


Guía de instalación
Tarjeta PROFIBUS
VLT® Soft Starter MCD 600

Guía de instalación | Tarjeta PROFIBUS
Índice
Índice
1 Seguridad 4
1.1 Exención de responsabilidad 4
1.2 Advertencias 4
1.3 Información importante para el usuario 4
2 Instalación 5
2.1 Instalación de la tarjeta de expansión 5
2.2 Conexión a la red 5
2.3 LED de realimentación 6
3 Configuración 7
3.1 Preparativos 7
3.2 Dirección de PROFIBUS 7
3.3 Activación del control de red 7
4 Estructuras de datos 8
4.1 Modos de funcionamiento 8
4.2 Estructura de datos de I/O de control del arrancador suave 8
4.3 Estructura de datos de I/O de supervisión del arrancador suave 9
4.4 Estructura de datos de I/O de programación del arrancador suave 12
4.4.1 Salidas 12
4.4.2 Entradas 12
4.5 Códigos de desconexión 14
5 Telegrama y aviso de diagnóstico de PROFIBUS 16
5.1 Estructura del telegrama de diagnóstico 16
5.1.1 Código de desconexión PROFIBUS 16
5.1.2 Número de parámetro modificado 16
6 Modos admitidos 17
6.1 Modo de bloqueo de PROFIBUS 17
6.2 Modo de sincronización de PROFIBUS 17
6.3 Modo de borrado de PROFIBUS 17
7 Especificaciones 18
7.1 Conexiones 18
7.2 Ajustes 18
7.3 Certificación 18
AQ277154583779es-000101 / | 3Danfoss A/S © 2018.09
Guía de instalación | Tarjeta PROFIBUS
Seguridad
1 Seguridad
1.1 Exención de responsabilidad
Los ejemplos y diagramas incluidos en este manual tienen únicamente un propósito ilustrativo. La información contenida en este
manual está sujeta a cambios en cualquier momento y sin previo aviso. No se aceptará responsabilidad alguna por daños directos,
indirectos o consecuentes como resultado del uso o la aplicación de este equipo.
1.2 Advertencias
ADVE RT EN CI A
RIESGO DE DESCARGA
La colocación o extracción de accesorios mientras el arrancador suave está conectado a la red puede producir lesiones.
Antes de colocar o extraer accesorios, aísle el arrancador suave de la tensión de red.
-
AD VE RT EN CI A
RIESGO DE LESIONES Y DE DAÑOS AL EQUIPO
Si se introducen objetos extraños o se toca el interior del arrancador suave mientras está abierta la tapa del puerto de
expansión, puede ponerse en peligro al personal y el arrancador suave podría dañarse.
No introduzca objetos extraños en el arrancador suave cuando la tapa del puerto esté abierta.
-
No toque el interior del arrancador suave cuando la tapa del puerto esté abierta.
-
1.3 Información importante para el usuario
Respete todas las medidas de seguridad necesarias cuando controle el arrancador suave a distancia. Avise al personal de que la
máquina puede arrancar sin previo aviso.
El instalador será responsable de seguir todas las instrucciones de este manual y respetar las buenas prácticas de manipulación
eléctrica.
A la hora de instalar y usar este equipo, siga todas las prácticas habituales reconocidas internacionalmente para la comunicación
RS485.
4 | Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181
1 2
e77ha739.10
Guía de instalación | Tarjeta PROFIBUS
Instalación
2 Instalación
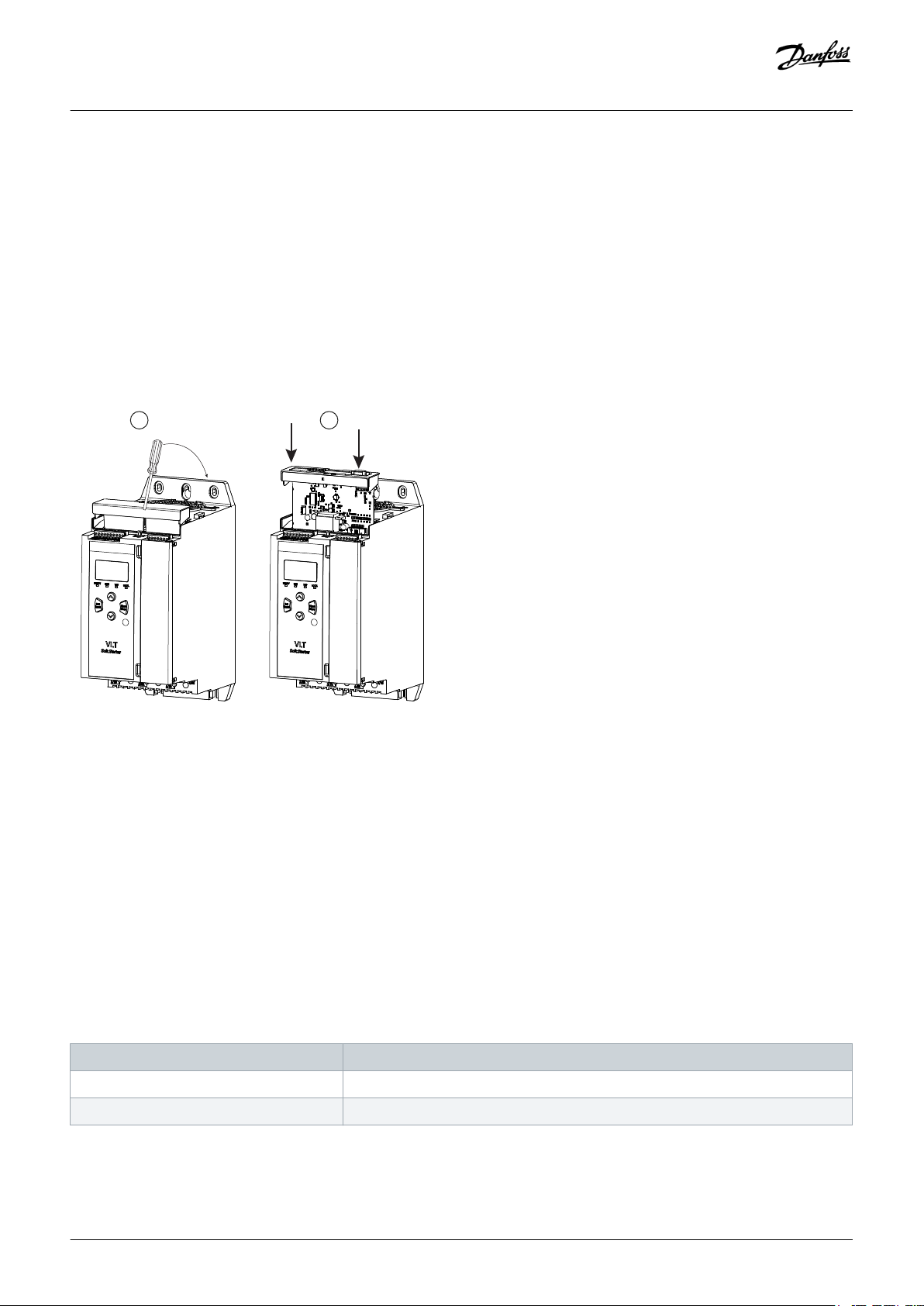
2.1 Instalación de la tarjeta de expansión
Procedimiento
1. Haga presión con un destornillador plano sobre la ranura central de la tapa del puerto de expansión y retírela del arrancador suave.
2. Coloque la tarjeta alineada con el puerto de expansión.
3. Empuje suavemente la tarjeta por los rieles de guía hasta que haga clic en el interior del arrancador suave.
Ejemplo:
Ilustración 1: Instalación de las tarjetas de expansión
2.2 Conexión a la red
Prerequisites:
La tarjeta de expansión debe instalarse en el arrancador suave.
Procedimiento
1. Restablezca la potencia de control.
2. Conecte el cableado de campo a través del conector DB9.
