

Page 1
MAVIC PRO
User Manual
2017.12
V2.0
Page 2
Searching for Keywords
Search for keywords such as “battery” and “install” to nd a topic. If you are using Adobe Acrobat
Reader to read this document, press Ctrl+F on Windows or Command+F on Mac to begin a search.
Navigating to a Topic
View a complete list of topics in the table of contents. Click on a topic to navigate to that section.
Printing this Document
This document supports high resolution printing.
Using this manual
Legends
Warning Important Hints and Tips Reference
Read Before the First Flight
Read the following documents before using the MAVICTM Pro:
1. Mavic Pro In the Box
2. Mavic Pro User Manual
3. Mavic Pro Quick Start Guide
4. Mavic Pro Disclaimer and Safety Guidelines
5. Mavic Pro Intelligent Flight Battery Safety Guidelines
We recommend that you watch all tutorial videos on the ofcial DJITM website and read the Disclaimer
before you y. Prepare for your rst ight by reviewing the Mavic Pro Quick Start Guide and refer to the
User Manual for more details.
Video Tutorials
Please watch the tutorial videos at the link below, which demonstrates how to use Mavic
Pro safely:
http://www.dji.com/mavic
Download the DJI GO 4 App
Be sure to use the DJI GOTM 4 app or other apps compatible with DJI aircraft during ight.
Scan the QR code on the right to download the latest version.
The Android version of the DJI GO 4 app is compatible with Android 4.4 or later.
The iOS version of the DJI GO 4 app is compatible with iOS 9.0 or later.
* For increased safety, the ight is restricted to a height of 30 m and distance of 50 m when not connected
or logged into the app during ight, including DJI GO 4 and all apps compatible with DJI aircraft.
Download the DJI Assistant 2
Download the DJI Assistant 2 at http://www.dji.com/mavic/download
2017 DJI All Rights Reserved.
2
©
Page 3

Contents
Using this manual
Legends
Read Before the First Flight
Video Tutorials
Download the DJI GO 4 App
Download the DJI Assistant 2
Product Prole
Introduction
Features Highlights
Preparing the Mavic Pro
Aircraft Diagram
Remote Controller Diagram
Aircraft
Aircraft Prole
Flight Mode
Flight Status Indicator
Return-to-Home (RTH)
Intelligent Flight Mode
Forward and Downward Vision System
Flight Recorder
Attaching and Detaching the Propellers
Intelligent Flight Battery
Remote Controller
Remote Controller Prole
Using the Remote Controller
Dual Remote Controller Mode
Linking the Remote Controller
Camera and Gimbal
Camera Prole
Gimbal
2
2
2
2
2
2
6
6
6
6
8
8
11
11
11
12
13
17
24
27
27
28
33
33
33
39
40
42
42
43
2017 DJI All Rights Reserved.
©
3
Page 4

DJI GO 4 App
Equipment
Editor
SkyPixel
Me
Flight
Flight Environment Requirements
Flight Limits and No-Fly Zones
Preight Checklist
Calibrating the Compass
Auto Takeoff and Auto Landing
Starting/Stopping the Motors
Flight Test
Appendix
Specications
Firmware Updates
Intelligent Flight Mode
Remote Controller LCD Screen Menu Information
After-Sales Information
45
45
50
50
50
52
52
52
53
54
55
56
56
59
59
61
61
62
63
2017 DJI All Rights Reserved.
4
©
Page 5

Product Prole
This section introduces the Mavic Pro
and lists the components of the aircraft
and remote controller.
2017 DJI All Rights Reserved.
©
5
Page 6
Product Prole
Introduction
The DJI Mavic Pro is DJI’s smallest ying camera, featuring a fully stabilized camera, Intelligent
Flight Modes and Obstacle Avoidance inside a revolutionary folding design. It captures 4K videos
and 12 megapixel photos, and is capable of both ActiveTrackTM and TapFlyTM making complex
shots effortless.
Mavic Pro boasts a maximum ight speed of 40 mph (65 kph) and a maximum ight time of 27
minutes*. In addition, the Mavic Pro Platinum has an extended max ight time of 30 min, as well as
Product Profile
a 60% noise reduction. (This user manual is taking Mavic Pro's gure for example. )
* Maximum ight time was tested in 0 wind at a consistent 15.5 mph (25 kph). This value should be taken
for reference only.
Features Highlights
The Mavic Pro is an ultra-portable aircraft thanks to its revolutionary folding design.
Camera and Gimbal: With the Mavic Pro, you are shooting 4K video at up to 30 frames per second and
capturing 12 megapixel photos that look crisper and cleaner than ever, all stabilized by the compact onboard gimbal.
Flight Controller: The next-generation ight controller has been updated to provide a safer, more reliable
ight experience. The aircraft is able to automatically return to its home point when transmission signal is
lost or battery level is low. Apart from being able to hover in door at low altitudes, the aircraft is also able
to sense and avoid obstacles on its route, enhancing safety.
HD Video Downlink: Built into the Remote Controller is DJI’s latest long-range transmission technology
OCUSYNCTM , offering a maximum transmission range of 4.3 mi (7 km) and making it possible to control
your aircraft up and stream video to your mobile device at 1080p.
Preparing the Mavic Pro
All arms of the aircraft are folded on delivery. Follow
the instructions below to unfold all the arms.
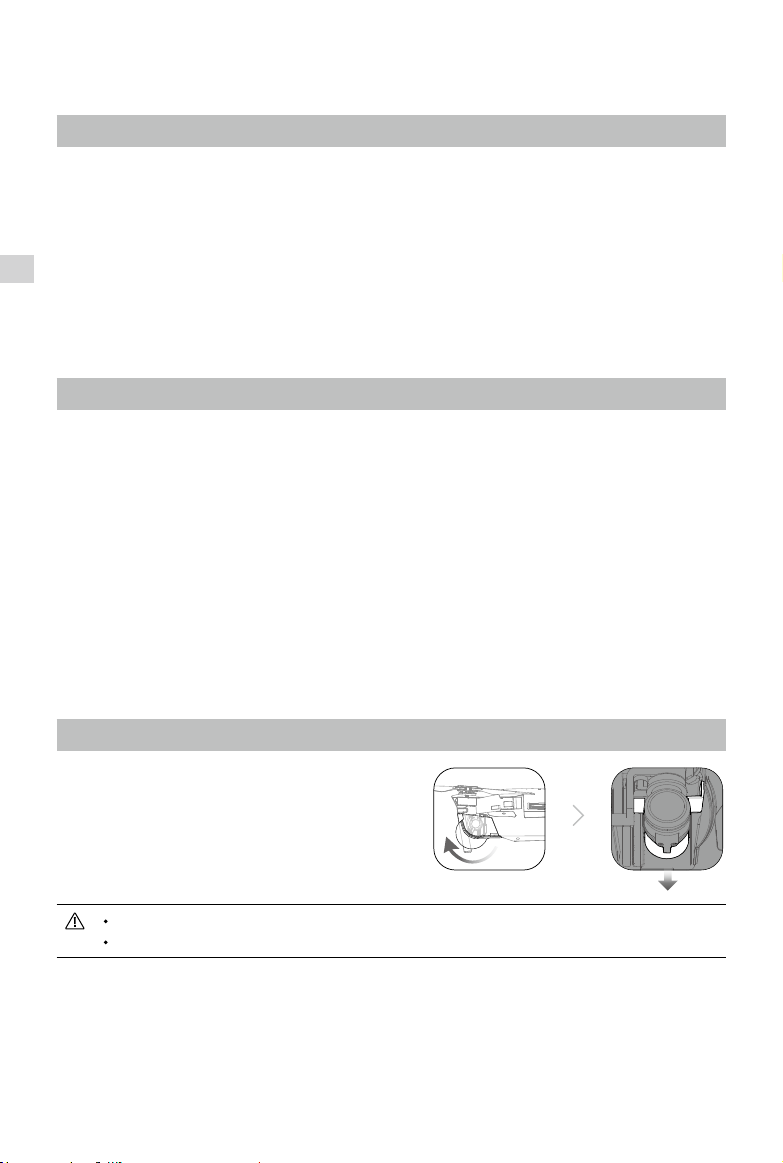
Preparing the Aircraft
Remove the gimbal cover and gimbal clamp from
the camera.
The gimbal cover is used to protect the gimbal. Remove it when necessary.
Use the Gimbal Clamp and Gimbal Cover to protect the gimbal when the Mavic Pro is not in use.
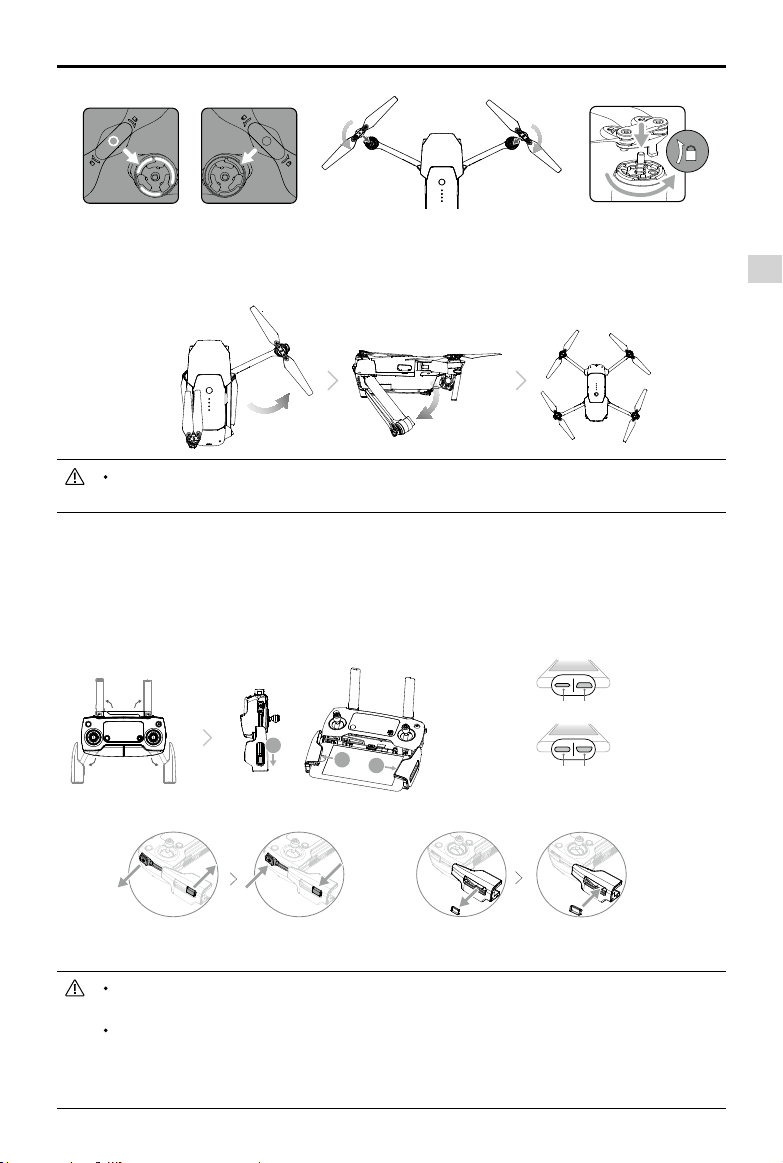
Attaching the Propellers
Attach the white ringed propellers to the mounting base with white marks. Press the propeller down onto
the mounting plate and rotate in the lock direction until it is secured. Attach the other propellers to the
mounting base without marks.
2017 DJI All Rights Reserved.
6
©
Page 7
Mavic Pro
Marked Unmarked
User Manual
Unfold the Arms
1. Unfold the front arms, followed by the rear arms of the aircraft as shown.
2. Unfold all propeller blades.
Unfold the front arms and the propellers before the rear ones. All arms and propellers must be
unfolded before powering on the aircraft, or it may affect Self Diagnostic Testing.
Preparing the Remote Controller
1. Unfold the mobile device clamps and the antennas.
2. Choose an appropriate RC cable based on the type of mobile device used. An RC cable with a
Lightning Connector has been connected and the Standard Micro USB connector cable and the USB
Type-C connector cable are included. An optional Reverse Micro USB connector cable is available.
Insert the mobile device and secure it.
Product Profile
Micro USB Connector
Reverse Micro USB
Connector
1
2
3
Refer to the gure below for how to replace the RC cable
Lightning Connector
USB Type-C Connector
.
The RC cable slider must be replaced if using an USB
Type-C RC cable.
Ensure the Control Mode Switch is toggled to "RC" when using the Remote Controller to control
the aircraft.
You can also connect your mobile device to the remote controller using a USB cable. Plug one end
of the cable into your mobile device and the other end into the USB port on the bottom of the remote
controller. Ensure to disconnect the RC cable from the Micro USB port on the remote controller when
using a USB cable.
2017 DJI All Rights Reserved.
©
7
Page 8
Mavic Pro
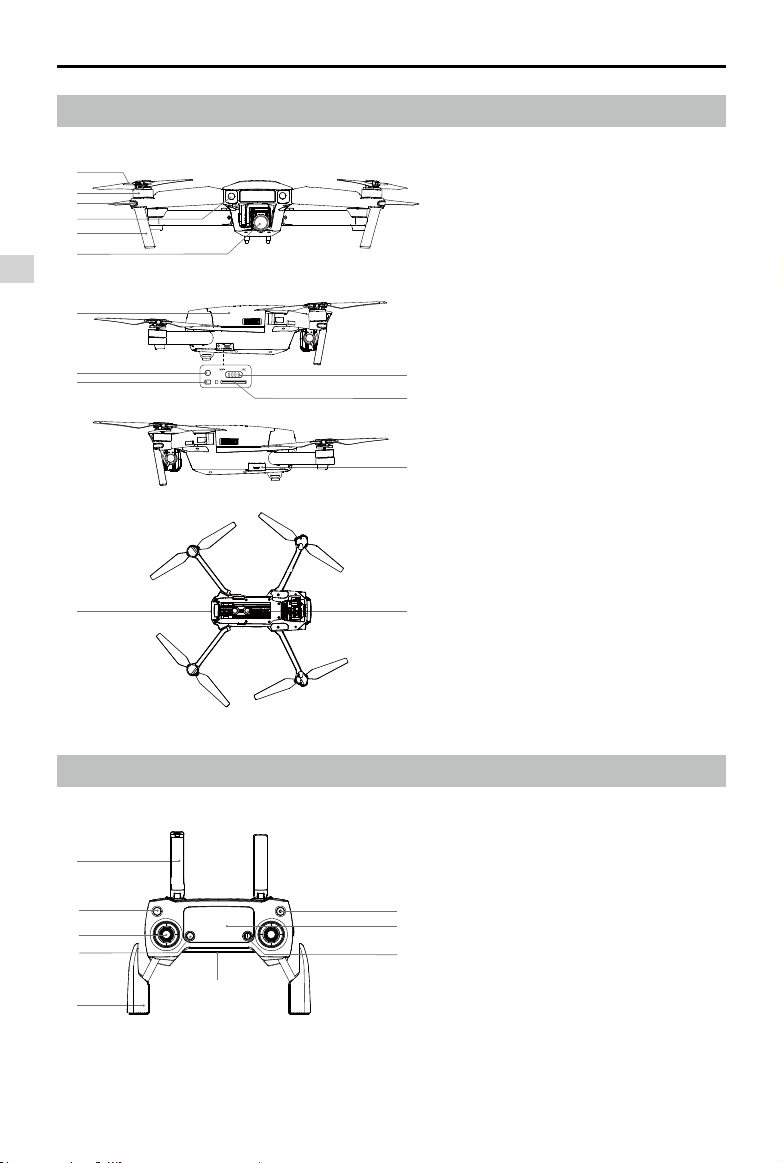
Aircraft Diagram
1
2
3
4
5
6
Product Profile
7
8
9
User Manual
1. Propeller
2. Motor
3. Front LED Indicator
4. Forward Vision System
5. Landing Gear
(with built-in antennas)
11
6. Gimbal and Camera
10
7. Intelligent Flight Battery
8. Link Button
12
9. Linking Status Indicator
10. Camera Micro SD Card Slot
11. Control Mode Switch
12. Micro USB Port
1413
13. Aircraft Status Indicator
14. Downward Vision System
Remote Controller Diagram
1
2
4
6
8
2017 DJI All Rights Reserved.
8
©
9
1. Antennas
Relays aircraft control and video
signal.
2. Return to Home (RTH) Button
3
5
7
Press and hold the button to initiate
Return to Home (RTH). Press again to
cancel RTH.
3. Power Button
Used to turn the remote controller on
and off.
4. Control Stick
Controls the orientation and
movement of the aircraft.
Page 9
Mavic Pro
User Manual
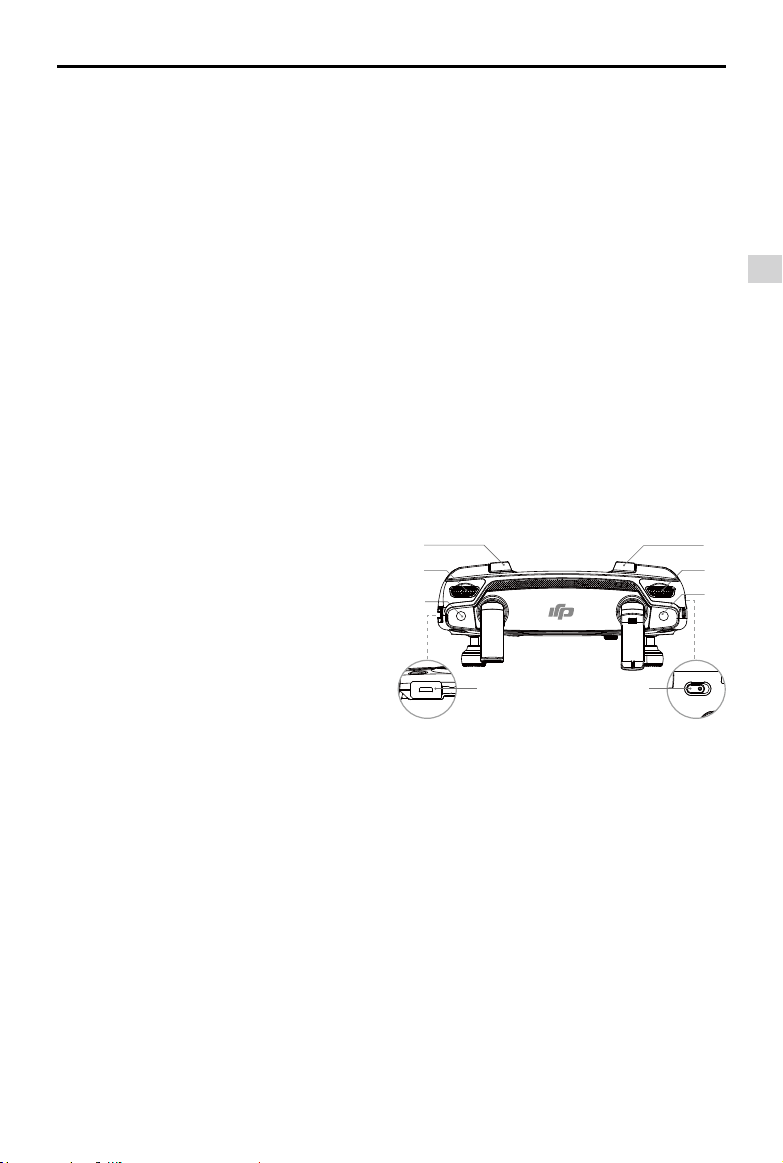
5. LCD Screen
Displays the aircraft and Remote Controller's
system status.
6. Flight Pause Button
Press once for emergency braking.
7. 5D Button
The default conguration is listed below. Set
these values based on your preference in
the DJI GO 4 app.
Left: Zoom In
Right: Zoom Out
Up: Gimbal Forward
Down: Gimbal Downward
Press down: Bring up DJI GO 4 Intelligent
Flight menu.
10. C1 Button
The default conguration is listed below.
Set these values based on your preference
in the DJI GO 4 app.
Press once to focus on the center or add a
waypoint when using Waypoints.
11. C2 Button
The default conguration is listed below.
Set these values based on your preference
in the DJI GO 4 app.
Press once to playback or delete a
waypoint when using Waypoints.
12. Gimbal Dial
Control the camera's tilt.
13. Camera Settings Dial
Turn the dial to adjust camera settings.
(Only functions when the remote controller
is connected to a mobile device running
the DJI GO 4 app)
14. Record Button
Press to start recording video. Press again
to stop recording.
8. Mobile Device Clamp
Securely mounts your mobile device onto
the remote controller.
9. USB Port
Connection to mobile device for DJI GO 4
app.
10
12
14
1716
15. Shutter Button
Press to take a photo. If burst mode is
selected, a pre-set number of photos will be
taken.
16. Power Port
Connect to the Charger to charge the
remote controller battery. Connect this port
to your mobile device using the RC cable.
17. Flight Mode Switch
Switch between P-mode and S-mode.
Product Profile
11
13
15
2017 DJI All Rights Reserved.
©
9
Page 10

