

Page 1
The TL494 is a fixed frequency, pulse width modulation control circuit
designed primarily for SWITCHMODE power supply control.
• Complete Pulse Width Modulation Control Circuitry
• On–Chip Oscillator with Master or Slave Operation
• On–Chip Error Amplifiers
• On–Chip 5.0 V Reference
• Adjustable Deadtime Control
• Uncommitted Output Transistors Rated to 500 mA Source or Sink
• Output Control for Push–Pull or Single–Ended Operation
• Undervoltage Lockout
Order this document by TL494/D
SWITCHMODE
PULSE WIDTH MODULATION
CONTROL CIRCUIT
SEMICONDUCTOR
TECHNICAL DATA
D SUFFIX
PLASTIC PACKAGE
CASE 751B
(SO–16)
MAXIMUM RATINGS
unless otherwise noted.)
Power Supply Voltage V
Collector Output Voltage VC1,
Collector Output Current
(Each transistor) (Note 1)
Amplifier Input Voltage Range V
Power Dissipation @ TA ≤ 45°C P
Thermal Resistance,
Junction–to–Ambient
Operating Junction Temperature T
Storage Temperature Range T
Operating Ambient Temperature Range
TL494C
TL494I
Derating Ambient Temperature T
NOTE: 1.Maximum thermal limits must be observed.
(Full operating ambient temperature range applies,
Rating Symbol TL494C TL494I Unit
IC1, I
N SUFFIX
PLASTIC PACKAGE
CASE 648
PIN CONNECTIONS
Noninv
1
Input
Input
Compen/PWN
CC
V
C2
C2
IR
D
R
θJA
J
stg
T
A
A
42 V
42 V
500 mA
–0.3 to +42 V
1000 mW
80 °C/W
125 °C
–55 to +125 °C
°C
0 to +70
–25 to +85
45 °C
Comp Input
Deadtime
Control
Ground
ORDERING INFORMATION
Device
TL494CD SO–16
TL494CN
TL494IN
+
Error
Amp
Inv
–
2
3
≈
0.1 V
4
C
5
T
Oscillator
R
6
T
7
C1
89
Operating
Temperature Range
TA = 0° to +70°C
TA = – 25° to +85°C
1
2
V
CC
Q1
(Top View)
Error
Amp
5.0 V
REF
+
–
Q2
Noninv
16
Input
Inv
15
Input
V
14
ref
Output
13
Control
V
12
CC
C2
11
E2
10
E1
Package
Plastic
Plastic
MOTOROLA ANALOG IC DEVICE DATA
Motorola, Inc. 1996 Rev 1
1
Page 2
TL494
RECOMMENDED OPERATING CONDITIONS
Characteristics Symbol Min Typ Max Unit
Power Supply Voltage V
Collector Output Voltage VC1, V
Collector Output Current (Each transistor) IC1, I
Amplified Input Voltage V
Current Into Feedback Terminal l
Reference Output Current l
Timing Resistor R
Timing Capacitor C
Oscillator Frequency f
CC
fb
ref
osc
7.0 15 40 V
C2
C2
in
T
T
– 30 40 V
– – 200 mA
–0.3 – VCC – 2.0 V
– – 0.3 mA
– – 10 mA
1.8 30 500 kΩ
0.0047 0.001 10 µF
1.0 40 200 kHz
ELECTRICAL CHARACTERISTICS (V
For typical values TA = 25°C, for min/max values TA is the operating ambient temperature range that applies, unless otherwise noted.
Characteristics Symbol Min Typ Max Unit
REFERENCE SECTION
Reference Voltage (IO = 1.0 mA) V
Line Regulation (VCC = 7.0 V to 40 V) Reg
Load Regulation (IO = 1.0 mA to 10 mA) Reg
Short Circuit Output Current (V
OUTPUT SECTION
Collector Off–State Current
(VCC = 40 V, VCE = 40 V)
Emitter Off–State Current
VCC = 40 V, VC = 40 V, VE = 0 V)
Collector–Emitter Saturation Voltage (Note 2)
Common–Emitter (VE = 0 V, IC = 200 mA)
Emitter–Follower (VC = 15 V, IE = –200 mA)
Output Control Pin Current
Low State (VOC ≤ 0.4 V)
High State (VOC = V
Output Voltage Rise T ime
Common–Emitter (See Figure 12)
Emitter–Follower (See Figure 13)
Output Voltage Fall T ime
Common–Emitter (See Figure 12)
Emitter–Follower (See Figure 13)
NOTE: 2. Low duty cycle pulse techniques are used during test to maintain junction temperature as close to ambient temperature as possible.
ref
= 0 V) I
ref
)
= 15 V, CT = 0.01 µF, RT = 12 kΩ, unless otherwise noted.)