Ejemplo:
Tabla 1: Terminal DB9
Número de pin Asignación
1 Pantalla
2 24 V CC negativo (opcional)
Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181| 5
Guía de instalación | Tarjeta PROFIBUS
Número de pin Asignación
3 R×D / T × D / –P
4 Sin uso
5 DGND
6 VP (solo esclavo de final de bus)
7 24 V CC positivo (opcional)
8 R × D / T × D / –N
9 DGND
Instalación
2.3 LED de realimentación
Apagados Encendidos
Alimentación (rojo) El dispositivo no está encendido. El dispositivo está encendido y listo para conectarse en
línea.
Red (verde) Sin conexión, fuera de línea o fallo de
intercambio de datos.
El dispositivo está en línea y en estado de intercambio de
datos.
AV IS O
Si está desactivada la comunicación, el arrancador suave puede sufrir una desconexión de Comunicaciones de red. Si el
parámetro 6-13 Network Communications (Comunicaciones de red) está ajustado en Soft Trip and Log (Desconexión suave y
registro) o en Trip Starter (Desconectar arrancador), habrá que reiniciar el arrancador suave.
AV IS O
Si falla la comunicación entre el dispositivo y la red, se apagará el LED de estado del bus. Al restaurarse la comunicación, volverá
a encenderse el LED de estado del bus.
6 | Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181
Guía de instalación | Tarjeta PROFIBUS
Configuración
3 Configuración
3.1 Preparativos
Importe el último archivo .gsd a la herramienta de configuración del maestro. Este archivo está disponible a través del proveedor en
www.danfoss.com/en/service-and-support/downloads/dds/fieldbus-configuration-files/#tab-downloads.
Si el maestro utiliza iconos de pantalla, hay dos archivos gráficos de mapa de bits disponibles en el sitio web. SSPM_N.bmp indica el
modo normal. SSPM_D.bmp indica el modo de diagnóstico.
3.2 Dirección de PROFIBUS
Ajuste la dirección de red de la tarjeta a través del arrancador suave (parámetro 12-7 PROFIBUS Address [Dirección de PROFIBUS]). Para
obtener más información sobre la configuración del arrancador suave, consulte el manual de funcionamiento del VLT® Soft Starter MCD
600.
AV IS O
La tarjeta PROFIBUS lee la dirección de red en el arrancador suave al aplicar la tensión de control. Si se modifican los parámetros
en el arrancador suave, reinicie la potencia de control para que los nuevos valores surtan efecto.
3.3 Activación del control de red
El arrancador suave solo acepta órdenes de la tarjeta PROFIBUS si el parámetro 1-1 Command Source (Origen de las órdenes) está
ajustado como Network (Red).
AV IS O
Si está activada la entrada de reinicio, el arrancador suave no funcionará. Si no se requiere un conmutador de reinicio, coloque
un enlace entre los terminales RESET y COM+ del arrancador suave.
En caso de fallo de la red PROFIBUS, el dispositivo abandonará el modo de intercambio de datos una vez que concluya el límite de
tiempo de vigilancia de red. Este límite de tiempo se ajusta en la herramienta de configuración del maestro.
Un parámetro de tiempo límite de comunicación ubicado en el archivo GSD determina el tiempo que debe pasar tras este evento para
que se obligue al arrancador suave a pasar al estado de desconexión.
Configure el parámetro Comunicación Timeout (Tiempo límite de comunicación) del archivo GSD con un ajuste comprendido entre 0 y
100 s. El ajuste predeterminado es 10 s.
AV IS O
Si el parámetro de tiempo límite de comunicación se ajusta en 0, el estado actual del arrancador suave permanecerá inalterado
en caso de fallo de red. Esto permite manejar el arrancador suave mediante control local, pero NO se trata de una opción a
prueba de fallos.
Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181| 7

