

Page 1
LM2711
TFT Panel Module
LM2711 TFT Panel Module
July 2003
General Description
The LM2711 is a compact bias solution for TFT displays. It
has a current mode PWM step-up DC/DC converter with a
1.4A, 0.17Ω internal switch. Capable of generating 8V at
300mA from a Lithium Ion battery, the LM2711 is ideal for
generating bias voltages for large screen LCD panels. The
LM2711 can be operated at switching frequencies of 600kHz
or 1.25MHz, allowing for easy filtering and low noise. An
external compensation pin gives the user flexibility in setting
frequency compensation, which makes possible the use of
small, low ESR ceramic capacitors at the output. The
LM2711 uses a patented internal circuitry to limit startup
inrush current of the boost switching regulator without the
use of an external softstart capacitor. An external softstart
pin enables the user to tailor the softstart to a specific
application. The LM2711 contains 4 Gamma buffers capable
of supplying 50mAsource and sink. The TSSOP-20 package
ensures a low profile overall solution.
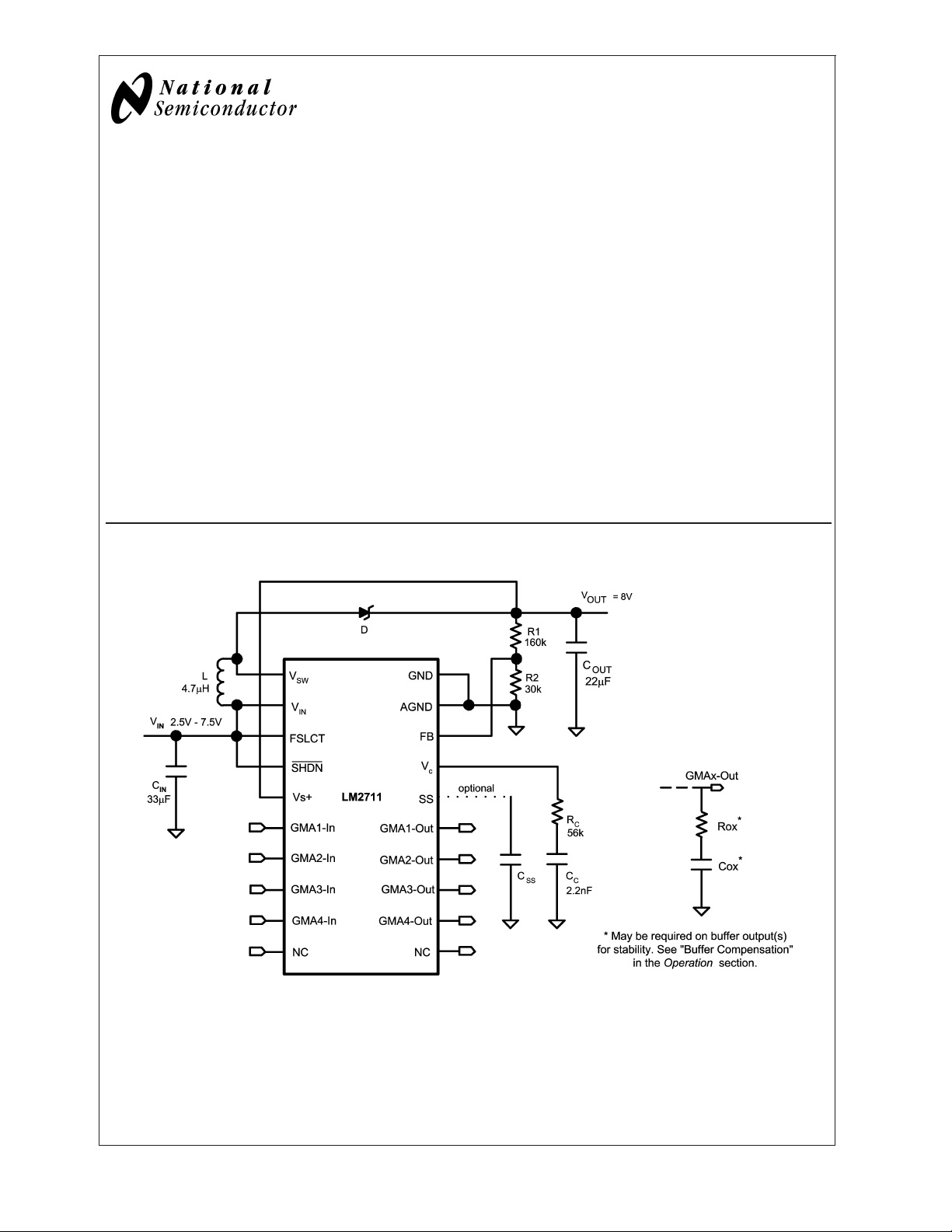
Typical Application Circuit
Features
n 1.4A, 0.17Ω, internal power switch
n V
operating range: 2.2V to 7.5V
IN
n 600kHz/1.25MHz selectable frequency step-up DC/DC
converter
n 20 pin TSSOP package
n Inrush current limiting circuitry
n External softstart override
n 4 Gamma buffers
Applications
n LCD Bias Supplies
20046831
© 2003 National Semiconductor Corporation DS200468 www.national.com
Page 2
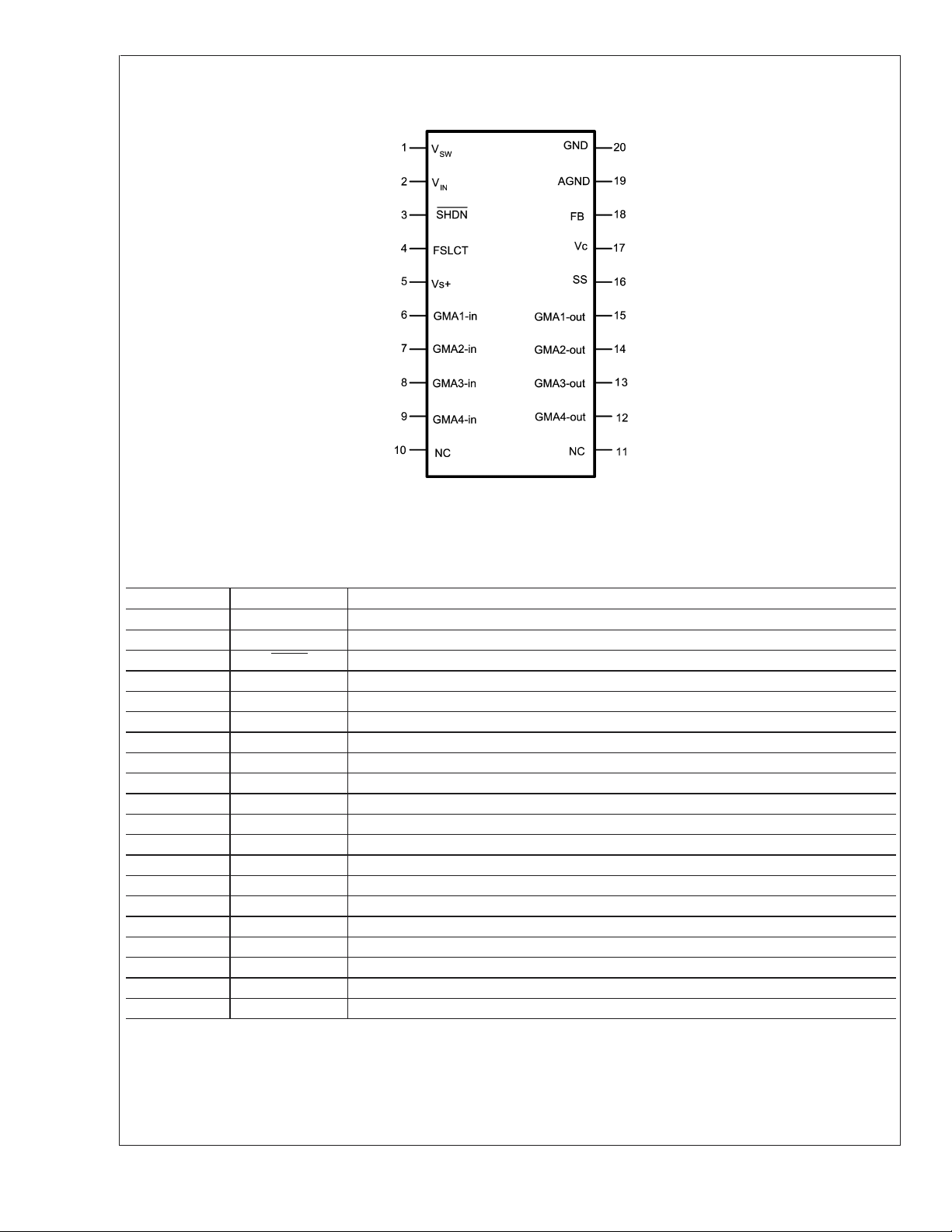
Connection Diagram
LM2711
Top View
TSSOP 20 package
20046804
= 125˚C, θJA= 120˚C/W (Note 1)
T
JMAX
Pin Description
Pin Name Function
1V
2V
SW
IN
3 SHDN
4 FSLCT Frequency Select pin. FSLCT = V
5 Vs+ Gamma Buffer input supply.
6 GMA1-in Gamma Buffer input.
7 GMA2-in Gamma Buffer input.
8 GMA3-in Gamma Buffer input.
9 GMA4-in Gamma Buffer input.
10 NC No Connection, leave open.
11 NC No Connection, leave open.
12 GMA4-out Gamma Buffer output.
13 GMA3-out Gamma Buffer output.
14 GMA2-out Gamma Buffer output.
15 GMA1-out Gamma Buffer output.
16 SS Soft start pin.
17 V
C
18 FB Output Voltage Feedback input.
19 AGND Gamma Buffer ground, Analog ground connection for Regulator.
20 GND Switch Power Ground.
Power switch input.
Switching Regulator Power input.
Shutdown pin, active low.
for 1.25 MHz, FSLCT = AGND or floating for 600kHz.
IN
Boost Compensation Network Connection.
www.national.com 2
Page 3