Aircraft
This section introduces the Flight
Controller, Forward and Downward
Vision System, and the Intelligent Flight
Battery.
2017 DJI All Rights Reserved.
10
©
Page 11
Aircraft
Aircraft Prole
The Mavic Pro aircraft comprises of a flight controller, video downlink, propulsion system and an
Intelligent Flight Battery. This section introduces the features of the ight controller, video downlink and
other aircraft components.
Flight Mode
The following ight modes are available for Mavic Pro:
P-mode (Positioning):
Forward and Downward Vision Systems to locate itself, automatically stabilize, and navigate between
obstacles. Advanced features such as TapFly and ActiveTrack are enabled in this mode.
When the Forward Vision System is enabled and lighting conditions are sufcient, the maximum ight
attitude angle is 16° with a maximum ight speed of 22 mph (36 kph). When forward obstacle sensing are
disabled, the maximum ight attitude angle is 25° and the maximum ight speed is 36 mph (58 kph).
The aircraft will revert to ATTI mode when GPS signal is weak, or when the compass experiences interference where the Vision System is unavailable. In ATTI mode, the aircraft is easily affected by its surround-
ings, which may result in horizontal shifting.
In ATTI mode, the Vision System and some advanced features are disabled. Therefore, the aircraft cannot
position or auto-brake in this mode. Please land in a safe place as soon as possible to avoid hazards.
Avoid ying in areas where GPS signal is weak, or in conned spaces. The aircraft will otherwise be
forced to enter ATTI mode, leading to a potential ight hazard.
Note: P Mode requires larger stick movements to achieve high speeds.
S-mode (Sport):
disabled, the aircraft will not be able to sense and avoid obstacles when in Sport Mode. Ground Station
and the Intelligent Flight functions are also not available in Sport Mode.
Note: Aircraft responses are optimized for agility and speed making it more responsive to stick
movements.
P-mode works best when the GPS signal is strong. The aircraft utilizes the GPS and
The aircraft is using GPS for positioning. As Forward and Downward Vision Systems are
Aircraft
The Forward Vision System is disabled in S-mode (Sport), which means the aircraft will not
be able to automatically avoid obstacles on its route.
The aircraft’s maximum speed and braking distance are signicantly increased in S-mode
(Sport). A minimum braking distance of 30 meters is required in windless conditions.
Descending speed is signicantly increased in S-mode (Sport).
The aircraft’s responsiveness is signicantly increased in S-mode (Sport), which means a small
stick movement on the remote controller will translate into a large travel distance of the aircraft.
Be vigilant and maintain adequate maneuvering space during ight.
Use the Flight Mode switch to change the ight mode of the aircraft.
2017 DJI All Rights Reserved.
©
11
Page 12
Mavic Pro User Manual
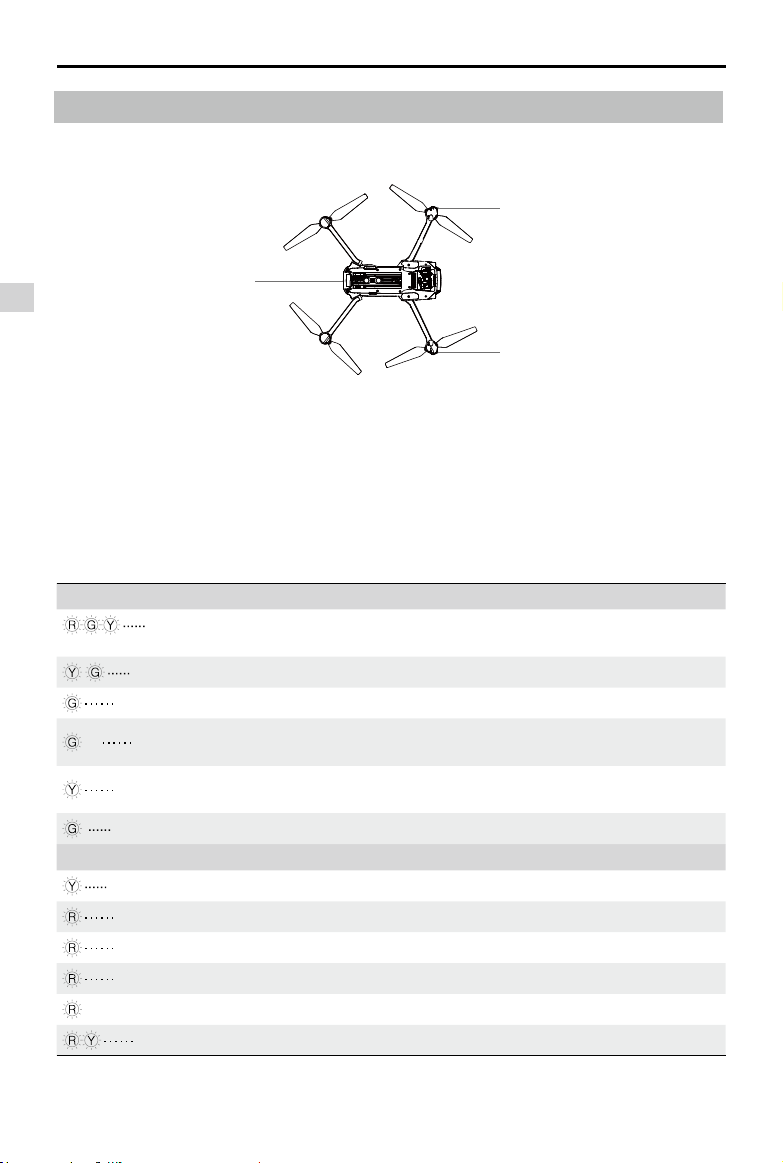
Flight Status Indicator
The Mavic Pro has Front LEDs and Aircraft Status Indicator. The positions of these LEDs are shown in the
gure below:
Front LED
Aircraft Status Indicator
Aircraft
Front LED
The Front LEDs show the orientation of the aircraft. The Front LEDs glow solid red when the aircraft is
turned on to indicate the front (or nose) of the aircraft (the Front LED can be turned off in the DJI GO 4
app). The Aircraft Status Indicator communicates the system status of the ight controller. Refer to the
table below for more information about the Aircraft Status Indicator.
Aircraft Status Indicator Description
Normal
Alternating red, green and yellow
ashes
Alternate yellow and green ashing Warming Up
Slow green ashing P-mode with GPS
×2 Two green ashes
Slow yellow ashing
Fast green ashing Braking
Warning
Fast yellow ashing Remote Controller Signal Lost
Slow red ashing Low Battery Warning
Fast red ashing Critical Low Battery Warning
Red ashing IMU Error
— Solid Red Critical Error
Fast alternating red and yellow ashing Compass Calibration Required
Turning On and Self Diagnostic Testing
P-mode with Forward and Downward Vision
Systems
No GPS and Forward and Downward Vision
Systems
2017 DJI All Rights Reserved.
12
©
Page 13
Mavic Pro User Manual
Return-to-Home (RTH)
Return-to-Home (RTH) function brings the aircraft back to the last recorded Home Point. There are three
types of RTH: Smart RTH, Low Battery RTH, and Failsafe RTH. This section describes these three scenarios in detail.
GPS
If a strong GPS signal was acquired before takeoff, the Home Point is
Home Point
the location from which the aircraft launched. The GPS signal strength
is indicated by the GPS icon ( ). The aircraft status indicator will
blink rapidly when the home point is recorded.
Aircraft can sense and avoid obstacles when Forward Vision System is enabled and the lighting
conditions are sufcient. The aircraft will automatically climb to avoid an obstacle and y to the
Home Point at the new altitude. To ensure the aircraft returns home forwards, it cannot rotate or
y left and right during RTH while the Forward Vision System is enabled.
Forward Vision System can be enabled during ight or RTH only.
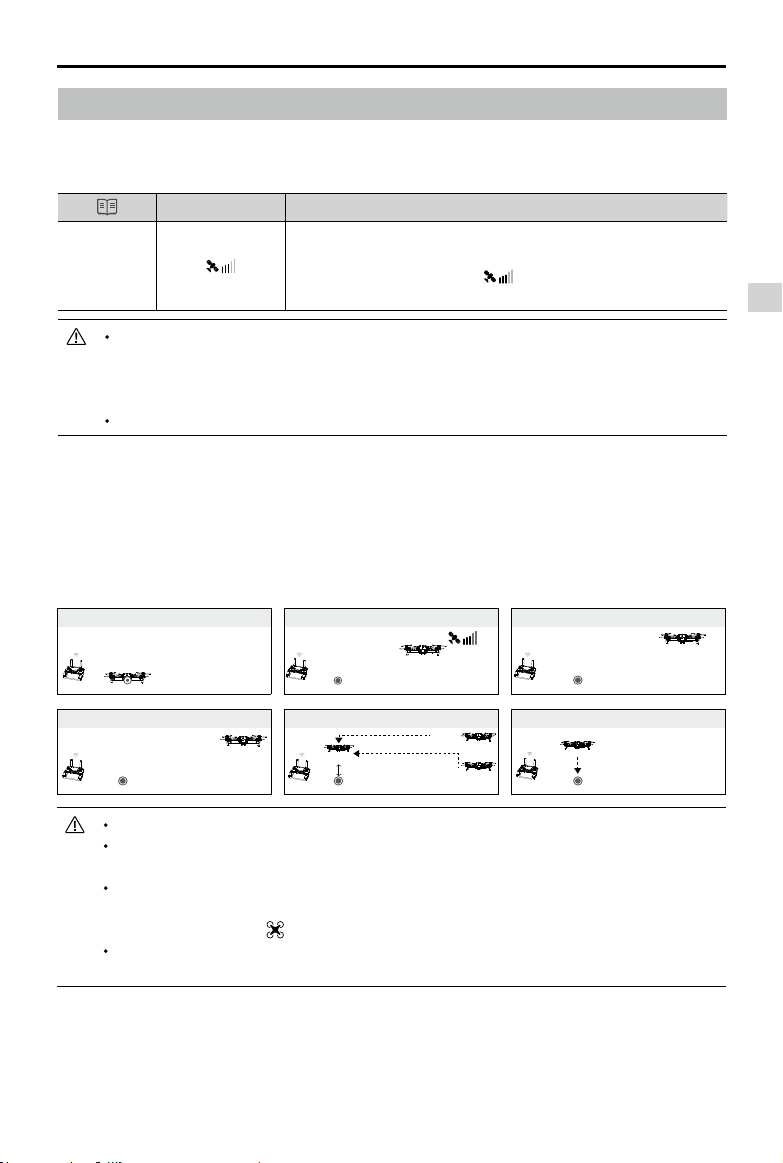
Failsafe RTH
If the Home Point was successfully recorded and the compass is functioning normally, Failsafe RTH
will be automatically activated if the remote controller signal is lost for a specified amount of time (3
seconds when using the remote controller and 20 seconds when using Wi-Fi). Return-to-Home can be
cancelled by the pilot, allowing them to regain control when the remote controller signal connection is reestablished.
Description
Aircraft
1 Record Home Point 3 Remot e Controller Signal Lo st
4 Signal Lost for Extended Time
×
2 Conrming Home Point
5
RTH (adjustable altitude)
Height over HP>Failsafe Altitude
×
Elevate to Failsafe Altitude
Failsafe Altitude
Height over HP<=Failsafe Altitude
×
6 Landing (after user conrmed landing)
×
Hovering at 2 meters above
the Home Point
Aircraft cannot return to the Home Point when the GPS signal is weak or unavailable.
Aircraft will stop ascending and immediately return to the Home Point if you move the left stick
in the aircraft reaches 20 meters (65 feet) altitudes or beyond during Failsafe.
The aircraft cannot avoid obstruction during Failsafe RTH if Forward Vision System is disabled.
It is important to set a suitable Failsafe altitude before each ight. Launch the DJI GO 4 app,
enter “Camera” and tap to set the Failsafe Altitude.
User cannot control the aircraft while it is ascending to its failsafe altitude. However, user can
press RTH button to exit the ascent and regain control.
2017 DJI All Rights Reserved.
©
13
Page 14
Mavic Pro User Manual
Smart RTH
Use the RTH button on the remote controller or tap the RTH button in the DJI GO 4 app and follow the onscreen instructions when GPS is available to initiate Smart RTH. The aircraft status indicator will blink to
display the current status. The aircraft will sense and avoid obstacles on its ight path during Smart RTH.
The aircraft may choose to navigate or hover in place to avoid collision. User can manually navigate the
aircraft to avoid obstacles if the Forward Vision System is disabled or if light levels are low. The pilot can
also immediately exit Smart RTH using the Flight Pause Button on the remote controller or by pressing the
Stop icon in the DJI GO 4 app.
Landing Protection will activate during Smart RTH, Precision Landing and when using Auto Landing in the
Aircraft
DJI GO 4 app:
1. When Landing Protection determines that the ground is suitable for landing, the Mavic Pro will land
gently.
2. If Landing Protection determines that the ground is not suitable for landing, the Mavic Pro will hover and
wait for pilot conrmation.
3. If Landing Protection is not operational, the DJI GO 4 app will display a landing prompt when the Mavic
Pro descends below 0.5 meters. Pull down on the throttle or use the auto landing slider to land.
Low Battery RTH
The low battery level failsafe is triggered when the DJI Intelligent Flight Battery is depleted to a point that
may affect the safe return of the aircraft. Users are advised to return home or land the aircraft immediately
when prompted. The DJI GO 4 app will display a notice when a low battery warning is triggered. The
aircraft will automatically return to the Home Point if no action is taken after a ten-second countdown. The
user can cancel the RTH procedure by pressing the RTH button on the remote controller. The thresholds
for these warnings are automatically determined based on the aircraft’s current altitude and distance from
the Home Point.
The aircraft will land automatically if the current battery level can only support the aircraft long enough
to descend from its current altitude. The user cannot cancel the auto landing but can use the remote
controller to alter the aircraft’s orientation during the landing process.
The Battery Level Indicator is displayed in the DJI GO 4 app, and is described below:
Critical Low battery level warning
2017 DJI All Rights Reserved.
14
©
(Red)
Low battery level
warning (Yellow)
Sufcient battery level
(Green)
Power requires
to return home
Battery level Indicator
Remaining ight time
12:29
Page 15
Mavic Pro User Manual
Battery Level
Warning
Low battery
level warning
Critical Low
battery level
warning
Estimated
remaining
ight time
When the Critical low battery level warning is triggered and the aircraft begins to land
automatically, push the left stick upward to make the aircraft hover at its current altitude, giving
you an opportunity to navigate to a more appropriate landing location.
The colored zones and markers on the battery level indicator bar reect the estimated
remaining ight time. They are automatically adjusted according to the aircraft’s current
location and status.
Remark
Battery power
is low. Land the
aircraft.
The aircraft
must land
immediately.
Estimated
remaining ight
based on current
battery level.
Aircraft Status
Indicator
Aircraft status
indicator blinks
RED slowly.
Aircraft status
indicator blinks
RED quickly.
N/A N/A N/A
DJI GO 4 App Flight Instructions
Tap “Go-home” to have the
aircraft return to the Home
point automatically, or
“Cancel” to resume normal
ight. If no action is taken,
the aircraft will automatically
go home after 10 seconds.
Remote controller will sound
an alarm.
The DJI GO 4 app display
will ash red and the aircraft
will start to descend. The
remote controller will sound
an alarm.
Fly the aircraft
back and land
it as soon as
possible, then
stop the motors
and replace the
battery.
Allow the aircraft to
descend and land
automatically.
Aircraft
Precision Landing
The Mavic Pro automatically scans and attempts to match the terrain features underneath during Return to
Home. When current terrain matches home point terrain, the Mavic will start landing immediately to achieve
precision landing. The DJI GO 4 app will show a terrain feature mismatch prompt if matching fails.
Precision Landing performance is subject to the following conditions:
a. Home point is recorded upon take off, and cannot not be refreshed during ight.
b. Aircraft must take off vertically. Take off altitude must be greater than 10 meters.
c. Home point terrain features remain largely unchanged.
d. Home point terrain with no distinctive features will affect the performance.
e. Lighting conditions cannot be too light nor too dark.
The following actions are available during landing:
a. Pull throttle down to accelerate landing.
b. Moving the control sticks in any other direction will stop Precision Landing. The Mavic Pro
will descend vertically and Landing Protection will remain active.
2017 DJI All Rights Reserved.
©
15
Page 16
Mavic Pro User Manual
5 m
H
5 m
H
RTH Altitude
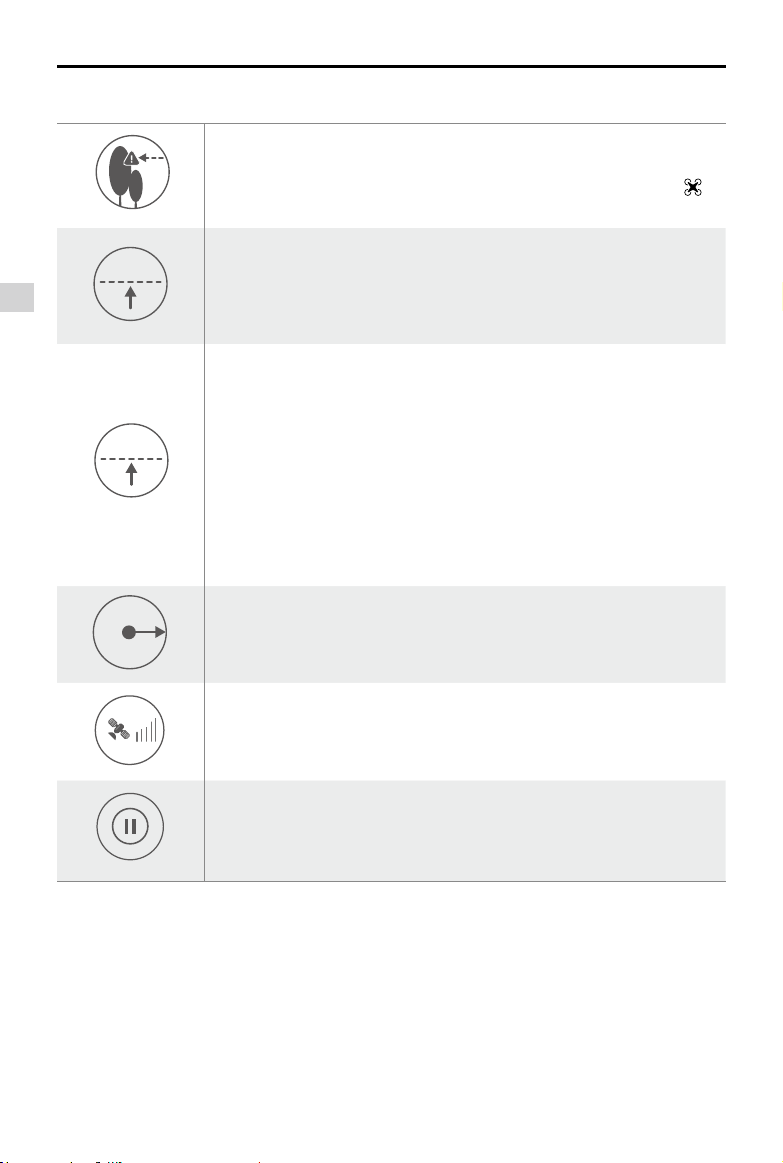
RTH Safety Notices
RTH Altitude
Aircraft
10 m
The aircraft cannot avoid obstructions during RTH when the Forward Vision
System is disabled. Therefore, it is important to set a suitable Failsafe altitude
before each ight. Launch the DJI GO 4 app and enter “Camera” and tap to
set the Failsafe altitude.
If Return to Home (RTH), including Smart RTH and Low Battery RTH, is
triggered and the aircraft is further than 20 m from the home point:
1. It will return to home at the current altitude if flying at or above the RTH
altitude.
2. It will ascend to the RTH altitude if ying below it.
If RTH, including Smart RTH and Low Battery RTH, is triggered between 16 ft
and 66 ft (5 m and 20 m) from the home point, and Forward Vision System is
activated:
1. If aircraft's current altitude is greater than 32 ft (10 m), the aircraft will return
to the home point at the current altitude.
2. If aircraft's current altitude is lower than 32 ft (10 m), the aircraft will first
automatically ascend to 32 ft (10 m), from the current altitude.
The ight speed will be adjusted to 9 mph (14 kph). The aircraft will start
landing immediately if the Forward Vision System is deactivated. When entering
Failsafe RTH, the Forward Vision System status is evaluated and RTH will adapt
accordingly.
5 m
H
Aircraft automatically descends and lands if RTH is triggered when the aircraft
is within a 16 ft (5 m) radius of the Home Point.
Aircraft cannot return to the Home Point when the GPS signal is weak or is
unavailable.
Press the Flight Pause button to exit from RTH. The aircraft will stop
ascending and hover.
Obstacle Avoidance During RTH
Aircraft can now sense and actively attempt to avoid obstacles during RTH, provided that the lighting
conditions are adequate for the Forward Vision System. Upon detecting an obstacle, the aircraft will act
as follows:
1. Aircraft decelerates when an obstacle is sensed at 49 ft (15 m) ahead.
2. Aircraft stops and hovers then starts ascending vertically to avoid the obstacle. The aircraft will
stop climbing when it is at least 16 ft (5 m) above the detected obstacle.
3. RTH procedures resume. The aircraft will continue ying to the Home Point at the current altitude.
2017 DJI All Rights Reserved.
16
©
Page 17
Mavic Pro User Manual
5 meters
15 meters
To ensure the aircraft returns home forwards, it cannot rotate during RTH while the
Forward Vision System is enabled.
The aircraft cannot avoid obstacles above, beside, or behind the aircraft.
Intelligent Flight Mode
TapFly
Introduction
With the TapFly feature, users can now tap on the mobile device screen to y in the designated direction
without using the remote controller. The aircraft will automatically avoid obstacles it sees or brake and
hover provided that the lighting is appropriate (< 300 lux) nor too bright (> 10,000 lux).
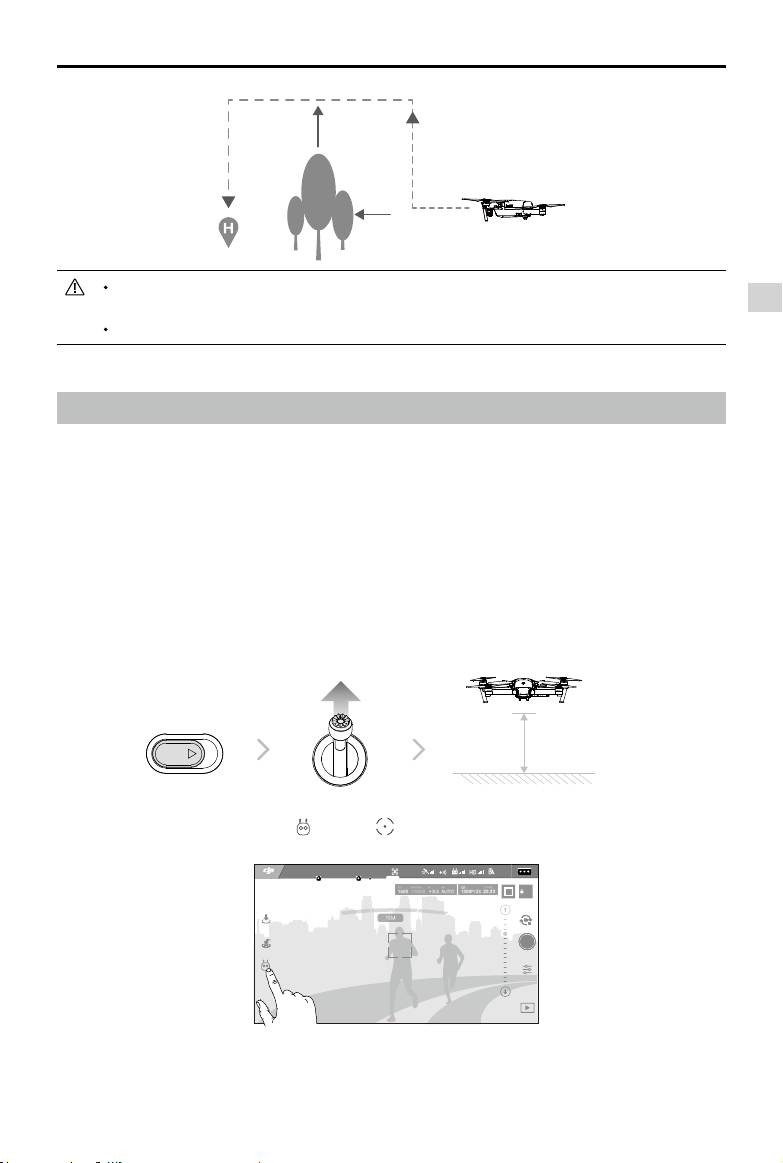
Using TapFly
Ensure the battery level is more than 50% for the Intelligent Flight Battery, and the aircraft is in P-mode.
Then follow the steps below to use TapFly:
1. Take off and ensure the aircraft is ying at least 6ft (2m) above the ground.
Aircraft
SPORT
2 meters
2. Launch the DJI GO 4 app and tap , then tap , read and understand the prompts.
READY TO GO (GPS)
H 10.0MD 30M
12
P-GPS
09:29
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
61%
AE
2017 DJI All Rights Reserved.
©
17
Page 18
Mavic Pro User Manual
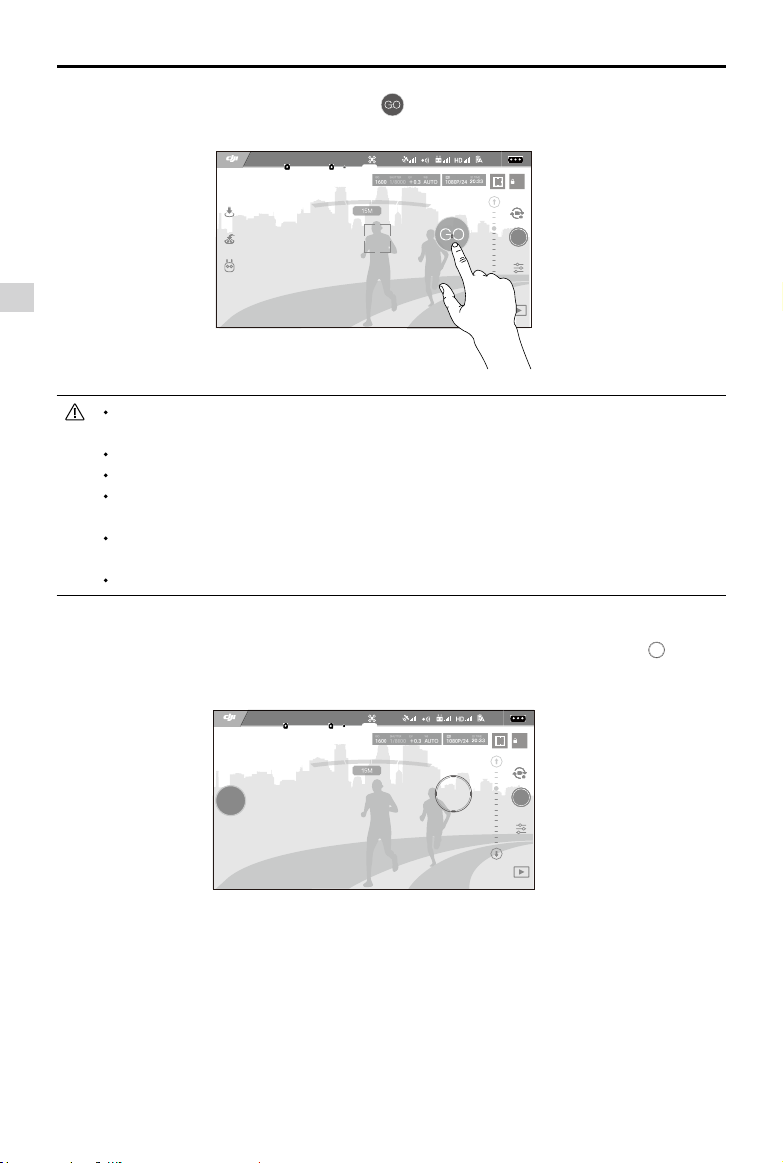
3. Tap once on the target direction and wait for the icon to appear. Tap again to conrm the selection
and the aircraft will y in that direction.
READY TO GO (GPS)
12
P-GPS
09:29
61%
AE
Aircraft
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
DO NOT guide the aircraft to fly towards people, animals, small and fine objects (e.g. tree
branches and power lines) or transparent objects (e.g. glass or water).
Watch for the obstacles in the ight path and stay clear of them.
There may be deviations between the expected and the actual ight path of TapFly selection.
The selectable range for the target direction is limited. You cannot make a TapFly selection close to
the upper or lower edge of the screen.
TapFly Mode may not work properly when the aircraft is ying over water or snow covered
areas.
Be extra cautious when ying in dark (< 300 lux ) or bright (>10,000 lux) environments.
After conrming the TapFly selection, the aircraft will y in the direction marked by the icon . Note: You
can still use the control stick to control the movement of the aircraft during the ight.
12
P-GPS
09:29
61%
AE
STOP
READY TO GO (GPS)
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
The aircraft will automatically adjust its speed when it senses an obstacle in front or if it is ying too close
to the ground. However, this feature should not be relied upon for navigation between obstacles.
Failsafe procedures will override TapFly. If the GPS signal weakens, the aircraft will exit autonomous ight
and return to home.
2017 DJI All Rights Reserved.
18
©
Page 19

