

Page 1

DATA SHEET
MOS INTEGRATED CIRCUIT
µ
PD784031Y
16-/8-BIT SINGLE-CHIP MICROCONTROLLERS
The µPD784031Y is based on the µPD784031 with an I2C bus control function appended, and is ideal for
applications in audio-visual systems.
µ
PD784031Y is a ROM-less version of µPD784035Y and 784036Y.
The
The functions are explained in detail in the following User’s Manual. Be sure to read this manual when
designing your system.
µ
PD784038, 784038Y Subseries User’s Manual - Hardware : U11316E
78K/IV Series User’s Manual - Instruction : U10905E
FEATURES
78K/IV Series
Pin-compatible with µPD78234 Subseries,
µ
PD784026 Subseries, and µPD784038
Subseries
Minimum instruction execution time: 125 ns
(@ 32-MHz operation)
I/O ports: 46
Serial interface: 3 channels
UART/IOE (3-wire serial I/O): 2 channels
2
CSI (3-wire serial I/O, 2-wire serial I/O, I
1 channel
PWM output: 2 outputs
C bus):
Timer/counter
16-bit Timer/counter x 3 units
16-bit Timer x 1 unit
Standby function
HALT/STOP/IDLE mode
Clock division function
Watchdog timer: 1 channel
A/D converter: 8-bit resolution x 8 channels
D/A converter: 8-bit resolution x 2 channels
Supply voltage: VDD = 2.7 to 5.5 V
APPLICATION FIELDS
Cellular phones, cordless phones, audio-visual systems, etc.
ORDERING INFORMATION
Part Number Package
µ
PD784031YGC-3B9
µ
PD784031YGC-8BT
µ
PD784031YGK-BE9 80-pin plastic TQFP (fine pitch) (12 x 12 mm) None 2048
80-pin plastic QFP (14 x 14 mm, thickness 2.7 mm)
80-pin plastic QFP (14 x 14 mm, thickness 1.4 mm)
Internal ROM (Bytes) Internal RAM (Bytes)
None 2048
None 2048
Document No. U11504EJ1V0DS00 (1st edition)
Date Published July 1997 N
Printed in Japan
The information in this document is subject to change without notice.
The mark
shows major revised points.
©
1996
Page 2
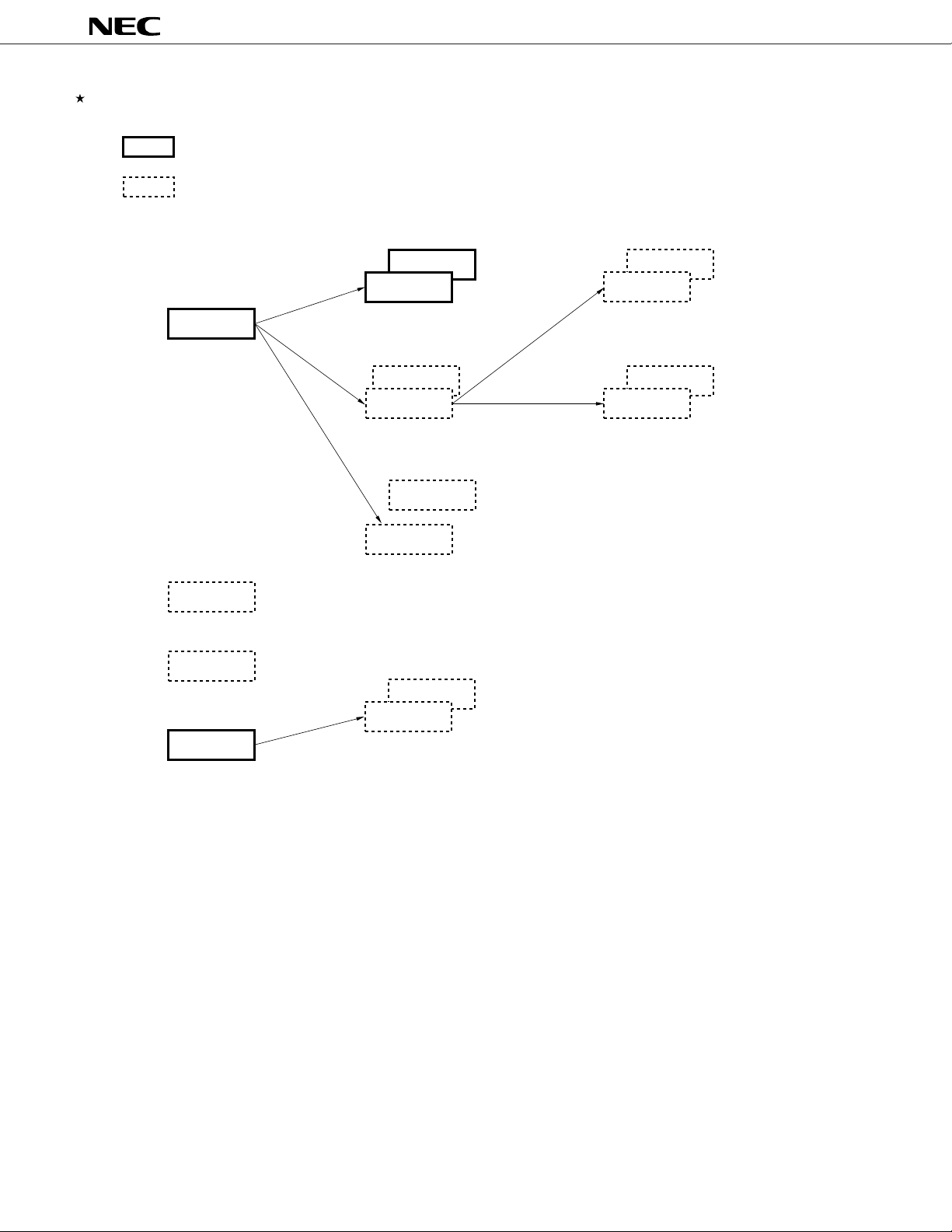
78K/IV SERIES PRODUCT DEVELOPMENT
: Under mass production
: Under development
µ
PD784031Y
Standard models
µPD784026
Enhanced A/D,
16-bit timer,
and power
management
ASSP models
µPD784908
Equipped with IEBus
controller
µPD78F4943
For CD-ROM,
56-Kbyte flash memory
µPD784915
Equipped with analog circuit for
software servo control VCR,
enhanced timer
TM
2
C bus supported
I
µPD784038Y
µPD784038
Enhanced internal memory capacity,
pin compatible with the µPD784026
µPD784216Y
µPD784216
100 pins,
enhanced I/O and
internal memory capacity
µPD784054
µPD784046
Equipped with 10-bit A/D
2
Multimaster I
µPD784928
Enhanced function of the µPD784915
C bus supported
µPD784928Y
2
Multimaster I
µPD784225
80 pins,
added ROM correction
Multimaster I
µPD784218
Enhanced internal memory capacity,
added ROM correction
C bus supported
µPD784225Y
2
C bus supportedMultimaster I2C bus supported
µPD784218Y
2
Page 3
µ
PD784031Y
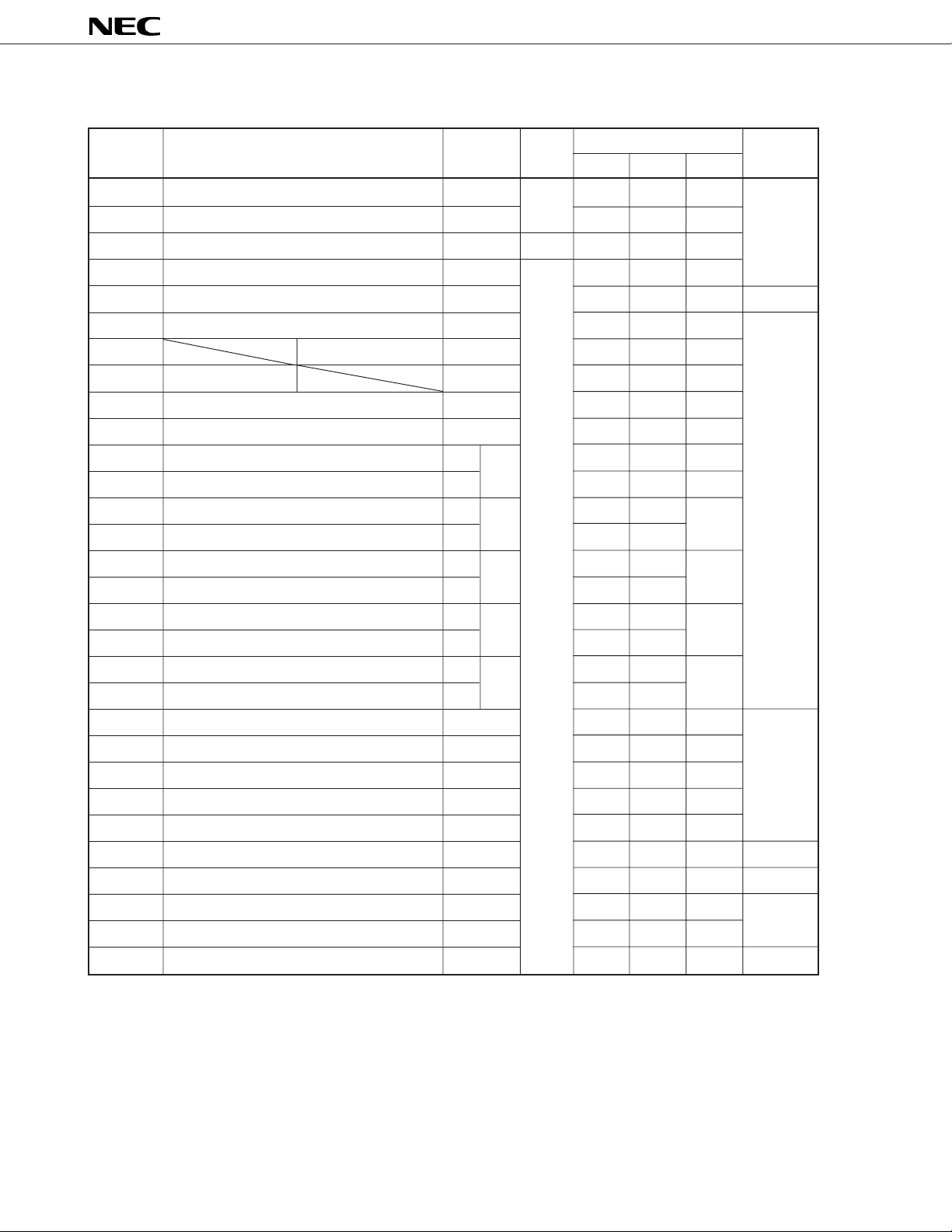
FUNCTIONS
Item Function
Number of basic instructions 113
(mnemonics)
General-purpose register 8 bits x 16 registers x 8 banks, or 16 bits x 8 registers x 8 banks (memory mapping)
Minimum instruction execution 125 ns/250 ns/500 ns/1000 ns (at 32 MHz)
time
Internal memory ROM None
RAM 2048 bytes
Memory space 1 Mbytes with program and data spaces combined
I/O port Total 46
Input 8
I/O 34
Output 4
Pins with
ancillary
Note
function
Real-time output port 4 bits x 2, or 8 bits x 1
Timer/counter Timer/counter 0: Timer register x 1 Pulse output
PWM output 12-bit resolution x 2 channels
Serial interface UART/IOE (3-wire serial I/O) : 2 channels (on-chip baud rate generator)
A/D converter 8-bit resolution x 8 channels
D/A converter 8-bit resolution x 2 channels
Watchdog timer 1 channel
Standby HALT/STOP/IDLE mode
Interrupt
Supply voltage VDD = 2.7 to 5.5 V
Package 80-pin plastic QFP (14 x 14 mm, thickness 2.7 mm)
Pins with pull- 32
up resistor
LEDs direct 8
drive output
Transistor 8
direct drive
Capture register x 1 • Toggle output
Compare register x 2 • PWM/PPG output
(16 bits) • One-shot pulse output
Timer/counter 1: Timer register x 1 Pulse output
Capture register x 1 • Real-time output (4 bits x 2)
(8/16 bits) Capture/compare register x 1
Compare register x 1
Timer/counter 2: Timer register x 1 Pulse output
Capture register x 1 • Toggle output
(8/16 bits) Capture/compare register x 1 • PWM/PPG output
Compare register x 1
Timer 3: Timer register x 1
(8/16 bits) Compare register x 1
CSI (3-wire serial I/O, 2-wire serial I/O, I2C bus) : 1 channel
Hardware source
Software source
Non-maskable
Maskable Internal: 16, external: 6
24 (internal: 17, external: 7 (variable sampling clock input: 1))
BRK instruction, BRKCS instruction, operand error
Internal: 1, external: 1
• 4 programmable priority levels
• 3 processing styles: vectored interrupt/macro service/context switching
80-pin plastic QFP (14 x 14 mm, thickness 1.4 mm)
80-pin plastic TQFP (fine pitch) (12 x 12 mm)
Note The pins with ancillary function are included in the I/O pins.
3
Page 4

µ
PD784031Y
CONTENTS
1. DIFFERENCES AMONG MODELS IN µPD784038Y SUBSERIES.................................................. 6
2. MAJOR DIFFERENCES FROM µPD784026 SUBSERIES AND µPD78234 SUBSERIES.............. 7
3. PIN CONFIGURATION (Top View)................................................................................................... 8
4. BLOCK DIAGRAM ............................................................................................................................ 10
5. PIN FUNCTION ............................................................................................................................... 11
5.1 Port Pins ................................................................................................................................................ 11
5.2 Non-port Pins ........................................................................................................................................ 12
5.3 Types of Pin I/O Circuits and Connections for Unused Pins............................................................ 14
6. CPU ARCHITECTURE .................................................................................................................... 17
6.1 Memory Space....................................................................................................................................... 17
6.2 CPU Registers ....................................................................................................................................... 19
6.2.1 General-purpose registers .......................................................................................................... 19
6.2.2 Control registers.......................................................................................................................... 20
6.2.3 Special function registers (SFRs) ............................................................................................... 21
7. PERIPHERAL HARDWARE FUNCTIONS ..................................................................................... 26
7.1 Ports....................................................................................................................................................... 26
7.2 Clock Generation Circuit...................................................................................................................... 27
7.3 Real-time Output Port ........................................................................................................................... 29
7.4 Timer/Counter........................................................................................................................................ 30
7.5 PWM Output (PWM0, PWM1)................................................................................................................ 32
7.6 A/D Converter........................................................................................................................................ 33
7.7 D/A Converter........................................................................................................................................ 34
7.8 Serial Interface ...................................................................................................................................... 35
7.8.1 Asynchronous serial interface/3-wire serial I/O (UART/IOE) ...................................................... 36
7.8.2 Clocked serial interface (CSI) ..................................................................................................... 38
7.9 Edge Detection Function...................................................................................................................... 39
7.10 Watchdog Timer .................................................................................................................................... 40
8. INTERRUPT FUNCTION ................................................................................................................. 41
8.1 Interrupt Sources .................................................................................................................................. 41
8.2 Vectored Interrupt................................................................................................................................. 43
8.3 Context Switching................................................................................................................................. 44
8.4 Macro Service........................................................................................................................................ 44
8.5 Application Example of Macro Service............................................................................................... 45
4
Page 5

