

Page 1
MAVIC PRO
Manuale utente
2017.06
V1.6
Page 2
Ricerca per parole chiave
Ricercare parole chiave come "batteria" e "installazione" per trovare un argomento. Per Mac
per avviare una ricerca, se si utilizza Adobe Acrobat Reader per leggere questo documento,
premere Ctrl+F per Windows o Comando+F.
Navigazione degli argomenti
È possibile visualizzare un elenco completo di argomenti nell'indice. Fare clic su un argomento
per navigare verso la rispettiva sezione.
Stampa di questo documento
Questo documento supporta la stampa ad alta risoluzione.
Utilizzo del presente manuale
Legende
Avvertimento Importante Consigli e suggerimenti Riferimento
Leggere prima del primo volo
Leggere i documenti seguenti prima di utilizzare MAVICTM Pro:
1. Contenuto della confezione di Mavic Pro
2. Manuale utente di Mavic Pro
3. Guida di avvio rapido di Mavic Pro
4. Limitazioni di responsabilità e direttive sulla sicurezza di Mavic Pro
5. Direttive sulla sicurezza della batteria di volo intelligente di Mavic Pro
Prima di volare, si consiglia di guardare tutti i tutorial disponibili sul sito web ufciale di DJITMe di
leggere le Limitazioni di responsabilità. Prepararsi al primo volo rivedendo la Guida di avvio rapido
di Mavic Pro e, per ulteriori dettagli, fare riferimento al Manuale utente.
Tutorial
Si prega di guardare i tutorial forniti al link seguente, per imparare a utilizzare Mavic
Pro in modo sicuro:
http://www.dji.com/mavic
Scaricare l'app DJI GO 4
Scaricare e installare l'app DJI GOTM 4 prima di utilizzare il velivolo. Eseguire la
scansione del codice QR presente a destra per scaricare la versione più recente.
La versione Android dell'app DJI GO 4 è compatibile con Android 4.4 o successivo.
La versione iOS dell'app DJI GO 4 è compatibile con iOS 9.0 o successivo.
Scaricare DJI Assistant 2
Scaricare DJI Assistant 2 all'indirizzo http://www.dji.com/mavic/download
2017 DJI Tutti i diritti riservati.
2
©
Page 3

Contenuti
Utilizzo del presente manuale
Legende
Leggere prima del primo volo
Tutorial
Scaricare l'app DJI GO 4
Scaricare DJI Assistant 2
Prolo del prodotto
Introduzione
Caratteristiche principali
Preparazione di Mavic Pro
Schema del velivolo
Schema del dispositivo di controllo remoto
Velivolo
Prolo dl velivolo
Modalità di volo
Indicatore di stato di volo
Ritorno alla posizione iniziale (RTH)
Modalità di volo intelligente
Sistema di visione in avanti e verso il basso
Registratore di volo
Montaggio e smontaggio delle eliche
Batteria di volo intelligente
Dispositivo di controllo remoto
Prolo del dispositivo di controllo remoto
Utilizzo del dispositivo di controllo remoto
Modalità doppio dispositivo di controllo remoto
Collegamento del dispositivo di controllo remoto
Telecamera e gimbal
Prolo della telecamera
Gimbal
2
2
2
2
2
2
6
6
6
6
8
8
11
11
11
12
13
17
23
26
26
27
32
32
32
38
39
41
41
42
2017 DJI Tutti i diritti riservati.
©
3
Page 4

App DJI GO 4
Equipment
Editor
SkyPixel
Me
Volo
Requisiti ambientali del volo
Limiti di volo e zone vietate al volo (No-Fly Zones)
Elenco dei controlli preliminari
Taratura della bussola
Decollo e atterraggio automatici
Avviamento/arresto dei motori
Prova di volo
Appendice
Speciche
Aggiornamenti del rmware
Modalità di volo intelligente 60
Informazioni relative al menu dello schermo LCD del dispositivo di
controllo remoto
Informazioni per l'assistenza
44
44
49
49
49
51
51
51
52
53
54
55
55
58
58
59
61
62
2017 DJI Tutti i diritti riservati.
4
©
Page 5

Prolo del prodotto
Questa sezione presenta Mavic Pro ed
elenca i componenti del velivolo e del
dispositivo di controllo remoto.
2017 DJI Tutti i diritti riservati.
©
5
Page 6
Prolo del prodotto
Introduzione
Mavic Pro di DJI è la telecamera di volo più piccola di DJI, dotata di una telecamera completamente
stabilizzata, della modalità di volo intelligente e della funzione per evitare gli ostacoli integrate in
un design pieghevole rivoluzionario. Cattura video da 4K e foto da 12 megapixel, e supporta le
modalità ActiveTrackTM e TapFlyTM per effettuare scatti complessi senza sforzo.
Mavic Pro vanta una velocità di volo massima di 65 km/h (40 mph) e un tempo di volo massimo di
27 minuti*.
Prolo del prodotto
* Il tempo di volo massimo è stato testato in assenza di vento a velocità costante di 25 km/h (15,5 mph).
Questo valore va considerato soltanto come riferimento.
Caratteristiche principali
Mavic Pro è un velivolo ultra-portatile grazie al suo rivoluzionario design pieghevole.
Telecamera e gimbal: con Mavic Pro si possono riprendere video da 4K no a 30 fotogrammi al
secondo e si possono scattare foto da 12 megapixel più vive e nitide che mai, il tutto stabilizzato dal
gimbal compatto di bordo.
Sistema di controllo di volo: la nuova generazione del sistema di controllo di volo è stata aggiornata per
fornire un'esperienza di volo più sicura e più afdabile. Il velivolo è in grado di tornare automaticamente
alla sua posizione iniziale quando perde il segnale di trasmissione o se il livello di carica della batteria è
basso. Oltre a essere in grado di rimanere sospeso in posizione al chiuso a basse altitudini, il velivolo è
anche in grado di rilevare ed evitare gli ostacoli sulla sua traiettoria, migliorando così la sicurezza.
Downlink video in HD: nel dispositivo di controllo remoto è incorporata l'OCUSYNCTM, ultima tecnologia di
trasmissione a lungo raggio di DJI, che offre una gamma di trasmissione massima di 7 km (4,3 mi) offrendo
la possibilità di controllare il velivolo e di eseguire video in streaming sul dispositivo mobile a 1080p.
Preparazione di Mavic Pro
Tutti i bracci del velivolo sono ripiegati alla consegna. Seguire le istruzioni riportate di seguito per
aprire tutti i bracci.
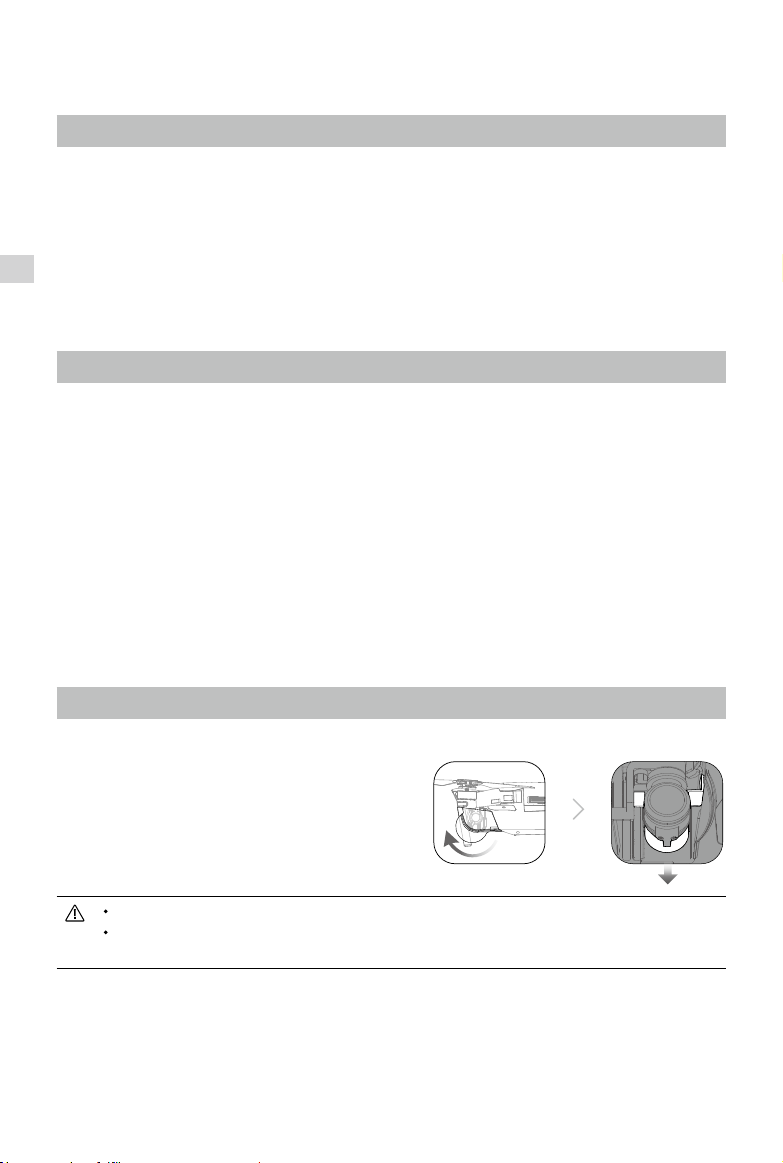
Preparazione del velivolo
Rimuovere il coperchio del gimbal e il supporto
del gimbal dalla telecamera.
Il coperchio del gimbal serve a proteggere il gimbal stesso. Rimuoverlo quando necessario.
Utilizzare il supporto e il coperchio del gimbal per proteggere quest'ultimo quando Mavic
Pro non è in uso.
Fissaggio delle eliche
Fissare le eliche ad anello di colore bianco sulla base di montaggio con i contrassegni di colore
bianco. Premere l'elica verso il basso sulla piastra di montaggio e ruotarla in direzione di blocco
no a ssarla. Fissare le altre eliche sulla base di montaggio senza i contrassegni.
2017 DJI Tutti i diritti riservati.
6
©
Page 7
Manuale utente
Contrassegnato Non contrassegnato
Mavic Pro
di
Aprire i bracci
1. Aprire prima i bracci anteriori, poi i bracci posteriori del velivolo come illustrato.
2. Aprire tutte le pale delle eliche.
Aprire prima i bracci e le eliche anteriori, quindi quelli posteriori. Prima di accendere il
velivolo, assicurarsi che tutti i bracci e che tutte le eliche siano aperti, in caso contrario,
l'autodiagnosi potrebbe esserne compromessa.
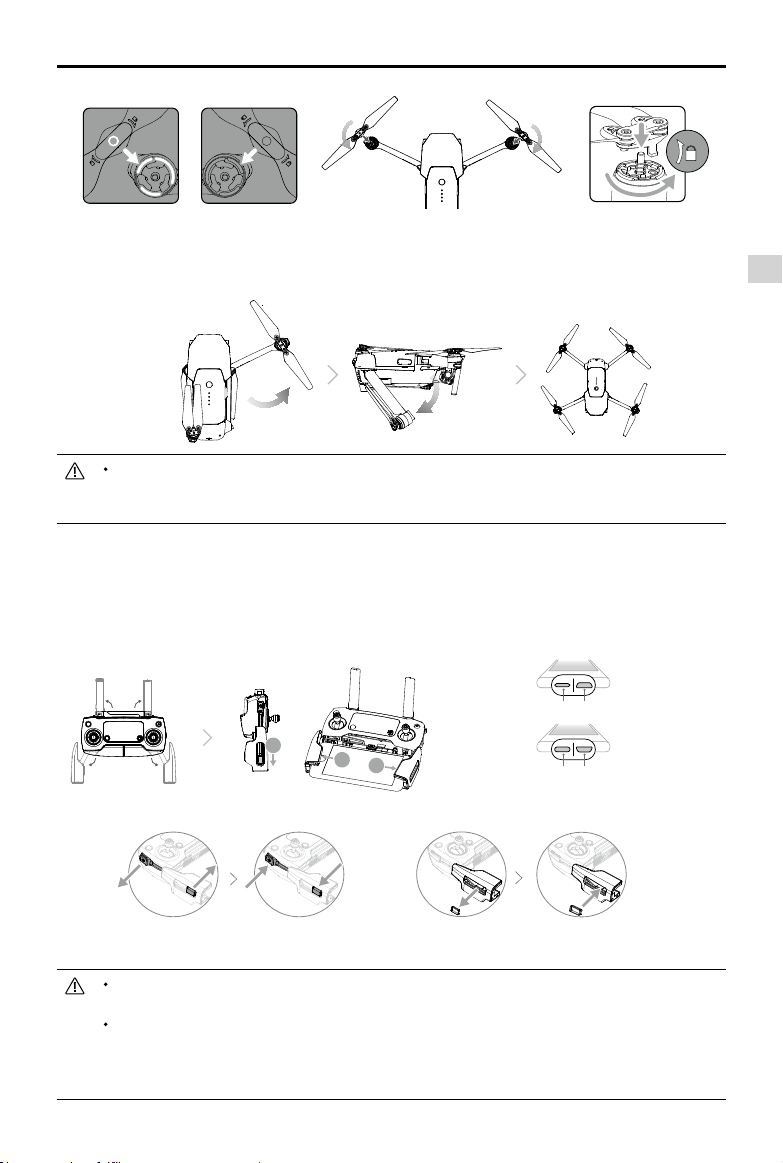
Preparazione del dispositivo di controllo remoto
1. Aprire i supporti e le antenne del dispositivo mobile.
2. Scegliere un cavo RC adeguato in base al tipo di dispositivo mobile utilizzato. È stato collegato
un cavo RC con connettore Lightning e sono inclusi il cavo connettore micro-USB standard e il
cavo connettore USB Type-C. È disponibile un cavo connettore micro-USB inverso opzionale.
Inserire il dispositivo mobile e ssarlo.
Prolo del prodotto
Connettore Lightning
1
2
3
Connettore USB Type-C
Connettore micro-USB
Connettore micro-USB
inverso
Fare riferimento alla gura riportata di seguito per informazioni sula sostituzione del cavo RC.
Il cursore del cavo RC deve essere sostituito se si utilizza
un cavo RC USB Type-C.
Quando si utilizza il dispositivo di controllo remoto per il controllo del velivolo, assicurarsi
che il commutatore della modalità di controllo sia attivato su "RC".
È anche possibile collegare il dispositivo mobile al dispositivo di controllo remoto tramite un cavo
USB. Inserire un'estremità del cavo nel dispositivo mobile e l'altra estremità nella porta USB sul
lato inferiore del dispositivo di controllo remoto. Quando si utilizza un cavo USB, assicurarsi di
scollegare il cavo RC dalla porta micro-USB presente sul dispositivo di controllo remoto.
2017 DJI Tutti i diritti riservati.
©
7
Page 8
Manuale utente
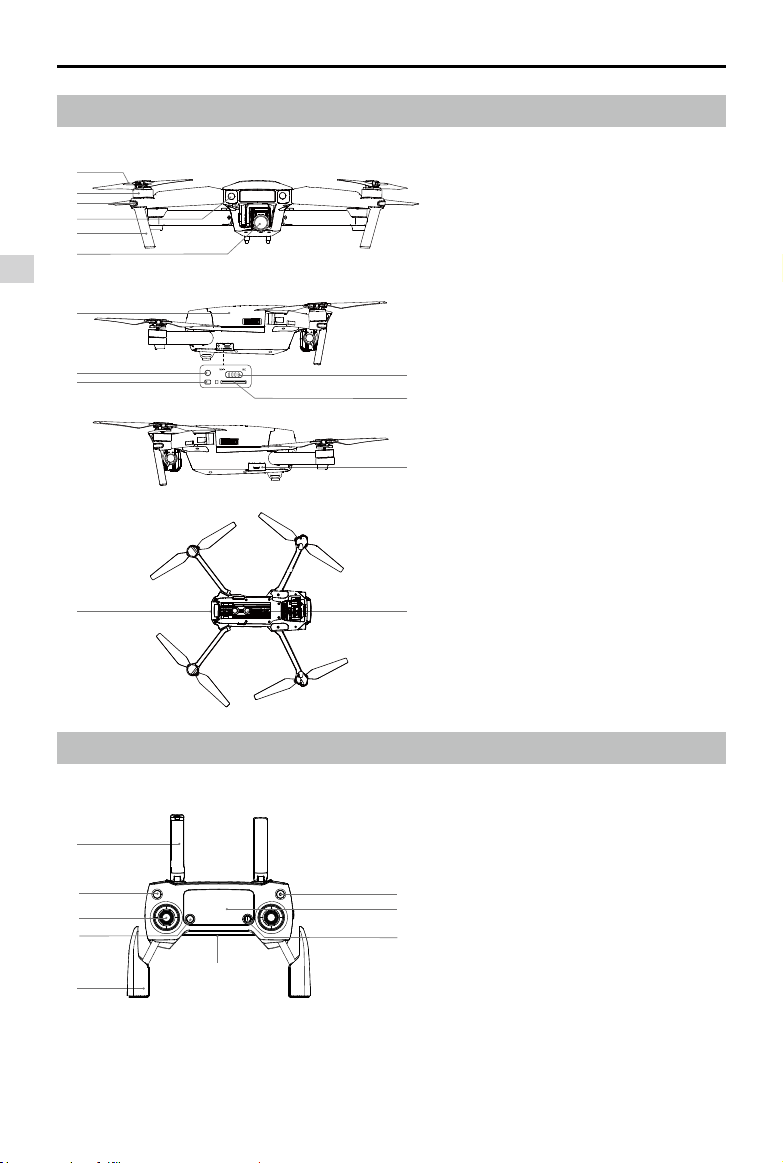
Schema del velivolo
1
2
3
4
5
6
Prolo del prodotto
7
8
9
Mavic Pro
di
1. Elica
2. Motore
3. Indicatore LED anteriore
4. Sistema di visione in avanti
5. Carrello di atterraggio
(con antenna integrata)
11
6. Gimbal e telecamera
10
7. Batteria di volo intelligente
8. Pulsante di collegamento
12
9. Indicatore dello stato di collegamento
10. Slot per micro-scheda SD per
telecamera
11. Commutatore della modalità di controllo
12. Porta micro-USB
1413
13. Indicatore di stato del velivolo
14. Sistema di visione verso il basso
Schema del dispositivo di controllo remoto
1
2
4
6
8
2017 DJI Tutti i diritti riservati.
8
©
9
3
5
7
1. Antenne
Trasmettono il comando del velivolo e
il segnale video.
2. Pulsante di ritorno alla posizione
iniziale (RTH)
Premere e tenere premuto il pulsante
per avviare il ritorno alla posizione
iniziale (RTH). Premere nuovamente
per annullare la funzione RTH.
3. Pulsante di accensione
Attiva e disattiva il dispositivo di
controllo remoto.
4. Levetta di comando
Controlla l'orientamento e il movimento
del velivolo.
Page 9
Manuale utente
Mavic Pro
di
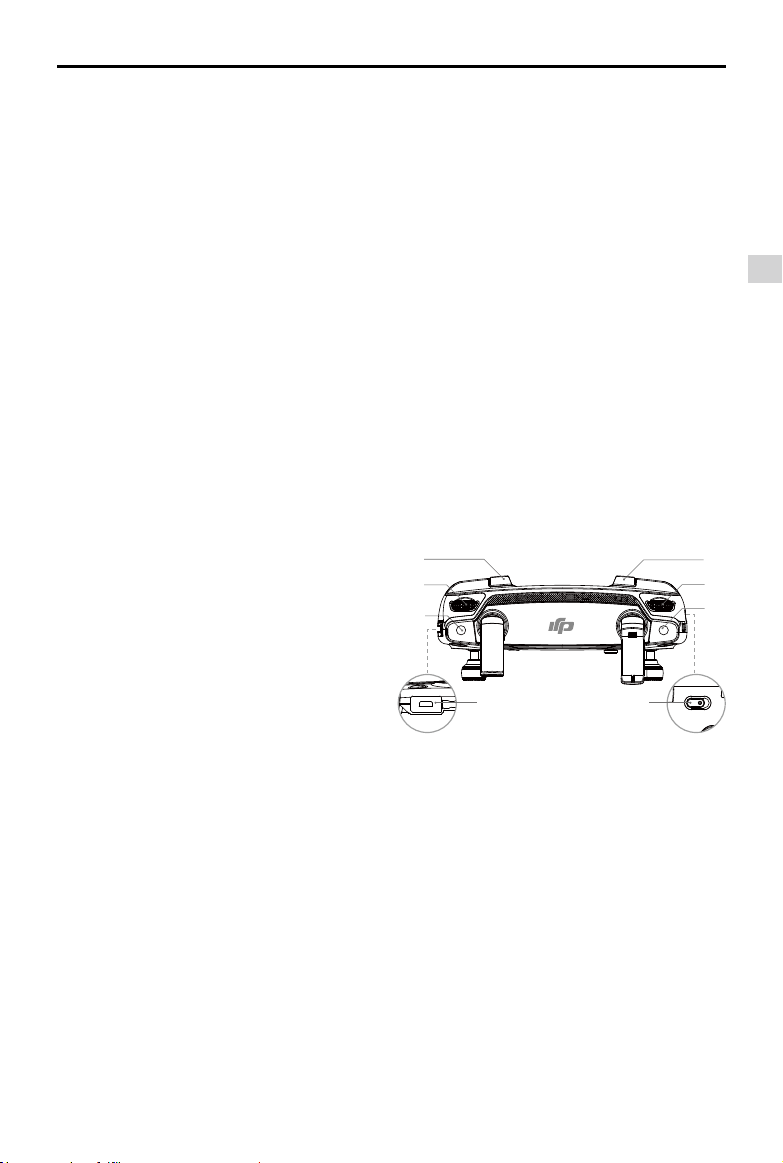
5. Schermo LCD
Visualizza lo stato del velivolo e del
dispositivo di controllo remoto.
6. Pulsante di pausa del volo
Premere una volta per la frenatura di
emergenza.
7. Pulsante 5D
La congurazione predenita è elencata di
seguito. Impostare questi valori nell'app DJI GO
4 in base alle proprie preferenze.
Sinistra: zoom avanti
Destra: zoom indietro
Verso l'alto: gimbal in avanti
Verso il basso: gimbal verso il basso
Premere verso il basso: aprire il menu di
volo intelligente di DJI GO 4.
10. Pulsante C1
La congurazione predenita è elencata
di seguito. Impostare questi valori nell'app
DJI GO 4 in base alle proprie preferenze.
Premere una volta per mettere a fuoco il
centro o aggiungere un waypoint quando
si utilizzando i waypoint.
11. Pulsante C2
La congurazione predenita è elencata
di seguito. Impostare questi valori nell'app
DJI GO 4 in base alle proprie preferenze.
Premere una volta per avviare la
riproduzione o eliminare un waypoint
quando si utilizzando i waypoint.
12. Selettore del gimbal
Controllare l'inclinazione della telecamera.
13. Selettore delle impostazioni della telecamera
Ruotare il selettore per regolare le
impostazioni della telecamera. (Funziona
solo quando il dispositivo di controllo
remoto non è collegato a un dispositivo
mobile che esegue l'app DJI GO 4)
14. Pulsante di registrazione
Premere il pulsante per avviare la
registrazione video. Premere nuovamente
il pulsante per arrestare la registrazione.
8. Supporto per dispositivo mobile
Monta saldamente il dispositivo mobile sul
dispositivo di controllo remoto.
9. Porta USB
Collega il dispositivo mobile per accedere
all'app DJI GO 4.
10
12
14
1716
15. Pulsante dell'otturatore
Premere il pulsante per scattare una foto.
Se è selezionata la modalità a rafca, si
ottiene il numero di foto preimpostato.
16. Presa di alimentazione
Per caricare la batteria del dispositivo di
controllo remoto, collegare il caricabatterie.
Collegare questa presa al vostro dispositivo
mobile utilizzando il cavo RC.
17. Commutatore della modalità di volo
Commutare tra la modalità P e la modalità S.
Prolo del prodotto
11
13
15
2017 DJI Tutti i diritti riservati.
©
9
Page 10

