

Page 1
MAVIC
PRO
用户手册
2016.10
V1.0
Page 2
快速搜索关键词
PDF 电子文档可以使用查找功能搜索关键词。例如在 Adobe Reader 中,Windows 用户使
用快捷键 Ctrl+F,Mac 用户使用 Command+F 即可搜索关键词。
点击目录转跳
用户可以通过目录了解文档的内容结构,点击标题即可跳转到相应页面。
打印文档
本文档支持高质量打印。
阅读提示
符号说明
禁止 重要注意事项 操作、使用提示 词汇解释、参考信息
使用建议
DJITM为 MAVICTM Pro 用户提供了教学视频和以下文档资料:
1.《MAVIC PRO 物品清单》
2.《MAVIC PRO 用户手册》
3.《MAVIC PRO 快速入门指南》
4.《MAVIC PRO 免责声明和安全操作指引》
5.《MAVIC PRO 智能飞行电池安全使用指引》
建议用户首先观看教学视频和《MAVIC PRO 免责声明和安全操作指引》,再使用《MAVIC
PRO 快速入门指南》了解使用过程。获取更多产品信息请参考《MAVIC PRO 用户手册》。
获取教学视频
用户可通过以下链接获取和观看教学视频,确保正确、安全地使用本产品。
http://www.dji.com/mavic
下载 DJI GO App
请务必连接 DJI GOTM App 使用本产品。扫描二维码以获得下载地址:
如无法正常登陆 Google Play 下载 DJI GO App ,请在浏览器地址栏内输入
“http://m.dji.net/djigo”直接下载 DJI GO App 。
DJI GO App 支持 Android V4.1.2 以上系统,支持 iOS 8.0 及以上。
下载 DJI Assistant 2 调参软件
通过以下地址下载 DJI Assistant 2 调参软件 http://www.dji.com/mavic/download
大疆创新 版权所有
©
2016
2
Page 3

目录
阅读提示
符号说明 2
使用建议 2
获取教学视频 2
下载 DJI GO App 2
下载 DJI Assistant 2 调参软件 2
产品概述
简 介 6
功能亮点 6
准备飞行器与电池 6
飞行器部件名称 8
遥控器部件名称 8
飞行器
飞行器概述 11
飞行模式 11
飞行器状态指示灯 12
自动返航 12
指点飞行 16
智能跟随 18
手势自拍 20
前视和下视视觉系统 21
飞行数据 24
螺旋桨 24
智能飞行电池 25
遥控器
遥控器概述 30
遥控器操作 30
遥控器对频 35
云台相机
云台相机概述 37
云 台 38
大疆创新 版权所有
©
2016
3
Page 4

DJIGOApp
设 备 41
编辑器 46
天空之城 47
我 47
飞 行
飞行环境要求 49
飞行限制以及特殊区域限飞 49
飞行前检查 51
指南针校准 51
自动起飞 / 自动降落 52
手动启动 / 停止电机 53
基础飞行 54
附 录
规格参数 56
固件升级 58
高级模式 58
遥控器菜单说明 59
售后保修信息 60
认证信息 60
大疆创新 版权所有
©
2016
4
Page 5

产品概述
本章主要介绍 Mavic Pro 的功能特点,指
导如何安装飞行器,以及介绍飞行器与遥
控器各个部件的名称。
大疆创新 版权所有
©
2016
5
Page 6
产品概述
简 介
Mavic Pro 便携折叠式飞行器配备前视和下视视觉系统,能实现指点飞行、智能跟随等功能,并
可自动返航以及在室内外稳定悬停、飞行。三轴云台相机可稳定拍摄 4K 超高清视频与 1200 万
像素照片。最大飞行速度为 65 km/h, 最长飞行时间为 27 分钟 *。
* 最长飞行时间为无风环境时以 25 km/h 匀速飞行时测得。
产品概述
功能亮点
Mavic Pro 飞行器采用新颖的折叠型设计,在保证飞行和使用质量的前提下,显著提升了便携性。
Mavic Pro 配备 28 mm(35 mm 格式等效)低畸变广角相机和高精度防抖云台,可拍摄 1200
万像素 JPEG 以及无损 RAW 格式的照片及 4K 超高清视频。
采用 DJI 领先的飞控系统,提供了敏捷、稳定、安全的飞行性能。返航功能可使飞行器失去遥
控信号或电量不足时自动飞回返航点并降落。除了能在超低空或室内实现稳定飞行和悬停以外,
Mavic Pro 飞行器配备了前视视觉系统,在有效范围内可实现主动避障,进一步提升安全性。
遥控器内置高清图传地面端,与飞行器机身内置的机载端配合,可通过 DJI GO App 在移动设
备上实时显示高清画面,稳定传输最高 1080p 图像以及上下行数据。采用新一代 OCUSYNC
技术,信号传输距离最远可达 7 km(FCC 合规版本)。
准备飞行器与电池
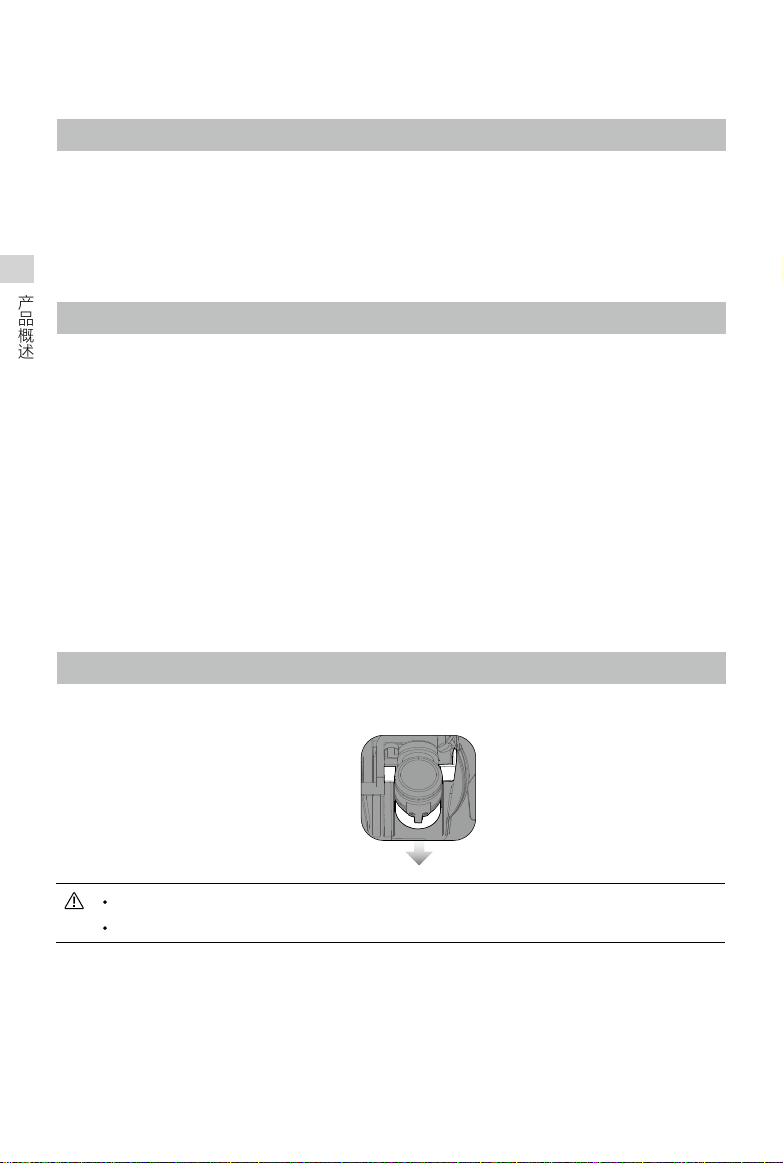
飞行器出厂时处于收纳状态,请按照如下步骤准备飞行器。
准备机身
移除云台罩,并取下云台锁扣。
云台罩用于保护云台相机,若需要获得最优拍摄效果,可酌情取下云台罩。
不使用时,建议装上云台锁扣和云台罩以保护云台相机。
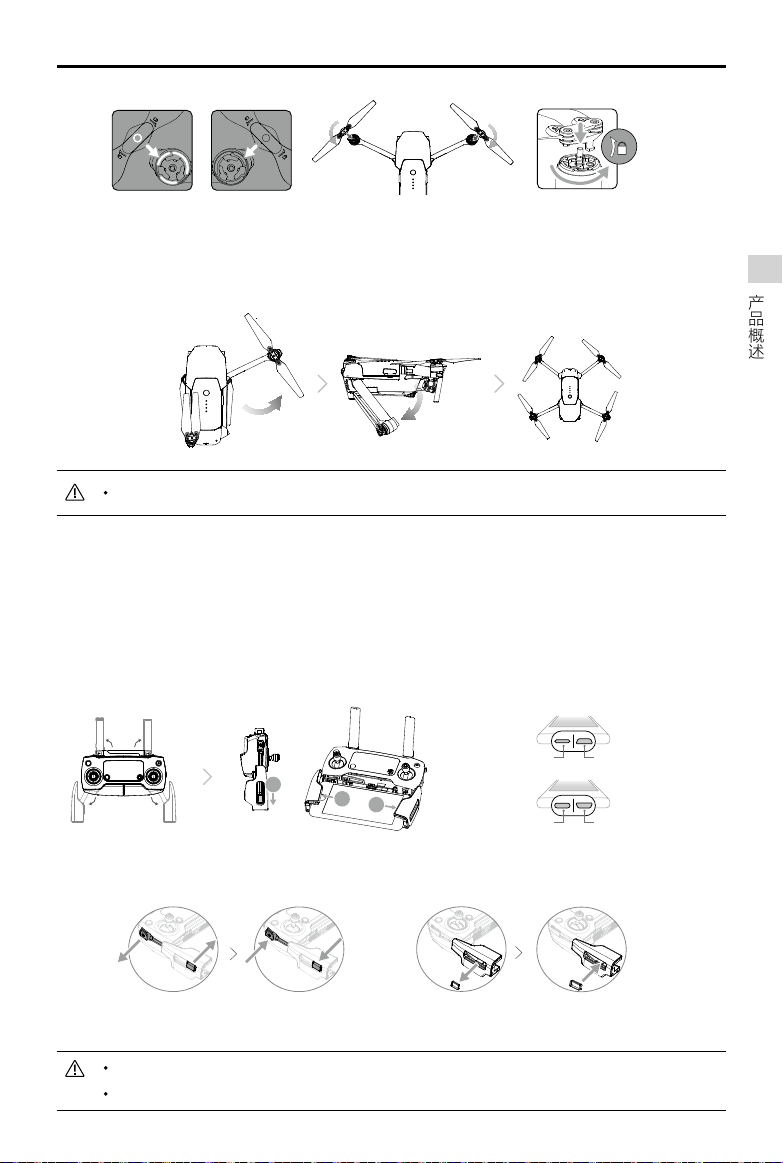
安装螺旋桨
如下图所示,准备一对螺旋桨,将带白圈的螺旋桨安装至带有白色标记的电机桨座上。将桨帽嵌
入电机桨座并按压到底,沿锁紧方向旋转螺旋桨至无法继续旋转,松手后螺旋桨将弹起锁紧。使
用同样的方法安装不带白圈的螺旋桨至不带白色标记的电机桨座上。
TM
大疆创新 版权所有
©
2016
6
Page 7
Mavic Pro
用户手册
白色标记 无标记
1. 按图示方向,首先展开前机臂,然后展开后机臂。
2. 展开所有的桨叶,使其充分展开。
3. 确保电池安装牢固,首次使用智能飞行电池前,请务必将智能飞行电池电量充满。
务必首先展开前机臂,然后再展开后机臂。
准备遥控器
1. 展开天线, 确保天线垂直。展开手柄。
2. 根据移动设备接口类型选择相应的遥控器转接线连接移动设备:Lightning 接口(遥控器转接
线已默认安装)、标准 Micro USB 接口(标配标准 Micro USB 接头遥控器转接线)、反向
Micro USB 接口(需另行购买遥控器转接线)、USB Type-C 接口(标配 USB Type-C 接口
遥控器转接线)。调整手柄角度,使移动设备稳定放置。
产品概述
Lightning 接口
1
2
3
USB Type- C 接口
根据下图更换遥控器转接线:
若使用USB Type- C接头遥控器转接线,
需同时更换所对应的束线滑块。
使用遥控器控制飞行时,确保飞行器控制模式切换开关处在 RC 档位。
支持使用标准 USB 连接线,连接遥控器的 USB 接口与移动设备。
标准 Micro USB 接口
反向 Micro USB 接口
大疆创新 版权所有
©
2016
7
Page 8
Mavic Pro
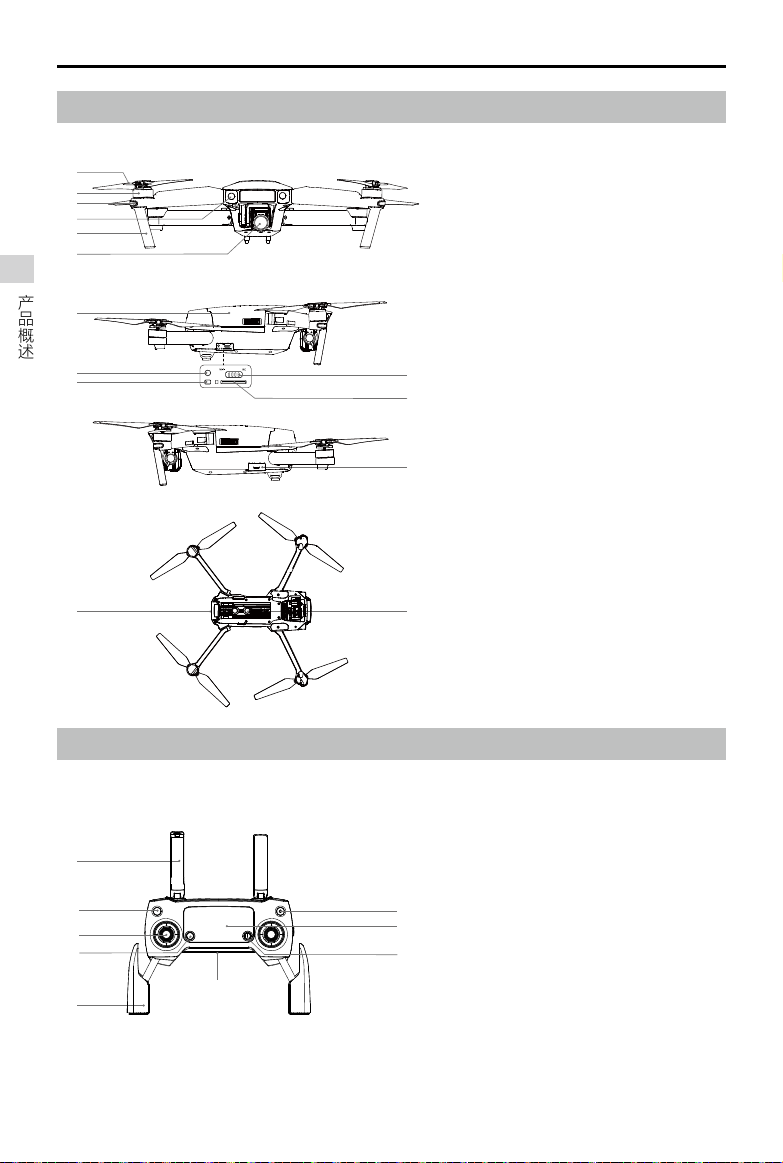
飞行器部件名称
1
2
3
4
5
6
产品概述
7
8
9
用户手册
1. 螺旋桨
2. 电机
3. 飞行器机头指示灯
4. 前视视觉系统
5. 起落架(内置天线)
6. 一体式云台相机
11
7. 智能飞行电池
10
8. 对频按键
9. 对频指示灯
12
10. 相机 Micro SD 卡槽
11. 控制模式切换开关
12. 调参 / 数据接口(Micro USB)
13. 飞行器状态指示灯
14. 下视视觉系统
1413
遥控器部件名称
1
2
4
6
8
大疆创新 版权所有
©
2016
8
1. 天线
传输飞行器控制信号和图像信
号。
2. 智能返航按键
3
5
7
9
长按启用智能返航,飞行器返回
起飞地点。短按一次取消。
3. 电源按键
开启 / 关闭遥控器电源。
4. 摇杆
DJI GO App 中可设置摇杆操控
方式。
Page 9
Mavic Pro
用户手册
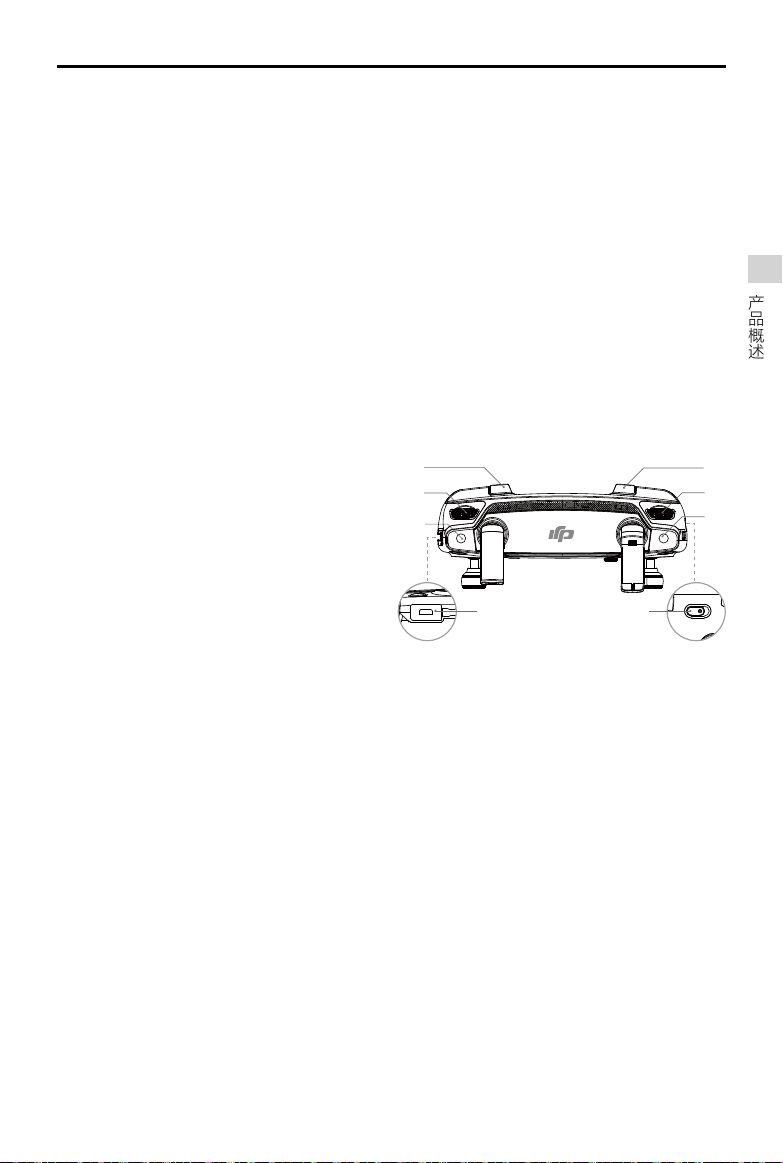
5. 状态显示屏
显示飞行器、遥控器的系统状态。
6. 急停按键
可在任何情况下让飞行器紧急刹车,原地悬停。
7. 五维按键
默认的功能定义如下,可通过 DJI GO App 自
行调整功能定义。
左: 相机变焦放大
右: 相机变焦缩小
上: 云台回中
下: 云台朝下
中心:调出智能飞行菜单。
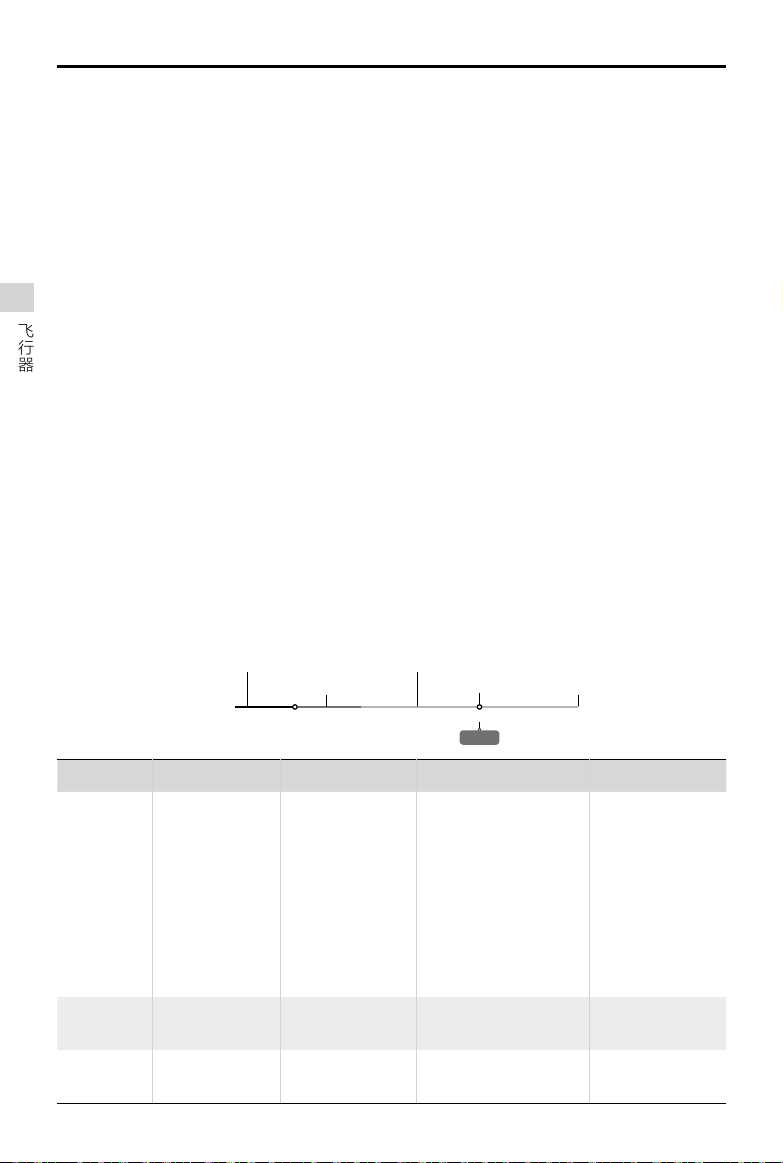
10. 自定义功能按键
C
1
默认的功能定义如下,可通过 DJI
GO App 自行调整功能定义。
短按一次进行中心点对焦 / 增加航点
(使用航点飞行功能时)。
11. 自定义功能按键
C
2
默认的功能定义如下,可通过 DJI
GO App 自行调整功能定义。
回放按钮 / 删除航点(使用航点飞行
功能时)。
12. 云台俯仰控制拨轮
调整云台俯仰角度。
13. 相机设置转盘
调整相机设置,选择回放相片与视频。
14. 录影按键
启动或停止录影。
8. 手柄
可调手柄宽度以适配移动设备。
USB
9.
接口
连接移动设备以运行 DJI GO App。
10
12
14
1716
15. 拍照按键
实现拍照功能。
16. 充电接口(Micro USB)
可通过 USB 数据线对遥控器充电;
可通过 DJI 定制转接线连接遥控器与移动设
备。
17. 飞行模式切换开关
档位依次为:P 模式(定位), S 模式(运动)。
产品概述
11
13
15
大疆创新 版权所有
©
2016
9
Page 10

