

Page 1

INTEGRATED CIRCUITS
DATA SH EET
TDA4857PS
2
I
C-bus autosync deflection
controller for PC monitors
Product specification
File under Integrated Circuits, IC02
2000 Jan 31
Page 2

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
FEATURES
Concept features
• Full horizontal plus vertical autosync capability
• Extended horizontal frequency range from
15 to 130 kHz
• Comprehensive set of I2C-bus driven geometry
adjustments and functions, including standby mode
• Very good vertical linearity
• Moire cancellation
• Start-up and switch-off sequence for safe operation of
all power components
• X-ray protection
• Flexible switched mode B+ supply function block for
feedback and feed forward converter
• Internally stabilized voltage reference
• Drive signal for focus amplifier with vertical parabola
waveforms
• DC controllable inputs for Extremely High Tension
(EHT) compensation
• SDIP32 package.
Synchronization
• Output for I2C-bus controllable vertical sawtooth and
• Vertical picture size independent of frequency
• Differential current outputs for DC coupling to vertical
• 50 to 160 Hz vertical autosync range.
East-West (EW) section
• I2C-bus controllable output for horizontal pincushion,
• Optional tracking of EW drive waveform with line
Focus section
• I2C-bus controllable output for vertical parabola
• Verticalparabolaisindependentoffrequencyandtracks
TDA4857PS
parabola (for pin unbalance and parallelogram)
booster
horizontal size, corner and trapezium correction
frequency selectable by I2C-bus.
with vertical adjustments.
• Can handle all sync signals (horizontal, vertical,
composite and sync-on-video)
• Output for video clamping (leading/trailing edge
selectable by I2C-bus), vertical blanking and protection
blanking
• Output for fast unlock status of horizontal
synchronization and blanking on grid 1 of picture tube.
Horizontal section
• I2C-bus controllable wide range linear picture position,
pin unbalance and parallelogram correction via
horizontal phase
• Frequency-lockedloopforsmoothcatchingofhorizontal
frequency
• Simple frequency preset of f
resistors
• Low jitter
• Soft start for horizontal and B+ control drive signals.
Vertical section
• I2C-bus controllable vertical picture size, picture
position, linearity (S-correction) and linearity balance
min
and f
by external
max
GENERAL DESCRIPTION
The TDA4857PS is a high performance and efficient
solution for autosync monitors. All functions are
controllable by the I2C-bus.
The TDA4857PS provides synchronization processing,
horizontal and vertical synchronization with full autosync
capability and very short settling times after mode
changes. External power components are given a great
deal of protection. The IC generates the drive waveforms
for DC-coupled vertical boosters such as the TDA486x
and TDA835x.
The TDA4857PS provides extended functions e.g. as a
flexible B+ control, an extensive set of geometry control
facilities and an output for vertical focus signals.
Together with the I2C-bus driven Philips TDA488x video
processor family, a very advanced system solution is
offered.
2000 Jan 31 2
Page 3
Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
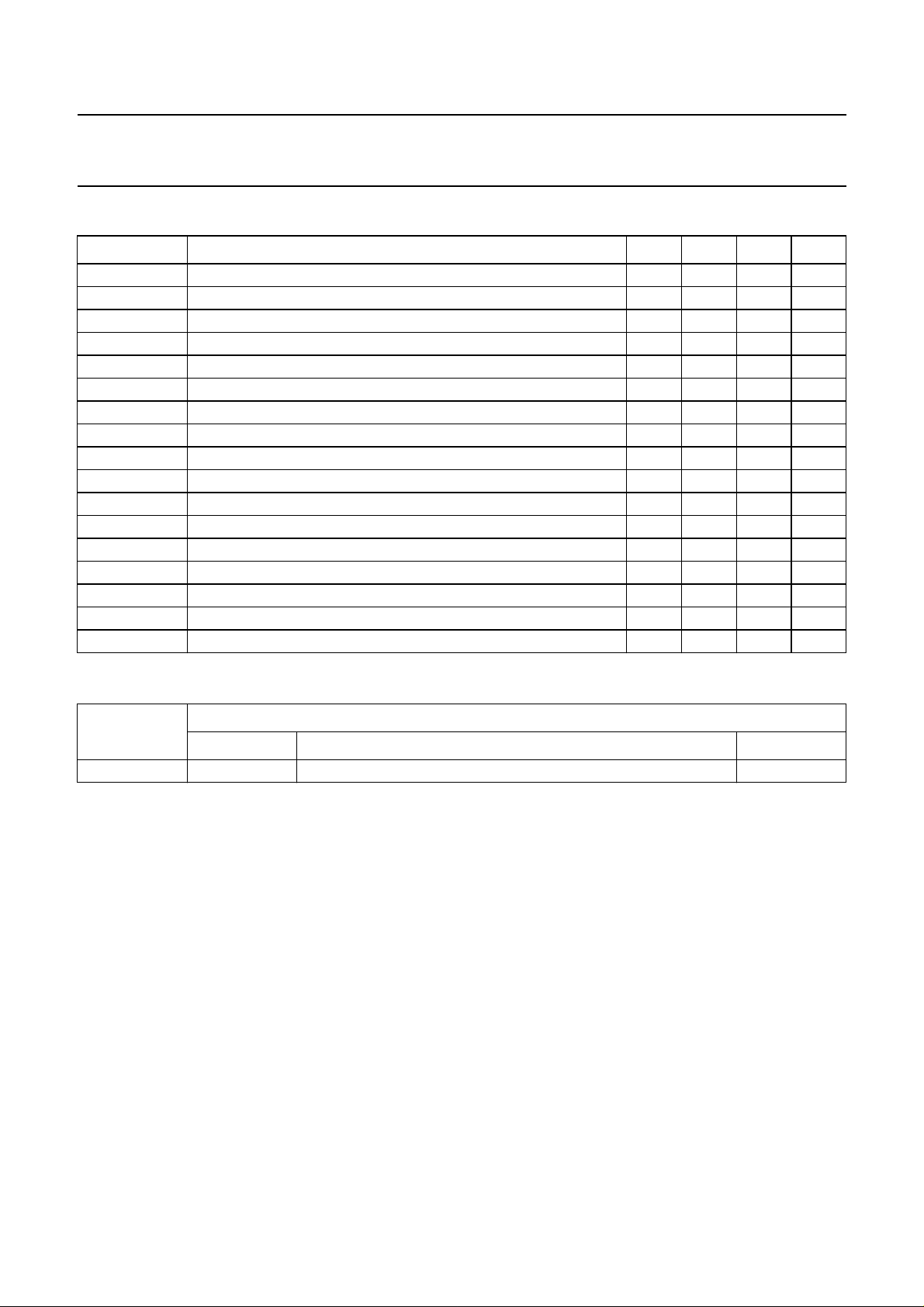
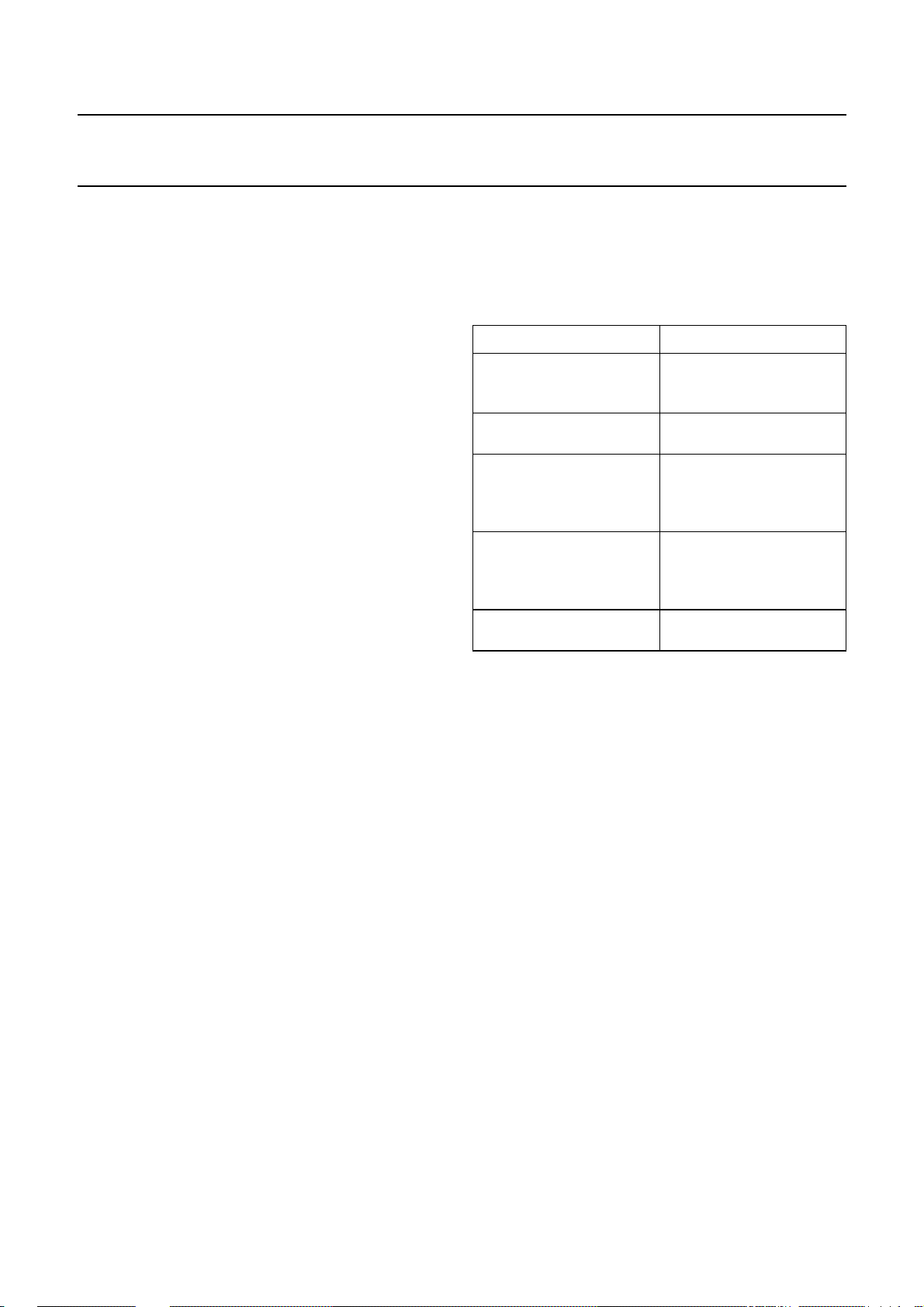
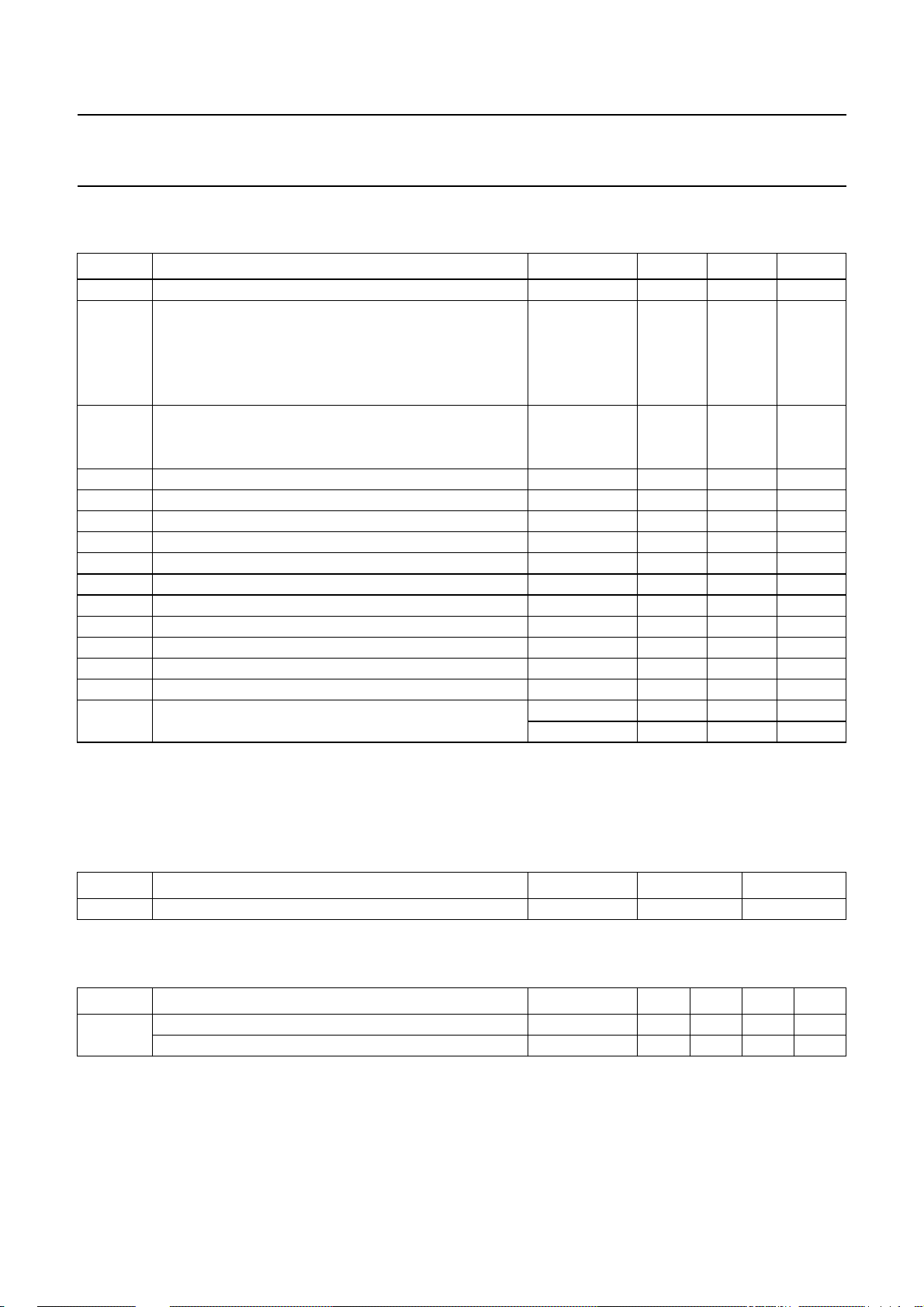
QUICK REFERENCE DATA
SYMBOL PARAMETER MIN. TYP. MAX. UNIT
V
CC
I
CC
I
CC(stb)
VSIZE vertical size 60 − 100 %
VGA VGA overscan for vertical size − 16.8 − %
VPOS vertical position −±11.5 − %
VLIN vertical linearity (S-correction) −2 −−46 %
VLINBAL vertical linearity balance −±2.5 − %
V
HSIZE
V
HPIN
V
HEHT
V
HTRAP
V
HCOR
HPOS horizontal position −±13 − %
HPARAL horizontal parallelogram −±1−%
HPINBAL EW pin unbalance −±1−%
T
amb
supply voltage 9.2 − 16 V
supply current − 70 − mA
supply current during standby mode − 9 − mA
horizontal size voltage 0.13 − 3.6 V
horizontal pincushion voltage (EW parabola) 0.04 − 1.42 V
horizontal size modulation voltage 0.02 − 0.69 V
horizontal trapezium correction voltage −±0.33 − V
horizontal corner correction voltage −0.64 − +0.08 V
ambient temperature −20 − +70 °C
ORDERING INFORMATION
TYPE
NUMBER
NAME DESCRIPTION VERSION
PACKAGE
TDA4857PS SDIP32 plastic shrink dual in-line package; 32 leads (400 mil) SOT232-1
2000 Jan 31 3
Page 4
This text is here in white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here in
o
_white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here inThis text is here in
white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader. white to force landscape pages to be ...
2000 Jan 31 4
ok, full pagewidth
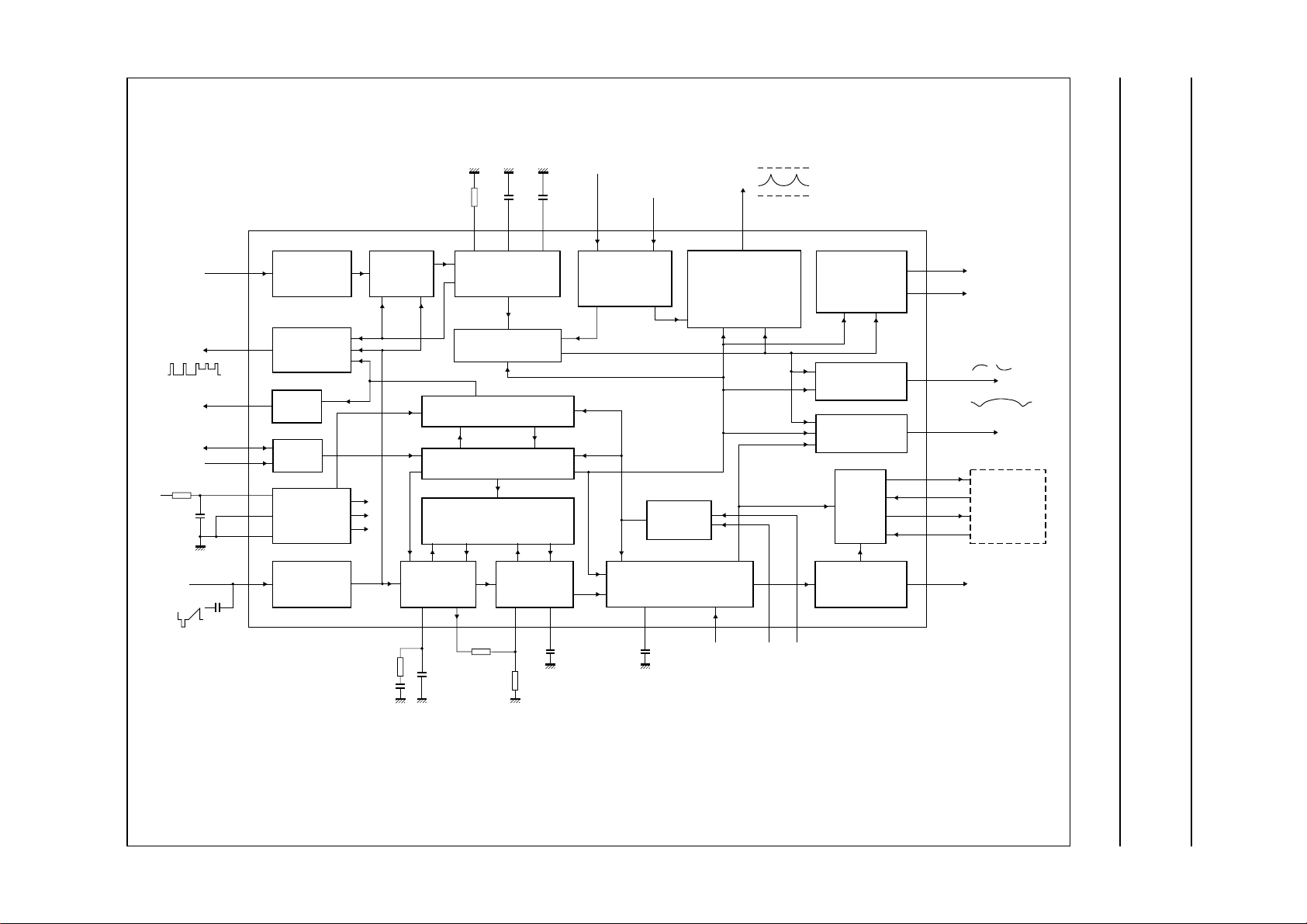
BLOCK DIAGRAM
Philips Semiconductors Product specification
PC monitors
I
2
C-bus autosync deflection controller for
clamping
blanking
HUNLOCK
V
CC
9.2 to 16 V
(TTL level)
SDA
SCL
(TTL level)
VSYNC
CLBL
PGND
SGND
HSYNC
14
VIDEO CLAMPING
16
VERTICAL BLANK
17
HUNLOCK
OUTPUT
19
18
RECEIVER
10
7
25
H/C SYNC INPUT
15
VERTICAL
SYNC INPUT
AND POLARITY
CORRECTION
AND
I2C-BUS
SUPPLY
AND
REFERENCE
AND POLARITY
CORRECTION
VERTICAL
SYNC
INTEGRATOR
HORIZONTAL
VERTICAL POSITION
VERTICAL SIZE, VOVSCN
PROTECTION
AND SOFT START
I2C-BUS REGISTERS
COINCIDENCE DETECTOR
FREQUENCY DETECTOR
PLL1 AND
POSITION
22
100
kΩ
(1%)
(5%)
23 22 21 31
24
VERTICAL
OSCILLATOR
AND AGC
nF
EHT compensation
via vertical size
150
nF
EHT COMPENSATION
EHT compensation
via horizontal size
VSMODVAGCVCAPVREF HSMOD
HORIZONTAL SIZE
AND
VERTICAL SIZE
TDA4857PS
PROTECTION
HORIZONTAL
OSCILLATOR
PLL2, PARALLELOGRAM,
PIN UNBALANCE AND
HORIZONTAL PINCUSHION
HORIZONTAL CORNER
HORIZONTAL TRAPEZIUM
HORIZONTAL SIZE
X-RAY
SOFT START
EWDRV
11
EW-OUTPUT
7 V
1.2 V
VERTICAL OUTPUT
VERTICAL LINEARITY
VERTICAL LINEARITY
BALANCE
OUTPUT
ASYMMETRIC
EW-CORRECTION
VERTICAL
FOCUS
B+
CONTROL
HORIZONTAL
OUTPUT
STAGE
12
13
ASCOR
20
32 FOCUS
BDRV
6
BSENS
4
BOP
3
BIN
5
HDRV
8
VOUT2
VOUT1
or
X-RAY
B+ CONTROL
APPLICATION
(2)
(video)
3.3 kΩ
100 nF
26
R
8.2
nF
HBUF
R
HREF
(1%)
28 29
(1)
27
(1) For the calculation of fH range see Section “Calculation of line frequency range”.
(2) See Figs 21 and 22.
Fig.1 Block diagram and application circuit.
10 nF
(2%)
30 1
HPLL2HCAPHREFHBUFHPLL1
8.2 nF
HFLB
XSEL XRAY
29
MHB658
TDA4857PS
Page 5
Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
PINNING
SYMBOL PIN DESCRIPTION
HFLB 1 horizontal flyback input
XRAY 2 X-ray protection input
BOP 3 B+ control OTA output
BSENS 4 B+ control comparator input
BIN 5 B+ control OTA input
BDRV 6 B+ control driver output
PGND 7 power ground
HDRV 8 horizontal driver output
XSEL 9 select input for X-ray reset
V
CC
EWDRV 11 EW waveform output
VOUT2 12 vertical output 2 (ascending sawtooth)
VOUT1 13 vertical output 1 (descending sawtooth)
VSYNC 14 vertical synchronization input
HSYNC 15 horizontal/composite synchronization input
CLBL 16 video clamping pulse/vertical blanking output
HUNLOCK 17 horizontal synchronization unlock/protection/vertical blanking output
SCL 18 I
SDA 19 I
ASCOR 20 output for asymmetric EW corrections
VSMOD 21 input for EHT compensation (via vertical size)
VAGC 22 external capacitor for vertical amplitude control
VREF 23 external resistor for vertical oscillator
VCAP 24 external capacitor for vertical oscillator
SGND 25 signal ground
HPLL1 26 external filter for PLL1
HBUF 27 buffered f/v voltage output
HREF 28 reference current for horizontal oscillator
HCAP 29 external capacitor for horizontal oscillator
HPLL2 30 external filter for PLL2/soft start
HSMOD 31 input for EHT compensation (via horizontal size)
FOCUS 32 output for vertical focus
10 supply voltage
2
C-bus clock input
2
C-bus data input/output
TDA4857PS
2000 Jan 31 5
Page 6
Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
handbook, halfpage
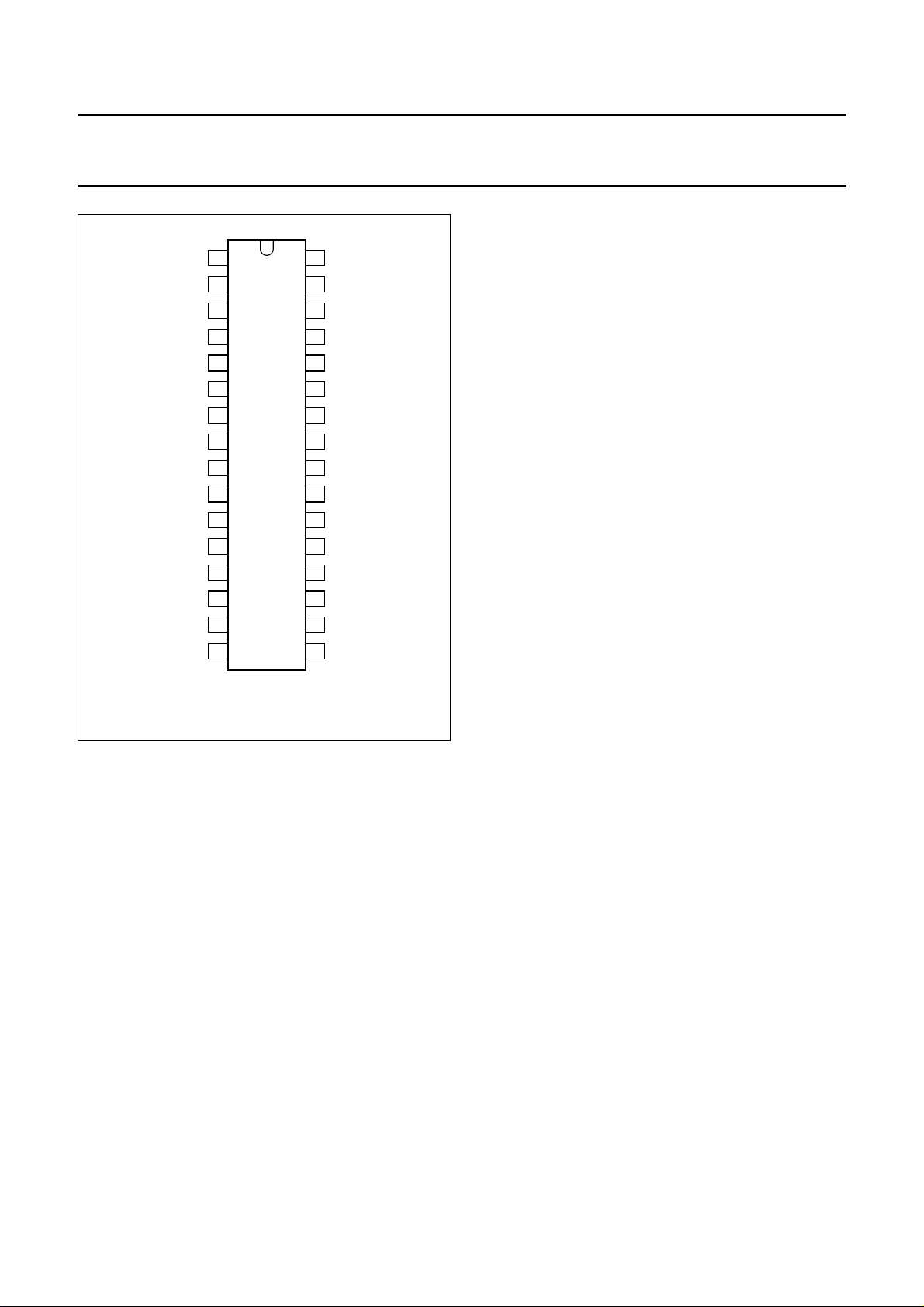
HFLB
1
XRAY
2
BOP
3
BSENS
EWDRV
VOUT2
VOUT1
VSYNC
HSYNC
BIN
BDRV
PGND
HDRV
XSEL
V
CC
CLBL
4
5
6
7
8
TDA4857PS
9
10
11
12
13
14
15
16
MHB656
Fig.2 Pin configuration.
FOCUS
32
HSMOD
31
HPLL2
30
HCAP
29
HREF
28
HBUF
27
HPLL1
26
SGND
25
VCAP
24
VREF
23
VAGC
22
VSMOD
21
ASCOR
20
SDA
19
SCL
18
HUNLOCK
17
TDA4857PS
Vertical sync integrator
Normalized composite sync signals from HSYNC are
integrated on an internal capacitor in order to extract
vertical sync pulses. The integration time is dependent on
the horizontal oscillator reference current at HREF
(pin 28). The integrator output directly triggers the vertical
oscillator.
Vertical sync slicer and polarity correction
Vertical sync signals (TTL) applied to VSYNC (pin 14) are
sliced at 1.4 V. The output signal of the sync slicer is
integrated on an internalcapacitor to detect and normalize
the sync polarity. The output signals of vertical sync
integrator and sync normalizer are disjuncted before they
are fed to the vertical oscillator.
Video clamping/vertical blanking generator
The video clamping/vertical blanking signal at CLBL
(pin 16) is a two-level sandcastle pulse which is especially
suitableforvideoICs such as the TDA488x family, but also
for direct applications in video output stages.
The upper level is the video clamping pulse, which is
triggeredbythehorizontalsyncpulse.Either the leading or
trailing edge can be selected by setting control bit CLAMP
via the I2C-bus. The width of the video clamping pulse is
determined by an internal single-shot multivibrator.
FUNCTIONAL DESCRIPTION
Horizontal sync separator and polarity correction
HSYNC (pin 15) is the input for horizontal synchronization
signals, which can be DC-coupled TTL signals (horizontal
or composite sync) and AC-coupled negative-going video
sync signals. Video syncs are clamped to 1.28 V and
sliced at 1.4 V. This results in a fixed absolute slicing level
of 120 mV related to top sync.
For DC-coupled TTL signals the input clamping current is
limited. The slicing level for TTL signals is 1.4 V.
The separated sync signal (either video or TTL) is
integrated on an internalcapacitor to detect and normalize
the sync polarity.
Normalized horizontal sync pulses are used as input
signals for the vertical sync integrator, the PLL1 phase
detector and the frequency-locked loop.
The lower level of the sandcastle pulse is the vertical
blanking pulse, which is derived directly from the internal
oscillator waveform. It is started by the vertical sync and
stopped with the start of the vertical scan. This results in
optimum vertical blanking. Two different vertical blanking
times are accessible, by control bit VBLK, via the I2C-bus.
Blanking will be activated continuously if one of the
following conditions is true:
Soft start of horizontal and B+ drive [voltage at HPLL2
(pin 30) pulled down externally or by the I2C-bus]
PLL1 is unlocked while frequency-locked loop is in
search mode or if horizontal sync pulses are absent
No horizontal flyback pulses at HFLB (pin 1)
X-ray protection is activated
Supply voltage at VCC (pin 10) is low (see Fig.23).
Horizontal unlock blanking can be switched off, by control
bit BLKDIS, via the I2C-bus while vertical blanking and
protection blanking is maintained.
2000 Jan 31 6
Page 7

