

Page 1

Jackrabbit (BL1800)
C-Programmable Single-Board Computer
User’s Manual
019–0067 • 090515–J
Page 2

Jackrabbit (BL1800) User’s Manual
Part Number 019-0067 • 090515–J • P rinted i n U. S.A.
©2000–2009 Digi International Inc. • All rights res erved.
No part of the contents of this manual may be reproduced or transmitted in any form or by any means
without the express written permission of Digi International.
Permission is granted to make one or more copies as long as the copyright page contained therein is
included. These copies of the manuals may not be let or sold for any reason without the express written
permission of Digi International.
Digi International reserves the right to make changes and
improvements to its products without providing n otice.
T r ade mark s
Rabbit and Dynamic C are registered trademarks of Digi International Inc.
Rabbit 2000 is a trademark of Digi International Inc.
The latest revision of this manual is available on the Rabbit Web s ite, www.rabbit.com ,
for free, unregistered download.
Digi International Inc.
www.rabbit.com
Jackrabbit (BL1800)
Page 3

TABLE OF CONTENTS
Chapter 1. Introduction 1
1.1 Features.................................................................................................................................................1
1.2 Development and Evaluation Tools......................................................................................................2
1.3 How to Use This Manual......................................................................................................................3
1.3.1 Additional Product Information....................................................................................................3
1.3.2 Online Documentation..................................................................................................................3
1.4 CE Compliance.....................................................................................................................................4
1.4.1 Design Guidelines.........................................................................................................................5
1.4.2 Interfacing the Jackrabbit to Other Devices..................................................................................5
Chapter 2. Getting Started 7
2.1 Development Kit Contents....................................................................................................................7
2.2 Development Hardware Connections...................................................................................................8
2.2.1 Attach Jackrabbit to Prototyping Board........................................................................................9
2.2.2 Connect Programming Cable......................................................................................................10
2.2.3 Connect Power............................................................................................................................11
2.3 Installing Dynamic C..........................................................................................................................12
2.4 Run a Sample Program.......................................................................................................................13
2.4.1 Troubleshooting..........................................................................................................................13
2.5 Where Do I Go From Here? ...............................................................................................................14
2.5.1 Real-Time Clock.........................................................................................................................14
2.5.2 Technical Support.......................................................................................................................14
Chapter 3. Subsystems 15
3.1 Jackrabbit Pinouts...............................................................................................................................16
3.1.1 Headers........................................................................................................................................16
3.2 Digital Inputs/Outputs.........................................................................................................................17
3.2.1 Digital Inputs...............................................................................................................................17
3.2.2 Digital Outputs............................................................................................................................18
3.2.3 Bidirectional I/O .........................................................................................................................20
3.3 A/D Converter.....................................................................................................................................21
3.4 D/A Converters...................................................................................................................................23
3.4.1 DA1.............................................................................................................................................24
3.4.2 DA0.............................................................................................................................................26
3.5 Serial Communication ........................................................................................................................28
3.5.1 RS-232 ........................................................................................................................................28
3.5.2 RS-485 ........................................................................................................................................28
3.5.3 Programming Port.......................................................................................................................30
3.6 Programming Cable............................................................................................................................32
3.6.1 Changing Between Program Mode and Run Mode....................................................................32
3.7 Memory...............................................................................................................................................33
3.7.1 SRAM .........................................................................................................................................33
3.7.2 Flash EPROM.............................................................................................................................33
3.8 Other Hardware...................................................................................................................................34
3.8.1 External Interrupts.......................................................................................................................34
3.8.2 Clock Doubler.............................................................................................................................34
3.8.3 Spectrum Spreader......................................................................................................................35
User’s Manual
Page 4

Chapter 4. Software Reference 37
4.1 An Overview of Dynamic C...............................................................................................................37
4.2 Sample Programs................................................................................................................................39
4.2.1 DEMOJR1.C ..............................................................................................................................40
4.2.2 Other Sample Programs Illustrating Digital I/O.........................................................................44
4.2.3 RS-232 Serial Communication Sample Programs .....................................................................46
4.2.4 RS-485 Serial Communication Sample Program.......................................................................47
4.3 Cooperative Multitasking...................................................................................................................48
4.3.1 Advantages of Cooperative Multitasking...................................................................................50
4.4 Jackrabbit Function Calls...................................................................................................................51
4.4.1 I/O Drivers..................................................................................................................................51
4.4.2 Serial Communication Drivers...................................................................................................55
4.5 Upgrading Dynamic C .......................................................................................................................56
4.5.1 Patches and Bug Fixes................................................................................................................56
4.5.2 Add-On Modules........................................................................................................................56
Appendix A. Specifications 57
A.1 Electrical and Mechanical Specifications..........................................................................................58
A.1.1 Exclusion Zone..........................................................................................................................60
A.1.2 Headers......................................................................................................................................61
A.2 Jumper Configurations......................................................................................................................62
A.3 Conformal Coating............................................................................................................................64
A.4 Use of Rabbit 2000 Parallel Ports.....................................................................................................65
Appendix B. Prototyping Board 69
B.1 Prototyping Board Overview.............................................................................................................70
B.1.1 Prototyping Board Features.......................................................................................................71
B.2 Mechanical Dimensions and Layout.................................................................................................72
B.3 Using the Prototyping Board.............................................................................................................73
B.3.1 Demonstration Board.................................................................................................................74
B.3.2 Prototyping Board......................................................................................................................76
Appendix C. Power Management 79
C.1 Power Supplies..................................................................................................................................79
C.2 Batteries and External Battery Connections...................................... ..... .................................. ... ......82
C.2.1 Battery Backup Circuit ..............................................................................................................83
C.2.2 Power to VRAM Switch............................................................................................................84
C.2.3 Reset Generator..........................................................................................................................84
C.3 Chip Select Circuit.............................................................................................................................85
Index 87
Schematics 89
Jackrabbit (BL1800)
Page 5

1. INTRODUCTION
The Jackrabbit is a high-performance, C-programmable single-
®
board computer with a compact form factor. A Rabbit
microprocessor operating at 29.5 MHz provides fast data processing.
1.1 Features
• 29.5 MHz clock
• 24 CMOS-compatible I/O
• 3 analog channels: 1 A/D input, 2 PWM D/A outputs
• 4 high-power outputs (factory-configured as 3 sinking and 1 sourcing)
• 4 serial ports (2 RS-232 or 1 RS-232 with RTS/CTS, 1 RS-485, and 1 CMOS-
compatible)
2000
• 6 timers (five 8-bit timers and one 10-bit timer)
• 128K SRAM, 256K flash EPROM
• Real-time clock
• Watchdog supervisor
• Voltage regulator
• Backup battery
User’s Manual 1
Page 6

Three Jackrabbit models are available. Their standard features are summarized in Table 1.
Table 1. Jackrabbit Features
Model Features
BL1800 Full-featured controller with switching voltage regulator.
BL1800 with 14.74 MHz clock, 12 8K flash EPROM, l inear
BL1810
voltage regulator, sinking outputs sink up to 200 mA,
sourcing output sources up to 100 mA, RS-232 serial ports
rated for 1 kV ESD
BL1820
BL1810 with 3 additional digital I/O, no RS-485, no
backup battery.
Throughout this manual, the term Jackrabbit refers to all three Jackrabbit models in
Table 1; individual models are referred to specifically according to the model number in
Table 1.
Appendix A provides detailed specifications.
Visit the Web site for up-to-date information about additional add-ons and features as
they become available. The Web site also has the latest revision of this user’s manual.
1.2 Development and Evaluation Tools
A complete Development Kit, including a Prototyping Board and Dynamic C development software, is available for the Jackrabbit. The Development Kit puts together the
essentials you need to design an embedded microprocessor-based system rapidly and efficiently.
2 Jackrabbit (BL1800)
Page 7

1.3 How to Use This Manual
This user’s manual is intended to give users detailed information on the Jackrabbit. It does
not contain detailed information on the Dynamic C development environment or the Rabbit
2000® microprocessor. Most users will want more detailed information on some or all of
these topics in order to put the Jackrabbit to effective use.
1.3.1 Additional Product Information
In addition to the product-specific information contained in the Jackrabbit (BL1800)
User’s Manual (this manual), several higher level reference manuals are provided in
HTML and PDF form on the accompanying CD-ROM. Advanced users will find these
references valuable in developing systems based on the Jackrabbit:
• Dynamic C User’s Manual
• Dynamic C Function Reference Manual
• Rabbit 2000 Microprocessor User’s Manual
1.3.2 Onlin e Documentation
The online documentation is installed along with Dynamic C, and an icon for the documentation menu is placed on the workstation’s desktop. Double-click this icon to reach the
menu. If the icon is missing, use your browser to find and load default.htm in the docs
folder, found in the Dynamic C installation folder.
The latest versions of all documents are always available for free, unregistered download
from our Web sites as well.
User’s Manual 3
Page 8

1.4 CE Compliance
Equipment is generally divided into two classes.
CLASS A CLASS B
Digital equipment meant for light industrial use Digital equipment meant for home use
Less restrictive emissions requirement:
less than 40 dB µV/m at 10 m
(40 dB relative to 1 µV/m) or 300 µV/m
More restrictive emissions requirement:
30 dB µV/m at 10 m or 1 00 µV/m
These limits apply over the range of 30–230 MHz. The limits are 7 dB higher for frequencies above 230 MHz. Although the test range goes to 1 GHz, the emissions from Rabbitbased systems at frequencies above 300 MHz are generally well below background noise
levels.
The Jackrabbit single-board computer has been tested and was found to
be in conformity with the following applicable immunity and emission
standards. The BL1810 and BL1820 single-board models are also CE
qualified as they are sub-versions of the Jackrabbit. Boards that are CEcompliant have the CE mark.
NOTE: Earlier versions of the Jackrabbit sold before 2002 that do not have the CE mark
are not CE-complaint.
Immunity
The Jackrabbit series of single-board computers meets the following EN55024/1998
immunity standards.
• EN61000-4-3 (Radiated Immunity)
• EN61000-4-4 (EFT)
• EN61000-4-6 (Conducted Immunity)
Additional shielding or filtering may be required for a heavy industrial environment.
Emissions
The Jackrabbit series of single-board computers meets the following emission standards
with the Rabbit 2000 spectrum spreader turned on and set to the normal mode. The spectrum
spreader is only available with Rev. C or higher of the Rabbit 2000 microprocessor. This
microprocessor is used in all Jackrabbit series boards that carry the CE mark.
• EN55022:1998 Class B
• FCC Part 15 Class B
In order for the Jackrabbit boards to meet these EN55022:1998 Class B standards, you
must add ferrite absorbers to the serial I/O cables used for RS-232 and RS-485 serial communication. Depending on your application, you may need to add ferrite absorbers to the
4 Jackrabbit (BL1800)
Page 9

digital I/O cables. Your results may vary, depending on your application, so additional
shielding or filtering may be needed to maintain the Class B emission qualification.
NOTE: If no ferrite absorbers are fitted, the Jackrabbit boards will still meet
EN55022:1998 Class A requirements as long as the spectrum spreader is turned on.
The spectrum spreader is on by default for Jackrabbit models BL1810 and BL1820. The
spectrum spreader is off by default for the Jackrabbit model BL1800, and must be turned
on with at least one wait state in order for the BL1800 model to be CE-compliant.
Section 3.8.3 provides further information about the spectrum spreader and its use, and
includes information on how to add a wait state.
1.4.1 Design Guidelines
Note the following requirements for incorporating the Jackrabbit series of single-board
computers into your application to comply with CE requirements.
General
• The power supply provided with the Development Kit is for development purposes
only . It i s the customer’ s responsibility to provide a CE-compliant power supply for the
end-product application.
• When connecting the Jackrabbit single-board computer to outdoor cables, the customer
is responsible for providing CE-approved surge/lightning protection.
• Rabbit recommends placing digital I/O or analog cables that are 3 m or longer in a
metal conduit to assist in maintaining CE compliance and to conform to good cable
design practices. Rabbit also recommends using properly shielded I/O cables in noisy
electromagnetic environments.
• When installing or servicing the Jackrabbit, it is the responsibility of the end-user to use
proper ESD precautions to prevent ESD damage to the Jackrabbit.
Safety
• For personal safety, all inputs and outputs to and from the Jackrabbit series of singleboard computers must not be connected to voltages exceeding SEL V levels (42.4 V AC
peak, or 60 V DC). Damage to the Rabbit 2000 microprocessor may result if voltages
outside the design range of 0 V to 5.5 V DC are applied directly to any of its digital
inputs.
• The lithium backup battery circuit on the Jackrabbit single-board computer has been
designed to protect the battery from hazardous conditions such as reverse charging and
excessive current flows. Do not disable the safety features of the design.
1.4.2 Interfacing the Jackrabbit to Other Devices
Since the Jackrabbit series of single-board computers is designed to be connected to other
devices, good EMC practices should be followed to ensure compliance. CE compliance is
ultimately the responsibility of the integrator. Additional information, tips, and technical
assistance are available from your authorized Rabbit distributor, and are also available on
our Web site at www.rabbit.com.
User’s Manual 5
Page 10

6 Jackrabbit (BL1800)
Page 11

2. GETTING S TARTED
This chapter des cribes the Jackrabbit board in more detail, an d
explains how to set up and use the accompanying Prototyping
Board.
NOTE: This chapter (an d this ma nual) as sume that yo u have the J ackrabbi t Development
Kit. If you purchased a Jackrabbit board by itself, you will have to adapt the information in this chapter and elsewhere to your test and development setup.
2.1 Development Kit Contents
The Jackrabbit Development Kit contains the following items:
• BL1810 single-board computer.
• Prototyping Board.
• Universal AC adapter, 12 V DC, 1 A (includes Canada/Japan/U.S., Australia/N.Z.,
U.K., and European style plugs).
7.5–25 V
DC at 5 W
.
If you are using another power supply, it must provide
NOTE: The linear voltage regulator becomes rather hot for voltages above 15 V.
• 10-pin header to DB9 programming cable with integrated level-matching circuitry.
• Dynamic C CD-ROM, with complete product documentation on disk.
• Getting Started instructions.
• A bag of accessory parts for use on the Prototyping Board.
• Screwdriver.
• Rabbit 2000 Processor Easy Reference poster.
• Registration card.
User’s Manual 7
Page 12

2.2 Development Hardware Connections
There are three steps to connecting the Prototyping Board for use with Dynamic C and the
sample programs:
1. Attach the Jackrabbit to the Prototyping Board.
2. Connect the programming cable between the Jackrabbit and the workstation PC.
3. Connect the power supply to the Jackrabbit.
8 Jackrabbit (BL1800)
Page 13

2.2.1 Attach Jackrabbit to Prototyping Board
To attach the Jackrabbit board to the Prototyping Board, turn the Jackrabbit board over so
that the battery is facing up. Plug the pins from headers J4 and J5 on the bottom side of the
Jackrabbit board into the header sockets at J2 and J6 on the Prototyping Board as indicated
in Figure 1.
GND
PA0
PA2
PA4
PA6
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
PE0
HV0
HV2KGND
Prototyping
Board
J4
PA1
PA3
PA5
PA7
PB1
PB3
PB5
PB7
PE7
PE5
PE3
PE1
HV1
HV3
VCC
GND
PCLK
VCC
GND
+RAW
Jackrabbit
J2
VCC
PA1
PA3
PA0
PA2
GND
GND
RXC
TXC
J2
PA5
PA7
GND
PB1
PB3
PB5
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
+RAW
VCC
PA4
PA6
PB0
PB2
PB4
PB6
PE6
GND
PA0
PA1
PA2
PA3
PA4
PA5
DS1
DS2
DS3
DS4
DS5
DS6
PE4
GND
WDO
PA6
PA7
PB2
PB3
PB4
S1S2S3
DS7
DS8
J6
PC1
PC3
PC5
PC7
AGND
DA1
PD1
PD3
PD5
PD7
GND
PE2
485+
K
PE0
HV0
HV2
PB5
S4
GND
GND
GND
J6
GND
VCC
SM1
STAT
VBAT
Buzzer
VCC
J5
GND
R3
Board
+
S1S2S3S4
DS1
RXB
TXB
PC0
PC2
PC4
PC6
AD0
DS2
PC1
PC3
PC5
PC7
TXC
RXC
DS3DS4
AGND
DS5
DS6
Battery
DA0
PD0
PD2
PD4
PD6
GND
485
VCC
SM0
IOBEN
GND
/RST
DA1
PD1
PD3
PD5
PD7
SM1
VCC
GND
485+
GND
STAT
VBAT
DS7
TXB
PC0
PC2
PC4
PC6
AD0
DA0
PD0
PD2
PD4
RXB
VCC
JACKRABBIT PROTOTYPING BOARD
PD6
S5
/RST
RESET
SM0
VCC
GND
485
GND
IOBEN
Z-World, Inc.
PWR
DS8
Figure 1. Attach Jackrabbit Board to Prototyping Board
NOTE: It is important that you line up the pins on headers J4 and J5 of the Jackrabbit
board exactly with the corresponding pins of header sockets J2 and J6 on the Prototyping Board. The header pi ns ma y be come bent or damaged if the pin ali gnmen t i s offset,
and the Jackrabbit might not work. Permanent electrical damage to the may also result
if a misaligned Jackrabbit is powered up.
Press the Jackrabbit’s pins firmly into the Prototyping Board headers.
User’s Manual 9
Page 14

2.2.2 Connect Programming Cable
The programming cable connects the Jackrabbit to the PC running Dynamic C to download programs and to monitor the Jackrabbit during debugging.
Connect the 10-pin connector of the programming cable labeled PROG to header J3 on
the Jackrabbit board as shown in Figure 2. Be sure to orient the marked (usually red) edge
of the cable towards pin 1 of the connector. (Do not use the DIAG connector, which is used
for a normal serial connection.)
NOTE: Use only the programming cable that has a red shrink wrap around the RS-232
level converter (Part No. 20-101-0513), which is supplied with the Development Kit.
Other Rabbit programming cables are not voltage-compatible or their connector sizes
may be different.
Remove slot cover,
1
insert tab into slot
Assemble
AC Adapter
Snap plug into place
2
JACKRABBIT BOARD
U5
JP1
SRAM
U6
RS-485
U4
RS-232
VCC
RXB
TXB
PC0
PC2
PC4
PC6
AD0
DA0
PD0
PD2
PD4
PD6
GND
485
VCC
SM0
IOBEN
GND
/RST
Red
shrink wrap
RESET
J5
GND
RXC
TXC
PC1
PC3
PC5
PC7
AGND
DA1
PD1
PD3
PD5
PD7
GND
485+
VCC
SM1
STAT
VBAT
GND
Colored side
lines up with
pin 1
Programming
connector
U1
J4
GND
VCC
PA0
PA1
PA2
PA3
PA4
PA5
PA6
PA7
K
U3
GND
PB1
PB3
PB5
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
+RAW
VCC
JACKRABBIT
Rabbit 2000
Y3
Z-World, Inc.
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
J2
PROG
PE0
HV0
HV2
GND
J1
VINGNDGND
J3
PROTOTYPING BOARD
Diagnostic
connector
DIAG
To
PC COM port
Figure 2. Power and Programming Cable Connections
to Jackrabbit Board
NOTE: Never disconnect the programming cable by pulling on the ribbon cable.
Carefully pull on the connector to remove it from the header.
Connect the other end of the programming cable to a COM port on your PC.
NOTE: Some PCs now come equipped only with a USB port. It may be possible to use
an RS-232/USB converter (Part No. 20-151-0178) with the programming cable supplied with the Jackrabbit Development Kit. Note that not all RS-232/USB converters
work with Dynamic C.
10 Jackrabbit (BL1800)
Page 15

2.2.3 Connect Power
When all other connections have been made, you can connect power to the Jackrabbit.
First, prepare the AC adapter for the country where it will be used by selecting the plug.
The Jackrabbit Development Kit presently includes Canada/Japan/U.S., Australia/N.Z.,
U.K., and European style plugs. Snap in the top of the plug assembly into the slot at the
top of the AC adapter as shown in Figure 2, then press down on the spring-loaded clip
below the plug assembly to allow the plug assembly to click into place.
Hook up the connector from the AC adapter to header J1 on the Jackrabbit board as shown
in Figure 2. The orientation of this connector is not important since the VIN (positive)
voltage is the middle pin, and GND is available on both ends of the three-pin header J1.
Plug in the AC adapter. The Jackrabbit board and the Prototyping Board are ready to be
used.
NOTE: A RESET button is provided on the Prototyping Board (see Figure 1) to allow
hardware reset without disconnecting power.
To power down the Jackrabbit, unplug the power connector from J1. You should disconnect power before making any circuit adjustments in the prototyping area, changing any
connections to the board, or removing the Jackrabbit from the Prototyping Board.
User’s Manual 11
Page 16

2.3 Installing Dynamic C
If you have not yet installed Dynamic C, do so now by inserting the Dynamic C CD from
the Jackrabbit Development Kit in your PC’s CD-ROM drive. The CD will auto-install
unless you have disabled auto-install on your PC.
If the CD does not auto-install, click Start > Run from the Windows Start button and
browse for the Dynamic C setup.exe file on your CD drive. Click OK to begin the
installation once you have selected the setup.exe file.
The online documentation is installed along with Dynamic C, and an icon for the documentation menu is placed on the workstation’s desktop. Double-click this icon to reach the
menu. If the icon is missing, create a new desktop icon that points to default.htm in the
docs folder, found in the Dynamic C installation folder.
The latest versions of all documents are always available for free, unregistered download
from our Web sites as well.
The Dynamic C User’s Manual provides detailed instructions for the installation of
Dynamic C and any future upgrades.
NOTE: If you have an earlier version of Dynamic C already installed, the default instal-
lation of the la te r ver sion wi ll b e in a dif f erent fold er, and a separate icon will appear on
your desktop.
Once your installation is complete, you will have up to three icons on your PC desktop.
One icon is for Dynamic C, one opens the documentation menu, and the third is for the
Rabbit Field Utility, a tool used to download precompiled software to a target system.
If you have purchased any of the optional Dynamic C modules, install them after installing
Dynamic C. The modules may be installed in any order. You must install the modules in
the same directory where Dynamic C was installed.
12 Jackrabbit (BL1800)
Page 17

2.4 Run a Sample Program
If you already have Dynamic C installed, you are now ready to test your programming
connections by running a sample program. Start Dynamic C by double-clicking on the
Dynamic C icon on your desktop or in your Start menu. Dynamic C uses the serial port
specified during installation.
If you are using a USB port to connect your computer to the BL1810, click on the Commu-
nications
programming cable. Click OK.Y ou may have to determine which COM port was assigned to
the RS-232/USB converter. Open Control Panel > System > Hardware > Device Man-
ager > Ports
select Options > Project Options, then select this COM port on the Communications
tab, then click OK. You may type the COM port number followed by Enter on your computer keyboard if the COM port number is outside the range on the dropdown menu.
Find the file PONG.C, which is in the Dynamic C SAMPLES folder. To run the program,
open it with the File menu, compile it using the Compile menu, and then run it by selecting
Run in the Run menu. The STDIO window will open on your PC and will display a small
square bouncing around in a box. This program shows that the CPU is working.
2.4.1 Troubleshooting
tab and verify that Use USB to Serial Converter is selected to support the USB
and identify which COM port is used for the USB connection. In Dynamic C,
If Dynamic C cannot find the target system (error message "No Rabbit Processor
Detected."
):
• Check that the BL1810 is powered correctly — the AC adapter should be connected to
header J1 on t he Jackrabbit boar d and should be plugged in to a wall outlet.
• Check both ends of the programming cable to ensure that they are firmly plugged into
the PC and that the PROG connector, not the DIAG connector, is plugged in to the
programming port on the BL1810 with the colored side lined up with pin 1.
• Ensure that the BL1810 is firmly and correctly installed in its sockets on the Prototyping Board.
• Select a different COM port within Dynamic C. From the
Project Options, then select another COM port from the list on the Comm unications
Options menu, select
tab, then click OK. Press <Ctrl-Y> to force Dynamic C to recompil e the BIOS.
If a program compiles and loads, but then loses target communication before you can
begin debugging, it is possible that your PC ca nnot handle the default debuggi ng baud rate.
Try lowering the debugging baud rate as follows.
• Locate the Serial Options dialog in the Dynamic C Options > Project Options >
Communications
menu. Choose a lower debug baud rate, then click OK.
User’s Manual 13
Page 18

