


RO-SER-INTERFACE
Hardware-Description
2010
Oktober
INDEX
1. Introduction 5
1.1. General remarks 5
1.2. Customer satisfaction 5
1.3. Customer response 5
2. Hardware description 7
2.1. Overview screen 7
2.2. Technical data 8
2.3. Selecting between RS-232 or RS-485 interface 9
2.4. Plug-in connector of the module 11
2.4.1. Power supply
2.4.2. RS-232/RS-485 Interface
2.4.2.1. RS-232 Pinout
2.4.2.2. RS-485 Pinout
11
11
12
12
2.5. Control LEDs 13
2.5.1. Definition of LEDs
13
3. Configuring the module 15
3.1. DIP-switches 15
3.2. The "special-mode" 16
3.3. Activating echo 16
3.4. Setting up Baud rate 17
3.5. Setting up module address (RS-485 only) 18
4. Software 20
4.1. Using our products 20
4.1.1. Access via graphical applications
20
Index | 2Seite

INDEX
4.1.2. Access via the DELIB driver library
4.1.3. Access via protocol
4.1.4. Access via provided test programs
20
20
21
4.2. DELIB driver library 22
4.2.1. Overview
4.2.2. Supported operating systems
4.2.3. Supported programming languages
4.2.4. Installation DELIB driver library
4.2.5. DELIB Configuration Utility
22
24
24
25
27
4.3. Test programs 28
4.3.1. Digital Input-Output Demo
4.3.2. Analog Input-Output Demo
4.3.3. Stepper Demo
28
29
30
5. Appendix 32
5.1. Revisions 32
5.2. Copyrights and trademarks 33
Index | 3Seite

Introduction
I
Introduction | Seite 4

1. Introduction
1.1. General remarks
First of all, we would like to congratulate you to the purchase of a high quality
DEDITEC product.
Our products are being developed by our engineers according to quality
requirements of high standard. Already during design and development we take
care that our products have -besides quality- a long availability and an optimal
flexibility.
Modular design
The modular design of our products reduces the time and the cost of
development. Therefor we can offer you high quality products at a competitive
price.
Availability
Because of the modular design of our products, we have to redesign only a
module instead of the whole product, in case a specific component is no longer
available.
1.2. Customer satisfaction
Our philosophy: a content customer will come again. Therefor customer
satisfaction is in first place for us.
If by any chance, you are not content with the performance of our product,
please contact us by phone or mail immediately.
We take care of the problem.
1.3. Customer response
Our best products are co-developments together with our customers. Therefor
we are thankful for comments and suggestions.
Introduction | Seite 5

Hardware description
II
Hardware description |Seite 6

2. Hardware description
2.1. Overview screen
The figure shows the control module with RS-232/RS-485 interface (left side)
combined with an input/output module (right side).
The figure shows the control module with a RS-232/RS-485 interface (left side)
combined with a flexible conntector input/output module (right side).
Hardware description |Seite 7

2.2. Technical data
Single power supply +7V..+24V DC
7 control LEDs
RS-232/RS-485 interface
Easy to configure over DIP switches
Galvanically isolated interface using optocouplers
Connection through 9 pol. D-SUB connector
Timeout feature providing ability to disconnect outputs for safety reasons
Comfortable connector system with ejection mechanism
Expandable in 16 gradations
Can be combined without any problem to other modules of the RO series
Hardware description |Seite 8

2.3. Selecting between RS-232 or RS-485 interface
The factory setting mode of the interface is RS-232. The following describes
how to change the interface mode to RS-485.
Notice!
Bevore opening the device, please note the following:
Disconnect the power supply (unplug AC/DC adaptor)!
Do not touch electronic components. They could be destroyed by electrostatic
discharge! If necessary, touch grounded metal casings or radiators.
Remove a module‘s side element. Unscrew the three Phillips screws.
Pull the circuit board together with the front panel sideways out.
Lift the front panel from the module.
Next to the left side of the serial interface (D-SUB 9 pol. connector) is a 10pol.
header with corresponding jumpers. The following table shows, which jumpers
to plug-in.
Hardware description |Seite 9

Header
Interface
Set jumper
RS-232
Pin1 & Pin3
Pin2 & Pin4
RS-485
Resistance
terminator
Pin3 & Pin5
Pin4 & Pin6
Pin7 & Pin8
Pin9 & Pin10
Assembling the elements in done the reverse order.
Hardware description |Seite 10

2.4. Plug-in connector of the module
2.4.1. Power supply
The input-power-supply-range lies between +7V and +24V DC. Power supply
can be realized with a standard AC/DC adaptor with 1A output current. A
suitable plug-in connector is included.
2.4.2. RS-232/RS-485 Interface
The connection to the serial bus is realized through a 9 pol D-SUB conector. It
is galvanically isolated through optocouplers.
Hardware description |Seite 11

2.4.2.1. RS-232 Pinout
Pin2TX3RX5GND
Pin2RS-485 B
7
RS-485 A
5
GND
2.4.2.2. RS-485 Pinout
Hardware description |Seite 12

2.5. Control LEDs
LED
Description
3,3V
Internal 3,3V power supply
5V
Internal 5V power supply
Interface
Activity
Active communication over the RS-232/RS-485 bus
ERROR
Error during serial-transfer (for details see document ”Serial
protocol”)
Inputs:
Change
State change between 2 read-out cylces detected
Outputs:
Auto-Off
Due to timeout, all outputs are switched-off for safety
reasons
I/O Access
CPU-access on the inputs and outputs of the connected
modules
The RS-232/RS-485 module has a series of control LEDs. They are used for
easy visual indication of various state functions.
While switching the module on in normal operating mode, the module should
signalize the following sequence:
-
all five LEDs flashing briefly
-
right LED (I/O access) flashing briefly
In ”special mode”, the following signal sequence should be seen:
-
all five LEDs flashing briefly
-
right LED (I/O access) flashing briefly
-
all five LEDs flashing briefly
2.5.1. Definition of LEDs
Hardware description |Seite 13

Configuring the module
III
Configuring the module |Seite 14
3. Configuring the module
DIP-switch A8
DIP-switch A7
Description
ONONSpecial-mode
(115K baud rate, module-address = 0,
Echo = OFF)
ON
OFF
Only for SERVICE-purpose: application
won’t start. Forced into bootloader
OFF
ON
Use setup of DIP-switch A4..A1and B8..B1
OFF
OFF
Use setup of DIP-switch A4..A1and B8..B1
DIP-switch A6
Description
ON
Echo = ON, serial received characters are sent back
(Echo = OFF, if DIP A8 and A7 = ON)
OFF
Echo = OFF
DIP-switch
Description
A5
Reserved
A4 to A1
Setting up the baud rate
B8 to B1
Setting up the serial module number
In order to integrate a module into an existing bus system, it is necessary to first
assign a free module address and the appropriate bit rate. The ”special mode”
may be alternatively used to quickly operate the system.
3.1. DIP-switches
Some of the settings are easily configurable using DIP-switches. Configurable
are ”special mode”, the Baud rate, the module’s address or interface-specific
settings.
Configuring the module |Seite 15

3.2. The "special-mode"
The ”special mode” is to quickly and easily set the device to the default values.
This is helpfull for a quick and easy setup and facilitates an error analysis or an
initial operation.
This mode is active, if switching the DIP-switches A7 and A8 to ”ON. The
remaining DIP-switches are disabled.
The module is now set to a baud rate of 115Kbauds, the module number and
”echo” are inactive.
3.3. Activating echo
Received serial characters are returned back to display them on the monitor
(ON = yes, OFF = no).
Configuring the module |Seite 16

3.4. Setting up Baud rate
Baud rate
DIP-switch
A4
DIP-switch
A3
DIP-switch A2
DIP-switch A1
1,25 Mbit
OnOnOnOn625 Kbit
OnOnOn
Off
250 Kbit
OnOnOffOn125 Kbit
OnOnOff
Off
115200 Bit
On
OffOnOn
57600 Bit
On
OffOnOff
50000 Bit
On
Off
OffOn38400 Bit
On
Off
Off
Off
19200 Bit
OffOnOnOn9600 Bit
OffOnOn
Off
4800 Bit
OffOnOffOn2400 Bit
OffOnOff
Off
1200 Bit
Off
OffOnOn
600 Bit
Off
OffOnOff
300 Bit
Off
Off
Off
On
The table lists the possible Baud rates. The trasfer rate is set using the 4 DIPswitches (A1 to A4).
Configuring the module |Seite 17

3.5. Setting up module address (RS-485 only)
Baud rate
BIt
Value ON
Value OFF
DIP-switch B8
Bit 7
128
0
DIP-switch B7
Bit 6
640DIP-switch B6
Bit 5
320DIP-switch B5
Bit 4
160DIP-switch B4
Bit 3
80DIP-switch B3
Bit 2
40DIP-switch B2
Bit 1
20DIP-switch B1
Bit 0
1
0
Baud rate
Address 0
Address 25
Address 237
DIP-switch B8
Off
OffOnDIP-switch B7
Off
OffOnDIP-switch B6
Off
OffOnDIP-switch B5
OffOnOff
DIP-switch B4
OffOnOn
DIP-switch B3
Off
OffOnDIP-switch B2
Off
Off
Off
DIP-switch B1
OffOnOn
The operation in RS-485 mode allows to connect several modules to the bus. It
is therefore necessary to assign an individual address to each module. This is
realized by means of DIP-switches B1 to B8, resulting in a range of 0 to 255.
The module-no. 0 is ignored, i.e. any no. will address the module.
Examples:
Configuring the module |Seite 18