Velivolo
Questa sezione introduce le funzioni
del dispositivo di controllo di volo, dei
sistemi di visione in avanti e verso il
basso e della batteria di volo intelligente.
2017 DJI Tutti i diritti riservati.
10
©
Page 11
Velivolo
Prolo dl velivolo
Il velivolo Mavic Pro comprende un dispositivo di controllo di volo, un sistema video downlink, un
sistema di propulsione e una batteria di volo intelligente. Questa sezione introduce le funzioni del
dispositivo di controllo di volo, del sistema video downlink e di altri componenti del velivolo.
Modalità di volo
Per Mavic Pro, sono disponibili le modalità di volo seguenti:
Modalità P (Posizionamento):
Nota: la modalità P richiede grandi movimenti della levetta per
Modalità S (Sport):
Nota: le risposte del velivolo sono ottimizzate per fare in modo che i
Il sistema di visione in avanti si disattiva in modalità S (Sport), il che signica che il
velivolo non sarà in grado di evitare automaticamente gli ostacoli sulla sua traiettoria.
In modalità S (Sport), la velocità massima del velivolo e la distanza di frenata sono state
signicativamente aumentate. In assenza di vento, occorre una distanza di frenata minima
di 30 metri.
La velocità di discesa è notevolmente maggiore in modalità S (Sport).
In modalità S (Sport), la reattività del velivolo aumenta signicativamente, il che signica
che il movimento di un bastoncino sul dispositivo di controllo remoto si traduce in una
grande distanza percorsa dal velivolo. Durante il volo, siate vigili e mantenete uno spazio
di manovra adeguato.
Utilizzare il commutatore della modalità di volo per modicare la modalità di volo del velivolo.
per il posizionamento, il velivolo utilizza il GPS. Con i sistemi di visione
la modalità P funziona meglio quando il segnale GPS è forte. Il velivolo
utilizza il GPS e i sistemi di visione in avanti e verso il basso per localizzarsi,
stabilizzarsi automaticamente e volare tra gli ostacoli. In questa modalità
sono disponibili funzioni avanzate quali TapFly e ActiveTrack. Quando il
sistema di visione in avanti è attivato e l'illuminazione è sufciente,
l'angolo di assetto di volo massimo è di 16° con una velocità di volo
massima di 36 km/h (22 mph). Quando il rilevamento frontale degli
ostacoli è disattivato, l'angolo di assetto di volo massimo è di 25° e la
velocità di volo massima è di 58 km/h (36 mph).
Il velivolo passa automaticamente a ATTI quando il segnale GPS
è debole e l'illuminazione è insufciente per i sistemi di visione in
avanti e verso il basso. Il velivolo controlla l'altitudine utilizzando
esclusivamente il barometro per il posizionamento.
raggiungere velocità elevate.
in avanti e verso il basso sono disattivati e con la modalità Sport
attivata, il velivolo non è in grado di rilevare ed evitare gli ostacoli.
In modalità S non è disponibile la funzione della stazione di terra né
quella di volo intelligente.
movimenti della levetta siano più reattivi al ne di garantire agilità e
velocità.
Velivolo
2017 DJI Tutti i diritti riservati.
©
11
Page 12
Manuale utente
Mavic Pro
di
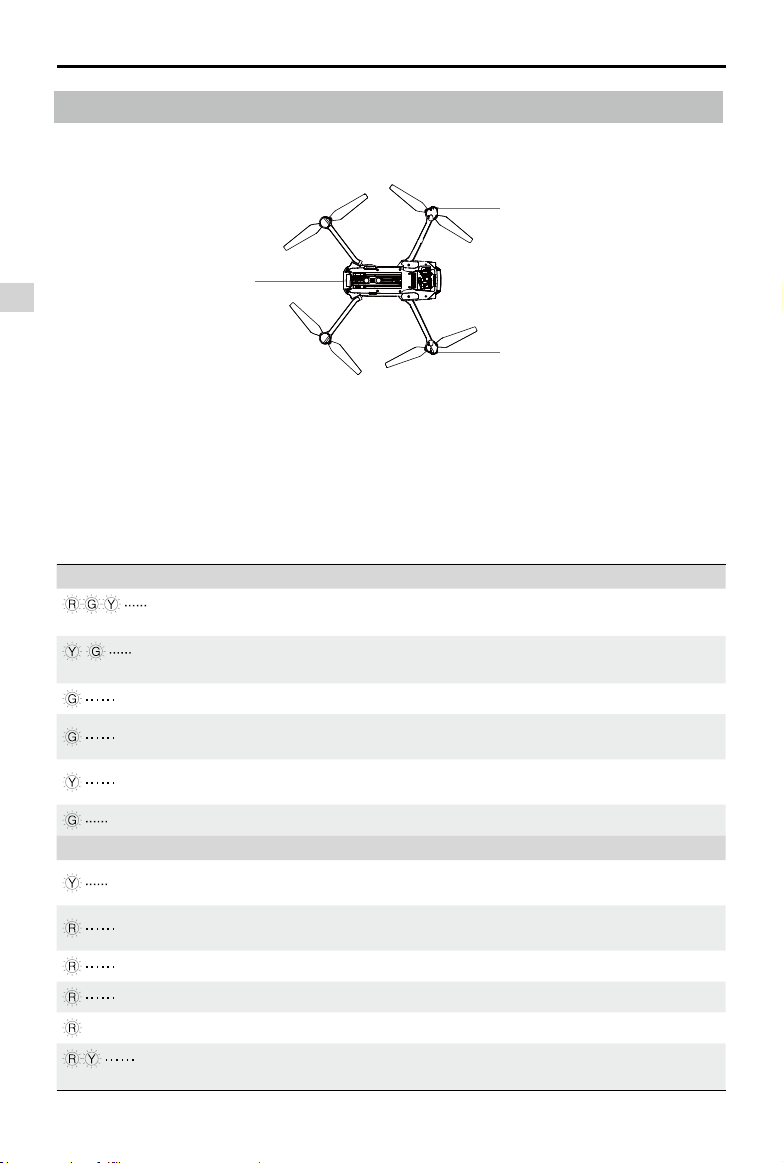
Indicatore di stato di volo
Mavic Pro dispone di LED anteriori e di un indicatore di stato di volo. Le posizioni di questi LED
sono illustrate nella gura seguente:
LED anteriore
Indicatore di stato del velivolo
Velivolo
LED anteriore
I LED anteriori indicano l'orientamento del velivolo. Quando il velivolo è attivato, i LED anteriori si
illuminano di colore rosso sso per indicare la parte anteriore (o muso) del velivolo (il LED anteriore
può essere disattivato dall'app DJI GO 4). L'indicatore di stato del velivolo comunica lo stato del
sistema del dispositivo di controllo di volo. Per ulteriori informazioni sull'indicatore di stato del
velivolo, fare riferimento alla tabella riportata di seguito.
Descrizione dell'indicatore di stato del velivolo
Normale
Rosso, verde e giallo lampeggianti
in alternanza
Giallo e verde lampeggianti in
alternanza
Verde lampeggiante lento
Verde lampeggiante per 2 volte
Giallo lampeggiante lentamente
Verde lampeggiante rapidamente
Avvertimento
Giallo lampeggiante rapidamente
Rosso lampeggiante lentamente
Rosso lampeggiante rapidamente
Rosso lampeggiante
— Rosso sso
Rosso e giallo lampeggianti
rapidamente in alternanza
Accensione e auto-diagnosi
Riscaldamento
Modalità P o modalità S con GPS
Modalità P con sistemi di visione in avanti e
verso il basso
Assenza di GPS e dei sistemi di visione in avanti
e verso il basso
Frenata
Perdita del segnale del dispositivo di controllo
remoto
Avvertimento di livello basso di carica della
batteria
Avvertimento di batteria quasi scarica
Errore IMU
Errore critico
Necessaria taratura della bussola
2017 DJI Tutti i diritti riservati.
12
©
Page 13
Manuale utente
Mavic Pro
di
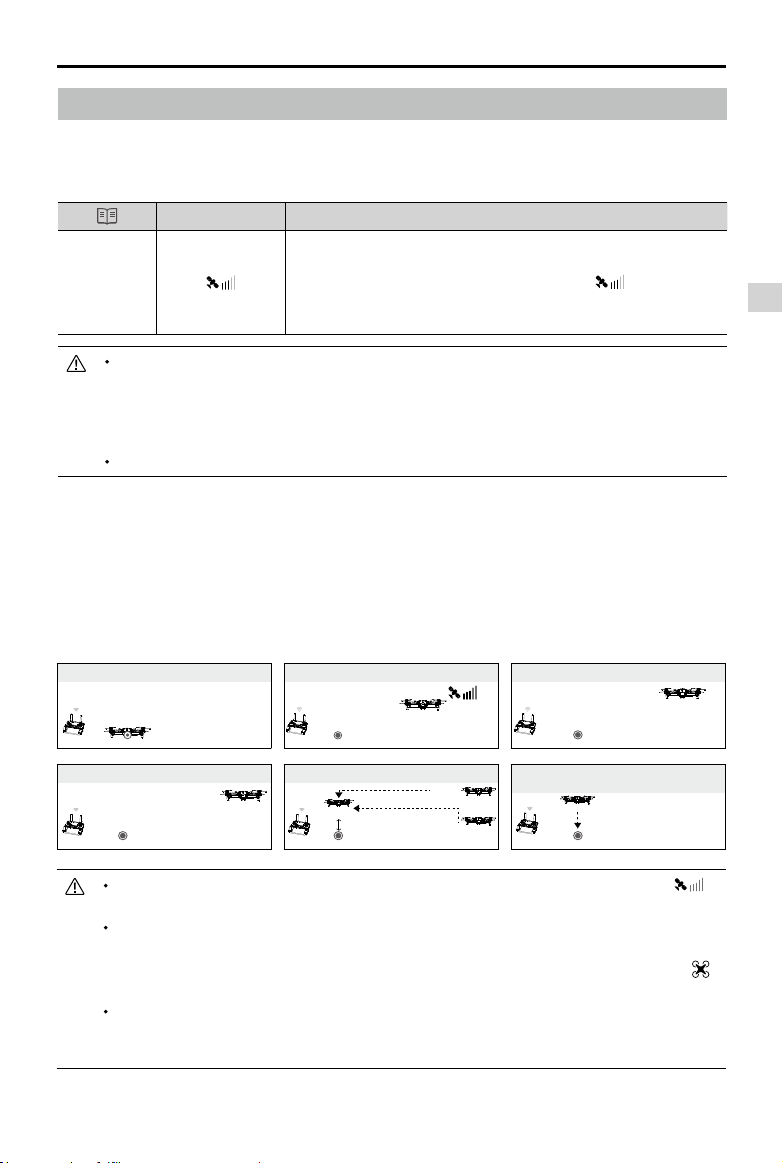
Ritorno alla posizione iniziale (RTH)
La funzione di ritorno alla posizione iniziale (RTH) riporta il velivolo nell'ultimo punto registrato come
posizione iniziale. Esistono tre tipi di procedure RTH: Smart RTH, Low Battery RTH e Failsafe RTH.
Questa sezione descrive in dettaglio i tre casi.
GPS
Descrizione
Se prima del decollo il segnale GPS è forte, la posizione iniziale
Posizione
iniziale
corrisponde al punto da cui è stato lanciato il velivolo. L'intensità
del segnale GPS è indicata dall'icona GPS ( ). L'indicatore
di stato del velivolo lampeggia rapidamente quando viene
registrata la posizione iniziale.
Il velivolo può rilevare ed evitare gli ostacoli quando il sistema di visione in avanti è attivo
e c'è abbastanza luce. Il velivolo sale automaticamente per evitare l'ostacolo e volare no
alla posizione iniziale alla nuova altitudine. Per assicurarsi che torni alla posizione iniziale
con la parte anteriore rivolta in avanti, il velivolo non può ruotare o volare a sinistra né a
destra durante la procedura RTH mentre il sistema di visione in avanti è attivato.
Il sistema di visione in avanti può essere attivato solo durante il volo o durante la funzione RTH.
Failsafe RTH
Se la posizione iniziale è stata registrata correttamente e la bussola funziona normalmente, la funzione
Failsafe RTH si attiva automaticamente se il segnale del dispositivo di controllo remoto viene perso
per un periodo di tempo specico (3 secondi quando si utilizza il dispositivo di controllo remoto e
20 secondi quando si utilizza il Wi-Fi). La funzione di ritorno alla posizione iniziale (Return-to-Home)
può essere annullata dal pilota, consentendo di riacquisire il controllo quando viene ristabilito il
collegamento del segnale del dispositivo di controllo remoto.
1 Registrazione della posizione iniziale 3 Perdita del segnale dispositiv o di controllo remo to 2 Conferma della posizione iniziale
×
4 Perdita del segnale per un perio do prolungato
×
5
RTH (regolabile in altezza)
Altezza rispetto al punto iniziale (HP)>Altitudine Failsafe
×
Alzarsi all'altitudine Failsafe
Altitudine Failsafe
Altezza rispetto al punto iniziale (HP)<=Altitudine Failsafe
6 Atterraggio (dopo che l'utente ha confermato
l'at terraggi o)
×
Volo in sospensione a 2 metri sopra
la posizione iniziale
Velivolo
Il velivolo non può tornare alla posizione iniziale quando il segnale GPS è debole ( [ ]
visualizzato in grigio) o non è disponibile.
Il velivolo non è in grado di evitare gli ostacoli durante la funzione RTH Failsafe se il
sistema di visione in avanti è disattivato. Prima di ogni volo è importante impostare
un'altitudine Failsafe idonea. Lanciare l'app DJI GO 4, accedere a "Camera" e toccare
per impostare l'altitudine Failsafe.
L'utente non può controllare il velivolo mentre sta salendo alla sua altitudine Failsafe.
Tuttavia, l'utente può premere il pulsante RTH per interrompere la salita e riprendere il
controllo.
2017 DJI Tutti i diritti riservati.
©
13
Page 14
Manuale utente
Mavic Pro
di
Smart RTH (RTH intelligente)
Utilizzare il pulsante RTH presente sul dispositivo di controllo remoto oppure toccare il pulsante
RTH nell'app DJI GO 4 e seguire le istruzioni a video quando il GPS è disponibile per avviare la
procedura Smart RTH. L'indicatore di stato del velivolo lampeggia per visualizzare lo stato attuale.
Il velivolo rileva ed evita gli ostacoli sulla sua traiettoria durante la procedura Smart RTH. Il velivolo
può scegliere di volare o di rimanere sospeso in posizione per evitare collisioni. L'utente può far
volare manualmente il velivolo in modo che eviti gli ostacoli se il sistema di visione in avanti è
disattivato o se l'illuminazione è scarsa. Il pilota può anche uscire immediatamente dalla procedura
Smart RTH utilizzando il pulsante di pausa del volo presente sul dispositivo di controllo remoto o
premendo l'icona Stop nell'app DJI GO 4.
Velivolo
La protezione all'atterraggio si attiva durante la procedura Smart RTH, l'atterraggio di precisione e
quando si usa la funzione di atterraggio automatico nell'app DJI GO 4:
1. Quando la protezione di atterraggio determina che il suolo è adatto per l'atterraggio, Mavic Pro
atterra delicatamente.
2. Se la protezione di atterraggio determina che il suolo non è adatto per l'atterraggio, Mavic Pro
rimane sospeso in posizione e attende la conferma del pilota.
3. Se la protezione di atterraggio non è operativa, l'app DJI GO 4 visualizza un prompt di
atterraggio quando Mavic Pro scende al di sotto di 0,5 m. Per atterrare, tirare la levetta di
accelerazione verso il basso oppure utilizzare il cursore automatico di atterraggio.
Low battery RTH (livello basso di carica della batteria per RTH)
L'avvertimento Failsafe di batteria quasi scarica appare quando la batteria di volo intelligente DJI
è scarica no al punto di non garantire il ritorno del velivolo. Quando richiesto, si consiglia agli
utenti di tornare alla posizione iniziale o di fare atterrare il velivolo immediatamente. L'app DJI GO 4
visualizza un avviso quando la batteria è scarica. Se non viene intrapresa alcuna azione, il velivolo
ritorna automaticamente alla posizione iniziale dopo un conto alla rovescia di dieci secondi. L'utente
può annullare la procedura RTH premendo il pulsante RTH sul dispositivo di controllo remoto.
I valori di soglia per queste avvertenze sono determinati automaticamente in base all'altitudine
attuale del velivolo e alla distanza dalla posizione iniziale.
Il velivolo atterra automaticamente se il livello attuale della batteria può permettere soltanto
l'atterraggio dall'altitudine attuale. L'utente può utilizzare il dispositivo di controllo remoto per
modicare l'orientamento del velivolo durante l'atterraggio.
L'indicatore di livello della batteria viene visualizzato nell'app DJI GO 4 (di seguito la descrizione):
Avvertimento di livello molto basso
di carica della batteria (Rosso)
2017 DJI Tutti i diritti riservati.
14
©
Avvertimento di livello basso di
carica della batteria (Giallo)
Indicatore di livello di carica della batteria
Livello di carica della
batteria sufciente (Verde)
Tempo di volo rimanente
L'alimentazione richiede di
tornare in posizione iniziale
12:29
Page 15
Manuale utente
Mavic Pro
di
Avvertimento
di livello di
carica della
batteria
Avvertimento
di livello
basso
di carica della
batteria
Avvertimento
di livello
molto basso
di carica
della batteria
Tempo di volo
rimanente
stimato
Quando viene emesso l'avvertimento di livello molto basso di carica della batteria e il
velivolo scende per atterrare automaticamente, spingere la levetta di sinistra verso l'alto per
mantenere il velivolo sospeso in posizione alla sua altitudine attuale e farlo volare no a una
posizione più appropriata per l'atterraggio.
Le zone colorate e i segni riportati sull'indicatore di livello della batteria segnalano il tempo
di volo stimato rimanente e vengono regolati automaticamente in base alla posizione e allo
stato attuale del velivolo.
Osservazione
La carica della
batteria è bassa.
Far atterrare il
velivolo.
Il velivolo
deve atterrare
immediatamente.
Volo rimanente
stimato in base
al livello attuale
di carica della
batteria.
Indicatore
di stato del
velivolo
L'indicatore
di stato del
velivolo
lampeggia
lentamente
in ROSSO.
L'indicatore
di stato del
velivolo
lampeggia
rapidamente
in ROSSO.
N/D N/D N/D
App DJI GO 4 Istruzioni di volo
Toccare "Go-home" delete. per
far tornare automaticamente
il velivolo alla posizione
iniziale, o toccare il pulsante
"Cancel" Delete per riprendere
il volo normale. Se non viene
intrapresa alcuna azione, il
velivolo torna automaticamente
alla posizione iniziale dopo
10 secondi. Il dispositivo di
controllo remoto attiva un
allarme sonoro.
Il display dell'app DJI GO
4 lampeggia di rosso e il
velivolo inizia a scendere. Il
dispositivo di controllo remoto
attiva un allarme sonoro.
Fare tornare
indietro il velivolo
e atterrare al più
presto, quindi
arrestare i motorini
e sostituire la
batteria.
Lasciare
scendere il
velivolo e atterrare
automaticamente.
Velivolo
Atterraggio di precisione
Mavic Pro esegue automaticamente la scansione e tenta di trovare una corrispondenza con le
caratteristiche del suolo sottostante durante la funzione di ritorno alla posizione iniziale (Return-to-Home).
Quando il suolo attuale corrisponde al suolo della posizione iniziale, Mavic inizia immediatamente
l'atterraggio per attuare un atterraggio di precisione. Se non viene rilevata alcuna corrispondenza,
l'app DJI GO 4 mostra un messaggio di mancata corrispondenza del suolo.
Le prestazioni dell'atterraggio di precisione sono soggette alle condizioni seguenti:
a. La posizione iniziale viene registrata dopo il decollo e non può non essere aggiornata
durante il volo.
b. Il velivolo deve decollare verticalmente. L'altitudine di decollo deve essere maggiore di 10 metri.
c. Le caratteristiche del suolo della posizione iniziale rimangono sostanzialmente invariate.
d. Il suolo della posizione iniziale senza caratteristiche distintive inuisce sulle prestazioni.
e. L'illuminazione non può deve essere troppo intensa o troppo scarsa.
In fase di atterraggio, sono disponibili le azioni seguenti:
a. Tirare la leva di accelerazione verso il basso per accelerare l'atterraggio.
b. Muovere la levetta di comando in qualsiasi altra direzione per interrompere l'atterraggio di
precisione. Mavic Pro scende verticalmente e la protezione di atterraggio rimane attiva.
2017 DJI Tutti i diritti riservati.
©
15
Page 16
Manuale utente
5 m
H
5 m
H
Altitudine RTH
di
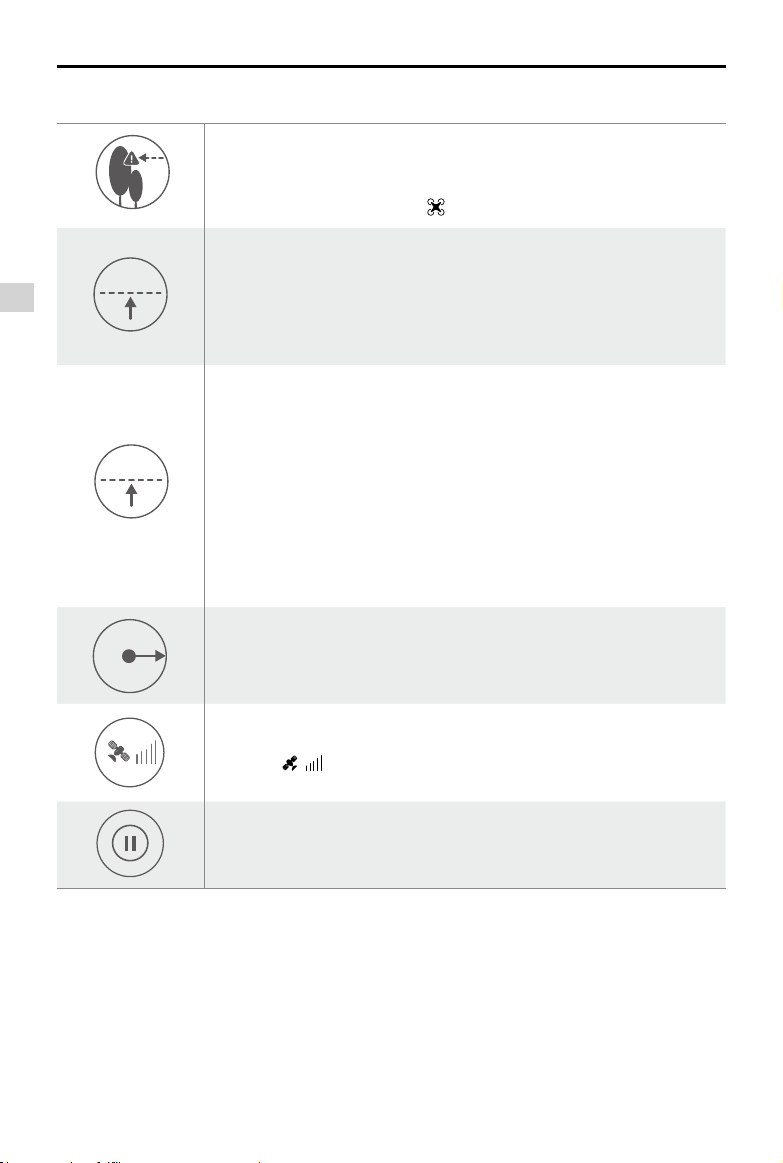
Avvisi sulla sicurezza RTH
Altitudine RTH
Velivolo
10 m
Mavic Pro
Il velivolo non è in grado di evitare gli ostacoli durante la procedura RTH
se il sistema di visione in avanti è disattivato. Pertanto, prima di ogni volo è
importante impostare un'altitudine Failsafe idonea. Lanciare l'app DJI GO 4,
accedere a "Camera" e toccare per impostare l'altitudine Failsafe.
Se viene lanciata la funzione di ritorno alla posizione iniziale (RTH), con la
procedura Smart RTH e un livello basso di carica della batteria per RTH, e il
velivolo è oltre 20 m dalla posizione iniziale:
1. Il velivolo torna alla posizione iniziale all'altezza attuale se vola
all'altitudine RTH o al di sopra di essa.
2. Il velivolo sale all'altitudine RTH se vola al di sotto di essa.
Se la funzione RTH, con la procedura Smart RTH e un livello basso di carica
della batteria per RTH, viene lanciata tra 5 m e 20 m (16 piedi e 66 piedi)
dalla posizione iniziale e il sistema di visione in avanti è attivato:
1. Se l'altitudine attuale del velivolo è superiore a 10 m (32 piedi), il velivolo
torna alla posizione iniziale all'altitudine attuale.
2. Se l'altitudine attuale del velivolo è inferiore a 10 m (32 piedi), il velivolo
scende prima automaticamente a 10 m (32 piedi) dall'altitudine attuale.
La velocità di volo viene regolata a 14 km/h (9 mph). Il velivolo inizia
immediatamente l'atterraggio se il sistema di visione in avanti è disattivato.
Quando si entra in funzione RTH Failsafe, il sistema di visione in avanti
viene valutato e la funzione RTH si adatta di conseguenza.
5 m
H
Il velivolo scende automaticamente e atterra se la funzione RTH è attivata
quando il velivolo
si trova entro un raggio di 5 m (6 piedi) dalla posizione iniziale.
Il velivolo non può tornare alla posizione iniziale quando il segnale GPS è
debole ( [ ] visualizzato in grigio) o non è disponibile.
Premere il pulsante di pausa del volo per uscire dalla funzione RTH. Il
velivolo interrompe la discesa e rimane sospeso in posizione.
Evitare gli ostacoli durante la procedura RTH
Il velivolo può ora rilevare e tentare attivamente di evitare gli ostacoli durante la procedura RTH,
a condizione che ci sia abbastanza luce per il sistema di visione in avanti. Al rilevamento di un
ostacolo, il velivolo agisce come segue:
1. Il velivolo rallenta quando viene rilevato un ostacolo a 15 m (49 piedi) di distanza.
2. Il velivolo si ferma e rimane sospeso in posizione, quindi inizia a salire verticalmente per evitare
l'ostacolo. Il velivolo smette di salire quando si trova ad almeno 5 m (16 piedi) sopra l'ostacolo rilevato.
3. Ripristino della procedura RTH. Il velivolo continua a volare no alla posizione iniziale all'altitudine
attuale.
16
2017 DJI Tutti i diritti riservati.
©
Page 17
Manuale utente
TapFly
ActiveTrack
Gesture
Joystick
Mavic Pro
di
5 metri
15 metri
Per assicurarsi che torni alla posizione iniziale con la parte anteriore rivolta in avanti, il velivolo
non può ruotare durante la procedura RTH mentre il sistema di visione in avanti è attivato.
Il velivolo non è in grado di evitare gli ostacoli sopra, accanto o dietro se stesso.
Modalità di volo intelligente
TapFly
Introduzione
Con la funzione TapFly, l'utente può ora toccare lo schermo del dispositivo mobile per far volare
il velivolo verso la direzione designata senza utilizzare il dispositivo di controllo remoto. Il velivolo
evita automaticamente gli ostacoli che vede o frena e rimane sospeso in posizione a condizione
che l'illuminazione sia appropriata (< 300 lux) e troppo intensa (> 10.000 lux).
Utilizzo della funzione TapFly
Assicurarsi che il livello di carica della batteria sia superiore al 50% per la batteria di volo
intelligente e che il velivolo sia in modalità P. Per utilizzare la funzione TapFly, seguire la procedura
riportata di seguito:
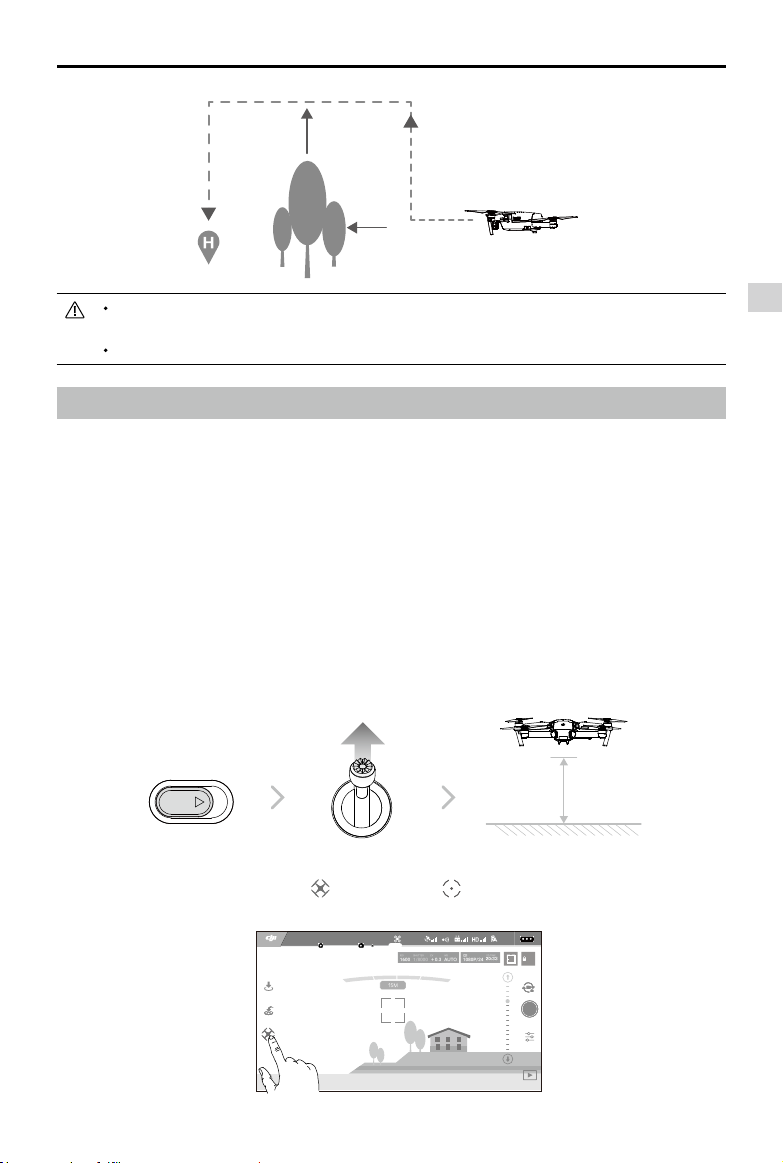
1. Decollare e assicurarsi che il velivolo voli ad almeno 2 m (6 piedi) sopra il livello del suolo.
Velivolo
SPORT
2 metri
2. Lanciare l'app DJI GO 4 e toccare , quindi toccare , leggere e comprendere i messaggi.
READY TO GO (GPS)
H 10.0MD 30M
12
P-GPS
09:29
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
61%
AE
2017 DJI Tutti i diritti riservati.
©
17
Page 18
Manuale utente
Mavic Pro
di
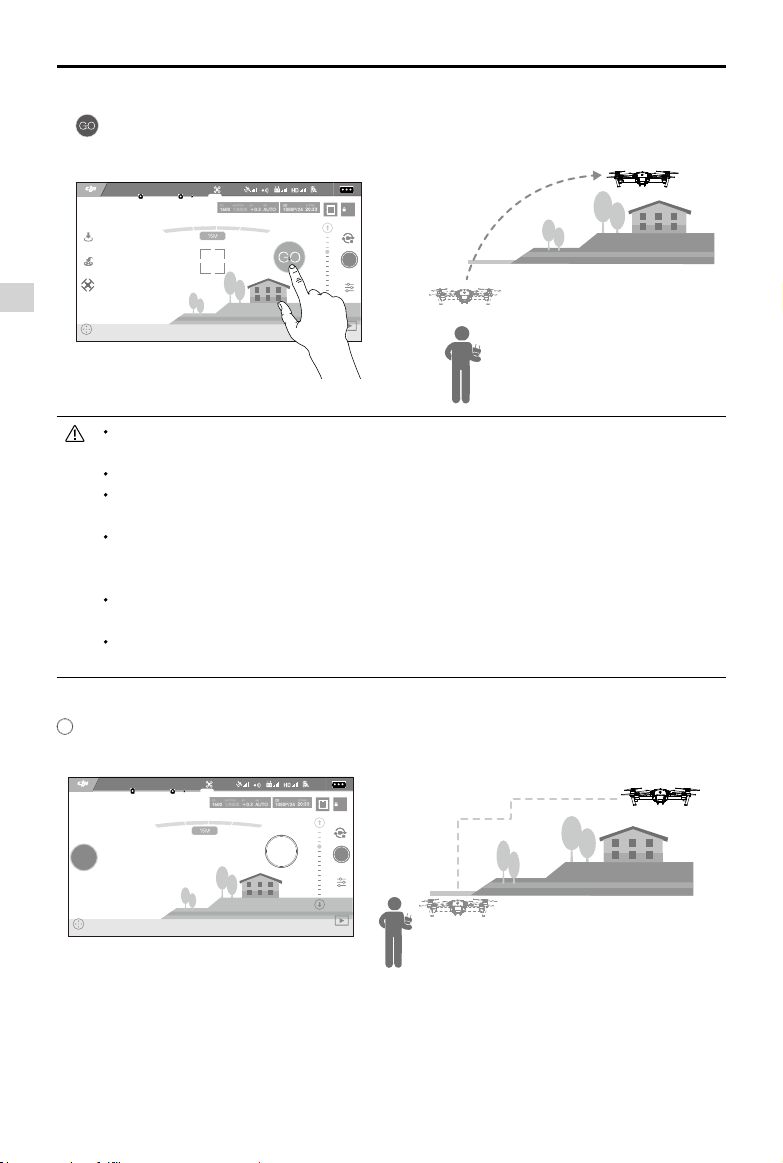
3. Toccare una volta verso la direzione di destinazione e attendere che venga visualizzata l'icona
. Toccare di nuovo per confermare la selezione e far volare il velivolo automaticamente verso
tale destinazione.
12
P-GPS
09:29
61%
AE
Velivolo
READY TO GO (GPS)
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
NON pilotare il velivolo verso persone, animali, oggetti sottili o di piccole dimensioni
(ad esempio rami di alberi e linee elettriche) o corpi trasparenti (ad esempio vetro o acqua).
Vericare che sulla traiettoria di volo non ci siano ostacoli e tenersi lontani da questi.
Possono vericarsi deviazioni tra il percorso previsto e quello effettivo della selezione
TapFly.
L'intervallo selezionabile per la direzione di destinazione è limitato. Non è possibile
effettuare una selezione TapFly in prossimità del bordo superiore e inferiore dello
schermo.
La modalità TapFly potrebbe non funzionare correttamente quando il velivolo è in volo
sull'acqua o su superci innevate.
Prestare estrema attenzione durante il volo in ambienti molto bui (< 300 lux) o molto
illuminati (> 10.000 lux).
Dopo aver confermato la selezione TapFly, il velivolo vola nella direzione contrassegnata dall'icona
. Nota: è comunque possibile utilizzare la levetta di comando per controllare il movimento del
velivolo durante il volo.
READY TO GO (GPS)
12
P-GPS
09:29
61%
AE
STOP
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
Il velivolo regola automaticamente la sua velocità quando viene rilevato un ostacolo davanti a sé
che vola troppo vicino al suolo. Tuttavia, questa funzione non deve essere invocata per il volo tra gli
ostacoli.
Le procedure Failsafe sostituiscono la modalità TapFly. Se il segnale GPS si indebolisce, il velivolo
esce dalla modalità di volo autonomo e torna alla posizione iniziale.
2017 DJI Tutti i diritti riservati.
18
©
Page 19
Manuale utente
TapFly
ActiveTrack
Gesture
Joystick
Uscire da TapFly
Per uscire da TapFly, utilizzare i metodi seguenti:
1. Premere il pulsante di pausa del volo presente sul dispositivo di controllo remoto.
2. Tirare indietro la levetta di beccheggio presente sul dispositivo di controllo remoto.
3. Toccare il pulsante "STOP" presente sullo schermo.
Mavic Pro
di
STOP
OPPURE OPPURE
Pulsante di pausa del volo
Il velivolo si ferma e rimane sospeso in posizione dopo essere uscito dalla modalità TapFly. Toccare
una nuova direzione di destinazione per continuare a volare o iniziare il volo manualmente.
ActiveTrack
La modalità ActiveTrack consente di contrassegnare e di tenere traccia, sullo schermo del proprio
dispositivo mobile, di un oggetto in movimento. Il velivolo evita automaticamente gli ostacoli sul suo
percorso di volo. Non è richiesto alcun dispositivo di tracciamento esterno.
Mavic Pro è in grado di identicare automaticamente e di tenere traccia di biciclette e altri veicoli,
persone e animali e di utilizzare diverse strategie di tracciamento per ciascuno di essi.
Utilizzo della modalità ActiveTrack
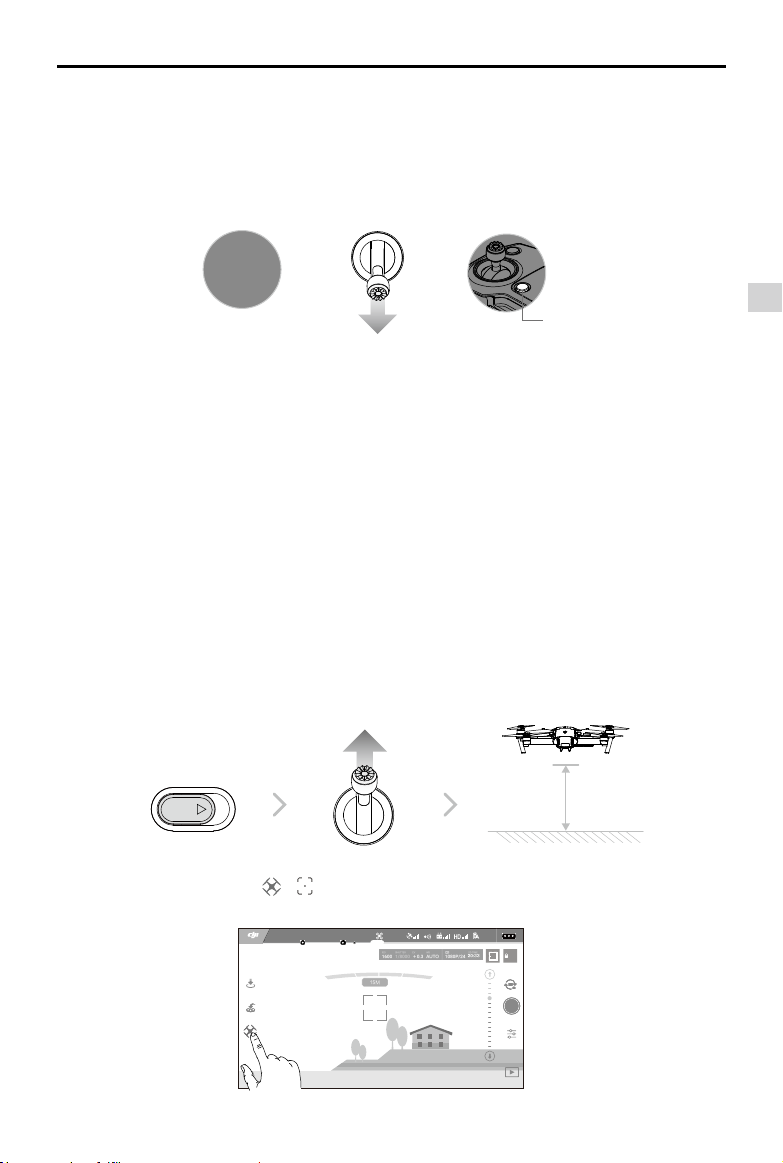
Assicurarsi che la batteria di volo intelligente sia carica per oltre il 50% e che il velivolo sia in
modalità P. Per utilizzare la modalità ActiveTrack, seguire la procedura riportata di seguito:
1. Decollare e tenere il velivolo sospeso in posizione ad almeno 2 m (6 piedi) sopra il livello del suolo.
SPORT
2 metri
Velivolo
2. Nell'app DJI GO 4, toccare e per richiamare le modalità di volo e selezionare ActiveTrack.
READY TO GO (GPS)
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
12
P-GPS
09:29
61%
AE
2017 DJI Tutti i diritti riservati.
©
19
Page 20