飞行器
本章介绍飞行器的系统组成,以及各功能
特点。
10
©
大疆创新 版权所有
2016
Page 11
飞行器
飞行器概述
Mavic Pro 飞行器主要由飞控、通讯系统、视觉系统、动力系统、以及智能飞行电池组成。本章
节将详细介绍飞行器上各个部件的功能。
飞行模式
Mavic Pro 的飞控支持如下飞行模式:
P 模式(定位):使用 GPS 模块和前视视觉系统和下视视觉系统以实现飞行器精确悬停、指点
飞行以及高级模式等功能。
S 模式(运动):使用 GPS 模块以实现精确悬停。飞行器操控感度经过调整,最大飞行速度将
会提升。 当选择使用 S 模式时,前视视觉系统将自动关闭,飞行器无法自行
避障。S 模式下不支持地面站及高级模式功能。
其中 P 模式有三种子状态:
1. P-GPS:GPS 信号良好时,利用 GPS 可精准定位。开启前视避障功能且光照条件满足视觉系
统需求时,最大飞行姿态角为 16°,最大飞行速度 10m/s。未开启前视避障功能时
最大飞行姿态角为 25°,最大飞行速度 16m/s。
2. P-OPTI: GPS 信号欠佳,光照条件满足视觉系统需求时利用视觉系统定位。开启前视避障功
能且光照条件满足视觉系统需求时,最大飞行姿态角为 16°,最大飞行速度 10m/s。
未开启前视避障功能时最大飞行姿态角为 25°,最大飞行速度 16m/s。
3. P-ATTI: GPS 信号欠佳且光照条件不满足视觉系统需求。此模式下飞行器不能精确悬停,仅
提供姿态增稳,并且不支持智能飞行功能。
飞行器
用户务必注意,在使用 S 模式(运动)飞行时,前视视觉系统不会生效,飞行器无法
主动刹车和躲避障碍物,用户务必留意周围环境,操控飞行器躲避飞行路线上的障碍物。
用户务必注意,在使用 S 模式(运动)飞行时,飞行器的飞行速度较 P 模式(定位)
相比将大幅度提升,由此造成刹车距离也相应地大幅度增加。在无风环境下飞行时,
用户应预留至少 30 米的刹车距离以保障飞行安全。
在使用 S 模式(运动)飞行时, 飞行器的下降速度也将大幅提升,在无风环境下飞行时,
用户应预留至少 30 米的刹车距离以保障飞行安全。
用户务必注意,在使用 S 模式(运动)飞行时,飞行器的姿态控制灵敏度与 P 模式(定
位)相比将大幅度提升,具体表现为遥控器上小幅度的操作会导致飞行器产生大幅度
的飞行动作。实际飞行时,用户应预留足够的飞行空间以保障飞行安全。
通过遥控器上飞行模式切换开关可以切换飞行器的飞行模式。
大疆创新 版权所有
©
2016
11
Page 12
Mavic Pro
用户手册
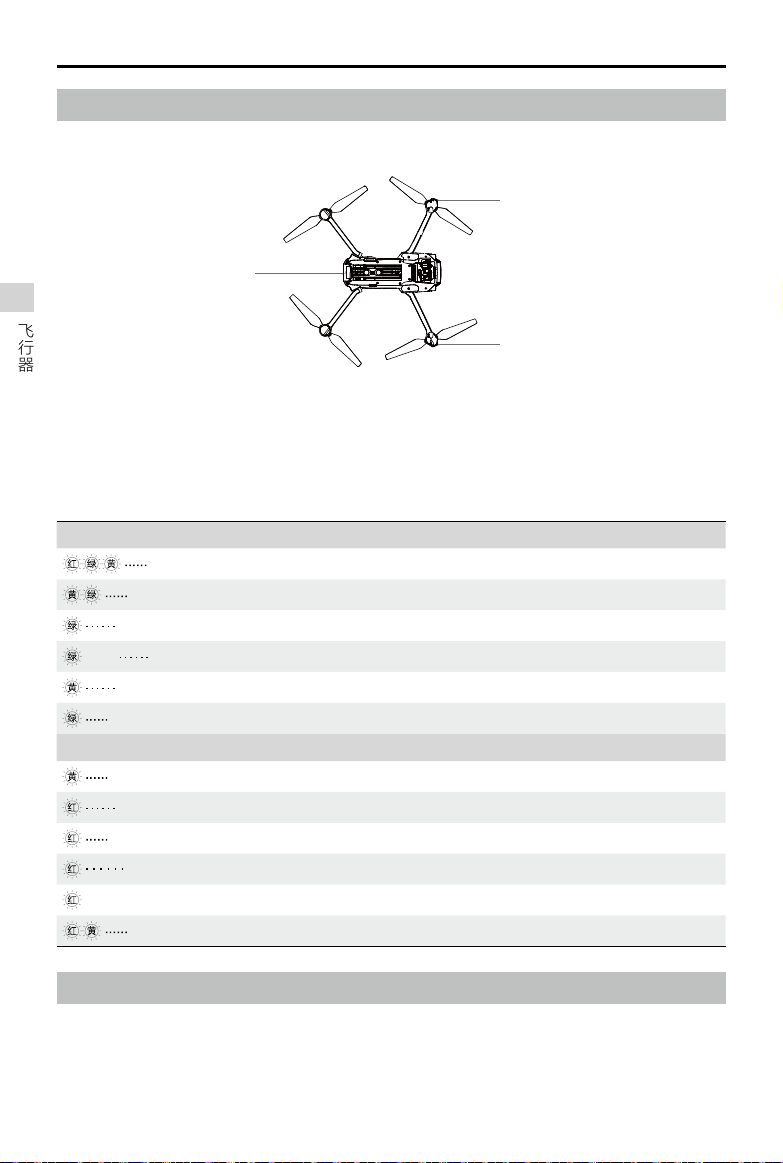
飞行器状态指示灯
Mavic Pro 机身上包含机头 LED 指示灯以及飞行器状态指示灯,它们的位置如下图所示。
机头 LED 指示灯
飞行器状态指示灯
飞行器
机头 LED 指示灯
机头 LED 指示灯用于指示飞行器的机头方向,飞行器启动后将会显示红灯常亮(可在 DJI GO
App 设置关闭)。尾部的飞行器状态指示灯指示当前飞控系统的状态。请参考下表了解不同的
闪灯方式所表示的飞控系统状态。
飞行器状态指示灯说明
正常状态
红绿黄连续闪烁 系统自检
黄绿交替闪烁 预热
绿灯慢闪 P 模式或 S 模式,使用 GPS 定位
×2
黄灯慢闪 无 GPS 无视觉定位
绿灯快闪 刹车
警告与异常
黄灯快闪 遥控器信号中断
红灯慢闪 低电量报警
红灯快闪 严重低电量报警
红灯间隔闪烁 放置不平或传感器误差过大
—— 红灯常亮 严重错误
红黄灯交替闪烁 指南针数据错误,需校准
绿灯双闪 P 模式或 S 模式,使用视觉系统定位
自动返航
Mavic Pro 飞行器具备自动返航功能。若起飞前成功记录了返航点,则当遥控器与飞行器之间失
去通讯信号时,飞行器将自动返回返航点并降落,以防止发生意外。Mavic Pro 为用户提供了三
种不同的返航方式,它们分别为智能返航,智能低电量返航以及失控返航。
大疆创新 版权所有
©
2016
12
Page 13
Mavic Pro
用户手册
GPS
描述
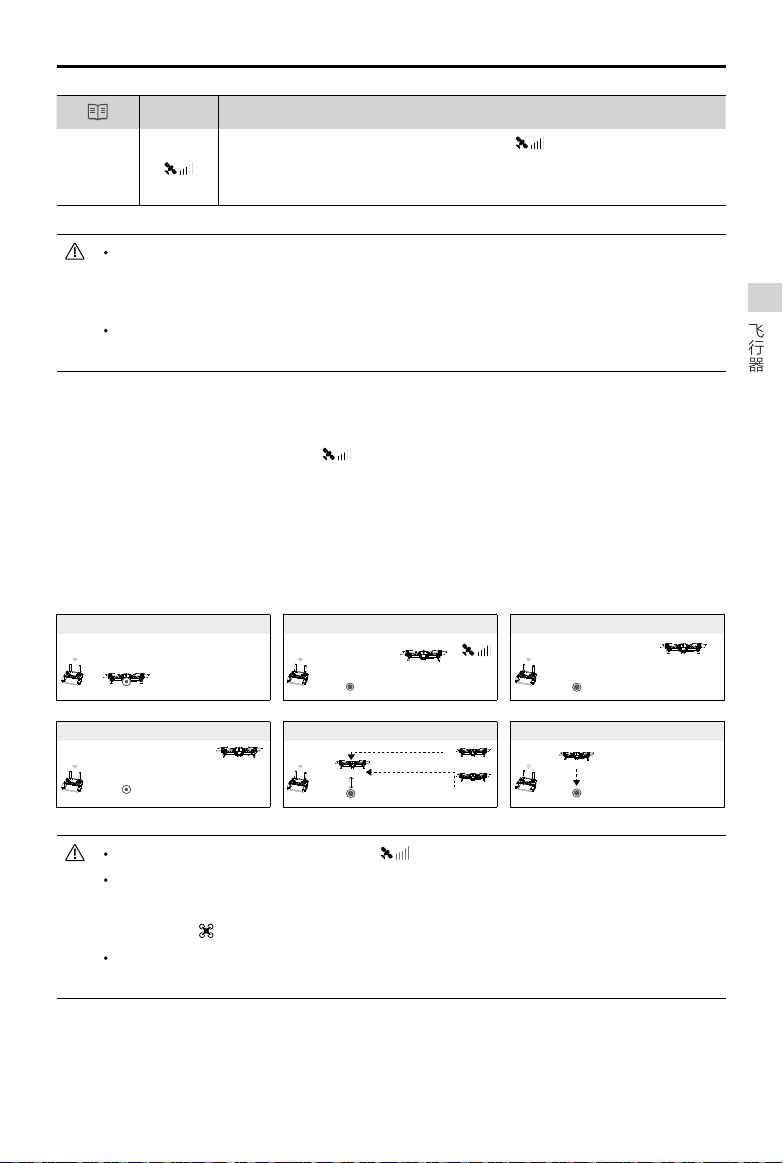
起飞时或飞行过程中,GPS 信号首次达到 (四格及以上,GPS 图标
返航点
绿色)时,将记录飞行器当前位置为返航点,记录成功后,飞行器状态
指示灯将快速闪烁若干次。
自动返航过程中,如果前视视觉系统功能开启且环境条件允许,当机头前方遇到障碍
物时,飞行器将自行爬升躲避障碍物。当飞行器完成躲避前方障碍物后,将保持最新
返航高度继续飞向返航点。
前视视觉系统功能开关有两个,可以选择在整个飞行过程开启,也可以单独在自动返
航时开启。
失控返航
当 GPS 信号良好(GPS 图标为绿色[ ]),指南针工作正常,且飞行器成功记录返航点后,
当无线信号在 RC 控制模式下中断 3 秒或以上, 或在 Wi-Fi 控制模式下中断 20 秒或以上,飞控
系统将接管飞行器控制权,控制飞行器飞回最近记录的返航点。 如果在返航过程中,无线信号
恢复正常,返航过程仍将继续,但用户可以通过遥控器控制飞行航向,且可短按遥控器智能返
航按键以取消返航。
返航过程图解
1 记录返航点
2 确认返航点
3 遥控器信号丢失,飞行器悬停
×
飞行器
4 信号丢失,飞行器准备返航
×
5 返航(返航高度可自定义)
×
当前高度 >返航高度
返航高度
当前高度 <=返航高度
先上升
6 悬停于返航点上方 2 米,用户确认降落
或
×
当 GPS 信号欠佳(GPS 图标为灰色[ ])或者 GPS 不工作时,无法实现返航。
自动返航过程中,若光照条件不符合前视视觉系统的需求,则飞行器无法躲避障碍物,
但用户可使用遥控器控制飞行器航向。所以在起飞前务必先进入 DJI GO App 的“相机”
界面,选择 设置适当的返航高度。
失控返航过程中,在飞行器上升至预设返航高度前,飞行器不可控,但用户可以通过取
消返航重新获取控制权。
©
2016
大疆创新 版权所有
13
Page 14
Mavic Pro
用户手册
智能返航
智能返航模式可通过遥控器智能返航按键或 DJI GO App 中的相机界面启动,其返航过程与失
控返航一致,区别在于用户可通过打杆控制飞行器航向。启动后飞行器状态指示灯仍按照当前
飞行模式闪烁。智能返航过程中,飞行器根据前视视觉系统提供的数据判断前方是否有障碍物,
智能地选择悬停或绕过障碍物。如果前视视觉系统失效,用户仍能控制飞行器航向,通过遥控
器上的智能返航按键或 DJI GO App 退出智能返航后,用户可重新获得控制权。
飞行器到达返航点上方时,降落保护功能生效,飞行器具体表现为:
若飞行器降落保护功能正常且检测到地面可降落时,飞行器将直接降落;
若飞行器降落保护功能正常,但检测结果为不适合降落时(例如下方为不平整地面或水面),
飞行器
则飞行器悬停,等待用户操作;
若飞行器降落保护功能不正常,则下降到离地面 0.5 米时,DJI GO App 将提示用户是否需要继
续降落。点击确认后,飞行器降落。
智能低电量返航
智能飞行电池电量过低时,没有足够的电量返航,此时用户应尽快降落飞行器,否则飞行器将
会直接坠落,导致飞行器损坏或者引发其它危险。为防止因电池电量不足而出现不必要的危险,
Mavic Pro 主控将会根据飞行的位置信息,智能地判断当前电量是否充足。若当前电量仅足够完
成返航过程,DJI GO App 将提示用户是否需要执行返航。若用户在 10 秒内不作选择,则 10
秒后飞行器将自动进入返航。返航过程中可短按遥控器智能返航按键取消返航过程。智能低电
量返航在同一次飞行过程中仅出现一次。
若当前电量仅足够实现降落,飞行器将强制下降,不可取消。返航和下降过程中均可通过遥控
器(若遥控器信号正常)控制飞行器。
严重低电量报警 ( 红色 )
低电量报警 ( 黄色 )
正常电量 ( 绿色 )
当前电量
电池能量槽
12:29
电量指示 含义 飞行器状态指示灯 DJI GO App 界面提示 飞行
选择执行后,飞行器
将自主返航,并在返
航点上方 2 米处悬停
等待用户确认降落。
智能低电量返航剩余电量仅足够安
全返航。
智能低电量降落剩余电量仅足够
从当前高度降落。
预计剩余飞
行时间
©
14
大疆创新 版权所有
2016
当前电量所能支持
的剩余飞行时间。
红灯慢闪 提示是否自动返航降落,
若不做选择,10 秒后飞行
器将默认返航,用户可选
择立刻返航或取消返航。
红灯快闪 提示用户正强制降落,不
可取消。
无 无 无
用户亦可在返航过程
中重新获取控制权。
注意:重新获取控制
权后,将不会再次出
现低电量报警返航
提示框。
飞行器将缓慢自行
降落并停止电机。
Page 15
Mavic Pro
5米
H
10米
5米
H
用户手册
飞行器自动下降过程中也可以推油门杆使飞行器悬停,操控飞行器转移到更合适的地
方再降落。
电池能量槽上的颜色区间以及预计剩余飞行时间信息,将根据飞行器的飞行高度以及
离返航点的距离动态调整。
精准降落
飞行器在自动返航的过程中,当到达返航点上方后开始匹配地形特征,一旦匹配成功则开始修
正降落位置,使飞行器能够精准地回到起飞点。
精准降落过程中降落保护同时生效。
飞行器仅在满足以下条件的情况下可实现精准降落:
a) 飞行器仅在起飞时记录返航点,飞行过程中未刷新返航点
b) 飞行器起飞方式为垂直起飞,且起飞高度超过 10 m
c) 地面环境未发生动态变化
d) 地面环境纹理不是太少(例如雪地)
e) 光线不是特别暗(例如晚上)或强光照射
降落过程中,可使用遥控器进行控制:
a) 下拉油门摇杆可加大下降速度
b) 上推油门摇杆或者其他方式拨动摇杆都被视为放弃精准降落,飞行器将垂直下降,
降落保护功能同时生效。
飞行器
自动返航安全注意事项
自动返航过程中,若光照条件不符合前视视觉系统需求,则飞行器无法躲避障
碍物,但用户可使用遥控器控制飞行器航向。所以在起飞前务必先进入 DJI GO
App 的“相机”界面,选择 设置适当的返航高度。
飞行器在距离返航点 20 米以上时,自动返航过程中(包括智能返航、智能低
返航高度
10米
5米
H
电量返航和失控返航):
1. 如果飞行高度大于返航高度,则以当前高度返航。
2. 如果飞行高度小于返航高度,飞行器将首先上升至返航高度并返航。
若飞行器距离返航点在 5-20 米之间,此时返航平飞速度为 4m/s。如果前视视
觉系统正常工作(仅在返航前判断一次),则:
1. 如果飞行高度大于 10 米,则以当前高度返航。
2. 如果飞行高度小于 10 米,飞行器将首先上升至 10 米并返航。
如果前视视觉系统失效,则飞行器会从当前高度立刻下降。
若在飞行器水平距离返航点 5 米以内触发返航,由于飞行器已经处于视距范围
内,所以飞行器将会从当前位置自动下降并降落,而不会爬升至预设高度。
大疆创新 版权所有
©
2016
15
Page 16
Mavic Pro
用户手册
当 GPS 信号欠佳(GPS 图标为灰色)或者 GPS 不工作时,不可使用自动返航。
返航过程中,当飞行器上升至 10 米以后但没达到预设返航高度前,若用户按
下遥控器上的急停按键,则飞行器将会暂停返航。
飞行器
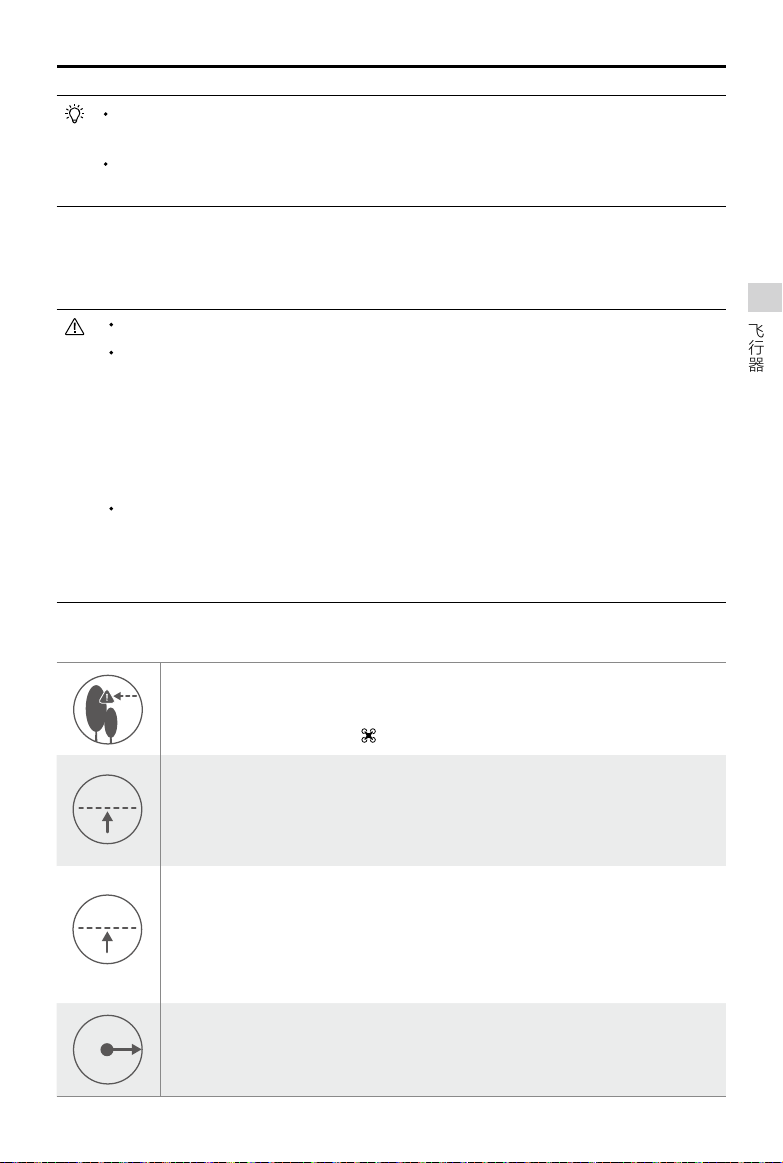
返航避障过程
当光照条件满足前视视觉系统工作时,飞行器可实现返航避障。具体过程如下:
1. 若机头前方 15 米处检测出障碍物,飞行器将减速。
2. 减速至悬停后,飞行器将自行上升以躲避障碍物。在上升至障碍物上方 5 米处后,飞行器停
止上升。
3. 退出上升状态,飞行器继续飞往返航点。
15米
前视视觉系统开启后,在智能返航过程中,为了确保机头朝向,用户将无法使用遥控
器调整机头朝向。
飞行器无法自动躲避位于飞行器上方、侧方与后方的障碍物。
指点飞行
简 介
用户可通过点击 DJI GO App 中的相机界面的实景图,指定飞行器向所选目标区域前进飞行,
飞行器将自行沿指点选取的方向飞行。若光照条件良好,飞行器在指点飞行的过程中可以躲避
前障碍物或悬停以进一步提升飞行安全性。
启动指点飞行
1. 确保飞行器电量充足,并处于 P 模式。启动飞行器,使飞行器起飞至离地面 3 米以上。
3m以上
16
©
大疆创新 版权所有
2016
SPORT
Page 17
Mavic Pro
指点飞行
智能跟随
手势自拍
摇杆模式
用户手册
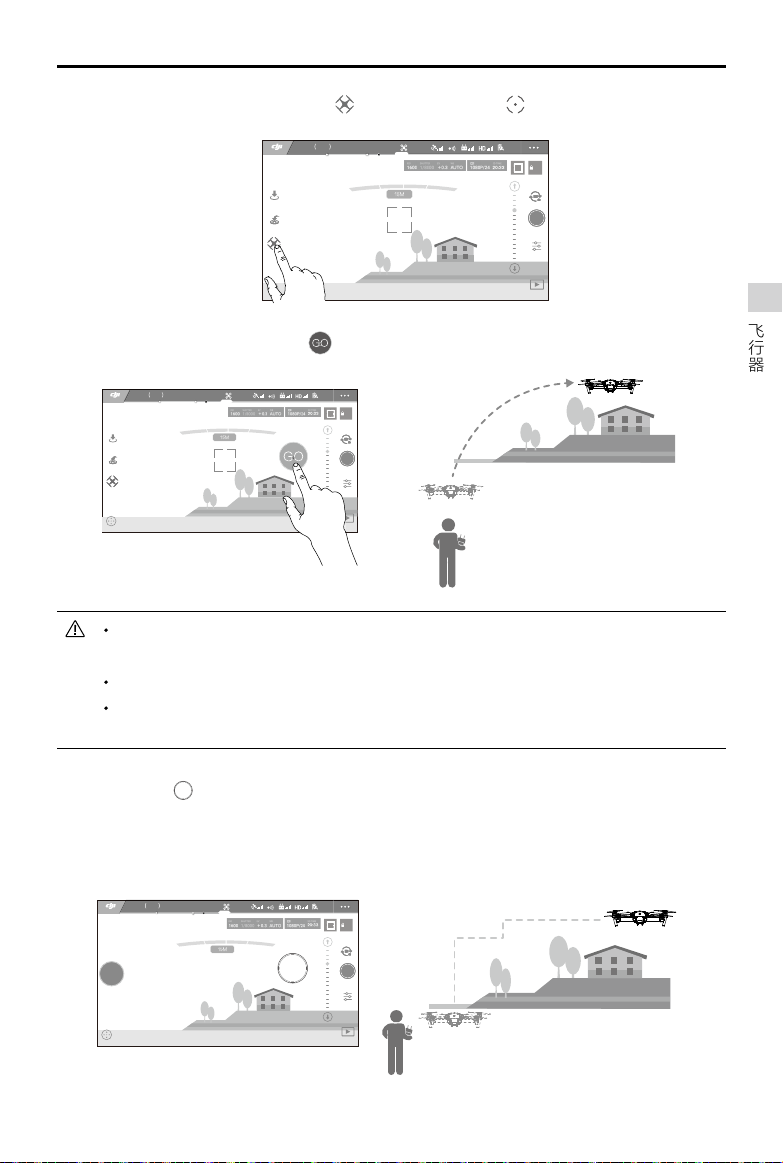
2. 进入 DJI GO App 的相机界面,点击 进入高级模式,选择 指点飞行并阅读注意事项。
飞行中 GPS
H 10.0MD 30M
12
P-GPS
09:29
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
61%
AE
3. 轻触屏幕选定目标区域直到出现 图标。再次点击后,飞行器则自行飞往目标方向。
飞行中 GPS
H 10.0MD 30M
12
P-GPS
09:29
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
61%
AE
请勿指示飞行器飞向人,动物,细小物体(如:树枝或电线等),或透明物体(如:
玻璃或水面等)。
用户选定的指点飞行的方向与飞行器实际飞行的方向可能存在误差。
用户在屏幕上可以选的指点飞行范围是有限的,在靠近操作界面的上部或下部边缘区
域点击时可能无法进行指点飞行。此时 DJI GO App 将提示无法执行指点飞行。
飞行器
飞行器自行飞往 图标锁定的方向。用户可设置最大巡航速度,飞行过程中,飞行器会根据环
境自动调节合适的巡航速度。飞行过程中若遇到障碍物,飞行器会根据当前飞行状态判断是否
需要避障或悬停。另外,若飞行过程中遥控器信号中断,飞行器会立刻退出指点飞行并进入失
控返航。
飞行中 GPS
STOP
H 10.0MD 30M
12
P-GPS
09:29
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
61%
AE
大疆创新 版权所有
©
2016
17
Page 18

