

Page 1

vacon® nxp
ПРИВОДЫ ПЕРЕМЕННОГО ТОКА
ПРИКЛАДНАЯ ПРОГРАММА
УПРАВЛЕНИЯ ЛИФТОМ NXP APFIFF33
РУКОВОДСТВО ПО ПРИМЕНЕНИЮ
Page 2

Page 3

vacon • 1
VACON® NXP, УПРАВЛЕНИЕ ЛИФТОМ —
РУКОВОДСТВО ПО ПРИМЕНЕНИЮ
ОГЛАВЛЕНИЕ
Код документа: DPD02007A
Код ПО: APFIFF33
V2.20 или более поздние версии
Дата: 6.6.2017
1 Прикладная программа управления лифтом NXP ............................................................ 4
1.1 Введение ......................................................................................................................................... 4
1.2 Интерфейс ввода/вывода ............................................................................................................. 4
1.3 Двигатель и энкодер ..................................................................................................................... 4
1.4 Управление контактором и тормозом ......................................................................................... 5
2 Проблемы совместимости параметров в различных версиях прикладной
программы ......................................................................................................................... 6
3 Управляющие входы/выходы ........................................................................................... 8
4 Принцип программирования входных сигналов ............................................................ 10
4.1 Определение входа для некоторой функции на клавиатуре ................................................. 10
4.2 Определение аналогового входа как дискретного ................................................................. 11
4.3 Определение входа/выхода для некоторой функции с помощью сервисной
®
программы VACON
4.4 Определение неиспользуемых входов/выходов ..................................................................... 11
5 Контролируемые значения (клавиатура панели управления: меню M1) ...................... 12
5.1 Контролируемые значения ......................................................................................................... 13
5.2 Контролируемые значения 2 ...................................................................................................... 15
6 Прикладная программа управления лифтом NXP: списки параметров ........................ 16
6.1 Основные параметры (клавиатура панели управления: меню M2 G2.1) ......................... 17
6.2 Параметры профиля скорости (клавиатура панели управления: меню M2 G2.2) .......... 18
6.3 Параметры управления механическим тормозом
(клавиатура панели управления:
меню M2 G2.3) .......................................................................................................................... 20
6.4 Параметры управления преобразователем частоты
(клавиатура панели управления: меню M2 G2.4) ................................................................ 22
6.5 Параметры управления двигателем (клавиатура панели управления:
меню M2 G2.5) .......................................................................................................................... 23
6.6 Стабилизаторы (клавиатура панели управления: меню M2 G2.5.11) ............................... 26
6.7
Идентифицируемые параметры (клавиатура панели управления:
меню M2 G2.5.12.x) .................................................................................................................. 27
6.8 Входные сигналы (клавиатура панели управления: меню M2 G2.6) ................................ 28
6.9 Выходные сигналы (клавиатура панели управления: меню M2 G2.7) ............................. 30
6.10 Средства защиты (клавиатура панели управления: меню M2 G2.8) ................................ 32
6.11 Параметры автоматического перезапуска
(клавиатура панели управления: меню M2 G2.9) ................................................................ 34
NCDrive ...................................................................................................... 11
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 4

2 • vacon
6.12 Параметры эвакуации (клавиатура панели управления: меню M2 G2.10) ...................... 35
6.13 Управление с клавиатуры (клавиатура панели управления: меню M3) ............................... 36
6.14 Системное меню (клавиатура панели управления: меню M6) ............................................... 36
6.15 Платы расширения (клавиатура панели управления: меню M7) .......................................... 36
7 Описание параметров ...................................................................................................... 37
7.1 Основные параметры .................................................................................................................. 37
7.2 Профиль скорости ........................................................................................................................ 42
7.3 Параметры задания скорости [м/с] (M2 -> G2.2.9) ................................................................... 48
7.4 Параметры задания скорости [Гц] (M2 -> G2.2.10) .................................................................. 49
7.5 Параметры рампы скорости 1 [(M2 -> G2.2.11) ........................................................................ 50
7.6 Параметры рампы скорости 2 [(M2 -> G2.2.12) ........................................................................ 51
7.7 Управление механическим тормозом ....................................................................................... 52
7.7.1 Логика управления механическим тормозом ........................................................... 54
7.7.2 Параметры управления с разомкнутым контуром (M2 -> G2.3.1) ............................ 55
7.7.3 Параметры управления с замкнутым контуром (M2 -> G2.3.2) ................................ 58
7.7.4 Внешний тормоз (M2 -> G2.3.3) .................................................................................. 61
7.7.5 Контроль тормозов (M2 -> G2.3.4) ............................................................................... 61
7.7.6 Настройка отпускания тормоза при управлении с замкнутым контуром ............... 62
7.8 Управление преобразователем частоты .................................................................................. 64
7.9 Параметры управления контактором двигателя (M2 -> G2.4.7) ............................................ 66
7.10 Расширенные параметры ........................................................................................................... 67
7.11 Управление двигателем .............................................................................................................. 69
7.11.1 Параметры U/F-характеристики ................................................................................ 71
7.11.2 Параметры для управления с замкнутым контуром ................................................. 74
7.11.2.1 Сползание ............................................................................................................ 79
7.11.3 Параметры синхронного двигателя с постоянными магнитами (СДПМ) ............... 80
7.11.3.1 Падения напряжения по осям D и Q .................................................................. 82
7.11.3.2 Регулятор тока магнитного потока .................................................................... 83
7.11.4 Параметры стабилизации ........................................................................................... 84
7.11.4.1 Стабилизатор крутящего момента ..................................................................... 84
7.11.4.2 Стабилизатор контура магнитного потока ........................................................ 86
7.11.4.3 Стабилизатор магнитного потока ...................................................................... 86
7.11.4.4 Стабилизатор напряжения ................................................................................. 87
7.11.5 Измеренные параметры .............................................................................................. 88
7.12 Входные сигналы ......................................................................................................................... 89
7.12.1 Дискретные входы (M2 -> G2.6.7) ............................................................................... 90
7.12.2 Аналоговые входы 1 и 2 .............................................................................................. 91
7.13 Выходные сигналы ................................
