

Page 1
SPARK
ユーザーマニュアル
2017.06
V1.2
Page 2
キーワードの検索
「バッテリー」や「取り付け」などのキーワードで検索して、トピックを見つけます。Adobe Acrobat
Reader を使用して本書を読んでいる場合、Windows では Ctrl+F、Mac では Command+F を押して検
索を開始します。
任意のトピックへの移動
目次のトピックの全リストが表示されます。トピックをクリックすると、そのセクションに進みます。
本書を印刷する
本書は高解像度印刷に対応しています。
このマニュアルの使用方法
凡例
警告 重要 ヒントとコツ 参考
初めてのフライト前にお読みいただくもの
SPARKTMをお使いになる前に以下の資料をお読みください。
1. Spark 同梱物
2. Spark ユーザーマニュアル
3. Spark クイックスタートガイド
4. Spark 免責事項と安全に関するガイドライン
5. Spark インテリジェント・フライト・バッテリー安全ガイドライン
フライトの前に、DJITM公式ウェブサイトですべてのチュートリアルビデオを視聴し、免責事項をお読みい
ただくことを推奨します。初めて使用する際は「Spark クイックスタートガイド」にひととおり目を通し、
詳細はユーザーマニュアルを参照してください。
チュートリアルビデオ
以下のアドレスにアクセスするか、右側の QR コードをスキャンして
Spark の安全な使用方法を説明している Spark チュートリアルビデオを視聴できます。
http://www.dji.com/spark/info#video
DJI GO 4 アプリのダウンロード
飛行中は必ず DJI GOTM 4 アプリを使用してください。右側の QR コードをスキャンすると
最新バージョンをダウンロードできます。
Android 版の DJI GO 4 アプリは、Android v4.4 以降で動作します。
iOS 版の DJI GO 4 アプリは、iOS v9.0 以降で動作します。
* 飛行中にアプリ(DJI GO 4 や DJI 製の機体と互換性のあるすべてのアプリ)に接続 / ログインしていな
い場合、安全性確保のため、高さ 30m 距離 50m に飛行制限されます。
DJI Assistant 2 のダウンロード
http://www.dji.com/spark/download から DJI Assistant 2 をダウンロードします。
2017 DJI All Rights Reserved.
2
©
Page 3

目次
このマニュアルの使用方法
凡例
初めてのフライト前にお読みいただくもの
チュートリアル ビデオ
DJI GO 4 アプリのダウンロード
DJI Assistant 2 のダウンロード
製品の特徴
はじめ に
主な機能
機体の各部名称
アクティベ ート
機体
フライトモード
機体ステータスインジケーター
3D 検知システムとビジョンシステム
Return-to-Home(RTH)
イ ン テ リ ジ ェ ン ト・フ ラ イ ト・ モ ー ド
ジェスチャーモード
フライトレ コ ーダ ー
プロ ペラの 取り付 けと取り外し
インテリジェント・フライト・バッテリー
ジンバルとカメラ
モバイルデバイスでの機体の制御
送信機(別売)
送信機の特徴
送信機の使用
送信機のリンク
DJI GO 4 アプリ
機器
Editor
SkyPixel
Me
2
2
2
2
2
2
6
6
6
7
7
9
9
10
11
13
16
23
26
26
27
30
31
36
36
37
38
41
41
44
44
44
2017 DJI All Rights Reserved.
©
3
Page 4

飛行
飛行環境の要件
飛行制限と飛行禁止区域
飛行前のチェックリスト
自動離陸と自動着陸
モーターの始動と停止(送信機を使用する場合)
フライトテ スト
コンパス のキャリブレーション
ファー ム ウェ ア の 更 新
付録
仕様
アフターサービスのご案内
46
46
46
47
48
48
49
49
50
53
53
55
2017 DJI All Rights Reserved.
4
©
Page 5
製品の特徴
本セクションでは DJI Spark について
紹介し、機体の各部名称について説明
します。
Page 6

製品の特徴
はじめに
DJI Spark は、DJI 製品の中で最も小型の空撮用カメラです。軽量で持ち運びやすい機体に、スタビライザー
付きカメラ、インテリジェント・フライト・モード、障害物回避機能を内蔵しています。Spark は、ビジョン
システムと 3D 検知システムを搭載し、1080p の動画撮影、12 メガピクセルの静止画撮影、QuickShot モー
ドやジェスチャーコントロールの使用が可能です。最高速度 50km/h*、最長飛行時間は 16 分 ** の Spark
なら、手軽で楽しく、エキサイティングなドローン撮影が身近になります。
主な機能
Spark はモバイルデバイスコントロールとジェスチャーコントロールをサポートしており、飛行がこれま
でになく簡単になりました。より多くの制御オプションを求めるユーザーは、別売の送信機で飛行能力を
最大限に引き出すことができます。
カメラとジンバル:Spark は、鮮明でシャープな撮影を実現。1080p 動画を最大 30fps で、静止画を画素
数 12 メガピクセルで撮影します。機体に搭載されているコンパクトなジンバルが、ブレのない安定した映
像を提供します。
フライトコントローラー:最新の次世代フライトコントローラーが、より安全で信頼性の高いフライト操
作を実現します。伝送信号が途絶えたり、バッテリー残量が低下したりすると、機体は自動でホームポイン
トに帰還します。Spark は、屋内での低高度のホバリングが可能というだけでなく、そのルート上の障害物を
認識して回避するので、高い安全性を発揮します。
* 最高飛行速度に達するには Spark 用送信機で Spark を操作する必要があります。
** 最長飛行時間は無風状態で、速度 20km/h でテストしたものです。この値は参考値です。
2017 DJI All Rights Reserved.
6
©
Page 7
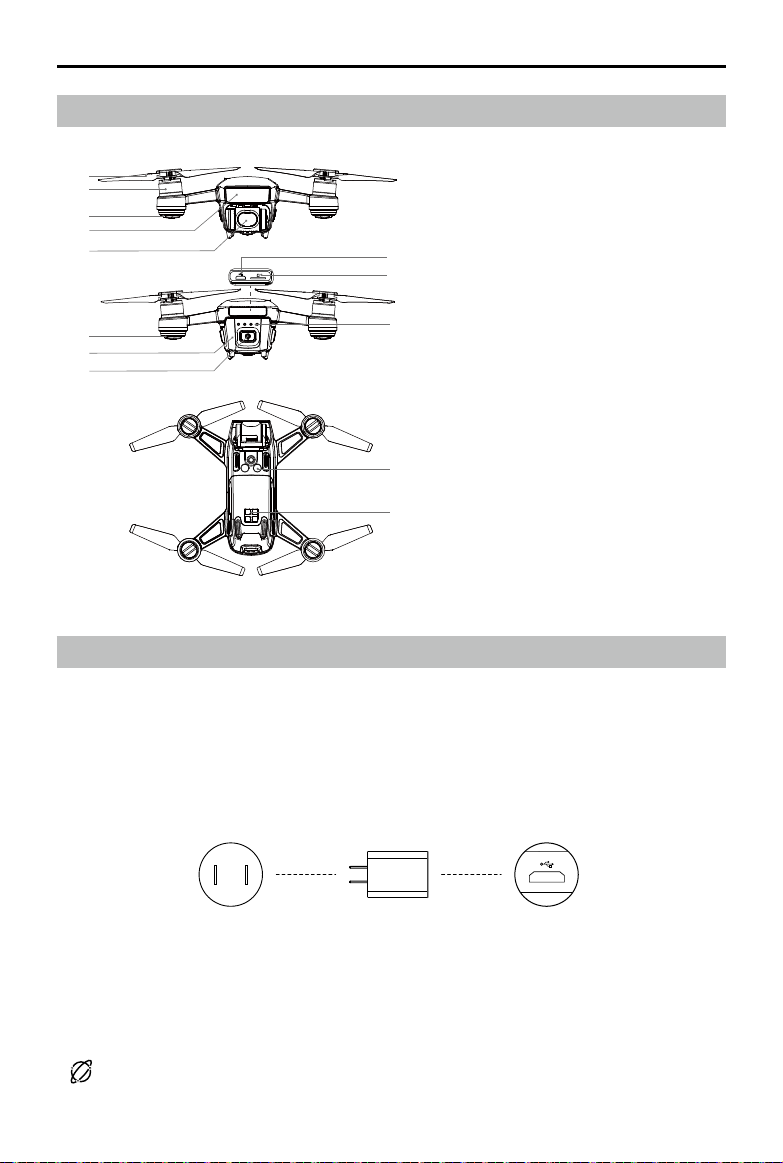
機体の各部名称
Spark ユーザーマニュアル
1
2
3
4
5
1. プロペラ
2. モーター
3. フロント LED
4. 3D 検知システム
10
5. ジンバルとカメラ
11
6. 機体ステータスインジケーター
7. インテリジェント・フライト・バッテリー
9
6
7
8
8. 電源ボタン
9. バッテリー残量インジケーター
10. Micro USB ポート
11. microSD カードスロット
12. 外部充電接点
13. ビジョンシステム
13
12
アクティベート
初めて使用する際は、インテリジェント・フライト・バッテリーと機体をアクティベートする必要があり
ます。
インテリジェント・フライト・バッテリーのアクティベート
すべてのバッテリーは、安全のために休止モードで出荷されています。初めて使用する際は、付属の USB
充電器を使用して、バッテリーを充電してアクティベートします。飛行するたびにバッテリーを完全に充
電することを推奨します。
電源コンセント
USB 充電器 Micro USB ポート
100 - 240V
機体のアクティベート
DJI GO 4 を起動し、右上のアイコンをタップして、ストレージボックスまたはバッテリー室の QR コードを
スキャンし、指示に従ってアクティベートします。
自分の DJI アカウントを使用して機体をアクティベートします。アクティベートするにはイン
イン タ ー ネ ット
ターネット接続が必要です。
2017 DJI All Rights Reserved.
©
7
Page 8

