

Page 1
Page 2

序言
感謝您使用本產品,本使用操作手冊提供 ASDA-AB 系列伺服驅動器及 ECMA 系列伺服電機
的相關信息。內容包括:
z 伺服驅動器和伺服電機的安裝與檢查
z 伺服驅動器的組成說明
z 試轉操作的步驟
z 伺服驅動器的控制功能介紹及調整方法
z 所有參數說明
z 通訊協議說明
z 檢測與保養
z 異常排除
z 應用例解說
本使用操作手冊適合下列使用者參考
z 伺服系統設計者
z 安裝或配線人員
z 試轉調機人員
z 維護或檢查人員
在使用之前,請您仔細詳讀本手冊以確保使用上的正確。此外,請將它妥善放置在安全的地
點以便隨時查閱。下列在您尚未讀完本手冊時,務必遵守事項:
z 安裝的環境必須沒有水氣,腐蝕性氣體及可燃性氣體
z 接線時禁止將三相電源接至電機 U、V、W 的接頭,一旦接錯時將損壞伺服電機
z 接地工程必須確實實施
z 在通電時,請勿拆解驅動器、電機或更改配線
z 在通電運作前,請確定緊急停機裝置是否隨時啟動
z 在通電運作時,請勿接觸散熱片,以免燙傷
如果您在使用上仍有問題,請咨詢經銷商或者本公司客服中心
Revision April 2008, Doc. Name: 2007PDD23000010 i
Page 3
序言
|ASDA-AB
系列
安全注意事項
ASDA-AB 系列為開放型(open type)伺服驅動器,操作時須安裝于遮蔽式的控制箱內。本
驅動器利用精密的反餽控制及結合高速運算能力的數字信號處理器(Digital Signal Processor,
DSP),來控制 IGBT 產生精確的電流輸出,用來驅動三相永磁式同步交流伺服電機(PMSM)
以達到精準定位。
ASDA-AB 系列可使用于工業應用場合,且建議安裝于使用手冊中的配線(電)箱環境(驅動
器、線材及電機都必須安裝于符合 UL 環境等級 1 的安裝環境最低要求規格)。
在接收檢驗、安裝、配線、操作、維護及檢查時,應隨時注意以下安全注意事項。
標誌「危險」、「警告」及「禁止」代表的含義:
意指可能潛藏危險,若未遵守可能會對人員造成嚴重或致命的傷害。
接收檢驗
安裝注意
配線注意
意指可能潛藏危險,若未遵守可能會對人員造成中度的傷害,或導致產品嚴重損
壞,或甚至故障。
意指絕對禁止的行動,若未遵守可能會導致產品損壞,或甚至故障而無法使用。
¾ 請依照指定的方式搭配使用伺服驅動器及伺服電機,否則可能會導致火災或設
備故障。
¾ 禁止將本產品暴露在有水氣、腐蝕性氣體、可燃性氣體等物質的場所下使用,
否則可能會造成觸電或火災。
¾ 請將接地保護端子連接到 class-3(100Ω 以下)接地系統,接地不良可能會造
成觸電或火災。
¾ 請勿連接三相電源至 U、V、W 電機輸出端子,否則可能會造成人員受傷或火災。
¾ 請鎖緊電源及電機輸出端子的固定螺絲,否則可能造成火災。
¾ 配線時,請參照線材選擇進行配線,避免危險事件發生。
操作注意
¾ 當機械設備開始運轉前,須配合其使用者參數調整設定值。若未調整到相符的
正確設定值,可能會導致機械設備運轉失去控制或發生故障。
¾ 機器開始運轉前,請確認是否可以隨時啟動緊急停機裝置。
ii
Revision April 2008, Doc. Name: 2007PDD23000010
Page 4
¾ 當電機運轉時,禁止接觸任何旋轉中的電機零件,否則可能會造成人員受傷。
¾ 為了避免意外事故,請先分開機械設備的連軸器及皮帶等,使其處于單獨的狀
¾ 在伺服電機和機械設備連接運轉后,如果發生操作錯誤,則不僅會造成機械設
¾ 強烈建議:請先在無負載情況下,測試伺服電機是否正常運作,之后再將負載
¾ 在運轉中,請不要觸摸伺服驅動器的散熱片,否則可能會由于高溫而發生燙傷。
保養及檢查
¾ 禁止接觸伺服驅動器及伺服電機內部,否則可能會造成觸電。
¾ 電源啟動時,禁止拆下驅動器面板,否則可能會造成觸電。
¾ 電源關閉 10 分鐘內,不得接觸接線端子,殘余電壓可能造成觸電。
¾ 不得拆開伺服電機,否則可能會造成觸電或人員受傷。
¾ 不得在開啟電源情況下改變配線,否則可能造成觸電或人員受傷。
態,再進行第一次試運轉。
備的損壞,有時還可能導致人身傷害。
接上,以避免不必要的危險。
序言
|ASDA-AB
系列
¾ 只有合格的電機專業人員才可以安裝、配線及修理保養伺服驅動器以及伺服電
機。
主電路配線
¾ 請不要將動力線和信號線從同一管道內穿過,也不要將其綁扎在一起。配線時,
請使動力線和信號線相隔 30 厘米(11.8 英吋)以上。
¾ 對于信號線、編碼器(PG)反饋線,請使用多股絞合線以及多芯絞合整體屏蔽
線。對于配線長度,信號輸入線最長為 3 米(9.84 英呎),PG 反饋線最長為 20
米(65.62 英呎)。
¾ 即使關閉電源,伺服驅動器內部仍然可能會滯留高電壓,請暫時(10 分鐘)不
要觸摸電源端子。並請確認「CHARGE」指示燈熄滅以后,再進行檢查作業。
¾ 請不要頻繁地開關電源。如果需要連續開關電源時,請控制在一分鐘一次以下。
主電路端子座配線
¾ 在配線時,請將端子座從伺服驅動器上拆下來。
¾ 端子座的一個電線插入口,請僅插入一根電線。
¾ 在插入電線時,請不要使芯線與鄰近的電線短路。
¾ 在上電之前,請確實檢查配線是否正確。
Revision April 2008, Doc. Name: 2007PDD23000010 iii
Page 5

序言
|ASDA-AB
系列
NOTE
各版本內容若略有差異,請以台達網站(http://www.delta.com.tw/industrialautomation/)
最新公佈信息為主。
iv
Revision April 2008, Doc. Name: 2007PDD23000010
Page 6
目錄
第一章 產品檢查與型號說明
1.1 產品檢查 ........................................................................................................ 1-1
1.2 產品型號對照 ................................................................................................ 1-2
1.2.1 銘牌說明 ............................................................................................... 1-2
1.2.2 型號說明 ............................................................................................... 1-3
1.3 伺服驅動器與電機機種名稱對應參照表.......................................................... 1-5
1.4 伺服驅動器各部名稱 ...................................................................................... 1-6
1.4.1 ASDA-AB 系列伺服驅動器(220V 系列) ............................................ 1-6
1.4.2 ASDA-AB 系列伺服驅動器(110V 系列) ............................................ 1-7
1.5 伺服驅動器操作模式簡介 ............................................................................... 1-8
1.6 斷路器與保險絲建議規格表 ........................................................................... 1-9
第二章 安裝
2.1 注意事項 ........................................................................................................ 2-1
2.2 儲存環境條件................................................................................................. 2-1
2.3 安裝環境條件................................................................................................. 2-1
2.4 安裝方向與空間 ............................................................................................. 2-2
第三章 配線
3.1 週邊裝置與主電源迴路連接 ........................................................................... 3-1
3.1.1 週邊裝置接線圖 .................................................................................... 3-1
3.1.2 驅動器的連接器與端子.......................................................................... 3-3
Revision April 2008, Doc. Name: 2007PDD23000010
Page 7

目錄
|ASDA-AB
系列
3.1.3 電源接線法 ........................................................................................... 3-4
3.1.4 電機 U、V、W 引出線的連接頭規格 ..................................................... 3-6
3.1.5 編碼器引出線連接頭規格 ...................................................................... 3-7
3.1.6 線材的選擇............................................................................................ 3-8
3.2 伺服系統基本方塊圖 ...................................................................................... 3-10
3.3 CN1 I/O 信號接線 .......................................................................................... 3-13
3.3.1 CN1 I/O 連接器端子 Layout .................................................................. 3-13
3.3.2 CN1 I/O 連接器信號說明....................................................................... 3-15
3.3.3 界面接線圖(CN1) ............................................................................. 3-24
3.3.4 使用者指定 DI 與 DO 信號..................................................................... 3-27
3.4 CN2 編碼器信號接線 ..................................................................................... 3-28
3.5 CN3 通訊口信號接線 ..................................................................................... 3-30
3.5.1 CN3 通訊口端子 Layout ........................................................................ 3-30
3.5.2 CN3 通訊口與個人電腦的連接方式 ....................................................... 3-31
3.6 標準接線方式................................................................................................. 3-32
3.6.1 位置(Pt)模式標準接線 ...................................................................... 3-32
3.6.2 位置(Pr)模式標準接線 ...................................................................... 3-34
3.6.3 速度模式標準接線................................................................................. 3-36
3.6.4 扭矩模式標準接線................................................................................. 3-38
第四章 面板顯示及操作
4.1 面板各部名稱................................................................................................. 4-1
4.2 參數設定流程................................................................................................. 4-2
4.3 狀態顯示 ........................................................................................................ 4-3
Revision April 2008, Doc. Name: 2007PDD23000010
Page 8

目錄
|ASDA-AB
系列
4.3.1 儲存設定顯示 ........................................................................................ 4-3
4.3.2 放棄設定顯示 ........................................................................................ 4-3
4.3.3 警示信息顯示 ........................................................................................ 4-3
4.3.4 正負號設定顯示 .................................................................................... 4-3
4.3.5 監控顯示 ............................................................................................... 4-4
4.4 一般功能操作................................................................................................. 4-5
4.4.1 異常狀態記錄顯示操作.......................................................................... 4-5
4.4.2 寸動模式操作 ........................................................................................ 4-6
4.4.3 位置命令教導操作................................................................................. 4-7
4.4.4 強制數字輸出操作................................................................................. 4-9
4.4.5 數字輸入診斷操作................................................................................. 4-9
4.4.6 數字輸出診斷操作................................................................................. 4-10
第五章 試轉操作與調機步驟
5.1 無負載檢測 .................................................................................................... 5-1
5.2 驅動器送電 .................................................................................................... 5-2
5.3 空載 JOG 測試 ............................................................................................... 5-6
5.4 空載的速度測試 ............................................................................................. 5-7
5.5 空載的定位測試 ............................................................................................. 5-9
5.6 調機步驟 ........................................................................................................ 5-12
5.6.1 調機步驟流程圖 .................................................................................... 5-13
5.6.2 結合機構的初步慣量估測流程圖 ........................................................... 5-14
5.6.3 PI 自動增益模式調機流程圖 .................................................................. 5-15
5.6.4 PDFF 自動增益模式調機流程圖 ............................................................ 5-17
Revision April 2008, Doc. Name: 2007PDD23000010
Page 9

目錄
|ASDA-AB
系列
5.6.5 負載慣量估測的限制 ............................................................................. 5-18
5.6.6 增益調整模式與參數的關係................................................................... 5-19
5.6.7 手動增益參數調整................................................................................. 5-20
第六章 控制功能
6.1 操作模式選擇................................................................................................. 6-1
6.2 位置模式 ........................................................................................................ 6-2
6.2.1 Pt 模式位置命令.................................................................................... 6-2
6.2.2 Pr 模式位置命令.................................................................................... 6-4
6.2.3 位置模式控制架構................................................................................. 6-5
6.2.4 位置 S 型平滑器.................................................................................... 6-6
6.2.5 電子齒輪比............................................................................................ 6-8
6.2.6 低通濾波器............................................................................................ 6-10
6.2.7 位置模式(Pr)時序圖.......................................................................... 6-10
6.2.8 位置迴路增益調整................................................................................. 6-11
6.3 速度模式 ........................................................................................................ 6-13
6.3.1 速度命令的選擇 .................................................................................... 6-13
6.3.2 速度模式控制架構................................................................................. 6-14
6.3.3 速度命令的平滑處理 ............................................................................. 6-15
6.3.4 模擬命令端比例器................................................................................. 6-18
6.3.5 速度模式時序圖 .................................................................................... 6-19
6.3.6 速度迴路增益調整................................................................................. 6-19
6.3.7 共振抑制單元 ........................................................................................ 6-24
6.4 扭矩模式 ........................................................................................................ 6-27
Revision April 2008, Doc. Name: 2007PDD23000010
Page 10

目錄
|ASDA-AB
系列
6.4.1 扭矩命令的選擇 .................................................................................... 6-27
6.4.2 扭矩模式控制架構................................................................................. 6-28
6.4.3 扭矩命令的平滑處理 ............................................................................. 6-29
6.4.4 模擬命令端比例器................................................................................. 6-29
6.4.5 扭矩模式時序圖 .................................................................................... 6-30
6.5 混合模式 ........................................................................................................ 6-31
6.5.1 速度/位置混合模式 ............................................................................. 6-31
6.5.2 速度/扭矩混合模式 ............................................................................. 6-32
6.5.3 扭矩/位置混合模式 ............................................................................. 6-32
6.6 其他 ............................................................................................................... 6-34
6.6.1 速度限制的使用 .................................................................................... 6-34
6.6.2 扭矩限制的使用 .................................................................................... 6-34
6.6.3 回生電阻的選擇方法 ............................................................................. 6-35
6.6.4 模擬監視 ............................................................................................... 6-39
6.6.5 電磁剎車的使用 .................................................................................... 6-42
第七章 參數與功能
7.1 參數定義 ........................................................................................................ 7-1
7.2 參數一覽表 .................................................................................................... 7-2
7.3 參數說明 ........................................................................................................ 7-13
表 7.1 數字輸入(DI)功能定義表................................................................... 7-70
表 7.2 數字輸出(DO)功能定義表................................................................. 7-75
第八章 通訊功能
8.1 RS-232、RS-485、RS-422 通訊硬件界面..................................................... 8-1
Revision April 2008, Doc. Name: 2007PDD23000010
Page 11

目錄
|ASDA-AB
8.2 RS-232、RS-485、RS-422 通訊口參數 ........................................................ 8-5
8.3 MODBUS 通訊協議........................................................................................ 8-7
8.4 通訊參數的寫入與讀出................................................................................... 8-15
系列
第九章 基本檢測與保養
9.1 基本檢測 ........................................................................................................ 9-1
9.2 保養 ............................................................................................................... 9-2
9.3 機件使用壽命................................................................................................. 9-2
第十章 異警排除
10.1 異警一覽表 .................................................................................................... 10-1
10.2 異警原因與處置 ............................................................................................. 10-3
10.3 發生異常后解決異警的方法 ........................................................................... 10-9
第十一章 規格
11.1 伺服驅動器標準規格(ASDA-AB 系列) ....................................................... 11-1
11.2 伺服電機標準規格(ECMA 系列) ................................................................ 11-4
11.3 轉矩特性(T-N 曲線)................................................................................... 11-8
11.4 過負載的特性................................................................................................. 11-9
11.5 伺服驅動器外型尺寸 ...................................................................................... 11-17
11.6 伺服電機外型尺寸.......................................................................................... 11-21
11.7 電磁干擾濾波器(EMI Filter)選型................................................................ 11-24
第十二章 應用例說明
12.1 內部位置寄存器控制(含原點回歸功能) ...................................................... 12-1
12.2 定距離送料(內部增量位置命令)................................................................. 12-3
12.3 ASDA-AB 系列搭配台達 DVP-EH 應用 .......................................................... 12-4
Revision April 2008, Doc. Name: 2007PDD23000010
Page 12

目錄
|ASDA-AB
12.4 ASDA-AB 系列搭配台達 TP04 應用............................................................... 12-9
12.5 定位範例 ........................................................................................................ 12-11
12.6 分度功能 ........................................................................................................ 12-14
12.7 自動功能 ........................................................................................................ 12-25
12.8 原點回歸功能................................................................................................. 12-30
12.9 ASDA 系列伺服驅動器與其他廠牌 PLC 搭配接線圖 ...................................... 12-37
附錄 A 配件
系列
Revision April 2008, Doc. Name: 2007PDD23000010
Page 13