...................................................................................... 93
7.13.1.1 Аналоговый выход .............................................................................................. 93
7.13.1.2 Дискретные выходы ............................................................................................ 96
7.13.1.3 Контролируемые предельные значения ........................................................... 97
7.13.1.4 Реле расширения ................................................................................................ 98
7.14 Параметры защиты ..................................................................................................................... 99
7.15 Параметры контроля лифта (M2 -> G2.8.4) ............................................................................. 105
7.16 Параметры автоматического перезапуска ............................................................................. 107
7.17 Параметры эвакуации ............................................................................................................... 110
7.18 Параметры управления с клавиатуры .................................................................................... 112
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 5

vacon • 3
1
8 Ввод прикладной программы управления лифтом в эксплуатацию ........................... 114
8.1 Монтаж преобразователя частоты VACON
9 Общий порядок настройки параметров ........................................................................ 115
9.1 Данные двигателя ..................................................................................................................... 115
9.2 Параметры скорости ................................................................................................................. 115
9.2.1 Входные и выходные сигналы ................................................................................. 115
9.3 Настройка прикладной программы ......................................................................................... 115
9.3.1 Порядок настройки при управлении с разомкнутым контуром ............................. 116
9.3.2 Порядок настройки при управлении с замкнутым контуром ................................. 116
9.3.3 Точная настройка при управлении с замкнутым контуром ................................... 117
10 Порядок проверки работы функции контроля тормоза ............................................... 119
10.1 Типы схем подключения ........................................................................................................... 119
10.1.1 Подключение к входам 10 Vcc .................................................................................. 119
10.1.2 Подключение к входам 24 Vcc .................................................................................. 120
10.2 Включение контроля тормозов для выполнения
требований стандарта EN-81-1+A3 ........................................................................................ 122
10.3 Сброс отказа контроля тормоза и коды отказов .................................................................... 122
10.4 Сертификация ............................................................................................................................ 122
10.5 Порядок проведения проверки ................................................................................................ 123
11 Устранение неполадок .................................................................................................. 126
®
NX ..................................................................... 114
12 Коды отказов ................................................................................................................. 127
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 6

4 • Vacon
APFIFF33 NXP Управление лифтом
1 ПРИКЛАДНАЯ ПРОГРАММА УПРАВЛЕНИЯ ЛИФТОМ NXP
Выбор прикладной программы управления лифтом в преобразователе частоты серии NXP
осуществляется в меню M6 на странице S6.2.
1.1 Введение
®
Прикладная программа управления лифтом преобразователя частоты VACON
применения в современных лифтовых системах. Реализуемые ею функции позволяют
обеспечить плавное движение кабины лифта. Таблица интерфейса ввода-вывода содержит
наиболее распространенные сигналы, которые необходимы для управления лифтами.
В данной прикладной программе фиксированные скорости представлены в метрах в секунду
[м/с], а также в герцах [Гц], ускорения и замедления — в метрах в секунду за секунду [м/с
а интервалы сглаживания рывков — в секундах [с].
Примечание. Для прикладной программы управления лифтом NXP версии 2.00 и выше
требуется плата управления NXP3 (см. главу
10.4).
1.2 Интерфейс ввода/вывода
Все выходы являются свободно программируемыми. Реле расширения R03 и R04 можно
назначить любому дискретному выходу методом TTF («клемма для функции»).
Функциям дискретных входов методом TTF могут свободно назначаться любые дискретные входы.
Сигналы пуска вперед и назад закреплены за входами DIN1 и DIN2 (см. след. стр.).
Аналоговые входы можно использовать для ввода заданий скорости и крутящего момента
(для компенсации веса кабины) или как дополнительные дискретные входы.
1.3 Двигатель и энкодер
NXP подходит для
2
],
®
Может использоваться любой преобразователь частоты VACON
NXP. Для режима управления
двигателем с замкнутым контуром требуются энкодер и дополнительная плата (NXOPTA4,
NXOPTA5, NXOPTBE, NXOPTBB или NXOPTAK).
Данная прикладная программа также поддерживает двигатели с постоянными магнитами.
Для них предусмотрена отдельная группа параметров в меню настройки.
Для обеспечения наилучших характеристик управления такими двигателями рекомендуется
использовать абсолютный энкодер с интерфейсом ENDAT совместно с дополнительной платой
OPTBB или OPTBE.
В случае применения энкодера с каналами Sin/Cos задайте параметр P7.3.1.3 или P7.3.1.5
равным «Interpolation = [Yes]». Также допускается использовать резольвер совместно
с дополнительной платой OPTBC.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 7

vacon • 5
1
1.4 Управление контактором и тормозом
Предусмотрено управление контактором двигателя, позволяющее преобразователю частоты
управлять контактором, включенным между преобразователем частоты и двигателем.
Логика управления контактором двигателя применяется, только если назначен выход для
управления контактором двигателя.
Контактор замыкается при запросе пуска. Преобразователь частоты начинает подавать
напряжение на двигатель с задержкой, заданной с помощью параметра, или при появлении
сигнала подтверждения от контактора двигателя на дискретном входе, запрограммированном
для этой функции.
Независимо от того, кто управляет контактором (преобразователь частоты или внешнее
устройство), рекомендуется постоянно контролировать состояние контактора, чтобы исключить
управление двигателем при разомкнутом контакторе (например, когда он разомкнут схемой
защиты), так как последнее может привести к выходу контактора из строя. Контроль контактора
производится, когда назначен дискретный вход для сигнала обратной связи от контактора
двигателя. В этом случае нет необходимости настраивать время задержки. Кроме того, отсутствие
сигнала подтверждения сигнализируется как отказ.
