

Page 1
SPARK
Bedienungsanleitung
2017.06
V1.2
Page 2
Stichwortsuche
Suchen Sie nach Stichwörtern wie „Akku“ und „Montage“, um das entsprechende Thema zu nden.
Wenn Sie dieses Dokument mithilfe von Adobe Acrobat Reader geöffnet haben, drücken Sie die
Tastenkombination Strg+F bei Windows oder Command+F bei Mac, um eine Suche zu starten.
Themensuche
Das Inhaltsverzeichnis bietet eine Liste mit allen verfügbaren Themen. Klicken Sie auf ein Thema, um
diesen Abschnitt aufzurufen.
Ausdrucken dieses Dokuments
Dieses Dokument unterstützt das Drucken mit hoher Auösung.
Hinweise zu dieser Anleitung
Erläuterung der Symbole
Warnung Wichtig Hinweise und Tipps Querverweis
Bitte vor dem ersten Flug lesen!
Lesen Sie sich vor dem Gebrauch der SPARKTM die folgenden Dokumente durch:
1. Spark Lieferumfang
2. Spark Bedienungsanleitung
3. Spark Kurzanleitung
4. Spark Haftungsausschluss und Sicherheitsvorschriften
5. Spark Sicherheitsvorschriften zur Intelligent Flight Battery
Schauen Sie sich vor dem Flugbetrieb alle Tutorial-Videos auf der ofziellen DJITM-Website an, und lesen
Sie den Haftungsausschluss. Bereiten Sie sich auf die erste Verwendung vor: Lesen Sie die SparkKurzanleitung. Genauere Informationen sind der Bedienungsanleitung zu entnehmen.
Tutorial-Videos
Gehen Sie zur folgenden Seite, oder scannen Sie den QR-Code rechts, um das
Spark-Tutorial-Video anzusehen, in dem die sichere Verwendung der Spark erläutert wird:
http://www.dji.com/spark/info#video
„DJI GO 4“-App herunterladen
Verwenden Sie im Flugbetrieb bitte unbedingt die „DJI GOTM 4“-App. Scannen Sie
den QR-Code rechts, um die aktuelle Version herunterzuladen.
Die Android-Version der „DJI GO 4“-App ist kompatibel mit Android 4.4 oder höher.
Die iOS-Version der „DJI GO 4“-App ist kompatibel mit iOS v9.0 oder höher.
* Aus Sicherheitsgründen ist der Flug auf eine Höhe von 30 Metern und einer Distanz von 50 Metern
beschränkt, sollten Sie sich nicht in der App mit einem Benutzerkonto angemeldet haben. Dies bezieht sich
auf alle mit DJI GO 4 kompatiblen Fluggeräte von DJI.
DJI Assistant 2 herunterladen
Laden Sie unter http://www.dji.com/spark/download den DJI Assistant 2 herunter.
2017 DJI Alle Rechte vorbehalten
2
©
Page 3

Inhalt
Hinweise zu dieser Anleitung
Erläuterung der Symbole
Bitte vor dem ersten Flug lesen!
Tutorial-Videos
„DJI GO 4“-App herunterladen
DJI Assistant 2 herunterladen
Produktbeschreibung
Einleitung
Besonderheiten
Zeichnung des Fluggeräts
Aktivierung
Fluggerät
Flugmodi
Statusleuchten des Fluggeräts
3D Sicht- und Optiksystem
Rückkehrfunktion (RTH)
Intelligente Flugmodi
Gestenmodus
Flugschreiber
Propeller anbringen und abnehmen
Intelligent Flight Battery
Gimbal und Kamera
Steuerung des Fluggeräts mit einem Mobilgerät
Fernbedienung (optional)
Beschreibung der Fernbedienung
Gebrauch der Fernbedienung
Verbindung zum Fluggerät herstellen
„DJI GO 4“-App
Ausstattung
Verfasser
SkyPixel
„Me“
2
2
2
2
2
2
6
6
6
7
7
9
9
10
11
13
16
23
26
26
27
30
31
36
36
37
38
41
41
44
44
44
2017 DJI Alle Rechte vorbehalten
©
3
Page 4

Flug
Anforderungen an die Flugumgebung
Fluggrenzen und Flugverbotszonen
Checkliste für die Flugvorbereitung
Automatisches Starten und Landen
Motoren ein-/ausschalten (bei Verwendung der Fernbedienung)
Testug
Kompass kalibrieren
Firmware-Updates
Anhang
Technische Daten
Informationen zum Kundendienst
46
46
46
47
48
48
49
49
50
53
53
55
2017 DJI Alle Rechte vorbehalten
4
©
Page 5

Produktbeschreibung
In diesem Abschnitt wird die DJI Spark
beschrieben. Ergänzend enthält das Kapitel
eine Liste aller Komponenten des Fluggeräts.
Page 6

Produktbeschreibung
Einleitung
Die DJI Spark ist das kompakteste aller Kameraflugsysteme von DJI. Sie verfügt über eine vollständig
stabilisierte Kamera, intelligente Flugmodi sowie ein Hinderniserkennungssystem. Zudem ist sie leicht
und lässt sich problemlos transportieren. Ausgestattet mit einem Sichtsystem und 3D-Sensorsystem kann
Spark 1080-p-Videos und 12-Megapixel-Fotos aufnehmen. Außerdem verfügt sie über den QuickShotModus und Gestensteuerung. Mit einer maximalen Fluggeschwindigkeit* von 50 km/h und einer maximalen
Flugzeit von 16 Minuten** ist die Spark schnell und wendig und bietet aufregende und unkomplizierte
Luftaufnahmen.
Besonderheiten
Durch die mobile Geräte- und Gestensteuerung unterstützt, wird das Fliegen unkomplizierter als je zuvor.
Piloten, die sich weitere Steuerungsoptionen wünschen, bietet die optionale Fernsteuerung unendliche
Flugmöglichkeiten.
Kamera und Gimbal: Mit der Spark können Sie jetzt dank Stabilisierung durch den integrierten Gimbal
noch schärfere 1080p-Videos mit bis zu 30 Bildern pro Sekunde und scharfe Fotos mit 12 Megapixeln
aufnehmen.
Flugcontroller: Die neue Flugsteuerung schenkt Ihnen ein noch sichereres, zuverlässigeres Flugerlebnis.
Das Fluggerät kann bei einer Unterbrechung des Fernsteuersignals oder bei niedrigem Akkuladezustand
selbstständig zum Startpunkt zurückkehren. Es beherrscht nicht nur den niedrigen Schwebeflug in
Innenräumen, sondern kann auch Hindernisse erkennen und umfliegen, was die generelle Sicherheit
erhöht.
* Für die maximale Fluggeschwindigkeit muss der Spark mit einer Spark-Fernbedienung gesteuert
werden.
** Die maximale Flugzeit wurde ohne Wind und bei einer konstanten Geschwindigkeit von 20 km/h
getestet. Diese Angabe dient nur als Richtwert.
2017 DJI Alle Rechte vorbehalten
6
©
Page 7
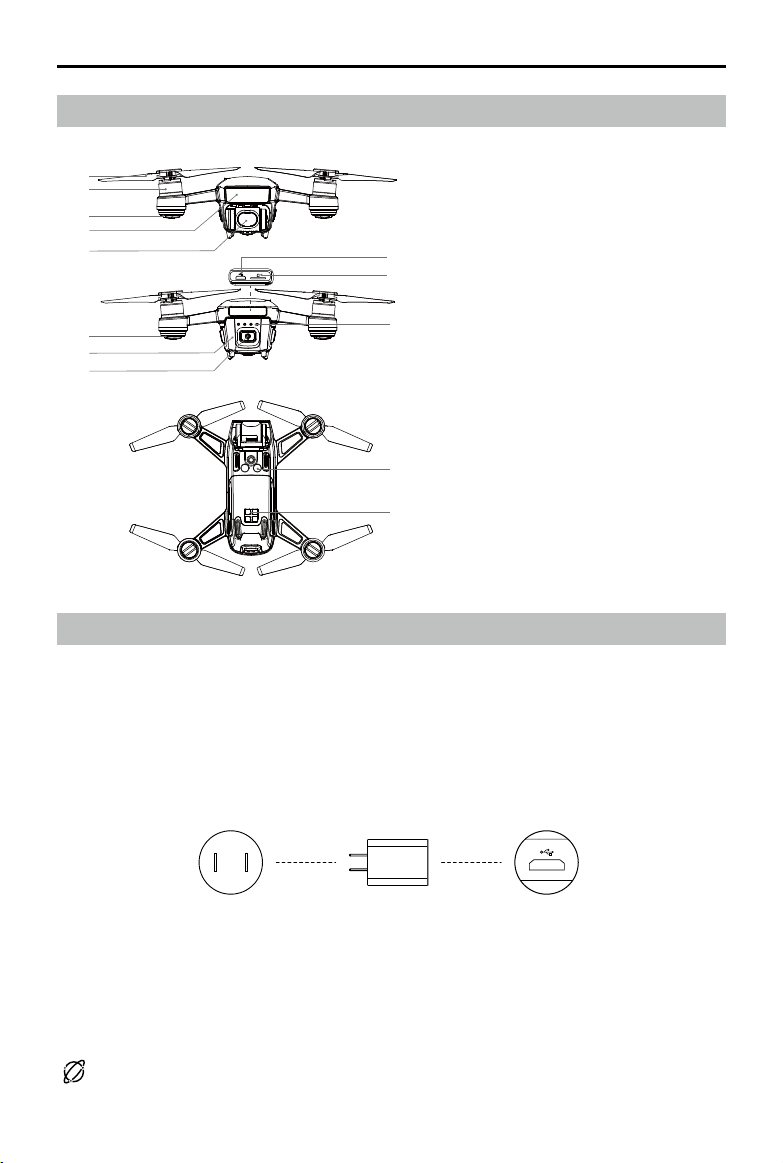
Zeichnung des Fluggeräts
Spark Bedienungsanleitung
1
2
3
4
5
6
7
8
1. Propeller
2. Motoren
3. Vordere LEDs
10
4. 3D-Sensorsystem
11
5. Gimbal und Kamera
6. Statusleuchten des Fluggeräts
9
7. Intelligent Flight Battery
8. Ein/Aus-Taste
9. Akkuladezustandsanzeigen
10. Micro-USB-Anschluss
11. Micro-SD-Karteneingang
13
12. Externer Ladekontakt
13. Sichtsystem
12
Aktivierung
Vor der erstmaligen Verwendung der Intelligent Flight Battery und des Fluggeräts ist eine Aktivierung
erforderlich.
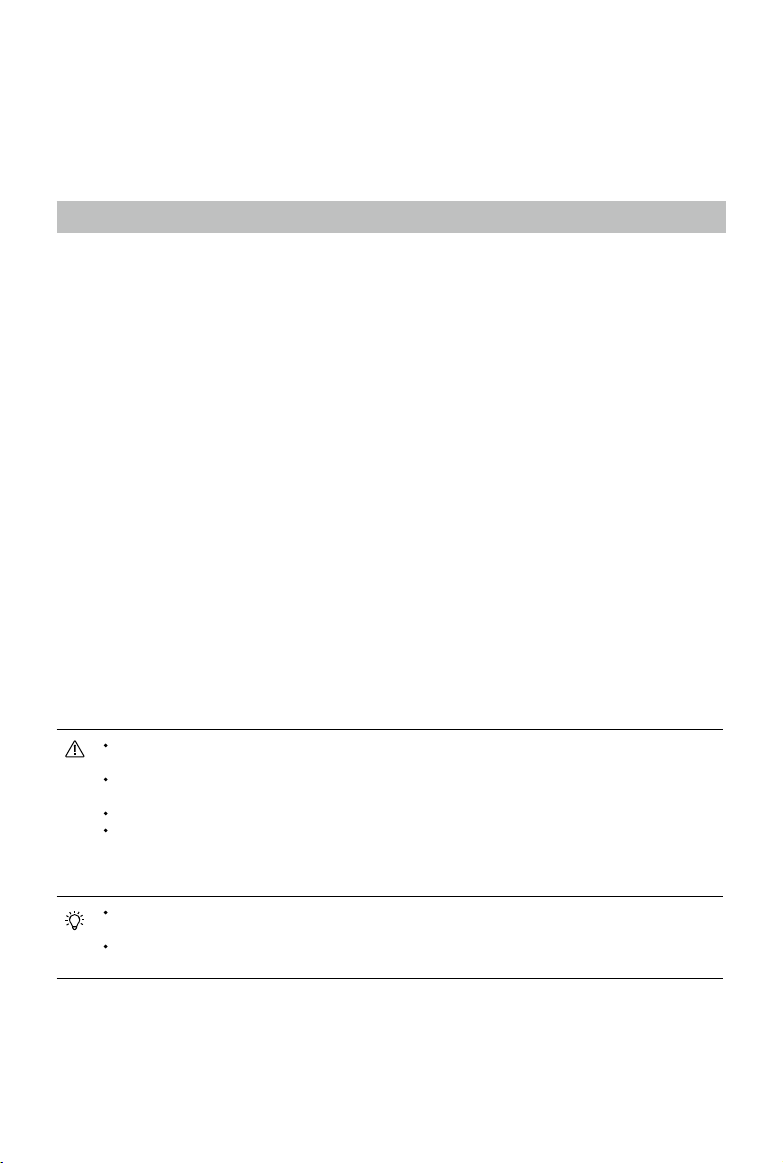
Intelligent Flight Battery aktivieren
Alle Akkus werden aus Gründen der Sicherheit vor dem Versand in den Ruhemodus versetzt. Für die
erstmalige Akku-Auadung und -Aktivierung verwenden Sie bitte das beiliegende USB-Ladegerät. Es wird
empfohlen, den Akku vor jedem Flug vollständig aufzuladen.
Steckdose
USB-Ladegerät Micro-USB-Anschluss
100 ~ 240 V
Fluggerät aktivieren
Starten Sie „DJI GO 4“, tippen Sie auf das Symbol in der oberen rechten Ecke, scannen Sie den QR-Code
auf der Transportbox oder im Akkufach, und befolgen Sie die Anweisungen zur Aktivierung.
Verwenden Sie Ihr DJI-Benutzerkonto, um das Fluggerät zu aktivieren. Für die Aktivierung wird eine
Internetverbindung benötigt.
Internet
2017 DJI Alle Rechte vorbehalten
©
7
Page 8