2.5 Where Do I Go From Here?
If everything appears to be working, we recommend the following sequence of action:
1. Run all of the sample programs described in Section 4.2 to get a basic familiarity with
Dynamic C and the Jackrabbit’s capabilities.
2. For further development, refer to this Jackrabbit (BL1800) User’s Manual for details
of the board’s hardware components.
A documentation icon should have been installed on your workstation’s desktop; click
on it to reach the documentation menu. You can create a new desktop icon that poi nts to
default.htm in the docs folder in the Dynamic C installation folder.
3. For advanced development topics, refer to the Dynamic C User’s Manual, also in the
online documentation set.
2.5.1 Real-Time Clock
If you plan to use the real-time clock functionality in your application, you will need to set
the real-time clock. You may set the real-time clock using the SETRTCKB.C sample program from the Dynamic C SAMPLES\RTCLOCK folder. The RTC_TEST.C sample program in the Dynamic C SAMPLES\RTCLOCK folder provides additional examples of how
to read and set the real-time clock
2.5.2 Technical Support
NOTE: If you purchased your Jackra bbit thr ough a distributor or through a Rabbi t pa rtner,
contact the distrib utor or partner first for tec hnic al support.
If there are any problems at this point:
• Use the Dynamic C Help menu to get further assistance with Dynamic C.
• Check the Rabbit Technical Bulletin Board and forums at www.rabbit.com/support/bb/
and at www.rabbit.com/forums/.
• Use the Technical Support e-mail form at www.rabbit.com/support/.
14 Jackrabbit (BL1800)
Page 19

3. SUBSYSTEMS
Chapter 3 describes the principal subsystems and their use for
the Jackrabbit.
• Digital Inputs/Outputs
• A/D Converter
• D/A Converters
• Serial Communication
• Memory
Figure 3 shows these Rabbit-based subsystems designed into the Jackrabbit.
SRAM
Flash
BL1800
32 kHz
osc
RABBIT
Programming
Port
15 MHz
osc
®
RS-232
RS-485
2000
Figure 3. Jackrabbit Subsystems
Digital
Inputs
Digital
Outputs
High-
Power
Outputs
A/D
Converter
Analog
Outputs
User’s Manual 15
Page 20

3.1 Jackrabbit Pinouts
Figure 4 shows the pinout for headers J4 and J5, which carry the signals associated with
the Jackrabbit subsystems.
J5
GND
PA0
PA2
PA4
PA6
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
PE0
HV0
HV2
GND
J4
VCC
PA1
PA3
PA5
PA7
GND
PB1
PB3
PB5
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
K
+RAW
VCC
Legend
Bidirectional
I/O
One-Direction
I/O
VCC
RXB
TXB
PC0
PC2
PC4
PC6
AD0
DA0
PD0
PD2
PD4
PD6
GND
485
VCC
SM0
IOBEN
GND
/RST
Figure 4. Pinout for Jackrabbit Headers J4 and J5
GND
RXC
TXC
PC1
PC3
PC5
PC7
AGND
DA1
PD1
PD3
PD5
PD7
GND
485+
VCC
SM1
STAT
VBAT
GND
3.1.1 Headers
Standard Jackrabbit models are equipped with two 2 × 20 IDC headers (J4 and J5) with a
2 mm pitch.
16 Jackrabbit (BL1800)
Page 21

3.2 Digital Inputs/Output s
3.2.1 Digital Inputs
The Jackrabbit has six CMOS-level digital inputs, PB0–PB5, each o f which is pulled up to
+5 V as shown in Figure 5. The BL1820, which does not have RS-485, has one additional
CMOS-level digital input, PC1.
Vcc
47 kW
GND
Figure 5. Digital Inputs
Rabbit 2000
Microprocessor
The actual switching threshold is approximately 2.40 V. Anything below this value is a
logic 0, and anything above is a logic 1.
NOTE: Since the voltage limits on the inputs to the Rabbit 2000 microprocessor are 0 to
5.5 V DC, the end user must ensure that the voltage applied to any I/O pin is within
these limits.
User’s Manual 17
Page 22

3.2.2 Digital Outputs
The Jackrabbit has four CMOS-level digital outputs, PB6–PB7, PCLK, and IOBEN. Four
high-power outputs, HV0–HV3, are also available—HV0–HV2 can each sink up to 1 A
(200 mA for the BL1810 and BL1820) at 30 V, and HV3 can source up to 500 mA (100 mA
for the BL1810 and BL1820) at 30 V. The BL1820, which does not have RS-485, has one
additional CMOS-level digital output, PC0.
HV0HV2 SINKING OUTPUTS
+K
Current
Flow
PE[02]
HV3 SOURCING OUTPUT
+K
PE3
Figure 6. Jackrabbit High-Power Digital Outputs
Current
Flow
The common power supply for the four high-power outputs is called K, and is available on
header J4. Connect K to the power supply that powers the load, which is usually a separate
power supply to that used for the Jackrabbit, and must be no more than 30 V because of
the power limitations of the resistors used in the sourcing output circuit.
The K connection performs two functions.
1. K supplies power to the sinking/sourcing transistors used in the high-power circuits.
2. A diode-capacitor combination in the circuit “snubs” voltage transients when inductive
loads such as relays and solenoids are driven.
18 Jackrabbit (BL1800)
Page 23

3.2.2.1 Configurable High-Power Output (HV3)
HV3, shown schematically in Figure 7, is factory-configured to be a sourcing output.
R55
0 W
C27
100 nF
HV3
(sinking
option)
R48
K
R50
100 kW
Q25
PE3
470 W
Q28
C28
100 nF
MMBT3906
MMBT4401
R52
1.8 kW
R51
1.8 kW
R56
HV3
(sourcing)
0 W
D24
Figure 7. Configurable High-Current Output
When used as a sourcing output, HV3 is switched to K when PE3 on the R abbit 2000 goes
high, and the two transistors shown in Fi gure 7 are turned on. The maximum sourcing current is 100 mA (BL1810 and BL1820) or 500 mA (BL1800), and the maximum K is 30 V.
This voltage limit on K arises because R51 and R52 at the base of Q28 can each dissipate
500 mW for a total of 1 W. The 30 V limit then constrains the sinking outputs as well
because K is common to all four high-current outputs.
User’s Manual 19
Page 24

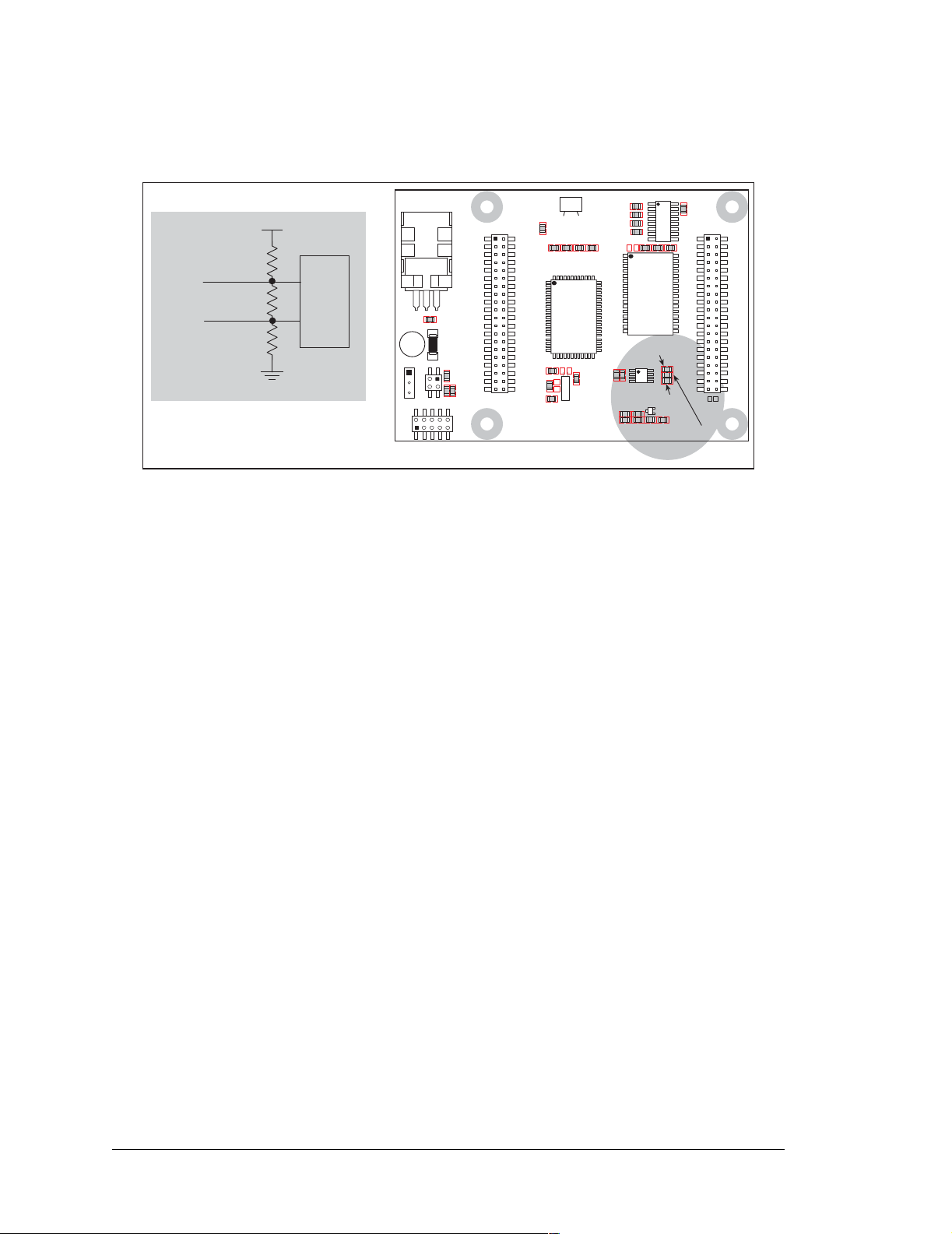
HV3 can also be reconfigured as a sinking output. To do so, remove the 0 Ω surfacemounted resistor R56, and solder on a 0 Ω surface-mounted resistor or jumper wire at
R55. If you plan to drive inductive loads, add a diode at D21. Figure 8 shows the location
of these components.
GND
RXC
TXC
PC1
PC3
PC5
PC7
AGND
DA1
PD1
PD3
PD5
PD7
GND
485+
VCC
SM1
STAT
VBAT
GND
J5
VCC
RXB
TXB
PC0
PC2
PC4
PC6
AD0
DA0
PD0
PD2
PD4
PD6
GND
485
VCC
SM0
IOBEN
GND
/RST
Battery
C27
D24
VCC
GND
PCLK
GND
+RAW
VCC
J4
GND
PA1
PA3
PA5
PA7
PB1
PB3
PB5
PB7
PE7
PE5
PE3
PE1
HV1
HV3
PA0
PA2
PA4
PA6
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
PE0
HV0
HV2
K
GND
R55
R56
D21
Figure 8. Changing HV3 to a Sinking Output
3.2.3 Bidirectional I/O
The Jackrabbit has 14 CMOS-level bidirectional I/O: PA0–PA7, PD0, PD3, PD6–PD7,
and PE4–PE5. The BL1820, which does not have RS-485, has one additional bidirectional
I/O, PD5.
20 Jackrabbit (BL1800)
Page 25

3.3 A/D Converter
The analog-to-digital (A/D) converter, shown in Figure 9, compares the DA0 voltage to
AD0, the voltage presented to the converter. DA0 therefore cannot be used for the digitalto-analog (D/A) converter when the A/D converter is being used.
Vcc
R34
51.1 kW
AD0
R35
200 W
DA0
R33
200 W
R32
51.1 kW
Vcc
R31
10 kW
9
10
13
12
LM324
+
LM324
+
DA0 too low
R36
8
0 W
R30
14
0 W
DA0 too high
PE7
PE6
Figure 9. Schematic Diagram of A/D Converter
The A/D converter transforms the voltage at DA0 into a 20 mV window centered around
DA0. For example, if DA0 is 2.0 V, the window in
the A/D
converter would be 1.990 V to
2.010 V. If AD0 > 2.010 V, PE7 would read high and PE6 would read low. If 1.990 V <
AD0 < 2.010 V, PE7 would read low and PE6 would read low. This is the case when the
A/D input is exactly the same as DA0. If AD0 < 1.990 V, PE7 would read low and PE6
would read high.
PE6 can be imagined to be a “DA0 voltage is too high” indicator . If DA0 is lar ger than the
analog voltage presented at AD0, then PE6 will be true (high). If this happens, the program will need to reduce the DA0 voltage.
PE7 can be imagined to be a “DA0 voltage is too low” indicator. If DA0 is smaller than
the analog voltage presented at AD0, then PE7 will be true (high). If this happens, the program will need to raise the DA0 voltage.
The A/D input, AD0, is the same as DA0 only when PE6 and PE7 are low. Because the
A/D converter circuit uses a 20 mV window, the accuracy is ±10 mV. DA0 can range from
0.1 V to 2.8 V, which represents 270 steps of ±10 mV. This is better than 8-bit accuracy.
Since the D/A converter is able to change the DA0 output in 3.88 mV steps, there are 697
steps over the range from 0.1 V to 2.8 V. This represents a resolution of more than 9 bits.
User’s Manual 21
Page 26

There is a 10 kΩ resistor, R31, connected between Vcc and AD0. This resistor should provide an appropriate voltage divider bias for a variety of common thermistors so that they
can be connected directly between AD0 and ground. The A/D converter load is the 10 kΩ
resistor connected to Vcc. Remove R31 if a smaller load is desired—this will lead to a
very high input impedance for the A/D converter.
The A/D converter has no reference voltage. There is a relative accuracy between measurements, but no absolute accuracy. This is because Vcc can vary ±5%, the pulse-width
modulated outputs might not reach the full 0 V and 5 V rails out of the Rabbit 2000 microprocessor, and the gain resistors used in the circuit have a 1% tolerance. For these reasons,
each Jackrabbit needs to be calibrated individually, with the constants held in software, to
be able to rely on an absolute accuracy . The Jackrabbit is sold without this calibration support.
The algorithm provided to perform the conversion does a successive approximation search
for the analog voltage. This takes an average of 150 ms, and a maximum of 165 ms, with a
14.7 MHz Jackrabbit.
22 Jackrabbit (BL1800)
Page 27

3.4 D/A Converters
Two digital-to-analog (D/A) converter outputs, DA0 and DA1, are supplied on the Jackrabbit. These are shown in Figure 10.
The D/A converters have no reference voltage. Although they may be fairly accurate from
one programmed voltage to the next, they do not have absolute accuracy. This is because
Vcc can change ±5%, the PWM outputs might not achieve the full 0 V and 5 V rail out of
the processor, and the gain resistors in the circuit have a 1% tolerance. The D/A converters
therefore need individual calibration, with the calibration constants held in software
before absolute accuracy can be relied on. The Jackrabbit is sold without such calibration.
Vcc
R29
1 MW
DA0
R20
1.1 kW
DA1
R25
1.1 kW
R26
82.5 kW
1
LM324
R28
100 kW
7
LM324
2
3
+
R27
255 kW
6
5
+
C22
100 nF
C20
100 nF
R22
10 kW
R24
100 kW
R21
110 kW
PD2
PD1
PD4
Figure 10. Schematic Diagram of D/A Converters
Note that DA0 is used to provide a reference voltage for the A/D converter and is unavailable for D/A conversion when the A/D converter is being used.
Pulse-width modulation (PWM) is used for the D/A conversion. This means that the digital signal, which is either 0 V or 5 V, is a train of pulses. This means that if the signal is
taken to be usually at 0 V (or ground), there will be 5 V pulses. The voltage will be 0 V for
a given time, then jump to 5 V for a given time, then back to ground for a given time, then
back to 5 V, and so on. A hardware filter in the circuit consisting of a resist or and capacitor
averages the 5 V signal and the 0 V signal over time. Therefore, if the time that the signal
is at 5 V is equal to the time the signal is 0 V, the duty cycle will be 50%, and the average
signal will be 2.5 V. If the time at 5 V is only 25% of the time, then the average voltage
will be 1.25 V. Thus, the software needs to only vary the time the signal is at 5 V with
respect to the time t he signa l is at 0 V to ac hieve any de sired voltage between 0 V and 5 V.
User’s Manual 23
Page 28

It is very easy to do pulse-width modulation with the Rabbit 2000 microprocessor because
of the chip’s architecture.
3.4.1 DA1
The op amp supporting DA1 converts pulse-width modulated signals to an analog voltage
between 0 V and 5 V. A digital signal that varies with time is fed from PD4. The resolution
of the DA1 output depends on the smallest increment of time to change the on/off time
(the time between 5 V and 0 V). The Jackrabbit uses the Rabbit 2000’s Port D control registers to clock out the signal at a timer timeout. The timer used is timer B. Timer B has 10
bits of resolution so that the voltage can be varied in 1/1024 increments. The resolution is
thus about 5 mV (5 V/1024).
R28 is present solely to balance the op amp input current bias. R25 helps to achieve a voltage close to ground for a 0% duty cycle.
A design constraint dictates how fast timer B must run. The hardware filter has a resistorcapacitor filter that averages the 0 V and 5 V values. Its effect is to smooth out the digital
pulse train. It cannot be perfect, and so there will be some ripple in the output voltage. The
maximum signal decay between pulses will occur when DA1 is set to 2.5 V. This means
the pulse train will have a 50% duty cycle. The maximum signal decay will be
t–
⎛⎞
------- -
⎝⎠
RC
2.5 V 1 e
where RC = 0.01 s for 14.74 MHz Jackrabbits, and t is the pulse on or off time (not the
length of the total cycle).
Timer B is driven at the Rabbit 2000 frequency divided by 2. The frequency achievable
with a 14.74 MHz clock is (14.74 MHz/2)/1024 = 7.17 kHz. This is a period of 1/f = 139 µs.
For a 50% duty cycle, half of the period will be high (70 µs at 5 V), and half will be low
(70 µs at 0 V). Thus, a 14.74 MHz Jackrabbit has t = 70 µs. Based on the standard capacitor discharge formula, this means that the maximum voltage change will be
2.5 V 1 e
This is less than a 20 mV peak-to-peak ripple.
The DA1 output can be less than 100 mV for a 0% duty cycle and above 3.5 V for a 100%
duty cycle. Because of software limitations on the low side and hardware limitations on
the high side, the duty cycle can only be programmed from 12% to 72%. The low limitation allows the software to perform other tasks as well as maintain the PWM for the D/A
converters. The high limitation is simply the maximum voltage obtainable with the
LM324 op amp used in the circuit. Anything outside the 12%–72% range gets output as
–× 17.4 mV=
–×
70 µs–
⎛⎞
----------------
⎝⎠
0.01 s
24 Jackrabbit (BL1800)
Page 29

either a 0% or a 100% duty cycle. The duty cycle is programmed as the high-time count of
1024 total counts of the Rabbit 2000’s timer B. Thus, 256 counts would be 25% of 1024
counts, and corresponds to a 25% duty cycle.
Table 2 lists typical DA1 voltages measured for various duty cycle values with a load
larger than 1 MΩ.
Table 2. Typical DA1 Voltages for Various Duty Cycles
Duty Cycle
(%)
0 0.002 0–122
12 0.620 123
25 1.242 256
50 2.483 512
72 3.567 742
100 3.567 743–1024
Voltage
(V)
Programmed Count
It is important to remember that the DA1 output voltage will not be realized instantaneously after programming in a value. There is a settl ing time beca use of the RC time constant (R24 × C22), which is 10 ms. For example, the voltage at any given time is
V = VP – (VP – V
where V is the voltage at time t, VP is the programmed voltage, V
DA1
)e
(-t/RC)
is the last DA1 out-
DA1
(EQ 1)
put voltage from the D/A converter, and RC is the time constant (10 ms). The settling will
be within 99.326% (or within about 21 mV for a 3 V change in voltage) after five time
constants, or 50 ms. Six time constants, 60 ms, will allow settling to within 99.75% (or to
within about 8 mV for a 3 V change in voltage). Seven time constants, 70 ms, will allow
settling to within 99.91% (or to within about 3 mV for a 3 V change in voltage).
An LM324 op amp, which can comfortably source 10 mA throughout the D/A converter
range, drives the D/A converter output. If the output voltage is above 1 V, the D/A converter can comfortably sink 10 mA. Below 1 V, the D/A converter can only sink a maximum of 100 µA.
To summarize, DA1 is provided uncalibrated, can be programmed with a resolution of
5 mV and a peak-to-peak ripple less than 20 mV over the range from 0.7 V to 3.5 V and
0 V. The settling time to within 21 mV is 50 ms.
User’s Manual 25
Page 30

3.4.2 DA0
The op amp supporting DA0 translates a 12%–88% duty cycle to an analog voltage range
of 0 V to 3 V. The software operates only within this duty cycle; a duty cycle less than
12% is rounded down to 0%, and any duty cycle above 88% is rounded up to 100%.
DA0 uses a voltage divider that consists of R21 and R27 and a gain-offset circuit that consists of R26 and R29 to achieve the output range of 0 V to 3 V within the software duty
cycle.
The DA0 output can be less than 100 mV for a 0% duty cycle and above 3.0 V for a 100%
duty cycle. The duty cycle is programmed as the high-time count of 1024 total counts of
the Rabbit 2000’s timer B. Thus, 256 counts would be 25% of 1024 counts, and corresponds to a 25% duty cycle.
Table 3 lists typical DA0 voltages measured for various duty cycle values with a load
larger than 1 MΩ.
Table 3. Typical DA0 Voltages for Various Duty Cycles
Duty Cycle
(%)
0 0.074 0–122
12 0.076 123
25 0.530 256
50 1.467 512
75 2.406 768
88 2.875 901
100 3.345 902–1024
Voltage
(V)
Programmed Count
It is important to remember that the DA0 output voltage will not be realized instantaneously
after programming in a value. There is a settling time because of the RC time constant
(R21 || R27 × C20), which is 7.68 ms. For example, the voltage at any given time is
V = VP – (VP – V
where V is the voltage at time t, VP is the programmed voltage, V
DA0
)e
(-t/RC)
is the last DA0 out-
DA0
(EQ 2)
put voltage from the D/A converter, and RC is the time constant (7.68 ms). The settling
will be within 99.326% (or within about 21 mV for a 3 V change in voltage) after five time
constants, or 38 ms. Six time constants, 46 ms, will allow settling to within 99.75% (or to
within about 8 mV for a 3 V change in voltage). Seven time constants, 54 ms, will allow
settling to within 99.91% (or to within about 3 mV for a 3 V change in voltage).
The settling time is reduced somewhat by precharging capacitor C20 with pulse-width
modulation from PD2.
26 Jackrabbit (BL1800)
Page 31

The resolution of the DA0 output depends on the smallest increment of time to change th e
on/off time (the time between 5 V and 0 V). The Jackrabbit uses the Rabbit 2000’s Port D
control registers to clock out the signal at a timer timeout. The timer used is timer B.
Timer B has 10 bits of resolution so that the voltage can be varied in 1/1024 increments.
The resolution is thus about 3.88 mV for the DA0 output voltage range of 0 V to 3 V i n the
12%–88% duty cycle.
An LM324 op amp, which can comfortably source 10 mA throughout the D/A converter
range, drives the D/A converter output. If the output voltage is above 1 V, the D/A converter can comfortably sink 10 mA. Below 1 V, the D/A converter can only sink a maximum of 100 µA.
The peak-to-peak ripple on DA0 is less than 3 mV. There is a way to get rid of the ripple
for very small periods of time. To do that, simply program the PWM port from a PWM
output to a high-impedance input. This will allow the capacitor to h old the voltage subjec t
only to leakage currents, which add up to about 1 µA. This will cause the capacitor to
change voltage at the rate of 10 V per second, or 10 mV per millisecond. Practically, this
means that the PWM can stop for about 1 ms (seven 1024-count D/A converter cycles on
a 14.74 MHz processor clock) with a voltage movement of less than 10 mV.
To summarize, DA0 is provided uncalibrated, can be programmed with a resolution of
3.88 mV and a peak-to-peak ripple less than 3 mV over the range from 0.1 V to 2.8 V and
at 3.35 V. The settling time to within 3 mV is 54 ms.
User’s Manual 27
Page 32