Mavic Pro
指点飞行
智能跟随
手势自拍
摇杆模式
用户手册
退出指点飞行
点击屏幕上的
停按键”。
STOP
按钮。或者向后掰动遥控器的右摇杆(以美国手为例),或者按下遥控器的“急
STOP
飞行器
或 或
急停按键
退出指点飞行后,飞行器将于原地悬停。用户可重新选定指点飞行方向继续飞行。用户启动智
能返航或自动降落功能时,飞行器将退出指点飞行,立刻执行返航或降落。
智能跟随
简 介
基于图像的智能跟随,对人,自行车 / 摩托车,小轿车,卡车,船,动物等有识别功能。在跟随
不同类型物体时将采用不同跟随策略。
用户可通过点击 DJI GO App 中的相机界面的实景图选定目标。选定目标后,飞行器将通过云
台相机跟踪目标,飞行器与目标保持一定距离并跟随飞行。整个跟随过程中,无需借助 GPS 外
置设备即可完成跟随功能。
启动智能跟随
1. 确保飞行器电量充足,并处于 P 模式。启动飞行器,使飞行器起飞至离地面 3 米以上。
SPORT
3m以上
2. 进入 DJI GO App 的相机界面,点击 进入高级模式,选择 智能跟随并阅读注意事项。
12
P-GPS
09:29
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
61%
AE
18
©
大疆创新 版权所有
2016
飞行中 GPS
H 10.0MD 30M
Page 19
Mavic Pro
用户手册
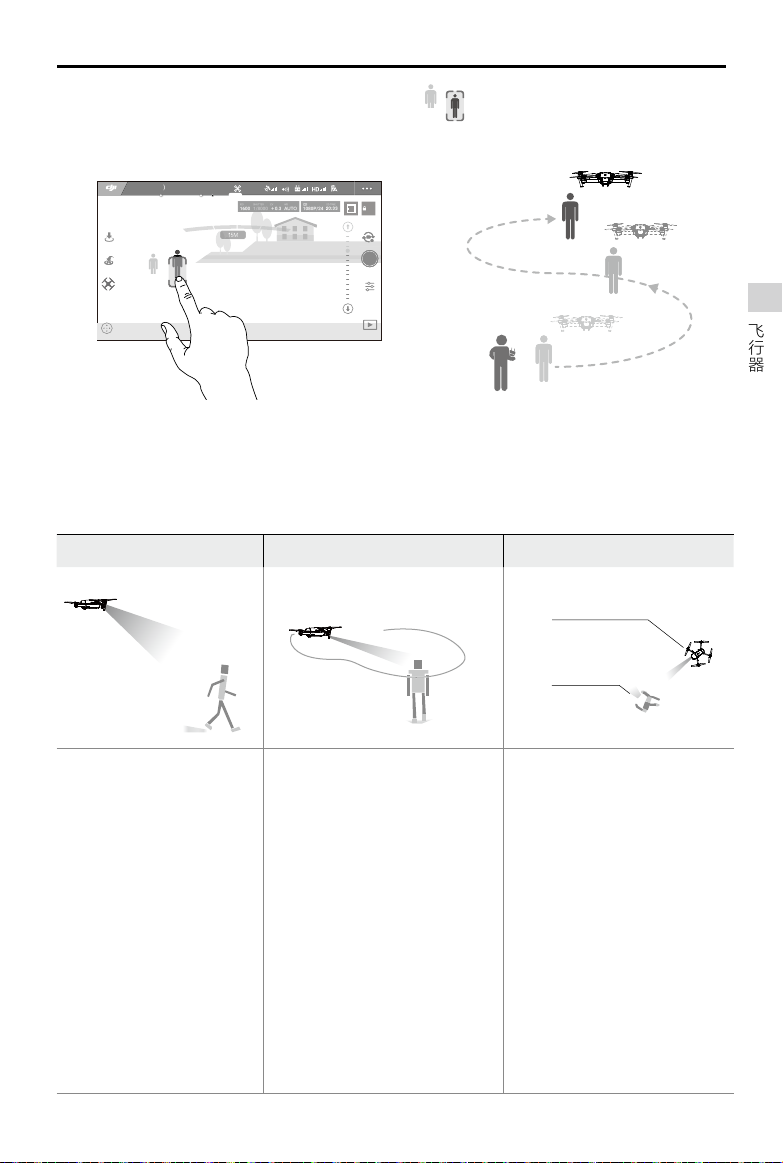
3. 轻触屏幕并拖动选择需要跟踪的目标区域。 点击 确认后,飞行器将与目标保持一定距
离并跟随飞行。若出现红框,则请重新选择目标。
飞行中 GPS
智能跟随
H 10.0MD 30M
12
P-GPS
09:29
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
61%
AE
使用智能跟随飞行过程中,飞行器会根据前视视觉系统提供的数据判断前方是否有障碍物,智
能地选择悬停或绕过障碍物。若跟随目标移动速度过快或长时间被遮挡,则需要重新选定跟随
目标。
智能跟随模式包含如下功能 :
普通模式 锁定模式 平行模式
飞行器
飞行器保持与跟随目标的
相对距离,寻找最短的路
径跟随目标。跟随过程中
可以通过横滚杆改变跟随
角度或实现环绕目标。
带有航向锁定功能。初始化目标
时,飞行器以当前与目标的夹角
为航向角进行跟随。跟随的结果
仅用于控制飞行器的航向角和云
台的移动,使得飞行器一直看向
跟随目标,但不主动跟随目标移
动,用户需要通过摇杆来控制飞
行。此时偏航杆不能控制飞行器
航向,云台控制拨轮不再控制云
台角度,而是对画面进行动态构
图控制。
此模式无视觉避障功能,请确保
在空旷无遮挡环境下使用。
飞行器始终保持相对目标的拍
摄和跟随角度,实现正面或侧
面跟随。跟随过程中可以通过
横滚杆改变跟随角度或实现环
绕目标。通过拖动目标下方的
滑块可实现自动环绕目标。
此模式下无视觉避障功能,请
确保在空旷无遮挡环境下使用。
大疆创新 版权所有
©
2016
19
Page 20

