

Page 1

ENGINEERING TOMORROW
Guia de Design
VLT® Parallel Drive Modules
250–1200 kW
vlt-drives.danfoss.com
Page 2

Page 3
Índice Guia de Design
Índice
1 Introdução
1.1 Objetivo do Guia de Design
1.2 Documento e versão de software
1.3 Recursos adicionais
2 Segurança
2.1 Símbolos de Segurança
2.2 Pessoal qualicado
2.3 Precauções de segurança
3 Aprovações e certicações
3.1 Marcação CE
3.2 Diretiva de Baixa Tensão
3.3 Diretiva EMC
3.4 Diretiva de maquinaria
3.5 Em conformidade com o UL
3.6 Conformidade com marcação RCM
3.7 Exportar as normas de controle
5
5
5
5
6
6
6
6
8
8
8
8
8
8
8
9
4 Visão Geral do Produto
4.1 Folha de dados para módulo de conversor
4.2 Folha de dados para um sistema de 2 conversores
4.3 Folha de dados para um sistema de 4 conversores
4.4 Componentes Internos do
4.5 Exemplos de resfriamento do canal traseiro
5 Recursos do produto
5.1 Funções automatizadas
5.2 Funções programáveis
5.3 Safe Torque O (STO)
5.4 Monitoramento do sistema
6 Especicações
6.1 Dimensões do Módulo de Conversor
6.2 Dimensões da prateleira de controle
6.3 Dimensões do sistema de 2 conversores
6.4 Dimensões do sistema de 4 conversores
10
10
11
12
12
14
16
16
18
20
21
23
23
26
27
31
6.5 Especicações dependente da potência.
6.5.1 Drive HVAC VLT® FC 102 39
6.5.2 VLT® AQUA Drive FC 202 43
6.5.3 VLT® AutomationDrive FC 302 48
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 1
39
Page 4
Índice
VLT® Parallel Drive Modules
6.6 Alimentação de Rede Elétrica para Módulo de Drive
6.7 Saída do Motor e dados do motor
6.8 Especicações de Transformador de 12 Pulsos
6.9 Condições Ambiente para Módulos de Drive
6.10 Especicações de Cabo
6.11 Entrada/Saída de controle e dados de controle
6.12 Especicações de derating
7 Informação sobre a solicitação de pedido
7.1 Formulário de Pedido
7.2 Congurador do conversor
7.3 Opcionais e Acessórios
7.3.1 General Purpose Input Output Module MCB 101 67
7.3.2 Isolação galvânica do VLT® General Purpose I/O MCB 101 68
7.3.3 Entradas Digitais - Terminal X30/1-4 69
7.3.4 Entradas Analógicas - Terminais X30/11, 12 69
7.3.5 Saídas digitais - Terminal X30/6, 7 69
7.3.6 Saída Analógica - Terminal X30/8 69
53
53
53
53
54
54
58
61
61
61
67
7.3.7 Encoder Input VLT® MCB 102 70
7.3.8 Resolver Input VLT® MCB 103 71
7.3.9 Relay Card MCB 105 do VLT
7.3.10 VLT® 24 V DC Supply MCB 107 75
7.3.11 VLT® PTC Thermistor Card 76
7.3.12 VLT® Extended Relay Card MCB 113 77
7.3.13 Resistores do Freio 78
7.3.14 Filtros de onda senoidal 78
7.3.15 Filtros dU/dt 79
7.3.16 Kit p\r\ Montagem Remota do LCP 79
®
7.4 Lista de vericação de design do sistema
8 Considerações durante a instalação
8.1 Ambiente Operacional
8.2 Requisitos Mínimos do Sistema
8.3 Requisitos elétricos para certicações e aprovações
8.4 Fusíveis e Disjuntores
73
80
82
82
83
85
86
9 EMC e Harmônicas
9.1 Aspectos Gerais das Emissões EMC
9.2 Resultados de teste de EMC
9.3 Requisitos de emissão
9.4 Requisitos de Imunidade
2 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
88
88
89
93
94
Page 5
Índice Guia de Design
9.5 Recomendações de EMC
9.6 Aspectos gerais de Harmônicas
9.7 Análise de harmônicas
9.8 O efeito de harmônicas em um sistema de distribuição de energia
9.9 Normas e Requisitos de Limitação de Harmônicas
9.10 Conformidade de Harmônicas do VLT® Parallel Drive Modules
9.11 Isolação Galvânica
10 Motor
10.1 Cabos de Motor
10.2 Isolação da Bobina do Motor
10.3 Correntes de Mancal do Motor
10.4 Proteção Térmica do Motor
10.5 Conexões do terminal do motor
10.6 Condições de Funcionamento Extremas
10.7 Condições de dU/dt
10.8 Conexão de Motores em Paralelo
95
98
98
99
100
100
100
102
102
102
102
103
105
109
111
111
11 Rede elétrica
11.1 Congurações de rede elétrica
11.2 Conexões do Terminal da Rede Elétrica
11.3 Conguração do disjuntor de 12 pulsos
12 Fiação de Controle
12.1 Percurso dos Cabos de Controle
12.2 Terminais de Controle
12.3 Saída do relé
13 Frenagem
13.1 Tipos de frenagem
13.2 Resistência de Frenagem
14 Controladores
14.1 Visão geral de controle de torque e velocidade
14.2 Princípio de controle
14.3 Estrutura de Controle em VVC+ Controle Vetorial Avançado
114
114
114
114
117
117
118
121
122
122
122
127
127
127
130
14.4 Estrutura de Controle em Fluxo Sensorless
14.5 Estrutura de Controle em Fluxo com Feedback de Motor
14.6 Controle de Corrente Interno em VVC
+
14.7 Controle Local e Remoto
14.8 Smart Logic Controller
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 3
131
131
132
132
133
Page 6
Índice
VLT® Parallel Drive Modules
15 Tratamento das Referências
15.1 Limites de Ref.
15.2 Escala de referências predenidas
15.3 Escala de Referências de Pulso e Analógicas e Feedback
15.4 Banda Morta em Torno de Zero
16 Controles do PID
16.1 Controles do PID de Velocidade
16.2 Controles do PID de Processo
16.3 Otimização de controles do PID
17 Exemplos de Aplicações
17.1 Adaptação Automática do Motor (AMA)
17.2 Referência de Velocidade Analógica
17.3 Partida/Parada
17.4 Reset do Alarme Externo
17.5 Referência de velocidade com potenciômetro Manual
17.6 Aceleração/desaceleração
135
136
137
137
138
142
142
145
150
151
151
151
152
153
153
154
17.7 Conexão de Rede da RS-485
17.8 Termistor do motor
17.9 Setup do relé com Smart Logic Control
17.10 Controle do Freio Mecânico
17.11 Conexão do Encoder
17.12 Sentido do encoder
17.13 Sistema de Drive de Malha Fechada
17.14 Programação do Limite de Torque e Parada
18 Apêndice
18.1 Renúncia de responsabilidade
18.2 Convenções
18.3 Glossário
Índice
154
154
155
156
156
157
157
157
159
159
159
159
163
4 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 7

Introdução Guia de Design
1 Introdução
1.1 Objetivo do Guia de Design
Este guia de design destina-se a engenheiros de projeto e
de sistema, consultores de projeto e especialistas de
produto e aplicação. Informações técnicas são fornecidas
para entender as capacidades do conversor de frequência
para integração no controle de motor e sistemas monitoramento. Detalhes referentes a operação, requisitos e
recomendações para integração de sistemas são descritas.
São fornecidas informações sobre características de
potência de entrada, saída do controle do motor e
condições de operacionais ambiente do conversor de
frequência.
Também estão incluídos recursos de segurança, monitoramento de condição de falha, relatório de status
operacional, capacidades de comunicação serial e opções
programáveis. Detalhes de design como requisitos de local,
cabos, fusíveis, ação de controle, tamanho e peso de
unidades e outras informações críticas necessárias para a
integração do sistema também são fornecidos.
e teste funcional. Informações complementares
descrevem a interface do usuário, exemplos de
aplicação, resolução de problemas e especi-
cações.
Consulte o guia de programação do VLT® Drive
•
HVAC FC 102, AQUA Drive do VLT® FC 202 e VLT
AutomationDrive FC 302 aplicável à série VLT
Parallel Drive Modules especíca utilizada na
criação do sistema de conversores. O guia de
programação descreve com maiores detalhes
como trabalhar com parâmetros e fornece
exemplos de aplicação.
®
O Manual de serviço de VLT
•
contém informações de serviço detalhadas,
incluindo informações aplicáveis ao VLT® Parallel
Drive Modules.
O Guia de Utilização VLT® Frequency Converters –
•
Safe Torque O contém diretrizes de segurança e
descreve a operação e especicações da função
Safe Torque O.
FC Series, D-frame
1 1
®
®
A revisão das informações detalhadas do produto no
estágio de design permite o desenvolvimento de um
sistema bem concebido com funcionalidade e
ótimas.
VLT® é uma marca registrada.
Documento e versão de software
1.2
Este manual é revisado e atualizado regularmente. Todas as
sugestões para melhorias são bem-vindas. Tabela 1.1
mostra a versão do documento com a respectiva versão de
software.
Edição Observações Versão do
MG37N2xx Especicações atualizadas 7.5x
Tabela 1.1 Documento e versão de software
Recursos adicionais
1.3
Recursos estão disponíveis para entender a programação e
as funções avançadas do conversor de frequência:
O VLT® Parallel Drive Modules Guia de Instalação
•
250-1200 kW fornece instruções para a instalação
mecânica e elétrica desses módulos de
conversores.
eciência
software
O Guia de Design VLT® Brake Resistor MCE 101
•
descreve como selecionar o resistor do freio para
qualquer aplicação.
O Guia de Design VLT® FC-Series Output Filter
•
descreve como selecionar o ltro de saída
adequado para qualquer aplicação.
As Instruções de instalação do Kit de Barramento
•
do VLT® Parallel Drive Modules contém
informações detalhadas sobre a instalação do kit
de barramento opcional.
As Instruções de instalação do Kit de Duto do VLT
•
Parallel Drive Modules contém informações
detalhadas sobre a instalação do kit de duto.
Publicações e manuais complementares estão disponíveis
na Danfoss. Ver drives.danfoss.com/knowledge-center/
technical-documentation/ para listagens.
®
O Guia do Usuário do VLT® Parallel Drive Modules
•
250–1200 kW contém procedimentos detalhados
de inicialização, programação operacional básica
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 5
Page 8

Segurança
VLT® Parallel Drive Modules
2 Segurança
22
2.1 Símbolos de Segurança
Os seguintes símbolos são usados neste manual:
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que pode
resultar em morte ou ferimentos graves.
CUIDADO
Indica uma situação potencialmente perigosa que pode
resultar em ferimentos leves ou moderados. Também
podem ser usados para alertar contra práticas inseguras.
AVISO!
Indica informações importantes, inclusive situações que
podem resultar em danos no equipamento ou na
propriedade.
2.2 Pessoal qualicado
Transporte correto e conável, armazenagem e instalação
são necessários para a operação segura e sem problemas
do VLT® Parallel Drive Modules. Somente pessoal
qualicado tem permissão de instalar este equipamento.
ADVERTÊNCIA
TEMPO DE DESCARGA
O módulo de conversor contém capacitores de
barramento CC. Após a aplicação da energia da rede
elétrica no conversor, esses capacitores podem
permanecer carregados mesmo após remover a energia.
Pode haver alta tensão presente mesmo quando as luzes
indicadoras de advertência estiverem apagadas. A falha
em aguardar 20 min após a energia ter sido removida
antes de executar serviço de manutenção ou reparo
poderá resultar em lesões graves ou morte.
1. Pare o motor.
2. Desconecte a rede elétrica CA e outras fontes
de alimentação do barramento CC, incluindo
bateria de backup, UPS e conexões do
barramento CC com outros conversores.
3. Desconecte ou bloqueie o motor PM.
4. Aguarde 20 minutos para os capacitores descarregarem completamente antes de realizar
qualquer serviço de manutenção.
Pessoal
autorizado a instalar equipamento, sistemas e circuitos em
conformidade com as leis e normas pertinentes. Além
disso, o pessoal deve estar familiarizado com as instruções
e as medidas de segurança descritas neste manual.
2.3
qualicado é denido como pessoal treinado,
Precauções de segurança
ADVERTÊNCIA
ALTA TENSÃO
O conversor de frequência possui alta tensão quando
conectado à rede elétrica CA. A falha em garantir que
apenas pessoal qualicado instale o sistema de
conversores pode resultar em morte ou lesões graves.
Somente pessoal qualicado tem permissão de
•
instalar o sistema de conversores.
6 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 9

Segurança Guia de Design
ADVERTÊNCIA
RISCO DE CORRENTE DE FUGA (>3,5 mA)
As correntes de fuga excedem 3,5 mA. Se o sistema de
conversores não for aterrado corretamente, o resultado
poderá ser morte ou lesões graves. Siga os códigos locais
e nacionais com relação ao ponto de aterramento de
proteção do equipamento com corrente de fuga > 3,5
mA. A tecnologia do conversor de frequência implica no
chaveamento de alta frequência em alta potência. Esse
chaveamento gera uma corrente de fuga na conexão do
terra. Uma falha de corrente no sistema de conversor nos
terminais de energia de saída pode conter um
componente CC que pode carregar os capacitores do
ltro e causar uma corrente de fuga transiente para o
terra. A corrente de fuga para o terra depende de várias
congurações do sistema, incluindo ltro de RFI, cabo de
motor blindado e potência do sistema de conversores.
Se a corrente de fuga exceder 3,5 mA, a EN/IEC
61800-5-1 (Norma de produto de sistema de conversor
de potência) exige cuidado especial.
O ponto de aterramento deve ser reforçado de uma
destas maneiras:
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
2 2
Fio terra de no mínimo 10 mm2 (6 AWG).
•
Dois os do ponto de aterramento separados,
•
ambos em conformidade com as regras de
dimensionamento.
Consulte EN 60364-5-54 § 543.7 para obter mais
informações.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 7
Page 10

Aprovações e certicações
VLT® Parallel Drive Modules
3 Aprovações e certicações
Os conversores de frequência são projetados em conformidade com as diretivas descritas nesta seção.
adequado quando instalados e mantidos corretamente e
usados como previsto.
33
Um conversor de frequência pode ser usado como
dispositivo independente ou como parte de uma
instalação mais complexa. Dispositivos usados como
independentes ou como parte de um sistema devem
conter a marcação CE. Os sistemas não precisam ter
marcação CE, mas devem atender os requisitos básicos de
Tabela 3.1 Aprovações
3.1 Marcação CE
A Marcação CE (Communauté européenne) indica que
fabricante do produto atende todas as diretivas da UE
aplicáveis. As três diretivas da UE aplicáveis ao projeto e à
fabricação de conversores de frequência são a Diretiva de
baixa tensão, a Diretiva EMC e (para unidades com função
de segurança integrada) a Diretiva de maquinaria.
A marcação CE é destinada a eliminar barreiras técnica
para liberar o comércio entre a CE e os estados da EFTA
dentro da UCE. A marcação CE não regula a qualidade do
produto. Especicações técnicas não pode ser deduzidas
da marcação CE.
Diretiva de Baixa Tensão
3.2
Os conversores de frequência são classicados como
componentes eletrônicos e devem ter certicação CE de
acordo com a Diretiva de Baixa Tensão 2014/35/EU. A
diretiva é aplicável a todos os equipamentos elétricos nas
faixas de tensão de 50-1000 V CA e 75-1500 V CC.
proteção da diretiva EMC.
3.4 Diretiva de maquinaria
Conversores de frequência são classicados como
componentes eletrônicos sujeitos à diretiva de baixa
tensão, porém, conversores de frequência com função de
segurança integrada devem atender a diretiva de
maquinaria 2006/42/EC. Os conversores de frequência sem
função de segurança não são classicados na Diretiva de
Maquinaria. Se um conversor de frequência for integrado
no sistema da máquina, a Danfoss fornece informações
sobre aspectos de segurança com relação ao conversor de
frequência.
A Diretiva de Maquinaria 2006/42/EC cobre uma máquina
que consiste em um agregado de componentes ou
dispositivos interconectados em que ao menos um é capaz
de movimento mecânico. A diretiva determina que o
projeto do equipamento deve garantir a segurança e a
saúde das pessoas, que os animais domésticos não quem
em perigo e que haja preservação do valor material desde
que o equipamento seja devidamente instalado, mantido e
usado como previsto.
A diretiva determina que o projeto do equipamento deve
garantir a segurança e a saúde das pessoas, que os animais
domésticos não quem em perigo e que haja preservação
do valor material desde que o equipamento seja
devidamente instalado, mantido e usado como previsto.
Danfoss As certicações CE estão em conformidade com a
Diretiva de baixa tensão e fornecem uma declaração de
conformidade mediante solicitação.
Diretiva EMC
3.3
Compatibilidade eletromagnética (EMC) signica que a
interferência eletromagnética entre aparelhos não
prejudica seu desempenho. O requisito de proteção básico
da Diretiva EMC 2014/30/EU determina que dispositivos
que geram interferência eletromagnética (EMI) ou cuja
operação poderia ser afetada pela EMI devem ser
projetados para limitar a geração de interferência eletromagnética e deverão ter grau de imunidade a EMI
8 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Quando conversores de frequência são usados em
máquinas com no mínimo uma parte móvel, o fabricante
da máquina deve fornecer uma declaração em conformidade com todos os estatutos e medidas de segurança
relevantes. Danfoss As
de maquinaria para conversores de frequência com função
de segurança integrada e fornecem uma declaração de
conformidade por solicitação.
Em conformidade com o UL
3.5
Para garantir que o conversor de frequência atenderá aos
requisitos de segurança do UL, consulte
capétulo 8.3 Requisitos elétricos para certicações e
aprovações.
Conformidade com marcação RCM
3.6
A etiqueta RCM Mark indica que está em conformidade
com as normas técnicas aplicáveis para Compatibilidade
eletromagnética (EMC). A etiqueta RCM Mark é necessária
para a colocação dos dispositivos elétricos e eletrônicos no
certicações CE atendem a diretiva
Page 11

