

Page 1

AC DRIVES
ПРИКЛАДНАЯ ПРОГРАММА MARINE APFIFF09
РУКОВОДСТВО ПО ПРИМЕНЕНИЮ
Page 2

Page 3

РУКОВОДСТВО ПО ПРИМЕНЕНИЮ ПРИКЛАДНОЙ
ПРОГРАММЫ VACON® MARINE
ОГЛАВЛЕНИЕ
Код документа: DPD02076B
Код ПО: APFIFF09V182
Дата: 15.05.2018
1. ПРИКЛАДНАЯ ПРОГРАММА MARINE — ВВЕДЕНИЕ .......................................................................................... 8
1.1 Общие сведения ................................................................................................................................................. 8
1.2 Основные функции ............................................................................................................................................. 9
2. Проблемы, связанные с совместимостью версий Marine ............................................................................. 10
3. Управляющие входы/выходы ........................................................................................................................ 11
4. Принцип программирования «Программирование клемм под функции» (TTF) ......................................... 12
4.1 Определение входа/выхода для некоторой функции на клавиатуре ......................................................... 12
4.2 Определение клеммы для некоторой функции с помощью сервисной программы NCDrive ................... 13
4.3 Определение неиспользуемых входов/выходов .......................................................................................... 14
5. ПРИКЛАДНАЯ ПРОГРАММА MARINE — КОНТРОЛИРУЕМЫЕ ЗНАЧЕНИЯ ....................................................... 15
5.1 Контролируемые значения .............................................................................................................................. 16
5.1.1 Контролируемые значения 2 ...................................................................................................................... 17
5.1.2 Контролируемые значения FieldBus ........................................................................................................... 18
5.1.3 Контролируемые значения ведущего/ведомого ...................................................................................... 18
5.1.4 Контролируемые значения ПИ-управления .............................................................................................. 19
5.1.5 Цепь обработки частоты .............................................................................................................................. 19
5.1.6 Цепь крутящего момента ............................................................................................................................ 19
5.1.7 Активные пределы ....................................................................................................................................... 19
5.2 Описания контролируемых значений ............................................................................................................ 20
5.2.1 Контролируемые значения 2 ...................................................................................................................... 23
5.2.2 Контролируемые значения FieldBus ........................................................................................................... 28
5.2.3 Ведущий/ведомый ....................................................................................................................................... 34
5.2.4 Контроль ПИ-управления ............................................................................................................................ 37
5.2.5 Цепь обработки частоты .............................................................................................................................. 38
5.2.6 Цепь крутящего момента ............................................................................................................................ 38
5.2.7 Счетчики ........................................................................................................................................................ 39
6. ПРИКЛАДНАЯ ПРОГРАММА MARINE — ПЕРЕЧЕНЬ ПАРАМЕТРОВ .................................................................. 41
6.1 Базовые параметры ......................................................................................................................................... 41
6.2 Обработка задания ........................................................................................................................................... 42
6.2.1 Базовые настройки ...................................................................................................................................... 42
6.2.2 Постоянное задание .................................................................................................................................... 42
6.2.3 Задание мощности ....................................................................................................................................... 43
6.2.4 Torque Reference (Задание момента) ......................................................................................................... 43
6.2.5 Параметры запрещения частоты ................................................................................................................ 44
6.2.6 Потенциометр двигателя ............................................................................................................................ 44
6.2.7 Регулировка задания ................................................................................................................................... 44
6.3 Управление изменением ................................................................................................................................. 45
6.3.1 Базовые настройки ...................................................................................................................................... 45
6.3.2 Быстрый останов .......................................................................................................................................... 45
6.3.3 Опции управления изменением скорости ................................................................................................. 45
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 4

APFIFF09 MARINE VACON®• 5
6.4 Входные сигналы .............................................................................................................................................. 46
6.4.1 Базовые настройки ...................................................................................................................................... 46
6.4.2 Цифровые входы .......................................................................................................................................... 46
6.4.3 Аналог. вход 1 ............................................................................................................................................... 47
6.4.4 Аналог. вход 2 ............................................................................................................................................... 48
6.4.5 Аналог. вход 3 ............................................................................................................................................... 48
6.4.6 Аналог. вход 4 ............................................................................................................................................... 49
6.4.7 Опции ............................................................................................................................................................ 49
6.5 Выходные сигналы ........................................................................................................................................... 50
6.5.1 Цифровые выходные сигналы .................................................................................................................... 50
6.5.2 Аналог. выход 1 ............................................................................................................................................ 51
6.5.3 Аналог. выход 2 ............................................................................................................................................ 51
6.5.4 Аналог. выход 3 ............................................................................................................................................ 52
6.5.5 Аналог. выход 4 ............................................................................................................................................ 52
6.5.6 Цифровой выход с задержкой 1 ................................................................................................................. 53
6.5.7 Цифровой выход 2 с задержкой ................................................................................................................. 53
6.5.8 Контролируемые предельные значения ................................................................................................... 54
6.6 Параметры предельных значений .................................................................................................................. 55
6.6.1 Обработка тока ............................................................................................................................................. 55
6.6.2 Обработка мощности ................................................................................................................................... 55
6.6.3 Обработка крутящего момента ................................................................................................................... 56
6.6.4 Обработка частоты ....................................................................................................................................... 56
6.6.5 Обработка звена пост. тока ......................................................................................................................... 57
6.6.6 Варианты настройки пределов ................................................................................................................... 57
6.7 Обработка магнитного потока и пост. тока .................................................................................................... 58
6.7.1 Настройки обработки магнитного потока и пост. тока в разомкнутом контуре ..................................... 58
6.7.2 Настройки обработки магнитного потока и пост. тока в замкнутом контуре ......................................... 58
6.8 Управление двигателем ................................................................................................................................... 59
6.8.1 Базовые настройки управления двигателем ............................................................................................. 59
6.8.2 Разомкнутый контур .................................................................................................................................... 59
6.8.3 Параметры для управления с замкнутым контуром ................................................................................. 59
6.8.4 Параметры управления СДПМ .................................................................................................................... 60
6.8.5 Стабилизаторы ............................................................................................................................................. 61
6.8.6 Параметры настройки ................................................................................................................................. 61
6.8.7 Параметры идентификации ........................................................................................................................ 62
6.9 Регулирование скорости .................................................................................................................................. 63
6.9.1 Базовые настройки управления скоростью ............................................................................................... 63
6.9.2 Настройки управления скоростью в разомкнутом контуре ..................................................................... 63
6.9.3 Настройки управления скоростью в замкнутом контуре ......................................................................... 63
6.10 Управление преобразователем частоты ........................................................................................................ 64
6.11 Параметры режима «Ведущий/ведомый» .................................................................................................... 65
6.12 Параметры защиты........................................................................................................................................... 66
6.12.1 Общие настройки ..................................................................................................................................... 66
6.12.2 Защита датчика температуры ................................................................................................................. 66
6.12.3 Защита от опрокидывания ...................................................................................................................... 67
6.12.4 Мониторинг ошибок скорости ................................................................................................................ 68
6.12.5 Защита двигателя ..................................................................................................................................... 68
6.12.6 Контроль активного нуля ........................................................................................................................ 69
6.12.7 Защита от недогрузки .............................................................................................................................. 69
6.12.8 Защита от замыкания на землю ............................................................................................................. 69
6.12.9 Защита охлаждения ................................................................................................................................. 69
6.12.10 Защита шины Fieldbus ............................................................................................................................. 70
6.12.11 Внешний отказ ......................................................................................................................................... 70
6.12.12 Отказ энкодера ........................................................................................................................................ 70
6.12.13 Опции ........................................................................................................................................................ 70
6.13 Параметры шины Fieldbus ............................................................................................................................... 71
6.14 Функции управления идентификатором ........................................................................................................ 72
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 5

6 • VACON® APFIFF09 MARINE
6.14.1 Управление значением ........................................................................................................................... 72
6.14.2 Управление 1 идентификатором цифрового входа .............................................................................. 72
6.14.3 Управление 2 идентификатором цифрового входа .............................................................................. 72
6.14.4 Управление 3 идентификатором цифрового входа .............................................................................. 73
6.14.5 Управляемый по идентификатору цифровой выход 1 ......................................................................... 73
6.14.6 Управляемый по идентификатору цифровой выход 2 ......................................................................... 73
6.14.7 Задержка произвольного цифрового входа .......................................................................................... 73
6.15 Brake Control (Управление тормозом) ............................................................................................................ 74
6.16 Параметры автоматического перезапуска ..................................................................................................... 76
6.17 Параметры ПИ-регулирования ........................................................................................................................ 76
6.18 Управление с клавиатуры (клавиатура панели управления: меню M3) ...................................................... 77
6.19 Системное меню (клавиатура панели управления: меню M6) ..................................................................... 77
6.20 Платы расширения (клавиатура панели управления: меню M7) ................................................................. 77
7. ПРИКЛАДНАЯ ПРОГРАММА MARINE — ОПИСАНИЕ ПАРАМЕТРОВ ................................................................ 78
7.1 Базовые параметры ......................................................................................................................................... 78
7.2 Обработка задания ........................................................................................................................................... 87
7.2.1 Базовые параметры ..................................................................................................................................... 88
7.2.2 Постоянное задание .................................................................................................................................... 91
7.2.3 Задание мощности ....................................................................................................................................... 93
7.2.4 Torque Reference (Задание момента) ......................................................................................................... 95
7.2.5 Запрещенные частоты ............................................................................................................................... 101
7.2.6 Потенциометр двигателя .......................................................................................................................... 102
7.2.7 Регулировка задания ................................................................................................................................. 104
7.3 Управление изменением ............................................................................................................................... 106
7.3.1 Быстрый останов ........................................................................................................................................ 109
7.3.2 Параметры изменения скорости .............................................................................................................. 110
7.4 Входные сигналы ............................................................................................................................................ 112
7.4.1 Базовые настройки .................................................................................................................................... 112
7.4.2 Цифровые входы ........................................................................................................................................ 114
7.4.3 Аналоговый вход 1 и 2 ............................................................................................................................... 120
7.4.4 Аналоговый вход 3 и 4 ............................................................................................................................... 125
7.4.5 Управление инверсией .............................................................................................................................. 128
7.5 Выходные сигналы ......................................................................................................................................... 129
7.5.1 Цифровые выходные сигналы .................................................................................................................. 129
7.5.2 Аналоговые выходы 1, 2, 3 и 4 .................................................................................................................. 134
7.5.3 Цифровой выход с задержкой 1 и 2 ......................................................................................................... 138
7.5.4 Контролируемые предельные значения ................................................................................................. 141
7.6 Параметры предельных значений ................................................................................................................ 143
7.6.1 Обработка ограничений тока .................................................................................................................... 143
7.6.2 Обработка ограничений мощности .......................................................................................................... 144
7.6.3 Обработка предела крутящего момента ................................................................................................. 148
7.6.4 Обработка ограничений частоты .............................................................................................................. 152
7.6.5 Обработка звена постоянного тока .......................................................................................................... 153
7.6.6 Параметры ограничения ........................................................................................................................... 156
7.7 Постоянный ток и работа с намагничиванием ............................................................................................ 157
7.7.1 Установочные параметры для разомкнутого контура ............................................................................ 158
7.7.2 Настройки управления замкнутым контуром .......................................................................................... 162
7.8 Управление двигателем ................................................................................................................................. 164
7.8.1 Параметры U/F-характеристики ............................................................................................................... 168
7.8.2 Настройки замкнутого контура ................................................................................................................. 172
7.8.3 Параметры синхронного двигателя с постоянными магнитами (СДПМ) .............................................. 175
7.8.4 Параметры стабилизации ......................................................................................................................... 181
7.8.5 Настройки точного регулирования ........................................................................................................... 184
7.8.6 Измеренные параметры ............................................................................................................................ 186
7.9 Настройки управления скоростью ................................................................................................................ 188
7.10 Управление преобразователем частоты ...................................................................................................... 194
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 6

APFIFF09 MARINE VACON®• 7
7.11 Ведущий/ведомый ......................................................................................................................................... 197
7.11.1 Ведущий/ведомый: стандартная система ........................................................................................... 197
7.11.2 Ведущий/ведомый: система DriveSynch .............................................................................................. 198
7.11.3 Конфигурация ведущего и ведомого ................................................................................................... 201
7.12 Параметры защиты......................................................................................................................................... 206
7.12.1 Общие настройки ................................................................................................................................... 206
7.12.2 Защита датчика температуры ............................................................................................................... 207
7.12.3 Защита от опрокидывания .................................................................................................................... 209
7.12.4 Ошибка скорости ................................................................................................................................... 211
7.12.5 Защита двигателя ................................................................................................................................... 212
7.12.6 Защита от перегрузки ............................................................................................................................ 215
7.12.7 Защита 4 мА ............................................................................................................................................ 217
7.12.8 Защита от недогрузки ............................................................................................................................ 218
7.12.9 КЗ на Землю ............................................................................................................................................ 220
7.12.10 Защита охлаждения ............................................................................................................................... 220
7.12.11 Связь по промышленной сети .............................................................................................................. 221
7.12.12 Функция внешнего отказа ..................................................................................................................... 222
7.12.13 Функция отказа энкодера ..................................................................................................................... 223
7.13 Настройка параметров сетевого интерфейса .............................................................................................. 224
7.13.1 Общие настройки ................................................................................................................................... 224
7.14 Функции идентификации ............................................................................................................................... 228
7.14.1 Управление значением ......................................................................................................................... 228
7.14.2 Управление идентификатором цифрового входа ............................................................................... 230
7.14.3 Цифровой вход, управляемый по идентификатору ............................................................................ 231
7.14.4 Задержка произвольного цифрового входа ........................................................................................ 232
7.15 Brake Control (Управление тормозом) .......................................................................................................... 233
7.15.1 Защита от самопроизвольного перемещения нагрузки .................................................................... 236
7.15.2 Функция контроля тормоза ................................................................................................................... 237
7.15.3 Параметры для управления замкнутым контуром ............................................................................. 238
7.15.4 Регулятор отката в замкнутом контуре. ............................................................................................... 239
7.16 Автоматический сброс отказа ....................................................................................................................... 240
7.17 ПИ-регулирование .......................................................................................................................................... 243
7.18 Параметры управления с клавиатуры .......................................................................................................... 245
8. Слово триггера регистратора данных ........................................................................................................... 246
9. Функция идентификации для синхронного двигателя с постоянными магнитами .................................... 247
9.1 Идентификация нулевого положения с помощью абсолютного энкодера. ............................................. 247
9.2 Начальная позиция с инкрементальным энкодером без входа Z-импульса. ........................................... 247
9.3 Идентификация с инкрементальным энкодером без входа Z-импульса. ................................................. 248
10. Подробное описание слов состояния и слов управления ....................................................................... 249
10.1 Fieldbus ............................................................................................................................................................ 249
10.1.1 Комбинация 1, ProfiDrive — Standard с дополнительной платой Profibus ........................................ 250
10.1.2 Комбинация 2, ByPass – ProfiDrive; Диаграмма состояний ................................................................ 251
10.1.3 Комбинация 3, ByPass — Basic .............................................................................................................. 258
11. Устранение неполадок ............................................................................................................................. 259
12. Коды отказов ............................................................................................................................................ 260
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 7
8 • VACON® APFIFF09 MARINE
1. ПРИКЛАДНАЯ ПРОГРАММА MARINE — ВВЕДЕНИЕ
Программное обеспечение APFIFF09, Прикладная программа Marine
Прикладная программа Marine предназначена для использования в морских
применениях и, отличаясь расширенными функциями управления мощностью, в
основном рассчитана на использование с системами судовых движителей различных
видов. Эта прикладная программа также может использоваться для управления
лебедками, причем логика плавного торможения позволяет использовать систему
лебедки с несколькими двигателями — потребуется настроить лишь несколько
дополнительных параметров, описанных в этом руководстве. Также в этом руководстве
рассматриваются настройки двигателей с постоянными магнитами.
1.1 Общие сведения
Это прикладная программа не имеет обратной совместимости. Прочтите примечание
по изменениям в прикладной программе или главу 2 «Проблемы, связанные с
совместимостью версий Marine» в данном руководстве, чтобы определить, на что следует
обращать внимание при обновлении прикладной программы. При вводе в эксплуатацию
также ознакомьтесь с обновленным описанием параметров в VACON
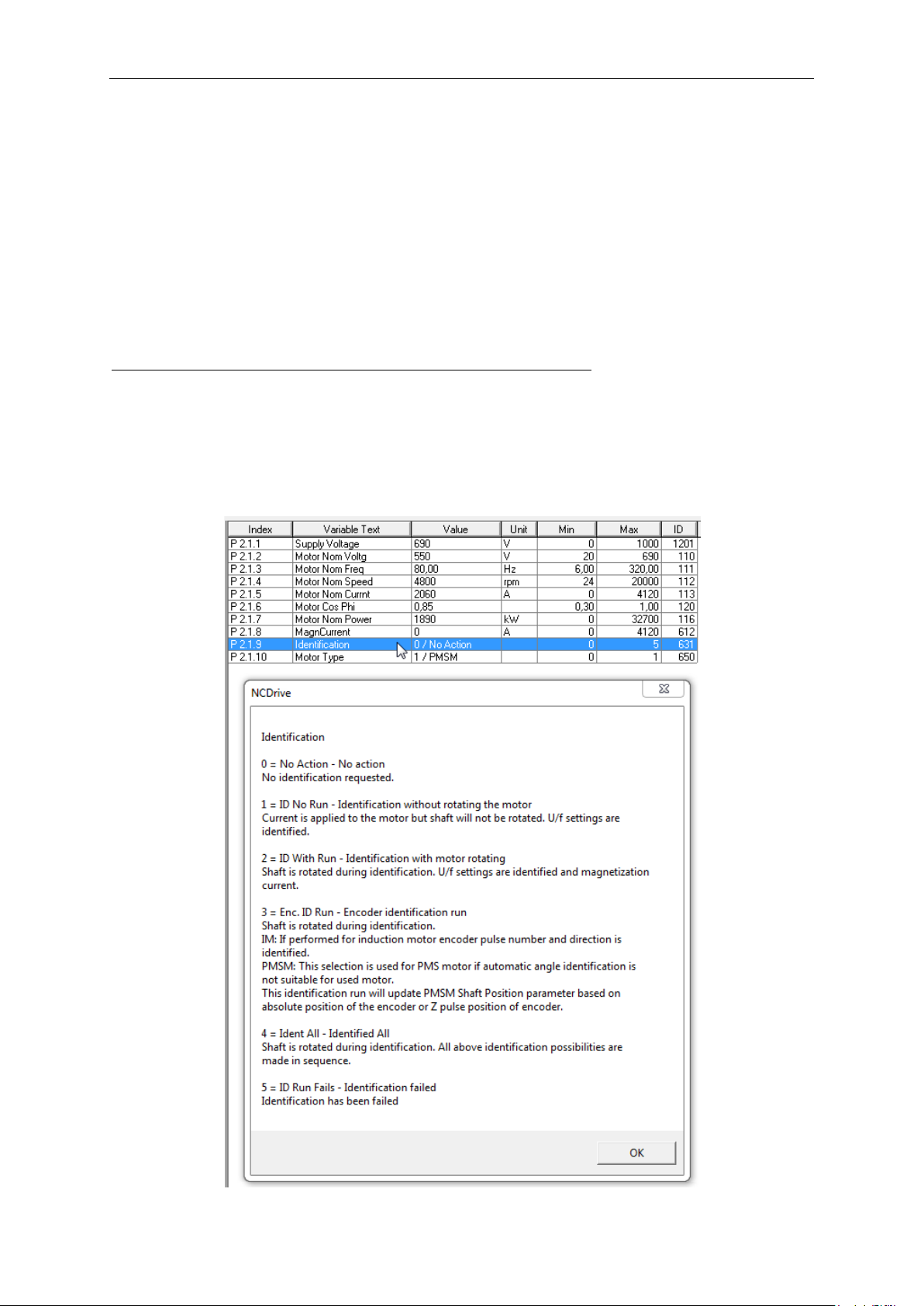
Для получения справки в VACON® NCDrive выберите нужную строку в столбце Variable
Text (Текст переменной) и нажмите F1.
Ниже приведен пример текста справки по параметру Identification в VACON
®
NCDrive.
®
NCDrive.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 8

APFIFF09 MARINE VACON®• 9
1.2 Основные функции
Прикладная программа Marine поддерживает широкий диапазон параметров для
управления асинхронными двигателями и двигателями с постоянными магнитами.
Она может использоваться в разнообразных технологических процессах, когда
необходима гибкость при работе с сигналами ввода-вывода, но доступна лишь
простая логика ПИ-регулятора.
Основное внимание уделено поведению задания мощности, ограничений мощности
и ограничений крутящего момента в различных ситуациях. Прикладная программа
позволяет регулировать задания мощности и крутящего момента (а также заданную
скорость их изменений) для обеспечения бесперебойной работы судовых генераторов
и механических компонентов.
Гибкие функции управления с использованием идентификаторов (ID-управление)
принципиально улучшают применимость прикладной программы в различных
технологических процессах: любой вход или любые фактические значения могут
связываться с любым параметром через коэффициент масштабирования.
Прикладная программа Marine не относится к программам с быстрым реагированием.
Базовые функции отрабатываются на временном промежутке 20 мс. Большинство
функций входов и выходов отрабатывается на временном промежутке 30 мс, а в
аналоговых выходах используются предварительно фильтруемые сигналы (крутящий
момент с линейной фильтрацией в течение 1 с, мощность и т. д.). Функции ограничения
мощности отрабатываются на временном промежутке 10 мс или быстрее.
Дополнительные функции:
• Зона нечувствительности входного сигнала джойстика.
• Различные пределы мощности могут поступать с цифрового входа или по шине
Fieldbus и настраиваются отдельно для стороны двигателя и стороны
генератора.
• Функция ведущего/ведомого для рулевых валов и двухобмоточных двигателей.
• Различные пределы крутящего момента для двигателя и генератора.
• Входные данные мониторинга системы охлаждения и теплообменников
с возможностью выбора ответной реакции.
• Входные данные контроля тормоза и фактические данные контроля тока для
немедленного включения тормоза.
• Различные настройки контроля скорости для различных скоростей и нагрузок.
• Функция толчкового режима с двумя отдельными заданиями.
• Возможность объединения данных процесса c шины FB с любым параметром
и некоторыми контролируемыми значениями.
• Аналоговые входы 3 и 4 могут управлять любыми параметрами, задаваемыми
по идентификационным номерам.
• Поддержка четырех аналоговых выходов.
• Поддержка двух плат PT100.
• Регулирование скорости нарастания предельной мощности.
• Регулирование скорости нарастания предельного крутящего момента.
• Автоматическое понижение мощности при питания от напряжения пост. тока.
• Функция фактической мощности ведомого преобразователя: мощность будет
увеличиваться только с разрешенной скоростью.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 9

10 • VACON® APFIFF09 MARINE
2. ПРОБЛЕМЫ, СВЯЗАННЫЕ С СОВМЕСТИМОСТЬЮ ВЕРСИЙ MARINE
V120
- Плата измерения температуры 2 имеет собственный параметр отклика.
V122
- Биты состояния контроля ошибок скорости перенесены из слова отказов 2 в
слово отказов 10 B0 и из слова предупреждений 1 в слово предупреждений 10 B
V128
- В предыдущей версии при работе в режиме изменения скорости на ведомом
преобразователе частоты управление тормозом ведомого преобразователя
включало тормоз после того, как ведущий преобразователь переходил в
состояние останова. Теперь в этом режиме тормоз включается одновременно
включением тормоза на ведущем преобразователе частоты.
с
Примечание 1. При обновлении прикладной программы не рекомендуется использовать
функцию загрузки параметров, предусмотренную в программе
VACON® NCDrive. Вместо
это следует выгрузить параметры из устройства и сравнить новые данные с прежним
файлом параметров. Разработка прикладной программы идет непрерывно, при этом
изменяются значения параметров по умолчанию. В случае загрузки параметров
непосредственно в преобразователь частоты улучшенные значения, используемые
умолчанию, будут утеряны.
по
0.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 10