Manuale utente
Mavic Pro
di
3. Toccare l'oggetto di cui si desidera tener traccia, quindi toccare la selezione per confermarla.
Se l'oggetto non viene riconosciuto automaticamente, trascinare una casella attorno ad esso.
La casella diventa verde in fase di tracciamento. Se la casella diventa rossa, l'oggetto non è
stato identicato ed è necessario riprovare.
READY TO GO (GPS)
12
P-GPS
09:29
61%
AE
Velivolo
ActiveTrack
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
La modalità ActiveTrack include le funzioni seguenti:
Tracciamento In evidenza Prolo
Il velivolo tiene traccia
dell'oggetto a una distanza
costante. Utilizzare la
levetta per il rollio presente
sul dispositivo di controllo
remoto oppure il cursore
nell'app DJI GO 4 per
fare un cerchio intorno
all'oggetto.
NON scegliere un'area in cui siano presenti persone, animali, oggetti sottili o di piccole dimensioni
(ad esempio rami di alberi e linee elettriche) o corpi trasparenti (ad esempio vetro e acqua).
Tenersi a distanza da eventuali ostacoli in prossimità del percorso di volo, in particolare
quando il velivolo vola all'indietro.
Utilizzare la modalità ActiveTrack con estrema cautela nelle situazioni seguenti:
Il velivolo non tiene traccia
automaticamente di un oggetto, ma
durante il volo mantiene la telecamera
rivolta verso l'oggetto. Il dispositivo
di controllo remoto può essere
utilizzato per manovrare il velivolo, ma
l'imbardata è disabilitata. La levetta di
sinistra e il selettore gimbal servono a
regolare l'inquadratura dell'oggetto.
a) L'oggetto di cui si tiene traccia non si muove in piano.
b) L'oggetto di cui si tiene traccia cambia drasticamente forma mentre si muove.
c) L'oggetto di cui si tiene traccia potrebbe risultare coperto o invisibile per un periodo di
tempo prolungato.
d) L'oggetto di cui si tiene traccia si sta muovendo su una supercie innevata.
e) L'illuminazione disponibile è scarsa (< 300 lux) o intensa (> 10.000 lux).
f) L'oggetto di cui si tiene traccia presenta un colore o un motivo simile all'ambiente circostante.
Il velivolo tiene
traccia dell'oggetto
a un'angolazione e a
una distanza costanti
lateralmente. Utilizzare
la levetta di rollio del
dispositivo di controllo
remoto per cerchiare
l'oggetto.
2017 DJI Tutti i diritti riservati.
20
©
Page 21