機体
このセクションでは、フライトコント
ローラー、3D 検知システム、ビジョン
システム、およびインテリジェント・フ
ライト・バッテリーについて説明します。
2017 DJI All Rights Reserved.
8
©
Page 9
機体
Spark は、フライトコントローラー、ビデオダウンリンクシステム、3D 検知システム、ジンバルとカメラ、
推進システム、およびインテリジェント・フライト・バッテリーを搭載しています。このセクションでは、
フライトコントローラー、ビデオダウンリンクシステム、その他の機体の部品の特徴について説明します。
フライトモード
Spark には、以下のフライトモードがあります。
P モード(ポジショニング): P モードは、強い GPS 信号受信時に最適に動作します。機体は、GPS とビ
ジョンシステムで位置を把握しながら、自動で安定し、障害物を避けて進み
ます。P モードでは、QuickShot、TapFly(タップフライ)や ActiveTrack(ア
クティブトラック)などのインテリジェント・フライト・モードが使用でき
ます。
前方の障害物検知機能が有効で十分に明るい場合、最大傾斜角度は 15°、 最
大速度は 10.8km/h です。前方の障害物検知機能が無効な場合、最大傾斜角
度は 15°、最大速度は 21.6km/h です。
GPS 信号が弱く、暗すぎてビジョンシステムも使用できない場合、機体は
自動的に ATTI モードに切り替わります。この場合、障害物を自動的に回避
することはできず、気圧計のみで位置を把握して高度を制御します。ATTI
モードではインテリジェント・フライト・モードを使用できません。
注記:P モードで高速飛行させるには、スティックを大きく動かす必要があ
ります。
S モード(スポーツ): 機体は GPS で位置を把握します。前方の障害物検知機能が無効になるため、
スポーツモードでは機体は障害物を検知して避けることができません。ス
ポーツモードでは、インテリジェント・フライト・モード、Pano モード、
および ShallowFocus が使用できません。
注記:敏捷性と速度に対する機体の応答性が最適化され、スティックの動き
への応答がより機敏になります。
S モード(スポーツ)では、3D 検知システムが無効になります。そのため、飛行経路上に障害
物があっても、自動で回避できなくなります。
S モード(スポーツ)では、機体の最大速度と制動距離が著しく増加します。無風状態の場合、
制動距離は少なくとも 30m 必要です。
S モードでは、下降速度が著しく増加します。
S モード(スポーツ)では、機体の応答性が著しく向上します。そのため、送信機のスティックを
わずかに動かしただけでも、機体は大きく移動します。飛行中は細心の注意を払い、十分な操縦
スペースを確保するようにしてください。
S モードを使用するには Spark 用送信機が必要です。S モードは、モバイルデバイスを使用して
飛行する場合は使用できません。
送信機のフライトモードスイッチを使用して、機体のフライトモードを選択します。
2017 DJI All Rights Reserved.
©
9
Page 10
Spark ユーザーマニュアル
機体ステータスインジケーター
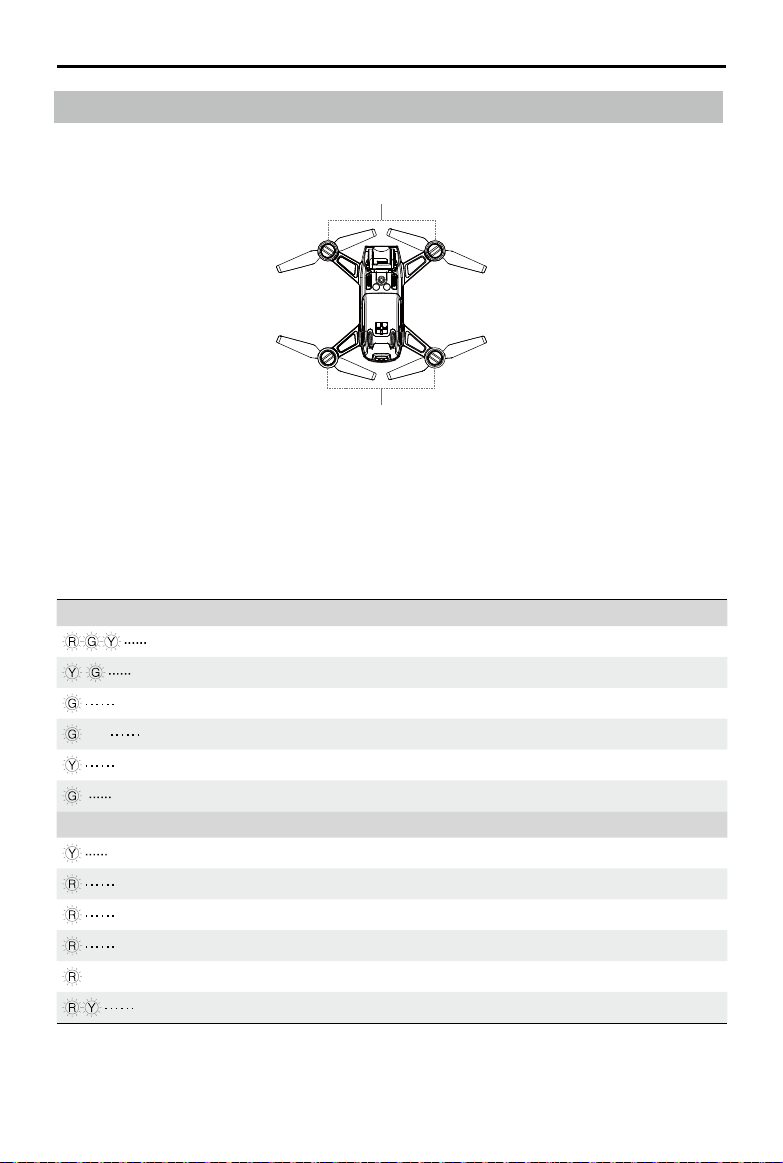
Spark にはフロント LED と機体ステータスインジケーターがあります。LED の位置は下図に示すとおり
です。
フロ ント LED
機体ステータスインジケーター
フロント LED は機体の向きと一部の機能のステータスを示します(詳細は、ジェスチャーモードの「機能
の説明」のセクションを参照してください)。機体の電源がオンになるとフロント LED が赤色に点灯し、
機体の前部(ノーズ)を示します。
機体ステータスインジケーターはフライトコントローラーのステータスを示します。機体ステータスイン
ジケーターの詳細については下表を参照してください。
機体ステータスインジケーターの解説
通常
赤色、緑色、黄色が順に点滅
黄色と緑色が交互に点滅
緑色がゆっくり点滅
× 2 緑色が 2 回点滅
黄色がゆっくり点滅
緑色が素早く点滅
警告
黄色が素早く点滅
赤色がゆっくり点滅
赤色が素早く点滅
赤色が点滅
赤色に点灯
赤色と黄色が交互に素早く点滅
電源オンおよび自己診断テスト中
ウォーミングアップ
P モード(GPS 有効)
P モード(ビジョンシステム有効)
GPS /ビジョンシステム無効
制動中
送信機信号消失
バッテリー警告
重度のローバッテリー警告
IMU エラー
重大なエラー
コンパスのキャリブレーションが必要
2017 DJI All Rights Reserved.
10
©
Page 11
Spark ユーザーマニュアル
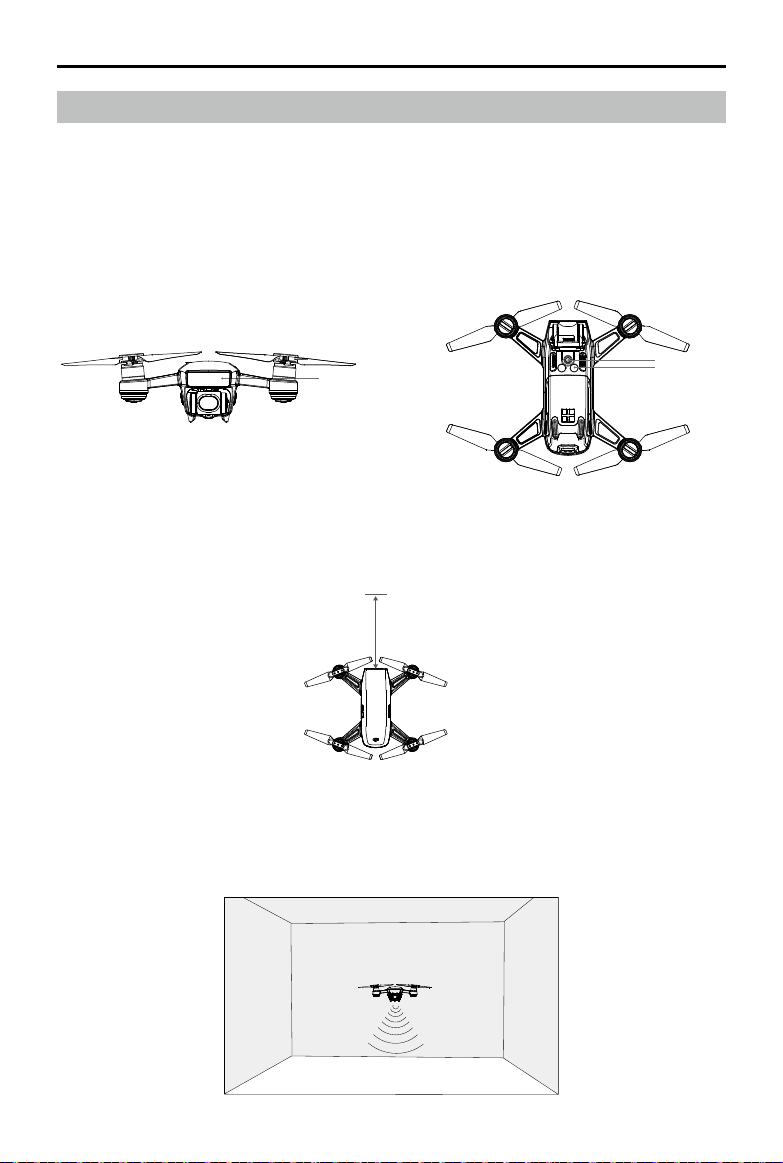
3D 検知システムとビジョンシステム
Spark には 3D 検知システム 1 が搭載されています。このシステムは、機体の前部にある 3D 赤外線モジュー
ルで構成されており、飛行中に障害物を検知することができます。
ビジョンシステムの主要部品は、機体本体の底部に位置しています。ビジョンシステムには、カメラ 2 と
3D 赤外線モジュール3 が含まれています。ビジョンシステムでは 3D 赤外線モジュールと画像データを使っ
て機体の現在位置を維持し、屋内や GPS 信号が使用できない環境での高精度のホバリングを可能にします。
3D 検知システムは、常に障害物を検知して、十分な明るさがあれば Spark が障害物を回避できるようにし
ます。
2
1
検知範囲
3D 検知システムの検知範囲は以下のとおりです。機体は、検知範囲外の障害物を検知または回避できません
ので注意してください。
0.2 〜 5m
3
ビジョンシステムの使用
ビジョンシステムは機体の電源がオンになると自動的に作動します。特別な操作は必要ありません。ビ
ジョンシステムは、GPS が使えない屋内環境でも使用できます。ビジョンシステムを使用すると、GPS が
なくても機体は正確にホバリングできます。
2017 DJI All Rights Reserved.
©
11
Page 12
Spark ユーザーマニュアル
ビジョンシステムを使用するには次の手順に従ってください。
1. 機体を P モードにして、平らな面の上に置きます。ビジョンシステムは模様に変化のない地表面では正
しく動作しないため、注意してください。
2. 機体の電源をオンにします。離陸後、機体はその場でホバリングします。機体ステータスインジケーター
が緑色に 2 回点滅し、ビジョンシステムが動作していることを示します。
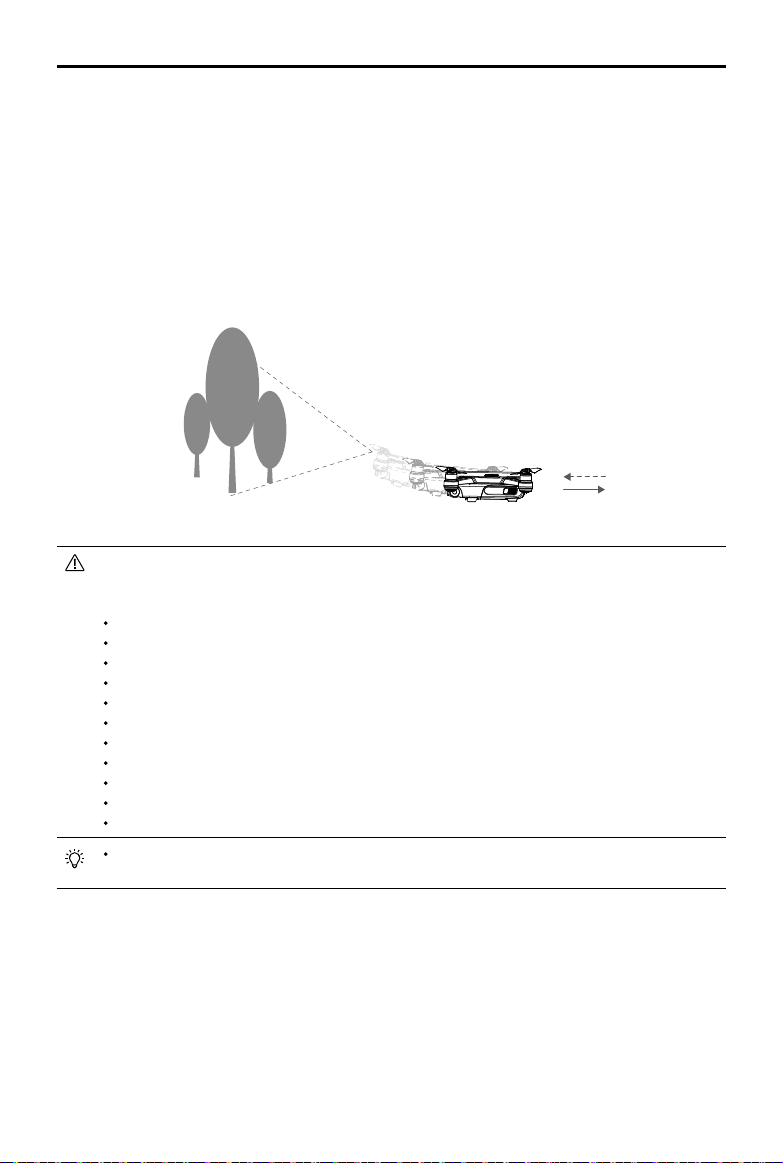
3D 検知ステムが有効化されているときは、前方に障害物を検知したとき、機体がアクティブににブレーキを
かけます。3D 検知システムは、明るさが適切で障害物がはっきりと目立つか特徴がある場合に、最も効果
的に動作します。十分な制動距離を確保するために、機体を 10.8km/h 以下で飛行させてください。
3D 検知システムとビジョンシステムの動作は、飛行する機体下の表面の状態に影響されます。
GPS もビジョンシステムも利用できない場合、機体は P モードから ATTI モードに自動で切り替
わります。以下のような状況で Spark を操作するときは特に注意してください。
高度 0.5 m以下で高速で飛行する場合。
単色(黒一色、白一色、赤一色、緑一色など)の地表面上を飛行する場合。
反射率が高い地表面上を飛行する場合。
水面または透明な地表面上を飛行する場合。
動く面または物体上を飛行する場合。
明るさが頻繁に、または急激に変わる場所を飛行する場合。
非常に暗い(10 ルクス未満)または非常に明るい(100,000 ルクス超)地表面上を飛行する場合。
はっきりした模様や特徴のない地表面上を飛行する場合。
タイルなど、同じパターンや構造が繰り返されている地表面上を飛行する場合。
小さく細い物体(木の枝、電線など)の上を飛行する場合。
地上 2 メートルを 10.8km/h 以上の速度で飛行する場合。
センサーは常にきれいな状態に保ってください。汚れやごみが付着していると、センサーの効果
に影響を及ぼす恐れがあります。
2017 DJI All Rights Reserved.
12
©
Page 13
Spark ユーザーマニュアル
Return-to-Home(RTH)
Return-to-Home(RTH)機能により、機体は最後に記録されたホームポイントに戻ります。RTH には 3 つ
のタイプ(スマート RTH、ローバッテリー RTH、フェールセーフ RTH)があります。次のセクションでは
これら 3 つの RTH のシナリオを詳細に説明します。
GPS
離陸前に強い GPS 信号が検知されていた場合は、機体を離陸させた
ホームポイント
場所がホームポイントになります。GPS の信号強度は、GPS アイコン
( )で表示されます。ホームポイントが記録されると、機体ステー
タスインジケーターが素早く点滅します。
スマート RTH
GPS が有効な場合はスマート RTH を使用できます。DJI GO 4 の RTH ボタンをタップして画面の指示に従
います。DJI GO 4 の停止アイコン × を押すと、スマート RTH をすぐに終了できます。
送信機の RTH の長押しでも、スマート RTH を開始することができます。もう一度押すと終了します。
ローバッテリー RTH
