

Page 1

MAVIC AIR
Gebruikershandleiding
2018.05
v1.2
Page 2

Zoeken naar trefwoorden
Zoek naar trefwoorden zoals "accu" en "installeren" om een onderwerp te vinden. Gebruik je Adobe
Acrobat Reader om dit document te openen? Druk dan op CTRL+F (Windows) of Command+F (Mac) om
een zoekopdracht in te voeren.
Naar een onderwerp navigeren
Bekijk de volledige lijst van onderwerpen in de inhoudsopgave. Klik op een onderwerp om naar dat
gedeelte te navigeren.
Dit document afdrukken
Dit document ondersteunt afdrukken met hoge resolutie.
Leeswijzer
Legenda
Waarschuwing Belangrijk Hints en tips Referentie
Lees eerst het volgende vóór de eerste vlucht
Lees de volgende documenten voordat je de MAVICTM Air in gebruik neemt:
1. Mavic Air In de doos
2. Mavic Air Gebruikershandleiding
3. Mavic Air Snelstartgids
4. Mavic Air Disclaimer en veiligheidsrichtlijnen
5. Mavic Air Intelligent Flight Battery - Veiligheidsrichtlijnen
Het verdient aanbeveling om op de officiële DJITM-website alle rondleidingvideo's te bekijken en de Mavic
Air Disclaimer en veiligheidsrichtlijnen te lezen voordat je de drone in gebruik neemt. Lees de Mavic Air
Snelstartgids en raadpleeg deze Mavic Air Gebruikershandleiding voor meer bijzonderheden om je voor te
bereiden op je eerste vlucht.
Videorondleidingen
Ga naar onderstaand adres of scan de QR-code rechts om de Mavic Air rondleidingvideo's te
bekijken waarin je kunt zien hoe je veilig gebruikmaakt van de Mavic Air:
http://www.dji.com/mavic-air/info#video
Download de DJI GO 4-app
Zorg dat je de DJI GOTM 4-app tijdens de vlucht gebruikt*. Scan de QR-code aan de
rechterzijde om de nieuwste versie te downloaden. De Android-versie van DJI GO 4 is
compatibel met Android v4.4 of later. De iOS-versie van DJI GO 4 is compatibel met iOS v9.0
of later.
* Voor een betere veiligheid is vliegen beperkt tot een hoogte van 30 meter en een actieradius van 50 meter
wanneer de drone tijdens het vliegen niet is verbonden met de app of niet is aangemeld bij de app. Dit geldt
voor DJI GO 4 en alle apps die compatibel zijn met de DJI-drone.
Download DJI Assistant 2
Download de DJI Assistant 2 via http://www.dji.com/mavic-air/download
2018 DJI Alle rechten voorbehouden.
©
2
Page 3

Inhoud
Leeswijzer
Legenda
Lees eerst het volgende vóór de eerste vlucht
Videorondleidingen
Download de DJI GO 4-app
Download DJI Assistant 2
Productproel
Inleiding
Belangrijkste functies
De Mavic Air voorbereiden
Overzicht drone
Afbeelding van de afstandsbediening
Activering
Drone
Vluchtmodi
LED's en statusindicator op de drone
Terug-naar-Basis
Vision Systems
Intelligente vluchtmodi
Geavanceerde Pilot Assistance-systemen
Vluchtrecorder
Propellers bevestigen en verwijderen
Intelligent Flight Battery
Gimbal en camera
2
2
2
2
2
2
6
6
6
6
8
8
9
11
11
12
13
16
19
27
27
27
28
32
Afstandsbediening
Gebruik van de afstandsbediening
Optimaal zendbereik
Afstandsbediening koppelen
35
35
38
39
2018 DJI Alle rechten voorbehouden.
©
3
Page 4

DJI GO 4-app
Equipment
Editor
SkyPixel
Me
De drone besturen met een mobiel apparaat
41
41
44
44
44
44
Vlucht
Vereisten voor de vliegomgeving
Vluchtbeperkingen en GEO-zones
Checklist voor vluchtvoorbereiding
Automatisch opstijgen en automatisch landen
Motoren starten/stoppen
Testvlucht
Bijlage
Specicaties
Het kompas kalibreren
Firmware-updates
After-Sales-informatie
47
47
47
48
49
49
50
53
53
55
57
57
2018 DJI Alle rechten voorbehouden.
©
4
Page 5

Productproel
In dit hoofdstuk wordt de Mavic Air
geïntroduceerd en krijg je een overzicht
van de onderdelen van de drone en de
afstandsbediening.
2018 DJI Alle rechten voorbehouden.
©
5
Page 6
Productproel
Inleiding
The DJI Mavic Air heeft een nieuw inklapsysteem en een volledig gestabiliseerde 3-assige gimbalcamera die
4K-videobeelden kan opnemen en 12 megapixel-foto's kan maken. De voor DJI zo kenmerkende technologieën
zoals Obstacle Avoidance (vermijden van obstakels) en Intelligent Flight Modes (intelligente vluchtmodi) zoals
SmartCapture, Panorama, Advanced Pilot Assistance Systems, QuickShots, ActiveTrackTM en TapFlyTM zorgen
ervoor dat je eenvoudig de meest complexe opnamen kunt maken. De Mavic Air kan bogen op een maximale
vliegsnelheid van 68,4 km/u (42,5 mph) en een maximale vliegduur van 21 minuten*.
Belangrijkste functies
Camera en gimbal: Met de Mavic Air kun je 4K-video-opnamen maken tot 30 beelden per seconde en uiterst
heldere en scherpe foto's van 12 megapixels, dit alles gestabiliseerd door de 3-assige gimbal aan boord.
Vluchtcontroller: Deze nieuwe generatie vluchtcontroller is nóg veiliger en betrouwbaarder. De drone kan
automatisch terugkeren naar de thuisbasis wanneer het signaal van de afstandsbediening verloren gaat of
het accuniveau te laag is. De drone kan niet alleen stilhangen op lage hoogtes binnen, maar op zijn route ook
obstakels detecteren en vermijden, wat de veiligheid vergroot.
HD Video Downlink: De geavanceerde wifi-technologie van DJI is geïntegreerd in de afstandsbediening en
biedt een maximaal zendbereik van 4 km (2,49 mi)** waardoor je 720 p video kunt streamen naar je mobiele
apparaat.
De Mavic Air voorbereiden
Drone voorbereiden
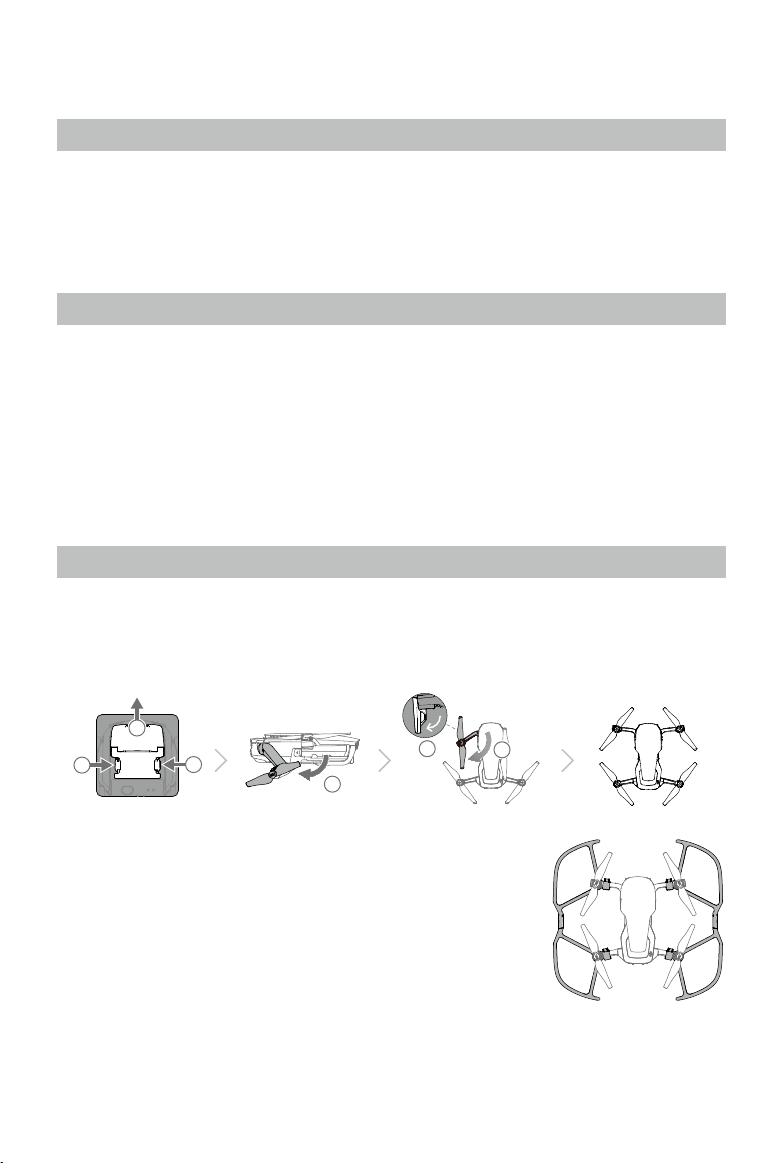
1. Verwijder de gimbalbescherming van de camera.
2. Alle armen worden ingeklapt wanneer de drone wordt verpakt in de fabriek. Klap eerst de achterste armen
uit en dan de voorarmen en het voorste landingsgestel.
2
1
3. Om veiligheidsredenen moeten de propellerafschermingen worden
aangebracht bij het gebruik van SmartCapture en het is raadzaam dat
de propellerafschermingen zijn aangebracht tijdens het vliegen in de
beginnersmodus of binnenshuis. Raadpleeg de gebruikersgids voor
Mavic Air-propellerafschermingen voor meer informatie.
* De maximale vliegduur is getest bij omstandigheden zonder wind en met
een constante snelheid van 25 km/u (15,5 mph). Deze waarde is slechts indicatief.
** De afstandsbediening kan de maximale overdrachtsafstand (FCC) bereiken in een grote open ruimte zonder
elektromagnetische interferentie, en op een hoogte van circa 120 meter (400 ft).
2018 DJI Alle rechten voorbehouden.
©
6
1
3
5
4
Page 7

Mavic Air Gebruikershandleiding
Het is raadzaam om de gimbalbescherming op de drone te laten zitten wanneer deze niet in gebruik
is. Zorg dat de gimbal horizontaal is bij het monteren of verwijderen van de gimbalbescherming.
Zorg dat het landingsgestel goed is uitgeklapt voor gebruik. Anders kunnen de ingebouwde antennes
hinder ondervinden, waardoor ernstige problemen met de videokoppeling kunnen ontstaan.
Als je de drone opbergt na gebruik, zorg dan dat je het landingsgestel eerst inklapt voordat je de
armen van de drone inklapt.
Wanneer je de modus Beginner wilt inschakelen, ga je naar Camera View in the DJI GO 4-app, tik
je op en tik je vervolgens op de schakelaar voor de modus Beginner. Vlieghoogte, afstand en
snelheid zijn beperkt in de modus Beginner. De modus Beginner werkt het beste wanneer het GPSsignaal sterk is.
4. Met het oog op de veiligheid zijn vóór verzending alle Intelligent Flight Batteries in de slaapstand gezet.
Gebruik de bijgeleverde netstroomadapter om de Intelligent Flight Batteries voor de eerste keer op te laden
en te activeren. Het is raadzaam de Intelligent Flight Battery vóór elke vlucht volledig op te laden. Voor het
opladen van een Intelligent Flight Battery na een vlucht verwijder je de accu uit de drone en bevestig je hem
aan de netstroomadapter.
Stopcontact
100-240 V
A
A
Voorbereiding van de afstandsbediening
1. Klap de antennes en de klemmen van het mobiele apparaat uit.
2. Verwijder de joysticks uit de sleuven op de afstandsbediening en schroef ze op hun plek.
3. Kies een geschikte afstandsbedieningskabel op basis van het soort mobiele apparaat dat je gebruikt.
Een kabel met een Lightning-connector is standaard aangesloten en Micro-USB- en USB-C-kabels zijn
meegeleverd in de verpakking. Beweeg de kabelschuif naar het uiteinde van de sleuf in de linkerklem
en sluit het uiteinde van de kabel aan op je mobiele apparaat. Zet je mobiele apparaat vast door beide
klemmen naar binnen te duwen.
1
5
2
Wanneer je een tablet gebruikt, gebruik dan de USB-poort op de afstandsbediening.
3
4
Gebruik de micro-USB- en de USB-poorten niet tegelijkertijd om video te koppelen. Koppel alle
apparaten los van de ene poort voordat u een apparaat op de andere poort aansluit om video te
koppelen.
6
7
2018 DJI Alle rechten voorbehouden.
©
7
Page 8

Mavic Air Gebruikershandleiding
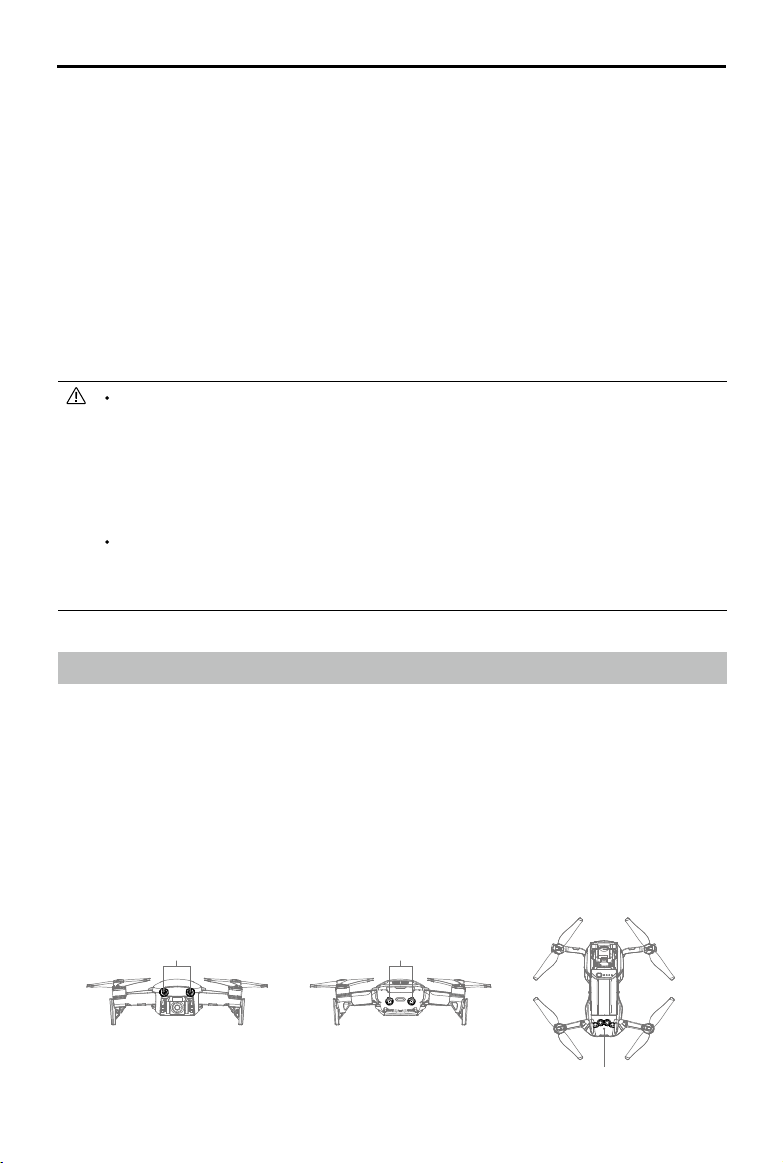
Overzicht drone
1
2
3
4
5
6
7
8
9
11
12
13
14
15
16
1. Systeem zicht naar voren
2. Propellers
3. Motoren
4. LED's voorzijde
5. Landingsgestel (met ingebouwde
antennes)
6. Gimbal en camera
10
7. GPS-antennes
8. Ventilatieopeningen
9. USB-C-poort
10. microSD-kaartsleuf camera
11. Statusindicator drone/functietoets
12. Vision System naar achteren
13. Accuniveau-leds
14. Aan-/uitknop
15. Intelligent Flight Battery
16. Accuvergrendeling
17. Systeem zicht naar beneden
17
Afbeelding van de afstandsbediening
1
2
3
4
5
6
7
2018 DJI Alle rechten voorbehouden.
©
8
8 9
1. Antennes
Voor het zenden van het besturingssignaal
en videosignaal van de drone.
2. Status-LED
Toont de systeemstatus van de
12
11
afstandsbediening.
3. Knop Return to Home (RTH) (terug naar
thuisbasis)
Druk op de knop en houd de knop ingedrukt
10
om RTH te activeren. Druk nogmaals op
deze knop om RTH te annuleren.
4. Oplaadpoort/hoofdvideoverbindingspoort
(Micro-USB)
Sluit de netstroomadapter aan om de
batterij van de afstandsbediening op te
laden. Sluit aan op een mobiel apparaat
voor videokoppeling via een RC-kabel.
Page 9

