

Page 1
INTEGRATED CIRCUITS
SC28L202
Dual universal asynchronous
receiver/transmitter (DUART)
Objective specification
Supersedes data of 2000 Jan 31
IC19 Data Handbook
2000 Feb 10
Page 2

Philips Semiconductors Objective specification
Dual universal asynchronous receiver/transmitter
(DUART)
DESCRIPTION 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FEATURES 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ORDERING INFORMATION 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PIN CONFIGURATION FOR 80XXX BUS INTERFACE (INTEL) (PRELIMINARY 2/10/00) 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CONFIGURATION FOR 68XXX BUS INTERFACE (MOTOROLA) 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OVERALL DESCRIPTION 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BRIEF DESCRIPTION OF FUNCTIONAL BLOCKS 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bus Interface 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timing Circuits 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I/O ports 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
UART s 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Transmitters and Receivers 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Character and Address Recognition 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Flow Control 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Test Modes and Software 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DETAILED DESCRIPTIONS 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bus Interface 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timing Circuit 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I/O Ports 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
UART Operation 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Receiver Operation 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Arbitrating Interrupt Structure 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PROGRAMMING THE HOST INTERFACE 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
REGISTER DESCRIPTION AND PROGRAMMING NOTE 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Registers that control Global Properties of the 28L202 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GCCR – Global Configuration Control Register 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GCCR(7:6) DACKN Assertion 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GCCR(5:3): Reserved 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GCCR(2:1): Interrupt vector configuration 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GCCR(0): Interrupt Status Masking 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SFSR A and B Special Feature & Status Register 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SFSR(7:4) Reserved 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SFSR(3) Status of loop back error check. 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SFSR(0) Reserved 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TRR Test and Revision Register. 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TRR(7) Test 2 Enable 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TRR [6:0] – Chip Revision Code 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
STCR – Scan Test Control Register. 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SES – System Enable Status Register, A and B 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
EOS – Enhanced Operation Status Register 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
UART Registers 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
These registers are generally concerned with formatting, transmitting and receiving data. 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR0 – Mode Register 0, A and B 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR0[7] Fixed length Watchdog T imer 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR0[5:4] – Tx interrupt fill level. 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR0[3] – FIFO Size 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR0[2:0] – Legacy Baud Rate Group Selection 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1 – Mode Register 1, A and B 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1[7] – Receiver Request to Send (hardware flow control) 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1[6] – Receiver interrupt control bit 1. 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1 [5] – Error Mode Select and sub modes 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1[4:3] – Parity Mode Select 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1[2] – Parity Type Select 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1[1:0] – Bits per Character Select 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR2 – Mode Register 2, A and B 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR2[7:6] – Mode Select 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR2[7:6] = b’00 Normal Mode 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR2[7:6] = b’01 Automatic Echo 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR2[7:6] = b’10 selects local loop back diagnostic mode. In this mode: 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR2 [7:6] = b’11 Selects the Remote Loop back diagnostic mode. In this mode: 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR2[5] Transmitter Request to Send Control 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR2[4] – Clear to Send Control 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR2[3:0] – Stop Bit Length Select 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SC28L202
2000 Feb 10
i
Page 3

Philips Semiconductors Objective specification
Dual universal asynchronous receiver/transmitter
(DUART)
MR3 – Mode Register 3, A and B 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR3[7 & 6] Xon/Xoff Character Stripping 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR3[5:4] Reserved 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR3[3:2] Xon/Xoff Processing 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR3[1:0] Address Recognition 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RxCSR – Receiver Clock Select Register A and B 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TxCSR Transmitter Clock Select Register A and B 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Rx and Tx Clock Select Table 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CRx – Command Register Extension, A and B 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CR[7] – Lock Tx and Rx enables. 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
WRITES TO THE LOWER 5 BITS OF THE CR WOULD USUALLY HAVE CR[7] 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CR[6] – Enable Transmitter 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CR[5] – Enable Receiver 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CR[4:0] – Miscellaneous Commands (See Table below) 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
COMMAND REGISTER EXTENSION TABLE A and B 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR – Channel Status Register A and B 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR[7] – Received Break 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR[6] – Framing Error (FE) 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR[5] – Parity Error (PE) 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR[4] – Overrun Error (OE) 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR [3] – Transmitter Idle (Tx Idle) 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR[2] – Transmitter Ready (TxRDY) 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR[1] – RxFIFO Full (RxFULL) 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR[0] – Receiver Ready (RxRDY) 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR – Interrupt Status Register A and B 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[7] – Input Change of State. 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[6] Fixed Watchdog Time–out. 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[5] – Address Recognition Status Change. 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[4] – Xon/Xoff Status Change. 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[3] – Counter Timer Status 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[2] – Change in Channel Break Status. 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[1] – RxINT. (Also Rx DMA hand shake at I/O pins) 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[0] – TxINT. (Also Tx DMA hand shake at I/O pins) 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IMR – Interrupt Mask Register A and B 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IMR[7] COS enable 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IMR[6] Fixed Watchdog Enable 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IMR[5] Address recognition enable 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IMR[4] Xon/Xoff Enable 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IMR[3] Counter/Timer Enable 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IMR[1] Receiver (Rx) Enable 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IMR[0] Transmitter (Tx) Enable 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RxFIFO – Receiver FIFO, A and B 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TxFIFO – Transmitter FIFO, A and B 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RxFIL – Receiver FIFO Interrupt Level, A and B 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RxFL – Receiver FIFO Fill Level Register 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TxFIL – Transmitter FIFO Interrupt Level A and B 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TxEL – Transmitter FIFO Empty Level Register 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Registers for Character Recognition 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XonCR – Xon/Xoff Character Register A and B 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XoffCR – Xoff Character Register A and B 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ARCR – Address Recognition Character Register A and B 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XISR – Xon–Xoff Interrupt Status Register A and B (Reading this register clears XISR(7:4)) 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XISR[7:6] Received X Character Status. 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XISR[5:4] Automatic transmission Status. 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XISR[3:2] TxD Condition of the automatic flow control status. 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XISR[1:0] TxD X character Status. 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
WCXER Watch Dog, Character, Address and X Enable Register – A and B 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Programmable Counters, Timers and Baud Rate generators 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PBRGPU – Programmable BRG Timer Reload Registers, Upper 0 and 1 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PBRGPL – Programmable BRG Timer Reload Registers, Lower 0 and 1 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CTCS 0 and 1 – Counter Timer clock source 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CTVU – Counter Timer Value Registers, Upper 0 and 1 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CTVL – Counter timer Value Registers, Lower 0 and 1 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PBRGCS – Programmable BRG Clock Source 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CTPU Counter Timer Preset Upper 0 and 1 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CTPL Counter –Timer Preset Low 0 and 1 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SC28L202
2000 Feb 10
ii
Page 4

Philips Semiconductors Objective specification
Dual universal asynchronous receiver/transmitter
(DUART)
Registers of the Arbitrating Interrupt System and Bidding control 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ICR – Interrupt Control Register 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
UCIR – Update CIR 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CIR – Current Interrupt Register 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IVR – Interrupt Vector Register 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modification of the IVR 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GICR – Global Interrupting Channel Register 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GIBCR – Global Interrupting Byte Count Register 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GITR – Global Interrupting Type Register 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GRxFIFO – Global RxFIFO Register 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
GTxFIFO – Global TxFIFO Register 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BCRBRK – Bidding Control Register – Break Change, A and B 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BCRCOS – Bidding Control Register – Change of State, A and B 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BCRx – Bidding Control Register – Xon/Xoff, A and B 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BCRA – Bidding Control Register – Address, A and B 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BCR C/T – Bidding Control Register –C/T, 0 and 1 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BCRLBE – Bidding Control Register – Received Loop Back Error 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Registers of the I/O ports 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IPCRL – Input Port Change Register Lower Nibble, A and B (n = A for A, n = B for B) 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IPCRU – Input Port Change Register Upper Nibble, A and B (n = A for A, n = B for B) 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IPR – Input Port Register, A and B (n = A for A, n = B for B) 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IPCE – Input Change Detect Enable, A and B (n = A for A, n = B for B) 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I/OPCR 0 – I/O Port Configuration Register 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I/OPCR 1 – I/O Port Configuration Register 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I/OPCR 2 – I/O Port Configuration Register 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I/OPCR 3 – I/O Port Configuration Register 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SOPR A and SOPR B – Set the Output Port Bits (OPR A and OPR B) 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ROPR A and ROPR B – Reset ROPR Output Port Bits (OPR A and OPR B) 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OPR – Output Port Register, A and B (n = A for A, n = B for B) 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
THE REGISTERS FOR COMPATIBILITY WITH PREVIOUS DUARTS 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
REGISTER DESCRIPTIONS Mode Registers 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1 Mode Register 1 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1 A[7] – Channel A Receiver Request–to–Send Control (Flow Control) 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1[6] – Receiver interrupt control bit 1. See description under MR0[6]. 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1 A[5] – Channel A Error Mode Select 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1 A[4:3| – Channel A Parity Mode Select 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1 A[2] – Channel A Parity Type Select 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR1 A[1:0] – Channel A Bits Per Character Select 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MR2 Mode Register 2 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR Status Register 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR A[7] – Received Break 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR A[6] – Channel A Framing Error 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR A[5] – Channel A Parity Error 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR A[4] – Channel A Overrun Error 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR A[3] – Channel A Transmitter Empty (TxEMT A) 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR A[2] – Channel A Transmitter Ready (TxRDY A) 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR A[1] – Channel A FIFO Full (FFULL A) 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR A[0] – Channel A Receiver Ready (RxRDY A) 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SR B – Channel B Status Register 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CSR A – Channel A Clock Select Register CSR A [7:4] – Channel A Receiver Clock Select 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CSR Clock Select Register 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CSR A [3:0] – Channel A EXTERNAL Transmitter Clock Select 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CSR B [7:4] – Channel B Receiver Clock Select 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CSR B [3:0] – Channel B Transmitter Clock Select 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Rx FIFO Register. For characters shorter than 8 bits the unused bits are set to zero 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tx FIFO register. For characters shorter than 8 bits the unused bits are set to zero 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CR A and B Command Register 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CR Command Register 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
COMMAND REGISTER TABLE A and B 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IPCR Input Port Configuration Register 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IPCR [7:4] I/03A, I/O2 A, I/O1 A, I/O0 A Change–of–State 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IPCR [3:0] I/O3 A, I/O2 A, I/O1 A, I/O0 A logical level of I/O pin. 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ACR Auxiliary Control Register 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ACR[7] – Baud Rate Generator Set Select 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ACR[6:4] – Counter/Timer Mode And Clock Source Select 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ACR [3:0] – I/O3 A, I/O2 A, I/O1 A, I/O0 A Change–of–State Interrupt Enable 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SC28L202
2000 Feb 10
iii
Page 5

Philips Semiconductors Objective specification
Dual universal asynchronous receiver/transmitter
(DUART)
ISR – Interrupt Status Register 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[7] – Input Port Change Status 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[6] – Channel B Change In Break 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[5] – Rx B Interrupt 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[4] – Tx B Interrupt 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[3] – Counter Ready. 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[2] – Channel A Change in Break 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[1] – Rx A Interrupt 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ISR[0] – Tx A Interrupt 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IMR – Interrupt Mask Register 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CTPU Counter Timer Preset Upper (Counter/Timer 0) 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CTPL Counter –Timer Preset Lower (Counter/Timer 0) 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CTVU Counter Timer Value Upper (Counter/Timer 0) 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CTVL Counter –Timer Value Lower (Counter/Timer 0) 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IVR Interrupt Vector register in 68K mode and General purpose read write register in the x86 mode 49. . . . . . . . . . . . . . . . . . . . . . . . .
IPR Input Port Register I/O(6:0) A 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OPCR Output Port Configuration Register. Controls [7:2] B 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SOPR – Set Bits in the OPR 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ROPR – Reset Bits in the OPR 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OPR Output Port Register 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
REGISTER MAPS 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
REGISTER MAP DETAIL (based on 28L92) 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Register Map 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
REGISTER MAP (BASED ON 28L92) 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
REGISTER MAP (BASED ON 28L92) 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
REGISTER MAP (BASED ON 28L92) 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ABSOLUTE MAXIMUM RATINGS1 55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DC ELECTRICAL CHARACTERISTICS123 (NOMINAL 5 VOLTS) 56. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AC CHARACTERISTICS1,2,3 (NOMINAL 5 VOLTS) 57. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DC ELECTRICAL CHARACTERISTICS1,2,3 (NOMINAL 3.3 VOLTS) 59. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AC CHARACTERISTICS1,2,3 (NOMINAL 3.3 VOLTS) 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SC28L202
2000 Feb 10
iv
Page 6

Philips Semiconductors Objective specification
Dual universal asynchronous receiver/transmitter
(DUART)
LIST OF FIGURES
Figure 1. Reset Timing (80XXX mode) 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 2. Bus Timing (80XXX mode) 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 3. Reset Timing (68XXX mode) 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 4. Bus Timing (Read Cycle) (68XXX mode) 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 5. Bus Timing (Write Cycle) (68XXX mode) 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 6. Interrupt Cycle Timing (68XXX mode) 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 7. Port Timing 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 8. Interrupt Timing (80xxx mode) 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 9. Clock Timing 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 10. Transmitter External Clocks 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 1 1. Receiver External Clock 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 12. Transmitter Timing 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 13. Receiver Timing 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 14. Wake-Up Mode 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figure 15. Test Conditions on Outputs 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LIST OF TABLES
Table 1. Interrupt V alues 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 2. SC28L202 REGISTER BIT DESCRIPTIONS 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 3. Receiver FIFO Interrupt Fill Level MR0(3)=0 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 4. Receiver FIFO Interrupt Fill Level MR0(3)=1 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 5. Transmitter FIFO Interrupt Fill Level MR0(3)=0 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 6. Transmitter FIFO Interrupt Fill Level MR0(3)=0 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 7. SC28L92 Register Addressing READ (RDN = 0) WRITE (WRN = 0) 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 8. Baud Rate Generator Characteristics 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 9. Receiver FIFO Interrupt Fill Level MR0(3)=0 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 10. Receiver FIFO Interrupt Fill Level MR0(3)=1 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 11. Transmitter FIFO Interrupt Fill Level MR0(3)=0 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 12. Transmitter FIFO Interrupt Fill Level MR0(3)=1 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 13. Baud Rate (Base on a 14.7456 MHz crystal clock) 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table 14. ACR 6:4 Field Definition 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SC28L202
2000 Feb 10
v
Page 7

Philips Semiconductors Objective specification
SC28L202Dual UART
DESCRIPTION
The 28L202 is a high performance dual UART. Its functional and
programming features closely match but greatly extend those of
previous Philips dual channel UARTs. Its configuration on power up
is similar that of the SC26C92. Its differences from the SC26C92
are: 256–character receiver, 256 character transmit FIFOs, 3 and 5
volt compatibility, 8 I/O ports for each UART – 16 total, arbitrating
interrupt system and overall faster buss and data speeds. It is
fabricated in an advanced 0.5 micron CMOS process that allows
stand by current of less that 10 microamperes.
It is a member of the IMPACT
Pin or register programming will allow the device to operate with
either the Motorola or Intel bus interface by changing the function of
some pins (reset is inverted, DACKN, and IACKN enabled for
example).
The Philips Semiconductors 28L202 Dual Universal Asynchronous
Receiver/Transmitter (DUART) is a single–chip CMOS–LSI
communications device that provides two full–duplex asynchronous
receiver/transmitter channels in a single package. It interfaces
directly with microprocessors and may be used in a polled or
interrupt driven system. The use of the Interrupt system provides
intelligent interrupt vectors.
The operating mode and data format of each channel may be
programmed independently. Additionally, each receiver and
transmitter can select its operating speed as one of twenty–seven
fixed baud rates; a 16X clock derived from one of two programmable
counter/timers, or an external 1X or 16X clock. The baud rate
generator and counter/timer can operate directly from a crystal or
from external clock inputs. The ability to independently program the
operating speed of the receiver and transmitter make the DUART
particularly attractive for dual–speed channel applications such as
clustered terminal systems and bridges.
Each receiver and transmitter is buffered by 256 character FIFOs to
nearly eliminate the potential of receiver overrun, transmitter
underrun and to reduce interrupt overhead in interrupt driven
systems. In addition, a flow control capability (Xon/Xoff and
RTS/CTS) is provided to disable a remote transmitter when the
receiver buffer is full.
Also provided on the 28L202 is a multipurpose 8–bit I/O for each
channel. These can be used as general–purpose I/O ports or can be
assigned specific functions (such as clock inputs or status and
interrupt outputs) under program control. Normally they will be used
for modem control and DMA interface. All ports have change of state
detectors and input sections are always active making output
signals available to the internal circuits and the control processor.
The 28L202 are available in 52–pin plastic quad flat pack (PQFP),
or 56-pin TSSOP packages.
line of Data Communications parts
FEATURES
•Member of IMP ACT family: 3.3 to 5.0 volt , –40°C to +85°C and
68K for 80xxx bus interface for all devices.
•Dual full–duplex independent asynchronous receiver/transmitters
•256 character FIFOs for each receiver and transmitter
•Powers up to 9600 baud, 1 stop bit, no parity, 1 stop bit, interrupt
disabled, all I/O set to input.
•Pin programming to 68K or 80xxx bus interface
•Three character recognition system per channel, used as:
– General purpose character recognition
– Xon/Xoff character recognition
– Address recognition Wake up (multi–drop or “9 bit”) mode
– System provides 4 levels of automation on a recognition event
•Programmable data format
– 5 to 8 data bits plus parity and 9 bit mode
– Odd, even, no parity or force parity
– 9/16,1, 1.5 or 2 stop bits
•16–bit programmable Counter/Timer
•Programmable baud rate for each receiver and transmitter
selectable from:
– 27 fixed rates: 50 to 2.0 Meg baud (includes MIDDI rate)
– Other baud rates via external clocks and C/T
– Programmable user–defined rates derived from a
programmable Counter/timer
– External 1X or 16X clock
•Parity, framing, and overrun error detection
•False start bit detection
•Line break detection and generation
•Programmable channel mode
– Normal (full–duplex)
– Automatic echo
– Local loop back
– Remote loop back
– Multi–drop mode (also called ‘wake–up’ or ‘9–bit’)
•Multi–function 8 bit I/O input port per channel loosely assigned to
each channel.
– Can serve as clock or control inputs
– Change of state detection on eight inputs
– Inputs have typically >100Mohm pull–up resistors
– Modem and DMA interface
•Versatile arbitrating interrupt system
– Interrupt system totally supports ‘single query’ polling
– Output port can be configured to provide a total of up to six
separate interrupt type outputs that may be wire ORed
(switched to open drain).
– Each FIFO can be independently programmed for any of 256
interrupt levels
– Watch dog timer for each receiver
•Maximum data transfer rates: 1X – 3 Mb/sec, 16X – 2 Mb/sec
•Automatic wake–up mode for multi–drop applications
•Start–end break interrupt/status
•Detects break which originates in the middle of a character
•On–chip crystal oscillator
•Power down mode at less than 10 µa
•Receiver time–out mode
•Single +3.3V or +5V power supply
2000 Feb 10
1
Page 8

Philips Semiconductors Objective specification
(Preliminary as of 1/31/00)
Number
SC28L202Dual UART
ORDERING INFORMATION
Description
52-Pin Plastic Quad Flat Pack (PQFP) SC28L202A1B SOT379-1
56-pin TSSOP SC28L202A1D SOT364-1
Industrial
VCC = +3.3 +5V ±10%,
T
= –40°C to +85°C
amb
Drawing
2000 Feb 10
2
Page 9

Philips Semiconductors Objective specification
SC28L202Dual UART
PIN CONFIGURATION FOR 80XXX BUS INTERFACE (INTEL) (PRELIMINARY 2/10/00)
Symbol
I/M I Bus Configuration: When high or not connected configures the bus interface to the Conditions shown in this table.
D0–D7 I/O Data Bus: Bi–directional 3–State data bus used to transfer commands, data and status between the DUART and
CEN I Chip Enable: Active–Low input signal. When Low , data transfers between the CPU and the DUART are enabled on
WRN I Write Strobe: When Low and CEN is also Low, the contents of the data bus is loaded into the addressed register.
RDN I Read Strobe: When Low and CEN is also Low, causes the contents of the addressed register to be presented on
A6–A0 I Address Inputs: Select the DUART internal registers and ports for read/write operations.
RESET I Reset: A High level clears internal registers (SR A, SR B, IMR, ISR, OPR, OPCR), places I/O[7:0] A and B at high
IRQN O Interrupt Request: Active–Low, open–drain, output which signals the CPU that one or more of the eighteen (18)
X1 / Sclk I Crystal 1: Crystal or external clock input. A crystal or clock of the specified limits must be supplied at all times.
X2 O Crystal 2: Connection for other side of the crystal. When a crystal is used, a capacitor must be connected from this
RxD A I Channel A Receiver Serial Data Input: The least significant bit is received first. “Mark” is High; “space” is Low.
RxD B I Channel B Receiver Serial Data Input: The least significant bit is received first. “Mark” is High; “space” is Low.
TxD A O Channel A Transmitter Serial Data Output: The least significant bit is transmitted first. This output is held in the
TxD B O Channel B Transmitter Serial Data Output: The least significant bit is transmitted first. This output is held in the
I/O[7:0]A I/O General–purpose input and output ports channel A: The character of these pins is controlled by I/OPCR. They may
I/O[7:0}B I/O General–purpose input and output ports channel B: The character of these pins is controlled by I/OPCR. They may
Vcc Power Power Supply: +3.3 or +5V supply input ± 10% (4 pins). Operation is assured from 2.97 to 5.5 volts. Timing
GND Power Ground (5 pins)
Pin
type
Name and Function
the CPU. D0 is the least significant bit.
D0–D7 as controlled by the WRN, RDN and A6–A0 inputs. When High, places the D0–D7 lines in the 3–State
condition.
The transfer occurs on the rising edge of the signal.
the data bus. The read cycle begins on the falling edge of RDN.
impedance input state, stops the counter/timer, and puts Channels A and B in the inactive state, with the TxD A and
TxD B outputs in the mark (High) state. Sets MR pointer to MR1 9600 baud, 1 start, no parity and 1 stop bit(s). (See
Reset table)
maskable interrupting conditions are true.
When a crystal is used, a capacitor must be connected from this pin to ground (see Figure 9).
pin to ground (see Figure 9). If X1/Sclk is driven from an external source, this pin must be open or not driving more
that 2 CMOS or TTL loads.
“mark” condition when the transmitter is disabled, idle or when operating in local loop back mode. “Mark” is High;
“space” is Low.
‘mark’ condition when the transmitter is disabled, idle, or when operating in local loop back mode. ‘Mark’ is High;
‘space’ is Low.
be inputs or outputs and will present many internal clocks and interrupt signals: RTS, CTS, DTR, DSR etc. All have
change of state detectors and the input is always active. These pins are set to input only when addressed from the
low order 16 address space. When these pins are configured for interrupt type signals (RxRDY, TxRDY, C/TRDY)
They switch to open drain outputs.
be inputs or outputs and will present many internal clocks and interrupt signals: RTS, CTS, DTR, DSR etc. All have
change of state detectors and the input is always active. These pins are set to output only when addressed from the
low order 16 address space. When these pins are configured for interrupt type signals (RxRDY, TxRDY, C/TRDY)
They switch to open drain outputs.
parameters are specified with respect to the Vcc being at 3.3 of 5.0 volts +/– 10%
2000 Feb 10
3
Page 10
Philips Semiconductors Objective specification
SC28L202Dual UART
CONFIGURATION FOR 68XXX BUS INTERFACE (MOTOROLA)
Symbol
I/M I Bus Configuration: When low configures the bus interface to the Conditions shown in this table.
D0–D7 I/O Data Bus: Bi–directional 3–State data bus used to transfer commands, data and status between the DUART and the
CSN I Chip Enable: Active–Low input signal. When Low , data transfers between the CPU and the DUART are enabled on
R/WN I Read/Write: Input Signal. When CSN is low R/WN high input a read cycle, when low a write cycle.
IACKN I Interrupt Acknowledge: Active low input indicates an interrupt acknowledge cycle. Usually asserted by the CPU in
DACKN O Data Transfer Acknowledge: A 3–State active –low output asserted in a write, read, or interrupt acknowledge cycle to
A6–A0 I Address Inputs: Select the DUART internal registers and ports for read/write operations.
RESETN I Reset: A low level clears internal registers (SR A , SR B, IMR, ISR, OPR, OPCR), places I/O[7:0] A and B at high
IRQN O Interrupt Request: Active–Low, open–drain, output which signals the CPU that one or more of the eighteen (18)
X1 / Sclk I Crystal 1: Crystal or external clock input. A crystal or clock of the specified limits must be supplied at all times. When
X2 O Crystal 2: Connection for other side of the crystal. When a crystal is used, a capacitor must be connected from this
RxD A I Channel A Receiver Serial Data Input: The least significant bit is received first. “Mark” is High; “space” is Low.
RxD B I Channel B Receiver Serial Data Input: The least significant bit is received first. “Mark” is High; “space” is Low.
TxD A O Channel A Transmitter Serial Data Output: The least significant bit is transmitted first. This output is held in the
TxD B O Channel B Transmitter Serial Data Output: The least significant bit is transmitted first. This output is held in the ‘mark’
I/O[7:0]A I/O General–purpose input and output ports channel A: The character of these pins is controlled by I/OPCR. They may
I/O[7:0}B I/O General–purpose input and output ports channel B: The character of these pins is controlled by I/OPCR. They may
Vcc Power Power Supply: +3.3 or +5V supply input ± 10% (4 Vcc Pins) ). Operation is assured from 2.97 to 5.5 volts. Timing
Vss Power Ground (5 Vss Pins)
Pin
type
Name and Function
CPU. D0 is the least significant bit.
D0–D7 as controlled by the R/WN and A0–A6 inputs. When High, places the D0–D7 lines in the 3–State condition.
response to an interrupt request. When asserted places the interrupt vector on the bus and asserts DACKN.
indicate proper transfer of data between the CPU and the DUART.
impedance input state, stops the counter/timer, and puts Channels A and B in the inactive state, with the TxD A and
TxD B outputs in the mark (High) state. Sets MR pointer to MR1, 9600 baud, 1 start, no parity and 1 stop bit(s). (See
Reset Table)
maskable interrupting conditions are true.
a crystal is used, a capacitor must be connected from this pin to ground (see Figure 9).
pin to ground (see Figure 9). If Sclk is driven from an external source, this pin must be left open.
“mark” condition when the transmitter is disabled, idle or when operating in local loop back mode. “Mark” is High;
“space” is Low.
condition when the transmitter is disabled, idle, or when operating in local loop back mode. ‘Mark’ is High; ‘space’ is
Low.
be inputs or outputs and will present many internal clocks and interrupt signals: RTS, CTS, DTR, DSR etc. All have
change of state detectors and the input is always active. These pins are set to input only when addressed from the
low order 16 address space. When these pins are configured for interrupt type signals (RxRDY, TxRDY, C/TRDY)
They switch to open drain outputs.
be inputs or outputs and will present many internal clocks and interrupt signals: RTS, CTS, DTR, DSR etc. All have
change of state detectors and the input is always active. These pins are set to output only when addressed from the
low order 16 address space. When these pins are configured for interrupt type signals (RxRDY, TxRDY, C/TRDY)
They switch to open drain outputs
parameters are specified with respect to the Vcc being at 3.3 of 5.0 volts +/– 10%
2000 Feb 10
4
Page 11
Philips Semiconductors Objective specification
SC28L202Dual UART
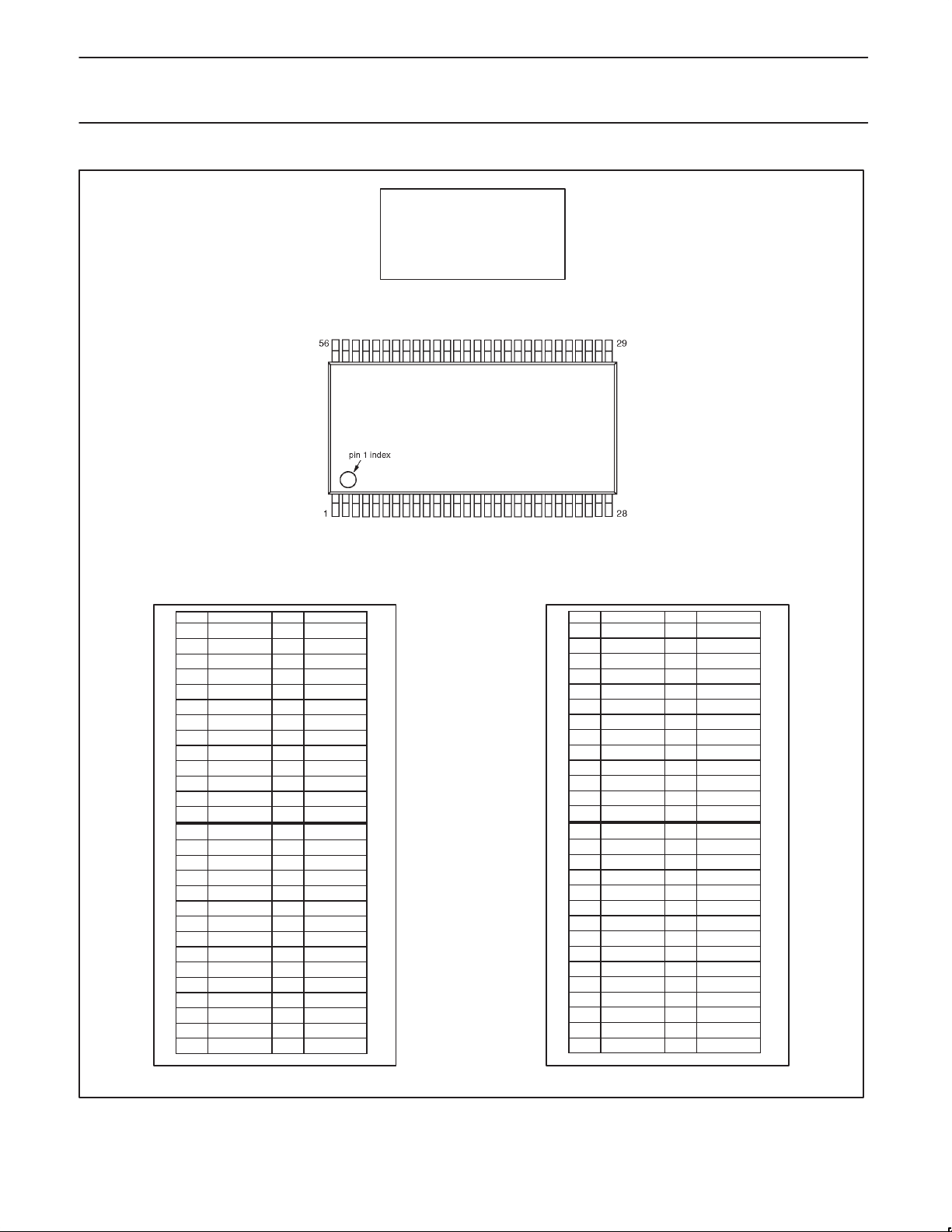
28L202
Pin Configurations
80xxx
56 Pin TSSOP
Pin Function Pin Function
1 Vcc 29 CEN
2 Vss 30 WRN
3 A6 31 RDN
4 A5 32 TxDB
5 A4 33 I/O7B
6 A3 34 I/O6B
7 RxDA 35 I/O5B
8 RESET 36 I/O4B
9 D7 37 I/O3B
10 D6 38 I/O2B
11 D5 39 I/O1B
12 D4 40 I/O0B
13 Vcc 41 Vcc
14 NC 42 Vcc
15 Vss 43 Vss
16 Vss 44 Vss
17 D3 45 I/O7A
18 D2 46 I/O6A
19 D1 47 I/O5A
20 D0 48 I/O4A
21 I / M 49 I/O3A
22 RxDB 50 I/O2A
23 A2 51 I/O1A
24 A1 52 I/O0A
25 A0 53 TxDA
26 (IACKN) 54 IRQN
27 Vcc 55
X1 / SCLK
28 Vss 56 X2
68xxx
56 Pin TSSOP
Pin Function Pin Function
1 Vcc 29 CEN
2 Vss 30 RWN
3 A6 31 DACKN
4 A5 32 TxDB
5 A4 33 I/O7B
6 A3 34 I/O6B
7 RxDA 35 I/O5B
8 RESETN 36 I/O4B
9 D7 37 I/O3B
10 D6 38 I/O2B
11 D5 39 I/O1B
12 D4 40 I/O0B
13 Vcc 41 Vcc
14 NC 42 Vcc
15 Vss 43 Vss
16 Vss 44 Vss
17 D3 45 I/O7A
18 D2 46 I/O6A
19 D1 47 I/O5A
20 D0 48 I/O4A
21 I / M 49 I/O3A
22 RxDB 50 I/O2A
23 A2 51 I/O1A
24 A1 52 I/O0A
25 A0 53 TxDA
26 IACKN 54 IRQN
27 Vcc 55
X1 / SCLK
28 Vss 56 X2
2000 Feb 10
SD00691
5
Page 12

