

Page 1
MAVIC PRO
Manual do usuário
2017.06
V1.6
Page 2
Pesquisa de palavras-chave
Pesquise palavras-chave como "bateria" e "instalar" para localizar um tópico. Se você estiver
usando o Adobe Acrobat Reader para ler este documento, pressione Ctrl+F no Windows ou
Command+F no Mac para iniciar uma pesquisa
Navegação para um tópico
Visualize uma lista completa de tópicos no índice. Clique em um tópico para navegar até a
respectiva seção.
Impressão deste documento
Esse documento suporta impressão em alta resolução.
Uso deste manual
Legenda
Advertência Importante Dicas Referência
Leia antes do primeiro voo
Leia os documentos a seguir antes de usar o MAVICTM Pro:
1. Mavic Pro na caixa
2. Manual do Usuário do Mavic Pro
3. Guia de Início Rápido do Mavic Pro
4. Isenção de responsabilidade e Diretrizes de segurança do Mavic Pro
5. Diretrizes de segurança da Bateria de Voo Inteligente do Mavic Pro
Recomendamos que você assista a todos os vídeos do tutorial no site oficial da DJITM e leia a
isenção de responsabilidade antes do voo. Prepare-se para seu primeiro voo, analisando o Guia
de início rápido do Mavic Pro, e consulte o Manual do usuário para obter mais detalhes.
Tutoriais de vídeo
Assista aos vídeos do tutorial no link abaixo, que demonstram como usar o Mavic
Pro com segurança:
http://www.dji.com/mavic
Download do aplicativo DJI GO 4
Faça download e instale o aplicativo DJI GOTM 4 antes de usar o quadricóptero.
Digitalize o código QR à direita para baixar a última versão.
A versão Android do aplicativo DJI GO 4 é compatível com Android 4.4 ou posterior.
A versão iOS do aplicativo DJI GO 4 é compatível com iOS 9.0 ou posterior.
Download do Assistente 2 DJI
Download do Assistente 2 DJI em http://www.dji.com/mavic/download
© 2017 DJI Todos os direitos reservados.
2
Page 3

Conteúdo
Uso deste manual
Legenda
Leia antes do primeiro voo
Tutoriais de vídeo
Download do aplicativo DJI GO 4
Download do Assistente 2 DJI
Perl do produto
Introdução
Principais recursos
Preparação do Mavic Pro
Diagrama do quadricóptero
Diagrama do controle remoto
Quadricóptero
Perl do quadricóptero
Modo de voo
Indicador de status de voo
Return-to-Home (RTH)
Modo de Voo Inteligente
Sistema de visão frontal e inferior
Gravador de voo
Conexão e desconexão das hélices
Bateria de voo inteligente
Controle remoto
Perl do controle remoto
Uso do controle remoto
Modo de Controle Remoto Duplo
Link do controle remoto
Câmera e estabilizador
Perl da câmera
Gimbal
2
2
2
2
2
2
6
6
6
6
8
8
11
11
11
12
13
17
23
26
26
27
32
32
32
38
39
41
41
42
2017 DJI Todos os direitos reservados.
©
3
Page 4

Aplicativo DJI GO 4
Equipamento
Editor
SkyPixel
Me
Voo
Requisitos ambientais de voo
Limites de voo e Zonas de Exclusão Aérea
Lista de vericação pré-voo
Calibração da bússola
Decolagem e pouso automáticos
Partida/Parada dos motores
Teste de voo
Apêndice
Especicações
Atualizações de rmware
Modo de Voo Inteligente
Informações do menu da tela de LCD do controle remoto
Informações de pós-vendas
44
44
49
49
49
51
51
51
52
53
54
55
55
58
58
59
60
61
62
© 2017 DJI Todos os direitos reservados.
4
Page 5
Perl do produto
Esta seção introduz o Mavic Pro e lista
os componentes do quadricóptero e do
controle remoto.
2017 DJI Todos os direitos reservados.
©
5
Page 6
Perl do produto
Introdução
O Mavic Pro é a menor câmera aérea da DJI, com uma câmera totalmente estabilizada, modos
de voo inteligente e recurso de desvio de obstáculo em um design dobrável revolucionário. Ele
captura vídeos em 4K, fotos de 12 megapixels e possui os recursos ActiveTrackTM e TapFly para
tirar fotos complexas sem o mínimo esforço.
O Mavic Pro alcança uma velocidade máxima de voo de 65 km/h (40 mph) e um tempo de voo
máximo de 27 minutos*.
Perl do produto
O tempo de voo máximo foi testado em condição de vento zero à velocidade constante de 25 km/h
(15,5 mph). Este valor serve apenas como referência.
Principais recursos
O Mavic Pro é um quadricóptero ultra-portátil, graças ao seu design dobrável revolucionário.
Câmera e gimbal: Com o Mavic Pro, você irá gravar vídeo 4K em até 30 fps e capturar fotos em
12 megapixels com nitidez e clareza nunca vistas, tudo estabilizado pelo gimbal compacto
integrado.
Controlador de voo: O controlador de voo de próxima geração foi atualizado para oferecer uma
experiência de voo mais segura e conável. O quadricóptero é capaz de retornar automaticamente
ao seu ponto inicial em caso de perda do sinal de transmissão ou se o nível da bateria estiver
baixo. Além de ser capaz de voar em baixas altitudes, o quadricóptero também é capaz de
detectar e evitar obstáculos em sua rota, aumentando a segurança.
Downlink de vídeo HD: A mais recente tecnologia de transmissão de longo alcance OCUSYNCTM
da DJI está integrada ao controle remoto oferecendo um máximo de 7 km (4,3 mi) de alcance de
transmissão e tornando possível controlar seu quadricóptero e transmitir vídeo para seu dispositivo
móvel a 1080p.
Preparação do Mavic Pro
Todos os braços do quadricóptero estão dobrados na entrega. Siga as instruções abaixo para
desdobrar todos os braços.
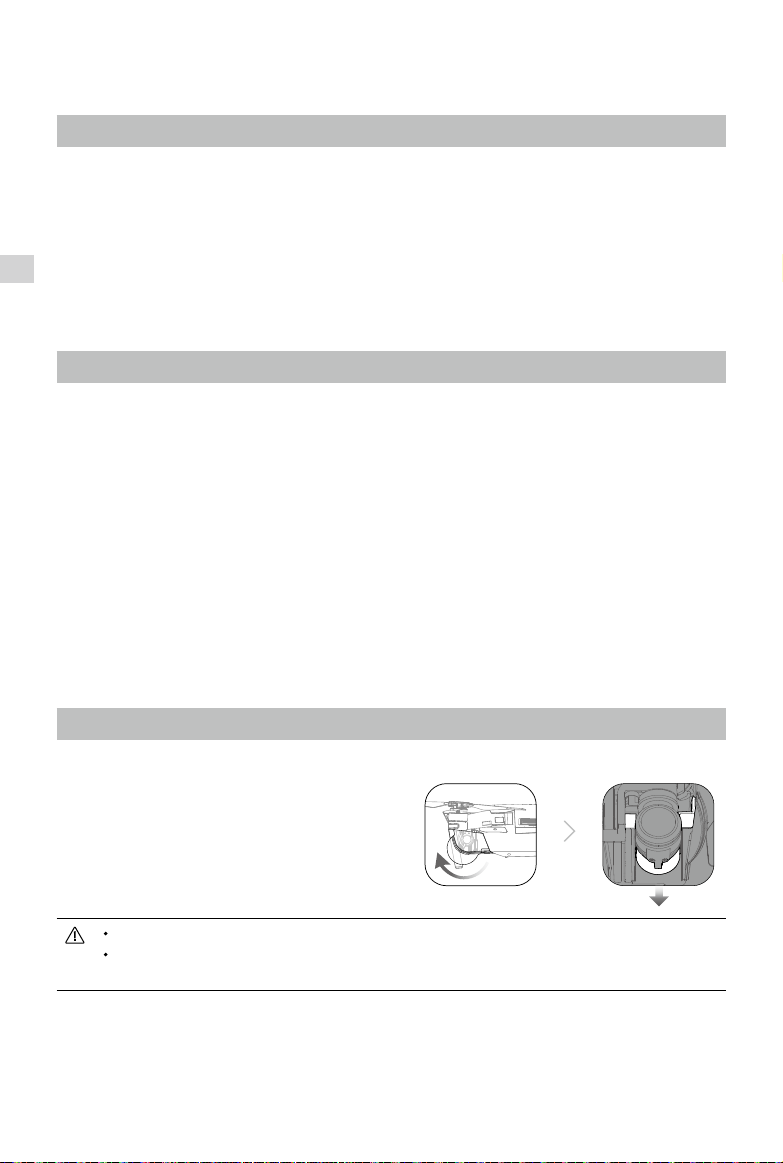
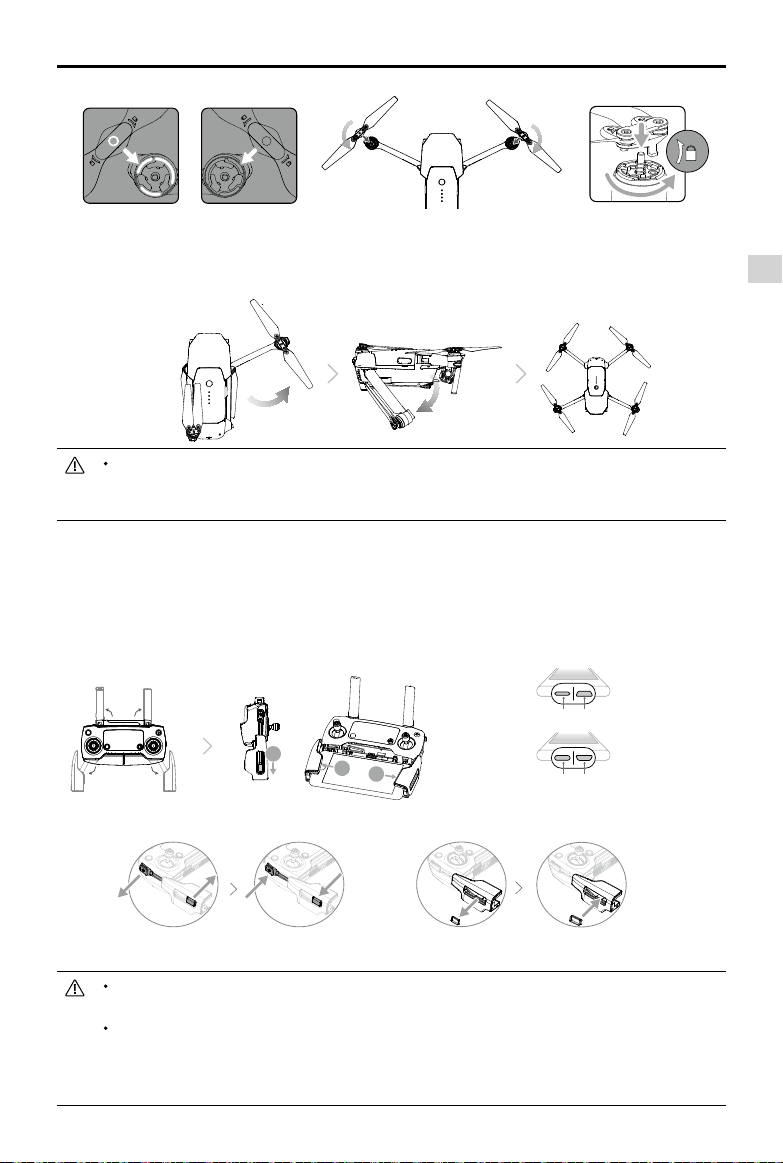
Preparo do quadricóptero
Remova a tampa e a braçadeira do gimbal da
câmera.
A tampa do gimbal é usada para protegê-lo. Remova-a quando necessário.
Use a braçadeira e a tampa do gimbal para proteger o gimbal quando o Mavic Pro não
estiver em uso.
Conexão das hélices
Conecte as hélices com anel branco na base de montagem com as marcas brancas. Pressione a
hélice na placa de montagem para baixo e gire na direção de travamento até car rme. Conecte
as outras hélices na base de montagem sem as marcas.
© 2017 DJI Todos os direitos reservados.
6
Page 7
Manual do Usuário do Mavic Pro
Marcado Desmarcado
Desdobre os braços
1. Desdobre os braços da frente e, sem seguida, os braços traseiros do quadricóptero, como indicado.
2. Desdobre todas as pás das hélices.
Desdobre os braços e as hélices frontais antes dos traseiros. Todos os braços e hélices
devem ser desdobrados antes de ligar o quadricóptero, ou o Teste de autodiagnóstico
pode sofrer alterações.
Preparo do controle remoto
1. Desdobre as braçadeiras e antenas do dispositivo móvel.
2. Escolha um cabo RC apropriado com base no tipo de dispositivo móvel usado. Um cabo RC
com um conector lightning foi conectado; o cabo do conector micro USB padrão e o cabo do
conector tipo C USB estão incluídos. Um cabo opcional de conector micro USB reverso está
disponível. Insira o dispositivo móvel e prenda-o.
Perl do produto
Conector Lightning
1
2
3
Conector USB tipo C
Conector Micro USB
Conector Micro USB
reverso
Consulte a gura abaixo para saber como substituir o cabo RC.
O controle deslizante do cabo RC deve ser substituído
quando um cabo RC de USB tipo C estiver sendo utilizado.
Verique se o interruptor do modo de controle foi mudado para "RC" ao usar o controle
remoto para controlar o quadricóptero.
Você também pode conectar seu dispositivo móvel ao controle remoto com um cabo
USB. Conecte uma extremidade do cabo no seu dispositivo móvel e a outra extremidade
na entrada USB na parte inferior do controle remoto. Certique-se de desconectar o cabo
de RC da porta micro USB no controle remoto ao utilizar um cabo USB.
2017 DJI Todos os direitos reservados.
©
7
Page 8
Manual do Usuário do Mavic Pro
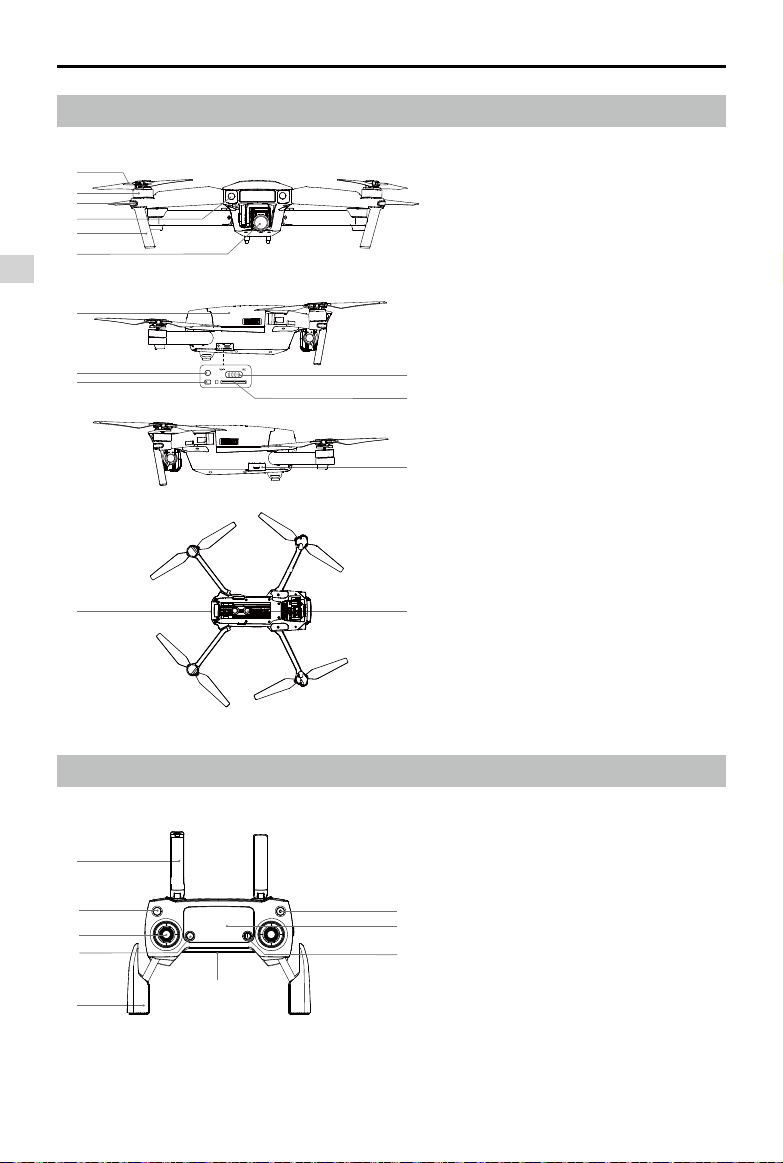
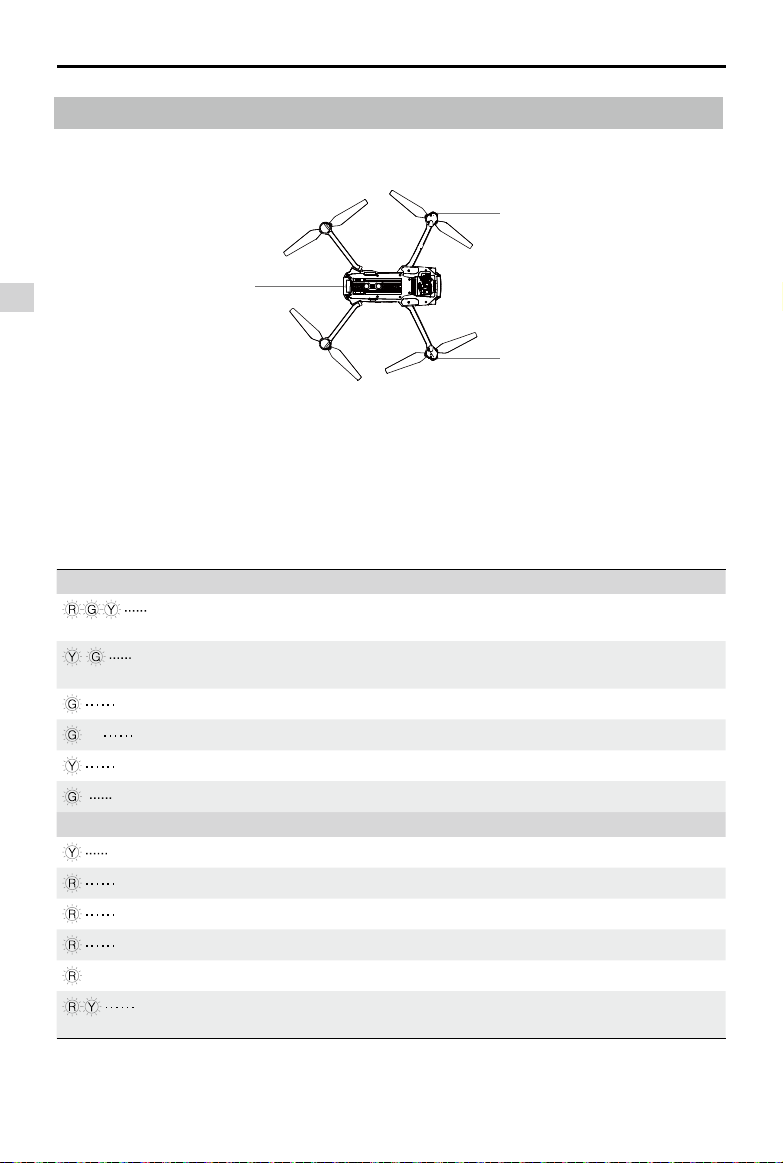
Diagrama do quadricóptero
1
2
3
4
5
6
Perl do produto
7
8
9
1. Hélice
2. Motor
3. Indicador de LED frontal
4. Sistema de visão frontal
5. Trem de pouso
(com antenas embutidas)
11
6. Gimbal e câmera
10
7. Bateria de voo inteligente
8. Botão Link
12
9. Indicador do status de vinculação
10. Slot de cartão Micro SD da câmera
11. Interruptor de modo de controle
12. Porta Micro USB
13. Indicador de status do quadricóptero
1413
14. Sistema de visão inferior
Diagrama do controle remoto
1
2
4
6
8
© 2017 DJI Todos os direitos reservados.
8
9
1. Antenas
Retransmite sinais de controle e de
vídeo do quadricóptero.
2. Botão Return to Home (RTH)
3
5
7
Mantenha pressionado o botão
para iniciar Return to Home (RTH).
Pressione novamente para cancelar
RTH.
3. Botão Power
Usado para ligar e desligar o controle
remoto.
4. Joysticks
Controla a orientação e o movimento
do quadricóptero.
Page 9
Manual do Usuário do Mavic Pro
5. Tela LCD
Exibe o status do sistema do quadricóptero
e do controle remoto.
6. Botão de pausa do voo
Pressione uma vez para frenagem de
emergência.
7. Botão 5D
A conguração padrão está relacionada
abaixo. Denir esses valores com base em
sua preferência no aplicativo DJI GO 4.
Esquerda: Aumentar o zoom
Direita: Diminuir o zoom
Para cima: Gimbal para frente
Para baixo: Gimbal para baixo
Pressione: Abra o menu do Voo Inteligente
DJI GO 4.
10. Botão C1
A conguração padrão está relacionada
abaixo. Denir esses valores com base
em sua preferência no aplicativo DJI GO 4.
Pressione uma vez para foco no centro
ou adicione um ponto de passagem ao
utilizar Wayponits.
11. Botão C2
A conguração padrão está relacionada
abaixo. Denir esses valores com base
em sua preferência no aplicativo DJI GO 4.
Pressione uma vez para reproduzir ou
excluir um ponto de passagem ao utilizar
Waypoints.
12. Botão Gimbal
Controle de inclinação da câmera.
13. Botão giratório de congurações da câmera
Gire o botão giratório para ajustar as
congurações da câmera. (Funciona
somente quando o controle remoto está
conectado a um dispositivo móvel que
esteja executando o aplicativo DJI GO 4)
8. Braçadeira de dispositivo móvel
Prende com segurança seu dispositivo
móvel ao controle remoto.
9. Entrada USB
Conexão do dispositivo móvel para executar
o aplicativo DJI GO 4.
10
12
14
1716
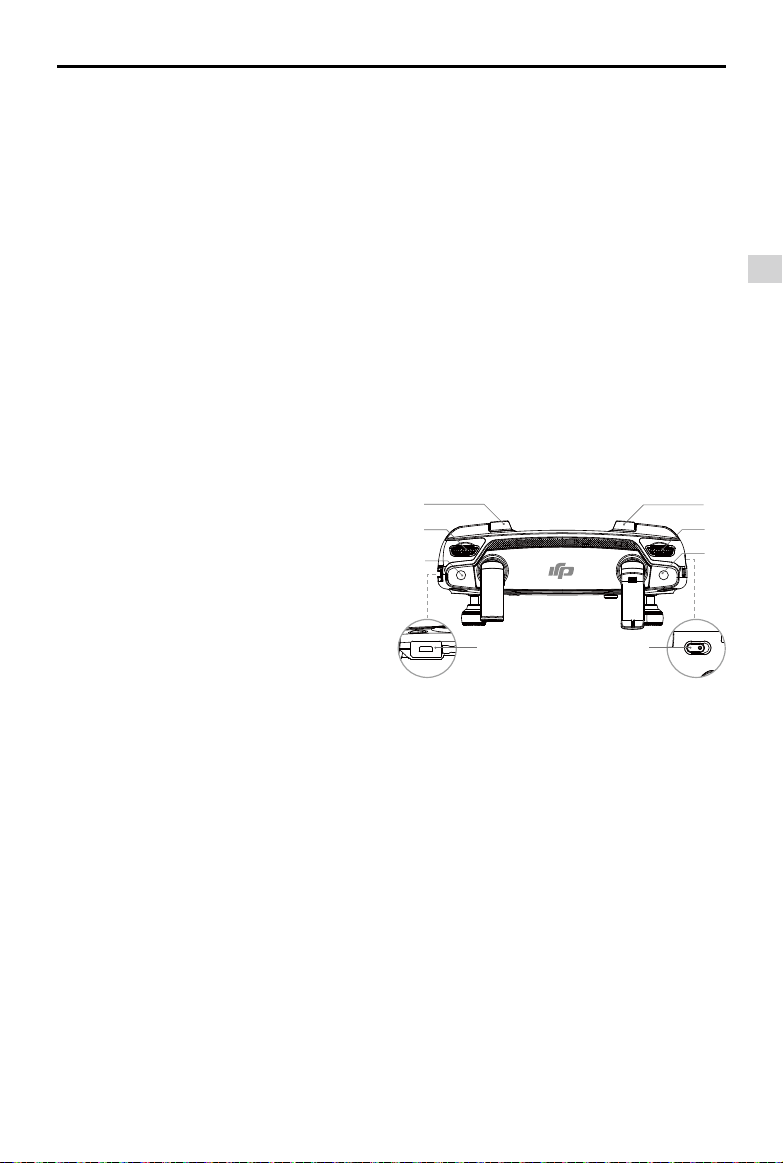
14. Botão de gravação
Pressione para iniciar a gravação do
vídeo. Pressione novamente para parar a
gravação.
15. Botão do obturador
Pressione para tirar uma foto. Se o modo
de disparo sequencial for selecionado, um
número pré-denido de fotos será tirado.
16. Entrada de alimentação
Conecte ao carregador para carregar a
bateria do controle remoto. Conectam essa
porta ao seu dispositivo móvel usando o
cabo de RC.
17. Interruptor do modo de voo
Alternar entre P-Mode e S-Mode.
Perl do produto
11
13
15
2017 DJI Todos os direitos reservados.
©
9
Page 10

