

Page 1

MAKING MODERN LIVING POSSIBLE
Programmierungshandbuch
VLT® Micro Drive
Page 2

Page 3
Inhaltsverzeichnis
Inhaltsverzeichnis
VLT® Micro Drive FC 51 Programmierungshandbuch
1 Sicherheit
1.1.1 Warnung vor Hochspannung 3
1.1.2 Sicherheitshinweise 3
1.1.3 Software-Version und Zulassungen 3
1.1.4 Allgemeine Warnung 3
1.1.5 IT-Netz 4
1.1.6 Vermeiden Sie unerwarteten Anlauf 4
1.1.8 Bevor Sie Reparaturarbeiten ausführen 4
2 Einleitung
2.1.1 FC ID 5
2.1.2 Typencode 5
3 Programmieren
3.1 Programmierung
3.1.1 Programmieren mit der MCT 10 Software 8
3.1.2 Programmieren mit LCP 11 oder LCP 12 8
3.2 Statusmenü
3
5
8
8
10
3.3 Quick-Menü
3.4 Hauptmenü
4 Parameterbeschreibungen
4.1 Parametergruppe 0: Betrieb/Display
4.2 Parametergruppe 1: Motor/Last
4.3 Parametergruppe 2: Bremsfunktionen
4.4 Parametergruppe 3: Sollwert/Rampen
4.5 Parametergruppe 4: Grenzen/Warnungen
4.6 Parametergruppe 5: Digit. Ein-/Ausgänge
4.7 Parametergruppe 6: Analogein-/-ausgänge
4.7.3 6-1* Analogeingang 1 33
4.8 Parametergruppe 7: Regler
4.9 Parametergruppe 8: Schnittstellen
4.9.6 8-8* FC-Ser.-Diagnose 40
4.10 Parametergruppe 13: Smart Logic
4.10.1 13-** Smart Logic 42
4.11 Parametergruppe 14: Sonderfunktionen
10
10
11
11
14
20
22
26
29
33
37
38
42
48
4.12 Parametergruppe 15: Info/Wartung
4.12.2 15-4* Typendaten 50
4.13 Parametergruppe 16: Datenanzeigen
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 1
50
51
Page 4
Inhaltsverzeichnis
VLT® Micro Drive FC 51 Programmierungshandbuch
5 Parameterübersicht
5.1.1 Konvertierungsindex 58
5.1.2 Änderungen während des Betriebs 58
5.1.3 2-Set-up (2-Par. Sätze) 58
5.1.4 Typ 58
5.1.5 0-** Betrieb/Display 59
5.1.6 1-** Motor/Last 60
5.1.7 2-** Bremsfunktionen 61
5.1.8 3-** Sollwert/Rampen 62
5.1.9 4-** Grenzen/Warnungen 63
5.1.10 5-** Digit. Ein-/Ausgänge 64
5.1.11 6-** Analoge Ein-/Ausg. 65
5.1.12 7-** PI Regler 66
5.1.13 8-** Opt./Schnittstellen 67
5.1.14 13-** Smart Logic 68
5.1.15 14-** Sonderfunktionen 69
5.1.16 15-** Info/Wartung 70
53
5.1.17 16-** Datenanzeigen 71
6 Fehlersuche und -behebung
6.1.1 Alarmwort, Warnwort und erweitertes Zustandswort 74
Index
72
78
2 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 5
Sicherheit
VLT® Micro Drive FC 51 Programmierungshandbuch
1 Sicherheit
1.1.1 Warnung vor Hochspannung
WARNUNG
Der Frequenzumrichter steht bei Netzanschluss unter
lebensgefährlicher Spannung. Die unsachgemäße Installation des Motors oder Frequenzumrichters kann Schäden
am Gerät sowie schwere Personenschäden oder sogar
tödliche Verletzungen verursachen. Daher müssen Sie die
Anleitungen in diesem Handbuch sowie lokale und
nationale Richtlinien und Sicherheitsvorschriften einhalten.
1.1.2 Sicherheitshinweise
VORSICHT
Vor Verwendung von Funktionen, die einen direkten oder
indirekten Einfluss auf die Personensicherheit haben (wie z.
B. Sicherer Stopp, Notfallbetrieb oder andere Funktionen,
die den Motor entweder zum Stoppen zwingen oder
versuchen, ihn in Betrieb zu halten), müssen eine
sorgfältige und eingehende Risikoanalyse und eine Systemprüfung durchgeführt werden. Die Systemprüfungen
müssen die Prüfung von Fehlerarten im Hinblick auf die
Steuersignale (analoge und digitale Signale und serielle
Kommunikation) einschließen.
1.1.3
Software-Version und Zulassungen
Software-Version
Programmierungshandbuch
VLT® Micro Drive
Baureihe FC51
Dieses Programmierungshandbuch beschreibt alle
VLT® Micro Drive-Frequenzumrichter mit Software-
Version 2.7x.
Software-Versionsnummer siehe
15-43 Softwareversion.
Tabelle 1.1
Allgemeine Warnung
1.1.4
1 1
HINWEIS
Wenden Sie sich vor Verwendung des Notfallbetriebs an
Danfoss.
Stellen Sie sicher, dass der Frequenzumrichter
•
über einen ordnungsgemäßen Erdungsanschluss
verfügt.
Entfernen Sie keine Netzanschlüsse, Motoran-
•
schlüsse oder anderen Leistungsanschlüsse,
während der Frequenzumrichter an die Stromversorgung angeschlossen ist.
Schützen Sie die Benutzer vor der Versorgungs-
•
spannung.
Schützen Sie den Motor gemäß den
•
einschlägigen Vorschriften gegen Überlast.
Der Erdableitstrom übersteigt 3,5 mA.
•
Sie können die Taste [Off] nicht als Sicherheits-
•
schalter benutzen. Sie trennt den
Frequenzumrichter nicht vom Netz!
WARNUNG
GEFAHR EINES STROMSCHLAGS
Das Berühren spannungsführender Teile – auch nach der
Trennung vom Netz – ist lebensgefährlich.
Achten Sie außerdem darauf, dass andere Spannungseingänge abgeschaltet sind (DC-Zwischenkreiskopplung).
Beachten Sie, dass im Zwischenkreis auch dann
Hochspannung vorhanden sein kann, wenn die LED
erloschen sind.
Warten Sie mindestens 4 Minuten bei allen Leistungsgrößen, bevor Sie potenziell spannungsführende Teile des
Frequenzumrichters berühren.
Eine kürzere Wartezeit ist nur zulässig, wenn auf dem
Typenschild für das jeweilige Gerät angegeben.
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 3
Page 6
Sicherheit
VLT® Micro Drive FC 51 Programmierungshandbuch
11
VORSICHT
Erdableitstrom
Der Erdableitstrom des Frequenzumrichters übersteigt 3,5
mA. Daher müssen Sie gemäß den Anforderungen der IEC
61800-5-1 ein verstärkter PE-Leiter mit 10 mm² Cu
anschließen oder einen zusätzlichen PE-Leiter – mit dem
gleichen Kabelquerschnitt wie die Netzverdrahtung –
getrennt abschließen.
Fehlerstromschutzschalter
Dieses Gerät kann Gleichfehlerströme im Schutzleiter
verursachen. Wenn ein Fehlerstromschutzschalter (RCD) als
zusätzlicher Schutz zum Einsatz kommt, verwenden Sie
netzseitig nur Fehlerschutzschalter mit Einschaltverzögerung (Typ B). Siehe auch den Danfoss
Anwendungshinweis zu Fehlerstromschutzschalter MN90GX.
Die Schutzerdung des Frequenzumrichters und die
Verwendung von Fehlerstromschutzschaltern muss immer
den einschlägigen Vorschriften entsprechen.
1.1.7 Entsorgungsanleitung
Tabelle 1.2
1.1.8
VORSICHT
Motorüberlastschutz ist durch Einstellung von 1-90
Thermischer Motorschutz auf die Option ETR Alarm möglich.
Für den nordamerikanischen Markt: Die ETR-Funktionen
beinhalten Motorüberlastschutz der Klasse 20 gemäß NEC.
WARNUNG
Installation in großen Höhenlagen:
Bei Höhenlagen über 2 km über NN ziehen Sie bitte
Danfoss zu PELV (Schutzkleinspannung - Protective extra
low voltage) zurate.
Trennen Sie den Frequenzumrichter vom Netz,
•
um unerwarteten Anlauf angeschlossener
Motoren zu vermeiden.
Um einen unerwarteten Anlauf zu vermeiden,
•
betätigen Sie vor dem Ändern von Parametern
immer die Taste [Off].
Geräte mit elektrischen Bauteilen dürfen nicht
zusammen mit dem Hausmüll entsorgt werden.
Sie müssen separat mit Elektro- und ElektronikAltgeräten gemäß den lokalen Bestimmungen
und den aktuell gültigen Gesetzen gesammelt
werden.
Bevor Sie Reparaturarbeiten
ausführen
1. Trennen Sie den FC51 vom Netz (und von der
externen DC-Versorgung, falls vorhanden).
2. Warten Sie 4 Minuten (M1, M2 und M3) bzw. 15
Minuten (M4 und M5), bis sich die Zwischenkreisdrosseln entladen haben.
3. Klemmen Sie DC-Zwischenkreisklemmen und
Bremsklemmen (falls vorhanden) ab.
4. Entfernen Sie das Motorkabel
1.1.5 IT-Netz
VORSICHT
IT-Netz
Installation an isolierter Netzstromquelle, d. h. IT-Netz.
Max. zulässige Versorgungsspannung bei Netzanschluss:
440 V.
Danfoss bietet als Option Netzfilter zur verbesserten
Reduzierung von Oberwellen an.
1.1.6
Vermeiden Sie unerwarteten Anlauf
Während der Frequenzumrichter an das Netz
angeschlossen ist, kann der Motor über digitale Befehle,
Busbefehle, Sollwerte oder über die LCP Bedieneinheit
gestartet/gestoppt werden.
4 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 7

