

Page 1

56F8345/56F8145
Data Sheet
Preliminary Technical Data
56F8300
16-bit Digital Signal Controllers
MC56F8345
Rev. 14.0
12/2005
freescale.com
Page 2
Document Revision History
Version History Description of Change
Rev 1.0 Pre-Release version, Alpha customers only
Rev 2.0 Initial Public Release
Rev 3.0 Corrected typo in Table 10-4, Flash Endurance is 10,000 cycles. Addressed additional
grammar issues.
Rev 4.0 Added “Typical Min” values to Table 10-16. Edited grammar, spelling, consistency of
language throughout family. Updated values in Current Consumption per Power Supply Pin,
Table 10-7, Regulator Parameters, Table 10-9, External Clock Operation Timing
Requirements Table 10-13, SP I Timing, Table 10-17, ADC Parameters, Table 10-23, and IO
Loading Coefficients at 10MHz, Table 10-24.
Rev 5.0 Added Part 4.8. Added the word “access” to FM Error Interrupt in Table 4-5. Removed min
and max numbers. Clarified CSBAR 0 and CSBAR 1 reset values in Table 4-10. Removed
min and max numbers, only documenting Typ. numbers for LVI in Table 10-6.
Rev 6.0 Updated numbers in Table 10-7 and Table 10-8 with more recent data. Corrected typo in
Table 10-3 in Pd characteristics.
Rev 7.0 Replaced any reference to Flash Interface Unit with Flash Memory Module. Added note to
V
pin in Table 2-3. Removed unneccessary notes in Table 10-12. Corrected temperature
CAP
range in Table 10-14. Added ADC calibration information to Table 10-23 and new graphs in
Figure 10-21.
Rev 8.0 Clarified Table 10-22. Corrected Digital Input Current Low (pull-up enabled) numbers in
Table 10-5. Removed text and Table 10-2. Replaced with note to Table 10-1.
Rev 9.0 Added 56F8145 information; edited to indicate differences in 56F8345 and 56F8145 .
Reformatted for Freescale look and feel. Updated Temperature Sensor and ADC tables;
updated balance of electrical tables for consistency throughout family. Clarified I/O power
description in Table 2-3, added note to Table 10-7 and clarified Section 12.3.
Rev 10.0 Corrected beginning address for On-Chip Data RAM, Table 4-6.
Rev 11.0 Corrected addresses in Table 4-6.
Rev 12.0 Corrected Figure 10-21. Added output voltage maximum value and note to clarify in
Table 10-1; also removed overall life expectancy note, since life expectancy is dependent on
customer usage and must be determined by reliability engineering. Clarified value and unit
measure for Maximum allowed P
Flash Data Retention in Table 10-4. Added new RoHS-compliant orderable part numbers in
Table 13-1.
Rev 13.0 Updated Table 10-23 to reflect new value for maximum Uncalibrated Gain Error
Rev 14.0 Deleted RSTO from Pin Group 2 (listed after Table 10-1). Deleted formula for Max Ambient
Operating Temperature (Automotive) and Max Ambient Operating Temperature (Industrial) in
Table 10-4. Added RoHS-compliance and “pb-free” language to back cover.
in Table 10-3. Corrected note about average value for
D
Please see http://www.freescale.com for the most current Data Sheet revision.
56F8345 Technical Data, Rev. 14.0
2 Freescale Semiconductor
Preliminary
Page 3
56F8345/56F8145 General Description
Note: Features in italics are NOT available in the 56F8145 device.
• Up to 60 MIPS at 60MHz core frequency
• DSP and MCU functionality in a unified,
C-efficient architecture
• 128KB Program Flash
• 4KB Program RAM
• 8KB Data Flash
• 8KB Data RAM
• 8KB Boot Flash
• Up to two 6-channel PWM modules
• Four 4-channel, 12-bit ADCs
• Temperature Sensor
RSTO
6
PWM Outputs
Current Sense Inputs
3
or GPIOC
4
Fault Inputs
6
PWM Outputs
3
Current Sense Inputs
or GPIOD
4
Fault Inputs
4
AD0
4
AD1
5
VREF
4
AD0
4
AD1
TEMP_SENSE
Decoder 0 or
4
4
2
4
2
ADCA
ADCB
Quadrature
Quad
Timer A or
GPIOC
Quadrature
Decoder 1 or
Quad
Timer B or
SP1I or
GPIOC
Quad Timer
C or GPIOE
Quad Timer
D or GPIOE
FlexCAN
PWMA
PWMB
Memory
Program Memory
64K x 16 Flash
2K x 16 RAM
4K x 16 Boot
Flash
Data Memory
4K x 16 Flash
4K x 16 RAM
Decoding
Peripherals
SPI0 or
GPIOE
Program Controller
and Hardware
XDB2
XAB1
XAB2
PAB
PDB
CDBR
CDBW
Peripheral
Device Selects
SCI1 or
GPIOD
4
Looping Unit
2
PAB
PDB
CDBR
CDBW
5
JTAG/
EOnCE
Port
Address
Generation Unit
RESET
IPBus Bridge (IPBB)
RW
Control
2
COP/
Watchdog
SCI0 or
GPIOE
• Up to two Quadrature Decoders
• FlexCAN module
• Optional On-Chip Regulator
• Two Serial Communication Interfaces (SCIs)
• Up to two Serial Peripheral Interface (SPIs)
• Up to four general-purpose Quad Timers
• Computer Operating Properly (COP)/Watchdog
• JTAG/Enhanced On-Chip Emulation (OnCE™) for
unobtrusive, real-time debugging
• Up to 49 GPIO lines
• 128-pin LQFP Package
V
PP
2
56800E Core
IPAB IPWDB IPRDB
IRQA
OCR_DIS
V
CAPVDDVSSVDDAVSSA
47 52
Digital Reg
16-Bit
Data ALU
16 x 16 + 36 -->36-Bit MAC
Three 16-bit Input Registers
Four 36-bit Accumulators
System Bus
Control
Interrupt
Controller
IRQB
Low Voltage
Supervisor
R/W Control
System
Integration
Module
CLKO
Analog Reg
External Bus
Clock
resets
P
O
R
Bit
Manipulation
Unit
* External
Address Bus
Switch
* External
Data
Bus Switch
Interface Unit
* Bus
Control
PLL
Clock
Generator
CLKMODE
6
5
4
6
* EMI not functional in
this package; use as
GPIO pins
O
XTAL
S
EXTAL
C
A8-13 or GPIOA0-5
GPIOB0-4 or A16-20
D7-10 or GPIOF0-3
GPIOD0-5 or CS2-7
56F8345/56F8145 Block Diagram - 128 LQFP
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 3
Preliminary
Page 4
Table of Contents
Part 1: Overview . . . . . . . . . . . . . . . . . . . . . . .5
1.1. 56F8345/56F8145 Fea tu r es . . . . . . . . . . . . . . .5
1.2. Device Description . . . . . . . . . . . . . . . . . . . . . .7
1.3. Award-Winning Development Environment . . .9
1.4. Architecture Block Diagram . . . . . . . . . . . . . .10
1.5. Product Documentation . . . . . . . . . . . . . . . . .14
1.6. Data Sheet Conventions . . . . . . . . . . . . . . . .14
Part 2: Signal/Connection Descriptions . . .15
2.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . .15
2.2. Signal Pins . . . . . . . . . . . . . . . . . . . . . . . . . . .1 8
Part 3: On-Chip Clock Synthesis (OCCS) . .33
3.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . .33
3.2. External Clock Operation . . . . . . . . . . . . . . . .33
3.3. Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . .3 5
Part 4: Memory Map . . . . . . . . . . . . . . . . . . .35
4.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . .35
4.2. Program Map . . . . . . . . . . . . . . . . . . . . . . . . .36
4.3. Interrupt Vector Table . . . . . . . . . . . . . . . . . . .38
4.4. Data Map . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
4.5. Flash Memory Map . . . . . . . . . . . . . . . . . . . . .41
4.6. EOnCE Memory Map . . . . . . . . . . . . . . . . . . .43
4.7. Peripheral Memory Mapped Registers . . . . . .44
4.8. Factory Programmed Memory . . . . . . . . . . . .70
Part 5: Interrupt Controller (ITCN) . . . . . . . .70
5.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . .70
5.2. Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70
5.3. Functional Description . . . . . . . . . . . . . . . . . .70
5.4. Block Diagram . . . . . . . . . . . . . . . . . . . . . . . .72
5.5. Operating Modes . . . . . . . . . . . . . . . . . . . . . .72
5.6. Register Descriptions . . . . . . . . . . . . . . . . . . .73
5.7. Resets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 9
Part 6: System Integration Module (SIM) .100
6.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . .100
6.2. Features . . . . . . . . . . . . . . . . . . . . . . . . . . . .100
6.3. Operating Modes . . . . . . . . . . . . . . . . . . . . .101
6.4. Operating Mode Register . . . . . . . . . . . . . . .101
6.5. Register Descriptions . . . . . . . . . . . . . . . . . .102
6.6. Clock Generation Overview . . . . . . . . . . . . .115
6.7. Power-Down Modes Overview . . . . . . . . . . .116
6.8. Stop and Wait Mode Disable Func tion . . . . .117
6.9. Resets . . . . . . . . . . . . . . . . . . . . . . . . . . . . .117
Part 8: General Purpose Input/Output
(GPIO) . . . . . . . . . . . . . . . . . . . . . . . 121
8.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . .121
8.2. Memory Maps . . . . . . . . . . . . . . . . . . . . . . . 121
8.3. Configuration . . . . . . . . . . . . . . . . . . . . . . . . 121
Part 9: Joint Test Action Group (JTAG) . 127
9.1. JTAG Information . . . . . . . . . . . . . . . . . . . . .127
Part 10: Specifications . . . . . . . . . . . . . . . 128
10.1. General Characteristics . . . . . . . . . . . . . . .128
10.2. DC Electrical Characteristics . . . . . . . . . . .132
10.3. AC Electrical Characteristics . . . . . . . . . . . 136
10.4. Flash Memory Characteristics . . . . . . . . . .136
10.5. External Clock Operation Timing . . . . . . . . 137
10.6. Phase Locked Loop Timing . . . . . . . . . . . .137
10.7. Crystal Oscillator Timing . . . . . . . . . . . . . .138
10.8. Reset, Stop, Wait, Mode Select, and
Interrupt Timing . . . . . . . . . . . . . . . 138
10.9. Serial Peripheral Interface (SPI) Timing . . . 140
10.10. Quad Timer Timing . . . . . . . . . . . . . . . . .143
10.11. Quadrature Decoder Timing . . . . . . . . . . . 144
10.12. Serial Communication Interface (SCI)
Timing . . . . . . . . . . . . . . . . . . . . . . 145
10.13. Controller Area Network (CAN) Timing . . 145
10.14. JTAG Timing . . . . . . . . . . . . . . . . . . . . . . 146
10.15. Analog-to-Digital Converter (ADC)
Parameters . . . . . . . . . . . . . . . . . .147
10.16. Equivalent Circuit for ADC Inputs . . . . . . .150
10.17. Power Consumption . . . . . . . . . . . . . . . . . 150
Part 11: Packaging . . . . . . . . . . . . . . . . . . 152
11.1. 56F8345 Package and Pin-Out
Information . . . . . . . . . . . . . . . . . . .152
11.2. 56F8145 Package and Pin-Out
Information . . . . . . . . . . . . . . . . . . .155
Part 12: Design Considerations . . . . . . . . 159
12.1. Thermal Design Considerations . . . . . . . . .159
12.2. Electrical Design Considerations . . . . . . . .160
12.3. Power Distribution and I/O Ring
Implementation . . . . . . . . . . . . . . .161
Part 13: Ordering Information . . . . . . . . . 162
Part 7: Security Features . . . . . . . . . . . . . .118
7.1. Operat ion with Security Enabled . . . . . . . . .118
7.2. Flash Access Blocking Mechanisms . . . . . .118
56F8345 Technical Data, Rev. 14.0
4 Freescale Semiconductor
Preliminary
Page 5
Part 1 Overview
1.1 56F8345/56F8145 Features
1.1.1 Core
• Efficient 16-bit 56800E family controller engine with dual Harvard architecture
• Up to 60 Million Instructions Per Second (MIPS) at 60MHz core frequency
• Single-cycle 16 × 16-bit parallel Multiplier-Accumulator (MAC)
• Four 36-bit accumulators, including extension bits
• Arithmetic and logic multi-bit shifter
• Parallel instruction set with unique DSP addressing modes
• Hardware DO and REP loops
• Three internal address buses
• Four internal data buses
• Instruction set supports both DSP and controller functions
• Controller-style addressing modes and instructions for compact code
• Efficient C compiler and local variable support
• Software subroutine and interrupt stack with depth limited only by memory
• JTAG/EOnCE debug programming interface
56F8345/56F8145 Features
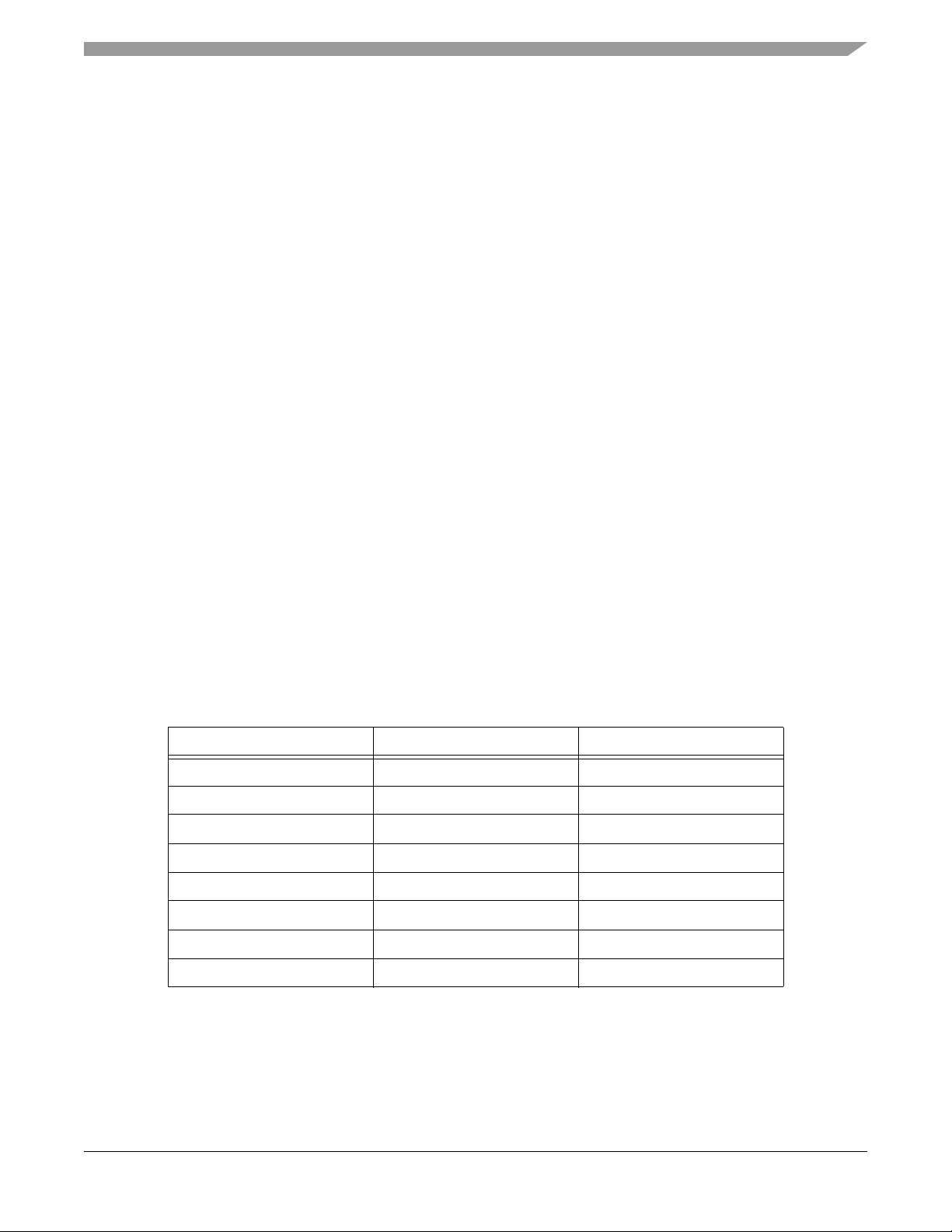
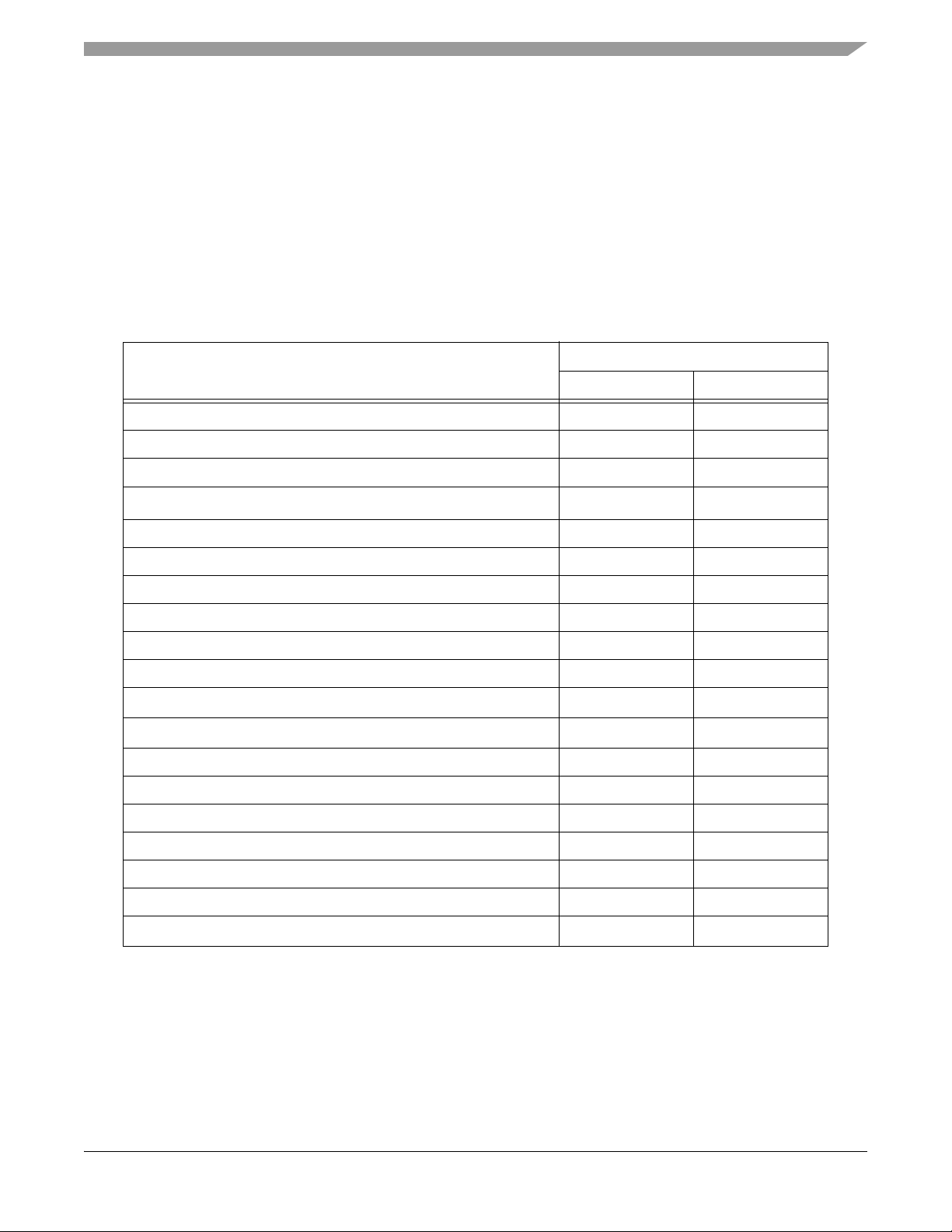
1.1.2 Differences Between Devices
Table 1-1 outlines the key differences between the 56F8345 and 56F8145 devices.
Table 1-1 Device Differences
Feature 56F8345 56F8145
Guaranteed Speed 60MHz/60 MIPS 40MHz/40MIPS
Program RAM 4KB Not Available
Data Flash 8KB Not Available
PWM 2 x 6 1 x 6
CAN 1 Not Available
Quad Timer 4 2
Quadrature Decoder 2 x 4 1 x 4
Temperature Sensor 1 Not Available
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 5
Preliminary
Page 6

1.1.3 Memory
Note: Features in italics are NOT available in the 56F8145 device.
• Harvard architecture permits as many as three simultaneous accesses to program and data memory
• Flash security protection feature
• On-chip memory, including a low-cost, high-volume Flash solution
— 128KB of Program Flash
— 4KB of Program RAM
— 8KB of Data Flash
—8KB of Data RAM
— 8KB of Boot Flash
• EEPROM emulation capability
1.1.4 Peripheral Circuits
Note: Features in italics are NOT available in the 56F8145 device.
• Pulse Width Modulator module:
— In the 56F8345, two P ulse W idth Modulator mod ules, each with six PWM out puts, three Current Sense
inputs, and four Fault inputs; fault-tolerant design with dead time insertion; supports both center-aligned
and edge-aligned modes
— In the 56F8145, one Pulse W idth Modulato r module with six PWM outputs, three Current Sense inputs
and three Fault inputs; fault-tolerant design with dead time insertion; supports both center-aligned and
edge-aligned modes
• Four 12-bit, Analog-to-Digital Converters (ADCs), which support four simultane ous conversions with
quad, 4-pin multiplexed inputs; ADC and PWM modules can be synchronized through Timer C, channels
2 and 3
• Quadrature Decoder:
— In the 56F8345, two four-input Quadrature Decoders or two additional Quad Timers
— In the 56F8145, one four-input Quadrature Decoder, which works in conjunction with Quad Timer A
• Temperature Sensor can be connected, on the board, to any of the ADC inputs to monitor the on-chip
temperature
•Quad Timer:
— In the 56F8345, four dedicated general-purpose Quad Timers totaling six dedicated pins: Timer C with
two pins and Timer D with four pins
— In the 56F8145, two Quad Timers; Timer A and Timer C both work in conjunction with GPIO
• Optional On-Chip Regulator
• FlexCAN (CAN Version 2.0 B-compliant) module with 2-pin port for transmit and receive
• Two Serial Communication Interfaces (SCIs), each with two pins (or four additional GPIO lines)
• Up to two Serial Peripheral Interfaces (SPIs), both with configurable 4-pin port (or eight additional GPIO
lines); SPI 1 can also be used as Quadrature Decoder 1 or Quad Timer B
• Computer Operating Properly (COP)/Watchdog timer
56F8345 Technical Data, Rev. 14.0
6 Freescale Semiconductor
Preliminary
Page 7