Fluggerät
In diesem Abschnitt werden der
Flugcontroller, das 3D-Sensorsystem,
das Sichtsystem und die Intelligent Flight
Battery beschrieben.
2017 DJI Alle Rechte vorbehalten
8
©
Page 9
Fluggerät
Die Spark ist mit Flugcontroller, Videolink, 3D-Sensorsystem, Gimbal und Kamera, Antriebssystem und
einer Intelligent Flight Battery ausgestattet. In diesem Abschnitt werden die Merkmale von Flugcontroller,
Videolink und anderen Komponenten des Fluggeräts beschrieben.
Flugmodi
Die Spark hat folgende Flugmodi:
Modus „P“ (Positionsbestimmung):
ausreichend stark ist. Durch das GPS und das Sichtsystem kann sich das Fluggerät lokalisieren,
selbsttätig stabilisieren und Hindernisse umfliegen. In diesem Modus sind erweiterte Funktionen wie
QuickShot, TapFly und ActiveTrack aktiviert.
Bei aktiviertem vorwärtsgerichteten Sichtsystem und ausreichender Umgebungshelligkeit erreicht das
Fluggerät einen maximalen Fluglagewinkel von 15 Grad bei 10,8 km/h maximaler Fluggeschwindigkeit.
Bei deaktivierter vorwärtsgerichteter Hinderniserkennung beträgt der maximale Fluglagewinkel 15 Grad
bei 21,6 km/h maximaler Fluggeschwindigkeit.
Bei schwachem GPS-Signal und zu dunklen Lichtverhältnissen für das Sichtsystem schaltet das
Fluggerät automatisch in den Modus „ATTI“. Dann kann es Hindernissen nicht automatisch ausweichen
und verwendet lediglich das Barometer zur Positionsbestimmung bzw. um die Höhe zu halten. Intelligente
Flugmodi sind im Modus „ATTI“ nicht verfügbar.
Hinweis: Im Modus „P“ müssen die Steuerhebel weiter bewegt werden, um höhere Geschwindigkeiten zu
erreichen.
Der Modus „P“ sollte gewählt werden, wenn das GPS-Signal
Modus „S“ (Sport):
Hinderniserkennungssystem im Sportmodus deaktiviert ist, kann das Fluggerät keine Hindernisse
erkennen und umfliegen. Intelligente Flugmodi, Pano-Modus und Bokeh sind im Sportmodus nicht
verfügbar.
Hinweis: Die Flugweise des Fluggeräts ist auf Agilität und Geschwindigkeit ausgelegt, sodass das
Fluggerät stärker auf die Hebelbewegungen reagiert.
Das 3D-Sichtsystem ist im Modus „S“ (Sport) deaktiviert, sodass das Fluggerät Hindernissen
nicht automatisch ausweichen kann.
Maximalgeschwindigkeit und Bremsweg des Fluggeräts sind im Modus „S“ (Sport) deutlich
optimiert. Bei Windstille ist ein minimaler Bremsweg von 30 Metern erforderlich.
Die maximale Sinkgeschwindigkeit wird im Modus „S“ erheblich erhöht.
Das Ansprechverhalten des Fluggeräts wird im Modus „S“ (Sport) erheblich verbessert. Das
bedeutet, dass eine nur geringfügige Bewegung des Hebels zu einer weiten Flugstrecke
des Fluggeräts führt. Fliegen Sie vorsichtig, und halten Sie angemessene Freiräume für Ihre
Flugmanöver ein.
Der Modus „S“ ist nur mit einer Spark-Fernbedienung verfügbar. Der Modus „S“ ist bei Flügen
mit einem Mobilgerät deaktiviert.
Mit dem Flugmodusschalter an der Fernbedienung werden die Flugmodi des Fluggeräts
ausgewählt.
Das Fluggerät bestimmt die Position durch GPS. Da das vorwärtsgerichtete
2017 DJI Alle Rechte vorbehalten
©
9
Page 10
Spark Bedienungsanleitung
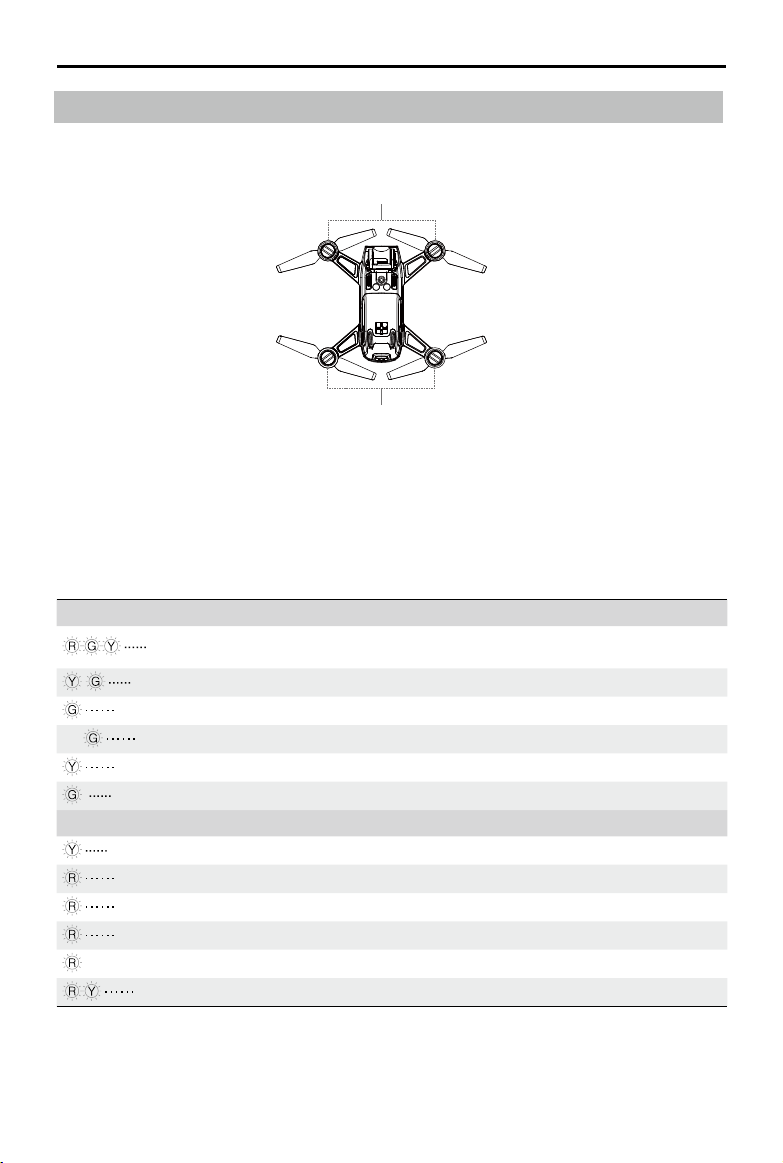
Statusleuchten des Fluggeräts
Die Spark ist mit vorderen LEDs und Fluggeräte-Statusleuchten ausgestattet. Die Lage dieser LEDs ist hier
dargestellt:
Vordere LEDs
Statusleuchten des Fluggeräts
An den vorderen LEDs sind die Ausrichtung des Fluggeräts sowie der Status einiger Funktionen zu erkennen
(siehe hierzu den Gestenmodus im Abschnitt „Beschreibung der Funktionen“). Die vorderen LEDs leuchten
bei eingeschaltetem Fluggerät durchgehend rot und kennzeichnen die Nase des Fluggeräts.
Die Statusleuchten des Fluggeräts zeigen den Systemstatus der Flugsteuerung an. Die folgende Tabelle
enthält weitere Informationen zu den Statusleuchten des Fluggeräts.
Beschreibung der Statusleuchten des Fluggeräts
Normal
Blinkt abwechselnd rot, grün und gelb
Blinkt abwechselnd grün und gelb Das Gerät bendet sich in der Aufwärmphase.
Blinkt langsam grün Modus „P“ mit GPS
2× Blinkt zweimal grün Modus „P“ mit Sichtsystem
Blinkt langsam gelb Kein GPS und Sichtsystem
Blinkt schnell grün Bremsvorgang
Warnung
Blinkt schnell gelb Signal der Fernbedienung unterbrochen
Blinkt langsam rot Warnung! Akkuladezustand niedrig
Blinkt schnell rot Warnung! Akkuladezustand sehr niedrig
Blinkt rot Störung im Inertialsensor (IMU)
— Leuchtet durchgehend rot Schwerer Fehler
Blinkt abwechselnd schnell rot und gelb Kompass kalibrieren!
Das Gerät schaltet ein und führt die
Eigendiagnose durch.
2017 DJI Alle Rechte vorbehalten
10
©
Page 11
Spark Bedienungsanleitung
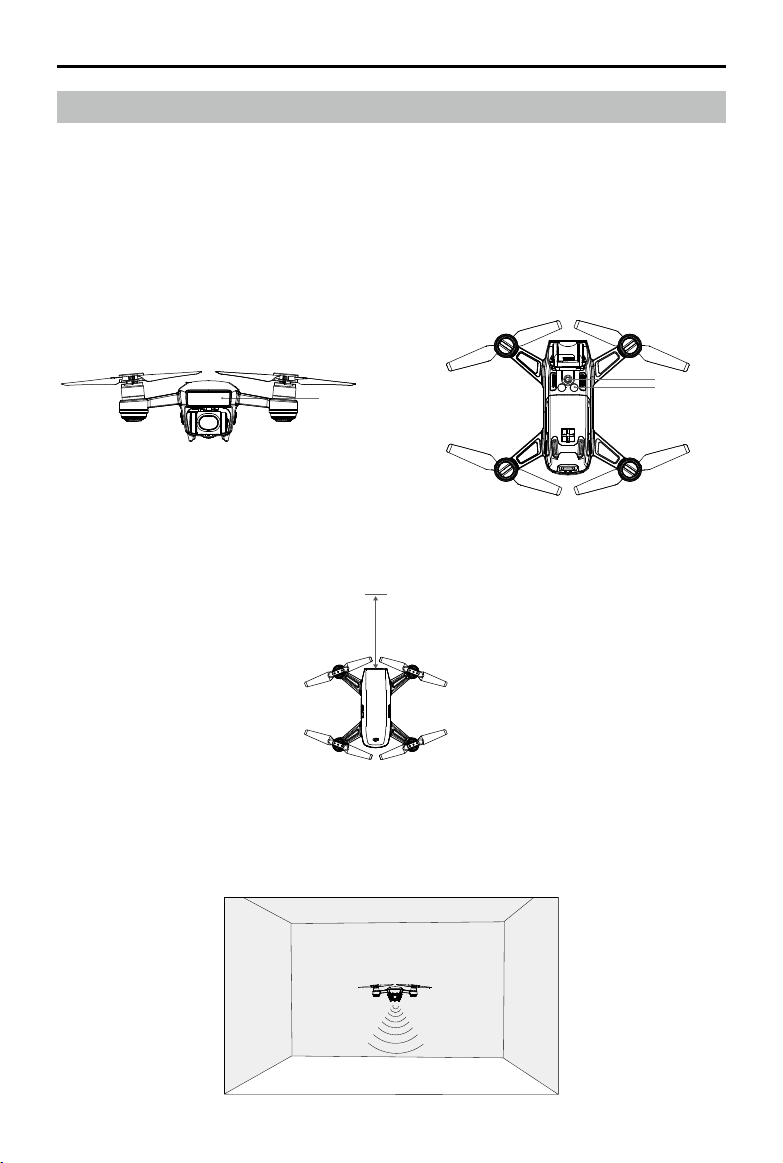
3D Sicht- und Hinderniserfassungssystem
Die Spark ist mit einem 3D-Sichtsystem 1 ausgestattet, bestehend aus einem 3D-Infrarotmodul an der
Nase des Fluggeräts, mit dem die Umgebung während des Fluges auf Hindernisse abgetastet wird.
Die Hauptbestandteile des Sichtsystems sind an der Unterseite des Fluggeräts montiert. Dazu gehören
eine Kamera 2 und ein 3D-Infrarotmodul 3. Anhand der 3D-Infrarot- und Bilddaten hält das Sichtsystem
das Fluggerät in Position, sodass es auch in geschlossenen Räumen bzw. in Regionen ohne GPS präzise
im Schwebeug iegen kann.
Das 3D-Sichtsystem tastet die Umgebung kontinuierlich auf Hindernisse ab, sodass die Spark bei
ausreichenden Lichtverhältnissen Hindernisse vermeiden kann.
2
1
Erfassungsbereich
Der Erfassungsbereich des 3D-Sichtsystems ist unten dargestellt. Beachten Sie, dass das Fluggerät keine
Hindernisse erkennt, die sich nicht innerhalb des Erfassungsbereichs benden.
0,2 bis 5 m
3
Verwendung des Sichtsystems
Das Sichtsystem wird beim Einschalten des Fluggeräts automatisch aktiviert. Sie müssen keine Änderungen
vornehmen. Das Sichtsystem wird meist in geschlossenen Räumen ohne GPS-Empfang verwendet. Mithilfe
des Sichtsystems kann sich das Fluggerät auch ohne GPS exakt im Schwebeug halten.
2017 DJI Alle Rechte vorbehalten
©
11
Page 12
Spark Bedienungsanleitung
Das Sichtsystem können Sie wie folgt aktivieren:
1. Das Fluggerät muss im Modus „P“ sein und auf einer ebenen Fläche abgestellt sein. Beachten Sie, dass
das Sichtsystem nur auf Flächen mit deutlich wechselhaftem Muster funktionsfähig ist.
2. Schalten Sie das Fluggerät ein. Das Fluggerät schwebt nach dem Start auf der Stelle. Wenn die
Statusleuchten des Fluggeräts zweimal grün blinken, ist das Sichtsystem bereit.
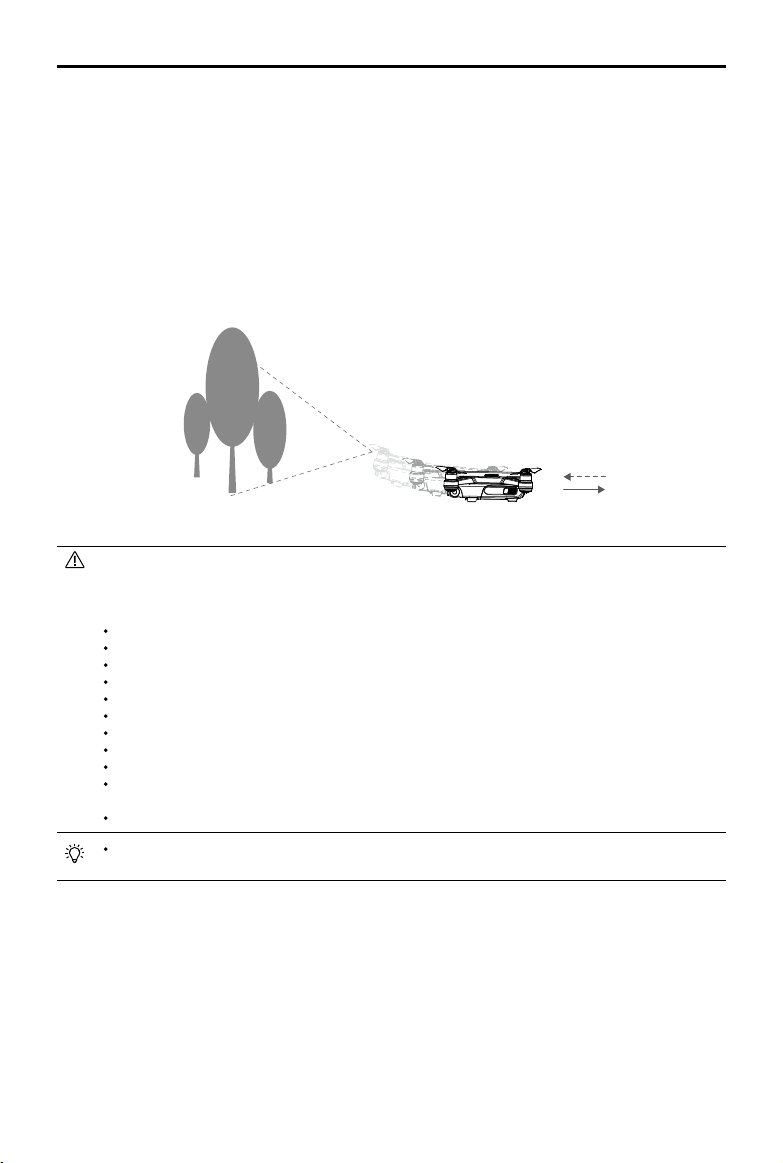
Dank des 3D-Sichtsystems kann das Fluggerät aktiv abbremsen, wenn es ein vorausbefindliches
Hindernis erkennt. Das 3D-Sichtsystem arbeitet am zuverlässigsten bei idealen Lichtverhältnissen und
klar denierten oder strukturierten Hindernissen. Der optimale Bremsweg ist nur gewährleistet, wenn das
Fluggerät mit maximal 10,8 km/h iegt.
Die Leistung des 3D Sicht- und Hinderniserfassungssystems ist abhängig von der überogenen
Oberfläche. Wenn GPS und optische Positionsbestimmung nicht verfügbar sind, schaltet das
Fluggerät automatisch aus dem Modus „P“ in den Modus „ATTI“. Bitte seien Sie besonders
achtsam, wenn Sie Spark in den folgenden Situationen verwenden:
Fliegen mit hohen Geschwindigkeiten in Höhen unter 0,5 m.
Beim Überiegen einfarbiger Flächen (z. B. nur schwarz, nur weiß, nur rot, nur grün).
Beim Überiegen stark reektierender Flächen.
beim Überiegen von Gewässern oder durchsichtigen/durchscheinenden Flächen.
Beim Überiegen beweglicher Flächen und Objekte.
In Bereichen mit häugem oder starkem Lichtwechsel.
Beim Überiegen sehr dunkler (< 10 Lux ) oder heller (> 100.000 Lux ) Flächen.
Beim Überiegen von Flächen ohne Muster oder Strukturen.
Beim Überiegen von Flächen mit wiederkehrenden Mustern oder Strukturen (z. B. Fliesen)
Beim Überfliegen von kleinen oder empfindlichen Gegenständen (z. B. Baumzweige oder
Stromleitungen).
Beim Fliegen mit Geschwindigkeiten über 10,8 km/h 2 Meter über dem Boden.
Halten Sie die Sensoren stets sauber. Schmutz und andere Fremdkörper können ihre Funktion
beeinträchtigen.
2017 DJI Alle Rechte vorbehalten
12
©
Page 13
Spark Bedienungsanleitung
Rückkehrfunktion (RTH)
Die Rückkehrfunktion (kurz: RTH für „Return To Home“) führt das Fluggerät zum zuletzt aufgezeichneten
Startpunkt zurück. Es gibt drei Arten der Rückkehrfunktion: Intelligente Rückkehrfunktion,
batteriebedingte Rückkehr und sicherheitsbedingte Rückkehr. Im folgenden Abschnitt werden die drei
Rückkehrfunktionsszenarien ausführlich beschrieben.
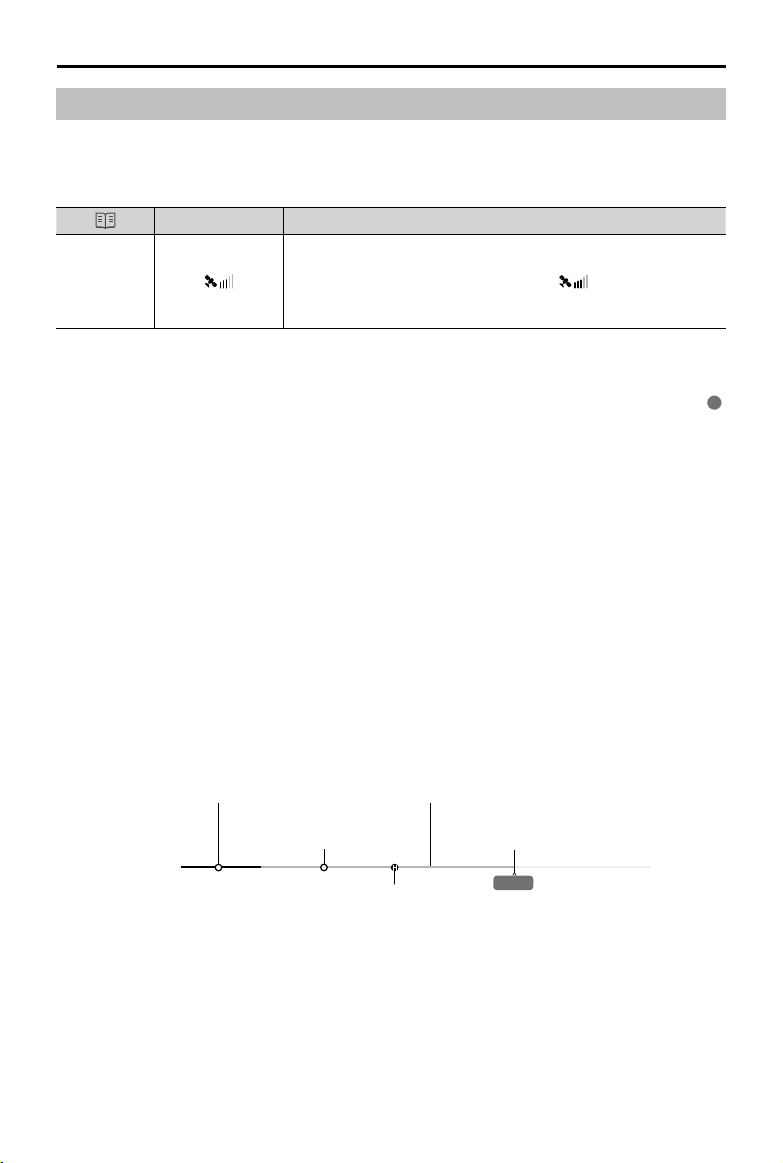
GPS
Wenn vor dem Start ein starkes GPS-Signal empfangen wurde,
wird der Standort beim Start als Startpunkt aufgezeichnet. Die
Startpunkt
GPS-Signalstärke ist am GPS-Symbol ( ) zu erkennen. Die
Statusleuchte des Fluggeräts blinkt schnell, wenn der Startpunkt
aufgezeichnet wird.
Intelligente Rückkehrfunktion (RTH)
Verwenden Sie die intelligente Rückkehrfunktion, wenn GPS verfügbar ist. Berühren Sie die Schaltäche
„RTH“ in DJI GO 4, und befolgen Sie die Bildschirmanweisungen. Durch Drücken des Stopp-Symbols ×
in DJI GO 4 kann die intelligente Rückkehrfunktion sofort beendet werden.
Drücken und halten Sie die Rückkehrtaste an der Fernbedienung, um die intelligente Rückkehrfunktion
auszulösen. Zum Beenden drücken Sie erneut.
Batteriebedingte Rückkehr
Die batteriebedingte Rückkehr wird ausgelöst, wenn die DJI Intelligent Flight Battery so leer ist, dass
eine sichere Rückkehr des Fluggeräts nicht mehr gewährleistet ist. Daher müssen Sie das Fluggerät bei
Aufforderung sofort zurückholen bzw. landen. DJI GO 4 blendet eine Meldung ein, wenn eine Warnung
wegen niedrigem Akkuladezustand ausgelöst wird. Wenn Sie nicht innerhalb von 10 Sekunden reagieren,
fliegt das Fluggerät selbsttätig den Startpunkt an. Sie können die Rückkehrfunktion abbrechen, indem
Sie die Rückkehrtaste oder die Flugpausentaste anf der Fernbedienung drücken. Die Toleranzwerte für
diese Warnmeldungen werden automatisch festgelegt und sind abhängig von der aktuellen Höhe und der
Entfernung des Fluggeräts vom Startpunkt. Die Rückkehr wegen niedrigem Akkuladezustand wird während
des Fluges nur einmal angezeigt.
Das Fluggerät landet selbsttätig, wenn der Akkuladezustand aufgrund der aktuellen Flughöhe nur noch
den Landeanug zulässt.
In DJI GO 4 wird der Akkuladezustand angezeigt (Beschreibung siehe unten):
Beschreibung
Warnung! Akkuladezustand
sehr niedrig (rot)
Warnung! Akkuladezustand
niedrig (gelb)
Strombedarf
für die Rückkehr
Akkuladezustandsanzeige
Akkuladezustand
ausreichend (grün)
Restugzeit
12:29
2017 DJI Alle Rechte vorbehalten
©
13
Page 14
Spark Bedienungsanleitung
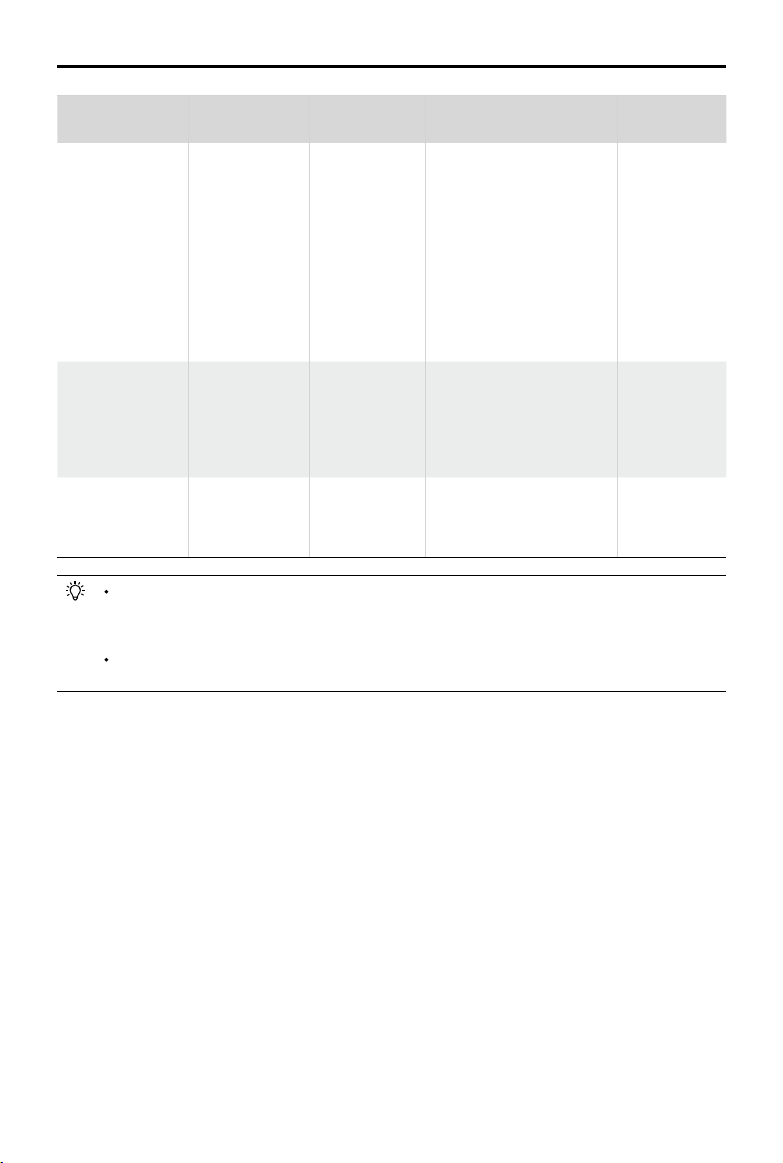
Akkuladezustand
Warnung
Warnung!
Akkuladezustand
sehr niedrig
Warnung!
Akkuladezustand
sehr niedrig
Geschätzte
Restugzeit
Wenn die Warnung „Akkuladezustand sehr niedrig“ ausgelöst wird und das Flugzeug den
automatischen Landevorgang beginnt, drücken Sie die virtuellen Joysticks oder Steuerhebel
nach oben, um das Fluggerät in seiner aktuellen Höhe zu halten. Dann können Sie zu einem
besser geeigneten Landeort navigieren.
Die geschätzte Restugzeit ist an Farbe und Kennzeichnung der Akkuladezustandsanzeige zu
erkennen. Die Anzeige richtet sich nach dem aktuellen Standort und Zustand des Fluggeräts.
Bemerkung
Schwache
Akkuladung
Fluggerät
landen
Fluggerät muss
sofort landen.
Geschätzte
verbleibende
Flugzeit je nach
Akkuladezustand
Statusanzeige
des Fluggeräts
Statusanzeige
des Fluggeräts
blinkt langsam
ROT.
Statusleuchten
des Fluggeräts
blinken schnell
ROT.
--- --- ---
„DJI GO 4“-App Anweisungen
„Go-home“ antippen, damit
das Fluggerät automatisch
den Startpunkt aniegt.
Oder „Cancel“ antippen,
um wieder in den normalen
Flugbetrieb zu schalten.
Wenn Sie nicht innerhalb
von 10 Sekunden reagieren,
iegt das Fluggerät
selbsttätig den Startpunkt
an. An der Fernbedienung
ertönt ein Alarmton.
Der Bildschirm der „DJI GO
4“-App blinkt rot, und das
Fluggerät tritt den Sinkug
an. An der Fernbedienung
ertönt ein Alarmton.
Fluggerät
umgehend
zum Startpunkt
zurückiegen
und landen,
Motoren
ausschalten
und Akku
wechseln.
Warten Sie, bis
das Fluggerät
automatisch
den Sinkug
antritt und
landet.
Sicherheitsbedingte Rückkehr
Wenn der Startpunkt registriert wurde, das GPS-Signal stark ist und der Kompass einwandfrei arbeitet,
wird bei einer Unterbrechung des Fernsteuersignals von bestimmter Dauer (3 Sekunden bei Bedienung
per Fernbedienung, 20 Sekunden bei WLAN-Bedienung) selbsttätig die sicherheitsbedingte Rückkehr
ausgelöst. Sie können die sicherheitsbedingte Rückkehr deaktivieren, um erneut die Steuerung zu
übernehmen, sobald die WLAN-Verbindung wiederhergestellt wurde.
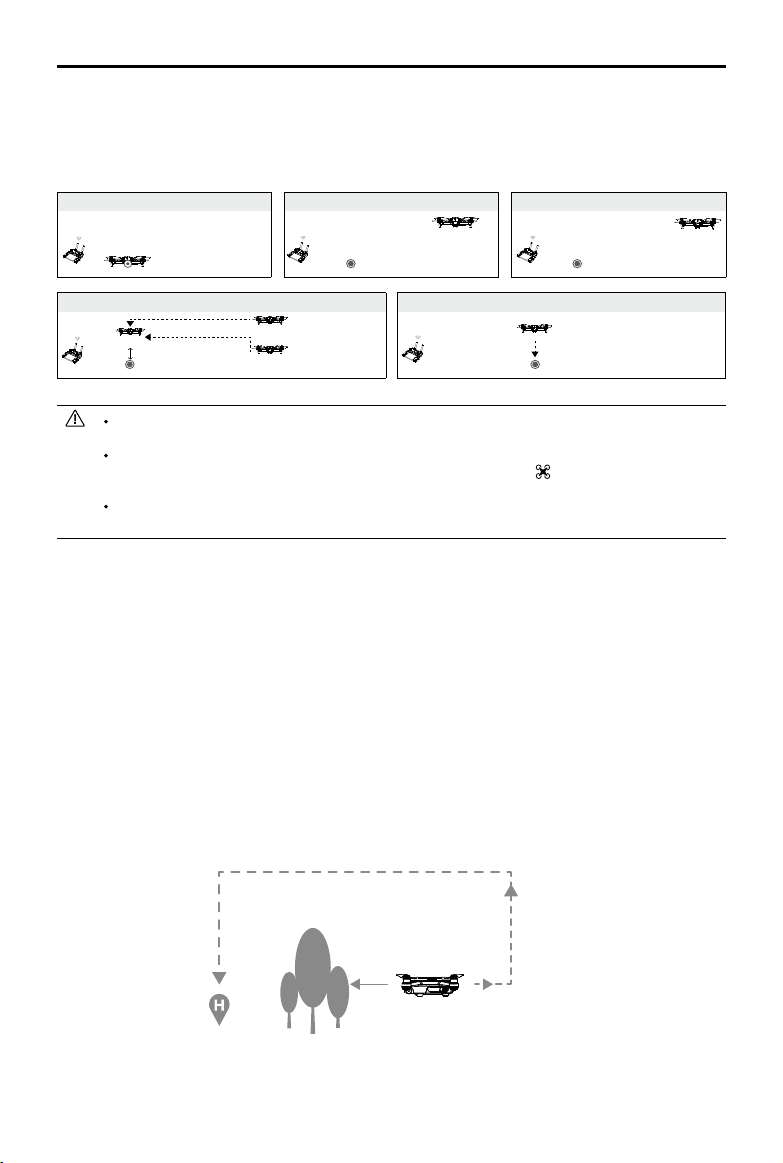
Rückkehrfunktion (RTH)
1. Der Startpunkt wird automatisch erfasst.
2. Die Rückkehrfunktion wird ausgelöst, d. h. intelligente Rückkehr, batteriebedingte Rückkehr oder
sicherheitsbedingte Rückkehr.
3. Der Startpunkt wird bestätigt, und das Fluggerät passt die eigene Ausrichtung an.
4. a. Das Fluggerät steigt zur voreingestellten Rückkehrughöhe und iegt den Startpunkt an, wenn sich
das Fluggerät 20 m vom Startpunkt entfernt bendet.
b. Wenn sich das Fluggerät zwischen 3 m und 20 m vom Startpunkt entfernt befindet, kehrt es aus
der aktuellen Höhe zum Startpunkt zurück, wobei die Option „Rückkehrfunktion aus der aktuellen
Flughöhe“ (die standardmäßige Einstellung in DJI GO 4) bei einer Höhe ab 2,5 m aktiviert ist. Es
steigt auf 2,5 m und kehrt zurück, wenn die Flughöhe unter 2,5 m ist.
Hinweis: Wenn „Rückkehrfunktion aus der aktuellen Flughöhe“ in DJI GO 4 deaktiviert ist, landet das
Fluggerät automatisch, wenn es sich zwischen 3 m und 20 m vom Startpunkt bendet.
2017 DJI Alle Rechte vorbehalten
14
©
Page 15
Spark Bedienungsanleitung
c. Das Fluggerät landet automatisch, wenn die Rückkehrfunktion ausgelöst wird und es sich näher als
3 m am Startpunkt bendet.
5. Das Fluggerät schwebt 0,3 m über dem Boden und wartet auf die Bestätigung durch den Piloten. Das
Fluggerät landet und stoppt die Motoren nach der Bestätigung durch den Piloten.
1 Startpunkt registrieren
4 Rückkehrfunktion (RTH) (einstellbare Höhe)
×
Höhe über SP > Rückkehrughöhe
Steigug auf Rückkehrughöhe
Rückkehrughöhe
Höhe über SP <= Rückkehrughöhe
2.Signal Fernbedienung unterbrochen
×
5 Landung (nach Bestätigung durch Pilot)
×
3 Längere Signalunterbrechung
×
Schwebeug auf 0,3 m über Startpunkt
Das Fluggerät kann bei schwachem oder fehlendem GPS-Signal nicht automatisch zum Startpunkt
zurückkehren.
Vor jedem Flug muss eine angemessene Flughöhe für die Rückkehr angegeben werden. Starten
Sie die „DJI GO 4“-App, berühren Sie „GO FLY“, und tippen Sie auf , um die Rückkehrughöhe
einzustellen.
Wenn bei der sicherheitsbedingten Rückkehr der linke Steuerhebel bewegt wird und das Fluggerät
über 20 Meter steigt, bricht das Fluggerät sofort den Steigug ab und iegt den Startpunkt an.
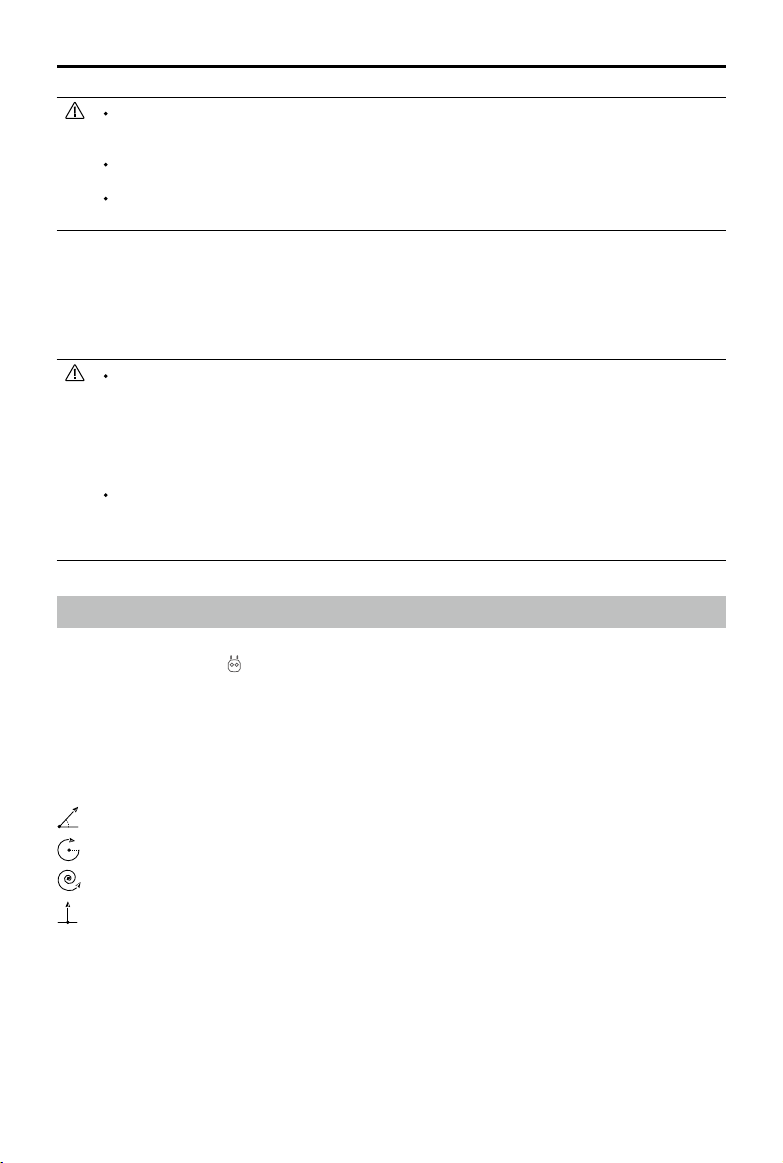
Kollisionsvermeidung beim Rückkehrug (RTH)
Die Spark kehrt mit einer Fluggeschwindigkeit von 10 m/s zum Startpunkt zurück. Wenn die
Rückkehrfunktion ausgelöst ist und sich das Fluggerät weiter als 100 m vom Startpunkt bendet, kann
keinen Hindernissen ausgewichen werden.
Spark kann während des Rückkehrflugs Hindernisse erkennen und diesen ausweichen, sofern die
Lichtverhältnisse ausreichend sind für das 3D-Sichtsystem und die Rückkehrfunktion ausgelöst wird, wenn
das Fluggerät sich weniger als 100 m vom Startpunkt entfernt bendet. Wenn das Fluggerät ein Hindernis
erkennt, verhält es sich wie folgt:
1. Das Fluggerät verlangsamt seine Geschwindigkeit, wenn in einer Entfernung von 5 m ein Hindernis
erkannt wird.
2. Das Fluggerät stoppt und schwebt, anschließend beginnt es mit dem Rückwärtsflug, bis das
3D-Sichtsystem keine Hindernisse mehr erkennt.
3. Das Fluggerät steigt circa 5 Sekunden lang vertikal auf.
4. Der Rückkehrug wird fortgesetzt. Das Fluggerät iegt auf der aktuellen Höhe zum Startpunkt zurück.
5 m
Aufstieg für fünf Sekunden
2017 DJI Alle Rechte vorbehalten
©
15
Page 16
Spark Bedienungsanleitung
Die Hinderniserkennung wird deaktiviert, und das Fluggerät steigt automatisch in die sichere
Höhe auf. Danach fliegt es mit einer Geschwindigkeit von 10 m/s zum Startpunkt zurück, sofern
Hindernisse weiterhin erkannt werden können, nachdem das Fluggerät 10 m im Rückwärtsug war.
Das Fluggerät wiederholt die Schritte 1 bis 3, wenn während des Steigugs erneut Hindernisse
erkannt werden.
Das Fluggerät kann keine Hindernisse umiegen, die sich über, neben oder hinter dem Fluggerät
benden.
Präzisionslandung
Beim Rückkehrug tastet die Spark das Gelände ab und versucht, sich den Konturen anzupassen. Wenn
das aktuelle Gelände den Verhältnissen am Startpunkt entspricht, leitet die Spark sofort die Landung ein,
um eine Präzisionslandung auszuführen. Wenn diese Übereinstimmung nicht besteht, wird in DJI GO 4
eine entsprechende Warnung angezeigt.
Die Qualität der Präzisionslandung ist von mehreren Bedingungen abhängig:
a. Der Startpunkt muss beim Start registriert werden und darf während des Fluges nicht geändert werden.
b. Das Fluggerät muss senkrecht gestartet werden. Die Starthöhe muss über 7 Meter betragen.
c. Die Geländeeigenschaften des Startpunkts müssen überwiegend unverändert bleiben.
d. Das Gelände am Startpunkt darf keine Eigenschaften haben, die sich negativ auf die Landequalität
auswirken.
e. Die Lichtverhältnisse dürfen nicht zu hell und nicht zu dunkel sein.
Während der Landung hat der Pilot mehrere Möglichkeiten:
a. Den Gashebel nach unten ziehen, um die Landung zu beschleunigen.
b. Die Steuerhebel in eine beliebige andere Richtung bewegen, um die Präzisionslandung
abzubrechen. Die Spark steigt senkrecht ab, nachdem die Steuerhebel gelöst wurden.
Intelligente Flugmodi
Die Spark unterstützt intelligente Flugmodi, einschließlich QuickShot, Active Track, TapFly, Gesten- und
Stativmodus. Berühren Sie in DJI GO 4, oder drücken Sie die Funktionstaste an der Fernbedienung, um
die intelligenten Flugmodi zu aktivieren.
QuickShot
Die QuickShot-Aufnahmemodi umfassen „Rocket/Rakete“, „Dronie“, „Circle/Kreis“ und „Helix/Spirale“.
Die Spark zeichnet ein Video entsprechend dem gewählten Aufnahmemodus auf und erzeugt dann
automatisch ein kurzes 10-Sekunden-Video. Das Video kann über das Wiedergabemenü angesehen,
bearbeitet oder aus sozialen Medien geteilt werden.
Dronie: Rückwärts- und Steigug, wobei die Kamera fest auf das Objekt ausgerichtet ist.
Circle: Umkreisen des Objekts.
Helix: Steigug, im Spiralug um das Objekt.
Rocket: Steilug, mit nach unten gerichteter Kamera.
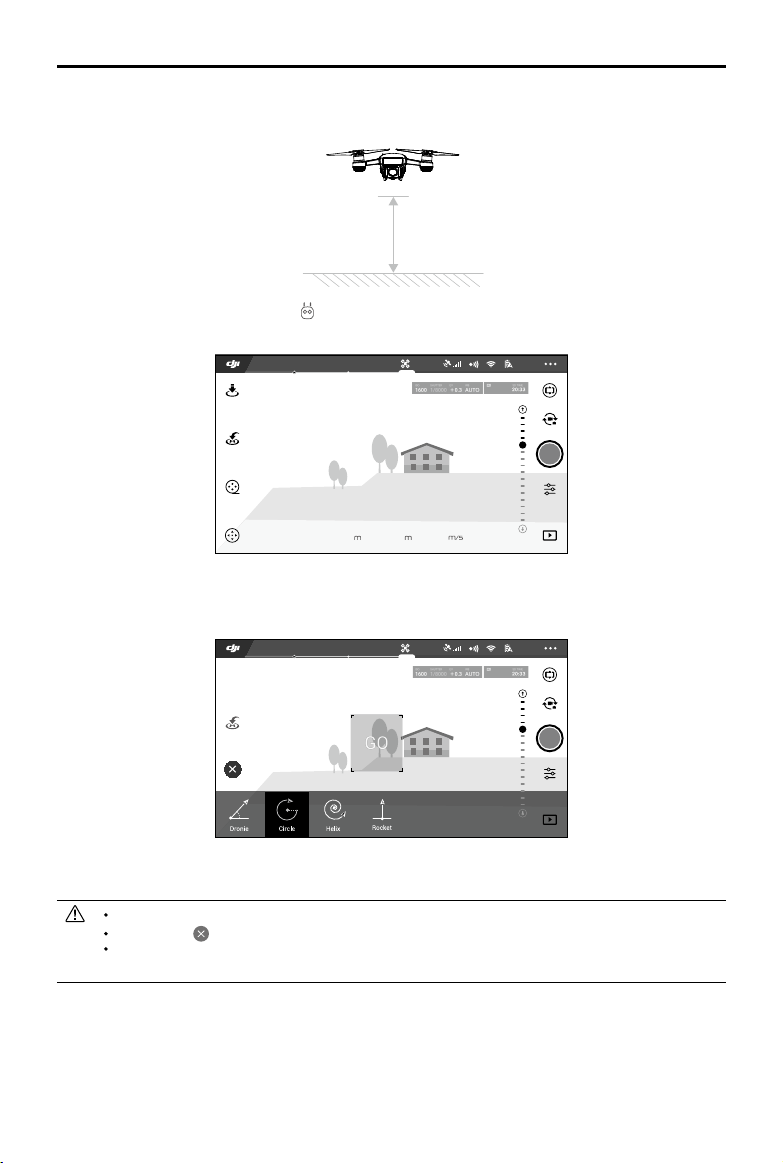
So verwenden Sie QuickShot
Stellen Sie sicher, dass das Fluggerät im Modus „P“ ist und die Intelligent Flight Battery ausreichend
aufgeladen ist. Verwenden Sie QuickShot wie folgt:
2017 DJI Alle Rechte vorbehalten
16
©
Page 17
Spark Bedienungsanleitung
GO
1. Lassen Sie das Fluggerät abheben, und achten Sie darauf, dass es mindestens 1,5 m über dem
Boden schwebt.
1,5 m
2. Starten Sie DJI GO 4, berühren Sie , wählen Sie dann „QuickShot“, und befolgen Sie die angezeigten
Anweisungen.
12
In-Flight(GPS)
QuickShot
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. Wählen Sie Ihr Zielobjekt im Kameramenü ,und wählen Sie dann den Aufnahmemodus. Berühren Sie
„GO“, um die Aufnahme zu starten. Nach dem Abschluss der Aufnahmen iegt das Fluggerät zu seinem
Startpunkt zurück.
12
In-Flight(GPS)
QuickShot
09:29
1080P/30
61%
2.4G
4. Betrachten und bearbeiten Sie das erzeugte oder das ursprüngliche Video mit der Wiedergabefunktion
(Playback).
QuickShot ist nur verfügbar, wenn das GPS-Signal ausreichend stark ist.
Berühren Sie in DJI GO 4, um QuickShot jederzeit während der Aufnahme zu beenden
Im QuickShot-Modus kann das Fluggerät Hindernissen nicht automatisch ausweichen. Stellen Sie
.
sicher, dass Sie QuickShot nur in weiten freien Flächen verwenden.
ActiveTrack
Mit ActiveTrack können Sie ein sich in Bewegung bendliches Objekt auf dem Bildschirm Ihres Mobilgeräts
markieren und xieren. Dafür wird kein externes Ortungsgerät benötigt.
Der Spark erkennt und verfolgt automatisch Fahrräder und andere Fahrzeuge, Menschen und Tiere, und
wendet für jede Objektart andere Verfolgungsstrategien an.
2017 DJI Alle Rechte vorbehalten
©
17
Page 18

