

Page 1

Rev. 1.0
Data Sheet
Fastrax IT530M
This document describes the electrical connectivity and functionality of the Fastrax IT530M
OEM GNSS Receiver.
August 14, 2012
Fastrax Ltd
Page 2
Page 2 of 35
Ref. #
Publisher; Reference
(1)
Fastrax; NMEA Manual for Fastrax IT500 Series GPS receivers
(2)
Fastrax; Reflow_soldering_ profile.pdf
(3)
Fastrax; LOCUS manual for Fastrax IT500 Series
TRADEMARKS
Fastrax is a registered trademark of Fastrax Ltd.
All other trademarks are trademarks of MediaTek, Inc. or either of respective holders.
COPYRIGHT
© 2011 Fastrax Ltd
DISCLAIMER
This document is compiled and kept up-to-date as conscientiously as possible. Fastrax Ltd cannot, however,
guarantee that the data are free of errors, accurate or complete and, therefore, assumes no liability for loss or
damage of any kind incurred directly or indirectly through the use of this document. The information in this
document is subject to change without notice and describes only generally the product defined in the introduction
of this documentation. Fastrax products are not authorized for use in life-support or safety-critical applications.
Use in such applications is done at the sole discretion of the customer. Fastrax will not warrant the use of its
devices in such applications.
REFERENCES
2012-08-14
IT530M_Datasheet
Page 3
Page 3 of 35
Rev.
Notes
Date
1.0
Initial documentation
2012-08-14
CHANGE LOG
2012-08-14
IT530M_Datasheet
Page 4

Page 4 of 35
1 Contents
2 Overview .............................................................................................................................................................. 6
2.1 General ........................................................................................................................................................ 6
2.2 Block diagram .............................................................................................................................................. 7
2.3 Frequency Plan ............................................................................................................................................ 7
2.4 General Specifications ................................................................................................................................. 7
3 Operation ............................................................................................................................................................. 9
3.1 Operating Modes ........................................................................................................................................ 9
3.2 Full Power Mode ......................................................................................................................................... 9
3.2.1 Host port configuration .......................................................................................................................... 9
3.3 Power Management Modes ........................................................................................................................ 9
3.4 Self-Assistance EASY™ usage..................................................................................................................... 11
3.5 Server Assistance EPO™ usage .................................................................................................................. 11
3.6 Logger LOCUS usage .................................................................................................................................. 11
3.7 DGPS usage ............................................................................................................................................... 11
3.8 Backup State.............................................................................................................................................. 11
3.9 Reset State ................................................................................................................................................ 12
4 Connectivity ....................................................................................................................................................... 13
4.1 Signal Assignments .................................................................................................................................... 13
4.2 Power supply ............................................................................................................................................. 14
4.3 Host port configuration ............................................................................................................................. 15
4.4 Host port UART ......................................................................................................................................... 15
4.5 Reset input ................................................................................................................................................ 15
4.6 FORCE_ON input ....................................................................................................................................... 15
4.7 Antenna input ........................................................................................................................................... 16
4.8 Active GNSS antenna ................................................................................................................................. 16
4.8.1 Jamming Remover ................................................................................................................................ 16
4.9 PPS output ................................................................................................................................................. 17
4.10 Wakeup output ......................................................................................................................................... 17
4.11 Interrupt input EINT1 ................................................................................................................................ 17
4.12 UI_FIX signal .............................................................................................................................................. 17
4.13 32K/DR_INT signal ..................................................................................................................................... 18
4.14 Mechanical Dimensions ............................................................................................................................ 18
4.15 Suggested pad layout ................................................................................................................................ 19
5 Electrical Specifications ...................................................................................................................................... 20
5.1 Absolute Maximum Ratings ...................................................................................................................... 20
2012-08-14
IT530M_Datasheet
Page 5

Page 5 of 35
5.2 DC Electrical specifications ........................................................................................................................ 20
5.3 AC Electrical characteristics ...................................................................................................................... 21
6 Manufacturing ................................................................................................................................................... 22
6.1 Assembly and Soldering ............................................................................................................................ 22
6.2 Moisture sensitivity ................................................................................................................................... 22
6.3 Marking ..................................................................................................................................................... 22
6.4 Tape and reel ............................................................................................................................................ 23
6.5 Environmental Specification ..................................................................................................................... 23
7 Reference design ............................................................................................................................................... 24
7.1 Reference circuit diagram ......................................................................................................................... 24
7.2 PCB layout suggestion ............................................................................................................................... 26
7.2.1 Other electronics on mother board ...................................................................................................... 26
7.2.2 Avoiding EMI ......................................................................................................................................... 27
8 AP530 Application board for IT530M ................................................................................................................ 28
8.1 Board Terminal I/O-connector .................................................................................................................. 28
8.2 Bill of materials ......................................................................................................................................... 29
8.3 AP530 Circuit diagram ............................................................................................................................... 31
8.4 AP530 layout and assembly ...................................................................................................................... 32
2012-08-14
IT530M_Datasheet
Page 6