Device Description
• Two dedicated external interrupt pins
• 49 General Purpose I/O (GPIO) pins; 28 pins dedicated to GPIO
• External reset input pin for hardware reset
• External reset output pin for system reset
• Integrated low-voltage interrupt module
• JTAG/Enhanced On-Ch ip Emulation (OnCE) for unobtrusive, processor speed-independent, real-time
debugging
• Software-programmable, Phase Lock Loop-based frequency synthesizer for the core clock
1.1.5 Energy Information
• Fabricated in high-density CMOS with 5V-tolerant, TTL-compatible digital inputs
• On-board 3.3V down to 2.6V voltage regulator for powering internal logic and memories; can be disabled
• On-chip regulators for digital and analog circuitry to lower cost and reduce noise
• Wait and Stop modes available
• ADC smart power management
• Each peripheral can be individually disabled to save power
1.2 Device Description
The 56F8345 and 56F8145 are members of the 56800E core-based family of controllers. Each combines,
on a single chip, the processing power of a Digital Signal Processor (DSP) and the functionality of a
microcontroller with a flexible set of peripherals to create an extremely cost-effective solution. Because
of their low cost, configuration flexibility, and compact program code, the 56F8345 and 56F8145 are
well-suited for many applications. The devices include many peripherals that are especially useful for
motion control, smart appliances, steppers, encoders, tachometers, limit switches, power supply and
control, automotive control (56F8345 only), engine management, noise suppression, remote utility
metering, industrial control for power, lighting, and automation applications.
The 56800E core is based on a Harvard-style architecture consisting of three execution units operating in
parallel, allowing as many as six operations per instruction cycle. The MCU-style programming model and
optimized instruction set allow straightforward generation of efficient, compact DSP and control code.
The instruction set is also highly efficient for C/C++ Compilers to enable rapid development of optimized
control applications.
The 56F8345 and 56F8145 support program execution from internal memories. Two data operands can be
accessed from the on-chip data RAM per instruction cycle. These devices also provide two external
dedicated interrupt lines and up to 49 General Purpose Input/Output (GPIO) lines, depending on peripheral
configuration.
1.2.1 56F8345 Features
The 56F8345 controller includes 128KB of Program Flash and 8KB of Data Flash (each programmable
through the JTAG port) with 4KB of Program RAM and 8KB of Data RAM. A total of 8KB of Boot Flash
is incorporated for easy customer inclusion of field-programmable software routines that can be used to
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 7
Preliminary
Page 8

program the main Program and Data Flash memory areas. Both Program and Data Flash memories can be
independently bulk erased or erased in pages. Program Flash page erase size is 1KB. Boot and Data Flash
page erase size is 512 bytes. The Boot Flash memory can also be either bulk or page erased.
A key application-specific feature of the 56F8345 is the inclusion of two Pulse Width Modulator (PWM)
modules. These modules each incorporate three complementary, individually programmable PWM signal
output pairs (each module is also capable of supporting six independent PWM functions, for a total of 12
PWM outputs) to enhance motor control functionality. Complementary operation permits programmable
dead time insertion, distortion correction via current sensing by software, and separate top and bottom
output polarity control. The up-counter value is programmable to support a continuously variable PWM
frequency. Edge-aligned and center-aligned synchronous pulse width control (0% to 100% modulation) is
supported. The device is capable of controlling most motor types: ACIM (AC Induction Motors); both
BDC and BLDC (Brush and Brushless DC motors); SRM and VRM (Switched and Variable Reluctance
Motors); and stepper motors. The PWMs incorporate fault protection and cycle-by-cycle current limiting
with sufficient output drive capability to directly drive standard optoisolators. A “smoke-inhibit”,
write-once protection feature for key parameters is also included. A patented PWM waveform distortion
correction circuit is also provided. Each PWM is double-buffered and includes interrupt controls to permit
integral reload rates to be programmable from 1 to 16. The PWM modules provide reference outputs to
synchronize the Analog-to-Digital Converters through two channels of Quad Timer C.
The 56F8345 incorporates two Quadrature Decoders capable of capturing all four transitions on the
two-phase inputs, permitting generation of a number proportional to actual position. Speed computation
capabilities accommodate both fast- and slow-moving shafts. An integrated watchdog timer in the
Quadrature Decoder can be programmed with a time-out value to alert when no shaft motion is detected.
Each input is filtered to ensure only true transitions are recorded.
This controller also provides a full set of standard programmable peripherals that include two Serial
Communications Interfaces (SCIs); two Serial Peripheral Interfaces (SPIs); and four Quad Timers. Any of
these interfaces can be used as General Purpose Input/Outputs (GPIOs) if that function is not required. A
Flex Controller Area Network (FlexCAN) interface (CAN Version 2.0 B-compliant) and an internal
interrupt controller are also a part of the 56F8345.
1.2.2 56F8145 Features
The 56F8145 controller includes 128KB of Program Flash, programmable through the JTAG port, and
8KB of Data RAM. A total of 8KB of Boot Flash is incorporated for easy customer inclusion of
field-programmable software routines that can be used to program the main Program Flash memory area.
The Program Flash memory can be independently bulk erased or erased in pages; Program Flash page
erase size is 1KB. The Boot Flash page erase size is 512 bytes; Boot Flash memory can also be either bulk
or page erased.
A key application-specific feature of the 56F8145 is the inclusion of one Pulse Width Modulator (PWM)
module. This module incorporates three complementary, individually programmable PWM signal output
pairs and can also support six independent PWM functions to enhance motor control functionality.
Complementary operation permits programmable dead time insertion, distortion correction via current
sensing by software, and separate top and bottom output polarity control. The up-counter value is
programmable to support a continuously variable PWM frequency. Edge-aligned and center-aligned
56F8345 Technical Data, Rev. 14.0
8 Freescale Semiconductor
Preliminary
Page 9

Award-Winning Development Environment
synchronous pulse width control (0% to 100% modulation) is supported. The device is capable of
controlling most motor types: ACIM (AC Induction Motors); both BDC and BLDC (Brush and Brushless
DC motors); SRM and VRM (Switched and Variable Reluctance Motors); and stepper motors. The PWM
incorporates fault protection and cycle-by-cycle current limiting with sufficient output drive capability to
directly drive standard optoisolators. A “smoke-inhibit”, write-once protection feature for key parameters
is also included. A patented PWM waveform distortion correction circuit is also provided. The PWM is
double-buffered and includes interrupt controls to permit integral reload rates to be programmable from 1
to 16. The PWM module provides reference outputs to synchronize the Analog-to-Digital Converters
through two channels of Quad Timer C.
The 56F8145 incorporates a Quadrature Decoder capable of capturing all four transitions on the two-phase
inputs, permitting generation of a number proportional to actual position. Speed computation capabilities
accommodate both fast- and slow-moving shafts. An integrated watchdog timer in the Quadrature Decoder
can be programmed with a time-out value to alert when no shaft motion is detected. Each input is filtered
to ensure only true transitions are recorded.
This controller also provides a full set of standard programmable peripherals that include two Serial
Communications Interfaces (SCIs); two Serial Peripheral Interfaces (SPIs); and two Quad Timers. Any of
these interfaces can be used as General Purpose Input/Outputs (GPIOs) if that function is not required. An
internal interrupt controller is also a part of the 56F8145.
1.3 Award-Winning Development Environment
Processor ExpertTM (PE) provides a Rapid Application Design (RAD) tool that combines easy-to-use
component-based software application creation with an expert knowledge system.
The CodeWarrior Integrated Development Environment is a sophisticated tool for code navigation,
compiling, and debugging. A complete set of evaluation modules (EVMs) and development system cards
will support concurrent engineering. Together, PE, CodeWarrior and EVMs create a complete, scalable
tools solution for easy, fast, and efficient development.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 9
Preliminary
Page 10