APFIFF09 MARINE VACON®• 11
220
NXOPTA1
Клемма
Сигнал
Описание
1
+10 Вопорн.
Выход опорного напряжения
Напряжение для потенциометра и т. п.
2
AI1+
Аналоговый вход 1.
Диапазон 0(4)–20 мА, Ri ≤ 250 Ом
Задание частоты аналогового входа 1.
Диапазон по умолчанию: напряжение 0–10 В
3
AI1-
Заземление входов/выходов
Земля для источников опорного сигнала
и сигналов управления
4
AI2+
Аналоговый вход 2.
Диапазон 0(4)–20 мА, Ri ≤ 250 Ом
Задание частоты аналогового входа 2
Диапазон по умолчанию: ток 0–20 мА
5
AI2-
6
+24 В
Выход управляющего напряжения
Напряжение для выключателей и т. п., не более
0,1 А
7
GND
Заземление входов/выходов
Земля для источников опорного сигнала
и сигналов управления
8
DIN1
Пуск в прямом направлении
Программируемый, G2.2.7
Контакт замкнут = Пуск вперед
Программируемая логика пуска, P2.2.1
9
DIN2
Пуск в обратном направлении
Программируемый, G2.2.7
Контакт замкнут = Пуск в реверсном направлении
Программируемая логика пуска P2.2.1
10
DIN3
Сброс отказа
Программируемый, G2.2.7
Контакт разомкнут = Нет отказа
Контакт замкнут = Отказ
11
CMA
Общая клемма для входов DIN1–
DIN3
Подключается к клемме GND («земля») или +24V
(+24 В)
12
+24 В
Выход управляющего напряжения
Напряжение для выключателей (см. описание
клеммы 6)
13
GND
Заземление входов/выходов
Земля для источников опорного сигнала
и сигналов управления
14
DIN4
Программируемый, G2.2.7
По умолчанию функция не выбрана
15
DIN5
Программируемый, G2.2.7
По умолчанию функция не выбрана
16
DIN6
Программируемый, G2.2.7
По умолчанию функция не выбрана
17
CMB
Общая клемма для входов DIN4–
DIN6
Подключается к клемме GND («земля») или +24V
(+24 В)
18
AOA1+
Аналог. выход 1
Выходной диапазон выбирается перемычками.
Диапазон 0–10 В, RL > 1 кОм
19
AOA1-
20
DOA1
Цифровой выход
Программируемый
Открытый коллектор, I ≤ 50 мА, U ≤ 48 В пост. тока
NXOPTA2
21
RO1
Релейный выход 1
Коммутационная способность
22
RO1
23
RO1
24
RO2
Релейный выход 2
Программируемый
25
RO2
26
RO2
Потенциометр задания,
1...10 кОм
мА
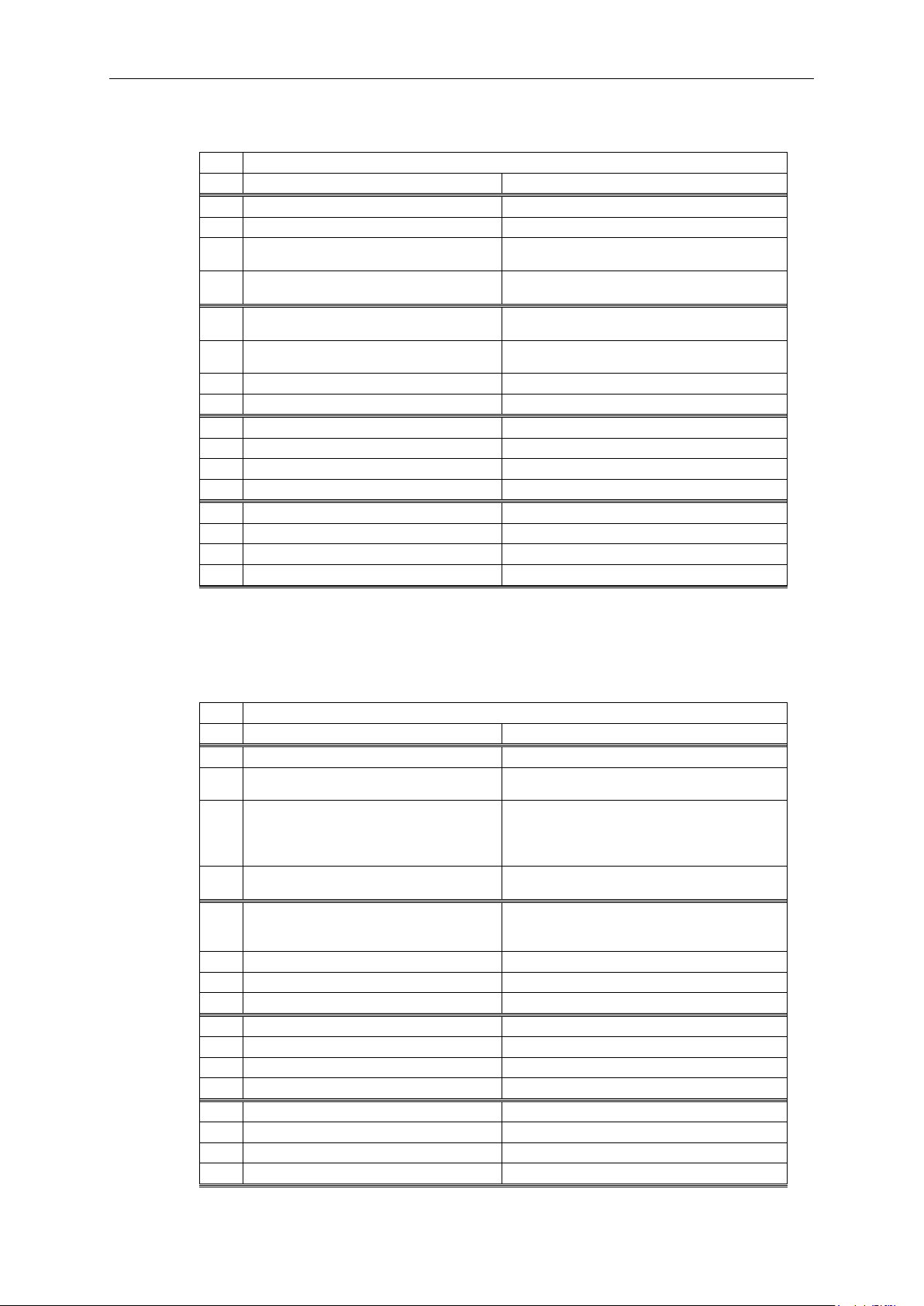
3. УПРАВЛЯЮЩИЕ ВХОДЫ/ВЫХОДЫ
Диапазон 0–10 В, Ri = 200 кОм
Диапазон 0–10 В, Ri = 200 кОм
Программируемый (P2.3.1.2)
Входной диапазон выбирается перемычками.
Входной диапазон выбирается перемычками.
Диапазон 0–20 мА. RL, макс. 500 Ом
Программируемый, G2.3.3
Программируемый, G2.3.3
24 В пост. тока/8 А
250 В перем. тока/8 A
125 В пост. тока/0,4 А
По умолчанию функция не выбрана
В пер. тока
Таблица 3–1. Пример конфигурации и подключения
входов/выходов по умолчанию для прикладной программы Marine.
Примечание. Спецификации оборудования и процедуры настройки см. в Руководстве
пользователя, в главе «Цепи управления».
Примечание. Описание выбора
перемычек см. ниже.
Дополнительную информацию см.
Руководстве пользователя
в
VACON
®
NX.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 11
12 • VACON® APFIFF09 MARINE
READY
I/Oterm
DigOUT:B.1
AI Ref Faul/Warn
READY
I/Oterm
DigOUT:0.0
READY
I/Oterm
DigOUT:0.0
READY
I/Oterm
DigOUT:B.1
enter
AI Ref Faul/Warn AI Ref Faul/Warn AI Ref Faul/Warn
4. ПРИНЦИП ПРОГРАММИРОВАНИЯ «ПРОГРАММИРОВАНИЕ КЛЕММ ПОД
ФУНКЦИИ» (TTF)
Принцип программирования входного и выходного сигнала в приложении
многоцелевого управления (Multipurpose Control Application NXP) и в приложении
управления насосами и вентиляторами (Pump and Fan Control Application) (а также
частично в других прикладных программах) отличается от общепринятого метода,
используемого в других прикладных программах
В традиционном методе программирования —
(метод FTT)
— для фиксированного входа или выхода определяется некоторая функция.
В то же время, в упомянутых выше прикладных программах используется
программирования клемм под функции (TTF)
осуществляется иным путем: функции фигурируют как параметры, для которых оператор
определяет некоторый вход/выход. См.
Предупреждение
4.1 Определение входа/выхода для некоторой функции на клавиатуре
Соединение определенного входа или выхода с некоторой функцией (параметром)
производится путем присвоения параметру соответствующего значения. Это значение
составляется из обозначения
гнезда платы
(см. руководство по эксплуатации VACON
ниже).
на плате управления VACON® NX
®
NX) и
Название
функции
Гнездо Номер клеммы
Тип клеммы
Пример. Нужно подключить функцию цифрового выхода
задания»
(см. Руководство пользователя VACON
(параметр 2.3.3.7) к цифровому выходу DO1 на базовой плате NXOPTA1
®
NX).
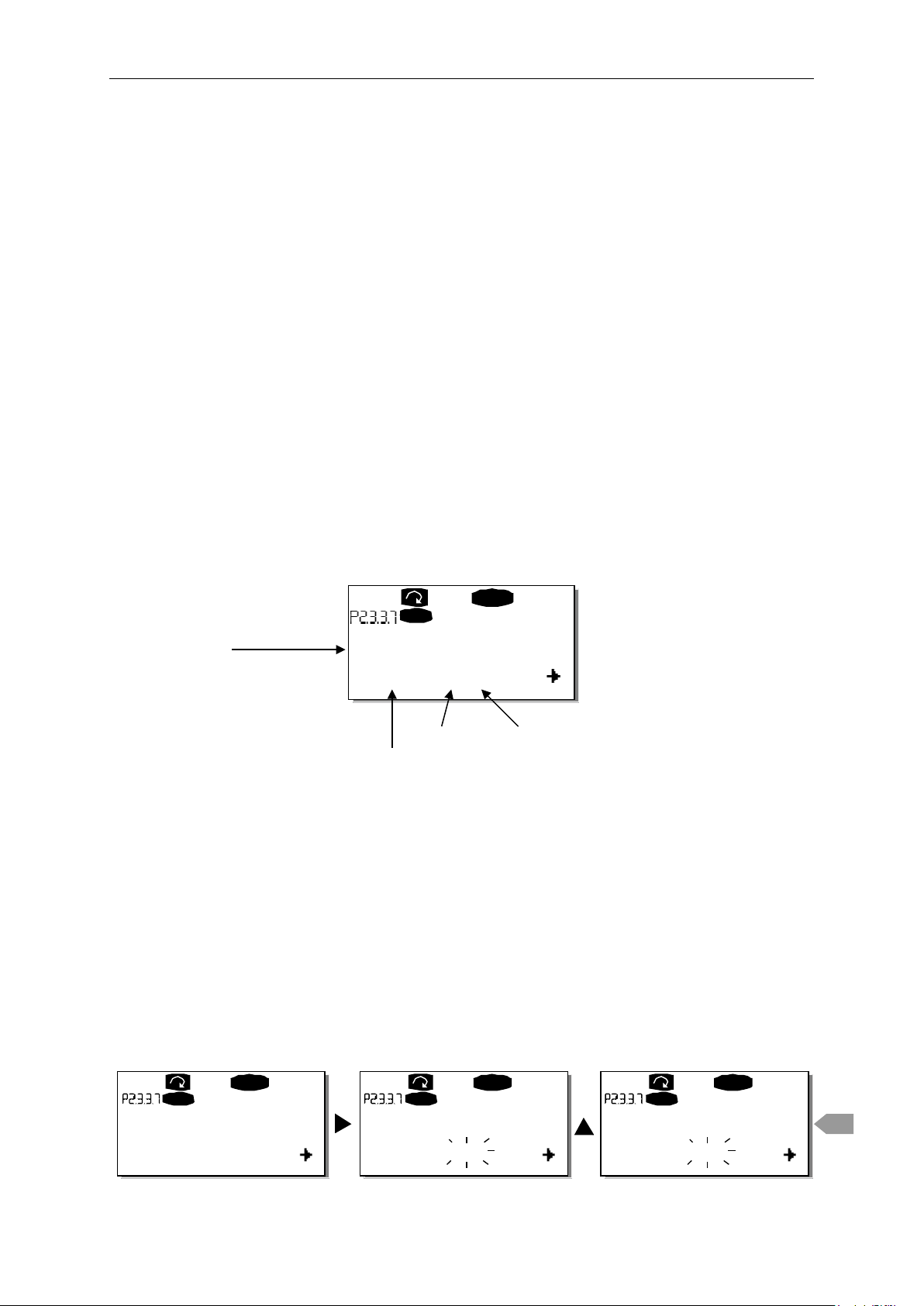
Сначала найдите на клавиатуре параметр 2.3.3.7. Нажмите один раз
«вправо»
, чтобы войти в режим редактирования. На
тип клеммы (DigIN, DigOUT, An.IN, An.OUT), а справа — текущий вход/выход, к которому
присоединяется функция (B.3, A.2 и т. д.). Если присоединение отсутствует, будет
показано значение (0.#).
Когда значение мигает, нажмите и удерживайте
найти нужное гнездо платы и требуемый номер сигнала. Программа будет прокручивать
гнезда платы начиная с
0 и далее от A до E и номера входов/выходов от 1 до 10.
Как только будет установлено нужное значение, нажмите один раз
чтобы подтвердить изменение.
VACON® NX.
программировании функций для клемм
метод
, в котором процесс программирования
на стр. 13.
соответствующего номера сигнала
(см.
«Отказ/предупреждение
кнопку меню
линии значений
кнопку «вверх» или «вниз»,
слева появится
чтобы
кнопку Enter
,
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 12
APFIFF09 MARINE VACON®• 13
Чтобы не допустить перегрузки функций и обеспечить
бесперебойную работу, НИ В КОЕМ СЛУЧАЕ не подключайте
две функции к одному и тому же выходу.
!
WARNING
Примечание. В отличие от
выходов, входы
в состоянии ВРАЩЕНИЕ менять нельзя.
ПРЕДУПРЕЖДЕНИЕ
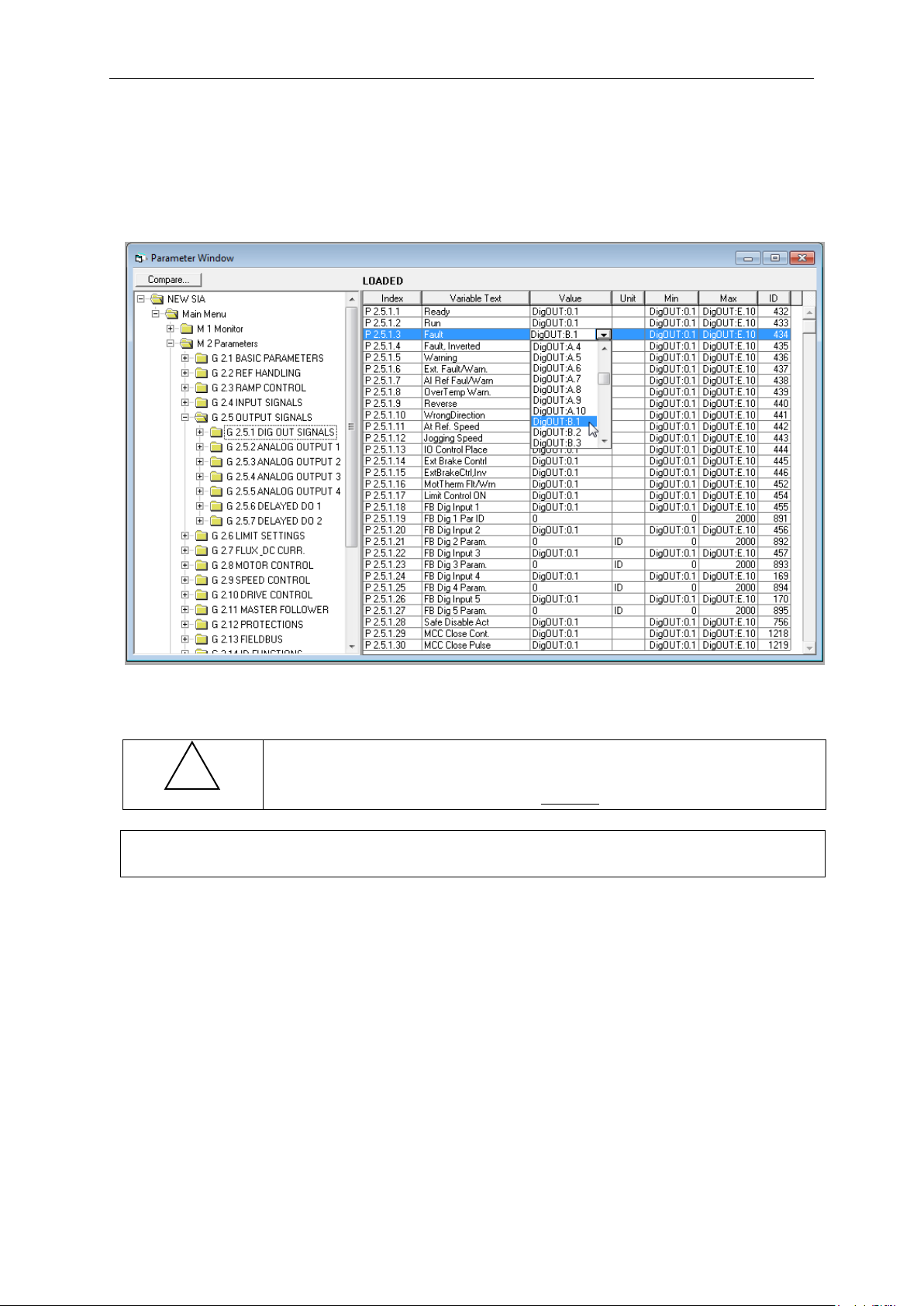
4.2 Определение клеммы для некоторой функции с помощью сервисной программы
NCDrive
®
При настройке параметров с помощью сервисной программы VACON
между функцией и входом/выходом устанавливается так же, как и при работе с панелью
управления. Нужно просто выбрать код адреса в раскрывающемся меню в столбце
(Значение),
см. рис. ниже.
NCDrive связь
Value
Рис. 4–1. Экран сервисной программы NCDrive; ввод кода адреса
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 13

14 • VACON® APFIFF09 MARINE
4.3 Определение неиспользуемых входов/выходов
Всем неиспользуемым входам и выходам должно быть присвоено значение гнезда
платы
большинства функций. Однако если понадобится использовать
0 и номер клеммы 1. Значение 0.1 также используется по умолчанию для
значения сигнала
цифрового входа (например, только в целях тестирования), то можно установить
значение гнезда платы
значение
TRUE. Другими словами, значение 1 соответствует разомкнутому контакту,
0 и любой номер клеммы от 2 до 10, чтобы задать для входа
а значения от 2 до 10 соответствуют замкнутому контакту.
Что касается аналоговых входов, назначение номеру клеммы значения 1 соответствует
уровню сигнала 0
уровню сигнала 30
сигнала 100
%. Значение 2 соответствует уровню сигнала 20 %, значение 3 —
% и т. д. Установка для клеммы значения 10 соответствует уровню
%.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 14

APFIFF09 MARINE VACON®• 15
5. ПРИКЛАДНАЯ ПРОГРАММА MARINE — КОНТРОЛИРУЕМЫЕ ЗНАЧЕНИЯ
На следующих страницах приведены перечни параметров, разделенных на
соответствующие группы. Каждый параметр содержит ссылку на описание этого
параметра. Описание параметров приводится на страницах с 78 по 238. Описания
параметров могут включать больше параметров, чем доступно в данной конкретной
прикладной программе; реально доступные параметры см. в списке параметров.
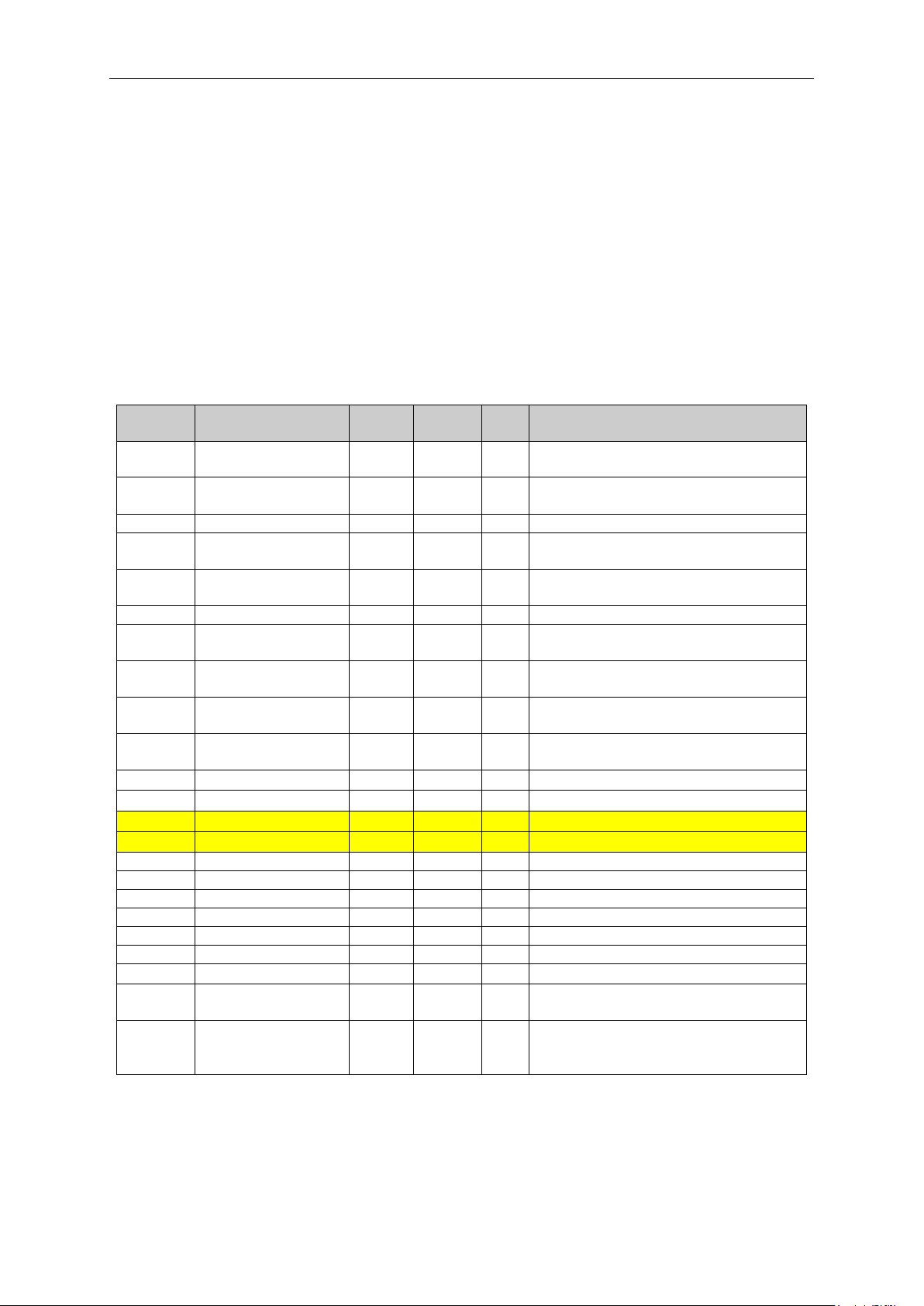
Пояснения названий столбцов:
Код = Обозначение места на клавиатуре; Сообщает оператору номер
текущего параметра.
Параметр = Название параметра.
Мин. = Минимальное значение параметра.
Mакс. = Максимальное значение параметра.
Ед. измер. = Единица измерения значения параметра; указывается при
наличии.
По умолчанию = Значение, предварительно установленное на заводе-изготовителе.
Пользоват. знач. = Собственная установка заказчика.
Ид. = Идентификационный номер параметра.
_____ = Код параметра выделен цветом: значение параметра можно
изменить только после того, как будет остановлен преобразователь
частоты.
_____ = К этим параметрам следует применять метод программирования
клемм под функции (
_____ = Контрольное значение также можно отслеживать по шине Fieldbus,
указав соответствующий идентификационный номер.
В руководстве также описываются сигналы, обычно не отображаемые при мониторинге,
то есть не являющиеся параметрами или стандартными сигналами контроля. Такие
сигналы выделяются [буквенными кодами в квадратных скобках], например:
[FW]MotorRegulatorStatus.
[V] Нормальный сигнал контроля.
[P] Нормальный параметр прикладной программы.
[FW] Сигнал микропрограммы: может контролироваться в VACON® NCDrive при выборе
типа сигнала Firmware (Микропрограмма).
[А] Сигнал прикладной программы, может контролироваться в VACON® NCDrive при
выборе типа сигнала Application (Прикладная программа).
[R] Параметр типа задания на клавиатуре.
[F] Функция. Сигнал получается как выход функции.
[DI] Сигнал на цифровом входе.
TTF) (см. главу 4).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 15
16 • VACON® APFIFF09 MARINE
Код
Параметр
Ед.
измер.
Формат
Ид.
Описание
Выходная частота, подаваемая на
двигатель
Задание частоты для управления
двигателем
V1.3
Скорость двигателя
об/мин
#
2
Скорость двигателя, об/мин
Различ
ный
Крутящий момент
двигателя
В % от ном. крутящего момента
двигателя
V1.6
Мощность двигателя
%
#,#
5
Напряжение
двигателя
Напряжение звена
постоянного тока
Измеренное напряжение пост. тока,
с фильтрацией.
Температура
устройства
Температура
двигателя
Расчетная температура двигателя,
отключение 105 %
V1.11
Аналог. вход 1
%
#,##
13
AI1, без фильтра.
V1.12
Аналог. вход 2
%
#,##
14
AI2, без фильтра.
V1.13
Аналог. вход 3
%
#,##
27
AI3, без фильтра.
V1.14
Аналог. вход 4
%
#,##
28
AI4, без фильтра.
V1.15
Аналог. выход 1
%
#,##
26
AO1
V1.16
Аналог. выход 2
%
#,##
31
AO2
V1.17
Аналог. выход 3
%
#,##
32
AO3
V1.18
Аналог. выход 4
%
#,##
1526 V1.19
DIN1, DIN2, DIN3
15
Состояния цифровых входов
V1.20
DIN4, DIN5, DIN6
16
Состояния цифровых входов
V1.21
Задание мощности
%
#,#
1700
Используемое задание мощности
Наибольшая температура платы OPTB8.
Фильтрация 4 с.
Элементы
контроля
5.1 Контролируемые значения
Контролируемые значения — это фактические значения параметров и сигналов, а также
данные состояний и результаты измерений.
Примечание для систем DriveSynch:
В системе DriveSynch надежными являются только сигналы контроля ведущего
преобразователя частоты.
На ведомых устройствах надежны только непосредственно измеряемые значения. Даже
выходная частота ведомого устройства в DriveSynch не является непосредственно
наблюдаемым параметром и поэтому может не отображать фактическую выходную
частоту, которой управляет ведущий преобразователь частоты в системе DriveSynch.
V1.1 Выходная частота Гц #,## 1
V1.2 Задание частоты Гц #,## 25
V1.4 Ток двигателя А
V1.5
V1.7
V1.8
V1.9
V1.10
3 Линейная фильтрация 1 с
% #,# 4
V #,# 6 Расчетное напряжение двигателя
V # 7
°C
%
# 8 Температура радиатора
# 9
V1.22 Температура PT-100
G1.23
многоканального
Таблица 5–1. Контролируемые значения
°C
#,# 42
Отображаются три выбираемых
контролируемых значения
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 16

APFIFF09 MARINE VACON®• 17
Код
Параметр
Ед.
измер.
Формат
Ид.
Описание
Различ
ный
Крутящий момент двигателя без
фильтрации
Напряжение
постоянного тока
Нефильтрованное напряжение
звена пост. тока
Слово состояния
приложения
Частота вращения
вала
Различ
ный
Электрическая мощность без
фильтрации
Измеренная
температура 1
Измеренная
температура 2
Измеренная
температура 3
Измеренная
температура 4
Измеренная
температура 5
Измеренная
температура 6
Количество оборотов
абс. энкодера
Положение абс.
энкодера
Реакция на
воздействие
Фактическое
значение CosPhi
Ток магнитного
потока
V1.24.18
Состояние регулятора
77 V1.24.19
Разность частот
Гц/с
1847
Различные биты состояния
регистратора данных.
V1.24.21
Частота энкодера 2
Гц
53
V1.24.22
Часы работы
час
1856
V1.24.23
Слово состояния 2
89
Магнитный поток
ротора
V1.24.25
Сбой идентификации
98
Мощность двигателя,
кВт
5.1.1 Контролируемые значения 2
V1.24.1 Ток А
V1.24.2 Крутящий момент % #,# 1125
V1.24.3
V1.24.4
V1.24.5
V1.24.6 Выходная мощность кВт
V1.24.7
V1.24.8
V1.24.9
V1.24.10
V1.24.11
V1.24.12
V1.24.13
V # 44
43
Гц #,## 1124 Без фильтрации
°C
°C
°C
°C
°C
°C
r
#,# 50 Фильтрация 4 с.
#,# 51 Фильтрация 4 с.
#,# 52 Фильтрация 4 с.
#,# 69 Фильтрация 4 с.
#,# 70 Фильтрация 4 с.
#,# 71 Фильтрация 4 с.
# 55
1113 Ток двигателя без фильтрации
1508
V1.24.14
V1.24.15
V1.24.16
V1.24.17
V1.24.20
V1.24.24
V1.24.26
# 54
#,### 68
#,# 72
97
#,# 1158
79
ступенчатое
Слово триггера
регистратора данных
Гц #,## 1132
%
%
кВт
Таблица 5–2. Контролируемые значения 2
облегчают диагностику с помощью
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 17

18 • VACON® APFIFF09 MARINE
Код
Параметр
Ед.
измер.
Формат
Ид.
Описание
V1.25.1
Слово управления FB
1160 V1.25.2
Задание скорости FB
875 V1.25.3
Слово состояния FB
65 V1.25.4
Фактическая скорость FB
865
Задание крутящего момента
с FB
Управление по умолчанию для
данных процесса 1 по шине FB
Масштабирование предела
FB
Управление по умолчанию для
данных процесса 2 по шине FB
Управление по умолчанию для
данных процесса 3 по шине FB
Управление по умолчанию для
данных процесса 4 по шине FB
Ток двигателя (независимый
с точностью до одной десятой
V1.25.10
Слово отказа 1
1172
V1.25.11
Слово отказа 2
1173
V1.25.12
Слово предупреждения 1
1174
Дополнительное слово
состояния
V1.25.14
Задание мощности с шины FB
1703
V1.25.15
Последний активный отказ
37
Дополнительное слово
управления
V1.25.17
Слово состояния цифр. входа
56
Слово 2 состояния цифр.
входа
Состояние управления
двигателем
Последнее активное
предупреждение
V1.25.21
Обороты вала
1170
V1.25.22
Угол вала
1169
V1.25.23
Слово отказа 10
1202
V1.25.24
Слово предупреждения 10
1269
Код
Параметр
Ед. измер.
Формат
Ид.
Описание
Состояние системы
SystemBus (SB)
Суммарный ток всех
(DriveSynch)
V1.26.3
Слово управления ведущего
93 Код
Параметр
Ед. измер.
Ид.
Описание
V1.26.4.1
Ток двигателя D1
А
1616
V1.26.4.2
Ток двигателя D2
А
1605
V1.26.4.3
Ток двигателя D3
А
1606
V1.26.4.4
Ток двигателя D4
А
1607 Код
Параметр
Ед. измер.
Ид.
Описание
V1.26.5.1
Слово состояния D1
1615
V1.26.5.2
Слово состояния D2
1602
V1.26.5.3
Слово состояния D3
1603
V1.26.5.4
Слово состояния D4
1604
5.1.2 Контролируемые значения FieldBus
V1.25.5
V1.25.6
% #,# 1140
% #,## 46
V1.25.7 Регулировка задания FB % #,## 47
V1.25.8 Аналог. выход FB % #,## 48
V1.25.9 Ток двигателя по шине FB А #,# 45
V1.25.13
V1.25.16
V1.25.18
V1.25.19
V1.25.20
1163
1161
от преобразователя частоты),
57
64
74
5.1.3 Контролируемые значения ведущего/ведомого
V1.26.1
V1.26.2 Суммарный ток А #,# 80
Таблица 5–3. Контролируемые значения FieldBus
1601
преобразователей частоты
Таблица 5–4. Контролируемые значения ведущего/ведомого
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 18

APFIFF09 MARINE VACON®• 19
Код
Параметр
Ед. измер.
Формат
Ид.
Описание
Используемое задание
ПИ-регулятора
Фактическое значение
ПИ-регулятора
Фактическое значение
ПИ-регулятора
Выход ПИ-регулятора до
масштабирования
Масштабированный выход
идентификатору
Код
Параметр
Ед. измер.
Формат
Ид.
Описание
V1.28.1
Задание частоты 1
Гц
1126 V1.28.2
Задание частоты 2
Гц
1127
Задание частоты для
управления двигателем
Задание частоты,
фактическое
Выход управления
изменением частоты
Задание частоты,
конечное
V1.28.7
Частота энкодера
Гц
1164
Код
Параметр
Ед. измер.
Формат
Ид.
Описание
Torque Reference
(Задание момента)
Задание крутящего
момента 3
Задание крутящего
момента, конечное
Выход регулирования
скорости
Задание крутящего
момента, фактическое
Код
Параметр
Ед.
измер.
Формат
Ид.
Описание
Предельный крутящий
момент двигателя
V1.30.2
Предел момента генератора
%
1951
Предел мощности
двигателя
Предел мощности
V1.30.5
Предельный ток
А 1954
Положительный предел
управления скоростью
Отрицательный предел
управления скоростью
5.1.4 Контролируемые значения ПИ-управления
V1.27.1 Задание ПИ-регулятора
V1.27.2
V1.27.3 Выход ПИ-регулятора
V1.27.4
Выход ПИ-регулятора,
масштабированный
5.1.5 Цепь обработки частоты
V.1.28.3 Задание частоты Гц #,## 25
V1.28.4
V1.28.5
V1.28.6
Гц
Гц
Гц
5.1.6 Цепь крутящего момента
20
21
23
1807
1128
1129
1131
ПИ-регулятора
Этот параметр используется
для подключения по
V1.29.1
V1.29.2
V1.29.3
V1.29.4
V1.29.5
5.1.7 Активные пределы
V1.30.1
V1.30.3
V1.30.4
V1.30.6
V1.30.7
генератора
%
%
%
%
%
%
%
%
%
%
18
1144
1145
1134
1180
1950
1952
1953
1955
1956
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 19

20 • VACON® APFIFF09 MARINE
Напряжение
Размер
Масштаб
208–240 В пер. тока
NX0001 – NX0011
100–0,01 A
208–240 В пер. тока
NX0012 – NX0420
10–0,1 A
208–240 В пер. тока
NX0530
1–1 A
380–500 В пер. тока
NX0003 – NX0007
100–0,01 A
380–500 В пер. тока
NX0009 – NX0300
10–0,1 A
380–500 В пер. тока
NX0385 – NX2643
1–1 A
525–690 В пер. тока
NX0004 – NX0013
100–0,01 A
525–690 В пер. тока
NX0018 – NX0261
10–0,1 A
525–690 В пер. тока
NX0325 – NX1500
1–1 A
5.2 Описания контролируемых значений
Примечание для систем DriveSynch:
В системе DriveSynch надежными являются только сигналы контроля ведущего
преобразователя частоты.
На ведомых устройствах надежны только непосредственно измеряемые значения.
Даже выходная частота ведомого устройства в DriveSynch не является непосредственно
наблюдаемым параметром и поэтому может не отображать фактическую выходную
частоту, которой управляет ведущий преобразователь частоты в системе DriveSynch.
V1.1 Выходная частота [#,## Гц] ID 1
Выходная частота, то есть частота тока, подаваемого в обмотки двигателя.
Обновляется с интервалом в 10 мс.
V1.2 Задание частоты [#,## Гц] ID 25
Задание частоты для управления двигателем, после функции разделения
скорости. Обновляется с интервалом в 1 мс.
V1.3 Скорость двигателя [ # об/мин] ID 2
Скорость двигателя, об/мин
V1.4 Ток двигателя [А] ID 3
Разомкнутый контур:
Линейная фильтрация 1 с.
Замкнутый контур:
Фильтрация 32 мс.
Ведущий преобразователь частоты в системе DriveSynch
Это значение показывает суммарное значение тока системы, деленное на
количество преобразователей частоты в системе (SbLastID). Параметр
SbLastId не может быть изменен; он должен быть установлен в соответствии
с количеством преобразователей частоты, подключенных к системной шине.
Ведомый преобразователь частоты в системе DriveSynch
Это значение — ток собственного блока питания преобразователя частоты.
Масштабирование тока для различных типоразмеров
Примечание. Значение ID45 (обычно на выходе данных процесса 3) должно быть
отмасштабировано так, чтобы всегда отображать только один знак после запятой.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 20

APFIFF09 MARINE VACON®• 21
V1.5 Крутящий момент двигателя % ID 4
В % от ном. крутящего момента двигателя
Разомкнутый контур
Линейная фильтрация 1 с
Замкнутый контур
Фильтрация 32 мс.
Ведомый преобразователь частоты в системе DriveSynch
Это значение — крутящий момент от собственного питания преобразователя
частоты, рассчитанный для разомкнутого контура. Крутящий момент
двигателя действителен только для ведущего устройства.
V1.6 Мощность двигателя % ID 5
Расчетная мощность двигателя. В % от номинального крутящего момента
двигателя. =
V1.7 Напряжение двигателя V ID 6
Расчетное напряжение двигателя
V1.8 Напряжение звена постоянного тока V ID 7
Измеренное напряжение пост. тока, с фильтрацией.
V1.9 Температура устройства C ID 8
Температура радиатора
V1.10 Температура двигателя % ID 9
Расчетная температура двигателя
Порог аварийного отключения составляет 105 % (если реакцией является
отказ).
V1.11 Аналог. вход 1 % ID 13
V1.12 Аналог. вход 2 % ID 14
Уровень аналогового входа без фильтрации.
0 % = 0 мА/0 В, -100 % = -10 В, 100 % = 20 мА/10 В.
Масштабирование при мониторинге определяется параметром
дополнительной платы.
V1.13 Аналог. вход 3 % ID 27
V1.14 Аналог. вход 4 % ID 28
Это входное значение можно регулировать с шины передачи данных,
если для входной клеммы выбрано значение 0.1. Таким образом можно
регулировать свободный аналоговый вход с шины Fieldbus и располагать
всеми доступными функциями аналоговых входов для данных процесса по
шине Fieldbus.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 21