Mavic Pro
用户手册
请在飞行器的跟随路径上始终避让人,动物,细小物体(如:树枝或电线等),或透
明物体(如:玻璃或水面)。
始终留意来自飞行器四周(特别是后方,左方和右方)的物体,并通过手动操作遥控
器来避免碰撞。
时刻准备在紧急情况下手动控制飞行器或点击屏幕上的“STOP”按钮。
当飞行器以倒退飞行方式进行智能跟随时,请确保后方没有障碍物。
在以下场景需谨慎使用智能跟随模式:
a) 被跟随物体在非水平地面上移动
b) 被跟随物体在移动时发生大幅度的形变
飞行器
c) 被跟随物体被长时间遮挡或位于视线外
d) 被跟随物体在积雪覆盖的区域
e) 被跟随物体与周围环境颜色或图案非常相近
f ) 环境特别暗(光照小于 300 lux)或者特别亮(光照大于 10,000 lux)时
用户在使用智能跟随模式时,请务必遵守当地的法律法规对隐私权的规定。
退出智能跟随
点击屏幕上的
STOP
按钮。或者按下遥控器上的“急停按键”按钮。
STOP
退出智能跟随模式后,飞行器将于原地悬停。 用户可在屏幕上重新选定需要跟随的目标继续飞行。
或
手势自拍
无需借助外部设备,用户即可通过手势自拍。请按照如下步骤使用手势自拍功能。
手势自拍步骤 提示 机头指示灯 注意事项
确认光照条件良好,并开启视觉避
1. 确认跟随目标
红灯慢闪
障功能,点击 DJI GO App 上的按
钮启用手势自拍。拍摄对象需要在
机头前方移动以方便摄像头捕捉。
拍摄对象高举双手向外张开,确认
2. 确认拍摄距离
×2 红灯双闪
成功后机头指示灯双闪。此时飞行
器与拍摄对象的距离将锁定。
按照左图做出自拍的姿势,注意双
3. 自拍倒数
红灯快闪
手必须置于脸前,拍摄对象必须面
向飞行器,手肘需要保持一定弯曲
角度。
大疆创新 版权所有
©
2016
20
Page 21

