

Eksempel på idriftsætning af PI-regulering med VLT6000 HVAC
1) VLT
frekvensomformeren tilsluttes forsynings- og motorkabel forskriftsmæssigt korrekt (Se
Betjeningsvejledning).
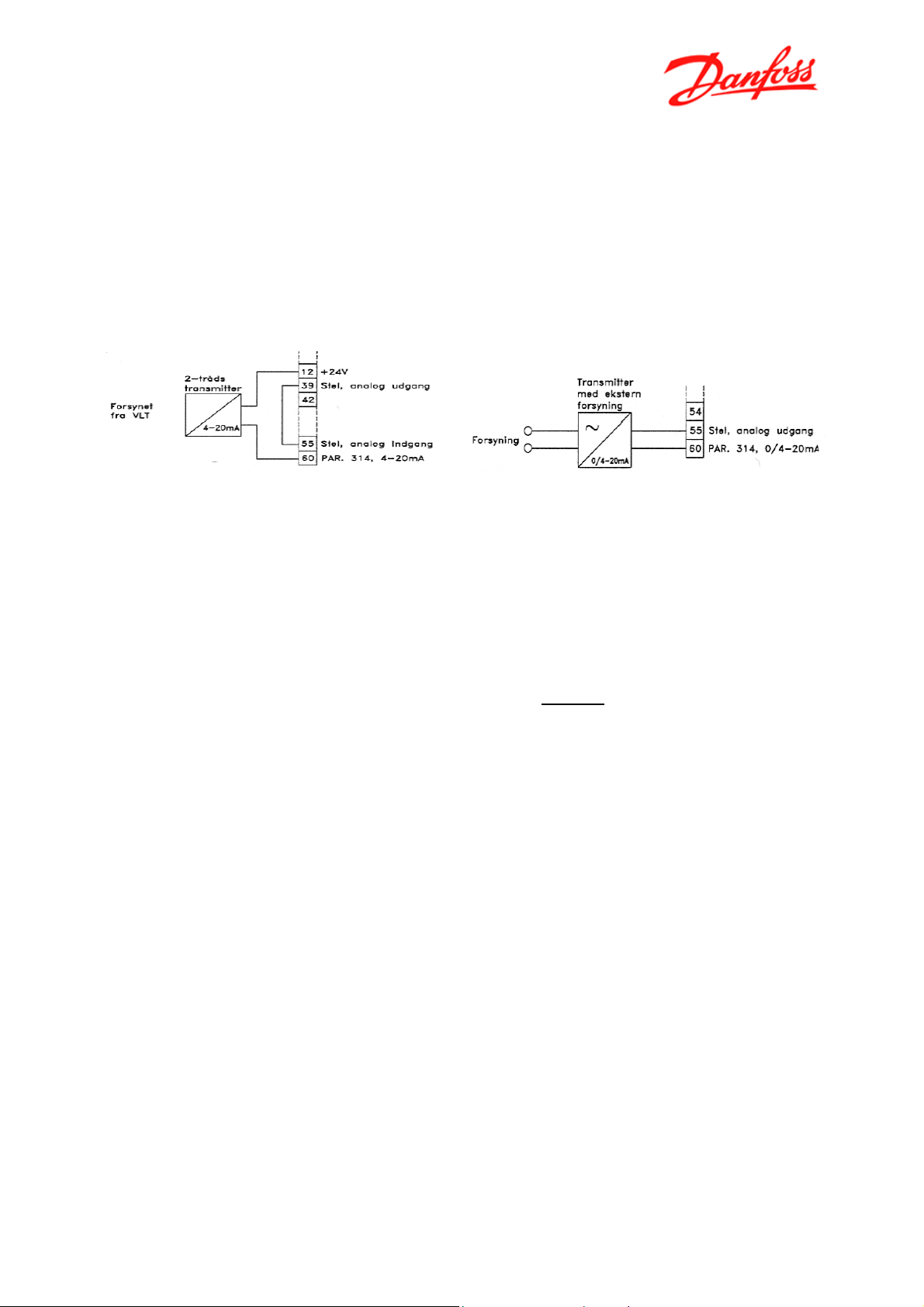
2) 2-tråds transmitter (4-20mA) monteres med + på kl. 12 og signal på kl. 60.