Philips Semiconductors Objective specification
SC28L202Dual UART
28L202
Pin Configuration
50 49 48 47 46 45 44 43 4252 41 40
51
1
2
3
4
5
6
7
8
9
10
11
12
13
15 16 17 18 19 20 21 22 23 2414 25 26
52 Pin
PQFP
39
38
37
36
35
34
33
32
31
30
29
28
27
80xxx
52 Pin PQFP
Pin Function Pin Function
1 RxDA 27 I/O5B
2 RESET 28 I/O4B
3 D7 29 I/O3B
4 D6 30 I/O2B
5 D5 31 I/O1B
6 D4 32 I/O0B
7 Vcc 33 Vcc
8 Vss 34 Vss
9 D3 35 I/O7A
10 D2 36 I/O6A
11 D1 37 I/O5A
12 D0 38 I/O4A
13 I / M 39 I/O3A
14 RxDB 40 I/O2A
15 A2 41 I/O1A
16 A1 42 I/O0A
17 A0 43 TxDA
18 (IACKN) 44 IRQN
19 Vcc 45
X1 / SCLK
20 Vss 46 X2
21 CEN 47 Vcc
22 WRN 48 Vss
23 RDN 49 A6
24 TxDB 50 A5
25 I/O7B 51 A4
26 I/O6B 52 A3
68xxx
52 Pin PQFP
Pin Function Pin Function
1 RxDA 27 I/O5B
2 RESETN 28 I/O4B
3 D7 29 I/O3B
4 D6 30 I/O2B
5 D5 31 I/O1B
6 D4 32 I/O0B
7 Vcc 33 Vcc
8 Vss 34 Vss
9 D3 35 I/O7A
10 D2 36 I/O6A
11 D1 37 I/O5A
12 D0 38 I/O4A
13 I / M 39 I/O3A
14 RxDB 40 I/O2A
15 A2 41 I/O1A
16 A1 42 I/O0A
17 A0 43 TxDA
18 IACKN 44 IRQN
19 Vcc 45
X1 / SCLK
20 Vss 46 X2
21 CEN 47 Vcc
22 RWN 48 Vss
23 DACKN 49 A6
24 TxDB 50 A5
25 I/O7B 51 A4
26 I/O6B 52 A3
2000 Feb 10
SD00692
6
Page 13

Philips Semiconductors Objective specification
SC28L202Dual UART
OVERALL DESCRIPTION
The SC28L202 is composed of several functional blocks. They are
listed in the approximate order of hierarchy as seen from the pins of
the device.
•Bus interface. 68K or x86 format
•Timing Circuits
•I/O Ports
•UARTs
•Transmitters and Receivers
•FIFO Structures
•Arbitrating Interrupt Structure
•Character & Address Recognition
•Flow Control
•Test and Software compatibility with previous Philips (Signetics)
UARTs
BRIEF DESCRIPTION OF FUNCTIONAL BLOCKS
Bus Interface
The Two basic modes of Bus Interface
The bus interface operates in “68K” or “x86” format as selected by
the I/M pin. The signals used by this section are the Address, Data
bus, Chip select, read/write, Data acknowledge and Interrupt
acknowledge and Interrupt request. Assertion of DACKN requires
two edges of the Sclk after the assertion of CEN. The default mode
is the x86 mode. Pin or register programming may change it to he
68K mode
Timing Circuits
Crystal Oscillator
The crystal oscillator is the main timing element for the 28L202. It is
nominally set at 14.7456 MHz. Operation with a crystal as a
frequency standard is specified from 7 MHz to 16.2 MHz The use of
an external clock allows all frequencies to 50 MHz. Clock prescalers
are provided to match various available system clocks to those
needed for baud rate generation.
NOTE: if an external clock is used X2 should not drive more
than 2 CMOS or 2 TTL equivalents.
Fixed Rate BRG
The BRG is the baud rate generator, is driven by the X1/Sclk input
through a programmable prescale divider. It generates all of the 27
“fixed” internal baud rates. This baud rate generator is designed to
generate the industry standard baud rates from a 14.7456 MHz
crystal or clock frequency. X1/Sclk frequencies different from
14.7456 MHz will cause the “fixed” baud rates to change by exactly
the ratio of 14.7456 to the different frequency.
Counter–Timer
The two counter–timers are programmable 16 bit “down” counters. It
provides miscellaneous baud rates, timing periods and acts as an
extra watchdog timer for the receivers. It has 8 programmable clock
sources derived from internal and external signals. It may also act
as a character counter for the receiver. Interrupts from the counter
timer are generated as it passes through zero.
Programmable BRG (PBRG)
This is another 16 bit programmable counter to generate only baud
rates or miscellaneous clock frequencies. Its output is available to
the receivers and transmitters and may be delivered to I/O ports. It
has 8 programmable clock sources derived from internal and
external signals.
I/O ports
The SC28L202 is provided with 16 I/O ports. These ports are true
input and/or output structures and are equipped with a change of
state detector. The input circuit of these pins is always active. Under
program control the ports my display internal signals or static logic
levels. The functions represented by the I/O ports include hardware
flow control. Modem signals, signals for interrupt conditions or
various internal clocks and timing intervals. Noisy inputs to the I/O
ports are filtered (de–bounced) by a 38.4 KHz clock. Change of
state detectors are provided for each pin and are always available.
UARTs
The UARTs are fully independent, full duplex and provide all normal
asynchronous functions: 5 to 8 data bits, parity odd or even,
programmable stop bit length, false start bit detection. Also provided
are 256 byte FIFOs Xon/Xoff software flow. The BRG,
Counter–timer , or external clocks provide the baud rates. The
receivers and transmitters may operate in either the “1x” or “16x”
modes.
The control section recognizes two address schemes. One is the
subset of the other: a four (4) bit and an eight (7) bit address
spaces. The purpose of this is to provide a large degree of software
compatibility with previous Philips/Signetics UARTs.
Transmitters and Receivers
The transmitters and receivers are independent devices capable of
full duplex operation. Baud rates, interrupt and status conditions are
under separate control. Transmitters have automatic simplex
“turnaround”. Receivers have RTS and Xon/Xoff flow control and a
three character recognition system.
FIFO Structures
The FIFO structure is 256 bytes for each of the four FIFOs in the
DUART. They are organized as 11 bit words for the receiver and 8
bye words for the transmitter. The interrupt level may be set at any
value from 0 to 255. The interrupt level is independently set for each
FIFO.
FIFO interrupt and DMA fill/empty levels are controlled by the RxFIL
and TxFIL registers which may set any level of the from 0 to 255.
The signals associated with the FIFO fill levels are available to the
I/O pins (for interrupt or DMA) and to the arbitrating interrupt system
for “fine tuning” of the arbitration authority.
Intelligent Interrupt Arbitration
The interrupt system uses a highly programmable arbitrating
technique to establish when an interrupt should be presented to the
processor. The advantageous feature of this system is the
presentation of the context of the interrupt. It is presented in both a
current interrupt register and in the interrupt vector. The context of
the interrupt shows the interrupting channel, identifies which of the
18 possible sources in requesting interrupt service and in the case
of a receiver or transmitter gives the current fill level of the FIFO.
The content of the current interrupt register also drives the Global
Registers of the interrupt system. These registers are indirect
addresses (pointers) to the interrupt source requesting service.
Programming of Bid Control Registers allows the interrupt level of
any source to be varied at any time over a range of 256 levels.
Character and Address Recognition
The character recognition system is designed as a general–purpose
system. There is one for each UART. Each recognition block stores
2000 Feb 10
7
Page 14

Philips Semiconductors Objective specification
SC28L202Dual UART
up to three characters. The recognition is done on a byte boundary
and sets status and interrupt when recognition events occur. Three
modes of automatic operation are provided for the in–band flow
control and three modes of automatic operation are provided for
address recognition. Both in–band flow control and address
recognition may also be completely under the control of the host
processor.
A subset of the recognition system is Xon/Xoff character recognition
and the recognition of the multi–drop address character. If Xon/Xoff
or multi–dorp function is enabled the recognition system passes the
information about the recognition event to the appropriate receiver
or transmitter state machine for execution. In any case the
information about a recognition event is available to the interrupt
system and to the control processor.
Flow Control
Flow control is implemented in either the traditional RTS/CTS
protocol or in the “inbound” Xon/Xoff method. Both may be
controlled by fully/partially automatic methods or by interrupt
generation.
Test Modes and Software
Four test modes are provided to verify UART function and processor
interface integrity. The first three are Auto echo, Local Loop Back,
and Remote Loop Back. Through local loop back the software
developer may verify all of the interrupt, flow control; the hardware
designer verify all of the timing and pin connections. This information
is obtained without any recourse to external test equipment, logic
analyzers or terminals.
The fourth, Receiver Error Loop back verification, employs a method
of automatic checking (accounting for transmission delays) of the
transmitted data to as echoed back through the remote receiver.
Errors generate interrupt and status events.
DET AILED DESCRIPTIONS
NOTE: For the convenience of the reader some paragraphs
of the following sections are repeated in descriptions of
closely linked functions described in other sections.
Bus Interface
The bus interface operates in two modes selected by the I/M pin. If
this pin is high or left open the signals DACKN signal is not
generated or used and data flow to and from the chip is controlled
by the state the CEN, RDN, WRN pin combination. If the I/M pin is
tied low the data is written to the device when the DACKN pin is
asserted low by the DUART. Read data is presented by a delay from
CEN active.
The Host interface is comprised of the signal pins CEN, WRN RDN,
(or R/WN) IACKN, DACKN, IRQN, 6 address pins and 8 three–state
data bus pins. Addressing of the various functions of the DUART is
through the address bus A(6:0). Data is presented on the 8–bit data
bus.
DACKN Cycle
When operating in the “68K” mode bus cycle completion is indicated
by the DACKN pin (an open drain signal) going low. The timing of
DACKN is by GCCR(6) where two time delays area available. The
delay begins with the falling edge of CEN and DACKN is presented
after either two edges of he X1/Sclk (1/2 X1/Sclk Cycle) or, under
program control, a short internal delay of less than 50 ns. Usually in
this mode the address and data are set up with respect to the
leading edges of the bus cycle.
The DACKN pin is a three state driver. At the termination of an
access to the L202 a very short pulse (less than 5 ns) drives the pin
high and immediately returns to the high impedance state. This will
occur at the termination of the CEN or IACKN cycle.
NOTE: The faster X86 timing may be used in the 68K mode IF the
bus cycles are faster than 1/2 period of the Sclk clock. Withdrawing
CEN before DACKN prevents the generation of DACKN. In this case
bus timing is effectively that of the X86 mode.
When operating in the “x86” mode DACKN is not generated. Data is
written on the termination of CEN or WRN whichever one occurs
first. Read data is presented from the leading edge of the read
condition (CEN and RDN both low).
IACKN Cycle, Update CIR
When the host CPU responds to the interrupt, it will usually assert
the IACKN signal low. This will cause the intelligent interrupt system
of the DUART to generate an IACKN cycle in which the condition of
the interrupting source is determined. When IACKN asserts, the last
valid of the interrupt arbitration cycle is captured in the CIR. The
value captured presents all of the important details of the highest
priority interrupt at the moment the IACKN (or the ”Update CIR”
command) was asserted. Due to system interrupt latency the
interrupt condition captured by the CIR may not be the condition that
caused the initial assertion of the interrupt.
The Dual UART will respond to the IACKN cycle with an interrupt
vector. The interrupt vector may be a fixed value, the content of the
Interrupt Vector Register, or when ”Interrupt Vector Modification” is
enabled via ICR, it may contain codes for the interrupt type and/or
interrupting channel. This allows the interrupt vector to steer the
interrupt service directly to the proper service routine. The interrupt
value captured in the CIR remains until another IACKN or “Update
CIR” command is given to the DUART. The interrupting channel and
interrupt type fields of the CIR set the current ”interrupt context” of
the DUART. The channel component of the interrupt context allows
the use of Global Interrupt Information registers that appear at fixed
positions in the register address map. For example, a read of the
Global RxFIFO will read the channel B RxFIFO if the CIR interrupt
context is channel B receiver. At another time read of the GRxFIFO
may read the channel A RxFIFO (CIR holds a channel A receiver
interrupt) and so on. Global registers exist to facilitate qualifying the
interrupt parameters and for writing to and reading from FIFOs
without explicitly addressing them.
The CIR will load with 0x00 if IACKN or Update CIR is asserted
when the arbitration circuit is NOT asserting an interrupt. In this
condition there is no arbitration value that exceeds the threshold
value. When Interrupt vector modification is active in this situation
the interrupt vector bits associated with the CIR will all be zero. A
zero type field indicates nothing with in the DUART is requiring
processor service.
NOTE: IACKN is essentially a special read action where the value of
the interrupt vector is presented to the data bus.
Timing Circuit
Crystal Oscillator
The crystal oscillator operates directly from a crystal, tuned between
7.0 MHz and 16.2 MHz connected across the X1/Sclk and X2 inputs
with a minimum of external components. BRG values listed for the
clock select registers correspond to a 14.7456 MHz crystal
frequency. Use of different frequencies will change the “standard”
baud rates by precisely the ratio of 14.7456 MHz to the different
crystal frequency.
An external clock up to 50 MHz frequency range may be connected
to X1/Sclk pin. If an external clock is used instead of a crystal,
X1/Sclk must be driven and X2 left floating or driving a load of not
2000 Feb 10
8
Page 15

Philips Semiconductors Objective specification
SC28L202Dual UART
more than 2 CMOS or TTL equivalents. The X1/Sclk clock serves as
the basic timing reference for the baud rate generator (BRG) and is
available to the programmable BRG (PBRG), counter–timers,
control logic and the UART receivers and transmitters.
Baud Rate Generator BRG
The baud rate generator operates from the oscillator or external
X1/Sclk clock input and generates 27 commonly used data
communications baud rates (including MIDDI) ranging from 50 to
921.6K baud. These common rates may be increased (up to 3000K
baud) when faster clocks are used on the X1/Sclk clock input. (See
Receiver and Transmitter Clock Select Register descriptions.) All of
these are available simultaneously for use by any receiver or
transmitter. The clock outputs from the BRG are at 16X the actual
baud rate.
Please see counter timer description for a description of the
frequency error that the asynchronous protocol may tolerate.
Depending on character length it varies from 4.1% to 6.7%.
Counter–Timer
The two Counter/Timers are programmable 16 bit dividers that are
used for generating miscellaneous clocks or generating timeout
periods. These clocks may be used by any or all of the receivers
and transmitters in the DUART or may be directed to an I/O pin for
miscellaneous use.
Counter/Timer programming
The counter timer is a 16–bit programmable divider that operates in
one of four modes: character count, counter, timer, and time out.
Character count counts characters. The timer mode generates a
square wave. In the counter mode it generates a time delay. In the
time out mode it monitors the time between received characters.
The C/T uses the numbers loaded into the Counter/Timer Lower
Register (CTPL) and the Counter/Timer Upper Register (CTPU) as
its divisor. The counter timer is controlled with six commands:
Start/Stop C/T, Read/Write Counter/Timer lower register and
Read/Write Counter/Timer upper register. These commands have
slight differences depending on the mode of operation. Please see
the detail of the commands under the CTPL/CTPU Register
descriptions.
Whenever the these timers are selected via the receiver or
transmitter Clock Select register their output will be configured as a
16x clock for the respective receiver or transmitter. Therefore one
needs to program the timers to generate a clock 16 times faster than
the data rate. The formula for calculating ’n’, the number loaded to
the CTPU and CTPL registers, based on a particular input clock
frequency is shown below.
For the timer mode the formula is as follows:
n +
NOTE: ‘n’ may assume a value of 1. In previous Philips data
communications controllers this value was not allowed. The
Counter/Timer Clock Select Register (CTCS) controls the
Counter/Timer input frequency.
The frequency generated from the above formula will be at a rate 16
times faster than the desired baud rate. The transmitter and receiver
state machines include divide by 16 circuits, which provide the final
frequency and provide various timing edges used in the qualifying
the serial data bit stream. Often this division will result in a
non–integer value: 26.3 for example. One may only program integer
numbers to a digital divider. There for 26 would be chosen. If 26.7
were the result of the division then 27 would be chosen. This gives a
baud rate error of 0.3/26.3 or 0.3/26.7 that yields a percentage error
Clockinputfrequency
(2 16 (Baud rate desired))
of 1.14% or 1.12% respectively, well within the ability of the
asynchronous mode of operation. Higher input frequency to the
counter reduces the error effect of the fractional division
One should be cautious about the assumed benign effects of small
errors since the other receiver or transmitter with which one is
communicating may also have a small error in the precise baud rate.
In a ”clean” communications environment using one start bit, eight
data bits and one stop bit the total difference allowed between the
transmitter and receiver frequency is approximately 4.6%. Less than
eight data bits will increase this percentage.
Programmable Baud Rate Generators. PBRG
Two PBRG Counters (Used only for random baud rate generation)
The two PBRG Timers are programmable 16 bit dividers that are
used for generating miscellaneous clocks. These clocks may be
used by any or all of the receivers and transmitters in the SC28L202
or output to the general purpose I/O pins.
Each timer unit has eight different clock sources available to it as
described in the PBRG clock source Register. Note that the timer
run and stop controls are also contained in this register. The PBRG
counters generate a symmetrical square wave whose half period is
equal in time to the division of the selected PBRG Timer clock
source by the number loaded to the PBRGPU and PBRGPL Preset
Registers. Thus, the output frequency will be the clock source
frequency divided by twice the 16 bit value loaded to these registers.
This is the result of counting down once for the high portion of the
output wave and once for the low portion.
Whenever the these timers are selected via the receiver or
transmitter Clock Select register their output will be configured as a
16x clock for the respective receiver or transmitter. Therefore one
needs to program the timers to generate a clock 16 times faster than
the data rate. The formula for calculating ’n’, the number loaded to
the PBRGPL and PBRGPU registers, is the same as shown above
I/O Ports
Eight I/O ports are “loosely” provided for each channel. They may be
programmed to be inputs or outputs. The input circuits are always
active whether programmed as and input or an output. In general a
2–bit code in the
function these pins will present. All I/O ports default to high
impedance input state on power up.
When calling software written for previous Philips (Signetics)
DUARTs the user should be sure to declare I/O ports to be
inputs where drivers may be attached to an I/O port pin that
previous software had expected to be an output.
Input Characteristics of the I/O ports
Eight I/O pins are provided for each channel. These pins are
configured individually to be inputs or outputs. As inputs they may
be used to bring external data to the bus, as clocks for internal
functions or external control signals. Each I/O pin has a ”Change of
State” detector. The change detectors are used to signal a change in
the signal level at the pin (Either 0 to 1 or 1 to 0 transitions). The
level change on these pins must be stable for 25 to 50 us (two
edges of the 38.4 KHz baud rate clock) before the detectors will
signal a valid change. These are typically used for interface signals
from modems to the DUART and from there to the host.
Output Port of the I/O ports
The OPR, I/OPCR, MR, and CR registers may control the I/O pins
when configured as outputs. (For the control in the loser 16 position
address space the control register is the OPCR) Via appropriate
programming the pins of the output port may be configures as
another parallel port to external circuits, or they may represent
internal conditions of the UART. When this 8–bit port is used as a
I/OPCR
(I/O Port Control Register) controls what
2000 Feb 10
9
Page 16

Philips Semiconductors Objective specification
SC28L202Dual UART
general–purpose output port, the output port pins drive inverse logic
levels of the individual bits in the Output Port Register (OPR). The
OPR register is set and reset by writing to the SOPR and ROPR
addresses. (See the description of the SOPR and ROPR registers).
The output pins will drive the same data polarity of the OPR
registers. The I/OPCR (or the OPCR) register conditions these
output pins to be controlled by the OPR or by other signals in the
chip. Output ports are driven high on hardware reset.
UART Operation
Receiver and Transmitter
The Dual UART has two full duplex asynchronous
receiver/transmitters. The operating frequency for the receiver and
transmitter can be selected independently from the baud rate
generator, the counter, or from an external input. Registers that are
central to basic full–duplex operation are the mode registers (MR0,
MR1 and MR2), the clock select registers (RxCSR and TxCSR), the
command register (CR), the status register (SR), the transmit
holding register (TxFIFO), the receive holding register (RxFIFO),
interrupt status register (ISR) and interrupt mask register (IMR).
MR3 does not exist in 92 mode. MR3 is used in the control of the
intelligent operations of the L202.
Transmitter Status Bits
The SR (Status Register, one per UART) contains two bits that show
the condition of the transmitter FIFO. These bits are TxRDY and Tx
Idle. TxRDY means the TxFIFO has space available for one or more
bytes; Tx Idle means The TxFIFO is completely empty and the last
stop bit has been completed – the transmitter is underrun. Tx Idle
can not be active without TxRDY also being active. These two bits
will go active upon initial enabling of the transmitter
Transmission resumes and the Tx Idle bit is cleared when the CPU
loads at least one new character into the TxFIFO. The TxRDY will
not extinguish until the TxFIFO is completely full. The TxRDY bit will
always be active when the transmitter is enabled and there is at
lease one open position in the TxFIFO.
The transmitter is disabled by a hardware reset, a transmitter reset
in the command register or by the transmitter disable bit also in the
command register (CR). The transmitter must be explicitly enabled
via the CR before transmission can begin. Note that characters
cannot be loaded into the TxFIFO while the transmitter is disabled,
hence it is necessary to enable the transmitter and then load the
TxFIFO. It is not possible to load the TxFIFO and then enable the
transmission.
Note the difference between transmitter disable and transmitter
reset.
Either hardware or software may cause the reset action. When reset
the transmitter stops transmission immediately. The transmit data
output will be driven high, transmitter status bits set to zero and any
data remaining in the TxFIFO is effectively discarded.
The transmitter disable is controlled by the Tx Enable bit in the
command register. Setting this bit to zero will not stop the transmitter
immediately but will allow it to complete any tasks presently
underway. It is only when the last character in the TxFIFO and its
stop bit(s) have been transmitted that the transmitter will go to its
disabled state. While the transmitter enable/disable bit in the
command register is at zero the TxFIFO will not accept any more
characters and the Tx Idle and TxRDY bits of the status register set
to zero.
Transmission of ”break”
Transmission of a break character is often needed as a
synchronizing condition in a data stream. The ”break” is defined as a
start bit followed by all zero data bits by a zero parity bit (if parity is
enabled) and a zero in the stop bit position. The forgoing is the
minimum time to define a break. The transmitter can be forced to
send a break (continuous low condition) by issuing a start break
command via the CR. Once the break starts, the TxD output
remains low until the host issues a command to ”stop break” via the
CR or the transmitter is issued a software or hardware reset. In
normal operation the break is usually much longer than one
character time.
1x and 16x modes, Transmitter
The transmitter clocking has two modes: 16x and 1x. Data is always
sent at the 1x rate. However the logic of the transmitter may be
operated with a clock that is 16 times faster than the data rate or at
the same rate as the data i.e. 1x. All clocks selected internally for
the transmitter (and the receiver) will be 16x clocks. Only when an
external clock is selected may the transmitter logic and state
machine operate in the 1x mode. The 1x or 16x clocking makes little
difference in transmitter operation. (This is not true in the receiver)
In the 16X–clock mode the transmitter will recognize a byte in the
TxFIFO within 1/16 to 2/16–bit time and thus begin transmission of
the start bit. In the 1x mode this delay may be up to 2 bit times.
Transmitter FIFO
The FIFO configuration of the as 28L202 is 256 8–bit words.
Interrupt levels may be set to any level within the FIFO size and may
be set differently for each FIFO. Logic associated with the FIFO
encodes the number of empty positions for presentation to the
interrupt arbitration system. The encoding value is the number of
empty positions. Thus, an empty TxFIFO will bid with the value or
255; when full it will not bid at all; one position empty bids with the
value 0. A Full TxFIFO will not bid since no character is available.
Normally TxFIFO will present a bid to the arbitration system
whenever it has one or more empty positions. The Bits of the
TxFIFO Interrupt Level in the MR0(5:4) allow the user to modify this
characteristic so that bidding will not start until one of four levels
(one or more filled, empty, 16 filled, 240 filled, full) have been
reached. As will be shown later this feature may be used to make
moderate improvements in the interrupt service efficiency . A similar
system exists for the Receiver.
Transmitter
The 28L202 is conditioned to transmit data when the transmitter is
enabled through the command register. The transmitter of the
28L202 indicates to the CPU that it is ready to accept a character by
setting the ISR TxRDY bit in the status register. This condition can
be programmed to generate an interrupt request at
When the transmitter is initially enabled the TxRDY and Tx Idle bits
will be set in the status register. When a character is loaded to the
transmit FIFO the Tx Idle bit will be reset. The Tx Idle bit will not set
until the transmit FIFO is empty and the transmit shift register has
finished transmitting the stop bit of the last character written to the
transmit FIFO.
The TxRDY bit is set whenever the transmitter is enabled and the
TxFIFO is not full. Data is transferred from the holding register to
transmit shift register when it is idle or has completed transmission
of the previous character. Characters cannot be loaded into the
TxFIFO while the transmitter is disabled.
The transmitter converts the parallel data from the CPU to a serial
bit stream on the TxD output pin. It automatically sends a start bit
I/O4
or IRQN.
2000 Feb 10
10
Page 17

Philips Semiconductors Objective specification
SC28L202Dual UART
followed by the programmed number of data bits, an optional parity
bit, and the programmed number of stop bits. The least significant
bit is sent first. Following the transmission of the stop bits, if a new
character is not available in the TxFIFO, the TxD output remains
High and the Tx Idle bit in the Status Register (SR) will be set to 1.
Transmission resumes and the Tx Idle bit is cleared when the CPU
loads a new character into the TxFIFO.
If the transmitter is disabled, it continues operating until the
character currently being transmitted is completely sent out. The
transmitter can be forced to send a continuous Low condition by
issuing a send break command. The transmitter can be reset
through a software command. If it is reset, operation ceases
immediately and the transmitter must be enabled through the
command register before resuming operation.
If CTS option of hardware flow control is enabled (MR2 [4] = 1), the
CTS input at I/O0 or I/O1 must be Low in order for the character to
be transmitted. The transmitter will check the state of the CTS input
at the beginning of each character transmitted. If it is found to be
High, the transmitter will delay the transmission of any following
characters until the CTS has returned to the low state. CTS going
high during the serialization of a character will not affect that
character.
It is an interesting point of the I/O system inputs being always active
that by enabling transmitter to be sensitive the I/O0 or I/O1 and then
controlling the I/O pin as an out put that one is able to control the
transmitter flow via software control of the I/O pin.
The transmitter can also control the RTSN outputs, I/O0 or I/O1 via
MR2 [5]. When this mode of operation is set (often referred to as the
RS–485 method) the meaning of the I/O0 B or I/O1 B signals is “all
bytes loaded to the transmitter’s FIFO have been transmitted
including the last stop bit(s). See the MR2(5) description for enabling
this automatic function.
Receiver Operation
Receiver
The receiver accepts serial data on the RxD pin, converts the serial
input to parallel format, checks for start bit, stop bit, parity bit (if any),
framing error or break condition, and presents the assembled
character and its status condition to the CPU via the RxFIFO. Three
status bits are FIFOed with each character received. The RxFIFO is
really 11 bits wide: eight data and 3 status. Unused FIFO bits for
character lengths less than 8 bits are set to zero.
It is important to note that in the asynchronous protocol the receiver
logic considers the entire message to be contained within the start
bit to the stop bit. It is not aware that a message may contain many
characters. The receiver returns to its idle mode at the end of each
stop bit! As described below it immediately begins to search for
another start bit, which is normally, of course, immediately
forthcoming.
1x and 16x mode, Receiver
The receiver operates in one of two modes: 1x and 16x. Of the two,
the 16x is more robust and the preferred mode. Although the 1x
mode may allow a faster data rate is does not provide for the
alignment of the receiver 1x data clock to that of the transmitter. This
strongly implies that the 1x clock of the remote transmitter is
available to the receiver; the two devices are physically close to
each other.
The 16x mode operates the receiver logic at a rate 16 times faster
than the 1x data rate. This allows for validation of the start bit length,
the validation of level changes at the receiver serial data input
(RxD), and the validation of the stop bit length. Of most importance
in the 16x mode is the ability of the receiver logic to align the phase
of the internally generated receiver 1x data clock to that of the
received start bit of the remote transmitter. This occurs with an
accuracy of less than 1/16 bit time.
Receiver
The receiver of the 28L202 is conditioned to receive data when
enabled through the command register. The receiver looks for a
High–to–Low (mark–to–space) transition of the start bit on the RxD
input pin. If a transition is detected, the state of the RxD pin is
sampled each 16X clock for 7–1/2 clock periods (16X clock mode)
or at the next rising edge of the bit time clock (1X clock mode). If
RxD is sampled high, (that is the start bit was low less than 7/16 to
½ bit time) the start bit is judged invalid and the search for another
valid start bit begins immediately. If RxD is still low, a valid start bit is
assumed and the receiver then continues to sample the input at
one–bit time intervals at the theoretical center of the bit. When the
proper number of data bits and parity bit (if used) have been
assembled, and one half–stop bit has been detected the receiver
loads the byte to the FIFO. The least significant bit is received first.
The data is then transferred to the Receive FIFO and the ISR
RxRDY bit in the SR is set to a 1. This condition can be
programmed to generate an interrupt at IRQN or I/O[4:5] for
channels A or B respectively. If the character length is less than 8
bits, the most significant unused bits in the RxFIFO are set to zero.
After the stop bit is detected, the receiver will immediately look for
the next start bit. However, if a non–zero character was received
with the stop bit at a zero level (framing error) and RxD remains Low
for at least another one half bit time after the stop bit was sampled,
then the receiver operates as if a new start bit had been detected. It
then continues assembling the next character.
The error conditions of parity error, framing error, and overrun error
(if any) are written to the SR at the received character boundary.
This is just before the RxRDY status bit is set.
A break condition is detected when RxD is Low for the entire
character including the parity bit, if used, and stop bit. When a break
is found a character consisting of all zeros will be loaded into the
RxFIFO, the received break bit in the SR and the “change of break”
bit in the ISR are set to 1 and the receiver ready is set in the SR.
The RxD input must
RxC1x clock for the receiver to recognize the end of the break
condition. At the end of the break condition the search for the next
start bit begins.
Two edges of the RxC1x clock will usually require a high time of one
RxC1x clock period or 3 RxC1x edges since the clock of the
controller is usually not synchronous to nor in phase with the RxC1x
clock.
Receiver Status Bits
There are five (5) status bits that are evaluated with each byte (or
character) received: received break, framing error, parity error,
overrun error, and change of break. The first three are appended to
each byte and stored in the RxFIFO. The last two are not
necessarily related to the byte being received or a byte that is in the
RxFIFO. They are however developed by the receiver state
machine.
The ”received break” will always be associated with a zero byte in
the RxFIFO. It means that zero character was a break character and
not a zero data byte. The reception of a break condition will always
set the ”change of break” (see below) status bit in the Interrupt
Status Register (ISR).
return to high for two (2) clock edges
of the
2000 Feb 10
11
Page 18