Pin Functions
VSW(Pin 1): This is the drain of the internal NMOS power
switch. Minimize the metal trace area connected to this pin to
minimize EMI.
(Pin 2): Input Supply Pin. Bypass this pin with a capacitor
V
IN
as close to the device as possible. The capacitor should
connect between V
SHDN(Pin 3): Shutdown Pin. The shutdown pin signal is
active low. A voltage of less than 0.3V disables the device. A
voltage greater than 0.85V enables the device.
FSLCT(Pin 4): Frequency Select Pin. Connecting FSLCT to
AGND selects a 600 kHz operating frequency for the switching regulator. Connecting FSLCT to V
operating frequency. If FSLCT is left floating, the switching
frequency defaults to 600 kHz.
Vs+(Pin 5): Supply pin for the four Gamma buffers. Bypass
this pin with a capacitor as close to the device as possible.
The capacitor should connect between Vs+ and GND.
GMA1-in(Pin 6):Gamma Buffer input pin.
GMA2-in(Pin 7): Gamma Buffer input pin.
GMA3-in(Pin 8): Gamma Buffer input pin.
GMA4-in(Pin 9): Gamma Buffer input pin.
NC(Pin 10):No Connection.
NC(Pin 11): No Connection.
and GND.
IN
selects a 1.25 MHz
IN
GMA4-out(Pin 12): Gamma Buffer output pin.
GMA3-out(Pin13): Gamma Buffer output pin.
GMA2-out(Pin 14): Gamma Buffer output pin.
GMA1-out(Pin 15): Gamma Buffer output pin.
SS(Pin 16): Softstart pin. Connect capacitor to SS pin and
AGND to slowly ramp inductor current on startup.
(Pin 17): Compensation Network for Boost switching
V
C
regulator. Connect resistor/capacitor network between V
pin and AGND for boost switching regulator AC compensation.
FB(Pin 18): Feedback pin. Set the output voltage by selecting values of R1 and R2 using:
Connect the ground of the feedback network to the AGND
plane, which can be tied directly to the GND pin.
AGND(Pin 19): Analog ground pin. Ground connection for
the Gamma buffers and the boost switching regulator. AGND
must be tied directly to GND at the pins.
GND(Pin 20): Power ground pin. Ground connection for the
NMOS power device of the boost switching regulator. GND
must be tied directly to AGND at the pins.
LM2711
C
Ordering Information
Order Number Package Type NSC Package Drawing Supplied As
LM2711MT-ADJ TSSOP-20 MTC20 73 Units, Rail
LM2711MTX-ADJ TSSOP-20 MTC20 2500 Units, Tape and Reel
www.national.com3
Page 4

