

Page 1
SPARK
사용자 매뉴얼
2017.06
V1.2
Page 2
키워드 검색
항목을 찾으려면 “배터리” 및 “설치” 같은 키워드를 검색합니다. Adobe Acrobat Reader로 이 문서를 열었다면
Windows에서는 Ctrl+F를, Mac에서는 Command+F를 눌러 검색합니다.
항목으로 이동
목차에서 전체 항목의 목록을 볼 수 있습니다. 원하는 섹션으로 이동하려면 항목을 클릭합니다.
이 문서 인쇄
이 문서는 고해상도 인쇄를 지원합니다.
매뉴얼 참고 사항
범례
경고 중요 힌트 및 팁 참조
첫 비행 전 읽어야 할 내용
SPARKTM를 사용하기 전에 아래 문서를 읽어보시기 바랍니다.
1. Spark 구성품 설명서
2. Spark 사용자 매뉴얼
3. Spark 퀵 스타트 가이드
4. Spark 고지 사항 및 안전 가이드
5. Spark 인텔리전트 플라이트 배터리 안전 가이드
비행 전에 공식 DJITM 웹사이트의 모든 튜토리얼 영상을 시청하고 고지 사항을 읽어볼 것을 권장합니다. Spark 퀵 스
타트 가이드를 검토하여 첫 비행을 준비하고, 자세한 내용은 사용자 매뉴얼을 참조하시기 바랍니다.
튜토리얼 영상
아래 주소로 이동하거나 오른쪽에 있는 QR 코드를 스캔하여 Spark 튜토리얼
영상에서 Spark를 안전하게 사용하는 방법을 시청하십시오.
http://www.dji.com/spark/info#video
DJI GO 4 앱 다운로드
비행 중에 DJI GOTM 4 앱을 사용해야 합니다. 오른쪽에 있는 QR 코드를 스캔하여
최신 버전을 다운로드해 주십시오.
Android 버전의 DJI GO 4는 Android v4.4 이상에서 호환됩니다.
iOS 버전의 DJI GO 4는 iOS v9.0 이상에서 호환됩니다.
* 더욱 안전한 비행을 위해, 비행 중 DJI GO 4 및 DJI 기체와 호환되는 모든 앱을 포함한 앱에 연결되어 있지 않거나
로그인 되어있지 않은 경우, 비행 고도는 30m, 거리는 50m로 제한됩니다.
DJI Assistant 2 다운로드
http://www.dji.com/spark/download에서 DJI Assistant 2를 다운로드하십시오.
2017 DJI All Rights Reserved.
©
2
Page 3

목차
매뉴얼 참고 사항
범례
첫 비행 전 읽어야 할 내용
튜토리얼 영상
DJI GO 4 앱
DJI Assistant 2
다운로드
다운로드
제품 개요
소개
주요 기능
기체 도표
활성화
기체
비행 모드
기체 상태 표시기
3D 감지 및 비전
리턴 투 홈
(RTH)
인텔리전트 플라이트 모드
Gesture Mode(
제스처 모드
비행 기록 장치
프로펠러 부착 및 분리
인텔리전트 플라이트 배터리
짐벌 및 카메라
모바일 기기로 기체 제어
조종기(선택 사항
)
조종기 개요
조종기 사용
조종기 연동
DJI GO 4
앱
Equipment
Editor
SkyPixel
Me
시스템
2
2
2
2
2
2
6
6
6
7
7
9
9
10
)
11
13
16
23
26
26
27
30
31
36
36
37
38
41
41
44
44
44
2017 DJI All Rights Reserved.
©
3
Page 4

비행
비행 환경 요구사항
비행 제한 및 비행 금지 구역
비행 전 체크리스트
자동 이륙 및 착륙
모터 시작/정지(조종기 사용 시
비행 테스트
콤파스 캘리브레이션
펌웨어 업데이트
부록
사양
A/S
정보
46
46
46
47
48
)
48
49
49
50
53
53
55
2017 DJI All Rights Reserved.
©
4
Page 5

제품 개요
이 섹션에서는 DJI Spark를 소개하고 기체의 구
성품을 설명합니다.
Page 6
제품 개요
소개
DJI Spark는 DJI의 초소형 비행 카메라로 가볍고 휴대하기 편한 본체에 안정화된 카메라, 인텔리전트 플라이트 모
드 및 장애물 회피 기능을 갖추고 있습니다. 비전 시스템과 3D 감지 시스템이 장착되어 있는 Spark는 1080p 동영
상을 촬영하고 12메가픽셀의 사진을 찍고 QuickShot 모드와 제스처 컨트롤이 가능합니다. 최대 비행 속도* 50km/
h(31mph), 최대 비행 시간 16분**에 달하는 Spark로 드론 촬영이 빠르고 재미있어지며 어렵지 않게 조작할 수 있습
니다.
주요 기능
Spark는 모바일 기기 제어 기능 및 제스처 컨트롤을 지원하므로 그 어느 때보다 쉽게 비행을 즐길 수 있습니다. 더 많
은 제어 기능을 찾는 사용자라면 옵션으로 제공되는 조종기를 사용하여 최대한 많은 비행 기능을 이용할 수 있습니
다.
카메라 및 짐벌: Spark에서는 초당 최대 30프레임 속도로 1080p 동영상을 촬영하고 보다 선명하고 깨끗한 품질의
12메가픽셀 사진을 찍을 수 있으며 소형 내장 짐벌로 안정성을 제공합니다.
비행 컨트롤러: 차세대 비행 컨트롤러는 더욱 안전하고 안정적인 비행 환경을 제공하도록 업데이트되었습니다. 전송
신호가 끊어지거나 배터리 잔량이 낮을 때 기체는 자동으로 홈 포인트로 돌아옵니다. 실내에서 낮은 고도로 호버링을
할 수 있을 뿐만 아니라 이동 경로에서 장애물을 감지하고 피함으로써 안전성을 향상시킵니다.
* 최대 비행 속도를 내려면 Spark 조종기를 사용하여 Spark를 조종해야 합니다.
** 최대 비행 시간은 지속적인 20km/h(12.4mph)의 무풍 환경에서 테스트되었습니다. 이 값은 참조용으로만 사용해야 합니
다.
2017 DJI All Rights Reserved.
©
6
Page 7
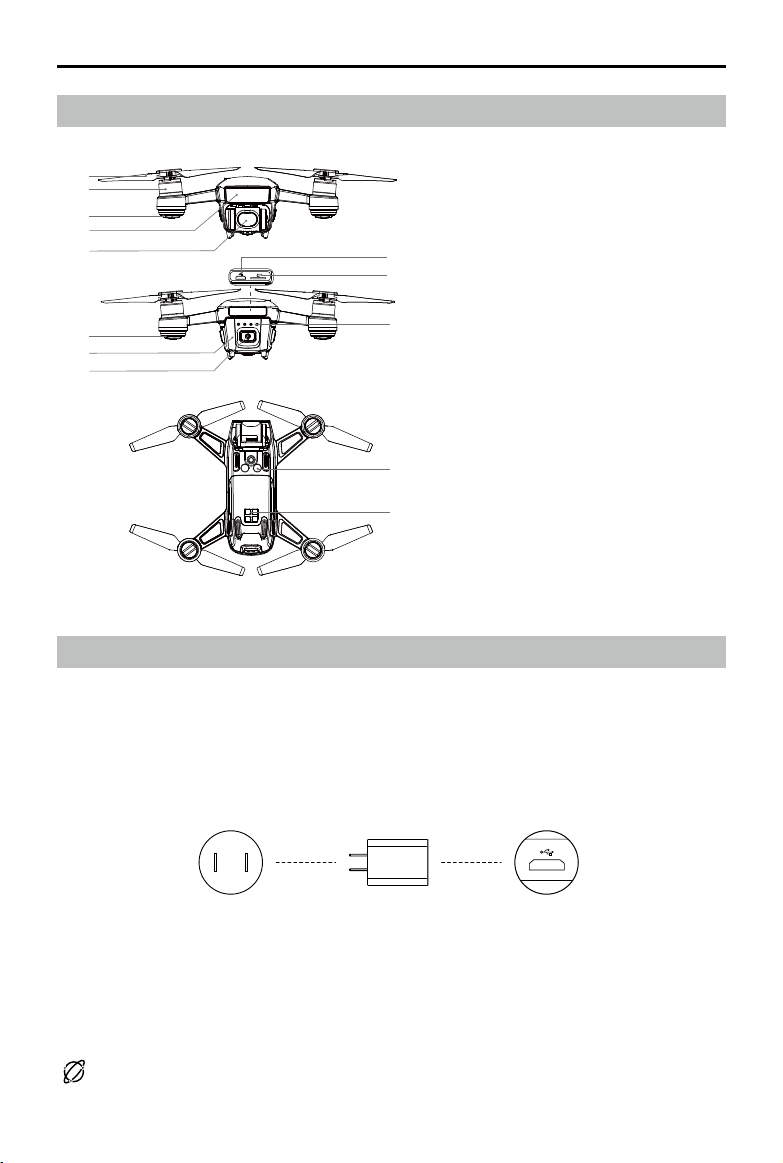
기체 도표
사용자 매뉴얼
Spark
1
2
3
4
5
6
7
8
1. 프로펠러
2. 모터
3. 전방 LED
10
11
4. 3D 감지 시스템
5. 짐벌 및 카메라
9
6. 기체 상태 표시기
7. 인텔리전트 플라이트 배터리
8. 전원 버튼
9. 배터리 잔량 표시기
13
10. Micro USB 포트
11. Micro SD 카드 슬롯
12
12. 외부 충전 접촉부
13. 비전 시스템
활성화
처음으로 인텔리전트 플라이트 배터리 및 기체를 사용하려면 먼저 활성화를 진행해야 합니다.
인텔리전트 플라이트 배터리 활성화
모든 배터리는 안전 상의 이유로 최대 절전 모드 상태로 배송됩니다. 처음 사용하기 전에 제공된 USB 충전기를 사용
하여 배터리를 충전하고 활성화하십시오. 항상 배터리가 완전히 충전된 상태로 비행을 시작하는 것이 좋습니다.
전기 콘센트
100~240V
USB 충전기 Micro USB 포트
기체 활성화
DJI GO 4를 실행시키고 오른쪽 상단 모서리에 있는 아이콘을 탭한 후 보관 상자나 배터리 함 내부의 QR 코드를 스캔
하고 활성화에 관한 지시 사항을 따릅니다.
사용자의 DJI 계정을 사용하여 기체를 활성화합니다. 활성화하려면 인터넷에 연결해야 합니다.
인터넷
2017 DJI All Rights Reserved.
©
7
Page 8