Aprovações e certicações Guia de Design
mercado na Austrália e Nova Zelândia. Os contratos regulatórios da marcação RCM lidam apenas com emissão
conduzida e irradiada. Para conversores de frequência, são
aplicados os limites de emissão especicados no EN/IEC
61800-3. Uma declaração de conformidade pode ser
fornecida mediante solicitação.
3.7 Exportar as normas de controle
Os conversores de frequência podem estar sujeitos a
regulamentações de controle de exportação regionais e/ou
nacionais.
Um número ECCN é usado para classicar todos os
conversores de frequência que são sujeitos a normas de
controle de exportação.
O número ECCN é fornecido nos documentos que
acompanham o conversor de frequência.
No caso de reexportação, é responsabilidade do
exportador garantir que está em conformidade com as
regulamentações de controle de exportação relevantes.
3 3
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 9
Page 12
130BF015.10
41
(1.6)
1122
(44.2)
1048
(41.3)
346 (13.6)
376 (14.8)
Visão Geral do Produto
VLT® Parallel Drive Modules
4 Visão Geral do Produto
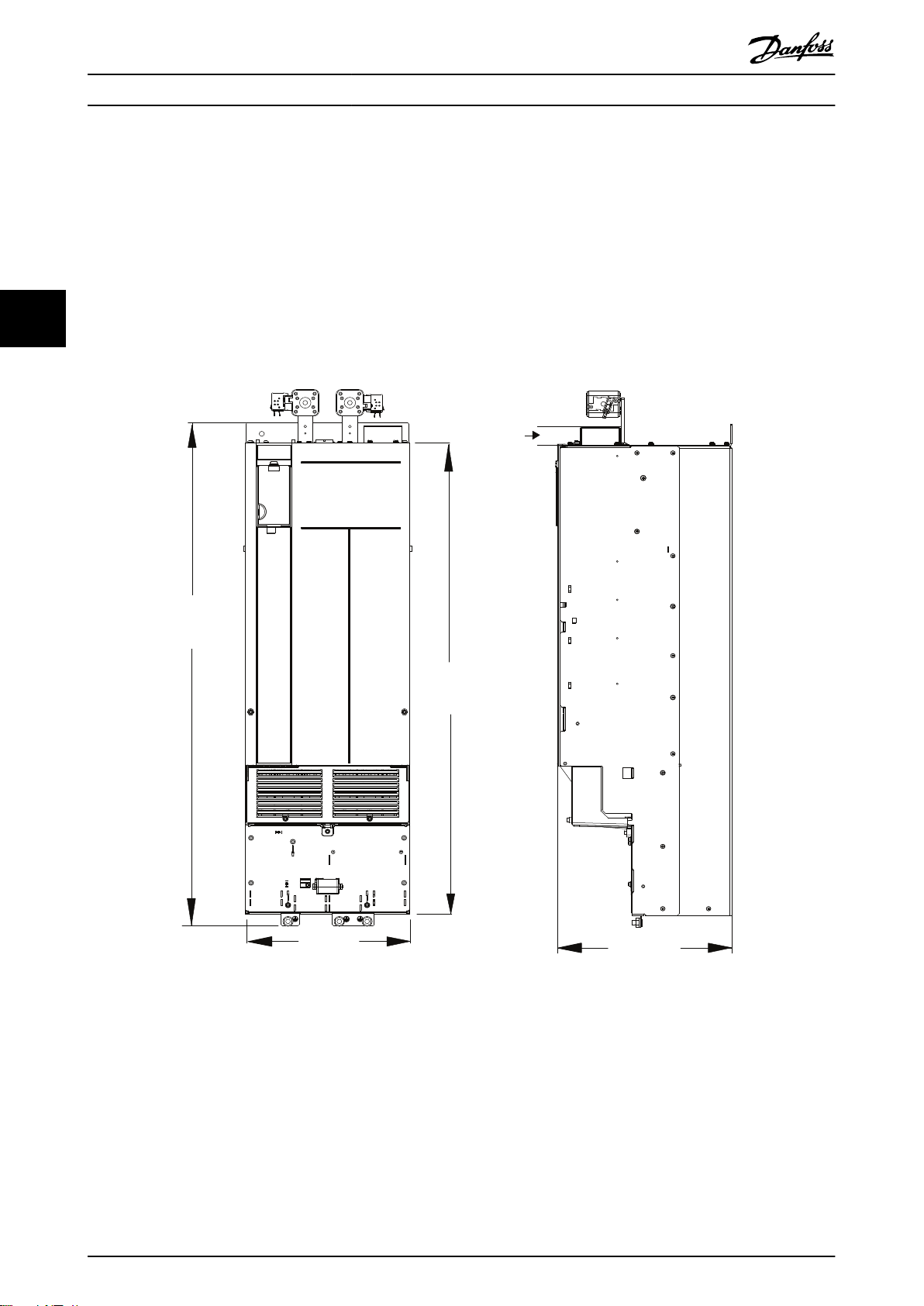
4.1 Folha de dados para módulo de conversor
Valor nominal da potência para 380–500 V
•
- HO: 160–250 kW (250–350 hp).
Valor nominal da potência para 525–690 V
44
•
- HO: 160–315 kW (200–450 hp).
Peso
•
- 125 kg (275 lb).
Características nominais de proteção
•
- IP 00.
- NEMA Tipo 00.
Ilustração 4.1 Dimensões do Módulo de Conversor
Opções Danfoss disponíveis:
Sistema de módulo de 2 conversores
•
Sistema de módulo de 4 conversores
•
10 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 13
130BF016.10
2260
(89.0)
2201
(86.7)
808 (31.8) 636 (25.0)
59
(2.3)
Visão Geral do Produto Guia de Design
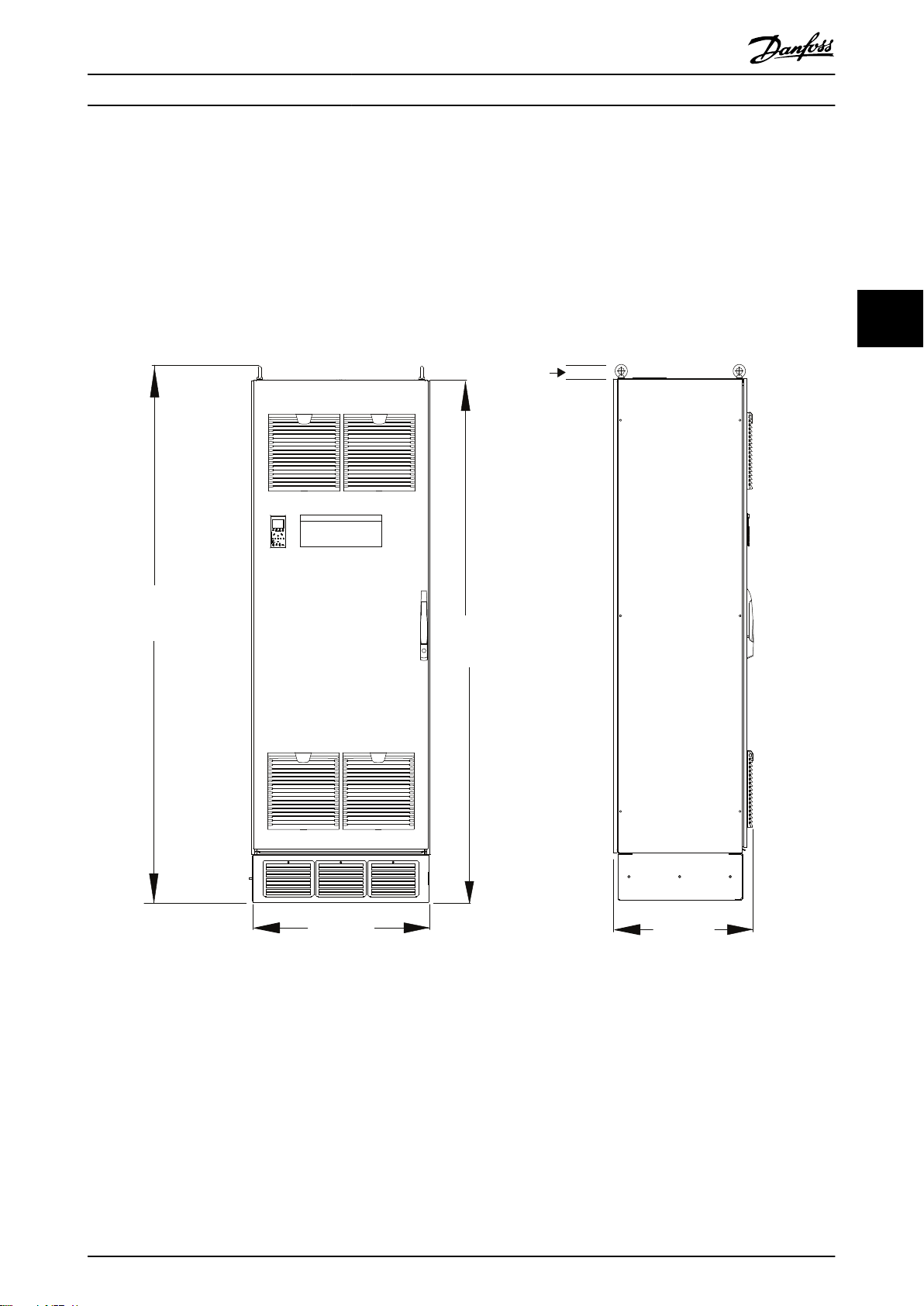
4.2 Folha de dados para um sistema de 2 conversores
Valor nominal da potência para 380–500 V
•
- HO: 250–450 kW (350–600 hp).
- NO: 315–500 kW (450–600 hp).
Valor nominal da potência para 525–690 V
•
- HO: 250–560 kW (300–600 hp).
- NO: 315–630 kW (350–650 hp).
Peso
•
- 450 kg (992 lb).
Características nominais de proteção
•
- IP54 (mostrado). Características nominais
do IP determinadas por requisito do
cliente.
- NEMA Tipo 12 (mostrado).
4 4
Ilustração 4.2 Sistema de 2 conversores com gabinete para dimensões mínimas
Opções Danfoss disponíveis:
Kit de barramento de 6 pulsos
•
Kit de barramento de 12 pulsos
•
Kit de resfriamento de entrada/saída traseiros
•
Kit de resfriamento de entrada traseiro/saída
•
superior
Kit de resfriamento de entrada inferior/saída
•
traseira
Kit de resfriamento de entrada inferior/saída
•
superior
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 11
Page 14
130BF017.10
636 (25.0)
2201
(86.7)
805 (31.7)
749 (29.5)
1608 (63.3)
(2.3)
59
(2.0)
52
2254
(88.7)
Visão Geral do Produto
VLT® Parallel Drive Modules
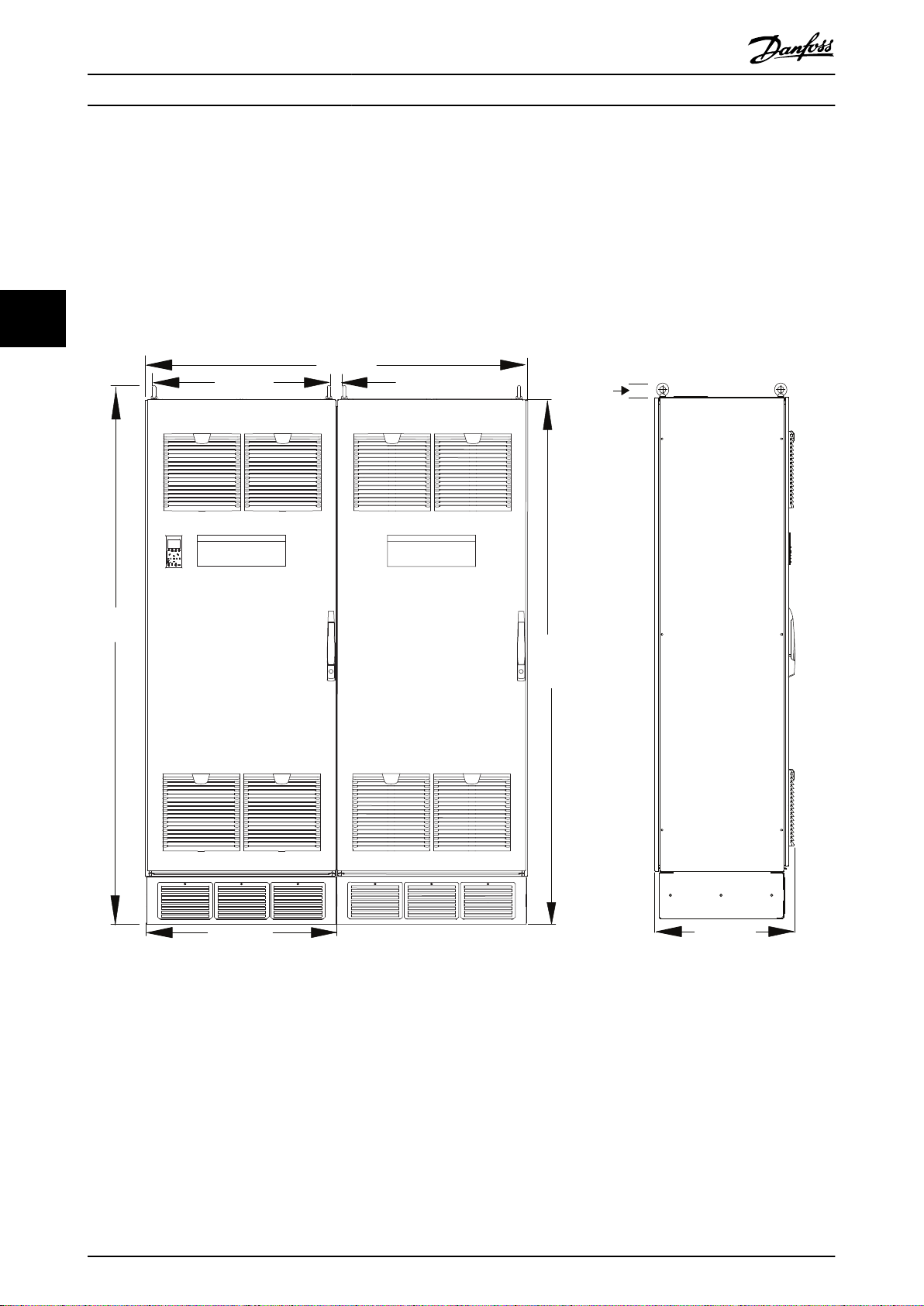
4.3 Folha de dados para um sistema de 4 conversores
Valor nominal da potência para 380–500 V
•
- HO: 500–800 kW (650–1200 hp).
- NO: 560–1000 kW (750–1350 hp).
Valor nominal da potência para 525–690 V
•
- HO: 630–1000 kW (650–1150 hp).
44
- NO: 710–1200 kW (750–1350 hp).
Peso
•
- 910 kg (2000 lb).
Características nominais de proteção
•
- IP54 (mostrado). Características nominais
do IP determinadas por requisito do
cliente.
- NEMA Tipo 12 (mostrado).
Ilustração 4.3 Sistema de 4 conversores com gabinete para dimensões mínimas
Opções Danfoss disponíveis:
Kit de barramento de 6 pulsos
•
Kit de barramento de 12 pulsos
•
Kit de resfriamento de entrada/saída traseiros
•
Kit de resfriamento de entrada traseiro/saída
•
superior
Kit de resfriamento de entrada inferior/saída
•
traseira
Kit de resfriamento de entrada inferior/saída
•
superior
4.4 Componentes Internos do
O sistema de conversores é projetado pelo instalador para
atender a requisitos de potência especicados, utilizando o
kit básico VLT® Parallel Drive Modules e qualquer kit
opcional selecionado. O kit básico consiste em hardware
de conexão e 2 ou 4 módulos de conversores de
frequência, que são conectados em paralelo.
O kit básico contém os seguintes itens:
12 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 15
130BE836.10
4
1
2
6
7
5
8
3
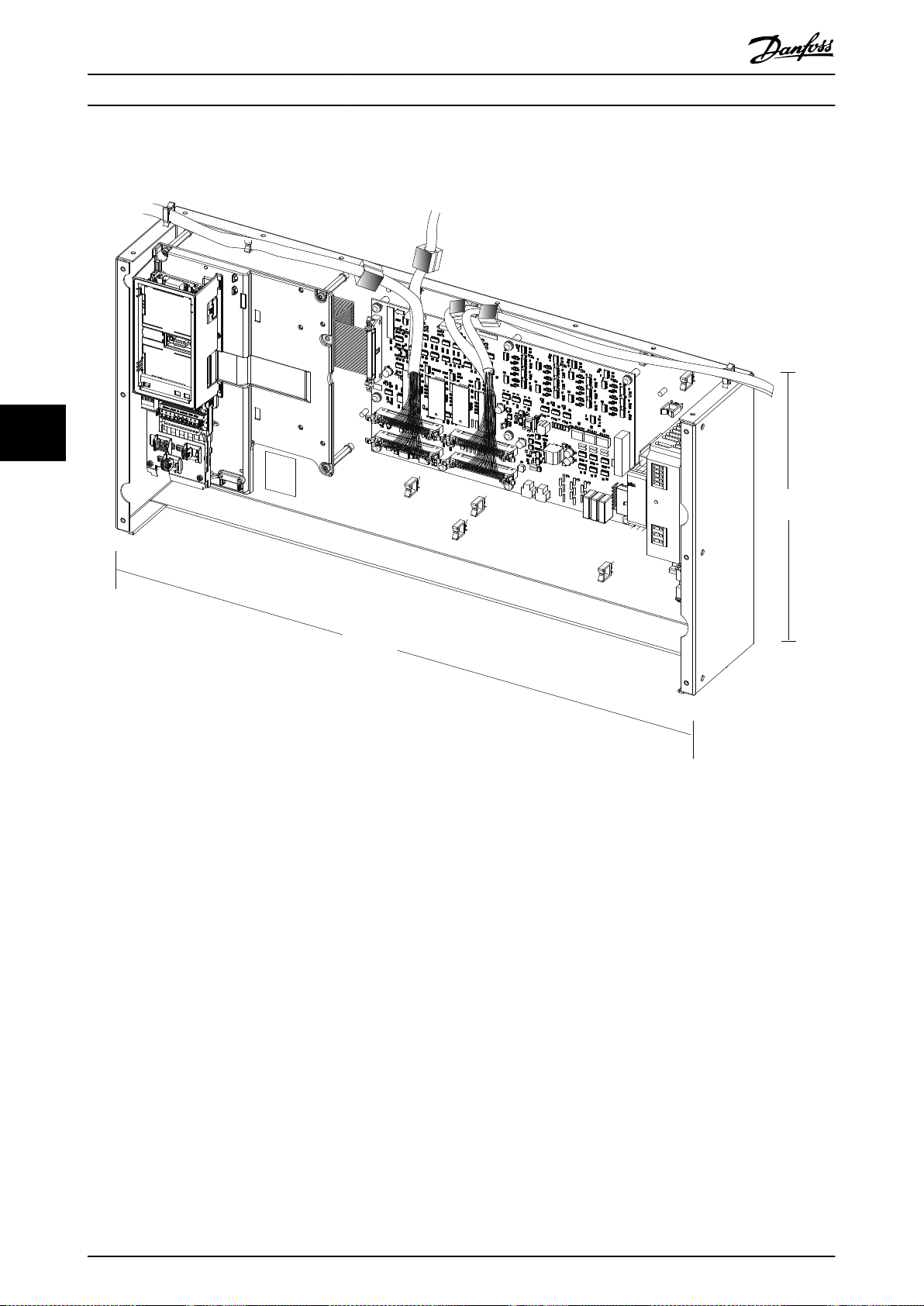
Visão Geral do Produto Guia de Design
Módulos Conversores
•
Prateleira de controle
•
Fiação
•
- Cabo em ta com conector de 44 pinos
(nas duas extremidades do cabo).
- Cabo de relé com conector de 16 pinos
(em uma extremidade do cabo).
- Cabo de microinterruptor de fusível CC
com conectores de 2 pinos (em uma
extremidade do cabo).
Fusíveis CC
•
Microinterruptores
•
Outros componentes, como kits de barramento e kits de
duto de resfriamento de canal traseiro, estão disponíveis
como opcionais para customizar o sistema de conversor.
O sistema de conversores em Ilustração 4.4 mostra um
sistema utilizando 4 módulos de conversores. Um sistema
utilizando dois módulos de conversores é semelhante,
exceto pelo hardware de conexão utilizado. O sistema de
conversor ilustrado mostra o kit de resfriamento e o kit do
opcional de barramento. No entanto, o instalador pode
utilizar outros métodos de conexão, incluindo barramentos
ou cabos elétricos fabricados de maneira personalizada.
AVISO!
O instalador é responsável pelos detalhes da construção
do sistema de conversores, incluindo conexões. Além
disso, se o instalador não utilizar o design recomendado
pela Danfoss, o instalador deverá obter aprovações
regulamentares separadas.
4 4
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 13
Page 16
130BF018.10
Visão Geral do Produto
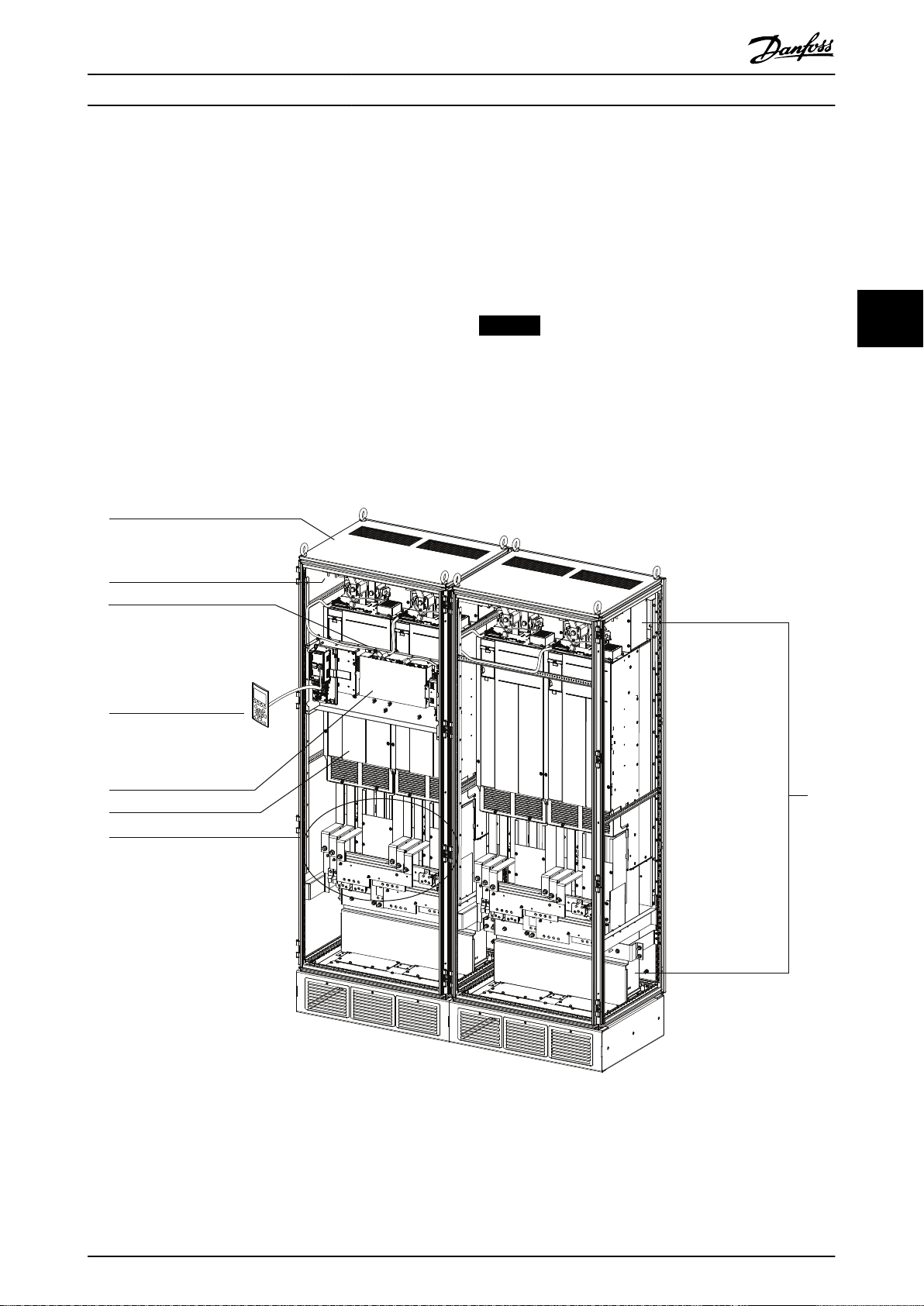
Área Título Funções
1 Gabinete
(fornecido
pelo
instalador)
2 Barramentos
CC (parte do
kit opcional
de
44
barramento)
3 Fiação Utilizado para conectar diversos componentes à prateleira de controle.
4 LCP O módulo de controle local, mostrado montado na porta do gabinete. Permite ao operador monitorar e controlar o
5 Prateleira de
controle
6 Módulos
Conversores
7 Kit de
barramento
(opcional)
8 Resfriamento
de entrada
inferior/saída
traseira
(opcional)
Utilizado para alojar os módulos conversores e outros componentes do sistema de conversores.
Utilizado para conectar os terminais CC dos módulos de conversores em paralelo. O kit pode ser solicitado na
Danfoss ou fabricado pelo fabricante do painel.
sistema e o motor.
Consiste em um MDCIC (Cartão de interface de controle de múltiplos conversores), um cartão de controle, um LCP,
um relé de segurança e uma SMPS (fonte de alimentação chaveada). O MDCIC faz a interface do LCP e do cartão
de controle com o cartão de potência em cada módulo conversor.
É possível instalar 2 ou 4 módulos conversores em paralelo para criar um sistema de conversores.
Utilizado para conectar o motor, a rede elétrica e os terminais de aterramento dos módulos conversores em
paralelo. O kit pode ser solicitado na Danfoss como um kit opcional ou fabricado pelo fabricante do painel.
Utilizado para direcionar o ar de entrada pela base do gabinete, através do canal traseiro do módulo de conversor
e através do topo do gabinete. Reduz o calor dentro do gabinete em 85%. O kit pode ser solicitados na Danfoss
como um kit opcional. Veja capétulo 4.5.1 Exemplos de resfriamento do canal traseiro.
VLT® Parallel Drive Modules
Ilustração 4.4 Visão geral do sistema de 4 conversores sem blindagens de EMI/EMC
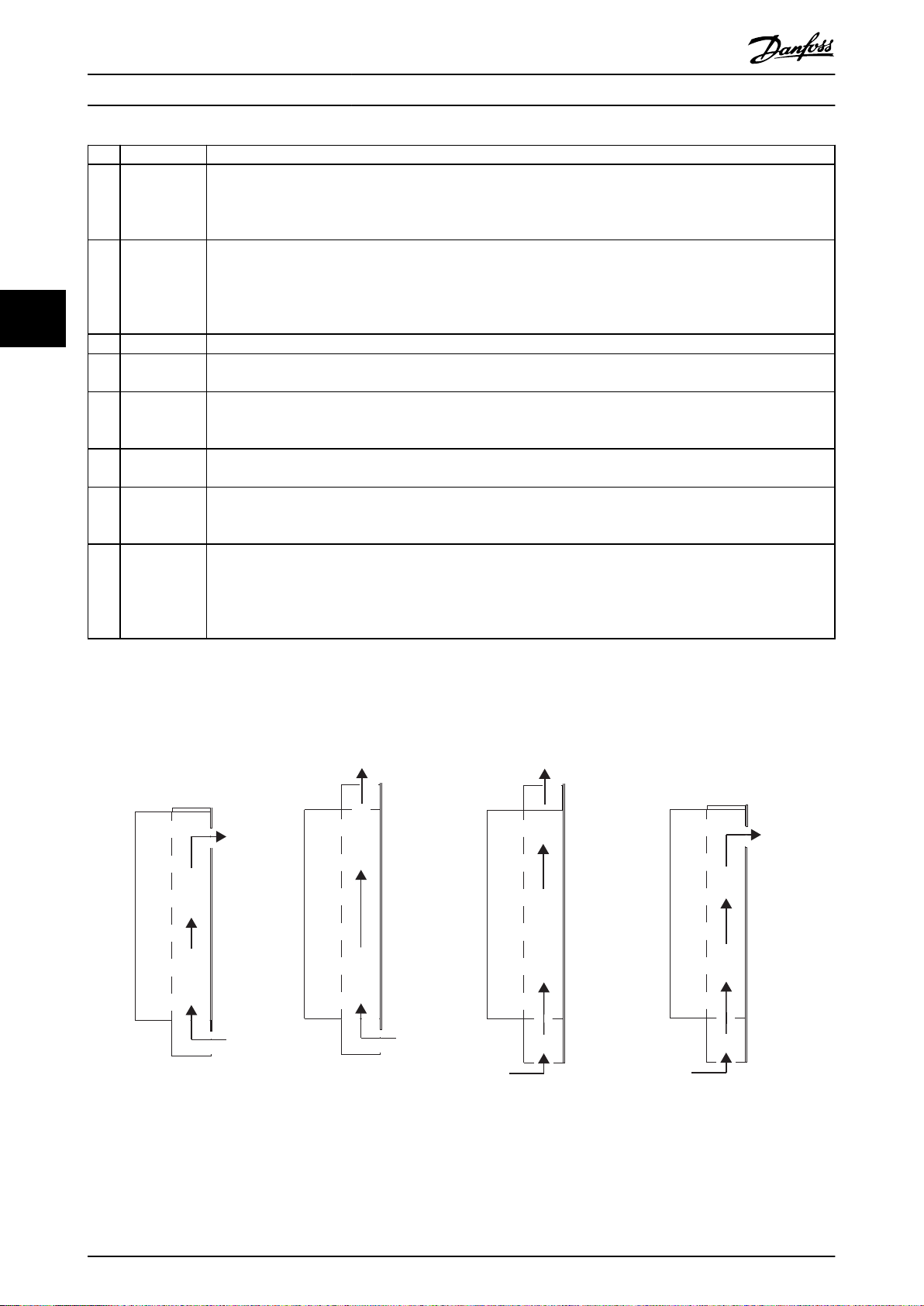
Exemplos de resfriamento do canal traseiro
4.5
Ilustração 4.5 Fluxo de ar do kit de resfriamento (da esquerda para a direita), entrada traseira/saída superior, entrada inferior/saída
superior, entrada inferior/saída traseira
14 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 17
130BF019.11
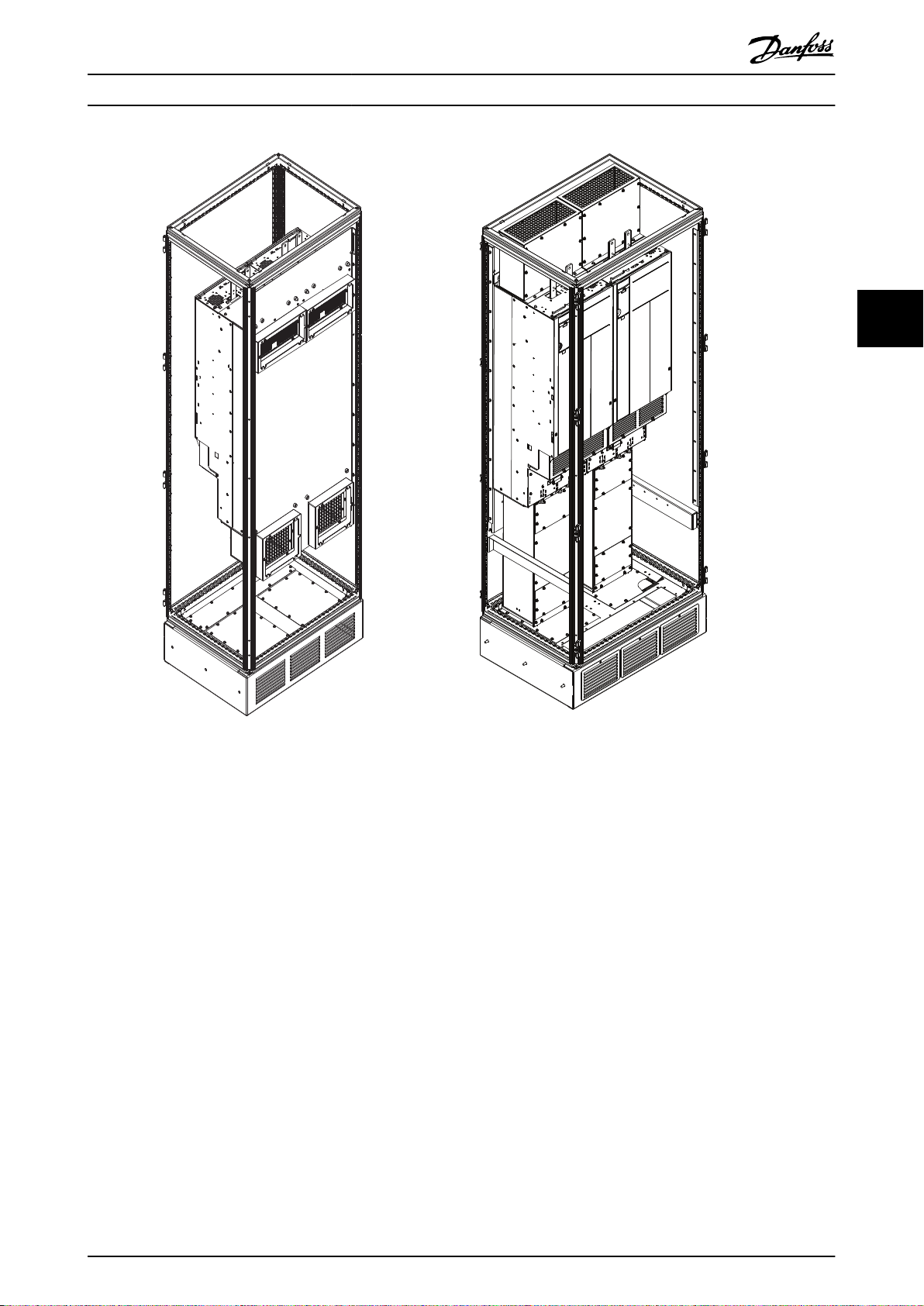
Visão Geral do Produto Guia de Design
4 4
Ilustração 4.6 Gabinete de 2 conversores com kit de resfriamento de entrada traseira/saída traseira (esquerda) e entrada inferior/saída
superior (direita)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 15
Page 18
Recursos do produto
5 Recursos do produto
VLT® Parallel Drive Modules
5.1 Funções automatizadas
Essas funções automatizadas são divididas em 3 categorias:
Ativadas por padrão, porém, podem ser desabi-
•
litadas por programação.
Desabilitadas por padrão, porém, podem ser
•
ativadas por programação.
Sempre ativadas.
55
•
5.1.1 Otimização Automática de Energia
Otimização automática de energia (AEO) é utilizada em
aplicações de HVAC. Este dispositivo orienta o conversor de
frequência para continuamente monitorar a carga do
motor e ajustar a tensão de saída para maximizar a
eciência. Sob carga leve, a tensão é reduzida e a corrente
do motor é minimizada. O motor é beneciado pela maior
eciência, aquecimento reduzido e operação mais
silenciosa. Não há necessidade de selecionar uma curva
V/Hz porque o conversor de frequência ajusta automaticamente a tensão do motor.
5.1.2 Modulação da frequência de
chaveamento automática
O conversor de frequência gera pulsos elétricos curtos para
formar um padrão de onda CA. A frequência da portadora
é a taxa desses pulsos. Uma frequência da portadora baixa
(taxa de pulso baixa) causa ruído no motor, tornando
preferível uma frequência da portadora mais alta. Uma
frequência da portadora alta, no entanto, gera calor no
conversor de frequência que pode limitar a quantidade de
corrente disponível ao motor. O uso de transistores
bipolares do gate isolados (IGBT) signica chaveamento de
velocidade alta.
A modulação de frequência de chaveamento automática
regula essas condições automaticamente para fornecer a
frequência da portadora mais alta sem causar sobreaquecimento ao conversor de frequência. Fornecendo uma
frequência da portadora alta regulada, isso silencia o ruído
de operação do motor em velocidades baixas quando o
controle de ruído for crítico e produz potência de saída
total para o motor quando a demanda solicitar.
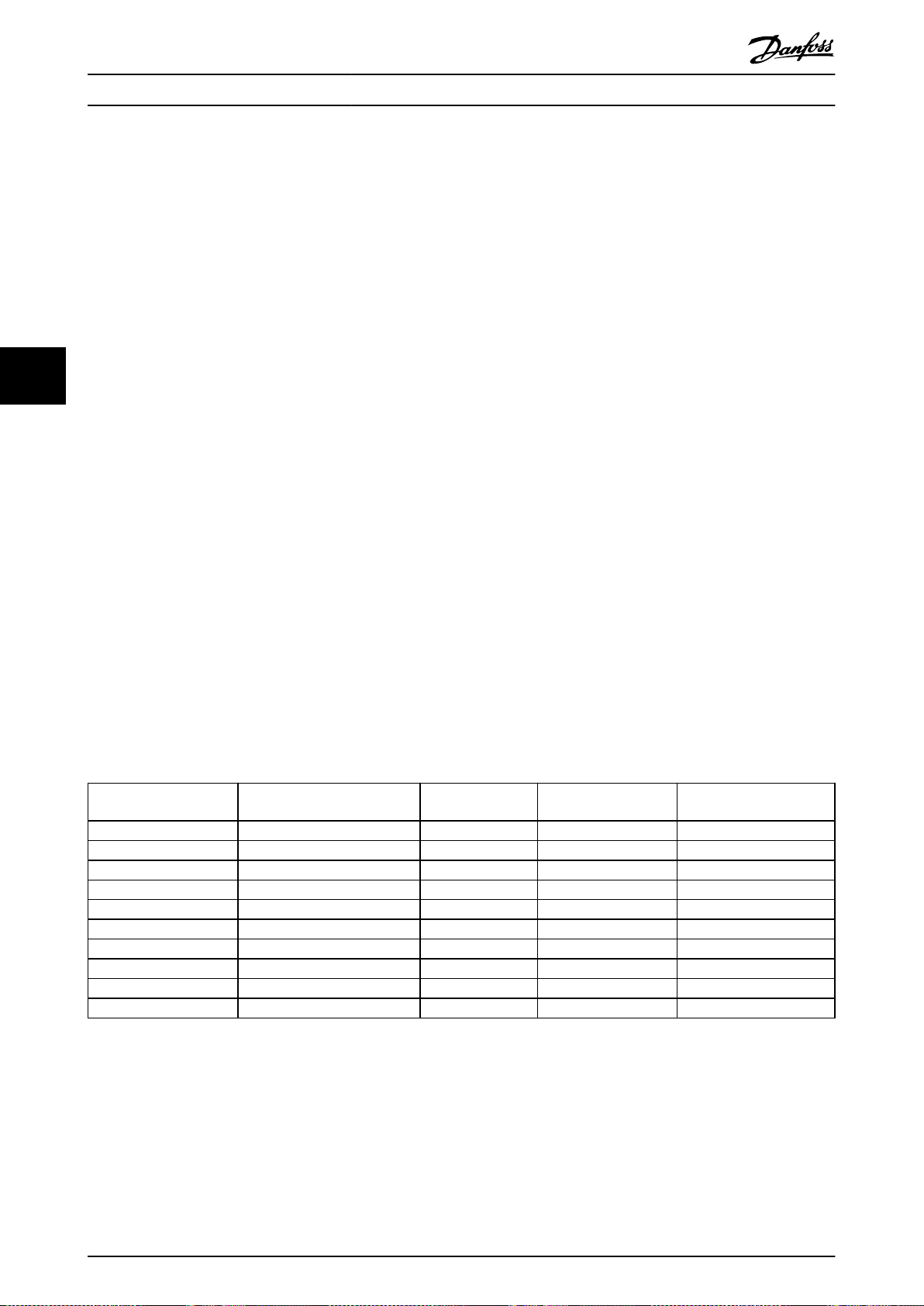
5.1.3 Derating automático para frequência
da portadora alta
O conversor de frequência foi projetado para a operação
de carga total contínua entre frequências da portadora
entre as frequências mínimas e máximas mostradas em
Tabela 5.1. Se a frequência da portadora for maior que a
frequência máxima, a corrente de saída do conversor de
frequência será reduzida automaticamente.
Potência
kW (hp)
250 (350) 3000 2000 8000 3000
315 (450) 2000 1500 6000 2000
355 (500) 2000 1500 6000 2000
400 (550) 2000 1500 6000 2000
450 (600) 2000 1500 6000 2000
500 (650) 2000 1500 6000 2000
560 (750) 2000 1500 6000 2000
630 (900) 2000 1500 6000 2000
710 (1000) 2000 1500 6000 2000
800 (1200) 2000 1500 6000 2000
Tabela 5.1 Faixas operacionais de frequência da portadora para 380-500 V
frequência de chaveamento
Hz
Mínimo
Hz
Máximo
Hz
Conguração de fábrica
Hz
16 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 19
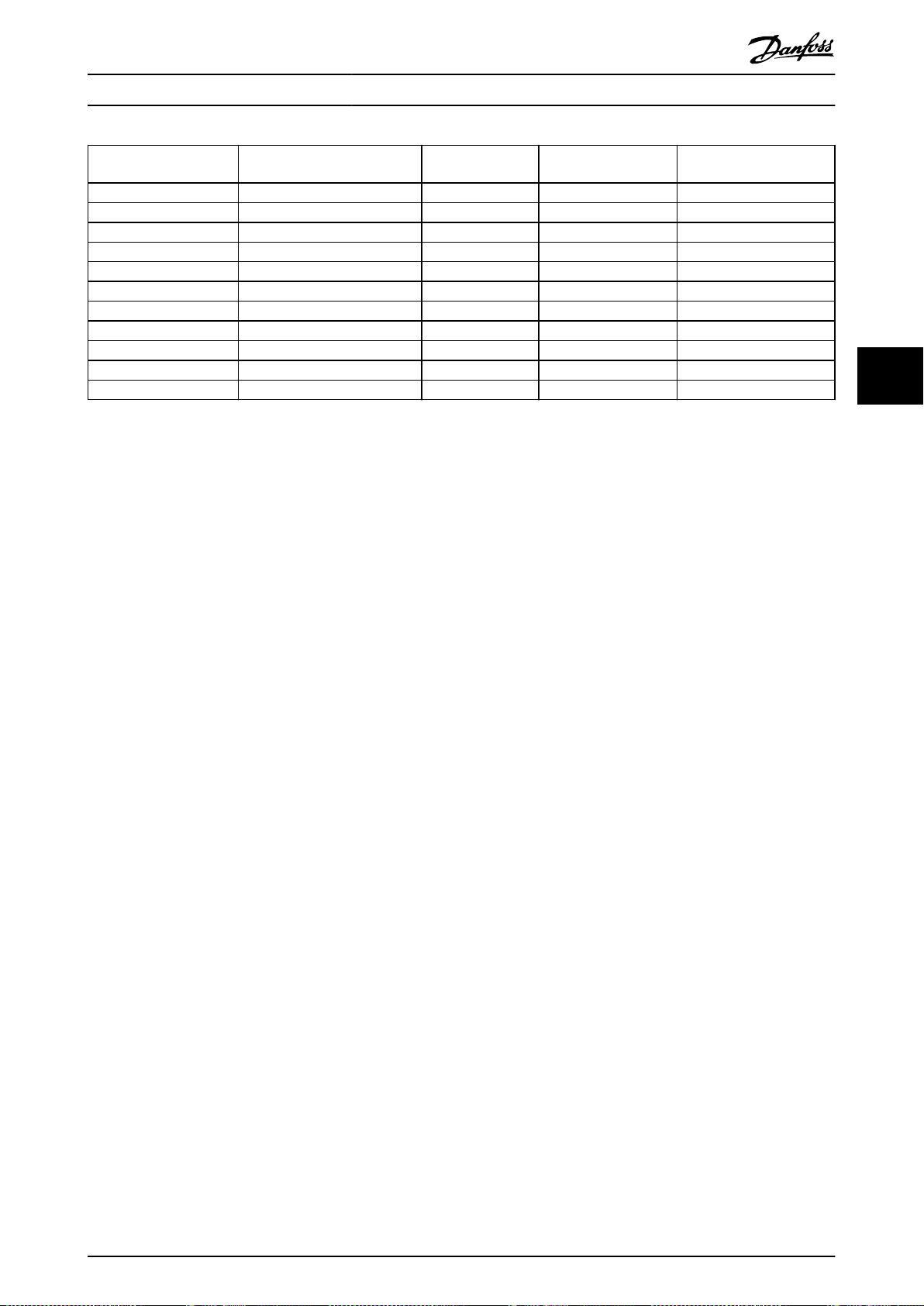
Recursos do produto Guia de Design
Potência
kW (hp)
250 (300) 3000 2000 8000 3000
315 (350) 2000 1500 6000 2000
355 (400) 2000 1500 6000 2000
400 (400) 2000 1500 6000 2000
500 (500) 2000 1500 6000 2000
560 (600) 2000 1500 6000 2000
630 (650) 2000 1500 6000 2000
710 (750) 2000 1500 6000 2000
800 (950) 2000 1500 6000 2000
900 (1050) 2000 1500 6000 2000
1000 (1150) 2000 1500 6000 2000
Tabela 5.2 Faixas operacionais de frequência da portadora para 525-690 V
5.1.4 Derating automático para
frequência de chaveamento
Hz
Mínimo
Hz
Máximo
Hz
5.1.7 Proteção contra Curto-Circuito
superaquecimento
O conversor de frequência fornece proteção inerente
O derating de superaquecimento automático funciona para
evitar o desarme do conversor de frequência em alta
temperatura. Os sensores de temperatura interna medem
as condições para proteger os componentes de potência
de superaquecimento. O conversor pode reduzir automaticamente a frequência da portadora para manter sua
temperatura operacional dentro dos limite de segurança.
Após a redução da frequência de chaveamento, o
conversor de frequência também pode reduzir a frequência
de saída e a corrente em até 30% para evitar um desarme
por superaquecimento.
5.1.5 Rampa automática
Um motor tentando acelerar uma carga muito rapidamente
para a corrente disponível pode causar o desarme do
conversor de frequência. O mesmo é verdadeiro para uma
desaceleração muito rápida. A rampa automática protege
contra esse cenário estendendo a taxa de rampa do motor
(aceleração ou desaceleração) para corresponder com a
corrente disponível.
contra curto-circuito com um circuito de desarme por falha
de atuação rápida. A corrente é medida em cada uma das
três fases de saída. Após 5–10 ms, se a corrente exceder o
valor permitido, todos os transistores do inversor são
desabilitados. Esse circuito fornece a detecção de corrente
mais rápida e a melhor proteção contra desarme por
distúrbios. Um curto-circuito entre duas fases de saída
pode causar um desarme de sobrecarga de corrente.
5.1.8 Proteção de falha de aterramento
Após receber feedback de sensores de corrente, o circuito
de controle soma as correntes trifásicas de cada módulo
de conversor. Se a soma de todas as três correntes de fase
for diferente de 0, indica uma corrente de fuga. Se o
desvio de 0 exceder uma quantidade predeterminada, o
conversor de frequência emite um alarme de falha de
aterramento.
5.1.9 Desempenho de utuação de
potência
Conguração de fábrica
Hz
5 5
5.1.6 Controle de limite de corrente
Quando uma carga exceder a capacidade da corrente de
operação normal do conversor de frequência (de um
conversor ou motor subdimensionado), o limite de
corrente reduz a frequência de saída para diminuir a
velocidade do motor e reduzir a carga. Um temporizador
ajustável está disponível para limitar a operação nessa
condição durante 60 s ou menos. O limite padrão da
fábrica é 110% da corrente nominal do motor para
minimizar a tensão da sobrecarga de corrente.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 17
O conversor de frequência resiste às utuações da rede
elétrica, como:
Transientes.
•
Quedas momentâneas.
•
Quedas de tensão curtas.
•
Surtos.
•
O conversor de frequência compensa automaticamente
para tensões de entrada de ±10% da nominal para
fornecer torque e tensão nominal do motor total. Com a
nova partida automática selecionada, o conversor de
frequência é energizado automaticamente após um
desarme da tensão. E com o ying start, o conversor de
frequência sincroniza a rotação do motor antes da partida.
Page 20
Recursos do produto
VLT® Parallel Drive Modules
5.1.10 Motor de partida suave
O conversor de frequência fornece a quantidade correta de
corrente para o motor para superar a inércia da carga e
fazer o motor adquirir velocidade. Isso evita que a tensão
de rede total seja aplicada a um motor parado ou em
funcionamento lento, o que gera uma corrente alta e calor.
Este recurso de partida suave herdado reduz a carga
térmica e o estresse mecânico, prolonga a vida útil do
motor e fornece uma operação do sistema mais silenciosa.
eletrônico preciso do motor. Isso permite que o conversor
de frequência calcule o desempenho ideal e a eciência do
motor. Realizar o procedimento AMA também maximiza o
recurso de otimização de energia automática do conversor
de frequência. A AMA é realizada sem o motor em rotação
e sem desacoplar a carga do motor.
5.2.2 Proteção Térmica do Motor
A proteção térmica do motor pode ser fornecida de duas
maneiras:
5.1.11 Amortecimento de ressonância
55
O ruído de ressonância do motor de alta frequência pode
ser eliminado através de amortecimento de ressonância.
Está disponível o amortecimento de frequência selecionado
manualmente ou automaticamente.
5.1.12 Ventiladores controlados por
temperatura
Os ventiladores de resfriamento internos são controlados
por temperatura por sensores no conversor de frequência.
O ventilador de resfriamento com frequência não está em
funcionamento durante a operação de carga baixa ou
quando estiver no sleep mode ou no modo de espera.
Esse recurso reduz o ruído, aumenta eciência e prolonga
a vida operacional do ventilador.
Um método usa um termistor do motor. O conversor de
frequência monitora a temperatura do motor conforme a
velocidade e a carga variam para detectar condições de
superaquecimento.
O outro método calcula a temperatura do motor medindo
a corrente, a frequência e o tempo de operação. O
conversor de frequência exibe a carga térmica no motor
em porcentagem e pode emitir uma advertência em um
setpoint de sobrecarga programável. As opções programáveis na sobrecarga permitem ao conversor de
frequência parar o motor, reduzir a saída ou ignorar a
condição. Mesmo em velocidades baixas, o conversor de
frequência atende os padrões de sobrecarga do motor
eletrônica I2t Classe 20.
5.2.3 Controlador PID incorporado
5.1.13 Conformidade com o EMC
O controlador proporcional, integral, derivativo (PID)
A Interferência eletromagnética (EMI) ou a Interferência de
radiofrequência (RFI) é um distúrbio que pode afetar um
circuito elétrico devido a indução eletromagnética ou a
radiação ou de uma fonte externa. O conversor de
frequência foi projetado para atender a norma para
produtos de EMC para IEC/EN 61800-3. Para obter mais
informações sobre o desempenho de EMC, consulte
capétulo 9.2 Resultados de teste de EMC.
integrado está disponível, eliminando a necessidade de
dispositivos de controle auxiliares. O controlador PID
mantém controle constante dos sistemas de malha fechada
em que pressão, temperatura e uxo regulados ou outros
requisitos do sistema devem ser mantidos. O conversor de
frequência pode fornecer controle autoconante da
velocidade do motor em resposta ao sinal de feedback de
sensores remotos.
Funções programáveis
5.2
As funções a seguir são as funções mais comuns
programadas para uso no conversor de frequência para
desempenho melhorado do sistema. Eles exigem o mínimo
de programação ou conguração. Saber que essas funções
estão disponíveis pode otimizar o projeto do sistema e
possivelmente evitar a introdução de componentes ou
funcionalidades redundantes. Consulte o Guia de
Programação especíco do produto para obter instruções
sobre a ativação dessas funções.
5.2.1 Adaptação Automática do Motor
A Adaptação Automática do Motor (AMA) é um
procedimento de teste automatizado usado para medir as
características do motor. A AMA fornece um modelo
18 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
O conversor de frequência acomoda dois sinais de
feedback de dois dispositivos diferentes. Esse recurso
permite regular um sistema com diferentes requisitos de
feedback. O conversor de frequência toma decisões de
controle comparando os dois sinais para otimizar o
desempenho do sistema.
5.2.4 Nova Partida Automática
O conversor de frequência pode ser programado para
reiniciar o motor automaticamente após um desarme de
pouca gravidade, como utuação ou perda de energia
momentânea. Esse recurso elimina a necessidade de reset
manual e melhora a operação automatizada de sistemas
controlados remotamente. O número de tentativas de
Page 21
Recursos do produto Guia de Design
novas partidas e a duração entre as tentativas pode ser
limitada.
5.2.5 Flying Start
O ying start permite ao conversor de frequência
sincronizar com um motor em operação girando até a
velocidade total, em qualquer sentido. Esse recurso evita
desarme devido à retirada de sobrecarga de corrente. Ele
minimiza a tensão mecânica para o sistema, pois o motor