3.5 Serial Communication
The Jackrabbit has two RS-232 (3-wire) serial channels, one RS-485 serial channel, and
one synchronous CMOS serial channel.
3.5.1 RS-232
The Jackrabbit’s two RS-232 serial channels are connected to an RS-232 transceiver, U4,
an industry-standard MAX232 chip. U4 provides the voltage output, slew rate, and input
voltage immunity required to meet the RS-232 serial communication protocol. Basically,
the chip translates the Rabbit 2000’ s 0 V to +Vcc signals to ±10 V. Note that the polarity is
reversed in an RS-232 circuit so that +5 V is output as –10 V and 0 V is output as +10 V.
U4 also provides the proper line loading for reliable communication.
The Rabbit 2000 serial port B signals are presented as RS-232 compliant signals TXB
(serial port B transmit) and RXB (serial port B receive) on header J5.
The Rabbit 2000 serial port C signals are presented as RS-232 compliant signals TXC
(serial port C transmit) and RXC (serial port C receive) on header J5.
The maximum baud rate for each RS-232 serial channel is 115,200 bps. RS-232 can be
used effectively at this baud rate for distances up to 15 m.
Because two RS-232 transmit and two RS-232 receive lines are available, one serial channel can be used for serial transmit and receive, and the other serial channel can be used as
a general digital I/O for RTS/CTS handshaking.
does not support RTS/CTS handshaking in its libraries, it is possible to write your own
software.
Although the present release of Dynamic C
3.5.2 RS-485
The Jackrabbit has one RS-485 serial channel, which is connected to the Rabbit 2000
serial port D through U6, an RS-485 transceiver.
tion protocol. The chip’s slew rate limiters provide for a maximum baud rate of 250,000 bps
U6 supports the RS-485 serial communica-
.
The half-duplex communication uses the Rabbit 2000’ s PD5 pin t o control the data enable
on the communication line.
The Jackrabbit can be used in an RS-485 multidrop network. Connect the RS-485+ to
RS-485+ and RS-485– to RS-485– using single twisted-pair wires (nonstranded, tinned)
as shown in Figure 11.
28 Jackrabbit (BL1800)
Page 33

VIN GNDGND
U1
J4
GND
PA0
PA2
PA4
PA6
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
J1
J2
PE0
HV0
HV2
GND
VCC
PA1
PA3
PA5
PA7
U3
GND
PB1
PB3
PB5
Rabbit 2000
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
K
+RAW
VCC
Y3
U4
J5
RS-232
VCC
RXB
SRAM
GND
485
IOBEN
GND
/RST
TXB
PC0
PC2
PC4
PC6
AD0
DA0
PD0
PD2
PD4
PD6
VCC
SM0
U5
U6
RS-485
GND
RXC
TXC
PC1
PC3
PC5
PC7
AGND
DA1
PD1
PD3
PD5
PD7
GND
485+
VCC
SM1
STAT
VBAT
GND
Ground recommended
RESET
J3
JACKRABBIT
Z-World, Inc.
VIN GNDGND
VIN GNDGND
U1
J4
GND
PA0
PA2
PA4
PA6
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
J1
J2
PE0
HV0
HV2
GND
VCC
PA1
PA3
PA5
PA7
U3
GND
PB1
PB3
PB5
Rabbit 2000
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
K
+RAW
VCC
Y3
U4
J5
RS-232
VCC
RXB
SRAM
GND
485
IOBEN
GND
/RST
TXB
PC0
PC2
PC4
PC6
AD0
DA0
PD0
PD2
PD4
PD6
VCC
SM0
U5
U6
RS-485
GND
RXC
TXC
PC1
PC3
PC5
PC7
AGND
DA1
PD1
PD3
PD5
PD7
GND
485+
VCC
SM1
STAT
VBAT
GND
RESET
J3
U3
Rabbit 2000
Z-World, Inc.
Y3
U4
J5
RS-232
VCC
U5
RXB
SRAM
GND
485
IOBEN
VCC
SM0
GND
/RST
U6
RS-485
GND
RXC
TXB
TXC
PC0
PC1
PC2
PC3
PC4
PC5
PC6
PC7
AD0
AGND
DA0
DA1
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
GND
485+
VCC
SM1
STAT
VBAT
GND
RESET
JACKRABBIT
U1
J4
GND
PA0
PA2
PA4
PA6
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
J1
J2
PE0
HV0
HV2
GND
VCC
PA1
PA3
PA5
PA7
GND
PB1
PB3
PB5
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
K
+RAW
VCC
J3
JACKRABBIT
Z-World, Inc.
Figure 11. Multidrop Jackrabbit Network
User’s Manual 29
Page 34
The Jackrabbit comes with a 220 Ω termination resistor and 681 Ω bias resistors already
installed, as shown in Figure 12.
U4
J5
RS-232
VCC
RXB
SRAM
R16
IOBEN
/RST
TXB
PC0
PC2
PC4
PC6
AD0
DA0
PD0
PD2
PD4
PD6
GND
485
VCC
SM0
GND
U5
U6
RS-485
R18
RESET
GND
RXC
TXC
PC1
PC3
PC5
PC7
AGND
DA1
PD1
PD3
PD5
PD7
GND
485+
VCC
SM1
STAT
VBAT
GND
R17
bias
485+
termination
485
bias
R18
681 W
R17
220 W
R16
681 W
U1
J4
GND
PA0
PA2
WDO
PA4
PA6
GND
PB0
PB2
PB4
PB6
GND
PE6
PE4
PE2
PE0
HV0
HV2
GND
U6
6
7
J1
J2
VIN GNDGND
J3
K
VCC
PA1
PA3
PA5
PA7
U3
GND
PB1
PB3
PB5
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
+RAW
VCC
JACKRABBIT
Rabbit 2000
Y3
Z-World, Inc.
Figure 12. RS-485 Termination and Bias Resistors
The load these bias and termination resistors present to the RS-485 transceiver (U6) limits
the number of Jackrabbits in a multidrop network to one master and nine slaves, unless the
bias and termination resistors are removed. When using more than 10 Jackrabbits in a
multidrop network, leave the 681 Ω bias resistors in place on the master Jackrabbit, and
leave the 220 Ω termination resistors in place on the Jackrabbit at each end of the network.
3.5.3 Programming Port
The Jackrabbit has a 10-pin program header labeled J3. The programming port uses the
Rabbit 2000’ s Serial Port A for communication. Dynamic C uses the programming port to
download and debug programs.
The programming port is also used for the following operations.
• Cold-boot the Rabbit 2000 after a reset.
• Remotely download and debug a program over an Ethernet connection using the
RabbitLink EG2110.
• Fast copy designated portions of flash memory from one Rabbit-based board (the
master) to another (the slave) using the Rabbit Cloning Board.
Alternate Uses of the Serial Programming Port
All three clocked Serial Port A signals are available as
• a synchronous serial port
• an asynchronous serial port, with the clock line usable as a general CMOS input
The serial programming port may also be used as a serial port via the
DIAG connector on
the serial programming cable.
30 Jackrabbit (BL1800)
Page 35

In addition to Serial Port A, the Rabbit 2000 startup-mode (SMODE0, SMODE1), status,
and reset pins are available on the serial programming port.
The two startup mode pins determine what happens after a reset—the Rabbit 2000 is
either cold-booted or the program begins executing at address 0x0000. These two
SMODE pins can be used as general inputs once the cold boot is complete.
The status pin is used by Dynamic C to determine whether a Rabbit microprocessor is
present. The status output has three different programmable functions:
1. It can be driven low on the first op code fetch cycle.
2. It can be driven low during an interrupt acknowledge cycle.
3. It can also serve as a general-purpose output.
The /RESET_IN pin is an external input that is used to reset the Rabbit 2000 and the
onboard peripheral circuits on the RabbitCore module. The serial programming port can be
used to force a hard reset on the RabbitCore module by asserting the /RESET_IN signal.
Refer to the Rabbit 2000 Microprocessor User’s Manual for more information.
User’s Manual 31
Page 36

3.6 Programming Cable
The programming cable is used to connect the Jackrabbit’s programming port to a PC serial
COM port. The programming cable converts the RS-232 voltage levels used by the PC
serial port to the TTL voltage levels used by the Rabbit 2000.
When the PROG connector on the programming cable is connected to the Jackrabbit’s
programming header, programs can be downloaded and debugged over the serial interface.
The DIAG connector of the programming cable may be used on the Jackrabbit’s programming h ea de r with the Jackrabbit operating in the Run Mode. This allows the programming
port to be used as a regular serial port.
3.6.1 Changing Between Program Mode and Run Mode
The Jackrabbit is automatically in Program Mode when the
PROG connector on the pro-
gramming cable is attached to the Jackrabbit, and is automatically in Run Mode when no
programming cable is attached. When the Rabbit 2000 is reset, the operating mode is
determined by the status of the SMODE pins. When the programming cable’s
PROG
connector is attached, the SMODE pins are pulled high, placing the Rabbit 2000 in the
Program Mode. When the programming cable’s PROG connector is not attached, the
SMODE pins are pulled low, causing the Rabbit 2000 to operate in the Run Mode.
Power
Colored side
lines up with
pin 1
J1
J2
VINGNDGND
J3
PROG
DIAG
Program Mode
U1
J4
GND
VCC
PA0
PA1
PA2
PA3
PA4
PA5
PA6
PA7
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
PE0
HV0
HV2
K
GND
Programming
connector
PC COM port
U3
GND
PB1
PB3
PB5
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
+RAW
VCC
JACKRABBIT
To
Rabbit 2000
Y3
Z-World, Inc.
U4
J5
RS-232
U6
RS-485
SRAM
IOBEN
VCC
RXB
TXB
PC0
PC2
PC4
PC6
AD0
DA0
PD0
PD2
PD4
PD6
GND
485
VCC
SM0
GND
/RST
RESET
JP1
U5
Reset pads
RESET Jackrabbit board when changing mode:
Short out RESET pads below header J5,
Press RESET button (if using Prototyping Board),
Cycle power off/on
after removing or attaching programming cable.
GND
RXC
TXC
PC1
PC3
PC5
PC7
AGND
DA1
PD1
PD3
PD5
PD7
GND
485+
VCC
SM1
STAT
VBAT
GND
J1
J2
VINGNDGND
J3
Run Mode
U1
J4
GND
PA0
PA2
PA4
PA6
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
PE0
HV0
HV2
K
GND
JACKRABBIT
U4
J5
RS-232
VCC
IOBEN
GND
RXB
RXC
TXB
TXC
PC0
PC1
PC2
PC3
PC4
PC5
PC6
PC7
AD0
AGND
DA0
DA1
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
GND
GND
485
485+
VCC
VCC
SM0
SM1
STAT
GND
VBAT
/RST
GND
RESET
VCC
PA1
PA3
PA5
PA7
U3
GND
PB1
PB3
PB5
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
+RAW
VCC
Rabbit 2000
Y3
JP1
U5
SRAM
U6
RS-485
Z-World, Inc.
Reset pads
OR
OR
Figure 13. Jackrabbit Program Mode and Run Mode Setup
A program “runs” in either mode, but can only be downloaded and debugged when the
Jackrabbit is in the Program Mode.
Refer to the
Rabbit 2000 Microprocessor User’s Manual for more information on the pro-
gramming port and the programming cable.
32 Jackrabbit (BL1800)
Page 37

3.7 Memory
3.7.1 SRAM
The Jackrabbit is designed to accept 32K to 512K of SRAM packaged in an SOIC case.
Standard Jackrabbit models come with 128K of SRAM. A factory-installed option for 512K
of SRAM is available. Figure 14 shows the locations and the jumper settings for the jumpers at JP1 used to set the SRAM size. The “jumpers” are 0 Ω surface-mounted resistors.
SRAM
JP1
128K
3
2
512K
JP1
1
1
2
3
U4
J5
RS-232
VCC
IOBEN
GND
RXB
RXC
TXB
TXC
PC0
PC1
PC2
PC3
PC4
PC5
PC6
PC7
AD0
AGND
DA0
DA1
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
GND
GND
485
485+
VCC
VCC
SM0
SM1
STAT
GND
VBAT
/RST
GND
RESET
JP1
U5
SRAM
U6
RS-485
VIN GNDGND
U1
J4
GND
VCC
PA0
PA1
PA2
PA3
PA4
PA5
PA6
PA7
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
J1
J3
PE0
HV0
J2
HV2
K
GND
U3
GND
PB1
PB3
PB5
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
+RAW
VCC
JACKRABBIT
Y3
Z-World, Inc.
Figure 14. Jackrabbit Jumper Settings for SRAM Size
NOTE: For ordering or other information involving the factory-installed 512K SRAM
option, call your Rabbit sales representative or distributor.
No 0 Ω surface-mounted resistors are installed at JP1 for 32K SRAM.
3.7.2 Flash EPROM
The Jackrabbit is also designed to accept 128K to 512K of flash EPROM packaged in a
TSOP case.
NOTE: Rabbit recommends that any c ustomer applications sh oul d not be constrained by
the sector size of the flash memory since it may be necessary to change the sector size
in the future.
A Flash Memory Bank Select jumper configuration option exists at JP3 with 0 Ω surfacemounted resistors for Jackrabbit boards labeled 175-0255. This option, used in conjunction with some configuration macros, allows Dynamic C to compile two different co-resident programs for the upper and lower halves of the 256K flash in such a way that both
programs start at logical address 0000. This is useful for applications that require a resident download manager and a separate downloaded program. See Technical Note 218,
Implementing a Serial Download Manager for a 256K Flash, for details.
User’s Manual 33
Page 38

3.8 Other Hardware
3.8.1 External Interrupts
Jackrabbit boards that carry the CE mark have external interrupts available on digital
inputs PE4 and PE5.
3.8.2 Clock Doubler
Jackrabbit BL1810 and BL1820 models take advantage of the Rabbit 2000 microprocessor’s internal clock doubler. A built-in clock doubler allows half-frequency crystals to be
used to reduce radiated emissions. The 14.74 MHz frequency is generated using a
7.37 MHz resonator. The clock doubler is disabled automatically in the BIOS for crystals
or resonators with a frequency above 12.9 MHz.
The clock doubler may be disabled if 14.74 MHz clock speeds are not required. Disabling
the Rabbit 2000 microprocessor’s internal clock doubler will reduce power consumption
and further reduce radiated emissions. Disable the clock doubler by adding a simple configuration macro as shown below.
1. Select the “Defines” tab from the Dynamic C Options > Project Options menu.
2. Add the line
CLOCK_DOUBLED=0 to always disable the clock doubler.
The clock doubler is enabled by default, and usually no entry is needed. If you need to
specify that the clock doubler is always enabled, add the line
CLOCK_DOUBLED=1 to
always enable the clock doubler. The clock speed will be doubled as long as the crystal
frequency is less than or equal to 26.7264 MHz.
3. Click OK to save the macro. The clock doubler will now remain off whenever you are
in the project file where you defined the macro.
34 Jackrabbit (BL1800)
Page 39

3.8.3 Spectrum Spreader
Jackrabbit boards that carry the CE mark h ave a Rabbit 2000 micr oprocessor that features a
spectrum spreade r, which helps to mitigate EMI problems . By default, th e spec tru m
spreader is on automatically for Jackrabbit BL1810 and BL1820 boards that carry the CE
mark when used with Dynamic C 7.32 or later versions, but the spectrum spreader may also
be turned off or set to a stronger setting. The spectrum spreader settings may be changed
through a simple configuration macro as shown below.
1. Select the “Defines” tab from the Dynamic C
Options > Project Options menu.
2. Normal spreading is the default, and usually no entry is needed. If you need to specify
normal spreading, add the line
ENABLE_SPREADER=1
For strong spreading, add the line
ENABLE_SPREADER=2
To disable the spectrum spreader, add the line
ENABLE_SPREADER=0
NOTE: The strong spectrum-spreading setting is not recommended since it may limit
the maximum clock speed or the maximum baud rate. It is unlikely that the strong setting will be used in a real application.
3. Click OK to save the macro. The spectrum spreader will now remain of f whenever you
are in the project file where you defined the macro.
The spectrum spreader is off by default for Jackrabbit BL1800 models, and needs to be
enabled for them to be CE-compliant. To allow the flash memory and RA M chips to
accommodate the occasional higher frequencies asso ciated with the spectrum spread er
being turned on for the Jackrabbit BL1800 models only, you will need at least one wait
state for both th e flash memory and the RAM. The strong spec trum -sprea ding s ettin g is not
needed for any Jackrabb it bo ard.
The number of wait states is specified in the following code from the
LIB\BOARDTYPES
library. (There are 0 wait states by default.)
#ifndef NUM_RAM_WAITST
#define NUM_RAM_WAITST 0
#endif
#ifndef NUM_FLASH_WAITST
#define NUM_FLASH_WAITST 0
#endif
There is no spectrum spreader f unctiona lity for Jackr abbit boa rds tha t do no t car ry the CE
mark or when using any Jackrabbit with a version of Dynamic C prior to 7.30.
User’s Manual 35
Page 40

36 Jackrabbit (BL1800)
Page 41

4. SOFTWARE REFERENCE
To develop and debug programs for the Jackrabbit (and for all
other Rabbit hardware), you must install and use Dynamic C. It
runs on an IBM-compatible PC and is designed for use with
Rabbit-based single-board computers and other devices based
on the Rabbit microprocessor. This chapter provides a tour of
the major features of Dynamic C with respect to the Jackrabbit.
4.1 An Overview of Dynamic C
Dynamic C has been in use worldwide since 1989. It is specially designed for programming embedded systems, and features quick compile and interactive debugging. A complete reference guide to Dynamic C is contained in the Dynamic C User’s Manual.
You have a choice of doing your software development in the flash memory or in the data
SRAM included on the Jackrabbit. The flash memory and SRAM options are selected
with the Options > Project Options > Compiler menu.
The advantage of working in RAM is to save wear on the flash memory, which is limited
to about 100,000 write cycles. The disadvantage is that the code and data might not both
fit in RAM.
NOTE: An application can be developed in RAM, but can not run sta nda lone from RAM
after the programming cable is disconnected. All standalone applications can only run
from flash m emory.
NOTE: Do not depend on the flash memory sector size or type. Due to the volatility of
the flash memory market, the Jackrabbit and Dynamic C were designed to accommodate flash devices with various sector sizes.
Developing software with Dynamic C is simple. Users can write, compile, and test C and
assembly code without leaving the Dynamic C development environment. Debugging
occurs while the application runs on the target. Alternatively, users can compile a program
to an image file for later loading. Dynamic C runs on PCs under Windows NT and later—
note that Dynamic C is still being evaluated for compatibility with Windows Vista at the
time of writing, and should not be expected to run correctly under Windows Vista at this
time. Programs can be downloaded at baud rates of up to 460,800 bps after the program
compiles.
User’s Manual 37
Page 42

Dynamic C has a number of standard features:
• Full-feature source and/or assembly-level debugger, no in-circuit emulator required.
• Royalty-free TCP/IP stack with source code and most common protocols.
• Hundreds of functions in source-code libraries and sample programs:
X Exceptionally fast support for floating-point arithmetic and transcendental functions.
X RS-232 and RS-485 serial communication.
X Analog and digital I/O drivers.
2
X I
C, SPI, GPS, file system.
X LCD display and keypad drivers.
• Powerful language extensions for cooperative or preemptive multitasking
• Loader utility program to load binary images into Rabbit-based targets in the absence
of Dynamic C.
• Provision for customers to create their own source code libraries and augment on-line
help by creating “function description” block comments using a special format for
library functions.
• Standard debugging features:
X Breakpoints—Set breakpoints that can disable interrupts.
X Single-stepping—Step into or over functions at a source or machine code level, µC/OS-II aware.
X Code disassembly—The disassembly window displays addresses, opcodes, mnemonics, and
machine cycle times. Switch between debugging at machine-code level and source-code level by
simply opening or closing the disassembly window.
X Watch expressions—Watch expressions are compiled when defined, so complex expressions
including function calls may be placed into watch expressions. Watch expressions can be updated
with or without stopping program execution.
X Register window—All processor registers and f lags are di splayed. T he contents of gener al register s
may be modified in the window by the user.
X Stack window—shows the contents of the top of the stack.
X Hex memory dump—displays the contents of memory at any address.
X STDIO wi ndow—
detected for debugging purposes.
printf outputs to this window and keyboard input on the host PC can be
printf output may also be sent to a serial port or file.
38 Jackrabbit (BL1800)
Page 43

4.2 Sample Programs
Sample programs are provided in the Dynamic C
SAMPLES
folder.
The various folders contain specific sample programs that illustrate the use of the corresponding Dynamic C libraries. For example, the sample program
PONG.C
demonstrates
the output to the Dynamic C STDIO window.
The
SAMPLES\JACKRAB
folder contains sample progra ms that illustrate feat ures unique to
the Jackrabbit.
Follow the instructions included with the sample program to connect the Jackrabbit and
the other hardware identified in the instructions.
To run a sample program, open it with the File menu (if it is not still open), then compile
and run it by selecting Run in the Run menu (or press F9). The Jackrabbit must be in
Program Mode (programming cable is attached to programming port as shown in
Figure 2) and must be connected to a PC using the programming cable.
More complete information on Dynamic C is provided in the Dynamic C User’s Manual.
The sample programs are listed in Table 4.
Table 4. Jackrabbit Sample Programs
DEMOJR1.C
DEMOJR2.C
DEMOJR3.C
JRIOTEST.C
JR_FLOWCONTROL.C
JR_PARITY.C
JRIO_COF.C
LCD_DEMO.C
RABDB01.C
RABDB02.C
The first five sample programs provide a step-by-step introduction to the Jackrabbit board.
Additional sample programs illustrate more advanced topics.
User’s Manual 39
Page 44
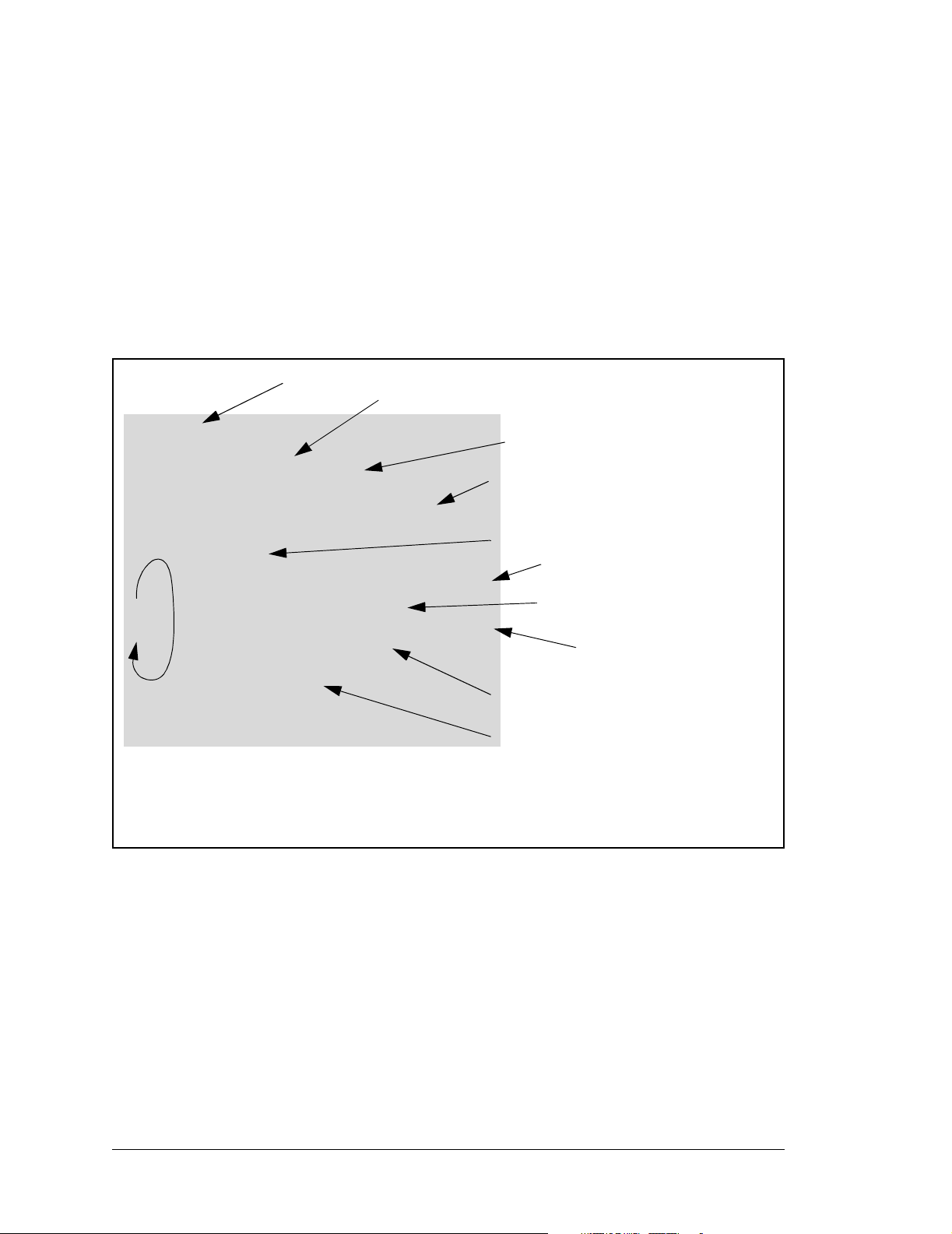
4.2.1 DEMOJR1.C
This sample program can be used to illustrate some of the functions of Dynamic C.
First, open the file DEMOJR1.C, which is in the SAMPLES/JACKRAB folder. The program
will appear in a window, as shown in Figure 15 below (minus some comments). Use the
mouse to place the cursor on the f unction name WrPortI in the program and type <Ctrl-H>.
This will bring up a documentation box for the function WrPortI. In general, you can do
this with all functions in Dynamic C libraries, includi ng li braries that you write yourself—
the Dynamic C User’s Manual provides more information. Close the documentation box
and continue.
C programs begin with main
NULL is a macro for a zero pointer
main(){
write to SPCR register to
initialize parallel port A
WrPortI(SPCR,NULL,0x84);
WrPortI(PADR,&PADRShadow,0xff);
while(1) {
BitWrPortI(PADR,&PADRShadow,1,2);
for(j=0; j<25000; j++);
BitWrPortI(PADR,&PADRShadow,0,2);
for(j=0; j<1000; j++);
} // end while(1)
} // end of main
Figure 15. Sample Program DEMOJR1.C
Note: See Rabbit 2000 Microprocessor User’s Manual
(Software Chapter) for details on the routines that read and
write I/O ports.
Write all 1’s to port A
to turn off all LEDs
Start a loop
Set bit 2 to a “1”
LED DS3 off.
Time delay by counting
to 25,000.
Set bit 2 to a “0”
turning LED DS3 on
Count to 1000 for a shorter
time delay
End of the endless loop
T o run the program DEMOJR1.C, load it with the File > Open menu, then compile and run it
by pressing F9 or by selecting Run in the Run menu. The LED on the Prototyping Board
should start flashing if everything went well. If this d oesn’ t work review t he following po ints.
• The target should be ready , which is indi cated by the message “BIOS successfully compiled...” If you did not receive this message or you get a communication error, recompile the BIOS by typing <Ctrl-Y> or select Recompile BIOS from the Compile menu.
• A message reports that “No Rabbit processor detected” in cases where the Jackrabbit
and Prototyping Board are not connected together, the wall transformer is not connected, or is not plugged in. (The red power LED lights whenever power is connected.)
40 Jackrabbit (BL1800)
Page 45