Логика управления механическим тормозом спроектирована таким образом, чтобы обеспечить
плавный отход от уровня этажа и подход к нему. Предусмотрено несколько способов настройки
тормоза для выполнения различных требований, предъявляемых лифтовыми двигателями
и логикой управления лифтом.
Прикладная программа версии 2.11 или более поздней версии также удовлетворяет
требованиям к защите от неконтролируемого движения кабины (EN 81-1:1998+A3:2009).
В случае лифтов с электрическим приводом одним из способов выполнить требования
стандарта EN 81-1+A3 является использование функции контроля тормозов двигателя
в преобразователе частоты. При этом сами тормоза также должны быть сертифицированы
на соответствие данному стандарту. Контроль необходимо осуществлять отдельно для каждого
тормоза. Если контроль показывает, что нормальная последовательность отпускания
и наложения тормозов не соблюдается, лифт должен быть остановлен для проведения
дальнейшей проверки. Дополнительную информацию см. в главе 9.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 8

6 • Vacon
APFIFF33 NXP Управление лифтом
2 ПРОБЛЕМЫ СОВМЕСТИМОСТИ ПАРАМЕТРОВ В РАЗЛИЧНЫХ ВЕРСИЯХ
ПРИКЛАДНОЙ ПРОГРАММЫ
APFIFF33V215 и APFIFF33V216
- Решена проблема обработки команд пуска/останова с панели
APFIFF33V213 и APFIFF33V215
- Решена проблема времени замыкания контактора двигателя (P2.4.7.1)
- Новый параметр P2.8.2.8 (Зад. отк. вых. фазы)
- Новый параметр P2.8.2.9 (Пред. ток отк. вых. фазы)
APFIFF33V211 и APFIFF33V213
- После выполнения эвакуации эвакуационный режим управления двигателем сменяется
обычным режимом управления после того, как преобразователь частоты прекращает
модуляцию
APFIFF33V206 и APFIFF33V211
- Выполнение требований к сертификации защиты от неконтролируемого движения кабины
по стандарту EN 81-1:1998+A3:2009
- Исключена смена источника сигналов управления нажатием кнопок в течение 3 с
- Ошибка скорости вала сигнализируется только при наличии команды «Пуск»
- Отказ панели не сигнализируется, если источником сигналов управления является NCDrive
- Отпускание тормоза возможно в режиме торможения постоянным током при управлении
с разомкнутым контуром
- Задержка наложения тормоза и задержка аварийного останова разделены
- Отказы эвакуации F60 и F62 сбрасываются при напряжении звена постоянного тока свыше 500 В
Изменения в параметрах:
- Параметр P 2.5.10.14 (ВнешЗадан Id) для точной настройки для синхронного двигателя
с постоянными магнитами
- Параметр P 2.5.9.18.4 (Порог активации предотвращения сползания) при инициализации
принимает значение 3.00 (три импульса энкодера)
- Параметр P 2.7.10 (Функция RO1) при инициализации принимает значение 0 («Нет»)
(было 2 = Ход) в целях безопасности
o Обычно используется значение 1 («Готовность»), нормально-разомкнутый контакт
может быть включен в электрическую цепь безопасности.
- Исключен параметр P 2.5.17.7 (Ti РегСкор Пуск)
- Исключен параметр P 2.5.17.8 (SpdCtrlStartDel)
- Разделены параметры аналоговых входов AI1 и AI2
- Добавлены параметры для установки минимального и максимального значений для групп
AI1 и AI2
- Добавлены параметры задержки включения дискретных входов DIN1 и DIN2
- Параметры защиты от сползания перемещены из группы параметров синхронного двигателя
с постоянными магнитами в группу параметров управления с замкнутым контуром
- Добавлено вычисление частоты скольжения. Это значение используется для максимальной
частоты наложения тормоза (разомкн. контур)
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 9

vacon • 7
1
- P2.3.1.3 (Част. отпуск._РК): начальное значение 100 -> 0
- P2.3.1.4 (Задерж. отп. торм._РК): начальное значение 10 -> 0
- P2.3.1.7 (Макс. част. при налож. торм._РК): начальное значение 400 -> 200 (2 Гц)
- P2.3.1-2.8 (Время реаг. торм.): начальное значение 5 -> 30 (300 мс)
- P2.3.2.3 (Част. отпуск._ЗК): начальное значение 1 -> 0
- P2.3.2.9 (Время 0 Гц при пуске_ЗК): начальное значение 400 -> 800
- P2.3.2.12 (Част. плавн. пуска_ЗК): начальное значение 2 -> 0
- P2.3.3.2 (КонтВнешТор1): начальное значение 1 -> 0
- P2.3.3.3 (КонтВнешТор2): начальное значение 1 -> 0
- P2.3.4.2 (ИнвКонтВнТор): добавлен идентификационный номер (ID)
- P2.5.9.18 (Контр Сполз): начальное значение 0 -> 1
(контроль сползания также можно использовать с асинхронными двигателями)
- P2.5.9.20 (НачМом Контр Сполз): начальное значение 200 -> 1
- P2.6.2.12 (Вх3 ВыборСкор): начальное значение 16 -> 15
- P2.6.2.13 (Повт. идент. угла): макс. значение 1 -> 89 (устранена ошибка)
o Выбран синхронный двигатель с постоянными магнитами
- коэффициенты усиления для регулирования скорости: 15 -> 10
- ток отпускания тормоза в режиме с замкнутым контуром: 5 %
от номинального тока двигателя -> 0
- задержка отпускания тормоза в режиме с замкнутым контуром: 0 -> 30
(300 мс)
Параметры управления тормозом:
- изменен текст отказа F55
- добавлен отказ F91
- добавлен параметр P2.3.3.3 (КонтВнешТор2)
- добавлен параметр P2.3.4.3 («КонтF55Пуск»)
- добавлены резервные параметры P3.5–P3.9 для реализации кнопки разрешения
сброса отказа тормоза с использованием B3.10
- добавлен параметр B3.10 (Сброс отк. КонтрТорм)
- увеличено значение по умолчанию параметра P2.3.4.1 для выполнения требований
приложений +A3. Значение по умолчанию 2,00 с.