Block Diagrams
LM2711
20046803
20046851
www.national.com 4
Page 5
LM2711
Absolute Maximum Ratings (Note 2)
If Military/Aerospace specified devices are required,
please contact the National Semiconductor Sales Office/
Distributors for availability and specifications.
V
IN
V
Voltage -0.3V to 18V
SW
-0.3V to 7.5V
ESD Ratings
(Note 3)
Human Body Model 2kV
Machine Model 200V
Operating Conditions
FB Voltage -0.3V to 7V
V
Voltage 0.965V to 1.565V
C
SHDN Voltage
-0.3V to V
FSLCT Voltage AGND to V
Supply Voltage, Vs+ -0.3V to 12V
Buffer Input Voltage Rail-to-Rail
IN
IN
Operating Temperature −40˚C to +125˚C
Storage Temperature −65˚C to +150˚C
Supply Voltage, V
V
Voltage 17V
SW
IN
2.2V to 7.5V
Supply Gamma Buffer, Vs+ 4V to 12V
Buffer Output Voltage Rail-to-Rail
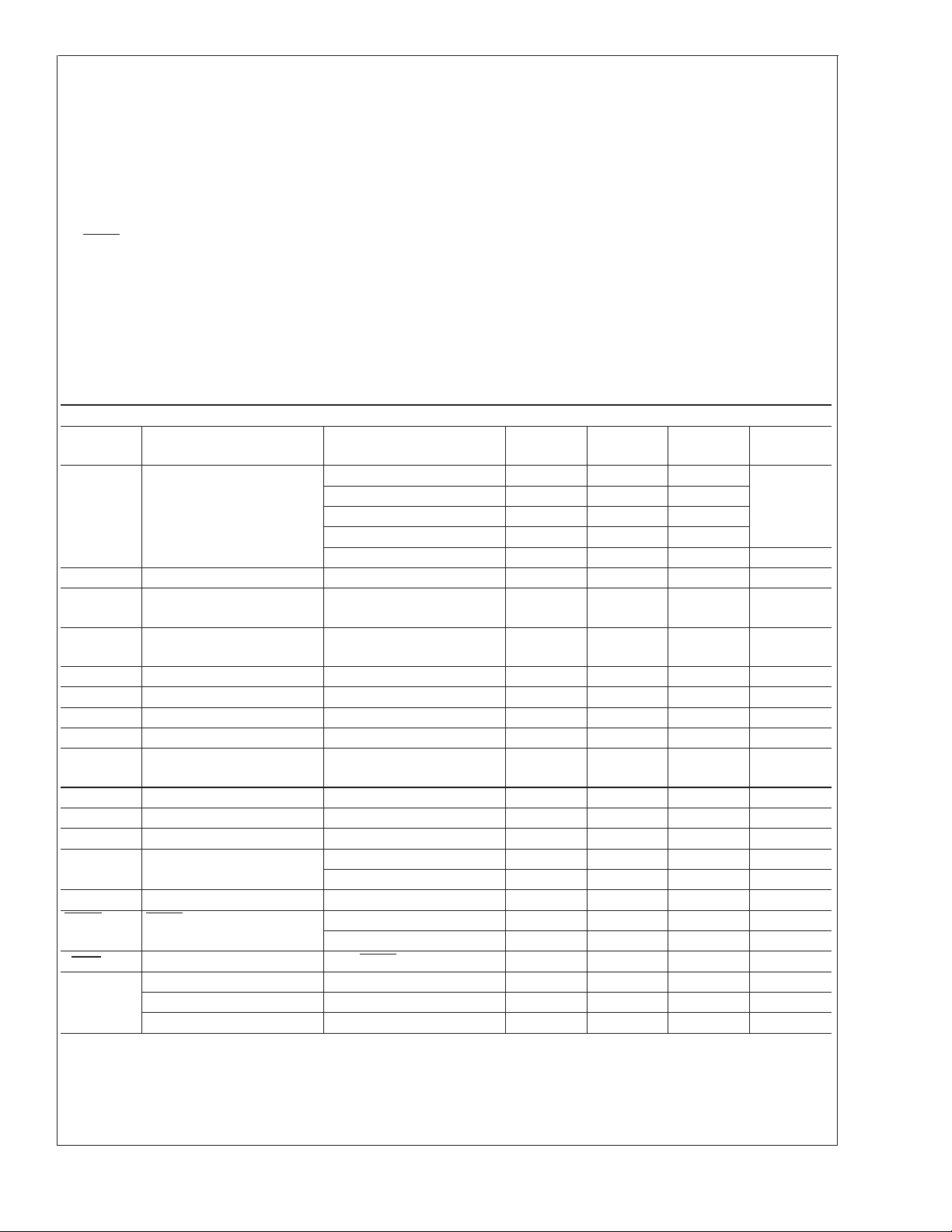
Electrical Characteristics
Specifications in standard type face are for TJ= 25˚C and those with boldface type apply over the full Operating Temperature Range (T
Switching Regulator
Symbol Parameter Conditions
I
Q
V
FB
%V
/∆VINFeedback Voltage Line
FB
I
CL
R
DSON
I
B
V
IN
I
SS
T
SS
g
m
A
V
D
MAX
f
S
I
L
SHDN
I
SHDN
UVP On Threshold 1.8 1.9 2 V
= −40˚C to +125˚C). Unless otherwise specified, VIN=2.2V and Vs+ = 8V, Rox = 50Ω, Cox = 1nF.
J
Min
(Note 4)
Typ
(Note 5)
Max
(Note 4)
Units
Quiescent Current Not Switching, FSCLT = 0V 1.6 2
Not Switching, FSCLT = V
IN
Switching, FSCLT = 0V 2.5 3
Switching, FSCLT = V
IN
1.65 2.2
3.4 4
mA
Shutdown mode 6 15 µA
Feedback Voltage 1.239 1.265 1.291 V
Regulation
Switch Current Limit
(Note 6)
Switch R
(Note 7) VIN= 2.7V 170 mΩ
DSON
VIN= 2.5V, V
OUT
=8V
0.03 0.05 %/V
1.4 A
FB Pin Bias Current(Note 8) 30 90 nA
Input Voltage Range 2.2 7.5 V
Soft Start Current 5 11 15 µA
Internal Soft Start Ramp
Time
FSLCT = 0V
6.7 10 mS
Error Amp Transconductance ∆I = 5µA 60 135 250 µmho
Error Amp Voltage Gain 135 V/V
Maximum Duty Cycle 78 85 %
Switching Frequency FSLCT = 0V 500 600 700 kHz
FSLCT = V
IN
0.9 1.25 1.5 MHz
Switch Leakage Current VSW= 17V 0.185 20 µA
SHDN Threshold Output High 0.85 0.6 V
Output Low 0.6 0.3 V
Shutdown Pin Current 0V ≤ SHDN ≤ V
IN
0.5 1 µA
Off Threshold 1.7 1.8 1.9 V
Hysteresis 100 mV
www.national.com5
Page 6
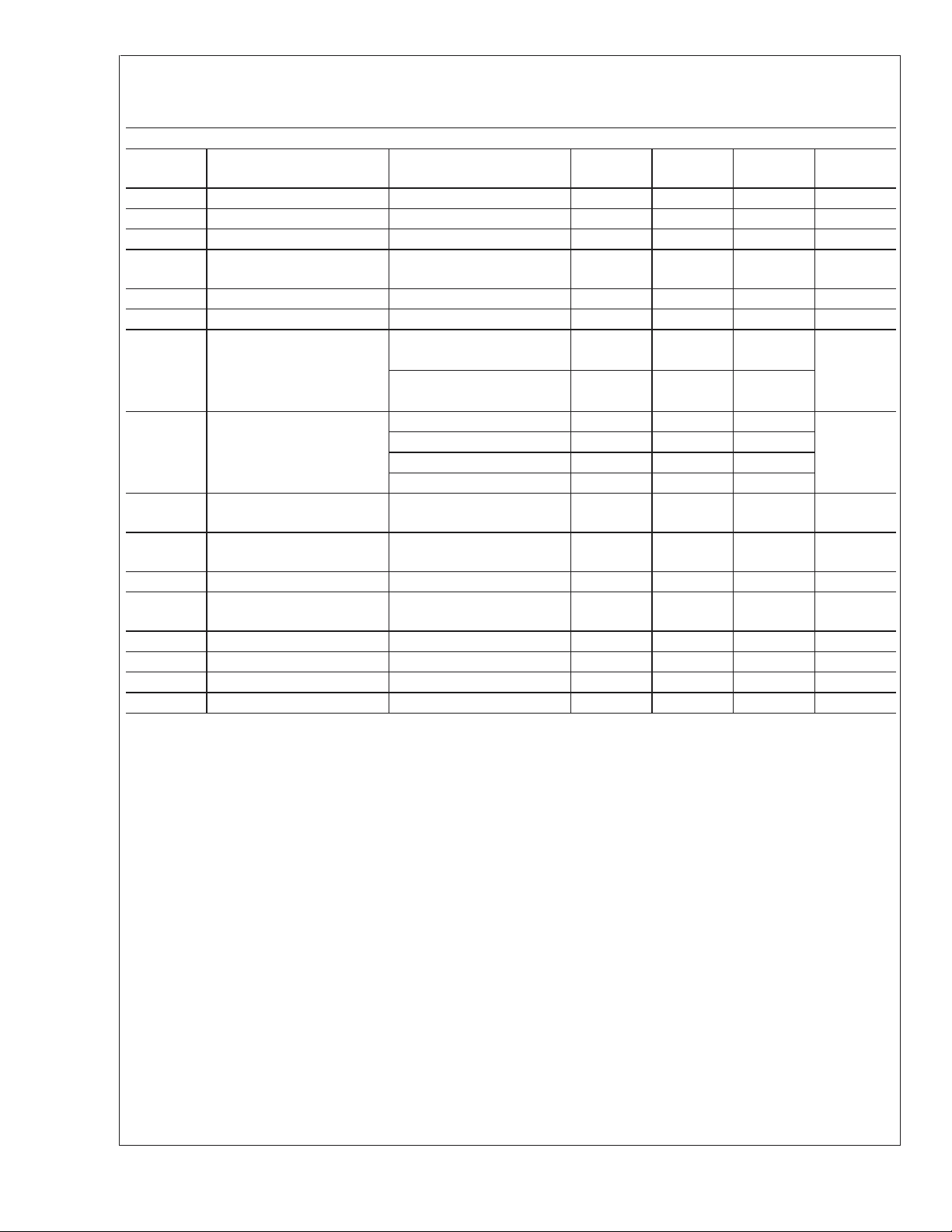
Electrical Characteristics
Specifications in standard type face are for TJ= 25˚C and those with boldface type apply over the full Operating Tempera-
LM2711
ture Range (T
BUFFERS
Symbol Parameter Conditions
V
OS
∆V
/∆T Offset Voltage Drift 8 µV/˚C
os
I
B
CMVR Input Common-mode Voltage
Z
IN
C
IN
I
OUT
V
Swing RL=10k, Vo min. 0.075
OUT
A
VCL
NL Gain Linearity R
Vs+ Supply Voltage 412V
PSRR Power Supply Rejection