Spark Bedienungsanleitung
GO
Fliegen mit ActiveTrack
Vergewissern Sie sich, dass die Intelligent Flight Battery voll aufgeladen und das Fluggerät auf den Modus
„P“ eingestellt ist. Gehen Sie wie nachstehend erläutert vor, um ActiveTrack zu verwenden:
1. Lassen Sie das Fluggerät abheben und mindestens 1,5 m über dem Boden schweben.
1,5 m
2. Tippen Sie zum Anzeigen der Flugmodi in DJI GO 4 auf , und wählen Sie ActiveTrack aus.
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. Tippen Sie auf das Objekt, das Sie verfolgen möchten, um Ihre Auswahl zu bestätigen. Wenn das
Objekt nicht automatisch erkannt wird, ziehen Sie einen Rahmen um das Objekt. Das Rechteck
wird grün, wenn die Fixierung eingesetzt hat. Wenn das Rechteck rot wird, wurde das Objekt nicht
identiziert, sodass Sie es erneut markieren müssen.
12
In-Flight(GPS)
09:29
ActiveTrack
1080P/30
61%
2.4G
4. Das Fluggerät weicht in diesem Modus automatisch Hindernissen auf seiner Flugroute aus. Wenn
das Fluggerät die Objektxierung verliert, weil sich das Objekt zu schnell bewegt oder es von einem
Hindernis blockiert wird, wählen Sie das Objekt erneut, um die Fixierung wiederherzustellen.
2017 DJI Alle Rechte vorbehalten
18
©
Page 19

