

Page 1
DATA SH EET
Product specification
Supersedes data of March 1992
File under Integrated Circuits, IC11
June 1994
INTEGRATED CIRCUITS
Philips Semiconductors
TDA5144
Brushless DC motor drive circuit
Page 2
June 1994 2
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
FEATURES
• Full-wave commutation (using push/pull drivers at the
output stages) without position sensors
• Built-in start-up circuitry
• Three push-pull outputs:
– output current 2.0 A (typ.)
– low saturation voltage
– built-in current limiter
– soft-switching outputs for low Electromagnetic
Interference (EMI)
• Thermal protection
• Flyback diodes
• Tacho output without extra sensor
• Transconductance amplifier for an external control
transistor.
APPLICATIONS
• General purpose spindle driver (e.g. for hard disk)
• Laser beam printer.
GENERAL DESCRIPTION
The TDA5144 is a bipolar integrated circuit used to drive
3-phase brushless DC motors in full-wave mode. The
device is sensorless (saving of 3 hall-sensors) using the
back-EMF sensing technique to sense the rotor position.
A special circuit is built-in to reduce the EMI (soft switching
output stages). It is ideally suited as a drive circuit for hard
disk drive spindle motor requiring powerful output stages
(current limit of 2.0 A). It can also be used in e.g. laser
beam printer and other applications.
QUICK REFERENCE DATA
Measured over full voltage and temperature range.
Notes
1. An unstabilized supply can be used.
2. V
VMOT
= VP; +AMP IN = −AMP IN = 0 V; all outputs IO = 0 mA.
ORDERING INFORMATION
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
P
supply voltage note 1 4 − 18 V
V
VMOT
input voltage to the output
driver stages
note 2 1.7 − 16 V
V
DO
drop-out output voltage IO= 100 mA − 0.90 1.05 V
I
LIM
current limiting V
VMOT
= 10 V; RO= 1.2 Ω 1.8 2.0 2.4 A
TYPE NUMBER
PACKAGE
PINS PIN POSITION MATERIAL CODE
TDA5144AT 20 SOL plastic SOT163-1
TDA5144T 28 SOL plastic SOT136-1
Page 3
June 1994 3
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
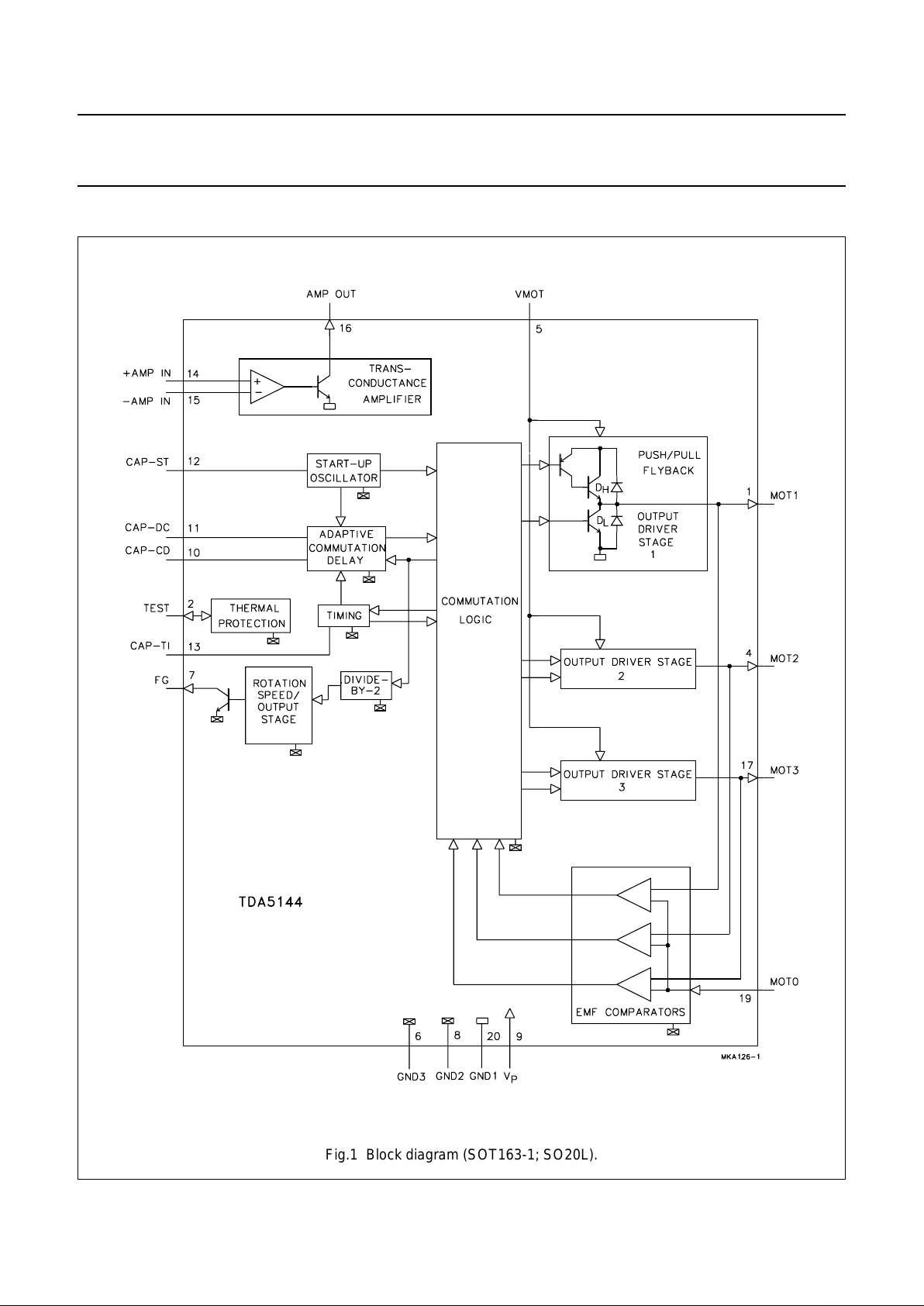
BLOCK DIAGRAM
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBBB
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBBB
BBBBBBBBBBBB
B
BBBBBBBBBBBB
B
BBBBBBBBBBBB
B
BBBBBBBBBBBB
B
BBBBBBBBBBBB
B
BBBBBBBBBBBB
B
BBBBBBBBBBBB
B
BBBBBBBBBBBBB
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBBB
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBB
B
BBBBBBBBBBBBBB
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBB
B
BBBBBBBBB
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBBB
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBBBBBBBBBBBB
B
Fig.1 Block diagram (SOT163-1; SO20L).
Page 4
June 1994 4
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
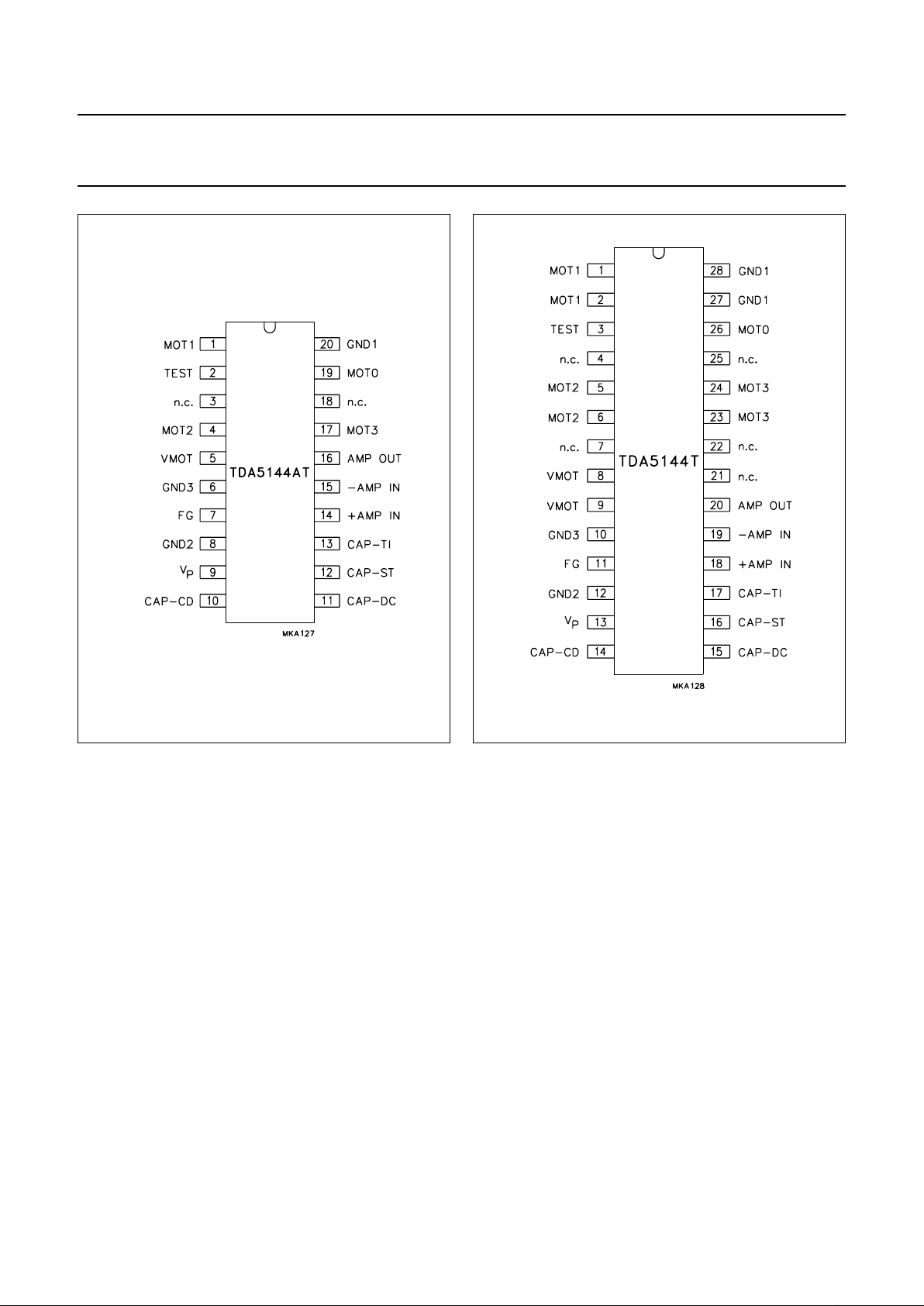
PINNING
SYMBOL
PIN
DESCRIPTION
SO20 SO28
MOT1 1 1 and 2 driver output 1
TEST 2 3 test input/output
n.c. 3 4 not connected
MOT2 4 5 and 6 driver output 2
n.c. − 7 not connected
VMOT 5 8 and 9 input voltage for the output driver stages
GND3 6 10 ground supply; must be connected
FG 7 1 1 frequency generator: output of the rotation speed (open collector digital output)