não recebe mudança repentina de velocidade quando o
conversor de frequência é iniciado.
5.2.6 Sleep Mode
O Sleep mode para o motor automaticamente quando a
demanda estiver em um nível baixo durante um intervalo
de tempo especicado. Quando a demanda do sistema
aumentar, o conversor reinicia o motor. O sleep mode
fornece economia de energia e reduz o desgaste do motor.
Ao contrário de um relógio setback, o conversor está
sempre disponível para operar quando a demanda de
despertar predenida for alcançada.
5.2.7 Funcionamento permissivo
O conversor pode aguardar por um sinal de sistema pronto
antes de iniciar. Quando este recurso estiver ativo, o
conversor permanece parado até receber permissão para
iniciar. O funcionamento permissivo garante que o sistema
ou equipamento auxiliar está no estado adequado antes
do conversor ter permissão para dar partida no motor.
5.2.8 Torque total em velocidade reduzida
O conversor de frequência segue uma curva V/Hz variável
para fornecer torque total do motor mesmo em
velocidades reduzidas. O torque de saída total pode
coincidir com a velocidade operacional nominal máxima
do motor. Essa curva de torque variável é diferente dos
conversores de torque variável que fornecem torque do
motor reduzido em velocidade baixa ou conversores de
torque constante que fornecem tensão, calor e ruído do
motor em excesso a menos que a velocidade total.
5.2.9 Bypass de frequência
5.2.10 Pré-aquecimento do Motor
Para pré-aquecer um motor em ambiente frio ou molhado,
uma pequena quantidade de corrente CC pode escoar
continuamente para o motor para protegê-lo de
condensação e de partida a frio. Isso pode eliminar a
necessidade de um aquecedor de espaço.
5.2.11 4 Setups Programáveis
O conversor de frequência tem quatro setups que podem
ser programados de forma independente. Usando setup
múltiplo é possível alternar entre funções programadas de
forma independente ativadas por entradas digitais ou
comando serial. Setups independentes são usados, por
exemplo, para alterar referências ou para operação dia/
noite ou verão/inverno ou para controlar vários motores. A
conguração ativa é mostrada no LCP.
Os dados de setup podem ser copiados de conversor de
frequência para conversor de frequência por download das
informações do LCP removível.
5.2.12 Freio CC
Algumas aplicações podem exigir a frenagem de um motor
até reduzir ou parar. Aplicar corrente CC ao motor freia o
motor e pode eliminar a necessidade de um freio de motor
separado. O freio CC pode ser programado para ativar a
uma frequência predeterminada ou após receber um sinal.
A taxa de frenagem também pode ser programada.
5.2.13 Torque de partida elevado
Para alta inércia ou altas cargas de atrito, há torque extra
disponível para partida. A corrente dissidente de 110% ou
160% do máximo pode ser congurada para um período
limitado de tempo.
5.2.14 Bypass
Um bypass automático ou manual é uma opção disponível.
O bypass permite ao motor operar em velocidade total
quando o conversor de frequência não estiver em
operação e permite a manutenção de rotina ou bypass de
emergência.
5 5
Em algumas aplicações, o sistema pode ter velocidades
operacionais que criam uma ressonância mecânica. Essa
ressonância mecânica pode gerar ruído excessivo e
possivelmente danicar os componentes mecânicos do
sistema. O conversor de frequência tem 4 larguras de
banda de frequência de bypass programáveis. Essas
larguras de banda permitem que o motor desenvolva
velocidades que induzem ressonância do sistema.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 19
5.2.15 Ride-through da perda de energia
Durante uma perda de energia, o conversor de frequência
continua a girar o motor até a tensão do barramento CC
cair abaixo do nível mínimo operacional, que corresponde
a 15% abaixo da tensão nominal mais baixa do conversor.
Conversores de frequência são classicados para operação
a 380–460 V, 550–600 V e alguns a 690 V. O tempo de
ride-through da perda de energia depende, após a carga,
Page 22
Recursos do produto
VLT® Parallel Drive Modules
do conversor de frequência e da tensão de rede no
momento da perda de energia.
5.2.16 Sobrecarga
Quando o torque necessário para manter ou acelerar para
a uma determinada de frequência exceder o limite de
corrente, o conversor de frequência tenta continuar a
operação. Ele reduz automaticamente a taxa de de
aceleração ou reduz a frequência de saída. Se a demanda
de sobrecorrente não for reduzida o suciente, o conversor
55
de frequência desliga e exibe uma falha dentro de 1,5 s. O
nível do limite de corrente é programável. O atraso do
desarme de sobrecorrente é utilizado para especicar o
tempo que o conversor de frequência opera no limite de
corrente antes de ser desligado. O nível do limite pode ser
programado entre 0–60 s, ou para operação innita, sujeito
ao conversor de frequência e à proteção térmica do motor.
5.3.1 Condições de Disponibilidade
O usuário é responsável por garantir que os técnicos
saibam como instalar e operar a função Safe Torque O ao:
Ler e entender as normas de segurança com
•
relação a saúde, segurança e prevenção de
acidentes.
Entender as diretrizes genéricas e de segurança
•
fornecidas nesta descrição e a descrição
estendida no Guia de Operação VLT® Frequency
Converters – Safe Torque O .
Ter bom conhecimento das normas genéricas e
•
de segurança da aplicação especíca.
O usuário é denido como integrador, operador, serviço e
equipe de manutenção.
5.3.2 Informações Complementares
5.3 Safe Torque O (STO)
Para obter mais informações sobre Safe Torque O,
O VLT® AutomationDrive FC 302 está disponível com a
funcionalidade Safe Torque O via terminal de controle 37.
A função STO está disponível em VLT® Drive HVAC FC 102
e AQUA Drive do VLT® FC 202.
incluindo instalação e colocação em funcionamento,
consulte o Guia de Operação dos VLT® Frequency Converters
– Safe Torque O.
5.3.3 Instalação de Dispositivo de
O STO desabilita a tensão de controle dos semicondutores
de potência do estágio de saída do conversor de
frequência, o que por sua vez impede a geração da tensão
necessária para girar o motor. Quando Safe Torque O (T
37) for ativado, o conversor de frequência emite um
alarme, desarma a unidade e faz parada por inércia do
motor. É necessário nova partida manual. A função Safe
Torque O pode ser usada para parar o conversor de
frequência em situações de parada de emergência. No
modo de operação normal, quando o Safe Torque O não
for necessário, use a função de parada normal. Quando
nova partida automática for utilizada, os requisitos de
acordo com a ISO 12100-2 parágrafo 5.3.2.5 deverão ser
atendidos.
A função Safe Torque O com VLT® AutomationDrive FC
302 pode ser usada em motores assíncronos, síncronos e
de ímã permanente. É possível ocorrer duas falhas nos
semicondutores de potência. Ao ocorrerem duas falhas no
semicondutor de potência ao utilizar motores de imã
permanente síncronos, podem causar uma rotação residual
no motor. A rotação pode ser calculada como ângulo =
360/(número de polos). A aplicação que usar motores
síncronos ou motor de imã permanente deve levar essa
possibilidade em consideração e assegurar que esse
cenário não seja um problema crítico de segurança. Esta
situação não é aplicável a motores assíncronos.
Segurança Externo Combinado com
VLT® PTC Thermistor Card MCB 112
Se o módulo MCB 112 de termistor ex-certicado, que
utiliza o terminal 37 como canal de desligar relacionado à
segurança, estiver conectado, a saída X44/12 do MCB 112
deve ser combinada com um sensor relacionado à
segurança (tecla de parada de emergência ou chave de
proteção de segurança) que ativa o Safe Torque O. A
saída para o terminal 37 de Safe Torque O está alta (24 V)
somente se tanto o sinal da saída MCB 112 X44/12 quanto
o sinal do sensor relacionado a segurança estiverem altos.
Se pelo menos um dos dois sinais estiverem baixos, a saída
para terminal 37 também deverá estar baixa. O dispositivo
de segurança com essa lógica E deve estar em confor-
midade com a IEC 61508, SIL 2. A conexão da saída do
dispositivo de segurança com lógica E segura ao terminal
37 de Safe Torque O deve ser protegida contra curto-
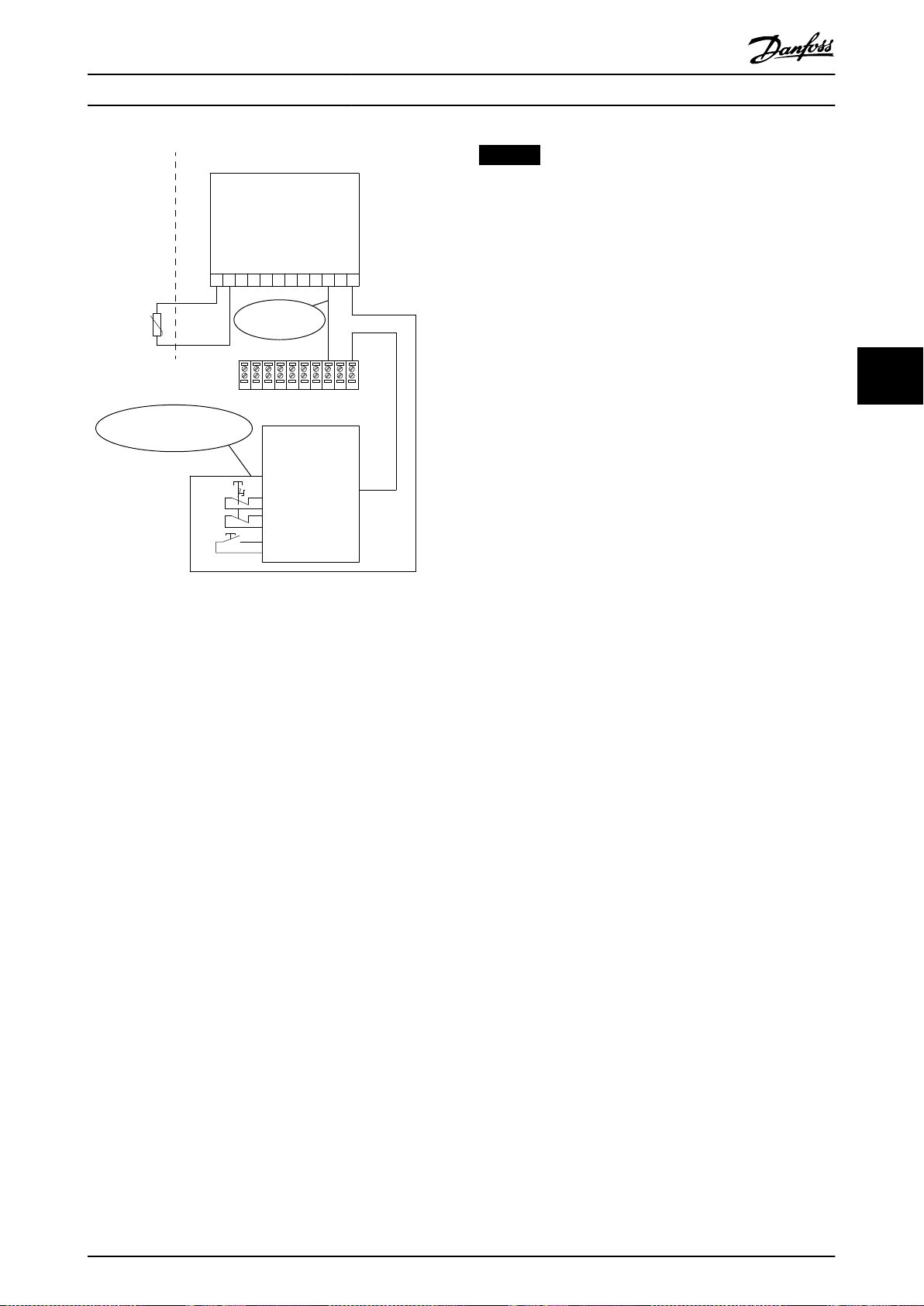
-circuito. Ilustração 5.1 mostra uma entrada de nova partida
do dispositivo de segurança externo. Nessa instalação, por
exemplo, programe [7] PTC 1 e Relé W ou [8] PTC 1 e Relé
A/W em parâmetro 5-19 Terminal 37 Parada Segura.
Consulte as Instruções de utilização do VLT® PTC Thermistor
Card MCB 112 para obter mais detalhes.
20 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 23
130BA967.12
Digital Input
PTC
Sensor
Non-Hazardous AreaHazardous
Area
X44/
PTC Thermistor Card
MCB 112
1 2 3 4 5 6 7 8 9 10 1112
Safety Device
Manual Restart
SIL 2
Safe AND Input
Safe Output
Safe Input
DI DI
Safe Stop
Par. 5-19
Terminal 37 Safe Stop
12 13 18 19 27 29 32 33 20 37
e.g. Par 5-15
Recursos do produto Guia de Design
AVISO!
[7] O PTC 1 e Relé W e o [8] PTC 1 e Relé A/W em
parâmetro 5-19 Terminal 37 Parada Segura abrem a nova
partida automática quando o dispositivo de segurança
externo for novamente desabilitado.
A nova partida automática somente é permitida nos
seguintes casos:
A prevenção de nova partida acidental é
•
implementada por outras partes da instalação do
Safe Torque O.
Uma presença na zona de perigo pode ser
•
sicamente excluída quando Safe Torque O não
estiver ativado. Em particular, o parágrafo 5.3.2.5
of ISO 12100-2 2003 deve ser observado.
Consulte capétulo 7.3.11 VLT® PTC Thermistor Card e o Guia
de Operação do VLT® PTC Thermistor Card MCB 112 para
obter mais informações sobre MCB 112.
5.4 Monitoramento do sistema
5 5
Ilustração 5.1 A ilustração dos aspectos essenciais para instalar
uma combinação de aplicação de Safe Torque O e uma
aplicação de MCB 112
Programação do parâmetro para dispositivo de
segurança externo
com MCB 112
Se MCB 112 estiver conectado, as seleções adicionais [4] a
[9] tornam-se possíveis para parâmetro 5-19 Terminal 37
Parada Segura (Terminal 37 Safe Torque O).
As seleções [1]* Alarme de parada segura e [3] Advertência
de parada segura em parâmetro 5-19 Terminal 37 Parada
Segura ainda estão disponíveis, mas são para instalações
sem MCB 112 ou quaisquer dispositivos de segurança
externos. Se [1]* Alarme de parada segura ou [3] Advertência
de parada segura em parâmetro 5-19 Terminal 37 Parada
Segura forem selecionados por engano e MCB 112 for
disparado, o conversor de frequência responde com o
alarme 72, Falha perigosa e realiza parada por inércia do
conversor de frequência com segurança, sem nova partida
automática.
As seleções [4] PTC 1 Alarme e [5] PTC 1 Advertência em
parâmetro 5-19 Terminal 37 Parada Segura são selecionadas
quando MCB 112 usa o Safe Torque O. Se a seleção [4] ou
[5] em parâmetro 5-19 Terminal 37 Parada Segura for
escolhida acidentalmente e o dispositivo de segurança
externo disparar Safe Torque O, o conversor de frequência
responde com um alarme 72, Falha Perigosa e faz parada
por inércia do conversor de frequência com segurança,
sem nova partida automática.
As seleções [6] a [9] em parâmetro 5-19 Terminal 37 Parada
Segura devem ser escolhidas para a combinação de
dispositivo de segurança externo com MCB 112.
O conversor de frequência monitora diversos aspectos da
operação do sistema, incluindo:
Condições da rede elétrica.
•
Carga do motor e desempenho.
•
Status do conversor de frequência.
•
Uma advertência ou um alarme não indica necessa-
riamente um problema no próprio conversor de frequência.
Pode ser uma condição fora do conversor de frequência
que está sendo monitorada para limites de desempenho. O
conversor de frequência possui diversas respostas de falha,
advertência e alarme pré-programadas. Funções adicionais
de alarme e advertência podem ser selecionados para
melhorar ou modicar o desempenho do sistema.
Esta seção descreve o alarme comum e as funções de
advertência. Saber que essas funções estão disponíveis
pode otimizar o projeto do sistema e possivelmente evitar
a introdução de componentes ou funcionalidades
redundantes.
5.4.1 Operação no superaquecimento
Por padrão, o conversor de frequência emite um alarme e
desarma com superaquecimento. Se Derate automático e
Advertência estiverem selecionados, o conversor de
frequência alerta sobre a condição, mas continua
funcionando e tenta se resfriar primeiro reduzindo sua
frequência de chaveamento. Em seguida, se necessário, ele
reduz a frequência de saída.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 21
Page 24
Recursos do produto
VLT® Parallel Drive Modules
5.4.2 Advertência de referência alta e baixa
Em operação de malha aberta, o sinal de referência
determina diretamente a velocidade do conversor de
frequência. A tela mostra uma advertência de referência
alta ou baixa piscando quando o máximo ou o mínimo for
atingido.
5.4.3 Advertência de feedback alto e baixo
Em operação de malha fechada, o conversor de frequência
55
monitora os valores de feedback alto e baixo selecionados.
A tela mostra uma advertência piscando alto ou baixo
quando apropriado. O conversor também pode monitorar
sinais de feedback em operação de malha aberta. Apesar
de os sinais não afetarem a operação do conversor de
frequência em malha aberta, podem ser úteis para a
indicação do status do sistema localmente ou via
comunicação serial. O conversor de frequência manipula 39
unidades de medida diferentes.
advertência de baixa frequência quando parar ou após a
partida até atingir a frequência de operação.
5.4.7 Advertência de alta corrente
Esta função é semelhante à advertência de alta frequência
(consulte capétulo 5.4.5 Advertência de alta frequência),
exceto uma conguração de corrente alta que é usada
para emitir uma advertência e ligar o equipamento
adicional. A função não está ativa quando parado ou na
partida até a corrente de operação denida ser alcançada.
5.4.8 Advertência de corrente baixa
Essa função é semelhante à advertência de corrente baixa
(consulte capétulo 5.4.6 Advertência de baixa frequência),
exceto quando uma conguração de corrente baixa for
usada para emitir uma advertência e desabilitar
equipamento externo. A função não está ativa quando
parado ou na partida até a corrente de operação denida
ser alcançada.
5.4.4 Desbalanceamento da tensão de
alimentação ou
Perda de Fase
5.4.9 Sem carga/Advertência de correia
partida
Ripple de corrente excessivo no barramento CC indica
desbalanceamento da tensão de alimentação da rede
elétrica ou perda de fase. Quando uma fase de potência
para o conversor for perdida, o padrão é emitir um alarme
e desarmar a unidade para proteger os capacitores do
barramento CC. Outras opções são emitir uma advertência
e reduzir a corrente de saída para 30% da corrente total ou
emitir uma advertência e continuar a operação normal.
Operar uma unidade conectada a uma linha desbalanceada
pode ser desejável até o desbalanceamento ser corrigido.
5.4.5 Advertência de alta frequência
Útil no escalonamento de equipamento adicional como
bombas ou ventiladores de refrigeração, o conversor de
frequência pode avisar quando a velocidade do motor
estiver alta. Uma conguração de alta frequência especíca
pode ser inserida no conversor. Quando a saída da unidade
exceder a frequência de advertência denida, a unidade
exibe uma advertência de alta frequência. Uma saída
digital do conversor de frequência pode sinalizar
dispositivos externos para ligar.
5.4.6 Advertência de baixa frequência
Este recurso pode ser usado para monitorar uma correia V.
Após um limite de corrente baixa ser armazenado no
conversor, se perda da carga for detectada, o conversor
pode ser programado para emitir um alarme e desarmar
ou para continuar a operação e emitir uma advertência.
5.4.10 Interface serial perdida
O conversor de frequência pode detectar perda de
comunicação serial. Um atraso de tempo de até 18.000 s é
selecionável para evitar uma resposta devido a
interrupções no barramento de comunicação serial.
Quando o atraso for excedido, as opções disponíveis
podem:
Manter sua última velocidade.
•
Acessar a velocidade máxima.
•
Acessar a velocidade predenida.
•
Parar e emitir uma advertência.
•
Útil ao escalonar o equipamento, o conversor de
frequência pode alertar quando a velocidade do motor
estiver baixa. Uma conguração de baixa frequência
especíca pode ser selecionada para alertar e desabilitar
dispositivos externos. A unidade não emite uma
22 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 25
346
(13.6)
868
[34.2]
856.6
(33.7)
1051
(41.4)
1096
(43.1)
1122
(44.2)
130
(5.1)
41
(1.6)
1048
(41.3)
280
(11.0)
107
(4.2)
213
(8.4)
320
(12.6)
271
(10.7)
95
(3.7)
130BE654.11
376
(14.8)
Especicações Guia de Design
6 Especicações
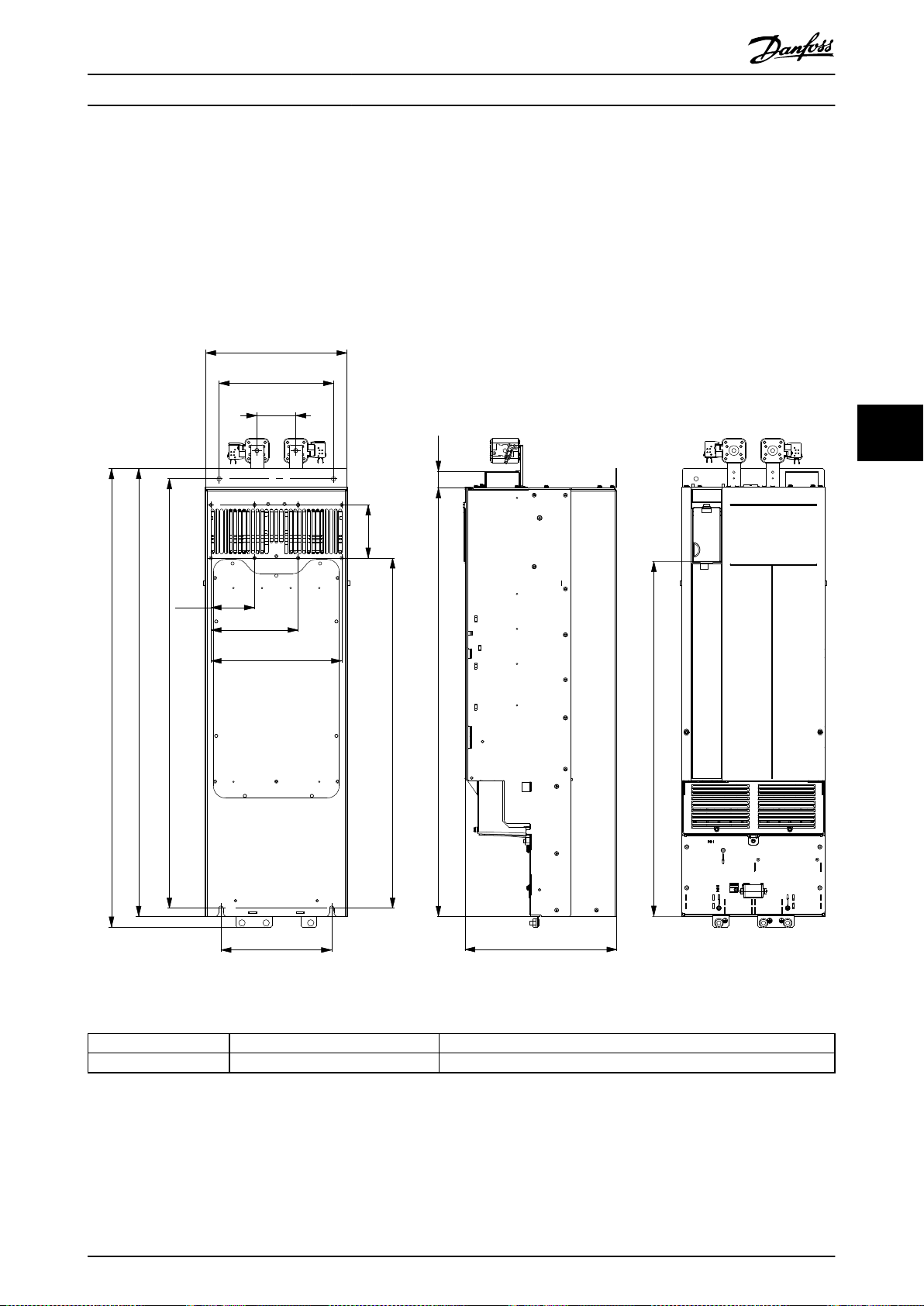
6.1 Dimensões do Módulo de Conversor
6.1.1 Dimensões Externas
Ilustração 6.1 mostra as dimensões do módulo de conversor relacionadas à sua instalação.
6
6
Ilustração 6.1 VLT® Parallel Drive Modules Dimensões da instalação
Descrição Peso do módulo [kg (lbs.)] Comprimento X largura x profundidade [mm (pol)]
Módulo conversor 125 (275) 1121,7 x 346,2 x 375 (44,2 x 13,6 x 14,8)
Tabela 6.1 Peso e Dimensões do Módulo de Conversor
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 23
Page 26
A
A
B
B
R
S
T
U
V
W
130BE748.10
319 (12.6)
200 (7.9)
0 (0.0)
376 (14.8)
Brake terminals
236.8 (9.0)
293 (11.5)
0 (0.0)
33 (1.3)
91 (3.6)
149 (5.8)
211 (8.3)
319 (12.6)
265 (10.4)
130BE749.10
Section A-A
Mains Terminals
Section B-B
Motor and Brake Terminals
Brake terminal
Motor terminal
Mains terminal
284 (11.2)
0 (0.0)
0 (0.0)
306 (12.1)
255 (10.0)
6
Especicações
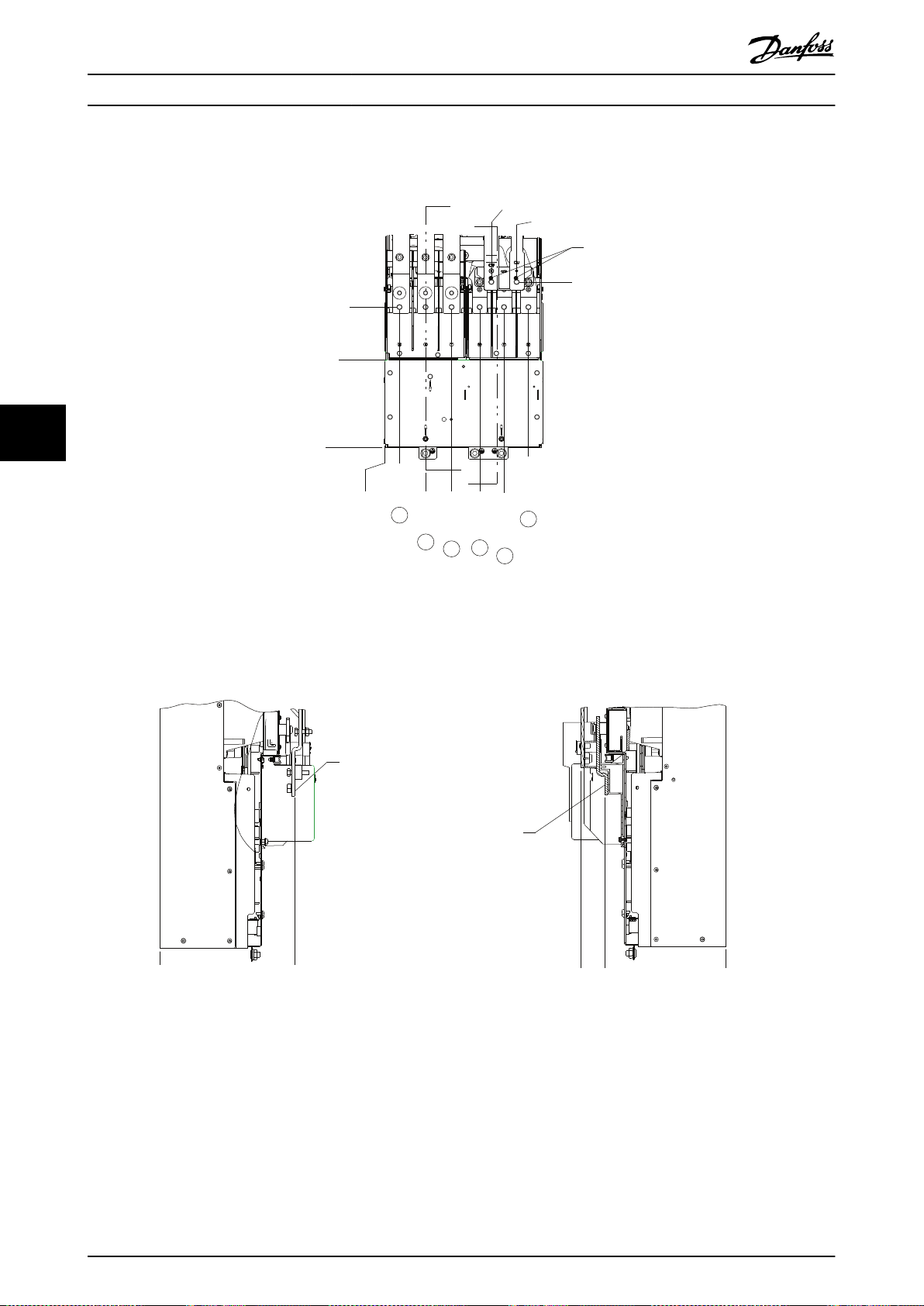
6.1.2 Dimensões de Terminal
VLT® Parallel Drive Modules
Ilustração 6.2 Dimensões do Terminal do Módulo de Conversor (vista frontal)
Ilustração 6.3 Dimensões do Terminal do Módulo de Conversor (vista lateral)
24 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 27
130BE751.10
105.5
(4.15)
236
(9.3)
126
(4.9)
95
(3.7)
Especicações Guia de Design
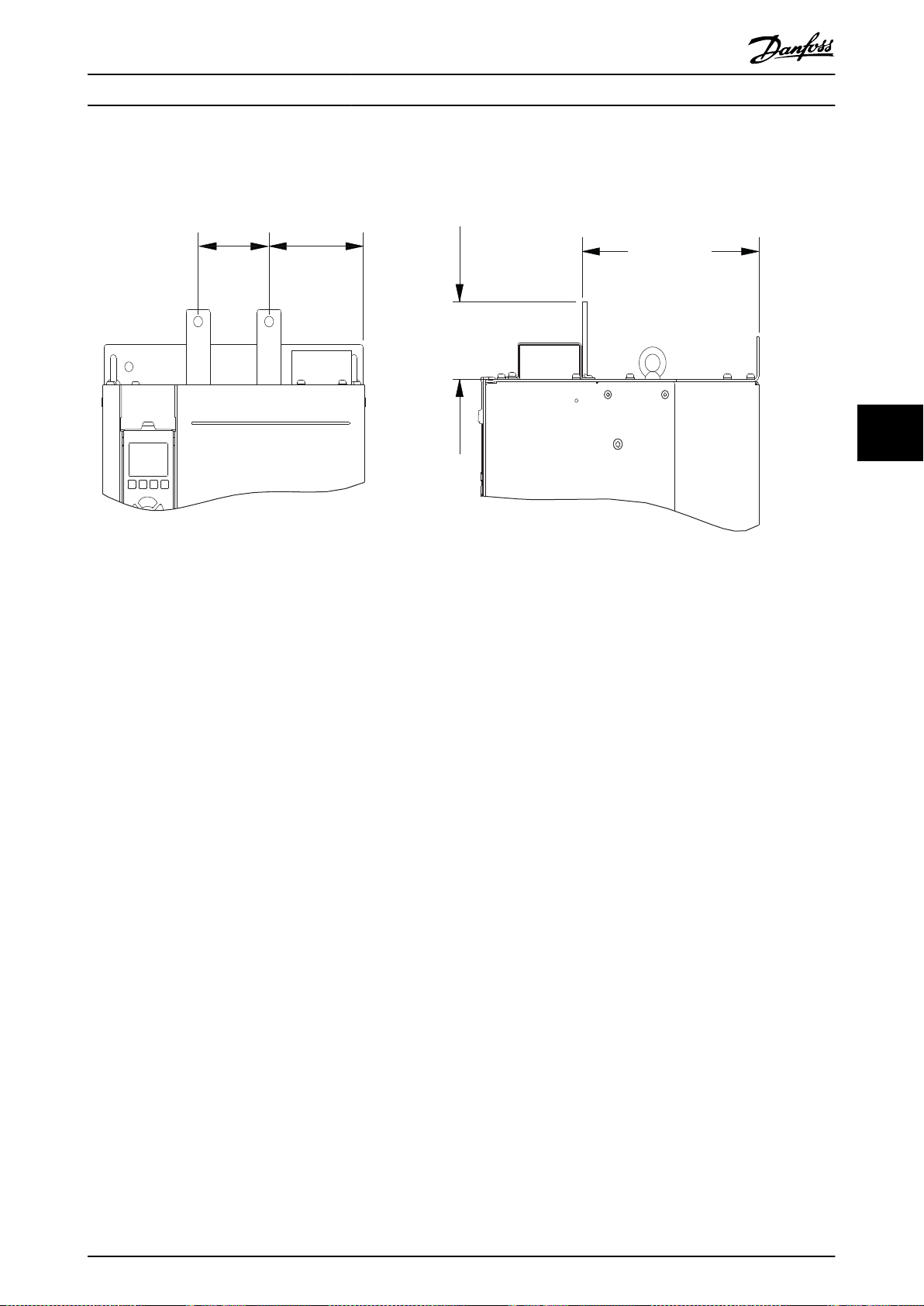
6.1.3 Dimensões do Barramento CC
6
6
Ilustração 6.4 Dimensões do barramento CC (visões frontal e lateral)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 25
Page 28
130BF029.10
705
(27.8)
332
(13.1)
6
Especicações
VLT® Parallel Drive Modules
6.2 Dimensões da prateleira de controle
Ilustração 6.5 Dimensões da prateleira de controle
26 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 29
130BF026.10
405
(15.9)
808 (31.8)
796
(31.3)
1959
(77.1)
2261
(89.0)
636
(25.0)
338
(13.3)
636
(25.0)
105
2201
(86.7)
Especicações Guia de Design
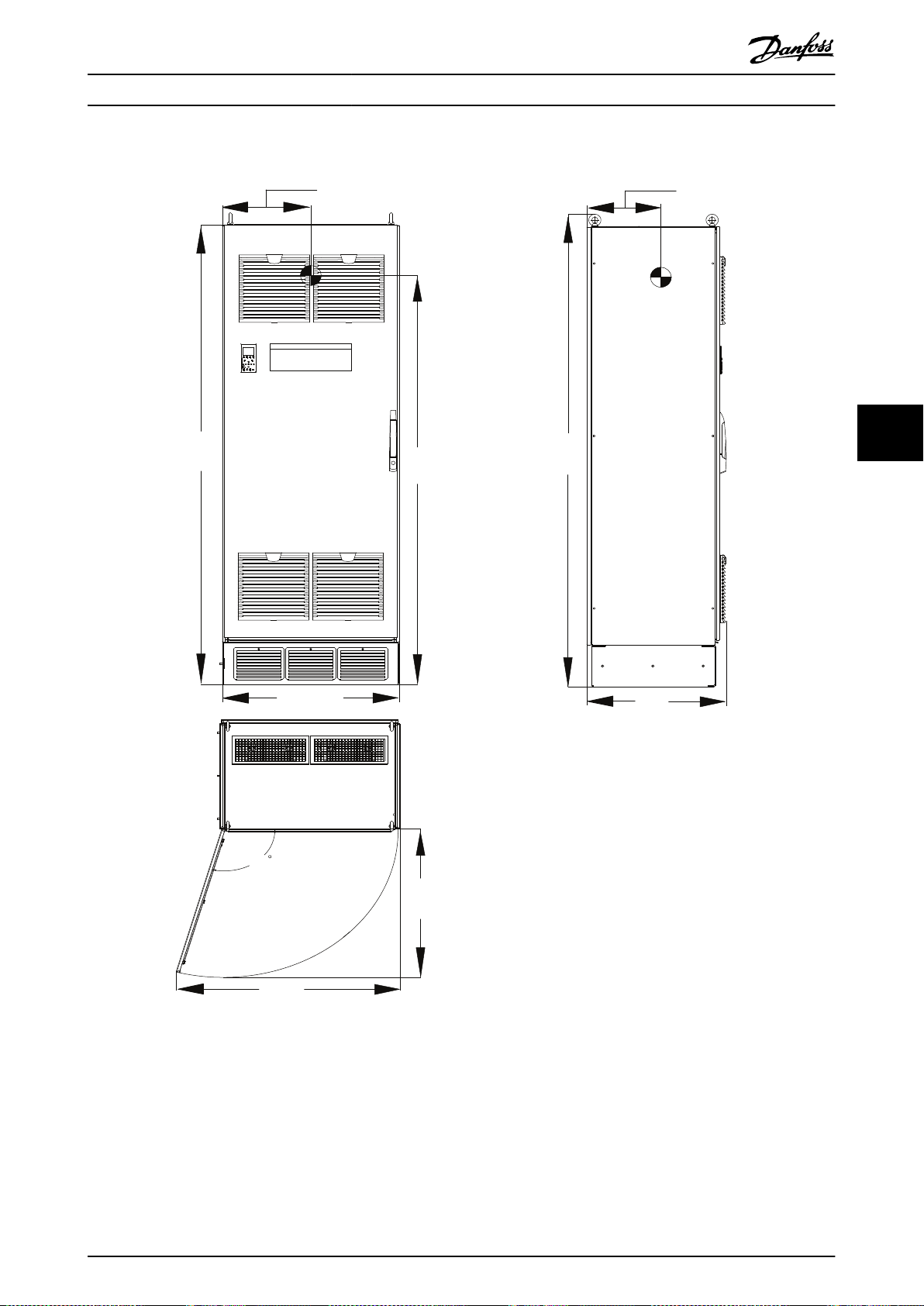
6.3 Dimensões do sistema de 2 conversores
6
6
Ilustração 6.6 Dimensões externas do sistema de 2 conversores (visões frontal, lateral e da abertura da porta)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 27
Page 30
659
(76.0)
556
(21.9)
1
2
0
3
4
522
(20.6)
491
(19.3)
460
(18.1)
363
(14.3)
0
101
(4.0)
113
(4.5)
185
(7.3)
218
(8.6)
0
401
(15.8)
130BF027.10
6
Especicações
VLT® Parallel Drive Modules
1 Barramentos do jumper da rede elétrica (módulo 1) 3 Barramentos do jumper da rede elétrica (módulo 2)
2 Terminais do freio 4 Terminais da rede elétrica
Ilustração 6.7 Terminais de rede elétrica do sistema de 2 conversores (Visões lateral e frontal)
28 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 31