Pga. forskelligt stelpotentiale monteres en lus mellem kl. 39 og kl. 55.
Transmittere med ekstern forsyning monteres med – på kl. 55 og + på kl. 60 (0/4-20mA), eller for
spændingssignal – på kl. 55 og + på kl. 53 (0-10Volt).
3) Der monteres en lus mellem kl. 12 og kl. 27, samt startfunktion mellem kl. 12 og kl. 18.
4) I ”QUICK MENU” indtastes alle relevante data.
5) I ”EXTEND. MENU” indtastes data i følgende parametre:
100 = Lukket sløjfe
206 = 1 sek.
207 = 1 sek.
314 = Feedback-signal (Ved 0/4-20mA transmittere) ELLER
308 = Feedback-signal (Ved 0-10Volt DC transmittere)
413 = Sættes til transmitterens min. værdi.
414 = Sættes til transmitterens max. værdi.
(F.eks. tryktransmitter 0-10 bar : 413 = 0 og 414 = 10)
415 = Den på transmitteren opgivne procesenhed (bar, Pa, m
3
/h, osv.)
204 = Samme som 413
205 = Samme som 414
418 = Setpunkt 1 (I procesenheden valgt i par. 415)
420 = Normal : Motorens omdrejninger stiger når feedback-signalet falder.
Inverteret : Motorens omdrejninger falder når feedbacksignalet falder.
423 = P-bånd : 1-1,5 (Erfaringstal. Værdien er applikationsafhængig)
424 = I-tid : 15-25 sek. (Erfaringstal. Værdien er applikationsafhængig)
427 = Lavpasfiltertid sættes til 2 sek.
6) Displayet kan være en god hjælp til optimering.
008 = Feedback Enhed
009 = Setpunkt 1
Værdierne er i ”U” units, og vises i øverste linie ved tryk på ”DISPLAY MODE”.
Forklaring til PID regulering
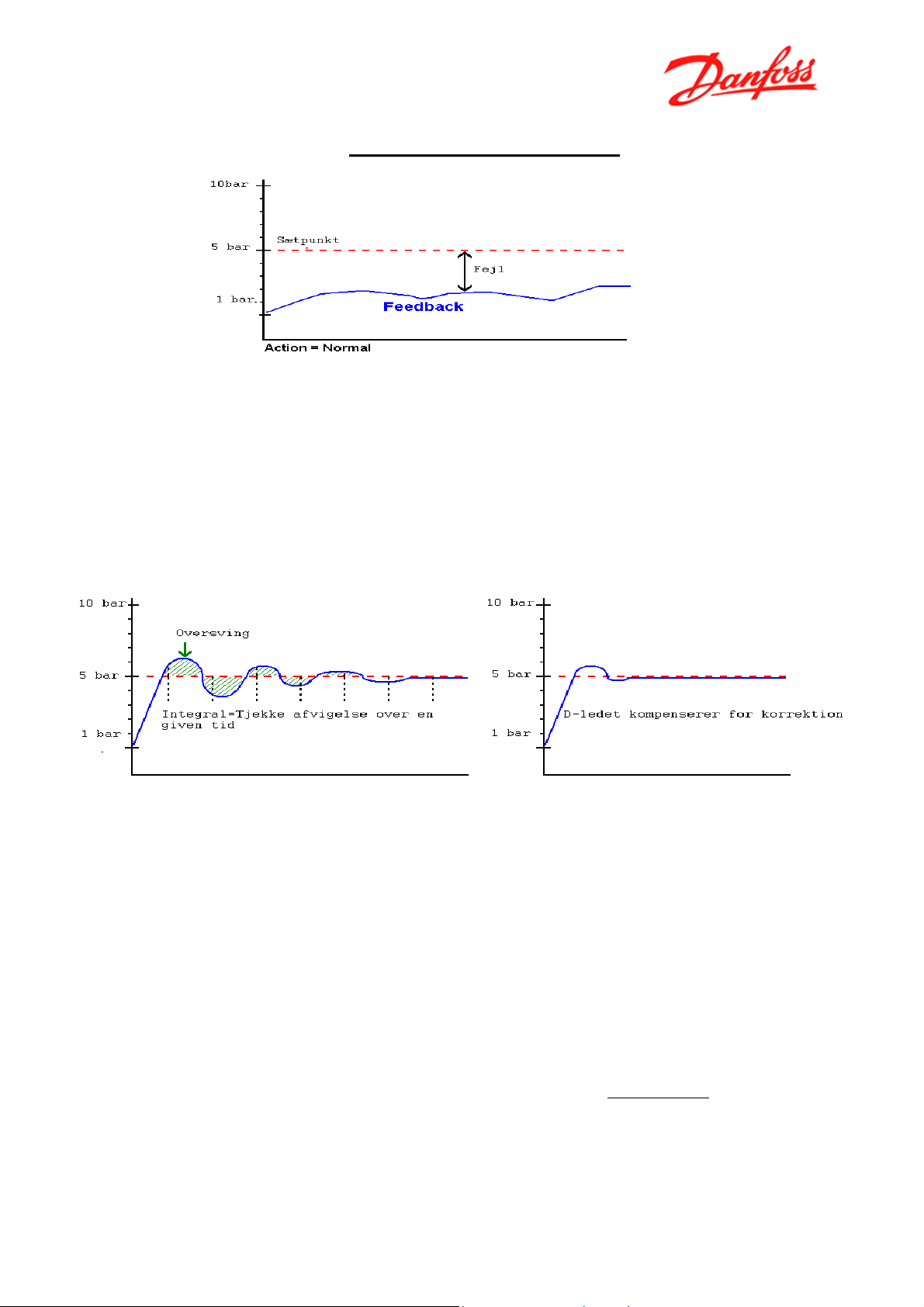
• Sætpunkt eller reference er den ønskede værdi for en styret variable. Eksempelvis 5 bar.
• Fejl (offset) er afvigelsen mellem setpunktet og feedback fra transmitteren. I det viste eksempet er der
en afvigelse på ca. 3 bar.
• Proportionalforstærkningen bliver ganget med afvigelsen for at give et output. Jo højere
proportionalforstærkning, jo højere ouput ændring ved en given afvigelse. Hvis