기체
이 섹션에서는 비행 컨트롤러, 3D 감지 시스템,
비전 시스템 및 인텔리전트 플라이트 배터리에
대해 소개합니다.
2017 DJI All Rights Reserved.
©
8
Page 9
기체
Spark에는 비행 컨트롤러, 동영상 다운링크 시스템, 3D 감지 시스템, 짐벌 및 카메라, 추진 시스템, 인텔리전트 플라
이트 배터리가 들어 있습니다. 이 섹션에서는 비행 컨트롤러, 동영상 다운링크 시스템 및 기타 기체 구성품의 기능을
소개합니다.
비행 모드
Spark에서는 다음과 같은 비행 모드를 사용할 수 있습니다.
P 모드(포지셔닝): P 모드는 GPS 신호가 강할 때 가장 잘 작동합니다. 기체는 GPS와 비전 시스템을 활용하
여 스스로 위치를 찾고 자동으로 안정화하며 장애물 사이를 이동합니다. 이 모드에서는
QuickShot, TapFly 및 ActiveTrack과 같은 인텔리전트 플라이트 모드가 활성화됩니다.
전방 장애물 감지 기능을 활성화하고 조명 조건이 충분한 경우 최대 비행 고도 각도는 최대
비행 속도 10.8km/h(6.7mph)에서 15°입니다. 전방 장애물 감지 기능이 비활성화되면 최대
비행 고도 각도는 15°이고 최대 비행 속도는 21.6km/h(13.4mph)가 됩니다.
GPS 신호가 약하고 비전 시스템을 위한 조명 조건이 너무 어두운 경우 기체가 자동으로
ATTI 모드로 전환되며, 이 모드에서는 장애물을 자동으로 피할 수 없고 자체 기압계만을 사
용하여 고도를 제어합니다. ATTI 모드에서는 인텔리전트 플라이트 모드를 사용할 수 없습니
다.
참고: P 모드에서 속도를 높이려면 스틱을 더 크게 움직여야 합니다.
S 모드(스포츠): 기체가 위치 조정을 위해 GPS를 이용합니다. 전방 장애물 감지 기능이 비활성화되면 기체는
스포츠 모드에서 장애물을 감지하고 피할 수 없습니다. 스포츠 모드에서는 인텔리전트 플라
이트 모드, Pano 모드 및 ShallowFocus를 사용할 수 없습니다.
참고: 기체 반응이 민첩성과 속도에 최적화되어 스틱 이동에 더 민감하게 반응합니다.
S 모드(스포츠)에서는 3D 감지 시스템이 비활성화되므로 기체가 경로에 있는 장애물을 자동으로 피하지
못합니다.
S 모드(스포츠)에서는 기체의 최대 속도와 제동 거리가 큰 폭으로 증가합니다. 바람이 불지 않는 조건에서
최소 30미터의 제동 거리가 필요합니다.
S 모드에서는 하강 속도가 큰 폭으로 증가합니다.
S 모드(스포츠)에서는 기체의 반응성이 크게 향상되어 조종기에서 스틱을 조금만 움직여도 기체는 상당
히 먼 거리를 이동하도록 명령을 해석합니다. 비행 중 적절한 이동 공간을 유지하며 움직임에 주의해야
합니다.
S 모드는 Spark 조종기로만 사용할 수 있습니다. 모바일 기기로 비행하는 경우 S 모드가 비활성화됩니다.
조종기에서 비행 모드 스위치를 사용하면 기체 비행 모드를 선택할 수 있습니다.
2017 DJI All Rights Reserved.
©
9
Page 10
사용자 매뉴얼
Spark
기체 상태 표시기
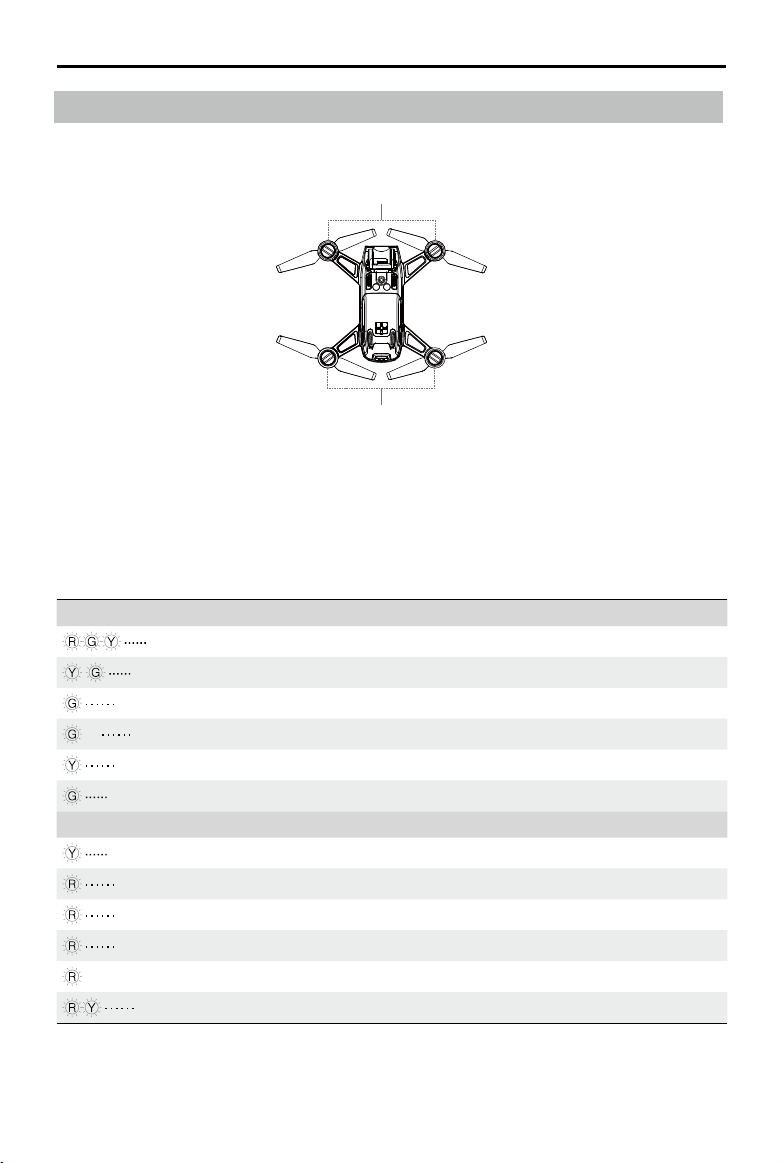
Spark에는 전방 LED와 기체 상태 표시기가 있습니다. LED 위치는 아래 그림에 표시되어 있습니다.
전방 LED
기체 상태 표시기
전방 LED는 기체의 방향 및 일부 기능의 상태를 표시합니다(자세한 내용은 Gesture Mode "기능 설명" 섹션 참조).
전방 LED는 기체가 켜질 때 기체의 전방 또는 기수를 나타내기 위해 빨간색으로 일정하게 유지됩니다.
기체 상태 표시기는 비행 컨트롤러의 시스템 상태를 알려줍니다. 기체 상태 표시기에 대한 자세한 내용은 아래 표를
참조하십시오.
기체 상태 표시기 설명
정상
빨간색, 녹색 및 노란색이 교대로 깜박임 전원 켜짐 및 자체 진단 테스트
노란색 및 녹색이 교대로 깜박임 가동 준비
녹색으로 느리게 깜박임 GPS를 사용한 P 모드
×2 녹색으로 두 번 깜박임 비전 시스템을 사용한 P 모드
노란색으로 느리게 깜박임 GPS 및 비전 시스템 사용 안 함
녹색으로 빠르게 깜박임 브레이크 사용
경고
노란색으로 빠르게 깜박임 조종기 신호 유실
빨간색으로 느리게 깜박임 배터리 부족 경고
빨간색으로 빠르게 깜박임 심각한 배터리 부족 경고
빨간색으로 깜박임 IMU 오류
— 빨간색 유지 심각한 오류
빨간색과 노란색이 교대로 빠르게 깜박임 콤파스 캘리브레이션 필요
2017 DJI All Rights Reserved.
©
10
Page 11
사용자 매뉴얼
Spark
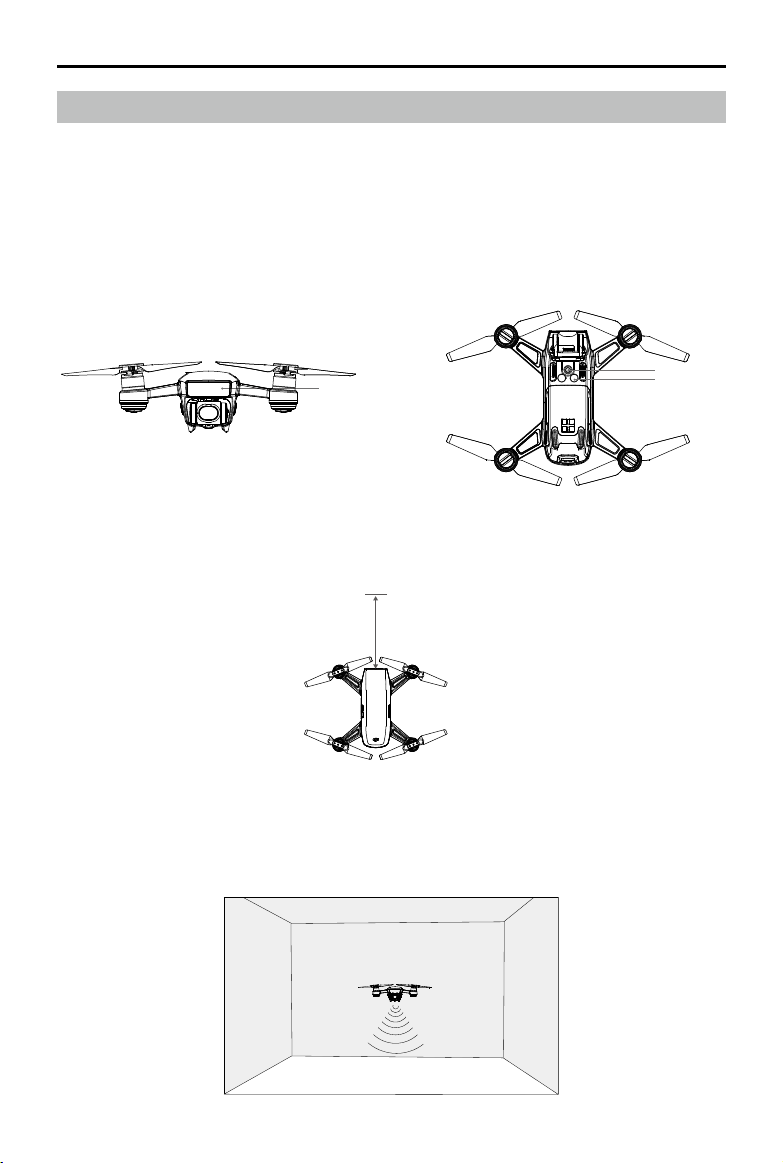
3D 감지 및 비전 시스템
Spark에는 기체의 전방에 3D 적외선 모듈로 구성된 3D 감지 시스템 1이 탑재되어 있어 비행 중 장애물이 있는지 확
인할 수 있습니다.
비전 시스템의 주요 부품은 기체 본체의 하부에 있습니다. 여기에는 카메라 2와 3D 적외선 모듈 3이 포함됩니다. 비
전 시스템은 3D 적외선 모듈과 이미지 데이터를 사용하여 기체가 현재 위치를 유지하도록 도와주기 때문에 실내 또
는 GPS 신호를 사용할 수 없는 환경에서도 정확한 호버링을 할 수 있습니다.
3D 감지 시스템은 조명이 충분한 상태에서 장애물이 있는지 계속 확인하여 Spark가 장애물을 피할 수 있도록 해줍니
다.
2
1
감지 범위
3D 감지 시스템의 감지 범위는 다음과 같습니다. 기체는 감지 범위 바깥에 있는 장애물을 감지하거나 회피할 수 없습
니다.
0.2~5m
3
비전 시스템 사용
비전 시스템은 기체가 켜지면 자동으로 활성화됩니다. 추가 조치는 필요하지 않습니다. 일반적으로 비전 시스템은
GPS를 사용할 수 없는 실내 환경에서 사용할 수 있습니다. 비전 시스템을 사용하여 기체는 GPS가 없어도 정밀하게
호버링할 수 있습니다.
2017 DJI All Rights Reserved.
©
11
Page 12
사용자 매뉴얼
Spark
비전 시스템을 사용하려면 다음 단계를 따릅니다.
1. 기체가 P 모드인지 확인하고 평평한 바닥에 놓습니다. 비전 시스템은 표면에 식별 가능한 패턴 변화가 없으면 제
대로 작동하지 않습니다.
2. 기체를 켭니다. 이륙 후 기체는 제자리에서 호버링합니다. 기체 상태 표시기가 녹색으로 두 번 깜박이면서 비전 시
스템이 작동 중임을 알립니다.
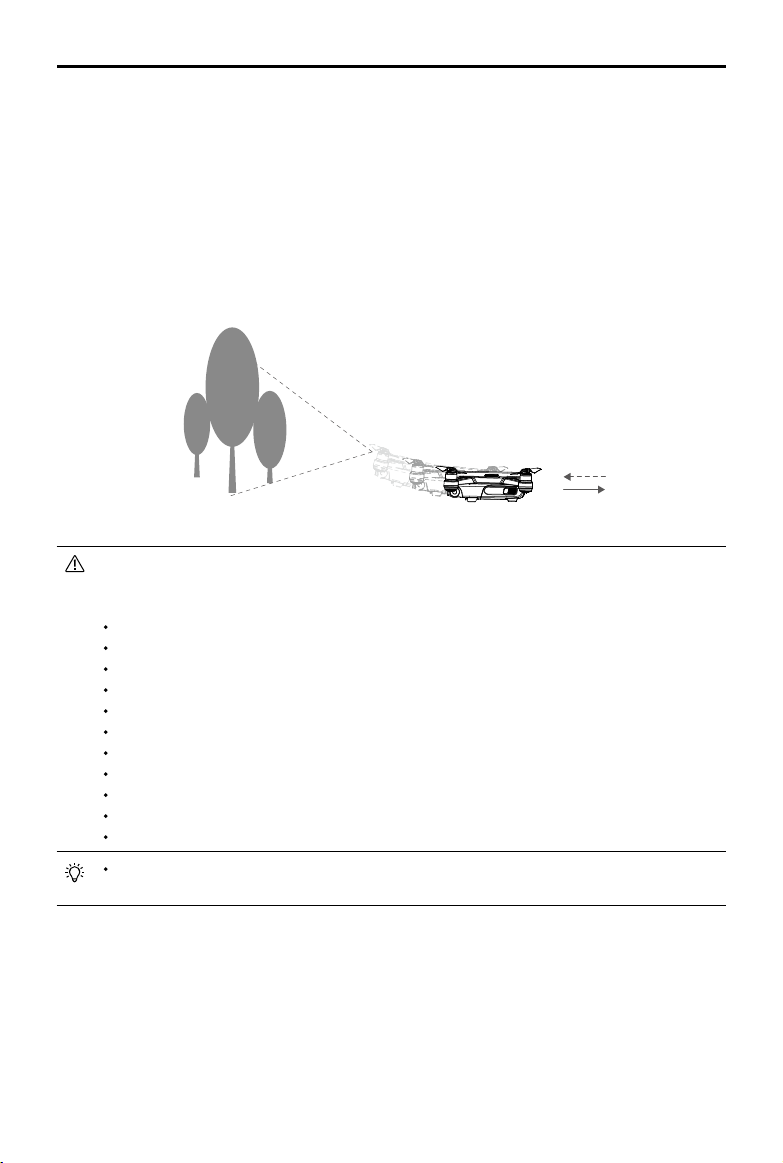
3D 감지 시스템을 기반으로 기체는 전방에서 장애물을 감지했을 때 적극적으로 브레이크를 작동시킬 수 있습니다.
3D 감지 시스템은 조명이 적당하고 장애물이 분명하게 표시되거나 질감이 명확한 경우에 가장 잘 동작합니다. 기체
는 충분한 제동 거리를 확보하기 위해 10.8km/h(6.7mph)가 넘는 속도로 비행해서는 안 됩니다.
3D 감지 및 비전 시스템의 성능은 비행 중인 표면 종류의 영향을 받습니다. 기체는 GPS나 비전 시스템을
모두 사용할 수 없는 경우 자동으로 P 모드에서 ATTI 모드로 전환됩니다. 다음 상황에서 Spark를 사용할 때
에는 주의해야 합니다.
0.5미터 미만 높이에서 고속으로 비행하는 경우
단색 표면(예: 완전한 검은색, 흰색, 빨간색, 녹색) 위로 비행하는 경우
반사가 잘 되는 표면 위로 비행하는 경우
물 또는 투명한 표면 위로 비행하는 경우
움직이는 표면 또는 사물 위로 비행하는 경우
조명이 자주 또는 심하게 변화되는 영역에서 비행하는 경우
극도로 어둡거나(10럭스 미만) 밝은(100,000럭스 초과) 표면 위로 비행하는 경우
식별 가능한 패턴 또는 결이 없는 표면 위로 비행하는 경우
동일한 반복 패턴 또는 결이 있는 표면(예: 타일) 위로 비행하는 경우
작고 가는 물체(예: 나뭇가지 및 전선) 위로 비행하는 경우
2m 이상의 높이에서 10.8km/h(6.7mph)가 넘는 고속으로 비행하는 경우
항상 센서를 청결하게 유지하십시오. 오염 물질이나 파편이 묻어 있을 경우 성능에 부정적인 영향을 줄 수
있습니다.
2017 DJI All Rights Reserved.
©
12
Page 13
사용자 매뉴얼
Spark
리턴 투 홈(RTH)
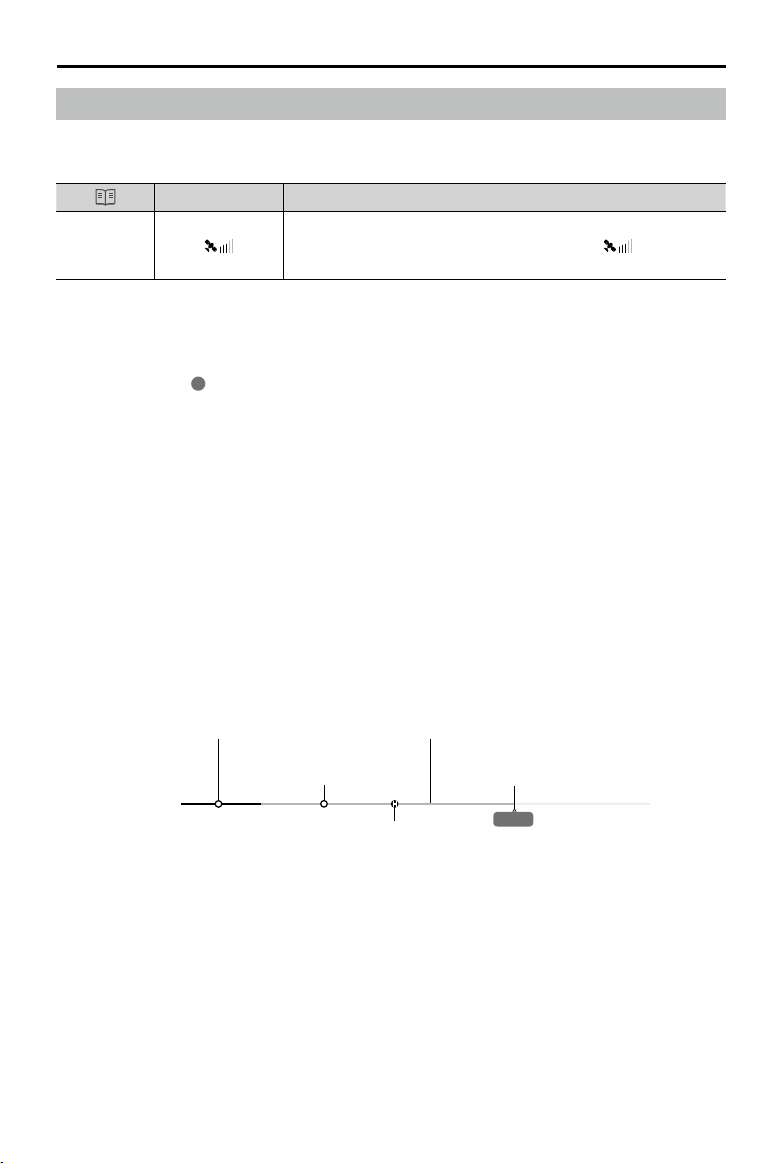
리턴 투 홈(RTH) 기능은 마지막으로 기록된 홈 포인트로 기체를 되돌립니다. RTH에는 스마트 RTH, 배터리 부족
RTH, 페일세이프 RTH의 세 가지 유형이 있습니다. 다음 섹션에서 3가지 RTH 시나리오에 대해 자세히 알아봅니다.
GPS
설명
이륙하기 전에 강력한 GPS 신호가 잡힌 경우 홈 포인트는 기체가 작동을
홈 포인트
시작한 위치가 됩니다. GPS 신호 강도는 GPS 아이콘( )으로 표시됩니
다. 홈 포인트가 기록되면 기체 상태 표시기가 빠르게 깜박입니다.
스마트 RTH
GPS를 사용할 수 있으면 스마트 RTH를 시작합니다. DJI GO 4에서 RTH 버튼을 탭하고 화면의 지시를 따릅니다. DJI
GO 4에서 정지 아이콘 ×을 눌러 스마트 RTH를 즉시 종료할 수도 있습니다.
조종기에서 RTH 버튼을 길게 눌러 스마트 RTH를 시작할 수도 있습니다. 종료하려면 다시 누르면 됩니다.
배터리 부족 RTH
DJI 인텔리전트 플라이트 배터리의 잔량이 안전한 기체 복귀에 영향을 줄 수도 있는 수준까지 떨어지면 배터리 부
족 RTH가 실행됩니다. 이 경우 즉시 기체를 홈 포인트로 되돌리거나 착륙시키는 것이 좋습니다. 배터리 부족 경고가
실행되면 DJI GO 4에 알림이 표시됩니다. 10초 동안 아무런 조치가 취해지지 않는 경우 기체가 자동으로 홈 포인트
로 돌아옵니다. 사용자는 조종기에서 RTH 버튼이나 비행 일시 정지 버튼을 눌러 RTH 절차를 취소할 수 있습니다. 이
러한 경고의 임계값은 기체의 현재 고도와 홈 포인트로부터 떨어진 거리에 따라 자동으로 결정됩니다. 배터리 부족
RTH는 비행 중에 한 번만 표시됩니다.
현재 배터리 잔량이 현재 고도에서 기체가 하강할 수 있는 정도만 남은 경우 기체가 자동으로 착륙합니다.
배터리 잔량 표시기는 DJI GO 4에 표시되며 아래에 설명되어 있습니다.
심각한 배터리 부족 경고(빨간색)
배터리 부족 경고(노란색)
충분한 배터리 잔량(녹색)
남은 비행 시간
홈으로 돌아오는 데
필요한 전력
배터리 잔량 표시기
12:29
2017 DJI All Rights Reserved.
©
13
Page 14
Spark
사용자 매뉴얼
배터리 잔량
경고
배터리 부족 경고배터리 전력이 낮
심각한 배터리
부족 경고
남은 비행 예상
시간
심각한 배터리 부족 경고가 활성화되고 기체가 자동으로 착륙하기 시작할 때 가상 조이스틱이나 조종 스
틱을 사용하여 스로틀을 올려 기체가 현재 고도에서 유지되도록 합니다. 이렇게 하면 기체가 더 적합한 착
륙 위치를 찾을 수 있습니다.
배터리 잔량 표시기의 색상 영역과 표시는 남은 비행 예상 시간을 나타냅니다. 이 색상 영역과 표시는 기
체의 현재 위치와 상태에 따라 자동으로 조정됩니다.
페일세이프 RTH
홈 포인트가 성공적으로 기록되고 GPS 신호가 강력하며 콤파스가 정상적으로 작동하는 경우 일정 시간 동안 무선 신
호가 사라졌을 때 페일세이프 RTH가 자동으로 활성화됩니다(조종기를 사용할 때 3초, Wi-Fi를 사용할 때 20초). 무
선 신호가 다시 연결되면 페일세이프 RTH를 취소하여 사용자가 다시 제어할 수 있습니다.
설명
습니다. 기체를 착
륙시키십시오.
기체를 즉시 착륙
시켜야 합니다.
현재 배터리 잔량
에 따른 남은 비행
예상 시간입니다.
기체 상태
표시기
기체 상태 표시기
가 빨간색으로 느
리게 깜박입니다.
기체 상태 표시기
가 빨간색으로 빠
르게 깜박입니다.
해당 없음 해당 없음 해당 없음
DJI GO 4 앱 비행 지침
기체를 자동으로 홈 포인트로
돌아오게 하려면 “Go-home”
을 탭합니다. 정상 비행을 계속
하려면 “Cancel”을 탭합니다.
조치가 취해지지 않으면 기체
가 10초 후에 자동으로 홈 포인
트로 돌아옵니다. 조종기에서
알람 소리가 울립니다.
DJI GO 4 앱 화면에 빨간색이
깜박이고 기체가 하강하기 시
작합니다. 조종기에서 알람 소
리가 울립니다.
가능한 빨리 기체
를 되돌려 착륙시
킨 다음 모터를 정
지하고 배터리를
교체합니다.
기체가 자동으로
하강하여 착륙하게
합니다.
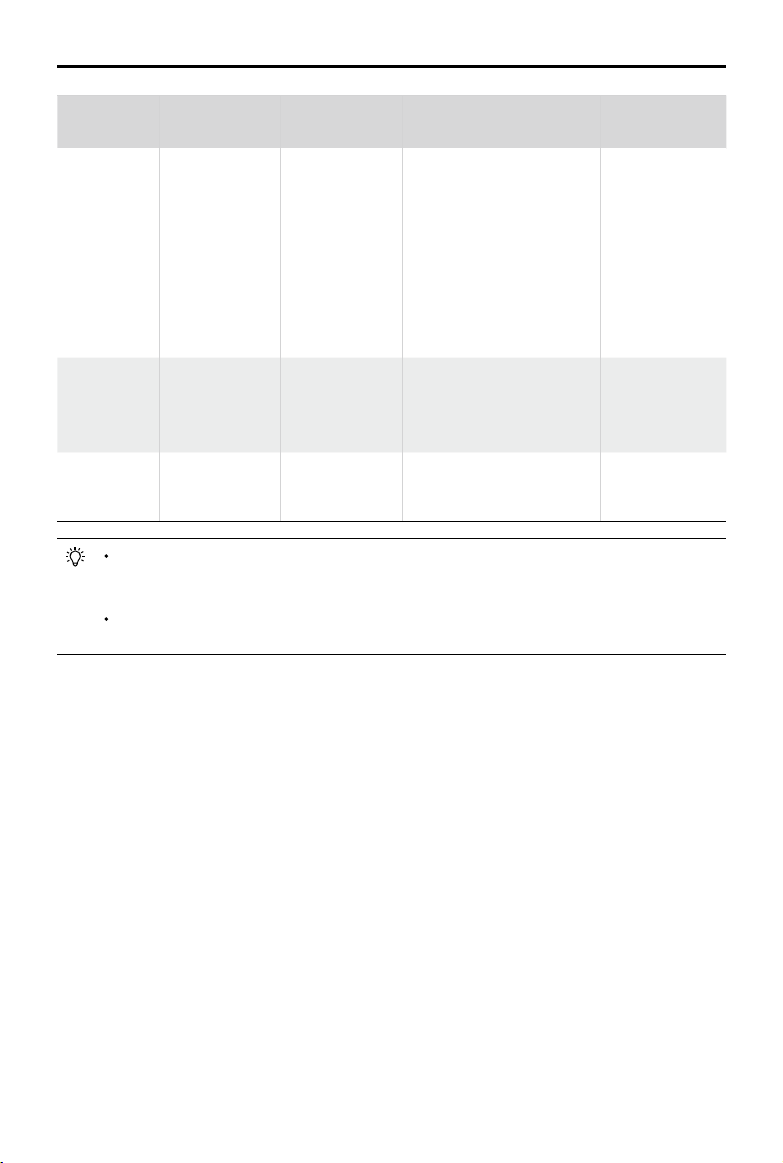
RTH 절차
1. 홈 포인트가 자동으로 기록됩니다.
2. RTH 절차가 실행됩니다(예: 스마트 RTH, 배터리 부족 RTH, 페일세이프 RTH).
3. 홈 포인트가 확인되고 기체가 방향을 조정합니다.
4. a. 기체가 사전 설정된 RTH 고도로 상승한 다음, 홈 포인트로부터 20m 이상 멀어지면 홈 포인트로 돌아옵니다.
b. 기체가 홈포인트로부터 3m와 20m 사이에 있으면 자동으로 RTH at Current Altitude(현재 고도에서 RTH)
옵션이 해제된 상태(DJI GO 4의 기본 설정)에서 자동으로 착륙합니다. 기체가 2.5m 이상 고도에서 비행하며
RTH at Current Altitude 옵션이 활성화된 경우, 현재 고도에서 홈포인트로 귀환합니다. 기체가 홈포인트에서
3m와 20m 사이에 있는데 2.5m 미만의 고도에서 비행하는 경우, 2.5m 고도까지 상승한 다음 홈포인트로 돌
아옵니다.
c. RTH가 실행되고 기체가 홈 포인트로부터 3m 미만에 있는 경우 기체가 자동으로 착륙합니다.
5. 기체가 지면 위 0.3m 높이에서 호버링하면서 사용자의 확인을 기다립니다. 사용자가 확인하면 기체가 착륙하고
모터가 정지됩니다.
2017 DJI All Rights Reserved.
©
14
Page 15
사용자 매뉴얼
Spark
1 홈 포인트 기록
4 RTH(고도 조정 가능)
×
페일세이프 고도
홈 포인트로부터의 높이>페일세이프 고도
페일세이프 고도 상승
홈 포인트로부터의 높이<=페일세이프 고도
2 조종기 신호 유실
×
5 착륙(사용자 확인 후)
×
3 장시간 동안 신호 유실
×
홈 포인트의 0.3m 높이에서 호버링
GPS 신호가 약하거나 없을 경우 기체가 홈 포인트로 돌아올 수 없습니다.
비행 전에 적합한 페일세이프 고도를 설정하는 것이 중요합니다. DJI GO 4 앱을 실행하고 “GO FLY”를 탭
한 다음 아이콘을 탭하여 페일세이프 고도를 설정합니다.
페일세이프 상태에서 기체가 20미터(65피트) 이상의 고도에 도달하고 나서 스로틀 스틱을 움직이면 기체
가 상승을 정지하고 즉시 홈 포인트로 돌아옵니다.
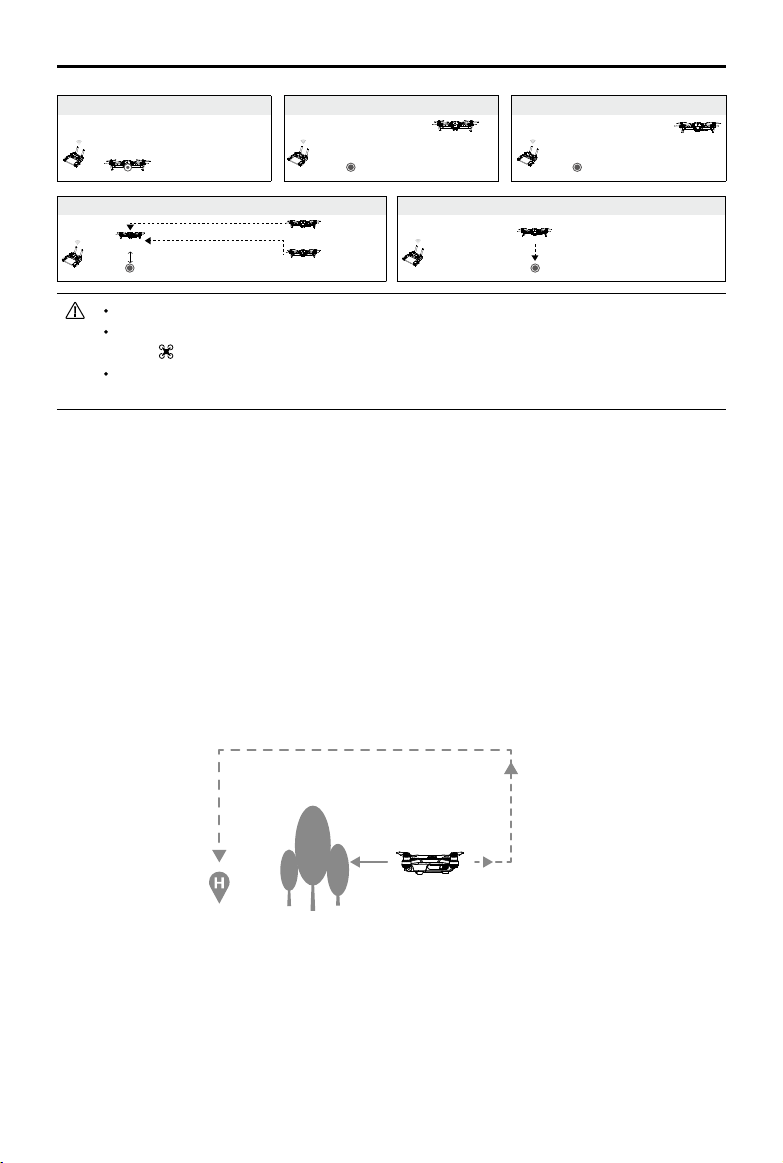
RTH 도중 장애물 회피
Spark는 비행 속도가 10m/초가 되면 홈으로 돌아오며, RTH가 실행되고 기체가 홈 포인트로부터 100m 이상 멀어지
면 장애물을 피할 수 없습니다.
기체가 홈 포인트로부터 100m 미만에 있으며 조명 조건이 3D 감지 시스템을 실행하기에 충분하고 RTH가 실행된
경우에는 Spark가 장애물을 감지하고 적극적으로 회피 시도를 할 수 있습니다. 장애물을 감지하면 기체는 다음과 같
이 행동합니다.
1. 기체가 5미터(16피트) 앞에서 장애물을 감지하면 속도를 줄입니다.
2. 기체가 정지하고 호버링한 다음, 3D 감지 시스템이 어떤 장애물도 감지하지 않을 때까지 뒤로 비행하기 시작합니
다.
3. 약 5초 동안 기체가 수직으로 상승합니다.
4. RTH 절차가 재개됩니다. 기체는 현재 고도에서 홈 포인트로 비행을 계속합니다.
5초 동안 상승
5m
2017 DJI All Rights Reserved.
©
15
Page 16
사용자 매뉴얼
Spark
기체가 뒤로 10m를 비행한 후에도 장애물이 계속 감지되면, 장애물 감지 기능이 꺼지고 기체가 페일세이
프 고도로 자동으로 상승한 다음, 10m/초의 비행 속도로 홈 포인트로 돌아옵니다.
상승 중에 장애물이 다시 감지되면 기체가 1-3단계를 반복합니다.
기체는 위, 측면 또는 뒤에 있는 장애물을 피할 수 없습니다.
정밀 착륙
Spark는 리턴 투 홈이 실행되는 동안 하방을 자동으로 검색하여 일치하는 지형 특성이 있는지 확인합니다. 현재 지형
이 홈 포인트 지형과 일치하면 Spark는 정밀 착륙을 수행하기 위해 즉시 착륙하기 시작합니다. 일치하는 지형을 찾지
못하면 DJI GO 4에 지형 특성이 일치하지 않는다는 메시지가 표시됩니다.
정밀 착륙 성능은 다음 조건에 따라 달라집니다.
a. 이륙 시 홈 포인트가 기록되고 비행 중에는 새로 고칠 수 없습니다.
b. 기체는 수직으로 이륙해야 합니다. 이륙 고도는 7미터 이상이어야 합니다.
c. 홈 포인트 지형 특성이 큰 차이 없이 유지됩니다.
d. 특징이 없는 홈 포인트 지형은 성능에 영향을 줍니다.
e. 조명 조건이 너무 밝거나 어두워서는 안 됩니다.
착륙 중 다음과 같은 동작이 가능합니다.
a. 스로틀을 아래로 당겨 착륙 속도를 높입니다.
b. 조종 스틱을 다른 방향으로 움직이면 정밀 착륙이 중단됩니다. 조종 스틱을 놓으면 Spark가 수직으로
하강합니다.
인텔리전트 플라이트 모드
Spark는 QuickShot, ActiveTrack, TapFly, Gesture 및 Tripod Mode 등과 같은 인텔리전트 플라이트 모드를 지원합
니다. DJI GO 4에서 아이콘을 탭하거나 조종기에서 Function 버튼을 누르면 인텔리전트 플라이트 모드를 활성화
할 수 있습니다.
QuickShot
QuickShot 촬영 모드에는 Rocket, Dronie, Circle 및 Helix 등이 있습니다. Spark는 선택된 촬영 모드에 따라 동영상
을 녹화한 다음 10초 분량의 짧은 동영상을 자동으로 생성합니다. 생성된 동영상은 Playback 메뉴에서 보거나 편집
하거나 소셜 미디어에 공유할 수 있습니다.
Dronie: 카메라를 피사체에 고정한 채 후방 및 위쪽으로 비행합니다.
Circle: 피사체 주위를 맴돕니다.
Helix: 피사체 주위를 나선형으로 돌며 상승합니다.
Rocket: 카메라를 아래로 향한 채 상승합니다.
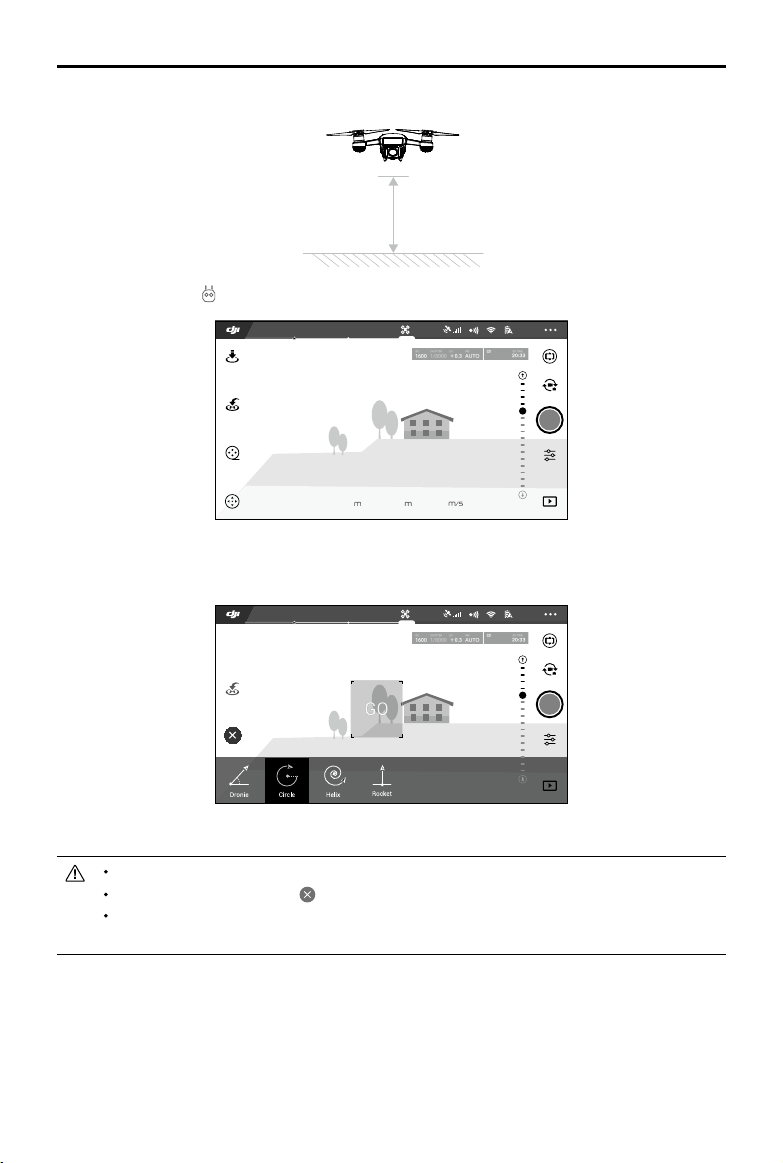
QuickShot 사용
기체가 P 모드이고 인텔리전트 플라이트 배터리가 충분히 충전되어 있는지 확인합니다. QuickShot을 사용하려면 다
음 단계를 수행합니다.
2017 DJI All Rights Reserved.
©
16
Page 17
GO
1. 이륙 후 기체가 지면에서 1.5m(4.5ft)를 넘는 고도를 유지하며 비행하는지 확인합니다.
1.5m
2. DJI GO 4를 실행하고 아이콘을 탭한 다음, QuickShot을 선택하고 메시지를 따릅니다.
12
In-Flight(GPS)
09:29
QuickShot
1080P/30
61%
2.4G
사용자 매뉴얼
Spark
H 9.6
S 1.1D 9.6
3. 카메라 뷰에서 대상 물체를 선택한 다음 촬영 모드를 선택합니다. “GO”를 탭하여 녹화를 시작합니다. 촬영을 마치
면 기체가 원래 위치로 돌아갑니다.
12
In-Flight(GPS)
09:29
QuickShot
1080P/30
61%
2.4G
4. Playback을 사용하여 생성된 동영상이나 원본 동영상을 보고 편집합니다.
QuickShot은 GPS 신호가 강할 때만 사용할 수 있습니다.
촬영 중 언제든지 DJI GO 4에서 아이콘을 탭하면 QuickShot을 종료할 수 있습니다..
QuickShot 모드에서는 기체가 자동으로 장애물을 피할 수 없습니다. 넓은 야외에서만 QuickShot을 사용
해야 합니다.
ActiveTrack
ActiveTrack으로 모바일 기기 화면에서 이동하는 물체를 표시하고 추적할 수 있습니다. 외부 추적 장치가 필요하지
않습니다.
Spark는 자동으로 자전거와 기타 차량, 사람과 동물을 식별하고 추적한 다음 각각 다른 추적 방식을 사용합니다.
2017 DJI All Rights Reserved.
©
17
Page 18