Exit TapFly
Use the following methods to exit TapFly:
1. Press the Flight Pause button on the remote controller.
2. Pull back the pitch stick on the remote controller for 3 seconds or above.
3. Tap “STOP” button on the screen.
Mavic Pro User Manual
STOP
OR OR
Flight Pause button
Aircraft will stop and hover after exiting from TapFly. Tap a new target direction to continue ying or begin
manual ight.
ActiveTrack
ActiveTrack allows you to mark and track a moving object on your mobile device screen. The aircraft will
automatically avoid obstacles in its ight path. No external tracking device is required.
The Mavic Pro can automatically identify and trace bikes and other vehicles, people and animals, and
use different tracking strategies for each.
Dynamic Home Point is available when using rmware v01.04.0000 or higher. If the tracking subject is a
person, the aircraft will automatically set the current position as the new home point when the aircraft is
15 m farther than the previous home point while tracking. Enable the Dynamic Home Point function by
tapping the icon in DJI GO 4.
Using ActiveTrack
Ensure the Intelligent Flight Battery has more than 50% power and the aircraft is in P-mode. Then follow
the steps below to use ActiveTrack:
1. Take off and hover at least 6ft (2m) above the ground.
SPORT
2 meters
Aircraft
2. In the DJI GO 4 app, tap and tap to bring up the ight modes and then select ActiveTrack.
READY TO GO (GPS)
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
12
P-GPS
09:29
61%
AE
2017 DJI All Rights Reserved.
©
19
Page 20
Mavic Pro User Manual
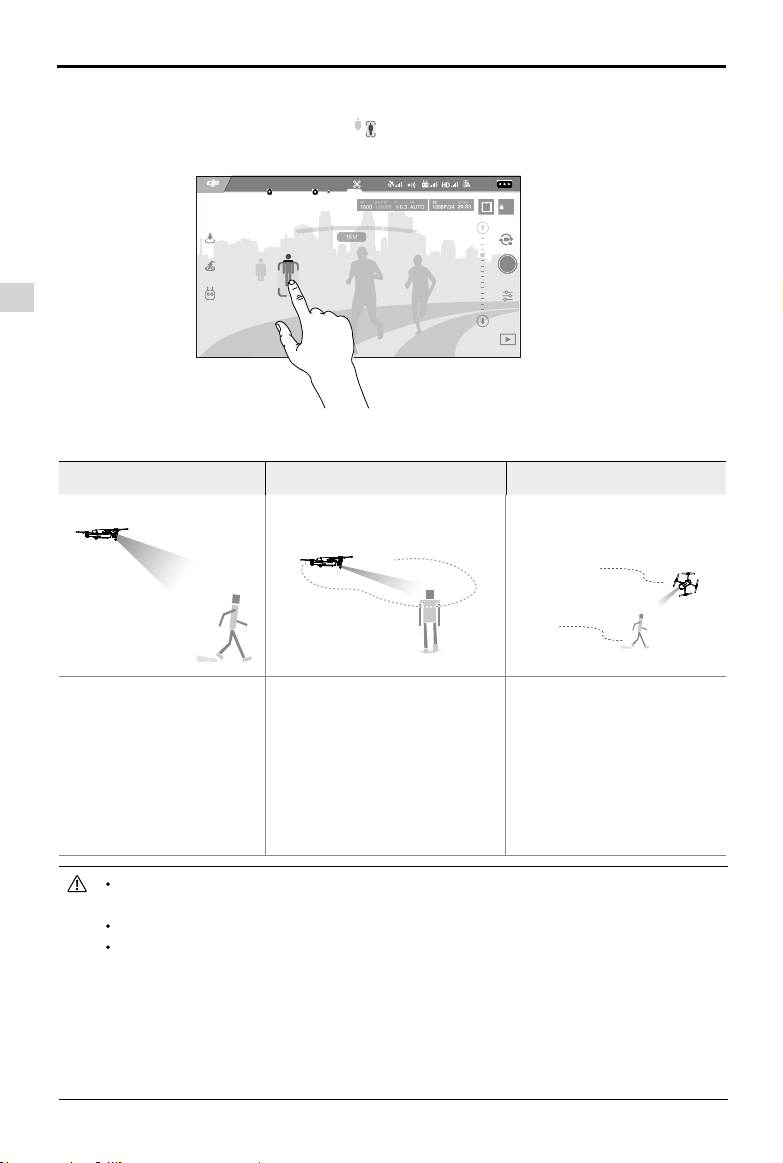
3. Tap on the subject you want to track then tap to conrm selection. If the subject is not automatically
recognized, drag a box around it. The box will turn green when tracking is in progress. If the box
turns red, the object could not be identied and you should try again.
READY TO GO (GPS)
12
P-GPS
09:29
61%
AE
Aircraft
ActiveTrack includes following functions:
Trace Spotlight Prole
The aircraft tracks the
subject at a constant
distance. Use the roll stick
on the remote controller or
the slider in DJI GO 4 to
circle the subject.
ActiveTrack
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
Aircraft will not trace a subject
automatically, but it keeps the
camera pointing at the subject
during ight. The remote controller
can be used to maneuver the
aircraft, but yaw is disabled. Using
the left stick and gimbal dial will
adjust subject framing.
The aircraft tracks the subject
at constant angle and distance
from the side. Use the roll stick
on the remote control to circle
the subject.
DO NOT select an area containing people, animals, small, ne objects (e.g. tree branches
and power lines) or transparent objects (e.g. glass or water).
Stay clear of obstacles near the ight path, particularly when the aircraft is ying backward.
Be extra vigilant when using ActiveTrack in any of the following situations:
a) The tracked subject is not moving on a level plane.
b) The tracked subject changes shape drastically while moving.
c) The tracked subject could be blocked or out of sight for a long time.
d) The tracked subject is moving on a snowy surface.
e) Available light is low (< 300 lux) or high (> 10,000 lux).
f) The tracked subject has a similar color or pattern as its surrounding environment.
2017 DJI All Rights Reserved.
20
©
Page 21