Mavic Air Gebruikershandleiding
5. Joysticks
Bestuur de richting en beweging van de drone.
6. Vluchtpauzeknop
Druk eenmaal voor een noodstop (wanneer GPS
of Vision System beschikbaar is).
7. Klemmen mobiel apparaat
Hiermee klem je je mobiele apparaat stevig vast
op de afstandsbediening.
8. Vluchtmodusschakelaar
Met deze schakelaar kun je kiezen tussen de
P-modus en S-modus.
9. USB / secundaire videoverbindingspoort
Sluit aan op een mobiel apparaat voor videodownlink via een standaard USB-kabel.
13. Gimbalwiel
Bestuurt de kanteling van de camera.
14. Opnameknop
Druk hierop om een video-opname te maken.
Druk nogmaals om te stoppen met opnemen.
15. Aanpasbare knop
Voert diverse functies uit op basis van de
instellingen in de DJI GO 4-app.
16. Sluiterknop
Druk hierop om een foto te maken. Als je de
burstmodus selecteert, wordt er een vooraf
ingesteld aantal foto's gemaakt.
10. Functietoets
Voert diverse functies uit op basis van de
instellingen in de DJI GO 4-app.
11. Aan-/uitknop
Druk eenmaal op de knop om het huidige
accuniveau te controleren. Druk eenmaal en
druk vervolgens opnieuw en houd vast om de
afstandsbediening aan/uit te zetten.
12. Accuniveau-leds
Voor het weergeven van het accuniveau van
de afstandsbediening.
13
14
15
16
Activering
De Mavic Air moet vóór het eerste gebruik worden geactiveerd. Volg de onderstaande stappen voor het
activeren van de Mavic Air met de DJI GO 4-app:
1. Sluit je mobiele apparaat aan op de afstandsbediening en start vervolgens DJI GO 4.
2. Meld je aan bij de app met je DJI-account of registreer een nieuwe DJI-account.
3. Zet de drone en de afstandsbediening aan.
4. Selecteer 'Mavic Air' en vervolgens 'Connect to the Aircraft’s Wi-Fi' en 'Wired Connection'. Volg dan de
aanwijzingen om de verbinding tot stand te brengen.
5. Tik op 'Activating Device' nadat de verbinding is voltooid en volg de aanwijzingen voor het activeren van de
Mavic Air.
2018 DJI Alle rechten voorbehouden.
©
9
Page 10

Drone
In dit hoofdstuk worden de
vluchtcontroller, de Vision Systems
Forward, Backward and Downward en
de Intelligent Flight Battery beschreven.
2018 DJI Alle rechten voorbehouden.
©
10
Page 11

Drone
De Mavic Air bestaat uit een vluchtcontroller, een video-downlinksysteem, een voortstuwingssysteem en een
Intelligent Flight Battery. Raadpleeg het overzicht van de drone in het hoofdstuk Productproel.
Vluchtmodi
De Mavic Air heeft twee vluchtmodi die gebruikers kunnen kiezen, plus een derde vluchtmodus waar de drone
onder bepaalde omstandigheden op terugvalt:
P-modus (positiebepaling): De P-modus werkt het beste wanneer het GPS-signaal sterk is. De drone
maakt gebruik van GPS en Vision Systems om zichzelf te lokaliseren, te stabiliseren en tussen obstakels te
navigeren. Intelligente vluchtmodi zoals SmartCapture, QuickShots, TapFly en ActiveTrack zijn in deze modus
ingeschakeld.
Wanneer de Forward en Backward Vision Systems zijn ingeschakeld en de lichtomstandigheden voldoende
zijn, dan is de maximale hoek van de vluchtattitude 15° en de maximale vliegsnelheid 28,8 km/u (17,9 mph).
Opmerking: De P-modus vereist grotere bewegingen van de joystick om hoge snelheden te kunnen bereiken.
S-modus (sport): In S-modus gebruikt de drone alleen GPS voor positionering en zijn de Forward en Backward
Vision Systems uitgeschakeld. Als zodanig kan de drone geen obstakels detecteren en vermijden en zijn
intelligente vluchtmodi niet beschikbaar.
Opmerking: De respons van de drone in S-modus is afgestemd op een optimale wendbaarheid en snelheid,
zodat de drone eectiever reageert op bewegingen van de joystick.
ATTI-modus: De drone schakelt automatisch naar Attitude-modus (ATTI) wanneer de Vision Systems niet
beschikbaar zijn of zijn uitgeschakeld en het GPS-signaal zwak is of als het kompas interferentie ondervindt.
Wanneer de Vision Systems niet beschikbaar zijn, is de drone niet in staat zichzelf te positioneren of
automatisch te remmen. Vliegen in ATTI-modus brengt dus mogelijke gevaren met zich mee. In ATTI-modus
wordt de drone gemakkelijk beïnvloed door zijn omgeving. Omgevingsfactoren zoals wind kunnen leiden tot
horizontale kanteling, waardoor gevaarlijke situaties kunnen ontstaan, vooral wanneer er in krappe ruimtes
wordt gevlogen.
Het wordt sterk aanbevolen zo spoedig mogelijk een veilige plek te zoeken om te landen als de
drone in ATTI-modus gaat. Je kunt de kans dat de drone naar ATTI-modus schakelt verkleinen en als
dit toch gebeurt de risico's ervan tot een minimum beperken, door niet te vliegen in gebieden waar
het GPS-signaal zwak is en door krappe ruimtes te vermijden.
De Forward en Backward Vision Systems zijn uitgeschakeld in S-modus, wat inhoudt dat de drone
obstakels op zijn vliegroute niet automatisch kan detecteren.
De maximale snelheid en de remafstand van de drone zijn in de S-modus aanzienlijk groter. In
windloze omstandigheden is een minimale remafstand van 30 meter (98,4 ft) vereist.
De daalsnelheid is in de S-modus aanzienlijk groter.
De respons van de drone is in de S-modus aanzienlijk groter, wat betekent dat een kleine beweging
van de joystick op de afstandsbediening zich vertaalt in een grote reisafstand van de drone. Wees
tijdens een vlucht oplettend en houd een toereikende manoeuvreerruimte aan.
Schakel de optie 'Multi Flight Modes' in de DJI GO 4-app in om te schakelen tussen de S-modus en
P-modus.
Gebruik de vluchtmodusschakelaar op de afstandsbediening om tussen de vluchtmodi van de drone
te schakelen.
De S-modus is alleen beschikbaar met een Mavic Air-afstandsbediening. De S-modus wordt
uitgeschakeld bij vliegen met een mobiel apparaat.
2018 DJI Alle rechten voorbehouden.
©
11
Page 12

Mavic Air Gebruikershandleiding
LED's en statusindicator op de drone
De Mavic Air heeft LED's aan de voorzijde en een statusindicator voor de drone zoals weergegeven in de
onderstaande afbeelding:
LED aan voorzijdeLED aan voorzijde
Statusindicator drone
De LED's aan de voorzijde geven de richting van de drone en de status van sommige functies weer (raadpleeg
het hoofdstuk Functies voor meer bijzonderheden). Wanneer de drone wordt aangezet, branden de LED's aan
de voorzijde continu rood om de voorkant van de drone aan te geven.
De statusindicator van de drone toont de status van het Flight Control System en de Intelligent Flight Battery
van de drone. Raadpleeg onderstaande tabel voor meer informatie over de dronestatussen die met de
statusindicator worden aangeduid. De statusindicator van de drone knippert ook wanneer het Home Point
(thuisbasis) wordt opgenomen, zoals beschreven in het hoofdstuk Terug-naar-Basis.
Statusindicator van drone
Kleur
Normale statussen
Afwisselend rood,
groen en geel
Geel Knippert viermaal Opwarmen
Groen Knippert langzaam P-modus met GPS
Groen
Geel Knippert langzaam
Groen Knippert snel Bezig met remmen
Waarschuwingsstatussen
Geel Knippert snel Signaal afstandsbediening verloren
Rood Knippert langzaam Waarschuwing laag
Rood Knippert snel Accu bijna leeg, ernstig
Rood Knippert IMU-fout
Rood Brandt continu Kritieke fout
Afwisselend rood
en geel
Knipper/brandt
continu
Knippert Inschakelen en uitvoeren van zelftests
Knippert periodiek
twee keer
Knippert snel Kompaskalibratie vereist
Beschrijving status van drone
P-modus met systemen voor voorwaarts en
benedenwaarts zicht
Geen GPS, Forward Vision System of
Downward Vision System
2018 DJI Alle rechten voorbehouden.
©
12
Page 13

Mavic Air Gebruikershandleiding
Terug-naar-Basis
De functie Return-to-Home (RTH) (terug naar thuisbasis) brengt de drone terug naar de laatst geregistreerde
thuisbasis (Home Point). Er zijn drie RTH-types: Smart RTH, RTH bij laag accuniveau, en uitvalbeveiligde RTH.
In dit hoofdstuk worden deze drie scenario's gedetailleerd beschreven.
GPS
Indien een sterk GPS-signaal werd ontvangen voordat de drone opsteeg, dan is
deze locatie, vanwaar de drone opsteeg, de thuisbasis. De sterkte van het GPS-
Thuisbasis
signaal wordt aangegeven door het GPS-pictogram ( ). De statusindicator
van de drone knippert snel groen wanneer het Home Point (thuisbasis) wordt
geregistreerd.
Smart RTH
Als het GPS-signaal voldoende sterk is, kan Smart RTH worden gebruikt om de drone terug te brengen naar
de thuisbasis. Je activeert Smart RTH door te tikken op in de DJI GO 4-app (en de aanwijzingen op het
scherm te volgen) of door de RTH-knop op de afstandsbediening ingedrukt te houden.
Je verlaat Smart RTH door te tikken op in de DJI GO 4-app of door de RTH-knop op de afstandsbediening
in te drukken.
RTH bij laag accuniveau
De RTH bij laag accuniveau wordt geactiveerd wanneer de capaciteit van de Intelligent Flight Battery is
gedaald tot een punt waarbij een veilige terugkeer van de drone in gevaar komt. Laat de drone onmiddellijk
terugkomen of onmiddellijk landen wanneer dit wordt gevraagd. DJI GO 4 toont een mededeling wanneer
een waarschuwing voor een bijna lege accu wordt geactiveerd. De drone keert automatisch terug naar de
thuisbasis indien geen actie wordt ondernomen nadat tien seconden is afgeteld. De gebruiker kan de RTHprocedure afbreken door op de RTH-knop of de vluchtpauzeknop op de afstandsbediening te drukken.
Als de RTH-procedure wordt afgebroken na een waarschuwing voor lage accucapaciteit, is de Intelligent Flight
Battery mogelijk niet voldoende geladen om de drone veilig te laten landen. Hierdoor kan de drone neerstorten
of verloren raken. De drempels voor waarschuwingen voor een laag accuniveau worden automatisch bepaald
op basis van de huidige hoogte van de drone en de afstand vanaf de thuisbasis. De RTH bij laag accuniveau
wordt slechts één keer geactiveerd tijdens elke vlucht.
Beschrijving
Waarschuwing kritiek laag accuniveau
(rood)
Waarschuwing laag
accuniveau (geel)
Opladen vereist om terug te
Indicatorbalk DJI GO 4 voor accuniveau
Accuniveau is hoog
genoeg (groen)
Resterende vliegtijd
12:29
keren naar de thuisbasis
De gekleurde zones en markeringen op de indicatorbalk van DJI GO 4 voor het accuniveau geven de
geschatte resterende vliegtijd aan. Zij passen zich automatisch aan de huidige locatie en status van
de drone aan.
Als het huidige accuniveau alleen nog maar voldoende is om de drone te laten dalen vanaf zijn
huidige hoogte, wordt een waarschuwing gegeven voor een ernstig laag accuniveau en gaat de
drone automatisch dalen en landen. Deze procedure kan niet worden geannuleerd. Als het gevaar
van een botsing bestaat, duw je de gashendel omhoog en navigeer je van het obstakel vandaan.
Als het accuniveau voldoende is, geeft de indicatorbalk voor het accuniveau in de DJI GO 4-app de
geschatte resterende vliegtijd weer op basis van het huidige accuniveau.
2018 DJI Alle rechten voorbehouden.
©
13
Page 14

Mavic Air Gebruikershandleiding
Als een waarschuwing wordt weergegeven voor een laag accuniveau, neem je de maatregelen zoals
beschreven in de onderstaande tabel.
Waarschuwingen RTH en accuniveau
Waarschu-
wing
Laag
accuniveau
Kritiek laag
accuniveau
Statusindicator
drone
Langzaam rood
knipperend
Snel rood
knipperend
DJI GO 4-app
Tik op 'Go-home' om de
drone automatisch te laten
terugkeren naar de thuisbasis
of tik op 'Cancel' om de
normale vlucht te hervatten.
Als geen actie wordt
ondernomen, gaat de drone
na 10 seconden automatisch
terug naar de thuisbasis.
Scherm knippert rood Alarm klinkt
Afstandsbe-
diening
Alarm klinkt
continu
continu
Opmerkingen/instructies
Accuniveau is laag. Laat
de drone onmiddellijk
terugvliegen en landen, zet
vervolgens de motoren stop
en vervang de accu.
De drone gaat automatisch
dalen en landen. Deze
procedure kan niet worden
geannuleerd. Als het gevaar
van een botsing bestaat,
duw je de gashendel
omhoog en navigeer je van
het obstakel vandaan.
Uitvalbeveiligde RTH (Failsafe)
Met het systeem voor voorwaarts gericht zicht kan de drone tijdens een vlucht een real-time kaart van zijn
vliegroute maken. Als het Home Point (thuisbasis) met succes is geregistreerd en het kompas normaal
functioneert, wordt de uitvalbeveiligde RTH automatisch geactiveerd als het signaal van de afstandsbediening
gedurende een bepaalde periode verloren is geraakt (3 seconden bij gebruik van de afstandsbediening en 20
seconden bij vliegen met een mobiel apparaat).
Als de uitvalbeveiligde RTH (Failsafe) wordt geactiveerd, begint de drone via zijn oorspronkelijke route terug te
vliegen naar huis. Als het draadloze signaal binnen 60 seconden na het activeren van de uitvalbeveiligde RTH
wordt hersteld, blijft de drone gedurende 10 seconden op zijn huidige locatie zweven en wacht op opdrachten
van de piloot. De gebruiker kan op in de DJI GO 4-app tikken of op de RTH-knop op de afstandsbediening
drukken om Uitvalbeveiligde RTH te annuleren en weer de controle over de drone over te nemen. Als er door
de piloot geen opdrachten worden gegeven, vliegt de drone in een rechte lijn naar de thuisbasis. Als het
draadloze signaal 60 seconden na het activeren van de uitvalbeveiligde RTH nog steeds niet is hersteld, stopt
de drone met het traceren van zijn oorspronkelijke route naar huis en vliegt in een rechte lijn naar de thuisbasis.
RTH-procedure
Smart RTH, RTH bij laag accuniveau en uitvalbeveiligde RTH volgen de volgende procedure:
1. De drone past zijn richting aan.
2. a. Als de drone verder dan 20 meter van de thuisbasis (Home Point ) is verwijderd, stijgt hij op naar de
vooraf ingestelde RTH-attitude en vliegt dan naar de thuisbasis.
b. Als de drone 5 m tot 20 m van de thuisbasis is verwijderd, vliegt hij op de huidige hoogte naar de
thuisbasis, tenzij de huidige hoogte lager is dan 2,5 meter. In dat geval stijgt hij op naar 2,5 meter en
vliegt dan naar de thuisbasis.
c. Als de drone minder dan 5 meter van de thuisbasis is verwijderd, landt hij onmiddellijk.
3. Wanneer de drone de thuisbasis heeft bereikt, landt hij en gaan de motoren uit.
2018 DJI Alle rechten voorbehouden.
©
14
Page 15