GND2 8 12 ground supply return for control circuits
V
P
9 13 supply voltage
CAP-CD 10 14 external capacitor connection for adaptive communication delay timing
CAP-DC 11 15 external capacitor connection for adaptive communication delay timing copy
CAP-ST 12 16 external capacitor connection for start-up oscillator
CAP-TI 13 17 external capacitor connection for timing
+AMP IN 14 18 non-inverting input of the transconductance amplifier
−AMP IN 15 19 inverting input of the transconductance amplifier
AMP OUT 16 20 transconductance amplifier output (open collector)
n.c. − 21 and 22 not connected
MOT3 17 23 and 24 driver output 3
n.c. 18 25 not connected
MOT0 19 26 input from the star point of the motor coils
GND1 20 27 and 28 ground (0 V) motor supply return for output stages
Page 5
June 1994 5
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
Fig.2 Pin configuration (SOT163-1; SO20L). Fig.3 Pin configuration (SOT136-1; SO28L).
FUNCTIONAL DESCRIPTION
The TDA5144 offers a sensorless three phase motor drive
function. It is unique in its combination of sensorless motor
drive and full-wave drive. The TDA5144 offers protected
outputs capable of handling high currents and can be used
with star or delta connected motors. It can easily be
adapted for different motors and applications. The
TDA5144 offers the following features:
• Sensorless commutation by using the motor EMF.
• Built-in start-up circuit.
• Optimum commutation, independent of motor type or
motor loading.
• Built-in flyback diodes.
• Three phase full-wave drive.
• High output current (2.0 A).
• Outputs protected by current limiting and thermal
protection of each output transistor.
• Low current consumption by adaptive base-drive.
• Soft-switching pulse output for low radiation.
• Accurate frequency generator (FG) by using the
motor EMF.
• Uncommitted operational transconductance amplifier
(OTA), with a high output current, for use as a control
amplifier.
Page 6
June 1994 6
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
LIMITING VALUES
In accordance with the Absolute Maximum Rating System (IEC 134).
SYMBOL PARAMETER CONDITIONS MIN. MAX. UNIT
V
P
supply voltage − 18 V
V
I
input voltage; all pins except
VMOT
VI< 18 V −0.3 VP + 0.5 V
V
VMOT
VMOT input voltage −0.5 17 V
V
O
output voltage
AMP OUT and FG GND V
P
V
MOT0, MOT1, MOT2 and MOT3 −1V
VMOT
+ V
DHF
V
V
I
input voltage CAP-ST, CAP-TI,
CAP-CD and CAP-DC
− 2.5 V
T
stg
storage temperature −55 +150 °C
T
amb
operating ambient temperature 0 +70 °C
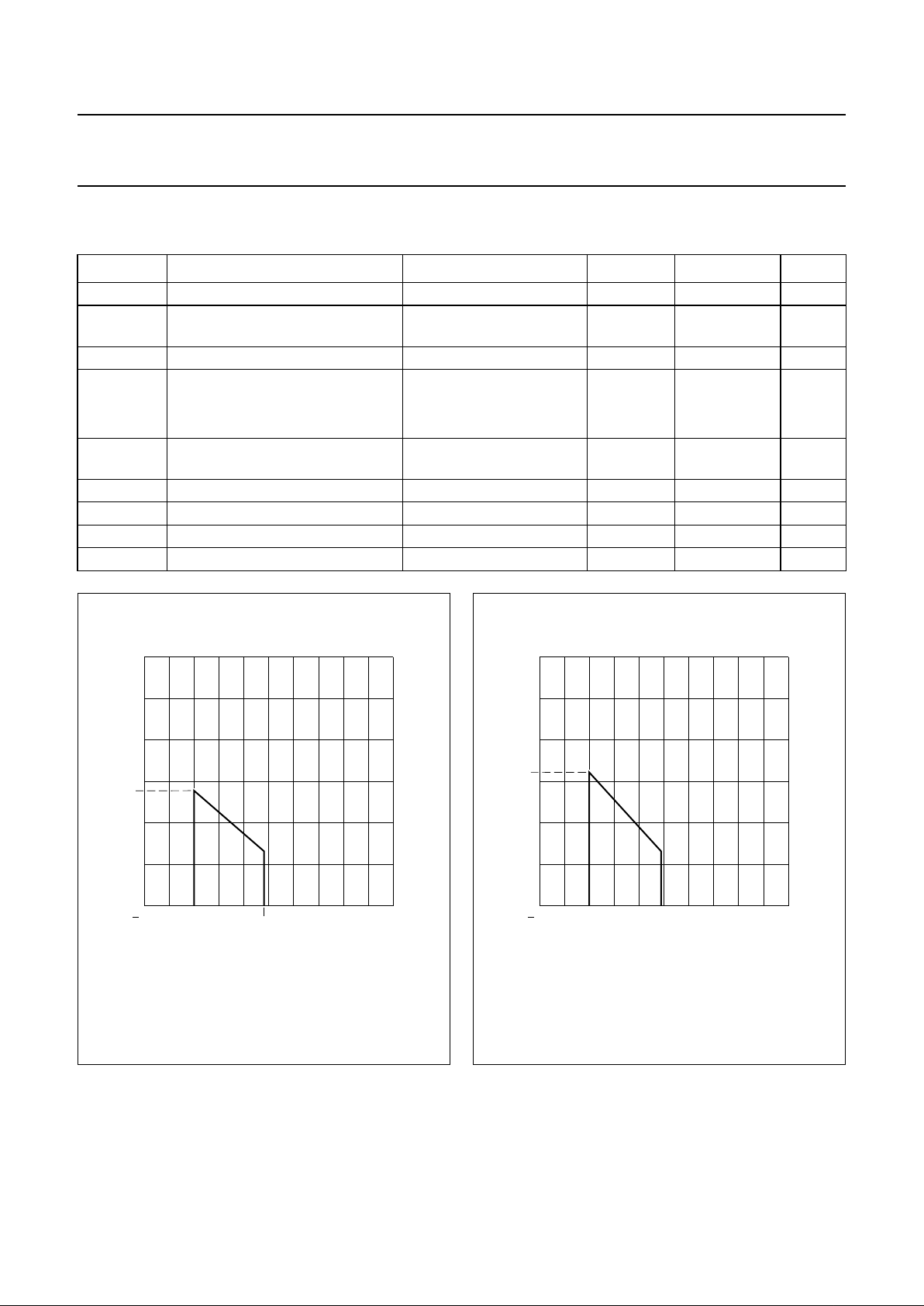
P
tot
total power dissipation see Figs 4 and 5 −− W
V
es
electrostatic handling see Chapter “Handling” − 500 V
Fig.4 Power derating curve (SOT163-1; SO20L).
P
tot
(W)
50
3
2
0
0 200
MBD536
50 100 150
T ( C)
amb
o
1.38
70
1
P
tot
(W)
50
3
2
0
0 200
MBD557
50 100 150
T ( C)
amb
o
1.62
1
Fig.5 Power derating curve (SOT136-1; SO28L).
HANDLING
Every pin withstands the ESD test according to
“MIL-STD-883C class 2”
. Method 3015 (HBM 1500 Ω, 100 pF) 3 pulses +
and 3 pulses − on each pin referenced to ground.
Page 7