Quadricóptero
Esta seção apresenta o Controlador de
voo, o sistema de visão frontal e inferior
e a bateria de voo inteligente.
©
2017 DJI Todos os direitos reservados.
10
Page 11
Quadricóptero
Perl do quadricóptero
O quadricóptero Mavic Pro é composto por um controlador de voo, downlink de vídeo, sistema de
propulsão e um bateria de voo inteligente. Esta seção apresenta os recursos do controlador de
voo, downlink de vídeo e outros componentes do quadricóptero.
Modo de voo
Os seguintes modos de voo estão disponíveis para o Mavic Pro:
Modo P (Posicionamento):
Observação: O P-mode exige movimentos do braço maior para atingir
S-Mode (Sport):
Observação: As respostas do quadricóptero são otimizadas para agilidade
O quadricóptero está usando o GPS para posicionamento. Se os sistemas
O modo P funciona melhor quando o sinal de GPS está forte. O
quadricóptero utiliza o GPS e os sistemas de visão frontal e inferior para
localizar-se, estabilizar-se automaticamente e navegar entre obstáculos.
Recursos avançados, como TapFly e ActiveTrack, são ativados nesse
modo. Quando o sistema de visão frontal estiver ativado e as condições
de iluminação forem sucientes, o ângulo máximo de altitude de voo será
de 16° com uma velocidade de voo máxima de 36 km/h (22 mph). Quando
a função de detecção de obstáculo a frente estiver desabilitada, o ângulo
máximo de altitude de voo será de 25° e a velocidade de voo máxima será
de 58km/h (36 mph).
O quadricóptero irá automaticamente mudar para ATTI quando o sinal de
GPS estiver fraco e as condições de iluminação estiverem muito escuras
para os sistemas de visão frontal e inferior. O quadricóptero apenas usará
seu barômetro de posicionamento para controlar a altitude.
altas velocidades.
de visão frontal e inferior estiverem desativados, o quadricóptero não
será capaz de detectar e evitar obstáculos quando estiver no modo Sport.
As funções Estação Terrestre e Voo Inteligente também não estão disponí
veis no modo Sport.
e velocidade, tornando-o mais ágil para os movimentos do braço.
Quadricóptero
O Sistema de Visão Frontal está desativado no S-Mode (Sport), o que signica que o
quadricóptero não será capaz de evitar obstáculos automaticamente em sua rota.
A velocidade máxima do quadricóptero e a distância de frenagem são signicativamente
maiores no S-Mode (Sport). Uma distância de frenagem mínima de 30 metros é
necessária em condições sem vento.
A velocidade de descida é signicativamente maior no S-Mode (Sport).
A capacidade de resposta do quadricóptero é signicativamente maior no S-Mode (Sport),
o que signica que um pequeno movimento do joystick do controle remoto vai se traduzir
em uma grande distância de percurso do quadricóptero. Fique atento e mantenha
espaço de manobra adequado durante o voo.
Use o interruptor de modo de voo para alterar o modo de voo do quadricóptero.
2017 DJI Todos os direitos reservados
©
.
11
Page 12
Manual do Usuário do Mavic Pro
Indicador de status de voo
O Mavic Pro tem LEDs dianteiros e Indicador de status do quadricóptero. As posições desses
LEDs estão exibidas na gura abaixo:
LED dianteiro
Indicador de status
do quadricóptero
Quadricóptero
LED dianteiro
Os LEDs dianteiros mostram a orientação do quadricóptero. Os LEDs frontais mostram um
vermelho sólido quando o quadricóptero está ligado para indicar a frente (ou o nariz) do
quadricóptero (o LED frontal pode ser desligado no aplicativo DJI GO 4). O indicador de status do
quadricóptero comunica o status do sistema do controlador de voo. Consulte a tabela abaixo para
mais informações sobre o indicador de status do quadricóptero.
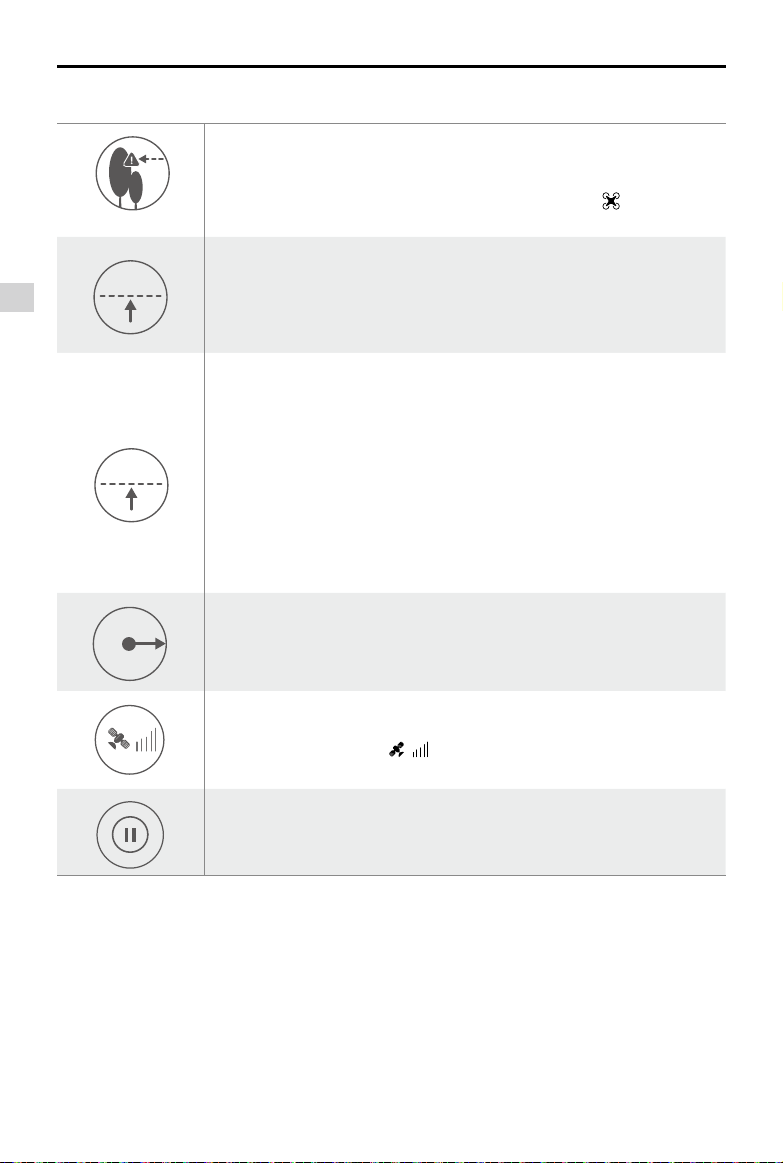
Descrição do indicador de status do quadricóptero
Normal
Alternar entre vermelho, verde e
amarelo piscando
Alternar entre amarelo e verde
piscando
Verde piscando lentamente
×2 Duas luzes verdes
Amarelo piscando lentamente
Verde piscando rapidamente
Advertência
Amarelo piscando rapidamente
Vermelho piscando lentamente
Vermelho piscando rapidamente
Piscando em vermelho
— Aceso em vermelho
Vermelho e amarelo piscando rápido
e alternadamente
Ligar e Teste de autodiagnóstico
Aquecimento
P-mode ou S-mode com GPS
P-mode com sistemas de visão frontal e inferior
Sem GPS e Sistemas de visão frontal e inferior
Frenagem
Perda de sinal do controle remoto
Advertência de bateria baixa
Advertência de bateria baixa crítica
Erro de IMU
Erro crítico
Necessário calibrar a bússola
©
2017 DJI Todos os direitos reservados.
12
Page 13
Manual do Usuário do Mavic Pro
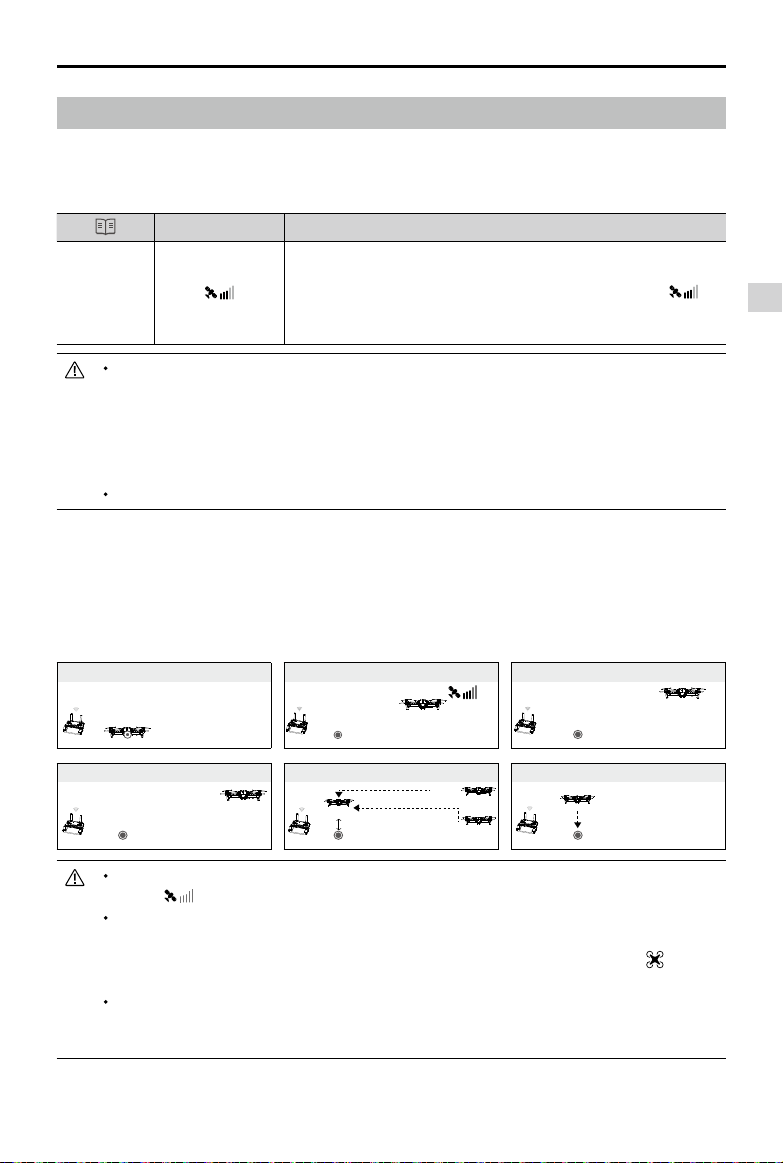
Return-to-Home (RTH)
A função Return-to-Home (RTH) retorna o quadricóptero para o último ponto inicial registrado. Há
três tipos de RTH: Smart RTH, Low Battery RTH, e Failsafe RTH. Esta seção descreve esses três
cenários em detalhes.
GPS
Descrição
Caso um sinal GPS forte tenha sido captado antes da decolagem, o
Ponto Inicial será a localização a partir da qual o quadricóptero iniciou o
Ponto inicial
voo. A força do sinal de GPS está indicada pelo ícone de GPS ( ). O
indicador de status do quadricóptero irá piscar rapidamente quando o
ponto de início estiver registrado.
O quadricóptero pode detectar e evitar obstáculos quando o Sistema de Visão Frontal
estiver ativo e as condições de iluminação forem sucientes. O quadricóptero irá subir
automaticamente para evitar os obstáculos e voará até o Ponto Inicial na nova altitude.
Para garantir que o quadricóptero volte à posição inicial posteriormente, ele não pode
girar ou voar para esquerda e direita durante a RTH enquanto o sistema de visão frontal
estiver ativado.
O Sistema de Visão Frontal pode ser ativado durante o voo ou apenas no RTH.
Failsafe RTH
Se o ponto inicial foi registrado com sucesso e a bússola está funcionando normalmente, o Failsafe
RTH será ativado automaticamente se o sinal do controle remoto for perdido por um período de
tempo especicado (3 segundos ao utilizar o controle remoto e 20 segundos ao utilizar o Wi-Fi). A
função Return-to-Home pode ser cancelada pelo piloto, permitindo retomar o controle quando a
conexão do sinal do controle remoto for restabelecida.
1 Registrar Home Point
4 Perda de sinal por um per íodo prolongado
×
2 Conrmando Home Point
5
RTH (altitude ajustáv el)
Altura acima de HP>Altitude de Failsafe
×
Elevar para Altitude de Failsafe
Altitude de Failsafe
Altura acima de HP<=Altitude de Failsafe
3 Perda de sinal do con trole remoto
×
6 Pouso (depois que o usuário conrmar o pouso)
×
Planando a 2 metros do
ponto inicial
Quadricóptero
Não é possível para o quadricóptero retornar ao Ponto Inicial quando o sinal de GPS está
fraco ([ ] é exibido em cinza) ou indisponível.
O quadricóptero não pode evitar obstruções durante o Failsafe RTH quando o Sistema de
Visão Frontal está desativado. É importante congurar uma altitude de Failsafe adequada
antes de cada voo. Inicie o aplicativo DJI GO 4, entre em "Câmera" e toque em para
congurar a altitude de failsafe.
O usuário não pode controlar o quadricóptero enquanto ele estiver subindo até a altitude
de Failsafe. No entanto, o usuário pode pressionar o botão RTH para interromper a subida
e retomar o controle.
2017 DJI Todos os direitos reservados
©
.
13
Page 14
Manual do Usuário do Mavic Pro
Smart RTH
Use o botão RTH no controle remoto ou toque no botão RTH no aplicativo DJI GO 4 e siga as
instruções na tela quando o GPS estiver disponível para iniciar o Smart RTH. O indicador de
status do quadricóptero piscará para exibir o status atual. O quadricóptero irá detectar e evitar
obstáculos no percurso de voo durante o Smart RTH. O quadricóptero pode escolher navegar ou
planar no lugar para evitar colisão. O usuário pode navegar manualmente o quadricóptero para
evitar obstáculos se o Sistema de Visão frontal estiver desativado ou se os níveis de luz estiverem
baixos. O piloto também pode sair do Smart RTH imediatamente usando o botão de pausa de voo
no controle remoto ou pressionando o ícone Parar no aplicativo DJI GO 4.
Quadricóptero
A proteção de pouso será ativada durante o Pouso de Precisão do Smart RTH, ao utilizar a função
de Pouso Automático no aplicativo DJI GO 4:
1. Quando a função de proteção de pouso determina que o solo é adequado para pouso, o Mavic
Pro pousará suavemente.
2. Se a função de proteção de pouso determinar que o solo não é adequado para pouso, o Mavic
Pro irá planar e aguardar a conrmação do piloto.
3. Se a função de proteção de pouso não estiver ativada, o aplicativo DJI GO 4 exibirá um aviso de
pouso quando o Mavic Pro descer abaixo de 0,5 metros. Para pousar, puxe o acelerador para
baixo ou use o controle deslizante de aterrissagem automática.
RTH de baixa bateria
O sistema contra falhas do nível de bateria baixo é acionado quando a Bateria de Voo Inteligente
da DJI está esgotada em um ponto que pode afetar o retorno seguro do quadricóptero. Aconselhase aos usuários que retornem o quadricóptero para o Home Point ou o pousem imediatamente
quando solicitado. O aplicativo DJI GO 4 irá exibir um aviso quando for disparada uma advertência
de bateria baixa. O quadricóptero retornará automaticamente para o Home Point caso nenhuma
ação seja executada após uma contagem regressiva de 10 segundos. O usuário pode cancelar
o procedimento de RTH pressionando o botão RTH no controle remoto. Os limites para essas
advertências são automaticamente determinados com base na altitude atual do quadricóptero e sua
distância do Home Point.
O quadricóptero irá pousar automaticamente se o nível atual da bateria puder durar somente até
que ele consiga pousar a partir da altitude atual. O usuário ainda pode utilizar o controle remoto
para controlar a orientação do quadricóptero durante o processo de pouso.
O indicador de nível de bateria é exibido no aplicativo DJI GO 4 e está descrito abaixo:
Advertência de nível de bateria
criticamente baixo (vermelho)
©
2017 DJI Todos os direitos reservados.
14
Advertência de nível de
bateria baixo (Amarelo)
Nível de bateria
suciente (verde)
Tempo de voo restante
Energia exige
retorno ao início
Indicador de nível da bateria
12:29
Page 15
Manual do Usuário do Mavic Pro
Nível da
bateria
Advertência
Observação
Indicador
de status do
quadricóptero
Aplicativo DJI GO 4 Instruções de voo
Toque em “Go-home” para que
Advertência
de nível
de bateria
baixa
A carga da
bateria está
baixa. Pousar o
quadricóptero.
O indicador
de status do
quadricóptero
pisca em
VERMELHO
lentamente.
o quadricóptero retorne ao ponto
inicial e pouse automaticamente
ou em “Cancel” para continuar o
voo normal. Caso nenhuma ação
seja tomada, o quadricóptero
voltará automaticamente para o
ponto inicial após 10 segundos.
O controle remoto soará um
Retorne com o
quadricóptero e
pouse-o assim
que possível,
depois desligue
os motores e
substitua a bateria.
alarme.
Advertência
de nível de
bateria crítico
baixo
Tempo de
voo restante
estimado
O quadricóptero
deverá pousar
imediatamente.
Voo restante
estimado com
base no nível
atual de bateria.
O indicador
de status do
quadricóptero
pisca em
VERMELHO
rapidamente.
N/A N/A N/A
O visor do aplicativo DJI GO
4 irá piscar em vermelho e o
quadricóptero irá iniciar sua
descida. O controle remoto soará
um alarme.
Deixe o
quadricóptero
descer e pousar
automaticamente.
Quando a Advertência de nível de bateria crítico for ativada e o quadricóptero estiver descendo
automaticamente, empurre o joystick esquerdo para cima para fazer o quadricóptero planar na altitude
atual, dando a você uma oportunidade para navegar para um local de pouso mais apropriado.
As zonas e os marcadores coloridos no indicador de nível de bateria reetem o tempo de voo
restante estimado. Eles são ajustados automaticamente de acordo com o local e o status atuais
do quadricóptero.
Quadricóptero
Pouso de precisão
O Mavic Pro verifica automaticamente e tenta fazer a correspondência dos recursos do solo abaixo
durante o retorno ao ponto inicial. Quando o solo atual corresponde ao solo do ponto inicial, o Mavic
começará imediatamente a pousar para atingir um pouso de precisão. O aplicativo DJI GO 4 exibirá um
aviso de incompatibilidade de recursos do solo se houver falha na correspondência.
O desempenho do pouso de precisão está sujeito às seguintes condições:
A. O ponto inicial é registrado na decolagem e não pode ser atualizado durante o voo.
B. O quadricóptero deve decolar verticalmente. A altitude de decolagem deve ser maior que
10 metros.
C. Os recurso do solo do ponto inicial devem permanecer totalmente inalterados.
D. O solo do ponto inicial sem recursos distintos afetará o desempenho.
E. A iluminação não pode ser muito clara nem muito escura.
As ações a seguir estão disponíveis durante o pouso:
A. Puxe o acelerador para baixo para acelerar o pouso.
B. A movimentação dos joysticks de controle em qualquer outra direção causará a interrupção do
pouso de precisão. O Mavic Pro descerá verticalmente e a proteção de pouso permanecerá ativa.
2017 DJI Todos os direitos reservados
©
.
15
Page 16
Manual do Usuário do Mavic Pro
5 m
H
5 m
H
Altitude RTH
Avisos de segurança de RTH
Altitude RTH
Quadricóptero
10 m
O quadricóptero não pode evitar obstruções durante o RTH quando o
Sistema de Visão Frontal está desativado. Portanto, é importante congurar
uma altitude de Failsafe adequada antes de cada voo. Execute o aplicativo
DJI GO 4 e entre na visualização “Câmera” e toque em para denir a
altitude de Failsafe.
Se a função Return to Home (RTH), incluindo Smart RTH e Bateria Fraca
RTH, for ativada e o quadricóptero estiver a mais de 20 m do ponto inicial:
1. Ele retornará ao ponto inicial na altitude atual se estiver voando na
altitude de RTH ou acima dela.
2. Ele subirá até a altitude RTH se estiver voando abaixo dela.
Se o RTH, incluindo o Smart RTH e a bateria fraca RTH, for ativado entre
5 m e 20 m (16 pés e 66 pés) do ponto inicial, e o sistema de visão frontal
estiver ativado:
1. Se a altitude atual do quadricóptero for superior a 10 m (32 pés), o
quadricóptero retornará ao ponto inicial na altitude atual.
2. Se a altitude atual do quadricóptero for inferior a 10 m (32 pés), ele
primeiro subirá até 10 m (32 pés) a partir da altitude atual.
A velocidade de voo será ajustada para 14 km/h (9 mph). O quadricóptero
começará a pousar imediatamente se o Sistema de Visão Frontal estiver
desativado. Ao entrar no Failsafe RTH, o status do sistema de visão frontal
será avaliado e o RTH se adaptará de acordo.
5 m
H
O quadricóptero descerá automaticamente e pousará se o RTH estiver
ativado quando o quadricóptero
estiver dentro de um raio de 5 m (6 pés) de ponto inicial.
Não é possível para o quadricóptero retornar ao Ponto Inicial quando o
sinal de GPS está fraco ([ ] é exibido em cinza) ou indisponível.
Pressione o botão de pausa de voo para sair do RTH. O quadricóptero irá
parar de subir e cará planando.
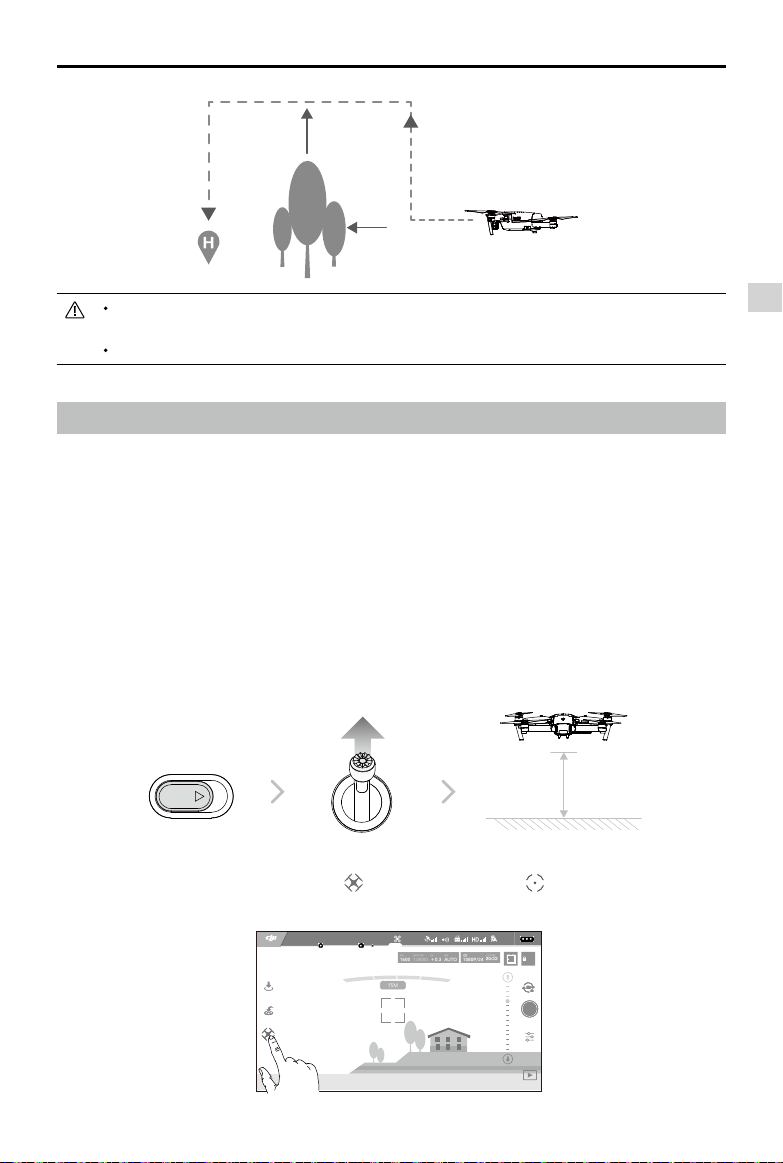
Para evitar obstáculos durante RTH
O quadricóptero pode agora detectar e tentar ativamente evitar obstáculos durante o RTH, desde
que as condições de luz sejam ideais para o Sistema de Visão Frontal. Ao detectar um obstáculo,
o quadricóptero agirá como indicado a seguir:
1. O quadricóptero desacelera quando um obstáculo for detectado a 15 metros (49 pés) à frente.
2. O quadricóptero para e plana, depois começa a subir verticalmente para evitar o obstáculo. Por
m, o quadricóptero irá parar de subir quando estiver pelo menos 5 metros (16 pés) acima do
obstáculo detectado.
3. Retomada dos procedimentos de RTH. O quadricóptero continuará voando até o Ponto Inicial
na altitude atual.
16
©
2017 DJI Todos os direitos reservados.
Page 17
5 metros
TapFly
ActiveTrack
Gesture
Joystick
Manual do Usuário do Mavic Pro
15 metros
Para garantir que o quadricóptero volte à posição inicial posteriormente, ele não pode
girar durante a RTH enquanto o sistema de visão frontal estiver ativado.
O quadricóptero não pode evitar obstáculos acima, na lateral ou atrás dele.
Modo de Voo Inteligente
TapFly
Introdução
Com o recurso TapFly, os usuários agora podem tocar na tela do dispositivo móvel para voar
na direção designada sem usar o controle remoto. O quadricóptero automaticamente evitará os
obstáculos que ele vê ou irá frear e planar contanto que a iluminação seja adequada (< 300 lux) e
não seja muito clara (> 10.000 lux).
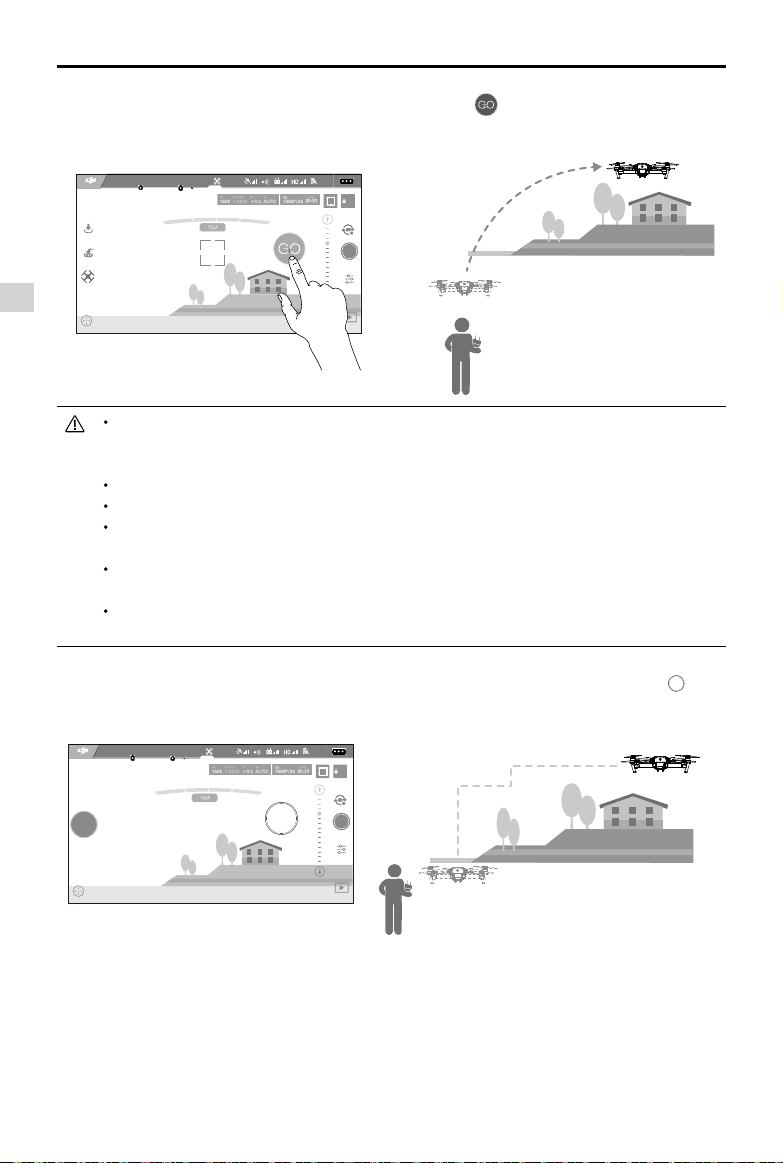
Uso do TapFly
Verique se o nível da bateria está acima de 50% para Bateria de Voo Inteligente e se o
quadricóptero esta no P-mode. Depois, siga os passos abaixo para usar o TapFly:
1. Decole e certique-se de que o quadricóptero esteja voando a pelo menos 6 pés (2 metros)
acima do solo.
SPORT
2. Inicie o aplicativo DJI GO 4 e toque em , em seguida toque em , leia e compreenda as
instruções.
READY TO GO (GPS)
12
P-GPS
09:29
61%
2 metros
AE
Quadricóptero
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
2017 DJI Todos os direitos reservados
©
.
17
Page 18
Manual do Usuário do Mavic Pro
3. Toque uma vez na direção alvo e aguarde até que o ícone apareça. Toque novamente para
conrmar a seleção e o quadricóptero automaticamente voará naquela direção.
12
P-GPS
09:29
61%
AE
Quadricóptero
READY TO GO (GPS)
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
NÃO oriente o quadricóptero para voar na direção de pessoas, animais, objetos
pequenos e nos (por exemplo, galhos de árvores e linhas de energia) ou transparentes
(por exemplo, vidro ou água).
Observe os obstáculos que estão no percurso de voo e que longe deles.
Pode haver desvios entre os percursos de voo esperado e real da seleção do TapFly.
O intervalo para a direção alvo selecionável é limitado. Não é possível fazer seleções de
TapFly que estejam perto da borda superior ou inferior da tela.
O modo TapFly pode não funcionar adequadamente quando o quadricóptero está acima
da água ou de uma área coberta de neve.
Seja extremamente cuidadoso ao voar em ambientes extremamente escuros (< 300 lux )
ou brilhantes (>10.000 lux).
Depois de conrmar a seleção de TapFly, o quadricóptero voará na direção marcada pelo ícone .
Observação: Você ainda pode usar o joystick para controlar o movimento do quadricóptero durante o voo.
READY TO GO (GPS)
12
P-GPS
09:29
61%
AE
STOP
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
O quadricóptero ajustará sua velocidade automaticamente quando detectar um obstáculo à sua
frente ou se estiver voando muito próximo do solo. No entanto, esse recurso não deve ser usado
para navegação entre obstáculos.
Os procedimentos de Failsafe substituirão o TapFly. Se o sinal de GPS enfraquecer, o
quadricóptero sairá do voo autônomo e retornará ao ponto inicial.
©
2017 DJI Todos os direitos reservados.
18
Page 19
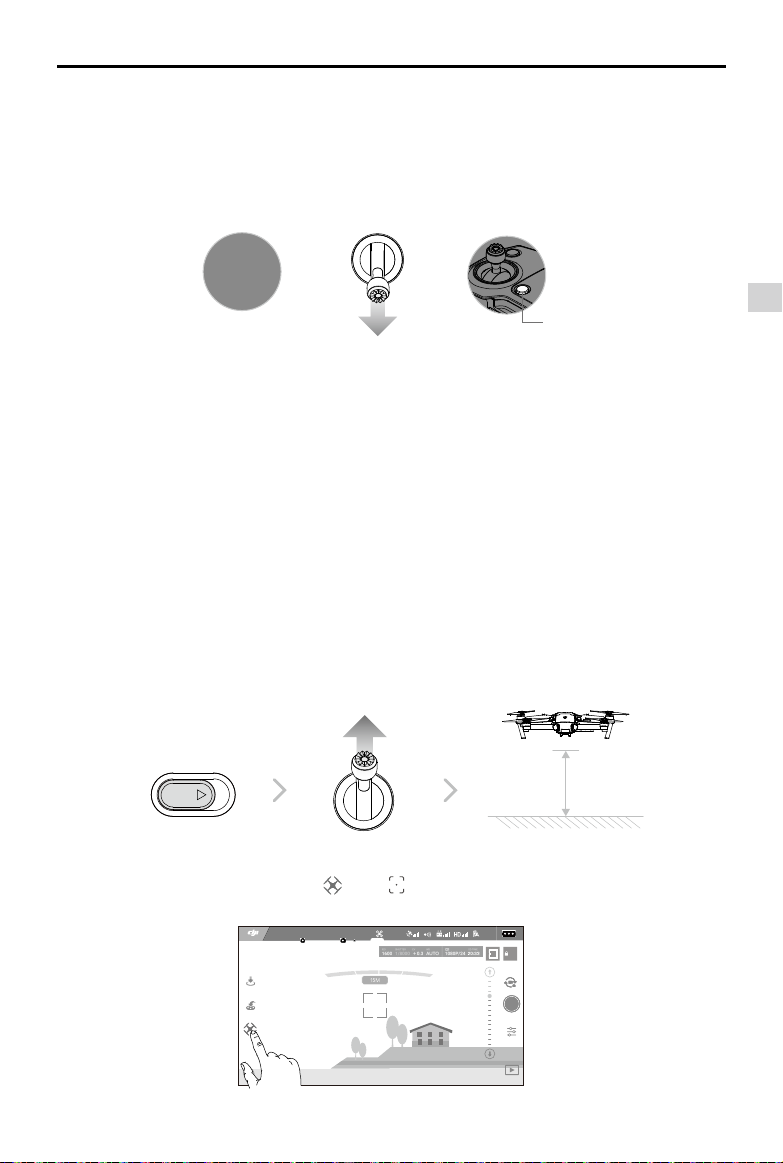
Sair do TapFly
TapFly
ActiveTrack
Gesture
Joystick
Use os seguintes métodos para sair do TapFly:
1. Pressione o Botão de pausa do voo no controle remoto.
2. Puxe o joystick de inclinação para trás no controle remoto.
3. Toque no botão "STOP" na tela.
Manual do Usuário do Mavic Pro
STOP
OU OU
Botão de pausa do voo
O quadricóptero irá parar e planar depois de sair do TapFly. Toque em uma nova direção alvo
para continuar voando ou inicie o voo manual.
ActiveTrack
O ActiveTrack permite marcar e acompanhar um objeto em movimento na tela do seu dispositivo
móvel. O quadricóptero automaticamente irá evitar obstáculos no percurso de voo. Nenhum
dispositivo de rastreamento externo será necessário.
O Mavic Pro pode identificar automaticamente e rastrear bicicletas e outros veículos, pessoas,
animais e usar diferentes estratégias de rastreamento para cada um.
Uso do ActiveTrack
Certifique-se de que a Bateria de Voo Inteligente tenha mais de 50% de carga e que o
quadricóptero esteja no P-Mode. Depois, siga os passos abaixo para usar o ActiveTrack:
1. Decole e plane a pelo menos 6 pés (2 metros) acima do solo.
SPORT
2 metros
Quadricóptero
2. No aplicativo DJI GO 4, toque em e em para exibir os modos de voo e, em seguida,
selecione ActiveTrack.
READY TO GO (GPS)
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
12
P-GPS
09:29
61%
AE
2017 DJI Todos os direitos reservados
©
.
19
Page 20