Manuale utente
Quando si utilizza la modalità ActiveTrack, occorre conformarsi alle normative e ai
Mavic Pro
di
regolamenti locali in materia di riservatezza.
Il velivolo non è in grado di evitare gli ostacoli quando è in modalità Prolo o In evidenza.
Utilizzare queste modalità in aree aperte.
Il velivolo rileva ed evita gli ostacoli sulla propria traiettoria di volo.
Se il velivolo perde traccia del soggetto perché è troppo veloce oppure oscurato, occorre
riselezionare l'oggetto per riprendere il tracciamento.
Uscita dall'ActiveTrack
Utilizzare i metodi seguenti per uscire dalla modalità ActiveTrack:
1. Premere il pulsante di pausa del volo presente sul dispositivo
STOP
OPPURE
di controllo remoto.
2. Toccare il pulsante "STOP" presente sullo schermo.
Dopo essere uscito dalla modalità ActiveTrack, il velivolo rimane sospeso in posizione e quel punto
è possibile scegliere di volare manualmente, di tener traccia di un altro oggetto o di tornare alla
posizione iniziale.
Modalità Movimento
Nella modalità Movimento, il sistema di visione di Mavic riconosce i movimenti, in modo da poter
seguire un soggetto e scattare sele senza disporre di un telefono o di un dispositivo di controllo.
Attenersi alla procedura riportata di seguito per utilizzare la modalità Movimento:
Modalità Prompt LED anteriori Osservazioni
Assicurarsi che il sistema di visione in avanti
sia attivo e che ci sia abbastanza luce. Toccare
l'icona e spostarsi davanti alla telecamera per
fare in modo che Mavic riconosca l'utente.
Alzare le braccia e fare cenno con la mano
verso Mavic; il LED anteriore lampeggia di
rosso due volte dopo aver confermato la
distanza di scatto.
Portarsi le dita davanti al viso come illustrato.
1. Conferma
dell'oggetto
2. Conferma
della
distanza
3. Conto alla
rovescia per
il sele
Rosso
lampeggiante
lentamente
×2
Rosso lampeggiante
2 volte
Rosso lampeggiante
rapidamente
Velivolo
La modalità Movimento può essere utilizzata solo in modalità Foto.
Far volare il velivolo almeno 2 metri sopra il livello del suolo, quindi spostarsi davanti alla
telecamera per farsi riconoscere. Gli indicatori LED anteriori lampeggiano rapidamente di
colore rosso se Mavic Pro non riesce a riconoscere un oggetto.
Attivando il GPS sul telefonino si consente a Mavic di seguire con più precisione durante il
volo in modalità Movimento.
2017 DJI Tutti i diritti riservati.
©
21
Page 22

Manuale utente
Mavic Pro
di
Modalità treppiede
Toccare l'icona nell'app DJI GO 4 per attivare la modalità treppiede. In modalità treppiede, la velocità
di volo massima è limitata a 3,6 km/h (2,2 mph) e la distanza di frenatura si riduce a 1 m (3,2 piedi).
Anche la capacità di risposta ai movimenti della levetta viene ridotta per ottenere movimenti controllati
più uidi.
Utilizzare solo la modalità treppiede dove il segnale GPS è forte o quando l'illuminazione
è ideale per il sistema di visione. Se il segnale GPS viene perso e se il sistema di visione
non è in grado di funzionare, si passa automaticamente alla modalità Assetto. In questo
caso, la velocità di volo aumenta e il velivolo non può rimanere sospeso in posizione.
Velivolo
Utilizzare la modalità treppiede con cautela.
Modalità Segui il suolo
Il sistema di visione verso il basso viene utilizzato in modalità Segui il suolo per mantenere
un'altitudine sopra il livello del suolo compresa tra 1 e 13 metri. Questa modalità è stata progettata
per l'uso su prati scoscesi con pendenza massima di 20°.
Attivare la modalità Segui il suolo toccando l'icona della modalità di volo intelligente nell'app DJI GO 4.
Quando questa modalità è attivata, viene registrata l'altezza attuale del velivolo. Il velivolo mantiene l'altezza
registrata durante il volo e sale quando la pendenza aumenta. Tuttavia, il velivolo non scende se il suolo è
in discesa.
È importante volare solo in condizioni in cui il sistema di posizionamento visivo può
funzionare correttamente; in caso contrario la modalità Segui il suolo non funziona.
Modalità Cinematic
Toccare l'icona della modalità Intelligent Flight nell'app DJI GO 4 per attivare la modalità Cinematic. In
modalità Cinematic, la distanza di frenata per il velivolo si estende. Il velivolo rallenta con cautela no
a fermarsi, mantenendo la ripresa omogenea e stabile anche se i segnali di comando sono instabili.
Modalità Fixed-Wing
Il velivolo volerà automaticamente in avanti a una determinata velocità dopo aver abilitato la modalità
Fixed-Wing. Spingere la levetta di sinistra verso l'alto per far salire e verso il basso per far scendere il
velivolo. Spingere la levetta di destra o di sinistra per ruotare il velivolo. Spingendo la levetta di destra
verso l'alto il velivolo accelera, mentre spingendo la levetta verso il basso la modalità Fixed-Wing
viene disabilitata.
Nell'app DJI GO 4, toccare l'icona e abilitare la modalità FIxed-Wing. Spingere la levetta di destra
verso l'alto no a quando non viene visualizzata l'icona C1, quindi premere il tasto C1 sul dispositivo
di controllo remoto per abilitare la modalità Fixed-Wing. Spingere la levetta di destra verso il basso per
3 secondi oppure premere il tasto C2 sul dispositivo di controllo remoto per disabilitare la modalità
Fixed-Wing.
2017 DJI Tutti i diritti riservati.
22
©
Page 23

Manuale utente
Spingere la levetta di destra verso l'alto no a quando il velivolo non raggiunge la velocità
Mavic Pro
di
di volo di 3 m/s per abilitare la modalità Fixed-Wing. Non muovere le levette in un'altra
direzione.
Quando la modalità Fixed-Wing è abilitata, non è possibile ridurre la velocità di volo. È
possibile solo spingere la levetta di destra per accelerare il velivolo. Spingendo la levetta
di destra in basso si disabilità la modalità Fixed-Wing.
Altre modalità di volo intelligenti e la modalità Portrait sono disabilitate quando si utilizza la
modalità Fixed-Wing.
La modalità Fixed-Wing è disponibile in modalità P e in modalità S.
Sistema di visione in avanti e verso il basso
Mavic Pro è dotato di un sistema di visione in avanti e verso il basso costantemente alla ricerca di
eventuali ostacoli di fronte ad esso, che gli permette di evitare collisioni andandoci intorno o volandoci
sopra o rimanendo sospeso in posizione. Il sistema di visione verso il basso utilizza gli ultrasuoni e
dati d'immagine per aiutare il velivolo a mantenere la sua posizione attuale. Con l'aiuto del sistema
di visione verso il basso, Mavic Pro può rimanere sospeso in posizione in modo più preciso e può
volare al chiuso o in altri ambienti in cui non è disponibile un segnale GPS. I componenti principali dei
sistemi di visione in avanti e verso il basso si trovano nella parte anteriore e nella parte inferiore del
velivolo; essi comprendono [1] [2] quattro sensori monoculari e [3] due sensori a ultrasuoni.
1 1
Velivolo
2
3 3
2
Campo di rilevamento
Il campo di rilevamento dei sistemi di visione in avanti e verso il basso è illustrato di seguito. Si noti che il
velivolo non è in grado di rilevare o di evitare gli ostacoli che non sono entro il campo di rilevamento.
2017 DJI Tutti i diritti riservati.
©
23
Page 24