130BF028.10
1
2
465 (18.3)
516 (20.3)
669 (27.5)
4
B
5
3
A
A
B
262 (10.3)0317 (12.5)
348 (13.7)
380 (15.0)
467 (18.4)
564 (22.2)
276 (10.9)
593 (23.4)
669 (26.3)
677 (26.7)
131 (12.3)
381 (15.0)
465 (18.3)
465 (18.3)
465 (18.3)
465 (18.3)
0
M8
M8
Especicações Guia de Design
6
6
1 Barramentos do jumper do motor (módulo 1) 4 Barramentos do jumper do motor (módulo 2)
2 Terminais do motor 5 Terminais do freio
3 Terminais do ponto de aterramento – –
Ilustração 6.8 Terminais de aterramento e motor do sistema de 2 conversores (visões frontal e lateral)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 29
Page 32

130BF034.10
139 (5.5)
71.5 (2.8)
84 (3.3)
103 (4.0)
627 (24.7)
671 (26.4)
711 (28.0)
274 (10.8)
97 (3.8)
181 (7.1)
532 (21.0)
534 (21.0)
137 (5.4)
179 (7.1)
0
89 (3.5)
188 (7.4)
344 (13.5)
323 (12.8)
165 (6.5)
373 (14.7)0311 (12.3)
286 (11.3)
416 (16.4)
291 (11.5)
0
568 (22.4)
556 (21.9)
456 (18.0)
436 (17.2)
416 (16.4)
96
(3.8)
6
Especicações
VLT® Parallel Drive Modules
Ilustração 6.9 Relés e barramento CC do sistema de 2 conversores (Visões lateral e frontal)
30 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 33

130BF033.10
796
(31.3)
105
800
(31.5)
1600
(63.0)
631
(24.8)
631
(24.8)
1970
(77.6)
2200
(86.6)
2254
(88.7)
1800
(71.0)
Especicações Guia de Design
6.4 Dimensões do sistema de 4 conversores
6
6
Ilustração 6.10 Dimensões externas do sistema de 4 conversores (visões frontal, lateral e da abertura da porta)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 31
Page 34

130BF030.10
485
(19.1)
445
(17.5)
0
456
(18.0)
416
(16.4)
331
(13.0)
291
(11.5)
222
(8.7)
0
2089
(82.2)
791
(31.1)
827
(32.5)
0
671
(26.4)
711
(28.0)
897
(35.3)
937
(36.9)
6
Especicações
VLT® Parallel Drive Modules
Ilustração 6.11 Conexões do jumper de 4 conversores (Vistas lateral e frontal)
32 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 35

130BF031.10
659 (26.0)
96 (3.8)
110 (4.3)
180 (7.1))
215 (8.4)
398 (15.7)
0
1
2
3
4
5
6
7
8
791 (31.1)
909 (35.8)
980 (38.6)
1014 (39.9)
1197 (47.1)
556 (21.9)
465 (18.3)
445 (17.5)
0
896 (35.3)
Especicações Guia de Design
6
6
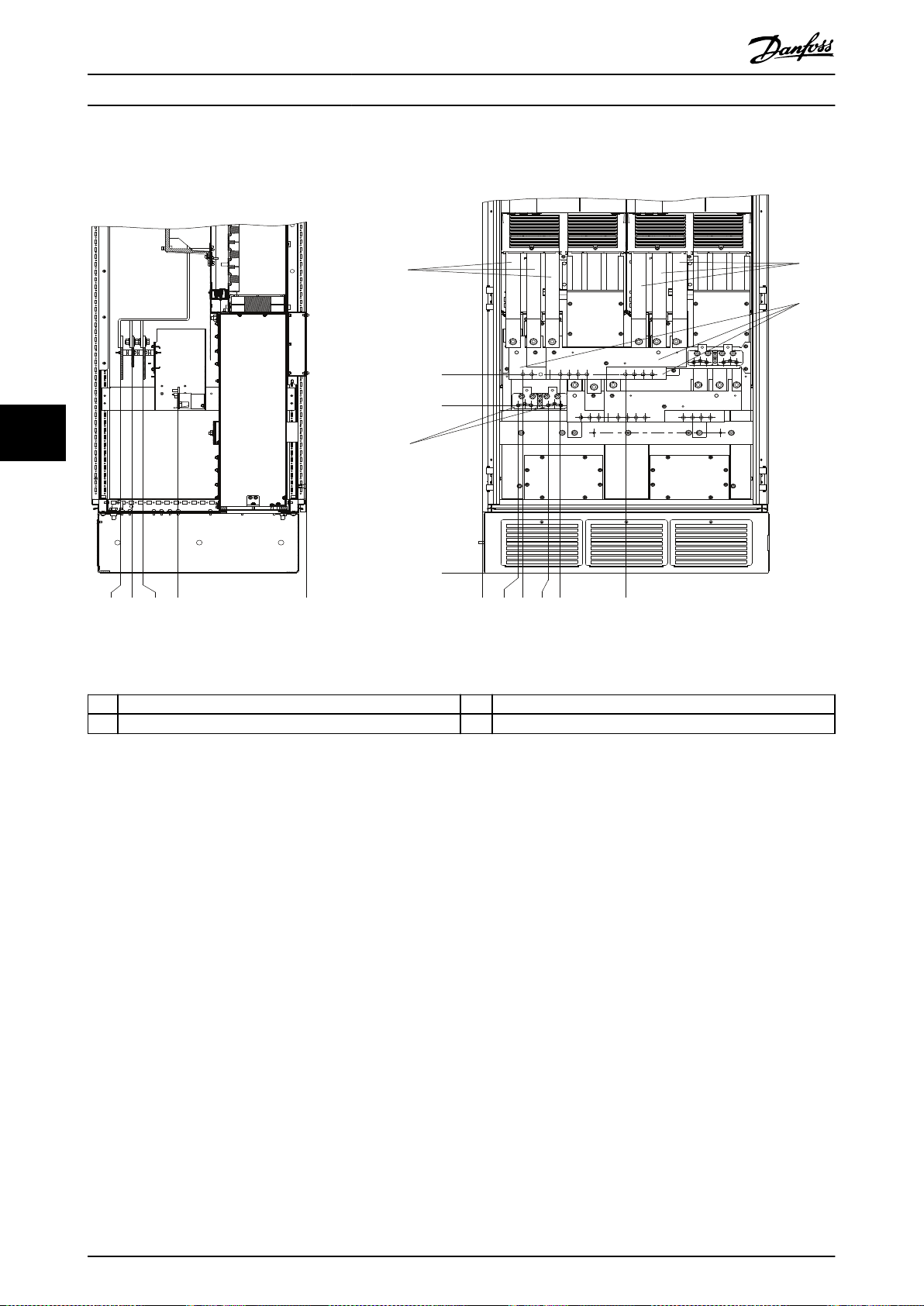
1 Barramentos do jumper da rede elétrica (módulos 1 e 2) 5 Barramentos do jumper da rede elétrica (módulos 3 e 4)
2 Terminais da rede elétrica (módulos 1 e 2) 6 Terminais de rede elétrica (módulos 3 e 4)
3 Terminais do freio (módulos 1 e 2) 7 Terminais de aterramento (módulos 3 e 4)
4 Terminais de aterramento (módulos 1 e 2) 8 Conectando o terminal do terra (consulte Ilustração 6.13)
Ilustração 6.12 Terminais de aterramento e da rede elétrica do sistema de 4 conversores (vista frontal)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 33
Page 36

130BF067.10
35
(1.4)
522 (20.6)
491 (19.3)
460 (18.3)
363 (14.3)
262 (10.3)
222 (8.7)
0
40
(1.6)
6
Especicações
VLT® Parallel Drive Modules
Ilustração 6.13 Terminais de aterramento e da rede elétrica do sistema de 4 conversores (visões lateral, esquerda e do terminal de
conexão do aterramento, direita)
34 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 37

130BF032.10
272 (10.7)
377 (14.8)
560 (22.1)
589 (23.2)
673 (26.5)
0
1072 (42.2)
1360 (53.5)
1389 (54.7)
1473 (58.0)
1177(46.3)
4x 697 (27.4)
6x 514 (20.2)
1
2
4
5
3
6
7
8
Especicações Guia de Design
6
6
1 Barramentos do jumper do motor (módulos 1 e 2) 5 Terminais do freio (módulos 3 e 4)
2 Terminais do freio (módulos 1 e 2) 6 Detalhe do terminal do freio (consulte Ilustração 6.15)
3 Terminais do motor (módulos 1 e 2) 7 Terminais do motor (módulos 3 e 4)
4 Barramentos do jumper do motor (módulos 3 e 4) 8 Detalhe do terminal do motor (consulte Ilustração 6.15)
Ilustração 6.14 Terminais do freio e do motor do sistema de 4 conversores (vista frontal)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 35
Page 38

130BF068.10
18
(0.7)
317 (12.5)
348 (13.7)
380 (18.3)
467(18.4)
0
5
(0.2)
3x 25
(1.0)
36
(1.4)
6
Especicações
VLT® Parallel Drive Modules
Ilustração 6.15 Terminais do freio e do motor do sistema de 4 conversores (visões lateral, esquerda, dos terminais do motor, superior
direita e dos terminais do freio, inferior direita)
36 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 39

1
2
130BF035.10
72 (2.8)
84 (3.3)
103 (4.0)
140 (5.5)
0
97 (3.8)
180 (7.1)
180 (7.1)
532 (21.0)
534 (21.0)
671 (26.4)
711 (28.0)
897 (35.3)
937 (36.9)
980 (38.6)
1074 (42.3)
1332 (52.5)
1332 (52.5)
1471 (57.9)
1511 (59.5)
344 (13.6)
323 (12.7)
166 (6.5)
135 (5.3)
0
4x 88 (3.5)
188 (7.4)
175 (6.9)
137 (5.4)
274 (10.8)
627 (24.7)
980 (38.6)
1427 (56.2)
4x 96 (3.8)
Especicações Guia de Design
6
6
1 Barramentos do jumper do aterramento (módulo 1) 2 Blindagem de aterramento (módulo 1)
Ilustração 6.16 Relés/barramento CC do sistema de 4 conversores e blindagem de aterramento (vista frontal)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 37
Page 40

130BF069.10
0
568 (22.4)
556 (22.0)
458 (18.0)
427 (16.8)
456 (18.0)
291 (11.5)
286 (11.3)
311 (12.3)
331 (13.0)
436 (17.2)
416 (16.4)
373 (14.7)
6
Especicações
VLT® Parallel Drive Modules
Ilustração 6.17 Relés e barramento CC do sistema de 4 conversores (vista lateral)
38 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 41

Especicações Guia de Design
6.5 Especicações dependente da potência.
6.5.1
Drive HVAC VLT® FC 102
Faixa de potência N315 N355 N400 N450 N500
Módulos Conversores 2 2 2 2 2
Conguração do reticador
Carga alta/normal NO NO NO NO NO
Potência no Eixo Típica a 400 V [kW] 315 355 400 450 500
Potência no eixo típica a 460 V [hp] 450 500 600 600 700/650
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do dissipador
de calor [°C (°F)]
Desarme do ambiente do cartão de potência [°C
(°F)]
Corrente de saída [A]
Contínua (a 380-440 V) 588 658 745 800 880
Intermitente ( 60 s sobrecarga) a 400 V 647 724 820 880 968
Contínua (a 460/500 V) 535 590 678 730 780
Intermitente ( 60 s sobrecarga) a 460/500 V 588 649 746 803 858
Contínuo (em 400 V) [kVA] 407 456 516 554 610
Contínuo (em 460 V) [kVA] 426 470 540 582 621
Contínuo (em 500 V) [kVA] 463 511 587 632 675
Corrente de entrada [A]
Contínua (a 400 V) 567 647 733 787 875
Contínua (a 460/500 V) 516 580 667 718 759
Perdas de energia [W]
Módulos conversores em 400 V 5825 6110 7069 7538 8468
Módulos conversores em 460 V 4998 5964 6175 6609 7140
Barramentos CA a 400 V 550 555 561 565 575
Barramentos CA a 460 V 548 551 556 560 563
Barramentos CC durante a regeneração 93 95 98 101 105
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica
Motor 4x120 (250) 4x150 (300)
Freio 4x70 (2/0) 4x95 (3/0)
Terminais de regeneração 4x120 (250) 4x150 (300) 6x120 (250)
Fusíveis da rede elétrica externos máximos
Conguração de 6 pulsos – – – – 600 V, 1600 A
Conguração de 12 pulsos 700 A, 600 V –
1)
12 pulsos 6 pulsos/12
pulsos
110 (230)
80 (176)
4x120 (250) 4x150 (300)
6
6
Tabela 6.2 FC 102, alimentação de rede elétrica CA de 380–480 V (sistema de 2 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 39
Page 42

6
Especicações
Faixa de potência N560 N630 N710 N800 N1M0
Módulos Conversores 4 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal NO NO NO NO NO
Potência no Eixo Típica a 400 V [kW] 560 630 710 800 1000
Potência no eixo típica a 460 V [hp] 750 900 1000 1200 1350
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do dissipador de calor [°C (°F)]
Desarme do ambiente do cartão de potência [°C (°F)]
Corrente de saída [A]
Contínua (a 380-440 V) 990 1120 1260 1460 1720
Intermitente ( 60 s sobrecarga) a 400 V 1089 1232 1386 1606 1892
Contínua (a 460/500 V) 890 1050 1160 1380 1530
Intermitente ( 60 s sobrecarga) a 460/500 V 979 1155 1276 1518 1683
Contínuo (em 400 V) [kVA] 686 776 873 1012 1192
Contínuo (em 460 V) [kVA] 709 837 924 1100 1219
Contínuo (em 500 V) [kVA] 771 909 1005 1195 1325
Corrente de entrada [A]
Contínua (a 400 V) 964 1090 1227 1422 1675
Contínua (a 460/500 V) 867 1022 1129 1344 1490
Perdas de energia [W]
Módulos conversores em 400 V 8810 10199 11632 13253 16463
Módulos conversores em 460 V 7628 9324 10375 12391 13958
Barramentos CA a 400 V 665 680 695 722 762
Barramentos CA a 460 V 656 671 683 710 732
Barramentos CC durante a regeneração 218 232 250 276 318
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica
Motor 4x185 (350) 8x120 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração 6x120 (250) 8x120 (250) 8x150 (300) 10x150 (300)
Fusíveis da rede elétrica externos máximos
Conguração de 6 pulsos 600 V,
Conguração de 12 pulsos 600 V, 700 A 600 V, 900 A 600 V,
1)
VLT® Parallel Drive Modules
110 (230)
80 (176)
4x185 (350) 8x120 (250)
600 V, 2.000 A 600 V, 2.500 A
1.600 A
1.500 A
Tabela 6.3 FC 102, alimentação de rede elétrica CA de 380–480 V (sistema de 4 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
40 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 43

Especicações Guia de Design
Faixa de potência N315 N400 N450 N500 N560 N630
Módulos Conversores 2 2 2 2 2 2
Conguração do reticador 12 pulsos
Carga alta/normal NO NO NO NO NO NO
Potência no eixo típica em 525–550 V [kW] 250 315 355 400 450 500
Potência no eixo típica a 575 V [HP] 350 400 450 500 600 650
Potência no eixo típica a 690 V [kW] 315 400 450 500 560 630
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do
dissipador de calor [°C (°F)]
Desarme do ambiente do cartão de
potência [°C (°F)]
Corrente de saída [A]
Contínua (a 550 V) 360 418 470 523 596 630
Intermitente (60 s sobrecarga) a 550 V 396 360 517 575 656 693
Contínua (a 575/690 V) 344 400 450 500 570 630
Intermitente (60 s sobrecarga) a 575/690 V 378 440 495 550 627 693
Contínuo (em 550 V) kVA 343 398 448 498 568 600
Contínuo (em 575 V) kVA 343 398 448 498 568 627
Contínuo (em 690 V) kVA 411 478 538 598 681 753
Corrente de entrada [A]
Contínua (a 550 V) 355 408 453 504 574 607
Contínua (a 575 V) 339 490 434 482 549 607
Contínua (a 690 V) 352 400 434 482 549 607
Perdas de energia [W]
Módulos conversores em 575 V 4401 4789 5457 6076 6995 7431
Módulos conversores em 690 V 4352 4709 5354 5951 6831 7638
Barramentos CA a 575 V 540 541 544 546 550 553
Barramentos CC durante a regeneração 88 88,5 90 91 186 191
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica
Motor 2x120 (250) 4x120 (250)
Freio 4x70 (2/0) 4x95 (3/0)
Terminais de regeneração 4x120 (250)
Fusíveis da rede elétrica externos
máximos
1)
2x120 (250) 4x120 (250)
700 V, 550 A 700 V, 630 A
110 (230)
80 (176)
6
6
Tabela 6.4 FC 102, alimentação de rede elétrica CA de 525–690 V (sistema de 2 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 41
Page 44