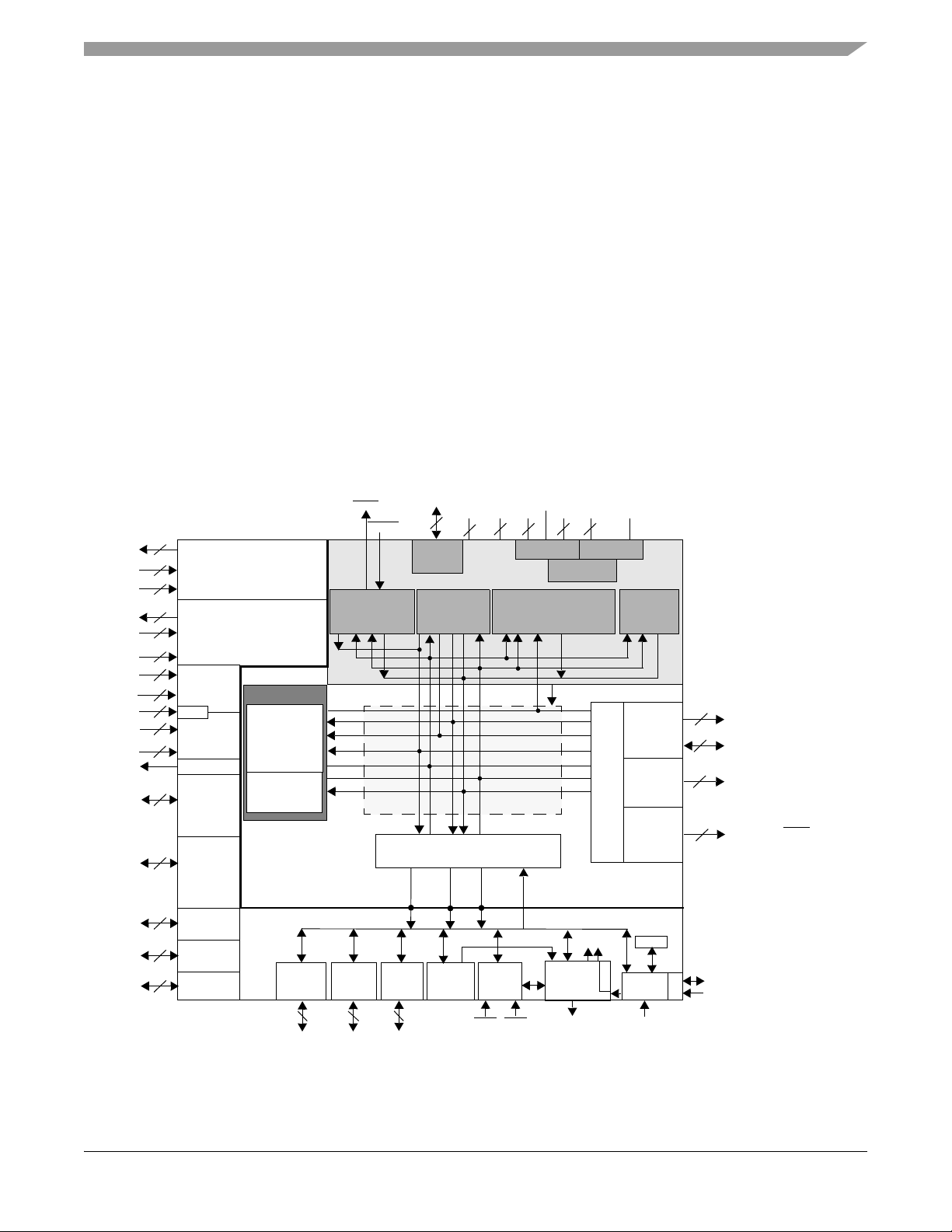
1.4 Architecture Block Diagram
Note: Features in italics are NOT available in the 56F8145 device and are shaded in the following figures.
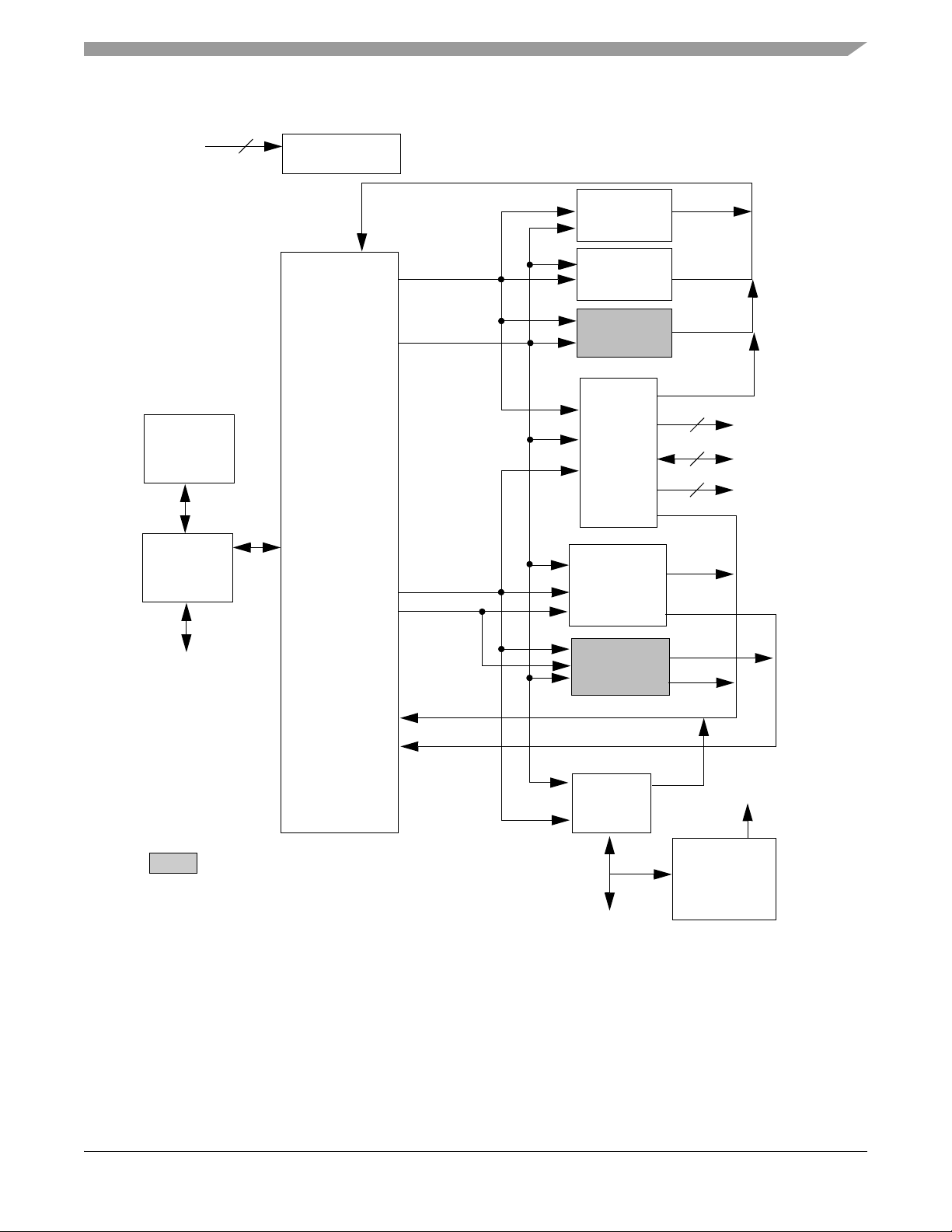
The 56F8345/56F8145 architecture is shown in Figure 1-1 and Figure 1-2. Figure 1-1 illustrates how the
56800E system buses communicate with internal memories and the IPBus Bridge. Table 1-2 lists the
internal buses in the 56800E architecture and provides a brief description of their function. Figure 1-2
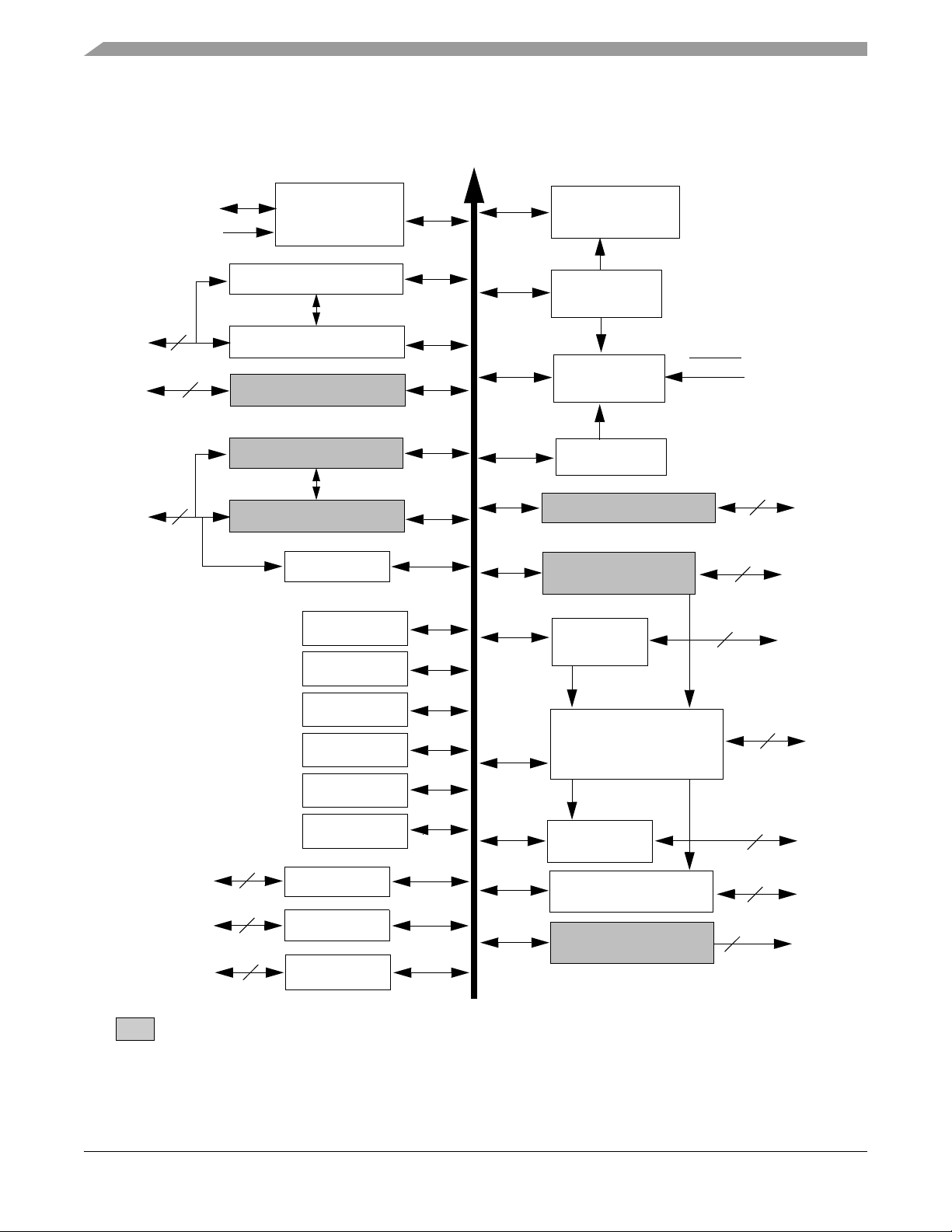
shows the peripherals and control blocks connected to the IPBus Bridge. The figures do not show the
on-board regulator and power and ground signals. They also do not show the multiplexing between
peripherals or the dedicated GPIOs. Please see Part 2, Signal/Connection Descriptions, to see which
signals are multiplexed with those of other peripherals.
Also shown in Figure 1-2 are connections between the PWM, Timer C and ADC blocks. These
connections allow the PWM and/or Timer C to control the timing of the start of ADC conversions. The
Timer C channel indicated can generate periodic start (SYNC) signals to the ADC to start its conversions.
In another operating mode, the PWM load interrupt (SYNC output) signal is routed internally to the Timer
C input channel as indicated. The timer can then be used to introduce a controllable delay before
generating its output signal. The timer output then triggers the ADC. To fully understand this interaction,
please see the 56F8300 Peripheral User’s Manual for clarification on the operation of all three of these
peripherals.
56F8345 Technical Data, Rev. 14.0
10 Freescale Semiconductor
Preliminary
Page 11
Architecture Block Diagram
CHIP
TAP
Controller
TAP
Linking
Module
5
JTAG / EOnCE
Boot
Flash
pdb_m[15:0]
pab[20:0]
Program
Flash
Program
cdbw[31:0]
RAM
56800E
xab1[23:0]
xab2[23:0]
EMI*
Data RAM
11
Address
4
6
Data
Control
External
JTAG Port
cdbr_m[31:0]
xdb2_m[15:0
Data
Flash
To Flash
Control
IPBus
Logic
Bridge
NOT available on the 56F8145 device.
Flash
Memory
* EMI not functional in this package; since only part of
the address/data bus is bonded out, use as GPIO pins
IPBus
Module
Figure 1-1 System Bus Interfaces
Note: Flash memories are encapsulated within the Flash Memory (FM) Module. Flash control is
accomplished by the I/O to the FM over the peripheral bus, while reads and writes are completed
between the core and the Flash memories.
Note: The primary data RAM port is 32 bits wide. Other data ports are 16 bits.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 11
Preliminary
Page 12
To/From IPBus Bridge
CLKGEN
(OSC / PLL)
Interrupt
Controller
Low-Voltage Interrupt
Timer A
POR & LVI
4
4
Quadrature Decoder 0
Timer D
System POR
SIM
RESET
COP Reset
Timer B
4
Quadrature Decoder 1
SPI1
COP
FlexCAN
PWMA
2
13
SYNC Output
GPIOA
PWMB
13
GPIOB
SYNC Output
GPIOC
GPIOD
GPIOE
GPIOF
4
2
2
SPI0
SCI0
SCI1
NOT available on the 56F8145 device.
Figure 1-2 Peripheral Subsystem
56F8345 Technical Data, Rev. 14.0
IPBus
ch3i ch2i
Timer C
ch3o ch2o
ADCB
ADCA
, V
1
REFN
TEMP_SENSE
Note: ADC A and ADC B use the same
voltage reference circuit with V
V
REFP, VREFMID
pins.
2
8
8
, and V
REFH
REFLO
,
12 Freescale Semiconductor
Preliminary
Page 13
Architecture Block Diagram
Table 1-2 Bus Signal Names
Name Function
Program Memory Interface
pdb_m[15:0] Program data bus for instruction word fetches or read operations.
cdbw[15:0] Primary core data bus used for program memory writes. (Only these 16 bits of the cdbw[31:0] bus
are used for writes to program memory.)
pab[20:0] Program memory address bus. Data is returned on pdb_m bus.
Primary Data Memory Interface Bus
cdbr_m[31:0] Primary core data bus for memory reads. Addressed via xab1 bus.
cdbw[31:0] Primary core data bus for memory writes. Addressed via xab1 bus.
xab1[23:0]
xdb2_m[15:0] Secondary data bus used for secondary data address bus xab2 in the dual memory reads.
xab2[23:0] Secondary data address bus used for the second of two simultaneous accesses. Capable of
IPBus [15:0] Peripheral bus accesses all on-chip peripherals registers. This bus operates at the same clock rate
1. Byte accesses can only occur in the bottom half of the memory address space. The MSB of the address will be forced
to 0.
Primary data address bus. Capable of addressing bytes1, words, and long data types. Data is written
on cdbw and returned on cdbr_m. Also used to access memory-mapped I/O.
Secondary Data Memory Interface
addressing only words. Data is returned on xdb2_m.
Peripheral Interface Bus
as the Primary Data Memory and therefore generates no delays when accessing the processor.
Write data is obtained from cdbw. Read data is provided to cdbr_m.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 13
Preliminary
Page 14
1.5 Product Documentation
The documents listed in Table 1-3 are required for a complete description and proper design with the
56F8345 and 56F8145 devices. Documentation is available from local
Semiconductor sales offices,
Freescale
Literature Distribution Centers, or online at
http://www.freescale.com.
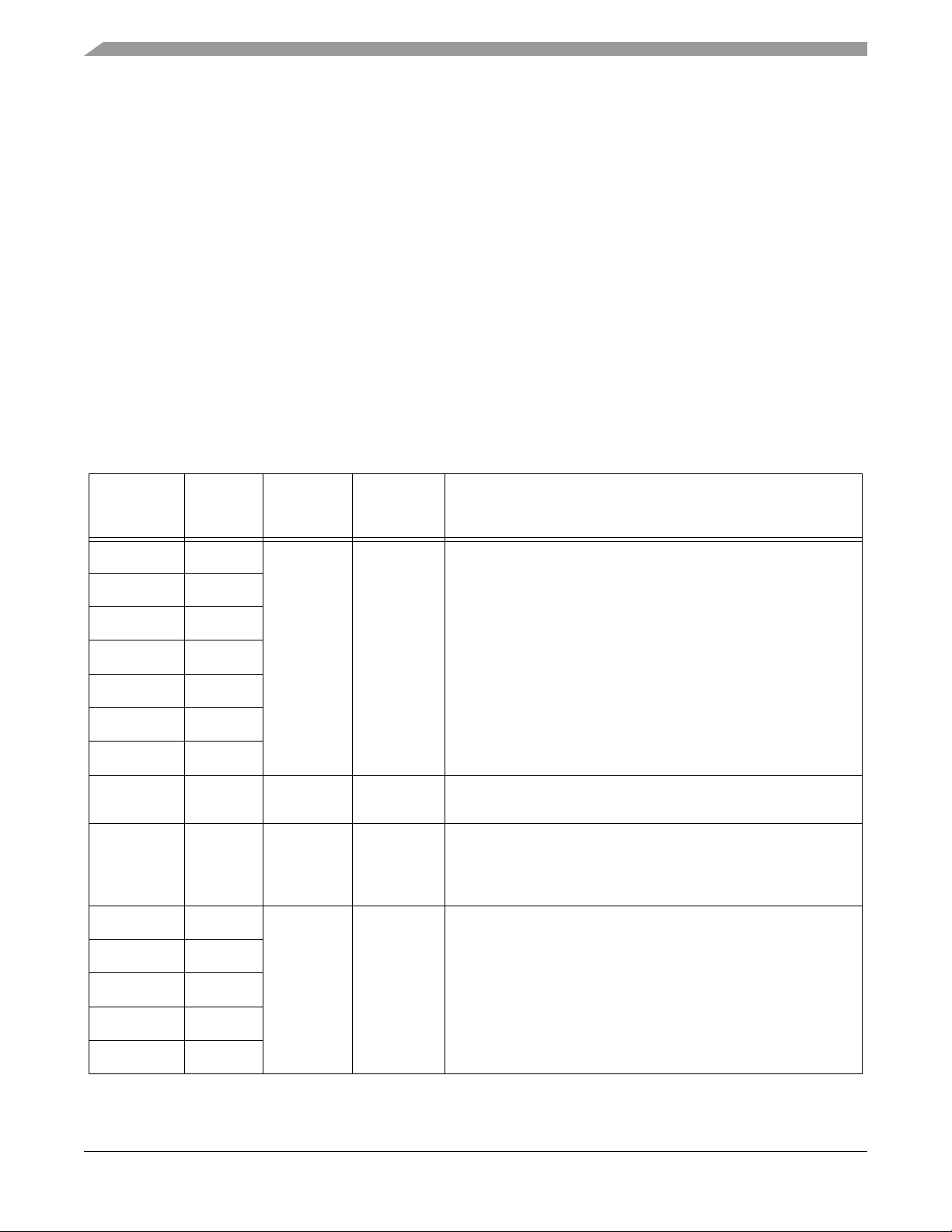
Table 1-3 Chip Documentation
Topic Description Order Number
Freescale
distributors,
Freescale
DSP56800E
Reference Manual
56F8300 Peripheral User
Manual
56F8300 SCI/CAN
Bootloader User Manual
56F8345/56F8145
Technical Data Sheet
Errata Details any chip issues that might be present MC56F8345E
Detailed description of the 56800E family architecture,
16-bit controller core processor, and the instruction set
Detailed description of peripherals of the 56F8300
family of devices
Detailed description of the SCI/CAN Bootloaders
56F8300 family of devices
Electrical and timing specifications, pin descriptions,
device specific peripheral information and package
descriptions (this document)
DSP56800EERM
MC56F8300UM
MC56F83xxBLUM
MC56F8345
MC56F8145E
1.6 Data Sheet Conventions
This data sheet uses the following conventions:
OVERBAR
“asserted” A high true (active high) signal is high or a low true (active low) signal is low.
This is used to indicate a signal that is active when pulled low. For example, the RESET pin is
active when low.
“deasserted” A high true (active high) signal is low or a low true (active low) signal is high.
Examples:
1. Values for VIL, VOL, VIH, and VOH are defined by individual product specifications.
14 Freescale Semiconductor
Signal/Symbol Logic State Signal State
PIN True Asserted VIL/V
PIN False Deasserted VIH/V
PIN True Asserted VIH/V
PIN False Deasserted VIL/V
56F8345 Technical Data, Rev. 14.0
Voltage
1
OL
OH
OH
OL
Preliminary
Page 15
Introduction
Part 2 Signal/Connection Descriptions
2.1 Introduction
The input and output signals of the 56F8345 and 56F8145 are organized into functional groups, as detailed
in Table 2-1 and as illustrated in Figure 2-1. In Table 2-2, each table row describes the signal or signals
present on a pin.
Table 2-1 Functional Group Pin Allocations
Functional Group
Power (V
Power Option Control
Ground (V
Supply Capacitors1 & V
PLL and Clock
Bus Control
Interrupt and Program Control
Pulse Width Modulator (PWM) Ports
Serial Peripheral Interface (SPI) Port 0
Serial Peripheral Interface (SPI) Port 1
Quadrature Decoder Port 0
Quadrature Decoder Port 1
Serial Communications Interface (SCI) Ports
CAN Ports
DD
or V
SS
or V
DDA
SSA
)
)
PP
2
3
Number of Pins in Package
56F8345 56F8145
99
11
66
66
44
66
44
26 13
44
—4
44
4—
44
2—
Analog-to-Digital Converter (ADC) Ports
Timer Module Ports
JTAG/Enhanced On-Chip Emulation (EOnCE)
Temperature Sense
4
Dedicated GPIO ( Address Bus = 11; Data Bus = 4
1. If the on-chip regulator is disabled, the V
2. Alternately, can function as Quad Timer pins or GPIO
3. Pins in this section can function as Quad Timer, SPI 1, orGPIO
4. EMI not functional in these packages; use as GPIO pins.
Note: See Table 1-1 for 56F8145 functional differences.
Freescale Semiconductor 15
Preliminary
pins serve as 2.5V V
CAP
56F8345 Technical Data, Rev. 14.0
)
DD_CORE
21 21
64
55
1—
28 28
power inputs
Page 16
Power
Power
Power
Ground
Ground
Other
Supply
Ports
PLL
and
Clock
*External
Address
Bus
or GPIO
*External
Data Bus
V
DD_IO
V
DDA_ADC
V
DDA_OSC_PLL
V
SS
V
SSA_ADC
OCR_DIS
V
1 - V
CAP
V
PP
CAP
1 & VPP2
CLKMODE
EXTAL
XTAL
CLKO
A8 - A13 (GPIOA0 - 5)
GPIOB0-4 (A16 - 20)
D7 - D10 (GPIOF0 - 3)
PHASEA0 (TA0, GPIOC4)
7
7
1
1
1
5
1
1
56F8345
1
4
4
2
1
1
1
1
1
1
1
6
6
5
4
4
1
PHASEB0(TA1, GPIOC5 )
1
INDEX0 (TA2, GPIOC6)
1
HOME0 (TA3, GPIOC7)
1
SCLK0 (GPIOE4)
1
MOSI0 (GPIOE5)
1
MISO0 (GPIOE6)
1
SS0
1
1
1
1
1
6
3
4
6
3
4
(GPIOE7)
PHASEA1(TB0, SCLK1, GPIOC0)
PHASEB1 (TB1, MOSI1, GPIOC1)
INDEX1 (TB2, MISO1, GPIOC2)
HOME1 (TB3, SS1
PWMA0 - 5
ISA0 - 2 (GPIOC8 - 10)
FAULTA0 - 3
PWMB0 - 5
ISB0 - 2 (GPIOD10 - 12)
FAULTB0-3
, GPIOC3)
Quadrature
Decoder 0
or Quad
Timer A or
GPIO
SPI0 or
GPIO
Quadrature
Decoder 1 or
Quad Timer B
or SPI1 or
GPIO
PWMA
PWMB
ANA0 - 7
*External
Bus
GPIOD0 - 5 (CS2 - 7)
Control
SCI0 or
GPIOE
SCI1 or
GPIO
TXD0 (GPIOE0)
RXD0 (GPIOE1)
TXD1 (GPIOD6)
RXD1 (GPIOD7)
JTAG/
EOnCE
Port
* EMI not functional in this package; use as GPIO pins
TCK
TMS
TDI
TDO
TRST
6
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
8
V
5
8
1
1
1
2
4
1
1
1
1
REF
ANB0 - 7
TEMP_SENSE
CAN_RX
CAN_TX
TC0 - 1 (GPIOE8 - 9)
TD0 - 3 (GPIOE10 - 13)
IRQA
IRQB
RESET
RSTO
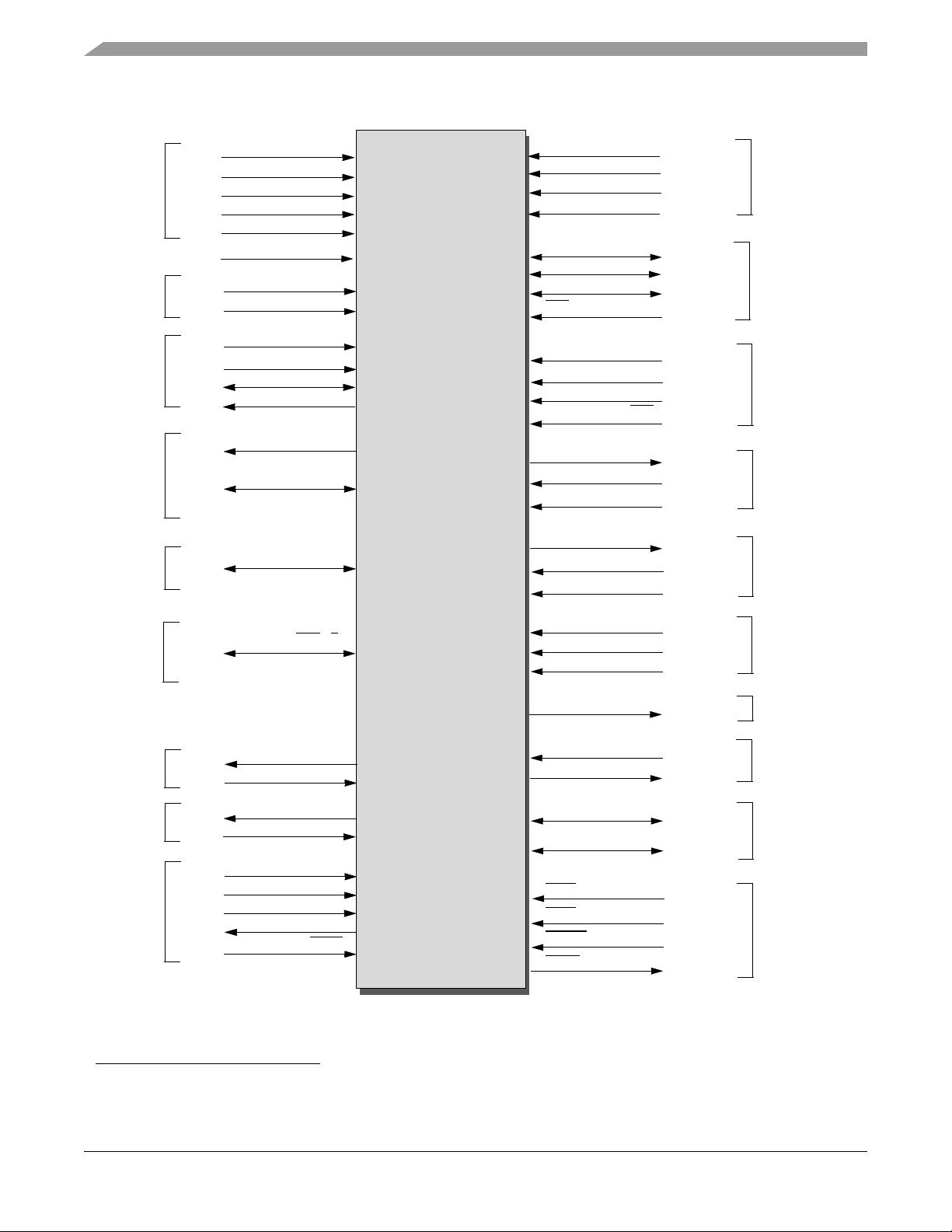
Figure 2-1 56F8345 Signals Identified by Functional Group1 (128-Pin LQFP)
1. Alternate pin functionality is shown in parenthesis; pin direction/type shown is the default functionality.
ADCA
ADCB
Temperature
Sensor
CAN
Quad
Timer C
and D or
GPIO
Interrupt/
Program
Control
56F8345 Technical Data, Rev. 14.0
16 Freescale Semiconductor
Preliminary
Page 17
Introduction
Power
Power
Power
Ground
Ground
Other
Supply
Ports
PLL
and
Clock
*External
Address
Bus
or GPIO
*External
Data Bus
V
DD_IO
V
DDA_ADC
V
DDA_OSC_PLL
V
SS
V
SSA_ADC
OCR_DIS
V
1 - V
CAP
V
PP
CAP
1 & VPP2
CLKMODE
EXTAL
XTAL
CLKO
A8 - A13 (GPIOA0 - 5)
GPIOB0-4 (A16 - 20)
D7 - D10 (GPIOF0 - 3)
PHASEA0 (TA0, GPIOC4)
7
7
1
1
1
5
1
1
56F8145
1
4
4
2
1
1
1
1
1
1
1
6
6
5
4
4
1
PHASEB0(TA1, GPIOC5 )
1
INDEX0 (TA2, GPIOC6)
1
HOME0 (TA3, GPIOC7)
1
SCLK0 (GPIOE4)
1
MOSI0 (GPIOE5)
1
MISO0 (GPIOE6)
1
SS0
1
1
1
1
1
3
6
3
4
(GPIOE7)
(SCLK1, GPIOC0)
(MOSI1, GPIOC1)
(MISO1, GPIOC2)
(S
S1,GPIOC3)
(GPIOC8 - 10)
PWMB0 - 5
ISB0 - 2 (GPIOD10 - 12)
FAULTB0-3
Quadrature
Decoder 0
or Quad
Timer A or
GPIO
SPI0 or
GPIO
SPI1 or
GPIO
GPIO
PWMB
ANA0 - 7
*External
Bus
Control
SCI0 or
GPIOE
SCI1 or
GPIO
JTAG/
EOnCE
Port
GPIOD0 - 5 (CS2 - 7)
TXD0 (GPIOE0)
RXD0 (GPIOE1)
TXD1 (GPIOD6)
RXD1 (GPIOD7)
TCK
TMS
TDI
TDO
TRST
6
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
8
V
5
8
2
4
1
1
1
1
REF
ANB0 - 7
TC0 - 1 (GPIOE8 - 9)
(GPIOE10 - 13)
IRQA
IRQB
RESET
RSTO
* EMI not functional in this package; use as GPIO pins
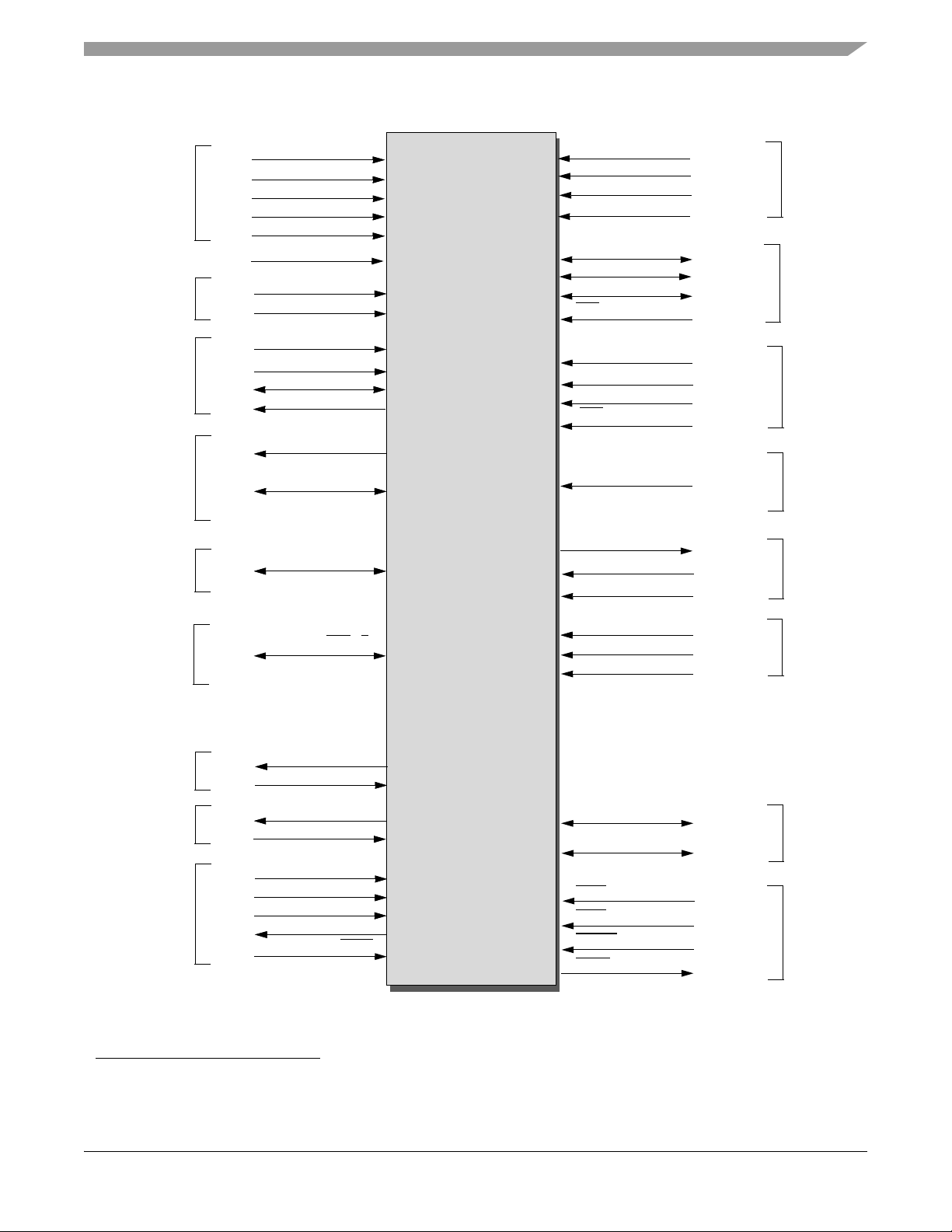
Figure 2-2 56F8145 Signals Identified by Functional Group1 (128-Pin LQFP)
1. Alternate pin functionality is shown in parenthesis; pin direction/type shown is the default functionality.
ADCA
ADCB
QUAD
Timer C or
GPIO
Interrupt/
Program
Control
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 17
Preliminary
Page 18
2.2 Signal Pins
After reset, each pin is configured for its primary function (listed first). Any alternate functionality must
be programmed.
EMI is not functional in this package; since only part of the address/data bus is bonded out, use as GPIO
pins.
Note: Signals in italics are NOT available in the 56F8145 device.
If the “State During Reset” lists more than one state for a pin, the first state is the actual reset state. Other
states show the reset condition of the alternate function, which you get if the alternate pin function is
selected without changing the configuration of the alternate peripheral. For example, the A8/GPIOA0 pin
shows that it is tri-stated during reset. If the GPIOA_PER is changed to select the GPIO function of the
pin, it will become an input if no other registers are changed.
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal
Name
V
DD_IO
V
DD_IO
V
DD_IO
V
DD_IO
V
DD_IO
V
DD_IO
V
DD_IO
V
DDA_ADC
V
DDA_OSC_
PLL
V
SS
V
SS
State
Pin No. Type
4 Supply I/O Power — This pin supplies 3.3V power to the chip I/O
14
25
36
62
76
112
94 Supply ADC Power — This pin supplies 3.3V power to the ADC
72 Supply Oscillator and PLL Power — This pin supplies 3.3V power to
3 Supply Ground — These pins provide ground for chip logic and I/O
21
During
Reset
Signal Description
interface and also the Processor core throught the on-chip
voltage regulator, if it is enabled.
modules. It must be connected to a clean analog power supply.
the OSC and to the internal regulator that in turn supplies the
Phase Locked Loop. It must be connected to a clean analog
power supply.
drivers.
V
SS
V
SS
V
SS
18 Freescale Semiconductor
35
59
65
56F8345 Technical Data, Rev. 14.0
Preliminary
Page 19
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal Pins
Signal
Name
V
SSA_ADC
Pin No. Type
95 Supply ADC Analog Ground — This pin supplies an analog ground to
State
During
Reset
Signal Description
the ADC modules.
OCR_DIS 71 Input Input On-Chip Regulator Disable —
Tie this pin to V
Tie this pin to V
to enable the on-chip regulator
SS
to disable the on-chip regulator
DD
This pin is intended to be a static DC signal from powe r-up
to shut down. Do not try to toggle this pin for power savings
during operation.
1 49 Supply Supply V
V
CAP
1 - 4 — When OCR_DIS is tied to VSS (regulator enabled),
CAP
connect each pin to a 2.2µF or greater bypass capacitor in order
2 122
V
CAP
3 75
V
CAP
4 13
V
CAP
to bypass the core logic voltage regulator, required for proper
chip operation. When OCR_DIS is tied to V
disabled), these pins become V
DD_CORE
(regulator
DD
and should be
connected to a regulated 2.5V power supply.
Note: This bypass is required even if the chip is powered
with an external supply.
V
1 119 Input Input VPP1 - 2 — These pins should be left unconnected as an open
PP
circuit for normal functionality.
2 5
V
PP
CLKMODE 79 Input Input Clock Input Mode Selection — This input determines the
function of the XTAL and EXTAL pins.
1 = External clock input on XTAL is used to directly drive the
input clock of the chip. The EXTAL pin should be grounded.
0 = A crystal or ceramic resonator should be connected between
XTAL and EXTAL.
EXTAL 74 Input Input External Crystal Oscillator Input — This input can be
connected to an 8MHz external crystal. Tie this pin low if XTAL is
driven by an external clock source.
XTAL 73 Input/
Output
Chip-driven Crystal Oscillator Output — This output connects the internal
crystal oscillator output to an external crystal.
If an external clock is used, XTAL must be used as the input and
EXTAL connected to GND.
The input clock can be selected to provide the clock directly to
the core. This input clock can also be selected as the input clock
for the on-chip PLL.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 19
Preliminary
Page 20
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal
Name
CLKO 6 Output Tri-Stated Clock Output — This pin outputs a buffered clock signal. Using
A8
(GPIOA0)
A9
(GPIOA1)
A10
(GPIOA2)
A11
(GPIOA3)
A12
(GPIOA4)
A13
(GPIOA5)
Pin No. Type
15 Output
Schmitt
16
17
18
19
20
Input/
Output
State
During
Reset
Tri-stated
Input
Signal Description
the SIM CLKO Select Register (SIM_CLKOSR), this pin can be
programmed as any of the following: disabled, CLK_MSTR
(system clock), IPBus clock, oscillator output, prescaler clock
and postscaler clock. Other signals are also available for test
purposes.
See Part 6.5.7 for details.
Address Bus — A8 - A13 specify six of the address lines for
external program or data memory accesses. Depending upon
the state of the DRV bit in the EMI bus control register (BCR), A8
- A13 and EMI control signals are tri-stated when the external
bus is inactive.
Port A GPIO — These six GPIO pins can be individually
programmed as input or output pins.
After reset, these pins default to address bus functionality and
be programmed as GPIO.
must
To deactivate the internal pull-up resistor, clear the appropriate
GPIO bit in the GPIOA_PUR register.
Example: GPIOA0, clear bit 0 in the GPIOA_PUR register.
Note: Primary function is not available in this package
configuration; GPIO function must be used instead.
GPIOB0
(A16)
GPIOB1
(A17)
GPIOB2
(A18)
GPIOB3
(A19)
20 Freescale Semiconductor
27 Schmitt
Input/
Output
Output
28
29
30
Input
Tri-stated
56F8345 Technical Data, Rev. 14.0
Port B GPIO — These four GPIO pins can be individually
programmed as an input or output pin.
Address Bus — A16 - A19 specify four of the address lines for
external program or data memory accesses. Depending upon
the state of the DRV bit in the EMI bus control register (BCR),
A16 - A19 and EMI control signals are tri-stated when the
external bus is inactive.
After reset, the default state is GPIO.
To deactivate the internal pull-up resistor, clear bit 0 in the
GPIOB_PUR register.
Example: GPIOB1, clear bit 1 in the GPIOB_PUR register.
Preliminary
Page 21
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal Pins
Signal
Name
GPIOB4
(A20)
(prescaler_
clock)
Pin No. Type
31 Schmitt
Input/
Output
Output
Output
State
During
Reset
Input
Tri-stated
Output
Signal Description
Port B GPIO — This GPIO pin can be individually programmed
as an input or output pin.
Address Bus — A20 specifies one of the address lines for
external program or data memory accesses. Depending upon
the state of the DRV bit in the EMI bus control register (BCR),
A20 and EMI control signals are tri-stated when the external bus
is inactive.
Clock Output — can be used to monitor the prescaler_clock on
GPIOB4.
After reset, the default state is GPIO.
This pin can also be used to view the prescaler_clock. In these
cases, the GPIOB_PER can be used to disable the GPIO. The
CLKOSR register in the SIM can then be used to choose
between address and clock functions; see
Part 6.5.7 for details.
To deactivate the internal pull-up resistor, clear bit 4 in the
GPIOB_PUR register.
D7
(GPIOF0)
D8
(GPIOF1)
D9
(GPIOF2)
D10
(GPIOF3)
22 Input/
Output
Input/
Output
23
24
26
Tri-stated
Input
Data Bus — D7 - D10 specify part of the data for external
program or data memory accesses. Depending upon the state of
the DRV bit in the EMI bus control register (BCR), D7 - D10 are
tri-stated when the external bus is inactive
Port F GPIO — These four GPIO pins can be individually
programmed as input or output pins.
After reset, these pins default to data bus functionality and
should be programmed as GPIO.
To deactivate the internal pull-up resistor, clear the appropriate
GPIO bit in the GPIOF_PUR register.
Example: GPIOF0, clear bit 0 in the GPIOF_PUR register.
Note: Primary function is not available in this package
configuration; GPIO function must be used instead.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 21
Preliminary
Page 22
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal
Name
GPIOD0
)
(CS2
GPIOD1
)
(CS3
GPIOD2
)
(CS4
GPIOD3
(CS5)
GPIOD4
(CS6)
GPIOD5
(CS7)
TXD0
(GPIOE0)
Pin No. Type
42 Input/
Output
Output
43
44
45
46
47
7 Output
Input/
Output
State
During
Reset
Input
Input
Tri-stated
Input
Signal Description
Port D GPIO — These six GPIO pins can be individually
programmed as input or output pins.
Chip Select — CS2 - CS7 may be programmed within the EMI
module to act as chip selects for specific areas of the external
memory map. Depending upon the state of the DRV bit in the
EMI bus control register (BCR), CS2
the external bus is inactive.
After reset, these pins are configured as GPIO.
To deactivate the internal pull-up resistor, clear the appropriate
GPIO bit in the GPIOD_PUR register.
Example: GPIOD0, clear bit 0 in the GPIOD_PUR register.
Transmit Data — SCI0 transmit data output
Port E GPIO — This GPIO pin can be individually programmed
as an input or output pin.
- CS7 are tri-stated when
RXD0
(GPIOE1)
TXD1
(GPIOD6)
8 Input
Input/
Output
40 Output
Input/
Output
Input
Input
Tri-stated
Input
After reset, the default state is SCI output.
To deactivate the internal pull-up resistor, clear bit 0 in the
GPIOE_PUR register.
Receive Data — SCI0 receive data input
Port E GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is SCI output.
To deactivate the internal pull-up resistor, clear bit 1 in the
GPIOE_PUR register.
Transmit Data — SCI1 transmit data output
Port D GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is SCI output.
To deactivate the internal pull-up resistor, clear bit 6 in the
GPIOD_PUR register.
56F8345 Technical Data, Rev. 14.0
22 Freescale Semiconductor
Preliminary
Page 23
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal Pins
Signal
Name
RXD1
(GPIOD7)
TCK 115 Schmitt
TMS 116 Schmitt
TDI 117 Schmitt
Pin No. Type
41 Input
Input/
Output
Input
Input
Input
State
During
Reset
Input
Input
Input,
pulled low
internally
Input,
pulled high
internally
Input,
pulled high
internally
Signal Description
Receive Data — SCI1 receive data input
Port D GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is SCI input.
To deactivate the internal pull-up resistor, clear bit 7 in the
GPIOD_PUR register.
Test Clock Input — This input pin provides a gated clock to
synchronize the test logic and shift serial data to the
JTAG/EOnCE port. The pin is connected internally to a
pull-down resistor.
Test Mode Select Input — This input pin is used to sequence
the JTAG TAP controller’s state machine. It is sampled on the
rising edge of TCK and has an on-chip pull-up resistor.
To deactivate the internal pull-up resistor, set the JTAG bit in the
SIM_PUDR register.
Test Data Input — This input pin provides a serial input data
stream to the JTAG/EOnCE port. It is sampled on the rising edge
of TCK and has an on-chip pull-up resistor.
To deactivate the internal pull-up resistor, set the JTAG bit in the
SIM_PUDR register.
TDO 118 Output Tri-stated Test Data Output — This tri-stateable output pin provides a
serial output data stream from the JTAG/EOnCE port. It is driven
in the shift-IR and shift-DR controller states, and changes on the
falling edge of TCK.
TRST
114 Schmitt
Input
Input,
pulled high
internally
Test Reset — As an input, a low signal on this pin provides a
reset signal to the JTAG TAP controller. To ensure complete
hardware reset, TRST
asserted. The only exception occurs in a debugging environment
when a hardware device reset is required and the JTAG/EOnCE
module must not be reset. In this case, assert RESET
assert TRST
To deactivate the internal pull-up resistor, set the JTAG bit in the
SIM_PUDR register.
.
should be asserted whenever RESET is
, but do not
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 23
Preliminary
Page 24
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal
Name
PHASEA0
(TA0)
(GPIOC4)
PHASEB0
(TA1)
(GPIOC5)
Pin No. Type
127 Schmitt
Input
Schmitt
Input/
Output
Schmitt
Input/
Output
128 Schmitt
Input
Schmitt
Input/
Output
Schmitt
Input/
Output
State
During
Reset
Input
Input
Input
Input
Input
Input
Signal Description
Phase A — Quadrature Decoder 0, PHASEA input
TA0 — Timer A, Channel 0
Port C GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is PHASEA0.
To deactivate the internal pull-up resistor, clear bit 4 of the
GPIOC_PUR register.
Phase B — Quadrature Decoder 0, PHASEB input
TA1 — Timer A, Channel 1
Port C GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is PHASEB0.
INDEX0
(TA2)
(GPIOC6)
1Schmitt
Input
Schmitt
Input/
Output
Schmitt
Input/
Output
Input
Input
Input
To deactivate the internal pull-up resistor, clear bit 5 of the
GPIOC_PUR register.
Index — Quadrature Decoder 0, INDEX input
TA2 — Timer A, Channel 2
Port C GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is INDEX0.
To deactivate the internal pull-up resistor, clear bit 6 of the
GPIOC_PUR register.
56F8345 Technical Data, Rev. 14.0
24 Freescale Semiconductor
Preliminary
Page 25
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal Pins
Signal
Name
HOME0
(TA3)
(GPIOC7)
SCLK0
(GPIOE4)
Pin No. Type
2Schmitt
Input
Schmitt
Input/
Output
Schmitt
Input/
Output
124 Schmitt
Input/
Output
Schmitt
Input/
Output
State
During
Reset
Input
Input
Input
Input
Input
Signal Description
Home — Quadrature Decoder 0, HOME input
TA3 — Timer A ,Channel 3
Port C GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is HOME0.
To deactivate the internal pull-up resistor, clear bit 7 of the
GPIOC_PUR register.
SPI 0 Serial Clock — In the master mode, this pin serves as an
output, clocking slaved listeners. In slave mode, this pin serves
as the data clock input.
Port E GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is SCLK0.
MOSI0
(GPIOE5)
126 Input/
Output
Input/
Output
Tri-stated
Input
To deactivate the internal pull-up resistor, clear bit 4 in the
GPIOE_PUR register.
SPI 0 Master Out/Slave In — This serial data pin is an output
from a master device and an input to a slave device. The master
device places data on the MOSI line a half-cycle before the clock
edge the slave device uses to latch the data.
Port E GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is MOSI0.
To deactivate the internal pull-up resistor, clear bit 5 in the
GPIOE_PUR register.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 25
Preliminary
Page 26
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal
Name
MISO0
(GPIOE6)
SS0
(GPIOE7)
Pin No. Type
125 Input/
Output
Input/
Output
123 Input
Input/
Output
State
During
Reset
Input
Input
Input
Input
Signal Description
SPI 0 Master In/Slave Out — This serial data pin is an input to a
master device and an output from a slave device. The MISO line
of a slave device is placed in the high-impedance state if the
slave device is not selected. The slave device places data on the
MISO line a half-cycle before the clock edge the master device
uses to latch the data.
Port E GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is MISO0.
To deactivate the internal pull-up resistor, clear bit 6 in the
GPIOE_PUR register.
SPI 0 Slave Select — SS0
the SPI module that the current transfer is to be received.
Port E GPIO — This GPIO pin can be individually programmed
as an input or output pin.
After reset, the default state is SS0
is used in slave mode to indicate to
.
PHASEA1
(TB0)
(SCLK1)
(GPIOC0)
9Schmitt
Input
Schmitt
Input/
Output
Schmitt
Input/
Output
Schmitt
Input/
Output
Input
Input
Input
Input
To deactivate the internal pull-up resistor, clear bit 7 in the
GPIOE_PUR register.
Phase A1 — Quadrature Decoder 1, PHASEA input for decoder
1.
TB0 — Timer B, Channel 0
SPI 1 Serial Clock — In the master mode, this pin serves as an
output, clocking slaved listeners. In slave mode, this pin serves
as the data clock input. To activate the SPI function, set the
PHSA_ALT bit in the SIM_GPS register. For details, see Part
6.5.8.
Port C GPIO — This GPIO pin can be individually programmed
as an input or output pin.
In the 56F8345, the default state after reset is PHASEA1.
In the 56F8145, the default state is not one of the functions
offered and must be reconfigured.
To deactivate the internal pull-up resistor, clear bit 0 in the
GPIOC_PUR register.
56F8345 Technical Data, Rev. 14.0
26 Freescale Semiconductor
Preliminary
Page 27
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal Pins
Signal
Name
PHASEB1
(TB1)
(MOSI1)
(GPIOC1)
Pin No. Type
10 Schmitt
Input
Schmitt
Input/
Output
Schmitt
Input/
Output
Schmitt
Input/
Output
State
During
Reset
Input
Input
Tri-stated
Input
Signal Description
Phase B1 — Quadrature Decoder 1, PHASEB input for decoder
1.
TB1 — Timer B, Channel 1
SPI 1 Master Out/Slave In — This serial data pin is an output
from a master device and an input to a slave device. The master
device places data on the MOSI line a half-cycle before the clock
edge the slave device uses to latch the data. To activate the SPI
function, set the PHSB_ALT bit in the SIM_GPS register. For
details, see Part 6.5.8.
Port C GPIO — This GPIO pin can be individually programmed
as an input or output pin.
In the 56F8345, the default state after reset is PHASEB1.
In the 56F8145, the default state is not one of the functions
offered and must be reconfigured.
To deactivate the internal pull-up resistor, clear bit 1 in the
GPIOC_PUR register.
INDEX1
(TB2)
(MISO1)
(GPIOC2)
11 Schmitt
Input
Schmitt
Input/
Output
Schmitt
Input/
Output
Schmitt
Input/
Output
Input
Input
Input
Input
Index1 — Quadrature Decoder 1, INDEX input
TB2 — Timer B, Channel 2
SPI 1 Master In/Slave Out — This serial data pin is an input to a
master device and output from a slave device. The MISO line of
a slave device is placed in the high-impedance state if the slave
device is not selected. The slave device places data on the
MISO line a half-cycle before the clock edge the master device
uses to latch the data. To activate the SPI function, set the
INDEX_ALT bit in the SIM_GPS register. See Part 6.5.8 for
details.
Port C GPIO — This GPIO pin can be individually programmed
as an input or output pin.
In the 56F8345, the default state after reset is INDEX1.
In the 56F8145, the default state is not one of the functions
offered and must be reconfigured.
To deactivate the internal pull-up resistor, clear bit 2 in the
GPIOC_PUR register.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 27
Preliminary
Page 28
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal
Name
HOME1
(TB3)
(SS1)
(GPIOC3)
Pin No. Type
12 Schmitt
Input
Schmitt
Input/
Output
Schmitt
Input
Schmitt
Input/
Output
State
During
Reset
Input
Input
Input
Input
Signal Description
Home — Quadrature Decoder 1, HOME input
TB3 — Timer B, Channel 3
SPI 1 Slave Select — In the master mode, this pin is used to
arbitrate multiple masters. In slave mode, this pin is used to
select the slave. To activate the SPI function, set the
HOME_ALT bit in the SIM_GPS register. See Part 6.5.8 for
details.
Port C GPIO — This GPIO pin can be individually programmed
as input or output pin.
In the 56F8345, the default state after reset is HOME1.
In the 56F8145, the default state is not one of the functions
offered and must be reconfigured.
To deactivate the internal pull-up resistor, clear bit 3 in the
GPIOC_PUR register.
PWMA0 58 Output Tri-State PWMA0 - 5 — These are six PWMA output pins.
PWMA1 60
PWMA2 61
PWMA3 63
PWMA4 64
PWMA5 66
ISA0
(GPIOC8)
ISA1
(GPIOC9)
ISA2
(GPIOC10)
104 Schmitt
Input
Schmitt
105
106
Input/
Output
Input
Input
ISA0 - 2 — These three input current status pins are used for
top/bottom pulse width correction in complementary channel
operation for PWMA.
Port C GPIO — These GPIO pins can be individually
programmed as input or output pins.
In the 56F8345, these pins default to ISA functionality.
In the 56F8145, the default state is not one of the functions
offered and must be reconfigured.
To deactivate the internal pull-up resistor, clear the appropriate
bit of the GPIOC_PUR register. See Part 6.5.6 for details.
56F8345 Technical Data, Rev. 14.0
28 Freescale Semiconductor
Preliminary
Page 29
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal Pins
Signal
Name
FAULTA0 67 Schmitt
FAULTA1 68
FAULTA2 69
FAULTA3 70 Schmitt
PWMB0 32 Output Tri-State PWMB0 - 5 — Six PWMB output pins.
PWMB1 33
PWMB2 34
PWMB3 37
PWMB4 38
PWMB5 39
Pin No. Type
Input
Input
State
During
Reset
Input FAULTA0 - 2 — These three fault input pins are used for
disabling selected PWMA outputs in cases where fault
conditions originate off-chip.
To deactivate the internal pull-up resistor, set the PWMA0 bit in
the SIM_PUDR register. See Part 6.5.6 for details.
Input FAULTA3 — This fault input pin is used for disabling selected
PWMA outputs in cases where fault conditions originate off-chip.
To deactivate the internal pull-up resistor, set the PWMA1 bit in
the SIM_PUDR register. See Part 6.5.6 for details.
Signal Description
ISB0
(GPIOD10)
ISB1
(GPIOD11)
ISB2
(GPIOD12)
FAULTB0 54 Schmitt
FAULTB1 55
FAULTB2 56
FAULTB3 57
ANA0 80 Input Input ANA0 - 3 — Analog inputs to ADC A, channel 0
ANA1 81
ANA2 82
ANA3 83
48 Schmitt
Input
Schmitt
50
51
Input/
Output
Input
Input
Input
Input FAULTB0 - 3 — These four fault input pins are used for
ISB0 - 2 — These three input current status pins are used for
top/bottom pulse width correction in complementary channel
operation for PWMB.
Port D GPIO — These GPIO pins can be individually
programmed as input or output pins.
At reset, these pins default to ISB functionality.
To deactivate the internal pull-up resistor, clear the appropriate
bit of the GPIOD_PUR register. See Part 6.5.6 for details.
disabling selected PWMB outputs in cases where fault
conditions originate off-chip.
To deactivate the internal pull-up resistor, set the PWMB bit in
the SIM_PUDR register. See Part 6.5.6 for details.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 29
Preliminary
Page 30
Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal
Name
Pin No. Type
State
During
Reset
Signal Description
ANA4 84 Input Input ANA4 - 7 — Analog inputs to ADC A, channel 1
ANA5 85
ANA6 86
ANA7 87
V
REFH
V
REFP
V
REFMID
V
REFN
V
REFLO
93 Input Input V
92 Input/
Output
Input/
Output
91
90
89 Input Input V
— Analog Reference Voltage High. V
REFH
than or equal to V
V
, V
REFP
REFMID
DDA_ADC.
& V
REFN
— Internal pins for voltage reference
which are brought off-chip so that they can be bypassed.
Connect to a 0.1 µF low ESR capacitor.
— Analog Reference Voltage Low. This should normally
REFLO
be connected to a low-noise V
SSA
.
ANB0 96 Input Input ANB0 - 3 — Analog inputs to ADC B, channel 0
ANB1 97
must be less
REFH
ANB2 98
ANB3 99
ANB4 100 Input Input ANB4 - 7 — Analog inputs to ADC B, channel 1
ANB5 101
ANB6 102
ANB7 103
TEMP_
SENSE
88 Temperature Sense Diode — This signal connects to an
on-chip diode that can be connected to one of the ADC inputs
and is used to monitor the temperature of the die. Must be
bypassed with a 0.01 µF capacitor.
CAN_RX 121 Schmitt
Input
Input FlexCAN Receive Data — This is the CAN input. This pin has
an internal pull-up resistor.
To deactivate the internal pull-up resistor, set the CAN bit in the
SIM_PUDR register.
CAN_TX 120 Open
Output FlexCAN Transmit Data — CAN output
Drain
Output
56F8345 Technical Data, Rev. 14.0
30 Freescale Semiconductor
Preliminary
Page 31

Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal Pins
Signal
Name
TC0
(GPIOE8)
TC1
(GPIOE9)
TD0
(GPIOE10)
TD1
(GPIOE11)
TD2
(GPIOE12)
TD3
(GPIOE13)
Pin No. Type
111 Schmitt
Input/
Output
Schmitt
113
107 Schmitt
108
109
110
Input/
Output
Input/
Output
Schmitt
Input/
Output
State
During
Reset
Input
Input
Input
Input
Signal Description
TC0 - 1 — Timer C, Channels 0 and 1
Port E GPIO — These GPIO pins can be individually
programmed as input or output pins.
At reset, these pins default to Timer functionality.
To deactivate the internal pull-up resistor, clear the appropriate
bit of the GPIOE_PUR register. See Part 6.5.6 for details.
TD0 - TD3 — Timer D, Channels 0, 1, 2 and 3
Port E GPIO — These GPIO pins can be individually
programmed as input or output pins.
At reset, these pins default to Timer functionality.
To deactivate the internal pull-up resistor, clear the appropriate
bit of the GPIOE_PUR register. See Part 6.5.6 for details.
IRQA
IRQB
52 Schmitt
Input
53
Input External Interrupt Request A and B — The IRQA and IRQB
inputs are asynchronous external interrupt requests during Stop
and Wait mode operation. During other operating modes, they
are synchronized external interrupt requests, which indicate an
external device is requesting service. They can be programmed
to be level-sensitive or negative-edge triggered.
To deactivate the internal pull-up resistor, set the IRQ bit in the
SIM_PUDR register. See Part 6.5.6 for details.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 31
Preliminary
Page 32

Table 2-2 Signal and Package Information for the 128-Pin LQFP
Signal
Name
Pin No. Type
RESET 78 Schmitt
Input
State
During
Signal Description
Reset
Input Reset — This input is a direct hardware reset on the processor.
When RESET
is asserted low, the device is initialized and placed
in the reset state. A Schmitt trigger input is used for noise
immunity. The internal reset signal will be deasserted
synchronous with the internal clocks after a fixed number of
internal clocks.
To ensure complete hardware reset, RESET
and TRST should
be asserted together. The only exception occurs in a debugging
environment when a hardware device reset is required and the
JTAG/EOnCE module must not be reset. In this case, assert
RESET
, but do not assert TRST.
Note: The internal Power-On Reset will assert on initial
power-up.
To deactivate the internal pull-up resistor, set the RESET
the SIM_PUDR register. See Part 6.5.6. for details.
RSTO 77 Output Output Reset Output — This output reflects the internal reset state of
the chip.
EXTBOOT Internal
Ground
Schmitt
Input
Input External Boot — This input is tied to V
boot from off-chip memory (assuming that the on-chip Flash
to force the device to
DD
memory is not in a secure state). Otherwise, it is tied to ground.
For details, see Table 4-4.
bit in
EMI_MODE Internal
Ground
Schmitt
Input
Note: When this pin is tied low, the customer boot software
should disable the internal pull-up resistor by setting the XBOOT
bit of the SIM_PUDR; see Part 6.5.6.
Note: This pin is internally tied low (to V
SS
).
Input External Memory Mode — This device will boot from internal
Flash memory under normal operation.
This function is also affected by EXTBOOT and the Flash
security mode; see Table 4-4 for details.
Note: When this pin is tied low, the customer boot software
should disable the internal pull-up resistor by setting the
EMI_MODE bit of the SIM_PUDR; see Part 6.5.6.
Note: This pin is internally tied low (to V
SS
).
56F8345 Technical Data, Rev. 14.0
32 Freescale Semiconductor
Preliminary
Page 33

Introduction
Part 3 On-Chip Clock Synthesis (OCCS)
3.1 Introduction
Refer to the OCCS chapter of the 56F8300 Peripheral User Manual for a full description of the OCCS.
The material contained here identifies the specific features of the OCCS design. Figure 3-1 shows the
specific OCCS block diagram to reference in the OCCS chapter of the 56F8300 Peripheral User Manual.
CLKMODE
XTAL
EXTAL
Crystal
OSC
PLLCID
Prescaler
÷ (1,2,4,8)
MUX
PLLDB
PLL
REF
F
x (1 to 128)
Prescaler CLK
F
OUT
÷2
F
OUT/2
PLLCOD
Postscaler
÷ (1,2,4,8)
ZSRC
SYS_CLK2
Source to SIM
MUX
Postscaler CLK
Bus Interface & Control
MSTR_OSC
FEEDBACK
Lock
Detector
Loss of
Reference
Clock
Detector
LCK
Loss of Reference
Clock Interrupt
Bus
Interface
Figure 3-1 OCCS Block Diagram
3.2 External Clock Operation
The system clock can be derived from an external crystal, ceramic resonator, or an external system clock
signal. To generate a reference frequency using the internal oscillator, a reference crystal or ceramic
resonator must be connected between the EXTAL and XTAL pins.
3.2.1 Crystal Oscillator
The internal oscillator is designed to interface with a parallel-resonant crystal resonator in the frequency
range specified for the external crystal in Table 10-15. A recommended crystal oscillator circuit is shown
in Figure 3-2. Follow the crystal supplier’s recommendations when selecting a crystal, since crystal
parameters determine the component values required to provide maximum stability and reliable start-up.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 33
Preliminary
Page 34

The crystal and associated components should be mounted as near as possible to the EXTAL and XTAL
pins to minimize output distortion and start-up stabilization time.
Crystal Frequency = 4 - 8MHz (optimized for 8MHz)
CLKMODE = 0
EXTAL EXTALXTAL XTAL
R
Z
CL1 CL2
R
Z
Sample External Crystal Parameters:
Rz = 750 KΩ
Note: If the operating temperature range is limited to
below 85
o
C (105oC junction), then Rz = 10 Meg Ω
Figure 3-2 Connecting to a Crystal Oscillator
Note: The OCCS_COHL bit must be set to 1 when a crystal oscillator is used. The reset condition on the
OCCS_COHL bit is 0. Please see the COHL bit in the Oscillator Control (OSCTL) register, discussed
56F8300 Peripheral User’s Manual.
in the
3.2.2 Ceramic Resonator (Default)
It is also possible to drive the internal oscillator with a ceramic resonator, assuming the overall system
design can tolerate the reduced signal integrity. A typical ceramic resonator circuit is shown in Figure 3-3.
Refer to the supplier’s recommendations when selecting a ceramic resonator and associated components.
The resonator and components should be mounted as near as possible to the EXTAL and XTAL pins.
Resonator Frequency = 4 - 8MHz (optimized for 8MHz)
2 Terminal
EXTAL XTAL
CL1
R
z
CL2
3 Terminal
EXTAL XTAL
R
z
C1
Sample External Ceramic Resonator Parameters:
= 750 KΩ
R
z
CLKMODE = 0
C2
Figure 3-3 Connecting a Ceramic Resonator
Note: The OCCS_COHL bit must be set to 0 when a ceramic resonator is used. The reset condition on the
OCCS_COHL bit is 0. Please see the COHL bit in the Oscillator Control (OSCTL) register, discussed
in the
56F8300 Peripheral User’s Manual.
56F8345 Technical Data, Rev. 14.0
34 Freescale Semiconductor
Preliminary
Page 35

Registers
3.2.3 External Clock Source
The recommended method of connecting an external clock is illustrated in Figure 3-4. The external clock
source is connected to XTAL and the EXTAL pin is grounded. Set OCCS_COHL bit high when using an
external clock source as well.
XTAL
External
Clock
EXTAL
V
SS
Note: When using an external clocking
source with this configuration, the input
“CLKMODE” should be high and COHL bit in
the OSCTL register should be set to 1.
Figure 3-4 Connecting an External Clock Signal Register
3.3 Registers
When referring to the register definitions for the OCCS in the 56F8300 Peripheral User Manual, use the
register definitions without the internal Relaxation Oscillator, since the 56F8345/56F8145 devices do
NOT contain this oscillator.
Part 4 Memory Map
4.1 Introduction
The 56F8345 and 56F8145 devices are 16-bit motor-control chips based on the 56800E core. These parts
use a Harvard-style architecture with two independent memory spaces for Data and Program. On-chip
RAM and Flash memories are used in both spaces.
This section provides memory maps for:
• Program Address Space, including the Interrupt Vector Table
• Data Address Space, including the EOnCE Memory and Peripheral Memory Maps
On-chip memory sizes for each device are summarized in Table 4-1. Flash memories’ restrictions are
identified in the “Use Restrictions” column of Table 4-1.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 35
Preliminary
Page 36

Note: Data Flash and Program RAM are NOT available on the 56F8145 device.
Table 4-1 Chip Memory Configurations
On-Chip Memory 56F8345 56F8145 Use Restrictions
Program Flash 128KB 128KB Erase / Program via Flash interface unit and word writes to
CDBW
Data Flash 8KB — Erase / Program via Flash interface unit and word writes to
CDBW. Data Flash can be read via either CDBR or XDB2,
but not by both simultaneously
Program RAM 4KB — None
Data RAM 8KB 8KB None
Program Boot Flash 8KB 8KB Erase / Program via Flash Interface unit and word writes to
CDBW
4.2 Program Map
The Program memory map is located in Table 4-4. The operating mode control bits (MA and MB) in the
Operating Mode Register (OMR) control the Program memory map. At reset, these bits are set as indicated
in Table 4-2.
EXT_BOOT = EMI_MODE = 0 and cannot be changed in the 56F8345 or 56F8145.
Note: Program RAM is NOT available on the 56F8145 device.
Table 4-2 OMR MB/MA Value at Reset
OMR MB =
Flash Secured
1. Information in shaded areas not applicable to 56F8345/56F8145.
2. This bit is only configured at reset. If the Flash secured state changes, this will not be reflect ed in MB until the next reset.
3. Changing MB in software will not affect Flash memory security.
2,3
State
0 0 Mode 0 – Internal Boot; EMI is configured to use 16 address lines; Flash
0 1 Not va lid; cannot boot externally if the Flash is secured and will actually
1 0 Mode 0 – Internal Boot; EMI is configured to use 16 address lines
1 1 Mode 1 – Exte rnal Boot; Flash Memory is not secured; EMI configuration is
OMR MA =
EXTBOOT Pin
Chip Operating Mode
Memory is secured; external P-space is not allowed; the EOnCE is disabled
configure to 00 state
determined by the state of the EMI_MODE pin
1
56F8345 Technical Data, Rev. 14.0
36 Freescale Semiconductor
Preliminary
Page 37