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
Frequency-locked loop
The frequency-locked loop can lock the horizontal
oscillatorover a wide frequencyrange. This is achievedby
a combined search and PLL operation. The frequency
range is preset by two external resistors and the
recommended maximum ratio is
f
---------f
This can, for instance, be a range from 15.625 to 90 kHz
with all tolerances included.
Without a horizontal sync signal the oscillator will be
free-running at f
. Any change of sync conditions is
min
detected by the internal coincidence detector. A deviation
of more than 4% between horizontal sync and oscillator
frequency will switch the horizontal section into search
mode.This means that PLL1control currents are switched
off immediately.
The internal frequency detector then starts tuning the
oscillator. Very small DC currents at HPLL1 (pin 26) are
usedtoperformthis tuning with a well defined change rate.
When coincidence between horizontal sync and oscillator
frequency is detected, thesearch mode is first replaced by
a soft-lock mode which lasts for the first part of the next
vertical period. The soft-lock mode is then replaced by a
normal PLL operation. This operation ensures smooth
tuning and avoids fast changes of horizontal frequency
during catching.
In this concept it is not allowed to load HPLL1.
The frequency dependent voltage at this pin is fed
internally to HBUF (pin 27) via a sample-and-hold and
buffer stage. The sample-and-hold stage removes all
disturbances caused by horizontal sync or composite
vertical sync from the buffered voltage. An external
resistorconnected between pins HBUF andHREF defines
the frequency range.
Out-of-lock indication (pin HUNLOCK)
Pin HUNLOCK is floating during search mode if no sync
pulses are applied, or if a protection condition is true.
All this can be detected by the microcontroller if a pull-up
resistor is connected to its own supply voltage.
For an additional fast vertical blanking at grid 1 of the
picture tube a 1 V signal referenced to ground is available
at this output. The continuous protection blanking
(see Section“Videoclamping/verticalblankinggenerator”)
is also available at this pin. Horizontal unlock blanking can
be switched off, by control bit BLKDIS via the I2C-bus,
while vertical blanking is maintained.
max
min
6.5
=
------- 1
TDA4857PS
Horizontal oscillator
The horizontal oscillator is of the relaxation type and
requires a capacitor of 10 nF to be connected at HCAP
(pin 29).For optimum jitter performance the valueof10 nF
must not be changed.
The minimum oscillator frequency is determined by a
resistor connected between pin HREF and ground.
A resistor connected between pins HREF and HBUF
defines the frequency range.
The reference current at pin HREF also defines the
integration time constant of the vertical sync integration.
Calculation of line frequency range
The oscillator frequencies f
calculated. This is achieved by adding the spread of the
relevant components to the highest and lowest sync
frequencies f
sync(min)
by the currents in R
and f
HREF
The following example is a 31.45 to 90 kHz application:
Table 1 Calculation of total spread
spread of for f
IC ±3% ±5%
C
HCAP
R
, R
HREF
HBUF
Total ±7% ±9%
Thus the typical frequency range of the oscillator in this
example is:
f
maxfsync max()
f
min
sync min()
-----------------------
1.09
f
1.07× 96.3 kHz==
28.9 kHz==
The TV mode is centred around f
±10%. Activation of the TV mode is only allowed between
15.625 and 35 kHz.
The resistors R
HREF
and R
the following formulae:
R
HREF
R
HBUFpar
78 kHz k××Ω
----------------------------------------------------------------f
0.0012 f
min
78 kHz k××Ω
-------------------------------------------------------------------f
0.0012 f
max
min
sync(max)
and R
and f
HBUF
max
must first be
max
. The oscillator is driven
.
±2% ±2%
±2% ±2%
with a control range of
min
HBUFpar
2
×+ kHz[]
min
can be calculated using
2.61 kΩ==
2
×+ kHz[]
max
726 Ω==
for f
min
2000 Jan 31 7
Page 8

