

Page 1
Preface
Thank you for choosing DELTA’s high-performance VFD-M Series. The VFD-M Series is
manufactured with high-quality components and materials and incorporates the latest microprocessor
technology available.
Getting Started
This quick start will be helpful in the installation and parameter setting of the AC motor drives. To
guarantee safe operation of the equipment, read the following safety guidelines before
connecting power to the AC motor drives. For detail information, refer to the VFD-M User Manual
on the CD supplied with the drive.
DANGER!
1. AC input power must be disconnected before any wiring to the AC motor drive is made.
2. A charge may still remain in the DC-link capacitors with hazardous voltages, even if the power
has been turned off. To prevent personal injury, please ensure that power has turned off before
opening the AC motor drive and wait ten minutes for the capacitors to discharge to safe voltage
levels.
3. Never reassemble internal components or wiring.
4. The AC motor drive may be destroyed beyond repair if incorrect cables are connected to the
input/output terminals. Never connect the AC motor drive output terminals U/T1, V/T2, and
W/T3 directly to the AC mains circuit power supply.
5. Ground the VFD-M using the ground terminal. The grounding method must comply with the laws
of the country where the AC motor drive is to be installed. Refer to the Basic Wiring Diagram.
6. VFD-M series is used only to control variable speed of 3-phase induction motors, NOT for 1-
phase motors or other purpose.
7. VFD-M series shall NOT be used for life support equipment or any life safety situation.
WARNING!
1. DO NOT use Hi-pot test for internal components. The semi-conductor used in AC motor drive
easily damage by high-pressure.
2. There are highly sensitive MOS components on the printed circuit boards. These components
are especially sensitive to static electricity. To prevent damage to these components, do not
touch these components or the circuit boards with metal objects or your bare hands.
3. Only quality person is allowed to install, wire and maintain AC motor drive.
CAUTION!
1. Some parameters settings can cause the motor to run immediately after applying power.
2. DO NOT install the AC motor drive in a place subjected to high temperature, direct sunlight,
high humidity, excessive vibration, corrosive gases or liquids, or airborne dust or metallic
particles.
3. Only use AC motor drives within specification. Failure to comply may result in fire, explosion or
electric shock.
4. To prevent personal injury, please keep children and unqualified people away from the
equipment.
5. When the motor cable between AC motor drive and motor is too long, the layer insulation of the
motor may be damaged. Please use a frequency inverter duty motor or add an AC output
reactor to prevent damage to the motor. Refer to appendix B Reactor for details.
6. The rated voltage for AC motor drive must be ≤240V for 230V models (≤120V for 115V models,
≤480V for 460V models, ≤600V for 575V models) and the mains supply current capacity must
be ≤5000A RMS (≤10000A RMS for the ≥40hp (30kW) models).
English-1
Page 2
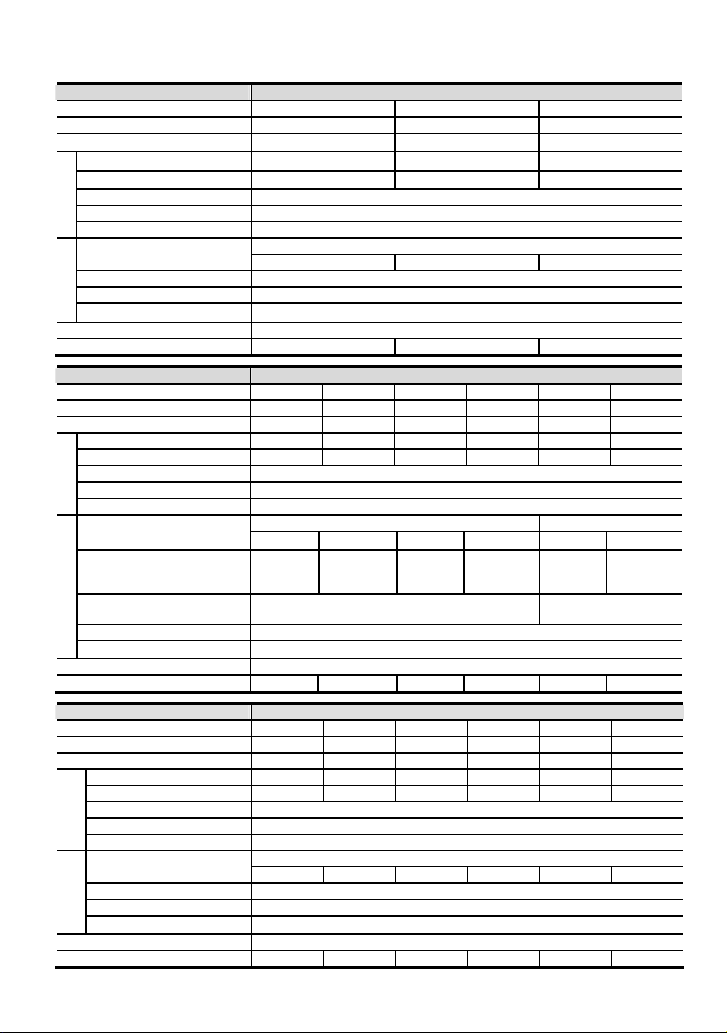
Specifications
Voltage Class 115V Class
Model Number VFD-XXXM 002 004 007
Max. Applicable Motor Output (kW) 0.2 0.4 0.75
Max. Applicable Motor Output (hp) 0.25 0.5 1.0
Rated Output Capacity (kVA) 0.6 1.0 1.6
Rated Output Current (A) 1.6 2.5 4.2
Maximum Output Voltage (V) 3-Phase proportion to twice the input voltage
Output Frequency (Hz) 0.1~400 Hz
Output Rating
Carrier Frequency (kHz) 1-15
Rated Input Current (A)
6 9 16
Single phase
Rated Voltage, Frequency Single phase, 100-120 VAC, 50/60Hz
Voltage Tolerance +-10% (90-132VAC)
Input Rating
Frequency Tolerance
±
5% (47~63Hz)
Cooling Method Fan Cooled
Weight (kg) 1.5 1.5 1.5
Voltage Class 230V Class
Model Number VFD-XXXM 004 007 015 022 037 055
Max. Applicable Motor Output (kW) 0.4 0.75 1.5 2.2 3.7 5.5
Max. Applicable Motor Output (hp) 0.5 1.0 2.0 3.0 5.0 7.5
Rated Output Capacity (kVA) 1.0 1.9 2.7 3.8 6.5 9.5
Rated Output Current (A) 2.5 5.0 7.0 10 17 25
Maximum Output Voltage (V)
3-Phase proportional to input voltage
Output Frequency (Hz) 0.1~400 Hz
Carrier Frequency (kHz)
Output Rating
Rated Input Current (A)
Input Current for 1-phase
Models when Using 3-phase
Power
Rated Voltage, Frequency
Input Rating
6.3/2.9 11.5/7.6 15.7/8.8 27/12.5 19.6 28
Single/3-phase 3-phase
3.2 6.3 9.0 12.5 -- --
Single/3-phase
200-240 VAC, 50/60Hz
1-15
3-phase
200-240VAC, 50/60Hz
Voltage Tolerance +-10% (180~264 VAC)
Frequency Tolerance
±
5% (47~63 Hz)
Cooling Method Fan Cooled
Weight (kg) 2.2/1.5 2.2/1.5 2.2/1.5 3.2/2.2 3.2 3.2
Voltage Class 460V Class
Model Number VFD-XXXM 007 015 022 037 055 075
Max. Applicable Motor Output (kW) 0.75 1.5 2.2 3.7 5.5 7.5
Max. Applicable Motor Output (hp) 1.0 2.0 3.0 5.0 7.5 10
Rated Output Capacity (kVA) 2.3 3.1 3.8 6.2 9.9 13.7
Rated Output Current (A) 3.0 4.0 5.0 8.2 13 18
Maximum Output Voltage (V) 3-phase Proportional to Input Voltage
Output Frequency (Hz) 0.1~400 Hz
Carrier Frequency (kHz) 1-15
Output Rating
Rated Input Current (A)
4.2 5.7 6.0 8.5 14 23
3-phase
Rated Voltage, Frequency 3-phase 380~480 VAC, 50/60Hz
Voltage Tolerance +-10% (342~528 VAC)
Input Rating
Frequency Tolerance
±
5% (47~63 Hz)
Cooling Method Fan Cooled
Weight (kg) 1.5 1.5 2.0 3.2 3.2 3.3
English-2
Page 3
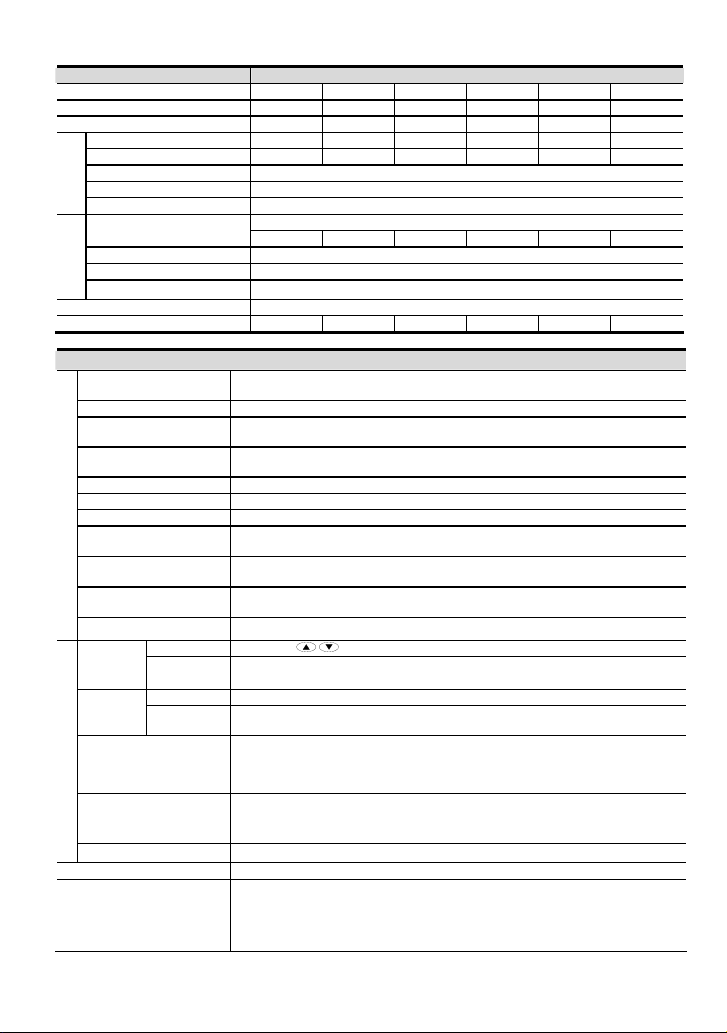
Voltage Class 575V Class
Model Number VFD-XXXM 007 015 022 037 055 075
Max. Applicable Motor Output (kW) 0.75 1.5 2.2 3.7 5.5 7.5
Max. Applicable Motor Output (hp) 1.0 2.0 3.0 5.0 7.5 10
Rated Output Capacity (kVA) 1.7 3.0 4.2 6.6 9.9 12.2
Rated Output Current (A) 1.7 3.0 4.2 6.6 9.9 12.2
Maximum Output Voltage (V) 3-phase Proportional to Input Voltage
Output Frequency (Hz) 0.1~400 Hz
Output Rating
Carrier Frequency (kHz) 1-10
Rated Input Current (A)
2.4 4.2 5.9 7.0 10.5 12.9
3-phase
Rated Voltage, Frequency 3-phase 500~600 VAC, 50/60Hz
Voltage Tolerance -15%~+10% (425~660 VAC)
Input Rating
Frequency Tolerance
±
5% (47~63 Hz)
Cooling Method Fan Cooled
Weight (kg) 1.5 1.5 2.0 3.2 3.2 3.3
General Specifications
Control System SPWM (Sinusoidal Pulse Width Modulation) control (V/F or sensorless vector
control)
Freq. Setting Resolution 0.1Hz
Output Frequency
Resolution
Torque Characteristics
0.1Hz
Including the auto-torque, auto-slip compensation; starting torque can be 150% at
5.0Hz
Overload Endurance 150% of rated current for 1 minute
Skip Frequency Three zones, settings range 0.1-400Hz
Accel/Decel Time 0.1 to 600 seconds (4 Independent settings for Accel/Decel Time)
Stall Prevention Level
Frequency Setting
Control Characteristics
DC Injection Braking
Braking Torque
20 to 200%, Setting of Rated Current
Operation frequency 0-60Hz, output 0-100% rated current
Start time 0-5 seconds, stop time 0-25 seconds
Approx. 20% (up to 125% possible with option brake resistor or brake unit
externally mounted, 1-15HP braking transistor built-in)
V/F Pattern Adjustable V/F pattern
Frequency
Setting
Operation
Setting
Signal
Multi-Function Input Signal
Multi-Function Output
Operating Characteristics
Indication
Keypad Setting by
External
Signal
Potentiometer-5KΩ/0.5W, 0 to +10VDC, 4 to 20mA RS-485 interface; MultiFunction Inputs 0 to 5 (7 steps, Jog, up/down)
Keypad Set by RUN, STOP
External
Signal
M0 to M5 can be combined to offer various modes of operation, RS-485 serial
interface (MODBUS).
Multi-step selection 0 to 7, Jog, accel/decel inhibit, first to forth accel/decel
switches, counter, PLC operation, external Base Block (NC, NO), auxiliary motor
control is invalid, selections, driver reset, UP/DOWN key settings, sink/source
selection