DJI インテリジェント・フライト・バッテリーが機体の安全な帰還に影響が出るほど消耗すると、ローバッ
テリー RTH が起動します。ローバッテリー警告が表示された場合は、機体をホームに帰還させるか、ただ
ちに着陸させてください。ローバッテリー警告が発せられると、DJI GO 4 に通知が表示されます。10 秒間
の警告の後に何も操作しないと、機体は自動的にホームポイントに帰還します。RTH 手順は、送信機の
RTH ボタンまたはフライト一時停止ボタンを押すことでキャンセルできます。この警告のしきい値は、現
在の機体の高度とホームポイントからの距離を基準に自動的に決定されます。ローバッテリー RTH は、飛
行中に 1 回のみ表示されます。
現在のバッテリー残量で現在の高度から下降させることしかできない場合は、機体は自動的に着陸を開始
します。
説明
DJI GO 4 に表示されるバッテリー残量インジケーターの意味は以下のとおりです。
重度のバッテリー残量警告
(赤色)
ローバッテリー残量警告
(黄色)
十分なバッテリー残量
(緑色)
残りの推定飛行可能時間
ホームへの帰還に
必要な電力
バッテリー 残 量イン ジケ ータ ー
12:29
2017 DJI All Rights Reserved.
©
13
Page 14
Spark ユーザーマニュアル
バッテリー
残量警告
ローバッテ
リー残量警告
重度のバッテ
リー残量警告
残飛行時間
重度のバッテリー残量警告が発せられ、機体が自動的に下降を始めたら、バーチャルジョイス
ティックまたはコントロールスティックでスロットルを上げて機体を現在の高度に保ちます。こ
うすることでより適切な着陸場所に移動することができます。
バッテリー残量インジケーターバーのカラーゾーンとマーカーは、推定飛行残時間に対応してい
ます。残飛行時間は機体の現在の位置や状況に応じて自動で調整されます。
フェールセーフ RTH
ホームポイントが正常に記録され、GPS 信号が強くコンパスが正常に動作している場合に、無線信号が指定さ
れた時間(送信機使用の場合は 3 秒、Wi-Fi 使用の場合は 20 秒)消 失 すると、フェールセ ーフ RTH が自動的に作
動します。無線信号との接続が再確立されると、ユーザーはフェールセーフ RTH をキャンセルして機体を制御で
きるようになります。
注意
バッテリー電
力が低下して
います。機体を
着陸させてく
ださい。
機体を速やか
に着陸させて
ください。
現在のバッテ
リー残量をもと
に推測した残飛
行時間です。
機体ステータス
インジケーター
機体ステータス
インジケーター
がゆっくり赤色
に点滅します。
機体ステータス
インジケーター
が素早く赤色で
点滅します。
なし なし なし
DJI GO 4 アプリ フライト指示
[帰還]をタップして機体を
自動的にホームポイントに帰
還させるか、[ 取消 ] をタップ
して通常飛行に戻ります。何
もしないと、機体は 10 秒後
に自動的にホームポイントに
戻ります。送信機ではアラー
ムが鳴ります。
DJI GO 4 アプリ画面が赤色で
点滅し、機体は下降を始めま
す。送信機ではアラームが鳴
ります。
できるだけ早く機
体を帰還、着陸さ
せ、モーターを停
止し、バッテリーを
交換してください。
機体が自動的に下
降して着陸します。
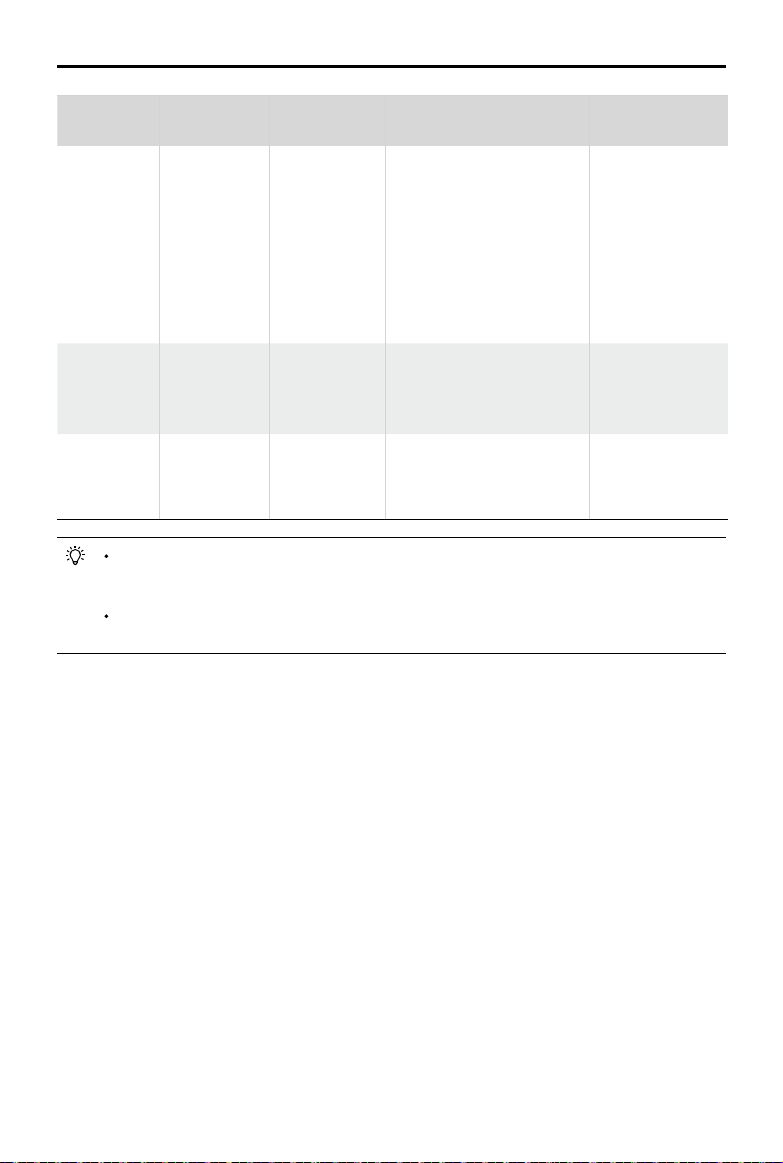
RTH 手順
1. ホームポイントが自動的に記録されます。
2. RTH 手順(スマート RTH、ローバッテリー RTH、フェールセーフ RTH)が開始されます。
3. ホームポイントを確認し、機体が方向を調整します。
4. a. 機体は、プリセットされた RTH の高度に上昇し、機体がホームポイントから 20m 以上離れている場
合はホームポイントに向けて飛行します。
b. 機体がホームポイントから 3m 〜 20m の間にあり、[ 現在の高度で RTH] が無効の場合は、自動着陸
します(DJI GO 4 のデフォルト設定)。
機体がホームポイントから 3m 〜 20m の間にあり、高度が 2.5m 以上を飛行中で [ 現在の高度で RTH]
が有効の場合には、機体は現在の高度のままホームポイントに戻ります。高度が 2.5m 未満を飛行中
の場合は 2.5m に上昇してからホームポイントに戻ります。
C. ホームポイントから 3m 未満の場所で RTH が起動すると、機体は自動的に着陸を開始します。
5. 機体は、地面から 0.3m の位置でホバリングし、ユーザーからの確認を待ちます。ユーザーの確認後、機
体は着陸し、モーターを停止します。
2017 DJI All Rights Reserved.
14
©
Page 15
Spark ユーザーマニュアル
1 ホームポイントの記録 2 送信機信号消失
4 RTH(高度の調整可能)
×
ホームからの高さがフェールセーフ高度を超える
フェールセーフ高度まで上昇
フェールセーフ高度
ホームからの高さがフェールセーフ高度以下
5 着陸(ユーザーの確認後)
×
3 長時間信号消失
××
ホームポイント上空 0.3m でホバリング
GPS 信号が弱い、または利用不可の場合、機体はホームポイントに戻ることができません。
飛行を開始する前に、適切なフェールセーフ高度を設定することが重要になります。DJI GO 4
アプリを起動して[GO FLY]をタップし、 をタップしてフェールセーフ高度を設定してくだ
さい。
フェールセーフ中、スロットルスティックを動かして機体の高度が 20 メートル以上になると、
機体は上昇を停止し、速やかにホームポイントに戻ります。
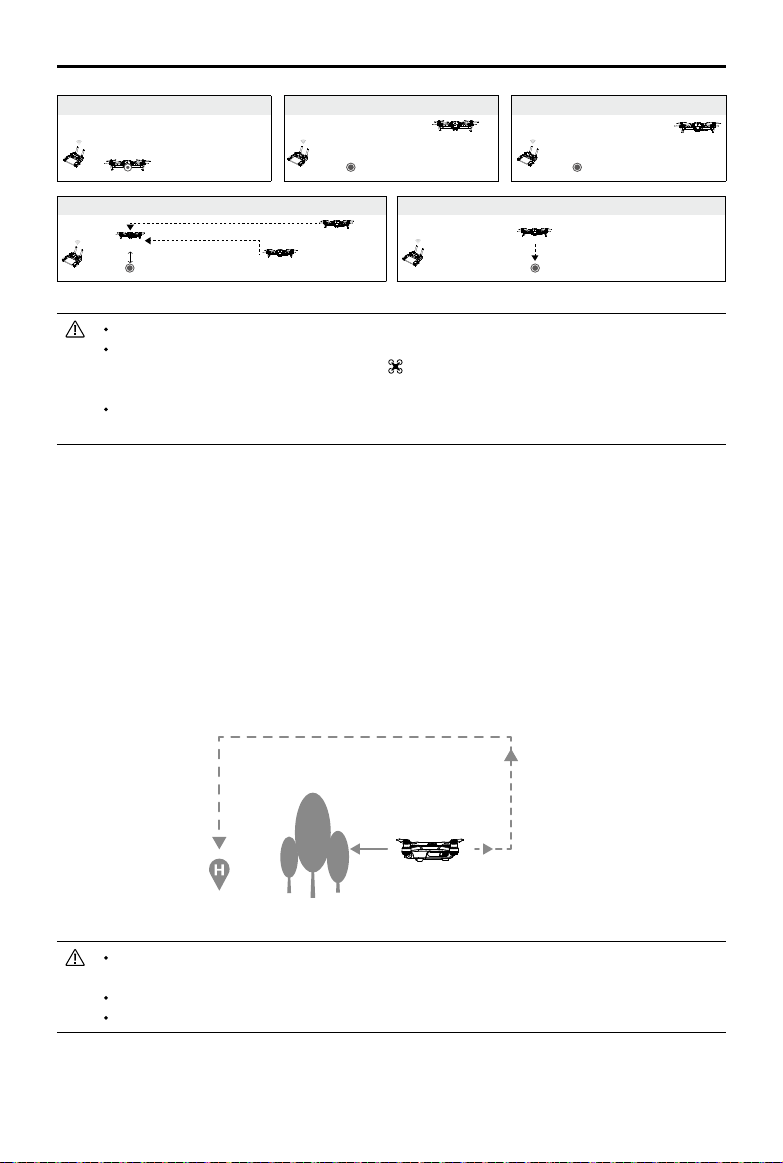
RTH 中の障害物回避
Spark は、RTH が起動して、ホームポイントから 100m 以上離れている場合、10m/s の飛行速度で帰還し
ますが、障害物を回避することはできません。
Spark は、3D 検知システムを使用するのに十分な明るさがあり、機体がホームポイントから 100m 未満の
位置にあるときに RTH が起動されると、RTH 中に障害物を検知し、能動的に回避しようとします。障害物を
認識すると、機体は以下のように動作します。
1. 5m 前方に障害物を検知すると、機体は減速します。
2. 機体は停止してホバリングし、3D 検知システムが障害物を検知できなくなるまで後進します。
3. 機体は約 5 秒間垂直に上昇します。
4. RTH プロセスを再開します。機体はそのままの高度でホームポイントまで飛行を継続します。
5 秒間の上昇
5m
機体が 10m 後進した後も障害物が検知される場合は、障害物検知がオフになり、機体は自動的
にフェールセーフ高度まで上昇して 10m/s の速度でホームポイントに戻ります。
機体は、上昇中に再度障害物を検知すると、1 〜 3 の手順を繰り返します。
機体は、機体の上方、側方、後方の障害物を回避できません。
2017 DJI All Rights Reserved.
©
15
Page 16
Spark ユーザーマニュアル
高精度着陸
Spark は Return-to-Home 中に、機体の下の地形の特徴を自動的に走査して照合します。現在の地形がホー
ムポイントの地形に一致すると、Spark は速やかに着陸を開始して、高精度着陸を実行します。照合に失
敗した場合、DJI GO 4 は地形の特徴不一致を表示します。
高精度着陸の性能は以下の条件に左右されます。
a. 離陸時にホームポイントが記録されており、フライト中に更新されていないこと。
b. 機体を垂直に離陸すること。離陸高度が 7m を超えていること。
c. ホームポイントの地形的特徴にほぼ変化がないこと。
d. ホームポイントの地形に目立った特徴がない場合は性能に影響が生じる。
e. 明るすぎたり暗すぎたりしないこと。
着陸中は以下の操作を行うことができます。
a. スロットルを下げて着陸を加速する。
b. コントロールスティックを別のいずれかの方向に動かして、高精度着陸を停止する。コントロー
ルスティックを離すと Spark は垂直に下降します。
インテリジェント・フライト・モード
Spark はインテリジェント・フライト・モード(QuickShot、ActiveTrack(アクティブトラック)、TapFly(タッ
プフライ)、ジェスチャー、およびトライポッドモード)をサポートします。DJI GO 4 で をタップするか、
送信機の機能ボタンを押して、インテリジェント・フライト・モードを有効にします。
QuickShot
QuickShot 撮影モードには、Rocket(ロケット)、Dronie(ドローニー)、Circle(サークル)、Helix(螺旋)
があります。Spark は選択した撮影モードに従って動画を録画し、10 秒間のショートビデオを自動的に生
成します。このショートビデオは再生メニューで表示、編集し、ソーシャルメディアで共有できます。
Dronie:被写体にカメラをロックした状態で、後方と前方に飛行します。
Circle:被写体の周りを飛行します。
Helix:上昇し、被写体の周りを旋回します。
Rocket:カメラを下に向けた状態で上昇します。
QuickShot の使用
機体が P モードでインテリジェント・フライト・バッテリーが十分に充電されていることを確認します。
QuickShot を使用するには次の手順に従ってください。
1. 離陸したら、機体を地上から 1.5m 以上の高度で飛行させます。
1.5 m
2017 DJI All Rights Reserved.
16
©
Page 17

