

Page 1

Spreading Wings S800 EVO
User Manual
V 1.10
February 07, 2014 Revision
www.dji.com
Page 2

Disclaimer
Thank you for purchasing this DJI product. Please regularly visit the S800 EVO web page at www.dji.com, which is
updated regularly. Product information, technical updates and manual corrections will be available on this web page.
Due to unforeseen changes or product upgrades, the information contained in the manual is subject to change
without notice.
Read this disclaimer carefully before using this product. By using this product, you hereby agree to this disclaimer
and signify that you have read them fully. Please strictly follow the manual to assemble and use the product. The
manufacturer and seller assume no liability for any resulting damage or injury arising from the operation or use of
this product.
DJI is registered trademark of DJI Innovations. Names of product, brand, etc., appearing in this manual are
trademarks or registered trademarks of their respective owner companies. This product and manual are copyrighted
by DJI Innovations with all rights reserved. No part of this product or manual shall be reproduced in any form
without the prior written consent or authorization of DJI Innovations. No patent liability is assumed with respect to
the use of the product or information contained herein.
Page 3
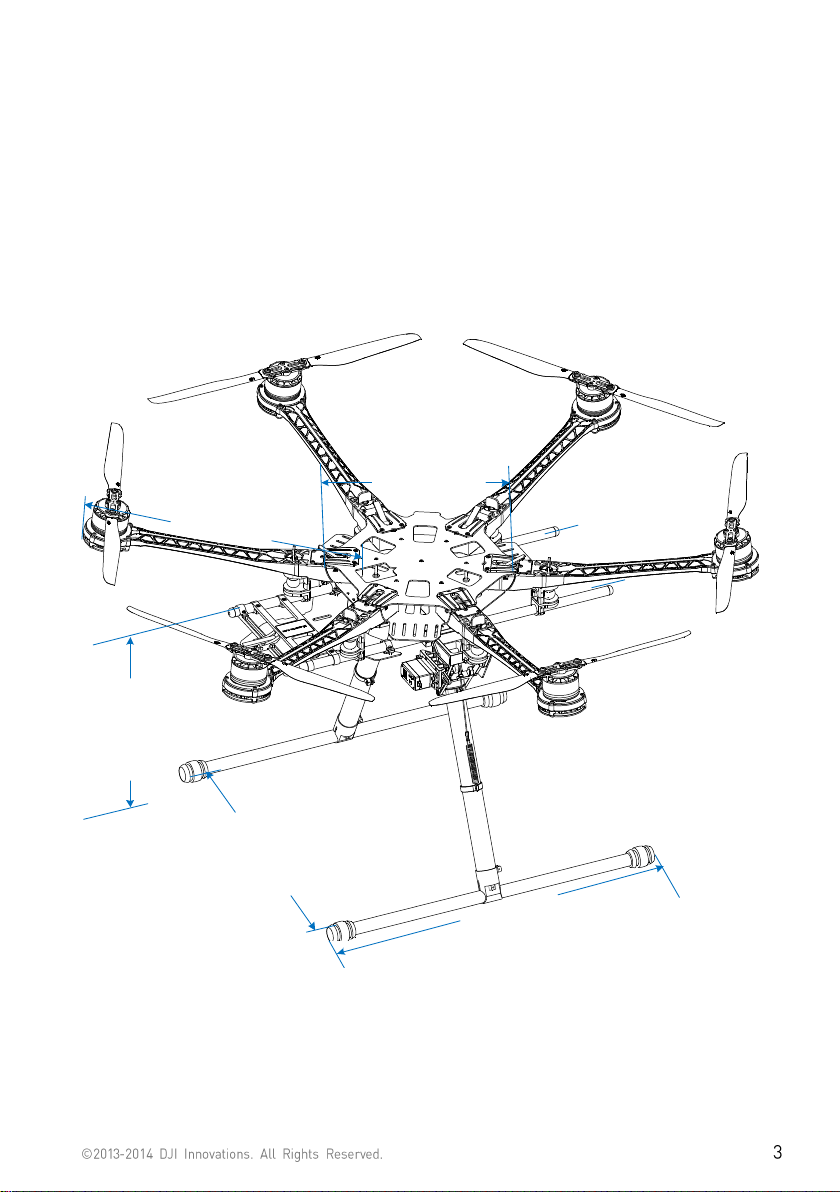
Profile
460
mm
(
Length
)
425
mm
(
Width
)
320
mm
(
Heigth
)
155
mm
(
Top
Width
)
350
mm
(
Length
)
240mm(Diameter)
S800 EVO is a multi-rotor designed for aerial photograph which integrates reinforced mechanical structures,
stabilized dynamical system and high-efficiency power supply. Integrated designs make assembly and configuration
become especially easy and fast; retractable landing gear, foldable propellers and collapsible GPS Mount are
conveniently portable for optimal user experiences. Retractable landing gears and vibration dampers coordinate to
create omnidirectional aerial view and high quality photograph. Combined with professional DJI multi-rotor
autopilot system S800 EVO will achieve hovering, cruising and other steady flight elements, which can be applied
for aerial photography and other aero-modeling activities.
Page 4

