

Page 1
Three Phase Direct PWM Sensorless Motor Driver AM9800
Data Sheet
General Description
The AM9800 is a direct PWM driver IC designed for
three-phase brushless motors. Also, by using highly
silent PWM drive, switching current of the phase
with a smooth slope reduces the sound of slewing
motor, and makes high-efficiency drive a reality by a
synchronous commutation.
The device is build-in lock protection. When the fan
is locked, the device will enter the lockup protection
mode. It is also equipped with thermal shutdown
function and forward or reverse rotation selection. In
normal operation, supply current is less than 2mA,
but in PWM=0 mode it is just around 20µA.
The AM9800 is available in SSOP-16 package.
Features
• Speed Controllable by PWM Input Signal
• Sensorless Drive
• Soft Switched Drive
• Build-in Forward/Reverse Switching Circuit
• Power Saving Function in a Stopped State: 2mA
and PWM=0 State: 20µA
• Build-in Current Limiter Circuit
• Build-in Lock Protection and Auto-restart
• Built-in Over Current Protection
• Built-in Thermal Shutdown Circuit
• ESD Rating: 4000V (Human Body Model)
300V (Machine Model)
Applications
• CPU Cooler Fan in Notebook Personal
Computers
Figure 1. Package Type of AM9800
SSOP-16
Sep. 2012 Rev. 1. 0 BCD Semiconductor Manufacturing Limited
1
Page 2
Data Sheet
Three Phase Direct PWM Sensorless Motor Driver AM9800
Pin Configuration
GS Package
(SSOP-16)
1
16
2
3
4
5
6
7
8
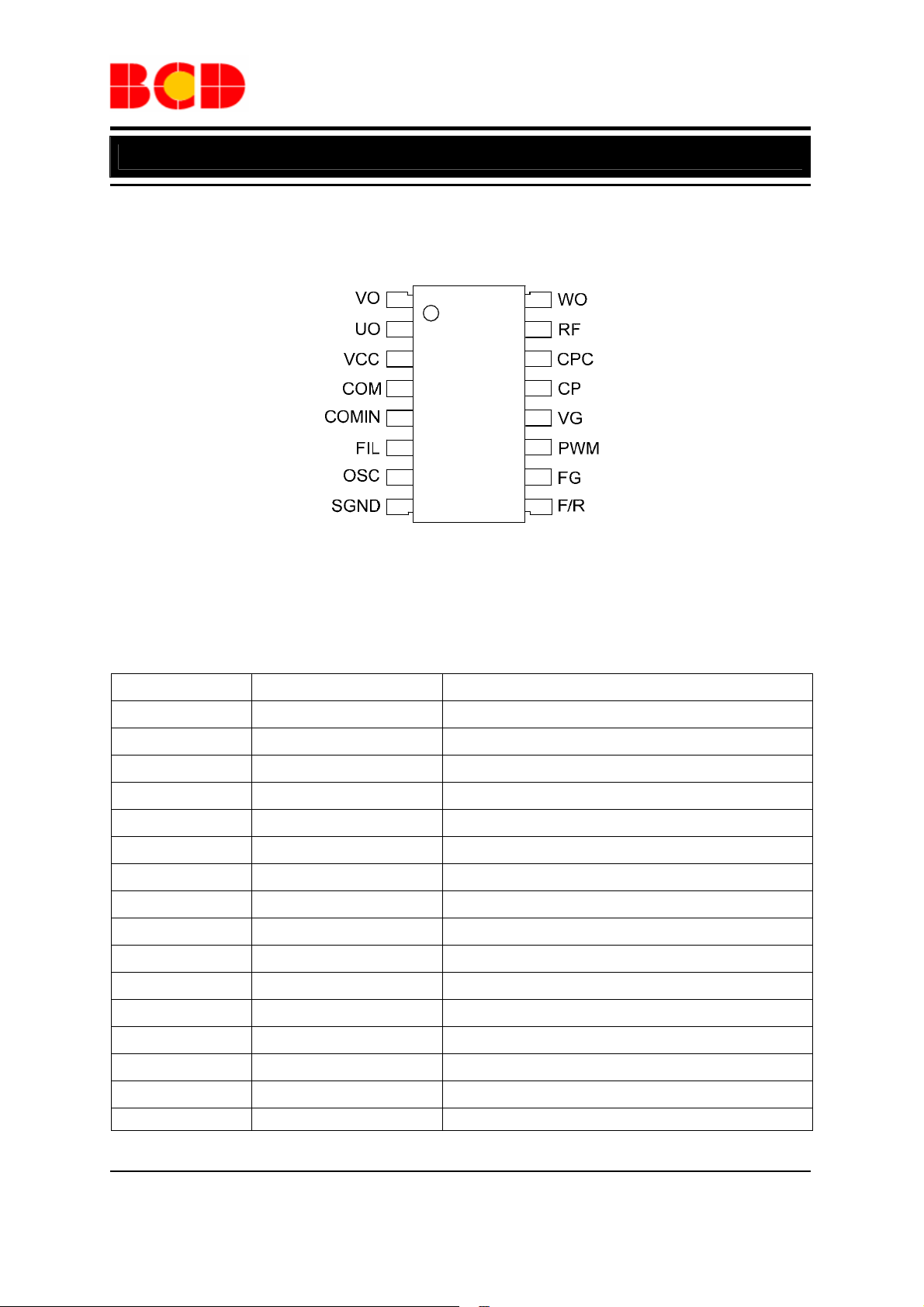