目錄
|ASDA-AB
系列
(此頁有意留為空白)
Revision April 2008, Doc. Name: 2007PDD23000010
Page 14
第一章 產品檢查與型號說明
1.1 產品檢查
為了防止本產品在購買與運送過程中的疏忽,請詳細檢查下表所列出的項目:
是否是所欲購買的產品:分別檢查電機與驅動器銘牌上的產品型號,可參閱下節所列
的型號說明
電機軸是否運轉平順:用手旋轉電機轉軸,如果可以平順運轉,代表電機轉軸是正常
的。但是,附有電磁剎車的電機,則無法用手平滑運轉!
外觀是否損傷:目視檢查是否外觀上有任何損壞或是刮傷
是否有鬆脫的螺絲:是否有螺絲未鎖緊或脫落
如果任何上述情形發生,請與代理商聯絡以獲得妥善的解決。
完整可操作的伺服組件應包括:
(1) 伺服驅動器及伺服電機。
(2) 一條 UVW 電機動力線,一端 U、V、W 三條線插至驅動器所附的母座,另一端為公
座與電機端的母座相接,還有一條綠色地線請鎖在驅動器的接地處。(選購品)
(3) 一條編碼器控制信號線與電機端編碼器的母座相接,一端接頭至驅動器 CN2,另一
端為公座。(選購品)
(4) 于 CN1 使用 50PIN 接頭(3M 式模擬產品)(選購品)
(5) 于 CN2 使用 20PIN 接頭(3M 式模擬產品)(選購品)
(6) 于 CN3 使用 6PIN 接頭(IEEE1394 模擬產品)(選購品)
(7) 5 PIN 快速接頭端子(L1、L2、R(L1M)、S(L2M)、T)(100W ~ 1.5kW 內建)
(8) 3 PIN 快速接頭(U、V、W)(100W ~ 1.5kW 內建)
(9) 3 PIN 快速接頭(P、D、C)(100W ~ 1.5kW 內建)
(10) 一支塑膠壓棒(100W ~ 1.5kW 內建)
(11) 一片金屬短路片(2kW ~ 2kW 內建)
(12) 一本安裝手冊
Revision April 2008, Doc. Name: 2007PDD23000010 1-1
Page 15
第一章 產品檢查與型號說明
|ASDA-AB
1.2 產品型號對照
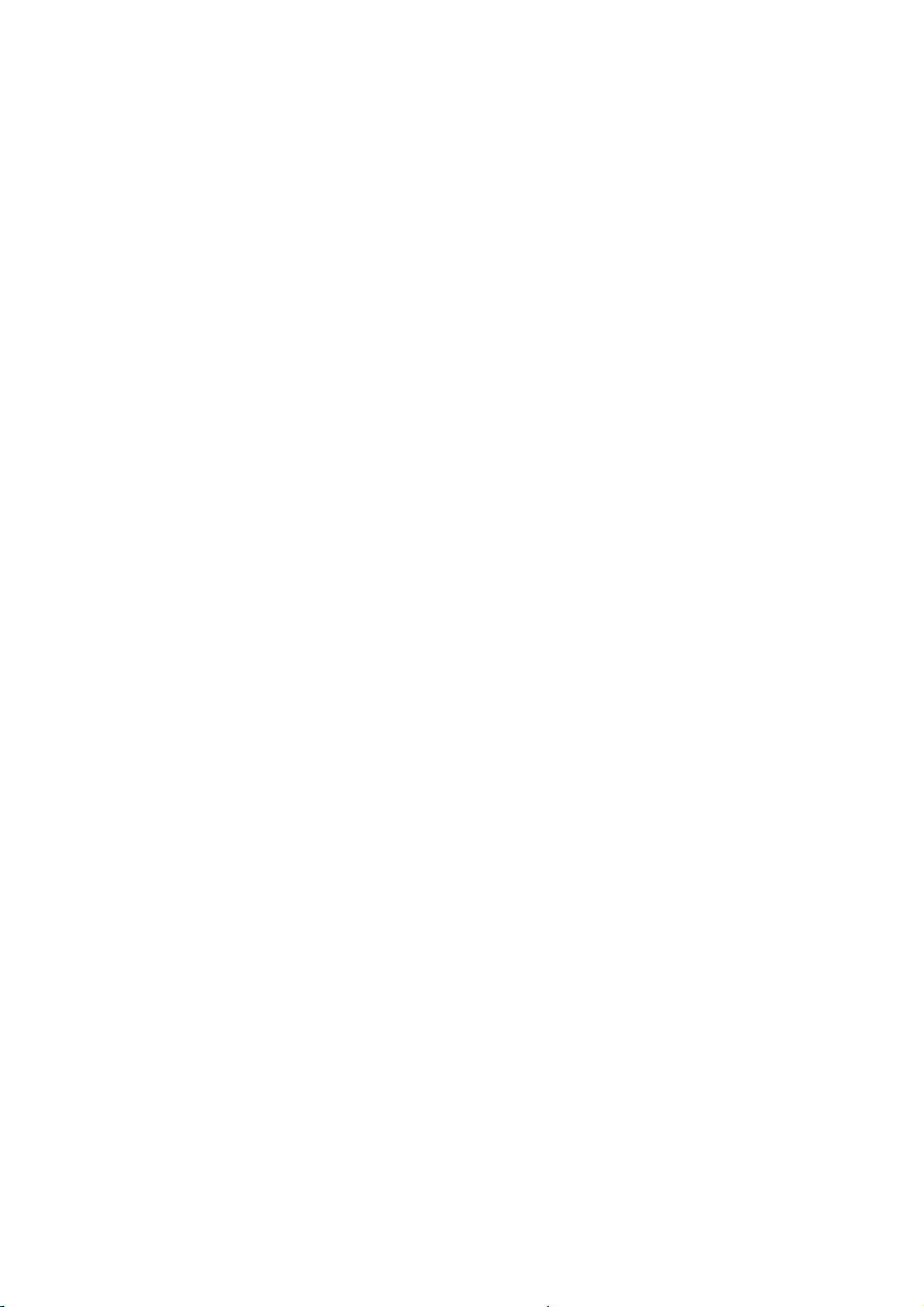
1.2.1 銘牌說明
ASDA-AB 系列伺服驅動器
銘牌說明
系列
序號說明
ECMA 系列伺服電機
銘牌說明
序號說明
1-2
Revision April 2008, Doc. Name: 2007PDD23000010
Page 16
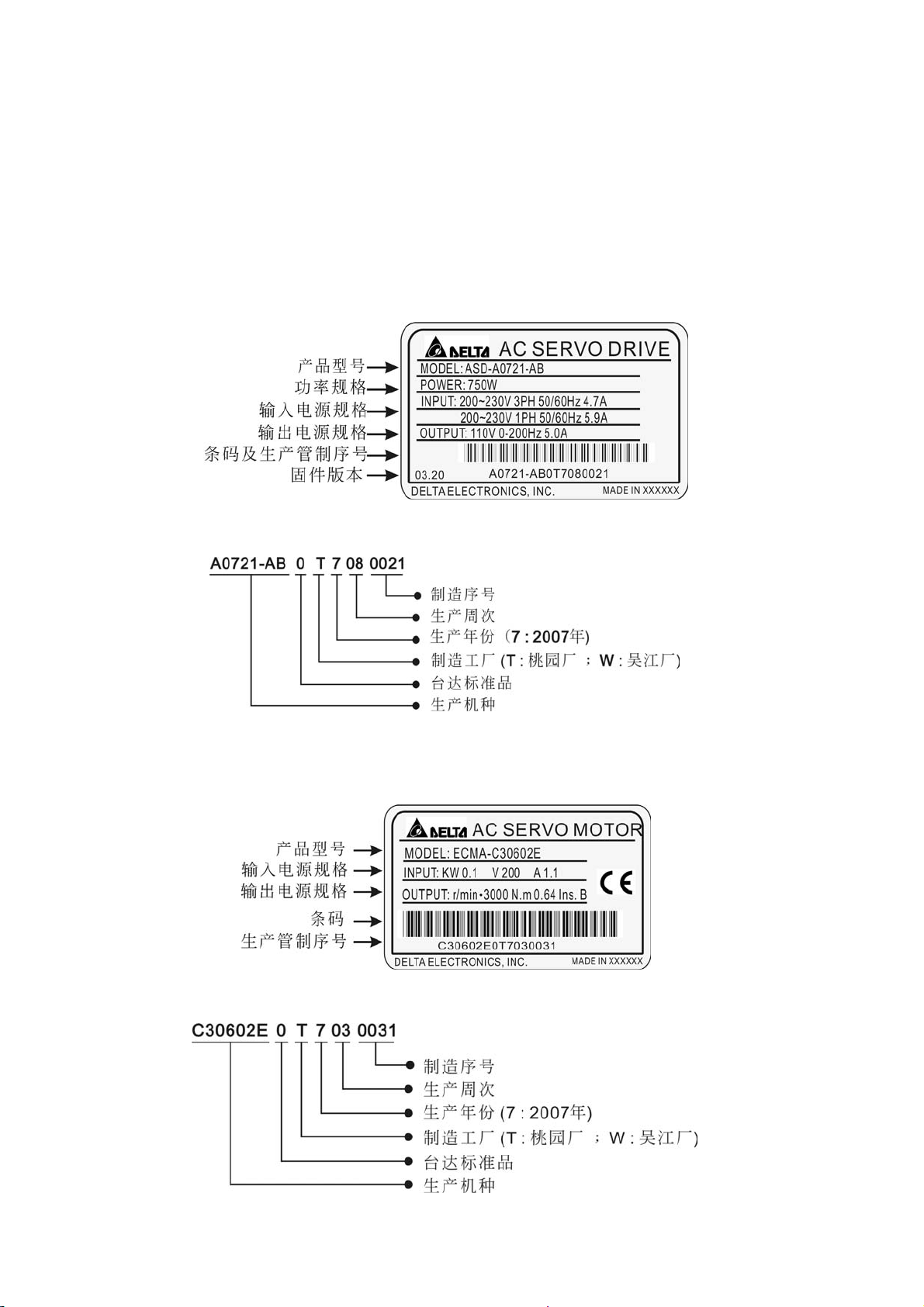
1.2.2 型號說明
ASDA-AB 系列伺服驅動器
第一章 產品檢查與型號說明
|ASDA-AB
系列
Revision April 2008, Doc. Name: 2007PDD23000010 1-3
Page 17
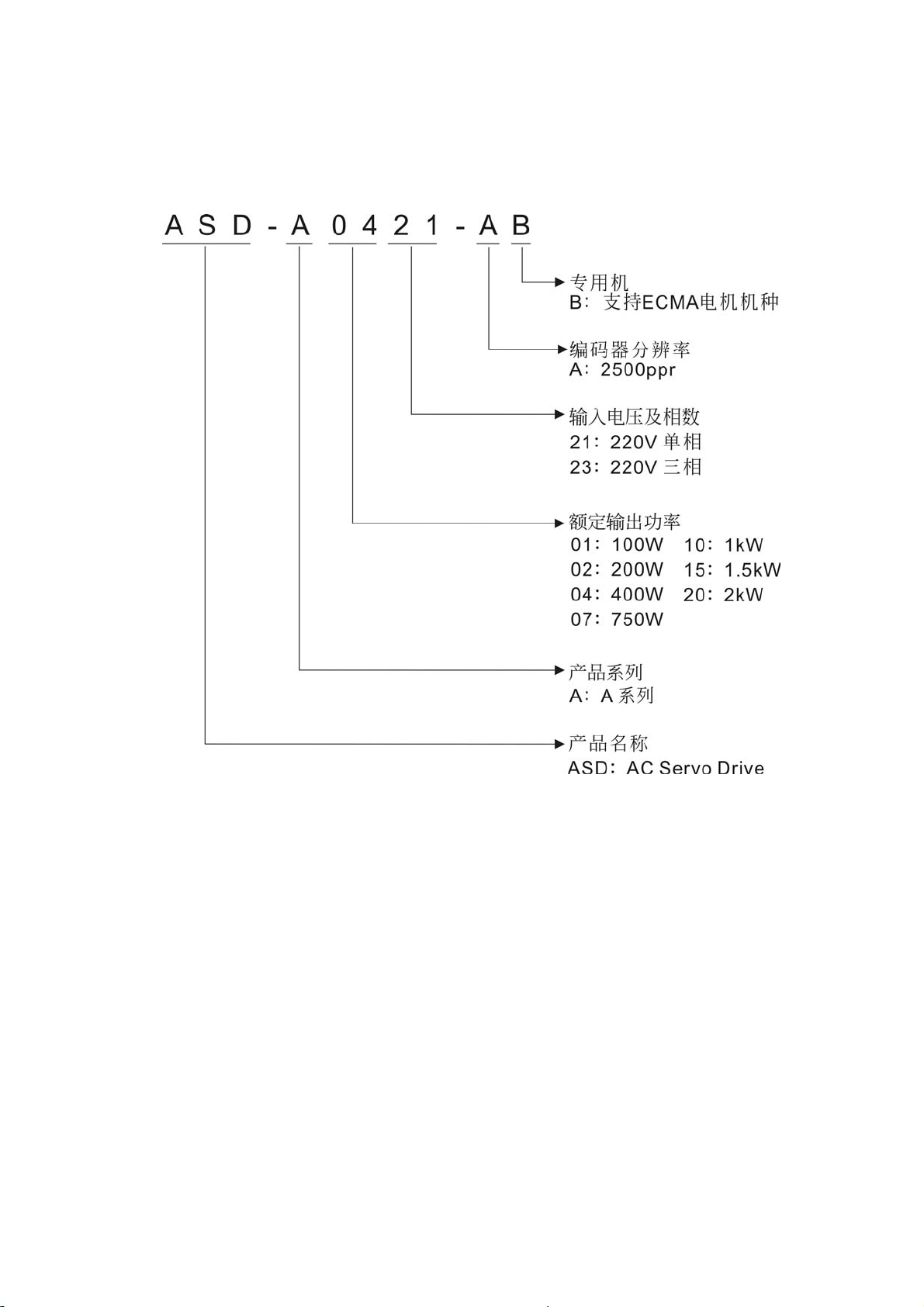
第一章 產品檢查與型號說明
ECMA 系列伺服電機
|ASDA-AB
系列
1-4
Revision April 2008, Doc. Name: 2007PDD23000010
Page 18
第一章 產品檢查與型號說明
1.3 伺服驅動器與電機機種名稱對應參照表
ASDA-AB 系列伺服驅動器
|ASDA-AB
系列
100W
200W
400W
750W ASD-A0721-AB
1000W ASD-A1021-AB
1500W ASD-A1521-AB
伺服驅動器 對應的伺服電機
ASD-A0111-AB
ASD-A0121-AB
ASD-A0211-AB
ASD-A0221-AB
ASD-A0411-AB
ASD-A0421-AB
ECMA-C30401S(S=8mm)
ECMA-C30602S(S=14mm)
ECMA-C30604S(S=14mm)
ECMA-C308047(7=14mm)
ECMA-E31305S(S=22mm)
ECMA-G31303S(S=22mm)
ECMA-C30807S(S=19mm)
ECMA-G31306S(S=22mm)
ECMA-C31010S(S=22mm)
ECMA-E31310S(S=22mm)
ECMA-G31309S(S=22mm)
ECMA-E31315S(S=22mm)
ECMA-C31020S(S=22mm)
2000W ASD-A2023-AB
為剎車或鍵槽/油封式樣
ECMA-E31320S(S=22mm)
ECMA-E31820S(S=35mm)
上表以伺服電機的額定電流的三倍來設計伺服驅動器的規格。如果使用者需要六倍于伺服電
機額定電流的伺服驅動器專用機,可咨詢經銷商。電機及驅動器的詳細規格可參照附錄。在
應用上,我們提供電機選取的程序(咨詢經銷商),可以提供使用者參考。如果選取電機的規
格比實際運用合理值不足時,電機及驅動器的平常操作電流大于額定電流,那么電機及驅動
器會有過熱危險,而且驅動器的過載保護也會因此動作。
Revision April 2008, Doc. Name: 2007PDD23000010 1-5
Page 19
第一章 產品檢查與型號說明
|ASDA-AB
系列
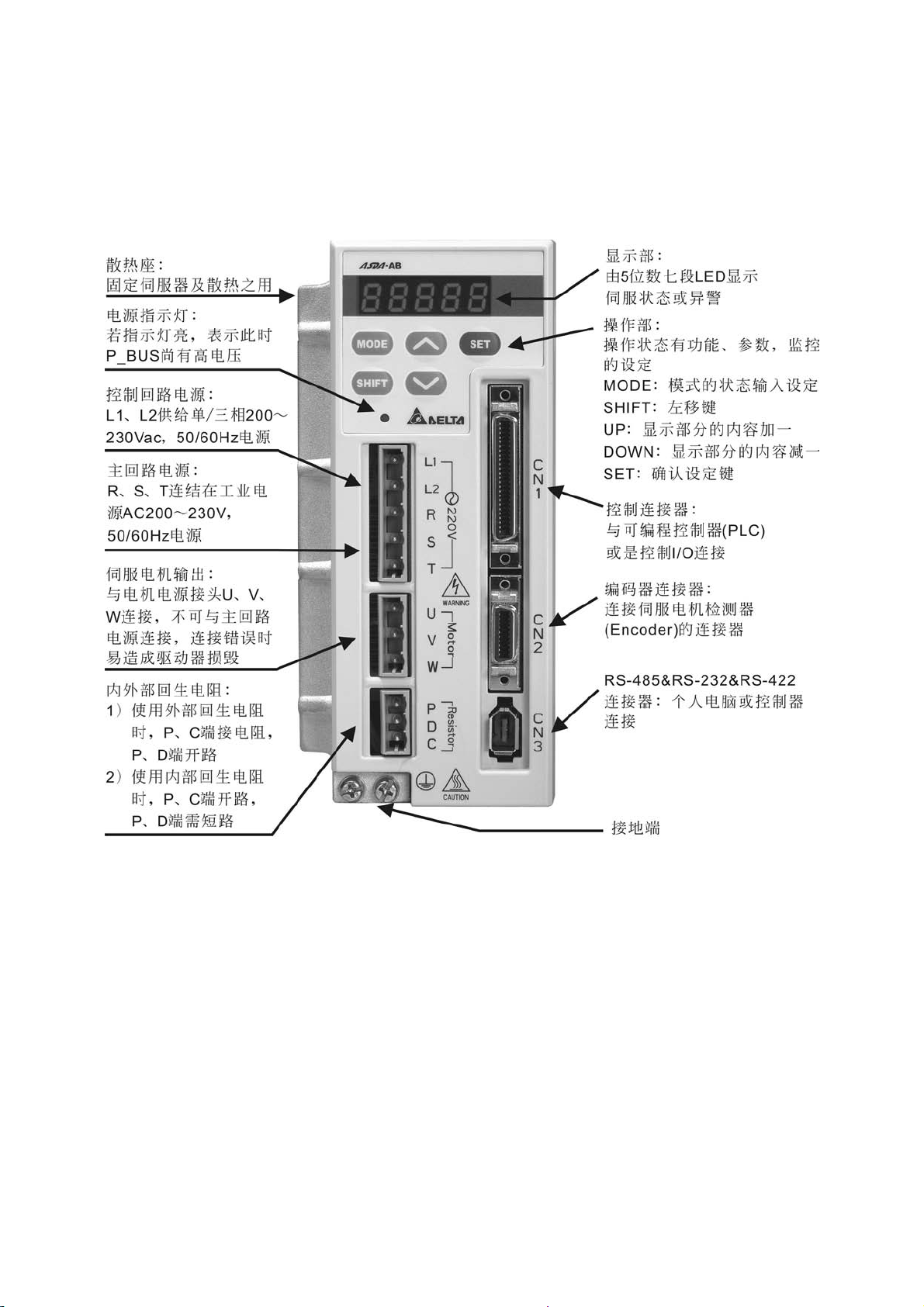
1.4 伺服驅動器各部名稱
1.4.1 ASDA-AB 系列伺服驅動器(220V系列)
1-6
Revision April 2008, Doc. Name: 2007PDD23000010
Page 20
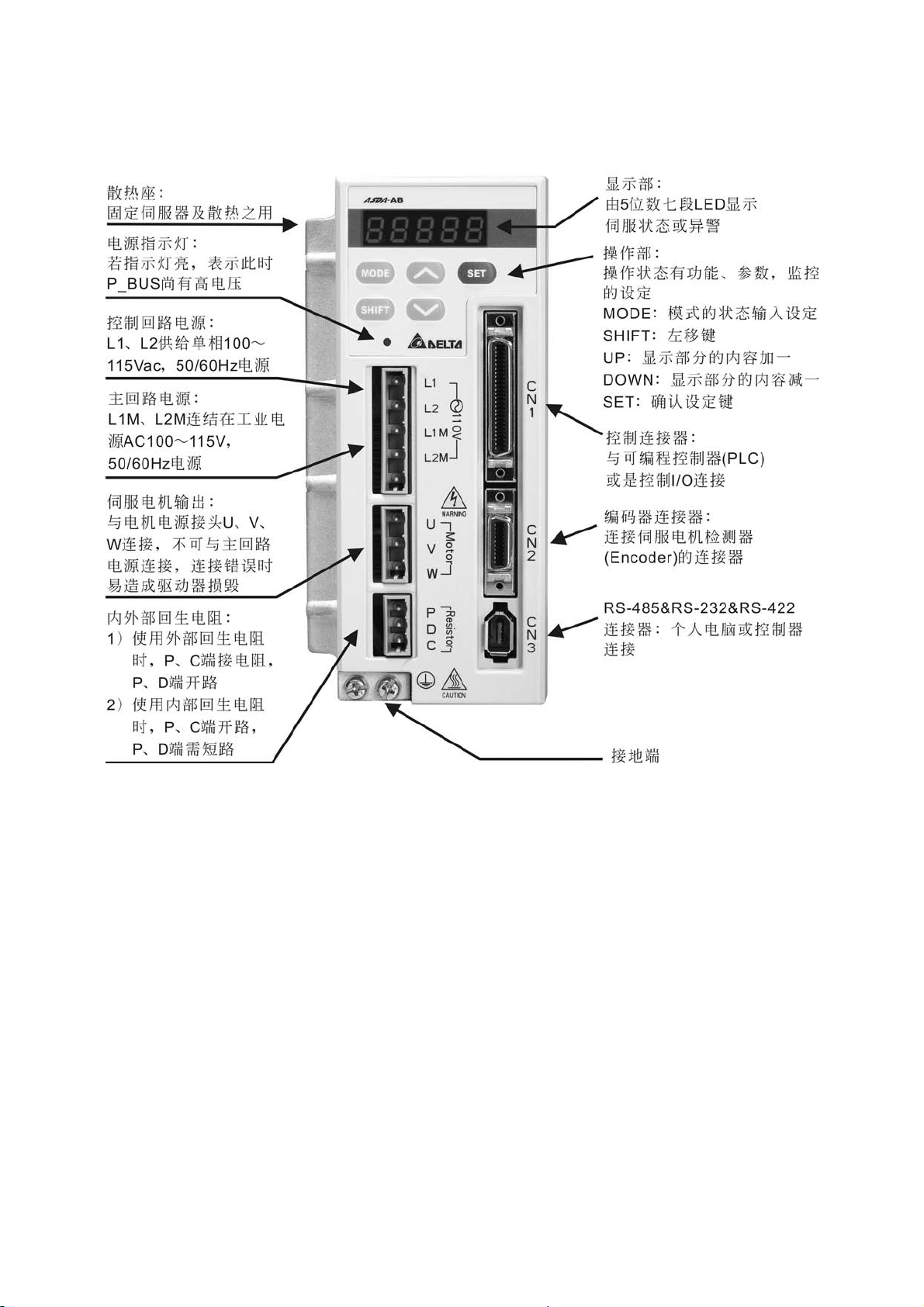
1.4.2 ASDA-AB 系列伺服驅動器(110V系列)
第一章 產品檢查與型號說明
|ASDA-AB
系列
Revision April 2008, Doc. Name: 2007PDD23000010 1-7
Page 21
第一章 產品檢查與型號說明
|ASDA-AB
系列
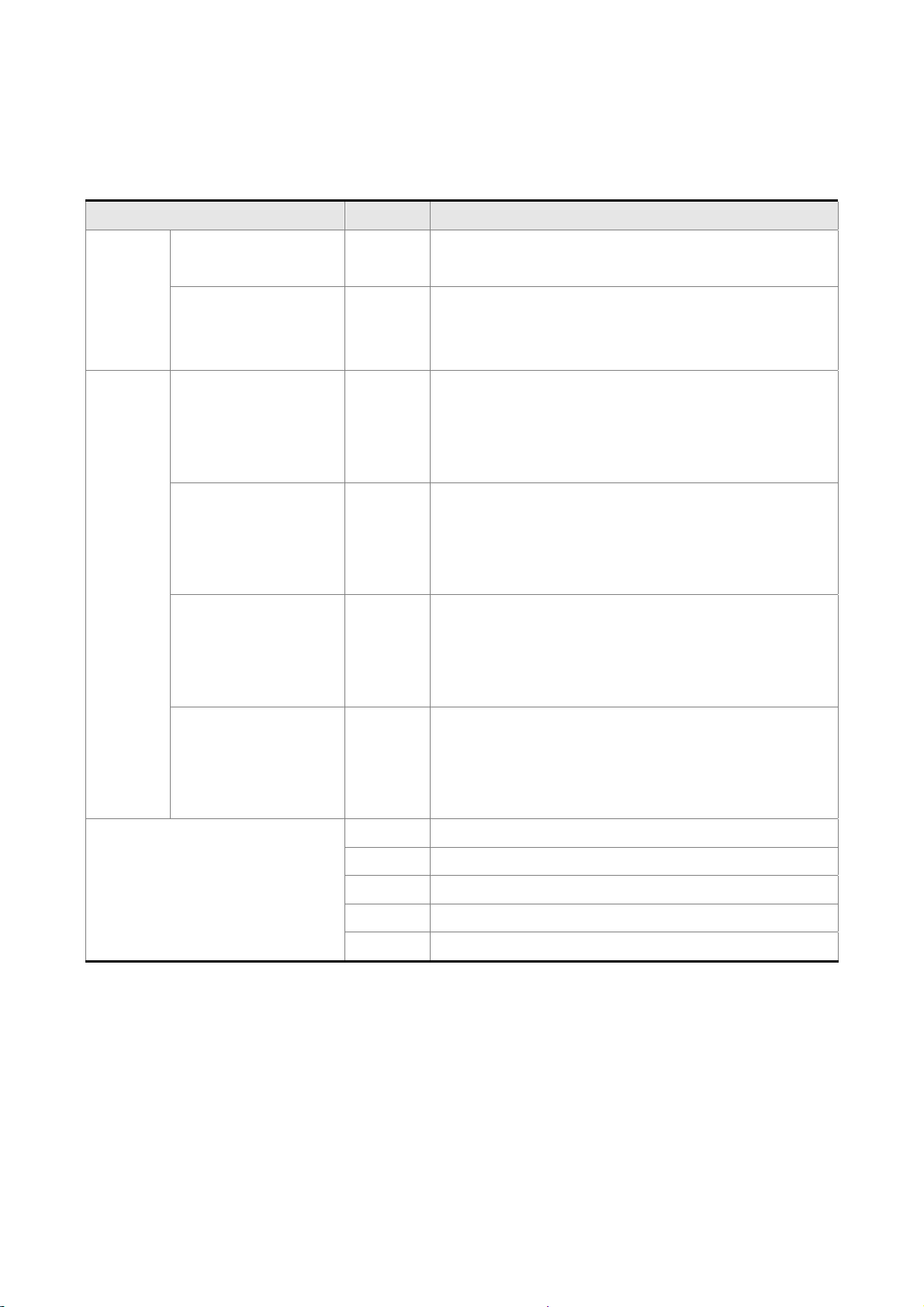
1.5 伺服驅動器操作模式簡介
本驅動器提供多種操作模式,可供使用者選擇,如下表所示:
模式名稱 模式代碼 說明
單一模式
單一模式
位置模式
(端子輸入)
位置模式
(內部寄存器輸入)
速度模式
速度模式
(無模擬輸入)
扭矩模式
Pt
Pr
S
Sz
T
驅動器接受位置命令,控制電機至目標位置。
位置命令由端子輸入,信號形態為脈衝。
驅動器接受位置命令,控制電機至目標位置。
位置命令由內部寄存器提供(共八組寄存器),可
利用 DI 信號選擇寄存器編號。
驅動器接受速度命令,控制電機至目標轉速。
速度命令可由內部寄存器提供(共三組寄存器),
或由外部端子輸入模擬電壓(-10V ~ +10V)。命令
的選擇是根據 DI 信號來選擇。
驅動器接受速度命令,控制電機至目標轉速。
速度命令僅可由內部寄存器提供(共三組寄存
器),無法由外部端子提供。命令的選擇是根據 DI
信號來選擇。
驅動器接受扭矩命令,控制電機至目標扭矩。
扭矩命令可由內部寄存器提供(共三組寄存器),
或由外部端子輸入模擬電壓(-10V ~ +10V)。命令
的選擇是根據 DI 信號來選擇。
驅動器接受扭矩命令,控制電機至目標扭矩。
扭矩模式
扭矩命令僅可由內部寄存器提供(共三組寄存
Tz
(無模擬輸入)
器),無法由外部端子提供。命令的選擇是根據 DI
信號來選擇。
混合模式
Pt-S
Pt-T
Pr-S
Pr-T
S-T
Pt 與 S 可通過 DI 信號切換
Pt 與 T 可通過 DI 信號切換
Pr 與 S 可通過 DI 信號切換
Pr 與 T 可通過 DI 信號切換
S 與 T 可通過 DI 信號切換
模式的選擇是通過參數 P1-01 來達成,當新模式設定后,必須將驅動器重新送電,新模式即
可生效!
1-8
Revision April 2008, Doc. Name: 2007PDD23000010
Page 22
1.6 斷路器與保險絲建議規格表
ASDA-AB 系列伺服驅動器
驅動器型號 斷路器 保險絲
操作模式 一般 一般
ASD-A0111-AB 10A 10A
ASD-A0211-AB 10A 10A
ASD-A0411-AB 20A 40A
ASD-A0121-AB 5A 5A
ASD-A0221-AB 5A 5A
ASD-A0421-AB 10A 20A
ASD-A0721-AB 10A 20A
ASD-A1021-AB 15A 25A
ASD-A1521-AB 20A 40A
第一章 產品檢查與型號說明
|ASDA-AB
系列
ASD-A2023-AB 30A 60A
Revision April 2008, Doc. Name: 2007PDD23000010 1-9
Page 23