Manual do Usuário do Mavic Pro
3. Toque no objeto que você deseja rastrear e, em seguida, toque para conrmar a seleção. Se o
objeto não for automaticamente reconhecido, arraste uma caixa ao redor dele. A caixa cará
verde quando o acompanhamento estiver em andamento. Se a caixa de seleção car vermelha,
o objeto não foi identicado e você deve tentar novamente.
READY TO GO (GPS)
12
P-GPS
09:29
61%
AE
Quadricóptero
ActiveTrack
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
O ActiveTrack inclui as seguintes funções:
Rastrear Spotlight Perl
O quadricóptero rastreia
o objeto a uma distância
constante. Use o joystick no
controle remoto ou o controle
deslizante no DJI GO 4 para
circular o objeto.
NÃO selecione uma área que tenha pessoas, animais, objetos pequenos e nos (por exemplo, galhos
de árvores e linhas de energia) ou transparentes (por exemplo, vidro ou água).
Fique longe de obstáculos perto do percurso de voo, especialmente quando o quadricóptero estiver
voando para trás.
Pratique vigilância extra ao usar o ActiveTrack em qualquer uma das seguintes situações:
a) O objeto acompanhado não se move em um plano nivelado.
b) O objeto acompanhado muda de forma drasticamente durante o movimento.
c) O objeto acompanhado pode car bloqueado ou fora de visão por um tempo longo.
d) O objeto acompanhado move-se sobre uma superfície com camada de neve.
e) A iluminação disponível está baixa (< 300 lux) ou alta (> 10,000 lux).
f) O objeto rastreado tem cor ou padrão semelhante ao ambiente ao redor.
O quadricóptero não rastreará um
objeto automaticamente, mas manterá
a câmera apontada para o objeto
durante o voo. O controle remoto
pode ser usado para manobrar o
quadricóptero, mas a função de
inclinação está desativada. O uso do
joystick esquerdo e do botão giratório
do gimbal ajustará o enquadramento
do objeto.
O quadricóptero rastreia o objeto
em ângulo e distância constantes
da lateral. Use o joystick no
controle remoto para circular o
objeto.
©
2017 DJI Todos os direitos reservados.
20
Page 21