Page 6 of 35
2 Overview
2.1 General
The Fastrax IT530M is an OEM GNSS receiver module variant based on Fastrax IT530 with the Mediatek MT3333
chip that supports All-in-One GNSS hybrid navigation. The Fastrax IT530M receiver provides extremely low power
and very fast TTFF together with weak signal acquisition and tracking capability to meet even the most stringent
performance expectations in navigation with hybrid solution using signals from both GPS + Glonass GNSS systems.
Future GNSS systems like Galileo or Beidou can be supported with future firmware upgrade in GPS + Galileo or GPS
+ Beidou modes. The module has ultra small form factor 9.6x9.6 mm, height is 1.85 mm nominal (2.15 mm max)
and can be assembled with SMT reflow soldering.
The IT530M provides complete signal processing from antenna input to host port UART and location data output is
in NMEA protocol. The module requires a main and a backup power supply. The host port is configurable to UART
during power up. Host data and I/O signal levels are 2.8V CMOS compatible and inputs are 3.6V tolerable. The host
interface equals to the IT530 module variant excluding TIMER output signal (open drain), which is now FORCE_ON
input signal; the external power switch used with IT530 low power modes is now embedded in to IT530M.
The IT530M supports a new feature called AlwaysLocate™, which is an intelligent controller of the IT530M power
saving mode. Depending on the environment and motion conditions, the module can adaptively adjust the
navigation activity and fix rate based on measured velocity in order to achieve a balance in positioning accuracy,
fix rate and power consumption.
The module is also optionally self-assisted since the EASY™ (Embedded Assist System) ephemeris extension is
embedded in the software without any resources required from the host. The EASY™ data is stored on internal
flash memory and allows fast TTFF typ. 3 seconds over 3 days. Also EPO™ (Extended Prediction Orbit) server
generated extended ephemeris input is also supported, which allows fast TTFF 10 seconds typ. over 7/14 days.
The IT530M contains also an AIC (Active Interference Cancellation), which provides state-of-art narrow band (CW)
interference and jamming elimination up to 12 CW jammers < -80dBm.
The module also supports a logging feature called LOCUS, which enables automatic logging of position data to
internal flash memory. The logging capacity is >16 hrs typ. @ 15 sec storage interval.
The antenna input supports passive and active antennas with excellent out-of-band blocking rejection and
provides also an input for externally generated antenna bias supply.
This document describes the electrical connectivity and main functionality of the Fastrax IT530M OEM GNSS
Receiver module.
2012-08-14
IT530M_Datasheet
Page 7
Page 7 of 35
Receiver
GNSS L1 C/A-code, SPS of GPS + Glonass, Galileo or Beidou
Chip set
Mediatek MT3333
Channels
99/33 (search/track)
Tracking sensitivity
-165 dBm typ. (GPS)
Navigation sensitivity
-165 dBm typ. (GPS)
Navigation sensitivity, re-acq.
-160 dBm typ. (GPS)
Navigation sensitivity, cold acq.
-148 dBm typ. (GPS)
Update rate
1 Hz (configurable up to 10 Hz)
Position accuracy (note 1)
3.0 m (67%) typ. Horizontal
5.0 m (67%) typ. Vertical
0.02 m/s (50%) typ. Velocity
Max altitude/velocity
<60,000 ft/<1,000 knots
Differential GPS
SBAS default (WAAS, EGNOS, MSAS, GAGAN, QZSS), RTCM
Time to First Fix, cold acq.
23 s typ. (note 1)
Time to First Fix, warm acq.
23 s typ. (note 1)
Time to First Fix, hot acq.
1 s typ. (note 1)
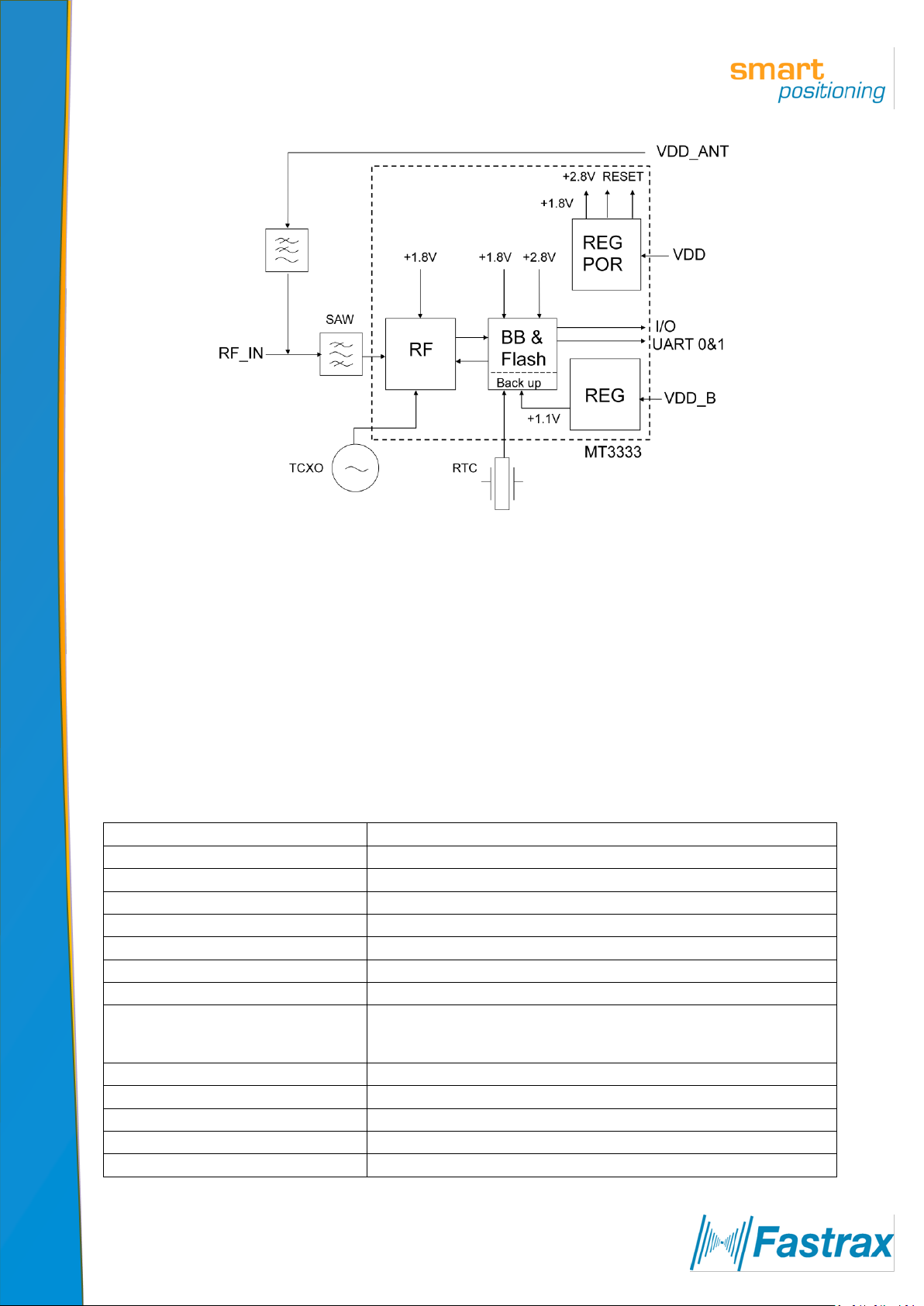
2.2 Block diagram
Figure 1 Block diagram
2.3 Frequency Plan
Clock frequencies generated internally in the Fastrax IT530M receiver:
Switched Mode Power Supply (in PWM and PFM modes)
32768 Hz Real Time Clock (RTC)
16.368 MHz Master Clock (TCXO)
3177.2 MHz Local Oscillator (LO) of the RF down-converter (GPS+Glonass mode)
LO/2, i.e. 1588.6 MHz of the RF down-converter (GPS+Glonass mode)
2.4 General Specifications
Table 1 General specifications
2012-08-14
IT530M_Datasheet
Page 8
Page 8 of 35
Supply voltage, main VDD
+3.0 … +4.3 V
Supply voltage, backup VDD_B
+2.0 … +4.3 V
Power consumption, Full Power
57 mW typ. @ 3.3 V (note 2)
Power consumption, AlwaysLocate™
tbd mW typ. @ 3.3 V
Power consumption, Backup state
30 µW typ. @ 3.0 V
External RF amplifier net gain range
0… +30 dB
Storage temperature
-40°C…+85°C
Operating temperature
-40°C…+85°C
Host port configuration
UART
Host port protocol
NMEA-0183 rev. 3.01
Serial data format (UART)
8 bits, no parity, 1 stop bit
Serial data speed (UART)
115,200 baud (configurable 4,800... 921,600 baud)
PPS output
200 ms high pulse, rising edge +/-10 ns @ full second GPS epoch
Note 1: With nominal GNSS signal levels -130dBm.
Note 2: @ 1Hz navigation, GPS + Glonass mode, SBAS enabled, average over 24h
2012-08-14
IT530M_Datasheet
Page 9