AC drive operating, frequency attained, non-zero, base block, fault indication,
local/remote indication, PLC operation indication, auxiliary motor output, driver is
ready, overheat alarm, emergency stop
Analog Output Signal Analog frequency/current signal output.
Alarm Output Contact 1 Form C contact or open collector output
AVR, S-Curve, over-voltage, over-current stall prevention, fault records, adjustable
carrier frequency, DC braking, momentary power loss restart, auto tuning,
Operation Functions
frequency limits, parameter Lock/Reset, vector control, counter, PID Control, PLC,
MODBUS communication, reverse Inhibition, abnormal reset, abnormal re-start,
digital frequency output, sleep/revival function, 1st/2nd frequency source selections
English-3
Page 4
General Specifications
A
Protection Functions
Display Keypads
Self-testing, over voltage, over current, under voltage, overload, overheating,
external fault, electronic thermal, ground fault.
6-key, 4-digit, 7-segment LED, 4 status LEDs, master frequency, output frequency,
output current, custom units, parameter values for setup, review and faults, RUN,
STOP, RESET, FWD/REV
Built-in Brake Chopper Built-in for all models
Protection Level IP20
Pollution Degree 2
Installation Location Altitude 1,000 m or lower, keep from corrosive gasses, liquid and dust
Ambient Temperature -10oC to 40oC (-10oC to 50oC without blind plate) Non-Condensing and not frozen
Storage/Transportation
Temperature
Ambient Humidity Below 90% RH (non-condensing)
Enviromental Conditions
Vibration 9.80665m/s2 (1G) less than 20Hz, 5.88m/s2 (0.6G) at 20 to 50Hz
Approvals
-20oC to 60oC
Note: Do not attempt to connect a single-phase power source to a three-phase models drive.
However it is acceptable to connect two wires of a three-phase power source to a single-phase drive.
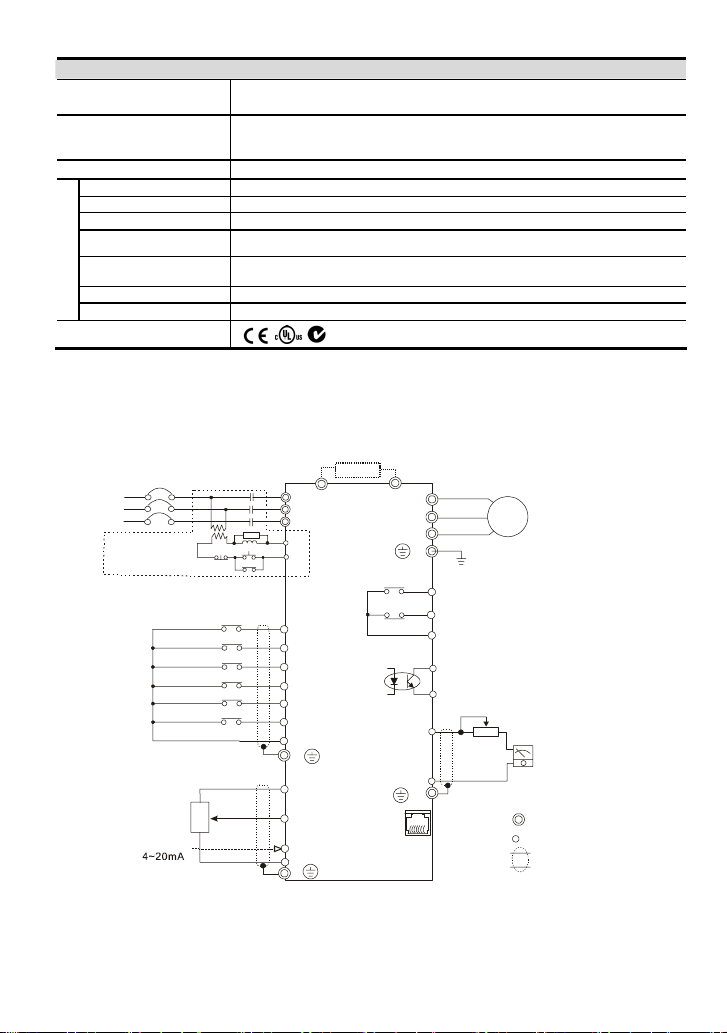
Basic Wiring Diagram
Users must connect wiring according to the following circuit diagram shown below.
Main Ci rcuit Powe r
NFB
R/L1
S/L2
T/L3
Recommended Circuit
when power suppl y
is turned OFF by a
fault output
The spec. of main circuit
terminal is M3.0
Factory default
Forward/St op
Reverse /Stop
Reset
Multi-step 1
Multi-step 2
Multi-step 3
Common si gnal
Master Frequency sett ing
factory default is VR which is
on the di gital keypad
Analog voltage
0~10VDC
:3K~
VR
Analog current
VR
5KΩ
NOTE: Do not plug a Modem or telephone line to the RS-485 communication
port, perm anent da mage may re sult. Termi nal 1& 2 are the po wer
sources fo r the opti onal cop y keypad an d should no t b e used whi le
using RS-48 5 commu nicat ion.
* If it is single phase model, please select any of the two input power
terminals in main circuit power.
* Single phase model can be input 3-phase power.
OFF
3
1
SA
ON
2
Brake Resistor (optional)
B1
R/L1
S/L2
T/L3
RB
MC
RC
MC
M0
M1
M2
M3
M4
M5
GND
E
Power for speed setting
+10V 10mA(MAX)
AVI
ACI
GND
E
B2
RS-485
series interface
U/T1
V/T2
W/T3
E
Grounding
RA
Multi-function indication
output contact
RB
120VAC/250VAC 5A
RC
24VDC less than 2.5A
Factory default:
indicates malfunction
MO1
Multi-function Photocoupler
output contact 48VDC 50mA
Factory default: Indicates
MCM
during operation
FM
GND
Factory default:
E
output frequency
RJ-11
1:15V
2:GND
6←1
3:SG4:SG+
5:Reserved
6:Reserved
AC Motor
IM
3~
VR(1KΩ)
For adjustment
Analog output
+
DC 0
-
Main circuit (power)
terminals
Control circui t terminals
Shielded leads
~
10V
English-4
Page 5
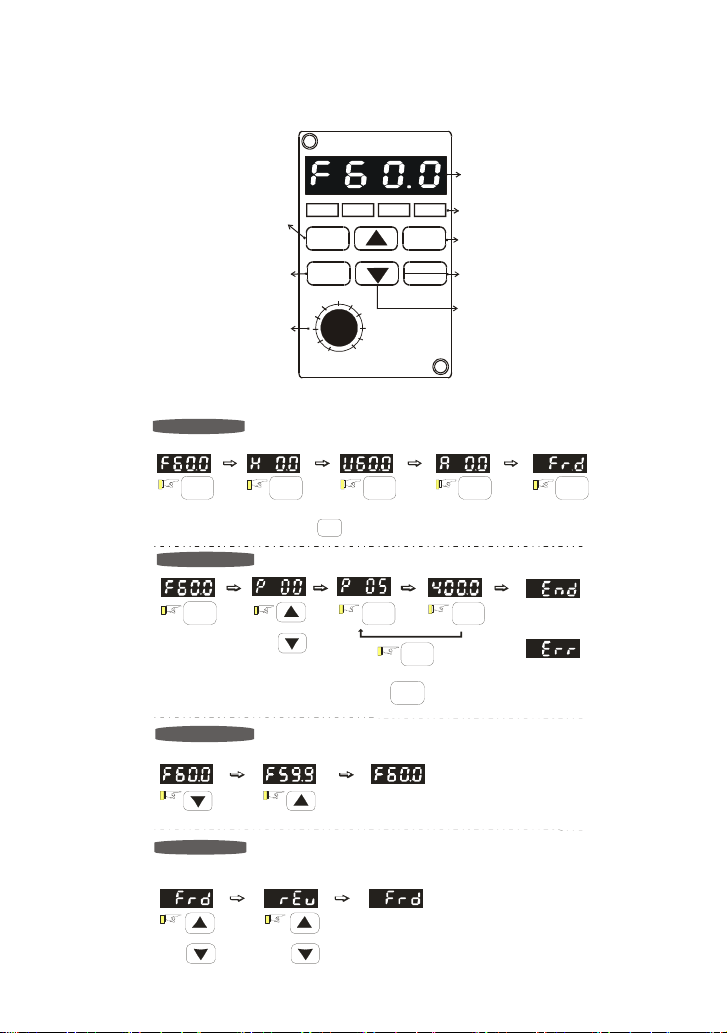
Description of Digital Keypad
The digital keypad includes two parts: Display panel and keypad. The display panel provides the
parameter display and shows the operation status of the AC drive and the keypad provides
programming and control interface.
Program/Functio n mode key
Selects normal mode/
program mode. Displa ys
the AC drive status, such as
output freq., selects the
parameters.
Enter Key
Press ENTER after
key in the elected
parameters or
change data.
Potentiometer
For master Frequen cy
setting refer to Pr.00.
DIGITAL KEYPAD
RUN STOP FWD REV
MODE
ENTER
50
VFD-M
100
0
FREQ SET
LC-M02E
RUN
STOP
RESET
LED Display
Indicates motor and
drive paramet er.
LED Indicates
Lamp lights during RUN,
STOP, FWD & REV
operation .
Run key
Starts AC drive operation.
STOP/RESET Key
Stops and resets the
parameter after a fault
occurs.
UP and DOWN Key
Sets the parameter number
or changes the numeri cal
data such as the freq.
reference.
How to Operate the Digital Keypad LC-M02E
Selection mode
START
MODE
MODE MODE MODE MODE
GO START
NOTE: In t he selectio n mode, press to set the par amet ers.
ENTER
To set parameters
ENTER
or
NOTE : In the para meter set ting mo de, you can p ress to r eturn to t he selec tion mode.
ENTER
MODE
MODE
ENTER
mov e to previo us
disp lay
para mete r s et
successfully
para meter set
err or
To modify data
START
To se t direction
(Whe n opera tion sour ce is digi tal k eypad)
or or
English-5
or
Page 6
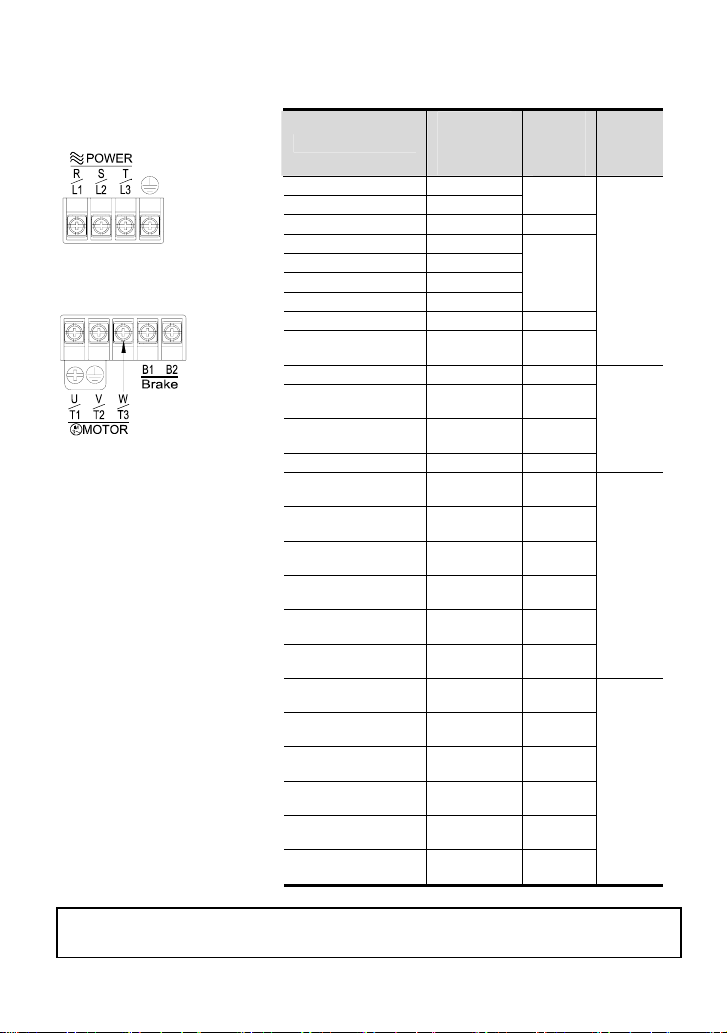
Power Terminals
Model Name
VFD002M11A 6A/1.6A
VFD004M11A 9A/2.5A
VFD007M11A 16A/4.2A 12 (3.3)
VFD004M21A/21B 6.3A/2.5A
VFD004M23A 3.2A/2.5A
VFD007M21A/21B 11.5A/5.0A
VFD007M23A 6.3A/5.0A
VFD015M21A/21B 15.7A/7.0A 12 (3.3)
VFD015M23A 9.0A/7.0A
VFD022M21A 27A/10A 8 (8.4)
VFD022M23B 15A/10A
VFD037M23A 19.6A/17A
VFD055M23A 28A/25A 8 (8.4)
VFD007M43B 4.2A/3.0A
VFD007M53A 2.4A/1.7A
VFD015M43B 5.7A/4.0A
VFD015M53A 4.2A/3.0A
VFD022M43B 6.0A/5.0A
VFD022M53A 5.9A/4.2A
VFD037M43A 8.5A/8.2A
VFD037M53A 7.0A/6.6A
VFD055M43A 14A/13A
VFD055M53A 10.5A/9.9A
VFD075M43A 23A/18A
VFD075M53A 12.9A/12.2A
Max.
Current
(input /
output)
Wire Type: 75 oC Copper Only
Note: It needs to use the Recognized Ring Terminal to conduct a proper wiring.
Wire
Gauge
AWG
(mm2)
12-14
(3.3-2.1)
12-14
(3.3-2.1)
12-14
(3.3-2.1)
8-12
(8.4-3.3)
8-10
(8.4-5.3)
12-14
(3.3-2.1)
12-14
(3.3-2.1)
12-14
(3.3-2.1)
12-14
(3.3-2.1)
12-14
(3.3-2.1)
12-14
(3.3-2.1)
8-14
(8.4-2.1)
8-14
(8.4-2.1)
8-12
(8.4-3.3)
8-12
(8.4-3.3)
8-10
(8.4-5.3)
8-12
(8.4-3.3)
Torque
kgf-cm
(in-lbf)
14
(12)
15
(13)
14
(12)
15
(13)
English-6
Page 7
Terminal Explanations
Terminal Symbol Explanation of Terminal Function
R/L1, S/L2, T/L3 AC line input terminals (three phase)
U/T1, V/T2, W/T3 Motor connections
B1 – B2 Connections for brake resistor (optional)
Earth Ground
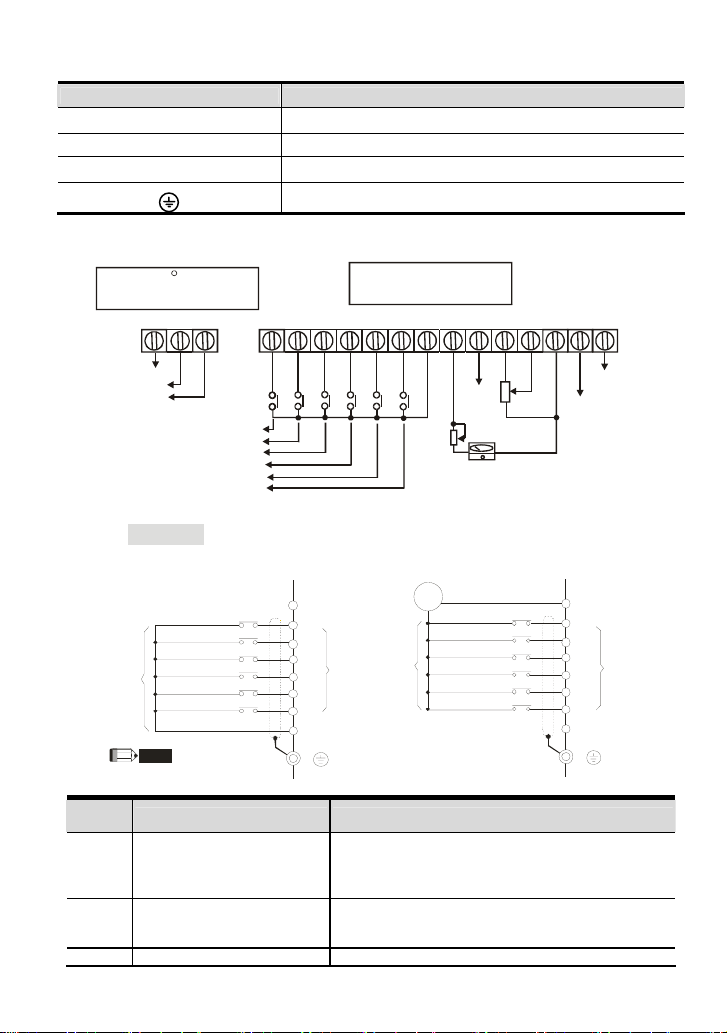
Control Terminal Wiring (Factory Setting)
Wire Type: 75 C, Coppe r Only
Wire Gauge : 2 4-12 AWG
Torque: 4kgf-cm (3.5 in-lbf)
RA RB RC
M0 M1 M2M3M4M5GND AFM
Wire Type: Copper Onl y
Wire Gauge: 22-16 AWG
Torque: 2kgf-cm (1.73 in-lbf)
ACI
+10V
AVI
GND
MCM
MO1
Relay contactor
Output
Factory Setting
Forward /Stop
Reverse/Stop
Multi-step speed 1
Multi- step speed 2
Multi- step speed 3
Reset
4~20mA
Bias
Potentiometer
Full scale voltmeter
0 to 10 VD C
Photo coupler
output
Factory sett ing:
fault indication
NPN Mode
NP N mode wi thou t exter nal po wer
For war d/St op
Reverse/Stop
g
n
i
t
Reset
t
e
Multi-step 1
S
y
r
Multi-step 2
o
t
c
Multi-step 3
a
F
Com mon Si gnal
NOTE
Don't apply the mains voltage
directly to above terminals.
Terminal
Symbol
Terminal Function Factory Settings (NPN mode)
+24V
M0
M1
M2
M3
M4
M5
GND
E
n
o
i
t
c
n
u
f
-
i
t
l
u
M
NPN mode with external power
24
+
Vdc
-
For war d/St op
g
s
l
a
n
i
m
r
e
T
t
u
p
n
I
Reverse/Stop
n
i
t
t
e
Reset
S
y
Multi-step 1
r
o
t
Multi-step 2
c
a
Multi-step 3
F
+24V
M0
M1
M2
M3
M4
M5
GND
E
RA-RC
Multi-Function Relay Output
RA
(N.O.) a
Resistive Load
5A(N.O.)/3A(N.C.) 277Vac; 5A(N.O.)/3A(N.C.) 30Vdc
Refer to P45 for programming.
Multi-Function Relay Output
RB
(N.C.) b
RB-RC
Resistive Load
5A(N.O.)/3A(N.C.) 277Vac; 5A(N.O.)/3A(N.C.) 30Vdc
RC Multi-function Relay Common 5A(N.O.)/3A(N.C.) 277Vac; 5A(N.O.)/3A(N.C.) 30Vdc
s
l
n
a
o
n
i
i
t
c
m
r
n
e
u
f
T
-
t
i
t
l
u
p
u
n
M
I
English-7
Page 8