22 • VACON® APFIFF09 MARINE
Состояние
DIN1/DIN2/DIN3
Состояние
DIN4/DIN5/DIN6
b0
DIN3
DIN6
b1
DIN2
DIN5
b2
DIN1
DIN4
V1.15 Аналог. выход 1 % ID 26
V1.16 Аналог. выход 2 % ID 31
V1.17 Аналог. выход 3 % ID 32
V1.18 Аналог. выход 4 % ID 1526
Значение сигнала аналогового выхода: 0 % = 0 мА/0 В, 100 % = 20 мА/10 В
V1.19 DIN1, DIN2, DIN3 ID 15
V1.20 DIN4, DIN5, DIN6 ID 16
V1.21 Задание мощности % ID 1700
Значение контроля задания мощности. Если задание мощности не
установлено в группе заданий, его можно напрямую записать в эту
переменную контроля из шины Fieldbus, тогда из группы заданий
мощности будет активна только функция изменения скорости.
V1.22 Температура PT-100 °C ID 42
Наибольшая температура платы OPTB8. Фильтрация 4 с.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 22

APFIFF09 MARINE VACON®• 23
Слово состояния приложения 1, ID43
FALSE
TRUE
b0
Магнитный поток не готов
Магнитный поток готов (> 90 %)
b1
Не в состоянии готовности
Готовность
b2
Нет вращения
Вращение
b3
Нет отказа
Отказ
b4
Прямое направление
Реверсное направление
b5
Аварийный останов активен
Аварийный останов НЕ активен
b6
Вращение запрещено
Вращение разрешено
b7
Нет предупреждений
Предупреждение
Отрицательная мощность или
генератора активен
Набор параметров 1 активен (или не
используется ни один набор параметров)
b10 Тормозной прерыватель работает
b11
Торможение пост. током отсутствует
Торможение пост. током активно
b12
Нет запроса вращения
Запрос вращения
b13
Нет активных ограничителей
Ограничитель активен
b14
Управление внешним тормозом ВЫКЛ
Управление внешним тормозом ВКЛ
b15
Не используется.
Не используется.
5.2.1 Контролируемые значения 2
V1.24.1 Ток А ID 1113
Величина тока двигателя без фильтрации, рекомендуемый сигнал для
®
контроля в VACON
NCDrive.
Ведущий преобразователь частоты в системе DriveSynch
Это значение показывает суммарное значение тока системы, деленное
на количество преобразователей частоты в системе (SbLastID). Параметр
SbLastId не может быть изменен; он должен быть установлен в соответствии
с количеством преобразователей частоты, подключенных к системной шине.
Ведомый преобразователь частоты в системе DriveSynch
Это значение — ток собственного блока питания преобразователя частоты.
V1.24.2 Крутящий момент % ID 1125
Крутящий момент двигателя без фильтрации.
V1.24.3 Напряжение постоянного тока V ID 44
Напряжение звена постоянного тока без фильтрации.
V1.24.4 Слово состояния приложения ID 43 «Status Word 1» (Слово состояния 1)
Слово состояния приложения объединяет различные состояния
преобразователя частоты в одном слове данных.
®
Рекомендуемый сигнал для мониторинга VACON
b8 Мощность положительная
b9
крутящий момент или предельный ток
Набор параметров 2 активен
NCDrive.
V1.24.5 Частота вращения вала Гц ID1124
Частота вала, используемая регулятором двигателя.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 23

24 • VACON® APFIFF09 MARINE
V1.24.6 Выходная мощность кВт ID 1508
Выходная мощность преобразователя частоты без фильтрации. =3cos
V1.24.7 Измеренная температура 1 °C ID 50
V1.24.8 Измеренная температура 2 °C ID 51
V1.24.9 Измеренная температура 3 °C ID 52
V1.24.10 Измеренная температура 4 °C ID 69
V1.24.11 Измеренная температура 5 °C ID 70
V1.24.12 Измеренная температура 6 °C ID 71
Отдельное измерение с двух плат PT100. Время фильтрации сигнала
составляет 4 с.
V1.24.13 Количество оборотов абс. энкодера ID55
Количество оборотов абс. энкодера.
V1.24.14 Положение абс. энкодера ID54
Положение абс. энкодера в пределах одного оборота. Сведения
о масштабных коэффициентах см. в документации энкодера.
V1.24.15 Реакция на ступенчатое воздействие Гц ID 1132
Ошибка частоты. Разница между выходной частотой ПЧ и фактической
частотой энкодера с погрешностью 0,001 Гц. Может использоваться для
настройки регулирования скорости в режиме управления с замкнутым
контуром.
V1.24.16 Фактическое значение CosPhi ID 68
Оценочное значение Cos Phi.
V1.24.17 Ток магнитного потока ID 72
Магнитный поток, создающий ток 100,0 %, равен номинальному магнитному
потоку.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 24
APFIFF09 MARINE VACON®• 25
Состояние регулятора ID77
b0
Состояние регулятора тока двигателя
b1
Состояние регулятора тока генератора
Состояние регулятора крутящего
момента двигателя
Состояние регулятора крутящего
момента генератора
Состояние регулятора
перенапряжения
Состояние регулятора пониженного
напряжения
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
Слово триггера регистратора данных ID97
Функция
Комментарий
b0
Состояние отказа
Регистратор срабатывает при отказе
Регистратор срабатывает при появлении
предупреждения
Регистратор срабатывает при отказе, для
получения первой ситуации отказа.
Состояние отказа ИЛИ состояние
предупреждения
Возникла ситуация срабатывания
B0 ИЛИ B1
Состояние отказа ИЛИ
сбросе
b5
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
V1.24.18 Состояние регулятора ID 77
b2
b3
b4
b5
Для контроля замкнутого контура B0
Для контроля замкнутого контура B1
Напряжение постоянного тока
Напряжение постоянного тока
V1.24.19 Разность частот ID 1847
Изменение конечного задания частоты в Гц/с.
V1.24.20 Слово триггера регистратора данных ID 97
b1 Состояние предупреждения
Предупреждение об автоматическом
b2
сбросе
b3
b4
предупреждение об автоматическом
которого определен автоматический
Этот бит можно использовать для
сброс.
Возникла ситуация срабатывания
B0 ИЛИ B2
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 25

26 • VACON® APFIFF09 MARINE
Слово состояния приложения 2 ID89
FALSE
TRUE
b0
Контроль значения SR = FALSE
Контроль значения SR = TRUE
Управление замкнутым контуром =
FALSE
b2
b3
b4
b5
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
V1.24.21 Частота энкодера 2
Частота энкодера второго входа платы OPT-D7.
V1.24.22 Часы работы
V1.24.23 Слово 2 состояния приложения ID 89 «Status Word 2» (Слово состояния 2)
Различные состояния преобразователя частоты, полезные при работе
с функциями цифровых выходов ID-управления.
Часы в состоянии работы.
b1
Управление замкнутым контуром = TRUE
V1.24.24 Магнитный поток ротора ID1158 «Rotor Flux» (Магн. поток ротора)
Рассчитанный магнитный поток ротора.
V1.24.25 Код сбоя идентификации [Код сбоя идентификации] ID 98
Код сбоя идентификации:
1 = Смещение измерения тока
2 = Уровень тока идентификации
3 = Слишком долгое время разгона
4 = Не достигнута заданная частота идентификации
5 = Слишком низкий или слишком высокий ток намагничивания
6 = Кривая магнитного потока вне ожидаемых уровней
7 = СДПМ, нулевое положение энкодера
8 = Слишком низкий максимальный предел частоты
9 = СДПМ, нулевой импульс энкодера не обнаружен
10 = Тайм-аут идентификации Ls
11 = Ток идентификации Ls
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 26

APFIFF09 MARINE VACON®• 27
V1.24.26 Мощность двигателя, кВт ID79
Выходная мощность преобразователя частоты за вычетом резистивных
потерь в двигателе. =
3cos 3
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 27

28 • VACON® APFIFF09 MARINE
Бит
Описание
Значение = 0
Значение = 1
b0
ВЫКЛ
ВКЛ, сброс после отказа или b1 и b2
ВКЛ, при нормальной работе:
Поддерживать в состоянии TRUE
Аварийный останов посредством
изменения скорости
ВКЛ, при нормальной работе:
Поддерживать в состоянии TRUE
b3
ЗАПРОС ОСТАНОВА
ЗАПРОС ВРАЩЕНИЯ
Принудительное изменение
скорости до нуля
b5
Запретить изменение скорости
Разрешить изменение скорости,
b6
Форсировать задание до нуля
Разрешить изменение скорости,
b7
Нет действия
СБРОС ОТКАЗА (0 -> 1)
b8
Нет действия
Толчковый режим 1
b9
Нет действия
Толчковый режим 2
b10
Отключить управление по Profibus
Включить управление по Profibus
b11
Fieldbus, DIN1 = ВЫКЛ
Fieldbus, DIN1 = ВКЛ (сторожевой импульс)
b12
Fieldbus, DIN2 = ВЫКЛ
Fieldbus, DIN2 = ВКЛ
b13
Fieldbus, DIN3 = ВЫКЛ
Fieldbus, DIN3 = ВКЛ
b14
Fieldbus, DIN4 = ВЫКЛ
Fieldbus, DIN4 = ВКЛ
b15
Нет действия
Нет действия
Бит
Описание
Значение = 0
Значение = 1
b0
Не готов к включению
Готов к включению
b1
Не готов к работе
Готов к работе
b2
Нет вращения
Вращение
b3
Нет отказа
Отказ
b4
Останов выбегом активен
Останов выбегом неактивен
b5
Быстрый останов активен
Быстрый останов неактивен
b6
Нет запрета включения
Запрет включения
b7
Нет предупреждений
Предупреждение
b8
Ошибка скорости
Скорость соответствует заданию
b9
Нет запроса на управление FB
Управление FB активно
b10
Fвых. < Fмакс.
Fвых. > Fмакс.
b11
не используется
не используется
b12
не используется
не используется
b13
не используется
не используется
b14
не используется
не используется
b15
Fieldbus, DIN1 = ВЫКЛ
Fieldbus, DIN1 = ВКЛ (сторожевой импульс)
5.2.2 Контролируемые значения FieldBus
V1.25.1 Слово управления FB ID1160
Слово управления, используемое в режиме байпаса. См. P2.13.22 и описание
дополнительной платы ByPass.
Дополнительные сведения см. в главе 9 в подробных описаниях слов
состояния и управления.
b1 Аварийный останов с выбегом
b2
b4
V1.26.2 Задание скорости FB ID875
Задание скорости с шины Fieldbus
V1.25.2 Слово состояния FB ID65
Слово состояния типа ProfiDrive. Не то же самое, что слово состояния,
используемое платой Profibus в режиме ProfiDrive. Для использования
должно быть выбрано с помощью общего слова состояния (GSW) P2.14.19.
Дополнительные сведения см. в главе 9 в подробных описаниях слов
состояния и управления.
Разрешить изменение скорости,
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 28

APFIFF09 MARINE VACON®• 29
Слово отказа 1 ID1172
Бит
Отказ(ы)
B0
F1 Перегрузка по току, F31 IGBT, F41 IGBT
B1
F2 Перенапряжение
B2
F9 Пониженное напряжение
B3
F15 Опрокидывание двигателя
B4
F3 Короткое замыкание на землю
B5
F17 Недогрузка двигателя
B6
F14 Перегрев устройства
B7
F16 Температура двигателя, F29 Термистор,
B8
F10 Отказ входной линии
B9
F42 ИЛИ W42 Тормозной резистор
B10
B11
F52 Клавиатура или F52 Ошибка связи с ПК
B12
F53 Отказ FieldBus
B13
F59 Отказ системной шины
B14
F54 Отказ связи с гнездом
B15
F50 Отказ 4 мА
V1.25.4 Фактическая скорость FB ID865
Значение фактической скорости, отправленное по Fieldbus.
V1.25.3 Задание крутящего момента с FB % ID 1140
Значение задания крутящего момента с шины Fieldbus.
Управление по умолчанию для данных процесса 1 по шине FB.
V1.25.4 Масштабирование предела FB % ID 46
Входное значение ограничения масштабирования с шины Fieldbus.
Управление по умолчанию для данных процесса 2 по шине FB.
V1.25.5 Регулировка задания FB % ID 47
Значение регулирования задания с шины Fieldbus.
Управление по умолчанию для данных процесса 3 по шине FB.
V1.25.6 Аналоговый выход FB % ID 48
Значение Fieldbus для управления аналоговым выходом.
Управление по умолчанию для данных процесса 4 по шине FB.
V1.25.7 Ток двигателя по шине FB А ID 45
Ток двигателя (независимый от преобразователя частоты), с точностью до
одной десятой.
V1.25.8 Слово отказа 1 ID 1172
Сведения о различных отказах накапливаются в двух словах, которые
могут быть считаны через шину Fieldbus или с помощью программного
®
обеспечения VACON
NCDrive для ПК.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 29

30 • VACON® APFIFF09 MARINE
Слово отказа 2 ID1173
Бит
Отказ(ы)
B0
F11 Выходная фаза
B1
B2
F43 Отказ энкодера
B3
B4
B5 B6
F51 Внешний отказ
B7
F12 или W12 Тормозной прерыватель
B8 B9
F31 IGBT, F41 IGBT
B10
F58 Отказ тормоза
B11
F60 Неисправность охлаждения
B12
B13
F8 Системный отказ
B14
B15
Слово предупреждения 1 ID1174
Бит
Предупреждения
B0
W15 Опрокидывание двигателя
B1
W16 Перегрев двигателя, W29 Термистор
B2
W17 Недогрузка двигателя
B3
W10 Потеря входной фазы
B4
W11 Потеря выходной фазы
B6
B7
B8
W14 Перегрев устройства
B9
W50 Предупреждение 4 мА
B10
B11
B12
B13 B14
W58 Предупреждение тормоза
B15
W52 Клавиатура или W52 Cвязь с ПК
V1.25.9 Слово отказа 2 ID 1173
V1.25.10 Слово предупреждения 1 ID 1174
B5 W30 Safe Torque Off
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 30

APFIFF09 MARINE VACON®• 31
Дополнительное слово состояния ID1163
Отказ
Комментарий
b0
Зарезервировано
Зарезервировано
Управление посредством окна активно,
скорость вне окна
b2
Зарезервировано
Зарезервировано
b3
Зарезервировано
Зарезервировано
b4
Зарезервировано
Зарезервировано
b5
Зарезервировано
Зарезервировано
b6
Зарезервировано
Зарезервировано
b7
Зарезервировано
Зарезервировано
b8
Зарезервировано
Зарезервировано
b9
Зарезервировано
Зарезервировано
Прреобразователь частоты в режиме
управления крутящим моментом
b11
Зарезервировано
Зарезервировано
b12
Зарезервировано
Зарезервировано
b13
Зарезервировано
Зарезервировано
b14
Зарезервировано
Зарезервировано
b15
Зарезервировано
Зарезервировано
Дополнительное слово управления ID1161
FALSE
TRUE
b0
Зарезервировано
Зарезервировано
b1
Зарезервировано
Зарезервировано
b2
Зарезервировано
Зарезервировано
b3
Зарезервировано
Зарезервировано
b4
Зарезервировано
Зарезервировано
b5
Зарезервировано
Зарезервировано
b6
Зарезервировано
Зарезервировано
b7
Нет действия
Внешний тормоз принудительно открыт
b8
Зарезервировано
Зарезервировано
b9
Нет действия
Сброс положения энкодера
b10
Зарезервировано
Зарезервировано
b11
Зарезервировано
Зарезервировано
b12
Зарезервировано
Зарезервировано
b13
Зарезервировано
Зарезервировано
b14
Зарезервировано
Зарезервировано
b15
Зарезервировано
Зарезервировано
V1.25.11 Дополнительное слово состояния ID 1163
b1
b10 Зарезервировано
V1.25.12 Задание мощности с шины FB ID1703
В этот контрольный сигнал записывается задание мощности с шины Fieldbus.
V1.25.13 История отказов ID 37
Номер последнего активного отказа.
V1.25.14 Дополнительное слово управления ID 1161
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 31

32 • VACON® APFIFF09 MARINE
Слово состояния 1 на DIN
Слово состояния 2 на DIN
b0
DIN: A.1
DIN: C.5
b1
DIN: A.2
DIN: C.6
b2
DIN: A.3
DIN: D.1
b3
DIN: A.4
DIN: D.2
b4
DIN: A.5
DIN: D.3
b5
DIN: A.6
DIN: D.4
b6
DIN: B.1
DIN: D.5
b7
DIN: B.2
DIN: D.6
b8
DIN: B.3
DIN: E.1
b9
DIN: B.4
DIN: E.2
b10
DIN: B.5
DIN: E.3
b11
DIN: B.6
DIN: E.4
b12
DIN: C.1
DIN: E.5
b13
DIN: C.2
DIN: E.6
b14
DIN: C.3
b15
DIN: C.4
Слово состояния управления двигателем
FALSE
TRUE
b0
Не в состоянии готовности
Готовность
b1
Нет вращения
Вращение
b2
Направление по час. стрелке
Против час. стрелки
b3
Нет отказа
Отказ
b4
Нет предупреждений
Предупреждение
b5 На заданной скорости
b6 На нулевой скорости
b7 Магнитный поток готов
Ограничитель скорости по постоянной
времени активен
b9
Направление энкодера
Против час. стрелки
Быстрый останов при пониженном
напряжении
Торможение пост. током
выключено
b12
b13 Задержка перезапуска активна
b14
b15
V1.2515 Слово состояния цифр. входа ID 56
V1.25.16 Слово 2 состояния цифр. входа ID 57
V1.25.17 Состояние управления двигателем ID 64
Это значение также отправляется на шину Fieldbus в случае тех шин Fieldbus,
в которых не используется собственная конечная машина.
b8
b10
b11
V1.25.18 Предупреждение ID 74
Последнее активное предупреждение.
Торможение пост. током активно
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 32

APFIFF09 MARINE VACON®• 33
Слово отказа 10 ID1202
Отказ
Комментарий
b0
Ошибка скорости
F61
b1
b2
Отказ из-за перегрузки активен
F82
b3
Нет отказа двигателя
F83
b4
Отказ PT100
F56 и F65
b5
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
Слово предупреждения 10 ID1269
Бит
Предупреждения
B0
W61 Ошибка скорости
B1
W3 Короткое замыкание на землю
B2
W82 Перегрузка
B3
B4
W56 или W65 Предупреждение PT100
B5 B6
B7
B8
B9
B10 B11
B12
B13 B14
B15
V1.25.19 Обороты вала ID 1170
Информация об оборотах от инкрементного энкодера. Это значение
сбрасывается при отключении подачи питания 24 В пост. тока на
преобразователь частоты.
V1.25.20 Угол вала ID 1169
Информация об угле вала от инкрементного энкодера. Это значение
сбрасывается при отключении подачи питания 24 В пост. тока на
преобразователь частоты.
V1.25.21 Слово отказа 10 ID 1202
V1.25.22 Слово предупреждения 10 ID 1269
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 33

34 • VACON® APFIFF09 MARINE
Слово состояния системной шины ID1601
FALSE
TRUE
b0 ПЧ 1 в состоянии синхронизации
b1 ПЧ 1 готов
b2 Вращение ПЧ 1
b3 Отказ ПЧ 1
b4 ПЧ 2 в состоянии синхронизации
b5 ПЧ 2 готов
b6 Вращение ПЧ 2
b7 Отказ ПЧ 2
b8 ПЧ 3 в состоянии синхронизации
b9 ПЧ 3 готов
b10 Вращение ПЧ 3
b11 Отказ ПЧ 3
b12 ПЧ 4 в состоянии синхронизации
b13 ПЧ 4 готов
b14 Вращение ПЧ 4
b15 Отказ ПЧ 4
5.2.3 Ведущий/ведомый
Ниже перечислены сигналы в системе «Ведущий/ведомый».
Примечание для систем DriveSynch:
В системе DriveSynch надежными являются только сигналы контроля ведущего
преобразователя частоты.
На ведомых устройствах надежны только непосредственно измеряемые значения.
Даже выходная частота ведомого устройства в DriveSynch не является непосредственно
наблюдаемым параметром и поэтому может не отображать фактическую выходную
частоту, которой управляет ведущий преобразователь частоты в системе DriveSynch.
V1.26.1 Состояние системы SystemBus (SB) ID 1601
D1: состояние всех (макс. 4) преобразователей частоты в системной шине.
D2, D3 и D4: собственное состояние преобразователя частоты B0–B3.
V1.26.2 Суммарный ток А ID 80
D1: это значение — ток всей системы синхронизации преобразователя
частоты.
D2, D3 и D4: это значение — это суммарный ток, потребляемый блоком
питания самого преобразователя и частоты и всеми преобразователями
меньшим идентификационным номером на системной шине (отсчет идет
с
от ведущего преобразователя).
Если ведущее устройство D2: это значение — ток всей системы
синхронизации преобразователя частоты.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 34

APFIFF09 MARINE VACON®• 35
Команда управления ведущего ID93
Ведущий/ведомый
Ведущий/ведомый DriveSynch
b0
Состояние готовности
b1
Вращение разрешено
b2
Конечный запрос вращения
b3
Сброс отказа
Сброс отказа
b4
Вращение
Вращение
b5
Отказ
b6
Brake Control (Управление тормозом)
Brake Control (Управление тормозом)
b7
Сторожевой импульс
Освобождение задания управления
торможением
b9
Триггер регистратора данных
Триггер регистратора данных
Останов с изменением скорости
активен
b11
Задержка запуска активна
b12
b13
b14
Отключение диагностики SystemBus
Отключение диагностики SystemBus
b15
V1.26. 3 Слово управления ведущего ID93
Команда управления ведущего преобразователя частоты. Ведущий
преобразователь отправляет, ведомый принимает.
b8
b10
V1.26.4.1 Ток двигателя D1 А ID 1616
D1, D2, D3 и D4: это значение — ток собственного блока питания
преобразователя частоты.
V1.26.4.2 Ток двигателя D2 А ID 1605
D1: это значение — ток блока питания преобразователя частоты номер два.
D2, D3 и D4: не обновлено.
V1.26.4.3 Ток двигателя D3 А ID 1606
D1: это значение — ток блока питания преобразователя частоты номер три.
D2, D3 и D4: не обновлено.
V1.26.4.4 Ток двигателя D4 А ID 1607
D1: это значение — ток блока питания привода номер четыре.
D2, D3 и D4: не обновлено.
V1.26.5.1 Слово состояния D1 ID 1615
D1: слово состояния для D1 без B15
D2, D3 и D4: слово состояния, отправленное на D1.
V1.26.5.2 Слово состояния D2 ID 1602
D1: слово состояния D2
D2, D3 и D4: не обновлено.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 35

36 • VACON® APFIFF09 MARINE
Слово состояния ведомого преобразователя частоты
FALSE
TRUE
b0
Магнитный поток не готов
Магнитный поток готов (> 90 %)
b1
Не в состоянии готовности
Готовность
b2
Нет вращения
Вращение
b3
Нет отказа
Отказ
b4
Переключатель заряда разомкнут
Переключатель заряда замкнут
b5
Предел частоты тормоза ВКЛ
Предел частоты тормоза ВЫКЛ
b6
Вращение запрещено
Вращение разрешено
b7
Нет предупреждений
Предупреждение
b8 Ведомый
b9 Ведущий
b10 DriveSynch в состоянии синхронизации
b11
Торможение пост. током отсутствует
Торможение пост. током активно
b12
Нет запроса вращения
Запрос вращения
b13
Нет активных ограничителей
Ограничитель активен
b14
Управление внешним тормозом ВЫКЛ
Управление внешним тормозом ВКЛ
b15 Тактовый импульс
V1.26.5.3 Слово состояния D3 ID 1603
D1: слово состояния D3
D2, D3 и D4: не обновлено.
V1.26.5.4 Слово состояния D4 ID 1604
D1: слово состояния D4
D2, D3 и D4: не обновлено.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 36

APFIFF09 MARINE VACON®• 37
5.2.4 Контроль ПИ-управления
Этот ПИ-регулятор использует идентификационные номера для входного и выходного
сигналов. Подробнее см. в главе «ПИ-управление».
V1.27.1 Задание ПИ-регулятора ID20
Используемое задание ПИ-управления, выбирается по идентификационному
номеру.
V1.27.2 Фактическое значение ПИ-регулятора ID21
Фактическое значение ПИ-регулятора. Фактический вход выбирается по
идентификационному номеру.
V1.27.3 Выход ПИ-регулятора ID23
Выход ПИ-регулятора до масштабирования. Это значение использует
верхнее (PI Out High) и нижнее (PI Out Low) значения ПИ-регулирования
в качестве ограничений.
V1.27.4 Выход ПИ-регулятора, масштабированный ID1807
Масштабируемый выход ПИ-регулятора.
Этот параметр используется для подключения по идентификатору. Функция
масштабирования используется для масштабирования значения в
соответствии с типом подключаемых сигналов. Например, когда выход
соединяется с ограничением крутящего момента, фактическое значение
должно быть в диапазоне -1000 ...+1000 (соответствует -100,0 %..+100,0 %),
но верхнее (PI Out High) и нижнее (PI Out Low) значения ПИ-регулирования
могут быть в диапазоне -30000...+30000, что обеспечивает лучшую точность
управления ПИ-регулятора.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 37

38 • VACON® APFIFF09 MARINE
5.2.5 Цепь обработки частоты
V1.28.1 Задание частоты 1 Гц 1126
Задание частоты до разделения скорости. Разделение скорости также
используется для управления заданием направления.
V1.28.2 Задание частоты 2 Гц 1126
Задание частоты после разделения частоты и регулировки задания,
но до интерполятора.
V1.28.3 Задание частоты Гц 25
Задание частоты после интерполятора, но до фильтрации второго порядка.
V1.28.4 Задание частоты, фактическое Гц 1128
Задание частоты для управления изменением скорости.
V1.28.5 Выход управления изменением частоты Гц 1129
Выход управления изменением скорости.
V1.28.6 Задание частоты, конечное Гц 1131
Окончательное задание, подаваемое на регулятор скорости. После
генератора изменения скорости и функции ступеней скорости, используемой
для управления скоростью в замкнутых контурах вместе с частотой от
энкодера 1.
V1.28.7 Частота энкодера 1 Гц 1164
Частота энкодера, контролируемая непосредственно на энкодере.
5.2.6 Цепь крутящего момента
V1.29.1 Задание момента % ID 18
Значение задания крутящего момента до разделения нагрузки.
V1.29.2 Задание крутящего момента 3 % 1144
Значение задания крутящего момента после разделения нагрузки, но до шага
крутящего момента.
V1.29.3 Задание крутящего момента, конечное % 1145
Окончательное задание крутящего момента в цепочке задания крутящего
момента перед компенсацией ускорения и выходом регулятора скорости.
V1.29.4 Выход регулирования скорости % 1134
Выход регулятора скорости в замкнутом контуре.
V1.29.5 Задание крутящего момента, фактическое % 1180
Задание конечного крутящего момента от регулятора скорости и регулятора
крутящего момента. Также включает коэффициенты шага крутящего момента
и компенсации ускорения.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 38

APFIFF09 MARINE VACON®• 39
5.2.7 Счетчики
Приведенные ниже значения счетчиков не отображаются в качестве стандартных
сигналов контроля, но доступны по идентификационным номерам через шину Fieldbus.
5.2.7.1 Счетчик времени включенного питания
Этот таймер ведет отсчет, когда на плату управления подается питание (то есть работает
только при наличии напряжения 24 В пост. тока на плате питания).
ID10 PowerOnTimeTripCounter (СчетчВремВключенногоСост)
Сбрасываемый счетчик длительности включенного состояния.
Значение UINT. Доступен только для ЧТЕНИЯ.
Используйте ID1050 для определения формата.
Используйте ID1051 для сброса значения
ID1050 PowerOnTripCounterUnit (ЕдИзмСчетчВремВключенногоСост)
Считывание или выбор формата счетчика времени включенного питания.
Значение USINT. Доступен для ЗАПИСИ.
1 = 1 мс
2 = 10 мс
3 = 100 мс
4 = 1 с
5 = 1 мин
6 = 1 ч (по умолчанию)
7 = 1 сутки
ID1051 ResetOnTimeTripCounter (СбросСчетчВклПитания)
Сброс счетчика отключения питания, для сброса счетчика требуется
нарастающий фронт.
Значение BOOL. Доступен для ЗАПИСИ.
Введите значение 1 формата INT для сброса, если используются данные
процесса.
5.2.7.2 Мониторинг счетчика электроэнергии
ID11 EnergyMeter (СчетчЭлектроэнергии)
Считайте ID80 и ID81, чтобы просмотреть используемый формат.
Значение UINT. Доступен только для ЧТЕНИЯ.
ID82 EnergyMeterFormat (ФорматСчетчЭлектроэнергии)
Место десятичной точки в значении
60 = Макс. 6 цифр, 0 цифр в дробной части
61 = Макс. 6 цифр, 1 цифра в дробной части
62 = Макс. 6 цифр, 2 цифры в дробной части
Значение UINT. Доступен только для ЧТЕНИЯ.
Примечание. Большинство стандартных приложений используют для этой
переменной идентификатор
ID80.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 39

40 • VACON® APFIFF09 MARINE
ID81 EnergyMeterUnit (ЕдИзмСчетчиЭлектроэнергии)
Единица измерения для счетчика электроэнергии
Значение USINT. Доступен только для ЧТЕНИЯ.
1 = кВт·ч
2 = МВт·ч
3 = ГВт·ч
4 = ТВт·ч
5.2.7.3 Контроль счетчика отключений электроэнергии
ID12 EnergytripCounter (СчетчОтключЭлектроэнергии)
Счетчик отключений электроэнергии, для определения формата используйте
ID1052.
Значение UINT. Доступен только для ЧТЕНИЯ.
Максимальное значение составляет 65 535, после этого значения счетчик
сбрасывается в ноль, и отсчет начинается заново.
ID1052 EnergyTripCounterUnit (ЕдИзмСчетчОтключЭлектроэнергии)
Доступен для ЗАПИСИ. Значение единицы измерения можно изменить через
шину передачи данных. Значение USINT.
1 = 0,01 кВт·ч
2 = 0,1 кВт·ч
3 = 1 кВт·ч
4 = 10 кВт·ч
5 = 100 кВт·ч
6 = 1 МВт·ч
7 = 10 МВт·ч
8 = 100 МВт·ч
9 = 1 ГВт·ч
10 = 10 ГВт·ч
ID1053 ResetMWhTripCounter (СбросСчетчОтключений)
Cброс счетчика отключений электроэнергии, для сброса счетчика требуется
нарастающий фронт.
Значение BOOL. Введите значение 1 формата INT для сброса, если
используются данные процесса.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 40

APFIFF09 MARINE VACON®• 41
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Польз
оват.
знач.
Ид.
Примечание
P2.1.1
Минимальная частота
0,00
P2.1.2
Гц
0,00
101
ПРИМЕЧАНИЕ. Если f
частоты.
Проверьте значение по
обмоток (треугольник/звезда)
Проверьте значение по
двигателя.
Номинальная скорость
Значение по умолчанию
типоразмера.
Проверьте значение по
двигателя.
Проверьте значение по
двигателя.
Проверьте значение по
двигателя.
0,00 А = Значение
двигателя.
0 = Нет действия
1
2
3
4
5
6
7
ПРИМЕЧАНИЕ.
0 = Асинхронный двигатель
1
2
3
4
двигатель
6. ПРИКЛАДНАЯ ПРОГРАММА MARINE — ПЕРЕЧЕНЬ ПАРАМЕТРОВ
6.1 Базовые параметры
P2.1.2 Максимальная частота P2.1.1 320,00 Гц 50,00 102
P2.1.3
P2.1.4
P2.1.5
P2.1.6
P2.1.7 cosϕ двигателя 0,30 1,00 0,85 120
P2.1.8
P2.1.9 Ток намагничивания 0,00 100,00 А 0,00
Номинальное
напряжение двигателя
Ном. частота
двигателя
двигателя
Номинальный ток
двигателя
Номинальная
мощность двигателя
180 690 В
8,00 320,00 Гц 50,00 111
5 20 000 об/мин 1440 112
0,1 x IH 2 x IH А IH
0,0 3200,0 кВт 0,0
NX2: 230 В
NX5: 400 В
NX6: 690 В
110
113
116
612
больше синхронной частоты
max
двигателя, проверьте
допустима ли такая частота для
двигателя и преобразователя
паспортной табличке
двигателя. Обратите внимание
также на схему соединения
паспортной табличке
применимо для 4-полюсного
двигателя и преобразователя
частоты соответствующего
паспортной табличке
паспортной табличке
паспортной табличке
рассчитывается исходя из
данных с паспортной таблички
P2.1.10 Идентификация 0 10 0
P2.1.11 Тип двигателя 0 4 0
Таблица 6–1. Базовые параметры G2.1
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
= Идентификация без
вращения
= Идентификация
с вращением
= Идентификация
с энкодером
= Все методы идентификации
631
650
= Абсолютный энкодер,
заблокированный ротор
= U/f и магн. поток
= Идентификация DTC
Перед
идентификацией установите
в качестве режима управления
двигателем режим
регулирования частоты!
= Синхронный двигатель
с постоянными магнитами
= Синхронный двигатель с
независимым возбуждением
(Sep.Ex SM)
= Зарезервировано
= Синхронный реактивный
Page 41