µ
PD784031Y
9. LOCAL BUS INTERFACE .............................................................................................................. 47
9.1 Memory Expansion ............................................................................................................................... 47
9.2 Memory Space....................................................................................................................................... 48
9.3 Programmable Wait .............................................................................................................................. 49
9.4 Pseudo Static RAM Refresh Function................................................................................................. 49
9.5 Bus Hold Function ................................................................................................................................ 49
10. STANDBY FUNCTION .................................................................................................................... 50
11. RESET FUNCTION ......................................................................................................................... 51
12. INSTRUCTION SET ........................................................................................................................ 52
13. ELECTRICAL SPECIFICATIONS ................................................................................................... 57
14. PACKAGE DRAWINGS .................................................................................................................. 77
15. RECOMMENDED SOLDERING CONDITIONS .............................................................................. 80
APPENDIX A. DEVELOPMENT TOOLS ............................................................................................... 82
APPENDIX B. RELATED DOCUMENTS ............................................................................................... 84
5
Page 6
µ
PD784031Y
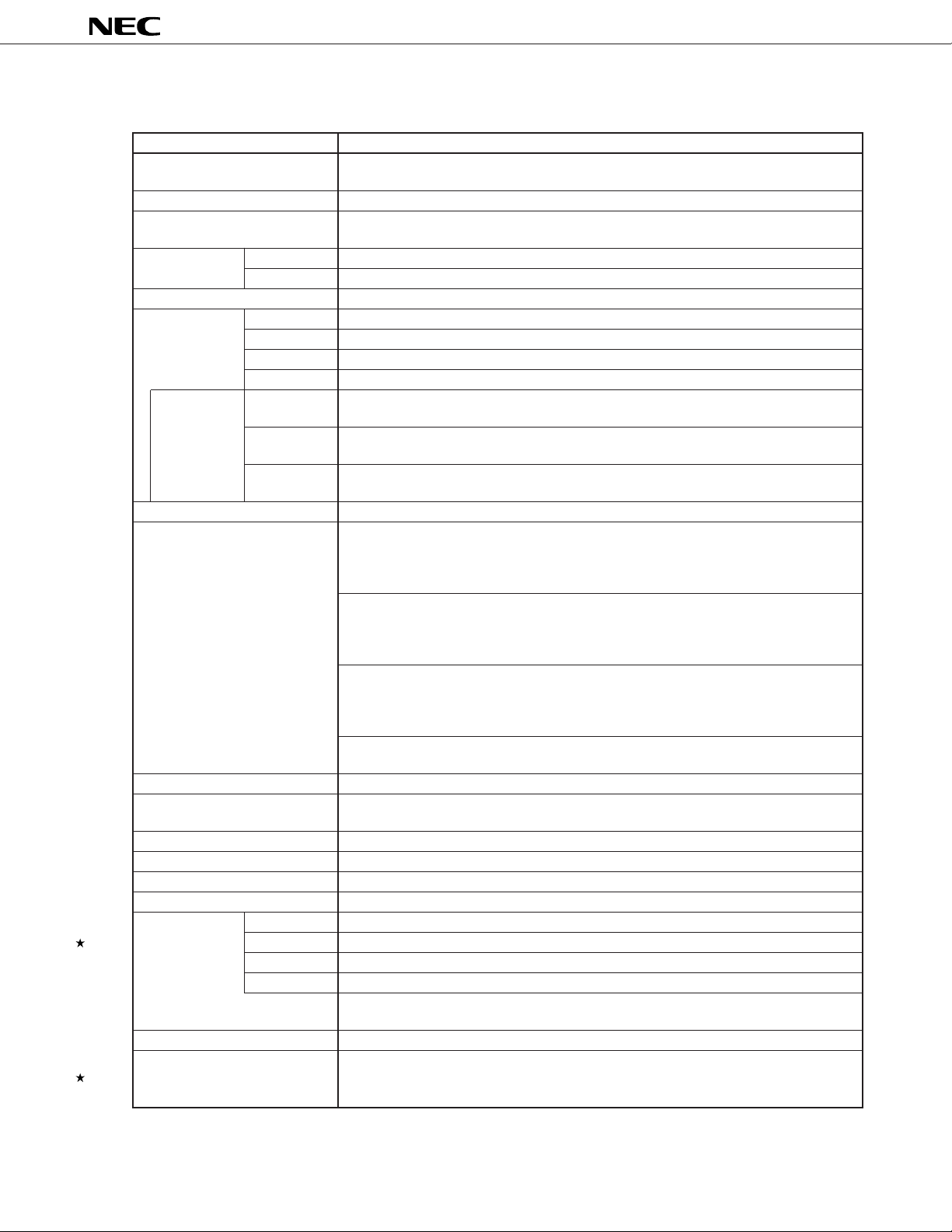
1. DIFFERENCES AMONG MODELS IN µPD784038Y SUBSERIES
The only difference among the µPD784031Y, 784035Y, 784036Y, 784037Y, and 784038Y lies in the internal memory
capacity.
The µPD78P4038Y is provided with a 128-Kbyte one-time PROM or EPROM instead of the mask ROM of the
µ
PD784035Y, 784036Y, 784037Y, and 784038Y. These differences are summarized in Table 1-1.
Table 1-1. Differences among Models in µPD784038Y Subseries
Part NumberµPD784031Y
Item
Internal ROM None 48 Kbytes 64 Kbytes 96 Kbytes 128 Kbytes 128 Kbytes
Internal RAM 2048 bytes 3584 bytes 4352 bytes
Package 80-pin plastic QFP (14 x 14 mm, thickness 2.7 mm)
80-pin plastic QFP (14 x 14 mm, thickness 1.4 mm)
80-pin plastic TQFP (fine pitch) (12 x 12 mm)
µ
PD784035YµPD784036YµPD784037YµPD784038YµPD78P4038Y
(mask ROM) (mask ROM) (mask ROM) (mask ROM)
(one-time PROM
or EPROM)
80-pin ceramic
WQFN
(14 x 14 mm)
6
Page 7
µ
PD784031Y
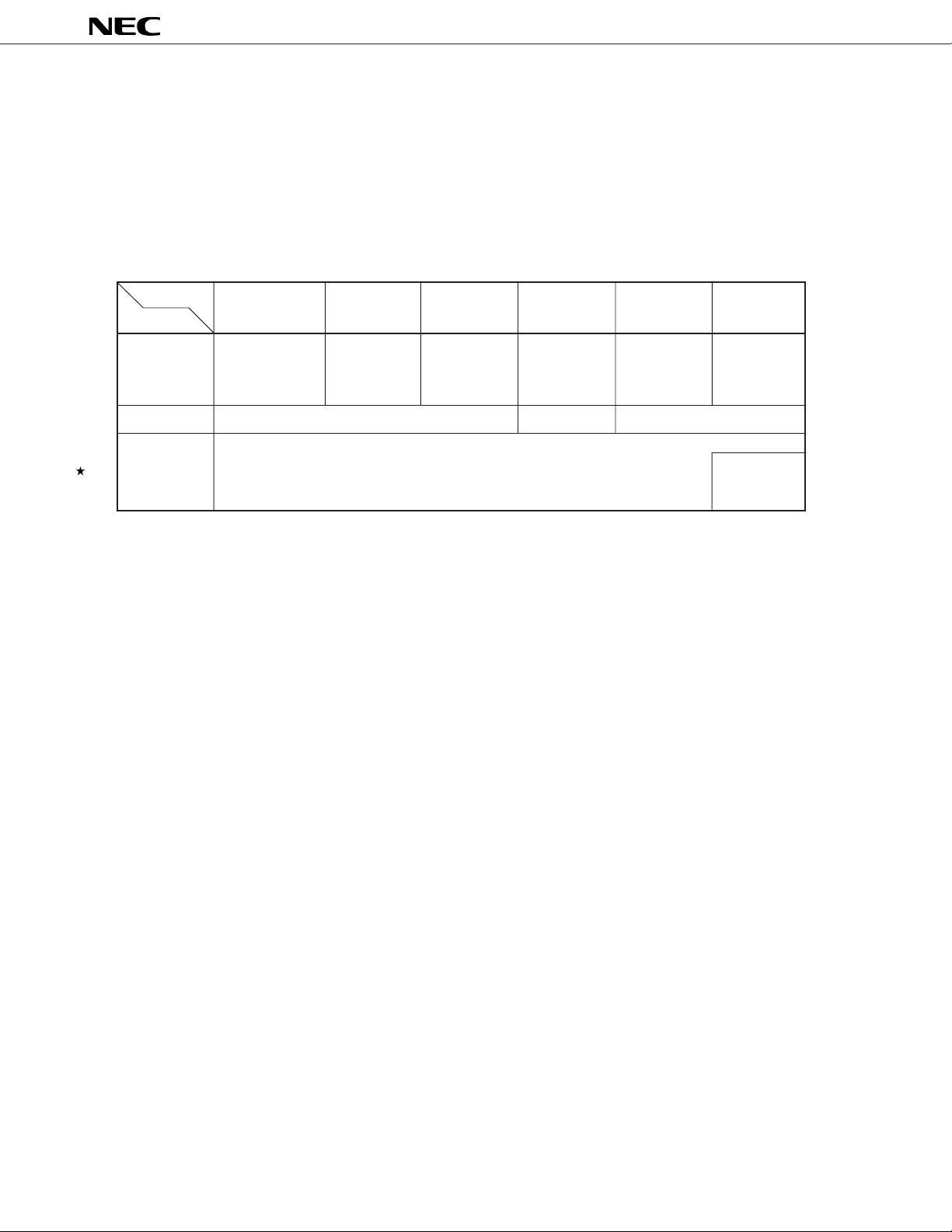
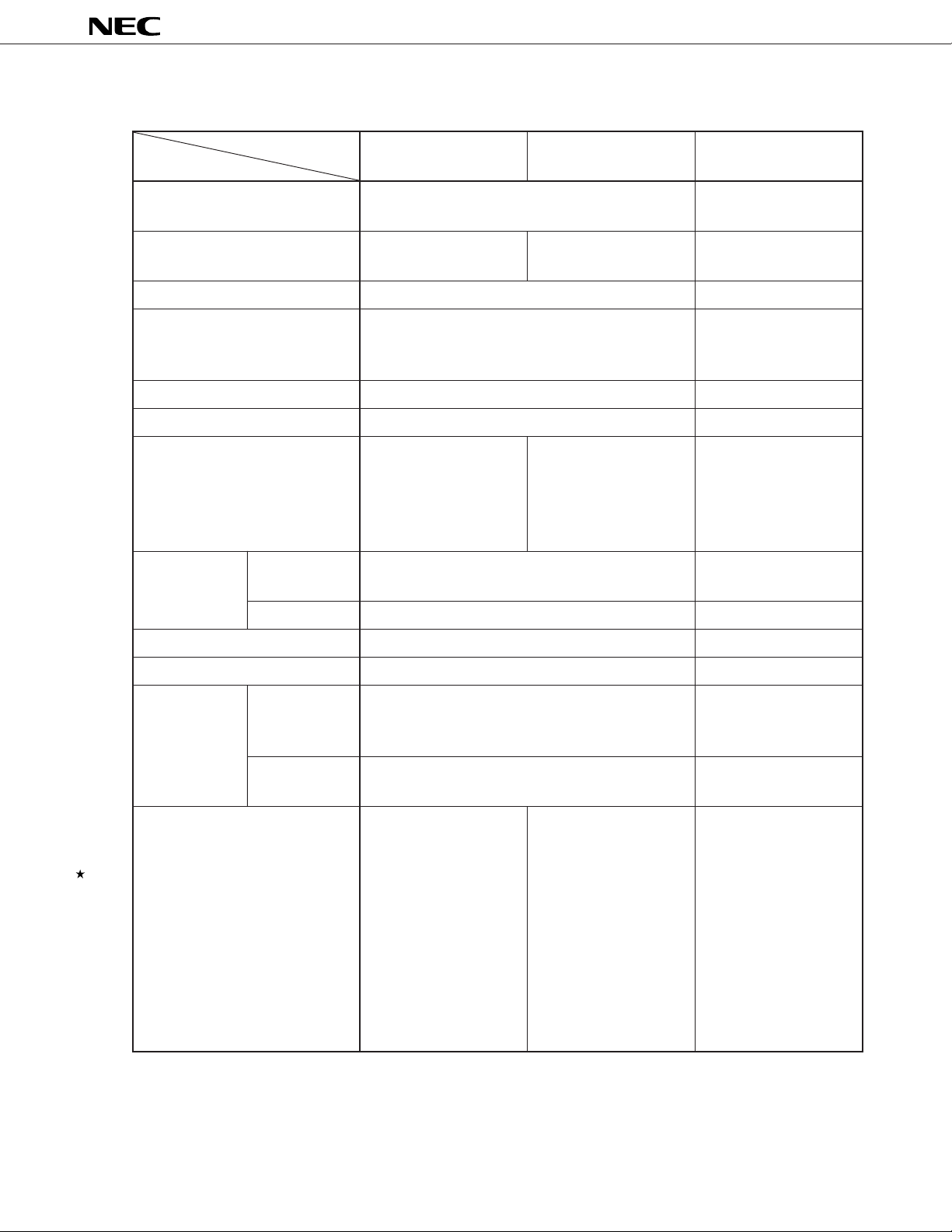
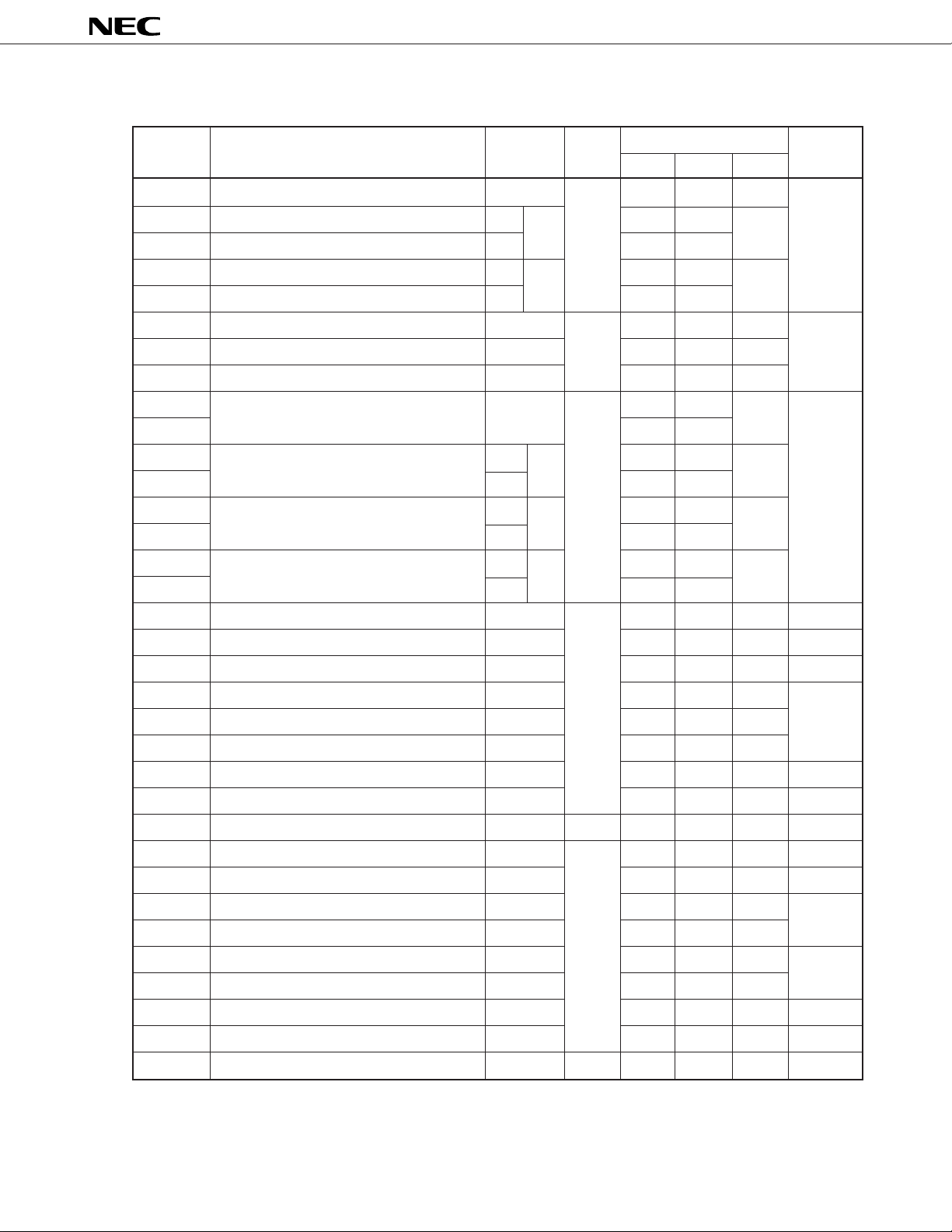
2. MAJOR DIFFERENCES FROM µPD784026 SUBSERIES AND µPD78234 SUBSERIES
Series Name
Item
Number of basic instructions 113 65
(mnemonics)
Minimum instruction execution time 125 ns 160 ns 333 ns
Memory space (program/data) 1 Mbytes combined 64 Kbytes/1 Mbytes
Timer/counter 16-bit timer/counter x 1 16-bit timer/counter x 1
Clock output function Provided None
Watchdog timer Provided None
Serial interface
Interrupt Context Provided None
switching
µ
PD784038Y Subseries
µ
PD784038 Subseries
(@ 32-MHz operation) (@ 25-MHz operation) (@ 12-MHz operation)
8-/16-bit timer/counter x 2 8-bit timer/counter x 2
8-/16-bit timer x 1 8-bit timer x 1
UART/IOE (3-wire serial
I/O) x 2 channels
CSI (3-wire serial I/O,
2-wire serial I/O, I2C
Note
bus
) x 1 channel
µ
PD784026 Subseries
UART/IOE (3-wire serial
I/O) x 2 channels
CSI (3-wire serial I/O, SBI)
x 1 channel
µ
PD78234 Subseries
UART x 1 channel
CSI (3-wire serial I/O, SBI)
x 1 channel
Priority 4 levels 2 levels
Standby function HALT/STOP/IDLE mode HALT/STOP mode
Operating clock Selectable from fXX/2, fXX/4, fXX/8, and fXX/16 Fixed to fXX/2
Pin function MODE pin None Specifies ROM-less mode
(always high level with
µ
PD78233 and 78237)
TEST pin Device test pin None
Usually, low level
Package
80-pin plastic QFP
(14 x 14 mm, thickness 2.7 mm)
80-pin plastic QFP
(14 x 14 mm, thickness 1.4 mm)
80-pin plastic TQFP
(fine pitch) (12 x 12 mm)
80-pin ceramic WQFN
(14 x 14 mm):
µ
PD78P4038Y and
78P4038 only
80-pin plastic QFP
(14 x 14 mm, thickness 2.7 mm)
80-pin plastic TQFP
(fine pitch) (12 x 12 mm):
µ
PD784021 only
80-pin ceramic WQFN
(14 x 14 mm):
µ
PD78P4026 only
80-pin plastic QFP
(14 x 14 mm, thickness 2.7 mm)
94-pin plastic QFP
(20 x 20 mm)
84-pin plastic QFJ
(1150 x 1150 mil)
94-pin ceramic WQFN
(20 x 20 mm):
µ
PD78P238 only
NoteµPD784038Y Subseries only
7
Page 8
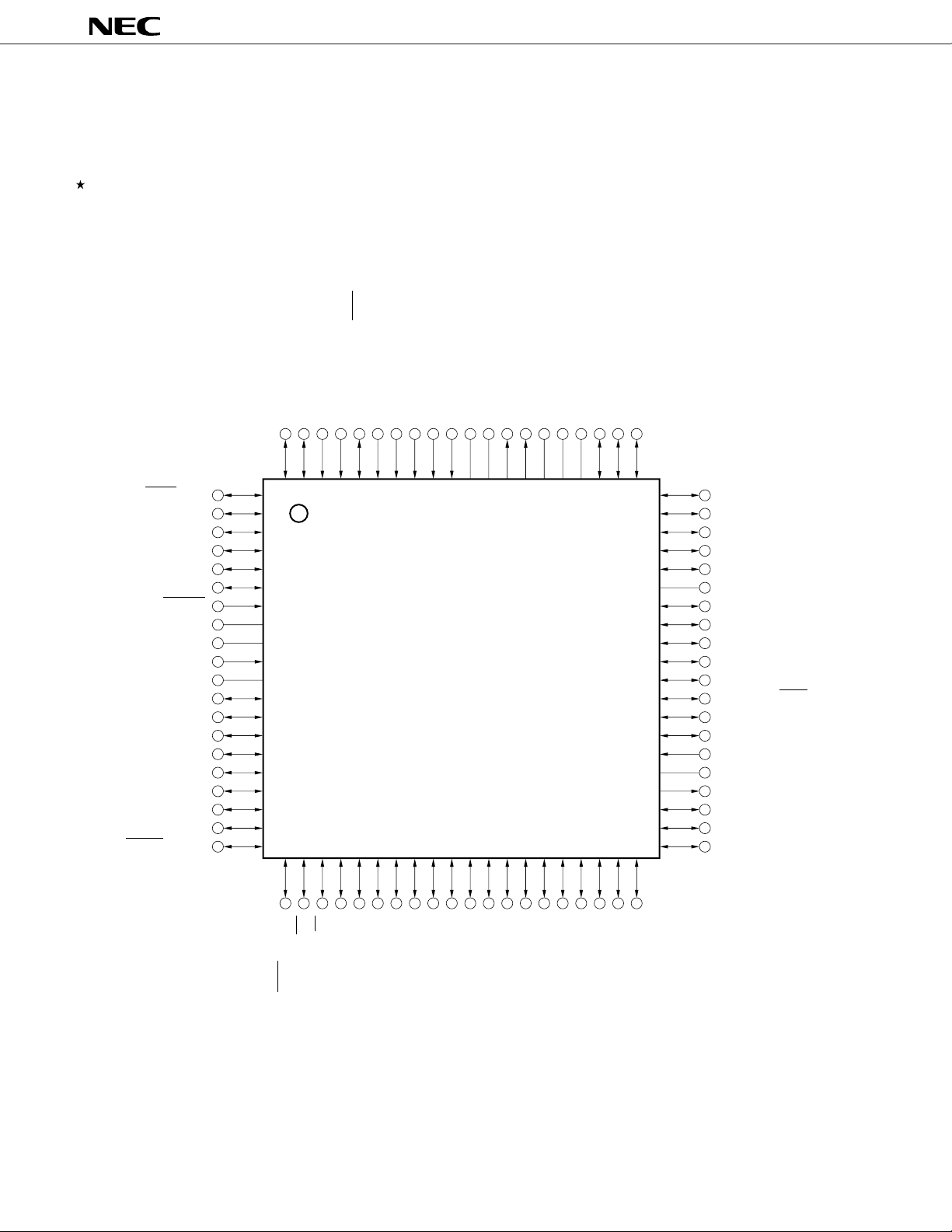
3. PIN CONFIGURATION (Top View)
• 80-pin plastic QFP (14 x 14 mm, thickness 2.7 mm)
µ
PD784031YGC-3B9
• 80-pin plastic QFP (14 x 14 mm, thickness 1.4 mm)
µ
PD784031YGC-8BT
• 80-pin plastic TQFP (fine pitch) (12 x 12 mm)
µ
PD784031YGK-BE9
µ
PD784031Y
P32/SCK0/SCL
P33/SO0/SDA
P34/TO0
P35/TO1
P36/TO2
P37/TO3
RESET
V
DD1
X2
X1
V
SS1
P00
P01
P02
P03
P04
P05
P06
P07
P67/REFRQ/HLDAK
REF3AVREF2
P31/TxD/SO1
P30/RxD/SI1
P27/SI0
P26/INTP5
P25/INTP4/ASCK/SCK1
P24/INTP3
P23/INTP2/CI
P22/INTP1
P21/INTP0
P20/NMI
AV
ANO1
80 6179 78 77 76 75 74 73 72 71 70 69 68 67 66 65 64 63 62
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21 4022 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39
ANO0
AVSSAV
REF1AVDD
P77/ANI7
P76/ANI6
P75/ANI5
60
59
58
57
56
55
54
53
52
51
50
49
48
47
46
45
44
43
42
41
P74/ANI4
P73/ANI3
P72/ANI2
P71/ANI1
P70/ANI0
V
DD0
P17
P16
P15
P14/TxD2/SO2
P13/TxD2/SI2
P12/ASCK2/SCK2
P11/PWM1
P10/PWM0
Note
TEST
V
SS0
ASTB
AD0
AD1
AD2
RD
WR
P66/WAIT/HLDRQ
Note Directly connect the TEST pin to V
8
P63/A19
P62/A18
SS0.
P61/A17
P60/A16
A15
A14
A13
A12
A11
A10
A9
A8
AD7
AD6
AD5
AD4
AD3
Page 9

