente, de acuerdo con la ubicación y
el estado actual de la aeronave.
Observación
El nivel de
carga de la
batería es
bajo. Aterrice
la aeronave.
La aeronave
debe aterrizar
inmediatamente.
Tiempo de
vuelo restante
estimado en
función del
nivel actual de
la batería.
Indicador de
estado de la
aeronave
Los
indicadores
de estado de
la aeronave
parpadean
lentamente en
ROJO.
Los
indicadores
de estado de
la aeronave
parpadean
rápidamente
en ROJO.
N/D N/D N/D
Aplicación DJI GO 4
Toque “Go-home” para
que la aeronave regrese
al punto de origen
automáticamente, o
“Cancel” para reanudar
el vuelo normal. Si no
se realiza ninguna
acción, la aeronave irá
automáticamente al punto
de origen después de
10 segundos. El control
remoto emitirá una alarma.
La pantalla de la
aplicación DJI GO 4
parpadeará en rojo y la
aeronave comenzará a
descender. El control
remoto emitirá una alarma.
Instrucciones de
Haga regresar
la aeronave
y aterrícela lo
antes posible;
a continuación,
detenga los
motores y
reemplace la
batería.
Deje que la
aeronave
descienda
y aterrice
automáticamente.
vuelo
RTH de seguridad (Failsafe RTH)
Si el punto de origen se ha registrado correctamente, la señal GPS es fuerte y la brújula funciona
con normalidad, el RTH de seguridad se activará automáticamente si se pierde la señal inalámbrica
durante un periodo de tiempo determinado (3 segundos cuando se utiliza el control remoto y 20
segundos cuando se utiliza Wi-Fi). El usuario puede cancelar el RTH de seguridad para retomar el
control en caso de restablecerse la conexión inalámbrica.
Procedimiento RTH
1. El punto de origen se registra automáticamente.
2. Se activa el procedimiento RTH (RTH inteligente, RTH por batería baja o RTH de seguridad).
3. El punto de origen se conrma y la aeronave ajusta su orientación.
4. a. La aeronave asciende a la altitud de RTH predefinida y se dirige al punto de origen si se
encuentra a más de 20 m de este.
2017 DJI Todos los derechos reservados.
14
©
Page 15
Spark Manual del usuario
b. Si la aeronave se encuentra a entre 3 y 20 m del punto de origen, aterrizará automáticamente
con la opción RTH at Current Altitude desactivada (ajuste por defecto en DJI GO 4). La
aeronave regresa al punto de origen a la altitud actual cuando la opción RTH at Current
Altitude está activada y si está volando como mínimo a 2,5 m sobre el suelo. En caso de volar
a menos de 2,5 m sobre el suelo, asciende a 2,5 m y regresa al punto de origen cuando la
aeronave se encuentra entre 3 y 20 m del punto de origen.
c. La aeronave aterriza automáticamente si el modo RTH se activa cuando se encuentra a menos
de 3 m del punto de origen.
5. La aeronave se pone en vuelo estacionario a 0,3 m sobre el suelo y espera la conrmación del
usuario. La aeronave aterriza y detiene los motores después de la conrmación del usuario.
1 Registrar punto de origen
2 Pérdida de señal del control remoto
×
3 Pérdida de señal durante un
periodo de tiempo prolongado
×
4 RTH (altitud ajustable)
×
Altura sobre HP>altitud seguridad
Elevar a altitud de seguridad
Altitud de seguridad
Altura sobre HP<=altitud seguridad
5 Aterrizaje (tras la conrmación del usuario)
×
Vuelo estacionario a 0,3 metros sobre el
punto de origen
La aeronave no puede volver al punto de origen si la señal de GPS es débil o nula.
Es importante denir una altitud de seguridad adecuada antes de cada vuelo. Inicie
la aplicación DJI GO 4, toque "GO FLY" y, a continuación, para denir la altitud de
seguridad.
La aeronave dejará de ascender e inmediatamente volverá al punto de origen si mueve
la palanca izquierda cuando la aeronave alcance una altitud de 20 metros (65 pies) o
superior durante el modo de seguridad.
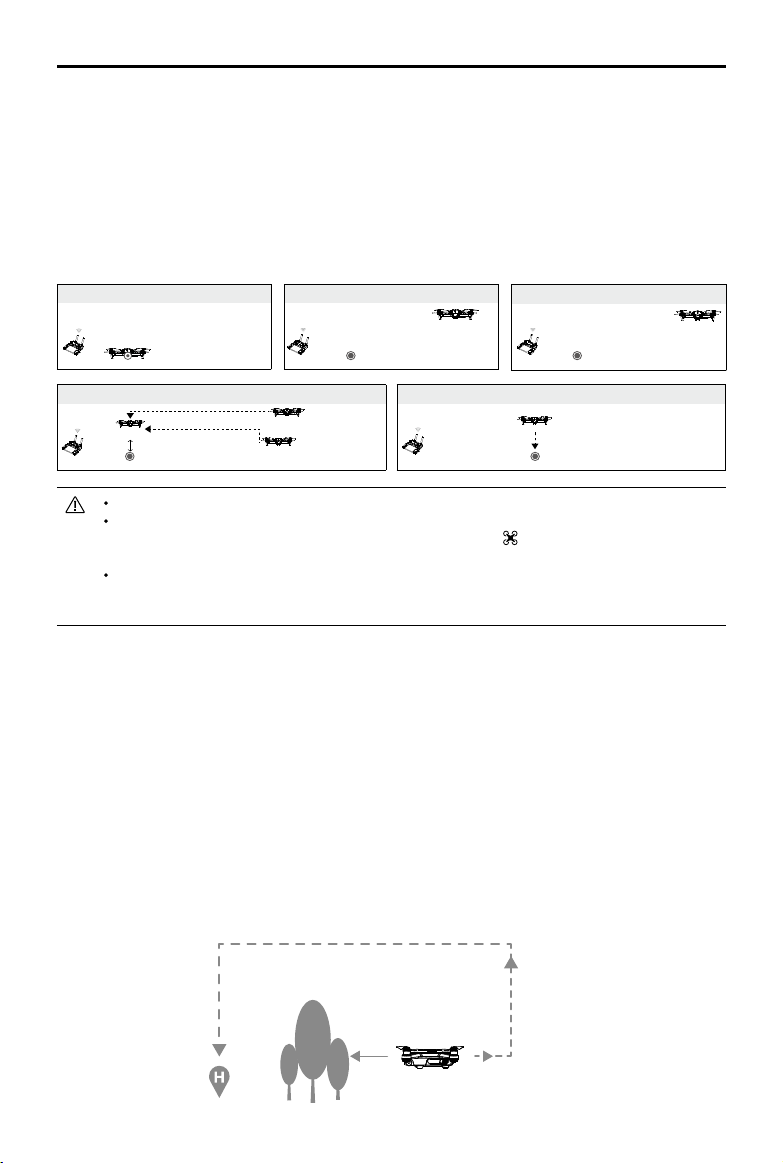
Sistema anticolisión durante RTH
El Spark regresará al punto de origen a una velocidad de vuelo de 10 m/s y no podrá evitar
obstáculos si se encuentra a más de 100 m del punto de origen cuando el RTH se activa.
El Spark puede detectar obstáculos e intentar evitarlos activamente durante RTH si las condiciones
de iluminación son adecuadas para el sistema de detección 3D y el RTH se activa cuando la
aeronave se encuentra a menos de 100 m del punto de origen. Al detectar un obstáculo, la
aeronave actuará de la siguiente manera:
1. La aeronave desacelera al detectarse un obstáculo a 5 metros (16 pies) por delante.
2. La aeronave se detiene y se mantiene en vuelo estacionario; a continuación, empieza a volar
hacia atrás hasta que el sistema de detección 3D no detecta obstáculos.
3. La aeronave asciende verticalmente durante unos 5 segundos.
4. Se reanuda el procedimiento de RTH. La aeronave seguirá volando hasta el punto de origen
manteniendo la altitud actual.
5 m
Ascenso durante 5 segundos
2017 DJI Todos los derechos reservados.
©
15
Page 16
Spark Manual del usuario
Si el obstáculo sigue detectándose después de que la aeronave haya volado hacia atrás
10 m, la detección de obstáculos se desactivará, la aeronave ascenderá automáticamente
a la altura de seguridad y se dirigirá al punto de origen a una velocidad de vuelo de 10 m/s.
Si el obstáculo se vuelve a detectar durante el ascenso, la aeronave repetirá los pasos 1-3.
La aeronave no puede evitar obstáculos situados por encima, por detrás o por los lados.
Aterrizaje de Precisión
El Spark explora automáticamente e intenta ajustarse a las características del terreno que hay
debajo durante el regreso al punto de origen. Cuando el terreno actual coincide con el terreno
del punto de origen, el Spark comenzará a aterrizar inmediatamente para lograr un aterrizaje de
precisión. DJI GO 4 mostrará un aviso de incompatibilidad de características de terreno si no se
produce coincidencia.
El rendimiento del Aterrizaje de Precisión está sujeto a las siguientes condiciones:
a. El punto de origen se registra al despegar y no se puede actualizar durante el vuelo.
b. La aeronave debe despegar verticalmente. La altitud de despegue debe ser superior a
7 metros.
c. Las características del terreno del punto de origen continúan prácticamente invariables.
d. Si el terreno del punto de origen no tiene características distintivas, afectará al rendimiento.
e. Las condiciones de iluminación no pueden ser demasiado claras ni demasiado oscuras.
Durante el aterrizaje, se encuentran disponibles las siguientes acciones:
a. Empujar el acelerador hacia abajo para acelerar el aterrizaje.
b. El Aterrizaje de Precisión se detendrá al mover las palancas de control en cualquier otra
dirección. El Spark descenderá verticalmente al soltar las palancas de control.
Modos de Vuelo Inteligente
El Spark es compatible con los Modos de Vuelo Inteligente, como QuickShot, ActiveTrack, TapFly,
modo gestual y modo trípode. Toque en DJI GO 4 o pulse el botón de función del control remoto
para activar un Modo de Vuelo Inteligente.
QuickShot
Entre los modos de grabación QuickShot se encuentran Rocket, Dronie, Circle y Helix. El Spark
grabará un vídeo conforme al modo de grabación seleccionado y, a continuación, generará
automáticamente un vídeo breve de 10 segundos de duración. El vídeo se puede reproducir, editar
o compartir en redes sociales desde el menú Playback.
Dronie: volar hacia atrás y hacia arriba, con la cámara ja en el objetivo.
Circle: hacer un círculo alrededor del objetivo.
Helix: volar hacia arriba, haciendo una espiral en torno al objetivo.
Rocket: ascender con la cámara apuntando hacia abajo.
Uso de QuickShot
Asegúrese de que la aeronave está en modo P y de que la Batería de Vuelo Inteligente tiene
suciente carga. Realice los pasos siguientes para utilizar la función QuickShot:
2017 DJI Todos los derechos reservados.
16
©
Page 17
Spark Manual del usuario
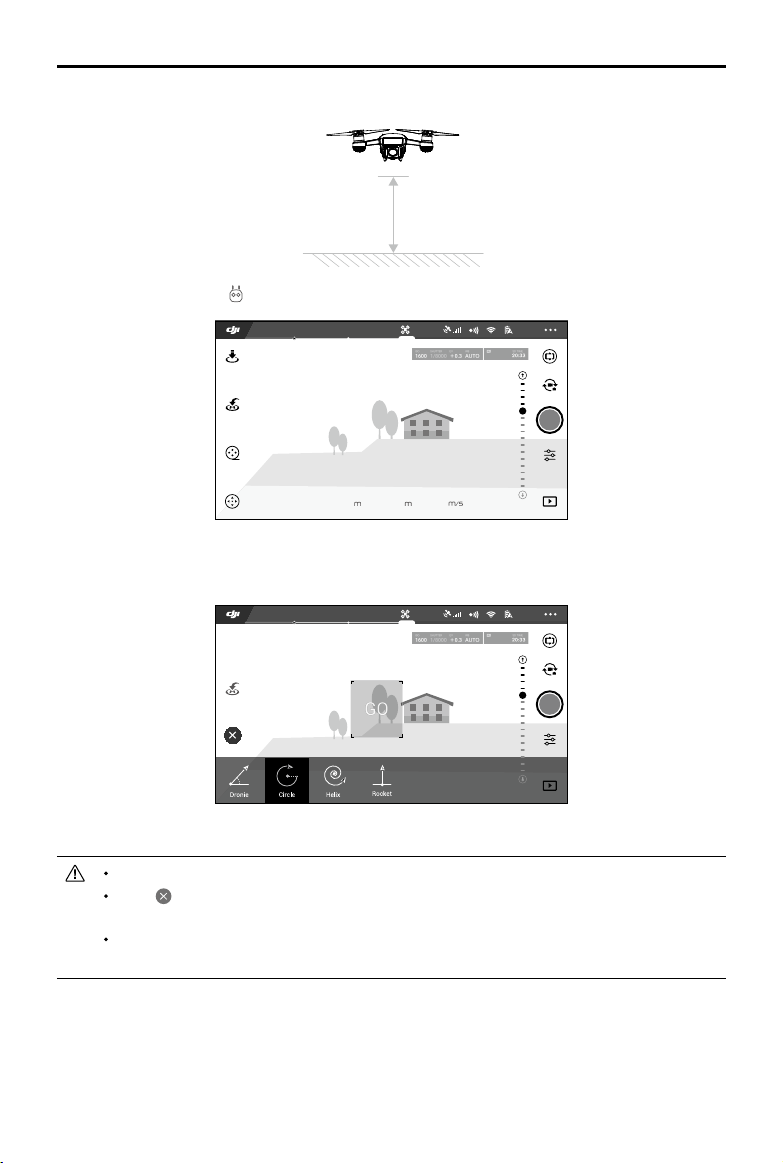
GO
1. Despegue y asegúrese de que la aeronave esté volando a por lo menos 1,5 m (4,5 pies) del
suelo.
1,5 m
2. Inicie DJI GO 4, toque , seleccione QuickShot y siga las instrucciones.
12
In-Flight(GPS)
QuickShot
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. Seleccione el objetivo en la vista de la cámara y elija un modo de grabación. Toque “GO” para
empezar a grabar. Una vez nalizada la grabación, la aeronave regresará a su posición original.
12
In-Flight(GPS)
QuickShot
09:29
1080P/30
61%
2.4G
4. Vea y edite el vídeo original o el generado mediante la función Playback.
QuickShot sólo está disponible si la señal GPS es fuerte.
Toque en DJI GO 4 para salir del modo QuickShot en cualquier momento durante la
grabación
En el modo QuickShot, la aeronave no puede evitar obstáculos automáticamente. Asegúrese
.
de utilizar la función QuickShot solamente en zonas abiertas y amplias.
ActiveTrack
ActiveTrack le permite marcar y seguir un objeto móvil en la pantalla de su dispositivo móvil. No se
requiere un dispositivo de seguimiento externo.
El Spark puede identificar y localizar automáticamente bicicletas y otros vehículos, personas y
animales, y utilizar diferentes estrategias de seguimiento para cada uno.
2017 DJI Todos los derechos reservados.
©
17
Page 18