사용자 매뉴얼
GO
Spark
ActiveTrack 사용
인텔리전트 플라이트 배터리가 완전히 충전되어 있고 기체가 P 모드인지 확인합니다. ActiveTrack을 사용하려면 다
음 단계를 따릅니다.
1. 이륙 후 기체가 지면에서 1.5m(4.5ft) 이상의 고도에서 호버링하는지 확인합니다.
1.5m
2. DJI GO 4에서 아이콘을 탭하여 비행 모드로 이동한 다음 ActiveTrack을 선택합니다.
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. 추적하려는 대상을 탭한 다음 다시 탭하여 선택을 확인합니다. 대상이 자동으로 인식되지 않으면 주위의 상자를
끕니다. 추적 중이면 상자가 녹색으로 바뀝니다. 상자가 빨간색으로 바뀌면 식별되지 않은 것일 수 있으므로 다시
시도해야 합니다.
12
In-Flight(GPS)
ActiveTrack
09:29
1080P/30
61%
2.4G
4. 기체는 비행 경로에 있는 장애물을 자동으로 회피합니다. 대상 이동 속도가 너무 빠르거나 장애물이 있어 기체가
추적하던 대상을 놓친 경우 대상을 다시 선택해 추적을 재개합니다.
2017 DJI All Rights Reserved.
©
18
Page 19