Philips Semiconductors Objective specification
SC28L202Dual UART
The Change of break condition is reset by a reset error status
command in the command register
A framing error occurs when a non–zero character was seen and
that character has a zero in the stop bit position.
The parity error indicates that the receiver–generated parity was not
the same as that sent by the transmitter.
The framing, parity and received break status bits are reset when
the associated data byte is read from the RxFIFO since these “error”
conditions are attached to the byte that has the error
The overrun error occurs when the RxFIFO is full, the receiver shift
register is full, and another start bit is detected. At this moment the
receiver has 257 valid characters and the start bit of the 258
th
has
been seen. At this point the host has approximately 6/16 bit time to
read a byte from the RxFIFO or the overrun condition will be set.
th
The 258
character then overruns the 257th and the 258th the 259
and so on until an open position in the RxFIFO is seen. (“seen”
meaning at least one byte was read from the RxFIFO.)
Overrun is cleared by a use of the “error reset” command in the
command register.
The fundamental meaning of the overrun is that data has been lost.
Data in the RxFIFO remains valid. The receiver will begin placing
characters in the RxFIFO as soon as a position becomes vacant.
NOTE: Precaution must be taken when reading an overrun FIFO.
There will be 256
th
valid characters in the receiver FIFO. There will
be one character in the receiver shift register. However it will NOT
be known if more than one “over–running” character has been
received since the overrun bit was set. The 257
and read as valid but it will not be known how many characters were
lost between the two characters of the 256
th
character received
th
and 257th reads of the
RxFIFO. In the 8-bit mode, the numbers 8 and 9 replace the
numbers 256 and 257 above.
The ”Change of break” means that either a break has been detected
or that the break condition has been cleared. This bit is available in
the ISR. The break change bit being set in the ISR and the received
break bit being set in the SR will signal the beginning of a break. At
the termination of the break condition only the change of break in
the ISR will be set. After the break condition is detected the
termination of the break will only be recognized when the RxD input
has returned to the high state for two successive edges of the 1x
clock; 1/2 to 1 bit time. (see above)
The receiver is disabled by reset or via CR commands. A disabled
receiver will not interrupt the host CPU under any circumstance in
the normal mode of operation. If the receiver is in the multi–drop or
special mode, it will be partially enabled and thus may cause an
interrupt. Refer to section on Wake–Up and the register description
for MR1 for more information.
Receiver FIFO
The receiver buffer memory is a 256 byte FIFO with three status bits
appended to each data byte. (The FIFO is then 256 11–bit ”words”).
The receiver state machine gathers the bits from the receiver shift
register and the status bits from the receiver logic and writes the
assembled byte and status bits to the RxFIFO shortly after the stop
bit has been sampled. Logic associated with the FIFO encodes the
number of filled positions for presentation to the interrupt arbitration
system. The encoding is always the number of filled positions. Thus,
a full RxFIFO will bid with the value of 255 and the Status Register
RxFULL bit is set. When empty it will not bit at all. One position
occupied bids with the value 1. An empty FIFO will not bid since no
character is available.
Normally RxFIFO will present a bid to the arbitration system
whenever it has one or more filled positions. The bits of the RxFIFO
Interrupt Offset Level (RxFIL) or the bits of the MR2(3:2) allow the
user to modify this characteristic so that bidding will not start until
one of four levels (one or more filled, 64 filled, 192 filled, full) have
been reached. As will be shown later this feature may be used to
make slight improvements in the interrupt service efficiency . A
similar system exists in the transmitter.
RxFIFO Status Bits. Status reporting modes
This description applies to the upper three bits in the ”Status
Register” These three bits are not ”in the status register”; they are
part of the RxFIFO. The three status bits at the output of the RxFIFO
are presented as the upper three bits of the status register included
in each UART.
The error status of a character, as reported by a read of the SR
th
(status register upper three bits) can be provided in two ways, as
programmed by the error mode control bit in the mode register:
”Character mode ” or the ”Block Mode”. The block mode may be
further modified (via a CR command) to set the status bits as the
characters enter the FIFO or as they are read from the FIFO.
In the ’character’ mode, status is provided on a character by
character basis as the characters are read from the RxFIFO: the
”status” applies only to the character at the output of the RxFIFO –
The next character to be read.
In the ’block’ mode (on entry) the status provided in the SR for these
three bits is the logical OR of the status for all characters coming to
the input of the RxFIFO since the last reset error command was
issued. In this mode each of the status bits stored in the RxFIFO are
passed through a latch as they are sequentially written to the
receiver FIFO. If any of the characters has an error bit set that latch
will set and remain set until it is reset with a “receiver reset” issued
from the command register or a chip reset is issued. The purpose of
this mode is indicating an error in the data block as opposed to an
error in a character. This mode improves receiver service efficiency.
In modern systems with low error rates, it is more efficient to ask for
retransmit of a block error data than to analyze it on a byte by byte
system.
The above paragraph describes the block mode activity as the data
is entered to the RxFIFO. Normally the status would be read only
once – at the beginning of the service to the receiver interrupt. If an
error is not set then the entire amount of data in the RxFIFO would
be read without any more reading if the receiver status. This
effectively doubles the efficiency of reading the receiver RxFIFO.
The use of the block mode on Exit passes the data and error
conditions as the RxFIFO is read. Here the final read of the status
register would be after the last byte was read from the RxFIFO. This
delays the knowledge of an error condition until after the data has
been read.
The latch used in the block mode to indicate ”problem data” is
usually set as the characters are read out of the RxFIFO. Via a
command in the CR the latch may be configured to set as error
characters are loaded to the RxFIFO. This gives the advantage of
indicating ”problem data” up to 256 (or the FIFO size) characters
earlier.
In either mode, reading the SR does not affect the RxFIFO. The
RxFIFO address is advanced only when the RxFIFO is read.
Therefore, the SR should be read prior to reading the corresponding
data character.
2000 Feb 10
12
Page 19

Philips Semiconductors Objective specification
SC28L202Dual UART
If the RxFIFO is full when a new character is received, the character is held in the receiver shift register until a position is available in the RxFIFO. At this time there are 257 valid characters in the RxFIFO. If an additional character is received while this state exists, the contents of the RxFIFO are not affected: the character previously in the shift register is lost and the overrun error status bit, SR [4], will be set upon receipt of the start bit of the new (overrunning) character. Wake Up Mode (Also the “9–bit”, “multi–drop”, “party; line” or Special mode) The SC28L202 provides four modes of this common asynchronous ”party line” protocol where the parity bit is used to indicate that a byte is address data or information data. Three automatic modes and the default Host operated mode are provided. The automatic mode has several sub modes (see below). In the full automatic the internal state machine devoted to this function will handle all operations associated with address recognition, data handling, receiver enables and disables. In both modes the meaning of the parity bit is changed. It is often referred to as the A/D bit or the address/data bit – sometimes the “9th” bit. It is used to indicate whether the byte presently in the receiver shift register is an ”address” byte or a ”data” byte. A ”1” usually means address, a ”0” data.
Its purpose is to allow several receivers connected to the same data
source to be individually addressed. Of course addressing could be
by group also. Normally the ”Master” would send an address byte to
all receivers ”listening”. The remote receiver will be “looking” at the
data stream for its address. Upon recognition of its address it will
enable itself to receive the following data stream. Upon receipt of an
address not its own it would then disable itself. As descried below
appropriate status bits are available to describe the operation.
Again, for this mode an “address byte” is a byte that has the bit in
the parity position set to logical 1.
The use of the multi–drop mode usually implies a “master and slave”
configuration of the several UART stations so programmed. The
software control should allow time for the slave stations to respond
to the receipt of an address bit. Often a reply from the addressed
station is expected to confirm the receipt of the address. Please see
control the automatic features of the address recognition in
MR0(1:0).
Enabling the Wake Up mode
(This mode is variously referred to as “9–bit” or “Multi–drop”.)
This mode is selected by programming bits MR1 [4:3] (the parity
bits) to ’11’. The wake up feature has four modes of operation: one
strictly under processor control and three automatic. These modes
are controlled by bits 6, 1, 0 in the MR3 register. Bit 6 controls the
loading of the address byte to the RxFIFO and MR0 [1:0] determines
the sub mode as shown in the following list.
MR3 [1:0] = 00 Normal Wake Up Mode (default) which is the same
as previous DUARTs and is therefore controlled by the processor.
The Host controls operation via interrupts it receives and commands
it writes to the DUART command registers (CR).
Normal Wake up (The default configuration)
The enabling of the wake–up mode executes a partial enabling of
the receiver state machine. Even though the receiver has been reset
the wake up mode will over ride the disable and reset condition.
In the default (mode “00” above and the least efficient) configuration
for this mode of operation, a ’master’ station transmits an address
character followed by data characters for the addressed ’slave’
station. The slave stations, whose receivers are normally disabled
(not reset), examine the received data stream. Upon recognition of
its address bit (this is the parity bit redefined to indicate the
associated byte is an address bye – not the address itself)
interrupts the CPU (by setting RxRDY). The CPU (host) compares
the received address to its station address and enables the receiver
if it wishes to receive the subsequent data characters. Upon receipt
of another address character, the CPU may disable the receiver to
initiate the process again.
A transmitted character consists of a start bit; the programmed
number of data bits, an address/data (A/D) bit and the programmed
number of stop bits. The CPU selects the polarity of the transmitted
A/D bit by programming bit MR1 [2]. MR1 [2] = 0 transmits a zero in
the A/D bit position which identifies the corresponding data bits as
data. MR1 [2] = 1 transmits a one in the A/D bit position which
identifies the corresponding data bits as an address. The CPU
should program the mode register prior to loading the corresponding
data bytes into the TxFIFO.
While in this mode, the receiver continuously looks at the received
data stream, whether it is enabled or disabled. If disabled, it sets the
RxRDY status bit and loads the character into the RxFIFO if the
received A/D bit is a one, but discards the received character if the
received A/D bit is a zero. If the receiver is enabled, all received
characters are transferred to the CPU via the RxFIFO. In either case
when the address character is recognized the data bits are loaded
into the data FIFO while the A/D bit is loaded into the status FIFO
position normally used for parity error (SR [5]). Framing error,
overrun error, and break detect operate normally whether or not the
receiver is enabled. When the automatic modes are in operation the
loading of the address character to the FIFO is controlled by the
MR0 (6) bit.
The several automatic controls. These modes are concerned with
the recognition of the address character itself
•MR3 [1:0] = 01 Auto wake. Enable receiver on address
recognition for this station. Upon recognition of its assigned
address the local receiver will be enabled by the character
recognition state machine and normal receiver communications
with the host will be established.
•MR3 [1:0] = 10 Auto Doze. Disable receiver on address
recognition, not for this station. Upon recognition of an address
character that is not its own, in the Auto Doze mode, the receiver
will be disabled by the character recognition state machine and
the address just received either discarded or loaded to the
RxFIFO depending on the programming of MR0 [6].
•MR3 [1:0] = 11 Auto wake and doze. Both modes described
above. The programming of MR3 [1:0] to 11 will enable both the
auto wake and auto doze features.
The enabling of the wake–up mode executes a partial enabling of
the receiver state machine. Even though the receiver has been reset
the wake up mode will over ride the disable and reset conditions.
Receiver Reset and Disable
Receiver disable stops the receiver immediately – data being
assembled in the receiver shift register is lost. Data and status in the
FIFO is preserved and may be read. A re–enable of the receiver
after a disable will cause the receiver to begin assembling
characters at the next start bit detected.
Receiver reset will discard the present shift register data, reset the
receiver ready bit (RxRDY), clear the status of the byte at the top of
2000 Feb 10
13
Page 20

Philips Semiconductors Objective specification
SC28L202Dual UART
the FIFO and re–align the FIFO read/write pointers. This effectively
“clears” the receiver FIFO although the FIFO data is not altered.
Receiver Watchdog Timer
A ‘watchdog timer’ is associated with each receiver. Its interrupt is
enabled by the “watchdog” bits of the “Watch Dog, Character
Address, and X enable” register (WCXER). The purpose of this
timer is to alert the control processor that characters are in the
RxFIFO which have not been read and/or the data stream has
stopped. This situation may occur at the end of a transmission when
the last few characters received are not sufficient to cause an
interrupt. This counter times out after 64 bit times. It is reset each
time a read of the RxFIFO is executed.
Receiver Time–out Mode
In addition to the watch dog timer described in the receiver section,
the counter/timer may be used for a similar function. Its
programmability, of course, allows much greater precision of timeout
intervals.
The time–out mode uses the received data stream to control the
counter. Each time a received character is transferred from the shift
register to the RxFIFO, the counter is restarted. If a new character is
not received before the counter reaches zero count, the counter
ready bit is set, and an interrupt can be generated. This mode can
be used to indicate when data has been left in the RxFIFO for more
than the programmed time limit. Otherwise, if the receiver has been
programmed to interrupt the CPU when the receive FIFO is full, and
the message ends before the FIFO is full, the CPU may not know
there is data left in the FIFO. The CTPU and CTPL value would be
programmed for just over one character time, so that the CPU would
be interrupted as soon as it has stopped receiving continuous data.
This mode can also be used to indicate when the serial line has
been marking for longer than the programmed time limit. In this
case, the CPU has read all of the characters from the FIFO, but the
last character received has started the count. If there is no new data
during the programmed time interval, the counter ready bit will get
set, and an interrupt can be generated.
Writing the appropriate command to the command register enables
the time–out mode. Writing an ‘Ax’ to CR A or CR B will invoke the
time–out mode for that channel. Writing a 0xCx to CR A or CR B will
disable the time–out mode. CTPU and CTPL should be loaded with
a count–down value that, with the selected clock, will generate a
time period greater than the normal receive character period. The
time–out mode disables the regular STAR T/STOP Counter
commands and puts the C/T into counter mode under the control of
the received data stream. Each time a received character is
transferred from the shift register to the RxFIFO, the C/T is stopped
after 1 C/T clock, reloaded with the value in CTPU and CTPL and
then restarted on the next C/T clock. If the C/T is allowed to end the
count before a new character has been received, the counter ready
bit, ISR [3], will be set. If IMR [3] is set, interrupt arbitration for the
C/T will begin. Invoking the ‘Set Time–out Mode On’ command, CRx
= ‘Ax’, clears the counter ready bit and stop the counter until the
next character is received.
Exiting the time mode will clear the counter ready bit.
Arbitrating Interrupt Structure
(NOTE: The advantages and intelligence of this system may be
completely defeated by merely setting the arbitration value in the
ICR to 0x00 and not using the CIR. One would then rely on
traditional interrupt service by searching and testing various status
registers on the assertion of the IRQN.)
The interrupt system determines when an interrupt should be
asserted thorough an arbitration (or bidding) system. This arbitration
is exercised over the several systems within the DUART that may
generate an interrupt. These will be referred to as ”interrupt
sources”. There are 18 in all and may of those have several
sub–levels. In general the arbitration is based on the fill level of the
receiver FIFO or the empty level of the transmitter FIFO. The FIFO
levels are encoded into an 8–bit number, which is concatenated to
the channel number and source identification code. All of this is
compared (via the bidding or arbitration process) to a user defined
”threshold”. Whenever a source exceeds the numerical value of the
threshold the interrupt will be generated.
Interrupt sources that do not have a FIFO are each provided with a
“programmable field” that will determine their importance in the
arbitration and type identification process. (See Table 1 below)
At the time of interrupt acknowledge (IACKN) the source which has
the highest bid (not necessarily the source that caused the interrupt
to be generated) will be captured in a ”Current Interrupt Register”
(CIR). This register will contain the complete definition of the
interrupting source: channel, types of interrupt (receiver, transmitter,
change of state, etc.) and FIFO fill level. The value of the bits in the
CIR are used to drive the interrupt vector and global registers such
that controlling processor may be steered directly to the proper
service routine. A single read operation to the CIR provides all the
information needed to qualify and quantify the most common
interrupt sources.
The interrupt sources for each channel are listed below.
•Transmit FIFO empty level for each channel
•Receive FIFO Fill level for each channel
•Receiver with error for each channel
•Change in break received status per channel
•Change of state on channel input pins
•Receiver Watch–dog Time out Event
•Xon/Xoff character recognition
•Address character recognition
•Counter–Timer
•No interrupt active (very useful in polled service and as a test
value to terminate interrupt service)
Associated with the interrupt system are the interrupt mask register
(IMR) and the interrupt status register (ISR) resident in each UART.
Programming of the IMR selects which of the above sources may
enter the arbitration process. The IMR enables the interrupt. Only
the bidders in the ISR whose associated bit in the IMR is set to one
(1) will be permitted to enter the arbitration process. The ISR can be
read by the host CPU to determine all currently active interrupting
conditions. For convenience of reading the ISR the MR1 (6) bit,
when set, allows the reading of the ISR masked by the bits of the
IMR.
Enabling and Activating Interrupt sources
An interrupt source becomes enabled when writing a one to the
proper Interrupt Mask Register bit (IMR) activates its interrupt
capability . An interrupt source can never generate an IRQN or have
its ”bid” or interrupt number appear in the CIR unless the source has
been enabled by the appropriate bit in an IMR.
An interrupt source is active if it is presenting its bid to the interrupt
arbiter for evaluation. Most sources have simple activation
requirements. The watch–dog timer, break received, Xon/Xoff or
2000 Feb 10
14
Page 21

Philips Semiconductors Objective specification
SC28L202Dual UART
Address Recognition and change of state interrupts become active
when the associated events occur and the arbitration value
generated thereby exceeds the threshold value programmed in the
ICR (Interrupt Control Register).
The transmitter and receiver functions have additional controls to
modify the condition upon which the initiation of interrupt ”bidding”
begins: the TxINT and RxINT fields of the MR0 and MR2 registers.
These fields can be used to start bidding or arbitration when the
RxFIFO is not empty, 50% full, 75% full or 100% full. For the
transmitter it is not full, 50% empty, 75% empty and empty.
Example: To increase the probability of transferring the contents of a
nearly full RxFIFO, do not allow it to start bidding until 50% or 75%
full. This will prevent its relatively high priority from winning the
arbitration process at low fill levels. A high threshold level could
accomplish the same thing, but may also mask out low priority
interrupt sources that must be serviced. Note that for fast channels
and/or long interrupt latency times using this feature should be used
with caution since it reduces the time the host CPU has to respond
to the interrupt request before receiver overrun occurs.
Setting interrupt priorities
The bid or interrupt number presented to the interrupt arbiter is
composed of character counts, channel codes, fixed and
programmable bit fields. The interrupt values are generated for
various interrupt sources as shown in Table 1. The value
represented by the bits 11 to 4 in Table 1 are compared against the
value represented by the “Threshold. The “Threshold”, bits 10 to 0 of
the ICR (Interrupt Control Register), is aligned such that bit 0 of the
threshold is compared to bit 1 of the interrupt value generated by
any of the sources. Whenever the value of the interrupt source is
greater than the threshold the interrupt will be generated.
The channel number arbitrates only against other channels. The
threshold is not used for the channel arbitration. This results in
channel B having the highest arbitration number. The decreasing
order is B to A. If all other parts of an arbitration cycle are equal then
the channel number will determine which channel will dominate in
the arbitration process.
Note several characteristics of Table 1 in bits 4:1. These bits contain
the identification of the bidding source as indicated below:
•0000 No interrupt source active
•x001 Receiver without error
•x101 Receiver with error (errors are: parity, framing and
• overrun. Break is not considered an error
•x010 Transmitter
•1110 Change of Break
•0110 Change of State on I/O Ports
•0111 Xon/Xoff Event
•1011 Address Recognition
•x100 Receiver watch dog
•1000 Counter timer
•1111 Rx Loop Back Error
The codes form bits 4:1 drive part of the interrupt vector modification
and the Global Interrupt Type Register. The codes are unique to
each source type and identify them completely. The channel
numbering progresses from ”A” to ”B” as the binary numbers 0 to 1
and identify the interrupting channel uniquely. As the channels
arbitrate ”B” will have the highest bidding value and ”A” the lowest
Table 1. Interrupt Values
Type Bit 11:4 Bit 3 Bit 2 Bit 1 Bit 0
Receiver w/o error RxFIFO filled Byte Count 0 0 1 Channel No.
Receiver w/ error RxFIFO filled Byte Count 1 0 1 Channel No.
Receiver Watch–dog RxFIFO filled Byte Count 1 0 0 Channel No.
Transmitter TxFIFO empty Byte Count 0 1 0 Channel No.
Change of Break Programmed Field 1 1 1 0 Channel No.
Rx Loop Back Error Programmed Field 1 1 1 1 Channel No.
Change of State Programmed Field 0 1 1 0 Port 0 or 1
Xon/Xoff Programmed Field 0 1 1 1 Channel No.
Counter timer Programmed Field 1 0 0 0 Counter 0 or 1
Address Recognition Programmed Field 1 0 1 1 Channel No.
No interrupt 0 0 0 0 0
Threshold Bits 7:0 of Interrupt Control Register
(ICR)
0 0 0 0 0
2000 Feb 10
15
Page 22

Philips Semiconductors Objective specification
SC28L202Dual UART
Interrupt Arbitration and IRQN generation
Interrupt arbitration is the process used to determine that an
interrupt request should be presented to the host. The arbitration is
carried out between the ”Interrupt Threshold” and the ”sources”
whose interrupt bidding is enabled by the IMR. The interrupt
threshold is part of the ICR (Interrupt Control Register) and is a
value programmed by the user. The ”sources” present a value to the
interrupt arbiter. That value is derived from four fields: the channel
number, type of interrupts source, FIFO fill level, and a
programmable value. The interrupt request (IRQN) will be asserted
only when one or more of these values exceeds the threshold value
in the interrupt control register will.
Following assertion of the IRQN the host will either assert IACKN
(Interrupt Acknowledge) or will use the command to ”Update the
CIR”. At the time either action is taken the CIR will capture the value
of the source that is prevailing in the arbitration process. (Call this
value the winning bid).
The Sclk drives the arbitration process. It evaluates the 12 bits of
the arbitration bus at ½ the Sclk rate developing a value for the CIR
every two Sclk cycles. New arbitration values presented to the
arbitration block during an arbitration cycle will be evaluated in the
next arbitration cycle.
For sources other than receiver and transmitters the user may set
the high order bits of an interrupt source’s bid value, thus tailoring
the relative priority of the interrupt sources. The fill level of their
respective FIFOs controls the priority of the receivers and
transmitters. The more filled spaces in the RxFIFO the higher the bid
value; the more empty spaces in the TxFIFO the higher its priority.
Channels whose programmable high order bits are set will be given
interrupt priority higher than those with zeros in their high order bits,
thus allowing increased flexibility . The transmitter and receiver bid
values contain the character counts of the associated FIFOs as high
order bits in the bid value. Thus, as a receiver’s RxFIFO fills, it bids
with a progressively higher priority for interrupt service. Similarly, as
empty space in a transmitter’s TxFIFO increases, its interrupt
arbitration priority increases.
The programmable fields allow the software to adjust the authority or
value of the bid for those devices not having a FIFO.
For example: The break condition is sometimes used to signal a
starting point in a continuous stream of data. A Continuous running
weather report or stock market “ticker–tape” report needs breaks in
the data so that a receiver knows where the data starts. Once start
of the break is detected it is important to reset the “change of break “
interrupt so that this bit can signal the condition of the break ending.
This is signaled by the ‘L202 the setting another change of break
event in the ISR. Since it is assumed the data will be starting very
soon after the end of break it is important to give the change of
break condition a high priority. This may be accomplished by setting
the arbitration value for the “change of break” to a high value. The
value in the “change of break programmable field” in Table 1 would
be 0x7F.
IACKN Cycle, Update CIR
When the host CPU responds to the interrupt, it will usually assert
the IACKN signal low. This will cause the DUART to generate an
IACKN cycle in which the condition of the interrupting device is
determined. When IACKN asserts, the last valid interrupt number is
captured in the CIR. The value captured presents most of the
important details of the highest priority interrupt at the moment the
IACKN (or the ”Update CIR” command) was asserted.
The Dual UART will respond to the IACKN cycle with an interrupt
vector. The interrupt vector may be a fixed value, the content of the
Interrupt Vector Register, or when ”Interrupt Vector Modification” is
enabled via ICR, it may contain codes for the interrupt type and/or
interrupting channel. This allows the interrupt vector to steer the
interrupt service directly to the proper service routine. The interrupt
value captured in the CIR remains until another IACKN cycle occurs
or until an ”Update CIR” command is given to the DUART. The
interrupting channel and interrupt type fields of the CIR set the
current ”interrupt context” of the DUART. The channel component of
the interrupt context allows the use of Global Interrupt Information
registers that appear at fixed positions in the register address map.
For example, a read of the Global RxFIFO will read the channel B
RxFIFO if the CIR interrupt context is channel B receiver. At another
time read of the GRxFIFO may read the channel A RxFIFO (CIR
holds a channel A receiver interrupt) and so on. Global registers
exist to facilitate qualifying the interrupt parameters and for writing to
and reading from FIFOs without explicitly addressing them.
The CIR will load with x’00 if IACKN or Update CIR is asserted when
the arbitration circuit is NOT asserting an interrupt. In this condition
there is no arbitration value that exceeds the threshold value. When
Interrupt vector modification is active in this situation the interrupt
vector bits associated with the CIR will all be zero.
Global Registers
The ”Global Registers”, 10 in all, are driven by the interrupt system.
They are defined by the content of the CIR (Current Interrupt
Register) as a result of an interrupt arbitration. In other words they
are indirect registers pointed to by the content of the CIR. The list of
global register follows:
•GIBCR The byte count of the interrupting FIFO
•GICR Channel number of the interrupting channel
•GITR Type identification of interrupting channel
•GRxFIFO Pointer to the interrupting receiver FIFO
•GTxFIFO Pointer to the interrupting transmitter FIFO
A read of the GRxFIFO will give the content of the RxFIFO that
presently has the highest bid value. The purpose of this system is to
enhance the efficiency of the interrupt system. The global registers
and the CIR update procedure are further described in the Interrupt
Arbitration system
Polling, (Normal and using the CIR)
Many users prefer polled to interrupt driven service where there are
not a large number of fast data channels and/or the host CPU’s
other interrupt overhead is low. The Dual UART is functional in this
environment.
The most efficient method of polling is the use of the ”update CIR”
command (with the interrupt threshold set to zero) followed by a
read of the CIR. This dummy write cycle will perform the same CIR
capture function that an IACKN falling edge would accomplish in an
interrupt driven system. A subsequent read of the CIR, at the same
address, will give information about an interrupt, if any. If the CIR
type field contains 0s, no interrupt is awaiting service. If the value is
non–zero, the fields of the CIR may be decoded for type; channel
and character count information. Optionally, the global interrupt
registers may be read for particular information about the interrupt
status or use of the global RxD and TxD registers for data transfer
as appropriate. The interrupt context will remain in the CIR until
another update CIR command or an IACKN cycle is initiated by the
host CPU occurs. The CIR loads with x’00 if Update CIR is asserted
when the arbitration circuit has NOT detected an arbitration value
that exceeds the threshold value of the ICR. The global registers
and CIR may be used as “vectors” to the service type required.
2000 Feb 10
16
Page 23

Philips Semiconductors Objective specification
SC28L202Dual UART
Traditional methods of polling status registers may also be used.
Their lower efficiency may be greatly offset by use of the UCIR
command and the read of the CIR. They reduce the many reads and
tests of status registers to only one read and one write. This would
normally be accomplished by setting the interrupt threshold to zero.
Then the moment any system within the DUART needs service the
next poll of the CIR would return a non zero value and the type field
will inform the processor which of the possible 18 systems needs
service. In the case of the FIFOs the number of bytes to be written
or read is also available.
Character and Address Recognition
(Also used for Multi–drop, Xon/Xoff systems)
Character recognition is specific to each of the two UARTs. Three
programmable characters are provided for the character recognition
for each channel. The three are general purpose in nature and may
be set to only cause an interrupt or to initiate some rather complex
operations specific to ”Multi–drop” address recognition or in–band
Xon/Xoff flow control.
Character recognition system continually examines the incoming
data stream. Upon the recognition of a character bits appropriate for
the character recognized are set in the Xon/Xoff Interrupt Status
Register (XISR) and in the Interrupt Status Register (ISR). The
setting of these bit(s) will initiate any of the automatic sequences or
and/or an interrupt that may have enabled via the MR0 register.
NOTE: Reading the XISR Clears the status bits associated with the
recognition.
The characters of the recognition system are fully programmable.
The Xon/Xoff characters will be set to the standard characters if the
hardware or software reset is used.
The character recognition circuits are basically designed to provide
general–purpose character recognition. Additional control logic has
been added to allow for Xon/Xoff flow control and for recognition of
the address character in the multi–drop or ”wake–up” mode. This
logic also allows for the generation of interrupts in either the
general–purpose recognition mode or the specific conditions
mentioned above.
The generality of the above provides a modicum of compatibility to
BOP (Bit Oriented Protocol) where the generation and detection of
“flags” is required. Parts of usually synchronous BOP protocols
(HDLC in particular) are beginning to show up in asynchronous
formats.
Character Stripping
The MR0 register provides for stripping the characters used for
character recognition. Recall that the character recognition may be
conditioned to control several aspects of the communication.
However this system is first a character recognition system. The
status of the various states of this system is reported in the XISR
and ISR registers. The character stripping of this system allows for
the removal of the specified control characters from the data stream:
two for the Xon /Xoff and one for the wake up. Via control in the
MR0 register these characters may be discarded (stripped) from the
data stream when the recognition system “sees” them or they may
be sent on the RxFIFO. Whether they are stripped or not the
recognition system will process them according to the action
requested; flow control, wake up, interrupt generation, etc. Care
should be exercised in programming the stripping option if noisy
environments are encountered. If a normal character were corrupted
to a Xoff character the transmitter would be stopped. If that
character were now stripped from the FIFO stack, then that stripping
action would make it difficult to determine the cause of transmitter
stopping.
When character stripping is invoked and a recognition character is
received that has an error bit set that character is sent to the
RxFIFO even though character stripping is active.
Flow Control (Xon/Xoff)
This section describes in–band flow control or Xon/Xoff signaling.
For the RTS/CTS hardware (out–of–band) control see MR1(7) and
MR2(4) descriptions.
The flow control is accomplished via the character recognition
system giving recognition information to the flow control processor.
Xon and Xoff are special characters used by a receiver to start and
stop the remote transmitter that is sending it data. As described
below several modes of manual and automatic flow control are
available by program control.
The modes of control are described in MR3(3:2)
•00 = Host mode
•01 = Auto transmit
•10 = Auto Receive
•11 = Auto receive and transmit
Mode control
Xon/Xoff mode control is accomplished via the MR0. Bits 3 and 2
reset to zero resulting in all Xon/Xoff processing being disabled. If
MR0 [2] is set, Xon/Xoff characters received may gate the
transmitter. If MR0 [3] is set, the transmitter will transmit Xon and
Xoff when triggered by attainment of fixed fill levels in the channel
RxFIFO. The MR0 [7] bit also has a Xon/Xoff function control. If this
bit is set, a received Xon or Xoff character is not loaded into the
RxFIFO. If cleared, the power–on and reset default, the received
Xon or Xoff character is loaded onto the RxFIFO for examination by
the host CPU. The MR0 (7) function operates regardless of the
value in MR0 (3:2)
Xon Xoff Characters
The programming of these characters is usually done individually.
The standard Xon/Xoff characters are . Xon is 0x11, Xoff 0x13. Any
enabling of the Xon/Xoff functions will use the contents of the Xon
and Xoff character registers as the basis on which recognition is
predicated.
Host mode
When neither the auto–receiver or auto–transmitter modes are set,
the Xon/Xoff logic is operating in the host mode. In host mode, all
activity of the Xon/Xoff logic is initiated by commands to the CRx.
The Xoff command forces the transmitter to disable exactly as
though a Xoff character had been received by the RxFIFO. The
transmitter will remain disabled until the chip is reset or the CR (7:3)
= 10110 (Xof f resume) command is given. In particular, reception of
a Xon or disabling or re–enabling the transmitter will NOT cause
resumption of transmission. Redundant CRTX–– commands, i.e.
CRTXon, CRTXon, are harmless, although they waste time. A
CRTXon may be used to cancel a CRTXoff (and vice versa) but both
may be transmitted depending on the command timing with respect
to that of the transmitter state machine.
Auto–transmitter mode
When a channel receiver loads a Xoff character into the RxFIFO, the
channel transmitter will finish transmission of the current character
and then stop transmitting. A transmitter so idled can be restarted by
the receipt of a Xon character by the receiver or by a hardware or
2000 Feb 10
17
Page 24