Spark Manual del usuario
GO
Uso de ActiveTrack
Asegúrese de que la Batería de Vuelo Inteligente esté completamente cargada y de que la
aeronave se encuentre en el modo P. Siga los pasos que aparecen a continuación
para usar la función ActiveTrack:
1. Despegue y vuele en modo estacionario a por lo menos 1,5 m (4,5 pies) del suelo.
1,5 m
2. En DJI GO, toque para ver los modos de vuelo, y seleccione ActiveTrack.
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. Toque en el objeto que desee seguir y, a continuación, toque para conrmar la selección. Si
el objeto no se reconoce automáticamente, arrastre un recuadro a su alrededor. El recuadro
cambiará a verde cuando el seguimiento esté en curso. Si el cuadro se vuelve rojo, es posible
que el objetivo no se haya identicado y deba intentarlo de nuevo.
12
In-Flight(GPS)
ActiveTrack
09:29
1080P/30
61%
2.4G
4. La aeronave esquivará automáticamente los obstáculos en su trayectoria de vuelo. Si la
aeronave pierde el rastro del objetivo porque este se mueve muy rápido o queda oscurecido,
vuelva a seleccionarlo para reanudar el seguimiento.
2017 DJI Todos los derechos reservados.
18
©
Page 19

Spark Manual del usuario
ActiveTrack incluye las siguientes funciones:
Trace Prole
La aeronave seguirá el objeto a un ángulo y
La aeronave sigue el objeto a una distancia
constante. Utilice la palanca de giro del Control
Remoto o el deslizador de DJI GO 4 para rodear
el objeto.
NO seleccione una zona en la que haya personas, animales, objetos pequeños y nos (p. ej.,
ramas de árboles y tendido eléctrico) u objetos transparentes (p. ej., vidrio o agua).
Evite los obstáculos próximos a la trayectoria de vuelo, en especial cuando la aeronave
vuele hacia atrás.
En caso de emergencia, controle la aeronave manualmente o toque el icono en DJI GO 4.
Extreme la atención al usar ActiveTrack en cualquiera de las siguientes situaciones:
a) El objetivo que sigue no se mueve en un plano nivelado.
b) El objetivo que se está siguiendo cambia de forma drásticamente mientras se mueve.
c) El objetivo podría permanecer tapado o fuera de la vista durante un largo periodo de
tiempo.
d) El objetivo que se sigue se mueve sobre la nieve.
e) El objetivo que se está siguiendo tiene un color o un patrón parecido al de su entorno.
f) Hay poca luz (< 300 lux) o demasiada (> 10 000 lux).
Debe respetar las leyes y normativas de privacidad locales al usar ActiveTrack.
Sea consciente de que la resolución de las imágenes es de 1440×1080 cuando se hace
un seguimiento.
a una distancia constantes desde el lateral.
Utilice la palanca de giro del Control Remoto
para rodear el objeto. La aeronave no podrá
esquivar obstáculos mientras se encuentre
en el modo Profile. Utilice este modo en
espacios abiertos.
Salir de ActiveTrack
Utilice los siguientes métodos para salir de ActiveTrack:
1. Pulse el botón de pausa de vuelo en el Control Remoto.
2. Toque el icono en la pantalla.
O bien
Después de salir de ActiveTrack, la aeronave volará en modo estacionario. En este momento,
puede elegir volar manualmente, seguir otro objeto o regresar al punto de origen.
TapFly
TapFly cuenta con dos submodos completamente nuevos: Coordinate y Direction. El modo
Coordinate es el predeterminado. La aeronave evitará automáticamente los obstáculos detectados,
o frenará y volará en modo estacionario frente a ellos, siempre que haya una luz adecuada (entre
300 lux y 10 000 lux).
2017 DJI Todos los derechos reservados.
©
19
Page 20

Spark Manual del usuario
GO
Modo Coordinate
Toque una ubicación especíca en la pantalla. La aeronave se desplazará a dicho lugar a su altitud
actual y se mantendrá en vuelo estacionario allí.
Uso del modo Coordinate
Asegúrese de que la Batería de Vuelo Inteligente esté completamente cargada y de que la
aeronave se encuentre en el modo P. Realice los pasos siguientes para utilizar el modo Coordinate:
1. Despegue y asegúrese de que la aeronave esté volando a por lo menos 1 m (3 pies) del suelo.
1 m
2. Inicie DJI GO 4 y toque . Seleccione TapFly y Coordinate Mode, y siga las instrucciones.
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. Toque una vez el objetivo y espere a que aparezca el icono "GO". Toque el icono "GO" para
conrmar la selección y la aeronave volará automáticamente hacia el objetivo. Si no es posible
llegar al objetivo, aparecerá un mensaje. En este caso, seleccione otro objetivo y vuelva a
intentarlo.
In-Flight(GPS)
H 9.6
12
TapFly
09:29
S 1.1D 9.6
1080P/30
61%
2.4G
4. Puede cambiar el objetivo durante el vuelo tocando la pantalla.
5. Mantenga pulsada la pantalla durante unos 2 segundos hasta que aparezca un círculo
azul. Arrastre el círculo hacia arriba y hacia abajo para ajustar el ángulo de inclinación del
estabilizador.
Al usar el modo Coordinate, asegúrese de que el objetivo se encuentra en una superficie
plana. De lo contrario, es posible que la aeronave no pueda llegar al objetivo correctamente.
2017 DJI Todos los derechos reservados.
20
©
Page 21