- Изменено значение по умолчанию параметра P2.3.4.2 (ИнвКонтВнТор): выбрана
инверсия. Когда система остановлена, контакты выключателей тормоза замкнуты и на
дискретные входы, используемые для контроля состояния тормоза, поступает
напряжение 24 В.
- Изменено значение по умолчанию параметра P2.3.4.3 (КонтF55Пуск): = 0
(«отключено»). При этом значении отказ контроля тормоза отображается только при
остановке на этаже и не отображается при движении между этажами.
Примечание. При обновлении прикладной программы не рекомендуется использовать
®
функцию загрузки параметров, предусмотренную в программе VACON
следует считать параметры из устройства и произвести сравнение с прежним файлом
параметров. Прикладная программа постоянно совершенствуется, в том числе меняются
используемые по умолчанию значения параметров. Если параметры будут непосредственно
загружены в устройство, оптимизированные значения по умолчанию будут утрачены.
NCDrive. Вместо это
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 10
8 • Vacon
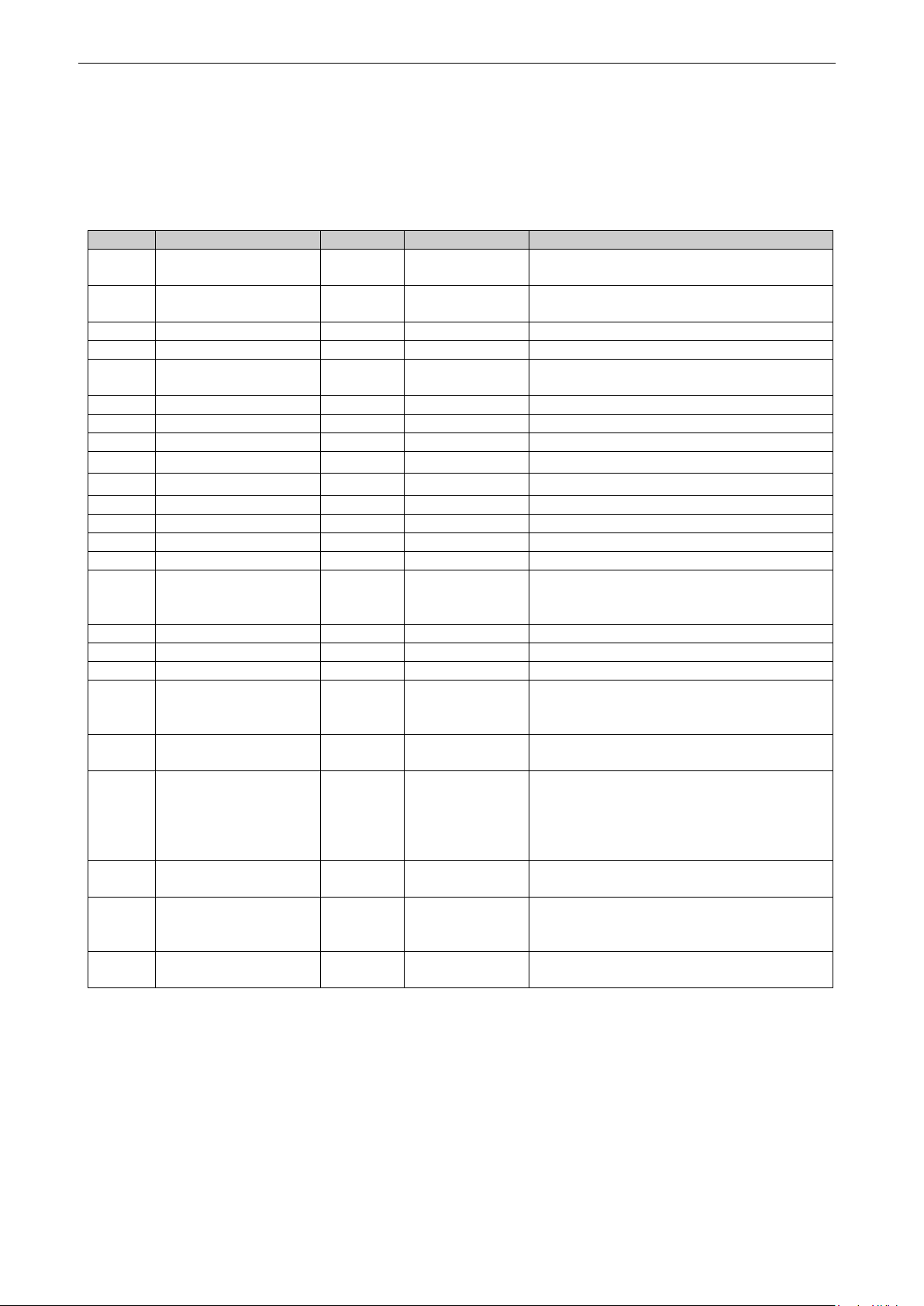
APFIFF33 NXP Управление лифтом
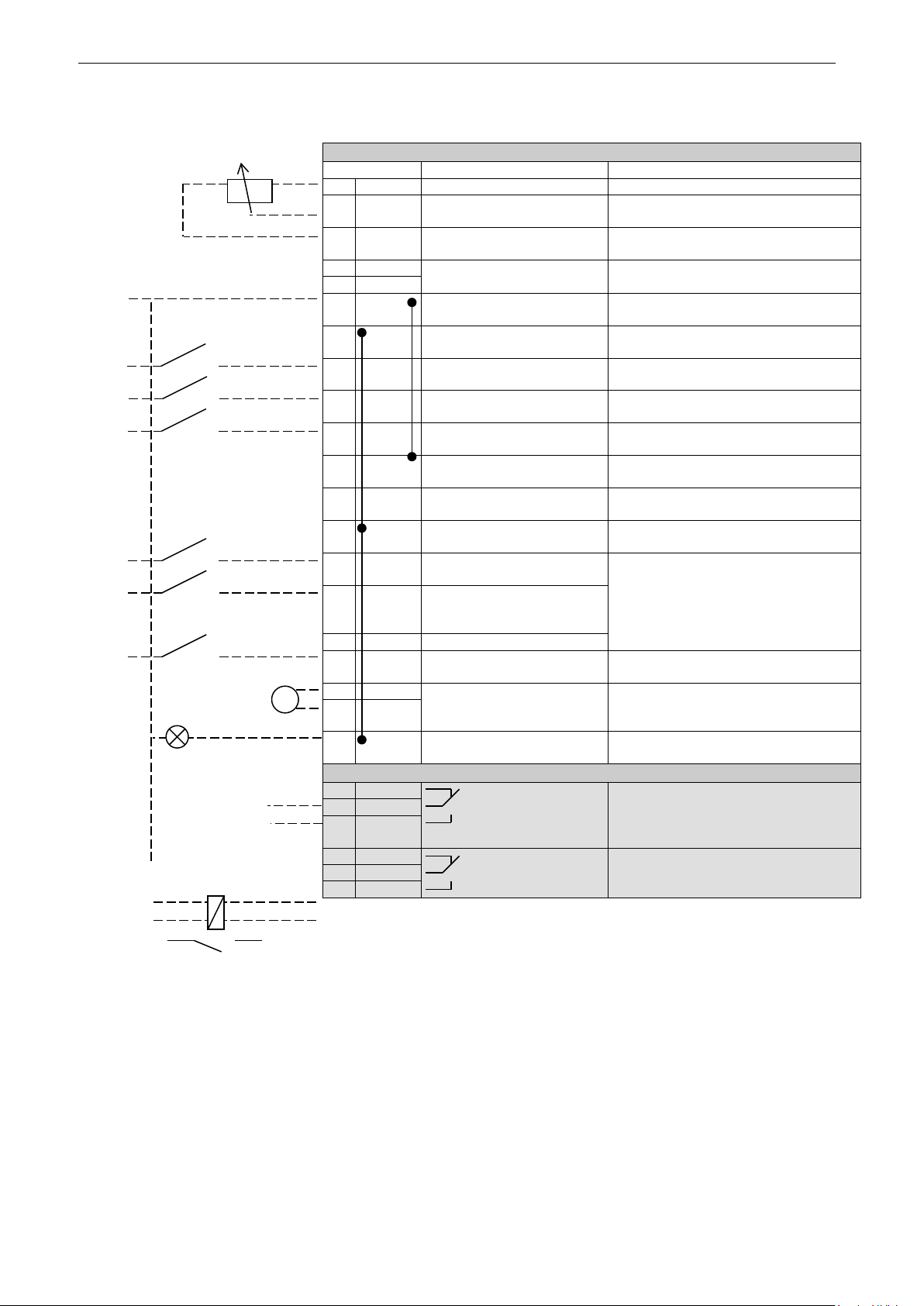
NXOPTA1
Клемма
Сигнал
Описание
1
+10 V
Выход опорного сигнала
Напряжение для потенциометра и т.п.
2
AI1+
Аналоговый вход, диапазон
напряжения 0—10 В=
Ввод задания частоты с использованием
сигнала напряжения
3
AI1–
Заземление входов/выходов
Земля для источников сигналов заданий
и управления