• The programming cable must be connected to the Jackrabbit board. (The colored wire
on the programming cable is closest to pin 1 on header J3 on the Jackrabbit board, as
shown in Figure 2.) The other end of the programming cable must be connected to the
PC serial port. The COM port specified in the Dynamic C Options menu must be the
same as the one the programming cable is connected to.
• To check if you have the correct serial port, select Compile, then Compile BIOS, or
type <Ctrl-Y>. If the “BIOS successfully compiled …” message does not display, try a
different serial port using the Dynamic C Options menu until you find the one you are
plugged into. Don’t change anything in this menu except the COM number. The baud
rate should be 115,200 bps and the stop bits should be 1.
Single-Stepping
Compile or re-compile DEMOJR1.C by clicking the Compile button on the task bar. The
program will compile and the screen will come up with a highlighted character (green) at
the first executable statement of the program. Use the F8 key to single-step. Each time the
F8 key is pressed, the cursor will advance one statement. When you get to the for(j=0,
j< ...
statement, it becomes impractical to single-step further because you would have
to press F8 thousands of times. We will use this statement to illustrate watch expressions.
Watch Expression
Type <Ctrl-W> or chose Add/Del Watch Expr es sio n in the Inspect menu. A box will
come up. Type the lower case letter j and click on add to top and close. Now continue
single-stepping with F8. Each time you step, the watch expression (j) will be evaluated
and printed in the watch window. Note how the value of j advances when the statement
j++ is executed.
Break Point
Move the cursor to the start of the statement:
for(j=0; j<1000; j++);
To set a break point on this statement, type F2 or select Breakpoint from the Run menu.
A red highlight will appear on the first character of the statement. To get the program running at full speed, type
F9 or select Run on the Run menu. The program will advance
until it hits the break point. Then the brea k point will s tart f lashing and show both r ed and
green colors. Note that LED DS3 is now solidly turned on. This is because we have passed
the statement turning on LED DS3. Note tha t j in the watch window has the value 25000.
This is because the loop above terminated when j reached 25000.
To remove the break point, type F2 or select Toggle Breakpoint on the Run menu. To
continue program execution, type F9 or select Run from the Run menu. Now the LED
should be flashing again since the program is running at full speed.
You can set break points while the program is running by positioning the cursor to a statement and using the F2 key. If the execution thread hits the break point, a break point will
take place. You can toggle the break point off with the F2 key and continue execution with
the F9 key. Try this a few times to get the feel of things.
User’s Manual 41
Page 46

Editing the Program
Click on the Edit box on the task bar. This will set Dynamic C into the edit mode so that
you can change the program. Use the Save as choice on the File menu to save the file
with a new name so as not to change the demo program. Save the file as MYTEST.C. Now
change the number 25000 in the for (.. statement to 10000. Then use the F9 key to
recompile and run the program. The LED will start flashing, but it will flash much faster
than before because you have changed the loop counter terminal value from 25000 to
10000.
Watching Variables Dynamically
Go back to edit mode (select edit) and load the program DEMOJR2.C using the File menu
Open command. This program is the same as the first program, except that a variable k
has been added along with a statement to increment
k each time around the endless loop.
The statement:
runwatch();
has been added. This is a debugging statement that makes it possible to view variables
while the program is running.
Use the F9 key to compile and run DEMOJR2.C. Now type <Ctrl-W> to open the watch
window and add the watch expression k to the top of the list of watch expressions. Now
type <Ctrl-U>. Each time you type <Ctrl-U>, you will see the current value of k, which is
incrementing about 5 times a second.
As an experiment add another expression to the watch window:
k*5
Then type <Ctrl-U> several times to observe the watch expressions k and k*5.
Summary of Features
So far you have practiced using the following features of Dynamic C.
• Loading, compiling and running a program. When you load a program it appears in an
edit window. You can compile by selecting Compile on the task bar or from the
Compile menu. When you compile the program, it is compiled into machine language
and downloaded to the target over the serial port. The execution proceeds to the first
statement of main where it pauses, waiting for you to command the program to run,
which you can do with the F9 key or by selecting Run on the Run menu. If want to
compile and start the program running with one keystroke, use F9, the run command. If
the program is not already compiled, the run command will compile it first.
• Single-stepping. This is done with the F8 key. The F7 key can also be used for single-
stepping. If the F7 key is used, then descent into subroutines will take place. With the
F8 key the subroutine is executed at full speed when the statement that calls it is
stepped over.
42 Jackrabbit (BL1800)
Page 47

• Setting break points. The F2 key is used to turn on or turn off (toggle) a break point at
the cursor position if the program has already been compiled. You can set a break point
if the program is paused at a break point. You can also set a break point in a program
that is running at full speed. This will cause the program to break if the execution
thread hits your break point.
• W atch expressions. A watch expression is a C expression that is evaluated on command
in the watch window . An expression is basically any type of C formula that can include
operators, variables and function calls, but not statements that require multiple lines
such as for or switch. You can have a list of watch expressions in the watch window. If
you are single-stepping, then they are all evaluated on each step. You can also command the watch expression to be evaluated by using the <Ctrl-U> command. When a
watch expression is evaluated at a break point, it is evaluated as if the statement was at
the beginning of the function where you are single-stepping. If your program is running
you can also evaluate watch expressions with a <Ctrl-U> if your program has a run-
watch()
command that is frequently executed. In this case, only expressions involving global variables can be evaluated, and the expression is evaluated as if it were in a
separate function with no local variables.
User’s Manual 43
Page 48

4.2.2 Other Sample Programs Illustrating Digital I/O
• DEMOJR2.C—repeatedly flashes LED DS3 (which is controlled by PA2) on the Prototyping Board.
This sample program also illustrates the use of the runwatch() function to allow
Dynamic C to update watch expressions while running. To test this:
1. Add a watch expression for "k" under "Inspect:Add/Del Watch Expression."
2. Click "Add to top" so that it will be permanently in the watch list.
3. While the program is running, type <Ctrl+U> to update the watch window.
• DEMOJR3.C—demonstrates the use of costatements to LED DS4 (which is controlled
by PA3) on the Prototyping Board. This sample program will also watch button S1
(PB2) and toggle LED DS1 (which is controlled by PA0) on/off when pressed. Note
that S1 presses are debounced by the software.
The pins on Parallel Port A can all be set as either outputs or as inputs via the slave port
control register (SPCTR). Do not use Parallel Port A if the slave port is being used.
Bits 0–5 on Parallel Port B are always inputs, and bits 6–7 are always outputs. Do not
use Parallel Port B if the slave port is being used.
JRIOTEST.C—exercises the JackRabbit's four digital output channels, the one analog
•
input channel, and the two analog output channels.
•
JRIO_COF.C—demonstrates the use of cofunctions with the analog input driver.
Before you run this sample program, connect DA1 to AD0 on header J7 of the Prototyping Board to provide an input voltage. Once the sample program is running, it will
read the input voltage ten times while another costatement is executed concurrently . The
values will be printed out in the Dynamic C STDIO window at the end of the program.
Before running the RABDB01.C and the RABDB02.C sample programs, you will need to
install 3 mm LEDs such as the Vishay Telefunken TLUR4400 at DS5–DS8 on the Jackrabbit Prototyping Board. These LEDs are included with the Jackrabbit Development Kit.
RABDB01.C—flashes LEDs DS5–DS8 on the Jackrabbit Prototyping Board (which are
•
connected to PA4–PA7) when corresponding switches S1–S4 (which are connected to
PB2–PB5) are pressed. The buzzer, which is driven by HV0 from PE0, will also sound
whenever switch S1 switch is pressed.
• RABDB02.C—flashes LEDs DS5–DS8 on the Jackrabbit Prototyping Board (which are
connected to PA4–PA7) when corresponding switches S1–S4 (which are connected to
PB2–PB5) are pressed. The buzzer, which is driven by HV0 from PE0, will also sound
whenever switch S1 switch is pressed.
44 Jackrabbit (BL1800)
Page 49

Before running the LCD_DEMO.C sample program, you will need an LCD based on the
HD44780 (or an equivalent) controller.
• LCD_DEMO.C—demonstrates a 4-bit interface to an LCD based on the HD44780 (or an
equivalent) controller.
Connect the LCD to P arallel Po rt A.
PA0
PA1
PA2
PA3
PA6
PA7
Optional Brightness
Control
10 kW
-5 V
VEE
+5 V
VCC
VEE
DB4
DB5
DB6
DB7
RS
E
DB0
DB1
DB2
DB3
R/W
LCD
PA0—LCD DB4
PA1—LCD DB5
PA2—LCD DB6
PA3—LCD DB7
PA6—LCD RS Register Select
(0 = command, 1 = data)
PA7—LCD E:normally low, latch es
on high to low transition
The R/W pin and DB0–DB3 on
Jackrabbit
Prototyping Board
J3
3
5
9
4
6
10
the LCD are grounded. DB0–DB3
are not used with a 4-bit inte rfac e.
This sample program only involves writing, and that is why we ground the R/W pin.
VEE is used to control brightness—the simplest thing to do is ground it. If you need to
control the brightness, you can connect a potentiometer between ground and -5 V, with
the arm going to the VEE pin. Check the specs on the LCD before doing this as some
LCDs may require a different connection. VCC is +5 V and VSS is ground.
User’s Manual 45
Page 50
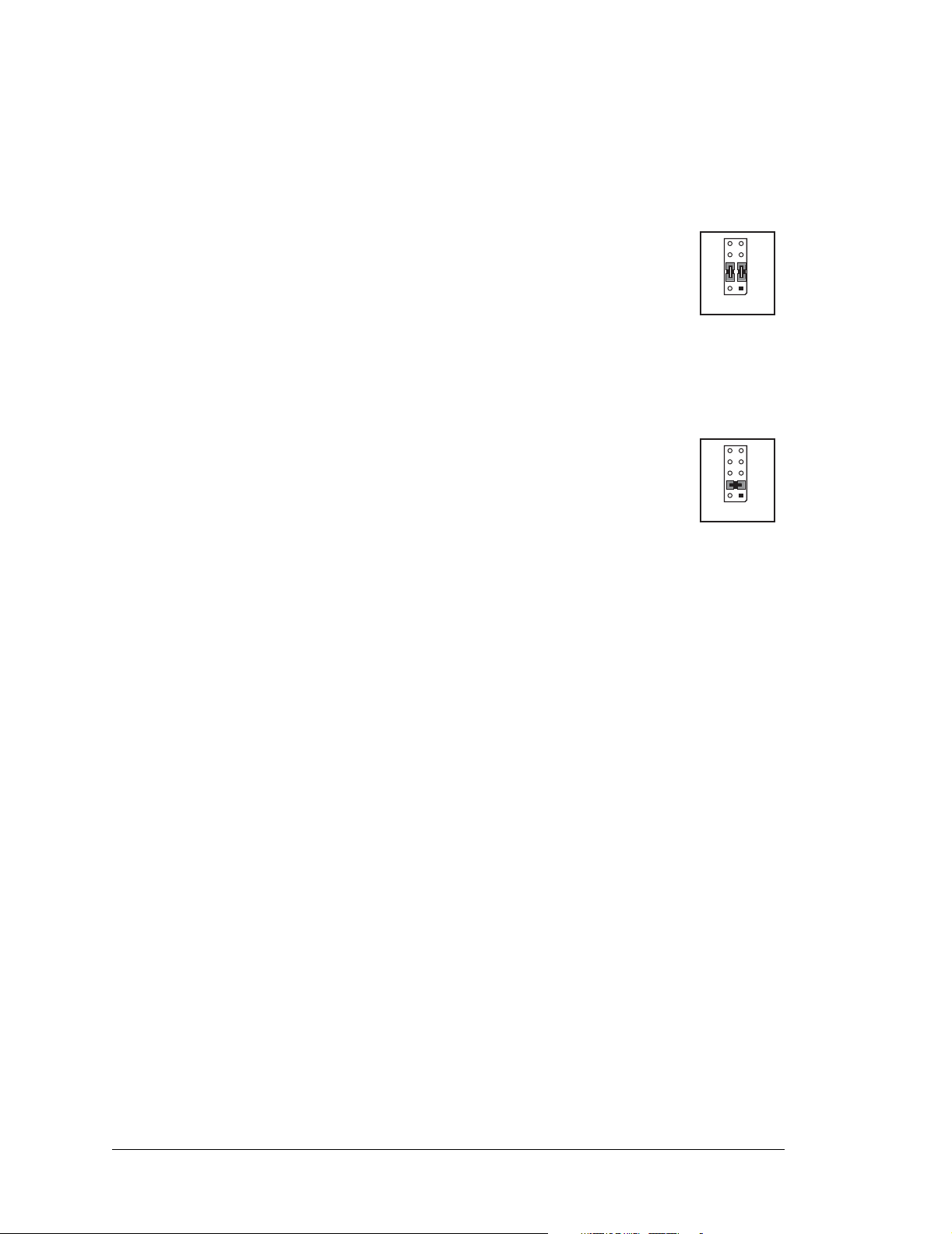
4.2.3 RS-232 Serial Communication Sample Programs
• JR_FLOWCONTROL.C—This program demonstrates hardware flow control by configuring Serial Port C (PC3/PC2) for CTS/RTS with serial data coming from TxB at
115 ,2 0 0 b p s. One character at a time is re ce ived and is displayed i n the STDIO window .
To set up the Prototyping Board, you will need to tie PC4 and PC5 (TxB
and RxB) together at header J1, and you will also tie PC2 and PC3 (TxC
and RxC) together as shown in the diagram.
TxC
RxC
A repeating triangular pattern should print out in the STDIO window. The
program will periodically switch flow control on or off to demonstrate
the effect of no flow control.
Refer to the serBflowcontrolOn() func tion call in the Dyn amic C Func tion Re fer-
ence Manual for a general description on how to set up flow control lines.
JR_PARITY.C—This program demonstrates the use of parity modes by
•
repeatedly sending byte values 0–127 from Serial Port B to Serial Port C.
The program will switch between generating parity or not on Serial Port
TxC
RxC
B. Serial Port C will always be checking parity, so parity errors should
occur during every other sequence.
To set up the Prototyping Board, you will need to tie PC4 and PC3 (TxB and RxC)
together at header J1 as shown in the diagram.
The Dynamic C
STDIO window will display the error sequence.
J1
J1
GND
RxB
TxB
GND
RxB
TxB
46 Jackrabbit (BL1800)
Page 51
4.2.4 RS-485 Serial Communication Sample Program
The following sample program illustrates the use of the RS-485 serial drivers. The sample
program shows a byte being transmitted, and then the RS-485 transceiver waits for a reply.
#define DINBUFSIZE 15
#define DOUTBUFSIZE 15
void main( void ){
int nEcho,nReply;
char cChar;
Jr485Init ();// Init RS485 Control (PD5)
serDopen ( 9600 );// Open Serial Port D
for (;;) {// Forever
for (cChar='a';cChar<='z';++cChar){
// Send Alphabet
Jr485Tx ();// Enable RS485 Transmitter
serDputc ( cChar );// Send Byte
while ((nEcho = serDgetc ()) == -1);
// Wait for Echo
Jr485Rx ();// Disable RS485 Transmitter
while ((nReply = serDgetc ()) == -1);
// Wait for Reply
printf ( "%02x -> %02x\n",nEcho,nReply );
}
}
}
NOTE: If your version of Dynamic C is earlier than 6.55, see Technical Note 117, Jack-
rabbit (BL1800 Series) RS-485 Bulletin, for information on restrictions on using both
DA1 and RS-485 at the same time.
User’s Manual 47
Page 52

4.3 Cooperative Multitasking
Cooperative multitasking is a convenient way to perform several different tasks at the
same time. An example would be to step a machine through a sequence of steps and at the
same time independently carry on a dialog with the operator via a human interface. Cooperative multitasking differs from a different approach called preemptive multitasking.
Dynamic C supports both types of multitasking. In cooperative multitaskin g each separate
task voluntarily surrenders its compute time when it does not need to perform any more
activity immediately. In preemptive multitasking control is forcibly removed from the task
via an interrupt.
Dynamic C has language extensions to support multitasking. The major C constructs are
called costatements, cofunctions, and slicing. These are described more completely in the
Dynamic C User’s Manual. The example below, sample program DEMOJR3.C, uses cos-
tatements. A costatement is a way to perform a sequence of operations that involve pauses
or waits for some external event to take place. A complete description of costatements is
in the Dynamic C User’s Manual. The DEMOJR3.C sample program has two independent
tasks. The first task flashes LED DS4 once a second. The second task uses button S1 on
the Prototyping Board to toggle the logical value of a virtual switch, vswitch, and flash
DS1 each time the button is pressed. This task also debounces button S1.
48 Jackrabbit (BL1800)
Page 53

int vswitch; // state of virtual switch controlled by button
S1
main(){ // begin main program
// set up parallel port A as output
WrPortI(SPCR,NULL,0x84);
WrPortI(PADR,&PADRShadow,0xff); // turn off all LEDs
vswitch=0; // initialize virtual switch off
(1) while (1) { // Endless loop
BigLoopTop(); // Begin a big endless loop
// first task flash LED DS4 every second for 200 milliseconds
(2) costate { // begin a costatement
BitWrPortI(PADR,&PADRShadow,0,3); // LED DS4 on
(3) waitfor(DelayMs(200)); // light on for 200 ms
BitWrPortI(PADR,&PADRShadow,1,3); // LED DS4 off
waitfor(DelayMs(800)); // light off for 800 ms
(4) } // end of costatement
// second task - debounce switch #1 and toggle virtual switch vswitch
// check button 1 and toggle vswitch on or off
costate {
(5) if(BitRdPortI(PBDR,2)) abort; // if button not down skip out
waitfor(DelayMs(50)); // wait 50 ms
if(BitRdPortI(PBDR,2)) abort; // if button not still down skip
out
vswitch=!vswitch; // toggle virtual switch- button was down 50
ms
while (1) { // wait for button to be off 200 ms
waitfor(BitRdPortI(PBDR,2)); // wait for button to go up
waitfor(DelayMs(200)); // wait for 200 milliseconds
if(BitRdPortI(PBDR,2)) break;// if button up break
} // end of while(1)
} // end of costatement
// make LED agree with vswitch if vswitch has changed
(6) if( (PADRShadow & 1) == vswitch) {
BitWrPortI(PADR,&PADRShadow,!vswitch,0);
)
(7) } // end of while loop, go back to start
} // end of main, never come here
The numbers in the left margin are reference indicators and are not a part of the code.
Load and run the program. Note that LED DS4 flashes once per second. Push button S1
several times and note how LED DS1 is toggled.
The flashing of LED DS4 is performed by the costatement starting at the line marked (2).
Costatements need to be executed regularly, often at least every 25 ms. To accomplish
this, the costa temen ts are en clos ed in a while loop. The term while loop is used as a handy
way to describe a style of real-time programming in which most operations are done in
one loop. The while loop starts at (1) and ends at (7). The function BigLoopTop() is
User’s Manual 49
Page 54