Spark ユーザーマニュアル
GO
2. DJI GO 4 を起動し をタップしてから、QuickShot を選択して指示に従います。
12
In-Flight(GPS)
09:29
QuickShot
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. カメラビューで目的の被写体を選択し、撮影モードを選択します。[GO]をタップして撮影を開始します。
撮影が終了すると、機体は元の位置に戻ります。
12
In-Flight(GPS)
09:29
QuickShot
1080P/30
61%
2.4G
4. 再生画面で、生成された動画または元の動画を表示、編集することができます。
QuickShot は、GPS 信号が強い場合のみ使用できます。
DJI GO 4 で をタップして、撮影中にいつでも QuickShot を終了できます。
QuickShot では、機体は障害物を自動的に回避できません。QuickShot は広い場所で使用してく
ださい。
ActiveTrack ( アクティブトラック )
ActiveTrack(アクティブトラック)を使用すると、モバイルデバイスの画面で動く被写体をマークして追
尾できます。追加の追尾デバイスは不要です。
Spark は、バイクや車、人や動物を自動的に識別して追尾することができ、対象に応じて異なる追尾方式を
使用します。
2017 DJI All Rights Reserved.
©
17
Page 18

Spark ユーザーマニュアル
GO
ActiveTrack(アクティブトラック)の使用
インテリジェント・フライト・バッテリーが完全に充電されており、機体が P モードであることを確認し
ます。ActiveTrack(アクティブトラック)を使用するには、以下の手順に従います。
1. 離陸したら、地上から 1.5m 以上の高度でホバリング状態にします。
1.5 m
2. DJI GO 4 で、 をタップしてフライトモードを呼び出し、ActiveTrack(アクティブトラック)を
選択します。
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. 追尾したい被写体をタップした後、もう一度タップして選択を確定します。対象が自動的に認識されな
い場合は、対象の周りをドラッグしてボックスで囲みます。追尾中はボックスが緑色に変わります。ボッ
クスが赤くなった場合は被写体が特定できていません。もう一度やり直してください。
12
In-Flight(GPS)
ActiveTrack
09:29
1080P/30
61%
2.4G
4. 機体は飛行経路上の障害物を自動的に回避します。移動速度が速すぎる、あるいは見えにくいなどの理
由で機体が追尾対象を見失った場合は、対象を選択し直して追尾を再開します。
2017 DJI All Rights Reserved.
18
©
Page 19

Spark ユーザーマニュアル
ActiveTrack(アクティブトラック)には、以下の機能があります。
トレース プロフィール
機体はその方向から一定の角度と距離を保って
機体は一定の距離を保って被写体を追尾します。送
信機のロールスティックまたは DJI GO 4 のスライ
ダーを使用して、被写体の周囲を回ります。
人や動物がいる場所、小さく細い物体(木の枝、電線など)や、透明な物体(ガラスや水など)
がある場所では、使わないようにしてください。
飛行経路近くの障害物には近づかないようにしてください(特に機体を後進させる場合)。
緊急時には機体を手動で操作するか、DJI GO 4 の アイコンをタップします。
以下のような状況で ActiveTrack(アクティブトラック)を実行する場合には、特に注意してく
ださい。
a)追尾している被写体が水平面上で動いていない。
b)追尾している被写体が動く際に大きく形状を変える。
c)追尾している被写体が長時間遮られているか、視界に入らない。
d)追尾している被写体が積雪面を移動している。
e)追尾している被写体が周囲の環境と似たような色や模様である。
f) 暗すぎる(300 ルクス未満)、または明るすぎる(10,000 ルクス超)。
ActiveTrack(アクティブトラック)を使用する場合は、必ず現地のプライバシー法規を順守し
てください。
トラッキング時の写真の解像度は 1440 × 1080 です。
被写体を追尾します。送信機のロールスティッ
クを使用して被写体の周囲を回ります。プロ
フィールモードでは、機体は障害物を回避でき
ません。このモードは広い場所で使用してくだ
さい。
ActiveTrack(アクティブトラック)の終了
以下の方法で ActiveTrack(アクティブトラック)を終了します。
1. 送信機のフライト一時停止ボタンを押します。
2. 画面上の アイコンをタップします。
または
ActiveTrack(アクティブトラック)を終了すると、機体はその位置でホバリングします。その時点で手動
飛行、別の対象の追尾、またはホームポイントへの帰還を選択できます。
TapFly(タップフライ)
TapFly(タップフライ)には、全く新しい 2 つのサブモード(座標モードと方向モード)があります。座
標モードがデフォルトで設定されています。明るさが適切な場合(300 ルクス以上 10,000 ルクス未満)、
機体は自動で認識した障害物を回避するか、それらの前で制動してホバリングします。
2017 DJI All Rights Reserved.
©
19
Page 20

Spark ユーザーマニュアル
GO
座標モード
画面の特定の場所をタップします。機体が現在の高度でその場所に移動し、ホバリングします。
座標モードの使用
インテリジェント・フライト・バッテリーが完全に充電されており、機体が P モードであることを確認し
ます。座標モードを使用するには以下の手順に従ってください。
1. 離陸したら、機体を地上から 1m 以上の高度でホバリング状態にします。
1m
2. DJI GO 4 を起動して をタップします。TapFly(タップフライ)、座標モードを選択して、指示
に従います。
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. 目標を 1 回タップし、[GO]アイコンが表示されるまで待ちます。[GO]アイコンをタップして選択内
容を確認すると、機体は目標に向かって自動的に飛行します。目標に到達できない場合は、プロンプト
が表示されます。この場合、別の目標を選択して、もう一度実行します。
12
In-Flight(GPS)
H 9.6
TapFly
09:29
S 1.1D 9.6
1080P/30
61%
2.4G
4. 画面をタップすると、飛行中に目標を変更できます。
5. 青い円が表示されるまで画面を約 2 秒間長押しします。円を上下にドラッグしてジンバルの傾斜角を調
整します。
座標モードを使用するときは、目標が平面上にあることを確認します。平面上にない場合は、機
体が目標に正確に到達できない可能性があります。
2017 DJI All Rights Reserved.
20
©
Page 21

Spark ユーザーマニュアル
座標モードの終了
次の方法で座標モードを終了します。
1. 画面上の アイコンをタップします。
2. 送信機のピッチスティックを引き戻し、3 秒以上維持します。
3. 送信機のフライト一時停止ボタンを押します。
4. 青い円を左右にドラッグします。
方向モード
画面でタップした方向に飛行します。
方向モードの使用
インテリジェント・フライト・バッテリーが完全に充電されており、機体が P モードであることを確認し
ます。方向モードを使用するには以下の手順に従ってください。
1. 離陸したら、機体を地上から 1m 以上の高度で飛行させます。
1m
2. DJI GO 4 を起動して をタップします。TapFly(タップフライ)を選択して、方向モードに切り替え、
指示に従います。
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. 目標を 1 回タップし、[GO]アイコンが表示されるまで待ちます。[GO]アイコンをタップして選択内容を
確認すると、機体はその方向に自動的に飛行します。
12
In-Flight(GPS)
TapFly
09:29
1080P/30
61%
2.4G
2017 DJI All Rights Reserved.
©
21
Page 22

Spark ユーザーマニュアル
選択内容を確認すると、機体は[GO]アイコンでマークされた方向に飛行します。機体前方に障害物があ
ることを認識した場合や、飛行高度が地面に近すぎる場合、機体は速度を自動的に調整します。ただし、
障害物の間をすり抜ける目的でこの機能を使用することは避けてください。
フェールセーフ手順は、すべての TapFly(タップフライ)機能より優先されます。GPS 信号が弱い場合、
機体は自動飛行を終了してホームポイントに帰還します。
方向モードの終了
次の方法で方向モードを終了します。
1. 画面上の アイコンをタップします。
2. 送信機のピッチスティックを引き戻し、3 秒以上維持します。
3. 送信機のフライト一時停止ボタンを押します。
方向モードを終了すると、機体は停止しホバリングします。新たな目的の方向をタップして飛行を続行す
るか、手動飛行を行えます。
または または
フライト一時停止ボタン
人、動物、細い物体(木の枝、電線など)、透明な物体(ガラスや水など)の上を飛行させない
でください。水や雪で覆われたエリアの上を機体が飛行している場合、TapFly(タップフライ)モー
ドが正しく機能しないことがあります。
飛行経路の障害物に注意し、障害物を避けるようにしてください。
想定する経路と TapFly(タップフライ)で選択した実際に飛行する経路には違いが生じることが
あります。
目標の方向として選択できる範囲には制限があります。方向モードで画面の上下端付近を選択す
ることはできません。
非常に暗い(300 ルクス未満)環境や非常に明るい(10,000 ルクス超)環境で飛行させる場合は、
特に注意してください。
トライポッドモード
トライポッドモードを有効にするには、DJI GO 4 で該当するアイコンをタップします。トライポッドモー
ドでは、最大飛行速度が 3.6km/h に制限されます。よりなめらかに動きをコントロールするために、スティッ
クの動きに対する応答性も低下します。
GPS 信号が強い場合、または明るさの条件がビジョンシステムの使用に理想的な場合にのみ、ト
ライポッドモードを使用してください。GPS 信号が消失し、ビジョンシステムが機能しない場合
は、自動的に ATTI モードに切り替わります。この場合、飛行速度が上がり、機体は定位置でホ
バリングできなくなります。トライポッドモードは慎重に使用してください。
2017 DJI All Rights Reserved.
22
©
Page 23