Page 9 of 35
3 Operation
3.1 Operating Modes
After power up the IT530M module boots from the internal ROM to Navigation Mode. Modes of operation:
Navigation Mode (Full Power)
o Power management system modes
Standby Mode
Backup State/Mode
Reset State
3.2 Full Power Mode
The module will enter Full Power (aka Navigation Mode) after first power up with factory configuration settings.
Power consumption will vary depending on the amount of satellite acquisitions and number of satellites in track.
This Mode is also referenced as Full On, Full Power or Navigation Mode.
Navigation is available and any configuration settings are valid as long as the main VDD and backup VDD_B power
supplies are active. When the main VDD and backup VDD_B supply is powered off, settings are reset to factory
configuration and receiver performs a cold start on next power up.
Suggestion is to keep the backup supply VDD_B active all the time in order to sustain on time, position and
ephemeris in the backup RTC and RAM. The main VDD supply can be used to control the module activity, i.e. when
VDD is switched off, the module operation is stopped.
Navigation fix rate can be configured by a NMEA command, see chapter 0. Note that baud rate must be set high
enough or message payload low enough in order to pass through all messages pending.
3.2.1 Host port configuration
Default host port is configured to UART Port 0 by keeping GPIO9 and GPIO10 floating (not connected) during
power up. UART Port1 is reserved for DGPS/RTCM protocol.
Default protocol for host communication is NMEA at 115,200 baud. Details on NMEA protocol can be found in
NMEA manual, ref (1). Default NMEA message output configuration: $GPGGA, $GNGSA, $GPGSV, $GPRMC,
$GPVTG and $GLGSV rate every second. The module supports also proprietary $PMTK input commands, see ref
(1). The message payload consists of $PMTK<cmd_id>,<data_field(s)>*<chk_sum><CR><LF>. Sample command:
$PMTK000*32<CR><LF>. For clarity <CR><LF> are not displayed in the following example messages but should be
added to the payload at host.
3.3 Power Management Modes
The IT530M module supports also low power operating modes for reduced power consumption:
1. Standby Mode: In this Mode the receiver stops navigation and internal processor enters standby state;
current drain at main supply VDD is reduced to 0.4 mA typ. Standby Mode is entered by sending NMEA
command: $PMTK161,0*28. Host can wake up the module from Standby Mode to Full Power Mode by
sending any byte via host port.
2. Backup Mode: (Support TBD) In this mode the receiver is configured to enter autonomously to Backup
State; the main power supply VDD shall be still active but supply is controlled internally on/off. In this
mode the receiver stays in Backup state (VDD and backup supply VDD_B active) and VDD current is
reduced to tbd mA. Backup Mode is entered by sending NMEA command: $PMTK225,4*2F. Host can
wake up the module via host control signal FORCE_ON signal toggle to high state (t>tbd ms).
2012-08-14
IT530M_Datasheet
Page 10
Page 10 of 35
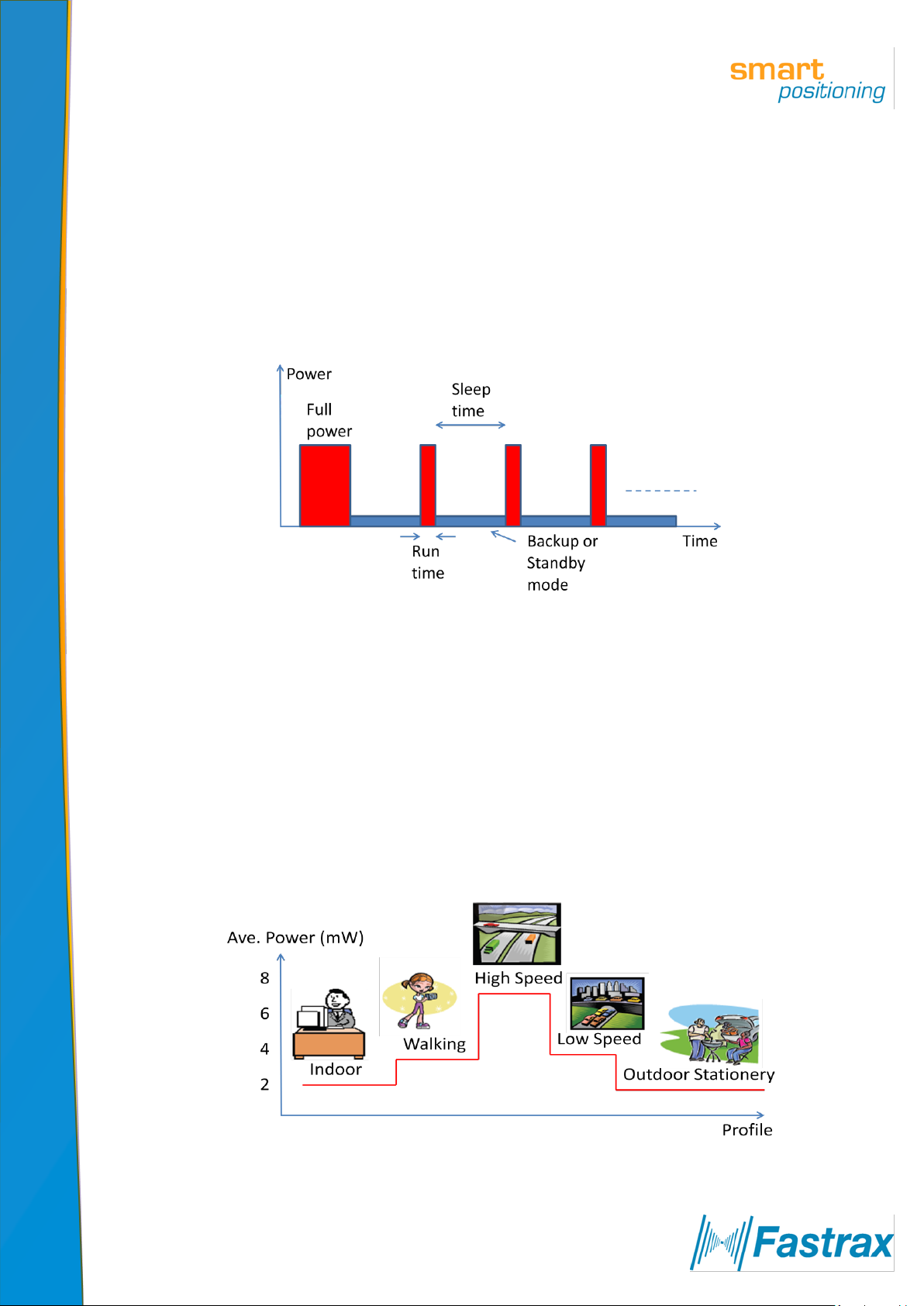
3. Periodic Mode: (Support TBD) This mode allows autonomous power on/off with reduced fix rate to reduce
average power consumption, see figure below; the main power supply VDD is controlled on/off externally
by a power switch that is controlled by the TIMER signal output, see reference circuit in chapter 7.1.
Periodic Mode is entered by sending the following NMEA command:
$PMTK225,<Type>,<Run_time>,<Sleep_time>,<
where Type=1 for Periodic Backup Mode; Run_time = Full Power period (ms); Sleep_time =
Standby/Backup period (ms);
acquisition fails during the Run_time;
2nd
_run_time = Full Power period (ms) for extended acquisition in case GNSS
2nd
_sleep_time = Standby/Backup period (ms) for extended sleep in
2nd
_run_time>,<
2nd
_sleep_time>*<checksum><CR><LF>,
case GNSS acquisition fails during the Run_time. Example: $PMTK225,1,3000,12000,18000,72000*16 for
periodic Mode with 3 sec Navigation and 12 sec sleep in Backup state. Acknowledge response for the
command is $PMTK001,225,3*35. The module can exit Periodic Mode by command $PMTK225,0*2B sent
just after the module has been wake up from previous sleep cycle.
Figure 2 Periodic Mode
4. AlwaysLocate™ (Support TBD) is an intelligent controller of the Periodic Mode; the main power supply VDD
is controlled on/off externally by a power switch that is controlled by the TIMER signal output, see
reference circuit in chapter 7.1. Depending on the environment and motion conditions, the module can
autonomously and adaptively adjust the parameters of the Periodic Mode, e.g. on/off ratio and fix rate to
achieve a balance in positioning accuracy and power consumption, see figure below. The average power
drain can vary based on conditions; typical average power is 3 mW. Associated profiles are: High and Low
Speed, Walking, Outdoor Static and Indoor. AlwaysLocate™ Mode is entered by sending the following
NMEA command: $PMTK225,<Mode>*<checksum><CR><LF>, where Mode=9 for AlwaysLocate™ in
Backup Mode. Example: $PMTK225,9*22. Acknowledge response for the command is
$PMTK001,225,3*35. The module can exit AlwaysLocate™ Mode by command $PMTK225,0*2B sent just
after the module has been wake up from previous sleep cycle.
2012-08-14
IT530M_Datasheet
Figure 3 AlwaysLocate™ Mode
Page 11