Manual do Usuário do Mavic Pro
Você deve seguir as leis e regulamentações locais de privacidade ao usar o ActiveTrack.
O quadricóptero não será capaz de evitar obstáculos quando estiver no modo Spotlight
ou Perl. Use esses modos em áreas abertas.
O quadricóptero irá detectar e evitar obstáculos no percurso de voo.
Se o quadricóptero perder o rastro do objeto porque ele se move muito rápido ou ca
oculto, selecione o objeto novamente para retomar o acompanhamento.
Sair do ActiveTrack
Use os seguintes métodos para sair do ActiveTrack:
1. Pressione o Botão de pausa do voo no controle remoto.
STOP
OU
2. Toque no botão "STOP" na tela.
Depois de sair do ActiveTrack, o quadricóptero cará planando no lugar, ponto em que você pode
optar por voar manualmente, rastrear outro objeto ou retornar ao ponto inicial.
Modo de sinais
No Modo de sinais, o Sistema de Visão do Mavic reconhece sinais, permitindo que ele siga e tire
seles sem um telefone ou um controlador. Siga as etapas abaixo para usar o Modo de Sinais:
Modos Avisos LEDs dianteiros Observações
Certifique-se de que o sistema de visão
frontal está ativo e que há luz suciente.
Toque no ícone e mova-se na frente da
câmera para que o Mavic o reconheça.
Levante seus braços e acene para o
Mavic, o LED frontal piscará em vermelho
duas vezes assim que confirmar a
distância de disparo da foto.
1. Conrme o
objeto
2. Conrme a
distância
Vermelho piscando
lentamente
×2
Vermelho pisca
duas vezes
Quadricóptero
3. Contagem
Regressiva
para a Sele
O Modo de sinais só pode ser usado no Modo de Foto.
Coloque o quadricóptero em voo a 2 metros ou mais acima do solo e, em seguida, mova-
Vermelho piscando
rapidamente
Coloque os dedos na frente do seu rosto,
como mostrado.
se em frente à câmera para ser reconhecido. Os indicadores de LED frontal piscarão em
vermelho rapidamente se o Mavic Pro não reconhecer um objeto.
A habilitação do GPS em seu telefone permitirá que o Mavic acompanhe o objeto com
mais precisão durante o vôo no Modo de sinais.
2017 DJI Todos os direitos reservados
©
.
21
Page 22

Manual do Usuário do Mavic Pro
Modo tripé
Toque no ícone do aplicativo DJI GO 4 para ativar o modo tripé. No modo tripé, a velocidade de
voo máxima é limitada a 3,6 km/h (2,2 mph) e a distância de frenagem é reduzida para 1 m (3,2 pés ).
A resposta para movimentos do joystick também é reduzida para movimentos mais uniformes e
mais controlados.
Use somente o modo tripé onde o sinal de GPS é forte ou as condições de luz são ideais
para o sistema de visão. Em caso de perda do sinal de GPS e se o sistema de visão não
funcionar, ele irá automaticamente mudar para o modo Atti. Nesse caso, a velocidade
de voo aumentará e o quadricóptero não poderá planar no lugar. Use o modo tripé com
Quadricóptero
cuidado.
Modo de seguimento do terreno
O sistema de visão inferior é utilizado no modo de seguimento do terreno para manter uma altura
acima do chão entre 1 e 13 metros. Esse modo foi desenvolvido para uso em pastagens com
inclinação não maior que 20°.
Ative o modo de acompanhamento de terreno, tocando no ícone do modo de voo inteligente no
aplicativo DJI GO 4. Quando esse modo estiver ativado, a altura atual do quadricóptero será
gravada. O quadricóptero manterá a altura registrada durante o voo e subirá quando a inclinação
aumentar. No entanto, o quadricóptero não irá descer em declives.
É importante que você só voe em condições em que o Vision Position System possa funcionar
corretamente; caso contrário, o modo de Seguimento de Terreno não funcionará.
Modo Cinemático
Toque no ícone do modo de voo inteligente no aplicativo DJI GO 4 para ativar o Modo Cinemático.
No modo Cinemático, a distância de frenagem do quadricóptero é aumentada. O quadricóptero
diminuirá a velocidade levemente até parar, mantendo a lmagem suave e estável mesmo em caso
de agitação nas entradas dos controles.
Modo Fixed-Wing
A aeronave voará automaticamente para a frente a uma determinada velocidade depois de entrar
no modo Fixed-Wing. Empurre o joystick para cima para subir, e para baixo para descer. Empurre
cada joystick para a esquerda ou para a direita para girar a aeronave. Empurre o joystick direito
para cima para acelerar, e para baixo para sair do modo Fixed-Wing.
No aplicativo DJI GO 4, toque no ícone e ative o modo Fixed-Wing. Empurre o joystick direito para
cima até o ícone C1 ser exibido, depois pressione o botão C1 no controle remoto para entrar no
modo Fixed-Wing. Empurre o joystick direito por 3 segundos ou pressione o botão C2 no controle
remoto para sair do modo Fixed-Wing.
Empurre o joystick direito para cima até atingir a velocidade de voo de 3m/s ou superior, para
entrar no modo Fixed-Wing. Não mova os joysticks em qualquer outra direção.
A velocidade de voo não pode ser reduzida ao usar o modo Fixed-Wing. Você só pode empurrar
o joystick direito para acelerar. Empurre o joystick direito para sair do modo Fixed-Wing.
Outros modos de voo inteligente e o modo retrato são desativados ao usar o modo Fixed-Wing.
O modo Fixed-Wing está disponível em P-Mode e S-Mode.
©
2017 DJI Todos os direitos reservados.
22
Page 23

Manual do Usuário do Mavic Pro
Sistema de visão frontal e inferior
O Mavic Pro está equipado com um Sistema de visão frontal e inferior que faz varreduras
constantes à frente, permitindo evitar colisões contornando, sobrevoando ou planando. O Sistema
de Visão Inferior utiliza ultrassom e dados de imagem para ajudar o quadricóptero a manter sua
posição atual. Com ajuda do Sistema de Visão Inferior, seu Mavic Pro pode planar com maior
precisão e voar em interiores ou em outros ambientes onde o sinal GPS não está disponível. Os
principais componentes do sistema de visão frontal e inferior estão localizados no nariz e na parte
inferior do quadricóptero; elas incluem [1] [2] quatro sensores monoculares e [3] dois sensores
ultrassônicos.
1 1
Quadricóptero
2
3 3
2
Faixa de detecção
A faixa de detecção do Sistema de Visão Frontal e Inferior é ilustrada a seguir. Observe que o
quadricóptero não pode detectar ou evitar os obstáculos que não estejam dentro da faixa de detecção.
Calibração de sensores
As câmeras dos sistemas de visão frontal e inferior instaladas no quadricóptero são calibradas na entrega.
Contudo, essas câmeras são vulneráveis a impacto excessivo e necessitam de calibração regular por
meio do Assistente 2 DJI ou do aplicativo DJI GO 4. Siga as etapas abaixo para calibrar a câmera.
Aponte o quadricóptero para a tela
01
02
Alinhe as caixas
Faça movimento panorâmico e
Repita as etapas acima para calibrar as câmeras do sistema de visão inferior.
2017 DJI Todos os direitos reservados
©
03
.
23
Page 24

Manual do Usuário do Mavic Pro
2m以上
Calibragem rápida
Use a calibração rápida quando o aplicativo DJI GO 4 notificar que a calibração do sensor é
necessária. Toque em "Status do Quadricóptero" -> "Sensores de visão" para iniciar a calibração rápida.
A calibração rápida é o reparo rápido para problemas do sensor de visão. Recomendase, quando possível, conectar o quadricóptero a um computador para executar uma
calibração completa usando o Assistente 2 DJI. Apenas calibre quando as condições de
iluminação forem adequadas e em superfícies texturizadas, ou seja, grama.
Não calibre o quadricóptero em superfícies altamente refletivas, como mármore ou
cerâmica.
Quadricóptero
Usando o sistema de visão inferior
O Sistema de Visão Inferior é ativado automaticamente quando o quadricóptero for ligado.
Nenhuma ação é necessária. O Sistema de Visão Inferior é normalmente utilizado em ambientes
internos, onde o GPS está indisponível. Usando o sistema de visão inferior, o quadricóptero pode
planar com precisão mesmo sem GPS.
Siga os passos abaixo para usar o Sistema de Visão Inferior:
1. Alterne o interruptor de modo de voo para o P-Mode.
2. Coloque o quadricóptero sobre uma superfície plana. Observe que não é
possível operar o Sistema de Visão Inferior adequadamente sobre superfícies
sem variações de padrão nítidas.
3. Ligue o quadricóptero. O indicador de status do quadricóptero piscará duas
vezes em verde para indicar que o Sistema de Visão Inferior está pronto. Empurre
suavemente o joystick esquerdo para levantar voo e o quadricóptero irá planar.
Frenagem assistida com o Sistema de Visão Frontal
Equipado com o Sistema de Visão Frontal, o quadricóptero é capaz de frear ativamente quando
obstáculos forem detectados à frente. Os sistemas de visão frontal e inferior funcionam melhor
quando a iluminação é adequada e o obstáculo está claramente marcado ou texturizado. O
quadricóptero deve voar a não mais do que 36 km/h (22mph) para permitir que haja uma distância
de frenagem suciente.
SPORT
©
2017 DJI Todos os direitos reservados.
24
Page 25