Figure 2. Pin Configuration of AM9800 (Top View)
15
14
13
12
11
10
9
Pin Description
Pin Number Pin Name Function
1 VO Output pin (V), connected to the motor coil
2 UO Output pin (U), connected to the motor coil
3 VCC Supply voltage
4 COM Motor middle-point connection
5 COMIN Motor position detection comparator filter pin 1
6 FIL Motor position detection comparator filter pin 2
7 OSC OSC startup frequency setting
8 SGND Ground for IC
9 F/R Rotation direction switching
10 FG FG pulse output
11 PWM PWM signal input
12 VG Charge pump step-up output
13 CP Charge pump step-up pulse output pin
14 CPC Charge pump step-up pin
15 RF Output current detection
16 WO Output pin (W), connected to the motor coil
Sep. 2012 Rev. 1. 0 BCD Semiconductor Manufacturing Limited
2
Page 3
Data Sheet
Three Phase Direct PWM Sensorless Motor Driver AM9800
Functional Block Diagram
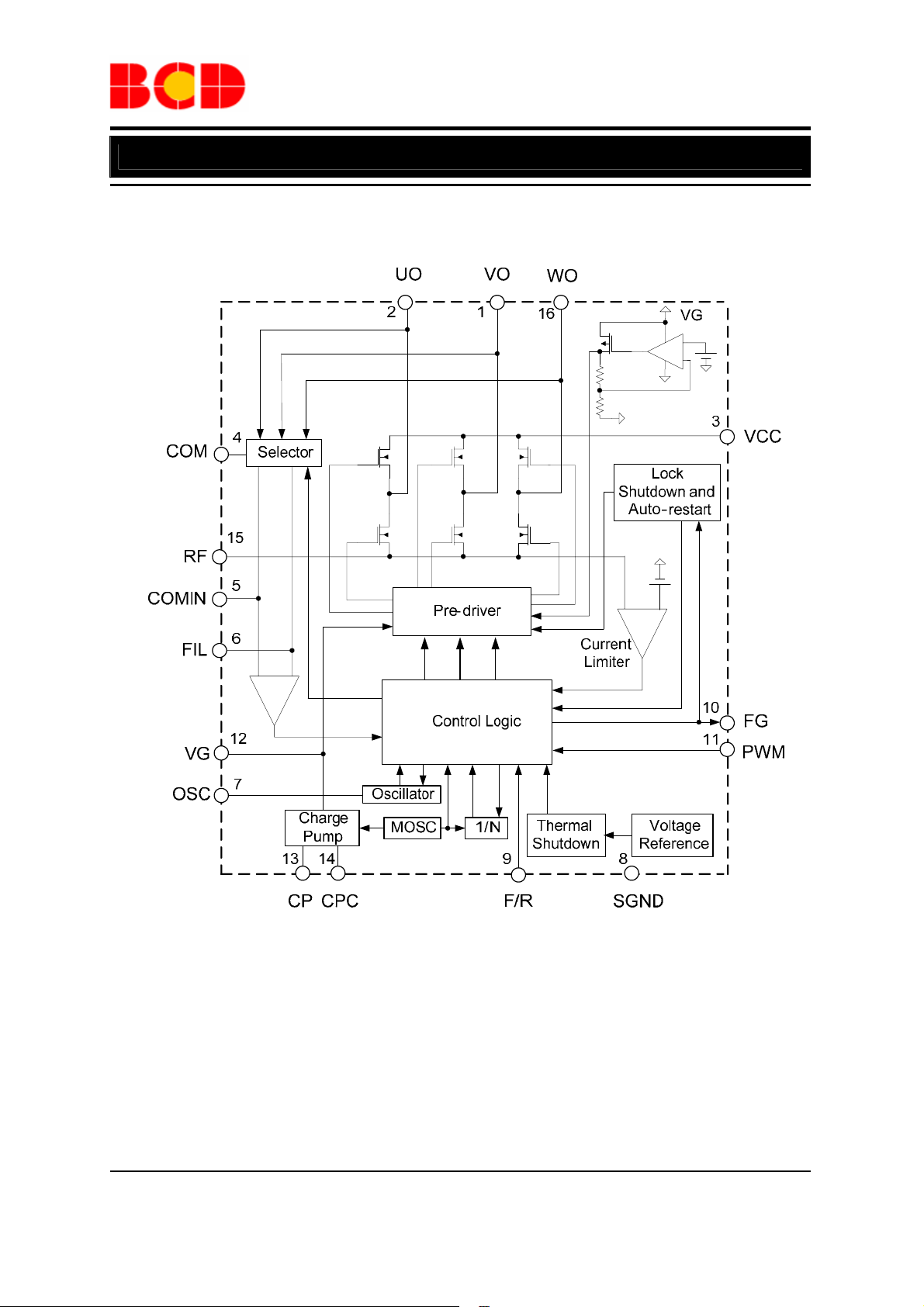
Figure 3. Functional Block Diagram of AM9800
Sep. 2012 Rev. 1. 0 BCD Semiconductor Manufacturing Limited
3
Page 4
Data Sheet
Three Phase Direct PWM Sensorless Motor Driver AM9800
Ordering Information
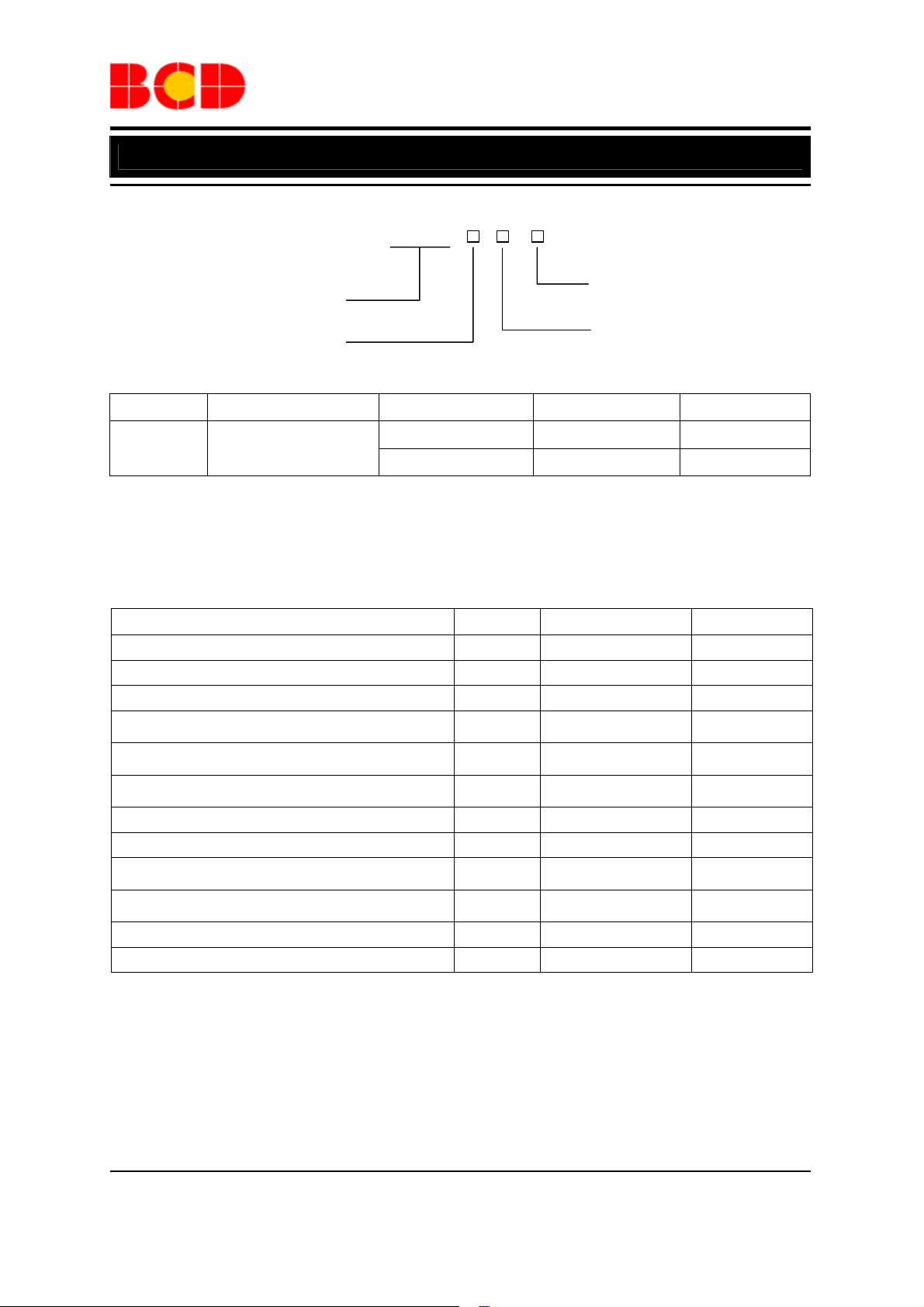
AM9800 -
Circuit Type
Package
GS: SSOP-16
Package Temperature Range Part Number Marking ID Packing Type
G1: Green
TR: Tape & Reel
Blank: Tube
SSOP-16
-30 to 95°C
AM9800GS-G1 AM9800GS-G1 Tube
AM9800GSTR-G1 AM9800GS-G1 Tape & Reel
BCD Semiconductor's Pb-free products, as designated with "G1" suffix in the part number, are RoHS
compliant and green.