Mavic Air Gebruikershandleiding
1 Registratie thuisbasis 2 Bezig met thuisbasis bevestigen
3 Signaal afstandsbediening verloren
×
4 Signaal langere tijd verloren
×
RTH (instelbare hoogte)
5
Hoogte boven thuisbasis > Uitvalbeveiligde hoogte
×
Stijgen naar uitvalbeveiligde hoogte
Uitvalbeveiligde hoogte
Hoogte boven thuisbasis<=Uitvalbeveiligde hoogte
6 Landen
×
Vermijden van obstakels tijdens RTH
De Mavic Air kan nu tijdens RTH obstakels detecteren en actief proberen te vermijden, mits de
lichtomstandigheden toereikend zijn voor voorwaarts en achterwaarts gericht zicht (Forward en Backward
Vision Systems). De procedure voor het vermijden van obstakels is als volgt:
1. De drone vertraagt wanneer een obstakel wordt gedetecteerd.
2. De drone stopt en zweeft, vliegt dan achteruit en stijgt verticaal tot geen obstakel wordt gedetecteerd.
3. De RTH-procedure wordt hervat. De drone vliegt verder naar de thuisbasis op de nieuwe hoogte.
De drone kan niet terugkeren naar de thuisbasis als het GPS-signaal zwak is of als GPS niet
beschikbaar is.
In Smart RTH en RTH bij laag accuniveau gaat tijdens stijgen naar de RTH-hoogte het stijgen
automatisch tot een hoogte van 20 meter is bereikt. Zodra een hoogte van 20 meter of meer is
bereikt en de gashendel wordt bewogen, stopt de drone met stijgen en vliegt op zijn huidige hoogte
naar de thuisbasis.
De drone kan geen obstakels vermijden tijdens uitvalbeveiligde RTH (Failsafe) als de Forward en
Backward Vision Systems niet beschikbaar zijn. Het is belangrijk om vóór elke vlucht een geschikte
RTH-hoogte in te stellen. Start de DJI GO 4-app, tik op en stel vervolgens de RTH-hoogte in.
De drone kan geen obstakels vermijden boven of naast de drone.
Tijdens de RTH-procedure kunnen de snelheid en hoogte van de drone worden geregeld met de
afstandsbediening of de DJI GO 4-app, maar de oriëntatie en vliegrichting worden aangestuurd door
de vluchtcontroller.
2018 DJI Alle rechten voorbehouden.
©
15
Page 16
Mavic Air Gebruikershandleiding
Landingsbeveiliging
Landingsbeveiliging wordt geactiveerd tijdens Smart RTH.
1. Wanneer de landingsbeveiliging bepaalt dat de grond geschikt is voor een landing, zal de Mavic Air
voorzichtig landen.
2. Wanneer de landingsbeveiliging bepaalt dat de grond niet geschikt is voor een landing, zal de Mavic Air
blijven stilhangen en op bevestiging van de piloot wachten.
3. Indien de landingsbeveiliging niet operationeel is, zal de DJI GO 4-app een landingsprompt weergeven
wanneer de Mavic Air tot onder 0,5 meter daalt. Trek de gashendel omlaag of gebruik de schuif voor
automatische landing om te landen.
Precisielanding
De Mavic Air scant tijdens Return-to-Home automatisch de terreinkenmerken onder de drone en probeert
overeenstemmende kenmerken te zoeken. Wanneer het huidige terrein overeenkomt met het terrein van
het Home Point (thuisbasis), begint de Mavic Air met landen. De DJI GO 4-app toont een prompt 'geen
overeenstemmend terrein' indien geen overeenstemmende kenmerken worden gevonden.
De prestatie van de precisielanding is onderhevig aan de volgende voorwaarden:
a. Het Home Point (thuisbasis) moet worden geregistreerd bij opstijging en mag niet worden
veranderd tijdens de vlucht, omdat de drone anders geen informatie heeft over de
terreinkenmerken van de thuisbasis.
b. Tijdens het opstijgen moet de drone 7 meter verticaal stijgen voordat hij horizontaal beweegt.
c. De terreinkenmerken van de thuisbasis moeten grotendeels ongewijzigd blijven.
d. De terreinkenmerken van de thuisbasis moeten voldoende onderscheidend zijn.
e. De lichtomstandigheden mogen niet te licht of te donker zijn.
Tijdens een precisielanding zijn de volgende acties beschikbaar:
a. Gashendel naar beneden om de landing te versnellen.
b. De joysticks in een andere richting bewegen om de precisielanding te stoppen. De Mavic Air landt
verticaal nadat de joysticks zijn losgelaten.
Vision Systems
De Mavic Air is uitgerust met systemen voor voorwaarts, achterwaarts en neerwaarts gericht zicht waarmee de
omgeving vóór en achter de drone constant wordt gescand op obstakels, waardoor botsingen kunnen worden
voorkomen door om of over obstakels heen te vliegen of door stil te hangen (als de lichtomstandigheden
toereikend zijn).
De belangrijkste onderdelen van deze Forward en Backward Vision Systems zijn vier camera's op de neus en
de achterzijde van de drone.
Het Downward Vision System helpt de drone zijn huidige positie te behouden. Met behulp van het Downward
Vision System kan je Mavic Air preciezer op zijn plaats stilhangen en binnen of in andere omgevingen vliegen
waar geen GPS-signaal beschikbaar is. De belangrijkste onderdelen van het Downward Vision System zijn twee
camera's en één 3D-infraroodmodule aan de onderzijde van de drone.
Systeem zicht naar voren Vision System naar achteren
Systeem zicht naar beneden
2018 DJI Alle rechten voorbehouden.
©
16
Page 17

Mavic Air Gebruikershandleiding
Detectievelden
De detectievelden van de systemen voor voorwaarts, achterwaarts en neerwaarts gericht zicht (Forward Vision
System, Backward Vision System en Downward Vision System) zijn hieronder afgebeeld. Merk op dat de drone
geen obstakels kan detecteren of vermijden die zich niet binnen de detectievelden bevinden.
50°
50°
50°
Middenlijn
5°
van camera
50°
50°
50°
53°
53°
53°
38°
5°
38°
67°
Camera's van de zichtsystemen kalibreren
De op de drone geïnstalleerde camera's van de systemen voor voorwaarts, achterwaarts en neerwaarts gericht
zicht zijn in de fabriek gekalibreerd. Het is echter mogelijk dat kalibratie nodig is met DJI Assistant 2 of de DJI
GO 4-app als de drone ergens tegenaan is gebotst.
De nauwkeurigste manier voor het kalibreren van de zichtsystemen is met DJI Assistant 2. Volg onderstaande
stappen voor het kalibreren van de camera's van het Forward Vision System en herhaal dan de stappen om de
camera's van het Backward en het Downward Vision System te kalibreren.
01
Richt de drone naar het scherm
02
Lijn de vakken uit
03
Pan en kantel de drone
1. Richt de drone naar het scherm.
2. Verplaats de drone om de vakken op het scherm uit te lijnen.
3. Pan (draai) en kantel de drone zoals gevraagd.
Wanneer de DJI GO 4-app meldt dat kalibratie van een zichtsysteem nodig is, maar er geen computer bij de
hand is, kan een snelle kalibratie worden uitgevoerd in de app. Tik achtereenvolgens op 'Aircraft Status' >
'Vision Sensors' om de snelle kalibratie te starten.
Een snelle kalibratie is een snelle oplossing voor problemen met zichtsystemen. Als het mogelijk
is, dan verdient het aanbeveling de drone op een computer aan te sluiten om een volledige
kalibratie uit te voeren met behulp van DJI Assistant 2. Voer alleen een kalibratie uit wanneer de
lichtomstandigheden toereikend zijn en op geproleerde oppervlakken zoals gras.
Voer geen kalibratie uit op sterk reecterende oppervlakken zoals marmer of keramische tegels.
2018 DJI Alle rechten voorbehouden.
©
17
Page 18

Mavic Air Gebruikershandleiding
De zichtsystemen gebruiken
Het systeem voor benedenwaarts gericht zicht wordt automatisch geactiveerd wanneer de drone wordt
ingeschakeld. Er is geen verdere actie vereist. Met het systeem voor benedenwaarts gericht zicht kan de drone
zelfs zonder GPS precies stil blijven hangen.
Het systeem voor benedenwaarts gericht zicht wordt vaak gebruikt in binnen gelegen ruimtes waar GPS niet
beschikbaar is. Het Downward Vision System werkt het best wanneer de drone op een hoogte van 0,5 tot
8 meter vliegt. Als de drone hoger vliegt dan 8 meter, werkt de functie Vision Positioning mogelijk niet naar
behoren, waardoor extra voorzichtigheid vereist is.
Voer de stappen hieronder uit om het Downward Vision System te gebruiken:
1. Zorg ervoor dat de drone in de P-modus is en plaats de drone op een vlakke ondergrond. Merk op dat het
systeem voor benedenwaarts gericht zicht niet goed werkt op oppervlakken zonder duidelijke variaties in
het patroon.
2. Schakel de drone in. Na het opstijgen zal de drone stilhangen op zijn plaats. De statusindicator van de drone
knippert tweemaal groen, wat aangeeft dat het Downward Vision System in werking is.
Met de Forward en Backward Vision Systems kan de drone actief remmen wanneer de drone obstakels
herkent die vóór de drone aanwezig zijn. De Forward and Backward Vision Systems werken het best wanneer
er voldoende licht is en obstakels duidelijk gemarkeerd zijn of een duidelijke structuur hebben. De drone mag
niet sneller vliegen dan 22,8 km/u (17,9 mph) om er zeker van te zijn dat de remafstand voldoende is.
De prestaties van de Vision Systems worden beïnvloed door het oppervlak waarboven wordt
gevlogen. De drone schakelt automatisch naar Attitude-modus (ATTI) wanneer de Vision Systems
niet beschikbaar zijn of zijn uitgeschakeld en het GPS-signaal zwak is of als het kompas interferentie
ondervindt. Bestuur de drone met uiterste voorzichtigheid in de volgende situaties:
a. Bij het vliegen met hoge snelheid op een hoogte lager dan 0,5 m (1,6 ft).
b. Bij het vliegen boven monochrome oppervlakken (bijv. volkomen zwart, volkomen wit, volkomen
rood, volkomen groen).
c. Bij het vliegen boven sterk reecterende oppervlakken.
d. Bij het vliegen boven water of transparante oppervlakken.
e. Bij het vliegen boven bewegende oppervlakken of voorwerpen.
f. Bij het vliegen in een gebied waar de verlichting vaak of sterk verandert.
g. Bij het vliegen boven extreem donkere (< 10 lux) of lichte (> 100.000 lux) oppervlakken of in de
richting van heldere lichtbronnen (bijvoorbeeld richting de zon).
h. Bij het vliegen boven oppervlakken zonder duidelijke patronen of structuur.
i. Bij het vliegen boven oppervlakken met identieke herhalende patronen of structuren (bijvoorbeeld
tegels).
j. Bij het vliegen boven kleine en jne voorwerpen (bijv. takken of hoogspanningsleidingen).
k. Bij het vliegen met hoge snelheden van meer dan 18 km/u (11,2 mph) op een hoogte van 1 meter
(3,3 ft).
2018 DJI Alle rechten voorbehouden.
©
18
Page 19

Mavic Air Gebruikershandleiding
Zorg dat de camera's en sensoren te allen tijde schoon zijn. Vuil of andere rommel kan de eectiviteit
van sensoren nadelig beïnvloeden.
De Forward, Backward en Downward Vision Systems herkennen patronen op de grond mogelijk niet
bij zeer weinig licht (minder dan 100 lux).
Intelligente vluchtmodi
De Mavic Air ondersteunt intelligente vluchtmodi, waaronder QuickShots, ActiveTrack, SmartCapture,
Statiefmodus, Cinemamodus, TapFly en bezienswaardigheid (POI). Tik op in DJI GO 4 om een intelligente
vluchtmodus te selecteren.
QuickShots
QuickShots-opnamemodi zijn Dronie, Circle, Helix, Rocket, Boomerang en Asteroid. De Mavic Air maakt een
video-opname volgens de geselecteerde opnamemodus en maakt er vervolgens automatisch een video van 10
seconden van. De video kan worden bekeken, bewerkt of gedeeld op sociale media via het afspeelmenu.
Dronie: De drone vliegt achteruit en omhoog, met de camera op het object gericht.
Cirkel: De drone vliegt rondjes om je object.
Helix: De drone vliegt omhoog en kringelt om je object heen.
Rocket:
Zorg dat er voldoende ruimte is bij het gebruik van Boomerang: Houd een horizontale straal van minimaal
Zorg dat er voldoende ruimte is bij het gebruik van Asteroid: Zorg voor minimaal 40 m (132 ft) ruimte
De drone stijgt op met de camera naar beneden gericht.
Boomerang: De drone vliegt in een ovale beweging rond je object, omhoog als hij wegvliegt vanaf het
startpunt en omlaag als hij terugvliegt. De startpunten van de drone vormen één uiteinde van de lange as
van het ovaal, terwijl het andere uiteinde van de lange as zich aan de andere kant van het object bevindt
gezien vanaf het startpunt.
30 m (99 ft) rond de drone aan. Zorg ook voor minimaal 10 m (33 ft) ruimte boven de drone.
Asteroid: De drone vliegt achteruit en omhoog, neemt een aantal foto's en vliegt dan terug naar het
startpunt. De gemaakte video begint met een panorama van de hoogste positie en toont vervolgens de
afdaling.
achter en 50 m (164 ft) ruimte boven de drone.
QuickShots gebruiken
Zorg ervoor dat de drone in de P-modus is en dat de Intelligent Flight Battery voldoende is opgeladen.
Voer de stappen hieronder uit om QuickShots te gebruiken:
1. Stijg op en blijf op ten minste 2 meter (6,6 ft) boven de grond stilhangen.
2 m
2. Tik in DJI GO 4 op , selecteer vervolgens QuickShots en volg de instructies.
2018 DJI Alle rechten voorbehouden.
©
19
Page 20