June 1994 7
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
CHARACTERISTICS
V
P
= 14.5 V; T
amb
=25°C; unless otherwise specified.
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Supply
V
P
supply voltage note 1 4 − 18 V
I
P
supply current note 2 − 6.3 7.2 mA
V
VMOT
input voltage to the output driver
stages
see Fig.1 1.7 − 16 V
Thermal protection
T
SD
local temperature at temperature
sensor causing shut-down
130 140 150 °C
∆T reduction in temperature before
switch-on
after shut-down − T
SD
− 30 − K
MOT0; centre tap
V
I
input voltage −0.5 − V
VMOT
V
I
I
input bias current 0.5 V < VI< V
VMOT
− 1.5 V −10 − 0 µA
V
CSW
comparator switching level note 3 ±20 ±25 ±30 mV
∆V
CSW
variation in comparator switching
levels
−3 0 +3 mV
V
hys
comparator input hysteresis − 75 −µV
MOT1, MOT2 and MOT3
V
DO
drop-out output voltage IO= 100 mA − 0.9 1.05 V
I
O
= 1000 mA − 1.6 1.85 V
∆V
OL
variation in saturation voltage
between lower transistors
IO= 100 mA −−180 mV
∆V
OH
variation in saturation voltage
between upper transistors
IO= −100 mA −−180 mV
I
LIM
current limiting V
VMOT
= 10 V; RO= 1.2 Ω 1.8 2.0 2.5 A
t
r
rise time switching output V
VMOT
= 15 V; see Fig.6 5 10 15 µs
t
f
fall time switching output V
VMOT
= 15 V; see Fig.6 10 15 20 µs
V
DHF
diode forward voltage (diode DH)IO=−500 mA;
notes 4 and 5; see Fig.1
−−1.5 V
V
DLF
diode forward voltage (diode DL)IO= 500 mA;
notes 4 and 5; see Fig.1
−1.5 −−V
I
DM
peak diode current note 5 −−2.5 A
+AMP IN and −AMP IN
V
I
input voltage −0.3 − VP− 1.7 V
differential mode voltage without
‘latch-up’
−−±V
P
V
I
b
input bias current −−650 nA
C
I
input capacitance − 4 − pF
V
offset
input offset voltage −−10 mV
Page 8