Page 11 of 35
The module can control the embedded VDD power switch autonomously only after the IT530M is set to Periodic,
Backup or to AlwaysLocate™ mode by a NMEA command.
Note also that first fix position accuracy can be somewhat degraded in Power Management Modes when
compared to Full Power operation. User can improve the position accuracy by taking the 2nd or 3rd fix after waking
up.
User can exit low power Modes 3… 4 to Full Power by sending NMEA command $PMTK225,0*2B just after the
module has woke up from previous sleep cycle.
3.4 Self-Assistance EASY™ usage
The IT530M module self-assistance (Support TBD) uses EASY™ (Embedded Assist System) ephemeris extension,
which is embedded in the software without any resources required from the host. The EASY™ data is stored on
internal flash memory and allows fast TTFF typ. 3 seconds over 3 days and is enabled by default.
Allow the receiver to navigate at least for 5 minutes with good GNSS satellite visibility in order to collect broadcast
ephemeris and to process necessary information.
3.5 Server Assistance EPO™ usage
The IT530M module supports also input from server generated EPO™ file (Extended Prediction Orbit, i.e.
ephemeris extension for GPS signals only), which can be transferred from a FTP server and allows fast TTFF with
GPS signal typ. 10 seconds over 7/14 days. Contact Fastrax support for details on EPO FTP server usage.
3.6 Logger LOCUS usage
The IT530M module supports (Support TBD) embedded logger function called LOCUS and when enabled it can log
position information to internal flash memory; default log interval is 15 seconds that provides typically > 16 h log
capacity. The LOCUS can be enabled by NMEA command $PMTK185,0*22. Contact Fastrax support for details on
Locus usage, see ref (3).
3.7 DGPS usage
By default DGPS/SBAS navigation mode is enabled. The search for suitable SBAS satellite signal is automatic.
The host may either enable DGPS/RTCM navigation mode by sending command ‘Set DGPS Data Source to RTCM’
$PMTK301,1*2D. The UART Port1 is used for RTCM message input at 9600 baud.
Note that DGPS usage is only supported with GPS system at 1 Hz navigation rate in Full Power mode. Note also
that acquiring necessary DGPS correction parameters may take up to 1 minute prior DGPS fix status is achieved,
which is indicated in the $GPGGA message, Fix Valid Indicator. Note also that DGPS corrections do not provide
corrections against multipath errors that are local; thus accuracy is not necessary improved in urban
environments.
3.8 Backup State
Backup State means a low quiescent (10 µA typ. at VDD_B) power state where receiver operation is stopped; only
the backup supply VDD_B is powered on while the main supply VDD is switched off by host (or autonomously by
IT530M, see also chapter 3.3). Waking up from Backup State to Full Power is controlled by host by switching on
the VDD supply.
After waking up the receiver will use all internal aiding like GNSS time, Ephemeris, Last Position etc. resulting to a
fastest possible TTFF in either Hot or Warm start modes.
During Backup State the I/O block is powered off; thus suggestion is that host shall force it’s outputs to low state
or to high-Z state during Backup state to minimize small leakage currents (<10 µA typ.) at receiver’s input signals.
2012-08-14
IT530M_Datasheet
Page 12

Page 12 of 35
3.9 Reset State
Reset State stops all internal operations and it is entered internally at power up after which internal reset state is
relaxed when 167 ms (typ.) has elapsed and module operations begin. The power on reset level is 2.7 +/- 0.1 V at
VDD. Host can also override Reset State via RESET_N input, which is low state active. Normally external reset
override is not required and RESET_N signal can be left floating (not connected).
2012-08-14
IT530M_Datasheet
Page 13

Page 13 of 35
Contact
Signal
I/O type
Full
Power,
Stanby
I/O type
Backup
I/O type
Reset
Signal description
1
VDD
P,I - P,I
Power supply input +3.3 V nom. De-couple
externally with e.g. 4.7 uF low ESR ceramic
capacitor.
2
VDD_B
P,I
P,I
P,I
Backup power input +3.3 V nom. De-couple
externally with e.g. 1 uF low ESR ceramic
capacitor.
3
VDD_ANT
P,I
P,I
P,I
Antenna bias power supply input up to +/-5.5 V.
Leave floating or connect to GND when not used.
When used de-couple signal further externally,
see Reference Circuit Diagram.
4
GND
G G G
Ground
5
GND
G G G
Ground
6
RF_IN
A,I,P,O
A,I,P,O
A,I,P,O
Analog Antenna input (50 ohm), Antenna bias
voltage output (low-pass filtered from VDD_ANT)
7
GND
G G G
Ground
8
GND
G G G
Ground
9
GND
G G G
Ground
10
GND
G G G
Ground
11
GPIO9
C,B
HZ
C,B
Reserved for future usage, leave floating.
12
RESET_N
C,I,PU
C,I,PU
C,I,PU
External reset input, active low. Can be left
unconnected when not used.
13
GPIO10
C,B
HZ
C,B
Reserved for future usage, leave floating.
14
GND
G G G
Ground
15
TX0
C,B
HZ
C,B
UART Port0 TX data transmit (NMEA)
16
RX0
C,B
HZ
C,B
UART Port0 RX data receive (NMEA), PU. Can be
left unconnected when not used.
17
FORCE_ON
C1V1,I
C1V1,I
C1V1,I
Power control input used to force wake up from
low power modes. When not used connect to
Ground externally.
18
GND
G G G
Ground
19
GND
G G G
Ground
20
PPS
C,B
HZ
C,B
- PPS Time Mark output signal (default)
- GPIO7
21
WAKEUP
P,O - P,O
2.8V power output for optional control of
external LNA bias switch, active high = LNA bias
on. Max load current drain 2 mA. Can be left
4 Connectivity
4.1 Signal Assignments
The I/O signals are available as soldering (castellated) pads on the bottom side of the module. These pads are also
used to attach the module on the motherboard. All digital I/O signal levels are 2.8 V CMOS compatible (except
TIMER and 32K/DR_INT that are 1.1 V CMOS) and inputs are 3.6 V tolerable. All unconnected I/O signals can be left
unconnected when not used, unless instructed to use external pull up/down resistor.
Table 2 Signal assignment
2012-08-14
IT530M_Datasheet
Page 14

Page 14 of 35
Contact
Signal
I/O type
Full
Power,
Stanby
I/O type
Backup
I/O type
Reset
Signal description
unconnected when not used.
22
32K/DR_INT
C1V1,B
C1V1,B
C1V2,B
- Wake up interrupt (DR_INT default), PD. Can be
left unconnected when not used.
- Optionally 32678 Hz RTC clock output
23
UI_FIX
C,B
HZ
C,B
- Fix indicator output (default). Can be left
unconnected when not used.
- GPIO6
24
GND
G G G
Ground
25
TX1
C,B
HZ
C,B
UART Port1 TX data transmit. Can be left
unconnected when not used.
26
RX1
C,B
HZ
C,B
UART Port1 RX data receive (RTCM), PU. Can be
left unconnected when not used.
27
EINT1
C,B
HZ
C,B
- Standby Mode control input (not supported).
Can be left unconnected when not used.
- GPIO13
28
GND
G G G
Ground
Note (a): Pull Up/down resistor present only shortly after power up.
Legend: A=Analogue, B=Bidirectional, C=CMOS 2.8 V, C1V1=CMOS 1.1 V, G=Ground, HZ=High
Impedance, I=Input, O=Output, OD=Output Open Drain, P=Power, PU=Internal Pull Up resistor,
PD=Internal Pull Down resistor. Note that with Birectional I/O the firmware has control for input vs. output
I/O type depending on the firmware function.
4.2 Power supply
The Fastrax IT530M module requires two separate power supplies: VDD_B for non-volatile back up block
(RTC/Backup RAM) and the VDD for digital parts and I/O. VDD can be switched off when navigation is not needed
but if possible keep the backup supply VDD_B active all the time in order to keep the non-volatile RTC & RAM
active for fastest possible TTFF.
Main power supply VDD current varies according to the VDD level, to the processor load, to the number of
satellites is track and to the rate of satellite re-acquisition. Typical VDD peak current is 27 mA (typ.) during GNSS
acquisition after power up and typical average 17 mA (VDD 3.3 V) over 24 h during good sky visibility in GPS +
Glonass mode. Note that average current drain will also increase during following features:
17 mA average (typ.) @1 Hz navigation, GPS + Glonass mode, good sky visibility
+4 mA @ during first 12.5 minutes after cold start due to receiving broadcast almanac data
+tbd mA @ 5 Hz navigation rate
+tbd mA @ 10 Hz navigation rate
+tbd mA @ Jammer Remover AIC usage
The following picture shows average current and power drain variation vs. VDD supply voltage.
Figure 4 IT530M Power Drain (typ.) vs. VDD (V)
2012-08-14
IT530M_Datasheet
Page 15