Philips Semiconductors Objective specification
SC28L202Dual UART
software reset. The last option results in the loss of the
untransmitted contents of the TxFIFO. When operating in this mode
the Command Register commands for the transmitter are not
effective.
While idle data may be written to the TxFIFO and it continue to
present its fill level to the interrupt arbiter and maintains the integrity
of its status registers.
Use of ’00’ as a Xon/Xoff character is complicated by the Receiver
break operation which loads a ’00’ character on the RxFIFO. The
Xon/Xoff character detectors do not discriminate in this case from a
Xon/Xoff character received through the RxD pin.
NOTE: To be recognized as a Xon or Xoff character, the receiver
must have room in the RxFIFO to accommodate the character. An
Xon/Xoff character that is received resulting in a receiver overrun
does not effect the transmitter nor is it loaded into the RxFIFO,
regardless of the state of the Xon/Xoff transparency bit, MR0 (7).
Receiver Mode
Since the receiving FIFO resources in the Dual UART are limited,
some means of controlling a remote transmitter is desirable in order
to lessen the probability of receiver overrun. The Dual UART
provides two methods of controlling the data flow. There is a
hardware–assisted means of accomplishing control, the so–called
out–of–band flow control, and an in–band flow control method.
The out–of–band flow control is implemented through the
CTSN–RTSN signaling via the I/O ports. The operation of these
hardware handshake signals is described in the receiver and
transmitter discussions.
In–band flow control is a protocol for controlling a remote transmitter
by embedding special characters within the message stream, itself.
Two characters, Xon and Xoff, which do not represent normal
printable character take on flow control definitions when the
Xon/Xoff capability is enabled. Flow control characters received may
be used to gate the channel transmitter on and off. This activity is
referred to as Auto–transmitter mode. To protect the channel
receiver from overrun, fixed fill levels (hardware set at 240
characters) of the RxFIFO may be employed to automatically insert
Xon/Xoff characters in the transmitter’s data stream. This mode of
operation is referred to as auto–receiver mode. Commands issued
by the host CPU via the CR can simulate all these conditions.
Auto Receive and Transmit
This is a combination of both modes.
NOTE: Xon /Xoff characters
The Xon/Xoff character with errors will be accepted as valid. The
user has the option sending or not sending these characters to the
FIFO. Error bits associated with Xon/Xoff will be stored normally to
the receiver FIFO.
The channel’s transmitter may be programmed to automatically
transmit a Xoff character without host CPU intervention when the
RxFIFO fill level exceeds a fixed limit (240). In this mode it will
transmit a Xon character when the RxFIFO level drops below a
second fixed limit (16). A character from the TxFIFO that has been
loaded into the TxD shift register will continue to transmit.
Character(s) in the TxFIFO that have not been loaded to the
transmitter shift register are unaffected by the Xon or Xoff
transmission. They will be transmitted after the Xon/Xoff activity
concludes.
If the fill level condition that initiates Xon activity negates before the
flow control character can begin transmission, the transmission of
the flow control character will not occur. That is, either of the
following sequences may be transmitted depending on the timing of
the FIFO level changes with respect to the normal character times:
Fix This
Character Xoff Xon Character
Character Character
Hardware keeps track of Xoff characters sent that are not rescinded
by a Xon. This logic is reset by writing MR0 (3) to ’0’. If the user
drops out of Auto–receiver mode while the XISR shows Xoff as the
last character sent the Xon/Xoff logic would not automatically send
the negating Xon.
The kill CRTX command (of the command register) can be used to
cleanly terminate any pending CRTX commands.
NOTE: In no case will a Xon/Xoff character transmission be aborted.
Once the character is loaded into the TX Shift Register, transmission
continues until completion or a chip reset or transmitter reset is
encountered. The kill CRTX command has no effect in either of the
Auto modes.
Xon/Xoff Interrupts
The Xon/Xoff logic generates interrupts only in response to
recognizing either of the characters in the XonCR or XoffCR (Xon or
Xoff Character Registers). The transmitter activity initiated by the
Xon/Xoff logic or any CR command does not generate an interrupt.
The character comparators operate regardless of the value in MR0
(3:2). Hence the comparators may be used as general–purpose
character detectors by setting MR0 (3:2)=’00’ and enabling the
Xon/Xoff interrupt in the IMR.
The Dual UART can present the Xon/Xoff recognition event to the
interrupt arbiter for IRQN generation. The IRQN generation may be
masked by setting bit 4 of the Interrupt Mask Register, IMR. The bid
level of a Xon/Xoff recognition event is controlled by the Bidding
Control Register X, BCRx, of the channel. The interrupt status can
be examined in ISR [4]. If cleared, no Xon/Xoff recognition event is
interrupting. If set, a Xon or Xoff recognition event has been
detected. The X Interrupt Status Register, XISR, can be read for
details of the interrupt and to examine other, non–interrupting, status
of the Xon/Xoff logic. Refer to the XISR in the Register Descriptions.
The character recognition function and the associated interrupt
generation is disabled on hardware or software reset.
Multi–drop or Wake up or 9 bit mode
This mode is used to address a particular UART among a group
connected to the same serial data source. Normally it is
accomplished by redefining the meaning of the parity bit such that it
indicates a character as address or data. While this method is fully
supported in the SC28L202 it also supports recognition of the
character itself. Upon recognition of its address the receiver will be
enabled and data loaded onto the RxFIFO.
Further the Address recognition has the ability, if so programmed, to
disable (not reset) the receiver when an address is seen that is not
recognized as its own. The particular features of ”Auto Wake and
Auto Doze” are described in the detail descriptions under “Receiver
Operation” above.
NOTE: Care should be taken in the programming of the character
recognition registers. Programming x’00, for example, may result in
a break condition being recognized as a control character. This will
be further complicated when binary data is being processed.
2000 Feb 10
18
Page 25

Philips Semiconductors Objective specification
SC28L202Dual UART
PROGRAMMING THE HOST INTERFACE
Writing control words into the appropriate registers programs the
operation of the DUART. Operational feedback is provided via status
registers that can be read by the CPU. The addressing of the
registers is described in the Register Map.
The contents of certain control registers are initialized to zero on
RESET. Care should be exercised if the contents of a register are
changed during operation, since certain changes may cause
operational problems.
For example, changing the number of bits per character while the
transmitter is active may cause the transmission of an incorrect
character. In general, the contents of the MR, the CSR, and the
OPCR should only be changed while the receiver(s) and
transmitter(s) are not enabled, and certain changes to the ACR
should only be made while the C/T is stopped.
Each channel has 3 mode registers (MR0, 1, 2) which control the
basic configuration of the channel. Mode, command, clock select,
and status registers are duplicated for each channel to provide total
independent operation and control. Refer to Table 2 for register bit
descriptions.
2000 Feb 10
19
Page 26

Philips Semiconductors Objective specification
SC28L202Dual UART
REGISTER DESCRIPTION AND PROGRAMMING NOTE
Programmers may use either of two register sets or mix the features
of each. It is suggested that only the extended register set be used
in new designs. However if a system needed to use a block of
communications code written for an older system then that code
could merely be called. This is similar to calling a DOS
a WINDOWS
recommended (but not required) to execute “Reset to C92”
command. Also consideration must be given to the I/O pins to avoid
contention of drivers of the pins and an external driver.
Two control register descriptions and maps are implemented in the
SC28L92: one represents the previous 4–bit address and the other
the new 7–bit address space representing the all the new features of
the new design.
The Design of the SC28L202 allows for high degree with former
Philips two channel communications controllers – DUARTs. To
environment. Before calling legacy code it is
program in
facilitate this feature the complete register function and control of the
SC26C92 is replicated in the SC28L202. That is code written for the
SCN2681, SCN68681, SCC2692, SCC68692 and SC26C92 will
operate with this device.
With the execution of code written for previous DUARTs and
immediately after a hardware reset or a “Reset to C92” command
the following configuration will exist:
1. The size of all FIFOs is set to 8 bytes (for legacy code).
2. FIFO interrupt levels are controlled by the bits of the MR
registers
3. All I/O ports are set to input.
4. Receiver FIFO set to interrupt on FIFO ready.
5. Transmitter FIFO set to interrupt on FIFO empty.
6. Baud selection follows previous 4 bit programming and baud rate
grouping controlled by the MR and ACR registers.
T able 2. SC28L202 REGISTER BIT DESCRIPTIONS
Registers that control Global Properties of the 28L202
GCCR – Global Configuration Control Register
THIS IS A VERY IMPORTANT REGISTER! IT SHOULD BE THE FIRST REGISTER ADDRESSED DURING INITIALIZATION.
Hex
Addr Reserved DACKN
GCCR(7:6) DACKN Assertion
Motorola bus cycle time can be controlled by selecting a DACKN
assertion time based on X1/Sclk speed .
See examples below.
X1/SCLK
3.6864 MHz 1/2–1 136–272 ns
7.3728 MHz 1/2–1 68–136 ns
14.7456 MHz 1/2–1 34–68 ns
29.4912 MHz 1–2 34–68 ns
33.1776 MHz 2–3 60–90 ns
44.2368 MHz 2–3 46–68 ns
GCCR(5:3): Reserved
GCCR(2:1): Interrupt vector configuration
The IVC field controls if and how the assertion of IACKN (the
interrupt acknowledge pin) will form the interrupt vector for the
Bit (7) Bit (6) Bit (5:3) Bit(2:1) BIT 0
Assertion
0 – Slow (timed
by 2 SCLK
edges)
1 – Fast
(Asynchronous)
#SCLK Cycles Delay
Reserved IVC Interrupt V ector Control ISR Read Mode
Set to 0
00 = no interrupt vector
01 = IVR(7:0)
10 = IVR(7:1) + channel code
11 = IVR(7:5) + interrupt type + channel code
DUART. If b’00, no vector will be presented during an IACKN cycle.
The bus will be driven high (0xFF). If the field contains a b’01, the
contents of the IVR, Interrupt Vector Register, will be presented as
the interrupt vector without modification.
If IVC = 0x10, the channel code will replace the LSB of the IVR; if
IVC = b’11 then a modified interrupt type and channel code replace
the 3 LSBs of the IVR. NOTE: The modified type field IVR(2:1) is:
0 = ISR Unmasked
1 = ISR Read Masked by IMR
•10 Receiver w/o error
•11 Receiver with error
•01 Transmitter
•00 All remaining sources
GCCR(0): Interrupt Status Masking
This bit controls the readout mode of the Interrupt Status Register,
ISR. If set, the ISR reads the current status masked by the IMR, i.e.
only interrupt sources enabled in the IMR can ever show a ’1’ in the
ISR. If cleared, the ISR shows the current status of the interrupt
source without regard to the Interrupt Mask setting.
SFSR A and B Special Feature & Status Register
Bit 7 Bit 6 Bit 5 BIT 4 BIT 3 BIT 2:1 BIT 0
Reserved Reserved Reserved Reserved Loop Back Error Remote Loop Error Check Reserved
2000 Feb 10
20
0 = No
1 = Yes
(read Only)
00 = Disabled
01 = Enabled, RxC ç TxC
10 = Enabled, RxC ç TxCN
Page 27

Philips Semiconductors Objective specification
SC28L202Dual UART
SFSR(7:4) Reserved
SFSR(3) Status of loop back error check.
A “1” indicates a loop back error occurred, which will be entered for
interrupt arbitration.
It can be cleared by the processor by a write to this register with
D(3) equal to “1”.
SFSR(2:1) Certification of returned data as Valid (This feature implies the transmitted data is being returned by the remote receiver. )
Sets automatic checking of returned data. This mode stores
transmitted data and compares it to data returned from the remote
receiver. It is used where relative short delay times are available, up
TRR Test and Revision Register.
TRR
TRR(7) Test 2 Enable
Bypass divide by 16 counter in all TxC and RxC.
STCR – Scan Test Control Register.
Addr
77 Memory Test Scan Test Iddq Test
STCR(0) Iddq Test – Turns off all pull–up devices on the I/O pins.
Bit 7 Bit 6:0
Test 2 Revision Code
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
to two characters in time . This mode will totally relieve the
processor of this task where certainty of transmission and reception
is required. The transmitted data is looped back by the remote
station with a half–bit time delay. The local transmitted data is
internally sent to the local receiver for comparison. An interrupt is
generated in the case of an error (data mismatch, parity or framing).
00 = The checking is disabled
01 = Return data is clocked in on rise of TxC
10 = Return data is clocked on of rise of TxCN
00 = Reserved
SFSR(0) Reserved
TRR [6:0] – Chip Revision Code
Indicates the revision of the chip. Initial code will be
revision code bits (6:0) are hard wired. The default setting of the test
bits is all zero.
0000000
. The
SES – System Enable Status Register, A and B
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Reserved Reserved Transmitter
Set to 0 Set to 0 0 = No
This register reports the enabled status of the several sub systems in the DUART. These systems are sometimes controlled by the state
machines of the receiver FIFOs.
EOS – Enhanced Operation Status Register
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Reserved I/O Port
Operation
0 = Default
1 = Enhanced
This register reports the status of the Enhanced operation in several sub systems in the DUART.
Reserved Counter/Timer
Enabled
1 = Yes
0 Clock Select
0 = Default
1 = Enhanced
Receiver
Enabled
0 = No
1 = Yes
Channel B
Rx/Tx
Clock
Selection
0 = Default
1 = Enhanced
Watch Dog
Timer
0 = No
1 = Yes
Address
Recognition
0 = No
1 = Yes
Channel A
Rx/Tx
Clock
Selection
0 = Default
1 = Enhanced
Channel B
FIFO
Interrupt Level
Control
0 = Default
1 = Enhanced
Xon Xoff
0 = No
1 = Yes
0 = No
1 = Yes
Channel A FIFO
Interrupt Level
Control
0 = Default
1 = Enhanced
2000 Feb 10
21
Page 28

Philips Semiconductors Objective specification
SC28L202Dual UART
UART Registers
These registers are generally concerned with formatting,
transmitting and receiving data.
The user must exercise caution when changing the mode of running
receivers, transmitters, PBRG or counter/timers. The selected mode
will be activated immediately upon selection, even if this occurs
during the reception or transmission of a character. It is also
possible to disrupt internal controllers by changing modes at critical
MR0 – Mode Register 0, A and B
MR0 can be accessed directly at H’20” and H’28” in the Extended section of the address map, or by means of the “MR Pointers” at the 0x00
and 0x08 address pointers used by legacy code.
Bit 7 BIT 6 BIT (5:4) BIT 3 BIT 2 BIT 1 BIT 0
MR0 A, MR0
B, and
MR0 B[3:0]
are reserved
*This bit control is duplicated at MR0[7].
MR0[7] Fixed length Watchdog Timer
This bit controls the receiver watchdog timer. 0 = disable, 1 =
enable. When enabled, the watch dog timer will generate a receiver
interrupt if the receiver FIFO has not been accessed within 64 bit
times of the receiver 1X clock. This is used to alert the control
processor that data is in the RxFIFO that has not been read. This
situation may occur when the byte count of the last part of a
message is not large enough to generate an interrupt.
MR0[6] – Bit 2 of receiver FIFO interrupt level. This bit along with Bit 6 of MR1 sets the fill level of the 8 byte FIFO that generates the receiver interrupt.
MR0[6] and MR1[6] Note that this control is split between MR0 and MR1. This is for backward compatibility to the SC2692 and SCN2681.
Rx Watchdog
*
0 = Disable
1 = Enable
RxINT BIT 2
See Tables in
MR0
description
TxINT (1:0)
See Table 13
Table 3. Receiver FIFO Interrupt Fill Level
MR0(3)=0
MR0[6] MR1[6] Interrupt Condition
00 1 or more bytes in FIFO (RxRDY)
01 3 or more bytes in FIFO
10 6 or more bytes in FIFO
11 8 bytes in FIFO (Rx FULL)
Table 4. Receiver FIFO Interrupt Fill Level
MR0(3)=1
MR0[6] MR1[6] Interrupt Condition
00 1 or more bytes in FIFO (RxRDY)
01 128 or more bytes in FIFO
10 192 or more bytes in FIFO
11 256 bytes in FIFO (Rx FULL)
For the receiver these bits control the number of FIFO positions
filled when the receiver will attempt to interrupt. After the reset the
receiver FIFO is empty. The default setting of these bits cause the
receiver to attempt to interrupt when it has one or more bytes in it.
times, thus rendering later transmission or reception faulty or
impossible.
An exception to this policy is switching from auto–echo or remote
loop back modes to normal mode. If the deselecting occurs just after
the receiver has sampled the stop bit (in most cases indicated by
the assertion of the channel’s RxRDY bit) and the transmitter is
enabled, the transmitter will remain in auto–echo mode until the end
of the transmission of the stop bit.
(TEST 1) (TEST 3)
FIFO Size
0 = 8 bytes
1 = 256
bytes
MR0[5:4] – Tx interrupt fill level.
BAUD RATE
EXTENDED II
0 = NormaL
1 = Extend II
Reserved
Set to 0
BAUD RATE
EXTENDED 1
0 = Normal
1 = Extend
Table 5. Transmitter FIFO Interrupt Fill Level
MR0(3)=0
MR0[5:4] Interrupt Condition
00 8 bytes empty (Tx EMPTY)
01 4 or more bytes empty
10 6 or more bytes empty
11 1 or more bytes empty (TxRDY)
Table 6. Transmitter FIFO Interrupt Fill Level
MR0(3)=0
MR0[5:4] Interrupt Condition
00 256 bytes empty (Tx EMPTY)
01 128 or more bytes empty
10 192 or more bytes empty
11 1 or more bytes empty (TxRDY)
For the transmitter these bits control the number of FIFO positions
empty when the receiver will attempt to interrupt. After the reset the
transmit FIFO has 8 bytes empty. It will then attempt to interrupt as
soon as the transmitter is enabled. The default setting of the MR0
bits (00) condition the transmitter to attempt to interrupt only when it
is completely empty . As soon as one byte is loaded, it is no longer
empty and hence will withdraw its interrupt request.
MR0[3] – FIFO Size
Selects between 8 or 256 byte FIFO structure
MR0[2:0] – Legacy Baud Rate Group Selection
These bits are used to select one of the six–baud rate groups.
See Table 13 for the group organization.
•000 Normal mode
•001 Extended mode I
•100 Extended mode II
Other combinations of MR2[2:0] should not be used
NOTE: MR0[3:0] are not used in channel B and should be set to 0.
2000 Feb 10
22
Page 29

Philips Semiconductors Objective specification
SC28L202Dual UART
MR1 – Mode Register 1, A and B
MR1 can be accessed directly at H’21” and H’29” in the Extended section of the address map, or by means of the “MR Pointers” at the 0x00
and 0x08 address pointers used by legacy code.
Bit 7 Bit 6 Bit 5 Bit 4:3 Bit 2 Bit 1:0
RxRTS Control See Tables in MR0
description
0 = off
1 = on
Error Mode Parity Mode Parity Type Bits per
0 = Character
1 = Block
(entry or exit)
00 = With Parity
01 = Force parity
10 = No parity
11 = Multi drop Special Mode
0 = Even
1 = Odd
Character
00 = 5
01 = 6
10 = 7
11 = 8
MR1[7] – Receiver Request to Send (hardware flow control)
This bit controls the deactivation of the RTSN output (I/O2) by the
receiver. The I/O2 output is asserted and negated by commands
applied via the command register or through the setting of the OPR
register bits. MR1[7] = 1 enables the receiver state machine to
controls the sate of the I/O2 (where the RTSN function is assigned)
to be automatically negated (driven high) upon receipt of a valid start
bit if the receiver FIFO is 240 full or greater. (for 8–byte mode the
FIFO full signal is used) RTSN is reasserted when the FIFO fill level
falls below 240 filled FIFO positions. This constitutes a change from
previous members of Philips (Signets)’ UART families where the
RTSN function triggered on FIFO full. This behavior caused
problems with PC UARTs that could not stop transmission at the
proper time.
NOTE: When the FIFO is set to an 8–byte depth the RTSN signaling
is triggered on position 8 of the FIFO
The RTSN feature can be used to prevent overrun in the receiver, by
using the RTSN output signal, to control the CTSN (see MR2(4)
description) input of the transmitting device. It is not recommend to
use the hardware flow control and the “in–band” (Xon/Xoff) flow
control at the same time although the DUART hardware will allow it.
To use the RTSN function:
1. Set MR1(7) to 1
2. Set I/O0 B or I/O1 B as appropriate to logical 0
3. Enable receiver
MR1[6] – Receiver interrupt control bit 1.
See description under MR0 [6]. (Writing to this register will reset the
RxFIFO interrupt to the bit configuration of MR0 and MR1. Reading
has no effect.)
*** change in MR in legacy section – at MR0 also***
MR1 [5] – Error Mode Select and sub modes
This bit selects the operating mode of the three FIFOed status bits
(FE, PE, and received break). In the character mode, status is
provided on a character by character basis; the status applies only
to the character at the output of the FIFO.
In the block mode, the status provided in the SR for these bits is the
accumulation (logical OR) of the status for all characters coming to
the output of the FIFO, since the last reset error command was
issued.
The Block Error mode has two–sub mode. These modes are
controlled by the command register. The error is “accumulated” (as
described above) at either the entry of the data in to the FIFO or on
the exit (read of the FIFO). Of the two the setting of the error on the
entry of the data into the FIFO gives the earliest warning of error
data.
MR1[4:3] – Parity Mode Select
If ’with parity’ or ’force parity’ is selected, a parity bit is added to the
transmitted character and the receiver performs a parity check on
incoming data. MR1[4:3] = 11 selects the channel to operate in the
special wake up mode.
MR1[2] – Parity Type Select
This bit sets the parity type (odd or even) if the ’with parity’ mode is
programmed by MR1[4:3], and the polarity of the forced parity bit if
the ’force parity’ mode is programmed it has no effect if the ’no
parity’ mode is programmed. In the special ’wake up’ mode, it
selects the polarity of the A/D bit. The parity bit is used to an
address or data byte in the ’wake up’ mode.
MR1[1:0] – Bits per Character Select
This field selects the number of data bits per character to be
transmitted and received. This number does not include the start,
parity, or stop bits.
2000 Feb 10
23
Page 30

Philips Semiconductors Objective specification
SC28L202Dual UART
MR2 – Mode Register 2, A and B
MR2 can be accessed directly at 0x22 and 0x2A in the Extended section of the address map, or by means of the “MR Pointers” at the 0x00 and
0x08 address pointers used by legacy code.
The MR2 register provides basic channel setup control that may need more frequent updating.
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
MR2 A
MR2 B
NOTE:
1. Add 0.5 to values shown for 0 – 7 if channel is programmed for 5 bits/char.
CHANNEL MODE Tx CONTROLS
00 = Normal
01 = Auto–Echo
10 = Local loop
11 = Remote loop
RTS
0 = No
1 = Yes
CTS
ENABLE Tx
0 = No
1 = Yes
STOP BIT LENGTH
NOTE: Add 0.5 to binary codes 0 – 7 for 5 bit character lengths.
0 = 0.563 4 = 0.813 8 = 1.563 C = 1.813
1 = 0.625 5 = 0.875 9 = 1.625 D = 1.875
2 = 0.688 6 = 0.938 A = 1.688 E = 1.938
3 = 0.750 7 = 1.000 B = 1.750 F = 2.000
MR2[7:6] – Mode Select
The DUART can operate in one of four modes: Normal, Automatic
Echo, Local Loop Back and Remote Loop Back
MR2[7:6] = b’00 Normal Mode
Normal and default mode The transmitter and receiver operating
independently.
MR2[7:6] = b’01 Automatic Echo
Places the channel in the automatic echo mode, which automatically
retransmits the received data. The following conditions are true
while in automatic echo mode:
• Received data is re–clocked and re–transmitted on the TxD output.
• The receiver clock is used for the transmitted data.
• The receiver must be enabled, but the transmitter need not be
enabled.
• The TxRDY and Tx Idle status bits are inactive.
• The received parity is checked, but is not regenerated for
transmission, i.e., transmitted parity bit is as received.
• Character framing is checked, but the stop bits are retransmitted
as received. Rx data is sent to RxFIFO
• A received break is echoed as received until the next valid start bit
is detected.
• CPU to receiver communication continues normally, but the CPU
to transmitter link is disabled.
MR2[7:6] = b’10 selects local loop back diagnostic mode. In this mode:
• The transmitter output is internally connected to the receiver input.
• The transmitter’s 1X clock is used for the receiver.
• The TxD output is held high.
• The RxD input is ignored.
• The transmitter must be enabled, but the receiver need not be
enabled.
• CPU to transmitter and receiver communications continue
normally .
MR2 [7:6] = b’11 Selects the Remote Loop back diagnostic mode. In this mode:
• Received data is re–clocked and re–transmitted on the TxD output.
• The receiver 1X clock is used for the transmitted data.
• Received data is not sent to the local CPU, and the error status
conditions are inactive.
• The received parity is not checked and is not regenerated for
transmission, i.e., the transmitted parity bit is as received.
• The receiver must be enabled, but the transmitter need not be
enabled.
• Character framing is not checked, and the stop bits are
retransmitted as received.
• A received break is echoed as received until the next valid start bit
is detected.
MR2[5] Transmitter Request to Send Control
This bit controls the deactivation of the RTSN output (I/O2) by the
transmitter. This output is manually asserted and negated by
appropriate commands issued via the command register. MR2 [5] = 1
negates (drives to logical 1) RTSN automatically one bit time after
the characters in the transmit shift register and in the TxFIFO (if any)
are completely transmitted (includes the programmed number of
stop bits if the transmitter is not enabled). This feature can be used
to automatically terminate the transmission of a message as follows:
• Program auto reset mode: MR2[5]= 1.
• Enable transmitter.
• Assert RTSN via command.
• Send message.
• Verify the next to last character of the message is being sent by
waiting until transmitter ready is asserted. Disable transmitter after
the last character is loaded into the TxFIFO.
• The last character will be transmitted and RTSN will be reset one
bit time after the last stop bit.
NOTE: when the transmitter controls the RTSN pin the meaning of
the pin is COMPLETELY changed. It has nothing to do with the
normal RTSN/CTSN “handshaking”. It is usually used to mean, “end
of message” and to “turn the line around” in simplex
communications. From a practical point of view the simultaneous
use of Tx control of RTSN and Rx control is mutually exclusive.
However if this is programmed the DUART performs as required.
MR2[4] – Clear to Send Control
The state of this bit determines if the CTSN input (I/O0) controls the
operation of the transmitter. If this bit is 0, CTSN has no effect on the
transmitter. If this bit is a 1, the transmitter checks the state of CTSN
each time it is ready to begin sending a character. If it is asserted
(low), the character is transmitted. If it is negated (high), the TxD
output remains in the marking state and the transmission is delayed
until CTSN goes low. Changes in CTSN, while a character is being
transmitted, do not affect the transmission of that character. This
feature can be used to prevent overrun of a remote receiver.
MR2[3:0] – Stop Bit Length Select
This field programs the length of the stop bit appended to the
transmitted character. Stop bit lengths of 9/16 through 2 bits can be
programmed. In all cases, the receiver only checks for a mark
condition at the center of the first stop bit position (one bit time after
the last data bit, or after the parity bit if parity is enabled). If an
external 1X clock is used for the transmitter, MR2[1] = 0 selects one
stop bit and MR2[1] = 1 selects two stop bits to be transmitted.
2000 Feb 10
24
Page 31

Philips Semiconductors Objective specification
SC28L202Dual UART
MR3 – Mode Register 3, A and B
Bit 7
Xon/Xoff
transparency
0 = flow control characters
received are loaded onto
the RxFIFO
1 = flow control characters
received are not loaded
onto the RxFIFO
NOTE:
1. If these bits are not 0 the characters will be stripped regardless of bits (3:2) or (1:0)
1
Bit 6 Bit 5:4 Bit 3:2 Bit 1:0
Address Recognition
transparency
0 = Address characters
received are loaded to
RxFIFO
1 = Address characters
received are not loaded onto
the RxFIFO
1
Reserved In–band flow control
mode
00 = host mode, only the host
CPU may initiate flow control
actions through the CR
01 = Auto Transmitter flow
control
10 = Auto Receiver flow control
11 = Auto Rx and Tx flow control
Address
Recognition
control
00 = Default
01 = Auto wake
10 = Auto doze
11 = Auto wake
and auto doze
MR3[7 & 6] Xon/Xoff Character Stripping
Control the handling of recognized Xon/Xoff or Address characters.
If set, the character codes are placed on the RxFIFO along with their
status bits just as ordinary characters are. If the character is not
loaded onto the RxFIFO, its received status will be lost unless the
receiver is operating in the block error mode, see MR1[5] and the
general discussion on receiver error handling. Interrupt processing
is not effected by the setting of these bits. See Character recognition
section.
MR3[5:4] Reserved
MR3[3:2] Xon/Xoff Processing
Control the Xon/Xoff processing logic. Auto Transmitter flow control
allows the gating of Transmitter activity by Xon/Xoff characters
received by the Channel’s receiver. Auto Receiver flow control
causes the Transmitter to emit an Xoff character when the RxFIFO
has loaded to a depth of 240 characters. Draining the RxFIFO to a
level of 128 or less causes the Transmitter to emit a Xon character .
All transmissions require no host involvement. A setting other than
b’00 in this field precludes the use of the command register to
transmit Xon/Xoff characters.
NOTE: Interrupt generation in Xon/Xoff processing is controlled by
the IMR (Interrupt Mask Register) of the individual channels. The
interrupt may be cleared by a read of the XISR, the Xon/Xoff
Interrupt Status Register. Receipt of a flow control character will
always generate an interrupt if the IMR is so programmed. The
MR0[3:2] bits have effect on the automatic aspects of flow control
only, not the interrupt generation.
MR3[1:0] Address Recognition
This field controls the operation of the Address recognition logic. If
the device is not operating in the special or ”wake–up” mode, this
hardware may be used as a general–purpose character detector by
choosing any combination except b’00. Interrupt generation is
controlled by the channel IMR. The interrupt may be cleared by a
read of the XISR, the Xon/Xoff Interrupt Status Register. See further
description in the section on the Wake Up mode.
2000 Feb 10
25
Page 32

Philips Semiconductors Objective specification
SC28L202Dual UART
RxCSR – Receiver Clock Select Register A and B
TxCSR Transmitter Clock Select Register A and B
Both registers consist of single 6–bit field that selects the clock source for the receiver and transmitter respectively. During a read the unused
bits in this register read b’000. The “BRG” baud rates (fixed BRG rates) shown in the table below are based on the Sclk crystal frequency of
14.7456 MHz. The baud rates shown below will vary as the Sclk crystal clock varies. For example, if the Sclk rate is changed to 7.3728 MHz all
the rates below will reduce by 1/2.
Bit 7 Bit 6 Bits 5:0
Reserved Reserved Transmitter/Receiver Clock select code,
Rx and Tx Clock Select Table
NOTE: Sclk maximum rate is 50 MHz. Data clock rates will follow exactly the ratio of the X1/Sclk to 14.7654 MHz
Tx A Clock Select Code Clock selection, Sclk = 14.7456 MHz Tx A Clock Select Code Clock selection, Sclk = 14.7456 MHz
00 0000 BRG – 50 01 0000 BRG – 75
00 0001 BRG – 110 01 0001 BRG – 150
00 0010 BRG – 134.5 01 0010 BRG – 450
00 0011 BRG – 200 01 0011 BRG – 1800
00 0100 BRG – 300 01 0100 BRG – 2000
00 0101 BRG – 600 01 0101 BRG – 14.4K
00 0110 BRG – 1200 01 0110 BRG – 19.2K
00 0111 BRG – 1050 01 01 11 BRG – 28.8K
00 1000 BRG – 2400 01 1000 BRG – 57.6K
00 1001 BRG – 4800 01 1001 BRG – 115.2K
00 1010 BRG – 7200 01 1010 BRG – 230.4K
00 1011 BRG – 9600 01 1011 BRG – 460.8K
00 1100 BRG – 38.4K 01 1100 BRG – 921.6K
00 1101 Timer 0 01 1101 Timer 1
00 1110 I/O3 A transmitter – 16x External * 01 1110 PBRG 0
00 111 1 I/O3 A transmitter – 1x External * 01 1111 Midi rate 31.25 KHz 1.66% error
Tx A Clock Select Code Clock selection, Sclk = 14.7456 MHz Tx A Clock Select Code Clock selection, Sclk = 14.7456 MHz
See Clock Multiplex Table below
11 0000 to 11 1 101 Reserved
11 1110 PBRG 1
11 1111 Reserved
This field selects the baud rate clock for the Channel A transmitter.
* External clock Pin and external clock mode assignment.
Tx/Rx CSR x [5:0] RxC Channel A TxC Channel B RxC channel B
001110 I/O4 A 16x I/O5 A 16x I/O6 A 16x
001111 I/O4 A 1X I/O5 A 1X I/O6 A 1X
2000 Feb 10
26
Page 33