µ
PD784031Y
A8 to A19 : Address Bus
AD0 to AD7 : Address/Data Bus
ANI0 to ANI7 : Analog Input
ANO0, ANO1 : Analog Output
ASCK, ASCK2 : Asynchronous Serial Clock
ASTB : Address Strobe
DD : Analog Power Supply
AV
AVREF1 to AVREF3 : Reference Voltage
SS : Analog Ground
AV
CI : Clock Input
HLDAK : Hold Acknowledge
HLDRQ : Hold Request
INTP0 to INTP5 : Interrupt from Peripherals
NMI : Non-maskable Interrupt
P00 to P07 : Port0
P10 to P17 : Port1
P20 to P27 : Port2
P30 to P37 : Port3
P60 to P63, P66, P67
: Port6
P70 to P77 : Port7
PWM0, PWM1 : Pulse Width Modulation Output
RD : Read Strobe
REFRQ : Refresh Request
RESET : Reset
RxD, RxD2 : Receive Data
SCK0 to SCK2 : Serial Clock
SCL : Serial Clock
SDA : Serial Data
SI0 to SI2 : Serial Input
SO0 to SO2 : Serial Output
TEST : Test
TO0 to TO3 : Timer Output
TxD, TxD2 : Transmit Data
DD0, VDD1 : Power Supply
V
VSS0, VSS1 : Ground
WAIT : Wait
WR : Write Strobe
X1, X2 : Crystal
9
Page 10
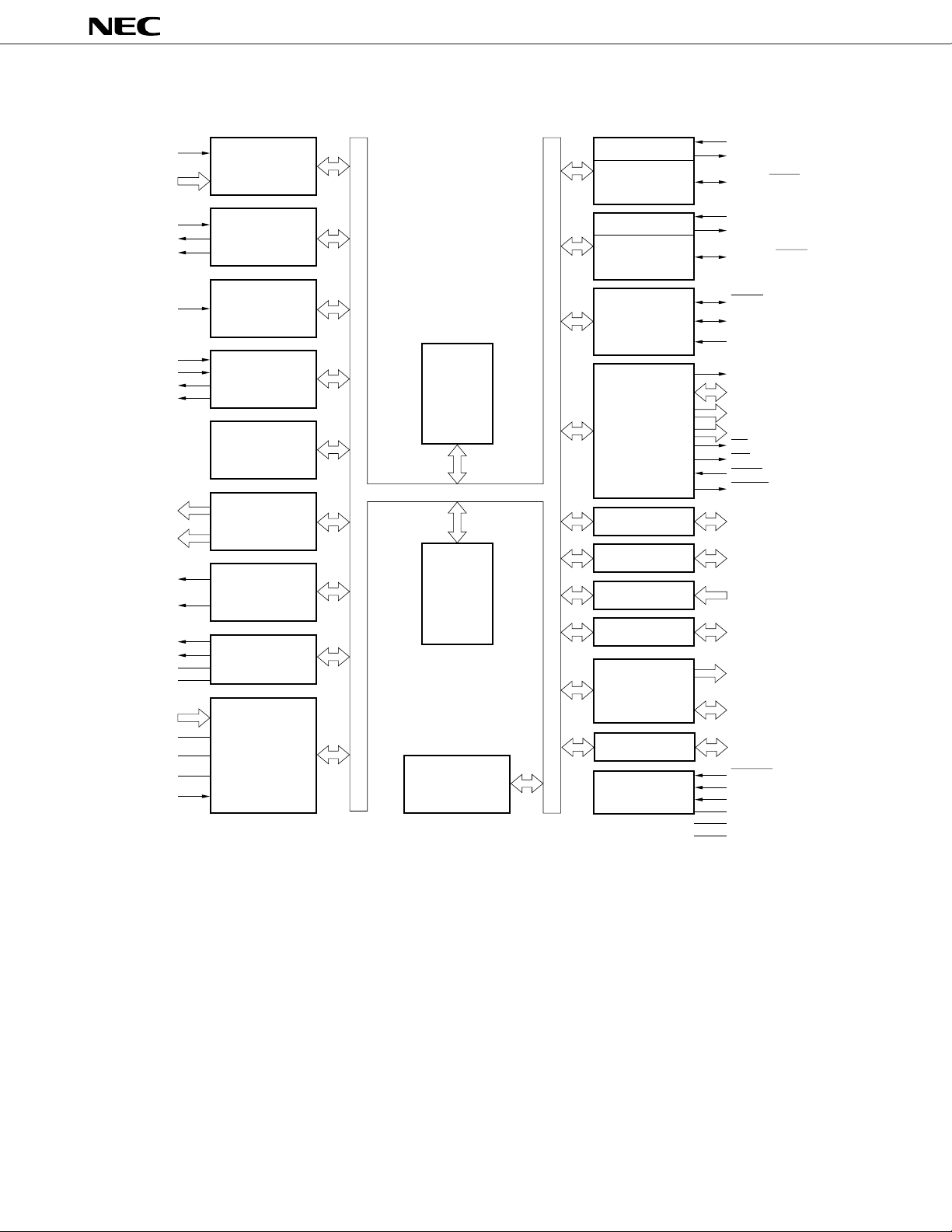
4. BLOCK DIAGRAM
µ
PD784031Y
NMI
INTP0 to INTP5
INTP3
TO0
TO1
INTP0
INTP1
INTP2/CI
TO2
TO3
P00
to
P03
P04
to
P07
PWM0
PWM1
ANO0
ANO1
REF2
AV
AV
REF3
ANI0 to ANI7
DD
AV
AV
REF1
AV
SS
INTP5
PROGRAMMABLE
INTERRUPT
CONTROLLER
TIMER/COUNTER0
(16 BITS)
TIMER/COUNTER1
(16 BITS)
TIMER/COUNTER2
(16 BITS)
TIMER3
(16 BITS)
REAL-TIME
OUTPUT PORT
PWM
D/A
CONVERTER
A/D
CONVERTER
78K/IV
CPU CORE
RAM
WATCHDOG
TIMER
UART/IOE2
BAUD-RATE
GENERATOR
UART/IOE1
BAUD-RATE
GENERATOR
CLOCKED
SERIAL
INTERFACE
BUS I/F
PORT0
PORT1
PORT2
PORT3
PORT6
PORT7
SYSTEM
CONTROL
RxD/SI1
TxD/SO1
ASCK/SCK1
RxD2/SI2
TxD2/SO2
ASCK2/SCK2
SCK0/SCL
SO0/SDA
SI0
ASTB
AD0
to
AD7
A8
to
A15
A16
to
A19
RD
WR
WAIT/HLDRQ
REFRQ/HLDAK
P00
to
P07
P10
to
P17
to
P27
P20
to
P37
P30
to
P63
P60
to
P67
P66
P70
to
P77
RESET
TEST
X1
X2
DD0,VDD1
V
V
SS0,VSS1
10
Page 11
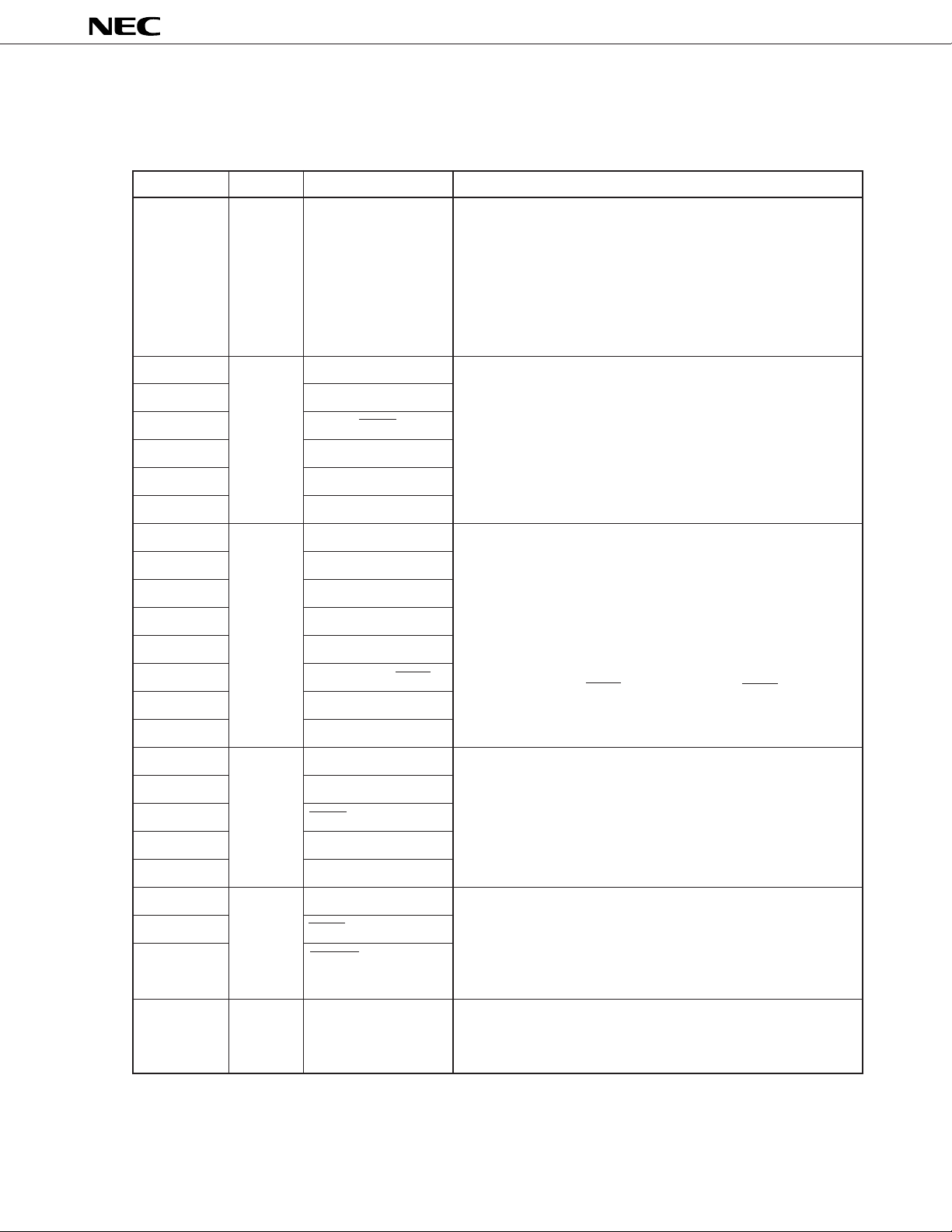
5. PIN FUNCTION
5.1 Port Pins
Pin Name I/O Alternate Function Function
µ
PD784031Y
P00 to P07 I/O –
P10 I/O PWM0
P11 PWM1
P12 ASCK2/SCK2
P13 RxD2/SI2
P14 TxD2/SO2
P15 to P17 –
P20 Input NMI
P21 INTP0
P22 INTP1
P23 INTP2/CI
P24 INTP3
P25 INTP4/ASCK/SCK1
P26 INTP5
P27 SI0
Port 0 (P0):
• 8-bit I/O port
• Can be used as real-time output port (4 bits x 2).
• Can be set in input or output mode bitwise.
• Pins set in input mode can be connected to internal pull-up
resistors by software.
• Can drive transistor.
Port 1 (P1):
• 8-bit I/O port
• Can be set in input or output mode bitwise.
• Pins set in input mode can be connected to internal pull-up
resistors by software.
• Can drive LEDs.
Port 2 (P2):
• 8-bit input port
• P20 cannot be used as general-purpose port pin (non-maskable
interrupt). However, its input level can be checked by interrupt
routine.
• P22 through P27 can be connected to internal pull-up resistors
by software in 6-bit units.
• P25/INTP4/ASCK/SCK1 pin can operate as SCK1 output pin if
so specified by CSIM1.
P30 I/O RxD/S1
P31 TxD/SO1
P32 SCK0/SCL
P33 SO0/SDA
P34 to P37 TO0 to TO3
P60 to P63 I/O A16 to A19
P66 WAIT/HLDRQ
P67 REFRQ/HLDAK
P70 to P77 I/O AN10 to AN17
Port 3 (P3):
• 8-bit I/O port
• Can be set in input or output mode bitwise.
• Pins set in input mode can be connected to internal pull-up
resistors by software.
Port 6 (P6):
• P60 through P63 is dedicated ports for output.
• P66 and P67 can be set in input or output mode bitwise.
• Pins set in input mode can be connected to internal pull-up
resistors by software.
Port 7 (P7):
• 8-bit I/O port
• Can be set in input or output mode bitwise.
11
Page 12
µ
PD784031Y
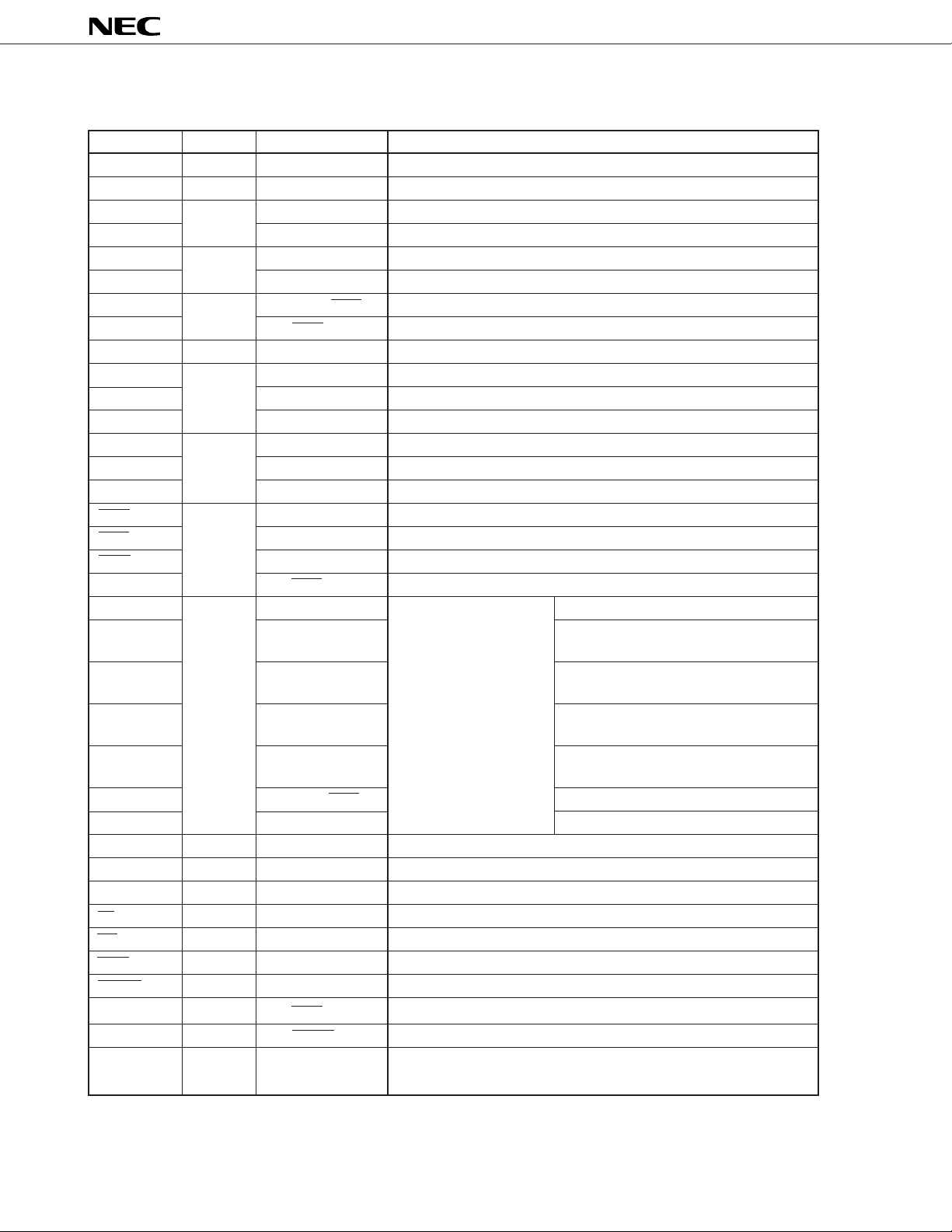
5.2 Non-port Pins
Pin Name I/O Alternate Function Function
TO0 to TO3 Output P34 to P37 Timer output
CI Input P23/INTP2 Count clock input to timer/counter 2
RxD Input P30/SI1 Serial data input (UART0)
RxD2 P13/SI2 Serial data input (UART2)
TxD Output P31/SO1 Serial data output (UART0)
TxD2 P14/SO2 Serial data output (UART2)
ASCK Input P25/INTP4/SCK1 Baud rate clock input (UART0)
ASCK2 P12/SCK2 Baud rate clock input (UART2)
SDA I/O P33/SO0 Serial data input/output (2-wire serial I/O, I2C bus)
SI0 Input P27 Serial data input (3-wire serial I/O0)
SI1 P30/RxD Serial data input (3-wire serial I/O1)
SI2 P13/RxD2 Serial data input (3-wire serial I/O2)
SO0 Output P33/SDA Serial data output (3-wire serial I/O0)
SO1 P31/TxD Serial data output (3-wire serial I/O1)
SO2 P14/TxD2 Serial data output (3-wire serial I/O2)
SCK0 I/O P32/SCL Serial clock input/output (3-wire serial I/O0)
SCK1 P25/INTP4/ASCK Serial clock input/output (3-wire serial I/O1)
SCK2 P12/ASCK2 Serial clock input/output (3-wire serial I/O2)
SCL P32/SCK0 Serial clock input/output (2-wire serial I/O, I2C bus)
NMI Input P20 External interrupt requests –
INTP0 P21 • Count clock input to timer/counter 1
• Capture trigger signal of CR11 or CR12
INTP1 P22 • Count clock input to timer/counter 2
• Capture trigger signal of CR22
INTP2 P23/CI • Count clock input to timer/counter 2
• Capture trigger signal of CR21
INTP3 P24 • Count clock input to timer/counter 0
• Capture trigger signal of CR02
INTP4 P25/ASCK/SCK1 –
INTP5 P26 Conversion start trigger input to A/D converter
AD0 to AD7 I/O – Time-division address/data bus (for external memory connection)
A8 to A15 Output – Higher address bus (for external memory connection)
A16 to A19 Output P60 to P63 Higher address when address is extended (for external memory connection)
RD Output – Read strobe to external memory
WR Output – Write strobe to external memory
WAIT Input P66/HLDRQ Wait insertion
REFRQ Output P67/HLDAK Refresh pulse output to external pseudo static memory
HLDRQ Input P66/WAIT Bus hold request input
HLDAK Output P67/REFRQ Bus hold acknowledge output
ASTB Output – Latch timing output of time-division address (A0 through A7)
(when accessing external memory)
12
Page 13

Pin Name I/O Alternate Function Function
RESET Input – Chip reset
X1 Input – Crystal connection for system clock oscillation
X2 – (Clock can also be input to X1.)
ANI0 to ANI7 Input P70 to P77 Analog voltage input to A/D converter
ANO0, ANO1 Output – Analog voltage output from D/A converter
AVREF1 – – Reference voltage to A/D converter
AVREF2, AVREF3
AVDD A/D converter power supply
AVSS A/D converter GND
Note 1
VDD0
Note 1
VDD1
Note 2
VSS0
Note 2
VSS1
TEST Directly connect to VSS0 (IC test pin).
Reference voltage to D/A converter
Power supply of port
Power supply except for port
GND of port
GND except for port
Notes 1. Provide the same potential to VDD0 and VDD1.
2. Provide the same potential to V
SS0 and VSS1.
µ
PD784031Y
13
Page 14
5.3 Types of Pin I/O Circuits and Connections for Unused Pins
Table 5-1 shows types of pin I/O circuits and the connections for unused pins.
For the input/output circuit of each type, refer to Figure 5-1.
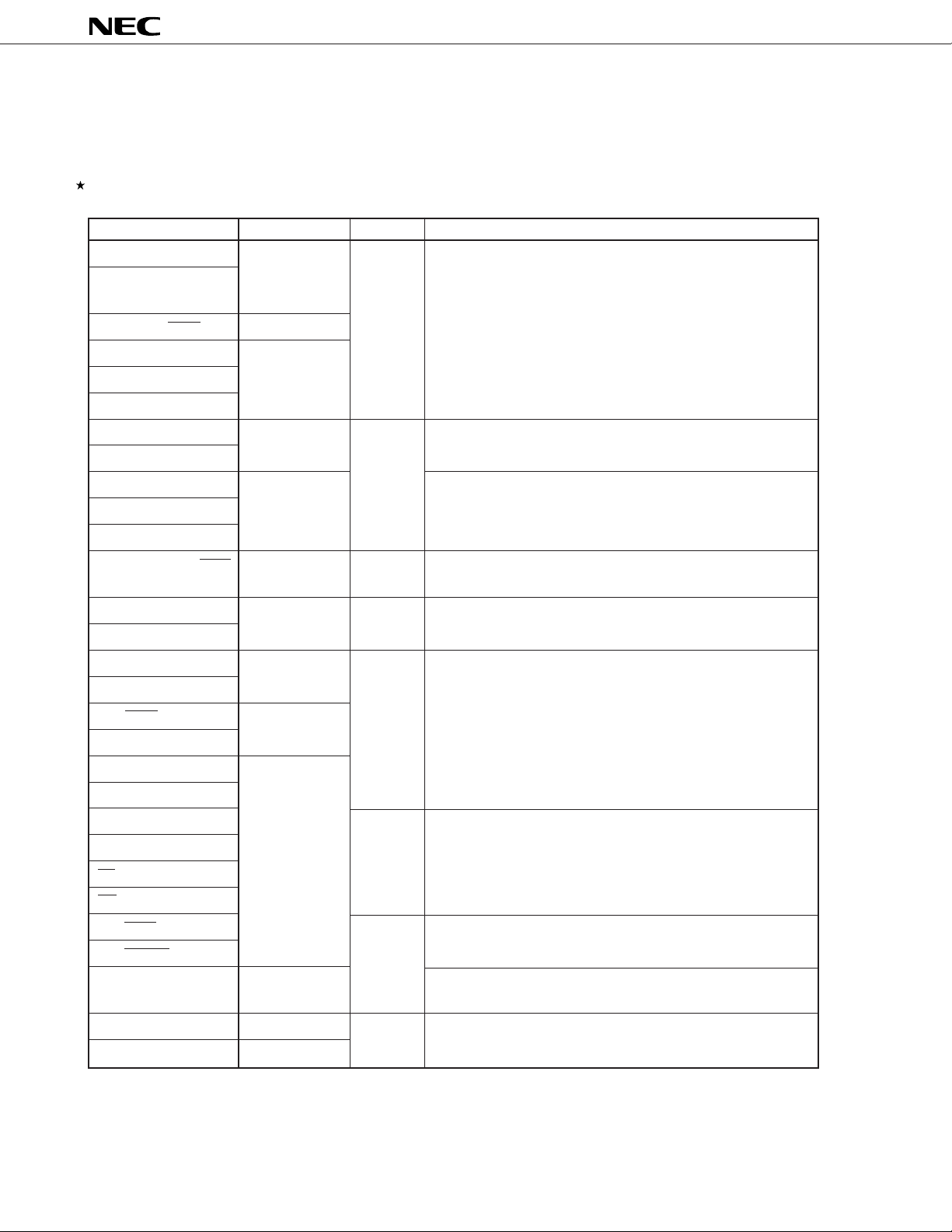
Table 5-1. Types of Pin I/O Circuits and Connections for Unused Pins (1/2)
Pin Name I/O Circuit Type I/O Recommended Connection for Unused Pins
P00 to P07 5-H I/O Input: Connect to VDD0.
P10/PWM0 Output: Open
P11/PWM1
P12/ASCK2/SCK2 8-C
P13/RxD2/SI2 5-H
P14/TxD2/SO2
P15 to P17
P20/NMI 2 Input Connect to VDD0 or VSS0.
P21/INTP0
P22/INTP1 2-C Connect to VDD0.
µ
PD784031Y
P23/INTP2/CI
P24/INTP3
P25/INTP4/ASCK/SCK1 8-C I/O Input: Connect to VDD0.
Output: Open
P26/INTP5 2-C Input Connect to VDD0.
P27/SI0
P30/RxD/SI1 5-H I/O Input: Connect to VDD0.
P31/TxD/SO1 Output: Open
P32/SCK0/SCL 10-B
P33/SO0/SDA
P34/TO0 to P37/TO3 5-H
AD0 to AD7
A8 to A15 Output
P60/A16 to P63/A19
RD
WR
P66/WAIT/HLDRQ I/O Input: Connect to VDD0.
P67/REFRQ/HLDAK Output: Open
P70/ANI0 to P77/ANI7 20-A Input: Connect to VDD0 or VSS0.
ANO0, ANO1 12 Output Open
Note
Open
Output: Open
ASTB 4-B
Note I/O circuit type of these pins is 5-H. However these pins perform only as output by an internal circuit.
14
Page 15
Table 5-1. Types of Pin I/O Circuits and Connections for Unused Pins (2/2)
Pin Name I/O Circuit Type I/O Recommended Connection for Unused Pins
RESET 2 Input –
TEST 1-A Directly connect to VSS0.
AVREF1 to AVREF3 – Connect to VSS0.
AVSS
AVDD Connect to VDD0.
µ
PD784031Y
Caution Connect an I/O pin whose input/output mode is unstable to V
DD0 via a resistor of several 10 kΩ
(especially if the voltage on the reset input pin rises higher than the low-level input level on power
application or when the mode is switched between input and output by software).
Remark Because the circuit type numbers shown in the above table are commonly used with all the models in the 78K
Series, these numbers of some models are not serial (because some circuits are not provided to some models).
15
Page 16
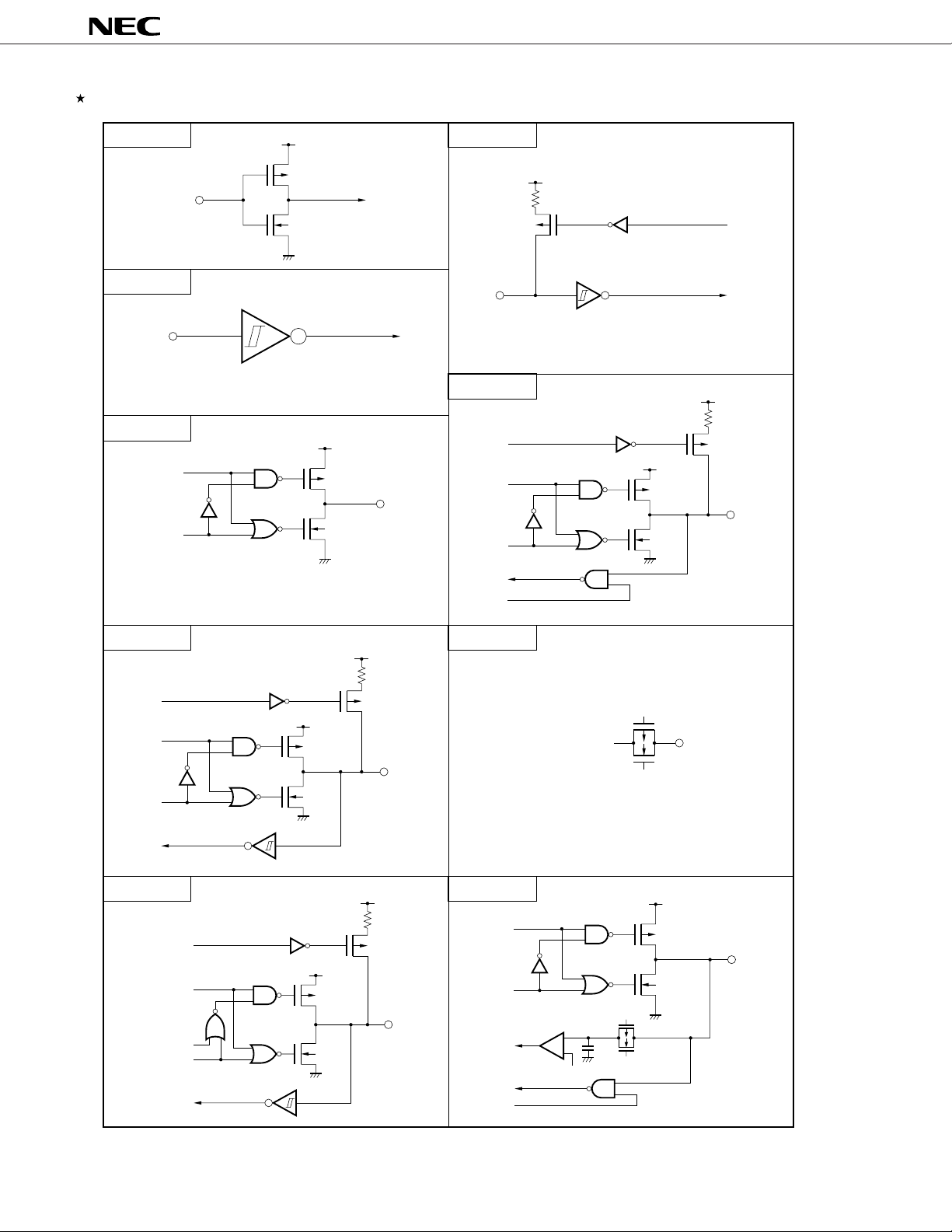
Figure 5-1. Types of Pin I/O Circuits
µ
PD784031Y
Type 1-A
DD0
V
P
IN
N
V
SS0
Type 2
IN
Schmitt trigger input with hysteresis characteristics
Type 4-B
data
output
disable
DD0
V
P
N
V
SS0
OUT
Type 2-C
V
DD0
P
IN
Schmitt trigger input with hysteresis characteristics
Type 5-H
pullup
enable
data
output
disable
DD0
V
P
N
V
SS0
pullup
enable
V
DD0
P
IN/OUT
Push-pull output that can go into a high-impedance
state (with both P-ch and N-ch off)
Type 8-C
pullup
enable
data
output
disable
DD0
V
P
N
V
SS0
Type 10-B
pullup
enable
DD0
V
data
open drain
output disable
P
N
V
SS0
input
enable
Type 12
V
DD0
P
P
Analog output voltage
IN/OUT
V
DD0
Type 20-A
N
data
P
OUT
DD0
V
P
IN/OUT
IN/OUT
output
disable
Comparator
+
–
AV
AV
REF
(threshold voltage)
N
V
SS0
P
N
SS
input
enable
16
Page 17