42 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Польз
оват.
знач.
Ид.
Примечание
0 = AI1
1
2
3
4
5
6
7
8
9
10
11
12 =
13 =
14
15
16 = Энкодер 2
0 = AI1
1
2
3
4
5
6
7
8
9 = Шина передачи данных
Задание управления
с шины Fieldbus
I/O Reference 2
(Задание вх./вых. 2)
Распределение
скорости
Распределение
нагрузки
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользо
ват.
знач.
Ид.
Примечание
Задание скорости
Предустановленная
скорость 1
Многоступенчатая
скорость 1
Предустановленная
скорость 2
Многоступенчатая
скорость 2
Предустановленная
скорость 3
Многоступенчатая
скорость 3
Предустановленная
скорость 4
Многоступенчатая
скорость 4
Предустановленная
скорость 5
Многоступенчатая
скорость 5
Предустановленная
скорость 6
Предустановленная
скорость 7
Многоступенчатая
скорость 7
Задание 1 толчкового
режима
Задание 2 толчкового
режима
Настройка скорости
VACON® NCDrive
6.2 Обработка задания
6.2.1 Базовые настройки
= AI2
= AI1 + AI2
= AI1 - AI2
= AI2 - AI1
= AI1 x AI2
= Джойстик, AI1
P2.2.1
P2.2.2
I/O Reference (Задание
вх./вых.)
Селектор задания
с клавиатуры
0 16 0 117
0 9 8 121
= Джойстик, AI2
= Клавиатура
= Шина передачи данных
= Потенциометр двигателя
= Минимум AI1, AI2
Максимум AI1, AI2
Макс. частота
= Выбор AВХ1/AВХ2
= Энкодер 1
= AI2
= AI1 + AI2
= AI1 - AI2
= AI2 - AI1
= AI1 x AI2
= Джойстик, AI1
= Джойстик, AI2
= Клавиатура
P2.2.3
P2.2.4
P2.2.5
P2.2.6
6.2.2 Постоянное задание
P2.2.7.1
P2.2.7.2
P2.2.7.3
P2.2.7.4
P2.2.7.5
P2.2.7.6
P2.2.7.7
P2.2.7.8
P2.2.7.9
P2.2.7.10
P2.2.7.11 Ступень скорости -50,0 50,0 0,0 0,0
толчкового режима
0 9 9 122 См. пар. 2.2.2
0 16 1 131 См. ID117 и ID422
-300,00 300,00 % 100,00
0,0 500,0 % 100,0
0,00 320,00 Гц 5,00 124
0,00 320,00 Гц 10,00 105
0,00 320,00 Гц 15,00 106
0,00 320,00 Гц 20,00 126
0,00 320,00 Гц 25,00 127
0,00 320,00 Гц 30,00 128
0,00 320,00 Гц 40,00 129 Многоступ. скорость 6
0,00 320,00 Гц 50,00 130
-320,00 320,00 Гц 2,00
-320,00 320,00 Гц -2,00
1241
1248
1239
1240
1252
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 42

APFIFF09 MARINE VACON®• 43
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Польз
оват.
знач.
Ид.
Примечание
Масштабирование от 0 до
0
1
2
3
4
5 =
предела FB, ID46
Максимальное задание
мощности
Скорость нарастания
задания мощности
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Польз
оват.
знач.
Ид.
Примечание
0 = Не используется
1
2
3
4
5
6
7
8
9
10 = Задание мощности
Макс. задание
крутящего момента
Мин. задание крутящего
момента
Время фильтрации
момента
Зона
задания момента
0 = Регулирование скорости
1 =
2
3
4 =
5 = Окно
Отрицательная граница
окна
Положительная граница
окна
Выкл. отриц. границы
окна
P2.2.9.10
Выкл. полож. окна
0,00
P2.10.12
Гц
0,00
1306
Шаг крутящего
момента
6.2.3 Задание мощности
IDxxxx
= Не используется
P2.2.8.1 Задание мощности 0 5 0
1620
= AI1
= AI2
= AI3
= AI4
Масштабирование
P2.2.8.2
P2.2.8.3
0,0 300,0 % 120,0
0 10000 %/s 100
Таблица 6–2. Выбор входного сигнала задания мощности, G2.2.8
6.2.4 Torque Reference (Задание момента)
P2.2.9.1
P2.2.9.2
Выбор задания
крутящего момента
0 8 0
-300,0 300,0 % 100
1621
1622
= AI1
= AI2
= AI3
= AI4
= Джойстик AI1 (от -10 до
10 В)
= Джойстик AI2 (от -10 до
641
10 В)
= Задание крутящего
момента с клавиатуры, R3.5
= Задание крутящего
момента с FB
= Крутящий момент
ведущего
642
P2.2.9.3
P2.2.9.4
P2.2.9.5
P2.2.9.6
P2.2.9.7
P2.2.9.8
P2.2.9.9
P2.2.9.11
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
задания крутящего
нечувствительности
Выбор крутящего
момента
-300,0 300,0 % 0,0
0 32000 мс 0
0,0 300,0 % 0,00
0 5 2
0,00 50,00 Гц 2,00
0,00 50,00 Гц 2,00
0,00 P2.10.11 Гц 0,00
-100,0 100,0 0,0 0,0
643
1244
1246
1278
1305
1304
1307
1253
Макс. предел частоты
= Выход изменения скорости
= Мин.
Макс.
Page 43

44 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Минимальная частота
разомкнутом контуре
Регулятор крутящего
момента в разомкнутом
Усиление П-звена
Регулятор крутящего
момента в разомкнутом
Усиление И-звена
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Нижняя граница
частотного диапазона 1
Верхняя граница
частотного диапазона 1
Множитель текущего
частот.
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Скорость изменения
значения потенциометра
двигателя
0 = Нет сброса
1
2
3 = Запрос останова; Fвых.
0 = Не копировать
1
2
частоту
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = не используется
1
2
3
4
5 = шина Fieldbus
Регулировка
значений
Регулировка
значений
6.2.4.1 Настройки задания крутящего момента в разомкнутом контуре
P2.2.9.11.1
P2.2.9.11.2
P2.2.9.11.3
при управлении
моментом в
контуре
контуре
0,00 50,00 Гц 3,00
0 32000 150
0 32000 10
6.2.5 Параметры запрещения частоты
P2.2.10.1
P2.2.10.2
P2.2.10.3
Таблица 6–3. Запрещенные частоты (G2.5)
запрещенного
запрещенного
Коэф. времени изм.
скорости
-1,00 320,00 Гц 0,00
0,00 320,00 Гц 0,00
0,1 10,0 x 1,0
6.2.6 Потенциометр двигателя
636
639
640
509 0 = Не используется
510 0 = Не используется
выбранного времени
518
изменения скорости между
границами запрещенных
P2.2.11.1
P2.2.11.2
P2.2.11.3
Сброс памяти задания
частоты потенциометра
двигателя
Копирование задания
потенциометра
двигателя
0,10 2000,00 Гц/с 1,00 331
0 3 1 367
0 2 0 366
Таблица 6–4. Потенциометр двигателя (G2.5)
6.2.7 Регулировка задания
P2.2.12.1 Регулировка входа 0 5 0 493
P2.2.12.2
P2.2.12.3
минимальных
максимальных
0,0 100,0 % 0,0 494
0,0 100,0 % 0,0 495
Скорость изменения значения
потенциометра двигателя
= Сброс в состоянии
останова
= Сброс при отключении
питания
= Копировать задание
= Копировать выходную
= AI1
= AI2
= AI3
= AI4
Регулирование предела для
уменьшения задания
Регулирование предела для
увеличения задания
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 44

APFIFF09 MARINE VACON®• 45
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Изменение скорости
1 = Пуск на ходу
0 = Выбег
1 = Изменение скорости
P2.3.3
Время разгона 1
0,2
3270,0 с 3,0
103
От 0 Гц до макс. частоты
P2.3.4
Время замедления 1
0,2
3270,0 с 3,0
104
От макс. частоты до 0 Гц
Форма кривой
изменения скорости 1
0 = Линейная
>0 = S-образная
P2.3.6
Время разгона 2
0,2
3270,0 с 10,0
502 P2.3.7
Время замедления 2
0,2
3270,0 с 10,0
503
Форма кривой
изменения скорости 2
0 = Линейная
>0 = S-образная
Inching Ramp (Изм.
режиме)
Масштабирование активного
0
1
2
3
4
5 = Шина Fieldbus
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Режим быстрого
вход/выход
0
1
Время замедления
останова
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Изменение
пропустить S2
Частота энкодера
контуре
Пост. времени
изменении скорости
6.3 Управление изменением
6.3.1 Базовые настройки
P2.3.1 Функция пуска 0 1 0
P2.3.2 Функция останова 0 1 0
P2.3.5
P2.3.8
P2.3.9
P2.3.10
скор. при толчковом
Сокращение времени
разгона/замедления
0 100 % 2
0 100 % 4
0,01 320,00 с 1,00
0 5 0
6.3.2 Быстрый останов
505
506
500
501
1257
изменения скорости от
100 до 10 %.
401
= Не используется
= AI1
= AI2
= AI3
= AI4
P2.3.11.1
P2.3.11.2
останова через
для быстрого
0 1 0
0,1 3200,0 с 10,0
6.3.3 Опции управления изменением скорости
P2.3.12.1
P2.3.12.2
P2.3.12.3
скорости:
ведомого при
изменении скорости
в разомкнутом
интерполятора
входа при
0 1 0
0 1 0
0 200 мс 20
1276
1256
1900
1902
1184
= Выбег
= Изменение скорости
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 45

46 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Сигнал пуска 1
DIN1)
Сигнал пуска 2
0
1
2
3
4
5
6
7
8
Пуск вперед
Импульс пуска
Пуск в реверсном направлении
Импульс останова при реверсе
Код
Параметр
Мин.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
P2.4.2.1
Сигнал пуска 1
0,1
A.1
403
Вперед, см. ID300
P2.4.2.2
Сигнал пуска 2
0,1
A.2
404
Реверс. См. ID300
P2.4.2.3
Вращение разрешено
0,1
0,2
407
Пуск двигателя разрешен (замкн. контур)
Направление вперед (разомкн. контур)
Направление реверс (замкн. контур)
См. предустановленные скорости в группе
P2.4.2.6
Предустановленная скорость 2
0,1
0,1
420
P2.4.2.7
Предустановленная скорость 3
0,1
0,1
421
Задание потенциометра двигателя
ВНИЗ
Задание потенциометра двигателя
уменьшается (замкн. контур)
Задание потенциометра двигателя
ВВЕРХ
Задание потенциометра двигателя
увеличивается (замкн. контур)
P2.4.2.10
Сброс отказа
0,1
0,1
414
Сброс всех отказов (замкн. контур)
Индикация внешнего отказа (замкн.
контур)
Индикация внешнего отказа (замкн.
контур)
Время разгона/замедления 1 (разомкн.
контур)
Запрет разгона/замедления (замкн.
контур)
Торможение пост. током включено (замкн.
Скорость толчкового режима, выбранная
для задания частоты (замкн. контур)
Выбор задания 1/2 для
входов/выходов
Выбор задания для входов/выходов:
14 ID117
Управление с клеммы
входа/выхода
Перевод источника сигналов управления
на клемму входа/выхода (замкн. контур)
Перевод источника сигналов управления
на клавиатуру (замкн. контур)
Перевод источника сигналов управления
на шину Fieldbus (замкн. контур)
Выбор набора параметров 1/набора
параметров 2
Замкнутый контур = Используется набор 2
Разомкнутый контур = Используется набор 1
Замкнутый контур = Используется режим 2
См. пар. 2.6.1, 2.6.12
Подтверждение внешнего
Сигнал слежения от механического
Используется в устройствах с жидкостным
охлаждением
* = Для пуска требуется нарастающий фронт
6.4 Входные сигналы
6.4.1 Базовые настройки
P2.4.1.1 Выбор логики
пуска/останова
0 8 5 300
Таблица 6–5. Входные сигналы: базовые настройки, G2.2.1
6.4.2 Цифровые входы
P2.4.2.4 Reverse (Реверс) 0,1 0,1 412
P2.4.2.5 Предустановленная скорость 1 0,1 0,1 419
P2.4.2.8
0,1 0,1 417
(По умолчанию:
Пуск/останов
Пуск/останов
Импульс пуска
Пуск
Пуск вперед*
Пуск*/останов
Пуск*/останов
(По умолчанию: DIN2)
Реверс
Вращение разрешено
Импульс останова
Mot.Pot UP
Пуск в реверсном направлении*
Reverse (Реверс)
Вращение разрешено
базовых параметров G2.1
P2.4.2.9
P2.4.2.11 Внешний отказ (замкн. контур) 0,1 0,1 405
P2.4.2.12 Внешний отказ (размыкание) 0,1 0,2 406
P2.4.2.13 Выбор времени разгона/замедления 0,1 0,1 408
P2.4.2.14 Запрет разгона/замедления 0,1 0,1 415
P2.4.2.15 Торможение постоянным током 0,1 0,1 416
P2.4.2.16 Скорость толчкового режима 0,1 0,1 413
P2.4.2.17
P2.4.2.18
P2.4.2.19 Управление с клавиатуры 0,1 0,1 410
P2.4.2.20 Управление с шины Fieldbus 0,1 0,1 411
P2.4.2.21
P2.4.2.22
Режим управления двигателем
1/2
0,1 0,1 418
0,1 0,1 422
0,1 0,1 409
0,1 0,1 496
0,1 0,1 164
контур)
Время разгона/замедления 2 (замкн.
контур)
Разомкнутый контур = Используется
режим 1
P2.4.2.23
P2.4.2.24 Монитор охлаждения 0,1 0,2 750
тормоза
0,1 0,2 1210
тормоза
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 46

APFIFF09 MARINE VACON®• 47
Enable Inching (Разрешить
толчковый режим)
Задание 1 толчкового режима (по
Этот
параметр запускает преобразователь
частоты.
Задание 2 толчкового режима (по
Этот
параметр запускает преобразователь
частоты.
P2.4.2.28
Предел 1 мощности двигателя
0,1
0,1
1500
Активирует предел 1 мощности
P2.4.2.29
Предел 2 мощности двигателя
0,1
0,1
1501
Активирует предел 2 мощности
Активирует второй предел частоты
P2.2.7.31 2-й предел частоты
P2.4.2.31
Предел 1 мощности генератора
0,1
0,1
1506
Активирует предел 1 мощности генератора
P2.4.2.32
Предел 2 мощности генератора
0,1
0,1
1507
Активирует предел 2 мощности генератора
P2.4.2.33
Сброс положения
0,1
0,1
1090
MF Mode 2 (Режим 2
P2.4.2.35
Аварийный останов
0,1
0,2
1213
Предел 1 крутящего момента
двигателя
Предел 1 крутящего момента
генератора
P2.4.2.38
Активация ПИД
0,1
0,1
1804
Сохраняет активный набор в выбранный
набор параметров
Изменяет сигналы пуска между
источниками A и B.
P2.4.2.41
Сигнал пуска 1B
0,1
A.1
403
Вперед, См. ID300
P2.4.2.42
Сигнал пуска 2B
0,1
A.2
404
Реверс. См. ID300
P2.4.2.43
Разрешение запроса пуска
0,1
0,2
1896
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
P2.4.3.1
Выбор сигнала AI1
0,1
E.10 A.1
377
Гнездо . Вход платы №
Пост. времени фильтра
задания AI1
0 = 0…100 %*
1
2
3
диапазон*
Минимальная
установка AI1
Диапазон пользователя:
входного сигнала
Максимальная
Диапазон пользователя:
Выбор частоты,
сигнала задания.
Выбор частоты,
сигнала задания.
Зона нечувствительности
джойстика AI1
Зона нечувствительности для
входа джойстика
Предел для спящего
режима AI1
Преобразователь частоты
предела.
Нажимайте enter (ввод) в
смещение
P2.4.3.12
Время фильтраl AI1
0,000
32,000 с 0,000
1228
*Не забудьте правильно разместить перемычки на
P2.4.2.25
P2.4.2.26 Толчковый режим 1 0,1 0,1 531
P2.4.2.27 Толчковый режим 2 0,1 0,1 532
P2.4.2.30 2-й предел частоты 0,1 0,1 1511
P2.4.2.34
P2.4.2.36
P2.4.2.37
P2.4.2.39 Сохранение набора параметров 0,1 0,1 1753
P2.4.2.40 Источник пуска A/B 0,1 0,1 425
ведущего/ведомого)
0,1 0,1 532 Разрешает функцию толчкового режима
0,1 0,1 1092
0,1 0,1 1624
0,1 0,1 1626
умолчанию вперед 2 Гц, см. P2.4.16).
умолчанию реверс 2 Гц, см. P2.4.17).
Таблица 6–6. Сигналы на цифровом входе, G2.2.4
6.4.3 Аналог. вход 1
P2.4.3.2
P2.4.3.3 Диапазон сигнала AI1 0 3 0
P2.4.3.4
P2.4.3.5
P2.4.3.6
P2.4.3.7
P2.4.3.8
P2.4.3.9
P2.4.3.10
пользовательская
пользовательская
установка AI1
Масштабирование
задания AI1, мин.
значение
Масштабирование
задания AI1, макс.
значение
Задержка перехода в
спящийe режим AI1
0,000 32,000 с 0,000
-160,00 160,00 % 0,00
-160,00 160,00 % 100,00
0,00 320,00 Гц 0,00
0,00 320,00 Гц 0,00
0,00 20,00 % 0,00
0,00 100,00 % 0,00
0,00 320,00 с 0,00
324 0 = Нет фильтрации
= 20…100 % * отказ 4 мА
320
= -10 В…+10 В*
= Пользовательский
321
минимальный уровень
322
максимальный уровень
входного сигнала
соответствующей
303
минимальному уровню
соответствующей
304
максимальному уровню
384
385
останавливается, если в
течение этого времени
уровень на входе ниже этого
386
P2.4.3.11 Смещение джойстика AI1 -100,00 100,00 % 0,00
Таблица 6–7. Параметры аналогового входа 1, G2.2.2
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
165
течение 1 с, чтобы установить
блоке X2. См. руководство по эксплуатации VACON® NX
Page 47
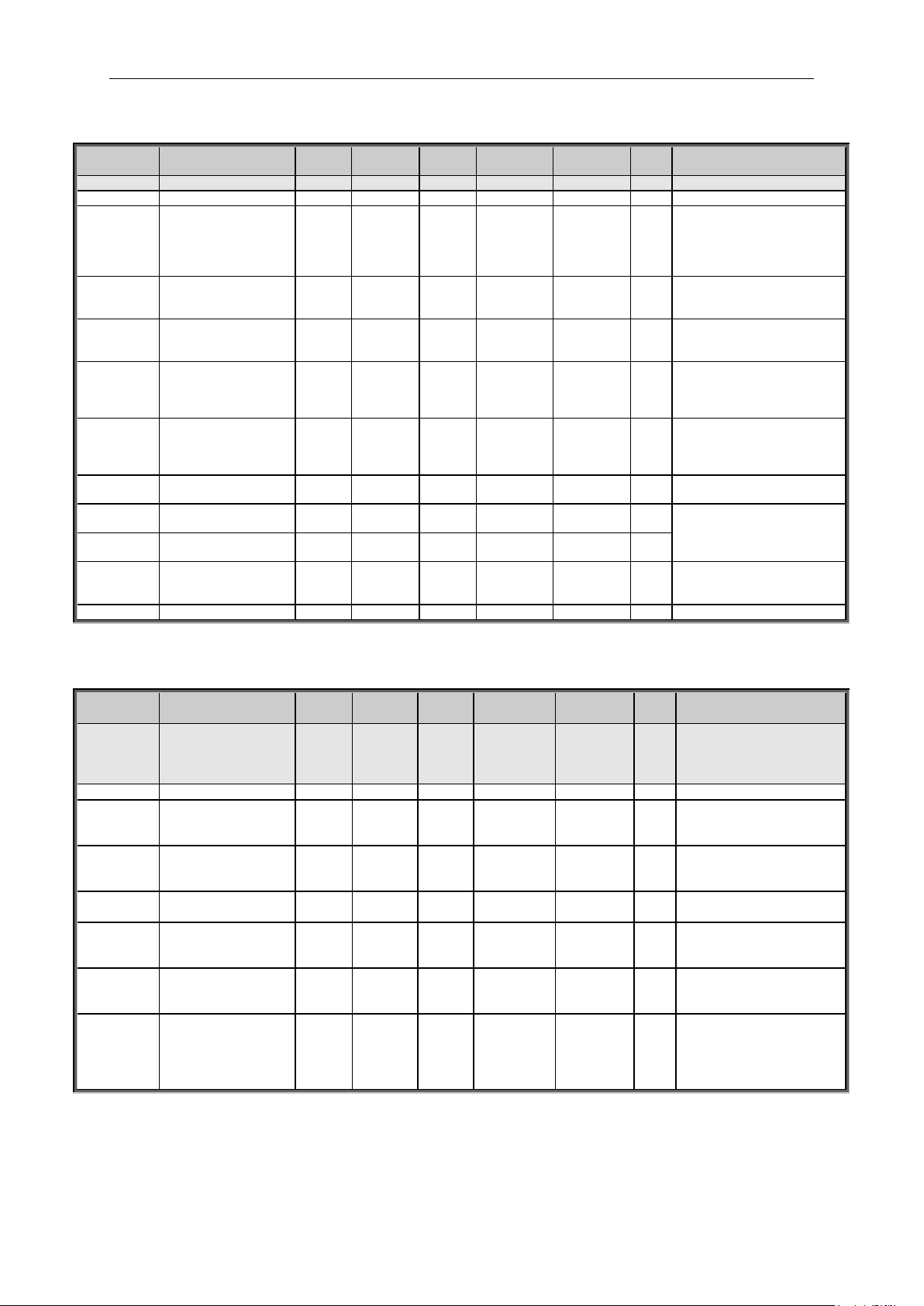
48 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
Пользоват.
знач.
Ид.
Примечание
P2.4.4.1
Выбор сигнала AI2
0,1
E.10 A.2
388
Гнездо . Вход платы №
P2.4.4.2
Время фильтра AI2
0,000
32,000 с 0,000
329
0 = Нет фильтрации
0 = 0…100 %*
1
2
3
диапазон*
Минимальная
установка AI2
Диапазон пользователя:
входного сигнала
Максимальная
Диапазон пользователя:
Выбор частоты,
сигнала задания.
Выбор частоты,
сигнала задания.
Зона нечувствительности
джойстика AI2
Зона нечувствительности для
входа джойстика
Предел для спящего
режима AI2
Преобразователь частоты
Задержка перехода
Нажимайте enter (ввод) в
смещение
P2.4.4.12
Время фильтра AI2
0,000
32,000 с 0,000
1232
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Гнездо . Вход платы №
шины FB
P2.4.5.2
Время фильтрации AI3
0,000
32,000 с 0,000
142
0 = Нет фильтрации
Минимальная
установка AI3
Максимальная
установка AI3
0 = Не инвертируется
1 = Инвертируется
Масштабирование
значение
Выбор значения,
сигналу мин. задания.
Масштабирование
значение
Выбор значения,
сигналу макс. задания.
Выберите параметр,
номеру.
**Не забудьте правильно разместить перемычки на
6.4.4 Аналог. вход 2
P2.4.4.3 Диапазон сигнала AI2 0 3 1
P2.4.4.4
P2.4.4.5
P2.4.4.6
P2.4.4.7
P2.4.4.8
P2.4.4.9
P2.4.4.10
P2.4.4.11 Смещение джойстика AI2 -100,00 100,00 % 0,00
пользовательская
пользовательская
установка AI2
Масштаб задания AI2,
мин. значение
Масштабирование
задания AI2, макс.
значение
в спящий режим AI2
-160,00 160,00 % 0,00
-160,00 160,00 % 100,00
0,00 320,00 Гц 0,00
0,00 320,00 Гц 0,00
0,00 20,00 % 0,00 395
0,00 100,00 % 0,00 396
0,00 320,00 с 0,00 397
Таблица 6–8. Параметры аналогового входа 2, G2.2.3
6.4.5 Аналог. вход 3
325
326
327
393
394
166
= 20…100 % * отказ 4 мА
= -10 В…+10 В*
= Пользовательский
минимальный уровень
максимальный уровень
входного сигнала
соответствующей
минимальному уровню
соответствующей
максимальному уровню
останавливается, если в
течение этого времени уровень
на входе ниже этого предела.
течение 1 с, чтобы установить
P2.4.5.1 Выбор сигнала AI3 0,1 E.10 0,1
P2.4.5.3
P2.4.5.4
пользовательская
пользовательская
-160,00 160,00 % 0,00
-160,00 160,00 % 100,00
P2.4.5.5 Инверсия сигнала AI3 0 1 0
P2.4.5.6
P2.4.5.7
P2.4.5.8
задания AI3, мин.
задания AI3, макс.
Идентификатор
управления AI3
-32000 32000 0
-32000 32000 0
0 10000 0
Таблица 6-9. Параметры аналогового входа 3, G2.2.4
блоке X2. См. руководство по эксплуатации VACON® NX
При значении 0.1 ID27
141
может управляться с
Пользовательский диапазон
144
активен всегда. См. ID326
Пользовательский диапазон
145
активен всегда. См. ID327
151
1037
соответствующего
1038
соответствующего
который нужно
1509
контролировать по
идентификационному
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 48

APFIFF09 MARINE VACON®• 49
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Гнездо . Вход платы №
шины FB
Постоянная времени
фильтра AI4
Минимальная c
установка AI4
Пользовательский
См. ID326
Максимальная
установка AI4
Пользовательский
См. ID327
0 = Не инвертируется
1 = Инвертируется
Масштабирование
значение
Выбор значения,
сигналу мин. задания.
Масштабирование
значение
Выбор значения,
сигналу макс. задания.
Выберите параметр,
номеру.
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Управление инверсией
входного сигнала
6.4.6 Аналог. вход 4
P2.4.6.1 Выбор сигнала AI4 0,1 E.10 0,1
P2.4.6.2
P2.4.6.3
P2.4.6.4
P2.4.6.5 Инверсия сигнала AI4 0 1 0
P2.4.6.6
P2.4.6.7
P2.4.6.8
пользовательская
пользовательская
задания AI3, мин.
задания AI3, макс.
Идентификатор
управления AI4
0,000 32,000 с 0,000
-160,00 160,00 % 0,00
-160,00 160,00 % 100,00
-32000 -32000 0
-32000 32000 0
0 10000 0
Таблица 6–10. Параметры аналогового входа 4, G2.2.5
6.4.7 Опции
При значении 0.1 ID28
152
может управляться с
153 0 = Нет фильтрации
155
диапазон активен всегда.
156
диапазон активен всегда.
162
1039
соответствующего
1040
соответствующего
который нужно
1510
контролировать по
идентификационному
P2.4.7.1
0 65535 0
1091
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 49

50 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
P2.5.1.1
Готовность
0,1
0,1
432
Готов к работе
P2.5.1.2
Вращение
0,1
0,1
433
Вращение
Преобразователь частоты
находится в состоянии отказа.
Преобразователь частоты не
находится в состоянии отказа.
P2.5.1.5
Предупреждение
0,1
0,1
436
Активное предупреждение
P2.5.1.6
Внешний отказ
0,1
0,1
437
Активный внешний отказ
P2.5.1.7
Отказ/предупреждение задания
0,1
0,1
438
Активный отказ 4 мA
Активна ошибка перегрева
преобразователя частоты
P2.5.1.9
Reverse (Реверс)
0,1
0,1
440
Выходная частота < 0 Гц
P2.5.1.10
Незапрошенное направление
0,1
0,1
441
Задание <> выходная частота
P2.5.1.11
На скорости
0,1
0,1
442
Задание = Выходная частота
Активна команда толчкового
Плата входов/выходов в
управления активна
P2.5.1.14
Управление внешним тормозом
0,1
0,1
445
См. пояснения в главе,
Управление внешним тормозом,
инвертированное
Контроль предела 1 выходной
частоты
Контроль предела 2 выходной
частоты
Контроль предельных значений
задания
Контроль температуры
ID354
Контроль предельных значений
Отказ или предупреждение
термистора
P2.5.1.22
Предел контроля аналогового входа
0,1
0,1
463
См. ID356
Один из регуляторов
предельных значений активен
P2.5.1.24
Цифровой вход 1 шины Fieldbus
0,1
0,1
455
Слово управления FB B11
Выберите параметр для
контроля
P2.5.1.26
Цифровой вход 2 шины Fieldbus
0,1
0,1
456
Слово управления FB B12
Выберите параметр для
контроля
P2.5.1.28
Цифровой вход 3 шины Fieldbus
0,1
0,1
457
Слово управления FB B13
Выберите параметр для
контроля
P2.5.1.30
Цифровой вход 4 шины Fieldbus
0,1
0,1
169
Слово управления FB B14
Выберите параметр для
контроля
P2.5.1.32
Цифровой вход 5 шины Fieldbus
0,1
0,1
170
Слово управления FB B15
Выберите параметр для
контроля
P2.5.1.34
Безопасное отключение активно
0,1
0,1
756
6.5 Выходные сигналы
6.5.1 Цифровые выходные сигналы
P2.5.1.3 Отказ 0,1 0,1 434
P2.5.1.4 Инвертированный отказ 0,1 0,1 435
P2.5.1.8 Предупреждение о перегреве 0,1 0,1 439
P2.5.1.12 Скорость толчкового режима 0,1 0,1 443
P2.5.1.13
P2.5.1.15
P2.5.1.16
P2.5.1.17
P2.5.1.18
P2.5.1.19
P2.5.1.20
P2.5.1.21 Тепловая защита двигателя 0,1 0,1 452
P2.5.1.23 Включение регулятора двигателя 0,1 0,1 454
P2.5.1.25 Цифр. параметр 1 шины FB ID0 ID0 891
P2.5.1.27 Цифр. параметр 2 шины FB ID0 ID0 892
Внешний источник сигналов
управления
Контроль предельного значения
температуры
крутящего момента
0,1 0,1 444
0,1 0,1 446
0,1 0,1 447 См. ID315
0,1 0,1 448 См. ID346
0,1 0,1 449 См. ID350
0,1 0,1 450
0,1 0,1 451 См. ID348
режима или
предустановленной скорости
качестве источника сигналов
посвященной управлению
тормозом
преобразователя частоты См.
P2.5.1.29 Цифр. параметр 3 шины FB ID0 ID0 893
P2.5.1.31 Цифр. параметр 4 шины FB ID0 ID0 894
P2.5.1.33 Цифр. параметр 5 шины FB ID0 ID0 895
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 50