Program Map
After reset, the OMR MA bit can be changed and will have an effect on the P-space memory map, as shown
in Table 4-3. Changing the OMR MB bit will have no effect.
Table 4-3 Changing OMR MA Value During Normal Operation
OMR MA Chip Operating Mode
0 Use internal P-space memory map configuration
1
1
1. Setting this bit can cause unpredictable results and is not recommended, since the EMI is not functional in this package.
Use external P-space memory map configuration – If MB = 0 at reset, changing this bit has no effect.
Table 4-4 shows the memory map options of the 56F8345/56F8145. The two right columns cannot be
used, since the EMI pins are not provided in the package; therefore, only the Mode 0 column is relevant.
Note: Program RAM is NOT available on the 56F8145 device.
Table 4-4 Program Memory Map at Reset
Begin/End
Address
P:$1F FFFF
P:$10 0000
P:$0F FFFF
P:$03 0000
P:$02 FFFF
P:$02 F800
P:$02 F7FF
P:$02 1000
P:$02 0FFF
P:$02 0000
P:$01 FFFF
P:$01 0000
P:$00 FFFF
P:$00 0000
Mode 0 (MA = 0)
Internal Boot
Internal Boot
16-Bit External Address Bus
External Program Memory
5
On-Chip Program RAM
4KB
Boot Flash
8KB
COP Reset Address = 02 0002
Boot Location = 02 0000
External Program RAM
5
Internal Program Flash
128KB
EMI_MODE = 0
16-Bit External Address Bus
External Program Memory
On-Chip Program RAM
4KB
Reserved
116KB
Boot Flash
8KB
(Not Used for Boot in this Mode)
Internal Program Flash
128KB
External Program RAM
COP Reset Address = 00 0002
Boot Location = 00 0000
Mode 11 (MA = 1)
External Boot
2, 3
20-Bit External Address Bus
5
External Program Memory
External Program RAM
COP Reset Address = 02 0002
Boot Location = 02 0000
5
EMI_MODE = 1
4
5
5
1. Cannot be used since MA = EXTBOOT = 0 and the EMI is not available; information in shaded areas not applicable to
56F8345/56F8145.
2. This mode provides maximum compatibility with 56F80x parts while operating externally.
3. “EMI_MODE = 0”, EMI_MODE pin is tied to ground at boot up.
4. “EMI_MODE = 1”, EMI_MODE pin is tied to VDD at boot up.
5. Not accessible in this part, since the EMI is not fully pinned out in this package; information in shaded areas not applicable to
56F8345/56F8145.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 37
Preliminary
Page 38

4.3 Interrupt Vector Table
Table 4-5 provides the reset and interrupt priority structure, including on-chip peripherals. The table is
organized with higher-priority vectors at the top and lower-priority interrupts lower in the table. The
priority of an interrupt can be assigned to different levels, as indicated, allowing some control over
interrupt priorities. All level 3 interrupts will be serviced before level 2, and so on. For a selected priority
level, the lowest vector number has the highest priority.
The location of the vector table is determined by the Vector Base Address (VBA) register. Please see Part
5.6.11 for the reset value of the VBA.
In some configurations, the reset address and COP reset address will correspond to vector 0 and 1 of the
interrupt vector table. In these instances, the first two locations in the vector table must contain branch or
JMP instructions. All other entries must contain JSR instructions.
Note: PWMA, FlexCAN, Quadrature Decoder 1, and Quad Timers B and D are NOT available on the
56F8145 device.
Table 4-5 Interrupt Vector Table Contents
Peripheral
core 2 3 P:$04 Illegal Instruction
core 3 3 P:$06 SW Interrupt 3
core 4 3 P:$08 HW Stack Overflow
core 5 3 P:$0A Misaligned Long Word Access
core 6 1-3 P:$0C OnCE Step Counter
core 7 1-3 P:$0E OnCE Breakpoint Unit 0
core 9 1-3 P:$12 OnCE Trace Buffer
core 10 1-3 P:$14 OnCE Transmit Register Empty
core 11 1-3 P:$16 OnCE Receive Register Full
core 14 2 P:$1C SW Interrupt 2
Vector
Number
Priority
Level
Vector Base
Address +
Interrupt Function
Reserved for Reset Overlay2
Reserved for COP Reset Overlay2
Reserved
Reserved
1
core 15 1 P:$1E SW Interrupt 1
core 16 0 P:$20 SW Interrupt 0
core 17 0-2 P:$22 IRQA
core 18 0-2 P:$24 IRQB
56F8345 Technical Data, Rev. 14.0
38 Freescale Semiconductor
Preliminary
Page 39

Table 4-5 Interrupt Vector Table Contents1 (Continued)
Interrupt Vector Table
Peripheral
LVI 20 0-2 P:$28 Low Voltage Detector (power sense)
PLL 21 0-2 P:$2A PLL
FM 22 0-2 P:$2C FM Access Error Interrupt
FM 23 0-2 P:$2E FM Command Complete
FM 24 0-2 P:$30 FM Command, data and address Buffers Empty
FLEXCAN 26 0-2 P:$34 FLEXCAN Bus Off
FLEXCAN 27 0-2 P:$36 F LEXCAN Error
FLEXCAN 28 0-2 P:$38 FLEXCAN Wake Up
FLEXCAN 29 0-2 P:$3A FLEXCAN Message Buffer Interrupt
GPIOF 30 0-2 P:$3C GPIO F
GPIOE 31 0-2 P:$3E GPIO E
GPIOD 32 0-2 P:$40 GPIO D
GPIOC 33 0-2 P:$42 GPIO C
Vector
Number
Priority
Level
Vector Base
Address +
Interrupt Function
Reserved
Reserved
GPIOB 34 0-2 P:$44 GPIO B
GPIOA 35 0-2 P:$46 GPIO A
Reserved
SPI1 38 0-2 P:$4C SPI 1 Receiver Full
SPI1 39 0-2 P:$4E SPI 1 Transmitter Empty
SPI0 40 0-2 P:$50 SPI 0 Receiver Full
SPI0 41 0-2 P:$52 SPI 0 Transmitter Empty
SCI1 42 0-2 P:$54 SCI 1 Transmitter Empty
SCI1 43 0-2 P:$56 SCI 1 Transmitter Idle
Reserved
SCI1 45 0-2 P:$5A SCI 1 Receiver Error
SCI1 46 0-2 P:$5C SCI 1 Receiver Full
DEC1 47 0-2 P:$5E Quadrature Decoder #1 Home Switch or Watchdog
DEC1 48 0-2 P:$60 Quadrature Decoder #1 INDEX Pulse
DEC0 49 0-2 P:$62 Quadrature Decoder #0 Home Switch or Watchdog
DEC0 50 0-2 P:$64 Quadrature Decoder #0 INDEX Pulse
Reserved
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 39
Preliminary
Page 40

Table 4-5 Interrupt Vector Table Contents1 (Continued)
Peripheral
TMRD 52 0-2 P:$68 Timer D, Channel 0
TMRD 53 0-2 P:$6A Timer D, Channel 1
TMRD 54 0-2 P:$6C Timer D, Cha nnel 2
TMRD 55 0-2 P:$6E Timer D, Channel 3
TMRC 56 0-2 P:$70 Timer C, Channel 0
TMRC 57 0-2 P:$72 Timer C, Channel 1
TMRC 58 0-2 P:$74 Timer C, Channel 2
TMRC 59 0-2 P:$76 Timer C, Channel 3
TMRB 60 0-2 P:$78 Timer B, Channel 0
TMRB 61 0-2 P:$7A Timer B, Channel 1
TMRB 62 0-2 P:$7C Timer B, Channel 2
TMRB 63 0-2 P:$7E Timer B, Channel 3
TMRA 64 0-2 P:$80 Timer A, Channel 0
TMRA 65 0-2 P:$82 Timer A, Channel 1
TMRA 66 0-2 P:$84 Timer A,Channel 2
Vector
Number
Priority
Level
Vector Base
Address +
Interrupt Function
TMRA 67 0-2 P:$86 Timer A, Channel 3
SCI0 68 0-2 P:$88 SCI 0 Transmitter Empty
SCI0 69 0-2 P:$8A SCI 0 Transmitter Idle
Reserved
SCI0 71 0-2 P:$8E SCI 0 Receiver Error
SCI0 72 0-2 P:$90 SCI 0 Receiver Full
ADCB 73 0-2 P:$92 ADC B Conversi on Compete / End of Scan
ADCA 74 0-2 P:$94 ADC A Conve rsi on Complete / End of Scan
ADCB 75 0-2 P:$96 ADC B Zero Crossing or Limit Error
ADCA 76 0-2 P:$98 ADC A Zero Crossing or Limit Error
PWMB 77 0-2 P:$9A Reload PWM B
PWMA 78 0-2 P:$9C Reload PWM A
PWMB 79 0-2 P:$9E PWM B Fault
PWMA 80 0-2 P:$A0 PWM A Fault
core 81 - 1 P:$A2 SW Interrupt LP
1. Two words are allocated for each entry in the vector table. This does not allow the full address range to be referenced
from the vector table, providing only 19 bits of address.
2. If the VBA is set to $0200 (or VBA = 0000 for Mode 1, EMI_MODE = 0), the first two locations of the vector table are
the chip reset addresses; therefore, these locations are not interrupt vectors.
56F8345 Technical Data, Rev. 14.0
40 Freescale Semiconductor
Preliminary
Page 41

4.4 Data Map
Note: Data Flash is NOT available on the 56F8145 device.
Data Map
Table 4-6 Data Memory Map1,
Begin/End Address
X:$FF FFFF
X:$FF FF00
X:$FF FEFF
X:$01 0000
X:$00 FFFF
X:$00 F000
X:$00 EFFF
X:$00 2000
X:$00 1FFF
X:$00 1000
X:$00 0FFF
X:$00 0000
1. Information in shaded areas not applicable to 56F8345/56F8145.
2. All addresses are 16-bit Word addresses, not byte addresses.
3. In the Operation Mode Register.
4. Setting EX = 1 is not recommended in the 56F8345/56F8145, since the EMI is not functional in this package.
5. The Data RAM is organized as a 2K x 32-bit memory to allow single-cycle, long-word operations.
EOnCE
256 locations allocated
External Memory
On-Chip Peripherals
4096 locations allocated
External Memory
On-Chip Data Flash
8KB
On-Chip Data RAM
5
8KB
EX = 0
3
EOnCE
256 locations allocated
External Memory
On-Chip Peripherals
4096 locations allocated
External Memory
2
EX = 1
4
4.5 Flash Memory Map
Figure 4-1 illustrates the Flash Memory (FM) map on the system bus.
The Flash Memory is divided into three functional blocks. The Program and boot memories reside on the
Program Memory buses. They are controlled by one set of banked registers. Data Memory Flash resides
on the Data Memory buses and is controlled separately by its own set of banked registers.
The top nine words of the Program Memory Flash are treated as special memory locations. The content of
these words is used to control the operation of the Flash Controller. Because these words are part of the
Flash Memory content, their state is maintained during power-down and reset. During chip initialization,
the content of these memory locations is loaded into Flash Memory control registers, detailed in the Flash
Memory chapter of the 56F8300 Peripheral User Manual. These configuration parameters are located
between $00_FFF7 and $00_FFFF.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 41
Preliminary
Page 42

BOOT_FLASH_START + $1FFF
BOOT_FLASH_STAR T = $02_0000
Program Memory
8KB
Boot
FM_BASE + $14
FM_BASE + $00
Data Memory
Banked Registers
Unbanked Registers
Reserved
DATA_FLASH_START + $0FFF
8KB
DATA_FLASH_START + $0000
PROG_FLASH_STAR T + $00_FFFF
PROG_FLASH_START + $00_FFF7
PROG_FLASH_START + $00_FFF6
Configure Field
Block 0 Odd
FM_PROG_MEM_TOP = $00_FFFF
Note: Data Flash is
NOT available in the
56F8145 device.
Block 0 Even
128KB
PROG_FLASH_STAR T = $00_0000
. . .
BLOCK 0 Odd (2 Bytes) $00_0003
BLOCK 0 Even (2 Bytes) $00_0002
BLOCK 0 Odd (2 Bytes) $00_0001
BLOCK 0 Even (2 Bytes) $00_0000
Figure 4-1 Flash Array Memory Maps
Table 4-7 shows the page and sector sizes used within each Flash memory block on the chip.
Note: Data Flash is NOT available on the 56F8145 device.
Table 4-7. Flash Memory Partitions
Flash Size Sectors Sector Size Page Size
Program Flash 128KB 16 4K x 16 bits 512 x 16 bits
Data Flash 8KB 16 256 x 16 bits 256 x 16 bits
Boot Flash 8KB 4 1K x 16 bits 256 x 16 bits
Please see the 56F8300 Peripheral User Manual for additional Flash information.
56F8345 Technical Data, Rev. 14.0
42 Freescale Semiconductor
Preliminary
Page 43

4.6 EOnCE Memory Map
Table 4-8 EOnCE Memory Map
Address Register Acronym Register Name
X:$FF FF8A OESCR External Signal Control Register
X:$FF FF8E OBCNTR Breakpoint Unit [0] Counter
X:$FF FF90 OBMSK (32 bits) Breakpoint 1 Unit [0] Mask Register
X:$FF FF91 — Breakpoint 1 Unit [0] Mask Register
X:$FF FF92 OBAR2 (32 bits) Breakpoint 2 Unit [0] Address Register
X:$FF FF93 — Breakpoint 2 Unit [0] Address Register
X:$FF FF94 OBAR1 (24 bits) Breakpoint 1 Unit [0] Address Register
EOnCE Memory Map
Reserved
Reserved
Reserved
X:$FF FF95 — Breakpoint 1 Unit [0] Address Register
X:$FF FF96 OBCR (24 bits) Breakpoint Unit [0] Control Register
X:$FF FF97 — Breakpoint Unit [0] Control Register
X:$FF FF98 OTB (21-24 bits/stage) Trace Buffer Register Stages
X:$FF FF99 — Trace Buffer Register Stages
X:$FF FF9A OTBPR (8 bits) Trace Buffe r Poi nter Register
X:$FF FF9B OTBCR Trace Buffer Control Register
X:$FF FF9C OBASE (8 bits) Peripheral Base Address Register
X:$FF FF9D OSR Status Register
X:$FF FF9E OSCNTR (24 bits) Instruction Step Counter
X:$FF FF9F — Instruction Step Counter
X:$FF FFA0 OCR (bits) Control Register
Reserved
X:$FF FFFC OCLSR (8 bits) Core Lock / Unlock Status Register
X:$FF FFFD OTXRXSR (8 bits) Transmit and Receive Sta tus an d Control Register
X:$FF FFFE OTX / ORX (32 bits) Transmit Register / Receive Register
X:$FF FFFF OTX1 / ORX1 Transmit Register Upper Word
Receive Register Upper Word
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 43
Preliminary
Page 44

4.7 Peripheral Memory Mapped Registers
On-chip peripheral registers are part of the data memory map on the 56800E series. These locations may
be accessed with the same addressing modes used for ordinary Data memory, except all peripheral
registers should be read/written using word accesses only.
Table 4-9 summarizes base addresses for the set of peripherals on the 56F8345 and 56F8145 devices.
Peripherals are listed in order of the base address.
The following tables list all of the peripheral registers required to control or access the peripherals.
Note: Features in italics are NOT available in the 56F8145 device.
Table 4-9 Data Memory Peripheral Base Address Map Summary
Peripheral Prefix Base Address Table Number
External Memory Interface EMI X:$00 F020 4-10
Timer A TMRA X:$00 F040 4-11
Timer B TMRB X:$00 F080 4-12
Timer C TMRC X:$00 F0C0 4-13
Timer D TMRD X:$00 F100 4-14
PWM A PWMA X:$00 F140 4-15
PWM B PWMB X:$00 F160 4-16
Quadrature Decoder 0 DEC0 X:$00 F180 4-17
Quadrature Decoder 1 DEC1 X:$00 F190 4-18
ITCN ITCN X:$00 F1A0 4-19
ADC A ADCA X:$00 F200 4-20
ADC B ADCB X:$00 F240 4-21
Temperature Sensor TSENSOR X:$00 F270 4-22
SCI #0 SCI0 X:$00 F280 4-23
SCI #1 SCI1 X:$00 F290 4-24
SPI #0 SPI0 X:$00 F2A0 4-25
SPI #1 SPI1 X:$00 F2B0 4-26
COP COP X:$00 F2C0 4-27
PLL, OSC CLKGEN X:$00 F2D0 4-28
GPIO Port A GPIOA X:$00 F2E0 4-29
GPIO Port B GPIOB X:$00 F300 4-30
GPIO Port C GPIOC X:$00 F310 4-31
GPIO Port D GPIOD X:$00 F320 4-32
GPIO Port E GPIOE X:$00 F330 4-33
GPIO Port F GPIOF X:$00 F340 4-34
SIM SIM X:$00 F350 4-35
56F8345 Technical Data, Rev. 14.0
44 Freescale Semiconductor
Preliminary
Page 45

Peripheral Memory Mapped Registers
Table 4-9 Data Memory Peripheral Base Address Map Summary (Continued)
Peripheral Prefix Base Address Table Number
Power Supervisor LVI X:$00 F360 4-36
FM FM X:$00 F400 4-37
FlexCAN FC X:$00 F800 4-38
Table 4-10 External Memory Integration Registers Address Map
(EMI_BASE = $00 F020)
Register
Acronym
CSBAR 0 $0 Chip Select Base Address Register 0 0 x 0004 = 64K since
CSBAR 1 $1 Chip Select Base Address Register 1 0 x 0004 = 64K since
CSBAR 2 $2 Chip Select Base Address Register 2
CSBAR 3 $3 Chip Select Base Address Register 3
CSBAR 4 $4 Chip Select Base Address Register 4
CSBAR 5 $5 Chip Select Base Address Register 5
CSBAR 6 $6 Chip Select Base Address Register 6
CSBAR 7 $7 Chip Select Base Address Register 7
CSOR 0 $8 Chip Select Option Register 0
CSOR 1 $9 Chip Select Option Register 1
CSOR 2 $A Chip Select Option Register 2
CSOR 3 $B Chip Select Option Register 3
CSOR 4 $C Chip Select Option Register 4
CSOR 5 $D Chip Select Option Register 5
CSOR 6 $E Chip Select Option Register 6
CSOR 7 $F Chip Select Option Register 7
CSTC 0 $10 Chip Select Timing Control Register 0
CSTC 1 $11 Chip Select Timing Control Register 1
CSTC 2 $12 Chip Select Timing Control Register 2
CSTC 3 $13 Chip Select Timing Control Register 3
CSTC 4 $14 Chip Select Timing Control Register 4
CSTC 5 $15 Chip Select Timing Control Register 5
CSTC 6 $16 Chip Select Timing Control Register 6
CSTC 7 $17 Chip Select Timing Control Register 7
BCR $18 Bus Control Register
Address
Offset
Register Description Reset Values
EXTBOOT = EMI_MODE
= 0
EMI_MODE = 0
is not functional in the 56F8345/56F8145 package
This table added to provide complete information, but this peripheral
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 45
Preliminary
Page 46

Table 4-11 Quad Timer A Registers Address Map
(TMRA_BASE = $00 F040)
Register Acronym Address Offset Register Description
TMRA0_CMP1 $0 Compare Register 1
TMRA0_CMP2 $1 Compare Register 2
TMRA0_CAP $2 Capture Register
TMRA0_LOAD $3 Load Register
TMRA0_HOLD $4 Hold Register
TMRA0_CNTR $5 Counter Register
TMRA0_CTRL $6 Control Registe r
TMRA0_SCR $7 Status and Control Register
TMRA0_CMPLD1 $8 Comparator Load Register 1
TMRA0_CMPLD2 $9 Comparator Load Register 2
TMRA0_COMSCR $A Comparator Status and Control Register
Reserved
TMRA1_CMP1 $10 Compare Register 1
TMRA1_CMP2 $11 Compare Register 2
TMRA1_CAP $12 Capture Registe r
TMRA1_LOAD $13 Load Register
TMRA1_HOLD $14 Hold Register
TMRA1_CNTR $15 Counter Register
TMRA1_CTRL $16 Control Register
TMRA1_SCR $17 Status and Control Register
TMRA1_CMPLD1 $18 Comparator Load Register 1
TMRA1_CMPLD2 $19 Comparator Load Register 2
TMRA1_COMSCR $1A Comparator Status and Control Register
Reserved
TMRA2_CMP1 $20 Compare Register 1
TMRA2_CMP2 $21 Compare Register 2
TMRA2_CAP $22 Capture Registe r
TMRA2_LOAD $23 Load Register
TMRA2_HOLD $24 Hold Register
TMRA2_CNTR $25 Counter Register
TMRA2_CTRL $26 Control Register
56F8345 Technical Data, Rev. 14.0
46 Freescale Semiconductor
Preliminary
Page 47

Peripheral Memory Mapped Registers
Table 4-11 Quad Timer A Registers Address Map (Continued)
(TMRA_BASE = $00 F040)
Register Acronym Address Offset Register Description
TMRA2_SCR $27 Status and Control Register
TMRA2_CMPLD1 $28 Comparator Load Register 1
TMRA2_CMPLD2 $29 Comparator Load Register 2
TMRA2_COMSCR $2A Comparator Status and Control Register
Reserved
TMRA3_CMP1 $30 Compare Register 1
TMRA3_CMP2 $31 Compare Register 2
TMRA3_CAP $32 Capture Registe r
TMRA3_LOAD $33 Load Register
TMRA3_HOLD $34 Hold Register
TMRA3_CNTR $35 Counter Register
TMRA3_CTRL $36 Control Register
TMRA3_SCR $37 Status and Control Register
TMRA3_CMPLD1 $38 Comparator Load Register 1
TMRA3_CMPLD2 $39 Comparator Load Register 2
TMRA3_COMSCR $3A Comparator Status and Control Register
Table 4-12 Quad Timer B Registers Address Map
(TMRB_BASE = $00 F080)
Quad Timer B is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
TMRB0_CMP1 $0 Compare Register 1
TMRB0_CMP2 $1 Compare Register 2
TMRB0_CAP $2 Capture Register
TMRB0_LOAD $3 Load Register
TMRB0_HOLD $4 Hold Register
TMRB0_CNTR $5 Counter Register
TMRB0_CTRL $6 Control Register
TMRB0_SCR $7 Status and Control Register
TMRB0_CMPLD1 $8 Comparator Load Register 1
TMRB0_CMPLD2 $9 Comparator Load Register 2
TMRB0_COMSCR $A Comparator Status and Control Register
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 47
Preliminary
Page 48

Table 4-12 Quad Timer B Registers Address Map (Continued)
(TMRB_BASE = $00 F080)
Quad Timer B is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
Reserved
TMRB1_CMP1 $10 Compare Register 1
TMRB1_CMP2 $11 Compare Register 2
TMRB1_CAP $12 Capture Register
TMRB1_LOAD $13 Load Register
TMRB1_HOLD $14 Hold Register
TMRB1_CNTR $15 Counter Register
TMRB1_CTRL $16 Control Register
TMRB1_SCR $17 Status and Control Register
TMRB1_CMPLD1 $18 Comparator Load Register 1
TMRB1_CMPLD2 $19 Comparator Load Register 2
TMRB1_COMSCR $1A Comparator Status and Control Register
Reserved
TMRB2_CMP1 $20 Compare Register 1
TMRB2_CMP2 $21 Compare Register 2
TMRB2_CAP $22 Capture Register
TMRB2_LOAD $23 Load Register
TMRB2_HOLD $24 Hold Register
TMRB2_CNTR $25 Counter Register
TMRB2_CTRL $26 Control Register
TMRB2_SCR $27 Status and Control Register
TMRB2_CMPLD1 $28 Comparator Load Register 1
TMRB2_CMPLD2 $29 Comparator Load Register 2
TMRB2_COMSCR $2A Comparator Status and Control Register
Reserved
TMRB3_CMP1 $30 Compare Register 1
TMRB3_CMP2 $31 Compare Register 2
TMRB3_CAP $32 Capture Register
TMRB3_LOAD $33 Load Register
TMRB3_HOLD $34 Hold Register
TMRB3_CNTR $35 Counter Register
56F8345 Technical Data, Rev. 14.0
48 Freescale Semiconductor
Preliminary
Page 49

Peripheral Memory Mapped Registers
Table 4-12 Quad Timer B Registers Address Map (Continued)
(TMRB_BASE = $00 F080)
Quad Timer B is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
TMRB3_CTRL $36 Control Register
TMRB3_SCR $37 Status and Control Register
TMRB3_CMPLD1 $38 Comparator Load Register 1
TMRB3_CMPLD2 $39 Comparator Load Register 2
TMRB3_COMSCR $3A Comparator Status and Control Register
Table 4-13 Quad Timer C Registers Address Map
(TMRC_BASE = $00 F0C0)
Register Acronym Address Offset Register Descriptio n
TMRC0_CMP1 $0 Compare Register 1
TMRC0_CMP2 $1 Compare Register 2
TMRC0_CAP $2 Capture Register
TMRC0_LOAD $3 Load Register
TMRC0_HOLD $4 Hold Register
TMRC0_CNTR $5 Counter Register
TMRC0_CTRL $6 Control Register
TMRC0_SCR $7 Status and Control Register
TMRC0_CMPLD1 $8 Comparator Load Register 1
TMRC0_CMPLD2 $9 Comparator Load Register 2
TMRC0_COMSCR $A Comparator Status and Control Register
Reserved
TMRC1_CMP1 $10 Compare Register 1
TMRC1_CMP2 $11 Compare Register 2
TMRC1_CAP $12 Capture Register
TMRC1_LOAD $13 Load Register
TMRC1_HOLD $14 Hold Register
TMRC1_CNTR $15 Counter Register
TMRC1_CTRL $16 Control Re gister
TMRC1_SCR $17 Status and Control Register
TMRC1_CMPLD1 $18 Comparator Load Register 1
TMRC1_CMPLD2 $19 Comparator Load Register 2
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 49
Preliminary
Page 50