Guía de instalación | Tarjeta PROFIBUS
Estructuras de datos
4 Estructuras de datos
4.1 Modos de funcionamiento
El archivo GSD contiene tres modos de funcionamiento, que presentan la siguiente compatibilidad con las estructuras de I/O de datos:
Estructura de datos Modo básico Modo ampliado Modo de carga y descarga
de parámetros
Estructura de datos de I/O de control del arrancador suave ✓ ✓ ✓
Estructura de datos de I/O de supervisión del arrancador suave ✗ ✓ ✓
Estructura de datos de I/O de programación del arrancador suave ✗ ✗ ✓
El modo básico permite iniciar y detener el arrancador suave y obtener información limitada sobre su estado de funcionamiento.
El modo ampliado define más bytes, lo que permite la lectura de datos de funcionamiento del arrancador suave tales como la
intensidad y la temperatura reales del motor.
El modo de carga y descarga de parámetros permite la lectura y escritura de valores de parámetros del arrancador suave.
4.2 Estructura de datos de I/O de control del arrancador suave
Tabla 2: Estructura del código de control maestro/esclavo
Byte Bits Detalles
0 0–1 Reservado
2–3 0 = Usar la entrada remota del arrancador suave para seleccionar el ajuste del motor
1 = Usar el ajuste primario del motor en el arranque
2 = Usar el ajuste secundario del motor en el arranque
4 = Reservado
4 0 = La acción de parada es una parada suave (según la selección del arrancador suave)
1 = La acción de parada es una parada rápida (parada por inercia)
5–7 Reservado
1 0 0 = Parada
1 = Arranque
1–2 Reservado
3 1 = Reinicio
4–7 Reservado
AV IS O
El bit 4 del byte 0 deberá ajustarse como 0 para iniciar el arrancador suave.
8 | Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181