Spark Manual del usuario
Salir del modo Coordinate
Utilice los siguientes métodos para salir del modo Coordinate:
1. Toque el icono en la pantalla.
2. Tire hacia atrás de la palanca de inclinación del control remoto durante al menos 3 segundos.
3. Pulse el botón de pausa de vuelo en el Control Remoto.
4. Arrastre el círculo azul a la izquierda y a la derecha.
Modo Direction
Sigue volando en la dirección indicada tocando la pantalla.
Uso del modo Direction
Asegúrese de que la Batería de Vuelo Inteligente esté completamente cargada y de que la
aeronave se encuentre en el modo P. Realice los pasos siguientes para utilizar el modo Direction:
1. Despegue y asegúrese de que la aeronave esté volando a por lo menos 1 m (3 pies) del suelo.
1 m
2. Inicie DJI GO 4 y toque . Seleccione TapFly, cambie a Direction Mode y siga las
instrucciones.
In-Flight(GPS)
12
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. Toque una vez el objetivo y espere a que aparezca el icono "GO". Toque el icono "GO" para
conrmar la selección y la aeronave volará automáticamente en esa dirección.
12
In-Flight(GPS)
TapFly
09:29
61%
2.4G
1080P/30
2017 DJI Todos los derechos reservados.
©
21
Page 22

Spark Manual del usuario
Después de conrmar la selección, la aeronave volará en la dirección marcada por el icono "GO".
La aeronave ajustará automáticamente su velocidad cuando detecte un obstáculo ante sí, o si
está volando demasiado cerca del suelo. Sin embargo, no se debe conar en esta característica
para la navegación entre obstáculos.
Los procedimientos de seguridad anularán todas las funciones TapFly. Si la señal GPS se debilita,
la aeronave saldrá del modo autónomo y regresará al punto de origen.
Salida del modo Direction
Utilice los siguientes métodos para salir del modo Direction:
1. Toque el icono en la pantalla.
2. Tire hacia atrás de la palanca de inclinación del control remoto durante al menos 3 segundos.
3. Pulse el botón de pausa de vuelo en el Control Remoto.
La aeronave se detendrá y volará en modo estacionario tras salir del modo Direction. Toque una
nueva dirección objetivo para continuar volando o inicie el vuelo manual.
O bien O bien
Botón de pausa durante vuelo
NO haga volar la aeronave sobre personas, animales, objetos pequeños y nos (p. ej., ramas
de árboles y tendido eléctrico) ni objetos transparentes (p. ej., vidrio o agua). El modo TapFly
podría no funcionar correctamente cuando la aeronave esté volando sobre zonas cubiertas
de agua o nieve.
Preste atención a posibles obstáculos en la trayectoria de vuelo y evite acercarse.
Es posible que haya diferencias entre las rutas de vuelo esperadas y las reales seleccionadas
en TapFly.
El rango de selección para la dirección objetivo es limitado. No se puede realizar una
selección del modo Direction cerca del borde superior o inferior de la pantalla.
Extreme las precauciones al volar en entornos demasiado oscuros (< 300 lux) o brillantes
(> 10 000 lux).
Modo trípode
Toque el icono de DJI GO 4 para activar el modo trípode. En el modo trípode, la velocidad de vuelo
máxima está limitada a 3,6 km/h (2,2 mph). La respuesta a los movimientos de la palanca también
se reduce para que los movimientos sean más suaves y controlados.
Utilice el modo de trípode sólo cuando la señal de GPS sea intensa o donde las condiciones
de luz sean ideales para el sistema de visión. Si se pierde la señal de GPS y el sistema de
visión no funciona, cambiará automáticamente al modo ATTI. En este caso, la velocidad de
vuelo aumentará y la aeronave no podrá volar en modo estacionario. Use el modo de trípode
con cuidado.
2017 DJI Todos los derechos reservados.
22
©
Page 23

Spark Manual del usuario
Modo gestual
El reconocimiento de gestos de aprendizaje completo permite hacer seles con gestos sencillos de
las manos. El Spark cuenta con controles gestuales novedosos, como PalmLaunch, PalmControl,
PalmLand, Beckon y Sele. Se recomienda encarecidamente instalar los protectores de las hélices
de Spark antes de usar el modo gestual para garantizar la seguridad.
Descripciones de funciones
PalmLaunch
1. Encienda la aeronave mientras la sostiene con
las manos. Espere hasta que los indicadores
de estado de la aeronave parpadeen en
amarillo. Asegúrese de que los dedos se
encuentran muy por debajo de los brazos de
la aeronave.
2. A continuación, toque dos veces el botón de
encendido de la Batería de Vuelo Inteligente.
Los LED delanteros deberían parpadear
lentamente en amarillo.
3. FaceAware empezará a funcionar
automáticamente. Si FaceAware se activa
correctamente, la aeronave emite dos pitidos
y los LED delanteros se iluminan en verde
jo. Si los LED delanteros parpadean dos
veces en rojo, FaceAware no se ha activado
correctamente. Repita el paso 2.
4. Los LED delanteros se iluminan en rojo jo
después de que los motores empiecen a
girar. Suelte la aeronave; esta volará en
modo estacionario.
Activación/desactivación de PalmControl
1. Sitúese delante de la aeronave y, a
continuación, levante y extienda uno de los
brazos en dirección a la aeronave. Extienda
los dedos y manténgalos juntos. Coloque la
palma de la mano a aproximadamente 0,7 m
del morro de la aeronave durante unos 2
segundos.
2. Si el modo PalmControl se activa
correctamente, los LED delanteros se
iluminarán en verde jo. Si los LED delanteros
empiezan a parpadear rápidamente en
amarillo, ajuste su distancia a la aeronave,
ya que esto signica que se encuentra
demasiado cerca o demasiado lejos de ella.
Indicadores LED
delanteros
Rojo jo
——
Parpadea en amarillo
Verde jo
——
Rojo jo
——
Verde jo
——
Imagen
3. Si baja la mano rápidamente, saldrá del
modo PalmControl; los LED delanteros
deberían iluminarse en rojo jo.
——
Rojo jo
2017 DJI Todos los derechos reservados.
©
23
Page 24

Spark Manual del usuario
Ajuste de la posición
1. Mueva la palma de la mano lentamente hacia
arriba o hacia abajo para controlar la altitud
de la aeronave; mantenga una distancia
constante entre la mano y la aeronave.
2. Mantenga la palma de la mano a una
distancia constante de su cuerpo (como se
muestra); a continuación, mueva el brazo
hacia la izquierda o hacia la derecha para
controlar la orientación de la aeronave.
3. Mantenga la palma de la mano a una
distancia constante de su cuerpo, y muévala
hacia adelante o hacia atrás para que la
aeronave vuele en dicha dirección.
Seguimiento
1. Sitúese delante de la aeronave y, a
continuación, levante uno de los brazos
y agite rápidamente la mano hacia la
cámara. Coloque la palma de la mano a
aproximadamente 0,7 m del morro de la
aeronave durante unos 2 segundos.
2. Si el gesto se reconoce correctamente, los
LED delanteros parpadearán dos veces en
verde. La aeronave ascenderá y volará hacia
atrás; a continuación, se pondrá en vuelo
estacionario a 3 m de su posición y a 2,3 m
sobre el suelo. No se mueva hasta que la
aeronave se detenga en vuelo estacionario.
Verde jo
——
×2
Parpadea en verde
dos veces
3. Los LED delanteros se iluminarán en verde
jo y la aeronave empezará a seguirle
automáticamente.
4. Si el gesto de agitar la mano falla o la
aeronave deja de seguirle, puede activar
el modo de seguimiento levantando ambos
brazos sobre la cabeza en forma de Y
durante 2 segundos.
Hacer seles
1. Forme un marco con las manos a unos 7 m
(23 pies) de la aeronave mirando a la cámara
de frente para empezar a hacer un sele.
2. Si los LED delanteros parpadean lentamente
en rojo, el gesto de sele se ha reconocido
correctamente. Espere la cuenta atrás
del sele, que dura 3 segundos. Los LED
delanteros parpadearán rápidamente en rojo,
lo que indica que la cámara está a punto de
hacer un sele.
2017 DJI Todos los derechos reservados.
24
©
Verde jo
——
Parpadea en rojo
lentamente
Page 25

Spark Manual del usuario
Beckon
1. Levante los brazos sobre la cabeza en forma
de Y durante 2 segundos después de que la
aeronave haya comenzado el seguimiento.
2. Si el modo Beckon se activa correctamente,
la aeronave empezará a volar hacia usted,
y se mantendrá en vuelo estacionario 1,5 m
sobre el suelo y a 1,2 m de usted.
3. Los LED delanteros se iluminarán en rojo jo.
PalmLand
Sitúese frente a la cámara y coloque la palma
de la mano aproximadamente 0,5 m debajo de
la aeronave, a una distancia máxima de 1,5 m
de usted. La aeronave descenderá lentamente
y aterrizará sobre la palma de su mano.
Se recomienda encarecidamente instalar los protectores de las hélices de Spark antes de
usar el modo gestual para garantizar la seguridad.
El control de gestos debe activarse en DJI GO 4 tocando .
Sea consciente de que la resolución de las imágenes es de 1440×1080 cuando se utilice el
modo gestual.
En PalmLaunch, los indicadores de estado de la aeronave parpadearán normalmente y no
mostrarán una pérdida de la señal inalámbrica, aunque no haya ningún dispositivo móvil ni
control remoto conectados.
Utilice el modo gestual en espacios abiertos.
El modo gestual sólo se puede utilizar para hacer fotos.
Si habilita el GPS en su dispositivo móvil, la aeronave podrá seguirle de forma más precisa en
el modo gestual.
——
——
Rojo jo
Rojo jo
2017 DJI Todos los derechos reservados.
©
25
Page 26