Manuale utente
Mavic Pro
di
Sensori di taratura
Le telecamere dei sistemi di visione in avanti e verso il basso installate sul velivolo sono tarate alla
consegna. Tuttavia queste telecamere patiscono gli urti eccessivi e di tanto in tanto vanno tarate
tramite il DJI Assistant 2 o l'app DJI GO 4. Seguire la procedura riportata di seguito per tarare
telecamera.
Velivolo
Rivolgere il velivolo verso lo schermo
01
02
Allineare le caselle
Ruotare orizzontalmente e verticalmente il velivolo
03
Ripetere la procedura descritta sopra per tarare le telecamere del sistema di visione verso il basso.
Taratura rapida
Utilizzare la taratura rapida quando l'app DJI GO 4 comunica che è richiesta la taratura del
sensore di visione. Per avviare la taratura rapida, toccare "Aircraft Status" -> "Vision Sensors".
La taratura rapida è un metodo veloce per risolvere eventuali problemi legati al sensore
di visione. Si consiglia di eseguire una taratura completa quando possibile, collegando
il velivolo a un computer utilizzando il DJI Assistant 2. Eseguire la taratura solo quando
l'illuminazione è adeguata e quando si vola su superci tramate, ad esempio sull'erba.
Non tarare il velivolo su superci altamente riettenti quali marmo o ceramica.
Utilizzo del sistema di visione verso il basso
Il sistema di visione verso il basso si attiva automaticamente quando il velivolo è acceso. Non
è necessario eseguire ulteriori operazioni. In genere, il sistema di visione verso il basso viene
utilizzato al chiuso, dove il GPS non è disponibile. Utilizzando il sistema di visione verso il basso, il
velivolo può rimanere sospeso in posizione in modo preciso anche senza GPS.
2017 DJI Tutti i diritti riservati.
24
©
Page 25

Manuale utente
2m以上
Attenersi alla procedura riportata di seguito per utilizzare il sistema di visione verso il
basso:
1. Portare il commutatore della modalità di volo in modalità P.
2. Posizionare il velivolo su una supercie piana. Si noti che il sistema di visione
verso il basso non è in grado di funzionare correttamente su superci senza
evidenti variazioni di motivo.
3. Accendere il velivolo. L'indicatore di stato del velivolo lampeggia in verde due volte,
il che indica che il sistema di visione verso il basso è pronto. Spingere delicatamente
la levetta di sinistra no al decollo per mantenere il velivolo sospeso in posizione.
Mavic Pro
di
SPORT
Frenata assistita dal sistema di visione in avanti
Assistito dal sistema di visione in avanti, il velivolo è in grado di contribuire attivamente alla frenatura
quando vengono rilevati ostacoli davanti. I sistemi di visione in avanti e verso il basso funzionano
meglio quando l'illuminazione è adeguata e l'ostacolo è chiaramente contrassegnato o testurizzato.
Il velivolo deve volare a massimo 36 km/h (22 mph) per consentire uno spazio di frenata sufciente.
Le prestazioni dei sistemi di visione in avanti e verso il basso sono inuenzate dalla
supercie su cui si vola. I sensori a ultrasuoni potrebbero non essere in grado di misurare
con precisione le distanze quando operano sopra materiali fonoassorbenti e la telecamera
potrebbe non funzionare correttamente in ambienti non ottimali. Il velivolo passa
automaticamente dalla modalità P alla modalità Assetto se non è disponibile né il GPS né i
sistemi di visione in avanti e verso il basso. Far funzionare il velivolo con la massima cautela
nelle seguenti situazioni:
In volo su superci monocromatiche (ad esempio nero puro, bianco puro, rosso puro,
verde puro).
In volo su superci fortemente riettenti.
In volo ad alta velocità, oltre 36 km/h (22 mph) a 2 metri o oltre 18 km/h (11 mph) a 1 metro.
In volo sull'acqua o superci trasparenti.
In volo su superci o oggetti in movimento.
In volo in una zona in cui l'illuminazione varia frequentemente o drasticamente.
In volo su superci molto scure (< 10 lux) o molto illuminate (> 100.000 lux).
In volo su superci in grado di assorbire le onde sonore (ad esempio tappeto spesso).
In volo su superci senza motivi o consistenza chiare.
In volo su superci con modelli o consistenza che si ripetono in modo identico
(ad esempio piastrelle).
In volo su superci inclinate che allontanano le onde sonore dal velivolo.
Velivolo
2017 DJI Tutti i diritti riservati.
©
25
Page 26

Manuale utente
Velivolo
Mantenere i sensori sempre puliti. La sporcizia o altri detriti possono compromettere
l'efcacia dei sensori.
Il sistema di visione verso il basso è efcace solo quando il velivolo si trova ad altezze
comprese tra 0,3 e 13 metri.
I sistemi di visione in avanti e verso il basso NON funzionano correttamente quando il
velivolo vola sull'acqua.
In condizioni di scarsa luminosità (meno di 100 lux), i sistemi di visione in avanti e verso il
basso non sono in grado di riconoscere i motivi del suolo.
Non utilizzare altri dispositivi a ultrasuoni con frequenza pari a 40 KHz quando i sistemi di
visione in avanti e verso il basso sono in funzione.
Mantenere gli animali lontani dal velivolo quando il sistema di visione verso il basso è
attivato. Il sensore sonar emette suoni ad alta frequenza udibili soltanto da alcuni animali.
Mavic Pro
di
Registratore di volo
I dati di volo vengono automaticamente registrati nella memoria interna del velivolo. Questo
comprende la telemetria di volo, le informazioni sullo stato del velivolo e altri parametri. Per
accedere a questi dati, collegare il velivolo al PC tramite la porta micro-USB.
Montaggio e smontaggio delle eliche
Su Mavic Pro vanno utilizzate soltanto eliche approvate da DJI. L'anello bianco e le eliche non
contrassegnate indicano dove devono essere ssate le eliche e in che senso devo ruotare.
Eliche Anello bianco Non contrassegnato
Figura
Da montare su Motori con contrassegni bianchi Motori senza contrassegni bianchi
Legende Blocco: ruotare le eliche nella direzione indicata per montarle e serrarle.
Fissaggio delle eliche
Fissare le eliche ad anello di colore bianco sulla base di montaggio con i contrassegni di colore
bianco. Premere l'elica verso il basso sulla piastra di montaggio e ruotarla in direzione di blocco
no a ssarla. Fissare le altre eliche sulle basi di montaggio senza i contrassegni. Aprire tutte le
pale delle eliche.
Contrassegnato Non contrassegnato
2017 DJI Tutti i diritti riservati.
26
©
Page 27

Manuale utente
Mavic Pro
di
Smontaggio delle eliche
Spingere le eliche verso il basso nella staffa di montaggio del motore e ruotarle in senso di sblocco.
Fare attenzione ai bordi aflati delle eliche. Maneggiare con cura.
Utilizzare solo eliche approvate da DJI. Non mischiare i tipi di elica.
Tenersi a distanza dai motori e NON toccare le eliche mentre ruotano.
Prima di ogni volo, vericare che le eliche e i motori siano installati correttamente e
saldamente.
Prima di ciascun volo, accertarsi che tutte le eliche siano in buone condizioni. NON
utilizzare eliche usurate, scheggiate o rotte.
Per evitare lesioni, MANTENERSI A DISTANZA e NON toccare le eliche o i motori quando
sono in movimento.
Per una migliore e più sicura esperienza di volo, utilizzare SOLTANTO eliche DJI.
Batteria di volo intelligente
Introduzione
La batteria di volo intelligente di DJI ha una capacità di 3.830 mAh, una tensione di 11,4 V e una
funzionalità intelligente di carica-scarica. La batteria va caricata solo utilizzando un caricabatterie
appropriato omologato da DJI.
Velivolo
Batteria di volo intelligente Caricabatterie
La batteria di volo intelligente deve essere completamente caricata prima di utilizzarla per la
prima volta.
Funzioni della batteria di volo intelligente DJI
1. Indicatore di livello di carica della batteria: gli indicatori LED visualizzano il livello attuale della batteria.
2. Funzione di scarica automatica: per evitare rigonamenti, la batteria si scarica automaticamente
al di sotto del 65% della carica totale quando rimane inattiva per oltre dieci giorni. Per scaricare
la batteria al 65% sono necessari circa due giorni. È normale che durante il processo di scarica
la batteria emetta del calore lieve. È possibile impostare le soglie di scarica nell'app DJI GO 4.
3. Ricarica bilanciata: bilancia automaticamente la tensione di ciascuna cella della batteria durante
la ricarica.
4. Protezione contro i sovraccarichi: la carica si arresta automaticamente quando la batteria è
completamente carica.
5. Rilevamento della temperatura: la batteria si carica solo quando la temperatura è compresa tra
5 °C (41 °F) e 40 °C (104 °F).
6. Protezione da sovracorrenti: la batteria interrompe la carica quando viene rilevato un amperaggio
elevato (oltre 8,5 A).
7. Protezione da scarica eccessiva: per evitare danni da scarica eccessiva, lo scaricamento si
interrompe automaticamente.
2017 DJI Tutti i diritti riservati.
©
27
Page 28

Manuale utente
Mavic Pro
di
8. Protezione da cortocircuito: l'alimentazione si interrompe automaticamente quando viene rilevato
un cortocircuito.
9. Protezione contro i danni alle celle della batteria: l'app DJI GO 4 visualizza un messaggio di
avvertimento se rileva che una cella della batteria è stata danneggiata.
10. Modalità di veglia: per risparmiare energia, la batteria interrompe l'alimentazione ed entra in
modalità di stand-by dopo 20 minuti di inattività.
11. Comunicazione: le informazioni relative alla tensione della batteria, alla capacità di corrente,
ecc. vengono trasmesse al dispositivo di controllo principale del velivolo.
Velivolo
Prima dell'uso, fare riferimento alle
di Mavic Pro
. Gli utenti assumono l'intera responsabilità di tutte le operazioni e dell'impiego
della batteria.
Direttive sulla sicurezza della batteria di volo intelligente
Utilizzo della batteria
LED1
Indicatori del livello di carica della batteria
LED2
LED3
LED4
Pulsante di accensione
Accensione/spegnimento
Accensione:
premere il pulsante di accensione, quindi premerlo di nuovo e tenerlo premuto per
2 secondi per effettuare l'accensione. La schermata dello stato del sistema del
dispositivo di controllo remoto visualizza il livello di corrente della batteria.
Spegnimento:
premere il pulsante di accensione, quindi premerlo di nuovo e tenerlo premuto per
2 secondi per effettuare lo spegnimento.
Avvertimento relativo alle basse temperature:
1. La capacità della batteria viene ridotta signicativamente quando si vola in ambienti a basse
temperature (tra -10 °C e 5 °C).
2. Le batterie non possono essere utilizzate in ambienti a temperature estremamente basse (< -10 °C).
Si consiglia di caricare completamente la batteria quando si decollo a temperature comprese tra
-10 °C e 5 °C.
3. Interrompere il volo non appena l'app DJI GO 4 visualizza "Low Battery Level Warning"
(Avvertimento di batteria quasi scarica) in ambienti a basse temperature.
4. Prima di volare in luogo dove a bassa temperatura, tenere la batteria al chiuso per riscaldarla.
5. Per garantire prestazioni ottimali della batteria, tenere il corpo della batteria a una temperatura
superiore a 20 °C.
In ambienti freddi, inserire la batteria nel vano batteria, accendere il velivolo e lasciarlo
riscaldare per circa 1-2 minuti prima di decollare.
Controllo del livello di carica della batteria
Gli indicatori di livello di carica della batteria visualizzano la carica residua. Quando la batteria è spenta,
premere una volta il pulsante di accensione; gli indicatori del livello della batteria si accendono per
visualizzare l'attuale il livello di carica della batteria. Per maggiori dettagli, fare riferimento a quanto segue.
2017 DJI Tutti i diritti riservati.
28
©
Page 29

Manuale utente
Mavic Pro
di
Gli indicatori di livello di carica della batteria visualizzano il livello attuale della batteria anche
durante la ricarica e mentre si scarica. Gli indicatori vengono descritti di seguito.
: il LED è acceso. : il LED lampeggia.
: il LED è spento.
Indicatori del livello di carica della batteria
LED1 LED2 LED3 LED4 Livello di carica della batteria
87,5% ~ 100%
75%~87,5%
62,5%~75%
50%~62,5%
37,5%~50%
25%~37,5%
12,5%~25%
0%~12,5%
=0%
Carica della batteria di volo intelligente
1. Collegare il caricabatterie a una sorgente di alimentazione (100-240 V, 50/60 Hz).
2. Collegare la batteria al caricabatterie per iniziare la carica.
3. L'indicatore di livello della batteria visualizza il livello attuale di carica della batteria durante la ricarica.
4. La batteria di volo intelligente è completamente carica quando tutti gli indicatori di livello di
carica della batteria sono spenti. Scollegare la batteria dal caricabatterie.
5. Lasciare che la temperatura della batteria scenda al livello della temperatura ambiente prima di
riporla per un periodo di tempo prolungato.
6. Il caricabatterie interrompe la carica della batteria se la temperatura della cella della batteria non
è compresa nel campo di funzionamento (da 5 °C a 40 °C).
Velivolo
Spegnere sempre la batteria prima di inserirla o di toglierla da Mavic Pro. Non inserire né
rimuovere mai la batteria quando è accesa.
Batteria di volo intelligente
Caricabatterie
©
Presa di alimentazione
2017 DJI Tutti i diritti riservati.
29
Page 30

Manuale utente
Indicatori di livello della batteria durante la ricarica della batteria
LED1 LED2 LED3 LED4 Livello di carica della batteria
Display a LED di protezione della batteria
Velivolo
La tabella riportata di seguito illustra i meccanismi di protezione della batteria e i corrispondenti
schemi dei LED.
Indicatori di livello della batteria durante la ricarica della batteria
LED1 LED2 LED3 LED4 Schema di lampeggiamento
Dopo che i problemi sono stati risolti, premere il tasto di accensione in modo da disattivare l'indicatore di
livello di carica della batteria. Scollegare la Batteria di volo intelligente dal caricabatterie e ricollegarla per
riprendere la ricarica. Non è necessario staccare e riattaccare il caricabatterie nel caso di un errore nella
temperatura ambiente; il caricatore riprende la carica quando la temperatura è compresa nell'intervallo
prescritto.
DJI non assume alcuna responsabilità per i danni causati da caricabatterie di altra origine.
Scarica della batteria di volo intelligente prima del trasporto delle batterie per un lungo viaggio:
far volare Mavic Pro all'aperto no a quando si rileva un'alimentazione residua inferiore al
20% o no a quando la batteria non può più essere accesa.
Mavic Pro
di
0%~25%
25%~50%
50%~75%
75%~100%
Completamente carica
Elemento di protezione
della batteria
Il LED2 lampeggia due volte al
secondo
Il LED2 lampeggia tre volte al secondo Cortocircuito rilevato
Il LED3 lampeggia due volte al
secondo
Il LED3 lampeggia tre volte al secondo
Il LED4 lampeggia due volte al
secondo
Il LED4 lampeggia tre volte al secondo
Sovracorrente rilevata
Carica eccessiva rilevata
Sovratensione del
caricabatterie rilevata
La temperatura di ricarica è
troppo bassa
La temperatura di ricarica è
troppo alta
2017 DJI Tutti i diritti riservati.
30
©
Page 31

Dispositivo di
controllo remoto
Questa sezione descrive le funzioni
del dispositivo di controllo remoto e
comprende istruzioni per il controllo del
velivolo e della telecamera.
2017 DJI Tutti i diritti riservati.
©
31
Page 32

Dispositivo di controllo remoto
Prolo del dispositivo di controllo remoto
Il dispositivo di controllo remoto di Mavic Pro è un dispositivo di comunicazione multifunzione
wireless che integra il sistema video downlink e il sistema di controllo remoto del velivolo. Il
downlink video il sistema di controllo remoto funzionano a 2,4 GHz. Il dispositivo di controllo remoto
è dotato di un certo numero di funzioni di controllo della telecamera, come ad esempio l'anteprima
di foto e video, e il controllo del movimento del gimbal. Il livello di carica della batteria è visualizzato
sullo schermo LCD del dispositivo di controllo remoto.
Conformità alle versione:
Dispositivo di controllo remoto
leggi locali vigenti.
Modalità di funzionamento:
in una modalità personalizzata.
Modalità 1:
Modalità 2:
Per impedire interferenze nella trasmissione, non azionare più di tre velivoli nella stessa zona.
la levetta di destra serve da acceleratore.
la levetta di sinistra serve da acceleratore.
Utilizzo del dispositivo di controllo remoto
Accensione e spegnimento del dispositivo di controllo remoto
Il dispositivo di controllo remoto di Mavic Pro è alimentato da una batteria ricaricabile 2S con
capacità di 2.970 mAh. Attenersi alla procedura riportata di seguito per accendere il dispositivo di
controllo remoto:
1. Quando il dispositivo di controllo remoto è spento, premere una volta il pulsante di accensione.
Lo schermo LCD visualizza il livello di carica della batteria.
2. Premere una sola volta il tasto di accensione, premerlo una seconda volta e tenerlo premuto in
modo da accendere il dispositivo di controllo remoto.
3. Il dispositivo di controllo remoto emette un segnale acustico quando viene acceso.
4. Ripetere il punto 2 per spegnere il dispositivo di controllo remoto.
il dispositivo di controllo remoto è conforme alle norme e alle
è possibile impostare il controllo in Modalità 1 o Modalità 2, o
2017 DJI Tutti i diritti riservati.
32
©
Page 33

Manuale utente
Mavic Pro
di
Carica del dispositivo di controllo remoto
Caricare il dispositivo di controllo remoto mediante il caricabatterie in dotazione. Per ulteriori
dettagli, fare riferimento alla gura seguente.
Presa di alimentazione
Caricabatterie
Controllo della telecamera
È possibile fare riprese video e scattare foto nonché regolare le impostazioni della telecamera tramite
il pulsante dell'otturatore, il pulsante di registrazione e il selettore delle impostazioni della telecamera.
4
3
1
2
1. Selettore delle impostazioni della telecamera
Ruotare il selettore per regolare le impostazioni della telecamera quali ISO, velocità dell'otturatore
senza lasciar andare il dispositivo di controllo remoto.
2. Pulsante dell'otturatore
Premere il pulsante per scattare una foto. Se la modalità a rafca è attivata, vengono prese più
foto con una singola pressione.
3. Pulsante di registrazione
Premere una volta per avviare la registrazione video, quindi premere nuovamente per
interrompere la registrazione.
Dispositivo di controllo remoto
4. Selettore del gimbal
Controlla l'inclinazione del gimbal.
2017 DJI Tutti i diritti riservati.
©
33
Page 34