Absolute Maximum Ratings (TA=25°C, Note 1)
Parameter Symbol Value Unit
Supply Voltage VCC 6.5 V
Pre-drive Voltage (Gate Voltage) VG 10 V
Output Current I
PWM Input Withstand Voltage V
FG Output Withstand Voltage VFG 6 V
FG Output Current IFG 5 mA
Power Dissipation1 (Independent IC) PD1 0.3 W
Power Dissipation2 (Note 2) PD2 0.8 W
Ambient Temperature (Note 3) TA -40 to 105
0.7 A
OUT
V
PWM
V
CC
°C
Storage Temperature T
ESD (Human Body Model) 4000 V
ESD (Machine Model) 300 V
-55 to 150
STG
°C
Note 1: Stresses greater than those listed under “Absolute Maximum Ratings” may cause permanent damage to
the device. These are stress ratings only, and functional operation of the device at these or any other conditions
beyond those indicated under “Recommended Operating Conditions” is not implied. Exposure to “Absolute
Maximum Ratings” for extended periods may affect device reliability.
Note 2: When mounted on 76.1mm×114.3mm×1.6mm glass epoxy board.
Note 3: T
=150°C. Use the IC in the range where the temperature of the chip does not exceed TJ=150°C during
J
operation.
Sep. 2012 Rev. 1. 0 BCD Semiconductor Manufacturing Limited
4
Page 5

Data Sheet
Three Phase Direct PWM Sensorless Motor Driver AM9800
Recommended Operating Conditions (TA=25°C)
Parameter Symbol Min Max Unit
Supply Voltage VCC 2.2 6 V
Operating Temperature TOP -30 95
°C
Electrical Characteristics
V
=5V, TA=25°C, unless otherwise specified.
CC
Parameter Symbol Conditions Min Typ Max Unit
Supply Current 1 I
Supply Current 2 I
VG Output Voltage VG 9.7 V
Upper Transistor Resistance R
Lower Transistor Resistance R
Upper & Lower Transistor
Resistance Total
OSC Frequency f
PWM Pin High-level Input
Voltage
PWM Pin Low-level Input
Voltage
V
R
ON(H+L)
V
PWMH
V
PWML
CC1
CC2
ONH
ONL
OSC
PWM=VCC
V
PWM
I
OUT
I
OUT
I
OUT
C
OSC
V
0 VCC×0.2 V
2 2.5 mA
=0V 20 50
=0.5A 1 1.5 Ω
=0.5A 1 1.5 Ω
=0.5A 2 3 Ω
=2200pF 1.0 kHz
×0.8 V
CC
CC
µA
V
PWM Pin Input Current I
PWM Input Frequency f
V
PWM
20 25 50 kHz
PWM
=0V -50 -20
PWM
µA
FG Low Level Voltage VFG IFG=0.5mA 0.2 V
RF Limiter Voltage VRF RF=0.5Ω 0.225 0.25 0.275 V
Lock Detection ON Time tON 2 s
Lock Detection OFF Time t
Thermal Protection
Temperature
Temperature Hysteresis
Width
4 s
OFF
T
175
SD
∆T
25
SD
°C
°C
Sep. 2012 Rev. 1. 0 BCD Semiconductor Manufacturing Limited
5
Page 6

Data Sheet
Three Phase Direct PWM Sensorless Motor Driver AM9800
Typical Performance Characteristics
2.5
2.0
1.5
1.0
Supply Current (mA)
0.5
TA=25oC
V
PWM=VCC
25
20
15
10
Supply Current (µA)
5
TA=25oC
V
=0V
PWM
0.0
0123456
Supply Voltage (V)
0
0123456
Supply Voltage (V)
Figure 4. Supply Current vs. Supply Voltage Figure 5. Supply Current vs. Supply Voltage
700
600
500
400
300
200
Saturation Voltage (mV)
100
VCC=5V, TA=25oC
V
SAT-UP
V
SAT-DOWN
0
0 100 200 300 400 500 600
Figure 6. Saturation Voltage vs. Output Current Figure 7. Power Dissipation vs. Temperature (Note 2)
Sep. 2012 Rev. 1. 0 BCD Semiconductor Manufacturing Limited
Output Current (mA)
1000
800
600
400
Power Dissipation (mW)
200
0
-40-20 0 20406080100
Ambient Temperature (
o
C)
6
Page 7

Data Sheet
Three Phase Direct PWM Sensorless Motor Driver AM9800
T ypical Application
1
VO
2
UO
3
VCC
1
F
1000pF
2200pF
4
5
6
7
8
COM
COMIN
FIL
OSC
SGND
PWM
WO
RF
CPC
CP
VG
FG
F/R
16
15
14
13
12
11
10
R
F
0.5
0.1
F
F
0.1
PWM Control Signal
R
FG
10k
9
FG Output
V
PWM
f=20k to
FG
50kHz
Figure 8. Typical Application of AM9800
Sep. 2012 Rev. 1. 0 BCD Semiconductor Manufacturing Limited
7
Page 8

Data Sheet
Three Phase Direct PWM Sensorless Motor Driver AM9800
Application Information
1. Reverse Connection of Power Supply
Connector
Reverse connection of power supply connector may
break IC. Some methods such as inserting a diode
between power supply and VCC terminal can be
taken to avoid the reverse connection destruction.