Contents
Disclaimer ................................................................................................................................................................................................................ 2
Profile ....................................................................................................................................................................................................................... 3
Contents .................................................................................................................................................................................................................. 4
Product Usage Cautions ................................................................................................................................................................................... 5
In The Box ............................................................................................................................................................................................................... 6
Tools Needed ........................................................................................................................................................................................................ 6
Center Frame Wiring ......................................................................................................................................................................................... 7
Attach Electric Equipment to Center Frame ............................................................................................................................................. 8
Mount Frame Arms ............................................................................................................................................................................................ 10
Mount Landing Gear .......................................................................................................................................................................................... 12
1 Assembly & Connection ....................................................................................................................................................................... 12
2 Travel Calibration .................................................................................................................................................................................. 13
3 Transmitter Setting ............................................................................................................................................................................... 14
4 Usage ......................................................................................................................................................................................................... 14
5 Mount Battery Bracket ........................................................................................................................................................................ 16
Assembly ................................................................................................................................................................................................................ 17
Install the IMU Mount (Optional) .................................................................................................................................................................. 18
Appendix ................................................................................................................................................................................................................ 19
ESC Sound ................................................................................................................................................................................................... 19
ESC LED ....................................................................................................................................................................................................... 19
Specifications ............................................................................................................................................................................................ 20
FAQ (Trouble Shooting) ................................................................................................................................................................................... 21
Solder ESC ................................................................................................................................................................................................... 21
Assemble the Vibration Absorber of Motors .................................................................................................................................. 21
Spare Parts Listing ............................................................................................................................................................................................. 22
Page 5
Product Usage Cautions
Assembly Cautions