ActiveTrack hat die folgenden Funktionen:
Verfolgen Prol
Spark Bedienungsanleitung
Das Fluggerät hält den Abstand zum xierten Objekt
konstant. Mit dem Rollhebel an der Fernbedienung
bzw. dem Schieber in DJI GO 4 können Sie das
Objekt umkreisen.
Wählen Sie KEINEN Bereich mit Menschen, Tieren, kleinen oder feinen Objekten (z. B. Baumzweige
oder Stromleitungen) oder mit durchsichtigen Objekten (z. B. Glas oder Gewässer) aus.
Wählen Sie für die Flugroute einen deutlichen Abstand zu Hindernissen, und zwar insbesondere,
wenn das Fluggerät rückwärts iegt.
Fliegen Sie das Fluggerät während einer Notsituation manuell, oder berühren Sie das Symbol
in DJI GO 4.
Seien Sie besonders achtsam, wenn Sie ActiveTrack in den folgenden Situationen verwenden:
a) Das xierte Objekt bewegt sich nicht auf einer ebenen Fläche.
b) Das xierte Objekt ändert während der Bewegung drastisch seine Form.
c) Es besteht längere Zeit keine direkte Sichtlinie zum xierten Objekt.
d) Das xierte Objekt bewegt sich auf einer schneebedeckten Fläche.
e) Das xierte Objekt hat eine ähnliche Farbe oder Oberäche wie die Umgebung.
f) Die Umgebung ist zu dunkel (< 300 Lux) oder zu hell (> 10.000 Lux).
Beachten Sie bei der Verwendung von ActiveTrack die lokalen gesetzlichen Bestimmungen zum
Schutz der Privatsphäre.
Bitte beachten Sie, dass die Auösung der Fotos während der Verfolgung nur 1440×1080 beträgt.
ActiveTrack verlassen
So können Sie die ActiveTrack-Funktion beenden:
1. Drücken Sie die Flugpausenttaste an der Fernbedienung.
2. Tippen Sie auf dem Bildschirm auf das Symbol .
Das Fluggerät verfolgt das Objekt von der Seite
mit gleichbleibendem Winkel und Abstand. Mit
dem Rollhebel an der Fernbedienung können
Sie das Objekt umkreisen. Im Prolmodus kann das
Fluggerät keine Hindernisse umiegen. Verwenden
Sie diesen Modus in offenen Bereichen.
ODER
Nachdem ActiveTrack beendet wurde, schwebt das Fluggerät auf der Stelle. Jetzt können Sie manuell
weiteriegen, ein anderes Objekt verfolgen oder den Rückkehrug antreten.
TapFly
TapFly verfügt über zwei völlig neue Submodi: Koordinatenmodus und Richtungsmodus. Der
Koordinatenmodus ist standardmäßig aktiviert. Sofern die Lichtverhältnisse stimmen (300 bis 10.000 Lux)
umiegt das Fluggerät selbsttätig alle erkannten Hindernisse bzw. bremst und schwebt auf der Stelle.
2017 DJI Alle Rechte vorbehalten
©
19
Page 20

Spark Bedienungsanleitung
GO
Koordinatenmodus
Berühren Sie einen bestimmten Punkt auf dem Bildschirm. Das Fluggerät iegt in der aktuellen Höhe zu
diesem Punkt und schwebt dann auf der Stelle.
Verwendung des Koordinatenmodus
Vergewissern Sie sich, dass die Intelligent Flight Battery voll aufgeladen und das Fluggerät auf den Modus
„P“ eingestellt ist. Verwenden Sie den Koordinatenmodus wie folgt:
1. Lassen Sie das Fluggerät abheben, und achten Sie darauf, dass es mindestens 1 m über dem Boden
schwebt.
1 m
2. Starten Sie DJI GO 4, und berühren Sie : Wählen Sie TapFly, Koordinatenmodus, und befolgen Sie die
Bildschirmanweisungen.
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. Tippen Sie einmal auf das Ziel, und warten Sie, bis das Symbol „GO“ eingeblendet wird. Tippen Sie zum
Bestätigen Ihrer Auswahl erneut auf „GO“. Nun iegt das Fluggerät automatisch zu der Zielrichtung.
Wenn das Ziel nicht erreicht werden kann, wird eine entsprechende Meldung angezeigt. Wählen Sie
dann ein anderes Ziel, und versuchen Sie es erneut.
12
In-Flight(GPS)
H 9.6
TapFly
09:29
S 1.1D 9.6
1080P/30
61%
2.4G
4. Ein Ziel kann während des Fluges durch Berühren des Bildschirms geändert werden.
5. Halten Sie den Bildschirm circa zwei Sekunden gedrückt, bis ein blauer Kreis angezeigt wird. Ziehen
Sie den Kreis nach oben und unten, um den Gimbal-Neigungswinkel anzupassen.
Vergewissern Sie sich, dass sich das Ziel bei Verwendung des Koordinatenmodus auf einer ebenen
Fläche bendet. Sonst kann das Fluggerät das Ziel eventuell nicht akkurat erreichen.
2017 DJI Alle Rechte vorbehalten
20
©
Page 21