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
The resistor R
and R
in parallel. The formulae for R
HBUF
into account the voltage swing across this resistor
R
R
HBUF
HREFRHBUFpar
---------------------------------------------R
HREFRHBUFpar
PLL1 phase detector
The phase detector is a standard type using switched
current sources, which are independent of the horizontal
frequency. It compares the middle of the horizontal sync
with a fixed point on the oscillator sawtooth voltage.
The PLL1 loop filter is connected to HPLL1 (pin 26).
See also Section “Horizontal position adjustment and
corrections”.
Horizontal position adjustment and corrections
A linear adjustment of the relative phase between the
horizontal sync and the oscillator sawtooth (in PLL1 loop)
is achieved via register HPOS.Once adjusted, the relative
phase remains constant over the whole frequency range.
Correctionof pin unbalance and parallelogramis achieved
by modulating the phase between the oscillator sawtooth
and horizontal flyback (in loop PLL2) via registers
HPARAL and HPINBAL. If those asymmetric EW
corrections are performed in the deflection stage, both
registers can be disconnected from the horizontal phase
via control bit ACD. This does not change the output at
pin ASCOR.
Horizontal moire cancellation
To achieve a cancellation of horizontal moire (also known
as ‘video moire’), the horizontal frequency is
divided-by-two to achieve a modulation of the horizontal
phase via PLL2. The amplitude is controlled by register
HMOIRE. To avoid a visible structure on screen the
polaritychanges with half of the verticalfrequency.Control
bit MOD disables the moire cancellation function.
is calculated as the value of R
HBUFpar
×
–
0.8×= 805 Ω=
HBUF
HREF
also takes
TDA4857PS
For the TDA4857PS external modulation of the PLL2
phase is not allowed, because this would disturb the start
advance of the horizontal focus parabola.
Soft start and standby
If HPLL2 is pulled to ground by resetting the register
SOFTST, the horizontal output pulses, vertical output
currents and B+ control driver pulses will be inhibited. This
means that HDRV (pin 8), BDRV (pin 6), VOUT1 (pin 13)
and VOUT2 (pin 12) are floating in this state. If HPLL2 is
pulled to ground by an external DC current, vertical output
currents stay active while HDRV (pin 8) and BDRV (pin 6)
are in floating state. In both cases the PLL2 and the
frequency-locked loop are disabled, CLBL (pin 16)
provides a continuous blanking signal and HUNLOCK
(pin 17) is floating.
This option can be used for soft start, protection and
power-down modes. When the HPLL2 pin is released
again, an automatic soft start sequence on the horizontal
drive as well as on the B+ drive output will be performed
(see Figs 24 and 25).
A soft start can only be performed if the supply voltage for
the IC is a minimum of 8.6 V.
The soft start timing is determined by the filter capacitor at
HPLL2 (pin 30), which is charged with a constant current
during soft start. If the voltage at pin 30 (HPLL2) reaches
1.1 V,thevertical output currents are enabled. At 1.7 Vthe
horizontaldriverstage generates very small output pulses.
The width of these pulses increases with the voltage at
HPLL2 until the final duty cycle is reached. The voltage at
HPLL2increasesfurtherandperformsa soft start at BDRV
(pin 6)as well. The voltage at HPLL2 continuestorise until
HPLL2 enters its normal operating range. The internal
charge current is now disabled. Finally PLL2 and the
frequency-locked loop are activated. If both functions
reachnormaloperation, HUNLOCK (pin 17) switches from
the floating status to normal vertical blanking, and
continuous blanking at CLBL (pin 16) is removed.
PLL2 phase detector
The PLL2 phase detector is similar to the PLL1 detector
and compares the line flyback pulse at HFLB (pin 1) with
the oscillator sawtooth voltage. The control currents are
independent of the horizontal frequency. The PLL2
detector thus compensates for the delay in the external
horizontal deflection circuit by adjusting the phase of the
HDRV (pin 8) output pulse.
2000 Jan 31 8
Output stage for line drive pulses [HDRV (pin 8)]
An open-collector output stage allows direct drive of an
inverting driver transistor because of a low saturation
voltage of 0.3 V at 20 mA. To protect the line deflection
transistor, the output stage is disabled (floating) for a low
supply voltage at V
(see Fig.23).
CC
The duty cycle of line drive pulses is slightly dependent on
the actual horizontal frequency. This ensures optimum
drive conditions over the whole frequency range.
Page 9

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
X-ray protection
TheX-rayprotectioninputXRAY(pin 2)providesavoltage
detector with a precise threshold. If the input voltage at
XRAY exceeds this threshold level for a certain time then
control bit SOFTST is reset, which switches the IC into
protection mode. In this mode several pins are forced into
defined states:
HUNLOCK (pin 17) is floating
The capacitor connected to HPLL2 (pin 30) is
discharged
Horizontal output stage (HDRV) is floating
B+ control driver stage (BDRV) is floating
Vertical output stages (VOUT1 and VOUT2) are floating
CLBL provides a continuous blanking signal.
There are two different methods of restarting the IC:
1. XSEL (pin 9) is open-circuit or connected to ground.
The control bit SOFTST must be set to logic 1 via the
I2C-bus. The IC then returns to normal operation via
soft start.
2. XSEL (pin 9) is connected to VCC via an external
resistor.Thesupplyvoltage of the IC must be switched
off for a certain period of time before the IC can be
restarted again using the standard power-on
procedure.
Vertical oscillator and amplitude control
This stage is designed for fast stabilization of vertical size
after changes in sync frequency conditions.
The free-running frequency f
resistor R
connected to pin 24. The value of R
C
VCAP
connected to pin 23 and the capacitor
VREF
optimized for noise and linearity performance in the whole
vertical and EW section, but also influences several
internal references. Therefore the value of R
be changed.
Capacitor C
should be used to select the free-running
VCAP
frequency of the vertical oscillator in accordance with the
=
following formula:
f
fr V()
To achieve a stabilized amplitude the free-running
frequencyf
,withoutadjustment,shouldbe at least 10%
fr(V)
lower than the minimum trigger frequency.
The contributions shown in Table 2 can be assumed.
is determined by the
fr(V)
VREF
VREF
-----------------------------------------------------------
10.8 R
1
× C
VREF
×
VCAP
is not only
must not
TDA4857PS
Table 2 Calculation of f
Contributing elements
Minimum frequency offset between f
lowest trigger frequency
Spread of IC ±3%
Spread of R
Spread of C
VREF
VCAP
Total 19%
Result for 50 to 160 Hz application:
f
fr V()
50 Hz
---------------
1.19
42 Hz==
The AGC of the vertical oscillator can be disabled by
setting control bit AGCDIS via the I
external current has to be injected into VCAP (pin 24) to
obtain the correct vertical size. This special application
mode can be used when the vertical sync pulses are
serrated (shifted); this condition is found in some display
modes, e.g. when using a 100 Hz upconverter for video
signals.
Application hint: VAGC (pin 22) has a high input
impedance during scan. Therefore, the pin must not be
loaded externally otherwise non-linearities in the vertical
output currents may occur due to the changing charge
current during scan.
Adjustment of vertical size, VGA overscan and EHT
compensation
The amplitude of the differential output currents at VOUT1
and VOUT2 can be adjusted via register VSIZE. Register
VOVSCN can activate a +17% step in vertical size for the
VGA350 mode.
VSMOD (pin 21) can be used for a DC controlled EHT
compensation of vertical size by correcting the differential
output currents at VOUT1 and VOUT2. The EW
waveforms, vertical focus, pin unbalance and
parallelogram corrections are not affected by VSMOD.
The adjustments for vertical size and vertical position also
affect the waveforms of the horizontal pincushion, vertical
linearity (S-correction), vertical linearity balance, focus
parabola, pin unbalance and parallelogram correction.
The result of this interaction is that no re-adjustment of
these parameters is necessary after an adjustment of
vertical picture size or position.
total spread
fr(V)
and
fr(V)
10%
±1%
±5%
2
C-bus. A precise
2000 Jan 31 9
Page 10

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
Adjustment of vertical position, vertical linearity and
vertical linearity balance
Register VPOS provides a DC shift at the sawtooth
outputs VOUT1 and VOUT2 (pins 13 and 12) and the EW
drive output EWDRV (pin 11) in such a way that the whole
picture moves vertically while maintaining the correct
geometry.
Register VLIN is used to adjust the amount of vertical
S-correction in the output signal. This function can be
switched off by control bit VSC.
Register VLINBAL is used to correct the unbalance of the
vertical S-correction in the output signal. This function can
be switched off by control bit VLC.
Adjustment of vertical moire cancellation
To achieve a cancellation of vertical moire (also known as
‘scanmoire’)theverticalpicturepositioncanbemodulated
by half the vertical frequency. The amplitude of the
modulation is controlled by register VMOIRE and can be
switched off via control bit MOD.
Horizontal pincushion (including horizontal size,
corner correction and trapezium correction)
EWDRV(pin 11) provides a complete EW drive waveform.
The components horizontal pincushion, horizontal size,
corner correction and trapezium correction are controlled
by the registers HPIN, HSIZE, HCOR and HTRAP.
HTRAP can be set to zero by control bit VPC.
The pincushion (EW parabola) amplitude, corner and
trapezium correction track with the vertical picture size
(VSIZE) and also with the adjustment for vertical picture
position(VPOS). The corner correctiondoes not track with
the horizontal pincushion (HPIN).
Further the horizontal pincushion amplitude, corner and
trapezium correction track with the horizontal picture size,
which is adjusted via register HSIZE and the analog
modulation input HSMOD.
If the DC component in the EWDRV output signal is
increasedviaHSIZEorI
trapezium component of the EWDRV output will be
reduced by a factor of
,thepincushion,cornerand
HSMOD
V
–
1
-------------------------------------------------------------------------
+
HSIZEVHEHT
–
1
14.4
V
HSIZE
-----------------
14.4 V
TDA4857PS
The value 14.4 V is a virtual voltage for calculation only.
The output pin can not reach this value, but the gain (and
DCbias)oftheexternalapplicationshouldbesuchthatthe
horizontal deflection is reduced to zero when EWDRV
reaches 14.4 V.
HSMOD can be used for a DC controlled EHT
compensation by correcting horizontal size, horizontal
pincushion, corner and trapezium. The control range at
this pin tracks with the actual value of HSIZE. For an
increasing DC component V
signal, the DC component V
V
1
reducedbyafactor of as shown in the previous
–
-----------------
14.4 V
equation.
The whole EWDRV voltage is calculated as follows:
V
V
= 1.2 V + [V
EWDRV
HCOR+VHTRAP
HSIZE+VHEHT
) × g(HSIZE, HSMOD)] × h(I
Where:
I
V
HEHT
f(HSIZE) 1
g(HSIZE, HSMOD) 1
()
hI
HREF
HSMOD
------------------- 120 µA
V
–=
-----------------
14.4 V
I
=
-------------------------------I
HREF
0.69×=
HSIZE
–=
HREF
f70kHz=
Two different modes of operation can be chosen for the
EW output waveform via control bit FHMULT:
1. Mode 1
Horizontal size is controlled via register HSIZE and
causesaDCshift at the EWDRV output. The complete
waveform is also multiplied internally by a signal
proportional to the line frequency [which is detected
via the current at HREF (pin 28)]. This mode is to be
used for driving EW diode modulator stages which
require a voltage proportional to the line frequency.
2. Mode 2
The EW drive waveform does not track with the line
frequency. This mode is to be used for driving EW
modulatorswhich require a voltage independent ofthe
line frequency.
in the EWDRV output
HSIZE
caused by I
HEHT
HSIZE
× f(HSIZE) + (V
V
+
HSIZEVHEHT
--------------------------------------------------------------------------
1
14.4 V
HSMOD
HREF
V
–
-----------------
14.4 V
will be
HPIN
)
HSIZE
+
2000 Jan 31 10
Page 11