ActiveTrack에는 다음과 같은 기능이 포함됩니다.
Trace Profile
사용자 매뉴얼
Spark
기체가 일정한 거리에서 대상을 추적합니다. 대상을 선회
하려면 조종기의 롤 스틱이나 DJI GO 4의 슬라이더를 사
용합니다.
사람, 동물, 작고 가는 물체(예: 나뭇가지 및 전선) 또는 투명한 물체(예: 유리 또는 물)가 있는 지역을 선택
하지 마십시오.
특히 기체가 뒤로 비행하고 있을 때 비행 경로 주위에 장애물이 없도록 주의하십시오.
긴급 상황이 발생할 경우 기체를 수동으로 조작하거나 DJI GO 4의 아이콘을 탭합니다.
다음 상황에서 ActiveTrack을 사용할 때에는 특히 주의해야 합니다.
a) 추적된 물체의 움직임이 평면적이지 않은 경우
b) 추적된 물체가 움직이는 동안 모양이 심하게 변하는 경우
c) 추적된 물체가 장시간 동안 가려지거나 시야에서 사라지는 경우
d) 추적된 물체가 눈이 쌓인 표면을 이동하는 경우
e) 추적 대상이 주변 환경과 동일한 색상 또는 패턴을 가지고 있는 경우
f) 조명이 너무 낮거나(300럭스 미만) 너무 높은(10,000럭스 초과) 경우
ActiveTrack 사용 시 현지 사생활 보호법 및 규정을 따라야 합니다.
추적 시 사진 해상도는 1440×1080입니다.
ActiveTrack 종료
다음과 같은 방법으로 ActiveTrack을 종료합니다.
1. 조종기에서 비행 일시 정지 버튼을 누릅니다.
2. 화면에서 아이콘을 탭합니다.
기체는 측면에서 일정한 각도와 거리로 대상을 추적
합니다. 조종기의 롤 스틱을 사용하여 대상을 선회합
니다. 기체가 Profile 모드인 경우에는 장애물을 피할
수 없습니다. 이 모드는 넓은 야외에서 사용하십시오.
또는
ActiveTrack을 종료하면 기체가 호버링합니다. 이 때 사용자는 수동으로 비행하거나 다른 대상을 추적하거나 홈 포
인트로 돌아갈 수 있습니다.
TapFly
TapFly에는 Coordinate Mode와 Direction Mode의 완전히 새로운 두 가지 하위 모드가 있습니다. Coordinate
Mode가 기본값입니다. 조명이 충분한 경우(300럭스 초과 10,000럭스 미만) 기체는 장애물이 보이면 자동으로 피
하거나 장애물 앞에서 제동하고 호버링합니다.
2017 DJI All Rights Reserved.
©
19
Page 20

사용자 매뉴얼
GO
Spark
Coordinate Mode
화면에서 특정 위치를 탭합니다. 기체가 현재 고도에서 해당 위치로 이동한 다음, 호버링합니다.
Coordinate Mode 사용
인텔리전트 플라이트 배터리가 완전히 충전되어 있고 기체가 P 모드인지 확인합니다. Coordinate Mode를 사용하려
면 다음 단계를 수행합니다.
1. 이륙 후 기체가 지면에서 1m(3ft) 넘는 고도를 유지하며 호버링하는지 확인합니다.
1m
2. DJI GO 4를 실행하고 아이콘을 탭합니다. TapFly 및 Coordinate Mode를 선택한 다음 메시지를 따릅니다.
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. 목표를 한 번 탭하고 “GO” 아이콘이 표시되기를 기다립니다. “GO” 아이콘을 탭하여 선택을 확인하면 기체가 자동
으로 목표를 향해 비행합니다. 목표에 도달할 수 없으면 메시지가 표시됩니다. 이러한 경우 다른 목표를 선택하고
다시 시도합니다.
12
In-Flight(GPS)
H 9.6
TapFly
09:29
S 1.1D 9.6
1080P/30
61%
2.4G
4. 비행 도중 화면을 탭하여 목표를 변경할 수 있습니다.
5. 파란색 원이 표시될 때까지 약 2초 동안 화면을 길게 누릅니다. 원을 위/아래로 끌어 짐벌의 경사각을 조절합니다.
Coordinate Mode를 사용할 때는 목표가 평면에 있는지 확인합니다. 그렇지 않으면 기체가 목표에 정확
히 도달하지 못할 수 있습니다.
2017 DJI All Rights Reserved.
©
20
Page 21

사용자 매뉴얼
Spark
Coordinate Mode 종료
다음과 같은 방법으로 Coordinate Mode를 종료합니다.
1. 화면에서 아이콘을 탭합니다.
2. 조종기의 피치 스틱을 3초 이상 당깁니다.
3. 조종기에서 비행 일시 정지 버튼을 누릅니다.
4. 파란색 원을 왼쪽 및 오른쪽으로 끕니다.
Direction Mode
화면에 탭한 방향으로 비행이 유지됩니다.
Direction Mode 사용
인텔리전트 플라이트 배터리가 완전히 충전되어 있고 기체가 P 모드인지 확인합니다. Direction Mode를 사용하려면
다음 단계를 수행합니다.
1. 이륙 후 기체가 지면에서 1m(3ft) 넘는 고도를 유지하며 비행하는지 확인합니다.
1m
2. DJI GO 4를 실행하고 아이콘을 탭합니다. TapFly를 선택하고 Direction Mode로 전환한 다음 메시지를 따릅
니다.
12
In-Flight(GPS)
P-GPS
09:29
1080P/30
61%
2.4G
H 9.6
S 1.1D 9.6
3. 목표를 한 번 탭하고 “GO” 아이콘이 표시되기를 기다립니다. “GO” 아이콘을 탭하여 선택을 확인하면 기체가 자동
으로 해당 방향으로 비행합니다.
12
In-Flight(GPS)
TapFly
09:29
1080P/30
61%
2.4G
2017 DJI All Rights Reserved.
©
21
Page 22