Spark Bedienungsanleitung
Beenden des Koordinatenmodus
So können Sie den Koordinatenmodus beenden:
1. Tippen Sie auf dem Bildschirm auf das Symbol .
2. Ziehen Sie den rechten Steuerhebel an der Fernbedienung mindestens für drei (3) Sekunden nach
hinten.
3. Drücken Sie die Flugpausenttaste an der Fernbedienung.
4. Ziehen Sie den blauen Kreis nach links und rechts.
Richtungsmodus
Berühren Sie den Bildschirm, und iegen Sie weiter in diese Richtung.
So verwenden Sie den Richtungsmodus
Vergewissern Sie sich, dass die Intelligent Flight Battery voll aufgeladen und das Fluggerät auf den Modus
„P“ eingestellt ist. Verwenden Sie den Richtungsmodus wie folgt:
1. Lassen Sie das Fluggerät abheben, und achten Sie darauf, dass es mindestens 1 m über dem Boden
schwebt.
1 m
2. Starten Sie DJI GO 4, und berühren Sie : Wählen Sie TapFly, schalten Sie um in den Richtungsmodus,
und befolgen Sie die Bildschirmanweisungen.
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. Tippen Sie einmal auf das Ziel, und warten Sie, bis das Symbol „GO“ eingeblendet wird. Tippen Sie
zum Bestätigen Ihrer Auswahl erneut auf „GO“. Nun iegt das Fluggerät automatisch in dieser Richtung.
12
In-Flight(GPS)
TapFly
09:29
1080P/30
61%
2.4G
2017 DJI Alle Rechte vorbehalten
©
21
Page 22

Spark Bedienungsanleitung
Nachdem Sie die Auswahl bestätigt haben, iegt das Fluggerät in die mit dem Symbol „GO“ angezeigte
Richtung. Das Fluggerät passt seine Geschwindigkeit automatisch an, wenn es ein vorausbendliches
Hindernis erkennt oder zu tief über dem Boden iegt. Allerdings sollte sich der Pilot beim Umiegen von
Hindernissen nicht auf diese Funktion verlassen.
Die Ausfallsicherung übersteuert alle TapFly-Funktionen. Wenn das GPS-Signal schwach ist, beendet das
Fluggerät den autonomen Flugmodus und kehrt zum Startpunkt zurück.
Beenden des Richtungsmodus
So können Sie den Richtungsmodus beenden:
1. Tippen Sie auf dem Bildschirm auf das Symbol .
2. Ziehen Sie den rechten Steuerhebel an der Fernbedienung mindestens für drei (3) Sekunden nach
hinten.
3. Drücken Sie die Flugpausenttaste an der Fernbedienung.
Nach Beenden des Richtungsmodus hält das Fluggerät an und schwebt. Tippen Sie eine neue Zielrichtung
ein, um den Flug fortzusetzen, oder iegen Sie manuell weiter.
ODER ODER
Flugpausentaste
Steuern Sie mit dem Fluggerät NICHT auf Menschen, Tiere, kleine oder feine Objekte (z. B.
Baumzweige oder Stromleitungen) oder durchsichtige Objekte (z. B. Glas oder Gewässer) zu. Über
Gewässern oder schneebedeckten Flächen ist die Funktion des TapFly-Modus möglicherweise
beeinträchtigt.
Achten Sie auf Hindernisse auf der Flugroute, um das Fluggerät davon fernzuhalten.
Die tatsächliche Flugroute kann von der mit TapFly eingegebenen Flugroute abweichen.
Der Auswahlbereich für die Zielrichtung ist begrenzt. Am oberen oder unteren Bildschirmrand können
Sie im Richtungsmodus keine Auswahl vornehmen.
Seien Sie besonders achtsam, wenn Sie bei extremer Dunkelheit (< 300 Lux) oder extremer Helligkeit
(> 10.000 Lux) iegen.
Stativmodus
Tippen Sie auf das Symbol in DJI GO 4, um den Stativmodus zu aktivieren. Im Stativmodus ist die
maximale Fluggeschwindigkeit auf 3,6 km/h begrenzt. Auch die Steuerhebel sprechen weniger empndlich
an, damit Sie die Bewegungen des Fluggeräts sanfter und präziser steuern können.
Verwenden Sie den Stativmodus nur bei ausreichend starkem GPS-Signal bzw. idealen
Lichtverhältnissen für das Sichtsystem. Wenn das GPS-Signal unterbrochen ist und das Sichtsystem
nicht arbeiten kann, wird automatisch der Modus „ATTI“ aktiviert. In diesem Fall steigt die
Fluggeschwindigkeit, und das Fluggerät kann nicht auf der Stelle schweben. Seien Sie vorsichtig,
wenn Sie im Stativmodus arbeiten.
2017 DJI Alle Rechte vorbehalten
22
©
Page 23

Spark Bedienungsanleitung
Gestenmodus
Die umfassende Gestenprogrammierung ermöglicht Ihnen Sele-Aufnahmen mit einfachen Handbewegungen.
Die brandneuen Gestensteuerungen der Spark umfassen PalmLaunch, PalmControl, PalmLand, Beckon
(Locken) und Sele. Aus Sicherheitsgründen wird dringend empfohlen, den Spark-Propellerschutz vor der
Verwendung des Gestenmodus zu montieren.
Beschreibung der Funktion Vordere LEDs Abbildung
PalmLaunch
1. Schalten Sie das Fluggerät ein, während Sie es
festhalten. Warten Sie, bis die Statusleuchten
des Fluggeräts gelb blinken Stellen Sie sicher,
dass sich Ihre Finger unter den Armen des
Fluggeräts benden.
2. Berühren Sie dann zweimal die Starttaste
der Intelligent Flight Battery. Nun sollten die
vorderen LEDs langsam gelb blinken.
3. FaceAware startet automatisch. Sobald
FaceAware erfolgreich aktiviert wurde, gibt das
Fluggerät zwei akustische Töne ab, und die
vorderen LEDs leuchten statisch grün. Wenn
die vorderen LEDs zweimal rot blinken, ist
FaceAware fehlgeschlagen. Wiederholen Sie
bitte Schritt 2.
Leuchtet
——
durchgehend rot
Blinkt gelb
Leuchtet
——
durchgehend grün
4. Die vorderen LEDs leuchten statisch rot, sobald
die Motoren drehen. Lassen Sie das Fluggerät
los. Es schwebt auf der Stelle.
PalmControl starten/stoppen
1. Stellen Sie sich vor das Fluggerät, heben
Sie dann einen Arm, und führen Sie diesen
in Richtung des Fluggeräts. Strecken Sie die
Finger aus, wobei Sie sie geschlossen halten.
Positionieren Sie die Handäche während zwei
(2) Sekunden circa 0,7 m vor der Nase des
Fluggeräts.
2. Die vorderen LEDs leuchten statisch grün, wenn
PalmControl erfolgreich aktiviert ist. Passen
Sie die Distanz zum Fluggerät an, wenn die
vorderen LEDs schnell gelb blinken. Dann
benden Sie sich zu nahe am Fluggerät, oder
Sie sind zu weit von diesem entfernt.
3. Wenn Sie die Hände schnell senken, beenden
Sie PalmControl, und die vorderen LEDs sollten
statisch rot leuchten.
Leuchtet
——
durchgehend rot
Leuchtet
——
durchgehend grün
Leuchtet
——
durchgehend rot
2017 DJI Alle Rechte vorbehalten
©
23
Page 24

Spark Bedienungsanleitung
Anpassen der Position
1. Bewegen Sie die Handäche langsam
nach oben oder unten, um die Höhe des
Fluggeräts zu steuern, wobei Sie eine konstante
Entfernung zwischen Handäche und Fluggerät
beibehalten.
2. Halten Sie die Handäche (wie abgebildet) in
einer konstanten Entfernung zu Ihrem Körper.
Bewegen Sie dann den Arm nach links oder
rechts, um die Ausrichtung des Fluggeräts zu
steuern.
3. Halten Sie die Handäche in einer konstanten
Entfernung zum Körper, während Sie sich
vorwärts oder rückwärts bewegen, um vorwärts
oder rückwärts zu iegen.
Folgen
1. Stellen Sie sich vor das Fluggerät, heben Sie
einen Arm, und winken Sie schnell mit der Hand
in die Kamera. Positionieren Sie die Handäche
während zwei (2) Sekunden circa 0,7 m vor der
Nase des Fluggeräts.
2. Die vorderen LEDs blinken zweimal grün,
wenn die Geste erfolgreich erkannt wurde. Das
Fluggerät hebt ab und iegt rückwärts, dann
schwebt es 3 m von der Stelle entfernt, an der
Sie stehen, 2,3 m über dem Boden. Bewegen
Sie Ihren Körper nicht, bis das Fluggerät an Ort
und Stelle schwebt.
Leuchtet
——
durchgehend grün
×2
Blinkt zweimal grün
3. Die vorderen LEDs leuchten statisch grün, und
das Fluggerät beginnt automatisch mit der
Fixierung.
4. Wenn die Geste "Winken" fehlschlägt, oder dass
Fluggerät die Verfolgung verliert, könnenSie
„Folgen“ aktivieren, indem Sie beide Arme in
einer Y-Form über den Kopf heben und diese
Stellung zwei (2) Sekunden beibehalten.
Sele-Aufnahmen
1. Während das Fluggerät Ihnen folgt, können Sie
aus einer Distanz von 7 m mit den Händen einen
Rahmen bilden und dann ein Sele aufnehmen.
2. Die Sele-Geste wurde erfolgreich erkannt, wenn
die vorderen LEDs langsam rot blinken. Warten
Sie drei Sekunden für den Sele-Countdown.
Die vorderen LEDs blinken schnell rot. Dies
bedeutet, dass die Kamera ein Sele aufnehmen
wird.
2017 DJI Alle Rechte vorbehalten
24
©
Leuchtet
——
durchgehend grün
Blinkt langsam rot
Page 25

Spark Bedienungsanleitung
Winken
1. Heben Sie die Arme während zwei Sekunden
in einer Y-Form über dem Kopf, nachdem das
Fluggerät die Verfolgung aufgenommen hat.
Leuchtet
2. Wenn „Winken“ erfolgreich aktiviert wurde, iegt
das Fluggerät auf Sie zu und schwebt 1,2 m
entfernt von der Stelle, an der Sie stehen, in
einer Höhe von 1,5 m über dem Boden.
3. Die vorderen LEDs leuchten statisch rot.
PalmLand
Richten Sie sich auf das Fluggerät aus und
bewegen Sie die Handäche circa 0,5 m unter
das Fluggerät, das sich maximal 1,5 m von Ihnen
entfernt bendet. Das Fluggerät steigt langsam ab
und landet auf Ihrer Handäche.
Aus Sicherheitsgründen wird dringend empfohlen, den Spark-Propellerschutz vor der Verwendung
des Gestenmodus zu montieren.
Die Gestensteuerung muss in DJI GO 4 unter aktiviert werden.
Im PalmLaunch-Modus blinken die Statusleuchten des Fluggeräts normal. Entfernte Signalverluste
werden nicht angezeigt, selbst dann nicht, wenn ein Mobilgerät oder eine Fernbedienung verbunden ist.
Verwenden Sie den Gestenmodus nur in oenen Bereichen.
Der Gestenmodus steht nur im Fotomodus zur Verfügung.
Wenn Sie an Ihrem Mobilgerät das GPS aktivieren, kann Ihnen das Fluggerät im Gestenmodus
exakter folgen.
Bitte beachten Sie, dass die Auösung von Fotos im Gestenmodus 1440×1080 beträgt.
——
durchgehend rot
Leuchtet
——
durchgehend rot
2017 DJI Alle Rechte vorbehalten
©
25
Page 26

Spark Bedienungsanleitung
Flugschreiber
Die Flugdaten werden automatisch im Bordspeicher des Fluggeräts gespeichert. Zu den Flugdaten
gehören Flugtelemetrie, Fluggerätstatus und andere Parameter. Um auf diese Daten zuzugreifen, schließen
Sie das Fluggerät über den Micro-USB-Anschluss an den PC an.
Propeller anbringen und abnehmen
Verwenden Sie mit Ihrer Spark ausschließlich die von DJI zugelassenen Propeller. Am weißen Ring bzw.
der fehlenden Markierung sind Einbauposition und Drehrichtung der Propeller zu erkennen.
Propeller Weißer Ring Nicht markiert
Abbildung
Befestigung an Motoren mit weißer Markierung Motoren ohne weiße Markierung
Legende Sichern: Drehen Sie die Propeller zum Anbringen/Sichern in die Pfeilrichtung.
Propeller anbringen
Bringen Sie die Propeller mit den weißen Ringen an der Montageplatte mit den weißen Markierungen an.
Drücken Sie den Propeller nach unten auf die Montageplatte, und drehen Sie ihn in Verriegelungsrichtung,
bis er fest sitzt. Bringen Sie die Propeller ohne Markierungen an den Montageplatten ohne Markierungen
an. Klappen Sie die Propellerblätter aus.
Markiert Nicht markiert
Propeller abnehmen
Drücken Sie die Propeller nach unten auf die Motormontageplatte, und drehen Sie sie in Löserichtung.
Propellerblätter sind scharfkantig. Handhaben Sie sie mit großer Vorsicht.
Verwenden Sie nur von DJI zugelassene Propeller. Verwenden Sie stets Propeller des gleichen Typs.
Halten Sie sich von drehenden Motoren fern. Berühren Sie niemals drehende Propeller.
Vergewissern Sie sich vor jedem Flug, dass die Propeller und Motoren fest und richtig befestigt sind.
Vergewissern Sie sich vor jedem Flug, dass die Propeller in gutem Zustand sind. Alte, beschädigte
oder defekte Propeller dürfen nicht verwendet werden.
Zum Schutz vor Verletzungen müssen Sie ausreichend Abstand zu den Propellern halten, und Sie
dürfen die drehenden Propeller nicht berühren.
Verwenden Sie ausschließlich DJI-Originalpropeller. Nur so ist der störungsfreie, sichere Flugbetrieb
gewährleistet.
2017 DJI Alle Rechte vorbehalten
26
©
Page 27

Spark Bedienungsanleitung
Intelligent Flight Battery
Einleitung
Die Intelligent Flight Battery von DJI hat eine Kapazität von 1480 mAh, eine Spannung von 11,4 V und
verfügt über eine intelligente Lade-/Entladefunktion. Für den Ladevorgang wird ein geeignetes, von DJI
zugelassenes Ladegerät benötigt.
Intelligent Flight Battery Ladegerät
Die Intelligent Flight Battery muss vor dem ersten Gebrauch komplett geladen sein.
Funktionen der DJI Intelligent Flight Battery
1. Akkuladezustand: Die LED-Ladezustandsanzeige zeigt den aktuellen Akkuladestand an.
2. Automatische Entladung: Um ein Aufblähen des Akkus zu vermeiden, entlädt der Akku sich nach
10 Tagen außer Betrieb automatisch auf unter 70 % seiner Gesamtkapazität. Das Entladen auf 65 %
dauert etwa zwei Tage. Beim Entladen gibt der Akku spürbar Wärme ab.
3. Spannungsangleichung: Beim Ladevorgang werden die Spannungswerte in den einzelnen
Batteriezellen automatisch aneinander angeglichen.
4. Überladeschutz: Der Ladevorgang wird automatisch beendet, sobald der Akku vollständig geladen ist.
5. Temperaturmessung: Der Akku wird nur geladen, wenn die Temperatur zwischen 5 °C und 40 °C liegt.
6. Überstromschutz: Bei hohen Stromstärken (über 3 A) wird der Ladevorgang beendet.
7. Tiefentladungsschutz: Um Schäden durch Tiefentladung zu vermeiden, wird der Entladevorgang
automatisch beendet.
8. Kurzschlussschutz: Bei einem Kurzschluss wird die Spannungszufuhr automatisch unterbrochen.
9. Ruhemodus: Der Akku schaltet die Stromversorgung nach 20 Minuten Inaktivität ab, um Strom zu sparen.
Nach sechs Stunden Inaktivität schaltet der Akku in den Ruhemodus, wenn der Akkuladezustand 10 %
unterschreitet. Auf diese Weise wird die Tiefentladung verhindert. Die Ladezustandanzeigen des Akkus
leuchten nicht. Sobald der Akku aufgeladen wird, wird der Ruhemodus beendet.
10. Kommunikation: Akkuspannung, Kapazität, Stromstärke usw. werden an das Flugsteuergerät des
Fluggeräts gesendet.
Lesen Sie vor dem Gebrauch die Sicherheitsvorschriften zur Intelligent Flight Battery für die Spark.
Der Anwender des Geräts ist allein verantwortlich für alle Vorgänge und Einsätze.
2017 DJI Alle Rechte vorbehalten
©
27
Page 28