Is+ Supply Current/Amplifier Vo = Vs+/2, No Load 1 2 mA
SR Slew Rate 10 V/µs
BW Bandwidth -3dB,R
φ 0 Phase Margin 50 Deg˚
Note 1: The maximum allowable power dissipation is a function of the maximum junction temperature, TJ(MAX), the junction-to-ambient thermal resistance, θJA,
and the ambient temperature, T
at any ambient temperature is calculated using: P
temperature, and the regulator will go into thermal shutdown.
Note 2: Absolute maximum ratings are limits beyond which damage to the device may occur. Operating Ratings are conditions for which the device is intended to
be functional, but device parameter specifications may not be guaranteed. For guaranteed specifications and test conditions, see the Electrical Characteristics.
Note 3: The human body model is a 100 pF capacitor discharged through a 1.5kΩ resistor into each pin. The machine model is a 200pF capacitor discharged
directly into each pin.
Note 4: All limits guaranteed at room temperature (standard typeface) and at temperature extremes (bold typeface). All room temperature limits are 100%
production tested or guaranteed through statistical analysis. All limits at temperature extremes are guaranteed via correlation using standard Statistical Quality
Control (SQC) methods. All limits are used to calculate Average Outgoing Quality Level (AOQL).
Note 5: Typical numbers are at 25˚C and represent the most likely norm.
Note 6: Duty cycle affects current limit due to ramp generator. See Switch Current Limit vs. V
Performance Characteristics section.
Note 7: See Typical Performance Characteristics section for Tri-Temperature data for R
Note 8: Bias current flows into FB pin.
= −40˚C to +125˚C). Unless otherwise specified, VIN=2.2V and Vs+ = 8V, Rox = 50Ω, Cox = 1nF.
J
Min
(Note 4)
Typ
(Note 5)
Max
(Note 4)
Input offset voltage 2.5 10 mV
Input Bias Current 170 800 nA
Range
0.05 Vs+-0.05 V
Input Impedance 400 kΩ
Input Capacitance 1 pF
Continuous Output Current Vs+=8V, Source 41 59 71
Vs+=8V, Sink −65 −53 −36
Vs+=12V, Source 50 71 85
Vs+=12V, Sink −75 −61 −42
R
=10k, Vo max. 7.88
L
R
=2k, Vo min. 0.075
L
R
=2k, Vo max. 7.865
L
Voltage Gain RL=2 kΩ
=10 kΩ
R
L
=2 kΩ, Buffer input=0.5 to
L
(Vs+-0.5V)
Vs+=4to12V
Ratio
L
. See the Electrical Characteristics table for the thermal resistance of various layouts. The maximum allowable power dissipation
A
(MAX) = (T
D
0.995
0.9985
=10 kΩ,CL=10pf 6 MHz
J(MAX)−TA
)/θJA. Exceeding the maximum allowable power dissipation will cause excessive die
and Switch Current Limit vs. Temperature graphs in the Typical
IN
vs. VIN.
DSON
0.998
0.9999
0.01 %
90 316 µV/V
Units
mA
V
V/V
www.national.com 6
Page 7