CC
4.75 5.0 5.25 V
– 2.0 25 mV
– 3.0 15 mV
15 35 75 mA
– 2.0 100 µA
– – –100 µA
–
–
–
–
–
–
–
–
I
C(off)
I
E(off)
V
sat(C)
V
sat(E)
I
OCL
I
OCH
ref
SC
t
t
line
load
r
f
1.1
1.5
10
0.2
100
100
25
40
1.3
2.5
–
3.5
200
200
100
100
V
µA
mA
ns
ns
2
MOTOROLA ANALOG IC DEVICE DATA
Page 3
TL494
ELECTRICAL CHARACTERISTICS (V
For typical values TA = 25°C, for min/max values TA is the operating ambient temperature range that applies, unless otherwise noted.
Characteristics Symbol Min Typ Max Unit
ERROR AMPLIFIER SECTION
Input Offset Voltage (VO
Input Offset Current (VO
Input Bias Current (VO
Input Common Mode Voltage Range (VCC = 40 V, TA = 25°C) V
Open Loop Voltage Gain (∆VO = 3.0 V, VO = 0.5 V to 3.5 V, RL = 2.0 kΩ) A
Unity–Gain Crossover Frequency (VO = 0.5 V to 3.5 V, RL = 2.0 kΩ) f
Phase Margin at Unity–Gain (VO = 0.5 V to 3.5 V, RL = 2.0 kΩ) φ
Common Mode Rejection Ratio (VCC = 40 V) CMRR 65 90 – dB
Power Supply Rejection Ratio (∆VCC = 33 V, VO = 2.5 V, RL = 2.0 kΩ) PSRR – 100 – dB
Output Sink Current (VO
Output Source Current (VO
PWM COMPARATOR SECTION (Test Circuit Figure 11)
Input Threshold Voltage (Zero Duty Cycle) V
Input Sink Current (V
DEADTIME CONTROL SECTION (Test Circuit Figure 11)
Input Bias Current (Pin 4) (V
Maximum Duty Cycle, Each Output, Push–Pull Mode
(V
= 0 V, CT = 0.01 µF, RT = 12 kΩ)
Pin 4
(V
= 0 V, CT = 0.001 µF, RT = 30 kΩ)
Pin 4
Input Threshold Voltage (Pin 4)
(Zero Duty Cycle)
(Maximum Duty Cycle)
OSCILLATOR SECTION
Frequency (CT = 0.001 µF, RT = 30 kΩ) f
Standard Deviation of Frequency* (CT = 0.001 µF, RT = 30 kΩ) σf
Frequency Change with Voltage (VCC = 7.0 V to 40 V, TA = 25°C) ∆f
Frequency Change with Temperature (∆TA = T
(CT = 0.01 µF, RT = 12 kΩ)
UNDERVOLTAGE LOCKOUT SECTION
Turn–On Threshold (VCC increasing, I
TOTAL DEVICE
Standby Supply Current (Pin 6 at V
(VCC = 15 V)
(VCC = 40 V)
Average Supply Current
(CT = 0.01 µF, RT = 12 kΩ, V
(VCC = 15 V) (See Figure 12)
(Pin 3)
= 2.5 V) V
(Pin 3)
= 2.5 V) I
(Pin 3)
= 2.5 V) I
(Pin 3)
= 0.7 V) I
(Pin 3)
= 3.5 V) IO+ 2.0 –4.0 – mA
(Pin 3)
= 0.7 V) I
= 0 V to 5.25 V) IIB
Pin 4
, All other inputs and outputs open)
ref
(Pin 4)
= 15 V, CT = 0.01 µF, RT = 12 kΩ, unless otherwise noted.)