Mavic Air Gebruikershandleiding
ISO
SHUTTEREVWB
CAPACITY
3. Selecteer je doelobject in Camera View (tik op de cirkel op het onderwerp of sleep een kader rond het
onderwerp) en kies een opnamemodus. Tik op “GO” om te beginnen met opnemen. De drone zal naar zijn
oorspronkelijke positie terugvliegen zodra de opname is beëindigd.
In flight (GPS)
QuickShot
1600 0.31/8000
12
09:29
61%
2.4G
1080P/2420GB
AsteroidDronie HelixCircle Rocket Boomerang
4. Tik op om de video te bekijken.
QuickShots zijn alleen beschikbaar wanneer het GPS-signaal sterk is.
De drone kan geen obstakels vermijden boven of naast de drone.
In alle QuickShots-opnamemodi worden video's opgenomen met 30 fps en in Asteroid worden
beelden vastgelegd in 1080p. Deze instellingen zijn vooraf ingesteld en kunnen niet worden
aangepast.
QuickShots afsluiten
Tik op in de DJI GO 4 of zet de vluchtmodusschakelaar in de S-modus wanneer je QuickShots tijdens het
maken van opnamen wilt verlaten. Druk op de vluchtpauzeknop op de afstandsbediening om een noodstop uit
te voeren.
ActiveTrack
Met ActiveTrack kun je op het scherm van je mobiele apparaat verschillende bewegende objecten markeren
en volgen. Er is geen extern volgapparaat nodig. Mavic Air kan automatisch mensen, voertuigen en boten
onderscheiden en volgen en voor elk een andere volgstrategie gebruiken.
Gebruik van ActiveTrack
Zorg ervoor dat de drone in de P-modus is en dat de Intelligent Flight Battery voldoende is opgeladen. Voer de
stappen hieronder uit om ActiveTrack te gebruiken:
1. Stijg op en blijf op ten minste 2 meter (6,6 ft) boven de grond stilhangen.
2 m
2. Tik in DJI GO 4 op en selecteer ActiveTrack.
2018 DJI Alle rechten voorbehouden.
©
20
Page 21

Mavic Air Gebruikershandleiding
ISO
SHUTTEREVWB
CAPACITY
3. Tik op het object dat je wilt volgen en tik vervolgens om je keuze te bevestigen. Indien het object niet
automatisch wordt herkend, sleep er dan een vak omheen. Het vak wordt groen wanneer het onderwerp is
herkend en volgen is gestart. Indien het vak rood wordt, kan het object niet worden geïdenticeerd en moet
je het opnieuw proberen.
In flight (GPS)
ActiveTrack
1600 0.31/8000
Trace
12
09:29
61%
2.4G
1080P/2420GB
SpotlightParallel
4. De drone zal op zijn vliegpad obstakels automatisch vermijden. Als de drone het object tijdens het volgen
kwijtraakt omdat het te snel beweegt of wordt verduisterd, selecteer het object dan opnieuw om het volgen
te hervatten.
ActiveTrack bevat de volgende submodi:
Volgen
Parallel
Spotlicht
De drone volgt het object
op een constante afstand.
Gebruik de rolstick op de
afstandsbediening of de schuif
in DJI GO 4 om in een cirkel
rond het object te vliegen.
De drone volgt het object in een
constante hoek en op een constante afstand vanaf de zijkant.
Gebruik de rolstick op de afstandsbediening om in een cirkel
rond het object te vliegen.
De drone zal een object niet
automatisch volgen, maar zal de
camera tijdens de vlucht op het object
gericht houden. De afstandsbediening
kan worden gebruikt om met de
drone te manoeuvreren, maar
oriëntatiebesturing is uitgeschakeld.
Met de linkerjoystick en het gimbalwiel
kan de inkadering van het object
worden aangepast.
2018 DJI Alle rechten voorbehouden.
©
21
Page 22

Mavic Air Gebruikershandleiding
Gebruik ActiveTrack NIET in gebieden met mensen, dieren, kleine en jne objecten (bijv. takken en
hoogspanningsleidingen) of transparante objecten (bijv. glas of water).
Blijf uit de buurt van obstakels op de vliegroute, met name obstakels links en rechts van de drone.
Bestuur de drone handmatig (druk op de vluchtpauzeknop of zet de vluchtmodusschakelaar in de
S-modus op de afstandsbediening) of tik op in DJI GO 4 in geval van nood.
Wees extra voorzichtig met het gebruik van ActiveTrack in de volgende situaties:
a. Het gevolgde object beweegt zich niet in een horizontaal vlak.
b. Het gevolgde object verandert sterk van vorm wanneer het beweegt.
c. Het gevolgde object kan een lange tijd uit het zicht zijn.
d. Het gevolgde object beweegt zich over een besneeuwd oppervlak.
e. Het gevolgde object heeft een vergelijkbare kleur of een vergelijkbaar patroon als de omgeving.
f. Er is te weinig licht (< 300 lux) of te veel licht (> 10.000 lux).
Je dient je aan de lokale privacywetgeving en regelgeving houden bij het gebruik van ActiveTrack.
ActiveTrack verlaten
Tik op op het scherm of zet de vluchtmodusschakelaar in de S-modus op de afstandsbediening om
ActiveTrack af te sluiten. Nadat ActiveTrack is verlaten, zal de drone stilhangen op zijn plaats. Je kunt er dan
voor kiezen om handmatig te vliegen, een ander object te volgen of terug te keren naar de thuisbasis.
SmartCapture
Met een goed begrip van gebarenherkenning kun je seles maken, video's opnemen en de drone besturen met
eenvoudige handbewegingen. De Mavic Air beschikt over gloednieuwe modi, zoals GestureLaunch, Follow en
GestureLand. (Opmerking: Firmware v1.0.1.0 of hoger is vereist voor het gebruik van SmartCapture en rmware
v1.0.2.0 of hoger is vereist om de drone te laten vliegen zonder gebruik te maken van de afstandsbediening of
DJI GO 4. )
SmartCapture kan worden geselecteerd door te tikken op in de DJI GO 4-app en SmartCapture
te selecteren of door tweemaal op de functietoets te drukken. De eerste keer dat je SmartCapture
gebruikt, selecteer je dit in de DJI GO 4-app en lees je de waarschuwingsprompt aandachtig door.
Gebruik SmartCapture alleen als je de waarschuwing begrijpt.
Gebruik SmartCapture alleen in open terrein zonder obstakels, met voldoende licht en uit de buurt
van veel mensen.
Gebruik SmartCapture alleen met de propellerafschermingen gemonteerd.
FaceAware en PalmControl activeren
Voor het gebruik van SmartCapture activeer je eerst FaceAware en PalmControl:
1. Tik op in de DJI GO 4-app en selecteer SmartCapture of druk tweemaal op de functietoets. Wanneer
FaceAware is geactiveerd piept de drone tweemaal en gaan de voorste LED's continu geel branden.
2. Gebruik vervolgens een van de volgende twee methoden om PalmControl te activeren:
a. GestureLaunch: Als de drone zich op de grond bevindt, kun je
GestureLaunch gebruiken om de drone te laten opstijgen en
PalmControl te activeren. Ga op een afstand van 2 tot 3 meter van
de voorzijde van de drone staan met je handpalm voor de neus van
de drone. Houd je handpalm open en je vingers dicht bij elkaar. Na
ongeveer twee seconden stijgt de drone automatisch op en blijft zweven
op een hoogte van 1,2 meter. De voorste LED's knipperen langzaam
groen om aan te geven dat PalmControl is geactiveerd.
2018 DJI Alle rechten voorbehouden.
©
22
1.2m
Page 23

Mavic Air Gebruikershandleiding
b. Als het toestel al is opgestegen, til je je arm op, strek je hem uit en houd je je handpalm ongeveer 2
meter voor de neus van de drone. Houd je handpalm open en je vingers dicht bij elkaar. De voorste
LED's gaan na ongeveer twee seconden langzaam groen knipperen om aan te geven dat PalmControl is
geactiveerd.
Als de omstandigheden niet geschikt zijn voor het gebruik van SmartCapture, branden de
voorste LED's continu rood en wordt er een waarschuwing weergegeven in DJI GO 4. Als je niet
gebruikmaakt van de app, sluit je de drone aan op je mobiele apparaat en start je de app om een
beschrijving van de waarschuwing te zien.
Wanneer FaceAware en PalmControl zijn geactiveerd, kun je de drone op de volgende manieren besturen. (Blijf
binnen een afstand van 7 meter van de drone om te zorgen dat je gebaren herkend worden):
Positie regelen
Beweeg je handpalm langzaam omhoog of omlaag
om de positie van de drone te regelen. Beweeg
je arm naar links of rechts om de oriëntatie van
de drone te regelen. Beweeg naar voren of naar
achteren om vooruit of achteruit te vliegen.
Voorste LED's knipperen langzaam groen
Afstand regelen
Til je andere arm op, strek hem uit en houd je twee
handpalmen dicht bij elkaar. Beweeg je handen
uit elkaar en de drone vliegt bij je vandaan tot een
maximale afstand van 6 meter. Beweeg je handen
naar elkaar toe en de drone vliegt naar je toe tot een
minimale afstand van 2 meter.
Voorste LED's knipperen langzaam groen
Volg mij
Laat je handen vallen om Follow te activeren. Wanneer Follow eenmaal is
geactiveerd, gaan de voorste LED's continu groen branden. Als je je lichaam
beweegt, volgt de drone je automatisch. Terwijl Follow actief is, kun je je hand of
handen omhoog doen om de andere SmartCapture-functies te gebruiken.
Voorste LED's continu groen
Met Follow kun je Trace selecteren om te zorgen dat de drone je op een
constante afstand volgt of Profile om te zorgen dat de drone je onder een
constante hoek en afstand aan de zijkant volgt. (Raadpleeg het hoofdstuk
ActiveTrack voor meer informatie over Trace en Profile.) Als je SmartCapture
gebruikt zonder de DJI GO 4-app, wordt Trace of Prole geselecteerd op basis
van wat je het laatst hebt gebruikt toen je Follow gebruikte bij het gebruik van
SmartCapture met de app. Als je nog nooit Follow hebt gebruikt bij het gebruik
van SmartCapture met de app, wordt de standaardkeuze (Trace) geselecteerd.
2018 DJI Alle rechten voorbehouden.
©
23
Page 24

Mavic Air Gebruikershandleiding
Sele
Maak een V-gebaar met één hand. Zodra je selfiegebaar is herkend, wordt
twee seconden afgeteld. Tijdens de eerste seconde van het aftellen knipperen
de voorste LED's van de drone langzaam rood en tijdens de tweede seconde
knipperen ze snel rood.
Groepssele
Maak twee of meer V-gebaren tegelijkertijd. Zodra het gebaar voor de
groepsselfie is herkend, wordt twee seconden afgeteld, waarna de drone de
eerste van drie foto's neemt. Tijdens het aftellen knipperen de voorste LED's één
seconde langzaam rood en dan één seconde snel rood. De voorste LED's gaan
vervolgens uit en de drone neemt een foto op zijn huidige positie.
Vervolgens vliegt de drone naar een punt op ongeveer 5 meter (16 ft) afstand
van je groep, stijgt op en neemt een foto onder een hoek van 30°. Dan vliegt de
drone naar een punt op ongeveer 7 meter (23 ft) afstand van je groep, stijgt op
en neemt een foto onder een hoek van 15°. Tenslotte vliegt de drone terug naar
zijn oorspronkelijke positie. De voorste LED's knipperen twee keer rood wanneer
de drone de tweede en de derde foto neemt.
Gebruik de groepsselfie alleen in gebieden met een sterk GPS-signaal. De groepsselfiefunctie is
uitgeschakeld als er geen GPS-signaal is (bijvoorbeeld bij vliegen binnenshuis).
Video's opnemen
Maak een lijstgebaar met je vingers (waarbij ten minste één hand zich boven je
neus bevindt). Zodra het lijstgebaar is herkend, gaan de voorste LED's van de
drone uit en begint de camera met opnemen. Wanneer vijf seconden of meer zijn
verstreken, maak je opnieuw het lijstgebaar om de opname te stoppen.
Voorste LED's uit
Besturing naar iemand anders
Laat je hand richting de grond vallen. De voorste LED's gaan continu groen
branden. Degene die de drone wil besturen, moet zijn of haar handpalm voor de
drone omhoog houden. Zodra de drone onder de controle van deze persoon is,
gaan de voorste LED's langzaam groen knipperen.
Voorste LED's knipperen langzaam groen
2018 DJI Alle rechten voorbehouden.
©
24
Page 25

Mavic Air Gebruikershandleiding
GestureLand
Beweeg je handpalm langzaam omlaag om de drone te laten dalen. Ga door
tot hij op zijn minimale hoogte is en laat hem dan nog drie seconden dalen. De
drone landt automatisch en de motoren gaan uit.
Voorste LED's knipperen langzaam groen
Wees voorzichtig bij het landen van de drone met GestureLand, aangezien de drone blijft reageren
op handgebaren totdat je SmartCapture verlaat. Als de drone het GestureLaunch-gebaar detecteert
voordat je SmartCapture hebt afgesloten, stijgt hij op. Wees voorzichtig bij het benaderen van de drone
en zorg dat je niet per ongeluk het GestureLaunch-gebaar maakt.
SmartCapture afsluiten
Tik op in DJI GO 4 of zet de vluchtmodusschakelaar in de S-modus op de afstandsbediening om
SmartCapture af te sluiten. Als je SmartCapture gebruikt zonder de DJI GO 4-app, moet je wanneer je
SmartCapture wilt afsluiten, eerst de drone laten landen met GestureLand en dan de drone uitzetten, of
de drone verbinden met DJI GO 4 en op tikken of de drone verbinden met de afstandsbediening en de
vluchtmodusschakelaar in de S-modus zetten.
De drone sluit SmartCapture niet automatisch af. Terwijl de drone in de lucht is en nadat hij is geland
met GestureLand, blijft hij reageren op handgebaren totdat je SmartCapture handmatig afsluit. Wees
dus voorzichtig.
Bij het gebruik van SmartCapture zonder de afstandsbediening of de DJI GO 4-app:
a. Als geen gezicht of handpalm wordt waargenomen in de eerste 60 seconden na het opstijgen,
landt de drone automatisch;
b. Als het object wegvalt tijdens Follow, vliegt de drone terug naar de positie waar het object recent
is waargenomen en wacht af. Als de drone het object binnen 30 seconden waarneemt, zet de
drone het volgen voort. Als het object niet binnen 30 seconden wordt waargenomen, landt de
drone automatisch.
Statiefmodus
Tik op in de DJI GO 4-app om de statiefmodus in te schakelen. In de statiefmodus is de maximale
vliegsnelheid beperkt tot 3,6 km/u (2,2 mph). Ook de respons op joystickbewegingen is verminderd om de
bewegingen beter controleerbaar en vloeiender te maken.
Gebruik de statiefmodus alleen wanneer het GPS-signaal sterk is of wanneer de lichtomstandigheden
ideaal zijn voor de Vision Systems. Als het GPS-signaal verloren raakt en indien de Vision Systems
zijn uitgeschakeld of niet beschikbaar zijn, schakelt de drone automatisch naar de ATTI-modus. In
dit geval zal de vliegsnelheid toenemen en zal de drone niet stilhangen op zijn plaats. Gebruik de
statiefmodus voorzichtig.
Cinemamodus
Tik op in de DJI GO 4-app om de cinemamodus in te schakelen. In cinemamodus is de remweg van de
drone langer en de draaisnelheid lager. De drone vertraagt langzaam totdat hij tot stilstand komt. Ondertussen
blijft hij duidelijke en stabiele beelden leveren, ook wanneer de besturingssignalen van een slechte kwaliteit zijn.
2018 DJI Alle rechten voorbehouden.
©
25
Page 26