used to collect some operations that are helpful to do once on every pass through the loop.
Place the cursor on this function name BigLoopTop() and hit <Ctrl-H> to learn more.
The statement at (3) waits for a time delay, in this case 200 ms. The costatement is being
executed on each pass through the big loop. When a waitfor condition is encountered
the first time, the current value of MS_TIMER is saved and then on each subsequent pass
the saved value is compared to the current value. If a waitfor condition is not encountered, then a jump is made to the end of the costatement (4), and on the next pass of the
loop, when the execution thread reaches the beginning of the costatement, execution
passes directly to the waitfor statement. Once 200 ms has passed, the statement after the
waitfor is executed. The costatement has the property that it can wait for long periods of
time, but not use a lot of exe cution tim e. Ea ch cos tat eme nt i s a litt le p rogram with i ts own
statement pointer that advances in response to conditions. On each pass through the big
loop, as little as one statement in the costatement is executed, starting at the current position of the costatement’s statement pointer. Consult the Dynamic C User’s Manual for
more details.
The second costatement in the program debounces the switch and maintains the variable
vswitch. Debouncing is performed by making sure that the switch is either on or of f for a
long enough period of time to ensure that high-frequency electrical hash generated when
the switch contacts open or close does not affect the state of the switch. The
abort state-
ment is illustrated at (5). If executed, the internal statement pointer is set back to the first
statement within the costatement, and a jump to the closing brace of the costatement is
made.
At (6) a use for a shadow register is illustrated. A shadow register is used to keep track of
the contents of an I/O port that is wr ite only - it can’ t be read back. If every time a write is
made to the port the same bits are set in the shadow register, then the shadow register has
the same data as the port register. In this case a test is made to see the sta te of the LED a nd
make it agree with the state of vswitch. This test is not strictly necessary, the output register could be set every time to agree with
vswitch, but it is placed here to illustrate the
concept of a shadow register.
To illustrate the use of snooping, use the watch window to observe vswitch while the
program is running. Add the variable vswitch to the list of watch expressions. Then toggle vswitch and the LED. Then type <Ctrl-U> to observe vswitch again.
4.3.1 Advantages of Cooperative Multitasking
Cooperative multitasking, as implemented with language extensions, has the advantage of
being intuitive. Unlike preemptive multitasking, variables can be shared between different
tasks without having to take elaborate precautions. Sharing variables between tasks is the
greatest cause of bugs in programs that use preemptive multitasking. It might seem that
the biggest problem would be response time because of the big loop time becoming long
as the program grows. Our solution for that is a device caused slicing that is further
described in the Dynamic C User’s Manual.
50 Jackrabbit (BL1800)
Page 55
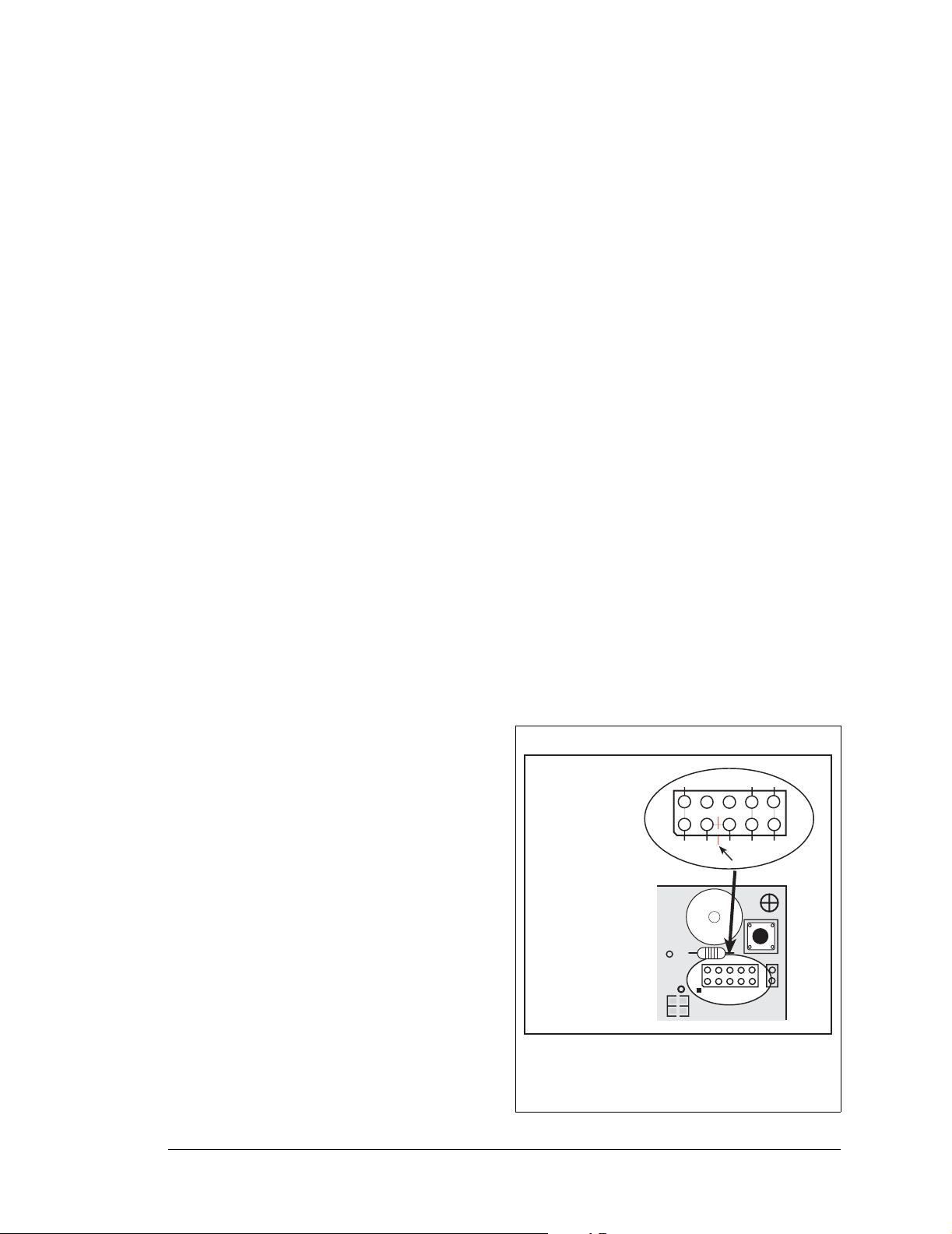
4.4 Jackrabbit Function Calls
4.4.1 I/O Drivers
The Jackrabbit contains four high-power digital output channels, two D/A converter output channels, and one A/D converter input channel. These I/O channels can be accessed
using the functions found in the JRIO.LIB library.
4.4.1.1 Initialization
The function jrioInit() must be called before any other function from the JRIO.LIB
library. This function initializes the digital outputs and sets up the driver for the analog
input/outputs. The digital outputs correspond to the Rabbit processor’s port E bits 0–3, and
the analog I/O uses timer B; bits 1, 2, and 4 of port D; and bits 6 and 7 of port E.
The function void jrioInit() initializes the I/O drivers for Jackrabbit. In particular, it
sets up parallel port D bits 1, 2, and 4 for analog output, port E bits 0–3 for digital output,
and starts up the pulse-width modulation routines for the A/D and D/A channels. Note that
these routines can consume up to 20% of the CPU’s processing power; the routines use
timer B and the B1 and B2 match registers.
4.4.1.2 Digital Outputs
The Jackrabbit contains four high-power digital output drivers, HV0–HV3, on header J4.
These can be turned on and off with the following functions from the library JRIO.LIB.
HV0, HV1, and HV2 are open-collector sinking outputs, and are able to sink up to 1 A
(200 mA for the Jackrabbit and BL1820)
from a 30 V source connected to the K line on
header J4. HV3 is a sourcing output that is able to source up to 500 mA (100 mA for the
BL1810 and BL1820) from a 30 V source connected to the K line.
CAUTION: Remember to cut the trace
between K and Vcc inside the outline
for header JP2 on the top side of the
Prototyping Boar d if you are s upplying
K from a separate power supply. An
exacto knife, a precision grinder tool,
or a screwdriver may be used to cut
through the traces as shown in
Figure 16.
NOTE: Failure to do this could lead to
the destruction of the Rabbit 2000
microprocessor and other components
once the Jackrabbit i s connect ed to the
Prototyping Board.
Cut gray trace
as shown
Top Side
Prototyping
Board
JP2
COIL(-)
LS1
Buzzer
R1
HV0
JP2
VCC
BZR
+RAW
VCC
K
Cut
K
R3
3
2
+
1
PE4
POT
AD0
RT1
GND
PD0
AD0
Figure 16. Cut Trace on Prototyping Board
When Vcc and K Are Different
User’s Manual 51
Page 56

void digOut(int channel, int value);
sets the state of a digital output bit.
jrioInit must be called first.
channel is the output channel number (0-3 on the Jackrabbit).
value is the output value (0 or 1).
void digOn(int channel);
sets the state of a digital output bit to on (1).
jrioInit must be called first.
channel is the output channel number (0–3 on the Jackrabbit).
void digOff(int channel);
sets the state of a digital output bit to off (0).
jrioInit must be called first.
channel is the output channel number (0–3 on the Jackrabbit).
NOTE: See the sample program JRIOTEST.C for an example of using the digital out-
put functions.
4.4.1.3 Analog Output
The two analog output channels on the Jackrabbit (DA0 and DA1 on header J5) are controlled by a pulse-width modulation (PWM) driver. This requires the use of some fraction
of the CPU cycles when the driver is running (up to 20% when both D/A channels are
used). A voltage is selected by giving a value from 0 to 1024 to the driver, corresponding
roughly to 0.1 V to 3.5 V on DA0. Because of the PWM interrupt frequency, the PWM
driver can provide a continuous range of voltage output in the range from 0.1 V to 3.0 V
for DA0, and 0.6 V to 3.6 V for DA1. These ranges can be specified with the constants
PWM_MIN, PWM_MAX0, and PWM_MAX1. In other words, setting channel DA0 to the value
PWM_MIN will output 0.1 V, and setting it to PWM_MAX0 will output 3.0 V. Similarly, set-
ting DA1 to PWM_MIN will output 0.6 V, and setting it to PWM_MAX1 will output 3.6 V. Values below PWM_MIN will be rounded down to 0, and values above PWM_MAX0 (PWM_MAX1
for DA1) will be rounded up to 1024.
The output channels can also be set in an “always on” or “always off” mode, which does
not require CPU cycles. The “always on” mode is set by requesting an output value of
1024, and will provide about 3.4 V on channel DA0, and 3.6 V on DA1. The “always off”
mode is selected by asking for a value of 0, and provides an output of around 0.1 V on
DA0 and 0.0 V on DA1.
See Table 5 for a summary of the possible analog output voltages corresponding to values
given in the anaOut function.
52 Jackrabbit (BL1800)
Page 57

Table 5. Typical Analog Output Voltages Corresponding
to Values in anaOut Function
Channel 0 PWM_MIN PWM_MAX 1024
DA0 0.08 V 0.08 V 2.875 V 3.4 V
DA1 0.004 V 0.63 V 3.6 V 3.6 V
The output value is set using the following function.
void anaOut(int channel, int value);
sets the state of an analog output channel.
jrioInit must be called first.
channel is the output channel number (0 or 1 on the Jackrabbit).
value is an integer from 0–1024 that corresponds to an output voltage as shown in Table 5.
NOTE: See the sampl e program JRIOTEST.C for exampl es o f u si ng t he anaOut func-
tion.
Effect of Interrupts on Analog I/O
The stability of the voltage output (and hence the voltage input determination as well)
depends on the ability of the driver to respond quickly to interrupt requests. Dynamic C
debugging, use of the printf function, or any serial communications can disrupt the
pulse-width modulation utilized by the driver and cause fluctuations in the voltage outputs. Avoid using serial communications or printf statements during portions of your
program where the voltage must remain steady . Also be aware that debugging and running
Dynamic C in polling mode wi ll cause f luctuations. Finally, be certain to disable the PWM
drivers by setting the output values to 0 or 1024 when you are done using them to free up
the CPU.
Calibration of Values to Voltages
The analog output channels on the Jackrabbit can be more accurately calibrated for each
individual Jackrabbit in the following manner (calibration of DA0 is assumed in this
example, calibration of DA1 would proceed similarly):
• Set desired channel output to
• Measure voltage V
on DA0.
min
PWM_MIN.
• Set desired channel output to PWM_MAX0.
• Measure voltage V
on DA0.
max
A linear relation between input value and voltage can now be calculated:
bVmax m PWM_MAX0×–=
User’s Manual 53
Page 58
m
---------------------------------------------------------------------=
PWM_MAX0 PWM_MIN–
Vmax Vmin–
voltage m value× b+=
4.4.1.4 Analog Input
The analog input channel on the Jackrabbit (AD0 on header J5) works by varying analog
output channel DA0 until its voltage matches the input voltage on AD0. DA0 obviously
cannot be used while an input voltage is being measured, although channel DA0 is still
available. The value returned corresponds to the value that DA0 required to match the
input voltage (you would call anaOut(0,value) for DA0 to provide that same voltage).
If the value returned is negative, then the function considers the value suspect for some
reason (most likely a failure of the DA0 voltage to settle quickly). The value can be taken
as is, or another measurement can be done.
void anaIn(int channel, int *value);
Analog input for the Jackrabbit analog input channel (AD0).
jrioInit must be called first.
channel is the input channel number (0 only on the Jackrabbit).
An integer between 0 and 1024 will be returned in value, corresponding to a voltage
obtained if output channel DA0 was set to that value. If a value is found, but the voltage
has not appeared to fully settle, the value will be negative (but equal in magnitude to the
found voltage) to allow remeasurement if desired.
NOTE: See sample program JRIOTEST.C for an example of the use of anaIn.
Two versions of the analog input function are available: the standard function, listed
above, that does not return until the measurement has been made, and a cofunction version
that can be called from within a costatement. This cofunction version allows other tasks to
be performed while the voltage match is being made. The voltage measurement will take
ten calls of the cofunction version to make a measurement.
void cof_anaIn(int channel, int *value);
The parameters are identical to those described above for anaIn.
NOTE: See sample program JRIO_COF.C for an example of the use of cof_anaIn.
54 Jackrabbit (BL1800)
Page 59
4.4.2 Serial Co mmunication Drivers
Library files included with Dynamic C provide a full range of serial communications support. The RS232.LIB library provides a set of circular-buffer-based serial functions. The
PACKET.LIB library provides packet-based serial functions where packets can be delim-
ited by the 9th bit, by transmission gaps, or with user-defined special characters. Both
libraries provide blocking functions, which do not return until they are finished transmitting or receiving, and nonblocking functions, which must be called repeatedly until they
are finished. For more information, see the Dynamic C Function Reference Manual and
Technical Note 213, Rabbit Serial Port Software.
4.4.2.1 RS-485 Serial Communication Drivers
The JR485.LIB library in the Dynamic C LIB/JRABLIB directory contains three RS-485
drivers for use with the Jackrabbit. These drivers are used with the drivers for Serial Port D
in the RS232.LIB library because serDopen uses PC0 (TXD) and PC1 (RXD), which
are connected to pin 4 and pin 1 of the SP483EN RS-485 chip at U6. This chip is half
duplex, requiring pin 3 (Data Enable) to be high for pins 6 and 7 to act as outputs, and low
for those pins to act as inputs.
Parallel Ports D and E on the Rabbit 2000 are double-buffered to provide precisely timed
updating of the output pins. Each port is divided into an upper and a lower nibble. All bits
of each nibble must be updated simultaneously. Each nibble may be updated constantly at
a rate of perclk/2 or on a match of a selected timer (Timer A1, B1, or B2).
The bits used to select the update rate for each nibble are left random at power-up. If a mode
other than perclk/2 is selected, the bits of a particular port will not update on a simple
writing to the port’s data register. In particular, PD5, the RS-485 transmitter control, will not
set the RS-485 transmitter enable unless the upper nibble of Port D is configured properly.
The JR485Init function in Dynamic C release 6.16 has provision to disable the special
clocking features associated with the high nibble of Port D. This effectively disables
digital-to-analog (D/A) converter output channel DA1, the low-resolution D/A converter
channel, which also uses PD4. Channel DA0 has its PWM output clocked separately with
the low nibble, and so is not affected. Because the analog-to-digital converter uses D/A
channel DA0, analog-to-digital conversion is not affected.
There are three RS-485 serial drivers.
void Jr485Init();
Sets up parallel port D pins for RS-485 use.
void Jr485Tx();
Sets pin 3 (DE) of the SP483EN chip high to disable Rx and enable Tx.
void Jr485Rx();
Resets pin 3 (DE) of the SP483EN chip low to disable Tx and enable Rx.
User’s Manual 55
Page 60

4.5 Upgrading Dynamic C
4.5.1 Patches and Bug Fixes
Dynamic C patches that focus on bug fixes are available from time to time. C heck the Web
site www.rabbit.com/support/ for the latest patches, workarounds, and bug fixes.
The default installation of a patch or bug fix is to install the file in a directory (folder) different from that of the original Dynamic C installation. Rabbit recommends using a different directory so that you can verify the operation of the patch without overwriting the
existing Dynamic C installation. If you have made any changes to the BIOS or to libraries,
or if you have programs in the old directory (folder), make these same changes to the
BIOS or libraries in the new directory containing the patch. Do not simply copy over an
entire file since you may overwrite a bug fix; of course, you may copy over any programs
you have written. Once you are sure the new patch works entirely to your satisfaction, you
may retire the existing installation, but keep it available to handle legacy applications.
4.5.2 Add-On Modules
Dynamic C installations are designed for use with the board they are included with, and
are included at no charge as part of our low-cost kits. Rabbit offers add-on Dynamic C
modules for purchase, including the popular µC/OS-II real-time operating system, as well
as PPP, Advanced Encryption Standard (AES), and other select libraries.
In addition to the Web-based technical support included at no extra charge, a one-year
telephone-based technical support module is also available for purchase.
56 Jackrabbit (BL1800)
Page 61

APPENDIX A. SPECIFICATIONS
Appendix A provides the specifications for the Jackrabbit.
User’s Manual 57
Page 62

A.1 Electrical and Mechanical Specifications
Figure A-1 shows the mechanical dimensions for the Jackrabbit.
3.5
(89)
3.3
0.9
(23)
(84)
0.15 dia, 4x
(4)
0.2
0.53
(0.5)
(14)
2.28
0.59
(15)
(58)
2.5
0.96
(64)
(25)
J4 J5
3.5
(89)
(15)
(25)
(14)
0.59
0.96
0.53
Please refer to the Jackrabbit
footprint diagram later in this
appendix for precise header
locations.
2.5
(64)
Figure A-1. Jackrabbit Dimensions
NOTE: All measurements are in inc hes fo llowed b y milli meters enclos ed in pa renthe se s.
All dimensions have a manufacturing tolerance of ±0.01" (0.25 mm).
58 Jackrabbit (BL1800)
Page 63

T ableA-1 lists the electri cal, mechani cal, and envi ron mental spec ificat ions for the Jackr abbit boar ds.
Table A-1. Jackrabbit Board Specifications
Parameter BL1800 BL1810 BL1820
Microprocessor Rabbit 2000 @ 29.5 MHz Rabbit 2000 @ 14.74 MHz
Flash EPROM
SRAM
Backup Battery
Digital Inputs 6, CMOS-level 7, CMOS-level
Digital Outputs
Configurable I/O
Analog Inputs
Analog Outputs
(supports 128K–512 K )
4 CMOS-level plus
4 high-power outputs—3
sink up to 1 A and 30 V
each, 1 sources up to
500 mA
Up to four serial ports:
256K
(supports 128K–512K)
128K
(supports 32K–512 K )
3 V lithium coin type, 950 mA·h,
supports real-time clock and SRAM
4 CMOS-level plus
4 high-power output s—3
sink up to 200 mA and
30 V each, 1 sources up
to 100 mA
14 CMOS-level: 8 are bytewide, 6 are by bit
One low-grade A/D input—input range 0.1 V to 2.8 V,
9-bit resolution, 8-bit accuracy, 10 samples/s
Two 9-bit filtered and buffered PWM outputs,
one 0.1–2.8 V DC, one 0.7–3.5 V DC, update rate 50 Hz
128K
None
5 CMOS-level plus
4 high-power output s—3
sink up to 200 mA and
30 V each, 1 sources up
to 100 mA
15 CMOS-level:
8 are bytewide, 7 are by bit
• two RS-232 or one R S- 232 (with CTS/RTS) rated at 15 kV ESD
Serial P orts
• one RS-485 rated at 15 kV ESD (RS-485 driver not installed on BL1820)
• one 5 V CMOS-compatible programming port
Two serial ports (A and B) can be clocked.
Serial Rate
Connectors Two 2 × 20, 2 mm IDC headers
Real-Time Clock Yes
Timers
W atchdog/Supervisor Yes
Power
Operating T emperatu re –40°C to +70°C
Humidity 5% to 95%, noncondensing
Board Size
User’s Manual 59
8–40 V DC, 1.2 W max.,
switching regulator
2.50" × 3.50" × 0.76"
(64 mm × 89 mm × 19 mm)
Max. burst rate = CLK/32 ( async)
Max. sustained rate = CLK/64
Five 8-bit timers (four cascadable from the first)
and one 10-bit timer with two match registers
7.5–25 V DC, 100 mA, linear regulator
2.50" × 3.50" × 0.94"
(64 mm × 89 mm × 24 mm)
2.50" × 3.50" × 0.63"
(64 mm × 89 mm × 16 mm)
Page 64
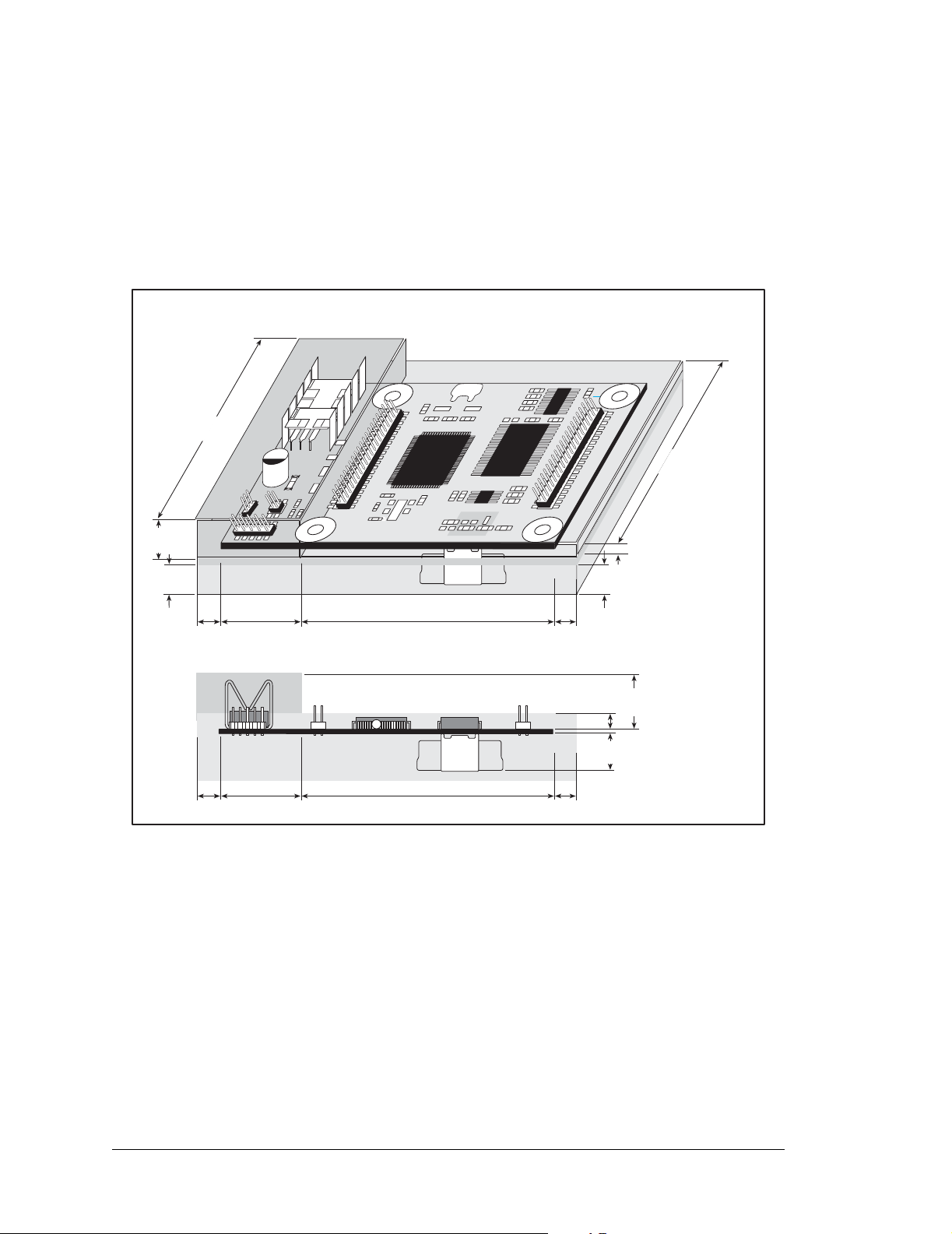
A.1.1 Exclusion Zone
It is recommended that you allow for “exclusion zones” around the Jackrabbit when the
Jackrabbit is incorporated into an assembly that includes other components. These “exclusion zones” that you keep free of other components and boards will allow for sufficient air
flow, and will help to minimize any electrical or EMI interference between adjacent
boards. Figure A-2 shows the “exclusion zones.”
Exclusion
Zones
3.0
(76)
3.0
(76)
(15)
0.60
0.40
(10)
0.40
(10)
0.12
(3)
0.25
(6)
0.9
(23)
2.6
(66)
J4 J5
0.9
(23)
2.6
(66)
Figure A-2. Jackrabbit “Exclusion Zones”
0.25
(6)
0.25
(6)
0.12
0.40
(3)
(10)
(15)
0.60
60 Jackrabbit (BL1800)
Page 65