Philips Semiconductors Objective specification
SC28L202Dual UART
CRx – Command Register Extension, A and B
CR is used to write commands to the DUART.
Bit 7
Lock Tx and Rx Enables Enable Tx Enable Rx Command Register codes.
0 = lock Rx & Tx state
1 = Change Rx & Tx state
CR[7] – Lock Tx and Rx enables.
If reset, the transmitter and receiver enable bits, CR[6:5] are not
significant. The enabled/disabled state of a receiver or transmitter
can be changed only if this bit is a “1” during the time of the write to
the command register.
WRITES TO THE LOWER 5 BITS OF THE CR WOULD USUALLY
HAVE CR[7]
AT “0” to maintain the condition of the receiver and transmitter. The
bit provides a mechanism for writing commands to a channel, via
CR[4:0], without the necessity of keeping track of or reading the
current enable status of the receiver and transmitter.
CR[6] – Enable Transmitter
A one written to this bit enables operation of the transmitter. The
TxRDY status bit will be asserted. When disabled by writing a zero
to this bit, the command terminates transmitter operation and resets
the TxRDY and Tx Idle status bits returning the transmitter to its idle
state . However, if a character is being transmitted or if characters
are loaded in the TxFIFO when the transmitter is disabled, the
transmission of the all character(s) is completed before assuming
the inactive state.
CR[5] – Enable Receiver
A one written to this bit enables operation of the receiver. The
receiver immediately begins the search for and the verification the
start bit. If a zero is written, this command terminates operation of
the receiver immediately – a character being received will be lost.
The command has no effect on the receiver status bits or any other
control registers. The data in the RxFIFO will be retained and may
be read. If the receiver is re–enabled subsequent data will be
appended to that already in the RxFIFO. If the special wake–up
mode is programmed, the receiver operates even if it is disabled
(see Wake–up Mode).
CR[4:0] – Miscellaneous Commands (See Table below)
The encoded value of this field can be used to specify a single
command as follows:
•00000 No command.
•00001 Reserved
•00010 Reset receiver. Immediately resets the receiver as if
hardware reset had been applied. The receiver is reset and the
FIFO pointer is reset to the first location effectively discarding all
unread characters in the FIFO.
•0001 1 Reset transmitter. Immediately resets the transmitter as if a
hardware reset had been applied. The transmitter is reset and the
FIFO pointer is reset to the first location effectively discarding all
untransmitted characters in the FIFO.
•00100 Reset error status. Clears the received break, parity error,
framing error, and overrun error bits in the status register
(SR[7:4]). It is used in either character or block mode. In block
mode it would normally be used after the block is read.
•00101 Reset break change interrupt. Causes the break detect
change bit in the interrupt status register (ISR[2]) to be cleared to
zero.
Bit 6 Bit 5 Bit 4:0
0 = disable
1 = enable
0 = disable
1 = enable
(See Command Register Table)
•00110 Start break. Forces the TxD output low (spacing). If the
The transmitter must be enabled to start a break.
•00111 Stop break. The TxD line will go high (marking) within two
•01000 Assert RTSN. Causes the RTSN output to be asserted
•01001 Negate RTSN. Causes the RTSN output to be negated
•01010 Set C/T Receiver time out mode on
•0101 1 Set MR Pointer to 0
•01100 Set C/T Receiver time out mode off
•01101 Block error status accumulation on FIFO entry. Allows the
•01110 Power Down Mode On
•0111 1 Disable Power Down Mode
•10000 Transmit an Xon Character
•10001 Transmit an Xoff Character
•10010 C/T start sets the counter timer to the value of the
•1001 1 C/T stop Effectively stops the counter/timer, captures the
•10100 Reserved
•10101 Reserved.
•10110 Transmitter resume command (This command is not active
transmitter is empty, the start of the break condition will be
delayed up to two bit times. If the transmitter is active and the
TxFIFO is empty then the break begins when transmission of the
current character is completed. If there are characters in the
TxFIFO, the start of break is delayed until all characters presently
in the TxFIFO and any subsequent characters loaded have been
transmitted. (Tx Idle must be true before break begins).
bit times. TxD will remain high for one bit time before the next
character is transmitted.
(low).
(high).
NOTE: The two commands above actually reset and set,
respectively, the I/O0 B (Channel A) or I/O1 B (Channel B)
pin associated with the OPR register. (See SOPR and
ROPR registers I/O pin control.
“received break”, “framing error” and “parity error” bits to be set as
the received character is loaded to the RxFIFO. (normally these
bits are set on reading of the data from the RxFIFO) Setting this
mode can give information about error data up to 256 bytes earlier
than the normal mode. However it clouds the ability to know
precisely which byte(s) are in error.
counter/timer preset register and starts the counter.
last count value and resets the counter ready status bit in the ISR
in “Auto–Transmit mode”). A command to cancel a previous Host
Xoff command. Upon receipt, the channel’s transmitter will
transfer a character, if any, from the TxFIFO and begin
transmission.
2000 Feb 10
27
Page 34

Philips Semiconductors Objective specification
SC28L202Dual UART
•10111 Host Xoff (or transmitter pause) command (CRTXoff). This
command allows tight host CPU control of the flow control of the
channel transmitter. When interrupted for receipt of a Xoff
character by the receiver, the host may stop transmission of
further characters by the channel transmitter by issuing the Host
Xoff command. Any character that has been transferred to the
TxD shift register will complete its transmission, including the stop
bit before the transmitter pauses. Even though the transmitter is
paused it is still able to send Xon/Xoff by the request of its
associated receiver.
•11000 Cancel Host transmit flow control command. Issuing this
command will cancel a previous command to transmit a flow
control character if the flow control character is not yet loaded into
the TxD Shift Register. If there is no character waiting for
transmission or if its transmission has already begun, then this
command has no effect and the character will be sent.
COMMAND REGISTER EXTENSION TABLE A and B
Commands 0x0F, 0x0F, 0xFF (marked with * ) are global and exist only in channel A’s register space.
Channel
Command
Code
CR[4:0] Description CR[4:0] Description
0 0000 NOP 1 0000 Transmit Xon
0 0001 Set MR pointer to 1 1 0001 Transmit Xoff
0 0010 Reset Receiver 1 0010 Start C/T
0 0011 Reset Transmitter 1 0011 Stop C/T
0 0100 Reset Error Status 1 0100 Reserved
0 0101 Reset Break Change Interrupt 1 0101 Reserved
0 0110 Begin Transmit Break 1 0110 Transmitter Resume Command (CRXoffRe)
0 0111 End Transmit Break 1 0111 Host Xoff Command (CR TXoff)
0 1000 Assert RTSN (I/O0 B or I/O1 B) 1 1000 Cancel Transmit X Char Command (CRTX)
0 1001 Negate RTSN (I/O0 B or I/O1 B) 1 1001 Reserved
0 1010 Set C/T Receiver time–out mode on 1 1010 Reserved
0 1011 Set MR pointer to 0 1 1011 Reset Address Recognition Status
0 1100 Set C/T Receiver time–out mode off 1 1100 Reserved
0 1101 Block Error Status on RxFIFO load 1 1101 Block Error Status on RxFIFO Read
0 1110 • Power Down Mode On 1 1110 Reserved
0 1111 • Disable Power Down Mode 1 1111 • Reset Device as a Hardware reset. Reserved in channel B*
Channel
Command
Channel
Command Code
•11001 Reserved
•11010 Reserved
•11011 Reset Address Recognition Status. This command clears
the interrupt status that was set when an address character was
recognized by a disabled receiver operating in the special mode.
•11100 Reserved
•11101 Block error status accumulates on FIFO read (Default
State)
•111 10 Reset to “C92” Register Set
•11111 Reserved for channel B, for channel A: executes a chip
wide reset. Executing this command in channel a is equivalent to
a hardware reset with the RESET(N) pin. Executing in channel B
has no effect.
Channel
Command
2000 Feb 10
28
Page 35

Philips Semiconductors Objective specification
SC28L202Dual UART
SR – Channel Status Register A and B
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Received Break Framing Error Parity Error Overrun Error Tx Idle TxRDY RxFULL RxRDY
0 = No
1 = Yes
SR[7] – Received Break
This bit indicates that an all zero character (including parity, if used)
of the programmed length has been received with a stop bit at a
logical zero. A single FIFO position is loaded with 0x00 when a
break is received; further entries to the FIFO are inhibited until the
RxD line returns to the marking state for at least one half bit time
(two successive edges of the internal or external 1x clock). When
this bit is set, the change in break bit in the ISR (ISR [2]) is set.
ISR[2] is also set when the end of the break condition, as defined
above, is detected. The break detect circuitry is capable of detecting
breaks that originate in the middle of a received character. However,
if a break begins in the middle of a character, it must last until the
end of the next character in order for it to be detected.
SR[6] – Framing Error (FE)
This bit indicates that a stop bit was not detected when an otherwise
non–zeros data character (including parity, if enabled) was received.
The stop bit check is made in the middle of the first stop bit position.
SR[5] – Parity Error (PE)
This bit is set when the ’with parity’ or ’force parity’ mode is
programmed and the corresponding character in the FIFO was
received with incorrect parity. In the special ’wake up mode’, the
parity error bit stores the received A/D bit.
SR[4] – Overrun Error (OE)
This bit, when set, indicates that one or more characters in the
received data stream have been lost. It is set upon receipt of the
start bit of a new character when the RxFIFO is full and a character
is already in the receive shift register (257 valid characters in the
receiver) waiting for an empty FIFO position. When this occurs, the
character in the receive shift register (and its break detect, parity
error and framing error status, if any) is lost. This bit is cleared by a
reset error status command.
SR [3] – Transmitter Idle (Tx Idle)
This bit is set when the transmitter underruns, i.e., both the TxFIFO
and the transmit shift register are empty. It is set after transmission
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
of the last stop bit of a character, if no character is in the TxFIFO
awaiting transmission. It is negated when the TxFIFO is loaded by
the CPU, or when the transmitter is disabled or reset. This bit is
concerned with the transmitter transmitting data and it essentially
shows “ transmitter underrun”. If, while it is underrun it is
commanded to send an X on/Xoff character it will remain at the zero
state. If it is underrun and while sending an Xon/Xoff character the
TxFIFO is loaded then the bit will go low.
SR[2] – Transmitter Ready (TxRDY)
This bit, when set, indicates that the TxFIFO is ready to be loaded
with at least one more character. This bit is cleared when the
TxFIFO is full or is above its interrupt threshold level set in the MR
registers or TxFIFO interrupt Fill Level register (TxFIL). Characters
loaded in the TxFIFO while the transmitter is disabled will not be
transmitted.
SR[1] – RxFIFO Full (RxFULL)
This bit is set when a character is transferred from the receive shift
register to the receive FIFO and the transfer causes the FIFO to
become full, i.e., all 256 RxFIFO positions are occupied. It is reset
when the CPU reads the RxFIFO and that read leaves one or more
empty byte position(s). If a character is waiting in the receive shift
register because the RxFIFO is full, RxFULL is not reset until the
second read of the RxFIFO since the waiting character is
immediately loaded to the RxFIFO.
SR[0] – Receiver Ready (RxRDY)
This bit indicates that a character has been received and is waiting
in the RxFIFO to be read by the CPU. It is set when the character is
transferred from the receive shift register to the RxFIFO and reset
when the CPU reads the RxFIFO, and no more characters are in the
RxFIFO.
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
2000 Feb 10
29
Page 36

Philips Semiconductors Objective specification
SC28L202Dual UART
ISR – Interrupt Status Register A and B
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
I/O Port
Change
of
state
This register provides the status of all potential interrupt sources for
a UART channel. When generating an interrupt arbitration value, the
contents of this register are masked by the interrupt mask register
(IMR). If a bit in the ISR is a ’1’ and the corresponding bit in the IMR
is also a ‘1’; interrupt arbitration for this source will begin. If the
corresponding bit in the IMR is a zero, the state of the bit in the ISR
can have no affect on the IRQN output. Note that the IMR may or
may not mask the reading of the ISR as determined by GCCR[06].
If GCCR[0] is cleared, the reset and power on default, the ISR is
read without modification. If GCCR[0] is set, the read of the ISR
gives a value of the ISR ANDed with the IMR.
ISR[7] – Input Change of State.
This bit is set when a change of state occurs at the I/O1 or I/O0
input pins. It is reset when the CPU reads the Input Port Register,
IPR.
ISR[6] Fixed Watchdog Time–out.
This bit is set when the receiver’s watchdog timer has counted more
than 64 bit times since the last RxFIFO event. RxFIFO events are a
read of the RxFIFO or GRxFIFO, or the load of a received character
into the FIFO. The interrupt will be cleared automatically when the
RxFIFO or GRxFIFO is read. The receiver watch–dog timer is
included to allow detection of the very last characters of a received
message that may be waiting in the RxFIFO, but are too few in
number to successfully initiate an interrupt. Refer to the watchdog
timer description for details of how the interrupt system works after a
watchdog time–out.
ISR[5] – Address Recognition Status Change.
This bit is set when a change in receiver state has occurred due to
an Address character being received from an external source and
matches the reference address in ARCR. The bit and interrupt is
negated by a write to the CR with command x11011, Reset Address
Recognition Status.
ISR[4] – Xon/Xoff Status Change.
This bit is set when a Xon/Xoff character being received from an
external source. The bit is negated by a read of the channel
Xon/Xoff Interrupt Status Register , XISR.
ISR[3] – Counter Timer Status
The C/T has timed out or the count passed through 0. This bit is
cleared by issuing the “stop C/T ” command.
ISR[2] – Change in Channel Break Status.
This bit, when set, indicates that the receiver has detected the
beginning or the end of a received break. It is reset when the CPU
issues a reset break change interrupt command via the CR.
Receiver
Watch–dog
Time–out
Address
recognition event
Xon/off
event
C/T
Ready
Break
Change
Of
state
ISR[1] – RxINT. (Also Rx DMA hand shake at I/O pins)
The general function of this bit is to indicate that the RxFIFO has
data available and that it has entered the arbitration process. The
particular meaning of this bit is programmed by RxFIL register. If
programmed as receiver ready (MR2[3:2] = 00), it indicates that at
least one character has been received and is waiting in the RxFIFO
to be read by the host CPU. It is set when the character is
transferred from the receive shift register to the RxFIFO and reset
when the CPU reads the last character from the RxFIFO.
If RxFIL is programmed as FIFO full, ISR[1] is set when a character
is transferred from the receive holding register to the RxFIFO and
the transfer causes the RxFIFO to become full, i.e. all 256 FIFO
positions are occupied. It is reset whenever RxFIFO is not full. If
there is a character waiting in the receive shift register because the
FIFO is full, the bit is set again when the waiting character is
transferred into the FIFO.
The other two conditions of these bits, 3/4 and half full operate in a
similar manner. The ISR[1] bit is set when the RxFIFO fill level
meets or exceeds the value; it is reset when the fill level is less. See
the description of the MR2 register.
NOTE: This bit must be at a one (1) for the receiver to enter the
arbitration process. It is the fact that this bit is zero (0) when the
RxFIFO is empty that stops an empty FIFO from entering the
interrupt arbitration. Also note that the meaning if this bit is not quite
the same as the similar bit in the status register (SR).
ISR[0] – TxINT. (Also Tx DMA hand shake at I/O pins)
The general function of this bit is to indicate that the TxFIFO has an
at least one empty space for data. The particular meaning of the bit
is controlled by MR0 [5:4] indicates the TxFIFO may be loaded with
one or more characters. If MR0[5:4] = 00 (the default condition) this
bit will not set until the TxFIFO is empty – 256 bytes available. If the
fill level of the TxFIFO is below the trigger level programmed by the
TxINT field of the Mode Register 0, this bit will be set. A one in this
position indicates that at least one character can be sent to the
TxFIFO. It is turned off as the TxFIFO is filled above the level
programmed by MR0[5:4. This bit turns on as the FIFO empties.
(Note that the RxFIFO bit turns on as the FIFO fills.) This often a
point of confusion in programming interrupt functions for the receiver
and transmitter FIFOs.
NOTE: This bit must be at a one (1) for the transmitter to enter the
arbitration process. It is the fact that this bit is zero (0) when the
TxFIFO is full that stops a full TxFIFO from entering the interrupt
arbitration. Also note that the meaning if this bit is not quite the same
as the similar bit in the status register (SR).
RxINT
Receiver entered the
arbitration process.
TxINT
Transmitter entered
the arbitration process.
2000 Feb 10
30
Page 37

Philips Semiconductors Objective specification
SC28L202Dual UART
IMR – Interrupt Mask Register A and B
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
I/O Port Change of state Rx Watch–dog
The programming of this register selects which bits in the ISR cause
an interrupt output. If a bit in the ISR is a ’1’ and the corresponding
bit in the IMR is a ’1’, the interrupt source is presented to the internal
interrupt arbitration circuits, eventually resulting in the IRQN output
being asserted (low). If the corresponding bit in the IMR is a zero,
the state of the bit in the ISR has no affect on the IRQN output.
IMR[7] COS enable
Allows a change of state in the inputs equipped with input change
detectors to cause an interrupt.
IMR[6] Fixed Watchdog Enable
Controls the generation of an interrupt watchdog timer event. If set,
a count of 64 idle bit times in the receiver will begin interrupt
arbitration.
IMR[5] Address recognition enable
Enables the generation of an interrupt in response to changes in the
Address Recognition circuitry of the Special Mode (multi–drop or
wake–up mode).
RxFIFO – Receiver FIFO, A and B
Bit[10] Bit[9] Bit[8] Bits [7:0]
These bits are sent to the status register This the data byte sent to the data bus or RxFIFO read
Break
Received Status
The FIFO for the receiver is 11 bits wide and 256 ”words” deep. The
status of each byte received is stored with that byte and is moved
along with the byte as the characters are read from the FIFO. The
upper three bits are presented in the STATUS register and they
change in the status register each time a data byte is read from the
FIFO. Therefor the status register should be read BEFORE the byte
is read from the RxFIFO if one wishes to ascertain the quality of the
byte
Time–out
Framing
Error Status
Address
recognition event
Parity
Error Status
Xon/off
event
IMR[4] Xon/Xoff Enable
Enables the generation of an interrupt in response to recognition of
an in–band flow control character.
IMR[3] Counter/Timer Enable
Enable the C/T interrupt when the C/T reaches 0 count.[2] Enables
the generation of an interrupt when a Break condition has been
detected by the channel receiver.
IMR[1] Receiver (Rx) Enable
Enables the generation of an interrupt when servicing for the
RxFIFO is desired.
IMR[0] Transmitter (Tx) Enable
Enables the generation of an interrupt when servicing for the
TxFIFO is desired.
The foregoing applies to the ”character error” mode of status
reporting. See MR1[5] and ”RxFIFO Status” descriptions for ”block
error” status reporting. Briefly, ”Block Error” gives the accumulated
error of all bytes received by the RxFIFO since the last “Reset Error”
command was issued. (CR = 0x04)
C/T
Ready
8 data bits
MSBs =0 for 7,6,5 bit data
Break Change
Of State
RxRDY
interrupt
TxRDY
interrupt
TxFIFO – Transmitter FIFO, A and B
Bits 7:0
8 data bits. MSBs set to 0 for 7, 6, 5 bit data
The FIFO for the transmitter is 8 bits wide by 256 bytes deep. For character lengths less than 8 bits the upper bits will be ignored by the
transmitter state machine and thus are effectively discarded.
RxFIL – Receiver FIFO Interrupt Level, A and B
Bits 7:0
Any one of 256 FIFO fill positions
The position in the Rx FIFO that causes the receiver will enter the interrupt arbitration process. This register is used to offset the effect of the
arbitration threshold. It use may yield moderate improvements in the interrupt service. It will also “equalize” interrupt latency and allow for larger
aggregate block transfers between fast and slow channels. Writing to this register removes the interrupt control established in MR0 and MR1.
RxFL – Receiver FIFO Fill Level Register
Bits 7:0
Channel byte count code ** (1) = implied ‘1’
00000001 = 1
00000010 = 2
to
11111111 = 255
**(1)00000000 = 256 if RxRDY status bit is set.
The number of bytes filled in the receiver FIFO
2000 Feb 10
31
Page 38

Philips Semiconductors Objective specification
SC28L202Dual UART
TxFIL – Transmitter FIFO Interrupt Level A and B
Bits 7:0
Any one of 256 FIFO empty positions
The position in the Tx FIFO that caused the transmitter will enter the interrupt arbitration process. This register is used to offset the effect of the
arbitration threshold. It use may yield moderate improvements in the interrupt service. It will also “equalize” interrupt latency and allow for larger
aggregate block transfers between fast and slow channels. Writing to this register removes the interrupt control established in MR0 and MR1.
TxEL – Transmitter FIFO Empty Level Register
Bits 7:0
Channel byte count code ** (1) = implied ‘1’
00000001 = 1
00000010 = 2
to
11111111 = 255
**(1)00000000 = 256 if TxRDY status bit is set.
The number of empty bytes in the Transmitter FIFO
Registers for Character Recognition
XonCR – Xon/Xoff Character Register A and B
Bits 7:0
8 Bits of the Xon Character Recognition (Resets to 0x11)
An 8–bit character register that contains the compare value for a Xon character.
XoffCR – Xoff Character Register A and B
Bits 7:0
8 Bits of the Xoff Character Recognition (Resets to 0x13)
An 8–bit character register that contains the compare value for a Xoff character.
ARCR – Address Recognition Character Register A and B
Bits 7:0
8 Bits of the Multi–Drop Address Character Recognition (Resets to 0x00)
An 8 bit character register that contains the compare value for the wake–up address character
2000 Feb 10
32
Page 39

Philips Semiconductors Objective specification
SC28L202Dual UART
XISR – Xon–Xoff Interrupt Status Register A and B (Reading this register clears XISR(7:4))
Bits 7:6 Bits 5:4 Bits 3:2 Bits 1:0
Received X Character Status Automatic X Character transmission
00 = none
01 = Xoff received
10 = Xon received
11 = both received
XISR[7:6] Received X Character Status.
This field can be read to determine if the receiver has encountered a
Xon or Xoff character in the incoming data stream. These bits are
maintained until a read of the XISR. The field is updated by X
character reception regardless of the state of MR3(7) and MR3(3:2)
or IMR(4). The field can therefore be used as a character detector
for the bit patterns stored in the Xon and Xoff Character Registers.
XISR[5:4] Automatic transmission Status.
This field indicates the last flow control character sent in the Auto
Receiver flow control mode. If Auto Receiver mode has not been
enabled, this field will always read b’00. It will likewise reset to b’00 if
MR0(3) is reset. If the Auto Receiver mode is exited while this field
reads b’10, it is the user’s responsibility to transmit a Xon, when
appropriate.
XISR[3:2] TxD Condition of the automatic flow control status.
This field tracks the transmitter’s flow status as follows:
•00 –
n
ormal transmission. Transmitter is not affected by Xon or
Xoff.
status
00 = none
01 = Xon transmitted
10 = Xoff transmitted
11 = Both transmitted
•01 – TxD halt pending. After the current character finishes the
transmitter will stop. The status will then change to b’11.
•10 –
restarted. It is sending (or is prepared to send) data characters.
After a read of the XISR, it will return to ”normal” status.
•11 – The transmitter is stopped due to an Xoff character being
received from its associated receiver. The transmitter is “flow
controlled”.
XISR[1:0] TxD X character Status.
This field allows determination of the type of character being
transmitted. It will always be b’00 if none of the automatic X
character controls of MR3[3:2] is enabled.
•01 – The channel is waiting for a data character to transfer from
the TxFIFO. This condition will only occur for a bit time after a Xon
or Xoff character transmission unless the TxFIFO is empty .
•10 – A command to send an Xoff character is pending.
•11 – A command to send an Xon character is pending.
Conditions b’10 and b’11 will not exist for more than a character
time.
TxD flow status TxD character status
00 = normal transmission
01 = TxD halt pending
10 = re – enabled
11 = flow halted
r
e–enabled. The transmitter had been halted and has been
00 = normal TxD data
01 = Idle wait for FIFO
data
10 = Xoff in pending
11 = Xon in pending
WCXER Watch Dog, Character, Address and X Enable Register – A and B
Bit 7 Bit 6 Bit 5 Bit 4 BIT 3 BIT 2 BIT 1 BIT 0
Watch dog * Address recognition Xon recognition Xoff Recognition
1 = disable Wd
0 = no action
This register enables the UART’s Character Recognition, Address
Recognition and Receiver watchdog timer. If both enable and
disable are active a disable results. This register is used to enable
the general–purpose character recognition feature WITHOUT
1 = enable
Wd
0 = no action
1 = disable Ar
0 = no action
1 = enable Ar
0 = no action
causing any Xon/Xoff or wakeup mode activities to occur. The
recognition event is reported in the ISR register.
* This bit control is duplicated at MR0[7].
1 = disable
Xon
0 = no action
1 = enable
Xon
0 = no action
1 = disable
Xoff
0 = no action
1 = enable
Xoff
0 = no action
2000 Feb 10
33
Page 40

Philips Semiconductors Objective specification
SC28L202Dual UART
Programmable Counters, Timers and Baud Rate generators
PBRGPU – Programmable BRG Timer Reload Registers, Upper 0 and 1
Bits 7:0
8 MSBs of the BRG Timer divisor.
This is the upper byte of the 16–bit value used by the BRG timer in generating a baud rate clock
PBRGPL – Programmable BRG Timer Reload Registers, Lower 0 and 1
Bits 7:0
8 LSB of the BRG Timer divisor.
This is the lower byte of the 16–bit value used by the BRG timer in generating a baud rate clock.
CTCS 0 and 1 – Counter Timer clock source
NOTE: Writing to this register removes the control established in the counter/timer portion of the ACR in the default register map
Bit 7:6 Bit 5:4 Bit 3:0
Reserved Mode control Clock selection
00 – Selects Counter Mode. Generates
a timing edge
01 – Selects Timer Mode. Generates a
square wave
10 – Reserved
11 – Selects Timer Pulse Mode.
Generates periodic pulses twice the
frequency as in Timer Mode. Pulse width
is one cycle of the clock as it is delivered to
the C/T. (i.e. after any prescale)
CTVU – Counter Timer Value Registers, Upper 0 and 1
Bits 7:0
8 MSBs of the Counter timer preset value
0000 External I/O2 A (for CT 0), I/O7 A (for CT 1)
0001 External I/O2 A/16 (for CT 0), I/O7 A/16 (for CT 1)
0010 Sclk
0011 Sclk / 2
0100 Sclk / 16
0101 Sclk / 32
0110 Sclk / 64
0111 Sclk / 128
TxC1X A
TxC1X B
1010, 1011 Reserved
1100 Rx Character Count (Ch A) Clock is RxFIFO A load pulse
1101 Rx Character Count (Ch B) Clock is RxFIFO B load pulse
1110, 1 11 1 Reserved
Reading this register gives the value of the upper 8 bits of the counter timer
CTVL – Counter timer Value Registers, Lower 0 and 1
Bits 7:0
8 LSB of the Counter timer preset value
Reading this register gives the value of the upper 8 bits of the
counter timer
NOTE: The counter timer should be stopped before reading. Usually
the clock of the counter timer is not synchronized with the read of
the C/T. It is therefore possible to capture changing data during the
read. Depending on the clock speed with respect to the read cycle
PBRGCS – Programmable BRG Clock Source
Bit 7 Bit 6:4 Bit 3 Bit 2:0
PBRG 1, Register control PBRG 1, Clock selection PBRG 0, Register control PBRG 0, Clock selection
0 = Resets PBRG 1 and
holds it stopped
1 = Allows PBRG 1 to run.
Start/Stop control and clock select register for the two BRG
counters. The clock selection is for the input to the counters. It is
that clock divided by the number represented by the PBRGPU and
PBRGPL the will be used as the 16x clock for the receivers and
transmitters. When the BRG timer Clock is selected for the
000 = Sclk
001 = Sclk / 2
010 = Sclk/ 16
011 = Sclk / 32
100 = Sclk / 64
101 = Sclk / 128
110 = I/O4 A
111 = Reserved
this could be made worse or completely eliminated. If the Stop
counter command is issued and following that the C/T is read there
will be no uncertainty go its value. If it is necessary to read the C/T
“on the fly” then reading it twice and comparing the values will
correct the problem. The double read will not be effective if the
counter timer clock is faster than a read cycle.
0 = Resets PBRG 0 and
holds it stopped.
1 = Allows PBRG 0 to run.
receiver(s) or transmitter(s) the receivers and transmitters will
consider it as a 16x clock and further device it by 16. In other words
the receivers and transmitters will always be in the 16x ode of
operation when the internal BRG timer is selected for their clock.
000 = Sclk
001 = Sclk / 2
010 = Sclk / 16
011 = Sclk / 32
100 = Sclk / 64
101 = Sclk / 128
110 = I/O3 A
111 = Reserved
2000 Feb 10
34
Page 41