Mavic Pro
用户手册
手势自拍只在拍照模式有效,若当前为录像模式,将会出现错误提示,机头指示灯红
灯特快闪。
飞行器处于 2 米以上才可确认目标,若确认失败,机头指示灯将会红灯特快闪。
手势自拍模式下,可以开启 GPS 辅助视觉跟随,在手机 GPS 信号良好的情况下会在
视觉目标丢失后用 GPS 持续跟随,直到重新找回目标。
前视和下视视觉系统
前视视觉系统位于机头两侧,由摄像头 1 组成,通过视觉图像测距来感知障碍物。
下视视觉系统位于飞行器底部,由摄像头 2 和超声波传感器 3 模块组成。下视视觉系统为图像
与超声波双结合的视觉系统,利用摄像头获取飞行器位置信息,同时通过超声波判断当前高度,
从而使飞行器精确定位,同时也能提供飞行器对地高度参考。
飞行器
1
2
3 3
2
1
观测范围
前视视觉系统和下视视觉系统的观测范围如下图所示。如有障碍物处于该观察范围以外则飞行
器无法有效地躲避障碍物,此时应谨慎飞行。
大疆创新 版权所有
©
2016
21
Page 22

Mavic Pro
3m以上
用户手册
校准摄像头
前视视觉系统和下视视觉系统出厂时已经校准,可直接使用。如果飞行器受到强烈碰撞,则有
可能导致需要重新校准。DJI GO App 将通知用户何时需要校准摄像头。请遵照以下步骤连接
DJI Assistant 2 调参软件进行高级校准或通过 DJI GO App 进行快速校准。
飞行器
01
将飞行器面向屏幕
02
移动位置以对准方框
03
水平以及垂直校准
快速校准
当 DJI GO App 提示标定参数异常时,可以在 DJI GO App 中点击“视觉传感器”中的“标定”
按钮进行快速校准。请根据提示进行操作。
推荐在光照条件良好,纹路丰富的场所(如草地)进行快速校准。
快速校准为临时解决方案,请尽量使用个人电脑上的 DJI Assistant 2 调参软件进行高
级校准。
不要在反光的表面上(如大理石、瓷砖等)进行快速校准。
下视视觉系统使用场景
下视视觉系统适用于高度为 13 米以下,无 GPS 信号或 GPS 信号欠佳的环境,特别适用于室内飞行。
使用步骤
1. 使用遥控器飞行模式切换开关,将飞行模式切换至 P 模式。
2. 开启智能飞行电池,等待至飞行器状态指示灯显示绿灯双闪。
3. 掰杆起飞,下视视觉系统自动工作无需人工干预。
大疆创新 版权所有
©
2016
22
SPORT
Page 23

Mavic Pro
用户手册
前视视觉系统使用场景
前视视觉系统适用于光照良好的环境,且飞行路线中遇到的障碍物纹理不可特别稀疏。另外由于
惯性关系,需要控制飞行器在有效距离内刹车,飞控系统将限制飞行器的姿态角不超过 16 度,
且飞行速度低于 10 米 / 秒。
前视视觉系统和下视视觉系统的测量精度容易受光照强度,物体表面纹理情况所影响,
而超声波则会在某些吸音材料上会出现不能正常测距的情况。在视觉和超声波失效的情
况下,飞行器会自动切换到姿态模式。所以以下场景,需谨慎使用:
低空(0.5 米以下)快速飞行时,视觉系统可能会无法定位。
纯色表面(例如纯黑、纯白、纯红、纯绿)。
有强烈反光或者倒影的表面。
水面或者透明物体表面。
运动物体表面(例如人流上方、大风吹动的灌木或者草丛上方)。
光照剧烈快速变化的场景。
特别暗(光照小于 10 lux)或者特别亮(光照大于 10,000 lux)的物体表面。
对超声波有很强吸收作用的材质表面(例如很厚的地毯)。
纹理特别稀疏的表面。
纹理重复度很高的物体表面(例如颜色相同的小格子砖)。
倾斜度超过 30 度的物体表面(不能收到超声波回波)。
细小的障碍物。
请勿覆盖摄像头模块的保护玻璃片,并保持清洁及无破损。
飞行器速度不宜过快,如离地 1 米处时飞行速度不可超过 5 米 / 秒,离地 2 米不可
超过 10 米 / 秒。
飞行器
请确保前视视觉系统的摄像机镜头清晰无污点。
下视视觉系统使用高度为 13 米以内。
由于下视视觉系统依赖地表图像来获取位移信息,请确保周边环境光源充足,地面
纹理丰富。
下视视觉系统在水面、光线昏暗的环境以及地面无清晰纹理的环境中无法定位。
在使用下视视觉系统的过程中,注意附近不要开启其它 40 KHz 超声波设备,包括其
它飞行器。
由于下视视觉系统会发出人耳无法感知的超声波,该超声波或会引起动物不安,使用
时请远离动物。
大疆创新 版权所有
©
2016
23
Page 24

Mavic Pro
用户手册
飞行数据
Mavic Pro 飞控具备飞行记录功能,飞行器开启电源以后的所有飞行相关数据都将存放于飞控系统
中。开启飞行器,连接遥控器至 DJI Assistant 2 调参软件可读取飞行数据。
螺旋桨
Mavic Pro 使用 8.3 寸快拆螺旋桨,白圈和不带白圈分别指示了不同的旋转方向。
螺旋桨 白圈 不带白圈
飞行器
示意图
安装位置 安装至带白色标记的安装座。 安装至不带标记的安装座。
符号说明
锁紧:表示安装螺旋桨时的旋转方向。
解锁:表示拆卸螺旋桨时的旋转方向。
安装方法
如下图所示,准备一对螺旋桨,将带白圈的螺旋桨安装至带有白色标记的电机桨座上。将桨帽
嵌入电机桨座并按压到底,沿锁紧方向旋转螺旋桨至无法继续旋转,松手后螺旋桨将弹起锁紧。
使用同样的方法安装不带白圈的螺旋桨至不带白色标记的电机桨座上。起飞前,务必展开所有
桨叶。
白色标记 无标记
拆卸方法
用力按压桨帽到底,然后沿螺旋桨所示解锁方向旋转螺旋桨,即可拆卸。
由于桨叶较薄,请小心操作以防意外划伤。
请使用 DJI 提供的螺旋桨,不可混用不同型号的螺旋桨。
螺旋桨为易损耗品,如有需要,请另行购买。
每次飞行前请检查螺旋桨是否安装正确和紧固。
每次飞行前请务必检查各螺旋桨是否完好。如有老化,破损或变形,请更换后再飞行。
请勿贴近旋转的螺旋桨和电机,以免割伤。
24
©
大疆创新 版权所有
2016
Page 25

Mavic Pro
用户手册
智能飞行电池
简 介
智能飞行电池是专门为 Mavic Pro 设计的一款容量为 3830 mAh、电压为 11.4 V、带有充放电管
理功能的电池。该款电池采用全新的高能电芯,并使用先进的电池管理系统为飞行器提供充沛
电力。智能飞行电池必须使用 DJI 官方提供的专用充电器进行充电。
智能飞行电池 充电器
首次使用智能飞行电池前,请务必将智能飞行电池电量充满。
智能飞行电池功能
智能飞行电池具有以下功能:
1. 电量显示:电池自带电量指示灯,可以显示当前电池电量。
2. 电池存储自放电保护:电池电量大于 65% 无任何操作存储 10 天 ( 默认值 ) 后,电池可启动
自放电至 65% 电量,以保护电池。自放电过程持续约 2-3 天,期间无 LED 灯指示,可能会
有轻微发热,属正常现象。保护启动时间参数可以通过 DJI GO App 设置。
3. 平衡保护:自动平衡电池内部电芯电压,以保护电池。
4. 过充电保护:过度充电会严重损伤电池,当电池充满后自动会停止充电。
5. 充电温度保护:电池温度为 5℃以下或 40℃以上时充电会损坏电池,在此温度时电池将不启
动充电。
6. 充电过流保护:大电流充电将严重损伤电池,当充电电流大于 8.5A,电池会停止充电。
7. 过放电保护:过度放电会严重损伤电池。电池未在使用时,放电至一定电压时电池会切断输
出。飞行过程中电池不会启用过放电保护。
8. 短路保护:在电池检测到短路的情况下,会切断输出,以保护电池。
9. 电芯损坏检测:在电池检测到电芯损坏或者电芯严重不平衡的情况下,会提示电池已经损坏。
10. 休眠保护:当电池处于开启状态时,若未连接任何用电设备,电池在 20 分钟后关闭输出,
同时会进入到休眠状态,以保持电量。
11. 通讯:飞行器可以通过电池上的通讯接口实时获得电池信息,例如电压、电量、电流等。
飞行器
使用电池前请详细阅读并严格遵守 DJI 在本手册、免责声明、电池表面贴纸上的要求。
未按要求使用造成的后果由用户承担。
大疆创新 版权所有
©
2016
25
Page 26

Mavic Pro
用户手册
使用智能飞行电池
电量指示灯
LED1
LED2
LED3
LED4
电池开关
开启 / 关闭智能飞行电池
开启智能飞行电池:在关闭状态下,先短按电池开关一次,再长按电池开关 2 秒以上,即可开
飞行器
启电池。电池开启时,电量指示灯显示当前电池电量。
关闭智能飞行电池:在开启状态下,先短按电池开关一次,再长按电池开关 2 秒以上,即可关
闭电池。电池关闭后,指示灯均熄灭。
低温使用注意事项:
1. 在低温环境(-10℃至 5℃)下使用电池,电池容量将骤减从而导致飞行时间急剧减少。当电
池温度在 -10℃与 5℃范围内,需满足一定电量条件方可起飞。使用前请充满电并对电池保温。
2. 不推荐在 -10℃以下的环境下使用电池。
3. 在低温环境下,当 DJI GO App 提示 “低电压报警”时建议立刻停止飞行。
4. 在低温环境下,建议在飞行前将电池预热至 5℃以上,预热至 20℃以上更佳。
在寒冷环境下飞行前,可将电池插入飞行器内预热1至2分钟,当电池充分预热后再起飞。
查看电量
在智能飞行电池关闭状态下,短按电池开关一次,可查看当前电量。
电量指示灯可用于显示智能飞行电池充放电过程中的智能飞行电池电量,指示灯定义如下。
表示 LED 灯在指示过程中常亮 表示 LED 灯在指示过程中有规律地闪亮
表示 LED 灯熄灭
电量指示灯
LED1 LED2 LED3 LED4 当前电量
87.5%~100%
75%~87.5%
62.5%~75%
50%~62.5%
37.5%~50%
25%~37.5%
12.5%~25%
0%~12.5%
=0%
大疆创新 版权所有
©
2016
26
Page 27

Mavic Pro
用户手册
充 电
1. 连接充电器到交流电源(100-240V,50/60Hz;如果需要,请使用电源转换插头)。
2. 在智能飞行电池开启或关闭的状态下,连接智能飞行电池与充电器。
3. 充电状态下智能飞行电池电量指示灯将会循环闪烁,并指示当前电量。
4. 电量指示灯全部熄灭时表示智能飞行电池已充满。请取下智能飞行电池和充电器,完成充电。
5. 飞行结束后智能飞行电池温度较高,须待智能飞行电池降至室温再对智能飞行电池进行充电。
6. 智能飞行电池最佳充电温度范围为 5℃至 40℃,若电芯的温度不在此范围,电池管理系统将
禁止充电。
在将智能飞行电池推入或拔出飞行器之前,请保持电池电源处于关闭状态。请勿在电
池电源打开状态下插拔电池。
飞行器
智能飞行电池
充电指示灯
充电器
LED1 LED2 LED3 LED4 当前电池电量
0%~25%
25%~50%
50%~75%
75%~100%
充满
充电保护指示
电池 LED 灯可显示由于充电异常触发的电池保护的相关信息。
充电指示灯
LED1 LED2 LED3 LED4 显示规则 保护项目
LED2 每秒闪 2 次 充电电流过大
LED2 每秒闪 3 次 充电短路
LED3 每秒闪 2 次 充电过充导致电池电压过高
LED3 每秒闪 3 次 充电器电压过高
LED4 每秒闪 2 次 充电温度过低
LED4 每秒闪 3 次 充电温度过高
插座
大疆创新 版权所有
©
2016
27
Page 28

Mavic Pro
用户手册
排除故障(充电电流过大,充电短路,充电过充导致电池电压过高,充电器电压过高)后, 请
按下电池开关取消 LED 灯保护提示,重新拔插充电器恢复充电。如遇到充电温度异常,则等待
充电温度恢复正常,电池将自动恢复充电,无需重新拔插充电器。
智能飞行电池必须使用 DJI 官方指定的专用充电器进行充电,对于使用非 DJI 官方提
供的充电器进行充电所造成的一切后果,DJI 将不予负责。
若电池当前电量高于 95%,需要开启电池才能充电。
放电方法
飞行器
为安全起见,电池在运输过程中需进行放电。将电池安装至飞行器后,飞行至低电量(如
20%-30% 或以下)。
28
©
大疆创新 版权所有
2016
Page 29

遥控器
本章节介绍遥控器的各项功能,包括如何
操控飞行器以及操作相机。
Page 30

遥控器
遥控器概述
Mavic Pro 遥控器使用新一代 OcuSync 高清图传技术,配合完备的功能按键,可在最大 7 千米
(FCC 合规版本,无遮挡环境)通信距离完成飞行器与相机的各种操作与设置,并可通过 DJI
GO App 在移动设备上实时显示高清画面。遥控器状态显示屏可实时显示飞行参数等信息,折叠
式手柄可固定移动设备。遥控器最长可工作时间约为 2.5 小时。
合规版本:Mavic Pro 遥控器符合当地标准。
遥控器
操控模式:遥控器根据操控习惯分为美国手、日本手和中国手,可以在 DJI GO App 中
自定义。建议初学者使用美国手作为操控方式。
美国手:控制油门的摇杆为遥控器的左摇杆。
日本手:控制油门的摇杆为遥控器的右摇杆。
遥控器操作
开启与关闭
遥控器内置充电电池,可通过遥控器状态显示屏查看当前电量。
按以下步骤开启遥控器:
1. 短按一次电源按键可查看当前电量,若电量不足请给遥控器充电。
2. 短按一次电源按键,然后长按电源按键 2 秒以开启遥控器。
3. 重复步骤 2 以关闭遥控器。
30
©
大疆创新 版权所有
2016
Page 31

Mavic Pro
用户手册
遥控器充电
如下图所示,将标配充电器上的 USB 充电线连接至遥控器上的充电器接口,为遥控器充电。
插座
充电器
控制相机
用户可通过遥控器上的“拍照按键”,“录影按键”,“相机设置转盘”实时操控相机。
4
3
1. 相机设置转盘
配合 DJI GO App 使用时,通过相机设置转盘可快速对相机参数进行设置。可通过转盘选择
查看下一张或者上一张相片或视频。
2. 拍照按键
按下该按键可以拍摄单张照片。通过 DJI GO App 可选择单张、多张或者定时拍摄模式。
3. 录影按键
按下录影按键开始录影,再次按下该按键停止录影。
4. 云台俯仰控制拨轮
可控制相机的俯仰拍摄角度。顺时针拨动拨轮,云台向上转动。逆时针拨动拨轮,云台向下转动。
1
2
遥控器
操控飞行器
遥控器出厂时默认操控模式为美国手 (Mode 2),本手册以美国手 (Mode 2) 为例说明遥控器的
操控方式。
摇杆回中 / 中位:遥控器的摇杆处于中间位置。
摇杆杆量:遥控器摇杆偏离摇杆中位的偏移量。
大疆创新 版权所有
©
2016
31
Page 32