Typical Performance Characteristics
LM2711
Efficiency vs. Load Current
= 8V, fS= 600 kHz)
(V
OUT
Efficiency vs. Load Current
= 10V, fS= 1.25 MHz)
(V
OUT
20046826
Efficiency vs. Load Current
(V
= 8V, fS= 1.25 MHz)
OUT
20046825
Switch Current Limit vs. Temperature
(V
= 8V)
OUT
Switch Current Limit vs. V
20046860
R
vs. V
DSON
IN
20046822 20046827
(ISW= 1A)
IN
20046820
www.national.com7
Page 8

Typical Performance Characteristics (Continued)
LM2711
(600 kHz, not switching)
(1.25 MHz, not switching)
I
vs. V
Q
IQvs. V
I
IN
Q
vs. V
IN
(600 kHz, switching)
20046821 20046829
I
IN
Q
vs. V
IN
(1.25 MHz, switching)
IQvs. V
IN
(In shutdown)
20046821
Frequency vs. V
20046819
IN
(600 kHz)
20046818 20046823
www.national.com 8
Page 9

Typical Performance Characteristics (Continued)
LM2711
Frequency vs. V
IN
(1.25 MHz) Feedback Pin Current vs. Temperature
20046824
CSSPin Current vs. V
IN
Load Transient Response
20046857
Load Transient Response Load Transient Response
V
= 8V, VIN= 3V, F = 600kHz
OUT
1) Load, 80mA to 260mA to 80mA
, 500mA/div, DC
2) I
L
, 200mV/div, AC
3) V
OUT
T = 100µs/div
20046858
20046883
V
= 8V, VIN= 3V, F = 1.25MHz
OUT
1) Load, 80mA to 260mA to 80mA
, 500mA/div, DC
2) I
L
, 100mV/div, AC
3) V
OUT
T = 100µs/div
V
= 10V, VIN= 5V, F = 1.25MHz
OUT
1) Load, 195mA to 385mA to 195mA
, 500mA/div, DC
2) I
L
, 500mV/div, AC
3) V
OUT
T = 100µs/div
20046876
20046875
www.national.com9
Page 10

Typical Performance Characteristics (Continued)
LM2711
V
OUT
1) SHDN, 1V/div, DC
2) I
3) V
T = 1ms/div
= 8V, VIN= 3V, R
, 500mA/div, DC
L
, 5V/div, DC
OUT
Internal Soft Start Internal Soft Start
=27Ω,CSS= none, F = 600kHz
LOAD
20046879
V
= 8V, VIN= 3V, R
OUT
1) SHDN, 1V/div, DC
, 500mA/div, DC
2) I
L
, 5V/div, DC
3) V
OUT
T = 1ms/div
=27Ω,CSS= none, F = 1.25MHz
LOAD
Input Offset Voltage vs. Common Mode Voltage
External Soft Start
(3 units)
20046877
V
= 8V, VIN= 3V, R
OUT
=27Ω,CSS= 330nF, F = 1.25MHz
LOAD
1) SHDN, 1V/div, DC
, 500mA/div, DC
2) I
L
, 5V/div, DC
3) V
OUT
T = 4ms/div
Input Offset Voltage vs. Common Mode Voltage
(Over Temperature) Input Bias Current vs. Common Mode Voltage
20046878
20046862
20046861
20046863
www.national.com 10
Page 11

Typical Performance Characteristics (Continued)
LM2711
Output Voltage vs. Output Current
(sinking)
20046864 20046865
Supply Current vs. Common Mode Voltage
Output Voltage vs. Output Current
(sourcing)
Large Signal Step Response
(50Ω, 1nF ext. compensation)
20046866
Large Signal Step Response
(no ext. compensation) Positive Slew Rate vs. Capacitive Load
20046868
20046867
20046869
www.national.com11
Page 12