Mavic Air Gebruikershandleiding
ISO
SHUTTEREVWB
CAPACITY
TapFly
TapFly heeft vier submodi: vooruit, achteruit, vrij en coördinaten. Als de lichtomstandigheden geschikt zijn (tussen
300 en 10.000 lux), vermijdt de drone automatisch de obstakels die hij detecteert.
Vooruit: De drone vliegt naar het doel terwijl het Forward Vision System obstakels detecteert.
Achteruit: De drone vliegt in de tegenovergestelde richting van het doel terwijl het Backward Vision System
Vrij: De drone vliegt in de richting van het doel. De afstandsbediening kan worden gebruikt om vrij met
Coördinaten: Tik op een specieke locatie op het scherm. De drone zal op zijn huidige hoogte naar dat punt
Gebruik van TapFly
Zorg ervoor dat de drone in de P-modus is en dat de Intelligent Flight
Battery voldoende is opgeladen. Voer de stappen hieronder uit om
TapFly te gebruiken:
1. Stijg op en blijf op ten minste 1 meter (3,3 ft) boven de grond
2. Tik in DJI GO 4 op , selecteer vervolgens TapFly, selecteer een submodus en volg de instructies.
3. Tik eenmaal op het doel en wacht tot de knop GO verschijnt. Tik op de knop GO om je keuze te bevestigen,
obstakels detecteert.
de oriëntatie van de drone te manoeuvreren.
toegaan en vervolgens op zijn plaats stil blijven hangen.
1 m
stilhangen.
waarna de drone automatisch naar het doel zal vliegen. Er wordt een melding weergegeven als het doel
niet kan worden bereikt. Selecteer, indien dit het geval is, een ander doel en probeer opnieuw. Door op het
scherm te tikken kan het doel tijdens de vlucht gewijzigd worden.
12
In flight (GPS)
TapFly
1600 0.31/8000
12
09:29
61%
2.4G
1080P/2420GB
GO
Forward
Reverse CoordinateFree
TapFly verlaten
Druk op de vluchtpauzeknop op de afstandsbediening of trek een joystick in de richting tegenovergesteld aan
de vlucht en het vliegtuig remt en blijft op zijn plaats hangen. Tik op het scherm om TapFly te hervatten. Tik op
of zet de vluchtmodusschakelaar in de S-modus om TapFly af te sluiten.
Gebruik TapFly NIET in gebieden met mensen, dieren, kleine en fijne objecten (bijv. takken en
hoogspanningsleidingen) of transparante objecten (bijv. glas of water). De TapFly-modus werkt
mogelijk niet goed als de drone boven water of een met sneeuw bedekt gebied vliegt.
Er kunnen afwijkingen zijn tussen verwachte en werkelijke vliegpaden die je in TapFly hebt
geselecteerd.
Het selecteerbare bereik voor de doelrichting is beperkt. Je kunt dicht bij de bovenste of onderste
rand van het scherm geen keuze maken.
2018 DJI Alle rechten voorbehouden.
©
26
Page 27

Mavic Air Gebruikershandleiding
Bezienswaardigheid (POI)
Selecteer een object en stel de cirkelstraal, vlieghoogte en vliegsnelheid in. De drone vliegt rond het object
volgens deze instellingen.
N
139m
7m/s 1.1m/s 627m
POINT OF INTEREST
34M
612m
Exit
3M/S
Flight Altitude Circle Radius
12M
Stop
Geavanceerde Pilot Assistance-systemen
De functie Advanced Pilot Assistance Systems (APAS) is beschikbaar in de P-modus. Wanneer APAS
is ingeschakeld, blijft de drone reageren op opdrachten en plant zijn route zowel op basis van de
joystickopdrachten als de vliegomgeving. APAS maakt het gemakkelijker om obstakels te vermijden en
vloeiendere beelden te krijgen en biedt een betere vliegbeleving.
Wanneer APAS is ingeschakeld en op de afstandsbediening op de vluchtpauzeknop wordt gedrukt of in de DJI
GO 4-app op wordt getikt, komt de drone tot stilstand. De drone wacht drie seconden op opdrachten van
de piloot.
Wanneer je APAS wilt inschakelen, tikt je op
De APAS-functie wordt automatisch uitgeschakeld bij het gebruik van intelligente vluchtmodi en
wordt automatisch hervat bij het beëindigen van intelligente vluchtmodi.
in de DJI GO 4-app.
APAS
Vluchtrecorder
Vluchtgegevens inclusief vluchttelemetrie, informatie over de dronestatus en andere parameters worden
automatisch opgeslagen op de interne datarecorder van de drone. Deze gegevens zijn toegankelijk via DJI
Assistant 2.
Propellers bevestigen en verwijderen
De Mavic Air gebruikt model 5332S-propellers. Er zijn twee soorten 5332S-propellers die zijn ontworpen om
in verschillende richtingen te draaien. De aan- of afwezigheid van witte markeringen op de propellers geeft aan
om welk type propeller het gaat en dus op welke motoren ze aangesloten moeten worden.
2018 DJI Alle rechten voorbehouden.
©
27
Page 28

Mavic Air Gebruikershandleiding
Gemarkeerd Ongemarkeerd
Aansluiten op motoren met witte markeringen Aansluiten op motoren zonder witte markeringen
Draai de propellers in de aangegeven montagerichting en zet de propellers vast.
Propellers bevestigen
Bevestig de propellers met de witte markeringen op de motoren met witte markeringen. Druk elke propeller op
de montageplaat en draai deze naar de vergrendelstand totdat de propeller vastzit. Bevestig de ongemarkeerde
propellers op de motoren zonder markeringen.
Witte markeringen Ongemarkeerd
Propellers demonteren
Druk de propellers omlaag tot in de montageplaat en draai ze in de ontgrendelingsrichting.
Propellerbladen zijn scherp. Wees dus voorzichtig.
Gebruik alleen originele DJI-propellers en gebruik geen verschillende typen propellers door elkaar.
Controleer vóór elke vlucht of de propellers in goede staat zijn. Gebruik geen oude, beschadigde of
gebroken propellers.
Controleer vóór elke vlucht of de propellers en motoren stevig en correct zijn geïnstalleerd.
Blijf om letsel te voorkomen uit de buurt van ronddraaiende propellers of motoren en raak deze niet
aan.
Plaats de drone tijdens vervoer of opslag in de richting die wordt aangegeven in de draagtas om
te voorkomen dat de propellers beschadigd raken. Knijp niet in de propellers en buig ze niet. Als
propellers vervormd raken, heeft dit invloed op de vliegprestaties.
Intelligent Flight Battery
De Mavic Air Intelligent Flight Battery is een accu van 11,55 V, 2375 mAh met functionaliteit voor slim opladen/
ontladen. De accu mag alleen worden opgeladen met een geschikte netstroomadapter die is goedgekeurd
door DJI.
Accukenmerken
1. Weergave accuniveau: De LED-indicators geven het huidige accuniveau weer.
2. Functie voor automatisch ontladen: Bij inactiviteit van meer dan 10 dagen ontlaadt de accu automatisch
tot onder 65% van zijn maximale lading, om opzwellen te voorkomen. Het duurt ongeveer 1 dag om de
accu naar 65% te ontladen. Het is normaal dat je een matige warmte uit de accu voelt komen tijdens de
ontlaadprocedure.
3. Uitgebalanceerd opladen: De voltages van de accucellen worden automatisch gebalanceerd tijdens het
opladen.
2018 DJI Alle rechten voorbehouden.
©
28
Page 29
Mavic Air Gebruikershandleiding
4. Overlaadbeveiliging: Het opladen stopt automatisch wanneer de accu volledig opgeladen is.
5. Temperatuurdetectie: De accu laadt uitsluitend op wanneer de temperatuur tussen de 5 en 40 °C ligt.
6. Bescherming tegen te hoge stroom: De accu stopt met opladen als een te hoge stroom wordt
gedetecteerd.
7. Bescherming tegen overontlading: Het ontladen stopt automatisch om te voorkomen dat de accu te ver
wordt ontladen.
8. Beveiliging tegen kortsluiting: De voeding wordt automatisch onderbroken wanneer kortsluiting wordt
gedetecteerd.
9. Bescherming tegen beschadiging van accucellen: De DJI GO 4-app toont een waarschuwingsbericht
wanneer een beschadigde accucel wordt gedetecteerd.
10. Slaapstand: Na een inactiviteit van 20 minuten onderbreekt de accu de stroomvoorziening en schakelt uit
om energie te besparen. Wanneer het accuniveau minder is dan 10% gaat de accu na een inactiviteit van
zes uur in slaapstand om een te hoge ontlading te voorkomen. In slaapstand branden de indicatoren van
het accuniveau niet. Door het opladen wordt de accu uit de slaapstand gehaald.
11. Communicatie: Informatie over de spanning, capaciteit en stroom van de accu wordt verzonden naar de
drone.
Raadpleeg de veiligheidsrichtlijnen van de Mavic Air Intelligent Flight Battery voordat je de accu in
gebruik neemt. Gebruikers zijn volledig aansprakelijk voor alle handelingen en elk gebruik.
Voordat je de Intelligent Flight Batteries in een drone plaatst, moeten ze eerst worden ontladen tot
het accuniveau 30% of lager is. Je kunt dit doen door de Mavic Air buiten te laten vliegen tot er
minder dan 30% lading over is of tot de Intelligent Flight Battery niet meer aan gaat.
Gebruik van de accu
Druk één keer op de aan-/uitknop, druk nogmaals op deze knop en houd de knop twee seconden ingedrukt
om de accu in of uit te schakelen.
Accuniveau-leds
LED1
LED2
LED3
LED4
Aan-/uitknop
Melding temperatuur laag
1. De accucapaciteit wordt aanzienlijk minder als wordt gevlogen in omgevingen met lage temperaturen (tussen
-10 °C en 5 °C).
2. Accu's kunnen niet worden gebruikt in omgevingen met extreem lage temperaturen (< -10 °C).
3. Stop zo snel mogelijk met vliegen wanneer de DJI GO 4-app in omgevingen met lage temperaturen de
waarschuwing voor een laag accuniveau toont.
4. Houd de temperatuur van de accu boven 20 °C om verzekerd te zijn van optimale accuprestaties.
5. De verminderde accucapaciteit in een lage omgevingstemperatuur vermindert de windbestendigheid van de
drone, dus wees extra voorzichtig.
Plaats in koude omgevingen de accu in het accucompartiment, schakel de drone in en laat deze circa
1 tot 2 minuten ingeschakeld om de accu op te warmen voordat wordt opgestegen.
2018 DJI Alle rechten voorbehouden.
©
29
Page 30

Mavic Air Gebruikershandleiding
Accuniveau controleren
De accuniveau-LED's op de accu geven aan hoeveel lading resteert. Als de accu is uitgeschakeld, druk dan
eenmaal op de aan-/uitknop, waarna de accuniveau-LED's gaan branden om het huidige accuniveau aan te
geven.
Accuniveau-leds
: LED is aan. : LED knippert. : LED is uit.
LED1 LED2 LED3 LED4
Accuniveau
88% - 100%
75% - 88%
63% - 75%
50% - 63%
38% - 50%
25% - 38%
13% - 25%
0% - 13%
Accu opladen
De Intelligent Flight Battery moet vóór het eerste gebruik volledig zijn opgeladen:
1. Sluit de netstroomadapter aan op een stopcontact (100-240 V, 50/60 Hz).
2. Sluit de Intelligent Flight Battery met de acculaadkabel aan op de netstroomadapter met de accu
uitgeschakeld.
3. De accuniveau-LED's geven tijdens het opladen het huidige accuniveau weer. De Intelligent Flight Battery is
volledig opgeladen wanneer alle accuniveau-LED's uit zijn. Maak de netstroomadapter los wanneer de accu
volledig opgeladen is.
Stopcontact
Oplaadtijd Intelligent Flight Battery
53 minuten in omgevingen met een temperatuur tussen 15 en 40 °C; 1 uur en 40 minuten in omgevingen met
een temperatuur tussen 5 en 15 °C).
Laad een Intelligent Flight Battery NIET direct na het vliegen op. De temperatuur van de accu
kan te hoog zijn. Laad een Intelligent Flight Battery NIET op voordat deze is afgekoeld tot
kamertemperatuur.
De netstroomadapter stopt met opladen van de accu als de celtemperatuur van de accu zich niet
binnen het bereik van de bedrijfstemperatuur bevindt (5 tot 40 °C). De ideale oplaadtemperatuur is
22 tot 28 °C.
De optionele Battery Charging Hub kan maximaal 4 accu's tegelijkertijd opladen. Bezoek de ociële
DJI Online Store voor meer informatie.
2018 DJI Alle rechten voorbehouden.
©
30
Netstroomadapter
Intelligent Flight Battery
Page 31

Mavic Air Gebruikershandleiding
Accuniveau-LED's tijdens het opladen
: LED is aan. : LED knippert. : LED is uit.
LED1 LED2
LED3
LED4
Accuniveau
0% - 50%
50% - 75%
75% - 100%
Volledig opgeladen
Accubeveiliging
De tabel hieronder toont de accubeveiligingsmechanismen en de bijbehorende LED-patronen.
Accubeveiligingsmechanismen
LED1 LED2 LED3 LED4 Knipperpatroon Accubeveiligingsitem
LED2 knippert tweemaal per seconde Overstroom gedetecteerd
LED2 knippert driemaal per seconde Kortsluiting gedetecteerd
LED3 knippert tweemaal per seconde Overlading gedetecteerd
LED3 knippert driemaal per seconde
LED4 knippert tweemaal per seconde Oplaadtemperatuur is te laag
LED4 knippert driemaal per seconde Oplaadtemperatuur is te hoog
Overspanning oplader
gedetecteerd
Wanneer de oplaadtemperatuurbeveiliging wordt geactiveerd, wordt het opladen van de accu hervat zodra
de temperatuur weer binnen het toegestane bereik valt. Als een van de andere accubeveiligingsmechanismen
is geactiveerd en het probleem is opgelost, kun je het opladen pas hervatten door eerst op de aan-/uitknop
te drukken om de accu uit te schakelen, de accu van de netstroomadapter los te nemen en dan weer aan te
sluiten.
DJI aanvaardt geen enkele verantwoordelijkheid voor schade die wordt veroorzaakt door
netstroomadapters van andere producenten.
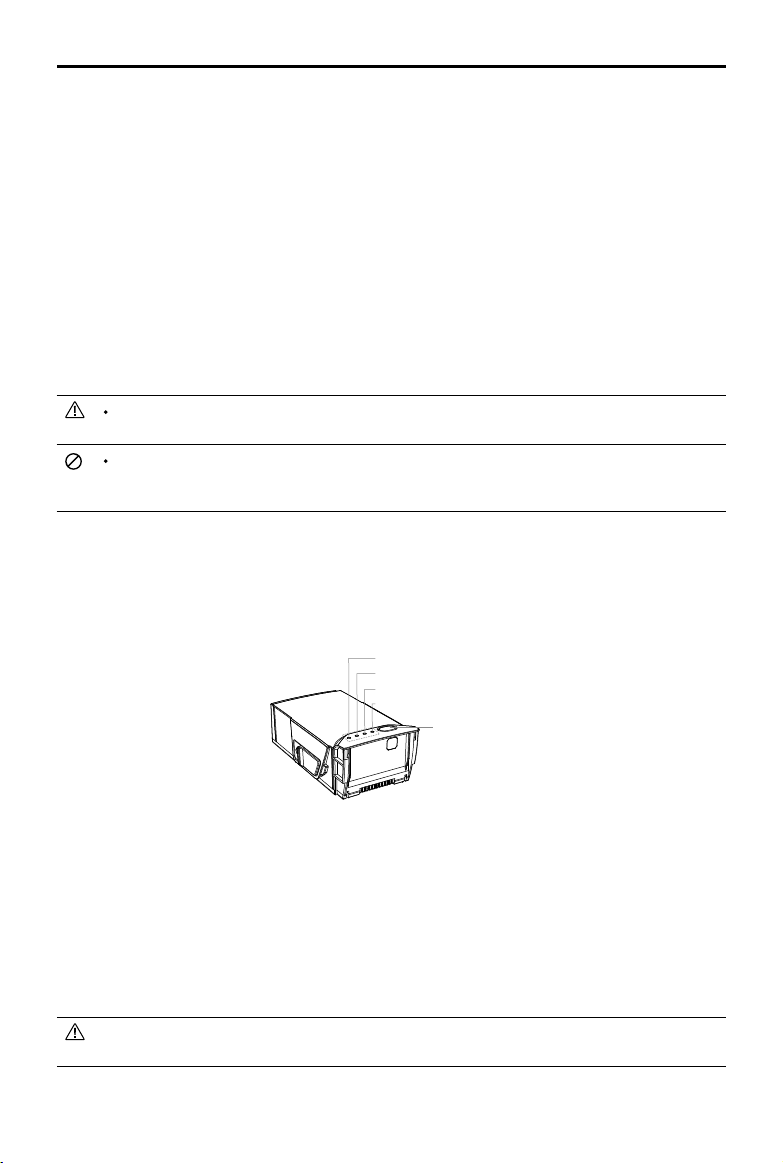
De Intelligent Flight Battery plaatsen
Plaats de Intelligent Flight Battery in het accuvak van de drone en zorg ervoor dat de accu stevig vastzit en dat
de accuvergrendelingen zijn vastgeklikt.
klik
2018 DJI Alle rechten voorbehouden.
©
31
Page 32