Mavic Pro
用户手册
遥控器(美国手) 飞行器( 为机头朝向) 控制方式
遥控器
油门摇杆用于控制飞行器升降。
往上推杆,飞行器升高。往下拉杆,飞行器降低。
中位时飞行器的高度保持不变(自动定高)。
飞行器起飞时,必须将油门杆往上推过中位,
飞行器才能离地起飞(请缓慢推杆,以防飞行
器突然急速上冲)。
偏航杆用于控制飞行器航向。
往左打杆,飞行器逆时针旋转。往右打杆,飞
行器顺时针旋转。中位时旋转角速度为零,飞
行器不旋转。
摇杆杆量对应飞行器旋转的角速度,杆量越大,
旋转的角速度越大。
俯仰杆用于控制飞行器前后飞行。
往上推杆,飞行器向前倾斜,并向前飞行。往
下拉杆,飞行器向后倾斜,并向后飞行。中位
时飞行器的前后方向保持水平。
摇杆杆量对应飞行器前后倾斜的角度,杆量越
大,倾斜的角度越大,飞行的速度也越快。
横滚杆用于控制飞行器左右飞行。
往左打杆,飞行器向左倾斜,并向左飞行。往
右打杆,飞行器向右倾斜,并向右飞行。中位
时飞行器的左右方向保持水平。
摇杆杆量对应飞行器左右倾斜的角度,杆量越
大,倾斜的角度越大,飞行的速度也越快。
32
©
大疆创新 版权所有
2016
按下遥控器上的“急停按键”退出智能飞行后,
飞行器将于原地悬停。
Page 33

飞行模式切换开关
拨动该开关以控制飞行器的飞行模式。飞行模式
切换开关位置参见右图,每个开关位置对应的飞
行模式参见下表。
Mavic Pro
用户手册
图示 对应飞行模式
SPORT
SPORT
P 模式 ( 定位)
S 模式 ( 运动 )
SPORT
P 模式(定位):使用 GPS 模块和前视和下视视觉系统以实现飞行器精确悬停,指点飞行以
及高级模式等功能。该模式下飞行器的感度值被适当调低。
S 模式(运动):使用 GPS 模块以实现精确悬停。飞行器操控感度经过调整,最大飞行速度
将会提升。当选择使用 S 模式时,前视视觉系统将自动关闭,飞行器无法
自行避障。
飞行模式切换开关默认锁定于 P 模式,如需在不同的飞行模式之间切换,需进入 DJI GO App
中的“相机”界面,点击“ ” 选择“允许切换飞行模式”以解除锁定,否则即使飞行模式切
换开关在 S 档位,飞行器仍按 P 模式飞行,且 DJI GO App 将不出现智能飞行选项。解除锁定后,
再将飞行模式切换开关从 P 档切到 S 档以进入 S 模式飞行。
智能返航按键
长按圆形按键直至蜂鸣器发出“嘀嘀”音激活智能返航,飞行器将返航至最近记录的返航点。
在返航过程中,用户仍然可通过也遥控器控制飞行器飞行方向。短按一次此按键将结束返航,
重新获得控制权。
遥控器
大疆创新 版权所有
©
2016
33
Page 34

Mavic Pro
用户手册
遥控器信号范围
遥控器信号的最佳通信范围如下:
最佳通信范围
信号强 信号弱
遥控器
操控飞行器时,务必使飞行器处于最佳通信范围内。 及时调整操控者与飞行器之间的方位与距离,
或天线位置以确保飞行器总是位于最佳通信范围内。
遥控器状态显示屏
遥控器的状态显示屏可实时提供系统信息,其中包括飞行器的飞行数据,智能飞行电池电量等信
息以供用户参考。每个图标的详细信息参照以下表格。
系统状态提示
飞行速度
遥控器电量提示
下视视觉系统高度提示
大疆创新 版权所有
©
2016
34
飞行模式提示
视觉系统提示
飞行器电量提示GPS 信号强弱
遥控器通信信号提示
飞行距离提示
曝光补偿提示
上升 / 下降提示
飞行高度提示
相机拍摄状态
电机转速提示
Micro SD 卡
检测提示
运动飞行
模式提示
Page 35

Mavic Pro
用户手册
遥控器对频
出厂时,遥控器与飞行器内置的接收机已完成对频,通电后即可使用。如更换遥控器,需要重
新对频才能使用。对频步骤如下:
1. 先开启遥控器,连接移动设备。然后开启智能飞行电池电源,运行 DJI GO App。
2. 选择“相机”界面,点击 图标,然后点击“遥控器对频”按钮。
确保控制模式开关处于 RC 档位,方可进行对频操作。
3. DJI GO App 显示倒数对话框,此时遥控器屏幕显示“BINDING”,表示正在对频。
4. 使用合适工具按下对频按键(如下图所示)后松开,完成对频。对频成后,遥控器指示灯显
示绿灯常亮。
对频按键
遥控器
大疆创新 版权所有
©
2016
35
Page 36

云台相机
本章节介绍相机的技术参数,云台相机的
活动范围以及工作模式。
36
©
大疆创新 版权所有
2016
Page 37

云台相机
云台相机概述
相机的 CMOS 尺寸为 1/2.3 英寸,分辨率可达到 1235 万有效像素。 配备 28 mm(35 mm 格
式等效)低畸变广角镜头,能有效提升画质。
支持每秒 30 帧的 4K 超高清视频录像 , 支持最高 1200 万像素静态照片拍摄,应用先进的图像
处理技术,输出优质的图片。支持多种拍摄模式,包括单拍、多张连拍和定时拍摄。多张连拍
支持极速连拍和自动包围曝光两种模式,最高可达 7 张 / 秒。
配备高精度三轴防抖云台,即使在做大动作飞行的情况下也能拍出平稳的视频。
结合 DJI GO App 使用,可以实现实时预览。用户也可以通过回放功能立即欣赏照片和视频,
还可以查看和删除相机存储卡上的内容,释放空间以存储更多的相片与视频。
相机 SD 接口
Mavic Pro 标配容量为 16GB 的 Micro SD 卡,可支持最高容量为 64GB 的 Micro SD 卡。由于
相机要求快速读写高分辨率的视频数据,请使用 Class 10 或 UHS-1 及以上规格的 Micro SD 卡,
以保证 HD 视频正常录制。
云台相机
请勿在飞行器电源开启状态下插入或拔出 Micro SD 卡,否则拍摄过程中得到的数据文
件有可能会丢失。
为保证相机系统稳定性,将单次录像时长限制在 30 分钟以内。
大疆创新 版权所有
©
2016
37
Page 38

Mavic Pro
用户手册
调参 / 数据接口(Micro USB)
在飞行器电源开启的情况下,通过 Micro USB 连接线连接到 PC,可以方便地拷贝相机 Micro SD
卡内的照片 / 视频。用户也可通过 SD 读卡器读取相片和视频数据。
云台相机
必须开启智能飞行电池,才能进行拷贝。
云 台
云台概述
三轴稳定云台为相机提供稳定的平台,使得在飞行器高速飞行的状态下,相机也能拍摄出稳定
的画面。通过遥控器的云台俯仰拨轮调整俯仰角度,也可在 DJI GO App 相机界面长按屏幕直
至出现蓝色光圈,通过拖动光圈调整云台角度。
高精度三轴防抖云台,角度抖动量为 ±0.01°,即使在做大动作飞行的情况下也能拍出平稳的视频。
俯仰方向可控角度为 -90°至 +30°,默认控制角度为 -90°至 0°(可在 DJI GO App 设置控制
角度至 +30°)。
30°
0°
-90°
跟随模式
FPV 模式
云台水平转动方向随飞行器移动,而云台横滚方向保持水平。用户可
远程控云台俯仰角度。此模式适用于拍摄稳定画面。
云台横滚方向的运动自动跟随飞行器横滚方向的运动而改变,适用体
验第一人称视角飞行。
38
©
大疆创新 版权所有
2016
Page 39

Mavic Pro
用户手册
请务必在电源开启前拆卸云台锁扣。
云台电机异常,可能是由于飞行器放置在凹凸不平的地面或草地上时地面物体碰到云
台,或者云台受到过大的外力作用(例如被碰撞或被掰动)。
起飞前请将飞行器放置在平坦开阔的地面上,请勿在电源开启后碰撞云台。
在大雾或云中飞行时可致云台结露,导致临时故障。若出现此状况,云台干燥后即可
恢复正常。
云台开机启动时,可能发出短暂的振动提示音,此为正常现象。
云台相机
大疆创新 版权所有
©
2016
39
Page 40

DJI GO App
本章节介绍 DJI GO App 的四个界面的主
要功能。
40
©
大疆创新 版权所有
2016
Page 41

DJI GO App
连接你的飞机
Mavic Pro
请在户外宽敞的场地起飞
了解更多
80%
设备
编辑器
天空之城 我
进入相机
用户可以通过点击 DJI GO App 来操作 Mavic Pro 的云台和相机,控制拍照、录影以及设置飞
行参数,还可以直接分享所拍摄的照片与视频到社交网络。
设 备
用户可从设备页面进入相机界面。
相机界面
DJI GO App
10 118 97654321
24
起飞准备完毕(GPS)
09:29
23
22
21
20
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
P-GPS
12
61%
12
13
AE
14
15
16
17
18
19
大疆创新 版权所有
©
2016
41
Page 42

Mavic Pro
用户手册
1. 飞行器状态提示栏
起飞准备完毕(GPS)
:显示飞行器的飞行状态以及各种警示信息。
2. 前视障碍物提示
:当检测到障碍物时非常接近时,图标显示红色。如果逐渐远离障碍物,图标则
显示为橙色或黄色。
3. 智能飞行电池电量
:实时显示当前智能飞行电池剩余电量及可飞行时间。电池电量进度条上的不同颜
色区间表示不同的电量状态。当电量低于报警阈值时,电池图标变成红色,提醒您尽快降落
飞行器并更换电池。
DJI GO App
4. 飞行模式
:显示当前飞行模式。点击进入飞控设置菜单,可进行飞行器返航点、限高、限远等基础设
置及感度参数调节等高级设置。
5. 相机参数
显示相机当前拍照 / 录像参数及剩余可拍摄容量。
6. GPS 状态
:用于显示 GPS 信号强弱。
7. 前视视觉系统状态图标
:用于显示前视视觉系统是否正常工作。点击可进入更多关于前视视觉系统的设置操作。
8. 遥控链路信号质量
:显示遥控器与飞行器之间遥控信号的质量。点击可进入更多关于遥控器的设置操作。
9. 高清图传链路信号质量
:显示飞行器与遥控器之间高清图传链路信号的质量。点击可进入更多关于高清图传的设
置操作。
10. 电池设置按键
:实时显示当前智能飞行电池剩余电量。
61%
点击可设置低电量报警阈值,并查看电池信息。可设置存储自放电启动时间。当飞行时发
生电池放电电流过高、放电短路、放电温度过高、放电温度过低、电芯损坏异常情况,界
面会实时提示。
大疆创新 版权所有
©
2016
42
Page 43

Mavic Pro
11. 对焦 / 测光切换按键
/ :点击按键可切换对焦 / 测光模式,在相关模式下单击屏幕画面可进行对焦 / 测光。
12. 通用设置按键
:点击按键打开通用设置菜单,可设置参数单位、直播平台、航线显示等。
13. 自动曝光锁定
:点击按键可锁定当前曝光值。
AE
14. 云台角度幅度提示
:显示云台当前俯仰幅度。
15. 拍照 / 录影切换按键
:点击该按键可切换拍照或录影模式。
16. 拍照 / 录影按键
/ :点击该按键可触发相机拍照或开始 / 停止录影,录影时按钮下方会显示时间码表示
当前录影的时间长度。按下遥控器上的拍照 / 录影按键亦可进行拍照 / 录影。
17. 拍照参数按键
:点击该按键可设置拍照与录影的各项参数。例如相机的 ISO、快门、曝光补偿参数,
以及录影的色彩模式、录影文件格式等参数。
用户手册
DJI GO App
18. 回放按键
:点击回放按键查看已拍摄的照片及视频。
19. 飞行状态参数
D 30M
H 10.0M
HS 10.0M/S
VS 2.0M/S
:飞行器与返航点水平方向的距离。
:飞行器与返航点垂直方向的距离。
:飞行器在水平方向的飞行速度。
:飞行器在垂直方向的飞行速度。
20. 地图缩略图标
点击该图标快速切换至地图界面。
大疆创新 版权所有
©
2016
43
Page 44

Mavic Pro
用户手册
21. 智能飞行模式
:显示是否启用智能飞行模式。点击选择不同的智能飞行模式。
22. 智能返航
:点击此按键,飞行器将即刻自动返航降落并关闭电机。
23. 自动起飞 / 降落
/ :轻触此按键,飞行器将自动起飞或降落。
24. 主界面
:轻触此按键,返回主界面。
DJI GO App
向左滑动屏幕,进入以下界面。
起飞准备完毕(GPS)
切换竖拍/横拍 云台朝前/向下
H 10.0MD 30M
09:29
调节屏幕亮度
VS 10.0M/S
VS 2.0M/S
12
P-GPS
返航点:飞机位置 返航点:自己位置
VPS 2.0MH.S 10.0 M/S
切换竖拍 / 横拍
点击可切换竖拍模式与横拍模式。竖拍模式下,相机将切换 90 度后拍摄。
拍照时请先对焦以捕捉清晰的画面。
可以在 DJI GO App 设置快捷键切换横、竖拍。
云台朝前 / 朝下
点击可快速将云台角度调整成向前或垂直地面的角度。
61%
AE
返航点
点击选择以飞行器当前坐标为返航点或遥控器当前坐标为返航点。
大疆创新 版权所有
©
2016
44
Page 45