Software
IV
Software | Seite 19

4. Software
4.1. Using our products
4.1.1. Access via graphical applications
We provide driverinterfaces e.g. for LabVIEW and ProfiLab. The DELIB driver
library is the basis, which can be directly activated by ProfiLAB.
For LabVIEW, we provide a simple driver connection with examples!
4.1.2. Access via the DELIB driver library
In the appendix, you can find the complete function reference for the integration
of our API-functions in your software. In addition we provide examples for the
following programming languages:
C
C++
C#
Delphi
VisualBasic
VB.NET
MS-Office
4.1.3. Access via protocol
The protocol for the activation of our products is open source. So you are able
to use our products on systems without Windows or Linux.
Software | Seite 20

4.1.4. Access via provided test programs
We provide simple handling test programs for the most important functions of
our products. These will be installed automatically by the installation of the
DELIB driver library.
So you can test directly e.g. relays or you can check the voltage of an A/D
converter.
Software | Seite 21

4.2. DELIB driver library
4.2.1. Overview
The following figure explains the structure of the DELIB driver library
The DELIB driver library allows an uniform response of DEDITEC hardware with
particular consideration of the following viewpoints:
Independent of operating system
Independent of programming language
Independent of the product
Program under diverse operating systems
The DELIB driver library allows an uniform response of our products on diverse
operating systems.
We has made sure, that all of our products can be responded by a few
commands.
Whatever which operating system you use. - Therefore the DELIB cares!
Software | Seite 22

Program with diverse programming languages
We provide uniform commands to create own applications. This will be solved
by the DELIB driver library.
You choose the programming language!
It can be simply developed applications under C++, C, Visual Basic, Delphi or
LabVIEW®.
Program independent of the interface
Write your application independent of the interface !
Program an apllication for an USB product of us. - Also, it will work with an
ethernet or RS-232 product of us !
SDK-Kit for Programmer
Integrate the DELIB in your application. On demand you receive an installation
script for free, which allows you, to integrate the DELIB installation in your
apllication.
Software | Seite 23

4.2.2. Supported operating systems
Our products support the following operating systems:
Windows 2000
Windows XP
Windows Vista
Windows 7
Linux
4.2.3. Supported programming languages
Our products are responsive via the following programming languages:
C
C++
C#
Delphi
VisualBasic
VB.NET
MS-Office
Software | Seite 24

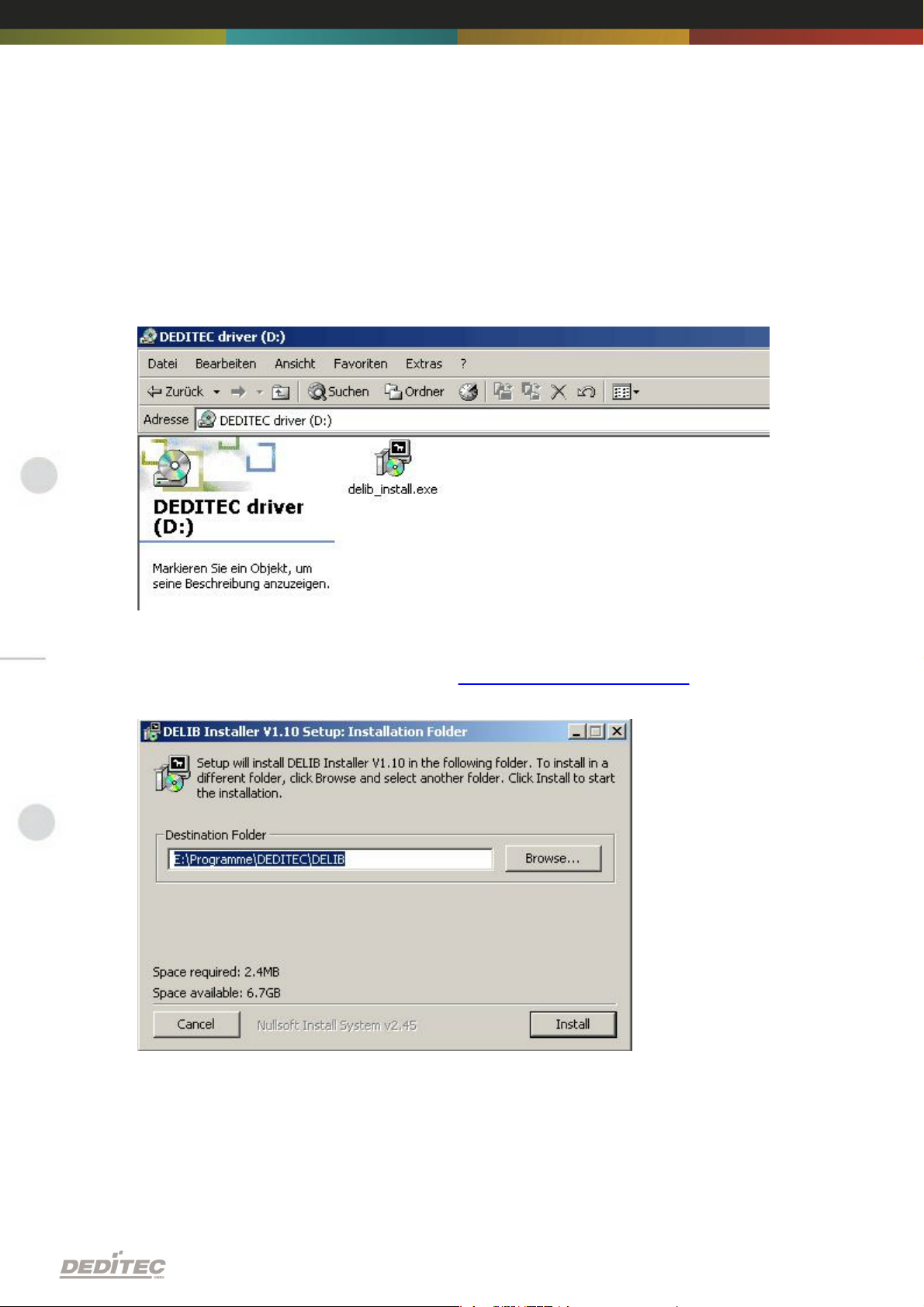
4.2.4. Installation DELIB driver library
DELIB stands for DEDITEC Library and contains the necessary libraries for the
modules in the programming languages C, Delphi and Visual Basic.
Insert the DEDITEC driver CD into the drive and start „delib_install.exe“. The
DELIB driver library is also available on http://www.deditec.en/delib
Click on „Install“.
Software | Seite 25
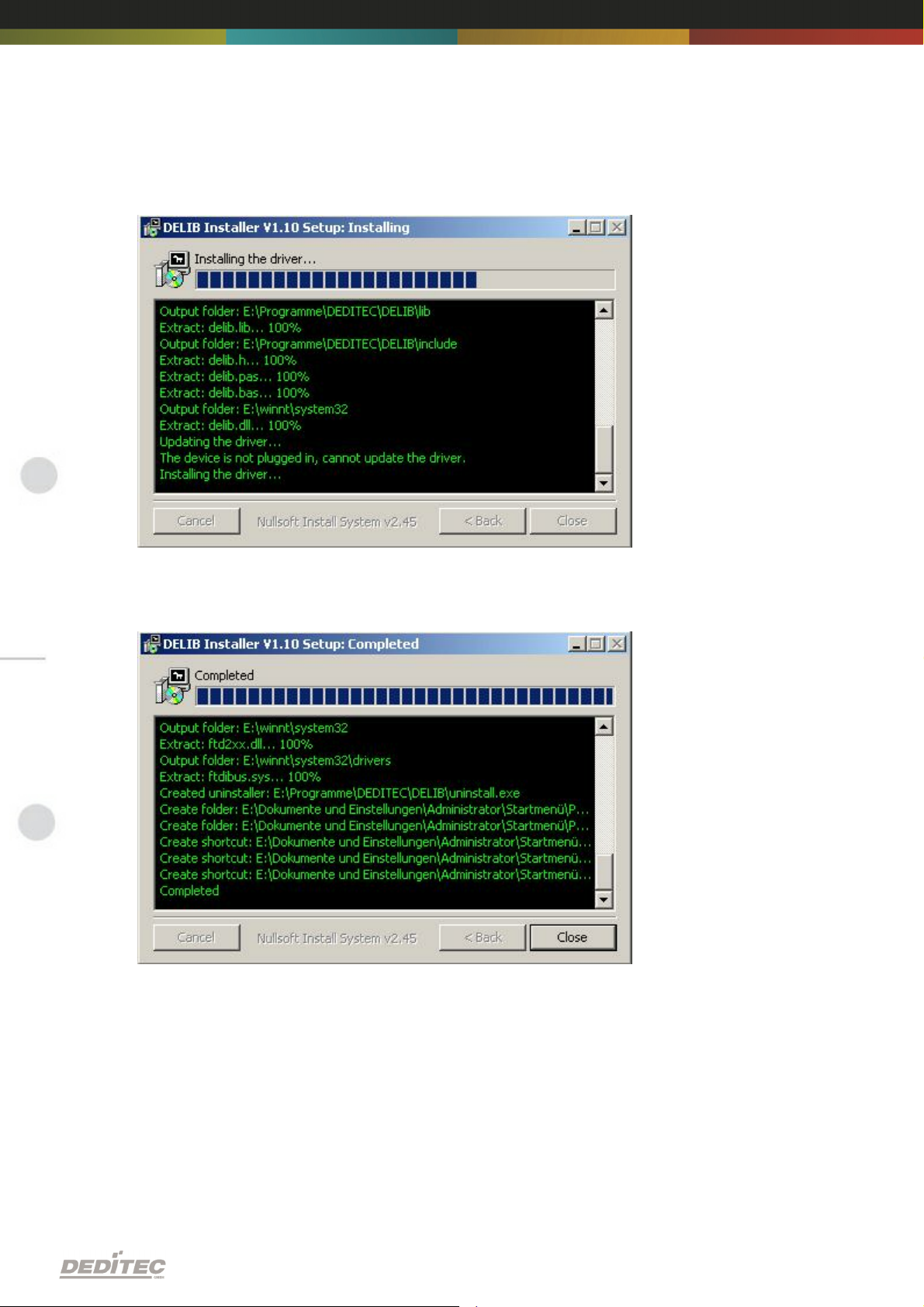
The drivers will be installed.
The DELIB driver library is now installed. Press „Close“ to finish the installation.
You can configure your module with the „DELIB Configuration Utility“ (see
next chapter). This is only necessary, if more than one module is present.
Software | Seite 26