Terminal
Symbol
Terminal Function Factory Settings (NPN mode)
M0 Multi-function auxiliary input
M1 Multi-function input 1
M2 Multi-function input 2
M3 Multi-function input 3
M4 Multi-function input 4
M5 Multi-function input 5
GND Common Signal
+10V +10 Vdc Output
Analog Voltage Input
+10V
AVI Circuit
AVI
AVI
ACM
ACI
Internal Circuit
ACI Circuit
Analog Current Input
ACI
M0~M5-GND
Refer to P38~P42 for programming the multi-function
inputs.
ON: the activation current is 10 mA.
OFF: leakage current tolerance is 10μA.
+10V-GND
It can supply +10 VDC power.
Impedance: 20kΩ
Resolution: 10 bits
Range: 0~10Vdc = 0~Max.Output Frequency
Impedance: 250Ω
Resolution: 10 bits
Range: 4~20mA = 0~Max.Output Frequency
Analog Output Meter
ACM Circuit
AFM
ACM
Internal Circuit
AFM
0 to 10V, 2mA
Impedance: 100kΩ
Output Current: 2mA m ax
Resolution: 8 bits
Range: 0 ~ 10Vdc
0~10V
Potentiometer
Internal Circuit
ACM
Max. 2mA
Maximum: 48Vdc, 50mA
Refer to P45 for programming.
Multi-function Output Terminal
MO1
(Photocoupler)
Multi-function Output Common
MCM
(Photocoupler)
MO1-DCM
Internal Circuit
Common for Multi-function Outputs
MO1
MCM
Max: 48Vdc/50mA
Note: Use twisted-shielded, twisted-pair or shielded-lead wires for the control signal wiring. It is
recommended to run all signal wiring in a separate steel conduit. The shield wire should only be
connected at the drive. Do not connect shield wire on both ends.
English-8
Page 9