사용자 매뉴얼
Spark
선택을 확인한 후에 기체가 “GO” 아이콘이 표시된 방향으로 비행합니다. 기체는 앞에서 장애물을 감지하거나 지면에
너무 가깝게 비행하고 있을 때 자동으로 속도를 조정합니다. 하지만 장애물 사이를 이동할 때 이 기능에 의존해서는
안 됩니다.
페일세이프 절차는 모든 TapFly 기능보다 우선합니다. GPS 신호가 약한 경우 기체는 자율 비행을 종료하고 홈 포인
트로 돌아옵니다.
Direction Mode 종료
다음과 같은 방법으로 Direction Mode를 종료합니다.
1. 화면에서 아이콘을 탭합니다.
2. 조종기의 피치 스틱을 3초 이상 당깁니다.
3. 조종기에서 비행 일시 정지 버튼을 누릅니다.
Direction Mode를 종료하면 기체가 이동을 정지하고 호버링합니다. 새 목표 방향을 탭하여 비행을 계속하거나 수동
비행을 시작할 수 있습니다.
또는 또는
비행 일시 정지 버튼
사람, 동물, 작고 가는 물체(예: 나뭇가지 및 전선) 또는 투명한 물체(예: 유리 또는 물) 쪽으로 기체를 비행
하지 마십시오. TapFly 모드는 기체가 물 또는 눈으로 덮인 지역 위로 비행하는 경우 제대로 작동하지 않
을 수 있습니다.
비행 경로를 확인해 장애물에 가까이 가지 않도록 하십시오.
예상 비행 경로와 TapFly에서 선택된 실제 비행 경로 사이에 편차가 있을 수 있습니다.
목표 방향으로 선택할 수 있는 범위는 제한됩니다. 화면 상단 또는 하단 모서리 가까이에서는 Direction
Mode를 선택할 수 없습니다.
너무 어둡거나(300럭스 미만) 너무 밝은(10,000럭스 초과) 환경에서 비행할 때에는 더 많은 주의를 기울
여야 합니다.
Tripod Mode(삼각대 모드)
Tripod Mode를 활성화하려면 DJI GO 4에서 아이콘을 탭합니다. Tripod Mode에서 최대 비행 속도는 3.6km/h
(2.2mph)로 제한됩니다. 스틱 이동에 대한 반응성도 줄어 부드럽게 더욱 절제되어 이동합니다.
GPS 신호가 강하거나 조명 조건이 비전 시스템에 이상적인 경우에만 Tripod Mode를 사용하십시오. GPS
신호가 사라지거나 비전 시스템이 작동하지 않는 경우 자동으로 ATTI 모드로 전환됩니다. 이러한 경우 비
행 속도가 빨라져 기체가 제자리에서 호버링하지 않습니다. Tripod Mode를 주의해서 사용하십시오.
2017 DJI All Rights Reserved.
©
22
Page 23

사용자 매뉴얼
Spark
Gesture Mode(제스처 모드)
딥 러닝 제스처 인식을 사용하여 간단한 손 동작으로 셀카를 찍도록 해줍니다. Spark에는 PalmLaunch,
PalmControl, PalmLand, Beckon 및 Selfie와 같은 새로운 제스처 컨트롤이 들어 있습니다. Gesture Mode를 안전
하게 사용하려면 먼저 Spark 프로펠러 가드를 설치하는 것이 좋습니다.
기능 설명 전방 LED 그림
PalmLaunch
1. 기체를 든 상태로 전원을 켭니다. 기체 상태 표시기가
노란색으로 깜박일 때까지 기다립니다. 손가락이 기
체 암 아래쪽에 위치하도록 합니다.
—— 빨간색 유지
2. 다음으로, 인텔리전트 플라이트 배터리 전원 버튼을
두 번 탭합니다. 전방 LED가 노란색으로 느리게 깜박
입니다.
3. FaceAware가 자동으로 작동하기 시작합니다.
FaceAware가 성공적으로 활성화되면 기체에서 신호
음이 두 번 울리고 전방 LED가 녹색으로 유지됩니다.
전방 LED가 빨간색으로 두 번 깜박이면 FaceAware
가 실패한 것입니다. 2단계를 반복하십시오.
4. 모터가 회전하기 시작하면 전방 LED가 빨간색으로
일정하게 유지됩니다. 기체를 놓으면 기체가 제자리
에서 호버링합니다.
PalmControl 시작/정지
1. 기체의 앞부분에 선 다음, 한쪽 팔을 올리고 기체 방
향으로 뻗습니다. 손가락을 쭉 펴고 모읍니다. 손바닥
을 기체의 기수 앞쪽 약 0.7m 거리에 2초 동안 펴고
있습니다.
2. PalmControl 활성화가 성공하면 전방 LED가 녹색으
로 일정하게 유지됩니다. 전방 LED가 노란색으로 빠
르게 깜박이기 시작하면 기체와의 거리를 조절합니
다. 이는 기체와 너무 가깝거나 너무 멀다는 뜻입니
다.
노란색으로 깜박임
—— 녹색 유지
—— 빨간색 유지
—— 녹색 유지
3. 손을 빠르게 내리면 PalmControl이 종료되고 전방
LED가 빨간색으로 일정하게 유지됩니다.
—— 빨간색 유지
2017 DJI All Rights Reserved.
©
23
Page 24

사용자 매뉴얼
Spark
위치 조정
1. 손바닥과 기체 사이에 일정한 거리를 유지하면서 손
바닥을 위/아래로 느리게 움직여 기체의 고도를 제어
합니다.
2. 몸과 손바닥 간 거리를 일정하게 유지한 다음(그림 참
조), 팔을 왼쪽이나 오른쪽으로 움직여 기체의 방향을
제어합니다.
3. 몸과 손바닥 간 거리를 일정하게 유지한 다음, 앞이나
뒤로 움직여 전방 또는 후방으로 비행합니다.
팔로우
1. 기체 앞에 선 다음, 한쪽 팔을 들고 카메라를 향해 손
을 빠르게 흔듭니다. 손바닥을 기체의 기수 앞쪽 약
0.7m 거리에 2초 동안 펴고 있습니다.
2. 제스처가 성공적으로 인식되면 전방 LED가 녹색으로
두 번 깜박입니다. 기체가 상승하고 후방으로 비행한
다음, 사용자가 서 있는 위치로부터 3m 떨어지고 지
면으로부터 2.3m 높이에서 호버링합니다. 기체가 한
곳에서 호버링할 때까지 움직이지 마세요.
3. 전방 LED가 녹색으로 일정하게 유지되고 기체가 자
동으로 추적을 시작합니다.
4. 흔들기 제스처가 실패하거나 기체가 사용자를 놓치
면 두 팔을 모두 머리 위로 올려 Y자 형태로 든 다음
2초 동안 유지하여 팔로우를 활성화합니다.
셀카 촬영
—— 녹색 유지
×2
녹색으로 두 번 깜박임
—— 녹색 유지
1. 기체가 사용자를 따라올 때 손으로 프레임을 만들면
셀카 촬영이 시작됩니다.
2. 전방 LED가 빨간색으로 느리게 깜박이면 셀카 제스
처가 성공적으로 인식된 것입니다. 3초 동안 셀카 카
운트다운을 기다립니다. 전방 LED가 빨간색으로 빠
르게 깜박이면 카메라가 곧 셀카를 촬영할 것이라는
뜻입니다.
2017 DJI All Rights Reserved.
©
24
빨간색으로 느리게 깜
박임
Page 25

Beckon
1. 기체가 추적을 시작하면 팔을 머리 위로 올려 2초 동
안 Y자 형태로 듭니다.
사용자 매뉴얼
Spark
2. Beckon이 성공적으로 활성화되면 기체가 사용자를
향해 비행하고, 사용자로부터 1.2m 떨어지고 지면으
로부터 1.5m 높이에서 호버링합니다.
3. 전방 LED가 일정한 빨간색으로 바뀝니다.
PalmLand
기체가 사용자로부터 1.5m 이하로 떨어져 있을 때 기체
카메라를 바라보며 기체 아래쪽으로 약 0.5m 위치에 손
바닥을 둡니다. 기체가 천천히 하강하여 손바닥에 착륙
합니다.
Gesture Mode를 안전하게 사용하려면 먼저 Spark 프로펠러 가드를 설치하는 것이 좋습니다.
DJI GO 4에서 아이콘을 탭하여 제스처 컨트롤을 활성화해야 합니다.
Gesture Mode에서 사진 해상도가 1440 x 1080인 점을 유의해주십시오.
PalmLaunch에서는 모바일 기기나 조종기가 연결되어 있지 않아도 기체 상태 표시기가 정상적으로 깜박
이며 원격 신호 없음이 표시되지 않습니다.
Gesture Mode는 넓은 야외에서 사용하십시오.
Gesture Mode는 사진 촬영 시에만 사용할 수 있습니다.
모바일 기기에서 GPS를 활성화하면 기체가 Gesture Mode에서 보다 정확하게 작동합니다.
—— 빨간색 유지
—— 빨간색 유지
2017 DJI All Rights Reserved.
©
25
Page 26

사용자 매뉴얼
Spark
비행 기록 장치
비행 데이터는 기체 내부 저장소에 자동으로 기록됩니다. 여기에는 비행 원격 측정, 기체 상태 정보 및 기타 설정값이
포함됩니다. 이 데이터에 액세스하려면 Micro USB 포트를 통해 기체를 PC에 연결합니다.
프로펠러 부착 및 분리
DJI 공인 프로펠러만 Spark에 사용하십시오. 흰색 링과 표시되지 않은 프로펠러는 부착해야 하는 위치와 회전 방향
을 나타냅니다.
프로펠러 흰색 링 표시되지 않음
그림
부착 위치 흰색 표시가 있는 모터 흰색 표시가 없는 모터
범례 잠금: 표시된 방향으로 프로펠러를 돌려서 장착/고정합니다.
프로펠러 부착
흰색 링이 있는 프로펠러를 흰색 표시가 있는 마운팅 베이스에 부착합니다. 각 프로펠러를 아래쪽으로 눌러 마운팅
플레이트에 끼우고 단단히 고정될 때까지 잠금 방향으로 돌립니다. 표시가 없는 프로펠러를 표시가 없는 마운팅 베이
스에 부착합니다. 모든 프로펠러 블레이드를 폅니다.
표시됨 표시되지 않음
프로펠러 분리
프로펠러를 장착된 모터를 향해 아래로 누르고 잠금 해제 방향으로 돌립니다.
프로펠러 블레이드가 날카로우니 주의해서 다루십시오.
DJI 공인 프로펠러만 사용하십시오. 프로펠러 유형을 혼합하지 마십시오.
회전 모터를 깨끗하게 유지하십시오. 회전 중에는 프로펠러를 만지지 마십시오.
비행을 시작할 때마다 사전에 프로펠러와 모터가 올바른 위치에 단단히 설치되었는지 확인합니다.
비행 전에 모든 프로펠러의 상태가 양호한지 확인하십시오. 오래되고 금이 가거나 파손된 프로펠러는 사
용하지 마십시오.
부상을 방지하기 위해 프로펠러나 모터가 회전 중일 때에는 멀리 떨어져 있어야 하며 절대로 만지지 않아
야 합니다.
보다 쾌적하고 안전한 비행 환경을 위해서는 정품 DJI 프로펠러를 사용해야 합니다.
2017 DJI All Rights Reserved.
©
26
Page 27

사용자 매뉴얼
Spark
인텔리전트 플라이트 배터리
소개
DJI 인텔리전트 플라이트 배터리는 1480mAh의 용량, 11.4V의 전압 및 스마트 충전/방전 기능을 갖추고 있습니다.
적절한 DJI 공인 충전기로만 충전해야 합니다.
인텔리전트 플라이트 배터리 충전기
인텔리전트 플라이트 배터리를 처음 사용할 때는 완전히 충전되어 있어야 합니다.
DJI 인텔리전트 플라이트 배터리 기능
1. 배터리 잔량 표시: LED 표시기가 현재 배터리 잔량을 표시합니다.
2. 자동 방전: 배터리는 10일 이상 사용하지 않을 경우 팽창을 방지하기 위해 전체 전력의 70% 미만으로 자동 방전
됩니다. 배터리가 65% 수준으로 방전되는 데는 2일 정도가 걸립니다. 방전 중에 배터리에서 약간의 열이 발생하
는 것은 정상입니다.
3. 균형 충전: 충전 시 각 배터리 셀의 전압 균형을 자동으로 맞춥니다.
4. 과충전 보호: 배터리가 완전히 충전되면 충전이 자동으로 중지됩니다.
5. 온도 감지: 온도가 5°C(41°F)와 40°C(104° F) 사이일 때만 배터리가 충전됩니다.
6. 과전류 보호: 높은 전류(3A 초과)가 감지되면 배터리가 충전을 중지합니다.
7. 과방전 보호: 과방전 피해를 방지하기 위해 방전이 자동으로 중지됩니다.
8. 합선 보호: 합선이 감지되는 경우 전력 공급을 자동으로 차단합니다.
9. 최대 절전 모드: 20분 동안 작동하지 않으면 절전을 위해 배터리가 전원 공급을 차단합니다. 배터리 잔량이 10%
미만일 때 6시간 동안 작동하지 않으면 과방전을 방지하기 위해 배터리가 최대 절전 모드로 전환됩니다. 배터리
잔량 표시기가 켜지지 않으며, 배터리를 충전하면 최대 절전 모드가 종료됩니다.
10. 통신: 배터리의 전압, 용량, 전류 등에 대한 정보가 기체의 메인 컨트롤러에 전송됩니다.
사용하기 전에 Spark 인텔리전트 플라이트 배터리 안전 가이드를 참조하십시오. 조작 및 사용에 대한 모
든 책임은 사용자에게 있습니다.
2017 DJI All Rights Reserved.
©
27
Page 28

사용자 매뉴얼
Spark
배터리 사용
켜기/끄기
켜기: 전원 버튼을 한 번 누른 다음 2초 동안 다시 길게 누르면 전원이 켜집니다. 조종기 시스템 상태 화면이 현재 배
터리 잔량을 표시합니다.
끄기: 전원 버튼을 한 번 누른 다음 다시 2초 동안 누르고 있으면 전원이 꺼집니다.
배터리 잔량 표시기
LED1
LED2
LED3
LED4
전원 버튼
낮은 온도 주의사항:
1. 낮은 온도(0°C~5°C)의 환경에서 비행하는 경우 배터리 용량이 현저히 줄어듭니다.
2. 온도가 극도로 낮은(0°C 미만) 환경에서는 배터리를 사용할 수 없습니다.
3. 낮은 온도의 환경에서 DJI GO 4 앱에 "배터리 부족 경고"가 표시된 경우 즉시 비행을 종료합니다.
4. 최적의 배터리 성능을 보장하기 위해 배터리 온도를 20°C 이상으로 유지합니다.
추운 지역에서는 배터리를 배터리 함에 넣고 이륙하기 전에 1~2분 정도 기체를 예열합니다.
배터리 잔량 확인
배터리 잔량 표시기는 남은 전력량을 표시합니다. 배터리가 꺼졌을 때 전원 버튼을 한 번 누르면 배터리 잔량 표시기
가 켜져 현재 배터리 잔량을 표시합니다. 자세한 내용은 아래를 참조하십시오.
충전 및 방전 중에도 배터리 잔량 표시기에 현재 배터리 잔량이 표시됩니다. 표시기 상태는 아래에 정의되어
있습니다.
: LED 켜짐 : LED 깜박임
: LED 꺼짐
LED1 LED2 LED3 LED4 배터리 잔량
88%~100%
75%~88%
63%~75%
50%~63%
38%~50%
25%~38%
13%~25%
0%~13%
2017 DJI All Rights Reserved.
©
28
Page 29