Manuale utente
Mavic Pro
di
Controllo del velivolo
In questa sezione si spiega come controllare l'orientamento del velivolo attraverso il dispositivo di
controllo remoto. è possibile impostare il controllo in Modalità 1, Modalità 2, o Modalità 3 o in una
modalità personalizzata.
Modalità 1
Levetta sinistra Levetta destra
Avanti
Verso l'alto
Dispositivo di controllo remoto
Modalità 2
Levetta sinistra Levetta destra
Modalità 3
Levetta sinistra Levetta destra
Indietro
Svolta a destraSvolta a sinistra
Verso l'alto
Verso il basso
Svolta a destraSvolta a sinistra
Avanti
Indietro
Verso il basso
Destra Sinistra
Avanti
Indietro
Destra Sinistra
Verso l'alto
Verso il basso
Destra Sinistra
Il dispositivo di controllo remoto è impostato sulla modalità 2 in modo predenito.
Punto neutro/intermedio delle levette: le levette di comando sono in posizione centrale.
Spostamento della levetta di comando: la levetta di comando viene allontanata dalla
posizione centrale.
2017 DJI Tutti i diritti riservati.
34
©
Svolta a destraSvolta a sinistra
Page 35

Manuale utente
Mavic Pro
di
Dispositivo di
controllo remoto
(Modalità 2)
(
Velivolo
Indica la direzione del muso)
Osservazioni
Spostando la levetta di sinistra verso l'alto e
verso il basso modica l'elevazione del velivolo.
Spingere la levetta verso l'alto per salire e verso
il basso per scendere.
Quando entrambe le levette sono centrate,
Mavic Pro rimane sospeso in posizione.
Più la levetta viene allontanata dalla posizione
centrale, più velocemente Mavic Pro cambia
elevazione. Spingere sempre con cautela la
levetta per evitare variazioni dell'elevazione in
modo improvviso e inaspettato.
Spostare la levetta di sinistra a sinistra o a destra
per controllare il timone e la rotazione del velivolo.
Spingere la levetta di sinistra per ruotare il
velivolo in senso antiorario e spingere la levetta
di destra per ruotare il velivolo in senso orario.
Se la levetta è centrata, Mavic Pro rimane nella
sua direzione attuale.
Più la levetta viene allontanata dalla posizione
centrale, più velocemente Mavic Pro ruota.
Spostando la levetta di destra verso l'alto e
verso il basso si modica il passo del velivolo in
avanti e all'indietro.
Spingere la levetta verso l'alto per volare in avanti
e verso il basso per volare all'indietro.
rimane sospeso in posizione se la levetta è centrata.
Spingere la levetta più lontano dalla posizione
centrale per aumentare l'angolo di beccheggio
(massimo 30˚) e la velocità del volo.
Spostando la levetta di destra verso sinistra e
verso destra si modica il passo del velivolo
verso sinistra e verso destra.
Spingere a sinistra per volare verso sinistra e a
destra per volare verso destra. Mavic Pro rimane
sospeso in posizione se la levetta è centrata.
Mavic Pro
Dispositivo di controllo remoto
Premere una volta il pulsante di pausa del volo
per uscire dalle modalità di volo ActiveTrack,
TapFly e Navigazione intelligente. Il velivolo
rimane sospeso nella sua posizione attuale.
Tenere il dispositivo di controllo remoto lontano da materiali magnetici per evitare
interferenze magnetiche.
Assicurarsi che le levette di comando siano centrate e che non siano premute da forze
esterne durante il trasporto o l'immagazzinaggio.
2017 DJI Tutti i diritti riservati.
©
35
Page 36

Manuale utente
Mavic Pro
di
Commutatore della modalità di volo
Posizionare il commutatore per selezionare la modalità
di volo. Scegliere la modalità P o la modalità S.
Posizione Modalità di volo
SPORT
SPORT
Modalità P
Modalità S
SPORT
Modalità P (Posizionamento)
velivolo utilizza il GPS e i sistemi di visione in avanti e verso il basso per localizzarsi, stabilizzarsi
Dispositivo di controllo remoto
automaticamente e volare tra gli ostacoli. In questa modalità sono disponibili funzioni avanzate quali
: la modalità P funziona meglio quando il segnale GPS è forte. Il
TapFly e ActiveTrack.
Nota: la modalità P richiede grandi movimenti della levetta per raggiungere velocità elevate.
Modalità S (Sport):
la manipolazione del velivolo è regolata per migliorare la manovrabilità e la
velocità. La velocità massima è aumentata a 65 km/h (40 mph). In questa modalità, il sistema di
visione in avanti è disattivato.
Per impostazione predenita, l'interruttore della modalità di volo è bloccato in modalità P,
indipendentemente dalla posizione dell'interruttore. Per cambiare modalità di volo, andare alla
Visualizzazione telecamera nell'app DJI GO 4, toccare e attivare "Multiple Flight Modes". Dopo aver
attivato le modalità di volo multiple, portare l'interruttore su P, quindi su S per volare in modalità Sport.
Dopo ogni accensione, Mavic Pro vola in modalità P per impostazione predenita. Portare sempre il
commutatore della modalità di volo alla modalità P, quindi alla modalità S prima di utilizzare la modalità S.
Pulsante RTH
Premere e tenere premuto il pulsante RTH per avviare la procedura di ritorno alla posizione iniziale
(RTH). Il velivolo torna quindi all'ultimo punto registrato come posizione iniziale. Premere nuovamente
il pulsante per annullare la procedura RTH e riprendere il controllo del velivolo.
2017 DJI Tutti i diritti riservati.
36
©
Page 37

Manuale utente
Mavic Pro
di
Distanza di trasmissione ottimale
Il segnale di trasmissione tra il velivolo e il dispositivo di controllo remoto è più afdabile in una zona
rappresentata di seguito:
Distanza di trasmissione ottimale
forte debole
Accertarsi che il velivolo voli entro la zona di trasmissione ottimale. Per ottenere le migliori prestazioni
di trasmissione, mantenere il rapporto appropriato tra l'operatore e il velivolo.
Schermo LCD
Lo schermo LCD visualizza in tempo reale vari stati di sistema inclusi la telemetria di volo e il
livello di carica della batteria. Per il signicato di ciascun'icona presente sullo schermo LCD, fare
riferimento alla gura riportata di seguito.
Intensità del segnale GPS
Livello di carica della
batteria del velivolo
Intensità del segnale RC
Prompt di stato del sistema
Modalità di volo
Dispositivo di controllo remoto
Velocità di volo
Livello di carica della
batteria RC
Distanza dal suolo
Sistema di visione
Distanza di volo
Compensazione dell'esposizione
Salita/discesa
Altitudine in volo
Stato della telecamera
Giri motore
Posizionamento
della micro-SD
Modalità Sport
* Sullo schermo del dispositivo di controllo remoto, il dispositivo di controllo remoto principale visualizza
MCTL mentre sul display del dispositivo di controllo remoto secondario viene visualizzata la modalità di
volo.
2017 DJI Tutti i diritti riservati.
©
37
Page 38

Manuale utente
Mavic Pro
di
Modalità doppio dispositivo di controllo remoto
Mavic Pro supporta la modalità doppio dispositivo di controllo remoto, sono richiesti la versione rmware
01.03.0400 Mavic Pro e l'app DJI GO 4 v4.0.5. Due dispositivi di controllo remoto sono in grado di
collegarsi allo stesso velivolo in modalità doppio dispositivo di controllo remoto.
Sia il dispositivo di controllo remoto principale, sia il dispositivo di controllo remoto secondario sono
in grado di controllare la direzione del velivolo e il movimento del gimbal oltre al funzionamento della
telecamera dopo che i dispositivi di controllo remoto sono riusciti a stabilire un collegamento con il velivolo.
Dispositivo di controllo remoto
Prestare attenzione alle differenze di funzionamento riportate di seguito relative ai dispositivi di controllo
primario e secondario.
1. Selettore del gimbal
Sia il dispositivo di controllo remoto principale, sia il dispositivo di controllo remoto secondario sono in
grado di controllare il selettore gimbal ma il dispositivo di controllo remoto principale ha la priorità. Ad
esempio, il dispositivo di controllo remoto secondario non è in grado di controllare il selettore gimbal
quando il dispositivo di controllo remoto principale sta utilizzando il selettore gimbal. Tuttavia, dopo aver
interrotto il controllo del selettore gimbal per due secondi, il dispositivo di controllo remoto secondario è
in grado di controllare il selettore del gimbal.
2. Levetta di comando
Sia il dispositivo di controllo remoto principale, sia il dispositivo di controllo remoto secondario sono in
grado di controllare la direzione del velivolo utilizzando le levette di comando. Il dispositivo di controllo
remoto principale ha la priorità. Il dispositivo di controllo remoto secondario non è in grado di controllare
la direzione del velivolo quando il dispositivo di controllo remoto principale sta utilizzando le levette
di comando. Quando le levette di comando non vengono utilizzare per due secondi, il dispositivo di
controllo remoto secondario è in grado di controllare la direzione del velivolo.
Per garantire un volo in condizioni di sicurezza, quando si porta verso il basso la levetta dell'acceleratore
sul dispositivo di controllo remoto secondario, spingere entrambe le levette verso il basso e all'interno.
Quando il dispositivo di controllo remoto principale sta controllando il velivolo, questo non risponderà a
quel comando, anche se il dispositivo di controllo remoto principale non è stato utilizzato per più di due
secondi.
Le levette del dispositivo di controllo remoto secondario devono essere rilasciate in modo che il
dispositivo di controllo remoto secondario possa controllare il velivolo.
2017 DJI Tutti i diritti riservati.
38
©
Page 39

Manuale utente
3. Commutatore della modalità di volo
Utilizzare esclusivamente il dispositivo di controllo remoto principale per abilitare la modalità di volo.
L'interruttore della modalità di volo è disabilitato sul dispositivo di controllo remoto secondario.
4. Impostazioni dell'app DJI GO 4
Le impostazioni di parametro e display per i dispositivi di controllo remoto principale e secondario in DJI
GO 4 sono le stesse. Ad eccezione del dispositivo di controllo di volo, sistema di visione, trasmissione
video, batteria di volo intelligente e gimbal, i parametri non possono essere impostati quando è in uso
il dispositivo di controllo remoto secondario. Le impostazioni di parametro e display in DJI GO 4 per i
dispositivi di controllo remoto principale e secondario sono le stesse.
Mavic Pro
di
Collegamento del dispositivo di controllo remoto
Il dispositivo di controllo remoto è collegato al velivolo prima della consegna. Il collegamento è necessario
soltanto quando si utilizza un nuovo dispositivo di controllo remoto per la prima volta. Attenersi alle
procedure riportate di seguito per il collegamento di un nuovo dispositivo di controllo remoto:
1. Accendere il dispositivo di controllo remoto e collegarlo al dispositivo mobile, e accendere il
velivolo. Lanciare l'app DJI GO 4.
2. Accedere a “Camera” e toccare , quindi toccare il pulsante di collegamento al dispositivo
di controllo remoto principale o di collegamento al dispositivo di controllo remoto secondario per
confermare.
Prima di effettuare il collegamento, portare il commutatore della modalità di controllo alla
modalità RC.
3. Il dispositivo di controllo remoto è pronto al collegamento.
4. Individuare il pulsante di collegamento sul lato del velivolo, come illustrato nella gura riportata
di seguito. Premere il pulsante di collegamento per avviare il collegamento stesso. L'indicatore
di stato del collegamento si accende di colore verde sso quando il telecomando è collegato
correttamente al velivolo, e lo schermo LCD sul dispositivo di controllo remoto visualizza le
informazioni relative al velivolo.
Pulsante di collegamento
Indicatore dello stato di collegamento
Dispositivo di controllo remoto
Il dispositivo di controllo remoto si scollega dal velivolo se allo stesso velivolo viene
collegato un nuovo dispositivo di controllo remoto.
In modalità doppio dispositivo di controllo remoto, il dispositivo di controllo remoto
secondario deve essere ricollegato al velivolo quando il dispositivo di controllo remoto
principale è stato ricollegato al velivolo.
2017 DJI Tutti i diritti riservati.
©
39
Page 40

Telecamera e gimbal
Questa sezione fornisce le speciche
tecniche della telecamera e spiega la
modalità di funzionamento del gimbal.
2017 DJI Tutti i diritti riservati.
40
©
Page 41

Telecamera e gimbal
Prolo della telecamera
La telecamera di bordo utilizza il sensore CMOS da 1/2,3 pollici per riprendere video no a 4K con
30 fotogrammi al secondo con Mavic Pro e fermi immagine da 12 megapixel. È possibile registrare
il video in uno dei due formati MOV o MP4. Le modalità di scatto immagini disponibili comprendono
le modalità a rafca, continua e a intervalli di tempo. Un'anteprima in tempo reale di quanto visto
dalla telecamera può essere monitorata sul dispositivo mobile collegato tramite l'app DJI GO 4.
Slot per micro-scheda SD per telecamera
Per memorizzare le foto e i video, prima di accendere Mavic Pro, inserire la scheda Micro SD nel suo
slot, come illustrato di seguito. Mavic Pro è fornito con una scheda Micro SD da 16 GB e supporta
schede Micro SD no a 64 GB. Si consiglia di utilizzare una scheda micro SD UHS-1 grazie alla sua
alta velocità di lettura e scrittura, che consente di salvare dati video ad alta risoluzione.
Non rimuovere la scheda micro-SD da Mavic Pro mentre il dispositivo è acceso.
Per garantire la stabilità del sistema della telecamera, le singole registrazioni video
vengono interrotte a 30 minuti.
Telecamera a gimbal
Porta dati della telecamera
Accendere Mavic Pro e collegare un cavo USB alla porta micro-USB per scaricare foto e video sul
proprio computer.
Il velivolo deve essere in funzione prima di poter accedere ai le presenti sulla scheda Micro SD.
2017 DJI Tutti i diritti riservati.
©
41
Page 42

Manuale utente
Mavic Pro
di
Gimbal
Prolo del gimbal
Il gimbal a 3 assi fornisce una piattaforma stabile per la telecamera collegata, consentendo di
acquisire immagini e video nitidi e stabili. Il gimbal può inclinare la telecamera no a 120 gradi.
30°
0°
Telecamera a gimbal
Utilizzare il selettore gimbal presente sul dispositivo di controllo remoto per controllare l'inclinazione
della telecamera o accedere alla vista telecamera nell'app DJI GO 4, toccare e tenere il dito sullo
schermo nché non viene visualizzato un cerchio blu, quindi trascinare il cerchio per controllare
l'inclinazione della telecamera.
L'intervallo controllabile dell'asse di rollio del gimbal va 0° a 90°, permettendo di scattare foto in
modalità Paesaggio e Ritratto. L'asse di rollio ruota di 90° quando la modalità Ritratto è attivata.
Si consiglia di utilizzare la modalità Ritratto per scattare foto invece che registrare video.
Quando il velivolo vola in modi che possano mettere alla prova il sistema, ad esempio una
frenata di emergenza o il volo in modalità Sport, l'asse di rollio del gimbal raggiunge il suo
necorsa e fa vibrare il gimbal.
-90°
Modalità di funzionamento del gimbal
Per il gimbal sono disponibili due modalità di funzionamento. Selezionare le diverse modalità di
funzionamento sulla pagina Impostazione telecamera dell'app DJI GO 4. Si noti che il dispositivo
mobile deve essere collegato al dispositivo di controllo remoto per implementare le modiche. Per
ulteriori dettagli, fare riferimento alla tabella riportata di seguito:
Modalità
d'inseguimento
Modalità FPV
Rimuovere il supporto del gimbal prima di accendere il velivolo.
Un errore motore del gimbal può vericarsi nelle situazioni seguenti:
(1) Il velivolo è posizionato su un terreno irregolare o il movimento del gimbal è ostruito.
(2) Il gimbal è stato sottoposto a una forza esterna eccessiva, come ad esempio una collisione.
Effettuare il decollo da un terreno in piano all'aperto e proteggere costantemente il
gimbal.
Volare nella nebbia o nelle nuvole può inumidire il gimbal e provocarne un guasto
temporaneo. Il gimbal recupera la sua piena funzionalità dopo che si asciughi.
È normale che il gimbal emetta un suono acustico al momento dell'inizializzazione.
2017 DJI Tutti i diritti riservati.
42
©
L'angolo tra l'orientamento del gimbal e il muso del velivolo rimane
sempre costante.
il gimbal si sincronizza con il movimento del velivolo per fornire
un'esperienza di volo in prima persona.
Page 43

App DJI GO 4
Questa sezione presenta le quattro
funzioni principali dell'app DJI GO 4.
2017 DJI Tutti i diritti riservati.
©
43
Page 44

App DJI GO 4
L'app DJI GO 4 è un'applicazione mobile progettata appositamente le apparecchiature DJI.
Utilizzare questa applicazione per controllare il gimbal, la telecamera e altre funzioni del velivolo.
L'app comprende anche le sezioni Equipment Editor, SkyPixel e Me, che vengono utilizzate per
congurare il velivolo e per modicare e condividere foto e video con altri.
80%
Connect your DJI device
Mavic Pro
Use AEB shoot to get more dynanic image
Camera
Learn more
Equipment Editor Skypixel Me
Equipment
Accedere alla vista telecamera toccando Camera sulla schermata di benvenuto di DJI GO 4.
Vista Telecamera
10 118 97654321
24
READY TO GO (GPS)
09:29
23
P-GPS
12
61%
12
13
AE
14
15
22
21
20
2017 DJI Tutti i diritti riservati.
44
©
16
17
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
18
19
Page 45