2. Power Supply Line
Back electromotive force (EMF) causes regenerated
current to the power supply line, so insert a capacitor
(recommended value: 1µF or larger) as close as
possible to the space between the power supply pin
(VCC pin) and ground pin (SGND pin) for routing
regenerated current.
3. GND Potential and External Components
Ensure that the potential of GND terminal is the
minimum potential in any operating condition.
External components connected to the ground must
be connected with lines that are as short as possible
and external components connected between IC pins
must be placed as close to the pins as possible.
4. Mounting Failures
In the process of attaching IC to the printed board,
more attention must be paid to the direction and
location of the IC, since mounting failures may also
break IC. In addition, destruction is also possible
when the circuit is shorted by foreign substance
between outputs or between output and power supply
or between output and GND.
5. Thermal Shutdown Circuit
Considering the power dissipation under actual
operating condition, the thermal design must be
applied with sufficient margin.
AM9800 features thermal shutdown (TSD) circuit
(protection temperature is 175°C typical and
hysteresis width is 25°C typical). When the chip
temperature reaches the TSD circuit temperature, the
output terminal becomes an open state. TSD circuit is
designed simply for the purpose of intercepting IC
from overheating. Make sure that the IC should not
be used again after this circuit operating. Figure 9
shows a fan rotates normally first and then enter into
OTP mode since the chip temperature reaches 175°C.
Finally the chip temperature decreases below 150°C,
then OTP mode is canceled and the fan rotates
normally again.
Sep. 2012 Rev. 1. 0 BCD Semiconductor Manufacturing Limited
VUO
5V/div
VVO
5V/div
VWO
5V/div
IWO
100mA/div
Time 1s/div
Figure 9. OTP Function
6. F/R Function
A high level input causes the current to flow into the
motor in the order of U, V, and W and a low level
input in the order of U, W, and V. When the motor is
used with the F/R pin open, the built-in resistor
enables the F/R pin to GND. Changing the order of
current application turns the motor to rotate in the
opposite direction. Switching H/L of F/R (pin 9)
terminal should not be done during the motor rotation.
It should be done once the motor stops. F/R terminal
should be connected to VCC or GND for reducing
PWM noise. Figure 10 shows a rotating fan’s
waveform at forward mode (F/R pin is connected to
SGND pin).
VUO
5V/div
VVO
5V/div
VWO
5V/div
IWO
200mA/div
Figure 10. Rotation Mode Waveform (Forward Mode)
Time 1ms/div
7. PWM Mode
The output transistor is on when a high-level voltage
is input to the PWM pin (pin 11), and is off when a
low-level voltage is input. PWM controls the speed
of the motor by inputting the pulse in accordance
with the duty cycle to the PWM pin. When the motor
is operated with the PWM pin open, the built-in
resistor enables the PWM pin to change to high-level
voltage and the motor speed rises to full speed. When
the PWM pin is fixed at low-level voltage, the motor
decelerates, and after the motor stops, it enters
“Power Saving Mode”. Figure 11 shows a rotating
fan’s waveform at PWM Mode.