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
Output stage for asymmetric correction waveforms
[ASCOR (pin 20)]
This output is designed as a voltage output for
superimposed waveforms of vertical parabola and
sawtooth. The amplitude and polarity of both signals can
be changed via registers HPARAL and HPINBAL.
Application hint: The TDA4857PS offers two possibilities
to control registers HPINBAL and HPARAL.
1. Control bit ACD = 1
The two registers now control the horizontal phase by
means of internal modulation of the PLL2 horizontal
phase control. The ASCOR output (pin 20) can be left
unused, but it will always provide an output signal
because the ASCOR output stage is not influenced by
the control bit ACD.
2. Control bit ACD = 0
The internal modulation via PLL2 is disconnected.
In order to obtain the required effect on thescreen, pin
ASCOR must now be fed to the DC amplifier which
controls the DC shift of the horizontal deflection. This
option is useful for applications which already use a
DC shift transformer.
Ifthe tube does notneed HPINBAL and HPARAL,then pin
ASCOR can be used for other purposes, i.e. for a simple
dynamic convergence.
Dynamic focus section [FOCUS (pin 32)]
Thissectiongeneratesacompletedrivesignalfordynamic
focus applications. The amplitude of the vertical parabola
is independent of frequency and tracks with all vertical
adjustments. The amplitude can be adjusted via register
VFOCUS.FOCUS(pin 32)is designed as a voltage output
for the vertical parabola.
B+ control function block
The B+ control function block of the TDA4857PS consists
of an Operational Transconductance Amplifier (OTA), a
voltagecomparator, a flip-flop and a dischargecircuit.This
configuration allows easy applications for different B+
controlconcepts.Seealso Application Note AN96052:
converter Topologies for Horizontal Deflection and EHT
with TDA4855/58”
.
“B+
TDA4857PS
GENERAL DESCRIPTION
The non-inverting input of the OTA is connected internally
toa high precision referencevoltage. The inverting inputis
connectedto BIN (pin 5). Aninternal clamping circuit limits
the maximum positive output voltage of the OTA.
The output itself is connected to BOP (pin 3) and to the
inverting input of the voltage comparator.
The non-inverting input of the voltage comparator can be
accessed via BSENS (pin 4).
B+ drive pulses are generated by an internal flip-flop and
fed to BDRV (pin 6) via an open-collector output stage.
This flip-flop is set at the rising edge of the signal at HDRV
(pin 8). The falling edge of the output signal at BDRV has
a defined delay of t
pulse (see Fig.21). When the voltage at BSENS exceeds
the voltage at BOP, the voltage comparator output resets
the flip-flop and, therefore, the open-collector stage at
BDRV is floating again.
An internal discharge circuit allows a well defined
discharge of capacitors at BSENS. BDRV is active at a
LOW-level output voltage (see Figs 21 and 22), thus it
requires an external inverting driver stage.
The B+ function block can be used for B+ deflection
modulators in many different ways. Two popular
application combinations are as follows:
• Boost converter in feedback mode (see Fig.21)
In this application the OTA is used as an error amplifier
witha limited output voltagerange. The flip-flop isset on
the rising edge of the signal at HDRV. A reset will be
generated when the voltage at BSENS, taken from the
current sense resistor, exceeds the voltage at BOP.
If no reset is generated within a line period. The rising
edgeof the next HDRV pulseforces the flip-flop to reset.
The flip-flop is set immediately after the voltage at
BSENS has dropped below the threshold voltage
V
RESTART(BSENS)
d(BDRV)
.
to the rising edge of the HDRV
2000 Jan 31 11
Page 12
Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
• Buck converter in feed forward mode (see Fig.22)
This application uses an external RC combination at
BSENS to provide a pulse width which is independent
from the horizontal frequency. The capacitor is charged
via an external resistor and discharged by the internal
discharge circuit. For normal operation the discharge
circuit is activated when the flip-flop is reset by the
internal voltage comparator. The capacitor will now be
discharged with a constant current until the internally
controlled stop level V
willbe maintained until therising edge of thenext HDRV
pulse sets the flip-flop again and disables the discharge
circuit.
If no reset is generated within a line period, the rising
edge of the next HDRV pulse automatically starts the
discharge sequence and resets the flip-flop. When the
voltage at BSENS reaches the threshold voltage
V
RESTART(BSENS)
automatically and the flip-flop will be set immediately.
This behaviour allows a definition of the maximum duty
cycle of the B+ control drive pulse by the relationship of
charge current to discharge current.
Supply voltage stabilizer, references, start-up
procedures and protection functions
The TDA4857PS incorporates an internal supply voltage
stabilizer to provide excellent stabilization for all internal
references.Aninternalgap reference, especially designed
for low-noise, is the reference for the internal horizontal
andverticalsupplyvoltages.Allinternalreference currents
and drive current for the vertical output stage are derived
from this voltage via external resistors.
If either the supply voltage is below 8.3 V or no data from
the I2C-bus has been received after power-up, the internal
softstart and protection functions do not allowanyof those
outputs [HDRV, BDRV, VOUT1, VOUT2 and HUNLOCK
(see Fig.23)] to be active.
For supply voltages below 8.3 V the internal I2C-bus will
not generate an acknowledge and the IC is in standby
mode. This is because the internal protection circuit has
generatedaresetsignalforthesoft start register SOFTST.
Above 8.3 V data is accepted and all registers can be
loaded. If register SOFTST has received a set from the
I2C-bus,theinternalsoftstartprocedure is released, which
activates all mentioned outputs.
STOP(BSENS)
, the discharge circuit will be disabled
is reached. This level
TDA4857PS
This protection mode has been implemented in order to
protect the deflection stages and the picture tube during
start-up, shut-down and fault conditions. This protection
mode can be activated as shown in Table 3.
Table 3 Activation of protection mode
ACTIVATION RESET
Low supply voltage at
pin 10
Power dip, below 8.1 V reload registers;
X-ray protection (pin 2)
triggered, XSEL (pin 9) is
open-circuit or connected
to ground
X-ray protection (pin 2)
triggered, XSEL (pin 9)
connected to V
external resistor
HPLL2 (pin 30) externally
pulled to ground
When the protection mode is active, several pins of the
TDA4857PS are forced into a defined state:
HDRV (horizontal driver output) is floating
BDRV (B+ control driver output) is floating
HUNLOCK (indicates, that the frequency-to-voltage
converter is out of lock) is floating (HIGH via external
pull-up resistor)
CLBL provides a continuous blanking signal
VOUT1 and VOUT2 (vertical outputs) are floating
The capacitor at HPLL2 is discharged.
If the soft start procedure is activated via the I
these actions will beperformed in a well defined sequence
(see Figs 23 and 24).
CC
via an
increase supply voltage;
reload registers;
soft start via I2C-bus
soft start via I
reload registers;
soft start via I
switch VCC off and on
again, reload registers;
soft start via I2C-bus
release pin 30
2
C-bus
2
C-bus
2
C-bus, all of
If during normal operation the supply voltage has dropped
below 8.1 V, the protection mode is activated and
HUNLOCK(pin 17)changesto the protection status and is
floating. This can be detected by the microcontroller.
2000 Jan 31 12
Page 13
Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
LIMITING VALUES
In accordance with the Absolute Maximum Rating System (IEC 134); all voltages measured with respect to ground.
SYMBOL PARAMETER CONDITIONS MIN. MAX. UNIT
V
CC
V
i(n)
V
o(n)
V
I/O(n)
I
o(HDRV)
I
i(HFLB)
I
o(CLBL)
I
o(BOP)
I
o(BDRV)
I
o(EWDRV)
I
o(FOCUS)
T
amb
T
j
T
stg
V
ESD
supply voltage −0.5 +16 V
input voltage for pins:
BIN −0.5 +6.0 V
HSYNC, VSYNC, VREF, HREF, VSMOD and HSMOD −0.5 +6.5 V
SDA and SCL −0.5 +8.0 V
XRAY −0.5 +8.0 V
output voltage for pins:
VOUT2, VOUT1 and HUNLOCK −0.5 +6.5 V
BDRV and HDRV −0.5 +16 V
input/output voltages at pins BOP and BSENS −0.5 +6.0 V
horizontal driver output current − 100 mA
horizontal flyback input current −10 +10 mA
video clamping pulse/vertical blanking output current −−10 mA
B+ control OTA output current − 1mA
B+ control driver output current − 50 mA
EW driver output current −−5mA
focus driver output current −−5mA
ambient temperature −20 +70 °C
junction temperature − 150 °C
storage temperature −55 +150 °C
electrostatic discharge for all pins note 1 −150 +150 V
note 2 −2000 +2000 V
Notes
1. Machine model: 200 pF; 0.75 µH; 10 Ω.
2. Human body model: 100 pF; 7.5 µH; 1500 Ω.
THERMAL CHARACTERISTICS
SYMBOL PARAMETER CONDITIONS VALUE UNIT
R
th(j-a)
thermal resistance from junction to ambient in free air 55 K/W
QUALITY SPECIFICATION
In accordance with
“URF-4-2-59/601”
; EMC emission/immunity test in accordance with
“DIS 1000 4.6”
(IEC 801.6).
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
EMC
emission test note 1 − 1.5 − mV
immunity test note 1 − 2.0 − V
Note
1. Tests are performed with application reference board. Tests with other boards will have different results.
2000 Jan 31 13
Page 14
Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
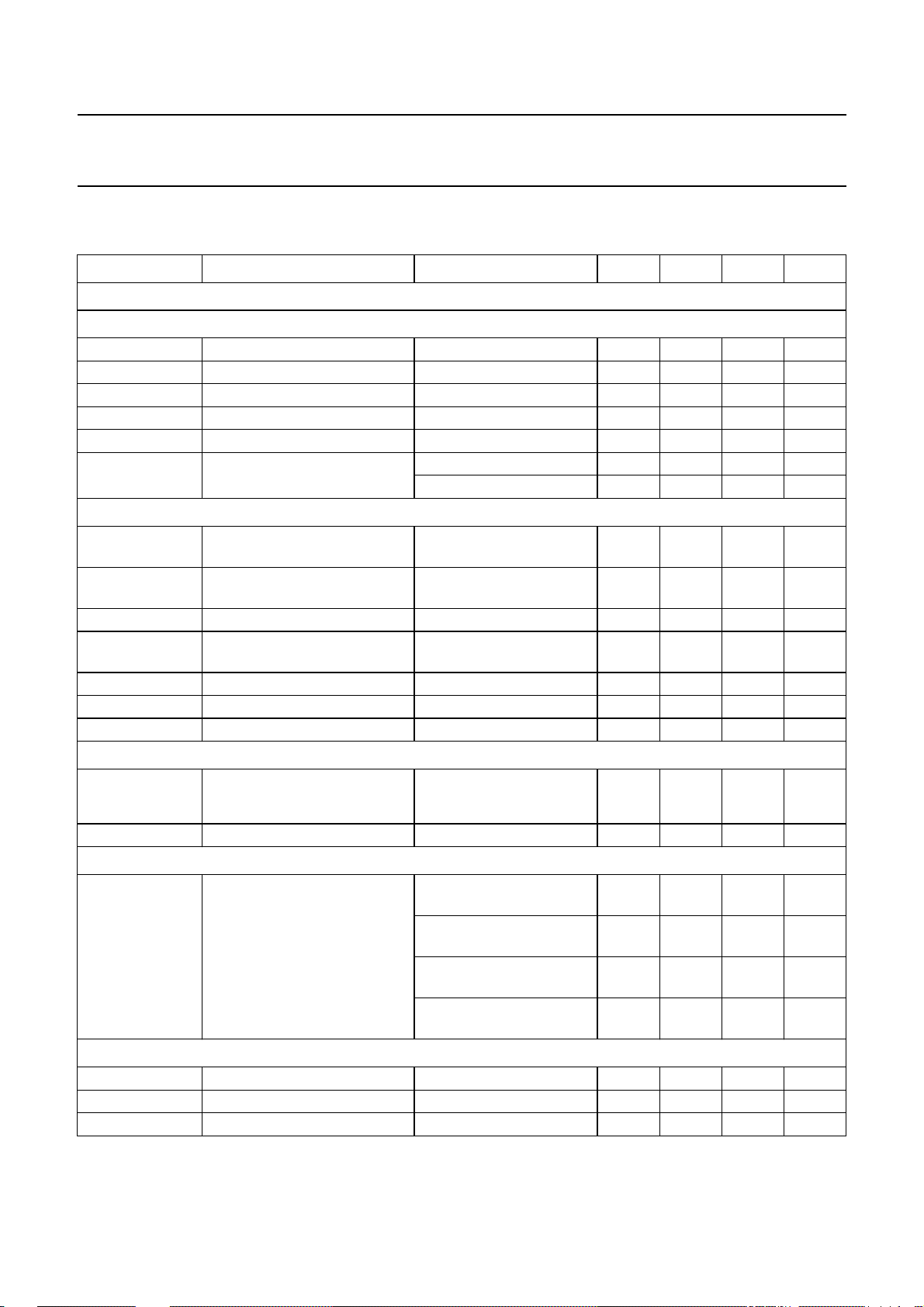
CHARACTERISTICS
VCC= 12 V; T
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Horizontal sync separator
I
NPUT CHARACTERISTICS FOR DC-COUPLED TTL SIGNALS: PIN HSYNC
V
i(HSYNC)
V
HSYNC(sl)
t
r(HSYNC)
t
f(HSYNC)
t
W(HSYNC)(min)
I
i(HSYNC)
INPUT CHARACTERISTICS FOR AC-COUPLED VIDEO SIGNALS (SYNC-ON-VIDEO, NEGATIVE SYNC POLARITY)
V
HSYNC
V
HSYNC(sl)
V
clamp(HSYNC)
I
ch(HSYNC)
t
W(HSYNC)(min)
R
source(max)
R
i(diff)(HSYNC)
Automatic polarity correction for horizontal sync
t
PH()
----------- t
H
t
d(HPOL)
Vertical sync integrator
t
int(V)
Vertical sync slicer (DC-coupled, TTL compatible): pin VSYNC
V
i(VSYNC)
V
VSYNC(sl)
I
i(VSYNC)
=25°C; peripheral components in accordance with Fig.1; unless otherwise specified.
amb
sync input signal voltage 1.7 −−V
slicing voltage level 1.2 1.4 1.6 V
rise time of sync pulse 10 − 500 ns
fall time of sync pulse 10 − 500 ns
minimum width of sync pulse 0.7 −−µs
input current V
sync amplitude of video input
V
R
= 0.8 V −−−200 µA
HSYNC
= 5.5 V −−10 µA
HSYNC
=50Ω−300 − mV
source
signal voltage
slicing voltage level
R
=50Ω 90 120 150 mV
source
(measured from top sync)
top sync clamping voltage level R
charge current for coupling
V
=50Ω 1.1 1.28 1.5 V
source
HSYNC>Vclamp(HSYNC)
1.7 2.4 3.4 µA
capacitor
minimum width of sync pulse 0.7 −−µs
maximum source resistance duty cycle = 7% −−1500 Ω
differential input resistance during sync − 80 −Ω
horizontal sync pulse width
−−25 %
related to line period
delay time for changing polarity 0.3 − 1.8 ms
integration time for generation
of a vertical trigger pulse
fH= 15.625 kHz;
I
= 0.52 mA
HREF
= 31.45 kHz;
f
H
I
= 1.052 mA
HREF
f
= 64 kHz;
H
I
= 2.141 mA
HREF
= 100 kHz;
f
H
I
= 3.345 mA
HREF
14 20 26 µs
71013µs
3.9 5.7 6.5 µs
2.5 3.8 4.5 µs
sync input signal voltage 1.7 −−V
slicing voltage level 1.2 1.4 1.6 V
input current 0V<V
< 5.5 V −−±10 µA
SYNC
2000 Jan 31 14
Page 15

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Automatic polarity correction for vertical sync
t
W(VSYNC)(max)
maximumwidthof vertical sync
pulse
t
d(VPOL)
delay time for changing polarity 0.45 − 1.8 ms
Video clamping/vertical blanking output: pin CLBL
t
clamp(CLBL)
V
clamp(CLBL)
width of video clamping pulse measured at V
top voltage level of video
clamping pulse
TC
clamp
STPS
clamp
temperature coefficient of
V
clamp(CLBL)
steepness of slopes for
RL=1MΩ; CL=20pF − 50 − ns/V
clamping pulse
t
d(HSYNCt-CLBL)
t
clamp1(max)
delay between trailing edge of
horizontal sync and start of
video clamping pulse
maximum duration of video
clamping pulse referenced to
clamping pulse triggered
on trailing edge of
horizontal sync;
control bit CLAMP = 0;
measured at V
end of horizontal sync
t
d(HSYNCl-CLBL)
t
clamp2(max)
delay between leading edge of
horizontal sync and start of
video clamping pulse
maximum duration of video
clamping pulse referenced to
clamping pulse triggered
on leading edge of
horizontal sync;
control bit CLAMP = 1;
measured at V
end of horizontal sync
V
blank(CLBL)
top voltage level of vertical
notes 1 and 2 1.7 1.9 2.1 V
blanking pulse
t
blank(CLBL)
TC
blank
V
scan(CLBL)
width of vertical blanking pulse
at pins CLBL and HUNLOCK
temperature coefficient of
V
blank(CLBL)
output voltage during vertical
control bit VBLK = 0 220 260 300 µs
control bit VBLK = 1 305 350 395 µs
I
scan
TC
scan
I
sink(CLBL)
I
L(CLBL)
temperature coefficient of
V
scan(CLBL)
internal sink current 2.4 −−mA
external load current −−−3.0 mA
Horizontal oscillator: pins HCAP and HREF
f
fr(H)
free-running frequency without
PLL1 action (for testing only)
R
R
C
∆f
fr(H)
spread of free-running
frequency (excluding spread of
external components)
= 3 V 0.6 0.7 0.8 µs
CLBL
=3V
CLBL
=3V
CLBL
= 0 0.59 0.63 0.67 V
CLBL
= ∞;
HBUF
= 2.4 kΩ;
HREF
= 10 nF; note 3
HCAP
−−400 µs
4.32 4.75 5.23 V
− 4 − mV/K
− 130 − ns
−−1.0 µs
− 300 − ns
−−0.15 µs
− 2 − mV/K
−−2−mV/K
30.53 31.45 32.39 kHz
−−±3.0 %
2000 Jan 31 15
Page 16