Mavic Pro
用户手册
使用移动设备控制飞行器
除了使用遥控器控制飞行器以外,还可以使用移动设备 DJI GO App 里的虚拟摇杆控制飞行器。
请根据以下步骤设置并使用。
1. 关闭智能飞行电池开关,然后拨动飞行器右侧的控制模式切换开关,将开关拨动至 Wi-Fi 档位。
控制模式切换开关
2. 开启智能飞行电池。
3. 开启移动设备的 Wi-Fi 功能,在 Wi-Fi 列表中选择 Mavic_XXX。输入贴在机臂上的连接密码。
4. 开启 DJI GO App, 点击“相机”进入相机页面,如果能看见相机的预览画面,则表明飞行器
与移动设备成功连接。
5. 选择自动起飞 ( ),使用显示在 DJI GO App 上的虚拟摇杆控制飞行器的航向。
使用安卓设备可以进入 DJI GO App, 点击屏幕右上方图标,然后按提示扫描机臂上的
二维码完成连接。Wi-Fi 二维码在机臂上与电池仓底部均可见。
Wi- Fi 模式下限制控制距离为 80 米,飞行高度为 50 米。最大水平飞行速度 4m/s,最
大上升速度 2m/s,最大下降速度为 1m/s。
用户可以自行设置移动设备 Wi-Fi 通信频率为 2.4G(默认频段)或 5G。由于部分移
动设备不支持 5G 频段,使用 5G 频段前请先检查移动设备。短按对频按钮,可重置通
信频段至 2.4G。
用户可自行更改 Wi-Fi SSID 与密码。注意更改 SSID 与密码后二维码将失效。长按对
频按钮 5 秒以上可重置 Wi-Fi 密码和 SSID。
DJI GO App
大疆创新 版权所有
©
2016
45
Page 46

Mavic Pro
用户手册
使用虚拟摇杆
当飞行器成功连接上移动设备后,即可开始使用虚拟摇杆控制飞行器。以下说明以美国手(左
摇杆控制油门)为例。启动 DJI GO App, 触碰屏幕将会出现以下画面:
DJI GO App
飞行中 GPS
左摇杆 右摇杆
09:29
虚拟摇杆
P-GPS
12
61%
AE
左半边的区域为左摇杆区域,用户可在该区域控制飞行器的上升,下降,左旋和右旋动作。
右半边的区域为右摇杆区域,用户可在该区域内控制飞行器的向前,向后,左移和右移动作。
点击“ ”可关闭和启用虚拟摇杆。
操作有效区域不仅限于白色圈内。
编辑器
DJI GO App 集成了 DJI 专有的视频编辑器。用户可通过视频编辑器快速剪辑影片,即时分享。
内置视频编辑器可方便用户随时进行剪辑,并可为视频添加文字及音乐,与好友分享飞行的精
彩瞬间。
大疆创新 版权所有
©
2016
46
Page 47

Mavic Pro
天空之城
浏览 DJI 产品动态,查看精彩视频及图片。
我
管理 DJI 账号,上传视频作品,访问 DJI 官方商城及 DJI 官方论坛,查看飞行记录等。
用户手册
飞
行
大疆创新 版权所有
©
2016
47
Page 48

飞行
本章节介绍了飞行注意事项,飞行限制区
域以及飞行器注意事项。
48
©
大疆创新 版权所有
2016
Page 49

飞 行
安装准备完成后,请先进行飞行培训或训练,比如使用 DJI GO App 模拟器进行飞行练习、由
专业人士指导等。飞行时请选择合适的飞行环境或使用新手模式飞行。飞行器飞行限高 500 米,
请勿超过安全飞行高度。飞行前务必阅读《Mavic Pro 免责声明和安全操作指引》以了解安全注
意事项。
飞行环境要求
1. 恶劣天气下请勿飞行,如大风(风速五级及以上)、下雪、下雨、有雾天气等。
2. 选择开阔、周围无高大建筑物的场所作为飞行场地。大量使用钢筋的建筑物会影响指南针工
作,而且会遮挡 GPS 信号,导致飞行器定位效果变差甚至无法定位。
3. 飞行时,请保持在视线内控制,远离障碍物、人群、水面等。
4. 请勿在有高压线,通讯基站或发射塔等区域飞行,以免遥控器受到干扰。
5. 在海拔 5000 米以上飞行,由于环境因素导致飞行器电池及动力系统性能下降,飞行性能将
会受到影响,请谨慎飞行。
6. 在南北极圈内飞行器无法使用 P 模式飞行,可以使用视觉系统飞行。
飞行限制以及特殊区域限飞
根据国际民航组织和各国空管对空域管制的规定以及对无人机的管理规定,无人机必须在规定
的空域中飞行。出于飞行安全考虑,默认开启飞行限制功能,包括高度和距离限制以及特殊区
域飞行限制,以帮助用户更加安全合法地使用本产品。
GPS 有效时,特殊区域飞行限制与高度和距离限制共同影响飞行,飞行器可飞行的空域为所有
限制空域的交集。飞行器在 GPS 有效时,仅受高度限制。
飞
行
限高限低和距离限制
限高与限低高度用于限制飞行器的飞行高度,最大半径用于限制飞行器的飞行距离。用户可以
在 DJI GO App 中设置。
最大高度
最大半径
返航点
开机时飞行
器的高度
大疆创新 版权所有
©
2016
49
Page 50

Mavic Pro
用户手册
飞行器状态指示灯 绿灯闪烁
飞行限制 DJI GO App 飞行器状态指示灯
最大高度
最大半径
飞行高度将不能超过 DJI GO App 中
设置的最大高度。
飞行器距离返航点的距离将不能超过
DJI GO App 中设置的最大半径。
飞行器状态指示灯 黄灯闪烁
飞行限制 DJI GO App 飞行器状态指示灯
GPS 信号欠佳但下视视觉系
统生效时,限飞高度为 5 米。
GPS 信号欠佳且下视视觉系
统失效时,限飞高度为 50 米。
飞
行
最大高度
最大半径 无限制,无提示。
飞行器由于惯性冲出限制边界后,遥控器仍有控制权,但不能继续让飞行器继续靠近
限制飞行区域。
如果飞行器位于最大半径之外,并从可半安全飞行状态下转变为可安全飞行,飞行器
将会自动返回到最大半径之内。
为保证飞行安全,请尽量避开机场、高速公路、火车站、地铁站以及市区等区域进行
飞行 ;尽量在视距范围内飞行。
提示:您的飞机已达到
最大限飞高度。
提示:您的飞机已达到
最大限飞距离。
提示:您的飞机已达到最大限飞
高度。
无红灯提示。
在靠近最大半径边
界时将会有超快闪
红灯提示 。
无红灯提示。
禁飞区
禁飞区包括机场限制飞行区域以及特殊飞行限制区域,DJI 官方网站上公布了全球已被飞行限制功
能覆盖的特殊区域列表,详情请参考飞行限制特殊区域(http://www.dji.com/cn/flysafe/no-fly)。
飞行器在禁飞区域将被禁止或限制飞行,DJI GO App 将会发出相应提示,请时刻留意。
大疆创新 版权所有
©
2016
50
Page 51

Mavic Pro
用户手册
飞行前检查
1. 遥控器、智能飞行电池以及移动设备是否电量充足。
2. 螺旋桨是否正确安装。
3. 确保已插入 Micro SD 卡。
4. 电源开启后相机和云台是否正常工作。
5. 开机后电机是否能正常启动。
6. DJI GO App 是否正常运行。
7. 确保摄像头清洁。
指南针校准
请依据 DJI GO App 或飞行器状态指示灯的提示进行指南针校准。校准注意事项如下:
请勿在强磁场区域或大块金属附近校准 , 如磁矿、停车场、带有地下钢筋的建筑区域等。
校准时请勿随身携带铁磁物质 , 如手机等。
指南针校准成功后,将飞行器放回地面时,如果受到磁场干扰,DJI GO App 会显示处理
方法,请按显示处置方法进行相应操作。
校准步骤
请选择空阔场地,根据下面的步骤校准指南针。若需查看更多关于指南针校准的内容,请观看
相关教学视频。
1. 进入 DJI GO App “相机”界面,点击正上方的飞行状态指示栏,在列表中选择指南针校准。
飞行器状态指示灯黄灯常亮代表指南针校准程序启动。
2. 水平旋转飞行器 360°,飞行器状态指示灯绿常亮。
飞
行
大疆创新 版权所有
©
2016
51
Page 52

Mavic Pro
用户手册
3. 使飞行器机头朝下,水平旋转 360 度。
4. 完成校准,若飞行器状态指示灯显示红灯闪亮,表示校准失败,请重新校准指南针。
飞
行
若校准完成后,飞行器状态指示灯仍显示红黄交替闪烁,则表示受到干扰,请更换校
准场地。
飞行器起飞前若需要进行指南针校准,运行 DJI GO App 后,界面上将会出现指南针
校准的提示,成功校准后该提示将会消失。
如果指南针校准成功后,将飞行器放回地面时再次提示需要校准,请将飞行器转移至
其他的位置放置。
需要重新校准的情况
1. 指南针数据异常,飞行器状态指示灯显示红黄灯交替闪烁。
2. 飞行场地与上一次指南针校准的场地相距较远。
3. 飞行器机械结构有变化。
4. 飞行时漂移比较严重,或者不能直线飞行。
自动起飞 / 自动降落
自动起飞
飞行器状态指示灯显示绿灯慢闪或双闪后,用户可选择使用自动起飞功能。请根据如下步骤使
用自动起飞功能:
1. 打开 DJI GO App, 进入“相机”界面。
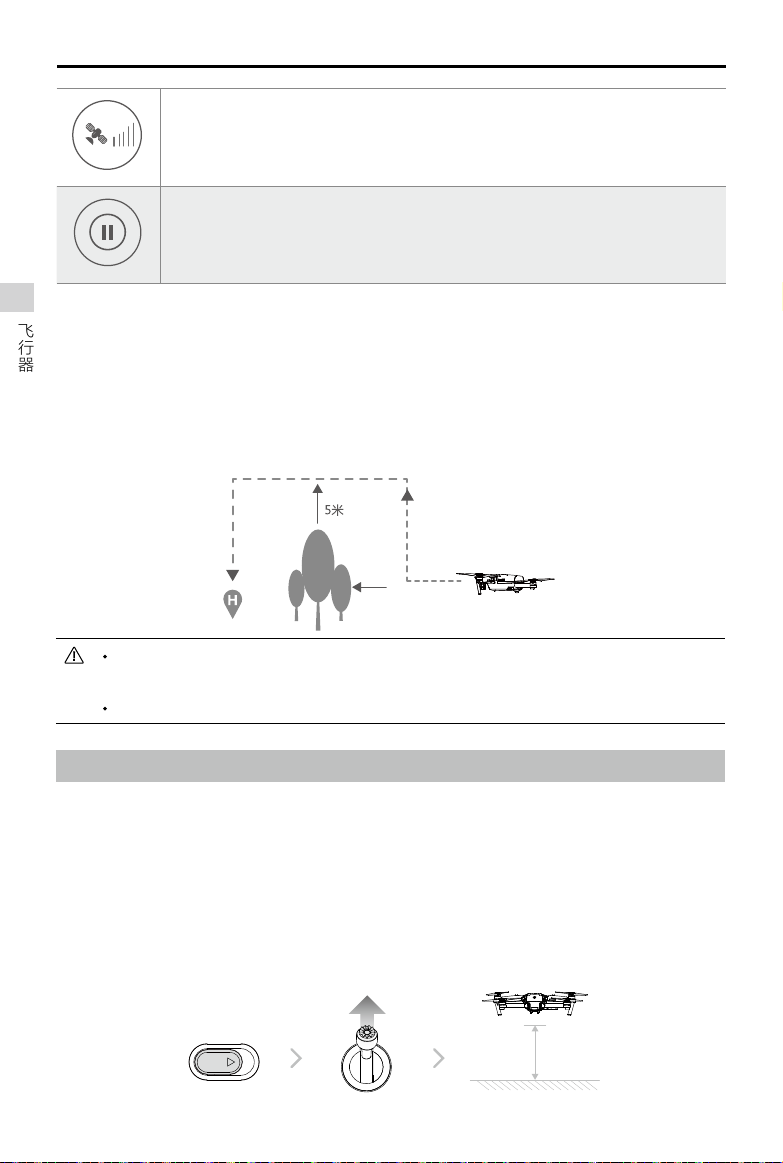
2. 根据界面提示,进行飞行前检查。
3. 点击“ ”,确认安全起飞条件,向右滑动按钮确定起飞。
4. 飞行器将自动起飞,在离地面 1.2 米处悬停。
绿色双闪表示仅依赖视觉系统飞行,飞行器能在 13 米以下高度稳定飞行。建议等待至
绿灯慢闪后再执行自动起飞。
大疆创新 版权所有
©
2016
52
Page 53

Mavic Pro
用户手册
自动降落
飞行器状态指示灯显示绿灯慢闪或双闪后,用户可选择使用自动降落功能。请根据如下步骤使
用自动降落功能:
1. 点击“ ”,确认安全降落条件,向右滑动按钮确定进入自动降落。
2. 飞行器下降过程中,用户可以通过点击屏幕的 按钮可以退出自动降落过程。
3. 若飞行器降落保护功能正常且检测到地面可降落时,飞行器将直接降落;
若飞行器降落保护功能正常,但检测到地面不可降落,则飞行器悬停,等待用户操作;
若飞行器降落保护功能不正常,则下降到离地面 0.5 米时,DJI GO App 将提示用户是否需
要继续降落。点击确认后,飞行器将继续下降。
4. 飞行器降落至地面并自行关闭电机。
请选择合适的场地降落。
手动启动 / 停止电机
启动电机
执行掰杆动作可启动电机。电机起转后,请马上松开摇杆。
或
飞
行
停止电机
电机起转后,有两种停机方式:
备用方法:飞行器着地之后,先将油门杆推到最低位置①,然后执行掰杆动作②,电机将立
即停止。停止后松开摇杆。
推荐方法:飞行器着地之后,将油门杆推到最低的位置并保持,3 秒后电机停止。
或
方法一 方法二
空中停机
默认仅当飞行器在空中检测到严重故障时,执行掰杆动作才可以停止电机。
可在 DJI GO App 设置任何情况下执行掰杆动作均可停止电机。
空中停机将造成飞行器坠毁。
大疆创新 版权所有
©
2016
53
Page 54