Manual do Usuário do Mavic Pro
O desempenho dos sistemas de visão frontal e inferior é afetado pela superfície sobre a qual
o quadricóptero está voando. Os sensores ultrassônicos podem não ser capazes de medir as
distâncias com precisão quando operando acima de materiais que absorvem o som e a câmera
pode não funcionar corretamente em ambientes abaixo do ideal. O quadricóptero irá alternar do
P-Mode para o A-Mode automaticamente se o GPS ou os Sistemas de Visão Frontal ou Inferior
estiverem indisponíveis. Opere o quadricóptero com bastante cuidado nas seguintes situações:
Voar sobre superfícies monocromáticas (por exemplo, preto puro, branco puro, vermelho puro,
verde puro).
Voar sobre superfícies altamente reexivas.
Voar a altas velocidades acima de 36 km/h (22mph) a 2 metros ou acima de 18 km/h (11mph) a
1 metro.
Voar sobre água ou superfícies transparentes.
Voar sobre superfícies ou objetos móveis.
Voar em uma área onde a iluminação altera frequentemente ou drasticamente.
Voar sobre superfícies com escuridão extrema (lux < 10) ou luz extrema (lux > 10,000).
Voar sobre superfícies que podem absorver ondas sonoras (por exemplo, carpete espesso).
Voar sobre superfícies sem padrões ou texturas visíveis.
Voar sobre superfícies com padrões ou texturas repetidas idênticas (por exemplo, azulejos).
Voar sobre superfícies inclinadas que reetem ondas sonoras para longe do quadricóptero.
Mantenha os sensores sempre limpos. Sujeira ou outros detritos podem afetar
adversamente sua ecácia.
O Sistema de Visão Inferior é ecaz somente quando o quadricóptero está a altitudes de
0,3 a 13 m.
Os Sistemas de Visão Frontal e Inferior podem não funcionar adequadamente quando o
quadricóptero está voando acima da água.
O Sistema de Visão Frontal e Inferior pode não ser capaz de reconhecer padrões no chão
em condições de pouca iluminação (menos de 100 lux).
Não use outros dispositivos ultrassônicos com uma frequência de 40KHz quando os
Sistemas Frontal e Inferior estiverem em operação.
Mantenha animais afastados do quadricóptero quando o Sistema de Visão Inferior estiver
ativado. O sensor sonar emite sons de alta frequência que são audíveis para alguns
animais.
Quadricóptero
2017 DJI Todos os direitos reservados
©
.
25
Page 26

Manual do Usuário do Mavic Pro
Gravador de voo
Os dados de voo são gravados automaticamente no armazenamento interno no quadricóptero.
Isso inclui telemetria de voo, informações de status do quadricóptero e outros parâmetros. Para
acessar esses dados, conecte o quadricóptero ao computador pela porta micro USB.
Conexão e desconexão das hélices
Use somente hélices aprovadas pela DJI com seu Mavic Pro. O anel branco e as hélices
desmarcadas indicam onde elas deve ser xadas e em qual direção devem girar.
Quadricóptero
Hélices Anel branco Desmarcado
Figura
Conectar a
Legenda
Motores com marcas brancas Motores sem marcas brancas
Travar: Gire as hélices na direção indicada para instalar e apertar.
Conexão das hélices
Conecte as hélices com anel branco na base de montagem com as marcas brancas. Pressione a
hélice na placa de montagem para baixo e gire na direção de travamento até car rme. Conecte
as outras hélices nas bases de montagem sem as marcas. Desdobre todas as pás das hélices.
Marcado Desmarcado
Desconexão das hélices
Pressione as hélices no suporte do motor e gire na direção de destravamento.
Esteja ciente das bordas aadas das hélices. Manuseie com cuidado.
Use somente as hélices aprovadas pela DJI. Não misture tipos de hélices.
Mantenha-se afastado dos motores e NÃO toque nas hélices quando estiverem girando.
Verique se as hélices e os motores estão instalados correta e rmemente antes de cada
voo.
Certique-se de que todas as hélices estejam em boas condições antes de cada voo.
NÃO utilize hélices velhas, lascadas ou quebradas.
Para evitar ferimentos, FIQUE AFASTADO e NÃO toque nas hélices, nem nos motores
quando estiverem girando.
SOMENTE utilize hélices DJI originais para uma experiência de voo melhor e mais segura.
©
2017 DJI Todos os direitos reservados.
26
Page 27

Manual do Usuário do Mavic Pro
Bateria de voo inteligente
Introdução
A Bateria de Voo Inteligente da DJI possui capacidade de 3830 mAh, tensão de 11,4 V e funcionalidade
de carga-descarga inteligente. Ela só deve ser carregada com um carregador adequado aprovado
pela DJI.
Bateria de voo inteligente Carregador
A Bateria de Voo Inteligente deverá ser totalmente carregada antes do primeiro uso.
Funções da Bateria de Voo Inteligente da DJI
1. Indicador de nível da bateria: Os indicadores LED exibem o nível atual da bateria.
2. Função de descarga automática: Para evitar estufamento, a bateria descarrega automaticamente
para menos de 65% da energia total quando está ociosa por mais de 10 dias a m de evitar
que inche. Demora cerca de 2 para descarregar a bateria até 65%. É normal sentir um calor
moderado emitido pela bateria durante o processo de descarga. Os limites de descarga devem
ser denidos no aplicativo DJI GO 4.
3. Carga balanceada: Balanceia automaticamente a tensão de cada célula da bateria ao carregar.
4. Proteção contra sobrecarga: A carga para automaticamente quando a bateria está carregada
ao máximo.
5. Detecção de temperatura: A bateria carregará somente quando a temperatura estiver entre 5°C
(41°F) e 40 °C (104 °F).
6. Proteção contra sobrecorrente: A bateria para de carregar quando uma corrente alta (maior que
8,5A) é detectada.
7. Proteção contra sobredescarga: Para evitar danos de descarga, a descarga é interrompida
automaticamente.
8. Proteção contra curto-circuito: Corta automaticamente a fonte de alimentação quando um curtocircuito é detectado.
9. Proteção contra danos à célula da bateria: O aplicativo DJI GO 4 exibe uma mensagem de
advertência ao detectar uma célula de bateria danicada.
10. Sleep Mode: Para economizar energia, a bateria cortará a fonte de alimentação e entrará no
modo inativo após 20 minutos de inatividade.
11. Comunicação: Informações relacionadas à tensão, capacidade, corrente, etc. da bateria são
transmitidas para o controle principal do quadricóptero.
Quadricóptero
Consulte
Diretrizes de segurança da Bateria de Voo Inteligente do Mavic Pro
usuários têm total responsabilidade por operações e uso.
antes do uso. Os
2017 DJI Todos os direitos reservados
©
.
27
Page 28

Manual do Usuário do Mavic Pro
Uso da bateria
LED1
Indicadores de nível
da bateria
LED2
LED3
LED4
Botão Power
Ligar/Desligar
Quadricóptero
Ligar:
Pressione o botão Power uma vez, depois pressione novamente e deixe pressionado por
2 segundos para ligar. A tela de status do sistema de controle remoto exibirá o nível atual da
bateria.
Desligar:
Pressione o botão Power uma vez, depois pressione novamente e deixe pressionado por
2 segundos para desligar.
Noticação de temperatura baixa:
1. A capacidade da bateria é reduzida signicativamente ao voar em ambientes com temperatura
baixa (-10°C e 5°C).
2. As baterias não podem ser usadas em ambientes com temperatura extremamente baixa (<
-10°C). Recomenda-se carregar completamente a bateria quando a decolagem for realizada em
ambientes com temperatura entre -10 °C e 5 °C.
3. Encerre o voo assim que o aplicativo DJI GO 4 exibir “Low Battery Level Warning” em ambientes
de baixa temperatura.
4. Mantenha a bateria em ambiente fechado para aquecê-la antes do uso em baixas temperaturas.
5. Para garantir o desempenho ideal, mantenha a temperatura da bateria acima de 20 °C.
Em ambientes frios, insira a bateria no compartimento e deixe o quadricóptero aquecer por
aproximadamente 1 a 2 minutos antes de decolar.
Vericação do nível da bateria
Os indicadores de nível da bateria exibem a energia restante. Quando a bateria estiver desligada,
pressione o botão Liga/Desliga uma vez, os indicadores de nível da bateria acendem para exibir o
nível atual da bateria. Veja abaixo para detalhes.
Os indicadores de nível de bateria também exibem o nível de bateria atual durante a carga
e a descarga. Os indicadores estão denidos abaixo.
: LED ligado. : LED piscando.
: LED desligado.
©
2017 DJI Todos os direitos reservados.
28
Page 29

Manual do Usuário do Mavic Pro
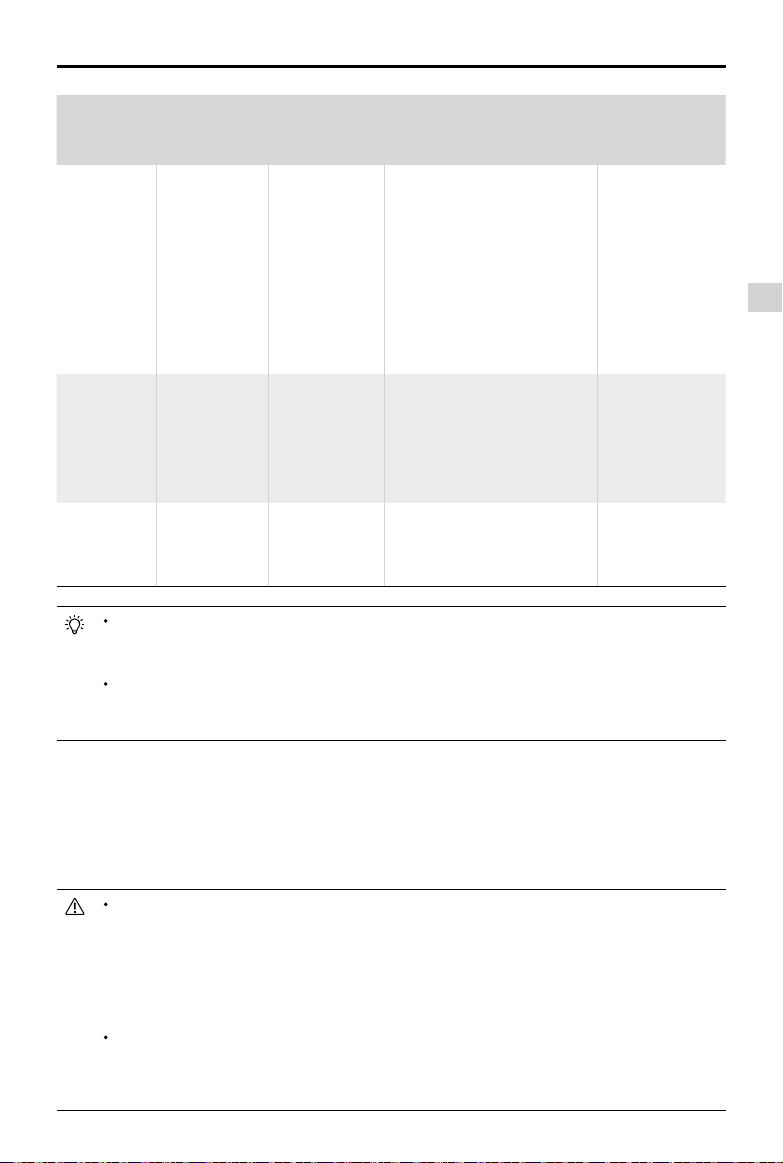
Indicadores de nível da bateria
LED1 LED2 LED3 LED4 Nível da bateria
87,5%~100%
75%~87,5%
62,5%~75%
50%~62,5%
37,5%~50%
25%~37,5%
12,5%~25%
0%~12,5%
=0%
Carregamento da Bateria de Voo Inteligente
1. Conecte o carregador da bateria a uma fonte de alimentação (100-240 V 50/60Hz).
2. Conecte a bateria ao carregador para iniciar o carregamento.
3. O indicador de nível de bateria exibe o nível de bateria atual à medida que é carregada.
4. A Bateria de Voo Inteligente está totalmente carregada quando os indicadores de nível de
bateria estão todos desligados. Desconecte a bateria do carregador.
5. Permita que a temperatura da bateria caia até a temperatura ambiente antes de armazená-la por
um período longo de tempo.
6. O carregador irá parar de carregar a bateria caso a temperatura da célula da bateria não esteja
na faixa de operação (5°C ~ 40 °C).
Quadricóptero
Sempre desligue a bateria antes de a inserir ou remover do Mavic Pro. Nunca insira ou
remova uma bateria quando estiver ligada.
Bateria de voo inteligente
Carregador
Tomada elétrica
Indicadores de nível de bateria ao carregar
LED1 LED2 LED3 LED4 Nível da bateria
0%~25%
25%~50%
50%~75%
75%~100%
Totalmente carregado
2017 DJI Todos os direitos reservados
©
.
29
Page 30

Manual do Usuário do Mavic Pro
Visor LED de proteção da bateria
A tabela abaixo mostra os mecanismos de proteção da bateria e os padrões LED correspondentes.
Indicadores de nível de bateria ao carregar
LED1 LED2 LED3 LED4 Padrão de luzes piscando Item de proteção da bateria
LED2 pisca duas vezes por segundo Sobrecorrente detectada
LED2 pisca três vezes por segundo Curto-circuito detectado
LED3 pisca duas vezes por segundo Sobrecarga detectada
Quadricóptero
LED3 pisca três vezes por segundo
LED4 pisca duas vezes por segundo
LED4 pisca três vezes por segundo
Carregador com sobretensão
detectado
A temperatura de carregamento
está muito baixa
A temperatura de carregamento
está muito alta
Após resolver esses problemas, pressione o botão Power para desligar o indicador de nível de
bateria. Desconecte a Bateria de Voo Inteligente do carregador e conecte-a novamente para
continuar carregando. Não é necessário desconectar e conectar no carregador em caso de erro
da temperatura ambiente. O carregador irá continuar carregando quando a temperatura estiver na
faixa permitida.
A DJI não assume responsabilidade por danos causados por carregadores de terceiros.
Como descarregar a bateria de voo inteligente antes de transportar as baterias para uma
longa viagem:
Voe com o Mavic Pro em uma área externa até que haja menos de 20% de energia
restante, ou até que a bateria não possa mais ser ligada.
©
2017 DJI Todos os direitos reservados.
30
Page 31

Controle remoto
Esta seção descreve os recursos do
controle remoto e inclui instruções para
controle do quadricóptero e da câmera.
2017 DJI Todos os direitos reservados.
©
31
Page 32

Controle remoto
Perl do controle remoto
O controle remoto do Mavic Pro é um dispositivo de comunicação sem o multifunções que integra
o sistema de downlink de vídeo e o sistema de controle remoto do quadricóptero. O sistema
de downlink de vídeo e controle remoto do quadricóptero opera a 2,4 GHz. O controle remoto
apresenta várias funções de controle da câmera, como capturar e pré-visualizar fotos e vídeos,
assim como controle de movimento do gimbal. O nível de bateria é exibido na tela de LCD do
controle remoto.
Versão de conformidade:
Controle remoto
locais.
Modo operacional:
personalizado.
Mode 1:
O joystick direito atua como acelerador.
Mode 2:
O joystick esquerdo atua como acelerador.
Para evitar interferência na transmissão, não opere mais que três quadricóptero na mesma
área.
Uso do controle remoto
Ligar e desligar o controle remoto
O controle remoto do Mavi Pro é alimentado por uma bateria recarregável 2S com capacidade de
2970 mAh. Siga os passos abaixo para ligar seu controle remoto:
1. Quando o controle remoto está desligado, pressione uma vez o botão Power. A tela de LCD
exibirá o nível atual da bateria.
2. Mantenha pressionado o botão Power para ligar o controle remoto.
3. O controle remoto irá emitir um bipe ao ser ligado.
4. Repita o Passo 2 para desligar o controle remoto.
O controle remoto está em conformidade com as regulamentações
O controle pode ser denido para Mode 1 ou Mode 2, ou para um modo
© 2017 DJI Todos os direitos reservados.
32
Page 33

Manual do Usuário do Mavic Pro
Carregamento do controle remoto
Carregue o controle remoto usando o carregador incluso. Consulte a gura abaixo para mais detalhes.
Tomada elétrica
Carregador
Controle da câmera
Faça vídeos/fotos e ajustar as congurações da câmera no botão do obturador, botão de gravação
e botão giratório de congurações da câmera no controle remoto.
4
3
1
2
1. Botão giratório de congurações da câmera
Vire o botão giratório para ajustar as configurações da câmera, como ISO e velocidade do
obturador sem tirar as mãos do controle remoto.
2. Botão do obturador
Pressione para tirar uma foto. Se o modo de disparo sequencial for ativado, várias fotos serão
tiradas pressionando uma única vez.
3. Botão Record
Pressione uma vez para iniciar a gravação de vídeo, depois, pressione novamente para parar a
gravação.
Controle remoto
4. Botão Gimbal
Controle a inclinação do gimbal.
O controle remoto está denido para Mode 2 por padrão.
Ponto neutro/central do joystick: Joysticks de controle na posição central.
Movimentação do joystick: O joystick é afastado da posição central.
2017 DJI Todos os direitos reservados.
©
33
Page 34

Manual do Usuário do Mavic Pro
Controle do quadricóptero
Esta seção explica como controlar a orientação do quadricóptero por meio do controle remoto. O
controle pode ser denido para Mode 1, Mode 2 ou Mode 3, ou para um modo personalizado.
Mode 1
Joystick esquerdo Joystick direito
Para frente
CIMA
Controle remoto
Mode 2
Mode 3
Para trás
Virar à direitaVirar à esquerda
Joystick esquerdo Joystick direito
Virar à direitaVirar à esquerda
Joystick esquerdo Joystick direito
Para frente
Para trás
Baixo
Direita Esquerda
Para frente
Para trás
Direita Esquerda
CIMA
Baixo
© 2017 DJI Todos os direitos reservados.
34
Direita Esquerda
Virar à direitaVirar à esquerda
Page 35