Philips Semiconductors Objective specification
SC28L202Dual UART
CTPU Counter Timer Preset Upper 0 and 1
CTPU
CTPL Counter –Timer Preset Low 0 and 1
CTPL
The CTPU and CTPL hold the eight MSBs and eight LSBs,
respectively, of the value to be used by the counter/timer in either
the counter or timer modes of operation. The minimum value that
may be loaded into the CTPU/CTPL registers is H‘0000’. Note that
these registers are write–only and cannot be read by the CPU.
In the timer mode, the C/T generates a square wave whose period is
twice the value (in C/T clock periods) of the CTPU and CTPL. The
waveform so generated is often used for a data clock. The formula
for calculating the divisor n to load to the CTPU and CTPL for a
particular 1X data clock is shown below.
NOTE: The 2 in the denominator is for the Square wave generation.
For the Pulse mode change the 2 to a 1.
n +
(2 16 (Baud rate desired))
Often this division will result in a non–integer number, 26.3 for
example. One can only program integer numbers in a digital divider.
Therefore, 26 would be chosen. This gives a baud rate error of
0.3/26.3, which is 1.14% and well within the ability asynchronous
mode of operation.
If the value in CTPU and CTPL is changed, the current half–period
will not be affected, but subsequent half periods will be. The C/T will
not be running until it receives an initial ‘Start Counter’ command
from the command register (or a read at address A6–A0 = 0001110
in the lower 16 position address space) . After this, while in timer
mode, the C/T will run continuously. Receipt of a start counter
command causes the counter to terminate the current timing cycle
and to begin a new cycle using the values in CTPU and CTPL.
The counter ready status bit (ISR [3]) is set once each cycle of the
square wave. The bit is reset by a stop counter command from the
command register (or a read with A6–A0 = 0x0F in the lower 16
position address space). The command however, does not stop the
C/T. the generated square wave is output on I/O3 if it is programmed
to be the C/T output. In the counter mode, the value C/T loaded into
CTPU and CTPL by the CPU is counted down to 0. Counting begins
upon receipt of a start counter command. Upon reaching terminal
count H‘0000’, the counter ready interrupt bit (ISR [3]) is set. The
counter continues counting past the terminal count until stopped by
the CPU. If I/O3 is programmed to be the output of the C/T, the
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
The lower eight (8) bits for the 16 bit counter timer preset register
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
The Upper eight (8) bits for the 16 bit counter timer preset register
output remains high until terminal count is reached; at which time it
goes low. The output returns to the High State and ISR [3] is cleared
when the counter is stopped by a stop counter command. The CPU
may change the values of CTPU and CTPL at any time, but the new
count becomes effective only on the next start counter commands. If
new values have not been loaded, the previous count values are
preserved and used for the next count cycle
In the counter mode, the current value of the upper and lower 8 bits
of the counter (CTPU, CTPL) may be read by the CPU. It is
recommended that the counter be stopped when reading to prevent
potential problems that may occur if a carry from the lower 8 bits to
the upper 8 bits occurs between the times that both halves of the
counter are read. However, note that a subsequent start counter
Clockinputfrequency
command will cause the counter to begin a new count cycle using
the values in CTPU and CTPL. When the C/T clock divided by 16 is
selected, the maximum divisor becomes 1,048,575.
The CTS, RTS, CTS Enable Tx signals
CTS (Clear To Send) is usually meant to be a signal to the
transmitter meaning that it may transmit data to the receiver. The
CTS input is on pin I/O0 A for Tx A and on I/O1 A for Tx B. The CTS
signal is active low; thus; it is called CTSN A for Tx A and CTSN B
for Tx B. RTS is usually meant to be a signal from the receiver
indicating that the receiver is ready to receive data. It is also active
low and is, thus, called RTSN A for Rx A and RTSN B for Rx B.
RTSN A is on pin I/O0 B and RTSN B is on I/O1 B. A receiver’s
RTSN output will usually be connected to the CTS input of the
associated transmitter. Therefore, one could say that RTS and CTS
are different ends of the same wire!
MR2 (4) is the bit that allows the transmitter to be controlled by the
CTS pin (I/O0 A or I/O1 A). When this bit is set to one AND the CTS
input is driven high, the transmitter will stop sending data at the end
of the present character being serialized. It is usually the RTS output
of the receiver that will be connected to the transmitter’s CTS input.
The receiver will set RTS high when the receiver FIFO is full AND
the start bit of the ninth character is sensed. Transmission then
stops with nine valid characters in the receiver. When MR2 (4) is set
to one, CTSN must be at zero for the transmitter to operate. If MR2
(4) is set to zero, the I/O pin will have no effect on the operation of
the transmitter. MR1 (7) is the bit that allows the receiver to control
I/O0 B. When the receiver controls I/O0 B (or I/O1 B), the meaning
of that pin will be the RTSN function.
2000 Feb 10
35
Page 42

Philips Semiconductors Objective specification
SC28L202Dual UART
Registers of the Arbitrating Interrupt System and Bidding control
ICR – Interrupt Control Register
Bits 7:0
Upper eight bits of the Arbitration Threshold
This register provides a single 8–bit field called the interrupt
threshold for use by the interrupt arbiter. The field is interpreted as a
single unsigned integer. The interrupt arbiter will not generate an
external interrupt request, by asserting IRQN, unless the value of
the highest priority interrupt exceeds the value of the interrupt
threshold. If the highest bidder in the interrupt arbitration is lower
than the threshold level set by the ICR, the Current Interrupt
Register, CIR, will contain 0x’00. Refer to the functional description
of interrupt generation for details on how the various interrupt source
bid values are calculated.
NOTE: While a watch–dog Timer interrupt is pending, the ICR is not
used and only receiver codes are presented for interrupt arbitration.
This allows receivers with very low count values (perhaps below the
CIR – Current Interrupt Register
Bits 7:6 Bits 5:1 Bits 0
Type Current byte count/type Channel number or C/T number
00 = Type other than transmit or Receiver 00000 = no interrupt
01 = Transmit
11 = Receive w errors
10 = Receive w/o errors
The Current Interrupt Register is provided to speed up the
specification of the interrupting condition in the DUART. The CIR is
updated at the beginning of an interrupt acknowledge bus cycle or in
response to an Update CIR command. (see immediately above)
Although interrupt arbitration continues in the background, the
current interrupt information remains frozen in the CIR until another
IACKN cycle or Update CIR command occurs. The LSBs of the CIR
provide part of the addressing for various Global Interrupt registers
including the GIBCR, GICR, GITR and the Global RxFIFO and
TxFIFO FIFO. The host CPU need not generate individual
addresses for this information since the interrupt context will remain
stable at the fixed addresses of the Global Interrupt registers until
IVR – Interrupt Vector Register
Bits 7:0
8 data bits of the Interrupt Vector (IVR)
The IVR contains the byte that will be placed on the data bus during an IACKN cycle when the GCCR bits (2:1) are set to binary ‘01’. This is the
unmodified form of the interrupt vector.
00001 = Change of State
00010 = Address Recognition
0001 1 = Xon/Xoff status
00100 = Receiver Watch dog
00101 = Break change
00110 = Counter Timer
00111 = Rx Loop Back Error
Current count code
00000 => At least 1 character
00001 => At least 16 characters
00001 => At least 24 characters
.
.
11101 => At least 240 characters
111 10 => At least 248 characters
11111 => 256 (See also GIBCR)
threshold value) to win interrupt arbitration without requiring the user
to explicitly lower the threshold level in the ICR. These bits are the
upper seven (8) bits of the interrupt arbitration system. The lower
three (3) bits represent the channel number.
UCIR – Update CIR
A command based upon a decode of address 0x8C. (UCIR is not a
register!) A write (the write data is not important; a “don’t care”) to
this ’register’ causes the Current Interrupt Register to be updated
with the value that is winning interrupt arbitration. The register would
be used in systems that polls the interrupt status registers rather
than wait for interrupts. Alternatively, the CIR is normally updated
during an Interrupt Acknowledge Bus cycle in interrupt driven
systems.
0 = Channel A or C/T 0
1 = Channel B or C/T 1
0 = A
1 = B
the CIR is updated. For most interrupting sources, the data available
in the CIR alone will be sufficient to set up a service routine.
The CIR may be processed as follows:
If CIR[7] = 1, then a receiver interrupt is pending and the count is
CIR[5:1], channel is CIR[0]
Else If CIR[6] = 1 then a transmitter interrupt is pending and the
count is CIR[5:1], channel is CIR[0]
Else the interrupt is another type, specified in CIR[5:1]
NOTE: The GIBCR, Global Interrupting Byte Count Register, may be
read to determine an exact character count.
2000 Feb 10
36
Page 43

Philips Semiconductors Objective specification
SC28L202Dual UART
Modification of the IVR
Bits 7:3 Bits 2:1 Bit 0
Always contains bits (7:3) of the IVR Will be replaced with current interrupt
The table above indicates how the IVR may be modified by the interrupting source. The modification of the IVR as it is presented to the data bus
during an IACK cycle is controlled by the setting of the bits (2:1) in the GCCR (Global Chip Configuration Register).
GICR – Global Interrupting Channel Register
Bits 7:1 Bit 0
Reserved Channel code
A register associated with the interrupting channel as defined in the CIR. It contains the channel number for the interrupting channel.
GIBCR – Global Interrupting Byte Count Register
Bits 7:0
Channel byte count code
00000001 = 1
00000010 = 2
.
11111111 = 255
00000000 = 256
A register associated with the interrupting channel as defined in the
CIR. Its numerical value equals TxEL or RxFL at the time IACKN or
“Update CIR” command was issued . The true number of bytes
type if IVC field of GCCR = 3
0 = a
1 = b
ready for transfer to the transmitter or transfer from the receiver. It is
undefined for other types of interrupts
Replaced with interrupting channel
number if IVC field of GCCR > 1
GITR – Global Interrupting Type Register
Bit 7:6
Receiver Interrupt Transmitter Interrupt Reserved Other types
0x = not receiver
10 = with receive errors
11 = w/o receive errors
A register associated with the interrupting channel as defined in the CIR. It contains the type of interrupt code for all interrupts.
GRxFIFO – Global RxFIFO Register
Bits 7:0
8 data bits of RxFIFO. MSBs set to 0 for 7, 6, 5 bit data
The RxFIFO of the channel indicated in the CIR channel field. Undefined when the CIR interrupt context is not a receiver interrupt.
TxFIFO Register
GTxFIFO – Global TxFIFO Register
Bits 7:0
8 data bits of TxFIFO. MSBs not used for 7, 6, 5 bit data
The TxFIFO of the channel indicated in the CIR channel field. Undefined when the CIR interrupt context is not a transmitter interrupt. Writing to
the GTxFIFO when the current interrupt is not a transmitter event may result in the characters being transmitted on a different channel than
intended.
BCRBRK – Bidding Control Register – Break Change, A and B
Bits 7:0
MSBs of break change interrupt bid
Bit 5 Bit 4:3 Bit 2:0
0 = not transmitter
1 = transmitter interrupt
read 0x00 000 = not ”other” type
001 = Change of State
010 = Address Recognition Event
011 = Xon/Xoff status
100 = Rx Watchdog
101 = Break Change
110 = Counter Timer
111 = Rx Loop Back Error
Global
This register provides the 8 MSBs of the Interrupt Arbitration number for a break change interrupt.
BCRCOS – Bidding Control Register – Change of State, A and B
Bits 7:0
MSBs of Change of state detectors (COS) interrupt bid
This register provides the 8 MSBs of the Interrupt Arbitration number for a Change of State, COS, interrupt.
2000 Feb 10
37
Page 44

Philips Semiconductors Objective specification
SC28L202Dual UART
BCRx – Bidding Control Register – Xon/Xoff, A and B
Bits 7:0
MSBs of an Xon/Xoff interrupt bid
This register provides the 8 MSBs of the Interrupt Arbitration number for a Xon/Xoff interrupt.
BCRA – Bidding Control Register – Address, A and B
Bits 7:0
MSBs of an address recognition event interrupt bid
This register provides the 8 MSBs of the Interrupt Arbitration number for an address recognition event interrupt.
BCR C/T – Bidding Control Register –C/T, 0 and 1
Bits 7:0
MSBs of a counter/timer event interrupt bid
This register provides the 8 MSBs of the Interrupt Arbitration number for a counter/timer event interrupt.
BCRLBE – Bidding Control Register – Received Loop Back Error
Bits 7:0
MSBs of a received loop back error event interrupt bid
This register provides the 8 MSBs of the Interrupt Arbitration number for the received loop back error interrupt.
Registers of the I/O ports
IPCRL – Input Port Change Register Lower Nibble, A and B (n = A for A, n = B for B)
Bit 7
∆I/O3 n
change
0 = no change
1 = change
This register may be read to determine the current logical level of the I/O pins and examine the output of the change detectors assigned to each
pin. If the change detection is not enabled or if the pin is configured as an output, the associated change field will read b’0.
IPCRU – Input Port Change Register Upper Nibble, A and B (n = A for A, n = B for B)
Bit 7
∆I/O7 n change ∆I/O6 n change ∆I/O5 n change ∆I/O4 n change I/O7 n state I/0n6 state I/O5 n state I/O4 n state
0 = no change
1 = change
This register may be read to determine the current logical level of the I/O pins and examine the output of the change detectors assigned to each
pin. If the change detection is not enabled or if the pin is configured as an output, the associated change field will read b’0.
IPR – Input Port Register, A and B (n = A for A, n = B for B)
Bits 7:0
Logical levels of I/O(7:0)n
IPCE – Input Change Detect Enable, A and B (n = A for A, n = B for B)
Bit 7
∆I/O7 n enable ∆I/O6 n enable ∆I/O5 n enable ∆I/O4 n enable ∆I/O3 n enable ∆I/O2 n enable ∆I/O1 n enable ∆I/O0 n enable
0 = disable
1 = enable
Bit 6 Bit 7 Bit 6 Bit 3 Bit 2 Bit 1 Bit 0
∆I/O2 n
change
0 = no change
1 = change
Bit 6 Bit 7 Bit 6 Bit 3 Bit 2 Bit 1 Bit 0
0 = no change
1 = change
Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 = disable
1 = enable
∆I/O1 n
change
0 = no change
1 = change
0 = no change
1 = change
0 = disable
1 = enable
∆I/O0 n
change
0 = no change
1 = change
0 = no change
1 = change
0 = disable
1 = enable
0 = disable
1 = enable
I/O3 n state I/O2 n state I/O1 n state I/O0 n
Reads the actual logic level at the pin.
1 = high level; 0 = low level
Reads the actual logic level at the pin.
1 = high level; 0 = low level
0 = disable
1 = enable
0 = disable
1 = enable
0 = disable
1 = enable
state
IPCE[7:0] bits activate the input change of state detectors. If a pin is configured as an output, the change of state detectors, if enabled, continue
to be active and will show a change of state as the I/P port changes.
2000 Feb 10
38
Page 45

Philips Semiconductors Objective specification
SC28L202Dual UART
I/OPCR 0 – I/O Port Configuration Register
Bits 7:6
I/O3 A control I/O2 A control I/O1 A control I/O0 A control
00 = GPI / TxC A
01 = OPR[3] A
10 = TxC A (16X) Output
11 = Reserved
I/OPCR 1 – I/O Port Configuration Register
Bits 7:6
I/O7 A control I/O6 A control I/O5 A control I/O4 A control
00 = GPI / CT 1 Clock Input
01 = OPR[7] A / DTRN B
10 = TxC B (1X) Output
11 = Reserved
I/OPCR 2 – I/O Port Configuration Register
Bits 7:6
I/O3 B control I/O2 B control I/O1 B control I/O0 B control
00 = GPI /DSRN B
01 = OPR[3] B
10 = RxC B (1X) Output
11 = C/T 0 Output (open
drain)
I/OPCR 3 – I/O Port Configuration Register
Bits 7:6 Bits 5:4 Bits 3:2 Bits 1:0
I/O7 B control I/O6 B control I/O5 B control I/O4 B control
00 = GPI /RIN B
01 = OPR[7] B
10 =TxINTN B (open drain)
11 =reserved
Bits 5:4 Bits 3:2 Bits 1:0
00 = GPI / CT 0 Clock Input
01 = OPR[2] A / DTRN A
10 = TxC A (1X) Output
11 = Reserved
Bits 5:4 Bits 3:2 Bits 1:0
00 = GPI / RxC B / PBRG 1 Clk Input
01 = OPR[6] A
10 = RxC B (16X) Output
11 = Reserved
Bits 5:4 Bits 3:2 Bits 1:0
00 = GPI /DSRN A
01 = OPR[2] B
10 = RxC A (1X) Output
11 = C/T 1 Output (open drain)
00 = GPI /RIN A
01 = OPR[6] B
10 =TxINTN A (open drain)
11 = reserved
00 = GPI / CTSN B
01 = OPR[1] A
10 –
11 = Reserved
00 = GPI / TxC B
01 = OPR[5] A
10 = TxC B (16X) Output
11 = Reserved
00 = GPI
01 = OPR[1] B / RTSN B
10 = Reserved
11 = Reserved
00 = GPI /DCDN B
01 = OPR[5] B
10 = RxINTN B (open
drain)
11 = reserved
00 = GPI / CTSN A
01 = OPR[0] A
10 –
11 = Reserved
00 = GPI / RxC A / PBRG 0 Clk Input
01 = OPR[4] A
10 = RxC A (16X) Output
11 = Reserved
00 = GPI
01 = OPR[0] B / RTSN B
10 = Reserved
11 = Reserved
00 = GPI /DCDN A
01 = OPR[4] B
10 = RxINTN A (open drain)
11 = reversed
NOTE: Both I/O Port A and B default to input upon a hardware reset to avoid hardware conflicts with I/O direction
The four registers above contain 4, 2 bit fields that set the direction and source for each of the I/O pins associated with the channel. The I/O0 B
or I/O1 B output may be RTSN if MR1[7] is set. It may also signal ”end of transmission” if MR2[5] is set. (Please see the descriptions of these
functions under the MR1 and MR2 register descriptions).
The binary settings of the binary 00 combination always configures the I/O pins as “inputs”. However the input circuit of the I/O pins are
ALWAYS active. In actuality the binary 00 condition only disable the output driver of the pin. Since the input circuit and the associated change of
state detector is always active the output signal may generate interrupts or drive counters.
This register resets to 0x00 on reset, effectively configuring all I/O pins as inputs. Inputs may be used as RxC, TxC inputs or CTSN and General
Purpose Inputs simultaneously. All inputs are equipped with change detectors that may be used to generate interrupts or can be polled, as
required.
SOPR A and SOPR B – Set the Output Port Bits (OPR A and OPR B)
SOPR [7:0] – Ones in the byte written to this register will cause the corresponding bit positions in the OPR to set to 1. Zeros have no effect. This
allows software to set individual bits with our keeping a copy of the OPR bit configuration. One register for each channel.
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Set OPR Bits OPR 7 OPR 6 OPR 5 OPR 4 OPR 3 OPR 2 OPR 1 OPR 0
1=set bit
0=no
change
1=set bit
0=no
change
1=set bit
0=no
change
1=set bit
0=no change
1=set bit
0=no change
1=set bit
0=no change
1=set bit
0=no change
1=set bit
0=no
change
2000 Feb 10
39
Page 46

Philips Semiconductors Objective specification
SC28L202Dual UART
ROPR A and ROPR B – Reset ROPR Output Port Bits (OPR A and OPR B)
ROPR [7:0] – Ones in the byte written to the ROPR will cause the
corresponding bit positions in the OPR to set to 0. Zeros have no
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Reset OPR
Bits
OPR – Output Port Register, A and B (n = A for A, n = B for B)
The output pins (I/O pins) drive the data written to this register.
OPR I/O7 n I/O6 n I/O5 n I/O4 n I/O3 n I/O2 n I/O1 n I/O0 n
This register is set by the SOPR and ROPR above.
OPR 7 OPR 6 OPR 5 OPR 4 OPR 3 OPR 2 OPR 1 OPR 0
1=reset bit
0=no change
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
0=Pin High
1=Pin Low
1=reset bit
0=no
change
0=Pin High
1=Pin Low
1=reset bit
0=no
change
0=Pin High
1=Pin Low
1=reset bit
0=no
change
0=Pin High
1=Pin Low
THE REGISTERS FOR COMP ATIBILITY WITH PREVIOUS DUARTS
The purpose of including previous functionality is to allow users to
call communications code that may be used in former systems.
When the registers in this lower 16–position address space is used
it will revoke programming done in the upper address space where
the addresses are duplicated. If functions have been called from
upper address space that DO NOT exist in the lower address space
they will remain active. It is therefore recommended that the “Reset
effect. This allows software to reset individual bits with our keeping a
copy of the OPR bit configuration. One register for each channel
1=reset bit
0=no
change
0=Pin High
1=Pin Low
to C92 “ command be issued before calling code written for older
devices. This is just recommended. If one wishes to enhance
previous code by using Xon/Xoff, for example, there is no restriction
against it. These registers provide the original functionality of
previous Philips DUARTs: SCN2681, SCN68681, SCC2691,
SCC68692, SC26C92 and SC28L92.
1=reset bit
0=no
change
0=Pin High
1=Pin Low
1=reset bit
0=no
change
0=Pin High
1=Pin Low
1=reset bit
0=no change
0=Pin High
1=Pin Low
Table 7. SC28L92 Register Addressing READ (RDN = 0) WRITE (WRN = 0)
Address READ (RDN = 0) WRITE (WRN = 0)
0 0 0 0 Mode Register A (MR0 A, MR1 A, MR2 A) Mode Register A (MR0 A, MR1 A, MR2 A)
0 0 0 1 Status Register A (SR A) Clock Select Register A (CSR A )
0 0 1 0 Reserved Command Register A (CR A)
0 0 1 1 Rx Holding Register A (RxFIFO A) Tx Holding Register A (TxFIFO A)
0 1 0 0 Input Port Change Register (IPCR) Aux. Control Register (ACR)
0 1 0 1 Interrupt Status Register (ISR) Interrupt Mask Register (IMR)
0 1 1 0 Counter/Timer Upper (CTPU) C/T Upper Preset Register (CTPU)
0 1 1 1 Counter/Timer Lower (CTPL) C/T Lower Preset Register (CTPL)
1 0 0 0 Mode Register B (MR0 B, MR1 B, MR2 B) Mode Register B (MR0 B, MR1 B, MR2 B)
1 0 0 1 Status Register B (SR B) Clock Select Register B (CSR B )
1 0 1 0 Reserved Command Register B (CR B)
1 0 1 1 Rx Holding Register B (RxFIFO B) Tx Holding Register B (TxFIFO B)
1 1 0 0 IVR or general purpose register IVR or general purpose register
1 1 0 1 Input Port (IPR) I/O(6:0) A Output Port Confide. Register (OPCR) I/O(7:2) B
1 1 1 0 Start Counter Command (C/T 0) Set Output Port Bits Command (SOPR) I/O(7:0) B
1 1 1 1 Stop Counter Command (C/T 0) Reset output Port Bits Command (ROPR) I/O(7:0) B
NOTE: The three MR Registers are accessed via the MR Pointer and Commands 0x1n and 0xBn (where n = represents receiver and
transmitter enable bits)
2000 Feb 10
40
Page 47

Philips Semiconductors Objective specification
SC28L202Dual UART
The following registers are unique for each Channel
Mode Register MRn A MRn B R/W
Status Register SR A SR B R only
Clock
Select
Command
Register
Receiver
FIFO
Transmitter
FIFO
CSR A CSR B W only
CR A CR B W only
RxFIFO A RxFIFO B R only
TxFIFO A TxFIFO B W only
These registers support functions for both Channels
Input Port Change Register IPCR R
Auxiliary Control Register ACR W
Interrupt Status Register ISR R
Interrupt Mask Register IMR W
Counter Timer Upper Value CTPU R
Counter Timer Lower Value CTPL R
Counter Timer Preset Upper CTPU W
Counter Timer Preset Lower CTPL W
Input Port Register IPR R
Output Configuration Register OPCR W
Set Output Port Bits W
Reset Output Port Bits W
Table 8. Baud Rate Generator Characteristics
Crystal or Clock = 14.7456 MHz
NORMAL RATE
(BAUD)
50 0.8 0 2400 38.4 0
75 1.2 0 4800 76.8 0
110 1.759 –0.069 7200 115.2 0
134.5 2.153 0.059 9600 153.6 0
150 2.4 0 19.2K 307.2 0
200 3.2 0 38.4K 614.4 0
300 4.8 0 14.4K 230.4 0
600 9.6 0 28.8K 460.8 0
1050 16.756 –0.260 31.25 500.0 1.6
1200 19.2 0 57.6k 921.6 0
1800 28.8 0 115.2K 1843.2 0
2000 32.056 0.175 230.4K 3686.4 0
NOTE: Duty cycle of 16X clock is 50% ± 1%
ACTUAL 16X
CLOCK (KHz)
ERROR (%) NORMAL RATE
(BAUD)
ACTUAL 16X
CLOCK (KHz)
ERROR (%)
2000 Feb 10
41
Page 48

Philips Semiconductors Objective specification
SC28L202Dual UART
REGISTER DESCRIPTIONS Mode Registers
MR0 Mode Register 0 MR0 is accessed by setting the MR pointer to 0 via the command register command B.
Bit 7 BIT 6 BIT (5:4) BIT 3 BIT 2 BIT 1 BIT 0
MR0 A
MR0 B
MR0 B[3:0]
are reserved
Rx WATCH
DOG
0 = Disable
1 = Enable
RxINT BIT 2
See Tables in
MR0 description
TxINT (1:0)
See table #4
FIFO Size
0 = 8
1 = 256
BAUD RATE
EXTENDED II
0 = Norma
1 = Extend II
TEST 2
Set to 0
BAUD RATE
EXTENDED 1
0 = Normal
1 = Extend
MR0[7] This bit controls the receiver watchdog timer. 0 = disable,
1 = enable. When enabled, the watch dog timer will generate a
receiver interrupt if the receiver FIFO has not been accessed within
64 bit times of the receiver 1X clock. This is used to alert the control
processor that data is in the RxFIFO that has not been read. This
situation may occur when the byte count of the last part of a
message is not large enough to generate an interrupt. This control
bit is duplicated WCXER(7:6)
MR0[6] – Bit 2 of receiver FIFO interrupt level. This bit along with Bit
6 of MR1 sets the fill level of the 8 byte FIFO that generates the
receiver interrupt.
MR0[6] MR1[6] Note that this control is split between MR0 and MR1.
This is for backward compatibility to the SC2692 and SCN2681.
Table 9. Receiver FIFO Interrupt Fill Level
MR0(3)=0
MR0[6] MR1[6] Interrupt Condition
00 1 or more bytes in FIFO (Rx RDY)
01 3 or more bytes in FIFO
10 6 or more bytes in FIFO
11 8 bytes in FIFO (Rx FULL)
Table 10. Receiver FIFO Interrupt Fill Level
MR0(3)=1
MR0[6] MR1[6] Interrupt Condition
00 1 or more bytes in FIFO (Rx RDY)
01 128 or more bytes in FIFO
10 192 or more bytes in FIFO
11 256 bytes in FIFO (Rx FULL)
For the receiver these bits control the number of FIFO positions
empty when the receiver will attempt to interrupt. After the reset the
receiver FIFO is empty. The default setting of these bits cause the
receiver to attempt to interrupt when it has one or more bytes in it.
MR0[5:4] – Tx interrupt fill level.
Table 11. Transmitter FIFO Interrupt Fill Level
MR0(3)=0
MR0[5:4] Interrupt Condition
00 8 bytes empty (Tx EMPTY)
01 4 or more bytes empty
10 6 or more bytes empty
11 1 or more bytes empty (Tx RDY)
Table 12. Transmitter FIFO Interrupt Fill Level
MR0(3)=1
MR0[5:4] Interrupt Condition
00 256 bytes empty (Tx EMPTY)
01 128 or more bytes empty
10 192 or more bytes empty
11 1 or more bytes empty (Tx RDY)
For the transmitter these bits control the number of FIFO positions
empty when the receiver will attempt to interrupt. After the reset the
transmit FIFO has 8 bytes empty. It will then attempt to interrupt as
soon as the transmitter is enabled. The default setting of the MR0
bits (00) condition the transmitter to attempt to interrupt only when it
is completely empty . As soon as one byte is loaded, it is no longer
empty and hence will withdraw its interrupt request.
MR0[3] – FIFO Size
MR0[2:0] – These bits are used to select one of the six–baud rate
groups.
See Table 13 for the group organization.
•000 Normal mode
•001 Extended mode I
•100 Extended mode II
Other combinations of MR2[2:0] should not be used
NOTE: MR0[3:0] are not used in channel B and should be set to 0.
2000 Feb 10
42
Page 49

Philips Semiconductors Objective specification
SC28L202Dual UART
MR1 Mode Register 1
Bit 7 BIT 6 BIT 5 Bit (4:3) BIT 2 Bits (1:0)
MR1 A
MR1 BRxCONTROLS
RTS
0 = No
1 = Yes
NOTE: * In block error mode the block error conditions must be cleared by using the error reset command (command 0x40) or a receiver reset.
RxINT
BIT 1
0 = RxRDY
1 = FFULL
ERROR
MODE
0 = Char
1 = Block
PARITY MODE PARITY
00 = With Parity
01 = Force Parity
10 = No Parity
11 = Multi–drop Mode
TYPE
0 = Even
1 = Odd
BITS PER
CHARACTER
00 = 5
01 = 6
10 = 7
11 = 8
MR1 A is accessed when the Channel A MR pointer points to MR1.
The pointer is set to MR1 by RESET or by a ‘set pointer’ command
applied via CR command 1. After reading or writing MR1 A, the
pointer will point to MR2 A.
MR1 A[7] – Channel A Receiver Request–to–Send Control (Flow Control)
This bit controls the deactivation of the RTSN A output (I/O0 B) by
the receiver. This output is normally asserted by setting OPR[0]B
and negated by resetting OPR[0]B.
MR1 A[7] = 1 causes RTSN A to be negated (I/O0 B is driven to a ‘1’
[V
]) upon receipt of a valid start bit if the Channel A FIFO is full.
CC
This is the beginning of the reception of the ninth byte. If the FIFO is
not read before the start of the tenth byte, an overrun condition will
occur and the tenth byte will be lost. However, the bit in OPR[0] is
not reset and RTSN A will be asserted again when an empty FIFO
position is available. This feature can be used for flow control to
prevent overrun in the receiver by using the RTSN A output signal to
control the CTSN input of the transmitting device.
MR1[6] – Receiver interrupt control bit 1. See description under MR0[6].
MR1 A[5] – Channel A Error Mode Select
This bit select the operating mode of the three FIFOed status bits
(FE, PE, received break) for Channel A. In the ‘character’ mode,
status is provided on a character–by–character basis; the status
applies only to the character at the top of the FIFO. In the ‘block’
MR2 Mode Register 2
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
MR2 A
MR2 B
NOTE: *Add 0.5 to values shown for 0 – 7 if channel is programmed
for 5 bits/char.
CHANNEL MODE Tx CONTROLS RTS CTS
00 = Normal
01 = Auto–Echo
10 = Local loop
11 = Remote loop
0 = No
1 = Yes
ENABLE Tx
0 = No
1 = Yes
mode, the status provided in the SR for these bits is the
accumulation (logical–OR) of the status for all characters coming to
the top of the FIFO since the last ‘reset error’ command for Channel
A was issued.
MR1 A[4:3| – Channel A Parity Mode Select
If ‘with parity’ or ‘force parity’ is selected a parity bit is added to the
transmitted character and the receiver performs a parity check on
incoming data
MR1 A[4:3] = 11 selects Channel A to operate in the special
multi–drop mode described in the Operation section.
MR1 A[2] – Channel A Parity Type Select
Selects the parity type (odd or even) if the “‘with parity” mode is
programmed by MR1 A[4:3], and the polarity of the forced parity bit if
the ‘force parity’ mode is programmed; no effect if ‘no parity’ is
programmed. In the special multi–drop mode it selects the polarity of
the A/D bit.
MR1 A[1:0] – Channel A Bits Per Character Select
This field selects the number of data bits per character to be
transmitted and received. The character length does not include the
start, parity, and stop bits.
MR2 A is accessed when the Channel A MR pointer points to MR2,
which occurs after any access to MR1 A. Accesses to MR2 A do not
change the pointer.
STOP BIT LENGTH
NOTE: Add 0.5 to binary codes 0 – 7 for 5 bit character lengths.
0 = 0.563 4 = 0.813 8 = 1.563 C = 1.813
1 = 0.625 5 = 0.875 9 = 1.625 D = 1.875
2 = 0.688 6 = 0.938 A = 1.688 E = 1.938
3 = 0.750 7 = 1.000 B = 1.750 F = 2.000
See description in the previous MR2 description
2000 Feb 10
43
Page 50