4.2.5. DELIB Configuration Utility
Start the “DELIB Configuration Utility” as follows:
Start Programs DEDITEC DELIB DELIB Configuration Utility.
The „DELIB Configuration Utility“ is a program to configure and subdivide
identical USB-modules in the system. This is only necessary if more than one
module is present.
Software | Seite 27
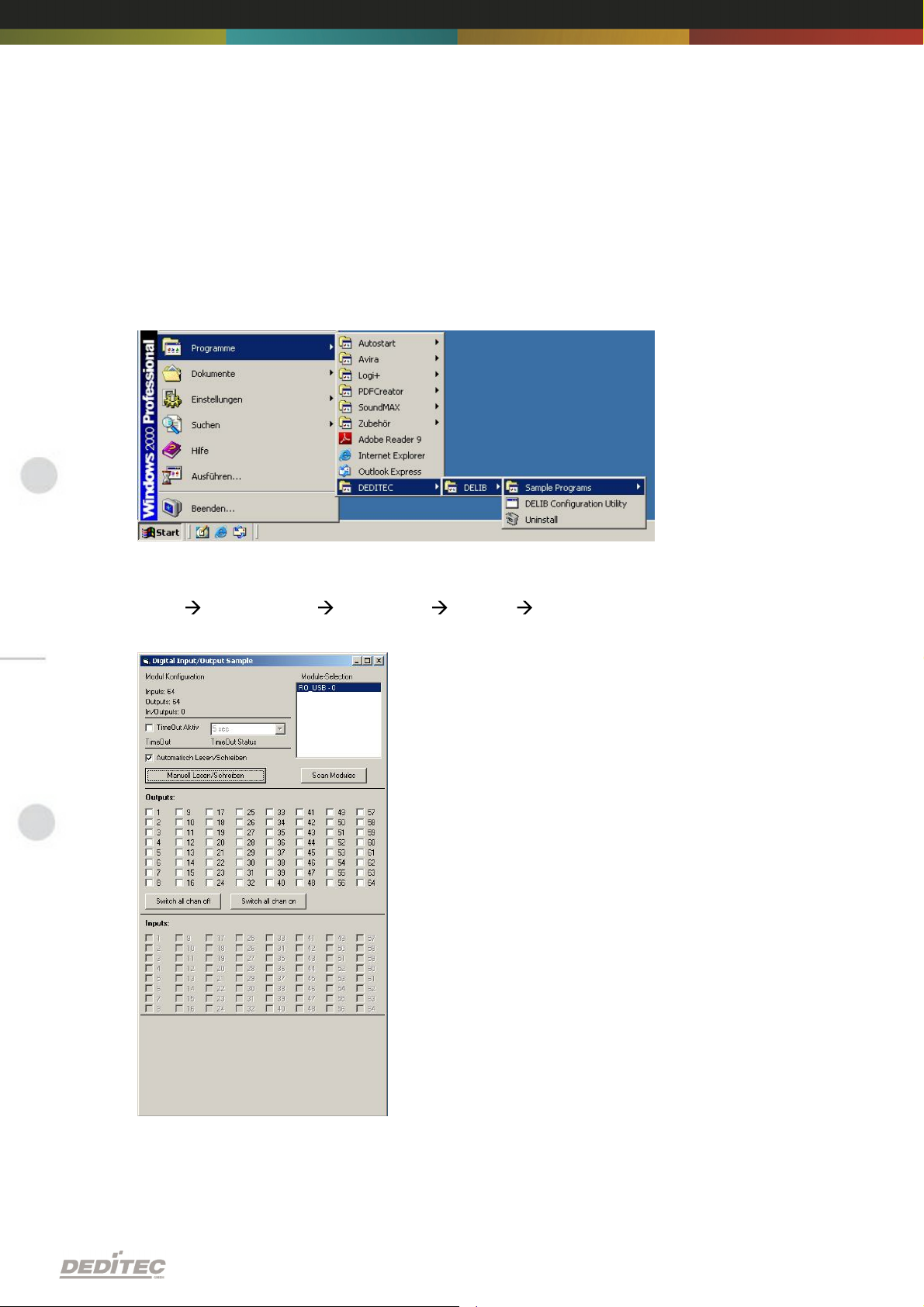
4.3. Test programs
4.3.1. Digital Input-Output Demo
Start “Digital Input-Output Demo” as follows:
Start Programme DEDITEC DELIB Digital Input-Output Demo.
The screenshot shows a test of the RO-USB-O64-R64. The configuration of the
module (64 inputs and 64 outputs) is shown on the upper left side.
Software | Seite 28
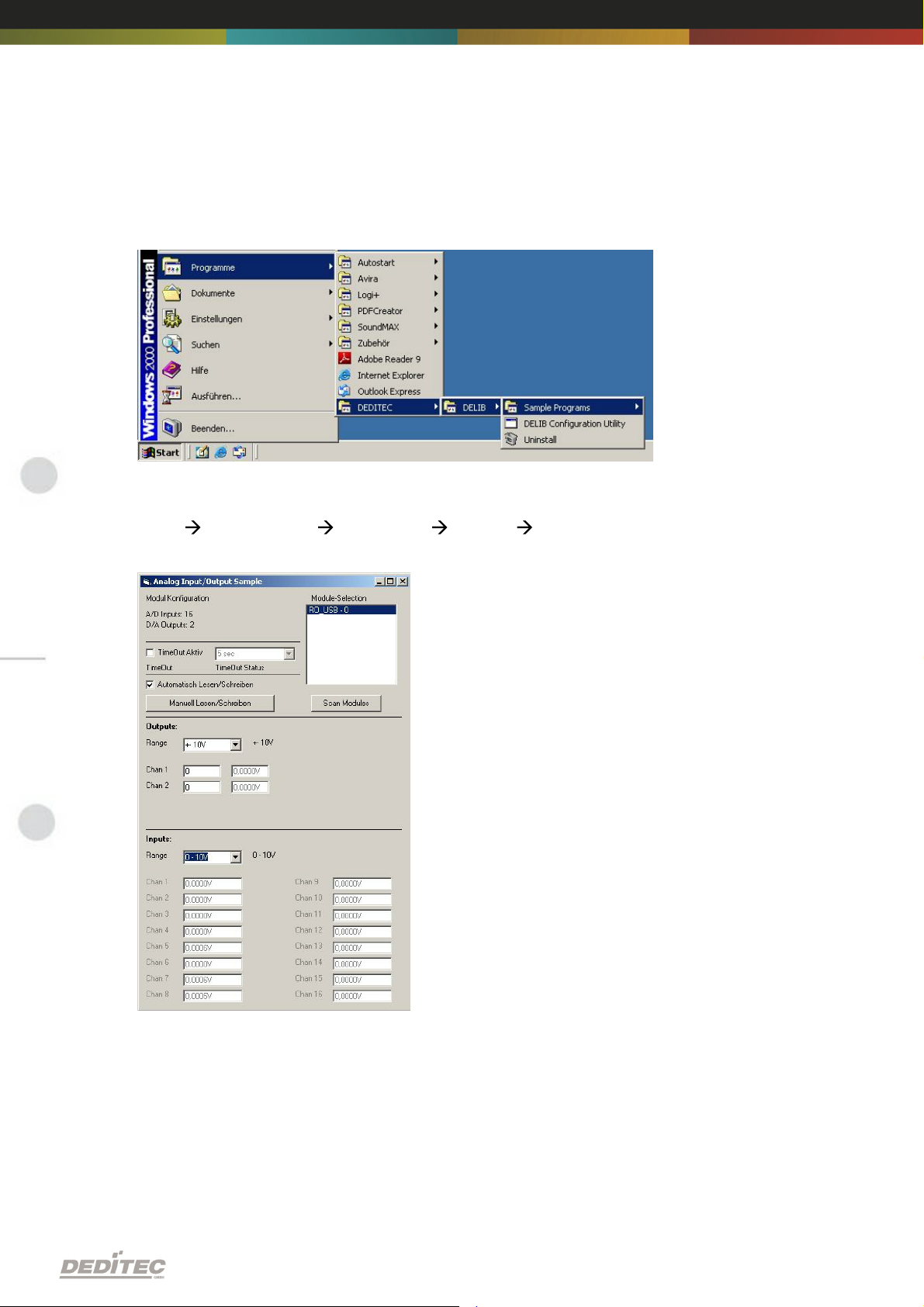
4.3.2. Analog Input-Output Demo
Start “Analog Input-Output Demo” as follows:
Start Programme DEDITEC DELIB Analog Input-Output Demo.
The screenshot shows a test of the RO-USB-AD16-DA2_ISO. The configuration
of the module (16 A/D inputs and 2 D/A outputs) is shown on the upper left side.
Software | Seite 29