4
AI2+
Аналоговый вход, диапазон
тока 0—20 мА
Ввод задания частоты с использованием
токового сигнала
5
AI2–
6
+24 V
Выход управляющего
напряжения
Выход для выключателей и т.п.,
не более 0,1 А
7
GND
Заземление входов/выходов
Земля для источников сигналов
заданий и управления
8
DIN1
Пуск в прямом направлении
(программируется)
Контакт замкнут = пуск вперед
9
DIN2
Пуск в обратном направлении
(программируется)
Контакт замкнут = пуск назад
10
DIN3
Fault Reset
(программируется)
Контакт замкнут = сброс отказа
11
CMA
Общая клемма для DIN 1–DIN 3
Подключить к клемме GND («земля»)
или +24 V («+24 В»)
12
+24 V
Выход управляющего
напряжения
Напряжение для выключателей (см. № 6)
13
GND
Заземление входов/выходов
Земля для источников сигналов заданий
и управления
14
DIN4
Выбор задания скорости
Программируемое задание скорости
для входов DIN4, DIN5 и DIN6:
15
DIN5
Выбор задания скорости
Задание действия
Двоичное задание
16
DIN6
Выбор задания скорости
17
CMB
Общая клемма для DIN4—DIN6
Подключить к клемме GND («земля»)
или +24 V («+24 В»)
18
AO1+
Частота выхода
Программируемый
макс. 500 ОмΩ
19
AO1–
20
DO1
Дискретный выход
ОТКАЗ
Программир
Открытый коллектор, I ≤ 50 мА, U ≤ 48 В=
NXOPTA2
21
RO1
Релейный выход 1
Программир
22
RO1
23
RO1
24
RO2
Релейный выход 2
Программир
25
RO2
26
RO2
ЦЕПЬ
220
мA
3 УПРАВЛЯЮЩИЕ ВХОДЫ/ВЫХОДЫ
ref
БЕЗОПАСНОСТИ
В~
Задание действия с направлением
Аналоговый выход
По умолчанию:
«Не использов.»