Spark ユーザーマニュアル
ジェスチャーモード
ディープラーニングジェスチャー認識により、単純な手の動きでセルフィーを撮影できます。Spark には、
PalmLaunch(パームローンチ)、PalmControl(パームコントロール)、PalmLand(パームランド)、
Beckon(手招き)、および Selfie(セルフィー)などの新しいジェスチャーコントロールが搭載されていま
す。安全のために、ジェスチャーモードを使用する前に Spark プロペラガードを取り付けることを強くお
推めします。
機能の説明 フロント LED 図
PalmLaunch
1. 機体を持った状態で電源を入れます。機体ステー
タスインジケーターが黄色に点滅するまで待ち
ます。機体のアームに触れないように十分距離を
とって下部を持ってください。
2. 次に、インテリジェント・フライト・バッテリー
の電源ボタンを 2 回タップします。フロント
LED がゆっくりと黄色に点滅します。
3. FaceAware(顔認識)が自動的に開始します。
顔認識が正常に起動すると、機体から 2 回ビー
プ音が鳴り、フロント LED が緑色に点灯します。
フロント LED が 2 回赤く点滅した場合、顔認識
は動作していません。手順 2 から繰り返してく
ださい。
4. モーターが回転し始めると、フロント LED が赤
く点灯します。機体を離すと、その場でホバリン
グします。
赤色点灯
黄色点滅
緑色点灯
赤色点灯
PalmControl 開始/停止
1. 機体の前に立ち、片方の腕を上げて機体に向け
て伸ばします。指を伸ばし、指同士は付けたま
まにします。機体の前方約 0.7m の位置に約
2 秒間手のひらをかざします。
2. PalmControl が正常に起動すると、フロント
LED が緑色に点灯します。フロント LED が黄色
で素早く点滅し始めたら、機体からの距離を調
整します。黄色の点滅は、機体に近すぎるか離
れすぎていることを意味しています。
3. 手を素早く下ろすと PalmControl が終了し、フ
ロント LED が赤色に点灯します。
緑色点灯
赤色点灯
2017 DJI All Rights Reserved.
©
23
Page 24

Spark ユーザーマニュアル
位置調整
1. 手のひらと機体の距離を一定に保ちながら、手
のひらを上下にゆっくり動かして機体の高度を
制御します。
2. 手のひらと身体の距離を一定に保ち(図を参照)、
腕を左右に動かして機体の方向を制御します。
3. 手のひらと身体の距離を一定に保ち、前後に動
き、機体を前進または後進させます。
フォロー
1. 機体の前に立ち、一方の手を上げて、カメラに
向かって素早く手を振ります。機体の機首の前
方約 0.7m の位置に約 2 秒間手のひらをかざしま
す。
2. ジェスチャーが正常に認識された場合はフロン
ト LED が緑色に 2 回点滅します。機体が上昇し
て後退し、ユーザーが立っている場所から 3m
離れた位置の地上 2.3m の高さでホバリングし
ます。 機体がホバリングするまで体を動かさな
いでください。
3. フロント LED が緑色に点灯し、機体が自動的な
追跡を開始します。
4. 手を振るジェスチャーが認識されない場合は、
または、機体がユーザーを見失った場合、両手を
頭の上に上げて Y 字型にし、その状態を 2 秒間
維持することでフォローを有効化することがで
きます。
セルフィーの撮影
緑色点灯
× 2
緑色に 2 回点滅
緑色点灯
1. カメラの方に向いているときに、手でフレームを
作ると、セルフィーの撮影が開始されます。
2. フロント LED が赤色にゆっくりと点滅している
場合は、セルフィーのジェスチャーが正常に認
識されています。セルフィーのカウントダウンを
3 秒間待ちます。フロント LED が赤色に素早く
点滅し、カメラがこれからセルフィーを撮影す
ることを示します。
2017 DJI All Rights Reserved.
24
©
ゆっくり赤色に点滅
Page 25

Beckon
1. 機体が追尾を開始したら、両腕を頭上に上げて
Y 字型にし、その状態を 2 秒間維持します。
Spark ユーザーマニュアル
2. Beckon が有効になると、機体はユーザーの方に
移動し、ユーザーから 1.2m 離れた位置の地上
1.5m の高さでホバリングします。
3. フロント LED が赤色に点灯します。
PalmLand
機体との距離が 1.5m 以内にある状態で
カメラの方に向き、機体の 0.5m 下あたりに手のひ
らを差し出します。機体はゆっくりと下降し、手の
上に着陸します。
安全のために、ジェスチャーモードを使用する前に Spark プロペラガードを取り付けることを強
くお推めします。
DJI GO 4 で をタップして、ジェスチャーコントロールを有効化する必要があります。
ジェスチャーモードでは、写真の解像度は 1440 x 1080 になります。
PalmLaunch では、機体ステータスインジケーターは通常どおり点滅し、モバイルデバイスまた
は送信機が接続されていない場合でもリモート信号の消失は表示されません。
ジェスチャーモードは広い場所で使用してください。
ジェスチャーモードが使用できるのは、写真を撮影するときのみです。
モバイルデバイスで GPS を有効化すると、ジェスチャーモードでの機体の追尾精度が高くなり
ます。
赤色点灯
赤色点灯
2017 DJI All Rights Reserved.
©
25
Page 26

Spark ユーザーマニュアル
フライトレコーダー
フライトデータは、機体の内部記憶装置に自動的に記録されます。記録されるデータには、フライトテレ
メトリデータや機体のステータス情報およびその他のパラメーターなどがあります。記録されたデータに
アクセスするには、機体の Micro USB ポートから PC に接続します。
プロペラの取り付けと取り外し
Spark では DJI の純正プロペラのみを使用してください。白いリングのあるプロペラと、マークのないプ
ロペラは、取り付け位置と回転方向の区別を示します。
プロペラ 白いリング マークなし
図
取り付け位置 白いマークのあるモーター 白いマークのないモーター
凡例
ロック:プロペラを矢印方向に回し、装着して締め付けます。
プロペラの取り付け
白いリング付きのプロペラを、白いマークのあるマウントベースに取り付けます。各プロペラをマウント
プレートに押し付け、固定されるまでロック方向に回転させてください。マークのないプロペラをマーク
のないマウントベースに取り付けます。プロペラブレードを開きます。
マー クあり マークなし
プロペラの取り外し
モーターマウントに向けてプロペラを押し下げ、ロック解除方向に回します。
プロペラブレードは先端が鋭いため、注意して扱ってください。
DJI の純正プロペラのみを使用してください。複数の種類のプロペラを一緒に使用しないでくだ
さい。
回転しているモーターから離れてください。回転しているプロペラには触れないでください。
フライト前に毎回、プロペラとモーターが正しくしっかりと取り付けられていることを確認して
ください。
フライト前に毎回、すべてのプロペラが良好な状態であることを確認してください。欠けたり、
損傷したり、古くなったプロペラは使用しないでください。
けがをしないよう、回転しているプロペラやモーターには手を触れたり近づけたりしないでくだ
さい。
安全で快適な飛行操作のため、必ず DJI の純正プロペラを使用してください。
2017 DJI All Rights Reserved.
26
©
Page 27

Spark ユーザーマニュアル
インテリジェント・フライト・バッテリー
はじめに
DJI インテリジェント・フライト・バッテリーは、容量 1,480mAh、電圧 11.4V、スマート充電 / 放電機能
付きです。バッテリーの充電には、必ず、対応した DJI 純正の充電器を使用してください。
インテリジェント・フ ライト・バッテリー 充電器
インテリジェント・フライト・バッテリーは、初めて使用する前に完全に充電してください。
DJI インテリジェント・フライト・バッテリーの機能
1. バッテリー残量表示:LED インジケーターは、現在のバッテリー残量を表示します。
2. 自動放電:バッテリーが 10 日間以上使用されない場合、膨張を防ぐために 70% 未満の電力まで自動で
放電します。バッテリーを 65%まで放電するには、およそ 2 日間かかります。放電の過程でバッテリー
から多少の熱が放出されますが、これは正常な状態です。
3. バランス充電:充電時に各バッテリーセルの電圧が自動的にバランス調整されます。
4. 過充電保護:バッテリーがフル充電されると充電を自動的に停止します。
5. 温度検知:バッテリーは、温度が 5 〜 40℃のときのみ充電されます。
6. 過電流保護:3A を超える大電流が検知されると、バッテリーの充電を停止します。
7. 過放電保護:過放電による損傷を防ぐため、放電を自動的に停止します。
8. 短絡保護:短絡を検知すると電源が自動的に切断されます。
9. 休止モード:20 分間何もしないと、省電力のためにバッテリーは電力の供給を停止してスイッチがオフ
になります。過放電を防ぐために、バッテリーレベルが 10% 未満になっているときに 6 時間何もしな
いとバッテリーは休止モードに入ります。バッテリーレベルインジケーターは点灯しません。バッテ
リーを充電すると、休止モードから復帰します。
10. 通信:バッテリーの電圧、容量、電流などに関する情報は、機体のメインコントローラーに送信され
ます。
ご使用前に「Spark インテリジェント・フライト・バッテリーの安全に関するガイドライン」を
参照してください。ユーザーはすべての操作と使用に対する責任を負うものとします。
2017 DJI All Rights Reserved.
©
27
Page 28

Spark ユーザーマニュアル
バッテリーの使用
電源のオン/オフ
電源をオンにする:電源ボタンを 1 回押し、次に 2 秒間長押しすると電源がオンになります。送信機のシ
ステムステータス画面に、現在のバッテリー残量が表示されます。
電源をオフにする:電源ボタンを 1 回押し、次に 2 秒間長押しすると電源がオフになります。
バッテリー 残 量イン ジケ ータ ー
LED1
LED2
LED3
LED4
電源ボタン
低温注意:
1. 低温環境(0 〜 5℃)で飛行すると、バッテリー容量は著しく減少します。
2. バッテリーは極低温環境(0℃未満)では使用できません。
3. 低温環境で DJI GO 4 アプリがローバッテリー残量警告を表示した場合は、ただちにフライトを終了し
てください。
4. バッテリーの性能を発揮するには、バッテリー温度を 20℃以上に維持してください。
低温環境では、バッテリーをバッテリー室に装填して機体の電源を入れ、離陸前に 1 〜 2 分ほど
暖機するようにしてください。
バッテリー残量のチェック
バッテリー残量インジケーターは、電力の残量を表示します。バッテリーの電源を切るとき、電源ボタンを
1 回押すと、バッテリー残量インジケーターが点灯して現在のバッテリー残量が表示されます。詳細は以下を
参照してください。
また、充電および放電中、バッテリー残量インジケーターは現在のバッテリー残量を表示します。
インジケーターの意味は以下のとおりです。
:LED がオン。 :LED が点滅。
:LED がオフ。
LED1 LED2 LED3 LED4 バッテリー残量
88 〜 100%
75 〜 88%
63 〜 75%
50 〜 63%
38 〜 50%
25 〜 38%
13 〜 25%
0 〜 13%
2017 DJI All Rights Reserved.
28
©
Page 29