Mavic Pro User Manual
You must follow local privacy laws and regulations when using ActiveTrack.
Aircraft will not be able to avoid obstacles while in Prole or Spotlight Mode. Use these
modes in open areas.
The aircraft will sense and avoid obstacles on its ight path.
If the aircraft loses track of the subject, because it is moving too fast or obscured, re-select
the subject to resume tracking.
Exiting ActiveTrack
Use the following methods to exit ActiveTrack:
1. Press the Flight Pause button on the remote controller.
2. Tap the “STOP” button on the screen.
After exiting ActiveTrack, the aircraft will hover in place, at which point you may choose to y manually,
track another subject, or return to home.
STOP
OR
Gesture Mode
In Gesture Mode, the Mavic’s Vision System recognizes gestures, allowing it to follow and capture seles
without a phone or a controller. Follow the steps below to use Gesture Mode:
Modes Prompts Front LEDs Remarks
Ensure the forward vision system is active
1. Conrm the
subject
2. Conrm the
distance
3. Sele Count
Down
Gesture Mode can only be used in Photo Mode.
Fly the aircraft 2 meters or higher above the ground then move in front of the camera to be
recognized. Front LED Indicators will blink red rapidly if the Mavic Pro fails to recognize a
subject.
Enabling GPS on your phone will allow the Mavic to follow with more accuracy while ying
in Gesture Mode.
Slow Red Flashing
×2
Red Flashes Twice
Fast Red Flashing
and there is enough light. Tap the icon and
move in front of the camera for the Mavic to
recognize you.
Raise your arms and wave to the Mavic,
the Front LED will blink red twice once it
conrms the shooting distance.
Put your fingers in front on your face as
shown.
Aircraft
2017 DJI All Rights Reserved.
©
21
Page 22

Mavic Pro User Manual
Tripod Mode
Tap the icon in the DJI GO 4 app to enable Tripod Mode. In Tripod Mode, the maximum ight speed
is limited to 2.2 mph (3.6 kph). Responsiveness to stick movements is also reduced for smoother more
controlled movements.
Only use Tripod Mode where the GPS signal is strong or light conditions are ideal for the vision
system. If GPS signal is lost and if the vision system cannot function, it will automatically switch
to Atti mode. In this case, ight speed will increase and the aircraft cannot hover in place. Use
Tripod Mode carefully.
Aircraft
Terrain Follow Mode
The Downward Vision System is utilized in Terrain Follow Mode to maintain a height above ground between 1
and 13 meters. This mode is designed for use on grassland sloped at no more than 20°.
Enable the Terrain Follow Mode by tapping the Intelligent Flight Mode icon in the DJI GO 4 app. When this
mode is enabled, the aircraft’s current height will be recorded. The aircraft will maintain the recorded height
during ight and ascend when the slope rises. However, the aircraft will not descend in downward slopes.
It is important that you only fly in conditions where the Vision Position System can function
correctly; otherwise the Terrain Follow Mode will not work.
Cinematic Mode
Tap the Intelligent Flight Mode icon in the DJI GO 4 app to enable Cinematic Mode. In Cinematic mode,
the braking distance for the aircraft is extended. The aircraft will slow down gently until it stops, keeping
footage smooth and stable even if control inputs are choppy.
Fixed-Wing Mode
The aircraft will y forward automatically at a certain speed after entering Fixed-Wing Mode. Push the left
stick up to ascend and down to descend. Push either stick left or right to rotate the aircraft. Pushing the
right stick up will accelerate and pushing down will exit Fixed-Wing Mode.
In the DJI GO 4 app, tap the icon and enable Fixed-Wing Mode. Push the right stick up until the C1
icon appears, then press the C1 button on the remote controller to enter Fixed-Wing Mode. Push the right
stick down for 3 seconds or press the C2 button on the remote controller to exit Fixed-Wing Mode.
Push the right stick up until ight speed reaches 3m/s or more to enter Fixed-Wing Mode. Do
not move the sticks in any other direction.
Flight speed cannot be reduced while using Fixed-Wing Mode. You can only push the right
stick up to accelerate. Pushing the right stick down will exit Fixed-Wing Mode.
Other Intelligent Flight Modes and Portrait Mode are disabled when using Fixed-Wing Mode.
Fixed-Wing Mode is available in both P mode and S mode.
2017 DJI All Rights Reserved.
22
©
Page 23