Manual do Usuário do Mavic Pro
Controle remoto
(Mode 2)
Quadricóptero
(
Indica a direção do nariz)
Observações
Mover o joystick esquerdo para cima e para baixo
muda a elevação do quadricóptero.
Empurre o joystick para cima e para baixo, para
subir e para descer, respectivamente.
Quando ambos os joysticks estiverem
centralizadas, o Mavic Pro irá planar.
Quanto mais o joystick for empurrado a partir da
posição central, mais rapidamente o Mavic Pro
mudará a elevação. Sempre empurre o joystick
suavemente para evitar alterações repentinas e
inesperadas de elevação.
Mover o joystick esquerdo para a esquerda ou
para a direita controla a orientação e a rotação do
quadricóptero.
Empurre o joystick para a esquerda para girar
o quadricóptero no sentido anti-horário e para o
lado direito para girar o quadricóptero no sentido
horário. Caso o joystick esteja centralizado, o
Mavic Pro manterá sua orientação atual.
Quanto mais o joystick for afastado da posição
central, mais rapidamente o Mavic Pro mudará a
elevação.
Mover o joystick direito para cima e para baixo
muda a inclinação do quadricóptero para frente e
para trás.
Empurre o joystick para cima e para baixo, para
avançar e para recuar, respectivamente.
irá planar caso o joystick seja centralizado.
Empurre o joystick mais afastado do centro para um
ângulo maior de inclinação (máximo de 30˚) e voo
mais rápido.
Mover o joystick direito para a esquerda e para a
direita muda a inclinação do quadricóptero para
esquerda e para a direita.
Empurre para a esquerda para voar para a
esquerda e empurre para a direita para voar para
a direita. O Mavic Pro irá planar caso a o joystick
seja centralizado.
O Mavic Pro
Controle remoto
Pressione o Botão de pausa do voo inteligente
uma vez para sair do modo de voo ActiveTrack,
TapFly e Navegação inteligente. O quadricóptero
irá planar na posição atual.
Mantenha o controle remoto longe de materiais magnéticos para evitar que seja afetado
por interferência magnética.
Certique-se de que os joysticks de controle estão na posição central e não estão sendo
comprimidos por força externa durante o transporte ou armazenamento.
2017 DJI Todos os direitos reservados.
©
35
Page 36

Manual do Usuário do Mavic Pro
Interruptor do modo de voo
Alterne o interruptor para selecionar o modo de voo
desejado. Escolha entre o P-mode e o S-mode.
Posição Modo de voo
SPORT
SPORT
P-Mode
S-Mode
SPORT
Modo P (Posicionamento)
quadricóptero utiliza o GPS e os sistemas de visão frontal e inferior para localizar-se, estabilizar-se
Controle remoto
automaticamente e navegar entre obstáculos. Recursos avançados, como TapFly e ActiveTrack,
: O modo P funciona melhor quando o sinal de GPS está forte. O
são ativados nesse modo.
Observação: O P-mode exige movimentos do braço maior para atingir altas velocidades.
S-Mode (Sport):
O controle do quadricóptero é ajustado para aumentar a capacidade de manobra
e velocidade. A velocidade máxima é aumentada para 65 km/h (40 mph). O Vision System é
desativado nesse modo.
O interruptor de modo de voo está travado no modo P por padrão, independente da posição do
interruptor. Para alternar modos de voo, vá para a vista da câmera no aplicativo DJI GO 4, toque
em e ative "Vários modos de voo". Depois de ativar vários modos de voo, alterne o interruptor
para a posição P e, em seguida, para S para voar no modo Sport.
O Mavic Pro voa no modo P por padrão sempre depois de ser ativado. Alterne o interruptor de
modo de voo para P e, em seguida, para S toda vez que você usar o modo S.
Botão RTH
Mantenha pressionado o botão RTH para iniciar o procedimento Return-to-Home (RTH). O
quadricóptero irá retornar para o último Home Point registrado. Pressione esse botão novamente
para cancelar o procedimento de RTH e recuperar controle do quadricóptero.
© 2017 DJI Todos os direitos reservados.
36
Page 37

Manual do Usuário do Mavic Pro
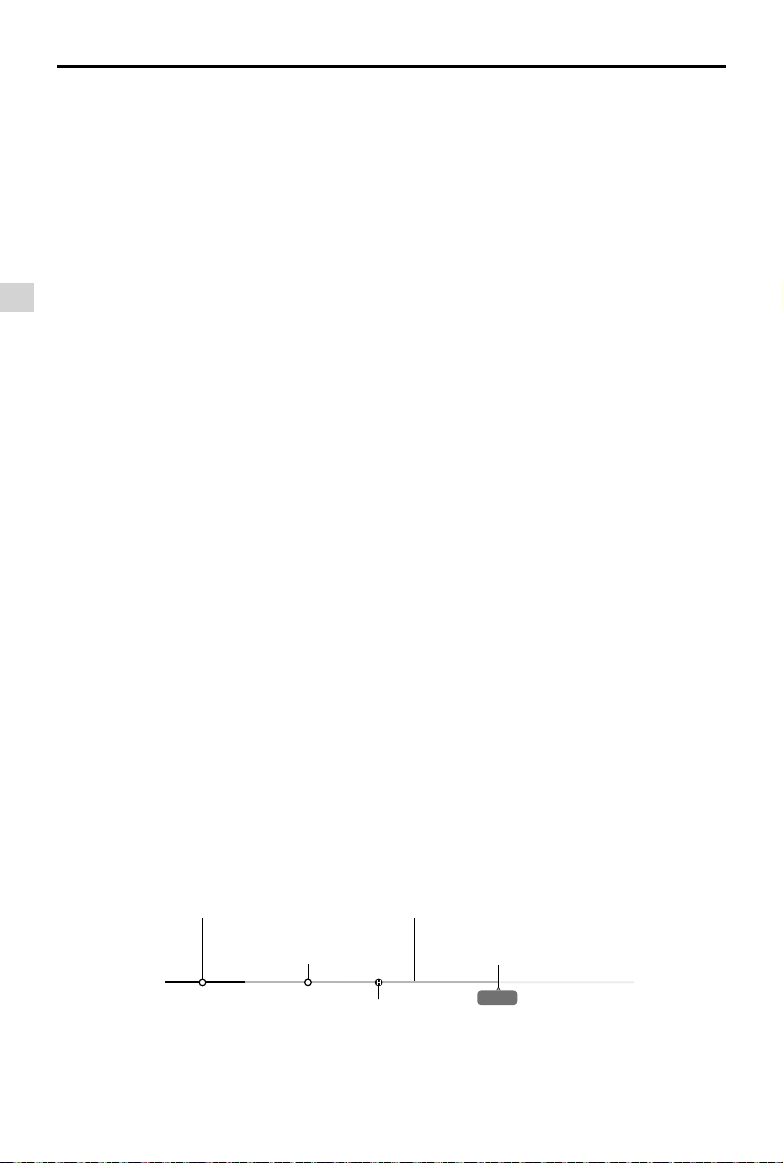
Faixa de transmissão ideal
O sinal de transmissão entre o quadricóptero e o controle remoto é mais conável dentro da área
representada abaixo:
Faixa de transmissão ideal
forte fraco
Certifique-se de que o quadricóptero esteja voando dentro da zona de transmissão ideal. Para
obter o melhor desempenho de transmissão, mantenha a relação adequada entre o operador e o
quadricóptero.
Tela LCD
A tela LCD exibe vários status do sistema, incluindo a telemetria de voo e o nível de bateria em
tempo real. Consulte a gura abaixo para obter o signicado de cada ícone na tela LCD.
Força do Sinal do GPS
Aviso de status
do sistema
Modo de voo
Nível de bateria
do quadricóptero
Força do sinal RC
Controle remoto
Velocidade de voo
Nível da bateria RC
Distância do solo
Vision Positioning System
Distância do voo
Compensação de exposição
Subir/descer
Altitude de voo
Status da câmera
Velocidade de
rotação do motor
Posicionamento
do Micro SD
Modos Sport
* Na tela do controle remoto, o controle primário exibe MCTL e o secundário exibe o modo de voo.
2017 DJI Todos os direitos reservados.
©
37
Page 38

Manual do Usuário do Mavic Pro
Modo de Controle Remoto Duplo
O Mavic Pro é compatível com o Modo de Controle Remoto Duplo. O rmware Mavic Pro, versão
do firmware 01.03.0400 e o aplicativo DJI GO 4, versão 4.0.5, são obrigatórios. Dois controles
remotos podem ser conectados à mesma aeronave no Modo de Controle Remoto Duplo.
Tanto o controle remoto primário quanto o secundário são capazes de controlar a orientação da
aeronave, o movimento do estabilizador e a operação da câmera, depois que os controles remotos
tiverem sido ligados à aeronave.
Controle remoto
Preste atenção às diferenças de operação abaixo entre o controle remoto primário e o secundário.
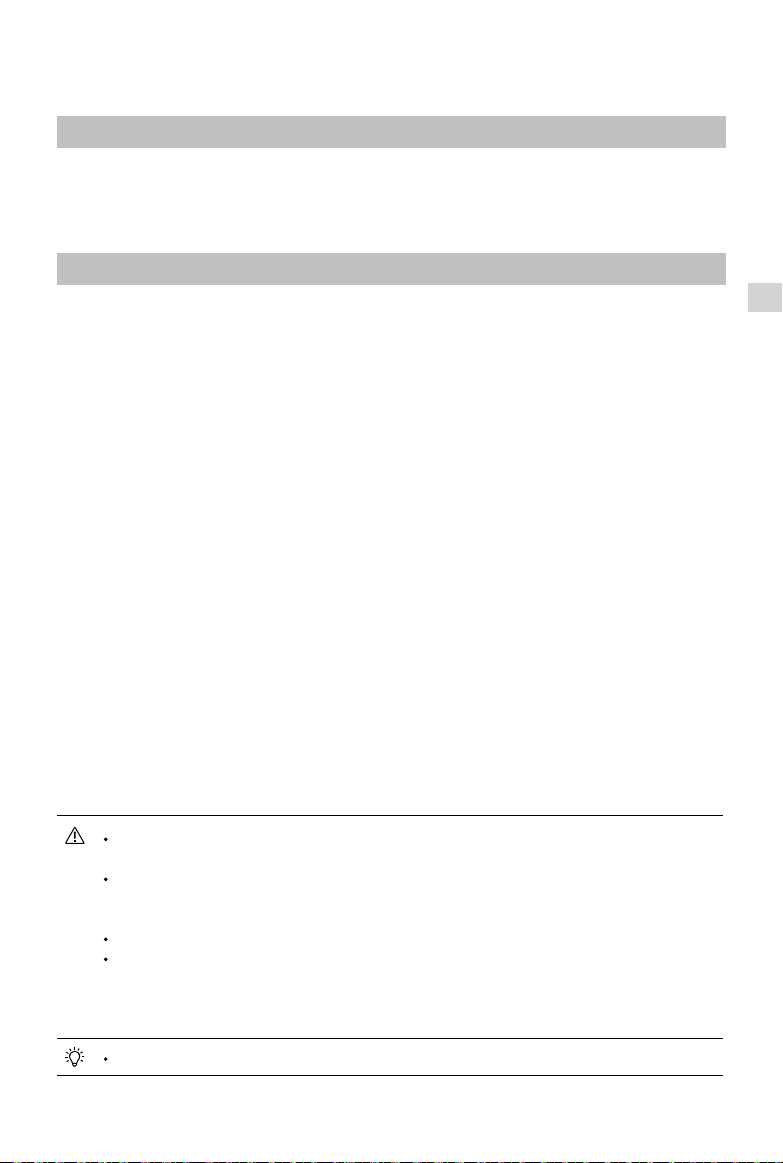
1. Botão estabilizador
Tanto o controle remoto primário quanto o secundário são capazes de controlar o seletor do
estabilizador, mas o controle remoto primário tem prioridade. Por exemplo, o controle remoto
secundário é incapaz de controlar o seletor do estabilizador quando o controle remoto primário
está usando o seletor. No entanto, após o m do controle do seletor do estabilizador por dois
segundos, o controle remoto secundário passa a ser capaz de controlar o seletor.
2. Joysticks
Tanto o controle remoto primário quanto o secundário são capazes de controlar a orientação da
aeronave usando os joysticks de controle. O controle remoto primário remoto tem prioridade. O
controle remoto secundário é incapaz de controlar a orientação da aeronave quando o controle
remoto primário está operando os joysticks de controle. Quando os joysticks cam ociosos por
dois segundos, o controle remoto secundário é capaz de controlar a orientação da aeronave.
Para garantir a segurança de voo, ao puxar para baixo o joystick do acelerador no controle
remoto secundário, puxe ambos os joysticks para baixo e para dentro. Quando o controle
remoto primário estiver controlando a aeronave, esta não irá responder a esse comando, mesmo
se o controle remoto primário tiver cado ocioso por mais de dois segundos.
Os joysticks do controle remoto secundário precisam ser liberados de modo que o controle
remoto secundário seja capaz de controlar a aeronave.
3. Interruptor do modo de voo
Use o controle remoto primário somente para alternar o modo de voo. O seletor do modo de voo
é desativado no controle remoto secundário.
4. Congurações do aplicativo DJI GO 4
As congurações de tela e os parâmetros dos controles remotos primário e secundário no DJI
© 2017 DJI Todos os direitos reservados.
38
Page 39

Manual do Usuário do Mavic Pro
GO 4 são os mesmos. Não é possível congurar nada pelo controle remoto secundário, exceto
controle de voo, vision system, transmissão de vídeo, Intelligent Flight Battery e parâmetros do
estabilizador. Os parâmetros de tela e parâmetros são os mesmos para os controles remotos
primário e secundário no DJI GO 4.
Link do controle remoto
O controle remoto vem vinculado ao quadricóptero antes da entrega. Realizar o link é necessário
somente ao utilizar um novo controle remoto pela primeira vez. Siga estes passos para realizar o
link com um novo controle remoto:
1. Ligue o controle remoto e conecte ao dispositivo móvel e ligue o quadricóptero. Inicie o
aplicativo DJI GO 4.
2. Entre em “Camera” e toque no ícone ; depois, toque no botão “Linking Primary RC” ou
“Linking Secondary RC” para conrmar.
Mude o interruptor de modo de controle para modo RC antes da vinculação.
3. O controle remoto está pronto para o link.
4. Localize o botão de vinculação na lateral do quadricóptero, conforme exibido na gura abaixo.
Pressione o botão de link para iniciar o link. O Indicador de Status de vinculação exibirá uma
luz verde quando o controle remoto for conectado com êxito ao quadricóptero, e a tela LCD no
controle remoto exibirá as informações do quadricóptero.
Controle remoto
Indicador do status de vinculação
Botão Link
O controle remoto irá se desconectar sozinho de um quadricóptero se um novo controle
remoto for vinculado ao mesmo quadricóptero.
No Modo de Controle Remoto Duplo, o controle remoto secundário deve ser religado à
aeronave quando o controle primário tiver sido religado à aeronave.
2017 DJI Todos os direitos reservados.
©
39
Page 40

Câmera e
estabilizador
Esta seção fornece as especicações
técnicas da câmera e explica os modos
de operação do gimbal.
© 2017 DJI Todos os direitos reservados.
40
Page 41

Câmera e estabilizador
Perl da câmera
A câmera embarcada usa o sensor CMOS de 1/2,3 pol para captura de vídeo de até 4k a 30 fps
com o Mavic Pro e 12 megapixels. Pode-se gravar o vídeo nos formatos MOV ou MP4. Os modos
de captura de fotos disponíveis incluem disparo sequencial, contínuo e modo de intervalo. Uma
pré-visualização em tempo real do que a câmera vê pode ser monitorada no dispositivo móvel por
meio do aplicativo DJI GO 4.
Slot de cartão Micro SD da câmera
Para armazenar suas fotos e vídeos, insira o cartão Micro SD no slot, conforme exibido abaixo,
antes de ligar o Mavic Pro. O Mavic Pro tem um cartão Micro SD de 16 GB e é compatível com
cartões Micro SD de até 64 GB. Um cartão Micro SD UHS-1 é recomendado devido a seu rápido
tempo de leitura e gravação, o que permite salvar dados de vídeo em alta resolução.
Não remova o cartão Micro SD do Mavic Pro quando estiver ligado.
Para garantir a estabilidade do sistema da câmera, cada gravação de vídeo é cortada no
limite de 30 minutos.
Câmera em gimbal
Entrada de dados da câmera
Ligue o Mavic Pro e conecte um cabo USB à porta Micro USB para fazer download de fotos e
vídeos para seu computador.
O quadricóptero deve ser ligado antes de tentar acessar os arquivos no cartão Micro SD.
2017 DJI Todos os direitos reservados.
©
41
Page 42

Manual do Usuário do Mavic Pro
Gimbal
Perl do gimbal
O gimbal de 3 eixos oferece uma plataforma estável para a câmera conectada, permitindo capturar
imagens e vídeos nítidos e estáveis. O gimbal pode inclinar a câmera dentro de uma faixa de 120
graus.
30°
0°
Câmera em gimbal
-90°
Use o botão giratório do gimbal no controle remoto para controlar a inclinação da câmera, ou vá
para visualização da câmera no aplicativo DJI GO 4, toque e mantenha pressionado na tela até
que um círculo azul seja exibido e, em seguida, arraste o círculo para controlar a inclinação da
câmera.
A amplitude controlável do eixo de rotação do gimbal é de 0° a 90°, permitindo que você fotografe
no modo paisagem e retrato. O eixo de rotação girará 90° quando o modo Retrato estiver ativado.
É recomendável usar o modo Retrato para tirar fotos em vez da gravar vídeos. Quando
o quadricóptero está voando em modos que sobrecarregam o sistema, por exemplo,
frenagem de emergência ou voo no modo Sport, o eixo de rotação do gimbal atingirá a
extremidade e causará uma vibração no gimbal.
Modos de operação do gimbal
Estão disponíveis dois modos de operação do gimbal. Alterne entre os diferentes modos de
operação na página de configurações da câmera do aplicativo DJI GO 4. Observe que seu
dispositivo móvel deve estar conectado ao controle remoto para que as alterações tenham efeito.
Consulte a tabela abaixo para detalhes:
Follow
Mode
O ângulo entre a orientação do gimbal e o nariz do quadricóptero
permanece sempre constante.
O gimbal irá sincronizar com o movimento do quadricóptero para
FPV Mode
fornecer uma experiência de vôo com perspectiva em primeira
pessoa.
Remova a braçadeira do gimbal antes de ligar o quadricóptero.
Pode ocorrer um erro do motor do gimbal nas seguintes situações:
(1) o quadricóptero está colocado em solo desigual ou o movimento do gimbal está obstruído.
(2) o gimbal foi submetido a uma força externa excessiva, como uma colisão.
Levante voo de uma área plana e aberta e proteja sempre o gimbal.
O voo com neblina pesada ou nuvens pode molhar o gimbal, levando a uma falha temporária.
O gimbal irá recuperar sua total funcionalidade após secar.
É normal que o bipe do gimbal toque na inicialização.
© 2017 DJI Todos os direitos reservados.
42
Page 43