Einleitung
2 Einleitung
VLT® Micro Drive FC 51 Programmierungshandbuch
2.1.1 FC ID
Der Typenschild-Aufkleber befindet sich oben an jedem
Frequenzumrichter und gibt Nennwerte, Seriennummer,
Warnhinweise, Bestellnummer sowie weitere relevante
Daten jedes Geräts an. Tabelle 2.1 zeigt genauer, wie der
Typencode gelesen wird.
Typencode
2.1.2
2 2
Abbildung 2.1 Dieses Beispiel zeigt den Typenschild-Aufkleber
Abbildung 2.2
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 5
Page 8
Einleitung
VLT® Micro Drive FC 51 Programmierungshandbuch
Beschreibung Pos. Mögliche Auswahl
Produktgruppe 1-3 Frequenzumrichter
Baureihe und Produkttyp 4-6 Micro Drive
22
Nennleistung 7-10 0,18-7,5 kW
Netzspannung 11-12 S2: Einphasig 200-240 V AC
T 2: Dreiphasig 200-240 V AC
T 4: Dreiphasig 380-480 V AC
Schutzart 13-15 IP20
EMV-Filter 16-17 HX: Kein EMV-Filter
H1: EMV-Filter, Klasse A1/B
H3: EMV-Filter, Klasse A1/B (reduzierte Kabellänge*)
Bremse 18 B: Mit integriertem Bremschopper (von 1,5 kW und höher)
X: Kein Bremschopper integriert
Display 19 X: Ohne LCP Bedienteil
N: Numerisches LCP Bedienteil (LCP 101)
P: Numerisches LCP Bedienteil (LCP 101) mit Potentiometer
Beschichtung der Platine 20 C: Beschichtete Platine
X. Keine beschichtete Platine
Netzoption 21 X: Keine Netzoption
Anpassung A 22 X: Keine Anpassung
Anpassung B 23 X: Keine Anpassung
Softwareversion 24-27 SXXX: Aktuelle Version - Std.-Software
Tabelle 2.1 Typencodebeschreibung
*Siehe VLT® Micro Drive Projektierungshandbuch, MG02K
6 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 9
Einleitung
VLT® Micro Drive FC 51 Programmierungshandbuch
2.1.3 Warnhinweise und Zulassungen
In diesem Programmierungshandbuch verwendete
Symbole.
Symbole
In diesem Handbuch werden die folgenden Symbole
verwendet.
WARNUNG
Kennzeichnet eine potenziell gefährliche Situation, die,
wenn sie nicht vermieden wird, den Tod oder schwere
Verletzungen zur Folge haben könnte.
VORSICHT
Kennzeichnet eine potenziell gefährliche Situation, die,
wenn sie nicht vermieden wird, leichte Verletzungen zur
Folge haben könnte. Es kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
VORSICHT
Kennzeichnet eine Situation, die Unfälle mit Geräte- oder
Sachschäden zur Folge haben könnte.
2.1.4 Abkürzungen und Normen
Abkürzungen Begriffe: SI-Einheiten I-P-Einheiten
a Beschleunigung
AWG American Wire Gauge = Amerikanisches Drahtmaß
Auto tune Automatische Motoranpassung
°C
I Strom A Ampere
I
LIM
IT-Netz
Joule Energie J=Nm ft-lb, Btu
°F
FC Frequenzumrichter
f Frequenz Hz Hz
kHz Kilohertz kHz kHz
LCP LCP Bedieneinheit
mA Milliampere
ms Millisekunden
min Minute
MCT Motion Control Tool
M-TYPE Abhängig vom Motortyp
Nm Newtonmeter in-lbs
I
M,N
f
M,N
P
M,N
U
M,N
PELV Schutzkleinspannung – Protective extra low voltage
Watt Leistung W Btu/h
Pascal Druck Pa = N/m² psi, psf, Fuß Wasser
I
INV
UPM Umdrehungen pro Minute
s Sekunde
SR Größenabhängig
T Temperatur C F
t Zeit s s,h
T
LIM
U Spannung V V
Celsius
Stromgrenze
Netzversorgung mit Sternpunkt in Transformator potenzialfrei zur
Erde
Fahrenheit
Motornennstrom
Motornennfrequenz
Motornennleistung
Motornennspannung
Wechselrichter-Ausgangsnennstrom
Drehmomentgrenze
2
m/s
ft/s
2 2
2
Tabelle 2.2 Abkürzungs- und Normentabelle
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 7
Page 10
3
Programmieren
VLT® Micro Drive FC 51 Programmierungshandbuch
3 Programmieren
3.1 Programmierung
3.1.1 Programmieren mit der MCT 10
Software
Sie können den Frequenzumrichter nach der Installation
der MCT 10 Software per PC über eine RS485-Schnittstelle
programmieren.
Diese Software können Sie entweder über die Bestellnummer 130B1000 bestellen oder von der Danfoss-Website
herunterladen: www.danfoss.com/BusinessAreas/DrivesSo-
lutions/softwaredownload
Das Display
Das Display zeigt eine Reihe von Informationen an.
Die Satznummer zeigt den aktiven Satz und den
Programm-Satz an. Stimmen der aktive Satz und
Programm-Satz überein, wird nur diese Satznummer
gezeigt (Werkseinstellung).
Bei unterschiedlichem aktiven Satz und Programm-Satz
zeigt das Display beide Satznummern (Satz 12). Die
blinkende Zahl kennzeichnet den Programm-Satz.
Siehe die Anleitung für Motion Control Tools MG10R.
Programmieren mit LCP 11 oder LCP
3.1.2
12
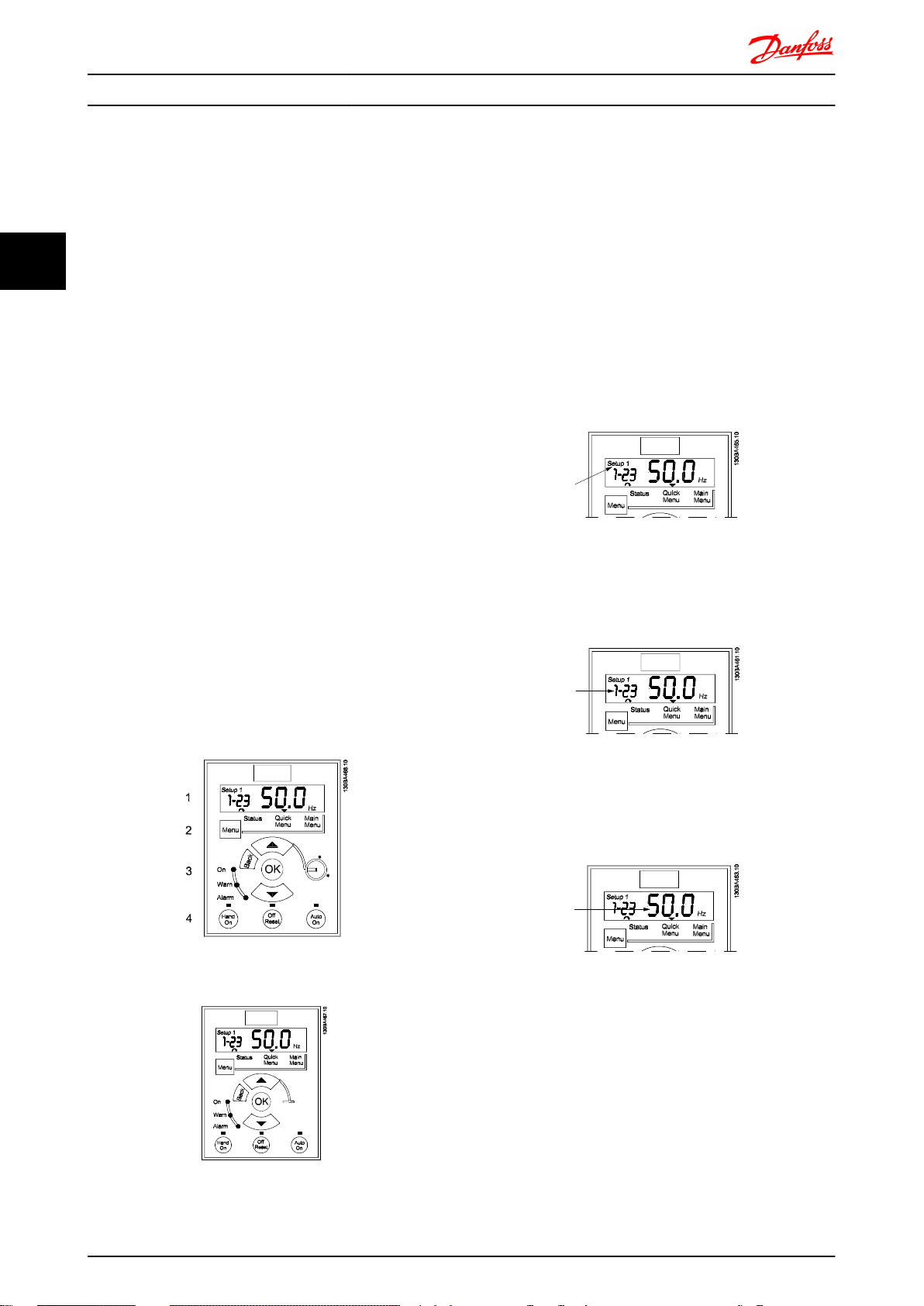
Das LCP ist in vier Funktionsbereiche unterteilt:
1. Numerisches Display
2. Menütaste.
3. Navigationstasten.
4. Bedientasten mit Kontroll-Anzeigen (LEDs).
Abbildung 3.1 LCP 12 mit Potentiometer
Abbildung 3.3 Anzeige des Parametersatzes
Die kleinen Ziffern links zeigen die ausgewählte Parameternummer.
Abbildung 3.4 Anzeige der ausgewählten Parameternummer
Die großen Ziffern in der Displaymitte zeigen den Wert des
ausgewählten Parameters an.
Abbildung 3.5 Anzeige des Werts des ausgewählten Parameters
Abbildung 3.2 LCP 11 ohne Potentiometer
8 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 11
Programmieren
VLT® Micro Drive FC 51 Programmierungshandbuch
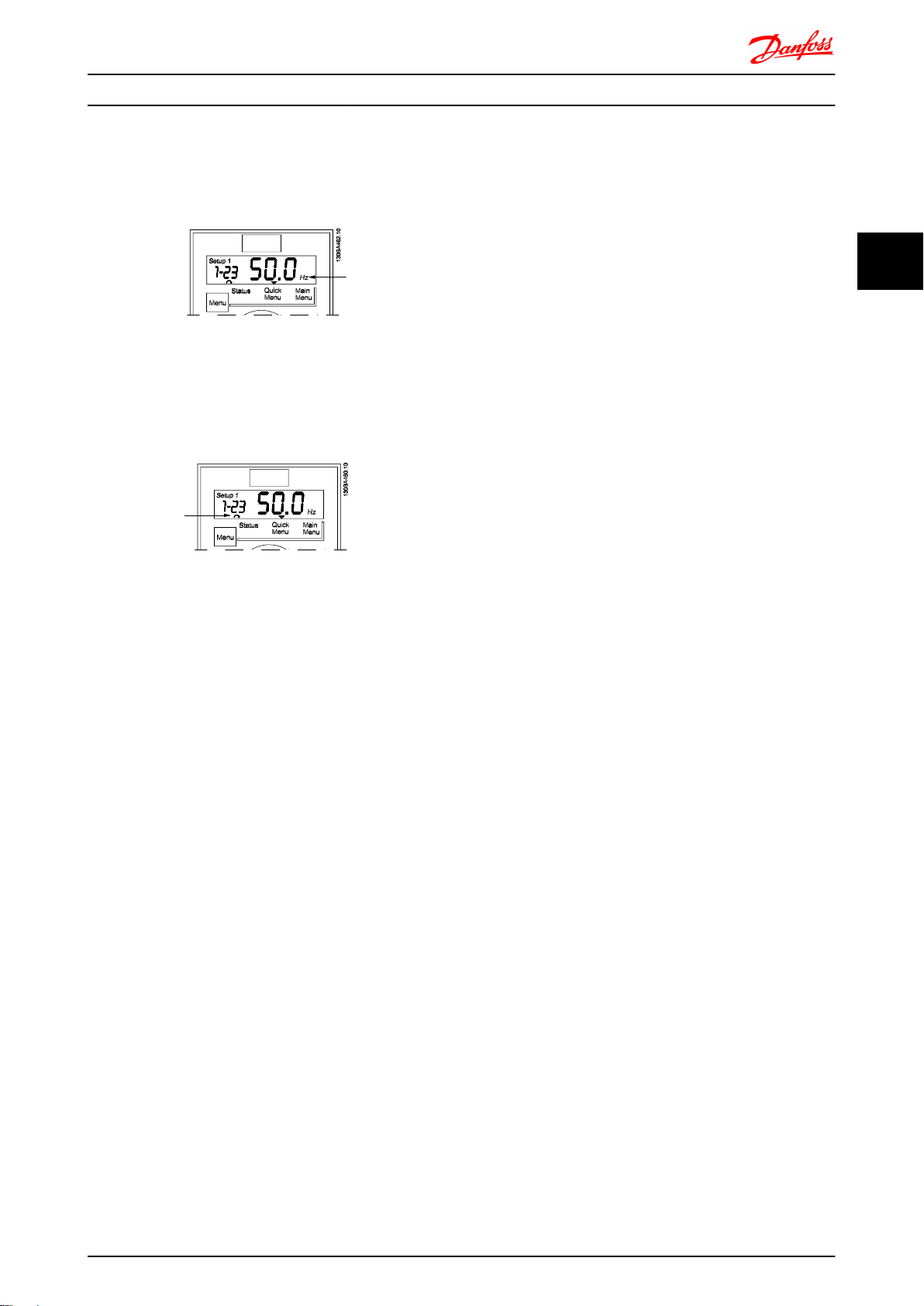
Rechts im Display steht die Einheit des ausgewählten
Parameters. Dies kann entweder Hz, A, V, kW, PS, %, s oder
UPM sein.
Abbildung 3.6 Anzeige der Einheit des ausgewählten Parameters
Die Motordrehrichtung wird unten links am Display durch
einen Pfeil angegeben, der entweder im (Rechtslauf) oder
gegen den Uhrzeigersinn (Linkslauf) gerichtet ist.
Abbildung 3.7 Anzeige der Motorlaufrichtung
Über die [MENU]-Taste können Sie eines der folgenden
Menüs auswählen
Statusmenü
Das Statusmenü befindet sich entweder im Anzeigemodus
oder im Hand-Betrieb. Im Anzeigemodus zeigt das Display
den Wert des aktuell ausgewählten Anzeigeparameters an.
Bei Hand-Betrieb wird der LCP-Ortsollwert angezeigt.
Quick Menu
Zeigt die Parameter des Quick-Menüs und die dazugehörigen Einstellungen an. Von hier aus ist der Zugriff auf
die Parameter des Quick-Menüs und deren Bearbeitung
möglich. Sie können meisten Anwendungen durch
Einstellung der Parameter in den Quick-Menüs betreiben.
Navigationstasten
[Back]: Bringt Sie zum früheren Schritt oder zur nächsthöheren Ebene in der Navigationsstruktur.
[▲] [▼]: Dienen dazu, zwischen Befehlen und Parametern
zu wechseln.
[OK]: Wird benutzt, um einen mit dem Cursor markierten
Parameter auszuwählen und um die Änderung einer
Parametereinstellung zu bestätigen.
Wenn Sie [OK] länger als 1 s drücken, rufen Sie den
Änderungsmodus auf. Im Änderungsmodus sind schnelle
Einstellungen von Parametern möglich, indem Sie [▲] [▼]
zusammen mit [OK] drücken.
Drücken Sie [▲] [▼], um den Wert zu ändern. Drücken Sie
[OK], um schnell zwischen Ziffern zu wechseln.
Zum Verlassen des Änderungsmodus drücken Sie [OK]
erneut länger als 1 s, um dabei Änderungen zu speichern,
oder drücken Sie [Back], um die Änderungen nicht zu
speichern.
Bedientasten
Eine gelbe LED über den Bedientasten zeigt die aktive
Taste an.
[Hand on]: Startet den Motor und ermöglicht die
Steuerung des Frequenzumrichter über das LCP.
[Off/Reset]: Der Motor stoppt, sofern er sich nicht im
Alarmmodus befindet. In diesem Fall findet ein Reset des
Motors statt.
[Auto on]: Der Frequenzumrichter wird entweder über die
Steuerklemmen oder die serielle Schnittstelle gesteuert.
[Potentiometer] (LCP 12): Abhängig von der Betriebsart des
Frequenzumrichter hat das Potentiometer zwei
verschiedene Funktionsweisen.
Im Autobetrieb dient das Potentiometer als zusätzlicher
programmierbarer Analogeingang.
Im Handbetrieb bestimmt das Potentiometer den
Ortsollwert.
3
3
[Main Menu]
Zeigt die Hauptmenü-Parameter und deren Einstellungen
an. Das Hauptmenü dient zum Zugriff und Programmieren
aller Parameter.
Kontroll-Anzeigen
Grüne LED: Der Frequenzumrichter ist
•
eingeschaltet.
Gelbe LED: Zeigt eine Warnung an. Siehe
•
6 Fehlersuche und -behebung.
Blinkende rote LED: Zeigt einen Alarm an. Siehe
•
6 Fehlersuche und -behebung.
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 9
Page 12
Programmieren
3.2 Statusmenü
VLT® Micro Drive FC 51 Programmierungshandbuch
3
Nach dem Netz-Ein ist das Statusmenü aktiv. Drücken Sie
die Taste [Menu], um zwischen Status, Quick-Menü und
Hauptmenü umzuschalten.
Mit [▲] und [▼] schalten Sie zwischen den Optionen in
jedem Menü um.
Das Display zeigt den Zustandsmodus durch einen kleinen
Pfeil über „Status“.
Abbildung 3.8 Anzeige des Statusmodus
3.3 Quick-Menü
Das Quick-Menü bietet schnellen Zugang zu den am
häufigsten verwendeten Parametern.
3.4 Hauptmenü
Das Hauptmenü bietet Zugriff auf alle Parameter.
1. Wählen Sie das Hauptmenü, indem Sie die Taste
[Menu] wiederholt drücken, bis der Pfeil im
Display über Main Menu steht.
2.
Navigieren Sie mit den Tasten [▲] [▼] durch die
Parametergruppen.
3. Drücken Sie [OK], um eine Parametergruppe
auszuwählen.
4.
Navigieren Sie mit den Tasten [▲] [▼] durch die
Parameter der jeweiligen Gruppe.
5. Drücken Sie zur Auswahl des Parameters [OK].
6.
Mit den Tasten [▲] [▼] können Sie den Parameterwert einstellen oder ändern.
7. Übernehmen Sie den Wert mit [OK].
8. Zum Verlassen des Menüs drücken Sie entweder
zweimal [Back], um das Quick-Menü zu öffnen,
oder einmal [Menu], um zum Zustandsmenü zu
wechseln.
1. Zum Aufruf des Quick-Menüs drücken Sie die
Taste [Menü], bis der Pfeil im Display über Quick
Menu steht.
2.
Wählen Sie mithilfe der Tasten [▲] [▼] entweder
QM1 oder QM2, und drücken Sie dann [OK].
3.
Navigieren Sie mit den Tasten [▲] [▼] durch die
Parameter im Quick-Menü.
4. Drücken Sie zur Auswahl eines Parameters [OK].
5.
Drücken Sie [▲] [▼], um den Wert einer Parametereinstellung zu ändern.
6. Drücken Sie [OK], um die Änderung zu
akzeptieren.
7. Zum Verlassen des Menüs drücken Sie entweder
zweimal [Back], um zum Zustandsmenü zu
wechseln, oder einmal [Menu], um das
Hauptmenü zu öffnen.
Abbildung 3.9 Anzeige des Quick-Menü-Modus
Abbildung 3.10 Anzeige des Hauptmenümodus
10 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 13
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4 Parameterbeschreibungen
4.1 Parametergruppe 0: Betrieb/Display
0-03 Ländereinstellungen
Option: Funktion:
Um die Anforderung nach unterschiedlichen
Werkseinstellungen in unterschiedlichen Teilen
der Welt zu erfüllen, wird 0-03 Ländereinstel-
lungen im Frequenzumrichter realisiert. Mit der
ausgewählten Einstellung ändern Sie die
Werkseinstellung der Motornennfrequenz.
[0 ] * Interna-
tional
[1] Nord-
Amerika
Die Werkseinstellung von 1-23 Motornenn-
frequenz wird auf 50 Hz festgelegt und 1-20
Motornennleistung wird in kW angezeigt.
Die Werkseinstellung von 1-23 Motornennfrequenz wird auf 60 Hz festgelegt und 1-20
Motornennleistung wird in HP angezeigt.
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht ändern.
0-04 Netz-Ein Modus (Hand-Modus)
Option: Funktion:
Dieser Parameter legt fest, ob der Frequenzumrichter bei einem Netz-Ein nach einem
Netz-Aus im Hand-Modus den Motor startet.
HINWEIS
Ist das LCP mit Potenziometer befestigt,
wird der Sollwert entsprechend dem
aktuellen Potenziometerwert eingestellt.
[0] Wieder-
anlauf
[1] * LCP Stop,
Letz.Soll.
[2] LCP Stop,
Sollw.=0
Der Frequenzumrichter wird mit denselben
Start-/Stoppbedingungen wie zum Zeitpunkt
des Netzausfalls weiter betrieben.
Der Ortsollwert wird gespeichert und nach
dem Netz-Ein verwendet.
Der Frequenzumrichter wird bei Netz-Ein
automatisch auf Stopp gesetzt (Funktion wie
[Off]-Taste am LCP).
Der Ortsollwert wird gespeichert und nach
dem Netz-Ein verwendet.
Der Frequenzumrichter wird bei Netz-Ein
automatisch auf Stopp gesetzt (Funktion wie
[Off]-Taste am LCP).
Der Ortsollwert wird auf 0 gesetzt. Der Motor
startet damit erst, wenn der Ortsollwert
erhöht wurde.
4.1.1 0-1* Parametersätze
Benutzerdefinierte Parameter und verschiedene externe
Eingänge (z. B. Bus, LCP, Analog-/Digitaleingänge, Istwert
usw.) steuern die Funktionen des Frequenzumrichters.
Ein vollständiger Satz aller Parameter zur Steuerung des
Frequenzumrichters wird auch als Parametersatz
bezeichnet. Der Frequenzumrichter enthält 2 Parametersätze, Satz 1 und Satz 2.
Des Weiteren können Sie einen festen Satz Werkseinstellungen in eine oder mehrere Parametersätze kopieren.
Einige Vorteile mehrerer Parametersätze im Frequenzumrichter sind:
Betrieb des Motors in einem Satz (Aktiver Satz),
•
während Parameter in einem anderen Satz
(Programm Satz) aktualisiert werden.
Sie können verschiedene Motoren (nacheinander)
•
an den Frequenzumrichter anschließen. Sie
können die Motordaten für verschiedene Motoren
in verschiedenen Parametersätzen speichern.
Schnelles Umschalten zwischen Einstellungen für
•
Frequenzumrichter und/oder Motor, während der
Motor läuft (z. B. Rampenzeit oder Festsollwert)
über Bus-Schnittstelle oder Digitaleingänge.
Sie können den aktiven Satz auf Externe Anwahl einstellen.
Dies bedeutet, dass der aktive Parametersatz über einen
Eingang an einer Digitaleingangsklemme und/oder über
das Bussteuerwort ausgewählt wird.
HINWEIS
Werkseinstellung kann nicht als Aktiver Satz genutzt werden.
0-10 Aktiver Satz
Option: Funktion:
Motorsteuerung über den aktiven Parametersatz.
Um bei laufendem Motor zwischen zwei
Parametersätzen umschalten zu können,
muss der Motor im Freilauf sein
•
ODER
müssen zuvor diese beiden Sätze (mit
•
0-12 Satz verknüpft mit) verknüpft
werden.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 11
Page 14
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
0-10 Aktiver Satz
Option: Funktion:
Beim Umschalten zwischen Sätzen, die nicht
verknüpft sind, findet diese Umschaltung erst
statt, wenn der Motor im Freilauf ist.
HINWEIS
Der Motor wird nur bei Motorfreilauf als
gestoppt betrachtet.
44
[1 ] * Satz 1
[2] Satz 2 Satz 2 ist aktiv.
[9] Externe
Anwahl
Satz 1 ist aktiv.
Auswahl des aktiven Parametersatzes über
Digitaleingang und/oder serielle Schnittstelle,
siehe 5-1* Digitaleingänge Option [23].
0-11 Programm Satz
Option: Funktion:
Parametersatz für Bearbeitung, d. h. Aktualisierung von Parametern im Frequenzumrichter
über das LCP oder die serielle Schnittstelle. Er
kann identisch mit dem aktiven Satz oder
unterschiedlich sein.
Alle Parametersätze können so unabhängig
vom aktiven Satz programmiert werden.
[1 ] * Satz 1
[2] Satz 2
[9] Aktiver
Satz
Parameter in Satz 1 aktualisieren.
Parameter in Satz 2 aktualisieren.
Parameter in dem Satz aktualisieren, der als
Aktiver Satz (siehe 0-10 Aktiver Satz) gewählt
wurde.
0-12 Satz verknüpfen mit
Option: Funktion:
Bei der Verknüpfung werden zuerst einige
Parameterwerte (Motordaten) des Satzes, der
in 0-12 gewählt wird, in den aktuellen Satz
kopiert.
Um bei laufendem Motor zwischen den
Parametersätzen umschalten zu können,
müssen Sie diese zuvor verknüpfen. Daher
findet die Umschaltung erst statt, wenn der
Motor im Freilauf ist.
[0] Nicht
verknüpft
[1 ] * Verknüpft Parameter, die mit „Ändern während des
Parameter in beiden Sätzen bleiben
unverändert und können bei laufendem
Motor nicht geändert werden.
Betriebs nicht möglich“ markiert sind, werden
in den aktuell gewählten Programm Satz
kopiert.
HINWEIS
0-31 Min. Wert benutzerdef. Anzeige
Range: Funktion:
zumrichters. Der in 0-31 Min. Wert
benutzerdef. Anzeige eingegebene Wert
wird bei 0 Hz angezeigt. Sie können die
Anzeige im Statusmodus auf dem LCPDisplay anzeigen lassen oder in 16-09
Benutzerdef. Anzeige ablesen.
0-32 Max. Wert benutzerdef. Anzeige
Range: Funktion:
100,0* [0,00-9999,00] Wählen Sie die gewünschte Einheit für
die benutzerdefinierte Anzeige in Bezug
auf die Ausgangsfrequenz des Frequenzumrichters. Der in 0-32 Max. Wert
benutzerdef. Anzeige eingegebene Wert
wird bei der in 4-14 Max. Frequenz
programmierten Frequenz angezeigt. Sie
können die Anzeige im Statusmodus auf
dem LCP-Display anzeigen lassen oder in
16-09 Benutzerdef. Anzeige ablesen.
4.1.2 0-4* LCP-Tasten
Der Frequenzumrichter kann in den folgenden drei
Betriebsarten arbeiten: Hand, Aus und Auto.
Hand: Sie bedienen den Frequenzumrichter über das LCP,
Fern-Betrieb ist nicht möglich. Bei Aktivierung von Hand
wird ein Startsignal gegeben.
OFF: Der Frequenzumrichter stoppt mit einem normalen
Rampenstopp. Bei Wahl von Off (Aus) können Sie den
Frequenzumrichter nur durch Betätigen von Hand oder
Auto auf dem LCP starten.
Auto: Im Autobetrieb kann der Frequenzumrichter über die
Digitaleingänge oder Bus gesteuert werden.
0-40 [Hand on]-LCP Taste
Option: Funktion:
[0] Deaktiviert Die [Hand on]-Taste hat keine Funktion.
[1 ] * Aktiviert Die [Hand on]-Taste ist funktionsfähig.
0-41 [Off/Reset]-LCP Taste
Option: Funktion:
[0] Off/Reset deaktivieren Die [Off/Reset]-Taste hat keine
Funktion.
[1 ] * Off/Reset aktivieren Signal stoppen und eventuelle
Fehler quittieren.
[2] Nur Reset aktivieren Nur Reset. Die Stop-(Off)-Funktion
ist deaktiviert.
Diesen Parameter können Sie bei
laufendem Motor nicht ändern.
0-42 [Auto on]-LCP Taste
Option: Funktion:
0-31 Min. Wert benutzerdef. Anzeige
Range: Funktion:
0,00 * [0,00-9999,00 ] Wählen Sie die gewünschte Einheit für
die benutzerdefinierte Anzeige in Bezug
auf die Ausgangsfrequenz des Frequen-
[0] Deaktiviert Die [Auto on]-Taste hat keine Funktion.
[1 ] * Aktiviert Die [Auto on]-Taste ist funktionsfähig.
12 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 15
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.1.3 0-5* Kopie/Speichern
0-50 LCP-Kopie
Option: Funktion:
Das abnehmbare LCP des Frequenzumrichters kann zum Speichern von
Parametersätzen und damit zur Übertragung
von Daten beim Verschieben von Parametereinstellungen von einem Frequenzumrichter
zum anderen dienen.
HINWEIS
LCP-Kopie kann nur am LCP aktiviert
werden und NUR, wenn der Motor im
Freilauf ist.
[1] Speichern in
LCP
[2] Lade von LCP,
Alle
[3] Lade von
LCP,nur Fkt.
Kopiert alle Sätze aus dem Frequenzumrichter in das LCP.
Kopiert alle Sätze vom LCP zum Frequenzumrichter.
Kopiert von der Motorgröße unabhängige
Daten vom LCP zum Frequenzumrichter.
0-51 Parametersatz-Kopie
Option: Funktion:
Diese Funktion dient dazu, den aktuellen
Parametersatz in den Programm Satz zu
kopieren.
Damit eine Parametersatz-Kopie ausgeführt
werden kann,
muss der Motor im Freilauf sein
•
0-10 Aktiver Satz muss auf [1] Satz
•
1 oder [2] Satz 2 eingestellt sein
HINWEIS
Das Tastenfeld und die Parameterdatenbank sind während der
Parametersatz-Kopie gesperrt.
[0 ] * Keine Kopie Die Kopierfunktion ist nicht aktiv.
[1] Kopie von
Satz 1
[2] Kopie von
Satz 2
[9] Kopie von
Werkseinstellung
Dient dazu, Satz 1 auf einen anderen Satz
zu kopieren (siehe 0-11 Programm Satz).
Dient dazu, Satz 2 auf einen anderen Satz
zu kopieren (siehe 0-11 Programm Satz).
Dient dazu, die Werkseinstellungen auf
einen anderen Satz zu kopieren (siehe 0-11
Programm Satz).
4.1.4 0-6* Passwort
0-60 Hauptmenü Passwort
Range: Funktion:
Definiert ein Passwort zum Schutz empfindlicher
Parameter, z. B. der Motorparameter, vor unbeabsichtigten Änderungen.
0 * [0-999] Definiert das Passwort, das den Zugriff auf das
Hauptmenü über die Taste [Main Menu]
einschränken kann. Wählen Sie die Nummer, die
Ändern anderer Parameterwerte erlaubt. 0
bedeutet kein Passwort.
HINWEIS
Ein Passwort gilt nur für das LCP, nicht die serielle
Kommunikation.
HINWEIS
Drücken von [Menu] (Menü), [OK] und [▼] hebt die
Passworteingabe auf. So wird automatisch der Parameterbearbeitungsbildschirm im Quick-Menü oder im
Hauptmenü eingeblendet.
0-61 Hauptmenü/Quick-Menü Zugriff ohne PW
Option: Funktion:
[0] * Vollständig
[1] LCP: Schreibge-
schützt
[2] LCP: Kein Zugriff
Wählen Sie [0] Vollständig, um das in
0-60 Hauptmenü Passwort definierte
Passwort zu deaktivieren.
Wählen Sie [1] Schreibgeschützt, um
unbefugte Bearbeitung der Parameter
im Hauptmenü/Quick-Menü zu
verhindern.
Wählen Sie [2] Kein Zugriff, um
unbefugte Bearbeitung und Anzeige der
Parameter im Hauptmenü/Quick-Menü
zu verhindern.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 13
Page 16
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.2 Parametergruppe 1: Motor/Last
1-05 Hand/Ort-Betrieb Konfiguration
Option: Funktion:
1-00 Regelverfahren
Option: Funktion:
Legen Sie mit diesem Parameter das Steuerverfahren bei aktivem Fernsollwert fest.
HINWEIS
Durch eine Änderung dieses
44
Parameters werden 3-00 Sollwertbereich,
3-02 Min. Sollwert und 3-03 Maximaler
Sollwert auf ihre Werkseinstellungen
zurückgesetzt.
HINWEIS
Sie können diesen Parameter bei
laufendem Motor nicht einstellen.
[0 ] * Drehzahl-
steuerung
[3] PID-Regler Ermöglicht eine Prozessregelung mit
Für normale Drehzahlregelung (Sollwerte).
Rückführung. Siehe Parametergruppe 7-3*
PI-Prozessregelung für weitere Informationen
zum PI-Regler.
[0] Drehzahl-
steuerung
[2] * Gemäß
Konfiguration in
1-00
Regelverfahren.
Im Hand-Betrieb verwendet der Frequenzumrichter immer das Regelverfahren mit
Drehzahlsteuerung, unabhängig von der
Einstellung in 1-00 Regelverfahren. Über das
lokale Potentiometer (falls vorhanden) oder
die Pfeiltaste nach oben/unten wird die
Ausgangsfrequenz eingestellt, die durch die
Max./Min. Frequenz (4-14 Max. Frequenz und
4-12 Min. Frequenz) begrenzt ist.
Bei 1-00 Regelverfahren programmiert auf [1]
Ohne Rückführung ist die Funktion wie oben
beschrieben.
Bei Einstellung [3] PI-Prozess in 1-00 Regelver-
fahren erfolgt bei Wechsel vom Auto-Betrieb
in den Hand-Betrieb eine Sollwertänderung
über das lokale Potentiometer oder die
Pfeiltaste nach oben/unten. Die Änderung
wird durch den maximalen/minimalen
Sollwert (3-02 Minimaler Sollwert and 3-03
Max. Sollwert) begrenzt.
1-01 Steuerprinzip
Option: Funktion:
[0] U/f Für parallel angeschlossene Motoren und/oder
Sondermotoranwendungen. Die U/f-Einstellungen
werden in 1-55 U/f -Kennlinie -U und 1-56 U/f -
Kennlinie -f vorgenommen.
HINWEIS
Bei der U/f-Steuerung sind Schlupf- und
Lastausgleich nicht enthalten.
[1] * VVCplus Normale Betriebsart, einschließlich Schlupf- und
Lastausgleiche.
4.2.1 1-2* Motordaten
Diese Parametergruppe dient zum Eingeben der
Motornenndaten (Leistung, Spannung, Frequenz, Strom
und Drehzahl) anhand der Werte auf dem MotorTypenschild des angeschlossenen Motors.
Führen Sie die AMA aus, siehe 1-29 Automatische Motoran-
passung (AMA).
Werkseinstellungen für erweiterte Motordaten, Parametergruppe 1-3* Erw. Motordaten , werden automatisch
berechnet.
1-03 Drehmomentkennlinien
Option: Funktion:
Mit mehr Drehmomentkennlinien
können Anwendungen mit geringem
Energieverbrauch und hohem
Drehmoment ausgeführt werden.
[0 ] * Konstantes
Drehmoment
[2] Automatische
Energieoptimierung
Die Ausgabe der Motorwelle liefert ein
konstantes Drehmoment unter variabler
Drehzahlregelung.
Durch diese Funktion wird der Energieverbrauch in der Zentrifugalpumpe und
in Lüfteranwendungen automatisch
optimiert. Siehe 14-41 Minimale AEO-
Magnetisierung.
1-05 Hand/Ort-Betrieb Konfiguration
Option: Funktion:
Dieser Parameter ist bei Einstellung [3] PID-
Prozess in 1-00 Regelverfahren aktiv. Mit dem
Parameter legen Sie die Sollwertverarbeitung
bei einem Wechsel vom Auto-Betrieb in den
Hand-Betrieb am LCP fest.
14 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
HINWEIS
Sie können Parameter in Parametergruppe 1-2* Motordaten
bei laufendem Motor nicht ändern.
1-20 Motornennleistung [kW]/[HP] (P
Option: Funktion:
Eingabe der Motornennleistung von den
Typenschilddaten
Zwei Leistungsgrößen unter, eine Größe über der
VLT-Nennleistung.
[1] 0,09 kW
[2] 0,12 kW
[3] 0,18 kW
[4] 0,25 kW
[5] 0,37 kW
[6] 0,55 kW
[7] 0,75 kW
[8] 1,10 kW
[9] 1,50 kW
[10] 2,20 kW
m.n
)
Page 17
130BA375.11
R
S
P 1-30
R
1s
X
h
P1-35
R
1
X
2
X
1
U
1
I
1
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
1-20 Motornennleistung [kW]/[HP] (P
m.n
)
Option: Funktion:
[11] 3,00 kW
[12] 3,70 kW
[13] 4,00 kW
[14] 5,50 kW
[15] 7,50 kW
[16] 11,00 kW
[17] 15,00 kW
[18] 18,50 kW
[19] 22,00 kW
[20] 30,00 kW
HINWEIS
Eine Änderung dieses Parameters betrifft die Parameter
1-22 Motornennspannung bis 1-25 Motornennfrequenz, 1-30
Statorwiderstand, 1-33 Statorstreureaktanz und 1-35
Hauptreaktanz.
1-22 Motornennspannung (U_
Range: Funktion:
230/400 V [50-999 V] Eingabe der Motornennspannung von
den Typenschilddaten
1-23 Motornennfrequenz (f_
Range: Funktion:
50 Hz* [20-400 Hz] Stellen Sie eine Motornennfrequenz ein,
die den Angaben auf dem Typenschild des
Motors entspricht.
1-24 Motornennstrom (I_
Range: Funktion:
Abhängig vom
Motortyp*
[0,01-100,00 A] Eingabe des
)
m.n
)
m.n
)
m.n
Motornennstroms von den
Typenschilddaten
1-29 Automatische Motoranpassung (AMA)
Option: Funktion:
3. Legen Sie ein Startsignal an.
- Am LCP: Drücken Sie [Hand on].
- Im Fern-Betrieb: Legen Sie ein
Startsignal an Klemme 18 an.
[0] * Anpassung
aus
[2] AMA
aktivieren
Die AMA-Funktion ist deaktiviert.
AMA-Funktion beginnt zu laufen.
HINWEIS
Für eine optimale Anpassung des
Frequenzumrichters sollten Sie die AMA
bei kaltem Motor durchführen.
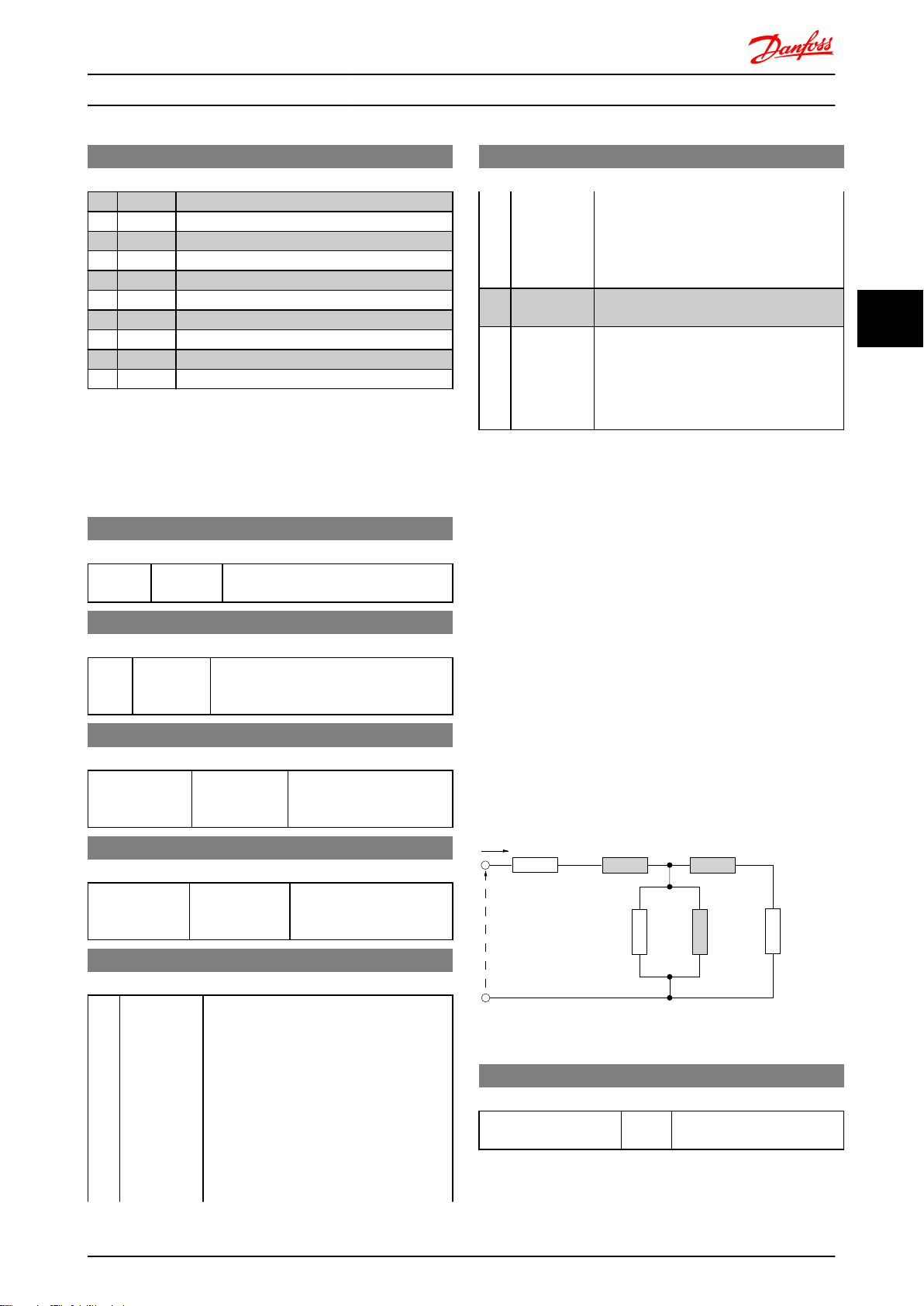
4.2.2 1-3* Erw. Motordaten
Sie stellen die erweiterten Motordaten über eine der
folgenden Methoden ein:
1. Führen Sie eine AMA an einem kalten Motor
durch. Der Frequenzumrichter misst den Wert am
Motor.
2. Geben Sie den Wert für X1 manuell ein. Erfragen
Sie den Wert gegebenenfalls vom Motorhersteller.
3. Verwenden Sie die Werkseinstellung für Rs, X
und X2. Der Frequenzumrichter ermittelt
automatisch einen Standardwert gemäß dem
eingestellten Motortyp.
HINWEIS
Diese Parameter können Sie bei laufendem Motor nicht
ändern.
4 4
1
1-25 Motornenndrehzahl (n_
m.n
)
Range: Funktion:
Abhängig vom
Motortyp*
[100-9999
UPM]
Eingabe der Motornenndrehzahl von den
Typenschilddaten
1-29 Automatische Motoranpassung (AMA)
Option: Funktion:
Die AMA dient zur Optimierung der
Motorleistung.
Abbildung 4.1
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht ändern.
1. Stoppen Sie den Frequenzumrichter - stellen Sie sicher, dass der
Motor stillsteht
2.
Wählen Sie [2] AMA aktivieren
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 15
1-30 Statorwiderstand (Rs)
Range: Funktion:
Je nach den
Motordaten*
[Ohm] Stellen Sie den Wert des
Statorwiderstands ein.
Page 18
Magn. strom
100%
Par. 1-50
Par. 1-51
Par. 1-52
Hz
RPM
130BD016.10
130BD017.10
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
1-33 Statorstreureaktanz (X1)
Range: Funktion:
Abhängig vom
Motortyp.*
[Ohm] Statorstreureaktanz des
Motors einstellen.
1-35 Hauptreaktanz (X2)
Range: Funktion:
Abhängig vom
44
Motortyp*
[Ohm] Hauptreaktanz des Motors
einstellen.
4.2.3 1-5* Lastunabhängige Einstellung
Mit dieser Parametergruppe werden die lastunabhängigen
Motoreinstellungen vorgenommen.
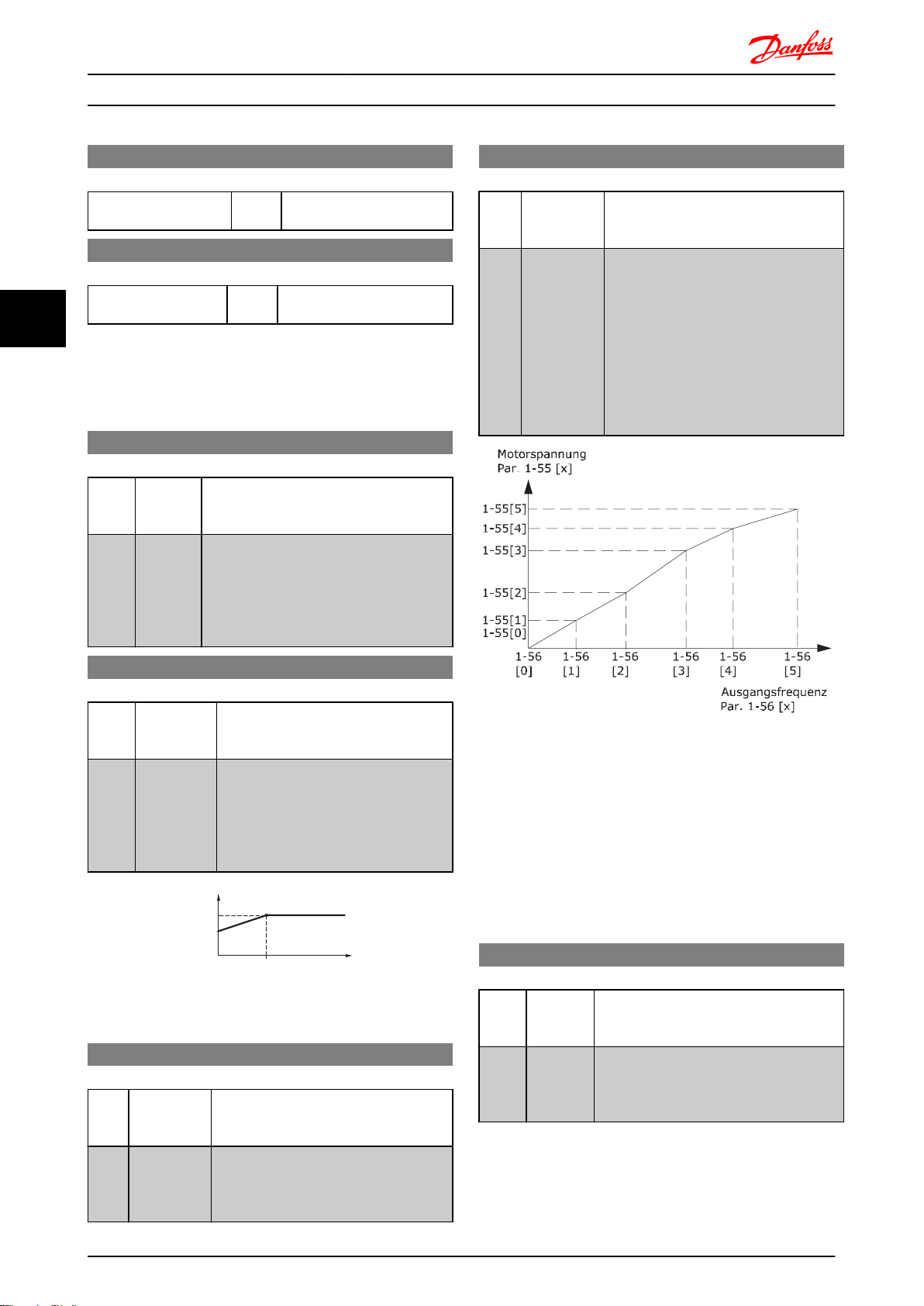
1-56 U/f-Kennlinie - f
Range: Funktion:
Dieser Parameter ist ein Array-Parameter
[0-5], der nur zugänglich ist, wenn 1-01
Steuerprinzip auf [0] U/f eingestellt ist.
0,0
Hz*
[0,0-1000,0
Hz]
Mit diesem Parameter können Sie die
Frequenz des gewählten U/f-Eckpunktes
einstellen. Die zugehörige Spannung
definieren Sie in 1-55 U/f -Kennlinie - U [V].
Erstellen Sie eine U/f-Kennlinie anhand
von 6 definierbaren Spannungen und
Frequenzen, siehe Abbildung 4.3.
Vereinfachen Sie die U/f-Kennlinien durch
Zusammenfassen von 2 oder mehr
Punkten (Spannungen und Frequenzen).
1-50 Motormagnetisierung bei 0 UPM
Range: Funktion:
Dieser Parameter ermöglicht beim Betrieb
mit niedriger Drehzahl eine angepasste
thermische Belastung des Motors.
100 %* [ 0-300%] Geben Sie einen Prozentsatz des Magnetisie-
rungsnennstroms ein. Eine zu niedrige
Einstellung reduziert möglicherweise das
Drehmoment an der Motorwelle zu stark
und birgt die Gefahr des Durchsackens der
Last.
1-52 Min. Drehzahl norm. Magnetis [Hz]
Range: Funktion:
0,0 Hz* [0,0-10,0
Hz]
Verwenden Sie diesen Parameter
zusammen mit 1-50 Motormagnetisierung
bei 0 UPM.
Stellen Sie die für den normalen Magnetisierungsstrom erforderliche Frequenz ein.
Wenn die eingestellte Frequenz niedriger
als die Schlupffrequenz des Motors ist, ist
1-50 Motormagnetisierung bei 0 UPM
inaktiv.
Abbildung 4.3 U/f-Kennlinien
HINWEIS
Für 1-56 U/f-Kennlinie - f [Hz] gilt Folgendes
[0] ≦ [1] ≦ [2] ≦ [3] ≦ [4] ≦ [5]
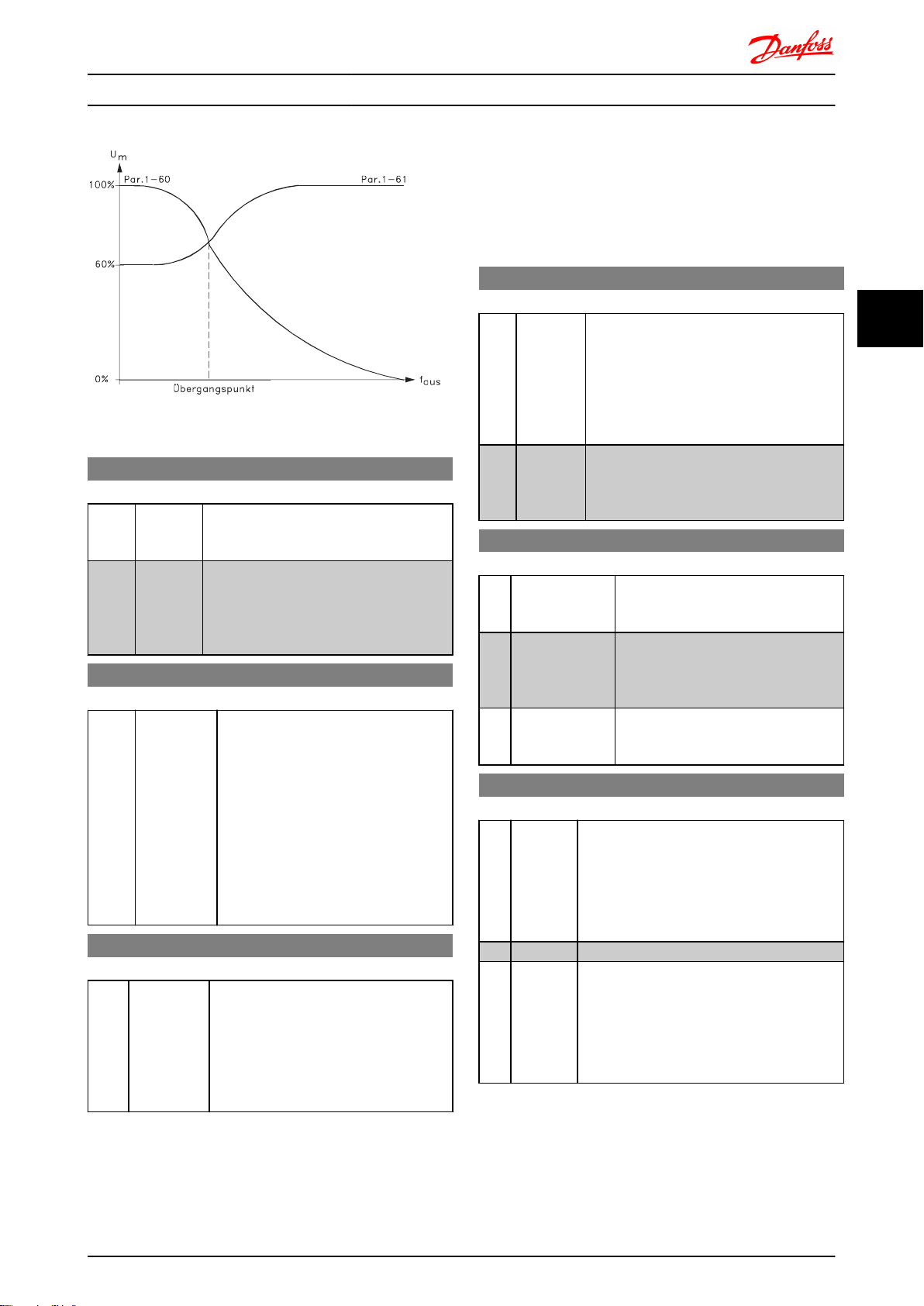
4.2.4 1-6* Lastabhängige Einstellung
Parameter zum Einstellen der lastabhängigen Kompensationen für den Motor.
1-60 Lastausgleich tief
Range: Funktion:
Abbildung 4.2
1-55 U/f-Kennlinie - U
100 %* [0-199 %] Geben Sie den Prozentsatz in Beziehung zur
Range: Funktion:
Dieser Parameter ist ein Array-Parameter
[0-5], der nur zugänglich ist, wenn 1-01
Steuerprinzip auf [0] U/f eingestellt ist.
0,0 V* [0,0-999,9 V] Mit diesem Parameter kann die Spannung
des gewählten U/f-Eckpunktes eingestellt
werden. Die zugehörigen Frequenzen sind
in 1-56 U/f-Kennlinie - f [Hz] definiert.
16 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Mit diesem Parameter erreichen Sie eine
optimale U/f-Kennlinie beim Betrieb mit
niedriger Drehzahl.
Last bei niedriger Drehzahl ein.
Der Umschaltpunkt wird automatisch gemäß
dem angeschlossenen Motortyp berechnet.
Page 19
130BD018.10
Parameterbeschreibungen
Abbildung 4.4
VLT® Micro Drive FC 51 Programmierungshandbuch
1-61 Lastausgleich hoch
Range: Funktion:
Mit diesem Parameter wird ein optimaler
Lastausgleich beim Betrieb mit hoher
Drehzahl erreicht.
100 %* [0-199%]Dieser Parameter beeinflusst die Regelung
der Ausgangsspannung in Abhängigkeit von
der Motorlast bei höheren Drehzahlen.
Der Umschaltpunkt wird automatisch gemäß
dem angeschlossenen Motortyp berechnet.
1-62 Schlupfausgleich
Range: Funktion:
100 %* [-400-399%]Ausgleich des lastunabhängigen
Motorschlupfs.
Der Schlupfausgleich wird automatisch u.
a. in Abhängigkeit von der Motornenndrehzahl n
berechnet.
M,N
HINWEIS
Die Funktion ist nur aktiv, wenn in
1-00 Regelverfahren die Option [0]
Drehzahl ohne Rückführung und in
1-01 Steuerprinzip die Option [1] VVC+
eingestellt ist.
1-63 Schlupfausgleich Zeitkonstante
Range: Funktion:
0,10 s [0,05-5,00 s] Dieser Parameter beeinflusst die Reaktions-
geschwindigkeit des Schlupfausgleichs. Ein
hoher Wert führt zu einer langsamen
Reaktion, ein niedriger Wert zu einer
schnellen Reaktion.
Bei Resonanzproblemen muss ggf. die Zeit
vergrößert werden.
4.2.5 1-7* Startfunktion
In Anbetracht des Bedarfs an verschiedenen Startfunktionen in verschiedenen Anwendungen kann in dieser
Parametergruppe eine Reihe von Funktionen ausgewählt
werden.
1-71 Startverzög.
Range: Funktion:
Durch eine hier angegebene Zeit kann die
Dauer zwischen einem Startsignal und dem
tatsächlichen Beginn der Beschleunigung
verzögert werden.
Eine Einstellung von 0,0 s schaltet 1-72
Startfunktion aus, wenn ein Startbefehl
gegeben wird.
0,0s* [0,0-10,0s]Geben Sie die vor Beginn der Beschleunigung
erforderliche Zeitverzögerung ein.
Während dieser Zeit wird eine Startfunktion
gemäß 1-72 Startfunktion ausgeführt.
1-72 Startfunktion
Option: Funktion:
[0] DC-Halten/
Verzögerung
[1] DC-Bremse/
Verzögerung
[2] * Freilauf/
Verzögerung
Der Motor wird für die Dauer Zeitverzögerung während des Starts mit DCHaltestrom versorgt (2-00 DC-Haltestrom).
Der Motor wird für die Dauer Zeitverzögerung während des Starts mit DCBremsstrom versorgt (2-01 DC-
Bremsstrom).
Der Wechselrichter befindet sich für die
Dauer der Zeitverzögerung während des
Starts im Freilauf (Wechselrichter aus).
1-73 Motorfangschaltung
Option: Funktion:
Der Parameter Motorfangschaltung ermöglicht
das „Fangen“ eines Motors, der aufgrund eines
Stromausfalls unkontrolliert läuft.
HINWEIS
Diese Funktion ist für Hubanwendungen
nicht geeignet.
[0] * Deaktiviert Motorfangschaltung ist nicht erforderlich.
[1] Aktiviert Ermöglicht dem Frequenzumrichter das
„Fangen“ eines drehenden Motors.
HINWEIS
Bei aktivierter Motorfangschaltung sind
die Parameter 1-71 Startverzögerung und
1-72 Startfunktion ohne Funktion.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 17
Page 20
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.2.6 1-8* Stoppfunktion
1-90 Thermischer Motorschutz
Option: Funktion:
Um den Bedarf an verschiedenen Stoppfunktionen in
verschiedenen Anwendungen zu erfüllen, bieten diese
Parameter einige spezielle Stoppfunktionen für den Motor.
1-80 Funktion bei Stopp
Option: Funktion:
Die ausgewählte Stoppfunktion ist in
44
[0]*Motorfreilauf Der Wechselrichter befindet sich im Freilauf.
[1] DC-Halten Der Motor wird mit einem DC-Strom versorgt.
folgenden Situationen aktiv:
Der Stoppbefehl wird gegeben und
•
eine Ausgangsdrehzahl wird per
Rampe Ab auf den Wert Mindest-
drehzahl für Stoppfunktion gebracht.
Der Standbefehl wird entfernt
•
(Standby) und die Ausgangsdrehzahl
wird per Rampe Ab auf den Wert
Mindestdrehzahl für Stoppfunktion
gebracht.
Der Befehl DC-Bremse wird gegeben
•
und die DC-Bremszeit ist abgelaufen
Bei laufendem Motor liegt die
•
berechnete Ausgangsdrehzahl unter
dem Wert Mindestdrehzahl für
Stoppfunktion.
Weitere Informationen unter 2-00 DC-
Haltestrom.
1-82 Ein.-Frequenz für Stoppfunktion [Hz]
Range: Funktion:
0,0 Hz* [0,0-20,0 Hz] Definiert die Drehzahl zum Aktivieren der
1-80 Funktion bei Stopp.
[0] * Kein
Motorschutz
[1] Thermistor-
Warnung
[2] Thermistor-
Abschalt.
[3] ETR-Warnung Wenn die berechnete Obergrenze des
[4] ETR-Alarm Wenn 90 % der berechneten Obergrenze
HINWEIS
Wenn die ETR-Funktion ausgewählt wurde, speichert der
Frequenzumrichter die aufgezeichnete Temperatur bei
Netz-Aus. Bei Netz-Ein wird dann unabhängig von der
verstrichenen Zeit mit dieser Temperatur fortgefahren.
Durch Änderung von 1-90 Thermischer Motorschutz zurück
auf [0] Kein Motorschutz wird die aufgezeichnete
HINWEIS
Die ETR-Berechnung erfolgt anhand
der Motordaten aus Gruppe 1-2*
Motordaten.
Deaktiviert die Temperaturüberwachung.
Ein Thermistor, der an einen der Analogoder Digitaleingänge angeschlossen ist,
gibt eine Warnung aus, wenn die obere
Grenze des Motortemperaturbereichs
überschritten wird (siehe 1-93 Thermistoran-
schluss).
Der am Digital- oder Analogeingang
angeschlossene Thermistor löst aus und der
Frequenzumrichter schaltet den Motor ab,
wenn die max. Motortemperatur
überschritten wird (siehe 1-93 Thermistoran-
schluss).
Motortemperaturbereichs überschritten
wird, gibt der Frequenzumrichter eine
Warnung aus.
des Motortemperaturbereichs überschritten
werden, tritt ein Alarm auf und der
Frequenzumrichter schaltet ab.
Temperatur zurückgesetzt.
4.2.7 1-9* Motortemperatur
1-93 Thermistoranschluss
Über eine thermische Überwachung kann der Frequenzumrichter die Motortemperatur ohne einen angeschlossenen
Thermistor berechnen. Damit kann eine Warnung oder ein
Alarm ausgegeben werden, wenn die Motortemperatur die
max. Betriebstemperatur überschreitet.
1-90 Thermischer Motorschutz
Option: Funktion:
Über ein elektronisch thermisches Relais
(ETR) wird die Motortemperatur basierend
auf Frequenz, Drehzahl und Zeit berechnet.
Danfoss empfiehlt die Verwendung der
ETR-Funktion, wenn kein Thermistor
vorhanden ist.
Option: Funktion:
Definiert die Anschlussstelle (z. B. Eingangs-
klemme 54) des Thermistors.
[0] * Ohne Kein Thermistor angeschlossen.
[1] Analog-
eingang
53
Anschluss des Thermistors an Analogeingangs-
klemme 53.
HINWEIS
Damit Analogeingangsklemme 53 wählbar
ist, darf diese nicht gleichzeitig für eine
andere Funktion vergeben sein.
[6] Digital-
eingang
29
Anschluss des Thermistors an Digitaleingangs-
klemme 29.
Wenn Digitaleingangsklemme 29 als Thermis-
toreingang gewählt ist, führt sie die in 5-13
Digitaleingang 29 gewählte Funktion nicht aus.
Der Wert von 5-13 Digitaleingang 29 bleibt
18 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 21