Spark ユーザーマニュアル
インテリジェント・フライト・バッテリーの充電
1. 充電器を電源(100 - 240V、50 / 60Hz)に接続します。
2. Spark の Micro USB ポートを充電器に接続して充電を開始します。
3. 充電中、バッテリー残量インジケーターは現在のバッテリー残量を表示します。
4. バッテリー残量インジケーターがすべてオフになると、インテリジェント・フライト・バッテリーの充
電は完了です。バッテリーを完全充電するまでに、約 1 時間 20 分かかります。バッテリーが完全に充
電されたら、充電器を取り外します。
充電器
絶対に電源をオンにした状態でバッテリーの抜き差しをしないでください。
長期間保管する場合は、バッテリー温度を室温まで下げてから保管するようにしてください。
バッテリーセルの温度が動作範囲(5 〜 40℃)内にない場合は、充電器はバッテリーの充電を停
止します。
LED1 LED2 LED3 LED4 バッテリー残量
電源コンセント
0 〜 50%
50 〜 75%
75 〜 100%
充電完了
バッテリー保護 LED 表示
次の表はバッテリー保護メカニズムと対応する LED パターンを示したものです。
LED1 LED2 LED3 LED4 点滅パターン バッテリー保護項目
LED2 が毎秒 2 回点滅する 過電流検知
LED2 が毎秒 3 回点滅する 短絡検知
LED3 が毎秒 2 回点滅する 過充電検知
LED3 が毎秒 3 回点滅する 充電器の過電圧検知
LED4 が毎秒 2 回点滅する 充電温度が低すぎる
LED4 が毎秒 3 回点滅する 充電温度が高すぎる
2017 DJI All Rights Reserved.
©
29
Page 30

Spark ユーザーマニュアル
これらの問題が解決したら、電源ボタンを押してバッテリー残量インジケーターをオフにします。インテ
リジェント・フライト・バッテリーを充電器から抜き、もう一度差し込んで充電を再開します。室温エラー
の場合は、バッテリーを充電器から抜き差しする必要はありません。温度が許容範囲になれば充電器は充
電を再開します。
DJI はサードパーティ製の充電器による損傷については、いかなる責任も負いません。
長距離搬送する場合はその前にインテリジェント・フライト・バッテリーを放電します。
バッテリー残量が 30% 未満になるか電源が入らなくなるまで Spark を屋外で飛行させます。
ジンバルとカメラ
ジンバル
概要
Spark の 2 軸機械式ジンバルは、搭載カメラを安定化させ、鮮明でブレのない静止画や動画の撮影を実現
します。ジンバルは 85˚ の範囲でチルトすることができます。
カメラビューで、青い円が表示されるまで画面を長押しします。円を左右にドラッグすると機体の向きを
操作できます。円を上下にドラッグするとカメラのチルトを操作できます。
0°
-85°
ジンバル操作モード
2 種類のジンバルの操作モードがあります。操作モードの切り替えは、DJI GO 4 アプリのカメラ設定ペー
ジで行います。
フォロー
モード
FPV モード ジンバルが機体の動きと同調して、一人称視点の飛行体験を提供します。
平らで広い場所から離陸して、常にジンバルを保護するようにしてください。
次のような場合、ジンバルのモーターにエラーが発生することがあります。
(1)機体が平らでない地面に置かれているか、ジンバルの動きが妨害される。
(2)ジンバルが、衝突など強い負荷の影響を受けた。
濃霧や雲の中を飛行すると、ジンバルが湿気を帯びて一時的に不具合が生じることがあります
が、ジンバルが乾けば機能は正常に戻ります。
機体がスポーツモードになっているときはジンバルは自動的に FPV モードになります。
2017 DJI All Rights Reserved.
30
©
ロール軸は常に水平に保たれます。
Page 31

Spark ユーザーマニュアル
カメラ
概要
搭載されているカメラは、1 / 2.3 インチの CMOS センサーを採用しており、最大 1080p で 30fps の動画
と 12 メガピクセルの静止画を撮影することができます。画像の撮影モードには、シングルショット、バー
スト、インターバル、パノラマ、シャローフォーカスなどがあります。DJI GO 4 アプリを使用することに
より、カメラが捉えている映像を、接続したモバイルデバイスで確認することができます。
カメラの microSD カードスロット
静止画や動画を保存するには、機体の電源を入れる前に、microSD カードをスロット(下図参照)に挿入
します。Spark は最大 64GB の microSD カードをサポートしています。読み書きの速度が速く、高解像度
動画の保存が可能な UHS-1 タイプの microSD カードの使用をお勧めします。
電源がオンのときは機体から microSD カードを抜かないでください。
カメラシステムが安定して動作するように、1 回の動画撮影は 30 分までにしてください。
システムの制限のために Mac コンピューターでは 32GB 以下の microSD カードのみを使用でき
ます。
SD カードがないか、SD カードの容量がいっぱいになっている場合は、撮影した映像をモバイル
デバイスに保存できます。静止画の解像度は 1,024 × 768 で、動画は 1,280 × 720 です。
カメラデータポート
Spark の電源を入れて USB ケーブルを Micro USB ポートに接続し、静止画や動画をコンピューターにダウン
ロードします。
microSD カードのファイルにアクセスするには、あらかじめ機体の電源をオンにしておく必要
があります。
モバイルデバイスでの機体の制御
Wi-Fi を介してモバイルデバイスを接続し、DJI GO 4 で機体を制御できます。詳細については、以下の手
順に従ってください。
1. 機体の電源を入れます。
2. モバイルデバイスの Wi-Fi をオンにし、Spark のネットワークを選択して、Wi-Fi のパスワードを入力し
ます。
3. DJI GO 4 を起動します。[GO FLY]をタップしてカメラビューに入ります。
4. アイコンをタップすると、自動的に離陸します。両方の親指を画面上に置き、仮想ジョイスティックを
使用して、機体を操作します。
2017 DJI All Rights Reserved.
©
31
Page 32

Spark ユーザーマニュアル
モバイルデバイスの Wi-Fi 周波数は 2.4GHz(デフォルト)または 5.8GHz に設定できます。通
信の干渉を減らすには、対応デバイスで 5.8GHz の Wi-Fi を選択します。(日本国内では、5.8GHz
は使用できません。)
ビープ音が 3 回聞こえるまで電源ボタンを 9 秒以上長押しして、Wi-Fi の名前とパスワードをリ
セットし、Wi-Fi の周波数を 2.4GHz に再設定します。または、DJI GO 4 アプリで[ヘルプ]を
タップし、画面の指示に従います。
Wi-Fi 接続での飛行は、電磁干渉が比較的少ない広い場所でのみ行ってください。接続が干渉を
受ける場合は、代わりに送信機を使用して飛行させるか、干渉が少ない場所に移動することを
お勧めします。
バーチャルジョイスティックの使用方法
バーチャルジョイスティックを使用する前に、モバイルデバイスが機体に接続されていることを確認して
ください。下図はモード 2(左スティックがスロットル)の場合を示しています。
12
In flight (GPS)
バ ー チャ ル ジョイス ティックの GUI
P-GPS
09:29
61%
2.4G
画面の左半分を押して、機体を上下左右に移動させます。画面の右半分を押して、機体を前後に移動させ
たり、横方向に移動させたりします。
[ ]ボタンの上をタップして、バーチャルジョイスティックを有効または無効にします。
白い円より上の位置でも制御コマンドに反応します。
2017 DJI All Rights Reserved.
32
©
Page 33

Spark ユーザーマニュアル
機体の操作
本セクションでは、機体の制御方法について説明します。コントロールスティックモードは、モード 1、モ ー
ド 2、モード 3、カスタムモードに設定できます。
モード 1
左スティック
前方
右スティック
上
モード 2
モード 3
後方
右旋回左旋回
右スティック左スティック
上
下降
右旋回左旋回
左スティック 右スティック
前方
後方
下降
右左
前方
後方
右左
上
下降
右左
スティックモードは、初期設定ではモード 2 に設定されています。
スティックニュートラル/中心点:コントロールスティックが中央にあります。
コントロールスティックを動かす:コントロールスティックを押して、中央位置から遠ざけます。
2017 DJI All Rights Reserved.
©
右旋回左旋回
33
Page 34

Spark ユーザーマニュアル
バーチャルジョイ
スティック/
送信機
(モード 2)
左スティック
左スティック
右スティック
機体
( 機首方向を示す)
備考
左スティックを上下に動かして機体の高度を変更
します。
上昇させるにはスティックを押し上げ、下降させ
るには押し下げます。
両方のスティックをともに中央に戻すと、Spark
はその場でホバリングします。
スティックが中央位置から離れるほど、Spark の
高度変更速度が速くなります。機体の高度を急激
に変えないよう、コントロールスティックは常に
優しくゆっくりと動かしてください。
左スティックを左右に動かして、機体の進行方向を
制御します。
スティックを左に押すと機体は反時計回りに回転
し、右に押すと時計回りに回転します。スティッ
クを中央に戻すと、Spark は現在の向きを維持し
ます。
スティックが中央位置から離れるほど、Spark の
回転速度が速くなります。
右スティックを上下に動かすと、機体を前後に移
動できます。
スティックを上に押すと前進し、下に押すと後進し
ます。
スティックを中央に戻すと Spark
ホバリングします。
スティックが中央位置から離れるほど、ピッチ角(最
大 30˚)が広がり、飛行速度も上がります。
はその場で
右スティック
2017 DJI All Rights Reserved.
34
©
右スティックを左右に動かすと、機体を左右に移
動できます。
左に押すと左に飛行し、右に押すと右に飛行しま
す。スティックを中央に戻すと Spark はその場で
ホバリングします。
Page 35

送信機(別売)
本セクションでは、送信機の各機能につ
いて説明します。また、機体とカメラの
操作手順についても説明します。
2017 DJI All Rights Reserved.
©
35
Page 36

送信機(別売)
送信機の特徴
Spark の送信機は、最新式の Wi-Fi 信号増幅伝送システムを搭載し、機体とジンバルカメラを 2km もの最
大伝送距離範囲で操作できます *。送信機をワイヤレスでモバイルデバイスに接続し、DJI GO 4 アプリで
ライブビデオ映像を表示できます。折りたたみ式のクランプを使用して、モバイルデバイスをしっかり固
定できます。送信機のバッテリー最大稼働時間は約 2.5 時間です *。
1
2
3
4
11
1. Return-to-Home(RTH)ボタン
このボタンを長押しすると、RTH を開始します。
再度押すと、RTH はキャンセルされます。
2. フライト一時停止ボタン
緊急に一時停止させる場合に、1 回押します。
3. 電源ポート(Micro USB)
送信機のバッテリーを充電するため、充電器に
接続します。
4. モバイルデバイス用クランプ
お手持ちのモバイルデバイスを送信機にしっか
りと取り付けます。
5. 機能ボタン
DJI GO 4 インテリジェント・フライト・モード・
メニューを呼び出します。
6. コントロールスティック
機体の向きと動きを制御します。
7. 電源ボタン
電源ボタンを 1 回押すと、現在のバッテリー残
量が確認できます。電源ボタンを 1 回押し、次
に長押しすると、送信機の電源がオンまたはオ
フになります。
10
9
8
7
6
12
5
14
8. バッテリー残量 LED
送信機のバッテリー残量を表示します。
9. フライトモードスイッチ
P モードと S モードを切り替えます。
10. アンテナ
機体制御と動画信号を送受信します。
11. ステータス LED
送信機のシステムステータスを表示します。
12. ジンバルダイヤル
カメラのチルトを制御します。
13. カスタマイズ可能ボタン
DJI GO 4 アプリの設定を基にしてさまざまな
機能を実行します。
14. 録画ボタン
録画ボタンを押して動画の録画を開始します。
再度押すと録画を停止します。
15. シャッターボタン
シャッターボタンを押し、静止画を撮影します。
13
15
* 最大伝送距離(FCC)は、障害物や電波干渉のないエリアで、高度が約 120m のときに有効です。最大稼
働時間は無風状態で、20km/h の一定速度でテストしたものです。この値は参考値です。
2017 DJI All Rights Reserved.
36
©
Page 37

Spark ユーザーマニュアル
規格準拠:送信機は、お住まいの地域のコンプライアンスおよび規制に準拠しています。
スティックモード:コントロールは、モード 1、モード 2、カスタムモードに設定できます。
送信機の使用
送信機の電力は容量 2,970mAh の再充電可能バッテリーで供給されます。
送信機の電源のオン / オフ
電源ボタンを 1 回押すと、現在のバッテリー残量が確認できます。電源ボタンを 1 回押し、次に長押しす
ると、送信機の電源がオンまたはオフになります。
バッテリーの充電
バッテリーを充電するには、送信機の電源ポートを USB 充電器に接続します。送信機を完全に充電するに
は約 2 時間かかります。
カメラの操作
送信機のシャッターボタン、録画ボタン、ジンバルダイヤルで、動画/静止画の撮影とカメラのチルトの
調整を行います。
機体の操作
スティックモードは、バーチャルジョイスティックの設定と同じです。
2017 DJI All Rights Reserved.
©
37
Page 38