Spark Manual del usuario
Registrador de vuelo
Los datos de vuelo se registran automáticamente en el almacenamiento interno de la aeronave.
Incluyen telemetría de vuelo, información de estado de la aeronave y otros parámetros. Para
acceder a estos datos, conecte la aeronave al PC a través del puerto Micro USB.
Montaje y desmontaje de las hélices
Utilice solamente hélices aprobadas por DJI para el Spark. Las hélices se diferencian en marcadas
con anillo blanco y sin marca para indicar el punto de montaje y la dirección de giro de la hélice.
Hélices Anillo blanco Sin marca
Imagen
Montar en Motores con marcas blancas Motores sin marcas blancas
Leyenda
Bloquear: Girar las hélices en la dirección indicada para montarlas y
apretarlas.
Fijación de las hélices
Fije las hélices con los anillos blancos en la base de montaje con marcas blancas. Presione cada
hélice hacia abajo sobre la placa de montaje y gírela en la dirección de bloqueo hasta que quede
ja. Acople las hélices sin marcas en las bases de montaje sin marcas. Despliegue todas las palas
de las hélices.
Con marca Sin marca
Extracción de las hélices
Presione las hélices sobre el punto de montaje del motor y gírelas en la dirección de desbloqueo.
Las palas de las hélices están aladas, así que debe manipularlas con cuidado.
Utilice solamente hélices aprobadas por DJI. No mezcle diferentes tipos de hélices.
Manténgase alejado de los motores en movimiento. No toque las hélices mientras están
girando.
Compruebe que las hélices y los motores estén instalados correcta y rmemente antes de
cada vuelo.
Asegúrese de que todas las hélices se encuentren en buen estado antes de cada vuelo. No
utilice hélices desgastadas, astilladas o rotas.
Para evitar lesiones, manténgase lejos de las hélices y los motores, y no los toque cuando
estén girando.
Utilice hélices DJI originales para experimentar un vuelo mejor y más seguro.
2017 DJI Todos los derechos reservados.
26
©
Page 27

Spark Manual del usuario
Batería de Vuelo Inteligente
Introducción
La Batería de Vuelo Inteligente DJI tiene una capacidad de 1480 mAh, un voltaje de 11,4 V y una
función de carga/descarga inteligente. Sólo se debe cargar con un cargador adecuado aprobado
por DJI.
Batería de Vuelo Inteligente Cargador
La Batería de Vuelo Inteligente debe estar completamente cargada antes de usarla por
primera vez.
Funciones de la Batería de Vuelo Inteligente DJI
1. Pantalla de nivel de batería: Los indicadores LED mostrarán el nivel actual de la batería.
2. Descarga automática: Para evitar que se sulfate, la batería se descarga automáticamente por
debajo del 70 % de la carga total cuando está inactiva durante más de 10 días. La batería tarda
unos dos días en descargarse hasta el 65 %. Es normal notar un calor moderado procedente de
la batería durante el proceso de descarga.
3. Carga equilibrada: Equilibra automáticamente el voltaje de cada celda de la batería durante la
carga.
4. Protección contra sobrecarga: La carga se detiene automáticamente cuando la batería está
completamente cargada.
5. Detección de temperatura: La batería sólo se carga a una temperatura de entre 5 °C (41 °F) y
40 °C (104 °F).
6. Protección contra sobrecorriente: La batería deja de cargar cuando se detecta un alto amperaje
(más de 3 A).
7. Protección contra exceso de descarga: Para evitar daños por descarga excesiva, la descarga
se detiene automáticamente.
8. Protección contra cortocircuitos: Corta automáticamente el suministro eléctrico al detectarse un
cortocircuito.
9. Modo de hibernación: A n de ahorrar energía, la batería interrumpe la alimentación eléctrica y
se desactiva después de 20 minutos de inactividad. Si el nivel de la batería es inferior al 10 %,
se pone en modo de hibernación después de 6 horas de inactividad para evitar una descarga
excesiva. Los indicadores de nivel de la batería no se iluminan. Al cargar la batería, esta sale de
la hibernación.
10. Comunicación: la información relativa a voltaje, capacidad, corriente y otros datos de la batería
se transmite al controlador principal de la aeronave.
Consulte las Directrices de seguridad de la Batería de Vuelo Inteligente del Spark antes de su
uso. Los usuarios asumen la responsabilidad completa de todas las operaciones y el uso.
2017 DJI Todos los derechos reservados.
©
27
Page 28

Spark Manual del usuario
Uso de la batería
Encendido y apagado
Encendido: pulse el botón de encendido una vez; a continuación, vuelva a pulsarlo y manténgalo
así durante 2 segundos para encender. La pantalla de estado del sistema del Control Remoto
mostrará el nivel de batería actual.
Apagado: pulse el botón de encendido una vez; a continuación, vuelva a pulsarlo y manténgalo así
durante 2 segundos para apagar.
Indicadores del nivel de batería
LED1
LED2
LED3
LED4
Botón de encendido
Aviso de temperatura baja:
1. La capacidad de la batería se reduce considerablemente al volar en entornos con baja
temperatura (0 °C y 5 °C).
2. Las baterías no se pueden utilizar en entornos con temperaturas muy bajas (< 0 °C).
3. Termine el vuelo en cuanto la aplicación DJI GO 4 muestre la advertencia “Low Battery Level
Warning” en entornos de baja temperatura.
4. Para garantizar el rendimiento óptimo de la batería, mantenga la temperatura de la batería por
encima de 20 °C.
En entornos fríos, introduzca la batería en su compartimento y encienda la aeronave
aproximadamente 1-2 minutos antes de despegar para que se caliente.
Comprobación del nivel de batería
Los indicadores del nivel de batería muestran la carga restante. Cuando la batería esté apagada,
pulse una vez el Botón de Encendido y los Indicadores del Nivel de Batería se iluminarán para
mostrar el nivel actual de la batería. Consulte los detalles a continuación.
Los indicadores del nivel de batería también mostrarán el nivel de batería durante la carga y
la descarga. Los indicadores se denen a continuación.
: LED encendido. : LED parpadeando.
: LED apagado.
LED1 LED2 LED3 LED4 Nivel de batería
88 %~100 %
75 %~88 %
63 %~75 %
50 %~63 %
38 %~50 %
25 %~38 %
13 %~25 %
0 %~13 %
2017 DJI Todos los derechos reservados.
28
©
Page 29

Spark Manual del usuario
Carga de la Batería de Vuelo Inteligente
1. Conecte el cargador de la batería a una fuente de alimentación (100-240 V y 50/60 Hz).
2. Conecte el puerto Micro USB del Spark al cargador para comenzar el proceso de carga.
3. El indicador de nivel de batería también mostrará el nivel de la batería mientras se carga.
4. La Batería de Vuelo Inteligente está completamente cargada cuando todos los indicadores del
nivel de batería están apagados. Se necesita aproximadamente 1 hora y 20 minutos para cargar
totalmente la batería. Desconecte el cargador cuando la batería esté completamente cargada.
Cargador
Toma de alimentación
Nunca introduzca ni retire una batería encendida.
Deje que la temperatura de la batería se enfríe hasta temperatura ambiente antes de
guardarla durante un periodo prolongado.
El cargador dejará de cargar la batería si la temperatura de la celda de la batería no se
encuentra dentro del intervalo de funcionamiento (5 °C a 40 °C).
LED1 LED2 LED3 LED4 Nivel de batería
0 %~50 %
50 %~75 %
75 %~100 %
Carga completa
Indicadores LED de protección de la batería
La tabla siguiente muestra los mecanismos de protección de la batería y los patrones de LED
correspondientes.
LED1 LED2 LED3 LED4 Patrón de parpadeo
El LED2 parpadea dos veces por
segundo
El LED2 parpadea tres veces por
segundo
El LED3 parpadea dos veces por
segundo
El LED3 parpadea tres veces por
segundo
El LED4 parpadea dos veces por
segundo
El LED4 parpadea tres veces por
segundo
Elemento de protección de la
batería
Se ha detectado
sobrecorriente
Se ha detectado cortocircuito
Se ha detectado sobrecarga
Se ha detectado sobrevoltaje
Temperatura de carga muy
baja
Temperatura de carga muy
alta
2017 DJI Todos los derechos reservados.
©
29
Page 30

Spark Manual del usuario
-85°
Una vez resueltos estos problemas, pulse el botón de encendido para apagar los indicadores de
nivel de batería. Desenchufe la Batería de Vuelo Inteligente del cargador y vuelva a enchufarla para
reanudar la carga. No es necesario desenchufar y volver a enchufar el cargador si se produce un
error de temperatura ambiente; el cargador reanudará la carga cuando la temperatura esté dentro
del intervalo permitido.
DJI no asume ninguna responsabilidad por los daños producidos por cargadores de otros
fabricantes.
Descarga de las Baterías de Vuelo Inteligente antes de realizar un viaje largo:
Vuele el Spark en el exterior hasta que quede menos del 30 % de carga o hasta que la
batería no se encienda.
Estabilizador y cámara
Estabilizador
Prole
El estabilizador mecánico de 2 ejes del Spark proporciona estabilización a la cámara acoplada, lo
que le permite capturar imágenes y vídeo nítidos y estabilizados. El estabilizador tiene un rango de
inclinación de 85˚.
En la vista de la cámara, mantenga pulsada la pantalla hasta que aparezca un círculo azul. Arrastre
el círculo hacia la izquierda y hacia la derecha para controlar la orientación de la aeronave;
arrástrelo hacia arriba y hacia abajo para controlar la inclinación de la cámara.
0°
Modos de funcionamiento del estabilizador
El estabilizador cuenta con dos modos de funcionamiento. Cambie entre los distintos modos de
funcionamiento en la página de ajustes de la cámara de la aplicación DJI GO 4.
Modo de
seguimiento
Modo en
primera
persona
(FPV)
Despegue desde terreno abierto y llano, y proteja el estabilizador en todo momento.
Se puede producir un error del motor del estabilizador en estas situaciones:
(1) La aeronave está situada sobre un terreno irregular o el movimiento del estabilizador
ha quedado obstruido.
(2) El estabilizador ha sufrido una fuerza externa excesiva, como una colisión.
El vuelo con niebla densa o nubes puede humedecer el estabilizador, haciendo que falle
temporalmente. El estabilizador volverá a funcionar correctamente cuando se seque.
El estabilizador se pondrá automáticamente en modo FPV cuando la aeronave esté en
modo Sport.
2017 DJI Todos los derechos reservados.
30
©
El eje de alabeo permanece nivelado en todo momento.
El estabilizador se sincronizará con el movimiento de la aeronave
para proporcionar una experiencia de vuelo en perspectiva de
primera persona.
Page 31