Page 15 of 35
De-couple the VDD input externally with e.g. 4.7uF low ESR ceramic capacitor
connected to GND. The module has also internal a low ESR (~0.01 ohm) by-pass
capacitor at VDD supply input. Ensure that the external regulator providing VDD
and VDD_B supply is compatible with low ESR load capacitors.
Backup supply VDD_B has to be active whenever Main supply VDD is active.
Back up supply VDD_B draws 10 µA typ. current in Backup State. During Full Power Mode VDD_B current typically
peaks up to 60 µA and is on the average 40 µA.
NOTE
By-pass the VDD supply input by a low ESR ceramic de-coupling capacitor (e.g. 4.7 uF) placed nearby VDD pin to
ensure low ripple voltage at VDD.
NOTE
4.3 Host port configuration
Default host port is UART and selected by leaving GPIO 9 and 10 signals floating (not connected) after power up.
Other host port configurations are not supported.
4.4 Host port UART
UART Port 0 is normally used for GNSS data reports and receiver control. Serial data rates are configurable from
4,800 baud to 921,600 baud by $PMTK251,<baud>*<checksum><CR><LF> command. Default baud rate is 115,200
baud; protocol is NMEA. RX signal is pulled up internally and can be left floating (not connected) when not used.
Figure 5 UART timing
Secondary UART Port 1 is configured to RTCM differential GPS data input at 9600 baud.
4.5 Reset input
The RESET_N (active low) signal provides external override of the internally generated power up/down reset.
Normally external control of RESET_N is not necessary.
When RESET_N signal is used, it will force volatile RAM data loss. Note that Non-Volatile Backup RAM content is
not cleared and thus fast TTFF is possible. The input has internal pull up resistor 85 kohm typ. and the signal can be
left floating (not connected) if not used. Non-Volatile Backup RAM content can be cleared with NMEA command
‘Factory Reset’ $PMTK104*37<CR><LF>.
4.6 FORCE_ON input
The FORCE_ON signal provides input that can be used to force wakeup from low power modes. The signal is active
high and shall be at high state at least > tbd ms for wakeup.
2012-08-14
IT530M_Datasheet
Page 16

Page 16 of 35
With an Active GNSS Antenna provide antenna supply externally via VDD_ANT. The
VDD_ANT supply must provide also short circuit protection externally, rated
current 70mA, abs. max. 150mA.
With Passive antennas leave VDD_ANT not connected or connect to GND.
4.7 Antenna input
The antenna shall provide simultaneous reception of both GPS 1575 MHz and Glonass bands 1598… 1606 MHz.
The module supports both passive and active antennas; the latter gives some advantage in sensitivity and thus
suggestion is to use amplified antenna signal. The antenna input RF_IN impedance is 50 ohms and it provides also
a bias supply low-pass filtered from VDD_ANT supply. The RF input signal path contains first a SAW band-pass filter
before internal LNA, which provides good out-of-band protection against GNSS blocking caused by possible nearby wireless transmitters.
Note that antenna input is ESD sensitive. With passive antennas the ESD performance can be improved by
connecting VDD_ANT supply input to GND. Also an external TVS diode with low capacitance (<0.5pF, e.g. Infineon
ESD0P2RF) can be used to improve RF-input ESD capability.
NOTE
4.8 Active GNSS antenna
The customer may use an external active GNSS antenna when antenna cable loss exceeds > 1dB. It is suggested
the active antenna has a net gain including cable loss in the range from +10 dB to +25 dB. Specified sensitivity is
measured with external low noise (NF<1dB, G>15dB) amplifier, which gives about 3 dB advantage in sensitivity
when compared to a passive antenna.
An active antenna requires certain bias voltage, which can be supplied externally via VDD_ANT supply input. Decouple externally the VDD_ANT input; see the application circuit diagram in chapter 6. The external bias supply
must provide limitation of the max current below 150mA during e.g. antenna cable short circuit condition.
When the module is in Standby/Backup mode, the antenna bias can be switched off externally by using WAKEUP
signal output to switch off VDD_ANT supply, see e.g. Application Circuit Diagram.
NOTE
4.8.1 Jamming Remover
Jamming Remover is an embedded HW block called AIC (Active Interference Cancellation) that tracks and removes
up to 12 pcs CW (Carrier Wave) type signals up to -80 dBm (total power signal levels). By default the AIC is disabled
and usage requires an NMEA command $PMTK286,1*23<CR><LF> to enable.
Jamming Remover can be used for solving EMI problems in the customer’s system and it is effective against e.g.
narrow band clock harmonics. When enabled, Jammer Remover will increase current drain by about 1 mA and
impact on GNSS performance is low at modest jamming levels; however at high jammer levels -90… -80 dBm the
RF signal sampling (ADC) starts to get saturated after which GNSS signal levels start to reduce.
2012-08-14
IT530M_Datasheet
Page 17

Page 17 of 35
Do not load WAKEUP output with current exceeding 2mA. Only loads with steady
state current drain is allowed, i.e. loads with ripple currents are prohibited.
Note that Jamming Remover is not effective against wide band noise (e.g. from host CPU memory bus), which
cannot be separated from thermal noise floor. Wide band Jamming signal increases effective noise floor and
eventually reduces GNSS signal levels.
4.9 PPS output
The PPS output signal provides pulse-per-second output pulse signal for timing purposes. Pulse length (high state)
is 100 ms and it has 1us accuracy synchronized at rising edge to full UTC second with nominal GNSS signal levels.
The PPS will output PPS after a few seconds from first fix after the fix epoch is synchronized to full second.
The PPS output is valid when navigation is valid and will also continue ‘freewheel’ after valid fix is lost by a certain
navigation DR timeout, typ. 10 seconds. User can also enable NMEA $GPZDA message that is sent right after the
PPS pulse just sent.
4.10 Wakeup output
The WAKEUP output voltage provides indication to e.g. external LNA bias switch that the module is active and
navigation. Polarity is active high = LNA bias active.
WAKEUP output is intended to drive only CMOS inputs; do not load WAKEUP signal with current exceeding 2mA.
Only loads with steady state current drain is allowed (i.e. loads with ripple currents are prohibited).
NOTE
4.11 Interrupt input EINT1
The default EINT1 function is Standby mode control but the function is not supported; leave signal floating (not
connected).
4.12 UI_FIX signal
The default UI_FIX function is valid fix indicator output. Without a valid fix the signal is at low state; during valid fix
condition the signal outputs 0.1 s pulses every 1 second.
Figure 6 UI_FIX valid fix indicator timing
2012-08-14
IT530M_Datasheet
Page 18

Page 18 of 35
4.13 32K/DR_INT signal
The default 32K/DR_INT function is wake up interrupting input. The module is able to wake up from Standby and
Backup modes to Full Power mode when the signal is toggled by low-high-low state with >10 ms pulse length.
While in the DR_INT function the input is pulled low with an internal pull down resistor and the input can be left
floating (not connected).
Optionally the signal can be configured to 32768 Hz RTC clock signal output with a custom firmware. The
32K/DR_INT signal has CMOS 1.1V logic levels and when input, the signal is +3.6V tolerable.
4.14 Mechanical Dimensions
Module size is square 9.6 mm (width), 9.6 mm (length) and 1.85 mm (height, 2.15 mm max). General tolerance is
0.3 mm. Note pin 1 polarity mark on the corner on the shield.
2012-08-14
IT530M_Datasheet
Figure 7 Mechanical Dimensions
Page 19