CC
IO
IO
IB
ICR
VOL
C–
m
O–
TH
I–
(DT)
DC
max
V
th
osc
osc
(∆V) – 0.1 – %
osc
to T
low
= 1.0 mA) V
ref
= 2.0 V)
high
)
∆f
(∆T) – – 12 %
osc
th
I
CC
– 2.0 10 mV
– 5.0 250 nA
– –0.1 –1.0 µA
–0.3 to VCC–2.0 V
70 95 – dB
– 350 – kHz
– 65 – deg.
0.3 0.7 – mA
– 2.5 4.5 V
0.3 0.7 – mA
– –2.0 –10 µA
45
–
–
0
– 40 – kHz
– 3.0 – %
5.5 6.43 7.0 V
–
–
– 7.0 –
48
45
2.8
–
5.5
7.0
50
50
3.3
–
10
15
%
V
mA
mA
* Standard deviation is a measure of the statistical distribution about the mean as derived from the formula, σ
MOTOROLA ANALOG IC DEVICE DATA
N
Σ (Xn – X
n = 1
N – 1
2
)
3
Page 4
TL494
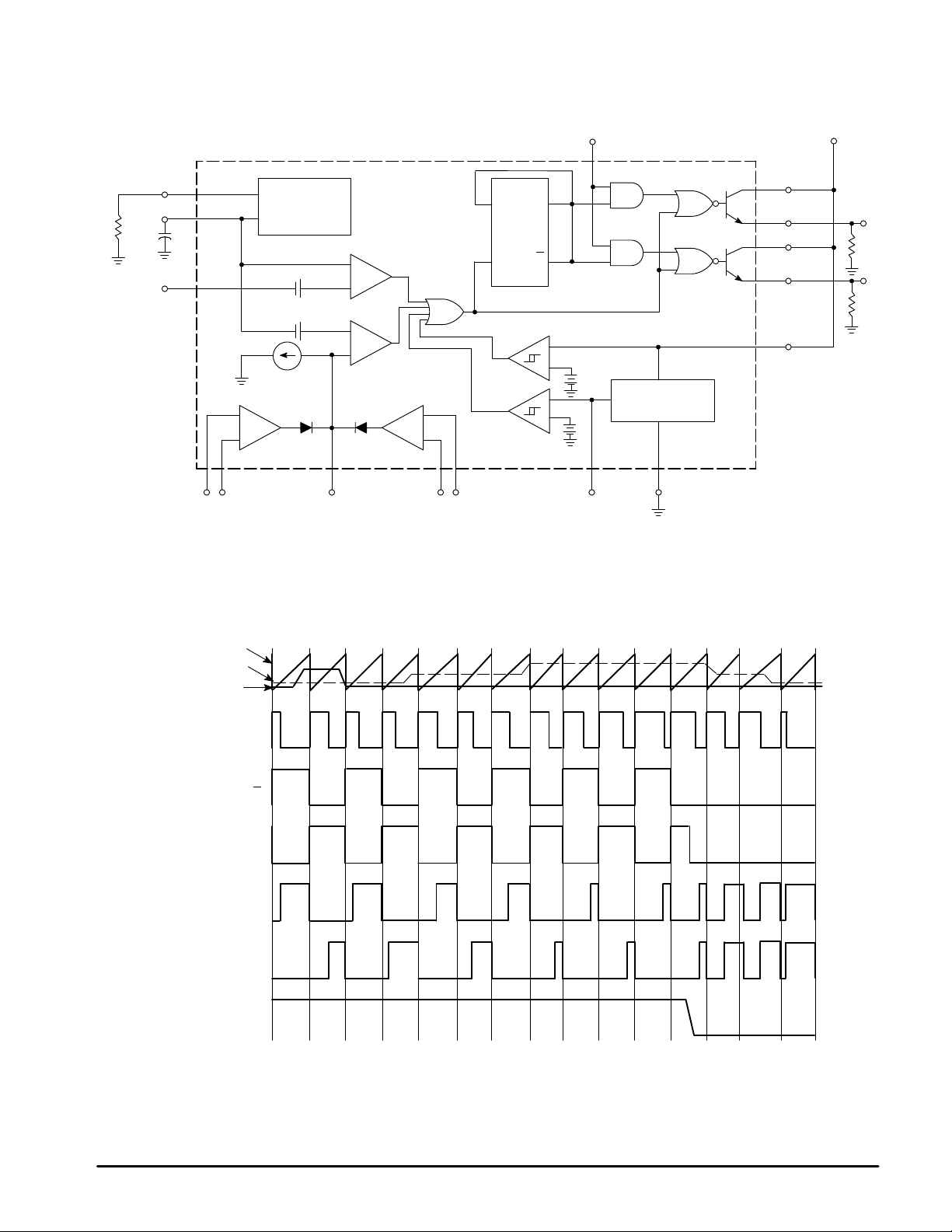
Figure 1. Representative Block Diagram
R
T
6
5
C
T
4
Deadtime
Control
Output Control
13
D
Ck
UV
Flip–
Flop
Q
Q
–
+
–
+
3.5V
4.9V
Ref.