Typical Performance Characteristics (Continued)
LM2711
Negative Slew Rate vs. Capacitive Load Phase Margin vs. Capacitive Load
20046870
20046871
Unity Gain Frequency vs. Capacitive Load CMRR vs. Frequency
PSRR vs. Frequency
20046872
20046873
20046874
www.national.com 12
Page 13

Operation
LM2711
FIGURE 1. Simplified Boost Converter Diagram
(a) First Cycle of Operation (b) Second Cycle Of Operation
CONTINUOUS CONDUCTION MODE
The LM2711 is a current-mode, PWM boost regulator. A
boost regulator steps the input voltage up to a higher output
voltage. In continuous conduction mode (when the inductor
current never reaches zero at steady state), the boost regulator operates in two cycles.
In the first cycle of operation, shown in Figure 1 (a), the
transistor is closed and the diode is reverse biased. Energy
is collected in the inductor and the load current is supplied by
.
C
OUT
The second cycle is shown in Figure 1 (b). During this cycle,
the transistor is open and the diode is forward biased. The
energy stored in the inductor is transferred to the load and
output capacitor.
The ratio of these two cycles determines the output voltage.
The output voltage is defined approximately as:
where D is the duty cycle of the switch, D and D' will be
required for design calculations
SETTING THE OUTPUT VOLTAGE
The output voltage is set using the feedback pin and a
resistor divider connected to the output as shown in the
typical operating circuit. The feedback pin voltage is 1.265V,
so the ratio of the feedback resistors sets the output voltage
according to the following equation:
20046802
SOFT-START CAPACITOR
The LM2711 has patented internal circuitry that is used to
limit the inductor inrush current on start-up. This inrush
current limiting circuitry serves as a soft-start. However,
many applications may require much more soft-start than
what is available with the internal circuitry. The external SS
pin is used to tailor the soft-start for a specific application. A
11µA current charges the external soft-start capacitor, Css.
The soft-start time can be estimated as:
Tss = Css*0.6V/11µA
The minimum soft-start time is set by the internal soft-start
circuitry, typically 7ms for 600kHz operation and approximately half that for 1.25MHz operation. Only longer soft-start
times may be implemented using the SS pin and a capacitor
. If a shorter time is designed for using the above equa-
C
SS
tion, the internal soft-start circuitry will override it.
Due to the unique nature of the dual internal/external soft-
start, care was taken in the design to ensure temperature
stable operation. As you can see with the Iss data in the
Electrical Characterisitcs table and the graph "Soft-Start
Current vs. V
"intheTypical Performance Characterisitcs
IN
section, the soft start curent has a temperature coefficient
and would lead one to believe there would be significant
variation with temperature. Though the current has a temperature coefficient the actual programmed external soft
start time does not show this extreme of a temperature
variation. As you can see in the following transient plots:
www.national.com13
Page 14

Operation (Continued)
LM2711
V
=8V,VIN= 2.5V, RL=27Ω,CSS= 330nF, T = 4ms/div,
OUT
F = 1.25MHz.
Trace:
1) SHDN, 1V/div, DC Coupled
2) IL, 0.5A/div, DC Coupled
3) V
, 5V/div, DC Coupled
OUT
INTRODUCTION TO COMPENSATION
TA= −20˚C
TA= 27˚C
20046880
20046881
20046805
FIGURE 2. (a) Inductor current. (b) Diode current.
The LM2711 is a current mode PWM boost converter. The
signal flow of this control scheme has two feedback loops,
one that senses switch current and one that senses output
voltage.
To keep a current programmed control converter stable
above duty cycles of 50%, the inductor must meet certain
criteria. The inductor, along with input and output voltage,
will determine the slope of the current through the inductor
(see Figure 2 (a)). If the slope of the inductor current is too
great, the circuit will be unstable above duty cycles of 50%.
A 10µH inductor is recommended for most 600 kHz applications, while a 4.7µH inductor may be used for most 1.25 MHz
applications. If the duty cycle is approaching the maximum of
85%, it may be necessary to increase the inductance by as
much as 2X. See Inductor and Diode Selection for more
detailed inductor sizing.
The LM2711 provides a compensation pin (V
) to customize
C
the voltage loop feedback. It is recommended that a series
combination of R
and CCbe used for the compensation
C
network, as shown in the typical application circuit. For any
given application, there exists a unique combination of R
and CCthat will optimize the performance of the LM2711
circuit in terms of its transient response. The series combination of R
and CCintroduces a pole-zero pair according to
C
the following equations:
C
TA= 85˚C
20046882
When programming the softstart time externally, simply use
the equation given in the Soft-Start Capacitor section above.
This equation uses the typical room temperature value of the
soft start current, 11µA, to set the soft start time.
www.national.com 14
where ROis the output impedance of the error amplifier,
approximately 1MΩ. For most applications, performance can
be optimized by choosing values within the range 5kΩ≤R
≤ 60kΩ (RCcan be up to 200kΩ if CC2is used, see High
Output Capacitor ESR Compensation) and 680pF ≤ C
C
C
≤
Page 15