µ
PD784031Y
6. CPU ARCHITECTURE
6.1 Memory Space
A memory space of 1 Mbytes can be accessed. Mapping of the internal data area (special function registers and internal
RAM) can be specified the LOCATION instruction. The LOCATION instruction must be always executed after reset
cancellation, and must not be used more than once.
(1) When LOCATION 0 instruction is executed
The internal data area is mapped in 0F700H to 0FFFFH.
(2) When LOCATION 0FH instruction is executed
The internal data area is mapped in FF700H to FFFFFH.
17
Page 18

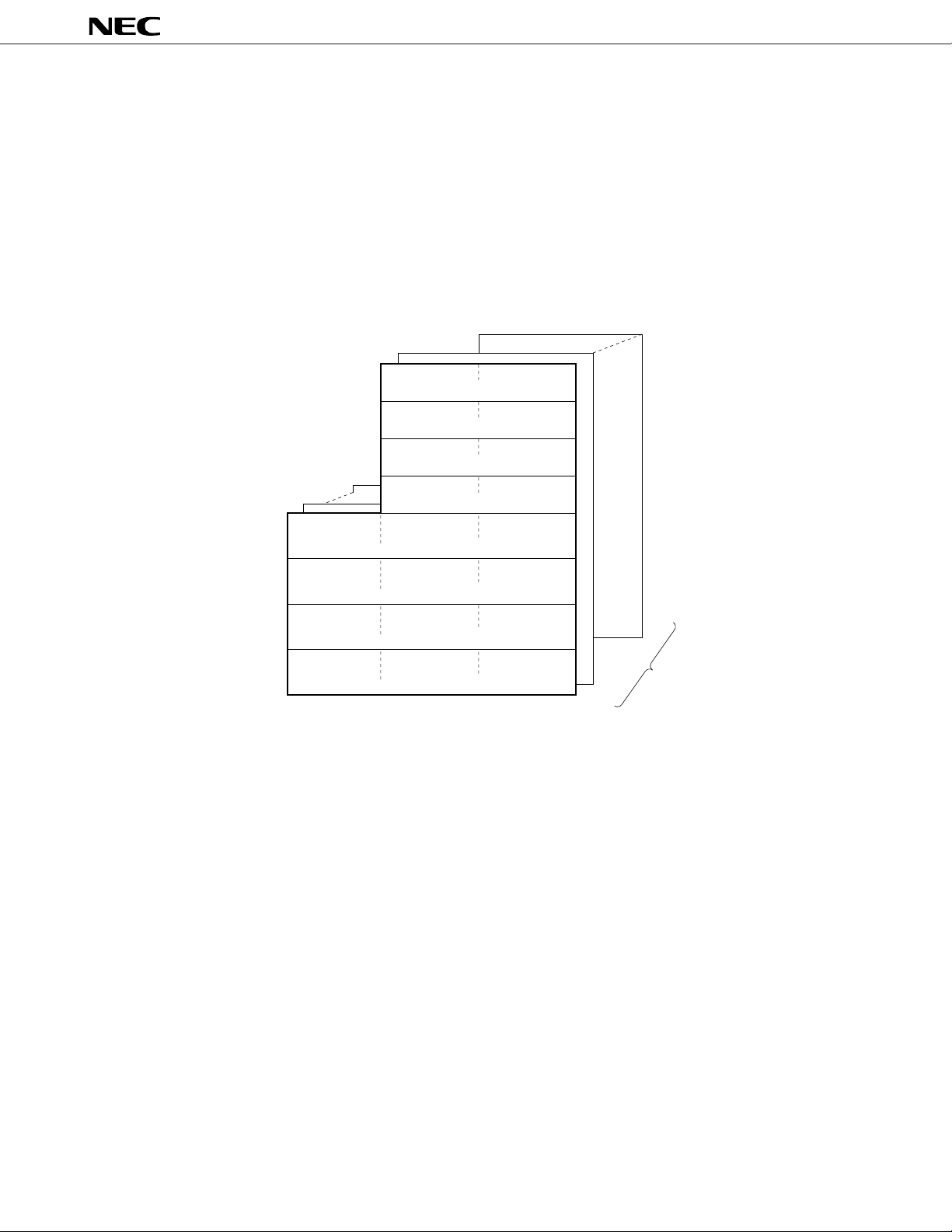
18
Figure 6-1. Memory Map of
µ
PD784031Y
On execution of
LOCATION 0 instruction
HFFFFF
External memory
(960 Kbytes)
H00001
HFFFF0
Special function registers (SFR)
HFDFF0
H0DFF0
H00FF0
HFFEF0
H00DF0
HFFCF0
(256 bytes)
Internal RAM
(2 Kbytes)
H007F0
HFF6F0
External memory
(63232 bytes)
H00000
Note
HFFEF0
General-purpose
registers (128 bytes)
H08EF0
HF7EF0
H13EF0
Macro service control word
area (44 bytes)
H60EF0
Data area (512 bytes)
H00DF0
HFFCF0
Program/data area
(1536 bytes)
H007F0
H00010
HFFF00
CALLF entry area
(2 Kbytes)
H00800
HFF700
H08000
HF7000
CALLT table area
(64 bytes)
H04000
HF3000
Vector table area
(64 bytes)
H00000
On execution of
LOCATION 0FH instruction
HFFFFF
Special function registers (SFR)
HFDFFF
H0DFFF
HFFEFF
H00FFF
HFFEFF
(256 bytes)
Internal RAM
(2 Kbytes)
H08EFF
HF7EFF
13
HEFF
H60EFF
H00DFF
HFFCFF
H007FF
HFF6FF
External memory
(1046272 bytes)
H007FF
HFFF00
H00800
HFF700
H08000
HF7000
H00001
HFFFF0
Note
H00000
µ
PD784031Y
Note Base area and entry area for reset or interrupt. However, the internal RAM area is not used as a reset entry area.
Page 19
µ
(
PD784031Y
6.2 CPU Registers
6.2.1 General-purpose registers
Sixteen 8-bit general-purpose registers are available. Two 8-bit registers can be also used in pairs as a 16-bit register.
Of the 16-bit registers, four can be used in combination with an 8-bit register for address expansion as 24-bit address
specification registers.
Eight banks of these registers are available which can be selected by using software or the context switching function.
The general-purpose registers except V, U, T, and W registers for address expansion are mapped to the internal RAM.
Figure 6-2. General-purpose Register Format
V
VVP (RG4)
U
UUP (RG5)
T
TDE (RG6)
W
WHL (RG7)
Parentheses
A (R1)
AX (RP0)
B (R3)
BC (RP1)
R5
R7
R9
VP (RP4)
R11
UP (RP5)
D (R13)
DE (RP6)
H (R15)
HL (RP7)
) indicate an absolute name.
X (R0)
C (R2)
R4
RP2
R6
RP3
R8
R10
E (R12)
L (R14)
8 banks
Caution Registers R4, R5, R6, R7, RP2, and RP3 can be used as X, A, C, B, AX, and BC registers, respectively,
by setting the RSS bit of the PSW to 1. However, use this function only for recycling the program of
the 78K/III Series.
19
Page 20
6.2.2 Control registers
(1) Program counter (PC)
The program counter is a 20-bit register whose contents are automatically updated when the program is executed.
Figure 6-3. Program Counter (PC) Format
19 0
PC
(2) Program status word (PSW)
This register holds the statuses of the CPU. Its contents are automatically updated when the program is executed.
Figure 6-4. Program Status Word (PSW) Format
15 14 13 12 11 10 9 8
UF RBS2 RBS1 RBS0 – – – –PSWH
µ
PD784031Y
PSW
76543210
S Z RSS
Note
AC IE P/V 0 CYPSWL
Note This flag is provided to maintain compatibility with the 78K/III Series. Be sure to clear this flag to 0, except when
the software for the 78K/III Series is used.
(3) Stack pointer (SP)
This is a 24-bit pointer that holds the first address of the stack.
Be sure to write 0 to the higher 4 bits of this pointer.
Figure 6-5. Stack Pointer (SP) Format
23 0
SP
20
0000
20
Page 21

µ
PD784031Y
6.2.3 Special function registers (SFRs)
The special function registers, such as the mode registers and control registers of the internal peripheral hardware, are
registers to which special functions are allocated. These registers are mapped to a 256-byte space of addresses 0FF00H
Note
through 0FFFFH
Note On execution of the LOCATION 0 instruction. FFF00H through FFFFFH on execution of the LOCATION 0FH
instruction.
Caution Do not access an address in this area to which no SFR is allocated. If such an address is accessed by
mistake, the
inputting the reset signal.
Table 6-1 lists the special function registers (SFRs). The meanings of the symbols in this table are as follows:
• Symbol................................ Symbol indicating an SFR. This symbol is reserved for NEC’s assembler (RA78K4).
.
µ
PD784031Y may be in the deadlock status. This deadlock status can be cleared only by
It can be used as an sfr variable by the #pragma sfr command with the C compiler
(CC78K4).
• R/W..................................... Indicates whether the SFR is read-only, write-only, or read/write.
R/W : Read/write
R : Read-only
W : Write-only
• Bit units for manipulation .... Bit units in which the value of the SFR can be manipulated.
SFRs that can be manipulated in 16-bit units can be described as the operand
sfrp of an instruction. To specify the address of this SFR, describe an even
address.
SFRs that can be manipulated in 1-bit units can be described as the operand of a
bit manipulation instruction.
• After reset........................... Indicates the status of the register when the RESET signal has been input.
21
Page 22
µ
PD784031Y
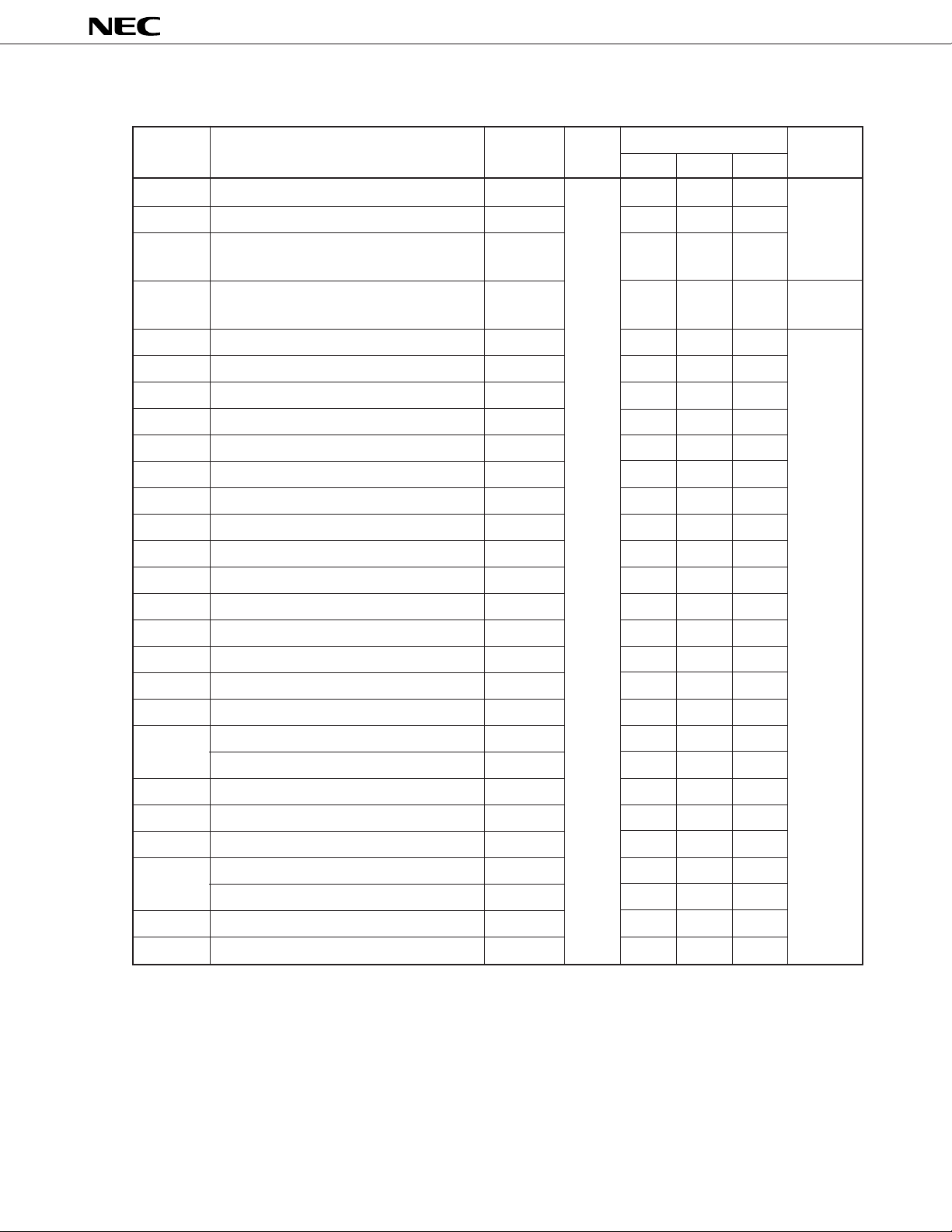
Table 6-1. Special Function Registers (SFRs) (1/4)
Note
Address
0FF00H Port 0 P0 R/W √√– Undefined
0FF01H Port 1 P1 √√–
0FF02H Port 2 P2 R √√–
0FF03H Port 3 P3 R/W √√–
0FF06H Port 6 P6 √√– 00H
0FF07H Port 7 P7 √√– Undefined
0FF0EH Port 0 buffer register L P0L √√–
Special Function Register (SFR) Name Symbol R/W Bit Units for Manipulation After Reset
1 bit 8 bits 16 bits
0FF0FH
0FF10H Compare register (timer/counter 0) CR00 – – √
0FF12H Capture/compare register (timer/counter 0) CR01 – – √
0FF14H Compare register L (timer/counter 1)
0FF15H Compare register H (timer/counter 1) – – –
0FF16H Capture/compare register L (timer/counter 1)
0FF17H Capture/compare register H (timer/counter 1) – – –
0FF18H Compare register L (timer/counter 2)
0FF19H Compare register H (timer/counter 2) – – –
0FF1AH Capture/compare register L (timer/counter 2)
0FF1BH Capture/compare register H (timer/counter 2) – – –
0FF1CH Compare register L (timer 3)
0FF1DH Compare register H (timer 3) – – –
0FF20H Port 0 mode register PM0 √√– FFH
0FF21H Port 1 mode register PM1 √√–
0FF23H Port 3 mode register PM3 √√–
0FF26H Port 6 mode register PM6 √√–
0FF27H Port 7 mode register PM7 √√–
Port 0 buffer register H
P0H √√–
CR10
CR11
CR20
CR21
CR30
CR10W
CR11W
CR20W
CR21W
CR30W
– √√
– √√
– √√
– √√
– √√
0FF2EH Real-time output port control register RTPC √√– 00H
0FF30H Capture/compare control register 0 CRC0 – √ – 10H
0FF31H Timer output control register TOC √√– 00H
0FF32H Capture/compare control register 1 CRC1 – √ –
0FF33H Capture/compare control register 2 CRC2 – √ – 10H
Note When the LOCATION 0 instruction is executed. When the LOCATION 0FH instruction is executed, “F0000H” is
added to this value.
22
Page 23
µ
PD784031Y
Table 6-1. Special Function Registers (SFRs) (2/4)
Note 1
Address
0FF36H Capture register (timer/counter 0) CR02 R – – √ 0000H
0FF38H Capture register L (timer/counter 1)
0FF39H Capture register H (timer/counter 1) – – –
Special Function Register (SFR) Name Symbol R/W Bit Units for Manipulation After Reset
1 bit 8 bits 16 bits
CR12
CR12W
– √√
0FF3AH Capture register L (timer/counter 2)
0FF3BH Capture register H (timer/counter 2) – – –
0FF41H Port 1 mode control register PMC1 R/W √√– 00H
0FF43H Port 3 mode control register PMC3 √√–
0FF4EH Pull-up resistor option register PUO √√–
0FF50H Timer register 0 TM0 R – – √ 0000H
0FF51H ––
0FF52H Timer register 1 TM1
0FF53H – – –
0FF54H Timer register 2 TM2
0FF55H – – –
0FF56H Timer register 3 TM3
0FF57H – – –
0FF5CH Prescaler mode register 0 PRM0 R/W – √ – 11H
0FF5DH Timer control register 0 TMC0 √√ – 00H
0FF5EH Prescaler mode register 1 PRM1 – √ – 11H
0FF5FH Timer control register 1 TMC1 √√– 00H
0FF60H D/A conversion value setting register 0 DACS0 – √ –
CR22
CR22W
TM1W
TM2W
TM3W
– √√
– √√
– √√
– √√
0FF61H D/A conversion value setting register 1 DACS1 – √ –
0FF62H D/A converter mode register DAM √√– 03H
0FF68H A/D converter mode register ADM √√– 00H
0FF6AH A/D conversion result register ADCR R – √ – Undefined
0FF70H PWM control register PWMC R/W √√– 05H
0FF71H PWM prescaler register PWPR – √ – 00H
0FF72H PWM modulo register 0 PWM0 – – √ Undefined
0FF74H PWM modulo register 1 PWM1 – – √
0FF7DH One-shot pulse output control register OSPC √√ – 00H
0FF80H I2C bus control register IICC √√–
0FF81H Prescaler mode register for serial clock SPRM – √ – 04H
0FF82H Clocked serial interface mode register CSIM √√– 00H
0FF83H Slave address register SVA
Note 2√Note 3
R/W
√ – 01H
Notes 1. When the LOCATION 0 instruction is executed. When the LOCATION 0FH instruction is executed, “F0000H”
is added to this value.
2. Bit 0 is read-only.
3. Only bit 0 can be manipulated in bit units.
23
Page 24