Output
Reference
Regulator
Gnd
Oscillator
Deadtime
Comparator
0.12V
0.7V
0.7mA
+
1
–
12 3 1516 14 7
Error Amp
1
Feedback PWM
Comparator Input
–
+
–
+
PWM
Comparator
+
2
–
Error Amp
This device contains 46 active transistors.
Lockout
2
Q1
Q2
8
9
11
10
12
V
CC
V
CC
Capacitor C
Feedback/PWM Comp.
Deadtime Control
T
Flip–Flop
Clock Input
Flip–Flop
Q
Flip–Flop
Q
Output Q1
Emitter
Output Q2
Emitter
Output
Control
Figure 2. Timing Diagram
4
MOTOROLA ANALOG IC DEVICE DATA
Page 5

TL494
APPLICATIONS INFORMATION
Description
The TL494 is a fixed–frequency pulse width modulation
control circuit, incorporating the primary building blocks
required for the control of a switching power supply. (See
Figure 1.) An internal–linear sawtooth oscillator is frequency–
programmable by two external components, RT and CT. The
approximate oscillator frequency is determined by:
≈
1.1
RT • C
T
f
osc
For more information refer to Figure 3.
Output pulse width modulation is accomplished by
comparison of the positive sawtooth waveform across
capacitor CT to either of two control signals. The NOR gates,
which drive output transistors Q1 and Q2, are enabled only
when the flip–flop clock–input line is in its low state. This
happens only during that portion of time when the sawtooth
voltage is greater than the control signals. Therefore, an
increase in control–signal amplitude causes a corresponding
linear decrease of output pulse width. (Refer to the Timing
Diagram shown in Figure 2.)
The control signals are external inputs that can be fed into
the deadtime control, the error amplifier inputs, or the
feedback input. The deadtime control comparator has an
effective 120 mV input offset which limits the minimum output
deadtime to approximately the first 4% of the sawtooth–cycle
time. This would result in a maximum duty cycle on a given
output of 96% with the output control grounded, and 48% with
it connected to the reference line. Additional deadtime may
be imposed on the output by setting the deadtime–control
input to a fixed voltage, ranging between 0 V to 3.3 V.
may be used to sense power–supply output voltage and
current. The error–amplifier outputs are active high and are
ORed together at the noninverting input of the pulse–width
modulator comparator. With this configuration, the amplifier
that demands minimum output on time, dominates control of
the loop.
When capacitor CT is discharged, a positive pulse is
generated on the output of the deadtime comparator, which
clocks the pulse–steering flip–flop and inhibits the output
transistors, Q1 and Q2. With the output–control connected to
the reference line, the pulse–steering flip–flop directs the
modulated pulses to each of the two output transistors
alternately for push–pull operation. The output frequency is
equal to half that of the oscillator. Output drive can also be
taken from Q1 or Q2, when single–ended operation with a
maximum on–time of less than 50% is required. This is
desirable when the output transformer has a ringback
winding with a catch diode used for snubbing. When higher
output–drive currents are required for single–ended
operation, Q1 and Q2 may be connected in parallel, and the
output–mode pin must be tied to ground to disable the
flip–flop. The output frequency will now be equal to that of the
oscillator.
The TL494 has an internal 5.0 V reference capable of
sourcing up to 10 mA of load current for external bias circuits.
The reference has an internal accuracy of ±5.0% with a
typical thermal drift of less than 50 mV over an operating
temperature range of 0° to 70°C.