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
TC
fr
f
H(max)
V
HREF
Unlock blanking detection: pin HUNLOCK
V
scan(HUNLOCK)
V
blank(HUNLOCK)
TC
blank
TC
sink
I
sink(int)
I
L(max)
I
L
PLL1 phase comparator and frequency-locked loop: pins HPLL1 and HBUF
t
W(HSYNC)(max)
t
lock(HPLL1)
I
ctrl(HPLL1)
V
HBUF
Phase adjustments and corrections via PLL1 and PLL2
HPOS horizontal position (referenced
HPINBAL horizontal pin unbalance
temperature coefficient of
−100 0 +100 10−6/K
free-running frequency
maximum oscillator frequency −−130 kHz
voltage at input for reference
2.43 2.55 2.68 V
current
low level voltage of HUNLOCK saturation voltage in case
−−250 mV
of locked PLL1; internal
sink current = 1 mA
blanking level of HUNLOCK external load current = 0 0.9 1 1.1 V
temperature coefficient of
V
blank(HUNLOCK)
temperature coefficient of
I
sink(HUNLOCK)
internal sink current for blanking pulses;
−−0.9 − mV/K
− 0.15 − %/K
1.4 2.0 2.6 mA
PLL1 locked
maximum external load current V
leakage current V
HUNLOCK
HUNLOCK
=1V −−−2mA
= 5 V in case of
−−±5µA
unlocked PLL1 and/or
protection active
maximum width of horizontal
−−25 %
sync pulse (referenced to line
period)
total lock-in time of PLL1 − 40 80 ms
control currents notes 4 and 5
locked mode, level 1 − 15 −µA
locked mode, level 2 − 145 −µA
buffered f/v voltage at HBUF
(pin 27)
minimum horizontal
frequency
maximum horizontal
− 2.5 − V
− 0.5 − V
frequency
register HPOS = 0 −−13 − %
to horizontal period)
register HPOS = 127 − 0 − %
register HPOS = 255 − 13 − %
correction via HPLL2
(referenced to horizontal
period)
register HPINBAL = 0;
control bit HPC = 0; note 6
register HPINBAL = 15;
control bit HPC = 0; note 6
register HPINBAL = X;
−−0.8 − %
− 0.8 − %
− 0 − %
control bit HPC = 1; note 6
2000 Jan 31 16
Page 17
Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
HPARAL horizontal parallelogram
correction (referenced to
horizontal period)
HMOIRE relative modulation of
horizontal position by 0.5f
phase alternates with 0.5f
HMOIRE
off
moire cancellation off control bit MOD = 1 − 0 − %
PLL2 phase detector: pins HFLB and HPLL2
φ
PLL2
PLL2 control (advance of
horizontal drive with respect to
middle of horizontal flyback)
I
ctrl(PLL2)
Φ
PLL2
PLL2 control current − 75 −µA
relative sensitivity of PLL2
phase shift related to
horizontal period
V
PROT(PLL2)(max)
maximum voltage for PLL2
protection mode/soft start
I
ch(PLL2)
charge current for external
capacitor during soft start
HORIZONTAL FLYBACK INPUT: PIN HFLB
V
pos(HFLB)
V
neg(HFLB)
I
pos(HFLB)
I
neg(HFLB)
V
sl(HFLB)
positive clamping voltage I
negative clamping voltage I
positive clamping current −−6mA
negative clamping current −−−2mA
slicing level − 2.8 − V
Output stage for line driver pulses: pin HDRV
register HPARAL = 0;
control bit HBC = 0; note 6
register HPARAL = 15;
control bit HBC = 0; note 6
register HPARAL = X;
control bit HBC = 1; note 6
register HMOIRE = 0;
;
control bit MOD = 0
H
V
register HMOIRE = 31;
control bit MOD = 0
maximum advance;
register HPINBAL = 07;
register HPARAL = 07
minimum advance;
register HPINBAL = 07;
register HPARAL = 07
V
< 3.7 V − 1 −µA
HPLL2
=5mA − 5.5 − V
HFLB
= −1mA −−0.75 − V
HFLB
−−0.8 − %
− 0.8 − %
− 0 − %
− 0 − %
− 0.05 − %
36 −−%
− 7 − %
− 28 − mV/%
− 4.4 − V
OPEN-COLLECTOR OUTPUT STAGE
V
sat(HDRV)
I
LO(HDRV)
saturation voltage I
output leakage current V
=20mA −−0.3 V
HDRV
I
=60mA −−0.8 V
HDRV
HDRV
2000 Jan 31 17
=16V −−10 µA
Page 18

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
AUTOMATIC VARIATION OF DUTY CYCLE; see Fig.14
t
HDRV(OFF)/tH
relative t
output; measured at
V
HDRV
is modulated by the relation
I
HREF/IVREF
X-ray protection: pins XRAY and XSEL
V
XRAY(sl)
t
W(XRAY)(min)
R
i(XRAY)
XRAY
rst
V
CC(XRAY)(min)
slicing voltage level for latch 6.22 6.39 6.56 V
minimum width of trigger pulse −−30 µs
input resistance at pin 2 V
reset of X-ray latch pin 9 open-circuit or
minimum supply voltage for
correct function of the X-ray
latch
V
CC(XRAY)(max)
maximum supply voltage for
reset of the X-ray latch
R
XSEL
external resistor at pin 9 no reset via I2C-bus 56 − 130 kΩ
Vertical oscillator [oscillator frequency in application without adjustment of free-running frequency f
f
fr(V)
f
cr(V)
free-running frequency R
vertical frequency catching
range
V
VREF
voltage at reference input for
vertical oscillator
t
d(scan)
delay between trigger pulse
and start of ramp at VCAP
(pin 24) (width of vertical
blanking pulse)
I
VAGC
C
VAGC
amplitude control current control bit AGCDIS = 0 ±120 ±200 ±300 µA
external capacitor at VAGC
(pin 22)
time of HDRV
OFF
= 3 V; HDRV duty cycle
I
HDRV
=20mA;
42 45 48 %
fH= 31.45 kHz
I
HDRV
=20mA;
45.5 48.5 51.5 %
fH= 58 kHz
I
HDRV
=20mA;
49 52 55 %
fH= 110 kHz
< 6.38 V + V
XRAY
V
> 6.38 V + V
XRAY
BE
BE
500 −−kΩ
− 5 − kΩ
standby mode − 5 − kΩ
set control bit SOFTST via
connected to GND
pin 9 connected to V
R
XSEL
CC
pin 9 connected to VCCvia
R
XSEL
pin 9 connected to VCCvia
R
XSEL
=22kΩ;
VREF
C
= 100 nF
VCAP
the I2C-bus
via
switch off VCC then
re-apply V
CC
−−4V
2 −−V
40 42 43.3 Hz
constant amplitude; note 7 50 − 160 Hz
− 3.0 − V
control bit VBLK = 0 220 260 300 µs
control bit VBLK = 1 305 350 395 µs
control bit AGCDIS = 1 − 0 −µA
150 − 220 nF
−
−
fr(V)
]
2000 Jan 31 18
Page 19

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
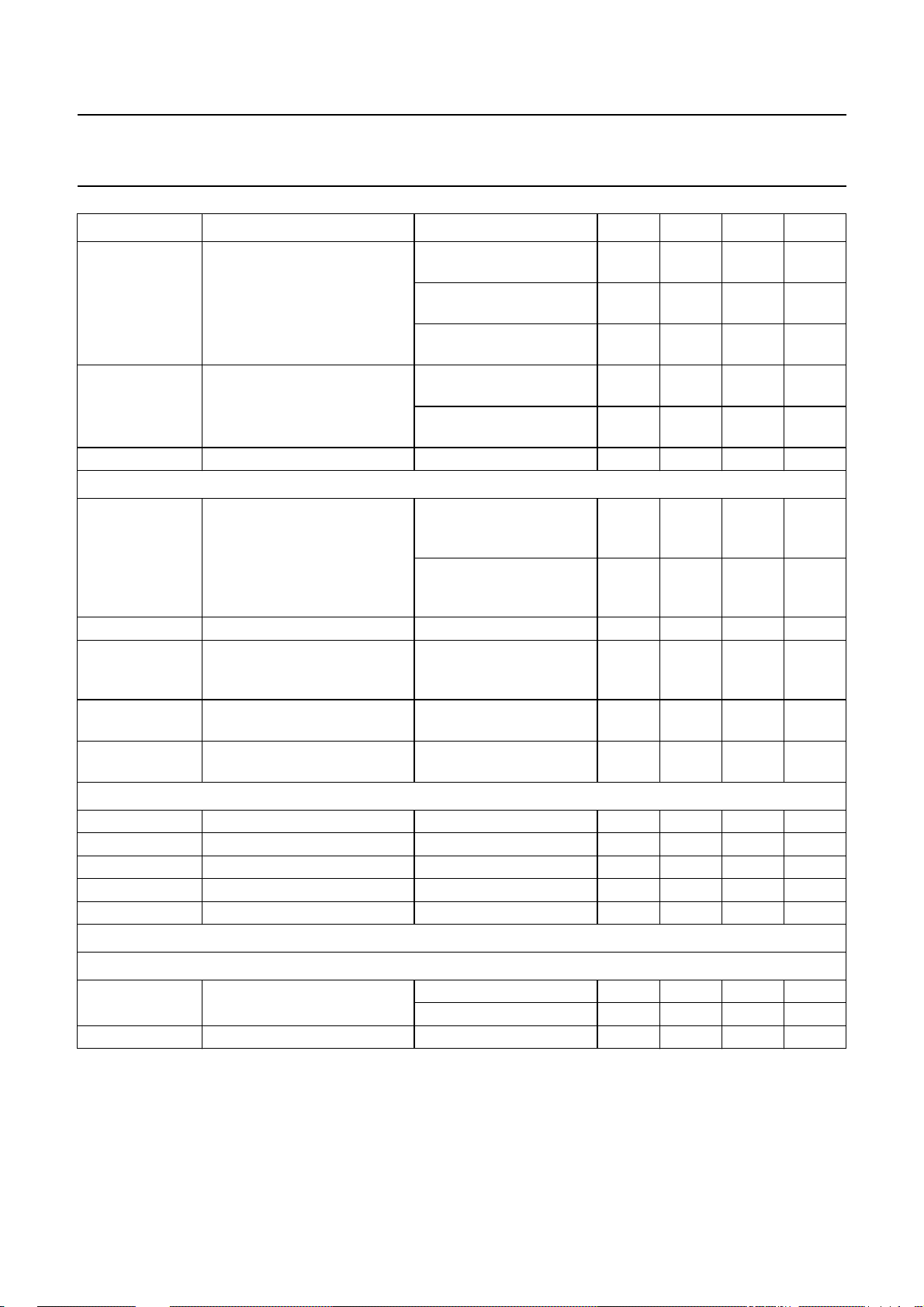
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Differential vertical current outputs
ADJUSTMENT OF VERTICAL SIZE INCLUDING VGA AND EHT COMPENSATION; see Fig.3
VSIZE vertical size without VGA
overscan (referenced to
nominal vertical size)
VSIZE
VGA
vertical size with VGA
overscan (referenced to
nominal vertical size)
VSMOD
EHT
EHT compensation on vertical
size via VSMOD (pin 21)
(referenced to 100% vertical
size)
I
i(VSMOD)
R
i(VSMOD)
V
ref(VSMOD)
f
ro(VSMOD)
input current (pin 21) VSMOD = 0 − 0 −µA
input resistance 300 − 500 Ω
reference voltage at input − 5.0 − V
roll-off frequency (−3 dB) I
ADJUSTMENT OF VERTICAL POSITION; see Fig.4
VPOS vertical position (referenced to
100% vertical size)
DJUSTMENT OF VERTICAL LINEARITY; see Fig.5
A
VLIN vertical linearity (S-correction) register VLIN = 0;
δVLIN symmetry error of S-correction maximum VLIN −−±0.7 %
DJUSTMENT OF VERTICAL LINEARITY BALANCE; see Fig.6
A
VLINBAL vertical linearity balance
(referenced to 100% vertical
size)
register VSIZE = 0;
− 60 − %
bit VOVSCN = 0; note 8
register VSIZE = 127;
− 100 − %
bit VOVSCN = 0; note 8
register VSIZE = 0;
− 70 − %
bit VOVSCN = 1; note 8
register VSIZE = 127;
115.9 116.8 117.7 %
bit VOVSCN = 1; note 8
I
I
=0 − 0 − %
VSMOD
= −120 µA −−7−%
VSMOD
VSMOD = −7% −−120 −µA
VSMOD
= −60 µA
1 −−MHz
+15µA (RMS)
register VPOS = 0;
−−11.5 − %
control bit VPC = 0
register VPOS = 127;
− 11.5 − %
control bit VPC = 0
register VPOS = X;
− 0 − %
control bit VPC = 1
− 2 − %
control bit VSC = 0; note 8
register VLIN = 15; control
− 46 − %
bit VSC = 0; note 8
register VLIN = X;
− 0 − %
control bit VSC = 1; note 8
register VLINBAL = 0;
−3.3 −2.5 −1.7 %
control bit VLC = 0; note 8
register VLINBAL = 15;
1.7 2.5 3.3 %
control bit VLC = 0; note 8
register VLINBAL = X;
− 0 − %
control bit VLC = 1; note 8
2000 Jan 31 19
Page 20

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
VMOIRE modulation of vertical picture
position by1⁄2vertical
frequency (related to 100%
vertical size)
moire cancellation off control bit MOD = 1 − 0 − %
Vertical output stage: pins VOUT1 and VOUT2; see Fig.27
∆I
VOUT(nom)(p-p)
nominal differential output
current (peak-to-peak value)
I
o(VOUT)(max)
maximum output current at
pins VOUT1 and VOUT2
V
VOUT
δI
os(vert)(max)
allowed voltage at outputs 0 − 4.2 V
maximum offset error of
vertical output currents
δI
lin(vert)(max)
maximum linearity error of
vertical output currents
EW drive output
register VMOIRE = 0;
− 0 − %
control bit MOD = 0
register VMOIRE = 31;
− 0.08 − %
control bit MOD = 0
∆I
VOUT=IVOUT1
− I
VOUT2
;
0.76 0.85 0.94 mA
nominal settings; note 8
control bit VOVSCN = 1 0.54 0.6 0.66 mA
nominal settings; note 8 −−±2.5 %
nominal settings; note 8 −−±1.5 %
EW DRIVE OUTPUT STAGE: PIN EWDRV; see Figs 7 to 10
V
const(EWDRV)
bottom output voltage at pin
EWDRV (internally stabilized)
register HPIN = 0;
register HCOR = 04;
register HTRAP = 08;
register HSIZE = 255
V
o(EWDRV)(max)
I
L(EWDRV
TC
) load current −−±2mA
EWDRV
maximum output voltage note 9 7.0 −−V
temperature coefficient of
output signal
V
HPIN(EWDRV)
horizontal pincushion voltage register HPIN = 0; note 8 − 0.04 − V
register HPIN = 63; note 8 − 1.42 − V
V
HCOR(EWDRV)
horizontal corner correction
voltage
register HCOR = 0;
control bit VSC = 0; note 8
register HCOR = 31;
control bit VSC = 0; note 8
register HCOR = X;
control bit VSC = 1; note 8
V
HTRAP(EWDRV)
horizontal trapezium correction
voltage
register HTRAP = 15;
control bit VPC = 0; note 8
register HTRAP = 0;
control bit VPC = 0; note 8
register HTRAP = X;
control bit VPC = 1; note 8
V
HSIZE(EWDRV)
horizontal size voltage register HSIZE = 255;
note 8
register HSIZE = 0; note 8 − 3.6 − V
1.05 1.2 1.35 V
−−600 10−6/K
− 0.08 − V
−−0.64 − V
− 0 − V
−−0.33 − V
− 0.33 − V
− 0 − V
− 0.13 − V
2000 Jan 31 20
Page 21