APFIFF09 MARINE VACON®• 51
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолча-
нию
Пользоват.
знач.
Ид.
Примечание
Выбор сигнала
аналогового выхода 1
Программирование TTF
См. главы 3.1 и 3.2
0 = Не используется (4 мА/2 В)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17 = С
18
19
20
частоты
Время фильтрации
аналогового выхода 1
Инверсия аналогового
выхода 1
0 = Не инвертируется
1 = Инвертируется
Минимум аналогового
выхода 1
0 = 0 мА (0 %)
1 = 4 мА (20 %)
Масштаб аналогового
выхода 1
Смещение аналогового
выхода 1
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Выбор сигнала
Программирование TTF
Функция аналогового
выхода 2
Время фильтрации
аналогового выхода 2
Инверсия аналогового
выхода 2
0 = Не инвертируется
1 = Инвертируется
Минимум аналогового
выхода 2
0 = 0 мА (0 %)
1 = 4 мА (20 %)
Масштаб аналогового
выхода 2
Смещение аналогового
выхода 2
6.5.2 Аналог. выход 1
P2.5.2.1
P2.5.2.2
P2.5.2.3
Функция аналогового
выхода 1
0,1 E.10 A.1 464
= Выходная частота (0—fмакс.)
= Задание частоты (0—fмакс.)
= Скорость двигателя (0 — ном.
скорость двигателя)
= Ток двигателя (0—Iном. двиг.)
= Крутящий момент двигателя
(0—Tном. двиг.)
= Мощность двигателя (0—Pном. двиг.)
= Напряжение двигателя
(0—Uном. двиг.)
= Напряжение звена пост. тока
(0—1000 В)
0 20 1 307
0,00 10,00 с 1,00 308 0 = Нет фильтрации
= AI1
= AI2
= Выходная частота (fмин. — fмакс.)
= -2 x крут. момент…+2 x крут.
момент
= -2 x мощность…+2 x мощность
= Температура PT100
= Аналоговый выход FB
= -2 x скорость…+2 x скорость
корость энкодера (0 — ном.
скорость двигателя)
= Температура устройства
= Выход управления значением
= Вых. мощность преобразователя
P2.5.2.4
P2.5.2.5
P2.5.2.6
P2.5.2.7
Таблица 6–11. Параметры аналогового выхода 1, G2.3.5
6.5.3 Аналог. выход 2
P2.5.3.1
P2.5.3.2
P2.5.3.3
P2.5.3.4
P2.5.3.5
P2.5.3.6
P2.5.3.7
Таблица 6–12. Параметры аналогового выхода 2, G2.3.6
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
аналогового выхода 2
0 1 0 309
0 1 0 310
10 1000 % 100 311
-100,00 100,00 % 0,00 375
0,1 E.10 0,1 471
0 20 4 472 См. P2.5.2.2
0,00 10,00 с 1,00 473 0 = Нет фильтрации
0 1 0 474
0 1 0 475
10 1000 % 100 476
-100,00 100,00 % 0,00 477
См. главы 3.1 и 3.2
Page 51

52 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Выбор сигнала
аналогового выхода 3
Программирование TTF
См. главы 3.1 и 3.2
Функция аналогового
выхода 3
Время фильтрации
аналогового выхода 3
Инверсия аналогового
выхода 3
0 = Не инвертируется
1 = Инвертируется
Минимум аналогового
выхода 3
0 = 0 мА (0 %)
1 = 4 мА (20 %)
Масштаб аналогового
выхода 3
Смещение аналогового
выхода 3
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Выбор сигнала
аналогового выхода 4
Программирование TTF
См. главы 3.1 и 3.2
Функция аналогового
выхода 4
Время фильтрации
аналогового выхода 4
Инверсия аналогового
выхода 4
0 = Не инвертируется
1 = Инвертируется
Минимум аналогового
выхода 4
0 = 0 мА (0 %)
1 = 4 мА (20 %)
Масштаб аналогового
выхода 4
Смещение аналогового
выхода 4
6.5.4 Аналог. выход 3
P2.5.4.1
P2.5.4.2
P2.5.4.3
P2.5.4.4
P2.5.4.5
P2.5.4.6
P2.5.4.7
0,1 E.10 0,1 478
0 20 5 479 См. P2.5.2.2
0,00 10,00 с 1,00 480 0 = Нет фильтрации
0 1 0 481
0 1 0 482
10 1000 % 100 483
-100,00 100,00 % 0,00 484
Таблица 6–13. Параметры аналогового выхода 3, G2.3.7
6.5.5 Аналог. выход 4
P2.5.5.1
P2.5.5.2
P2.5.5.3
P2.5.5.4
0,1 E.10 0,1 1527
0 20 5 1520 См. P2.5.2.2
0,00 10,00 с 1,00 1521 0 = Нет фильтрации
0 1 0 1522
P2.5.5.5
P2.5.5.6
P2.5.5.7
0 1 0 1523
10 1000 % 100 1525
-100,00 100,00 % 0,00 1524
Таблица 6–14. Параметры аналогового выхода 4, G2.3.8
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 52

APFIFF09 MARINE VACON®• 53
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Выбор сигнала цифрового
Возможность инвертирования
(команды инвертирования)
0 = Не используется
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28 = Выбор бита идентификации
Задержка включения
цифрового выхода 1
Задержка выключения
цифрового выхода 1
0,00 = Задержка выключения не
используется
Инверсия задержанного
цифрового выхода 1
0 = Не инвертируется
1 = Инвертируется
Бит идентификации
произвольного цифрового
входа
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Выбор сигнала цифрового
Возможность инвертирования
(команды инвертирования)
Функция цифрового
выхода 2
Задержка включения
цифрового выхода 2
0,00 = Задержка не
используется
Задержка выключения
цифрового выхода 2
0,00 = Задержка выключения
не используется
6.5.6 Цифровой выход с задержкой 1
P2.5.6.1
2.5.6.2
P2.5.6.3
P2.5.6.4
P2.5.6.5
P2.5.6.6
Таблица 6–15. Параметры задержанного цифрового входа 1, G2.3.1
6.5.7 Цифровой выход 2 с задержкой
P2.5.7.1
P2.5.7.2
P2.5.7.3
P2.5.7.4
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Функция цифрового
выхода 1
выхода 1
выхода 2
0,1 E.10 0,1 486
0 28 1 312
0,00 320,00 с 0,00 487 0,00 = Задержка не используется
0,00 320,00 с 0,00 488
0 1 0 1587
0,00 2000,15 0,00 1217
0,1 E.10 0,1 489
0 28 0 490 См. P2.5.6.2
0,00 320,00 с 0,00 491
0,00 320,00 с 0,00 492
с помощью команд ID1091
= Готовность
= Вращение
= Отказ
= Инвертированный отказ
= Предупреждение о перегреве
ПЧ
= Внешний отказ или
предупреждение
= Отказ или предупреждение
задания
= Предупреждение
= Реверс
= Выбрана скорость толчкового
режима
= На скорости
= Включен регулятор двигателя
= Контроль предельных
значений частоты 1
= Контроль предельных
значений частоты 2
= Контроль предельного
момента
= Контроль предельных
значений задания
= Управление внешним
тормозом
= В качестве источника
сигналов управления
активирована плата ввода/вывода
= Контроль предельной
температуры ПЧ
= Задание инвертировано
= Инвертированное управление
внешним тормозом
= Отказ или предупреждение
термистора
= Регулирование посредством
вкл./выкл.
= Входные данные 1 с шины
Fieldbus
= Входные данные 2 с шины
Fieldbus
= Входные данные 3 с шины
Fieldbus
= Сброс набора предупреждений
с помощью команд ID1091
Page 53

54 • VACON® APFIFF09 MARINE
Инверсия задержанного
цифрового выхода 2
0 = Не инвертируется
1 = Инвертируется
Бит идентификации
произвольного цифрового
входа
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
0 = Нет пределов
1
2 = Контроль верхнего предела
Предел выходной
значение
0 = Нет пределов
1
2 = Контроль верхнего предела
Пределвыходной
значение
0 = Не используется
1
2
3
4
момент), верхний предел
Значение контроля
момента
Уменьшение предела
момента
0 = Не используется
1
2 = Верхний предел
Значение контроля
задания
Контроль температуры
частоты
0 = Не используется
1
2 = Верхний предел
Контролируемое
частоты
0 = Не используется
1
2
3
4 = AI4
Нижний предел
сигнала
Верхний предел
сигнала
P2.5.7.5
P2.5.7.6
0 1 0 1588
0,00 2000,15 0,00 1385
Таблица 6–16. Параметры задержанного цифрового выхода 2, G2.3.2
6.5.8 Контролируемые предельные значения
P2.5.8.1
P2.5.8.2
P2.5.8.3
P2.5.8.4
P2.5.8.5
Контроль предела 1
выходной частоты
частоты 1,
Контролируемое
Контроль предела 2
выходной частоты
частоты 2
Контролируемое
Контроль предельных
значений крутящего
момента
0 2 0 315
0,00 320,00 Гц 0,00 316
0 2 0 346
0,00 320,00 Гц 0,00 347
0 4 0 348
= Контроль нижнего предела
= Контроль нижнего предела
= Контроль нижнего предела
= Контроль верхнего предела
= Абс. энкодер (крутящий
момент), нижний предел
= Абс. энкодер (крутящий
P2.5.8.6
P2.5.8.7
P2.5.8.8
P2.5.8.9
P2.5.8.10
P2.5.8.11
P2.5.8.12
P2.5.8.13
P2.5.8.14
предельного крутящего
контроля крутящего
Контроль предельных
значений задания
предельных значений
преобразователя
значение температуры
преобразователя
Контролируемый
аналоговый сигнал
контроля аналогового
контроля аналогового
-300,0 300,0 % 100,0 349
0 5 0
0 2 0 350
0,00 100,0 % 0,00 351
0 2 0 354
-10 100 °C 40 355
0 4 0 356
0,00 100,00 % 10,00 357 Сбросить предел
0,00 100,00 % 90,00 358 Установить предел
Таблица 6–17. Настройки контроля пределов, G2.3.4
402
= Нижний предел
= Нижний предел
= AI1
= AI2
= AI3
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 54

APFIFF09 MARINE VACON®• 55
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
При достижении предела
выходная частота уменьшается
Масштабирование от 0 до ID107
0
1
2
3
4
5 =
FB, ID46
P2.6.1.3
Предельный ток, Kp
1
32000
1451 P2.6.1.4
Предельный ток, Ki
1
32000
1452
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
P2.6.2.1
Предел мощности
0,0
300,0 % 300,0
1722
Предел общей мощности
Предел мощности
генератора
Предел мощности
двигателя
Предел 1 мощности
генератора
Предел мощности активируется
с помощью цифрового входа
Предел 2 мощности
генератора
Предел мощности активируется
с помощью цифрового входа
Предел мощности активируется
с помощью цифрового входа
Предел мощности активируется
с помощью цифрового входа
Скорость изменения
предельной мощности
0 = Нет
1 = Да
Гистерезис мощности
ведомого
Масштабирование
двигателя
Масштабирование
генератора
Уровень пост. тока для
пониженном напряжении
Предел мощности при
пониженном напряжении
6.6 Параметры предельных значений
6.6.1 Обработка тока
P2.6.1.1 Предел по току 0 2 x IH А IL
P2.6.1.2
Масштабирование
предельного тока
0 5 0
6.6.2 Обработка мощности
P2.6.2.2
P2.6.2.3
P2.6.2.4
P2.6.2.5
P2.6.2.6 Предельная мощность 1 0 300,0 % 100,0
0,0 300,0 % 300,0
0,0 300,0 % 300,0
0,0 300,0 % 300,0
0,0 300,0 % 300,0
107
399
1290
1289
1513
1514
1503
= Не используется
= AI1
= AI2
= AI3
= AI4
Масштабирование предела
P2.6.2.7 Предельная мощность 2 0 300,0 % 50,0
P2.6.2.8
P2.6.2.9 Мощность ведомого 0 1 0
P2.6.2.10
P2.6.2.11
P2.6.2.12
P2.6.2.13
P2.6.2.14
предельной мощности
предельной мощности
мощности при
0 10000 %/s 100
0,0 100,0 % 10,0
0 5 0
0 5 0
0 1200 В 0
-300,0 300,0 % 0
1504
1502
1705
1529
Как параметр P2.6.2
179
Масштабирование от 0 до ID1289
Как параметр P2.6.2
1088
Масштабирование от 0 до ID1290
1611
1612
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 55

56 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Torque Limit
(Предел момента)
Предельный крутящий
момент двигателя
Предельный крутящий момент на
стороне двигателя
Предел момента
генератора
Ограничение крутящего момента
на стороне генератора
Предел 1 крутящего
момента двигателя
Предел 1 крутящего
момента генератора
0 = Не используется
1
2
3
генераторный
Скорость увеличения
момента
Гистерезис предельного
момента на ведомом
Масштабирование от 0 до ID1287
0
1
2
3
4
5 =
FB, ID46
Масштабирование
момента генератора
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Усиление П-звена
крутящего момента
Управление пределом
Усиление И-звена
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Предел выхода
управления скоростью
Положительный
скоростью
Отрицательный
скоростью
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
2
Макс. предел частоты,
входу.
P2.6.4.2
Отрицательный предел
-320,00
320,00
Гц
-320,00
1286
Альтернативный предел для
6.6.3 Обработка крутящего момента
P2.6.3.1
P2.6.3.2
P2.6.3.3
P2.6.3.4
P2.6.3.5
P2.6.3.6
P2.6.3.7
P2.6.3.8
P2.6.3.9
P2.6.3.10
Torque Follower
(Момент ведомого)
предельного крутящего
Масштабирование
предельного крутящего
момента двигателя
предельного крутящего
0,0 300,0 % 300,0
0,0 300,0 % 300,0
0,0 300,0 % 300,0
0,0 300,0 % 300,0
0,0 300,0 % 300,0
0 3 0
0 10000 %/s 100
0,0 300,0 % 10,0
0 5 0
0 5 0
609 Общий макс. предел
1287
1288
1625
1627
1706
1532
1533
485
1087
6.6.3.1 Настройки обработки крутящего момента в разомкнутом контуре
= Двигательный режим
= Генераторный режим
= Двигательный +
= Не используется
= AI1
= AI2
= AI3
= AI4
Масштабирование предела
Масштабирование от 0 до ID1288
Как параметр P2.6.3.9
P2.6.3.9.1
P2.6.3.9.2
6.6.3.2 Настройки задания крутящего момента в замкнутом контуре
P2.6.3.10.1
P2.6.3.10.2
P2.6.3.10.3
6.6.4 Обработка частоты
P2.6.4.1 Максимальная частота
управления пределом
крутящего момента
предел управления
предел управления
0,0 32000 3000
0,0 32000 200
0,0 300,0 % 300,0
0,0 300,0 % 300,0
0,0 300,0 % 300,0
0,00 320,00 Гц 35,00
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
610
611
1382
646
645
1512
активируемый по цифровому
Page 56

APFIFF09 MARINE VACON®• 57
частоты
отрицательного направления
Положительный предел
частоты
Альтернативный предел для
положительного направления
P2.6.4.4
Нулевой предел частоты
0,00
320,00
Гц
1,00
1283
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Не используется
1
2
скорости)
0 = Высокое напряжение
1
2
прерывателя
0 = Запрещено
1
2
3
4
вращения (не при тестировании)
Уровень тормозного
прерывателя
5: 605
6: 836
5: 797
6: 1099
0 = Не используется
1
2
скорости до нуля)
0 = Задание пониженного
1
пост. тока.
Задание пониженного
напряжения
5: 410
6: 567
5: 540
6: 745
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Задание
перенапряжения
Предельный крутящий
перенапряжении
Максимальный момент в
повышенного напряжения.
Задание пониженного
напряжения в замкнутом
контуре
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
Ограничение суммарного
тока в замкнутом контуре
0 = Нет
1 = Да
P2.6.4.3
-320,00 320,00 Гц 320,00
6.6.5 Обработка звена пост. тока
P2.6.5.1
P2.6.5.2
P2.6.5.3 Тормозной прерыватель 0 4 0
P2.6.5.4
P2.6.5.5
Регулятор
перенапряжения
Селектор задания
перенапряжения
Регулятор пониженного
напряжения
0 2 1
0 2 1
В
0 2 1
1285
607
1262
504
1267
608
= Используется (без
изменения частоты)
= Используется (с изменением
= Нормальное напряжение
= Уровень тормозного
= Используется во время
вращения
= Внешний тормозной
прерыватель
= Используется во время
останова/вращения
= Используется во время
= Используется (без
изменения частоты)
= Используется (уменьшение
P2.6.5.6
P2.6.5.7
Селектор задания
пониженного напряжения
0 1 1
В Различный
6.6.5.1 Настройки обработки звена пост. тока в замкнутом контуре
P2.6.5.8.1
P2.6.5.8.2
P2.6.5.8.3
момент со стороны
двигателя при
94,00 130,00 % 118,00
0,0 300,0 % 10,0
60,00 80,00 % 65,00
6.6.6 Варианты настройки пределов
P2.6.6.1
0 1 0
напряжения
1537
1538
1528
1623
1567
1901
= 0,8 * расчетное напряжение
двигательном режиме, при
котором активен регулятор
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 57

58 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
Ток торможения пост.
током
Время торможения
при пуске
0
Время торможения
при останове
0 = Торможение постоянным
останове
Частота запуска
скорости
ID46 Масштабирование от 0 до
0
1
2
3
4
5 =
FB
Ток торможения пост.
током при останове
Торможение магнитным
потоком
0 = Выкл
1 = Вкл
Ток торможения
магнитным потоком
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Ток намагничивания
при пуске
Время намагничивания
при пуске
Задание магнитного
потока
Задержка отключения
магнитного потока
-1 =
Магнитный поток в
состоянии останова
Пониженный уровень
магнитного потока
Частота уменьшенного
магнитного потока
6.7 Обработка магнитного потока и пост. тока
6.7.1 Настройки обработки магнитного потока и пост. тока в разомкнутом контуре
P2.7.1.1
P2.7.1.2
P2.7.1.3
P2.7.1.4
P2.7.1.5
P2.7.1.6
P2.7.1.7
P2.7.1.8
постоянным током
постоянным током
торможения пост. током
во время
останов с изменением
Масштабирование тока
торможения пост. током
0,00 IL А 0,00
0,00 600,00 с 0,00
0,00 600,00 с 0,00
0,10 10,00 Гц 1,50
0 5 0
0,00 IL А Различный
0 1 0
0,00 IL А IH
507
516
508
515
400
1080
520
519
= Торможение постоянным
током выключается при пуске
током выключается при
ID507
= Не используется
= AI1
= AI2
= AI3
= AI4
Масштабирование предела
6.7.2 Настройки обработки магнитного потока и пост. тока в замкнутом контуре
P2.7.2.1
P2.7.2.2
P2.7.2.3
P2.7.2.4
P2.7.2.5
P2.7.2.6
P2.7.2.7
0 IL А 0,00
0,0 600,0 с 0,0
0,0 500,0 % 100,0
-1 32000 с 0
0,0 150,0 % 100,0
0,0 500,0 % 100,0
0,00 32,00 Гц 0,00
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
627
628
1250
1402
1401
1613
1614
Всегда
Page 58

APFIFF09 MARINE VACON®• 59
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Регулирование частоты
1
2
3
4
в замкнутом контуре
Управление двигателем,
режим 2
Выбор крутящего момента
0 = Регулирование скорости
1 =
2
3
4 =
5 = Окно
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
0 = Не используется
1
форсирование момента
0 = Линейная
1
2
3
магнитного потока
P2.8.4.3
Точка ослабления поля
6,00
320,00
Гц
50,00
602
Напряжение в точке
ослабления поля
Частота в средней точке
кривой U/f
n% x U
P2.6.5
Выходное напряжение
0 = Запрещено
1 = Разрешено
P2.8.4.9
Ток I/f
0,0
150,0 % 50,0
1693 P2.8.4.10
Предел управления I/f
0,0
300,0 % 10,0
1790
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
Регулирование тока
Усиление П-звена
Регулирование тока
Время И-звена
P2.8.5.3
Регулировка скольжения
0
500 % 75
619 P2.8.5.4
Компенсация ускорения
0,00
300,00 с 0,00
626
Постоянная времени
фильтра ошибок скорости
Время фильтрации
энкодера
6.8 Управление двигателем
6.8.1 Базовые настройки управления двигателем
= Регулирование скорости
= Регулирование
P2.8.1
Режим управления
двигателем
0 4 0
скорости/крутящего момента
600
= Регулирование скорости
в замкнутом контуре
= Управление
скоростью/крутящим моментом
P2.8.2
P2.8.3
0 4 2
0 5 2
6.8.2 Разомкнутый контур
P2.8.4.1 Оптимизация U/f 0 1 0
P2.8.4.2 Выбор соотношения U/f 0 3 0
P2.8.4.4
P2.8.4.5
P2.8.4.6
Напряжение в средней
точке кривой U/f
10,00 200,00 % 100,00
0,00 P2.8.3.3 Гц 50,00
0,00 100,00 % 100,00
521 См. P2.8.1
Макс. предел частоты
1278
109
108
603 n% x Un двиг.
604
605
= Выход изменения скорости
= Мин.
Макс.
= Автоматическое
= Квадратичное
= Программируемое
= Линейное с оптимизацией
n двиг.
Макс. значение параметра =
P2.8.4.7
P2.8.4.8 Запуск I/f 0 1 0
6.8.3 Параметры для управления с замкнутым контуром
P2.8.5.1
P2.8.5.2
P2.8.5.5
P2.8.5.6
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
при нулевой частоте
0,00 40,00 % 0,00
0,00 100,00 % 40,00
0,0 3200,0 мс 1,5
0 1000 мс 0
0 1000 мс 0
606 n% x Un двиг.
534
617
657
1311
618
Page 59

60 • VACON® APFIFF09 MARINE
0.1 = Энкодер, вход 1
2 = Энкодер, вход 2
Выбор цепи крутящего
скоростью
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
Положение вала
СДПМ
0 = Автоматический
1
2
3 = Запрещено
Величина
Ток импульса
полярности
Время
начального угла
Предел управления I/f
Kp регулятора тока
магнитного потока
Время тока
магнитного потока
Разрешение
0 = Нет
1
Падение напряжения
Lsd
Падение напряжения
Lsq
Ток
энкодера
Режим
полярности
Длина импульса
полярности
Угол обнаружения
полярности
Режим
угла
Kp d регулятора
тока
Граница
Режим
энкодера
P2.8.5.7 Выбор энкодера 0 2 0
P2.8.5.8
момента при управлении
0 65535 0
1595
1557
6.8.4 Параметры управления СДПМ
P2.8.6.1
P2.8.6.2
P2.8.6.3
P2.8.6.4
P2.8.6.5
P2.8.6.6 Ток I/f 0,0 150,0 % 50,0 1693
Режим
идентификации
начального угла
постоянного тока
идентификации
начального угла
определения
идентификации
0 65535 0 649
0 10 0 1691
0,0 150,0 % 0,0 1756
-10,0 200,0 % 0,0 1566
0 32000 мс 0 1755
Значение по умолчанию после
идентификации равно 96.
= Принудительный
= После подачи питания
P2.8.6.7
P2.8.6.8
P2.8.6.9
P2.8.6.10 Внешнее задание Id -150,0 150,0 % 0,0 1730
P2.8.6.11
P2.8.6.12
P2.8.6.13
P2.8.6.14
P2.8.6.15
P2.8.6.16
P2.8.6.17
P2.8.6.18
P2.8.6.19
P2.8.6.20
идентификации Rs
идентификации
идентификации
идентификации
напряжения
0,0 300,0 % 10,0 1790
0 32000 5000 651
0 1000 25 652
0 1 1 654
-32000 32000 0 1757
-32000 32000 0 1758
0,0 150,0 % 90,0 1734
0 1 1737
0 1000 мс 200 1742
0,0 360,0 Град. 1,5 1748
0 2 1749
0 32000 % 1761
0,0 120,0 % 1759
= Да
P2.8.6.21
выполнения
идентификации
680
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 60

APFIFF09 MARINE VACON®• 61
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Усиление стабилизатора
крутящего момента
P2.8.7.2
Демпфирование
крутящего момента
P2.8.7.3
Усиление стабилизатора
точке ослабления поля
P2.8.7.4
Предел стабилизатора
крутящего момента
P2.8.7.5
Усиление стабилизатора
потока
P2.8.7.6
Пост. времени
магнитного потока
P2.8.7.7
Усиление стабилизатора
магнитного потока
P2.8.7.8
Коэф. стабилизации
P2.8.7.9
Усиление стабилизатора
напряжения
P2.8.7.10
Пост. времени
напряжения
P2.8.7.11
Предел стабилизатора
напряжения
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Параметры пуска на
ходу
P2.8.8.2
Параметры управления
двигателем
P2.8.8.3
Селектор
резонанса
P2.8.8.4
Частота демпфирования
0
320,0
Гц 0
1763
P2.8.8.5
Усиление
демпфирования
P2.8.8.6
Фаза демпирования
0
360 0,00
1765
P2.8.8.7
Частота активации
демпфирования
P2.8.8.8
Постоянная времени
фильтра демпфирования
P2.8.8.9
Если установлен
101 %.
P2.8.8.10
Предельная глубина
модулятора
P2.8.8.11
Фильтр напряжения
пост. тока
P2.8.8.12
Ток намагничивания
переменным током
P2.8.8.13
Время сканирования
пер. тока
P2.8.8.14
Ток намагничивания
пост. током
P2.8.8.15
Время установления
магнитного потока
P2.8.8.16
Крутящий момент
магнитного потока
P2.8.8.17
Предел принятия
частоты пуска на ходу
6.8.5 Стабилизаторы
P2.8.7.1
стабилизатора
крутящего момента в
контура магнитного
стабилизатора контура
магнитного потока
стабилизатора
6.8.6 Параметры настройки
0 1000 100
0 1000 800
0 1000 50
0 1500 150
0 32767 10000
0 32700 900
0 32000 500
-30000 30000 1796
0 100,0 % 10,0 1738
0 1000 900 1552
0 320,00 Гц 1,50 1553
1412
1413
1414
1720
1550
1551
1797
С двигателями СПДМ
используйте значение 980
P2.8.8.1
0 65535 0
0 65535 0
демпфирования
Предел перемодуляции 50 120 % 105
установления
0 200 0,00
0 32000 0
0 320,00 % 0
0 32700 105
0 200 % 100
0,0 500,0 0,0
1610
1740
1760
1764
1770
1771
синусоидальный фильтр,
1515
задайте здесь значение
655
1591
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
0 320,00 Гц 1,50
1903 Мин. частота пуска на ходу
Page 61

62 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
P2.8.9.1
Магнитный поток 10 %
0
2500 % 10
1355 P2.8.9.2
Магнитный поток 20 %
0
2500 % 20
1356 P2.8.9.3
Магнитный поток 30 %
0
2500 % 30
1357 P2.8.9.4
Магнитный поток 40 %
0
2500 % 40
1358 P2.8.9.5
Магнитный поток 50 %
0
2500 % 50
1359 P2.8.9.6
Магнитный поток 60 %
0
2500 % 60
1360 P2.8.9.7
Магнитный поток 70 %
0
2500 % 70
1361 P2.8.9.8
Магнитный поток 80 %
0
2500 % 80
1362 P2.8.9.9
Магнитный поток 90 %
0
2500 % 90
1363 P2.8.9.10
Магнитный поток 100 %
0
2500 % 100
1364 P2.8.9.11
Магнитный поток 110 %
0
2500 % 110
1365 P2.8.9.12
Магнитный поток 120 %
0
2500 % 120
1366 P2.8.9.13
Магнитный поток 130 %
0
2500 % 130
1367 P2.8.9.14
Магнитный поток 140 %
0
2500 % 140
1368 P2.8.9.15
Магнитный поток 150 %
0
2500 % 150
1369
P2.8.9.16
Используется для
контуром.
P2.8.9.17
Напряжение IR-
P2.8.9.18
Масштаб IR-
генераторном режиме
P2.8.9.19
Масштаб IR-
двигательном режиме
P2.8.9.20
Падение напряжения Ls
0
3000 0
673
P2.8.9.21
Напряжение противо-
ЭДС двигателя
P2.8.9.22
Смещение Iu
-32000
32000 0
668 P2.8.9.23
Смещение Iv
-32000
32000 0
669 P2.8.9.24
Смещение Iw
-32000
32000 0
670 P2.8.9.25
Kp модуля оценки
0
32000
1781 P2.8.9.26
Ki модуля оценки
0
32000
1782 P2.8.9.27
Падение напряжения
0,00
20,00 671
P2.8.9.28
Kp регулятора тока
вращении
Код
Параметр
Мин.
Mакс.
Ед. измер.
По умолчанию
Пользоват. знач.
Ид.
Примечание
P 2.8.10.1
DeadTimeComp.
1751
P 2.8.10.2
DeadTieContCurL
1752 P 2.8.10.3
DeadTHWCompDisab
1750 P 2.8.10.4
MakeFluxTime
660 P 2.8.10.5
CurrMeasFCompTC
1554 P 2.8.10.6
TCDunDampGain
1576 P 2.8.10.7
TCDynDampTC
1577 P 2.8.10.8
CurrLimOptions
1702 P 2.8.10.9
AdConvStartShift
1701 P 2.8.10.10
VoltageCorr. Kp
1783 P 2.8.10.11
VoltageCorr. Ki
1784 P 2.8.10.12
GearRatioMultipl
1558 P 2.8.10.13
GearRatioDivider
1559
6.8.7 Параметры идентификации
Падение напряжения Rs
компенсации в нулевой
точке
компенсации в
компенсации в
идентификации при
0 30000 Различный
0 30000 Различный
0 30000 Различный
0 30000 Различный
0,00 320,00 % 0
Таблица 6–18. Параметры идентификации, G2.6.4
6.8.7.1 Параметры точной настройки
662
664
665
667
674
695
вычисления крутящего
момента в режиме
управления с разомкнутым
Таблица 6–19. Параметры точной настройки
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 62