Figure 3. Oscillator Frequency versus
Timing Resistance
500 k
Functional T able
Input/Output
Controls
Grounded Single–ended PWM @ Q1 and Q2 1.0
@ V
Push–pull Operation 0.5
ref
Output Function
f
out
f
osc
=
The pulse width modulator comparator provides a means
for the error amplifiers to adjust the output pulse width from
the maximum percent on–time, established by the deadtime
control input, down to zero, as the voltage at the feedback pin
varies from 0.5 V to 3.5 V. Both error amplifiers have a
common mode input range from –0.3 V to (VCC – 2V), and
VCC = 15 V
µ
100 k
10 k
, OSCILLAT OR FREQUENCY (Hz)f
osc
1.0 k
500
1.0 k 2.0 k 5.0 k 10 k 20 k 50 k 100 k 200 k 500 k 1.0 M
CT = 0.001
0.01
µ
0.1
RT, TIMING RESISTANCE (
F
µ
F
F
Ω
)
MOTOROLA ANALOG IC DEVICE DATA
5
Page 6

TL494
Figure 4. Open Loop V oltage Gain and
Phase versus Frequency
120
110
100
90
80
70
60
50
40
30
, OPEN LOOP VOL TAGE GAIN (dB)
20
VOL
10
A
0
1.0 10 100 1.0 k 10 k 100 k 1.0 M
A
VOL
f, FREQUENCY (Hz)
VCC = 15 V
∆
VO = 3.0 V
Ω
RL = 2.0 k
Figure 6. Percent Duty Cycle versus
Deadtime Control Voltage
50
40
30
20
10
0
% DC, PERCENT DUTY CYCLE (EACH OUTPUT)
0 1.0 2.0 3.0 3.5
1
2
VDT, DEADTIME CONTROL VOLTAGE (IV)
VCC = 15 V
VOC = V
ref
1. CT = 0.01 µF
2. RT = 10 k
2. CT = 0.001 µF
2. RT = 30 k
Figure 5. Percent Deadtime versus
Oscillator Frequency
20
18
0
20
40
60
80
φ
100
120
, EXCESS PHASE (DEGREES)
140
φ
160
180
16
14
12
10
8.0
6.0
4.0
2.0
0
% DT , PERCENT DEADTIME (EACH OUTPUT)
500 k 1.0 k 10 k 100 k 500 k
f
, OSCILLAT OR FREQUENCY (Hz)
osc
CT = 0.001 µF
µ
F
0.001
Figure 7. Emitter–Follower Configuration
Output Saturation Voltage versus
Emitter Current
1.9
1.8
1.7
Ω
Ω
1.6
1.5
1.4
, SATURATION VOLTAGE (V)
1.3
1.2
CE(sat)
V
1.1
0 100 200 300 400
IE, EMITTER CURRENT (mA)
Figure 8. Common–Emitter Configuration
Output Saturation Voltage versus
Collector Current
2.0
1.8
1.6
1.4
1.2
1.0
, SATURATION VOLTAGE (V)V
0.8
CE(sat)
0.6
0.4
0 100 200 300 400
IC, COLLECTOR CURRENT (mA)
6
Figure 9. Standby Supply Current
versus Supply V oltage
10
9.0
8.0
7.0
6.0
5.0
4.0
3.0
, SUPPLY CURRENT (mA)
CC
2.0
I
1.0
0
0 5.0 10 15 20 25 30 35 40
VCC, SUPPLY VOLTAGE (V)
MOTOROLA ANALOG IC DEVICE DATA
Page 7

TL494
Figure 10. Error–Amplifier Characteristics Figure 11. Deadtime and Feedback Control Circuit
VCC = 15V
150
C1
E1
C2
E2
Ref
Out
150
2W
2W
Output 1
Output 2
Error Amplifier
Under Test
+
V
in
V
ref
–
+
–
Other Error
Amplifier
Feedback
Terminal
(Pin 3)
Test
Inputs
50k
V
Deadtime
Feedback
R
T
C
T
(+)
(–)
Error
(+)
(–)
Output
Control
CC
Gnd
Figure 12. Common–Emitter Configuration
Test Circuit and Waveform