第一章 產品檢查與型號說明
|ASDA-AB
系列
(此頁有意留為空白)
1-10
Revision April 2008, Doc. Name: 2007PDD23000010
Page 24
第二章 安裝
2.1 注意事項
下列請使用者特別注意:
1) 驅動器與電機連線不能拉緊;
2) 固定驅動器時,必須在每個固定處確實鎖緊;
3) 電機軸心必須與設備軸心桿對心良好;
4) 如果驅動器與電機連線超過 20 米,請在 UVW 連接線加粗,且編碼器連線必須加粗;
5) 電機固定四根螺絲必須鎖緊。
2.2 儲存環境條件
本產品在安裝之前必須置于其包裝箱內,若該機暫不使用,為了使該產品能夠符合本公司的
保固範圍內及日后的維護,儲存時務必注意下列事項:
必須置于無塵垢、干燥的位置。
儲存位置的環境溫度必須在-20℃到+65℃範圍內。
儲存位置的相對溼度必須在 0%到 90%範圍內,且無結露。
避免儲存于含有腐蝕性氣、液體的環境中。
最好適當包裝存放在架子或台面。
2.3 安裝環境條件
本產品驅動器使用環境溫度為 0℃ ~ 55℃。若環境溫度超過 45℃以上時,請置于通風良好的
場所。長時間的運轉建議在 45℃以下的環境溫度,以確保產品的可靠性能。如果本產品裝在
配電箱裡,那配電箱的大小及通風條件必須讓所有內部使用的電子裝置沒有過熱的危險。而
且也要注意機器的震動是否會影響配電箱的電子裝置。除此之外,使用的條件也包括:
無發高熱裝置的場所﹔
無水滴、蒸氣、灰塵及油性灰塵的場所;
無腐蝕、易燃性的氣、液體的場所﹔
Revision April 2008, Doc. Name: 2007PDD23000010 2-1
Page 25

第二章 安裝
|ASDA-AB
系列
無漂浮性的塵埃及金屬微粒的場所﹔
堅固無振動的場所﹔
無電磁噪聲干擾的場所。
本產品電機使用環境溫度為 0℃ ~ 40℃。使用的條件也包括:
無發高熱裝置的場所﹔
無水滴、蒸氣、灰塵及油性灰塵的場所﹔
無腐蝕、易燃性的氣、液體的場所﹔
無漂浮性的塵埃及金屬微粒的場所﹔
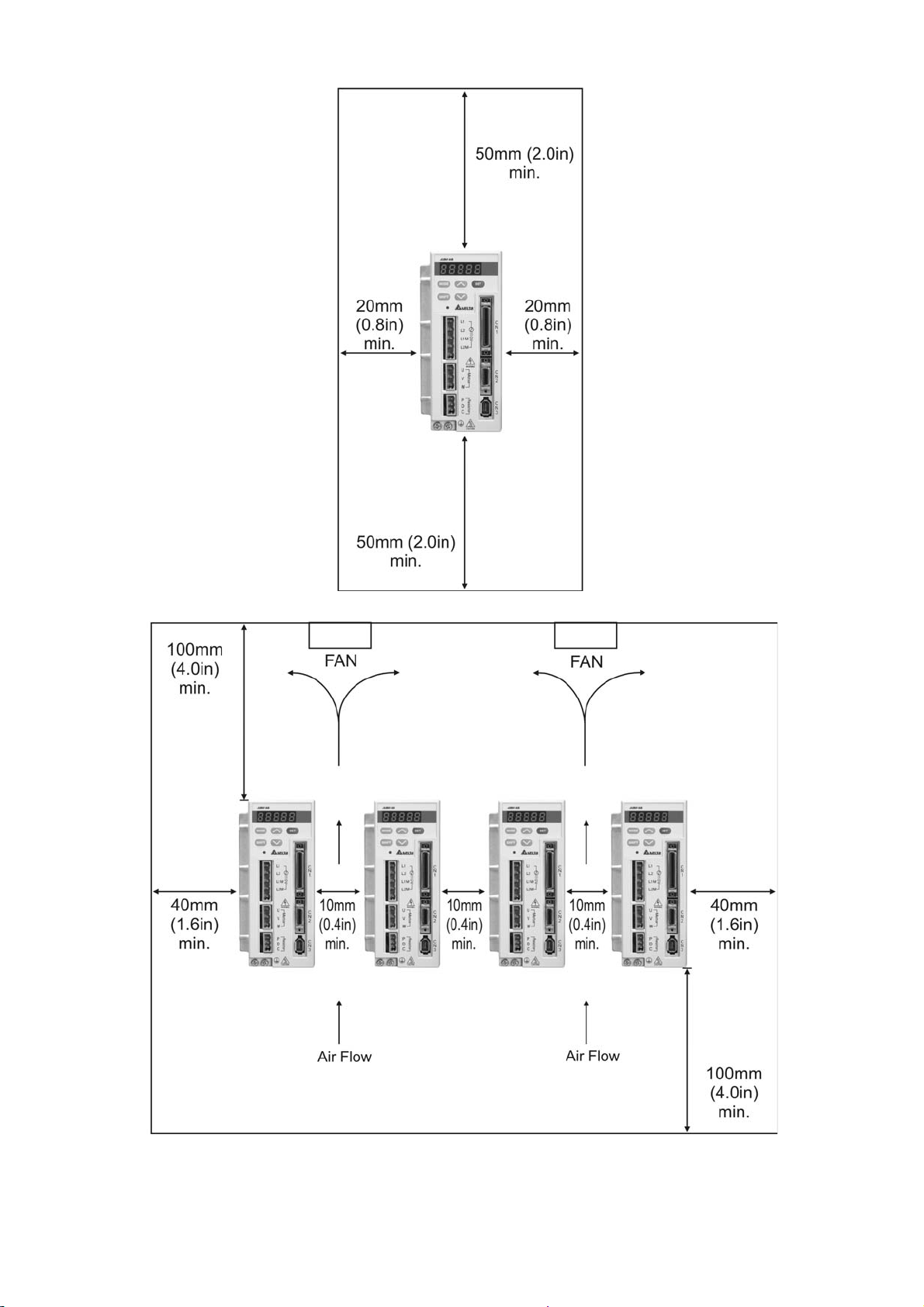
2.4 安裝方向與空間
注意事項:
安裝方向必須依規定,否則會造成故障原因。為了使冷卻循環效果良好,安裝交流伺服驅動
器時,其上下左右與相鄰的物品和擋板(牆)必須保持足夠的空間,否則會造成故障原因。
交流伺服驅動器在安裝時其吸、排氣孔不可封住,也不可傾倒放置,否則會造成故障。
安裝示意圖:
為了使散熱風扇能夠有比較低的風阻以有效排出熱量,請使用者遵守一台與多台交流伺服驅
動器的安裝間隔距離建議值(如下圖所示)。
2-2
Revision April 2008, Doc. Name: 2007PDD23000010
Page 26
第二章 安裝
|ASDA-AB
系列
Revision April 2008, Doc. Name: 2007PDD23000010 2-3
Page 27