June 1994 8
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
AMP OUT (open collector)
I
sink
output sink current 40 −−mA
V
sat
saturation voltage II=40mA − 1.5 2.1 V
V
O
output voltage −0.5 − +18 V
SR slew rate R
L
= 330 Ω; CL=50pF − 60 − mA/µs
G
tr
transfer gain 0.3 −−S
FG (open collector)
V
OL
LOW level output voltage IO= 1.6 mA −−0.4 V
V
OH(max)
maximum HIGH level output
voltage
V
P
−−V
t
THL
HIGH-to-LOW transition time CL= 50 pF; RL=10kΩ− 0.5 −µs
ratio of FG frequency and
commutation frequency
− 1:2 −
δ duty factor − 50 − %
CAP-ST
I
sink
output sink current 1.5 2.0 2.5 µA
I
source
output source current −2.5 −2.0 −1.5 µA
V
SWL
LOW level switching voltage − 0.20 − V
V
SWH
HIGH level switching voltage − 2.20 − V
CAP-TI
I
sink
output sink current − 28 −µA
I
source
output source current 0.2 V < V
CAP-TI
< 0.3 V −−57 −µA
0.3V<V
CAP-TI
< 2.2 V −−5−µA
V
SWL
LOW level switching voltage − 50 − mV
V
SWM
MIDDLE level switching voltage − 0.30 − V
V
SWH
HIGH level switching voltage − 2.20 − V
CAP-CD
I
sink
output sink current 10.6 16.2 22 µA
I
source
output source current −5.3 −8.1 −11 µA
I
sink/Isource
ratio of sink to source current 1.85 2.05 2.25
V
IL
LOW level input voltage 800 875 900 mV
V
IH
HIGH level input voltage 2.3 2.4 2.55 V
CAP-DC
I
sink
output sink current 10.1 15.5 20.9 µA
I
source
output source current −20.9 −15.5 −10.1 µA
I
sink/Isource
ratio of sink to source current 0.9 1.025 1.15
V
IL
LOW level input voltage 800 875 900 mV
V
IH
HIGH level input voltage 2.3 2.4 2.55 V
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Page 9

June 1994 9
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
Notes to the characteristics
1. An unstabilized supply can be used.
2. V
VMOT=VP
, all other inputs at 0 V; all outputs at VP;
IO= 0 mA.
3. Switching levels with respect to MOT1, MOT2 and
MOT3.
4. Drivers are in the high-impedance OFF-state.
5. The outputs are short-circuit protected by limiting the
current and the IC temperature.
Fig.6 Output transition time measurement.
APPLICATION INFORMATION
(1) Value selected for 3 Hz start-up oscillator frequency.
Fig.7 Application diagram without use of the operational transconductance amplifier (OTA).
Page 10