proportionalforstærkningen er for lille(0.01) har den ingen effekt på frekvensomformeren. Hvis den
er for høj(3.00 eller mere) kan systemet blive ustabilt og køre op og ned mellem min. hast. og maks.
hast. Dette kaldes pendling. En god start kunne være at indstille proportionalforstærkningen om
omegnen af 1,00 men er applikationsafhængig. Hvis man kun bruger proportionalforstærkning uden I
eller D (se længere need bliver output relativt tæt på setpunktet men der vil altid være en afvigelse.
• I-ledet tjekker afvigelsen over en periode og korrigere på de målte afvigelser.
• D-ledet tjekker afvigelsen og korrigerer for hastigheden på integraledets korrektioner.
• Integral forstærkningen er baseret på afvigelseshistorikken. Integral funktionen opretholder en måling
af totalafvigelsen indenfor en given periode og giver et output iht. til dette. Jo lavere tal jo oftere vil
den tjekke afvigelsen og jo større indlydelse har I-tiden. Hvis den er for lav(mindre end 5 sek) kan
systemet blive ustabilt og pendle. Et godt sted at starte er 10 sek. men igen er det
applikationsafhæggigt. I-ledet fjerner en varig afvigelse som fremkommer af
proportionalforstærkningen(se ovenfor). Som det ses på billedet ovenfor giver I-ledet over- og
undersving men som det også ses vil reguleringssløjfen falde til ro over en tid.
• Differential eller D-ledet er baseret på afvigelsens ændringshastighed. Det brudes til at minimere over
og undersvinget og til at dæmpe svingninger i systemet. Jo større D-tid jo større indflydelse har Dledet. Hvis D-tiden er for lang bliver systemet ustabilt. D-ledet er meget følsom
feedbacksignalet og bruges af den grund sjældent i process styresystemer. Hvis den skal bruges kan
et lavpasfilter med fordel anvendes. I hastighedes styringer bruges den til gængæld ofte.
overfor støj i
 Loading...
Loading...