第二章 安裝
|ASDA-AB
系列
(此頁有意留為空白)
2-4
Revision April 2008, Doc. Name: 2007PDD23000010
Page 28
第三章 配線
本章說明伺服驅動器的接線方法與各種信號的意義,以及列出各種模式下的標準接線圖。
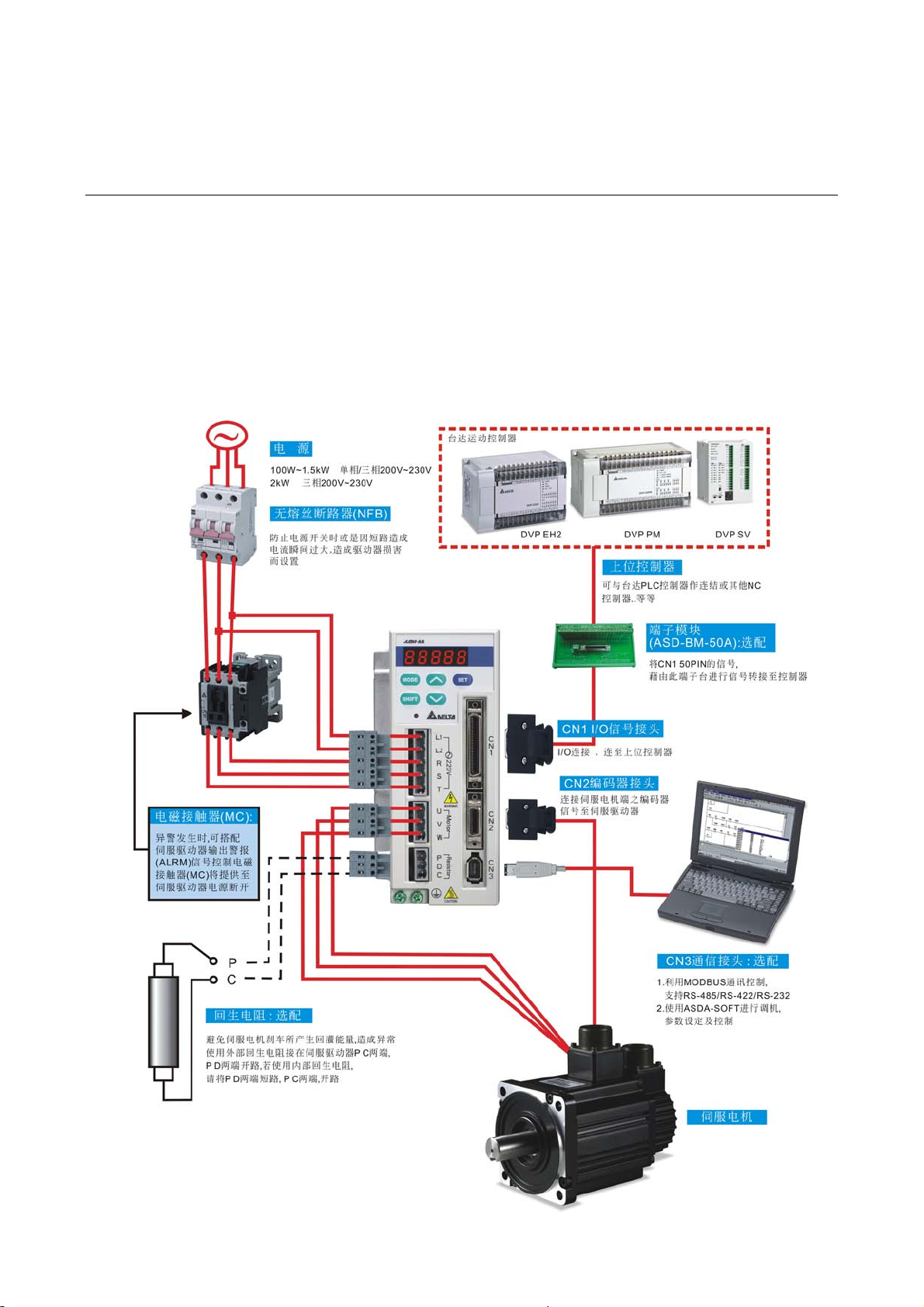
3.1 週邊裝置與主電源迴路連接
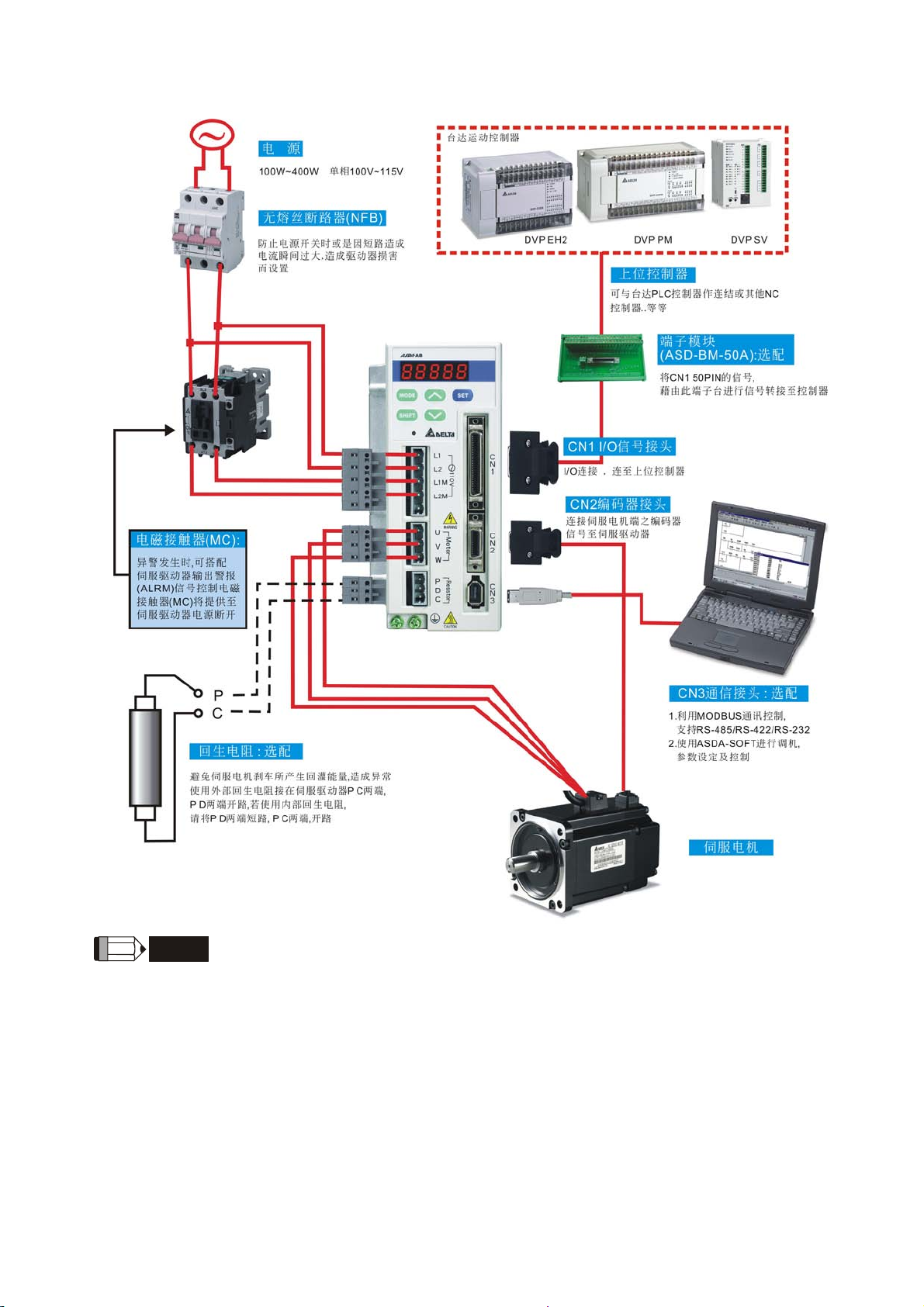
3.1.1 週邊裝置接線圖
220V 系列:
Revision April 2008, Doc. Name: 2007PDD23000010 3-1
Page 29
第三章 配線
110V 系列:
|ASDA-AB
系列
NOTE
安裝注意事項:
1) 檢查 R、S、T(L1M、L2M)與 L1、L2 的電源和接線是否正確。
2) 確認伺服電機輸出 U、V、W 端子相序接線是否正確,接錯電機可能
不轉或亂轉。
3) 使用外部回生電阻時,需將 P、D 端開路、外部回生電阻應接于 P、C
端,若使用內部回生電阻時,則需將 P、D 端短路且 P、C 端開路。
4) 異警或緊急停止時,利用 ALARM 或是 WARN 輸出將電磁接觸器(MC)
斷電,以切斷伺服驅動器電源。
5) 在 11 0V 機種,已將三相電源標示法 R 改為 L1M,S 改為 L2M,成為
單相入電,其原先 T 相入電位置已無任何作用(無回路)。
3-2 Revision April 2008, Doc. Name: 2007PDD23000010
Page 30
第三章 配線
|ASDA-AB
系列
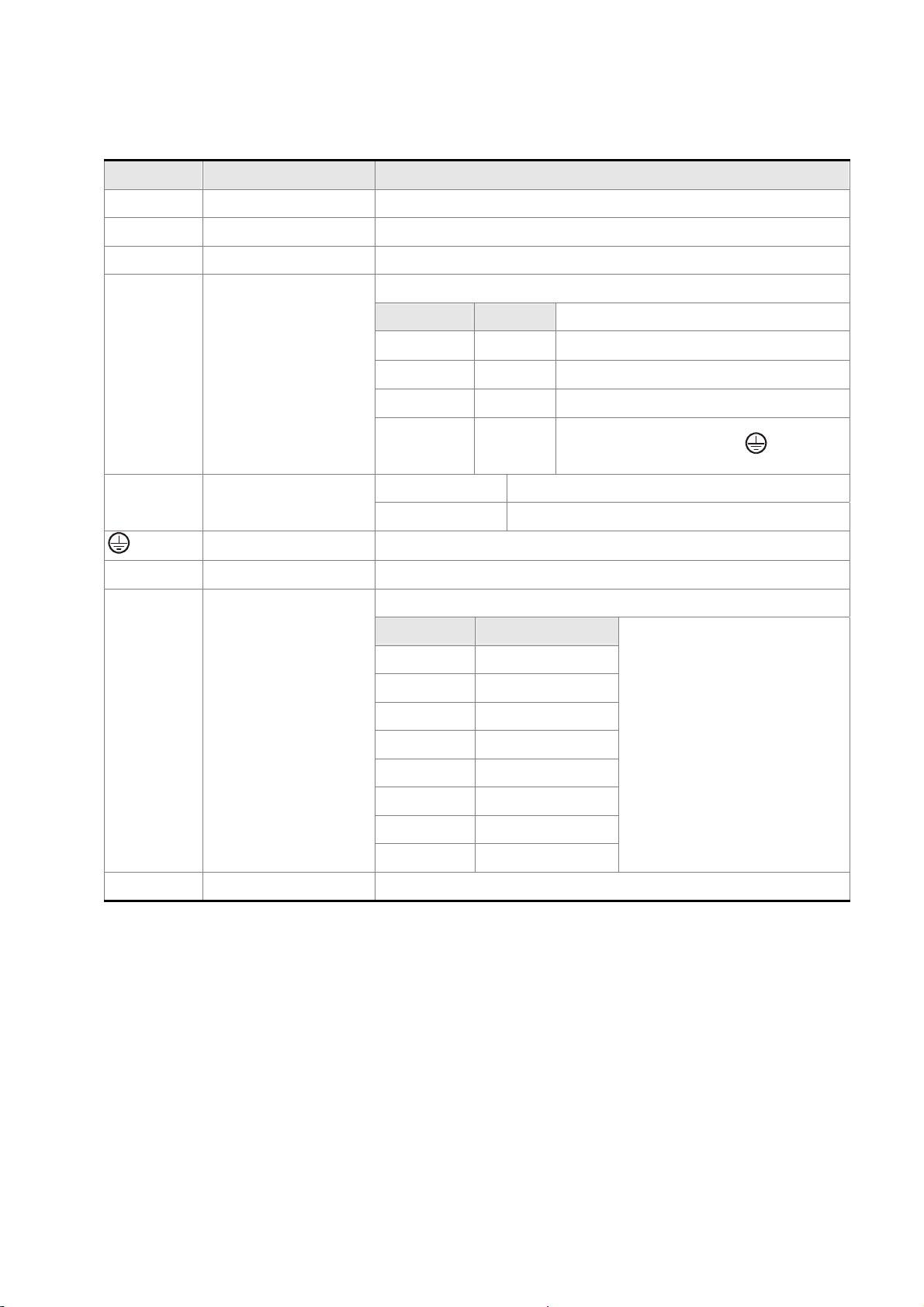
3.1.2 驅動器的連接器與端子
端子記號 名稱 說明
L1、L2 控制迴路電源輸入端 連接單相交流電源。(根據產品型號,選擇適當的電壓規格)
L1M、L2M 主迴路電源輸入端
連接單相交流電源。(根據產品型號,選擇適當的電壓規格)
R、S、T 主迴路電源輸入端 連接三相交流電源。(根據產品型號,選擇適當的電壓規格)
U、V、W
FG
電機連接線
連接至電機
端子記號 線色
U
V
W
FG
紅
白
黑
綠
電機三相主電流電力線
連接至驅動器的接地處
使用內部電阻 P、D 端短路,P、C 端開路 P、D、C 回生電阻端子
使用外部電阻 電阻接于 P、C 兩端,且 P、D 端開路
兩處
CN1
CN2
接地保護端子 連接至電源地線以及電機的地線
I/O 連接器 連接上位控制器,參見 3.3 節
編碼器連接器
連接電機的編碼器,參見 3.4 節
端子記號 線色
A
藍
CN3
/A
B
/B
Z
/Z
+5V
GND
藍/黑
綠
綠/黑
黃
黃/黑
紅與紅/白
黑與黑/白
通訊口連接器 連接個人電腦(PC 或 NOTEBOOK),參見 3.5 節
下列為接線時必須特別注意的事項:
1) 當電源切斷時,因為驅動器內部大電容含有大量的電荷,請不要接觸 R、S、T(L1M、
L2M)及 U、V、W 這六條大電力線。請等待充電燈熄滅時,方可接觸。
2) R、S、T(L1M、L2M)及 U、V、W 這六條大電力線不要與其他信號線靠近,儘
可能間隔 30 厘米(11.8 英吋)以上。
3) 如果編碼器連線需要加長時,請使用雙絞並附屏蔽接地的信號線。請不要超過 20
米(65.62 英呎),如果要超過 20 米,請使用線徑大一倍的信號線,以確保信號不
會衰減太多。
4) 線材選擇請參考 3.1.6 節。
Revision April 2008, Doc. Name: 2007PDD23000010 3-3
Page 31

第三章 配線
|ASDA-AB
系列
3.1.3 電源接線法
伺服驅動器電源接線法分為單相、三相、220V 與 110 V 三種,220V 單相僅容許用于 1.5kW
與 1.5kW 以下機種,110V 單相僅容許用于 400W 與 400W 以下機種。圖中,Power ON
為 a 接點,OFF 與 Alarm Processing 為 b 接點。MC 為電磁接觸器線圈及斷電保持,與主
迴路電源接點。
單相電源接線法(1.5kW 與 1.5kW 以下適用,220V 系列)
3-4 Revision April 2008, Doc. Name: 2007PDD23000010
Page 32

單相電源接線法(400W 與 400W 以下適用,110V 系列)
第三章 配線
|ASDA-AB
系列
三相電源接線法(全機種皆適用,220V 系列)
Revision April 2008, Doc. Name: 2007PDD23000010 3-5
Page 33

第三章 配線
|ASDA-AB
系列
3.1.4 電機 U、V、W 引出線的連接頭規格
電機型號 U、V、W/電磁剎車連接頭 端子定義
ECMA-C30401S (100W)
ECMA-C30602S (200W)
ECMA-C30604S (400W)
ECMA-C308047 (400W)
ECMA-C30807S (750W)
ECMA-C30602S (200W)
ECMA-C30604S (400W)
ECMA-C308047 (400W)
ECMA-C30807S (750W)
ECMA-G31303S (300W)
ECMA-E31305S (500W)
ECMA-G31306S (600W)
ECMA-G31309S (900W)
ECMA-C31010S (1000W)
ECMA-E31310S (1000W)
ECMA-E31315S (1500W)
ECMA-C31020S (2000W)
ECMA-E31320S (2000W)
A
HOUSING: JOWLE (C4201H00-2*2PA)
B
HOUSING: JOWLE (C4201H00-2*3PA)
C
3106A-20-18S
ECMA-E31820S (2000W)
D
3106A-24-11S
U
CASE GROUND
BRAKE1
BRAKE2
接線名稱
(紅) V (白) W (黑)
端子定義 A
端子定義 B
端子定義 C
端子定義 D
3-6 Revision April 2008, Doc. Name: 2007PDD23000010
1 2 3 4 - -
1 2 4 5 3 6
F I B E G H
D E F G A B
(綠)
(黃)
(藍)
Page 34

第三章 配線
|ASDA-AB
系列
線材選擇請使用電線以 600V 乙烯樹脂電線為基準,配線長度 30 米以下,超過 30 米的場
合請考慮電壓降來選定電線尺寸,線材選擇請參考 3.1.6 節的說明。
NOTE
1) 剎車線圈並沒有極性,接線名稱為 BRAKE1 & BRAKE2。
2) 剎車用電源為 DC24V,嚴禁與控制信號電源 VDD 共用。
3.1.5 編碼器引出線連接頭規格
電機型號 Encoder 連接頭 端子定義
ECMA-C30401S (100W)
ECMA-C30602S (200W)
ECMA-C30604S (400W)
ECMA-C308047 (400W)
ECMA-C30807S (750W)
ECMA-G31303S (300W)
ECMA-E31305S (500W)
ECMA-G31306S (600W)
A
HOUSING: AMP (1-172161-9)
ECMA-G31309S (900W)
ECMA-C31010S (1000W)
ECMA-E31310S (1000W)
ECMA-E31315S (1500W)
ECMA-C31020S (2000W)
ECMA-E31320S (2000W)
ECMA-E31820S (2000W)
A
B
A
(藍)
/A
(藍/黑) B (綠)
1 4 2 5 3 6 7 8 9
A
(藍)
/A
(藍/黑) B (綠)
A B C D F G S R L
接線名稱
AMP
(1-172161-9)
端子定義
接線名稱
3106A-20-29S
端子定義
3106A-20-29S
/B
(綠/黑)Z (黃)
/B
(綠/黑)Z (黃)
/Z
(黃/黑)
/Z
(黃/黑)
+5V
(紅&紅/白)
+5V
(紅&紅/白)
GND
(黑&黑/
)
白
GND
(黑&黑/
)
白
B
BRAID
SHELD
BRAID
SHELD
線材選擇請使用附屏蔽網線的多芯線,而屏蔽網線要確實與 SHIELD 端相連接,線材選擇
請參考 3.1.6 節的說明。
Revision April 2008, Doc. Name: 2007PDD23000010 3-7
Page 35