사용자 매뉴얼
Spark
인텔리전트 플라이트 배터리 충전
1. 배터리 충전기를 전원에 연결합니다(100~240V, 50/60Hz).
2. Spark의 Micro USB 포트에 충전기를 연결하여 충전을 시작합니다.
3. 충전 중, 배터리 잔량 표시기에 현재 배터리 잔량이 표시됩니다.
4. 배터리 잔량 표시기가 모두 꺼지면 인텔리전트 플라이트 배터리가 완전히 충전된 것입니다. 배터리를 완전히 충
전하는 데 약 1시간 20분이 걸립니다. 배터리가 완전히 충전되면 충전기를 분리합니다.
충전기
전기 콘센트
켜진 상태에서는 절대 배터리를 삽입하거나 분리하지 마십시오.
장기간 보관할 때에는 배터리 온도를 실온으로 낮추십시오.
배터리 셀의 온도가 작동 범위(5°C~40°C) 내에 있지 않으면 충전기가 배터리 충전을 중단합니다.
LED1 LED2 LED3 LED4 배터리 잔량
0%~50%
50%~75%
75%~100%
충전 완료
배터리 보호 LED 표시
아래 표에는 배터리 보호 메커니즘과 해당 LED 패턴이 나타나 있습니다.
LED1 LED2 LED3 LED4 깜박임 패턴 배터리 보호 항목
LED2가 초당 두 번 깜박임 과전류 감지
LED2가 초당 세 번 깜박임 합선 감지됨
LED3이 초당 두 번 깜박임 과충전 감지
LED3이 초당 세 번 깜박임 충전기 과전압 감지
LED4가 초당 두 번 깜박임 충전 온도가 너무 낮음
LED4가 초당 세 번 깜박임 충전 온도가 너무 높음
2017 DJI All Rights Reserved.
©
29
Page 30

사용자 매뉴얼
Spark
문제가 해결되면 전원 버튼을 눌러 배터리 잔량 표시기를 끕니다. 충전기에서 인텔리전트 플라이트 배터리를 뺐다가
다시 꽂아서 충전을 시작합니다. 실내 온도 오류의 경우 배터리를 충전기에서 뺐다가 다시 꽂을 필요가 없습니다. 충
전기는 온도가 허용 가능한 범위 내에 있는 경우 충전을 다시 시작합니다.
DJI는 타사 충전기를 사용하여 발생하는 손상에 대해서는 어떠한 책임도 지지 않습니다.
장거리 여행을 하기 전에는 다음과 같이 인텔리전트 플라이트 배터리를 방전하십시오.
전력이 30% 미만으로 떨어지거나 배터리가 켜지지 않을 때까지 Spark를 야외에서 비행시킵니다.
짐벌 및 카메라
짐벌
개요
Spark의 2축 기계식 짐벌은 부착된 카메라에 견고함을 제공하여 선명하고 안정적인 이미지와 동영상을 촬영할 수 있
도록 도와줍니다. 짐벌의 경사각은 85˚입니다.
카메라 뷰에서 파란색 원이 나타날 때까지 화면을 길게 누릅니다. 원을 왼쪽 및 오른쪽으로 끌어 기체의 방향을 제어
하고, 원을 위/아래로 끌어 카메라 기울기를 제어합니다.
0°
-85°
짐벌 조작 모드
두 가지의 짐벌 조작 모드를 사용할 수 있습니다. DJI GO 4 앱의 카메라 설정 페이지에서 여러 조작 모드 사이를 전
환합니다.
팔로우 모드 롤 축이 항상 수평으로 유지됩니다.
FPV 모드 짐벌이 기체의 움직임과 동기화되어 1인칭 시점의 비행 경험을 제공합니다.
장애물이 없고 평평한 지면에서 이륙하여 짐벌을 항상 안전하게 보호하십시오.
다음 상황에서는 짐벌 모터 오류가 발생할 수 있습니다.
(1) 기체가 고르지 못한 지면에 있거나 짐벌 움직임이 방해를 받을 때
(2) 충돌 등 짐벌 외부에서 큰 힘이 가해질 때
안개나 구름이 많이 낀 상태에서 비행하면 짐벌이 젖어서 일시적인 장애가 발생할 수 있습니다. 이 경우
짐벌을 충분히 말려주면 기능이 완전히 복구됩니다.
기체가 스포츠 모드에 있으면 짐벌이 자동으로 FPV 모드로 진입합니다.
2017 DJI All Rights Reserved.
©
30
Page 31

사용자 매뉴얼
Spark
카메라
개요
내장 카메라는 1/2.3인치 CMOS 센서를 사용하여 30fps에서 최대 1080p의 동영상 및 12메가픽셀의 정지 화상을 촬
영합니다. 사용할 수 있는 사진 촬영 모드에는 단일 촬영, 연속 촬영, 인터벌, 파노라마 및 ShallowFocus가 있습니다.
연결된 모바일 기기에서 DJI GO 4 앱을 통해 카메라에 잡힌 대상을 실시간 미리 보기로 모니터링할 수 있습니다.
카메라 Micro SD 카드 슬롯
사진과 동영상을 저장하려면 기체를 켜기 전에 아래 그림처럼 Micro SD 카드를 슬롯에 넣습니다. Spark는 최대
64GB의 Micro SD 카드를 지원합니다. 권장되는 카드는 빠른 읽기/쓰기 속도를 제공하고 고해상도 동영상 녹화가 가
능한 UHS-1 Micro SD 카드입니다.
기체의 전원이 켜진 상태에서 Micro SD 카드를 제거하지 마십시오.
카메라 시스템의 안정성을 위해 단일 동영상 녹화는 최대 30분으로 제한됩니다.
Mac 컴퓨터에서는 시스템 제한 사항으로 인해 32GB 이하의 Micro SD 카드만 사용할 수 있습니다.
SD 카드가 없거나 SD 카드 저장 공간이 가득 찬 경우 모바일 기기에 촬영된 영상을 저장할 수 있습니다.
사진의 해상도는 1024×768이고 동영상의 해상도는 1280×720입니다.
카메라 데이터 포트
사진과 동영상을 컴퓨터에 다운로드하려면 Spark를 켜고 USB 케이블을 Micro USB 포트에 연결합니다.
Micro SD 카드의 파일에 액세스하기 전에 기체가 켜져 있어야 합니다.
모바일 기기로 기체 제어
Wi-Fi를 통해 모바일 기기에 연결하면 DJI GO 4를 사용하여 기체를 제어할 수 있습니다. 사용법을 알아보려면 아래
의 지침을 따르십시오.
1. 기체의 전원을 켭니다.
2. 모바일 기기의 Wi-Fi를 켜고, Spark의 네트워크를 선택하고, Wi-Fi 암호를 입력합니다.
3. DJI GO 4를 실행합니다. “GO FLY”를 탭하여 카메라 뷰로 진입합니다.
4. 아이콘을 탭하여 기체를 자동으로 이륙시킵니다. 두 엄지 손가락을 화면에 놓고 가상 조이스틱을 사용하여 기
체를 조종합니다.
2017 DJI All Rights Reserved.
©
31
Page 32

사용자 매뉴얼
Spark
모바일 기기의 Wi-Fi 주파수는 2.4GHz(기본값) 또는 5.8GHz로 설정할 수 있습니다. 지원되는 기기에서
는 간섭을 줄이기 위해 Wi-Fi를 5.8GHz로 설정합니다.
Wi-Fi 이름 및 암호를 재설정하고 Wi-Fi 주파수를 2.4GHz로 재설정하려면 신호음이 3번 울릴 때까지 전
원 버튼을 9초 이상 길게 누릅니다. 또는 DJI GO 4 앱에서 “Help”를 탭한 다음 지시를 따릅니다.
상대적으로 전자기 간섭이 적은 넓은 야외에서는 Wi-Fi 연결만 사용해서 비행하십시오. 간섭이 연결에
부정적인 영향을 주는 경우, 대신 조종기를 사용하여 비행하거나 간섭이 적은 공간으로 이동하십시오.
버츄얼 조이스틱 사용
버츄얼 조이스틱을 사용하기 전에 모바일 기기가 기체에 연결되어 있는지 확인합니다. 아래 그림은 모드 2를 기반으
로 합니다(왼쪽 스틱을 스로틀로 사용).
12
In flight (GPS)
버츄얼 조이스틱 GUI
P-GPS
09:29
61%
2.4G
화면의 왼쪽 절반을 누르면 기체를 위쪽, 아래쪽, 왼쪽 또는 오른쪽으로 이동시킬 수 있습니다. 화면의 오른쪽 절반을
누르면 기체를 전방, 후방 또는 비스듬히 이동시킬 수 있습니다.
" " 버튼을 탭해 버츄얼 조이스틱을 활성화하거나 비활성화합니다.
흰색 원 바깥의 영역도 제어 명령에 반응합니다.
2017 DJI All Rights Reserved.
©
32
Page 33

사용자 매뉴얼
Spark
기체 제어
이 섹션에서는 기체를 제어하는 방법을 설명합니다. 조종 스틱 모드는 모드 1, 모드 2, 모드 3 또는 사용자 정의 모드
로 설정할 수 있습니다.
모드 1
왼쪽 스틱
전방
오른쪽 스틱
Up
모드 2
모드 3
후방
오른쪽으로왼쪽으로
오른쪽 스틱왼쪽 스틱
Up
아래로
오른쪽으로왼쪽으로
왼쪽 스틱 오른쪽 스틱
전방
후방
아래로
오른쪽왼쪽
전방
후방
오른쪽왼쪽
Up
아래로
오른쪽왼쪽
스틱 모드는 기본적으로 모드 2로 설정되어 있습니다.
스틱 중립/중간 지점: 조종 스틱이 가운데 위치에 있습니다.
조종 스틱 이동: 조종 스틱을 가운데 위치에서 바깥 쪽으로 밀어 이동합니다.
오른쪽으로왼쪽으로
2017 DJI All Rights Reserved.
©
33
Page 34

Spark
사용자 매뉴얼
버츄얼 조이스틱 /
조종기
(모드 2)
왼쪽 스틱
왼쪽 스틱
오른쪽 스틱
(
기체
는 기수 방향을 나타냄)
설명
왼쪽 스틱을 위/아래로 움직이면 기체의 고도가 변경됩
니다.
상승하려면 스틱을 밀어 올리고 하강하려면 밀어 내립
니다.
두 스틱이 가운데에 있으면 Spark가 호버링합니다.
스틱이 가운데에서 멀어질수록 Spark의 고도가 더 빠르
게 변화합니다. 예상하지 못한 급격한 고도 변화를 방지
하려면 스틱을 항상 부드럽게 움직여야 합니다.
왼쪽 스틱을 왼쪽이나 오른쪽으로 이동하여 기체의 방
향타와 회전을 제어합니다.
기체를 시계 반대 방향으로 회전시키려면 스틱을 왼쪽
으로 밀고 시계 방향으로 회전시키려면 오른쪽으로 밉
니다. 스틱이 가운데에 있으면 Spark가 현재 방향을 그
대로 유지합니다.
스틱이 가운데 위치에서 멀어질수록 Spark가 더 빠르게
회전합니다.
오른쪽 스틱을 위/아래로 움직이면 기체의 전방/후방
피치가 변경됩니다.
전방으로 비행하려면 스틱을 밀어 올리고 후방으로 비행
하려면 밀어 내립니다.
호버링합니다.
피치 각도(최대 30˚)와 비행 속도를 높이려면 스틱을 가
운데 위치에서 더 멀리 밀어냅니다.
스틱이 가운데에 있으면 Spark
가
오른쪽 스틱
2017 DJI All Rights Reserved.
©
34
오른쪽 스틱을 왼쪽/오른쪽으로 움직이면 기체의 좌우
피치가 변경됩니다.
좌측으로 비행하려면 왼쪽으로 밀고 우측으로 비행
하려면 오른쪽으로 밉니다. 스틱이 가운데에 있으면
Spark가 호버링합니다.
Page 35

조종기(선택 사항)
이 섹션에서는 조종기의 기능에 대해 설명하고
기체와 카메라를 제어하기 위한 지침을 제공합
니다.
2017 DJI All Rights Reserved.
©
35
Page 36

조종기(선택 사항)
조종기 개요
Spark의 조종기는 새로운 증폭형 Wi-Fi 신호 전송 시스템을 장착하여 최대 전송 범위 2km(1.2mi)*에서 기체 및 짐벌
카메라를 조종할 수 있도록 합니다. 조종기를 모바일 기기에 무선으로 연결하고 DJI GO 4 앱을 통해 라이브 동영상
피드를 표시할 수 있습니다. 접이식 클램프를 사용하면 모바일 기기를 고정할 수 있습니다. 최대 조종기 배터리 수명
은 약 2.5시간입니다*.
1
2
3
4
11
1. 리턴 투 홈(RTH) 버튼
버튼을 길게 눌러 RTH를 시작합니다. RTH를 취소하
려면 다시 누릅니다.
2. 비행 일시 정지 버튼
한 번 눌러 긴급 브레이크를 사용합니다.
3. 전원 포트(Micro USB)
충전기에 연결하여 조종기 배터리를 충전합니다.
4. 모바일 기기 클램프
모바일 기기를 조종기에 단단히 고정시킵니다.
5. 기능 버튼
DJI GO 4 인텔리전트 플라이트 모드 메뉴를 불러옵
니다.
6. 조종 스틱
기체의 방향과 이동을 제어합니다.
7. 전원 버튼
전원 버튼을 한 번 눌러 현재 배터리 잔량을 확인합니
다. 한 번 누른 다음 다시 길게 누르면 조종기가 켜지
거나 꺼집니다.
8. 배터리 잔량 LED
조종기의 배터리 잔량을 표시합니다.
10
9
8
7
6
12
5
14
9. 비행 모드 전환
P 모드와 S 모드 사이를 전환합니다.
10. 안테나
기체 제어 신호와 동영상 신호를 중계합니다.
11. 상태 LED
조종기의 시스템 상태를 표시합니다.
12. 짐벌 다이얼
카메라의 기울기를 제어합니다.
13. 사용자 지정 가능 버튼
DJI GO 4 앱의 설정에 따라 다양한 기능을 수행합
니다.
14. 녹화 버튼
누르면 동영상 녹화가 시작됩니다. 다시 누르면 녹
화가 정지됩니다.
15. 셔터 버튼
누르면 사진이 촬영됩니다.
13
15
* 조종기는 전자기 간섭이 없는 확 트인 넓은 지역의 약 120m 고도에서 최대 전송 거리(FCC)에 도달할 수 있습니다.
최대 작동 시간은 20km/h(12.4mph)의 일정 속도로 비행하며 무풍 환경에서 테스트되었습니다. 이 값은 참조용으
로만 사용해야 합니다.
2017 DJI All Rights Reserved.
©
36
Page 37