µ
Table 6-1. Special Function Registers (SFRs) (3/4)
Note 1
Address
0FF84H Clocked serial interface mode register 1 CSIM1 R/W √√– 00H
0FF85H Clocked serial interface mode register 2 CSIM2 √√–
0FF86H Serial shift register SIO – √ –
0FF88H Asynchronous serial interface mode register ASIM √√–
0FF89H Asynchronous serial interface mode register 2 ASIM2 √√–
0FF8AH Asynchronous serial interface status register ASIS R √√–
Special Function Register (SFR) Name Symbol R/W Bit Units for Manipulation After Reset
1 bit 8 bits 16 bits
PD784031Y
0FF8BH
0FF8CH Serial receive buffer: UART0 RXB – √ – Undefined
0FF8DH Serial receive buffer: UART2 RXB2 R – √ –
0FF90H Baud rate generator control register BRGC – √ – 00H
0FF91H Baud rate generator control register 2 BRGC2 – √ –
0FFA0H External interrupt mode register 0 INTM0 √√–
0FFA1H External interrupt mode register 1 INTM1 √√–
0FFA4H Sampling clock select register SCS0 – √ –
0FFA8H In-service priority register ISPR R √√–
0FFAAH Interrupt mode control register IMC R/W √√– 80H
0FFACH Interrupt mask register 0L MK0L MK0 √√√FFFFH
0FFADH Interrupt mask register 0H
0FFAEH Interrupt mask register 1L MK1L √√– FFH
0FFC0H Standby control register STBC – √
0FFC2H Watchdog timer mode register WDM – √
Asynchronous serial interface status register 2
Serial transmit shift register: UART0 TXS W – √ –
Serial shift register: IOE1 SIO1 R/W – √ –
Serial transmit shift register: UART2 TXS2 W – √ –
Serial shift register: IOE2 SIO2 R/W – √ –
ASIS2 √√–
MK0H
√√
Note 2
Note 2
– 30H
– 00H
0FFC4H Memory expansion mode register MM √√– 20H
0FFC5H Hold mode register HLDM √√– 00H
0FFC6H Clock output mode register CLOM √√–
0FFC7H Programmable wait control register 1 PWC1 – √ – AAH
0FFC8H Programmable wait control register 2 PWC2 – – √ AAAAH
Notes 1. When the LOCATION 0 instruction is executed. When the LOCATION 0FH instruction is executed, “F0000H”
is added to this value.
2. Data can be written by using only dedicated instructions such as MOV STBC, #byte and MOV WDM, #byte,
and cannot be written with any other instructions.
24
Page 25
µ
PD784031Y
Table 6-1. Special Function Registers (SFRs) (4/4)
Note
Address
0FFCCH Refresh mode register RFM R/W √√– 00H
0FFCDH Refresh area specification register RFA √√–
0FFCFH Oscillation stabilization time specification OSTS – √ –
0FFD0H to External SFR area – √√––
0FFDFH
0FFE0H Interrupt control register (INTP0) PIC0 √√– 43H
0FFE1H Interrupt control register (INTP1) PIC1 √√–
0FFE2H Interrupt control register (INTP2) PIC2 √√–
0FFE3H Interrupt control register (INTP3) PIC3 √√–
0FFE4H Interrupt control register (INTC00) CIC00 √√ –
0FFE5H Interrupt control register (INTC01) CIC01 √√ –
Special Function Register (SFR) Name Symbol R/W Bit Units for Manipulation After Reset
1 bit 8 bits 16 bits
register
0FFE6H Interrupt control register (INTC10) CIC10 √√ –
0FFE7H Interrupt control register (INTC11) CIC11 √√ –
0FFE8H Interrupt control register (INTC20) CIC20 √√ –
0FFE9H Interrupt control register (INTC21) CIC21 √√ –
0FFEAH Interrupt control register (INTC30) CIC30 √√ –
0FFEBH Interrupt control register (INTP4) PIC4 √√–
0FFECH Interrupt control register (INTP5) PIC5 √√–
0FFEDH Interrupt control register (INTAD) ADIC √√–
0FFEEH Interrupt control register (INTSER) SERIC √√–
0FFEFH Interrupt control register (INTSR) SRIC √√–
Interrupt control register (INTCSI1) CSIIC1 √√–
0FFF0H Interrupt control register (INTST) STIC √√–
0FFF1H Interrupt control register (INTCSI) CSIIC √√–
0FFF2H Interrupt control register (INTSER2) SERIC2 √√–
0FFF3H Interrupt control register (INTSR2) SRIC2 √√–
Interrupt control register (INTCSI2) CSIIC2 √√–
0FFF4H Interrupt control register (INTST2) STIC2 √√–
0FFF5H Interrupt control register (INTSPC) SPCIC √√–
Note When the LOCATION 0 instruction is executed. When the LOCATION 0FH instruction is executed, “F0000H” is
added to this value.
25
Page 26
µ
PD784031Y
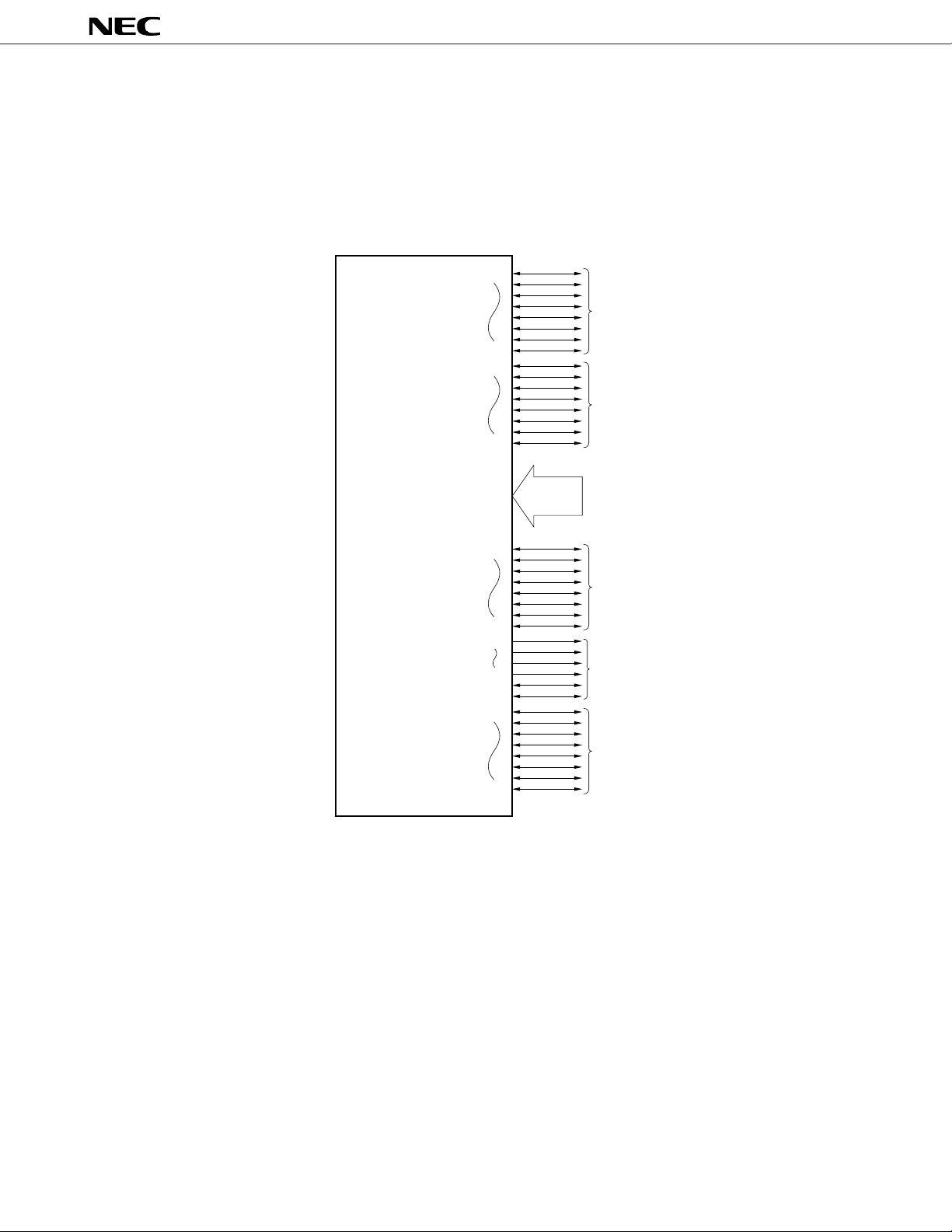
7. PERIPHERAL HARDWARE FUNCTIONS
7.1 Ports
The ports shown in Figure 7-1 are provided to make various control operations possible. Table 7-1 shows the function
of each port. Ports 0 through 6 can be connected to internal pull-up resistors by software when inputting.
Figure 7-1. Port Configuration
P00
Port 0
P07
P10
Port 1
P17
P20 to P27
P30
P37
P60
P63
P66
P67
P70
P77
Port 2
8
Port 3
Port 6
Port 7
26
Page 27
µ
PD784031Y
Table 7-1. Port Functions
Port Name Pin Name Function Specification of Pull-up Resistor
Connection by Software
Port 0 P00 to P07 • Can be set in input or output mode in 1-bit units. All port pins in input mode
• Can operate as 4-bit real-time output port
(P00 through P03 and P04 through P07).
• Can drive transistor.
Port 1 P10 to P17 • Can be set in input or output mode in 1-bit units. All port pins in input mode
• Can drive LEDs.
Port 2 P20 to P27 • Input port In 6-bit units (P22 through P27)
Port 3 P30 to P37 • Can be set in input or output mode in 1-bit units. All port pins in input mode
Port 6 P60 to P63 • Output only All port pins in input mode
P66, P67 • Can be set in input or output mode in 1-bit units.
Port 7 P70 to P77 • Can be set in input or output mode in 1-bit units. –
7.2 Clock Generation Circuit
An on-chip clock generation circuit necessary for operation is provided. This clock generation circuit has a divider circuit.
If high-speed operation is not necessary, the internal operating frequency can be lowered by the divider circuit to reduce
the current consumption.
Figure 7-2. Block Diagram of Clock Generation Circuit
X1
Oscillation
circuit
X2
Remark fXX : oscillation frequency or external clock input
fCLK: internal operating frequency
f
XX
1/2 1/2 1/2 1/2
f
XX
/2
UART/IOE
INTP0 noise reduction circuit
Oscillation stabilization timer
Selector
CLK
f
CPU
Peripheral circuit
27
Page 28

Figure 7-3. Example of Using Oscillation Circuit
(1) Crystal/ceramic oscillation
PD784031Y
µ
V
SS1
X1
X2
(2) External clock
• EXTC bit of OSTS = 1 • EXTC bit of OSTS = 0
µ
PD784031Y
µ
PD74HC04, etc.
PD784031Y
µ
X1
X2
PD784031Y
µ
X1
X2Open
Caution When using the clock oscillation circuit, wire the dotted portion in the above figure as follows to avoid
adverse influences of wiring capacitance.
• Keep the wiring length as short as possible.
• Do not cross the wiring with other signal lines.
• Do not route the wiring in the vicinity of lines through which a high alternating current flows.
• Always keep the potential at the ground point of the capacitor in the oscillation circuit the same
SS1. Do not ground to a ground pattern through which a high current flows.
as V
• Do not extract signals from the oscillation circuit.
28
Page 29

µ
PD784031Y
7.3 Real-time Output Port
The real-time output port outputs data stored in a buffer in synchronization with the coincidence interrupt generated by
timer/counter 1 or with an external interrupt. As a result, pulses without jitter can be output.
The real-time output port is therefore ideal for applications where arbitrary patterns must be output at specific intervals
(such as open loop control of a stepping motor).
The real-time output port mainly consists of port 0 and port 0 buffer registers (P0H and P0L) as shown in Figure 7-4.
Figure 7-4. Block Diagram of Real-time Output Port
Internal bus
844
INTP0 (from external source)
INTC10 (from timer/counter 1)
INTC11 (from timer/counter 1)
Real-time output port
control register (RTPC)
Output trigger
control circuit
Buffer register
8
P0H P0L
44
Output latch (P0)
P07 P00
29
Page 30

µ
PD784031Y
7.4 Timer/Counter
Three units of timers/counters and one unit of timer are provided.
Because a total of seven interrupt requests are supported, these timers/counters and timer can be used as seven units
of timers/counters.
Table 7-2. Operations of Timers/Counters
Name Timer/Counter 0 Timer/Counter 1 Timer/Counter 2 Timer 3
Item
Count width 8 bits – √√√
16 bits √√√√
Operation
mode
Function Timer output 2ch – 2ch –
Interval timer 2ch 2ch 2ch 1ch
External event counter √√√–
One-shot timer – – √ –
Toggle output √ – √ –
PWM/PPG output √ – √ –
One-shot pulse output
Real-time output – √ ––
Pulse width measurement 1 input 1 input 2 inputs –
Number of interrupt requests 2221
Note
√ –––
Note The one-shot pulse output function makes a pulse output level active by software and inactive by hardware (interrupt
request signal).
This function is different in nature from the one-shot timer function of timer/counter 2.
30
Page 31

Timer/counter 0
Figure 7-5. Block Diagram of Timers/Counters
Clear control
Software trigger
µ
PD784031Y
INTP3
Timer/counter 1
INTP0
f
XX/8
Edge detection
XX/8
f
Edge detection
Prescaler
Prescaler
Event input
INTP3
INTP0
Selector
Selector
Capture/Compare register
Timer register 0
(TM0)
Compare register
(CR00)
Compare register
(CR01)
Capture register
(CR02)
Clear control
Timer register 1
(TM1/TM1W)
Compare register
(CR10/CR10W)
(CR11/CR11W)
Capture register
(CR12/CR12W)
Match
Match
Match
Match
OVF
TO0
TO1
Pulse output control
INTC00
INTC01
OVF
INTC10
To real-time output port
INTC11
Timer/counter 2
f
XX/8
INTP1
Edge detection
Edge detection
INTP2/CI
Timer 3
XX/8
f
Remark OVF: overflow flag
Prescaler
INTP2
Prescaler
INTP1
Selector
Capture/Compare register
Clear control
Timer register 2
(TM2/TM2W)
Compare register
(CR20/CR20W)
(CR21/CR21W)
Capture register
(CR22/CR22W)
Timer register 3
(TM3/TM3W)
Compare register
(CR30/CR30W)
Match
Match
Clear
Match
OVF
TO2
TO3
Pulse output control
INTC20
INTC21
CSI
INTC30
31
Page 32

µ
PD784031Y
7.5 PWM Output (PWM0, PWM1)
Two channels of PWM (pulse width modulation) output circuits with a resolution of 12 bits and a repeat frequency of
62.5 kHz (f
These outputs are ideal for controlling the speed of a DC motor.
CLK = 16 MHz) are provided. Both these PWM output channels can select a high or low level as the active level.
Figure 7-6. Block Diagram of PWM Output Unit
Internal bus
f
CLK
Prescaler
Remark n = 0 or 1
PWM modulo register
PWMn
8-bit down counter
1/256
16
0347815
8
4
Pulse control circuit
4-bit counter
8
PWM control
register (PWMC)
Reload
control
Output
control
PWMn (output pin)
32
Page 33

µ
Internal bus
ANI0
ANI1
ANI2
ANI3
ANI4
ANI5
ANI6
ANI7
INTP5
Input selector
Edge
detection
circuit
Conversion trigger
Sample & hold circuit
Voltage comparator
Successive approximation
register (SAR)
Control
Circuit
INTAD
8
Series resistor string
R/2
Tap selector
R
R/2
AV
REF1
AV
SS
8
Trigger enable
A/D converter mode
register (ADM)
8
A/D conversion result
register (ADCR)
PD784031Y
7.6 A/D Converter
An analog-to-digital (A/D) converter with eight multiplexed inputs (ANI0 through ANI7) is provided.
This A/D converter is of successive approximation type. The result of conversion is retained by an 8-bit A/D conversion
result register (ADCR). Therefore, high-speed, high-accuracy conversion can be performed (conversion time: approx. 7.5
µ
s at fCLK = 16 MHz).
A/D conversion can be started in either of the following two modes:
• Hardware start: Conversion is started by trigger input (INTP5).
• Software start: Conversion is started by setting a bit of the A/D converter mode register (ADM).
After started, the A/D converter operates in the following modes:
• Scan mode: Two or more analog inputs are sequentially selected, and data to be converted are obtained from all the
input pins.
• Select mode: Only one analog input pin is used to continuously obtain converted values.
These operation modes and whether starting or stopping the A/D converter are specified by the ADM.
When the result of conversion is transferred to the ADCR, interrupt request INTAD is generated. By using this request
and macro service, the converted values can be successively transferred to the memory.
Figure 7-7. Block Diagram of A/D Converter
33
Page 34

µ
PD784031Y
7.7 D/A Converter
Two circuits of digital-to-analog (D/A) converters are provided. These D/A converters are of voltage output type and
have a resolution of 8 bits.
The conversion method is of R-2R resistor ladder type. By writing a value to be output to an 8-bit D/A conversion value
setting register (DACSn: n = 0 or 1), an analog value is output to the ANOn (n = 0 or 1) pin. The output voltage range is
determined by the voltage applied across the AV
Because the output impedance is high, no current can be extracted from the output. If the impedance of the load is low,
insert a buffer amplifier between the load and output pin.
The ANOn pin goes into a high-impedance state while the RESET signal is low. After releasing reset, DACSn is cleared
to 0.
Figure 7-8. Block Diagram of D/A Converter
AV
REF2
REF2 and AVREF3 pins.
ANOn
2R
R
AV
REF3
2R
Selector
R
2R
R
2R
DACSn DACEn
Remark n = 0 or 1
34
Internal bus
Page 35

µ
PD784031Y
7.8 Serial Interface
Three independent serial interface channels are provided.
Asynchronous serial interface (UART)/3-wire serial I/O (IOE) x 2
Clocked serial interface (CSI) x 1
• 3-wire serial I/O (IOE)
• 2-wire serial I/O (IOE)
2
C bus interface (I2C)
• I
Therefore, communication with an external system and local communication within the system can be simultaneously
executed (refer to Figure 7-9).
Figure 7-9. Example of Serial Interface
2
C
V
DD
V
DD
PD6272 (EEPROM
µ
SDA
SCL
PD78062Y (slave)
µ
TM
)
PD4711A
µ
RS-232-C
driver/receiver
PD784031Y (master)
µ
[UART]
RxD
TxD
Port
(a) UART + I
2
C]
[I
SDA
SCL
PD4711A
µ
RS-232-C
driver/receiver
PD4711A
µ
RS-232-C
driver/receiver
[UART]
RxD2
TxD2
Port
(b) UART + 3-wire serial I/O + 2-wire serial I/O
PD784031Y (master)
µ
[3-wire serial I/O]
SI1
Note
Port
V
SCL
Note
Port
[2-wire serial I/O]
[UART]
RxD
TxD
Port
SO1
SCK1
INTPm
SDA
INTPn
SDA
SCL
PD75108 (slave)
µ
SI
SO
SCK
Port
INT
V
DD
DD
PD78014 (slave)
µ
SB0
SCK0
Port
INT
LCD
Note Handshake line
35
Page 36

µ
PD784031Y
7.8.1 Asynchronous serial interface/3-wire serial I/O (UART/IOE)
Two channels of serial interfaces that can select an asynchronous serial interface mode and 3-wire serial I/O mode are
provided.
(1) Asynchronous serial interface mode
In this mode, data of 1 byte following the start bit is transferred or received.
Because an on-chip baud rate generator is provided, a wide range of baud rates can be set.
Moreover, the clock input to the ASCK pin can be divided to define a baud rate.
When the baud rate generator is used, a baud rate conforming to the MIDI standard (31.25 kbps) can be also
obtained.
Figure 7-10. Block Diagram in Asynchronous Serial Interface Mode
Internal bus
Receive buffer RXB, RXB2
R
X
D, RXD2
T
X
D, TXD2
Baud rate generator
f
XX
/2
ASCK, ASCK2
Remark f
XX: oscillation frequency or external clock input
n = 0 through 11
m = 16 through 30
Selector
1/2
n + 1
Receive shift
register
Receive control
parity check
1/2m
1/2m
INTSR,
INTSR2
INTSER,
INTSER2
Transmit shift
register
Transmit control
parity append
TXS, TXS2
INTST, INTST2
36
Page 37

µ
PD784031Y
(2) 3-wire serial I/O mode
In this mode, the master device starts transfer by making the serial clock active and transfers 1-byte data in
synchronization with this clock.
This mode is used to communicate with a device having the conventional clocked serial interface. Basically,
communication is established by using three lines: one serial clock (SCK) and two serial data (SI and SO) lines.
Generally, to check the communication status, a handshake line is necessary.
Figure 7-11. Block Diagram in 3-wire Serial I/O Mode
Internal bus
Direction control circuit
SIO1, SIO2
SI1, SI2
Shift register Output latch
SO1, SO2
SCK1, SCK2
Remark f
Serial clock counter
Serial clock
control circuit
XX: oscillation frequency or external clock input
n = 0 through 11
m = 1 or 16 through 30
Interrupt signal
generation circuit
1/m 1/2
Selector
INTCSI1,
INTCSI2
n + 1
fXX/2
37
Page 38

µ
PD784031Y
7.8.2 Clocked serial interface (CSI)
In this mode, the master device starts transfer by making the serial clock active and communicates 1-byte data in
synchronization with this clock.
Figure 7-12. Block Diagram of Clocked Serial Interface
Internal bus
SI0
SO0/SDA
(in 2-wire or I
SCK0/SCL
N-ch open drain output
2
C bus mode)
Selector
Direction
control
register
Shift register
Start condition
detection circuit
detection circuit
Stop condition
detection circuit
Serial clock
Slave address
register
Acknowledge
counter
Match signal
Set Reset
Output latch
Interrupt signal
generation
circuit
Acknowledge
detection
control
Wake-up
control circuit
INTSPC
INTCSI
Remark f
38
Serial clock
control circuit
N-ch open drain output
(in 2-wire or I
XX: oscillation frequency or external clock input
2
C bus mode)
CLS0
CLS1
Selector
Timer 3 output
XX
/16
f
Selector
Prescaler
XX
/2
f
Page 39

µ
PD784031Y
(1) 3-wire serial I/O mode
This mode is to communicate with devices having the conventional clocked serial interface.
Basically, communication is established in this mode with three lines: one serial clock (SCK0) and two serial data
(SI0 and SO0) lines.
Generally, a handshake line is necessary to check the communication status.
(2) 2-wire serial I/O mode
This mode is to transfer 8-bit data by using two lines: serial clock (SCL) and serial data bus (SDA).
Generally, a handshake line is necessary to check the communication status.
2
C (Inter IC) bus mode
(3) I
2
This mode is to communicate with devices conforming to the I
This mode is to transfer 8-bit data with two or more devices by using two lines: serial clock (SCL) and serial data
bus (SDA).
During transfer, a “start condition”, “data”, and “stop condition” can be output onto the serial data bus. During
reception, these data can be automatically detected by hardware.
C bus format.
7.9 Edge Detection Function
The interrupt input pins (NMI and INTP0 through INTP5) are used not only to input interrupt requests but also to input
trigger signals to the internal hardware units. Because these pins operate at an edge of the input signal, they have a function
to detect an edge. Moreover, a noise reduction circuit is also provided to prevent erroneous detection due to noise.
Pin Name Detectable Edge Noise Reduction
NMI Either of rising or falling edge By analog delay
INTP0 to INTP3 Either or both of rising and falling edges By clock sampling
INTP4, INTP5 By analog delay
Note INTP0 can select a sampling clock.
Note
39
Page 40

µ
PD784031Y
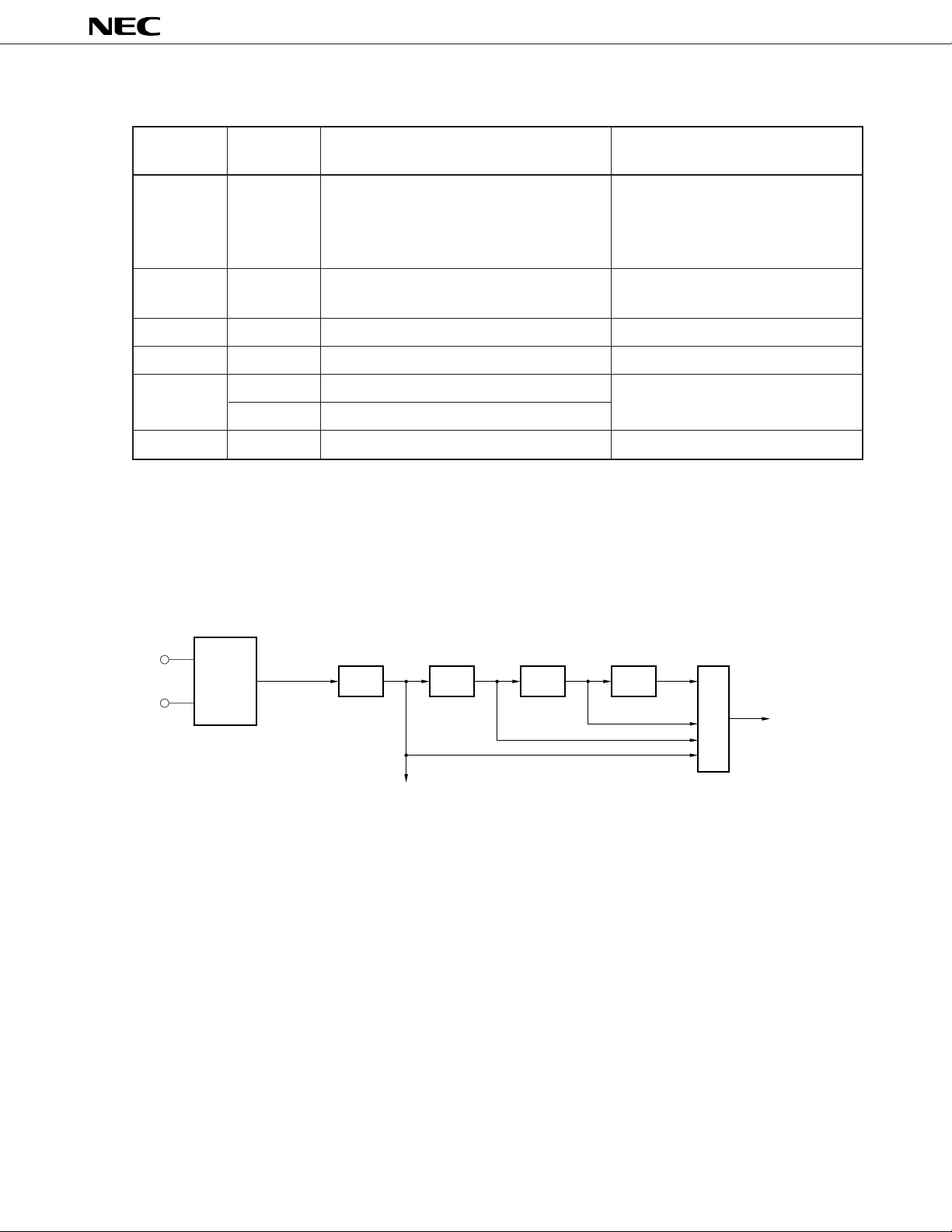
7.10 Watchdog Timer
A watchdog timer is provided to detect a hang up of the CPU. This watchdog timer generates a non-maskable interrupt
unless it is cleared by software within a specified interval time. Once enabled to operate, the watchdog timer cannot be
stopped by software. Whether the interrupt by the watchdog timer or the interrupt input from the NMI pin takes precedence
can be specified.
Figure 7-13. Block Diagram of Watchdog Timer
f
CLK
Clear signal
Timer
21
f
CLK
/2
20
f
CLK
/2
19
f
CLK
/2
17
f
CLK
/2
Selector
INTWDT
40
Page 41