Parameterbeschreibungen
1-93 Thermistoranschluss
Option: Funktion:
jedoch in der Parameterdatenbank
unverändert, während die Funktion inaktiv ist.
Eingang digital/
analog
Digital 10 V
Analog 10 V
Tabelle 4.1
Versor-
gungssp
annung
VLT® Micro Drive FC 51 Programmierungshandbuch
Abschalt-
werte
<800 Ω ⇒ 2,9
kOhm
<800 Ω ⇒ 2,9
kOhm
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 19
Page 22
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.3 Parametergruppe 2: Bremsfunktionen
4.3.1 2-** Bremsfunktionen
4.3.2 2-0* DC Halt/
Einstellung der DC-Bremsfunktion, bei der ein drehender
2-04 DC-Bremse Ein
Range: Funktion:
0,0 Hz* [0,0-400,0 Hz] Aktiviert und definiert die Einschalt-
frequenz für die DC-Bremsfunktion aus
2-01 DC-Bremsstrom bei Rampe Ab.
Bei Wert 0 ist die Funktion
ausgeschaltet.
Motor durch Anlegen eines DC-Stroms am Motor gebremst
wird.
44
2-00 DC-Haltestrom
Range: Funktion:
Definiert die Intensität der GleichspannungsHalten-Funktion (auch zum Vorwärmen des
Motors geeignet).
Der Parameter ist aktiv, wenn DC-Halten in 1-72
Startfunktion oder 1-80 Funktion bei Stopp
ausgewählt ist.
50%* [0-100%] Definiert die Intensität der Gleichspannungs-
Halten-Funktion. Der angegebene Strom
bezieht sich in Prozent auf den
Motornennstrom (1-24 Motornennstrom). 100 %
DC-Haltestrom entspricht I
M,N
.
HINWEIS
Stellen Sie sicher, dass der Motor nicht durch eine zu hohe
Stromeinstellung (z. B. 100 %) beschädigt oder zerstört
wird.
2-01 DC-Bremsstrom
Range: Funktion:
50%* [0-150%] Definiert die Intensität der Gleichspannungs-
Bremsen-Funktion.
Die DC-Bremse lässt sich auf vier Arten
aktivieren:
1.
DC-Bremsbefehl, siehe 5-1* Digita-
leingänge Option [5]
2.
DC-Einschaltfunktion, siehe 2-04 DC-
Bremse Ein [Hz]
3. DC-Bremse als Startfunktion
ausgewählt, siehe 1-72 Startfunktion
4. DC-Bremse in Verbindung mit
Motorfangschaltung, 1-73 Motorfangschaltung.
2-02 DC-Bremszeit
Range: Funktion:
Die DC-Bremszeit legt fest, wie lange der DCBremsstrom am Motor angelegt wird.
10,0 s* [0,0-60 s] Definiert, wie lange die DC-Bremsfunktion
aus 2-01 DC-Bremsstrom ausgeführt wird.
4.3.3 2-1* Generatorisches Bremsen
Die Parameter in dieser Gruppe zum Aktivieren und
Definieren der generatorischen Bremsfunktionen
verwenden.
2-10 Bremsfunktion
Option: Funktion:
Bremswiderstand:
Die Widerstandsbremse begrenzt bei generatorischem Betrieb des Motors die Spannung im
Zwischenkreis. Ohne Bremswiderstand schaltet
der Frequenzumrichter an einem Punkt ab.
Der Bremswiderstand nimmt überschüssige
Energie von der Motorbremse auf. Ein Frequenzumrichter mit Bremse stoppt einen Motor
schneller als ohne Bremse. Dies wird in vielen
Anwendungen genutzt. Es muss ein externer
Bremswiderstand angeschlossen werden.
Eine Alternative zu der Widerstandsbremse ist
die AC-Bremse.
HINWEIS
Die Funktion Bremswiderstand ist nur bei
Geräten mit eingebauter Bremselektronik
(Bremschopper) verfügbar. Es muss ein
externer Widerstand angeschlossen
werden.
AC-Bremse:
Die AC-Bremse nimmt überschüssige Energie
auf, indem sie eine Verlustleistung im Motor
aufbaut.
Es ist wichtig, daran zu denken, dass bei einem
Anstieg der Verlustleistung die Motortemperatur steigt.
Aus Keine Bremsfunktion.
[0]
*
[1] Bremswi-
derstand
[2] AC-
Bremse
Bremswiderstand ist aktiv.
AC-Bremse ist aktiv.
HINWEIS
Wird DC-Bremse als Startfunktion aktiviert, wird die DCBremszeit durch die Startverzög. bestimmt.
20 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 23
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
2-11 Bremswiderstand (Ohm)
Range: Funktion:
5 Ω* [5-5000 Ω] Stellen Sie den Wert des Bremswiderstand ein.
2-16 AC-Bremse, max. Strom
Range: Funktion:
100,0%* [0.0-150.0%] Den max. zulässigen Strom für die AC-
Bremse eingeben, um eine Überhitzung
des Motors zu vermeiden.
100 % entspricht dem in 1-24
Motornennstrom eingestellten
Motorstrom.
2-17 Überspannungssteuerung
Option: Funktion:
Die Überspannungssteuerung reduziert das
Risiko, dass der Frequenzumrichter aufgrund
einer Überspannung im Zwischenkreis durch
generatorische Leistung von der Last
abschaltet.
Eine Überspannung tritt auf, wenn z. B. die
Rampenzeit ab zu kurz im Vergleich zum
tatsächlichen Trägheitsmoment der Last
eingestellt wird.
[0] * Deaktiviert Die Überspannungssteuerung ist nicht aktiv/
erforderlich.
[1] Aktiv (ohne
Stopp)
[2] Aktiviert Die Überspannungssteuerung läuft auch bei
Die Überspannungssteuerung ist nur
wirksam, wenn kein Stoppsignal aktiv ist.
aktivem Stoppsignal.
HINWEIS
Haben Sie in 2-10 Bremsfunktion die Auswahl Bremswiderstand getroffen, ist die Überspannungssteuerung auch
dann nicht aktiv, wenn sie in diesem Parameter aktiviert
wird.
4.3.4 2-2* Mechanische Bremse
Für Hubanwendungen ist eine elektromagnetische Bremse
erforderlich. Die Bremse wird durch ein Relais gesteuert,
das die Bremse bei Aktivierung löst.
Die Bremse schließt, wenn der Frequenzumrichter
abschaltet oder ein Freilaufbefehl gegeben wird. Sie wird
auch geschlossen, wenn die Drehzahl unter den in
Parameter 2-22 Bremse schließen bei Motorfrequenz
eingestellten Wert sinkt.
2-20 Bremse öffnen bei Motorstrom
Range: Funktion:
0,00 A* [0,00-100A]Definiert, bei welchem Motorstrom nach
einem Startsignal die mechanische Bremse
gelüftet werden soll.
VORSICHT
Wenn die Startverzögerungszeit
abgelaufen ist und der Motorstrom
unter dem Wert von Bremse öffnen
bei Motorstrom liegt, schaltet der
Frequenzumrichter ab.
2-22 Bremse schließen bei Motorfrequenz
Range: Funktion:
Wenn der Motor über Rampe gestoppt wird,
fällt die mechanische Bremse ein, wenn die
Motordrehzahl unter der aktiven Bremsdrehzahl
liegt.
Die Motordrehzahl wird in den folgenden
Situationen gemäß der gewählten Rampe zum
Stopp abgebremst.
Ein Startbefehl wird entfernt (Stand-by)
•
Ein Stoppbefehl wird aktiviert
•
Ein Schnellstopp wird aktiviert
•
(Schnellstopprampe wird verwendet)
0 Hz* [0-400
Hz]
Definiert, bei welcher Motorfrequenz nach
einem Stoppsignal die mechanische Bremse
wieder einfallen soll.
Die mechanische Bremse schließt sich
automatisch, wenn der Frequenzumrichter
abschaltet oder einen Alarm meldet.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 21
Page 24
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.4 Parametergruppe 3: Sollwert/Rampen
4.4.1 3-** Sollwert/Rampen
4.4.3 3-1* Sollwerteinstellung
Parameter zum Einstellen der Sollwerteingänge,
Festsollwerte und Sollwertverarbeitung Sie wählen
Parameter zum Einstellen der Sollwertverarbeitung, von
Grenzwerten und Bereichen.
Festsollwerte für die entsprechenden Digitaleingänge in
Parametergruppe 5-1* Digitaleingänge.
3-10 Festsollwert
4.4.2 3-0* Sollwertgrenzen
44
Parameter zum Einstellen von Sollwerteinheit, Grenzwerten
und Bereichen.
3-00 Sollwertbereich
Option: Funktion:
Auswahl des Bereichs für das Sollwert- und
Istwertsignal.
[0] * Min -
Max
[1] -Max.
bis +
Max.
Sollwertgrenzen können nur positive Werte
aufweisen.
Dies ist bei Betrieb im Regelverfahren PI-Prozess
zu wählen.
Die Wertebereiche können positive und negative
Werte aufweisen.
Wenn Sie das Potentiometer zur Einstellung des
Motorlaufs in beiden Richtungen verwenden,
legen Sie den Sollwertbereich durch Auswahl von
Option [1] auf -Max. Sollwert bis +Max. Sollwert
fest. Wählen Sie [Hand on] am LCP. Stellen Sie das
Potentiometer auf den Minimalwert, sodass der
Motor bei maximaler Drehzahl im Linkslauf
betrieben werden kann. Stellen Sie anschließend
das Potentiometer auf den Maximalwert, sodass
der Motor über Rampe Ab auf 0 zurückfährt und
bei maximaler Drehzahl im Rechtslauf betrieben
wird.
3-02 Minimaler Sollwert
Range: Funktion:
0,00* [-4999-4999] Geben Sie den minimalen Sollwert ein.
Die Summe aller internen und externen
Sollwerte ist auf den minimalen Sollwert
(3-02 Minimaler Sollwert) begrenzt.
3-03 Max. Sollwert
Range: Funktion:
Der maximale Sollwert kann im Bereich
minimaler Sollwert bis -4999 eingestellt
werden.
50,00* [-4999-4999] Geben Sie den maximalen Sollwert ein.
Die Summe aller internen und externen
Sollwerte ist auf den maximalen Sollwert
(3-03 Maximaler Sollwert) begrenzt.
Option: Funktion:
Jeder Parametersatz enthält acht (0-7)
Festsollwerte, die über 3 Digitaleingänge oder serielle Schnittstelle
wählbar sind.
[18]
Bit 2
0 0 0 0
0 0 1 1
0 1 0 2
0 1 1 3
1 0 0 4
1 0 1 5
1 1 0 6
1 1 1 7
Tabelle 4.2 Parametergruppe 5-1*
Digitaleingänge Option [16], [17] und
[18]
[0,00]*-100.00-100.00% Mit diesem Parameter können Sie
verschiedene Festsollwerte programmieren.
Normalerweise ist 100 % = der in 3-03
Max. Sollwert eingestellte Wert.
Es gibt jedoch Ausnahmen, wenn 3-00
Sollwertbereich auf [0] Min. bis Max.
eingestellt ist.
Beispiel 1:
3-02 Minimaler Sollwert ist auf 20 und
3-03 Max. Sollwert auf 50 eingestellt. In
diesem Fall sind 0 % = 0 und 100 % =
50.
Beispiel 2:
3-02 Minimaler Sollwert ist auf -70 und
3-03 Max. Sollwert auf 50 eingestellt. In
diesem Fall sind 0 % = 0 und 100 % =
70.
[17]
Bit 1
[16]
Bit 0
[16]
Bit 0
22 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 25
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
3-11 Festdrehzahl Jog [Hz]
Range: Funktion:
Die Festdrehzahl Jog ist eine feste
Ausgangsdrehzahl und übergeht die
gewählte Sollwertdrehzahl, siehe Parametergruppe 5-1* Digitaleingänge Option [14].
Wird der Motor im Job-Betrieb gestoppt,
wirkt das Festdrehzahl Jog-Signal als
Startsignal.
Bei Entfernen des Festdrehzahl Jog-Signals
läuft der Motor gemäß der gewählten
Konfiguration.
5,0Hz [0,0-400,0
Hz]
Auswahl der Drehzahl, die als Festdrehzahl
Jog wirken soll.
3-12 Frequenzkorrektur Auf/Ab
Range: Funktion:
0%*
[0-100%]
Die Funktion Frequenzkorrektur Auf/Ab wird durch
einen Eingangsbefehl aktiviert (siehe 5-1* Digita-
leingänge, Option [28]/[29]). Ist der Befehl aktiv,
wird der Wert für Frequenzkorrektur auf/ab (in
%) wie folgt zur Sollwertfunktion addiert:
Sollwert
=
Sollwert
+
Sollwert
Frequenzkorrektur Auf Frequenzkorrektur Ab
×
Sollwert
=
Sollwert
Frequenzkorrektur Auf Frequenzkorrektur Ab
×
−
100
Sollwert
100
Wird der Eingangsbefehl deaktiviert, kehrt der
Sollwert zu seinem ursprünglichen Wert zurück,
d. h. Sollwert = Sollwert + 0.
3-14 Relativer Festsollwert
Range: Funktion:
0,00% [-100.00-100.00%] Definiert einen Festsollwert (in %),
der als variabler Wert (definiert in
3-18 Relativ. Skalierungssollw.
Ressource) zum momentanen Sollwert
addiert wird.
Die Summe dieses variablen und des
relativen Festsollwert (mit Y in der
nachstehenden Abbildung markiert)
ergibt den gesamten relativen
Sollwert, der zu allen anderen
Sollwerten relativ addiert wird.
X
+ X ×
Abbildung 4.5
Y
100
3-15 Variabler Sollwert 1
Option: Funktion:
Es ist möglich, bis zu drei variable
Sollwertsignale (3-15 Variabler Sollwert 1,
3-16 Variabler Sollwert 2 und 3-17
Variabler Sollwert 3) zu definieren. Die
Summe der Sollwertsignale legt die
aktuellen Sollwerte fest.
[0] Deaktiviert Kein Sollwertsignal definiert.
[1] * Analogeingang 53 Verwendet Signale von Analogeingang
53 als Sollwert, siehe Parametergruppe
6-1* Analogeingang 1.
[2] Analogeingang 60 Verwendet Signale von Analogeingang
60 als Sollwert, siehe Parametergruppe
6-2* Analogeingang 2.
[8] Pulseingang 33 Verwendet Signale vom Pulseingang als
Sollwert, siehe Parametergruppe 5-5*
Pulseingänge.
[11] Bus Sollwert Verwendet Signale vom lokalen Bus als
Sollwert, siehe Parametergruppe 8-9*
Bus-Istwert.
[21] LCP-Potenti-
ometer
Verwendet Signale vom LCP-Potenti-
ometer als Sollwert, siehe
Parametergruppe 6-8* LCP-Potenti-
ometer.
3-16 Variabler Sollwert 2
Option: Funktion:
Siehe Beschreibung unter 3-15 Variabler
Sollwert 1.
[0] Deaktiviert Kein Sollwertsignal definiert.
[1] Analogeingang 53 Verwendet Signale von Analogeingang
53 als Sollwert.
[2] * Analogeingang 60 Verwendet Signale von Analogeingang
60 als Sollwert.
[8] Pulseingang 33 Verwendet Signale vom Pulseingang als
Sollwert, siehe Parametergruppe 5-5*
Pulseingänge.
[11] Bus Sollwert Verwendet Signale des lokalen Bus als
Sollwert.
[21] LCP-Potentiometer Verwendet Signale vom LCP-Potenti-
ometer als Sollwert.
3-17 Variabler Sollwert 3
Option: Funktion:
Siehe Beschreibung unter 3-15
Variabler Sollwert 1.
[0] Deaktiviert Kein Sollwertsignal definiert.
[1] Analogeingang 53 Verwendet Signale von Analogeingang
53 als Sollwert.
[2] Analogeingang 60 Verwendet Signale von Analogeingang
60 als Sollwert.
[8] Pulseingang 33 Verwendet Signale vom Pulseingang
als Sollwert, siehe Parametergruppe
5-5* Pulseingänge.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 23
Page 26

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
3-17 Variabler Sollwert 3
Option: Funktion:
[11] * Bus Sollwert Verwendet Signale des lokalen Bus als
Sollwert.
[21] LCP-Potentiometer Verwendet Signale vom LCP-Potenti-
ometer als Sollwert.
3-18 Relativ. Skalierungssollw. Ressource
Option: Funktion:
44
[0] * Deaktiviert Die Funktion ist deaktiviert
[1] Analogeingang 53 Auswahl von Analogeingang 53 als
[2] Analogeingang 60 Auswahl von Analogeingang 60 als
[8] Pulseingang 33 Auswahl von Pulseingang 33 als Quelle
[11] Bus Sollwert Auswahl des Bussollwerts als Quelle des
[21] LCP-Potentiometer Auswahl des LCP-Potentiometers als
Dieser Parameter definiert die Quelle
des relativen Sollwerts. Die Summe
dieses variablen und des relativen
Festsollwerts (3-14 Relativer Festsollwert)
ergibt den gesamten relativen Sollwert,
der zu allen anderen Sollwerten addiert
wird.
Quelle des relativen Sollwerts.
Quelle des relativen Sollwerts.
des relativen Sollwerts.
relativen Sollwerts.
Quelle des relativen Sollwerts.
4.4.4 3-4* Rampe 1
Bei einer linearen Rampe wird mit konstanter Geschwindigkeit beschleunigt, bis die gewünschte Motordrehzahl
erreicht ist. Beim Erreichen der Drehzahl kann ein gewisses
Maß an Überschwingen auftreten, das kurze Zeit
Drehzahlrucke verursacht, bevor sie sich stabilisiert.
Bei Auswahl einer S-Rampe erfolgt eine Anpassung des
Beschleunigungs-/Verzögerungsvorgangs an die Lastverhältnisse, um Rucke beim Erreichen der Drehzahl zu
vermeiden.
Abbildung 4.6 zeigt einen Vergleich der zwei Rampentypen.
Rampenzeiten
Rampe Auf: Beschleunigungszeit von 0 bis Motornennfrequenz (1-23 Motornennfrequenz).
Verzögerungszeit von Motornennfrequenz (1-23 Motornenn-
frequenz) bis 0.
Begrenzung
Eine zu kurze Rampenzeit Auf kann zur Anzeige einer
Drehmomentgrenzenwarnung (W12) und/oder DCÜberspannungswarnung (W7) führen. Die Rampe wird
gestoppt, wenn der Frequenzumrichter die motorische
Drehmomentgrenze (4-16 Momentengrenze motorisch)
erreicht.
Eine zu kurze Rampenzeit Ab kann zur Anzeige einer
Drehmomentgrenzenwarnung (W12) und/oder DCÜberspannungswarnung (W7) führen. Die Rampe wird
gestoppt, wenn der Frequenzumrichter die motorische
Drehmomentgrenze (4-17 Momentengrenze generatorisch)
und/oder die interne DC-Überspannungsgrenze erreicht.
3-40 Rampentyp 1
Option: Funktion:
[0] * Linear Konstante Beschleunigung/Verzögerung.
[2] S-Rampe Sanfte Schwankungen kompensiert Beschleu-
nigung/Verzögerung.
3-41 Rampenzeit Auf 1
Range: Funktion:
Größenabhängig*
[0,05-3600,00s]Geben Sie die Rampenzeit Auf
von 0 Hz bis zu der in 1-23
Motornennfrequenz eingestellten
Motornennfrequenz (f
Wählen Sie eine Rampenzeit Auf,
bei der die Drehmomentgrenze
nicht überschritten wird, siehe
4-16 Momentengrenze motorisch.
M,N
) ein.
3-42 Rampenzeit Ab 1
Range: Funktion:
Größenabhängig*
[0,05-3600,00s]Geben Sie die Rampenzeit ab von
Motornennfrequenz (f
Motornennfrequenz bis 0 Hz ein.
Wählen Sie eine Rampenzeit Ab,
die bei generatorischem
Motorbetrieb nicht zu einer
Überspannung im Wechselrichter
führt. Des Weiteren darf das
generatorische Drehmoment die in
4-17 Momentengrenze generatorisch
festgelegte Grenze nicht
überschreiten.
) in 1-23
M,N
3-5* Rampe 2
4.4.5
Zur Beschreibung der Rampentypen siehe Parameter-
Abbildung 4.6
24 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
gruppe 3-4* Rampe 1.
Page 27

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
HINWEIS
Rampe 2 - alternative Rampenzeiten:
Der Wechsel von Rampe 1 zu Rampe 2 erfolgt über den
Digitaleingang. Siehe 5-1* Digitaleingänge, Option [34].
3-50 Rampentyp 2
Option: Funktion:
[0] * Linear Konstante Beschleunigung/Verzögerung.
[2] S-Rampe Sanfte Schwankungen kompensiert Beschleu-
nigung/Verzögerung.
3-51 Rampenzeit Auf 2
Range: Funktion:
Größenabhängig*
3-52 Rampenzeit Ab 2
Range: Funktion:
Größenabhängig
[0,05-3600,00s]Geben Sie die Rampenzeit Auf
von 0 Hz bis zu der in 1-23
Motornennfrequenz eingestellten
Motornennfrequenz (f
Wählen Sie eine Rampenzeit Auf,
bei der die Drehmomentgrenze
nicht überschritten wird, siehe
4-16 Momentengrenze motorisch.
[0,05-3600,00s]Geben Sie die Rampenzeit ab von
Motornennfrequenz (f
Motornennfrequenz bis 0 Hz ein.
Wählen Sie eine Rampenzeit Ab,
die bei generatorischem
Motorbetrieb nicht zu einer
Überspannung im Wechselrichter
führt. Des Weiteren darf das
generatorische Drehmoment die in
4-17 Momentengrenze generatorisch
festgelegte Grenze nicht
überschreiten.
M,N
) in 1-23
M,N
) ein.
3-80 Rampenzeit JOG
Range: Funktion:
Die Rampenzeit JOG wird mit
Anwahl der JOG-Drehzahl über
Digitaleingang oder Bus-Schnittstelle aktiviert.
3-81 Rampenzeit Schnellstopp
Range: Funktion:
Größenabhängig*
[0,05-3600,00 s] Eine lineare Rampe, die bei
aktiviertem Schnellstopp
anzuwenden ist. Siehe Parametergruppe 5-1* Digitaleingänge,
Option [4].
4 4
3-8* Weitere Rampen
4.4.6
Parameter zum Konfigurieren von Spezialrampen, z. B.
Festdrehzahl JOG oder Schnellstopp.
Bei Festdrehzahl JOG ist eine Rampe auf oder Rampe ab
möglich, während beim Schnellstopp nur Rampe ab
möglich ist.
3-80 Rampenzeit JOG
Range: Funktion:
Größenabhängig*
[0,05-3600,00s]Eine lineare Rampe, die bei
aktivierter Festdrehzahl JOG
anzuwenden ist. Siehe Parametergruppe 5-1* Digitaleingänge,
Option [14].
Rampenzeit Auf = Rampenzeit
Ab.
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 25
Page 28

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.5 Parametergruppe 4: Grenzen/
Warnungen
4.5.1 4-** Motorgrenzen
Parametergruppe zum Konfigurieren von Grenzwerten und
Warnungen.
44
4.5.2 4-1* Motor Grenzen
4-14 Max. Frequenz
Range: Funktion:
HINWEIS
Da die maximale Ausgangsfrequenz ein absoluter Wert ist,
kann von ihr nicht abgewichen
werden.
4-16 Momentengrenze motorisch
Range: Funktion:
Verwenden Sie diese Parameter für die Festlegung von
Drehzahl, Drehmoment und aktuellem Arbeitsbereich des
Motors.
4-10 Motor Drehrichtung
Option: Funktion:
Bei Anschluss der Klemmen 96, 97 und 98
an U, V und W dreht der Motor bei
Blickrichtung von vorne nach rechts.
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
[0] * Nur Rechts Die Motorwelle dreht sich im Rechtslauf.
Diese Einstellung verhindert einen Linkslauf
des Motors. Wenn Sie 1-00 Regelverfahren
auf Regelung ohne Rückführung einstellen,
wird 4-10 Motor Drehrichtung automatisch
auf Rechtslauf eingestellt.
[1] Nur Links Die Motorwelle dreht sich im Linkslauf. Diese
Einstellung verhindert einen Rechtslauf des
Motors.
[2] * Beide
Richtungen
Diese Einstellung ermöglicht einen Motorlauf
in beide Richtungen. Die Ausgangsfrequenz
ist jedoch begrenzt: Min. Motordrehzahl
(4-12 Min. Drehzahl) bis max. Motordrehzahl
(4-14 Max. Drehzahl). Wenn Sie 1-00 Regelver-
fahren auf Regelung ohne Rückführung
einstellen, wird 4-10 Motor Drehrichtung
automatisch auf Beide Richtungen eingestellt.
4-12 Min. Frequenz
Range: Funktion:
0,0 Hz* [0,0-400,0 Hz]
Stellen Sie die Min. Frequenz
entsprechend der minimalen Ausgangsfrequenz der Motorwelle ein.
HINWEIS
Da die minimale Ausgangsfrequenz
ein absoluter Wert ist, kann von ihr
nicht abgewichen werden.
4-14 Max. Frequenz
Range: Funktion:
65,0 Hz* [0,0-400,0 Hz]
Stellen Sie die Max. Frequenz
entsprechend der minimalen Ausgangsfrequenz der Motorwelle ein.
150 %* [0-400%] Definiert die Momentengrenze für den
motorischen Betrieb.
Wenn eine Einstellung in 1-00 Regelverfahren
bis 1-25 Motor/Last geändert wird, werden
nicht automatisch die Werkseinstellungen
wieder hergestellt.
4-17 Momentengrenze generatorisch
Range: Funktion:
100 %* [0-400%] Definiert die Momentengrenze für den
generatorischen Betrieb.
Wenn eine Einstellung in 1-00 Regelverfahren
bis 1-25 Motor/Last geändert wird, werden
nicht automatisch die Werkseinstellungen
wieder hergestellt.
4.5.3 4-4* Einstellbare Warnungen 2
4-40 Warnung Frequenz niedrig
Range: Funktion:
0,00
[0,0 Hz-
Hz*
Abhängig vom
Wert von 4-41
Warnung
Frequenz hoch]
4-41 Warnung Frequenz hoch
Range: Funktion:
400,0
Hz*
[Abhängig
vom Wert von
4-40 Warnung
Frequenz tief -
400,0 Hz]
Mithilfe dieses Parameters können Sie
eine minimale Grenze für den Frequenzbereich einstellen.
Wenn die Motordrehzahl diese Grenze
unterschreitet, zeigt das Display die
Meldung DREHZAHL NIEDRIG an.
Warnbit 10 wird eingestellt in 16-94 Erw.
Zustandswort. Sie können das Ausgangsrelais so konfigurieren, dass es diese
Warnung anzeigt. Die Warn-LED am LCP
leuchtet nicht auf, wenn der eingestellte
Grenzwert dieses Parameters erreicht
wird.
Dieser Parameter stellt eine höhere
Grenze für den Frequenzbereich ein.
Wenn die Motordrehzahl diese Grenze
überschreitet, zeigt das Display die
Meldung DREHZAHL HOCH an.
Warnbit 9 wird eingestellt in 16-94
Erw. Zustandswort. Sie können das
Ausgangsrelais so konfigurieren, dass
es diese Warnung anzeigt. Die WarnLED am LCP leuchtet nicht auf, wenn
26 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 29

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4-41 Warnung Frequenz hoch
Range: Funktion:
der eingestellte Grenzwert dieses
Parameters erreicht wird.
4.5.4 4-5* Einstellbare Warnungen
Parametergruppe mit einstellbaren Warnungsgrenzen für
Strom, Drehzahl, Sollwert und Istwert.
Warnungen werden auf dem Display, am programmierten
Ausgang oder an der seriellen Schnittstelle angezeigt.
4-50 Warnung Strom niedrig
Range: Funktion:
Mit diesem Parameter wird ein unterer
Grenzwert für den Strombereich
festgelegt.
Wenn der Strom unter den eingestellten
Grenzwert fällt, wird Warnbit 8 in 16-94
Erw.> Zustandswort gesetzt.
Sie können das Ausgangsrelais so
konfigurierten, dass es diese Warnung
anzeigt. Die LCP-Warnleuchte leuchtet
nicht auf, wenn der eingestellte
Grenzwert dieses Parameters erreicht
wird.
0,00A* [0,00-26,00A]Stellen Sie den Wert für die min.
Stromgrenze ein.
4-51 Warnung Strom hoch
Range: Funktion:
Mit diesem Parameter wird ein oberer
Grenzwert für den Strombereich
festgelegt.
Wenn die Stromstärke die festgelegte
Grenze übersteigt, wird das Warnbit 7 in
16-94 Erw. Zustandswort gesetzt.
Sie können das Ausgangsrelais so
konfigurierten, dass es diese Warnung
anzeigt. Die LCP-Warnleuchte leuchtet
nicht auf, wenn der eingestellte
Grenzwert dieses Parameters erreicht
wird.
26,00A* [0,00-26,00A]Stellen Sie die max. Stromgrenze ein.
4-54 Warnung Sollwert niedr.
Range: Funktion:
-4999,000* [-4999,000 Abhängig vom
Wert von 4-55
Warnung
Sollwert hoch]
Mithilfe dieses Parameters können
Sie eine minimale Grenze für den
Sollwertbereich einstellen.
Wenn der tatsächliche Sollwert diese
Grenze unterschreitet, zeigt das
Display die Meldung „Sollwert
niedrig“ an Warnbit 20 wird
4-54 Warnung Sollwert niedr.
Range: Funktion:
eingestellt in 16-94 Erw.
Zustandswort. Sie können das
Ausgangsrelais so konfigurieren,
dass es diese Warnung anzeigt. Die
Warn-LED am LCP leuchtet nicht auf,
wenn der eingestellte Grenzwert
dieses Parameters erreicht wird.
4-55 Warnung Sollwert hoch
Range: Funktion:
4999,000* [Abhängig
vom Wert von
4-54 Warnung
Sollwert niedrig
4999,000]
Mithilfe dieses Parameters können
Sie eine maximale Grenze für den
Sollwertbereich einstellen.
Wenn der tatsächliche Sollwert diese
Grenze überschreitet, zeigt das
Display „Sollwert hoch“ an. Warnbit
19 wird eingestellt in 16-94 Erw.
Zustandswort. Sie können das
Ausgangsrelais so konfigurieren, dass
es diese Warnung anzeigt. Die WarnLED am LCP leuchtet nicht auf, wenn
der eingestellte Grenzwert dieses
Parameters erreicht wird.
4-56 Warnung Istwert niedrig
Range: Funktion:
-4999,000* [-4999,000Abhängig vom
Wert von 4-57
Warnung Istwert
hoch]
Mithilfe dieses Parameters können
Sie eine minimale Grenze für den
Istwertbereich einstellen.
Wenn der Istwert unter diese
Grenze fällt, zeigt das Display
„Istwert niedrig“ an. Warnbit 6 wird
eingestellt in 16-94 Erw.
Zustandswort. Sie können das
Ausgangsrelais so konfigurieren,
dass es diese Warnung anzeigt. Die
Warn-LED am LCP leuchtet nicht
auf, wenn der eingestellte
Grenzwert dieses Parameters
erreicht wird.
4-57 Warnung Istwert hoch
Range: Funktion:
4999,000* [Abhängig
vom Wert von
4-56 Warnung
Istwert niedrig -
4999,000]
Mithilfe dieses Parameters können
Sie eine maximale Grenze für den
Sollwertbereich einstellen.
Wenn die Motordrehzahl diesen
Grenzwert überschreitet, zeigt das
Display die Meldung „Istwert hoch“
an. Warnbit 5 wird eingestellt in
16-94 Erw. Zustandswort. Sie können
das Ausgangsrelais so konfigurieren,
dass es diese Warnung anzeigt. Die
Warn-LED am LCP leuchtet nicht auf,
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 27
Page 30