Mavic Pro User Manual
GO
QuickShot
QuickShot shooting modes include Rocket, Dronie and Helix. Mavic will record a video according to the
selected shooting mode and then automatically generate a 10-second short video. The video can then
be viewed, edited, or shared to social media from the Playback menu.
Dronie : Fly backward and upward, with the camera locked on your subject.
Helix: Fly upward, spiraling around your subject.
Rocket: Ascend with the camera pointing downward.
Using QuickShot
Ensure that the aircraft is in P Mode and that the Intelligent Flight Battery is charged sufciently. Follow
the steps below to use QuickShot:
1. Take off and ensure the aircraft is ying at least 4.5 ft (1.5 m) above the ground.
1.5 m
2. Launch DJI GO 4, tap , then select QuickShot, and follow the prompts.
In-Flight(GPS)
12
P-GPS
09:29
61%
1080P/30
Aircraft
H 9.6
S 1.1D 9.6
3. Select your target subject in the camera view and choose a shooting mode. Tap “GO” to begin
recording. The aircraft will y back to its original position after shooting is nished.
In-Flight(GPS)
12
QuickShot
09:29
1080P/30
61%
2017 DJI All Rights Reserved.
©
23
Page 24

Mavic Pro User Manual
4. View and edit the generated or original video using Playback.
QuickShot is only available when GPS signal is strong.
Tap in DJI GO 4 or pull a control stick opposite to the direction of ight to exit QuickShot
anytime during shooting
In QuickShot, the aircraft cannot avoid obstacles automatically. Please make sure to only use
.
QuickShot in wide open areas.
Forward and Downward Vision System
Aircraft
The Mavic Pro is equipped with a Forward and Downward Vision System that constantly scans for
obstacles in front of it, allowing it to avoid collisions by going around, over or hovering. The downward Vision System uses ultrasound and image data to help the aircraft maintain its current position.
With the help of the Downward Vision System, your Mavic Pro can hover in place more precisely
and y indoors or in other environments where a GPS signal is not available. The main components
of the Forward and Downward Vision System are located on the nose and the bottom of the aircraft;
they include [1] [2] four monocular sensors and [3] two ultrasonic sensors.
1 1
2
3 3
2
Detection Range
The detection range of the Forward and Downward Vision System is depicted as follow. Note that the
aircraft cannot sense or avoid the obstacles that are not within the detection range.
2017 DJI All Rights Reserved.
24
©
Page 25

Mavic Pro User Manual
2m以上
Calibrating Sensors
Forward and Downward Vision Systems cameras installed on the aircraft are calibrated on delivery.
However these cameras are vulnerable to excessive impact and will require occasional calibration
via DJI Assistant 2 or the DJI GO 4 app. Follow the steps below to calibrate the camera.
Point the aircraft toward the screen
01
02
Align the boxes
03
Pan and tilt the aircraft
Repeat the steps above to calibrate the Downward Vision System cameras.
Quick Calibration
Use quick calibration when the DJI GO 4 app notify that vision sensor calibration is required. Tap
through “Aircraft Status” -> “Vision Sensors” to start quick calibration.
Quick calibration is quick x to vision sensor issues. Connecting the aircraft to a computer to
carry out a full calibration using DJI Assistant 2 is recommended when possible. Only calibrate
when lighting conditions are adequate and on textured surfaces i.e. grass.
Do not calibrate the aircraft on highly reective surfaces such as Marble or ceramics.
Using the Downward Vision System
The Downward Vision System is activated automatically when the aircraft is turned on. No further
action is required. The Downward Vision System is typically used in indoor environments where
GPS is unavailable. Using the Downward Vision System, the aircraft can hover precisely even without GPS.
Aircraft
Follow the steps below to use Downward Vision System:
1. Toggle the ight mode switch to P-mode.
2. Place the aircraft on a at surface. Note that the Downward Vision System cannot work
properly on surfaces without clear pattern variations.
3. Turn on the aircraft. The aircraft status indicator will ash green two times, which
indicates the Downward Vision System is ready. Gently push the left stick up to lift
off and the aircraft will hover in place.
2017 DJI All Rights Reserved.
©
SPORT
25
Page 26

Mavic Pro User Manual
Assisted Braking from Forward Vision System
Powered by the Forward Vision System, the aircraft is able to actively brake when obstacles are detected
in front. Forward and Downward Vision Systems work best when lighting is adequate and the obstacle is
clearly marked or textured. The aircraft must y at no more than 22mph (36kph) to allow sufcient braking
distance.
Aircraft
The performance of the Forward and Downward Vision Systems are affected by the surface being
own over. Ultrasonic sensors may not be able to accurately measure distances when operating
above sound-absorbing materials and the camera may not function correctly in suboptimal
environments. The aircraft will switch from P-mode to Atti mode automatically if neither GPS nor
Forward and Downward Vision Systems are available. Operate the aircraft with great caution in
the following situations:
Flying over monochrome surfaces (e.g. pure black, pure white, pure red, pure green).
Flying over a highly reective surfaces.
Flying at high speeds of over 22mph (36kph) at 2 meters or over 11mph (18kph) 1 meter.
Flying over water or transparent surfaces.
Flying over moving surfaces or objects.
Flying over inclined surfaces that will deect sound waves away from the aircraft.
Flying over small and ne objects (e.g. tree branches and power lines).
Flying in an area where the lighting changes frequently or drastically.
Flying over extremely dark (lux < 10) or bright (lux > 100,000) surfaces.
Flying over surfaces that can absorb sound waves (e.g. thick carpet).
Flying over surfaces without clear patterns or texture.
Flying over surfaces with identical repeating patterns or textures (e.g. tiling).
Keep sensors clean at all times. Dirt or other debris may adversely affect their effectiveness.
The Downward Vision System is only effective when the aircraft is at altitudes of 0.3 to 13 meters.
Forward and Downward Vision Systems may not function properly when the aircraft is ying
over water.
The Forward and Downward Vision System may not be able to recognize patterns on the
ground in low light (less than 100lux).
Do not use other ultrasonic devices with a frequency of 40KHz when Forward and Downward
Vision Systems are in operation.
Keep animals away from the aircraft when the Downward Vision System is activated. The sonar
sensor emits high frequency sounds that are audible to some animals.
2017 DJI All Rights Reserved.
26
©
Page 27

Mavic Pro User Manual
Flight Recorder
Flight data is automatically recorded to the internal storage of the aircraft. This includes flight
telemetry, aircraft status information, and other parameters. To access this data, connect the aircraft
to the PC through the Micro USB port.
Attaching and Detaching the Propellers
Use only DJI approved propellers with your Mavic Pro. White ring and unmarked propellers indicate
where they should be attached and in which direction whey should spin.
Propellers White Ring Unmarked
Figure
Attach On Motors with white marks Motors without white marks
Legends Lock : Turn the propellers in the indicated direction to mount and tighten.
Attaching the Propellers
Attach the white ringed propellers to the mounting base with white marks. Press the propeller down onto
the mounting plate and rotate in the lock direction until it is secured. Attach the other propellers to the
mounting bases without marks. Unfold all the propellers blades.
Aircraft
Marked Unmarked
Detaching the Propellers
Press the propellers down into the motor mount and rotate in the unlock direction.
Be aware of the sharp edges of the propellers. Handle with care.
Use only the DJI approved propellers. Do not mix propeller types.
Stand clear of the motors and DO NOT touch the propellers when they are spinning.
Check that the propellers and motors are installed correctly and rmly before every ight.
Ensure that all propellers are in good condition before each ight. DO NOT use aged, chipped,
or broken propellers.
To avoid injury, STAND CLEAR of and DO NOT touch propellers or motors when they are spinning.
ONLY use original DJI propellers for a better and safer ight experience.
2017 DJI All Rights Reserved.
©
27
Page 28

Mavic Pro User Manual
Intelligent Flight Battery
Introduction
The DJI Intelligent Flight Battery has a capacity of 3830 mAh, a voltage of 11.4 V, and a smart charge/
discharge functionality. It should only be charged using an appropriate DJI approved charger.
Aircraft
Intelligent Flight Battery Charger
The Intelligent Flight Battery must be fully charged before using it for the rst time.
DJI Intelligent Flight Battery Functions
1. Battery Level Display: The LED indicators display the current battery level.
2. Auto-Discharging Function: To prevent swelling, the battery automatically discharges to below 65% of
total power when it is idle for more than ten days. It takes around two days to discharge the battery to
65%. It is normal to feel moderate heat being emitted from the battery during the discharge process.
Discharge thresholds can be set in the DJI GO 4 app.
3. Balanced Charging: Automatically balances the voltage of each battery cell when charging.
4. Overcharge Protection: Charging automatically stops when the battery is fully charged.
5. Temperature Detection: The battery will only charge when the temperature is between 5°C (41°F) and
40°C (104°F).
6. Over Current Protection: The battery stops charging when a high amperage (more than 8.5A) is
detected.
7. Over Discharge Protection: To prevent over-discharge damage, discharging automatically stops.
8. Short Circuit Protection: Automatically cuts the power supply when a short circuit is detected.
9. Battery Cell Damage Protection: The DJI GO 4 app displays a warning message when a damaged
battery cell is detected.
10. Sleep Mode: To save power, the battery will cut off power supply and enter sleep mode after 20
minutes of inactivity.
11. Communication: Information pertaining to the battery’s voltage, capacity, current, etc. is transmitted to
the aircraft’s main controller.
Refer to
Mavic Pro Intelligent Flight Battery Safety Guidelines
responsibility for all operations and usage.
2017 DJI All Rights Reserved.
28
©
before use. Users take full
Page 29

Mavic Pro User Manual
Using the Battery
LED1
Battery Level Indicators
LED2
LED3
LED4
Power Button
Turning ON/OFF
Turning On:
Turning Off:
Press the Power Button once, then press again and hold for 2 seconds to turn on.
Press the Power Button once, then press again and hold for 2 seconds to turn off.
Low Temperature Notice:
1. Battery capacity is signicantly reduced when ying in low temperature (-10°C and 5°C) environments.
2. Batteries cannot be used in extremely low temperature (< -10°C) environments.
It is recommended to fully charged the battery when taking off in temperature between -10°C and 5°C.
3. End the flight as soon as the DJI GO 4 app displays the “Low Battery Level Warning” in low
temperature environments.
4. Keep the battery indoors to warm it before ying in low temperature environments.
5. To ensure optimal performance of the battery, keep the battery temperature above 20°C.
Aircraft
In cold environments, insert the battery into the battery compartment and turn on the aircraft for
approximately 1-2 minutes to warm up before taking off.
Checking the Battery Level
The Battery Level Indicators display how much power remains. When the battery is turned off, press the
Power Button once, the Battery Level Indicators will light up to display the current battery level. See below
for details.
The Battery Level Indicators will also show the current battery level during charging and
discharging. The indicators are dened below.
: LED is on. : LED is ashing.
: LED is off.
2017 DJI All Rights Reserved.
©
29
Page 30

Mavic Pro User Manual
Battery Level Indicators
LED1 LED2 LED3 LED4 Battery Level
87.5%~100%
75%~87.5%
62.5%~75%
50%~62.5%
37.5%~50%
Aircraft
25%~37.5%
12.5%~25%
0%~12.5%
=0%
Charging the Intelligent Flight Battery
1. Connect the Battery Charger to a power source (100-240V, 50/60Hz).
2. Connect the Battery to the Charger to start charging.
3. The Battery Level Indicator will display the current battery level as it is charging.
4. The Intelligent Flight Battery is fully charged when the Battery Level Indicators are all off. Detach the
battery from the Charger.
5. Allow battery temperature to drop to room temperature before storing for an extended period.
6. The charger will stop charging the battery if the battery cell’s temperature is not within the operating
range (5°C to 40°C).
Always turn off the battery before inserting it or removing it from the Mavic Pro. Never insert or
remove a battery when it is turned on.
Intelligent Flight Battery
Battery Level Indicators While Charging
Charger
LED1 LED2 LED3 LED4 Battery Level
0%~25%
25%~50%
50%~75%
75%~100%
Fully Charged
2017 DJI All Rights Reserved.
30
©
Power Outlet
Page 31

Mavic Pro User Manual
Battery Protection LED Display
The table below shows battery protection mechanisms and corresponding LED patterns.
Battery Level Indicators while Charging
LED1 LED2 LED3 LED4 Blinking Pattern Battery Protection Item
LED2 blinks twice per second Over current detected
LED2 blinks three times per second Short circuit detected
LED3 blinks twice per second Over charge detected
LED3 blinks three times per second Over-voltage charger detected
LED4 blinks twice per second Charging temperature is too low
LED4 blinks three times per second Charging temperature is too high
After these issues are resolved, press the Power Button to turn off the Battery Level Indicator. Unplug the
Intelligent Flight Battery from the charger and plug it back in to resume charging. You do not need to unplug and plug in the charger in the event of a room temperature error; the charger will resume charging
when the temperature is within the allowable range.
DJI does not take any responsibility for damage caused by third-party chargers.
How to discharge the Intelligent Flight Battery before transport the batteries for long trip:
Fly the Mavic Pro outdoors until there is less than 20% of power left, or until the battery can no
longer be turned on.
Aircraft
2017 DJI All Rights Reserved.
©
31
Page 32

Remote Controller
This section describes the features
of the remote controller and includes
instructions for controlling the aircraft
and the camera.
2017 DJI All Rights Reserved.
32
©
Page 33