1. Stato del sistema
PRONTO PER LA PARTENZA (GPS)
: questa icona indica lo stato di volo del velivolo e i vari stati di allarme.
Manuale utente
Mavic Pro
di
2. Stato di rilevamento degli ostacoli
: delle barre rosse vengono visualizzate quando vicino al velivolo sono presenti
ostacoli. Delle barre arancioni vengono visualizzate quando nel campo di rilevamento sono
presenti ostacoli.
3. Indicatore di livello di carica della batteria
: l'indicatore di livello di carica della batteria fornisce una visualizzazione dinamica del
livello di carica della batteria. Le zone colorate sull'indicatore di livello di carica della batteria
rappresentano i livelli di potenza necessari per effettuare diverse funzioni.
4. Modalità di volo
: il testo accanto a questa icona indica l'attuale modalità di volo.
Toccare per configurare le impostazioni MC (Dispositivo di controllo principale). Queste
impostazioni consentono di modicare i limiti del volo e di impostare i valori di guadagno.
5. Parametri della telecamera
Visualizza i parametri delle impostazioni della telecamera e la capacità della scheda micro-SD.
6. Intensità del segnale GPS
: mostra l'intensità attuale del segnale GPS. Le barre bianche indicano l'intensità adeguata
del GPS.
7. Stato del sistema di visione in avanti
: toccare questo pulsante per attivare o disattivare le funzioni fornite dal sistema di visione in avanti.
8. Segnale del dispositivo di controllo remoto
: questa icona indica l'intensità del segnale del dispositivo di controllo remoto. L'icona
lampeggia quando durante il volo viene rilevata un'interferenza. Quando nell'app DJI GO 4
non vengono più segnalate avvertenze aggiuntive, signica che l'interferenza non inuenza il
funzionamento dell'esperienza complessiva di volo.
App DJI GO 4
9. Intensità del segnale di collegamento video HD
: questa icona indica l'intensità del collegamento downlink video HD tra il velivolo e
il dispositivo di controllo remoto.L'icona lampeggia quando durante il volo viene rilevata
un'interferenza. Quando nell'app DJI GO 4 non vengono più segnalate avvertenze aggiuntive,
signica che l'interferenza non inuenza il funzionamento dell'esperienza complessiva di volo.
10. Livello di carica della batteria
: questa icona indica il livello attuale di carico della batteria.
61%
Toccare per visualizzare il menu delle informazioni sulla batteria, impostare le varie soglie di
avvertimento della batteria e visualizzare lo storico degli avvertimenti della batteria.
. Pulsante di messa a fuoco/misurazione
11
/ : toccare questo tasto per passare dalla modalità di messa a fuoco alla modalità di
misurazione e viceversa. Toccare questo pulsante per selezionare un oggetto da mettere a
fuoco o da misurare. La modalità Auto Focus-Continuous verrà attivata automaticamente a
2017 DJI Tutti i diritti riservati.
©
45
Page 46

Manuale utente
AE
seconda dello stato del velivolo e della videocamera dopo aver attivato l'Auto Focus.
Mavic Pro
di
12. Impostazioni generali
: toccare questo tasto per avvedere al menu delle impostazioni generali per impostare le
metriche, attivare il livestream, visualizzare le traiettorie di volo ecc.
13. Blocco automatico dell'esposizione
: toccare questo tasto per bloccare il valore di esposizione.
14. Selettore gimbal
: visualizza il beccheggio del gimbal.
15. Pulsante foto/video
: toccare questo tasto per passare dalla modalità Foto alla modalità Video e viceversa.
App DJI GO 4
16. Pulsante scatto/registrazione
/ : toccare questo tasto per iniziare a scattare foto o a registrare video.
17. Impostazioni della telecamera
: toccare per impostare i valori ISO, dell'otturatore e dell'esposizione automatica della
telecamera.
18. Riproduzione
: toccare questo tasto per accedere alla pagina di riproduzione e visualizzare in anteprima
le foto e i video non appena vengono acquisiti.
19. Telemetria del volo
D 30M
H 10.0M
: distanza tra il velivolo e la posizione iniziale.
: altezza da terra.
HS 10.0M/S
VS 2.0M/S
20. Mappa
Toccare per visualizzare la mappa.
21. Modalità di volo intelligente
: toccare questo tasto per selezionare la modalità di volo intelligente.
22. Smart RTH (RTH intelligente)
: avviare la procedura di ritorno alla posizione iniziale (RTH). Toccare per far tornare il
velivolo all'ultimo punto registrato come posizione iniziale.
2017 DJI Tutti i diritti riservati.
46
©
: velocità orizzontale del velivolo.
: velocità verticale del velivolo.
Page 47

Decollo e atterraggio automatici
23.
/ : premere per avviare il decollo o l'atterraggio automatico.
Manuale utente
Mavic Pro
di
24. Indietro
: premere questo tasto per tornare al menu principale.
Far scorrere il dito verso sinistra nella vista telecamera per accedere al menu illustrato di seguito.
READY TO GO (GPS)
09:29
P-GPS
12
61%
AE
Portrait/Landscape Gimbal up/down
H 10.0MD 30M
Home Point: Aircraft Home Point: Me
Adjust screen brightness
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
Portrait/Landscape
Passare alla modalità Portrait toccando l'icona.
Gimbal up/down
Toccare l'icona per puntare la telecamera verso il basso o in avanti.
Home Point
Utilizzare la posizione del velivolo o la posizione del dispositivo di controllo remoto come
posizione iniziale.
Utilizzo del dispositivo mobile per controllare il velivolo
Oltre al dispositivo di controllo remoto, per il controllo del velivolo è possibile utilizzare la
connessione Wi-Fi del dispositivo mobile. Seguire le istruzioni riportate di seguito per imparare a
controllare il velivolo sotto Wi-Fi.
1. Spegnere il velivolo, quindi portare il commutatore della modalità di controllo su "Wi-Fi".
Commutatore della modalità di controllo
App DJI GO 4
2. Accendere il velivolo.
3. Accendere il Wi-Fi del dispositivo mobile e inserire la password del Wi-Fi riportata sul braccio
anteriore per collegarsi alla rete Mavic.
4. Toccare l'icona per fare decollare il velivolo automaticamente. Toccare lo schermo e
utilizzare i joystick virtuali per guidare il velivolo.
2017 DJI Tutti i diritti riservati.
©
47
Page 48

Manuale utente
Avviare l'app DJI GO 4 e toccare l'icona in alto a destra dello schermo, quindi eseguire
Mavic Pro
di
la scansione del codice QR del Wi-Fi riportato sul braccio anteriore per avviare la
connessione. Si noti che questa funzione è disponibile sui dispositivi Android.
Quando si usa il Wi-Fi in una zona aperta con nessuna interferenza elettromagnetica, la
distanza di trasmissione è di circa 80 m (262 piedi) a un'altitudine di 50 m (164 piedi). La
velocità di volo massima è di 14 km/h (9 mph), la velocità di risalita massima è 2 m/s e la
velocità di discesa massima è di 1 m/s.
La frequenza del Wi-Fi del dispositivo mobile può essere impostata a 2,4 Ghz (predenito) o a
5 GHz. Sui dispositivi supportati, impostare il Wi-Fi a 5 GHz per riscontrare meno interferenze.
Premere e tenere premuto il pulsante di collegamento per almeno 5 secondi per impostare
la password del Wi-Fi e l'SSID. Premere e rilasciare il pulsante lasciare la frequenza di
trasmissione a 2.4 GHz.
Utilizzo della modalità Wi-Fi in una vasta area aperta con meno interferenze
elettromagnetiche. Se il Wi-Fi è gravemente inuenzato da interferenze elettromagnetiche,
App DJI GO 4
utilizzare il dispositivo di controllo remoto per far volare il velivolo.
Utilizzo dei joystick virtuali
Assicurarsi che il dispositivo mobile sia collegato al velivolo prima di utilizzare joystick virtuali. Le
illustrazioni riportate di seguito si basano sulla Modalità 2 (levetta di sinistra come acceleratore).
READY TO GO (GPS)
12
P-GPS
09:29
61%
AE
GUI dei joystick virtuali
Sinistra Destra
Spostare il velivolo verso l'alto, verso il basso o ruotare a destra o a sinistra premendo sulla metà
sinistra dello schermo. Spostare il velivolo in avanti, indietro o ruotare a sinistra o a destra premendo
sulla metà sinistra dello schermo.
Toccare il pulsante " " per attivare o disattivare i joystick virtuali.
La zona oltre il cerchio bianco risponde ai comandi di controllo.
2017 DJI Tutti i diritti riservati.
48
©
Page 49

Manuale utente
Mavic Pro
di
Editor
Nell'app DJI GO 4 è integrato un editor video intelligente. Dopo la registrazione di vari
clip video e dopo averli scaricate sul dispositivo mobile, occorre andare su Editor nella
schermata Home. È quindi possibile selezionare un modello e un numero specifico di clip, che
vengono automaticamente abbinati per creare un breve filmato il quale può essere condiviso
immediatamente.
SkyPixel
Visualizzare e condividere foto e video nella pagina SkyPixel.
Me
Se si dispone già di un account DJI, si può partecipare alle discussioni del forum e condividere la
graca con la community.
App DJI GO 4
2017 DJI Tutti i diritti riservati.
©
49
Page 50

Volo
Questa sezione descrive le procedure
corrette per un volo sicuro e le limitazioni
al volo.
2017 DJI Tutti i diritti riservati.
50
©
Page 51

Volo
Una volta eseguita la preparazione pre-volo, si consiglia di utilizzare il simulatore di volo dell'app DJI GO
4 per afnare le proprie capacità di volo e realizzare un'esperienza di volo sicura. Accertarsi che tutti i
voli avvengano in una zona libera da ostacoli.
Requisiti ambientali del volo
1. Non utilizzare il velivolo in condizioni climatiche difficili. Queste includono velocità del vento
superiori a 10 m/s, neve, pioggia e nebbia.
2. Volo in zone aperte. Le strutture alte e le grandi strutture metalliche possono influenzare la
precisione della bussola e del sistema GPS di bordo.
3. Evitare gli ostacoli, le folle, le linee elettriche ad alta tensione, gli alberi e gli specchi d'acqua.
4. Ridurre al minimo le interferenze evitando le zone con alti livelli di elettromagnetismo, comprese
le stazioni di base e le torri di trasmissione radio.
5. Le prestazioni del velivolo e della batteria sono soggette a fattori ambientali quali la densità e la
temperatura dell'aria. Prestare molta attenzione quando si vola ad altitudini superiori a 5.000 metri
(16.404 piedi) sopra il livello del mare, in quanto le prestazioni della batteria e del velivolo potrebbero
essere compromesse.
6. Mavic Pro non è in grado di utilizzare la modalità P elle zone polari.
Limiti di volo e zone vietate al volo (No-Fly Zones)
Tutti gli operatori di velivoli senza equipaggio (UAV) devono rispettare tutte le norme vigenti stabilite
dal governo e dalle agenzie di regolamentazione tra cui l'ICAO e la FAA. Per motivi di sicurezza,
i voli sono limitati per impostazione predenita per aiutare gli utenti a utilizzare questo prodotto in
modo sicuro e legale. Le limitazioni di volo impongono limiti di altezza e distanza nonché le zone
vietate al volo.
Durante il funzionamento in modalità P, i limiti di altezza e distanza e le zone vietate al volo
contribuiscono a gestire il volo in modo sicuro.
Volo
Altitudine massima di volo e limiti di raggio
L'altitudine massima di volo e i limiti di raggio possono subire modiche nell'app DJI GO 4. Tenere
presente che l'altitudine massima di volo non può superare 500 metri (1.640 piedi). In conformità a
queste impostazioni, Mavic Pro vola entro i limiti di un cilindro chiuso, come illustrato di seguito:
Massima altitudine in volo
Raggio massimo
Posizione iniziale
Altezza del velivolo
all'accensione
2017 DJI Tutti i diritti riservati.
©
51
Page 52

Manuale utente
Segnale GPS forte Lampeggiante Verde
Massima
altitudine in volo
Raggio
massimo
Segnale GPS debole giallo lampeggiante
Volo
Massima
altitudine in
volo
Raggio
massimo
Se si vola fuori dal limite, è ancora possibile controllare il velivolo, il quale però non può
volare oltre.
Se si vola fuori del raggio massimo, il velivolo torna automaticamente nel campo impostato
quando il segnale GPS è forte.
Per motivi di sicurezza, si prega di non volare vicino ad aeroporti, autostrade, stazioni
ferroviarie, linee ferroviarie, centri urbani o ad altre zone sensibili. Far volare il velivolo solo
nei limiti della propria visuale.
Mavic Pro
di
Limiti di volo App DJI GO 4 Indicatore di stato del velivolo
L'altitudine del velivolo
non può superare il valore
specicato.
La distanza di volo deve
essere inferiore al raggio
massimo.
Limiti di volo App DJI GO 4 Indicatore di stato del velivolo
L'altezza è limitata a 5 metri
(16 piedi) quando il segnale
GPS è debole e con il sistema
di visione verso il basso attivato.
L'altezza è limitata a 30 metri
(98 piedi) quando il segnale
GPS è debole e con il sistema di
visione verso il basso disattivato.
Nessun limite
Avvertimento:
limite di altezza
raggiunto.
Avvertimento:
distanza limite
raggiunta.
Avvertimento:
limite di altezza
raggiunto.
Nessuno.
Rosso lampeggiante
rapidamente quando
ci si avvicina al raggio
limite massimo.
Nessuno.
Zone vietate al volo (No-Fly Zones)
Tutte le zone vietate al volo sono riportate sul sito ufciale DJI http://www.dji.com/ysafe/no-y. Le zone
vietate al volo sono suddivise in aeroporti e aree soggette a limitazioni. Gli aeroporti comprendono i
maggiori aeroporti e campi di volo in cui aeromobili con equipaggio volano a bassa altitudine. Le zone
soggette a limitazioni comprendono le linee di conne tra paesi o quelle dichiarate sensibili.
Elenco dei controlli preliminari
1. Il dispositivo di controllo remoto, la batteria spirali intelligente di volo e il dispositivo mobile sono
completamente carichi.
2. Le eliche sono montate correttamente e saldamente.
3. La scheda Micro SD è stata inserita se necessario.
4. Il gimbal funziona normalmente.
5. I motori possono essere avviati e funzionano normalmente.
6. L'app DJI GO 4 è stata collegata correttamente al velivolo.
7. Assicurarsi che i sensori dei sistemi di visione in avanti e verso il basso siano puliti.
2017 DJI Tutti i diritti riservati.
52
©
Page 53

Manuale utente
Mavic Pro
di
Taratura della bussola
Tarare la bussola solo quando l'app DJI GO 4 o l'indicatore di stato lo richiedono. Per tarare la
bussola, rispettare le regole seguenti:
NON tarare la bussola dov'è possibile che siano presenti forti campi magnetici, come in
presenza di magnetite, nei parcheggi e in presenza di rinforzi sotterranei in acciaio.
NON portare con sé materiali ferromagnetici quali chiavi o telefoni cellulari durante la taratura.
L'app DJI GO 4 chiede di risolvere il problema della bussola se è presente una forte
interferenza che la inuenza dopo la taratura. Per risolvere il problema della bussola,
attenersi alla istruzioni richieste.
Procedure di taratura
Scegliere una zona aperta per eseguire le procedure seguenti.
1. Toccare la barra di stato del velivolo nell'app, selezionare "Calibrate" e seguire le istruzioni
visualizzate sullo schermo.
2. Tenere il velivolo in posizione orizzontale e ruotare di 360 gradi. Gli indicatori di stato del velivolo
si accendono di luce verde ssa.
Volo
3. Mantenere il velivolo in posizione verticale con il muso rivolto verso il basso e farlo ruotare di 360
gradi attorno all'asse centrale.
2017 DJI Tutti i diritti riservati.
©
53
Page 54

Manuale utente
4. Tarare nuovamente il velivolo se gli indicatori di stato del velivolo lampeggiano di rosso.
Se l'indicatore di stato del velivolo lampeggia con luce rossa e gialla dopo la procedura di
taratura, spostare il velivolo in una posizione diversa e riprovare.
NON eseguire la taratura della bussola in prossimità di oggetti metallici come ponti,
automobili, ponteggi.
Se l'indicatore di stato del velivolo lampeggia alternativamente con luce rossa e
gialla dopo aver appoggiato il velivolo sul suolo, la bussola ha rilevato un'interferenza
magnetica. Cambiare posizione.
Mavic Pro
di
Decollo e atterraggio automatici
Decollo automatico
Utilizzare il decollo automatico solo quando gli indicatori di stato del velivolo lampeggiano in verde.
Attenersi alla procedura riportata di seguito per utilizzare la funzione di decollo automatico:
1. Lanciare l'app DJI GO 4 e accedere alla pagina "Camera".
Volo
2. Completare tutte le fasi dell'elenco dei controlli preliminari.
3. Toccare " " e confermare che le condizioni sono sicure per il volo. Far scorrere l'icona per
confermare e procedere al decollo.
4. Il velivolo decolla e rimane sospeso in posizione a 1,2 metri sopra il livello del suolo.
L'indicatore di stato del velivolo lampeggia rapidamente quando si utilizza il sistema
di visione verso il basso per garantire una maggiore stabilità. Il velivolo rimane
automaticamente sospeso in posizione entro 13 metri. Si consiglia di attendere no a che
vi sia sufciente segnale GPS prima di utilizzare la funzione di decollo automatico.
Atterraggio automatico
Utilizzare l'atterraggio automatico solo quando l'indicatore di stato del velivolo lampeggia di
colore verde. Attenersi alla procedura riportata di seguito per utilizzare la funzione di atterraggio
automatico:
1. Toccare , per confermare che le condizioni di atterraggio sono ideali. Scorrere per
confermare.
2. Interrompere immediatamente la procedura di atterraggio usando il pulsante presente sullo
schermo.
3. a. Quando la protezione di atterraggio determina che il suolo è adatto per l'atterraggio, Mavic
Pro atterra delicatamente.
b. Se la protezione di atterraggio determina che il suolo non è adatto per l'atterraggio, Mavic Pro
rimane sospeso in posizione e attende la conferma del pilota.
c. Se la protezione di atterraggio non è operativa, l'app DJI GO 4 visualizza un prompt di
atterraggio quando Mavic Pro scende al di sotto di 0,5 metri. Per atterrare, tirare la levetta di
accelerazione verso il basso oppure utilizzare il cursore automatico di atterraggio.
4. Il velivolo atterra e si spegnere automaticamente.
2017 DJI Tutti i diritti riservati.
54
©
Page 55