A.1.2 Headers
The Jackrabbit has 0.1" IDC headers at J1 (1 × 3) and J2 (2 × 2) for the power supply and
an external battery connection. There are 2 mm IDC headers at J3 (2 × 5 programming
port) and at J4 and J5 (2 × 20 Rabbit subsystems) for physical connection to other boards
or ribbon cables.
Figure A-3 shows the Jackrabbit footprint to help you lay out the “motherboard” into
which the Jackrabbit is plugged in. These values are relative to the mounting hole closest
to header J3.
(58.4)
2.300
(5.1)
0.200
J5
J4
Jackrabbit Footprint
J2
J1
J3
0.084
(2.1)
2.284
(58.0)
2.400
(61.0)
2.600
(66.0)
Figure A-3. User Board Footprint for Jackrabbit
0.485
(12.3)
0.755
(19.2)
0.790
(20.1)
0.900
(22.9)
(11.1)
0.438
(1.3)
0.051
(12.7)
0.500
(46.3)
1.823
(53.3)
2.100
User’s Manual 61
Page 66
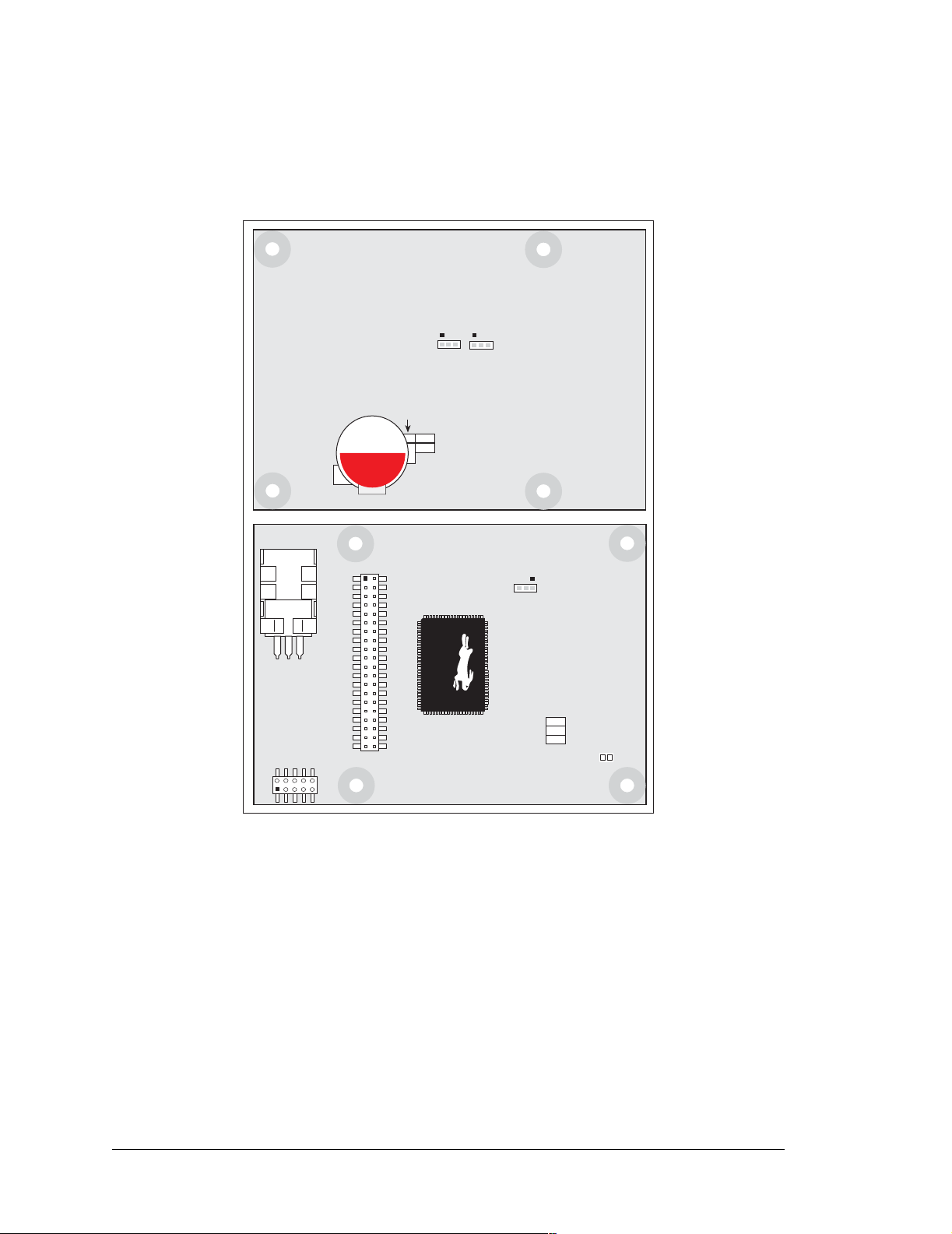
A.2 Jumper Configurations
Figure A-4 shows the header and jumper locations used to configure the various Jackrabbit
options.
Top Side
JP3
JP2
C27
Battery
D21
R55
R56
CAUTION
D24
Bottom Side
JP1
R16
R17
R18
JACKRABBIT
Z-World, Inc.
Figure A-4. Location of Jackrabbit Configurable Positions
62 Jackrabbit (BL1800)
Page 67
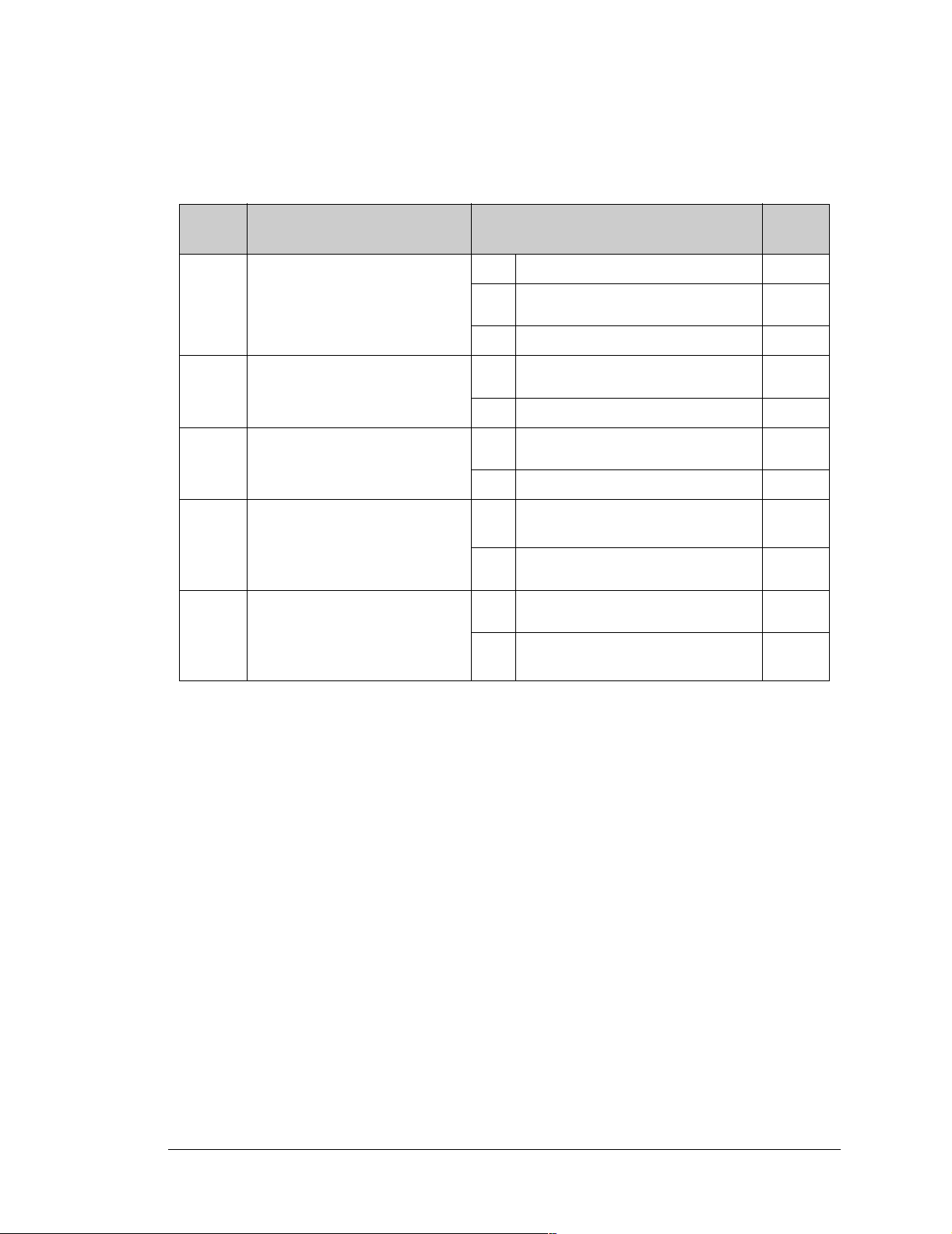
Table A-2 lists the configuration options. 0 Ω surface mount resistors are used for all the
header positions.
Table A-2. Jackrabbit Jumper Configurations
Header Description Pins Connected
n.c. 32K
JP1 SRAM Size
JP2 Flash Memory Size
JP3 Flash Memory Bank Select
— HV3 Sinkin g/Sourcing
RS-485 Bias and Termination
—
Resistors (not installed on
BL1820)
1–2 128K
2–3 512K
1–2 128K/256K
2–3 512K
1–2 Normal Mode
2–3 Bank Mode
D21
Sinking
R55
R56 Sourcing
R17 Termination resistor
R16
Bias resistors
R18
Factory
Default
×
×
×
×
×
×
NOTE: Header JP3 is available only on Jackrabbit boards labeled 175-0255. These
boards were introduced in 2003.
User’s Manual 63
Page 68

A.3 Conformal Coating
The areas around the crystal oscillator and the battery backup circuit on the Jackrabbit
have had the Dow Corning silicone-based 1-2620 conformal coating applied. The conformally coated areas are shown in Figure A-5. The conformal coating protects these highimpedance circuits from the effects of moisture and contaminants over time, and helps to
maintain the accuracy of the real-time clock.
Conformally coated area
Figure A-5. Jackrabbit Areas Receiving Conformal Coating
Any components in the conformally coated area may be replaced using standard soldering
procedures for surface-mounted components. A new conformal coating should then be
applied to offer continuing protection against the effects of moisture and contaminants.
NOTE: For more information on conformal coatings, refer to Technical Note 303,
Conformal Coatings.
64 Jackrabbit (BL1800)
Page 69

A.4 Use of Rabbit 2000 Parallel Ports
Figure A-6 shows the use of the Rabbit 2000 parallel ports. The Jackrabbit has 27 generalpurpose digital inputs/outputs available on headers J4 and J5—15 are bidirectional (one of
which is used by the RS-485 chip on BL1800 and BL1810 models), seven are inputs only
(one of which is used by the RS-485 chip on BL1800 and BL1810 models), and five are
outputs only (one of which is used by the RS-485 chip on BL1800 and BL1810 models),
as shown in Figure A-6.
2x RS-232,
1x RS-485,
CMOS synch-
ronous serial
PCLK
IOBENB
PA0PA7
Port A
PB0
PB5
Port B
PB6
PB7
JACKRABBIT
Serial
Ports
RAM
Real-Time Clock
Misc. Outputs
Clock Doubler
Backup Battery
Programming
Port
Figure A-6. Jackrabbit Subsystems
Flash
Watchdog
6 Timers
Slave Port
High-Power Outputs
HV0HV3
PD0, PD3,
PD6, PD7
Port D
Port E
D/A Converters
A/D Converter
PE4PE5
DA0
DA1
AD0
User’s Manual 65
Page 70
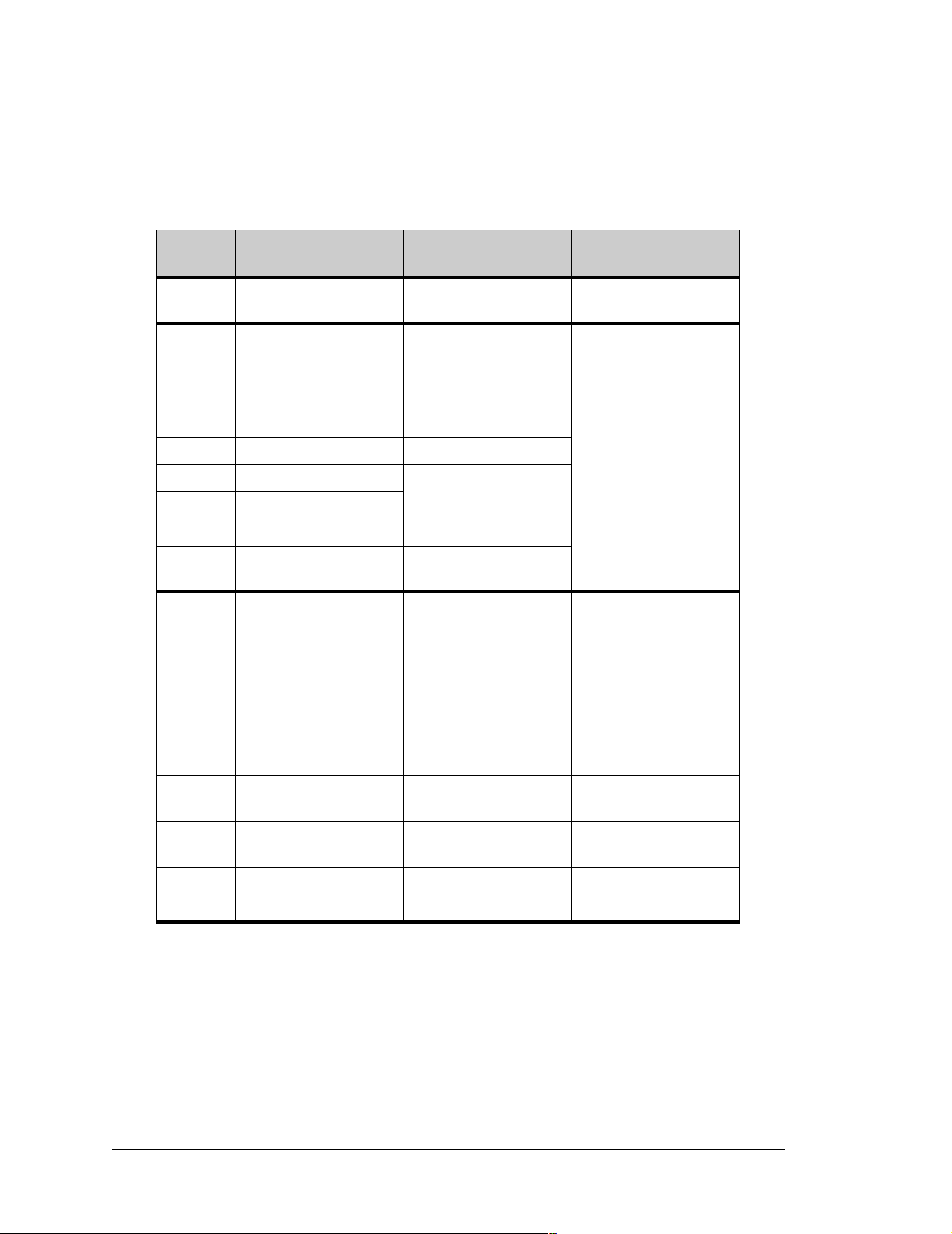
The ports on the Rabbit 2000 microprocessor used in the Jackrabbit are configurable, and
so the factory defaults can be reconfigured. Table A-3 lists the Rabbit 2000 factory
defaults and the alternate configurations.
Table A-3. Jackrabbit Pinout Configurations
Pin
PA0–PA7 Parallel I/O
PB0 Input Serial port clock CLKB
PB1 Input Serial port clock CLKA
PB2 Input
PB3 Input Slave port read /SRD
PB4 Input
PB5 Input
PB6 Output
PB7 Output
PC0 Output TXD
PC1 Input RXD
Rabbit 2000
Factory Default
Alternate Use Jackrabbit Use
Slave port data bus SD0–
SD7
Slave port write /S WR
Slave port address lines
SA1–SA0
Slave port attention line
/SLAVEATTN
PB1 (CLKA) is
connected to J3
(programming port)
Connected to RS-485 IC
Tx input
Connected to RS-485 IC
Rx output
PC2 Output TXC
PC3 Input RXC
PC4 Output TXB
PC5 Input RXB
PC6 Output TXA
PC7 Input RXA
Connected to RS-232 IC
Tx input
Connected to RS-232 IC
Rx output
Connected to RS-232 IC
Tx input
Connected to RS-232 IC
Rx output
Connected to
programmi ng port
66 Jackrabbit (BL1800)
Page 71
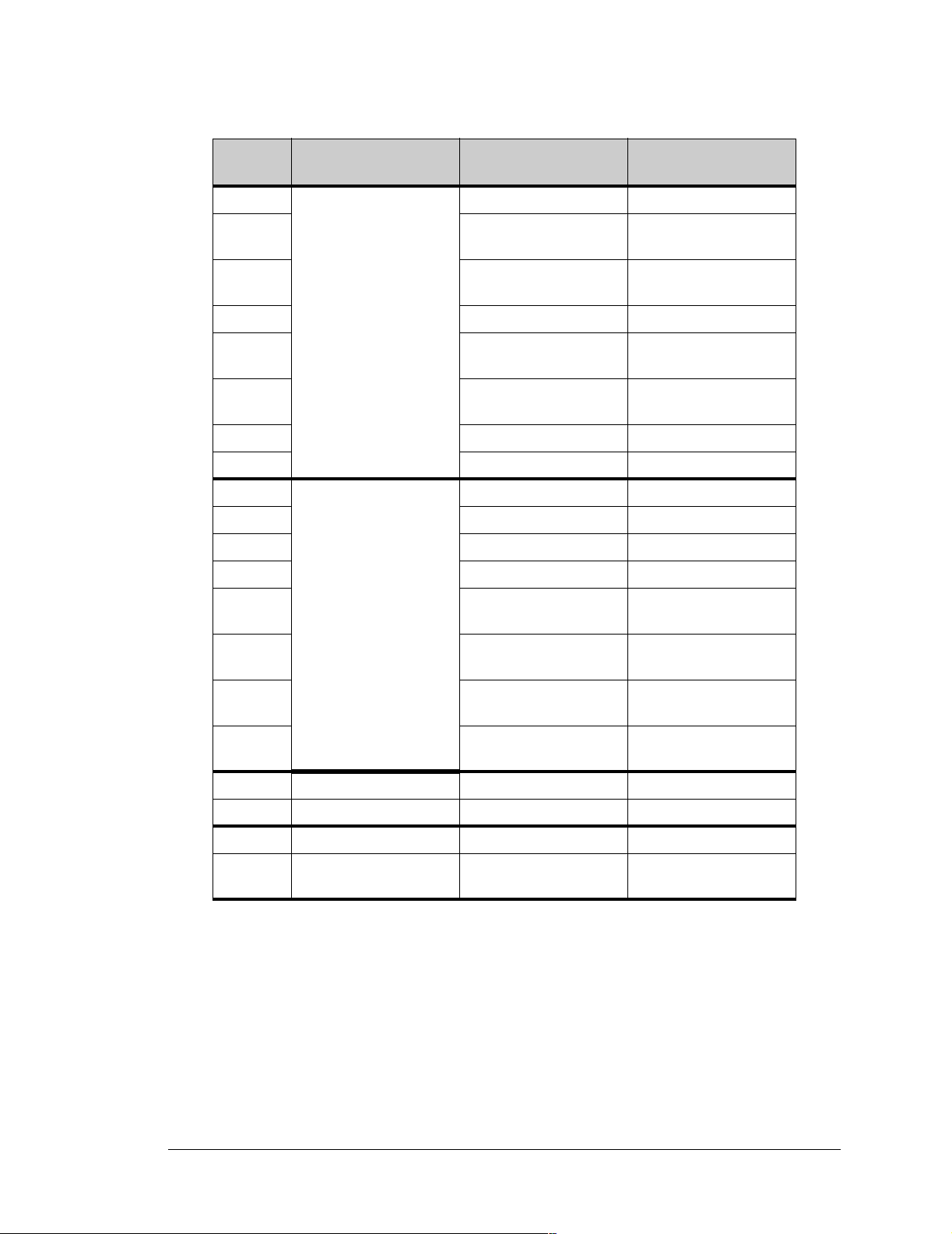
Table A-3. Jackrabbit Pinout Configurations (continued)
Pin
PD0
PD1
PD2
PD3
PD4 ATXB output
PD5 ARXB input
PD6 ATXA output
PD7 ARXA input
PE0
PE1 I1 output or INT1A input H V1 output control
PE2 I2 output HV2 output c ontrol
PE3 I3 output HV3 output c ontrol
PE4
PE5
Rabbit 2000
Factory Default
Bitwise or parallel
programmable I/O,
can be driven or opendrain output
Bitwise or parallel
programmable I/O
Alternate Use Jackrabbit Use
Connected to control
DA0
Connected to control
DA0
Connected to control
DA1
Connected to RS-485 IC
data enable input
I0 output or INT0A input HV0 output co ntrol
I4 output or external
INT0B input
I5 output or external
INT1B input
PE6 I6 output
PE7
PCLK Peripheral clock Output
IOBEN I/O buffer enable Output
WDO Watchdog output Single low pulse output
STAT Status Output
I7 output or slave port
chip select /SCS
Connected to A/D
comparator output
Connected to A/D
comparator output
Connected to
programmi ng port
As shown in Table A-3, pins PE4 and PE5 can instead be used as external INT0B and
INT1B interrupts. Pins PD6 and PD7 can instead be used to access Serial Port A on the
Rabbit 2000 microprocessor. P ins PB0 and PB1 can instead be used to access the clock on
Serial Port B and Serial Port A of the Rabbit 2000 microprocessor.
The four output-only pins are located on PB6–PB7, PCLK, and IOBEN. PB7 can also be
used with the slave port of the Rabbit 2000 microprocessor. The primary function of
PCLK is as a peripheral clock or a peripheral clock ÷ 2, but PCLK can instead be used as
a digital output. Similarly, IOBENB is an I/O buffer enable, but can instead be used as a
digital output. STAT and WDO also have limited uses as digital outputs.
User’s Manual 67
Page 72

68 Jackrabbit (BL1800)
Page 73

APPENDIX B. PROTOTYPING BOARD
Appendix B describes the features and accessories of the Prototyping Board, and explains the use of the Prototyping Board to
demonstrate the Jackrabbit and to build pro totypes of your own
circuits.
User’s Manual 69
Page 74

B.1 Prototyping Board Overview
The Prototyping Board included in the Development Kit makes it easy to connect a Jackrabbit board to a power supply and a PC workstation for development. It also provides
some basic I/O peripherals (switches and LEDs), as well as a prototyping area for more
advanced hardware development.
For the most basic level of evaluation and development, the Prototyping Board can be
used without modification.
As you progress to more sophisticated experimentation and hardware development, modifications and additions can be made to the board without modifying or damaging the Jackrabbit board itself.
The Prototyping Board is shown below in Figure B-1, with its main features identified.
Jackrabbit
Connectors
J2
PB7
PB5
PB3
PB1
PA7
PA5
PA3
PA1
VCC
J3
PA4
PA2
PA0
GND
1
6
J4
PCLK
GND
PB6
PB4
PB2
PB0
GND
WDO
PA6
PA5
PA4
PA3
PA2
PA1
PA0
JP1
DS5
DS4
DS3
DS2
DS1
DS6
J5
User
LEDs
Buzzer
HV3
HV1
GND
PE1
PE3
PE5
PE7
PE2
PE4
PE6
PE0
HV0
HV2
GND
GND
PB5
PB4
PB3
PB2
PA7
PA6
S1S2S3
S4
DS7
DS8
GND
LS1
VCC
+RAW
COIL(+)
COIL(-)
K
GND
R3
3
2
+
R1
JP2
1
+RAW
HV0
PE4
POT
AD0
RT1
GND
PD0
K
AD0
BZR
VCC
RN1
DS1DS2DS3
RS-232
Signal
Header
9
5
Prototyping
Area
GND
J1
TXC
RXB
RXC
TXB
GND
RXC
J7
RXB
VCC
JACKRABBIT PROTOTYPING BOARD
AGND
PC7
TXC
PC1
PC3
DA1
PD1
PD3
PD5
PD7
TXB
DA0
AD0
PD6
PD4
PD2
PD0
PC6
PC4 PC5
PC2
PC0
Extension
Headers
GND
485+
VCC
VCC
485
GND
Z-World, Inc.
SM1
SM0
J6
VBAT
STAT
GND
IOBEN
N.C.
COM
GND
S5
/RST
Reset
Switch
N.O.
RESET
S2 S1
DS4
DS5DS6DS7DS8
S4 S3
Power
PWR
DS9
User
Switches
LED
Figure B-1. Prototyping Board
70 Jackrabbit (BL1800)
Page 75