Remote Controller
Remote Controller Prole
The Mavic Pro remote controller is a multi-function wireless communication device that integrates the
video downlink system and aircraft remote control system. The video downlink and aircraft remote control
system operate at 2.4 GHz. The remote controller features a number of camera control functions, such
as taking and previewing photos and videos, as well as controlling gimbal motion. The battery level is
displayed via the LCD Screen of the remote controller.
Compliance Version:
Operating Mode:
Mode 1:
The right stick serves as the throttle.
Mode 2:
The left stick serves as the throttle.
To prevent transmission interference, do not operate more than three aircraft in the same area.
Using the Remote Controller
Turning the Remote Controller On and O
The Mavic Pro remote controller is powered by a 2S rechargeable battery that has a capacity of
2970 mAh. Follow the steps below to turn on your remote controller:
1. When the remote controller is turned off, press the Power Button once. The LCD Screen will display the
current battery level.
2. Press once, then again and hold the Power Button to turn on the remote controller.
3. The remote controller will beep when it is turned on.
4. Repeat Step 2 to turn off the remote controller.
The remote controller is compliant with local compliance and regulations.
Control can be set to Mode 1 or Mode 2, or to a custom mode.
Remote Controller
2017 DJI All Rights Reserved.
©
33
Page 34

Mavic Pro User Manual
Charging the Remote Controller
Charge the remote controller using the included charger. Refer to the gure below for more details.
Power Outlet
Remote Controller
Controlling the Camera
Charger
Shoot videos/photos, and adjust camera settings via the Shutter Button, Record Button, and Camera Settings Dial on the remote controller.
4
3
1
2
1. Camera Settings Dial
Turn the dial to adjust camera settings such as ISO, shutter speed, without letting go of the remote
controller.
2. Shutter Button
Press to take a photo. If burst mode is activated, multiple photos will be taken with a single press.
3. Record Button
Press once to start recording video, then press again to stop recording.
4. Gimbal Dial
Control the tilt of the gimbal.
2017 DJI All Rights Reserved.
34
©
Page 35

Mavic Pro User Manual
Controlling the Aircraft
This section explains how to control the orientation of the aircraft through the remote controller. Control
can be set to Mode 1 , Mode 2 or Mode 3, or to a custom mode.
Mode 1
Left Stick
Forward
Right Stick
Up
Mode 2
Mode 3
Backward
Turn RightTurn Left
Right StickLeft Stick
Up
Down
Turn RightTurn Left
Left Stick Right Stick
Forward
Backward
Down
Remote Controller
RightLeft
Forward
Backward
RightLeft
Up
Down
RightLeft
The Remote Control is set to Mode 2 by default.
Stick Neutral/Mid-Point: Control sticks are in the center position.
Moving the Control Stick: The control stick is pushed away from the center position.
Turn RightTurn Left
2017 DJI All Rights Reserved.
©
35
Page 36

Mavic Pro User Manual
Remote Controller
(Mode 2)
Remote Controller
(
Aircraft
Indicates Nose Direction)
Remarks
Moving the left stick up and down changes the
aircraft’s elevation.
Push the stick up to ascend and down to descend.
When both sticks are centered, the Mavic Pro will
hover in place.
The more the stick is pushed away from the center
position, the faster the Mavic Pro will change
elevation. Always push the stick gently to prevent
sudden and unexpected elevation changes.
Moving the left stick to the left or right controls the
rudder and rotation of the aircraft.
Push the stick left to rotate the aircraft counterclockwise, push the stick right to rotate the aircraft
clockwise. If the stick is centered, the Mavic Pro
will maintain its current orientation.
The more the stick is pushed away from the center
position, the faster the Mavic Pro will rotate.
Moving the right stick up and down changes the
aircraft’s forward and backward pitch.
Push the stick up to fly forward and down to fly
backward.
centered.
Push the stick further away from the center position for
a larger pitch angle (maximum 30˚) and faster ight.
Mavic Pro
will hover in place if the stick is
Moving the right stick control left and right changes
the aircraft’s left and right pitch.
Push left to y left and right to y right. The Mavic
Pro will hover in place if the stick is centered.
Press the Flight Pause button once to exit from
the ActiveTrack, TapFly and Intelligent Navigation
ight mode. The aircraft will hover at the current
position.
Keep the remote controller away from magnetic materials to avoid it being affected by magnetic
interference.
Ensure the control sticks are in the center position and not being squeezed by external force
during transportation or storage.
2017 DJI All Rights Reserved.
36
©
Page 37

Flight Mode Switch
Toggle the switch to select the desired flight mode.
Choose between P-mode and S-mode.
Position Flight Mode
SPORT
SPORT
P-mode
S-mode
Mavic Pro User Manual
SPORT
P-mode (Positioning)
P-mode works best when the GPS signal is strong. The aircraft utilizes the GPS
:
and Forward and Downward Vision Systems to locate itself, automatically stabilize, and navigate between
obstacles. Advanced features such as TapFly and ActiveTrack are enabled in this mode.
Note: P-mode requires larger stick movements to achieve high speeds.
S-mode (Sport):
The handling of the aircraft is adjusted in to enhance maneuverability and speed.
Maximum speed is increased to 40mph (65kph). Forward Vision System is disabled in this mode.
The Flight Mode is locked in P Mode by default, regardless of switch position. To switch ight modes, go
to Camera view in the DJI GO 4 app, tap and enable “Multiple Flight Modes”. After enabling multiple
ight modes, toggle the switch to P and then to S to y in Sport Mode.
The Mavic Pro is y in P-mode by default every time after powering on. Toggle the Flight Mode Switch to
P and then to S every time before you use S mode.
RTH Button
Press and hold the RTH button to start the Return-to-Home (RTH) procedure. The aircraft will then return to
the last recorded Home Point. Press this button again to cancel the RTH procedure and regain control of
the aircraft.
Remote Controller
2017 DJI All Rights Reserved.
©
37
Page 38

Mavic Pro User Manual
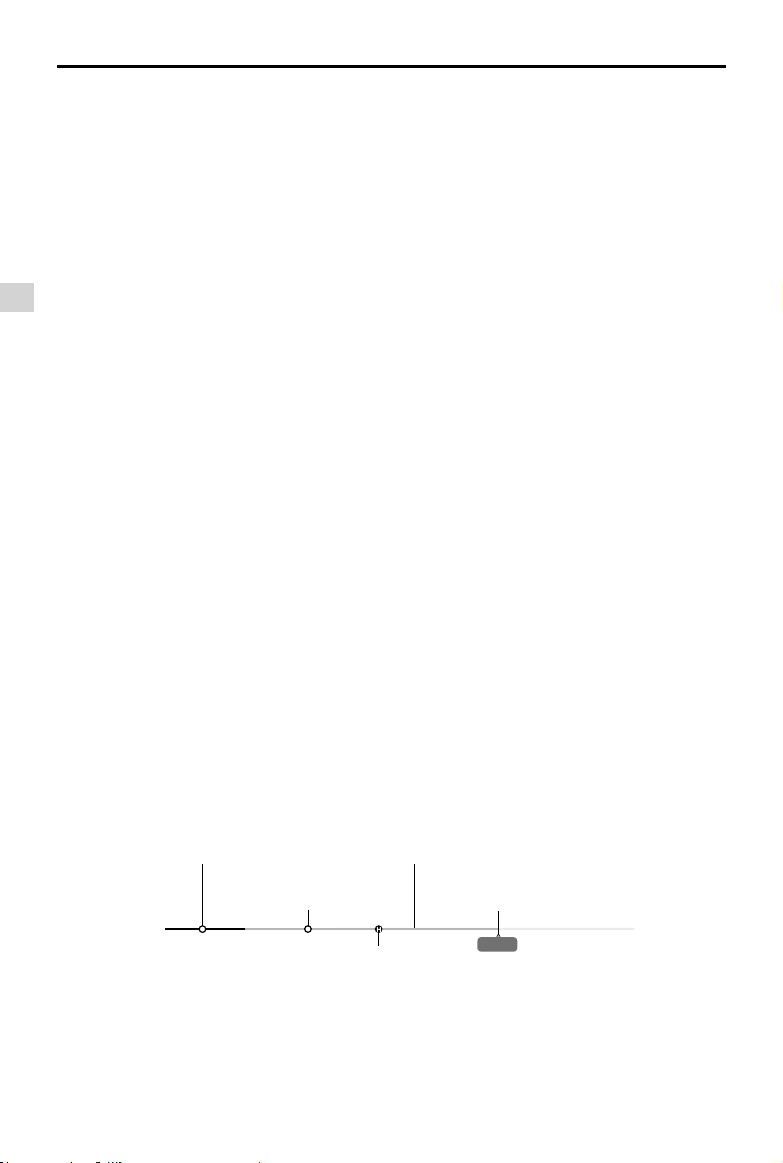
Optimal Transmission Range
The transmission signal between the aircraft and the remote controller is most reliable within the area that
depicted below:
Optimal Transmission Range
Remote Controller
strong weak
Ensure that the aircraft is ying within the optimal transmission zone. To achieve the best transmission
performance, maintain the appropriate relationship between the operator and the aircraft.
LCD Screen
The LCD Screen displays various system statuses including ight telemetry and battery level in real time.
Refer to the gure below for the meaning of each icon on the LCD Screen.
GPS signal strength
System status prompt
Flight mode*
Aircraft battery level
RC signal strength
Flight speed
RC battery level
Distance to the ground
Vision System
Flight distance
Exposure compensation
Ascend/Descend
Flight altitude
Camera status
Motor rotation
speed
Micro SD
placement
Sport modes
* On the remote controller’s screen, the Primary remote controller displays MCTL while the Secondary
remote controller displays ight mode.
2017 DJI All Rights Reserved.
38
©
Page 39

Mavic Pro User Manual
Dual Remote Controller Mode
Mavic Pro supports Dual Remote Controller Mode, Mavic Pro rmware version 01.03.0400, DJI GO 4 app
iOS v4.0.5 or DJI GO 4 app Android v4.0.5 are required. Two remote controllers can connect to the same
aircraft in Dual Remote Controller Mode.
Both the Primary remote controller and the Secondary remote controller are able to control the orientation
of the aircraft and the movement of the gimbal and camera operation after the remote controllers have
been linked to the aircraft.
Please pay attention to the below operation differences of the Primary and Secondary remote controller.
1. Gimbal Dial
Both Primary remote controller and Secondary remote controller are able to control the gimbal dial
but the Primary remote controller has priority. For example, the Secondary remote controller is unable
to control the gimbal dial when the Primary remote controller is using the gimbal dial. However, after
stopping control of the gimbal dial for two seconds, the Secondary remote controller is able to control
the gimbal dial.
2. Control Stick
Both the Primary remote controller and Secondary remote controller are able to control the orientation
of the aircraft using control sticks. The Primary remote controller has priority. The Secondary remote
controller is unable to control the aircraft’s orientation when the Primary remote controller is operating
the control sticks. When the control sticks are idle for two seconds, the Secondary remote controller is
able to control the aircraft’s orientation.
To ensure ight safety, when pulling down the throttle stick on the Secondary remote controller, push
both sticks down and inwards. When the Primary remote controller is controlling the aircraft, the aircraft
will not respond to that command, even if the Primary remote controller has been idle for more than two
seconds.
The Secondary remote controller sticks need to be released so that the Secondary remote controller is
able to control the aircraft.
3. Flight Mode Switch
Only use the Primary remote controller to switch the ight mode. The Flight Mode Switch is disabled on
the Secondary remote controller.
4. DJI GO 4 App Settings
The display and parameter settings for the Primary and Secondary remote controllers in DJI GO 4 are
the same. Everything except the ght controller, vision system, video transmission, Intelligent Flight
Battery and gimbal parameters cannot be set up when using the Secondary remote controller. Display
and parameter settings in the DJI GO 4 for Primary and Secondary remote controllers are the same.
2017 DJI All Rights Reserved.
©
Remote Controller
39
Page 40

Mavic Pro User Manual
Linking the Remote Controller
The remote controller is linked to your aircraft before delivery. Linking is only required when using a new
remote controller for the rst time. Follow these steps to link a new remote controller:
1. Turn on the remote controller and connect to the mobile device, and turn on the aircraft. Launch the
DJI GO 4 app.
2. Enter “Camera” and tap on and then tap the “Linking Primary RC” or “Linking Secondary
RC” button to conrm.
Toggle the Control Mode switch to RC mode before linking.
Remote Controller
3. The remote controller is ready to link.
4. Locate the linking button on the side of the aircraft, as shown in the gure below. Press the link button
to start linking. The Linking Status Indicator will display a solid green once the remote controller is
successfully linked to the aircraft, and the LCD screen on the remote controller will display the aircraft’s
information.
Linking Status Indicator
The remote controller will un-link itself from an aircraft if a new remote controller is linked to the
same aircraft.
In dual remote controller mode, the slave remote controller must be relinked to the aircraft when
the master remote controller has been relinked to the aircraft.
2017 DJI All Rights Reserved.
40
©
Link Button
Page 41

Camera and Gimbal
This section provides the technical
specications of the camera and
explains the gimbal’s operation modes.
2017 DJI All Rights Reserved.
©
41
Page 42

Camera and Gimbal
Camera Prole
The on-board camera uses the 1/2.3 inch CMOS sensor to capture video up to 4K at 30 fps with the
Mavic Pro and 12 megapixel stills. You may choose to record video in either MOV or MP4 formats.
Available picture shooting modes include burst, continuous, and interval mode. A live preview of what the
camera sees can be monitored on the connected mobile device via the DJI GO 4 app.
Camera Micro SD Card Slot
To store your photos and videos, insert the Micro SD card into the slot, as shown below, before
turning on the Mavic Pro. The Mavic Pro comes with a 16 GB Micro SD card and supports Micro
SD cards up to 64 GB. A UHS-1 Micro SD card is recommended due to their fast read and write
speeds allowing you to save high-resolution video data.
Gimbal Camera
Do not remove the Micro SD card from the Mavic Pro when it is turned on.
To ensure the stability of the camera system, single video recordings are capped at 30 minutes.
Camera Data Port
Turn on the Mavic Pro and connect a USB cable to the Micro USB Port to update rmware.
2017 DJI All Rights Reserved.
42
©
Page 43

Mavic Pro User Manual
Gimbal
Gimbal Prole
The 3-axis gimbal provides a steady platform for the attached camera, allowing you to capture clear,
stable images and video. The gimbal can tilt the camera within a 120˚ range.
30°
0°
-90°
Use the gimbal dial on the remote controller to control camera tilt, or go to Camera View in the DJI
GO 4 app, tap and hold on the screen until a blue circle appears, then drag the circle to control
the camera’s tilt.
The controllable range of the gimbal roll axis is 0° to 90°, enabling you to shoot in Landscape
Mode and Portrait Mode. The roll axis will rotate 90° when Portrait Mode is enabled.
It is recommended to use the Portrait Mode for taking photos instead of recording video. When
the aircraft is own in ways that taxes the system, for example emergency braking or ying in
Sport Mode, the gimbal roll axis will reach its endpoint and cause the gimbal to vibrate.
Gimbal Operation Modes
Two gimbal operation modes are available. Switch between the different operation modes on the camera
settings page of the DJI GO 4 app. Note that your mobile device must be connected to the remote
controller for changes to take effect. Refer to the table below for details:
Follow Mode
FPV Mode
Remove the Gimbal Clamp before powering on the aircraft.
A gimbal motor error may occur in these situations:
(1) The aircraft is placed on uneven ground or the gimbal’s motion is obstructed.
(2) The gimbal has been subjected to excessive external force, such as a collision.
Take off from at, open ground and protect the gimbal at all times.
Flying in heavy fog or clouds may make the gimbal wet, leading to temporary failure. The
gimbal will recover full functionality after it dries.
It is normal for the gimbal to beep upon initialization.
The angle between the gimbal’s orientation and aircraft’s nose remains
constant at all times.
The gimbal will synchronize with the movement of the aircraft to provide a
rst-person perspective ying experience.
Gimbal Camera
2017 DJI All Rights Reserved.
©
43
Page 44