Operation (Continued)
4.7nF. Refer to the Applications Information section for recommended values for specific circuits and conditions. Refer
to the Compensation section for other design requirement.
COMPENSATION FOR BOOST DC/DC
This section will present a general design procedure to help
insure a stable and operational circuit. The designs in this
datasheet are optimized for particular requirements. If different conversions are required, some of the components may
need to be changed to ensure stability. Below is a set of
general guidelines in designing a stable circuit for continuous conduction operation, in most all cases this will provide
for stability during discontinuous operation as well. The
power components and their effects will be determined first,
then the compensation components will be chosen to produce stability.
INDUCTOR AND DIODE SELECTION
Although the inductor sizes mentioned earlier are fine for
most applications, a more exact value can be calculated. To
ensure stability at duty cycles above 50%, the inductor must
have some minimum value determined by the minimum
input voltage and the maximum output voltage. This equation is:
where fs is the switching frequency, D is the duty cycle, and
is the ON resistance of the internal switch taken from
R
DSON
the graph "R
acteristics section. This equation is only good for duty cycles
greater than 50% (D
recommended values may be used. The corresponding inductor current ripple as shown in Figure 2 (a) is given by:
The inductor ripple current is important for a few reasons.
One reason is because the peak switch current will be the
average inductor current (input current or I
As a side note, discontinuous operation occurs when the
inductor current falls to zero during a switching cycle, or ∆i
is greater than the average inductor current. Therefore, continuous conduction mode occurs when ∆i
average inductor current. Care must be taken to make sure
that the switch will not reach its current limit during normal
operation. The inductor must also be sized accordingly. It
should have a saturation current rating higher than the peak
inductor current expected. The output voltage ripple is also
affected by the total ripple current.
The output diode for a boost regulator must be chosen
correctly depending on the output voltage and the output
current. The typical current waveform for the diode in continuous conduction mode is shown in Figure 2 (b). The diode
must be rated for a reverse voltage equal to or greater than
the output voltage used. The average current rating must be
greater than the maximum load current expected, and the
peak current rating must be greater than the peak inductor
current. During short circuit testing, or if short circuit condi-
vs. VIN"intheTypical Performance Char-
DSON
>
0.5), for duty cycles less than 50% the
LOAD
is less than the
L
/D’) plus ∆iL.
LM2711
tions are possible in the application, the diode current rating
must exceed the switch current limit. Using Schottky diodes
with lower forward voltage drop will decrease power dissipation and increase efficiency.
DC GAIN AND OPEN-LOOP GAIN
Since the control stage of the converter forms a complete
feedback loop with the power components, it forms a closedloop system that must be stabilized to avoid positive feedback and instability. A value for open-loop DC gain will be
required, from which you can calculate, or place, poles and
zeros to determine the crossover frequency and the phase
margin. A high phase margin (greater than 45˚) is desired for
the best stability and transient response. For the purpose of
stabilizing the LM2711, choosing a crossover point well below where the right half plane zero is located will ensure
sufficient phase margin. A discussion of the right half plane
zero and checking the crossover using the DC gain will
follow.
INPUT AND OUTPUT CAPACITOR SELECTION
The switching action of a boost regulator causes a triangular
voltage waveform at the input. A capacitor is required to
reduce the input ripple and noise for proper operation of the
regulator. The size used is dependant on the application and
board layout. If the regulator will be loaded uniformly, with
very little load changes, and at lower current outputs, the
input capacitor size can often be reduced. The size can also
be reduced if the input of the regulator is very close to the
source output. The size will generally need to be larger for
applications where the regulator is supplying nearly the
maximum rated output or if large load steps are expected. A
minimum value of 10µF should be used for the less stressful
conditions while a 22µF to 47µF capacitor may be required
for higher power and dynamic loads. Larger values and/or
lower ESR may be needed if the application requires very
low ripple on the input source voltage.
The choice of output capacitors is also somewhat arbitrary
and depends on the design requirements for output voltage
ripple. It is recommended that low ESR (Equivalent Series
Resistance, denoted R
ceramic, polymer electrolytic, or low ESR tantalum. Higher
ESR capacitors may be used but will require more compensation which will be explained later on in the section. The
ESR is also important because it determines the peak to
peak output voltage ripple according to the approximate
equation:
∆V
OUT
L
A minimum value of 10µF is recommended and may be
increased to a larger value. After choosing the output capacitor you can determine a pole-zero pair introduced into the
control loop by the following equations:
Where RLis the minimum load resistance corresponding to
the maximum load current. The zero created by the ESR of
the output capacitor is generally very high frequency if the
ESR is small. If low ESR capacitors are used it can be
neglected. If higher ESR capacitors are used see the High
Output Capacitor ESR Compensation section.
) capacitors be used such as
ESR
) 2∆iLR
ESR
(in Volts)
www.national.com15
Page 16

Operation (Continued)
LM2711
RIGHT HALF PLANE ZERO
A current mode control boost regulator has an inherent right
half plane zero (RHP zero). This zero has the effect of a zero
in the gain plot, causing an imposed +20dB/decade on the
rolloff, but has the effect of a pole in the phase, subtracting
another 90˚ in the phase plot. This can cause undesirable
effects if the control loop is influenced by this zero. To ensure
the RHP zero does not cause instability issues, the control
loop should be designed to have a bandwidth of less than
the frequency of the RHP zero. This zero occurs at a frequency of:
HIGH OUTPUT CAPACITOR ESR COMPENSATION
When using an output capacitor with a high ESR value, or
just to improve the overall phase margin of the control loop,
another pole may be introduced to cancel the zero created
by the ESR. This is accomplished by adding another capacitor, C
, directly from the compensation pin VCto ground, in
C2
parallel with the series combination of R
should be placed at the same frequency as f
and CC. The pole
C
, the ESR
Z1
zero. The equation for this pole follows:
1
⁄
2
To ensure this equation is valid, and that CC2can be used
without negatively impacting the effects of R
and CC,f
C
PC2
must be greater than 10fZC.
where I
is the maximum load current.
LOAD
SELECTING THE COMPENSATION COMPONENTS
The first step in selecting the compensation components R
and CCis to set a dominant low frequency pole in the control
loop. Simply choose values for R
and CCwithin the ranges
C
given in the Introduction to Compensation section to set this
pole in the area of 10Hz to 500Hz. The frequency of the pole
created is determined by the equation:
where ROis the output impedance of the error amplifier,
approximately 1MΩ. Since R
, it does not have much effect on the above equation and
R
O
can be neglected until a value is chosen to set the zero f
is created to cancel out the pole created by the output
f
ZC
capacitor, f
. The output capacitor pole will shift with differ-
P1
is generally much less than
C
ZC
ent load currents as shown by the equation, so setting the
zero is not exact. Determine the range of f
pected loads and then set the zero f
ZC
over the ex-
P1
to a point approximately in the middle. The frequency of this zero is determined by:
CHECKING THE DESIGN
The final step is to check the design. This is to ensure a
bandwidth of
C
This is done by calculating the open-loop DC gain,A
this value is known, you can calculate the crossover visually
1
⁄2or less of the frequency of the RHP zero.
. After
DC
by placing a −20dB/decade slope at each pole, and a +20dB/
decade slope for each zero. The point at which the gain plot
crosses unity gain, or 0dB, is the crossover frequency. If the
crossover frequency is less than
1
⁄2the RHP zero, the phase
margin should be high enough for stability. The phase margin can also be improved by adding C
in the section. The equation for A
as discussed earlier
C2
is given below with
DC
additional equations required for the calculation:
.
Now RCcan be chosen with the selected value for CC.
Check to make sure that the pole f
is still in the 10Hz to
PC
500Hz range, change each value slightly if needed to ensure
both component values are in the recommended range. After
checking the design at the end of this section, these values
can be changed a little more to optimize performance if
desired. This is best done in the lab on a bench, checking the
load step response with different values until the ringing and
overshoot on the output voltage at the edge of the load steps
is minimal. This should produce a stable, high performance
circuit. For improved transient response, higher values of R
C
should be chosen. This will improve the overall bandwidth
which makes the regulator respond more quickly to transients. If more detail is required, or the most optimal performance is desired, refer to a more in depth discussion of
compensating current mode DC/DC switching regulators.
www.national.com 16
mc ) 0.072fs (in V/s)
where RLis the minimum load resistance, VINis the maximum input voltage, g
is the error amplifier transconduc-
m
tance found in the Electrical Characteristics table, and R
is the value chosen from the graph "R
SON
DSON
vs. VIN"in
the Typical Performance Characteristics section.
BUFFER (Vcom and GMAx) COMPENSATION
The architecture used for the buffers in the LM2711 requires
external compensation on the output. Depending on the
equivalent capacitive load of the TFT-LCD panel, external
components at the buffer outputs may or may not be necessary. If the capacitance presented by the load is equal to or
greater than 5nF no external components are needed as the
TFT-LCD panel will act as compensation itself. Distributed
resistive and capacitive loads enhance stability and increase
-
D
Page 17