(1) Mount the GPS Module with a bracket, to avoid interference with the power board of center frame.
(2) For IMU mounting, make sure the arrow direction marking on the IMU is pointing to the aircraft nose.
(3) The receiver is strongly recommended to be attached under the bottom board of center frame, and the
head of antenna is downward without any obstacle. Otherwise the aircraft may be out of control, since
the wireless signal may be lost.
(4) Mount the arms correctly.
a) Center frame Arm
b) Center frame Arm
(5) For removing screws in the bottom board, please proceed with cautious, avoiding damages. Do not
remove any other screws fixed with glue.
(6) Notice matching the indications is very important, please pay attention to them.
Flight Cautions
(1) With DJI WKM autopilot system, make sure the output signal of WKM F1~F2 and M1~M6 are all normal,
to avoid serious damages and injuries.
(2) Keep flying the multi-rotor a distance from people, building, high-voltage lines, tall trees, water, etc.
(3) Make sure to use 6S LiPo battery for power supply.
(4) Do not get close to or touch the working motors and propellers, which will cause serious injury.
(5) Do not over load the multi-rotor.
(6) Make sure the propellers and the motors are installed correctly and firmly before flying.
(7) Make sure all parts of product are in good condition before each flight. Do not fly with wore or broken
parts.
(8) Strongly recommend you to use DJI parts as much as possible.
Others
(1) If you have any problem you cannot solve, please contact your dealer or DJI customer service.
When flying, the fast rotating propellers may cause serious damage(s) and injuries. Therefore, please fly with a high
safety in mind at all time.
Page 6
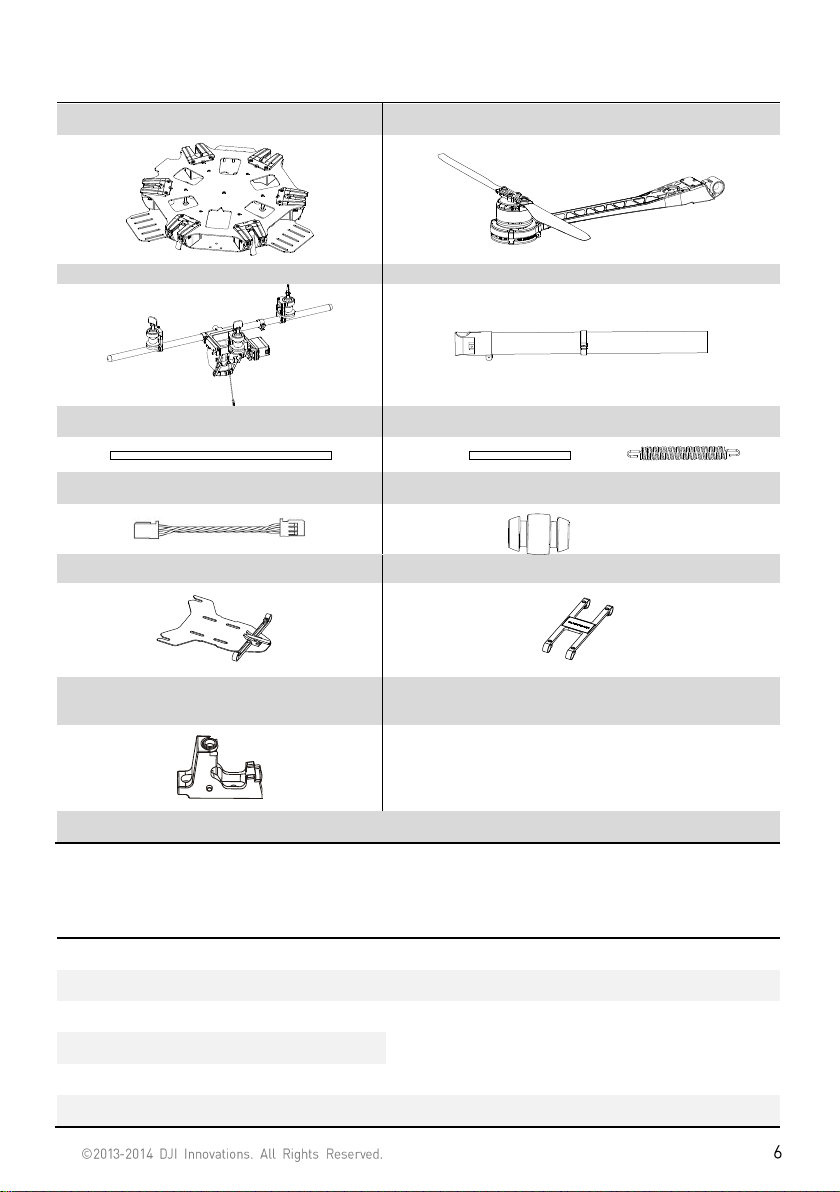
In The Box
Center Frame×1
Frame Arm×6
Retracting Mechanism×2
Landing Gear Support Tube ×2
Base Pipe×2
H Frame Connection Pipe×1、Spring×2
Package of 3-PIN Servo Cable ×1
Silicone Rubber Damper ×4
Package of Battery Tray×1
Package of IMU Mount×1
GPS Fixed Seat×1
Screw Package for Frame×1
Screw Package for Landing Gear×1
Out of The Box Guidance ×2
2.0mm Hex Wrench, 2.5mm Hex Wrench
For mounting screws.
Thread Locker
For fastening screws.
Nylon Cable Tie
For binding devices and wires.
Scissors
Diagonal Cutting Pliers
Foam Double Sided Adhesive Tape
For fixing receiver, controller and other modules.
Tools Needed
Page 7
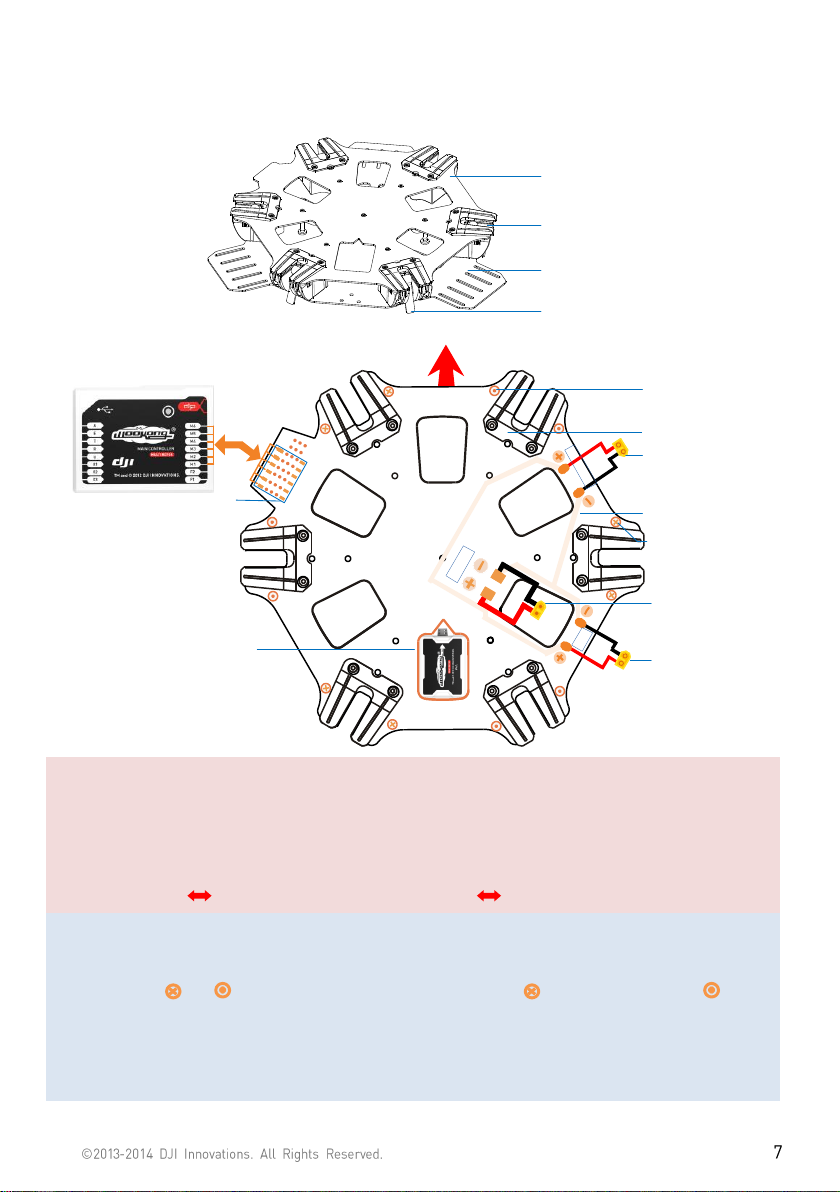
Center Frame Wiring
Top Board
Bottom Board
Buckle
Slot
M
1
M
2
M3
M
4
M6
M
5
BATT
PM
GIMBAL
IMU Front
Aircraft Nose
To Battery
To PMU
XT60 Male
XT60 Female
XT60 Female
To Gimbal
M
1
M
2
M
3
M
4
M
5
M
6
Motor clock-wise
ESC signal outlet
To main controller
Mark
IMU mount position
Circuit line
Parallel Circuit
Motor number
Mark
Motor counter clock-wise
Mark
Top Board
Notes:
(1) For IMU mounting, make sure the arrow direction marking on the IMU is pointing to the aircraft nose.
(2) Connect the 3-pin connectors (M1~M6) of servo cable from WKM M.C. to ESC signal socket (M1~M6) on
center frame markings accordingly.
(WKM M.C. M1 ESC signal socket M1, …… , WKM M.C. M6 ESC signal socket M6)
Tips:
(1) The main battery power leads, gimbal and PMU leads are on the bottom surface of the top board.
(2) Markings and stand for the propeller rotation direction. means clock-wise, and means
counter clock-wise.
(3) If other lead connector is required, please cut the original connector and solder on the new one. (But NOT
Recommend.)
The top board is a power distribution board, and the bottom board is for loading autopilot system components.
Page 8
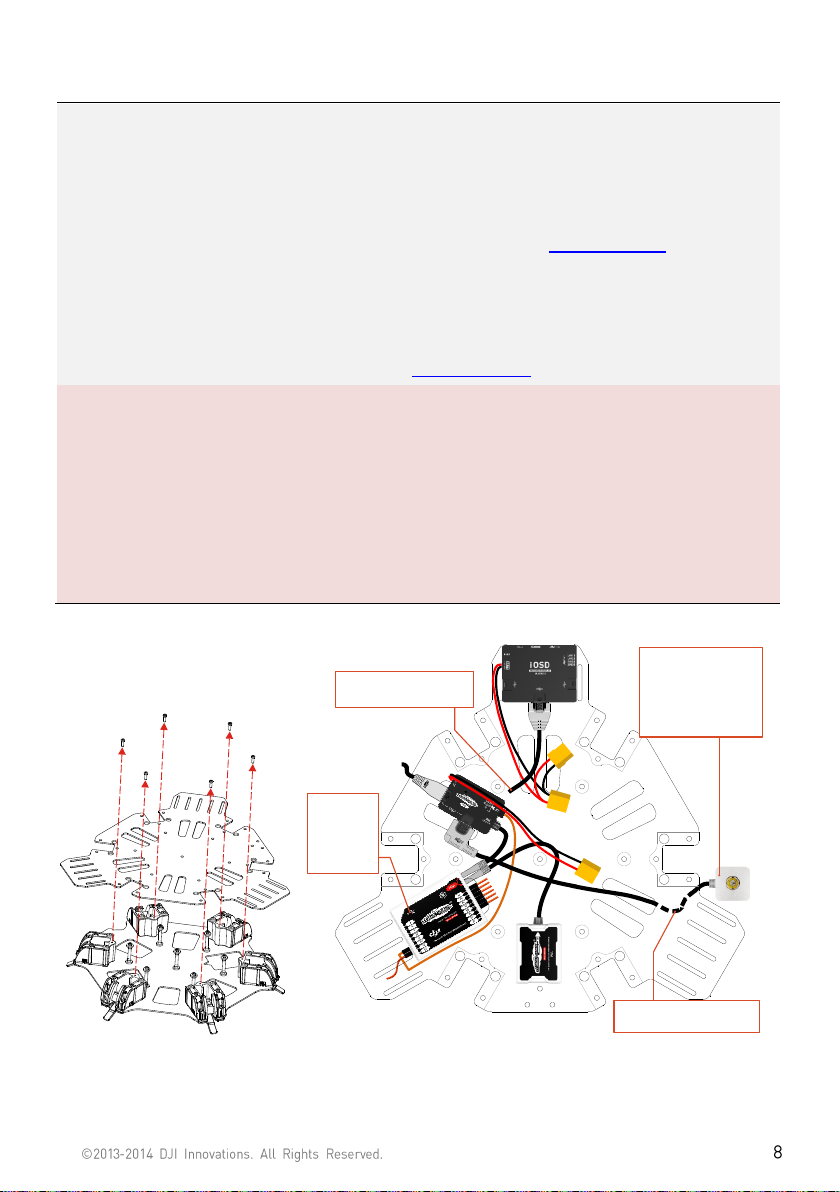
Attach Electric Equipment to Center Frame
1. (Fig.1)Remove the screws in the bottom board.
2. (Fig.2)Attach the IMU module into IMU position in the center frame. Ensure the IMU casing is out of
touching the top board edge, as vibration can cause IMU mal-function.
3. (Fig.2)Please attach DJI Autopilot System parts onto the bottom board (not including GPS modules.
4. (Fig.2)Connect the Autopilot System and receiver. Please refer to DJI
WKM User Manual
for details.
5. (Fig.3)Please fix all the screws to bottom board, and use adequate thread locker.
6. (Fig.4)Attach the GPS Fixed Seat to the top board (near to the M3), then mount the GPS Module to the
GPS Fixed Seat with a bracket.
7. Configure Autopilot System. Please refer to DJI
WKM User Manual
.
Note:
(1) Make sure to mount the IMU module at the IMU position first, and the mount orientation is correct.
(2) Mount the GPS with a bracket, to avoid interference from center frame power board.
(3) Make sure the USB port of the M.C. is pointing outwards for easy access.
(4) Please wire neatly. Make sure the wires will not be cut by the edge of frames.
(5) Install the screws with appropriate strength to prevent damage threads.
(6) Watch out clamping fingers when folding the GPS Bracket.
To GIMBAL Lead
To the CAN Port of
GPS/Compass Module
You can attach the LED
Module to the support
tube.
Note: Risk of wire cut
off by the Retracting
Mechanism.
GPS/Compass
Module
Micro-USB
Port faces
outwards for
connection
convenience
Receiver
(D-BUS)
You can wire the LED
through the bottom board
To PM Lead
Fig.1 Remove the screws Fig.2 Attach the Autopilot System
Page 9