June 1994 10
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
Introduction (see Fig.8)
Full-wave driving of a three phase motor requires three
push-pull output stages. In each of the six possible states
two outputs are active, one sourcing (H) and one sinking
(L). The third output presents a high impedance (Z) to the
motor, which enables measurement of the motor
back-EMF in the corresponding motor coil by the EMF
comparator at each output. The commutation logic is
responsible for control of the output transistors and
selection of the correct EMF comparator. In Table 1 the
sequence of the six possible states of the outputs has
been depicted.
Table 1 Output states.
Note
1. H = HIGH state;
L = LOW state;
Z = high-impedance OFF-state.
The zero-crossing in the motor EMF (detected by the
comparator selected by the commutation logic) is used to
calculate the correct moment for the next commutation,
that is, the change to the next output state. The delay is
calculated (depending on the motor loading) by the
adaptive commutation delay block.
Because of high inductive loading the output stages
contain flyback diodes. The output stages are also
protected by a current limiting circuit and by thermal
protection of the six output transistors.
The detected zero-crossings are used to provide speed
information. The information has been made available on
the FG output pin. This is an open collector output and
provides an output signal with a frequency that is half the
commutation frequency.
The system will only function when the EMF voltage from
the motor is present. Therefore, a start oscillator is
provided that will generate commutation pulses when no
zero-crossings in the motor voltage are available.
STATE MOT1
(1)
MOT2
(1)
MOT3
(1)
1ZLH
2HLZ
3HZL
4ZHL
5LHZ
6LZH
A timing function is incorporated into the device for internal
timing and for timing of the reverse rotation detection.
The TDA5144 also contains an uncommitted
transconductance amplifier (OTA) that can be used as a
control amplifier. The output is capable of directly driving
an external power transistor.
The TDA5144 is designed for systems with low current
consumption: use of I2L logic, adaptive base drive for the
output transistors (patented).
Adjustments
The system has been designed in such a way that the
tolerances of the application components are not critical.
However, the approximate values of the following
components must still be determined:
• The start capacitor; this determines the frequency of the
start oscillator.
• The two capacitors in the adaptive commutation delay
circuit; these are important in determining the optimum
moment for commutation, depending on the type and
loading of the motor.
• The timing capacitor; this provides the system with its
timing signals.
T
HE START CAPACITOR (CAP-ST)
This capacitor determines the frequency of the start
oscillator. It is charged and discharged, with a current of
2 µA, from 0.05 to 2.2 V and back to 0.05 V. The time
taken to complete one cycle is given by:
t
start
= (2.15 × C) s (with C in µF)
The start oscillator is reset by a commutation pulse and so
is only active when the system is in the start-up mode. A
pulse from the start oscillator will cause the outputs to
change to the next state (torque in the motor). If the
movement of the motor generates enough EMF the
TDA5144 will run the motor. If the amount of EMF
generated is insufficient, then the motor will move one step
only and will oscillate in its new position. The amplitude of
the oscillation must decrease sufficiently before the arrival
of the next start pulse, to prevent the pulse arriving during
the wrong phase of the oscillation.
Page 11

June 1994 11
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
The oscillation of the motor is given by:
where:
K
t
= torque constant (N.m/A)
I = current (A)
p = number of magnetic pole-pairs
J = inertia J (kg.m2)
Example: J = 72 × 10−6kg.m2, K = 25 × 10−3N.m/A, p = 6
and I = 0.5 A; this gives f
osc
= 5 Hz. If the damping is high
then a start frequency of 2 Hz can be chosen or
t = 500 ms, thus C = 0.5/2 = 0.25 µF (choose 220 nF).
T
HE ADAPTIVE COMMUTATION DELAY (CAP-CD AND
CAP-DC)
In this circuit capacitor CAP-CD is charged during one
commutation period, with an interruption of the charging
current during the diode pulse. During the next
commutation period this capacitor (CAP-CD) is discharged
at twice the charging current. The charging current is
8.1 µA and the discharging current 16.2 µA; the voltage
range is from 0.9 to 2.2 V. The voltage must stay within
this range at the lowest commutation frequency of
interest, f
C1
:
(C in nF)
If the frequency is lower, then a constant commutation
delay after the zero-crossing is generated by the discharge
from 2.2 to 0.9 V at 16.2 µA;
maximum delay = (0.076 × C) ms (with C in nF).
Example: nominal commutation frequency = 900 Hz and
the lowest usable frequency = 400 Hz; so:
(choose 18 nF)
The other capacitor, CAP-DC, is used to repeat the same
delay by charging and discharging with 15.5 µA. The same
value can be chosen as for CAP-CD. Figure 9 illustrates
typical voltage waveforms.
f
osc
1
2π
K
t
I× p×
J
---------------------- -
---------------------------------- -
=
C
8.1 10
6–
×
f1.3×
--------------------------
6231
f
C1
------------ -
==
CAP-CD
6231
400
------------ -
15.6==
Page 12

June 1994 12
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBB
B
BBBBBBBBBBBB
BBBBBBBBB
B
BBBBBBBBB
B
BBBBBBBBB
B
BBBBBBBBB
B
BBBBBBBBBB
BBBBBBBBBB
B
BBBBBBBBBB
B
BBBBBBBBBB
B
BBBBBBBBBB
B
BBBBBBBBBB
B
BBBBBBBBBB
B
BBBBBBBBBBB
BBBBBBB
B
BBBBBBB
B
BBBBBBB
B
BBBBBBBB
BBBBBBBBBB
B
BBBBBBBBBB
B
BBBBBBBBBB
B
BBBBBBBBBB
B
BBBBBBBBBBB
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBB
B
BBBBBBBBB
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBBBBBBBBBBBB
B
BBBBBB
B
BBBBBB
B
BBBBBB
B
BBBBBB
B
BBBBBBB
Fig.8 Typical application of the TDA5144 as a scanner driver, with use of OTA.
Page 13