4.3.3. Stepper Demo
Start “Stepper Demo” as follows:
Start Programme DEDITEC DELIB Stepper Demo.
The screenshot shows a test of the RO-USB-STEPPER2. The configuration of
the module (2 Stepper) is shown on the upper left side.
Software | Seite 30
Appendix
V
Appendix | Seite 31

5. Appendix
5.1. Revisions
Rev 1.00 First issue
Rev 2.00 Design change
Appendix | Seite 32

5.2. Copyrights and trademarks
Linux is registered trade-mark of Linus Torvalds.
Windows CE is registered trade-mark of Microsoft Corporation.
USB is registered trade-mark of USB Implementers Forum Inc.
LabVIEW is registered trade-mark of National Instruments.
Intel is registered trade-mark of Intel Corporation
AMD is registered trade-mark of Advanced Micro Devices, Inc.
Appendix | Seite 33

RO-DIGITAL-IN-OUT
Hardware-Description
2010
Oktober

INDEX
1. Introduction 6
1.1. General remarks 6
1.2. Customer satisfaction 6
1.3. Customer response 6
2. Hardware description 8
2.1. Opto-coupler inputs 9
2.1.1. Overview screen
2.1.2. Technical data
2.1.3. 16-bit counter
2.1.4. Registering short input pulses
2.1.5. Galvanically decouppled through optocouplers
2.1.6. Plug-in connector on the module
2.1.6.1. Connection wiring
2.1.6.2. Visual control of the inputs
2.1.6.3. Pinout
2.1.7. Variable input voltage range
2.1.7.1. Changing the input voltage
10
11
11
11
12
12
13
13
13
14
2.2. Relay outputs 15
2.2.1. Overview screen
2.2.2. Technical data
2.2.3. Timeout-protection
2.2.4. Plug-in connector on the module
2.2.4.1. Relay-outputs (galvanically decoupled, max.
1A)
2.2.4.2. Connection wiring
2.2.4.3. Visual control of the outputs
2.2.4.4. Pinout
15
16
17
17
17
18
18
18
9
2.3. MOSFET outputs 19
2.3.1. Overview screen
2.3.2. Technical data
2.3.3. Timeout-protection
2.3.4. Plug-in connector on the module
19
20
21
21
Index | 2Seite

INDEX
2.3.4.1. Optocoupler-outputs (galvanically isolated,
max. 2A DC)
2.3.4.2. Connection wiring
2.3.4.3. Pinout
3. Software 24
3.1. Using our products 24
21
22
22
3.1.1. Access via graphical applications
3.1.2. Access via the DELIB driver library
3.1.3. Access via protocol
3.1.4. Access via provided test programs
24
24
24
25
3.2. DELIB driver library 26
3.2.1. Overview
3.2.2. Supported operating systems
3.2.3. Supported programming languages
3.2.4. Installation DELIB driver library
3.2.5. DELIB Configuration Utility
26
28
28
29
31
3.3. Test programs 32
3.3.1. Digital Input-Output Demo
32
4. DELIB API reference 34
4.1. Management functions 34
4.1.1. DapiOpenModule
4.1.2. DapiCloseModule
4.2. Error handling 36
34
35
4.2.1. DapiGetLastError
4.2.2. DapiGetLastErrorText
36
37
4.3. Reading Digital inputs 38
4.3.1. DapiDIGet1
4.3.2. DapiDIGet8
4.3.3. DapiDIGet16
4.3.4. DapiDIGet32
4.3.5. DapiDIGet64
4.3.6. DapiDIGetFF32
4.3.7. DapiDIGetCounter
38
39
40
41
42
43
44
Index | 3Seite

INDEX
4.4. Setting Digital outputs 45
4.4.1. DapiDOSet1
4.4.2. DapiDOSet8
4.4.3. DapiDOSet16
4.4.4. DapiDOSet32
4.4.5. DapiDOSet64
4.4.6. DapiDOReadback32
4.4.7. DapiDOReadback64
45
46
47
48
49
50
51
4.5. Output timeout management 52
4.5.1. DapiSpecialCMDTimeout
4.5.2. DapiSpecialCMDTimeoutGetStatus
52
53
4.6. Test functions 54
4.6.1. DapiPing
54
4.7. Example program 55
5. Appendix 58
5.1. Revisions 58
5.2. Copyrights and trademarks 59
Index | 4Seite

Introduction
I
Introduction | Seite 5

1. Introduction
1.1. General remarks
First of all, we would like to congratulate you to the purchase of a high quality
DEDITEC product.
Our products are being developed by our engineers according to quality
requirements of high standard. Already during design and development we take
care that our products have -besides quality- a long availability and an optimal
flexibility.
Modular design
The modular design of our products reduces the time and the cost of
development. Therefor we can offer you high quality products at a competitive
price.
Availability
Because of the modular design of our products, we have to redesign only a
module instead of the whole product, in case a specific component is no longer
available.
1.2. Customer satisfaction
Our philosophy: a content customer will come again. Therefor customer
satisfaction is in first place for us.
If by any chance, you are not content with the performance of our product,
please contact us by phone or mail immediately.
We take care of the problem.
1.3. Customer response
Our best products are co-developments together with our customers. Therefor
we are thankful for comments and suggestions.
Introduction | Seite 6

Hardware description
II
Hardware description |Seite 7

2. Hardware description
Using the in-/output modules is based on two 16 pol. connectors with each 8
different current circuits. Each state of these (total 16) current circuits is
signalized by a LED. The modules are numbered from left to right (see overview
screen).
Hardware description |Seite 8

2.1. Opto-coupler inputs
2.1.1. Overview screen
The figure shows two modules next to each other with corresponding
numbering of the terminal blocks.
The lower figure shows a flexible conntector module with 32 outputs and
corresponding numbered ports. Each outer end of the module has a 26 pol. wire
trap connector. Thus, multiple modules can be connected in series using a
ribbon cable for each connection.
Hardware description |Seite 9

2.1.2. Technical data
Variable power supply min. 5V, max. 30V AC
16-bit counter for the first 16 input channels
Pulse-detection between 2 read out cycles, indicated by LED
LED status indication of the inputs
Galvanically isolated using optocouplers
Comfortable connector system with ejection mechanism
Expandable in 16 gradations
Can be combined without any problem to other modules of the RO series
Hardware description |Seite 10

2.1.3. 16-bit counter
The first 16 input channels have each a 16 bit counter. Thus, events as light
barriers, turnstiles or push-buttons are counted. Easy logical circuits are
realizable, which may e.g. switch one or several outputs, if a counter reached a
certain amount (set-point is reached). Please refer to the manual ”RO-series” to
implement such logical circuits into software.
2.1.4. Registering short input pulses
Short input pulses between to read-out cycles are registered through an
additional logic and can be separately read-out. A registered pulse on one or
more inputs is signalized by the LED ”Inputs: Change” on the control module.
The LED is extinguishing, if the software-register of the input state change is
read out by the user. For more indformation, see ”Register assignment”.
2.1.5. Galvanically decouppled through optocouplers
AC input optocouplers provide a galvanic isolation of the module towards the
connected equipment. They also provide a safe connection to the module for
reverse currents and high voltage peaks.
Hardware description |Seite 11

2.1.6. Plug-in connector on the module
As terminal block, user-friendly terminal strips with locking protection and
ejection mechanism are used. They are reverse-polarity protected and allow
quick replugging. The wire connection itself is realised with a screwless
connector system. A tool is included with each module.
2.1.6.1. Connection wiring
Connecting the wires is to be effected at the ports with the same numbering, for
example: 1a & 1b, 2a & 2b. ...
The optocoupler inputs are suitable for AC voltage. Therefore it is not necessary
to take care of the connection polarity.
The figure shows two terminal blocks with numbered connection ports.
Hardware description |Seite 12