Table 4-13 Quad Timer C Registers Address Map (Continued)
(TMRC_BASE = $00 F0C0)
Register Acronym Address Offset Register Descriptio n
TMRC1_COMSCR $1A Comparator Status and Control Register
Reserved
TMRC2_CMP1 $20 Compare Register 1
TMRC2_CMP2 $21 Compare Register 2
TMRC2_CAP $22 Capture Register
TMRC2_LOAD $23 Load Register
TMRC2_HOLD $24 Hold Register
TMRC2_CNTR $25 Counter Register
TMRC2_CTRL $26 Control Re gister
TMRC2_SCR $27 Status and Control Register
TMRC2_CMPLD1 $28 Comparator Load Register 1
TMRC2_CMPLD2 $29 Comparator Load Register 2
TMRC2_COMSCR $2A Comparator Status and Control Register
Reserved
TMRC3_CMP1 $30 Compare Register 1
TMRC3_CMP2 $31 Compare Register 2
TMRC3_CAP $32 Capture Register
TMRC3_LOAD $33 Load Register
TMRC3_HOLD $34 Hold Register
TMRC3_CNTR $35 Counter Register
TMRC3_CTRL $36 Control Re gister
TMRC3_SCR $37 Status and Control Register
TMRC3_CMPLD1 $38 Comparator Load Register 1
TMRC3_CMPLD2 $39 Comparator Load Register 2
TMRC3_COMSCR $3A Comparator Status and Control Register
56F8345 Technical Data, Rev. 14.0
50 Freescale Semiconductor
Preliminary
Page 51

Table 4-14 Quad Timer D Registers Address Map
(TMRD_BASE = $00 F100)
Quad Timer D is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
TMRD0_CMP1 $0 Compare Register 1
TMRD0_CMP2 $1 Compare Register 2
TMRD0_CAP $2 Capture Register
TMRD0_LOAD $3 Load Register
TMRD0_HOLD $4 Hold Register
TMRD0_CNTR $5 Counter Register
TMRD0_CTRL $6 Control Register
TMRD0_SCR $7 Status and Control Register
TMRD0_CMPLD1 $8 Comparator Load Register 1
TMRD0_CMPLD2 $9 Comparator Load Register 2
Peripheral Memory Mapped Registers
TMRD0_COMSCR $A Comparator Status and Control Register
Reserved
TMRD1_CMP1 $10 Compare Register 1
TMRD1_CMP2 $11 Compare Register 2
TMRD1_CAP $12 Capture Register
TMRD1_LOAD $13 Load Register
TMRD1_HOLD $14 Hold Register
TMRD1_CNTR $15 Counter Register
TMRD1_CTRL $16 Control Re gister
TMRD1_SCR $17 Status and Control Register
TMRD1_CMPLD1 $18 Comparator Load Register 1
TMRD1_CMPLD2 $19 Comparator Load Register 2
TMRD1_COMSCR $1A Comparator Status and Control Register
Reserved
TMRD2_CMP1 $20 Compare Register 1
TMRD2_CMP2 $21 Compare Register 2
TMRD2_CAP $22 Capture Register
TMRD2_LOAD $23 Load Register
TMRD2_HOLD $24 Hold Register
TMRD2_CNTR $25 Counter Register
TMRD2_CTRL $26 Control Re gister
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 51
Preliminary
Page 52

Table 4-14 Quad Timer D Registers Address Map (Continued)
(TMRD_BASE = $00 F100)
Quad Timer D is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
TMRD2_SCR $27 Status and Control Register
TMRD2_CMPLD1 $28 Comparator Load Register 1
TMRD2_CMPLD2 $29 Comparator Load Register 2
TMRD2_COMSCR $2A Comparator Status and Control Register
Reserved
TMRD3_CMP1 $30 Compare Register 1
TMRD3_CMP2 $31 Compare Register 2
TMRD3_CAP $32 Capture Register
TMRD3_LOAD $33 Load Register
TMRD3_HOLD $34 Hold Register
TMRD3_CNTR $35 Counter Register
TMRD3_CTRL $36 Control Re gister
TMRD3_SCR $37 Status and Control Register
TMRD3_CMPLD1 $38 Comparator Load Register 1
TMRD3_CMPLD2 $39 Comparator Load Register 2
TMRD3_COMSCR $3A Comparator Status and Control Register
Table 4-15 Pulse Width Modulator A Registers Address Map
(PWMA_BASE = $00 F140)
PWMA is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
PWMA_PMCTL $0 Control Register
PWMA_PMFCTL $1 Fault Control Register
PWMA_PMFSA $2 Fault Status Acknowledge Register
PWMA_PMOUT $3 Output Control Register
PWMA_PMCNT $4 Counter Register
PWMA_PWMCM $5 Counter Modulo Register
PWMA_PWMVAL0 $6 Value Register 0
PWMA_PWMVAL1 $7 Value Register 1
PWMA_PWMVAL2 $8 Value Register 2
PWMA_PWMVAL3 $9 Value Register 3
PWMA_PWMVAL4 $A Value Register 4
56F8345 Technical Data, Rev. 14.0
52 Freescale Semiconductor
Preliminary
Page 53

Peripheral Memory Mapped Registers
Table 4-15 Pulse Width Modulator A Registers Address Map (Continued)
(PWMA_BASE = $00 F140)
PWMA is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
PWMA_PWMVAL5 $B Value Register 5
PWMA_PMDEADTM $C Dea d Time Register
PWMA_PMDISMAP1 $D Disable Mapping Register 1
PWMA_PMDISMAP2 $E Disable Mapping Register 2
PWMA_PMCFG $F Configure Register
PWMA_PMCCR $10 Channel Control Register
PWMA_PMPORT $11 Port Register
PWMA_PMICCR $12 PWM Internal Correction Control Register
Table 4-16 Pulse Width Modulator B Registers Address Map
(PWMB_BASE = $00 F160)
Register Acronym Address Offset Register Descriptio n
PWMB_PMCTL $0 Control Re gister
PWMB_PMFCTL $1 Fault Control Register
PWMB_PMFSA $2 Fault Status Acknowledge Register
PWMB_PMOUT $3 Output Control Register
PWMB_PMCNT $4 Counter Register
PWMB_PWMCM $5 Counter Modulo Register
PWMB_PWMVAL0 $6 Value Register 0
PWMB_PWMVAL1 $7 Value Register 1
PWMB_PWMVAL2 $8 Value Register 2
PWMB_PWMVAL3 $9 Value Register 3
PWMB_PWMVAL4 $A Value Register 4
PWMB_PWMVAL5 $B Value Register 5
PWMB_PMDEADTM $C Dead Time Register
PWMB_PMDISMAP1 $D Disable Mapping Register 1
PWMB_PMDISMAP2 $E Disable Mapping Register 2
PWMB_PMCFG $F Configure Register
PWMB_PMCCR $10 Channel Control Register
PWMB_PMPORT $11 Port Register
PWMB_PMICCR $12 PWM Internal Correction Control Register
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 53
Preliminary
Page 54

Table 4-17 Quadrature Decoder 0 Registers Address Map
(DEC0_BASE = $00 F180)
Register Acronym Address Offset Register Description
DEC0_DECCR $0 Decoder Control Register
DEC0_FIR $1 Filter Interval Register
DEC0_WTR $2 Watchdog Time-out Register
DEC0_POSD $3 Position Difference Counter Register
DEC0_POSDH $4 Position Difference Counter Hold Register
DEC0_REV $5 Revolution Counter Register
DEC0_REVH $6 Revolution Hold Register
DEC0_UPOS $7 Upper Position Counter Register
DEC0_LPOS $8 Lower Position Counter Register
DEC0_UPOSH $9 Upper Position Hold Register
DEC0_LPOSH $A Lower Position Hold Register
DEC0_UIR $B Upper Initialization Register
DEC0_LIR $C Lower Initialization Register
DEC0_IMR $D Input Monitor Register
Table 4-18 Quadrature Decoder 1 Registers Address Map
(DEC1_BASE = $00 F190)
Quadrature Decoder 1 is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
DEC1_DECCR $0 Decoder Control Register
DEC1_FIR $1 Filter Interval Register
DEC1_WTR $2 Watchdog Time-out Register
DEC1_POSD $3 Position Difference Counter Register
DEC1_POSDH $4 Position Difference Counter Hold Register
DEC1_REV $5 Revolution Counter Register
DEC1_REVH $6 Revolution Hold Register
DEC1_UPOS $7 Upper Position Counter Register
DEC1_LPOS $8 Lower Position Counter Register
DEC1_UPOSH $9 Upper Position Hold Register
DEC1_LPOSH $A Lower Position Hold Register
DEC1_UIR $B Upper Initialization Register
DEC1_LIR $C Lower Initialization Register
DEC1_IMR $D Input Monitor Register
56F8345 Technical Data, Rev. 14.0
54 Freescale Semiconductor
Preliminary
Page 55

Table 4-19 Interrupt Control Registers Address Map
(ITCN_BASE = $00 F1A0)
Register Acronym Address Offset Register Description
IPR 0 $0 Interrupt Priority Regi ster 0
IPR 1 $1 Interrupt Priority Regi ster 1
IPR 2 $2 Interrupt Priority Regi ster 2
IPR 3 $3 Interrupt Priority Regi ster 3
IPR 4 $4 Interrupt Priority Regi ster 4
IPR 5 $5 Interrupt Priority Regi ster 5
IPR 6 $6 Interrupt Priority Regi ster 6
IPR 7 $7 Interrupt Priority Regi ster 7
IPR 8 $8 Interrupt Priority Regi ster 8
IPR 9 $9 Interrupt Priority Regi ster 9
VBA $A Vector Base Address Register
Peripheral Memory Mapped Registers
FIM0 $B Fast Interrupt Match Register 0
FIVAL0 $C Fast Interrupt Vector Address Low 0 Register
FIVAH0 $D Fast Interrupt Vector Address High 0 Register
FIM1 $E Fast Interrupt Match Register 1
FIVAL1 $F Fast Interrupt Vector Address Low 1 Register
FIVAH1 $10 Fast Interrupt Vector Address High 1 Register
IRQP 0 $11 IRQ Pending Register 0
IRQP 1 $12 IRQ Pending Register 1
IRQP 2 $13 IRQ Pending Register 2
IRQP 3 $14 IRQ Pending Register 3
IRQP 4 $15 IRQ Pending Register 4
IRQP 5 $16 IRQ Pending Register 5
Reserved
ICTL $1D Interrupt Control Register
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 55
Preliminary
Page 56

Table 4-20 Analog-to-Digital Converter Registers Address Map
(ADCA_BASE = $00 F200)
Register Acronym Address Offset Register Description
ADCA_CR1 $0 Control Register 1
ADCA_CR2 $1 Control Register 2
ADCA_ZCC $2 Zero Crossing Control Register
ADCA_LST 1 $3 Channel List Register 1
ADCA_LST 2 $4 Channel List Register 2
ADCA_SDIS $5 Sampl e Disable Register
ADCA_STAT $6 Status Register
ADCA_LSTAT $7 Limit Status Register
ADCA_ZCSTAT $8 Zero Crossing Status Register
ADCA_RSLT 0 $9 Result Register 0
ADCA_RSLT 1 $A Result Register 1
ADCA_RSLT 2 $B Result Register 2
ADCA_RSLT 3 $C Result Register 3
ADCA_RSLT 4 $D Result Register 4
ADCA_RSLT 5 $E Result Register 5
ADCA_RSLT 6 $F Result Register 6
ADCA_RSLT 7 $10 Result Register 7
ADCA_LLMT 0 $11 Low Limit Register 0
ADCA_LLMT 1 $12 Low Limit Register 1
ADCA_LLMT 2 $13 Low Limit Register 2
ADCA_LLMT 3 $14 Low Limit Register 3
ADCA_LLMT 4 $15 Low Limit Register 4
ADCA_LLMT 5 $16 Low Limit Register 5
ADCA_LLMT 6 $17 Low Limit Register 6
ADCA_LLMT 7 $18 Low Limit Register 7
ADCA_HLMT 0 $19 High Limit Register 0
ADCA_HLMT 1 $1A High Limit Regi ster 1
ADCA_HLMT 2 $1B High Limit Regi ster 2
ADCA_HLMT 3 $1C High Limit Register 3
ADCA_HLMT 4 $1D High Limit Register 4
ADCA_HLMT 5 $1E High Limit Regi ster 5
56F8345 Technical Data, Rev. 14.0
56 Freescale Semiconductor
Preliminary
Page 57

Peripheral Memory Mapped Registers
Table 4-20 Analog-to-Digital Converter Registers Address Map (Continued)
(ADCA_BASE = $00 F200)
Register Acronym Address Offset Register Description
ADCA_HLMT 6 $1F High Limit Register 6
ADCA_HLMT 7 $20 High Limit Register 7
ADCA_OFS 0 $21 Offset Register 0
ADCA_OFS 1 $22 Offset Register 1
ADCA_OFS 2 $23 Offset Register 2
ADCA_OFS 3 $24 Offset Register 3
ADCA_OFS 4 $25 Offset Register 4
ADCA_OFS 5 $26 Offset Register 5
ADCA_OFS 6 $27 Offset Register 6
ADCA_OFS 7 $28 Offset Register 7
ADCA_POWER $29 Power Control Register
ADCA_CAL $2A ADC Calibration Register
Table 4-21 Analog-to-Digital Converter Registers Address Map
(ADCB_BASE = $00 F240)
Register Acronym Address Offset Register Description
ADCB_CR1 $0 Control Register 1
ADCB_CR2 $1 Control Register 2
ADCB_ZCC $2 Zero Crossing Control Register
ADCB_LST 1 $3 Channel List Register 1
ADCB_LST 2 $4 Channel List Register 2
ADCB_SDIS $5 Sampl e Disable Register
ADCB_STAT $6 Status Register
ADCB_LSTAT $7 Limit Status Register
ADCB_ZCSTAT $8 Zero Crossing Status Register
ADCB_RSLT 0 $9 Result Register 0
ADCB_RSLT 1 $A Result Register 1
ADCB_RSLT 2 $B Result Register 2
ADCB_RSLT 3 $C Result Register 3
ADCB_RSLT 4 $D Result Register 4
ADCB_RSLT 5 $E Result Register 5
ADCB_RSLT 6 $F Result Register 6
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 57
Preliminary
Page 58

Table 4-21 Analog-to-Digital Converter Registers Address Map (Continued)
(ADCB_BASE = $00 F240)
Register Acronym Address Offset Register Description
ADCB_RSLT 7 $10 Result Register 7
ADCB_LLMT 0 $11 Low Limit Register 0
ADCB_LLMT 1 $12 Low Limit Register 1
ADCB_LLMT 2 $13 Low Limit Register 2
ADCB_LLMT 3 $14 Low Limit Register 3
ADCB_LLMT 4 $15 Low Limit Register 4
ADCB_LLMT 5 $16 Low Limit Register 5
ADCB_LLMT 6 $17 Low Limit Register 6
ADCB_LLMT 7 $18 Low Limit Register 7
ADCB_HLMT 0 $19 High Limit Register 0
ADCB_HLMT 1 $1A High Limit Regi ster 1
ADCB_HLMT 2 $1B High Limit Regi ster 2
ADCB_HLMT 3 $1C High Limit Register 3
ADCB_HLMT 4 $1D High Limit Register 4
ADCB_HLMT 5 $1E High Limit Regi ster 5
ADCB_HLMT 6 $1F High Limit Register 6
ADCB_HLMT 7 $20 High Limit Register 7
ADCB_OFS 0 $21 Offset Register 0
ADCB_OFS 1 $22 Offset Register 1
ADCB_OFS 2 $23 Offset Register 2
ADCB_OFS 3 $24 Offset Register 3
ADCB_OFS 4 $25 Offset Register 4
ADCB_OFS 5 $26 Offset Register 5
ADCB_OFS 6 $27 Offset Register 6
ADCB_OFS 7 $28 Offset Register 7
ADCB_POWER $29 Power Control Register
ADCB_CAL $2A ADC Calibration Register
Table 4-22 Temperature Sensor Register Address Map
(TSENSOR_BASE = $00 F270)
Temperature Sensor is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
TSENSOR_CNTL $0 Control Register
56F8345 Technical Data, Rev. 14.0
58 Freescale Semiconductor
Preliminary
Page 59

Peripheral Memory Mapped Registers
Table 4-23 Serial Communication Interface 0 Registers Address Map
(SCI0_BASE = $00 F280)
Register Acronym Address Offset Register Description
SCI0_SCIBR $0 Baud Rate Register
SCI0_SCICR $1 Control Register
Reserved
SCI0_SCISR $3 Status Register
SCI0_SCIDR $4 Data Register
Table 4-24 Serial Communication Interface 1 Registers Address Map
(SCI1_BASE = $00 F290)
Register Acronym Address Offset Register Description
SCI1_SCIBR $0 Baud Rate Register
SCI1_SCICR $1 Control Register
Reserved
SCI1_SCISR $3 Status Register
SCI1_SCIDR $4 Data Register
Table 4-25 Serial Peripheral Interface 0 Registers Address Map
(SPI0_BASE = $00 F2A0)
Register Acronym Address Offset Register Description
SPI0_SPSCR $0 Status and Control Register
SPI0_SPDSR $1 Data Size Register
SPI0_SPDRR $2 Data Receive Register
SPI0_SPDTR $3 Data Transmitter Register
Table 4-26 Serial Peripheral Interface 1 Registers Address Map
(SPI1_BASE = $00 F2B0)
Register Acronym Address Offset Register Description
SPI1_SPSCR $0 Status and Control Register
SPI1_SPDSR $1 Data Size Register
SPI1_SPDRR $2 Data Receive Register
SPI1_SPDTR $3 Data Transmitter Register
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 59
Preliminary
Page 60

Table 4-27 Computer Operating Properly Registers Address Map
(COP_BASE = $00 F2C0)
Register Acronym Address Offset Register Description
COPCTL $0 Control Register
COPTO $1 Time-Out Register
COPCTR $2 Counter Register
Table 4-28 Clock Generation Module Registers Address Map
(CLKGEN_BASE = $00 F2D0)
Register Acronym Address Offset Register Description
PLLCR $0 Control Register
PLLDB $1 Divide-By Register
PLLSR $2 Status Register
Reserved
SHUTDOWN $4 Shutdown Register
OSCTL $5 Oscillator Control Register
Table 4-29 GPIOA Re gisters Address Map
(GPIOA_BASE = $00 F2E0)
Register Acronym
GPIOA_PUR $0 Pull-up Enable Register 0 x 3FFF
GPIOA_DR $1 Data Register 0 x 0000
GPIOA_DDR $2 Data Direction Register 0 x 0000
GPIOA_PER $3 Peripheral Enable Register 0 x 3FFF
GPIOA_IAR $4 Interrupt Assert Register 0 x 0000
GPIOA_IENR $5 Interrupt Enable Register 0 x 0000
GPIOA_IPOLR $6 Interrupt Polarity Register 0 x 0000
GPIOA_IPR $7 Interrupt Pending Register 0 x 0000
GPIOA_IESR $8 Interrupt Edge-Sensitive Register 0 x 0000
GPIOA_PPMODE $9 Push-Pull Mode Register 0 x 3FFF
GPIOA_RAWDATA $A Raw Data Input Register —
Address Offset Register Description Reset Value
56F8345 Technical Data, Rev. 14.0
60 Freescale Semiconductor
Preliminary
Page 61

Peripheral Memory Mapped Registers
Table 4-30 GPIOB Re gisters Address Map
(GPIOB_BASE = $00 F300)
Register Acronym Address Offset Register Description Reset Value
GPIOB_PUR $0 Pull-up Enable Register 0 x 00FF
GPIOB_DR $1 Data Register 0 x 0000
GPIOB_DDR $2 Data Direction Registe r 0 x 0000
GPIOB_PER $3 Peripheral Enable Register 0 x 0000
GPIOB_IAR $4 Interrupt Assert Register 0 x 0000
GPIOB_IENR $5 Interrupt Enable Register 0 x 0000
GPIOB_IPOLR $6 Interrupt Polarity Register 0 x 0000
GPIOB_IPR $7 Interrupt Pending Register 0 x 0000
GPIOB_IESR $8 Interrupt Edge-Sensitive Register 0 x 0000
GPIOB_PPMODE $9 Push-Pull Mode Register 0 x 00FF
GPIOB_RAWDATA $A Raw Data Input Register —
Table 4-31 GPIOC Re gisters Address Map
(GPIOC_BASE = $00 F310)
Register Acronym Address Offset Register Description Reset Value
GPIOC_PUR $0 Pull-up Enable Registe r 0 x 07FF
GPIOC_DR $1 Data Register 0 x 0000
GPIOC_DDR $2 Data Direction Register 0 x 0000
GPIOC_PER $3 Peripheral Enable Register 0 x 07FF
GPIOC_IAR $4 Interrupt Assert Register 0 x 0000
GPIOC_IENR $5 Interrupt Enable Register 0 x 0000
GPIOC_IPOLR $6 Interrupt Polarity Register 0 x 0000
GPIOC_IPR $7 Interrupt Pending Register 0 x 0000
GPIOC_IESR $8 Interrupt Edge-Sensitive Register 0 x 0000
GPIOC_PPMODE $9 Push-Pull Mode Register 0 x 07F F
GPIOC_RAWDATA $A Raw Data Input Register —
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 61
Preliminary
Page 62

Table 4-32 GPIOD Re gisters Address Map
(GPIOD_BASE = $00 F320)
Register Acronym Address Offset Register Description Reset Value
GPIOD_PUR $0 Pull-up Enable Register 0 x 1FFF
GPIOD_DR $1 Data Register 0 x 0000
GPIOD_DDR $2 Data Direction Register 0 x 0000
GPIOD_PER $3 Peripheral Enable Register 0 x 1FC0
GPIOD_IAR $4 Interrupt Assert Register 0 x 0000
GPIOD_IENR $5 Interrupt Enable Register 0 x 0000
GPIOD_IPOLR $6 Interrupt Polarity Register 0 x 0000
GPIOD_IPR $7 Interrupt Pending Register 0 x 0000
GPIOD_IESR $8 Interrupt Edge-Sensitive Register 0 x 0000
GPIOD_PPMODE $9 Push-Pull Mode Register 0 x 1FFF
GPIOD_RAWDATA $A Raw Data Input Register —
Table 4-33 GPIOE Registers Address Map
(GPIOE_BASE = $00 F330)
Register Acronym Address Offset Register Description Reset Value
GPIOE_PUR $0 Pul l-up Enable Register 0 x 3FFF
GPIOE_DR $1 Data Register 0 x 0000
GPIOE_DDR $2 Data Direction Register 0 x 0000
GPIOE_PER $3 Peripheral Enable Register 0 x 3FFF
GPIOE_IAR $4 Interrupt Assert Register 0 x 0000
GPIOE_IENR $5 Interrupt Enable Register 0 x 0000
GPIOE_IPOLR $6 Interrupt Polarity Register 0 x 0000
GPIOE_IPR $7 Interrupt Pending Register 0 x 0000
GPIOE_IESR $8 Interrupt Edge-Sensitive Register 0 x 0000
GPIOE_PPMODE $9 Push-Pull Mode Register 0 x 3FFF
GPIOE_RAWDATA $A Raw Data Input Register —
56F8345 Technical Data, Rev. 14.0
62 Freescale Semiconductor
Preliminary
Page 63

Peripheral Memory Mapped Registers
Table 4-34 GPIOF Registers Address Map
(GPIOF_BASE = $00 F340)
Register Acronym Address Offset Register Description Reset Value
GPIOF_PUR $0 Pull-up Enable Register 0 x FFFF
GPIOF_DR $1 Data Register 0 x 0000
GPIOF_DDR $2 D ata Direction Register 0 x 0000
GPIOF_PER $3 Peripheral Enable Register 0 x FFFF
GPIOF_IAR $4 Interrupt Assert Register 0 x 0000
GPIOF_IENR $5 Interrupt Enable Register 0 x 0000
GPIOF_IPOLR $6 Interrupt Polarity Register 0 x 0000
GPIOF_IPR $7 Interrupt Pending Register 0 x 0000
GPIOF_IESR $8 Interrupt Edge-Sensitive Register 0 x 0000
GPIOF_PPMODE $9 Push-Pull Mode Register 0 x FFFF
GPIOF_RAWDATA $A Raw Data Input Register —
Table 4-35 System Integration Module Registers Address Map
(SIM_BASE = $00 F350)
Register Acronym Address Offset Register Descriptio n
SIM_CONTROL $0 Control Register
SIM_RSTSTS $1 Reset Status Register
SIM_SCR0 $2 Software Control Register 0
SIM_SCR1 $3 Software Control Register 1
SIM_SCR2 $4 Software Control Register 2
SIM_SCR3 $5 Software Control Register 3
SIM_MSH_ID $6 Most Significant Half JTAG ID
SIM_LSH_ID $7 Least Significant Half JTAG ID
SIM_PUDR $8 Pull-up Disable Register
Reserved
SIM_CLKOSR $A Clock Out Select Register
SIM_GPS $B Quad Decoder 1 / Timer B / SPI 1 Select Register
SIM_PCE $C Peripheral Clock Enable Register
SIM_ISALH $D I/O Short Address Location High Register
SIM_ISALL $E I/O Short Address Location Low Register
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 63
Preliminary
Page 64