Spark Manual del usuario
Cámara
Prole
La cámara de a bordo utiliza el sensor CMOS de 1/2,3 pulgadas para capturar vídeos de hasta
1080p a 30 fps e imágenes fijas de 12 megapíxeles. Entre los modos de toma de imágenes
disponibles se encuentran el disparo único, la ráfaga, el intervalo, el panorama y ShallowFocus.
La previsualización inmediata de lo que ve la cámara se puede supervisar en el dispositivo móvil
conectado a través de la aplicación DJI GO 4.
Ranura para tarjeta microSD de la cámara
Para guardar las fotos y vídeos, introduzca la tarjeta microSD en la ranura, como se muestra a
continuación, antes de encender la aeronave. El Spark admite tarjetas microSD de hasta 64 GB. Se
recomienda una tarjeta microSD UHS-1 debido a su velocidad de lectura y escritura, que permite
grabar vídeo de alta resolución.
No extraiga la tarjeta microSD de la cámara mientras esté encendida.
Para asegurar la estabilidad del sistema de cámara, las grabaciones de vídeos
independientes tienen un límite de 30 minutos.
En ordenadores Mac, solamente se pueden utilizar tarjetas microSD de 32 GB como
máximo, debido a las limitaciones del sistema.
El vídeo capturado se puede guardar en el dispositivo móvil si no tiene una tarjeta SD o la
tarjeta está llena. Tenga en cuenta que la resolución de las fotos es de 1024×768 y la de
los vídeos, 1280×720.
Puerto de datos de la cámara
Encienda el Spark, y conecte un cable USB al puerto Micro USB para descargar fotos y vídeos al
ordenador.
La aeronave debe encenderse antes de intentar acceder a los archivos de la tarjeta
microSD.
Control de la aeronave con un dispositivo móvil
Puede conectar un dispositivo móvil a través de Wi-Fi para controlar la aeronave con DJI GO 4.
A continuación se explica cómo.
1. Encienda la aeronave.
2. Active el Wi-Fi del dispositivo móvil, seleccione la red de Spark e introduzca la contraseña Wi-Fi.
3. Inicie DJI GO 4. Toque “GO FLY” para acceder a la vista de cámara.
4. Toque el icono para despegar automáticamente. Coloque ambos pulgares en la pantalla y
utilice los joysticks virtuales para manejar la aeronave.
2017 DJI Todos los derechos reservados.
©
31
Page 32

Spark Manual del usuario
La frecuencia de Wi-Fi del dispositivo móvil se puede establecer en 2,4 GHz
(predeterminado) o en 5,8 GHz. En dispositivos compatibles, ajuste el Wi-Fi a 5,8 GHz
para reducir las interferencias.
Mantenga pulsado el botón de encendido durante al menos 9 segundos hasta que
escuche 3 pitidos para restablecer el nombre y la contraseña Wi-Fi, así como para
restablecer la frecuencia Wi-Fi a 2,4 GHz. También puede tocar “Help” en la aplicación
DJI GO 4 y seguir las instrucciones.
Utilice la aeronave con conexión Wi-Fi solamente en espacios abiertos y amplios con
interferencias electromagnéticas relativamente bajas. Si la conexión se ve afectada
negativamente por las interferencias, se recomienda manejar la aeronave con el control
remoto o desplazarse a una zona con menos interferencias.
Uso de Joysticks Virtuales
Asegúrese de que el dispositivo móvil esté conectado a la aeronave antes de usar los joysticks
virtuales. Las ilustraciones que se muestran a continuación están basadas en el modo 2 (palanca
izquierda y acelerador).
12
In flight (GPS)
P-GPS
09:29
61%
2.4G
Interfaz gráca del usuario de los Joysticks Virtuales
Mueva la aeronave hacia arriba y hacia abajo, hacia la izquierda o hacia la derecha pulsando sobre
la mitad izquierda de la pantalla. Mueva la aeronave hacia adelante, hacia atrás o lateralmente
pulsando sobre la mitad derecha de la pantalla.
Toque el botón “ ” para activar o desactivar los joysticks virtuales.
La zona que hay más allá de los círculos blancos también responde a los comandos de
control.
2017 DJI Todos los derechos reservados.
32
©
Page 33

Spark Manual del usuario
Control de la aeronave
En esta sección se explica cómo controlar la aeronave. El modo de palanca de control se puede
ajustar en el modo 1, modo 2, modo 3 o en un modo personalizado.
Modo 1
Palanca izquierda
Adelante
Palanca derecha
Arriba
Modo 2
Modo 3
Atrás
Girar derechaGirar izquierda
Palanca derechaPalanca izquierda
Arriba
Abajo
Girar derechaGirar izquierda
Palanca izquierda Palanca derecha
Adelante
Atrás
Abajo
DerechaIzquierda
Adelante
Atrás
DerechaIzquierda
Arriba
Abajo
DerechaIzquierda
Girar derechaGirar izquierda
El modo de palanca (Stick Mode) está congurado en el modo 2 de forma predeterminada.
Palanca neutra/punto medio: Las palancas de control no están centradas.
Movimiento de la palanca de control: Las palancas de control se alejan de la posición
central.
2017 DJI Todos los derechos reservados.
©
33
Page 34

Spark Manual del usuario
Joysticks virtuales /
Control remoto
(modo 2)
Palanca izquierda
Palanca izquierda
Palanca derecha
Palanca derecha
Aeronave
(
indica la dirección del
morro)
Observaciones
Al mover la palanca izquierda hacia arriba y
abajo, cambia la elevación de la aeronave.
Empuje la palanca hacia arriba para ascender
y hacia abajo para descender.
Cuando las dos palancas estén centradas, el
Spark volará en modo estacionario.
Cuanto más se aleje la palanca de la posición
central, más rápido se elevará el Spark.
Empuje siempre la palanca con suavidad
para evitar cambios de elevación repentinos e
imprevistos.
Al mover la palanca izquierda hacia la
izquierda o la derecha, se controlan el timón y
la rotación de la aeronave.
Empuje la palanca hacia la izquierda para que
la aeronave gire hacia la izquierda; empújela
hacia la derecha para que la aeronave gire
hacia la derecha. Si la palanca está centrada,
el Spark mantendrá su orientación presente.
Cuanto más se aleje la palanca de la posición
central, más rápido girará el Spark.
Al mover la palanca derecha hacia arriba
o hacia abajo, la aeronave cabecea hacia
adelante o hacia atrás.
Empuje la palanca hacia arriba para volar hacia
delante y hacia abajo para volar hacia atrás.
Spark
volará en modo estacionario si la palanca
está centrada.
Empuje la palanca más lejos de la posición
central para conseguir un mayor ángulo de
alabeo (máximo 30˚) y un vuelo más rápido.
Al mover la palanca de control derecha hacia
la izquierda o hacia la derecha, la aeronave
alabea a izquierda o derecha.
Empuje hacia la izquierda para volar a la
izquierda y a la derecha para volar a la
derecha. El Spark volará en modo estacionario
si la palanca está centrada.
El
2017 DJI Todos los derechos reservados.
34
©
Page 35

Control remoto
(opcional)
En esta sección se describen las
características del control remoto y se
incluyen instrucciones para el control de
la aeronave y de la cámara.
2017 DJI Todos los derechos reservados.
©
35
Page 36

Control remoto (opcional)
Perl del control remoto
El control remoto del Spark incorpora un nuevo sistema amplicado de transmisión de la señal Wi-Fi
capaz de controlar la aeronave y la cámara del estabilizador a un alcance máximo de transmisión
de 2 km (1,2 mi)*. El control remoto se puede conectar inalámbricamente a un dispositivo móvil
y mostrar una señal de vídeo en tiempo real a través de la aplicación DJI GO 4. Las abrazaderas
plegables le permiten aanzar el dispositivo móvil. La duración máxima de la batería del control
remoto es de aproximadamente 2,5 horas*.
1
2
3
4
11
1. Botón de regreso al punto de origen (RTH)
Mantenga pulsado el botón para iniciar el
RTH. Pulse de nuevo para cancelar el RTH.
2. Botón de pausa durante vuelo
Pulse una vez para realizar un frenado de
emergencia.
3. Puerto de alimentación (Micro USB)
Se conecta al cargador para cargar la batería
del control remoto.
4. Abrazaderas para dispositivo móvil
Permiten anclar el dispositivo móvil al control
remoto.
5. Botón de función
Abre el menú Intelligent Flight Modes de DJI
GO 4.
6. Palancas de control
Controlan la orientación y el movimiento de la
aeronave.
7. Botón de encendido
Pulse el botón de encendido una vez para
comprobar el nivel actual de la batería. Pulse
una vez, después otra y mantenga pulsado
para encender o apagar el control remoto.
10
9
8
7
6
12
5
14
8. Indicadores LED de nivel de batería
Muestran el nivel de la batería del control
remoto.
9. Interruptor de modo de vuelo
Permite cambiar entre modo P y modo S.
10. Antenas
Transmiten el control de la aeronave y la
señal de vídeo.
11. Indicador LED de estado
Muestra el estado del sistema del control
remoto.
12. Dial del estabilizador
Controla la inclinación de la cámara.
13. Botón personalizable
Realiza varias funciones en función de los
ajustes de la aplicación DJI GO 4.
14. Botón de grabación
Pulse para comenzar a grabar vídeo.
Vuelva a pulsar para detener la grabación.
15. Botón del obturador
Púlselo para tomar una foto.
13
15
* El control remoto puede alcanzar su distancia máxima de transmisión (FCC) en una amplia zona
abierta sin interferencias electromagnéticas, y a una altitud de unos 120 metros. El tiempo máximo
de funcionamiento se determinó en ausencia de viento a una velocidad constante de 20 km/h
(12,4 mph). Este valor debe tomarse sólo a título de referencia.
2017 DJI Todos los derechos reservados.
36
©
Page 37

Spark Manual del usuario
Conformidad normativa:
Modo de palanca:
modo personalizado.
El Control Remoto es compatible con las normativas locales.
Los controles se pueden ajustar en el modo 1 o el modo 2, o en un
Uso del control remoto
El control remoto está alimentado por una batería recargable con una capacidad de 2970 mAh.
Activación y desactivación del control remoto
Pulse el botón de encendido una vez para comprobar el nivel actual de la batería. Pulse una vez,
después otra y mantenga pulsado para encender o apagar el control remoto.
Carga de la batería
Conecte el puerto de alimentación del control remoto al cargador USB para cargar la batería. Se
necesitan aproximadamente 2 horas para cargar totalmente el control remoto.
Control de la cámara
Capture vídeos/fotos y ajuste la inclinación de la cámara mediante el botón del obturador, el botón
de grabación y el selector de estabilizador en el control remoto.
Control de la aeronave
El modo de palanca será igual que la conguración de los joysticks virtuales.
2017 DJI Todos los derechos reservados.
©
37
Page 38