Mavic Pro
用户手册
基础飞行
基础飞行步骤
1. 把飞行器放置在平整开阔地面上,用户面朝机尾。
2. 开启遥控器和智能飞行电池。
3. 运行 DJI GO App ,连接移动设备与 Mavic Pro,进入“相机”界面。
4. 等待飞行器状态指示灯绿灯慢闪,进入可安全飞行状态。执行掰杆动作,启动电机。
5. 往上缓慢推动油门杆,让飞行器平稳起飞。
6. 需要下降时,缓慢下拉油门杆,使飞行器缓慢下降于平整地面。
7. 落地后,将油门杆拉到最低的位置并保持 3 秒以上直至电机停止。
8. 停机后依次关闭飞行器和遥控器电源。
飞行过程出现黄灯快闪时,飞行器进入失控保护。
飞
行
飞行过程出现红灯慢闪或快闪时,代表飞行器进入低电量返航状态,根据 DJI GO App
提示进行相应操作。
更多关于飞行的教学,请观看相关教学视频。
航拍提示和技巧
1. 执行飞行前检查。
2. 选择合适的云台工作模式。
3. 尽量在可安全飞行状态下进行拍照或录影。
4. 选择晴朗,少风的天气进行拍摄。
5. 根据拍摄需求设置相机,例如照片格式,曝光度等。
6. 飞行前可进行试飞,以帮助规划航线和取景。
7. 飞行过程中尽量小幅度地推杆以使飞行器平稳地飞行。
54
©
飞行安全认识对于您、周围人群与环境的安全非常重要。
请务必仔细阅读《免责声明和安全操作指引》。
大疆创新 版权所有
2016
Page 55

附 录
大疆创新 版权所有
©
2016
55
Page 56

附 录
规格参数
飞行器
起飞重量(不含云台罩) 734 g
起飞重量(含云台罩) 743 g
尺寸 83×83×198 mm (折叠状态)
对角线距离(不含桨) 335 mm
最大上升速度 5 m/s (运动模式)
最大下降速度 3 m/s
最大水平飞行速度 65 km/h(运动模式,海平面附近无风环境)
最大飞行海拔高度 5000 m
最长飞行时间 27 分钟(无风环境 25 km/h 匀速飞行)
最长悬停时间 24 分钟(无风环境)
综合续航 21 分钟(普通机动飞行,剩 15% 电量)
最远续航里程 13 km(无风环境)
附
工作环境温度 0℃至 40℃
录
卫星定位模块 GPS/GLONASS 双模
云 台
可控转动范围 俯仰:-90°至 +30°,横滚:0°或 90°(横拍及竖拍模式)
前视视觉系统
感知范围 0.7 至 15 m(精确测距);15 至 30 m(可探测)
使用环境
下视视觉系统
速度测量范围 飞行速度 ≤36 km/h(高度 2 米,光照充足)
高度测量范围 0.3 m 至 13 m
精确悬停范围 0.3 m 至 13 m
使用环境 地面有丰富纹理,光照条件充足 (>15 lux,室内日光灯正常照射环境 )
相 机
影像传感器 1/2.3 英寸 CMOS 有效像素 1235 万(总像素 1271 万)
镜 头
ISO 范围 100 - 3200(视频);100 - 1600(照片)
电子快门速度 8 - 1/8000 秒
照片最大分辨率 4000×3000
表面有丰富纹理,光照条件充足 ( > 15 lux,室内日光灯正常照射
环境 )
FOV 78.8° 28 mm(35 mm 格式等效) f/2.
对焦点:0.5 m 至无穷远;畸变 <1.5%
2
56
©
大疆创新 版权所有
2016
Page 57

单张拍摄
照片拍摄模式
多张连拍(BURST):3/5/
自动包围曝光(AEB):3/5 张 @0.7EV 步长
7张
定时拍摄
HDR
C4K: 4096×2160 24p, 4K: 3840×2160 24/25/30p
录像分辨率
2.7K: 2720×1530 24/25/3
FHD: 1920×1080 24/25/30/48/50/60/96p
0p
HD:1280×720 24/25/30/48/50/60/120p
视频存储最大码流 60 Mbps
支持文件系统 FAT32(≤ 32 GB),exFAT (> 32GB)
图片格式 JPEG,DNG
视频格式 MP4, MOV (MPEG-4 AVC/H.264)
支持存储卡类型
microSDTM卡;最大支持 64GB 容量,传输速度为 Class 10 及以上
或达到 UHS-1 评级的 Micro SD 卡
遥控器
工作频率 2.400–2.4835GHz
信号有效距离 FCC: 7000 m;CE: 4000 m(无干扰、无遮挡)
工作环境温度 0℃至 40℃
电 池 2970 mAh
发射功率(EIRP) FCC: ≤26 dBm;CE: ≤20 dBm
工作电流 / 电压 950 mA @3.7 V
支持移动设备
厚度 6.5-8.5 mm,最大长度 160 mm
接口类型:Lightning, Micro USB (Type-B), USB Type-C
充电器
电 压 13.05 V
额定功率 50 W
智能飞行电池
容 量 3830 mAh
电 压 11.4 V
电池类型 LiPo 3S
能 量 43.6 Wh
电池整体重量 约 240 g
充电环境温度 5℃至 40℃
最大充电功率 100 W
Mavic Pro
用户手册
TM
附
录
大疆创新 版权所有
©
2016
57
Page 58

Mavic Pro
用户手册
固件升级
使用 DJI GO App 或者 DJI Assistant 2 调参软件对飞行器和遥控器进行升级。
使用 DJI GO App 升级
将 Mavic Pro 遥控器与 DJI GO 连接,根据 DJI GO 的提示进行固件升级。升级时需连接互联网。
使用 DJI Assistant 2 升级
根据以下步骤进行固件升级操作:
1. 开启智能飞行电池。使用 Micro USB 连接线连接调参接口至个人电脑。
2. 启动 DJI Assistant 2 调参软件,使用 DJI 账号登陆并进入主界面。
3. 点击 Mavic Pro,然后点击左边的固件升级按钮。
4. 选择并确认需要升级的固件版本。
5. DJI Assistant 2 调参软件将自行下载并升级固件。
6. 升级完成后,请重启机器。
可连接遥控器的充电接口与电脑升级。需在遥控器电源关闭的情况下连接电脑,再开启遥控器
才能成功连接。遥控器与飞行器连接后,可使用调参软件同时升级遥控器与飞行器。
附
录
整个升级过程将持续 15 分钟左右。在升级过程中飞行器可能会出现如下状况:云台无力,
状态指示灯异常闪烁或飞行自行重启,以上均属正常现象,请耐心等待固件升级完成。
整个升级过程中飞行器将不会发出提示音。
确保整个升级过程中个人电脑能够访问互联网。
确保飞行器与遥控器电量至少在 50% 以上。
升级过程中请勿插拔 Micro USB 数据线。
高级模式
在高级模式下提供以下几种功能:
航向锁定
返航锁定 记录返航点后使用俯仰控制杆控制飞行器返回返航点,飞行航向与机头朝向无关。
兴趣点环绕
航点飞行
©
2016
58
记录航向时的机头朝向为飞行前向,飞行过程中飞行器航向和飞行前向与机头
方向改变无关,您无需关注机头方向即可简便控制飞行器飞行。
记录兴趣点后,飞行器自行围绕兴趣点飞行,环绕过程中机头将一直指向兴趣
点。环绕过程中可动态调整环绕半径以及方向等参数。
记录航点后 , 飞行器可自行飞往所有航点以完成预设的飞行轨迹。飞行过程中
可通过摇杆控制飞行器朝向。
大疆创新 版权所有
Page 59

Mavic Pro
遥控器菜单说明
遥控器状态提示
BAT xx PCT 遥控器电量 xx %
SHUTDOWN_ 遥控器关机中
CHARGING_ 遥控器电池充电中
USB PLUGGED 飞行器已连接 USB 线(和 PC)
FC U-DISK 主控处于读取数据模式
UPGRADING 系统升级中
BINDING 飞行器和遥控器对频中
飞行前
CONNECTING_ 尝试连接飞行器
SYS INITING 系统初始化中
READY TO GO 飞行器起飞准备完毕
飞行模式
BEGINNER 飞行器处于新手模式
GPS MODE 飞行器处于 GPS 模式
OPTI MODE 飞行器处于视觉定位模式
ATTI MODE 飞行器处于姿态模式
SPORT MODE 飞行器处于运动模式
飞行状态提示
TAKING OFF 飞机器正在起飞
LANDING 飞行器正在降落
GOING HOME 飞行器正在返航
NAV GOHOME 飞行器处于返航模式
NAV LANDING 飞行器处于着陆模式
MAX ALT. 飞行器达到最大高度
MAX RADIUS 飞行器达到最大半径
OBSTACLE 飞行器检测到障碍物
NO FLY ZONE 飞行器处于禁飞区域
智能飞行模式
TRIPOD 飞行器处于三脚架模式
ACTIVETRACK 飞行器处于智能跟随模式
TAP FLY 飞行器处于指点飞行模式
COURSE LOCK 飞行器处于航向锁定模式
HOME LOCK 飞行器处于返航点锁定模式
POI MODE 飞行器处于兴趣点环绕模式
WAY POINT 飞行器处于航点飞行模式
FOLLOW ME 飞行器处于热点跟随模式
TERRAIN 飞行器处于地形跟随模式
系统警报或故障提示
SYS WARNING+CHECK APP 系统警报,请查看 App 获取更多信息
UNACTIVATED+CHECK APP 飞行器未激活,请查看 App 获取更多信息
COMPASS ERR+ CHECK APP 指南针异常,请查看 App 获取更多信息
BATTERY ERR+CHECK APP 电池故障,请查看 App 获取更多信息
SD ERR+CHECK APP SD 卡错误,请查看 App 获取更多信息
用户手册
附
录
大疆创新 版权所有
©
2016
59
Page 60

Mavic Pro
用户手册
CALIBRATING IMU 正在校准或者校准完成但未重启
STICK ERR+RE-CTR STCK 摇杆未回中,归中摇杆
WHEEL ERR+RE-CTR WHEL 遥控器左拨轮不在中位,归中左拨轮
MECH ERR 遥控器校准文件中值错误,请联系售后
STICK EMI+PLS RETURN 摇杆受到强电磁干扰,建议返航
SD FULL SD 卡内存已满
NO PROP 桨叶丢失
BAT TEMP HI 飞行器电池温度过高
BATTERY ERR 飞行器电池故障
BAT TEMP LO 飞行器电池温度过低
LOW BATTERY 飞行器电池电量低
RC LOW BAT 遥控器电量低
NO RC SIGNL 丢失遥控信号
RC TEMP HI 遥控器温度过高
STICK EMI 摇杆受到电磁干扰
STICK ERR 摇杆故障
NO RTH 飞行器无法返航
附
售后保修信息
录
请浏览 DJI 官网以下页面以了解最新的售后,退货,免费以及收费保修信息 :
售后服务政策:http://www.dji.com/cn/service
退换货政策:http://www.dji.com/cn/service/refund-return
付费维修服务:http://www.dji.com/cn/service/repair-service
免费保修服务:http://www.dji.com/cn/service/warranty-service
认证信息
FCC Compliance
This device complies with part 15 of the FCC Rules. Operation is subject to the following two
conditions:
(1) This device may not cause harmful interference, and
(2) This device must accept any interference received, including interference that may cause
undesired operation.
Changes or modifications not expressly roved by the party responsible for compliance could
void the user's authority to operate the equipment.
FCC Warning Message
Any Changes or modifications not expressly roved by the party responsible for compliance
could void the user’s authority to operate the equipment.
This device complies with part 15 of the FCC Rules. Operation is subject to the following
two conditions: (1) This device may not cause harmful interference, and (2) this device must
accept any interference received, including interference that may cause undesired operation.
大疆创新 版权所有
©
2016
60
Page 61

Mavic Pro
用户手册
FCC Radiation Exposure Statement:
This equipment complies with FCC radiation exposure limits set forth for an uncontrolled
environment. This equipment should be installed and operated with minimum distance 20cm
between the radiator& your body. This transmitter must not be co-located or operating in
conjunction with any other antenna or transmitter.
Note: This equipment has been tested and found to comply with the limits for a Class B
digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide
reasonable protection against harmful interference in a residential installation. This equipment
generates uses and can radiate radio frequency energy and, if not installed and used in
accordance with the instructions, may cause harmful interference to radio communications.
However, there is no guarantee that interference will not occur in a particular installation. If
this equipment does cause harmful interference to radio or television reception, which can be
determined by turning the equipment off and on, the user is encouraged to try to correct the
interference by one or more of the following measures:
— Reorient or relocate the receiving antenna.
— Increase the separation between the equipment and receiver.
— Connect the equipment into an outlet on a circuit different from that to which the receiver is
connected.
— Consult the dealer or an experienced radio/TV technician for help.
附
录
IC RSS warning
This device complies with Industry Canada licence-exempt RSS standard (s). Operation is
subject to the following two conditions: (1) this device may not cause interference, and (2)
this device must accept any interference,including interference that may cause undesired
operation of the device.
Le présent areil est conforme aux CNR d'Industrie Canada licables aux areils radio exempts
de licence.
L'exploitation est autorisée aux deux conditions suivantes:
(1) l'areil ne doit pas produire de brouillage, et
(2) l'utilisateur de l'areil doit accepter tout brouillage radioélectrique subi, même si le
brouillage est susceptible d'en compromettre le fonctionnement.
IC Radiation Exposure Statement:
This equipment complies with IC RF radiation exposure limits set forth for an uncontrolled
environment. This transmitter must not be co-located or operating in conjunction with any
other antenna or transmitter.
This equipment should be installed and operated with minimum distance 20cm between the
radiator& your body.
大疆创新 版权所有
©
2016
61
Page 62

Mavic Pro
用户手册
Any Changes or modifications not expressly roved by the party responsible for compliance
could void the user’s authority to operate the equipment.
KCC Warning Message
“해당무선설비는 운용 중 전파혼신 가능성이 있으므로 인명안전과 관련된 서비스는 할 수 없습
니다 .”
“해당 무선설비는 운용 중 전파혼신 가능성이 있음”
NCC Warning Message
低功率電波輻射性電機管理辦法
第十二條經型式認證合格之低功率射頻電機,非經許可,公司、商號或使用者均不得擅自變更
頻率、加大功率或變更原設計之特性及功能。
第十四條低功率射頻電機之使用不得影響飛航安全及干擾合法通信;經發現有干擾現象時,應
改善至無干擾時方得繼續使用。前項合法通信,指依電信法規定作業之無線電通信。低功率射
頻電機須忍受合法通信或工業、科學及醫療用電波輻射性電機設備之干擾。
附
录
62
©
大疆创新 版权所有
2016
Page 63

DJI 技术支持
http://www.dji.com/cn/support
本手册如有更新,恕不另行通知。
您可以在 DJI 官方网站查询最新版本《用户手册》
http://www.dji.com/mavic
如果您对说明书有任何疑问或建议,请通过以下电子邮箱联系我们:
DocSupport@dji.com
MAVICTM是大疆创新的商标。
Copyright © 2016 大疆创新 版权所有
。
微信扫一扫关注 DJI 公众号
 Loading...
Loading...