Spark Bedienungsanleitung
Funktionen des Akkus
Ein- und Ausschalten (ON/OFF)
Einschalten: Um das Gerät einzuschalten, drücken Sie die Einschalttaste einmal und halten Sie diese
anschließend für zwei Sekunden gedrückt. Auf dem Statusbildschirm der Fernbedienung wird der aktuelle
Akkuladezustand angezeigt.
Ausschalten: Um den Akku auszuschalten, drücken Sie erneut die Einschalttaste einmal und halten Sie
diese anschließend für zwei Sekunden gedrückt.
Akkuladezustandsanzeigen
LED1
LED2
LED3
LED4
Ein/Aus-Taste
Bei Kälte beachten:
1. Beim Flugbetrieb in kalten Umgebungen (0° C bis 5° C) ist die Kapazität des Akkus erheblich
eingeschränkt.
2. Die Akkus können nicht bei niedrigen Temperaturen (unter 0 °C) verwendet werden.
3. Beenden Sie den Flugbetrieb sofort, wenn die „DJI GO 4“-App bei Kälte die Meldung „Warnung!
Akkuladezustand sehr niedrig“ anzeigt.
4. Damit der Akku optimal funktioniert, ist die Temperatur des Akkugehäuses über 20 °C zu halten.
Setzen Sie den Akku bei Kälte in das Batteriefach, und schalten Sie das Fluggerät zum Warmlaufen
vor dem Abiegen etwa 1 bis 2 Minuten ein.
Überprüfen des Akkuladezustands
An der Akkuladezustandsanzeige ist zu erkennen, wie viel Restenergie der Akku noch hat. Drücken Sie
im ausgeschalteten Zustand des Akkus einmal die Ein/Aus-Taste. Die LEDs zeigen den Ladezustand an.
Nähere Informationen nden Sie unten.
Auch beim Laden und Entladen zeigen die Leuchten den Akkuladezustand an. Legende zu den
Leuchten:
: LED eingeschaltet : LED blinkt.
: LED ausgeschaltet
LED1 LED2 LED3 LED4 Akkuladezustand
88 % bis 100 %
75 % bis 88 %
63 % bis 75 %
50 % bis 63 %
38 % bis 50 %
25 % bis 38 %
13 % bis 25 %
0 % bis 13 %
2017 DJI Alle Rechte vorbehalten
28
©
Page 29

Spark Bedienungsanleitung
Intelligent Flight Battery laden
1. Schließen Sie das Ladegerät an eine Spannungsquelle an (100–240 V, 50/60 Hz).
2. Verbinden Sie den Micro-USB-Anschluss an der Spark mit dem Ladegerät, um den Ladevorgang zu
beginnen.
3. Beim Laden und Entladen zeigen die Akkuladezustandsanzeigen den Akkuladezustand an.
4. Wenn alle Leuchten erloschen sind, ist die Intelligent Flight Battery vollständig geladen. Das
vollständige Auaden des Akkus dauert circa 1 Stunde und 20 Minuten. Trennen Sie das Ladegerät,
sobald der Akku vollständig geladen ist.
Ladegerät
Im eingeschalteten Zustand darf der Akku nicht eingesetzt oder herausgenommen werden.
Warten Sie, bis der Akku Zimmertemperatur hat, bevor Sie ihn für längere Zeit lagern.
Wenn die Akkuzellentemperatur außerhalb des Betriebsbereichs (5 °C bis.40 °C) liegt, beendet das
Ladegerät den Ladevorgang.
LED1 LED2 LED3 LED4 Akkuladezustand
Steckdose
0 % bis 50 %
50 % bis 75 %
75 % bis 100 %
Vollständig geladen
LED-Zustände bei aktiver Schutzeinrichtung
In der folgenden Tabelle sind die Akkuschutzeinrichtungen und die entsprechenden LED-Zustände
dargestellt.
LED1 LED2 LED3 LED4 Blinkfolge Akkuschutzeinrichtung
LED 2 blinkt zweimal pro Sekunde. Überstrom
LED 2 blinkt dreimal pro Sekunde. Kurzschluss
LED 3 blinkt zweimal pro Sekunde. Überladung
LED 3 blinkt dreimal pro Sekunde.
LED 4 blinkt zweimal pro Sekunde. Ladetemperatur zu niedrig
LED 4 blinkt dreimal pro Sekunde. Ladetemperatur zu hoch
Überhöhte Spannung am
Ladegerät
2017 DJI Alle Rechte vorbehalten
©
29
Page 30

Spark Bedienungsanleitung
Nachdem Sie die Störungen behoben haben, drücken Sie die Ein/Aus-Taste, um die Akkuladezustandsanzeigen
auszuschalten. Trennen Sie die Intelligent Flight Battery vom Ladegerät, und schließen Sie sie wieder an,
um den Ladevorgang fortzusetzen. Bei Fehlermeldungen, die mit der Zimmertemperatur zusammenhängen,
müssen Sie das Ladegerät nicht aus- und wieder einstecken, da der Ladevorgang automatisch fortgesetzt
wird, sobald die Temperatur wieder den zulässigen Bereich erreicht.
DJI haftet nicht für Schäden, die durch Ladegeräte von Fremdherstellern verursacht werden.
Entladen der Intelligent Flight Batteries vor längeren Reisen:
Fliegen Sie den Spark im Freien, bis die Ladung unter 30 % sinkt, oder der Akku sich nicht mehr
einschalten lässt.
Gimbal und Kamera
Gimbal
Prol
Der 2-achsige mechanische Gimbal der Spark ist eine stabile Halterung für die Kamera, damit Sie
Fotos und Videos aufnehmen können, ohne das die Aufnahmen verwackeln. Der Gimbal hat einen
Neigungswinkel von 85°.
Im Kameramodus halten Sie den Bildschirm gedrückt, bis ein blauer Kreis angezeigt wird. Ziehen Sie den
Kreis nach links oder rechts, um die Richtung des Fluggeräts zu steuern. Ziehen Sie den Kreis nach oben
und unten, um die Neigung der Kamera zu steuern.
0°
-85°
Gimbal-Betriebsarten
Der Gimbal bietet zwei Betriebsarten. In den Kameraeinstellungen der „DJI GO 4“-App können Sie
zwischen diesen Betriebsarten umschalten.
Folgemodus Die Rollachse ist jederzeit eben.
FPV-Modus
Starten Sie immer auf ebenen, freien Flächen, und halten Sie den Gimbal jederzeit geschützt.
In einigen Fällen kann es zu einer Störung am Gimbal-Motor kommen:
(1) Das Fluggerät wurde auf einer unebenen Oberäche abgestellt, oder der Gimbal ist in seiner
Bewegungsfreiheit eingeschränkt.
(2) Der Gimbal wurde einer zu starken äußeren Krafteinwirkung ausgesetzt, z. B. bei einer
Kollision.
Im Flugbetrieb bei dichter Nebelbildung oder Bewölkung kann der Gimbal feucht werden und
kurzzeitig ausfallen. Nach dem Abtrocknen funktioniert der Gimbal wieder einwandfrei.
Der Gimbal schaltet automatisch in den FPV-Modus, wenn das Fluggerät im Sportmodus ist.
2017 DJI Alle Rechte vorbehalten
30
©
Der Gimbal passt sich den Bewegungen des Fluggeräts an und simuliert
dadurch eine Ich-Perspektive (FPV,
First-Person-View
).
Page 31

Spark Bedienungsanleitung
Kamera
Prol
Die Kamera hat einen 1/2,3-Zoll-CMOS-Sensor für Videoaufnahmen bis 1080p bei 30 fps und
12-Megapixel-Standbildern. Sie können die Videos im MP4-Format aufzeichnen. Die verfügbaren
Aufnahmemodi sind: Einzelaufnahme, Serienaufnahme, Intervall, Panorama und Bokeh Das Live-Bild der
Kamera können Sie am angeschlossenen Mobilgerät in der „DJI GO 4“-App verfolgen.
Einschub für die Micro-SD-Karte
Um Fotos und Videos zu speichern, stecken Sie die Micro-SD-Speicherkarte, wie nachstehend
gezeigt, vor dem Einschalten des Fluggeräts in den Steckplatz. Die Spark unterstützt Micro-SD-Karten
bis 64 GB. Wir empfehlen eine Micro-SD-Speicherkarte des Typs UHS-1, da die hohen Lese- und
Schreibgeschwindigkeiten dieser Karten auch für hochauösende Videodaten geeignet sind.
Bei eingeschaltetem Fluggerät darf die Micro-SD-Karte NICHT entfernt werden.
Um die Stabilität des Kamerasystems zu gewährleisten, ist die Länge der einzelnen
Aufzeichnungen auf 30 Minuten begrenzt.
Infolge der Systemeinschränkungen können auf Mac-Computern nur Micro-SD-Karten bis
maximal 32 GB verwendet werden.
Die Aufnahmen können auch dann auf dem Mobilgerät gespeichert werden, wenn keine SD-
Karten vorhanden sind oder die SD-Karte voll ist. Beachten Sie die Auösung von 1024 x 768 für
Fotos und 1280 x 720 für Videos.
Kameradatenanschluss
Wenn Sie Fotos und Videos von der Kamera auf den Computer kopieren möchten, schalten Sie die Spark
ein, und schließen Sie ein USB-Kabel an den Micro-USB-Anschluss an.
Das Fluggerät muss eingeschaltet sein, bevor Sie auf die Dateien auf der Micro-SD-Karte
zugreifen können.
Steuerung des Fluggeräts mit einem Mobilgerät
Sie können ein Mobilgerät über WLAN verbinden, um das Fluggerät über DJI GO 4 zu steuern. Befolgen
Sie hierzu die nachstehenden Anweisungen.
1. Schalten Sie das Fluggerät ein.
2. Schalten Sie das WLAN am Mobilgerät ein, wählen Sie das Spark-Netzwerk, und geben Sie das WLANPasswort ein.
3. Starten Sie DJI GO 4. Berühren Sie „GO FLY“, um den Kameramodus zu öffnen.
4. Tippen Sie auf , um den Flug automatisch zu starten. Legen Sie beide Daumen auf den Bildschirm,
und verwenden Sie die virtuellen Joysticks, um das Fluggerät zu manövrieren.
2017 DJI Alle Rechte vorbehalten
©
31
Page 32

Spark Bedienungsanleitung
Die WLAN-Frequenz Ihres Mobilgeräts kann auf 2,4 GHz (Standardeinstellung) oder 5,8
GHz eingestellt werden. Stellen Sie das WLAN nach Möglichkeit auf 5,8 GHz ein, um die
Störungsanfälligkeit zu verringern.
Um den WLAN-Namen und das Passwort zurückzusetzen, halten Sie die Netztaste neun (9)
Sekunden gedrückt bzw. länger, bis Sie drei Pieptöne hören. Setzen Sie die WLAN-Frequenz
dann auf 2,4 GHz zurück. Oder berühren Sie in der „DJI GO 4“App „Help“, und befolgen Sie die
Anweisungen.
Fliegen Sie mit einer WLAN-Verbindung ausschließlich in weiten, offenen Bereichen mit relativ
geringen elektromagnetischen Störungen. Wenn Ihre Verbindung durch Interferenzen gestört
wird, empfehlen wir, dass Sie stattdessen mit der Fernbedienung iegen oder in einen Bereich
mit weniger Interferenzen wechseln.
Steuerung mit den virtuellen Joysticks
Vergewissern Sie sich, dass das Mobilgerät mit dem Fluggerät gekoppelt ist, bevor Sie mit den virtuellen
Joysticks arbeiten. Die Grak unten zeigt den Modus 2 (linker Hebel = Gashebel).
12
In flight (GPS)
P-GPS
09:29
61%
2.4G
Bedienoberäche für die virtuellen Joysticks
Durch Drücken auf die linke Bildschirmhälfte können Sie das Fluggerät nach oben oder unten, links oder
rechts bewegen. Bewegen Sie das Fluggerät vorwärts, rückwärts oder seitlich, indem Sie auf die rechte
Bildschirmhälfte drücken.
Tippen Sie auf „ ", um die virtuellen Joysticks zu aktivieren bzw. zu deaktivieren.
Auch der Bereich außerhalb der weißen Kreise reagiert auf Ihre Steuerbefehle.
2017 DJI Alle Rechte vorbehalten
32
©
Page 33

Spark Bedienungsanleitung
Fluggerät bedienen
Dieser Abschnitt erläutert die Steuerung des Fluggeräts. Die Steuerungen können auf Modus 1, Modus 2,
Modus 3 oder einen benutzerdenierten Modus eingestellt werden.
Modus 1
Modus 2
Modus 3
Linker Hebel
Vorwärts
Rückwärts
RechtsdrehungLinksdrehung
Rechter Hebel
Rechter HebelLinker Hebel
Steigflug
Sinkflug
RechtsdrehungLinksdrehung
Linker Hebel Rechter Hebel
Vorwärts
Steigflug
Sinkflug
RechtsLinks
Vorwärts
Rückwärts
RechtsLinks
Steigflug
Rückwärts
RechtsLinks
Die Fernbedienung bendet sich standardmäßig im Modus 2.
Hebel in Neutralstellung in Mittellage: Steuerhebel sind mittig.
Hebel bewegen: Die Steuerhebel werden aus der Mittellage in eine andere Position bewegt.
2017 DJI Alle Rechte vorbehalten
©
Sinkflug
RechtsdrehungLinksdrehung
33
Page 34

Spark Bedienungsanleitung
Virtuelle Joysticks/
Fernbedienung
(Modus 2)
Linker Hebel
Linker Hebel
Rechter Hebel
Rechter Hebel
Fluggerät
(
Fluglage)
Bemerkung
Durch senkrechtes Verstellen des linken Hebels
wird die Flughöhe geändert.
Hebel nach oben = Steigug, Hebel nach unten =
Sinkug
Beide Hebel in Mittellage = Spark schwebt auf der
Stelle.
Je weiter der Steuerhebel aus der Mittellage
bewegt wird, desto schneller ändert die Spark die
Flughöhe. Hebel stets sanft betätigen, um abrupte/
unerwartete Flughöhenänderungen zu vermeiden.
Durch waagrechtes Verstellen des linken Hebels
wird der Gierwinkel geändert (Seitenruder).
Hebel nach links = Drehung gegen den
Uhrzeigersinn, Hebel nach rechts = Drehung im
Uhrzeigersinn. In der Mittellage bleibt die Spark in
der aktuellen Richtung.
Je weiter der Hebel aus der Mittellage bewegt
wird, desto schneller dreht sich die Spark.
Durch senkrechtes Verstellen des rechten Hebels
wird der Nickwinkel geändert.
Hebel nach oben = vorwärts, Hebel nach unten =
rückwärts
Stelle.
Je weiter der Hebel aus der Mittellage bewegt wird,
desto größer der Nickwinkel (max. 30˚) und desto
höher die Fluggeschwindigkeit.
Durch waagrechtes Verstellen des rechten Hebels
wird die Neigung nach links und rechts geändert.
Hebel nach links = nach links iegen, Hebel nach
rechts = nach rechts iegen In Mittellage schwebt
die Spark auf der Stelle.
In Mittellage schwebt die Spark
auf der
2017 DJI Alle Rechte vorbehalten
34
©
Page 35

Fernbedienung
(optional)
In diesem Kapitel werden die Funktionen
der Fernbedienung und die Bedienung
von Fluggerät und Kamera beschrieben.
2017 DJI Alle Rechte vorbehalten
©
35
Page 36

Fernbedienung (optional)
Beschreibung der Fernbedienung
Die Fernbedienung verfügt über ein brandneues WLAN-Signalübertragungssystem, mit dem es möglich ist,
das Fluggerät und die Gimbal-Kamera mit einer maximalen Übertragungsreichweite von 2 km* zu steuern.
Die Fernbedienung kann eine drahtlose Verbindung zum Mobilgerät herstellen und so einen Live-VideoFeed über die „DJI GO 4“-App zum Benutzer übertragen. Mit dem Klappbügel können Sie Ihr Mobilgerät
befestigen. Der Akku der Fernbedienung hält ca. 2,5 Stunden*.
1
2
3
4
11
1. Rückkehrtaste
Halten Sie diese Taste gedrückt, um die
Rückkehrfunktion (RTH) zu aktivieren. Zum
Abbrechen der Rückkehrfunktion drücken Sie
die Taste erneut.
2. Flugpausentaste
Drücken Sie die Taste einmal, um eine
Notbremsung einzuleiten.
3. Netzanschluss (Micro-USB)
Stellt die Verbindung zum Ladegerät her, um
den Akku der Fernbedienung zu laden.
4. Mobilgeräteklammern
Dient zur sicheren Befestigung des Mobilgeräts
an der Fernbedienung.
5. Funktionstaste
Menü „DJI GO 4 Intelligent Flight Modes“ öffnen
6. Steuerhebel
Fluglage und Bewegungen des Fluggeräts
steuern
7. Ein/Aus-Taste
Drücken Sie die Ein-/Aus-Taste einmal, um
den aktuellen Akkuladezustand zu prüfen.
Drücken Sie die Taste noch einmal, und halten
Sie sie gedrückt, um die Fernbedienung ein-/
auszuschalten.
10
9
8
7
6
12
5
14
8. Akkuladezustands-LEDs
Diese zeigen den Ladezustand des Akkus in
der Fernbedienung an.
9. Flugmodusschalter
Schaltet zwischen Modus „P“ und Modus „S“ um.
10. Antennen
Übertragung von Flugsteuersignal und
Videosignal
11. Status-LED
Zeigt den Systemzustand der Fernbedienung
an.
12. Gimbal-Rädchen
Steuerung der Kameraneigung
13. Frei belegbare Taste
Verschiedene Funktionen, basierend auf den
Einstellungen in „DJI GO 4“-App
14. Videotaste
Startet und beendet die Videoaufzeichnung.
15. Fototaste
Dient als Auslöser für die Fotokamera-Funktion.
13
15
* Die Fernbedienung erreicht Ihre maximale Übertragungsreichweite (FCC) auf offenem Gelände ohne
elektromagnetische Störquellen und bei einer Flughöhe von ca. 120 Metern. Die maximale Flugzeit wurde
ohne Wind und bei einer konstanten Geschwindigkeit von 20 km/h getestet. Diese Angabe dient nur als
Richtwert.
2017 DJI Alle Rechte vorbehalten
36
©
Page 37