Fig.3 Fix the screws
Note: for DJI A2 user,
please use the
component in red; for
WKM user, it is not
required.
Fig.4 Mount the GPS Fixed Seat and GPS module
Mind You Fingers
Fig.5 Note of folding the GPS Bracket
Page 10

Mount Frame Arms
Step 1
Step 2
Motor rotation direction
Clock-wise
Counter clock-wise
Motor
ESC
LED
Copper contacts
Screw
Propeller
Cover
(1)
Step 3
Step 4
Step 5
(2)
35
o
Horizontal
Vertical
Horizontal
Step1: Check the arms.
(1) Make sure the copper contacts are in good condition without bend or severe wear.
(2) Make sure the propellers are without crack, and screws in propeller cover tight.
(3) Make sure the motors are mounted firmly, and rotate freely.
(4) We recommend you to mount the arms with red propeller cover to M1 and M2 to indicate the nose
of aircraft.
(5) Distinguish the marks and on the arms.
Arm Center frame
Arm Center frame
Step2: Insert the frame arm into center frame vertically.
Step3: Slowly rotate the frame arm upward until positioned completely.
Step4: Press down the buckle to lock the arm. Make sure the arm does not move.
Step5: Make sure the buckle is pressed down correctly, about 35o under normal circumstances.
Notes:
(1) Please add some lubricant at the position (1) if it is hard to press down the buckle.
(2) Slowly rotate the frame arm to prevent from breaking the copper contacts.
©2012 DJI Innovations. All Rights Reserved. 10
Page 11