6
Especicações
Faixa de potência N710 N800 N900 N1M0 N1M2
Módulos Conversores 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal NO NO NO NO NO
Potência no eixo típica em 525–550 V [kW] 560 670 750 850 1000
Potência no eixo típica a 575 V [HP] 750 950 1050 1150 1350
Potência no eixo típica a 690 V [kW] 710 800 900 1000 1200
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do dissipador
de calor [°C (°F)]
Desarme do ambiente do cartão de potência [°C
(°F)]
Corrente de saída [A]
Contínua (a 550 V) 763 889 988 1108 1317
Intermitente (60 s sobrecarga) a 550 V 839 978 1087 1219 1449
Contínua (a 575/690 V) 730 850 945 1060 1260
Intermitente (60 s sobrecarga) a 575/690 V 803 935 1040 1166 1590
Contínua (a 550 V) 727 847 941 1056 1056
Contínua (a 575 V) 727 847 941 1056 1056
Contínua (a 690 V) 872 1016 1129 1267 1506
Corrente de entrada [A]
Contínua (a 550 V) 743 866 962 1079 1282
Contínua (a 575 V) 711 828 920 1032 1227
Contínua (a 690 V) 711 828 920 1032 1227
Perdas de energia [W]
Módulos conversores em 575 V 8683 10166 11406 12852 15762
Módulos conversores em 690 V 8559 9996 11188 12580 15358
Barramentos CA a 575 V 644 653 661 672 695
Barramentos CC durante a regeneração 198 208 218 231 256
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica
Motor 4x120 (250) 6x120 (250) 8x120 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração 4x150 (300) 6x120 (250) 6x150 (300) 8x120 (250)
Fusíveis da rede elétrica externos máximos
Conguração de 6 pulsos 700 V, 1.600 A 700 V, 2.000 A
Conguração de 12 pulsos 700 V, 900 A 700 V, 1.500 A
1)
VLT® Parallel Drive Modules
110 (230)
80 (176)
4x120 (250) 6x120 (250) 8x120 (250)
Tabela 6.5 FC 102, alimentação de rede elétrica CA de 525–690 V (sistema de 4 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
42 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 45

Especicações Guia de Design
6.5.2
VLT® AQUA Drive FC 202
Faixa de potência N315 N355 N400 N450 N500
Módulos Conversores 2 2 2 2 2
Conguração do reticador 12 pulsos 6 pulsos/12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Potência no Eixo Típica a 400 V [kW] 250 315 315 355 355 400 400 450 450 500
Potência no eixo típica a 460 V [hp] 350 450 450 500 500 600 550 600 600 650
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do
dissipador de calor
[°C (°F)]
Desarme do ambiente do cartão de
potência [°C (°F)]
Corrente de saída [A]
Contínua (a 400 V) 480 588 600 658 658 745 695 800 810 880
Intermitente ( 60 s sobrecarga) a 400V720 647 900 724 987 820 1043 880 1215 968
110 (230)
80 (176)
6
6
Contínua (a 460/500 V) 443 535 540 590 590 678 678 730 730 780
Intermitente ( 60 s sobrecarga) a
460/500 V
Contínuo (em 400 V) [kVA] 333 407 416 456 456 516 482 554 554 610
Contínuo (em 460 V) [kVA] 353 426 430 470 470 540 540 582 582 621
Contínuo (em 500 V) [kVA] 384 463 468 511 511 587 587 632 632 675
Corrente de entrada [A]
Contínua (a 400 V) 463 567 590 647 647 733 684 787 779 857
Contínua (a 460/500 V) 427 516 531 580 580 667 667 718 711 759
Perdas de energia [W]
Módulos conversores em 400 V 4505 5825 5502 6110 6110 7069 6375 7538 7526 8468
Módulos conversores em 460 V 4063 4998 5384 5964 5271 6175 6070 6609 6604 7140
Barramentos CA a 400 V 545 550 551 555 555 561 557 565 566 575
Barramentos CA a 460 V 543 548 548 551 551 556 556 560 560 563
Barramentos CC durante a
regeneração
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica
Motor 4x120 (250) 4x150 (300)
Freio 4x70 (2/0) 4x95 (3/0)
Terminais de regeneração 4x120 (250) 6x120 (250) 6x120 (250)
Fusíveis da rede elétrica externos
máximos
Conguração de 6 pulsos – – – – 600 V, 1600 A
Conguração de 12 pulsos 600 V, 700 A 600 V, 900 A
1)
665 588 810 649 885 746 1017 803 1095 858
93 93 95 95 98 98 101 101 105 105
2
4x120 (250)
4x150 (300)
Tabela 6.6 FC 202, alimentação de rede elétrica CA de 380–480 V (sistema de 2 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 43
Page 46

6
Especicações
Faixa de potência N560 N630 N710 N800 N1M0
Módulos Conversores 4 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Potência no Eixo Típica a 400 V [kW] 500 560 560 630 630 710 710 800 800 1000
Potência no eixo típica a 460 V [hp] 650 750 750 900 900 1000 1000 1200 1200 1350
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do
dissipador de calor
[°C (°F)]
Desarme do ambiente do cartão de
potência [°C (°F)]
Corrente de saída [A]
Contínua (a 400 V) 880 990 990 1120 1120 1260 1260 1460 1460 1720
Intermitente ( 60 s sobrecarga) a 400V1320 1089 1485 1232 1680 1386 1890 1606 2190 1892
Contínua (a 460/500 V) 780 890 890 1050 1050 1160 1160 1380 1380 1530
Intermitente ( 60 s sobrecarga) a
460/500 V
Contínuo (em 400 V) [kVA] 610 686 686 776 776 873 873 1012 1012 1192
Contínuo (em 460 V) [kVA] 621 709 709 837 837 924 924 1100 1100 1219
Contínuo (em 500 V) [kVA] 675 771 771 909 909 1005 1005 1195 1195 1325
Corrente de entrada [A]
Contínua (a 400 V) 857 964 964 1090 1090 1227 1127 1422 1422 1675
Contínua (a 460 V) 759 867 867 1022 1022 1129 1129 1344 1344 1490
Perdas de energia [W]
Módulos conversores em 400 V 7713 8810 8918 10199 10181 11632 11390 13253 13479 16463
Módulos conversores em 460 V 6641 7628 7855 9324 9316 10375 12391 12391 12376 13958
Barramentos CA a 400 V 655 665 665 680 680 695 695 722 722 762
Barramentos CA a 460 V 647 656 656 671 671 683 683 710 710 732
Barramentos CC durante a
regeneração
2
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica
Motor 4x185 (350) 8x125 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração 6x125 (250) 8x125 (250) 8x150 (300) 10x150 (300)
Fusíveis da rede elétrica externos
máximos
Conguração de 6 pulsos 600 V, 1600 A 600 V, 2.000 A 600 V, 2.500 A
Conguração de 12 pulsos 600 V, 900 A 600 V, 1.500 A
1)
VLT® Parallel Drive Modules
110 (230)
80 (176)
1170 979 1335 1155 1575 1276 1740 1518 2070 1683
218 218 232 232 250 250 276 276 318 318
4x185 (350)
8x125 (250)
Tabela 6.7 FC 202, alimentação de rede elétrica CA de 380–480 V (sistema de 4 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
44 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 47

Especicações Guia de Design
Faixa de potência N315 N400 N450
Módulos Conversores 2 2 2
Conguração do reticador 12 pulsos
Carga alta/normal HO NO HO NO HO NO
Potência no eixo típica em 525–550 V [kW] 200 250 250 315 315 355
Potência no eixo típica a 575 V [HP] 300 350 350 400 400 450
Potência no eixo típica a 690 V [kW] 250 315 315 400 355 450
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do dissipador de
calor [°C (°F)]
Desarme do ambiente do cartão de potência [°C
(°F)]
Corrente de saída [A]
Contínua (a 550 V) 303 360 360 418 395 470
Intermitente (60 s sobrecarga) a 550 V 455 396 560 460 593 517
Contínua (a 575/690 V) 290 344 344 400 380 450
Intermitente (60 s sobrecarga) a 575/690 V 435 378 516 440 570 495
Contínua (a 550 V) 289 343 343 398 376 448
Contínua (a 575 V) 289 343 343 398 378 448
Contínua (a 690 V) 347 411 411 478 454 538
Corrente de entrada [A]
Contínua (a 550 V) 299 355 355 408 381 453
Contínua (a 575 V) 286 339 339 490 366 434
Contínua (a 690 V) 296 352 352 400 366 434
Perdas de energia [W]
Módulos conversores em 575 V 3688 4401 4081 4789 4502 5457
Módulos conversores em 690 V 3669 4352 4020 4709 4447 5354
Barramentos CA a 575 V 538 540 540 541 540 544
Barramentos CC durante a regeneração 88 88 89 89 90 90
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica
Motor 2x120 (250) 4x120 (250)
Freio 4x70 (2/0)
Terminais de regeneração 4x120 (250)
Fusíveis da rede elétrica externos máximos 700 V, 550 A
1)
2x120 (250)
110 (230)
80 (176)
4x120 (250)
6
6
Tabela 6.8 FC 202, alimentação de rede elétrica CA de 525–690 V (sistema de 2 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 45
Page 48

6
Especicações
Faixa de potência N500 N560 N630
Módulos Conversores 2 2 2
Conguração do reticador 12 pulsos
Carga alta/normal HO NO HO NO HO NO
Potência no eixo típica em 525–550 V [kW] 315 400 400 450 450 500
Potência no eixo típica a 575 V [HP] 400 500 500 600 600 650
Potência no eixo típica a 690 V [kW] 400 500 500 560 560 630
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do dissipador de
calor [°C (°°F)]
Desarme do ambiente do cartão de potência [°C
(°F)]
Corrente de saída [A]
Contínua (a 550 V) 429 523 523 596 596 630
Intermitente (60 s sobrecarga) a 550 V 644 575 785 656 894 693
Contínua (a 575/690 V) 410 500 500 570 570 630
Intermitente (60 s sobrecarga) a 575/690 V 615 550 750 627 627 693
Contínuo (em 550 V) [kVA] 409 498 498 568 568 600
Contínuo (em 575 V) [kVA] 408 498 598 568 568 627
Contínuo (em 690 V) [kVA] 490 598 598 681 681 753
Corrente de entrada [A]
Contínua (a 550 V) 413 504 504 574 574 607
Contínua (a 575 V) 395 482 482 549 549 607
Contínua (a 690 V) 395 482 482 549 549 607
Perdas de energia [W]
Módulos conversores em 575 V 4892 6076 6016 6995 6941 7431
Módulos conversores em 690 V 4797 5951 5886 6831 6766 7638
Barramentos CA a 575 V 542 546 546 550 550 553
Barramentos CC durante a regeneração 91 91 186 186 191 191
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica
Motor 4x120 (250)
Freio 4x70 (2/0) 4x95 (3/0)
Terminais de regeneração 4x120 (250)
Fusíveis da rede elétrica externos máximos 700 V, 630 A
1)
VLT® Parallel Drive Modules
110 (230)
80 (176)
4x120 (250)
Tabela 6.9 FC 202, alimentação de rede elétrica CA de 525–690 V (sistema de 2 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
46 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 49

Especicações Guia de Design
Faixa de potência N710 N800 N900 N1M0 N1M2
Módulos Conversores 4 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Potência no eixo típica em 525–550
V [kW]
Potência no eixo típica a 575 V [HP] 650 750 750 950 950 1050 1050 1150 1150 1350
Potência no eixo típica a 690 V [kW] 630 710 710 800 800 900 900 1000 1000 1200
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do
dissipador de calor
[°C (°F)]
Desarme do ambiente do cartão de
potência [°C (°F)]
Corrente de saída [A]
Contínua (a 550 V) 659 763 763 889 889 988 988 1108 1108 1317
Intermitente (60 s sobrecarga) a 550V989 839 1145 978 1334 1087 1482 1219 1662 1449
500 560 560 670 670 750 750 850 850 1000
110 (230)
80 (176)
6
6
Contínua (a 575/690 V) 630 730 730 850 850 945 945 1060 1060 1260
Intermitente (60 s sobrecarga) a
575/690 V
Contínuo (em 550 V) [kVA] 628 727 727 847 847 941 941 1056 1056 1255
Contínuo (em 575 V) [kVA] 627 727 727 847 847 941 941 1056 1056 1255
Contínuo (em 690 V) [kVA] 753 872 872 1016 1016 1129 1129 1267 1267 1506
Corrente de entrada [A]
Contínua (a 550 V) 642 743 743 866 866 962 1079 1079 1079 1282
Contínua (a 575 V) 613 711 711 828 828 920 1032 1032 1032 1227
Contínua (a 690 V) 613 711 711 828 828 920 1032 1032 1032 1227
Perdas de energia [W]
Módulos conversores em 575 V 7469 8683 8668 10166 10163 11406 11292 12852 12835 15762
Módulos conversores em 690 V 7381 8559 8555 9996 9987 11188 11077 12580 12551 15358
Barramentos CA a 575 V 637 644 644 653 653 661 661 672 672 695
Barramentos CC durante a
regeneração
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica
Motor 4x120 (250) 6x120 (250) 8x120 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração 4x150 (300) 6x120 (250) 6x150 (300) 8x120 (250)
Fusíveis da rede elétrica externos
máximos
Conguração de 6 pulsos 700 V, 1.600 A 700 V, 2.000 A
Conguração de 12 pulsos
1)
945 803 1095 935 1275 1040 1418 1166 1590 1590
198 198 208 208 218 218 231 231 256 256
2
4x120 (250)
700 V, 900 A
6x120 (250) 8x120 (250)
700 V, 1.500 A
Tabela 6.10 FC 202, alimentação de rede elétrica CA de 525–690 V (sistema de 4 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 47
Page 50

6
Especicações
6.5.3
VLT® AutomationDrive FC 302
Faixa de potência N250 N315 N355 N400 N450
Módulos Conversores 2 2 2 2 2
Conguração do reticador
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Potência no Eixo Típica a 400 V [kW] 250 315 315 355 355 400 400 450 450 500
Potência no eixo típica a 460 V [hp] 350 450 450 500 500 600 550 600 600 650
Potência no eixo típica a 500 V [kW] 315 355 355 400 400 500 500 530 530 560
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do
dissipador de calor
[°C (°F)]
Desarme do ambiente do cartão de
potência [°C (°F)]
Corrente de saída [A]
Contínua (a 380-440 V) 480 588 600 658 658 745 695 800 810 880
Intermitente ( 60 s sobrecarga) a 400V720 647 900 724 987 820 1043 880 1215 968
VLT® Parallel Drive Modules
12 pulsos 6 pulsos/12
pulsos
110 (230)
80 (176)
Contínua (a 460/500 V) 443 535 540 590 590 678 678 730 730 780
Intermitente ( 60 s sobrecarga) a
460/500 V
Contínuo (em 400 V) [kVA] 333 407 416 456 456 516 482 554 554 610
Contínuo (em 460 V) [kVA] 353 426 430 470 470 540 540 582 582 621
Contínuo (em 500 V) [kVA] 384 463 468 511 511 587 587 632 632 675
Corrente de entrada [A]
Contínua (a 400 V) 463 567 590 647 647 733 684 787 779 857
Contínua (a 460/500 V) 427 516 531 580 580 667 667 718 711 759
Perdas de energia [W]
Módulos conversores em 400 V 4505 5825 5502 6110 6110 7069 6375 7538 7526 8468
Módulos conversores em 460 V 4063 4998 5384 5964 5721 6175 6070 6609 6604 7140
Barramentos CA a 400 V 545 550 551 555 555 561 557 565 566 575
Barramentos CA a 460 V 543 548 548 551 556 556 556 560 560 563
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica
Motor 4x120 (250) 4x150 (300)
Freio 4x70 (2/0) 4x95 (3/0)
Terminais de regeneração 4x120 (250) 4x150 (300) 6x120 (250)
Fusíveis da rede elétrica externos
máximos
Conguração de 6 pulsos – – – – 600 V, 1.600 A
Conguração de 12 pulsos 600 V, 700 A 600 V, 900 A
1)
2
665 588 810 649 885 746 1017 803 1095 858
4x120 (250) 4x150 (300)
Tabela 6.11 FC 302, alimentação de rede elétrica CA 380–500 V (sistema de 2 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
48 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 51

Especicações Guia de Design
Faixa de potência N500 N560 N630 N710 N800
Módulos Conversores 4 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Potência no Eixo Típica a 400 V [kW] 500 560 560 630 630 710 710 800 800 1000
Potência no eixo típica a 460 V [hp] 650 750 750 900 900 1000 1000 1200 1200 1350
Potência no eixo típica a 500 V [kW] 560 630 630 710 710 800 800 1000 1000 1100
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do
dissipador de calor [°C (°F)]
Desarme do ambiente do cartão de
potência [°C (°F)]
Corrente de saída [A]
Contínua (a 380-440 V) 880 990 990 1120 1120 1260 1260 1460 1460 1720
Intermitente ( 60 s sobrecarga) a 400 V 1320 1089 1485 1232 1680 1386 1890 1606 2190 1892
Contínua (a 460/500 V) 780 890 890 1050 1050 1160 1160 1380 1380 1530
Intermitente ( 60 s sobrecarga) a 460/500 V 1170 979 1335 1155 1575 1276 1740 1518 2070 1683
Contínuo (em 400 V) [kVA] 610 686 686 776 776 873 873 1012 1012 1192
Contínuo (em 460 V) [kVA] 621 709 709 837 837 924 924 1100 1100 1219
Contínuo (em 500 V) [kVA] 675 771 771 909 909 1005 1005 1195 1195 1325
Corrente de entrada [A]
Contínua (a 400 V) 857 964 964 1090 1090 1227 1227 1422 1422 1675
Contínua (a 460/500 V) 759 867 867 1022 1022 1129 1129 1344 1344 1490
Perdas de energia [W]
Módulos conversores em 400 V 7713 8810 8918 10199 10181 11632 11390 13253 13479 16463
Módulos conversores em 460 V 6641 7628 7855 9324 9316 10375 12391 12391 12376 13958
Barramentos CA a 400 V 655 665 665 680 680 695 695 722 722 762
Barramentos CA a 460 V 647 656 656 671 671 683 683 710 710 732
Barramentos CC durante a regeneração 218 218 232 232 250 276 276 276 318 318
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica
Motor 4x185 (350) 8x120 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração 6x125 (250) 8x125 (250) 8x150 (300) 10x150 (300)
Fusíveis da rede elétrica externos máximos
Conguração de 6 pulsos 600 V, 1.600 A 600 V, 2.000 A 600 V, 2.500 A
Conguração de 12 pulsos 600 V, 900 A 600 V, 1.500 A
1)
4x185 (350) 8x120 (250)
110 (230)
80 (176)
6
6
Tabela 6.12 FC 302, alimentação de rede elétrica CA 380–500 V (sistema de 4 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 49
Page 52

6
Especicações
Faixa de potência N250 N315 N355 N400
Módulos Conversores 2 2 2 2
Conguração do reticador 12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO
Potência no eixo típica em 525–550 V
[kW]
Potência no eixo típica a 575 V [HP] 300 350 350 400 400 450 400 500
Potência no eixo típica a 690 V [kW] 250 315 315 400 355 450 400 500
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do
dissipador de calor [°C (°F)]
Desarme do ambiente do cartão de
potência [°C (°F)]
Corrente de saída [A]
Contínua (a 550 V) 303 360 360 418 395 470 429 523
Intermitente (60 s sobrecarga) a 550 V 455 396 560 360 593 517 644 575
Contínua (a 575/690 V) 290 344 344 400 380 450 410 500
Intermitente (60 s sobrecarga) a 575/690
V
Contínuo (em 550 V) [kVA] 289 343 343 398 376 448 409 498
Contínuo (em 575 V) [kVA] 289 343 343 398 378 448 408 498
Contínuo (em 690 V) [kVA] 347 411 411 478 454 538 490 598
Corrente de entrada [A]
Contínua (a 550 V) 299 355 355 408 381 453 413 504
Contínua (a 575 V) 286 339 339 490 366 434 395 482
Contínua (a 690 V) 296 352 352 400 366 434 395 482
Perdas de energia [W]
Módulos de conversor a 600 V 3688 4401 4081 4789 4502 5457 4892 6076
Módulos conversores em 690 V 3669 4352 4020 4709 4447 5354 4797 5951
Barramentos CA a 575 V 538 540 540 541 540 544 542 546
Barramentos CC durante a regeneração 88 88 89 89 90 90 91 91
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica
Motor 2x120 (250) 4x120 (250)
Freio 4x70 (2/0)
Terminais de regeneração 4x120 (250)
Fusíveis da rede elétrica externos
máximos
1)
2
VLT® Parallel Drive Modules
200 250 250 315 315 355 315 400
110 (230)
80 (176)
435 378 516 440 570 495 615 550
2x120 (250) 4x120 (250)
700 V, 550 A
Tabela 6.13 FC 302, alimentação de rede elétrica CA de 525–690 V (sistema de 2 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
50 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 53

Especicações Guia de Design
Faixa de potência N500 N560
Módulos Conversores 2 2
Conguração do reticador 12 pulsos
Carga alta/normal HO NO HO NO
Potência no eixo típica em 525–550 V [kW] 400 450 450 500
Potência no eixo típica a 575 V [HP] 500 600 600 650
Potência no eixo típica a 690 V [kW] 500 560 560 630
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do dissipador de calor [°C (°F)]
Desarme do ambiente do cartão de potência [°C (°F)]
Corrente de saída [A]
Contínua (a 550 V) 523 596 596 630
Intermitente (60 s sobrecarga) a 550 V 785 656 894 693
Contínua (a 575/690 V) 500 570 570 630
Intermitente (60 s sobrecarga) a 575/690 V 750 627 627 693
Contínuo (em 550 V) [kVA] 498 568 568 600
Contínuo (em 575 V) [kVA] 498 568 568 627
Contínuo (em 690 V) [kVA] 598 681 681 753
Corrente de entrada [A]
Contínua (a 550 V) 504 574 574 607
Contínua (a 575 V) 482 549 549 607
Contínua (a 690 V) 482 549 549 607
Perdas de energia [W]
Módulos de conversor a 600 V 6016 6995 6941 7431
Módulos conversores em 690 V 5886 6831 6766 7638
Barramentos CA a 575 V 546 550 550 553
Barramentos CC durante a regeneração 186 186 191 191
Tamanho do cabo máximo [mm2 (mcm)]
Rede elétrica
Motor 4x120 (250)
Freio 4x95 (3/0)
Terminais de regeneração 4x120 (250)
Fusíveis da rede elétrica externos máximos 700 V, 630 A
1)
110 (230)
80 (176)
4x120 (250)
6
6
Tabela 6.14 FC 302, alimentação de rede elétrica CA de 525–690 V (sistema de 2 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 51
Page 54

6
Especicações
Faixa de potência N630 N710 N800 N900 N1M0
Módulos Conversores 4 4 4 4 4
Conguração do reticador 6 pulsos/12 pulsos
Carga alta/normal HO NO HO NO HO NO HO NO HO NO
Potência no eixo típica em 525–550 V
[kW]
Potência no eixo típica a 575 V [HP] 650 750 750 950 950 1050 1050 1150 1150 1350
Potência no eixo típica a 690 V [kW] 630 710 710 800 800 900 900 1000 1000 1200
Características nominais de proteção IP00
Eciência 0,98
Frequência de saída [Hz] 0–590
Desarme por superaquecimento do
dissipador de calor [°C (°F)]
Desarme do ambiente do cartão de
potência [°C (°F)]
Corrente de saída [A]
Contínua (a 550 V) 659 763 763 889 889 988 988 1108 1108 1317
Intermitente (60 s sobrecarga) a 550 V 989 839 1145 978 1334 1087 1482 1219 1662 1449
Contínua (a 575/690 V) 630 730 730 850 850 945 945 1060 1060 1260
Intermitente (60 s sobrecarga) a
575/690 V
Contínuo (em 550 V) [kVA] 628 727 727 847 847 941 941 1056 1056 1255
Contínuo (em 575 V) [kVA] 627 727 727 847 847 941 941 1056 1056 1255
Contínuo (em 690 V) [kVA] 753 872 872 1016 1016 1129 1129 1267 1267 1506
Corrente de entrada [A]
Contínua (a 550 V) 642 743 743 866 866 962 1079 1079 1079 1282
Contínua (a 575 V) 613 711 711 828 828 920 1032 1032 1032 1227
Contínua (a 690 V) 613 711 711 828 828 920 1032 1032 1032 1227
Perdas de energia [W]
Módulos de conversor a 600 V 7469 8683 8668 10166 10163 11406 11292 12852 12835 15762
Módulos conversores em 690 V 7381 8559 8555 9996 9987 11188 11077 12580 12551 15358
Barramentos CA a 575 V 637 644 644 653 653 661 661 672 672 695
Barramentos CC durante a regeneração 198 198 208 208 218 218 231 231 256 256
Tamanho do cabo máximo [mm
(mcm)]
Rede elétrica
Motor 4x120 (250) 6x120 (250) 8x120 (250)
Freio 8x70 (2/0) 8x95 (3/0)
Terminais de regeneração 4x150 (300) 6x120 (250) 6x150 (300) 8x120 (250)
Fusíveis da rede elétrica externos
máximos
Conguração de 6 pulsos 700 V, 1.600 A 700 V, 2.000 A
Conguração de 12 pulsos 700 V, 900 A 700 V, 1.500 A
1)
2
VLT® Parallel Drive Modules
500 560 560 670 670 750 750 850 850 1000
110 (230)
80 (176)
945 803 1095 935 1275 1040 1418 1166 1590 1590
4x120 (250) 6x120 (250) 8x120 (250)
Tabela 6.15 FC 302, alimentação de rede elétrica CA de 525–690 V (sistema de 4 conversores)
1) Para unidades de 12 pulsos, os cabos entre o terminais delta e em estrela devem ser iguais em número e comprimento.
52 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 55

Especicações Guia de Design
6.6 Alimentação de Rede Elétrica para Módulo de Drive
Alimentação de rede elétrica
Terminais de alimentação R/91, S/92, T/93
Tensão de alimentação
Frequência de alimentação 50/60 Hz ±5%
Desbalanceamento máximo temporário entre fases de rede elétrica 3,0% da tensão de alimentação nominal
Fator de potência real (λ) ≥0,98 nominal com carga nominal
Fator de potência de deslocamento (cos φ) (Aproximadamente 1)
Chaveamento na alimentação de entrada L1, L2, L3 Máximo 1 vez cada 2 minutos
Ambiente de acordo com EN 60664-1 Categoria de sobretensão III/grau de poluição 2
1) A unidade é adequada para uso em um circuito capaz de fornecer não mais que 85.000 Amperes RMS simétricos, 480/600 V.
2) Tensão de rede baixa/queda da tensão de rede:
Durante tensão de rede baixa, o módulo de conversor continua até a tensão no barramento CC cair abaixo do nível mínimo de
parada, que normalmente corresponde a 15% abaixo da tensão de alimentação nominal mais baixa. Energização e torque total
não podem ser esperados em tensão de rede inferior a 10% abaixo da tensão de alimentação nominal mais baixa. O módulo de
conversor desarma para uma queda da rede elétrica detectada.
1)
2)
380–480, 500 V 690 V, ±10%, 525–690 V ±10%
6.7 Saída do Motor e dados do motor
Saída do motor
Terminais do motor U/96, V/97, W/98
Tensão de saída 0–100% da tensão de alimentação
Frequência de saída 0–590 Hz
Chaveamento na saída Ilimitado
Tempos de rampa 1–3.600 s
6
6
Características do torque
Torque de sobrecarga (torque constante) Máximo 150% durante 60 s
Torque de partida Máximo 180% até 0,5 s
Torque de sobrecarga (torque variável) Máximo 110% durante s
Torque de partida (torque variável) Máximo 135% durante s
1) A porcentagem está relacionada ao torque nominal.
Eciência
Eciência
1) Eciência medida com corrente nominal. Para saber a classe de eciência energética, consulte capétulo 6.9 Condições
Ambiente para Módulos de Drive. Para saber as perdas de carga parcial, consulte www.danfoss.com/vltenergyeciency.
98%
6.8 Especicações de Transformador de 12 Pulsos
Conexão Dy11 d0 ou Dyn 11d0
Alternação de fases entre secundários 30°
Diferença de tensão entre secundários <0,5%
Impedância de curto circuito de secundários >5%
Diferença de impedância de curto circuito entre secundários <5% de impedância de curto circuito
Outros Sem aterramento dos secundários permitidos. Filtro estático recomendado
6.9 Condições Ambiente para Módulos de Drive
1)
1)
1)
1)
Ambiente
Características nominais de IP IP00
Ruído Acústico 84 dB (funcionando em carga total)
Teste de vibração 1,0 g
Vibração e choque (IEC 60721-33-3) Classe 3M3
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 53
Page 56

6
Especicações
Máxima umidade relativa 5–95% (IEC 721-3-3; Classe 3K3 (não condensante) durante operação
Ambiente agressivo (IEC 60068-2-43) teste com H2S Classe Kd
Gases agressivos (IEC 60721-3-3) Classe 3C3
Temperatura ambiente
Temperatura ambiente mínima, durante operação plena 0 °C (32 °F)
Temperatura ambiente mínima em desempenho reduzido -10 °C (14 °F)
Temperatura durante a armazenagem/transporte -25 a +65 °C (-13 a 149 °F)
Altitude máxima acima do nível do mar, sem derating
Normas de EMC, Emissão EN 61800-3
Normas de EMC, Imunidade EN 61800-4-2, EN 61800-4-3, EN 61800-4-4, EN 61800-4-5 e EN 61800-4-6
Classe de eciência energética
1) Consulte o capétulo 6.12 Especicações de derating para efetuar derating para temperatura ambiente elevada e derating para
alta altitude.
2) Determinada de acordo com EN50598-2 em:
Carga nominal.
•
90% frequência nominal.
•
Conguração de fábrica da frequência de chaveamento.
•
Conguração de fábrica do padrão de chaveamento.
•
1)
2)
VLT® Parallel Drive Modules
Máximo 45 °C (113 °F) (média de 24 horas máxima de 40 °C (104 °F))
1)
1000 m (3281 ft)
IE2
6.10 Especicações de Cabo
Comprimentos de cabo e seções transversais de cabos de controle
Comprimento de cabo de motor máximo, blindado 150 m (492 pés)
Comprimento de cabo de motor máximo, não blindado 300 m (984 pés)
Seção transversal máxima para terminais de controle, o exível ou rígido sem buchas de terminal do
cabo 1,5 mm2/16 AWG
Seção transversal máxima para terminais de controle, o exível com buchas de terminal do cabo 1 mm2/18 AWG
Seção transversal máxima para terminal de controle, o exível com buchas de terminal do cabo com
colar 0,5 mm2/20 AWG
Seção transversal mínima para terminais de controle 0,25 mm2/24 AWG
Seção transversal máxima para terminais de 230 V 2,5 mm2/14 AWG
Seção transversal mínima para terminais de 230 V 0,25 mm2/24 AWG
1) Para cabos de energia, consulte as tabelas de dados elétricos em capétulo 6.5 Especicações dependente da potência..
1)
6.11 Entrada/Saída de controle e dados de controle
Entradas digitais
Entradas digitais programáveis
Número do terminal 18, 19, 271), 291), 32, 33
Lógica PNP ou NPN
Nível de tensão 0–24 V CC
Nível de tensão, lógica 0 PNP <5 V CC
Nível de tensão, lógica 1 PNP >10 V CC
Nível de tensão, 0 lógico NPN
Nível de tensão, 1 lógico NPN
Tensão máxima na entrada 28 V CC
Faixa de frequência de pulso 0–110 kHz
Largura de pulso mínima (ciclo útil) 4,5 ms
Resistência de entrada, R
Todas as entradas digitais são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
1) Os terminais 27 e 29 também podem ser programados como saídas.
2) Exceto terminal de entrada 37 de Safe Torque O.
2)
2)
i
Aproximadamente 4 kΩ
4 (6)
>19 V CC
<14 V CC
1)
54 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 57