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
HEHT(EWDRV)
I
i(HSMOD)
R
i(HSMOD)
V
ref(HSMOD)
f
ro(HSMOD)
TRACKING OF EWDRV OUTPUT SIGNAL WITH HORIZONTAL FREQUENCY PROPORTIONAL VOLTAGE
f
H(MULTI)
V
PAR(EWDRV)
LE
EWDRV
Output for asymmetric EW corrections: pin ASCOR
V
HPARAL(ASCOR)
V
HPINBAL(ASCOR)
V
o(ASCOR)(max)(p-p)
V
o(ASCOR)(max)
V
c(ASCOR)
V
o(ASCOR)(min)
I
o(ASCOR)(max)
EHT compensation on
horizontal size via HSMOD
(pin 31)
input current (pin 31) V
I
I
V
= 0; note 8 − 0.69 − V
HSMOD
= −120 µA; note 8 − 0.02 − V
HSMOD
= 0.02 V − 0 −µA
HEHT
= 0.69 V −−120 −µA
HEHT
input resistance 300 − 500 Ω
reference voltage at input I
roll-off frequency (−3 dB) I
=0 − 5.0 − V
HSMOD
= −60 µA+15µA
HSMOD
1 −−MHz
(RMS)
horizontal frequency range for
15 − 80 kHz
tracking
parabola amplitude at EWDRV
(pin 11)
I
= 1.052 mA;
HREF
fH= 31.45 kHz;
− 0.72 − V
control bit FHMULT = 1;
note 10
I
HREF
= 2.341 mA;
− 1.42 − V
fH= 70 kHz;
control bit FHMULT = 1;
note 10
function disabled;
− 1.42 − V
control bit FHMULT = 0;
note 10
linearity error of horizontal
−−8%
frequency tracking
vertical sawtooth voltage for
EW parallelogram correction
register HPARAL = 0;
control bit HPC = 0; note 8
register HPARAL = 15;
−−0.825 − V
− 0.825 − V
control bit HPC = 0; note 8
register HPARAL = X;
− 0.05 − V
control bit HPC = 1; note 8
vertical parabola voltageforpin
unbalance correction
register HPINBAL = 0;
control bit HBC = 0; note 8
register HPINBAL = 15;
−−1.0 − V
− 1.0 − V
control bit HBC = 0; note 8
register HPINBAL = X;
− 0.05 − V
control bit HBC = 1; note 8
maximum output voltageswing
− 4 − V
(peak-to-peak value)
maximum output voltage − 6.5 − V
centre voltage − 4.0 − V
minimum output voltage − 1.9 − V
maximum output current V
≥ 1.9 V −−1.5 − mA
ASCOR
2000 Jan 31 21
Page 22

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
I
o(sink)(ASCOR)(max)
Focus section: pin FOCUS
V
VFOCUS(p-p)
V
o(FOCUS)(max)
V
o(FOCUS)(min)
I
o(FOCUS)(max)
C
L(FOCUS)(max)
B+ control section; see Figs 21 and 22
TRANSCONDUCTANCE AMPLIFIER: PINS BIN AND BOP
V
i(BIN)
I
i(BIN)(max)
V
ref(int)
V
o(BOP)(min)
V
o(BOP)(max)
I
o(BOP)(max)
g
m(OTA)
G
v(ol)
C
BOP(min)
VOLTAGE COMPARATOR: PIN BSENS
V
i(BSENS)
V
i(BOP)
I
LI(BSENS)(max)
OPEN-COLLECTOR OUTPUT STAGE: PIN BDRV
I
o(BDRV)(max)
I
LO(BDRV)
V
sat(BDRV)
t
off(BDRV)(min)
t
d(BDRV-HDRV)
BSENS DISCHARGE CIRCUIT: PIN BSENS
V
STOP(BSENS)
I
dch(BSENS)
V
th(BSENS)(restart)
maximum output sink current V
amplitude of vertical parabola
(peak-to-peak value)
register VFOCUS = 0;
note 8
register VFOCUS = 07;
≥ 1.9 V − 50 −µA
ASCOR
− 0.02 − V
− 0.8 − V
note 8
maximum output voltage I
minimum output voltage I
= 0 5.7 6 6.3 V
FOCUS
= 0 4.9 5.2 5.7 V
FOCUS
maximum output current ±1.5 −−mA
maximum capacitive load −−20 pF
input voltage pin 5 0 − 5.25 V
maximum input current pin 5 −−±1µA
reference voltage at internal
2.37 2.5 2.58 V
non-inverting input of OTA
minimum output voltage pin 3 −−0.5 V
maximum output voltage pin 3 I
< 1 mA 5.0 5.3 5.6 V
BOP
maximum output current pin 3 −±500 −µA
transconductance of OTA note 11 30 50 70 mS
open-loop voltage gain note 12 − 86 − dB
minimum value of capacitor at
10 −−nF
pin 3
voltage range of positive
0 − 5V
comparator input
voltage range of negative
0 − 5V
comparator input
maximum leakage current discharge disabled −−−2µA
maximum output current 20 −−mA
output leakage current V
saturation voltage I
=16V −−3µA
BDRV
<20mA −−300 mV
BDRV
minimum off-time − 250 − ns
delay between BDRV pulse
and HDRV pulse
discharge stop level capacitive load;
discharge current V
measured at
V
HDRV=VBDRV
I
= 0.5 mA
BSENS
> 2.5 V 4.5 6.0 7.5 mA
BSENS
− 500 − ns
=3V
0.85 1.0 1.15 V
threshold voltage for restart fault condition 1.2 1.3 1.4 V
2000 Jan 31 22
Page 23

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
C
BSENS(min)
Internal reference, supply voltage, soft start and protection
V
CC(stab)
I
CC
I
CC(stb)
PSRR power supply rejection ratio of
V
CC(blank)
V
CC(blank)(min)
V
on(VCC)
V
off(VCC)
THRESHOLDS DERIVED FROM HPLL2 VOLTAGE
V
HPLL2(blank)(ul)
V
HPLL2(bduty)(ul)
V
HPLL2(bduty)(ll)
V
HPLL2(hduty)(ul)
V
HPLL2(hduty)(ll)
V
HPLL2(stby)(ll)
V
HPLL2(stby)(ul)
V
HPLL2(stby)(ll)
minimum value of capacitor at
2 −−nF
BSENS (pin 4)
external supply voltage for
9.2 − 16 V
complete stabilization of all
internal references
supply current − 70 − mA
standby supply current STDBY = 1; V
PLL2
<1V;
− 9 − mA
3.5V<VCC<16V
f = 1 kHz 50 −−dB
internal supply voltage
supply voltage level for
VCC decreasing from 12 V 8.2 8.6 9.0 V
activation of continuous
blanking
minimum supply voltage level
VCC decreasing from 12 V 2.5 3.5 4.0 V
for function of continuous
blanking
supply voltage level for
activation of HDRV, BDRV,
VCCincreasing from below
typical 8 V
7.9 8.3 8.7 V
VOUT1, VOUT2 and
HUNLOCK
supply voltage level for
deactivation of BDRV, VOUT1,
VCC decreasing from
above typical 8.3 V
7.7 8.1 8.5 V
VOUT2 and HUNLOCK; also
sets register SOFTST
upper limit voltage for
− 4.7 − V
continuous blanking
upper limit voltage for variation
− 3.4 − V
of BDRV duty cycle
lower limit voltage for variation
− 2.8 − V
of BDRV duty cycle
upper limit voltage for variation
− 2.8 − V
of HDRV duty cycle
lower limit voltage for variation
− 1.7 − V
of HDRV duty cycle
lower limit voltage for VOUT1
− 1.1 − V
and VOUT2 to be active via
I2C-bus soft start
upper limit voltage for standby
− 1 − V
voltage
lower limit voltage for VOUT1
− 0 − V
and VOUT2 to be active via
external DC current
2000 Jan 31 23
Page 24

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
Notes
1. For duration of vertical blanking pulse see subheading ‘Vertical oscillator [oscillator frequency in application without
adjustment of free-running frequency f
2. Continuous blanking at CLBL (pin 16) will be activated, if one of the following conditions is true:
a) No horizontal flyback pulses at HFLB (pin 1) within a line
b) X-ray protection is triggered
c) Voltage at HPLL2 (pin 30) is low during soft start
d) Supply voltage at VCC (pin 10) is low
e) PLL1 unlocked while frequency-locked loop is in search mode.
3. Oscillator frequency is f
when no sync input signal is present (continuous blanking at pins 16 and 17).
min
4. Loading of HPLL1 (pin 26) is not allowed.
5. Voltage at HPLL1 (pin 26) is fed to HBUF (pin 27) via a buffer. Disturbances caused by horizontal sync are removed
by an internal sample-and-hold circuit.
6. All vertical and EW adjustments in accordance with note 8, but VSIZE = 80% (register VSIZE = 63 and control
bit VOVSCN = 0).
7. Value of resistor at VREF (pin 23) may not be changed.
8. All vertical and EW adjustments are specified at nominal vertical settings; unless otherwise specified, which means:
a) VSIZE = 100% (register VSIZE = 127 and control bit VOVSCN = 0)
b) VSMOD = 0 (no EHT compensation)
c) VPOS centred (register VPOS = X and control bit VPC = 1)
d) VLIN = 0 (register VLIN = X and control bit VSC = 1)
e) VLINBAL = 0 (register VLINBAL = X and control bit VLC = 1)
f) FHMULT = 0
g) HPARAL = 0 (register HPARAL = X and control bit HPC = 1)
h) HPINBAL = 0 (register HPINBAL = X and control bit HBC = 1)
i) Vertical oscillator synchronized
j) HSIZE = 255.
9. The output signal at EWDRV (pin 11) may consist of horizontal pincushion + corner correction + DC shift +
trapezium correction. If the control bit VOVSCN is set, and the VPOS adjustment is set to an extreme value, the tip
of the parabola may be clipped at the upper limit of the EWDRV output voltage range. The waveform of corner
correction will clip if the vertical sawtooth adjustment exceeds 110% of the nominal setting.
10. If fH tracking is enabled, the amplitude of the complete EWDRV output signal (horizontal pincushion + corner
correction + DC shift + trapezium) will be changed proportional to I
fixed.
11. First pole of transconductance amplifier is5 MHz without external capacitor (will become the second pole, if the OTA
operates as an integrator).
fr(V)
]’.
. The EWDRV low level of 1.2 V remains
HREF
V
12. Open-loop gain is at f = 0 with no resistive load and C
BOP
-------------V
BIN
2000 Jan 31 24
= 10 nF [from BOP (pin 3) to GND].
BOP
Page 25

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
Vertical and EW adjustments
∆l
2
MBG590
∆l
1
t
(1)
handbook, halfpage
I
VOUT1
I
VOUT2
(1) ∆I1 is the maximum amplitude setting at register VSIZE = 127,
control bit VOVSCN = 0, control bit VPC = 1,
control bit VSC = 1 and control bit VLC = 1.
I∆
2
VSIZE
VSMOD
------- -
100%×=
I∆
1
I∆
2
100%×=
------- I∆
1
TDA4857PS
handbook, halfpage
I
VOUT1
I
VOUT2
(1)
∆l
1
(1) ∆I1 is the maximum amplitude setting at register VSIZE = 127
and control bit VPC = 1.
∆ I1∆–
I
2
VPOS
--------------------- 2I
∆×
1
100%×=
∆l
MBG592
2
t
Fig.3 Adjustment of vertical size.
handbook, halfpage
I
VOUT1
I
VOUT2
(1)
∆l
1
(1) ∆I1 is the maximum amplitude setting at register VSIZE = 127
and VLIN = 0%.
–
I∆
1I∆2
VLIN
--------------------- -
100%×=
∆
I
1
∆l2/∆t
/∆t
Fig.5 Adjustment of vertical linearity (vertical
S-correction).
MBG594
t
Fig.4 Adjustment of vertical position.
handbook, halfpage
I
VOUT1
I
VOUT2
(1) ∆I1 is the maximum amplitude setting at register VSIZE = 127,
register VOVSCN = 0, control bit VPC = 1, control bit VLIN = 1
and control bit VLINBAL = 0.
–
I∆
1I∆2
VLINBAL
--------------------- 2I
∆×
1
100%×=
MGM068
∆I
∆I
2
Fig.6 Adjustment of vertical linearity balance.
(1)
1
t
2000 Jan 31 25
Page 26

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
handbook, halfpage
V
EWDRV
MGM069
V
HPIN(EWDRV)
t
handbook, halfpage
V
EWDRV
TDA4857PS
MGM070
V
HCOR(EWDRV)
t
Fig.7 Adjustment of parabola amplitude at
pin EWDRV.
handbook, halfpage
V
EWDRV
V
MGM071
HTRAP(EWDRV)
t
Fig.8 Influence of corner correction at pin EWDRV.
handbook, halfpage
V
EWDRV
V
HSIZE(EWDRV)
+
V
HEHT(EWDRV)
t
MGM072
Fig.9 Influence of trapezium at pin EWDRV.
2000 Jan 31 26
Fig.10 Influence of HSIZE and EHT compensation
at pin EWDRV.
Page 27

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
handbook, halfpage
V
ASCOR
V
c(ASCOR)
V
HPARAL(ASCOR)
MGM073
t
handbook, halfpage
V
ASCOR
V
c(ASCOR)
TDA4857PS
MGM074
V
HPINBAL(ASCOR)
t
Fig.11 Adjustment of parallelogram at pin ASCOR.
Fig.12 Adjustment of pin balance at pin ASCOR.
2000 Jan 31 27
Page 28

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
Pulse diagrams
4.0 V
handbook, full pagewidth
vertical oscillator sawtooth
at VCAP (pin 24)
vertical sync pulse
automatic trigger level
synchronized trigger level
3.8 V
1.4 V
inhibited
TDA4857PS
internal trigger
inhibit window
(typical 4 ms)
vertical blanking pulse
at CLBL (pin 16)
vertical blanking pulse
at HUNLOCK (pin 17)
differential output currents
VOUT1 (pin 13) and
VOUT2 (pin 12)
EW drive waveform
at EWDRV (pin 11)
I
VOUT1
I
VOUT2
7.0 V maximum
DC shift 3.6 V maximum
low-level 1.2 V fixed
MGM075
Fig.13 Pulse diagram for vertical part.
2000 Jan 31 28
Page 29

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
handbook, full pagewidth
horizontal oscillator sawtooth
at HCAP (pin 29)
horizontal sync pulse
TDA4857PS
PLL1 control current
at HPLL1 (pin 26)
video clamping pulse
at CLBL (pin 16)
triggered on trailing edge
of horizontal sync
line flyback pulse
at HFLB (pin 1)
PLL2 control current
at HPLL2 (pin 30)
line drive pulse
at HDRV (pin 8)
PLL2
control range
-
+
+
45 to 52% of line period
–
vertical blanking level
MHB660
Fig.14 Pulse diagram for horizontal part.
2000 Jan 31 29
Page 30

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
handbook, full pagewidth
handbook, full pagewidth
composite sync (TTL)
at HSYNC (pin 15)
relative t
HDRV(OFF)/tH
(%)
Fig.15 Relative t
52
45
15 30 110 130
time of HDRV as a function of horizontal frequency.
OFF
TDA4857PS
MGM077
fH (kHz)
internal integration of
composite sync
internal vertical
PLL1 control voltage
at HPLL1 (pin 26)
clamping and blanking
pulses at CLBL (pin 16)
handbook, full pagewidth
composite sync (TTL)
at HSYNC (pin 15)
clamping and blanking
pulses at CLBL (pin 16)
trigger pulse
MGC947
a. Reduced influence of vertical sync on horizontal phase.
MBG596
b. Generation of video clamping pulses during vertical sync with serration pulses.
Fig.16 Pulse diagrams for composite sync applications.
2000 Jan 31 30
Page 31

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
I2C-BUS PROTOCOL
2
C-bus data format
I
(1)
S
SLAVE ADDRESS
Notes
1. S = START condition.
2. SLAVE ADDRESS (MAD) = 1000 1100.
3. A = acknowledge, generatedbythe slave. No acknowledge, if thesupply voltage is below 8.3 V forstart-upand 8.1 V
for shut-down procedure.
4. SUBADDRESS (SAD).
5. DATA,if more than 1 byte of DATA istransmitted, then no auto-increment of the significant subaddress is performed.
6. P = STOP condition.
It should be noted that clock pulses according to the 400 kHz specification are accepted for 3.3 and 5 V applications
(reference level = 1.8 V). Default register values after power-up are random. All registers have to be preset via software
before the soft start is enabled.
Important: If the register contents are changed during the vertical scan, this might result in a visible interference on the
screen. The cause for this interference is the abrupt change in picture geometry which takes effect at random locations
within the visible picture.
(2)
(3)
A
SUBADDRESS
(4)
(3)
A
DA TA
(5)
(3)
A
(6)
P
To avoid this kind of interference, the adjustment of the critical geometry parameters HSIZE, HPOS, VSIZE and VPOS
should be synchronized with the vertical flyback. This should be done in such a way that the adjustment change takes
effect during the vertical blanking time (see Fig.17).
For very slow I
2
C-bus interfaces, it might be necessary to delay the transmission of the last byte (or only the last bit) of
an I2C-bus message until the start of the vertical sync or vertical blanking.
handbook, full pagewidth
vertical
sync pulse
vertical
blanking pulse
SDA
parameter change takes effect
MGM088
Fig.17 Timing of the I2C-bus transmission for interference-free adjustment.
2000 Jan 31 31
Page 32