Aplicativo DJI GO 4
Esta seção introduz as principais
funções do aplicativo DJI GO 4.
2017 DJI Todos os direitos reservados.
©
43
Page 44

Aplicativo DJI GO 4
O aplicativo DJI GO 4 é um aplicativo móvel projetado especicamente para o equipamento da
DJI. Use esse aplicativo para controlar o gimbal, a câmera e outras funções do quadricóptero. O
aplicativo apresenta as seções Equipment, Editor, SkyPixel e Me, que são usadas para congurar
seu quadricóptero, editar e compartilhar suas fotos e vídeos com outras pessoas.
80%
Connect your DJI device
Mavic Pro
Aplicativo DJI GO 4
Equipment Editor Skypixel Me
Use AEB shoot to get more dynanic image
Camera
Learn more
Equipamento
Entre em Visualização da Câmera tocando em "Câmera" na tela de boas-vindas do DJI GO 4.
Visualização da câmera
10 118 97654321
24
READY TO GO (GPS)
09:29
23
22
21
20
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
19
P-GPS
12
61%
12
13
AE
14
15
16
17
18
© 2017 DJI Todos os direitos reservados.
44
Page 45

Manual do Usuário do Mavic Pro
1. Status do Sistema
PRONTO PARA SAIR (GPS)
: Este ícone indica o status de voo do quadricóptero e várias mensagens de aviso.
2. Status de detecção de obstáculos
: Barras vermelhas são exibidas quando obstáculos estão próximos do quadricóptero.
Barras laranjas são exibidos quando obstáculos estão no intervalo de detecção.
3. Indicador de nível da bateria
: O indicador de nível de bateria fornece um visor dinâmico do nível de bateria. As zonas
coloridas no indicador de nível de bateria representam os níveis de energia necessários para realizar
diferentes funções.
4. Modo de voo
: O texto ao lado desse ícone indica o modo de voo atual.
Toque para configurar as configurações de MC (Main Controller). Essas configurações permitem
modicar limites de voo e denir os valores de ganho.
5. Parâmetros da câmera
Exibe os parâmetros de conguração da câmera e a capacidade de cartão Micro SD.
6. Força do sinal do GPS
: Mostra a intensidade do sinal atual do GPS. Barras brancas indicam força de GPS adequada.
7. Status do Sistema de Visão Frontal
: Toque nesse botão para ativar ou desativar recursos fornecidos pelo Sistema de Visão Frontal.
Aplicativo DJI GO 4
8. Sinal do Controle Remoto
: Esse ícone mostra a potência do sinal do controle remoto. O ícone irá piscar se uma
interferência for reconhecida durante o voo. Se não houver alertas adicionais no DJI GO 4, isso
signica que a interferência não irá afetar a operação e a experiência de voo de uma forma geral.
9. Força do sinal do link de vídeo HD
: Esse ícone mostra a potência da conexão de downlink de vídeo HD entre o quadricóptero
e o controle remoto. O ícone irá piscar se uma interferência for reconhecida durante o voo. Se não
houver alertas adicionais no DJI GO 4, isso signica que a interferência não irá afetar a operação e a
experiência de voo de uma forma geral.
10. Nível da bateria
: Esse ícone mostra o nível atual da bateria.
61%
Toque para visualizar o menu de informações de bateria, denir os vários limites de advertência de
bateria e visualizar o histórico de advertências de bateria.
. Foco/Botão de medição
11
/ : Toque para alternar entre o modo de foco e de medição Toque para selecionar o objeto a
ser focalizado e medido. O Foco Automático Contínuo será acionado automaticamente de acordo com
o status do quadricóptero e da câmera após ativar o Foco Automático.
2017 DJI Todos os direitos reservados.
©
45
Page 46

Manual do Usuário do Mavic Pro
Congurações gerais
12.
: Toque para entrar no menu de conguração geral para congurar métricas, habilitar livestream,
exibir rotas de voo e assim por diante.
13. Bloqueio da exposição automática
:Toque para bloquear o valor de exposição.
AE
14. Controle deslizante do gimbal
: Exibe a inclinação do gimbal.
15. Botão de foto/vídeo
: Toque para alternar entre os modos de foto e gravação de vídeo.
16. Botão do Fotos/Gravação
Aplicativo DJI GO 4
/ : Toque em para tirar fotos ou gravar um vídeo.
17. Congurações da câmera
: Toque para denir valores de ISO, obturador e autoexposição da câmera.
18. Playback
: Toque para entrar na página de reprodução e visualizar fotos e vídeos assim que eles
forem capturados.
19. Telemetria de voo
D 30M
H 10.0M
HS 10.0M/S
VS 2.0M/S
: Distância entre o quadricóptero ao Ponto Inicial.
: Altura a partir do solo.
: Velocidade horizontal do quadricóptero.
: Velocidade vertical do quadricóptero.
20. Mapa
Toque para exibir mapa.
21. Modo de Voo Inteligente
: Toque para selecionar o modo de voo inteligente.
22. Smart RTH
: Inicia o procedimento RTH. Toque para que o quadricóptero retorne para o último ponto
inicial registrado.
Decolagem/pouso automáticos
23.
/ : Toque para iniciar decolagem ou pouso automático.
© 2017 DJI Todos os direitos reservados.
46
Page 47

Manual do Usuário do Mavic Pro
24. Volta
: Toque neste ícone para voltar para o menu principal.
Deslize para a esquerda na visualização da câmera para acessar o menu mostrado abaixo.
READY TO GO (GPS)
12
P-GPS
09:29
61%
AE
Portrait/Landscape Gimbal up/down
H 10.0MD 30M
Home Point: Aircraft Home Point: Me
Adjust screen brightness
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
Retrato/Paisagem
Alterne para o modo de retrato, tocando no ícone.
Gimbal para cima/baixo
Toque no ícone para apontar a câmera para frente ou para baixo.
Ponto inicial
Use a localização do quadricóptero ou do controle remoto como ponto inicial.
Uso do dispositivo móvel para controlar o quadricóptero
Além de usar o controle remoto incluído, você pode usar a conexão Wi-Fi no dispositivo móvel para
controlar o quadricóptero. Siga as instruções abaixo para saber como controlar o quadricóptero
por Wi-Fi.
1. Desligue o quadricóptero e, em seguida, mude o interruptor de Modo de controle para a posição
"Wi-Fi".
Aplicativo DJI GO 4
Interruptor de modo de controle
2. Ligue o quadricóptero.
3. Ligue o dispositivo móvel Wi-Fi e digite a senha Wi-Fi mostrada no braço frontal para
conectar-se à rede Mavic.
4. Toque no ícone para decolar o quadricóptero automaticamente. Toque na tela e utilize
os joysticks virtuais para navegar com o quadricóptero.
2017 DJI Todos os direitos reservados.
©
47
Page 48

Manual do Usuário do Mavic Pro
Execute o aplicativo DJI GO 4 e toque no ícone no canto superior direito da tela; em
seguida, digitalize o código QR Wi-Fi no braço frontal para iniciar a conexão. Observe
que esse recurso está disponível em dispositivos Android.
Ao utilizar o WiFi em uma área aberta ampla sem qualquer interferência eletromagnética,
o alcance da transmissão é de aproximadamente 262 pés (80 m) a uma altitude de 164
pés (50 m). A velocidade máxima de voo é de 9 mph (14 km), a velocidade máxima de
subida é de 2 m/s e a velocidade máxima de descida é de 1 m/s.
A frequência de Wi-Fi em seu dispositivo móvel pode ser denida em 2,4 Ghz (padrão) ou
5 GHz. Em aparelhos compatíveis, dena Wi-Fi em 5 GHz para menos interferência.
Pressione e segure o botão de vinculação por 5 segundos ou mais para denir a senha
do Wi-Fi e o SSID. Pressione e solte para denir a freqüência de transmissão em 2.4 GHz.
Uso do modo Wi-Fi em uma ampla área aberta com menos interferência eletromagnética.
Se o Wi-Fi for severamente afetado pela interferência eletromagnética, use o controle
Aplicativo DJI GO 4
remoto para pilotar seu quadricóptero.
Uso de Joysticks Virtuais
Certique-se de que o dispositivo móvel foi conectado ao quadricóptero antes de usar os joysticks
virtuais. As ilustrações abaixo são baseadas no Modo 2 (joystick esquerdo funciona como
acelerador).
READY TO GO (GPS)
12
P-GPS
09:29
61%
AE
GUI de Joysticks virtuais
Esquerda Direita
Mova o quadricóptero para cima, para baixo ou gire para a esquerda ou para a direita,
pressionando na metade esquerda da tela. Mova o quadricóptero para frente, para trás ou gire
para a esquerda ou para a direita, pressionando na metade direita da tela.
Toque no botão " " para habilitar ou desabilitar os joysticks virtuais.
A área além do ciclo branco também controla os comandos.
© 2017 DJI Todos os direitos reservados.
48
Page 49

Manual do Usuário do Mavic Pro
Editor
Um editor de vídeo inteligente está integrado ao aplicativo DJI GO 4. Depois de gravar vários
clipes de vídeo e baixá-los em seu dispositivo móvel, vá para o Editor na tela inicial. Será possível
selecionar um modelo e um número especíco de clipes que serão combinados automaticamente
para criar um curta-metragem que pode ser compartilhado imediatamente.
SkyPixel
Visualize e compartilhe as fotos e os vídeos na página do SkyPixel.
Me
Se você já tem uma conta DJI, você poderá participar de fóruns de discussão e compartilhar sua
criação com a comunidade.
Aplicativo DJI GO 4
2017 DJI Todos os direitos reservados.
©
49
Page 50

Voo
Esta seção descreve práticas seguras e
restrições de voo.
© 2017 DJI Todos os direitos reservados.
50
Page 51

Voo
Após concluir a preparação ao voo, recomenda-se utilizar o simulador de voo no aplicativo DJI GO
4 para aprimorar suas habilidades de voo e praticar com segurança. Certique-se de que todos os
voos sejam realizados em uma área aberta.
Requisitos ambientais de voo
1. Não utilize o quadricóptero em condições climáticas rigorosas. Isso inclui velocidade do vento
excedendo 10 m/s, neve, chuva e névoa.
2. Voe em espaços abertos. Estruturas altas e grandes em metal podem afetar a precisão da
bússola embarcada e do sistema GPS.
3. Evite obstáculos, multidões, linhas de alta tensão, árvores e corpos d'água.
4. Minimize a interferência evitando áreas com altos níveis de eletromagnetismo, incluindo estações
base e torres de radiotransmissão.
5. O desempenho do quadricóptero e da bateria está sujeito a fatores ambientais, como densidade
do ar e temperatura. Tome cuidado ao voar em altitudes maiores que 5000 m (16.404 pés)
acima do nível do mar, pois o desempenho da bateria e do quadricóptero poderá ser afetado.
6. O Mavic Pro não pode usar o P-mode nas áreas polares.
Limites de voo e Zonas de Exclusão Aérea
Todos os operadores de veículos aéreos automatizados (UAV) devem obedecer a todas as
regulamentações estabelecidas pelo governo e agências reguladoras, incluindo o ICAO e a FAA.
Por motivos de segurança, os voos estão limitados, por padrão, o que ajuda os usuários a operar
este produto com segurança e legalmente. As limitações de voo incluem limites de altura, limites
de distância e Zonas de Exclusão Aérea.
Ao operar no P-Mode, os limites de altura e distância e as Zonas de Exclusão Aérea funcionam em
conjunto para administrar a segurança do voo.
Voo
Limites máximos de altitude e raio
Os limites máximos de altitude e raio podem ser alterados no aplicativo DJI GO 4. Esteja ciente
de que a altitude de voo máxima não pode exceder 500 m (1640 pés). De acordo com essas
congurações, seu Mavic Pro voa em um cilindro restrito, como mostrado abaixo:
Altitude de voo máxima
Raio máx.
Ponto Inicial
Altura do quadricóptero
quando ligado
2017 DJI Todos os direitos reservados.
©
51
Page 52

Manual do Usuário do Mavic Pro
Sinal de GPS forte Piscando verde
Limites de voo Aplicativo DJI GO 4
Altitude de
voo máxima
Raio máx.
Sinal de GPS fraco Piscando amarelo
Voo
Altitude
de voo
máxima
A altitude do quadricóptero
não pode exceder o valor
especicado.
A distância de voo deve
estar dentro do raio máximo.
Limites de voo Aplicativo DJI GO 4
A altura é restrita a 5 metros
(16 pés) quando o sinal do GPS estiver
fraco e o sistema de visão inferior estiver
ativado. A altura é restrita a 30 metros (98
pés) quando o sinal de GPS estiver fraco e o
sistema de visão inferior estiver desativado.
Raio máx. Sem limite
Se o quadricóptero voar fora do limite, ainda será possível controlá-lo, mas não será
possível voar mais longe.
Se o quadricóptero voar fora do raio máximo, ele voará de volta para dentro do alcance
automaticamente quando o sinal do GPS estiver forte.
Por motivos de segurança, não voe próximo a aeroportos, estradas, estações de trem,
linhas de trem, centros de cidades ou outras áreas restritas. Voe com o quadricóptero
somente dentro do seu campo de visão.
Advertência: Limite
de altura atingido.
Advertência:
Limite de distância
atingido.
Advertência:
Limite de altura
atingido.
Indicador de status do
quadricóptero
Nenhum.
Vermelho piscando rápido
quando próximo ao
limite de raio máximo.
Indicador de status
do quadricóptero
Nenhum.
Zonas de Exclusão Aérea
Todas as Zonas de Exclusão Aérea estão listadas no site ocial da DJI em http://www.dji.com/ysafe/
no-y. Zonas de exclusão aérea estão divididas entre aeroportuárias e áreas restritas. Aeroportuárias
inclui os grandes aeroportos e campos de voo onde aeronaves tripuladas operam em baixas altitudes.
Áreas restritas incluem linhas de fronteira entre países ou instituições condenciais.
Lista de vericação pré-voo
1. Controle remoto, Bateria de Voo Inteligente e dispositivo móvel totalmente carregados.
2. Hélices instaladas correta e rmemente.
3. Cartão Micro SD inserido, se necessário.
4. Gimbal funcionando normalmente.
5. Motores dão partida e funcionam normalmente.
6. O aplicativo DJI GO 4 está conectado com sucesso ao quadricóptero.
7. Certique-se de que os sensores do Sistema de Visão Frontal e Inferior estejam limpos.
© 2017 DJI Todos os direitos reservados.
52
Page 53

Manual do Usuário do Mavic Pro
Calibração da bússola
Calibre a bússola somente quando o aplicativo DJI GO 4 ou o indicador de status solicitar. Observe
as seguintes regras ao calibrar a bússola:
NÃO calibre a bússola em locais onde exista a chance de forte interferência magnética,
como magnetita, estruturas de estacionamento e estruturas subterrâneas de metal.
NÃO carregue materiais ferromagnéticos, como celulares, com você durante a calibração.
O aplicativo DJI GO 4 solicitará que você resolva o problema da bússola se ela for
afetada por interferência forte após a realização da calibração. Siga as instruções
indicadas para resolver o problema da bússola.
Procedimentos de calibração
Escolha uma área aberta para realizar os procedimentos seguintes.
1. Toque na barra de status do quadricóptero no aplicativo, selecione "Calibrate" e siga as
instruções na tela.
2. Segure o quadricóptero horizontalmente e gire 360 graus. Os indicadores de Status do
quadricóptero acenderão em verde.
Voo
3. Mantenha o quadricóptero na posição vertical com o nariz apontando para baixo e gire-o 360
graus em torno do eixo central.
2017 DJI Todos os direitos reservados.
©
53
Page 54

Manual do Usuário do Mavic Pro
4. Calibre novamente o quadricóptero se os indicadores de status do quadricóptero piscarem em
vermelho.
Caso o indicador de status do quadricóptero pisque em vermelho e amarelo após o
procedimento de calibração, mova seu quadricóptero para um local diferente e tente
novamente.
NÃO calibre a bússola perto de objetos de metal, como uma ponte de metal, carros,
andaimes.
Se o indicador de status do quadricóptero piscar em vermelho e amarelo após o
posicionamento do quadricóptero no solo, a bússola detectou interferência magnética.
Altere sua localização.
Decolagem e pouso automáticos
Decolagem automática
Voo
Use a decolagem automática somente se os indicadores de status do quadricóptero estiverem piscando
em verde. Siga os passos abaixo para usar o recurso de decolagem automática:
1. Execute o aplicativo DJI GO 4 e entre na página “Camera”.
2. Conclua todos os passos na lista de vericação pré-voo.
3. Toque em " " e conrme se as condições são seguras para o voo. Deslize o ícone para conrmar e
decolar.
4. O quadricóptero decola e plana a 1,2 metros acima do chão.
O indicador de status do quadricóptero pisca rapidamente quando está utilizando o
Sistema de Visão Inferior para estabilização. O quadricóptero irá planar automaticamente
abaixo de 13 metros. Recomenda-se aguardar até que haja sinal suciente do GPS antes
de utilizar o recurso de decolagem automática.
Pouso automático
Use o pouso automático somente se o indicador de status do quadricóptero estiver piscando em
verde. Siga os passos abaixo para usar o recurso de pouso automático:
1. Toque em para garantir que a condição inicial é ideal. Deslize para conrmar.
2. Aborte o processo de pouso imediatamente usando o botão na tela.
3. a. Quando a função de proteção de pouso determina que o solo é adequado para pouso, o
Mavic Pro pousará suavemente.
b. Se a função de proteção de pouso determinar que o solo não é adequado para pouso, o
Mavic Pro irá planar e aguardar a conrmação do piloto.
c. Se a função de proteção de pouso não estiver ativada, o aplicativo DJI GO 4 exibirá um aviso
de pouso quando o Mavic Pro descer abaixo de 0,5 metros. Para pousar, puxe o acelerador
para baixo ou use o controle deslizante de aterrissagem automática.
4. O quadricóptero irá decolar e pousar automaticamente.
© 2017 DJI Todos os direitos reservados.
54
Page 55