Especicações Guia de Design
Safe Torque O (STO) Terminal 37
Nível de tensão 0–24 V CC
Nível de tensão, lógica 0 PNP < 4 V CC
Nível de tensão, lógica 1 PNP >20 V CC
Tensão máxima na entrada 28 V CC
Corrente de entrada típica a 24 V 50 mA
Corrente de entrada típica a 20 V 60 mA
Capacitância de entrada 400 nF
Todas as entradas digitais são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
1) Consulte o Guia de Operação dos VLT
37 e Safe Torque O.
2) Ao usar um contator com uma bobina CC com STO, sempre faça um caminho de retorno para a corrente da bobina ao
desligar. O caminho de retorno pode ser feito usando um diodo de roda livre através da bobina. Como alternativa, use um MOV
de 30 V ou 50 V para obter tempo de resposta mais rápido. Os contatores típicos podem ser adquiridos com esse diodo.
Entradas Analógicas
Número de entradas analógicas 2
Número do terminal 53, 54
Modos Tensão ou corrente
Seleção do modo Chaves S201 e S202
Modo de tensão Chave S201/chave S202 = OFF (U)
Nível de tensão -10 V a +10 V (escalável)
Resistência de entrada, R
Tensão máxima ±20 V
Modo de corrente Chave S201/chave S202 = ON (I)
Nível de corrente 0/4–20 mA (escalável)
Resistência de entrada, R
Corrente máxima 30 mA
Resolução das entradas analógicas 10 bits (+ sinal)
Precisão das entradas analógicas Erro máx. 0,5% da escala total
Largura de banda 20 Hz/100 Hz
As entradas analógicas são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
i
i
1), 2)
(Terminal 37 está xo na lógica PNP)
®
Frequency Converters – Safe Torque O para obter mais informações sobre o terminal
Aproximadamente 10 kΩ
Aproximadamente 200 Ω
rms
rms
6
6
Ilustração 6.18 Isolamento PELV
Entrada de pulso
Pulso programável 2/1
Número do terminal do pulso 291), 32/33
Frequência máxima no terminais 29, 33 110 kHz (acionado por Push-pull)
Frequência máxima no terminais 29, 33 5 kHz (coletor aberto)
Frequência mínima nos terminais 29, 33 4 Hz
Nível de tensão 0–24 V CC
Tensão máxima na entrada 28 V CC
Resistência de entrada, R
Precisão da entrada de pulso (0,1–1 kHz) Erro máximo: 0,1% do fundo de escala
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 55
i
Aproximadamente 4 kΩ
Page 58

Especicações
Precisão da entrada do encoder (1-11 kHz) Erro máximo: 0,05% do fundo de escala
As entradas do encoder e de pulso (terminais 29, 32, 33) são isoladas galvanicamente da tensão de alimentação (PELV) e de
outros terminais de alta tensão.
1) As entradas de pulso são 29 e 33.
Saída analógica
Número de saídas analógicas programáveis 1
Número do terminal 42
Faixa atual na saída analógica 0/4–20 mA
Carga máxima de GND - saída analógica 500 Ω
Precisão na saída analógica Erro máximo: 0,5% do fundo de escala
Resolução na saída analógica 12 bit
A saída analógica está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
VLT® Parallel Drive Modules
6
Cartão de controle, comunicação serial RS485
Número do terminal 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Terminal número 61 Ponto comum dos terminais 68 e 69
O circuito de comunicação serial RS485 está funcionalmente separado de outros circuitos centrais e isolado galvanicamente da
tensão de alimentação (PELV).
Saída digital
Saída digital/pulso programável 2
Número do terminal 27, 29
Nível de tensão na saída de frequência/digital 0–24 V
Corrente de saída máxima (dissipador ou fonte) 40 mA
Carga máxima na saída de frequência 1 kΩ
Carga capacitiva máxima na saída de frequência 10 nF
Frequência de saída mínima na saída de frequência 0 Hz
Frequência de saída máxima na saída de frequência 32 kHz
Precisão da saída de frequência Erro máximo: 0,1% do fundo de escala
Resolução das saídas de frequência 12 bit
1) Os terminais 27 e 29 podem também ser programados como entrada.
A saída digital está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, saída 24 VCC
Número do terminal 12, 13
Tensão de saída 24 V +1, -3 V
Carga máxima 200 mA
A alimentação de 24 VCC está isolada galvanicamente da tensão de alimentação (PELV), mas tem o mesmo potencial das
entradas e saídas digitais e analógicas.
1)
Saídas do relé
Saídas do relé programáveis 2
Número do terminal do Relé 01 1–3 (desabilitado), 1–2 (ativado)
Carga do terminal máxima (CA-1)1) em 1-3 (NC), 1-2 (NO) (carga resistiva) 240 V CA, 2 A
Carga do terminal máxima (CA-15)1) (carga indutiva @ cosφ 0,4) 240 V CA 0,2 A
Carga do terminal máxima (CC-1)1) em 1-2 (NO), 1-3 (NC) (carga resistiva) 60 V CC, 1 A
Carga do terminal máxima (CC-13)1) (carga indutiva) 24 V CC, 0,1 A
Número do terminal do Relé 02 (somente VLT® AutomationDrive FC 302) 4-6 (desabilitado), 4-5 (ativado)
Carga do terminal máxima (CA-1)1) em 4-5 (NO) (carga resistiva)
Carga do terminal máxima (CA-15)1) em 4-5 (NO) (carga indutiva @ cosφ 0,4) 240 V CA 0,2 A
Carga do terminal máxima (CC-1)1) em 4-5 (NO) (carga resistiva) 80 V CC, 2 A
Carga do terminal máxima (CC-13)1) em 4-5 (NO) (carga indutiva) 24 V CC, 0,1 A
Carga do terminal máxima (CA-1)1) em 4-6 (NC) (carga resistiva) 240 V CA, 2 A
Carga do terminal máxima (CA-15)1) em 4-6 (NC) (carga indutiva @ cosφ 0,4 240 V CA 0,2 A
Carga do terminal máxima (CC-1)1) em 4-6 (NC) (carga resistiva) 50 V CC, 2 A
56 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
2)3)
sobretensão categoria II 400 V CA, 2 A
Page 59

Especicações Guia de Design
Carga do terminal máxima (CC-13)1) em 4-6 (NC) (carga indutiva) 24 V CC, 0,1 A
Carga do terminal mínima em 1–3 (NF), 1–2 (NA), 4–6 (NF), 4–5 (NA) 24 V CC 10 mA, 24 V CA 20 mA
Ambiente de acordo com EN 60664-1 Categoria de sobretensão III/grau de poluição 2
1) IEC 60947 partes 4 e 5.
Os contatos do relé são isolados galvanicamente do resto do circuito por isolação reforçada (PELV).
2) Categoria de sobretensão II.
3) Aplicações UL 300 V CA 2 A.
Cartão de controle, saída 10 V CC
Número do terminal 50
Tensão de saída 10,5 V ±0,5 V
Carga máxima 25 mA
A alimentação de 10 V CC está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Características de controle
Resolução da frequência de saída em 0-590 Hz ±0,003 Hz
Repetir a precisão da partida/parada precisa (terminais 18, 19) ≤±0,1 ms
Tempo de resposta do sistema (terminais 18, 19, 27, 29, 32, 33) ≤10 ms
Faixa de controle da velocidade (malha aberta) 1:100 da velocidade síncrona
Faixa de controle da velocidade (malha fechada) 1:1.000 da velocidade síncrona
Precisão da velocidade (malha aberta) 30–4000 rpm: Erro ±8 rpm
Precisão de velocidade (malha fechada), dependendo da resolução do dispositivo de
feedback 0–6000 rpm: Error ±0,15 rpm
Todas as características de controle são baseadas em um motor assíncrono de 4 polos
Desempenho do cartão de controle
®
Intervalo de varredura (VLT
AQUA Drive do VLT® FC 202)
Intervalo de varredura (FC 302) 1 ms
Cartão de controle, comunicação serial USB
Padrão USB 1,1 (velocidade total)
Plugue USB Plugue de dispositivo USB tipo B
A conexão ao PC é realizada por meio de um cabo de USB host/dispositivo.
A conexão USB está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
A conexão do terra do USB NÃO está isolada galvanicamente do ponto de aterramento de proteção. Utilize somente laptop
isolado para ligar-se ao conector USB do conversor de frequência.
Drive HVAC FC 102, VLT® Refrigeration Drive FC 103,
5 ms (VLT® AutomationDrive FC
302)
6
6
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 57
Page 60

Max.I
out
(%)
at T
AMB, MAX
D, E and F enclosures
Altitude (km)
HO
NO
T
at 100% I
out
100%
96%
92%
0 K
-3 K
-6 K
1 km 2 km 3 km
-5 K
-8 K
-11 K
130BC015.10
AMB, MAX
6
Especicações
VLT® Parallel Drive Modules
6.12 Especicações de derating
Considere derating quando qualquer das condições a seguir estiver presente:
Baixa pressão do ar operando acima de 1.000 m (3.281 pés).
•
Alta temperatura ambiente.
•
Alta frequência de chaveamento.
•
Operação em baixa velocidade.
•
Cabos de motor longos.
•
Cabos com seção transversal grande.
•
Se essas condições estiverem presentes, a Danfoss recomenda aumentar um tamanho de potência.
6.12.1 Derating para Altitude e Temperatura Ambiente
A capacidade de resfriamento de ar diminui com pressão do ar mais baixa.
A 1.000 m (3.281 pés) de altitude ou abaixo, nenhum derating é necessário.
Acima de 1.000 m (3.281 pés), a temperatura ambiente (T
Ilustração 6.19.
) ou corrente de saída máxima (
AMB
) deve ser reduzida. Veja
IMAX
Ilustração 6.19 Derating da corrente de saída baseada na altitude em T
Ilustração 6.19
mostra que a 41,7 °C (107 °F), 100% da corrente de saída nominal ca disponível. A 45 °C (113 °F) (T
AMB, MAX
- 3 K), 91% da corrente de saída nominal está disponível.
6.12.2 Derating para frequência de chaveamento e temperatura ambiente
AVISO!
DERATING DE FÁBRICA
Os VLT® Parallel Drive Modules já são reduzidos para temperatura operacional (55 °C (131 °F) T
T
AMB,AVG
).
Os grácos a seguir indicam se a corrente de saída deve ser reduzida com base na frequência de chaveamento e na
temperatura ambiente. Referente aos grácos, I
frequência de chaveamento.
indica a porcentagem da corrente de saída nominal e fsw indica a
out
e 50 °C (122 °F)
AMB,MAX
AMB
, MAX
58 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 61

130BX473.11
Iout [%]
fsw [kHz]
70
80
90
1
60
100
110
2 3 4 5 6 7 8
9
0
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX474.11
70
80
90
1
60
100
110
2 3 4 5 6 7 8 90
50
Iout [%]
fsw
[kHz]
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX475.11
Iout [%]
fsw
[kHz]
70
80
90
60
100
110
2 4 60
31 5
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX476.11
Iout [%]
fsw
[kHz]
70
80
90
60
100
110
2 4
60
50
1
3
5
40 ˚C (104 ˚F)
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX477.11
70
80
90
1
60
100
110
2 3 4 5 6 70
Iout [%]
fsw
[kHz]
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX478.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 5 6 70
50
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
50 ˚C (131 ˚F)
130BX479.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 50
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX480.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 50
50
40 ˚C (104 ˚F)
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
Especicações Guia de Design
Faixa
de tensão
Padrão de
chaveamento
Sobrecarga alta HO, 150% Sobrecarga normal NO, 110%
60 AVM
380–500 V
SFAVM
Tabela 6.16 Derating para frequência de chaveamento, 250 kW a 400 V CA (350 hp a 460 V CA)
Faixa
de tensão
Padrão de
chaveamento
Sobrecarga alta HO, 150% Sobrecarga normal NO, 110%
60 AVM
6
6
525–690 V
Tabela 6.17 Derating para frequência de chaveamento, 250 kW a 690 V CA (300 hp a 575 V CA)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 59
SFAVM
Page 62

130BX481.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 54 50
6 7
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX482.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 54 50 6 7
50
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX483.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 50
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX484.11
Iout [%]
fsw
[kHz]
70
80
90
1
60
100
110
2 3 4 50
50
40 ˚C (104 ˚F)
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX489.11
Iout [%]
fsw
[kHz]
70
80
90
0.5
60
100
110
2.00.0 1.0 1.5 2.5 4.03.0 3.5
5.54.5 5.0
50 ˚C (122 ˚F)
55 ˚C (131 ˚F)
130BX490.11
Iout [%]
fsw
[kHz]
70
80
90
0.5
60
100
110
2.00.0 1.0 1.5 2.5 4.03.0 3.5 5.54.5 5.0
50
55 ˚C (131 ˚F)
45 ˚C (113 ˚F)
50 ˚C (122 ˚F)
130BX491.11
Iout [%]
fsw
[kHz]
70
80
90
0.5
60
100
110
2.00.0 1.0 1.5 2.5 4.03.0 3.5
55 ˚C (131 ˚F)
50 ˚C (122 ˚F)
45 ˚C (113 ˚F)
130BX492.11
70
80
90
0.5
Iout [%]
60
100
110
2.0
fsw
[kHz]
0.0 1.0 1.5 2.5 4.03.0 3.5
50
55 ˚C (131 ˚F)
50 ˚C (122 ˚F)
45 ˚C (113 ˚F)
40 ˚C (104 ˚F)
Especicações
VLT® Parallel Drive Modules
6
Faixa
de tensão
Padrão de
chaveamento
Sobrecarga alta HO, 150% Sobrecarga normal NO, 110%
60 AVM
380–500 V
SFAVM
Tabela 6.18 Derating para frequência de chaveamento, 315–800 kW a 400 V CA (450–1200 hp a 460 V CA)
Faixa
de tensão
Padrão de
chaveamento
Sobrecarga alta HO, 150% Sobrecarga normal NO, 110%
60 AVM
525–690 V
SFAVM
Tabela 6.19 Derating para frequência de chaveamento, 315–1000 kW a 400 V CA (350–1150 hp a 575 V CA)
60 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 63

F C - T
130BC530.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X D
Informação sobre a solicita... Guia de Design
7 Informação sobre a solicitação de pedido
7.1 Formulário de Pedido
Tabela 7.1 String do Código do Tipo
Grupos de produto
Série de conversores de frequência
Código de geração
Valor nominal da potência
Fases
Tensão de Rede
Gabinete metálico
Tamanho do gabinete metálico
Classe do Gabinete Metálico
Tensão de alimentação de controle
Conguração do hardware
Filtro de RFI/Drive de harmônicas
baixas/12 pulsos
Freio
Display (LCP)
Revestimento de PCB
Opcional de rede elétrica
Adaptação A
Adaptação B
Release de software
Idioma do software
Opcionais A
Opcionais B
Opcionais C0, MCO
Opcionais C1
Software do opcional C
Opcionais D
1–3
4–6
7
8–10
11
12
13–15
16–23
16–17
18
19
20
21
22
23
24–27
28
29–30
31–32
33–34
35
36–37
38–39
Tabela 7.2 Exemplo de código do tipo para solicitação de
pedido de um conversor de frequência
Nem todas as seleções/opcionais estão disponíveis para
cada variação. Para vericar se a versão apropriada está
disponível, consulte o Congurador do Drive na Internet.
7.2 Congurador do conversor
É possível projetar um conversor de frequência conforme
os requisitos da aplicação utilizando o sistema de código
de compra mostrado em Tabela 7.1 e Tabela 7.2.
Encomende conversores de frequência padrão e
conversores de frequência com opcionais integrados
enviando uma string do código do tipo que descreve o
produto ao escritório de vendas local da Danfoss, por
exemplo:
FC-302N800T5E00P2BGC7XXSXXXXAXBXCXXXXDX
O signicado dos caracteres na string são denidos em
Tabela 7.3 e Tabela 7.4.
Corresponder ao conversor de frequência apropriado para
aplicação correta ao utilizar o congurador do conversor. O
congurador do conversor gera automaticamente um
código de vendas de oito dígitos para ser encaminhado ao
escritório de vendas local. Além disso, também é possível
estabelecer uma lista de projeto com diversos produtos e
enviá-la a um representante de vendas da Danfoss.
O Congurador do Drive pode ser encontrado no site
global: www.danfoss.com/drives.
Os conversores de frequência são entregues automaticamente com um pacote de idiomas relevantes para a
região que originou o pedido. Quatro pacotes regionais de
idiomas cobrem os seguintes idiomas:
Pacote de Idiomas 1
Inglês, Alemão, Francês, Dinamarquês, Espanhol, Sueco,
Italiano e Finlandês.
Pacote de Idiomas 2
Inglês, Alemão, Chinês, Coreano, Japonês, Tailandês, Chinês
Tradicional e Indonésio de Bahasa.
7 7
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 61
Page 64

Informação sobre a solicita...
VLT® Parallel Drive Modules
Pacote de Idiomas 3
Inglês, Alemão, Esloveno, Búlgaro, Sérvio, Romeno,
Húngaro, Tcheco e Russo.
Para fazer pedido de conversores de frequência com um
pacote de idiomas diferente, entre em contato com o
escritório de vendas da Danfoss local.
Pacote de Idiomas 4
Inglês, Alemão, Espanhol, Inglês dos Estados Unidos, Grego,
Português do Brasil, Turco e Polonês.
Descrição Posição Opcional possível
Grupo de produto 1–6 102: FC 102
202: FC 202
302: FC 302
Código de Geração 7 N
Valor nominal da potência 8–10 250 kW
315 kW
355 kW
400 kW
450 kW
500 kW
77
Fases 11 Trifásico (T)
Tensão de rede 11–12 T 4: 380–480 V CA
Gabinete metálico 13–15 E00: IP00
Filtro de RFI, hardware 16–17 P2: Drive paralelo + ltro de RFI, classe A2 (6 pulsos)
Freio 18 X: Sem IGBT do freio
Display. 19 G: Painel de controle local (LCP) gráco
Revestimento de PCB 20 C: Revestido de PCB
Opcional de rede elétrica 21 J: Disjuntor + fusíveis
Adaptação 22 X: Entradas de cabo padrão
Adaptação 23 X: Sem adaptação
Release de software 24–27 S067: Controle de movimentos integrado
Idioma do software 28 X: Pacote de idioma standard
560 kW
630 kW
710 kW
800 kW
900 kW
1M0 kW
1M2 kW
T 5: 380–500 V CA
T 7: 525–690 V CA
C00: IP00 + canal traseiro de aço inoxidável
P4: Drive paralelo + ltro de RFI, classe A1 (6 pulsos)
P6: Drive paralelo + ltro de RFI, classe A2 (12 pulsos)
P8: Drive paralelo + ltro de RFI, classe A1 (12 pulsos)
B: IGBT do freio montado
R: Terminais de regeneração
S: Freio + regeneração
T: Safe Torque O (STO)
U: Safe Torque O + freio
Q: Painel de acesso ao dissipador de calor
Tabela 7.3 Código do Tipo de Solicitação de Pedido para VLT® Parallel Drive Modules
62 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 65

Informação sobre a solicita... Guia de Design
Descrição Posição Opcional possível
Opcionais A 29-
30
Opcionais B 31-
32
Opcionais C0/ E0 33-
34
Opcionais C1/ A/B no Adaptador
do Opcional C
Software do opcional C/
Opcionais E1
Opcionais D 38-
35 X: Sem opcionais
3637
39
AX: Sem opcional A
A0: VLT® PROFIBUS DP MCA 101
A4: VLT® DeviceNet MCA 104
A6: VLT® CANopen MCA 105
A8: VLT® EtherCAT MCA 124
AG: VLT® LonWorks MCA 108
AJ: VLT® BACnet MCA 109
AT: VLT® PROFIBUS Converter MCA 113
AU: VLT® PROFIBUS Converter MCA 114
AL: VLT® PROFINET MCA 120
AN: VLT® EtherNet/IP MCA 121
AQ: VLT® Modbus TCP MCA 122
AY: VLT® EtherNet/IP MCA 121
BX: Sem opcionais
BK: VLT® General Purpose I/O MCB 101
BR: VLT® Encoder Input MCB 102
BU: VLT® Resolver Input MCB 103
BP: VLT® Relay Card MCB 105
BY: VLT® Extended Cascade Controller MCO 101
BZ: VLT® Safe PLC I/O MCB 108
B0: VLT® Analog I/O MCB 109
B2: VLT® PTC Thermistor Card MCB 112
B4: VLT® Sensor Input MCB-114
B6: VLT® Safety Option MCB 150
B7: VLT® Safety Options MCB 151
CX: Sem opcionais
C4: VLT® Motion Control Option MCO 305
R: VLT® Extended Relay Card MCB 113
S: VLT® Advanced Cascade Controller MCO 102
XX: Controlador padrão
10: VLT® Synchronizing Controller MCO 350
11: VLT® Position Controller MCO 351
12: VLT® Center Winder MCO 352
DX: Sem opcionais
D0: VLT® 24 V DC Supply MCB 107
7 7
Tabela 7.4 Solicitação de pedido de opcionais
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 63
Page 66

Informação sobre a solicita...
VLT® Parallel Drive Modules
7.2.1 Filtros de Saída
O chaveamento de alta velocidade do conversor de frequência gera alguns efeitos secundários que inuenciam o motor e o
ambiente fechado. Dois tipos de ltro diferentes, os ltros dU/dt e de onda senoidal, estão disponíveis para tratar desses
efeitos colaterais. Para obter mais detalhes, consulte o Guia de Design VLT® FC-Series Output Filter
380–500 V Comum Individual
400 V, 50 Hz 460 V, 60 Hz 500 V, 50 Hz FsW
kW A Hp A kW A kHz IP00 IP23 IP00 IP23
250 480 350 443 315 443 3 130B2849 130B2850 130B2844 130B2845
315 600 450 540 355 540 2 130B2851 130B2852 130B2844 130B2845
355 658 500 590 400 590 2 130B2851 130B2852 130B2844 130B2845
400 745 600 678 500 678 2 130B2853 130B2854 130B2844 130B2845
450 800 600 730 530 730 2 130B2853 130B2854 130B2847 130B2848
500 880 650 780 560 780 2 130B2853 130B2854 130B2847 130B2848
560 990 750 890 630 890 2 2x130B2849 2x130B2850 130B2847 130B2848
630 1120 900 1050 710 1050 2 3x130B2849 2x130B2850 130B2847 130B2848
77
710 1260 1000 1160 800 1160 2 3x130B2849 2x130B2850 130B2847 130B2848
800 1460 1200 1380 1000 1380 2 3x130B2851 3x130B2852 130B2849 130B2850
Tabela 7.5 Filtros dU/dt disponíveis, 380-500 V
525–690 V Comum Individual
525 V, 50 Hz 575 V, 60 Hz 690 V, 50 Hz FsW
kW A Hp A kW A kHz IP00 IP23 IP00 IP23
250 360 350 344 315 344 2 130B2851 130B2852 130B2841 130B2842
300 395 400 410 355 380 1,5 130B2851 130B2852 130B2841 130B2842
315 429 450 450 400 410 1,5 130B2851 130B2852 130B2841 130B2842
400 523 500 500 500 500 1,5 130B2853 130B2854 130B2844 130B2845
450 596 600 570 560 570 1,5 130B2853 130B2854 130B2844 130B2845
500 630 650 630 630 630 1,5 130B2853 130B2854 130B2844 130B2845
560 763 750 730 710 730 1,5 130B2853 130B2854 130B2847 130B2848
670 889 950 850 800 850 1,5 130B2853 130B2854 130B2847 130B2848
750 988 1050 945 – – – 3x130B2849 3x130B2850 130B2847 130B2848
850 1108 1150 1060 1000 1060 1,5 3x130B2849 3x130B2850 130B2847 130B2848
1000 1317 1350 1260 1200 1260 1,5 3x130B2851 3x130B2852 130B2849 130B2850
Tabela 7.6 Filtros dU/dt disponíveis, 525-690 V
380–500 V Comum Individual
400 V, 50 Hz 460 V, 60 Hz 500 V, 50 Hz FsW
kW A Hp A kW A kHz IP00 IP23 IP00 IP23
250 480 350 443 315 443 3 130B3188 130B3189 130B3186 130B3187
315 600 450 540 355 540 2 130B3191 130B3192 130B3186 130B3187
355 658 500 590 400 590 2 130B3191 130B3192 130B3186 130B3187
400 745 600 678 500 678 2 130B3193 130B3194 130B3188 130B3189
450 800 600 730 530 730 2 2x130B3188 2x130B3189 130B3188 130B3189
500 880 650 780 560 780 2 2x130B3188 2x130B3189 130B3186 130B3187
560 990 750 890 630 890 2 2x130B3191 2x130B3192 130B3186 130B3187
630 1120 900 1050 710 1050 2 2x130B3191 2x130B3192 130B3186 130B3187
710 1260 1000 1160 800 1160 2 3x130B3188 2x130B3189 130B3188 130B3189
800 1460 1200 1380 1000 1380 2 3x130B3188 2x130B3189 130B3188 130B3189
Tabela 7.7 Filtros de onda senoidal disponíveis, 380-500 V
64 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 67

U V W U V W U V W U V W
130BF038.10
1
2
Informação sobre a solicita... Guia de Design
525–690 V Comum Individual
kW A Hp A kW A kHz IP00 IP23 IP00 IP23
525 V, 50 Hz 575 V, 60 Hz 690 V, 50 Hz FsW
250 360 350 344 315 344 2 130B4129 130B4151 130B4125 130B4126
300 395 400 410 355 380 1,5 130B4129 130B4151 130B4125 130B4126
315 429 450 450 400 410 1,5 130B4152 130B4153 130B4125 130B4126
400 523 500 500 500 500 1,5 130B4154 130B4153 130B4129 130B4151
450 596 600 570 560 570 1,5 130B4156 130B4157 – –
500 630 650 630 630 630 1,5 130B4156 130B4157 130B4129 130B4151
560 763 750 730 710 730 1,5 2x130B4142 2x130B4143 130B4129 130B4151
670 889 950 850 800 850 1,5 2x130B4142 2x130B4143 130B4125 130B4126
750 988 1050 945 – – – 2x130B4142 2x130B4143 130B4129 130B4151
850 1108 1150 1060 1000 1060 1,5 3x130B4154 3x130B4155 130B4129 130B4151
1000 1317 1350 1260 1200 1260 1,5 3x130B4154 3x130B4155 130B4129 130B4151
Tabela 7.8 Filtros de onda senoidal disponíveis, 525-690 V
7 7
1 Módulo conversor 2 Filtro
Ilustração 7.1 Conguração do ltro sem barramentos comuns (individuais)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 65
Page 68

U V W U V W U V W U V W
130BF039.11
1
3
2 4
5
Informação sobre a solicita...
VLT® Parallel Drive Modules
77
1 Módulo conversor 4 Gabinete 2
2 Gabinete 1 5 Cabos
3 Filtro – –
Ilustração 7.2 Conguração do ltro com barramentos comuns (individuais)
66 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 69

130BC528.10
1
2
3
Informação sobre a solicita... Guia de Design
7.3 Opcionais e Acessórios
Danfoss oferece um grande número de opcionais e acessórios para o VLT® AutomationDrive FC 302, VLT® HVAC Basic Drive
FC 102 e AQUA Drive do VLT® FC 202. Os opcionais a seguir são instalados no cartão de controle no slot A, B ou C. Consulte
Ilustração 7.3. Para obter mais informações, consulte as instruções que acompanham o equipamento opcional.
7 7
1 Slot A
2 Slot B
3 Slot C
Ilustração 7.3 Opções de slot no cartão de controle
7.3.1 General Purpose Input Output
Module MCB 101
O VLT® General Purpose I/O MCB 101 é usado para
extensão das entradas e saídas digitais e analógicas do FC
102, FC 103, FC 202, FC 301 e FC 302. O MCB 101 deve ser
instalado no slot B do conversor de frequência.
Conteúdo:
•
•
•
Módulo opcional do MCB 101.
Recurso estendido para o LCP.
Tampa de terminal.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 67
Page 70

130BC526.11
1
2 3
4 5
6
7
8
9 10
11
12
COM DIN
DIN7
DIN8
DIN9
GND(1)
DOUT3
0/24 V DC
DOUT4
0/24 V DC
AOUT2
0/4-20 mA
24 V
GND(2)
AIN3
AIN4
RIN=
5k Ω
RIN=
10k Ω
-0 to +10
VDC
-0 to +10
VDC
0 V 24 V
0 V 24 V
24 V DC0 V
0 V24 V DC
<500 Ω
>600 Ω
>600 Ω
X30/
DIG IN
DIG &
ANALOG
OUT
ANALOG
IN
CPU
CAN BUS
CPU
Control card (FC 100/200/300)
General Purpose
I/O option MCB 101
PLC
(PNP)
PLC
(NPN)
Informação sobre a solicita...
VLT® Parallel Drive Modules
Ilustração 7.4 Módulo opcional do MCB 101
7.3.2
Isolação galvânica do VLT® General
Purpose I/O MCB 101
As entradas analógicas/digitais são isoladas galvanicamente
de outras entradas/saídas no MCB 101 e no cartão de
77
controle do conversor de frequência.
As saídas analógicas/digitais no MCB 101 estão isoladas
galvanicamente das demais entradas/saídas do MCB 101,
mas não das entradas/saídas no cartão de controle do
conversor de frequência.
Conecte os terminais 1 e 5 se as entradas digitais 7, 8 ou 9
devem ser chaveadas pelo uso de de alimentação interna
de 24 V (terminal 9). Consulte Ilustração 7.5.
Ilustração 7.5 Diagrama de Princípios
68 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 71

Informação sobre a solicita... Guia de Design
7.3.3 Entradas Digitais - Terminal X30/1-4
Entrada digital
№ de entradas digitais 4 (6)
Número do terminal 18, 19, 27, 29, 32, 33
Lógica PNP ou NPN
Nível de tensão 0–24 V CC
Nível de tensão, 0 lógico PNP (GND=0 V) <5 V CC
Nível de tensão, 1 lógico PNP (GND=0 V) >10 V CC
Nível de tensão, 0 lógico NPN (GND=24 V) <14 V CC
Nível de tensão, 1 lógico NPN (GND=24 V) >19 V CC
Tensão máxima na entrada 28 V contínuo
Faixa de frequência de pulso 0–110 kHz
Ciclo útil, largura de pulso mínima 4,5 ms
Impedância de entrada >2 kΩ
7.3.4 Entradas Analógicas - Terminais X30/11, 12
Entrada analógica
Número de entradas analógicas 2
Número do terminal 53, 54, X30.11, X30.12
Modos Tensão
Nível de tensão -10 V a +10 V
Impedância de entrada >10 kΩ
Tensão máxima 20 V
Resolução das entradas analógicas 10 bits (+ sinal)
Precisão das entradas analógicas Erro máx. 0,5% da escala total
Largura de banda 100 Hz
7.3.5 Saídas digitais - Terminal X30/6, 7
Saída digital
Número de saídas digitais 2
Número do terminal X30.6, X30.7
Nível de tensão na saída de frequência/digital 0–24 V
Corrente de saída máxima 40 mA
Carga máxima ≥600 Ω
Carga capacitiva máxima <10 nF
Frequência de saída mínima 0 Hz
Frequência de saída máxima ≤32 kHz
Precisão da saída de frequência Erro máximo: 0,1% do fundo de escala
7 7
7.3.6 Saída Analógica - Terminal X30/8
Saída analógica
Número de saídas analógicas 1
Número do terminal 42
Faixa atual na saída analógica 0–20 mA
Carga máxima de GND - saída analógica 500 Ω
Precisão na saída analógica Erro máximo: 0,5% do fundo de escala
Resolução na saída analógica 12 bit
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 69
Page 72