Table 4-36 Power Supervisor Registers Address Map
(LVI_BASE = $00 F360)
Register Acronym Address Offset Register Description
LVI_CONTROL $0 Control Register
LVI_STATUS $1 Status Register
Table 4-37 Flash Module Registers Address Map
(FM_BASE = $00 F400)
Register Acronym Address Offset Register Descrip tion
FMCLKD $0 Clock Divider Register
FMMCR $1 Module Control Register
Reserved
FMSECH $3 Security High Half Register
FMSECL $4 Security Low Half Register
Reserved
Reserved
FMPROT $10 Protection Register (Banked)
FMPROTB $11 Protection Boot Register (Banked)
Reserved
FMUSTAT $13 User Status Register (Banked)
FMCMD $14 Command Register (Banked)
Reserved
Reserved
FMOPT 0 $1A 16-Bit Information Option Register 0
Hot temperature ADC reading of Temperature Sensor;
value set during factory test
FMOPT 1 $1B 16-Bit Information Option Register 1
Not used
FMOPT 2 $1C 16-Bit Information Option Register 2
Room temperature ADC reading of Temperature Sensor;
value set during factory test
56F8345 Technical Data, Rev. 14.0
64 Freescale Semiconductor
Preliminary
Page 65

Peripheral Memory Mapped Registers
Table 4-38 FlexCAN Registers Address Map
(FC_BASE = $00 F800)
FlexCAN is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
FCMCR $0 Module Configuration Register
Reserved
FCCTL0 $3 Control Register 0 Register
FCCTL1 $4 Control Register 1 Register
FCTMR $5 Free-Running Timer Register
FCMAXMB $6 Maximum Message Buffer Configuration Register
Reserved
FCRXGMASK_H $8 Receive Global Mask High Register
FCRXGMASK_L $9 Receive Global Mask Low Register
FCRX14MASK_H $A Receive Buffer 14 Mask High Register
FCRX14MASK_L $B Receive Buffer 14 Mask Low Register
FCRX15MASK_H $C Receive Buffer 15 Mask High Register
FCRX15MASK_L $D Receive Buffer 15 Mask Low Register
Reserved
FCSTATUS $10 Error and Status Register
FCIMASK1 $11 Interrupt Masks 1 Register
FCIFLAG1 $12 Interrupt Flags 1 Register
FCR/T_ERROR_CNTRS $13 Receive and Transmit Error Counters Register
Reserved
Reserved
Reserved
FCMB0_CONTROL $40 Message Buffer 0 Control / Status Register
FCMB0_ID_HIGH $41 Message Buffer 0 ID High Register
FCMB0_ID_LOW $42 Message Buffer 0 ID Low Register
FCMB0_DATA $43 Message Buffer 0 Data Register
FCMB0_DATA $44 Message Buffer 0 Data Register
FCMB0_DATA $45 Message Buffer 0 Data Register
FCMB0_DATA $46 Message Buffer 0 Data Register
Reserved
FCMSB1_CONTROL $48 Messag e Buffer 1 Control / Status Register
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 65
Preliminary
Page 66

Table 4-38 FlexCAN Registers Address Map (Continued)
(FC_BASE = $00 F800)
FlexCAN is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
FCMSB1_ID_HIGH $49 Message Buffer 1 ID High Register
FCMSB1_ID_LOW $4A Message Buffer 1 ID Low Register
FCMB1_DATA $4B Message Buffer 1 Data Register
FCMB1_DATA $4C Message Buffer 1 Data Register
FCMB1_DATA $4D Message Buffer 1 Data Register
FCMB1_DATA $4E Message Buffer 1 Data Register
Reserved
FCMB2_CONTROL $50 Message Buffer 2 Control / Status Register
FCMB2_ID_HIGH $51 Message Buffer 2 ID High Register
FCMB2_ID_LOW $52 Message Buffer 2 ID Low Register
FCMB2_DATA $53 Message Buffer 2 Data Register
FCMB2_DATA $54 Message Buffer 2 Data Register
FCMB2_DATA $55 Message Buffer 2 Data Register
FCMB2_DATA $56 Message Buffer 2 Data Register
Reserved
FCMB3_CONTROL $58 Message Buffer 3 Control / Status Register
FCMB3_ID_HIGH $59 Message Buffer 3 ID High Register
FCMB3_ID_LOW $5A Message Buffer 3 ID Low Register
FCMB3_DATA $5B Message Buffer 3 Data Register
FCMB3_DATA $5C Message Buffer 3 Data Register
FCMB3_DATA $5D Message Buffer 3 Data Register
FCMB3_DATA $5E Message Buffer 3 Data Register
Reserved
FCMB4_CONTROL $60 Message Buffer 4 Control / Status Register
FCMB4_ID_HIGH $61 Message Buffer 4 ID High Register
FCMB4_ID_LOW $62 Message Buffer 4 ID Low Register
FCMB4_DATA $63 Message Buffer 4 Data Register
FCMB4_DATA $64 Message Buffer 4 Data Register
FCMB4_DATA $65 Message Buffer 4 Data Register
FCMB4_DATA $66 Message Buffer 4 Data Register
Reserved
56F8345 Technical Data, Rev. 14.0
66 Freescale Semiconductor
Preliminary
Page 67

Peripheral Memory Mapped Registers
Table 4-38 FlexCAN Registers Address Map (Continued)
(FC_BASE = $00 F800)
FlexCAN is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
FCMB5_CONTROL $68 Message Buffer 5 Control / Status Register
FCMB5_ID_HIGH $69 Message Buffer 5 ID High Register
FCMB5_ID_LOW $6A Message Buffer 5 ID Low Register
FCMB5_DATA $6B Message Buffer 5 Data Register
FCMB5_DATA $6C Message Buffer 5 Data Register
FCMB5_DATA $6D Message Buffer 5 Data Register
FCMB5_DATA $6E Message Buffer 5 Data Register
Reserved
FCMB6_CONTROL $70 Message Buffer 6 Control / Status Register
FCMB6_ID_HIGH $71 Message Buffer 6 ID High Register
FCMB6_ID_LOW $72 Message Buffer 6 ID Low Register
FCMB6_DATA $73 Message Buffer 6 Data Register
FCMB6_DATA $74 Message Buffer 6 Data Register
FCMB6_DATA $75 Message Buffer 6 Data Register
FCMB6_DATA $76 Message Buffer 6 Data Register
Reserved
FCMB7_CONTROL $78 Message Buffer 7 Control / Status Register
FCMB7_ID_HIGH $79 Message Buffer 7 ID High Register
FCMB7_ID_LOW $7A Message Buffer 7 ID Low Register
FCMB7_DATA $7B Message Buffer 7 Data Register
FCMB7_DATA $7C Message Buffer 7 Data Register
FCMB7_DATA $7D Message Buffer 7 Data Register
FCMB7_DATA $7E Message Buffer 7 Data Register
Reserved
FCMB8_CONTROL $80 Message Buffer 8 Control / Status Register
FCMB8_ID_HIGH $81 Message Buffer 8 ID High Register
FCMB8_ID_LOW $82 Message Buffer 8 ID Low Register
FCMB8_DATA $83 Message Buffer 8 Data Register
FCMB8_DATA $84 Message Buffer 8 Data Register
FCMB8_DATA $85 Message Buffer 8 Data Register
FCMB8_DATA $86 Message Buffer 8 Data Register
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 67
Preliminary
Page 68

Table 4-38 FlexCAN Registers Address Map (Continued)
(FC_BASE = $00 F800)
FlexCAN is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
Reserved
FCMB9_CONTROL $88 Message Buffer 9 Control / Status Register
FCMB9_ID_HIGH $89 Message Buffer 9 ID High Register
FCMB9_ID_LOW $8A Message Buffer 9 ID Low Register
FCMB9_DATA $8B Message Buffer 9 Data Register
FCMB9_DATA $8C Message Buffer 9 Data Register
FCMB9_DATA $8D Message Buffer 9 Data Register
FCMB9_DATA $8E Message Buffer 9 Data Register
Reserved
FCMB10_CONTROL $90 Message Buffer 10 Control / Status Register
FCMB10_ID_HIGH $91 Message Buffer 10 ID High Register
FCMB10_ID_LOW $92 Message Buffer 10 ID Low Register
FCMB10_DATA $93 Message Buffer 10 Data Register
FCMB10_DATA $94 Message Buffer 10 Data Register
FCMB10_DATA $95 Message Buffer 10 Data Register
FCMB10_DATA $96 Message Buffer 10 Data Register
Reserved
FCMB11_CONTROL $98 Message Buffer 11 Control / Status Register
FCMB11_ID_HIGH $99 Message Buffer 11 ID High Register
FCMB11_ID_LOW $9A Message Buffer 11 ID Low Register
FCMB11_DATA
FCMB11_DATA
FCMB11_DATA
FCMB11_DATA
FCMB12_CONTROL $A0 Messag e Buffer 12 Control / Status Register
FCMB12_ID_HIGH $A1 Message Buffer 12 ID High Register
FCMB12_ID_LOW $A2 Message Buffer 12 ID Low Register
FCMB12_DATA $A3 Message Buffer 12 Data Register
FCMB12_DATA $A4 Message Buffer 12 Data Register
$9B
$9C
$9D
$9E
Message Buffer 11 Data Register
Message Buffer 11 Data Register
Message Buffer 11 Data Register
Message Buffer 11 Data Register
Reserved
FCMB12_DATA $A5 Message Buffer 12 Data Register
56F8345 Technical Data, Rev. 14.0
68 Freescale Semiconductor
Preliminary
Page 69

Peripheral Memory Mapped Registers
Table 4-38 FlexCAN Registers Address Map (Continued)
(FC_BASE = $00 F800)
FlexCAN is NOT available in the 56F8145 device
Register Acronym Address Offset Register Description
FCMB12_DATA $A6 Message Buffer 12 Data Register
Reserved
FCMB13_CONTROL $A8 Messag e Buffer 13 Control / Status Register
FCMB13_ID_HIGH $A9 Message Buffer 13 ID High Register
FCMB13_ID_LOW $AA Message Buffer 13 ID Low Register
FCMB13_DATA $AB Message Buffer 13 Data Register
FCMB13_DATA $AC Message Buffer 13 Data Register
FCMB13_DATA $AD Message Buffer 13 Data Register
FCMB13_DATA $AE Message Buffer 13 Data Register
Reserved
FCMB14_CONTROL $B0 Messag e Buffer 14 Control / Status Register
FCMB14_ID_HIGH $B1 Message Buffer 14 ID High Register
FCMB14_ID_LOW $B2 Message Buffer 14 ID Low Register
FCMB14_DATA $B3 Message Buffer 14 Data Register
FCMB14_DATA $B4 Message Buffer 14 Data Register
FCMB14_DATA $B5 Message Buffer 14 Data Register
FCMB14_DATA $B6 Message Buffer 14 Data Register
Reserved
FCMB15_CONTROL $B8 Messag e Buffer 15 Control / Status Register
FCMB15_ID_HIGH $B9 Message Buffer 15 ID High Register
FCMB15_ID_LOW $BA Message Buffer 15 ID Low Register
FCMB15_DATA $BB Message Buffer 15 Data Register
FCMB15_DATA $BC Message Buffer 15 Data Register
FCMB15_DATA $BD Message Buffer 15 Data Register
FCMB15_DATA $BE Message Buffer 15 Data Register
Reserved
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 69
Preliminary
Page 70

4.8 Factory Programmed Memory
The Boot Flash memory block is programmed during manufacturing with a default Serial Bootloader
program. The Serial Bootloader application can be used to load a user application into the Program and
Data Flash (NOT available in the 56F8145) memories of the device. The 56F83xx SCI/CAN Bootloader
User Manual (MC56F83xxBLUM) provides detailed information on this firmware. An application note,
Production Flash Programming (AN1973), details how the Serial Bootloader program can be used to
perform production Flash programming of the on-board Flash memories as well as other potential
methods.
Like all the Flash memory blocks, the Boot Flash can be erased and programmed by the user. The Serial
Bootloader application is programmed as an aid to the end user, but is not required to be used or maintained
in the Boot Flash memory.
Part 5 Interrupt Controller (ITCN)
5.1 Introduction
The Interrupt Controller (ITCN) module is used to arbitrate between various interrupt requests (IRQs), to
signal to the 56800E core when an interrupt of sufficient priority exists, and to what address to jump in
order to service this interrupt.
5.2 Features
The ITCN module design includes these distinctive features:
• Programmable priority levels for each IRQ
• Two programmable Fast Interrupts
• Notification to SIM module to restart clocks out of Wait and Stop modes
• Drives initial address on the address bus after reset
For further information, see Table 4-5, Interrupt Vector Table Contents.
5.3 Functional Description
The Interrupt Controller is a slave on the IPBus. It contains registers allowing each of the 82 interrupt
sources to be set to one of four priority levels, excluding certain interrupts of fixed priority. Next, all of
the interrupt requests of a given level are priority encoded to determine the lowest numerical value of the
active interrupt requests for that level. Within a given priority level, 0 is the highest priority, while number
81 is the lowest.
5.3.1 Normal Interrupt Handling
Once the ITCN has determined that an interrupt is to be serviced and which interrupt has the highest
priority, an interrupt vector address is generated. Normal interrupt handling concatenates the VBA and the
vector number to determine the vector address. In this way, an offset is generated into the vector table for
each interrupt.
56F8345 Technical Data, Rev. 14.0
70 Freescale Semiconductor
Preliminary
Page 71

Functional Description
5.3.2 Interrupt Nesting
Interrupt exceptions may be nested to allow an IRQ of higher priority than the current exception to be
serviced. The following tables define the nesting requirements for each priority level.
Table 5-1 Interrupt Mask Bit Definition
1
SR[9]
0 0 Priorities 0, 1, 2, 3 None
0 1 Priorities 1, 2, 3 Priority 0
1 0 Priorities 2, 3 Priorities 0, 1
1 1 Priority 3 Priorities 0, 1, 2
1. Core status register bits indicating current interrupt mask within the core.
SR[8]
1
Permitted Exceptions Masked Exceptions
Table 5-2. Interrupt Priority Encoding
IPIC_LEVEL[1:0]
00 No Interrupt or SWILP Priorities 0, 1, 2, 3
01 Priority 0 Priorities 1, 2, 3
10 Priority 1 Priorities 2, 3
11 Priorities 2 or 3 Priority 3
1. See IPIC field definition in Part 5.6.30.2
1
Current Interrupt
Priority Level
Required Nested
Exception Priority
5.3.3 Fast Interrupt Handling
Fast interrupts are described in the DSP56F800E Reference Manual. The interrupt controller recognizes
fast interrupts before the core does.
A fast interrupt is defined (to the ITCN) by:
1. Setting the priority of the interrupt as level 2, with the appropriate field in the IPR registers
2. Setting the FIMn register to the appropriate vector number
3. Setting the FIVALn and FIVAHn registers with the address of the code for the fast interrupt
When an interrupt occurs, its vector number is compared with the FIM0 and FIM1 register values. If a
match occurs, and it is a level 2 interrupt, the ITCN handles it as a fast interrupt. The ITCN takes the vector
address from the appropriate FIVALn and FIVAHn registers, instead of generating an address that is an
offset from the VBA.
The core then fetches the instruction from the indicated vector adddress and if it is not a JSR, the core starts
its fast interrupt handling.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 71
Preliminary
Page 72

5.4 Block Diagram
INT1
Priority
Level
2 -> 4
Decode
Priority
Level
Level 0
82 -> 7
Priority
Encoder
Level 3
82 -> 7
Priority
Encoder
7
7
any0
any3
CONTROL
IACK
SR[9:8]
INT
VAB
IPIC
PIC_EN
INT82
2 -> 4
Decode
Figure 5-1 Interrupt Controller Block Diagram
5.5 Operating Modes
The ITCN module design contains two major modes of operation:
• Functional Mode
The ITCN is in this mode by default.
• Wait and Stop Modes
During Wait and Stop modes, the system clocks and the 56800E core are turned off. The ITCN will signal
a pending IRQ to the System Integration Module (SIM) to restart the clocks and service the IRQ. An IRQ
can only wake up the core if the IRQ is enabled prior to entering the Wait or Stop mode. Also, the IRQA
and IRQB
are set to make them falling-edge sensitive. This is because there is no clock available to detect the falling
edge.
A peripheral which requires a clock to generate interrupts will not be able to generate interrupts during Stop
mode. The FlexCAN module can wake the device from Stop mode, and a reset will do just that, or IRQA
and IRQB
signals automatically become low-level sensitive in these modes, even if the control register bits
can wake it up.
56F8345 Technical Data, Rev. 14.0
72 Freescale Semiconductor
Preliminary
Page 73

Register Descriptions
5.6 Register Descriptions
A register address is the sum of a base address and an address offset. The base address is defined at the
system level and the address offset is defined at the module level. The ITCN peripheral has 24 registers.
Table 5-3 ITCN Register Summary
(ITCN_BASE = $00F1A0)
Register
Acronym
IPR0 $0
IPR1 $1
IPR2 $2
IPR3 $3
IPR4 $4
IPR5 $5
IPR6 $6
IPR7 $7
IPR8 $8
IPR9 $9
VBA $A
FIM0 $B
FIVAL0 $C
FIVAH0 $D
FIM1 $E
FIVAL1 $F
FIVAH1 $10
IRQP0 $11
IRQP1 $12
IRQP2 $13
IRQP3 $14
IRQP4 $15
IRQP5 $16
ICTL $1D
Base Address + Register Name Section Location
Interrupt Priority Register 0
Interrupt Priority Register 1
Interrupt Priority Register 2
Interrupt Priority Register 3
Interrupt Priority Register 4
Interrupt Priority Register 5
Interrupt Priority Register 6
Interrupt Priority Register 7
Interrupt Priority Register 8
Interrupt Priority Register 9
Vector Base Address Register
Fast Interrupt 0 Match Register
Fast Interrupt 0 Vector Address Low Register
Fast Interrupt 0 Vector Address High Register
Fast Interrupt 1 Match Register
Fast Interrupt 1 Vector Address Low Register
Fast Interrupt 1 Vector Address High Register
IRQ Pending Register 0
IRQ Pending Register 1
IRQ Pending Register 2
IRQ Pending Register 3
IRQ Pending Register 4
IRQ Pending Register 5
Reserved
Interrupt Control Register
5.6.1
5.6.2
5.6.3
5.6.4
5.6.5
5.6.6
5.6.7
5.6.8
5.6.9
5.6.10
5.6.11
5.6.12
5.6.13
5.6.14
5.6.15
5.6.16
5.6.17
5.6.18
5.6.19
5.6.20
5.6.21
5.6.22
5.6.23
5.6.30
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 73
Preliminary
Page 74

Add.
Register
Offset
Name
$0 IPR0
$1 IPR1
$2 IPR2
$3 IPR3
$4 IPR4
$5 IPR5
$6 IPR6
IPR7
$7
$8 IPR8
$9 IPR9
$A VBA
$B FIM0
$C FIVAL0
$D FIVAH0
$E FIM1
$F FIVAL1
$10 FIVAH1
$11 IRQP0
$12 IRQP1
$13 IRQP2
$14 IRQP3
$15 IRQP4
$16 IRQP5
Reserved
$1D ICTL
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0 0
R
W
0 0 0 0 0 0 0 0 0 0
R
BKPT_U0 IPL STPCNT IPL
W
R
FMCBE IPL FMCC IPL FMERR IPL LOCK IPL LVI IPL
W
R
GPIOD
IPL
W
R
SPI0_RCV
IPL
W
R
DEC1_XIRQ IPL DEC1_HIRQ IPL
W
R
TMRC0 IPL TMRD3 IPL TMRD2 IPL TMRD1 IPL TMRD0 IPL
W
R
TMRA0 IPL TMRB3 IPL TMRB2 IPL TMRB1 IPL TMRB0 IPL TMRC3 IPL TMRC2 IPL TMRC1 IPL
W
R
SCI0_RCV IPL SCI0_RERR IPL
W
R
PWMA_F IPL PWMB_F IPL
W
0 0 0 VECTOR BASE ADDRESS
R
GPIOE
IPL
SPI1_XMIT
IPL
GPIOF
IPL
SPI1_RCV
IPL
SCI1_RCV
IPL
0 0
PWMA_RL
IPL
0 0 0 0 0 0 0 0 0 0
RX_REG IPL TX_REG IPL TRBUF IPL
0 0
FCMSGBUF IPL FCWKUP IPL FCERR IPL FCBOFF IPL
0 0 0 0
SCI1_RERR
IPL
SCI0_TIDL IPL SCI0_XMIT IPL TMRA3 IPL TMRA2 IPL TMRA1 IPL
PWMB_RL IPL ADCA_ZC IPL ABCB_ZC IPL ADCA_CC IPL ADCB_CC IPL
0 0
GPIOA IPL GPIOB IPL GPIOC IPL
SCI1_TIDL
IPL
0 0
IRQB IPL IRQA IPL
SCI1_XMIT
IPL
DEC0_XIRQ IPL
W
0 0 0 0 0 0 0 0 0
R
W
R
W
0 0 0 0 0 0 0 0 0 0 0
R
FAST INTERRUPT 0
VECTOR ADDRESS LOW
W
0 0 0 0 0 0 0 0 0
R
W
R
W
0 0 0 0 0 0 0 0 0 0 0
R
0 0 0 0 0 0 0 0 0 0 0
W
R
FAST INTERRUPT 1
VECTOR ADDRESS LOW
PENDING [16:2] 1
FAST INTERRUPT 0
FAST INTERRUPT 0
VECTOR ADDRESS HIGH
FAST INTERRUPT 1
FAST INTERRUPT 1
VECTOR ADDRESS HIGH
W
R
PENDING [32:17]
W
R
PENDING [48:33]
W
R
PENDING [64:49]
W
R
PENDING [80:65]
W
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
R
W
IRQA
INT IPIC VAB
R
INT_DIS
IRQB
1
STATE
STATE
W
0 0
SPI0_XMIT
IPL
DEC0_HIRQ
IPL
PEND-
ING
[81]
IRQB
IRQA
EDG
EDG
= Reserved
Figure 5-2 ITCN Register Map Summary
56F8345 Technical Data, Rev. 14.0
74 Freescale Semiconductor
Preliminary
Page 75

Register Descriptions
5.6.1 Interrupt Priority Register 0 (IPR0)
Base + $0 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
0 0
00 0 0 0 0 0000000000
BKPT_U0IPL STPCNT IPL
Figure 5-3 Interrupt Priority Register 0 (IPR0)
5.6.1.1 Reserved—Bits 15–14
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
5.6.1.2 EOnCE Breakpoint Unit 0 Interrupt Priority Level (BKPT_U0 IPL)—
Bits13–12
This field is used to set the interrupt priority levels for IRQs. This IRQ is limited to priorities 1 through 3.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 1
• 10 = IRQ is priority level 2
• 11 = IRQ is priority level 3
0 0 0 0 0 0 0 0 0 0
5.6.1.3 EOnCE Step Counter Interrupt Priority Level (STPCNT IPL)—
Bits 11–10
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 1 through 3.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 1
• 10 = IRQ is priority level 2
• 11 = IRQ is priority level 3
5.6.1.4 Reserved—Bits 9–0
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
5.6.2 Interrupt Priority Register 1 (IPR1)
Base + $1 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
0 0 0 0 0 0 0 0 0 0
0000000000000000
RX_REG IPL TX_REG IPL TRBUF IPL
Figure 5-4 Interrupt Priority Register 1 (IPR1)
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 75
Preliminary
Page 76

5.6.2.1 Reserved—Bits 15–6
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
5.6.2.2 EOnCE Receive Register Full Interrupt Priority Level
(RX_REG IPL)—Bits 5–4
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 1 through 3.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 1
• 10 = IRQ is priority level 2
• 11 = IRQ is priority level 3
5.6.2.3 EOnCE Transmit Register Empty Interrupt Priority Level
(TX_REG IPL)—Bits 3–2
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 1 through 3.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 1
• 10 = IRQ is priority level 2
• 11 = IRQ is priority level 3
5.6.2.4 EOnCE Trace Buffer Interrupt Priority Level (TRBUF IPL)—
Bits 1–0
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 1 through 3.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 1
• 10 = IRQ is priority level 2
• 11 = IRQ is priority level 3
5.6.3 Interrupt Priority Register 2 (IPR2)
Base + $2 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
FMCBE IPL FMCC IPL FMERR IPL LOCK IPL LVI IPL
0000000000000000
Figure 5-5 Interrupt Priority Register 2 (IPR2)
0 0
IRQB IPL IRQA IPL
56F8345 Technical Data, Rev. 14.0
76 Freescale Semiconductor
Preliminary
Page 77