(3) Please refer to (2) to make sure the arm is perfectly positioned.
(4) Make sure to use appropriate strength to press down the buckle correctly.
(5) Do not hot plug arms.
Tips:
(1) LED is on after motor start.
Step 6 Double Check
Arms①②are aircraft nose, arms④⑤ are aircraft tail. See from top, motors on arms①③⑤ rotate counter
clockwise; motors on arms②④⑥ rotate clockwise.
Aircraft Nose
①
②
③
④
⑤
⑥
Page 12

Mount Landing Gear
R
IN
L
Con tr ol B oar d
Ser vo
Arm
Cen ter L ine
Ser vo
Ser vo A rm Ins ta llati on
Fin is hed
Ser vo A ss emb ly
Rig ht art o f th e
and in g e ar
P
LG
Left Serv o
Right S ervo
Lef t Servo
Rig ht Ser vo
SET B utt on
LED
Rec eiver C han nel
ADircra f t os e N ire ct ion
Lef t art of
the
PLGand in g e ar
DANGE R!!!
DO N OT T OUCH !
step1: Servo Installation
(If the servos have already been installed, please skip this step.)
1. (Shown in the Fig) Define and mark the two HS-7954SH servos from Hitec as left servo and right servo.
2. Connect the left servo to the [L] port on the control board, and the right servo to the [R] port.
3. Keep pressing the SET button with aid of a small tool, and then power on. You will see the yellow LED
beside SET button flashes quickly, and then wait until the servos have finished their position initialization.
4. Make sure the servo arm is parallel to the servo’s center line.
5. Power off, assemble the left and right servos to the left and the right parts of the landing gear.
Tips: If you use your own servos, it is recommended to use the dedicated programmer from Hitec to enlarge the
servo travel from 120° to 150°, and then install servos by the above steps. Servos from DJI have been enlarged
servo travel.
step2: Mechanical Assembly
By using a 2-position switch of R/C transmitter, you can control the landing gear to retract remotely.
1 Assembly & Connection
The part with the control board attached is defined as left, and the other part is right. Make sure to make a
distinction between the left and the right servos.
Page 13