B.1.1 Prototyping Board Features
• Power LED—The power LED lights whenever power is connected to the Prototyping
Board.
• Reset Switch—A momentary-contact, normally open switch is connected directly to the
Jackrabbit’s / RESET_IN pin. Pressing the switch forces a hardware reset of the system.
• I/O Switches and LEDs—Four momentary-contact, normally open switches are con-
nected to the PB2–PB5 pins of the Rabbit 2000 microprocessor on the Jackrabbit, and
may be read as inputs by sample applications.
Four LEDs are connected to the PA1–PA4 pins of the of the Rabbit 2000 microprocessor on the Jackrabbit, and may be driven as output indicators by sample applications.
• Prototyping Area—A generous prototyping area has been provided for the installation
of through-hole components. Several areas for surface-mount devices are also available. (Note that there are SMT device pads on both top and bottom of the Prototyping
Board.)
• Extension Headers—The complete pin sets of the Jackrabbit are duplicated at these
two sets of headers. Developers can solder wires directly into the appropriate holes, or,
for more flexible development, 40-pin header strips can be soldered into place. See
Figure B-7 for the header pinouts.
• RS-232—T wo 3-wire or one 5-wire RS-232 serial port are available on the Prototyping
Board. Refer to the Prototyping Board schematic (090-0088) for additional details.
A 10-pin 0.1-inch spacing header strip is installed at J1 to permit connection of a ribbon
cable leading to a standard DE-9 serial connector.
User’s Manual 71
Page 76
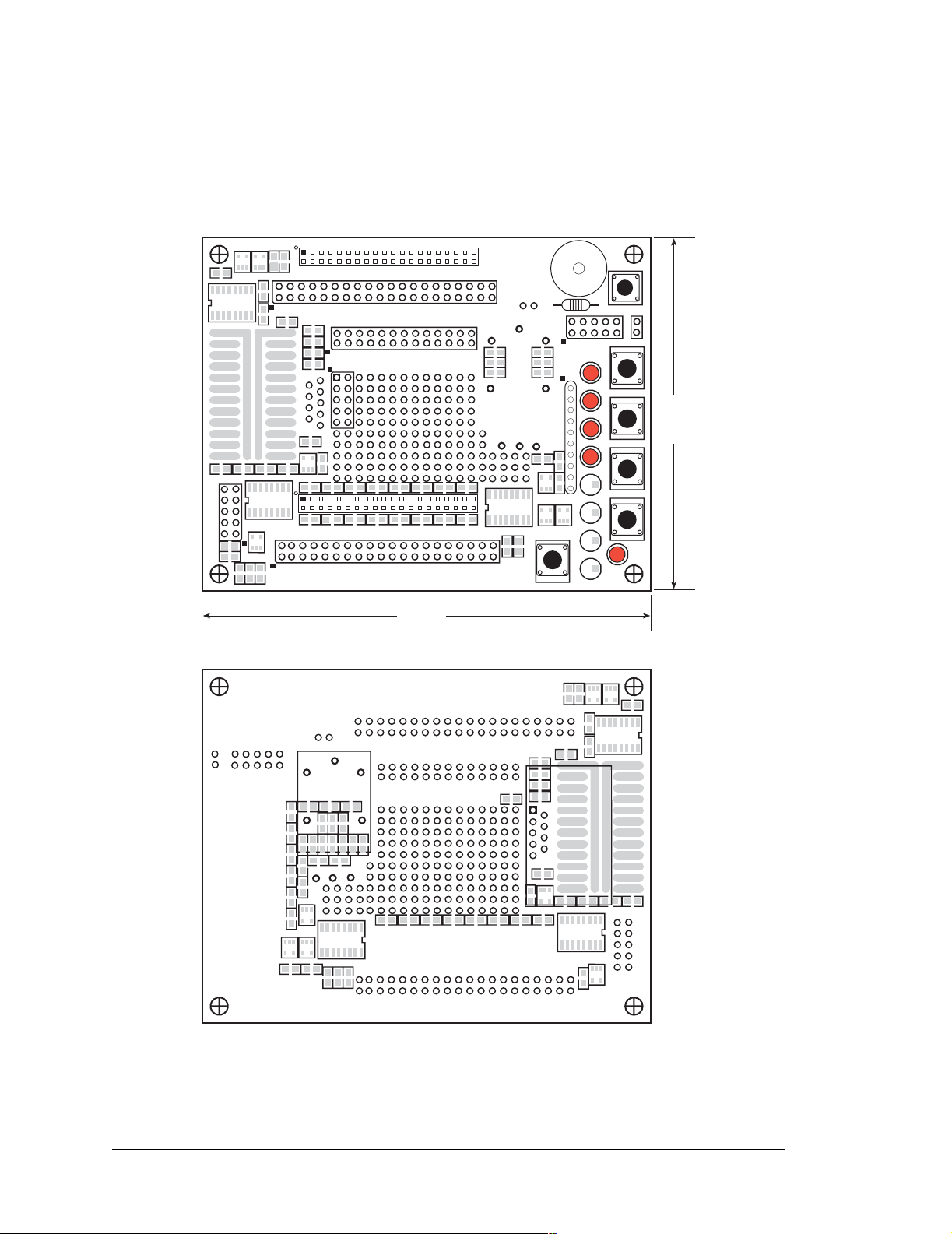
B.2 Mechanical Dimensions and Layout
Figure B-2 shows the mechanical dimensions and layout for the Jackrabbit Prototyping Board.
Top Side
TXC
RXC
J2
PA7
PA5
PA3
PA1
VCC
J3
PA2
PA0
GND
PB3
PB1
GND
PB2
PB0
GND
PA6
PA4
PA2
PA1
PA0
PE5
PE7
PB7
PB5
PCLK
PB6
PE6
PB4
GND
WDO
PA7
PA6
PA5
PA4
PA3
JP1
DS5
DS4
DS3
DS2
DS1
J5
1
6
J4
9
5
DS6
DS7
DS8
PE1
PE3
PE2
PE4
PB3
PB2
S1S2S3
PE0
PB4
GND
HV3
VCC
+RAW
HV1
K
HV0
HV2
GND
GND
PB5
S4
GND
N.C.
COM
COIL(+)
N.O.
COIL(-)
LS1
Buzzer
R1
JP2
R3
3
2
+
1
+RAW
HV0
BZR
RN1
VCC
PE4
POT
AD0
RT1
GND
PD0
K
AD0
DS1DS2DS3
S2 S1
(80)
3.15
DS4
GND
J1
RXB
TXB
GND
RXC
TXC
AGND
PC7
PC1
PC3
DA1
PD1
PD3
PD5
PD7
GND
485+
VCC
SM1
J6
VBAT
STAT
GND
J7
S5
TXB
RXB
PC0
VCC
JACKRABBIT PROTOTYPING BOARD
DA0
AD0
PD4
PD2
PD0
PC6
PC4 PC5
PC2
PD6
GND
Z-World, Inc.
485
VCC
SM0
IOBEN
GND
/RST
RESET
DS5DS6DS7DS8
S4 S3
PWR
DS9
4.00
(102)
Bottom Side
+RAW
GND
VCC
HV1
GND
HV3
K
PE0
HV0
HV2
GND
PB5
PB4
COIL(+)
COIL(-)
HV0
POT
+RAW
JP2
PD0PE4
BZR
VCC
AD0
K
PCLK
PE1
PE3
PE5
PE7
GND
PB7
PB5
PB3
PB1
PA5
PA3
PA1
PA7
VCC
J3
PE2
PE4
PE6
GND
WDO
PB4
PB2
PB0
GND
PB3
PB6
PB2
PA7
PA6
PA5
PA4
PA3
PA2
PA1
PA0
JP1
DS1
DS2
DS3
DS4
DS5
DS6
DS7
DS8
S1S2S3S4GND
GND
PA6
PA4
PA2
PA0
1
J4
6
9
AGND
AD0
5
GND
J1
RXB
TXC
TXB
RXC
PC1
PC3
PC5
PC7
TXC
GND
PC2
PC6
PC4
J7
PC0
TXB
RXB
VCC
RXC
N.O.
COM
GND
/RST
N.C.
VBAT
GND
STAT
IOBEN
SM1
SM0
VCC
VCC
485+
485-
GND
GND
PD1
PD3
PD5
PD7
DA1
PD6
PD4
PD2
DA0
PD0
Figure B-2. Jackrabbit Prototyping Board
72 Jackrabbit (BL1800)
Page 77

B.3 Using the Prototyping Board
The Prototyping Board is actually both a demonstration board and a prototyping board. As
a demonstration board, it can be used to demonstrate the functionality of the Jackrabbit
right out of the box without any modifications to either board. There are no jumpers or dip
switches to configure or misconfigure on the Prototyping Board so that the initial setup is
very straightforward.
Once you have looked at the basic sample programs described in the Jackrabbit (BL1800)
Getting Started Manual, solder the headers included in the bag of spare parts onto the
Prototyping Board. Solder a 10-pin header to the top side at location J1. Solder the additional headers shown in Figure B-3 onto the bottom side.
Top Side
J1
JP2
GND
J1
TXC
RXC
PD0PE4
J2
PA7
PA5
PA3
PA1
GND
VCC
J3
GND
PA6
PA4
PA2
PA0
GND
PA0
JP1
DS1
J5
1
6
J4
9
5
RXB
TXB
GND
RXC
TXC
PC1
PC3
J7
TXB
RXB
PC4 PC5
PC2
PC0
VCC
JACKRABBIT PROTOTYPING BOARD
Bottom Side
COIL(+)
COIL(-)
HV0
POT
+RAW
JP2
BZR
VCCKAD0
PCLK
PB6
PE2
PE4
PE6
PB4
PB2
PB0
PA4
PA3
PA2
PA1
DS5
DS4
DS3
DS2
PE0
GND
WDO
PB4
PB3
PB2
PA7
PA6
PA5
S1S2S3
DS6
DS7
DS8
COIL(+)
R1
COIL(-)
K
HV0
HV2
GND
GND
PB5
S4
GND
HV3
LS1
VCC
+RAW
HV1
GND
PE1
PE3
PE5
PE7
PB7
PB5
PB3
PB1
Buzzer
HV0
JP2
BZR
RN1
+RAW
VCC
R3
3
2
+
1
PE4
POT
AD0
RT1
GND
PD0
K
AD0
DS1DS2DS3
S2 S1
N.C.
N.O.
COM
J6
AGND
PC7
DA1
PD1
PD3
PD5
PD7
DA0
AD0
PD6
PD4
PD2
PD0
PC6
GND
485+
VCC
VCC
485
GND
Z-World, Inc.
VBAT
SM1
STAT
GND
S5
SM0
IOBEN
RESET
GND
/RST
DS4
DS5DS6DS7DS8
S4 S3
PWR
DS9
JP1
+RAW
VCC
HV1
HV3
K
GND
HV0
HV2
GND
PB5
GND
PCLK
GND
PE1
PE3
PE5
PE7
PE2
PE4
PE6
PE0
GND
PB4
PB3
PB2
PA7
PA6
DS7
DS8S1S2S3S4
GND
PB7
PB5
PB3
PB1
PA5
PA3
PA1
PA7
VCC
J3
WDO
PB4
PB2
PB0
PB6
PA5
PA4
PA3
PA2
PA1
DS2
DS3
DS4
DS5
DS6
GND
GND
PA6
PA4
PA2
PA0
PA0
JP1
DS1
1
J4
6
J4
9
COM
N.O.
N.C.
485+
VBAT
STAT
GND
SM1
VCC
GND
/RST
GND
IOBEN
SM0
VCC
PD1
PD3
PD5
PD7
485-
GND
PD6
PD4
PD2
PD0
5
GND
RXB
AGND
PC5
PC7
PC1
PC3
DA1
DA0
AD0
PC6
PC4
PC2
PC0
TXB
RXC
TXC
GND
J7
TXB
RXB
VCC
(not included
in Development Kit)
J1
TXC
RXC
Figure B-3. Where to Solder Additional Headers
User’s Manual 73
Page 78

B.3.1 Demonstration Board
A relay , a thermistor , four additional LEDs, and a serial cable are included in a bag of parts
to further allow exploration of the Jackrabbit‘s operation.
The SPDT relay handles 120 V at 5 A with a 12 V activating coil. The layout to accept this
relay is included on the top side of the Prototyping Board. Note that the relay coil
connections need to be wired to one of the sinking high-power outputs (HV0–HV2) of the Jackrabbit.
Install the relay on the bottom side of the Prototyping Board, as shown in Figure B-4.
Connect:
+12 V to COIL(+)
HVx to COIL(-)
K to +RAW
[COIL(+) and COIL(-) spacing
is 0.1" (2.5 mm)]
+RAW
VCC
COM
GND
GND
/RST
N.C.
K
VBAT
GND
HV3
HV2
GND
STAT
IOBEN
COIL(+)
COIL(-)
HV0
POT
+RAW
JP2
PD0PE4
BZR
VCC
AD0
K
N.O.
HV1
SM1
SM0
GND
PE0
HV0
PB5
PB4
VCC
VCC
Relay
PE1
PE3
PE5
PE7
PE2
PE4
PE6
GND
PB3
PB2
PA7
PA6
DS7
DS8
S1S2S3S4GND
485+
GND
PD5
PD7
485-
GND
PD6
PD4
Bottom Side
PCLK
WDO
PA5
DS6
PD3
PD2
GND
PB7
PB5
PB3
PB1
PA5
PA3
PA7
PB4
PB2
PB0
GND
PA6
PA4
PB6
PA4
PA3
PA2
DS3
DS4
DS5
AGND
PD1
DA1
DA0
AD0
PD0
PA2
PA1
PA0
JP1
DS1
DS2
1
J4
6
9
5
PC1
PC3
PC5
PC7
TXC
PC2
PC0
TXB
PC6
PC4
RXC
PA1
PA0
RXB
VCC
GND
GND
VCC
J3
GND
J1
RXB
TXC
TXB
RXC
J7
Relay Contacts
[0.156" (4 mm) spacing]
Figure B-4. Installation of Relay on Prototyping Board
NOTE: COIL(+) must be connected to a 12 V power supply when using the relay.
This is the nominal volt age suppl ied as + RAW when the transformer supplied with the
Development Kit is used, and in this ca se you may con n ec t COIL(+) to +RAW. If you
use another power supply, connect COIL(+) to +12 V if +RAW is different.
NOTE: If you do use the transformer supplied with the Development Kit for COIL(+),
be aware that its volta ge may be as hi gh as 16 V at low curr ent dr aws. This n eeds to be
taken into consideration if you plan to use a 12 V relay in critical applications.
74 Jackrabbit (BL1800)
Page 79

The thermistor has a nominal room-temperature
resistance of about 10 kΩ, which drops to about
6kΩ at 40°C. Once you solder the thermistor onto
the RT1 pads (see Figure B-5) on the Prototyping
Board, the A/D converter readings on AD0 will
change with temperature.
If the 10 kΩ potentiometer is removed, the change
in A/D converter readings with temperature will be
larger.
The LEDs can be mounted in positions DS5–DS8,
shown in Figure B-6, to display the complete status
for Parallel Port A.
COIL(-)
LS1
Buzzer
R1
JP2
+
+RAW
HV0
BZR
VCC
PE4
POT
PD0
K
AD0
DS1
R3
3
2
1
RT1
10 kW
Potentiometer
Thermistor
AD0
GND
S1
Figure B-5. Thermistor and
Potentiometer Locations
The serial cable included in the parts bag can be
used to connect the Jackrabbit’s RS-232 outputs
from header J1 on the Prototyping Board to an
available PC serial port.
Unlike the CMOS-level signals on header J3, the
programming port on the Jackrabbit board, the signals on header J1 on the Prototyping Board are full
RS-232 level signals without needing the CMOS to
RS-232 converter that is present in the programming cable. The RS-232 level signals are processed
via the MAX232 transceiver chip, U4, on the Jackrabbit board to Serial Ports B and C of the Rabbit
2000. The CMOS-level signals on the programming port are connected to Serial Port A.
DS1DS2DS3
Existing
LEDs
Add
Dev Kit
LEDs
}
}
S2 S1
DS4
DS5DS6DS7DS8
S4 S3
PWR
DS9
Figure B-6. LED Location
User’s Manual 75
Page 80
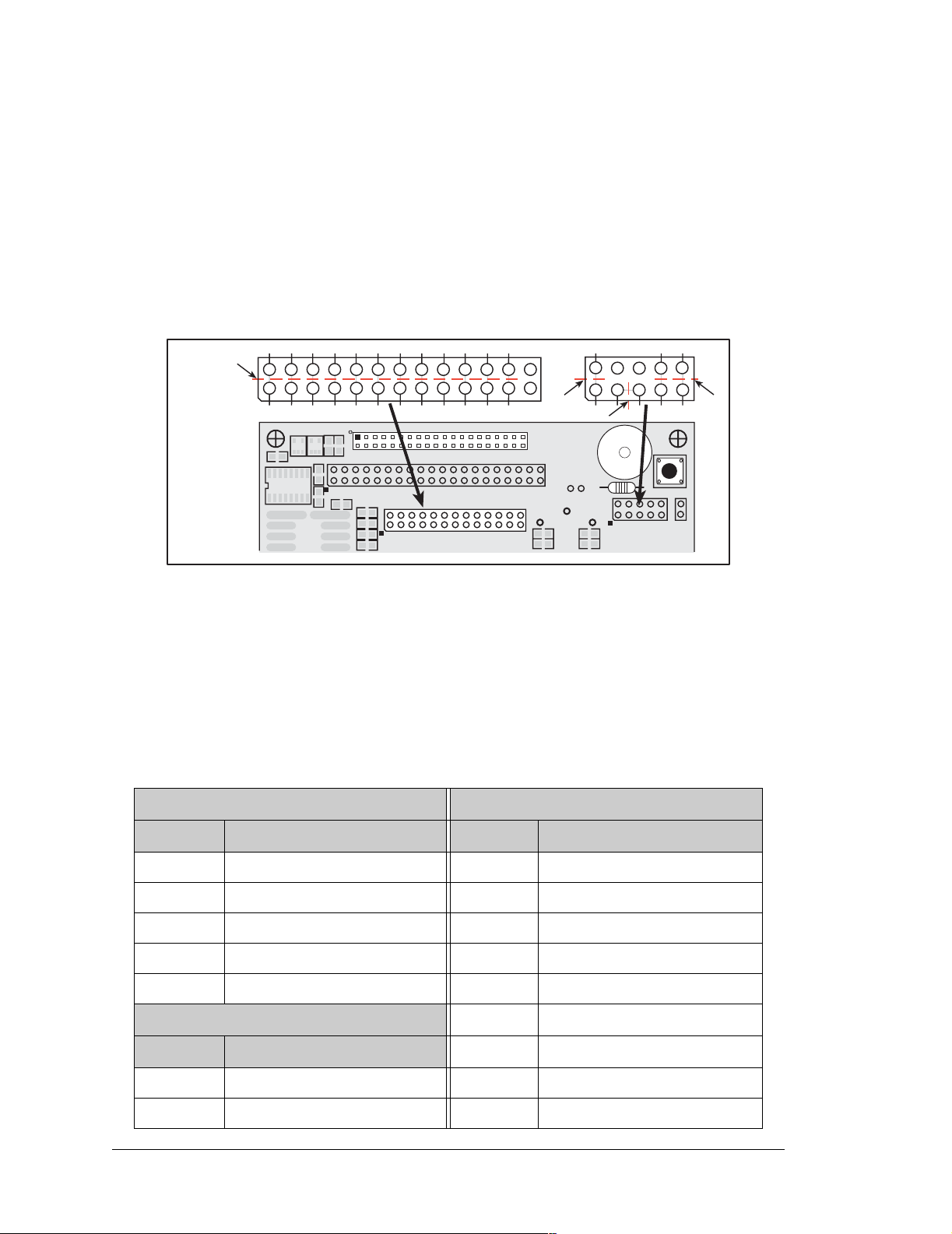
B.3.2 Prototyping Board
To maximize the availability of Jackrabbit resources, the demonstration hardware (LEDs,
switches, potentiometer, buzzer) on the Prototyping Board may be disconnected. This is
done by cutting the traces seen between and within the silk-screen outline of headers JP1
and JP2 on the Prototyping Board. Figure B-6 shows the 16 places where cuts should be
made. An exacto knife or high-speed precision grinder tool like a Dremel® tool would
work nicely to cut the traces. Alternatively, if safety is a major concern, a small standard
screwdriver may be carefully and forcefully used to wipe through the PCB traces.
Cut
Cut all gray
traces shown
Top Side
Cut
Cut
J2
HV3
VCC
+RAW
HV1
GND
PE1
PE3
PE5
PE7
PB7
PB5
PB3
PB1
PA7
PA5
PA3
PA1
VCC
J3
GND
GND
GND
PA6
PA4
PA2
PA0
PA0
JP1
DS1
PCLK
PB6
PE4
PE6
PB4
PB2
PB0
PA1
DS2
GND
WDO
PB2
PA7
PA6
PA5
PA4
PA3
PA2
S1S2S3
DS5
DS4
DS3
DS6
DS7
DS8
K
PE2
PE0
HV0
HV2
GND
GND
PB5
PB4
PB3
S4
GND
COIL(+)
COIL(-)
LS1
Buzzer
R1
JP2
+RAW
HV0
POT
PD0
K
AD0
BZR
VCC
Cut
R3
3
2
+
1
PE4
AD0
RT1
GND
Figure B-6. Where to Cut Traces to Permanently Disable
Demonstration Hardware on Prototyping Board
Jumpers across the appropriate pins on headers JP1 and JP2 can be used to reconnect specific demonstration hardware later if needed. Each pin is labeled on the PCB to facilitate
placing the jumpers. The jumper positions are summarized in Table B-1.
Table B-1. Prototyping Board Jumper Settings
Header JP1 Header JP2 (continued)
Pins Description Pins Description
1–2 Buzzer 5–6 PA2 to LED DS3
3–5 K to +5 V 7–8 PA3 to LED DS4
5–6 K to +RAW 9–10 PA4 to LED DS5
7–8 Potentiometer or Thermistor 11–12 PA5 to LED DS6
9–10 Interrupt Enable 13–14 PA6 to LED DS7
Header JP2 15–16 PA7 to LED DS8
Pins Description 17–18 PB2 to switch S1
1–2 PA0 to LED DS1 19–20 PB3 to switch S2
3–4 PA1 to LED DS2 21–22 PB4 to switch S3
76 Jackrabbit (BL1800)
Page 81

Once the LEDs, resistors, and switches are disconnected as described above, the user has a
Jackrabbit board with connection points conv eniently brough t out to labeled points at headers
J3 and J7 on the Prototyping Board. Small to me dium circuits can be pro t otyped using pointto-point wiring with 20 to 30 AW G wire between the prototyping area and the holes at locations J3 and J7. Note that the pinouts at locations J3 and J7 on the top side of the Prototyping
Board (shown in Figure B-7) are a mirror image of the Jackrabbit board pinouts.
TXC
PC1
PC3
PC5
PC7
DA1
PD1
PD3
PD5
PD7
SM1
J7
VCC
RXB
TXB
PC0
PC2
PC4
PC6
AD0
DA0
PD0
PD2
PD4
PD6
GND
485
VCC
SM0
IOBEN
GND
/RST
VCC
PA1
PA3
PA5
PA7
GND
PB1
PB3
PB5
PB7
PCLK
PE7
PE5
PE3
PE1
GND
HV1
HV3
+RAW
VCC
J3
GND
PA0
PA2
PA4
PA6
GND
PB0
PB2
PB4
PB6
WDO
GND
PE6
PE4
PE2
PE0
HV0
HV2
K
GND
GND
RXC
AGND
GND
485+
VCC
STAT
VBAT
GND
Figure B-7. Jackrabbit I/O Pinout on Prototyping Board (top side)
A user-supplied DE9 connector can be added as shown in Figure B-3. The signals are
brought out to location J5 on the top side of the Prototyping Board.
There are six independent surface-mount 14- to 16-pin SOIC pads and fourteen 3- to 5-pin
SOT23 pads. Each component has every one of its pin pads connected to a hole in the prototyping area. The layout is such that there is another SOIC or SOT23 pad directly on the
other side of the PCB from the SOIC or SOT23 pads. However, each layout location is
routed to its unique set of connection holes. Because the traces are very thin, carefully
determine which set of holes is connected to which surface-mount pad. There are several
standard 0805 passive-component surface-mount pads. These pads are not routed to wiring holes so wire must be soldered directly to the component. In addition, there is a large
generic array of wide traces connected to large holes. This is provided as an additional
area for surface-mount passive components. There is a moderate amount of 0.1” arrayed
through-hole prototyping area (about 137 holes) for mounting through-hole components.
Thus, many circuits requiring special circuitry external to the Jackrabbit can be prototyped
and tested with the Prototyping Board. If additional prototyping space is needed, install
40-pin headers at locations J3 and J7 on the top side of the Prototyping Board to connect
to sockets that you would install at J3 and J7 on the top side of a second Prototyping
Board.
User’s Manual 77
Page 82

78 Jackrabbit (BL1800)
Page 83

APPENDIX C. POWER MANAGEMENT
C.1 Power Supplies
Power is supplied to the Jackrabbit board from an external source through either header J1
or header J4. J1 is a 3-pin straight header with a pitch of 0.1". Vin is on pin 2 between
ground on pins 1 and 3. The symmetry allows for a 3-pin cable to be connected either way.
The Jackrabbit board itself is protected against reverse polarity by a Shottky diode at D2
as shown in Figure C-1. The Shottky diode has a low forward voltage drop, 0.3 V, which
keeps the minimum DCIN required to power the Jackrabbit lower than a normal silicon
diode would allow.
LINEAR POWER SUPPLY
J1
1
2
IN
3
POWER
+RAW
DCIN
D2
1N5819
C1
10 µF
7805
U1
1
Vcc
3
2
C2
100 nF
SWITCHING POWER SUPPLY
LM2575
14
U2
15
8
1
12
7
17
2
18
10
330 µH
1
D1
1N5819
Vcc
C3
4
330 µF
3
L1
Figure C-1. Jackrabbit Power Supply Schematic
The external power, +RAW, is provided to any daughterboard connected to the Jackrabbit
via pin 38 of header J4. +RAW is not protected against reversed polarity, such as could
happen if the cable was connected to header J1 offset by one pin. This absence of protection is intentional so as to provide the maximum possible voltage to any daughterboard
connected to the Jackrabbit.
Capacitor C1 provides surge current protection for the voltage regulator, and allows the
external power supply to be located some distance away from the Jackrabbit board. A
switching power supply or a linear power supply option is provided, depending on the
Jackrabbit model.
User’s Manual 79
Page 84