8
Page 9

v
Data Sheet
Three Phase Direct PWM Sensorless Motor Driver AM9800
Application Information (Continued)
VUO
5V/div
VVO
5V/div
VWO
5V/div
-IWO
100mA/div
Figure 11. Rotation Mode Waveform (PWM Mode)
(f=25kHz, V
Time 5ms/di
=5V, VL=0V, Duty Cycle=50%)
H
8. Soft Switching Circuit
AM9800 adopts variable duty soft switching to
minimize the motor drive noise. Figure 12 shows
how soft switching circuit works during the fan
rotation.
VUO
5V/div
VVO
5V/div
VWO
5V/div
-IWO
200mA/div
Figure 12. Soft Switching Waveform
Time 200µs/div
9. Current Limiter Circuit
The driver current is detected by connecting a resistor
between RF pin (pin 15) and ground. The current
limiter circuit limits the output current peak value to
a level determined by the equation I=V
(V
=0.25V typical).
RF
RF/RF
10. OSC Circuit
A capacitor must be connected between OSC pin (Pin
7) and ground. When a capacitor is connected, the
OSC pin starts self-oscillation, and its frequency
becomes the startup frequency. Figure 13 shows a fan
system’s OSC Waveform.
V
OSC
100mV/div
Figure 13. OSC Waveform (C
Sep. 2012 Rev. 1. 0 BCD Semiconductor Manufacturing Limited
Time 500µs/div
=2200pF)
OSC
11.Position Detector Comparator Circuit
for Rotor
The position detector comparator circuit for the rotor
is a comparator for detecting rotor positional
information with the back EMF signal generated
when the motor rotates. The IC determines the timing
at which the output block applies current to the motor
based on the position information obtained here. A
capacitor (between 1000 and 10000pF) must be
connected between COMIN pin (pin 5) and the FIL
pin (pin 6) to prevent any motor startup misoperation
that is caused by the comparator input noise.
12.FG Output Circuit
FG output pin (pin 10) provides a pulse signal
equivalent to what provided by systems using a
Hall-effect sensor. A pull-up resistor (10kΩ is
recommended) must be connected between FG pin
and the power supply. Figure 14 shows the FG output
signal when the fan rotates.
VUO
5V/div
VVO
5V/div
VFG
5V/div
Figure 14. FG Output Signal
Time 5ms/div
13. Lock Shutdown and Auto Restart
This IC detects the rotation of the motor by internal
circuit block, and adjusts lock detection ON time (t
and lock detection OFF time (t
t
ON
and t
are shown as below:
OFF
) by internal counter.
OFF
VUO
5V/div
VVO
5V/div
VWO
5V/div
Figure 15. Lock Mode
9
Time 1s/div
ON
)
Page 10

Data Sheet
Three Phase Direct PWM Sensorless Motor Driver AM9800
Mechanical Dimensions
SSOP-16 Unit: mm(inch)
3.800(0.150)
4.000(0.157)
0.200(0.008)
0.300(0.012)
°
7
0.900(0.035)1.000(0.039)
5.800(0.228)
6.200(0.244)
°
8
°
8
0.200(0.008)
0.250(0.010)
Note: Eject hole, oriented hole and mold mark is optional.