1. Assemble the left and right parts respectively, and then fix the screws at the joints with appropriate
thread locker.
2. Connect the left and right parts with connecting rod.
3. For safety reasons, make sure to connect the springs to both parts.
step3: Electrical Connections
1. Plug the cables from the servos into the correct ports on the control board. Make sure the right servo is
connected to the [R] port, and the left servo to the [L] port.
2. Connect the required 2-position switch of R/C receiver to the [IN] port.
1. For safety reasons, please keep your hands away from any link mechanism to avoid injury.
2. Make sure the [R], [L] and [IN] connections are correct and firmly connected.
3. Hang the Landing Gear in the air during calibration, as the landing gear will move.
4. Keep pressing the SET button using a small tool and power on. You can see the LED flashes YELLOW
quickly, and then press the SET button once again. The system begins auto calibration with the indication
of the LED flashing YELLOW slowly. DO NOT obstruct any moving part during auto calibration.
5. The left-part is calibrated, the left link mechanism first moves up then moves down automatically. Then
the right-part is calibrated, the right link mechanism first moves up then moves down automatically.
6. After calibration, both left and right parts are in the [Lower] position, and the LED is solid GREEN on.
Then the landing gear will work normally.
Notes:
(1) If the LED is solid YELLOW on during calibrating, it means that there is something wrong with the
calibration, please re-do the Servo Installation of the Assembly & Connection section, since the servo arm
might be installed with a wrong angle.
(2) Please avoid any obstruction during calibrating. If the landing gear is blocked from moving, please
recalibrate the landing gear by the above steps.
(3) If the [R] and [L] servo cables are reversed, the travel will not be measured correctly. Please connect
correctly and recalibrate the landing gear using the above steps.
2 Travel Calibration
If the Landing Gear you got has been installed with the servos, please skip this step. Otherwise, calibrate the system
using the following procedures.
Page 14

3 Transmitter Setting
Select a 2-position switch (default setting is OK) of
Transmitter as the control input of the landing gear, and
then make sure the corresponding port of receiver is
connected to the [IN] port on control board.
Fig. 1
Fig. 2
1. Make sure the transmitter & receiver batteries are fully charged.
2. Toggle the switch to the [Lower] position, and then turn on the transmitter.
3. Make sure the [R], [L] and [IN] connections are correct and firmly connected.
4. Make sure the Landing Gear is at the [Lower] position, and then power on the system. If the green LED is
solid on, then this is a normal start. If the LED flashes GREEN slowly, please re-calibrate the system
according to the procedure of Travel Calibration.
5. Make sure to toggle the switch to the [Retracted] position ONLY AFTER you takeoff the aircraft.
6. When the aircraft is landing, please toggle the switch to the [Lower] position for a safe landing.
Retracted:Toggle the switch to
this position to retract the
landing gear (Fig.1)
Lower:Toggle the switch to this
position to lower the landing
gear (Fig. 2)
Tips:
(1) If the switch of Transmitter has FailSafe function,
set the FailSafe value to the [Lower] position, so
that the landing gear will be in [Lower] status when
the receiver enters FailSafe mode, to land the
aircraft safely.
(2) To avoid false switch triggering, you can use the
slide lever or other trim as the landing gear’s
control switch.
4 Usage
The landing gear can be used by following the steps below after assembly & connection.
Page 15

Tips
(1) The system will turn off the servo power temporarily within 3 seconds after the landing gear has reached
the target position.
(2) When powering on the system, if the Transmitter switch is at the [Retracted] position, which is the unsafe
signal for the landing gear, the LED will quickly flash RED. Toggle the switch to the [Lower] position.
(3) If there is an abnormal signal or no signal input into the [IN] port the LED will slowly flash RED. Please
check the receiver and the connections.
(4) If the power consumption of servos is too large during usage, the LED will be solid RED on. If this status
lasts more than 4 seconds, the landing gear will lower and the LED will flash GREEN slowly. Please
re-calibrate the system.
System works normally
Hasn’t been calibrated
Need re-calibration
Wrong calibration
Enter the calibration mode
System is calibrating
Motor stall
Input signal is unsafe when power on the Transmitter
Input signal is abnormal
Parameter
Range
Parameter
Range
Working Voltage
3S~6S (LiPo)
Input Signal
PWM (High-Pulse Width 800us~2200us)
Working Current
Max 1A@6S
Output Signal
PWM(Mid Position is 1520us) in 90Hz
Working Temperature
-20~70oC
Output Voltage
6V
Total Weight
875g
Servo Travel
150 o (Minimum120 o)
LED Indicator
Specifications
Page 16

5 Mount Battery Bracket
Step1: Mount the retaining clip and the bracket, fix screws (but not tighten).
M2.5X5
Retaining Clips
Chamfer Outwards
Bracket
Notch Outwards
Step2: Place the battery mounting board and adjust its position, and then tighten all screws.
Ensure to align
90
o
Parallel
Correct
Parallel Parallel
Battery Mounting Board
About
131
mm
Page 17

Assembly
Assembly
(2)
①
②
③
④
⑤
⑥
(1)
Vibration Absorber
Coaxial Align
Not
Coaxial
Align knob to mark
Insert knob into arm Rotate knob
Aircraft
Nose
Mark
Knob
Vibration Damper Mount
Vibration Damper Mount Details
Not
Coaxial
1. Align all knobs on H frame to the marks; refer to fig (1).
2. Lie frame and Landing Gear horizontally, insert knobs into arms ③ and ⑥ first, and then adjust to
insert the others into the arms.
3. Make sure the Vibration Damper Mount is correct, and then rotate the knob to the end, as fig (2) shown.
Notes:
Ensure all knobs on the H frame aligned to the marks, and they would go through the arms successfully.
Page 18