Spark Manual del usuario
Interruptor de modo de vuelo
Cambie el interruptor para seleccionar el modo
de vuelo deseado. Elija entre el modo P y el
modo S.
Posición Modo de vuelo
SPORT
SPORT
Modo P
Modo S
Botón RTH
Mantenga pulsado el botón RTH para iniciar el procedimiento de regreso al punto de origen (RTH).
La aeronave regresará al último punto de origen registrado. Pulse este botón de nuevo para
cancelar el procedimiento de RTH y recuperar el control de la aeronave.
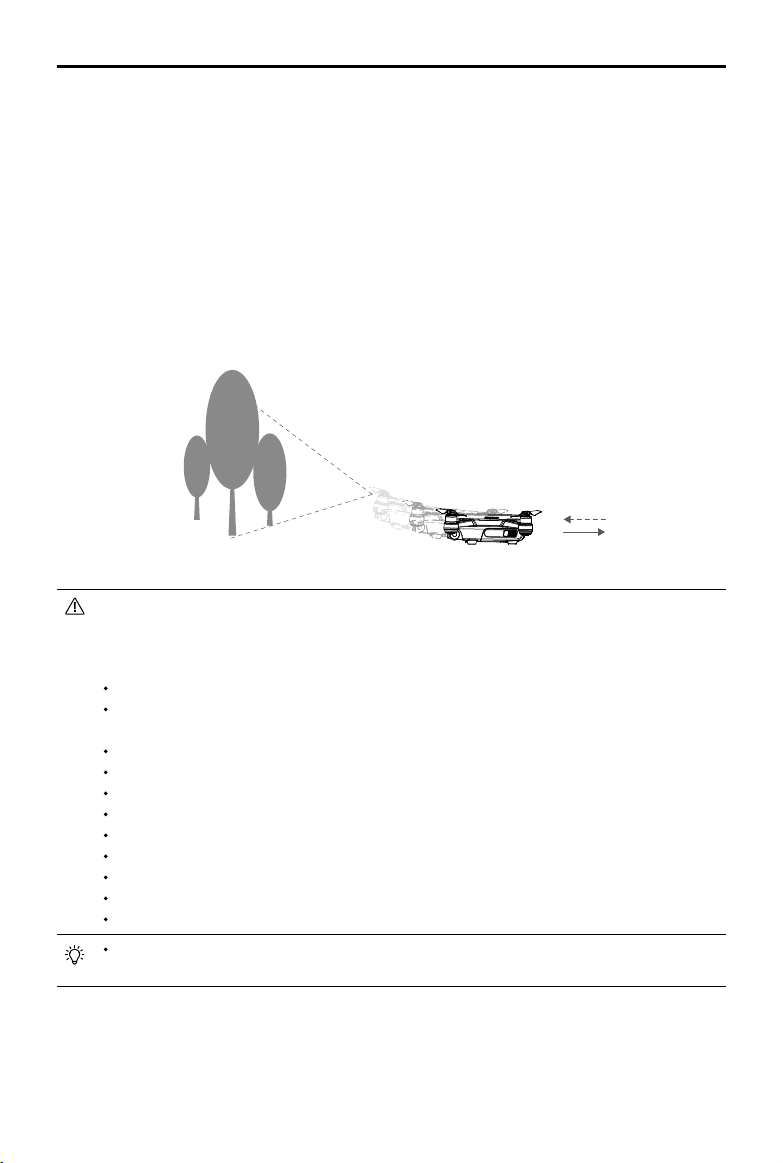
Intervalo de transmisión óptimo
La señal de transmisión entre la aeronave y el control remoto es más able cuando las antenas
están situadas en relación con la aeronave como se muestra en la siguiente imagen:
Intervalo de transmisión óptimo
intensa débil
Asegúrese de que la aeronave está volando dentro de la zona de transmisión óptima. Para
garantizar un rendimiento óptimo de la transmisión, ajuste el control remoto y las antenas conforme
al diagrama anterior.
Vinculación del control remoto
La aeronave y el control remoto se suministran ya vinculados si compra el Combo Spark (con el
control remoto incluido). Para vincular un control remoto al Spark, siga estas instrucciones:
1. Encienda la aeronave y el control remoto. Espere hasta que los indicadores de estado de la
aeronave parpadeen en amarillo.
2. Mantenga pulsado el botón de encendido de la Batería de Vuelo Inteligente durante 3 segundos.
Suelte el botón cuando escuche un pitido. Los LED delanteros parpadearán en rojo.
3. Mantenga pulsados simultáneamente el botón de pausa durante vuelo, el botón de función y el
botón personalizable. La vinculación comienza cuando la alarma se convierte en un pitido único
rápido después de alternar entre un pitido único y un pitido doble.
2017 DJI Todos los derechos reservados.
38
©
Page 39

Spark Manual del usuario
4. Seguidamente, los indicadores LED delanteros se iluminarán en rojo fijo tras parpadear en
verde. Cuando el indicador LED de estado del control remoto se ilumine en verde fijo, la
vinculación se habrá completado.
Asegúrese de que el control remoto se encuentra en un radio de 20 cm (0,66 pies) de la
aeronave durante la vinculación.
Desconexión del control remoto
Además de con el control remoto, puede controlar la aeronave con los joysticks virtuales de DJI
GO 4. No obstante, cuando el control remoto esté vinculado a la aeronave, se desactivará el
control mediante los joysticks virtuales. Para activar los joysticks virtuales, tendrá que desconectar
el control remoto y la aeronave.
1. Encienda la aeronave.
2. Mantenga pulsado el botón de encendido de la Batería de Vuelo Inteligente durante 6 segundos
hasta que escuche un pitido doble; esto indica que se ha desconectado el control remoto y la
aeronave.
Conecte la red Wi-Fi de la aeronave después de desconectar el control remoto para usar los
joysticks virtuales.
2017 DJI Todos los derechos reservados.
©
39
Page 40

Aplicación DJI GO 4
Esta sección presenta las funciones
principales de la aplicación DJI GO 4.
2017 DJI Todos los derechos reservados.
40
©
Page 41

Aplicación DJI GO 4
Utilice esta aplicación para controlar el estabilizador, la cámara y otras funciones de la aeronave.
La aplicación también cuenta con las secciones Equipment, Editor, SkyPixel y Me, que se utilizan
para congurar la aeronave y editar y compartir sus fotos y vídeos con otras personas.
Equipment
Acceda a la vista de cámara tocando el icono “GO FLY” en la página Equipment cuando el
dispositivo móvil está conectado a la aeronave.
Vista de la cámara
8 97654321
12
22
21
20
In flight (GPS)
P-GPS
09:29
2.4G
1080P/30
61%
10
11
12
13
14
19
18
H 9.6
S 1.1D 9.6
17
15
16
1. Estado del sistema
En vuelo (GPS)
: este icono indica el estado de vuelo de la aeronave y muestra varios mensajes de
advertencia.
2. Estado de detección de obstáculos
: aparecen barras rojas cuando los obstáculos están cerca de la aeronave.
Aparecen barras naranjas cuando los obstáculos están en el rango de detección.
3. Indicador de nivel de batería
: el indicador de nivel de batería proporciona una visualización dinámica del nivel de la
batería. Las zonas de colores del indicador de nivel de batería representan los niveles de carga
necesarios para llevar a cabo diferentes funciones.
4. Modo de vuelo
: el texto situado junto a este icono indica el modo de vuelo actual.
Tóquelo para ajustar la conguración del MC (controlador principal). Esta conguración permite
modicar los límites de vuelo y denir los valores de ganancia.
2017 DJI Todos los derechos reservados.
©
41
Page 42

Spark Manual del usuario
5. Parámetros de la cámara
1080P/30
Muestra los parámetros de conguración de la cámara y la capacidad de la tarjeta microSD.
Active la visualización de los parámetros de la cámara en la conguración de la cámara.
6. Intensidad de señal GPS
: muestra la intensidad de la señal GPS actual. Las barras blancas indican una intensidad
de GPS adecuada.
7. Estado del sistema de detección 3D
: toque este icono para activar o desactivar funciones del sistema de detección 3D.
8. Conguración Wi-Fi
: toque esta opción para acceder al menú de conguración Wi-Fi.
2.4G
9. Nivel de batería
: este icono muestra el nivel actual de la batería.
61
%
Tóquelo para ver el menú de información de la batería, establecer los distintos umbrales de
advertencia de la batería y ver el historial de advertencias de la batería.
10. General Settings
: tóquelo para acceder al menú de conguración general para denir métricas, habilitar el
modo de transmisión en directo, mostrar rutas de vuelo, etc.
11. Seguimiento del cabeceo del estabilizador
: ajuste la inclinación del estabilizador girando el dispositivo móvil después de pulsar este icono.
12. Deslizador del estabilizador
: muestra la inclinación del estabilizador.
13. Cambio entre foto y vídeo
: tóquelo para cambiar entre los modos de foto y grabación de vídeo.
14. Botón de disparo/grabación
/
: tóquelo para comenzar la captura de fotos o la grabación de vídeos.
15. Camera Settings
: toque esta opción para acceder al menú de conguración de la cámara.
Toque para establecer los valores de ISO, obturador y autoexposición de la cámara.
Toque para seleccionar los modos de fotografía. El Spark es compatible con los modos de
disparo único, ráfaga, intervalo, panorama y ShallowFocus.
Toque esta opción para acceder al menú de conguración general de la cámara.
2017 DJI Todos los derechos reservados.
42
©
Page 43

Spark Manual del usuario
Al tomar fotos ShallowFocus, tenga en cuenta lo siguiente:
Este modo es apto para capturar imágenes estáticas. Si desea fotograar a personas, no
se mueva durante el proceso; de lo contrario, es posible que la foto ShallowFocus no se
realice correctamente.
La aeronave ascenderá unos 20 cm antes de capturar imágenes. Asegúrese de que no
haya ningún obstáculo sobre la aeronave.
El rango de captura máximo es de 30 m.
16. Reproducción
: tóquelo para acceder a la página Playback, y previsualizar las fotos y los vídeos en
cuanto se capturen.
17. Telemetría de vuelo
H 9.6M
D 9.6M
S 1.1M/S
18. Interruptor de joysticks virtuales
interruptor, coloque los dedos sobre la pantalla para usar los joysticks virtuales para controlar
la aeronave. Para realizar otras acciones en la pantalla, desactive el interruptor.
19. Modo de Vuelo Inteligente
: altura desde el suelo.
: distancia entre la aeronave y el punto de origen.
: velocidad de la aeronave.
: toque esta opción para activar o desactivar los joysticks virtuales. Una vez activado este
: tóquelo para seleccionar los modos de vuelo inteligente.
20. RTH inteligente
: inicia el procedimiento RTH. Tóquelo para que la aeronave regrese al último punto de
origen registrado.
Despegue/aterrizaje automáticos
21.
/ : tóquelo para iniciar el despegue o el aterrizaje automático.
22. Atrás
: toque este botón para volver al menú principal.
En la vista de la cámara, mantenga pulsada la pantalla hasta que aparezca un círculo azul.
Arrastre el círculo hacia la izquierda y hacia la derecha para controlar la orientación de la
aeronave; arrástrelo hacia arriba y hacia abajo para controlar la inclinación de la cámara.
2017 DJI Todos los derechos reservados.
©
43
Page 44