DJI GO 4 App
This section introduces the main
functions of the DJI GO 4 app.
2017 DJI All Rights Reserved.
44
©
Page 45

DJI GO 4 App
The DJI GO 4 app is a mobile application designed specically for DJI equipment. Use this app to control
the gimbal, camera, and other aircraft functions. The app features Equipment, Editor, SkyPixel and Me
sections, which are used for conguring your aircraft, editing and sharing your photos and videos with
others.
80%
Connect your DJI device
Mavic Pro
Use AEB shoot to get more dynanic image
Camera
Learn more
Equipment Editor Skypixel Me
Equipment
Enter Camera View by tapping Camera on the DJI GO 4 welcome screen.
Camera View
DJI GO 4 App
10 118 97654321
24
READY TO GO (GPS)
09:29
23
22
21
20
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
P-GPS
12
61%
12
13
AE
14
15
16
17
18
19
2017 DJI All Rights Reserved.
©
45
Page 46

Mavic Pro User Manual
1. System Status
READY TO GO (GPS)
: This icon indicates aircraft ight status and various warning messages.
2. Obstacles Detection Status
: Red bars are displayed when obstacles are close to the aircraft. Orange bars are
displayed when obstacles are in detection range.
3. Battery Level Indicator
: The battery level indicator provides a dynamic display of the battery level. The colored
zones on the battery level indicator represent the power levels needed to carry out different functions.
4. Flight Mode
: The text next to this icon indicates the current ight mode.
Tap to congure the MC (Main Controller) Settings. These settings allow you to modify ight limits and
set gain values.
DJI GO 4 App
5. Camera Parameters
Displays camera settings parameters and capacity of the Micro SD card.
6. GPS Signal Strength
: Shows the current GPS signal strength. White bars indicate adequate GPS strength.
7. Forward Vision System Status
: Tap into this button to enable or disable features provided by the Forward Vision System.
8. Remote Controller Signal
: This icon shows the strength of the remote controller signal. The icon will blink when an
interference is recognized during ight. When there are no additional warnings in DJI GO 4, it means
that the interference will not affect operation and overall ight experience.
9. HD Video Link Signal Strength
: This icon shows the strength of the HD video downlink connection between the aircraft and the
remote controller. The icon will blink when an interference is recognized during ight. When there are
no additional warnings in DJI GO 4, it means that the interference will not affect operation and overall
ight experience.
10. Battery Level
: This icon shows the current battery level.
61%
Tap to view the battery information menu, set the various battery warning thresholds, and view the
battery warning history.
. Focus/Metering Button
11
/ : Tap to switch between focus and metering mode. Tap to select object for focusing or
metering. Auto Focus-Continuous will be triggered automatically according to the status of the aircraft
and camera after enabling Auto Focus.
2017 DJI All Rights Reserved.
46
©
Page 47

Mavic Pro User Manual
12. General Settings
: Tap to enter general setting menu for setting metrics, enabling livestream, display ight routes
and so on.
13. Auto Exposure Lock
: Tap to lock the exposure value.
AE
14. Gimbal Slider
: Displays the pitch of the gimbal.
15. Photo/Video Button
: Tap to switch between photo and video recording modes.
16. Shoot / Record Button
/ : Tap to start shooting photos or recording video.
17. Camera Settings
: Tap to enter the camera settings menu.
Tap to set ISO, shutter, and auto exposure values of the camera.
Tap to select photo modes. Mavic Pro supports Single Shot, Burst Shot, Interval Shot and Pano.
18. Playback
: Tap to enter the playback page and preview photos and videos as soon as they are captured.
19. Flight Telemetry
D 30M
H 10.0M
HS 10.0M/S
VS 2.0M/S
: Distance between the aircraft and the Home Point.
: Height from the Home Point.
: Aircraft horizontal speed.
: Aircraft vertical speed.
20. Map
Tap to view map.
21. Intelligent Flight Mode
: Tap to select Intelligent Flight Mode.
DJI GO 4 App
22. Smart RTH
: Initiate RTH home procedure. Tap to have the aircraft return to the last recorded home point.
2017 DJI All Rights Reserved.
©
47
Page 48

Mavic Pro User Manual
Auto Takeoff/Landing
23.
/ : Tap to initiate auto takeoff or landing.
24. Back
: Tap this icon to return to the main menu.
Slide left in the Camera view to enter the menu shown below.
READY TO GO (GPS)
Portrait/Landscape Gimbal up/down
12
P-GPS
09:29
Home Point: Aircraft Home Point: Me
61%
AE
DJI GO 4 App
Adjust screen brightness
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
Portrait/Landscape
Switch to Portrait mode by tapping the icon.
Gimbal up/down
Tap the icon to point the camera downward or forward.
Home Point
Use aircraft location or remote controller location as the home point.
Using Mobile Device to Control Aircraft
Apart from using the included remote controller, you may use the Wi-Fi connection on the mobile device
to control the aircraft. Follow the instructions below to learn how to control the aircraft over Wi-Fi.
1. Power off the aircraft, then toggle the Control Mode Switch to the “Wi-Fi” position.
Control Mode Switch
2. Power on the aircraft.
3. Turn on your mobile device's Wi-Fi and enter the Wi-Fi password shown on the front arm to connect to
the Mavic network.
4. Tap icon to take off the aircraft automatically. Tap on the screen and use the Virtual Joysticks to
navigate the aircraft.
2017 DJI All Rights Reserved.
48
©
Page 49

Mavic Pro User Manual
Launch the DJI GO 4 app and tap the icon on the top right of your screen, then scan the Wi-
Fi QR Code on the front arm to start connection. Note that this feature is available on Android
devices.
When using Wi-Fi in a wide open area with no Electromagnetic Interference, transmission
distance is approximately 262ft (80m) at an altitude of 164ft (50m). The maximum ight speed
is 9mph (14kph), maximum ascent speed is 2m/s and maximum descent speed is 1m/s.
The Wi-Fi frequency of your mobile device can be set to 2.4GHz (default) or 5GHz. On
supported devices, set Wi-Fi to 5GHz for less interference.
Press and hold the linking button for 5 seconds or more to set Wi-Fi password and SSID. Press
and release to rest the transmission frequency to 2.4 GHz.
Using Wi-Fi mode in a wide open area with less Electromagnetic Interference. If the Wi-Fi is
severely affected by the Electromagnetic Interference, use the remote controller to fly your
aircraft instead.
Using Virtual Joysticks
Ensure the mobile device has been connected to the aircraft before using the Virtual Joysticks. The
illustrations below are based on Mode 2 (left stick as throttle).
READY TO GO (GPS)
Virtual Joysticks GUI
Left Right
12
P-GPS
09:29
61%
AE
Move the aircraft upwards, downwards or rotate to the left or right by pressing on the left half of the
screen. Move the aircraft forwards, backwards or rotate to the left or right by pressing on the right half of
the screen.
Tap on the " " button to enable or disable Virtual Joysticks.
DJI GO 4 App
The area beyond the white cycle is also responsive to control commands.
©
2017 DJI All Rights Reserved.
49
Page 50

Mavic Pro User Manual
Editor
An intelligent video editor is built into the DJI GO 4 app. After recording several video clips and
downloading them to your mobile device, go to Editor on the home screen. You can then select a
template and a specied number of clips which are automatically combined to create a short lm that can
be shared immediately.
SkyPixel
View and share the photos and videos in the SkyPixel page.
Me
If you already have a DJI account, you will be able to participate in forum discussions, and share your
creation with the community.
DJI GO 4 App
2017 DJI All Rights Reserved.
50
©
Page 51

Flight
This section describes safe ight
practices and ight restrictions.
2017 DJI All Rights Reserved.
©
51
Page 52

Flight
Once pre-ight preparation is complete, it is recommended that you use the ight simulator in the DJI GO
4 app to hone your ight skills and practice ying safely. Ensure that all ights are carried out in an open
area.
Flight Environment Requirements
1. Do not use the aircraft in severe weather conditions. These include wind speeds exceeding 10 m/s,
snow, rain and fog.
2. Fly in open areas. Tall structures and large metal structures may affect the accuracy of the on-board
compass and GPS system.
3. Avoid obstacles, crowds, high voltage power lines, trees, and bodies of water.
4. Minimize interference by avoiding areas with high levels of electromagnetism, including base stations
and radio transmission towers.
5. Aircraft and battery performance is subject to environmental factors such as air density and temperature.
Be very careful when ying at altitudes greater than 16404 feet (5000 meters) above sea level, as the
Flight
performance of the battery and aircraft may be affected.
6. The Mavic Pro cannot use P-mode within the polar areas.
Flight Limits and No-Fly Zones
All unmanned aerial vehicle (UAV) operators should abide by all regulations set forth by government and
regulatory agencies including the ICAO and the FAA. For safety reasons, ights are limited by default,
which helps users operate this product safely and legally. Flight limitations include height limits, distance
limits, and No-Fly Zones.
When operating in P-mode, height limits, distance limits, and No-Fly Zones function concurrently to
manage ight safety.
Maximum ight altitude & Radius Limits
Maximum flight altitude and radius limits may be changed in the DJI GO 4 app. Be aware that the
maximum ight altitude cannot exceed 1640 feet (500 meters). In accordance with these settings, your
Mavic Pro will y in a restricted cylinder, as shown below:
2017 DJI All Rights Reserved.
52
©
Maximum Flight Altitude
Max Radius
Home Point
Height of aircraft
when turned on
Page 53

Mavic Pro User Manual
GPS Signal Strong Blinking Green
Flight Limits DJI GO 4 App Aircraft Status Indicator
Maximum Flight
Altitude
Max Radius
GPS Signal Weak Blinking Yellow
Maximum
Flight
Altitude
Max Radius No limits
If the aircraft ies out of the limit, you can still control the aircraft, but you cannot y it any farther.
If the aircraft ies out of the max radius, it will y back within range automatically when
GPS signal is strong.
For safety reasons, please do not y close to airports, highways, railway stations, railway lines,
city centers, or other sensitive areas. Fly the aircraft only within your line of sight.
Aircraft's altitude cannot
exceed the specied value.
Flight distance must be within
the max radius.
Flight Limits DJI GO 4 App Aircraft Status Indicator
Height is restricted to 16 feet (5
meters) when the GPS signal is
weak and Downward Vision System
is activated. Height is restricted to
98 feet (30 meters) when the GPS
signal is weak and Downward
Vision System is inactivated.
Warning: Height
limit reached.
Warning: Distance
limit reached.
Warning: Height limit
reached.
None.
Rapid red ashing
when close to the max
radius limit.
None.
Flight
No-Fly Zones
All No-Fly Zones are listed on the DJI official website at http://www.dji.com/flysafe/no-fly. No-Fly
Zones are divided into Airports and Restricted Areas. Airports include major airports and flying
elds where manned aircraft operate at low altitudes. Restricted Areas include border lines between
countries or sensitive institute.
Preight Checklist
1. Remote controller, Intelligent Flight Battery, and mobile device are fully charged.
2. Propellers are mounted correctly and rmly.
3. Micro SD card has been inserted, if necessary.
4. Gimbal is functioning normally.
5. Motors can start and are functioning normally.
6. The DJI GO 4 app is successfully connected to the aircraft.
7. Ensure that the sensors for the Forward and Downward Vision System are clean.
2017 DJI All Rights Reserved.
©
53
Page 54

Mavic Pro User Manual
Calibrating the Compass
It is recommended to calibrate the compass in any of the following situations when ying outdoors:
1. Flying at a location farther than 10 km away from the last ight location.
2. The aircraft hasn’t been own for more than one month.
3. A compass interference warning appears in the DJI GO 4 app, and the warning persists after chang-
ing location.
Restart the aircraft when calibration is complete.
DO NOT calibrate your compass where there is a chance of strong magnetic interference, such
as magnetite, parking structures, and steel reinforcements underground.
DO NOT carry ferromagnetic materials with you during calibration such as cellular phones.
The DJI GO 4 app will prompt you to resolve the compass issue if the compass is affected by
strong interference after calibration is complete. Follow the prompted instructions to resolve the
compass issue.
Flight
Calibration Procedures
Choose an open area to carry out the following procedures.
1. Tap the Aircraft Status Bar in the app and select “Calibrate”, then follow the on-screen instructions.
2. Hold the aircraft horizontally and rotate 360 degrees. The Aircraft Status Indicators will display a solid
green light.
3. Hold the aircraft vertically, with nose pointing downward, and rotate it 360 degrees around the center
axis.
2017 DJI All Rights Reserved.
54
©
Page 55

Mavic Pro User Manual
4. Re-calibrate the aircraft if the aircraft status indicators blink red.
If the Aircraft Status Indicator blinks red and yellow after the calibration procedure, move your
aircraft to a different location and try again.
DO NOT calibrate the compass near metal objects such as a metal bridge, cars, scaffolding.
If the aircraft status indicator is blinking red and yellow alternately after placing the aircraft on
the ground, the compass has detected magnetic interference. Change your location.
Auto Takeoff and Auto Landing
Auto Takeoff
Use auto takeoff only if the Aircraft Status Indicators are blinking green. Follow the steps below to use the
auto takeoff feature:
1. Launch the DJI GO 4 app, and enter “Camera” page.
2. Complete all steps on the pre-ight checklist.
3. Tap “ ”, and conrm that conditions are safe for ight. Slide the icon to conrm and takeoff.
4. Aircraft takes off and hovers at 1.2 meters above ground.
Aircraft Status Indicator blinks rapidly when it is using the Downward Vision System for
stabilization. The aircraft will automatically hover below 13 meters. It is recommended to wait
until there is sufcient GPS before using the Auto Take-off feature.
Auto-Landing
Use auto-landing only if the Aircraft Status Indicator is blinking green. Follow the steps below to use the
auto-landing feature:
1. Tap on , to ensure the landing condition is ideal. Slide to conrm.
2. Abort landing process immediately by using the button on the screen.
3. a. When Landing Protection determines that the ground is suitable for landing, the Mavic Pro will
land gently.
b. If Landing Protection determines that the ground is not suitable for landing, the Mavic Pro will hover
and wait for pilot conrmation.
c. If Landing Protection is not operational, the DJI GO 4 app will display a landing prompt when the
Mavic Pro descends below 0.5 meters. Pull down on the throttle or use the auto landing slider to
land.
4. Aircraft will land and turn off automatically.
Flight
2017 DJI All Rights Reserved.
©
55
Page 56