Page 19 of 35
Figure 8 Pin numbering and dimensions, bottom view
4.15 Suggested pad layout
Suggested paste mask openings equal to pad layout. Note the keepout (void area) 4.8x7.2mm for copper & trace
& components for all layers under the embedded antenna.
2012-08-14
IT530M_Datasheet
Figure 9 Suggested pad layout and occupied area, top view
Page 20

Page 20 of 35
Symbol
Parameter
Min
Max
Unit
T
AMB
Operating and storage temperature
-40
+85
°C
P
DIS
Power dissipation
-
200
mW
VDD
Supply voltage input
-0.3
+4.3
V
VDD_B
Supply voltage input, Backup
-0.3
+4.3
V
VDD_ANT
Supply voltage input, Antenna Bias
-5.5
+5.5
V
I
VDD_ANT
Antenna Bias Current
-150
+150
mA
VIO(ESD)
IO ESD voltage (only RF_IN, Machine Model)
-50
+50
V
VIO(ESD)
IO ESD voltage (excluding RF_IN, HBM
Model)
-1000
+1000
V
PRF
RF_IN input power (in band 1575 +/- 10 MHz)
-
-40
dBm
PRF
RF_IN input power (out of band <1460 MHz
or >1710 MHz)
-
+15
dBm
Symbol
Parameter
Min
Typ
Max
Unit
T
AMB
Operating temperature
-40
+25
+85
°C
VDD
Supply voltage input
+3.0
+3.3
+4.3 V VDD_B
Supply voltage input, Backup
+2.0
+3.0
+4.3 V I
VDD
(peak)
Supply current, peak acq.
27 mA
I
VDD
(ave)
Supply current average, tracking
17 mA
I
VDD_B
(peak)
Supply current Backup, peak
60 µA
I
VDD_B
(ave)
Supply current Backup, average
40 µA
I
VDD_B
Supply current, Backup state
10 µA
I
I(LEAK)
Leakage current, Digital Input
-10 +10
µA
VOL
Low level output voltage, IOL 2 mA
- +0.4 V VOH
High level output voltage, IOH 2 mA
+2.4 - - V VIL
Low level input voltage
-0.3 +0.7 V VIH
High level input voltage
+2.1 +3.6
V
Note that module is Electrostatic Sensitive Device (ESD).
5 Electrical Specifications
5.1 Absolute Maximum Ratings
Stressing the device beyond the Absolute Maximum Ratings may cause permanent damage. Operation beyond the
DC Electrical Specifications is not recommended and extended exposure beyond the Recommended Operating
Conditions can affect device reliability.
Table 3 Absolute Maximum Ratings
NOTE
5.2 DC Electrical specifications
Operating conditions are T
=+25°C, VDD =+3.3 V and VDD_B =+3.0 V unless stated otherwise.
AMB
Table 4 DC Electrical characteristics
2012-08-14
IT530M_Datasheet
Page 21

Page 21 of 35
RPU
Internal Pull Up resistor
40
85
190
kohm
RPD
Internal Pull Down resistor
40
85
190
kohm
Symbol
Parameter
Min
Typ
Max
Unit
VOL
Low level output voltage, IOL 2 mA
- +0.165
V
VOH
High level output voltage, IOH 2 mA
+0.78
- V
VIL
Low level input voltage
-0.3 +0.275
V
VIH
High level input voltage
+0.935
+3.6 V RPU
Internal Pull Up resistor
130 560
kohm
RPD
Internal Pull Down resistor
130 560
kohm
Symbol
Parameter
Min
Typ
Max
Unit
t
PPS
PPS cycle time
1 s t
PPS,H
PPS, high state pulse length
200 ms
∆t
PPS
PPS accuracy, rising edge (note 1)
-10 +10
ns TBD
f
RTC
RTC output (32K/DR_INT) frequency (note 2)
32768
Hz
Table 5 DC Electrical characteristics, 1.1 V CMOS domain (FORCE_ON & 32K/DR_INT)
5.3 AC Electrical characteristics
Operating conditions are T
=+25°C and VDD =+1.8 V unless stated otherwise.
AMB
Table 6 AC Electrical characteristics
Note 1: with nominal GPS signal levels -130dBm.
Note 2: when enabled by I/O configuration.
2012-08-14
IT530M_Datasheet
Page 22

Page 22 of 35
Note that module is Electrostatic Sensitive Device (ESD).
6 Manufacturing
6.1 Assembly and Soldering
The IT530M module is intended for SMT assembly and soldering in a Pb-free reflow process on the top side of the
PCB. Suggested solder paste stencil height is 150um minimum to ensure sufficient solder volume. If required paste
mask pad openings can be increased to ensure proper soldering and solder wetting over pads.
Use pre-heating at 150… 180°C for 60… 120 sec. Suggested peak reflow temperature is 235… 245°C (for
SnAg3.0Cu0.5 alloy). Absolute max reflow temperature is 260°C. For details see Fastrax document ‘Soldering
Profile’ ref (7).
Note that module is Electrostatic Sensitive Device (ESD).
NOTE
Avoid also ultrasonic exposure due to internal crystal and SAW components.
The IT530M module meets the requirements of Directive 2002/95/EC of the European Parliament and of the
Council on the Restriction of Hazardous Substance (RoHS). For details contact Fastrax support.
6.2 Moisture sensitivity
IT530M module is moisture sensitive at MSL 3 (see the standard IPC/JEDEC J-STD-020C). The module must be
stored in the original moisture barrier bag or if the bag is opened, the module must be repacked or stored in a dry
cabin (according to the standard IPC/JEDEC J-STD-033B). Factory floor life in humid conditions is 1 week for MSL 3.
Moisture barrier bag self life is 1 year; thus it is suggested to assemble modules prior self life expiration. If the
moisture barrier bad self life is exceeded, the modules must be baked prior usage; contact Fastrax support for
details.
6.3 Marking
Module marking includes type code, batch code and serial number.
Type code is e.g. IT530Mrbbbb (may vary), where
IT530M is module type code for IT530M
r is incremental firmware revision (e.g. B, may vary)
bbbb is BOM (Bill-of-Materials) revision code (e.g. 4341, may vary)
Batch code is e.g.120208 (may vary), where
1 is factory code
2 is last digit of the year (e.g. 2012)
02 is month (e.g. February)
2012-08-14
IT530M_Datasheet
Page 23

Page 23 of 35
Test
Condition
Standard
Temperature Cycle
Test: +85°C (20min) / -40°C (20min), Ramp Slope: 10°C/min,
Test Cycles: 300 Cycles
JESD22A104
High Temperature Storage
Temperature +85°C , Test Time: 1,000hr
JESD22A103C
Temperature Humidity Test
Temperature +85°C , 85% R.H., Test Time: 1,000hr
JESD22A101
Vibration Test
10G, 10… 1,000Hz, 1 Octave/min (amplitude 1.0mm max @
<70Hz)
JESD22B103
Shock Test
100G pulse, duration 2ms, 5 Shock 2 directions 3 Axis = 30
Shocks
JESD22B110
08 is incremental number of the production batch during the month
Serial number is unique for each module having 10 digits including tester code, last two digits of the year, Julian
date code and incremental number.
6.4 Tape and reel
Minimum order quantity is 500 pcs. Reel is packed in 500 pcs per reel.
Figure 10 Tape and reel specification
6.5 Environmental Specification
The IT530M module shall be qualified for environmental stresses with the following test series:
Table 7 Environmental tests
2012-08-14
IT530M_Datasheet
Page 24