Register Descriptions
5.6.3.1 Flash Memory Command, Data, Address Buffers Empty Interrupt
Priority Level (FMCBE IPL)—Bits 15–14
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.3.2 Flash Memory Command Complete Priority Level (FMCC IPL)—
Bits 13–12
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.3.3 Flash Memory Error Interrupt Priority Level (FMERR IPL)—Bits 11–10
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.3.4 PLL Loss of Lock Interrupt Priority Level (LOCK IPL)—Bits 9–8
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 77
Preliminary
Page 78

5.6.3.5 Low Voltage Detector Interrupt Priority Level (LVI IPL)—Bits 7–6
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.3.6 Reserved—Bits 5–4
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
5.6.3.7 External IRQ B Interrupt Priority Level (IRQB IPL)—Bits 3–2
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.3.8 External IRQ A Interrupt Priority Level (IRQA IPL)—Bits 1–0
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
It is disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.4 Interrupt Priority Register 3 (IPR3)
Base + $3 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
GPIOD
IPL
000000 0 0 0 0 0 0 0 0 0 0
GPIOE
IPL
GPIOF
IPL
FCMSGBUF IPL FCWKUP IPL FCERR IPL FCBOFF IPL
Figure 5-6 Interrupt Priority Register 3 (IPR3)
0 0
56F8345 Technical Data, Rev. 14.0
78 Freescale Semiconductor
Preliminary
Page 79

Register Descriptions
5.6.4.1 GPIOD Interrupt Priority Level (GPIOD IPL)—Bits 15–14
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.4.2 GPIOE Interrupt Priority Level (GPIOE IPL)—Bits 13–12
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.4.3 GPIOF Interrupt Priority Level (GPIOF IPL)—Bits 11–10
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.4.4 FlexCAN Message Buffer Interrupt Priority Level (FCMSGBUF IPL)—
Bits 9–8
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 79
Preliminary
Page 80

5.6.4.5 FlexCAN Wake Up Interrupt Priority Level (FCWKUP IPL)—Bits 7–6
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.4.6 FlexCAN Error Interrupt Priority Level (FCERR IPL)—Bits 5–4
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.4.7 FlexCAN Bus Off Interrupt Priority Level (FCBOFF IPL)—Bits 3–2
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.4.8 Reserved—Bits 1–0
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
5.6.5 Interrupt Priority Register 4 (IPR4)
Base + $4 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
SPI0_RCV
IPL
0000000000000000
SPI1_XMIT
IPL
SPI1_RCV
IPL
Figure 5-7 Interrupt Priority Register 4 (IPR4)
0 0 0 0
GPIOA
IPL
GPIOB
IPL
GPIOC
IPL
56F8345 Technical Data, Rev. 14.0
80 Freescale Semiconductor
Preliminary
Page 81

Register Descriptions
5.6.5.1 SPI 0 Receiver Full Interrupt Priority Level (SPI0_RCV IPL)—
Bits 15–14
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.5.2 SPI 1 Transmit Empty Interrupt Priority Level (SPI1_XMIT IPL)—
Bits 13–12
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.5.3 SPI 1 Receiver Full Interrupt Priority Level (SPI1_RCV IPL)—
Bits 11–10
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.5.4 Reserved—Bits 9–6
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
5.6.5.5 GPIOA Interrupt Priority Level (GPIOA IPL)—Bits 5–4
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 81
Preliminary
Page 82

5.6.5.6 GPIOB Interrupt Priority Level (GPIOB IPL)—Bits 3–2
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.5.7 GPIOC Interrupt Priority Level (GPIOC IPL)—Bits 1–0
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.6 Interrupt Priority Register 5 (IPR5)
Base + $5 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
DEC1_XIRQ
IPL
0000000 000000000
DEC1_HIRQ
IPL
SCI1_RCV
IPL
SCI1_RERR
IPL
0 0
SCI1_TIDL
IPL
SCI1_XMIT
IPL
SPI0_XMIT
IPL
Figure 5-8 Interrupt Priority Register 5 (IPR5)
5.6.6.1 Quadrature Decoder 1 INDEX Pulse Interrupt Priority Level
(DEC1_XIRQ IPL)—Bits 15–14
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
82 Freescale Semiconductor
Preliminary
Page 83

Register Descriptions
5.6.6.2 Quadrature Decoder 1 HOME Signal Transition or Watchdog Timer
Interrupt Priority Level (DEC1_HIRQ IPL)—Bits 13–12
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.6.3 SCI 1 Receiver Full Interrupt Priority Level (SCI1_RCV IPL)—
Bits 11–10
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.6.4 SCI 1 Receiver Error Interrupt Priority Level (SCI1_RERR IPL)—
Bits 9–8
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.6.5 Reserved—Bits 7–6
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
5.6.6.6 SCI 1 Transmitter Idle Interrupt Priority Level (SCI1_TIDL IPL)—
Bits 5–4
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 83
Preliminary
Page 84

5.6.6.7 SCI 1 Transmitter Empty Interrupt Priority Level (SCI1_XMIT IPL)—
Bits 3–2
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.6.8 SPI 0 Transmitter Empty Interrupt Priority Level (SPI0_XMIT IPL)—
Bits 1–0
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.7 Interrupt Priority Register 6 (IPR6)
Base + $6 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
TMRC0
IPL
0000000000000000
TMRD3
IPL
TMRD2
IPL
TMRD1
IPL
TMRD0
IPL
0 0
DEC0_XIRQ
IPL
DEC0_HIRQ
IPL
Figure 5-9 Interrupt Priority Register 6 (IPR6)
5.6.7.1 Timer C, Channel 0 Interrupt Priority Level (TMRC0 IPL)—
Bits 15–14
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
84 Freescale Semiconductor
Preliminary
Page 85

Register Descriptions
5.6.7.2 Timer D, Channel 3 Interrupt Priority Level (TMRD3 IPL)—
Bits 13–12
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.7.3 Timer D, Channel 2 Interrupt Priority Level (TMRD2 IPL)—
Bits 11–10
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.7.4 Timer D, Channel 1 Interrupt Priority Level (TMRD1 IPL)—
Bits 9–8
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.7.5 Timer D, Channel 0 Interrupt Priority Level (TMRD0 IPL)—
Bits 7–6
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 85
Preliminary
Page 86

5.6.7.6 Reserved—Bits 5–4
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
5.6.7.7 Quadrature Decoder 0, INDEX Pulse Interrupt Priority Level
(DEC0_XIRQ IPL)—Bits 3–2
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.7.8 Quadrature Decoder 0, HOME Signal Transition or Watchdog Timer
Interrupt Priority Level (DEC0_HIRQ IPL)—Bits 1–0
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.8 Interrupt Priority Register 7 (IPR7)
Base + $7 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
5.6.8.1 Timer A, Channel 0 Interrupt Priority Level (TMRA0 IPL)—Bits 15–14
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
TMRA0 IPL TMRB3 IPL TMRB2 IPL TMRB1 IPL TMRB0 IPL TMRC3 IPL TMRC2 IPL TMRC1 IPL
0000000000000000
Figure 5-10 Interrupt Priority Register (IPR7)
56F8345 Technical Data, Rev. 14.0
86 Freescale Semiconductor
Preliminary
Page 87

Register Descriptions
5.6.8.2 Timer B, Channel 3 Interrupt Priority Level (TMRB3 IPL)—Bits 13–12
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.8.3 Timer B, Channel 2 Interrupt Priority Level (TMRB2 IPL)—Bits 11–10
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.8.4 Timer B, Channel 1 Interrupt Priority Level (TMRB1 IPL)—Bits 9–8
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.8.5 Timer B, Channel 0 Interrupt Priority Level (TMRB0 IPL)—Bits 7–6
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.8.6 Timer C, Channel 3 Interrupt Priority Level (TMRC3 IPL)—Bits 5–4
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 87
Preliminary
Page 88

5.6.8.7 Timer C, Channel 2 Interrupt Priority Level (TMRC2 IPL)—Bits 3–2
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.8.8 Timer C, Channel 1 Interrupt Priority Level (TMRC1 IPL)—Bits 1–0
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.9 Interrupt Priority Register 8 (IPR8)
Base + $8 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
SCI0_RCV
IPL
0000000000000000
SCI0_RERR
IPL
0 0
SCI0_TIDL
IPL
SCI0_XMIT
IPL
TMRA3 IPL TMRA2 IPL TMRA1 IPL
Figure 5-11 Interrupt Priority Register 8 (IPR8)
5.6.9.1 SCI0 Receiver Full Interrupt Priority Level (SCI0_RCV IPL)—Bits 15–14
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.9.2 SCI0 Receiver Error Interrupt Priority Level (SCI0_RERR IPL)—
Bits 13–12
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
88 Freescale Semiconductor
Preliminary
Page 89

Register Descriptions
5.6.9.3 Reserved—Bits 11–10
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
5.6.9.4 SCI0 Transmitter Idle Interrupt Priority Level (SCI0_TIDL IPL)—
Bits 9–8
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.9.5 SCI0 Transmitter Empty Interrupt Priority Level (SCI0_XMIT IPL)—
Bits 7–6
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.9.6 Timer A, Channel 3 Interrupt Priority Level (TMRA3 IPL)—Bits 5–4
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.9.7 Timer A, Channel 2 Interrupt Priority Level (TMRA2 IPL)—Bits 3–2
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 89
Preliminary
Page 90

5.6.9.8 Timer A, Channel 1 Interrupt Priority Level (TMRA1 IPL)—Bits 1–0
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.10 Interrupt Priority Register 9 (IPR9)
Base + $9 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
PWMA_F IPL PWMB_F IPL
0000000000000000
Figure 5-12 Interrupt Priority Register 9 (IPR9)
5.6.10.1 PWM A Fault Interrupt Priority Level (PWMA_F IPL)—Bits 15–14
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
PWMA_RL
IPL
PWMB_RL
IPL
ADCA_ZC IPL ABCB_ZC IPL
ADCA_CC
IPL
ADCB_CC
IPL
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.10.2 PWM B Fault Interrupt Priority Level (PWMB_F IPL)—Bits 13–12
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.10.3 Reload PWM A Interrupt Priority Level (PWMA_RL IPL)—Bits 11–10
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
90 Freescale Semiconductor
Preliminary
Page 91

Register Descriptions
5.6.10.4 Reload PWM B Interrupt Priority Level (PWMB_RL IPL)—Bits 9–8
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.10.5 ADC A Zero Crossing or Limit Error Interrupt Priority Level
(ADCA_ZC IPL)—Bits 7–6
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.10.6 ADC B Zero Crossing Interrupt Priority Level (ADCB_ZC IPL)—
Bits 5–4
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.10.7 ADC A Conversion Complete Interrupt Priority Level
(ADCA_CC IPL)—Bits 3–2
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 91
Preliminary
Page 92

5.6.10.8 ADC B Conversion Complete Interrupt Priority Level
(ADCB_CC IPL)—Bits 1–0
This field is used to set the interrupt priority level for IRQs. This IRQ is limited to priorities 0 through 2.
They are disabled by default.
• 00 = IRQ disabled (default)
• 01 = IRQ is priority level 0
• 10 = IRQ is priority level 1
• 11 = IRQ is priority level 2
5.6.11 Vector Base Address Register (VBA)
Base + $A 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
5.6.11.1 Reserved—Bits 15–13
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
0 0 0
0000000000000000
VECTOR BASE ADDRESS
Figure 5-13 Vector Base Address Register (VBA)
5.6.11.2 Interrupt Vector Base Address (VECTOR BASE ADDRESS)—
Bits 12–0
The contents of this register determine the location of the Vector Address Table. The value in this register
is used as the upper 13 bits of the interrupt Vector Address Bus (VAB[20:0]). The lower eight bits are
determined based upon the highest-priority interrupt. They are then appended onto VBA before presenting
the full interrupt address to the 56800E core; see Part 5.3.1 for details.
5.6.12 Fast Interrupt 0 Match Register (FIM0)
Base + $B 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
5.6.12.1 Reserved—Bits 15–7
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
0 0 0 0 0 0 0 0 0
0000000000000000
FAST INTERRUPT 0
Figure 5-14 Fast Interrupt 0 Match Register (FIM0)
56F8345 Technical Data, Rev. 14.0
92 Freescale Semiconductor
Preliminary
Page 93

Register Descriptions
5.6.12.2 Fast Interrupt 0 Vector Number (FAST INTERRUPT 0)—Bits 6–0
This value determines which IRQ will be a Fast Interrupt 0. Fast interrupts vector directly to a service
routine based on values in the Fast Interrupt Vector Address registers without having to go to a jump table
first; see Part 5.3.3. IRQs used as fast interrupts must be set to priority level 2. Unexpected results will
occur if a fast interrupt vector is set to any other priority. Fast interrupts automatically become the
highest-priority level 2 interrupt, regardless of their location in the interrupt table, prior to being declared
as fast interrupt. Fast Interrupt 0 has priority over Fast Interrupt 1. To determine the vector number of each
IRQ, refer to Table 4-5.
5.6.13 Fast Interrupt 0 Vector Address Low Register (FIVAL0)
Base + $C 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
0000000000000000
Figure 5-15 Fast Interrupt 0 Vector Address Low Register (FIVAL0)
5.6.13.1 Fast Interrupt 0 Vector Address Low (FIVAL0)—Bits 15–0
FAST INTERRUPT 0
VECTOR ADDRESS LOW
The lower 16 bits of the vector address used for Fast Interrupt 0. This register is combined with FIVAH0
to form the 21-bit vector address for Fast Interrupt 0 defined in the FIM0 register.
5.6.14 Fast Interrupt 0 Vector Address High Register (FIVAH0)
Base + $D 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
Figure 5-16 Fast Interrupt 0 Vector Address High Register (FIVAH0)
5.6.14.1 Reserved—Bits 15–5
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
5.6.14.2 Fast Interrupt 0 Vector Address High (FIVAH0)—Bits 4–0
The upper five bits of the vector address used for Fast Interrupt 0. This register is combined with FIVAL0
to form the 21-bit vector address for Fast Interrupt 0 defined in the FIM0 register.
0 0 0 0 0 0 0 0 0 0 0
0000000000000000
FAST INTERRUPT 0
VECTOR ADDRESS HIGH
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 93
Preliminary
Page 94

5.6.15 Fast Interrupt 1 Match Register (FIM1)
Base + $E 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
5.6.15.1 Reserved—Bits 15–7
This bit field is reserved or not implemented. It is read as 0, but cannot be modified by writing.
5.6.15.2 Fast Interrupt 1 Vector Number (FAST INTERRUPT 1)—Bits 6–0
This value determines which IRQ will be a Fast Interrupt 1. Fast interrupts vector directly to a service
routine based on values in the Fast Interrupt Vector Address registers without having to go to a jump table
first; see Part 5.3.3. IRQs used as fast interrupts must be set to priority level 2. Unexpected results will
occur if a fast interrupt vector is set to any other priority. Fast interrupts automatically become the
highest-priority level 2 interrupt, regardless of their location in the interrupt table, prior to being declared
as fast interrupt. Fast Interrupt 0 has priority over Fast Interrupt 1. To determine the vector number of each
IRQ, refer to Table 4-5.
0 0 0 0 0 0 0 0 0
0000000000000000
FAST INTERRUPT 1
Figure 5-17 Fast Interrupt 1 Match Register (FIM1)
5.6.16 Fast Interrupt 1 Vector Address Low Register (FIVAL1)
Base + $F 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
0000000000000000
FAST INTERRUPT 1
VECTOR ADDRESS LOW
Figure 5-18 Fast Interrupt 1 Vector Address Low Register (FIVAL1)
5.6.16.1 Fast Interrupt 1 Vector Address Low (FIVAL1)—Bits 15–0
The lower 16 bits of the vector address are used for Fast Interrupt 1. This register is combined with
FIVAH1 to form the 21-bit vector address for Fast Interrupt 1 defined in the FIM1 register.
5.6.17 Fast Interrupt 1 Vector Address High Register (FIVAH1)
Base + $10 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
Figure 5-19 Fast Interrupt 1 Vector Address High Register (FIVAH1)
0 0 0 0 0 0 0 0 0 0 0
0000000000000000
FAST INTERRUPT 1
VECTOR ADDRESS HIGH
5.6.17.1 Reserved—Bits 15–5
This bit field is reserved or not implemented. It is read as 0 and cannot be modified by writing.
56F8345 Technical Data, Rev. 14.0
94 Freescale Semiconductor
Preliminary
Page 95

Register Descriptions
5.6.17.2 Fast Interrupt 1 Vector Address High (FIVAH1)—Bits 4–0
The upper five bits of the vector address are used for Fast Interrupt 1. This register is combined with
FIVAL1 to form the 21-bit vector address for Fast Interrupt 1 defined in the FIM1 register.
5.6.18 IRQ Pending 0 Register (IRQP0)
Base + $11 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
1111111111111111
Figure 5-20 IRQ Pending 0 Register (IRQP0)
5.6.18.1 IRQ Pending (PENDING)—Bits 16–2
This register combines with the other five to represent the pending IRQs for interrupt vector numbers 2
through 81.
• 0 = IRQ pending for this vector number
• 1 = No IRQ pending for this vector number
PENDING [16:2] 1
5.6.18.2 Reserved—Bit 0
This bit is reserved or not implemented. It is read as 1 and cannot be modified by writing.
5.6.19 IRQ Pending 1 Register (IRQP1)
$Base + $12 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
1111111111111111
Figure 5-21 IRQ Pending 1 Register (IRQP1)
5.6.19.1 IRQ Pending (PENDING)—Bits 32–17
This register combines with the other five to represent the pending IRQs for interrupt vector numbers 2
through 81.
• 0 = IRQ pending for this vector number
• 1 = No IRQ pending for this vector number
PENDING [32:17]
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 95
Preliminary
Page 96

5.6.20 IRQ Pending 2 Register (IRQP2)
Base + $13 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
1111111111111111
PENDING [48:33]
Figure 5-22 IRQ Pending 2 Register (IRQP2)
5.6.20.1 IRQ Pending (PENDING)—Bits 48–33
This register combines with the other five to represent the pending IRQs for interrupt vector numbers 2
through 81.
• 0 = IRQ pending for this vector number
• 1 = No IRQ pending for this vector number
5.6.21 IRQ Pending 3 Register (IRQP3)
Base + $14 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
1111111111111111
PENDING [64:49]
Figure 5-23 IRQ Pending 3 Register (IRQP3)
5.6.21.1 IRQ Pending (PENDING)—Bits 64–49
This register combines with the other five to represent the pending IRQs for interrupt vector numbers 2
through 81.
• 0 = IRQ pending for this vector number
• 1 = No IRQ pending for this vector number
5.6.22 IRQ Pending 4 Register (IRQP4)
Base + $15 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
1111111111111111
Figure 5-24 IRQ Pending 4 Register (IRQP4)
5.6.22.1 IRQ Pending (PENDING)—Bits 80–65
This register combines with the other five to represent the pending IRQs for interrupt vector numbers 2
through 81.
PENDING [80:65]
• 0 = IRQ pending for this vector number
• 1 = No IRQ pending for this vector number
56F8345 Technical Data, Rev. 14.0
96 Freescale Semiconductor
Preliminary
Page 97

Register Descriptions
5.6.23 IRQ Pending 5 Register (IRQP5)
Base + $16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
111111111111111 1
Figure 5-25 IRQ Pending Register 5 (IRQP5)
5.6.23.1 Reserved—Bits 96–82
This bit field is reserved or not implemented. The bits are read as 1 and cannot be modified by writing.
5.6.23.2 IRQ Pending (PENDING)—Bit 81
This register combines with the other five to represent the pending IRQs for interrupt vector numbers 2
through 81.
• 0 = IRQ pending for this vector number
• 1 = No IRQ pending for this vector number
PEND-
ING
[81]
5.6.24 Reserved—Base + 17
5.6.25 Reserved—Base + 18
5.6.26 Reserved—Base + 19
5.6.27 Reserved—Base + 1A
5.6.28 Reserved—Base + 1B
5.6.29 Reserved—Base + 1C
5.6.30 ITCN Control Register (ICTL)
Base + $1D 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Read
Write
RESET
INT IPIC VAB
0 0 0 1000000 0 1 1 1 0 0
INT_DIS
Figure 5-26 ITCN Control Register (ICTL)
1
IRQB
STATE IRQA STATE
IRQB
EDG
IRQA
EDG
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 97
Preliminary
Page 98

5.6.30.1 Interrupt (INT)—Bit 15
This read-only bit reflects the state of the interrupt to the 56800E core.
• 0 = No interrupt is being sent to the 56800E core
• 1 = An interrupt is being sent to the 56800E core
5.6.30.2 Interrupt Priority Level (IPIC)—Bits 14–13
These read-only bits reflect the state of the new interrupt priority level bits being presented to the 56800E
core at the time the last IRQ was taken. This field is only updated when the 56800E core jumps to a new
interrupt service routine.
Note: Nested interrupts may cause this field to be updated before the original interrupt service routine can
read it.
• 00 = Required nested exception priority levels are 0, 1, 2, or 3
• 01 = Required nested exception priority levels are 1, 2, or 3
• 10 = Required nested exception priority levels are 2 or 3
• 11 = Required nested exception priority level is 3
5.6.30.3 Vector Number - Vector Address Bus (VAB)—Bits 12–6
This read-only field shows the vector number (VAB[7:1]) used at the time the last IRQ was taken. This
field is only updated when the 56800E core jumps to a new interrupt service routine.
Note: Nested interrupts may cause this field to be updated before the original interrupt service routine can
read it.
5.6.30.4 Interrupt Disable (INT_DIS)—Bit 5
This bit allows all interrupts to be disabled.
• 0 = Normal operation (default)
• 1 = All interrupts disabled
5.6.30.5 Reserved—Bit 4
This bit field is reserved or not implemented. It is read as 1 and cannot be modified by writing.
5.6.30.6 IRQB State Pin (IRQB STATE)—Bit 3
This read-only bit reflects the state of the external IRQB pin.
5.6.30.7 IRQA State Pin (IRQA STATE)—Bit 2
This read-only bit reflects the state of the external IRQA pin.
56F8345 Technical Data, Rev. 14.0
98 Freescale Semiconductor
Preliminary
Page 99

Resets
5.6.30.8 IRQB Edge Pin (IRQB Edg)—Bit 1
This bit controls whether the external IRQB interrupt is edge- or level-sensitive. During Stop and Wait
modes, it is automatically level-sensitive.
•0 = IRQB interrupt is a low-level sensitive (default)
•1 = IRQB
interrupt is falling-edge sensitive.
5.6.30.9 IRQA Edge Pin (IRQA Edg)—Bit 0
This bit controls whether the external IRQA interrupt is edge- or level-sensitive. During Stop and Wait
modes, it is automatically level-sensitive.
•0 = IRQA interrupt is a low-level sensitive (default)
•1 = IRQA
interrupt is falling-edge sensitive.
5.7 Resets
5.7.1 Reset Handshake Timing
The ITCN provides the 56800E core with a reset vector address whenever RESET is asserted. The reset
vector will be presented until the second rising clock edge after RESET is released.
5.7.2 ITCN After Reset
After reset, all of the ITCN registers are in their default states. This means all interrupts are disabled except
the core IRQs with fixed priorities:
• Illegal Instruction
• SW Interrupt 3
• HW Stack Overflow
• Misaligned Long Word Access
• SW Interrupt 2
• SW Interrupt 1
• SW Interrupt 0
• SW Interrupt LP
These interrupts are enabled at their fixed priority levels.
56F8345 Technical Data, Rev. 14.0
Freescale Semiconductor 99
Preliminary
Page 100

Part 6 System Integration Module (SIM)
6.1 Introduction
The SIM module is a system catchall for the glue logic that ties together the system-on-chip. It controls
distribution of resets and clocks and provides a number of control features. The system integration module
is responsible for the following functions:
• Reset sequencing
• Clock generation & distribution
• Stop/Wait control
• Pull-up enables for selected peripherals
• System status registers
• Registers for software access to the JTAG ID of the chip
• Enforcing Flash security
These are discussed in more detail in the sections that follow.
6.2 Features
The SIM has the following features:
• Flash security feature prevents unauthorized access to code/data contained in on-chip Flash memory
• Power-saving clock gating for peripheral
• Three power modes (Run, Wait, Stop) to control power utilization
— Stop mode shuts down the 56800E core, system clock, peripheral clock, and PLL operation
— Stop mode entry can optionally disable PLL and Oscillator (low power vs. fast restart); must be done
explicitly
— Wait mode shuts down the 56800E core and unnecessary system clock operation
— Run mode supports full part operation
• Controls to enable/disable the 56800E core WAIT and STOP instructions
• Calculates base delay for reset extension based upon POR or RESET
clocks (phased release of reset) for reset, except for POR, which is 2
• Controls reset sequencing after reset
• Software-initiated reset
• Four 16-bit registers reset only by a Power-On Reset usable for general-purpose software control
• System Control Register
• Registers for software access to the JTAG ID of the chip
operations. Reset delay will be 3 x 32
21
clock cycles.
56F8345 Technical Data, Rev. 14.0
100 Freescale Semiconductor
Preliminary
 Loading...
Loading...