第三章 配線
|ASDA-AB
系列
3.1.6 線材的選擇
本驅動器各端子與信號配線的建議線材,如下表所示:
電源配線-線徑 mm² (AWG)
驅動器與對應電機型號
ASD-A0111-AB
ECMA-C30401S
ASD-A0121-AB
ASD-A0211-AB
ECMA-C30602S
ASD-A0221-AB
ECMA-C30604S
ASD-A0411-AB
ASD-A0421-AB
ECMA-C308047
ECMA-E31305S
ECMA-G31303S
ECMA-C30807S
ASD-A0721-AB
ECMA-G31306S
ECMA-C31010S
ASD-A1021-AB
ECMA-E31310S
ECMA-G31309S
ASD-A1521-AB ECMA-E31315S
L1, L2
U, V, W P, C
(L1M, L2M)
1.3(AWG16)2.1(AWG14)0.82(AWG18) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)0.82(AWG18) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)0.82(AWG18) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)0.82(AWG18) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)0.82(AWG18) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)0.82(AWG18) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)0.82(AWG18) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)0.82(AWG18) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)1.3(AWG16) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)1.3(AWG16) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)1.3(AWG16) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)1.3(AWG16) 2.1(AWG14)
R, S, T
ASD-A2023-AB
驅動器型號
ASD-A0111-AB
ASD-A0121-AB
ASD-A0211-AB
ASD-A0221-AB
ASD-A0411-AB
ASD-A0421-AB
ASD-A0721-AB
ASD-A1021-AB
ASD-A1521-AB
ASD-A2023-AB
ECMA-C31020S
ECMA-E31320S
ECMA-E31820S
1.3(AWG16)2.1(AWG14)2.1(AWG14) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)2.1(AWG14) 2.1(AWG14)
1.3(AWG16)2.1(AWG14)3.3(AWG12) 2.1(AWG14)
編碼器配線 — 線徑mm² (AWG)
芯線尺寸 芯線條數 線種規範 標準線長
0.13(AWG26) 10 條(4 對)
0.13(AWG26) 10 條(4 對)
0.13(AWG26) 10 條(4 對)
0.13(AWG26) 10 條(4 對)
0.13(AWG26) 10 條(4 對)
0.13(AWG26) 10 條(4 對)
0.13(AWG26) 10 條(4 對)
UL2464
UL2464
UL2464
UL2464
UL2464
UL2464
UL2464
3 米(9.84 英呎)
3 米(9.84 英呎)
3 米(9.84 英呎)
3 米(9.84 英呎)
3 米(9.84 英呎)
3 米(9.84 英呎)
3 米(9.84 英呎)
3-8 Revision April 2008, Doc. Name: 2007PDD23000010
Page 36

第三章 配線
|ASDA-AB
系列
NOTE
1)編碼器的配線請使用雙絞屏蔽電纜 (shielded twisted-pair cable),
以減低噪聲的干擾。
2)屏蔽線必須確實與 SHIELD 端 相連接。
3)配線時,請按照線材選擇進行配線,避免危險事件發生。
Revision April 2008, Doc. Name: 2007PDD23000010 3-9
Page 37

第三章 配線
|ASDA-AB
系列
3.2 伺服系統基本方塊圖
220V 系列:
3-10 Revision April 2008, Doc. Name: 2007PDD23000010
Page 38

第三章 配線
|ASDA-AB
系列
Revision April 2008, Doc. Name: 2007PDD23000010 3-11
Page 39

第三章 配線
|ASDA-AB
110V 系列:
系列
3-12 Revision April 2008, Doc. Name: 2007PDD23000010
Page 40

第三章 配線
|ASDA-AB
3.3 CN1 I/O 信號接線
3.3.1 CN1 I/O 連接器端子 Layout
為了更有彈性與上位控制器互相溝通,我們提供可任意規劃的 5 組輸出及 8 組輸入。控制
器提供的八個輸入設定與五個輸出分別為參數 P2-10 ~ P2-17 與參數 P2-18 ~ P2-22。除
此之外,還提供差動輸出的編碼器 A+,A-,B+,B-,Z+,Z-信號,以及模擬轉矩命令輸
入和模擬速度命令輸入。其接腳圖如下:
系列
Revision April 2008, Doc. Name: 2007PDD23000010 3-13
Page 41

第三章 配線
|ASDA-AB
系列
2 DO3-
4 DO2-
6 DO1-
8 DI4-
10 DI2-
12 GND
14 NC
16 MON1
T_RE
18
F
20 VCC
22 /OA
24 /OZ
數字輸出
數字輸出
數字輸出
數字輸入
數字輸入
模擬輸入信
號的地
無作用
模擬數據
監視輸出 1
模擬命令輸入
轉矩
+12 電源輸出
(模擬命令用)
編碼器
/A 脈衝輸出
編碼器
/Z 脈衝輸出
1 DO4+
3 DO3+
5 DO2+
7 DO1+
9 DI1-
11 COM+
13 GND
15 MON2
17 VDD
19 GND
21 OA
23 /OB
25 OB
數字輸出
數字輸出
數字輸出
數字輸出
數字輸入
電源輸入端
(12~24V)
模擬輸入信號
的地
模擬數據監視
輸出 2
+24V 電源輸
出(外部 I/O
用)
模擬輸入信號
的地
編碼器 A 脈
衝輸出
編碼器/B 脈
衝輸出
編碼器 B 脈
衝輸出
26 DO4-
27 DO5-
29 NC
31 DI7-
33 DI5-
35 PULL HI
37 /SIGN
39 NC
41 /PULSE
43 PULSE
45 COM-
47 COM-
49 COM-
數字輸出
無作用
數字輸入
數字輸入
指令脈衝的
外加電源
位置指令符
號(-)
無作用
位置指令脈
衝(-)
位置指令脈
衝(+)
VDD(24V)
電源的地
VDD(24V)
電源的地
VDD(24V)
電源的地
28 DO5+
30 DI8-
32 DI6-
34 DI3-
36 SIGN
38 NC
40 NC
42 V_REF
44 GND
46 NC
48 OCZ
50 OZ
NOTE
1) NC 代表 NO CONNECTION,此端子由驅動器內部使用,請勿連接,
以免造成損壞!
數字輸出
數字輸出
數字輸入
數字輸入
數字輸入
位置指令符號
(+)
無作用
無作用
模擬命令輸
入速度(+)
模擬輸入信號
的地
無作用
編碼器 Z 脈衝
開集極輸出
編碼器 Z 脈衝
差動輸出
3-14 Revision April 2008, Doc. Name: 2007PDD23000010
Page 42

3.3.2 CN1 I/O 連接器信號說明
前一節所列的信號,在此詳加說明:
一般信號
第三章 配線
|ASDA-AB
系列
信號名稱
模擬命令
(輸入)
模擬數據
監視
(輸出)
位置脈衝
命令
(輸入)
Pin No
V_REF 42
T_REF 18
MON1
MON2
PULSE
/PULSE
SIGN
/SIGN
16
15
43
41
36
37
PULL HI 35
功能
電機的速度命令-10V ~ +10V,代表 -3000 ~
+3000 r/min 的轉速命令。
電機的扭矩命令-10V ~ +10V,代表 -100% ~
+100%額定扭矩命令。
電機的運轉狀態:例如轉速與電流,可以用模
擬電壓方式來表示,本驅動器提供兩個
Channel 的輸出,使用者可以利用參數 P0-03
來選擇所欲監視的數據。本信號是以電源的地
(GND)為基準。
位置脈衝可以用差動(Line Driver)或集極開
路方式輸入,命令的形式也可分成三種(正逆
轉脈衝、脈衝與方向、AB 相脈衝),可由參數
P1-00 來選擇。
當位置脈衝使用集極開路方式輸入時,必須將
本端子連接至一外加電源,提供 DC24V 電源。
接線方式
(參考 3.3.3)
C1
C1
C2
C3/C4
C3
位置脈衝
命令
(輸出)
電源
OA
/OA
OB
/OB
OZ
/OZ
21
22
25
23
50
24
VDD 17
11
COM+
COM-
45
47
49
VCC 20
將編碼器的 A、B、Z 信號以差動(Line Driver)
方式輸出。
VDD 是驅動器所提供的+24V 電源,用以提供
DI 與 DO 信號使用,可承受 500mA。
COM+是 DI 與 DO 的電壓輸入共同端,當電
壓使用 VDD 時,必須將 VDD 連接至 COM+。
若不使用 VDD 時,必須由使用者提供外加電
源(+12V ~ +24V),此外加電源的正端必須
連至 COM+,而負端連接至 COM-。
VCC 是驅動器所提供的+12V 電源,用以提供
簡易的模擬命令(速度或扭矩)使用,可承受
100mA。
C11/C12
-
-
Revision April 2008, Doc. Name: 2007PDD23000010 3-15
Page 43

第三章 配線
|ASDA-AB
系列
信號名稱
Pin No
功能
(參考 3.3.3)
12,13,
接線方式
電源
GND
VCC 電壓的基準是 GND。
-
19,44
14,29,
其他
NC
38,39,
40,46,
NO CONNECTION,此端子由驅動器內部使
-
用,請勿連接,以免造成損壞!
48
由于本驅動器的操作模式繁多(請參考 1.5 節),而各種操作模式所需用到的 I/O 信號不盡
相同,為了更有效率的利用端子,因此 I/O 信號的選擇必須採用可規劃的方式,換言之,
使用者可自由選擇 DI/DO 的信號功能,以符合自己的需求.然而,預設的 DI/DO 信號根據
選用的操作模式,已選擇了適當的信號功能,可以符合一般應用的需求。
3-16 Revision April 2008, Doc. Name: 2007PDD23000010
Page 44

第三章 配線
|ASDA-AB
系列
使用者必須先根據自己的需要,選擇操作模式(各種模式簡介請參考 1.5 節),然后對照下
列 DI/DO 表,即可知在該模式之下,預設的 DI/DO 信號以及其 Pin No 以利進行接線。
下表列出預設的 DI/DO 信號功能與接腳編號:
預設 DO 信號說明如下
DO 信號名稱 操作模式
Pin No
+ -
SRDY ALL 7 6
SON
無
- -
ZSPD ALL 5 4
TSPD
ALL(Pt, Pr 除外)
- -
Pt, Pr, Pt-S,
TPOS
1 26
Pt-T, Pr-S, Pr-T
TQL
無
- -
ALRM ALL 28 27
功能
當驅動器通電后,控制迴路與電機
電源迴路均無異警(ALRM)發生
時,此輸出為 ON。
當輸入 SON 為 ON,電機伺服迴路
可以順利運作后,此輸出為 ON。
當電機轉速小于參數 P1-38 設定值
時,此輸出為 ON。
當電機的實際轉速(r/min)大于參
數 P1-39 設定值時,此輸出為 ON。
當電機命令與實際位置的誤差
(PULSE)小于參數 P1-54 設定值
時,此輸出為 ON。
扭矩限制動作中,此輸出為 ON。
伺服驅動器異警發生。(除了正反極
限、緊急停止、通訊異常、低電壓
接線方式
(參考 3.3.3)
C5/C6/
C7/C8
發生時,為輸出 WARN 警告輸出)
BRKR ALL
HOME ALL 3 2
電磁剎車的控制接點。
當完成原點回歸,此信號輸出信號
到達過負載準位設定時,輸出為
OLW ALL - -
ON。
伺服驅動器警告輸出
WARN ALL - -
當正反極限、緊急停止、通訊異常、
低電壓發生時,產生警告輸出。
CMDOK Pr
內部位置命令完成輸出。
NOTE
1)例如,使用者選用 Pr 模式,則 3,2 接腳為 HOME;若是 S 模式,則
3,2 接腳為 TSPD。
2)未列出 Pin No 的信號代表不是預設的信號,如果想要使用,必須更改
參數,將某些 DI/DO 對應的信號設定成所要的信號,詳細說明請參考
3.3.4 節。
Revision April 2008, Doc. Name: 2007PDD23000010 3-17
Page 45

第三章 配線
|ASDA-AB
預設 DI 信號說明如下
系列
DI 信號名稱 操作模式
Pin
No
SON ALL 9
當 ON 時,伺服迴路啟動,電機線圈激磁。
當異警(ALRM)發生后,此信號用來復
ARST ALL 33
位驅動器,使 Ready(SRDY)信號重新
輸出。
GAINUP ALL -
CCLR Pt, Pr 10
用來切換控制器增益。
清除偏差計數器。
當此信號 ON,且電機速度小于參數
ZCLAMP ALL -
P1-38 時,將電機位置鎖定于信號發生的
瞬間位置。
CMDINV Pr, T, S -
當此信號 ON,電機運動方向反轉。
Pr 模 式 下,當 CTRG 導通瞬間(上升沿),
Pr,
CTRG
10
將 POS0 ~ 2 選擇的位置命令讀入控制
Pr-S, Pr-T
器。
TRQLM S, Sz 10
ON 代表扭力限制命令有效。
功能
接線方式
(參考 3.3.3)
SPDLM T, Tz 10
ON 代表速度限制命令有效。
Pr 模式下,選擇位置命令的來源:
POS0 34
POS1 8
Pr, Pr-S, Pr-T
POS2
POS2 POS1 POS0
0
0
0
0
1
1
-
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
選擇速度命令的來源:
0
命令來源
S
模式為模擬輸入;
Sz 0
模式為
SPD0 34
S, Sz, Pt-S,
SPD1 SPD0
0
Pr-S, S-T
1
P1-09
0
P1-10
1
P1-11
SPD1
8
0
1
1
命令來源
P1-15, P1-16
P1-17, P1-18
P1-19, P1-20
P1-21, P1-22
P1-23, P1-24
P1-25, P1-26
P1-27, P1-28
P1-29, P1-30
C9/C10
3-18 Revision April 2008, Doc. Name: 2007PDD23000010
Page 46

第三章 配線
|ASDA-AB
系列
DI 信號名稱 操作模式
Pin
No
選擇扭矩命令的來源:
TCM0 Pt,T, Tz, Pt-T 34
TCM1 TCM0
0
0
TCM1 Pr-T,S-T 8
1
1
S-P Pt-S, Pr-S 31
S-T S-T 31
T-P Pt-T, Pr-T 31
混合模式切換,OFF:速度 ON:位置。
混合模式切換,OFF:速度 ON:扭矩。
混合模式切換,OFF:扭矩 ON:位置。
為 B 接點,必須時常導通(ON),否則驅
EMGS ALL 30
動器顯示異警(ALRM)。
逆向運轉禁止極限,為 B 接點,必須時常
Pt, Pr, S, T
CWL
32
導通(ON ),否則驅動器顯示異警
Sz, Tz
(ALRM)。
0
1
0
1
功能
命令來源
T
模式為模擬輸入;
Tz 0
模式為
P1-12
P1-13
P1-14
接線方式
(參考 3.3.3)
C9/C10
Pt, Pr, S, T
正向運轉禁止極限,為 B 接點,必須時常
CCWL
31
導通(ON ),否則驅動器顯示異警
Sz, Tz
(ALRM)。
ORGP Pr -
為 ON 時,開始原點回歸動作。
反方向運轉扭矩限制(P1-02 開啟扭矩限
TLLM
無
-
制功能才有效)。
正方向運轉扭矩限制(P1-02 開啟扭矩限
TRLM
無
-
制功能才有效)。
在內部位置寄存器模式下,需搜尋原點,
SHOM Pr -
此信號接通后啟動搜尋原點功能(請參考
參數 P1-47 設定)。
INDEX0 Pr -
INDEX1 Pr -
INDEX2 Pr -
INDEX3 Pr -
在位置內部寄存器模式下,參數 P1-33 設
定為 2,3,4 時(分度功能),分度選擇
輸入(P1~32)(請參考 12.6 章節)。
INDEX4 Pr -
MD0 Pr -
MD1 Pr -
MDP0 Pr -
MDP1 Pr -
JOGU ALL -
JOGD ALL -
Revision April 2008, Doc. Name: 2007PDD23000010 3-19
分度模式切換輸入 bit 0。
分度模式切換輸入 bit 1。
分度手動連續切換模式。
分度手動單步切換模式。
此信號接通時,電機正方向寸動轉動。
此信號接通時,電機反方向寸動轉動。
Page 47

第三章 配線
|ASDA-AB
系列
DI 信號名稱 操作模式
Pin
No
運轉至下一內部寄存器位置(僅適用于
STEPU Pr -
Pr 模式)。
運轉至上一內部寄存器位置(僅適用于
STEPD Pr -
Pr 模式)。
回轉至第一定位點(僅適用于自動步進模
STEPB Pr -
式)。
自動定位模式輸入控制。此信號接通,自
動依據內部位置寄存器設定值的命令運
轉,而位置間隔時間,請參考參數 P2-52
AUTOR Pr -
~ P2-59 的設定,若有位置間隔時間沒設
定的狀況下,則不執行沒設定位置間隔時
間的內部位置命令,跳至下個內部位置命
令。
GNUM0
Pt, Pr, Pt-S,
Pr-S
電子齒輪比分子選擇 0(可選擇的齒輪比
-
分子值請參考 P2-60 ~ P2-62)
功能
接線方式
(參考 3.3.3)
C9/C10
GNUM1
Pt, Pr, Pt-S,
Pr-S
電子齒輪比分子選擇 1(可選擇的齒輪比
-
分子值請參考 P2-60 ~ P2-62)
脈衝禁止輸入。在位置模式下,此信號接
INHP Pt, Pt-S -
通時,外部脈衝輸入命令無作用
S, Sz, Pt-S,
STF
啟動速度命令正向運轉
Pr-S, S-T
STB
S, Sz, Pt-S,
Pr-S, S-T
啟動速度命令反向運轉
3-20 Revision April 2008, Doc. Name: 2007PDD23000010
Page 48

第三章 配線
|ASDA-AB
系列
各操作模式下預設的 DI 與 DO 整理如下:下表並沒有比前兩頁的表格提供更多的信息,但
由于將各操作模式分開在不同欄位,可以避免不同模式間的混淆。但是無法顯示出各信號
的 Pin 腳編號。
表 3.1 DI 輸入功能預設值定義表
符號 DI 碼 輸入功能
SON 01
ARST 02
GAINUP 03
CCLR 04
ZCLAMP 05
伺服啟動
異常復位
增益切換
脈衝清除
零速度箝制
命令輸入反向
CMDINV 06
控制
內部位置控制
HOLD 07
命令暫停
內部位置命令
CTRG 08
觸發
TRQLM 09
SPDLM 10
扭矩限制
速度限制
內部位置命令
POS0 11
選擇 0
Pt Pr S T Sz Tz
PtS Pt T Pr S PrT S
T
DI1 DI1 DI1 DI1 DI1 DI1 DI1 DI1 DI1 DI1 DI1
DI5 DI5 DI5 DI5 DI5 DI5
DI2 DI2 DI2
DI2 DI2 DI2
DI2 DI2
DI2 DI2
DI3 DI3 DI3
POS1 12
內部位置命令
選擇 1
內部位置命令
POS2 13
選擇 2
SPD0 14
SPD1 15
TCM0 16
TCM1 17
速度命令選擇 0
速度命令選擇 1
扭矩命令選擇 0
扭矩命令選擇 1
速度/位置混
S-P 18
合模式命令選
擇切換
速度/扭矩混
S-T 19
合模式命令選
擇切換
扭矩/位置混
T-P 20
合模式命令選
擇切換
DI4 DI4 DI4
DI3 DI3 DI3 DI5 DI3
DI4 DI4 DI4 DI6 DI4
DI3 DI3 DI3 DI3 DI5 DI5
DI4 DI4 DI4 DI4 DI6 DI6
DI7 DI7
DI7
DI7 DI7
Revision April 2008, Doc. Name: 2007PDD23000010 3-21
Page 49