Operation (Continued)
performance of the buffers. If the capacitance presented by
the load is less than 5nF external components will be required as the load itself will not ensure stability. No external
compensation in this case will lead to oscillation of the buffer
and an increase in power consumption. A single 5nF or
greater capacitor on the output will ensure a stable buffer
with no oscillations. For applications requiring a higher slew
rate, a good choice for compensation is to add a 50Ω (Rox)
in series with a 1nF (Cox) capacitor from the output of the
buffer to ground. This allows for driving zero to infinite capacitance loads with no oscillations, minimal overshoot, and
a higher slew rate than using a large capacitor. The high
phase margin created by the external compensation will
guarantee stability and good performance for all conditions.
For noise sensitive applications greater output capacitance
may be desired. When the power supply for the buffers (Vs+)
is connected to the output of the switching regulator, the
output ripple of the regulator will produce ripple at the output
of the buffers.
LAYOUT CONSIDERATIONS
The LM2711 uses two separate ground connections, GND
for the driver and NMOS power device of the boost regulator
and AGND for the sensitive analog control circuitry of the
boost regulator and the V
AGND and GND pins should be tied directly together at the
and Gamma buffers. The
COM
package, see Figure 3 and Figure 4. The feedback, softstart,
and compensation networks should be connected directly to
a dedicated analog ground plane and this ground plane must
connect to the AGND pin, as in Figure 3. If no analog ground
plane is available then the ground connections of the feedback, softstart, and compensation networks must tie directly
to the AGND pin, as show in Figure 4. Connecting these
networks to the GND pin can inject noise into the system and
effect performance. For 600kHz operation the FSLCT pin
should be tied to an analog ground plane or directly to the
AGND pin. For 1.25MHz operation the FSLCT pin should be
tied to the V
The input bypass capacitor C
pin.
IN
must be placed close to the
IN
IC. This will reduce copper trace resistance which effects
input voltage ripple of the IC. For additional input voltage
filtering, a 100nF bypass capacitor can be placed in parallel
with C
noise to ground. The output capacitor, C
, close to the VINpin, to shunt any high frequency
IN
, should also be
OUT
placed close to the IC. Any copper trace connections for the
capacitor can increase the series resistance, which
C
OUT
directly effects output voltage ripple and efficiency. The feedback network, resistors R1 and R2, should be kept close to
the FB pin, and away from the inductor, to minimize copper
trace connections that can inject noise into the system.
Trace connections made to the inductor and schottky diode
should be minimized to reduce power dissipation and increase overall efficiency.
LM2711
FIGURE 3. Multi-Layer Layout
FIGURE 4. Single Layer Layout
20046852
20046853
www.national.com17
Page 18

Application Information
LM2711
FIGURE 5. 600kHz, 8V Application
20046859
FIGURE 6. 1.25MHz, 5V Application
www.national.com 18
20046884
Page 19

Application Information (Continued)
LM2711
FIGURE 7. 1.25MHz, 10V Application
20046885
FIGURE 8. 1.25MHz, 12V Application
20046886
www.national.com19
Page 20

Physical Dimensions inches (millimeters) unless otherwise noted
LM2711 TFT Panel Module
TSSOP-20 Pin Package (MTC)
For Ordering, Refer to Ordering Information Table
NS Package Number MTC20
LIFE SUPPORT POLICY
NATIONAL’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT
DEVICES OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT AND GENERAL
COUNSEL OF NATIONAL SEMICONDUCTOR CORPORATION. As used herein:
1. Life support devices or systems are devices or
systems which, (a) are intended for surgical implant
into the body, or (b) support or sustain life, and
whose failure to perform when properly used in
accordance with instructions for use provided in the
2. A critical component is any component of a life
support device or system whose failure to perform
can be reasonably expected to cause the failure of
the life support device or system, or to affect its
safety or effectiveness.
labeling, can be reasonably expected to result in a
significant injury to the user.
National Semiconductor
Americas Customer
Support Center
Email: new.feedback@nsc.com
Tel: 1-800-272-9959
www.national.com
National does not assume any responsibility for use of any circuitry described, no circuit patent licenses are implied and National reserves the right at any time without notice to change said circuitry and specifications.
National Semiconductor
Europe Customer Support Center
Fax: +49 (0) 180-530 85 86
Email: europe.support@nsc.com
Deutsch Tel: +49 (0) 69 9508 6208
English Tel: +44 (0) 870 24 0 2171
Français Tel: +33 (0) 1 41 91 8790
National Semiconductor
Asia Pacific Customer
Support Center
Email: ap.support@nsc.com
National Semiconductor
Japan Customer Support Center
Fax: 81-3-5639-7507
Email: jpn.feedback@nsc.com
Tel: 81-3-5639-7560
 Loading...
Loading...