Spark Bedienungsanleitung
Compliance-Standards:
Hebelmodus:
eingestellt werden.
Die Steuerungen können auf Modus 1, Modus 2 oder benutzerdenierter Modus
Die Fernbedienung erfüllt die lokalen Vorschriften und Richtlinien.
Gebrauch der Fernbedienung
Die Fernbedienung wird mit einem Akku mit 2970 mAh Kapazität betrieben.
Fernbedienung ein- und ausschalten
Drücken Sie die Ein-/Aus-Taste einmal, um den aktuellen Akkuladezustand zu prüfen. Drücken Sie die
Taste noch einmal, und halten Sie sie gedrückt, um die Fernbedienung ein-/auszuschalten.
Akku laden
Verbinden Sie den Netzanschluss an der Fernbedienung mit dem USB-Ladegerät, um den Akku
aufzuladen. Das vollständige Auaden der Fernbedienung nimmt ca. zwei (2) Stunden in Anspruch.
Kamera steuern
Mit der Fototaste, der Videotaste und dem Kamerarädchen an der Fernbedienung können Sie Videos
aufzeichnen, Fotos machen, die Kameraeinstellungen ändern und die Kameraneigung anpassen.
Fluggerät bedienen
Der Hebelmodus ist mit der Einstellung für die virtuellen Joysticks identisch.
2017 DJI Alle Rechte vorbehalten
©
37
Page 38

Spark Bedienungsanleitung
Flugmodusschalter
Mit diesem Schalter können Sie den gewünschten
Flugmodus auswählen. Schaltet zwischen Modus „P“
und Modus „S“ um.
Stellung Flugmodus
SPORT
SPORT
Modus „P“
Modus „S“
Rückkehrtaste
Wenn Sie die Rückkehrtaste gedrückt halten, fliegt das Fluggerät automatisch den Startpunkt an
(Rückkehrfunktion). Das Fluggerät iegt den zuletzt aufgezeichneten Startpunkt an. Wenn Sie diese Taste
erneut drücken, wird die Rückkehr abgebrochen, und Sie können das Fluggerät wieder steuern.
Optimaler Sendebereich
Das Sendesignal zwischen Fluggerät und Fernbedienung erreicht die höchste Zuverlässigkeit, wenn die
Antennen relativ zum Fluggerät ausgerichtet sind. Siehe nachstehende Abbildung:
Optimaler Sendebereich
stark schwach
Halten Sie das Fluggerät stets im optimalen Sendebereich. Für die Beibehaltung der optimalen
Sendeleistung passen Sie die Fernbedienung und die Antennen entsprechend den Angaben im
vorstehenden Diagramm an.
Verbindung zum Fluggerät herstellen
Wenn Sie die Spark Combo (mit enthaltener Fernbedienung) erwerben, werden Fluggerät und
Fernbedienung vor dem Versand gekoppelt. Zum Koppeln einer Fernbedienung mit dem Spark befolgen
Sie bitte folgende Anweisungen:
1. Schalten Sie Fluggerät und Fernbedienung ein. Warten Sie, bis die Statusleuchten des Fluggeräts gelb
blinken.
2. Halten Sie die Ein/Aus-Taste der Intelligent Flight Battery drei Sekunden lang gedrückt. Lösen Sie die
Taste, sobald Sie einen einzelnen Piepton hören. Die vorderen LEDs blinken rot.
3. Halten Sie die Flugpausentaste, die Funktionstaste und die frei belegbare Taste gleichzeitig gedrückt.
Die Kopplung beginnt, sobald der Alarm nach einem abwechselnd einzelnen/doppelten Ton einmal
schnell ertönt.
2017 DJI Alle Rechte vorbehalten
38
©
Page 39

Spark Bedienungsanleitung
4. Die vorderen LEDs leuchten anschließend durchgehend rot, nachdem sie zuvor grün geblinkt haben.
Wenn die Status-LED der Fernbedienung durchgehend grün leuchtet, ist das Koppeln abgeschlossen.
Vergewissern Sie sich, dass die Fernbedienung sich während des Koppelns in einem Radius von
20 cm zum Fluggerät bendet.
Trennen der Fernbedienung
Nebst der Fernbedienung können Sie das Fluggerät auch über die virtuellen Joysticks in DJI GO 4 steuern.
Wenn jedoch eine Fernbedienung mit dem Fluggerät gekoppelt ist, ist die Steuerung über die virtuellen
Joysticks deaktiviert. Um die virtuellen Joysticks zu verwenden, müssen Sie Fernbedienung und Fluggerät
trennen.
1. Schalten Sie das Fluggerät ein.
2. Halten Sie die Ein/Aus-Taste der Intelligent Flight Battery sechs Sekunden gedrückt, bis Sie einen
doppelten Piepton hören. Dieser verweist darauf, dass Fernbedienung und Fluggerät getrennt wurden.
Verbinden Sie das WLAN-Netzwerk des Fluggeräts nach der Trennung der Fernbedienung. Nun können
Sie die virtuellen Joysticks verwenden.
2017 DJI Alle Rechte vorbehalten
©
39
Page 40

„DJI GO 4“-App
Dieser Abschnitt beschreibt die
Hauptfunktionen der „DJI GO 4“-App.
2017 DJI Alle Rechte vorbehalten
40
©
Page 41

„DJI GO 4“-App
Mit dieser App können Sie den Gimbal, die Kamera und andere Funktionen des Fluggeräts steuern. Die
App bietet in den Bereichen „Equipment“, „Editor“, „SkyPixel“ und „Me“ Tools zum Kongurieren Ihres
Fluggeräts sowie zum Bearbeiten und Teilen Ihrer Fotos und Videos.
Ausstattung
Öffnen Sie das Kameramenü durch Berühren von „GO FLY“ auf der Equipment-Seite, sobald Ihr Mobilgerät
mit dem Fluggerät verbunden ist.
Kameramenü
8 97654321
12
22
21
20
In flight (GPS)
P-GPS
09:29
2.4G
1080P/30
61%
10
11
12
13
14
19
18
H 9.6
S 1.1D 9.6
17
15
16
1. Systemstatus
Während des Fluges (GPS)
: Das Symbol zeigt den Flugzustand des Fluggeräts sowie verschiedene Warnmeldungen an.
2. Status der Hinderniserkennung
: Wenn sich das Fluggerät in der Nähe eines Hindernisses aufhält, werden rote Balken
angezeigt. Wenn sich das Hindernis im Erfassungsbereich bendet, werden orangefarbene Balken
angezeigt.
3. Akkuladezustandsanzeige
: Zeigt den jeweils aktuellen Akkuladezustand an. Die Farbbereiche an der Akkuladezustandsanzeige
geben den erforderlichen Ladezustand für die verschiedenen Funktionen an.
4. Flugmodus
: Neben diesem Symbol wird der aktuelle Flugmodus als Text angezeigt.
Tippen Sie das Symbol an, um die Einstellungen des Flugsteuergeräts (Main Controller) zu
kongurieren. Hier können Sie Grenzwerte für den Flugbetrieb einrichten und die Verstärkungswerte
einstellen.
2017 DJI Alle Rechte vorbehalten
©
41
Page 42

Spark Bedienungsanleitung
5. Kameraparameter
1080P/30
Zeigt die Kameraeinstellungen und die Speicherkapazität der Micro-SD-Karte an. Aktivieren Sie die
Anzeige der Kameraparameter in den Kameraeinstellungen.
6. GPS-Signalstärke
: Zeigt die Stärke des GPS-Signals. Weiße Balken bedeuten eine ausreichende GPS-Signalstärke.
7. 3D-Sensorsystemstatus
: Tippen Sie auf dieses Symbol, um die Funktionen des 3D-Sensorsystems zu aktivieren bzw. zu
deaktivieren.
8. WLAN-Einstellungen
: Berühren, um das WLAN-Einstellungsmenü zu öffnen.
2.4G
9. Akkuladezustand
: An diesem Symbol ist der aktuelle Akkuladezustand zu erkennen.
61
%
Wenn Sie hier tippen, wird ein Menü mit Informationen zum Akku geöffnet, in dem Sie die verschiedenen
Warnschwellen für den Akkuladezustand einstellen und den Verlauf der Akkuwarnmeldungen einsehen
können.
10. Allgemeine Einstellungen
: Mit diesem Symbol öffnen Sie die allgemeinen Einstellungen, in denen Sie Metriken einstellen,
einen Livestream aktivieren, Flugrouten anzeigen können und vieles mehr.
11. Gimbal: Nicken/Verfolgen
: Passen Sie die Gimbal-Neigung durch Drehen Ihres Mobilgeräts an, nachdem Sie dieses Symbol
berührt haben.
12. Gimbal-Schieber
: Zeigt die Neigung des Gimbals an.
13. Umschalten zwischen Foto/Video
: Mit diesem Symbol schalten Sie zwischen Foto- und Videoaufnahme um.
14. Foto-/Videotaste
/
: Mit diesem Symbol nehmen Sie das Foto auf bzw. starten die Videoaufzeichnung.
15. Kameraeinstellungen
: Berühren, um das Kameraeinstellungsmenü zu öffnen.
Berühren Sie , um ISO, Belichtungszeit und Belichtungsreihe der Kamera einzustellen.
Berühren Sie , um Fotoaufnahmen auszuwählen. Spark unterstützt Einzelaufnahmen,
Serienaufnahmen, Intervallaufnahmen, Pano und Bokeh.
Berühren Sie , um das Kameraeinstellungsmenü zu öffnen.
2017 DJI Alle Rechte vorbehalten
42
©
Page 43

Spark Bedienungsanleitung
Beachten Sie bei Bokeh-Fotoaufnahmen bitte Folgendes:
Der Modus ist für Standbildaufnahmen geeignet. Bewegen Sie sich nicht, wenn Sie in diesem
Modus Personen aufnehmen, sonst können Sie ggf. kein Bokeh-Foto machen.
Vor der Aufnahme hebt das Fluggerät circa 20 cm ab. Vergewissern Sie sich, dass sich über
dem Fluggerät keine Hindernisse benden.
Der geeignete Aufnahmebereich liegt innerhalb von 30 m.
16. Wiedergabe
: Berühren Sie das Symbol, um das Wiedergabemenü zu öffnen, damit Sie Ihre Fotos und Videos
direkt nach der Aufnahme einsehen können.
17. Flugtelemetrie
H 9,6M
D 9,6M
S 1,1M/S
18. Virtueller Joystick-Schalter
Finger auf den Bildschirm, um das Fluggerät nach der Aktivierung dieses Schalters mit virtuellen
Joysticks zu steuern. Wenn Sie diesen Schalter deaktivieren, können Sie den Bildschirm auch für
andere Vorgänge berühren.
19. Intelligenter Flugmodus
20. Intelligente Rückkehrfunktion (RTH)
zuletzt aufgezeichneten Startpunkt zurück.
: Höhe über Boden
: Entfernung des Fluggeräts vom Startpunkt
: Geschwindigkeit des Fluggeräts
: Berühren Sie das Symbol, um die virtuellen Joysticks zu aktivieren/deaktivieren. Legen Sie die
: Mit diesem Symbol wählen Sie die intelligenten Flugmodi.
: Rückkehrvorgang wird eingeleitet. Wenn Sie dieses Symbol antippen, iegt das Fluggerät zum
21. Automatisches Starten/Landen
/ : Wenn Sie dieses Symbol antippen, wird die automatische Start- und Landefunktion aktiviert.
22. Zurück
: Dieses Symbol führt Sie wieder zum Hauptmenü.
Im Kameramodus halten Sie den Bildschirm gedrückt, bis ein blauer Kreis angezeigt wird. Ziehen
Sie den Kreis nach links oder rechts, um die Richtung des Fluggeräts zu steuern. Ziehen Sie den
Kreis nach oben und unten, um die Neigung der Kamera zu steuern.
2017 DJI Alle Rechte vorbehalten
©
43
Page 44

Spark Bedienungsanleitung
Verfasser
Die „DJI GO 4“-App enthält ein intelligentes Video-Bearbeitungsprogramm. Nachdem Sie mehrere
Videoclips aufgenommen und auf das Mobilgerät heruntergeladen haben, öffnen Sie den Editor auf der
Startseite. Dann können Sie eine Vorlage und eine vorgegebene Anzahl Clips auswählen, aus denen
automatisch ein kurzer Film zusammengestellt wird, den Sie sofort teilen können.
SkyPixel
Auf der SkyPixel-Seite können Sie Ihre Fotos und Videos ansehen und teilen.
„Me“
Wenn Sie bereits ein DJI-Konto haben, können Sie an Forumsdiskussionen teilnehmen und Ihr Bildmaterial
mit der Community teilen.
2017 DJI Alle Rechte vorbehalten
44
©
Page 45

Flug
Dieser Abschnitt enthält Informationen
zum Thema Flugsicherheit und
Fluggrenzen.
2017 DJI Alle Rechte vorbehalten
©
45
Page 46

Flug
Sobald das Fluggerät für den ersten Einsatz vorbereitet ist, sollten Sie mit dem Flugsimulator in der
„DJI GO 4“-App Ihre Flugkünste trainieren und das sichere Fliegen üben. Fliegen Sie nur in offenen
Bereichen!
Anforderungen an die Flugumgebung
1. Betreiben Sie das Fluggerät nicht bei widrigen Wetterverhältnissen (Windgeschwindigkeiten von über
10 m/s, Schnee, Regen, Nebel usw.).
2. Fliegen Sie in offenen Bereichen. Hohe Gebäude und Stahlbauten können den Bordkompass und das
GPS-System stören.
3. Überfliegen Sie nach Möglichkeit keine Hindernisse, Menschenmengen, Hochspannungsleitungen,
Bäume und Gewässer.
4. Halten Sie Störstrahlung möglichst gering: Vermeiden Sie Bereiche mit erhöhter elektromagnetischer
Strahlung wie Basisstationen oder Funkmasten.
5. Betreiben Sie das Fluggerät nicht bei zu großen Höhenunterschieden (z.B. Flüge aus einem Gebäude
nach draußen), schwachem GPS-Signal, oder Interferenzen. Diese Faktoren beeinträchtigen die
Flugsicherheit maßgeblich.
6. Die Leistung des Fluggeräts und der Batterie ist abhängig von Umgebungsbedingungen wie Luftdichte
und Lufttemperatur. Ab einer Flughöhe von 4.000 m über N.N. wird die Leistung von Akku und Fluggerät
möglicherweise beeinträchtigt.
7. In Polarregionen darf der Spark nicht im Modus „P“ betrieben werden.
Fluggrenzen und Flugverbotszonen
Betreiber unbemannter Luftfahrzeuge müssen sich nach allen gesetzlichen und behördlichen
Vorschriften richten. Hierzu zählen auch die internationalen Zivilluftfahrtorganisation ICAO und FAA.
Aus Sicherheitsgründen sind die Flüge standardmäßig begrenzt, damit Sie das Produkt sicher und
legal betreiben können. Zu den Flugbegrenzungen gehören unter anderem Flughöhe, Flugradius und
Flugverbotszonen.
Im Modus „P“ ist der Flugbetrieb aus Sicherheitsgründen in Höhe und Radius sowie durch
Flugverbotszonen eingeschränkt.
Flughöhen- und Flugradiusbegrenzung
Flughöhen- und Flugradiusbegrenzung können in der „DJI GO 4“-App geändert werden. Bitte denken Sie
daran, dass die maximale Flughöhe 500 m nicht überschreiten darf! Mit diesen Einstellungen iegt der
Spark nur innerhalb des unten dargestellten zylindrischen Bereichs:
2017 DJI Alle Rechte vorbehalten
46
©
Maximale Flughöhe
Maximaler Flugradius
Startpunkt
Flughöhe beim Einschalten
Page 47

Spark Bedienungsanleitung
GPS-Signal stark
Fluggrenzen „DJI GO 4“-App
Maximale
Flughöhe
Maximaler
Flugradius
GPS-Signal schwach
Maximale
Flughöhe
Maximaler
Flugradius
Außerhalb des Grenzbereichs lässt sich das Fluggerät zwar weiterhin steuern, aber nicht weiter
vom Standort des Piloten entfernen.
Fliegen Sie aus Sicherheitsgründen nie in der Nähe von Flugplätzen, Flughäfen, Schnellstraßen,
Autobahnen, Bahnhöfen, Bahnstrecken, Stadtzentren oder ähnlichen sicherheitskritischen
Bereichen. Behalten Sie das Fluggerät stets im Blick.
Die Flughöhe darf den
Vorgabewert nicht überschreiten.
Die Entfernung muss innerhalb
des maximalen Flugradius liegen.
Fluggrenzen „DJI GO 4“-App
Bei schwachem GPS-Signal und
aktiviertem Optiksystem ist die
Höhe auf 5 Meter begrenzt. Bei
schwachem GPS-Signal und
deaktiviertem Optiksystem ist die
Höhe auf 30 Meter begrenzt.
Keine Einschränkung
Warnung: Maximale
Flughöhe erreicht.
Warnung: Maximale
Entfernung erreicht.
Warnung: Maximale
Flughöhe erreicht.
Statusanzeige des
Fluggeräts
---
Statusanzeige des
Fluggeräts
---
Flugverbotszonen
Alle Flugverbotszonen sind auf der offiziellen DJI-Website aufgeführt: http://www.dji.com/flysafe/nofly. Flugverbotszonen sind in Flughäfen und Flugbeschränkungsgebiete unterteilt. Unter die Flughäfen
fallen alle größeren Flughäfen und Flugplätze, in deren Bereich bemannte Flugzeuge auf niedriger Höhe
unterwegs sind. Flugbeschränkungsgebiete umfassen Landesgrenzen oder Bereiche, in welchen Flüge
ein Sicherheitsproblem darstellen können.
Checkliste für die Flugvorbereitung
1. Die Akkus für Fernbedienung und Mobilgerät sowie die Intelligent Flight Battery sind vollständig
geladen.
2. Die Propeller sind ordnungsgemäß und sicher befestigt.
3. Die Micro-SD-Speicherkarte wurde ggf. eingesetzt.
4. Der Gimbal funktioniert einwandfrei.
5. Die Motoren lassen sich starten und arbeiten einwandfrei.
6. Die „DJI GO 4“-App ist mit dem Fluggerät gekoppelt.
7. Vergewissern Sie sich, dass die Sensoren für das 3D-Sichtsystem und das Hinderniserfassungssystem
sauber sind.
2017 DJI Alle Rechte vorbehalten
©
47
Page 48