µ
PD784031Y
8. INTERRUPT FUNCTION
As the servicing in response to an interrupt request, the three types shown in Table 8-1 can be selected by program.
Table 8-1. Servicing of Interrupt Request
Servicing Mode Entity of Servicing Servicing Contents of PC and PSW
Vector interrupt Software Branches and executes servicing routine Saves to and restores
(servicing is arbitrary). from stack.
Context switching Automatically switches register bank, Saves to or restores from
branches and executes servicing routine fixed area in register bank.
(servicing is arbitrary).
Macro service Firmware Executes data transfer between memory Retained
and I/O (servicing is fixed).
8.1 Interrupt Sources
Table 8-2 shows the interrupt sources available. As shown, interrupts are generated by 24 types of sources, execution
of the BRK instruction or BRKCS instruction, or an operand error.
The priority of interrupt servicing can be set to four levels, so that nesting can be controlled during interrupt servicing
and that which of the two or more interrupts that simultaneously occur should be serviced first. When the macro service
function is used, however, nesting always proceeds.
The default priority is the priority (fixed) of the service that is performed if two or more interrupt requests, having the same
request, simultaneously generate (refer to Table 8-2).
41
Page 42

Table 8-2. Interrupt Sources
µ
PD784031Y
Type Default Source Internal/
Priority Name Trigger External
Software – BRK instruction Instruction execution – –
BRKCS instruction
Operand error If result of exclusive OR between byte of operand and
byte is not FFH when MOV STBC, #byte, MOV WDM,
#byte, or LOCATION instruction is executed
Non-maskable
Maskable 0 (highest) INTP0 Detection of pin input edge External √
– NMI Detection of pin input edge External –
WDT Overflow of watchdog timer Internal
(TM1/TM1W capture trigger, TM1/TM1W event counter input)
1 INTP1 Detection of pin input edge
(TM2/TM2W capture trigger, TM2/TM2W event counter input)
2 INTP2 Detection of pin input edge
(TM2/TM2W capture trigger, TM2/TM2W event counter input)
3 INTP3 Detection of pin input edge
(TM0 capture trigger, TM0 event counter input)
4 INTC00 Generation of TM0-CR00 match signal Internal √
5 INTC01 Generation of TM0-CR01 match signal
6 INTC10 Generation of TM1-CR10 match signal
(in 8-bit operation mode)
Generation of TM1W-CR10W match signal
(in 16-bit operation mode)
7 INTC11 Generation of TM1-CR11 match signal
(in 8-bit operation mode)
Generation of TM1W-CR11W match signal
(in 16-bit operation mode)
8 INTC20 Generation of TM2-CR20 match signal
(in 8-bit operation mode)
Generation of TM2W-CR20W match signal
(in 16-bit operation mode)
9 INTC21 Generation of TM2-CR21 match signal
(in 8-bit operation mode)
Generation of TM2W-CR21W match signal
(in 16-bit operation mode)
10 INTC30 Generation of TM3-CR30 match signal
(in 8-bit operation mode)
Generation of TM3W-CR30W match signal
(in 16-bit operation mode)
11 INTP4 Detection of pin input edge External √
12 INTP5 Detection of pin input edge
13 INTAD End of A/D conversion (transfer of ADCR) Internal √
14 INTSER Occurrence of ASI0 reception error –
15 INTSR End of ASI0 reception or CSI1 transfer √
INTCSI1
16 INTST End of ASI0 transfer
17 INTCSI End of CSI1 transfer
18 INTSER2 Occurrence of ASI2 reception error –
19 INTSR2 End of ASI2 reception or CSI2 transfer √
INTCSI2
20 INTST2 End of ASI2 transfer
21 (lowest) INTSPC I2C bus stop condition interrupt
Macro Service
Remark ASI: asynchronous serial interface
CSI: clocked serial interface
42
Page 43

µ
PD784031Y
8.2 Vectored Interrupt
Execution branches to a servicing routing by using the memory contents of a vector table address corresponding to
the interrupt source as the address of the branch destination.
So that the CPU performs interrupt servicing, the following operations are performed:
• On branching : Saves the status of the CPU (contents of PC and PSW) to stack
• On returning : Restores the status of the CPU (contents of PC and PSW) from stack
To return to the main routine from an interrupt service routine, the RETI instruction is used.
The branch destination address is in a range of 0 to FFFFH.
Table 8-3. Vector Table Address
Interrupt Source Vector Table Address
BRK instruction 003EH
Operand error 003CH
NMI 0002H
WDT 0004H
INTP0 0006H
INTP1 0008H
INTP2 000AH
INTP3 000CH
INTC00 000EH
INTC01 0010H
INTC10 0012H
INTC11 0014H
INTC20 0016H
INTC21 0018H
INTC30 001AH
INTP4 001CH
INTP5 001EH
INTAD 0020H
INTSER 0022H
INTSR 0024H
INTCSI1
INTST 0026H
INTCSI 0028H
INTSER2 002AH
INTSR2 002CH
INTCSI2
INTST2 002EH
INTSPC 0030H
43
Page 44

µ
PD784031Y
8.3 Context Switching
When an interrupt request is generated or when the BRKCS instruction is executed, a predetermined register bank is
selected by hardware. Context switching is a function that branches execution to a vector address stored in advance in
the register bank, and to stack the current contents of the program counter (PC) and program status word (PSW) to the
register bank.
The branch address is in a range of 0 to FFFFH.
Figure 8-1. Context Switching Operation when Interrupt Request is Generated
0000B
<7> Transfer
PC19 to 16
<2> Save
(bits 8 through 11
of temporary register)
Temporary register
<1> Save
PSW
PC15 to 0
<6> Exchange
<5> Save
Register bank n (n = 0 to 7)
A
B
R5
R7
V
U
T
W
VP
UP
D
H
X
C
R4
R6
<3> Switching of register bank
E
L
(RBS0 to RBS2 ← n)
<4> RSS ← 0
IE ←0
Register bank n
(0 to 7)
8.4 Macro Service
This function is to transfer data between memory and a special function register (SFR) without intervention by the CPU.
A macro service controller accesses the memory and SFR in the same transfer cycle and directly transfers data without
loading it.
Because this function does not save or restore the status of the CPU, or load data, data can be transferred at high
speeds.
44
CPU
Internal bus
Figure 8-2. Macro Service
Read
Memory SFR
Write
Macro service
controller
Write
Read
Page 45

8.5 Application Example of Macro Service
(1) Transfer of serial interface
Transfer data storage buffer (memory)
Data n
Data n – 1
Data 2
Data 1
Internal bus
µ
PD784031Y
TxD
Transfer shift register
Transfer control INTST
TXS (SFR)
Each time macro service request INTST is generated, the next transfer data is transferred from memory to TXS. When
data n (last byte) has been transferred to TXS (when the transfer data storage buffer has become empty), vectored interrupt
request INTST is generated.
(2) Reception of serial interface
Receive data storage buffer (memory)
Data n
Data n – 1
Data 2
Data 1
Internal bus
RXB (SFR)
INTSR
RxD
Receive buffer
Receive shift register
Reception control
Each time macro service request INTSR is generated, the receive data is transferred from RXB to memory. When data
n (last byte) has been transferred to memory (when the receive data storage buffer has become full), vectored interrupt
request INTSR is generated.
45
Page 46

µ
(3) Real-time output port
INTC10 and INTC11 serve as the output triggers of the real-time output port. The macro services for these can
set the following output pattern and intervals simultaneously. Therefore, INTC10 and INTC11 can control two
stepping motors independently of each other. They can also be used for PWM output or to control DC motors.
PD784031Y
Output timing profile (memory)
Internal bus
Match
CR10
INTC10
T
Tn– 1
T2
T1
TM1
n
(SFR)
P00 to P03
Output pattern profile (memory)
n
P
Pn– 1
P2
P1
Internal bus
(SFR)
P0L
Output latch
Each time macro service request INTC10 is generated, the pattern and timing are transferred to the buffer register (P0L)
and compare register (CR10), respectively. When the contents of the timer register 1 (TM1) coincide with those of CR10,
INTC10 is generated again, and the contents of P0L are transferred to the output latch. When Tn (last byte) has transferred
to CR10, vectored interrupt request INTC10 is generated.
The same applies to INTC11.
46
Page 47

µ
PD784031Y
9. LOCAL BUS INTERFACE
The local bus interface can connect an external memory or I/O (memory mapped I/O) and support a memory space
of 1 Mbytes (refer to Figure 9-1).
Figure 9-1. Example of Local Bus Interface
PD784031Y
µ
A16 to A19
Decoder
RD
WR
REFRQ
AD0 to AD7
ASTB
A8 to A15
Latch
Pseudo SRAM
PD27C1001A
µ
Data bus
Address bus
Gate array
I/O expansion
Centronics I/F, etc.
PROM
Character
generator
µ
PD24C1000
9.1 Memory Expansion
The memory capacity can be expanded in seven steps, from 256 bytes to 1 Mbytes, by connecting an external program
memory and data memory.
47
Page 48

µ
PD784031Y
9.2 Memory Space
The 1-Mbyte memory space is divided into eight spaces of logical addresses. Each space can be controlled by using
the programmable wait function and pseudo static RAM refresh function.
Figure 9-2. Memory Space
HFFFFF
512 Kbytes
H00008
HFFFF7
256 Kbytes
H00004
HFFFF3
128 Kbytes
H00002
HFFFF1
64 Kbytes
H00001
HFFFF0
16 Kbytes
H000C0
HFFFB0
16 Kbytes
H00080
HFFF70
16 Kbytes
H00040
HFFF30
16 Kbytes
H00000
48
Page 49

µ
PD784031Y
9.3 Programmable Wait
The memory space can be divided into eight spaces and wait states can be independently inserted in each of these
spaces while the RD and WR signals are active. Even when a memory with a different access time is connected, therefore,
the efficiency of the entire system does not drop.
In addition, an address wait function that extends the active period of the ASTB signal is also provided so as to have
a sufficient address decode time (this function can be set to the entire space).
9.4 Pseudo Static RAM Refresh Function
The following refresh operations can be performed:
• Pulse refresh : A bus cycle that outputs a refresh pulse to the REFRQ pin at a fixed cycle is inserted. The
memory spaces is divided into eight spaces, and a refresh pulse can be output from the
REFRQ pin while a specified memory space is accessed. Therefore, the normal memory
access is not kept to wait by the refresh cycle.
• Power-down self-refresh : The low level is output to the REFRQ pin in the standby mode to retain the contents of the
pseudo static RAM.
9.5 Bus Hold Function
A bus hold function is provided to facilitate connection of a DMA controller. When a bus hold request signal (HLDRQ)
is received from an external bus master, the address bus, address/data bus, and ASTB, RD, and WR pins go into a highimpedance state when the current bus cycle has been completed. This makes the bus hold acknowledge (HLDAK) signal
active, and releases the bus to the external bus master.
Note that, while the bus hold function is used, the external wait function and pseudo static RAM refresh function cannot
be used.
49
Page 50

µ
PD784031Y
10. STANDBY FUNCTION
This function is to reduce the power dissipation of the chip, and can be used in the following modes:
• HALT mode : Stops supply of the operating clock to the CPU. This mode is used in combination with the normal
operation mode for intermittent operation to reduce the average power dissipation.
• IDLE mode : Stops the entire system with the oscillation circuit continuing operation. The power dissipation in this
mode is close to that in the STOP mode. However, the time required to restore the normal program
operation from this mode is almost the same as that from the HALT mode.
• STOP mode: Stops the oscillator and thereby to stop all the internal operations of the chip. Consequently, the power
dissipation is minimized with only leakage current flowing.
These modes are programmable.
The macro service can be started from the HALT mode.
Figure 10-1. Transition of Standby Status
Macro service request
End of one processing
End of macro service
Interrupt request
RESET input
Sets HALT mode
Note 2
HALT
(standby)
Macro
service
Macro service request
End of one processing
NMI, INTP4, INTP5 input
STOP
(standby)
Waits for
oscillation
stabilization
Note 1
Sets STOP mode
RESET input
(standby)
Oscillation stabilization
time expires
Sets IDLE mode
RESET input
NMI, INTP4, INTP5 input
IDLE
Program
operation
Note 1
Interrupt request of
masked interrupt
Notes 1. When INTP4 and INTP5 are not masked
2. Only interrupt requests that are not masked
Remark Only the externally input NMI is valid. The watchdog timer cannot be used to release the standby mode (STOP/
IDLE mode).
50
Page 51

µ
PD784031Y
11. RESET FUNCTION
When the low level is input to the RESET pin, the internal hardware is initialized (reset status).
When the RESET pin goes high, the following data are set to the program counter (PC).
• Lower 8 bits of PC : contents of address 0000H
• Middle 8 bits of PC : contents of address 0001H
• Higher 4 bits of PC : 0
Program execution is started from a branch destination address which is the contents of the PC. Therefore, the system
can be reset and started from any address.
Set the contents of each register by program as necessary.
The RESET input circuit has a noise reduction circuit to prevent malfunctioning due to noise. This noise reduction circuit
is a sampling circuit by analog delay.
Figure 11-1. Accepting Reset Signal
Executes instruction at
reset start address
RESET
(input)
Internal reset signal
Delay
Delay
Reset starts Reset ends
Delay Initialize PC
Assert the RESET signal active until the oscillation stabilization time (approx. 40 ms) elapses to execute a power-ON
reset operation.
Figure 11-2. Power-ON Reset Operation
Oscillation stabilization time Delay Initialize PC
V
DD
Executes instruction at
reset start address
RESET
(input)
Internal reset signal
Reset ends
51
Page 52

12. INSTRUCTION SET
(1) 8-bit instructions (The instructions in parentheses are combinations realized by describing A as r)
MOV, XCH, ADD, ADDC, SUB, SUBC, AND, OR, XOR, CMP, MULU, DIVUW, INC, DEC, ROR, ROL, RORC,
ROLC, SHR, SHL, ROR4, DBNZ, PUSH, POP, MOVM, XCHM, CMPME, CMPMNE, CMPMNC, CMPMC, MOVBK,
XCHBK, CMPBKE, CMPBKNE, CMPBKNC, CMPBKC, CHIKL, CHKLA
Table 12-1. Instruction List by 8-bit Addressing
µ
PD784031Y
Second Operand #byte A r saddr sfr !addr16 mem r3 [WHL+] n
None
Note 2
r' saddr' !!addr24 [saddrp] PSWL [WHL–]
First Operand
A (MOV) (MOV) MOV
Note 1
ADD
(XCH) XCH
Note 1
(ADD)
(ADD)
Note 1
(MOV)
(XCH)
(ADD)
Note 6
MOV (MOV) MOV MOV (MOV)
Note 6
(XCH) (XCH) XCH (XCH)
Note 1,6
(ADD)
Note 1
ADD
r MOV (MOV) MOV MOV MOV MOV ROR
Note 1
ADD
(XCH) XCH XCH XCH XCH DIVUW
(ADD)
Note 1
ADD
Note 1
ADD
Note 1
ADD
Note 1
Note 1
[%saddrg]
Note 1
ADD
PSWH
(ADD)
Note 1
Note 3
MULU
INC
DEC
saddr MOV
Note 1
ADD
(MOV)
(ADD)
Note 6
MOV MOV INC
Note 1
ADD
Note 1
XCH DEC
Note 1
ADD
DBNZ
sfr MOV MOV MOV PUSH
ADD
Note 1
(ADD)
Note 1
ADD
Note 1
POP
CHKL
CHKLA
!addr16 MOV (MOV) MOV
!!addr24 ADD
Note 1
mem MOV
[saddrp] ADD
Note 1
[%saddrg]
mem3 ROR4
ROL4
r3 MOV MOV
PSWL
PSWH
B, C DBNZ
STBC, WDM MOV
[TDE+] (MOV)
[TDE–]
(ADD)
MOVM
Note 1
Note 4
MOVBK
Note 5
Notes 1. The operands of ADDC, SUB, SUBC, AND, OR, XOR, and CMP are the same as that of ADD.
2. Either the second operand is not used, or the second operand is not an operand address.
3. The operands of ROL, RORC, ROLC, SHR, and SHL are the same as that of ROR.
4. The operands of XCHM, CMPME, CMPMNE, CMPMNC, and CMPMC are the same as that of MOVM.
5. The operands of XCHBK, CMPBKE, CMPBKNE, CMPBKNC, and CMPBKC are the same as that of MOVBK.
6. The code length of some instructions having saddr2 as saddr in this combination is short.
52
Page 53

µ
PD784031Y
(2) 16-bit instructions (The instructions in parentheses are combinations realized by describing AX as rp)
MOVW, XCHW, ADDW, SUBW, CMPW, MULUW, MULW, DIVUX, INCW, DECW, SHRW, SHLW, PUSH, POP,
ADDWG, SUBWG, PUSHU, POPU, MOVTBLW, MACW, MACSW, SACW
Table 12-2. Instruction List by 16-bit Addressing
Second Operand #word AX rp saddrp sfrp !addr16 mem [WHL+] byte n None
Note 2
rp' saddrp' !!addr24 [saddrp]
First Operand
AX (MOVW) (MOVW) (MOVW)
Note 1
ADDW
(XCHW) (XCHW)
Note 1
(ADD)
(ADDW)
Note 1
(MOVW)
(XCHW)
Note 1,3
(ADDW)
Note 3
MOVW (MOVW) MOVW (MOVW)
Note 3
(XCHW) XCHW XCHW (XCHW)
Note 1
(ADDW)
rp MOVW (MOVW) MOVW MOVW MOVW MOVW SHRW
Note 1
ADDW
saddrp MOVW
ADDW
(XCHW) XCHW XCHW XCHW SHLW INCW
Note 1
(ADDW)
(MOVW)
(ADDW)
Note 1
Note 3
Note 1
ADDW
Note 1
ADDW
Note 1
ADDW
Note 1
MOVW MOVW INCW
Note 1
ADDW
XCHW DECW
Note 1
ADDW
[%saddrg]
MULW
DECW
sfrp MOVW MOVW MOVW PUSH
Note 1
ADDW
!addr16 MOVW (MOVW) MOVW
(ADDW)
Note 1
ADDW
Note 1
POP
MOVTBLW
!!addr24
mem MOVW
[saddrp]
[%saddrg]
Note 4
PSW PUSH
SP ADDWG
SUBWG
post PUSH
PUSHU
POPU
[TDE+] (MOVW) SACW
byte MACW
MACSW
Notes 1. The operands of SUBW and CMPW are the same as that of ADDW.
2. Either the second operand is not used, or the second operand is not an operand address.
3. The code length of some instructions having saddrp2 as saddrp in this combination is short.
4. The operands of MULUW and DIVUX are the same as that of MULW.
POP
POP
53
Page 54

µ
PD784031Y
(3) 24-bit instructions (The instructions in parentheses are combinations realized by describing WHL as rg)
MOVG, ADDG, SUBG, INCG, DECG, PUSH, POP
Table 12-3. Instruction List by 24-bit Addressing
Second Operand #imm24 WHL rg saddrg !!addr24 mem1
rg'
First Operand
WHL (MOVG) (MOVG) (MOVG) (MOVG) (MOVG) MOVG MOVG MOVG
(ADDG) (ADDG) (ADDG) ADDG
(SUBG) (SUBG) (SUBG) SUBG
rg MOVG (MOVG) MOVG MOVG MOVG INCG
ADDG (ADDG) ADDG DECG
SUBG (SUBG) SUBG PUSH
saddrg (MOVG) MOVG
!!addr24 (MOVG) MOVG
mem1 MOVG
[%saddrg] MOVG
SP MOVG MOVG INCG
[%saddrg]
SP None
POP
DECG
Note Either the second operand is not used, or the second operand is not an operand address.
Note
54
Page 55

(4) Bit manipulation instructions
MOV1, AND1, OR1, XOR1, SET1, CLR1, NOT1, BT, BF, BTCLR, BFSET
Table 12-4. Bit Manipulation Instructions
µ
PD784031Y
Second Operand CY saddr.bit sfr.bit /saddr.bit /sfr. bit None
A.bit X.bit /A.bit /X.bit
PSWL.bit PSWH.bit /PSWL.bit /PSWH.bit
mem2.bit /mem2.bit
First Operand !addr16.bit !!addr24.bit /!addr16.bit /!!addr24.bit
CY MOV1 AND1 NOT1
AND1 OR1 SET1
OR1 CLR1
XOR1
saddr.bit MOV1 NOT1
sfr.bit SET1
A.bit CLR1
X.bit BF
PSWL.bit BT
PSWH.bit BTCLR
mem2.bit BFSET
!addr16.bit
!!addr24.bit
Note
Note Either the second operand is not used, or the second operand is not an
operand address.
55
Page 56

µ
(5) Call and return/branch instructions
CALL, CALLF, CALLT, BRK, RET, RETI, RETB, RETCS, RETCSB, BRKCS, BR, BNZ, BNE, BZ, BE, BNC, BNL,
BC, BL, BNV, BPO, BV, BPE, BP, BN, BLT, BGE, BLE, BGT, BNH, BH, BF, BT, BTCLR, BFSET, DBNZ
Table 12-5. Call and Return/Branch Instructions
PD784031Y
Operand of Instruction $addr20
Address
Basic instruction BC
Compound instruction BF
$!addr20
Note
BR BR BR BR BR BR BR BR RET
BT
BTCLR
BFSET
DBNZ
!addr16 !!addr20 rp rg [rp] [rg] !addr11 [addr5] RBn None
CALL CALL CALL CALL CALL CALL CALL CALLF CALLF BRKCS BRK
RETCS RETI
RETCSB
RETB
Note The operands of BNZ, BNE, BZ, BE, BNC, BNL, BL, BNV, BPO, BV, BPE, BP, BN, BLT, BGE, BLE, BGT, BNH,
and BH are the same as BC.
(6) Other instructions
ADJBA, ADJBS, CVTBW, LOCATION, SEL, NOT, EI, DI, SWRS
56
Page 57