June 1994 13
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
Fig.9 CAP-CD and CAP-DC typical voltage waveforms in normal running mode.
THE TIMING CAPACITOR (CAP-TI)
Capacitor CAP-TI is used for timing the successive steps
within one commutation period; these steps include some
internal delays.
The most important function is the watchdog time in which
the motor EMF has to recover from a negative diode-pulse
back to a positive EMF voltage (or vice versa). A watchdog
timer is a guarding function that only becomes active when
the expected event does not occur within a predetermined
time.
The EMF usually recovers within a short time if the motor
is running normally (<<ms). However, if the motor is
motionless or rotating in the reverse direction, then the
time can be longer (>>ms).
A watchdog time must be chosen so that it is long enough
for a motor without EMF (still) and eddy currents that may
stretch the voltage in a motor winding; however, it must be
short enough to detect reverse rotation. If the watchdog
time is made too long, then the motor may run in the wrong
direction (with little torque).
The capacitor is charged, with a current of 57 µA, from
0.2 to 0.3 V. Above this level it is charged, with a current of
5 µA, up to 2.2 V only if the selected motor EMF remains
in the wrong polarity (watchdog function). At the end, or, if
the motor voltage becomes positive, the capacitor is
discharged with a current of 28 µA. The watchdog time is
the time taken to charge the capacitor, with a current of
5 µA, from 0.3 to 2.2 V.
To ensure that the internal delays are covered CAP-TI
must have a minimum value of 2 nF. For the watchdog
function a value for CAP-TI of 10 nF is recommended.
To ensure a good start-up and commutation, care must be
taken that no oscillations occur at the trailing edge of the
flyback pulse. Snubber networks at the outputs should be
critically damped.
Typical voltage waveforms are illustrated by Fig.10.
Page 14

June 1994 14
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
Fig.10 Typical CAP-TI and V
MOT1
voltage waveforms in normal running mode.
If the chosen value of CAP-TI is too small oscillations can occur in certain positions of a blocked rotor. If the chosen value is too large, then it
is possible that the motor may run in the reverse direction (synchronously with little torque).
Other design aspects
There are other design aspects concerning the application
of the TDA5144 besides the commutation function. They
are:
• Generation of the tacho signal FG
• General purpose operational transconductance
amplifier (OTA)
• Possibilities of motor control
• Reliability.
FG
SIGNAL
The FG signal is generated in the TDA5144 by using the
zero-crossing of the motor EMF from the three motor
windings. Every zero-crossing in a (star connected) motor
winding is used to toggle the FG output signal. The FG
frequency is therefore half the commutation frequency. All
transitions indicate the detection of a zero-crossing.
The accuracy of the FG output signal depends on the
symmetry of the motor's electromagnetic construction,
which also effects the satisfactory functioning of the motor
itself.
Example: a 3-phase motor with 6 magnetic pole-pairs at
1500 rpm and with a full-wave drive has a commutation
frequency of 25 × 6 × 6 = 900 Hz, and generates a tacho
signal of 450 Hz.
T
HE OPERATIONAL TRANSCONDUCTANCE AMPLIFIER (OTA)
The OTA is an uncommitted amplifier with a high output
current (40 mA) that can be used as a control amplifier.
The common mode input range includes ground (GND)
and rises to VP− 1.7 V. The high sink current enables the
OTA to drive a power transistor directly in an analog
control amplifier.
Although the gain is not extremely high (0.3 S), care must
be taken with the stability of the circuit if the OTA is used
as a linear amplifier as no frequency compensation has
been provided.
The convention for the inputs (inverting or not) is the same
as for a normal operational amplifier: with a resistor (as
load) connected from the output (AMP OUT) to the positive
supply, a positive-going voltage is found when the
non-inverting input (+AMP IN) is positive with respect to
the inverting input (−AMP IN). Confusion is possible
because a ‘plus’ input causes less current, and so a
positive voltage.
Page 15

June 1994 15
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
MOTOR CONTROL
DC motors can be controlled in an analog manner using
the OTA.
For the analog control an external transistor is required.
The OTA can supply the base current for this transistor
and act as a control amplifier (see Fig.8).
R
ELIABILITY
It is necessary to protect high current circuits and the
output stages are protected in two ways:
• Current limiting of the ‘lower’ output transistors. The
‘upper’ output transistors use the same base current as
the conducting ‘lower’ transistor (+15%). This means
that the current to and from the output stages is limited.
• Thermal protection of the six output transistors is
achieved by each transistor having a thermal sensor
that is active when the transistor is switched on. The
transistors are switched off when the local temperature
becomes too high.
It is possible, that when braking, the motor voltage (via the
flyback diodes and the impedance on VMOT) may cause
higher currents than allowed (>0.6 A). These currents
must be limited externally.
Page 16

June 1994 16
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
PACKAGE OUTLINES
handbook, full pagewidth
7.6
7.4
10.65
10.00
A
MBC234 - 1
0.3
0.1
2.45
2.25
1.1
0.5
0.32
0.23
1.1
1.0
0 to 8
o
2.65
2.35
detail A
S
13.0
12.6
0.1 S
110
1120
pin 1
index
0.9
0.4
(4x)
0.25 M
(20x)
0.49
0.36
1.27
Fig.11 Plastic small outline package; 20 leads; large body (SOT163-1; SO20L).
Dimensions in mm.
Page 17