Механический тормоз
Диапазон 0—20 мА (резист. нагр.),
(обычно используется как
выход «ГОТОВНОСТЬ»)
Табл. 3–1. Конфигурация входов-выходов по умолчанию
в прикладной программе управления лифтом NXP
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 11
vacon • 9
1
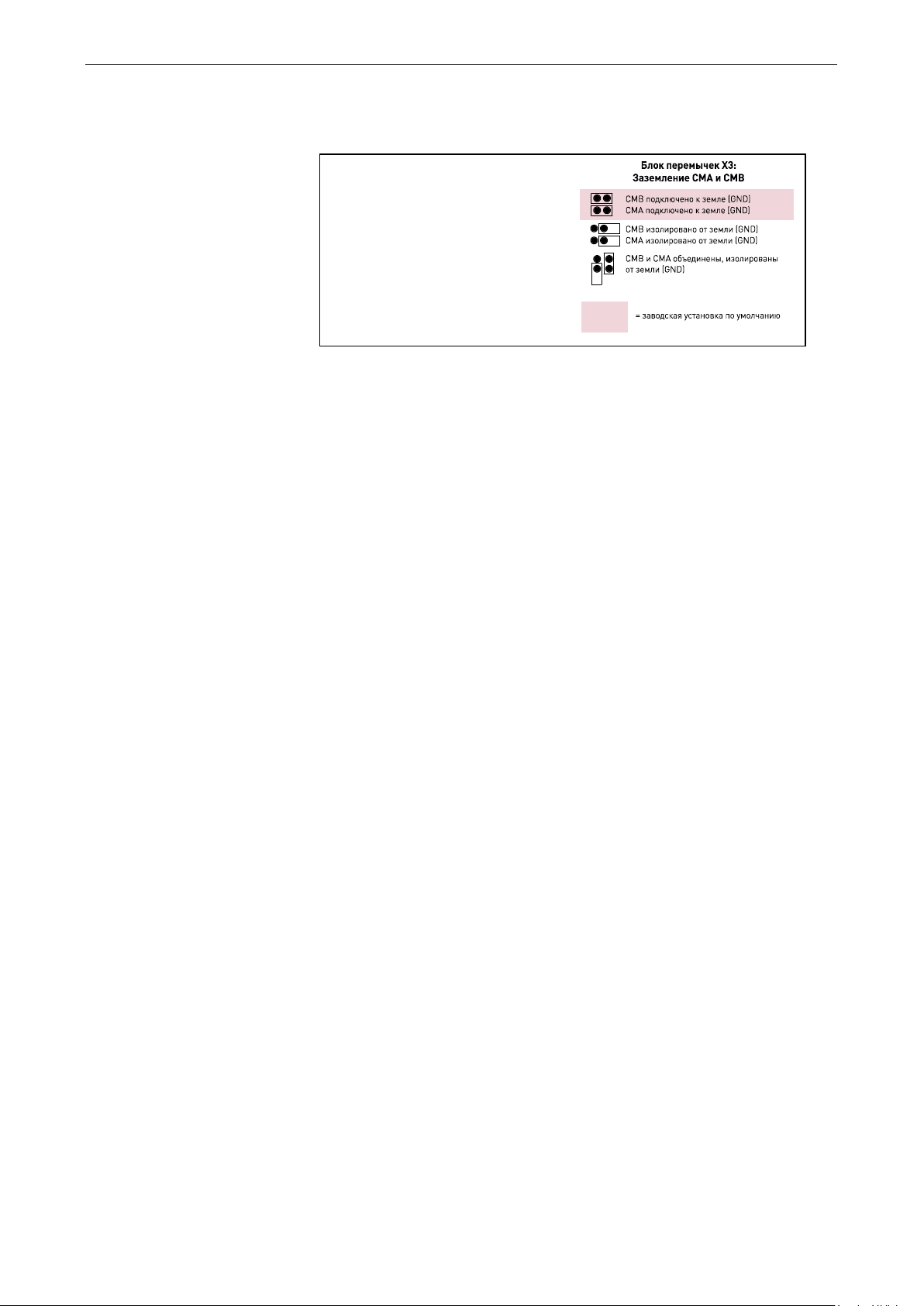
Примечание. Относительно выбора перемычек см. ниже.
Дополнительную информацию см. в руководстве по эксплуатации
®
VACON
NXS/P.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 12
10 • Vacon
APFIFF33 NXP Управление лифтом
READY
I/Oterm
DigIN:0.1
Fault reset
Название функции
Тип клеммы
Номер клеммы
Гнездо
4 ПРИНЦИП ПРОГРАММИРОВАНИЯ ВХОДНЫХ СИГНАЛОВ
Принцип программирования входных сигналов в прикладной программе управления
®
лифтом VACON
в других прикладных программах) отличается от общепринятого метода, используемого
в других прикладных программах VACON
В традиционном методе программирования — программировании функций для клемм
(метод FTT) — для фиксированного входа определяется некоторая функция. В то же время,
в упомянутых выше прикладных программах используется метод программирования клемм для
функций (TTF), в котором процесс программирования осуществляется иным путем: функции
фигурируют как параметры, для которых оператор задает некоторый вход.
4.1 Определение входа для некоторой функции на клавиатуре
Соединение некоторой функции (входного сигнала) с некоторым дискретным входом производится
путем присвоения параметру соответствующего значения. Это значение составляется из
обозначения гнезда платы на плате управления VACON
®
VACON
NXS/P) и соответствующего номера сигнала (см. ниже).
, а также в универсальной прикладной программе управления VACON® (и частично
®
NX.