Mavic Air Gebruikershandleiding
17°
De Intelligent Flight Battery verwijderen
Verschuif de accuvergrendelingen aan de zijkanten van de Intelligent Flight Battery, waarna deze uit het accuvak
omhoogspringt.
Plaats of verwijder de accu nooit wanneer deze ingeschakeld is.
Zorg dat de accu stevig is bevestigd. De drone kan niet vliegen als de accu verkeerd is geplaatst.
Gimbal en camera
Gimbal
De 3-assige gimbal van Mavic Air biedt stabilisatie voor de camera, zodat je heldere, stabiele foto's en video-
opnamen kunt maken. De gimbal heeft een kantelbereik van -90˚ tot +17˚. Het kantelbereik is standaard
ingesteld op -90˚ tot 0˚ en kan worden aangepast in DJI GO 4 (tik op en selecteer 'Advanced Settings' >
'Extend Gimbal Tilt Limit'). Andere gimbalinstellingen, zoals Gimbal Mode en and Gimbal Auto Calibration, kun
je ook selecteren door te tikken op .
Gebruik het gimbalwiel op de afstandsbediening om de kantelbeweging van de camera te besturen. Of ga in
DJI GO 4 naar Camera View, druk op het scherm en houd vast tot een blauwe cirkel verschijnt, en sleep de
cirkel omhoog of omlaag om de camera te kantelen. Sleep de cirkel naar links of rechts om de oriëntatie van
de drone te regelen.
0°
-90°
Bedieningsmodi van de gimbal
Er zijn twee bedieningsmodi voor de gimbal beschikbaar. Schakel heen en weer tussen de verschillende
bedieningsmodi op de pagina van de camera-instellingen in de DJI GO 4-app.
Volgmodus (Follow Mode): De hoek tussen de gimbalrichting en de neus van de drone blijft te allen tijde
constant.
FPV-modus (FPV Mode): De gimbal synchroniseert met de beweging van de drone om een vliegervaring te
creëren vanuit de eerste persoon.
Tik of klop niet op de gimbal wanneer de drone ingeschakeld. Stijg altijd op vanaf een vlak, open
terrein om de gimbal tijdens take-o te beschermen.
Er kan zich een fout voordoen in de motor van de gimbal in de volgende situaties:
a. De drone is op een ongelijk oppervlak geplaatst of de beweging van de gimbal wordt belemmerd.
b. De gimbal is blootgesteld geweest aan een buitensporige externe kracht, bijvoorbeeld een
botsing.
Vliegen in dichte mist of wolken kan de gimbal nat maken, wat leidt tot een tijdelijke storing. De
functies van de gimbal worden volledig hersteld zodra de gimbal is opgedroogd.
2018 DJI Alle rechten voorbehouden.
©
32
Page 33

Mavic Air Gebruikershandleiding
Camera
De camera aan boord maakt gebruik van zijn 1/2,3 inch CMOS-sensor om video-opnamen tot 4K bij 30 fps en
foto's van 12 megapixels te maken. Je kunt video opnemen in de formaten MOV of MP4. Beschikbare modi
voor het maken van foto's zijn Single Shot, Burst, Interval, HDR en verschillende panoramamodi. Via de DJI GO
4-app kan op een aangesloten mobiel apparaat een live preview worden bekeken van wat de camera ziet.
microSD-kaartsleuf camera
De Mavic Air heeft 8 GB interne opslag en ondersteunt tevens het gebruik van een microSD-kaart voor het
opslaan van je foto's en video's. Een UHS-1 microSD-kaart is vereist vanwege de snelle lees- en schrijfsnelheid
die nodig is voor video-opnamen met hoge resolutie.
microSD-kaartsleuf
Verwijder de microSD-kaart niet uit de drone als deze is ingeschakeld.
Enkelvoudige video-opnamen worden beperkt tot een lengte van 30 minuten om de stabiliteit van het
camerasysteem te waarborgen.
2018 DJI Alle rechten voorbehouden.
©
33
Page 34

Afstandsbediening
In dit hoofdstuk worden de functies van
de afstandsbediening beschreven en
instructies gegeven over de besturing
van de drone en de camera.
2018 DJI Alle rechten voorbehouden.
©
34
Page 35

Afstandsbediening
De geavanceerde wifi-technologie van DJI is in de afstandsbediening ingebouwd en biedt een maximaal
zendbereik van 4 km*, terwijl downlinken van 720p-video van de drone naar de DJI GO 4-app op je mobiele
apparaat tot de mogelijkheden behoort. Door de afneembare joysticks is de afstandsbediening eenvoudiger
op te bergen. Maximale accuduur van de afstandsbediening is ca.3 uur**. Raadpleeg het overzicht van de
afstandsbediening in het hoofdstuk Productproel.
Gebruik van de afstandsbediening
De afstandsbediening wordt aangestuurd door een oplaadbare accu die een capaciteit heeft van 2970 mAh.
Druk eenmaal op de aan/uit-knop om het laadniveau te controleren. Druk eenmaal en druk vervolgens opnieuw
en houd vast om de afstandsbediening aan/uit te zetten.
Accu opladen
Gebruik een USB-C-kabel om de USB-adapter op de netstroomadapter aan te sluiten. Steek de USB-adapter
dan in de poort Charging/Main Video Link op de afstandsbediening. Het duurt ongeveer twee en een half uur
om de accu van de afstandsbediening volledig op te laden.
Stopcontact
Netstroomadapter
USB
Adapter
De camera besturen
Maak video's/foto's, en wijzig de kanteling van de camera via de sluiterknop, opnameknop, en het cameragimbalwiel op de afstandsbediening.
* De afstandsbediening kan de maximale overdrachtsafstand (FCC) bereiken in een grote open ruimte zonder elektro-
magnetische interferentie, en op een hoogte van circa 120 meter (400 ft).
** De maximale levensduur van de accu is getest onder laboratoriumomstandigheden met een iOS-apparaat. Deze
waarde is slechts indicatief.
2018 DJI Alle rechten voorbehouden.
©
35
Page 36

Mavic Air Gebruikershandleiding
De drone besturen
De joysticks op de afstandsbediening worden gebruikt voor het regelen van de oriëntatie van de drone (gieren),
voorwaarts/achterwaarts bewegen (hellen), hoogte (gasklep) en links/rechts bewegen (rollen). De functie die elke
joystickbeweging uitvoert, wordt bepaald door de gekozen joystickmodus. Er zijn drie voorgeprogrammeerde
modi (Modus 1, Modus 2 en Modus 3) beschikbaar en aangepaste modi kunnen worden gedenieerd in de DJI
GO 4-app. De standaardmodus is Modus 2.
In elk van de drie voorgeprogrammeerde modi zweeft de Mavic Air met een constante oriëntatie op zijn plaats
wanneer beide joysticks gecentreerd zijn. De functies in onderstaande afbeelding worden uitgevoerd als een
joystick uit de middelste stand wordt geduwd.
Modus 1
Modus 2
Modus 3
Linkerjoystick
Linkerjoystick Rechterjoystick
Vooruit
Achteruit
RechtsafLinksaf
Omhoog
Omlaag
RechtsafLinksaf
Vooruit
Rechterjoystick
RechterjoystickLinkerjoystick
Omhoog
Omlaag
RechtsLinks
Vooruit
Achteruit
RechtsLinks
Omhoog
2018 DJI Alle rechten voorbehouden.
©
36
Achteruit
Omlaag
RechtsLinks
RechtsafLinksaf
Page 37

Mavic Air Gebruikershandleiding
In onderstaande afbeelding wordt uitgelegd hoe elke joystick moet worden gebruikt (Modus 2 wordt als
voorbeeld gebruikt).
Afstandsbe-
diening
(Modus 2)
( Geeft de neusrichting aan)
Drone
Opmerkingen
De hoogte van de drone wijzig je door de
linkerjoystick omhoog of omlaag te bewegen. Duw
de joystick omhoog om te stijgen en omlaag om te
dalen. Hoe meer de joystick uit het midden wordt
geduwd, des te sneller zal de drone van hoogte
veranderen. Duw altijd zachtjes tegen de joystick om
een plotselinge en onverwachte verandering van de
hoogte te voorkomen.
Door de linkerjoystick naar links of rechts te bewegen,
wordt de richting van de drone bestuurd. Duw de
joystick naar links om de drone linksom te laten
draaien en duw de joystick naar rechts om de drone
rechtsom te laten draaien. Des te meer de joystick
vanuit het midden wordt geduwd, des te sneller zal
de drone draaien.
Het hellen van de drone wijzig je door de
rechterjoystick omhoog en omlaag te bewegen. Duw
de joystick omhoog om naar voren te vliegen en naar
beneden om naar achteren te vliegen. Hoe meer de
joystick uit het midden wordt geduwd, des te sneller
zal de drone bewegen.
Het rollen van de drone wijzig je door de
rechterjoystick naar links of rechts te bewegen. Duw
de joystick naar links om naar links te vliegen en duw
de joystick naar rechts om naar rechts te vliegen. Hoe
meer de joystick uit het midden wordt geduwd, des
te sneller zal de drone bewegen.
Houd de afstandsbediening uit de buurt van magnetische materialen om te voorkomen dat de
afstandsbediening nadelig wordt beïnvloed door magnetische interferentie.
Het wordt aangeraden de joysticks tijdens vervoer of opslag te verwijderen en aan te brengen in hun
opslagsleuven op de afstandsbediening om te voorkomen dat ze beschadigd raken.
2018 DJI Alle rechten voorbehouden.
©
37
Page 38

Mavic Air Gebruikershandleiding
Vluchtmodusschakelaar
Selecteer de gewenste vluchtmodus met de schakelaar.
Kies tussen de P-modus en S-modus.
Positie Vluchtmodus
SPORT
SPORT
P-modus
S-modus
SPORT
RTH-knop
Druk de RTH-knop in en houd deze ingedrukt om de Return-to-Home (RTH)-procedure te starten. De drone
zal vervolgens terugkeren naar de laatst geregistreerde thuisbasis. Druk nogmaals op deze knop als je de RTHprocedure wilt annuleren en weer de controle wilt terugkrijgen over de drone. Raadpleeg het hoofdstuk Terugnaar-Basis voor meer informatie over RTH.
De functietoets en de aanpasbare knop
De functies van de functietoets en aanpasbare knop worden ingesteld in de DJI GO 4-app.
Optimaal zendbereik
Het signaal tussen de drone en de afstandsbediening is het meest betrouwbaar wanneer de antennes ten
opzichte van de drone zijn geplaatst zoals hieronder is afgebeeld.
sterk
zwak
Zorg ervoor dat de drone vliegt binnen de optimale zendzone. Pas de afstandsbediening en de antennes
volgens de bovenstaande afbeelding aan om de optimale zendprestaties in stand te houden.
2018 DJI Alle rechten voorbehouden.
©
38
Page 39

Mavic Air Gebruikershandleiding
Afstandsbediening koppelen
Afstandsbedieningen die samen met een Mavic Air worden aangeschaft, worden vóór verzending gekoppeld.
Volg de onderstaande instructies om de afstandsbediening aan een Mavic Air te koppelen:
1. Schakel de drone en de afstandsbediening in.
2. Start DJI Go 4.
3. Selecteer 'Connect to the Aircraft's Wi-Fi' en 'Wired Connection'. Selecteer vervolgens 'Linking the remote
controller'.
4. Houd de functietoets van de drone twee seconden ingedrukt. Laat de knop los als je een pieptoon hoort en
de voorste LED's rood knipperen.
5. Wanner de status-LED op de afstandsbediening continu groen brandt en de voorste LED's continu rood
branden, is de koppeling tot stand gebracht.
Zorg dat de afstandsbediening tijdens het tot stand brengen van de koppeling maximaal 0,5 meter
van de drone verwijderd is.
2018 DJI Alle rechten voorbehouden.
©
39
Page 40

DJI GO 4-app
Dit hoofdstuk introduceert de
hoofdfuncties van de DJI GO 4-app.
2018 DJI Alle rechten voorbehouden.
©
40
Page 41

DJI GO 4-app
ISO
SHUTTEREVWB
CAPACITY
Gebruik deze app om de gimbal, camera, en andere dronefuncties te besturen. De app is uitgerust met de
onderdelen Equipment, Editor, SkyPixel en Me, die worden gebruikt om je drone te congureren en om je foto's
en video's te bewerken en met anderen te delen.
Equipment
Menu Device
Als dit nog niet is geselecteerd, selecteer je Mavic Air in het menu Device in de linkerbovenhoek van het
scherm.
Menu Function
Tik op in de rechterbovenhoek van het scherm om het menu Function te openen. Dit menu heeft vijf opties:
Scan QR Code: scan een QR-code om verbinding te maken met een drone.
Academy: gebruik de vluchtsimulator, bekijk tutorials en lees de producthandleidingen.
Flight Records: hier vind je al je vluchtgegevens.
GEO zones: lees meer over GEO-zones.
Find My Drone: ontvang de kaartcoördinaten van de laatst geregistreerde locatie van je drone en geef de drone
opdracht te knipperen met zijn LED's en te piepen.
Camera View
Ga wanneer je mobiele apparaat op de drone is aangesloten, naar Camera View door op het scherm
Equipment op de knop GO FLY te tikken.
9 1087654321
09:29
12
61%
2.4G
1080P/2420GB
22
21
In flight (GPS)
GPS
1600 0.31/8000
1. Systeemstatusbalk
READY TO GO (GPS)
2. Obstakel-detectiestatus
Er worden oranje balken weergegeven wanneer er obstakels in het detectiebereik zijn.
20
19
18
17
APAS
139m
7m/s 1.1m/s 627m
612m
16
: Dit pictogram geeft de vluchtstatus van de drone aan en toont diverse waarschuwingsberichten.
: Er worden rode balken weergegeven wanneer er dichtbij de drone obstakels aanwezig zijn.
2018 DJI Alle rechten voorbehouden.
©
11
12
13
-10
15
41
Page 42