Guía de instalación | Tarjeta PROFIBUS
Tabla 3: Estructura del código de estado maestro/esclavo
Estructuras de datos
Byte Bits Detalles
0 0–5
Intensidad del motor (% FLC)
(1)
6 Origen de la orden
0 = LCP remoto, entrada digital, reloj
1 = Red
7 1 = Rampa (de arranque o parada)
1 0 1 = Listo
1 1 = En arranque, en funcionamiento o en parada
2 1 = Desconectado
3 1 = Advertencia
4–7 Reservado
1
El valor de intensidad del motor (% FLC) indica la intensidad como porcentaje de la corriente a plena carga ajustada del motor. Un valor de 63 equivale al 200 % de la corriente a
plena carga. Para convertir este valor en un porcentaje legible, debe dividirse por 0,315. En los modelos MCD6-0063B y menores, este valor es 10 veces mayor que el valor indicado en
el LCP.
4.3 Estructura de datos de I/O de supervisión del arrancador suave
Tabla 4: Estructura de los bytes de salida maestro/esclavo
Byte 2
Petición de datos de funcionamiento (números de petición de datos del 1 al 16)
Tabla 5: Estructura de los bytes de entrada maestro/esclavo en respuesta a una petición de datos de funcionamiento
Byte Bit
Byte 2
Número de petición de datos de eco
Byte 3
Bits 7-1 reservados Bit 0 = 1: Número de petición de datos incorrecto
Byte 4
Valor de dato (byte alto)
Byte 5
Valor de dato (byte bajo)
AV IS O
En caso de que el número de petición de datos sea incorrecto, dicho número se ajustará en 1.
Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181| 9

Guía de instalación | Tarjeta PROFIBUS
Tabla 6: Definición de los valores de datos
Estructuras de datos
Número
Descripción Bits Detalles
de petición de datos
0 Reservado
1 Información de la producción 0–7 Reservado
8–15 Código de producto:
15 = MCD 600
2 Estado del arrancador 0–3 1 = Listo
2 = Arranque
3 = Funcionamiento
4 = Parada (incluido el frenado)
5 = No preparado (retardo de reinicio, control de la temperatura de reinicio, simulación de ejecución, entrada de reinicio abierta)
6 = Desconectado
7 = Modo de programación
8 = Velocidad fija de avance
9 = Velocidad fija de retroceso
4 0 = Secuencia de fase negativa
1 = Secuencia de fase positiva (válida únicamente si el bit 6 = 1)
5 1 = La corriente supera la FLC
6 0 = No inicializado
1 = Inicializado
7 1 = Error de comunicación entre el dispositivo y el arrancador suave
8–15 Consulte 4.5 Códigos de desconexión
3 Intensidad del motor 0–7 Corriente RMS media de las tres fases (byte bajo)
8–15 Corriente RMS media de las tres fases (byte alto)
4 Temperatura del motor 0–7 Modelo térmico del motor (%)
8–15 Reservado
5 % factor de potencia 0–7 100 % = factor de potencia 1
8–15 Reservado
10 | Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181

Guía de instalación | Tarjeta PROFIBUS
Estructuras de datos
Número
de petición de datos
6 Potencia (kW) 0–11 Potencia
7 Potencia (kVA) 0–11 Potencia
Descripción Bits Detalles
12–15 Escala de potencia
0 = Multiplicar la potencia por 10 para obtener W
1 = Multiplicar la potencia por 100 para obtener W
2 = Potencia (kW)
3 = Multiplicar la potencia por 10 para obtener kW
12–15 Escala de potencia
0 = Multiplicar la potencia por 10 para obtener VA
1 = Multiplicar la potencia por 100 para obtener VA
2 = Potencia (kVA)
3 = Multiplicar la potencia por 10 para obtener kVA
8 Tensión 0–13 Corriente RMS media de las tres fases
14–15 Reservado
9 Corriente 0–13 Corriente de la fase 1 (RMS)
14–15 Reservado
10 Corriente 0–13 Corriente de la fase 2 (RMS)
14–15 Reservado
11 Corriente 0–13 Corriente de la fase 3 (RMS)
14–15 Reservado
12 Tensión 0–13 Tensión de la fase 1
14–15 Reservado
13 Tensión 0–13 Tensión de la fase 2
14–15 Reservado
14 Tensión 0–13 Tensión de la fase 3
14–15 Reservado
15 Versión 0–7 Número de la versión secundaria del software
8–15 Número de la versión principal del software
Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181| 11