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4-57 Warnung Istwert hoch
Range: Funktion:
wenn der eingestellte Grenzwert
dieses Parameters erreicht wird.
4-58 Motorphasen Überwachung
Option: Funktion:
Bei Ausfall einer Motorphase sinkt das Motordreh-
44
moment. Diese Überwachung kann für Sonderzwecke
(z. B. kleine Motoren, die mit reiner U/f-Kennlinie
laufen) ausgeschaltet werden, es besteht jedoch das
Risiko einer Überhitzung des Motors. Danfoss
empfiehlt daher dringend, die Funktion auf Ein zu
stellen.
Bei einer fehlenden Motorphase schaltet der Frequenzumrichter ab und zeigt einen Alarm an.
HINWEIS
Diesen Parameter können Sie bei laufendem
Motor nicht ändern.
[0] Aus Funktion ist deaktiviert.
[1] * Ein Funktion ist aktiviert.
4.5.5 4-6* Drehz.ausblendung
Bei einigen Antrieben kann es bei bestimmten Drehzahlen
zu Resonanzproblemen kommen. Durch die Drehzahlausblendung vermeiden Sie einen statischen Betrieb in diesen
Bereichen. Der Frequenzumrichter durchläuft diese
Bereiche mit der Rampenzeit.
4-61 Ausbl. Drehzahl von [Hz]
Array [2]
Range: Funktion:
0,0 Hz* [0,0-400,0
Hz]
4-63 Ausbl. Drehzahl bis [Hz]
Array [2]
Range: Funktion:
0,0 Hz* [0,0-400,0 Hz] Geben Sie die oberen oder unteren
Geben Sie die oberen oder unteren
Grenzen für die Frequenzen ein, die
vermieden werden sollen.
Als auszublendende Drehzahl kann in
den Parameter Ausbl. von und Ausbl. bis
beliebig die obere oder untere Grenze
eingegeben werden. Die Funktion wird
jedoch deaktiviert, wenn in den beiden
Parametern die gleichen Werte
eingestellt sind.
Grenzen für den Frequenzbereich ein,
der vermieden werden soll.
Geben Sie hier unbedingt die entgegengesetzte Grenze zu 4-61 Ausbl. Drehzahl
von [Hz] ein.
28 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 31

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.6 Parametergruppe 5: Digit. Ein-/
Ausgänge
4.6.1 5-** Digit. Ein-/Ausgänge
Im Folgenden werden alle Funktionen und Signale für
Digitaleingangsbefehle erläutert.
4.6.2 5-1* Digitaleingänge
Parameter zum Einstellen der Funktionen der Digitaleingänge.
Die Digitaleingänge dienen zur Auswahl verschiedener
Funktionen im Frequenzumrichter. Sie können alle Digitaleingänge auf die folgenden Funktionen einstellen:
[0] Ohne Funktion Der Frequenzumrichter reagiert nicht
auf an die Klemme geführte Signale.
[1] Alarm quittieren Setzt den Frequenzumrichter nach
Abschaltung/Alarm zurück. Sie können
nicht alle Alarme quittieren.
[2 ] Motorfreilauf
invers
[3] Motorfreilauf/Reset Reset und Freilaufstopp, invertierter
[4] Schnellst.rampe
(inv)
[5] DC-Bremse (invers) Invertierter Eingang für DC-Bremse (NC).
[6] Stopp invers Stopp, invertierte Funktion. Wenn das
[8] Start Wählen Sie Start, um die ausgewählte
[9] Puls-Start Der Motor wird gestartet, wenn ein Puls
Motorfreilaufstopp, invertierter Eingang
(NC). Der Frequenzumrichter belässt
den Motor im Freilauf.
Eingang (NC). Wenn das Signal an der
zugewiesenen Klemme von Logisch „1“
auf „0“ wechselt, wird der Frequenzumrichter nach einem Alarm zurückgesetzt
und es wird Motorfreilauf ausgeführt.
Invertierter Eingang (NC). Wenn das
Signal an der zugewiesenen Klemme
„0“ ist, wird ein Stopp gemäß 3-81
Schnellstopp-Rampenzeit ausgeführt.
Nach Anhalten des Motors dreht die
Motorwelle im Leerlauf.
Hält den Motor durch Anlegen einer
DC-Spannung für einen bestimmten
Zeitraum an, siehe 2-01 DC-Bremsstrom.
Die Funktion ist nur aktiv, wenn der
Wert in 2-02 DC-Bremszeit ungleich 0 ist.
Signal an der zugewiesenen Klemme
von „1“ auf „0“ wechselt, wird ein
Rampenstopp aktiviert. Der Stopp wird
gemäß der gewählten Rampenzeit
ausgeführt.
Klemme für einen Start/Stopp-Befehl zu
konfigurieren.
1=Start, 0=Stopp.
für 2 ms aktiviert wird; bei Aktivierung
von Stopp (invers) wird er gestoppt.
[10] Reversierung Ändert die Drehrichtung der
Motorwelle. Das Reversierungssignal
ändert nur die Drehrichtung. Die
Startfunktion wird nicht aktiviert.
Wählen Sie [2] Beide Richtungen in 4-10
Motor Drehrichtung.
0 = normal, 1 = Reversierung.
[11] Start +
Reversierung
[12] Start nur Rechts Ist zu wählen, wenn der Frequenzum-
[13] Start nur Links Ist zu wählen, wenn der Frequenzum-
[14] Festdrz. (JOG) Aktiviert für die zugewiesene Klemme
[16] Festsollwert Bit 0 Festsollwert Bit 0, 1 und 2 erlaubt die
[17] Festsollwert Bit 1
[18] Festsollwert Bit 2 Wie Festsollwert Bit 0 [16].
[19] Sollw. speich. Speichert den aktuellen Sollwert. Der
[20] Drehz. speich. Speichert die aktuelle Ausgangs-
Wird für Start/Stopp und gleichzeitige
Reversierung verwendet. Signale beim
Start [8] sind nicht gleichzeitig möglich.
0 = Stopp, 1 = Reversierung starten.
richter nach einem Start nur ein
Rechtsdrehfeld erzeugen soll.
richter nach einem Start nur ein
Linksdrehfeld erzeugen soll.
die JOG-Funktion. Siehe 3-11
Festdrehzahl JOG.
Wahl zwischen einem der acht
Festsollwerte wie unten angegeben.
Wie Festsollwert Bit 0 [16], siehe 3-10
Festsollwert.
gespeicherte Wert ist jetzt der
Ausgangspunkt bzw. die Bedingung für
Drehzahl auf und Drehzahl ab. Wird
Drehzahl auf/ab benutzt, so richtet sich
die Drehzahländerung immer nach
Rampe 2 (3-51 Rampenzeit Auf 2 und
3-52 Rampenzeit Ab 2) im Intervall 3-02
Minimaler Sollwert - 3-03 Max. Sollwert.
drehzahl. Die gespeicherte
Motorfrequenz ist nun der
Ausgangspunkt bzw. die Bedingung für
die Verwendung von Drehzahl auf und
Drehzahl ab. Wird Drehzahl auf/ab
benutzt, so richtet sich die Drehzahländerung immer nach Rampe 2 im
Intervall 4-12 Min. Frequenz - 4-14 Max.
Frequenz.
HINWEIS
Wenn Drehzahl speichern aktiv ist,
kann der Frequenzumrichter nicht
über ein niedriges Start-Signal
(Option [8]) angehalten werden.
Der Frequenzumrichter ist über
eine für Freilauf invers [2] oder
Motorfreilauf/Reset, invers [3]
programmierte Klemme zu
stoppen.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 29
Page 32

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
[21] Drehzahl auf Drehzahl auf und Drehzahl ab sind zu
wählen, wenn eine digitale Steuerung
der Drehzahl auf/ab (Motorpotentiometer) erfolgen soll. Aktivieren Sie
diese Funktion durch Auswahl von
Sollwert speichern oder Ausgangsfrequenz speichern. Wird Drehzahl ab
weniger als 400 ms aktiviert, wird der
resultierende Sollwert um 0,1 % erhöht.
44
[22] Drehzahl ab Identisch mit Drehzahl auf [21].
[23] Satzanwahl Bit 0
[26] Präz. Stopp inv.
(nur Klemme 33)
[27] Start, präziser
Stopp (nur
Klemme 33)
[28] Freq.korr. Auf Wählen Sie Freq.korr. Auf/Ab, um den
[29] Freq.korr. Ab Wie Freq.korr. Auf [28]
[32] Pulseingang (nur
Klemme 33)
[34] Rampe Bit 0 Logisch 0=Rampe 1, siehe Parameter-
[60] Zähler A (+) Eingang für Zähler A.
[61] Zähler A (-) Eingang für Zähler A.
[62] Reset Zähler A Eingang zum Reset von Zähler A.
[63] Zähler B (+) Eingang für Zähler B.
[64] Zähler B (-) Eingang für Zähler B.
[65] Reset Zähler B Eingang zum Reset von Zähler B.
Falls Drehzahl auf länger als 400 ms
aktiviert ist, erfolgt Rampe auf/ab des
resultierenden Sollwerts gemäß Rampe
2 in 3-51 Rampenzeit Auf 2.
0-10 Aktiver Satz muss auf Externe
Anwahl eingestellt sein.
Logisch 0 = Satz 1, Logisch 1 = Satz 2.
Verzögert das Stoppsignal, um einen
präzisen Stopp unabhängig von der
Abtastzeit zu erhalten. Die Funktion ist
nur für Klemme 33 verfügbar.
Wie [26], aber mit Start.
resultierenden Sollwert um den in 3-12
Wert für Frequenzkorrektur auf/ab festgelegten Prozentsatz zu erhöhen oder zu
reduzieren.
Pulseingang ist zu wählen, wenn die
zugewiesene Klemme als Frequenzeingang (Pulssignal) konfiguriert werden
soll. Die Skalierung erfolgt in Parametergruppe 5-5* Pulseingänge.
gruppe 3-4* Rampe 1
Logisch 1=Rampe 2, siehe Parametergruppe 3-5* Rampe 2
5-10 Klemme 18 Digitaleingang
Option: Funktion:
[8] * Start Die Funktion aus dem verfügbaren Digitaleingangs-
bereich auswählen.
Siehe Parametergruppe 5-1* Digitaleingänge für
Wahlmöglichkeiten.
5-11 Klemme 19 Digitaleingang
Option: Funktion:
[10] * Reversierung Wählen Sie die Funktion aus dem
verfügbaren Digitaleingangsbereich aus.
Mögliche Optionen finden Sie in Parametergruppe 5-1* Digitaleingänge.
5-12 Klemme 27 Digitaleingang
Option: Funktion:
[1] * Alarm quittieren Wählen Sie die Funktion aus dem
verfügbaren Digitaleingangsbereich aus.
Mögliche Optionen finden Sie in Parametergruppe 5-1* Digitaleingänge.
5-13 Klemme 29 Digitaleingang
Option: Funktion:
[14] * Festdrz. (JOG) Wählen Sie die Funktion aus dem
verfügbaren Digitaleingangsbereich aus.
Mögliche Optionen finden Sie in Parametergruppe 5-1* Digitaleingänge.
5-15 Klemme 33 Digitaleingang
Option: Funktion:
[16] * Festsollwert Bit 0 Wählen Sie die Funktion aus dem
verfügbaren Digitaleingangsbereich aus.
Mögliche Optionen finden Sie in
Parametergruppe 5-1* Digitaleingänge.
4.6.3 5-3* Digitalausgänge
5-34 Ein Verzögerung, Klemme 42 Digitalausgang
Range: Funktion:
0,01 s* [0,00-600,00 s]
5-35 Aus Verzögerung, Klemme 42 Digitalausgang
Range: Funktion:
0,01 s* [0,00-600,00 s]
4.6.4 5-4* Relais
Parametergruppe zum Einstellen der Funktionen der
Relaisausgänge.
[0]
Ohne Funktion Werkseinstellung für alle Digital- und
Relaisausgänge.
[1] Steuer. bereit An der Steuerkarte liegt Versorgungs-
spannung an.
[2] FU bereit Der Frequenzumrichter ist betriebs-
bereit und legt ein Versorgungssignal
an der Steuerkarte an.
[3] Bereit/Fern-Betrieb Der Frequenzumrichter ist betriebs-
bereit für Auto-Betrieb.
[4] Freigabe/k. Warnung Der Frequenzumrichter ist betriebs-
bereit. Es wurde kein Start-/
30 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 33

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
Stoppbefehl gegeben. Es liegen
keine Warnungen vor.
[5] Motor ein Der Motor läuft.
[6] Motor ein/k.
Warnung
[7] Grenzen OK/k. Warn. Der Motor läuft innerhalb der
[8] Ist=Sollw./k. Warn. Die Motordrehzahl entspricht dem
[9] Alarm Ein Alarm aktiviert den Ausgang.
[10] Alarm oder Warnung Ein Alarm oder eine Warnung
[12] Außerh.Stromber. Der Motorstrom befindet sich
[13] Unter Min.-Strom Der Motorstrom liegt unter dem in
[14] Über Max.-Strom Der Motorstrom liegt über dem in
[16] Unter Min.-Frequenz Die Motordrehzahl liegt unter dem in
[17] Über Max.-Frequenz Die Motordrehzahl liegt über dem in
[19] Unter Min.-Istwert
[20] Über Max.-Istwert
[21] Warnung Übertemp. Der Frequenzumrichter aktiviert die
[22] Bereit, k.therm.Warn. Der Frequenzumrichter ist betriebs-
[23] Bereit, k. therm.
Warnung
[24] Bereit,k.Üb.-/Un.sp. Der Frequenzumrichter ist betriebs-
[25] Reversierung Der Motor läuft bzw. ist bereit, im
Motor läuft und es liegen keine
Warnungen vor.
programmierten Strombereiche, siehe
4-50 Warnung Strom niedrig und 4-51
Warnung Strom hoch. Es liegen keine
Warnungen vor.
Sollwert.
aktiviert den Ausgang.
außerhalb des in 4-50 Warnung Strom
niedrig und 4-51 Warnung Strom hoch
eingestellten Bereichs.
4-50 Warnung Strom niedrig
eingestellten Wert.
4-51 Warnung Strom hoch
eingestellten Wert.
4-40 Warnung Frequenz niedrig
eingestellten Wert.
4-41 Warnung Frequenz hoch
eingestellten Wert.
Der Istwert liegt unter dem in 4-56
Warnung Istwert niedrig eingestellten
Wert.
Der Istwert liegt über dem in 4-57
Warnung Istwert hoch eingestellten
Wert.
Übertemperaturwarnung, wenn die
Temperatur den Grenzwert für Motor,
Frequenzumrichter, Bremswiderstand
oder Thermistor überschreitet.
bereit, und es liegt keine
Übertemperaturwarnung vor.
Der Frequenzumrichter ist betriebs-
bereit (Auto-Betrieb), und es liegt
keine Übertemperaturwarnung vor.
bereit, und die Netzspannung liegt
innerhalb des festgelegten
Spannungsbereichs.
Rechtslauf zu drehen, wenn logisch =
0 und im Linkslauf bei logisch = 1.
Der Ausgang ändert sich, sobald das
Reversierungssignal angelegt wird.
[26] Bus OK Die Bus-Kommunikation ist aktiv. Es
liegt kein Timeout vor.
[28] Bremse, k. Warnung Die Bremse ist aktiv und es liegen
keine Warnungen vor.
[29] Bremse OK/k. Alarm Die Bremselektronik ist betriebs-
bereit, es liegen keine Fehler vor.
[30] Stör. Bremse (IGBT) Dient zum Schutz des Frequenzum-
richters im Falle eines Fehlers in der
Bremselektronik. Dient zum Schutz
des Frequenzumrichters im Falle
eines Fehlers in der Bremselektronik.
[32] Mech. Bremse Ermöglicht das Steuern einer
externen mechanischen Bremse,
siehe Parametergruppe 2-2*
Mechanische Bremse.
[36] Steuerwort Bit 11 Bit 11 in Steuerwort steuert das
Relais.
[41] Unter Min.-Sollwert
[42] Über Max.-Sollwert
[51] Hand-Sollwert aktiv
[52] Fernsollwert aktiv
[53] Kein Alarm
[54] Startbefehl aktiv
[55] Reversierung aktiv
[56] Frequenzumrichter
im Hand-Betrieb
[57] Autobetrieb
[60] Vergleicher 0
[61] Vergleicher 1
[62] Vergleicher 2
[63] Vergleicher 3
[70] Logikregel 0
Der Sollwert liegt unter dem in 4-54
Warnung Sollwert niedr. eingestellten
Wert.
Der Sollwert liegt über dem in 4-55
Warnung Sollwert hoch eingestellten
Wert.
Siehe auch Parametergruppe 13-1*
Vergleicher. Wird der Vergleicherwert
0 als WAHR ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
Siehe auch Parametergruppe 13-1*
Vergleicher. Wird der Vergleicherwert
1 als WAHR ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
Siehe auch Parametergruppe 13-1*
Vergleicher. Wird der Vergleicherwert
2 als WAHR ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
Siehe auch Parametergruppe 13-1*
Vergleicher. Wird der Vergleicherwert
1 als WAHR ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
Siehe Parametergruppe 13-4*
Logikregeln. Wird Logikregel 1 als
WAHR ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 31
Page 34

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
[71] Logikregel 1
[72] Logikregel 2
44
[73] Logikregel 3
[81] SL-Digitalausgang B
5-40 Relaisfunktion
Option: Funktion:
[0] * Ohne Funktion Funktion aus dem verfügbaren Ausgangsre-
5-41 Ein Verzögerung, Relais
Option: Funktion:
[0,01 s] * [0,00-600,00 s] Geben Sie die Einschaltverzögerung
Siehe Parametergruppe 13-4*
Logikregeln. Wird Logikregel 2 als
WAHR ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
Siehe Parametergruppe 13-4*
Logikregeln. Wird Logikregel 3 als
WAHR ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
Siehe Parametergruppe 13-4*
Logikregeln. Wird Logikregel 3 als
WAHR ausgewertet, wird der
Ausgang aktiviert. Andernfalls ist er
AUS.
Siehe 13-52 SL-Controller Aktion.
Wenn die Smart Logic Aktion [39]
Digitalausgang A-EIN ausgeführt wird,
wird der Eingang aktiviert. Wenn die
Smart Logic Aktion [33] Digital-
ausgang A-AUS ausgeführt wird, wird
der Eingang deaktiviert.
laisbereich auswählen.
des Relais ein. Ändert sich die
ausgewählte Ereignisbedingung vor
Ablauf der Einschaltverzögerung, bleibt
der Relaisausgang unverändert. Zur
Funktion zur Regelung des Relais siehe
5-40 Relaisfunktion.
5-55 Klemme 33 Min. Frequenz
Range: Funktion:
20 Hz* [20-4999 Hz] Parameter zum Skalieren der Min.-
Frequenz des Pulseingangs 33. Der
angegebene Wert bezieht sich auf die
Einstellung in 5-57 Klemme 33 Min. Soll-/
Istwert.
5-56 Klemme 33 Hohe Frequenz
Range: Funktion:
5000 Hz* [21-5000 Hz] Parameter zum Skalieren der Max.-
Frequenz des Pulseingangs 33. Der
angegebene Wert bezieht sich auf die
Einstellung in 5-58 Klemme 33 Max.
Soll-/ Istwert.
5-57 Klemme 33 Min. Soll-/ Istwert
Range: Funktion:
0,000* [-4999-4999] Festlegung des minimalen Soll-/Istwertes
als Bezug für die Min. Frequenz des
Pulseingangs 33 (5-55 Klemme 33 Min.
Frequenz).
5-58 Klemme 33 Max. Soll-/ Istwert
Range: Funktion:
50,000* [-4999-4999] Festlegung des maximalen Soll-/Istwertes
als Bezug für die Max. Frequenz des
Pulseingangs 33 (5-56 Klemme 33 Max.
Frequenz).
5-42 Aus Verzögerung, Relais
Option: Funktion:
[0,01 s] * [0,00-600,00 s] Geben Sie die Ausschaltverzögerung
des Relais ein. Ändert sich die
ausgewählte Ereignisbedingung vor
Ablauf der Ein-/Ausschaltverzögerung,
bleibt der Relaisausgang unverändert.
Zur Funktion zur Regelung des Relais
siehe 5-40 Relaisfunktion.
4.6.5 5-5* Pulseingänge
Wählen Sie in 5-15 Klemme 33 Digitaleingang die Option
[32] Pulseingang. Jetzt wird Klemme 33 als Pulseingang im
Bereich von 5-55 Klemme 33 Min. Frequenz bis 5-56 Klemme
33 Max. Frequenz benutzt. Sie skalieren den Frequenzeingang über 5-57 Klemme 33 Min.Soll-/Istwert und 5-58
Klemme 33 Max. Soll-/ Istwert.
32 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 35

Soll-/Istwert
[UPM]
Analogeingang
Max.
Soll-/ Istwert
Min.
Soll-/ Istwert
Min. Spannung oder
Min. Strom
Max. Spannung oder
Max. Strom
130BD019.13
1 V 5 V 10 V
300
600
900
1.200
1.500
[V]
150
Par. 6-xx
Par. 6-xx
Par. 6-xx
Par. 6-xx
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.7 Parametergruppe 6: Analogein-/ausgänge
4.7.1 6-** Analoge Ein-/Ausg.
Parametergruppe zum Konfigurieren der Analogein- und ausgänge.
4.7.2 6-0* Grundeinstellungen
Par.-Gruppe zum Einstellen grundleg. Eigensch. der
Analogein-/-ausgänge.
6-00 Signalausfall Zeit
Range: Funktion:
Die Signalausfall Zeit dient zur Überwachung des
Signals an einem Analogeingang. Fällt das Signal
für länger als die hier eingestellte Zeit aus, wird
eine Signalausfall-Warnmeldung angezeigt.
10s* [1-99s]Fällt das Signal für die hier eingestellte Zeit aus,
wird die Signalausfall Funktion ausgeführt (6-01
Signalausfall Funktion).
Wird das Signal in dieser Zeit erfasst, wird der
Timer auf 0 gestellt.
Bei einem Signalausfall speichert der Frequenzumrichter die Ausgangsfrequenz und startet den
Signalausfall Zeit-Timer.
HINWEIS
Mikroschalter 4 in Position U:
6-10 Klemme 53 Skal. Min.Spannung und 6-11 Klemme 53
Skal. Max.Spannung sind aktiv.
Mikroschalter 4 in Position I:
6-12 Klemme 53 Skal. Min.Strom und 6-13 Klemme 53 Skal.
Max.Strom sind aktiv.
4 4
Abbildung 4.7
6-01 Signalausfall Funktion
Option: Funktion:
Die Funktion wird aktiviert, wenn das
Eingangssignal weniger als 50 % des in 6-10
Klemme 53 Min. Spannung, 6-12 Klemme 53
Min. Strom oder 6-22 Klemme 60 Min. Strom
eingestellten Werts beträgt.
[0] * Aus Funktion ist deaktiviert.
[1] Freq.
speichern
[2] Stopp Der Frequenzumrichter fährt den Motor über
[3] Festdrz.
(JOG)
[4] Max.
Drehzahl
[5] Stopp und
Alarm
4.7.3 6-1* Analogeingang 1
Parameter zum Skalieren und Konfigurieren der Grenzwerte
für Analogeingang 1 (Klemme 53).
Der Motor wird mit der momentanen
Ausgangsfrequenz weiter betrieben.
Rampe auf 0 Hz. Vor dem Neustart des
Frequenzumrichters muss die Signalausfallbe-
dingung entfernt werden.
Der Motor wird mit Festdrehzahl JOG
betrieben, siehe 3-11 Festdrehzahl JOG.
Der Motor wird mit maximaler Drehzahl
betrieben, siehe 4-14 Max. Frequenz.
Der Motor stoppt und es wird ein Alarm
ausgelöst. Vor dem Neustart des Frequen-
zumrichters muss die Signalausfallbedingung
entfernt und ein Reset ausgeführt werden.
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 33
Abbildung 4.8
6-10 Klemme 53 Skal. Min.Spannung
Range: Funktion:
Dieser Skalierungswert muss dem
minimalen Sollwert aus 6-14 Klemme 53
Skal. Min.-Soll/Istwert entsprechen. Siehe
auch 4.4 Parametergruppe 3: Sollwert/
Rampen.
0,07 V* [0,00-9,90 V] Geben Sie den minimalen (unteren)
Spannungswert ein.
VORSICHT
Sie müssen den Wert auf min. 1 V einstellen, um die
Signalausfall-Funktion in 6-01 Signalausfall-Funktion zu
aktivieren.
Page 36

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
6-11 Klemme 53 Skal. Max.Spannung
Range: Funktion:
Dieser Skalierungswert muss dem
maximalen Sollwert aus 6-15 Klemme 53
Skal. Max.Soll-/Istwert entsprechen.
10,0 V* [0,10-10,00 V] Geben Sie den maximalen (oberen)
Spannungswert ein.
6-12 Klemme 53 Skal. Min.Strom
44
Range: Funktion:
Dieser Skalierungswert muss dem
minimalen Sollwert aus 6-14 Klemme
53 Skal. Min.Soll-/Istwert entsprechen.
0,14 mA* [0,00-19,90 mA] Geben Sie den minimalen
Stromwert ein.
VORSICHT
Sie müssen den Wert auf min. 2 mA einstellen, um die
Signalausfall-Funktion in 6-01 Signalausfall-Funktion zu
6-16 Klemme 53 Filterzeit
Range: Funktion:
überlagert sind. Ein hoher Wert ergibt
mehr Glättung, erhöht jedoch auch die
Reaktionszeit.
0,01 s* [0,01-10,00 s] Geben Sie die Zeitkonstante ein.
6-19 Klemme 53 Funktion
Option: Funktion:
Wählen Sie den Eingang an Klemme 53.
VORSICHT
6-19 Klemme 53 Funktion MUSS
gemäß Einstellung Mikroschalter 4
eingestellt sein.
[0] * Einstellung
Spannung
[1] Einstellung
Strom
aktivieren.
4.7.4 6-2* Analogeingang 2
6-13 Klemme 53 Skal. Max.Strom
Range: Funktion:
Dieser Skalierungswert muss dem
maximalen Sollwert aus 6-15
Klemme 53 Skal. Max.Soll-/Istwert
entsprechen.
20,00 mA* [0,10-20,00 mA] Geben Sie den maximalen
Stromwert ein.
6-14 Klemme 53 Skal. Min.-Soll-/ Istwert
Range: Funktion:
Festlegung des minimalen Soll-/Istwertes
als Bezug für den Min.-Wert des
Analogeingangs 53 (6-10 Klemme 53 Skal.
Min.Spannung bzw. 6-12 Klemme 53 Skal.
Min.Strom).
0,000* [-4999-4999] Geben Sie den Skalierungswert des
Analogeingangs ein.
6-15 Klemme 53 Skal. Max.-Soll-/ Istwert
Range: Funktion:
Festlegung des maximalen Soll-/
Istwertes als Bezug für den Min.Wert des Analogeingangs 53
(6-11 Klemme 53 Skal.
Max.Spannung bzw. 6-13 Klemme
53 Skal. Max.Strom).
50,000* [-4999.000-4999.000] Geben Sie den Skalierungswert
des Analogeingangs ein.
6-16 Klemme 53 Filterzeit
Range: Funktion:
Dieser Filter gleicht Schwankungen des
Analogsignals an Analogeingang 53 aus.
Dies ist vorteilhaft, wenn z. B. Störsignale
Parameter zum Skalieren und Konfigurieren der Grenzwerte
für Analogeingang 2, Klemme 60.
6-22 Klemme 60 Skal. Min.Strom
Range: Funktion:
Dieses Sollwertsignal muss dem
minimalen Sollwert aus 6-24 Klemme
60 Skal. Min.Soll-/Istwert entsprechen.
0,14 mA* [0,00-19,90 mA] Geben Sie den minimalen
Stromwert ein.
VORSICHT
Sie müssen den Wert auf min. 2 mA einstellen, um die
Signalausfall-Funktion in 6-01 Signalausfall-Funktion zu
aktivieren.
6-23 Klemme 60 Skal. Max. Strom
Range: Funktion:
Dieses Sollwertsignal muss dem
maximalen Stromwert aus 6-25
Klemme 60 Skal. Min.Soll-/Istwert
entsprechen.
20,00 mA* [0,10-20,00 mA] Geben Sie den maximalen
Stromwert ein.
6-24 Klemme 60 Skal. Min.-Soll-/ Istwert
Range: Funktion:
Festlegung des minimalen Soll-/Istwertes
als Bezug für den Min.-Wert des
Analogeingangs 60 in 6-22 Klemme 60 Skal.
Min.Strom.
0,000* [-4999-4999] Geben Sie den Skalierungswert des
Analogeingangs ein.
34 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 37

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
6-25 Klemme 60 Skal. Max.-Soll-/ Istwert
Range: Funktion:
Festlegung des maximalen Soll-/Istwertes
als Bezug für den Max.-Wert des
Analogeingangs 60 in 6-23 Klemme 60 Skal.
Max.Strom.
50,00* [-4999-4999] Geben Sie den Skalierungswert des
Analogeingangs ein.
6-26 Klemme 60 Filterzeit
Range: Funktion:
Dieser Filter gleicht Schwankungen des
Analogsignals an Analogeingang 60 aus.
Dies ist vorteilhaft, wenn z. B. Störsignale
überlagert sind. Ein hoher Wert ergibt
mehr Glättung, erhöht jedoch auch die
Reaktionszeit.
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht ändern.
0,01 s* [0,01-10,00s]Geben Sie die Zeitkonstante ein.
4.7.5 6-8* LCP-Potentiometer
Das LCP-Potentiometer kann als Variabler Sollwert oder
Relativ. Skalierungssollw. Ressource gewählt werden.
HINWEIS
Im Hand-Betrieb gibt das LCP-Potentiometer den
Ortsollwert vor.
6-80 LCP-Poti Ein
Option: Funktion:
Wenn das LCP-Poti deaktiviert ist, können [▲]
[▼] den Ortsollwert einstellen, und der PotiWert liefert im Auto-/Hand-Betrieb keinen
Sollwert vor.
[0] Deaktiviert
[1] * Aktiviert
6-81 LCP-Potentiometer Min. Soll-/ Istwert
Range: Funktion:
Der Skalierungswert entspricht 0.
0,000* [-4999-4999] Geben Sie den minimalen Sollwert ein.
Der Sollwert entspricht der Potentiometerstellung 0 Grad (Potentiometer vollständig
gegen den Uhrzeigersinn gedreht).
6-82 LCP-Potentiometer Soll-/ Istwert
Range: Funktion:
Der angegebene Wert bezieht sich auf die
Festlegung in 3-03 Max. Sollwert.
50,00* [-4999-4999] Geben Sie den maximalen Sollwert ein.
6-82 LCP-Potentiometer Soll-/ Istwert
Range: Funktion:
Der Sollwert entspricht der Potentiometerstellung 200 Grad (Potentiometer
vollständig im Uhrzeigersinn gedreht).
4.7.6 6-9* Analogausgang
Parameter zum Konfigurieren der Analogausgänge des
Frequenzumrichters.
6-90 Klemme 42 Funktion
Option: Funktion:
[0] * 0-20 mA Der Bereich für Analogausgänge ist 0-20
mA.
[1] 4-20 mA Der Bereich für Analogausgänge ist 4-20
mA.
[2] Digitalausgang Wirkt als langsam reagierender Digital-
ausgang. Stellen Sie den Wert als 0 mA
(aus) oder 20 mA (ein) ein, siehe 6-92
Klemme 42 Digitalausgang.
6-91 Klemme 42 Analogausgang
Option: Funktion:
Dieser Parameter definiert
die Funktion des
Analogausgangs 1,
Klemme 42.
[0] * Ohne Funktion
[10] Ausgangsfrequenz [0-100 Hz]
[11] Sollwert (Sollw. min-max)
[12] Istwert (Istw. min-max)
[13] Motorstrom (0-I
[16] Leistung (0-P
[19] DC-Zwischenkreisspannung
(0-1000 V)
[20] Bussollwert [0,0 %-100,0 %] Der Analogausgang folgt
nom
max
)
)
6-92 Klemme 42 Digitalausgang
Option: Funktion:
Zu Optionen und Beschreibungen
siehe Parametergruppe 5-4* Relais.
[0] * Ohne Funktion
[80] SL-Digitalausgang A
Siehe 13-52 SL-Controller Aktion. Wenn
die Smart Logic Aktion [38] Digital-
ausgang A-EIN ausgeführt wird, wird
der Eingang aktiviert. Wenn die Smart
Logic Aktion [32] Digitalausgang A-AUS
ausgeführt wird, wird der Eingang
deaktiviert.
3-02 Minimaler Sollwert bis
3-03 Max. Sollwert.
16-37 Max. WR-Strom ist
I
.
max
1-20 Motornennleistung ist
P
(Motor).
nom
dem im RS485-Bus festge-
legten Sollwert.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 35
Page 38

130BD020.11
(mA)
0 %
20
0/4
100 %
Strom
Analogausgang min.
Skalierung
Par. 6-51
Variabel für
Ausgang
Beispiel: Drehzahl
(UPM)
Analogausgang max.
Skalierung
Par. 6-52
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
6-93 Klemme 42 Ausgang min. Skalierung
Range: Funktion:
0,00 % [0.00-200.0%] Dieser Parameter skaliert das Min.-Signal
an Ausgangsklemme 42 in Prozent des
max. Signalpegels. Wenn z. B. 0 mA
(oder 0 Hz) bei 25 % des max.
Ausgangswerts gewünscht ist, programmieren Sie 25 %. Skalierungswerte bis zu
44
Abbildung 4.9
100 % können nie höher sein als die
entsprechende Einstellung in 6-94
Klemme 42 Ausgang Min. Skalierung.
6-94 Klemme 42 Ausgang max. Skalierung
Range: Funktion:
100,00%*
[0.00-200.00%]
Dieser Parameter skaliert das Max.Signal an Ausgangsklemme 42. Die
max. Skalierung ist prozentual im
Bezug auf den maximalen Wert des
dargestellten Signals anzugeben. Der
Ausgang kann so skaliert werden, dass
bei maximalem Signal ein Strom unter
20 mA oder bei einem Signal von
unter 100 % bereits 20 mA erreicht
werden.
Sollen die 20 mA bereits bei 0 bis
100% des Signalwertes erreicht
werden, ist der prozentuale Wert
direkt einzugeben, z. B. 50 % = 20 mA.
Wenn bei maximalem Signal (100 %)
ein Strom zwischen 4 und 20 mA
erreicht werden soll, ist der
Prozentwert wie folgt zu berechnen:
20
gewünschter maximaler Strom
mA
d. h.
10 mA =
20
× 100 = 200 %
10
× 100 %
36 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 39