Install the IMU Mount (Optional)
1. (Fig.1) Remove the screws to dismount the Battery Bracket.
2. (Fig.2) Fix the IMU Mount and remount the Battery Bracket.
3. (Fig.3) Adjust the IMU Mount and the Battery Bracket, and then fix all the screws.
4. (Fig.4) Attach the IMU Module; make sure that the arrow on LOGO is pointing to the aircraft nose.
Fig.1 Fig.2
Aircraft Nose
Arrow on
IMU LOGO
Fig.3 Fig.4
If you wish to achieve a smooth and steady fight, carry out the following procedures to install the IMU Mount.
Page 19

Appendix
ESC State
Sound
Ready
♪1234567--B--B
Throttle stick is not at bottom
BBBBBB…
Input signal abnormal
B--------B--------B…
Input voltage abnormal
BB---BB---BB---BB…
ESC State
LED
Standby
Off
Motor rotating
Solid Red or Green On
Motor rotating at full throttle position
Solid Yellow On
Tips:
DJI ESCs are specially designed for multi-rotors. When use with DJI autopilot systems, you do not have to setup
any parameters or calibrate travel range.
ESC Sound
ESC LED
Page 20

Specifications
Frame
Diagonal Wheelbase
800mm
Frame Arm Length
350mm
Frame Arm Weight
(with Motor, ESC, Propeller )
356g
Center Frame Diameter
240mm
Center Frame Weight
550g
Landing Gear Size
460mm(Length)×425mm(Width)×320mm(Height)
(Top width: 155mm)
Retractable Landing Gear Weight
(Including Battery Tray)
1050g
Motor
Stator Size
41×14mm
KV
400rpm/V
Max Power
500W
Weight (with Cooling Fan)
158g
ESC
Current
40A OPTO
Voltage
6S LiPo
Signal Frequency
30Hz ~ 450Hz
Drive PWM Frequency
8KHz
Weight (with Radiators)
35g
Foldable Propeller (1552)
Material
Engineering plastic
Size
15×5.2 inch
Weight
13g
Flight Parameters
Takeoff Weight
6.0Kg ~ 8.0Kg
Total Weight
3.7Kg
Power Battery
LiPo (6S、10000mAh~15000mAh、15C(Min))
Max Power Consumption
3000W
Hover Power Consumption
800W(@ Takeoff Weight 6.7Kg)
Hover Time
Max: 20 min (@15000mAh&6.7KgTakeoff Weight)
Working Environment Temperature
-10 ~ +40 oC
Page 21

FAQ (Trouble Shooting)
For arms
For arms
G V
G P
G V
G P
Blue
Solder pad
Fine wire
Thick wire
Black
Red
Blue
Black
Red
Thick wire
Fine wire
Propeller CCW
Propeller CW
A
B
C
D
Solder ESC
Make sure to solder the thick wires and fine wires correctly, when solder ESC to frame arm.
Clockwise and counter clockwise motor should be soldered to ESC correctly by different color order.
Assemble the Vibration Absorber of Motors
The soft gasket is a part of the Vibration Absorber and it has a thick end and a thin end, it’s important to assemble
the soft gaskets in correct approach adhere to the diagram below.
Propeller CCW: the thick ends of the gaskets (A) are upwards, the thick ends of the gaskets (B) are downwards.
Propeller CW: the thick ends of the gaskets (C) are downwards, the thick ends of the gaskets (D) are upwards.
Page 22

Spare Parts Listing
SE010101CCW
CW-Clockwise CCW-Counter clockwise; ;
;;
Parts NO.
Package NO.
01Arm Frame 02Center Frame
03Landing Gear
;;
S800 EVO
Frame Arm
M2x 9(3pc s)
SE0 10102 CCW
SE0 10102
SE0 10103
M3x 10.5( 2pcs)
M2. 5(4pc s)
SE0 10301 B/
SE0 10401 R
SE0 10302
SE0 14401
SE0 10303
M3x 4.5(2 pcs)
SE0 10501 R/
M2. 5x11( 4pcs)
SE0 10601 G
SE0 11001
SE0 10702 (4pcs )
SE0 10701 CW/
M3 (3 pcs )x4. 5
SE0 10101 CW/
SE0 10801 CCW
S 01 4402E
Package NO.
Name
Components Number
1
Frame Arm (Counter Clockwise)
SE010101CCW、SE010102、SE010103、M2x9
2
Frame Arm (Clockwise)
SE010102CW、SE010102、SE010103、M2x9
3
Motor with black Prop cover
SE010301B、SE010302、SE014402、SE014401 、
SE010303 、M2.5x5、M3x4.5
4
Motor with red Prop cover
SE010401R、SE010302、SE014402、SE014401 、
SE010303 、M2.5x5、M3x4.5
5
ESC with Red Led
SE010501R
6
ESC with Green Led
SE010601G
45
1552 Folding Propellers(both
CW&CCW)
SE010701CCW、SE010801CW、SE010702、M3x10.5
9
Washer for Propeller
SE010702
10
ESC Heat Sink
SE011001
If S800 EVO needs component replaced, please refer to the following diagram to identify the component NO., and
then make a purchase of corresponding package. Each package includes screws needed. The Components Number
is defined as bellow.
Page 23