APFIFF09 MARINE VACON®• 63
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
P2.9.1
Падение нагрузки
0,00
100,00 % 0,00
620
P2.9.2
Время падения нагрузки
0
32000
мс 0
656
Для динамических изменений.
0 = Нормальное
до Fном.
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Регулятор скорости
(разомкнутый контур)
Регулятор скорости
(разомкнутый контур)
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Усиление П-звена
при регулировании
скорости
Время I-звена при
Отрицательное значение
Время скорости 0
при пуске
Время скорости 0
при останове
Точка f1 управления
скоростью
Точка f0 управления
скоростью
Kp f0 управления
скоростью
Точка ослабления
поля
управления
скоростью
Минимальное
значение крутящего
скоростью
Минимальное
крутящего момента
скоростью
Крутящий момент
скоростью
6.9 Регулирование скорости
6.9.1 Базовые настройки управления скоростью
P2.9.3
Устранение падения
нагрузки
0 2 0
Таблица 6–20. Базовые настройки управления скоростью
6.9.2 Настройки управления скоростью в разомкнутом контуре
P2.9.4.1
P2.9.4.2
Таблица 6–21. Настройки управления скоростью в разомкнутом контуре
Усиление П-звена
Усиление И-звена
0 32767 3000
0 32767 300
6.9.3 Настройки управления скоростью в замкнутом контуре
P2.9.5.1
P2.9.5.2
P2.9.5.3
регулировании
скорости
0 1000 30
-32000 32000 мс 100
0 32000 мс 100
1 = На пределе нулевой частоты
1534
2 = Линейное изменение от нуля
637
638
613
614
использует формат 0,1 мс,
а не 1 мс
615
P2.9.5.4
P2.9.5.5
P2.9.5.6
P2.9.5.7
P2.9.5.8
P2.9.5.9
P2.9.5.10
P2.9.5.11
Таблица 6–22. Настройки регулирования скорости в замкнутом контуре
Kp
момента при
управлении
значение Kp
при управлении
постоянной
времени Kp при
управлении
0 32000 мс 100
0,00 320,00 Гц 0,00
0,00 320,00 Гц 0,00
0 1000 % 100
0 1000 % 100
0 400,0 % 0,0
0 1000 % 100
0 1000 мс 0
616
1301
1300
1299
1298
1296
1295
1297
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 63
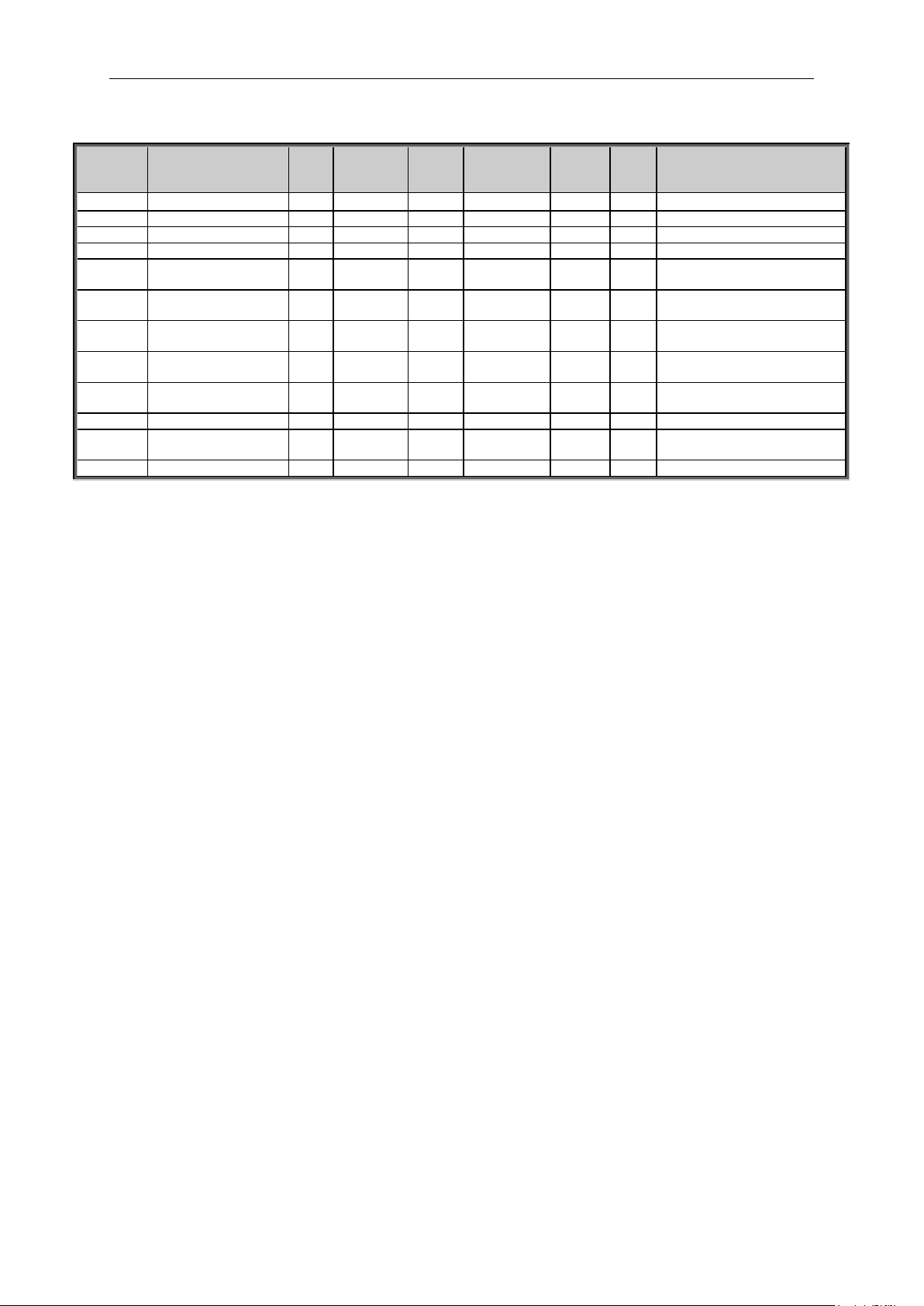
64 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
P2.10.1
Частота переключения
1,0
Различный
кГц
3,6
601
P2.10.2
Тип модулятора
0 3 0
1516
P2.10.3
Опции управления
0
65535 64
1084
P2.10.4
Опции управления 2
0
65535 0
1798
P2.10.5
Дополнительные
параметры 1
P2.10.6
Дополнительные
параметры 2
P2.10.7
Дополнительные
параметры 4
P2.10.8
Дополнительные
параметры 5
P2.10.9
Дополнительные
параметры 6
P2.10.10
Задержка перезапуска
0
65535
с
Различный
1424
P2.10.11
Задержка перезапуска
в замкнутом контуре
P2.10.12
Время работы
1855
6.10 Управление преобразователем частоты
0 65535 0
0 65535 0
0 65535 0
0 65535 0
0 65535 0
0 60,000 с Различный
Таблица 6–23. Управление преобразователем частоты
1560
1561
1563
1564
1565
672 Замкнутый контур и пуск на ходу
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 64

APFIFF09 MARINE VACON®• 65
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Не используется
1
2
3
4 = Ведомее устройство DriveSynch
Выбор задания скорости
0 = AI1
1
2
3
4
5
6
7
8
9
10
11
12 =
13 =
14
15
16
17
18
ведущего
0 = Не используется
1
2
3
4
5
6
7
8
9
10
0 = Выбег
1
2 = Как ведущий
Не используется во время изменения
0
1
2
тормоза ведомого.
MF Mode 2 (Режим 2
ведущего/ведомого)
0 = Нет реакции
1
2
3 = Отказ, останов выбегом
Задержка отказа
шины системы
P2.11.9
Отказ ведомого
0 3 1
1536
См. P2.11.6
6.11 Параметры режима «Ведущий/ведомый»
P2.11.1
P2.11.2
P2.11.3
P2.11.4
Режим
«Ведущий/ведомый»
ведомого
преобразователя
Выбор задания
крутящего момента
Функция останова
частоты
ведомого
ведомого
0 4 0
0 18 17
0 10 10
0 2 2
1324
1081
1083
1089
= Ведущий
= Ведомый
= Ведущее устройство DriveSynch
= AI2
= AI1 + AI2
= AI1 - AI2
= AI2 - AI1
= AI1 x AI2
= Джойстик, AI1
= Джойстик, AI2
= Клавиатура
= Шина передачи данных
= Потенциометр двигателя
= Минимум AI1, AI2
Максимум AI1, AI2
Макс. частота
= Выбор AВХ1/AВХ2
= Энкодер 1
= Энкодер 2
= Задание ведущего
= Выход изменения скорости
= AI1
= AI2
= AI3
= AI4
= Джойстик, AI1
= Джойстик, AI2
= Задание крутящего момента
клавиатуры, R3.5
с
= Задание крутящего момента с FB
= Крутящий момент ведущего
преобразователя частоты в
разомкнутом контуре
= Крутящий момент ведущего
преобразователя частоты в замкнутом
контуре
= Изменение скорости
P2.11.5
P2.11.6
P2.11.7
P2.11.8
Логика торможения
ведущего/ведомого
Отказ системной
Таблица
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
0 2 0
0 4 0
шины
6–24
. Параметры управления в режиме «ведущий/ведомый», G2.11
0 3 1
0,00 320,00 с 3,00
скорости ведомого или в режиме
синхронизации
= Ведущий или собственная
1326
= Собственная
= Ведущий и собственная, кроме того,
ведущий отслеживает состояние
1093 P2.11.1
1082
1352
= Предупреждение
= Отказ, останов в соотв. с 2.3.2
Page 65
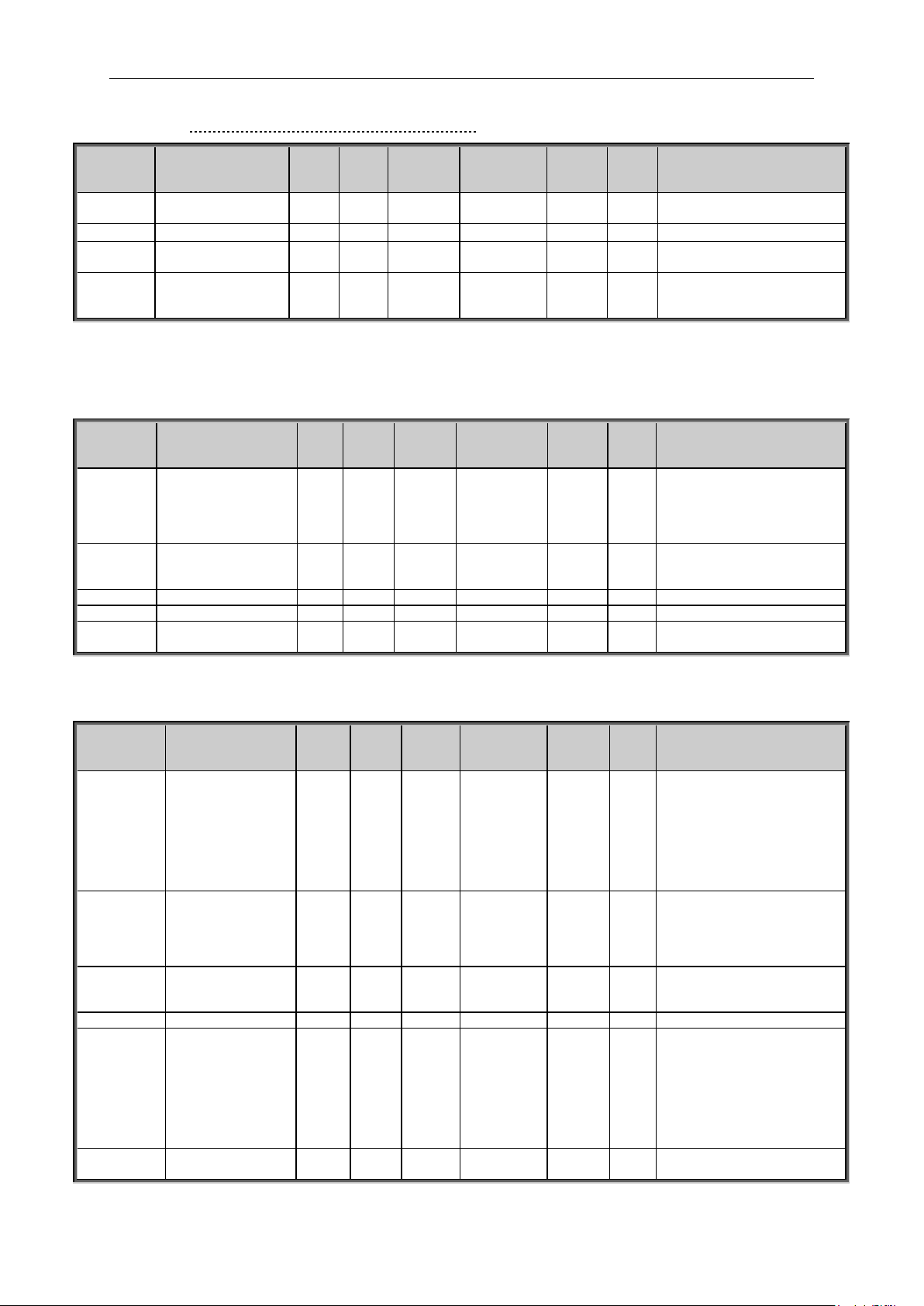
66 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс. Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Ошибка ведомого
DriveSynch
2.11.10.2
Сдвиг фазы ведомого
0,0
360,0
Десятичн.
0,0
1518
Усиление балансировки
напряжения пост. тока
Последний
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Нет реакции
1
2
3 = Отказ, останов выбегом
пониженного напряжения
0 = Отказ запоминается в
1 = Отказ не запоминается
P2.12.1.3
Контроль выходных фаз
0 3 2
702
См. P2.12.1.1
P2.12.1.4
Реакция на отказ гнезда
0 3 2
734
См. P2.12.1.1
Реакция с безопасным
отключением
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Не используется (запись
1
2
3
4
5 = Датчик 3 используется
0 = Нет реакции
1
2
3 = Отказ, останов выбегом
Предел
платы 1
P2.12.2.4
Предел отказа платы 1
-30,0
200,0
°C
130,0
742
0 = Не используется (запись
1
2
3
4
5 = Датчик 3 используется
Реакция на отказ по
температуре
0 = Нет реакции
1 = Предупреждение
6.11.1.1 Специальные параметры DriveSynch
2.11.10.1
2.11.10.3
2.11.10.4
идентификатор
SystemBus 2
0 2
0 1000 100
0 64 0
Таблица 6–25. Специальные параметры DriveSynch
6.12 Параметры защиты
6.12.1 Общие настройки
P2.12.1.1 Контроль входных фаз 0 3 0
P2.12.1.2
P2.12.1.5
Реакция на отказ из-за
0 1 0
0 2 1
1531
1519
1799
730
727
755 См. P2.12.1.1
= Предупреждение
= Отказ, останов в соотв. с
2.3.2
истории отказов
Таблица 6–26. Общие настройки
6.12.2 Защита датчика температуры
P2.12.2.1
P2.12.2.2
P2.12.2.3
P2.12.2.5
Число используемых
входов на плате 1
Реакция на отказ по
температуре
предупреждения
Число используемых
входов на плате 2
0 5 0
0 3 2
-30,0 200,0 °C 120,0
0 5 0
идентификатора)
= Датчик 1 используется
739
740
741
743
= Датчики 1 и 2 используются
= Датчики 1, 2 и 3
используются
= Датчики 2 и 3 используются
= Предупреждение
= Отказ, останов в соотв. с
2.3.2
идентификатора)
= Датчик 1 используется
= Датчики 1 и 2 используются
= Датчики 1, 2 и 3
используются
= Датчики 2 и 3 используются
P2.12.2.6
0 3 2
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
766
Page 66

APFIFF09 MARINE VACON®• 67
2 = Отказ, останов в соотв. с
3 = Отказ, останов выбегом
Предел
платы 2
P2.12.2.8
Предел отказа платы 2
-30,0
200,0
°C
130,0
746 P2.12.2.9.1
Предупр. канала 1B
-30,0
200,0
°C
0,0
764 P2.12.2.9.2
Отказ канала 1B
-30,0
200,0
°C
0,0
765 P2.12.2.9.3
Предупр. канала 1C
-30,0
200,0
°C
0,0
768 P2.12.2.9.4
Отказ канала 1C
-30,0
200,0
°C
0,0
769 P2.12.2.9.5
Предупр. канала 2B
-30,0
200,0
°C
0,0
770 P2.12.2.9.6
Отказ канала 2B
-30,0
200,0
°C
0,0
771 P2.12.2.9.7
Предупр. канала 2C
-30,0
200,0
°C
0,0
772 P2.12.2.9.8
Отказ канала 2C
-30,0
200,0
°C
0,0
773
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Нет реакции
1
2
3 = Отказ, останов выбегом
P2.12.3.2
Ток опрокидывания
0,1
2 x IH А IH
710
Предел времени
опрокидывания
Предельная частота
опрокидывания
2.3.2
P2.12.2.7
предупреждения
-30,0 200,0 °C 120,0
Таблица 6–27. Защита PT-100
6.12.3 Защита от опрокидывания
P2.12.3.1
P2.12.3.3
P2.12.3.4
Защита от
опрокидывания
0 3 0
1,00 120,00 с 15,00
1,0 P2.1.2 Гц 25,0
745
709
711
712
= Предупреждение
= Отказ, останов в соотв. с
2.3.2
Таблица 6–28. Защита от опрокидывания
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 67

68 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Нет реакции
1
2
3 = Отказ, останов выбегом
Предел ошибок
скорости
Задержка отказа по
скорости
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Нет реакции
1
2
3
Температурный
двигателя
Коэффициент
при нулевой скорости
Тепловая постоянная
времени двигателя
P2.12.5.5
Рабочий цикл двигателя
0
100 % 100
708
Реакция на отказ
термистора
0 = Нет реакции
1
2 = Отказ
0 = Не используется
1
2
3 = Мощность
Макс. вход при
перегрузке
Макс. приращение при
перегрузке
Минимальное значение
перегрузки на входе
Программное ограничение
0 = Запрещено
6.12.4 Мониторинг ошибок скорости
P2.12.4.1 Режим ошибки скорости 0 3 0
P2.12.4.2
P2.12.4.3
Таблица 6–29. Мониторинг ошибок скорости
0,0 100,0 % 5,0
0,00 100,00 S 0,1
6.12.5 Защита двигателя
P2.12.5.1
P2.12.5.2
P2.12.5.3
P2.12.5.4
Защита двигателя от
перегрева
коэффициент
окружающей среды
охлаждения двигателя
0 3 2
-100,0 100,0 % 0,0
0,0 150,0 % 40,0
1 200 мин 45
752
753
754
704
705
706
707
= Предупреждение
= Отказ, останов в соотв. с
2.3.2
= Предупреждение
= Отказ, останов в соотв. с
2.3.2
= Отказ, останов выбегом
P2.12.5.6
P2.12.5.7 Реакция на перегрузку 0 2 1
P2.12.5.8 Сигнал перегрузки 0 2 0
P2.12.5.9
P2.12.5.10
P2.12.5.11
P2.12.5.12
Таблица 6–30. Защита двигателя
Предел аварийного
останова из-за
перегрузки по току
0 3 2
0,0 300,0 % 150,0
0 10000 200
0,0 300,0 % 105,0
0 1000,0 % 0
732 См. P2.12.5.1
1838
1837
1839
1840
1849
1904
= Предупреждение
= Ток
= Крутящий момент
перегрузки по току для
номинального тока двигателя,
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 68

APFIFF09 MARINE VACON®• 69
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Реакция на отказ задания
0 = Нет реакции
1
2
3
4
5 = Отказ, останов выбегом
Частота отказа
задания 4 мА
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
0 = Нет реакции
1
2
3 = Отказ, останов выбегом
Нагрузка в зоне
ослабления поля
P2.12.7.3
Ток при нулевой частоте
5,0
150,0 % 10,0
715
Предел времени защиты
от недогрузки
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
Защита от замыкания на
0 = Нет реакции
1
2
3
Предельный ток
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Нет действия,
1
2
3 = Нет действия, отказ
Задержка отказа
охлаждения
6.12.6 Контроль активного нуля
= Предупреждение
= Предупреждение + прежняя
P2.12.6.1
4 мА
0 5 0
частота
700
= Предупреждение+предуст.
частота 2.12.6.2
= Отказ, останов в соотв. с
2.3.2
P2.12.6.2
0,00 P2.1.2 Гц 0,00
Таблица 6–31. Контроль активного нуля
6.12.7 Защита от недогрузки
P2.12.7.1 Защита от недогрузки 0 3 0
P2.12.7.2
P2.12.7.4
10,0 150,0 % 50,0
2,00 600,00 с 20,00
Таблица 6–32. Защита от недогрузки
6.12.8 Защита от замыкания на землю
P2.12.8.1
P2.12.8.2
землю
замыкания на землю
Таблица 6-33. Защита от замыкания на землю
0 3 2
0,0 100,0 % 50,0
728
713
714
716
703
1333
= Предупреждение
= Отказ, останов в соотв. с 2.3.2
= Предупреждение
= Отказ, останов в соотв. с 2.3.2
= Отказ, останов выбегом
6.12.9 Защита охлаждения
P2.12.9.1
P2.12.9.2
Таблица 6-34. Защита охлаждения
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Реакция на отказ
охлаждения
1 2 2
0,00 7,00 с 2,00
762
751
предупреждение
= Предупреждение,
предупреждение
= Предупреждение, отказ
Page 69

70 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Нет действия
1
2
3
4
5 = Быстрый останов
Задержка отказа, когда для
реакции FB выбран вариант 4
Задержка сторожевого
Задержка при отсутствии
таймера. 0,00 с = Отключена
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Нет реакции
1
2
3 = Отказ, останов выбегом
0 = Нет реакции
1
2
3 = Отказ, останов выбегом
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Реакция на отказ
энкодера
1 = Предупреждение
2 = Отказ
Предел скорости
вращения энкодера в Гц
Ограничение времени
P2.12.12.4
Предел отказа Iq
0
300 %
1800
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Запрещение
блокировки останова
-1 = Блокировка
1 = Да
6.12.10 Защита шины Fieldbus
= Предупреждение
P2.12.10.1
Отклик на отказ связи
по шине Fieldbus
0 5 2
733
= Отказ
= Отказ, останов выбегом
= Предупреждение;
предыдущая частота
P2.12.10.2 Задержка отказа FB 0,00 60,00 с 0,50
P2.12.10.3
таймера FB
0,00 30,00 с 0,00
Таблица 6–35. Защита шины Fieldbus
6.12.11 Внешний отказ
P2.12.11.1
P2.12.11.2
Реакция на внешний
отказ 1
Реакция на внешний
отказ 2
0 3 2
0 3 2
6.12.12 Отказ энкодера
1850
1354
701
747
импульса от сторожевого
= Предупреждение
= Отказ, останов в соотв. с
2.3.2
= Предупреждение
= Отказ, останов в соотв. с
2.3.2
P2.12.12.1
P2.12.12.2
P2.12.12.3
6.12.13 Опции
P2.12.14
P2.12.15
быстрого вращения
Перезапуск
регистратора данных
1 2 2
0,00 320,00 Гц
0,00 32,00 с
0 1 0
-1 1 0
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1353
1801
1805
1086
1857
0 = Нет
Page 70

APFIFF09 MARINE VACON®• 71
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Минимальный масштаб
шины Fieldbus
Максимальный масштаб
шины Fieldbus
Выбор 1 выводимых данных
Выберите контролируемые
По умолч.: выходная частота
Выбор 2 выводимых данных
процесса по шине Fieldbus
Выбор 3 выводимых данных
процесса по шине Fieldbus
По умолч.: ток двигателя на шину
FB
Выбор 4 выводимых данных
процесса по шине Fieldbus
Выбор 5 выводимых данных
процесса по шине Fieldbus
Выбор 6 выводимых данных
Выбор 7 выводимых данных
процесса по шине Fieldbus
По умолч.: напряжение звена
пост. тока
Выбор 8 выводимых данных
процесса по шине Fieldbus
По умолч.: последний активный
отказ
Выберите контролируемые
момента с FB
Выбор 2 вводимых данных
процесса по шине Fieldbus
По умолч.: масштабирование
предела FB
Выбор 3 вводимых данных
процесса по шине Fieldbus
По умолч.: регулировка задания
FB
Выбор 4 вводимых данных
процесса по шине Fieldbus
Выберите контролируемые
идентификатора параметра
Выберите контролируемые
идентификатора параметра
Выберите контролируемые
идентификатора параметра
Выберите контролируемые
идентификатора параметра
Идентификатор общего
слова состояния
Выберите контролируемые
данные в общем слове состояния
Режим фактической
скорости FB
0 = Рассчитанная
1 = Фактическая
Селектор гнезда
0 = Все 4 = Гнездо D
5
1 = Стандартная
2 = ProfiDrive
Мин. пользовательское
значение для FB
Мин. масштаб задания скорости
по FB
Макс. пользовательское
значение для FB
Мин. масштаб задания скорости
по FB
Программный выбор бита
идентификации 11
Программный выбор бита
идентификации 12
Программный выбор бита
идентификации 13
Программный выбор бита
идентификации 14
6.13 Параметры шины Fieldbus
P2.13.1
P2.13.2
P2.13.3
P2.13.4
P2.13.5
P2.13.6
P2.13.7
P2.13.8
P2.13.9
P2.13.10
P2.13.11
P2.13.12
P2.13.13
P2.13.14
процесса по шине Fieldbus
процесса по шине Fieldbus
Выбор 1 вводимых данных
процесса по шине Fieldbus
0,00 320,00 Гц 0,00
0,00 320,00 Гц 0,00
0 10000 1
0 10000 2
0 10000 3
0 10000 4
0 10000 5
0 10000 6
0 10000 7
0 10000 37
0 10000 1140
0 10000 46
0 10000 47
0 10000 48
850
851
данные с помощью
852
идентификатора параметра
853 По умолч.: скорость двигателя
854
855 По умолч.: момент двигателя
856 По умолч.: мощность двигателя
857 По умолч.: напряжение двигателя
858
859
данные с помощью
876
идентификатора параметра.
По умолч.: задание крутящего
877
878
879 По умолч.: аналоговый выход FB.
P2.13.15
P2.13.16
P2.13.17
P2.13.18
P2.13.19
P2.13.20
P2.13.21
P2.13.22 Конечная машина 1 2 1
P2.13.23
P2.13.24
P2.13.25
P2.13.26
P2.13.27
P2.13.28
Выбор 5 вводимых данных
процесса по шине Fieldbus
Выбор 6 вводимых данных
процесса по шине Fieldbus
Выбор 7 вводимых данных
процесса по шине Fieldbus
Выбор 8 вводимых данных
процесса по шине Fieldbus
управления
0 10000 0
0 10000 0
0 10000 0
0 10000 0
0 10000 67
0 1 0
0 8 0
-32000 +32000 0
-32000 +32000 +10000
0 2000,00 0
0 2000,00 0
0 2000,00 0
0 2000,00 0
880
данные с помощью
881
данные с помощью
882
данные с помощью
883
данные с помощью
897
1741
1440
896
898
899
1628
1629
1630
1631
= Гнездо E
Таблица 6–36. Параметры шины Fieldbus
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 71

72 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Идентификатор входного
сигнала управления
Предел отключения
входа управления
Предел включения входа
управления
Значение выключения
Значение включения
выхода управления
Идентификатор сигнала
выхода управления
0 = SR абс. энкодера
1 =
2
3
4 =
5 =
инвертированный
Время фильтрации
выхода управления
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Цифровой вход
идентификатору
Выберите идентификатор,
входу
Значение при низком уровне
сигнала на цифровом входе
Значение при высоком
входе
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Цифровой вход
идентификатору
Выберите идентификатор,
входу
Значение при низком уровне
сигнала на цифровом входе
Значение при высоком уровне
сигнала на цифровом входе
6.14 Функции управления идентификатором
6.14.1 Управление значением
P2.14.1.1
P2.14.1.2
P2.14.1.3
P2.14.1.4
P2.14.1.5
P2.14.1.6
P2.14.1.7 Режим управления 0 5 0
P2.14.1.8
выхода управления
0 10000 Ид. 0
-32000 32000 0
-32000 32000 0
-32000 32000 0
-32000 32000 0
0 10000 Ид. 0
0,000 32,000 с 0,000
Таблица 6–37. Выбор входного сигнала задания мощности, G2.2.8
6.14.2 Управление 1 идентификатором цифрового входа
P2.14.2.1
управления по
0,1 E.10 0,1
1580
1581
1582
1583
1584
1585
Масштаб абс. энкодера
= Масштаб абс. энкодера,
инвертированный
1586
1721
1570 Гнездо . Вход платы №
= SR
Масштаб
Масштаб
P2.14.2.2
P2.14.2.3 Ошибочное значение -32000 32000 0 1572
P2.14.2.4 Значение True -32000 32000 0
Управляемый
идентификатор
0 10000 Ид. 0
1571
1573
Таблица 6–38. Параметры управления идентификатором цифрового входа
6.14.3 Управление 2 идентификатором цифрового входа
P2.14.3.1
P2.14.3.2
P2.14.3.3 Ошибочное значение -32000 32000 0 1592
P2.14.3.4 Значение True -32000 32000 0
Таблица 6–39. Параметры управления идентификатором цифрового входа
управления по
Управляемый
идентификатор
0,1 E.10 0,1
0 10000 Ид. 0
1590 Гнездо . Вход платы №
1575
1593
управляемый по цифровому
уровне сигнала на цифровом
управляемый по цифровому
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 72

APFIFF09 MARINE VACON®• 73
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Цифровой вход
идентификатору
Выберите идентификатор,
входу
Значение при низком уровне
сигнала на цифровом входе
Значение при высоком
входе
Код
Параметр
Мин.
Mакс.
Ед. измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Бит идентификации
цифрового входа
Выбор
цифрового выхода
Код
Параметр
Мин.
Mакс.
Ед. измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
Бит идентификации
цифрового входа
Выбор произвольного
цифрового выхода
Код
Параметр
Мин.
Mакс.
Ед. измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Бит идентификации
цифрового входа
P2.14.7.2
Задержка включения
0,00
320,00 с 0,00
1833 P2.14.7.3
Задержка отключения
0,00
320,00 с 0,00
1834
Одиночный импульс
Идентификатор
выхода управления
6.14.4 Управление 3 идентификатором цифрового входа
P2.14.4.1
P2.14.4.2
P2.14.4.3 Ошибочное значение -32000 32000 0 1594
P2.14.4.4 Значение True -32000 32000 0
управления по
Управляемый
идентификатор
0,1 E.10 0,1
0 10000 Ид. 0
1578 Гнездо . Вход платы №
1579
управляемый по цифровому
1596
уровне сигнала на цифровом
Таблица 6–40. Параметры управления идентификатором цифрового входа
6.14.5 Управляемый по идентификатору цифровой выход 1
P2.14.5.1
P2.14.5.2
произвольного
произвольного
0,00 2000,15
0,1 E.10 0,1 1574
Таблица 6–41. Параметры цифровых входов, управляемых по идентификатору, G2.3.10
Бит
идентификации
0,00 1216
6.14.6 Управляемый по идентификатору цифровой выход 2
P2.14.6.1
P2.14.6.2
произвольного
0,00 2000,15
0,1 E.10 0,1 1574
Бит
идентификации
0,00 1386
Таблица 6–42. Параметры цифровых входов, управляемых по идентификатору, G2.3.10
6.14.7 Задержка произвольного цифрового входа
P2.14.7.1
P2.14.7.4
P2.14.7.5
произвольного
времени
0,00 2000,15
0,00 320,00 с 0,00 1836
0 10000 0 1835
Таблица 6–43. Параметры цифровых входов, управляемых по идентификатору, G2.3.10
Бит
идентификации
0,00 1832
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 73
74 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Время, требуемое для
отпускания тормоза
Предел частоты
разомкнутом контуре
Предел отпускания и
задания, когда тормоз закрыт.
Предел частоты
замкнутом контуре
Предел отпускания и
задания, когда тормоз закрыт.
Предел частоты
включения тормоза +
Частота наложения из
положительного направления
Предел частоты
включения тормоза -
Частота наложения из
отрицательного направления
Если ток падает ниже этого
включается.
При нуле функция отключена.
увеличиваться.
Точка, в которой значение
генератора.
Макс. дополнительное
генератора
1 = Предупреждение
2
3 = Отказ, останов выбегом
P2.15.11
Задержка отказа тормоза
0,00
320,00 с 0,20
1317
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
0 = Не используется
1
2
3
вперед/назад
Крутящий момент при
пуске ВПЕРЕД
Крутящий момент при
пуске НАЗАД
Время крутящего
момента при пуске
-1 = А
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
P2.15.13.1
Kp отката
1787
P2.15.13.2
Откат крутящего момента
1788 P2.15.13.3
Уровень отката
1789
6.15 Brake Control (Управление тормозом)
P2.15.1 Задержка мех. тормоза 0,00 320,00 с 0,00 1544
P2.15.2
P2.15.3
P2.15.4
P2.15.5
P2.15.6
P2.15.7
P2.15.8
P2.15.9
P2.15.10
выключения тормоза при
выключения тормоза при
Предельный ток
вкл./выкл. тормоза
Уровень скорости при
увеличении предела
крутящего момента
генератора
Макс. уровень скорости
при увеличении предела
крутящего момента
генератора
увеличение предела
крутящего момента
Действие при отказе
тормоза
0,00 320,00 Гц 1,50 1535
0,00 320,00 Гц 0,00 1555
0,00 320,00 Гц 1,00 1539
0,00 320,00 Гц 1,50 1540
0,00 320,00 А 0,00 1085
0,00 320,00 Гц 0,00 1547
0,00 320,00 Гц 100,00 1548
0,0 300,0 % 300,0 1549
1 3 1
1316
максимальный предел
максимальный предел
значения, тормоз немедленно
Точка, в которой предел
крутящего момента
генератора начинает
крутящего момента из ID1549
добавляется к базовому
крутящему моменту
= Отказ, останов в соотв.
с 2.3.2
Таблица 6–44. Параметры управления тормозом, G2.3.9
6.15.1.1 Пусковой крутящий момент управления тормозом в замкнутом контуре
P2.15.12.1
P2.15.12.2
P2.15.12.3
P2.15.12.4
Крутящий момент при
пуске
0 3 0
-300,0 300,0 с 0,0
-300,0 300,0 с 0,0
-1 10000 мс -1
621
633
634
1371
= Память крутящего момента
= Задание крутящего момента
= Крутящий момент при пуске
6.15.1.2 Управление откатом в замкнутом контуре
втоматический
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 74