SUMMARY OF PARAMETER SETTINGS
a: The parameter can be set during operation
Parameter Explanation Settings
Factory
Setting
00: Master frequency determined by
digital keypad (LC-M02E)
01: Master frequency determined by 0 to
+10 V input on AVI terminal with
jumpers
02: Master frequency determined by 4 to
20mA input on ACI terminal with
00
aPr.00
Source of Frequency
Command
jumpers
03: Master frequency determined by RS-
485 Communication port
04: Master frequency determined by
potentiometer on digital keypad
00: Operation determined by digital
keypad
01: Operation determined by external
control terminals, keypad STOP is
effective
02: Operation determined by external
aPr.01
Source of Operation
command
control terminals, keypad STOP is
ineffective
00
03: Operation determined by RS-485
communication port, keypad STOP is
effective
04: Operation determined by RS-485
communication port, keypad STOP is
ineffective
Pr.02 Stop Method
Pr.03
Maximum Output
Frequency
00: Ramp stop
01: Coast Stop
00
50.00 to 400.0 Hz 60.00
Maximum Voltage
Pr.04
Frequency (Base
10.00 to 400.0Hz 60.00
Frequency)
Pr.05
Maximum Output
Voltage (Vmax)
115V/230V: 0.1 to 255.0V
460V: 0.1 to 510.0V
575V: 0.1 to 637.0V
220.0
440.0
575.0
Pr.06 Mid-point Frequency 0.10 to 400.0Hz 1.50
Pr.07 Mid-point Voltage
115V/230V: 0.1 to 255.0V
460V: 0.1 to 510.0V
575V: 0.1 to 637.0V
10.0
20.0
26.1
Pr.08 Minimum Output Freq 0.10 to 20.00Hz 1.50
Pr.09
Minimum Output
Voltage
115V/230V: 0.1 to 255.0V
460V: 0.1 to 510.0V
575V: 0.1 to 637.0V
10.0
20.0
26.1
aPr.10 Acceleration Time 1 0.1 to 600.0 sec or 0.01 to 600.0 sec 10.0
aPr.11 Deceleration Time 1 0.1 to 600.0 sec or 0.01 to 600.0 sec 10.0
aPr.12 Acceleration Time 2 0.1 to 600.0 sec or 0.01 to 600.0 sec 10.0
aPr.13 Deceleration Time 2 0.1 to 600.0 sec or 0.01 to 600.0 sec 10.0
Pr.14 Accel S-curve 00 to 07 00
aPr.15 Jog Accel/Decel Time 0.1 to 600.0 sec or 0.01 to 600.0 sec 1.0
Customer
English-9
Page 10