2.1.6.2. Visual control of the inputs
Port
Pin
Port
Pin11a & 1b
9
9a & 9b
2
2a & 2b
10
10a & 10b
3
3a & 3b
11
11a & 11b
4
4a & 4b
12
12a & 12b
5
5a & 5b
13
13a & 13b
6
6a & 6b
14
14a & 14b
7
7a & 7b
15
15a & 15b
8
8a & 8b
16
16a & 16b
Input voltage range
5V – 15V
15V – 30V
Resistance value
1K
2K2
The state of each input is directly signalized by a separate LED. This simplifies
to detect and rectify wiring errors, because the signals on the cables are directly
observable.
2.1.6.3. Pinout
2.1.7. Variable input voltage range
The factory-default of the inputs is set to a voltage range of 15V to 30V. This
may be changed to a range of 5V to 15V (even afterward).
Hardware description |Seite 13

2.1.7.1. Changing the input voltage
Each terminal block has 8 inputs sudivided in two groups and each group has its
own input voltage range (resulting groups: 1-4, 5-8, 9-12 und 13-16). Each
group‘s input voltage range is defined by a corresponding resistor network.
The following steps describes how to exchange one or more resistor networks.
Notice!
Bevore opening the device, please note the following:
Disconnect the power supply (unplug AC/DC adaptor)!
Do not touch electronic components. They could be destroyed by electrostatic
discharge! If necessary, touch grounded metal casings or radiators.
Remove a module‘s side element. Unscrew the three Phillips screws.
Pull the circuit board together with the front panel sideways out.
Lift the front panel from the module.
Every input module has two single rowed socket terminal strips in which the
resistor networks are plugged in. Please carefully remove the desired resistor
network and replace them it appropriate one.
Assembling the elements in done the reverse order.
Hardware description |Seite 14

2.2. Relay outputs
2.2.1. Overview screen
The figure shows two modules next to each other with corresponding
numbering of the terminal blocks.
The lower figure shows a flexible conntector module with 32 outputs and
corresponding numbered ports. Each outer end of the module has a 26 pol. wire
trap connector. Thus, multiple modules can be connected in series using a
ribbon cable for each connection.
Hardware description |Seite 15

2.2.2. Technical data
Timeout-protection
LED status indication of the outputs
Galvanically isolated using optocouplers
Comfortable connector system with ejection mechanism
Expandable in 16 gradations
Can be combined without any problem to other modules of the RO series
Max. switching voltage: 36V
Max. switching current: 1A
Max. switching power: 20W
Switching cycles according to the manufacturer: 10 Mio.
Hardware description |Seite 16

2.2.3. Timeout-protection
The timeout-protection gives the possibility to switch-off automatically the
outputs on its own to prevent damage. This takes place, if in a predefined time
frame no communication with the module was possible. Reasons could be cable
disruption, PC-crash and more. This way damage control, surcharge of
connected equipment and risk of accidents can be avoided. Switching off the
outputs is indicated by a LED.
2.2.4. Plug-in connector on the module
As terminal block, user-friendly terminal strips with locking protection and
ejection mechanism are used. They are reverse-polarity protected and allow
quick replugging. The wire connection itself is realised with a screwless
connector system. A tool is included with each module.
2.2.4.1. Relay-outputs (galvanically decoupled, max. 1A)
The relays are able to switch voltages up to 36V. The max. current is 1A at a
max. power of 20W.
Additionally, the relays provide a safe electrical isolation of the module to the
connected equipment.
Hardware description |Seite 17

2.2.4.2. Connection wiring
Port
Pin
Port
Pin11a & 1b
9
9a & 9b
2
2a & 2b
10
10a & 10b
3
3a & 3b
11
11a & 11b
4
4a & 4b
12
12a & 12b
5
5a & 5b
13
13a & 13b
6
6a & 6b
14
14a & 14b
7
7a & 7b
15
15a & 15b
8
8a & 8b
16
16a & 16b
Connecting the wires is to be effected at the ports with the same numbering, for
example: 1a & 1b, 2a & 2b. ...
It is not necessary to take care to the correct polarity.
2.2.4.3. Visual control of the outputs
The state of each output is directly signalized by a separate LED. This simplifies
to detect and rectify wiring errors, because the signals on the cables are directly
observable.
2.2.4.4. Pinout
Hardware description |Seite 18

2.3. MOSFET outputs
2.3.1. Overview screen
The figure shows two modules next to each other with corresponding
numbering of the terminal blocks.
The lower figure shows a flexible conntector module with 32 outputs and
corresponding numbered ports. Each outer end of the module has a 26 pol. wire
trap connector. Thus, multiple modules can be connected in series using a
ribbon cable for each connection.
Hardware description |Seite 19

2.3.2. Technical data
Timeout-protection
LED status indication of the outputs
Galvanically isolated using optocouplers
Comfortable connector system with ejection mechanism
Expandable in 16 gradations
Can be combined without any problem to other modules of the RO series
Max. switching voltage: 30V DC
Max. switching current: 2A DC
Max. switching power: 40W
Hardware description |Seite 20

2.3.3. Timeout-protection
The timeout-protection gives the possibility to switch-off automatically the
outputs on its own to prevent damage. This takes place, if in a predefined time
frame no communication with the module was possible. Reasons could be cable
disruption, PC-crash and more. This way damage control, surcharge of
connected equipment and risk of accidents can be avoided. Switching off the
outputs is indicated by a LED.
2.3.4. Plug-in connector on the module
As terminal block, user-friendly terminal strips with locking protection and
ejection mechanism are used. They are reverse-polarity protected and allow
quick replugging. The wire connection itself is realised with a screwless
connector system. A tool is included with each module.
2.3.4.1. Optocoupler-outputs (galvanically isolated, max. 2A DC)
Every output is realized using high current optocouplers. Using optocouplers
provides a secure galvanical decoupling of the module-driven equipment to the
module itself.
Pay attention to the optocoupler’s output polarity while wiring (see figure below)!
Hardware description |Seite 21

2.3.4.2. Connection wiring
Port
Pin
Port
Pin11a & 1b
9
9a & 9b
2
2a & 2b
10
10a & 10b
3
3a & 3b
11
11a & 11b
4
4a & 4b
12
12a & 12b
5
5a & 5b
13
13a & 13b
6
6a & 6b
14
14a & 14b
7
7a & 7b
15
15a & 15b
8
8a & 8b
16
16a & 16b
Connecting the wires is to be effected at the ports with the same numbering, for
example: 1a & 1b, 2a & 2b, ... Pay attention to the optocoupler’s output polarity
while wiring, else the outputs will get damaged. Connect the positive voltage to
port ”a”, and the switched positive voltage to port ”b”.
2.3.4.3. Pinout
Hardware description |Seite 22

Software
III
Software | Seite 23

3. Software
3.1. Using our products
3.1.1. Access via graphical applications
We provide driverinterfaces e.g. for LabVIEW and ProfiLab. The DELIB driver
library is the basis, which can be directly activated by ProfiLAB.
For LabVIEW, we provide a simple driver connection with examples!
3.1.2. Access via the DELIB driver library
In the appendix, you can find the complete function reference for the integration
of our API-functions in your software. In addition we provide examples for the
following programming languages:
C
C++
C#
Delphi
VisualBasic
VB.NET
MS-Office
3.1.3. Access via protocol
The protocol for the activation of our products is open source. So you are able
to use our products on systems without Windows or Linux.
Software | Seite 24

3.1.4. Access via provided test programs
We provide simple handling test programs for the most important functions of
our products. These will be installed automatically by the installation of the
DELIB driver library.
So you can test directly e.g. relays or you can check the voltage of an A/D
converter.
Software | Seite 25

3.2. DELIB driver library
3.2.1. Overview
The following figure explains the structure of the DELIB driver library
The DELIB driver library allows an uniform response of DEDITEC hardware with
particular consideration of the following viewpoints:
Independent of operating system
Independent of programming language
Independent of the product
Program under diverse operating systems
The DELIB driver library allows an uniform response of our products on diverse
operating systems.
We has made sure, that all of our products can be responded by a few
commands.
Whatever which operating system you use. - Therefore the DELIB cares!
Software | Seite 26

Program with diverse programming languages
We provide uniform commands to create own applications. This will be solved
by the DELIB driver library.
You choose the programming language!
It can be simply developed applications under C++, C, Visual Basic, Delphi or
LabVIEW®.
Program independent of the interface
Write your application independent of the interface !
Program an apllication for an USB product of us. - Also, it will work with an
ethernet or RS-232 product of us !
SDK-Kit for Programmer
Integrate the DELIB in your application. On demand you receive an installation
script for free, which allows you, to integrate the DELIB installation in your
apllication.
Software | Seite 27

3.2.2. Supported operating systems
Our products support the following operating systems:
Windows 2000
Windows XP
Windows Vista
Windows 7
Linux
3.2.3. Supported programming languages
Our products are responsive via the following programming languages:
C
C++
C#
Delphi
VisualBasic
VB.NET
MS-Office
Software | Seite 28
3.2.4. Installation DELIB driver library
DELIB stands for DEDITEC Library and contains the necessary libraries for the
modules in the programming languages C, Delphi and Visual Basic.
Insert the DEDITEC driver CD into the drive and start „delib_install.exe“. The
DELIB driver library is also available on http://www.deditec.en/delib
Click on „Install“.
Software | Seite 29