June 1994 17
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
handbook, full pagewidth
7.6
7.4
10.65
10.00
A
MBC236 - 1
0.3
0.1
2.45
2.25
1.1
0.5
0.32
0.23
1.1
1.0
0 to 8
o
2.65
2.35
detail A
S
18.1
17.7
0.1 S
114
1528
pin 1
index
0.9
0.4
(4x)
0.25 M
(28x)
0.49
0.36
1.27
Fig.12 Plastic small outline package; 28 leads; large body (SOT136-1; SO28L).
Dimensions in mm.
Page 18

June 1994 18
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
SOLDERING
Plastic small-outline packages
B
YWAVE
During placement and before soldering, the component
must be fixed with a droplet of adhesive. After curing the
adhesive, the component can be soldered. The adhesive
can be applied by screen printing, pin transfer or syringe
dispensing.
Maximum permissible solder temperature is 260 °C, and
maximum duration of package immersion in solder bath is
10 s, if allowed to cool to less than 150 °C within 6 s.
Typical dwell time is 4 s at 250 °C.
A modified wave soldering technique is recommended
using two solder waves (dual-wave), in which a turbulent
wave with high upward pressure is followed by a smooth
laminar wave. Using a mildly-activated flux eliminates the
need for removal of corrosive residues in most
applications.
B
Y SOLDER PASTE REFLOW
Reflow soldering requires the solder paste (a suspension
of fine solder particles, flux and binding agent) to be
applied to the substrate by screen printing, stencilling or
pressure-syringe dispensing before device placement.
Several techniques exist for reflowing; for example,
thermal conduction by heated belt, infrared, and
vapour-phase reflow. Dwell times vary between 50 and
300 s according to method. Typical reflow temperatures
range from 215 to 250 °C.
Preheating is necessary to dry the paste and evaporate
the binding agent. Preheating duration: 45 min at 45 °C.
R
EPAIRING SOLDERED JOINTS (BY HAND-HELD SOLDERING
IRON OR PULSE
-HEATED SOLDER TOOL)
Fix the component by first soldering two, diagonally
opposite, end pins. Apply the heating tool to the flat part of
the pin only. Contact time must be limited to 10 s at up to
300 °C. When using proper tools, all other pins can be
soldered in one operation within 2 to 5 s at between 270
and 320 °C. (Pulse-heated soldering is not recommended
for SO packages.)
For pulse-heated solder tool (resistance) soldering of VSO
packages, solder is applied to the substrate by dipping or
by an extra thick tin/lead plating before package
placement.
DEFINITIONS
LIFE SUPPORT APPLICATIONS
These products are not designed for use in life support appliances, devices, or systems where malfunction of these
products can reasonably be expected to result in personal injury. Philips customers using or selling these products for
use in such applications do so at their own risk and agree to fully indemnify Philips for any damages resulting from such
improper use or sale.
Data sheet status
Objective specification This data sheet contains target or goal specifications for product development.
Preliminary specification This data sheet contains preliminary data; supplementary data may be published later.
Product specification This data sheet contains final product specifications.
Limiting values
Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 134). Stress above one or
more of the limiting values may cause permanent damage to the device. These are stress ratings only and operation
of the device at these or at any other conditions above those given in the Characteristics sections of the specification
is not implied. Exposure to limiting values for extended periods may affect device reliability.
Application information
Where application information is given, it is advisory and does not form part of the specification.
Page 19

June 1994 19
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5144
NOTES
Page 20