Parameter Explanation Settings
Factory
Setting
aPr.16 Jog Frequency 0.00 to 400.0 Hz 6.00
aPr.17 1st Step Speed Freq. 0.00 to 400.0Hz 0.00
aPr.18 2nd Step Speed Freq. 0.00 to 400.0Hz 0.00
aPr.19 3rd Step Speed Freq. 0.00 to 400.0Hz 0.00
aPr.20 4th Step Speed Freq. 0.00 to 400.0Hz 0.00
aPr.21 5th Step Speed Freq. 0.00 to 400.0Hz 0.00
aPr.22 6th Step Speed Freq. 0.00 to 400.0Hz 0.00
aPr.23 7th Step Speed Freq. 0.00 to 400.0Hz 0.00
Pr.24
Pr.25
Pr.26
Pr.27
Pr.28
Pr.29
Pr.30
Pr.31
Reserve Operation
Inhibition
Over-Voltage Stall
Prevention
Over-current Stall
Prevention during
Acceleration
Over-current Stall
Prevention during
Operation
DC Braking Current
Level
DC Braking during
Start-up
DC Braking during
Stopping
Start-point for DC
Braking
00: Enable REV operation
01: Disable REV operation
00: Disable
115V/230V: 330 to 450 Vdc
460V: 660 to 900 Vdc
575V: 825 to 1025 Vdc
00: Disable
20% to 200%
00: Disable
20% to 200%
00
390
780
975
150
150
00 to 100 % 00
0.0 to 5.0 sec 0.0
0.0 to 25.0 sec 0.0
0.00 to 60.00 Hz 0.00
00: Stop operation after momentary
power loss
01: Continues after momentary power
Pr.32
Momentary Power Loss
Operation Selection
loss, speed search starts with Master
Frequency
00
02: Continues after momentary power
loss, speed search starts with
Minimum output Frequency
Pr.33
Pr.34
Pr.35
Pr.36
Pr.37
Maximum Allowable
Power Loss Time
Base-Block Time for
Speed Search
Maximum Current
Level for Speed Search
Upper Bound of Output
Frequency
Lower Bound of Output
Frequency
0.3 to 5.0 sec 2.0
0.3 to 5.0 sec 0.5
30 to 200 % 150
0.10 Hz to 400.0 Hz 400.0
0.00 Hz to 400.0 Hz 0.00
Customer
English-10
Page 11