The drivers will be installed.
The DELIB driver library is now installed. Press „Close“ to finish the installation.
You can configure your module with the „DELIB Configuration Utility“ (see
next chapter). This is only necessary, if more than one module is present.
Software | Seite 30

3.2.5. DELIB Configuration Utility
Start the “DELIB Configuration Utility” as follows:
Start Programs DEDITEC DELIB DELIB Configuration Utility.
The „DELIB Configuration Utility“ is a program to configure and subdivide
identical USB-modules in the system. This is only necessary if more than one
module is present.
Software | Seite 31

3.3. Test programs
3.3.1. Digital Input-Output Demo
Start “Digital Input-Output Demo” as follows:
Start Programme DEDITEC DELIB Digital Input-Output Demo.
The screenshot shows a test of the RO-USB-O64-R64. The configuration of the
module (64 inputs and 64 outputs) is shown on the upper left side.
Software | Seite 32

DELIB API reference
IV
DELIB API reference | Seite 33

4. DELIB API reference
// USB-Modul öffnen
handle = DapiOpenModule(RO_USB1, 0);
printf("handle = %x\n", handle);
if (handle==0)
{
// USB Modul wurde nicht gefunden
printf("Modul konnte nicht geöffnet werden\n");
return;
}
4.1. Management functions
4.1.1. DapiOpenModule
Description
This function opens a particular module.
Definition
ULONG DapiOpenModule(ULONG moduleID, ULONG nr);
Parameters
moduleID=Specifies the module, which is to be opened (see delib.h)
nr=Indicates No of module which is to be opened.
nr=0 -> 1. module
nr=1 -> 2. module
Return value
handle=handle to the corresponding module
handle=0 -> Module was not found
Remarks
The handle returned by this function is needed to identify the module for all
other functions.
Example program
DELIB API reference | Seite 34

4.1.2. DapiCloseModule
// Close the module
DapiCloseModule(handle);
Description
This command closes an opened module.
Definition
ULONG DapiCloseModule(ULONG handle);
Parameters
handle=This is the handle of an opened module
Return value
none
Example program
DELIB API reference | Seite 35

4.2. Error handling
ULONG error;
error=DapiGetLastError();
if(error==0) return FALSE;
printf("ERROR = %d", error);
4.2.1. DapiGetLastError
Description
This function returns the last registered error.
Definition
ULONG DapiGetLastError();
Parameters
None
Return value
Error code
0=no error. (see delib.h)
Example program
DELIB API reference | Seite 36

4.2.2. DapiGetLastErrorText
BOOL IsError ()
{
if (DapiGetLastError () != DAPI_ERR_NONE)
{
unsigned char msg[500];
DapiGetLastErrorText((unsigned char*) msg, sizeof(msg));
printf ("Error Code = %x * Message = %s\n", 0, msg);
return TRUE;
}
return FALSE;
}
Description
This function reads the text of the last registered error.
Definition
extern ULONG __stdcall DapiGetLastErrorText(unsigned char * msg, unsigned long msg_length);
Parameters
msg = text buffer
msg_length = length of the buffer
Example program
DELIB API reference | Seite 37

4.3. Reading Digital inputs
4.3.1. DapiDIGet1
Description
This command reads a single digit input.
Definition
ULONG DapiDIGet1(ULONG handle, ULONG ch);
Parameters
handle=This is the handle of an opened module.
ch=Specifies the number of input that is to be read (0 ..).
Return value
State of the input (0 / 1).
DELIB API reference | Seite 38

4.3.2. DapiDIGet8
Description
This command reads 8 digital inputs simultaneously.
Definition
ULONG DapiDIGet8(ULONG handle, ULONG ch);
Parameters
handle=This is the handle of an opened module.
ch=Specifies the number of the input, from which it begins to read from (0, 8,
16, 24, 32, ..)
Return value
State of the read inputs.
DELIB API reference | Seite 39

4.3.3. DapiDIGet16
Description
This command reads 16 digital inputs simultaneously.
Definition
ULONG DapiDIGet16(ULONG handle, ULONG ch);
Parameters
handle=This is the handle of an opened module.
ch=Specifies the number of the input, from which it begins to read from (0, 16,
32, ..)
Return value
State of the read inputs.
DELIB API reference | Seite 40

4.3.4. DapiDIGet32
unsigned long data;
// ---------------------------------------------------// Einen Wert von den Eingängen lesen (Eingang 1-31)
data = (unsigned long) DapiDIGet32(handle, 0);
// Chan Start = 0
printf("Eingang 0-31 : 0x%x\n", data);
printf("Taste für weiter\n");
getch();
// ---------------------------------------------------// Einen Wert von den Eingängen lesen (Eingang 32-64)
data = (unsigned long) DapiDIGet32(handle, 32);
// Chan Start = 32
printf("Eingang 32-64 : 0x%x\n", data);
printf("Taste für weiter\n");
getch();
Description
This command reads 32 digital inputs simultaneously.
Definition
ULONG DapiDIGet32(ULONG handle, ULONG ch);
Parameters
handle=This is the handle of an opened module.
ch=Specifies the number of the input, from which it begins to read from (0, 32,
64, ..)
Return value
State of the read inputs.
Example program
DELIB API reference | Seite 41

4.3.5. DapiDIGet64
Description
This command reads 64 digital inputs simultaneously.
Definition
ULONGLONG DapiDIGet64(ULONG handle, ULONG ch);
Parameters
handle=This is the handle of an opened module.
ch=Specifies the number of the input,from which it begins to read from (0, 64, ..)
Return value
State of the read inputs.
DELIB API reference | Seite 42

4.3.6. DapiDIGetFF32
Description
This command reads the flip-flops from the inputs and resets them. (Input state
change).
Definition
ULONGLONG DapiDIGet64(ULONG handle, ULONG ch);
Parameters
handle=This is the handle of an opened module .
ch=Specifies the number of the input, from which it begins to read from (0, 32,
..)
Return value
State of 32 input change states
DELIB API reference | Seite 43

4.3.7. DapiDIGetCounter
value = DapiDIGetCounter(handle, 0 ,0);
// Reading counter of DI Chan 0
value = DapiDIGetCounter(handle, 1 ,0);
// Reading counter of DI Chan 1
value = DapiDIGetCounter(handle, 8 ,0);
// Reading counter of DI Chan 8
value = DapiDIGetCounter(handle, 0 ,DAPI_CNT_MODE_READ_WITH_RESET);
// Reading AND resetting counter of DI Chan 0
Description
This command reads the counter of a digital input
Definition
ULONG DapiDIGetCounter(handle, ch, par1);
Parameters
handle=This is the handle of an opened module.
ch=Specifies the digital input, from which the counter will be read
par1=0 (Normal counter function)
par1=DAPI_CNT_MODE_READ_WITH_RESET (Reading and resetting the
counter)
Return value
Value of the counter.
Example program
DELIB API reference | Seite 44

4.4. Setting Digital outputs
4.4.1. DapiDOSet1
Description
This is the command to set a single output.
Definition
void DapiDOSet1(ULONG handle, ULONG ch, ULONG data);
Parameters
handle=This is the handle of an opened module
ch=Specifies the number of the output to be set to (0 ..)
data=Specifies the data value that is to be written (0 / 1)
Return value
None
DELIB API reference | Seite 45

4.4.2. DapiDOSet8
Description
This command sets 8 digital outputs simultaneously.
Definition
void DapiDOSet8(ULONG handle, ULONG ch, ULONG data);
Parameters
handle=This is the handle of an opened module
ch=Specifies the number of the output, from which it begins to write to (0, 8, 16,
24, 32, ..)
data=Specifies the data values, to write to the outputs
Return value
None
DELIB API reference | Seite 46

4.4.3. DapiDOSet16
Description
This command sets 16 digital outputs simultaneously.
Definition
void DapiDOSet16(ULONG handle, ULONG ch, ULONG data);
Parameters
handle=This is the handle of an opened module
ch=Specifies the number of the output, from which it begins to write to (0, 16,
32, ..)
data=Specifies the data values, to write to the outputs
Return value
None
DELIB API reference | Seite 47

4.4.4. DapiDOSet32
// Einen Wert auf die Ausgänge schreiben
data = 0x0000ff00; // Ausgänge 9-16 werden auf 1 gesetzt
DapiDOSet32(handle, 0, data); // Chan Start = 0
printf("Schreibe auf Ausgänge Daten=0x%x\n", data);
printf("Taste für weiter\n");
getch();
// ---------------------------------------------------// Einen Wert auf die Ausgänge schreiben
data = 0x80000000; // Ausgang 32 wird auf 1 gesetzt
DapiDOSet32(handle, 0, data); // Chan Start = 0
printf("Schreibe auf Ausgänge Daten=0x%x\n", data);
printf("Taste für weiter\n");
getch();
// ---------------------------------------------------// Einen Wert auf die Ausgänge schreiben
data = 0x80000000; // Ausgang 64 wird auf 1 gesetzt
DapiDOSet32(handle, 32, data); // Chan Start = 32
printf("Schreibe auf Ausgänge Daten=0x%x\n", data);
printf("Taste für weiter\n");
getch();
Description
This command sets 32 digital outputs simultaneously.
Definition
void DapiDOSet32(ULONG handle, ULONG ch, ULONG data);
Parameters
handle=This is the handle of an opened module
ch=Specifies the number of the output, from which it begins to write to (0, 32,
64, ..)
data=Specifies the data values, to write to the outputs
Return value
None
Example program
DELIB API reference | Seite 48