Spark Manual del usuario
Editor
La aplicación DJI GO 4 dispone de un editor de vídeo inteligente. Después de grabar varios clips
de vídeo y descargarlos en su dispositivo móvil, elija la opción Editor en la pantalla de inicio.
A continuación, puede seleccionar una plantilla y un número determinado de clips, que se
combinan automáticamente para crear un corto que se puede compartir de inmediato.
SkyPixel
Vea y comparta las fotos y los vídeos en la página SkyPixel.
Me
Si ya tiene una cuenta DJI, podrá participar en los debates del foro y compartir sus creaciones con
la comunidad.
2017 DJI Todos los derechos reservados.
44
©
Page 45

Vuelo
En esta sección se describen las
prácticas de vuelo seguras y las
restricciones de vuelo.
2017 DJI Todos los derechos reservados.
©
45
Page 46

Vuelo
Una vez que haya nalizado la preparación previa al vuelo, se recomienda utilizar el simulador de
vuelo de la aplicación DJI GO 4 para perfeccionar las habilidades de vuelo y practicar el vuelo con
seguridad. Asegúrese de que todos los vuelos se llevan a cabo en un espacio abierto.
Requisitos del entorno de vuelo
1. No utilice la aeronave en condiciones climáticas adversas, como viento a una velocidad superior
a 10 m/s, nieve, lluvia y niebla.
2. Vuele en espacios abiertos. Las estructuras altas y las grandes estructuras metálicas pueden
afectar a la precisión de la brújula de a bordo y del sistema GPS.
3. Evite obstáculos, multitudes, líneas de alta tensión, árboles y masas de agua.
4. Reduzca al mínimo las interferencias evitando zonas con altos niveles de electromagnetismo,
incluidos repetidores y torres de radiotransmisión.
5. No utilice la aeronave cuando haya un fuerte cambio en el nivel del suelo (p.ej. del interior
al exterior de un edificio) y si la señal de GPS sea débil, en caso de que la función de
posicionamiento se vea interferida y afecte a la seguridad de vuelo.
6. El rendimiento de la aeronave y de la batería depende de factores del entorno, como la densidad
del aire y la temperatura. Tenga mucho cuidado cuando vuele a una altitud de 4000 m (13 123
pies) sobre el nivel del mar, ya que las prestaciones de la aeronave y la batería pueden verse
afectadas.
7. El Spark no puede usar el modo P en zonas polares.
Límites de vuelo y zonas de exclusión aérea
Todos los operadores de vehículos aéreos no tripulados (UAV) deben cumplir con las normativas
gubernamentales y de organizaciones como la OACI (Organización de Aviación Civil Internacional)
y la FAA (Administración federal de aviación de EE. UU.). Por motivos de seguridad, los vuelos
están limitados de forma predeterminada para ayudar a los usuarios a utilizar este producto de
forma segura y legal. Las limitaciones de vuelo incluyen límites de altura y de distancia, y zonas de
exclusión aérea.
Cuando se emplea el modo P, los límites de altura y de distancia, así como las zonas de exclusión
aérea funcionan simultáneamente para gestionar el vuelo.
Límites máximos de altitud de vuelo y radio
Los límites máximos de altitud de vuelo y radio se pueden cambiar en la aplicación DJI GO 4.
Tenga en cuenta que la altitud de vuelo máxima no puede sobrepasar los 500 metros (1640 pies).
De acuerdo con estos valores, el Spark volará en un cilindro restringido, como se muestra a
continuación:
2017 DJI Todos los derechos reservados.
46
©
Altitud de vuelo máxima
Radio máximo
Punto de origen
Altura de la aeronave al encenderla
Page 47

Señal GPS fuerte
Altitud de vuelo
máxima
Radio máximo
Señal GPS débil
Límites de vuelo Aplicación DJI GO 4
La altura se limita a 5 metros
Altitud
de vuelo
máxima
Radio
máximo
(16 pies) cuando la señal GPS
es débil y el sistema de visión
está activado. La altura se limita
a 30 metros (98 pies) cuando la
señal GPS es débil y el sistema
de visión está desactivado.
Sin límite
Límites de vuelo Aplicación DJI GO 4
La altitud de la aeronave
no puede superar el valor
especicado.
La distancia de vuelo debe
estar dentro del radio máx.
Warning: Height limit
reached.
Warning: Distance
limit reached.
Warning: Height limit
reached.
Spark Manual del usuario
Indicador de estado de
la aeronave
Ninguno.
Indicador de estado de
la aeronave
Ninguno.
Si la aeronave vuela fuera del límite, aún puede controlarla, pero no podrá hacerla volar
más allá.
Por razones de seguridad, no vuele cerca de aeropuertos, carreteras, estaciones
de ferrocarril, líneas de ferrocarril, centros urbanos u otras zonas sensibles.
aeronave únicamente hasta donde pueda verla.
Vuele la
Zonas de exclusión aérea
Todas las zonas de exclusión aérea se indican en el sitio web oficial de DJI en http://www.dji.com/
ysafe/no-y. Las zonas de exclusión aérea se dividen en aeropuertos y zonas restringidas. Los
aeropuertos incluyen los principales aeropuertos y campos de vuelo en los que las aeronaves
tripuladas operan a baja altitud. Entre las zonas restringidas se encuentran las fronteras entre
países y los lugares en los que los vuelos pueden suponer riesgos de seguridad.
Lista de comprobación previa al vuelo
1. El control remoto, la Batería de Vuelo Inteligente y el dispositivo móvil están completamente
cargados.
2. Las hélices están correcta y rmemente montadas.
3. La tarjeta microSD se ha introducido, en caso necesario.
4. El estabilizador funciona con normalidad.
5. Los motores pueden arrancar y funcionan con normalidad.
6. La aplicación DJI GO 4 está correctamente conectada a la aeronave.
7. Asegúrese de que los sensores del sistema de visión y del sistema de detección 3D estén
limpios.
2017 DJI Todos los derechos reservados.
©
47
Page 48

Spark Manual del usuario
Despegue y aterrizaje automáticos
Despegue automático
Utilice el despegue automático sólo si los indicadores de estado de la aeronave parpadean en
verde. Realice los pasos siguientes para utilizar la función de despegue automático:
1. Inicie la aplicación DJI GO 4 y toque "GO FLY" para acceder a la página Camera.
2. Realice todos los pasos de la lista de comprobación previa al vuelo.
3. Toque “ ” y conrme que las condiciones son seguras para el vuelo. Deslice el icono para
conrmar y despegue.
4. La aeronave despega y vuela en modo estacionario a 1,2 metros por encima del suelo.
El indicador de estado de la aeronave parpadea rápidamente cuando se utiliza el
sistema de visión para la estabilización. La aeronave volará en modo estacionario
automáticamente por debajo de 30 metros. Se recomienda esperar hasta conseguir una
buena señal GPS antes de usar la función de despegue automático.
Aterrizaje automático
Utilice el aterrizaje automático sólo si los indicadores de estado de la aeronave parpadean en
verde. Realice los pasos siguientes para utilizar la función de aterrizaje automático:
1. Toque para asegurarse de que las condiciones de aterrizaje sean idóneas. Deslice para
conrmar.
2. Anule inmediatamente el proceso de aterrizaje mediante el botón que aparece en la pantalla.
3. La aeronave aterrizará y se apagará automáticamente.
Arranque/parada de los motores (con el control remoto)
Arranque de los motores
El comando de combinación de palancas (CSC) se utiliza para arrancar los motores. Empuje las
dos palancas hacia las esquinas inferiores interiores o exteriores para arrancar los motores. Una
vez que los motores hayan empezado a girar, suelte las dos palancas a la vez.
O bien
Parada de motores
Los motores se pueden parar de dos formas.
Método 1: Cuando la aeronave haya aterrizado, empuje la palanca izquierda hacia abajo y
sosténgala. Los motores se pararán después de tres segundos.
Método 2: Cuando la aeronave haya aterrizado, empuje la palanca izquierda hacia abajo y efectúe
el mismo CSC que se empleó para arrancar los motores, como se ha descrito anteriormente. Los
motores se pararán inmediatamente. Suelte las dos palancas una vez que los motores se paren.
O bien
Método 1 Método 2
2017 DJI Todos los derechos reservados.
48
©
Page 49

Spark Manual del usuario
Para ejecutar el CSC en el aire en caso de emergencia, sostenga la palanca durante 1,5
segundos para detener los motores en el vuelo. La detención de los motores en pleno
vuelo provocará que la aeronave sufra una colisión.
Prueba de vuelo
Procedimientos de despegue y aterrizaje
1. Coloque la aeronave en un espacio abierto y plano con los indicadores del nivel de batería
orientados hacia usted.
2. Encienda la Batería de Vuelo Inteligente.
3. Inicie la aplicación DJI GO 4 y acceda a la página Camera.
4. Espere hasta que los indicadores de la aeronave parpadeen en verde. Esto significa que el
punto de origen está registrado y que se puede volar con seguridad. Utilice la función de
despegue automático:
5. Utilice la función de aterrizaje automático para aterrizar la aeronave.
6. Apague la Batería de Vuelo Inteligente.
Si los Indicadores de Estado de la Aeronave parpadean rápidamente en amarillo durante
el vuelo, la aeronave ha pasado a modo de seguridad (Failsafe).
Si los indicadores de estado de la aeronave parpadean lenta o rápidamente en rojo
durante el vuelo, el nivel de batería es bajo.
Para obtener más información de vuelo, vea nuestros videotutoriales.
Sugerencias y consejos de vídeo
1. Repase la lista completa de comprobación previa al vuelo antes de cada vuelo.
2. Seleccione el modo de funcionamiento deseado del estabilizador en la aplicación DJI GO 4.
3. Grabe vídeo sólo cuando vuele en modo P.
4. Vuele siempre con buen tiempo y evite volar con lluvia o vientos fuertes.
5. Elija los ajustes de cámara que se adapten a sus necesidades. Estos incluyen el formato de
fotografía y la compensación de exposición.
6. Realice pruebas de vuelo para establecer rutas de vuelo y escenas preliminares.
7. Empuje las palancas de control suavemente para mantener un movimiento uniforme y estable
de la aeronave.
Calibración de la brújula
Calibre la brújula sólo cuando se lo solicite la aplicación DJI GO 4 o el indicador de estado. Siga
las reglas siguientes al calibrar la brújula:
EVITE calibrar la brújula si existen posibilidades de que se produzcan fuertes interferencias
magnéticas, como cerca de magnetita, estructuras de aparcamientos y estructuras
metálicas subterráneas.
NO lleve consigo materiales ferromagnéticos, como teléfonos móviles, durante la calibración.
La aplicación DJI GO 4 le avisará si la brújula se ve afectada por interferencias fuertes tras
efectuar la calibración. Siga las instrucciones para resolver el problema de la brújula
2017 DJI Todos los derechos reservados.
©
.
49
Page 50