Guía de instalación | Tarjeta PROFIBUS
Estructuras de datos
Número
de petición de datos
16 Estado de las entradas digitales Para todas las entradas, 0 = abierta, 1 = cerrada (cortocircuito)
Descripción Bits Detalles
0 Arranque/parada
1 Reservado
2 Reinicio
3 Entrada A
4 Entrada B
5–15 Reservado
4.4 Estructura de datos de I/O de programación del arrancador suave
La estructura de datos de I/O de programación del arrancador suave permite la carga (lectura) y descarga (escritura) en toda la red de
valores de los parámetros del arrancador.
AV IS O
No modifique los valores predeterminados de los parámetros avanzados (grupo de parámetros 20-** Advanced Parameters
[Parámetros avanzados]). El cambio de estos valores puede provocar un comportamiento impredecible del arrancador suave.
4.4.1 Salidas
Tabla 7: Estructura de los bytes de salida maestro/esclavo
Byte Bits Detalles
3 0–7 Número de parámetros para lectura/escritura
4 0 Reservado
1 1 = Lectura de parámetro
2 1 = Escritura de parámetro
3–7 Reservado
5 0–7 Valor de parámetro de byte alto para escritura en el arrancador suave / cero valores de datos de lectura
6 0–7 Valor de parámetro de byte bajo para escritura en el arrancador suave / cero valores de datos de lectura
4.4.2 Entradas
Tabla 8: Estructura de los bytes de entrada maestro/esclavo
Byte Bits Detalles
6 0–7 Número de parámetro de eco
12 | Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181

Guía de instalación | Tarjeta PROFIBUS
Byte Bits Detalles
7 0 1 = Número de parámetro incorrecto
1 1 = Valor de parámetro incorrecto
2–7 Reservado
8 0–7 Lectura de valor de parámetro de byte alto en el arrancador suave
9 0–7 Lectura de valor de parámetro de byte bajo en el arrancador suave
Estructuras de datos
Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181| 13

Guía de instalación | Tarjeta PROFIBUS
4.5 Códigos de desconexión
Código Descripción
0 Sin desconexión
1 Exceso de tiempo de arranque
2 Sobrecarga del motor
3 Termistor del motor
4 Desequilibrio de corriente
5 Frecuencia
6 Secuencia de fase
7 Sobrecorriente instantánea
8 Pérdida de potencia
9 Baja corriente
Estructuras de datos
10 Exceso de temperatura del disipador
11 Conexión del motor
12 Desconexión de la entrada A
13 FLC (corriente a plena carga) demasiado alta
14 Opción incompatible (función no disponible en triángulo interno)
15 Fallo de la tarjeta de comunicación
16 Desconexión de red forzada
17 Fallo interno
18 Sobretensión
19 Baja tensión
23 Parámetro fuera de rango
24 Desconexión de la entrada B
26 Pérdida de fase L1
27 Pérdida de fase L2
28 Pérdida de fase L3
29 L1-T1 cortocircuitado
30 L2-T2 cortocircuitado
31 L3-T3 cortocircuitado
33 Sobrecorriente temporal (sobrecarga de bypass)
14 | Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181

Guía de instalación | Tarjeta PROFIBUS
Código Descripción
34 Exceso de temperatura del SCR
35 Batería/reloj
36 Circuito del termistor
47 Exceso de potencia
48 Baja potencia
56 LCP desconectado
57 Detección de velocidad cero
58 ITSM SCR
59 Sobrecorriente instantánea
60 Capacidad de carga
70 Lectura de corriente errónea L1
Estructuras de datos
71 Lectura de corriente errónea L2
72 Lectura de corriente errónea L3
73 Eliminar la tensión de red (tensión de red conectada en modo de simulación)
74 Conexión del motor T1
75 Conexión del motor T2
76 Conexión del motor T3
77 Fallo de disparo P1
78 Fallo de disparo P2
79 Fallo de disparo P3
80 Fallo VZC P1
81 Fallo VZC P2
82 Fallo VZC P3
83 Tensiones de control bajas
84–96 Fallo interno x. Póngase en contacto con su distribuidor local e indique el código de fallo (x).
Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181| 15