Center Frame
M2.5x 5( 25pcs)
M2x9( 12 pcs)
SE021 40 1( 6pcs)
SE021 20 1
SE021 60 1( 7pcs)
SE021 50 1
SE021 50 2
SE021 50 3
SE021 30 1SE021 30 1
M2.5x 5( 25pcs)
Package NO.
Name
Components Number
11
Center Frame
SE021201、SE021301、SE021401、SE021501、
SE021502 、SE021503、SE021601、M2x9、M2.5x5
12
Center Frame Top Board
SE021201、M2x9、M2.5x5
13
Center Frame Bottom Board
SE021301、M2.5x5
14
Top Board Cover
SE021401、M2x9
15
Arm Mounting Bracket
SE021501、SE021502、SE021503、 M2x9、M2.5x5
16
Aluminum Brace for Center Frame
SE021601、M2.5x5
Page 24

Landing Gear
SE0 31701
SE0 31702
SE0 31801
SE0 31901
HC_ M2 5x 10 4p cs. ( )
SE0 32001
PM2 5 x4.x3
SE0 32901
SE0 32201
SE0 32202
SE0 32204
M2 5x5 4 pcs. ( )
SE0 32301
SE0 32302
M3x 8
SE0 32501
SE0 32502
HC_ M2.5x 8
HC_ M3x22
SE0 32401
SE0 32402
SE0 32601
SE0 32701 (4pcs )
SE0 32101
SE0 33001
SE0 32801
SE0 32802
SE0 32803
SE0 32803
SE0 32802
SE0 32804
HC_ M3x8()2pc s
SE0 33102
SE0 32801
SE0 33103
SE0 33104
M3x 5 2pc s()
M2. 5x5 2 pc s()
M3x 8()4pcs
SE8032802
SE8032801 SE8032803
(2)
SE8032502
SE8032402
(1)
SE0 33301
SE0 33201
SE0 33201
SE0 33202
SE0 33401 7pcs()
M2. 5x8
SE0 33203
Package NO.
Name
Components Number
17
Retract Module(Left)
SE031701、SE031702
18
Retract Module(Right)
SE031801、SE031702
19
HITEC Servo (Right)
SE031901、HC_M2.5x10
20
HITEC Servo (Left)
SE032001、HC_M2.5x10
21
Carbon Tube of H-Frame
SE032101、HC_M2.5x8
22
Control Board
SE032201、SE032202、SE032203、SE032204、M2.5x5
23
Spring
SE032301、SE032302、SE031702、M3x8
24
Support Tube (Right)
SE032401、SE032402、M3x8、HC_M2.5x8、HC_M3x8
25
Support Tube (Left)
SE032501、SE032502、M3x8、HC_M2.5x8、HC_M3x8
Note1: (1) Left Support Tube right Support Tube are different; (2) Left set, middle set and right set of Damping Unit
are different.
Page 25

26
Base Tube
SE032601、SE032701
27
Silicone Rubber Damper
SE032701
28
Damping Unit (Set)
SE032801、SE032802、SE032803、SE032804、HC_M3x8
29
Aluminum Tube of H-Frame
SE032901
30
Silicone Rubber of H-Frame
SE033001
31
Battery Tray
SE033101、SE033102、SE033103、SE033104、M2.5x5、M3x5
32
Control arm of Retractable
Module(Left)
SE033201、SE033202、SE033203、M2.5x8
33
Control Arm of Retractable
Module(Right)
SE033301、SE033202、SE033203、M2.5x8
34
Shaft Sleeve of Retract
Module
SE033401
35
IMU Mount
SE033501 、M3x8
Others
SE033 60 1
SE0 33801
Package NO.
Name
Components Number
36
GPS Holder
SE033601
37
Screws Package
M3x8(10pcs)、HC_M2.5x10(10pcs)、M2.5x5(30pcs)、M2x9(10pcs)、
M3x4.5(10pcs)、M2.5x8(5pcs)、M2.5x11(10pcs)、M3x 10.5(15pcs)、
HC_M3x8(10pcs)、HC_M2.5x8(10pcs)、HC_M3x22(5pcs)
38
Blade Holder
SE033801
Package NO.
Name
Components Number
39
Battery Mount Board
SE033104、Velcro straps
40
Frame Arm with Prop CCW &Red LED
Package NO. 1、4、5、7、10
41
Frame Arm with Prop CW &Red LED
Package NO. 2、4、5、8、10
42
Frame Arm with Prop CCW &Green LED
Package NO. 1、3、6、7、10
43
Frame Arm with Prop CW &Green LED
Package NO. 2、3、6、8、10
Page 26

M2. 5( 4pcs)
SE0 14 401
S 0144 02E
Package NO.
Name
Components Number
44
Vibration absorber of Motor
SE014401、SE014402、M2.5
 Loading...
Loading...