Mavic Air Gebruikershandleiding
O
S
T
TEREVWB
3. Indicatorbalk accuniveau
: De indicator van het accuniveau biedt een dynamisch display van het accuniveau. De gekleurde
zones op de indicator van het accuniveau vertegenwoordigen de stroomniveaus die nodig zijn om
verschillende functies uit te voeren.
4. Vluchtmodus
: De tekst naast dit pictogram geeft de huidige vluchtmodus aan.
Tik om de instellingen van de vluchtcontroller te congureren. Met deze instellingen kun je vluchtbeperkingen
wijzigen en versterkingswaarden instellen.
5. Cameraparameters
Toont cameraparameters en de capaciteit van de interne opslag en de microSD-kaart.
IS
HU
1600 0.31/8000
1080P/2420GB
CAPACITY
6. Sterkte GPS-signaal
: Toont de huidige sterkte van het GPS-signaal. Witte balken geven een toereikende GPS-sterkte aan.
7. Status van Forward en Backward Vision Systems
: Tik op deze knop om functies van de Forward en Backward Vision Systems in of uit te schakelen.
8. Wi-instellingen
: Tik om naar het wi-instellingenmenu te gaan.
2.4G
9. Accuniveau
: Geeft het huidige accuniveau weer. Tik hierop om het accu-informatiemenu te bekijken, de diverse
61%
drempels voor accuwaarschuwingen in te stellen en de historie van accuwaarschuwingen te bekijken.
10. Algemene instellingen
: Tik om naar het menu General Settings te gaan om maateenheden in te stellen, livestream in/uit te
schakelen en beeldscherminstellingen voor de vliegroute in te stellen.
11. Wisselen foto/video
: Tik hierop om te wisselen tussen de foto-opnamemodus en de video-opnamemodus.
12. Gimbalschuif
: Geeft de kantelhoek van de gimbal aan.
13. Knop voor het maken van foto's en het opnemen van video
/ : Tik hierop om te beginnen met het maken van foto's of opnemen van video.
14. Camera-instellingen
: Tik om naar het menu Camera Settings te gaan.
Tik op om de ISO-waarde, de sluitertijd en de instellingen voor automatische belichting van de
camera in te stellen.
Tik op om opnamemodi voor foto's te selecteren. De Mavic Air ondersteunt Single Shot, Burst
Shot, Interval Shot en verschillende panoramamodi. Panorama ondersteunt vier submodi voor
opnamen en kan sferische (bolvormige) panoramafoto's van 32 megapixels vastleggen en genereren.
Tik op om naar het menu General Camera Settings te gaan.
15. Weergave
: Tik hierop om de weergavepagina te openen om een preview te bekijken van foto's en video's zodra
deze zijn gemaakt.
2018 DJI Alle rechten voorbehouden.
©
42
Page 43

Mavic Air Gebruikershandleiding
16. Vluchttelemetrie
D 30M
H 10.0M
HS 10.0M/S
VS 2.0M/S
: Afstand tussen de drone en de thuisbasis.
: Hoogte vanaf Home Point (thuisbasis).
:
Horizontale snelheid van drone.
:
Verticale snelheid van drone.
17. Kaart
Tik om de kaart te bekijken.
18. Geavanceerde Pilot Assistance-systemen
: Tik om de APAS-functie in/uit te schakelen. De APAS-functie is uitgeschakeld als de Forward en
APAS
Backward Vision Systems zijn uitgeschakeld of niet beschikbaar zijn.
19. Intelligente vluchtmodus
: Tik hierop om de intelligente vluchtmodi te selecteren.
20. Smart RTH
: Tik om de Smart RTH-procedure te starten en te zorgen dat de drone teruggaat naar het laatst
geregistreerde Home Point (thuisbasis).
21. Automatisch opstijgen/landen
/ : Tik hierop om automatisch op te stijgen of automatisch te landen.
22. Terug
: Tik om terug te keren naar het hoofdmenu.
2018 DJI Alle rechten voorbehouden.
©
43
Page 44

Mavic Air Gebruikershandleiding
Editor
In de DJI GO 4-app is een intelligente video-editor ingebouwd. Nadat je diverse videoclips hebt opgenomen en
deze hebt gedownload naar je mobiele apparaat, ga dan naar Editor in het startscherm. Je kunt vervolgens een
sjabloon en een gespeciceerd aantal clips selecteren die automatisch worden gecombineerd om een korte lm
te maken die je onmiddellijk kunt delen.
SkyPixel
Bekijk en deel de foto's en video's op de SkyPixel-pagina.
Me
Als je al een DJI-account hebt, kun je deelnemen aan forumdiscussies en je creatie delen met de community.
De drone besturen met een mobiel apparaat
Je kunt via wi een mobiel apparaat aansluiten om de drone met DJI GO 4 te besturen:
1. Schakel de drone in.
2. Houd de functietoets op de drone vier seconden ingedrukt totdat je een dubbele pieptoon hoort. Die geeft
aan dat de drone is overgeschakeld naar besturing via een mobiel apparaat.
3. Start de DJI GO 4-app en tik op het pictogram in de rechterbovenhoek van het scherm. Scan vervolgens
de wi-QR-code op de drone om de verbindingsprocedure te starten.
4. Tik op om automatisch op te stijgen. Zet beide duimen op het scherm en gebruik de virtuele joysticks
om met de drone te manoeuvreren.
Wanneer je alleen met een mobiel apparaat vliegt in een grote open ruimte zonder elektromagnetische
interferentie is de maximale overdrachtsafstand circa 100 meter op een hoogte van 50 m.
De wi-frequentie kan worden ingesteld op 2,4 GHz (standaard) of 5 GHz. Stel wi op ondersteunde
mobiele apparaten in op 5 GHz voor minder interferentie.
Mocht je de QR-code niet kunnen scannen, schakel dan wi in op je mobiele apparaat en voer het
wi-wachtwoord in dat op de drone is weergegeven. Maak vervolgens verbinding met het Mavic Air-
netwerk.
Koppelen is verplicht als er wordt teruggewisseld naar de afstandsbedieningsmodus.
Wanneer je de SSID en het wachtwoord voor wi opnieuw wilt instellen en de wi-frequentie wilt
terugzetten op 2,4 GHz, houd je de functietoets van de drone ongeveer 6 seconden ingedrukt totdat
je drie piepjes hoort. Of tik op Help in de DJI GO 4-app en volg vervolgens de instructies.
Vlieg alleen met een mobiel apparaat in grote open ruimtes met betrekkelijk weinig
elektromagnetische interferentie. Als je verbinding ongunstig wordt beïnvloed door interferentie, dien
je in plaats daarvan met de afstandsbediening te vliegen of naar een gebied te gaan met minder
interferentie.
2018 DJI Alle rechten voorbehouden.
©
44
Page 45

Mavic Air Gebruikershandleiding
Gebruik van virtuele joysticks
Zorg ervoor dat het mobiele apparaat aangesloten is op de drone voordat je de virtuele joysticks gebruikt. De
onderstaande afbeeldingen zijn gebaseerd op Modus 2 (linkerjoystick voor gasregeling en gieren, rechterjoystick
voor hellen en rollen). Tik op om de virtuele joysticks in of uit te schakelen.
In flight (GPS)
09:29
P-GPS
12
61%
Virtuele joysticks
Links Rechts
Het gebied dat buiten de witte cirkels ligt, reageert ook op besturingsopdrachten.
AE
2018 DJI Alle rechten voorbehouden.
©
45
Page 46

Vlucht
In dit hoofdstuk worden veilige
vliegmethoden en vluchtbeperkingen
behandeld.
2018 DJI Alle rechten voorbehouden.
©
46
Page 47

Vlucht
Zodra de voorbereidingen voor een vlucht zijn voltooid, verdient het aanbeveling om de vluchtsimulator in de
DJI GO 4-app te gebruiken om je vliegvaardigheden te verbeteren en in veilig vliegen te oefenen. Zorg ervoor
dat alle vluchten worden uitgevoerd in een open gebied. Raadpleeg de hoofdstukken Afstandsbediening en
DJI GO 4-app voor informatie over het gebruik van de afstandsbediening en de app voor het besturen van de
drone.
Vereisten voor de vliegomgeving
1. Gebruik de drone niet in zwaar weer. Dan bedoelen we windsnelheden van meer dan 10 m/s, sneeuw,
regen en mist.
2. Vlieg in open gebieden. Hoge constructies en grote metalen constructies kunnen een nadelige invloed
uitoefenen op de nauwkeurigheid van het kompas en GPS-systeem aan boord.
3. Vermijd obstakels, menigten, hoogspanningsleidingen, bomen, en wateroppervlaktes.
4. Beperk interferentie zo veel mogelijk door gebieden met een hoog niveau van elektromagnetisme te
vermijden, zoals locaties in de buurt van hoogspanningsleidingen, basisstations, onderstations en
zendmasten.
5. De prestaties van de drone en de accu zijn afhankelijk van omgevingsfactoren zoals de luchtdichtheid en
temperatuur. Wees zeer voorzichtig bij vliegen op 5000 meter of hoger boven de zeespiegel, omdat de
prestaties van de accu en de drone dan kunnen teruglopen.
6. In de poolgebieden kan de Mavic Air geen gebruik maken van GPS. Gebruik bij vliegen op dergelijke
locaties het Downward Vision System.
Vluchtbeperkingen en GEO-zones
Houd je tijdens het vliegen met de Mavic Air aan alle wet- en regelgeving. Vluchtbeperkingen worden standaard
toegepast om gebruikers te helpen dit product veilig en legaal te gebruiken. Vluchtbeperkingen omvatten
hoogtelimieten, afstandslimieten en GEO-zones.
Bij gebruik van de P-modus functioneren de hoogtelimieten, afstandslimieten en GEO-zones gezamenlijk om de
vliegveiligheid te waarborgen.
Vlieghoogte- en afstandslimieten
De vlieghoogte- en afstandslimieten kunnen worden gewijzigd in de DJI GO 4-app. Let op dat de maximale
vlieghoogte niet hoger mag zijn dan 500 meter. Op basis van deze instellingen zal de Mavic Air vliegen in een
beperkte cilinder, zoals hieronder afgebeeld:
Max. vlieghoogte
Hoogte van
drone wanneer
ingeschakeld
Max. straal
Thuisbasis
2018 DJI Alle rechten voorbehouden.
©
47
Page 48

Mavic Air Gebruikershandleiding
GPS-signaal sterk Knippert groen
Vluchtbeperkingen DJI GO 4-app Statusindicator drone
Max. hoogte
Max. afstand
GPS-signaal zwak Knipperend geel
Max. hoogte
Max. afstand Geen limiet
De hoogte van de drone kan
de gespeciceerde waarde niet
overschrijden.
De vliegafstand moet zich
binnen de max. straal bevinden.
Vluchtbeperkingen DJI GO 4-app Statusindicator drone
De hoogte wordt beperkt tot 5 meter (16
feet) wanneer het GPS-signaal zwak is en
het Downward Vision System geactiveerd
is. De hoogte wordt beperkt tot 30 meter
(98 feet) wanneer het GPS-signaal zwak
is en het Downward Vision System niet
geactiveerd is.
Waarschuwing:
Hoogtelimiet
bereikt.
Waarschuwing:
Afstandslimiet
bereikt.
Waarschuwing:
Hoogtelimiet
bereikt.
N.v.t.
N.v.t.
N.v.t.
Als de drone een van de limieten bereikt, kun je de drone nog steeds besturen, maar kun je
niet nog verder weg vliegen.
Als de drone de maximumstraal verlaat, vliegt hij automatisch terug tot binnen het bereik
wanneer het GPS-signaal sterk is.
Vlieg om veiligheidsredenen niet dicht in de buurt van vliegvelden, snelwegen, treinstations,
treinsporen, stadscentra of andere gevoelige gebieden.
Vlieg de drone alleen binnen je gezichtsveld.
GEO-zones
Alle GEO-zones staan vermeld op de officiële DJI-website op http://www.dji.com/flysafe. GEO-zones zijn
ingedeeld in verschillende categorieën en omvatten locaties, zoals vliegvelden, vlieggebieden waar bemande
vliegtuigen op lage hoogte vliegen, grenzen tussen landen en gevoelige locaties zoals energiecentrales.
Checklist voor vluchtvoorbereiding
1. Zorg dat de afstandsbediening, het mobiele apparaat en de Intelligent Flight Battery volledig zijn opgeladen.
2. Zorg dat de Intelligent Flight Battery stevig op zijn plaats vastzit.
3. Zorg dat de armen van de drone en het landingsgestel zijn uitgeklapt.
4. Zorg dat de propellers en propellerafschermingen in goede staat verkeren en stevig zijn bevestigd en
vastgemaakt.
5. Zorg dat niets de motoren blokkeert en dat de motoren normaal werken.
Controleer of de cameralens en de sensoren van de Vision Systems schoon zijn.
6. Controleer of de gimbal en de camera normaal werken.
7. Zorg dat de DJI GO 4-app is verbonden met de drone.
2018 DJI Alle rechten voorbehouden.
©
48
Page 49

Mavic Air Gebruikershandleiding
Automatisch opstijgen en automatisch landen
Automatisch opstijgen
Gebruik automatisch opstijgen alleen als de statusindicator van de drone groen knippert. Volg de stappen
hieronder om de functie voor automatisch opstijgen te gebruiken:
1. Activeer de DJI GO 4-app en tik op GO FLY om naar Camera View gaan.
2. Voer alle stappen op de checklist voor vluchtvoorbereiding uit.
3. Tik op .
4. Indien de omstandigheden geschikt zijn om op te stijgen, verschuif je de schuif om dit te bevestigen. De
drone stijgt op en blijft 1,2 meter boven de grond hangen.
De statusindicator van de drone geeft aan of de drone voor vluchtcontrole gebruik maakt van GPS
en/of van het Downward Vision System. Raadpleeg het hoofdstuk LED's en statusindicator op de
drone voor meer informatie.
Het is raadzaam om te wachten totdat het GPS-signaal sterk is voordat je de drone automatisch laat
opstijgen.
Automatisch landen
Gebruik automatisch landen alleen als de statusindicator van de drone groen knippert. Volg de stappen
hieronder om de functie voor automatisch landen te gebruiken:
1. Tik op .
2. Als de omstandigheden geschikt zijn om te landen, verschuif je de schuif om dit te bevestigen. De drone
start de procedure voor automatisch landen. Er worden waarschuwingen weergegeven in de DJI GO 4-app
als de drone detecteert dat de omstandigheden niet geschikt zijn om te landen. Zorg dat je onmiddellijk
reageert.
Tijdens de automatische landingsprocedure kan de automatische landing onmiddellijk worden
afgebroken door in de DJI GO 4-app te tikken op .
Motoren starten/stoppen
De motoren starten
Er wordt gebruik gemaakt van een gecombineerde joystickopdracht om de motoren te starten. Duw beide
joysticks naar de binnenste of buitenste hoeken van de onderzijde om de motoren te starten. Laat beide
joysticks gelijktijdig los zodra de motoren zijn gestart.
OF
2018 DJI Alle rechten voorbehouden.
©
49
Page 50