Manual do Usuário do Mavic Pro
Partida/Parada dos motores
Partida dos motores
Um Combination Stick Command (CSC) é usado para dar partida nos motores. Empurre ambos
os joysticks para os cantos inferiores internos ou externos para dar partida nos motores. Após os
motores começarem a girar, libere ambos os joysticks simultaneamente.
OU
Parada dos motores
Há dois métodos para parar os motores.
Método 1: Quando o Mavic Pro tiver pousado, empurre o joystick esquerdo para baixo , depois
faça o mesmo CSC usado para dar partida nos motores, conforme descrito acima . Os motores
irão parar imediatamente. Libere ambos os joysticks após a parada dos motores.
Método 2: Quando o quadricóptero tiver pousado, pressione e segure o joystick esquerdo. Os
motores irão parar após três segundos.
OU
Voo
Método 1 Método 2
Parada dos motores em pleno voo
A parada dos motores em pleno voo causará a queda do quadricóptero. Os motores podem
ser parados em pleno voo apenas quando o controlador de voo detectar um erro crítico. (Esta
conguração pode ser alterada no aplicativo DJI GO 4).
Teste de voo
Procedimentos de decolagem/pouso
1. Coloque o quadricóptero em uma área aberta e plana com os indicadores de nível de bateria
voltados para você.
2. Ligue o controle remoto e seu dispositivo móvel e, depois, ligue a Bateria de Voo Inteligente.
3. Execute o aplicativo DJI GO 4 e entre na página Camera.
4. Aguarde até que o indicador do quadricóptero pisque em verde. Isso signica que o Ponto Inicial
está gravado e agora é seguro voar. Caso pisquem em amarelo, o Ponto Inicial não terá sido
registrado.
5. Levante o joystick esquerdo lentamente para decolar ou use a Decolagem automática.
6. Capture fotos e vídeos usando o aplicativo DJI GO 4.
7. Puxe o joystick esquerdo para baixo para descer, o quadricóptero irá planar a 0,5 metro (5 pés)
acima do solo por cerca de 1 segundo e, em seguida, mantenha o joystick esquerdo em sua
posição mais baixa até que você toque o chão e os motores parem.
8. Desligue primeiro a Bateria de Voo Inteligente, depois o controle remoto.
2017 DJI Todos os direitos reservados.
©
55
Page 56

Manual do Usuário do Mavic Pro
Quando o Indicador de status do quadricóptero piscar rapidamente em amarelo durante
o voo, o quadricóptero terá entrado no modo Failsafe.
Uma advertência de nível baixo de bateria será sinalizada pelos Indicadores de Status do
quadricóptero piscando lenta ou rapidamente em vermelho durante o voo.
Assista aos nossos tutoriais em vídeo para obter mais informações sobre o voo.
Sugestões e dicas de vídeo
1. Percorra a lista de vericação pré-voo completa antes de cada voo.
2. Selecione o modo de operação do gimbal desejado no aplicativo DJI GO 4.
3. Grave vídeo somente quando estiver voando no P-Mode.
4. Sempre voe com bom tempo e evite voar na chuva ou com vento forte.
5. Escolha as configurações da câmera de acordo com suas necessidades. As configurações
incluem o formato da foto e a compensação de exposição.
6. Execute testes de voo para estabelecer rotas de voo e visualizar cenas.
7. Empurre os joysticks com cuidado para manter o movimento do quadricóptero suave e estável.
Voo
© 2017 DJI Todos os direitos reservados.
56
Page 57

Apêndice
2017 DJI Todos os direitos reservados.
©
57
Page 58

Apêndice
Especicações
Quadricóptero
Peso 734 g (1,62 lbs)
Peso (incluindo a tampa do
gimbal)
Dimensões 83 × 83 × 198 mm (dobrada)
Comprimento diagonal (hélices
excluídas)
Velocidade máx. de ascensão 5 m/s (16,4 pés/s) no modo esportivo
Velocidade máx. de descida 3 m (9,8 pés)
Velocidade máx. 65 km/h (40,4 mph) no modo Sport, sem vento
Teto máximo de serviço acima do
nível do mar
Tempo máx. de voo 27 minutos (Vento 0 a 15,5 mph (25 km/h))
Tempo máx. de planagem 24 minutos (Vento 0)
Méd. Tempo de voo 21 minutos (voo geral, 15% de carga restante da bateria)
Apêndice
Distância máxima de voo 8 mi (13 km, vento 0)
Temperatura operacional 0°C a 40°C (32°F a 104°F)
Sistemas de posicionamento por
satélite
Frequência de funcionamento
Potência do transmissor (EIRP)
Gimbal
Amplitude controlável
Vision Positioning System voltado para frente
Alcance de detecção
Ambiente operacional Superfícies com padrões nítidos e iluminação adequada (lux > 15)
Sistema de visão inferior
Faixa de velocidade ≤ 36 km/h (22,4 mph) a 2 m (6,6 pés) acima do solo
Faixa de altitude 0,3 a 13 m (1 a 43 pés)
Faixa operacional 0,3 a 13 m (1 a 43 pés)
Ambiente operacional Superfícies com padrões nítidos e iluminação adequada (lux > 15)
Câmera
Sensor
743 g (1,64 lbs)
335 mm
5000 m (16404 pés)
GPS/GLONASS
FCC: 2,4-2,4835 GHz; 5,150-5,250 GHz; 5,725-5,850 GHz
CE: 2,4-2,4835 GHz; 5,725-5,850 GHz
SRRC: 2,4-2,4835 GHz; 5,725-5,850 GHz
2,4 GHz
FCC: ≤26 dBm; CE: ≤20 dBm; SRRC: ≤20 dBm
5,2 GHz
FCC: ≤23 dBm
5,8 GHz
FCC: ≤23 dBm; CE ≤13 dBm; SRRC: ≤23 dBm
Inclinação: -90° a +30°, Rotação: 0° ou 90° (horizontalmente e
verticalmente)
Intervalo de medição de precisão: 2 pés (0,7 m) a 49 pés (15 m)
Intervalo detectável: 49 pés (15 m) a 98 pés (30 m)
1/2,3” Pixels efetivos CMOS:12,35 Megapixels
(Total de pixels: 12,71 M)
© 2017 DJI Todos os direitos reservados.
58
Page 59

Manual do Usuário do Mavic Pro
Objetiva
FOV 78,8° 28 mm (equivalente ao formato 35 mm) f/2.2
Distorção < 1,5% do foco de 0,5 m a ∞
Gama ISO 100 - 3200(vídeo), 100 - 1600 (foto)
Velocidade do obturador eletrônico
8 s a 1/8000 s
Tamanho máximo da imagem 4000×3000
Disparo único
Disparo sequencial: 3/5/7 quadros
Modos de fotograa
Variação da exposição automática (AEB):
3/5 quadros com bracketing em variação de 0,7 EV
Intervalo
HDR
C4K: 4096×2160 24p, 4K: 3840×2160 24/25/30p
Modos de gravação de vídeo
2,7K: 2720×1530 24/25/30p
FHD: 1920×1080 24/25/30/48/50/60/96p
HD: 1280×720 24/25/30/48/50/60/120p
Taxa de bits para armazenamento
de vídeo
60 Mbps
Sistemas de cheiros suportados FAT32 (≤ 32 GB), exFAT (> 32GB)
Foto JPEG, DNG
Vídeo MP4, MOV (MPEG-4 AVC/H.264)
Suporta cartões SD
microSDTM. Capacidade máxima: Necessário classicação classe
10 64GB ou UHS-1
Controle remoto
Frequência de funcionamento 2.400 GHz a 2.4835 GHz
Conformidade com a FCC: 7 km (4,3 mi); conformidade com a CE:
Distância máxima de transmissão
4 km (2,5 mi); conformidade com a SRRC: 4 km (2,5 mi)
Sem obstrução, livre de interferências.
Temperatura operacional 0 C a 40°C (32°F a 104°F)
Bateria 2970 mAh
Potência do transmissor (EIRP) FCC: ≤ 26 dBm; CE: ≤ 20 dBm; SRRC: ≤20 dBm
Tensão de operação 950 mA a 3,7 V
Tamanhos de dispositivos móveis
suportados
Espessura suportada: 6,5 - 8,5 mm, comprimento máximo: 160mm
Tipos de portas USB suportadas: Lightning, Micro USB (Tipo B),
USB Tipo C
TM
Carregador
Tensão 13,05 V
Potência nominal 50 W
Bateria de voo inteligente
Capacidade 3830 mAh
Tensão 11,4 V
Tipo de bateria LiPo 3S
Energia 43,6 Wh
Peso líquido Aprox. 240 g (0,5 lbs)
Temperatura operacional 5°C a 40°C (41°F a 104°F)
Potência máx. de carga 100 W
Apêndice
Atualizações de rmware
Use o DJI Assistant 2 ou o aplicativo DJI GO 4 para atualizar o quadricóptero e o controle remoto.
2017 DJI Todos os direitos reservados.
©
59
Page 60

Manual do Usuário do Mavic Pro
Uso do aplicativo DJI GO 4
Conecte o controle remoto e o aplicativo DJI GO 4. Você receberá um aviso se uma nova
atualização do rmware estiver disponível. Para iniciar a atualização, conecte o dispositivo móvel à
Internet e siga as instruções na tela.
Uso do DJI Assistant 2
Use o DJI Assistant 2 para atualizar o firmware para o controle remoto e para o quadricóptero
simultaneamente.
Siga as instruções abaixo para atualizar o rmware usando o DJI Assistant 2:
1. Com o controle remoto e o quadricóptero desligados, conecte o controle remoto ao computador
por meio da porta de carregamento usando um cabo micro USB.
2. Ligue o controle remoto e o quadricóptero.
3. Inicie o DJI Assistant 2 e faça login com a sua conta da DJI.
4. Selecione "Mavic Pro" e clique em "Firmware Updates" no painel esquerdo.
5. Selecione a versão do rmware que deseja atualizar.
6. Aguarde até que o firmware seja ser baixado; a atualização do firmware será iniciada
automaticamente.
7. Reinicie o quadricóptero e o controle remoto quando a atualização do rmware estiver concluída.
Apêndice
O controle remoto e quadricóptero também podem ser atualizados separadamente.
Se você conectar o quadricóptero ao computador através de sua porta micro USB, você
só poderá atualizar o rmware do quadricóptero.
A atualização do rmware leva cerca de 15 minutos. É normal que o gimbal que frouxo,
o indicador de status do quadricóptero pisque de forma anormal e o quadricóptero seja
reiniciado. Aguarde pacientemente até a atualização ser concluída.
Verique se o computador tem acesso à Internet.
Certique-se de que as baterias tenham pelo menos 50% de potência.
Não desconecte o quadricóptero do computador durante a atualização do rmware.
Modo de Voo Inteligente
O modo de voo inteligente inclui os recursos Course Lock, Home Lock, Point of Interest (POI),
Follow Me e Waypoints para ajudar os usuários a criarem lmagens prossionais durante o voo.
Course Lock e Home Point Lock ajudam a bloquear a orientação do quadricóptero para que
o usuário possa se concentrar em outras operações. Os modos Point of Interest, Follow Me e
Waypoints permitem que o quadricóptero voe automaticamente de acordo com as manobras de
voo predenidas.
Bloqueia a direção atual do nariz como a direção de avanço do quadricóptero.
Course Lock
Home Lock
Point of Interest
© 2017 DJI Todos os direitos reservados.
60
O quadricóptero irá se mover mas direções bloqueadas, independentemente da
sua orientação (ângulo de inclinação).
Puxe o joystick de inclinação para trás para mover o quadricóptero em direção
ao Ponto Inicial registrado.
O quadricóptero irá orbitar ao redor do objeto automaticamente para permitir
que o operador possa se concentrar mais no enquadramento do objeto no Point
of Interest.
Page 61

Manual do Usuário do Mavic Pro
Uma conexão virtual é criada entre o quadricóptero e o dispositivo móvel, para
Follow Me
que o quadricóptero possa acompanhar o seu movimento. Observe que o
desempenho do Follow Me está sujeito à precisão do GPS no dispositivo móvel.
Grave um percurso de voo e, então, o quadricóptero irá voar ao longo do mesmo
Waypoints
percurso repetidamente enquanto você controla a câmera e a orientação. O
percurso de voo pode ser salvo e aplicado novamente no futuro.
Antes de usar o Modo de Voo Inteligente pela primeira vez, ative o Modo Multiple Flight iniciando o
aplicativo DJI GO 4 > Camera View > > Mulitple Flight Mode.
Informações do menu da tela de LCD do controle remoto
Status do controle remoto
BAT xx PCT Nível da bateria do controle remoto.
SHUTDOWN_ Controle remoto está sendo desligado.
CHARGING_ Controle remoto está carregando.
USB PLUGGED Mavic Pro foi conectado a um computador.
FC U-DISK Controlador de voo está lendo dados.
UPGRADING Atualização.
BINDING O quadricóptero está vinculado ao controle remoto.
Antes do voo
CONNECTING_ O controle remoto está se conectando ao quadricóptero.
SYS INITING O sistema está iniciando.
READY TO GO Pronto para decolar.
Modo de voo
BEGINNER No Modo para Iniciante.
GPS MODE No modo P-GPS.
OPTI MODE No modo OPTI.
ATTI MODE No Modo P-ATTI.
SPORT MODE No modo Sport.
Status do vôo
TAKING OFF Decolando.
LANDING Pousando
GOING HOME Voltando ao ponto inicial
NAV GOHOME Voltando ao ponto inicial
NAV LANDING Pousando.
MAX ALT. O quadricóptero atingiu a altitude máxima
MAX RADIUS O quadricóptero atingiu o raio máximo
OBSTACLE Obstáculo detectado.
NO FLY ZONE O quadricóptero está em uma zona de exclusão aérea.
Status do Modo de Voo Inteligente
TRIPOD No modo tripé.
ACTIVETRACK Uso do ActiveTrack
TAP FLY Uso do TapFly
COURSE LOCK No modo de bloqueio de curso
HOME LOCK No modo de bloqueio inicial
POI MODE No Modo Point of Interest
WAY POINT No Modo Waypoints.
FOLLOW ME No modo Siga-me.
TERRAIN Modo de seguimento do terreno.
Aviso do sistema e Informações de erro
SYS WARNING+CHECK APP
Aviso do sistema. Consultar aplicativo DJI GO 4 para obter mais
informações.
Apêndice
2017 DJI Todos os direitos reservados.
©
61
Page 62

Manual do Usuário do Mavic Pro
UNACTIVATED+CHECK APP Quadricóptero não está ativado. Consultar aplicativo DJI GO 4 para
MAG INTERF+CHECK APP Erro da bússola. Consultar aplicativo DJI GO 4 para obter mais
BATTERY ERR+CHECK APP Erro da bateria. Consultar aplicativo DJI GO 4 para obter mais
SD ERR+CHECK APP Erro do cartão Micro SD Consultar aplicativo DJI GO 4 para obter mais
CALIBRATING Calibração de IMU/o quadricóptero não foi reiniciado após o término
STICK ERR+RE-CTR STCK O joystick de controle não está centralizada. Centralize-o novamente.
WHEEL ERR+RE-CTR WHEL Botão giratório à esquerda no controle remoto não está centralizado.
STICK ERR Erro no joystick de controle. Calibre os joysticks de controle no
MECH ERR Erro do controle remoto. Calibre o controle remoto no aplicativo DJI GO
STICK EMI3+AUTO RTH Os joysticks de controle estão enfrentando graves interferências
STICK EMI2+MANUAL RTH Os joysticks de controle estão enfrentando interferências
Apêndice
STICK EMI1 Os joysticks de controle estão enfrentando leves interferências
SD FULL O cartão Micro SD está cheio
NO PROP As hélices não estão conectadas.
BAT TEMP HI Bateria de Voo inteligente está muito quente.
BATTERY ERR Erro de Bateria de Voo Inteligente.
BAT TEMP LO Bateria de Voo inteligente está muito fria.
LOW BATTERY Bateria de voo inteligente está fraca.
RC LOW BAT Bateria do controle remoto está fraca.
NO RC SIGNL Perda de sinal do controle remoto.
RC TEMP HI Controle remoto está muito quente.
NO RTH O quadricóptero não pode voltar ao ponto inicial.
obter mais informações.
informações.
informações.
informações.
da calibração.
Centralize-o novamente.
aplicativo DJI GO 4.
4. Se o problema persistir, entre em contato com o suporte da DJI
eletromagnéticas e não funcionam. O quadricóptero retornará ao ponto
de partida e pousará imediatamente.
eletromagnéticas e podem não funcionar. Use o Smart RTH e pouse o
quadricóptero assim que possível.
eletromagnéticas; leve o quadricóptero para outro local.
Informações de pós-vendas
Visite as páginas a seguir para saber mais sobre a política de pós-vendas e informações de
garantia:
1. Política de pós-vendas: http://www.dji.com/service
2. Política de reembolso: http://www.dji.com/service/refund-return
3. Serviço de reparo pago: http://www.dji.com/service/repair-service
4. Serviço de garantia: http://www.dji.com/service/warranty-service
© 2017 DJI Todos os direitos reservados.
62
Page 63

Suporte DJI
http://www.dji.com/support
Este conteúdo está sujeito a alterações.
Transra a versão mais recente disponível em
http://www.dji.com/mavic
Caso tenha dúvidas relativas a este documento, entre em contato com a DJI enviando uma
mensagem para DocSupport@dji.com. (compatível com os idiomas inglês e chinês)
é uma marca comercial da DJI.
MAVIC
Copyright © 2017 DJI Todos os direitos reservados.
 Loading...
Loading...