Parameter Explanation Settings
Factory
Setting
00: M0: FWD/STOP, M1: REV/STOP
Pr.38
Multi-function Input
Terminal (M0,M1)
01: M0: RUN/STOP, M1: REV/FWD
02: M0, M1, M2: 3-wire operation control
00
mode
00: No Function
01: Output OFF (N.O.) (enabled when
running)
02: Output OFF (N.C.) (enabled when
running)
03: External Fault (normally open) N.O.
04: External Fault (normally close) N.C
05: RESET
06: Multi-Step Speed Command 1
07: Multi-Step Speed Command 2
08: Multi-Step Speed Command 3
09: Jog Operation
10: Accel/Decel Speed Inhibit
Pr.39
Pr.40
Pr.41
Pr.42
Multi-function Input
Terminal (M2)
Multi-function Input
Terminal (M3)
Multi-function Input
Terminal (M4)
Multi-function Input
Terminal (M5)
11: First or Second Accel/Decel Time
12: Base-block (B.B.) (N.O)
13: Base-block (B.B.) (N.C)
14: Increase Master Frequency
15: Decrease Master Frequency
16: Run PLC Program
17: Pause PLC
18: Counter Trigger Signal
19: Counter Reset
20: No function
21: RESET command (N.C)
22: Control source: External Terminal
23: Control source: Keypad
05
06
07
08
24: Control source: Communication
25: Parameter Lock (Write disable, Read
is always 0)
26: PID Disable (N.O.)
27: PID Disable (N.C.)
28: Second Source for Frequency
Command
29: Forward (contact is open) / Reverse
(contact is close)
30: One-Shot PLC Run
31: Index input signal
32: Counter Incremented by Drive Output
Frequency
00: Analog Frequency Meter (0 to
Maximum Output Frequency)
aPr.43 Analog Output Signal
01: Analog Current Meter (0 to 250% of
the rated AC drive current)
00
02: Feedback signal (0 - 100%)
03: Output power (0 - 100%)
aPr.44 Analog Output Gain 00 to 200 % 100
Customer
English-11
Page 12

Parameter Explanation Settings
Factory
Setting
00: AC Drive Operational
01: Maximum Output Frequency Attained
02: Zero Speed
03: Over-Torque Detection
04: Base-Block (B.B) Indication
05: Low Voltage Indication
06: AC Drive Operation Mode
07: Fault Indication
Pr.45
Pr.46
Multi-Function Output
Terminal 1
(Photocoupler output)
Multi-function Output
Terminal 2
(Relay Output)
08: Desired Frequency Attained
09: PLC Program Running
10: PLC Program Step Completed
11: PLC Program Completed
12: PLC Operation Paused
13: Top Count Value Attained
14: Preliminary Counter Value Attained
15: Warning (PID feedback loss,
communication error)
16: Below the Desired Frequency
00
07
17: PID supervision
18: Over Voltage supervision
19: Over Heat supervision
20: Over Current stall supervision
21: Over Voltage stall supervision
22: Forward command
23: Reverse command
24: Zero Speed (Includes Drive Stop)
aPr.47
aPr.48
aPr.49
aPr.50
Desired Frequency
Attained
Adjust Bias of External
Input Frequency
Potentiometer Bias
Polarity
Potentiometer
Frequency Gain
0.00 to 400.0 Hz 0.00
0.00 to 200.0% 0.00
00: Positive Bias
01: Negative Bias
00
0.10 to 200.0% 100.0
00: Reverse Motion Disabled in negative
Pr.51
Potentiometer Reverse
Motion Enable
bias
01: Reverse Motion Enabled in negative
00
bias
aPr.52 Motor Rated Current 30.0% FLA to 120.0% FLA FLA
aPr.53 Motor No-Load Current 00%FLA to 99%FLA
0.4*
FLA
aPr.54 Torque Compensation 00 to 10 00
aPr.55 Slip Compensation 0.00 to 10.00 0.00
Pr.56 Reserved
Pr.57 AC Drive Rated Current Display (unit: 0.1A) ##.#
00: Standard Motor (self cool motor)
Pr.58
Electronic Thermal
Overload Relay
01: Inverter Motor (auxiliary cool fan on
motor)
02
02: Inactive
Customer
English-12
Page 13

Parameter Explanation Settings
aPr.59
Electronic Thermal
Motor Overload
30 to 300 sec 60
Factory
Setting
00: Over-Torque Detection Disable
01: Enabled during constant speed
operation until the allowable time for
detection (Pr.62) elapses.
Pr.60
Over-Torque Detection
Mode
02: Enabled during constant speed
operation and halted after detection.
03: Enabled during acceleration until the
00
allowable time for detection (Pr.62)
elapses.
04: Enabled during acceleration and
halted after detection.
Pr.61
Pr.62
Over-Torque Detection
Level
Over-Torque Detection
Time
30 to 200 % 150
0.0 to 10.0 seconds 0.1
00: Decelerate to 0 Hz
Pr.63 Loss of ACI (4-20mA)
01: Stop immediately and display "EF"
02: Continue operation by last frequency
00
command
00: Display AC drive output Frequency
(Hz)
01: Display User-defined output
Frequency (H*Pr.65)
02: Output Voltage (E)
03: DC Bus Voltage (u_)
04: PV (i)
aPr.64
User Defined Function
for Display
05: Display the value of internal counter
(c)
06
06: Display the setting frequency (F or
o=%)
07: Display the parameter setting (Pr.00)
08: Reserved
09: Output Current (A)
10: Display program operation (0.xxx),
Fwd, or Rev
aPr.65 Coefficient K 0.01 to 160.0 1.00
aPr.66
Communication
Frequency
0.00 to 400.0 Hz 0.00
Pr.67 Skip Frequency 1 0.00 to 400.0 Hz 0.00
Pr.68 Skip Frequency 2 0.00 to 400.0 Hz 0.00
Pr.69 Skip Frequency 3 0.00 to 400.0 Hz 0.00
Pr.70 Skip Frequency Band 0.00 to 20.00 Hz 0.00
Pr.71
Pr.72
PWM Carrier
Frequency
Auto Restart Attempts
after Fault
01 to 15
The factory setting of VFD075M43A is 10.
575V series: 01 to 10 6
00 to 10 00
15
Customer
English-13
Page 14