Page 24 of 35
7 Reference design
The idea of the reference design is to give a guideline for the applications using the OEM GNSS module. In itself it
is not a finished product, but an example that performs correctly.
In the following two chapters the reader is exposed to design rules that he should follow, when designing the
GNSS receiver in to the application. By following the rules one end up having an optimal design with no
unexpected behavior caused by the PCB layout itself. In fact these guidelines are quite general in nature, and can
be utilized in any PCB design related to RF techniques or to high speed logic.
7.1 Reference circuit diagram
The following picture describes a minimum connectivity for a typical autonomous navigation application. It
consists of the IT530M module, which is powered by the main VDD supply (+3.3 V typ.) and backup supply VDD_B
(+3.0V typ). The external by-pass capacitor C7 is used to de-couple the VDD supply pin close to pin 1.
Suggestion is to keep the backup supply VDD_B active all the time and host may use the VDD supply to control
module activity between Full Power and Backup operation modes.
The host port is configured to UART by keeping GPIO 9 & 10 floating. Serial port TX output is connected to host
UART input. RX input connection to host UART output is required when sending commands to IT530M.
Optionally WAKEUP signal can be used to drive external antenna bias VDD_ANT (+3.3 V typ.) voltage switch (Q1)
during Full Power/Standby/Backup Modes. Transistor Q1 provides also Antenna Bias short circuit protection by
limiting bias current to 50 mA typ. L1 and C2 provide additional RF decoupling at VDD_ANT supply.
The reference circuit supports also connectivity to IT530 (GPS only) module variant for optional Backup/Periodic
modes of operation: with IT530 the external power switch U1, R8 and D2 shall be assembled while omitting bypass resistor R9 & R11 (0R). The U1 power switch is controlled autonomously by the TIMER signal from IT530; for
details see also IT530 datasheet. This way user may share the same electrical design with both IT530 and IT530M
module variants.
Optional connectivity to host includes PPS, UI_FIX, 32K/DR_INT signals. UART Port 1 RX1 signal can be used
optionally as input for RTCM differential GPS messages.
Note that all I/O signal levels are CMOS 2.8V compatible (excluding TIMER and 32K/DR_INT signals that have 1.2 V
CMOS domain) and inputs are 3.6 V tolerable.
Some I/O signals have series resistors 47… 220 ohm, which are intended for RF-decoupling purposes to improve
rejection to internally generated EMI that may leak to nearby GNSS antenna. If GNSS antenna is away > 20cm from
module and/or I/O signals are routed under ground plane these series resistor may be omitted.
2012-08-14
IT530M_Datasheet
Page 25

Page 25 of 35
2012-08-14
IT530M_Datasheet
Figure 11 Reference circuit diagram
Page 26

Page 26 of 35
Layer
Description
1
Signal + RF trace + Ground plane with solid copper under IT530M
2
Ground plane for signals and for RF trace
3
Signals and power planes
4
Ground plane (also short traces allowed)
7.2 PCB layout suggestion
The suggested 4-layer PCB build up is presented in the following table.
Table 8 Suggested PCB build up
For a multi-layer PCB the first inner layer below the IT530M is suggested to be dedicated for the ground plane.
Below this ground layer other layers with signal traces are allowed. It is always better to route very long signal
traces in the inner layers of the PCB. In this way the trace can be easily shielded with ground areas from above and
below.
The serial resistors at the I/O should be placed very near to the IT530M module. In this way the risk for the local
oscillator leakage is minimized. For the same reason by-pass capacitors C1 and C2 should be connected very close
to the module with short traces to IO contacts and to the ground plane. Place the GND via hole as close as possible
to the capacitor.
Connect the GND soldering pads of the IT530M to ground plane with short traces (thermals) to via holes, which
are connected to the ground plane. Use preferably one via hole for each GND pad.
The RF input should be routed clearly away from other signals, this minimizes the risk against interference. The
proper width for the 50 ohm transmission line impedance depends on the dielectric material of the substrate and
on the height between the signal trace and the first ground plane. With FR-4 material the width of the trace shall
be two times the substrate height.
A board space free of any traces should be covered with copper areas (GND). In this way, a solid RF ground is
achieved throughout the circuit board. Several via holes should be used to connect the ground areas between
different layers.
Additionally, it is important that the PCB build-up is symmetrical on both sides of the PCB core. This can be
achieved by choosing identical copper content on each layers, and adding copper areas to route-free areas. If the
circuit board is heavily asymmetric, the board may bend during the PCB manufacturing or reflow soldering.
Bending may cause soldering failures and reduce end product reliability.
The AP530 Application Board layout described in next chapter can be also used as layout reference.
7.2.1 Other electronics on mother board
Signal traces on top and bottom layers should have minimum length. Route signals mainly at inner layers below
the top or bottom ground plane. In this way, a solid RF ground is achieved throughout the circuit board on top and
bottom sides. Several via holes should be used to connect the ground areas between different layers.
Areas with dense component placing and dense routing requirements should be covered with a metal shield,
which should be connected to ground plane with multiple GND via holes. Small ground plane openings for SMT
components (length few mm, like LED or push buttons) in the ground plane are OK without a shield.
2012-08-14
IT530M_Datasheet
Page 27

Page 27 of 35
PCB 6-layer
Build up:
I/O connector,
indicator etc.
GND via
holes
CPU
Shield
Top, GND plane
L2, signal
L3, signal
L4, GND plane
L5, Power plane
Bottom, GND plane
Buried and blind
via holes for
signal traces
’Faraday enclosure’
EMI filter
Dense areas having multiple via holes may open the ground plane for wide areas, thus blind and buried via holes
are suggested to be used when changing layers for internal signals and power planes.
Use a power plane layer dedicated solely for power nets. Use wide trace width or even copper plane areas to
achieve low impedance for power nets. Dedicate at least one layer as ground planes on adjacent layer above or
below power plane layer in order to maximize capacitance to ground plane.
7.2.2 Avoiding EMI
Any GNSS receiver is vulnerable to external spurious EMI signals since GNSS signals are very weak below thermal
noise floor. Any man made noise or spurious signals picked up by the nearby GNSS antenna increases the noise
floor and reduces GNSS signal levels. Carrier Wave (CW) type spurious signals like clock harmonics on GNSS band
may also cause cross correlation products that may interfere with GNSS signal tracking and cause position offsets.
The embedded GNSS antenna may pick up local EMI signals and thus it is essential for good GNSS performance
that the following measures against EMI are properly implemented:
High speed electronics like host CPU & memory bus are enclosed in a ‘Faraday shield’. The electrical enclosure
is formed by the ground planes on PCB + metal shield over components. Route signals at inner layers as
discussed previously. Use preferably a power plane(s) layer for supply nets.
Any signal that is routed outside the Faraday shield is protected against EMI noise on 1575MHz with a serial
RF filter like
o a serial resistor (> 330ohm, suitable for I/O with low current) or
o with a dedicated EMI filter (or ferrite bead) suitable for higher current or
o with suitable by-pass capacitor e.g. 18pF (low impedance due to series resonance at 1575MHz).
The following picture gives a suggestion for e.g. a 6-layer PCB build up, which forms a Faraday shield together with
ground planes on PCB and with the shield over high speed electronics. Buried and blind via holes are used to keep
EMI signal inside ground planes. I/O signals that are routed outside the Faraday enclosure are filtered with a
suitable EMI filter. Power plane layer is used for supply nets with low impedance traces/planes.
Figure 12 Avoiding EMI with Faraday enclosure
2012-08-14
IT530M_Datasheet
Page 28