15V
R
L
68
V
Each
Output
Transistor
90%
V
CC
10%
C
Q
E
t
r
C
L
15pF
90%
t
f
C
10%
Figure 13. Emitter–Follower Configuration
Test Circuit and Waveform
15V
C
Each
Gnd
Output
Transistor
90%
10%
Q
V
E
R
L
68
t
r
t
f
C
15pF
90%
V
10%
EE
L
EE
MOTOROLA ANALOG IC DEVICE DATA
7
Page 8

TL494
Figure 14. Error–Amplifier Sensing T echniques
V
O
To Output
Voltage of
System
R1
1
+
Error
V
ref
R2
2
Amp
–
Positive Output Voltage
VO = V
1 +
ref
3
R
1
R
2
Negative Output Voltage
VO = V
Error
Amp
ref
Figure 15. Deadtime Control Circuit Figure 16. Soft–Start Circuit
Output
Control
R
Output
V
ref
Q
R
T
6
D
T
C
T
5
1
4
R
2
Output
Q
1
+
–
2
R
1
R
2
V
ref
4
D
T
V
ref
R2
R1
V
To Output
Voltage of
System
R
S
O
C
S
Output
Control
0 ≤ VOC ≤ 0.4 V
30k
Max. % on Time, each output
0.001
≈
45 –
80
1 +
R1
R2
Figure 17. Output Connections for Single–Ended and Push–Pull Configurations
1
Q
Single–Ended
Q
C
1
1
E
2
C
2
2
E
Q
C
1.0 mA to
500 mA
Q
E
2.4 V ≤ VOC ≤ V
Output
Control
ref
Push–Pull
1
C
Q
1
Q
2
1.0 mA to 250 mA
1
E
2
C
1.0 mA to 250 mA
2
E
8
MOTOROLA ANALOG IC DEVICE DATA
Page 9

TL494
Figure 18. Slaving T wo or More Control Circuits Figure 19. Operation with Vin > 40 V Using
V
ref
External Zener
R
T
+Vin = 8.0V to 20V
33k
0.01
0.01
1M
15
16
C
1
2
3
T
4.7k
6
R
T
5
C
T
V
ref
6
R
T
5
C
T
Master
Slave
(Additional
Circuits)
Figure 20. Pulse Width Modulated Push–Pull Converter
12
V
+
–
Comp
–
+
OC V
REF
13144567910
4.7k
+
10k
TL494
DT CTRTGnd E1E
10
0.001
CC
15k
270
V
CC
12
5.0V
Ref
Gnd
7
+VO = 28 V
IO = 0.2 A
22
k
+
50
35V
4.7k
+
50
1.0
35V
R
S
Vin > 40V
47
8
C
1
11
C
2
2
Tip
32
Tip
32
47
+
50
25V
T
1
VZ = 39V
1N4934
L
1
1N4934
1N975A
240
Test Conditions Results
Line Regulation Vin = 10 V to 40 V 14 mV 0.28%
Load Regulation Vin = 28 V, IO = 1.0 mA to 1.0 A 3.0 mV 0.06%
Output Ripple Vin = 28 V, IO = 1.0 A 65 mV pp P.A.R.D.
Short Circuit Current Vin = 28 V, RL = 0.1 Ω 1.6 A
Efficiency Vin = 28 V, IO = 1.0 A 71%
MOTOROLA ANALOG IC DEVICE DATA
All capacitors in
µ
F
L1 – 3.5 mH @ 0.3 A
T1 – Primary: 20T C.T. #28 AWG
T1 – Secondary: 12OT C.T. #36 AWG
T1 – Core: Ferroxcube 1408P–L00–3CB
9
Page 10

TL494
Figure 21. Pulse Width Modulated Step–Down Converter
+Vin = 10V to 40V
+
50
50V
0.001
Tip 32A
47
150
12
V
CC
TL494
C
R
T
564137910
D.T. O.C. Gnd E1E
T
47k
8
C1C
11
2
Comp
–
+
V
ref
–
2
+
14
15
16
1.0mH @ 2A
47k
0.1
1.0M
3
2
1
5.1k 5.1k
5.1k
150
0.1
MR850
500
10V
+VO = 5.0 V
+
+
IO = 1.0 A
50
10V
Test Conditions Results
Line Regulation Vin = 8.0 V to 40 V 3.0 mV 0.01%
Load Regulation Vin = 12.6 V , IO = 0.2 mA to 200 mA 5.0 mV 0.02%
Output Ripple Vin = 12.6 V, IO = 200 mA 40 mV pp P.A.R.D.