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.8 Parametergruppe 7: Regler
4.8.1 7-** Regler
Parametergruppe zum Konfigurieren der Anwendungssteuerung.
4.8.2 7-2* PID-Prozess Istw.
Definiert die Ressourcen für die Istwertrückführung an die
PI-Prozessregelung und die Verarbeitung des Istwerts.
HINWEIS
Stellen Sie 3-15 Variabler Sollwert 1 auf [0] Keine Funktion
ein, um den Analogeingang als Istwertsignal zu
verwenden.
Damit eine Eingangsklemme wählbar ist, darf diese nicht
gleichzeitig für eine andere Funktion vergeben sein
(gewählt in 3-15, 3-16 und 3-17).
7-20 PI-Prozess Istwert
Option: Funktion:
Wählt den Eingang, der als Istwertsignal
dient.
[0] * Keine Funktion
[1] Analogeingang 53
[2] Analogeingang 60
[8] Pulseingang 33
[11] Bus Sollwert
4.8.3 7-3* PI-Prozessregler
7-30 Auswahl Normal-/Invers-Regelung
Option: Funktion:
[0] * Normal Ist der Istwert größer als der Sollwert, wird die
Drehzahl verringert.
Ist der Istwert kleiner als der Sollwert, wird die
Drehzahl erhöht.
[1] Invers Ist der Istwert größer als der Sollwert, wird die
Drehzahl erhöht.
Ist der Istwert kleiner als der Sollwert, wird die
Drehzahl verringert.
7-31 PI-Prozess Anti-Windup
Option: Funktion:
[0] Aus Die Regelung einer Abweichung wird auch fortgesetzt,
wenn es nicht möglich ist, die Ausgangsfrequenz
weiter zu erhöhen/zu verringern.
[1] * Ein Der PI-Regler regelt eine Abweichung nicht, wenn die
Ausgangsfrequenz nicht erhöht/verringert werden
kann.
7-32 PID-Prozess Reglerstart bei
Range: Funktion:
0,0 Hz* [0,0-200,0 Hz] Bei einem Startsignal reagiert der
Frequenzumrichter mit einer Drehzahlregelung ohne Rückführung und wechselt
erst bei Erreichen der programmierten
Startdrehzahl zur Prozessregelung.
7-33 PI-Prozess P-Verstärkung
Option: Funktion:
[0,01] * 0.00-10.00 Geben Sie den Wert für die P-Proportional-
verstärkung ein, d. h., wie oft die
Abweichung zwischen Soll- und Istwertsignal
angewendet werden soll.
HINWEIS
0,00 = Aus.
7-34 PI-Prozess I-Zeit
Range: Funktion:
9999,00 s* [0,10-9999,00 s] Der Integrator liefert eine
steigende Verstärkung bei
konstanter Abweichung zwischen
Soll- und Istwertsignal. Die Integrationszeit ist die Zeit, die der
Integrator benötigt, um die gleiche
Verstärkung wie die P-Verstärkung
zu erreichen.
7-38 PI-Prozess Vorsteuerung
Range: Funktion:
0%* [0-400%] Der Vorsteuerungsfaktor sendet einen Teil des
Sollwertsignals um den PI-Regler herum, der
sich dann nur auf einen Teil des Regelsignals
auswirkt.
Durch die Aktivierung des Vorsteuerungsfaktors
werden Übersteuerung und hohe Dynamik bei
Änderung des Sollwerts reduziert.
Dieser Parameter ist bei Einstellung [3] PID-
Prozess in 1-00 Regelverfahren aktiv.
7-39 Bandbreite Ist-Sollwert
Range: Funktion:
5% [0-200% ] Geben Sie den Wert für Bandbreite Ist-Sollwert
ein.
Die PI-Regelabweichung ist die Differenz
zwischen Sollwert und Istwert. Wenn sie
geringer ist als der in diesem Parameter
eingestellte Wert, ist der Ist-Sollwert aktiv.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 37
Page 40

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.9 Parametergruppe 8: Schnittstellen
4.9.1 8-** Kommunikation
Parametergruppe zur Kommunikationskonfiguration.
4.9.2 8-0* Grundeinstellungen
44
Parametergruppe zum Konfigurieren der allgemeinen
Kommunikationseinstellungen verwenden.
8-01 Führungshoheit
8-06 Timeout Steuerwort quittieren
Option: Funktion:
Quittieren des Timeout-Steuerworts entfernt die
Timeout-Funktion.
[0] * Kein Reset Die Steuerwort-Timeout-Funktion wird nicht
quittiert.
[1] Reset Steuerwort Timeout wird quittiert und der
Parameter wechselt auf die Einstellung [0] Kein
Reset.
4.9.3 8-3* Einstellungen FC-Schnittstelle
Option: Funktion:
[0] * Klemme und
Steuerw.
[1] Nur Klemme Steuerung über Digitaleingang.
[2] Nur Steuerwort Steuerung nur über Steuerwort.
Steuerung über Digitaleingang und
Steuerwort.
HINWEIS
Die Einstellung in diesem
Parameter hebt die Einstellungen
in 8-50 Motorfreilauf bis 8-56
Festsollwertanwahl auf.
8-02 Aktives Steuerwort
Option: Funktion:
[0] Deaktiviert Die Funktion ist nicht aktiv.
[1] * FC-Seriell RS485 Die Überwachung des Steuerworts erfolgt
über die serielle Schnittstelle RS485.
Parameter zum Konfigurieren der FC-Schnittstelle.
8-30 FC-Protokoll
Option: Funktion:
Definiert das Übertragungsprotokoll für die
serielle FC-Schnittstelle. Eine Änderung in
diesem Parameter wird erst nach erneutem
Netz-Ein des Frequenzumrichters wirksam.
[0] * FC-Profil
[2] Modbus RTU
8-31 Adresse
Range: Funktion:
Die Busadresse auswählen.
1* [1 - Protokollabhängig] FC-Bus-Intervall: 1-126.
Modbus-Intervall: 1-247.
8-03 Steuerwort Timeout-Zeit
Range: Funktion:
1,0 s* [0,1-6500 s] Mit diesem Parameter wird die max. Zeit
eingestellt, die zwischen dem Empfang von
zwei aufeinander folgenden Telegrammen
vergehen darf, bevor die Timeout-Funktion
aus 8-04 Steuerwort Timeout-Funktion
ausgeführt wird.
8-04 Steuerwort Timeout-Funktion
Option: Funktion:
Mit diesem Parameter kann eine
auszuführende Timeout-Funktion
(Watchdog) eingestellt werden.
[0] * Aus Keine Funktion.
[1] Drehz. speich. Speichert die aktuelle Ausgangsfrequenz bis
zur Wiederherstellung der Kommunikation.
[2] Stopp Stopp und bei Wiederaufnahme der
Kommunikation automatischer Wieder-
anlauf.
[3] Festdrz. (JOG) Der Motor läuft mit JOG-Drehzahl bis zur
Wiederaufnahme der Kommunikation.
[4] Max. Drehzahl Der Motor läuft bis zur Wiederaufnahme der
Kommunikation mit maximaler Drehzahl.
[5] Stopp und
Alarm
Der Motor stoppt und der Frequenzum-
richter schaltet mit Alarm ab. Neustart über
LCP oder Digitaleingang.
8-32 FC-Baudrate
Option: Funktion:
Dieser Parameter definiert die Baudrate an der
FC-Schnittstelle.
HINWEIS
Ein Wechsel der Baudrate wird nach
Antwort auf alle laufenden Busanforderungen wirksam.
[0] 2400 Baud
[1] 4800 Baud
[2] * 9600 Baud Bei Auswahl des FC-Protokolls in 8-30.
[3] * 19200 Baud Bei Auswahl von Modbus RTU in 8-30.
[4] 38400 Baud
8-33 Parität FC-Schnittstelle
Option: Funktion:
Dieser Parameter betrifft nur
den Modbus, da ein FC-Bus
immer gerade Parität besitzt.
[0] * Gerade Parität (1 Stoppbit)
[1] Ungerade Parität
[2] Keine Parität (1 Stoppbit) Für Modbus RTU auswählen
[3] Keine Parität (2 Stoppbits)
38 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 41

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
8-35 FC-Antwortzeit Min.-Delay
Range: Funktion:
0,010 s* [0,001-0,500 s] Definiert die minimale Zeit, welche der
Frequenzumrichter nach dem
Empfangen eines FC-Telegramms
wartet, bevor sein Antworttelegramm
gesendet wird.
8-36 FC-Antwortzeit Max.-Delay
Range: Funktion:
5,000 s* [0,010-10,00 s] Geben Sie die maximal zulässige
Verzögerung zwischen der
Übermittlung einer Anfrage und dem
Eingang der Antwort ein. Nach
Überschreiten der Zeit wird die
Steuerwort Timeout-Funktion aktiviert.
4.9.4 8-4* FC-/MC-Protokoll
8-43 PCD-Konfiguration Lesen
Array [16]
Option: Funktion:
[0] * Keine
[1] 1500 Betriebsstunden
[2] 1501 Motorlaufstunden
[3] 1502 Zähler-kWh
[4] 1600 Steuerwort
[5] 1601 Sollwert [Einheit]
[6] 1602 Sollwert %
[7] 1603 Zustandswort
[8] 1605 Haupt-Istwert [%]
[9] 1609 Benutzerdef. Anzeige
[10] 1610 Leistung [kW]
[11] 16-11 Leistung [HP]
[12] 1612 Motorspannung
[13] 1613 Frequenz
[14] 1614 Motorstrom
[15] 1615 Frequenz [%]
[16] 1618 Therm. Motorschutz
[17] 1630 DC-Spannung
[18] 1634 Kühlkörpertemp.
[19] 1635 FC Überlast
[20] 1638 SL Contr.Zustand
[21] 1650 Externer Sollwert
[22] 1651 Puls-Sollwert
[23] 1652 Istwert [Einheit]
[24] 1660 Digitaleingang 18,19,27,33
[25] 1661 Digitaleingang 29
[26] 1662 Analogeingang 53 (V)
[27] 1663 Analogeingang 53 (mA)
[28] 1664 Analogeingang 60
[29] 1665 Analogausgang 42 [mA]
[30] 1668 Pulseing. 33 [Hz]
[31] 1671 Relaisausgänge
8-43 PCD-Konfiguration Lesen
Array [16]
Option: Funktion:
[32] 1672 Zähler A
[33] 1673 Zähler B
[34] 1690 Alarmwort
[35] 1692 Warnwort
[36] 1694 Erw. Zustandswort
Wählen Sie die Parameter,
die den PCD der
Telegramme zugewiesen
werden sollen. Die Anzahl
der verfügbaren PCD ist
von den Telegrammen
abhängig. Diese Tabelle
gilt nicht für [0] Array und
[1] Array. Für diese beiden
Arrays ist Index 1 auf [7]
und Index 2 auf [8]
festgelegt. Diese beiden
Arrays kann der
Endbenutzer nicht ändern.
8-5* Betr. Bus/Klemme
4.9.5
Definiert für grundsätzliche Funktionen individuell die
Priorität zwischen Klemme (Digitaleingänge) und Bus
(Steuerwort Bus/FC Seriell).
HINWEIS
Dieser ist nur aktiv, wenn in 8-01 Führungshoheit [0]
Klemme und Steuerw. gewählt wurde.
8-50 Motorfreilauf
Option: Funktion:
Definiert für die Funktion Motorfreilauf die
Priorität zwischen Klemme (Digitaleingänge)
und Bus (Steuerwort Bus/FC Seriell).
[0] Klemme Aktivierung über einen Digitaleingang.
[1] Bus Aktivierung über eine serielle Schnittstelle.
[2] Bus UND
Klemme
[3] * Bus ODER
Klemme
8-51 Schnellstopp
Option: Funktion:
[0] Klemme Aktivierung über einen Digitaleingang.
[1] Bus Aktivierung über die serielle Schnittstelle.
Aktivierung über serielle Kommunikations-
schnittstelle und Digitaleingang.
Aktivierung über serielle Kommunikations-
schnittstelle oder Digitaleingang.
Definiert für die Funktion Schnellstopp die
Priorität zwischen Klemme (Digitaleingänge)
und Bus (Steuerwort Bus/FC seriell), wobei
die Einstellung in Par. 8-01 eine höhere
Priorität hat.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 39
Page 42

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
8-51 Schnellstopp
Option: Funktion:
[2] Bus UND
Klemme
[3] * Bus ODER
Klemme
Aktivierung über serielle Schnittstelle und
einen Digitaleingang.
Aktivierung über serielle Schnittstelle oder
einen Digitaleingang.
8-52 DC-Bremse
8-55 Satzanwahl
Option: Funktion:
[0] Klemme Aktivierung über einen Digitaleingang.
[1] Bus Aktivierung über die serielle Schnittstelle.
[2] Bus UND
Klemme
[3] * Bus ODER
Klemme
Aktivierung über serielle Schnittstelle und
einen Digitaleingang.
Aktivierung über serielle Schnittstelle oder
einen Digitaleingang.
Option: Funktion:
44
[0] Klemme Aktivierung über einen Digitaleingang.
[1] Bus Aktivierung über die serielle Schnittstelle.
[2] Bus UND
Klemme
[3] * Bus ODER
Klemme
Definiert für die Funktion DC-Bremse die
Priorität zwischen Klemme (Digitaleingänge)
und Bus (Steuerwort Bus/FC seriell), wobei
die Einstellung in Par. 8-01 eine höhere
Priorität hat.
Aktivierung über serielle Schnittstelle und
einen Digitaleingang.
Aktivierung über serielle Schnittstelle oder
einen Digitaleingang.
8-53 Start
Option: Funktion:
Definiert für die Funktion Start die Priorität
zwischen Klemme (Digitaleingänge) und Bus
(Steuerwort Bus/FC Seriell), wobei die
Einstellung in Par. 8-01 eine höhere Priorität
hat.
[0] Klemme Aktivierung über einen Digitaleingang.
[1] Bus Aktivierung über die serielle Schnittstelle.
[2] Bus UND
Klemme
[3] * Bus ODER
Klemme
Aktivierung über serielle Schnittstelle und
einen Digitaleingang.
Aktivierung über serielle Schnittstelle oder
einen Digitaleingang.
8-54 Reversierung
Option: Funktion:
Definiert für die Funktion Reversierung die
Priorität zwischen Klemme (Digitaleingänge)
und Bus (Steuerwort Bus/FC Seriell), wobei
die Einstellung in Par. 8-01 eine höhere
Priorität hat.
[0] Klemme Aktivierung über einen Digitaleingang.
[1] Bus Aktivierung über die serielle Schnittstelle.
[2] Bus UND
Klemme
[3] * Bus ODER
Klemme
Aktivierung über serielle Schnittstelle und
einen Digitaleingang.
Aktivierung über serielle Schnittstelle oder
einen Digitaleingang.
8-56 Festsollwertanwahl
Option: Funktion:
Definiert für die Funktion Festsollwertanwahl die Priorität zwischen Klemme
(Digitaleingänge) und Bus (Steuerwort
Bus/FC Seriell).
[0] Klemme Aktivierung über einen Digitaleingang.
[1] Bus Aktivierung über eine serielle Schnittstelle.
[2] Bus UND
Klemme
[3] * Bus ODER
Klemme
Aktivierung über serielle Kommunikations-
schnittstelle und Digitaleingang.
Aktivierung über serielle Kommunikations-
schnittstelle oder Digitaleingang.
4.9.6 8-8* FC-Ser.-Diagnose
Diese Parameter dienen zur Überwachung der Buskommunikation über die Schnittstelle.
8-80 Zähler Busmeldungen
Range: Funktion:
0 N.v.* [0-0 N.v.] Dieser Parameter zeigt die Zahl der am Bus
erfassten gültigen Telegramme.
8-81 Zähler Busfehler
Range: Funktion:
0 N.v.* [0-0 N.v.] Dieser Parameter zeigt die Zahl der am Bus
erfassten Telegramme mit Fehlern (z. B. CRCFehler).
8-82 Zähler Slavemeldungen
Range: Funktion:
0 N.v.* [0-0 N.v.] Dieser Parameter zeigt die vom Frequenzum-
richter an den Slave gesendete Zahl gültiger
Telegramme.
8-83 Zähler Slavefehler
Range: Funktion:
0 N.v.* [0-0 N.v.] Dieser Parameter zeigt die Zahl von Fehlerte-
legrammen, die der Frequenzumrichter nicht
ausführen konnte.
8-55 Satzanwahl
Option: Funktion:
Definiert für die Funktion Parametersatzauswahl die Priorität zwischen Klemme
(Digitaleingänge) und Bus (Steuerwort
Bus/FC seriell), wobei die Einstellung in Par.
8-01 eine höhere Priorität hat.
40 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 43

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.9.7 8-9* Bus-Istwert
Parameter zum Konfigurieren des Bus-Istwerts.
8-94 Bus-Istwert 1
Range: Funktion:
0* [0x8000-0x7FFF] Der Bus-Istwert wird über FC-Profil oder
Modbus übermittelt, indem der Istwert in
diesen Parameter geschrieben wird.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 41
Page 44

Start
Ereignis 13-01
Stop
Ereignis 13-02
Stop
Ereignis 13-02
Stop
Ereignis
13-02
Zustand 1
Ereignis 1/
Aktion 1
Zustand 4
Ereignis 4/
Aktion 4
Zustand 2
Ereignis 2/
Aktion 2
Zustand 3
Ereignis 3/
Aktion 3
130BD021.10
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
44
4.10 Parametergruppe 13: Smart Logic
Wahl von
[1] Reset in 13-03 SLC-Parameter initialisieren setzt
alle SLC-Parameter zurück und startet die Programmierung
4.10.1 13-** Smart Logic
Smart Logic besteht aus frei definierbaren Verknüpfungen
erneut.
4.10.2 13-0* SL-Controller
und Vergleichern, die beispielsweise einem Digitaleingang
zugeordnet werden können, und einer Ablaufsteuerung
(Smart Logic Controller). Der SLC ist im Wesentlichen eine
Parameter zum Aktivieren und Definieren des Smart Logic
Controllers (LC Ablaufsteuerung).
Folge benutzerdefinierter Aktionen (siehe 13-52 SL-
Controller Aktion [x]), die ausgeführt werden, wenn das
zugehörige Ereignis (siehe 13-51 SL-Controller Ereignis [x])
als Wahr ermittelt wird.
13-00 Smart Logic Controller
Option: Funktion:
[0] * Anpassung aus Funktion ist deaktiviert.
[1] On SLC ist aktiv.
Ereignisse und Aktionen sind paarweise verknüpft, die
verknüpfte Aktion wird also ausgeführt, wenn ein Ereignis
wahr ist. Danach wird das nächste Ereignis ausgewertet
13-01 SL-Controller Start
Option: Funktion:
und die zugehörige Aktion ausgeführt usw. Das jeweils
aktuelle Ereignis wird ausgewertet.
[0] Falsch
Ist das Ereignis False (Falsch), wird keine Aktion im SLC
ausgeführt.
Sie können 1 bis 20 Ereignisse und Aktionen program-
[1] Wahr
[2] Motor ein Ausführliche Beschreibung siehe
[3] Im Bereich Ausführliche Beschreibung siehe
mieren.
Wenn das letzte Ereignis / die letzte Aktion durchgeführt
[4] Ist=Sollwert Ausführliche Beschreibung siehe
wurde, startet die Sequenz ausgehend von Ereignis/Aktion
[0] erneut.
Abbildung 4.10 Beispiel mit drei Ereignissen/Aktionen
SLC starten und stoppen
[7] Außerh.Stromber. Ausführliche Beschreibung siehe
[8] Unter Min.-Strom Ausführliche Beschreibung siehe
[9] Über Max.-Strom Ausführliche Beschreibung siehe
[16] Warnung Übertemp. Ausführliche Beschreibung siehe
[17] Netzsp.auss.Bereich Die Netzspannung liegt außerhalb
[18] Reversierung Ausführliche Beschreibung siehe
[19] Warnung Eine Warnung ist aktiv.
[20] Alarm (Abschaltung) Ein Alarm mit Abschaltung ist aktiv.
[21] Alarm (Absch.verrgl.) Ein Alarm mit Abschaltblockierung
[22] Vergleicher 0 Verwendet das Ergebnis von
[23] Vergleicher 1 Verwendet das Ergebnis von
Starten Sie den durch Auswahl von [1] Ein in 13-00 Smart
Logic Controller. Wenn Ereignis [0] als TRUE (WAHR)
[24] Vergleicher 2 Verwendet das Ergebnis von
ausgewertet wird, führt der SLC die nächste Aktion aus
und beginnt danach, das nächste Ereignis auszuwerten.
Der SLC stoppt, wenn das Stoppereignis (definiert in 13-02
SL-Controller Stopp) TRUE (WAHR) ist. Sie können den SLC
auch durch Auswahl von [0] Aus in 13-00 Smart Logic
Control stoppen.
42 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
[25] Vergleicher 3 Verwendet das Ergebnis von
[26] Logikregel 0 Verwendet das Ergebnis von
[27] Logikregel 1 Verwendet das Ergebnis von
Definiert, bei welchem die Smart
Logic Control gestartet werden soll.
Gibt Falsch in die Logikregel ein.
Gibt Wahr in die Logikregel ein.
Parametergruppe 5-4* Relais [5].
Parametergruppe 5-4* Relais [7].
Parametergruppe 5-4* Relais [8].
Parametergruppe 5-4* Relais [12].
Parametergruppe 5-4* Relais [13].
Parametergruppe 5-4* Relais [14].
Parametergruppe 5-4* Relais [21].
des vorgegebenen Spannungsbereichs.
Parametergruppe 5-4* Relais [25].
ist aktiv.
Vergleicher 0 in der Logikregel.
Vergleicher 1 in der Logikregel.
Vergleicher 2 in der Logikregel.
Vergleicher 3 in der Logikregel.
Logikregel 0 in der Logikregel.
Logikregel 1 in der Logikregel.
Page 45

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
13-01 SL-Controller Start
Option: Funktion:
[28] Logikregel 2 Verwendet das Ergebnis von
Logikregel 2 in der Logikregel.
[29] Logikregel 3 Verwendet das Ergebnis von
Logikregel 3 in der Logikregel.
[33] Digitaleingang 18 Verwendet das Ergebnis von Digital-
eingang 18 in der Logikregel.
[34] Digitaleingang 19 Verwendet das Ergebnis von Digital-
eingang 19 in der Logikregel.
[35] Digitaleingang 27 Verwendet das Ergebnis von Digital-
eingang 27 in der Logikregel.
[36] Digitaleingang 29 Verwendet das Ergebnis von Digital-
eingang 29 in der Logikregel.
[38] Digitaleingang 33
[39] * Startbefehl
[40] FU gestoppt
Dieses Ereignis ist Wahr, wenn der
Frequenzumrichter gestartet wurde
(über Digitaleingang oder andere
Methoden).
Dieses Ereignis ist Wahr, wenn der
Frequenzumrichter gestoppt oder in
Freilauf versetzt wurde (über Digital-
eingang oder andere Methoden).
13-02 SL-Controller Stopp
Option: Funktion:
Definiert, bei welchem die Smart
Logic Control gestartet werden soll.
[0] Falsch
[1] Wahr
[2] Motor ein Ausführliche Beschreibung siehe
[3] Im Bereich Ausführliche Beschreibung siehe
[4] Ist=Sollwert Ausführliche Beschreibung siehe
[7] Außerh.Stromber. Ausführliche Beschreibung siehe
[8] Unter Min.-Strom Ausführliche Beschreibung siehe
[9] Über Max.-Strom Ausführliche Beschreibung siehe
[16] Warnung Übertemp. Ausführliche Beschreibung siehe
[17] Netzsp.auss.Bereich Die Netzspannung liegt außerhalb
[18] Reversierung Ausführliche Beschreibung siehe
[19] Warnung Eine Warnung ist aktiv.
[20] Alarm (Abschaltung) Ein Alarm mit Abschaltung ist aktiv.
[21] Alarm (Absch.verrgl.) Ein Alarm mit Abschaltblockierung
[22] Vergleicher 0 Verwendet das Ergebnis von
Gibt Falsch in die Logikregel ein.
Gibt Wahr in die Logikregel ein.
Parametergruppe 5-4* Relais [5].
Parametergruppe 5-4* Relais [7].
Parametergruppe 5-4* Relais [8].
Parametergruppe 5-4* Relais [12].
Parametergruppe 5-4* Relais [13].
Parametergruppe 5-4* Relais [14].
Parametergruppe 5-4* Relais [21].
des vorgegebenen Spannungsbe-
reichs.
Parametergruppe 5-4* Relais [25].
ist aktiv.
Vergleicher 0 in der Logikregel.
13-02 SL-Controller Stopp
Option: Funktion:
[23] Vergleicher 1 Verwendet das Ergebnis von
Vergleicher 1 in der Logikregel.
[24] Vergleicher 2 Verwendet das Ergebnis von
Vergleicher 2 in der Logikregel.
[25] Vergleicher 3 Verwendet das Ergebnis von
Vergleicher 3 in der Logikregel.
[26] Logikregel 0 Verwendet das Ergebnis von
Logikregel 0 in der Logikregel.
[27] Logikregel 1 Verwendet das Ergebnis von
Logikregel 1 in der Logikregel.
[28] Logikregel 2 Verwendet das Ergebnis von
Logikregel 2 in der Logikregel.
[29] Logikregel 3 Verwendet das Ergebnis von
Logikregel 3 in der Logikregel.
[30] Timeout 0 Logikregel benutzt das Ergebnis von
Timer 0.
[31] Timeout 1 Logikregel benutzt das Ergebnis von
Timer 1.
[32] Timeout 2 Logikregel benutzt das Ergebnis von
Timer 2.
[33] Digitaleingang 18 Verwendet das Ergebnis von Digital-
eingang 18 in der Logikregel.
[34] Digitaleingang 19 Verwendet das Ergebnis von Digital-
eingang 19 in der Logikregel.
[35] Digitaleingang 27 Verwendet das Ergebnis von Digital-
eingang 27 in der Logikregel.
[36] Digitaleingang 29 Verwendet das Ergebnis von Digital-
eingang 29 in der Logikregel.
[38] Digitaleingang 33
[39] Startbefehl
[40] * FU gestoppt
Dieses Ereignis ist Wahr, wenn der
Frequenzumrichter gestartet wurde
(über Digitaleingang oder andere
Methoden).
Dieses Ereignis ist Wahr, wenn der
Frequenzumrichter gestoppt oder in
Freilauf versetzt wurde (über Digital-
eingang oder andere Methoden).
13-03 SL-Parameter Initialisieren
Option: Funktion:
[0] * Kein Reset Alle in Parametergruppe 13 program-
mierten Einstellungen beibehalten.
[1] SL-Parameter Initiali-
sieren
Alle Parameter von Gruppe 13 auf
die Werkseinstellungen zurücksetzen.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 43
Page 46

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BD022.10
Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.10.3 13-04 Vergleicher
Vergleicher dienen zum Vergleichen von Betriebsvariablen
(z. B. Ausgangsfrequenz, Ausgangsstrom, Analogeingang
usw.) mit festen Sollwerten.
44
Zusätzlich gibt es Digitalwerte, die mit den festgelegten
Zeitwerten verglichen werden. Siehe dazu die Erklärung
unter 13-10 Vergleicher-Operand. Vergleicher werden ein
Mal pro Abtastintervall ausgewertet. Sie können das
Ergebnis (WAHR oder FALSCH) direkt für die Definition
eines Ereignisses oder als boolesche Eingabe in eine
Logikregel benutzen. Alle Parameter in dieser Parametergruppe sind Arrayparameter mit einem Index 0 bis 5.
Wählen Sie Index 0, um Vergleicher 0 zu programmieren,
Index 1, um Vergleicher 1 zu programmieren usw.
[0] * Deaktiviert Der Vergleicher ist deaktiviert.
[1] Sollwert Zeigt den aktuellen Gesamtsollwert in
[2] Istwert Istwert in [Hz]
[3] Motordrehzahl Motordrehzahl in Hz.
[4] Motorstrom Motorstrom in [A].
[6] Motorleistung Motorleistung in [kW].
[7] Motorspannung Motorspannung in [V].
[8] Zwischenkreisspann. DC-Zwischenkreisspannung in [V].
[12] Analogeingang 53 Ausgedrückt als Istwert.
[13] Analogeingang 60 Ausgedrückt als Istwert.
[18] Pulseingang 33 Ausgedrückt als Istwert.
[20] Alarmnummer Zeigt die Nummer des Alarms an.
[30] Zähler A Aktueller Zählerwert.
[31] Zähler B Aktueller Zählerwert.
[0] Kleiner als <
44 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Abbildung 4.11
13-10 Vergleicher-Operand
Array [4]
Option: Funktion:
Wählen Sie die Variable, die vom
Vergleicher überwacht werden soll.
% (Summe aus internen und externen
Sollwerten).
13-11 Vergleicher-Funktion
Array [4]
Option: Funktion:
Operator für den Vergleich auswählen.
Das Ergebnis der Bewertung ist Wahr, wenn
die in 13-10 Vergleicheroperand ausgewählte
13-11 Vergleicher-Funktion
Array [4]
Option: Funktion:
Variable kleiner ist als der Festwert in 13-12
Vergleicherwert. Das Ergebnis ist Falsch,
wenn die in 13-10 Vergleicheroperand
ausgewählte Variable größer ist als der
Festwert in 13-12 Vergleicherwert.
[1] * Ungefähr
gleich ≈
[2] Größer als > Inverse Logik von Option [0].
Das Ergebnis der Bewertung ist Wahr, wenn
die in 13-10 Vergleicheroperand ausgewählte
Variable gleich dem Festwert in 13-12
Vergleicherwert ist.
13-12 Vergleicher-Wert
Array [4]
Range: Funktion:
0,0* [-9999-9999] Definiert den Wert, mit welchem der
Operand verglichen wird.
4.10.4 13-2* Timer
Verwenden Sie die Timerergebnisse für die Definition eines
Ereignisses (13-51 SL-Controller Ereignis) oder als boolesche
Eingabe in eine Logikregel (13-40 Logikregel Boolsch 1,
13-42 Logikregel Boolsch 2 oder 13-44 Logikregel Boolsch 3).
Wenn der Timerwert überschritten wurde, wechselt der
Timer von False (FALSCH) auf True (WAHR).
13-20 SL-Timer
Array [3]
Range: Funktion:
0,0 s* [0,0-3600 s] Der Wert definiert die Dauer der FALSE-
Ausgabe vom programmierten Timer. Ein
Timer ist nur False (FALSCH), solange er
gestartet ist.
4.10.5 13-4* Logikregeln
Parameter zur freien Definition von binären Verknüpfungen
(Boolesch). Es ist möglich, 3 boolesche Zustände in einer
Logikregel über UND, ODER, NICHT miteinander zu
verknüpfen. Das Ergebnis (Wahr/Falsch) kann z. B. von
einem Digitalausgang verwendet werden. Wählen Sie den
booleschen Eingang für die Berechnung in 13-40 Logikregel
Boolsch 1, 13-42 Logikregel Boolsch 2 und 13-44 Logikregel
Boolsch 3. Definieren Sie die logischen Verknüpfungen für
die ausgewählten Eingänge in 13-41 Logikregel Verknüpfung
1 und 13-43 Logikregel Verknüpfung 2.
Page 47

. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BD023.10
Parameterbeschreibungen
Abbildung 4.12
VLT® Micro Drive FC 51 Programmierungshandbuch
Priorität der Berechnung
Die Ergebnisse von 13-40 Logikregel Boolsch 1,
13-41 Logikregel Verknüpfung 1 und 13-42 Logikregel Boolsch
2 werden zuerst berechnet. Das Ergebnis (WAHR/FALSCH)
der Berechnung wird mit der Einstellung von
13-43 Logikregel Verknüpfung 2 und 13-44 Logikregel Boolsch
3 kombiniert und ergibt so das Endergebnis (WAHR/
FALSCH) der Logikregel.
13-40 Logikregel Boolsch 1
Array [4]
Option: Funktion:
Auswahl der 1. Booleschen Variablen
zur Verwendung in der ausgewählten
Logikregel.
[0] * Falsch
[1] Wahr
[2] Motor ein Ausführliche Beschreibung siehe
[3] Im Bereich Ausführliche Beschreibung siehe
[4] Ist=Sollwert Ausführliche Beschreibung siehe
[7] Außerh.Stromber. Ausführliche Beschreibung siehe
[8] Unter Min.-Strom Ausführliche Beschreibung siehe
[9] Über Max.-Strom Ausführliche Beschreibung siehe
[16] Warnung Übertemp. Ausführliche Beschreibung siehe
[17] Netzsp.auss.Bereich Die Netzspannung liegt außerhalb
[18] Reversierung Ausführliche Beschreibung siehe
[19] Warnung Eine Warnung ist aktiv.
[20] Alarm (Abschaltung) Ein Alarm mit Abschaltung ist aktiv.
[21] Alarm (Absch.verrgl.) Ein Alarm mit Abschaltblockierung ist
[22] Vergleicher 0 Verwendet das Ergebnis von
[23] Vergleicher 1 Verwendet das Ergebnis von
Gibt Falsch in die Logikregel ein.
Gibt Wahr in die Logikregel ein.
Parametergruppe 5-4* Relais [5].
Parametergruppe 5-4* Relais [7].
Parametergruppe 5-4* Relais [8].
Parametergruppe 5-4* Relais [12].
Parametergruppe 5-4* Relais [13].
Parametergruppe 5-4* Relais [14].
Parametergruppe 5-4* Relais [21].
des vorgegebenen Spannungsbe-
reichs.
Parametergruppe 5-4* Relais [25].
aktiv.
Vergleicher 0 in der Logikregel.
Vergleicher 1 in der Logikregel.
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 45
13-40 Logikregel Boolsch 1
Array [4]
Option: Funktion:
[24] Vergleicher 2 Verwendet das Ergebnis von
Vergleicher 2 in der Logikregel.
[25] Vergleicher 3 Verwendet das Ergebnis von
Vergleicher 3 in der Logikregel.
[26] Logikregel 0 Verwendet das Ergebnis von
Logikregel 0 in der Logikregel.
[27] Logikregel 1 Verwendet das Ergebnis von
Logikregel 1 in der Logikregel.
[28] Logikregel 2 Verwendet das Ergebnis von
Logikregel 2 in der Logikregel.
[29] Logikregel 3 Verwendet das Ergebnis von
Logikregel 3 in der Logikregel.
[30] Timeout 0 Logikregel benutzt das Ergebnis von
Timer 0.
[31] Timeout 1 Logikregel benutzt das Ergebnis von
Timer 1.
[32] Timeout 2 Logikregel benutzt das Ergebnis von
Timer 2.
[33] Digitaleingang 18 Verwendet das Ergebnis von Digital-
eingang 18 in der Logikregel.
[34] Digitaleingang 19 Verwendet das Ergebnis von Digital-
eingang 19 in der Logikregel.
[35] Digitaleingang 27 Verwendet das Ergebnis von Digital-
eingang 27 in der Logikregel.
[36] Digitaleingang 29 Verwendet das Ergebnis von Digital-
eingang 29 in der Logikregel.
[38] Digitaleingang 33 Verwendet das Ergebnis von Digital-
eingang 33 in der Logikregel.
[39] Startbefehl
[40] FU gestoppt
Dieses Ereignis ist Wahr, wenn der
Frequenzumrichter gestartet wurde
(über Digitaleingang oder andere
Methoden).
Dieses Ereignis ist Wahr, wenn der
Frequenzumrichter gestoppt oder in
Freilauf versetzt wurde (über Digitaleingang oder andere Methoden).
13-41 Logikregel Verknüpfung 1
Array [4]
Option: Funktion:
Wählt, welche logische Verknüpfung für
die Booleschen Variablen von 13-40
Logikregel Boolsch 1 und 13-42
Logikregel Boolsch 2 benutzt wird.
[0] * Deaktiviert
[1] UND Verknüpfung [13-40] UND [13-42].
[2] ODER Verknüpfung [13-40] ODER [13-42].
[3] UND NICHT Verknüpfung [13-40] UND NICHT
Ignoriert 13-42 Logikregel Boolsch 2,
13-43 Logikregel Verknüpfung 2 und
13-44 Logikregel Boolsch 3.
[13-42].
4 4
Page 48