第三章 配線
|ASDA-AB
系列
符號 DI 碼 輸入功能
EMGS 21
CWL 22
CCWL 23
ORGP 24
緊急停止
反轉禁止極限
正轉禁止極限
回歸的原點
反方向運轉扭
TLLM 25
矩限制
正方向運轉扭
TRLM 26
矩限制
SHOM 27
啟動原點回歸
分度數控制輸
INDEX0 28
入 0
分度數控制輸
INDEX1 29
入 1
分度數控制輸
INDEX2 30
入 2
Pt Pr S T Sz Tz
PtS Pt T Pr S PrT S
T
DI8 DI8 DI8 DI8 DI8 DI8 DI8 DI8 DI8 DI8 DI8
DI6 DI6 DI6 DI6 DI6 DI6
DI7 DI7 DI7 DI7 DI7 DI7
INDEX3 31
分度數控制輸
入 3
分度數控制輸
INDEX4 32
入 4
MD0 33
MD1 34
分度模式 0
分度模式 1
分度手動連續
MDP0 35
切換模式
分度手動單步
MDP1 36
切換模式
JOGU 37
JOGD 38
正轉寸動輸入
反轉寸動輸入
運轉至下一內
部寄存器位置
STEPU 39
(僅適用于 Pr
模式)
運轉至上一內
部寄存器位置
STEPD 40
(僅適用于 Pr
模式)
3-22 Revision April 2008, Doc. Name: 2007PDD23000010
Page 50

第三章 配線
|ASDA-AB
系列
符號 DI 碼 輸入功能
回轉至第一定
STEPB 41
位點(僅適用于
自動步進模式)
自動定位模式
AUTOR 42
輸入控制
電子齒輪比分
GNUM0 43
子選擇 0
電子齒輪比分
GNUM1 44
子選擇 1
INHP 45
脈衝輸入禁止
速度命令正向
STF 46
運轉
速度命令反向
STB 47
運轉
NOTE
DI1 ~ 8 對應的接腳請參考 3.3.1 的內容
Pt Pr S T Sz Tz
PtS Pt T Pr S PrT S
T
表 3.2 DO 輸出功能預設值定義表
DO
符號
輸入功能
碼
SRDY 01
SON 02
ZSPD 03
TSPD 04
TPOS 05
TQL 06
ALRM 07
BRKR 08
HOME 09
OLW 10
WARN 11
CMDOK 12
伺服備妥
伺服啟動
零速度檢出
目標速度到達
目標位置到達
扭矩限制中
伺服警示
電磁剎車
原點回歸完成
過負載預警
伺服警告
內部位置命令
DO1 DO1 DO1 DO1 DO1 DO1 DO1 DO1 DO1 DO1 DO1
DO2 DO2 DO2 DO2 DO2 DO2 DO2 DO2 DO2 DO2 DO2
DO3 DO3 DO3 DO3 DO3 DO3 DO3 DO3 DO3
DO4 DO4 DO4 DO4 DO4 DO4
DO5 DO5 DO5 DO5 DO5 DO5 DO5 DO5 DO5 DO5 DO5
DO4 DO4 DO4 DO4
DO3DO3
完成
Pt Pr S T Sz Tz
PtS Pt T Pr S PrT S
T
NOTE
Revision April 2008, Doc. Name: 2007PDD23000010 3-23
DO1 ~ 5 對應的接腳請參考 3.3.1 的內容
Page 51

第三章 配線
|ASDA-AB
系列
3.3.3 界面接線圖(CN1)
速度與扭矩模擬命令輸入有效電壓範圍從-10V ~ +10V。這電壓範圍對應的命令值可由相關
參數來設定;輸入阻抗為 10KΩ。
C1:速度,扭力模擬命令輸入 C2:模擬監視輸出 MON1 ,MON2
脈衝指令可使用開集極方式或差動 Line driver 方式輸入,差動 Line driver 輸入方式的最大
輸入脈衝為 500kpps,開集極方式的最大輸入脈衝為 200kpps。
C3-1:脈衝命令輸入使用內部電源(集極開路)C3-2:脈衝命令輸入使用外部電源(集極開路)
¾
強烈建議:不可雙電源輸入以免燒毀。
3-24 Revision April 2008, Doc. Name: 2007PDD23000010
Page 52

C4:脈衝命令輸入(差動輸入)
此光耦合晶體為單
相,請務必注意輸入
脈衝命令的電流流向
第三章 配線
|ASDA-AB
系列
¾
控制器與驅動器信號的地需連接一起。
DO 驅動電感性負載時需裝上二極管。(容許電流:40mA 以下;突波電流:100mA 以下)
C5:DO 接線,內部電源,一般負載 C6:DO 接線,內部電源,電感負載
Revision April 2008, Doc. Name: 2007PDD23000010 3-25
Page 53

第三章 配線
C7:DO 接線,外部電源,一般負載 C8:DO 接線,外部電源,電感負載
|ASDA-AB
系列
以繼電器或開集極晶體管輸入信號
C9:DI 接線,內部電源 C10:DI 接線,外部電源
¾
強烈建議:不可雙電源輸入以免燒毀。
3-26 Revision April 2008, Doc. Name: 2007PDD23000010
Page 54

第三章 配線
|ASDA-AB
C11:編碼器位置輸出 (Line driver) C12:編碼器位置輸出(光耦合器)
3.3.4 使用者指定 DI 與 DO 信號
系列
如果預設的 DI/DO 信號無法滿足需求,自行設定 DI/DO 信號的方法也很簡單,DI1 ~ 8 與
DO1 ~ 5 的信號功能是根據參數 P2-10 ~ P2-17 與參數 P2-18 ~ P2-22 來決定的。請參考
7.2 章節如下表所示,在對應參數中輸入 DI 碼或 DO 碼,即可設定此 DI/DO 的功能。
信號名稱
Pin No
對應參數
信號名稱
Pin No
對應參數
DI1- 9 P2-10 DO1+ 7
P2-18
DI2- 10 P2-11 DO1- 6
DI3- 34 P2-12 DO2+ 5
P2-19
DI4- 8 P2-13 DO2- 4
DI
DI5- 33 P2-14 DO3+ 3
DO
P2-20
DI6- 32 P2-15 DO3- 2
DI7- 31 P2-16 DO4+ 1
P2-21
DI8- 30 P2-17 DO4- 26
DO5+ 28
P2-22
DO5- 27
Revision April 2008, Doc. Name: 2007PDD23000010 3-27
Page 55

第三章 配線
|ASDA-AB
系列
3.4 CN2 編碼器信號接線
ECMA 系列的電機內附一個 2500ppr A、B、Z、U、V、W 的編碼器。從電源起動時 U+、V+、
W+、U-、V-、W-信號即在 0。5 秒內以六條線告知驅動器,再下來同樣六條線換成 A+、B+、
Z+、A-、B-、Z-信號。2500ppr A、B 信號進入驅動器后即成為 10000ppr,再加電源 VCC(2
條)和地(GND)(2 條),編碼器連接線共有 10 條。
連接器的接線端外型與接腳編號如下圖所示:
快速接頭
HOUSING: AMP (1-172161-9)
10
8
9
20
19
CN2連接器(公)背面接線端
2
1
12
11
軍規接頭
3106A-20-29S
3-28 Revision April 2008, Doc. Name: 2007PDD23000010
Page 56

各信號的意義說明如下:
第三章 配線
|ASDA-AB
系列
Pin No
2
4
5
7
9
10
14,16
13,15
信號名稱 端子記號
軍規
接頭
/Z 相輸入
/A 相輸入
A 相輸入
B 相輸入
/B 相輸入
Z 相輸入
編碼器電源
編碼器電源
屏蔽 屏蔽
/Z G 6
/A B 4
A A 1
B C 2
/B D 5
Z F 3
+5V S 7
GND R 8
L 9
快速
功能、說明 顏色
接頭
編碼器 /Z 相輸出 黃/黑
編碼器 /A 相輸出 藍/黑
編碼器 A 相輸出 藍
編碼器 B 相輸出 綠
編碼器 /B 相輸出 綠/黑
編碼器 Z 相輸出 黃
編碼器用 5V 電源 紅與紅/白
接地 黑與黑/白
屏蔽 屏蔽
Revision April 2008, Doc. Name: 2007PDD23000010 3-29
Page 57

第三章 配線
|ASDA-AB
系列
3.5 CN3 通訊口信號接線
3.5.1 CN3 通訊口 端子 Layout
驅動器通過通訊連接器與電腦相連,使用者可利用本公司提供的軟件(洽經銷商)來操作
驅動器。我們提供三種常用通訊界面:(1)RS-232;(2)RS-485;(3)RS-422。可使用
參數(P3-05)設定。 RS-232 較為常用,通訊距離大約 15 米。若選擇使用 RS485 或 RS422,
可達較遠的傳輸距離,且支持多組驅動器同時連線能力。
Pin No.
1
2
3
4
5
6
信號名稱 端子記號 功能、說明
信號接地
RS-232 數據傳送
RS-422 數據接收
RS-232 數據接收
RS-422 數據接收
RS-422 數據傳送
RS-422 數據傳送
NOTE
1) RS-485 接線請參考 8-3 頁。
2) 市售的 IEEE1394 通訊線有兩種,其中一種的內部接地端子(pin 1)
GND
RS-232-TX
驅動器端數據傳送
連接至 PC 的 RS-232 接收端
RS-422-RX+
RS-232_RX
驅動器端數據接收差動+端
驅動器端數據接收
連接至 PC 的 RS-232 傳送端
RS-422_RX-
RS-422-TX+
RS-422-TX-
驅動器端數據接收差動-端
驅動器端數據傳送差動+端
驅動器端數據傳送差動-端
會與屏蔽線短路;如果使用此種接頭會導致通訊損毀,請勿將此通訊
線上的接地線與端子外殼短路。
3-30 Revision April 2008, Doc. Name: 2007PDD23000010
Page 58

3.5.2 CN3 通訊口與個人電腦的連接方式
5
1
第三章 配線
J3
|ASDA-AB
系列
PC NOTEBOOK或
2
3
2
4
驅動器的CN3
Revision April 2008, Doc. Name: 2007PDD23000010 3-31
Page 59

第三章 配線
|ASDA-AB
系列
3.6 標準接線方式
3.6.1 位置(Pt)模式標準接線
220V 系列:
3-32 Revision April 2008, Doc. Name: 2007PDD23000010
Page 60

110V 系列:
第三章 配線
|ASDA-AB
系列
Note:
*1: 剎車接線無極性。
*2: 請參考 3.3.3 章節的 C4 配線;若輸入為開集極請參考 3.3.3 章節的 C3 配線。
*3: 請參考參數 P1-46 設定。
Revision April 2008, Doc. Name: 2007PDD23000010 3-33
Page 61

第三章 配線
|ASDA-AB
系列
3.6.2 位置(Pr)模式標準接線
220V 系列:
3-34 Revision April 2008, Doc. Name: 2007PDD23000010
Page 62

110V 系列:
第三章 配線
|ASDA-AB
系列
Note:
*1: 剎車接線無極性。
*2: 請參考參數 P1-46 設定。
Revision April 2008, Doc. Name: 2007PDD23000010 3-35
Page 63

第三章 配線
|ASDA-AB
系列
3.6.3 速度模式標準接線
220V 系列:
3-36 Revision April 2008, Doc. Name: 2007PDD23000010
Page 64

110V 系列:
第三章 配線
|ASDA-AB
系列
Note:
*1: 剎車接線無極性。
*2: 請參考參數 P1-46 設定。
Revision April 2008, Doc. Name: 2007PDD23000010 3-37
Page 65

第三章 配線
|ASDA-AB
系列
3.6.4 扭矩模式標準接線
220V 系列:
3-38 Revision April 2008, Doc. Name: 2007PDD23000010
Page 66

110V 系列:
第三章 配線
|ASDA-AB
系列
Note:
*1: 剎車接線無極性。
*2: 請參考參數 P1-46 設定。
Revision April 2008, Doc. Name: 2007PDD23000010 3-39
Page 67

第三章 配線
|ASDA-AB
系列
(此頁有意留為空白)
3-40 Revision April 2008, Doc. Name: 2007PDD23000010
Page 68

第四章 面板顯示及操作
本章說明 ASDA-AB 系列伺服驅動器的面板狀態顯示及各項操作說明。
4.1 面板各部名稱
名稱 功能
顯示器 五組七段顯示器用于顯示監控值、參數值及設定值。
電源指示燈 主電源迴路電容量的充電顯示。
MODE 鍵 進入參數模式或脫離參數模式及設定模式。
SHIFT 鍵
UP 鍵 變更監控碼、參數碼或設定值。
DOWN 鍵 變更監控碼、參數碼或設定值。
SET 鍵 顯示及儲存設定值。
參數模式下可改變群組碼。設定模式下閃爍字符左移可用于修正較高
的設定字符值。
Revision April 2008, Doc. Name: 2007PDD23000010 4-1
Page 69

第四章 面板顯示及操作
|ASDA-AB
4.2 參數設定流程
系列
(1) 驅動器電源接通時,顯示器會先持續顯示監控顯示符號約一秒鐘。然后才進入監控顯示
模式。
(2) 在監控模式下若按下 UP 或 DOWN 鍵可切換監控參數。此時監控顯示符號會持續顯示約
一秒鐘。
(3) 在監控模式下若按下 MODE 鍵可進入參數模式。按下 SHIFT 鍵時可切換群組碼。UP/
DOWN 鍵可變更后二字符參數碼。
(4) 在參數模式下按下 SET 鍵,系統立即進入設定模式。顯示器同時會顯示此參數對應的設
定值。此時可利用 UP/DOWN 鍵修改參數值或按下 MODE 鍵脫離設定模式並回到參數
模式。
(5) 在設定模式下可按下 SHIFT 鍵使閃爍字符左移,再利用 UP/DOWN 快速修正較高的設
定字符值。
(6) 設定值修正完畢后按下 SET 鍵,即可進行參數儲存或執行命令。
(7) 完成參數設定后顯示器會顯示結束代碼「-END-」,並自動回復到監控模式。
4-2
Revision April 2008, Doc. Name: 2007PDD23000010
Page 70

第四章 面板顯示及操作
|ASDA-AB
4.3 狀態顯示
4.3.1 儲存設定顯示
按下 SET 儲存設定鍵時,面板顯示器會依設定狀態持續顯示設定狀態符號一秒鐘。
顯示符號 內 容 說 明
設定值正確儲存結束。
唯讀參數,寫入禁止。
密碼輸入錯誤或未輸入密碼。
設定值不正確或輸入保留設定值。
伺服啟動中無法輸入。
此參數不儲存于 EEPROM。
此參數須重新開機才有效。
系列
4.3.2 放棄設定顯示
顯示符號 內 容 說 明
參數模式下按入 MODE 鍵,用以放棄參數修改。
設定模式下按入 MODE 鍵,可跳回至參數模式下,若再按入 MODE 鍵,
即放棄參數修改。
4.3.3 警示信息顯示
顯示符號 內 容 說 明
驅動器產生錯誤時,顯示警示符號’ALE’及警示代碼’nn’,其中代碼值的
顯示範圍為 1 ~ 23。
其代表含意請參考 P0-01。
4.3.4 正負號設定顯示
顯示符號 內 容 說 明
進入設定模示時,可按下 UP/DOWN 鍵來增減顯示的內容值。SHIFT
鍵可改變欲修正的進位值(此時進位值會呈現閃爍狀態)。
當參數值具有正負號且設定範圍大于 4 位數時。如上述操作完成參數值
設定后,連續按 SHIFT 鍵數次,在最高字符呈閃爍狀態后的下一次,
所有字符的右下方會出現圓點時即表示負值狀態。
當參數值具有正負號且設定範圍小于 5 位數時。如同上述操作方式最高
字符會出現一減號時即表示負值狀態。
Revision April 2008, Doc. Name: 2007PDD23000010 4-3
Page 71

第四章 面板顯示及操作
|ASDA-AB
系列
4.3.5 監控顯示
驅動器電源接通時,顯示器會先持續顯示監控顯示符號約一秒鐘。然后才進入監控顯示模
式。在監控顯示模式下可按下 UP 或 DOWN 鍵來改變欲顯示的監控狀態,或可直接修改參
數 P0-02 來指定監控狀態。電源接通時會以 P0-02 的設定值為預設的監控碼。例如 P0-02
值為 2,每當電源接通時,會先顯示 C.P 監控符號然后再顯示脈衝命令輸入脈衝數。
P0-02 設定值
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
監控顯示符號 內容說明 單位
電機反餽脈衝數(絕對值)
電機反餽旋轉圈數(絕對值)
脈衝命令輸入脈衝數
脈衝命令旋轉圈數
控制命令脈衝與反餽脈衝誤差數
脈衝命令輸入頻率
電機轉速
速度輸入命令
速度輸入命令
扭矩輸入命令
扭矩輸入命令
平均扭矩
峰值扭矩
主回路電壓
負載/電機慣性比
[pulse]
[rev]
[pulse]
[rev]
[pulse]
[r/min]
[r/min]
[V]
[r/min]
[V]
[%]
[%]
[%]
[V]
[times]
電機反餽脈衝數(相對值)/位置 latch
脈衝數
[pulse]
16
latch 旋轉圈數
監控值顯示範例 狀態值顯示說明
電機反餽旋轉圈數(相對值)/位置
正整數顯示。顯示值為 +1234。
數值顯示範圍小于五位數的負數顯示。顯示值為 -1234。
數值顯示範圍大于四位數的負數顯示。顯示值為 -12345。
小數點顯示。顯示值為 12.34。
4-4
[rev]
Revision April 2008, Doc. Name: 2007PDD23000010
Page 72