Short Circuit Current Vin = 12.6 V, RL = 0.1 Ω 250 mA
Efficiency Vin = 12.6 V, IO = 200 mA 72%
10
MOTOROLA ANALOG IC DEVICE DATA
Page 11

–A–
916
B
18
F
C
S
H
G
D
16 PL
0.25 (0.010) T
K
M
–A–
16 9
–B–
18
G
K
–T–
SEATING
PLANE
D
16 PL
0.25 (0.010) A
M
S
B
T
TL494
OUTLINE DIMENSIONS
N SUFFIX
PLASTIC PACKAGE
CASE 648–08
ISSUE R
L
SEATING
–T–
PLANE
J
M
A
D SUFFIX
PLASTIC PACKAGE
CASE 751B–05
(SO–16)
ISSUE J
8 PLP
0.25 (0.010) B
C
S
M
R
X 45
M
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
3. DIMENSION L TO CENTER OF LEADS WHEN
FORMED PARALLEL.
4. DIMENSION B DOES NOT INCLUDE MOLD FLASH.
5. ROUNDED CORNERS OPTIONAL.
DIM MIN MAX MIN MAX
A 0.740 0.770 18.80 19.55
B 0.250 0.270 6.35 6.85
C 0.145 0.175 3.69 4.44
D 0.015 0.021 0.39 0.53
F 0.040 0.70 1.02 1.77
G 0.100 BSC 2.54 BSC
M
S
_
F
J
H 0.050 BSC 1.27 BSC
J 0.008 0.015 0.21 0.38
K 0.1 10 0.130 2.80 3.30
L 0.295 0.305 7.50 7.74
M 0 10 0 10
S 0.020 0.040 0.51 1.01
NOTES:
1. DIMENSIONING AND TOLERANCING PER
ANSI Y14.5M, 1982.
2. CONTROLLING DIMENSION: MILLIMETER.
3. DIMENSIONS A AND B DO NOT INCLUDE
MOLD PROTRUSION.
4. MAXIMUM MOLD PROTRUSION 0.15 (0.006)
PER SIDE.
5. DIMENSION D DOES NOT INCLUDE DAMBAR
PROTRUSION. ALLOWABLE DAMBAR
PROTRUSION SHALL BE 0.127 (0.005) TOTAL
IN EXCESS OF THE D DIMENSION AT
MAXIMUM MATERIAL CONDITION.
DIM MIN MAX MIN MAX
A 9.80 10.00 0.386 0.393
B 3.80 4.00 0.150 0.157
C 1.35 1.75 0.054 0.068
D 0.35 0.49 0.014 0.019
F 0.40 1.25 0.016 0.049
G 1.27 BSC 0.050 BSC
J 0.19 0.25 0.008 0.009
K 0.10 0.25 0.004 0.009
M 0 7 0 7
P 5.80 6.20 0.229 0.244
R 0.25 0.50 0.010 0.019
MILLIMETERSINCHES
____
INCHESMILLIMETERS
____
MOTOROLA ANALOG IC DEVICE DATA
11
Page 12

TL494
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty , representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and
specifically disclaims any and all liability, including without limitation consequential or incidental damages. “T ypical” parameters which may be provided in Motorola
data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”
must be validated for each customer application by customer’s technical experts. Motorola does not convey any license under its patent rights nor the rights of
others. Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other
applications intended to support or sustain life, or for any other application in which the failure of the Motorola product could create a situation where personal injury
or death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorola
and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees
arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that Motorola
was negligent regarding the design or manufacture of the part. Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal
Opportunity/Affirmative Action Employer.
How to reach us:
USA/EUROPE/Locations Not Listed: Motorola Literature Distribution; JAPAN: Nippon Motorola Ltd.; Tatsumi–SPD–JLDC, 6F Seibu–Butsuryu–Center,
P.O. Box 20912; Phoenix, Arizona 85036. 1–800–441–2447 or 602–303–5454 3–14–2 Tatsumi Koto–Ku, Tokyo 135, Japan. 03–81–3521–8315
MFAX: RMF AX0@email.sps.mot.com – TOUCHT ONE 602–244–6609 ASIA/PACIFIC: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
INTERNET: http://Design–NET.com 51 Ting K o k Road, Tai Po, N.T ., Hong Kong. 852–26629298
12
◊
MOTOROLA ANALOG IC DEVICE DATA
TL494/D
*TL494/D*
 Loading...
Loading...