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
13-41 Logikregel Verknüpfung 1
Array [4]
Option: Funktion:
[4] ODER NICHT Verknüpfung [13-40] ODER NICHT
[13-42].
[5] NICHT UND Verknüpfung NICHT [13-40] und [13-42].
[6] NICHT ODER Verknüpfung NICHT [13-40] ODER
[13-42].
44
[7] NICHT UND NICHT Verknüpfung NICHT [13-40] UND NICHT
[13-42].
[8] NICHT ODER
NICHT
Verknüpfung NICHT [13-40] ODER
NICHT [13-42].
13-42 Logikregel Boolesch 2
Array [4]
Option: Funktion:
Den zweiten booleschen Eingang für die ausgewählte
Logikregel wählen.
Siehe 13-40 Logikregel Boolesch 1 für Wahlmöglichkeiten
und Beschreibungen.
13-43 Logikregel Verknüpfung 2
Array [4]
Option: Funktion:
Den zweiten logischen Operator
auswählen, der auf die booleschen
Eingänge, die in 13-40 Logikregel Boolesch
1, 13-41 Logikregel Operator 1 und 13-42
Logikregel Boolesch 2 berechnet werden,
und auf den booleschen Eingang von
13-42 Logikregel Boolesch 2 angewandt
werden soll.
[0] * Deaktiviert 13-44 Logikregel Boolesch 3
[1] Und Bewertet den Ausdruck [13-40/13-42] UND
[13-44].
[2] Oder Bewertet den Ausdruck [13-40/13-42]
ODER [13-44].
[3] Und nicht Bewertet den Ausdruck [13-40/13-42] UND
NICHT [13-44].
[4] Oder nicht Bewertet den Ausdruck [13-40/13-42]
ODER NICHT [13-44].
[5] Nicht und Bewertet den Ausdruck NICHT
[13-40/13-42] und [13-44].
[6] Nicht oder Bewertet den Ausdruck NICHT
[13-40/13-42] ODER [13-44].
[7] Nicht und nicht Bewertet den Ausdruck NICHT
[13-40/13-42] UND NICHT [13-44].
[8] Nicht oder nicht Bewertet den Ausdruck NICHT
[13-40/13-42] ODER NICHT [13-44].
13-44 Logikregel Boolesch 3
Array [4]
Option: Funktion:
Den dritten booleschen Eingang für die ausgewählte
Logikregel auswählen.
Siehe 13-40 Logikregel Boolesch 1 für Wahlmöglichkeiten
und Beschreibungen.
4.10.6 13-5* SL-Programm
13-51 SL-Controller-Ereignis
Array [20]
Option: Funktion:
Den booleschen Eingang zur Definition des SmartController-Ereignisses auswählen.
Siehe 13-40 Logikregel Boolesch 1 für Wahlmöglichkeiten
und Beschreibungen.
13-52 SL-Controller Aktion
Array [20]
Option: Funktion:
Definiert die dem SLC-Ereignis
entsprechende Aktion. Aktionen
werden ausgeführt, wenn das
entsprechende Ereignis (13-51 SL-
Controller Ereignis) Wahr ist.
[0] * Deaktiviert Funktion ist deaktiviert.
[1] Keine Aktion Es wird keine Aktion ausgeführt.
[2] Anwahl Datensatz 1 Ändert den aktiven Parametersatz
auf Satz 1.
[3] Anwahl Datensatz 2 Ändert den aktiven Parametersatz
auf Satz 2.
[10] Festsollwert 0 Wählt Festsollwert 0 aus.
[11] Anwahl Festsollwert 1 Wählt Festsollwert 1 aus.
[12] Anwahl Festsollwert 2 Wählt Festsollwert 2 aus.
[13] Anwahl Festsollwert 3 Wählt Festsollwert 3 aus.
[14] Anwahl Festsollwert 4 Wählt Festsollwert 4 aus.
[15] Anwahl Festsollwert 5 Wählt Festsollwert 5 aus.
[16] Anwahl Festsollwert 6 Wählt Festsollwert 6 aus.
[17] Anwahl Festsollwert 7 Wählt Festsollwert 7 aus.
[18] Anwahl Rampe 1 Wählt Rampe 1 aus.
[19] Anwahl Rampe 2 Wählt Rampe 2 aus.
[22] Start Sendet einen Startbefehl an den
Frequenzumrichter.
[23] Start+Reversierung Sendet einen Start- + Reversie-
rungsbefehl an den
Frequenzumrichter.
[24] Stopp Sendet einen Stoppbefehl an den
Frequenzumrichter.
[25] Schnellstopp Sendet einen Schnellstoppbefehl an
den Frequenzumrichter.
[26] DC-Stopp Sendet einen DC-Stoppbefehl an
den Frequenzumrichter.
46 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 49

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
13-52 SL-Controller Aktion
Array [20]
Option: Funktion:
[27] Motorfreilauf Der Frequenzumrichter geht sofort
in Freilauf über. Alle Stoppbefehle,
einschließlich Freilaufbefehl,
stoppen den SLC.
[28] Drehz. speich. Speichert die Ausgangsfrequenz.
[29] Start Timer 0 Startet Timer 0.
[30] Start Timer 1 Startet Timer 1
[31] Start Timer 2 Startet Timer 2
[32] Digitalausgang 42 AUS Deaktiviert Digitalausgang 42.
[33] Relais AUS Deaktiviert das Relais.
[38] Digitalausgang 42 EIN Aktiviert Digitalausgang 42.
[39] Relais EIN Aktiviert das Relais.
[60] Reset Zähler A Zähler A wird auf 0 gesetzt.
[61] Reset Zähler B Zähler B wird auf 0 gesetzt.
4 4
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 47
Page 50

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.11 Parametergruppe 14:
Sonderfunktionen
4.11.1 14-** Sonderfunktionen
Parametergruppe zum Einstellen von Sonderfunktionen des
Frequenzumrichters.
44
4.11.2 14-0* IGBT-Ansteuerung
14-01 Taktfrequenz
Option: Funktion:
Wählt die Taktfrequenz des Wechselrichters, um
Störgeräusche und Verlustleistung zur Steigerung
des Wirkungsgrads zu verringern.
[0] 2 kHz
[1] * 4 kHz
[2] 8 kHz
[4] 16 kHz
HINWEIS
Für 18,5-kW- und 22-kW-Frequenzumrichter ist diese
Option [4] nicht verfügbar.
14-03 Übermodulation
Option: Funktion:
Diese Funktion ermöglicht eine genauere
Drehzahlregelung nahe oder oberhalb der
Nenndrehzahl (50/60 Hz). Ein weiterer Vorteil
der Übermodulation ist die Fähigkeit, auch bei
einem Abfall der Netzversorgung eine
konstante Drehzahl beizubehalten.
[0] Deaktiviert Deaktiviert die Übermodulationsfunktion, um
Drehmoment-Rippel an der Motorwelle zu
vermeiden.
[1] * On Verbindet die Übermodulationsfunktion, um
eine gegenüber der Netzspannung um bis zu
15 % höhere Ausgangsspannung zu erhalten.
4.11.3 14-1* Netzüberwachung
Diese Parametergruppe enthält Funktionen für den
Umgang mit Netzphasenfehlern.
14-12 Netzphasen-Unsymmetrie
Option: Funktion:
Betrieb bei stark unsymmetrischer Belastung
kann die Lebensdauer des Frequenzumrichters
verkürzen.
Mit diesem Parameter definieren Sie das
Verhalten bei Erkennen einer Netzphasen-
Unsymmetrie.
[0] * Alarm Der Frequenzumrichter hat abgeschaltet.
[1] Warnung Der Frequenzumrichter gibt eine Warnung aus.
[2] Deaktiviert Keine Aktion.
Parameter zum Einstellen der automatischen Alarmquittierung und zum Initialisieren des Frequenzumrichters
(Werkseinstellung der Parameter laden).
14-20 Quittierfunktion
Option: Funktion:
Wählen Sie die Quittierfunktion nach
einer Abschaltung aus. Nach dem
Quittieren können Sie den Frequenzumrichter neu starten.
[0] * Manuell
Quittieren
[1] 1x Autom.
Quittieren
[2] 2x Autom.
Quittieren
[3] 3x Autom.
Quittieren
[4] 4x Autom.
Quittieren
[5] 5x Autom.
Quittieren
[6] 6x Autom.
Quittieren
[7] 7x Autom.
Quittieren
[8] 8x Autom.
Quittieren
[9] 9x Autom.
Quittieren
[10] 10x
Auto.Quittieren
[11] 15x
Auto.Quittieren
[12] 20x
Auto.Quittieren
[13] Unbegr. Auto.
Quitt.
[14] Quitt. b. Netz-Ein Sie können eine Abschaltblockierung bei
Die Quittierung erfolgt über die [Reset]Taste oder die Digitaleingänge.
Der Frequenzumrichter nimmt nach
einer Abschaltung ein automatisches
Quittieren vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung zwei automatische
Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung drei automatische
Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung vier automatische
Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung fünf automatische
Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung sechs automatische
Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung sieben automatische
Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung acht automatische
Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung neun automatische
Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung zehn automatische
Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung fünfzehn automatische Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung zwanzig automatische
Quittierversuche vor.
Der Frequenzumrichter nimmt nach
einer Abschaltung eine unbegrenzte
Zahl automatischer Quittierversuche vor.
Netz-Ein des Frequenzumrichters
quittieren.
48 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 51

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
14-20 Quittierfunktion
Option: Funktion:
VORSICHT
Der Motor kann unerwartet
anlaufen.
14-21 Autom. Quittieren Zeit
Range: Funktion:
10 s* [0-600 s] Dieser Parameter definiert die Wartezeit, die
zwischen zwei autom. Quittierversuchen liegen
soll (siehe 14-20 Quittierfunktion). Stellen Sie die
gewünschte Zeit ein.
14-22 Betriebsart
Option: Funktion:
Mit diesem Parameter geben Sie Normalbetrieb
an oder initialisieren alle Parameter außer 15-03
Anzahl Netz-Ein, 15-04 Anzahl Übertemperaturen
und 15-05 Anzahl Überspannungen.
[0] * Normal
Betrieb
[2] Initiali-
sierung
Der Frequenzumrichter läuft im normalen
Betrieb.
Setzt alle Parameter auf Werkseinstellung
zurück (ausgenommen 15-03 Anzahl Netz-Ein,
15-04 Anzahl Übertemperaturen und 15-05
Anzahl Überspannungen). Nach Auswahl von
Initialisieren ist der Frequenzumrichter aus- und
wieder einzuschalten.
14-22 Betriebsart stellt sich selbst auf Normal
Betrieb [0] zurück.
14-41 Minimale AEO-Magnetisierung
Range: Funktion:
66%* [40-75%] Geben Sie die minimal zulässige Magneti-
sierung für AEO ein. Ein niedriger Wert führt zu
weniger Energieverlusten im Motor. Die Folge
kann geringeres Gegenmoment bei plötzlichen
Lastwechseln sein.
4 4
14-26 WR-Fehler Abschaltverzögerung
Option: Funktion:
[0] Alarm Wenn der Frequenzumrichter eine Überspannung
erfasst, schaltet er unverzüglich ab.
HINWEIS
Wir empfehlen, [0] Alarm in Hub- und
Vertikalförderanwendungen zu wählen.
[1] * Warnung Wenn der Frequenzumrichter eine Überspannung
erfasst, gibt er unverzüglich eine Warnung aus.
Nach dem Schutzfilter schaltet er ab.
HINWEIS
Wir empfehlen, Protection Mode in Hubund Vertikalförderanwendungen zu
deaktivieren.
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 49
Page 52

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.12 Parametergruppe 15: Info/Wartung
Parametergruppe mit Informationen und Wartungsdaten
zum FU, z. B. Betriebsdaten, Hardwarekonfiguration,
4.12.1 15-3* Fehlerspeicher
Diese Parametergruppe enthält einen Fehlerspeicher, der
die Gründe für die letzten zahn Abschaltungen anzeigt.
Softwareversionen.
15-30 Fehlerspeicher: Fehlercode
15-00 Betriebszeit
Range: Funktion:
0 Tage* [0-65535
44
Tage]
Gibt an, wie lange der Frequenzumrichter in Betrieb war.
Der Wert wird beim Abschalten des
Geräts gespeichert. Dieser Zähler kann
nicht zurückgesetzt werden.
Range: Funktion:
0 [0-255]
Beschreibung des Fehlercodes in der VLT Micro
Kurzanleitung MG02B.
4.12.2 15-4* Typendaten
Parameter mit Informationen zu den Typendaten des
15-01 Motorlaufstunden
Range: Funktion:
0* [0- 2147483647] Gibt an, wie viele Betriebsstunden der
Motor gelaufen ist.
Der Wert wird beim Abschalten des Geräts
gespeichert. Zähler-Reset in 15-07 Reset
Motorlaufstundenzähler.
15-02 Zähler-kWh
Range: Funktion:
0 [0-65535] Angabe des Netzstromverbrauchs in kWh
(Durchschnittswert) während 1 Stunde.
Zähler-Reset in 15-06 Reset Zähler-kWh.
15-03 Anzahl Netz-Ein
Range: Funktion:
0 [0-2147483647] Gibt die Anzahl der Netz-Einschaltungen des
Frequenzumrichters an.
Dieser Zähler kann nicht zurückgesetzt
werden.
15-04 Anzahl Übertemperaturen
Range: Funktion:
0 [0-65535] Angabe der Anzahl von Übertemperaturen, die am
Frequenzumrichter aufgetreten sind.
Dieser Zähler kann nicht zurückgesetzt werden.
15-05 Anzahl Überspannungen
Range: Funktion:
0* [0-65535] Angabe der Anzahl von Überspannungen, die am
Frequenzumrichter aufgetreten sind.
Dieser Zähler kann nicht zurückgesetzt werden.
15-06 Reset Zähler-kWh
Frequenzumrichters, z. B. Nenndaten, Bestellnummer,
Softwareversionen usw.
15-40 FC-Typ
Option: Funktion:
FC-Typ anzeigen.
15-41 Leistungsteil
Option: Funktion:
Zeigt die Nennleistung dieses Frequenzumrichters.
15-42 Nennspannung
Option: Funktion:
Zeigt die Nennspannung (Netz) dieses Frequenzumrichters.
15-43 Softwareversion
Option: Funktion:
Zeigt die Softwareversion des installierten Gerätefirmware (Gesamt: Steuer- und Leistungskarte).
15-46 Typ Bestellnummer
Option: Funktion:
Zeigt die Bestellnummer dieses Frequenzumrichters
ohne nachgerüstete Optionen an.
15-48 LCP-Version
Option: Funktion:
Zeigt die Ident.-Nummer des angeschlossenen LCP
Bedienteils an.
15-51 Typ Seriennummer
Option: Funktion:
Zeigt die Seriennummer dieses Frequenzumrichters an.
Option: Funktion:
[0] * Kein Reset Der Zähler wurde nicht zurückgesetzt.
[1] Resetzähler Der Zähler wurde zurückgesetzt.
15-07 Reset Motorlaufstundenzähler
Option: Funktion:
[0] * Kein Reset Der Zähler wird nicht auf null zurückgesetzt.
[1] Resetzähler Der Zähler wird auf null zurückgesetzt.
50 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 53

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.13 Parametergruppe 16: Datenanzeigen
16-00 Steuerwort
Range: Funktion:
0* [0-65535] Zeigt das aktuell gültige Steuerwort des Frequen-
zumrichters in Hex-Code.
16-01 Sollwert [Einheit]
Range: Funktion:
0,000* [-4999.000-4999.000] Zeigt den aktuellen Gesamt-
sollwert an (Summe aus Digital,
Analog, Festsollwert, LCP-Poti, Bus
und Sollwert speichern).
16-02 Sollwert %
Range: Funktion:
0,0* [-200.0-200.0%] Zeigt den aktuellen Gesamtsollwert in %
(Summe aus Digital, Analog, Festsollwert,
LCP-Poti, Bus und Sollwert speichern).
16-03 Zustandswort
Range: Funktion:
0* [0-65535] Zeigt das aktuelle Zustandswort des Frequenzum-
richters in Hex-Code.
16-13 Frequenz
Range: Funktion:
0,0 Hz* [0,0-400,0 Hz] Zeigt die aktuelle Frequenzumrichter-
Ausgangsfrequenz an.
16-14 Motorstrom
Range: Funktion:
0,00 A* [0,00-655 A] Zeigt den aktuellen Frequenzumrichter-
Ausgangsstrom an.
16-15 Frequenz [%]
Range: Funktion:
0,00* [-100.00-100.00%] Ein 2-Byte-Wort, das die tatsächliche
Motorfrequenz (ohne Resonanzdämpfung) als Prozentsatz von 4-14
Max. Frequenz ausgibt.
16-18 Therm. Motorschutz
Range: Funktion:
0%* [0-100%] Zeigt die berechnete thermische Belastung am
Motor an.
4.13.2 16-3* Anzeigen-FU
4 4
16-05 Hauptistwert [%]
Range: Funktion:
0,00* [-100.00-100.00%] Zeigt den aktuellen Hauptistwert der
Feldbus-Schnittstelle in Hex-Code.
16-09 Benutzerdefinierte Anzeige
Range: Funktion:
0,00* [0.00-9999.00%]
Benutzerdef. Anzeige auf Basis der
Einstellungen von 0-31 Min. Wert
benutzerdef. Anzeige, 0-32 Max. Wert
benutzerdef. Anzeige und 4-14 Max.
Frequenz
4.13.1 16-1* Anzeigen-Motor
16-10 Leistung [kW]
Range: Funktion:
0 kW* [0-99 kW] Anzeige der Ausgangsleistung in kW.
16-11 Leistung [HP]
Range: Funktion:
0 HP [0-99 HP ] Anzeige der Ausgangsleistung in HP (nur
Nordamerika).
16-12 Motorspannung
Range: Funktion:
0,0* [0,0-999,9 V] Zeigt die aktuelle Frequenzumrichter-
Ausgangsspannung (berechnet) an.
16-30 DC-Spannung
Range: Funktion:
0 V* [0-10000 V] Zeigt die aktuelle DC-Zwischenkreisspannung.
16-34 Kühlkörpertemp.
Range: Funktion:
0*
[0-255 °C]
Zeigt die Temperatur des Kühlkörpers des
Frequenzumrichters in Grad Celsius an.
16-35 FC Überlast
Range: Funktion:
0%* [0-100%] Zeigt die prozentuale Überlast des Wechsel-
richters an.
16-36 Nenn- WR- Strom
Range: Funktion:
0,00 A* [0.01-655A] Dauernennstrom des Wechselrichters.
16-37 Max.- WR-Strom
Range: Funktion:
0,00 A* [0.1-655A] Max. Wechselrichterstrom im Aussetzbetrieb
(150 %).
16-38 SL Contr.Zustand
Range: Funktion:
0* [0-255] Zeigt die Nummer des aktiven Smart Logic
Controller-Zustands an.
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 51
Page 54

Parameterbeschreibungen
VLT® Micro Drive FC 51 Programmierungshandbuch
4.13.3 16-5* Soll- & Istwerte
16-72 Zähler A
Range: Funktion:
16-50 Externer Sollwert
Range: Funktion:
0,0 %* [-200.0-200.0%] Zeigt die Summe der extern
angelegten Sollwerte in % an.
0* [-32768-32767] Zeigt den aktuellen Wert von Zähler A.
16-73 Zähler B
Range: Funktion:
0* [-32768-32767] Zeigt den aktuellen Wert von Zähler B.
16-51 Puls-Sollwert
44
Range: Funktion:
0,0 %* [-200.0-200.0%] Zeigt das Pulssollwert-Signal in % an.
16-52 Istwert
Range: Funktion:
0,000* [-4999.000-4999.000] Anzeige des Analog- oder
Pulsistwerts in Hz.
4.13.5 16-8* FC-Schnittstelle
Parameter zur Anzeige der Sollwerte der FC-Schnittstelle.
16-86 FC Sollwert 1
Range: Funktion:
0* [0x8000-0x7FFF] Anzeige des aktuell empfangenen
Sollwerts an der FC Schnittstelle.
4.13.4 16-6* Ein- und Ausgänge
4.13.6 16-9* Bus Diagnose
16-60 Digitaleingänge 18, 19, 27, 33
Range: Funktion:
0* [0-1111] Zeigt die Signalzustände der aktiven Digita-
leingänge.
16-61 Digitaleingang 29
Range: Funktion:
0* [0-1] Zeigt den Signalzustand an Digitaleingang 29.
16-62 Analogeingang 53 (Spannung)
Range: Funktion:
0,00* [0,00-10,00 V] Anzeige der Eingangsspannung an der
Analogeingangsklemme.
16-63 Analogeingang 53 (Strom)
Range: Funktion:
0,00* [0,00-20,00 mA] Anzeige des Eingangsstroms an der
Analogeingangsklemme.
16-90 Alarmwort
Range: Funktion:
0* [0-0xFFFFFFFF] Zeigt das aktuell gültige Alarmwort in Hex-
Code.
16-92 Warnwort
Range: Funktion:
0* [0-0xFFFFFFFF] Zeigt das aktuell gültige Warnwort in Hex-
Code.
16-94 Erw. Zustandswort
Range: Funktion:
0* [0-0xFFFFFFFF] Zeigt das aktuell gültige erweiterte
Warnwort in Hex-Code.
16-64 Analogeingang 60
Range: Funktion:
0,00* [0,00-20,00 mA] Zeigt den aktuellen Wert an Eingang 60
als Sollwert oder Schutzwert an.
16-65 Analogausgang 42 [mA]
Range: Funktion:
0,00 mA* [0,00-20,00 mA] Anzeige des Ausgangsstroms an
Analogausgang 42.
16-68 Pulseingänge
Range: Funktion:
20 Hz* [20-5000 Hz] Anzeige der Eingangsfrequenz an der
Pulseingangsklemme.
16-71 Relaisausgänge
Range: Funktion:
0* [0-1] Zeigt die Einstellung aller Relais an.
52 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 55

Parameterübersicht
5 Parameterübersicht
0-** Betrieb/Display
0-0/ Grundeinstellungen
0-03 Ländereinstellungen
*[0] International
[1] US
0-04 Netz-Ein Modus (Hand)
[0] Wiederanlauf
[1] LCP Stop,Letz.Soll.
[2] LCP Stop, Sollw.=0
0-1* Parametersätze
0-10 Aktiver Satz
*[1] Satz 1
[2] Satz 2
[9] Externe Anwahl
0-11 Programm-Satz
*[1] Satz 1
[2] Satz 2
[9] Aktiver Satz
0-12 Satz verknüpfen mit
[0] Nicht verknüpft
*[20] Verknüpft
0-31 Min. Wert benutzerdef.
Anzeige
0,00-9999,00
*0,00
0-32 Max. Wert benutzerdef.
Anzeige
0,00-9999,00
*100,0
0-4* LCP-Tasten
0-40 [Hand on]-LCP Taste
[0] Deaktiviert
*[1] Aktiviert
0-41 [Off/Reset]-LCP Taste
[0] Alle deaktivieren
*[1] Alle aktivieren
[2] Nur Reset aktivieren
0-42 [Auto on]-LCP Taste
[0] Deaktiviert
*[1] Aktiviert
0-5* Kopie/Speichern
0-50 LCP-Kopie
*[0] Keine Kopie
[1] Speichern in LCP
[2] Lade von LCP, Alle
[3] Lade von LCP, nur Fkt.
0-51 Parametersatz-Kopie
*[0] Keine Kopie
[1] Kopie zu Satz 1
[2] Kopie zu Satz 2
[9] Kopie zu allen
0-6* Passwort
0-60 Hauptmenü Passwort
0-999 *0
0-61 Zugriff auf Haupt-/QuickMenü ohne Passwort
*[0] Vollständig
[1] LCP: Schreibgeschützt
[2] LCP: Kein Zugriff
1-** Motor/Last
1-0* Grundeinstellungen
1-00 Regelverfahren
*[0] Ohne Rückführung
[3] PID-Prozess
1-01 Steuerprinzip
[0] U/f
*[1] VVC
1-03 Drehmomentverhalten der
Last
*[0] Konstantes Drehmoment
[2] Autom. Energieoptim.
1-05 Hand/Ort-Betrieb Konfiguration
[0] Drehzahlsteuerung
*[2] Wie Par. 1-00
1-2* Motordaten
1-20 Motornennleistung [kW] [HP]
[1] 0,09 kW
[2] 0,12 kW
[3] 0,18 kW
[4] 0,25 kW
[5] 0,37 kW
[6] 0,55 kW
[7] 0,75 kW
[8] 1,10 kW
[9] 1,50 kW
[10] 2,20 kW
[11] 3,00 kW
[12] 3,70 kW
[13] 4,00 kW
[14] 5,50 kW
[15] 7,50 kW
[16] 11,00 kW
[17] 15,00 kW
[18] 18,50 kW
[19] 22,00 kW
[20] 30,00 kW
VLT® Micro Drive FC 51 Programmierungshandbuch
Parameterübersicht
1-22 Motornennspannung
50-999 V * 230-400 V
1-23 Motornennfrequenz
20-400 Hz *50 Hz
1-24 Motornennstrom
0,01-100,00 A *Abhängig vom
Motortyp
1-25 Motornenndrehzahl
100-9999 UPM * Abh. vom
Motortyp
1-29 Automatische Motoranpassung (AMA)
*[0] Anpassung aus
[2] Reduz. Anpassung
1-3* Erw. Motordaten
1-30 Statorwiderstand (Rs)
[Ohm] * Abh. von Motordaten
1-33 Statorstreureaktanz (X1)
[Ohm] * Abh. von Motordaten
plus
1-35 Hauptreaktanz (Xh)
[Ohm] * Abh. von Motordaten
1-5* Lastunabh. Einst.
1-50 Motormagnetisierung bei 0
UPM
0-300 % *100 %
1-52 Min. Drehzahl norm.
Magnetis. [Hz]
0,0-10,0 Hz *0,0 Hz
1-55 U/f-Kennlinie - U
0-999,9 V
1-56 U/f-Kennlinie - f
0-400 Hz
1-6* Lastabh. Einstellung
1-60 Lastausgleich tief
0-199 % Lastausgleich *100 %
1-61 Lastausgleich hoch
0-199 % *100 %
1-62 Schlupfausgleich
-400-399 % *100 %
1-63 Schlupfausgleich Zeitkonstante
0,05-5,00 s *0,10 s
1-7* Startfunktion
1-71 Startverzögerung
0,0-10,0 s * 0,0 s
1-72 Startfunktion
[0] DC-Halten
[1] DC-Bremse
*[2] Freilauf/Verz.zeit
1-73 Motorfangschaltung
*[0] Deaktiviert
[1] Aktiviert
1-8* Stoppfunktion
1-80 Funktion bei Stopp
*[0] Motorfreilauf
[1] DC-Halten
1-82 Ein.-Frequenz für
Stoppfunktion [Hz]
0,0-20,0 Hz *0,0 Hz
1-9* Motortemperatur
1-90 Thermischer Motorschutz
*[0] Kein Motorschutz
[1] Thermistor Warnung
[2] Thermistor-Abschalt.
[3] ETR-Warnung
[4] ETR-Alarm
1-93 Thermistoranschluss
*[0] Ohne
[1] Analogeingang 53
[6] Digitaleingang 29
2-** Bremsfunktionen
2-0* DC Halt/DC Bremse
2-00 DC-Halte-/Vorwärmstrom
0-150 % *50 %
2-01 DC-Bremsstrom
0-150 % *50 %
2-02 DC-Bremszeit
0,0-60,0 s *10,0 s
2-04 DC-Bremse Ein [Hz]
0,0-400,0 Hz * 0,0 Hz
2-1* Generator. Bremsen
2-10 Bremsfunktion
*[0] Anpassung aus
[1] Bremswiderstand
[2] AC-Bremse
2-11 Bremswiderstand (Ohm)
5-5000 *5
2-16 AC-Bremse, max. Strom
0-150 % *100 %
2-17 Überspannungssteuerung
*[0] Deaktiviert
[1] Aktiv (ohne Stopp)
[2] Aktiviert
2-2* Mechanische Bremse
2-20 Bremse öffnen bei
Motorstrom
0,00-100,0 A *0,00 A
2-22 Bremse schließen bei
Motorfrequenz [Hz]
5 5
Tabelle 5.1
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 53
Page 56

Parameterübersicht
VLT® Micro Drive FC 51 Programmierungshandbuch
0,0-400,0 Hz * 0,0 Hz
3-** Sollwert/Rampen
3-0* Sollwertgrenzen
3-00 Sollwertbereich
*[0] Min - Max
[1] -Min. bis +Max.
3-02 Minimaler Sollwert
-4999-4999 *0,000
3-03 Max. Sollwert
-4999-4999 *50,00
3-1* Sollwerteinstellung
3-10 Festsollwert
55
-100,0-100,0 % *0,00 %
3-11 Festdrehzahl JOG [Hz]
0,0-400,0 Hz *5,0 Hz
3-12 Frequenzkorrektur auf/ab
0,00-100,0 % *0,00 %
3-14 Relativer Festsollwert
-100,0-100,0 % *0,00 %
3-15 Variabler Sollwert 1
[0] Ohne Funktion
*[1] Analogeingang 53
[2] Analogeingang 60
[8] Pulseingang 33
[11] Bus Sollwert
[21] LCP-Potentiometer
3-16 Variabler Sollwert 2
[0] Ohne Funktion
[1] Analogeingang 53
*[2] Analogeingang 60
[8] Pulseingang 33
*[11] Bus Sollwert
[21] LCP-Potentiometer
3-17 Variabler Sollwert 3
[0] Ohne Funktion
[1] Analogeingang 53
[2] Analogeingang 60
[8] Pulseingang 33
*[11] Bus Sollwert
[21] LCP-Potentiometer
3-18 Relativ. Skalierungssollw.
Ressource
*[0] Ohne Funktion
[1] Analogeingang 53
[2] Analogeingang 60
[8] Pulseingang 33
[11] Bus Sollwert
[21] LCP-Potentiometer
3-4* Rampe 1
3-40 Rampentyp 1
*[0] Linear
[2] Sinus2-Rampe
3-41 Rampenzeit Auf 1
0,05-3600 s *3,00 s (10,00 s1))
1)
Nur M4 und M5
3-42 Rampenzeit Ab 1
0,05-3600 s *3,00 s (10,00 s 1))
3-5* Rampe 2
3-50 Rampentyp 2
*[0] Linear
[2] Sinus2-Rampe
3-51 Rampenzeit Auf 2
0,05-3600 s *3,00 s (10,00 s 1))
3-52 Rampenzeit Ab 2
0,05-3600 s *3,00 s (10,00 s1))
3-8* Weitere Rampen 3-80
Rampenzeit JOG
0,05-3600 s *3,00 s (10,00 s1))
3-81 Schnellstopp Rampenzeit
0,05-3600 s *3,00 s (10,00 s1))
4-** Grenzen/Warnungen
4-1* Motor Grenzen
4-10 Motor Drehrichtung
[0] Nur Rechts, wenn Par. 1-00 =
[3]
[1] Nur Links
*[2] Beide Richtungen, wenn Par.
1-00 = [0]
4-12 Min. Frequenz [Hz]
0,0-400,0 Hz * 0,0 Hz
4-14 Max. Frequenz [Hz]
0,1-400,0 Hz *65,0 Hz
4-16 Momentengrenze motorisch
0-400 % *150 %
4-17 Momentengrenze generatorisch
0-400 % *100 %
4-4* Warnungen Grenzen 2
4-40 Warnung Frequenz niedrig
0,00-Wert von 4-41 Hz *0,0 Hz
4-41 Warnung Frequenz hoch
Wert von 4-40-400,0 Hz *400,0 Hz
4-5* Warnungen Grenzen
4-50 Warnung Strom niedrig
0,00-100,00 A *0,00 A
4-51 Warnung Strom hoch
0,00-100,00 A *100,00 A
4-54 Warnung Sollwert niedr.
-4999,000-Wert von 4-55
*-4999,000
4-55 Warnung Sollwert hoch
Wert von 4-54-4999,000
*4999,000
4-56 Warnung Istwert niedr.
-4999,000-Wert von 4-57
*-4999,000
4-57 Warnung Istwert hoch
Wert von 4-56-4999,000
*4999,000
4-58 Motorphasen-Überwachung
[0] Deaktiviert
*[1] Aktiviert
4-6* Drehz.ausblendung
4-61 Ausbl. Drehzahl von [Hz]
0,0-400,0 Hz * 0,0 Hz
4-63 Ausbl. Drehzahl bis [Hz]
0,0-400,0 Hz * 0,0 Hz
5-1* Digitaleingänge
5-10 Klemme 18 Digitaleingang
[0] Ohne Funktion
[1] Alarm quittieren
[2] Motorfreilauf (inv.)
[3] Mot.freil./Res. inv.
[4] Schnellst.rampe (inv)
[5] DC-Bremse (invers)
[6] Stopp (invers)
*[8] Start
[9] Puls-Start
[10] Reversierung
[11] Start + Reversierung
[12] Start nur Rechts
[13] Start nur Links
[14] Festdrz. (JOG)
[16-18] Festsollwert Bit 0-2
[19] Sollw. speich.
[20] Drehz. speich.
[21] Drehzahl auf
[22] Drehzahl ab
[23] Satzanwahl Bit 0
[28] Freq.korr. Auf
[29] Freq.korr. Ab
[34] Rampe Bit 0
[60] Zähler A (+)
[61] Zähler A (-)
[62] Reset Zähler A
[63] Zähler B (+)
[64] Zähler B (-)
[65] Reset Zähler B
5-11 Klemme 19 Digitaleingang
Siehe Par. 5-10. *[10]
Reversierung
5-12 Klemme 27 Digitaleingang
Siehe Par. 5-10. * [1] Reset
5-13 Klemme 29 Digitaleingang
Siehe Par. 5-10. * [14]
Festdrehzahl JOG
5-15 Klemme 33 Digitaleingang
Siehe Par. 5-10. * [16]
Festsollwert Bit 0
[26] Präz. Stopp inv.
[27] Präz. Start, Stopp
[32] Pulseingang
5-3* Digitalausgänge
5-34 Ein-Verzög., Klemme 42
Digitalausgang
0,00-600,00 s *0,01 s
5-35 Aus-Verzög., Klemme 42
Digitalausgang
0,00-600,00 s *0,01 s
5-4* Relais
5-40 Relaisfunktion
*[0] Ohne Funktion
[1] Steuer. bereit
[2] FU bereit
[3] Bereit/Fern-Betrieb
[4] Freigabe/k. Warnung
[5] Motor ein
[6] Motor ein/k. Warnung
[7] Grenzen OK/k. Warn.
[8] Ist=Sollw./k. Warn.
[9] Alarm
[10] Alarm oder Warnung
[12] Außerh. Stromber.
[13] Unter Min.-Strom
[14] Über Max.-Strom
[16] Unter Min.-Drehzahl
[17] Über Max.-Drehzahl
[19] Unter Min.-Istwert
[20] Über Max.-Istwert
[21] Warnung Übertemp.
[22] Bereit, k.therm.Warn.
[23] Fern, Ber., k. therm. Warn.
[24] Bereit,k.Üb.-/Un.sp.
[25] Reversierung
[26] Bus OK
[28] Bremse, k. Warnung
[29] Bremse OK/k. Alarm
[30] Stör. Bremse (IGBT)
[32] Mechanische Bremse
[36] Steuerwort Bit 11
[41] Unter Min.-Sollwert
[42] Über Max.-Sollwert
[51] Hand-Sollwert aktiv
[52] Fernsollwert aktiv
[53] Kein Alarm
[54] Startbefehl aktiv
[55] Reversierung aktiv
[56] Handbetrieb
[57] Autobetrieb
[60-63] Vergleicher 0-3
[70-73] Logikregel 0-3
[81] SL-Digitalausgang B
5-41 Ein-Verzög., Relais
0,00-600,00 s *0,01 s
Tabelle 5.2
54 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 57