The linear voltage regulator is simply a fixed-voltage regulator with a ±5% voltage output
tolerance as the temperature changes. The regulator has a small heat sink, which increases
the maximum external input voltage. Higher external input voltages increase the voltage
dropped by the regulator. The Vcc coming out of the regulator is always 5 V.
The power necessarily dissipated by the regulator can be calculated if both the external
input voltage and the current drawn by the Jackrabbit board and daughterboards connected
to the Jackrabbit board are known. The current provided by the high-power output drivers
does not have to be included if a separate power supply is connected to K so that power
does not come from Vcc.
The linear regulator maintains its output voltage to within ±5% as long as the heat sink is
dissipating less than 2 W. The regulator will operate outside its specifications when the
heat sink is dissipating 2 W to 3.3 W. Thermal shutdown turns the regulator off above
3.3 W. Figure C-2 shows the power operating curves.
350
300
250
200
Current (mA)
150
100
Undervoltage dropout area
50
510
Regulated
within
specifications
15
3.3 W
__________
(DCIN 5 V)
__________
(DCIN 5 V)
shutdown
Regulated
specifications
20 25
2 W
Thermal
outside
30
35
DCIN (V)
Figure C-2. 7805 Linear Regulator Power Operating Curve
The Jackrabbit operating at 14.74 MHz with no loading at the outputs typically consumes
105 mA when the programming cable is connected, and 95 mA when the programming
cable is not connected. This means that DCIN can safely be from 7.5 V to 25 V. An additional 50 mA is available for a daughterboard, but the voltage regulation would suffer
slightly.
80 Jackrabbit (BL1800)
Page 85
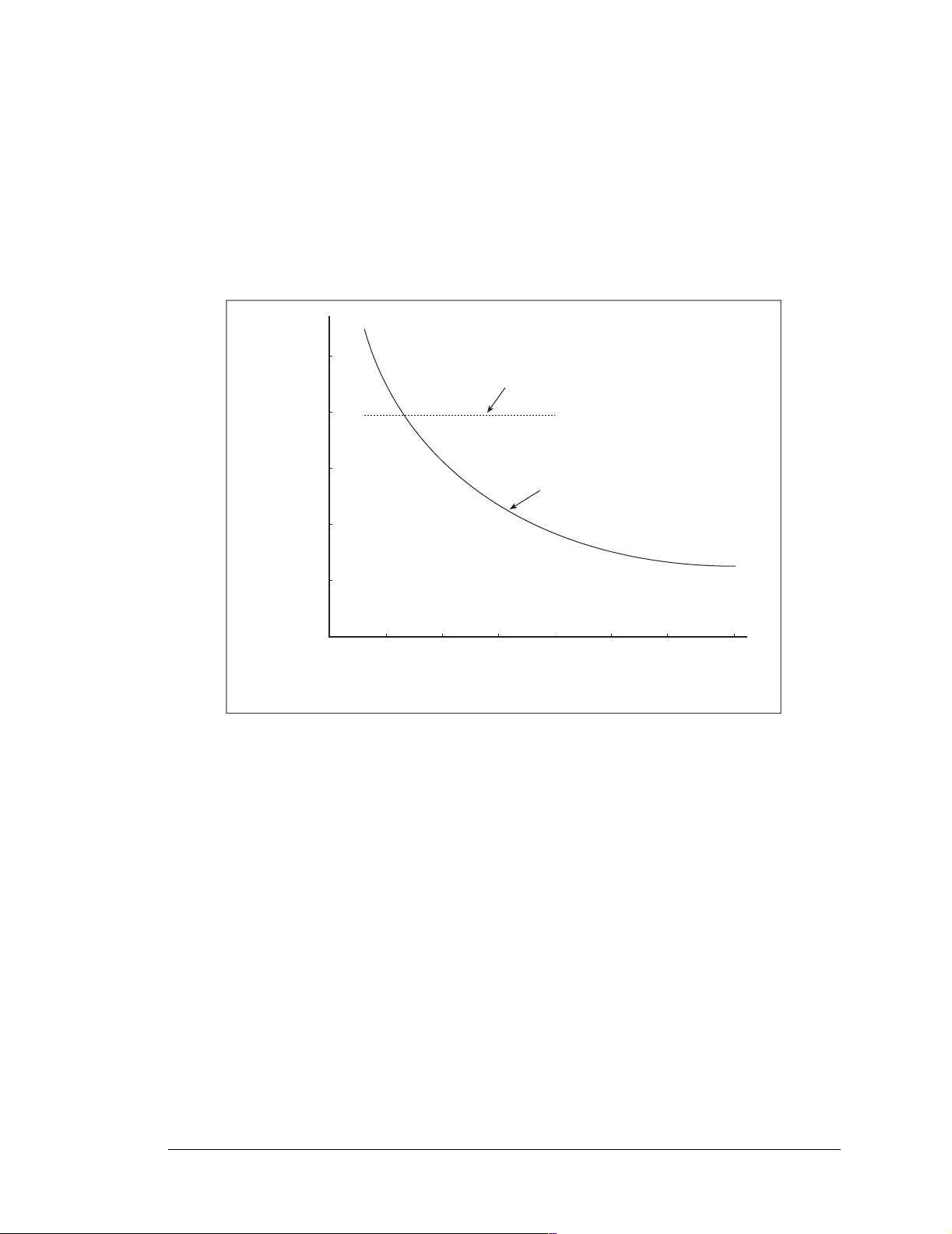
The switching voltage regulator is used when there is a need for an additional range in the
external input voltage or when lower power consumption is desired. The input voltage
range is from 8 V to 40 V.
Figure C-3 shows typical power operating curves for both the linear regulator (BL1810
and BL1820) and the switching regulator (BL1800) for a nonloaded Jackrabbit operating
at 14.74 MHz with the programming cable connected.
125
(BL1810 and BL1820 @ 14.7 MHz)
100
75
50
Linear regulator
Switching regulator
(BL1800 @ 29.49 MHz)
Current (mA)
25
0
510
15
20 25
30
DCIN (V)
Figure C-3. Typical Jackrabbit Current Consumption
35
40
User’s Manual 81
Page 86
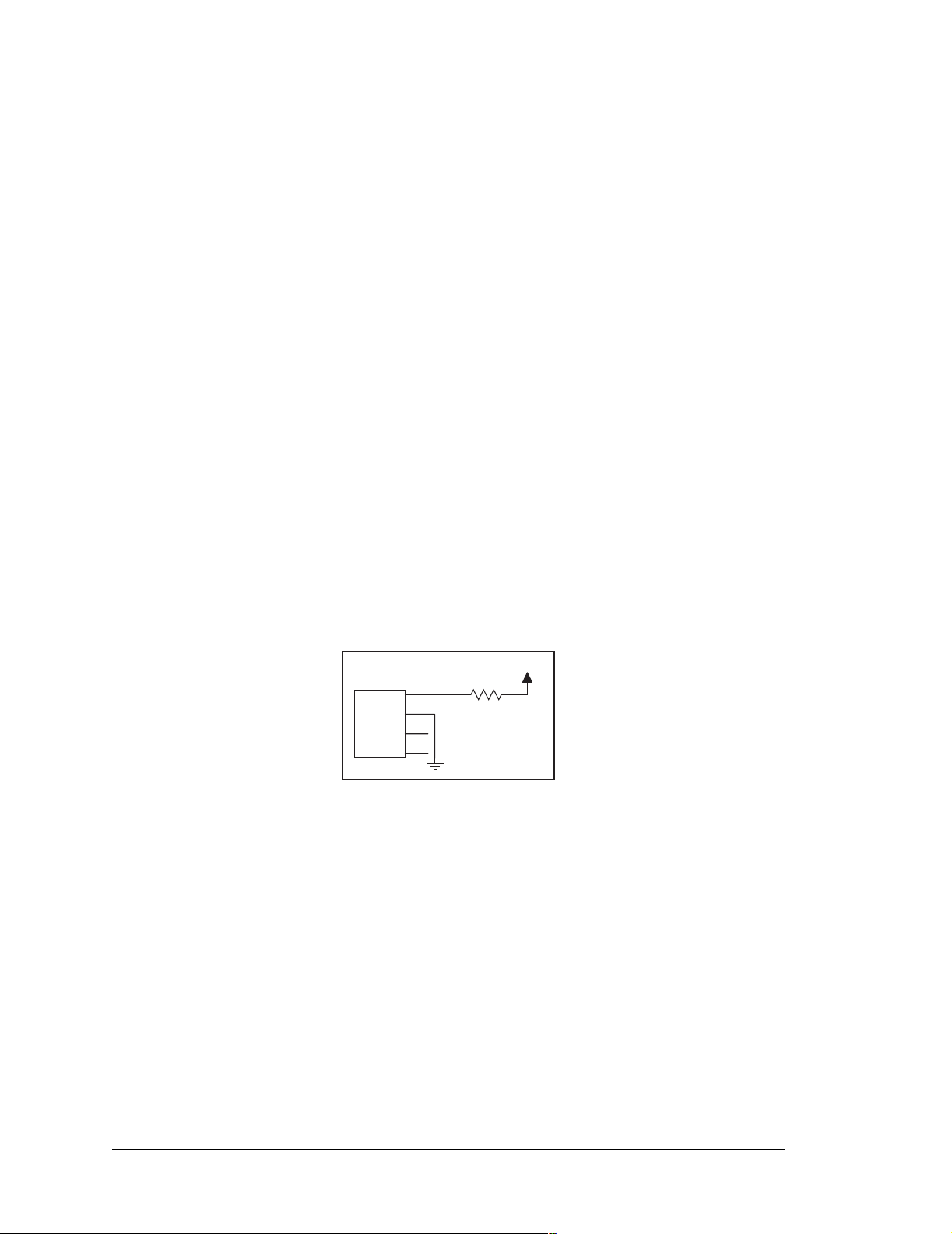
C.2 Batteries and External Battery Connections
The soldered-in 950 mA·h lithium coin cell provides power to the real-time clock and
SRAM when external power is removed from the circuit. This allows the Jackrabbit to
continue to keep track of time and preserves the SRAM memory contents.
The drain on the battery is typically less than 20 µA when there is no external power
applied. The battery can last more than 5 years:
950 mA·h
------------------------ 5.4 years.=
20 µA
The drain on the battery is typically less than 4 µA when there external power is applied.
The battery can last for its full shelf life:
950 mA·h
------------------------ 27 y e a r s ( s h e lf li fe = 1 0 y ea rs ).=
4 µA
Since the shelf life of the batt er y i s 10 year s, the ba tter y c an la st for i ts full she lf lif e whe n
external power is applied to the Jackrabbit.
Header J2, shown in Figure C-4, allows external access to the battery. This header makes
it possible to connect an external 3 V power supply while replacing the soldered-in 3 V
lithium coin-type battery. This allows the Jackrabbit SRAM and real-time clock to retain
data while the battery is being replaced.
VBAT
J2
1
2
3
EXT
BATT
4
Figure C-4. External Battery Connections at Header J2
R1
100 W
Alternatively, header J2 can be used to accommodate an external battery. In this case, be
sure to cut out the solder ed-i n battery on the Jackr abbit to p reven t dischar ging the exter nal
battery into a dead battery.
82 Jackrabbit (BL1800)
Page 87

C.2.1 Battery Backup Circuit
Figure C-5 shows the Jackrabbit battery backup circuitry.
R12
0 W
MMBT5088LT1
Q1
VRAM
R10
4.3 MW
R80
0 W
R81
0 W
R82
0 W
3 V
VBAT
R13
1.3 kW
R14
R15
D80
D81
D82
Figure C-5. Jackrabbit Battery Backup Circuit
Resistor R12, shown in Figure C-5, is typically not stuffed on the Jackrabbit board.
VRAM and Vcc are equal when power is supplied to the Jackrabbit. R13 prevents any catastrophic failure of Q1 from allowing unlimited current to enter the soldered-in battery.
Resistors R14 and R15 make up a voltage divider between the battery voltage and the temperature-compensation voltage at the anode of diode D80. This voltage divider biases the
base of Q1 to about 2.6 V. VBE on Q1 is about 0.55 V. Therefore, VRAM is about 2.05 V.
These voltages vary with temperature. VRAM varies the least because temperature-compensation diodes D80–D82 will offset the variation with temperature of Q1 VBE. R80–
R82 may be stuffed instead of the corresponding D80–D82 to provide the optimum temperature compensation.
Resistor R10 provides a minimum load to the regulator circuit.
User’s Manual 83
Page 88

The battery-backup circuit serves two purposes:
• It reduces the battery voltage to the real-time clock, thereby reducing the current consumed by the real-time clock and lengthening the battery life.
• It ensures that current can flow only out of the battery to prevent charging the battery.
C.2.2 Power to VRAM Switch
The VRAM switch, shown in Figure C-6, allows the soldered-in battery to provide power
when the external power goes off. The switch provides an isolation between Vcc and the
battery when Vcc goes low. This prevents the Vcc line from draining the battery.
VCC
FDV302P
/RES
R46
22 kW
Figure C-6. VRAM Switch
Q23
Q24
MMBT3904
VRAM
R43
0 W
R45
10 kW
Transistor Q23 is needed to provide a very small voltage drop between Vcc and VRAM
(<100 mV, typically 10 mV) so that the processor lines powered by Vcc will not have a
significantly different voltage than VRAM.
When the Jackrabbit is not resetting (pin 2 on U21 is high), the /RES line will be high.
This turns on Q24, causing its collector (pin 3) to go low. This turns on Q23, allowing
VRAM to nearly equal Vcc.
When the Jackrabbit is resetting, the /RES line will go low. This turns off Q23 and Q24,
providing an isolation between Vcc and VRAM.
The battery backup circuit keeps VRAM from dropping below 2 V.
C.2.3 Reset Generator
The Jackrabbit uses a reset generator, U21, to reset the Rabbit 2000 microprocessor when
the voltage drops below the voltage necessary for reliable operation. The Jackrabbit does
not have a reset output presented to the headers. The reset generator has a reset input that
can be used to force the Jackrabbit to reset. This input is available on headers J3 and J5,
and also on pads directly below header J5. The two pads allow a screwdriver to be used to
short the pads, forcing a reset.
84 Jackrabbit (BL1800)
Page 89
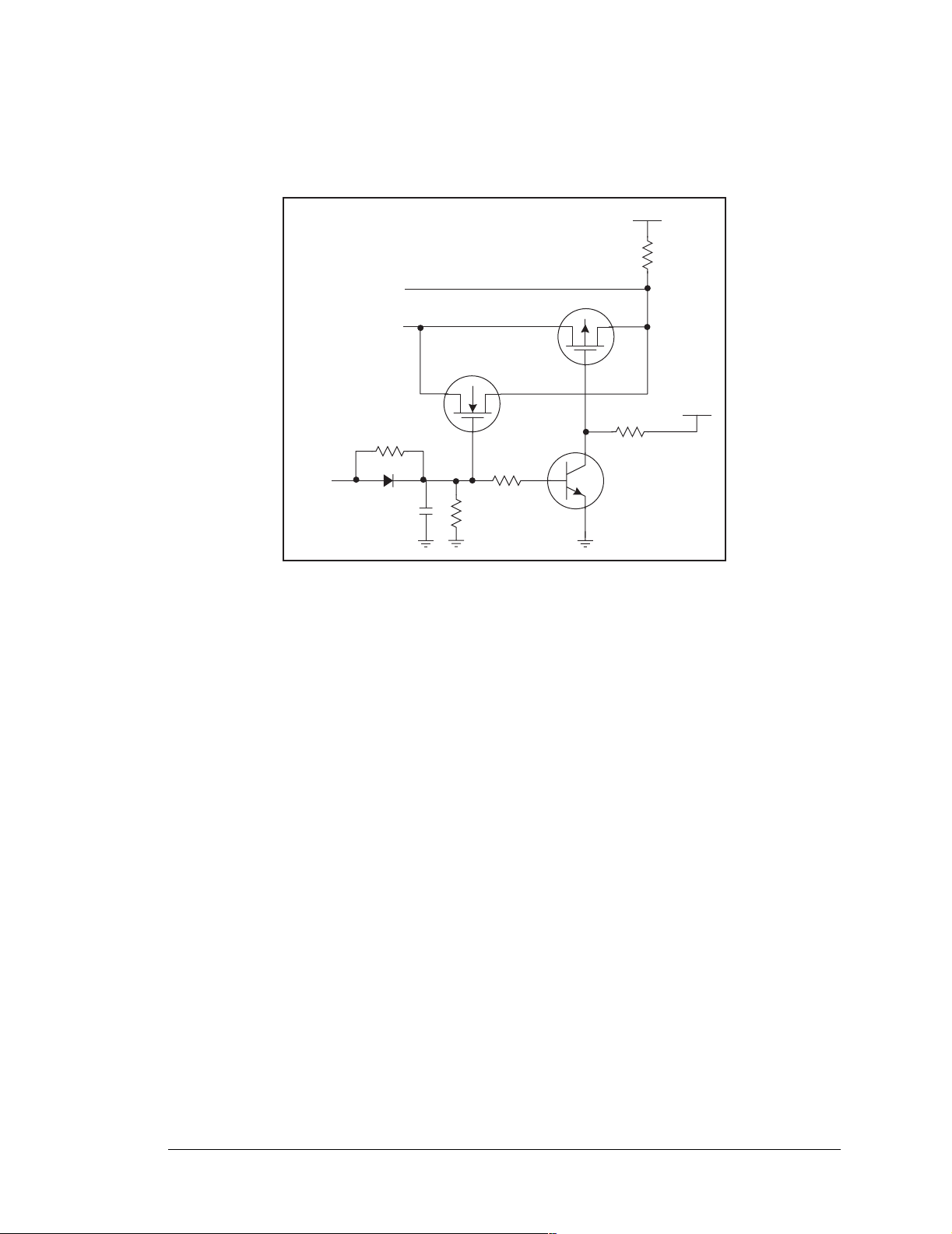
C.3 Chip Select Circuit
Figure C-7 shows a schematic of the chip select circuit.
VRAM
R37
/CSRAM
/CS1
Q20
R42
R41
/RES
D20
C23 R40
Figure C-7. Chip Select Circuit
Q21
Q22
R39
VRAM
The current drain on the battery in a battery-backed circuit must be kept at a minimum.
When the Jackrabbit board is not powered, the battery keeps the SRAM memory contents
and the real-time clock (RTC) going. The SRAM has a powerdown mode that greatly
reduces power consumption. This powerdown mode is activated by raising the chip select
(CS) signal line. Normally the SRAM requires Vcc to operate. However, only 2 V is
required for data retention in powerdown mode. Thus, when power is removed from the
circuit, the battery voltage needs to be provided to both the SRAM power pin and to the
CS signal line. The CS control circuit accomplishes this task for the CS signal line.
In a powered-up condition, the CS control circuit must allow the processor’s chip select
signal /CS1 to control the SRAM’ s CS signal /CSR AM. So, with power applied, /CSRAM
must be the same signal as /CS1, and with power removed, /CSRAM must be held high
(but only needs to be battery voltage high). Q20 and Q21 are MOSFET transistors with
opposing polarity. They are both turned on when power is applied to the circuit. They
allow the CS signal to pass from the processor to the SRAM s o that the proc essor can per iodically access the SRAM. When power is removed from the circuit, the transistors will
turn off and isolate /CSRAM from the processor. The isolated /CSRAM line has a 100 kΩ
pullup resistor to VRAM (R37). This pullup resistor keeps /CSRAM at the VRAM voltage
level (which under no power condition is the backup battery’s regulated voltage at a little
more than 2 V).
User’s Manual 85
Page 90

Transistors Q20 and Q21 are of opposite polarity so that a rail-to-rail voltages can be
passed. When the /CS1 voltage is low, Q20 will conduct. When the /CS1 voltage is high,
Q21 will conduct. It takes time for the transistors to turn on, creating a propagation delay.
This delay is typically very small, about 10 ns to 15ns.
The signal that turns the transistors on is a high on the processor’s reset line, /RES. When
the Jackrabbit is not in reset, the reset line will be high, turning on N-channel Q20 and
Q22. Q22 is a simple inverter needed to turn on Q21, an P-channel MOSFET. When a
reset occurs, the /RES line will go low. This will cause C23 to discharge through R42 and
R40. This small delay (about 160 µs) ensures that there is adequate time for the processor
to write any last byte pending to the SRAM before the processor puts itself into a reset
state. When coming out of reset, CS will be enabled very quickly because D20 conducts to
charge capacitor C23.
86 Jackrabbit (BL1800)
Page 91

INDEX
A
A/D converter .................21, 22
additional information
online documentation ..........3
analog input
function calls
anaIn ..............................54
cof_anaIn .......................54
analog outputs
function calls
anaOut ........................... 53
B
backup battery .................82, 83
chip select circuit ..............84
external battery connec-
tions ..............................82
board initialization
function calls ..................... 51
jrioInit ...........................51
C
C language ............................37
CE compliance ........................4
design guidelines .................5
clock doubler ........................34
conformal coating .................64
current consumption .............81
D
D/A converters 23, 24, 25, 26, 27
Development Kit .................2, 7
digital I/O ..............................17
configurable high-power
output ...................... 19, 20
configurable I/O ................20
high-power outputs ...........18
inputs only .........................17
outputs only .......................18
SMODE0 ..........................31
SMODE1 ..........................31
digital inputs
switching threshold ...........17
digital outputs
function calls
digOff ............................52
digOn .............................52
digOut ...........................52
dimensions
Jackrabbit .......................... 58
Prototyping Board .............72
Dynamic C ......................13, 37
add-on modules .................12
installation .....................12
installation .........................12
standard features ............... 38
debugging ......................38
telephone-based technical
support .......................... 56
upgrades and patches ........56
USB port settings ..............13
E
electrical specifications .........59
EMI
spectrum spreader feature . 35
exclusion zones ..................... 60
external interrupts .................34
F
features ....................................1
Prototyping Board .......70, 71
flash memory ........................33
H
hardware connections .............8
power supply .....................11
programming cable ........... 10
hardware reset ....................... 11
headers .................................. 16
high-power outputs .........18, 19
J
Jackrabbit
dimensions ........................ 58
electrical specifications ..... 59
jumper configurations ..... 62, 63
HV3 sinking/sourcing ....... 63
JP1 (SRAM size) ........33, 63
JP2 (flash memory size) ....63
JP3 (flash memory bank
select) ......................33, 63
jumper locations ................62
Prototyping Board .............76
RS-485 bias and termination
resistors .........................63
M
manuals ...................................3
P
pinout
Jackrabbit .......................... 16
Prototyping Board .............77
power supplies
current consumption .........81
voltage regulators ..............79
linear regulator ..............80
programming cable
Jackrabbit connections ...... 10
PROG connector ...............32
switching between Program
Mode and Run Mode .... 32
programming port .................30
Prototyping Board ...........69, 70
adding additional headers . 73
dimensions ........................ 72
expansion area .................. 71
features ........................70, 71
how to disable demonstration
hardware ....................... 76
installing relay ..................74
jumper configurations .......76
LEDs ................................. 75
User’s Manual 87
Page 92

Prototyping Board (continued)
pinout .................................77
prototyping area .................77
thermistor ..........................75
R
Rabbit 2000 parallel ports 65, 66
real-time clock
how to set ..........................14
reset .......................................11
reset generator .......................84
RS-232 ..................................28
RS-485 ..................................28
termination and bias resis-
tors .................................30
S
sample programs ...................55
DEMOJR1.C ...............39, 40
DEMOJR2.C ...............39, 44
DEMOJR3.C .........39, 44, 48
Dynamic C
break point .....................41
cooperative multitasking 48
editing ............................42
single-stepping ...............41
watch expression ...........41
watching variables
dynamically ................42
JRIO_COF.C ...............39, 44
JRIOTEST.C ...............39, 44
LCD_DEMO.C ...........39, 45
PONG.C ............................13
RABDB01.C ...............39, 44
RABDB02.C ...............39, 44
real-time clock
RTC_TEST.C ................14
SETRTCKB.C ...............14
RS-232 serial communication
JR_FLOWCONTROL.C
............................... 39, 46
JR_PARITY.C .........39, 46
RS-485 serial communica-
tion ................................47
serial communication ............28
function calls
Jr485Init .........................55
Jr485Rx .........................55
Jr485Tx ..........................55
programming port ..............30
RS-232 ...............................28
RS-485 ...............................28
RS-485 network ................29
RS-485 termination and bias
resistors .........................30
software
analog input .......................54
analog outputs ...................52
digital outputs ....................51
I/O drivers .........................51
libraries
JRIO.LIB .......................51
PACKET.LIB ................55
RS232.LIB .....................55
sample programs ...............39
PONG.C ........................39
serial communication ........55
specifications .........................59
Jackrabbit
exclusion zones ..............60
header footprint .............61
headers ...........................61
relative pin 1 locations ..61
spectrum spreader .................35
SRAM ...................................33
subsystems ......................15, 65
T
technical support ...................14
U
USB/serial port converter ......10
Dynamic C settings ...........13
88 Jackrabbit (BL1800)
Page 93

SCHEMATICS
090-0092 Jackrabbit Schematic
www.rabbit.com/documentation/schemat/090-0092.pdf
090-0088 Jackrabbit Prototyping Board Schematic
www.rabbit.com/documentation/schemat/090-0088.pdf
090-0128 Programming Cable Schematic
www.rabbit.com/documentation/schemat/090-0128.pdf
You may use the URL information provided above to access the latest schematics directly.
User’s Manual 89
Page 94

 Loading...
Loading...