第四章 面板顯示及操作
|ASDA-AB
4.4 一般功能操作
4.4.1 異常狀態記錄顯示操作
進入參數模式 P4-00 ~ P4-04 后,按下 SET 鍵,可顯示對應的錯誤歷史記錄碼或藉由 UP
鍵依序顯示出 H1 ~ 5 的錯誤歷史記錄碼。其中 H1 為最近發生的錯誤碼,較前一次的為
H2,並依此類推至 H5。範例中最近一次的錯誤歷史記錄碼為 10。
系列
Revision April 2008, Doc. Name: 2007PDD23000010 4-5
Page 73

第四章 面板顯示及操作
|ASDA-AB
系列
4.4.2 寸動模式操作
進入參數模式 P4-05 后,可依下列設定方式進行寸動操作模式。
(1) 按下 SET 鍵,顯示寸動速度值。初值為 20 r/min。
(2) 按下 UP 或 DOWN 鍵來修正希望的寸動速度值。範例中調整為 100r/min。
(3) 按下 SET 鍵,顯示 JOG 並進入寸動模式。
(4) 進入寸動模示后按下 UP 或 DOWN 鍵使伺服電機朝正方向旋轉或逆方向旋轉﹐放開按
鍵則伺服電機立即停止運轉。寸動操作必須在 SERVO ON 時才有效。
4-6
Revision April 2008, Doc. Name: 2007PDD23000010
Page 74

第四章 面板顯示及操作
|ASDA-AB
系列
4.4.3 位置命令教導操作
教導功能依下列設定方式進行操作:
(1) 開啟內部位置命令教導功能(P2-30=4)。
(2) 進入參數模式 P4-05,並按下 SET 鍵,顯示器會顯示教導移動速度值。初值為 20 r/min。
(3) 按下 UP 或 DOWN 鍵來修正希望移動的速度值。範例中調整為 100r/min。
(4) 按下 SET 鍵,顯示 JOG o1 並進入教導模式。
(5) 在教導模式下(顯示 JOGox),隨時可按 UP 或 DOWN 鍵使伺服電機朝正方向旋轉或
逆方向旋轉,放開按鍵則伺服電機立即停止運轉(必須在 SERVO ON 時才有效)。
(6) 位置選定后,按下 SET 鍵時 JOGo1 會改變數值為 JOGo2 的同時伺服電機的絕對位置
會被記錄于內部存儲器內(P1-15:內部位置指令 1 的位置轉數設定,P1-16:內部位
置指令 1 的位置脈衝數設定)。
(7) 在教導模式下(顯示 JOGox),按下 SHIFT 鍵可直接修改 JOGox 的’x’值,以便快速跳
至欲修改的教導點。此時不會做任何位置點的儲存。
Revision April 2008, Doc. Name: 2007PDD23000010 4-7
Page 75

第四章 面板顯示及操作
|ASDA-AB
系列
教導點與內部位置存儲區一覽表:
位置教導點 內部位置存儲區
JOGo1
JOGo2
JOGo3
JOGo4
JOGo5
JOGo6
JOGo7
JOGo8
P1-15(內部位置指令 1 的位置轉數設定)
P1-16(內部位置指令 1 的位置脈衝數設定)
P1-17(內部位置指令 2 的位置轉數設定)
P1-18(內部位置指令 2 的位置脈衝數設定)
P1-19(內部位置指令 3 的位置轉數設定)
P1-20(內部位置指令 3 的位置脈衝數設定)
P1-21(內部位置指令 4 的位置轉數設定)
P1-22(內部位置指令 4 的位置脈衝數設定)
P1-23(內部位置指令 5 的位置轉數設定)
P1-24(內部位置指令 5 的位置脈衝數設定)
P1-25(內部位置指令 6 的位置轉數設定)
P1-26(內部位置指令 6 的位置脈衝數設定)
P1-27(內部位置指令 7 的位置轉數設定)
P1-28(內部位置指令 7 的位置脈衝數設定)
P1-29(內部位置指令 8 的位置轉數設定)
P1-30(內部位置指令 8 的位置脈衝數設定)
4-8
Revision April 2008, Doc. Name: 2007PDD23000010
Page 76

第四章 面板顯示及操作
|ASDA-AB
系列
4.4.4 強制數字輸出操作
依下列設定方式進入輸出診斷模式(OP x)。由 UP/DOWN 鍵可改變’x’數值從 0 至 1F(十
六進位制表示法),分別對應 DO1 至 DO5 的強制輸出控制。當數值設為 1F 時,DO1 ~ DO5
全部導通。此功能必需在 SERVO OFF 的狀態才有效。
4.4.5 數字輸入診斷操作
依下列設定方式進入輸入診斷模式。 由外部輸入信號 DI1 ~ DI8 觸發時相對應的信號會顯
示于面板顯示器上。其顯示方式為位,當位顯示時為觸發。
Revision April 2008, Doc. Name: 2007PDD23000010 4-9
Page 77

第四章 面板顯示及操作
|ASDA-AB
系列
4.4.6 數字輸出診斷操作
依下列設定方式進入輸出診斷模式。由輸出信號 DO1 ~ DO5 的導通狀態,其相對應的信
號會顯示于面板顯示器上;其顯示方式為位,當位顯示表示 ON。
4-10
Revision April 2008, Doc. Name: 2007PDD23000010
Page 78

第五章 試轉操作與調機步驟
本章分成兩部分來說明試轉操作,第一部分為無負載檢測,第二部分為安裝在機台的檢測。
為了安全,請使用者務必先進行第一部分的測試。
5.1 無負載檢測
為了避免對伺服驅動器或機構造成傷害,請先將伺服電機所接的負載移除(包括伺服電機軸
心上的連軸器及相關的配件,此目的主要是避免伺服電機在運轉過程中電機軸心未拆解的配
件飛脫,間接造成人員傷害或設備損壞)。若移除伺服電機所接的負載后,根據正常操作程序,
能夠使伺服電機正常運轉起來,之后即可將伺服電機的負載接上。
強烈建議:請先在無載下,讓伺服電機正常運作,之后再將負載接上以避免不必要的危險。
請依下表所列的項目,逐一檢查以便在電機運轉前,早一步發現問題及早解決,以免電機開
始運轉后造成損壞:
運轉前檢測
(未供應控制電源)
運轉時檢測
(已供應控制電源)
檢查伺服驅動器是否有外觀上明顯的毀損。
配線端子的接續部位請實施絕緣處理。
檢查配線是否完成及正確,避免造成損壞或發生異常動作。
螺絲或金屬片等導電性物體、可燃性物體是否存在伺服驅動器內。
控制開關是否置于 OFF 狀態。
伺服驅動器或外部的回生電阻,不可設置于可燃物體上。
為避免電磁制動器失效,請檢查立即停止運轉及切斷電源的迴路
是否正常。
伺服驅動器附近使用的電子儀器受到電磁干擾時,請使用儀器降
低電磁干擾。
請確定驅動器的外加電壓準位是否正確。
編碼器電纜應避免承受過大應力。當電機在運轉時,注意接續電
纜是否與機件接觸而產生磨耗或發生拉扯現象。
伺服電機若有振動現象或運轉聲音過大,請與廠商聯絡。
確認各項參數設定是否正確,依機械特性的不同可能會有不預期
的動作。勿將參數作過度極端的調整。
重新設定參數時,請確定驅動器是在伺服停止(SERVO OFF)的
狀態下進行,否則會成為故障發生的原因。
繼電器動作時,若無接觸的聲音或其他異常聲音產生,請與廠商
聯絡。
電源指示燈與 LED 顯示是否有異常現象。
Revision April 2008, Doc. Name: 2007PDD23000010 5-1
Page 79

第五章 試轉操作與調機步驟
|ASDA-AB
系列
5.2 驅動器送電
請使用者依序按照以下步驟執行
(一) 先確認電機與驅動器之間的相關線路連接正確:
1) U、V、W 與 FG 必須分別對應紅、白、黑與綠線。如果接錯,電機運轉將會出現不
正常,電機地線 FG 務必與驅動器的接地端子連接,接線請參考 3.1 節。
2) 電機的編碼器連線已正確接至 CN2:如果只欲執行 JOG 功能,CN1 與 CN3 可以不
用連接(請參考 5.3),CN2 的接線請參考 3.1 與 3.4 的內容。
危險:請勿將電源端(R、S、T)接到伺服驅動器的輸出(U、V、W),否則將造成伺服驅
動器損壞。
(二) 連接驅動器的電源線路
將電源連接至驅動器,電源接線法請參考 3.1.3。
(三) 電源啟動
包括控制迴路(L1、L2)與主迴路(R、S、T)電源,當電源啟動,驅動器畫面為:
因為出廠值的數字輸入(DI6 ~ DI8)為逆向運轉禁止極限(CWL)與正向運轉禁止極限
(CCWL)與緊急停止(EMGS)信號,若不使用出廠值的數字輸入(DI6 ~ DI8),需調
整數字輸入(DI)的參數 P2-15 ~ P2-17 的設定,可將參數設定為 0(Disable 此 DI 的
功能)或修改成其他功能定義。
若上一次結束時,驅動器狀態顯示參數(P0-02)設定為電機速度(06),則正常的畫面
為:
當畫面沒有顯示任何文字時,請檢查 L1 與 L2 是否電壓過低。
1) 當畫面出現
過電壓警告:
主回路輸入電壓高于額定容許電壓值或電源輸入錯誤(非正確電源系統)。
5-2
Revision April 2008, Doc. Name: 2007PDD23000010
Page 80

第五章 試轉操作與調機步驟
解決方法:
用電壓計測定主回路輸入電壓是否在額定容許電壓值以內。
用電壓計測定電源系統是否與規格定義相符。
2) 當畫面出現
位置編碼器異常警告:
請檢查電機的位置編碼器是否有連接牢固或接線錯誤。
解決方法:
確認接線是否遵循說明書內的建議線路。
檢視位置編碼器接頭。
|ASDA-AB
系列
檢查接線是否鬆脫。
位置編碼器損壞。
3) 當畫面出現
緊急停止警告:
請檢查數字輸入 DI1~DI8 中是否有設緊急停止(EMGS)
解決方法:
若不需緊急停止(EMGS)信號作為輸入,則只要確認數字輸入 DI1~DI8 中,沒有
任一個數字輸入為緊急停止(EMGS)(即是 P2-10~P2-17 沒有一個設定為 21)。
若需要緊急停止(EMGS)信號作為輸入,則只要確認數字輸入 DI1~DI8,何者為
緊急停止(EMGS)且其接點必須導通(ON)。
4) 當畫面出現
逆向運轉禁止極限異常警告:
請檢查數字輸入 DI1~DI8 中是否有設逆向運轉禁止極限(CWL)而且該接點沒有導通
(ON)。
Revision April 2008, Doc. Name: 2007PDD23000010 5-3
Page 81

第五章 試轉操作與調機步驟
|ASDA-AB
系列
解決方法:
若不需逆向運轉禁止極限(CWL)信號作為輸入,則只要確認數字輸入 DI1~DI8 中,
沒有任一個數字輸入為逆向運轉禁止極限(CWL)(即是 P2-10∼P2-17 沒有一個設
定為 22)。
若需要逆向運轉禁止極限(CWL)信號作為輸入,則只要確認數字輸入 DI1~DI8,
何者為逆向運轉禁止極限(CWL)且其接點必須導通(ON)。
5) 當畫面出現
正向運轉禁止極限異常警告:
請檢查數字輸入 DI1~DI8 中是否有設正向運轉禁止極限(CCWL)而且該接點沒有導通
(ON)。
解決方法:
若不需正向運轉禁止極限(CCWL)信號作為輸入,則只要確認數字輸入 DI1~DI8
中,沒有任一個數字輸入為正向運轉禁止極限(CCWL)(即是 P2-10∼P2-17 沒有
一個設定為 23)。
若需要正向運轉禁止極限(CCWL)信號作為輸入,則只要確認數字輸入 DI1~DI8,
何者為正向運轉禁止極限(CCWL)且其接點必須導通(ON)。
若在正常畫面出現時,且將伺服啟動(SON)設定在 DI1,此時按下伺服啟動按鈕:
6) 當畫面出現
過電流警告:
解決方法:
檢查電機與驅動器接線狀態。
導線本體是否短路。
排除短路狀態,並防止金屬導體外露。
7) 當畫面出現
低電壓警告:
5-4
Revision April 2008, Doc. Name: 2007PDD23000010
Page 82

第五章 試轉操作與調機步驟
|ASDA-AB
系列
解決方法:
檢查主回路輸入電壓接線是否正常。
電壓計測定是否主回路電壓正常。
用電壓計測定電源系統是否與規格定義相符。
備註:若在啟動電源或作伺服啟動(不下任何命令)過程中出現其他警告信息或不正常
顯示時,請通知經銷商。
Revision April 2008, Doc. Name: 2007PDD23000010 5-5
Page 83

第五章 試轉操作與調機步驟
|ASDA-AB
系列
5.3 空載 JOG 測試
我們提出 JOG 寸動方式來試轉電機及驅動器,使用者可不需要接額外配線這是非常方便的。
為了安全起見,寸動速度建議在低轉速下進行,寸動模式以所設定的寸動速度來作等速度移
動,以下是我們的說明。
STEP 1:使用軟件設定伺服啟動,設定參數 P2-30 輔助功能設為 1,此設定為軟件強制伺服
啟動
STEP 2:設定參數 P4-05 為寸動速度(單位:r/min),將欲寸動速度設定后,按下 SET 鍵
后,驅動器將進入 JOG 模式
STEP 3:按下 MODE 鍵時,即可脫離 JOG 模式。
5-6
Revision April 2008, Doc. Name: 2007PDD23000010
Page 84

第五章 試轉操作與調機步驟
|ASDA-AB
系列
5.4 空載的速度測試
作空載速度測試前,盡可能將電機基座固定,以防止電機轉速變化所產生反作用力造成危險。
STEP 1:
將驅動器的控制模式設定為速度模式調整參數 P1-01 控制模式設定為 2,即為速度模式,更
改后須重新開機才會更新操作模式。
STEP 2:
速度控制模式下,所需試運轉設定數字輸入 DI 設定如下:
數字輸入 參數設定值 符號 功能定義說明
DI1 P2-10=101 SON
DI2 P2-11=109 TRQLM
DI3 P2-12=114 SPD0
DI4 P2-13=115 SPD1
DI5 P2-14=102 ARST
DI6 P2-15=0 Disabled
DI7 P2-16=0 Disabled
DI8 P2-17=0 Disabled
伺服啟動
扭矩限制
速度命令選擇 0
速度命令選擇 1
異常復位
此 DI 功能無效
此 DI 功能無效
此 DI 功能無效
CN1 Pin No
DI1-=9
DI2-=10
DI3-=34
DI4-=8
DI5-=33
-
-
-
上表將原出廠設定值逆向運轉禁止極限(DI6)與正向運轉禁止極限(DI7)及緊急停止(DI8)
的功能取消,因此將參數 P2-15 ~ 17 設為 0(Disabled),台達伺服的數字輸入為可由使用者
自由規劃,因此使用者規劃數字輸入(DI)時,需參考 DI 碼的定義。
設定完后,若驅動器有異常信號出現(因為出廠設定值有逆向運轉禁止極限與正向運轉禁止
極限及緊急停止的功能),須重新開機或將異常復位 DI5 接腳導通,用來清除異常狀態,請參
考 5.2 章節。
速度命令選擇根據 SPD0、SPD1 來選擇,列表如下:
CN1 的 DI 信號
速度命令編號
命令來源 內容 範圍
SPD1 SPD0
S1 0 0
外部模擬命令 V-REF,GND 之間電壓差
+/-10V
S2 0 1 P1-09 0~5000r/min
S3 1 0 P1-10 0~5000r/min
S4 1 1
內部寄存器參數
P1-11 0~5000r/min
0:表示開關狀態為開路(OFF)
1:表示開關狀態為導通(ON)
Revision April 2008, Doc. Name: 2007PDD23000010 5-7
Page 85

第五章 試轉操作與調機步驟
|ASDA-AB
系列
速度內部寄存器的命令設定
參數 P1-09 設定為 3000 輸入數值命令 旋轉方向
參數 P1-10 設定為 100
參數 P1-11 設定為-3000
+ CW
- CCW
STEP 3:
(1) 使用者將數字輸入 DI1 導通,伺服啟動(Servo on)。
(2) 數字輸入 DI3(SPD0)與 DI4(SPD1)速度命令開關開路,代表 S1 命令,此時電機
根據模擬電壓命令運轉。
(3) 只導通數字輸入 DI3(SPD0),代表 S2 命令 3000r/min 被承認,此時電機轉速為
3000r/min。
(4) 只導通數字輸入 DI4(SPD1),代表 S3 命令 100r/min 被承認,此時電機轉速為
100r/min。
(5) 同時導通數字輸入 DI3(SPD0)與 DI4(SPD1),代表 S4 命令 -3000r/min 被承認,
此時電機轉速為 -3000r/min。
(6) 可任意重複(3),(4),(5)。
(7) 欲停止時,數字輸入 DI1 開路伺服停止(Servo OFF)。
5-8
Revision April 2008, Doc. Name: 2007PDD23000010
Page 86