Parameterübersicht
VLT® Micro Drive FC 51 Programmierungshandbuch
6-0* Grundeinstellungen
6-00 Signalausfall Zeit
1-99 s *10 s
6-01 Signalausfall TimeoutFunktion
*[0] Aus
[1] Drehz. speich.
[2] Stopp
[3] Festdrz. (JOG)
[4] Max. Drehzahl
[5] Stopp und Alarm
6-1* Analogeingang 1
6-10 Klemme 53 Skal.
Min.Spannung
0,00-9,99 V *0,07 V
6-11 Klemme 53 Skal.
Max.Spannung
0,01-10,00 V *10,00 V
6-12 Klemme 53 Skal. Min.Strom
0,00-19,99 mA *0,14 mA
6-13 Klemme 53 Skal. Min.Strom
0,01-20,00 mA *20,00 mA
6-14 Kl. 53 Skal. Min.-Soll-/
Istwert
-4999-4999 *0,000
6-15 Kl. 53 Skal. Max.-Soll-/
Istwert
-4999-4999 *50,000
6-16 Klemme 53 Filterzeit
0,01-10,00 s *0,01 s
6-19 Klemme 53 Funktion
*[0] Einstellung Spannung
[1] Einstellung Strom
6-2* Analogeingang 2
6-22 Klemme 60 Skal. Min.Strom
0,00-19,99 mA *0,14 mA
6-23 Klemme 60 Skal. Max.Strom
0,01-20,00 mA *20,00 mA
6-24 Kl. 60 Skal. Min.-Soll-/
Istwert
-4999-4999 *0,000
6-25 Kl. 60 Skal. Max.-Soll-/
Istwert
-4999-4999 *50,00
6-26 Klemme 60 Filterzeit
0,01-10,00 s *0,01 s
6-8* LCP-Potentiometer
6-80 LCP-Poti Ein
[0] Deaktiviert
[1] * Aktiviert
6-81 LC-Poti Min. Sollwert
-4999-4999 *0,000
6-82 LCP-Poti Max. Sollwert
-4999-4999 *50,00
6-9* Analogausgang xx
6-90 Klemme 42 Funktion
*[0] 0-20 mA
6-26 Klemme 60 Filterzeit
0,01-10,00 s *0,01 s
6-8* Tastenfeld-Potentiometer
6-80 Tastenfeld-Poti Ein
[0] Deaktiviert
[1] * Aktiviert
6-81 Tastenfeld-Poti Min. Sollwert
-4999-4999 *0,000
6-82 Tastenfeld-Poti Max.
Sollwert
-4999-4999 *50,00
6-9* Analogausgang xx
6-90 Klemme 42 Funktion
*[0] 0-20 mA
[1] 4-20 mA
[2] Digitalausgang
6-91 Klemme 42 Analogausgang
*[0] Ohne Funktion
[10] Ausgangsfrequenz
[11] Sollwert
[12] Istwert
[13] Motorstrom
[16] Leistung
[20] Bussteuerung
6-92 Klemme 42 Digitalausgang
Siehe Par. 5-40
*[0] Ohne Funktion
[80] SL-Digitalausgang A
6-93 Klemme 42 Ausgang Min.
Skalierung
0,00-200,0 %
*0,00 %
6-94 Klemme 42 Ausgang Max.
Skalierung
0,00-200,0 % *100,0 %
7-** PI-Regler
7-2* PI-Prozess Istw.
7-20 PI-Prozess Istwert 1
*[0] Keine Funktion
[1] Analogeingang 53
[2] Analogeingang 60
[8] Pulseingang 33
[11] Bussollwert
7-3* PI-Prozessregler
7-30 Auswahl Normal-/InversRegelung
*[0] Normal
[1] Invers
7-31 PI-Prozess Anti-Windup
[0] Deaktiviert
*[1] Aktiviert
7-32 PI-Prozess Reglerstart bei
0,0-200,0 Hz *0,0 Hz
7-33 PI-Prozess Proportionalverstärkung
0,00-10,00 *0,01
7-34 PI-Prozess I-Zeit
0,10-9999 s *9999 s
7-38 PI-Prozess Vorsteuerung
0-400 % *0 %
7-39 Bandbreite Ist=Sollwert
0-200 % *5 %
8-** Opt./Schnittstellen
8-0* Grundeinstellungen
8-01 Führungshoheit
*[0] Klemme und Steuerw.
[1] Nur Klemme
[2] Nur Steuerwort
8-02 Aktives Steuerwort
[0] Deaktiviert
*[1] FC-Seriell RS485
8-03 Steuerwort Timeout-Zeit
0,1-6500 s *1,0 s
8-04 Steuerwort TimeoutFunktion
*[0] Aus
[1] Drehz. speich.
[2] Stopp
[3] Festdrz. (JOG)
[4] Max. Drehzahl
[5] Stopp und Alarm
8-06 Timeout Steuerwort
quittieren
*[0] Reset
[1] Reset
8-3* Ser. FC-Schnittst.
8-30 FC-Protokoll
*[0] FC-Profil
[2] Modbus
8-31 Adresse
1-247 *1
8-32 Baudrate
[0] 2400 Baud
[1] 4800 Baud
*[2] 9600 Baud Bei Auswahl von
FC-Profil in 8-30
* [3] 19200 Baud Bei Auswahl
von FC-Profil in 8-30
*[4] 38400 Baud
8-33 Parität/Stoppbits
*[0] Gerade, 1 Stoppbit
[1] Ungerade, 1 Stoppbit
[2] Keine, 1 Stoppbit
[3] Ohne Parität, 2 Stoppbits
8-35 FC-Antwortzeit Min.-Delay
0,001-0,5 *0,010 s
8-36 FC-Antwortzeit Max.-Delay
0,100-10,00 s *5,000 s
8-4* FC/MC-Protokoll
8-43 PCD-Konfiguration Lesen
*[0] Keine Ausdrucksgrenze
[1] [1500] Betriebsstunden
[2] [1501] Laufstunden
[3] [1502] Zähler-kWh
[4] [1600] Steuerwort
[5] [1601] Sollwert [Einheit]
[6] [1602] Sollwert %
[7] [1603] Zustandswort
[8] [1605] Hauptistwert [%]
[9] [1609] Benutzerdef. Anzeige
[10] [1610] Leistung [kW]
[11] [1611] Leistung [HP]
[12] [1612] Motorspannung
[13] [1613] Frequenz
[14] [1614] Motorstrom
[15] [1615] Frequenz [%]
[16] [1618] Therm. Motorschutz
[17] [1630] DC-Spannung
[18] [1634] Kühlkörpertemp.
[19] [1635] FC Überlast
[20] [1638] SL Contr.Zustand
[21] [1650] Externer Sollwert
[22] [1651] Puls-Sollwert
[23] [1652] Istwert [Einheit]
[24] [1660] Digitaleingang
18,19,27,33
[25] [1661] Digitaleingang 29
[26] [1662] Analogeingang 53(V)
[27] [1663] Analogeingang 53
(mA)
[28] [1664] Analogeingang 60
[29] [1665] Analogausgang 42
[mA]
[30] [1668] Pulseing. 33 [Hz]
[31] [1671] Relaisausgänge
[32] [1672] Zähler A
[33] [1673] Zähler[34] [1690]
Alarmwort
[34] [1690] Alarmwort
[35] [1692] Warnwort
[36] [1694] Erw. Zustandswort
8-5* Betr. Bus/Klemme
8-50 Motorfreilauf
[0] Digitaleingang
[1] Bus
[2] Bus UND Klemme
*[3] Bus ODER Klemme
8-51 Schnellstopp
Siehe Par. 8-50 * [3] Bus ODER
Klemme
8-52 DC-Bremse
Siehe Par. 8-50 * [3] Bus ODER
Klemme
8-53 Start
Siehe Par. 8-50 * [3] Bus ODER
Klemme
5 5
Tabelle 5.3
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 55
Page 58

Parameterübersicht
VLT® Micro Drive FC 51 Programmierungshandbuch
8-54 Reversierung
Siehe Par. 8-50 * [3] Bus ODER
Klemme
8-55 Satzanwahl
Siehe Par. 8-50 * [3] Bus ODER
Klemme
8-56 Festsollwertanwahl
Siehe Par. 8-50 * [3] Bus ODER
Klemme
8-8X FC-Anschlussdiagnose
8-80 Zähler Busmeldungen
0-0 N.v. *0 N.v.
55
8-81 Zähler Busfehler
0-0 N.v. *0 N.v.
8-82 Zähler Slavemeldungen
0-0 N.v. *0 N.v.
8-83 Zähler Slavefehler
0-0 N.v. *0 N.v.
8-9* Bus Festdrehzahl JOG/Istwert
8-94 Bus-Istwert 1
0x8000-0x7FFF *0
13-** Smart Logic13-0* SL-Controller
13-00 Smart Logic Controller
*[0] Anpassung aus
[1] Ein
13-01 SL-Controller Start
[0] Falsch
[1] Wahr
[2] Motor ein
[3] Im Bereich
[4] Ist=Sollwert
[7] Außerh.Stromber.
[8] Unter Min.-Strom
[9] Über Max.-Strom
[16] Warnung Übertemp.
[17] Netzsp.auss.Bereich
[18] Reversierung
[19] Warnung
[20] Alarm (Abschaltung)
[21] Alarm (Abschaltung)
[22-25] Vergleicher 0-3
[26-29] Logikregel 0-3
[33] Digitaleingang 18
[34] Digitaleingang 19
[35] Digitaleingang 27
[36] Digitaleingang 29
[38] Digitaleingang 33
*[39] Startbefehl
[40] FU gestoppt
13-02 SL-Controller Stopp
Siehe Par. 13-01 * [40] FU
gestoppt
13-03 SL-Parameter initialisieren
*[0] Kein Reset
[1] Reset
13-1* Vergleicher
13-10 Vergleicher-Operand
*[0] Deaktiviert
[1] Sollwert
[2] Istwert
[3] Motordrehzahl
[4] Motorstrom
[6] Motorleistung
[7] Motorspannung
[8] Zwischenkreisspann.
[12] Analogeingang 53
[13] Analogeingang 60
[18] Pulseingang 33
[20] Alarmnummer
[30] Zähler A
[31] Zähler B
13-11 Vergleicher-Funktion
[0] Kleiner als <
*[1] Ungefähr gleich ≈
[2] Größer als >
13-12 Vergleicher-Wert
-9999-9999 *0,0
13-2* Timer
13-20 SL-Timer
0,0-3600 s *0,0 s
13-4* Logikregeln
13-40 Logikregel Boolsch 1
Siehe Par. 13-01 * [0] Falsch
[30]-[32] Timeout 0-2
13-41 Logikregel Verknüpfung 1
*[0] Deaktiviert
[1] UND
[2] ODER
[3] UND NICHT
[4] ODER NICHT
[5] NICHT UND
[6] NICHT ODER
[7] NICHT UND NICHT
[8] NICHT ODER NICHT
13-42 Logikregel Boolsch 2
Siehe Par. 13-40
13-43 Logikregel Verknüpfung 2
Siehe Par. 13-41 * [0] Deaktiviert
13-44 Logikregel Boolsch 3
Siehe Par. 13-40
13-5* SL-Programm
13-51 SL-Controller Ereignis
Siehe Par. 13-40
13-52 SL-Controller Aktion
*[0] Deaktiviert
[1] Keine Aktion
[2] Anwahl Datensatz 1
[3] Anwahl Datensatz 2
[10-17] Anwahl Festsollw. 0-7
[18] Anwahl Rampe 1
[19] Anwahl Rampe 2
[22] Start
[23] Start+Reversierung
[24] Stopp
[25] Schnellstopp
[26] DC-Stopp
[27] Motorfreilauf
[28] Drehz. speichern
[29] Start Timer 0
[30] Start Timer 1
[31] Start Timer2
Digitalausgang B-EIN
[32] Digitalausgang A-AUS
[33] Digitalausgang B-AUS
[38] Digitalausgang A-EIN
[39] Digitalausgang B-EIN
[60] Reset Zähler A
[61] Reset Zähler B
14-** Sonderfunktionen
14-0*IGBT-Ansteuerung
14-01 Taktfrequenz
[0] 2 kHz
*[1] 4 kHz
[2] 8 kHz
[4] 16 kHz bei M5 nicht verfügbar
14-03 Übermodulation
[0] Aus
*[1] Ein
14-1* Netzausfall
14-12 Netzphasen-Unsymmetrie
*[0] Alarm
[1] Warnung
[2] Deaktiviert
14-2* Reset/Initialisieren
14-20 Quittierfunktion
*[0] Manuell Quittieren
[1-9] 1x-9x Autom. Quittieren
[10] 10x Auto.Quittieren
[11] 15x Auto.Quittieren
[12] 20x Auto.Quittieren
[13] Unbegr. Auto. Quitt.
[14] Quitt. b. Netz-Ein
14-21 Autom. Quittieren Zeit
0-600 s * 10 s
14-22 Betriebsart
*[0] Normal Betrieb
[2] Initialisierung
14-26 WR-Fehler Abschaltverzögerung
*[0] Alarm
[1] Warnung
14-4* Energieoptimierung
14-41 Minimale AEO-Magnetisierung
40-75 % *66 %
15-** Info/Wartung 15-0*
Betriebsdaten
15-00 Betriebsstunden
15-01 Motorlaufstunden
15-02 Zähler-kWh
15-03 Anzahl Netz-Ein
15-04 Anzahl Übertemperaturen
15-05 Anzahl Überspannungen
15-06 Reset Zähler-kWh
*[0] Kein Reset
[1] Reset
15-07 Reset Motorlaufstundenzähler
*[0] Kein Reset
[1] Reset
15-3* Fehlerspeicher
15-30 Fehlerspeicher: Fehlercode
15-4* Typendaten
15-40 FC-Typ
15-41 Leistungsteil
15-42 Nennspannung
15-43 Softwareversion
15-46 Typ Bestellnummer
15-48 LCP-Version
15-51 Typ Seriennummer
16-** Datenanzeigen
16-0* Anzeigen-Allgemein
16-00 Steuerwort
0-0XFFFF
16-01 Sollwert [Einheit]
-4999-4999
16-02 Sollwert %
-200,0-200,0 %
16-03 Zustandswort
0-0XFFFF
16-05 Haupt-Istwert [%]
-200,0-200,0 %
16-09 Benutzerdef. Anzeige
Abh. von Par. 0-31, 0-32 und
4-14
16-1* Anzeigen-Motor
16-10 Leistung [kW]
16-11 Leistung [HP]
16-12 Motorspannung [V]
16-13 Frequenz [Hz]
16-14 Motorstrom [A]
16-15 Frequenz [%]
16-18 Therm. Motorschutz [%]
16-3* Anzeigen-FU
16-30 DC-Spannung
16-34 Kühlkörpertemp.
16-35 FC Überlast
16-36 Nenn-WR- Strom
16-37 Max.- WR-Strom
16-38 SL-Contr.Zustand
16-5* Soll- & Istwerte
16-50 Externer Sollwert
16-51 Puls-Sollwert
Tabelle 5.4
56 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 59

Parameterübersicht
VLT® Micro Drive FC 51 Programmierungshandbuch
16-52 Istwert [Einheit]
16-6* Anzeig. Ein-/Ausg.
16-60 Digitaleingänge 18,19,27,33
0-1111
16-61 Digitaleingang 29
0-1
16-62 Analogeingang 53
(Spannung)
Tabelle 5.5
16-63 Analogeingang 53 (Strom)
16-64 Analogeingang 60
16-65 Analogausgang 42
[mA]16-68 Pulseingang [Hz]16-71
Relaisausgänge 16-72 Zähler A
16-73 Zähler B
16-8* Anzeig. Schnittst.
16-86 Bus Sollwert 1
0x8000-0x7FFFF
16-9* Bus Diagnose16-90
Alarmwort
0-0XFFFFFFFF
16-92 Warnwort
0-0XFFFFFFFF
16-94 Erw. Zustandswort
0-0XFFFFFFFF
18-** Erw. Motordaten 2
18-8* Motorwiderstände
18-80 Statorwiderstand (hohe
Auflösung)
0,000-99,990 Ohm *0,000 Ohm
18-81 Statorstreureaktanz (hohe
Auflösung)
0,000-99,990 Ohm *0,000 Ohm
5 5
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 57
Page 60

Parameterübersicht
VLT® Micro Drive FC 51 Programmierungshandbuch
5.1.1 Konvertierungsindex
Die verschiedenen Attribute jedes Parameters sind im
Abschnitt Werkseinstellungen aufgeführt. Parameterwerte
werden nur als ganze Zahlen übertragen. Aus diesem
Grund werden Umrechnungsfaktoren gemäß Tabelle 5.6
verwendet, um Dezimalwerte zu übertragen.
Beispiel:
1-24 Motornennstrom hat einen Umrechnungsfaktor von -2
(d. h. Umrechnungsfaktor von 0,01 gemäß Tabelle 5.6). Soll
der Parameter auf 2,25 A eingestellt werden, übertragen
55
Sie den Wert 225 über Modbus. Ein Umrechnungsfaktor
von 0,01 bedeutet, dass der Frequenzumrichter den
übertragene Wert mit 0,01 multipliziert. Der Frequenzumrichter erkennt somit den über den Bus übertragenen Wert
225 als 2,25 A erkannt.
Umrechnungsindex Umrechnungsfaktor
2 10
1 100
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
2-Set-up (2-Par. Sätze)
5.1.3
"All set-up" (Alle Parametersätze): Der Parameter kann
einzeln in jedem der zwei Parametersätze eingestellt
werden, d. h., ein einzelner Parameter kann zwei
verschiedene Datenwerte haben.
"1 set-up" (1 Parametersatz): Der Datenwert ist in beiden
Parametersätzen gleich.
5.1.4 Typ
Datentyp Beschreibung Typ
2 Ganzzahl 8 Bit Int8
3 Ganzzahl 16 Bit Int16
4 Ganzzahl 32 Bit Int32
5 Ohne Vorzeichen 8
Bit
6 Ohne Vorzeichen
16 Bit
7 Ohne Vorzeichen
32 Bit
9 Sichtbare
Zeichenfolge
Tabelle 5.7
Uint8
Uint16
Uint32
Sichtbare
Zeichenfolge
Tabelle 5.6 Umrechnungstabelle
Änderungen während des Betriebs
5.1.2
„WAHR“ bedeutet, dass Sie den Parameter während des
Betriebs des Frequenzumrichters ändern können; „FALSCH“
bedeutet, dass Sie den Frequenzumrichter stoppen
müssen, um Änderungen vorzunehmen.
58 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 61

Parameterübersicht
5.1.5 0-** Betrieb/Display
VLT® Micro Drive FC 51 Programmierungshandbuch
Parameter
Anzahl
0-03 Ländereinstellungen [0] International 1 Satz FALSCH - Uint8
0-04 Netz-Ein-Modus (Hand) [1] LCP Stop,Letz.Soll.
0-10 Aktiver Satz [1] Satz 1 1 Satz WAHR - Uint8
0-11 Programm Satz [1] Satz 1 1 Satz WAHR - Uint8
0-12 Link Setups [20] Verknüpft
0-31
0-32
0-40 [Hand On]-Taste auf LCP [1] Aktiviert
0-41 [Off / Reset]-Taste auf LCP [1] Enable All
0-42 [Auto on]-LCP Taste [1] Aktiviert
0-50 LCP-Kopie [0] Keine Kopie 1 Satz FALSCH - Uint8
0-51 Parametersatzkopie [0] Keine Kopie 1 Satz FALSCH - Uint8
0-60 Hauptmenü Passwort 0 1 Satz WAHR 0 Uint16
0-61
Parameterbeschreibung Werkseinstellung 2 Satz
Alle Parametersätze WAHR - Uint8
Alle Parame-
tersätze FALSCH - Uint8
Benutzerdefinierte Anzeige min.
Skalierung 0 1 Satz WAHR -2 Int32
Benutzerdefinierte Anzeige max.
Skalierung 0 1 Satz WAHR -2 Int32
Alle Parame-
tersätze WAHR - Uint8
Alle Parame-
tersätze WAHR - Uint8
Alle Parame-
tersätze WAHR - Uint8
Haupt-/Quick-Menü Zugriff ohne
PW 0 1 Satz WAHR - Uint8
Während Betrieb
ändern
UmwandlungsindexTyp
5 5
Tabelle 5.8
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 59
Page 62

Parameterübersicht
5.1.6 1-** Motor/Last
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
1-00 Regelverfahren [0] Ohne Rückführung
1-01 Steuerprinzip [1] VVCplus
1-03 Drehmomentverhalten der Last
55
1-05 Hand-Betrieb Konfiguration
1-20 Motornennleistung
1-22 Motorspannung
1-23 Motornennfrequenz
1-24 Motorstrom
1-25 Motornenndrehzahl
1-29 Automatic Motor Tuning (AMT) [0] Off 1 Satz FALSCH - Uint8
1-30 Statorwiderstand (Rs)
1-33 Statorstreureaktanz (X1)
1-35 Hauptreaktanz (Xh)
1-50 Motormagnetisierung bei 0/min 100%
1-52 Min. Drehzahl norm. Magnetis. [Hz] 0 Hz
1-55 U/f-Kennlinie - U
1-56 U/f-Kennlinie - F
1-60 Lastausgleich niedrige Drehzahl 100%
1-61 Lastausgleich hohe Drehzahl 100%
1-62 Schlupfausgleich 100%
1-63 Schlupfausgleich Zeitkonstante 0,1 s
1-71 Startverzög. 0 s
1-72 Startfunktion [2] Freilauf/Verz.zeit
1-73 Motorfangschaltung [0] Deaktiviert
1-80 Funktion bei Stopp [0] Motorfreilauf
Parameterbeschreibung Werkseinstellung 2 Satz
Alle Parametersätze WAHR - Uint8
Alle Parametersätze FALSCH - Uint8
[0] Konstantes
Drehmoment
[2] Wie Modus 1-00
Konfigurationsmodus
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze FALSCH - Uint8
Alle Parametersätze FALSCH 0 Uint16
Alle Parametersätze FALSCH 0 Uint16
Alle Parametersätze FALSCH -2 Uint16
Alle Parametersätze FALSCH 0 Uint16
Alle Parametersätze FALSCH -2 Uint16
Alle Parametersätze FALSCH -2 Uint32
Alle Parametersätze FALSCH -2 Uint32
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR -1 Uint16
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR 0 Int16
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -1 Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze FALSCH - Uint8
Alle Parametersätze WAHR - Uint8
Änderung
während
Betrieb
Umwand
lungsindexTyp
60 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 63

Parameterübersicht
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
1-82
1-90 Thermischer Motorschutz [0] Kein Motorschutz
1-93 Thermistoranschluss [0] Ohne
Tabelle 5.9
Parameterbeschreibung Werkseinstellung 2 Satz
Ein.-Frequenz für Stoppfunktion
[Hz] 0 Hz
5.1.7 2-** Bremsfunktionen
Parame-
ternummer
2-00 DC-Haltestrom 50%
2-01 DC-Bremsstrom 50%
2-02 DC-Bremszeit 10 s
2-04 DC-Bremse Ein 0 Hz
2-10 Bremsfunktion [0] Off
2-11 Bremswiderstand (Ω)
2-16 AC-Bremse, max. Strom 100%
2-17 Überspannungssteuerung [0] Deaktiviert
2-20 Bremse öffnen bei Motorstrom 0 A
2-22
Parameterbeschreibung Werkseinstellung 2 Satz
Bremse schließen bei
Motorfrequenz 0 Hz
Änderung
während
Umwand
lungsindexTyp
Betrieb
Alle Parametersätze WAHR -1 Uint16
Alle Parametersätze WAHR - Uint8
Alle Parametersätze FALSCH - Uint8
Änderung
während Betrieb
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR -1 Uint16
Alle Parametersätze WAHR -1 Uint16
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR -2 Uint32
Alle Parametersätze WAHR -1 Uint16
UmwandlungsindexTyp
5 5
Tabelle 5.10
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 61
Page 64

Parameterübersicht
5.1.8 3-** Sollwert/Rampen
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
3-00 Sollwertbereich [0] Min. bis Max.
3-02 Minimaler Sollwert 0
3-03 Maximaler Sollwert 50
55
3-10 Festsollwert 0%
3-11 Festdrehzahl Jog [Hz] 5 Hz
3-12 Frequenzkorrektur auf/ab 0%
3-14 Relativer Festsollwert 0%
3-15 Variabler Sollwert 1 [1] Analogeing. 53
3-16 Variabler Sollwert 2 [2] Analogeing. 60
3-17 Variabler Sollwert 3 [11] Bus Sollwert
3-18
3-40 Rampentyp 1 [0] Linear
3-41 Rampenzeit Auf 1 3 s
3-42 Rampenzeit Ab 1 3 s
3-50 Rampentyp 2 [0] Linear
3-51 Rampenzeit Auf 2 3 s
3-52 Rampenzeit Ab 2 3 s
3-80 Rampenzeit JOG 3 s
3-81 Rampenzeit Schnellstopp 3 s 1 Satz WAHR -2 Uint32
Parameterbeschreibung Werkseinstellung 2 Satz
Relativer Skalierungssollwert
Ressource [0] Ohne Funktion
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -2 Int16
Alle Parametersätze WAHR -1 Uint16
Alle Parametersätze WAHR -2 Int16
Alle Parametersätze WAHR -2 Int16
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR -2 Uint32
Alle Parametersätze WAHR -2 Uint32
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR -2 Uint32
Alle Parametersätze WAHR -2 Uint32
Alle Parametersätze WAHR -2 Uint32
Änderung
während Betrieb
UmwandlungsindexTyp
Tabelle 5.11
62 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 65

Parameterübersicht
5.1.9 4-** Grenzen/Warnungen
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
4-10 Motor Drehrichtung [2] Beide Richtungen
4-12 Min. Frequenz [Hz] 0 Hz
4-14 Max. Frequenz [Hz] 65 Hz
4-16 Momentengrenze motorisch 150%
4-17 Momentengrenze generatorisch 100%
4-40 Warnung Frequenz niedrig 0Hz
4-41 Warnung Frequenz Hoch 400Hz
4-50 Warnung Strom niedrig 0 A
4-51 Warnung Strom hoch 26 A
4-54 Warnung Sollwert niedr. -4999
4-55 Warnung Sollwert hoch 4999
4-56 Warnung Istwert niedrig -4999
4-57 Warnung Istwert hoch 4999
4-58 Motorphasen-Überwachung [1] Ein
4-61 Ausbl. Drehzahl von [Hz] 0 Hz
4-63 Ausbl. Drehzahl bis [Hz] 0 Hz
Parameterbeschreibung Werkseinstellung 2 Satz
Änderung
während Betrieb
Alle Parametersätze FALSCH - Uint8
Alle Parametersätze FALSCH -1 Uint16
Alle Parametersätze FALSCH -1 Uint16
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR -1 Uint16
Alle Parametersätze WAHR -1 Uint16
Alle Parametersätze WAHR -2 Uint32
Alle Parametersätze WAHR -2 Uint32
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze FALSCH - Uint8
Alle Parametersätze WAHR -1 Uint16
Alle Parametersätze WAHR -1 Uint16
UmwandlungsindexTyp
5 5
Tabelle 5.12
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 63
Page 66

Parameterübersicht
5.1.10 5-** Digit. Ein-/Ausgänge
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
5-10 Klemme 18 Digitaleingang [8] Start
5-11 Klemme 19 Digitaleingang [10] Reversierung
5-12 Klemme 27 Digitaleingang [1] Reset
55
5-13 Klemme 29 Digitaleingang [14] Festdrz. (JOG)
5-15 Klemme 33 Digitaleingang [16] Festsollwert Bit 0
5-34 Ein-Delay, Klemme 42 Digitalausgang 0,01s
5-35 Aus-Delay, Klemme 42 Digitalausgang 0,01s
5-40 Relaisfunktion [0] Ohne Funktion
5-41 Ein Verzög., Relais 0,01s
5-42 Aus Verzög., Relais 0,01s
5-55 Klemme 33 Min. Frequenz 20 Hz
5-56 Klemme 33 Max. Frequenz 5000 Hz
5-57 Klemme 33 Min. Soll-/ Istwert 0
5-58 Klemme 33 Max. Soll-/ Istwert 50
Parameterbeschreibung Werkseinstellung 2 Satz
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR -2- Uint16
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -3 Int32
Änderung
während Betrieb
Umwand
lungsindexTyp
Tabelle 5.13
64 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 67

Parameterübersicht
5.1.11 6-** Analoge Ein-/Ausg.
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
6-00 Signalausfall Zeit 10 s
6-01 Signalausfall Funktion [0] Off
6-10 Klemme 53 Min. Spannung 0,07 V
6-11 Klemme 53 Max. Spannung 10 V
6-12 Klemme 53 Min. Strom 0,14 mA
6-13 Klemme 53 Max. Strom 20 mA
6-14 Klemme 53 Min. Soll-/ Istwert 0
6-15 Klemme 53 Max. Soll-/ Istwert 50
6-16 Klemme 53 Filterzeitkonstante 0,01 s
6-19 Klemme 29 Funktion [0] Einstellung Spannung 1 Satz WAHR - Uint8
6-22 Klemme 60 Skal. Min.Strom 0,14 mA
6-23 Klemme 60 Skal. Max.Strom 20 mA
6-24 Klemme 60 Skal. Min.-Soll/ Istwert 0
6-25
6-26 Klemme 60 Filterzeitkonstante 0,01 s
6-80 LCP Potentiometer aktivieren 1 1 Satz FALSCH - Uint8
6-81
6-82 LCP-Potentiometer Hoher Sollw. 50
6-90 Klemme 42 Funktion [0] 0-20 mA
6-91 Klemme 42 Analogausgang [0] Ohne Funktion
6-92 Klemme 42 Digitalausgang [0] Ohne Funktion
6-93 Kl. 42 Ausgang min. Skalierung 0%
6-94 Kl. 42 Ausgang max. Skalierung 100%
Parameterbeschreibung Werkseinstellung 2 Satz
Klemme 60 Skal. Max.-Soll/
Istwert 50
LCP-Potentiometer Niedriger
Sollw. 0
Alle Parametersätze WAHR 0 Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR -3 Int32
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -2 Uint16
Änderung
während Betrieb
UmwandlungsindexTyp
5 5
Tabelle 5.14
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 65
Page 68

Parameterübersicht
5.1.12 7-** PI Regler
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
7-20 PID-Prozess Istwert 1 [0] Ohne Funktion
7-30 Auswahl Normal-/Invers-Regelung [0] Normal
7-31 PI-Prozess Anti-Windup [1] Aktiviert
55
7-32 PI-Prozess Reglerstart bei 0 Hz
7-33 PI-Prozess P-Verstärkung 0.01
7-34 PI-Prozess I-Zeit 9999 s
7-38 PI-Prozess Vorsteuerung 0%
7-39 Bandbreite Ist-Sollwert 5%
Tabelle 5.15
Parameterbeschreibung Werkseinstellung 2 Satz
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR -1 Uint16
Alle Parametersätze WAHR -2 Uint16
Alle Parametersätze WAHR -2 Uint32
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR 0 Uint8
Änderung
während Betrieb
Umwand-
lungsindexTyp
66 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 69

Parameterübersicht
5.1.13 8-** Opt./Schnittstellen
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
8-01 Führungshoheit [0] Klemme und Steuerw.
8-02 Aktives Steuerwort [1] FC RS485
8-03 Steuerwort Timeout-Zeit 1 s 1 Satz WAHR -1 Uint16
8-04 Steuerwort Timeout-Funktion [0] Off 1 Satz WAHR - Uint8
8-06 Reset Steuerwort-Timeout [0] Ohne Funktion 1 Satz WAHR - Uint8
8-30 FC-Protokoll [0] FC 1 Satz WAHR 0 Uint8
8-31 Adresse 1 1 Satz WAHR 0 Uint8
8-32 FC-Baudrate [2] 9600 Baud 1 Satz WAHR - Uint8
8-33 FC-Schnittstellenparität [0] Even Parity, 1 Stop Bit 1 Satz WAHR - Uint8
8-35 FC-Antwortzeit Min.-Delay 0,01 s 1 Satz WAHR -3 Uint16
8-36 FC-Antwortzeit Max.-Delay 5 s 1 Satz WAHR -3 Uint16
8-43
8-50 Motorfreilauf [3] Logik ODER
8-51 Schnellstopp [3] Logik ODER
8-52 DC Bremse [3] Logik ODER
8-53 Start [3] Logik ODER
8-54 Reversierung [3] Logik ODER
8-55 Parametersatzanwahl [3] Logik ODER
8-56 Festsollwertanwahl [3] Logik ODER
8-94 Bus-Istwert 1 0
Parameterbeschreibung Werkseinstellung 2 Satz
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
FC-Schnittstelle PCD-Lesekonfiguration 0 1 Satz WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR 0 Int16
Änderung
während Betrieb
UmwandlungsindexTyp
5 5
Tabelle 5.16
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 67
Page 70