Spark ユーザーマニュアル
フライトモードスイッチ
このスイッチを切り替えて、目的のフライトモー
ドを選択します。P モードまたは S モードを選択し
ます。
スイッチの位置 フライトモード
SPORT
SPORT
P モード
S モード
RTH ボタン
RTH ボタンを長押しして、Return-to-Home(RTH)を開始します。すると、機体は最後に記録されたホー
ムポイントへ戻ります。もう一度このボタンを押すと、RTH はキャンセルされ、機体を操作できるように
なります。
最適な伝送距離
機体と送信機間の信号伝送は、アンテナと機体の相対的な位置関係が下の図に示すようになっているとき
に最も信頼性が高くなります。
最適な伝送距離
強い 弱い
最適な伝送区域内で機体を飛行させてください。最適な伝送状態を維持するために、上の図に従って送信
機とアンテナを調整してください。
送信機のリンク
送信機が付属する Spark コンボをお買い求めの場合、機体と送信機は出荷前にリンクされています。送信
機を Spark にリンクするには、以下の手順に従ってください。
1. 機体と送信機の電源を入れます。機体ステータスインジケーターが黄色に点滅するまで待ちます。
2. インテリジェント・フライト・バッテリーの電源ボタンを 3 秒間長押しします。ビープ音が 1 回鳴った
らボタンを放します。フロント LED が赤色に点滅します。
3. フライト一時停止ボタンと機能ボタンとカスタマイズ可能ボタンを同時に長押しします。アラームが
ビープ音 1 回と 2 回の交互から、速いビープ音 1 回に変わると、リンクが開始されます。
2017 DJI All Rights Reserved.
38
©
Page 39

Spark ユーザーマニュアル
4. フロント LED が緑色に点滅した後、赤色に点灯します。送信機のステータス LED が緑色に点灯したら、
リンクは完了です。
リンクは、送信機が機体から 20cm 以内にあるときに行ってください。
送信機のリンクを解除する
送信機以外に、DJI GO 4 のバーチャルジョイスティックでも機体を制御することができます。ただし、送
信機が機体にリンクされている間、バーチャルジョイスティックは無効になります。バーチャルジョイス
ティックを有効にするには、送信機と機体のリンクを解除する必要があります。
1. 機体の電源を入れます。
2. インテリジェント・フライト・バッテリーの電源ボタンを 6 秒間長押しすると、ビープ音が 2 回鳴って
送信機と機体のリンクが解除されます。
送信機のリンクを解除した後で機体の Wi-Fi ネットワークに接続すると、バーチャルジョイスティックを使
用することができます。
2017 DJI All Rights Reserved.
©
39
Page 40

DJI GO 4 アプリ
本セクションでは、DJI GO 4 アプリの
主要機能について説明します。
2017 DJI All Rights Reserved.
40
©
Page 41

DJI GO 4 アプリ
このアプリを使用して、ジンバルやカメラ、機体のその他の機能を制御します。アプリには、機体の設定、
静止画と動画の編集や他ユーザーとの共有を行うための[機器]、[Editor]、[ SkyPixel]、[ Me]というセク
ションがあります。
機器
モバイルデバイスが機体に接続されているときに、[機器]ページの[GO FLY]アイコンをタップしてカ
メラビューに入ります。
カメラビュー
8 97654321
12
22
21
20
In flight (GPS)
P-GPS
09:29
2.4G
1080P/30
61%
10
11
12
13
14
19
18
1. システムのステータス
飛行中(GPS)
:このアイコンは、機体の飛行ステータスを示し、さまざまな警告メッセージを表示します。
H 9.6
S 1.1D 9.6
17
15
16
2. 障害物認識ステータス
:障害物が機体に近づくと、赤色のバーが表示されます。障害物が認識可能な範囲に入る
と、オレンジ色のバーが表示されます。
3. バッテリー残量インジケーター
:バッテリー残量インジケーターは、バッテリー残量をリアルタイムに表示します。バッテリー
残量インジケーターのカラーゾーンは、各種機能の実行に必要な電力レベルを表します。
4. フライトモード
:このアイコン横の文字列は、現在のフライトモードを示します。
タップして MC(メインコントローラー)の設定を行います。これらの設定から飛行限界を変更し、ゲイン
値などを設定できます。
2017 DJI All Rights Reserved.
©
41
Page 42

Spark ユーザーマニュアル
5. カメラのパラメーター
1080P/30
カメラの設定パラメーターと microSD カードの容量が表示されます。カメラ設定でカメラのパラメー
ターの表示を有効にします。
6. GPS の信号強度
:現在の GPS の信号強度を示します。白色のバーが適切な GPS の信号強度を示します。
7. 3D 認識システムのステータス
:3D 検知システムの機能を有効または無効にするにはこのアイコンをタップします。
8. Wi-Fi 設定
:タップすると、Wi-Fi 設定メニューに移動します。
2.4G
9. バッテリー残量
61%
:このアイコンは、現在のバッテリー残量を示します。
タップしてバッテリー情報メニューの表示、各種バッテリー警告のしきい値の設定、バッテリー警告の
履歴の確認を行います。
10. 一般設定
:タップして一般設定メニューに進み、測定基準の設定、ライブストリームの有効化、飛行経路の
表示などを行います。
11. ジンバルピッチの追跡
:このアイコンをタップした後でモバイルデバイスを回転させてジンバルのチルトを調整します。
12. ジンバルスライダー
:ジンバルのピッチ角を表示します。
13. 静止画/動画の切り替え
:タップして静止画撮影モードと動画録画モードを切り替えます。
14. 撮影/録画ボタン
/ :タップして静止画の撮影または動画の録画を開始します。
15. カメラの設定
:タップすると、カメラ設定メニューに移動します。
をタップして、カメラの ISO、シャッター、オート露出の値を設定します。
をタップして、静止画モードを選択します。Spark は、シングルショット、バーストショット、イン
ターバルショット、パノラマ、シャローフォーカスをサポートします。
をタップすると、全般的なカメラ設定メニューに移動します。
2017 DJI All Rights Reserved.
42
©
Page 43

Spark ユーザーマニュアル
シャローフォーカス画像を撮影するときには、次の点に注意してください。
シャローフォーカスは静止画の撮影に適しています。人を撮影するときには、撮影中に動かな
いようにしてください。動いた場合、シャローフォーカス画像の撮影に失敗することがあります。
機体は約 20cm 上昇してから撮影を行います。機体の周囲に障害物がないことを確認します。
撮影に適した範囲は 30m 以内です。
16. 再生
:タップして再生ページに進み、撮影後すぐに静止画や動画をプレビューできます。
17. フライトテレメトリ
H 9.6M
D 9.6M
S 1.1M/S
18. バーチャルジョイスティックの切り替え
クを使用して機体を制御するには、このスイッチを有効にした後で指を画面の上に置きます。このスイッ
チを無効にすると、画面に触れて別の操作を実行できます。
19. インテリジェント・フライト・モード
20. スマート RTH
:地面からの高さです。
:機体とホームポイント間の距離です。
:機体の速度です。
:タップして、バーチャルジョイスティックを有効または無効にします。バーチャルジョイスティッ
:タップしてインテリジェント・フライト・モードを選択します。
:RTH 手順を開始します。タップして機体を最後に記録したホームポイントに帰還させます。
21. 自動離陸/着陸
/ :タップして自動離陸/着陸を開始します。
22. 戻る
:このアイコンをタップすると、メインメニューに戻ります。
カメラビューで、青い円が表示されるまで画面を長押しします。円を左右にドラッグすると機体
の向きを制御できます。円を上下にドラッグするとカメラのチルトを制御できます。
2017 DJI All Rights Reserved.
©
43
Page 44

Spark ユーザーマニュアル
Editor
DJI GO 4 アプリには、優れた動画エディターが搭載されています。複数の動画クリップを録画し、モバイ
ルデバイスにダウンロードした後、ホーム画面の[Editor]に進みます。次に、テンプレートを選択して自
動的に結合するクリップ数を指定すると、ショートフィルムが作成され、すぐに共有することができます。
SkyPixel
SkyPixel ページで静止画や動画を閲覧、共有できます。
Me
DJI アカウントをすでにお持ちの場合、ここでフォーラムのディスカッションに参加したり、自分の作品を
コミュニティで共有したりすることができます。
2017 DJI All Rights Reserved.
44
©
Page 45

飛行
本セクションでは、安全な飛行方法と飛
行に関する制限事項について説明します。
2017 DJI All Rights Reserved.
©
45
Page 46

飛行
飛行前の準備が完了したら、DJI GO 4 アプリのフライトシミュレーターを使用して飛行スキルを向上させ、
安全な飛行のための練習を行ってください。飛行は常に障害物のない開けた場所で実施してください。
飛行環境の要件
1. 悪天候時に機体を使用しないでください。悪天候とは、風速 10m/s 超の強風、雪、雨、霧などです。
2. 障害物のない開けた場所で飛行させてください。高い建造物や巨大な金属製の建造物は、機体に搭載さ
れているコンパスや GPS システムの精度に影響を及ぼす場合があります。
3. 障害物、人混み、高電圧線、木々、水域での飛行は避けてください。
4. 高レベルの電磁波を発する基地局や電波塔など場所は避け、電波干渉を最小限に抑えてください。
5. 位置決め機能が阻害され、その結果飛行の安全性に影響を及ぼす場合には、地表面が著しく変化する場
所 ( 建物の中から外への飛行等 ) や GPS 信号が弱い時には、機体を飛行させないでください。
6. 機体やバッテリーの性能は、空気密度や気温などの環境要因に左右されます。海抜 4,000m で飛行させ
るときは、バッテリーと機体の性能が落ちる可能性があるため、細心の注意を払ってください。
7. Spark は、南極圏、北極圏では P モードで使用できません。
飛行制限と飛行禁止区域
無人航空機(UAV)の運用者は、ICAO や FAA などの政府機関や、監督官庁の定めるすべての規制に従う
必要があります。安全上の理由から、飛行制限は初期設定で有効化されており、ユーザーが本製品を安全
かつ合法的に使用できるようになっています。飛行制限には、高度制限、距離制限、飛行禁止区域などが
あります。
P モードでの操作時は、高度制限、距離制限、飛行禁止区域の機能が同時に働き、飛行の安全を管理します。
最大飛行高度と半径制限
最大飛行高度と半径制限は、DJI GO 4 アプリで変更できる場合があります。ただし、最大飛行高度は
500m を超えることはできません。これらの設定に従って、Spark は下図のような制限円筒内で飛行します。
2017 DJI All Rights Reserved.
46
©
最大飛行高度
最大半径
ホームポイント
電源 をオンにしたときの
機体高度
Page 47

Spark ユーザーマニュアル
GPS 信号が強い
飛行制限 DJI GO 4 アプリ
最大飛行高度
最大半径
GPS 信号が弱い
最大飛行
高度
最大半径 制限なし
機体が制限区域を超えて飛行した場合でも、機体の制御はできますが、それ以上遠くに飛ばすこ
とはできません。
安全上の理由から、空港、高速道路、鉄道の駅、鉄道の線路、市街地、重要な施設などの近くで
飛行させないでください。機体は、常に目視が可能な範囲内で飛行させてください。
機体の高度は指定の値を超え
ることができません。
飛行距離は最大半径内でなけ
ればなりません。
飛行制限 DJI GO 4 アプリ
GPS 信号が弱く、ビジョンシステム
が起動している場合、飛行高度は 5
メートルに制限されます。GPS 信号
が弱く、ビジョンシステムが起動し
ていない場合、飛行高度は 30 メー
トルに制限されます。
警告:高度制限に
到達。
警告:距離制限に
到達。
警告:高度制限に到達。 なし。
機体ステータスインジケー
ター
なし。
機体ステータスインジ
ケーター
飛行禁止区域
すべての飛行禁止区域は、DJI 公式ウェブサイト http://www.dji.com/flysafe/no-fly に一覧表示されています。
飛行禁止区域は、空港と制限区域に分けられています。空港には、主要空港および有人飛行機が低空飛行
する飛行場が含まれます。制限区域には、国境や、飛行がセキュリティ上の問題を生じる可能性のある場
所が含まれます。
飛行前のチェックリスト
1. 送信機、インテリジェント・フライト・バッテリー、モバイルデバイスの充電が完了している。
2. プロペラが正しくしっかりと取り付けられている。
3. 必要に応じて microSD カードが挿入されている。
4. ジンバルが正常に機能している。
5. モーターが始動でき、正常に機能している。
6. DJI GO 4 アプリが機体に正しく接続されている。
7. 3D 認識システムとビジョンシステムのセンサーに汚れがないことを確認している。
2017 DJI All Rights Reserved.
©
47
Page 48