Philips Semiconductors
Philips Semiconductors – a worldwide company
Argentina: IEROD, Av. Juramento 1992 - 14.b, (1428)
BUENOS AIRES, Tel. (541)786 7633, Fax. (541)786 9367
Australia: 34 Waterloo Road, NORTH RYDE, NSW 2113,
Tel. (02)805 4455, Fax. (02)805 4466
Austria: Triester Str. 64, A-1101 WIEN, P.O. Box 213,
Tel. (01)60 101-1236, Fax. (01)60 101-1211
Belgium: Postbus 90050, 5600 PB EINDHOVEN, The Netherlands,
Tel. (31)40 783 749, Fax. (31)40 788 399
Brazil: Rua do Rocio 220 - 5
th
floor, Suite 51,
CEP: 04552-903-SÃO PAULO-SP, Brazil.
P.O. Box 7383 (01064-970).
Tel. (011)821-2327, Fax. (011)829-1849
Canada: INTEGRATED CIRCUITS:
Tel. (800)234-7381, Fax. (708)296-8556
DISCRETE SEMICONDUCTORS: 601 Milner Ave,
SCARBOROUGH, ONTARIO, M1B 1M8,
Tel. (0416)292 5161 ext. 2336, Fax. (0416)292 4477
Chile: Av. Santa Maria 0760, SANTIAGO,
Tel. (02)773 816, Fax. (02)777 6730
Colombia: IPRELENSO LTDA, Carrera 21 No. 56-17,
77621 BOGOTA, Tel. (571)249 7624/(571)217 4609,
Fax. (571)217 4549
Denmark: Prags Boulevard 80, PB 1919, DK-2300 COPENHAGEN S,
Tel. (032)88 2636, Fax. (031)57 1949
Finland: Sinikalliontie 3, FIN-02630 ESPOO,
Tel. (9)0-50261, Fax. (9)0-520971
France: 4 Rue du Port-aux-Vins, BP317,
92156 SURESNES Cedex,
Tel. (01)4099 6161, Fax. (01)4099 6427
Germany: PHILIPS COMPONENTS UB der Philips G.m.b.H.,
P.O. Box 10 63 23, 20043 HAMBURG,
Tel. (040)3296-0, Fax. (040)3296 213.
Greece: No. 15, 25th March Street, GR 17778 TAVROS,
Tel. (01)4894 339/4894 911, Fax. (01)4814 240
Hong Kong: PHILIPS HONG KONG Ltd., Components Div.,
6/F Philips Ind. Bldg., 24-28 Kung Yip St., KWAI CHUNG, N.T.,
Tel. (852)424 5121, Fax. (852)428 6729
India: Philips INDIA Ltd, Components Dept,
Shivsagar Estate, A Block ,
Dr. Annie Besant Rd. Worli, Bombay 400 018
Tel. (022)4938 541, Fax. (022)4938 722
Indonesia: Philips House, Jalan H.R. Rasuna Said Kav. 3-4,
P.O. Box 4252, JAKARTA 12950,
Tel. (021)5201 122, Fax. (021)5205 189
Ireland: Newstead, Clonskeagh, DUBLIN 14,
Tel. (01)640 000, Fax. (01)640 200
Italy: PHILIPS COMPONENTS S.r.l.,
Viale F. Testi, 327, 20162 MILANO,
Tel. (02)6752.3302, Fax. (02)6752 3300.
Japan: Philips Bldg13-37, Kohnan 2-chome, Minato-ku, TOKYO 108,
Tel. (03)3740 5028, Fax. (03)3740 0580
Korea: (Republic of) Philips House, 260-199 Itaewon-dong,
Yongsan-ku, SEOUL, Tel. (02)794-5011, Fax. (02)798-8022
Malaysia: No. 76 Jalan Universiti, 46200 PETALING JAYA,
SELANGOR, Tel. (03)750 5214, Fax. (03)757 4880
Mexico: Philips Components, 5900 Gateway East, Suite 200,
EL PASO, TX 79905, Tel. 9-5(800)234-7381, Fax. (708)296-8556
Netherlands: Postbus 90050, 5600 PB EINDHOVEN, Bldg. VB
Tel. (040)783749, Fax. (040)788399
New Zealand: 2 Wagener Place, C.P.O. Box 1041, AUCKLAND,
Tel. (09)849-4160, Fax. (09)849-7811
Norway: Box 1, Manglerud 0612, OSLO,
Tel. (022)74 8000, Fax. (022)74 8341
Pakistan: Philips Electrical Industries of Pakistan Ltd.,
Exchange Bldg. ST-2/A, Block 9, KDA Scheme 5, Clifton,
KARACHI 75600, Tel. (021)587 4641-49,
Fax. (021)577035/5874546.
Philippines: PHILIPS SEMICONDUCTORS PHILIPPINES Inc,
106 Valero St. Salcedo Village, P.O. Box 2108 MCC, MAKATI,
Metro MANILA, Tel. (02)810 0161, Fax. (02)817 3474
Portugal: PHILIPS PORTUGUESA, S.A.,
Rua dr. António Loureiro Borges 5, Arquiparque - Miraflores,
Apartado 300, 2795 LINDA-A-VELHA,
Tel. (01)14163160/4163333, Fax. (01)14163174/4163366.
Singapore: Lorong 1, Toa Payoh, SINGAPORE 1231,
Tel. (65)350 2000, Fax. (65)251 6500
South Africa: S.A. PHILIPS Pty Ltd., Components Division,
195-215 Main Road Martindale, 2092 JOHANNESBURG,
P.O. Box 7430 Johannesburg 2000,
Tel. (011)470-5911, Fax. (011)470-5494.
Spain: Balmes 22, 08007 BARCELONA,
Tel. (03)301 6312, Fax. (03)301 42 43
Sweden: Kottbygatan 7, Akalla. S-164 85 STOCKHOLM,
Tel. (0)8-632 2000, Fax. (0)8-632 2745
Switzerland: Allmendstrasse 140, CH-8027 ZÜRICH,
Tel. (01)488 2211, Fax. (01)481 77 30
Taiwan: PHILIPS TAIWAN Ltd., 23-30F, 66, Chung Hsiao West
Road, Sec. 1. Taipeh, Taiwan ROC, P.O. Box 22978,
TAIPEI 100, Tel. (02)388 7666, Fax. (02)382 4382.
Thailand: PHILIPS ELECTRONICS (THAILAND) Ltd.,
209/2 Sanpavuth-Bangna Road Prakanong,
Bangkok 10260, THAILAND,
Tel. (662)398-0141, Fax. (662)398-3319.
Turkey:Talatpasa Cad. No. 5, 80640 GÜLTEPE/ISTANBUL,
Tel. (0212)279 2770, Fax. (0212)269 3094
United Kingdom: Philips Semiconductors Limited, P.O. Box 65,
Philips House, Torrington Place, LONDON, WC1E 7HD,
Tel. (071)436 41 44, Fax. (071)323 03 42
United States:INTEGRATED CIRCUITS:
811 East Arques Avenue, SUNNYVALE, CA 94088-3409,
Tel. (800)234-7381, Fax. (708)296-8556
DISCRETE SEMICONDUCTORS: 2001 West Blue Heron Blvd.,
P.O. Box 10330, RIVIERA BEACH, FLORIDA 33404,
Tel. (800)447-3762 and (407)881-3200, Fax. (407)881-3300
Uruguay: Coronel Mora 433, MONTEVIDEO,
Tel. (02)70-4044, Fax. (02)92 0601
For all other countries apply to: Philips Semiconductors,
International Marketing and Sales, Building BAF-1,
P.O. Box 218, 5600 MD, EINDHOVEN, The Netherlands,
Telex 35000 phtcnl, Fax. +31-40-724825
SCD31 © Philips Electronics N.V. 1994
All rights are reserved. Reproduction in whole or in part is prohibited without the
prior written consent of the copyright owner.
The information presented in this document does not form part of any quotation
or contract, is believed to be accurate and reliable and may be changed without
notice. No liability will be accepted by the publisher for any consequence of its
use. Publication thereof does not convey nor imply any license under patent- or
other industrial or intellectual property rights.
Printed in The Netherlands
373061/1500/02/pp20 Date of release: June 1994
Document order number: 9397 735 60011
 Loading...
Loading...