Parameterübersicht
5.1.14 13-** Smart Logic
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
13-00 Smart Logic Controller [0] Off 1 Satz WAHR - Uint8
13-01 SL-Controller Start [39] Startbefehl 1 Satz WAHR - Uint8
13-02 SL-Controller Stopp [40] FU gestoppt 1 Satz WAHR - Uint8
13-03 SL-Parameter Initialisieren [0] Kein Reset 1 Satz WAHR - Uint8
13-10 Vergleicher-Operand [0] Deaktiviert 1 Satz WAHR - Uint8
13-11 Vergleicher-Funktion [1] ApproxEqual 1 Satz WAHR - Uint8
55
13-12 Vergleicher-Wert 0 1 Satz WAHR -1 Int32
13-20 SL-Controller-Timer 0 s 1 Satz WAHR -1 Uint32
13-40 Logikregel Boolsch 1 [0] Falsch 1 Satz WAHR - Uint8
13-41 Logikregel Verknüpfung 1 [0] Deaktiviert 1 Satz WAHR - Uint8
13-42 Logikregel Boolsch 2 [0] Falsch 1 Satz WAHR - Uint8
13-43 Logikregel Verknüpfung 2 [0] Deaktiviert 1 Satz WAHR - Uint8
13-44 Logikregel Boolsch 3 [0] Falsch 1 Satz WAHR - Uint8
13-51 SL-Controller-Ereignis [0] Falsch 1 Satz WAHR - Uint8
13-52 SL-Controller-Aktion [0] Deaktiviert 1 Satz WAHR - Uint8
Tabelle 5.17
Parameterbeschreibung Werkseinstellung 2 Satz
Änderung
während Betrieb
Umwandl
ungsindexTyp
68 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 71

Parameterübersicht
5.1.15 14-** Sonderfunktionen
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
14-01 Taktfrequenz [1] 4,0 kHz
14-03 Übermodulation [1] Ein
14-12 Netzphasen-Unsymmetrie [0] Abschaltung
14-20 Quittierfunktion [0] Manuell Quittieren
14-21 Autom. Quittieren Zeit 10 s
14-22 Betriebsart [0] Normal Betrieb 1 Satz WAHR - Uint8
14-26 WR-Fehler Aktion [0] Abschaltung
14-41 Minimale AEO-Magnetisierung 66 %
Tabelle 5.18
Parameterbeschreibung Werkseinstellung 2 Satz
Alle Parametersätze WAHR - Uint8
Alle Parametersätze FALSCH - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR 0 Uint16
Alle Parametersätze WAHR - Uint8
Alle Parametersätze WAHR 0 Uint8
Änderung
während Betrieb
Umwandl
ungsindexTyp
5 5
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 69
Page 72

Parameterübersicht
5.1.16 15-** Info/Wartung
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
15-00 Bearbeitungszeit 0 1 Satz WAHR 0 Uint32
15-01 Motorlaufstunden 0 1 Satz WAHR 0 Uint32
15-02 Zähler-kWh 0 1 Satz WAHR 0 Uint32
15-03 Anzahl Netz-Ein 0 1 Satz WAHR 0 Uint32
15-04 Anzahl Übertemperaturen 0 1 Satz WAHR 0 Uint16
15-05 Anzahl Überspannungen 0 1 Satz WAHR 0 Uint16
55
15-06 Reset kWh-Zähler [0] Kein Reset 1 Satz WAHR - Uint8
15-07 Reset Motorlaufstundenzähler [0] Kein Reset 1 Satz WAHR - Uint8
15-30 Fehlerspeicher: Fehlercode 0 1 Satz WAHR 0 Uint8
15-40 FC-Typ 1 Satz FALSCH 0 VisibleString
15-41 Leistungsteil 1 Satz FALSCH 0 VisibleString
15-42 Spannung 1 Satz FALSCH 0 VisibleString
15-43 Steuerkarte SW-Version 1 Satz FALSCH 0 VisibleString
15-46 Typ Bestellnummer 1 Satz FALSCH 0 VisibleString
15-48 LCP-Version 1 Satz FALSCH 0 VisibleString
15-51 Typ Seriennummer 1 Satz FALSCH 0 VisibleString
Tabelle 5.19
Parameterbeschreibung Werkseinstellung 2 Satz
Änderung
während Betrieb
Umwa
ndlung
sindex
Typ
70 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 73

Parameterübersicht
5.1.17 16-** Datenanzeigen
VLT® Micro Drive FC 51 Programmierungshandbuch
Parame-
ternummer
16-00 Steuerwort 0 1 Satz WAHR 0 Uint16
16-01 Sollwert [Einheit] 0 1 Satz WAHR -3 Int32
16-02 Sollwert % 0 1 Satz WAHR -1 Int16
16-03 Zustandswort 0 1 Satz WAHR 0 Uint16
16-05 Hauptistwert [%] 0 1 Satz WAHR -2 Int16
16-09 Benutzerdefinierte Anzeige 0 1 Satz WAHR -2 Int32
16-10 Leistung [kW] 0 1 Satz WAHR -3 Uint16
16-11 Leistung [hp] 0 1 Satz WAHR -3 Uint16
16-12 Motorspannung 0 1 Satz WAHR 0 Uint16
16-13 Frequenz 0 1 Satz WAHR -1 Uint16
16-14 Motorstrom 0 1 Satz WAHR -2 Uint16
16-15 Frequenz [%] 0 1 Satz WAHR -1 Uint16
16-18 Therm. Motorschutz 0 1 Satz WAHR 0 Uint8
16-30 DC-Spannung 0 1 Satz WAHR 0 Uint16
16-34 Kühlkörpertemperatur 0 1 Satz WAHR 0 Uint8
16-35 FC Überlast 0 1 Satz WAHR 0 Uint8
16-36 Nenn- WR- Strom 0 1 Satz WAHR -2 Uint16
16-37 Nenn- WR-Strom 0 1 Satz WAHR -2 Uint16
16-38 SL Contr.Zustand 0 1 Satz WAHR 0 Uint8
16-50 Externer Sollwert 0 1 Satz WAHR -1 Int16
16-51 Pulssollwert 0 1 Satz WAHR -1 Int16
16-52 Istwert [Einheit] 0 1 Satz WAHR -3 Int32
16-60 Digitaleingang 18,19,27,33 0 1 Satz WAHR 0 Uint16
16-61 Digitaleingang 29 0 1 Satz WAHR 0 Uint8
16-62 Analogeingang 53 (V) 0 1 Satz WAHR -2 Uint16
16-63 Analogeingang 53 (mA) 0 1 Satz WAHR -2 Uint16
16-64 Analogeingang 60 0 1 Satz WAHR -2 Uint16
16-65 Analogausgang 42 [mA] 0 1 Satz WAHR -2 Uint16
16-68 Pulseingang 33 20 1 Satz WAHR 0 Uint16
16-71 Relaisausgänge 0 1 Satz WAHR 0 Uint8
16-72 Zähler A 0 1 Satz WAHR 0 Int16
16-73 Zähler B 0 1 Satz WAHR 0 Int16
16-86 FC Sollwert 1 0 1 Satz WAHR 0 Int16
16-90 Alarmwort 0 1 Satz WAHR 0 Uint32
16-92 Warnwort 0 1 Satz WAHR 0 Uint32
16-94 Erw. Zustandswort 0 1 Satz WAHR 0 Uint32
Parameterbeschreibung Werkseinstellung 2 Satz
Änderung
während Betrieb
Umwandl
ungsindexTyp
5 5
Tabelle 5.20
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 71
Page 74

Fehlersuche und -behebung
VLT® Micro Drive FC 51 Programmierungshandbuch
6 Fehlersuche und -behebung
6
Die entsprechende LED an der Frontseite des Frequenzumrichters signalisiert eine Warnung oder einen Alarm, das
Display zeigt einen entsprechenden Code.
Eine Warnung bleibt so lange bestehen, bis die Ursache
nicht mehr vorliegt. Sie können den Motor dabei eventuell
weiter betreiben. Warnmeldungen können, aber müssen
nicht unbedingt kritisch sein.
Bei einem Alarm hat der Frequenzumrichter abgeschaltet.
Sie müssen Alarme zur Wiederaufnahme des Betriebes
nach Beseitigung der Ursache quittieren.
Dazu gibt es vier Möglichkeiten:
1. Durch Drücken von [Reset].
2. Über einen Digitaleingang mit der Funktion
„Reset“.
3. Über die serielle Schnittstelle.
HINWEIS
Nach manuellem Quittieren über die [Reset]-Taste müssen
Sie die Taste [Auto on] oder [Hand on] drücken, um den
Motor neu zu starten!
Wenn sich ein Alarm nicht quittieren lässt, kann dies daran
liegen, dass die Ursache noch nicht beseitigt ist oder der
Alarm mit einer Abschaltblockierung versehen ist (siehe
auch Tabelle 6.1).
VORSICHT
Alarme mit Abschaltblockierung bieten einen zusätzlichen
Schutz, d. h., Sie müssen vor dem Quittieren des Alarms
die Netzversorgung abschalten. Nach dem Wiederzuschalten ist der Frequenzumrichter nicht mehr blockiert
und Sie können ihn nach Beseitigung der Ursache wie
oben beschrieben quittieren.
Alarme ohne Abschaltblockierung können Sie auch mittels
der automatischen Quittierfunktion in 14-20 Reset Mode
zurücksetzen (Achtung: automatischer Wiederanlauf ist
möglich!).
Ist in Tabelle 6.1 für einen Code Warnung und Alarm
markiert, tritt entweder eine Warnung vor einem Alarm
auf, oder Sie können festlegen, ob der Frequenzumrichter
für einen bestimmten Fehler eine Warnung oder ein Alarm
ausgeben soll.
Dies ist z. B. in 1-90 Motor Thermal Protection möglich.
Nach einem Alarm oder einer Abschaltung läuft der Motor
im Freilauf aus, und am Frequenzumrichter blinken Alarm
und Warnung. Nachdem Sie das Problem behoben haben,
blinkt nur noch der Alarm.
Nr. Beschreibung Warnung Alarm Abschaltblo-
ckierung
2 Signalfehler (X) (X) 6-01
4 Netzunsymmetrie (X) (X) (X) 14-12
7 DC-Überspannung X X
8 DC-Unterspannung X X
9 Wechselrichter-Überlast X X
10 Motortemperatur ETR (X) (X) 1-90
11 Motor Thermistor (X) (X) 1-90
12 Drehmomentgrenze (X) 4-16, 4-17
13 Überstrom X X X
14 Erdschluss X X X
16 Kurzschluss X X
17 Steuerwort-Timeout (X) (X) 8-04
25 Bremswiderstand Kurzschluss X X
27 Bremse IGBT-Fehler X X
28 Bremswiderstand Test X
29 Leistungskarte Übertemp. X X
30 Motorphase U fehlt (X) (X) 4-58
31 Motorphase V fehlt (X) (X) 4-58
32 Motorphase W fehlt (X) (X) 4-58
38 Interner Fehler X X
44 Erdschluss 2 X X
47 24V Fehler X X
Fehler Parameterbe-
zeichnung
72 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 75

Fehlersuche und -behebung
VLT® Micro Drive FC 51 Programmierungshandbuch
Nr. Beschreibung Warnung Alarm Abschaltblo-
ckierung
51 AMA-Motordaten überprüfen X
52 AMA Motornennstrom überprüfen X
53 AMA-Motor zu groß X
54 AMA-Motor zu klein X
55 AMA-Daten außerhalb des Bereichs X
59 Stromgrenze X
63 Mechanische Bremse X
80 Initialisiert X
84 Verbindung zwischen Frequenzumrichter und
LCP ist unterbrochen
85 Taste deaktiviert X
86 Kopierfehler X
87 LCP-Daten ungültig X
88 LCP-Daten nicht kompatibel X
89 Parameter ist schreibgeschützt X
90 Parameterdatenbank ausgelastet X
91 Parameterwert ist in diesem Modus nicht gültig X
92 Parameterwert außerhalb des min./max.
Grenzwerts
Tabelle 6.1 Liste der Alarm-/Warncodes
(X) Parameterabhängig
X
X
Fehler Parameterbe-
zeichnung
6
6
Eine Abschaltung ist ein Zustand, der in Fehlersituationen
eintritt. Die Abschaltung führt zum Motorfreilauf und Sie
können sie durch Drücken der Taste [Reset] oder mit
einem Reset über einen Digitaleingang (Parametergruppe
5-1* [1]) zurücksetzen. Die Ursache des Alarms kann den
Frequenzumrichter nicht beschädigen und keine gefährlichen Bedingungen herbeiführen. Eine
Abschaltblockierung tritt auf, wenn ein Alarm angezeigt
wird, der den Frequenzumrichter oder angeschlossene
Teile beschädigen könnte. Sie können eine Abschaltblockierung nur durch Aus- und Einschalten des
Frequenzumrichters quittieren.
LED-Anzeigen
Warnung Gelb
Alarm Rot blinkend
Tabelle 6.2
Die Alarmwörter, Warnwörter und erweiterten Zustandswörter können zur Diagnose über den seriellen Bus oder
den optionalen Feldbus ausgelesen werden. Siehe auch
16-90 Alarm Word, 16-92 Warning Word und 16-94 Ext.
Status Word.
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 73
Page 76

6
Fehlersuche und -behebung
VLT® Micro Drive FC 51 Programmierungshandbuch
6.1.1 Alarmwort, Warnwort und erweitertes Zustandswort
Par. 16-90 Par. 16-92 Par. 16-94
Erweitertes
Bit Hex Dez Alarmwort Warnwort
0 1 1 Bremswiderstand Test Rampe
Umrichter Übertem1 2 2 Umrichter Übertemperatur
2 4 4 Erdschluss Start Rechts-/Linkslauf
3 8 8 Freq.korr. Ab
4 10 16 Steuerwort-Timeout Steuerwort-Timeout Freq.korr. Auf
5 20 32 Überstrom Überstrom Über Max.-Istwert
6 40 64 Moment.grenze Unter Min.-Istwert
7 80 128 Motor Therm. Motor Therm. Ausgangsstrom hoch
8 100 256 Motortemp.ETR Motortemp.ETR Ausgangsstrom niedrig
9 200 512 Wechselrichterüberlast Wechselrichterüberlast Über Max. Frequenz
10 400 1024 DC-Untersp. DC-Untersp. Unter Min. Frequenz
11 800 2048 DC-Übersp. DC-Übersp.
12 1000 4096 Kurzschluss
13 2000 8192 Bremsung
14 4000 16384 Netzunsymm. Netzunsymm.
15 8000 32768 "AMA nicht OK" Übersp.-Steu.
16 10000 65536 Signalfehler Signalfehler AC-Bremse
17 20000 131072 Interner Fehler
18 40000 262144
19 80000 524288 Mot.Phase U Über Max.-Sollwert
20 100000 1048576 Mot.Phase V Unter Min.-Sollwert
21 200000 2097152 Mot.Phase W
22 400000 4194304
23 800000 8388608 24V Fehler
24 1000000 16777216
25 2000000 33554432 Stromgrenze
26 4000000 67108864 Bremswiderstand Kurzschluss
27 8000000 134217728 Bremse IGBT Kurzschluss
28 10000000 268435456 M4/M5: Erdschluss (Entsätt.) Motorphase fehlt
29 20000000 536870912 FU initialisiert
30 40000000 1073741824 Nicht definiert
31 80000000 2147483648 Mech. Bremse Datenbank ausgelastet
peratur AMA läuft
Zustandswort
Ortsollwert/Fern-
Sollwert
Tabelle 6.3
Sie können die Alarmworte, Warnworte und erweiterten
Zustandsworte zu Diagnosezwecken über die serielle
Schnittstelle auslesen. Siehe auch 16-94 Erw. Zustandswort.
WARNUNG/ALARM 2, Signalfehler
Signal an Klemme 53 oder 60 beträgt weniger als 50 % der
in 6-10 Klemme 53 Min. Spannung, 6-12 Klemme 53 Min.
Strom und 6-22 Klemme 60 Min. Strom eingestellten Werte.
WARNUNG/ALARM 4, Netzphasenfehler
Versorgungsseitig fehlt eine Phase, oder das Ungleichgewicht der Netzspannung ist zu hoch. Diese Meldung
erscheint im Falle eines Fehlers im Eingangsgleichrichter
des Frequenzumrichters.
Fehlersuche und -behebung: Kontrollieren Sie die Versorgungsspannung und die Versorgungsströme zum
Frequenzumrichter. Diesen Fehler können Netzspannungsverzerrungen verursachen. Einbau eines Danfoss-Netzfilters
kann dieses Problem beheben.
WARNUNG/ALARM 7, DC-Überspannung
Überschreitet die Zwischenkreisspannung den Grenzwert,
schaltet der Frequenzumrichter nach einiger Zeit ab.
Fehlersuche und -behebung
Schließen Sie einen Bremswiderstand an
Verlängern Sie die Rampenzeit
Ändern Sie den Rampentyp
74 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 77

Fehlersuche und -behebung
VLT® Micro Drive FC 51 Programmierungshandbuch
Aktivieren Sie die Funktionen in
2-10 Bremsfunktion
Erhöhen Sie 14-26 WR-Fehler Abschaltverzögerung
Diesen Fehler können Netzspannungsverzerrungen
verursachen. Einbau eines Danfoss-Netzfilters kann dieses
Problem beheben.
WARNUNG/ALARM 8, DC-Unterspannung
Wenn die Zwischenkreisspannung (DC-Zwischenkreis) unter
den unteren Spannungsgrenzwert sinkt, prüft der Frequenzumrichter, ob eine externe 24 V DC-Versorgung
angeschlossen ist. Wenn keine externe 24 V DC-Versorgung
angeschlossen ist, schaltet der Frequenzumrichter nach
einer festgelegten Zeit ab. Die Verzögerungszeit hängt von
der Gerätgröße ab.
Fehlersuche und -behebung
Prüfen Sie, ob die Versorgungsspannung mit der
Spannung des Frequenzumrichters übereinstimmt.
Führen Sie den Eingangsspannungstest durch.
Prüfen Sie die Vorladekreisschaltung.
WARNUNG/ALARM 9, Wechselrichterüberlast
Der Frequenzumrichter schaltet aufgrund von Überlastung
(zu hoher Strom über zu lange Zeit) bald ab. Der Zähler für
den elektronischen, thermischen Wechselrichterschutz gibt
bei 98 % eine Warnung aus und schaltet bei 100 % mit
einem Alarm ab. Sie können den Frequenzumrichter erst
zurücksetzen, bis der Zähler unter 90 % fällt.
Das Problem besteht darin, dass Sie den Frequenzumrichter zu lange Zeit mit mehr als 100 % Ausgangsstrom
belastet haben.
Fehlersuche und -behebung
Vergleichen Sie den angezeigten Ausgangsstrom
auf dem LCP mit dem Nennstrom des Frequenzumrichters.
Vergleichen Sie den auf dem LCP angezeigten
Ausgangsstrom mit dem gemessenen
Motorstrom.
Lassen Sie die thermische Last des Frequenzumrichters auf dem LCP anzeigen und überwachen
Sie den Wert. Bei Betrieb des Frequenzumrichters
über dem Dauer-Nennstrom sollte der Zählerwert
steigen. Bei Betrieb unter dem Dauernennstrom
des Frequenzumrichters sollte der Zählerwert
sinken.
WARNUNG/ALARM 10, Motortemperatur Überlast
Die ETR-Funktion hat eine thermische Überlastung des
Motors errechnet. In 1-90 Thermischer Motorschutz können
Sie wählen, ob der Frequenzumrichter eine Warnung oder
einen Alarm ausgeben soll, wenn der Zähler 100 %
erreicht. Der Fehler tritt auf, wenn der Motor zu lange
durch über 100 % überlastet wird.
Fehlersuche und -behebung
Prüfen Sie den Motor auf Überhitzung.
Prüfen Sie, ob der Motor mechanisch überlastet
ist.
Prüfen Sie die Einstellung des richtigen
Motorstroms in 1-24 Motornennstrom.
Überprüfen Sie, ob die Motordaten in den
Parametern 1-20 bis 1-25 korrekt eingestellt sind.
Ausführung der AMA in 1-29 Automatische
Motoranpassung (AMA). Die Spitzenstromgrenze
des Wechselrichters (ca. 200 % des Nennstroms)
ist überschritten. Die Warnung dauert ca. 8 bis 12
s, danach schaltet der Frequenzumrichter ab und
gibt einen Alarm aus. Schalten Sie den Frequenzumrichter ab und überprüfen Sie, ob die
Motorwelle gedreht werden kann und die
Motorgröße dem Frequenzumrichter entspricht.
Bei Auswahl der mechanischen Bremssteuerung
kann die Abschaltung extern zurückgesetzt
werden. kann den Frequenzumrichter genauer auf
den Motor abstimmen und die thermische
Belastung reduzieren.
WARNUNG/ALARM 11, Motor Thermistor
Der Thermistor bzw. die Verbindung zum Thermistor ist
ggf. unterbrochen. Wählen Sie in 1-90 Thermischer
Motorschutz, ob der Frequenzumrichter eine Warnung oder
einen Alarm ausgeben soll.
Fehlersuche und -behebung
Prüfen Sie den Motor auf Überhitzung.
Prüfen Sie, ob der Motor mechanisch überlastet
ist.
WARNUNG/ALARM 13, Überstrom
Die Spitzenstromgrenze des Wechselrichters (ca. 200 % des
Nennstroms) ist überschritten. Die Warnung dauert ca. 8
bis 12 s, danach schaltet der Frequenzumrichter ab und
gibt einen Alarm aus. Schalten Sie den Frequenzumrichter
ab und überprüfen Sie, ob die Motorwelle gedreht werden
kann und die Motorgröße dem Frequenzumrichter
entspricht. Bei Auswahl der erweiterten mechanischen
Bremssteuerung können Sie die Abschaltung extern
quittieren.
Fehlersuche und -behebung:
Entfernen Sie die Netzversorgung und prüfen Sie,
ob die Motorwelle gedreht werden kann.
Kontrollieren Sie, ob die Motorgröße mit dem
Frequenzumrichter übereinstimmt.
Überprüfen Sie die Parameter 1-20 bis 1-25 auf
korrekte Motordaten.
6
6
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 75
Page 78

Fehlersuche und -behebung
VLT® Micro Drive FC 51 Programmierungshandbuch
6
ALARM 14, Erdschluss
Es wurde ein Erdschluss zwischen einer Ausgangsphase
und Erde festgestellt. Überprüfen Sie die Isolation des
Motors und des Motorkabels.
Fehlersuche und -behebung:
Schalten Sie den Frequenzumrichter aus und
beheben Sie den Erdschluss.
Prüfen Sie, ob Erdschlüsse im Motor vorliegen,
indem Sie mit Hilfe eines Megaohmmeters den
Widerstand der Motorkabel und des Motors zur
Masse messen.
ALARM 16, Kurzschluss
Es liegt ein Kurzschluss im Motor oder in den Motorkabeln
vor.
Schalten Sie den Frequenzumrichter ab und beheben Sie
den Kurzschluss.
WARNUNG/ALARM 17, Steuerwort-Timeout
Es liegt keine Kommunikation zum Frequenzumrichter vor.
Die Warnung ist nur aktiv, wenn Sie 8-04 Steuerwort
Timeout-Funktion NICHT auf AUS programmiert haben.
Wenn Sie 8-04 Steuerwort Timeout-Funktion auf Stopp und
Alarm einstellen, erscheint eine Warnung und der Frequenzumrichter fährt unter Ausgabe eines Alarms nach Rampe
ab bis zur Abschaltung herunter. Sie können
möglicherweise 8-03 Control Timeout Time erhöhen.
Fehlersuche und -behebung:
Prüfen Sie die Verbindungen des seriellen
Kommunikationskabels.
Erhöhen Sie 8-03 Steuerwort Timeout-Zeit
Überprüfen Sie die Funktion der Kommunikati-
onsgeräte.
Überprüfen Sie auf EMV-gerechte Installation.
WARNUNG 25, Bremswiderstand Kurzschluss
Der Frequenzumrichter überwacht den Bremswiderstand
während des Betriebs. Ein Kurzschluss bricht die
Bremsfunktion abgebrochen und verursacht eine Warnung.
Sie können den Frequenzumrichter weiterhin betreiben,
allerdings ohne Bremsfunktion. Schalten Sie den Frequenzumrichter aus und tauschen Sie den Bremswiderstand aus
(siehe 2-15 Bremswiderstand Test).
WARNUNG/ALARM 27, Bremschopper-Fehler
Der Bremstransistor wird während des Betriebs überwacht.
Bei einem Kurzschluss wird die Bremsfunktion
abgebrochen und die Warnung ausgegeben. Sie können
den Frequenzumrichter weiterhin betreiben, aufgrund des
Kurzschlusses überträgt der Frequenzumrichter jedoch eine
hohe Leistung an den Bremswiderstand, auch wenn der
Umrichter den Motor nicht bremst.
Schalten Sie den Frequenzumrichter aus und entfernen Sie
den Bremswiderstand.
WARNUNG/ALARM 28, Bremstest Fehler
Der Bremswiderstand ist nicht angeschlossen oder funktioniert nicht.
ALARM 29, Kühlkörpertemp.
Der Kühlkörper überschreitet seine maximal zulässige
Temperatur. Der Temperaturfehler kann erst dann quittiert
werden, wenn die Kühlkörpertemperatur eine definierte
Kühlkörpertemperatur wieder unterschritten hat. Die
Abschalt- und Quittiergrenzen sind je nach der
Leistungsgröße des Frequenzumrichters unterschiedlich.
Fehlersuche und -behebung
Mögliche Ursachen:
Umgebungstemperatur zu hoch
Zu langes Motorkabel.
Falsche Freiräume zur Luftzirkulation über und
unter dem Frequenzumrichter.
Blockierte Luftzirkulation des Frequenzumrichters.
Beschädigter Kühlkörperlüfter
Schmutziger Kühlkörper
ALARM 30, Motorphase U fehlt
Motorphase U zwischen dem Frequenzumrichter und dem
Motor fehlt.
Schalten Sie den Frequenzumrichter aus und prüfen Sie
Motorphase U.
ALARM 31, Motorphase V fehlt
Motorphase V zwischen dem Frequenzumrichter und dem
Motor fehlt.
Schalten Sie den Frequenzumrichter aus und prüfen Sie
Motorphase V.
ALARM 32, Motorphase W fehlt
Motorphase W zwischen dem Frequenzumrichter und dem
Motor fehlt.
Schalten Sie den Frequenzumrichter aus und prüfen Sie
Motorphase W.
ALARM 38, Interner Fehler
Fehlersuche und -behebung
Schalten Sie die Stromversorgung aus und wieder
ein.
Stellen Sie sicher, dass die Optionen richtig
montiert sind.
Prüfen Sie, ob lose Anschlüsse vorliegen oder
Anschlüsse fehlen.
Wenden Sie sich ggf. an Ihren Lieferanten oder den
Danfoss-Service. Notieren Sie zuvor die Nummer des
Fehlercodes, um weitere Hinweise zur Fehlersuche und behebung zu erhalten.
WARNUNG 47, 24-V-Versorgung – Fehler
Die 24 V DC-Versorgung wird an der Steuerkarte
gemessen. Die externe 24-V DC Versorgung ist
möglicherweise überlastet. Wenden Sie sich andernfalls an
Ihren Danfoss-Lieferanten.
76 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 79

Fehlersuche und -behebung
ALARM 51, AMA-Motordaten überprüfen
Die Einstellung von Motorspannung, Motorstrom und/oder
Motorleistung ist vermutlich falsch. Überprüfen Sie die
Einstellungen in den Parametern 1-20 bis 1-25.
ALARM 55, AMA-Daten außerhalb des Bereichs
Die Parameterwerte des Motors liegen außerhalb des
zulässigen Bereichs. Die AMA lässt sich nicht ausführen.
ALARM 63, Mechanische Bremse Fehler
Der Motorstrom hat während der eingestellten Startverzögerung nicht den Wert zum Lüften der mechanischen
Bremse überschritten.
ALARM 80, Frequenzumrichter initialisiert
Ein manueller Reset hat den Frequenzumrichter mit
Werkseinstellungen initialisiert. Führen Sie einen Reset des
Frequenzumrichters durch, um den Alarm zu beheben.
ALARM 84, Verbindung zwischen Frequenzumrichter und
LCP ist unterbrochen
Versuchen Sie, das LCP vorsichtig wieder zusammenzubauen.
ALARM 85, Taste deaktiviert
Siehe Parametergruppe 0-4* LCP-Tasten.
ALARM 86, Kopierfehler
Beim Kopieren vom Frequenzumrichter in das LCP oder
umgekehrt ist ein Fehler aufgetreten.
ALARM 87, LCP-Daten ungültig
Tritt beim Kopieren aus dem LCP auf, wenn das LCP
fehlerhafte Daten enthält oder keine Daten im LCP
gespeichert wurden.
ALARM 88, LCP-Daten nicht kompatibel
Tritt beim Kopieren aus dem LCP auf, wenn Sie Daten
zwischen Frequenzumrichtern mit stark abweichenden
Softwareversionen übertragen.
WARNUNG 89, Parameter ist schreibgeschützt
Tritt beim Versuch der Bearbeitung eines schreibgeschützten Parameters auf.
ALARM 90, Parameterdatenbank ausgelastet
LCP- und RS485-Verbindung versuchen gleichzeitig,
Parameter zu aktualisieren.
ALARM 91, Parameterwert ist in diesem Modus nicht gültig
Tritt beim Versuch auf, einen Parameter mit einem
ungültigen Wert zu belegen.
ALARM 92, Parameterwert außerhalb des unteren/oberen
Grenzwerts
Tritt beim Versuch der Einrichtung eines Werts auf, der
außerhalb des gültigen Bereichs liegt. Parameter kann nur
geändert werden, wenn der Motor nicht läuft. Err. Tritt bei
der Eingabe eines falschen Passworts zum Ändern eines
passwortgeschützten Parameters auf.
VLT® Micro Drive FC 51 Programmierungshandbuch
6
6
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 77
Page 80

Index
VLT® Micro Drive FC 51 Programmierungshandbuch
Index
A
Abkürzungen Und Normen................................................................. 7
Aktiver Satz............................................................. 8, 11, 13, 30, 53, 59
Alarm- Und Warnmeldungen........................................................... 72
Alarmwort, Warnwort Und Erweitertes Zustandswort........... 74
Analoge Ein-/Ausg............................................................................... 65
Ä
Ändern Während Des Betriebs Nicht Möglich........................... 12
H
Hand.......................................................................................................... 14
Hand-Betrieb............................................................................ 31, 35, 60
Hand-Modus........................................................................................... 11
Hauptmenü............................................................................................ 10
I
Info/Wartung.......................................................................................... 70
Isolierte Netzstromquelle..................................................................... 4
IT-Netz......................................................................................................... 4
A
Anzeigemodus......................................................................................... 9
Anzeigen-Motor.................................................................................... 51
Ausgangsstrom..................................................................................... 75
Automatische Motoranpassung (AMA)........................................ 15
B
Bedientasten............................................................................................. 9
Betrieb/Display...................................................................................... 59
Bremsfunktionen.................................................................................. 61
Bremswiderstand
Bremswiderstand............................................................... 20, 31, 61
(Ohm)................................................................................................... 53
Bus.............................................................................................................. 31
D
Datenanzeigen...................................................................................... 71
DC Bremse............................................................................................... 20
DC-Bremse................................................................................ 18, 29, 53
Digit. Ein-/Ausgänge........................................................................... 64
Display........................................................................................................ 8
E
Einheit......................................................................................................... 9
Elektronik-Altgeräte............................................................................... 4
EMV............................................................................................................ 76
Entsorgungsanleitung.......................................................................... 4
Erdableitstrom..................................................................................... 3, 4
F
Fehlerstromschutzschalter.................................................................. 4
Fehlersuche Und -behebung........................................................... 72
G
Grenzen/Warnungen.......................................................................... 63
K
Kontroll-Anzeigen................................................................................... 9
Konvertierungsindex........................................................................... 58
Kurzschluss............................................................................................. 76
L
Lastausgleich............................................................................ 16, 53, 60
Lastausgleiche....................................................................................... 14
LCP
11.............................................................................................................. 1
12.............................................................................................................. 1
Liste Der Alarm-/Warncodes............................................................ 73
M
Magnetisierungsnennstrom............................................................. 16
[
[Main Menu].............................................................................................. 9
M
Max. Sollwert.......................................................................................... 22
MCT 10 Software..................................................................................... 1
Minimaler Sollwert............................................................................... 22
Motor Grenzen...................................................................................... 63
Motor/Last............................................................................................... 60
Motordaten............................................................................................. 75
Motordrehrichtung................................................................................ 9
Motorleistung........................................................................................ 77
Motornenndrehzahl............................................................................ 15
Motornennfrequenz............................................................................ 15
Motornennleistung.............................................................................. 14
Motornennspannung.......................................................................... 15
Motornennstrom.................................................................................. 15
Motorphase..................................................................................... 51, 53
Motorphasen.......................................................................................... 28
78 MG02C603 - VLT® ist eine eingetragene Marke von Danfoss.
Page 81

Index
Motorstrom............................................................................................. 77
Motortemperatur................................................................... 18, 20, 53
Motorüberlastschutz............................................................................. 4
VLT® Micro Drive FC 51 Programmierungshandbuch
Ü
Überspannungssteuerung.................................................. 21, 53, 61
N
Navigationstasten................................................................................... 9
Nennstrom.............................................................................................. 75
O
Opt./Schnittstellen............................................................................... 67
P
Parameternummer................................................................................. 8
PI Regler................................................................................................... 66
Programm Satz........................................................................ 11, 12, 13
Programm-Satz................................................................................. 8, 53
Q
Quick Menu............................................................................................... 9
Quick-Menü............................................................................................ 10
R
Rampenzeit
Ab 1....................................................................................................... 24
Auf 1...................................................................................................... 24
Reset.......................................................................................................... 77
Reset/Initialisieren................................................................................ 48
W
Wert.............................................................................................................. 8
Z
Zurücksetzen.......................................................................................... 75
S
Satz
Satz........................................................................................................ 46
Bearbeiten.......................................................................................... 59
Satznummer............................................................................................. 8
Schlupfausgleich.................................................................... 17, 53, 60
Serielle Schnittstelle..................................... 9, 25, 38, 39, 40, 51, 52
Smart Logic............................................................................................... 2
Sollwert/Rampen.................................................................................. 62
Sonderfunktionen......................................................................... 48, 69
Statusmenü........................................................................................ 9, 10
Symbole...................................................................................................... 7
T
Thermische Belastung................................................................. 16, 51
Thermistor................................................................................. 18, 53, 75
Thermistorressource........................................................................... 60
Typencode................................................................................................. 1
Typendaten............................................................................................ 50
MG02C603 - VLT® ist eine eingetragene Marke von Danfoss. 79
Page 82

www.danfoss.com/drives
132R0001 MG02C603 Ver. 2012-09-20
*MG02C603*
 Loading...
Loading...