사용자 매뉴얼
Spark
표준 준수:
스틱 모드:
조종기는 현지 규정을 준수합니다.
모드 1, 모드 2 또는 사용자 정의 모드로 제어 방법을 설정할 수 있습니다.
조종기 사용
조종기의 전원은 2970mAh 용량의 충전식 배터리에서 공급됩니다.
조종기 켜기 및 끄기
전원 버튼을 한 번 눌러 현재 배터리 잔량을 확인합니다. 한 번 누른 다음 다시 길게 누르면 조종기가 켜지거나 꺼집
니다.
배터리 충전
조종기의 전원 포트를 USB 충전기에 연결하여 배터리를 충전합니다. 조종기를 완전히 충전하는 데는 약 2시간이 걸
립니다.
카메라 제어
조종기에서 셔터 버튼, 녹화 버튼 및 짐벌 다이얼을 통해 동영상/사진을 촬영하고 카메라 기울기를 조정합니다.
기체 제어
스틱 모드는 가상 조이스틱에 설정한 것과 동일하게 작동합니다.
2017 DJI All Rights Reserved.
©
37
Page 38

사용자 매뉴얼
Spark
비행 모드 전환
스위치를 전환하여 원하는 비행 모드를 선택합니다. P 모
드와 S 모드 사이에서 선택합니다.
위치 비행 모드
SPORT
SPORT
P 모드
S 모드
RTH 버튼
RTH 버튼을 길게 누르면 리턴 투 홈(RTH) 절차가 시작됩니다. 그러면 마지막으로 기록된 홈 포인트로 기체가 돌아
옵니다. 이 버튼을 다시 누르면 RTH 절차를 취소하고 기체를 다시 수동으로 제어할 수 있습니다.
최적 전송 범위
기체와 조종기 사이의 전송 신호는 아래와 같이 안테나와 기체가 위치해 있을 때 가장 안정적입니다.
최적 전송 범위
강함 약함
기체가 최적 전송 영역 내에서 비행하도록 합니다. 최적의 전송 성능을 유지하려면 위의 다이어그램에서와 같이 조종
기와 안테나를 조절합니다.
조종기 연동
Spark 콤보(조종기 포함)를 구매하면 기체와 조종기가 배송 전에 연동됩니다. 조종기를 Spark에 연동하려면 아래 지
침을 따르십시오.
1. 기체와 조종기의 전원을 켭니다. 기체 상태 표시기가 노란색으로 빠르게 깜박일 때까지 기다립니다.
2. 인텔리전트 플라이트 배터리의 전원 버튼을 3초 동안 길게 누릅니다. 신호음이 한 번 울리면 버튼을 놓습니다. 전
방 LED가 빨간색으로 깜박입니다.
3. 비행 일시 정지 버튼, 기능 버튼 및 사용자 지정 가능 버튼을 동시에 길게 누릅니다. 단일/이중 신호음이 교대로 울
린 후 빠른 단일 신호음으로 바뀌면 연동이 시작됩니다.
2017 DJI All Rights Reserved.
©
38
Page 39

사용자 매뉴얼
Spark
4. 그런 다음 전방 LED가 녹색으로 깜박인 후 빨간색으로 일정하게 유지됩니다. 조종기의 상태 LED가 녹색으로 일
정하게 유지되면 연동이 완료된 것입니다.
연동하는 동안 조종기가 기체에서 20cm(0.66ft) 내에 있는지 확인합니다.
조종기 분리
조종기를 사용하는 것 외에도, DJI GO 4에서 버츄얼 조이스틱을 사용하여 기체를 제어할 수 있습니다. 단, 기체에 조
종기가 연동되어 있는 동안에는 버츄얼 조이스틱 제어가 비활성화됩니다. 조종기와 기체를 분리한 다음 버츄얼 조이
스틱을 활성화해야 합니다.
1. 기체의 전원을 켭니다.
2. 이중 신호음이 울릴 때까지 인텔리전트 플라이트 배터리의 전원 버튼을 6초 동안 길게 누릅니다. 그러면 조종기
와 기체가 분리됩니다.
버츄얼 조이스틱을 사용하려면 조종기를 분리한 후 기체의 Wi-Fi 네트워크를 연결합니다.
2017 DJI All Rights Reserved.
©
39
Page 40

DJI GO 4 앱
이 섹션에서는 DJI GO 4 앱의 주요 기능을 소개
합니다.
2017 DJI All Rights Reserved.
©
40
Page 41

DJI GO 4 앱
이 앱을 사용하여 짐벌, 카메라 및 기타 기체 기능을 제어할 수 있습니다. 앱에는 Equipment, Editor, SkyPixel 및 Me
섹션 등을 비롯하여 기체를 구성하고 사진과 동영상을 편집하며 다른 사람들과 공유하는 데 사용할 수 있는 다양한
기능이 갖추어져 있습니다.
Equipment
모바일 기기가 기체에 연결되면 Equipment 페이지에서 “GO FLY” 아이콘을 탭하여 카메라 뷰로 전환합니다.
카메라 뷰
8 97654321
12
22
21
20
In flight (GPS)
P-GPS
09:29
2.4G
1080P/30
61%
10
11
12
13
14
19
18
H 9.6
S 1.1D 9.6
17
15
16
1. 시스템 상태
In flight (GPS)
: 이 아이콘은 기체 비행 상태를 나타내며 다양한 경고 메시지를 표시합니다.
2. 장애물 감지 상태
: 장애물이 기체에 가까이 오면 빨간색 막대가 표시됩니다. 장애물이 감지 범위에 있으면 주황색
막대가 표시됩니다.
3. 배터리 잔량 표시기
: 배터리 잔량 표시기는 배터리 잔량을 동적으로 표시합니다. 배터리 잔량 표시기에서 색상으로 표시된
영역은 다양한 기능을 수행하는 데 필요한 전력 수준을 나타냅니다.
4. 비행 모드
: 이 아이콘 옆의 텍스트는 현재 비행 모드를 나타냅니다.
메인 컨트롤러(MC) 설정을 구성하려면 아이콘을 탭합니다. 이 설정으로 비행 제한을 변경하고 게인 값을 설정할
수 있습니다.
2017 DJI All Rights Reserved.
©
41
Page 42

사용자 매뉴얼
Spark
5. 카메라 설정값
1080P/30
카메라 설정의 설정값과 Micro SD 카드 용량을 표시합니다. 카메라 설정에서 카메라 설정값 표시를 활성화합니
다.
6. GPS 신호 강도
: 현재 GPS 신호 강도를 표시합니다. 흰색 막대는 GPS 강도가 적정함을 나타냅니다.
7. 3D 감지 시스템 상태
: 이 아이콘을 탭하여 3D 감지 시스템이 제공하는 기능을 활성화하거나 비활성화합니다.
8. Wi-Fi 설정
: 탭하여 Wi-Fi 설정 메뉴로 이동합니다.
2.4G
9. 배터리 잔량
: 이 아이콘은 현재 배터리 잔량을 표시합니다.
61
%
아이콘을 탭하면 배터리 정보 메뉴를 표시하고, 다양한 배터리 경고 임계값을 설정하고, 배터리 경고 이력을 표시
할 수 있습니다.
10. 일반 설정
: 탭하여 측정 기준을 설정하고, 라이브 스트리밍을 활성화하며, 비행 경로를 표시하는 일반 설정 메뉴로 이
동합니다.
11. 짐벌 피치 추적
: 이 아이콘을 탭한 후 모바일 기기를 회전하여 짐벌의 기울기를 조정합니다.
12. 짐벌 슬라이더
: 짐벌 피치를 표시합니다.
13. 사진/동영상 전환
: 탭하여 사진과 동영상 녹화 모드 사이를 전환합니다.
14. 촬영/녹화 버튼
/ : 탭하여 사진 촬영 또는 동영상 녹화를 시작합니다.
15. 카메라 설정
: 탭하여 카메라 설정 메뉴로 이동합니다.
아이콘을 탭하여 카메라의 ISO, 셔터 및 자동 노출 값을 설정합니다.
아이콘을 탭하여 사진 모드를 선택합니다. Spark는 단일 촬영, 연속 촬영, 인터벌 촬영, 파노라마 및
ShallowFocus를 지원합니다.
아이콘을 탭하여 일반 카메라 설정 메뉴로 이동합니다.
2017 DJI All Rights Reserved.
©
42
Page 43

사용자 매뉴얼
Spark
ShallowFocus 사진을 촬영할 때는 다음 사항에 주의하십시오.
정지 장면을 촬영하는 데 적합합니다. 사람을 촬영할 때는 프로세스 중에 움직이지 마십시오. 그렇지 않
으면 ShallowFocus 사진 촬영에 실패할 수 있습니다.
촬영 전에 기체가 약 20cm 정도 상승합니다. 기체 위에 장애물이 없도록 하십시오.
적합한 촬영 범위는 30m 이내입니다.
16. 재생
: 탭하여 Playback 페이지로 이동하면 촬영과 동시에 사진과 동영상을 미리 볼 수 있습니다.
17. 비행 원격 측정
H 9.6M
D 9.6M
S 1.1M/S
18. 버츄얼 조이스틱 스위치
: 탭하여 버츄얼 조이스틱을 활성화/비활성화합니다. 이 스위치가 활성화되면 화면에 손가락을 올려 놓고 버
츄얼 조이스틱을 사용하여 기체를 제어합니다. 이 스위치를 비활성화하면 화면을 눌러 다른 작업을 할 수 있습니
다.
19. 인텔리전트 플라이트 모드
: 탭하여 인텔리전트 플라이트 모드를 선택합니다.
20. 스마트 RTH
: RTH 절차를 시작합니다. 탭하면 기체가 마지막으로 기록된 홈 포인트로 돌아옵니다.
지면으로부터의 높이입니다.
:
기체와 홈 포인트 사이의 거리입니다.
:
기체 속도입니다.
:
자동 이륙/착륙
21.
/ : 자동 이륙 또는 착륙을 시작하려면 탭합니다.
22. 뒤로
: 이 아이콘을 눌러 주 메뉴로 돌아갑니다.
카메라 뷰에서 파란색 원이 나타날 때까지 화면을 길게 누릅니다. 원을 왼쪽 및 오른쪽으로 끌어 기체의 방
향을 제어하고, 원을 위/아래로 끌어 카메라 기울기를 제어합니다.
2017 DJI All Rights Reserved.
©
43
Page 44

사용자 매뉴얼
Spark
Editor
DJI GO 4 앱에서는 인텔리전트 동영상 편집기가 기본적으로 제공됩니다. 몇 개의 동영상 클립을 녹화하여 모바일 기
기로 다운로드한 다음 홈 화면의 Editor로 이동합니다. 템플릿과 지정된 수의 클립을 선택하면 선택한 클립을 자동으
로 결합하여 즉시 공유할 수 있는 짧은 분량의 필름을 만들 수 있습니다.
SkyPixel
SkyPixel 페이지에서 사진과 동영상을 보고 공유합니다.
Me
이미 DJI 계정이 있으면 여기에서 포럼 토론에 참여하거나 커뮤니티에서 자신의 창작물을 공유할 수 있습니다.
2017 DJI All Rights Reserved.
©
44
Page 45

비행
이 섹션에서는 안전한 비행 연습과 비행 제한사
항에 대해 설명합니다.
2017 DJI All Rights Reserved.
©
45
Page 46

비행
비행 전 준비 작업이 완료되면 DJI GO 4 앱에서 비행 시뮬레이터를 사용하여 비행 기술을 익히고 안전하게 비행하는
방법을 연습하는 것이 좋습니다. 비행은 항상 시야가 확보된 넓은 공간에서 수행해야 합니다.
비행 환경 요구사항
1. 날씨가 좋지 않을 때는 기체를 사용하지 마십시오. 풍속이 10m/초를 초과하거나, 눈 또는 비가 오거나, 안개가 낀
경우가 이에 해당합니다.
2. 시야가 확보된 넓은 지역에서 비행합니다. 고층 건물과 대형 철골 구조물은 내장 콤파스와 GPS 시스템의 정확성
에 영향을 줄 수 있습니다.
3. 장애물, 군중, 고압 전선, 나무 및 수계를 피하십시오.
4. 기지국과 송신탑을 비롯하여 높은 수준의 전자기가 발생하는 지역을 피해 간섭을 최소화하십시오.
5. 명확한 지면 레벨의 변화가 있는 장소(예: 빌딩 내부에서 외부로 비행)와 GPS 신호가 약한 경우 기체를 작동하지
마십시오. 포지셔닝 기능이 방해를 받아 비행 안전에 영향을 줄 수 있습니다.
6. 기체와 배터리의 성능은 공기 밀도나 기온과 같은 환경적 요소의 영향을 받습니다. 해발 4000m(13123피트) 이
상의 고도에서 비행할 때는 배터리와 기체 성능이 영향을 받을 수 있으므로 매우 주의해야 합니다.
7. Spark는 극지방에서 P 모드를 사용할 수 없습니다.
비행 제한 및 비행 금지 구역
모든 무인항공기(UAV) 조작자는 ICAO와 FAA를 포함하는 정부 및 규제 당국의 모든 규정을 준수해야 합니다. 사용
자가 법을 위반하지 않으면서 안전하게 제품을 사용할 수 있도록 비행이 기본적으로 제한됩니다. 비행 제한에는 높이
제한, 거리 제한 및 비행 금지 구역이 포함됩니다.
P 모드로 작동하는 경우 높이 제한, 거리 제한 및 비행 금지 구역이 함께 적용되어 비행을 관리합니다.
최대 비행 고도 및 반경 제한
최대 비행 고도 및 반경 제한은 DJI GO 4 앱에서 변경할 수 있습니다. 최대 비행 고도는 500미터(1640피트)를 넘을
수 없습니다. 이러한 설정에 따라 Spark는 아래 그림처럼 제한된 원통형 공간에서 비행하게 됩니다.
2017 DJI All Rights Reserved.
©
46
최대 비행 고도
최대 반경
홈 포인트
전원을 켰을 때 기체의 높이
Page 47

사용자 매뉴얼
Spark
GPS 신호 강함 녹색 깜박임
비행 제한 DJI GO 4 앱 기체 상태 표시기
최대 비행 고도
최대 반경
GPS 신호 약함 노란색 깜박임
최대 비행
고도
최대 반경 제한 없음
기체가 제한 범위를 벗어난 경우 기체를 계속 제어할 수 있지만 더 멀리 비행할 수는 없습니다.
안전을 위해 공항, 고속도로, 철도역, 철로, 시내 중심가 또는 기타 민감한 지역 근처에서는 비행하지 마십
시오. 시야가 확보된 장소에서만 기체를 비행하십시오.
기체의 고도는 지정된 값을 초과
할 수 없습니다.
비행 거리가 최대 반경 내에 있어
야 합니다.
비행 제한 DJI GO 4 앱 기체 상태 표시기
GPS 신호가 약하거나 비전 시스템이 활
성화된 경우 높이가 5미터(16피트)로 제
한됩니다. GPS 신호가 약하거나 비전
시스템이 비활성화된 경우 높이가 30미
터(98피트)로 제한됩니다.
Warning: Height
limit reached.
Warning: Distance
limit reached.
Warning: Height limit
reached.
없음.
없음.
비행 금지 구역
모든 비행 금지 구역은 DJI 공식 웹사이트(http://www.dji.com/flysafe/no-fly)에 나와 있습니다. 비행 금지 구역은
공항과 제한 구역으로 나뉩니다. 공항은 주요 공항과 함께 유인 기체가 낮은 고도에서 비행하는 구역을 포함합니다.
제한 구역에는 국경 지대나 비행이 보안상 문제를 야기할 수 있는 위치가 포함됩니다.
비행 전 체크리스트
1. 조종기, 인텔리전트 플라이트 배터리 및 모바일 기기가 완전히 충전되어 있어야 합니다.
2. 프로펠러가 제자리에 단단히 고정되어 있어야 합니다.
3. 필요한 경우 Micro SD 카드가 삽입되어 있어야 합니다.
4. 짐벌이 정상적으로 작동해야 합니다.
5. 모터가 정상적으로 시동되어 작동 중이어야 합니다.
6. DJI GO 4 앱이 기체에 성공적으로 연결되어 있어야 합니다.
7. 3D 감지 시스템 및 비전 시스템용 센서가 깨끗한지 확인합니다.
2017 DJI All Rights Reserved.
©
47
Page 48