Spark Manual del usuario
Procedimientos de calibración
Seleccione un espacio abierto para llevar a cabo los siguientes procedimientos.
1. Toque la barra de estado de la aeronave en la aplicación, seleccione “Calibrate” y siga las
instrucciones que aparezcan en la pantalla.
2. Sostenga la aeronave en posición horizontal y gírela 360 grados. Los indicadores de estado de
la aeronave se iluminarán en verde jo.
3. Mantenga la aeronave en posición vertical con el morro apuntando hacia abajo y gire
360 grados alrededor del eje central.
4. Vuelva a calibrar la aeronave si los indicadores de estado de la aeronave parpadean en rojo.
Si los indicadores de estado de la aeronave parpadean en rojo y amarillo después del
procedimiento de calibración, mueva la aeronave a una ubicación diferente y vuelva a
intentarlo.
NO calibre la brújula cerca de objetos metálicos como puentes metálicos, coches o
andamios.
Si el indicador de estado de la aeronave parpadea en rojo y amarillo de forma intermitente
después de colocar la aeronave en el suelo, la brújula ha detectado una interferencia
magnética. Cambie de ubicación.
Actualizaciones de rmware
Utilice DJI GO 4 o DJI Assistant 2 para actualizar el rmware de la aeronave. Solamente es posible
usar DJI GO 4 para actualizar el rmware del control remoto.
Uso de la aplicación DJI GO 4
Conecte la aeronave y el control remoto con la aplicación DJI GO 4. Se le indicará si hay disponible
un rmware nuevo. Para comenzar a actualizar, conecte su dispositivo móvil a Internet y siga las
instrucciones de la pantalla.
Uso de DJI Assistant 2
Siga las instrucciones siguientes para actualizar el rmware mediante DJI Assistant 2:
2017 DJI Todos los derechos reservados.
50
©
Page 51

Spark Manual del usuario
1. Con la aeronave apagada, conecte la aeronave a un ordenador a través del puerto Micro USB
con un cable Micro USB.
2. Encienda la aeronave.
3. Abra DJI Assistant 2 e inicie sesión con sus datos de cuenta DJI.
4. Seleccione “Spark” y haga clic en “Firmware Updates” en el panel izquierdo.
5. Seleccione la versión de rmware que desea actualizar.
6. Espere a que se descargue el rmware; la actualización del rmware empezará automáticamente.
7. Una vez nalizada la actualización de rmware, reinicie la aeronave.
Asegúrese de que la aeronave esté conectada al ordenador antes de encenderla.
La actualización de rmware durará unos 15 minutos. Es normal que el estabilizador se
quede ojo, los indicadores de estado de vuelo parpadeen aleatoriamente y la aeronave
se reinicie. Espere pacientemente a que nalice la actualización.
Asegúrese de que el ordenador tiene acceso a Internet.
Asegúrese de que la Batería de Vuelo Inteligente tiene al menos un 50 % de carga y que
el control remoto tiene al menos un 30 % de carga.
No desconecte la aeronave del ordenador durante la actualización.
2017 DJI Todos los derechos reservados.
©
51
Page 52

Apéndice
2017 DJI Todos los derechos reservados.
52
©
Page 53

Apéndice
Especicaciones
Aeronave
Peso 300 g
Dimensiones 143×143×55 mm
Longitud diagonal (sin incluir hélices) 170 mm
Velocidad de ascenso máx. 3 m/s (9,8 pies/s) en modo Sport
Velocidad de descenso máx. 3 m/s (9,8 pies/s) al usar el aterrizaje automático
Velocidad máxima 50 km/h (31 mph) en modo Sport sin viento
Altitud de vuelo máx. por encima del
nivel del mar
Tiempo de vuelo máx. 16 minutos (sin viento a 25 km/h sostenidos [15,5 mph])
Tiempo de vuelo máximo 15 minutos (sin viento)
Temperatura de funcionamiento De 0 a 40 °C (de 32 a 104 °F)
GNSS GPS/GLONASS
Precisión de vuelo estacionario con
GPS
Potencia de transmisión (PIRE)
Frecuencia de funcionamiento 2,400-2,4835 GHz; 5,725-5,825 GHz
Estabilizador
Intervalo controlable Cabeceo: -85 a 0°
Estabilización 2 ejes (cabeceo, alabeo)
Sistema de detección 3D
Rango de detección 0,2 a 5 m (0,6 a 16 pies)
Entorno de funcionamiento
Sistema de visión
Intervalo de velocidad ≤ 36 km/h (22,4 mph) a 2 m (6,6 pies) sobre el suelo
Intervalo de altitud 0 - 8 m (0 - 26 pies)
Intervalo de funcionamiento 0 - 30 m (0 - 98 pies)
Entorno de funcionamiento
Cámara
Sensor CMOS de 1/2,3” píxeles efectivos: 12 megapíxeles
Lente
4000 m (13 123 pies)
Vertical: ±0,1 m (con Posicionamiento visual); ±0,5 m
(con posicionamiento por GPS)
Horizontal: ±0,3 m (con Posicionamiento visual); ±1,5 m
(con posicionamiento por GPS)
2.4G
FCC: 25 dBm; CE: 18 dBm: SRRC: 18 dBm
5.8G
FCC: 27 dBm; CE: 14 dBm: SRRC: 27 dBm
Supercies con materiales de reexión difusa, tamaño 20×20
mm y reectividad > 20% (como muros, árboles, personas, etc.)
Supercies con patrones claros y materiales de reexión difusa,
reectividad > 20 %, iluminación adecuada (lux > 15)
81,9° FOV, 25 mm (equivalente a formato de 35 mm), f/2.6
Rango de captura: 2 m a
∞
2017 DJI Todos los derechos reservados.
©
53
Page 54

Spark Manual del usuario
Intervalo de ISO 100-3200 (vídeo), 100-1600 (fotos)
Velocidad de obturador electrónico 2 - 1/8000 s
Tamaño de imagen máximo 3968 × 2976
Disparo simple
Modos de fotografía ja
Modos de grabación de vídeo FHD: 1920×1080 30p
Tasa de bits de almacenamiento de
vídeo
Sistema de archivo admitido FAT32
Fotografía JPEG
Vídeo MP4 (MPEG-4 AVC/H.264)
Tarjetas SD admitidas
Wi-Fi
Frecuencia de funcionamiento 2.4G / 5.8G
Distancia máxima de transmisión (sin
obstrucciones ni interferencias)
Control remoto
Frecuencias de funcionamiento 2,412-2,462 GHz; 5,745-5,825 GHz
Distancia de transmisión máx.
(Sin obstáculos, libre de
interferencia)
Intervalo de temperaturas de
funcionamiento
Batería integrada 2970 mAh
Potencia de transmisión (PIRE)
Voltaje de funcionamiento 950 mA a 3,7 V
Tamaño admitido de dispositivo
móvil
Cargador
Entrada 100-240 V, 50/60 Hz, 0,5 A
Salida 5 V/3 A, 9 V/2 A, 12 V/1,5 A
Disparo en ráfagas: 3 fotogramas
Exposición automática en horquillado (AEB): 3 fotogramas en
horquilla de exposición a 0.7EV Bias
Intervalo (2/3/5/7/10/15/20/30/60 s)
24 Mbps
Modelo recomendado
Sandisk 16/32 GB UHS-1 microSDHC
Kingston 16/32 GB UHS-1 microSDHC
Samsung 16/32 GB UHS-I microSDHC
Sandisk 64 GB UHS-1 microSDXC
Kingston 64 GB UHS-1 microSDXC
Samsung 64 GB UHS-I microSDXC
100 m (distancia), 50 m (altura)
2,4 GHz
FCC: 2 km (1,2 mi); CE: 0,5 km (0,31 mi); SRRC: 0,5 km
(0,31 mi)
5,8 GHz
FCC: 2 km (1,2 mi); CE: 0,3 km (0,19 mi); SRRC: 1,2 km
(0,75 mi)
De 0 a 40 °C (de 32 a 104 °F)
2,4 GHz
FCC: ≤26 dBm, CE: ≤18 dBm, SRRC: ≤18 dBm
5,8 GHz
FCC: ≤28 dBm , CE:≤14 dBm, SRRC: ≤26 dBm
Espesor admitido: 6,5 mm - 8,5 mm
Longitud máxima: 160 mm
:
2017 DJI Todos los derechos reservados.
54
©
Page 55

Spark Manual del usuario
Batería de Vuelo Inteligente
Capacidad 1480 mAh
Voltaje 11,4 V
Tensión de carga máxima 13,05 V
Tipo de batería LiPo 3S
Energía 16,87 Wh
Peso neto Aprox. 95 g
Temperatura de funcionamiento de 5 a 40 °C (de 41 a 104 °F)
Información postventa
Visite las páginas siguientes para obtener más información sobre la política de postventa y
garantía:
1. Política de postventa: http://www.dji.com/service
2. Política de reembolso: http://www.dji.com/service/refund-return
3. Servicio de reparación de pago: http://www.dji.com/service/repair-service
4. Servicio de garantía: http://www.dji.com/service/warranty-service
2017 DJI Todos los derechos reservados.
©
55
Page 56

Asistencia técnica de DJI
http://www.dji.com/support
Contenidos sujetos a cambios.
Descargue la última versión en
http://www.dji.com/spark
Si tiene preguntas acerca de este documento, póngase en contacto
con DJI enviando un mensaje a
DocSupport@dji.com
.
SPARK es una marca comercial de DJI.
Copyright © 2017 DJI Todos los derechos reservados.
 Loading...
Loading...