Spark Bedienungsanleitung
Automatisches Starten und Landen
Automatisches Starten
Nur wenn die Statusleuchten des Fluggeräts grün blinken, können Sie das Fluggerät automatisch starten
lassen. Den automatischen Start können Sie wie folgt einleiten:
1. Starten Sie die „DJI GO 4“-App, und tippen Sie auf „GO FLY“, um die Kameraseite zu öffnen.
2. Arbeiten Sie die Checkliste für die Flugvorbereitung durch.
3. Tippen Sie auf „ ”, und vergewissern Sie sich, dass die Flugbedingungen sicher sind. Schieben Sie
den Balken zur Seite, um den Start zu bestätigen.
4. Das Fluggerät startet und schwebt 1,20 m über dem Boden.
Die Statusanzeige des Fluggeräts blinkt schnell, wenn die Stabilisierung durch das Sichtsystem
aktiv ist. Das Fluggerät schwebt selbsttätig in weniger als 30 Metern Höhe. Warten Sie mit dem
automatischen Start, bis das GPS-Signal ausreichend für die Verwendung der automatischen
Startfunktion ist.
Automatische Landung
Nur wenn die Statusleuchten des Fluggeräts grün blinken, können Sie das Fluggerät automatisch landen
lassen. Die automatische Landung können Sie wie folgt einleiten:
1. Tippen Sie auf , um zu prüfen, ob die idealen Landebedingungen erfüllt sind. Betätigen Sie zur
Bestätigung den Schieberegler auf dem Bildschirm.
2. Mit der Schaltäche können Sie die Landung sofort abbrechen.
3. Das Fluggerät landet und schaltet sich automatisch aus.
Motoren ein-/ausschalten (bei Verwendung der Fernbedienung)
Motoren einschalten
Die Motoren werden gestartet, indem Sie beide Steuerhebel (Combination Stick Command) gleichzeitig
betätigen. Drücken Sie beide Hebel schräg in die inneren oder äußeren Ecken, um die Motoren
einzuschalten. Sobald die Motoren zu laufen beginnen, lassen Sie beide Steuerhebel gleichzeitig los.
ODER
Motoren ausschalten
Es gibt zwei Möglichkeiten, die Motoren auszuschalten.
Methode 1: Ziehen Sie nach der Landung den linken Hebel nach unten, und halten ihn in dieser Stellung.
Nach drei Sekunden werden die Motoren ausgeschaltet.
Methode 2: Wenn das Fluggerät gelandet ist, ziehen Sie den linken Hebel nach unten. Betätigen Sie dann
beide Steuerhebel gleichzeitig (wie beim Starten der Motoren, siehe oben) . Die Motoren werden sofort
ausgeschaltet. Sobald die Motoren ausgeschaltet sind, lassen Sie beide Hebel los.
ODER
Methode 1 Methode 2
2017 DJI Alle Rechte vorbehalten
48
©
Page 49

Spark Bedienungsanleitung
Um beide Steuerhebel während des Fluges in einer Notsituation zu verwenden, warten Sie
1,5 Sekunden, um die Motoren im Flug auszuschalten. Wenn Sie die Motoren während des Fluges ausschalten, stürzt das Fluggerät ab.
Testug
Start-/Landeverfahren
1. Stellen Sie das Fluggerät auf einer offenen, ebenen Fläche so ab, dass die Status-LED für den Akkuladezustand
zu Ihnen weisen.
2. Schalten Sie die Intelligent Flight Battery ein.
3. Starten Sie die „DJI GO 4“-App, und öffnen Sie das Kameramenü.
4. Warten Sie, bis die Status-LED am Fluggerät grün blinken. Dies bedeutet, dass der Startpunkt
aufgezeichnet wurde und der Flugbetrieb freigegeben ist. Verwenden Sie automatisches Starten.
5. Verwenden Sie automatisches Landen, um das Fluggerät zu landen.
6. Schalten Sie die Intelligent Flight Battery aus.
Wenn die Status-LED des Fluggeräts im Flugbetrieb schnell gelb blinken, bendet sich das Flug-
gerät im Rückkehrmodus.
Wenn die Status-LED des Fluggeräts im Flugbetrieb langsam oder schnell rot blinken, ist der
Akkuladezustand zu niedrig.
Nähere Fluginformationen erhalten Sie in unseren Video-Tutorials.
Vorschläge und Tipps für Videoaufnahmen
1. Gehen Sie vor jedem Flug die gesamte Checkliste durch.
2. Stellen Sie in der „DJI GO 4“-App die gewünschte Gimbal-Betriebsart ein.
3. Videoaufnahmen sind nur im Modus „P“ möglich.
4. Fliegen Sie immer bei gutem Wetter, und vermeiden Sie das Fliegen bei Regen und starkem Wind.
5. Wählen Sie die Kameraeinstellungen, die Ihren Anforderungen gerecht werden. Das Fotoformat und die
Belichtungskorrektur lassen sich ebenfalls einstellen.
6. Führen Sie Testüge durch, um Flugrouten aufzustellen und um eine Vorschau von Bildszenen zu erstellen.
7. Verschieben Sie die Steuerhebel sanft, um die Bewegungen des Fluggeräts üssig und stabil zu halten.
Kompass kalibrieren
Kalibrieren Sie den Kompass nur dann, wenn die „DJI GO 4“-App oder die Statusanzeige Sie dazu
auffordern. Beachten Sie beim Kalibrieren Ihres Kompasses folgende Regeln:
Der Kompass darf NICHT kalibriert werden, wenn das Risiko starker magnetischer
Störausstrahlung besteht, beispielsweise unterirdische Magnetitvorkommen, Tiefgaragen oder
Stahlbewehrungen.
Führen Sie bei der Kalibrierung KEINE ferromagnetischen Gegenstände wie Handys mit sich!
Die „DJI GO 4“-App fordert Sie dazu auf, ein Kompassproblem zu beheben, wenn der Kompass
nach der Kalibrierung starken Interferenzen ausgesetzt ist. Befolgen Sie zur Behebung des
Kompassproblems die Anweisungen auf dem Bildschirm
.
2017 DJI Alle Rechte vorbehalten
©
49
Page 50

Spark Bedienungsanleitung
Kalibrierverfahren
Führen Sie die hier beschriebenen Kalibrierverfahren stets auf freien Flächen durch.
1. Tippen Sie in der App auf die Fluggerät-Statusleiste, wählen Sie „Calibrate“, und befolgen Sie die
Anweisungen auf dem Bildschirm.
2. Halten Sie das Fluggerät in der Hand, und drehen Sie es horizontal um 360 Grad. Die Status-LED des
Fluggeräts leuchten durchgehend grün.
3. Halten Sie das Fluggerät senkrecht mit der Nase nach unten fest, und drehen Sie es um 360 Grad um
die Mittelachse.
4. Kalibrieren Sie das Fluggerät neu, wenn die Status-LED des Fluggeräts rot blinken.
Wenn die Status-LED des Fluggeräts nach der Kalibrierung rot und gelb blinken, versuchen Sie
es an einem anderen Ort.
Kalibrieren Sie den Kompass NICHT in der Nähe von Metallobjekten wie Metallbrücken, Autos
oder Gerüsten.
Wenn die Status-LED des Fluggeräts nach der Landung abwechselnd rot und gelb blinkt, hat
der Kompass eine magnetische Störung erkannt. Wechseln Sie den Standort.
Firmware-Updates
Aktualisieren Sie die Firmware des Fluggeräts mit DJI GO 4 oder mit DJI Assistant 2. Die Firmware der
Fernbedienung kann nur mit DJI GO 4 aktualisiert werden.
Verwenden der „DJI GO 4“-App
Verbinden Sie das Fluggerät und die Fernbedienung mit der „DJI GO 4“-App. Falls ein neues FirmwareUpdate verfügbar ist, werden Sie darauf hingewiesen. Um das Update zu starten, verbinden Sie das
Mobilgerät mit dem Internet, und befolgen Sie die Anweisungen auf dem Bildschirm.
Verwenden von DJI Assistant 2
Befolgen Sie zur Aktualisierung der Firmware mit DJI Assistant 2 die Anweisungen unten:
2017 DJI Alle Rechte vorbehalten
50
©
Page 51

Spark Bedienungsanleitung
1. Sobald das Fluggerät ausgeschaltet ist, verbinden Sie es über den Micro-USB-Anschluss und ein
Micro-USB-Kabel mit einem Computer.
2. Schalten Sie das Fluggerät ein.
3. Starten Sie DJI Assistant 2, und melden Sie sich mit Ihrem DJI-Benutzerkonto an.
4. Wählen Sie Spark, und klicken Sie im linken Feld auf „Firmware Updates“.
5. Wählen Sie die Firmware-Version, die Sie aktualisieren möchten.
6. Nach Herunterladen der Firmware startet die Aktualisierung der Firmware selbsttätig.
7. Starten Sie das Fluggerät nach Abschluss der Firmware-Aktualisierung neu.
Vergewissern Sie sich vor dem Einschalten, dass das Fluggerät mit dem Computer verbunden ist.
Die Aktualisierung der Firmware nimmt ca. 15 Minuten in Anspruch. Es ist normal, dass bei diesem
Vorgang der Gimbal ausfährt, die Status-LED des Fluggeräts ungewöhnlich blinken und das
Fluggerät neu startet. Warten Sie bitte mit Geduld, bis die Aktualisierung abgeschlossen ist.
Der Computer muss Internetzugang haben.
Die Akkuleistung der Intelligent Flight Battery muss mindestens 50 % betragen und jene der
Fernbedienung mindestens 30 %.
Trennen Sie das Fluggerät während der Aktualisierung der Firmware nicht vom Computer.
2017 DJI Alle Rechte vorbehalten
©
51
Page 52

Anhang
2017 DJI Alle Rechte vorbehalten
52
©
Page 53

Anhang
Technische Daten
Fluggerät
Gewicht 300 g
Abmessungen 143 × 143 × 55 mm
Diagonale (ohne Propeller) 170 mm
Max. Steiggeschwindigkeit 3 m/s im Sportmodus
Max. Sinkgeschwindigkeit 3 m/s bei Verwendung von automatischem Landen
Max. Fluggeschwindigkeit 50 km/h im Sportmodus ohne Wind
Dienstgipfelhöhe über N.N. 4.000 m
Max. Flugzeit 16 Minuten (ohne Wind bei konstant 25 km/h)
Max. Schwebezeit
Betriebstemperatur 0 °C bis 40 °C
GNSS GPS/GLONASS
GPS-Schwebeuggenauigkeit
Strahlungsleistung (EIRP)
Betriebsfrequenz 2,400–2,4835 GHz; 5,725–5,825 GHz
Gimbal
Kontrollierter Bereich Nickachse: -85° bis 0°
Stabilisierung 2 Achsen (Nicken, Rollen)
3D-Sensorsystem
Erfassungsbereich 0,2 bis 5 m
Betriebsumgebung
Sichtsystem
Geschwindigkeitsbereich ≤ 36 km/h bei 2 m über dem Boden
Höhenbereich 0 bis 8 m
Betriebsbereich 0 bis 30 m
Betriebsumgebung
Kamera
Sensor 1/2,3-Zoll-CMO; Pixel effektiv: 12 Megapixel
Objektiv
15 Minuten (bei Windstille)
Vertikal: ±0,1 m (mit VPS); ±0,5 m (mit GPS-Positionsbestimmung)
Horizontal: ±0,3 m (mit VPS); ±1,5 m (mit GPS-Positionsbestimmung)
2,4 G
FCC: 25 dBm; CE: 18 dBm; SRRC: 18 dBm
5,8 G
FCC: 27 dBm; CE: 14 dBm; SRRC: 27 dBm
Diffus reektierende Oberächen, Größe 20 x 20 mm und mit
Reexionsgrad > 20 % (Mauern, Bäume, Menschen usw.)
Oberächen mit deutlichen Mustern und diffus reektierende
Oberächen, Reexionsvermögen > 20 %, ausreichende Beleuchtung
(> 15 Lux)
Sichtfeld 81,9°, 25 mm (entspricht 35-mm-Format), f/2.6
Aufnahmebereich: 2 m bis
∞
2017 DJI Alle Rechte vorbehalten
©
53
Page 54

Spark Bedienungsanleitung
ISO-Bereich 100-3200 (Video), 100-1600 (Foto)
Belichtungszeit 2 – 1/8000 s
Max. Bildgröße 3968 × 2976
Einzelaufnahme
Fotomodi
Videoaufnahmemodi FHD: 1920 × 1080 30p
Bitrate des Videospeichers 24 Mb/s
Unterstütztes Dateisystem FAT32
Foto JPEG
Video MP4 (MPEG-4 AVC/H.264)
Unterstützte SD-Speicherkarten
WLAN
Betriebsfrequenz 2,4 G/5,8 G
Sendereichweite (ohne
Verschattung, störungsfrei)
Fernbedienung
Betriebsfrequenzen 2,412–2,462 GHz, 5,745–5,825 GHz
Sendereichweite
(ohne Verschattung,
störungsfrei)
Betriebstemperatur 0 °C bis 40 °C
Integrierter Akku 2970 mAh
Strahlungsleistung (EIRP)
Betriebsspannung 950 mA bei 3,7 V
Unterstützte Mobilgerätegröße
Ladegerät
Eingang 100–240 V, 50/60 Hz, 0,5 A
Ausgang 5 V/3 A, 9 V/2 A, 12 V/1,5 A
Serienbildaufnahme: 3 Bilder
Belichtungsreihe: 3 fokussierte Frames bei Blendenöffnung 0,7
Intervall (2/3/5/7/10/15/20/30/60 s)
Empfohlenes Modell
Sandisk 16/32 GB UHS-1 Micro SDHC
Kingston 16/32 GB UHS-1 Micro SDHC
Samsung 16/32 GB UHS-I Micro SDHC
Sandisk 64 GB UHS-1 Micro SDXC
Kingston 64 GB UHS-1 Micro SDXC
Samsung 64 GB UHS-I Micro SDXC
100 m (Entfernung), 50 m (Höhe)
2,4 GHz
FCC: 2 km, CE: 0,5 km, SRRC: 0,5 km
5,8 GHz
FCC: 2 km, CE: 0,3 km, SRRC: 1,2 km
2,4 GHz
FCC: ≤26 dbm, CE: ≤18 dBm, SRRC: ≤18 dBm
5,8 GHz
FCC: ≤28 dbm , CE: ≤14 dBm, SRRC: ≤26 dBm
Unterstützte Dicke 6,5 mm bis 8,5 mm
Max. Länge: 160 mm
:
2017 DJI Alle Rechte vorbehalten
54
©
Page 55

Spark Bedienungsanleitung
Intelligent Flight Battery
Kapazität 1480 mAh
Spannung 11,4 V
Max. Ladespannung 13,05 V
Akkutyp LiPo 3S
Energie 16,87 Wh
Nettogewicht ca. 95 g
Betriebstemperatur
5 °C bis 40 °C
Informationen zum Kundendienst
Besuchen Sie für weitere Informationen über die Kundendienstrichtlinien und Garantiedaten folgende
Seiten:
1. Kundendienstrichtlinie: http://www.dji.com/service
2. Erstattungsrichtlinie http://www.dji.com/service/refund-return
3. Reparaturdienst gegen Bezahlung: http://www.dji.com/service/repair-service
4. Garantieleistung: http://www.dji.com/service/warranty-service
2017 DJI Alle Rechte vorbehalten
©
55
Page 56

DJI Support
http://www.dji.com/support
Änderungen vorbehalten.
Die aktuelle Fassung nden Sie unter
http://www.dji.com/spark
Sollten Sie Fragen bezüglich dieses Dokuments haben, kontaktieren
Sie bitte DJI, indem Sie eine Nachricht an
schreiben. (Support nur in Englisch und Chinesisch verfügbar)
DocSupport@dji.com
SPARK ist eine Marke von DJI.
Copyright © 2017 DJI Alle Rechte vorbehalten.
 Loading...
Loading...