Philips Semiconductors Objective specification
SC28L202Dual UART
SR Status Register
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
SR A
SR B
NOTE: *These status bits are appended to the corresponding data character in the receive FIFO. A read of the status provides these bits
(7:5) from the top of the FIFO together with bits (4:0). These bits are cleared by a “reset error status” command. In character mode they are
discarded when the corresponding data character is read from the FIFO. In block error mode, the error–reset command (command 4x or
receiver reset) must used to clear block error conditions
RECEIVED
BREAK*
0 = No
1 = Yes
FRAMING
ERROR*
0 = No
1 = Yes
PARITY
ERROR*
0 = No
1 = Yes
OVERRUN
ERROR
0 = No
1 = Yes
TxEMT TxRDY FFULL RxRDY
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
SR A[7] – Received Break
Channel A Received Break. This bit indicates that an all zero
character of the programmed length has been received without a
stop bit. Only a single FIFO position is occupied when a break is
received: further entries to the FIFO are inhibited until the RxD A line
returns to the marking state for at least one–half a bit time two
successive edges of the internal or external 1X clock. This will
usually require a high time of one X1 clock period or 3 X1 edges
since the clock of the controller is not synchronous to the X1 clock.
When this bit is set, the Channel A ‘change in break’ bit in the ISR
(ISR[2]) is set. ISR[2] is also set when the end of the break
condition, as defined above, is detected.
The break detect circuitry can detect breaks that originate in the
middle of a received character. However, if a break begins in the
middle of a character, it must persist until at least the end of the next
character time in order for it to be detected.
This bit is reset by command 4 (0100) written to the command
register or by receiver reset.
SR A[6] – Channel A Framing Error
This bit, when set, indicates that a stop bit was not detected when
the corresponding data character in the FIFO was received. The
stop bit check is made in the middle of the first stop bit position.
SR A[5] – Channel A Parity Error
This bit is set when the ‘with parity’ or ‘force parity’ mode is
programmed and the corresponding character in the FIFO was
received with incorrect parity.
In the special multi–drop mode the parity error bit stores the receive
A/D (Address/Data) bit.
SR A[4] – Channel A Overrun Error
This bit, when set, indicates that one or more characters in the
received data stream have been lost. It is set upon receipt of a new
character when the FIFO is full and a character is already in the
receive shift register waiting for an empty FIFO position. When this
occurs, the character in the receive shift register (and its break
detect, parity error and framing error status, if any) is lost.
This bit is cleared by a ‘reset error status’ command.
SR A[3] – Channel A Transmitter Empty (TxEMT A)
This bit will be set when the transmitter under runs, i.e., both the
TxEMT and TxRDY bits are set. This bit and TxRDY are set when
the transmitter is first enabled and at any time it is re–enabled after
either (a) reset, or (b) the transmitter has assumed the disabled
state. It is always set after transmission of the last stop bit of a
character if no character is in the THR awaiting transmission.
It is reset when the THR is loaded by the CPU, a pending
transmitter disable is executed, the transmitter is reset, or the
transmitter is disabled while in the under run condition.
SR A[2] – Channel A Transmitter Ready (TxRDY A)
This bit, when set, indicates that the transmit FIFO is not full and
ready to be loaded with another character. This bit is cleared when
the transmit FIFO is loaded by the CPU and there are (after this
load) no more empty locations in the FIFO. It is set when a
character is transferred to the transmit shift register. TxRDY A is
reset when the transmitter is disabled and is set when the
transmitter is first enabled. Characters loaded to the TxFIFO while
this bit is 0 will be lost. This bit has different meaning from ISR[0].
SR A[1] – Channel A FIFO Full (FFULL A)
This bit is set when a character is transferred from the receive shift
register to the receive FIFO and the transfer causes the FIFO to
become full, i.e., all eight FIFO positions are occupied. It is reset
when the CPU reads the receive FIFO. If a character is waiting in
the receive shift register because the FIFO is full, FFULL A will not
be reset when the CPU reads the receive FIFO. This bit has
different meaning from ISR1 when MR1 6 is programmed to a ‘1’.
SR A[0] – Channel A Receiver Ready (RxRDY A)
This bit indicates that a character has been received and is waiting
in the FIFO to be read by the CPU. It is set when the character is
transferred from the receive shift register to the FIFO and reset
when the CPU reads the receive FIFO, only if (after this read) there
are no more characters in the FIFO.
SR B – Channel B Status Register
The bit definitions for this register are identical to the bit definitions
for SR A, except that all status applies to the Channel B receiver
and transmitter and the corresponding inputs and outputs.
2000 Feb 10
44
Page 51

Philips Semiconductors Objective specification
SC28L202Dual UART
CSR A – Channel A Clock Select Register CSR A [7:4] – Channel A Receiver Clock Select
This field selects the baud rate clock for the Channel A receiver. The
field definition is shown in Table 13.
CSR Clock Select Register
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
CSR A & CSR B RECEIVER CLOCK SELECT TRANSMITTER CLOCK SELECT
See Text and Table 13 See Text and T able 13
Table 13. Baud Rate (Base on a 14.7456 MHz crystal clock)
MR0[0] = 0 (Normal Mode) MR0[0] = 1 (Extended Mode I) MR0[2] = 1 (Extended Mode II)
CSR A [7:4] ACR[7] = 0 ACR[7] = 1 ACR[7] = 0 ACR[7] = 1 ACR[7] = 0 ACR[7] = 1
0000 50 75 300 450 4,800 7,200
0001 110 110 110 110 880 880
0010 134.5 134.5 134.5 134.5 1,076 1,076
0011 200 150 1200 900 19.2K 14.4K
0100 300 300 1800 1800 28.8K 28.8K
0101 600 600 3600 3600 57.6K 57.6K
0110 1,200 1,200 7200 7,200 115.2K 115.2K
0111 1,050 2,000 1,050 2,000 1,050 2,000
1000 2,400 2,400 14.4K 14.4K 57.6K 57.6K
1001 4,800 4,800 28.8K 28.8K 4,800 4,800
1010 7,200 1,800 7,200 1,800 57.6K 14.4K
1011 9,600 9,600 57.6K 57.6K 9,600 9,600
1100 38.4K 19.2K 230.4K 115.2K 38.4K 19.2K
1101 Timer Timer Timer Timer Timer Timer
1110 I/O4 A–16X I/O4 A–16X I/O4 A–16X I/O4 A–16X I/O4 A–16X I/O4 A–16X
1111 I/O4 A–1X I/O4 A–1X I/O4 A–1X I/O4 A–1X I/O4 A–1X I/O4 A–1X
NOTE: The receiver clock is always a 16X clock except for CSR A [7:4] = 111 1.
CSR A [3:0] – Channel A EXTERNAL Transmitter Clock Select
This field selects the baud rate clock for the Channel A transmitter.
The field definition is as shown in Table 13, except as follows:
CSR A [3:0] ACR[7] = 0 ACR[7] = 1
1110 I/O3 A–16X I/O3 A–16X
1111 I/O3 A–1X I/O3 A–1X
The transmitter clock is always a 16X clock except for CSR[3:0] =
1111.
CSR B [7:4] – Channel B Receiver Clock Select
This field selects the baud rate clock for the Channel B receiver. The
field definition is as shown in Table 13, except as follows:
CSR B [7:4] ACR[7] = 0 ACR[7] = 1
1110 I/O6 A–16X I/O6 A–16X
111 I/O6 A–1X I/O6 A–1X
Rx FIFO Register. For characters shorter than 8 bits the unused bits are set to zero
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Bits of the received data characters.
Tx FIFO register. For characters shorter than 8 bits the unused bits are set to zero
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Bits of the data characters to be transmitted
CR A and B Command Register
CR, one for each channel, controls the channel commands and
enables/disables the receiver and transmitter. Commands may be to
The receiver clock is always a 16X clock except for CSR B [7:4] =
1111.
CSR B [3:0] – Channel B Transmitter Clock Select
This field selects the baud rate clock for the Channel B transmitter.
The field definition is as shown in Table 13, except as follows:
CSR B [3:0]
1110 I/O5 A–16X I/O5 A–16X
1111 I/O5 A–1X I/O5 A–1X
The transmitter clock is always a 16X clock except for CSR B [3:0] =
1111.
the upper and lower four bits in the same bus cycle. If both enable
and disable bits are set to 1 in the lower four bits a disable will
result.
ACR[7] = 0 ACR[7] = 1
2000 Feb 10
45
Page 52

Philips Semiconductors Objective specification
SC28L202Dual UART
CR Command Register
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
CR A &CR B MISCELLANEOUS COMMANDS Disable Tx Enable Tx Disable Rx Enable Rx
See Text of Channel Command Register 1 = Yes
NOTE: Access to the miscellaneous commands should be separated by 3 X1 clock edges. A disabled transmitter cannot be loaded.
COMMAND REGISTER TABLE A and B
Commands 0xE, 0xF (marked with *) are global and exist only in channel A’s register space.
Channel Command Code
CR[7:4] Description CR[7:4] Description
0000 NOP 1000 Assert RTSN (I/O0 B or I/O1 B)
0001 Set MR pointer to 1 1001 Negate RTSN (I/O0 B or I/O1 B)
0010 Reset Receiver 1010 Set C/T Receiver time–out mode on
0011 Reset Transmitter 1011 Set MR pointer to 0
0100 Reset Error Status 1 100 Set C/T Receiver time–out mode off
0101 Reset Break Change Interrupt 1101 Block Error Status on RxFIFO load
0110 Begin T ransmit Break 1110 • Power Down Mode On
0111 End Transmit Break 1111 • Disable Power Down Mode
Channel Command Channel Command Code Channel Command
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
•0000 No command.
•0001 set MR pointer to 1
•0010 Reset receiver. Immediately resets the receiver as if
hardware reset had been applied. The receiver is reset and the
FIFO pointer is reset to the first location effectively discarding all
unread characters in the FIFO.
•0011 Reset transmitter. Immediately resets the transmitter as if a
hardware reset had been applied. The transmitter is reset and the
FIFO pointer is reset to the first location effectively discarding all
untransmitted characters in the FIFO.
•0100 Reset error status. Clears the received break, parity error,
framing error, and overrun error bits in the status register
(SR[7:4]). I
It is used in either character or block mode. In block mode it would
normally be used after the block is read.
•0101 Reset break change interrupt. Causes the break detect
change bit in the interrupt status register (ISR[2]) to be cleared to
zero.
•0110 Start break. Forces the TxD output low (spacing). If the
transmitter is empty, the start of the break condition will be
delayed up to two bit times. If the transmitter is active and the
TxFIFO is empty then the break begins when transmission of the
current character is completed. If there are characters in the
TxFIFO, the start of break is delayed until all characters presently
in the TxFIFO and any subsequent characters loaded have been
transmitted. (Tx Idle must be true before break begins).
The transmitter must be enabled to start a break.
•0111 Stop break. The TxD line will go high (marking) within two bit
times. TxD will remain high for one bit time before the next
character is transmitted.
• 1000 Assert R TSN. Causes the RTSN output to be asserted (low).
•1001 Negate RTSN. Causes the RTSN output to be negated
(high).
NOTE: The two commands above actually reset and set,
respectively, the I/O0 B or I/O1 B pin associated WITH the
OPR register.
•1010 Set C/T Receiver time out mode on. The receiver in this
channel will restart the C/T as reach receive character is
transferred from the shift register to the RxFIFO. The C/T is
placed in the Counter Mode, the Start/Stop Counter commands
are disabled, the counter is stopped and the Counter Ready bit,
ISR(3), is reset.
•1011 Set MR Pointer to 0
•1100 Set C/T Receiver time out mode off
•1101 Block error status accumulation on FIFO entry. Allows the
“received break”, “framing error” and “parity error” bits to be set as
the received character is loaded to the RxFIFO. (normally these
bits are set on reading of the data from the RxFIFO) Setting this
mode can give information about error data up to 256 bytes earlier
than the normal mode. However it clouds the ability to know
precisely which byte(s) are in error.
•1110 Power Down Mode On
•1111 Disable Power Down Mode
2000 Feb 10
46
Page 53

Philips Semiconductors Objective specification
SC28L202Dual UART
IPCR Input Port Configuration Register
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
IPCR Delta
I/O 3A
0 = no change
1 = change
Delta
I/O 2A
0 = no change
1 = change
Delta
I/O 1A
0 = no change
1 = change
Delta
I/O 0A
0 = no change
1 = change
I/O 3A I/O 2A I/O 1A I/O 0A
0 = low
1 = High
0 = low
1 = High
0 = low
1 = High
0 = low
1 = High
IPCR [7:4] I/03A, I/O2 A, I/O1 A, I/O0 A Change–of–State
These bits are set when a change–of–state, as defined in the input
port section of this data sheet, occurs at the respective input pins.
They are cleared when the IPCR is read by the CPU. A read of the
IPCR also clears ISR [7], the input change bit in the interrupt status
register. The setting of these bits can be programmed to generate
an interrupt to the CPU.
ACR Auxiliary Control Register
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
BRG SET
ACR
ACR[7] – Baud Rate Generator Set Select
This bit selects one of two sets of baud rates to be generated by the
BRG and it effects both channels. (see Table 13).
ACR[6:4] – Counter/Timer Mode And Clock Source Select
This field selects the operating mode of the counter/timer and its
clock source as shown in Table 14.
ACR [3:0] – I/O3 A, I/O2 A, I/O1 A, I/O0 A Change–of–State Interrupt Enable
This field selects which bits of the input port change register (IPCR)
cause the input change bit in the interrupt status register (ISR [7]) to
be set. If a bit is in the ‘on’ state the setting of the corresponding bit
in the IPCR will also result in the setting of ISR [7], which results in
the generation of an interrupt output if IMR [7] = 1. If a bit is in the
‘off’ state, the setting of that bit in the IPCR has no effect on ISR [7].
Select
0 = set 1
1 = set 2
Counter Timer Mode
and
clock source select
See Table 14 0 = off
Delta
I/O3 A interrupt
enable
1 = enabled
IPCR [3:0] I/O3 A, I/O2 A, I/O1 A, I/O0 A logical level of I/O pin.
These bits provide the current state of the respective inputs. The
information is unlatched and reflects the state of the input pins at the
time the IPCR is read.
Delta
I/O2 A interrupt
enable
0 = off
1 = enabled
Delta
I/O1 A interrupt
enable
0 = off
1 = enabled
Delta
I/O0 A interrupt
enable
0 = off
1 = enabled
Table 14. ACR 6:4 Field Definition
ACR(6:4) MODE CLOCK SOURCE
000 Counter External (I/02A)
001 Counter TxC A – 1X clock of Channel A
010 Counter TxC B – 1X clock of Channel B
011 Counter (X1/Sclk) clock divided by 16
100 Timer External (I/O 2A)
101 Timer External (I/O2 A) divided by 16
110 Timer Crystal or external clock (X1/Sclk)
111 Timer (X1/Sclk) clock divided by 16
NOTE: The timer mode generates a square wave.
transmitter
transmitter
2000 Feb 10
47
Page 54

Philips Semiconductors Objective specification
SC28L202Dual UART
ISR – Interrupt Status Register
This register provides the status of all potential interrupt sources.
The contents of this register are masked by the Interrupt Mask
Register (IMR). If a bit in the ISR is a ‘1’ and the corresponding bit in
the IMR is also a ‘1’ then INTRN output will be asserted (Low). If the
ISR
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
INPUT
PORT
CHANGE
0=not enabled
1=enabled
ISR[7] – Input Port Change Status
This bit is a ‘1’ when a change–of–state has occurred at the
I/O(3:0)A or B inputs and that event has been selected to cause an
interrupt by the programming of ACR[3:0]. The bit is cleared when
the CPU reads the IPCR.
ISR[6] – Channel B Change In Break
This bit, when set, indicates that the Channel B receiver has
detected the beginning or the end of a received break. It is reset
when the CPU issues a Channel B ‘reset break change interrupt’
command.
ISR[5] – Rx B Interrupt
This bit indicates that the channel B receiver is interrupting
according to the fill level programmed by the MR0 and MR1
registers. This bit has a different meaning than the receiver
ready/full bit in the status register.
ISR[4] – Tx B Interrupt
This bit indicates that the channel B transmitter is interrupting
according to the interrupt level programmed in the MR0[5:4] bits.
This bit has a different meaning than the Tx RDY bit in the status
register.
ISR[3] – Counter Ready.
In the counter mode, this bit is set when the counter reaches
terminal count and is reset when the counter is stopped by a stop
counter command.
In the timer mode, this bit is set once each cycle of the generated
square wave (every other time that the counter/timer reaches zero
IMR
CTPU Counter Timer Preset Upper (Counter/Timer 0)
CPTU
CTPL Counter –Timer Preset Lower (Counter/Timer 0)
CTPL
CTVU Counter Timer Value Upper (Counter/Timer 0)
CPVL
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
INPUT PORT
CHANGE
0=not
enabled
1=enabled
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
The upper eight (8) bits for the 16 bit counter timer preset register
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
The lower eight (8) bits for the 16 bit counter timer preset register
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
The lower eight (8) bits for the 16 bit counter timer value
DELTA
Break B
0=not enabled
1=enabled
Delta
Break B
0=not
enabled
1=enabled
RxRDY/
FFULL B
0=not
enabled
1=enabled
RxRDY/
FFULL B
0=not
enabled
1=enabled
TxRDY B Counter
0=not enabled
1=enabled
TxRDY B Counter
0=not
enabled
1=enabled
corresponding bit in the IMR is a zero the state of the bit in the ISR
has no effect on the INTRN output. Note that the IMR does not mask
the reading of the ISR – the true status will be provided regardless
of the contents of the IMR. The contents of this register are
initialized to H‘00’ when the DUART is reset.
Ready
0=not enabled
1=enabled
count). The bit is reset by a stop counter command. The command,
however, does not stop the counter/timer.
ISR[2] – Channel A Change in Break
This bit, when set, indicates that the Channel A receiver has
detected the beginning or the end of a received break. It is reset
when the CPU issues a Channel A ‘reset break change interrupt’
command.
ISR[1] – Rx A Interrupt
This bit indicates that the channel A receiver is interrupting
according to the fill level programmed by the MR0 and MR1
registers. This bit has a different meaning than the receiver
ready/full bit in the status register.
ISR[0] – Tx A Interrupt
This bit indicates that the channel A transmitter is interrupting
according to the interrupt level programmed in the MR0[5:4] bits.
This bit has a different meaning than the Tx RDY bit in the status
register.
IMR – Interrupt Mask Register
The programming of this register selects which bits in the ISR
causes an interrupt output. If a bit in the ISR is a ‘1’ and the
corresponding bit in the IMR is also a ‘1’ the INTRN output will be
asserted. If the corresponding bit in the IMR is a zero, the state of
the bit in the ISR has no effect on the INTRN output. Note that the
IMR does not mask the programmable interrupt outputs I/O3 B–I/O7
B or the reading of the ISR.
Ready
0=not
enabled
1=enabled
Delta
Break A
0=not enabled
1=enabled
Delta
Break A
0=not
enabled
1=enabled
RxRDY/
FFULL A
0=not enabled
1=enabled
RxRDY/
FFULL A
0=not
enabled
1=enabled
TxRDY A
0=not enabled
1=enabled
TxRDY A
0=not
enabled
1=enabled
2000 Feb 10
48
Page 55

Philips Semiconductors Objective specification
SC28L202Dual UART
CTVL Counter –Timer Value Lower (Counter/Timer 0)
CTVL Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
The lower eight (8) bits for the 16 bit counter timer value register
Only the counter/timer 0 is available in the low order 16–position
address map. Issuing the start command loads the C/T with the
preset value. The Stop command resets the C/T ready bit in the ISR
(Interrupt status Register) and captures the C/T value in the output
IVR Interrupt Vector register in 68K mode and General purpose read write register in the x86 mode
IVR
IPR Input Port Register I/O(6:0) A
IPR
OPCR Output Port Configuration Register. Controls [7:2] B
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
The eight (8) bits of the interrupt vector in the 68K mode.
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Logical levels or the I/O[6:0] A, Bit 7 read as “1”
Bit 7 BIT 6 BIT 5 BIT 4 BIT (3:2) BIT (1:0)
I/O7 B I/O6 B I/O5 B I/O4 B I/O3 B I/O2 B
0 = OPR[7]
1 = Tx RDY B
0 = OPR[6]
1 = Tx RDY A
0 = OPR[5]
1 = Rx RDY / FFULL B
latches of the C/T. In the special time out mode the start and stop
commands are ignored. The “start command is executed by a read
at address 0xE; the stop at 0xF.
0 = OPR[4]
1 = Rx RDY / FFULL A
00 = OPR[3]
01 = C/T OUTPUT
10 = TxC B(1X)
11 = RxC B(1X)
00 = OPR[2]
01 = TxC A(16X)
10 = TxC A(1X)
11 = RxC A(1X)
NOTE: I/O0 B and I/O1 B output OPR(0) and OPR(1) respectively.
Under program control of MR1 and MR2 the signals RTSN A for
I/O0 B and RTSN B for I/O1 B may be assigned.
OPCR[7] –This bit programs the I/O7 B output to provide one of the
following:
•0 The complement of OPR[7].
•1 The Channel B transmitter interrupt output which is the
complement of ISR[4]. When in this mode I/O7 acts as an open–
drain output. Note that this output is not masked by the contents
of the IMR.
OPCR[6] –This bit programs the I/O6 B output to provide one of the
following:
•0 The complement of OPR[6].
•1 The Channel A transmitter interrupt output which is the
complement of ISR[0]. When in this mode I/O6 acts as an open–
drain output. Note that this output is not masked by the contents
of the IMR.
OPCR[5] –This bit programs the I/O5 B output to provide one of the
following:
•0 The complement of OPR[5].
•1 The Channel B receiver interrupt output which is the
complement of ISR[5]. When in this mode I/O5 acts as an
open–drain output. Note that this output is not masked by the
contents of the IMR.
OPCR[4] –This field programs the I/O4 B output to provide one of
the following:
•0 The complement of OPR[4].
•1 The Channel A receiver interrupt output which is the
complement of ISR[1]. When in this mode I/O4 acts as an
open–drain output. Note that this output is not masked by the
contents of the IMR.
OPCR[3:2] –This bit programs the I/O3 B output to provide one of
the following:
•00 The complement of OPR[3].
•01 The counter/timer output, in which case I/O3 acts as an
open–drain output. In the timer mode, this output is a square wave
at the programmed frequency . In the counter mode, the output
remains high until terminal count is reached, at which time it goes
low. The output returns to the high state when the counter is
stopped by a stop counter command. Note that this output is not
masked by the contents of the IMR.
•10 The 1X clock for the Channel B transmitter that shifts the
transmitted data. If data is not being transmitted, a free running 1X
clock is output.
•11 The 1X clock for the Channel B receiver that samples the
received data. If data is not being received, a free running 1X
clock is output.
OPCR[1:0] –This field programs the I/O2 B output to provide one of
the following:
•00 The complement of OPR[2].
•01 The 16X clock for the Channel A transmitter. This is the clock
selected by CSR A [3:0], and will be a 1X clock if CSR A [3:0] =
1111.
•10 The 1X clock for the Channel A transmitter that shifts the
transmitted data. If data is not being transmitted, a free running 1X
clock is output.
•11 The 1X clock for the Channel A receiver that samples the
received data. If data is not being received, a free running 1X
clock is output.
2000 Feb 10
49
Page 56

Philips Semiconductors Objective specification
SC28L202Dual UART
SOPR – Set Bits in the OPR
Ones in the byte written to this register will cause the corresponding bit positions in the OPR to set to 1. Zeros have no effect. This allows
software to set individual bits without keeping a copy of the OPR bit configuration.
Set OPR
Bits
ROPR – Reset Bits in the OPR
Ones in the byte written to the ROPR will cause the corresponding bit positions in the OPR to set to 0. Zeros have no effect. This allows
software to reset individual bits with our keeping a copy of the OPR bit configuration.
Reset OPR
Bits
OPR Output Port Register
The bits in the OPR register are controlled by the use of the SOPR and ROPR commands. The output pins (OP pins) drive the compliment of
the data stored in this register.
OPR
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
I/O7 B I/O6 B I/O5 B I/O4 B I/O3 B I/O2 B I/O1 B I/O0 B
1=set bit
0=no change
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
I/O7 B I/O6 B I/O5 B I/O4 B I/O3 B I/O2 B I/O1 B I/O0 B
1=reset bit
0=no change
Bit 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
I/O7 B I/O6 B I/O5 B I/O4 B I/O3 B I/O2 B I/O1 B I/O0 B
0=Pin High
1=Pin Low
1=set bit
0=no change
1=reset bit
0=no change
0=Pin High
1=Pin Low
1=set bit
0=no change
1=reset bit
0=no change
0=Pin High
1=Pin Low
1=set bit
0=no change
1=reset bit
0=no change
0=Pin High
1=Pin Low
1=set bit
0=no change
1=reset bit
0=no change
0=Pin High
1=Pin Low
1=set bit
0=no change
1=reset bit
0=no change
0=Pin High
1=Pin Low
1=set bit
0=no change
1=reset bit
0=no change
0=Pin High
1=Pin Low
1=set bit
0=no change
1=reset bit
0=no change
0=Pin High
1=Pin Low
2000 Feb 10
50
Page 57

Philips Semiconductors Objective specification
SC28L202Dual UART
REGISTER MAPS
The registers of the SC28L202 are LOOSELY partitioned into two
groups: those used in controlling data channels and those used in
handling the actual data flow and status. Below is shown the general
configuration of all the register addressed. The ”Register Map
Summary” shows the configuration of the lower four bits of the
address that is the same for THE INDIVIDUAL UARTs. It also shows
the addresses for the several in the address space of UART A and
UART B that apply to the total chip configuration. The ”Register Map
Detail” shows the use of every address in the 8–bit address space.
A(6:0)
000 0000 (0x00) Mode Register (MR0 A, MR1 A, MR2 A) DEFAULT Mode Register (MR0 A, MR1 A, MR2 A) DEFAULT
000 0001 (0x01) Status Register (SR A) Clock Select Register (CSR A) DEFAULT
000 0010 (0x02) Command Register (CR A) DEFAULT
000 0011 (0x03) Receiver FIFO Register (RxFIFO A) Transmitter FIFO Register (TxFIFO A)
000 0100 (0x04) • Input Port Change Register (IPCR) DEFAULT • Auxiliary Control Register (ACR) DEFAULT
000 0101 (0x05) • Interrupt Status Register (ISR) DEFAULT • Interrupt Mask Register (IMR) DEFAULT
000 0110 (0x06) • Counter Timer Value Register Upper (CTVU 0) • Counter Timer Preset Register Upper (CTPU 0)
000 0111 (0x07) • Counter Timer Value Register Lower (CTVL 0) • Counter Timer Preset Register Lower (CTPL 0)
READ WRITE
DEFAULT
REGISTER MAP DETAIL (based on 28L92)
Register Map
NOTE: The register maps for channels A and B (UARTs A and B)
contain some control registers that configure the entire chip. These
are denoted by a ”” symbol
Addressing Scheme:
A B+8
Default Extension +16
NOTE: Addresses 0x00 to 0x0F represent the “C92 Register” map
000 1000 (0x08) Mode Register (MR0 B, MR1 B, MR2 B) DEFAULT Mode Register (MR0 B, MR1 B, MR2 B) DEFAULT
000 1001 (0x09) Status Register (SR B) Clock Select Register (CSR B) DEFAULT
000 1010 (0x0A) Command Register (CR B) DEFAULT
000 1011 (0x0B) Receiver FIFO Register (RxFIFO B) Transmitter FIFO Register (TxFIFO B)
000 1100 (0x0C) • Interrupt Vector Register (IVR) GLOBAL • Interrupt Vector Register (IVR) GLOBAL
000 1101 (0x0D) • Input Port Register (IPR) I/O(6:0) A • Output Port Configuration Register (OPCR) I/O(7:2)B
000 1110 (0x0E) • Start Counter Command DEFAULT C/T 0 • Set Output Port Register (SOPR) I/O(7:0)B
000 111 1 (0x0F) • Stop Counter Command DEFAULT C/T 0 • Reset Output Port Register (ROPR) I/O(7:0)B
EXTENSION
001 0000 (0x10) Receiver FIFO Fill Level (RxFL A) • Set Output Port Register (SOPR A)
001 0001 (0x11) Transmitter FIFO Empty level (TxEL A) • Reset Output Port Register (ROPR A)
001 0010 (0x12) • Enhanced Operation Status (EOS) Command Register Extension (CRx A)
001 0011 (0x13) • Input Port Change Register Upper (IPCRU A) • I/O Port Configuration Register 0 (I/OPCR 0)
001 0100 (0x14) • Input Port Change Register Lower (IPCRL A) • I/O Port Configuration Register 1 (I/OPCR 1)
001 0101 (0x15) • Input Port Register (IPR A)
001 0110 (0x16) • Counter Timer Value Register Upper (CTVU 0) • Counter Timer Preset Register Upper (CTPU 0)
001 0111 (0x17) • Counter Timer Value Register Lower (CTVL 0) • Counter Timer Preset Register Lower (CTPL 0)
001 1000 (0x18) Receiver FIFO Fill Level (RxFL B) • Set Output Port Register (SOPR B)
001 1001 (0x19) Transmitter FIFO Empty level (TxEL B) • Reset Output Port Register (ROPR B)
001 1010 (0x1A) Command Register Extension (CRx B)
001 1011 (0x1B) • Input Port Change Register Upper (IPCRU B) • I/O Port Configuration Register 2 (I/OPCR 2)
001 1100 (0x1C) • Input Port Change Register Lower (IPCRL B) • I/O Port Configuration Register 3 (I/OPCR 3)
001 1101 (0x1D) • Input Port Register (IPR B)
001 1110 (0x1E) • Counter Timer Value Register Upper (CTVU 1) • Counter Timer Preset Register Upper (CTPU 1)
001 111 1 (0x1F) • Counter T imer Value Register Lower (CTVL 1) • Counter Timer Preset Register Lower (CTPL 1)
2000 Feb 10
51
Page 58

Philips Semiconductors Objective specification
SC28L202Dual UART
REGISTER MAP (BASED ON 28L92)
NOTE: The register maps for channels A and B (UARTs A and B) contain some control registers that configure the entire chip. These are
denoted by a ”•” symbol
A(6:0)
010 0000 (0x20) Mode Register 0 (MR0 A) NEW ADDRESS Mode Register 0 (MR0 A) NEW ADDRESS
010 0001 (0x21) Mode Register 1 (MR1 A) NEW ADDRESS Mode Register 1 (MR1 A) NEW ADDRESS
010 0010 (0x22) Mode Register 2 (MR2 A) NEW ADDRESS Mode Register 2 (MR2 A) NEW ADDRESS
010 0011 (0x23) Mode Register 3 (MR3 A) NEW ADDRESS Mode Register 3 (MR3 A) NEW ADDRESS
010 0100 (0x24) • Counter/Timer Clock Source (CTCS 0) • Counter/T imer Clock Source (CTCS 0)
010 0101 (0x25) Interrupt Status Register (ISR A) • Interrupt Mask Register (IMR A)
010 0110 (0x26) • Programmable BRG Preset Lower (PBRGPL 0) • Programmable BRG Preset Lower (PBRGPL 0)
010 0111 (0x27) • Programmable BRG Preset Upper (PBRGPU 0) • Programmable BRG Preset Upper (PBRGPU 0)
010 1000 (0x28) Mode Register 0 (MR0 B) NEW ADDRESS Mode Register 0 (MR0 B) NEW ADDRESS
010 1001 (0x29) Mode Register 1 (MR1 B) NEW ADDRESS Mode Register 1 (MR1 B) NEW ADDRESS
010 1010 (0x2A) Mode Register 2 (MR2 B) NEW ADDRESS Mode Register 2 (MR2 B) NEW ADDRESS
010 1011 (0x2B) Mode Register 3 (MR3 B) NEW ADDRESS Mode Register 3 (MR3 B) NEW ADDRESS
010 1100 (0x2C) • Counter/Timer Clock Source (CTCS 1) • Counter/Timer Clock Source (CTCS 1)
010 1101 (0x2D) • Interrupt Status Register (ISR B) • Interrupt Mask Register (IMR B)
010 1110 (0x2E)
010 111 1 (0x2F)
READ WRITE
EXTENSION
011 0000 (0x30) Receiver Clock Select Register (RxCSR A) Receiver Clock Select Register (RxCSR A)
011 0001 (0x31) Transmitter Clock Select Register (TxCSR A) T ransmitter Clock Select Register (TxCSR A)
011 0010 (0x32) • Input Port Change Interrupt Enable (IPCE A) • Input Port Change Interrupt Enable (IPCE A)
011 0011 (0x33) • Programmable BRG Clock Source (PBRGCS) • Programmable BRG Clock Source (PBRGCS)
011 0100 (0x34)
011 0101 (0x35)
011 0110 (0x36) • Programmable BRG Preset Lower (PBRGPL 1) • Programmable BRG Preset Lower (PBRGPL 1)
011 011 1 (0x37) • Programmable BRG Preset Upper (PBRGPU 1) • Programmable BRG Preset Upper (PBRGPU 1)
011 1000 (0x38) Receiver Clock Select Register (RxCSR B) Receiver Clock Select Register (RxCSR B)
011 1001 (0x39) Transmitter Clock Select Register (TxCSR B) T ransmitter Clock Select Register (TxCSR B)
011 1010 (0x3A) • Input Port Change Interrupt Enable (IPCE B) • Input Port Change Interrupt Enable (IPCE B)
011 1011 (0x3B)
011 1100 (0x3C)
011 1101 (0x3D)
011 11 10 (0x3E)
011 11 11 (0x3F)
2000 Feb 10
52
Page 59