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
Table 4 List of I2C-bus controlled switches; notes 1 and 2
CONTROL
BIT
BLKDIS 0: vertical, protection and horizontal unlock blanking
available on pins CLBL and HUNLOCK
1: only vertical and protection blanking available on
pins CLBL and HUNLOCK
HBC 0: HPINBAL (parabola) waveform enabled 01 X #####D1#
1: HPINBAL (parabola) waveform disabled
HPC 0: HPARAL (sawtooth) waveform enabled 01 X ####D2##
1: HPARAL (sawtooth) waveform disabled
AGCDIS 0: AGC in vertical oscillator active 01 X ###D3###
1: AGC in vertical oscillator inhibited
VSC 0: VLIN and HCOR adjustments enabled 01 X # # D4 ####
1: VLIN and HCOR adjustments forced to centre value
MOD 0: horizontal and vertical moire cancellation enabled 01 X # D5 #####
1: horizontal and vertical moire cancellation disabled
FHMULT 0: EW output independent of horizontal frequency 0B ######XD0
1: EW output tracks with horizontal frequency
VOVSCN 0: vertical size 100% 0B #####D2X#
1: vertical size 116.8% for VGA350
CLAMP 0: trailing edge for horizontal clamp 0B ####D3#X#
1: leading edge for horizontal clamp
VBLK 0: vertical blanking = 260 µs 0B###D4##X#
1: vertical blanking = 340 µs
VLC 0: VLINBAL adjustment enabled 0B # # D5 ###X#
1: VLINBAL adjustment forced to centre value
VPC 0: VPOS and HTRAP adjustments enabled 0B # D6 ####X#
1: VPOS and HTRAP adjustments forced to centre value
ACD 0: ASCOR disconnected from PLL2 0B D7 #####X#
1: ASCOR internally connected with PLL2
STDBY
SOFTST
(3)
0: internal power supply enabled 0D XXXXXX#D0
1: internal power supply disabled
(3)
0: soft start not released (pin HPLL2 pulled to ground) 0D XXXXXXD1#
1: soft start is released (power-up via pin HPLL2)
FUNCTION
SAD
(HEX)
01X######D0
REGISTER ASSIGNMENT
D7 D6 D5 D4 D3 D2 D1 D0
Notes
1. X = don’t care.
2. # = this bit is occupied by another function. If the register is addressed, the bit values for both functions must be
transferred.
3. Bits STDBY and SOFTST can be reset by internal protection circuit.
2000 Jan 31 32
Page 33

2000 Jan 31 33
Table 5 List of I2C-bus controlled functions and those accessible by pins; notes 1 and 2
FUNCTION NAME BITS
Horizontal size HSIZE 8 00 D7 D6 D5 D4 D3 D2 D1 D0
Vertical position VPOS 7 02 D7 D6 D5 D4 D3 D2 D1 X
Vertical linearity
balance
Moire cancellation via
vertical position
Horizontal pincushion HPIN 6 04 X X D5 D4 D3 D2 D1 D0
Moire cancellation via
horizontal position
Horizontal position HPOS 8 06 D7 D6 D5 D4 D3 D2 D1 D0
Vertical linearity VLIN 4 07 D7 D6 D5 D4 # # # #
EW pin balance HPINBAL 4 07 # # # # D3 D2 D1 D0
Vertical size VSIZE 7 08 D7 D6 D5 D4 D3 D2 D1 X
Horizontal corner
correction
Horizontal trapezium
correction
Horizontal
parallelogram
Vertical focus VFOCUS 3 0A D7 D6 D5 # # # # #
VLINBAL 4 03 X D6 D5 D4 D3 # # #
VMOIRE 3 03 # # # # # D2 D1 D0
HMOIRE 5 05 X X X D4 D3 D2 D1 D0
HCOR 5 09 X X X D4 D3 D2 D1 D0
HTRAP 4 0C D7 D6 D5 D4 # # # #
HPARAL 4 0C # # # # D3 D2 D1 D0
SAD
(HEX)
REGISTER ASSIGNMENT
D7 D6 D5 D4 D3 D2 D1 D0
CONTROL
BIT
− 0.1 to 3.6 V HSMOD
VPC ±11.5% VSMOD
VLC ±2.5% of 100%
MOD 0 to 0.08% of
− 0 to 1.44 V VSIZE, VOVSCN,
MOD 0 to 0.05% of
−±13% of horizontal
VSC −2to−46% VSIZE, VOVSCN,
HBC and
ACD
− 60 to 100% VSMOD
VSC +6 to −46% of
VPC ±0.33 V VSIZE, VOVSCN,
HPC and
ACD
− 0 to 25% VSIZE, VOVSCN
RANGE
vertical size
vertical amplitude
horizontal period
period
±1% of
horizontal period
parabola amplitude
±1% of horizontal
period
FUNCTION
TRACKS WITH
VSIZE, VOVSCN,
VPOS and VSMOD
−
VPOS, HSIZE and
HSMOD
−
−
VPOS and VSMOD
VSIZE, VOVSCN
and VPOS
VSIZE, VOVSCN,
VPOS, HSIZE and
HSMOD
VPOS, HSIZE and
HSMOD
VSIZE, VOVSCN
and VPOS
and VPOS
Philips Semiconductors Product specification
PC monitors
I
2
C-bus autosync deflection controller for
TDA4857PS
Notes
1. X = don’t care.
2. # = this bit is occupied by another function. If the register is addressed, the bit values for both functions must be transferred.
Page 34

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
Start-up procedure
VCC< 8.3 V:
START
Power-down mode (XXXX XXXX)
no acknowledge is given by IC
all register contents are random
VCC > 8.3 V
Standby mode (XXXX XX01)
STDBY = 1
all other register contents are random
S 8CH A 0DH A 00H A P
Protection mode (XXXX XX00)
all other register contents are random
S 8CH A SAD A DATA A P
Protection mode (XXXX XX00)
no
S 8CH A 0DH A 02H A P
Soft-start sequence (XXXX XX10)
no
change/refresh of data?
S 8CH A SAD A DATA A P
(1) See Fig.19.
SOFTST = 0
STDBY = 0
SOFTST = 0
STDBY = 0
SOFTST = 0
registers are pre-set
all registers defined?
yes
STDBY = 0
SOFTST = 1
Operating mode (XXXX XX10)
STDBY = 0
SOFTST = 1
yes
L1
L2
L3
SOFTST = 0?
yes
(1)
L4
no
MGM078
• As long as the supply voltage is too low for correct
• Supply current is 9 mA or less.
VCC> 8.3 V:
• The internal POR has ended and the IC is in standby
• Control bits STDBY and SOFTST are reset to their start
• All other register contents are random
• Pin HUNLOCK is at HIGH-level.
Setting control bit STDBY = 0:
• Enables internal power supply
• Supply current increases from 9 to 70 mA
• When VCC< 8.6 V register SOFTST cannot be set by
• Output stages are disabled, except the vertical output
• Pin HUNLOCK is at HIGH-level.
Setting all registers to defined values:
• Due to the hardware configuration of the IC
Setting control bit SOFTST = 1:
• Before starting the soft-start sequence a delay of
• HDRV duty cycle increases
• BDRV duty cycle increases
• PLL1 and PLL2 are enabled.
IC in full operation:
• Pin HUNLOCK is at LOW-level when PLL1 is locked
• Any change of the register content will result in
• Setting control bit SOFTST = 0 is the only way (except
Soft-down sequence:
• See L4 of Fig.19 for starting the soft-down sequence.
TDA4857PS
operation, the IC will give no acknowledge due to
internal Power-on reset (POR)
mode
values
the I2C-bus
(no auto-increment) any register setting needs a
complete 3-byte I2C-bus data transfer as follows:
START - IC address - subaddress - data - STOP.
minimum 80 ms is necessary to obtain correct function
of the horizontal drive
immediate change of the output behaviour
power-down via pin VCC) to leave the operating mode.
Fig.18 I2C-bus flow for start-up.
2000 Jan 31 34
Page 35

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
Protection and standby mode
Soft-down sequence:
L4
S 8CH A 0DH A 00H A P
Soft-down sequence (XXXX XX00)
STDBY = 0
SOFTST = 0
Protection mode (XXXX XX00)
STDBY = 0
SOFTST = 0
registers are set
no
STDBY = 1?
yes
SOFTST = 1?
(1)
L3
no
yes
• Start the sequence by setting control bit SOFTST = 0
• BDRV duty cycle decreases
• HDRV duty cycle decreases.
Protection mode:
• Pins HDRV and BDRV are floating
• Continuous blanking at pin CLBL is active
• Pin HUNLOCK is floating
• PLL1 and PLL2 are disabled
• Register contents are kept in internal memory.
Protection mode can be left by 3 ways:
1. Entering standby mode by setting control
2. Starting the soft-start sequence by setting control
3. Decreasing the supply voltage below 8.1 V.
TDA4857PS
bit SOFTST = 0 and control bit STDBY = 1
bit SOFTST = 1 (bit STDBY = don’t care);
see L3 of Fig.18 for continuation
S 8CH A 0DH A 01H A P
Standby mode (XXXX XX01)
STDBY = 1
all other register contents are random
(1) See Fig.18.
SOFTST = 0
(1)
L2
MBK382
Fig.19 I2C-bus flow for protection and standby
mode.
Standby mode:
• Set control bit STDBY = 1
• Driver outputs are floating (same as protection mode)
• Supply current is 9 mA
• Only the I2C-bus and protection circuits are operative
• Contents of all registers except the value of bit STDBY
and bit SOFTST are lost
• See L2 of Fig.18 for continuation.
2000 Jan 31 35
Page 36

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
handbook, full pagewidth
all register contents are random
(1) See Fig.18.
(ANY Mode)
VCC < 8.1 V
Power-Down Mode
no acknowledge is given by IC
(1)
L1
Fig.20 I2C-bus flow for any mode.
MGM079
V
a soft-down sequency followed by a
CC
soft start sequence is generated
8.6 V
internally.
8.1 V
V
IC enters standby mode.
CC
8.6 V
8.1 V
TDA4857PS
Power-down mode
Power dip of VCC< 8.6 V:
• The soft-down sequence is started first.
• Then the soft-start sequence is generated internally.
Power dip of VCC< 8.1 V or VCC shut-down:
• This function is independent from the operating mode, so it works under any condition.
• All driver outputs are immediately disabled
• IC enters standby mode.
2000 Jan 31 36
Page 37

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
APPLICATION INFORMATION
handbook, full pagewidth
2
1
horizontal
flyback pulse
D1
C1
R1
R3
V
HPLL2
2.5 V
5
V
BIN
SOFT START
OTA
R2
34
V
C2
V
HDRV
BOP
C
BOP
>10 nF
4
C4
V
BSENS
SRQ
Q
DISCHARGE
6
V
CC
(1)
R6
3
INVERTING
BUFFER
V
BDRV
TDA4857PS
V
i
L
TR1
R5
R4
D2
HORIZONTAL
OUTPUT
STAGE
MGM080
EWDRV
For f < 50 kHz and C2 < 47 nF calculation formulas and behaviour of the OTA are the same as for an OP. An exception is the limited output current at
BOP (pin 3). See Chapter “Characteristics”, Row Head “B+ control section; see Figs 21 and 22”.
(1) The recommended value for R6 is 1 kΩ.
a. Feedback mode application.
handbook, full pagewidth
1
horizontal
flyback pulse
2
V
3
V
BSENS
4
HDRV
V
BDRV
V
BSENS
= V
BOP
t
on
t
d(BDRV)
t
off(min)
MBG600
V
RESTART(BSENS)
V
STOP(BSENS)
b. Waveforms for normal operation. c. Waveforms for fault condition.
Fig.21 Application and timing for feedback mode.
2000 Jan 31 37
Page 38

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
2
V
HDRV
34
V
BOP
D1
C1
4
C
BSENS
>2 nF
V
BSENS
SRQ
DISCHARGE
EHT adjustment
V
HPLL2
2.5 V
R1 R2
V
BIN
power-down
SOFT START
OTA
5
TR2
Q
R3
6
V
CC
R4
INVERTING
BUFFER
V
3
(1)
BDRV
HORIZONTAL
OUTPUT
STAGE
EHT
transformer
TR1
TDA4857PS
horizontal
flyback pulse
1
D2
I
5
MOSFET
MGM081
(1) The recommended value for R4 is 1 kΩ.
handbook, full pagewidth
1
horizontal
flyback pulse
2
V
HDRV
t
on
3
V
BDRV
t
d(BDRV)
4
V
5
I
BSENS
MOSFET
V
BOP
> 10 nF
C
BOP
a. Forward mode application.
V
BOP
t
(discharge time of C
off
BSENS
)
V
RESTART(BSENS)
V
STOP(BSENS)
MBG602
b. Waveforms for normal operation. c. Waveforms for fault condition.
Fig.22 Application and timing for feed forward mode.
2000 Jan 31 38
Page 39

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
Start-up sequence and shut-down sequence
handbook, full pagewidth
V
CC
8.3 V data accepted from I
video clamping pulse enabled if control bit STDBY = 0
3.5 V continuous blanking (pin 16 and 17) activated
continuous blanking off
8.6 V
PLL2 soft start/soft-down enabled
2
C-bus
TDA4857PS
MGM082
(1)
time
handbook, full pagewidth
V
CC
a. Start-up sequence.
continuous blanking (pin 16 and 17) activated
8.6 V
PLL2 soft-down sequence is triggered
8.1 V
no data accepted from I
video clamping pulse disabled
b. Shut-down sequence.
(2)
2
C-bus
3.5 V continuous blanking disappears
MGM083
time
(1) See Figs 18, 19, 20, 24 and 25.
(2) See Figs 24b and 25b.
Fig.23 Start-up sequence and shut-down sequence.
2000 Jan 31 39
Page 40

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
PLL2 soft start sequence and PLL2 soft-down sequence
handbook, full pagewidth
V
HPLL2
3.4 V
BDRV duty cycle begins to increase
2.8 V
duty cycle increases
1.7 V
1 V VOUT1 and VOUT2 enabled
HDRV duty cycle has reached nominal value
HDRV duty cycle begins to increase
MGM084
continuous blanking off
4.7 V
PLL2 enabled
frequency detector enabled
HDRV/HFLB protection enabled
BDRV duty cycle has reached nominal value
time
TDA4857PS
handbook, full pagewidth
V
HPLL2
a. PLL2 soft start sequence, via the I2C-bus, if VCC> 8.6 V.
continuous blanking (pin 16 and 17) activated
4.7 V
PLL2 disabled
frequency detector disabled
HDRV/HFLB protection disabled
3.4 V
BDRV duty cycle begins to decrease
duty cycle decreases
2.8 V BDRV floating
HDRV duty cycle begins to decrease
1.7 V
HDRV floating
1 V VOUT1 and VOUT2 floating
(1)
time
b. PLL2 soft-down sequence, via the I2C-bus, if VCC> 8.6 V.
MGM085
(1)
(1) HDRV, BDRV, VOUT2 and VOUT1 are floating for VCC< 8.6 V.
Fig.24 PLL2 soft start sequence and PLL2 soft-down sequence via the I2C-bus.
2000 Jan 31 40
Page 41

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
handbook, full pagewidth
V
HPLL2
3.3 V
BDRV duty cycle begins to increase
3.0 V
duty cycle increases
1.7 V
HDRV duty cycle has reached nominal value
HDRV duty cycle begins to increase
MHB108
continuous blanking off
4.6 V
PLL2 enabled
frequency detector enabled
HDRV/HFLB protection enabled
BDRV duty cycle has reached nominal value
time
TDA4857PS
handbook, full pagewidth
V
HPLL2
a. PLL2 soft start sequence by external DC current, if VCC> 8.6 V.
MHB109
continuous blanking (pin 16 and 17) activated
4.6 V
PLL2 disabled
frequency detector disabled
HDRV/HFLB protection disabled
3.3 V
BDRV duty cycle begins to decrease
duty cycle decreases
3.0 V BDRV floating
HDRV duty cycle begins to decrease
1.7 V
HDRV floating
(1)
time
(1)
b. PLL2 soft-down sequence by external DC current, if VCC> 8.6 V.
(1) HDRV, BDRV, VOUT2 and VOUT1 are floating for VCC< 8.6 V.
Fig.25 PLL2 soft start sequence and PLL2 soft-down sequence by external DC current.
2000 Jan 31 41
Page 42