®
NX (см. руководство по эксплуатации
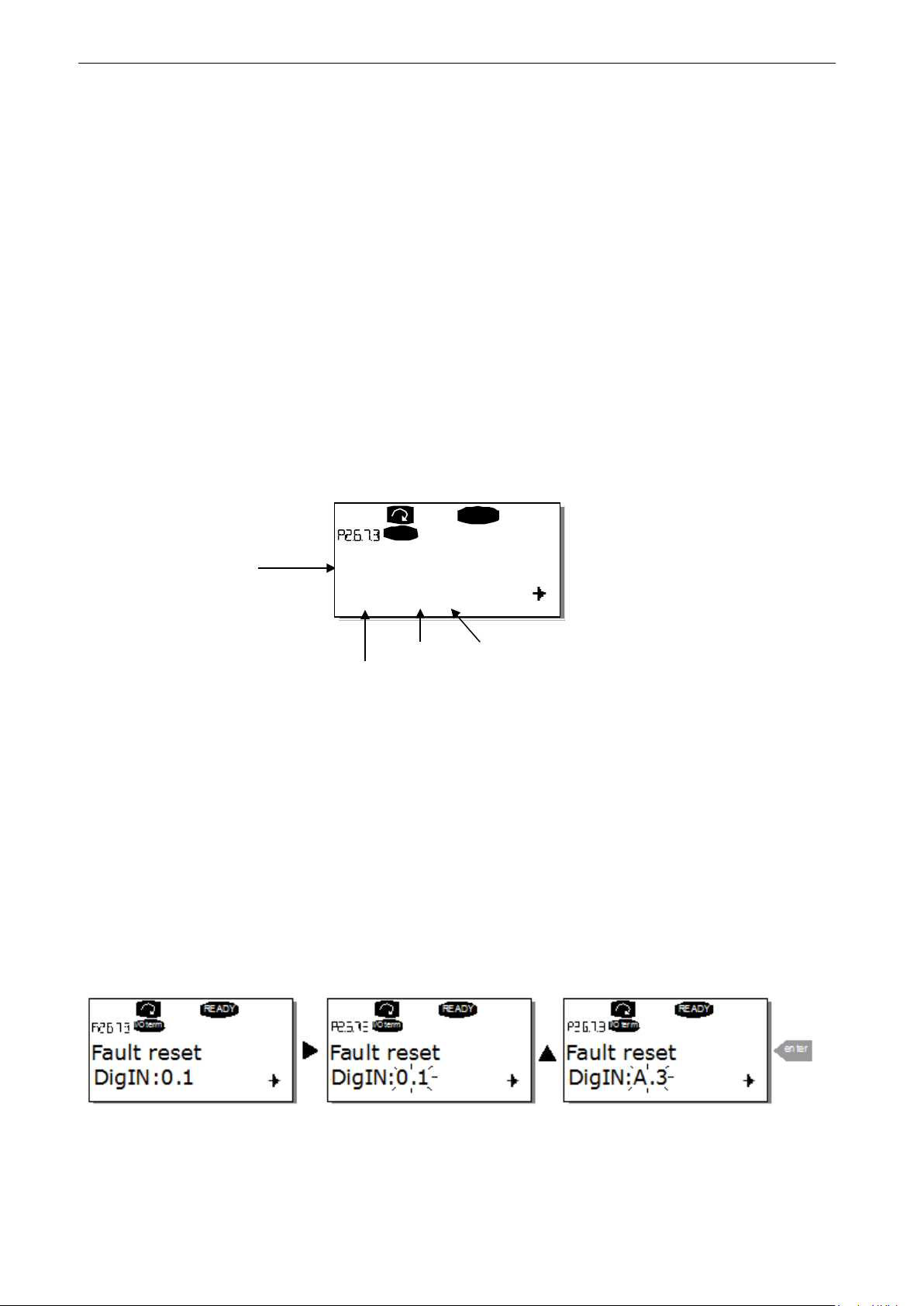
Пример: Нужно подключить функцию «Сброс отказа» (параметр 2.6.7.3) к дискретному входу
A.3 на основной плате NXOPTA1, находящейся в гнезде A.
Сначала задайте на клавиатуре параметр 2.6.7.3. Нажмите один раз кнопку меню «вправо»,
чтобы ввести режим редактирования. В строке значений слева отображается тип клеммы
(DigIN), а справа — дискретный вход, к которому подключается функция.
Когда значение мигает, нажмите и удерживайте кнопку обозревателя «вверх» или «вниз»
чтобы найти нужное гнездо платы и требуемый номер сигнала. Программа будет поочередно
показывать гнезда платы начиная с 0 и далее от A до E и номера входов/выходов от 1 до 10.
Как только будет установлено нужное значение, нажмите один раз кнопку ввода Enter,
чтобы подтвердить изменение.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 13
vacon • 11
1
4.2 Определение аналогового входа как дискретного
Прикладная программа управления лифтом позволяет использовать аналоговые
входы в качестве дискретных входов. Для программирования используется метод TTF.
Необходимо определить SlotF.1 для AI1 и SlotF.2 для AI2. Логическому состоянию «0»
соответствует уровень сигнала менее 50 %, а состоянию «1» — уровень сигнала более 50 %.
®
Параметры SlotF доступны в программе VACON
NCDrive версии 2.0.18 или выше.