µ
PD784031Y
13. ELECTRICAL SPECIFICATIONS
Absolute Maximum Ratings (TA = 25°C)
Parameter Symbol Test Conditions Ratings Unit
Supply voltage VDD –0.5 to +7.0 V
AVDD AVSS to VDD + 0.5 V
AVSS –0.5 to +0.5 V
Input voltage VI –0.5 to VDD + 0.5 V
Output voltage VO –0.5 to VDD + 0.5 V
Output current low-level IOL 1 pin 15 mA
Total of output pins 100 mA
Output current high-level IOH 1 pin –10 mA
Total of output pins –100 mA
Reference input voltage AVREF1 –0.5 to VDD + 0.3 V
to A/D converter
Reference input voltage AVREF2 –0.5 to VDD + 0.3 V
to D/A converter
Operating ambient TA –40 to +85 °C
temperature
Storage temperature Tstg –65 to +150 °C
AVREF3 –0.5 to VDD + 0.3 V
Caution The product quality may be damaged even if a value of only one of the above parameters exceeds the
absolute maximum rating or any value exceeds the absolute maximum rating for an instant. That is,
the absolute maximum rating is a rating value which may cause a product to be damaged physically.
The absolute maximum rating values must therefore be observed in using the product.
57
Page 58

Operating Condition
• Operating ambient temperature (TA) : –40 to +85°C
• Rise, fall time (t
r, tf) (unspecified pins) : 0 to 200
• Supply voltage and clock cycle time : refer to Figure 13-1
Figure 13-1. Supply Voltage and Clock Cycle Time
10000
4000
[ns]
1000
CYK
125
100
Clock Cycle Time t
62.5
µ
s
Guaranteed
Operation
Range
µ
PD784031Y
10
01234567
Supply Voltage [V]
Capacitance (TA = 25°C, VDD = VSS = 0 V)
Parameter Symbol Test Conditions MIN. TYP. MAX. Unit
Input capacitance CI f = 1 MHz 10 pF
Output capacitance CO
I/O capacitance CIO
Unmeasured pins returned to
0 V.
10 pF
10 pF
58
Page 59

µ
PD784031Y
Oscillator Characteristics (TA = –40 to +85°C, VDD = +4.5 to 5.5 V, VSS = 0 V)
Resonator Recommended Circuit Parameter MIN. MAX. Unit
Ceramic resonator or Oscillation frequency (fXX) 4 32 MHz
crystal resonator
V
SS1
X1 X2
C2C1
External clock X1 input frequency (fX) 4 32 MHz
X1 X2
HCMOS
inverter
X1 input rise, fall time (tXR, tXF) 0 10 ns
X1 input high-/low-level width 10 125 ns
(tWXH, tWXL)
Caution When using the clock oscillator, wiring in the area enclosed with the dotted line should be carried out
as follows to avoid an adverse effect from wiring capacitance.
• Wiring should be as short as possible.
• Wiring should not cross other signal lines.
• Wiring should not be placed close to a varying high current.
• The potential of the oscillator capacitor ground should be the same as V
SS1. Do not ground it to
the ground pattern in which a high current flows.
• Do not fetch a signal from the oscillator.
59
Page 60

µ
PD784031Y
Oscillator Characteristics (TA = –40 to +85°C, VDD = +2.7 to 5.5 V, VSS = 0 V)
Resonator Recommended Circuit Parameter MIN. MAX. Unit
Ceramic resonator or Oscillation frequency (fXX) 4 16 MHz
crystal resonator
V
SS1
X1 X2
C2C1
External clock X1 input frequency (fX) 4 16 MHz
X1 X2
HCMOS
inverter
X1 input rise, fall time (tXR, tXF) 0 10 ns
X1 input high-/low-level width 10 125 ns
(tWXH, tWXL)
Caution When using the clock oscillator, wiring in the area enclosed with the dotted line should be carried out
as follows to avoid an adverse effect from wiring capacitance.
• Wiring should be as short as possible.
• Wiring should not cross other signal lines.
• Wiring should not be placed close to a varying high current.
• The potential of the oscillator capacitor ground should be the same as V
SS1. Do not ground it to
the ground pattern in which a high current flows.
• Do not fetch a signal from the oscillator.
60
Page 61

µ
PD784031Y
DC Characteristics (TA = –40 to +85°C, VDD = AVDD = +2.7 to 5.5 V, VSS = AVSS = 0 V) (1/2)
Parameter Symbol Test Conditions MIN. TYP. MAX. Unit
Input voltage low-level VIL1 Except for pins shown in –0.3 0.3VDD V
Notes 1, 2, 3, 4, 6
VIL2 Pins shown in Notes 1, 2, 3, 4, 6 –0.3 0.2VDD V
VIL3 VDD = +5.0 V ± 10 % –0.3 +0.8 V
Pins shown in Notes 2, 3, 4
Input voltage high-level V IH1 Except for pins shown in Notes 1, 6 0.7VDD VDD + 0.3 V
VIH2 Pins shown in Notes 1, 6 0.8VDD VDD + 0.3 V
VIH3 VDD = +5.0 V ± 10 % 2.2 VDD + 0.3 V
Pins shown in Notes 2, 3, 4
Output voltage low-level VOL1 IOL = 2 mA 0.4 V
Except for pins shown in Note 6
VOL2 IOL = 3 mA 0.4 V
Pins shown in Note 6
IOL = 6 mA 0.6 V
Pins shown in Note 6
VOL3 VDD = +5.0 V ± 10 % 1.0 V
IOL = 8 mA
Pins shown in Notes 2, 5
Output voltage high-level VOH1 IOH = –2 mA VDD – 1.0 V
VOH2 VDD = +5.0 V ± 10 % VDD – 1.4 V
IOH = –5 mA
Pins shown in Note 4
X1 input current low-level IIL EXTC = 0 –30
0 V ≤ VI ≤ VIL2
X1 input current high-level IIH EXTC = 0 +30
VIH2 ≤ VI ≤ VDD
µ
A
µ
A
Notes 1. X1, X2, RESET, P12/ASCK2/SCK2, P20/NMI, P21/INTP0, P22/INTP1, P23/INTP2/CI, P24/INTP3,
P25/INTP4/ASCK/SCK1, P26/INTP5, P27/SI0, TEST
2. AD0 to AD7, A8 to A15
3. P60/A16 to P63/A19, RD, WR, P66/WAIT/HLDRQ, P67/REFRQ/HLDAK
4. P00 to P07
5. P10 to P17
6. P32/SCK0/SCL, P33/SO0/SDA
61
Page 62

µ
PD784031Y
DC Characteristics (TA = –40 to +85°C, VDD = AVDD = +2.7 to 5.5 V, VSS = AVSS = 0 V) (2/2)
Parameter Symbol Test Conditions MIN. TYP. MAX. Unit
Input leakage current ILI 0 V ≤ VI ≤ VDD ±10
Except for X1 pin when EXTC = 0
Output leakage current ILO 0 V ≤ VO ≤ VDD ±10
VDD supply current IDD1 Operating fXX = 32 MHz 25 45 mA
mode VDD = +5.0 V ± 10 %
fXX = 16 MHz 12 25 mA
VDD = +2.7 to 3.3 V
IDD2 HALT mode fXX = 32 MHz 13 26 mA
VDD = +5.0 V ± 10 %
fXX = 16 MHz 8 12 mA
VDD = +2.7 to 3.3 V
IDD3 IDLE mode fXX = 32 MHz 12 mA
(EXTC = 0) VDD = +5.0 V ± 10 %
fXX = 16 MHz 8 mA
VDD = +2.7 to 3.3 V
Pull-up resistor RL VI = 0 V 15 80 kΩ
µ
A
µ
A
62
Page 63

µ
PD784031Y
AC Characteristics (TA = –40 to +85°C, VDD = AVDD = +2.7 to 5.5 V, VSS = AVSS = 0 V)
(1) Read/write operation (1/2)
Parameter Symbol Test Conditions MIN. MAX. Unit
Address setup time tSAST VDD = +5.0 V ± 10 %
ASTB high-level width tWSTH VDD = +5.0 V ± 10 %
Address hold time (from ASTB↓)tHSTLA VDD = +5.0 V ± 10 % 0.5T – 24 ns
Address hold time (from RD↑)tHRA 0.5T – 14 ns
Address → RD↓ delay time tDAR VDD = +5.0 V ± 10 % (1 + a) T – 9 ns
Address float time (from RD↓)tFRA 0ns
Address → data input time tDAID VDD = +5.0 V ± 10 %
ASTB↓ → data input time tDSTID VDD = +5.0 V ± 10 % (2 + n) T – 40 ns
RD↓ → data input time tDRID VDD = +5.0 V ± 10 % (1.5 + n) T – 50 ns
ASTB↓ → RD↓ delay time tDSTR 0.5T – 9 ns
Data hold time (from RD↑)tHRID 0ns
RD↑ → address active time tDRA After program VDD = +5.0 V ± 10 % 0.5T – 8 ns
read
After data VDD = +5.0 V ± 10 % 1.5T – 8 ns
read
RD↑ → ASTB↑ delay time tDRST 0.5T – 17 ns
RD low-level width tWRL VDD = +5.0 V ± 10 %
Address hold time (from WR↑)tHWA 0.5T – 14 ns
Address → WR↓ delay time tDAW VDD = +5.0 V ± 10 % (1 + a) T – 5 ns
ASTB↓ → data output delay time
WR↓ → data output delay time tDWOD 0.5T – 11 ns
ASTB↓ → WR↓
output delay time
tDSTOD VDD = +5.0 V ± 10 % 0.5T + 19 ns
tDSTW 0.5T – 9 ns
(0.5 + a) T – 15
(0.5 + a) T – 31
(0.5 + a) T – 17
(0.5 + a) T – 40
0.5T – 34 ns
(1 + a) T – 15 ns
(2.5 + a + n) T – 37
(2.5 + a + n) T – 52
(2 + n) T – 60 ns
(1.5 + n) T – 70 ns
0.5T – 12 ns
1.5T – 12 ns
(1.5 + n) T – 30
(1.5 + n) T – 40
(1 + a) T – 15 ns
0.5T + 35 ns
ns
ns
ns
ns
ns
ns
ns
ns
Remark T: TCYK (system clock cycle time)
a : 1 in address wait, 0 in the other conditions
n : the number of wait (n ≥ 0)
63
Page 64

µ
PD784031Y
(1) Read/write operation (2/2)
Parameter Symbol Test Conditions MIN. MAX. Unit
Data setup time (to WR↑)tSODW VDD = +5.0 V ± 10 %
Data hold time (from WR↑)
WR↑ → ASTB↑ delay time tDWST 0.5T – 12 ns
WR low-level width tWWL VDD = +5.0 V ± 10 %
Note
tHWOD VDD = +5.0 V ± 10 % 0.5T – 5 ns
(1.5 + n) T – 30
(1.5 + n) T – 40
0.5T – 25 ns
(1.5 + n) T – 30
(1.5 + n) T – 40
Note The data hold time includes the time to hold VOH1 and VOL1 in the load condition of CL = 50 pF, RL = 4.7 kΩ.
ns
ns
ns
ns
Remark T: T
CYK (system clock cycle time)
n : the number of wait (n ≥ 0)
(2) Bus hold timing
Parameter Symbol Test Conditions MIN. MAX. Unit
HLDRQ↑ → float delay time tFHQC
HLDRQ↑ → HLDAK↑ tDHQHHAH VDD = +5.0 V ± 10 %
delay time
Float → HLDAK↑ delay time tDCFHA 1T + 30 ns
HLDRQ↓ → HLDAK↓ tDHQLHAL VDD = +5.0 V ± 10 % 2T + 40 ns
delay time
HLDAK↓ → active delay time tDHAC VDD = +5.0 V ± 10 % 1T – 20 ns
1T – 30 ns
(6 + a + n) T + 50
(7 + a + n) T + 30
(7 + a + n) T + 40
2T + 60 ns
Remark T: TCYK (system clock cycle time)
a : 1 in address wait, 0 in the other conditions
n : the number of wait (n ≥ 0)
ns
ns
ns
64
Page 65

µ
PD784031Y
(3) External wait timing
Parameter Symbol Test Conditions MIN. MAX. Unit
Address → WAIT↓ input time tDAWT VDD = +5.0 V ± 10 % (2 + a) T – 40 ns
(2 + a) T – 60 ns
ASTB↓ → WAIT↓ input time tDSTWT VDD = +5.0 V ± 10 % 1.5T – 40 ns
1.5T – 60 ns
ASTB↓ → WAIT hold time tHSTWTH VDD = +5.0 V ± 10 % (0.5 + n) T + 5 ns
(0.5 + n) T + 10 ns
ASTB↓ → WAIT↑ delay time tDSTWTH VDD = +5.0 V ± 10 % (1.5 + n) T – 40 ns
(1.5 + n) T – 60 ns
RD↓ → WAIT↓ input time tDRWTL VDD = +5.0 V ± 10 % T – 50 ns
T – 70 ns
RD↓ → WAIT↓ hold time tHRWT VDD = +5.0 V ± 10 % nT + 5 ns
nT + 10 ns
RD↓ → WAIT↑ delay time tDRWTH VDD = +5.0 V ± 10 % (1 + n) T – 40 ns
(1 + n) T – 60 ns
WAIT↑ → data input time tDWTID VDD = +5.0 V ± 10 % 0.5T – 5 ns
0.5T – 10 ns
WAIT↑ → WR↑ delay time tDWTW 0.5T ns
WAIT↑ → RD↑ delay time tDWTR 0.5T ns
WR↓ → WAIT↓ input time tDWWTL VDD = +5.0 V ± 10 % T – 50 ns
T – 75 ns
WR↓ → WAIT hold time tHWWT VDD = +5.0 V ± 10 % nT + 5 ns
nT + 10 ns
WR↓ → WAIT↑ delay time tDWWTH VDD = +5.0 V ± 10 % (1 + n) T – 40 ns
(1 + n) T – 70 ns
Remark T: TCYK (system clock cycle time)
a : 1 in address wait, 0 in the other conditions
n : the number of wait (n ≥ 0)
(4) Refresh timing
Parameter Symbol Test Conditions MIN. MAX. Unit
Random read/write cycle time tRC 3T ns
REFRQ low-level pulse width tWRFQL VDD = +5.0 V ± 10 % 1.5T – 25 ns
1.5T – 30 ns
ASTB↓ → REFRQ delay time tDSTRFQ 0.5T – 9 ns
RD↑ → REFRQ delay time tDRRFQ 1.5T – 9 ns
WR↑ → REFRQ delay time tDWRFQ 1.5T – 9 ns
REFRQ↑ → ASTB delay time tDRFQST 0.5T – 15 ns
REFRQ high-level pulse width tWRFQH VDD = +5.0 V ± 10 % 1.5T – 25 ns
1.5T – 30 ns
Remark T: TCYK (system clock cycle time)
65
Page 66

µ
PD784031Y
Serial Operation (TA = –40 to +85°C, VDD = +2.7 to 5.5 V, AVSS = VSS = 0 V)
(1) CSI
Parameter Symbol Test Conditions MIN. MAX. Unit
Serial clock cycle time (SCK0) tCYSK0 Input External clock 10/fXX + 380 ns
when SCK0, SO0 are CMOS
input/output
Output T
Serial clock low-level width tWSKL0 Input External clock 5/fXX + 150 ns
(SCK0) when SCK0, SO0 are CMOS
input/output
Output 0.5T – 40
Serial clock high-level width tWSKH0 Input External clock 5/fXX + 150 ns
(SCK0) when SCK0, SO0 are CMOS
input/output
Output 0.5T – 40
SI0 setup time (to SCK0↑)tSSSK0 40 ns
SI0 hold time (from SCK0↑)tHSSK0 5/fXX + 40 ns
SO0 output delay time tDSBSK1 CMOS push-pull output 0 5/fXX + 150 ns
(from SCK0↓) (3-wire serial I/O mode)
tDSBSK2 Open drain output 0 5/fXX + 400 ns
(2-wire serial I/O mode), RL = 1 kΩ
µ
s
µ
s
µ
s
Remarks 1. The values shown in the table above are those in the condition of CL = 100 pF.
2. T : serial clock cycle set by the software. The minimum value is 16/f
XX.
3. fXX : oscillation frequency
2
C
(2) I
Parameter Symbol Standard Mode I2C Bus High-speed Mode I2C Bus Unit
fXX = 4 to 32 MHz fXX = 8 to 32 MHz
MIN. MAX. MIN. MAX.
SCL clock frequency fSCL 0 100 0 400 kHz
Low status hold time of SCL tLOW 4.7 1.3
clock
High status hold time of SCL tHIGH 4.0 0.6
clock
Data hold time tHD ; DAT 300 300 900 ns
Data setup time tSU ; DAT 250 100 ns
SDA, SCL signal rise time tR 1000 20 + 0.1Cb 300 ns
SDA, SCL signal fall time tF 300 20 + 0.1Cb 300 ns
Load capacitance of each bus line
Cb 400 400 pF
µ
s
µ
s
66
Page 67

µ
PD784031Y
(3) IOE1, IOE2
Parameter Symbol Test Conditions MIN. MAX. Unit
Serial clock cycle time tCYSK1 Input VDD = +5.0 V ± 10 % 250 ns
(SCK1, SCK2) 500 ns
Output Internal 16 frequency division T ns
Serial clock low-level width tWSKL1 Input VDD = +5.0 V ± 10 % 85 ns
(SCK1, SCK2) 210 ns
Output Internal 16 frequency division 0.5T – 40 ns
Serial clock high-level width tWSKH1 Input VDD = +5.0 V ± 10 % 85 ns
(SCK1, SCK2) 210 ns
Output Internal 16 frequency division 0.5T – 40 ns
SI1, SI2 setup time tSSSK1 40 ns
(to SCK1, SCK2↑)
SI1, SI2 hold time tHSSK1 40 ns
(from SCK1, SCK2↑)
SO1, SO2 output delay time tDSOSK 050ns
(from SCK1, SCK2↓)
SO1, SO2 output hold time tHSOSK When transferring data 0.5tCYSK1 – 40 ns
(from SCK1, SCK2↑)
Remarks 1. The values shown in the table above are those in the condition of CL = 100 pF.
2. T: serial clock cycle set by the software. The minimum value is 16/fXX.
(4) UART, UART2
Parameter Symbol Test Conditions MIN. MAX. Unit
ASCK clock input cycle time tCYASK VDD = +5.0 V ± 10 % 125 ns
250 ns
ASCK clock low-level width tWASKL VDD = +5.0 V ± 10 % 52.5 ns
85 ns
ASCK clock high-level width tWASKH VDD = +5.0 V ± 10 % 52.5 ns
85 ns
67
Page 68

µ
PD784031Y
Other Operations
Parameter Symbol Test Conditions MIN. MAX. Unit
NMI low-level width tWNIL 10
NMI high-level width tWNIH 10
INTP0 low-level width tWIT0L 3tCYSMP + 10 ns
INTP0 high-level width tWIT0H 3tCYSMP + 10 ns
INTP1 to INTP3, CI low-level width
INTP1 to INTP3, CI high-level width
INTP4, INTP5 low-level width tWIT2L 10
INTP4, INTP5 high-level width tWIT2H 10
RESET low-level width tWRSL 10
RESET high-level width tWRSH 10
Remark tCYSMP : sampling clock set by the software
tCYCPU : CPU operation clock set by the software
tWIT1L 3tCYCPU + 10 ns
tWIT1H 3tCYCPU + 10 ns
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
A/D Converter Characteristics
Parameter Symbol Test Conditions MIN. TYP. MAX. Unit
Resolution 8 bit
Total error
Linearity error
Quantization error ±1/2 LSB
Conversion time tCONV FR = 1 120 tCYK
Sampling time tSAMP FR = 1 24 tCYK
Analog input voltage VIAN –0.3
Analog input impedance RAN 1000 MΩ
AVREF1 current AIREF1 0.5 1.5 mA
AVDD supply current AIDD1 fXX = 32 MHz, CS = 1 2.0 5.0 mA
Note
Note
(TA = –40 to +85°C, VDD = AVDD = AVREF1 = +2.7 to 5.5 V, VSS = AVSS = 0 V)
1.0 %
0.8 %
FR = 0 180 tCYK
FR = 0 36 tCYK
AVREF1 + 0.3
AIDD2 STOP mode, CS = 0 1.0 20
Note Quantization error is not included. This is expressed in proportion to the full-scale value.
Remark t
CYK: system clock cycle time
V
µ
A
68
Page 69

µ
PD784031Y
D/A Converter Characteristics (TA = –40 to +85°C, VDD = AVDD = +2.7 to 5.5 V, VSS = AVSS = 0 V)
Parameter Symbol Test Conditions MIN. TYP. MAX. Unit
Resolution 8 bit
Total error Load VDD = AVDD = AVREF2 0.6 %
condition = +2.7 to 5.5 V
4 MΩ, 30 pF AVREF3 = 0 V
VDD = AVDD = +2.7 to 5.5 V
AVREF2 = 0.75VDD
AVREF3 = 0.25VDD
Load VDD = AVDD = AVREF2 0.8 %
condition = +2.7 to 5.5 V
2 MΩ, 30 pF AVREF3 = 0 V
VDD = AVDD = +2.7 to 5.5 V
AVREF2 = 0.75VDD
AVREF3 = 0.25VDD
Settling time Load condition 2 MΩ, 30 pF 10
Output resistance RO DACS0, 1 = 55 H 10 kΩ
Analog reference voltage AVREF2 0.75VDD VDD V
AVREF3 0 0.25VDD V
AVREF2, AVREF3 resistance value RAIREF DACS0, 1 = 55 H 4 8 kΩ
Reference supply input current AIREF2 05mA
AIREF3 –5 0 mA
0.8 %
1.0 %
µ
s
69
Page 70

µ
PD784031Y
Data Retention Characteristics (TA = –40 to +85°C)
Parameter Symbol Test Conditions MIN. TYP. MAX. Unit
Data retention voltage VDDDR STOP mode 2.5 5.5 V
Data retention current IDDDR VDDDR = +2.7 to 5.5 V 10 50
VDDDR = +2.5 V 2 10
VDD rise time tRVD 200
VDD fall time tFVD 200
VDD hold time tHVD 0ms
(from setting STOP mode)
STOP release signal input time tDREL 0ms
Oscillation stabilization wait time tWAIT Crystal resonator 30 ms
Ceramic resonator 5 ms
Input voltage low-level VIL Specified pins
Input voltage high-level VIH 0.9VDDDR VDDDR V
Note
0 0.1VDDDR V
Note RESET, P20/NMI, P21/INTP0, P22/INTP1, P23/INTP2/CI, P24/INTP3, P25/INTP4/ASCK/SCK1, P26/INTP5,
P27/SI0, P32/SCK0/SCL, and P33/SO0/SDA pins
µ
A
µ
A
µ
s
µ
s
AC Timing Test Point
V
DD
–1 V
0.45 V
0.8VDD or 2.2 V
0.8 V
0.8VDD or 2.2 V
Test Points
0.8 V
70
Page 71

Timing Waveform
(1) Read operation
ASTB
A8 to A19
AD0 to AD7
t
WSTH
t
SAST
t
DAR
t
DSTR
t
HSTLA
t
DAID
t
DSTID
t
FRA
t
DRID
t
DRST
t
HRA
t
t
DRA
HRID
µ
PD784031Y
RD
(2) Write operation
ASTB
A8 to A19
AD0 to AD7
WR
t
WSTH
t
SAST
t
DAW
t
DSTW
t
HSTLA
t
DSTOD
t
DWOD
t
WRL
t
SODW
t
DWST
t
HWA
t
HWOD
t
WWL
71
Page 72