Manuale utente
Mavic Pro
di
Avviamento/arresto dei motori
Avviamento dei motori
Una combinazione di comandi da levette (CSC) viene utilizzata per avviare i motori. Spingere
entrambe le levette negli angoli inferiori interno ed esterno per avviare i motori. Quando i motori si
sono avviati, rilasciare entrambe le levette simultaneamente.
OPPURE
Arresto dei motori
Vi sono due metodi per arrestare i motori.
Metodo 1: quando Mavic Pro è atterrato, spingere la levetta di sinistra verso il basso , quindi
eseguire la stessa combinazione di comandi da levette (CSC) utilizzata per avviare i motori, come
descritto sopra . I motori si arrestano immediatamente. Rilasciare entrambe le levette una volta
che i motori sono fermi.
Metodo 2: quando il velivolo è atterrato, premere e tenere premute la levetta di sinistra. I motori si
spengono dopo tre secondi.
OPPURE
Metodo 1 Metodo 2
Spegnere i motori durante il volo
Lo spegnimento dei motori durante il volo causa lo schianto del velivolo. I motori possono essere spenti
durante il volo solo se il dispositivo di controllo di volo rileva un errore critico. (Questa impostazione può
essere modicata nell'app DJI GO 4)
Volo
Prova di volo
Procedure di decollo e atterraggio
1. Disporre il velivolo in un'area piana all'aperto con gli indicatori di livello della batteria rivolti verso di sé.
2. Accendere il dispositivo di controllo remoto e il dispositivo mobile, quindi la batteria di volo intelligente.
3. Lanciare l'app DJI GO 4 e accedere alla pagina Camera.
4. Attendere che l'indicatore del velivolo lampeggi di colore verde. Ciò signica che la posizione
iniziale è stata registrata e che è ora possibile volare in sicurezza. Se lampeggiano in giallo, la
posizione iniziale non è stata registrata.
5. Spingere lentamente la levetta di sinistra no al decollo oppure utilizzare la funzione di decollo
automatico.
6. Scattare foto e girare video tramite l'app DJI GO 4.
7. Tirare verso il basso la levetta di sinistra per iniziare a scendere e per mantenere il velivolo sospeso
in posizione a 0,5 m (1,5 piedi) sopra il livello del suolo per circa 1 secondo, quindi tenere premuta
la levetta di sinistra nella sua posizione più bassa no a quando il volare in sospensione non tocca
il suolo e i motori si arrestano.
8. Spegnere primo la batteria di volo intelligente e poi il dispositivo di controllo remoto.
2017 DJI Tutti i diritti riservati.
©
55
Page 56

Manuale utente
Quando l'indicatore di stato del velivolo lampeggia rapidamente di colore giallo durante il
volo, il velivolo è entrato in modalità Failsafe.
Un avvertimento di batteria quasi scarica viene segnalato dagli indicatori di stato del
velivolo che lampeggiano lentamente o rapidamente di rosso durante il volo.
Per ulteriori informazioni sul volo, sono disponibili i nostri tutorial.
Mavic Pro
di
Consigli e suggerimenti video
1. Scorrere interamente l'elenco dei controlli preliminari prima di ciascun volo.
2. Selezionare il modo di funzionamento del gimbal desiderato nell'app DJI GO 4.
3. Girare il video solo quando si vola in modalità P.
4. Volare sempre in buone condizioni meteorologiche, evitando pioggia o venti forti.
5. Scegliere le impostazioni della telecamera che si adattano alle proprie esigenze. Le impostazioni
includono il formato delle foto e la compensazione dell'esposizione.
6. Eseguire le prove di volo per stabilire gli itinerari di volo e gli scenari d'anteprima.
7. Spostare delicatamente le levette di comando in modo che i movimenti del velivolo siano
Volo
regolari e stabili.
2017 DJI Tutti i diritti riservati.
56
©
Page 57

Appendice
2017 DJI Tutti i diritti riservati.
©
57
Page 58

Appendice
Speciche
Velivolo
Peso 734 g (1,62 libbre)
Peso (incluso il coperchio gimbal) 743 g (1,64 libbre)
Dimensioni 83 × 83 × 198 mm (piegato)
Lunghezza diagonale (eliche escluse) 335 mm
Massima velocità di risalita 5 m/s (16,4 piedi/s) in modalità Sport
Velocità di discesa massima 3 m/s (9,8 piedi/s)
Velocità massima 65 km/h (40,4 mph) in modalità Sport in assenza di vento
Quota massima di funzionamento
sopra il livello del mare
Durata massima di volo 27 minuti (assenza di vento a una coerente 25 km/h (15,5 mph))
Tempo massimo in sospensione 24 minuti (assenza di vento)
Avg. Tempo di volo medio 21 minuti (volo generico, 15% di batteria residua)
Distanza di volo massima 13 km (8 mi, assenza di vento)
Temperatura di funzionamento Da 0 °C a 40 °C (da 32 °F a 104 °F)
Sistemi di posizionamento satellitare GPS/GLONASS
Frequenza operativa
Potenza del trasmettitore (EIRP)
Gimbal
Intervallo controllabile Beccheggio: da -90° a +30°; Rullio: 0° o 90° (orizzontale e verticale)
Sistema di visione in avanti
Intervallo di rilevamento
Ambiente di funzionamento Superci con motivi chiari e illuminazione adeguata (> 15 lux)
Sistema di visione verso il basso
Intervallo di velocità ≤ 36 km/h (22,4 mph) a 2 m (6,6 piedi) sopra il livello del suolo
Intervallo di altitudine 0,3 - 13 m (1 - 43 piedi)
Intervallo di funzionamento 0,3 - 13 m (1 - 43 piedi)
Ambiente di funzionamento Superci con motivi chiari e illuminazione adeguata (> 15 lux)
Telecamera
Sensore
Obiettivo
5.000 m (16.404 piedi)
FCC: 2,4-2,4835 GHz; 5,150-5,250 GHz; 5,725-5,850 GHz
CE: 2,4-2,4835 GHz; 5,725-5,850 GHz
SRRC: 2,4-2,4835 GHz; 5,725-5,850 GHz
2,4 GHz
FCC: ≤26 dBm; CE: ≤20 dBm; SRRC: ≤20 dBm
5,2 GHz
FCC: ≤23 dBm
5,8 GHz
FCC: ≤23 dBm; CE ≤13 dBm; SRRC: ≤23 dBm
Precisione intervallo di misurazione: da 0,7 m (2 piedi) a 15 m
(49 piedi)
Intervallo rilevabile: da 15 m (49 piedi) a 30 m (98 piedi)
1/2,3" CMOS Pixel effettivi:12,35 megapixel
(Pixel totali: 12.71 M)
78,8° FOV, 28 mm (equivalente al formato 35 mm) f/2.2,
Distorsione <1,5% Messa a fuoco da 0,5 m a ∞
2017 DJI Tutti i diritti riservati.
58
©
Page 59

Manuale utente
Intervallo ISO 100 - 3.200 (video), 100 - 1.600 (foto)
Velocità dell'otturatore elettronico 8 s a 1/8.000 s
Massima dimensione immagine
Modalità fotograa
Modalità di registrazione video
Velocità di trasmissione per
memorizzazione video
File system supportati FAT32 (≤ 32 GB), exFAT (> 32GB)
Fotograe JPEG, DNG
Video MP4/MOV (MPEG-4 AVC/H.264)
Schede SD supportate
Dispositivo di controllo remoto
Frequenza operativa Da 2,400 GHz a 2,4835 GHz
Distanza massima di trasmissione
Temperatura di funzionamento Da 0 °C a 40 °C (da 32 °F a 104 °F)
Batteria 2.970 mAh
Potenza del trasmettitore (EIRP) FCC: ≤ 26 dBm; CE: ≤ 20 dBm; SRRC: ≤20 dBm
Tensione di funzionamento 950 mA a 3,7 V
Dimensioni del dispositivo mobile
supportato
Caricabatterie
Tensione 13,05 V
Potenza nominale 50 W
Batteria di volo intelligente
Capacità 3.830 mAh
Tensione 11,4 V
Tipo di batteria LiPo 3S
Energia 43,6 Wh
Peso netto Circa 0,5 libbre (240 g)
Temperatura di funzionamento Da 5 °C a 40 °C (da 41 °F a 104 °F)
Massima potenza di carica 100 W
4000×3000
Scatto singolo
Scatti a rafca: 3/5/7 fotogrammi
Auto Exposure Bracketing (AEB):
3/5 fotogrammi nell'intervallo con 0,7 EV di deviazione
Intervallo
HDR
C4K: 4096×2160 24p, 4K: 3840×2160 24/25/30p
2,7K: 2720×1530 24/25/30p
FHD: 1.920×1080 24/25/30/48/50/60/96p
HD: 1280×720 24/25/30/48/50/60/120p
60 Mbps
microSDTM. Capacità massima: 64 GB classe 10 o UHS-1
nominale richiesta.
Conforme allo standard FCC: 4,3 miglia (7 km); Conforme alla
normativa CE: 4 km (2,5 mi); Conforme alla normativa SRRC: 4 km
(2,5 mi) Senza ostacoli né interferenze.
Spessore supportato: 6,5 - 8,5 mm, Lunghezza massima: 160 mm
Tipi di porte USB supportate:
Lightning, micro-USB (Type-B), USB Type-C
TM
Mavic Pro
di
Appendice
2017 DJI Tutti i diritti riservati.
©
59
Page 60

Manuale utente
Mavic Pro
di
Aggiornamenti del rmware
Utilizzare il DJI Assistant 2 o l'app DJI GO 4 per aggiornare il velivolo e il dispositivo di controllo
remoto.
Utilizzo dell’app DJI GO 4
Collegare il dispositivo di controllo remoto e l'app DJI GO 4; il dispositivo ricorda all'utente se
è disponibile un nuovo aggiornamento del rmware. Per avviare l'aggiornamento, collegare il
dispositivo mobile a internet e seguire le istruzioni visualizzate sullo schermo.
Utilizzo di DJI Assistant 2
Utilizzare il DJI Assistant 2 per aggiornare contemporaneamente il rmware del dispositivo di
controllo remoto e del velivolo.
Seguire le istruzioni riportate di seguito per aggiornare il rmware tramite il DJI Assistant 2:
1. Con il dispositivo di controllo remoto e il velivolo spenti, collegare il dispositivo di controllo remoto
al computer tramite la porta di carica usando un cavo micro-USB.
2. Accendere il dispositivo di controllo remoto e il velivolo.
3. Lanciare il DJI Assistant 2 e accedere al proprio account DJI.
4. Selezionare "Mavic Pro" e fare clic su "Firmware Updates" sul pannello di sinistra.
5. Selezionare la versione del rmware che si desidera aggiornare.
Appendice
6. Attendere il download del rmware che verrà quindi aggiornato automaticamente.
7. Al termine dell'aggiornamento del rmware, riavviare il velivolo e il dispositivo di controllo remoto.
Il dispositivo di controllo remoto e il velivolo possono anche essere aggiornati separatamente.
Se si collega il velivolo al computer tramite la porta micro-USB del velivolo, è possibile
aggiornare solo il rmware del velivolo.
Il rmware si aggiorna in circa 15 minuti. È normale che il gimbal si spenga, che l'indicatore
di stato del velivolo lampeggi in modo anomalo e che il velivolo si riavvii. Si prega di
attendere no al completamento dell'aggiornamento.
Assicurarsi che il computer abbia accesso a Internet.
Assicurarsi che le batterie hanno almeno il 50% di carica.
Non scollegare il velivolo dal computer durante l'aggiornamento del rmware.
Modalità di volo intelligente
La modalità di volo intelligente include le funzioni Course Lock, Home Lock, Point of Interest, Follow
Me e Waypoint per aiutare gli utenti a creare i scatti professionali durante il volo. Course Lock e
Home Lock aiutano a bloccare l'orientamento del velivolo in modo che l'utente possa concentrarsi
maggiormente su altre operazioni. Le modalità Point of Interest, Follow Me e Waypoint consentono
al velivolo di volare automaticamente in base alle manovre di volo pre-impostate.
Course Lock
Home Lock
Point of Interest
2017 DJI Tutti i diritti riservati.
60
©
Bloccare l'attuale direzione del muso come direzione di volo in avanti del
velivolo. Il velivolo si muove nelle direzioni bloccate indipendentemente dal suo
orientamento (angolo di imbardata).
Tirare la levetta di beccheggio all'indietro per far tornare il velivolo alla posizione
iniziale registrata.
Il velivolo orbita automaticamente intorno all'oggetto per consentire all'operatore
di concentrarsi maggiormente sull'impostazione degli scatti dell'oggetto nel
punto di interesse.
Page 61

Manuale utente
Si crea una catena virtuale tra il velivolo e il dispositivo mobile in modo che il
Follow Me
Waypoint
Prima di utilizzare la modalità di volo intelligente per la prima volta, attivare Multiple Flight Mode
lanciando l'app DJI GO 4 > Camera View > > Multiple Flight Mode.
velivolo possa tener traccia dei movimenti dell'operatore a mano a mano che
quest'ultimo si muove. Si noti che le prestazioni della funzione Seguimi sono
soggette alla precisione del GPS sul dispositivo mobile.
Dopo aver registrato un percorso di volo, il velivolo vola lungo tale percorso
ripetutamente mentre l'operatore controlla la telecamera e l'orientamento. Il
percorso di volo può essere salvato e riapplicare in futuro.
Mavic Pro
di
Informazioni relative al menu dello schermo LCD del dispositivo di controllo remoto
Stato del dispositivo di controllo remoto
BAT xx PCT Livello di carica della batteria del dispositivo di controllo remoto.
SHUTDOWN_ Il dispositivo di controllo remoto si sta spegnendo.
CHARGING_ Il dispositivo di controllo remoto è in carica.
USB PLUGGED Mavic Pro è stato collegato a un computer.
FC U-DISK Il dispositivo di controllo di volo sta leggendo i dati.
UPGRADING Aggiornamento in corso.
BINDING Il velivolo si sta collegando al dispositivo di controllo remoto.
Prima del volo
CONNECTING_ Il dispositivo di controllo remoto si sta collegando al velivolo.
SYS INITING Il sistema si sta avviando.
READY TO GO Pronto al decollo.
Modalità di volo
BEGINNER Modalità per principianti attiva.
GPS MODE Modalità P-GPS attiva.
OPTI MODE Modalità P-OPTI attiva.
ATTI MODE Modalità Assetto attiva.
SPORT MODE Modalità Sport attiva.
Stato del volo
TAKING OFF Decollo.
LANDING Atterraggio.
GOING HOME Ritorno alla posizione iniziale.
NAV GOHOME Ritorno alla posizione iniziale.
NAV LANDING Atterraggio.
MAX ALT. Il velivolo ha raggiunto l'altitudine massima.
MAX RADIUS Il velivolo ha raggiunto il raggio massimo.
OBSTACLE Ostacolo rilevato.
NO FLY ZONE Il velivolo è in una zona vietata al volo.
Stato della modalità di volo intelligente
TRIPOD Modalità treppiede attiva.
ACTIVETRACK Utilizzo della modalità ActiveTrack.
TAP FLY Utilizzo della funzione TapFly.
COURSE LOCK Modalità Course Lock attiva
HOME LOCK Modalità Home Lock attiva
POI MODE Modalità Point of Interest attiva
WAY POINT Modalità Waypoints attiva.
FOLLOW ME Modalità Follow Me attiva.
Appendice
2017 DJI Tutti i diritti riservati.
©
61
Page 62

Manuale utente
TERRAIN Modalità Terrain Follow il suolo attiva.
Informazioni relative agli avvisi di sistema e agli errori
SYS WARNING+CHECK APP Avviso di sistema. Per ulteriori informazioni, fare riferimento
UNACTIVATED+CHECK APP Il velivolo non è attivato. Per ulteriori informazioni, fare
MAG INTERF+CHECK APP Errore della bussola. Per ulteriori informazioni, fare riferimento
BATTERY ERR+CHECK APP Errore della batteria. Per ulteriori informazioni, fare riferimento
SD ERR+CHECK APP Errore della scheda micro-SD. Per ulteriori informazioni, fare
TARATURA Taratura IMU/Dopo l'avvenuta taratura, non è stato possibile
STICK ERR+RE-CTR STCK La levetta di comando non è centrata. Ri-centrarla.
ROTELLA ERR+RE-CTR WHEL Il selettore sinistro sul dispositivo di controllo remoto non è
STICK ERR Errore della levetta di comando. Tarare la levetta di comando
MECH ERR Errore del dispositivo di controllo remoto. Tarare il dispositivo
Appendice
STICK EMI3+AUTO RTH La levetta di comando subisce gravi interferenze
STICK EMI2+MANUAL RTH La levetta di comando subisce interferenze elettromagnetiche
STICK EMI1 La levetta di comando subisce lievi interferenze
SD FULL La scheda micro-SD è piena.
NO PROP Non vi sono eliche collegate.
BAT TEMP HI La batteria di volo intelligente è troppo calda.
BATTERY ERR Errore della batteria di volo intelligente.
BAT TEMP LO La batteria di volo intelligente è troppo fredda.
LOW BATTERY La batteria di volo intelligente è scarica.
RC LOW BAT La batteria del dispositivo di controllo remoto è scarica.
NO RC SIGNL Perdita del segnale del dispositivo di controllo remoto.
RC TEMP HI Dispositivo di controllo remoto troppo caldo.
NO RTH Il velivolo non riesce a tornare alla posizione iniziale.
Mavic Pro
di
all'app DJI GO 4.
riferimento all'app DJI GO 4.
all'app DJI GO 4.
all'app DJI GO 4.
riferimento all'app DJI GO 4.
avviare il velivolo.
centrato. Ri-centrarlo.
nell'app DJI GO 4.
di controllo remoto nell'app DJI GO 4. Se il problema
persiste, rivolgersi all'assistenza DJI.
elettromagnetiche e non funziona. Il velivolo tornerà alla
posizione iniziale e atterrerà immediatamente.
e potrebbe non funzionare. Utilizzare la procedura Smart
RTH e far atterrare il velivolo non appena possibile.
elettromagnetiche, far volare il velivolo in un'altra posizione.
Informazioni per l'assistenza
Per saperne di più sulla politica relativa all'assistenza e per le informazioni sulla garanzia, visitare le
pagine seguenti:
1. Politica relativa all'assistenza: http://www.dji.com/service
2. Politica sul rimborso: http://www.dji.com/service/refund-return
3. Assistenza per le riparazioni a pagamento: http://www.dji.com/service/repair-service
4. Assistenza per la garanzia: http://www.dji.com/service/warranty-service
2017 DJI Tutti i diritti riservati.
62
©
Page 63

Assistenza DJI
http://www.dji.com/support
Il presente contenuto è soggetto a modiche.
Scaricare l'ultima versione da
http://www.dji.com/mavic
Per qualsiasi domanda circa questo documento, si prega di contattare DJI mandando
un messaggio all'indirizzo email
è un marchio registrato di DJI.
MAVIC
Copyright © 2017 DJI Tutti i diritti riservati.
DocSupport@dji.com
. (Servizio in inglese e cinese)
 Loading...
Loading...