4.4.5. DapiDOSet64
Description
This command is to set 64 digital outputs.
Definition
void DapiDOSet64(ULONG handle, ULONG ch, ULONG data);
Parameters
handle=This is the handle of an opened module
ch=Specifies the number of the output, from which it begins to write to (0, 64, ..)
data=Specifies the data values, to write to the outputs
Return value
None
DELIB API reference | Seite 49

4.4.6. DapiDOReadback32
Description
This command reads back the 32 digital outputs.
Definition
ULONG DapiDOReadback32(ULONG handle, ULONG ch);
Parameters
handle=This is the handle of an opened module
ch=Specifies the number of the input, from which it begins to read from (0, 32,
..)
Return value
Status of 32 outputs.
DELIB API reference | Seite 50

4.4.7. DapiDOReadback64
Description
This command reads back the 64 digital outputs.
Definition
ULONGLONG DapiDOReadback64(ULONG handle, ULONG ch);
Parameters
handle=This is the handle of an opened module
ch=Specifies the number of the input, from which it begins to read from (0, 64,
..)
Return value
Status of 64 outputs.
DELIB API reference | Seite 51

4.5. Output timeout management
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT,
DAPI_SPECIAL_TIMEOUT_SET_VALUE_SEC, 3, 7);
//Die Zeit des Timeouts wird auf 3,7sek gesetzt.
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT,
DAPI_SPECIAL_TIMEOUT_ACTIVATE, 0, 0);
//Der Timeout wird aktiviert.
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT,
DAPI_SPECIAL_TIMEOUT_DEACTIVATE, 0, 0);
//Der Timeout wird deaktiviert.
4.5.1. DapiSpecialCMDTimeout
Description
This command serves to set the timeout time
Definition
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT, cmd, par1, par2);
Parameters
handle=This is the handle of an opened module
Set timeout time
cmd=DAPI_SPECIAL_CMD_TIMEOUT_SET_VALUE_SEC
par1=Seconds [s]
par2=Milliseconds [100ms] (value 6 stands for 600ms)
Activate timeout
cmd=DAPI_SPECIAL_CMD_TIMEOUT_ACTIVATE
Deactivate timeout
cmd=DAPI_SPECIAL_CMD_TIMEOUT_DEACTIVATE
Return value
None
Example program
DELIB API reference | Seite 52

4.5.2. DapiSpecialCMDTimeoutGetStatus
status = DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT,
DAPI_SPECIAL_TIMEOUT_GET_STATUS, 0, 0); //Abfrage des Timeout-Status.
Description
This command reads the timeout status.
Definition
ULONG DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT,
DAPI_SPECIAL_TIMEOUT_GET_STATUS, 0, 0);
Parameters
handle=This is the handle of an opened module
Return value
Return=0 (timeout is deactivated)
Return=1 (timeout is activated)
Return=2 (timeout has occurred)
Example program
DELIB API reference | Seite 53

4.6. Test functions
4.6.1. DapiPing
Description
This command checks the connection of an opened module.
Definition
ULONG DapiPing(ULONG handle, ULONG value);
Parameters
handle=This is the handle of an opened module
value=Given test value to the module
Return value
The given test-value “value“ is also the return value
DELIB API reference | Seite 54
4.7. Example program
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
//
// (c) DEDITEC GmbH, 2009
//
// web: http://www.deditec.de
//
// mail: vertrieb@deditec.de
//
//
//
// dtapi_prog_beispiel_input_output.cpp
//
//
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
//
//
// Folgende Bibliotheken beim Linken mit einbinden: delib.lib
// Dies bitte in den Projekteinstellungen (Projekt/Einstellungen/Linker(ObjektBibliothek-Module) .. letzter Eintrag konfigurieren
#include <windows.h>
#include <stdio.h>
#include "conio.h"
#include "delib.h"
// ---------------------------------------------------------------------------// ---------------------------------------------------------------------------// ---------------------------------------------------------------------------// ---------------------------------------------------------------------------// ----------------------------------------------------------------------------
void main(void)
{
unsigned long handle;
unsigned long data;
unsigned long anz;
unsigned long i;
unsigned long chan;
// ---------------------------------------------------// USB-Modul öffnen
handle = DapiOpenModule(USB_Interface8,0);
printf("USB_Interface8 handle = %x\n", handle);
if (handle==0)
{
// USB Modul wurde nicht gefunden
printf("Modul konnte nicht geöffnet werden\n");
printf("TASTE für weiter\n");
getch();
DELIB API reference | Seite 55

return;
}
// Zum Testen - ein Ping senden
// ---------------------------------------------------printf("PING\n");
anz=10;
for(i=0;i!=anz;++i)
{
data=DapiPing(handle, i);
if(i==data)
{
// OK
printf(".");
}
else
{
// No answer
printf("E");
}
}
printf("\n");
// ---------------------------------------------------// Einen Wert auf die Ausgänge schreiben
data = 255;
DapiWriteByte(handle, 0, data);
printf("Schreibe auf Adresse=0 daten=0x%x\n", data);
// ---------------------------------------------------// Einen Wert auf die Ausgänge schreiben
data = 255;
DapiWriteByte(handle, 1, data);
printf("Schreibe auf Adresse=0 daten=0x%x\n", data);
// ---------------------------------------------------// Einen Wert auf die Ausgänge schreiben
data = 255;
DapiWriteByte(handle, 2, data);
printf("Schreibe auf Adresse=2 daten=0x%x\n", data);
// ---------------------------------------------------// Einen Wert von den Eingängen lesen
data = (unsigned long) DapiReadByte(handle, 0);
printf("Gelesene Daten = 0x%x\n", data);
// ---------------------------------------------------// Einen A/D Wert lesen
chan=11; // read chan. 11
data = DapiReadWord(handle, 0xff010000 + chan*2);
printf("Adress=%x, ret=%x volt=%f\n", chan, data, ((float) data) / 1024*5);//
Bei 5 Volt Ref
// ---------------------------------------------------// Modul wieder schliessen
DapiCloseModule(handle);
printf("TASTE für weiter\n");
getch();
return ;
}
DELIB API reference | Seite 56

Appendix
V
Appendix | Seite 57

5. Appendix
5.1. Revisions
Rev 1.00 First issue
Rev 2.00 Design change
Appendix | Seite 58

5.2. Copyrights and trademarks
Linux is registered trade-mark of Linus Torvalds.
Windows CE is registered trade-mark of Microsoft Corporation.
USB is registered trade-mark of USB Implementers Forum Inc.
LabVIEW is registered trade-mark of National Instruments.
Intel is registered trade-mark of Intel Corporation
AMD is registered trade-mark of Advanced Micro Devices, Inc.
Appendix | Seite 59

RO-Series
Hardware-Description
2010
November

INDEX
1. Introduction 10
1.1. General remarks 10
1.2. Customer satisfaction 10
1.3. Customer response 10
2. Hardware description 12
2.1. Ethernet Interface 12
2.1.1. Hardware description
2.1.1.1. Overview screen
2.1.1.2. Technical data
2.1.1.3. Plug-in connector of the module
2.1.1.3.1. Power supply
2.1.1.3.2. Ethernet interface
2.1.1.4. Buttons of the module
2.1.1.5. Controll LEDs
2.1.1.5.1. Definition of LEDs
2.1.2. Restore basic configuration
2.1.2.1. Restore IP address
2.1.2.2. Restore firmware
2.1.3. Firmware Update
2.1.3.1. DEDITEC Flasher
2.1.3.2. Web interface
2.1.4. Configuring the module
2.1.4.1. Configuration via DELIB Configuration utility
2.1.4.2. Configuration via internal web server
2.1.4.3. Factory settings
12
12
14
15
15
15
16
17
17
18
18
18
19
19
20
22
22
26
27
2.2. CAN Interface 28
2.2.1. Hardware description
2.2.1.1. Overview screen
2.2.1.2. Technical data
2.2.1.3. Plug-in connector of the module
2.2.1.3.1. Power supply
2.2.1.3.2. CAN interface
2.2.1.4. Control LEDs
2.2.1.4.1. Definition of LEDs
Index |
28
28
29
30
30
30
31
31
2Seite
INDEX
2.2.2. Configuring the module
2.2.2.1. DIP-switches
2.2.2.2. The “special mode”
2.2.2.3. Software mode
2.2.2.4. DIP-switch mode
2.2.2.4.1. Setting up the transfer rate
2.2.2.4.2. Setting up the CAN module address
32
32
33
34
36
36
37
2.3. RS-232/RS-485 Interface 39
2.3.1. Hardware description
2.3.1.1. Overview screen
2.3.1.2. Technical data
2.3.1.3. Selecting between RS-232 or RS-485 interface
2.3.1.4. Plug-in connector of the module
2.3.1.4.1. Power supply
2.3.1.4.2. RS-232/RS-485 Interface
2.3.1.4.2.1RS-232 Pinout
2.3.1.4.2.2RS-485 Pinout
2.3.1.5. Control LEDs
2.3.1.5.1. Definition of LEDs
2.3.2. Configuring the module
2.3.2.1. DIP-switches
2.3.2.2. The "special-mode"
2.3.2.3. Activating echo
2.3.2.4. Setting up Baud rate
2.3.2.5. Setting up module address (RS-485 only)
39
39
40
41
43
43
43
44
44
45
45
46
46
47
47
48
49
2.4. USB Interface 50
2.4.1. Hardware description
2.4.1.1. Overview screen
2.4.1.2. Technical data
2.4.1.3. Plug-in connector of the module
2.4.1.3.1. Power supply
2.4.1.3.2. USB interface
2.4.1.4. Control LEDs
2.4.1.4.1. Definition of the LEDs
50
50
51
52
52
52
53
53
2.5. Digital in-/output modules 54
2.5.1. Hardware description
2.5.1.1. Opto-coupler inputs
54
55
Index |
3Seite