Hold Timing
ADTB, A8 to A19,
AD0 to AD7, RD, WR
tFHQC tDCFHA
HLDRQ
HLDAK
External WAIT Signal Input Timing
(1) Read operation
ASTB
t
DSTWT
tDHQHHAH
t
DSTWTH
t
HSTWTH
tDHQLHAL
tDHAC
µ
PD784031Y
A8 to A19
AD0 to AD7
RD
WAIT
(2) Write operation
ASTB
A8 to A19
AD0 to AD7
t
DAWT
t
DSTWT
t
DRWTL
t
DSTWTH
t
HSTWTH
t
HRWT
t
DRWTH
t
DWTID
t
DWTR
72
WR
WAIT
t
DAWT
t
DWWTL
t
HWWT
t
DWWTH
t
DWTW
Page 73

Refresh Timing Waveform
(1) Random read/write cycle
t
RC
ASTB
WR
t
RC
RD
(2) When refresh memory access is simultaneous with read, write
ASTB
t
RC
µ
PD784031Y
t
t
RC
RC
RD, WR
REFRQ
(3) Refresh after read
ASTB
RD
REFRQ
(4) Refresh after write
t
DSTRFQ
t
WRFQL
t
DRRFQ
t
t
WRFQH
DRFQST
t
WRFQL
t
DRFQST
ASTB
WR
REFRQ
t
DWRFQ
t
WRFQL
t
DRFQST
73
Page 74

Serial Operation
(1) CSI
SCK
t
WSKL0
t
CYSK0
t
WSKH0
SSSK0tHSSK0
t
µ
PD784031Y
SI
t
DSBSK1
SO Output Data
2
C
(2) I
t
F
t
R
t
HIGH
t
LOW
SCL
SDA
tHD ; DAT tSU ; DAT
(3) IOE1, IOE2
t
WSKL1
SCK
t
CYSK1
t
WSKH1
t
HSBSK1
Input Data
SSSK1tHSSK1
t
SI
SO
(4) UART, UART2
ASCK2
74
ASCK,
t
WASKH
t
CYASK
t
DSOSK
t
HSOSK
Output Data
t
WASKL
Input Data
Page 75

Interrupt Input Timing
NMI
INTP0
t
WNIH
t
WIT0H
t
WIT1H
t
WNIL
t
WIT0L
t
WIT1L
µ
PD784031Y
INTP1 to INTP3
INTP4, INTP5
Reset Input Timing
RESET
CI,
t
WIT2H
t
WRSH
t
WIT2L
t
WRSL
75
Page 76

External Clock Timing
X1
Data Retention Characteristics
STOP Mode Setting
V
DD
t
HVD
t
FVD
µ
PD784031Y
t
WXH
t
XR
t
CYX
V
DDDR
t
RVD
t
WXL
t
XF
t
DREL
t
WAIT
RESET
NMI
(release by falling edge)
NMI
(release by rising edge)
76
Page 77

14. PACKAGE DRAWINGS
80 PIN PLASTIC QFP (14×14)
µ
PD784031Y
A
B
61
60
41
40
CD
80
1
20
21
F
G
H
M
I
P
J
K
N
L
NOTE
Each lead centerline is located within 0.13 mm (0.005 inch) of
its true position (T.P.) at maximum material condition.
detail of lead end
S
Q
R
M
ITEM MILLIMETERS INCHES
A 17.2±0.4 0.677±0.016
B 14.0±0.2 0.551
C 14.0±0.2 0.551
D 17.2±0.4 0.677±0.016
F 0.825 0.032
G 0.825 0.032
H 0.30±0.10 0.012
I 0.13 0.005
J 0.65 (T.P.) 0.026 (T.P.)
K 1.6±0.2 0.063±0.008
L 0.8±0.2 0.031
M 0.15 0.006
N 0.10 0.004
P 2.7 0.106
Q 0.1±0.1 0.004±0.004
R5°±5° 5°±5°
S 3.0 MAX. 0.119 MAX.
+0.10
–0.05
+0.009
–0.008
+0.009
–0.008
+0.004
–0.005
+0.009
–0.008
+0.004
–0.003
S80GC-65-3B9-4
Remark Dimensions and materials of ES products are the same as those of mass-produced products.
77
Page 78

80 PIN PLASTIC QFP (14×14)
µ
PD784031Y
A
B
4160
4061
detail of lead end
2180
201
F
G
H
M
I
P
N
NOTE
Each lead centerline is located within 0.13 mm (0.005 inch) of
its true position (T.P.) at maximum material condition.
C D
S
R
Q
J
K
M
L
ITEM MILLIMETERS INCHES
A 17.20±0.20 0.677±0.008
+0.009
B 14.00±0.20 0.551
C 14.00±0.20 0.551
D 17.20±0.20 0.677±0.008
F 0.825 0.032
G 0.825 0.032
H 0.32±0.06 0.013
I 0.13 0.005
J 0.65 (T.P.) 0.026 (T.P.)
K 1.60±0.20 0.063±0.008
L 0.80±0.20 0.031
+7°
–3°
+0.03
–0.07
M 0.17 0.007
N 0.10 0.004
P 1.40±0.10 0.055±0.004
Q 0.125±0.075 0.005±0.003
R3° 3°
S 1.70 MAX. 0.067 MAX.
+0.009
–0.008
–0.008
+0.009
–0.008
+0.002
–0.003
+0.009
–0.008
+0.001
–0.003
+7°
–3°
P80GC-65-8BT
Remark Dimensions and materials of ES products are the same as those of mass-produced products.
78
Page 79

80-PIN PLASTIC TQFP (FINE PITCH) (12 × 12 mm)
A
B
µ
PD784031Y
60
61
F
80
1
G
H
M
I
41
40
21
20
J
K
P
N
L
NOTE
Each lead centerline is located within 0.10 mm (0.004 inch) of
its true position (T.P.) at maximum material condition.
detail of lead end
C
S
D
Q
R
M
ITEM MILLIMETERS INCHES
A 14.0±0.2 0.551
B 12.0±0.2 0.472
C 12.0±0.2 0.472
D 14.0±0.2 0.551
F
1.25
G 1.25
0.10
+0.05
–0.04
+0.055
–0.045
H 0.22 0.009±0.002
I
J 0.5 (T.P.)
K 1.0±0.2 0.039
L 0.5±0.2 0.020
M 0.145 0.006±0.002
N 0.10 0.004
P 1.05 0.041
Q 0.05±0.05
R 5°±5° 5°±5°
S 1.27 MAX. 0.050 MAX.
+0.009
–0.008
+0.009
–0.008
+0.009
–0.008
+0.009
–0.008
0.049
0.049
0.004
0.020 (T.P.)
+0.009
–0.008
+0.008
–0.009
0.002±0.002
P80GK-50-BE9-4
Remark Dimensions and materials of ES products are the same as those of mass-produced products.
79
Page 80

µ
PD784031Y
15. RECOMMENDED SOLDERING CONDITIONS
This product should be soldered and mounted under the conditions recommended in the table below.
For details of recommended soldering conditions, refer to the information document Semiconductor Device Mounting
Technology Manual (C10535E).
For soldering methods and conditions other than those recommended below, contact an NEC sales representative.
Table 15-1. Surface Mounting Type Soldering Conditions (1/2)
µ
PD784031YGC-3B9: 80-pin plastic QFP (14 × 14 mm, thickness 2.7 mm)
(1)
Soldering Method Soldering Conditions Symbol
Infrared reflow Package peak temperature: 235°C, Duration: 30 sec. max. (at 210°C or above), IR35-00-3
Number of times: 3 times max.
VPS Package peak temperature: 215°C, Duration: 40 sec. max. (at 200°C or above), VP15-00-3
Number of times: 3 times max.
Wave soldering Solder bath temperature: 260°C max., Duration: 10 sec. max., Number of times: Once, WS60-00-1
Preliminary heat temperature: 120°C max. (Package surface temperature)
Partial heating Pin temperature: 300°C max. Duration: 3 sec. max. (per device side) —
Caution Use of more than one soldering method should be avoided (except in the case of partial heating).
(2)µPD784031YGC-8BT: 80-pin plastic QFP (14 × 14 mm, thickness 1.4 mm)
Soldering Method Soldering Conditions Symbol
Infrared reflow Package peak temperature: 235°C, Duration: 30 sec. max. (at 210°C or above), IR35-00-2
Number of times: Twice max.
VPS Package peak temperature: 215°C, Duration: 40 sec. max. (at 200°C or above), VP15-00-2
Number of times: Twice max.
Wave soldering Solder bath temperature: 260°C max., Duration: 10 sec. max., Number of times: Once, WS60-00-1
Preliminary heat temperature: 120°C max. (Package surface temperature)
Partial heating Pin temperature: 300°C max. Duration: 3 sec. max. (per device side) —
Caution Use of more than one soldering method should be avoided (except in the case of partial heating).
80
Page 81

µ
PD784031Y
Table 15-1. Surface Mounting Type Soldering Conditions (2/2)
µ
PD784031YGK-BE9: 80-pin plastic TQFP (fine pitch) (12 × 12 mm)
(3)
Soldering Method Soldering Conditions Symbol
Infrared reflow Package peak temperature: 235°C, Duration: 30 sec. max. (at 210°C or above), IR35-107-2
Number of times: Twice max., Time limit: 7 days
required at 125°C)
<precaution>
Do not bake devices by packing them in non-heat resistant trays or packing materials
such as magazine cases and tapes. Use heat-resistant trays.
VPS Package peak temperature: 215°C, Duration: 40 sec. (at 200°C or above), VP15-107-2
Number of times: Twice max., Time limit: 7 days
required at 125°C)
<precaution>
Do not bake devices by packing them in non-heat resistant trays or packing materials
such as magazine cases and tapes. Use heat-resistant trays.
Partial heating Pin temperature: 300°C max. Duration: 3 sec. max. (per device side) —
Note
(thereafter 10 hours prebaking
Note
(thereafter 10 hours prebaking
Note For the storage period after dry-pack decapsulation, storage conditions are max. 25°C, 65 % RH.
Caution Use of more than one soldering method should be avoided (except in the case of partial heating).
81
Page 82

APPENDIX A. DEVELOPMENT TOOLS
The following development tools are available for supporting development of a system using the µPD784031Y.
Language Processor Software
RA78K4
CC78K4
CC78K4-L
PG-1500 PROM programmer
PA-78P4026GC Programmer adapter connected to PG-1500
PA-78P4038GK
PA-78P4026KK
PG-1500 controller
Note 1
Note 1
Note 1
PROM Writing Tool
Note 2
Assembler package common to 78K/IV Series
C compiler package common to 78K/IV Series
C compiler library source file common to 78K/IV Series
PG-1500 control program
µ
PD784031Y
Debugging Tool
IE-784000-R In-circuit emulator common to 78K/IV Subseries
IE-784000-R-BK Break board common to 78K/IV Series
IE-784038-R-EM1 Emulation board for evaluation of
µ
PD784038Y Subseries
IE-784000-R-EM
IE-70000-98-IF-B Interface adapter when PC-9800 Series (except notebook type) is used as host machine
IE-70000-98N-IF Interface adapter and cable when notebook type PC-9800 Series is used as host
machine
IE-70000-PC-IF-B Interface adapter when IBM PC/ATTM is used as host machine
IE-78000-R-SV3 Interface adapter and cable when EWS is used as host machine
EP-78230GC-R Emulation probe for 80-pin plastic QFP (GC-3B9 and GC-8BT types) common to
µ
PD784038Y Subseries
EP-78054GK-R Emulation probe for 80-pin plastic TQFP (fine pitch) (GK-BE9 type) common to
µ
PD784038Y Subseries
EV-9200GC-80 Socket mounted on board of target system created for 80-pin plastic QFP (GC-3B9 and
GC-8BT types)
TGK-080SDW Adapter mounted on board of target system created for 80-pin plastic TQFP (fine pitch)
(GK-BE9 type)
EV-9900 Jig used to remove µPD78P4038YKK-T from EV-9200GC-80
SM78K4
ID78K4
DF784038
Note 3
Note 3
Note 4
System simulator common to 78K/IV Series
Integrated debugger for IE-784000-R
Device file for µPD784038Y Subseries
Real-time OS
RX78K/IV
MX78K4
82
Note 4
Note 2
Real-time OS for 78K/IV Series
OS for 78K/IV Series
Page 83

Notes 1. • PC-9800 Series (MS-DOSTM) based
• IBM PC/AT and compatible machine (PC DOSTM, WindowsTM, MS-DOS, IBM DOSTM) based
TM
• HP9000 Series 700
• SPARCstationTM (SunOSTM) based
• NEWSTM (NEWS-OSTM) based
2. • PC-9800 Series (MS-DOS) based
• IBM PC/AT and compatible machine (PC DOS, Windows, MS-DOS, IBM DOS) based
3. • PC-9800 Series (MS-DOS + Windows) based
• IBM PC/AT and compatible machine (PC DOS, Windows, MS-DOS, IBM DOS) based
• HP9000 Series 700 (HP-UX) based
• SPARCstation (SunOS) based
4. • PC-9800 Series (MS-DOS) based
• IBM PC/AT and compatible machine (PC DOS, Windows, MS-DOS, IBM DOS) based
• HP9000 Series 700 (HP-UX) based
• SPARCstation (SunOS) based
Remarks 1. RA78K4, CC78K4, SM78K4, and ID78K4 are used in combination with DF784038.
2. TGK-080SDW is manufactured by TOKYO ELETECH Corporation. Consult your local NEC sales
representative when purchasing it.
(HP-UXTM) based
µ
PD784031Y
83
Page 84

µ
APPENDIX B. RELATED DOCUMENTS
Documents Related to Device
Document Name Document No.
English Japanese
µ
PD784031Y Data Sheet This manual U11504J
µ
PD784035Y, 784036Y, 784037Y, 784038Y Data Sheet U10741E U10741J
µ
PD78P4038Y Data Sheet U10742E U10742J
µ
PD784038, 784038Y Subseries User’s Manual - Hardware U11316E U11316J
µ
PD784038Y Subseries Special Function Register Table – U11091J
78K/IV Series User’s Manual - Instruction U10905E U10905J
78K/IV Series Instruction Table – U10594J
78K/IV Series Instruction Set – U10595J
78K/IV Series Application Note - Software Basics – U10095J
PD784031Y
Documents Related to Development Tools (User’s Manuals)
Document Name Document No.
English Japanese
RA78K4 Assembler Package Operation U11334E U11334J
Language – U11162J
RA78K Series Structured Assembler Preprocessor EEU-1402 EEU-817
CC78K4 Series Operation – EEU-960
Language – EEU-961
CC78K Series Library Source File – U12322J
PG-1500 PROM Programmer EEU-1335 U11940J
PG-1500 Controller - PC-9800 Series (MS-DOS) Based EEU-1291 EEU-704
PG-1500 Controller - IBM PC Series (PC DOS) Based U10540E EEU-5008
IE-784000-R EEU-1534 EEU-5004
IE-784038-R-EM1 U11383E U11383J
EP-78230 EEU-1515 EEU-985
EP-78054GK-R EEU-1468 EEU-932
SM78K4 System Simulator - Windows Based Reference U10093E U10093J
SM78K Series External Part User Open Interface Specifications U10092E U10092J
ID78K4 Integrated Debugger - Windows Based Reference U10440E U10440J
ID78K4 Integrated Debugger
- HP9000 Series 700 (HP-UX) Based
Reference To be released soon U11960J
Caution The above related documents are subject to change without prior notice. Be sure to use the latest
version when starting design.
84
Page 85

µ
PD784031Y
Documents Related to Embedded Software (User’s Manual)
Document Name Document No.
English Japanese
78K/IV Series Real-time OS Basics U10603E U10603J
Installation U10604E U10604J
Debugger – U10364J
78K/IV Series OS MX78K4 Basics – U11779J
Other Documents
Document Name Document No.
English Japanese
IC Package Manual C10943X
Semiconductor Device Mounting Technology Manual C10535E C10535J
Quality Grades on NEC Semiconductor Devices C11531E C11531J
Reliability Quality Control on NEC Semiconductor Device C10983E C10983J
Electric Static Discharge (ESD) Test – MEM-539
Semiconductor Devices Quality Assurance Guide MEI-1202 C11893J
Microcomputer Product Series Guide – U11416J
Caution The above related documents are subject to change without prior notice. Be sure to use the latest
version when starting design.
85
Page 86

NOTES FOR CMOS DEVICES
1 PRECAUTION AGAINST ESD FOR SEMICONDUCTORS
Note: Strong electric field, when exposed to a MOS device, can cause destruction of
the gate oxide and ultimately degrade the device operation. Steps must be
taken to stop generation of static electricity as much as possible, and quickly
dissipate it once, when it has occurred. Environmental control must be
adequate. When it is dry, humidifier should be used. It is recommended to avoid
using insulators that easily build static electricity. Semiconductor devices
must be stored and transported in an anti-static container, static shielding bag
or conductive material. All test and measurement tools including work bench
and floor should be grounded. The operator should be grounded using wrist
strap. Semiconductor devices must not be touched with bare hands. Similar
precautions need to be taken for PW boards with semiconductor devices on it.
µ
PD784031Y
2 HANDLING OF UNUSED INPUT PINS FOR CMOS
Note: No connection for CMOS device inputs can be cause of malfunction. If no
connection is provided to the input pins, it is possible that an internal input level
may be generated due to noise, etc., hence causing malfunction. CMOS device
behave differently than Bipolar or NMOS devices. Input levels of CMOS devices
must be fixed high or low by using a pull-up or pull-down circuitry. Each unused
pin should be connected to VDD or GND with a resistor, if it is considered to have
a possibility of being an output pin. All handling related to the unused pins must
be judged device by device and related specifications governing the devices.
3 STATUS BEFORE INITIALIZATION OF MOS DEVICES
Note: Power-on does not necessarily define initial status of MOS device. Production
process of MOS does not define the initial operation status of the device.
Immediately after the power source is turned ON, the devices with reset
function have not yet been initialized. Hence, power-on does not guarantee outpin levels, I/O settings or contents of registers. Device is not initialized until the
reset signal is received. Reset operation must be executed immediately after
power-on for devices having reset function.
86
Page 87

µ
PD784031Y
Regional Information
Some information contained in this document may vary from country to country. Before using any NEC
product in your application, please contact the NEC office in your country to obtain a list of authorized
representatives and distributors. They will verify:
• Device availability
• Ordering information
• Product release schedule
• Availability of related technical literature
• Development environment specifications (for example, specifications for third-party tools and components,
host computers, power plugs, AC supply voltages, and so forth)
• Network requirements
In addition, trademarks, registered trademarks, export restrictions, and other legal issues may also vary from
country to country.
NEC Electronics Inc. (U.S.)
Santa Clara, California
Tel: 800-366-9782
Fax: 800-729-9288
NEC Electronics (Germany) GmbH
Duesseldorf, Germany
Tel: 0211-65 03 02
Fax: 0211-65 03 490
NEC Electronics (Germany) GmbH
Benelux Office
Eindhoven, The Netherlands
Tel:040-2445845
Fax: 040-2444580
NEC Electronics (France) S.A.
Velizy-Villacoublay, France
Tel:01-30-67 58 00
Fax: 01-30-67 58 99
NEC Electronics Hong Kong Ltd.
Hong Kong
Tel:2886-9318
Fax: 2886-9022/9044
NEC Electronics Hong Kong Ltd.
Seoul Branch
Seoul, Korea
Tel: 02-528-0303
Fax: 02-528-4411
NEC Electronics (UK) Ltd.
Milton Keynes, UK
Tel: 01908-691-133
Fax: 01908-670-290
NEC Electronics Italiana s.r.1.
Milano, Italy
Tel: 02-66 75 41
Fax: 02-66 75 42 99
NEC Electronics (France) S.A.
Spain Office
Madrid, Spain
Tel: 01-504-2787
Fax: 01-504-2860
NEC Electronics (Germany) GmbH
Scandinavia Office
Taeby, Sweden
Tel: 08-63 80 820
Fax: 08-63 80 388
NEC Electronics Singapore Pte. Ltd.
United Square, Singapore 1130
Tel:253-8311
Fax: 250-3583
NEC Electronics Taiwan Ltd.
Taipei, Taiwan
Tel: 02-719-2377
Fax: 02-719-5951
NEC do Brasil S.A.
Sao Paulo-SP, Brasil
Tel: 011-889-1680
Fax: 011-889-1689
J96. 8
87
Page 88

µ
PD784031Y
Caution Purchase of NEC I2C components conveys a license under the Philips I2C Patent Rights to use
these components in an I
Specification as defined by Philips.
EEPROM and IEBus are trademarks of NEC Corporation.
MS-DOS and Windows are either registered trademarks or trademarks of Microsoft Corporation in the United
States and/or other countries.
IBM DOS, PC/AT, and PC DOS are trademarks of International Business Machines Corporation.
HP9000 Series 700 and HP-UX are trademarks of Hewlett-Packard Company.
SPARCstation is a trademark of SPARC International, Inc.
SunOS is a trademark of Sun Microsystems, Inc.
NEWS and NEWS-OS are trademarks of Sony Corporation.
The related documents indicated in this publication may include preliminary versions. However, preliminary versions
are not marked as such.
2
C system, provided that the system conforms to the I2C Standard
No part of this document may be copied or reproduced in any form or by any means without the prior written consent
of NEC Corporation. NEC Corporation assumes no responsibility for any errors which may appear in this document.
NEC Corporation does not assume any liability for infringement of patents, copyrights or other intellectual property
rights of third parties by or arising from use of a device described herein or any other liability arising from use of
such device. No license, either express, implied or otherwise, is granted under any patents, copyrights or other
intellectual property rights of NEC Corporation or others.
While NEC Corporation has been making continuous effort to enhance the reliability of its semiconductor devices,
the possibility of defects cannot be eliminated entirely. To minimize risks of damage or injury to persons or property
arising from a defect in an NEC semiconductor device, customers must incorporate sufficient safety measures in
its design, such as redundancy, fire-containment, and anti-failure features.
NEC devices are classified into the following three quality grades:
“Standard”, “Special”, and “Specific”. The Specific quality grade applies only to devices developed based on a
customer designated “quality assurance program” for a specific application. The recommended applications of a
device depend on its quality grade, as indicated below. Customers must check the quality grade of each device
before using it in a particular application.
Standard: Computers, office equipment, communications equipment, test and measurement equipment, audio
and visual equipment, home electronic appliances, machine tools, personal electronic equipment and
industrial robots
Special: Transportation equipment (automobiles, trains, ships, etc.), traffic control systems, anti-disaster
systems, anti-crime systems, safety equipment and medical equipment (not specifically designed for
life support)
Specific: Aircrafts, aerospace equipment, submersible repeaters, nuclear reactor control systems, life support
systems or medical equipment for life support, etc.
The quality grade of NEC devices is “Standard” unless otherwise specified in NEC’s Data Sheets or Data Books.
If customers intend to use NEC devices for applications other than those specified for Standard quality grade, they
should contact an NEC sales representative in advance.
Anti-radioactive design is not implemented in this product.
M4 96.5
 Loading...
Loading...