Informação sobre a solicita...
VLT® Parallel Drive Modules
7.3.7
Encoder Input VLT® MCB 102
O módulo da VLT® Encoder Input MCB 102 pode ser
utilizado como fonte do feedback do controle de uxo de
malha fechada (parâmetro 1-02 Fonte Feedbck.Flux Motor) e
como do controle da velocidade de malha fechada
(parâmetro 7-00 Fonte do Feedb. do PID de Veloc.). Congure
o opcional de encoder no grupo do parâmetro 17-
-**Opcional do feedback de motor.
O MCB 102 é usado para:
Malha fechada do VVC+.
•
Controle da velocidade do Flux Vector.
•
Controle de torque do Flux Vector.
•
Motor de ímã permanente.
•
Tipos de encoder suportados:
Encoder incremental: Tipo TTL 5 V, RS422,
77
•
frequência máxima: 410 kHz.
Encoder incremental: 1 Vpp, seno-cosseno.
•
HIPERFACE® Encoder: Absoluto e Seno-Cosseno
•
(Stegmann/SICK).
Designação
Descrição
X31
1 NC
2 NC 8 VCC Saída 8 V (7-12 V, I
3 5 VCC 5 VCC
4 GND GND GND GND
5 Entrada A +COS +COS Entrada A
6 Entrada A inv REFCOS REFCOS Entrada A inv
7 Entrada B +SIN +SIN Entrada B
8 Entrada B inv REFSIN REFSIN Entrada B inv
9 Entrada Z +Dados RS485 Saída do
10 Entrada Z inv -Dados RS485 Saída do
11 NC NC Dados de
12 NC NC Dados de
Máx. 5 V em X31,5-12
Encoder
incremental
(consulte o
Ilustração 7.6)
Encoder SinCos
HIPERFACE
(consulte
Ilustração 7.7)
®
Encoder EnDat Encoder SSI Descrição
oscilador
oscilador inv.
entrada
entrada inv.
AVISO!
Os LEDs são visíveis somente quando o LCP é removido.
A reação no caso de um erro do encoder pode ser
selecionada no parâmetro 17-61 Monitoram. Sinal
Encoder: [0] Desabilitado, [1] Advertência ou [2] Desarme.
Quando o kit do opcional do encoder for encomendado
separadamente, ele incluirá:
O opcional de encoder não suporta conversores de
frequência VLT® AutomationDrive FC 302 fabricados antes
da semana 50/2004.
Versão mínima do software: 2.03 (parâmetro 15-43 Versão
de Software)
1)
24 V
1)
5 V
Saída do
oscilador
Saída do
oscilador inv.
Dados de
entrada
Dados de
entrada inv.
Encoder EnDat: Absoluto e Seno-Cosseno
•
(Heidenheim) Suporta a versão 2.1.
Encoder SSI: Absoluto.
•
Encoder Input VLT® MCB 102.
•
Acessório do LCP aumentado e tampa de
•
terminal aumentada.
Saída 24 V (21-25 V, I
Saída 5 V (5 V ± 5%, I
Entrada Z OR +Dados RS485
Entrada Z OR -Dados RS485
Uso futuro
Uso futuro
máx
: 200 mA)
máx
máx
125 mA)
: 200 mA)
Tabela 7.9 Descrições do Terminal do Opcional do Encoder do MCB 102 dos tipos de Encoder suportados
1) Alimentação para encoder: Consulte dados sobre o encoder.
70 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 73

1
2 3 12
130BA163.11
754 6 8 9 10 11
24 V
8 V 5 V GND A A B B Z Z D D
Us 7-12V (red)
GND (blue)
+COS (pink)
REFCOS (black)
+SIN (white)
REFSIN (brown)
Data +RS 485 (gray)
Data -RS 485 (green)
1 2 3 12754 6 8 9 10 11
130BA164.10
130BA119.10
B
A
A
B
A
B
B
A
Informação sobre a solicita... Guia de Design
Ilustração 7.8 Sentido da rotação
Ilustração 7.6 Encoder incremental
Comprimento de cabo máximo 150 m (492 pés).
Ilustração 7.7 Encoder SinCos HIPERFACE
7.3.8
Resolver Input VLT® MCB 103
O Resolver Option VLT® MCB 103 é utilizado para fazer
interface do feedback de motor do resolver com o VLT
®
AutomationDrive FC 301/FC 302. Os resolvers são usados
como dispositivos de feedback de motor para motores
síncronos sem escova com imã permanente.
O kit do opcional de resolver encomendado separadamente inclui:
Opcional VLT® Resolver MCB 103.
•
Acessório do LCP aumentado e tampa de
•
terminal aumentada.
Seleção dos parâmetros: 17-5* Interface do Resolver.
O MCB 103 suporta diversos tipos de resolver de rotor.
Polos do resolver Parâmetro 17-50 Pólos: 2 x 2
Tensão de entrada
do resolver
Frequência de
entrada do resolver
Relação de
transformação
Tensão de entrada
do secundário
Carga do secundário
Tabela 7.10 Especicações do resolver
Parâmetro 17-51 Tensão Entrad: 2,0–8,0
x 7,0
Vrms
Parâmetro 17-52 Freq de Entrada: 2–15 kHz
x 10,0 kHz
Parâmetro 17-53 Rel de transformação: 0,1–
1,1 x 0,5
Máximo 4 V
Aproximadamente 10 kΩ
rms
7 7
Vrms
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 71
Page 74

130BT102.10
Informação sobre a solicita...
VLT® Parallel Drive Modules
O LED 2 acende quando o sinal Cosinus está OK no
resolver.
LED 3 acende quando o sinal Sinus está OK no resolver.
77
Ilustração 7.9 A Entrada do Resolver MCB 103 usada com um
Motor de imã permanente
AVISO!
O MCB 103 pode ser utilizado somente com os tipos de
resolver fornecidos com rotor. Os resolvers fornecidos
com estator não podem ser utilizados.
Indicadores LED
Os LEDs estão ativos quando o par. é
parâmetro 17-61 Monitoram. Sinal Encoder estiver
programado para [1] Advertência ou [2] Desarme.
LED 1 acende quando o sinal de referência está OK no
resolver
Ilustração 7.10 Motor de Ímã Permanente (PM) com o resolver
como feedback de velocidade.
Exemplo de setup
Em Ilustração 7.9, um Motor de ímã permanente (PM) é
utilizado com o resolver como feedback de velocidade. Um
motor PM normalmente deve funcionar em modo de uxo.
Fiação
O comprimento de cabo máximo é 150 m (492 pés), se for
utilizado um cabo do tipo par trançado.
AVISO!
Use somente cabo de motor e cabos de circuito de
frenagem blindados. Os cabos do resolver devem ser
blindados e separados dos cabos de motor. A blindagem
do cabo do resolver deve estar conectada corretamente
à placa de desacoplamento e ao chassi (ponto de
aterramento) no lado do motor.
72 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 75

130BA177.10
8-9mm
2mm
Informação sobre a solicita... Guia de Design
Parâmetro 1-00 Modo Conguração [1] Malha fechada de velocidade
Parâmetro 1-01 Principio de Controle do Motor [3] Fluxo com feedback
Parâmetro 1-10 Construção do Motor [1] PM, SPM não saliente
Parâmetro 1-24 Corrente do Motor Plaqueta de identicação
Parâmetro 1-25 Velocidade nominal do motor Plaqueta de identicação
Parâmetro 1-26 Torque nominal do Motor Plaqueta de identicação
Não é possível executar a AMA em motores PM (pequenos)
Parâmetro 1-30 Resistência do Estator (Rs) Folha de dados do motor
Parâmetro 30-80 Indutância do eixo-d (Ld) Folha de dados do motor (mH)
Parâmetro 1-39 Pólos do Motor Folha de dados do motor
Parâmetro 1-40 Força Contra Eletromotriz em
1000RPM
Parâmetro 1-41 O Set do Ângulo do Motor Folha de dados do motor (normalmente zero)
Parâmetro 17-50 Pólos Folha de dados do resolver
Parâmetro 17-51 Tensão Entrad Folha de dados do resolver
Parâmetro 17-52 Freq de Entrada Folha de dados do resolver
Parâmetro 17-53 Rel de transformação Folha de dados do resolver
Parâmetro 17-59 Interface Resolver [1] Ativado
Tabela 7.11 Parâmetros para ajustar
Folha de dados do motor
7 7
7.3.9
Relay Card MCB 105 do VLT
A VLT® Relay Card MCB 105 inclui 3 peças de contatos do tipo SPDT e deve ser instalada no slot do opcional B.
Dados elétricos
Carga do terminal máxima (CA-1)1) (Carga resistiva) 240 V CA 2 A
Carga do terminal máxima (CA-15)1) (Carga indutiva @ cosφ 0,4) 240 V CA 0,2 A
Carga do terminal máxima (CC-1)1) (Carga resistiva) 24 V CC 1 A
Carga do terminal máxima (CC-13)1) (Carga indutiva) 24 V CC 0,1 A
Carga do terminal mínima (CC) 5 V 10 mA
Velocidade de chaveamento máxima em carga nominal/carga mínima 6 min-1/20
1) IEC 947 peça 4 e 5
Quando o kit do opcional de relé for encomendado
separadamente, ele incluirá:
VLT® Relay Card MCB 105.
•
Acessório do LCP aumentado e tampa de
•
terminal aumentada.
Etiqueta para cobertura do acesso às chaves
•
S201(A53), S202 (A54) e S8011).
Fitas para cabo para
•
1) IMPORTANTE! A etiqueta DEVE ser xada no chassi do
LCP para alcançar a aprovação do UL.
xá-lo no módulo do relé.
®
Ilustração 7.11 Desconecte os terminais do relé
-1
ADVERTÊNCIA
Advertência de alimentação dupla. Não misture sistemas
de 24/ 48 V com sistemas de alta tensão.
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 73
Ilustração 7.12 Comprimento correto do o descascado
Page 76

1 1 1
1 102 3 4 5 6 7 8 9 1211
2 2 3
1 1 1
1 102 3 4 5 6 7 8 9 1211
3 3 3
1 1 1
1 102 3 4 5 6 7 8 9 1211
2 2
2
130BA176.11
Informação sobre a solicita...
VLT® Parallel Drive Modules
77
Ilustração 7.13 Método correto de instalar partes energizadas
e sinais de controle
74 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 77

130BF022.10
Informação sobre a solicita... Guia de Design
7.3.10
Uma alimentação de 24 V CC externa pode ser instalada como alimentação de baixa tensão, para o cartão de controle e
qualquer cartão de opcional instalado, permitindo a operação total do LCP sem conexão à rede elétrica.
Especicação da alimentação de 24 V CC externa
Faixa de tensão de entrada 24 V CC ±15% (máximo 37 V em 10 s)
Corrente de entrada máxima 2,2 A
Corrente de entrada média para o 0,9 A
Comprimento de cabo máximo 75 m (246 pés)
Carga de capacitância de entrada 10 uF
Atraso na energização: 0,6 s
As entradas são protegidas.
Números dos terminais:
Quando a VLT® 24 V DC Supply MCB 107 estiver alimentando o circuito de controle, a alimentação de 24 V interna é
desconectada automaticamente. Para obter mais informações sobre a instalação, consulte as instruções de utilização
separadas que acompanham o equipamento opcional.
VLT® 24 V DC Supply MCB 107
Terminal 35: Alimentação de -24 V CC externa.
•
Terminal 36: Alimentação de +24 V CC externa.
•
7 7
Ilustração 7.14 Conexão de alimentação de 24 V CC
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 75
Page 78

MS 220 DA
11
10
20-28 VDC 10 mA
12
20-28 VDC
60 mA
com
ZIEHL
X44
12 13 18 19 27 29 32 33 20 37
3
NC
4NC5NC6NC7NC8NC9NC10 11NC121
T1
2
T2
T
P
T
P
PTC
M3~
130BA638.10
DO
Motor protection
MCB 112 PTC Thermistor Card
Option B
Reference for 10, 12
DO FOR SAFE
STOP T37
Code No.130B1137
Control Terminals of FC302
Informação sobre a solicita...
VLT® Parallel Drive Modules
7.3.11
O opcional do VLT® PTC Thermistor Card MCB 112
possibilita monitorar a temperatura de um motor elétrico
por meio de uma entrada do termistor PTC isolada galvani-
camente. É um opcional B para VLT® Drive HVAC FC 102,
AQUA Drive do VLT® FC 202 e VLT® AutomationDrive FC
302 com Safe Torque O (STO).
VLT® PTC Thermistor Card
Certicação ATEX com séries FC 102/202/302
O VLT® PTC Thermistor Card MCB 112 foi certicado pela
ATEX, o que signica que o FC séries 102/202/302
juntamente com o MCB 112, agora pode ser utilizado com
motores em atmosferas potencialmente explosivas.
Consulte o cartão do termistor para obter mais
informações.
Para obter informações sobre montagem e instalação do
opcional, consulte as instruções que acompanham ele. Para
saber as diferentes possibilidades de aplicação, consulte
capétulo 17 Exemplos de Aplicações.
X44/1 e X44/2 são as entradas do termistor. O X44/12 ativa
o Safe Torque
valores do termistor tornarem isso necessário e o X44/10
77
informa ao conversor de frequência que um pedido de
Toque seguro desligado (Safe Torque O) veio do MCB 112
O do conversor de frequência (T-37) se os
Ilustração 7.16 Símbolo de atmosfera explosiva (ATEX)
para assegurar um tratamento conveniente do alarme. Para
usar a informações de X44/10, uma das entradas digitais
do conversor de frequência (ou um DI de um opcional
montado) deve ser programado para Cartão PTC 1 [80].
Parâmetro 5-19 Terminal 37 Parada Segura deve ser
congurado para a funcionalidade Safe Torque O
desejada. O padrão é [1] Alarme de parada segura.
Ilustração 7.15 Instalação do MCB 112
Dados elétricos
Conexão do resistor
PTC em conformidade com a DIN 44081 e a DIN 44082
Número 1..6 resistores em série
Válvula de Desligar 3,3 Ω ... 3,65 Ω ... 3,85 Ω
Valor do reset 1,7 Ω ... 1,8 Ω ... 1,95 Ω
76 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 79

130BA965.10
121110987654321
4321 12111098765432121 13 14
+-+-+-+-+-+-+-+-+
-
+
-
A03
A03
Ext. 24 VDC
DI1
DI2
DI3
DI4
DI5
DI6
DI7
X45/ X48/ X46/
X47/
Relay 3 Relay 4 Relay 5 Relay 6
Informação sobre a solicita... Guia de Design
Tolerância do disparo ± 6 °C (10,8 °F)
Resistência coletiva do loop do sensor <1,65 Ω
Tensão do terminal ≤ 2,5 V para R ≤3,65 Ω, ≤9 V para R=∞
Corrente do sensor ≤ 1 mA
Curto circuito 20 Ω≤R ≤40 Ω
Consumo de energia 60 mA
Condições de teste
EN 60 947-8
Tensão para medição da resistência de sobretensão 6000 V
Categoria da sobretensão III
Grau de poluição 2
Tensão Vbis para medição da isolação 690 V
Isolação galvânica até Vi 500 V
-20 °C (-4 °F) ... +60 °C (140 °F)
Temperatura ambiente permanente
EN 60068-2-1 Calor seco
Umidade 5–95%, condensação não permitida
Resistência de EMC EN 61000-6-2
Emissão EMC EN 61000-6-4
Resistência da Vibração 10 ... 1000 Hz 1,14 g
Resistência de choque 50 g
7 7
Valores de sistema de segurança
EN 61508 para Tu=75 °C (167 °F) em andamento
2 para ciclo de manutenção de 2 anos
SIL
1 para ciclo de manutenção de 3 anos
HFT 0
PFD (para teste funcional anual) 4,10 x 10
SFF 78%
λs+λ
λ
DU
DD
8494 FIT
934 FIT
Código de compra 130B1137
7.3.12
VLT® Extended Relay Card MCB 113
O VLT® Extended Relay Card MCB 113 adiciona 7 entradas
digitais, 2 saídas analógicas e 4 relés SPDT à E/S padrão do
conversor de frequência para exibilidade ampliada e para
estar em conformidade com as recomendações da NAMUR
NE37 Alemã.
O MCB 113 é um opcional C1 padrão do Danfoss VLT
®
Drive HVAC FC 102, VLT® Refrigeration Drive FC 103, AQUA
Drive do VLT® FC 202, VLT® AutomationDrive FC 301 e
Ilustração 7.17 Conexões elétricas do MCB 113
VLT® AutomationDrive FC 302 e é automaticamente
detectado após a montagem.
Assegure a isolação galvânica entre o conversor de
frequência e o cartão do opcional MCB 113 conectando a
uma fonte de 24 V externa no X58/. Se a isolação galvânica
não for necessária, o cartão do opcional pode ser
alimentado por meio de uma fonte de 24 V interna do
conversor de frequência.
-3
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 77
Page 80

Informação sobre a solicita...
VLT® Parallel Drive Modules
AVISO!
É aceitável combinar sinais de 24 V com sinais de alta
tensão nos relés, desde que haja um relé sem uso entre
eles.
Para fazer setup do MCB 113, use grupos do parâmetro 5-1*
Entradas digitais, 6-7* Saída analógica 3, 6-8* Saída
Dados elétricos
Relés
Números 4 SPDT
Carregar a 250 V CA/30 V CC 8 A
Carregar a 250 V CA/30 V CC com cosφ = 0,4 3,5 A
Categoria de sobretensão (contato-ponto de aterramento) III
Categoria de sobretensão (contato-contato) II
Combinação de sinais de 250 V e 24 V E possível com um relé sem uso entre eles
77
Atraso máximo do resultado
Entradas digitais
Números 7
Intervalo 0/24 V
Modo PNP/NPN
Impedância de entrada 4 kW
Nível de disparo baixo 6,4 V
Nível de disparo alto 17 V
Atraso máximo do resultado 10 ms
analógica 4, 14-8* Opcionais, 5-4* Relés e 16-6* Entradas e
Saídas.
AVISO!
No grupo do parâmetro 5-4* Relés, matriz [2] é relé 3,
matriz [3] é relé 4, matriz [4] é relé 5 e matriz [5] é o relé
6.
10 ms
Isolado do terra/ chassi para uso em sistemas de rede elétrica IT
Saídas analógicas
Números 2
Intervalo 0/4-20 mA
Resolução 11 bit
Linearidade <0,2%
EMC
EMC IEC 61000-6-2 e IEC 61800-3 relativo a Imunidade de IMPULSO, ESD, OSCILAÇÃO e Imunidade Conduzida
7.3.13 Resistores do Freio
Os resistores do freio são utilizados para dissipar o excesso
de energia da frenagem regenerativa. O resistor é
selecionado em relação ao seu valor ôhmico, à sua taxa de
dissipação de energia e ao seu tamanho físico. A Danfoss
oferece uma ampla variedade de resistores diferentes
projetados especicamente para os nossos conversores de
frequência. Para obter mais informações, ver
capétulo 13.2.1 Seleção do Resistor do Freio. Além disso,
consulte o VLT® Brake Resistor MCE 101 Design Guide.
7.3.14 Filtros de onda senoidal
Quando um conversor de frequência controla um motor, é
possível ouvir ruído de ressonância do motor. Este ruído,
resultante do projeto do motor, ocorre toda vez que uma
chave do inversor é ativada no conversor de frequência.
Dessa forma a frequência do ruído de ressonância
corresponde à frequência de chaveamento do conversor de
frequência.
Para o conversor de frequência, a Danfoss poderá fornecer
um ltro de onda-senoidal para amortecer o ruído do
motor. O ltro reduz o tempo de aceleração da tensão, da
tensão de carga de pico U
para o motor. O ltro resulta em que a corrente e a tensão
tornam-se quase senoidais, o que reduz a acústica do ruído
do motor.
O ripple de corrente nas bobinas do ltro de onda
senoidal também causa ruído. Este problema pode ser
resolvido integrando o ltro a um gabinete ou gabinete
metálico semelhante.
Para números de peça de
capétulo 7.2.1 Filtros de Saída.
e do ripple de corrente ΔI
PEAK
ltro de onda senoidal, consulte
78 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 81

130BA138.11
130BA200.10
Informação sobre a solicita... Guia de Design
7.3.15 Filtros dU/dt
A combinação de tensão rápida e um aumento de corrente
causa tensões na isolação do motor. Essas mudanças
rápidas de energia podem reetir-se também na linha CC
do inversor e causar o seu desligamento. O ltro dU/dt é
projetado para reduzir o tempo de subida de tensão e a
rápida mudança de energia no motor. Essa intervenção
evita envelhecimento prematuro e descarga elétrica no
isolamento do motor.
Os
ltros dU/dt inuem positivamente na radiação do
ruído magnético no cabo que conecta o conversor de
frequência ao motor. A forma de onda da tensão é ainda
pulsada, mas a relação dU/dt é reduzida em comparação
com a instalação sem ltro.
7.3.16 Kit p\r\ Montagem Remota do LCP
O LCP pode ser transferido para frente de um painel
elétrico usando o kit integrado remoto. Está disponível
também um kit do LCP, sem o LCP. Para unidades IP66, o
código de compra é 130B1117. Use o código de compra
130B1129 para unidades IP55.
Ilustração 7.19 Código de compra 130B1113, Kit de LCP com
LCP gráco, presilhas, cabo e guarnição
7 7
Gabinete metálico Frente do IP54
Comprimento de cabo máximo entre o LCP
e a unidade
Comunicação padrão RS485
Tabela 7.12 Dados técnicos para montar um LCP para o IP66
Gabinete metálico
Ilustração 7.18 Dimensões
3 m (9 pés. 10
pol)
Ilustração 7.20 Código de compra 130B1114, Kit de LCP com
LCP numérico, presilhas e guarnição
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 79
Page 82

Informação sobre a solicita...
VLT® Parallel Drive Modules
7.4 Lista de vericação de design do sistema
Tabela 7.13 fornece uma lista de vericação para integrar um conversor de frequência em um sistema de controle de motor.
A lista tem a intenção de ser lembrete das categorias gerais e opcionais necessários para especicar os requisitos do
sistema.
Categoria Detalhes Notas
Modelo FC
Potência
Volts
Corrente
Física
Dimensões
Peso
Condições operacionais ambiente
Temperatura
Altitude
77
Umidade
Qualidade do ar/poeira
Requisitos de derating
Tamanho do
gabinete metálico
Entrada
Cabos
Tipo
Comprimento
Fusíveis
Tipo
Tamanho
Características nominais
Opcionais
Conectores
Contatos
Filtros
Saída
Cabos
Tipo
Comprimento
Fusíveis
Tipo
Tamanho
Características nominais
Opcionais
Filtros
Controle
Fiação
Tipo
Comprimento
Ligações do terminal
Comunicação
Protocolo
Conexão
Fiação
Opcionais
☑
80 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 83

Informação sobre a solicita... Guia de Design
Categoria Detalhes Notas
Conectores
Contatos
Filtros
Motor
Tipo
Características nominais
Tensão
Opcionais
Ferramentas e equipamentos especiais
Transporte e armazenagem
Montagem
Conexão de rede elétrica
Tabela 7.13 Lista de vericação de design do sistema
☑
7 7
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 81
Page 84

Considerações durante a ins...
VLT® Parallel Drive Modules
8 Considerações durante a instalação
8.1 Ambiente Operacional
Para obter especicações relacionadas às condições
ambiente, consulte capétulo 6.9 Condições Ambiente para
Módulos de Drive.
AVISO!
CONDENSAÇÃO
A umidade pode condensar nos componentes eletrônicos
e causar curtos circuitos. Evite instalação em áreas
sujeitas a geada. Instalar um aquecedor de gabinete
quando a unidade for mais fria que o ar ambiente.
Operação em modo de espera reduz o risco de
condensação enquanto a dissipação de energia
mantenha o circuito isento de umidade.
Gases corrosivos como sulfeto de hidrogênio, cloro ou
88
amônia podem danicar os componentes elétricos e
mecânicos. O VLT® Parallel Drive Modules utiliza placas de
circuito com revestimento isolante para reduzir os efeitos
de gases agressivos. Para obter as características nominais
e especicações de classe de revestimento isolante, ver
capétulo 6.9 Condições Ambiente para Módulos de Drive.
Ao instalar a unidade em ambientes empoeirados, preste
atenção ao seguinte:
Manutenção periódica
Quando a poeira acumula em componentes eletrônicos,
age como uma camada de isolamento. Essa camada reduz
a capacidade de resfriamento dos componentes e os
componentes
aquecido reduz a vida útil dos componentes eletrônicos.
Mantenha o dissipador de calor e os ventiladores livres de
acúmulo de poeira. Para obter mais informações de serviço
e manutenção, consulte VLT® Parallel Drive Modules Manual
de serviço.
Ventiladores de resfriamento
Ventiladores fornecem uxo de ar para refrigerar a
unidade. Quando ventiladores são expostos a ambientes
empoeirados, a poeira pode danicar os rolamentos do
ventilador e causam falha prematura do motor.
cam mais quentes. O ambiente mais
Sistemas operados em atmosferas potencialmente
explosivas devem atender condições especiais. A diretiva
UE 94/9/EC (ATEX 95) classica a operação de dispositivos
eletrônicos em atmosferas potencialmente explosivas.
A classe d especica que se ocorrer uma faísca,
•
ela é contida em uma área protegida.
A Classe E proíbe qualquer ocorrência de faísca.
•
Motores com classe de proteção
Não exige aprovação. Fiação e restrição especiais são
necessários.
Motores com proteção classe e
Quando combinado com um dispositivo de monitoramento PTC aprovado por ATEX como o VLT® PTC
Thermistor Card MCB 112, a instalação não precisa da
aprovação individual de uma organização aprovada.
Motores com proteção classe d/e
O motor tem uma classe de proteção de ignição, enquanto
que o cabo de motor e o ambiente de conexão estão em
conformidade com a classicação d. Para atenuar a alta
tensão de pico, utilize um ltro de onda senoidal na saída
do VLT® Parallel Drive Modules.
Ao utilizar o VLT® Parallel Drive Modules em uma
atmosfera potencialmente explosiva, use o seguinte:
Motores com classe de proteção de ignição d ou
•
e.
Sensor de temperatura do PTC para monitorar a
•
temperatura do motor.
Cabos de motor curtos.
•
Filtros de saída de onda senoidal quando cabos
•
de motor blindados não são utilizados.
AVISO!
MONITORAMENTO DO SENSOR DO TERMISTOR
DO MOTOR
As unidades VLT® AutomationDrive com o opcional MCB
112 são certicadas pela PTB para atmosferas
potencialmente explosivas.
ADVERTÊNCIA
ATMOSFERA EXPLOSIVA
Não instale um conversor de frequência em uma
atmosfera potencialmente explosiva. A falha em seguir
essa diretriz aumenta o risco de morte ou ferimentos
graves.
Instale a unidade em um gabinete fora dessa
•
área.
82 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Um conversor de frequência contém muitos componentes
eletrônicos e mecânicos, muitos dos quais são vulneráveis
aos efeitos ambientais.
Page 85

Considerações durante a ins... Guia de Design
CUIDADO
Por este motivo, o conversor de frequência não deve ser
instalado em ambientes com líquidos, partículas ou
gases em suspensão no ar que possam afetar e danicar
os componentes eletrônicos. A não observação das
medidas de proteção necessárias aumenta o risco de
paradas, reduzindo assim a vida útil do conversor de
frequência.
Grau de proteção conforme IEC 60529
Para prevenir falhas cruzadas e curtos circuitos entre
terminais, conectores, trilhas e circuitos relacionados à
segurança causados por objetos estranhos, a função Safe
Torque O (STO) deve ser instalada e operada em um
gabinete de controle IP54 ou de classicação mais alta (ou
ambiente equivalente.
Líquidos podem ser transportados pelo ar e condensar no
conversor de frequência e podem causar corrosão dos
componentes e peças metálicas. Vapor, óleo e água
salgada podem causar corrosão de componentes e peças
metálicas. Em ambientes com estas características,
recomenda-se a utilização de equipamento com classicação do gabinete IP54/55. Como opção de proteção
adicional, pode-se encomendar placas de circuito impresso
com revestimento externo.
Partículas em suspensão no ar, como de poeira, podem
causar falha mecânica, elétrica ou térmica no conversor de
frequência. Um indicador típico dos níveis excessivos de
partículas em suspensão no ar são partículas de poeira em
volta do ventilador do conversor de frequência. Em
ambientes empoeirados, utilize equipamento com classicação do gabinete IP54/IP55.
Em ambientes com temperaturas e umidade elevadas,
gases corrosivos como compostos sulfúricos, nitrogenados
e com cloro causam reações químicas nos componentes
do conversor de frequência.
Essas reações químicas afetam e danicam com rapidez os
componentes eletrônicos. Nesses ambientes, recomenda-se
que o equipamento seja montado em um gabinete
ventilado, impedindo o contato do conversor de frequência
com gases agressivos.
PCBs revestidos opcionais também oferecem proteção
nesses ambientes.
AVISO!
Montar os conversores de frequência em ambientes
agressivos aumenta o risco de paradas e também reduz
consideravelmente a vida útil do conversor.
indicadores típicos de líquidos nocivos em suspensão no
ar.
Com frequência, detectam-se níveis excessivos de
partículas de poeira em gabinetes de instalação e em
instalações elétricas existentes. Um indicador de gases
agressivos em suspensão no ar é o enegrecimento de
extremidades de os e trilhos de cobre.
8.2 Requisitos Mínimos do Sistema
8.2.1 Gabinete
O kit consiste em 2 ou 4 módulos de conversor,
dependendo do valor nominal da potência. Os gabinetes
devem atender aos seguintes requisitos mínimos:
Largura [mm (pol)] 2 conversores: 800 (31,5), 4 conversores:
1600 (63)
Profundidade [mm
(pol)]
Altura [mm (pol)]
Capacidade de peso
[kg (lb)]
Aberturas de
ventilação
Tabela 8.1 Requisitos do gabinete
1) Necessário se o barramento ou os kits de resfriamento da Danfoss
forem usados.
600 (23,6)
2000 (78,7)
2 conversores: 450 (992), 4 conversores:
910 (2006)
Consulte capétulo 8.2.4 Requisitos de
resfriamento e uxo de ar.
1)
8.2.2 Barras condutoras
Se o kit do barramento Danfoss não for utilizado, consulte
Tabela 8.2 para obter as medições da seção transversal que
são necessárias ao criar barramentos customizados. Para
obter as dimensões terminais, consulte
capétulo 6.1.2 Dimensões de Terminal e
capétulo 6.1.3 Dimensões do Barramento CC.
Descrição Largura [mm (pol)] Espessura [mm (pol)]
Motor CA 143,6 (5,7) 6,4 (0,25)
rede elétrica
CA
Barramento
CC
Tabela 8.2 Medições da seção transversal para barramentos
customizados
143,6 (5,7) 6,4 (0,25)
76,2 (3,0) 12,7 (0,50)
8 8
Antes de instalar o conversor de frequência, verique a
presença de líquidos, partículas e gases em suspensão no
ar ambiente observando as instalações existentes no
ambiente. A presença de água ou óleo sobre peças
metálicas ou a corrosão nas partes metálicas, são
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 83
AVISO!
Alinhe os barramentos verticalmente para fornecer
máximo uxo de ar.
Page 86