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
handbook, full pagewidth
V
XRAY
V
HUNLOCK
BDRV duty cycle
HDRV duty cycle
X-ray latch triggered
TDA4857PS
floating
floating
MHB657
Vertical linearity error
(1) I
VOUT=IVOUT1
(2) I1=I
VOUT
(3) I2=I
VOUT
(4) I3=I
VOUT
Which means:
Vertical linearity error =
at V
at V
at V
I
− I
VOUT2
VCAP
VCAP
VCAP
I1I3–
=
--------------
0
2
Fig.26 Activation of the soft-down sequence via pin XRAY.
handbook, halfpage
.
= 1.9 V.
= 2.6 V.
= 3.3 V.
I
–
I
1I2
–
1 max
or
--------------
--------------
I
0
–
2I3
I
0
I
VOUT
(µA)
+415
−415
(1)
(2)
I
1
(3)
I
0
2
I
3
V
MBG551
(4)
VCAP
Fig.27 Definition of vertical linearity error.
2000 Jan 31 42
Page 43

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
Printed-circuit board layout
handbook, full pagewidth
external components of
horizontal section
32
31
external components of
horizontal section
further connections to other components
or ground paths are not allowed
30
29
28
27
26
TDA4857PS
external components of
vertical section
25
24
23
22
21
20
19
18
17
pin 25 should be the 'star point'
for all small signal components
no external ground tracks
connected here
2.2 nF47 nF
TDA4857PS
1
2
3
470 pF
B-drive line in parallel
to ground
SMD
For optimum performance of the TDA4857 the ground paths must be routed as shown.
Only one connection to other grounds on the PCB is allowed.
Note: The tracks for HDRV and BDRV should be kept separate.
5
6
7
8
100 µF
9
12 V
10
11
12
13
14
4
only this path may be connected
to general ground of PCB
15
MHB659
16
Fig.28 Hints for printed-circuit board (PCB) layout.
2000 Jan 31 43
Page 44

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
INTERNAL PIN CONFIGURATION
PIN SYMBOL INTERNAL CIRCUIT
1 HFLB
1.5 kΩ
1
7 x
2 XRAY
5 kΩ
2
TDA4857PS
MBG561
3 BOP
4 BSENS
6.25 V
MBG562
3
5.3 V
MBG563
4
2000 Jan 31 44
MBG564
Page 45

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
PIN SYMBOL INTERNAL CIRCUIT
5 BIN
5
MBG565
6 BDRV
6
7 PGND power ground, connected to substrate
8 HDRV
8
TDA4857PS
MBG566
9 XSEL
10 V
CC
11 EWDRV
MGM089
4 kΩ
9
MBK381
10
MGM090
108 Ω
11
108 Ω
MBG570
2000 Jan 31 45
Page 46

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
PIN SYMBOL INTERNAL CIRCUIT
12 VOUT2
12
13 VOUT1
13
14 VSYNC
TDA4857PS
MBG571
MBG572
15 HSYNC
16 CLBL
100 Ω
14
7.3 V
15
2 kΩ
1.28 V
85 Ω
7.3 V
16
1.4 V
MBG573
1.4 V
MBG574
MBG575
2000 Jan 31 46
Page 47

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
PIN SYMBOL INTERNAL CIRCUIT
17 HUNLOCK
17
18 SCL
18
19 SDA
19
TDA4857PS
MGM091
MGM092
20 ASCOR
21 VSMOD
MGM093
480 Ω
20
MGM094
250 Ω
21
5 V
MGM095
2000 Jan 31 47
Page 48

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
PIN SYMBOL INTERNAL CIRCUIT
22 VAGC
22
23 VREF
23
TDA4857PS
MBG581
3 V
24 VCAP
25 SGND signal ground
26 HPLL1
27 HBUF
MBG582
24
MBG583
26
4.3 V
MGM096
2000 Jan 31 48
27
5 V
MGM097
Page 49

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
PIN SYMBOL INTERNAL CIRCUIT
28 HREF
29 HCAP
76 Ω
28
7.7 V
29
30 HPLL2
7.7 V
TDA4857PS
2.525 V
MBG585
31 HSMOD
30
HFLB
250 Ω
31
6.25 V
MGM098
5 V
MGM099
2000 Jan 31 49
Page 50

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
PIN SYMBOL INTERNAL CIRCUIT
32 FOCUS
32
Electrostatic discharge (ESD) protection
TDA4857PS
120 Ω
200 Ω
120 Ω
MGM100
pin
pin
MBG559
Fig.29 ESD protection for pins 4, 11 to 13,
16 and 17.
7.3 V
7.3 V
MBG560
Fig.30 ESD protection for pins 2, 3, 5, 18 to 24
and 26 to 32.
2000 Jan 31 50
Page 51

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
PACKAGE OUTLINE
SDIP32: plastic shrink dual in-line package; 32 leads (400 mil)
D
seating plane
L
Z
32
e
b
TDA4857PS
SOT232-1
M
E
A
2
A
A
1
w M
b
1
17
c
(e )
M
1
H
pin 1 index
1
0 5 10 mm
scale
DIMENSIONS (mm are the original dimensions)
A
A
A
UNIT b
Note
1. Plastic or metal protrusions of 0.25 mm maximum per side are not included.
mm
OUTLINE
VERSION
SOT232-1
max.
4.7 0.51 3.8
12
min.
max.
IEC JEDEC EIAJ
1.3
0.8
b
1
0.53
0.40
REFERENCES
0.32
0.23
cEe M
(1) (1)
D
29.4
28.5
9.1
8.7
E
16
(1)
Z
L
3.2
2.8
EUROPEAN
PROJECTION
M
10.7
10.2
E
12.2
10.5
e
1
w
H
0.181.778 10.16
ISSUE DATE
92-11-17
95-02-04
max.
1.6
2000 Jan 31 51
Page 52

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
SOLDERING
Introduction to soldering through-hole mount
packages
This text gives a brief insight to wave, dip and manual
soldering.Amore in-depth account of soldering ICs canbe
found in our
Packages”
Wave soldering is the preferred method for mounting of
through-hole mount IC packages on a printed-circuit
board.
Soldering by dipping or by solder wave
The maximum permissible temperature of the solder is
260 °C; solder at this temperature must not be in contact
with the joints for more than 5 seconds.
Suitability of through-hole mount IC packages for dipping and wave soldering methods
DBS, DIP, HDIP, SDIP, SIL suitable suitable
“Data Handbook IC26; Integrated Circuit
(document order number 9398 652 90011).
PACKAGE
Thetotalcontacttimeofsuccessive solder waves must not
exceed 5 seconds.
The device may be mounted up to the seating plane, but
the temperature of the plastic body must not exceed the
specified maximum storage temperature (T
printed-circuit board has been pre-heated, forced cooling
may be necessary immediately after soldering to keep the
temperature within the permissible limit.
Manual soldering
Apply the soldering iron (24 V or less) to the lead(s) of the
package, either below the seating plane or not more than
2 mm above it. If the temperature of the soldering iron bit
is less than 300 °C it may remain in contact for up to
10 seconds. If the bit temperature is between
300 and 400 °C, contact may be up to 5 seconds.
SOLDERING METHOD
DIPPING WAVE
(1)
TDA4857PS
). If the
stg(max)
Note
1. For SDIP packages, the longitudinal axis must be parallel to the transport direction of the printed-circuit board.
2000 Jan 31 52
Page 53

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
TDA4857PS
PC monitors
DEFINITIONS
Data sheet status
Objective specification This data sheet contains target or goal specifications for product development.
Preliminary specification This data sheet contains preliminary data; supplementary data may be published later.
Product specification This data sheet contains final product specifications.
Limiting values
Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 134). Stress above one or
more of the limiting values may cause permanent damage to the device. These are stress ratings only and operation
of the device at these or at any other conditions above those given in the Characteristics sections of the specification
is not implied. Exposure to limiting values for extended periods may affect device reliability.
Application information
Where application information is given, it is advisory and does not form part of the specification.
LIFE SUPPORT APPLICATIONS
These products are not designed for use in life support appliances, devices, or systems where malfunction of these
products can reasonably be expected to result in personal injury. Philips customers using or selling these products for
use in such applications do so at their own risk and agree to fully indemnify Philips for any damages resulting from such
improper use or sale.
PURCHASE OF PHILIPS I
Purchase of Philips I
components in the I2C system provided the system conforms to the I2C specification defined by
Philips. This specification can be ordered using the code 9398 393 40011.
2
C COMPONENTS
2
C components conveys a license under the Philips’ I2C patent to use the
2000 Jan 31 53
Page 54

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
NOTES
TDA4857PS
2000 Jan 31 54
Page 55

Philips Semiconductors Product specification
I2C-bus autosync deflection controller for
PC monitors
NOTES
TDA4857PS
2000 Jan 31 55
Page 56

Philips Semiconductors – a w orldwide compan y
Argentina: see South America
Australia: 3 Figtree Drive, HOMEBUSH, NSW 2140,
Tel. +61 2 9704 8141, Fax. +61 2 9704 8139
Austria: Computerstr. 6, A-1101 WIEN, P.O. Box 213,
Tel. +43 1 60 101 1248, Fax. +43 1 60 101 1210
Belarus: Hotel Minsk Business Center, Bld. 3, r. 1211, Volodarski Str. 6,
220050 MINSK, Tel. +375 172 20 0733, Fax. +375 172 20 0773
Belgium: see The Netherlands
Brazil: see South America
Bulgaria: Philips Bulgaria Ltd., Energoproject, 15th floor,
51 James Bourchier Blvd., 1407 SOFIA,
Tel. +359 2 68 9211, Fax. +359 2 68 9102
Canada: PHILIPS SEMICONDUCTORS/COMPONENTS,
Tel. +1 800 234 7381, Fax. +1 800 943 0087
China/Hong Kong: 501 Hong Kong Industrial Technology Centre,
72 Tat Chee Avenue, Kowloon Tong, HONG KONG,
Tel. +852 2319 7888, Fax. +852 2319 7700
Colombia: see South America
Czech Republic: see Austria
Denmark: Sydhavnsgade 23, 1780 COPENHAGEN V,
Tel. +45 33 29 3333, Fax. +45 33 29 3905
Finland: Sinikalliontie 3, FIN-02630 ESPOO,
Tel. +358 9 615 800, Fax. +358 9 6158 0920
France: 51 Rue Carnot, BP317, 92156 SURESNES Cedex,
Tel. +33 1 4099 6161, Fax. +33 1 4099 6427
Germany: Hammerbrookstraße 69, D-20097 HAMBURG,
Tel. +49 40 2353 60, Fax. +49 40 2353 6300
Hungary: see Austria
India: Philips INDIA Ltd, Band Box Building, 2nd floor,
254-D, Dr. Annie Besant Road, Worli, MUMBAI 400 025,
Tel. +91 22 493 8541, Fax. +91 22 493 0966
Indonesia: PTPhilips Development Corporation,Semiconductors Division,
Gedung Philips, Jl. Buncit Raya Kav.99-100, JAKARTA 12510,
Tel. +62 21 794 0040 ext. 2501, Fax. +62 21 794 0080
Ireland: Newstead, Clonskeagh, DUBLIN 14,
Tel. +353 1 7640 000, Fax. +353 1 7640 200
Israel: RAPAC Electronics, 7 Kehilat Saloniki St, PO Box 18053,
TEL AVIV 61180, Tel. +972 3 645 0444, Fax. +972 3 649 1007
Italy: PHILIPS SEMICONDUCTORS, ViaCasati,23 - 20052 MONZA (MI),
Tel. +39 039 203 6838, Fax +39 039 203 6800
Japan: Philips Bldg 13-37, Kohnan 2-chome, Minato-ku,
TOKYO 108-8507, Tel. +81 3 3740 5130, Fax. +81 3 3740 5057
Korea: Philips House, 260-199 Itaewon-dong, Yongsan-ku, SEOUL,
Tel. +82 2 709 1412, Fax. +82 2 709 1415
Malaysia: No. 76 Jalan Universiti, 46200 PETALING JAYA, SELANGOR,
Tel. +60 3 750 5214, Fax. +60 3 757 4880
Mexico: 5900 Gateway East, Suite 200, EL PASO, TEXAS 79905,
Tel. +9-5 800 234 7381, Fax +9-5 800 943 0087
Middle East: see Italy
Netherlands: Postbus 90050, 5600 PB EINDHOVEN, Bldg. VB,
Tel. +31 40 27 82785, Fax. +31 40 27 88399
New Zealand: 2 Wagener Place, C.P.O. Box 1041, AUCKLAND,
Tel. +64 9 849 4160, Fax. +64 9 849 7811
Norway: Box 1, Manglerud 0612, OSLO,
Tel. +47 22 74 8000, Fax. +47 22 74 8341
Pakistan: see Singapore
Philippines: Philips Semiconductors Philippines Inc.,
106 Valero St. Salcedo Village, P.O. Box 2108 MCC, MAKATI,
Metro MANILA, Tel. +63 2 816 6380, Fax. +63 2 817 3474
Poland: Al.Jerozolimskie 195 B, 02-222 WARSAW,
Tel. +48 22 5710 000, Fax. +48 22 5710 001
Portugal: see Spain
Romania: see Italy
Russia: Philips Russia, Ul. Usatcheva 35A, 119048 MOSCOW,
Tel. +7 095 755 6918, Fax. +7 095 755 6919
Singapore: Lorong 1, Toa Payoh, SINGAPORE 319762,
Tel. +65 350 2538, Fax. +65 251 6500
Slovakia: see Austria
Slovenia: see Italy
South Africa: S.A. PHILIPS Pty Ltd., 195-215 Main Road Martindale,
2092 JOHANNESBURG, P.O. Box 58088 Newville 2114,
Tel. +27 11 471 5401, Fax. +27 11 471 5398
South America: Al. Vicente Pinzon, 173, 6th floor,
04547-130 SÃO PAULO, SP, Brazil,
Tel. +55 11 821 2333, Fax. +55 11 821 2382
Spain: Balmes 22, 08007 BARCELONA,
Tel. +34 93 301 6312, Fax. +34 93 301 4107
Sweden: Kottbygatan 7, Akalla, S-16485 STOCKHOLM,
Tel. +46 8 5985 2000, Fax. +46 8 5985 2745
Switzerland: Allmendstrasse 140, CH-8027 ZÜRICH,
Tel. +41 1 488 2741 Fax. +41 1 488 3263
Taiwan: Philips Semiconductors, 6F, No. 96, Chien Kuo N. Rd., Sec. 1,
TAIPEI, Taiwan Tel. +886 2 2134 2886, Fax. +886 2 2134 2874
Thailand: PHILIPS ELECTRONICS (THAILAND) Ltd.,
209/2 Sanpavuth-Bangna Road Prakanong, BANGKOK 10260,
Tel. +66 2 745 4090, Fax. +66 2 398 0793
Turkey: Yukari Dudullu, Org. San. Blg., 2.Cad. Nr. 28 81260 Umraniye,
ISTANBUL, Tel. +90 216 522 1500, Fax. +90 216 522 1813
Ukraine: PHILIPS UKRAINE, 4 Patrice Lumumba str., Building B, Floor 7,
252042 KIEV, Tel. +380 44 264 2776, Fax. +380 44 268 0461
United Kingdom: Philips Semiconductors Ltd., 276 Bath Road, Hayes,
MIDDLESEX UB3 5BX, Tel. +44 208 730 5000, Fax. +44 208 754 8421
United States: 811 East Arques Avenue, SUNNYVALE, CA 94088-3409,
Tel. +1 800 234 7381, Fax. +1 800 943 0087
Uruguay: see South America
Vietnam: see Singapore
Yugoslavia: PHILIPS, Trg N. Pasica 5/v, 11000 BEOGRAD,
Tel. +381 11 3341 299, Fax.+381 11 3342 553
For all other countries apply to: Philips Semiconductors,
International Marketing & Sales Communications, Building BE-p, P.O. Box 218,
5600 MD EINDHOVEN, The Netherlands, Fax. +31 40 27 24825
© Philips Electronics N.V. SCA
All rights are reserved. Reproduction in whole or in part is prohibited without the prior written consent of the copyright owner.
The information presented in this document does not form part of any quotation or contract, is believed to be accurate and reliable and may be changed
without notice. No liability will be accepted by the publisher for any consequence of its use. Publication thereof does not convey nor imply any license
under patent- or other industrial or intellectual property rights.
2000
Internet: http://www.semiconductors.philips.com
69
Printed in The Netherlands 753504/01/pp56 Date of release: 2000 Jan 31 Document order number: 9397 750 06652
 Loading...
Loading...