Parameter Explanation Settings
Pr.73 Present Fault Record 00
Pr.74
Second Most Recent
Fault Record
00: No fault occurred
01: Over-current (oc)
02: Over-voltage (ov)
03: Overheat (oH)
04: Overload (oL)
Factory
Setting
00
05: Overload 1 (oL1)
06: External Fault (EF)
07: CPU failure 1 (CF1)
08: CPU failure 3 (CF3)
09: Hardware Protection Failure (HPF)
10: Over-current during acceleration (oca)
11: Over-current during deceleration
(ocd)
Pr.75
Third Most Recent
Fault Record
12: Over-current during steady state
operation (ocn)
13: Ground fault or fuse failure(GFF)
00
14: Low Voltage (not record)
15: 3 Phase Input Power Loss
16: EPROM failure (CF2)
17: External interrupt allowance(bb)
18: Overload (oL2)
19: Auto Adjustable accel/decel failure
(CFA)
20: CPU self detection failure (codE)
00: All parameters can be set/read
01: All parameters are read-only
Pr.76
Parameter Lock and
Configuration
02-08: Reserved
09: Resets all parameters to 50Hz factory
defaults
00
10: Resets all parameters to 60Hz factory
defaults
Time for Auto Reset the
Pr.77
Restart Times in
0.1 to 6000.0 sec 60.0
Abnormality
00: Disable PLC operation
01: Execute one program cycle
02: Continuously execute program cycles
Pr.78 PLC Operation Mode
03: Execute one program cycle step by
step
00
04: Continuously execute one program
cycle step by step
Pr.79 PLC FWD/REV Motion 00 to 127 00
Pr.80
Pr.81
Pr.82
Pr.83
Identity Code of the AC
Motor Drive
Time Duration of 1st
Step Speed
Time Duration of 2nd
Step Speed
Time Duration of 3rd
Step Speed
Read only ##
00 to 9999 sec 00
00 to 9999 sec 00
00 to 9999 sec 00
Customer
English-14
Page 15

Parameter Explanation Settings
Pr.84
Pr.85
Pr.86
Pr.87
Pr.88
Time Duration of 4th
Step Speed
Time Duration of 5th
Step Speed
Time Duration of 6th
Step Speed
Time Duration of 7th
Step Speed
Communication
Address
00 to 9999 sec 00
00 to 9999 sec 00
00 to 9999 sec 00
00 to 9999 sec 00
01 to 254 01
Factory
Setting
Customer
00: 4800 bps
Pr.89 Transmission Speed
01: 9600 bps
02: 19200 bps
01
03: 38400 bps
00: Warn and Continue Operating
Pr.90
Transmission Fault
Treatment
Pr.91 Time Out Detection
01: Warn and RAMP to Stop
02: Warn and COAST to Stop
03: Keep Operation without Warning
0.0: Disable
0.1 to 120.0 sec
03
0.0
00: MODBUS ASCII mode, <7,N,2>
01: MODBUS ASCII mode, <7,E,1>
Pr.92
Communication
Protocol
02: MODBUS ASCII mode, <7,O,1>
03: MODBUS RTU mode, <8,N,2>
04: MODBUS RTU mode, <8,E,1>
00
05: MODBUS RTU mode, <8,O,1>
Pr.93
Pr.94
Accel 1 to Accel 2
Frequency Transition
Decel 1 to Decel 2
Frequency Transition
Pr.95 Auto Energy Saving
Pr.96
Pr.97
Pr.98
Pr.99
Counter Countdown
Complete
Preset counter
countdown
Total Time Count from
Power On (Days)
Total Time Count from
Power On (Minutes)
0.01 to 400.0
0.00: Disable
0.01 to 400.0
0.00: Disable
00: Disable auto energy saving
01: Enable auto energy saving
0.00
0.00
00
00 to 9999 00
00 to 9999 00
00 to 65535 days
00 to 1440 minutes
Read
Only
Read
Only
Pr.100 Software Version ##
00: Linear Accel/Decel
01: Auto Accel, Linear Decel
Pr.101
Auto Adjustable
Accel/Decel
02: Linear Accel, Auto Decel
03: Auto Accel/Decel
04: Linear Accel/Decel Stall Prevention
00
during Deceleration
English-15
Page 16

Parameter Explanation Settings
Factory
Setting
00: AVR function enabled
Pr.102
Pr.103
Auto Voltage
Regulation (AVR)
Auto tune Motor
Parameters
Pr.104 R1 value
Pr.105 Control Mode
01: AVR function disabled
02: AVR function disabled when stops
03: AVR function disabled when decel
00: Disable
01: Auto tune for R1
02: Auto tune for R1 + No Load testing
00 to 65535 mΩ
00: V/F Control
01: Sensor-less Control
00
00
00
00
Pr.106 Rated Slip 0.00 to 10.00 Hz 3.00
Pr.107 Vector Voltage Filter 5 to 9999 (per 2ms) 10
Pr.108
Pr.109
Pr.110
Vector Slip
Compensation Filter
Selection for Zero
Speed Control
Voltage of Zero Speed
Control
25 to 9999 (per 2ms) 50
00: No output
01: Control by DC voltage
00
to 20.0 % of Max. output voltage (Pr.05) 5.0
Pr.111 Decel S-curve 00 to 07 00
Pr.112
External Terminal
Scanning Time
01 to 20 01
00: None speed search
Pr.113
Restart Method after
Fault (oc, ov, BB)
01: Continue operation after fault speed
search from speed reference
02: Continue operation after fault speed
01
search from Minimum speed
00: Fan Off when the drive stop after 1
Min.
Pr.114 Cooling Fan Control
01: AC Drive Runs and Fan On, AC Drive
Stops and Fan Off
02
02: Always Run
03: Reserved
00: Disable
01: Keypad (based on Pr.00 setting)
Pr.115 PID Set Point Selection
02: AVI (external 0-10V)
00
03: ACI (external 4-20mA)
04: PID set point (Pr.125)
00: Input positive PID feedback, PV from
AVI (0 to 10V)
01: Input negative PID feedback, PV from
Pr.116
PID Feedback Terminal
Selection
AVI (0 to 10V)
02: Input positive PID feedback, PV from
00
ACI (4 to 20mA)
03: Input negative PID feedback, PV from
ACI (4 to 20mA)
Pr.117 Proportional Gain (P) 0.0 to 10.0 1.0
Pr.118 Integral Time (I)
0.00: Disable
0.01 to 100.0 sec
1.00
Customer
English-16
Page 17

Parameter Explanation Settings
Factory
Setting
Pr.119 Differential Time (D) 0.00 to 1.00 sec 0.00
Pr.120
Integration’s Upper
Bound Frequency
00 to 100 % 100 %
Pr.121 One-Time Delay 0.0 to 2.5 sec 0.0
Pr.122
Pr.123
Pr.124
PID Frequency Output
Command Limit
Feedback Signal
Detection Time
Feedback Signal Fault
Treatment
00 to 110 % 100
0.0: Disable
0.1 to 3600 sec
00: Warning and RAMP to stop
01: Warning and keep operating
60.0
00
Pr.125 Source of PID Set Point 0.00 to 400.0Hz 0.00
Pr.126 PID Offset Level 1.0 to 50.0 % 10.0
Pr.127
Pr.128
Pr.129
Pr.130
Pr.131
Pr.132
Pr.133
Pr.134
Detection Time of PID
Offset
Minimum Reference
Value
Maximum Reference
Value
Invert Reference Signal
AVI (0-10V)
Minimum Reference
Value (4-20mA)
Maximum Reference
Value (4-20mA)
Invert Reference Signal
(4-20mA)
Analog Input Delay
Filter for Set Point
0.1 to 300.0 sec 5.0
0.0 to 10.0 V 0.0
0.0 to 10.0 V 10.0
00: Not inverted
01: Inverted
00
0.0 to 20.0mA 4.0
0.0 to 20.0mA 20.0
00: Not inverted
01: Inverted
00
00 to 9999 (per 2ms) 50
Analog Input Delay
Pr.135
Filter for Feedback
00 to 9999 (per 2ms) 5
Signal
Pr.136 Sleep Period 0.0 to 6550.0 sec 0.0
Pr.137 Sleep Frequency 0.00 to 400.0 Hz 0.00
Pr.138 Wake Up Frequency 0.00 to 400.0 Hz 0.00
Pr.139
Pr.140
Pr.141
Treatment for Counter
Attained
External Up/Down
Selection
Save Frequency Set
Point
00: Continue operation
01: Stop Immediately and display E.F.
00: Fixed Mode (keypad)
01: By Accel or Decel Time
02: Reserved
00: Not Save
01: Save
00
00
01
Customer
English-17
Page 18