Considerações durante a ins...
VLT® Parallel Drive Modules
8.2.3 Considerações térmicas
Para obter valores de dissipação de calor, consulte
capétulo 6.5 Especicações dependente da potência.. As
fontes de calor a seguir devem ser consideradas ao
determinar requisitos de resfriamento:
Temperatura ambiente fora do gabinete metálico.
•
Filtros (por exemplo, onda senoidal e RF).
•
Para obter o ar de resfriamento necessário, consulte
capétulo 8.2.4 Requisitos de resfriamento e uxo de ar.
Fusíveis.
•
Componentes de controle.
•
8.2.4 Requisitos de resfriamento e uxo de ar
As recomendações fornecidas nesta seção são necessárias para o resfriamento ecaz dos módulos de conversor dentro do
gabinete metálico do painel. Cada módulo de conversor contém um ventilador do dissipador de calor e um ventilador de
mistura. Designs típicos de gabinete metálico utilizam ventiladores de porta juntamente com os ventiladores de módulo de
conversor para remover calor do gabinete.
Danfoss fornece diversos kits de resfriamento do canal traseiro como opcionais. Esses kits removem 85% do calor do
gabinete, reduzindo a necessidade de grandes ventiladores de porta.
AVISO!
88
Certique-se de que o uxo total dos ventiladores do gabinete atendem ao uxo de ar recomendado.
Ventiladores de resfriamento do módulo de conversor
O módulo de conversor é equipado com um ventilador do dissipador de calor, que fornece a taxa de uxo de ar necessária
de 840 m3/h (500 cfm) ao longo do dissipador de calor. Além disso, há um ventilador de resfriamento montado no topo da
unidade e um pequeno ventilador de mistura de 24 V CC montado sob a placa de entrada que é operado sempre que o
módulo de conversor estiver energizado.
Em cada módulo de conversor, o cartão de potência fornece tensão CC para energizar os ventiladores. O ventilador de
mistura é alimentado por 24 V CC da fonte de alimentação no modo de chaveamento principal. O ventilador do dissipador
de calor e o ventilador superior são alimentados por 48 V CC de uma fonte de alimentação em modo de chaveamento no
cartão de potência. Cada ventilador tem feedback de tacômetro para o cartão de controle para conrmar que o ventilador
está funcionando corretamente. O controle da velocidade e de liga/desliga dos ventiladores ajudam a reduzir ruído acústico
desnecessário e prolongar a vida útil dos ventiladores.
Ventiladores do gabinete
Quando o opcional de resfriamento do canal traseiro não for utilizado, os ventiladores montados no gabinete devem
remover todo o calor gerado dentro do gabinete.
Para cada gabinete contendo dois módulos de conversor, a recomendação de uxo do ventilador do gabinete é a seguinte:
Ao utilizar resfriamento do canal traseiro, é recomendável um uxo de 680 m3/h (400 cfm).
•
Quando resfriamento do canal traseiro não for utilizado, é recomendável um uxo de 4080 m3/h (2400 cfm).
•
84 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 87

130BE569.10
Considerações durante a ins... Guia de Design
Ilustração 8.1 Fluxo de ar, Unidade standard (esquerda), Kit de resfriamento inferior/superior (meio) e Kit de resfriamento traseiro/
traseiro (direita)
Os módulos de conversor são adequados para
Requisitos elétricos para certicações e
8.3
aprovações
A conguração padrão fornecida neste guia (módulos de
conversor, prateleira de controle, chicotes de ação, fusíveis
e microinterruptores) possui certicação UL e CE. As
condições a seguir devem ser atendidas além da
conguração padrão para obter requisitos de aprovação
regulamentar UL e CE. Para obter uma lista de renúncias
de responsabilidade, consulte capétulo 18.1 Renúncia de
responsabilidade.
Utilize o conversor de frequência em um
•
ambiente interno, controlado e aquecido. O ar de
resfriamento deve ser limpo, livre de materiais
corrosivos e de poeira eletricamente condutiva.
Consulte capétulo 6.9 Condições Ambiente para
Módulos de Drive para obter limites especícos.
A temperatura ambiente máxima do ar é 40 °C
•
(104 °F) com corrente nominal.
O sistema do conversor deve ser montado em ar
•
limpo, de acordo com a classicação do gabinete.
Para obter aprovações regulamentares de
certicação UL ou CE, os módulos de conversor
devem ser instalados de acordo com a
conguração padrão fornecida neste guia.
A tensão e a corrente máximas não devem
•
exceder os valores fornecidos em
capétulo 6.5 Especicações dependente da potência.
para a conguração do conversor especicada.
•
utilização em um circuito capaz de fornecer não
mais do que 100 kA rms simétricos com tensão
nominal do conversor (máximo de 600 V para
unidades de 690 V) quando protegidos por
fusíveis com a conguração padrão. Veja
capétulo 8.4.1 Seleção de Fusível. As características
nominais de amperes é baseada em testes
realizados de acordo com a UL 508C.
Os cabos localizados dentro do circuito do motor
•
devem ser classicados para pelo menos 75 °C
(167 °F) em instalações em conformidade com o
UL. Os tamanhos do cabo foram fornecidos em
capétulo 6.5 Especicações dependente da potência.
para a conguração do conversor especicada.
O cabo de entrada deve ser protegido com
•
fusíveis. Os disjuntores não devem ser utilizados
sem fusíveis nos EUA. Fusíveis IEC adequados
(classe aR) ou fusíveis UL (classe L ou T) são
listados em capétulo 8.4.1 Seleção de Fusível. Além
disso, requisitos regulamentares especícos do
país devem ser seguidos.
Para instalação nos EUA, deve ser fornecida
•
proteção do circuito de derivação de acordo com
o Código Elétrico Nacional (NEC) e qualquer
código local aplicável. Para atender esse requisito,
utilize fusíveis classicados pela UL.
Para instalação no Canadá, deve ser fornecida
•
proteção do circuito de derivação de acordo com
o Código Elétrico Canadense e qualquer código
8 8
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 85
Page 88

Considerações durante a ins...
VLT® Parallel Drive Modules
provincial aplicável. Para atender esse requisito,
utilize fusíveis classicados pela UL.
8.4 Fusíveis e Disjuntores
8.4.1 Seleção de Fusível
Para proteger o sistema de conversor em caso de um ou
mais componentes internos falharem dentro de um
módulo de conversor, utilize fusíveis e/ou disjuntores no
lado da alimentação de rede elétrica.
8.4.1.1 Proteção do Circuito de Derivação
Para proteger a instalação contra risco de choques elétricos
e de incêndio, proteja todos os circuitos de derivação de
uma instalação contra curto-circuito e sobrecorrente de
acordo com as regulamentações nacionais e internacionais.
8.4.1.2 Proteção contra Curto-Circuito
88
A Danfoss recomenda os fusíveis listados em
capétulo 8.4.1.3 Fusíveis recomendáveis para conformidade
com CE e capétulo 8.4.1.4 Fusíveis recomendados para
conformidade com o UL para obter conformidade com o UL
ou CE na proteção de pessoal de serviço e de propriedade
Número de
módulos de
conversor
2 N250 N315 aR-630
2 N315 N355 aR-630
2 N355 N400 aR-630
2 N400 N450 aR-800
2 N450 N500 aR-800
4 N500 N560 aR-900
4 N560 N630 aR-900
4 N630 N710 aR-1600
4 N710 N800 aR-1600
4 N800 N1M0 aR-1600
Tabela 8.4 Sistemas de conversor de 12 pulsos (380–500 V CA)
Número de
módulos de
conversor
4 N630 N710 aR-1600
4 N710 N800 aR-2000
4 N800 N900 aR-2500
4 N900 N1M0 aR-2500
4 N1M0 N1M2 aR-2500
Tabela 8.5 Sistemas de conversores de 6 pulsos (525–690 V CA)
FC 302 FC 102/
FC 202
FC 302 FC 102/
FC 202
Fusível recomendado
(máximo)
Fusível recomendado
(máximo)
contra as consequências da falha de componentes nos
módulos de conversores.
8.4.1.3 Fusíveis recomendáveis para
conformidade com CE
Número de
módulos de
conversor
2 N450 N500 aR-1600
4 N500 N560 aR-2000
4 N560 N630 aR-2000
4 N630 N710 aR-2500
4 N710 N800 aR-2500
4 N800 N1M0 aR-2500
FC 302 FC 102/
FC 202
Fusível recomendado
(máximo)
Número de
módulos de
conversor
2 N250 N315 aR-550
2 N315 N355 aR-630
2 N355 N400 aR-630
2 N400 N500 aR-630
2 N500 N560 aR-630
2 N560 N630 aR-900
4 N630 N710 aR-900
4 N710 N800 aR-900
4 N800 N900 aR-900
4 N900 N1M0 aR-1600
4 N1M0 N1M2 aR-1600
FC 302 FC 102/
FC 202
Fusível recomendado
(máximo)
Tabela 8.3 Sistemas de conversor de 6 pulsos (380–500 V CA)
Tabela 8.6 Sistemas de conversor de 12 pulsos (525–690 V CA)
8.4.1.4 Fusíveis recomendados para
conformidade com o UL
Os módulos conversores são fornecidos com
•
fusíveis CA integrados. Os módulos foram
qualicados para características nominais da
corrente de curto-circuito (SCCR) de 100 kA para
as congurações de barramento padrão em todas
as tensões (380–690 V CA).
Se não houver opções de potência ou
•
barramentos adicionais conectados externamente,
o sistema de conversor é qualicado para 100 kA
86 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 89

Considerações durante a ins... Guia de Design
SCCR com qualquer fusível classe L ou classe T
listado pela UL conectado nos terminais de
entrada dos módulos de conversor.
Não exceda as características nominais do fusível
•
indicadas em Tabela 8.8 a Tabela 8.9 com as
características nominais da corrente dos fusíveis
Classe L ou T.
Número de
módulos de
conversor
2 N450 N500 1.600 A
4 N500 N560 2.000 A
4 N560 N630 2.000 A
4 N630 N710 2.500 A
4 N710 N800 2.500 A
4 N800 N1M0 2.500 A
Tabela 8.7 Sistemas de conversor de 6 pulsos (380–500 V CA)
Número de
módulos de
conversor
2 N250 N315 630 A
2 N315 N355 630 A
2 N355 N400 630 A
2 N400 N450 800 A
2 N450 N500 800 A
4 N500 N560 900 A
4 N560 N630 900 A
4 N630 N710 1.600 A
4 N710 N800 1.600 A
4 N800 N1M0 1.600 A
FC 302 FC 102/
FC 202
FC 302 FC 102/
FC 202
Fusível recomendado
(máximo)
Fusível recomendado
(máximo)
Número de
módulos de
conversor
2 N250 N315 550 A
2 N315 N355 630 A
2 N355 N400 630 A
2 N400 N500 630 A
2 N500 N560 630 A
2 N560 N630 900 A
4 N630 N710 900 A
4 N710 N800 900 A
4 N800 N900 900 A
4 N900 N1M0 1.600 A
4 N1M0 N1M2 1.600 A
Tabela 8.10 Sistemas de conversor de 12 pulsos (525–690 V CA)
Fusíveis de no mínimo 700 V certicados pelo UL podem ser usados
para os sistemas de conversores de frequência de 525–690 V CA.
FC 302 FC 102/
FC 202
Fusível recomendado
(máximo)
8 8
Tabela 8.8 Sistemas de conversor de 12 pulsos (380–500 V CA)
Fusíveis de no mínimo 500 V certicados pelo UL podem ser usados
para os sistemas de conversores de frequência de 380–500 V CA.
Número de
módulos de
conversor
4 N630 N710 1.600 A
4 N710 N800 2.000 A
4 N800 N900 2.500 A
4 N900 N1M0 2.500 A
4 N1M0 N1M2 2.500 A
Tabela 8.9 Sistemas de conversores de 6 pulsos (525–690 V CA)
FC 302 FC 102/
FC 202
Fusível recomendado
(máximo)
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 87
Page 90

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
EMC e Harmônicas
VLT® Parallel Drive Modules
9 EMC e Harmônicas
9.1 Aspectos Gerais das Emissões EMC
O transiente de ruptura é encontrado mais normalmente em frequências na faixa de 150 kHz a 30 MHz. Interferência em
suspensão no ar proveniente do sistema do conversor de frequência na faixa de 30 MHz a 1 GHz é gerada pelo inversor,
cabo de motor e motor.
As correntes capacitivas do cabo de motor acopladas a um alto dU/dt da tensão do motor geram correntes de fuga.
Cabos de motor blindados aumentam a corrente de fuga (ver Ilustração 9.1) porque cabos blindados têm capacitância mais
alta em relação ao ponto de aterramento que cabos não blindados. Se a corrente de fuga não for ltrada, ela causa maior
interferência na rede elétrica na faixa de frequência de rádio abaixo de 5 MHz. Como a corrente de fuga (I1) é levada de
volta à unidade por meio da blindagem (I3), há apenas um pequeno campo eletromagnético (I4) do cabo de motor
blindado.
Enquanto a blindagem reduz a interferência irradiada, ela aumenta a interferência de baixa frequência na rede elétrica.
Conecte a blindagem do cabo de motor ao gabinete metálico do conversor de frequência e ao gabinete do motor. Para
conectar a blindagem, use braçadeiras de blindagem integrada para evitar extremidades torcidas da blindagem. As
extremidades da blindagem retorcidas aumentam a impedância da blindagem em frequências mais altas, o que reduz o
efeito da blindagem e aumenta a corrente de fuga (I4).
Se for usado cabo blindado para eldbus, relé, cabos de controle, interface de sinal ou freio, monte a blindagem no
gabinete em ambas as extremidades. No entanto, em algumas situações é necessário romper a blindagem para evitar loops
de corrente.
99
1 Fio terra
2 Blindagem
3 Alimentação de rede elétrica CA
4 Conversor de frequência
5 Cabo de motor blindado
6 Motor
Ilustração 9.1 Correntes de Fuga
Ilustração 9.1 mostra um exemplo de conversor de frequência de 6 pulsos, mas poderia ser aplicável a um de 12 pulsos
também.
Ao colocar a blindagem em uma placa de montagem, use uma placa de montagem metálica para conduzir as correntes da
blindagem de volta ao conversor de frequência. Garanta que haja bom contato elétrico da placa de montagem através dos
88 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 91

EMC e Harmônicas Guia de Design
parafusos de montagem com o chassi do conversor de frequência. Quando se usam cabos não blindados, alguns requisitos
de emissão não são cumpridos, embora os requisitos de imunidade sejam observados.
Para reduzir ao máximo o nível de interferência de todo o sistema (unidade e instalação), use cabo de motor e cabo do freio
tão curtos quanto possível. Evite colocar cabos com nível de sinal sensível junto com o cabo do freio e do motor. Interferência nas frequências de rádio superior a 50 MHz (em suspensão no ar) é produzida pela eletrônica de controle. Para obter
mais informações sobre EMC, consulte capétulo 9.5 Recomendações de EMC.
9.2 Resultados de teste de EMC
Os resultados de testes a seguir foram obtidos utilizando um conversor de frequência (com opcionais, se for o caso), um
cabo de controle blindado, uma caixa de controle com potenciômetro, cabos blindados de motor e um motor.
Tipo do ltro de RFI Emissão conduzida Emissão Irradiada
1)
Normas e requisitos
P2, P4 (FC 302) No 150 m No Sim
P6, P8 (FC 302) 150 m (492 pés) 150 m (492 pés) Sim Sim
Tabela 9.1 Resultados de Teste de EMC (Emissão e Imunidade)
ltro de RFI externo é necessário para atender à categoria C2.
1) Um
EN/IEC 61800-3 Categoria C2 Categoria C3 Categoria C2 Categoria C3
AVISO!
Esse tipo de sistema de conversor de potência não é destinado a ser usado em uma rede pública de baixa tensão que
alimenta estabelecimentos domésticos. Interferência de radiofrequência é esperada se usado em tal rede e medidas de
atenuação complementares poderão ser necessárias.
O conversor de frequência atende ao requisito de emissão para categoria C3 com 150 m (492 pés) de cabo blindado. Para
atender à categoria C2, um ltro de RFI externo é necessário.
Ilustração 9.2 mostra o diagrama elétrico do
cenário, o ltro de RFI está isolado do terra, e o relé do RFI é desabilitado utilizando parâmetro 14-50 Filtro de RFI.
O fator de atenuação para o ltro de RFI é fornecido em Ilustração 9.3.
ltro de RFI que foi utilizado para qualicar o conversor de frequência. Neste
9 9
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 89
Page 92

L1 L1
L2
L3
L2
L3
130BF078.10
1
2
101-1 30
0
-20
-40
-60
-80
-100
-120
dBm
130BF079.10
EMC e Harmônicas
VLT® Parallel Drive Modules
1 Linha 2 Carga
Ilustração 9.2 Diagrama elétrico do ltro de RFI
99
Ilustração 9.3 Requisito de atenuação para um ltro externo
90 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 93

Start 150.0 kHz Stop 30.0 MHz
1 MHz
TF
A_QP
A_AVG
130BF080.10
90 dBµV
80 dBµV
70 dBµV
60 dBµV
50 dBµV
40 dBµV
30 dBµV
20 dBµV
10 dBµV
83.9 dBµV
202 kHz
M1[1]
0.000 s
EMC e Harmônicas Guia de Design
Ilustração 9.4 Emissão conduzida na rede elétrica na conguração P4/P8 sem um ltro de RFI externo
9 9
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 91
Page 94

90 dBµV
80 dBµV
70 dBµV
60 dBµV
50 dBµV
40 dBµV
30 dBµV
20 dBµV
10 dBµV
Start 150.0 kHz Stop 30.0 MHz
1 MHz
87.31 dBµV
202 kHz
M1[1]
0.000 s
TF
A_QP
A_AVG
130BF064.10
EMC e Harmônicas
VLT® Parallel Drive Modules
99
Ilustração 9.5 Emissão conduzida na rede elétrica na conguração P4/P8 sem um ltro de RFI externo
92 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 95

90 dBµV
80 dBµV
70 dBµV
60 dBµV
50 dBµV
40 dBµV
30 dBµV
20 dBµV
10 dBµV
Start 150.0 kHz Stop 30.0 MHz
1 MHz
79.81 dBµV
202 kHz
M1[1]
0.000 s
A_QP
A_AVG
130BF065.10
TF
EMC e Harmônicas Guia de Design
Ilustração 9.6 Emissão conduzida na rede elétrica na conguração P4/P8 sem um ltro de RFI externo
Requisitos de emissão
9.3
De acordo com a norma para produto de EMC para conversores de frequência EN/IEC 61800-3, os requisitos de EMC
dependem do ambiente em que o conversor de frequência estiver instalado. Esses ambientes junto com os requisitos de
alimentação de tensão de rede são denidos em Tabela 9.2.
Categoria Denição
C1 Conversores de frequência instalados em ambiente residencial e de escritório com
tensão de alimentação inferior a 1.000 V.
C2 Conversores de frequência instalados em ambiente residencial e de escritório com
tensão de alimentação inferior a 1.000 V. Esses conversores de frequência não estão
C3 Conversores de frequência instalados em ambiente industrial com tensão de
C4 Conversores de frequência instalados em ambiente industrial com tensão de
Tabela 9.2 Requisitos de emissão
conectados e não podem ser movidos e são destinados a instalação e colocação em
funcionamento por um prossional.
alimentação inferior a 1.000 V.
alimentação igual ou superior a 1.000 V ou corrente nominal igual ou superior a 400
A ou destinados para uso em sistemas complexos.
Requisito de emissão conduzida de
acordo com os limites em EN55011
Classe B
Classe A Grupo 1
Classe B Grupo 2
Sem linha limite
Faça um plano de EMC
Quando normas de emissão genérica forem usadas, é exigido que os conversores de frequência estejam em conformidade
com Tabela 9.3.
9 9
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 93
Page 96

EMC e Harmônicas
VLT® Parallel Drive Modules
Ambiente Norma genérica
Ambiente inicial
(residência e escritório)
Segundo ambiente
(ambiente industrial)
Tabela 9.3 Limites das normas de emissão genérica
EN/IEC 61000-6-3 Norma de emissão para ambientes residenciais,
comerciais e industriais leves.
EN/IEC 61000-6-4 Norma de emissão para ambiente industrial. Classe A Grupo 1
Requisito de emissão conduzida de
acordo com os limites em EN55011
Classe B
9.4 Requisitos de Imunidade
Os requisitos de imunidade para conversores de frequência dependem do ambiente onde são instalados. Os requisitos para
ambiente industrial são mais rigorosos que os requisitos para ambientes residencial e de escritório. Todos os conversores de
frequência Danfoss estão em conformidade com os requisitos tanto para ambiente industrial quanto para ambiente
residencial e de escritório.
Para documentar a imunidade contra o transiente de ruptura, os testes de imunidade a seguir foram realizados em um
conversor de frequência (com opcionais, se relevantes), um cabo de controle blindado e uma caixa de controle com
potenciômetro, cabo de motor e motor. Os testes foram executados de acordo com as normas básicas a seguir. Para obter
mais detalhes, consulte Tabela 9.4.
EN/IEC 61000-4-2: Descargas eletrostáticas (ESD): Simulação de descargas eletrostáticas dos seres humanos.
•
EN/IEC 61000-4-3: Radiação de campo magnético de incidência, modulado em amplitude, simulação dos efeitos de
•
radar e de equipamentos de radiocomunicação bem como de comunicações móveis.
99
EN/IEC 61000-4-4: Transiente por faísca elétrica Simulação da interferência originada pelo chaveamento de um
•
contator, relé ou dispositivos semelhantes.
EN/IEC 61000-4-5: Transientes de sobretensão: Simulação de transientes originados por relâmpagos que atingem
•
instalações próximas.
EN/IEC 61000-4-6: Modo comum de RF: Simulação do efeito de equipamento de radiotransmissão, ligado aos
•
cabos de conexão.
Padrão básico Ruptura
IEC 61000-4-4
Critério de aceitação B B B A A
Linha
Motor
Freio 4 kV CM
Load Sharing 4 kV CM
Fios de controle
Barramento padrão 2 kV CM
Fios de relé 2 kV CM
Aplicação e opcionais de
Fieldbus
Cabo do LCP
24 V CC externa
Gabinete metálico
Tabela 9.4 Formulário de Imunidade EMC, Faixa de Tensão: 380–500 V, 525–600 V, 525–690 V
1) Injeção na blindagem do cabo.
AD: Descarga aérea; CD: Descarga de contato; CM: Modo comum; DM: Módulo diferencial.
4 kV CM
4 kV CM
2 kV CM
2 kV CM
2 kV CM
2 V CM
– –
Sobretensão
IEC 61000-4-5
2 kV/2 Ω DM
4 kV/12 Ω CM
4 kV/2 Ω
4 kV/2 Ω
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
0,5 kV/2 Ω DM
1 kV/12 Ω CM
1)
1)
1)
1)
1)
1)
1)
1)
ESD
IEC
61000-4-2
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
8 kV AD
6 kV CD
Campo eletromagnético
irradiado
IEC 61000-4-3
10 V/m –
Tensão do modo
comum de RF
IEC 61000-4-6
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
94 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 97

EMC e Harmônicas Guia de Design
9.5 Recomendações de EMC
A seguir encontra-se uma orientação de boas práticas de
engenharia para a instalação de conversores de frequência.
Siga estas diretrizes em conformidade com EN/IEC 61800-3
Ambiente inicial. Se a instalação estiver em EN/IEC 61800-3
Segundo ambiente, redes industriais ou em uma instalação
com seu próprio transformador, desviar-se destas diretrizes
é permitido, mas não recomendável.
Siga as boas práticas de engenharia para garantir
instalação elétrica em conformidade com a EMC.
Use somente cabos de motor blindados/
•
trançados e cabos de controle blindados/
trançados. A blindagem fornece uma cobertura
mínima de 80%. O material de blindagem deve
ser metálico, normalmente de cobre, alumínio,
aço ou chumbo, mas também de outros
materiais. Não há requisitos especiais para os
cabos de rede elétrica.
As instalações que usam conduítes metálicos
•
rígidos não precisam usar cabo blindado, mas o
cabo de motor deve ser instalado em conduíte
separado dos cabos de rede elétrica e de
controle. É necessário haver conexão total do
conduíte do conversor de frequência ao motor. O
desempenho de EMC dos conduítes exíveis varia
muito e é necessário obter informações do
fabricante a esse respeito.
Conecte o conduíte de blindagem ao ponto de
•
aterramento nas duas extremidades dos cabos de
motor e dos cabos de controle. Às vezes não é
possível conectar a blindagem nas duas
extremidades. Nesses casos, conecte a blindagem
ao conversor de frequência. Consulte também a
capétulo 9.5.2 Aterramento de Cabos de Controle
Blindados.
Evite terminação da blindagem com extremidades
•
torcidas (rabichos). Isso aumenta a impedância de
alta frequência da blindagem, o que reduz sua
ecácia em altas frequências. Ao invés disso, use
braçadeiras de cabos de baixa impedância ou
buchas de cabo próprias para EMC.
Sempre que possível, evite usar cabos de controle
•
ou cabo de motor sem blindagem dentro de
gabinetes que abrigam o conversor de
frequência.
Deixe a blindagem tão próxima das buchas quanto
possível.
Ilustração 9.7 mostra um exemplo de uma instalação
elétrica em conformidade com a EMC de um conversor de
frequência IP20. O conversor de frequência está instalado
em um gabinete de instalação, com um contator de saída,
e conectado a um PLC que, neste exemplo, está instalado
em um gabinete separado. Outras maneiras de fazer a
instalação podem proporcionar desempenho de EMC tão
bom quanto este, desde que sejam seguidas as orientações
para as práticas de engenharia.
Se a instalação não for executada de acordo com as
orientações e se forem usados cabos e
sem blindagem, alguns requisitos de emissão não serão
atendidos, embora os requisitos de imunidade sejam
atendidos.
os de controle
9 9
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 95
Page 98

EMC e Harmônicas
VLT® Parallel Drive Modules
99
Ilustração 9.7 Instalação elétrica em conformidade com a EMC de um conversor de frequência em gabinete
96 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Page 99

EMC e Harmônicas Guia de Design
9.5.1 Uso dos Cabos de Controle de Aterramento
A Danfoss recomenda cabo blindado/encapado metalicamente trançado para otimizar a imunidade EMC dos cabos de
controle e a Emissão EMC dos cabos de motor.
A capacidade de um cabo reduzir a radiação de entrada e de saída do ruído elétrico depende da impedância de transferência (ZT). A blindagem de um cabo normalmente é projetada para reduzir a transferência do ruído elétrico. entretanto,
uma blindagem com valor de impedância de transferência (ZT) mais baixa é mais ecaz que uma blindagem com
impedância de transferência (ZT) mais alta.
A impedância de transferência (ZT) raramente é informada pelos fabricantes de cabos, mas geralmente é possível estimar a
impedância de transferência (ZT) avaliando o projeto físico do cabo, como:
A condutibilidade do material de blindagem.
•
A resistência de contato entre os condutores de blindagem individuais.
•
A cobertura da blindagem, que é a área física do cabo coberta pela blindagem, geralmente indicada como uma
•
porcentagem.
Tipo de blindagem, que é padrão trançado ou entrelaçado.
•
a Cobertura de alumínio com o de cobre.
b Cabo de o de cobre trançado ou de o de aço blindado.
c Fio de cobre trançado de camada única com cobertura de malha de porcentagem variável (esse tipo de cabo é o cabo de
referência típico da Danfoss).
d Camada dupla de o de cobre trançado.
e Camada dupla de o de cobre trançado com camada intermediária magnética blindada/encapada metalicamente.
f Cabo embutido em tubo de cobre ou aço.
g Cabo de chumbo com espessura de parede de 1,1 mm (0,04 pol).
9 9
Ilustração 9.8 Desempenho da blindagem do cabo
MG37N228 Danfoss A/S © 11/2016 Todos os direitos reservados. 97
Page 100

1
2
PE
FC
PE
PLC
130BB922.12
PE PE
<10 mm
100nF
FC
PE
PE
PLC
<10 mm
130BB609.12
PE
FC
PE
FC
130BB923.12
PE PE
69
68
61
69
68
61
1
2
<10 mm
PE
FC
PE
FC
130BB924.12
PE PE
69
69
68
68
1
2
<10 mm
EMC e Harmônicas
VLT® Parallel Drive Modules
9.5.2 Aterramento de Cabos de Controle Blindados
Blindagem correta
O método preferido na maioria dos casos é prender os
cabos de controle e de comunicação serial com
braçadeiras de blindagem fornecidas nas duas
Evite ruído de EMC na comunicação serial
Esse terminal está conectado ao ponto de aterramento por
meio de um link RC interno. Para reduzir a interferência
entre condutores, utilize cabos de par trançado.
extremidades para garantir o melhor contato possível dos
cabos de alta frequência. Se o potencial do ponto de
aterramento entre o conversor de frequência e o PLC for
diferente, pode ocorrer ruído elétrico que perturba todo o
sistema. Esse problema pode ser resolvido instalando um
cabo de equalização junto ao cabos de controle. Mínima
seção transversal do cabo: 16 mm2 (4 AWG).
1
Mínimo 16 mm2 (4 AWG)
Ilustração 9.11 Método recomendado para evitar ruído de EMC
2 Cabo de equalização
Como alternativa, a conexão com o terminal 61 pode ser
omitida:
1
Mínimo 16 mm2 (4 AWG)
Ilustração 9.9 Blindagem correta
2 Cabo de equalização
99
Malhas de aterramento de 50/60 Hz
Com cabos de controle longos, poderão ocorrer malhas de
aterramento. Para eliminar malhas de aterramento, conecte
uma extremidade da blindagem ao ponto de aterramento
com um capacitor de 100 nF (mantendo os cabos curtos).
1
Mínimo 16 mm2 (4 AWG)
Ilustração 9.12 Blindagem sem usar Terminal 61
2 Cabo de equalização
9.6 Aspectos gerais de Harmônicas
Ilustração 9.10 Evitando malha de aterramento
98 Danfoss A/S © 11/2016 Todos os direitos reservados. MG37N228
Cargas não lineares, como as encontradas com conversores
de frequência de 6 pulsos, não puxam corrente de maneira
uniforme da rede de energia. Essa corrente não senoidal
possui componentes que são múltiplos da frequência
básica da corrente. Esses componentes são chamados de
harmônicas. É importante controlar a distorção de
harmônica total na alimentação de rede elétrica. Apesar
das correntes harmônicas não afetarem diretamente o
consumo de energia elétrica, geram calor na ação a em
transformadores que podem afetar outros dispositivos na
mesma rede elétrica.
Análise de harmônicas
9.7
Como as harmônicas aumentam as perdas de calor, é
importante projetar os sistemas com as harmônicas em
mente para evitar sobrecarga do transformador, indutores
e ação.
Quando necessário, realize uma análise das harmônicas do
sistema para determinar efeitos no equipamento.
 Loading...
Loading...