APFIFF09 MARINE VACON®• 75
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
Время освобождения
крутящего момента при
останове
6.15.1.3 Функции
P2.15.14.1
0 32000 мс 0
1848
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 75

76 • VACON® APFIFF09 MARINE
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Пользоват.
знач.
Ид.
Примечание
P2.16.1
Время ожидания
0,10
10,00 с 0,50
717
Время на попытки
перезапуска
0 = Изменение скорости
1
2
останова
Число попыток после
пониженного напряжения
Число попыток после
повышенного напряжения
Число попыток после
перегрузки по току
Число попыток после
отключения из-за задания
Число попыток после
перегрева двигателя
Число попыток после
Количество попыток после
недогрузки
P2.16.11
Моделирование отказа
0
65535 0
1569
Код
Параметр
Мин.
Mакс.
Ед.
измер.
Ступень
По
умолчанию
Ид.
Примечание
Усиление ПИ-
регулятора
Время И-звена ПИ-
регулятора
P2.17.3
Задание ПИ-регулятора
-32000
32000 0 167
Сигнал задания ПИ-
Ид.
Фактический
регулятора
Идентификатор
регулятора
>= 1 = нет инверсии
<=-1 =
0 = недопустимое значение
Нижний предел ПИ-
регулирования
Верхний предел ПИ-
Масштаб выхода ПИ-
регулятора
Значение ПИ-
состоянии останова
6.16 Параметры автоматического перезапуска
P2.16.2
P2.16.3 Функция запуска 0 2 2
P2.16.4
P2.16.5
P2.16.6
P2.16.7
P2.16.8
P2.16.9
P2.16.10
отключения из-за
отключения из-за
отключения из-за
отключения из-за
отключения
отключения из-за
0,00 60,00 с 0,10
0 10 0
0 10 0
0 3 0
0 10 0
0 10 0
0 10 0
0 10 0
Таблица 6–45. Параметры автоматического перезапуска, G2.16
6.17 Параметры ПИ-регулирования
718
719
720
721
722
723
726
725
738
= Пуск на ходу
= В соответствии с функцией
P2.17.1
P2.17.2
P2.17.4
P2.17.5
P2.17.6
P2.17.7
P2.17.8
P2.17.9
P2.17.10
P2.17.11
регулятора
идентификатор ПИ-
выхода ПИ-
Масштаб ПИ-
регулятора
регулирования
регулирования в
0,0 1000,0 % 100,0 118
0,00 320,00 с 1,00 119
0 10000 167 332 По умолчанию P2.17.3
0 10000 0 333
0 10000 0 1802
-32000 32000 1 340
-32000 32000 359
-32000 32000 10000 360
-3200,0 3200,0 % 100,0 1803
-32000 32000 0 1806
Таблица 46. Параметры ПИ-регулятора, G2.15
есть инверсия
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 76

APFIFF09 MARINE VACON®• 77
Код
Параметр
Мин.
Mакс.
Ед.
измер.
По
умолчанию
Поль-
зоват.
знач.
Ид.
Примечание
0 = Управление с ПК
1
2
3 = Fieldbus
R3.2
Задание с клавиатуры
P2.1.1
P2.1.2
Гц
0,00
Направление
(на клавиатуре)
0 = Вперед
1 = Реверс
0 = Ограниченная функция
1
разрешена
Задание крутящего
момента
6.18 Управление с клавиатуры (клавиатура панели управления: меню M3)
Ниже перечислены параметры для выбора источника сигналов управления и
направления с помощью клавиатуры. См. описание меню управления с клавиатуры
®
в руководстве по эксплуатации VACON
NX.
P3.1
P3.3
P3.4 Кнопка Stop 0 1 1 114
R3.5
Источник сигналов
управления
1 3 2 125
0 1 0 123
0,0 100,0 % 0,0
= Клеммы входов/выходов
= Клавиатура
кнопки Stop (Стоп)
= Кнопка Stop (Стоп) всегда
Таблица 6–47. Параметры управления с клавиатуры, M3
6.19 Системное меню (клавиатура панели управления: меню M6)
Сведения об общих параметрах и функциях преобразователя частоты (таких как выбор
прикладной программы и языка, наборы параметров, настраиваемых заказчиком, или
информация об аппаратных и программных средствах) см. в руководстве по
®
эксплуатации VACON
NX.
6.20 Платы расширения (клавиатура панели управления: меню M7)
В меню
плате управления, а также приведена информация о платах. Более подробную
к
информацию см. в руководстве по эксплуатации VACON
M7 показаны платы расширения и дополнительные платы, присоединенные
®
NX.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 77

78 • VACON® APFIFF09 MARINE
7. ПРИКЛАДНАЯ ПРОГРАММА MARINE — ОПИСАНИЕ ПАРАМЕТРОВ
7.1 Базовые параметры
P2.1.1 Минимальная частота ID101 «Min Frequency» (Мин. частота)
Определяет минимальную частоту любого регулируемого входа задания (то есть
когда задание не является параметром). Минимальная частота обходится при
использовании скорости толчкового режима (jogging), предустановленной скорости
или задания толчкового режима (inching).
P2.1.2 Максимальная частота ID102 «Max Frequency» (Макс. частота)
Определяет макс. предел частоты для положительного и отрицательного направлений.
Пределы частоты в зависимости от направления могут устанавливаться в «G: Limit
Settings (Настройки пределов) \ Frequency Handling (Обработка частоты)».
Примечание. Когда преобразователь частоты находится в состоянии вращения,
изменяйте значение этого параметра на более низкое, чем текущая выходная
не
частота. Изменение будет выполнено без разгона/замедления.
Примечание. Максимальная и минимальная частоты используются в нескольких
функциях масштабирования и не рассчитаны на динамическое изменение значений.
Никогда не устанавливайте значение максимальной частоты равным минимальной
частоте или меньше. При изменении частоты в прикладной программе
Marine не
подавайте никакие другие команды на преобразователь частоты в течение 2 секунд,
чтобы программное обеспечение могло надлежащим образом обработать изменения.
Работа DriveSynch
Максимальная рекомендуемая частота — 100 Гц.
P2.1.3 Номинальное напряжение двигателя ID110 «Motor Nom Voltg» (Ном. напр. двиг.)
Возьмите это значение Un с паспортной таблички двигателя.
P2.1.4 Номинальная частота двигателя ID111 «Motor Nom Freq» (Ном. част. двиг.)
Возьмите это значение fn с паспортной таблички двигателя. Значению этого
параметра также становится равен параметр точки ослабления поля в «G: Motor
Control (Управление двигателем) \ U/f Settings (Настройки U/f)».
P2.1.5 Номинальная скорость двигателя ID112 «Motor Nom Speed» (Ном. скор. двиг.)
Возьмите это значение nn с паспортной таблички двигателя. Также примите во
внимание номинальную частоту.
Иногда значение номинальной скорости двигателя указывается с точностью
до одного разряда после запятой. В этом случае такое значение округляют до
ближайшего целого значения и корректируют номинальную частоту двигателя с
таким расчетом, чтобы преобразователь частоты правильно вычислял значение
[FW]PolePairNumber (ЧислоПарПолюсов).
P2.1.6 Номинальный ток двигателя ID113 «Motor Nom Currnt» (Ном. ток двиг.)
Возьмите это значение In c паспортной таблички двигателя. Если известно значение
тока намагничивания, перед выполнением идентификации также задайте параметр
P2.1.9 (Ток намагничивания).
Работа DriveSynch
Номинальный ток с паспортной таблички двигателя/число двигателей, работающих
®
параллельно в системе VACON
DriveSynch.
P2.1.7 Cos Phi двигателя ID120 «Motor Cos Phi» (Cos Phi двигателя)
Возьмите это значение «cos phi» с паспортной таблички двигателя.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 78

APFIFF09 MARINE VACON®• 79
P2.1.8 Номинальная мощность двигателя ID116 «Motor Nom Power» (Ном. мощн. двиг.)
Возьмите эту величину с паспортной таблички двигателя.
Работа DriveSynch
Номинальная мощность с паспортной таблички двигателя/число преобразователей
частоты, работающих параллельно в системе VACON
®
DriveSynch.
P2.1.9 Ток намагничивания ID612 «MagnCurrent» (Ток намагн.)
Введите в этот параметр значение тока намагничивания двигателя (ток без
нагрузки).
Может быть измерен путем запуска двигателя с нагрузкой, составляющей 2/3 от
номинальной.
При нулевом значении этого параметра ток намагничивания вычисляется по
номинальным параметрам двигателя.
5 1
=
5
=
5
1 ( )
2
1 ( )2 1
5
()> (
,
)
[]
=
()
)
(
Если значение этого параметра известно до выполнения автоматического
определения (идентификации) параметров двигателя, оно используется в качестве
справочного для настройки параметров кривой U/f при выполнении идентификации
без вращения двигателя.
Работа DriveSynch
Номинальный ток намагничивания /число преобразователей частоты, работающих
®
параллельно в системе VACON
DriveSynch.
P2.1.10 Идентификация ID631 «Identification» (Идентификация)
Выполнение идентификации — это часть настройки особых параметров двигателя
и преобразователя частоты. Этот инструмент для ввода в эксплуатацию и
обслуживания ПЧ предназначен для определения как можно лучших значений
параметров для большинства преобразователей частоты. Средство автоматической
идентификации двигателя рассчитывает или измеряет параметры двигателя,
которые требуются для оптимального управления двигателем и скоростью.
ПРИМЕЧАНИЕ. Перед идентификацией установите в качестве режима управления
двигателем режим регулирования частоты!
Примечание. Во время выполнения идентификации преобразователь частоты
в
целях обеспечения безопасности не отпускает механический тормоз. Если для
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 79

80 • VACON® APFIFF09 MARINE
используемого метода идентификации необходимо свободное вращение вала,
потребуется внешнее отпускание механического тормоза.
Примечание. Во время выполнения идентификации предельные значения
крутящего момента и мощности должны быть больше 100 %. Кроме того,
предельный ток должен быть больше номинального тока двигателя.
Примечание. Во время выполнения идентификации время разгона не должно
превышать 20 с.
Примечание. Если значение частоты коммутации изменяется после идентификации,
рекомендуется выполнить идентификацию еще раз.
Примечание. В случае двигателей небольшой мощности и при большой длине
кабелей для успешного выполнения идентификации может потребоваться уменьшить
значение частоты коммутации.
0 = «No Action» (Нет действия) — нет действия
Идентификация не запрашивается.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 80

APFIFF09 MARINE VACON®• 81
P2.1.9 «MagnCurrent» (Ток намагн.)
P2.8.4.2 «U/f Ratio Select» (Выбор завис. U/f)
P2.8.4.2 «U/f Ratio Select» (Выбор
завис. U/f)
P2.8.4.5 «U/f Mid Freq» (Част СреднТочU/f)
P2.8.4.5 «U/f Mid Freq» (Част
СреднТочU/f)
P2.8.4.6 «U/f mid Voltg» (Напр СреднТочU/f)
P2.8.4.6 «U/f mid Voltg» (Напр
СреднТочU/f)
P2.8.4.7 «Zero Freq Voltg» (Напр НульЧаст)
P2.8.4.7 «Zero Freq Voltg» (Напр
НульЧаст)
P2.8.5.1 «CurrentControlKp» (Kp РегулятТока)
P2.8.9.16 RsVoltageDrop
P2.8.6.12 LsdVoltageDrop (ПаденНапрLsd)
P2.8.9.17 «IrAddZeroPVoltag»
(НапрКомпIrНулТочк)
P2.8.6.13 LsqVoltageDrop (ПадениеНапрLsq)
P2.8.9.22-24 Ix Offset (Смещ. Ix)
P2.8.6.19 Curr. Contr. Kp d (Kp d управл. током)
1 = «ID No Run» (Идентификация без вращения) — идентификация без вращения
двигателя
Ток подается в обмотки двигателя, но вал двигателя не вращается. В этом режиме
определяются параметры кривой U/f.
Это минимальная необходимая идентификация при управлении двигателем в
режиме с разомкнутым контуром. Тем не менее, после подключения механизмов
к валу рекомендуется всегда выполнять идентификацию с вращением двигателя
в случае необходимости работы с разомкнутым контуром.
Пример выполнения
Параметры, обновляемые в ходе этой идентификации
Асинхр. двиг.: Двиг. с пост. магн.:
(ПадениеНапрRs)
P2.8.9.16 RsVoltageDrop (ПадениеНапрRs)
P2.8.9.20 LsVoltageDrop (ПадениеНапрLs)
P2.8.9.22-24 Ix Offset (Смещ. Ix)
P2.8.9.25 «Estimator Kp» (Kp МодуляОценки)
P2.8.9.17 «IrAddZeroPVoltag»
(НапрКомпIrНулТочк)
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 81

82 • VACON® APFIFF09 MARINE
P2.1.9 «MagnCurrent» (Ток
P2.8.4.2 «U/f Ratio Select» (Выбор завис. U/f)
P2.8.4.2 «U/f Ratio Select»
(Выбор завис. U/f)
P2.8.4.3 «Field WeakngPnt» (Точка ослабления
поля)
P2.8.4.5 «U/f Mid Freq» (Част
СреднТочU/f)
P2.8.4.5 «U/f Mid Freq» (Част СреднТочU/f)
P2.8.4.6 «U/f mid Voltg» (Напр
СреднТочU/f)
P2.8.4.6 «U/f mid Voltg» (Напр СреднТочU/f)
P2.8.4.7 «Zero Freq Voltg»
(Напр НульЧаст)
P2.8.4.7 «Zero Freq Voltg» (Напр НульЧаст)
P2.8.9.16 RsVoltageDrop
(ПадениеНапрRs)
P2.8.5.1 «CurrentControlKp» (Kp РегулятТока)
P2.8.9.17 «IrAddZeroPVoltag»
(НапрКомпIrНулТочк)
P2.8.6.12 LsdVoltageDrop (ПаденНапрLsd)
P2.8.9.22-24 Ix Offset (Смещ. Ix)
P2.8.6.13 LsqVoltageDrop (ПадениеНапрLsq)
P2.8.9.1–15 «Flux X %» (Магн.
поток X, %)
P2.8.6.19 Curr. Contr. Kp d (Kp d управл. током)
2 = «ID With Run» (Идентификация с вращением) — идентификация с вращением
двигателя
Необходимо, чтобы вал двигателя мог свободно вращаться.
Для выполнения идентификации с вращением вал двигателя должен быть
отсоединен от нагрузки. В этом режиме определяются параметры кривой U/f и ток
намагничивания. Независимо от конечного режима управления (то есть с замкнутым
или разомкнутым контуром) следует по возможности использовать именно этот
способ идентификации, так как он позволяет обеспечить более точное и
качественное управление двигателем. После успешного определения при
вращающемся двигателе преобразователь частоты начинает использовать
внутреннюю оценку скольжения для компенсации изменившейся температуры
двигателя, параметр SCTorqueChainSelect (ВыборЦепиМом/УпрСкор), B5 и B6.
Пример выполнения
Параметры, обновляемые в ходе этой идентификации
Асинхр. двиг.: Двиг. с пост. магн.:
намагн.)
P2.8.9.16 RsVoltageDrop (ПадениеНапрRs)
P2.8.9.20 LsVoltageDrop (ПадениеНапрLs)
P2.8.9.21 «MotorBEMVoltage» (НапрПрЭДС двиг.)
P2.8.9.22-24 Ix Offset (Смещ. Ix)
P2.8.9.25 «Estimator Kp» (Kp МодуляОценки)
P2.8.9.17 «IrAddZeroPVoltag» (НапрКомпIrНулТочк)
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 82

APFIFF09 MARINE VACON®• 83
P2.1.9 «MagnCurrent»
(Ток намагн.)
P2.8.6.1 «PMSMShaftPositio»
(Положение вала СПДМ)
P2.8.4.2 «U/f Ratio Select»
(Выбор завис. U/f)
P2.8.9.22-24 Ix Offset (Смещ. Ix)
P2.8.4.5 «U/f Mid Freq»
(Част СреднТочU/f)
P2.8.9.25 «Estimator Kp» (Kp МодуляОценки)
3 = «Enc. ID Run» (Идент. с энкод.) — выполнение идентификации с энкодером
Необходимо, чтобы вал двигателя мог свободно вращаться.
СДПМ: для синхронного двигателя с постоянными магнитами (СДПМ) эта операция
используется в том случае, когда автоматическое определение начального угла не
подходит для используемого двигателя (угол определяется автоматически при
каждом пуске, если параметр положения вала СДПМ содержит нулевое значение).
При выполнении этого вида идентификации значение параметра положения вала
СДПМ обновляется с учетом абсолютного положения абсолютного энкодера или
положения нулевой метки (Z-импульса) инкрементального энкодера.
Асинхронные двигатели: при выполнении этой операции для асинхронного
двигателя определяются направление и количество импульсов энкодера. Может
использоваться, если информация энкодера полностью отсутствует; точные
результаты можно получить, только если двигатель отсоединен от нагрузки.
Примечание. Если положение энкодера относительно двигателя будет изменено
(например, после ремонта), идентификацию потребуется выполнить повторно.
Параметры, обновляемые в ходе этой идентификации
Асинхр. двиг.: Двиг. с пост. магн.:
P2.8.4.6 «U/f mid Voltg» (Напр СреднТочU/f)
P2.8.4.7 «Zero Freq Voltg» (Напр НульЧаст)
P2.8.9.16 RsVoltageDrop (ПадениеНапрRs)
P2.8.9.17 «IrAddZeroPVoltag»
(НапрКомпIrНулТочк)
P2.8.9.22-24 Ix Offset (Смещ. Ix)
P2.8.9.1–15 «Flux X %» (Магн. поток X, %)
P7.3.1.2 «Pulse revolution» (Имп. за оборот)
P7.3.1.3 Invert direction (Смена направл.)
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 83

84 • VACON® APFIFF09 MARINE
P2.1.9 «MagnCurrent» (Ток
намагн.)
P2.8.4.2 «U/f Ratio Select» (Выбор завис. U/f)
P2.8.4.2 «U/f Ratio Select» (Выбор
P2.8.4.3 «Field WeakngPnt» (Точка ослабления
P2.8.4.5 «U/f Mid Freq» (Част
СреднТочU/f)
P2.8.4.5 «U/f Mid Freq» (Част СреднТочU/f)
P2.8.4.6 «U/f mid Voltg» (Напр
СреднТочU/f)
P2.8.4.6 «U/f mid Voltg» (Напр СреднТочU/f)
P2.8.4.7 «Zero Freq Voltg» (Напр
НульЧаст)
P2.8.4.7 «Zero Freq Voltg» (Напр НульЧаст)
P2.8.9.16 RsVoltageDrop
(ПадениеНапрRs)
P2.8.5.1 «CurrentControlKp» (Kp РегулятТока)
P2.8.9.17 «IrAddZeroPVoltag»
(НапрКомпIrНулТочк)
P2.8.6.12 LsdVoltageDrop (ПаденНапрLsd)
P2.8.9.22-24 Ix Offset (Смещ. Ix)
P2.8.6.13 LsqVoltageDrop (ПадениеНапрLsq)
P2.8.9.1–15 «Flux X %» (Магн.
поток X, %)
P2.8.6.19 Curr. Contr. Kp d (Kp d управл. током)
4 = «Ident All» (Все методы) — идентификация с использованием всех методов
Необходимо, чтобы вал двигателя мог свободно вращаться.
Все вышеприведенные выборы определения выполняются по порядку.
Параметры, обновляемые в ходе этой идентификации
Асинхр. двиг.: Двиг. с пост. магн.:
завис. U/f)
P2.8.9.16 RsVoltageDrop (ПадениеНапрRs)
P2.8.9.17 «IrAddZeroPVoltag»
P2.8.9.20 LsVoltageDrop (ПадениеНапрLs)
P2.8.9.22-24 Ix Offset (Смещ. Ix)
P2.8.9.25 «Estimator Kp» (Kp МодуляОценки)
поля)
(НапрКомпIrНулТочк)
P2.8.9.21 «MotorBEMVoltage» (НапрПрЭДС двиг.)
P2.8.6.1 «PMSMShaftPositio» (Положение вала СПДМ)
5 = «Enc.ABS.Lock» (АбсЭнкодЗаблокРотор) — абсолютный энкодер при
заблокированном роторе
Определение нулевого положения абсолютного энкодера при заблокированном
роторе двигателя с постоянными магнитами.
Вал двигателя должен быть заблокирован во время выполнения идентификации
в этом режиме.
Параметры, обновляемые в ходе этой идентификации
Двиг. с пост. магн.:
P2.8.6.1 «PMSMShaftPositio» (Положение вала СПДМ)
P2.8.9.22-24 Ix Offset (Смещ. Ix)
P2.8.9.25 «Estimator Kp» (Kp МодуляОценки)
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 84

APFIFF09 MARINE VACON®• 85
6 = «U/f + Magn.Curr» (U/f + Ток намагн.) — кривая U/f и ток намагничивания
Вал двигателя вращается во время выполнения идентификации.
При выборе этого метода идентиикации не производится определение по кривой
насыщения, а тормоз отпускается при начале вращения при пуске.
Поскольку прогон кривой насыщения не выполняется, время выполнения
идентификации сокращается, и она возможна даже при подсоединенном
подъемном крюке.
Пример выполнения
Параметры, обновляемые в ходе этой идентификации
- P2.1.9 «MagnCurrent» (Ток намагн.)
- P2.8.4.2 «U/f Ratio Select» (Выбор завис. U/f)
- P2.8.4.5 «U/f Mid Freq» (Част СреднТочU/f)
- P2.8.4.6 «U/f mid Voltg» (Напр СреднТочU/f)
- P2.8.4.7 «Zero Freq Voltg» (Напр НульЧаст)
- P2.8.9.16 RsVoltageDrop (ПадениеНапрRs)
- P2.8.9.17 «IrAddZeroPVoltag» (НапрКомпIrНулТочк)
- P2.8.9.22-24 Ix Offset (Смещ. Ix)
10 = «ID Run Fails» (Сбой идент.) — не удалось выполнить идентификацию
Последняя попытка выполнить идентификацию завершилась сбоем.
Перед выполнением идентификации необходимо правильно задать основные
параметры, указанные на паспортной табличке двигателя:
- P2.1.3 – P2.1.8. Основные данные двигателя.
- P2.1.9 (Ток намагничивания) также может указываться, если он доступен перед
идентификацией без вращающегося двигателя; Кривая U/f будет подстроена в
соответствии с заданным током намагничивания.
- P2.1.11 Тип двигателя.
При управлении с замкнутым контуром с установленным энкодером также
необходимо задать параметр количества импульсов/оборотов (в меню M7).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 85

86 • VACON® APFIFF09 MARINE
Чтобы выполнить автоматическую идентификацию, необходимо задать для этого
параметра требуемое значение, после чего подать команду пуска в запрошенном
направлении. Команда пуска должна быть подана на преобразователь частоты в
течение 20 с. Если в течение 20 секунд команда пуска не будет подана, выполнение
идентификации отменяется и параметр сбрасывается к значению по умолчанию.
Выполнение идентификации можно остановить в любое время с помощью обычной
команды останова. Параметр при этом сбрасывается к значению по умолчанию. Если
во время выполнения идентификации выявляется какой-либо сбой или неполадка,
преобразователь частоты пытается довести идентификацию до конца, если это
возможно. Если не все запрошенные типы идентификации удалось выполнить
успешно, по завершении идентификации выдается предупреждение.
Во время выполнения идентификации управление тормозом не действует.
Примечание. После выполнения идентификации запустить двигатель можно только
новой командой пуска (преобразователь частоты ожидает нарастающий фронт).
Примечание. В прикладной программе Marine все полученные путем идентификации
значения сохраняются в параметрах. В случае загрузки предыдущих параметров
обратно в преобразователь частоты, например после замены платы управления,
повторять идентификацию не требуется.
Работа DriveSynch: Идентификация активируется только с ведущего
преобразователя:
P2.1.11 Тип двигателя ID650 «Motor Type» (Тип двигателя)
Данный параметр служит для выбора типа используемого двигателя.
0 «Induction» (Индукционный) — асинхронный двигатель
– Асинхронный двигатель
1 «PMSM» (СДПМ) — синхронный двигатель с постоянными магнитами
– Синхронный двигатель
– Прежде чем использовать преобразователь частоты с двигателем с внешним
намагничиванием, проконсультируйтесь с производителем.
– Если частоты коммутации выше 3,5 кГц не требуются, в этой точке
рекомендуется переключиться на программный модулятор 1. Подробнее читайте
в главе 6.8.3 «Настройка синхронного двигателя с постоянными магнитами» и в
главе 8 «Функции идентификации синхронных двигателей с постоянными
магнитами».
См. описание связанного параметра в группе G2.8.6 «Параметры управл.
двигателем/СДПМ».
2 «Sep.Ex SM» (СинхрНезависВозбужд) — синхронный двигатель
с независимым возбуждением
– По состоянию на 18.01.2018 это прикладная программа не поддерживает
задание возбуждения для преобразователей частоты с возбуждением.
3 «Reserved» (Зарезервировано)
4 «SRM» (СинхрРеактДвиг)
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 86

APFIFF09 MARINE VACON®• 87
SEL
G
IN 0
IN 1
Конечное расположение задания
PC
Управл ение с ПК
PC
Задание с ПК
SEL
G
IN 0
IN 1
AND
IN 1
IN 2
F
Follower (Ведомый)
F
Ref from Maste r
(Задание с ведущего)
SEL
G
IN 0
IN 1
FW
ConstantFreqRef6
(За дан ие6П ост оян ной Ча ст оты)
FW
ConstantFreqRef7
(За дан ие7П ост оян ной Ча ст оты)
F
Ramp Follower (Изм.
скорости, ведо мый )
SEL
G
IN 0
IN 1
DI
Enable Inching
(Разрешить толчковый режим)
P
Inching Ref 1 / 2 (Зад ани е
1 / 2 толчкового режима)
SEL
G
IN 0
IN 1
DI
(F)
Preset S pe ed
(Пре дустан овл. с коро сть)
P(F)
Preset S pe eds
(Пре дустан овл. с коро сти)
F
4 mA fault
(Отказ 4 мА )
SEL
G
IN 0
IN 1
P
4mA Faul t Fr eq.
(Отказ частоты 4 мА)
P
Исто чник сигна лов уп равл ения
P
I/O Reference (За дан ие в х./в ых.)
P
Key pad Ref Sel
(Выбор задания клавиатуры)
P
Fi el db us Ct r R ef
(Задание управления по Fiel db us)
SEL
G
IN 0
IN 1
P
I/O Reference 2
(За дан ие в х./в ых. 2)
DI
I/O Re f 1/2 (За дан ие в х./в ых. 1/2)
MUX
K
IN 0
IN 1
IN 2
IN 3
MIN
IN 1
IN 2
SEL
G
IN 0
IN 1
DI
Max F req ue ncy 2 (М акс. частота 2)
P
Max F req ue ncy (Мак с. ча сто та)
P
Max F req ue ncy 2 (М акс. частота 2)
P
SpeedShare
C
100,00
ADD
+
+
+
F
Adj ust R eferen ce (Ре гулиро вка з адания )
FW
FreqRef2
(ЗаданиеЧастоты2)
LIMIT
MN
IN
MX
P
Max F req ue ncy (Мак с. ча сто та)
P
Pos Freq Li mit (П олож. предел частоты)
LIMIT
MN
IN
MX
P
-Max F req ue ncy (-Мак с. ча сто та)
P
Neg Freq Limit (От риц. предел частоты)
LIMIT
MN
IN
MX
V
FreqReference
(Задание частоты)
FW
FreqRefFilterTC
(Пос тВр ем ен иФил ьт раЗ ад анЧ аст оты )
FW
FreqRefActual
(Фа ктЗад аниеЧас тоты )
Переключатель
IN
TIME
OUT
P
Start 0SpeedTime (Врем Пуска Скор0)
FW
FreqRef1
(ЗаданиеЧастоты1)
Конечное расположе ние задания
RampControlIn
(ВходУправленияИзменСкор)
MULDIV
VALUE
MULTIP
DIVIS
Фильтр x2
IN
TC
OUT
7.2 Обработка задания
Порядок приоритетов цепочки задания скорости в прикладной программе Marine.
Цепь задания скорости перед управлением изменением скорости
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 87

88 • VACON® APFIFF09 MARINE
7.2.1 Базовые параметры
P2.2.1 Выбор 1 задания частоты для платы ввода/вывода ID117 «I/O Reference»
(Задание вх./вых.)
Определяет используемый источник задания частоты, если источником сигналов
управления является клемма входа/выхода (P3.1 Источник сигналов управления).
0 = «AI1» (Аналог. вход 1) — аналоговый вход 1.
Масштабирование сигнала в «G2.4.2: Input Signals (Входные сигналы) \ Analogue
Input 1 (Аналоговый вход 1)»
1 = «AI2» (Аналог. вход 2) — аналоговый вход 2.
Масштабирование сигнала в «G2.4.3: Input Signals (Входные сигналы) \ Analogue
Input 2 (Аналоговый вход 2)»
2 = «AI1+AI2» (Аналог. вход 1 + аналог. вход 2) — аналоговый вход 1 +
аналоговый вход 2.
При альтернативном масштабировании заданий в группе аналоговых входов
можно настроить соответствие 100 % входного значения частоте 25 Гц, тогда
при 100 % на обоих входах окончательное задание будет составлять 50 Гц.
3 = «AI1-AI2» (Аналог. вход 1 – аналог. вход 2)
Аналоговый вход 1 – аналоговый вход 2
4 = «AI2-AI1» (Аналог. вход 2 – аналог. вход 1)
Аналоговый вход 2 – аналоговый вход 1
5 = «AI1xAI2» (Аналог. вход 1 x аналог. вход 2)
Аналоговый вход 1 x аналоговый вход 2
6 = «AI1 Joystick» (Аналог. вход 1, джойстик)
Аналоговый вход 1, -10 В... +10 В пост. тока
7 = «AI2 Joystick» (Аналог. вход 2, джойстик)
Аналоговый вход 2, -10 В... +10 В пост. тока
8 = «Keypad Ref» (Задание с клавиатуры)
Задание с клавиатуры R3.2
9 = «Fieldbus» (Шина fieldbus)
Задание берется с шины Fieldbus, альтернативное задание можно выбрать в «G:
Fieldbus»
10 = «Motor Pot» (Потенциометр двигателя) — потенциометр двигателя.
Задание обрабатывается с помощью двух цифровых входов «G: Input Signals
(Входные сигналы) \ Digital Inputs (Цифровые входы)» (увеличение и
уменьшение). Способ работы настраивается в «G: Ref Handling (Обработка
задания) \ Motor Potentiometer (Потенциометр двигателя».
11 = «AI1, AI2 min» (Ан. вход 1, Ан. вход 2, мин.)
В качестве задания используется наименьшее из значений аналогового входа 1
и
аналогового входа 2.
12 = «AI1, AI2 max» (Ан. вход 1, Ан. вход 2, макс.)
В качестве задания используется наибольшее из значений аналогового входа 1
и
аналогового входа 2.
13 = «Max Freq» (Макс. частота) — максимальная частота
P2.1.2 Макс. частота используется в качестве задания.
14 = «AI1/AI2 Sel» (Выбор ан. вх.1/ан. вх. 2) — выбор AI1/AI2
Цифровой вход «I/O Ref 1/2» (Задание вх./вых. 1/2) используется для выбора
между заданием по аналоговому входу 1 и аналоговому входу 2. «I/O Ref 1/2»
(Задание вх./вых. 1/2) используется для выбора между параметрами «I/O
Reference» (Задание вх./вых.) и «I/O Reference 2» (Задание вх./вых. 2),
если выбран вариант отличный от 14 (то есть этого значения).
15 = «Encoder 1» (Энкодер 1)
Задание считывается со входа энкодера 1.
16 = «Encoder 2» (Энкодер 2)
Задание считывается со входа энкодера 2. Этот выбор может использоваться
с двойными платами энкодеров. Он может использоваться, например, для
синхронизации скоростей, когда два двигателя должны работать с одной
и той же скоростью, но не обязательно с совпадающим углом.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 88