0.650(0.026)
0.750(0.030)
0.800(0.031)
Φ
0.150(0.006)
0.250(0.010)
SEE
DETAIL A
0.635(0.025)
BSC
0.100(0.004)
0.250(0.010)
1.350(0.053)
1.550(0.061)
0.020(0.001)
0.050(0.002)
0.400(0.016)
1.270(0.050)
R0.150(0.006)
°
0
°
8
DETAIL A
°
7
4.700(0.185)
5.100(0.201)
1.350(0.053)
1.750(0.069)
0.250(0.010)
R0.150(0.006)
Sep. 2012 Rev. 1. 0 BCD Semiconductor Manufacturing Limited
10
Page 11

BCD Semiconductor Manufacturing Limited
IMPORTANT NOTICE
IMPORTANT NOTICE
BCD Semiconductor Manufacturing Limited reserves the right to make changes without further notice to any products or specifi-
BCD Semiconductor Manufacturing Limited reserves the right to make changes without further notice to any products or specifi-
cations herein. BCD Semiconductor Manufacturing Limited does not assume any responsibility for use of any its products for any
cations herein. BCD Semiconductor Manufacturing Limited does not assume any responsibility for use of any its products for any
particular purpose, nor does BCD Semiconductor Manufacturing Limited assume any liability arising out of the application or use
particular purpose, nor does BCD Semiconductor Manufacturing Limited assume any liability arising out of the application or use
of any its products or circuits. BCD Semiconductor Manufacturing Limited does not convey any license under its patent rights or
of any its products or circuits. BCD Semiconductor Manufacturing Limited does not convey any license under its patent rights or
other rights nor the rights of others.
other rights nor the rights of others.
http://www.bcdsemi.com
MAIN SITE
MAIN SITE
- Headquarters
BCD Semiconductor Manufacturing Limited
BCD Semiconductor Manufactur ing Limited
- Wafer Fab
No. 1600, Zi Xing Road, Shanghai ZiZhu Science-based Industrial Park, 200241, China
Shanghai SIM-BCD Semiconductor Manufacturing Limited
Tel: +86-21-24162266, Fax: +86-21-24162277
800, Yi Shan Road, Shanghai 200233, China
Tel: +86-21-6485 1491, Fax: +86-21-5450 0008
REGIONAL SALES OFFICE
Shenzhen Office
REGIONAL SALES OFFICE
Shanghai SIM-BCD Semiconductor Manufacturing Co., Ltd., Shenzhen Office
Shenzhen Office
Unit A Room 1203, Skyworth Bldg., Gaoxin Ave.1.S., Nanshan District, Shenzhen,
Shanghai SIM-BCD Semiconductor Manufacturing Co., Ltd. Shenzhen Office
China
Advanced Analog Circuits (Shanghai) Corporation Shenzhen Office
Tel: +86-755-8826 7951
Room E, 5F, Noble Center, No.1006, 3rd Fuzhong Road, Futian District, Shenzhen 518026, China
Fax: +86-755-8826 7865
Tel: +86-755-8826 7951
Fax: +86-755-8826 7865
- Wafer Fab
BCD Semiconductor Manufacturing Limited
Shanghai SIM-BCD Semiconductor Manufacturing Co., Ltd.
- IC Design Group
800 Yi Shan Road, Shanghai 200233, China
Advanced Analog Circuits (Shanghai) Corporation
Tel: +86-21-6485 1491, Fax: +86-21-5450 0008
8F, Zone B, 900, Yi Shan Road, Shanghai 200233, China
Tel: +86-21-6495 9539, Fax: +86-21-6485 9673
Taiwan Office
BCD Semiconductor (Taiwan) Company Limited
Taiwan Office
4F, 298-1, Rui Guang Road, Nei-Hu District, Taipei,
BCD Semiconductor (Taiwan) Company Limited
Tai wan
4F, 298-1, Rui Guang Road, Nei-Hu District, Taipei,
Tel: +886-2-2656 2808
Taiwan
Fax: +886-2-2656 2806
Tel: +886-2-2656 2808
Fax: +886-2-2656 2806
USA Office
BCD Semiconductor Corporation
30920 Huntwood Ave. Hayward,
CA 94544, U.S.A
Tel : +1-510-324-2988
Fax: +1-510-324-2788
USA Office
BCD Semiconductor Corp.
30920 Huntwood Ave. Hayward,
CA 94544, USA
Tel : +1-510-324-2988
Fax: +1-510-324-2788
 Loading...
Loading...