Parameter Explanation Settings
00: Keypad Up/Down
Pr.142
Pr.143 Software Braking Level
Pr.144
Pr.145
Pr.146 Line start Lockout
Pr.147
Pr.148 Number of Motor Poles 02 to 20 04
Pr.149
Pr.150
Pr.151
Pr.152 Skip Frequency Width 0.00 to 400.0Hz 0.00
Pr.153 Bias Frequency Width 0.00 to 400.0Hz 0.00
Pr.154 Reserved
aPr.155
aPr.156
aPr.157
Second Source of
Frequency Command
Total operation time
(Day)
Total operation time
(Minutes)
Decimal Number of
Accel / Decel Time
Gear Ratio for Simple
Index Function
Index Angle for Simple
Index Function
Deceleration Time for
Simple Index Function
Compensation
Coefficient for Motor
Instability
Communication
Response Delay Time
Communication Mode
Selection
01: AVI (0-10V)
02: ACI (4-20mA)
03: Communication
04: Keypad potentiometer
115V/230V 370-450 Vdc 380.0
460V 740-900 Vdc 760.0
575V 925-1075 Vdc 950.0
Read Only
Read Only
00: Disable
01: Enable
00: One decimal
01: Two decimals
4 to 1000 200
00.0 to 360.0 180.0
0.00 to 100.00 sec 0.00
0.0: Disable
0.1 to 5.0 (recommended setting d2.0)
0 to 200 (x500us) 0
0: Delta ASCII
1: Modbus
Factory
Setting
00
00
00
0.0
1
Customer
English-18
Page 19

Fault Codes
Fault
Fault Descriptions Corrective Actions
Name
Over current
Abnormal increase
in current.
Over voltage
The DC bus voltage
has exceeded its
maximum allowable
value.
Overheating
Heat sink
temperature too
high
Low voltage
The AC motor drive
detects that the DC
bus voltage has
fallen below its
minimum value.
Overload
The AC motor drive
detects excessive
drive output current.
Overload 1
Internal electronic
overload trip
Overload 2
Motor overload.
1. Check whether the motors horsepower corresponds to the
AC drive output power.
2. Check the wiring connections between the AC drive and
motor for possible short circuits.
3. Increase the Acceleration time (Pr.10, Pr.12).
4. Check for possible excessive loading conditions at the motor.
5. If there are any abnormal conditions when operating the AC
drive after short-circuit being removed, it should be sent back
to manufacturer.
1. Check whether the input voltage falls within the rated AC
drive input voltage.
2. Check for possible voltage transients.
3. Bus over-voltage may also be caused by motor regeneration.
Either increase the decel time or add an optional brake
resistor.
4. Check whether the required braking power is within the
specified limits.
1. Ensure that the ambient temperature falls within the specified
temperature range.
2. Make sure that the ventilation holes are not obstructed.
3. Remove any foreign objects from the heatsinks and check for
possible dirty heat sink fins.
4. Check the fan and clean it.
5. Provide enough spacing for adequate ventilation.
1. Check whether the input voltage falls within the AC motor
drive rated input voltage range.
2. Check whether the motor has sudden load.
3. Check for correct wiring of input power to R-S-T (for 3-phase
models) without phase loss.
1. Check whether the motor is overloaded.
2. Reduce torque compensation setting in Pr.54.
3. Take the next higher power AC motor drive model.
NOTE: The AC motor drive can withstand up to 150% of the
rated current for a maximum of 60 seconds.
1. Check for possible motor overload.
2. Check electronic thermal overload setting.
3. Use a higher power motor.
4. Reduce the current level so that the drive output current does
not exceed the value set by the Motor Rated Current Pr.52.
1. Reduce the motor load.
2. Adjust the over-torque detection setting to an appropriate
setting.
English-19
Page 20

Fault
Fault Descriptions Corrective Actions
Name
1. Short-circuit at motor output: Check for possible poor
insulation at the output lines.
Over-current
during
acceleration
2. Torque boost too high: Decrease the torque compensation
setting in Pr.54.
3. Acceleration Time too short: Increase the Acceleration Time.
4. AC motor drive output power is too small: Replace the AC
motor drive with the next higher power model.
1. Short-circuit at motor output: Check for possible poor
Over-current
during
deceleration
insulation at the output line.
2. Deceleration Time too short: Increase the Deceleration Time.
3. AC motor drive output power is too small: Replace the AC
motor drive with the next higher power model.
1. Short-circuit at motor output: Check for possible poor
Over-current
during steady state
operation
Internal EEPROM
can not be
programmed.
Internal EEPROM
can not be read.
insulation at the output line.
2. Sudden increase in motor loading: Check for possible motor
stall.
3. AC motor drive output power is too small: Replace the AC
motor drive with the next higher power model.
1. Turn off the power.
2. Check whether the input voltage falls within the rated AC
drive input voltage.
3. Turn on the power.
1. Check the connections between the main control board and
the power board
2. Reset the drive to the factory settings.
1. Input EF (N.O.) on external terminal is closed to GND. Output
External Fault
U, V, W will be turned off.
2. Give RESET command after fault has been cleared.
1. Check if the motor is suitable for operation by AC motor
Auto accel/decel
failure
drive.
2. Check if the regenerative energy is too large.
3. Load may have changed suddenly.
When (one of) the output terminal(s) is grounded, short circuit
current is more than 50% of AC motor drive rated current, the AC
motor drive power module may be damaged.
Ground fault
NOTE: The short circuit protection is provided for AC motor
drive protection, not for protection of the user.
1. Check whether the IGBT power module is damaged.
2. Check for possible poor insulation at the output line.
Communication
error (see Pr.92)
1. Check the connection between the AC drive and computer
for loose wires.
2. Check if the communication protocol is properly set.
1. When the external input terminal (B.B) is active, the AC
External Base
Block.
OC hardware error Return to the factory.
motor drive output will be turned off.
2. Deactivate the external input terminal (B.B) to operate the AC
motor drive again.
English-20
Page 21

Fault
Fault Descriptions Corrective Actions
Name
CC (current clamp)
OV hardware error
GFF hardware
error
OV or LV
Current sensor
error
U-phase error
W-phase error
Phase Loss Check input phase wiring for loose contacts.
Software
protection failure
PID feedback
signal error
Return to the factory.
Return to the factory.
1. Check parameter settings (Pr.116) and AVI/ACI wiring.
2. Check for possible fault between system response time and
the PID feedback signal detection time (Pr.123)
Dimensions
W
W1
H
H1
DD1
H2
Model Name W W1 H H1 H2 D D1
VFD004M21A/23A,
VFD007M21A/23A,
VFD015M21A/23A
VFD002M11A,
VFD004M11A/21B,
VFD007M11A/21B/43B/53A,
VFD015M21B/43B/53A,
VFD022M23B/43B/53A
85.0
[3.35]
100.0
[3.94]
74.0
[2.91]
89.0
[3.50]
English-21
141.5
[5.57]
151.0
[5.94]
130.5
[5.14]
140.0
[5.51]
10.0
[0.39]
10.0
[0.39]
Unit: mm [inch]
113.0
[4.45]
116.5
[4.59]
[0.39]
[0.41]
10.0
10.5
Page 22

W1
W
H1
D1 D
H2 H
Model Name W W1 H H1 H2 D D1
VFD022M21A,
VFD037M23A/43A/53A,
VFD055M23A/43A/53A,
VFD075M43A/53A
125.0
[4.92]
110.0
[4.33]
220.0
[8.66]
205.0
[8.07]
15.0
[0.59]
English-22
Unit: mm [inch]
166.3
[6.55]
[0.32]
8.2
 Loading...
Loading...