Spark ユーザーマニュアル
自動離陸と自動着陸
自動離陸
自動離陸機能は、機体ステータスインジケーターが緑色に点滅した場合のみ、使用してください。自動離
陸機能を使用するには、次の手順に従ってください。
1. DJI GO 4 アプリを起動し、[GO FLY]をタップしてカメラページに進みます。
2. フライト前チェックリストの手順をすべて完了します。
3. [ ]をタップして、安全に飛行できる条件であることを確認します。アイコンをスライドさせて確定し、
離陸します。
4. 機体が離陸し、地上 1.2m でホバリングします。
ビジョンシステムを使用して安定化を行っている場合、機体ステータスインジケーターが素早く
点滅します。 機体は 30m 以下の高度で自動的にホバリングします 。自動離陸機能を使用する前
に、十分な GPS 信号が得られるまで待つことをお勧めします。
自動着陸
自動着陸機能は、機体ステータスインジケーターが緑色に点滅した場合のみ、使用してください。自動着
陸機能を使用するには、次の手順に従ってください。
1. をタップし、着陸条件が良好であることを確認します。スライドして確定します。
2. ただちに着陸プロセスを中止するには、画面上の ボタンを使用します。
3. 機体が着陸し、モーターが自動停止します。
モーターの始動と停止(送信機を使用する場合)
モーターの始動
モーターの始動には、コンビネーション・スティック・コマンド(CSC)を使用します。両方のスティックを
内側下または外側角に向けて倒して、モーターを始動します。モーターの回転が始まったら、両方のスティッ
クを同時に放します。
または
モーターの停止
モーターを停止させるには、2 通りの方法があります。
方法 1:機体が着陸したら、左スティックを押し下げ、そのままの状態を維持します。モーターは 3 秒後
に停止します。
方法 2:機体が着陸したら、左スティックを押し下げ、そのうえで上述のモーターの始動で使用したのと同
じ CSC を実行します。モーターはただちに停止します。モーターが停止したら両方のスティックを放します。
または
方法 1 方法 2
2017 DJI All Rights Reserved.
48
©
Page 49

Spark ユーザーマニュアル
緊急時に空中で CSC を実行するには、スティックを 1.5 秒間維持して飛行中のモーターを停止
します。飛行中にモーターが停止すると、機体は墜落します。
フライトテスト
離陸/着陸手順
1. バッテリー残量インジケーターを自分の方に向けて、開けた平らな場所に機体を置きます。
2. インテリジェント・フライト・バッテリーの電源をオンにします。
3. DJI GO 4 アプリを起動して、カメラページに進みます。
4. 機体ステータスインジケーターが緑色に点滅するまで待ちます。緑色の点滅は、ホームポイントが記録
され、安全に飛行できることを意味します。自動離陸を使用します。
5. 自動着陸を使用して、機体を着陸させます。
6. インテリジェント・フライト・バッテリーの電源をオフにします。
飛行中、機体ステータスインジケーターが黄色で素早く点滅する場合、機体はフェールセーフモー
ドに入っています。
飛行中、機体ステータスインジケーターが赤色にゆっくりまたは素早く点滅する場合、ローバッ
テリー残量警告を示しています。
飛行に関する詳細は、当社のチュートリアルビデオをご覧ください。
動画に関する提案とヒント
1. 各フライト前に、フライト前のチェックリストをすべて確認してください。
2. DJI GO 4 アプリで目的のジンバル操作モードを選択してください。
3. 動画撮影は P モードで飛行している場合にのみ行ってください。
4. 常に好天時に飛行し、雨天や強風時の飛行は避けてください。
5. お好みのカメラ設定を選択してください。設定には、静止画のフォーマットや露出補正などがあります。
6. 飛行ルートと撮影シーンを想定し飛行テストを実施してください。
7. コントロールスティックをゆっくり操作してスムーズで安定した動きを維持してください。
コンパスのキャリブレーション
コンパスのキャリブレーションは、DJI GO 4 アプリまたはステータスインジケーターから促された場合に
行ってください。コンパスのキャリブレーションを実施する場合、次のルールを順守してください。
磁鉄鉱の近く、立体駐車場、地下の鋼鉄補強材など強い磁性干渉を受ける可能性のある場所では、
コンパスのキャリブレーションを行わないでください。
キャリブレーション中は、携帯電話などのような強磁性体を携帯しないでください。
キャリブレーションの完了後にコンパスが強力な干渉を受けた場合、DJI GO 4 アプリが通知しま
す。指示に従ってコンパスの問題点を解決してください。
2017 DJI All Rights Reserved.
©
49
Page 50

Spark ユーザーマニュアル
キャリブレーション手順
障害物のない開けた場所を選んで、以下の手順を実施してください。
1. アプリの機体ステータスバーをタップして[キャリブレーションを実施する]を選択し、画面の指示に
従います。
2. 機体を水平に保ち、360 度回転させます。機体ステータスインジケーターが緑色に点灯します。
3. 機体の機首を下に向けて機体を垂直に保ち、中心軸周りに 360 度回転させます。
4. 機体ステータスインジケーターが赤色に点滅した場合、再度機体キャリブレーションを実施します。
キャリブレーション手順の実行後、機体ステータスインジケーターが赤色と黄色に点滅した場合
は、機体を別の場所に移動してキャリブレーションをやり直してください。
金属製の橋や車両、足場など、金属製の物体の近くでコンパスをキャリブレーションしないでく
ださい。
機体を地面に設置後、機体ステータスインジケーターが赤色と黄色に交互に点滅した場合、コン
パスは磁気干渉を受けています。場所を変えてください。
ファームウェアの更新
機体のファームウェ更新するには、DJI GO 4 または DJI Assistant 2 を使用します。送信機のファームウェ
アは、DJI GO 4 でのみ更新できます。
DJI GO 4 アプリの使用
機体、送信機、DJI GO 4 アプリを接続します。新しいファームウェアの更新が利用できる場合には、通知
されます。更新を開始するには、モバイルデバイスをインターネットに接続し、画面の指示に従います。
DJI Assistant 2 の使用
DJI Assistant 2 を使用してファームウェアの更新を行うには次の手順に従ってください。
1. 機体の電源を切った状態で、Micro USB ケーブルでコンピューターの Micro USB ポートに機体を接続し
ます。
2017 DJI All Rights Reserved.
50
©
Page 51

Spark ユーザーマニュアル
2. 機体の電源を入れます。
3. DJI Assistant 2 を起動し、ご登録の DJI アカウントでログインします。
4. [Spark]を選択し、左側パネルの [ ファームウェア更新 ] をクリックします。
5. 更新したいファームウェアバージョンを選択します。
6. ファームウェアがダウンロードされるのを待ちます。ファームウェア更新が自動で始まります。
7. ファームウェア更新が完了したら機体を再起動します。
電源を入れる前に機体がコンピューターに接続されていることを確認します。
ファームウェアの更新には 15 分ほどかかります。ジンバルが軽く動作し、機体ステータスイン
ジケーターが不規則に点滅して機体が再起動しますが、これは正常な動作です。更新が完了する
までお待ちください。
コンピューターがインターネットに接続されていることを確認してください。
インテリジェンス・フライト・バッテリーの残量が 50% 以上あり、送信機のバッテリーの残量
が 30% 以上あることを確認します。
更新中は、機体をコンピューターから取り外さないでください。
2017 DJI All Rights Reserved.
©
51
Page 52

付録
2017 DJI All Rights Reserved.
52
©
Page 53

付録
仕様
機体
重量 300g
寸法 143 × 143 × 55mm
対角寸法 ( プロペラを除く) 170mm
最大上昇速度 スポーツモードで 3m/s
最大下降速度 自動着陸使用時で 3m/s
最大速度 無風、スポーツモードで 50km/h
運用限界高度(海抜) 4,000m
最大飛行時間 16 分(無風、定速 25km/h)
最大ホバリング時間 15 分(無風)
動作環境温度 0 〜 40℃
GNSS GPS / GLONASS
垂直:± 0.1m(ビジョンポジショニング)、± 0.5m
GPS ホバリング精度の範囲
トランスミッター出力(EIRP)
動作周波数 2.400 〜 2.483GHz、5.725 〜 5.825GHz*
ジンバル
操作可能範囲 ピッチ:-85 〜 0°
機構 2 軸(ピッチ、ロール)
3D 認識システム
障害物認識範囲 0.2 〜 5m
動作環境
ビジョンシステム
対応速度 高度 2m で 36km/h 以下
対応高度 0 〜 8m
動作範囲 0 〜 30m
動作環境
カメラ
センサー 1 / 2.3 インチ CMOS、有効画素数:1,200 万画素
レンズ
* 日本国内では、使用できません。
(GPS ポジショニング)
水平:± 0.3m(ビジョンポジショニング)、± 1.5m
(GPS ポジショニング)
2.4G
FCC:25dBm、CE:18dBm、SRRC:18dBm
5.8G*
FCC:27dBm、CE:14dBm、SRRC:27dBm
拡散反射する物体、サイズ 20 × 20mm 以上、反射率 20% 以上
(壁、樹木、人間など)
地表の模様が明瞭で、拡散反射する物体(反射率 20% 以上)、
適切な明るさがある状態(15 ルクス超)
視野角 81.9°、 25mm(35mm 判換算相当)、f/2.6
撮影範囲:2m
〜 ∞
2017 DJI All Rights Reserved.
©
53
Page 54

Spark ユーザーマニュアル
ISO レンジ 100 〜 3,200(動画)、100 〜 1,600(写真)
電子シャッター速度 2 〜 1 / 8,000 秒
最大静止画サイズ 3,968 × 2,976
シングルショット
静止画モード
動画記録モード FHD:1,920 × 1,080 30p
最大ビデオビットレート 24Mbps
対応ファイルシステム FAT32
静止画 JPEG
動画 MP4(MPEG-4 AVC / H.264)
対応 SD カード
Wi-Fi
動作周波数 2.4G / 5.8G*
最大伝送距離
(障害物や干渉がない場合)
送信機
動作周波数 2.412 〜 2.462GHz、5.745 〜 5.825GHz*
最大伝送距離 **
(障害物や干渉がない場合)
動作環境温度 0 〜 40℃
内蔵バッテリー 2,970mAh
トランスミッター出力(EIRP)
動作電圧 950mA @3.7V
対応モバイルデバイスサイズ
充電器
入力 100 - 240V、50 / 60Hz、0.5A
出力 5V / 3A、9V / 2A、12V / 1.5A
* 日本国内では、使用できません。
** 日本国内で使用する場合の最大伝送距離は 500m です。
バーストモード:3 枚
オート露出ブラケット(AEB): 3 ブラケットフレーム
(0.7EV ステップ)
間隔(2 / 3 / 5 / 7 / 10 / 15 / 20 / 30 / 60 秒)
推奨されるモデル:
Sandisk 16 / 32GB UHS-1 microSDHC
Kingston 16 / 32GB UHS-1 microSDHC
Samsung 16 / 32GB UHS-I microSDHC
Sandisk 64GB UHS-1 microSDXC
Kingston 64GB UHS-1 microSDXC
Samsung 64GB UHS-I microSDXC
100m(距離)、50m(高度)
2.4GHz
FCC:2km、CE:0.5km、SRCC:0.5km
5.8GHz*
FCC:2km、CE:0.3km、SRRC:1.2km
2.4GHz
FCC:26dbm 以下、CE:18dBm 以下、SRRC:18dBm 以下
5.8GHz*
FCC:28dBm 以下、CE:14dBm 以下、SRRC:26dBm 以下
厚さ:6.5 〜 8.5mm
最大長:160mm
2017 DJI All Rights Reserved.
54
©
Page 55

Spark ユーザーマニュアル
インテリジェント・フライト・バッテリー
容量 1,480mAh
電圧 11.4V
最大許容電圧 13.05V
バッテリータイプ LiPo 3S
電力量 16.87Wh
正味重量 約 95g
動作環境温度 5 〜 40℃
アフターサービスのご案内
アフターセールスポリシーおよび保証については、以下のサイトをご覧ください。
1. アフターセールスポリシー:http://www.dji.com/jp/service
2. 返金ポリシー:http://www.dji.com/service/refund-return
3. 有償修理サービス:http://www.dji.com/service/repair-service
4. 保証サービス:http://www.dji.com/service/warranty-service
2017 DJI All Rights Reserved.
©
55
Page 56

DJI サポート
http://www.dji.com/support
本内容は変更されることがあります。
最新版は下記よりダウンロードしてください。
http://www.dji.com/spark
If you have any questions about this document, please contact DJI
by sending a message to DocSupport@dji.com.
SPARK は DJI の商標です。
Copyright © 2017 DJI All Rights Reserved.
 Loading...
Loading...