Page 28 of 35
Pin
Signal
I/O
Alternative GPIO
name
Interface to Fastrax Evaluation Kit
1
TX1 O -
UART Port 1 async. output
2
GND
- - Ground
3
RX1 I -
UART Port 1 async. input (RTCM)
4
GND
- - Ground
5
TX0 O -
UART Port 0 async. output (NMEA)
6
GND
- - Ground
7
RX0 I -
UART Port 0 async. input (NMEA)
8
GND
- - Ground
9
VDD_3V3
I - Power supply input +3.3V
10
GND
- - Ground
11
PPS O -
1PPS signal output
12
GND
- - Ground
13
RESET_N
I - Active low async. system reset
14 - - - Not connected
15 - - - Not connected
16 - I - Not connected
17
GND
- - Ground
18 - - - Not connected
19 - - - Not connected
20 - - - Not connected
21
GND
- - Ground
22 - - - Not connected
23 - - - Not connected
24 - - - Not connected
25
GND
- - Ground
26
UI_FIX
O - UI indicator B output
27 - - - UART CTS signal
28 - - - Not connected
29 - - - UART RTS signal
30
WAKEUP
O - UI indicator A output
31
GND
- - Ground
32 - - - Not connected
33
GND
- - Ground
34 - I - Not connected
35
GND
- - Ground
8 AP530 Application board for IT530M
The Fastrax Application Board AP530 provides the IT530M connectivity to the Fastrax Evaluation Kit or to other
evaluation purposes. It provides a single PCB board equipped with the IT530M module, MCX antenna connector,
Antenna Bias +3.3 V switch, VDD Power Switch, switch for GPS_ON control and 2x20 pin Card Terminal connector.
Default host port configuration is set to UART by switch S4… S6 ‘ON’ and S7 & S8 ‘OFF’. S3 should be ‘ON’ for first
power up; for successive power up and for low power modes the S3 shall be switched to ‘OFF’.
8.1 Board Terminal I/O-connector
The following signals are available at the 40-pin Card Terminal I/O connector J2. The same pin numbering applies
also to the Fastrax Evaluation Kit pin header J4. Note that UART Port 0 maps to serial Port 0 at the Fastrax
Evaluation Kit. I/O signal levels are CMOS 3.3V compatible unless stated otherwise.
Table 9 Board Terminal signals
2012-08-14
IT530M_Datasheet
Page 29

Page 29 of 35
Pin
Signal
I/O
Alternative GPIO
name
Interface to Fastrax Evaluation Kit
36
EINT1
I - EINT1 (Standby) control input
37
GND
- - Ground
38
32K/DR_INT
I/O - Default: DR_INT wakeup control input
39
GND
- - Ground
40
FORCE_ON_N
I - Inverted FORCE_ON control input, pulled up to VDD_3V3
A1
IT530M MODULE
IT530M
BT1
PANASONIC ML621/F9D, 3V 5mAh
3V/ML621
C1
Capacitor chip, 1uF 6.3V +20% X5R 0402
1uF
C2
10nF 50V 10% X7R 0402
10nF
C7
4,7uF 6,3V X5R 0805 +20%
4u7F
C11
4,7uF 6,3V X5R 0805 +20%
4u7F
C12
Capacitor chip, 1uF 6.3V +20% X5R 0402
1uF
D1
Diode 40V 225mA, BAT54J
BAT54J
D2
Diode 40V 225mA, BAT54J
N/A
D3
Diode 40V 225mA, BAT54J
N/A
D4
LED Red
TLSU1008
D5
LED Red
TLSU1008
J1
50 Ohm male MCX connector PCB
CON/BNC_90DEG_PCB
J2
EDGE MOUNT SOCKET STRIP 40 PINS
2x20 edge
J3
2x5 pin-header, straight, 2.54mm
2x5P2.54
J4
1x2 pin-header, straight, pitch 2.54mm
1x2P2.54
J5
1x2 pin-header, straight, pitch 2.54mm
1x2P2.54
L1
75R,+25%@100MHz, 0R4@DC, 300mA
BLM15BB750
PCB1
Application board for IT530 rev B
PCB/AP530B00
Q1
NPN/PNP
BC847BPN
R1
Resistor chip, 1k 5% 0402 63mW
1k, 5%
R2
Resistor chip, 47R 0402 63mW 5%
47R, 5%
R3
Resistor chip, 47R 0402 63mW 5%
47R, 5%
R4
Resistor chip, 220R 5% 0402 63mW
220R, 5%
R5
Resistor chip, 47R 0402 63mW 5%
47R, 5%
R6
Resistor chip, 220R 5% 0402 63mW
220R, 5%
R7
Resistor chip, 220R 5% 0402 63mW
220R, 5%
R8
Resistor chip, 1M 5% 0402 63mW
N/A
R9
Resistor chip, 470R 5% 0402 63mW
470R, 5%
R10
Resistor chip, 220R 5% 0402 63mW
220R, 5%
R11
Resistor chip, 47R 0402 63mW 5%
47R, 5%
R12
Resistor chip, 47R 0402 63mW 5%
47R, 5%
R13
Resistor chip, 220R 5% 0402 63mW
220R, 5%
R14
Resistor chip, 220R 5% 0402 63mW
220R, 5%
R15
Resistor chip, 470R 5% 0402 63mW
470R, 5%
R16
Resistor chip, 10k 5% 0402 63mW
N/A
R17
Resistor chip, 10k 5% 0402 63mW
10k, 5%
8.2 Bill of materials
2012-08-14
IT530M_Datasheet
Page 30

Page 30 of 35
R18
Resistor chip, 0R 0402
0R
R19
Resistor chip, 0R 0402
0R
R20
Resistor chip, 220R 5% 0402 63mW
220R, 5%
R21
Resistor chip, 220R 5% 0402 63mW
220R, 5%
R22
Resistor chip, 3.9k 5% 0402 63mW
3k9, 5%
R23
Resistor chip, 5k6 5% 0402 63mW
5k6, 5%
R24
Resistor chip, 47k 5% 0402 63mW
47k, 5%
R26
Resistor chip, 10k 5% 0402 63mW
10k, 5%
R27
Resistor chip, 10k 5% 0402 63mW
10k, 5%
R33
Resistor chip, 10k 5% 0402 63mW
N/A
S1
Jumper, Pitch, 2.54mm, Red colour
J4/P1-P2
S2
Label 13x16mm iTrax03s
STICKER13x16
S3
Switch, SMD PUSH BUTTON
SW
S4
Switch, on-off
SW JMP 2P54
S5
Switch, on-off
SW JMP 2P54
S6
Switch, on-off
SW JMP 2P54
S7
Switch, on-off
SW JMP 2P54
S8
Switch, on-off
SW JMP 2P54
S9
Jumper, Pitch, 2.54mm, Red colour
J5/P1-P2
U1
POWER SWITCH 0.1 ohm
N/A
U2
Logic buffer
NC7SZ125
U4
Schmit-Trigger inverter
NC7SZ14M5X
2012-08-14
IT530M_Datasheet
Page 31

Page 31 of 35
8.3 AP530 Circuit diagram
2012-08-14
IT530M_Datasheet
Figure 13 AP530 Circuit diagram
Page 32

Page 32 of 35
8.4 AP530 layout and assembly
Figure 14 Assembly drawing, top side
2012-08-14
IT530M_Datasheet
Figure 15 Layer 1, (top)
Page 33

Page 33 of 35
Figure 16 Layer 2
2012-08-14
IT530M_Datasheet
Figure 17 Layer 3
Page 34

Page 34 of 35
Figure 18 Layer 4 (bottom)
2012-08-14
IT530M_Datasheet
Page 35

Page 35 of 35
Contact Information
Fastrax Ltd
Street Address: Fastrax Ltd
Polaris Business Park
Itsehallintokuja 6
02600 Espoo
Finland
Tel: +358 (0)424 733 1
Fax: +358 (0)9 8240 9691
http://www.fastraxgps.com
E-mail:
Sales: sales@fastraxgps.com
Support: support@fastraxgps.com
2012-08-14
IT530M_Datasheet
Page 36

 Loading...
Loading...