第五章 試轉操作與調機步驟
|ASDA-AB
系列
5.5 空載的定位測試
作空載定位測試前,盡可能將電機固定,以防止電機轉速變化所產生反作用力造成危險。
STEP 1:
將驅動器的控制模式設定為位置內部寄存器模式。
將調整參數 P1-01 控制模式設定為 1,即為位置內部寄存器模式。更改后須重新開機才會更
新控制模式。
STEP 2:位置內部寄存器模式下,所需試運轉設定數字輸入的 DI 設定如下:
數字輸入 參數設定值 符號 功能定義說明
DI1 P2-10=101 SON
DI2 P2-11=108 CTRG
DI3 P2-12=111 POS0
DI4 P2-13=112 POS1
DI5 P2-14=102 ARST
DI6 P2-15=0 Disabled
DI7 P2-16=0 Disabled
DI8 P2-17=0 Disabled
伺服啟動
扭矩限制
內部位置命令選擇 0
內部位置命令選擇 1
異常復位
此 DI 功能無效
此 DI 功能無效
此 DI 功能無效
CN1 Pin No
DI1-=9
DI2-=10
DI3-=34
DI4-=8
DI5-=33
-
-
-
上表將原出廠設定值逆向運轉禁止極限(DI6)與正向運轉禁止極限(DI7)及緊急停止(DI8)
的功能取消,因此將參數 P2-15 ~ 17 設為 0(Disabled),台達伺服的數字輸入為可由使用者
自由規劃,因此使用者規劃數字輸入(DI)時,需參考 DI 碼的定義。
設定完后,若驅動器有異常信號出現(因為出廠設定值有逆向運轉禁止極限與正向運轉禁止
極限及緊急停止的功能),須重新開機或將異常復位 DI5 接腳導通,用來清除異常狀態,請參
考 5.2 章節。
配線圖可參考 3.6.2 位置(Pr)模式標準配線圖,但由于 POS2 並不是預設的輸入 DI,因此
更改 P2-14 值為 113。位置內部八組寄存器命令與 POS0~POS2 及相關參數調整的關係如下
表所示:
位置命令
內位置 1
內位置 2
內位置 3
POS2 POS1 POS0 CTRG
0 0 0
0 0 1
0 1 0
對應參數 移動速度寄存器 說明
P1-15
圈數(+/- 30000)
P2-36(V1)
P1-16
P1-17
脈衝(+/- max cnt)
圈數(+/- 30000)
P2-37(V2)
P1-18
P1-19
脈衝(+/- max cnt)
圈數(+/- 30000)
P2-38(V3)
P1-20
脈衝(+/- max cnt)
Revision April 2008, Doc. Name: 2007PDD23000010 5-9
Page 87

第五章 試轉操作與調機步驟
|ASDA-AB
系列
位置命令
內位置 4
內位置 5
內位置 6
內位置 7
內位置 8
POS2 POS1 POS0 CTRG
0 1 1
1 0
1 0
1 1
1 1
0
1
0
1
對應參數 移動速度寄存器 說明
P1-21
圈數(+/- 30000)
P2-39(V4)
P1-22
P1-23
脈衝(+/- max cnt)
圈數(+/- 30000)
P2-40(V5)
P1-24
P1-25
脈衝(+/- max cnt)
圈數(+/- 30000)
P2-41(V6)
P1-26
P1-27
脈衝(+/- max cnt)
圈數(+/- 30000)
P2-42(V7)
P1-28
P1-29
脈衝(+/- max cnt)
圈數(+/- 30000)
P2-43(V8)
P1-30
脈衝(+/- max cnt)
0:表示開關狀態為開路(OFF)
1:表示開關狀態為導通(ON)
使用者可以任意設定這八組命令寄存器值(參數 P1-15 ~ P1-30),而且內部寄存器命令值的
定義,可以命令設定為絕對位置指令,將參數 P1-33 內部位置指令控制模式設為 0;若命令
設定為相對位置指令,將參數 P1-33 內部位置指令控制模式設為 1。
舉例將參數設定如下
參數 P1-33 設定為 1(相對位置指令)
(更改后須重新開機才會更新)
參數 P1-15 內部位置 1 圈數設定為 1(圈);參數 P1-16 內部位置 1 脈衝數設定為 0(脈衝)
內部位置 1 命令為 P1-15 圈數+P1-16 脈衝數
參數 P1-17 內部位置 2 圈數設定為 10(圈);參數 P1-18 設定為 0(脈衝)
內部位置 2 命令為 P1-17 圈數+P1-18 脈衝數
參數 P1-19 內部位置 3 圈數設定為-10;參數 P1-20 設定為 0
內部位置 3 命令為 P1-19 圈數+P1-20 脈衝數
參數 P1-21 內部位置 4 圈數設定為 100;參數 P1-22 設定為 0
內部位置 4 命令為 P1-21 圈數+P1-22 脈衝數
參數 P1-23 內部位置 5 圈數設定為-1000;參數 P1-24 設定為 0
內部位置 5 命令為 P1-23 圈數+P1-24 脈衝數
參數 P1-25 內部位置 6 圈數設定為 0;參數 P1-26 設定為 100
內部位置 6 命令為 P1-25 圈數+P1-26 脈衝數
參數 P1-27 內部位置 7 圈數設定為 0;參數 P1-28 設定為 1000
內部位置 7 命令為 P1-27 圈數+P1-28 脈衝數
參數 P1-29 內部位置 8 圈數設定為-10;參數 P1-30 設定為 2500
內部位置 8 命令為 P1-29 圈數+P1-30 脈衝數
5-10
Revision April 2008, Doc. Name: 2007PDD23000010
Page 88

第五章 試轉操作與調機步驟
|ASDA-AB
系列
輸入數值命令 旋轉方向
+ CW
- CCW
STEP 3:
操作步驟
(1) 使用者將數字輸入 DI1 伺服啟動(Servo ON)導通,則伺服啟動。
(2) 將數字輸入 DI2 命令觸發(CTRG)瞬間導通(觸發信號)代表內部位置 1 命令(P1-15
圈數 + P1-16 脈衝數)1 圈被承認,此時電機已轉動一圈。
(3) 先將 DI3 內部位置命令選擇 POS0 導通,數字輸入 DI2 命令觸發(CTRG)瞬間導通(觸
發信號)代表內部位置 2 命令(P1-17 圈數 + P1-18 脈衝數)10 圈被承認,此時電機
再轉 10 圈。
(4) 先將 DI3(POS0)與 DI4(POS1)及 DI5(POS2)內部位置命令選擇全部導通數字
輸入 DI2 命令觸發(CTRG)瞬間導通(觸發信號)代表內部位置 8 命令(P1-29 圈數
+ P1-30 脈衝數))10.25 圈被承認,此時電機再轉 10.25 圈。
(5) 可任意以不同 DI3(POS0)、DI4(POS1)、DI5(POS2)組合重複上述動作。
(6) 停止時,數字輸入 DI1 開路伺服停止(Servo OFF)。
Revision April 2008, Doc. Name: 2007PDD23000010 5-11
Page 89

第五章 試轉操作與調機步驟
|ASDA-AB
系列
5.6 調機步驟
表一、初步慣性比估測------- JOG 模式
1. 當配線完成后送電時驅動器會出現
2. 按「MODE」鍵選取參數功能模式
3. 按「SHIFT」鍵 2 次選取參數群組模式
4. 按「UP」鍵光標選取使用者參數 P2-17
5. 按「SET」鍵顯示參數值顯示如右內容所示
6. 按「SHIFT」鍵 2 次選取,按「UP」鍵,再按「SET」鍵
7. 按「UP」鍵光標選取使用者參數 P2-30
8. 按「SET」鍵顯示參數值顯示如下內容
9. 選取參數值 1,按「UP」鍵光標以選取數值
10. 按「SET」鍵將參數值寫入,顯示器會顯示如右內容所示
11. 此時 SERVO ON 畫面接着顯示如右內容所示
12. 按「DOWN」鍵光標按 3 次選取慣量估測值
13. 顯示現在慣量估測值的內容(為出廠值)
14. 按「MODE」鍵選取參數功能模式
15. 按「SHIFT」鍵 2 次選取參數群組模式
16. 按「UP」鍵光標選取使用者參數 P4-05
17. 按「SET」鍵顯示內容為寸動速度 20r/min,按「UP」鍵與
「DOWN」鍵增加或減少其寸動速度而按「SHIFT」鍵按一次
則增加一位數
18. 選定所需的寸動速度后,按「SET」鍵后,顯示如右內容所示
19. 按「UP」鍵則正向旋轉或按「DOWN」鍵則逆向旋轉
20. 先從低速度做寸動,來回等速在機構上運行平順后,再以較高速度做寸動
21. 在 P4-05 JOG 畫面下無法看到負載慣性比,請連續按兩下「MODE」鍵,即可看到負
載慣性比,要再執行 JOG,按「MODE」鍵,「SET」鍵兩次,觀看面板顯示,依據負
載慣性比是否在多次反復加減速后固定顯示一個值
5-12
Revision April 2008, Doc. Name: 2007PDD23000010
Page 90

5.6.1 調機步驟流程圖
第五章 試轉操作與調機步驟
|ASDA-AB
系列
Revision April 2008, Doc. Name: 2007PDD23000010 5-13
Page 91

第五章 試轉操作與調機步驟
|ASDA-AB
系列
5.6.2 結合機構的初步慣量估測流程圖
5-14
Revision April 2008, Doc. Name: 2007PDD23000010
Page 92

第五章 試轉操作與調機步驟
|ASDA-AB
5.6.3 PI 自動增益模式調機流程圖
將 P2-32 設定 2(PI 自動增益模式-慣量持續估測)
P2-31 自動調整模式應答性設定(出廠值為 4)
自動調整模式應答性設定:值越大應答性越快。
調整 P2-31:增加 P2-31 自動調整模式應答性設定值來增加應答性或降低來減少噪音。
調整 P2-25:根據 P2-31 自動調整模式應答性設定值來增加而調整。
系列
持續調整至性能滿意,再將 P2-32 設定 3(PI 自動增益模式-停止慣量估測),調機完成。
Revision April 2008, Doc. Name: 2007PDD23000010 5-15
Page 93

第五章 試轉操作與調機步驟
|ASDA-AB
系列
表二、PI 自動調整模式應答性設定值設定與 P2-25 設定建議值
P2-31 自動調整
模式應答性設定值
0 20Hz 13
1 30Hz 9
2 40Hz 6
3 60Hz 4
4 85Hz 3
5 120Hz 3
6 160Hz 2
7 200Hz 1
8 250Hz 1
9 以上
速度回路應答頻率 P2-25 設定建議值
300Hz 0
5-16
Revision April 2008, Doc. Name: 2007PDD23000010
Page 94

第五章 試轉操作與調機步驟
|ASDA-AB
系列
5.6.4 PDFF 自動增益模式調機流程圖
將 P2-32 設定 4(PDFF 自動增益模式-慣量持續估測)
P2-31 自動調整模式應答性設定(出廠值為 4)
自動調整模式應答性設定:值越大應答性越快。
調整 P2-31:增加 P2-31 自動調整模式應答性設定值來增加應答性或降低來減少噪音。
持續調整至性能滿意,接着再將 P2-32 設定 5(PDFF 自動增益模式-停止慣量估測),調機
完成。
Revision April 2008, Doc. Name: 2007PDD23000010 5-17
Page 95

第五章 試轉操作與調機步驟
|ASDA-AB
系列
表三、PDFF 自動調整模式應答性設定值與速度回路應答頻率
自動調整模式
速度回路應答頻率
應答性設定值
自動調整模式
速度回路應答頻率
應答性設定值
0 20Hz 8 120Hz
1 30Hz 9 140Hz
2 40Hz A 160Hz
3 50Hz B 180Hz
4 60Hz C 200Hz
5 70Hz D 220Hz
6 80Hz E 260Hz
7 100Hz F 300Hz
5.6.5 負載慣量估測的限制
1. 到達 2000 r/min 的加減速時間需在 1 秒以下。回轉速需在 200 r/min 以上。負載慣量
需為電機慣量的 100 倍以下。外力或慣性比變化不得太劇烈。自動增益模式(固定慣
量 P2-32 為 3 或 5),負載慣量停止估測。負載慣性比估測值,斷電不儲存,每次重
新上電,參數 P1-37 為負載慣性比估測的初始值。但以下兩種狀況,負載慣性比估測
值會自動存入參數 P1-37:
(1) 當由自動模式 2 切換至自動模式 3。
(2) 當由自動模式 4 切換至自動模式 5。
5-18
Revision April 2008, Doc. Name: 2007PDD23000010
Page 96

5.6.6 增益調整模式與參數的關係
第五章 試轉操作與調機步驟
|ASDA-AB
系列
增益調整模式
手動增益調整
PI 自動增益調整
(慣量持續估測)
PI 自動增益調整
(慣量由 P1-37 設定)
PDFF 自動增益調整
(慣量持續估測)
P2-32
0
(出廠值)
2
3
4
自動設定
的參數
無
P2-00,
P2-04,
P2-06,
P2-00
P2-04
P2-06
P2-00,
P2-04,
P2-06,
P2-25,
使用者自行調整的參數
P2-00(位置控制增益)
P2-04(速度控制增益)
P2-06(速度積分補償)
P2-25(共振抑制低通濾波)
P2-31 自動調整模式應答性設定值
(應答等級)
P2-25(共振抑制低通濾波)
P1-37(負載慣性比)
P2-31 自動調整模式應答性設定值
(應答等級)
P2-25(共振抑制低通濾波)
P2-31 自動調整模式應答性設定值
(應答等級)
增益狀態
固定
持續
調整
固定
持續
調整
P2-26
P2-00,
P2-04,
P1-37(負載慣性比)
PDFF 自動增益調整
5
P2-06,
P2-31 自動調整模式應答性設定值
固定
(慣量由 P1-37 設定)
P2-25,
(應答等級)
P2-26,
由自動模式 3 設為手動模式 0 時,P2-00、P2-04、P2-06 會重新修改成自動模式下相對應
的參數值。
由自動模式 5 設為手動模式 0 時,P2-00、P2-04、P2-06、P2-25、P2-26 會重新修改成
自動模式下相對應的參數值。
Revision April 2008, Doc. Name: 2007PDD23000010 5-19
Page 97

第五章 試轉操作與調機步驟
|ASDA-AB
系列
5.6.7 手動增益參數調整
關于位置或速度響應頻率的選擇必須由機台的剛性及應用的場合來決定,一般而言,高頻
度定位的機台或要求精密加工的機台需要設定較高的響應頻率,但設定較高的響應頻率容
易引發機台的共振,因此有高響應需求的場合需要剛性較高的機台以避免機械共振。在未
知機台的容許響應頻率時,可逐步加大增益設定以提高響應頻率直到共振音產生時,再調
低增益設定值。其相關增益調整原則如下說明:
位置控制增益(KPP,參數 P2-00)
本參數決定位置回路的應答性,KPP 值設定越大位置回路響應頻率越高,對于位置命
令的追隨性越佳,位置誤差量越小,定位整定時間越短,但是過大的設定會造成機台
產生抖動或定位會有過衝(overshoot)的現象。位置回路響應頻率的計算如下:
位置回路響應頻率
(Hz)=
KPP
2
速度控制增益(KVP,參數 P2-04)
本參數決定速度控制回路的應答性,KVP 設越大速度回路響應頻率越高,對于速度命
令的追隨性越佳,但是過大的設定容易引發機械共振。速度回路的響應頻率必須比位
置回路的響應頻率高 4~6 倍,當位置響應頻率比速度響應頻率高時,機台會產生抖動
或定位會有過衝(overshoot)的現象。速度回路響應頻率的計算如下:
速度回路響應頻率
=
KVP
( )
2
X
1
(1+JL/JM)
Hz
速度積分補償(KVI,參數 P2-06)
KVI 越大對固定偏差消除能力越佳,過大的設定容易引發機台的抖動,建議設定值如
下:
KVI( P2-06)
參數
1.5x
速度回路的響應頻率
共振抑制低通濾波器(NLP,參數 P2-25)
負載慣性比越大,速度回路的響應頻率會下降,必須加大 KVP 以維持速度的響應頻
率,在加大 KVP 的過程,可能產生機械共振音,請嘗試利用本參數將噪音消除。越
大的設定對高頻噪音的改善越明顯,但是過大的設定會導致速度回路不穩定及過衝的
現象,其設定建議值如下:
NLP( P2-25)
參數
4x (Hz)
速度回路的響應頻率
1000
外部干擾抵抗增益(DST,參數 P2-26)
本參數用來增加對外力的抵抗能力並降低加減速的過衝的現象,出廠值為 0。在手動
模式不建議調整,除非是要進行自動增益結果的微調。
5-20
Revision April 2008, Doc. Name: 2007PDD23000010
Page 98

第五章 試轉操作與調機步驟
|ASDA-AB
位置前饋增益(PFG,參數 P2-02)
可降低位置誤差量並縮短定位的整定時間,但過大的設定容易造成定位過衝的現象;
若電子齒輪比設定大于 10 亦容易產生噪音。
系列
Revision April 2008, Doc. Name: 2007PDD23000010 5-21
Page 99

第五章 試轉操作與調機步驟
|ASDA-AB
系列
(此頁有意留為空白)
5-22
Revision April 2008, Doc. Name: 2007PDD23000010
Page 100

第六章 控制功能
6.1 操作模式選擇
本驅動器提供位置、速度、扭矩三種基本操作模式,可使用單一控制模式,即固定在一種模
式控制,也可選擇用混合模式來進行控制,下表列出所有的操作模式與說明:
模式名稱 模式代號 模式碼 說明
位置模式
(端子輸入)
位置模式
(內部寄存器輸入)
速度模式
單
一
速度模式
模
(無模擬輸入)
式
扭矩模式
Pt 00
Pr 01
S 02
Sz 04
T 03
驅動器接受位置命令,控制電機至目標位置。
位置命令由端子輸入,信號型態為脈衝。
驅動器接受位置命令,控制電機至目標位置。
位置命令由內部寄存器提供(共八組寄存器),
可利用 DI 信號選擇寄存器編號。
驅動器接受速度命令,控制電機至目標轉速。
速度命令可由內部寄存器提供(共三組寄存
器),或由外部端子輸入模擬電壓(-10V ~
+10V)。命令的選擇是根據 DI 信號來選擇。
驅動器接受速度命令,控制電機至目標轉速。
速度命令僅可由內部寄存器提供(共三組寄存
器),無法由外部端子提供。命令的選擇是根據
DI 信號來選擇。
驅動器接受扭矩命令,控制電機至目標扭矩。
扭矩命令可由內部寄存器提供(共三組寄存
器),或由外部端子輸入模擬電壓(-10V ~
+10V)。命令的選擇是根據 DI 信號來選擇。
驅動器接受扭矩命令,控制電機至目標扭矩。
扭矩模式
(無模擬輸入)
混合模式
Revision April 2008, Doc. Name: 2007PDD23000010 6-1
Tz 05
Pt-S 06
Pt-T 07
Pr-S 08
Pr-T 09
S-T 10
扭矩命令僅可由內部寄存器提供(共三組寄存
器),無法由外部端子提供。命令的選擇是根據
DI 信號來選擇。
Pt 與 S 可通過 DI 信號切換
Pt 與 T 可通過 DI 信號切換
Pr 與 S 可通過 DI 信號切換
Pr 與 T 可通過 DI 信號切換
S 與 T 可通過 DI 信號切換
 Loading...
Loading...