INDEX
2.5.1.1.1. Overview screen
2.5.1.1.2. Technical data
2.5.1.1.3. 16-bit counter
2.5.1.1.4. Registering short input pulses
2.5.1.1.5. Galvanically decouppled through optocouplers
2.5.1.1.6. Plug-in connector on the module
2.5.1.1.6.1Connection wiring
2.5.1.1.6.2Visual control of the inputs
2.5.1.1.6.3Pinout
2.5.1.1.7. Variable input voltage range
2.5.1.1.7.1Changing the input voltage
2.5.1.2. Relay outputs
2.5.1.2.1. Overview screen
2.5.1.2.2. Technical data
2.5.1.2.3. Timeout-protection
2.5.1.2.4. Plug-in connector on the module
2.5.1.2.4.1Relay-outputs (galvanically decoupled, max. 1A)
2.5.1.2.4.2Connection wiring
2.5.1.2.4.3Visual control of the outputs
2.5.1.2.4.4Pinout
2.5.1.3. MOSFET outputs
2.5.1.3.1. Overview screen
2.5.1.3.2. Technical data
2.5.1.3.3. Timeout-protection
2.5.1.3.4. Plug-in connector on the module
2.5.1.3.4.1Optocoupler-outputs (galvanically isolated, max. 2A DC)
2.5.1.3.4.2Connection wiring
2.5.1.3.4.3Pinout
55
56
57
57
57
58
58
59
59
59
60
61
61
62
63
63
63
64
64
64
65
65
66
67
67
67
68
68
2.6. Analog in-/output modules 69
2.6.1. Hardware description
2.6.1.1. RO-AD16-DA4
2.6.1.1.1. Overview screen
2.6.1.1.2. Technical data
2.6.1.1.3. Timeout-protection
2.6.1.1.4. Pinout
2.6.1.1.4.1A/D connection wiring (18pol)
2.6.1.1.4.2D/A connection wiring (10pol)
2.6.1.2. RO-AD16
2.6.1.2.1. Overview screen
69
69
70
71
72
73
73
73
74
74
Index |
4Seite

INDEX
2.6.1.2.2. Technical data
2.6.1.2.3. Pinout
2.6.1.2.3.1A/D connection wiring (18pol)
2.6.1.3. RO-AD16_ISO
2.6.1.3.1. Overview screen
2.6.1.3.2. Technical data
2.6.1.3.3. Pinout
2.6.1.3.3.1A/D connection wiring (18pol)
2.6.1.4. RO-DA4
2.6.1.4.1. Overview screen
2.6.1.4.2. Technical data
2.6.1.4.3. Timeout-protection
2.6.1.4.4. Pinout
2.6.1.4.4.1D/A connection wiring (10pol)
2.6.1.5. RO-DA2_ISO
2.6.1.5.1. Overview screen
2.6.1.5.2. Technical data
2.6.1.5.3. Timeout-protection
2.6.1.5.4. Pinout
2.6.1.5.4.1D/A connection wiring (10pol)
75
76
76
77
77
78
79
79
80
80
81
82
82
82
83
83
84
85
86
86
2.7. Stepper module 87
2.7.1. Hardware description
2.7.1.1. Overview screen
2.7.1.2. Technical data
2.7.1.3. Stepping motor control
2.7.1.4. Stepper connection wiring (10pol) - pinout
87
87
88
88
89
3. Software 91
3.1. Using our products 91
3.1.1. Access via graphical applications
3.1.2. Access via the DELIB driver library
3.1.3. Access via protocol
3.1.4. Access via provided test programs
3.2. DELIB driver library 93
3.2.1. Overview
3.2.2. Supported operating systems
3.2.3. Supported programming languages
91
91
91
92
93
95
95
Index |
5Seite

INDEX
3.2.4. Installation DELIB driver library
3.2.5. DELIB Configuration Utility
96
98
3.3. Test programs 99
3.3.1. Digital Input-Output Demo
3.3.2. Analog Input-Output Demo
3.3.3. Stepper Demo
99
100
101
4. DELIB API reference 103
4.1. Management functions 103
4.1.1. DapiOpenModule
4.1.2. DapiCloseModule
4.2. Error handling 105
4.2.1. DapiGetLastError
4.2.2. DapiGetLastErrorText
4.3. Reading Digital inputs 107
4.3.1. DapiDIGet1
4.3.2. DapiDIGet8
4.3.3. DapiDIGet16
4.3.4. DapiDIGet32
4.3.5. DapiDIGet64
4.3.6. DapiDIGetFF32
4.3.7. DapiDIGetCounter
4.4. Setting Digital outputs 114
103
104
105
106
107
108
109
110
111
112
113
4.4.1. DapiDOSet1
4.4.2. DapiDOSet8
4.4.3. DapiDOSet16
4.4.4. DapiDOSet32
4.4.5. DapiDOSet64
4.4.6. DapiDOReadback32
4.4.7. DapiDOReadback64
114
115
116
117
118
119
120
4.5. A/D converter functions 121
4.5.1. DapiADSetMode
4.5.2. DapiADGetMode
4.5.3. DapiADGet
121
123
124
Index |
6Seite

INDEX
4.5.4. DapiADGetVolt
4.5.5. DapiADGetmA
125
126
4.6. D/A outputs management 127
4.6.1. DapiDASetMode
4.6.2. DapiDAGetMode
4.6.3. DapiDASet
4.6.4. DapiDASetVolt
4.6.5. DapiDASetmA
4.6.6. DapiSpecialCmd_DA
127
129
130
131
132
133
4.7. Stepper motor functions 135
4.7.1. DapiStepperCommands
4.7.1.1. DAPI_STEPPER_CMD_GO_POSITION
4.7.1.2.
DAPI_STEPPER_CMD_GO_POSITION_RELATIVE
4.7.1.3. DAPI_STEPPER_CMD_SET_POSITION
4.7.1.4. DAPI_STEPPER_CMD_SET_FREQUENCY
4.7.1.5. DAPI_STEPPER_CMD_GET_FREQUENCY
4.7.1.6.
DAPI_STEPPER_CMD_SET_FREQUENCY_DIRECTLY
4.7.1.7. DAPI_STEPPER_CMD_STOP
4.7.1.8. DAPI_STEPPER_CMD_FULLSTOP
4.7.1.9. DAPI_STEPPER_CMD_DISABLE
4.7.1.10.
DAPI_STEPPER_CMD_SET_MOTORCHARACTERISTIC
4.7.1.11.
DAPI_STEPPER_CMD_GET_MOTORCHARACTERISTIC
4.7.1.12.
DAPI_STEPPER_CMD_MOTORCHARACTERISTIC_EEP
ROM_SAVE
4.7.1.13.
DAPI_STEPPER_CMD_MOTORCHARACTERISTIC_EEP
ROM_LOAD
4.7.1.14.
DAPI_STEPPER_CMD_MOTORCHARACTERISTIC_LOA
D_DEFAULT
4.7.1.15. DAPI_STEPPER_CMD_GO_REFSWITCH
4.7.1.16. DAPI_STEPPER_CMD_GET_CPU_TEMP
4.7.1.17.
DAPI_STEPPER_CMD_GET_MOTOR_SUPPLY_VOLTAG
E
135
135
136
137
138
139
140
141
142
143
144
149
157
158
159
160
161
162
Index |
7Seite

INDEX
4.7.2. DapiStepperGetStatus
4.7.2.1. DAPI_STEPPER_STATUS_GET_ACTIVITY
4.7.2.2. DAPI_STEPPER_STATUS_GET_POSITION
4.7.2.3. DAPI_STEPPER_STATUS_GET_SWITCH
4.7.3. DapiStepperCommandEx
163
163
164
165
166
4.8. Output timeout management 167
4.8.1. DapiSpecialCMDTimeout
4.8.2. DapiSpecialCMDTimeoutGetStatus
167
168
4.9. Test functions 169
4.9.1. DapiPing
169
4.10. Example program 170
5. Appendix 173
5.1. Revisions 173
5.2. Copyrights and trademarks 174
Index |
8Seite
 Loading...
Loading...