Guía de instalación | Tarjeta PROFIBUS
Telegrama y aviso de diagnóstico de
PROFIBUS
5 Telegrama y aviso de diagnóstico de PROFIBUS
5.1 Estructura del telegrama de diagnóstico
La tarjeta PROFIBUS es compatible con diagnósticos externos. El siguiente telegrama se enviará al maestro en caso de desconexión del
arrancador suave o si se modifica un parámetro de este.
Byte Información
0 Longitud del diagnóstico del usuario (ajustado siempre = 3)
1 Código de desconexión
2 Número de parámetro modificado
5.1.1 Código de desconexión PROFIBUS
Cuando se desconecta el arrancador suave, se ajusta un aviso de diagnóstico en el maestro y el código de desconexión se registra en el
byte 1. Cuando se reinicia el arrancador suave, también se reiniciarán el aviso de diagnóstico y los datos del código de desconexión = 0
en caso de que ya no exista la condición de fallo (consulte 4.5 Códigos de desconexión.
5.1.2 Número de parámetro modificado
Si se cambia un número de parámetro a través del LCP, dicho número de parámetro se registra en el byte 2. Cuando el maestro lea o
escriba el parámetro modificado, el byte 2 se reiniciará = 0.
Un número de parámetro modificado no activa un aviso de diagnóstico.
16 | Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181

Guía de instalación | Tarjeta PROFIBUS
Modos admitidos
6 Modos admitidos
6.1 Modo de bloqueo de PROFIBUS
En el modo de bloqueo, las entradas solo se actualizan con nuevos datos del arrancador suave cuando se ejecuta otra acción de
bloqueo. Una acción de desbloqueo devolverá el dispositivo a su funcionamiento normal.
6.2 Modo de sincronización de PROFIBUS
En el modo de sincronización, las ordenes dadas al arrancador suave no se procesan mientras no se ejecuta otra acción de
sincronización. Una acción de eliminación de la sincronización devolverá el dispositivo a su funcionamiento normal.
6.3 Modo de borrado de PROFIBUS
Si el maestro envía una orden global de borrado, el dispositivo enviará una orden de parada rápida al arrancador suave.
Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181| 17

Guía de instalación | Tarjeta PROFIBUS
Especificaciones
7 Especificaciones
7.1 Conexiones
Arrancador suave Conector de pines de 6 contactos
Red Terminal macho de 5 contactos y terminal hembra desenchufable (suministrados)
Dimensión máxima del cable
7.2 Ajustes
Rango de direcciones 1–125
Velocidad de datos (bps) 9,6 kb/s - 12,0 Mb/s (detección automática)
7.3 Certificación
RCM CEI 60947-4-2
CE EN 60947-4-2
RoHS Conforme con la Directiva europea 2011/65/UE
2,5 mm2 (14 AWG)
Ilustración 2: PROFIBUS International
18 | Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181

Guía de instalación | Tarjeta PROFIBUS
Índice
A
Aviso de diagnóstico 16, 16
C
Conector DB9
E
Estructura de datos
Entrada
Salida
Estructura del código de control 8
H
Herramientas
Destornillador plano
12
12
Índice
5
5
M
Modo ampliado 8
Modo básico 8
Modo de carga y descarga de parámetros
T
Tapa del puerto de expansión
Tarjeta de expansión 5
Telegrama 16
8
5
Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181| 19

Guía de instalación | Tarjeta PROFIBUS
20 | Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181

Guía de instalación | Tarjeta PROFIBUS
Danfoss A/S © 2018.09
AQ277154583779es-000101 / 175R1181| 21

Danfoss can accept no responsibility for possible errors in catalogues, brochures and other printed material. Danfoss reserves the right to alter its products without notice. This also applies to products
already on order provided that such alterations can be made without subsequential changes being necessary in specifications already agreed. All trademarks in this material are property of the respective
companies. Danfoss and the Danfoss logotype are trademarks of Danfoss A/S. All rights reserved.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
Danfoss A/S © 2018.09 MG15S105
*MG15S105
AQ277154583779es-000101/ 175R1181
*
 Loading...
Loading...