Mavic Air Gebruikershandleiding
Motoren stoppen
Je kunt de motoren op twee manieren stoppen.
1. Methode 1: Nadat de drone is geland, duw de linkerjoystick dan omlaag en houd deze vast. De motoren
2. Methode 2: Wanneer de drone is geland, duw dan de linkerjoystick omlaag en voer daarna dezelfde
zullen na drie seconden stoppen.
gecombineerde joystickopdracht uit die werd gebruikt om de motoren te starten, zoals hierboven
beschreven. De motoren zullen onmiddellijk stoppen. Laat beide sticks los als de motoren
eenmaal zijn gestopt.
OF
Methode 1 Methode 2
De motoren tijdens het vliegen stoppen
Wanneer je de motoren stopt tijdens het vliegen, zal de drone neerstorten. De motoren mogen alleen tijdens het
vliegen worden gestopt als er een noodsituatie is, bijvoorbeeld wanneer er een botsing heeft plaatsgevonden
of als de drone niet meer onder controle is en heel snel stijgt/daalt, in de lucht rolt of een motor is afgeslagen.
Gebruik voor het stoppen van de motoren tijdens het vliegen dezelfde gecombineerde joystickopdracht (CSC)
als de opdracht die is gebruikt voor het starten van de motoren.
Testvlucht
Opstijg/landingsprocedures
1. Plaats de drone op een open, vlakke ondergrond met de statusindicator van de drone naar je toe gericht.
2. Schakel het luchtvaartuig en de afstandsbediening in.
3. Start de DJI GO 4-app en open de Camera View.
4. Wacht tot de statusindicator van de drone snel groen knippert. Dit geeft aan dat het Home Point (thuisbasis)
is geregistreerd en het nu veilig is om te vliegen.
5. Duw zachtjes tegen de gashendel om op te stijgen of gebruik automatisch opstijgen.
6. Trek aan de gashendel of gebruik automatisch landen om de drone te laten landen.
7. Zet de drone en de afstandsbediening uit.
Als de statusindicator van de drone tijdens het vliegen snel geel knippert, heeft de drone het signaal
van de afstandsbediening verloren en activeert de drone Uitvalbeveiligde RTH (Failsafe). Raadpleeg
het hoofdstuk Terug-naar-Basis voor meer informatie.
Als de statusindicator van de drone tijdens het vliegen langzaam of snel rood knippert, is er sprake
van een waarschuwing voor een laag of kritiek laag accuniveau.
Bekijk de Mavic Air-videotutorials om meer te weten te komen over de opstijg- en
landingsprocedures.
Videosuggesties/tips
1. De controlelijst ter voorbereiding van de vlucht is ontwikkeld om je te helpen veilig te vliegen en ervoor te
zorgen dat je video-opnamen kunt maken tijdens de vlucht. Doorloop vóór elke vlucht de volledige checklist
voor vluchtvoorbereiding.
2. Selecteer in de DJI GO 4-app voor de gimbal de gewenste bedrijfsmodus.
3. Maak alleen video-opnamen als je vliegt in de P-modus.
4. Vlieg altijd in goed weer en ga niet vliegen bij regen of wind.
2018 DJI Alle rechten voorbehouden.
©
50
Page 51

Mavic Air Gebruikershandleiding
5. Kies camera-instellingen die zijn afgestemd op je behoefte. Denk hierbij aan instellingen voor het fotoformaat
en de belichtingscompensatie.
6. Voer vluchttests uit om vliegroutes vast te stellen en scènes vooraf te bekijken.
7. Duw zachtjes tegen de joysticks om de beweging van de drone vloeiend en stabiel te houden.
2018 DJI Alle rechten voorbehouden.
©
51
Page 52

Bijlage
2018 DJI Alle rechten voorbehouden.
©
52
Page 53

Bijlage
Specicaties
Drone
Gewicht
Afmetingen (l x b x h) Ingeklapt: 168 × 83 × 49 mm
Diagonale lengte
Max. stijgsnelheid
Max. daalsnelheid
Max. snelheid (nabij
zeeniveau, geen wind)
Max. servicehoogte boven
zeeniveau
Max. vliegtijd
Max. stilhangtijd
Max. vliegafstand
Max. windbestendigheid
Max. kantelhoek
Maximale hoeksnelheid
Bedrijfstemperatuur
GNSS
Bedrijfsfrequentie
Zendervermogen (EIRP) 2,4 GHz:
GPS-nauwkeurigheidsbereik
bij zweven
Interne opslag
Gimbal
Stabilisatie
Max. regelsnelheid (kantelen)
Bereik torsietrillingen
Regelbaar bereik
Vision System
Eectieve detectiesnelheid
Hoogtebereik
Werkingsbereik 0,5 - 30 meter (1,6 - 98 ft)
Werkingsomgeving Oppervlakken van materiaal met diuse reectie, formaat > 20×20 mm en reectiviteit
430 g
Uitgeklapt: 168 × 184 × 64 mm
213 mm (exclusief propellers)
2 m/s (P-modus met RC); 4 m/s (S-modus); 2 m/s (P-modus zonder RC)
1,5 m/s (P-modus met RC); 3 m/s (S-modus); 1 m/s (P-modus zonder RC)
28,8 km/h (17,9 mph); P-modus met RC
68,4 km/h (42.5 mph); S-modus
10 km/h (6,7 mph); P-modus zonder RC
5000 m
21 minuten (0 wind bij een constante snelheid van 25 km/u (15,5 mph))
20 minuten (0 wind)
10 km (0 wind)
10 m/s (22 mph)
35° (S-modus); 25° (P-modus)
250°/s
0 °C tot 40 °C (32 °F tot 104 °F)
GPS/GLONASS
2,4-2,4835 GHz; 5,725-5,850 GHz
FCC: <28 dBm; CE: <19 dBm; SRRC: <19 dBm; MIC: <19 dBm
5,8 GHz:
FCC: <31 dBm; CE: <14 dBm; SRRC: <27 dBm
Verticaal: ± 0,1 m (met zichtpositionering); ± 0,5 m (met GPS)
Horizontaal: ± 0,1 m (met zichtpositionering); ± 1,5 m (met GPS)
8 GB
3-assig (kantelen, rollen, pannen)
120°/s
± 0,005°
Kantelen: -90° tot +0° (standaardinstelling); -90° tot +17° (uitgebreid)
≤ 8 m/s
0,1 - 8 m (0,3 - 26 ft)
> 20% (bijv. muur, bomen, mensen), voldoende verlichting (> 15 lux)
2018 DJI Alle rechten voorbehouden.
©
53
Page 54

Mavic Air Gebruikershandleiding
Richtingen
Gezichtsveld Vooruit: Horizontaal: 50°, verticaal: 19°
Detectiebereik Vooruit:
Camera
Sensor 1/2,3 inch CMOS, eectieve pixels: 12 megapixels
Lens 85° FOV, 24 mm (equivalent aan 35mm-formaat) f/2.8
ISO-bereik Video: 100 - 3200 (auto); 100 - 3200 (handmatig)
Elektronische sluitertijd
Maximale beeldgrootte 4056×3040
Fotografeermodi stilbeelden Enkele opname
Video-opnamemodi 4K Ultra HD: 3840×2160 24/25/30 p
Bitrate video-opslag 100 Mbps
Ondersteund
bestandssysteem
Foto JPEG/DNG (RAW)
Video MP4, MOV (MPEG-4 AVC/H.264)
Ondersteunde SD-kaarten microSD (Klasse 10 of UHS-1-classicatie vereist)
Afstandsbediening
Bedrijfsfrequenties 2,4-2,4835 GHz; 5,725-5,850 GHz
Max overdrachtsafstand (vrij
van obstakels en interferentie)
Bedrijfstemperatuurbereik 0 °C tot 40 °C (32 °F tot 104 °F)
Vooruit/achteruit/omlaag
Achteruit: Horizontaal: 50°, verticaal: 19°
Naar beneden: Voor en achter: 67°, links en rechts: 53°
Bereik nauwkeurige metingen: 0,5 - 12 m
Detecteerbaar bereik: 12 - 24 m
Achteruit:
Bereik nauwkeurige metingen: 0,5 -10 m
Detecteerbaar bereik: 10 - 20 m
Opnamebereik: 0,5 m tot oneindig
Foto: 100 - 1600 (auto); 100 - 3200 (handmatig)
8 tot 1/8000 s
HDR
Serieopnamen: 3/5/7 frames
Auto Exposure Bracketing (AEB): 3/5 bracketed frames bij 0,7 EV Bias
Interval (2/3/5/7/10/15/20/30/60 s)
Pano: 3×1: 42°×78°, B: 2048×H:3712
3×3: 119°×78°, B: 4096×H:2688
180°: 251°×88°, B: 6144×H:2048
Bol (3×8+1): 8192×4096
2,7 K: 2720×1530 24/25/30/48/50/60 p
FHD: 1920×1080 24/25/30/48/50/60/120 p
HD: 1280×720 24/25/30/48/50/60/120 p
FAT32
2,4 GHz: FCC: 4 km (2,5 mijl), CE/SRRC/MIC: 2 km (1,2 mi)
5,8 GHz: FCC: 4 km (2,5 mijl); CE: 0,5 km (0,3 mi); SRRC: 2,5 km (1,6 mi)
2018 DJI Alle rechten voorbehouden.
©
54
Page 55

Mavic Air Gebruikershandleiding
Zendervermogen (EIRP)
Ingebouwde accu 2970 mAh
Bedrijfsstroom/-spanning 1400 mA 3,7 V (Android)
Ondersteunde grootte mobiel
apparaat
Ondersteunde USBpoorttypen
Voedingsadapter
Invoer 100 to 240 V, 50/60 Hz, 1,4 A
Uitgang Netstroom: 13,2 V 3,79 A
Spanning 13,2 V
Nominaal vermogen 50 W
Intelligent Flight Battery
Capaciteit 2375 mAh
Spanning 11,55 V
Max. oplaadspanning 13,2 V
Accutype LiPo 3S
Vermogen 27,43 Wh
Netto gewicht Ongeveer 140 g
Bereik oplaadtemperatuur 5 ℃ tot 40 ℃
Max. oplaadvermogen 60 W
2,4 GHz: <26 dBm (FCC), <18 dBm (CE), <18 dBm (SRRC),
<18 dBm (MIC)
5,8 GHz: <30 dBm (FCC), <14 dBm (CE), <26 dBm (SRRC)
750 mA 3,7 V (iOS)
Dikte: 6,5 - 8,5 mm
Max. lengte: 160 mm
Lightning, Micro-USB (Type-B), USB-C
USB: 5 V 2 A
Het kompas kalibreren
Het wordt aanbevolen het kompas te kalibreren als een van de volgende situaties zich tijdens het vliegen buiten
voordoet:
1. Vliegen op een locatie meer dan 50 km verwijderd van de laatste vlieglocatie.
2. De drone heeft langer dan 30 dagen niet gevlogen.
3. Een waarschuwing over kompasinterferentie verschijnt in de DJI GO 4-app en/of de statusindicator van de
drone knippert snel afwisselend rood en geel.
Kalibreer het kompas NIET op plaatsen waar magnetische interferentie kan optreden, bijvoorbeeld
op locaties dicht bij magnetietopslagplaatsen of grote metalen constructies zoals parkeergarages,
met staal verstevigde kelders, bruggen, auto's of steigers.
Houd tijdens het kalibreren GEEN objecten (zoals mobiele telefoons) die ferromagnetische materialen
bevatten in de buurt van de drone.
Het is niet nodig het kompas te kalibreren wanneer je binnenshuis vliegt.
2018 DJI Alle rechten voorbehouden.
©
55
Page 56

Mavic Air Gebruikershandleiding
Kalibratieprocedure
Kies een open gebied om de volgende procedure uit te voeren.
1. Tik in de DJI GO 4-app op de systeemstatusbalk, selecteer Calibrate en volg daarna de aanwijzingen op het
scherm.
2. Houd de drone horizontaal en draai hem 360 graden rond. De statusindicator van de drone gaat constant
groen branden.
3. Houd de drone verticaal, met de neus omlaag gericht en draai de drone 360 graden rond een verticale as.
4. Als de statusindicator van de drone rood knippert, is de kompaskalibratie mislukt. Ga ergens anders staan
en voer de kalibratieprocedure opnieuw uit.
Zodra de kalibratie is geslaagd, kan de drone onmiddellijk opstijgen. Als je de drone niet binnen
3 minuten na aoop van de kalibratie laat opstijgen, is het mogelijk dat er nog een waarschuwing
voor kompasinterferentie verschijnt terwijl de drone op de grond staat. Als dit gebeurt, betekent
dit dat de huidige locatie niet geschikt is voor vliegen met de drone, vanwege het niveau van de
elektromagnetische interferentie.
2018 DJI Alle rechten voorbehouden.
©
56
Page 57

Mavic Air Gebruikershandleiding
Firmware-updates
Gebruik DJI GO 4 of DJI Assistant 2 om de rmware van de drone te updaten.
DJI GO 4 gebruiken
Wanneer je de afstandsbediening en de DJI GO 4-app met elkaar verbindt, ontvang je een melding als er
nieuwe rmware beschikbaar is. Start de update door je mobiele apparaat te verbinden met internet en volg de
instructies op het scherm. Je kunt de rmware niet updaten als de afstandsbediening niet is gekoppeld aan de
drone.
Gebruik van DJI Assistant 2
De USB-C-poort wordt gebruikt om de Mavic Air op een computer aan te sluiten wanneer de rmware moet
worden bijgewerkt.
Volg de instructies hieronder om de rmware te updaten via DJI Assistant 2:
1. Sluit bij een uitgeschakelde drone de drone aan op een computer via de Micro USB-poort met behulp van
een Micro USB-kabel.
2. Schakel de drone in.
3. Activeer DJI Assistant 2 en meld je aan bij je DJI-account.
4. Selecteer 'Mavic Air' en klik op 'Firmware Updates' op het linkerpaneel.
5. Selecteer de rmwareversie die je wilt installeren.
6. Wacht tot de rmware is gedownload. De rmware-update start automatisch.
7. Start de drone opnieuw op nadat update van de rmware is voltooid.
Zorg ervoor dat de drone aan je computer is aangesloten voordat je hem aanzet.
De firmware-update duurt circa 15 minuten. Het is normaal dat de gimbal verstoord raakt, de
statusindicatoren van de drone knipperen en de drone opnieuw wordt gestart. Wacht geduldig totdat
de update is voltooid.
Zorg ervoor dat de computer toegang heeft tot internet.
Zorg er voordat je een update uitvoert voor dat de Intelligent Flight Battery ten minste 50%
opgeladen is en de afstandsbediening ten minste 30%.
Verbreek de verbinding tussen de drone en de computer niet tijdens een update.
After-Sales-informatie
Ga naar https://www.dji.com/support voor meer informatie over de service na aankoop, reparaties en
ondersteuning.
2018 DJI Alle rechten voorbehouden.
©
57
Page 58

DJI-ondersteuning
http://www.dji.com/support
Deze inhoud is aan verandering onderhevig.
Download de nieuwste versie op
http://www.dji.com/mavic-air
Als u vragen hebt over dit product, neem dan contact op met
DJI door een e-mail te sturen naar
(alleen Engels en Chinees worden ondersteund)
is een handelsmerk van DJI.
MAVIC
Copyright © 2018 DJI Alle rechten voorbehouden.
DocSupport@dji.com
.
 Loading...
Loading...