Mavic Pro User Manual
Starting/Stopping the Motors
Starting the Motors
A Combination Stick Command (CSC) is used to start the motors. Push both sticks to the bottom
inner or outer corners to start the motors. Once the motors have started spinning, release both sticks
simultaneously.
OR
Stopping the Motors
There are two methods to stop the motors.
Method 1: When Mavic Pro has landed, push the left stick down , then conduct the same CSC that was
used to start the motors, as described above . Motors will stop immediately. Release both sticks once
Flight
motors stop.
Method 2: When the aircraft has landed, push and hold the left stick down. The motors will stop after three
seconds.
OR
Method 1 Method 2
Stop Motors Mid-ight
Stop motors mid-ight will cause the aircraft to crash. The motors can only be stopped mid-ight when the
ight controller detects a critical error. (This setting can be changed in the DJI GO 4 app)
Flight Test
Takeo/Landing Procedures
1. Place the aircraft in an open, at area with the battery level indicators facing towards you.
2. Turn on the remote controller and your mobile device, then turn on the Intelligent Flight Battery.
3. Launch the DJI GO 4 app and enter the Camera page.
4. Wait until the Aircraft Indicator blinks green. This means the Home Point is recorded and it is now safe
to y. If they ash yellow, the Home Point has not been recorded.
5. Push the left stick up slowly to take off or use Auto Takeoff.
6. Shoot photos and videos using the DJI GO 4 app.
7. Pull down the left stick to descend, the aircraft will hover at 1.5 ft (0.5 m) above the ground for about 1
second, then hold the left stick at its lowest position until you touch the ground and the motors stop.
8. Turn off the Intelligent Flight Battery rst, then the Remote Controller.
2017 DJI All Rights Reserved.
56
©
Page 57

Mavic Pro User Manual
When the Aircraft Status Indicator blinks yellow rapidly during ight, the aircraft has entered Failsafe
mode.
A low battery level warning is indicated by the Aircraft Status Indicators blinking red slowly or
rapidly during ight.
Watch our video tutorials for more ight information.
Video Suggestions and Tips
1. Go through the full pre-ight checklist before each ight.
2. Select the desired gimbal operation mode in the DJI GO 4 app.
3. Only shoot video when ying in P-mode.
4. Always y in good weather and avoid ying in rain or heavy wind.
5. Choose the camera settings that suit your needs. Settings include photo format and exposure
compensation.
6. Perform ight tests to establish ight routes and preview scenes.
7. Push the control sticks gently to keep the aircraft’s movement smooth and stable.
Flight
2017 DJI All Rights Reserved.
©
57
Page 58

Appendix
2017 DJI All Rights Reserved.
58
©
Page 59

Appendix
Specications
Aircraft
Weight 1.62 lbs (734 g)
Weight (including gimbal cover) 1.64 lbs (743 g)
Dimensions 83 × 83 × 198 mm (folded)
Diagonal Length (propellers excluded) 335 mm
Max Ascent Speed 16.4 ft/s (5 m/s) in Sport Mode
Max Descent Speed 9.8 ft/s (3 m/s)
Max Speed 40.4 mph (65 kph) in Sport Mode without wind
Max Service Ceiling Above Sea Level 16404 feet (5000 m)
Max Flight Time
Max Hovering Time
Avg. Flight Time 21 minutes (general ight, 15% battery left)
Max Flight Distance
Operating Temperature 32° to 104° F (0° to 40° C)
Satellite Positioning Systems GPS/GLONASS
Operating Frequency
Transmitter Power (EIRP)
Gimbal
Controllable Range Pitch: -90° to +30°, Roll: 0°or 90° (Horizontally and vertically)
Forward Vision System
Sensing Range
Operating Environment Surfaces with clear patterns and adequate lighting (lux > 15)
Downward Vision System
Velocity Range ≤ 22.4 mph (36 kph) at 6.6 ft (2 m) above ground
Altitude Range 1 - 43 feet (0.3 - 13 m)
Operating Range 1 - 43 feet (0.3 - 13 m)
Operating Environment Surfaces with a clear patterns and adequate lighting (lux > 15)
Camera
Sensor
Mavic Pro Platinum: 30 minutes; Mavic Pro: 27 minutes
(0 wind at a consistent 15.5 mph (25 kph))
Mavic Pro Platinum: 27 minutes; Mavic Pro: 24 minutes
(0 wind)
Mavic Pro Platinum: 9.3 mi (15 km); Mavic Pro: 8 mi (13 km)
(0 wind)
FCC: 2.4-2.4835 GHz; 5.150-5.250 GHz; 5.725-5.850 GHz
CE: 2.4-2.4835 GHz; 5.725-5.850 GHz
SRRC: 2.4-2.4835 GHz; 5.725-5.850 GHz
2.4 GHz
FCC: ≤26 dBm; CE: ≤20 dBm; SRRC: ≤20 dBm
5.2 GHz
FCC: ≤23 dBm
5.8 GHz
FCC: ≤23 dBm; CE ≤13 dBm; SRRC: ≤23 dBm
Precision measurement range: 2 ft (0.7 m) to 49 ft (15 m)
Detectable range: 49 ft (15 m) to 98 ft (30 m)
1/2.3” CMOS Effective pixels:12.35 Megapixels
(Total pixels: 12.71 M)
Appendix
2017 DJI All Rights Reserved.
©
59
Page 60

Mavic Pro User Manual
Lens
ISO Range 100 - 3200 (video), 100 - 1600 (photo)
Electronic Shutter Speed 8 s to 1/8000 s
Max Image Size 4000×3000
Still Photography Modes
Video Recording Modes
Video Storage Bitrate 60 Mbps
Supported File Systems FAT32 (≤ 32 GB), exFAT (> 32GB)
Photo JPEG, DNG
Video MP4, MOV (MPEG-4 AVC/H.264)
Appendix
Supported SD Cards
Remote Controller
Operating Frequency 2.400 GHz to 2.4835 GHz
Max Transmission Distance
Operating Temperature 32° to 104° F (0° to 40° C)
Battery 2970 mAh
Transmitter Power ( EIRP ) FCC: ≤ 26 dBm; CE: ≤ 20 dBm; SRRC: ≤20 dBm
Operating Voltage 950 mA @ 3.7 V
Supported Mobile Device Size
Charger
Voltage 13.05 V
Rated Power 50 W
Intelligent Flight Battery
Capacity 3830 mAh
Voltage 11.4 V
Battery Type LiPo 3S
Energy 43.6 Wh
Net Weight Approx. 0.5 lbs (240 g)
Operating Temperature 41° to 104° F (5° to 40° C)
Max. Charging Power 100 W
78.8° FOV, 28 mm (35 mm format equivalent) f/2.2
Distortion <1.5% Focus from 0.5 m to ∞
Single shot
Burst shooting: 3/5/7 frames
Auto Exposure Bracketing (AEB):
3/5 bracketed frames at 0.7EV Bias
Interval
HDR
C4K: 4096×2160 24p, 4K: 3840×2160 24/25/30p
2.7K: 2720×1530 24/25/30p
FHD: 1920×1080 24/25/30/48/50/60/96p
HD: 1280×720 24/25/30/48/50/60/120p
microSDTM. Max capacity: 64GB Class 10 or UHS-1 rating
required.
FCC: 4.3 mi (7 km); CE: 2.5 mi (4 km)
SRRC: 2.5 mi (4 km) Unobstructed and free of interference.
Thickness supported: 6.5 - 8.5 mm, Max length: 160 mm
Supported USB port types:
Lightning, Micro USB (Type-B), USB Type-C
TM
2017 DJI All Rights Reserved.
60
©
Page 61

Mavic Pro User Manual
Firmware Updates
Use DJI Assistant 2 or DJI GO 4 app to update aircraft and remote controller.
Using the DJI GO 4 App
Connect the remote controller and the DJI GO 4 app, You will be reminded if a new rmware upgrade
is available. To start upgrading, connect your mobile device to the Internet and follow the on-screen
instructions.
Using DJI Assistant 2
Use the DJI Assistant 2 to update the rmware for the remote controller and the aircraft simultaneously.
Follow the instructions below to update the rmware through DJI Assistant 2:
1. With the remote controller and the aircraft powered off, connect the remote controller to the computer
through the charging port using a micro USB cable.
2. Power on the remote controller and aircraft.
3. Launch DJI Assistant 2 and login with your DJI account.
4. Select “Mavic Pro” and click on the “Firmware Updates” on the left panel.
5. Select the rmware version that you wish to update.
6. Wait for the rmware to be downloaded and rmware update will start automatically.
7. Reboot the aircraft and the remote controller after the rmware update is complete.
The remote controller and the aircraft can also be updated separately.
If you connect the aircraft to the computer via the aircraft’s micro USB port, you are only able to
update the aircraft rmware.
The rmware update will take around 15 minutes. It is normal that the gimbal goes limp, aircraft
status indicator blinks abnormally and the aircraft reboots. Please wait patiently until the update
is complete.
Ensure the computer has access to the Internet.
Ensure the batteries have at least 50% power.
Do not disconnect the aircraft from the computer during rmware update.
Please note that rmware update may reset various Main Controller Settings, such as the RTH
Altitude and Maximum Flight Distance, to factory defaults. Before the update, take note of your
preferred DJI GO 4 settings, and readjust them after the update to suit your preference.
Appendix
Intelligent Flight Mode
Intelligent Flight mode includes Course Lock, Home Lock, Point of Interest (POI), Follow Me and
Waypoints features to assist users to create professional shoots during the ight. Course Lock and Home
Point lock helps to lock the orientation of aircraft so that the user can focus more on other operations.
Point of Interest, Follow Me and Waypoints mode enable aircraft to y automatically according to the
pre-set ight maneuvers.
Course Lock
Home Lock Pull the pitch stick backward to move the aircraft toward its recorded Home Point.
Point of Interest
Lock the current nose direction as the aircraft’s forward direction. The aircraft will
move in the locked directions regardless of its orientation (yaw angle).
The aircraft will orbit around the subject automatically to allow the operator can be
more focus on framing their shoot on the subject in Point of Interest.
2017 DJI All Rights Reserved.
©
61
Page 62

Mavic Pro User Manual
A virtual tether is created between the aircraft and the mobile device so that the
Follow Me
Waypoints
Enable Multiple Flight Mode by launching the DJI GO 4 app > Camera View > > Multiple Flight Mode
before using the Intelligent Flight Mode for the rst time.
aircraft can track your movement as you move. Note that Follow Me performance is
subject to the GPS accuracy on the mobile device.
Record a flight path, then the aircraft will fly along the same path repeatedly
while you control the camera and orientation. The ight path can be saved and
re-apply in the future.
Remote Controller LCD Screen Menu Information
Remote Controller Status
BAT xx PCT Remote Controller battery level.
SHUTDOWN_ Remote controller is powering off.
CHARGING_ Remote controller is charging.
USB PLUGGED Mavic Pro has been connected to a computer.
Appendix
FC U-DISK Flight Controller is reading data.
UPGRADING Upgrading.
BINDING Aircraft is binding with the remote controller.
Before Flight
CONNECTING_ The remote controller is connecting to the aircraft.
SYS INITING System is initiating.
READY TO GO Ready to take off.
Flight Mode
BEGINNER In Beginner Mode.
GPS MODE In P-GPS Mode.
OPTI MODE In P-OPTI Mode.
ATTI MODE In P-ATTI Mode.
SPORT MODE In Sport Mode.
Flight Status
TAKING OFF Taking off.
LANDING Landing.
GOING HOME Returning to Home.
NAV GOHOME Returning to home.
NAV LANDING Landing.
MAX ALT. Aircraft has reached maximum altitude.
MAX RADIUS Aircraft has reached maximum radius.
OBSTACLE Obstacle detected.
NO FLY ZONE Aircraft is in a No Fly zone.
Intelligent Flight Mode Status
TRIPOD In Tripod Mode.
ACTIVETRACK Using ActiveTrack.
TAP FLY Using TapFly.
COURSE LOCK In Course Lock Mode
HOME LOCK In Home Lock Mode
POI MODE In Point of Interest Mode
2017 DJI All Rights Reserved.
62
©
Page 63

Mavic Pro User Manual
WAY POINT In Waypoints Mode.
FOLLOW ME In Follow Me Mode.
TERRAIN In Terrain Follow Mode.
System Waning and Error Information
SYS WARNING+CHECK APP System Warning. See DJI GO 4 app for more information.
UNACTIVATED+CHECK APP Aircraft not Activated. See DJI GO 4 app for more information.
MAG INTERF+CHECK APP Compass Error. See DJI GO 4 app for more information.
BATTERY ERR+CHECK APP Battery Error. See DJI GO 4 app for more information.
SD ERR+CHECK APP Micro SD Card Error. See DJI GO 4 app for more information.
CALIBRATING IMU Calibrating/Did not restart aircraft after calibration is
complete.
STICK ERR+RE-CTR STCK Control stick is not centered. Re-center it.
WHEEL ERR+RE-CTR WHEL Left Dial on the remote controller is not centered. Re-center it.
STICK ERR Control stick error. Calibrate the control sticks in the DJI GO 4 app.
MECH ERR Remote Controller Error. Calibrate the remote controller in the DJI
GO 4 app. If this problem persists, contact DJI support.
STICK EMI3+AUTO RTH Control Sticks are experiencing severe electromagnetic
interference and cannot function. The aircraft will return to home
and land immediately.
STICK EMI2+MANUAL RTH Control Sticks are experiencing electromagnetic interference and
may not function. Use Smart RTH and land the aircraft as soon as
possible.
STICK EMI1 Control Sticks are experiencing slight electromagnetic
interference, y the aircraft to another location.
SD FULL Micro SD Card is full.
NO PROP No propellers attached.
BAT TEMP HI Intelligent Flight Battery is too hot.
BATTERY ERR Intelligent Flight Battery error.
BAT TEMP LO Intelligent Flight Battery is too cold.
LOW BATTERY Intelligent Flight Battery low battery.
RC LOW BAT Remote Controller low battery.
NO RC SIGNL Remote Controller signal lost.
RC TEMP HI Remote Controller too hot.
NO RTH Aircraft cannot Return to Home.
Appendix
After-Sales Information
Visit the following pages to learn more about After-sales policy and warranty information:
1. After-sales Policy: http://www.dji.com/service
2. Refund Policy: http://www.dji.com/service/refund-return
3. Paid Repair Service: http://www.dji.com/service/repair-service
4. Warranty Service: http://www.dji.com/service/warranty-service
2017 DJI All Rights Reserved.
©
63
Page 64

DJI Support
http://www.dji.com/support
This content is subject to change.
Download the latest version from
http://www.dji.com/mavic
If you have any questions about this document, please contact DJI by
sending a message to
TM
is a trademark of DJI.
MAVIC
Copyright © 2017 DJI All Rights Reserved.
DocSupport@dji.com
.
 Loading...
Loading...