Philips Semiconductors Objective specification
SC28L202Dual UART
REGISTER MAP (BASED ON 28L92)
NOTE: The register maps for channels A and B (UARTs A and B) contain some control registers that configure the entire chip. These are
denoted by a ”•” symbol
A(6:0)
100 0000 (0x40) System Enable Status (SES A) Watchdog, Character and X Enable(WCXER A)
100 0001 (0x41) Xon Character Register (XonCR A) Xon Character Register (XonCR A)
100 0010 (0x42) Xoff Character Register (XoffCR A) Xoff Character Register (XoffCR A)
100 0011 (0x43) Address Recognition Character (ARCR A) Address Recognition Character (ARCR A)
100 0100 (0x44) Xon/Xoff Interrupt Status Register (XISR A)
100 0101 (0x45) Special Function Register (SFR A) Special Function Register (SFR A)
100 0110 (0x46) Receiver FIFO Interrupt Level (RxFIL A) Receiver FIFO Interrupt Level (RxFIL A)
100 0111 (0x47) Transmitter FIFO Interrupt Level (TxFIL A) Transmitter FIFO Interrupt Level (TxFIL A)
100 1000 (0x48) System Enable Status (SES B) Watchdog, Character and X Enable (WCXER B)
100 1001 (0x49) Xon Character Register (XonCR B) Xon Character Register (XonCR B)
100 1010 (0x4A) Xoff Character Register (XoffCR B) Xoff Character Register (XoffCR B)
100 1011 (0x4B) Address Recognition Character (ARCR B) Address Recognition Character (ARCR B)
100 1100 (0x4C) Xon/Xoff Interrupt Status Register (XISR B)
100 1101 (0x4D) Special Function Register (SFR B) Special Function Register (SFR B)
100 1110 (0x4E) Receiver FIFO Interrupt Level (RxFIL B) Receiver FIFO Interrupt Level (RxFIL B)
100 111 1 (0x4F) T ransmitter FIFO Interrupt Level (TxFIL B) Transmitter FIFO Interrupt Level (TxFIL B)
READ WRITE
NEW
101 0000 (0x50) Bidding Control Register – Break Change (BCRBRK A) Bidding Control Register – Break Change (BCRBRK A)
101 0001 (0x51) Bidding Control Register – Change of State (BCRCOS A) Bidding Control Register – Change of State (BCRCOS A)
101 0010 (0x52) Bidding Control Register – Counter/Timer (BCRCT A) Bidding Control Register – Counter/Timer (BCRCT A)
101 0011 (0x53) Bidding Control Register – Xon (BCRx A) Bidding Control Register – Xon (BCRx A)
101 0100 (0x54) Bidding Control Register – Address (BCRA A) Bidding Control Register – Address (BCRA A)
101 0101 (0x55) Bidding Control Register – Loop Back Error (BCRLBE A) Bidding Control Register – Loop Back Error (BCRLBE A)
101 0110 (0x56)
101 0111 (0x57)
101 1000 (0x58) Bidding Control Register – Break Change (BCRBRK B) Bidding Control Register – Break Change (BCRBRK B)
101 1001 (0x59) Bidding Control Register – Change of State (BCRCOS B) Bidding Control Register – Change of State (BCRCOS B)
101 1010 (0x5A) Bidding Control Register – Counter/Timer (BCRCT B) Bidding Control Register – Counter/Timer (BCRCT B)
101 1011 (0x5B) Bidding Control Register – Xon (BCRx B) Bidding Control Register – Xon (BCRx B)
101 1100 (0x5C) Bidding Control Register – Address (BCRA B) Bidding Control Register – Address (BCRA B)
101 1101 (0x5D) Bidding Control Register – Loop Back Error (BCRLBE B) Bidding Control Register – Loop Back Error (BCRLBE B)
101 1110 (0x5E)
101 111 1 (0x5F)
2000 Feb 10
53
Page 60

Philips Semiconductors Objective specification
SC28L202Dual UART
REGISTER MAP (BASED ON 28L92)
NOTE: The register maps for channels A and B (UARTs A and B) contain some control registers that configure the entire chip. These are
denoted by a ”•” symbol
A(6:0)
110 0000 (0x60) • Interrupt Control Register (ICR) • Interrupt Control Register (ICR)
110 0001 (0x61) • Current Interrupt Register (CIR) • Update Current Interrupt Register (UCIR)
110 0010 (0x62)
110 0011 (0x63)
110 0100 (0x64) • Interrupt Vector Register (IVR) • Interrupt Vector Register (IVR)
110 0101 (0x65)
110 0110 (0x66) • Global Chip Configuration Register (GCCR) • Global Chip Configuration Register (GCCR)
110 011 1 (0x67) • Test & Revision Register (TRR) • Test & Revision Register (TRR)
110 1000 (0x68)
110 1001 (0x69)
110 1010 (0x6A)
110 1011 (0x6B)
110 1100 (0x6C)
110 1101 (0x6D)
110 11 10 (0x6E)
110 11 11 (0x6F)
READ WRITE
GLOBAL
111 0000 (0x70) • Global Interrupt Channel Register (GICR)
111 0001 (0x71) • Global Interrupt Byte Count Register (GIBCR)
111 0010 (0x72) •Global Interrupt Type Register (GITR)
111 001 1 (0x73) • Global RxFIFO Register (GRxFIFO) • Global TxFIFO Register (GTxFIFO)
111 0100 (0x74)
111 0101 (0x75)
111 01 10 (0x76)
111 01 11 (0x77) • Scan Test Control Register (STCR) • Scan Test Control Register (STCR)
111 1000 (0x78)
111 1001 (0x79)
111 1010 (0x7A)
111 101 1 (0x7B)
111 1 100 (0x7C)
111 1 101 (0x7D)
111 1 110 (0x7E)
111 1 111 (0x7F)
2000 Feb 10
54
Page 61

Philips Semiconductors Objective specification
SC28L202Dual UART
ABSOLUTE MAXIMUM RATINGS
SYMBOL
T
amb
T
stg
V
CC
V
SS
PARAMETER RATING UNIT
Operating ambient temperature range
Storage temperature range –65 to +150
Voltage from VCC to GND3 –0.5 to +7.0 –0.5 to +7.0 V
Voltage from any pin to GND
1
2
Note
4
_C
_C
3
–0.5 to VCC +0.5 V
P Power dissipation (PLCC44) 2.4 W
P Power dissipation (PQFP44) 1.78 W
Derating factor above 25 _C (PLCC44)
Derating factor above 25 _C (PQFP44)
19
15
mw/_C
Mw/_C
NOTES:
1. Stresses above those listed under Absolute Maximum Ratings may cause permanent damage to the device. This is a stress rating only and
functional operation of the device at these or any other condition above those indicated in the operation section of this specification is not
implied.
2. For operating at elevated temperatures, the device must be derated based on + 150_C maximum junction temperature.
3. This product includes circuitry specifically designed for the protection of its internal devices from damaging effects of excessive static
charge. Nonetheless, it is suggested that conventional precautions be taken to avoid applying any voltages larger than the rated maxima.
4. Parameters are valid over specified temperature range.
2000 Feb 10
55
Page 62

Philips Semiconductors Objective specification
Input leakage current
All exce t in ut ort ins In ut ort ins
SC28L202Dual UART
DC ELECTRICAL CHARACTERISTICS
123
(NOMINAL 5 VOLTS)
Vcc = 5v ± 10% Ta = – 40 to +85 _C unless otherwise specified
LIMITS UNIT
SYMBOL PARAMETER TEST CONDITIONS Min Typ Max
V
IL
V
IH
V
IH
V
OL
V
OH
I
IX1PD
I
ILX1
I
IHX1
Ii
I
OZH
I
OZL
I
ODL
I
ODH
I
CC
Input low voltage 1.2 0.8 V
VIH Input high voltage (except X1/CLK)
–40 to +85_C
2.4 1.5 V
Input high voltage (X1/CLK) 0.8*Vcc 2.4 V
Output low voltage IOL = 4 ma 0.2 0.4 V
Output high voltage (except OD outputs)
X1/CLK input current – power down VIN = 0 to V
4
IOH = –400 ua Vcc – 0.5 v
CC
0.5 0.05 0.5 µA
X1/CLK input low current – operating VIN = 0 –130 0 µA
X1/CLK input high current – operating VIN = V
p
p
p
:
p
p
p
5
p
p
VIN = 0 to V
VIN = 0 to V
Output off current high, 3–State data bus VIN = V
CC
CC
CC
CC
0 130 µA
–0.5 0.05 +0.5 µA
–8 0.05 +0.5 µA
0.5 µA
Output off current low, 3–State data bus VIN = 0V –0.5 µA
Open–drain output low current in off–state VIN = 0 –0.5 µA
Open–drain output high current in off–state VIN = V
Power supply current:
6
CC
0.5 µA
Operating mode CMOS input levels 25 ma
Power down mode
7
CMOS input levels ≤1 5 µa
NOTES:
1. Parameters are valid over specified temperature range.
2. All voltage measurements are referenced to ground (GND). For testing, all inputs swing between 0.4V and 3.0V with a transition time of 5 ns
maximum. For X1/CLK this swing is between 0.4V and 4.4V . All time measurements are referenced at input voltages of 0.8V and 2.0V and
output voltages of 0.8V and 2.0V , as appropriate.
3. Typical values are at +25_C, typical supply voltages, and typical processing parameters.
4. Test conditions for outputs: C
5. Input port pins have active pull up transistors that will source a typical 2 µA from Vcc when the input pins are at Vss. Input port pins at V
= 150 pF, except interrupt outputs. T est conditions for interrupt outputs: C
L
source 0.0 µA
6. All outputs are disconnected. Inputs are switching between CMOS levels of V
7. See UART application note for power down currents of 10 ua or less.
–0.2V and VSS + 0.2V .
CC
= 50 pF, R
L
= 2.7K ohm to VCC.
L
CC
2000 Feb 10
56
Page 63

Philips Semiconductors Objective specification
SC28L202Dual UART
AC CHARACTERISTICS
1,2,3
(NOMINAL 5 VOLTS)
Vcc = 5v ± 10% Ta = – 40 to +85 _C unless otherwise specified
4
LIMITS
Symbol Parameter Min Typ Max UNIT
Reset timing (See Figure 3)
t
RES
Reset Pulse Width 100 18 ns
Bus Timing5 (See Figure ___)
t
*AS
t
*AH
t
*CS
t
*CH
t
*RW
t
*DD
t
*DA
t
*DF
t
*DI
t
*DS
t
*DH
t
*RWD
A6–A0 setup time to RDN, WRN Low 10 6 ns
A6–A0 hold time from RDN, WRN low 20 ns
CEN setup time to RDN, WRN low 0 ns
CEN Hold time from RDN. WRN Hi 0 ns
WRN, RDN pulse width (Low time) 15 11 ns
Data valid after RDN low (125 pf load) See loading table for smaller loads 15 40 ns
RDN low to data bus active
6
0 ns
Data bus floating after RDN or CEN high 20 ns
RDN or CEN high to data bus invalid
7
0 ns
Data bus setup time before WRN or CEN high (write cycle) 25 17 ns
Data hold time after WRN high 0 –15 ns
High time between read and/or write cycles
5,7
15 12 ns
Port Timing5 (See Figure 7)
t
t
t
*PS
*PH
*PD
Port in setup time before RDN low (Read IP ports cycle) 0 –20 ns
Port in hold time after RDN high 0 –20 ns
OP port valid after WRN or CEN high (OPR write cycle) 40 60 ns
Interrupt Timing (See Figure 8)
INTRN (or I/O(7:3)B when used as interrupts) negated from:
Read RxFIFO (RxRDY/FFULL interrupt) 40 60 ns
Write TxFIFO (TxRDY interrupt) 40 60 ns
t
*IR
Reset Command (delta break change interrupt) 40 60 ns
Stop C/T command (Counter/timer interrupt 40 60 ns
Read IPCR (delta input port change interrupt) 40 60 ns
Write IMR (Clear of change interrupt mask bit(s)) 40 60 ns
Clock Timing (See Figure 9)
t
*CLK
f
*CLK
f
*CTC
f
*CTC
t
*RX
f
*RX
t
*TX
f
*TX
X1/CLK high or low time 30 20 ns
X1/CLK frequency (7.0 to 16.2 MHz with crystal) 1.0 14.7 50 MHz
C/T Clk (IP2) high or low time (C/T external clock input) 30 20 ns
C/T Clk (IP2) frequency
8
0 MHz
RxC high or low time (16X) 30 ns
RxC Frequency (16X) 0 50 MHz
RxC Frequency (1x)
8,9
0 3 MHz
TxC High or low time (16X) 30 ns
TxC frequency (16X) 50 MHz
TxC frequency (1X)
8,9
0 3 MHz
Transmitter Timing (See Figure 12)
t
*TXD
t
*TCS
TxD output delay from TxC low (TxC input pin) 40 60 ns
Output delay from TxC output pin low to TxD data output 6 30 ns
Receiver Timing (See Figure 13)
t
*RXS
t
*RXH
RxD data setup time to RxC high 50 40 ns
RxD data hold time from RxC high 50 40 ns
68000 or Motorola bus timing (See Figure ___)
t
DCR
T
T
t
DAT
t
CSC
DCW
DAH
DACKN Low (read cycle) from X1 High 15 20 ns
DACKN Low (write cycle) from X1 High 15 20 ns
DACKN High from CSN or IACKN high 8 10 ns
DACKN High impedance from CSN or IACKN high 8 10 ns
CSN or IACKN setup time to X1 high for minimum DACKN cycle 10 8 ns
2000 Feb 10
57
Page 64

Philips Semiconductors Objective specification
SC28L202Dual UART
NOTES:
1. Parameters are valid over specified temperature range.
2. All voltage measurements are referenced to ground (GND). For testing, all inputs swing between 0.4V and 3.0V with a transition time of 5 ns
maximum. For X1/CLK this swing is between 0.4V and 4.4V . All time measurements are referenced at input voltages of 0.8V and 2.0V and
output voltages of 0.8V and 2.0V , as appropriate.
3. Test conditions for outputs: C
4. Typical values are at +25_C, typical supply voltages, and typical processing parameters.
5. Timing is illustrated and referenced to the WRN and RDN inputs. Also, CEN may be the ‘strobing’ input. CEN and RDN (also CEN and
WRN) are ORed internally. The signal asserted last initiates the cycle and the signal negated first terminates the cycle.
6. Guaranteed by characterization of sample units.
7. If CEN is used as the ‘strobing’ input, the parameter defines the minimum High times between one CEN and the next. The RDN signal must
be negated for t RWD time to guarantee that any status register changes are valid.
8. Minimum frequencies are not tested but are guaranteed by design.
9. Clocks for 1X mode should be symmetrical.
= 150 pF, except interrupt outputs. T est conditions for interrupt outputs: C
L
= 50 pF, R
L
= 2.7K ohm to VCC.
L
2000 Feb 10
58
Page 65

Philips Semiconductors Objective specification
SC28L202Dual UART
DC ELECTRICAL CHARACTERISTICS
1,2,3
(NOMINAL 3.3 VOLTS)
Vcc = 3.3v ± 10% Ta = – 40 to +85 _C unless otherwise specified
LIMITS UNIT
SYMBOL PARAMETER TEST CONDITIONS Min Typ Max
V
IL
V
IH
V
OL
V
OH
I
IX1PD
I
ILX1
I
IHX1
Input low voltage 0.65 0.2*Vcc V
Input high voltage (X1/CLK) 0.8*Vcc 1.7 V
Output low voltage IOL = 4 ma 0.2 0.4 V
Output high voltage (except OD outputs)
X1/CLK input current – power down VIN = 0 to V
4
IOH = –400 ua Vcc–0.5 Vcc–0.2 v
CC
–0.5 0.05 +0.5 µA
X1/CLK input low current – operating VIN = 0 –80 0 µA
X1/CLK input high current – operating VIN = V
CC
0 80 µA
Input leakage current:
I
i
I
OZH
I
OZL
I
ODL
I
ODH
I
CC
All except input port pins
Input port pins
Output off current high, 3–State data bus VIN = V
5
VIN = 0 to V
VIN = 0 to V
CC
CC
CC
–0.5 0.05 +0.5 µA
–8 0.5 +0.5 µA
0.5 µA
Output off current low, 3–State data bus VIN = 0V –0.5 µA
Open–drain output low current in off–state VIN = 0 –0.5 µA
Open–drain output high current in off–state VIN = V
Power supply current:
6
CC
0.5 µA
Operating mode CMOS input levels 25 ma
Power down mode
7
CMOS input levels ≤1 5.0 µA
NOTES:
1. Parameters are valid over specified temperature range.
2. All voltage measurements are referenced to ground (GND). For testing, all inputs swing between 0.4V and 3.0V with a transition time of 5 ns
maximum. For X1/CLK this swing is between 0.4V and 4.4V . All time measurements are referenced at input voltages of 0.8V and 2.0V and
output voltages of 0.8V and 2.0V , as appropriate.
3. Typical values are at +25_C, typical supply voltages, and typical processing parameters.
4. Test conditions for outputs: C L = 150 pF , except interrupt outputs. Test conditions for interrupt outputs: C L = 50 pF, R L = 2.7K ohm to V
5. Input port pins have active pull up transistors that will source a typical 2 µA from Vcc when the input pins are at Vss. Input port pins at Vcc
CC
source 0.0 µA
6. All outputs are disconnected. Inputs are switching between CMOS levels of V
7. See UART application note for power down currents of 10 ua or less.
–0.2V and VSS + 0.2V .
CC
.
2000 Feb 10
59
Page 66

Philips Semiconductors Objective specification
SC28L202Dual UART
AC CHARACTERISTICS
1,2,3
(NOMINAL 3.3 VOLTS)
Vcc = 3.3v ± 10% Ta = – 40 to +85 _C unless otherwise specified
4
LIMITS
Symbol Parameter Min Typ Max UNIT
Reset timing (See Figure 3)
t
RES
Reset Pulse Width 100 18 ns
Bus Timing (See Figure ___)
t
*AS
t
*AH
t
*CS
t
*CH
t
*RW
t
*DD
t
*DA
t
*DF
t
*DI
t
*DS
t
*DH
t
*RWD
A6–A0 setup time to RDN, WRN Low 10 6 ns
A6–A0 hold time from RDN, WRN low 25 15 ns
CEN setup time to RDN, WRN low 0 ns
CEN Hold time from RDN. WRN Hi 0 ns
WRN, RDN pulse width (Low time) 20 15 ns
Data valid after RDN low (125 pf load) See load table for smaller loads 20 50 ns
RDN low to data bus active 0 ns
Data bus floating after RDN or CEN high 15 25 ns
RDN or CEN high to data bus invalid 0 ns
Data bus setup time before WRN or CEN high (write cycle) 25 20 ns
Data hold time after WRN high 0 –15 ns
High time between read and/or write cycles 20 14 ns
Port Timing (See Figure 7)
t
t
t
*PS
*PH
*PD
Port in setup time before RDN low (Read IP ports cycle) 0 –20 ns
Port in hold time after RDN high 0 –20 ns
OP port valid after WRN or CEN high (OPR write cycle) 50 70 ns
Interrupt Timing (See Figure 8)
INTRN (or I/O(7:3)B when used as interrupts) negated from:
Read RxFIFO (RxRDY/FFULL interrupt) 40 60 ns
Write TxFIFO (TxRDY interrupt) 40 60 ns
t
*IR
Reset Command (delta break change interrupt) 40 60 ns
Stop C/T command (Counter/timer interrupt 40 60 ns
Read IPCR (delta input port change interrupt) 40 60 ns
Write IMR (Clear of change interrupt mask bit(s)) 40 60 ns
Clock Timing (See Figure 9)
t
*CLK
f
*CLK
f
*CTC
f
*CTC
t
*RX
f
*RX
X1/CLK high or low time 30 20 ns
X1/CLK frequency (7.0 to 16.2 MHz with crystal) 1 14.7 34 MHz
C/T Clk (IP2) high or low time (C/T external clock input) 30 20 ns
C/T Clk (IP2) frequency 0 8 MHz
RxC high or low time (16X) 30 ns
RxC Frequency (16X) 0 24 MHz
RxC Frequency (1x) 0 1 MHz
t
f
*TX
*TX
TxC High or low time (16X) 30 ns
TxC frequency (16X) 24 MHz
TxC frequency (1X) 0 1 MHz
Transmitter Timing (See Figure 12)
t
*TXD
t
*TCS
TxD output delay from TxC low (TxC input pin) 40 60 ns
Output delay from TxC output pin low to TxD data output 6 30 ns
Receiver Timing (See Figure 13)
t
*RXS
t
*RXH
RxD data setup time to RxC high 50 40 ns
RxD data hold time from RxC high 50 40 ns
68000 or Motorola bus timing (See Figure ___)
t
DCR
T
T
t
DAT
t
CSC
DCW
DAH
DACKN Low (read cycle) from X1 High 18 25 ns
DACKN Low (write cycle) from X1 High 18 25 ns
DACKN High from CSN or IACKN high 2 5 ns
DACKN High impedance from CSN or IACKN high 10 15 ns
CSN or IACKN setup time to X1 high for minimum DACKN cycle 15 10
2000 Feb 10
60
Page 67

Philips Semiconductors Objective specification
SC28L202Dual UART
NOTES:
1. Parameters are valid over specified temperature range.
2. All voltage measurements are referenced to ground (GND). For testing, all inputs swing between 0.4V and 3.0V with a transition time of 5 ns
maximum. For X1/CLK this swing is between 0.4V and 4.4V . All time measurements are referenced at input voltages of 0.8V and 2.0V and
output voltages of 0.8V and 2.0V , as appropriate.
3. Test conditions for outputs: C
4. Typical values are at +25_C, typical supply voltages, and typical processing parameters.
5. Timing is illustrated and referenced to the WRN and RDN inputs. Also, CEN may be the ‘strobing’ input. CEN and RDN (also CEN and
WRN) are ORed internally. The signal asserted last initiates the cycle and the signal negated first terminates the cycle.
6. Guaranteed by characterization of sample units.
7. If CEN is used as the ‘strobing’ input, the parameter defines the minimum High times between one CEN and the next. The RDN signal must
be negated for t RWD time to guarantee that any status register changes are valid.
8. Minimum frequencies are not tested but are guaranteed by design.
9. Clocks for 1X mode should be symmetrical.
= 150 pF, except interrupt outputs. T est conditions for interrupt outputs: C
L
RESETN
t
RES
SD00133
Figure 1. Reset Timing (80XXX mode)
= 50 pF, R
L
= 2.7K ohm to VCC.
L
A0–A3
CEN
RDN
D0–D7
(READ)
WDN
D0–D7
(WRITE)
t
AS
t
AH
t
CS
t
RW
t
DD
FLOAT FLOATVALID
NOT
VALID
t
DS
VALID
Figure 2. Bus Timing (80XXX mode)
t
CH
t
RWD
t
DF
t
RWD
t
DH
SD00087
2000 Feb 10
RESETN
t
RES
SD00109
Figure 3. Reset Timing (68XXX mode)
61
Page 68

Philips Semiconductors Objective specification
SC28L202Dual UART
t
CSC
X1/CLK
A1–A4
RWN
CSN
D0–D7
DTACKN
NOTE: DACKN low requires two rising edges of X1 clock after CSN is low.
t
AS
t
CS
t
DD
NOT
VALID
t
DA
Figure 4. Bus Timing (Read Cycle) (68XXX mode)
t
CSC
X1/CLK
A1–A4
RWN
t
AS
t
CS
t
CH
t
t
DAT
RWD
t
t
DF
t
DAH
CH
SD00687
t
AH
DATA VALID
t
DCR
CSN
D0–D7
DTACKN
NOTE: DACKN low requires two rising edges of X1 clock after CSN is low.
Figure 5. Bus Timing (Write Cycle) (68XXX mode)
2000 Feb 10
t
t
DAT
RWD
t
DH
t
DAH
SD00688
t
AH
t
DS
t
DCW
62
Page 69

Philips Semiconductors Objective specification
SC28L202Dual UART
t
X1/CLK
INTRN
IACKN
CSC
t
DD
D0–D7
DTACKN
NOTE: DACKN low requires two rising edges of X1 clock after CSN is low.
Figure 6. Interrupt Cycle Timing (68XXX mode)
RDN
t
PS
IP0–IP6
(a) INPUT PINS
WRN
t
DAL
t
DCR
t
t
CSD
PH
t
DF
t
DAH
t
DAT
t
PD
SD00149
2000 Feb 10
OP0–OP7
(b) OUTPUT PINS
OLD DATA NEW DATA
SD00135
Figure 7. Port Timing
63
Page 70

Philips Semiconductors Objective specification
SC28L202Dual UART
V
WRN
OUTPUT
RDN
OUTPUT
1
V
M
1
INTERRUPT
INTERRUPT
NOTES:
1. INTRN or OP3-OP7 when used as interrupt outputs.
2. The test for open-drain outputs is intended to guarantee switching of the output transistor. Measurement of this response is referenced from the midpoint of the switching
, to a point 0.5V above VOL. This point represents noise margin that assures true switching has occurred. Beyond this level, the effects of external circuitry and
signal, V
M
test environment are pronounced and can greatly affect the resultant measurement.
Figure 8. Interrupt Timing (80xxx mode)
M
t
IR
V
+0.5V
OL
V
OL
t
IR
V
+0.5V
OL
V
OL
SD00136
t
CLK
t
CTC
t
Rx
t
X1/CLK
CTCLK
RxC
TxC
C1 = C2 ∼ 24pF FOR CL = 20pF
C1 and C2 should be chosen according to the crystal manufacturer’s specification.
C1 and C2 values will include any parasitic capacitance of the wiring and X1 X2 pins.
Package capacitance approximately 4pF.
Tx
3pF
PARASITIC CAPACITANCE
C1
C2
3pF
PARASITIC CAPACITANCE
t
CLK
t
CTC
t
Rx
t
Tx
14.7456MHz
X1
X2
NOTE:
RESISTOR REQUIRED
FOR TTL INPUT.
CLK
*NOTE: X2 MUST BE LEFT OPEN.
SC28L92
2pF
50kΩ
to
100kΩ
4pF
V
CC
470Ω
X1
X2*
TO UART
CIRCUIT
2000 Feb 10
SD00689
Figure 9. Clock Timing
64
Page 71

Philips Semiconductors Objective specification
SC28L202Dual UART
1 BIT TIME
(1 OR 16 CLOCKS)
TxC
(INPUT)
t
TXD
TxD
t
TCS
TxC
(1X OUTPUT)
SD00138
Figure 10. Transmitter External Clocks
TxD D1 D2 D3 D4 D6BREAK
TRANSMITTER
ENABLED
TxRDY
(SR2)
WRN
1
CTSN
(IP0)
2
RTSN
(OP0)
NOTES:
1. Timing shown for MR2(4) = 1.
2. Timing shown for MR2(5) = 1.
RxC
(1X INPUT)
RxD
t
RXS
t
RXH
SD00139
Figure 11. Receiver External Clock
D1 D8 D9 D10 D12START
OPR(0) = 1 OPR(0) = 1
BREAK
STOP
BREAK
D11 WILL
NOT BE
WRITTEN TO
THE TxFIFO
Figure 12. Transmitter Timing
SD00155
2000 Feb 10
65
Page 72

Philips Semiconductors Objective specification
SC28L202Dual UART
RxD
RECEIVER
ENABLED
RxRDY
(SR0)
FFULL
(SR1)
RxRDY/
FFULL
2
(OP5)
RDN
OVERRUN
(SR4) RESET BY COMMAND
1
RTS
(OP0)
NOTES:
1. Timing shown for MR1(7) = 1.
2. Shown for OPCR(4) = 1 and MR(6) = 0.
MASTER STATION
TxD
OPR(0) = 1
D1 D2 D8 D9 D10 D11 D12 D13
D12, D13 WILL BE LOST
DUE TO RECEIVER DISABLE.
STATUS DATA
D1
D11 WILL BE LOST
DUE TO OVERRUN
STATUS DATAD2STATUS DATAD3STATUS DATA
D10
Figure 13. Receiver Timing
BIT 9
ADD#2 1
ADD#1
BIT 9
1
BIT 9
D0 0
SD00156
TRANSMITTER
ENABLED
TxRDY
(SR2)
WRN
RxD
RECEIVER
ENABLED
RxRDY
(SR0)
RDN/WRN
MR1(4–3) = 11
MR1(2) = 1
PERIPHERAL STATION
MR1(4–3) = 11
ADD#1MR1(2) = 0 D0 MR1(2) = 1 ADD#2
BIT 9
0
BIT 9
ADD#1 1
ADD#1
BIT 9
D0 0
STATUS DATA
D0
Figure 14. Wake-Up Mode
ADD#2 1
BIT 9
BIT 9
0
STATUS DATA
ADD#2
SD00096
2000 Feb 10
66
Page 73

Philips Semiconductors Objective specification
SC28L202Dual UART
INTRN
DACKN
D0–D7
TxDA/B
OP0–OP7
I = 2.4mA
125pF
I = 2.4mA VOL return to VCC for a 0 level
I = 400µA V
125pF
return to V
OH
SS
Figure 15. Test Conditions on Outputs
+5V
for a 1 level
SD00690
2000 Feb 10
67
Page 74

Philips Semiconductors Objective specification
Dual universal asynchronous receiver/transmitter
(DUART)
QFP52: plastic quad flat package; 52 leads (lead length 1.6 mm); body 10 x 10 x 2.0 mm SOT379-1
SC28L202
2000 Feb 10
68
Page 75

Philips Semiconductors Objective specification
Dual universal asynchronous receiver/transmitter
(DUART)
TSSOP56: plastic thin shrink small outline package; 56 leads; body width 6.1mm SOT364-1
SC28L202
2000 Feb 10
69
Page 76

Philips Semiconductors Objective specification
Dual universal asynchronous receiver/transmitter
(DUART)
NOTES
SC28L202
2000 Feb 10
70
Page 77

Philips Semiconductors Objective specification
Dual universal asynchronous receiver/transmitter
(DUART)
Data sheet status
Data sheet
status
Objective
specification
Preliminary
specification
Product
specification
Product
status
Development
Qualification
Production
Definition
This data sheet contains the design target or goal specifications for product development.
Specification may change in any manner without notice.
This data sheet contains preliminary data, and supplementary data will be published at a later date.
Philips Semiconductors reserves the right to make chages at any time without notice in order to
improve design and supply the best possible product.
This data sheet contains final specifications. Philips Semiconductors reserves the right to make
changes at any time without notice in order to improve design and supply the best possible product.
[1]
SC28L202
[1] Please consult the most recently issued datasheet before initiating or completing a design.
Definitions
Short-form specification — The data in a short-form specification is extracted from a full data sheet with the same type number and title. For
detailed information see the relevant data sheet or data handbook.
Limiting values definition — Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 134). Stress above one
or more of the limiting values may cause permanent damage to the device. These are stress ratings only and operation of the device at these or
at any other conditions above those given in the Characteristics sections of the specification is not implied. Exposure to limiting values for extended
periods may affect device reliability.
Application information — Applications that are described herein for any of these products are for illustrative purposes only. Philips
Semiconductors make no representation or warranty that such applications will be suitable for the specified use without further testing or
modification.
Disclaimers
Life support — These products are not designed for use in life support appliances, devices or systems where malfunction of these products can
reasonably be expected to result in personal injury . Philips Semiconductors customers using or selling these products for use in such applications
do so at their own risk and agree to fully indemnify Philips Semiconductors for any damages resulting from such application.
Right to make changes — Philips Semiconductors reserves the right to make changes, without notice, in the products, including circuits, standard
cells, and/or software, described or contained herein in order to improve design and/or performance. Philips Semiconductors assumes no
responsibility or liability for the use of any of these products, conveys no license or title under any patent, copyright, or mask work right to these
products, and makes no representations or warranties that these products are free from patent, copyright, or mask work right infringement, unless
otherwise specified.
Philips Semiconductors
811 East Arques Avenue
P.O. Box 3409
Sunnyvale, California 94088–3409
Telephone 800-234-7381
Copyright Philips Electronics North America Corporation 2000
All rights reserved. Printed in U.S.A.
Date of release: 02-00
Document order number: 9397 750 06826
2000 Feb 10
71
 Loading...
Loading...