사용자 매뉴얼
Spark
자동 이륙 및 착륙
자동 이륙
기체 상태 표시기가 녹색으로 깜박이는 경우에만 자동 이륙을 사용하십시오. 자동 이륙 기능을 사용하려면 다음 단계
를 수행합니다.
1. DJI GO 4 앱을 시작하고 "GO FLY"를 탭하여 카메라 페이지로 이동합니다.
2. 비행 전 체크리스트에 있는 모든 단계를 완료합니다.
3. “ ”을 탭하고 비행하기에 안전한 조건인지 확인합니다. 아이콘을 밀어 확인하고 이륙합니다.
4. 기체가 이륙하여 지면으로부터 1.2미터 위에서 호버링합니다.
안정화를 위해 비전 시스템을 사용 중인 경우 기체 상태 표시기가 빠르게 깜박입니다. 기체는 30미터 미만
에서 자동으로 호버링합니다. 자동 착륙 기능을 사용하기 전에 충분한 GPS가 확보될 때까지 기다리는 것
이 좋습니다.
자동 착륙
기체 상태 표시기가 녹색으로 깜박이는 경우에만 자동 착륙을 사용하십시오. 자동 착륙 기능을 사용하려면 다음 단
계를 수행합니다.
1. 을 탭해 착륙 조건이 적당한지 확인합니다. 밀어서 확인합니다.
2. 화면에서 버튼을 사용하면 착륙 과정이 즉시 취소됩니다.
3. 기체가 착륙하고 전원이 자동으로 꺼집니다.
모터 시작/정지(조종기 사용 시)
모터 시동
스틱 조합 명령(CSC)은 모터를 시동하는 데 사용합니다. 양쪽 스틱을 안쪽 아래 또는 바깥쪽 모서리로 밀어 모터를
시동합니다. 모터가 회전을 시작하면 양쪽 스틱을 동시에 놓습니다.
또는
모터 정지
모터를 정지하는 두 가지 방법은 다음과 같습니다.
방법 1: 기체가 착륙하면 왼쪽 스틱을 아래로 누르고 그대로 유지합니다. 3초 후에 모터가 정지됩니다.
방법 2: 기체가 착륙하면 왼쪽 스틱을 아래로 누르고, 위에 설명된 대로 모터를 시작하는 데 사용되는 동일한 CSC를
수행합니다. 모터가 즉시 정지됩니다. 모터가 정지하면 양쪽 스틱을 놓습니다.
또는
방법 1 방법 2
2017 DJI All Rights Reserved.
©
48
Page 49

사용자 매뉴얼
Spark
긴급 상황이 발생할 경우 CSC 비행을 수행하려면 1.5초 동안 길게 눌러 비행 중 모터를 정지시킵니다. 비
행 중 모터를 정지하면 기체가 추락하게 됩니다.
비행 테스트
이륙/착륙 절차
1. 시야가 확보된 평평한 장소에 기체를 놓고 배터리 잔량 표시기가 사용자를 바라보게 합니다.
2. 인텔리전트 플라이트 배터리를 켭니다.
3. DJI GO 4 앱을 시작하고 카메라 페이지로 이동합니다.
4. 기체 표시기가 녹색으로 깜박일 때까지 기다립니다. 이 상태는 홈 포인트가 기록되고 안전하게 비행할 준비가 되
었음을 의미합니다. 자동 이륙을 사용합니다.
5. 자동 착륙을 사용하여 기체를 착륙시킵니다.
6. 인텔리전트 플라이트 배터리를 끕니다.
비행 중에 기체 상태 표시기가 노란색으로 빠르게 깜박이면 기체가 페일세이프 모드로 진입된 것입니다.
배터리 부족 경고는 비행 중에 기체 상태 표시기가 빨간색으로 천천히 또는 빠르게 깜박이는 것으로 표시
됩니다.
자세한 비행 정보는 튜토리얼 영상을 시청하십시오.
동영상 제안사항 및 팁
1. 비행을 시작하기 전에 모든 비행 전 체크리스트를 확인합니다.
2. DJI GO 4 앱에서 원하는 짐벌 작동 모드를 선택합니다.
3. P 모드로 비행할 때에만 동영상을 촬영합니다.
4. 항상 날씨가 좋을 때 비행하고 비 또는 강한 바람은 피합니다.
5. 필요에 맞는 카메라 설정을 선택합니다. 설정에는 사진 형식과 노출 보정 등이 포함됩니다.
6. 비행 테스트를 수행하여 비행 경로 및 미리 보기 장면을 점검합니다.
7. 조종 스틱을 부드럽게 밀어 기체의 움직임을 원활하고 안정적으로 유지합니다.
콤파스 캘리브레이션
DJI GO 4 앱 또는 상태 표시기에서 콤파스를 캘리브레이션하라고 알리는 경우에만 콤파스를 캘리브레이션하십시오.
콤파스를 캘리브레이션할 때는 다음 규칙을 준수하십시오.
자석 주변, 주차용 구조물 또는 지하 금속 보강재와 같이 강한 자기 간섭이 일어날 가능성이 있는 곳에서
는 콤파스를 캘리브레이션하지 마십시오.
캘리브레이션 중에는 휴대전화와 같은 자성이 강한 물체를 소지하지 마십시오.
캘리브레이션을 완료한 후 콤파스가 강한 간섭의 영향을 받는 경우 DJI GO 4 앱에 해당 메시지가 표시됩
니다. 콤파스 문제를 해결하려면 표시되는 메시지를 따르십시오.
2017 DJI All Rights Reserved.
©
49
Page 50

사용자 매뉴얼
Spark
캘리브레이션 절차
장애물이 없는 공간에서 다음 절차를 수행합니다.
1. 앱에서 기체 상태 표시줄을 탭하거나 ‘Calibrate’를 선택하여 화면에 표시되는 지침을 따릅니다.
2. 기체를 잡고 수평으로 360도 회전시킵니다. 기체 상태 표시기가 녹색으로 일정하게 유지됩니다.
3. 기수가 아래쪽으로 향하도록 기체를 수직으로 잡고, 가운데 축을 중심으로 360도 회전시킵니다.
4. 기체 상태 표시기가 빨간색으로 깜박이는 경우 기체를 다시 캘리브레이션합니다.
캘리브레이션 절차 후에 기체 상태 표시기가 빨간색과 노란색으로 깜박이면 기체를 다른 위치로 이동하여
다시 시도합니다.
금속 다리, 자동차, 비계와 같은 금속 물체 근처에서 콤파스를 캘리브레이션하지 마십시오.
기체를 바닥에 놓은 후 기체 상태 표시기가 빨간색과 노란색으로 교대로 깜박이면 콤파스가 자기 간섭을
감지한 것입니다. 위치를 변경하십시오.
펌웨어 업데이트
DJI GO 4 또는 DJI Assistant 2를 사용하여 기체 펌웨어를 업데이트합니다. 조종기 펌웨어 업데이트는 DJI GO 4
에서만 가능합니다.
DJI GO 4 앱 사용
기체 및 조종기를 DJI GO 4 앱과 연결합니다. 새 펌웨어 업데이트를 사용할 수 있으면 알림이 표시됩니다. 업데이트
를 시작하려면 모바일 기기를 인터넷에 연결하고 화면에 표시되는 지침을 따르십시오.
DJI Assistant 2 사용
DJI Assistant 2를 통해 펌웨어를 업데이트하려면 아래 지침을 따릅니다.
1. 기체의 전원을 끈 채 Micro USB 케이블과 Micro USB 포트를 사용하여 기체를 컴퓨터에 연결합니다.
2017 DJI All Rights Reserved.
©
50
Page 51

2. 기체의 전원을 켭니다.
3. DJI Assistant 2를 실행하고 DJI 계정으로 로그인합니다.
4. Spark를 선택하고 왼쪽 창에서 Firmware Updates를 클릭합니다.
5. 업데이트하려는 펌웨어 버전을 선택합니다.
6. 펌웨어가 다운로드되기를 기다리면 펌웨어 업데이트가 자동으로 시작됩니다.
7. 펌웨어 업데이트가 완료되면 기체가 자동으로 재부팅됩니다.
전원을 켜기 전에 기체가 컴퓨터에 연결되어 있어야 합니다.
펌웨어 업데이트는 약 15분 정도 소요됩니다. 짐벌이 펴지고 기체 상태 표시기가 비정상적으로 깜박거리
다 재부팅되는 것은 정상적인 현상입니다. 업데이트가 완료될 때까지 기다려 주십시오.
컴퓨터가 인터넷에 연결되어 있는지 확인합니다.
인텔리전트 플라이트 배터리 전력이 50% 이상이며 조종기 전력이 30% 이상인지 확인합니다.
업데이트하는 동안 기체를 컴퓨터에서 분리해서는 안 됩니다.
사용자 매뉴얼
Spark
2017 DJI All Rights Reserved.
©
51
Page 52

부록
2017 DJI All Rights Reserved.
©
52
Page 53

부록
사양
기체
무게 300g
크기 143×143×55mm
대각선 길이(프로펠러 제외) 170mm
최대 상승 속도 스포츠 모드에서 3m/초(9.8ft/s)
최대 하강 속도 자동 착륙 사용 시 3m/초(9.8ft/s)
최대 속도 바람이 없을 때 스포츠 모드에서 50km/h(31mph)
최대 실용 상승 한계 고도(해발) 4000m(13123피트)
최대 비행 시간 16분(지속적인 25km/h(15.5mph)의 무풍 환경)
최대 호버링 시간 15분(무풍)
작동 온도 0°~40°C(32°~104°F)
GNSS GPS/GLONASS
GPS 호버링 정확도 범위
송신기 출력(EIRP)
작동 주파수 2.400~2.4835GHz, 5.725~5.825GHz
짐벌
제어 가능 범위 피치: -85°~0°
안정화 2축(피치, 롤)
3D 감지 시스템
감지 범위 0.2~5m(0.6~16피트)
작동 환경
비전 시스템
속도 범위 지상 2m(6.6ft) 높이에서 36km/h(22.4mph) 이하
고도 범위 0~8m(0~26피트)
작동 범위 0~30m(0~98피트)
작동 환경
카메라
센서 1/2.3” CMOS, 유효 픽셀:12메가픽셀
렌즈
수직: ±0.1m(비전 포지셔닝 사용 시), ±0.5m(GPS 포지셔닝 사용 시)
수평: ±0.3m(비전 포지셔닝 사용 시), ±1.5m(GPS 포지셔닝 사용 시)
2.4G
FCC: 25dBm, CE: 18dBm, SRRC: 18dBm
5.8G
FCC: 27dBm, CE: 14dBm, SRRC: 27dBm
확산 반사가 일어나고 크기가 20x20mm를 초과하며 반사율이 20%를 초
과하는 표면(벽, 나무, 사람 등)
선명한 패턴에 확산 반사가 일어나며 반사율이 20%를 초과하는 표면, 적
당한 조명(15럭스 초과)
81.9° FOV, 25mm(35mm 포맷에 해당), f/2.6
촬영 범위: 2m~
∞
2017 DJI All Rights Reserved.
©
53
Page 54

사용자 매뉴얼
Spark
ISO 범위 100~3200(동영상), 100~1600(사진)
전자 셔터 속도 2~1/8000초
최대 이미지 크기 3968 × 2976
단일 촬영
스틸 사진 모드
동영상 녹화 모드 FHD: 1920×1080 30p
동영상 저장소 비트전송율 24Mbps
지원 파일 시스템 FAT 32
사진 JPEG
동영상
지원 SD 카드
Wi-Fi
작동 주파수 2.4G / 5.8G
최대 전송 거리(장애물과 간섭이 없는 상
태)
조종기
작동 주파수
최대 전송 거리
(장애물과 간섭이 없는 상태)
작동 온도 범위 0°~40°C(32°~104°F)
내장 배터리 2970mAh
송신기 출력(EIRP)
작동 전압 950mA @3.7V
지원 모바일 기기 크기
충전기
입력 100~240V, 50/60Hz, 0.5A
출력 5V/3A, 9V/2A, 12V/1.5A
연속 촬영: 3프레임
AEB(자동 노출 브라케팅): 0.7EV 바이어스에서 3 브래킷 프레임
인터벌(2/3/5/7/10/15/20/30/60초)
MP4(MPEG-4 AVC/H.264)
지원되는 모델:
Sandisk 16/32GB UHS-1 Micro SDHC
Kingston 16/32GB UHS-1 Micro SDHC
Samsung 16/32GB UHS-I Micro SDHC
Sandisk 64GB UHS-1 Micro SDXC
Kingston 64GB UHS-1 Micro SDXC
Samsung 64GB UHS-I Micro SDXC
100m(거리), 50m(높이)
2.412~2.462GHz, 5.745~5.825GHz
2.4GHz
FCC: 2km(1.2마일), CE: 0.5km(0.31마일), SRRC: 0.5km(0.31마일)
5.8GHz
FCC: 2km(1.2마일), CE: 0.3km(0.19마일), SRRC: 1.2km(0.75마일)
2.4GHz
FCC: 26dbm 이하, CE: 18dBm 이하, SRRC: 18dBm 이하
5.8GHz
FCC: 28dbm 이하, CE: 14dBm 이하, SRRC: 26dBm 이하
지원 두께: 6.5mm~8.5mm
최대 길이: 160mm
2017 DJI All Rights Reserved.
©
54
Page 55

인텔리전트 플라이트 배터리
용량 1480mAh
전압 11.4V
최대 충전 전압 13.05V
배터리 유형 LiPo 3S
에너지 16.87Wh
순중량 약 95g
작동 온도 5°~40°C(41°~104°F)
A/S 정보
A/S 정책과 워런티 정보에 관한 자세한 내용은 다음 페이지를 참조하십시오.
1. A/S 정책: http://www.dji.com/service
2. 환불 정책: http://www.dji.com/service/refund-return
3. 유료 수리 서비스: http://www.dji.com/service/repair-service
4. 워런티 서비스: http://www.dji.com/service/warranty-service
사용자 매뉴얼
Spark
2017 DJI All Rights Reserved.
©
55
Page 56

DJI 고객지원
http://www.dji.com/support
이 문서의 내용은 언제든지 변경될 수 있습니다.
최신 버전은 다음 웹사이트에서 다운로드하십시오.
http://www.dji.com/spark
본 문서에 관한 문의사항이 있으시다면 DocSupport@dji.com 으로 연
락주시기 바랍니다. (현재 영어 및 중국어 서비스만 지원되고 있음을 알
려드립니다.)
SPARK는 DJI의 상표입니다.
Copyright © 2017 DJI All Rights Reserved.
 Loading...
Loading...