APFIFF09 MARINE VACON®• 89
P2.2.2 Выбор задания частоты с клавиатуры ID121 «Keypad Ref Sel» (Выбор задания
с клавиатуры)
Определяет источник задания частоты, используемый, если источником сигналов
управления является клавиатура (P3.1 «Control Place» (Источник сигналов управления))
0 = «AI1» (Аналог. вход 1) — аналоговый вход 1.
Масштабирование сигнала в «G2.4.3: Input Signals (Входные сигналы) \ Analogue
Input 1 (Аналоговый вход 1)»
1 = «AI2» (Аналог. вход 2) — аналоговый вход 2.
Масштабирование сигнала в «G2.4.4: Input Signals (Входные сигналы) \ Analogue
Input 2 (Аналоговый вход 2)»
2 = «AI1+AI2» (Аналог. вход 1 + аналог. вход 2) — аналоговый вход 1 +
аналоговый вход 2.
При альтернативном масштабировании заданий в группе аналоговых входов
можно настроить соответствие 100 % входного значения частоте 25 Гц. В этом
случае при 100 % на обоих окончательное задание будет равно 50 Гц.
3 = «AI1-AI2» (Аналог. вход 1 – аналог. вход 2)
Аналоговый вход 1 – аналоговый вход 2
4 = «AI2-AI1» (Аналог. вход 2 – аналог. вход 1)
Аналоговый вход 2 – аналоговый вход 1
5 = «AI1xAI2» (Аналог. вход 1 x аналог. вход 2)
Аналоговый вход 1 x аналоговый вход 2
6 = «AI1 Joystick» (Аналог. вход 1, джойстик)
Аналоговый вход 1, -10 В... +10 В пост. тока
7 = «AI2 Joystick» (Аналог. вход 2, джойстик)
Аналоговый вход 2, -10 В... +10 В пост. тока
8 = «Keypad Ref» (Задание с клавиатуры)
Задание с клавиатуры R3.2
9 = «Fieldbus» (Шина fieldbus)
Задание берется с шины Fieldbus, альтернативное задание можно выбрать в «G:
Fieldbus»
P2.2.3 Выбор задания частоты по шине Fieldbus ID122 «Fielbus Ctr Ref» (Задание
управления по Fieldbus)
Определяет выбор источника задания частоты, если источником сигналов
управления является Fieldbus (P3.1 Источник сигналов управления)
0 = «AI1» (Аналог. вход 1) — аналоговый вход 1.
Масштабирование сигнала в «G2.4.3: Input Signals (Входные сигналы) \ Analogue
Input 1 (Аналоговый вход 1)»
1 = «AI2» (Аналог. вход 2) — аналоговый вход 2.
Масштабирование сигнала в «G2.4.4: Input Signals (Входные сигналы) \ Analogue
Input 2 (Аналоговый вход 2)»
2 = «AI1+AI2» (Аналог. вход 1 + аналог. вход 2) — аналоговый вход 1 +
аналоговый вход 2.
При альтернативном масштабировании заданий в группе аналоговых входов
можно настроить соответствие 100 % входного значения частоте 25 Гц, тогда
при 100 % на обоих входах окончательное задание будет составлять 50 Гц.
3 = «AI1-AI2» (Аналог. вход 1 – Аналог. вход 2)
Аналоговый вход 1 – аналоговый вход 2
4 = «AI2-AI1» (Аналог. вход 2 – аналог. вход 1)
Аналоговый вход 2 – аналоговый вход 1
5 = «AI1xAI2» (Аналог. вход 1 x аналог. вход 2)
Аналоговый вход 1 x аналоговый вход 2
6 = «AI1 Joystick» (Аналог. вход 1, джойстик)
Аналоговый вход 1, -10 В... +10 В пост. тока
7 = «AI2 Joystick» (Аналог. вход 2, джойстик)
Аналоговый вход 2, -10 В... +10 В пост. тока
8 = «Keypad Ref» (Задание с клавиатуры)
Задание с клавиатуры R3.2
9 = «Fieldbus» (Шина fieldbus)
Задание берется с шины Fieldbus, альтернативное задание можно выбрать в «G:
Fieldbus»
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 89

90 • VACON® APFIFF09 MARINE
P2.2.4 Выбор задания частоты ввода/вывода 2 ID131 «I/O Reference 2» (Задание вх./вых. 2)
Этот параметр используется для выбора другого источника входа задания с помощью
цифрового входа P2.4.2.17 «I/O Ref. 2» (Задание вх./вых. 2). Доступные варианты
выбора совпадают с вариантами выбора задания частоты с платы входов/выходов 1.
Другие связанные с функцией параметры
- Цифровой вход P2.4.2.17 «I/O Ref. 2» (Задание вх./вых. 2)
P2.2.5 Распределение скорости ID1241 «Speed Share» (Распределение скорости)
Определяет процентное соотношение задания скорости после нахождения
окончательного задания, но до управления изменением скорости. Контрольное
значение «FreqReference» показывает задание после функции разделения скорости.
Используется для регулировки соотношения задания, например, в линейных
системах преобразователей частоты, чтобы ПЛК мог устанавливать одно и то
же задание для всех преобразователей частоты, в то время как передаточное
отношение компенсации разделения скорости влияет на скорость технологической
линии.
P2.2.6 Распределение нагрузки ID1248 «Load Share» (Распределение нагрузки)
Определяет процент окончательного задания крутящего момента после выбора
источника задания окончательного крутящего момента, но до функций пошагового
изменения задания крутящего момента, зоны нечувствительности задания момента
и фильтрации задания.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 90

APFIFF09 MARINE VACON®• 91
Цифровой вход
скорость 1
Цифровой вход
скорость 2
Цифровой вход
скорость 3
Базовая скорость
0 0 0
Предустановленная
скорость 1
Предустановленная
скорость 2
Предустановленная
скорость 3
Предустановленная
скорость 4
Предустановленная
Предустановленная
Предустановленная
скорость 7
7.2.2 Постоянное задание
P2.2.7.1 Задание скорости толчкового режима ID124 «Jog Speed Ref» (Задание
скорости толчкового режима)
Определяет задание скорости толчкового режима, когда активировано через
цифровой вход. Это задание будет выполняться после команды реверса, если
она будет подана. Скорость толчкового режима имеет более высокий приоритет
по сравнению с предустановленными заданиями скорости.
Связанные параметры
- Цифровой вход P2.4.2.16 Скорость толчкового режима
P2.2.7.2 Предустановленная скорость 1 ID105 «Preset Speed 1» (Предуст. скор. 1)
P2.2.7.3 Предустановленная скорость 2 ID106 «Preset Speed 2» (Предуст. скор. 2)
P2.2.7.4 Предустановленная скорость 3 ID126 «Preset Speed 3» (Предуст. скор. 3)
P2.2.7.5 Предустановленная скорость 4 ID127 «Preset Speed 4» (Предуст. скор. 4)
P2.2.7.6 Предустановленная скорость 5 ID128 «Preset Speed 5» (Предуст. скор. 5)
P2.2.7.7 Предустановленная скорость 6 ID129 «Preset Speed 6» (Предуст. скор. 6)
P2.2.7.8 Предустановленная скорость 7 ID130 «Preset Speed 7» (Предуст. скор. 7)
Значения параметров определяют задания предустановленных скоростей, которые
активируются цифровыми входами. Эти задания будут выполняться после команды
реверса, если она будет подана.
Скорость
скорость 5
скорость 6
Таблица 7–1. Предустановленные скорости 1–7
Предустановленная
Связанные параметры
Цифровые входы P2.4.2.5–7 Предустановленная скорость 1–3
7.2.2.1 Функция толчкового режима
Предустановленная
1 0 0
0 1 0
1 1 0
0 0 1
1 0 1
0 1 1
1 1 1
Предустановленная
Функция толчкового режима запускает преобразователь частоты и достигает заданной скорости
без дополнительной команды пуска независимо от источника управления. Функция толчкового
режима требует разрешения через цифровой вход, прежде чем будет возможно принятие
команды. Функция толчкового режима также отключается в случае активной команды запуска
из активного источника сигналов управления.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 91

92 • VACON® APFIFF09 MARINE
P2.2.7.9 Задание 1 толчкового режима ID1239 «Inching Ref 1» (Задание 1
толчкового режима)
P2.2.7.10 Задание 2 толчкового режима ID1240 «Inching Ref 2» (Задание 2
толчкового режима)
Эти параметры определяют задание для режима толчкового режима. Задание является
двунаправленным, и команда реверса не влияет на направление задания толчкового режима.
Другие параметры толчкового режима
- Выбор цифрового входа: Enable Inching (Разрешить толчковый режим)
- Выбор цифрового входа: Inching 1 (Толчковый режим 1)
- Выбор цифрового входа: Inching 2 (Толчковый режим 2)
- Параметр: Inching Ramp (Изм. скор. при толчковом режиме)
P2.2.7.11 Ступень скорости ID1252 «Speed Step» (Ступень скорости)
Этот параметр VACON® NCDrive помогает отстроить регулятор скорости (см.
®
сервисную программу VACON
NCDrive, инструмент реакции на ступенчатое
воздействие). С помощью этого инструмента можно устанавливать величину
шага задания скорости после включения режима изменения.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 92

APFIFF09 MARINE VACON®• 93
MUX
K
IN 0
IN 1
IN 2
IN 3
IN 4
IN 5
IN 6
IN 7
IN 8
IN 9
P
Power Ref. Power Ref. Sel
(Выбор задания мощности)
F
Analogue Input 1 (Ан алог . в хо д 1)
F
Analogue Input 2 (Ан ал ог. в хо д 2)
F
Analogue Input 4 (Ан алог . в хо д 4)
F
Analogue Input 3 (Ан алог . в хо д 3)
V
Power Reference
(За дан ие м ощн ос ти)
F
FieldBusReference (Зад ани е с Fiel dBus)
F
Key pad Referece (Задание с клавиатуры)
F
AI2 Joustck (Д жо йст ик AI2)
F
AI1 Joyst ick (AI1 Д жойс ти к)
V
Pow er Refer ence (Зад ание мощнос ти)
Варианты 7 и 8 не используют
макс. масштабирование
MUL
X
X
P
Pow er Ref. Max (Зад ание мощн., макс .)
RAMP10
STOP OUT
SET
DATA
SPEED
IN
LT
IN 1
IN 2
P PowerRefInc.Rate
Po wer _Reference_Final
(Задание_мощности_окончательное)
7.2.3 Задание мощности
Режим задания мощности позволяет двигателю работать с постоянной мощностью, в то время
как скорость и крутящий момент изменяются. Это обеспечивает стабильную нагрузку на
генераторы при изменяющихся условиях.
В этом режиме также обеспечивается быстрая реакция подруливающих двигателей, поскольку
крутящий момент быстро возрастает после увеличения задания мощности, и подруливающие
двигатели быстро раскручиваются до нового задания.
При использовании чистого управления скоростью, когда время изменения скорости
настраивается медленным, чтобы ограничить быстрые изменения мощности при высоких
скоростях, реакция оказывается медленной, особенно при запуске с нулевой скорости, когда
подруливающие двигатели еще не создают тяги.
Переключение между режимом задания мощности и режимом регулятора скорости
производится посредством переключения режимов управления двигателем между
управлением скоростью и управлением крутящим моментом.
Примечание. Не переключайтесь между режимами управления с разомкнутым контуром
замкнутым контуром во время работы преобразователя частоты.
и
- P2.8.1 Режим управления двигателем; режимы управления скоростью
- P2.8.2 Режим управления двигателем 2; режимы управления крутящим моментом
- Цифровой вход, режим управления двигателем 1/2; выбор между режимами
управления скоростью и мощностью
- P2.2.9.1 Задание крутящего момента с параметром «10 = Power Ref» (Задание
мощности)
В режиме задания мощности преобразователь частоты работает в режиме управления крутящим
моментом. Поэтому переключатель задания крутящего момента необходимо установить в
значение 10 (Задание мощности), тогда указанное задание мощности будет преобразовываться
в задание крутящего момента для управления двигателем.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 93

94 • VACON® APFIFF09 MARINE
Задание на
входе
Задание
мощности
80 %
20 %
Внутреннее
задание
10 % / с
6 с
P2.2.8.1 Выбор задания мощности ID1620 «Power Ref. Sel» (Выбор задания мощности)
С помощью этого параметра выбирается источник входного сигнала для задания
мощности. Если это значение равно нулю, но в то же время для задания крутящего
момента выбран параметр «10 = Power Ref» (Задание мощности), то значение
задания можно записать непосредственно в контролируемое значение «Power
Reference» (Задание мощности) через шину Fieldbus или с помощью функции
записи идентификатора аналогового входа.
0 = «Not Used» (Не используется)
1 = «AI1» (Аналог. вход 1) — аналоговый вход 1.
Масштабирование сигнала в «G2.4.3: Input Signals (Входные сигналы) \ Analogue
Input 1 (Аналоговый вход 1)»
2 = «AI2» (Аналог. вход 2) — аналоговый вход 2.
Масштабирование сигнала в «G2.4.4: Input Signals (Входные сигналы) \ Analogue
Input 2 (Аналоговый вход 2)»
3 = «AI3» (Аналог. вход 3)
Масштабирование сигнала в «G2.4.5: Input Signals (Входные сигналы) \ Analogue
Input 3 (Аналоговый вход 3)»
4 = «AI4» (Аналог. вход 4)
Масштабирование сигнала в «G2.4.6 Input Signals (Входные сигналы) \ Analogue
Input 4 (Аналоговый вход 4)»
5 = «AI1 Joystick» (Аналог. вход 1, джойстик)
Аналоговый вход 1, -10 В... +10 В пост. тока
6 = «AI2 Joystick» (Аналог. вход 2, джойстик)
Аналоговый вход 2, -10 В... +10 В пост. тока
7 = «Keypad Ref» (Задание с клавиатуры)
Задание крутящего момента с клавиатуры, R3.6
8 = «Fieldbus» (Шина fieldbus)
Переменная контроля FB, Задание мощности ID1703
P2.2.8.2 Максимальное задание мощности ID1621 «Power Ref. Max» (Задание мощн.,
макс.)
Коэффициент масштабирования для ввода задания мощности. Масштабирование
не используется, когда для параметра задания мощности выбран вариант 7 или 8.
P2.2.8.3 Скорость нарастания задания мощности ID1621 «PowerRefInc.Rate»
(СкорНарастЗаданияМощн)
Скорость увеличения для задания мощности. Если задание уменьшается, скорость
нарастания не применяется. Когда скорость изменения равна нулю, выполняется
обход изменения скорости.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 94

APFIFF09 MARINE VACON®• 95
P
Выб ор зад ания м омента
F
Analogue Input 1
(Анал ог. вх од 1)
F
Analogue Input 2
(Анал ог. вх од 2)
F
Analogue Input 4
(Анал ог. вх од 4)
F
Analogue Input 3
(Анал ог. вх од 3)
C
Not Use d (Н е исп оль зуе тся)
F
Fiel dBusRef er ence
(Зад ание с FieldB us)
F
Keypad R eferece
(Зад ание с клави атуры )
F
AI2 Joustck (Джойстик AI2)
F
AI1 Joystick (AI1 Джойстик)
MUX
K
IN 0
IN 1
IN 2
IN 3
IN 4
IN 5
IN 6
IN 7
IN 8
IN 9
IN 10
F
Mast e r Tor qu e (Кру тящий
момент ведущего)
F
Power Reference
(Зад ание мо щност и)
V
Tor qu e Re fer e nc e
(Задание момента)
P
Load Share
(РазделениеНагрузки)
IN
DEAD ZONE
OUT
LIMIT
FW
TorqueRef3 (Зад ан3Мом ента)
P
TorqueRefDeadZon e (Зон аНеч увств Задан Моме нта)
V
Tor qu e Re fer e nc e
(Задание момента)
ADD
+
+
P
TorqRefSte p (Сту пен ьЗадан Моме нта)
Фильтр x2
IN
TC
OUT
P
TorqRefFilter TC (П остВр емФил ьтрЗад анМ ом)
MULDIV
VALUE
MULTIP
DIVIS
C
100,0
SUB
+
-
-
P
Torq Ref Max
(Задание момента, м акс.)
P
Torq Ref Min
(Задание момента, мин.)
MULDIV
VALUE
MULTIP
DIVIS
C
10000
ADD
+
+
+
P
Torq Ref Mi n
(Задание момента, мин.)
LIMIT
MN
IN
MX
P
Torq Ref Max
(Задание момента, макс.)
P
Torq Ref Max (Задание момента, макс .)
NEG
IN
7.2.4 Torque Reference (Задание момента)
Крутящий момент двигателя регулируется, что позволяет изменять скорость двигателя в
зависимости от фактической нагрузки на валу двигателя. Поведением ограничения скорости
управляет параметр P2.2.9.6 «TorqSpeedLimit» (ПределСкор/Момента).
Для входов джойстиков максимальная отрицательная величина задания равна значению «Torq
Ref Max» (Задание момента, макс.), умноженному на минус единицу. Минимальное значение
используется только при выборе аналоговых входов с 1 по 4. Кроме того, максимальная
отрицательная величина задания крутящего момента равна значению «Torq Ref Max»
(Задание момента, макс.), умноженному на минус единицу.
P2.2.9.1 Выбор задания крутящего момента ID641 «Torq Ref Select» (Выбор задания
момента)
0 = «Not Used» (Не используется)
1 = «AI1» (Аналог. вход 1) — аналоговый вход 1.
Масштабирование сигнала в «G: Input Signals (Входные сигналы) \ Analogue Input
1 (Аналоговый вход 1)»
2 = «AI2» (Аналог. вход 2) — аналоговый вход 2.
Масштабирование сигнала в «G: Input Signals (Входные сигналы) \ Analogue Input
2 (Аналоговый вход 2)»
3 = «AI3» (Аналог. вход 3)
4 = «AI4» (Аналог. вход 4)
5 = «AI1 Joystick» (Аналог. вход 1, джойстик)
Аналоговый вход 1, -10 В...+10 В пост. тока Для входов джойстиков максимальная
отрицательная величина задания равна значению «Torq Ref Max» (Задание
момента, макс.), умноженному на минус единицу.
6 = «AI2 Joystick» (Аналог. вход 2, джойстик)
Аналоговый вход 2, -10 В пост. тока ... +10 В пост. тока Для входов джойстиков
максимальная отрицательная величина задания равна значению «Torq Ref Max»
(Задание момента, макс.), умноженному на минус единицу.
7 = «Keypad Ref» (Задание с клавиатуры)
Задание крутящего момента с клавиатуры, R3.5.
8 = «Fieldbus» (Шина fieldbus)
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Задание берется из шины Fieldbus. Можно выбрать альтернативное
масштабирование в «G: Fieldbus»
9 = «Master Torque» (Момент ведущего)
При использовании функции «Ведущий/ведомый» задание берется с ведущего
преобразователя частоты.
10 = «Power Ref.» (Задание мощности)
Задание берется из функции задания мощности. Этот вариант преобразует
задание мощности в задание крутящего момента для управления двигателем.
Page 95

96 • VACON® APFIFF09 MARINE
+100 %
T макс.
- T макс.
Задание
-100 %
+10 %
-10 %
Зона
нечувствит ельности
10 %
P2.2.9.2 Масштабирование задания крутящего момента, максимальное значение
ID641 «Torq Ref Max» (Задание момента, макс.)
Максимальное допустимое задание крутящего момента для отрицательного и
положительного значений. Используется также для получения максимального
отрицательного предела через вход джойстика.
P2.2.9.3 Масштабирование задания момента, минимальное значение ID642 «Torq Ref
Min» (Задание момента, мин.)
Минимальное задание крутящего момента при использовании аналогового входа
в качестве источника задания параметров 1–4.
P2.2.9.4 Время фильтрации задания крутящего момента ID1244
«TorqRefFilterTC» (ПостВремениФильтрацииЗаданияМомента)
Определяет время фильтрации для задания крутящего момента. Фильтрация
производится после функции разделения нагрузки, но до функции пошагового
изменения крутящего момента.
P2.2.9.5 Зона нечувствительности задания момента ID1246
«TorqRefDeadZone» (ЗонаНечувствЗаданияМомента)
Малые значения задания крутящего момента в районе нуля можно проигнорировать,
если задать это значение больше нуля. Когда задание лежит в диапазоне между
нулем и положительным/отрицательным значением этого параметра, заданию
принудительно присваивается нулевое значение.
P2.2.9.6 Выбор крутящего момента ID1278 «Torque Select» (Выбор момента)
Этот параметр определяет режим ограничения скорости при управлении по
крутящему моменту. Этот параметр может использоваться в качестве выбора режима
управления одним двигателем, когда при переходе от управления в разомкнутом
контуре к управлению в замкнутом контуре изменения не вносятся.
0 = «SpeedControl» (Регулирование скорости) — режим управления скоростью
Преобразователь принудительно переключается на работу в режиме управления
скоростью, когда параметр режима управления двигателем устанавливается в режим
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 96

APFIFF09 MARINE VACON®• 97
Регулятор скорости активен
Регулятор скорости активен
P
Pos Freq Limit
(Пол ож . предел частоты)
P
Neg Freq Limit
(Отри ц. предел частоты)
Вр ем я
Преобр. час т. в режиме управл. кр. моментом
Преобр. час т. в режиме управл. кр. моментом
Скорость
[об/мин]
speed controller active
Включен регулятор скорости
P
Neg Speed Limit
(От риц. предел скорости)
t
R
FreqRampOut
(Вы хИз мен Ча сто ты)
Speed controller active
Скорость
[об/мин]
Преобр. час т. в режиме
управл. кр. моментом
Преобр. час т. в режиме
управл. кр. моментом
P
Pos Freq Limit
(Пол ож . предел частоты)
FW
FreqRampO ut
(ВыхИзменЧастоты)
Выход генератора режима изм. скорости
Включен регулятор скорости
управления моментом; таким образом, переключаться между режимами управления
скоростью и моментом, например, с шины Fielbus можно с помощью одного параметра.
1 = «MaxFreqLimit» (Макс. предел частоты) — положительные и отрицательные
пределы частоты
Скорость не ограничивается заданием скорости; ее ограничивают только
максимальная частота либо положительное или отрицательное ограничения
частоты, если их величина меньше значения параметра максимальной частоты.
2 = «RampOutput» (Выход изменения скорости) — выходное значение изменения
скорости в обоих направлениях
Скорость ограничивается заданием после генератора изменения скорости, то есть
скорость увеличивается в течение заданного времени разгона/замедления до того,
пока фактический момент не сравняется с заданием момента. Если в момент снятия
нагрузки с вала скорость ниже задания, то скорость увеличивается без ускорения.
Этот вариант выбран по умолчанию. Для систем «ведущий/ведомый» рекомендуется
использовать вариант, разрешающий несколько большее задание для ведомого
устройства по моменту, чтобы нагрузка балансировалась равномерно, например,
оконное управление.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
3 = «Min» (Мин.) — минимальное из значений задания скорости и задания момента.
В качестве окончательного задания крутящего момента выбирается минимум из
значения выхода регулятора скорости и задания скорости.
Page 97

98 • VACON® APFIFF09 MARINE
Время
Регулятор скорости активен
Регулятор скорости активен
Выход генератора
изменения скорости
P
Pos Freq Limit
(Полож. предел частоты)
P
Neg Freq Limit (От риц.
предел частоты)
FW
FreqRampOut
(ВыхИз менЧас тоты)
Скорость
[об/мин]
Преобр. час т. в режиме управл. кр.
моментом
Преобр. час т. в режиме управл. кр. моментом
Включен регулятор скорости
Преобр. час т. в режиме управл. кр. моментом
Включен регулятор скорости
Включен регулятор скорости
Включен регулятор скорости
Регулятор скорости активен
Регулятор скорости активен
Преобр. час т. в режиме управл. кр. моментом
speed controller active
Включен регулятор скорости
P
Pos Freq Limit (Полож.
предел частоты)
R
Neg Freq Limit (От риц.
предел частоты)
Время
FW
FreqRampOut
(ВыхИз менЧас тоты)
Включен регулятор скорости
Скорость
[об/мин]
Преобр. час т. в режиме управл. кр. моментом
Преобр. час т. в режиме управл. кр. моментом
Регулятор скорости активен
Регулятор скорости активен
P
Window Pos Off
(Выкл. полож. окна)
P
Window Neg Off
(Выкл. отриц. окна)
P
Pos Freq Limit (Полож.
предел частоты)
P
Neg Freq Limit
(От риц. предел частоты)
P
Window Neg
(От риц. граница окна)
P
Window Pos (Положит.
граница окна)
Включен регулятор скорости
Speed Reference
(Задание скорости)
Область управления
крутящим моментом
Включен регулятор скорости
4 = «Max» (Макс.) — максимальное из значений задания скорости и задания
крутящего момента.
В качестве окончательного задания крутящего момента выбирается максимум из
значения выхода регулятора скорости и задания скорости.
5 = «Window» (Окно) — управление с помощью окна
Внутри окна скорость ограничивается заданием скорости.
Предел активации управления скоростью — это не то же самое, что предел скорости.
Поэтому скорость должна сначала достичь значений «Window Pos» (Положит. граница
окна) или «Window Neg» (Отрицат. граница окна), чтобы включился регулятор
скорости. Когда регулятор скорости активен, скорость ограничивается пределами,
заданными вариантами «Window Pos Off» (Выкл. полож. окна) и «Windows Neg Off»
(Выкл. отриц. окна) в параметре «FinalFreqRef» (ОкончЗаданиеЧастоты).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 98

APFIFF09 MARINE VACON®• 99
P2.2.9.7 Отрицательная граница окна ID1305 «Window Neg» (Отриц. граница окна)
Задает размер окна скорости в отрицательном направлении от задания скорости
в режиме управления крутящим моментом. Если и значение Window Negative Off
(Выкл. отриц. окна), и значение Window Positive Off (Выкл. полож. окна) (ID1307 и
ID1306) оба равны нулю, то этот параметр также представляет границу скорости,
получаемую из задания скорости в режиме управления моментом. В противном
случае это граница активации управления скоростью.
P2.2.9.8 Положительная граница окна ID1304 «Window Pos» (Положит. граница окна)
Задает размер окна скорости в положительном направлении от конечного задания
скорости в режиме управления крутящим моментом. Если и значение Window
Negative Off (Выкл. отриц. окна), и значение Window Positive Off (Выкл. полож. окна)
(ID1307 и ID1306) оба равны нулю, то этот параметр также представляет границу
скорости, получаемую из «FinalFreqRef» (ОкончЗаданиеЧастоты). В противном
случае это граница активации управления скоростью.
P2.2.9.9 Отрицательный предел выключения окна ID1307 «Window Neg Off» (Выкл.
отриц. окна)
Задает предел выключения регулятора скорости в отрицательном направлении,
когда регулятор скорости возвращает скорость обратно в заданное окно.
P2.2.9.10 Положительный предел выключения окна ID1306 «Window Pos Off» (Выкл.
полож. окна)
Задает предел выключения регулятора скорости в положительном направлении,
когда регулятор скорости возвращает скорость обратно в заданное окно.
P2.2.9.11 Шаг крутящего момента ID1253 «Torque Step» (Шаг момента)
Параметр VACON® NCDrive, который помогает отстроить регулятор крутящего
®
момента (см. сервисную программу VACON
NCDrive инструмент реакции на
ступенчатое воздействие). С помощью этого инструмента можно устанавливать
шаг изменения задания крутящего момента.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 99

100 • VACON® APFIFF09 MARINE
7.2.4.1 Настройки задания крутящего момента в разомкнутом контуре
P2.2.9.11.1 Минимальная частота при управлении крутящим моментом в разомкнутом
контуре ID636 «OL TC Min Freq» (Мин. частота при управлении моментом, РК)
Задает предел частоты, ниже которого преобразователь частоты работает в
управления частотой.
P2.2.9.11.2 Усиление П-звена регулятора для управления крутящим моментом в
разомкнутом контуре ID639 «OL TorqCtrl P» (П-звено момента, РК)
Определяет усиление для крутящего момента в режиме управления с разомкнутым
контуром.
P2.2.9.11.3 Усиление И-звена регулятора для управления крутящим моментом в
разомкнутом контуре ID640 «OL TorqCtrl I» (И-звено момента, РК)
Определяет усиление времени интегрирования для крутящего момента в режиме
управления с разомкнутым контуром.
режиме
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Page 100

APFIFF09 MARINE VACON®• 101
Ис по льз уемое
зад ание ско рости [об /мин]
Требуемое задание скорости
[об/мин]
Ниж ний
пр едел
Ве рхн ий
пр едел
Вр ем я [с]
Скорость [об/ми н]
Ниж ний
пр ед ел
Ве рхн ий
пр ед ел
Коэф. времени изм.
скорости = 2,5
Ко эф. в рем ени из м .
скорости = 0,3
7.2.5 Запрещенные частоты
В некоторых системах может потребоваться исключить определенные частоты из-за проблем
механического резонанса. С помощью этих параметров можно устанавливать пределы для
области запрещения частот, а также коэффициент изменения скорости для использования
в случае превышения частотой верхнего предельного значения. Когда входное задание
увеличивается, внутреннее задание частоты остается на уровне нижнего предельного
значения, пока входное задание не превысит верхнее предельное значение.
P2.2.10.1 Область запрещенной частоты 1; нижний предел ID509 «Range 1 Low Lim»
(Диапазон 1, нижний предел)
P2.2.10.2 Область запрещенной частоты 1; верхний предел ID510 «Range 1 High Lim»
(Диапазон 1, верхний предел)
Определение диапазона, в котором используется другое время разгона/замедления,
определяемое параметром «RampTimeFactor» (Временной коэффициент
разгона/замедления).
P2.2.10.3 Временной коэффициент разгона/замедления для запрещенного диапазона
ID518 «RampTimeFactor» (Временной коэффициент разгона/замедления)
Множитель выбранного текущего времени разгона/торможения между границами
запрещенных частот.
Рис. 7–1. Масштабирование изменения скорости между запрещенными частотами
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
 Loading...
Loading...