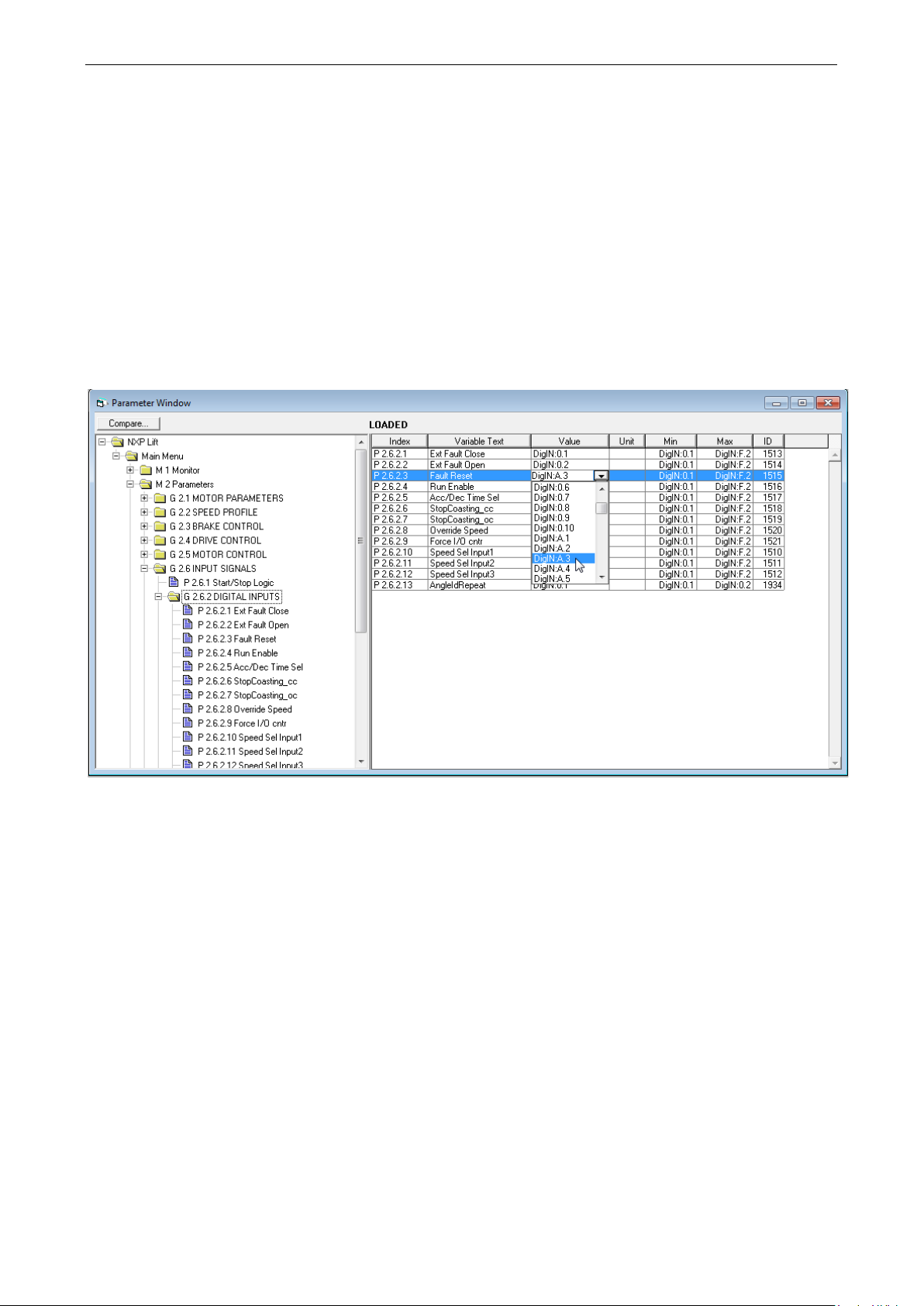
4.3 Определение входа/выхода для некоторой функции с помощью сервисной
®
программы VACON
При настройке параметров с помощью сервисной программы VACON
NCDrive
®
NCDrive связь между
функцией и входом/выходом устанавливается так же, как и при работе с панелью управления.
Нужно просто выбрать код адреса в раскрывающемся меню в столбце Value (Значение).
Рис. 1. Вид окна сервисной программы NCDrive: ввод кода адреса
4.4 Определение неиспользуемых входов/выходов
Для всех неиспользуемых входов и выходов должно быть установлено значение 0.1
(гнездо платы 0, номер клеммы 1). Значение 0.1 также по умолчанию используется
для большинства функций. В то же время, если значения сигнала дискретного входа требуется
использовать, например, для целей тестирования, можно установить значение гнезда платы 0
и любой номер клеммы от 2 до 10, чтобы установить вход в состояние ИСТИНА. Другими
словами, значение 1 соответствует разомкнутому контакту, а значения от 2 до 10 соответствуют
замкнутому контакту.
Что касается аналоговых входов, если для номера клеммы присвоить значение 0.1,
это соответствует уровню сигнала 0 %. Значение 2 соответствует уровню сигнала 20 %,
значение 3 — уровню сигнала 30 %, и т. д. Установка для клеммы значения 10 соответствует
уровню сигнала 100 %.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 14
12 • Vacon
APFIFF33 NXP Управление лифтом
Код
Параметр
Ед. измер.
Идентификатор
Описание
Выходная частота напряжения,
подаваемого на двигатель
Задание частоты для
управления двигателем
V1.3
СкоростьДвигат
об/мин
2
Скорость двигателя, об/мин
V1.4
ТокДвигат A 3
В процентах от номинального
крутящего момента двигателя
V1.6
Мощность двигателя
%
5
Мощ. на валу двигат.
V1.7
НапряжДвигат
В
6
V1.8
Напр ПосТока
В
7
V1.9
Температ ПЧ
°C
8
Температура радиатора
V1.10
Вход напряжения
В
13
AI1
V1.11
Вход тока
мA
14
AI2
V1.12
DIN1, DIN2, DIN3
15
Состояния дискретных входов
V1.13
DIN4, DIN5, DIN6
16
Состояния дискретных входов
V1.14
DO1, RO1, RO2
17
Состояния дискретных и релейных выходов
Состояние реле расширения
будущего использования)
V1.16
Аналоговый выход I
мA
26
AO1
V1.17
Скорость лифта
м/с
1630
Скорость лифта, м/с
V1.18
Скорость энкодера
об/мин
1631
Крутящий
без фильтрации
Задание крутящего момента на выходе
Расстояние, на котором происходит
Количество
пар полюсов
Рассчитанное количество пар полюсов.
Требуется проверка.
Рассчитанная температура двигателя
двигателя
Одновременно могут контролироваться
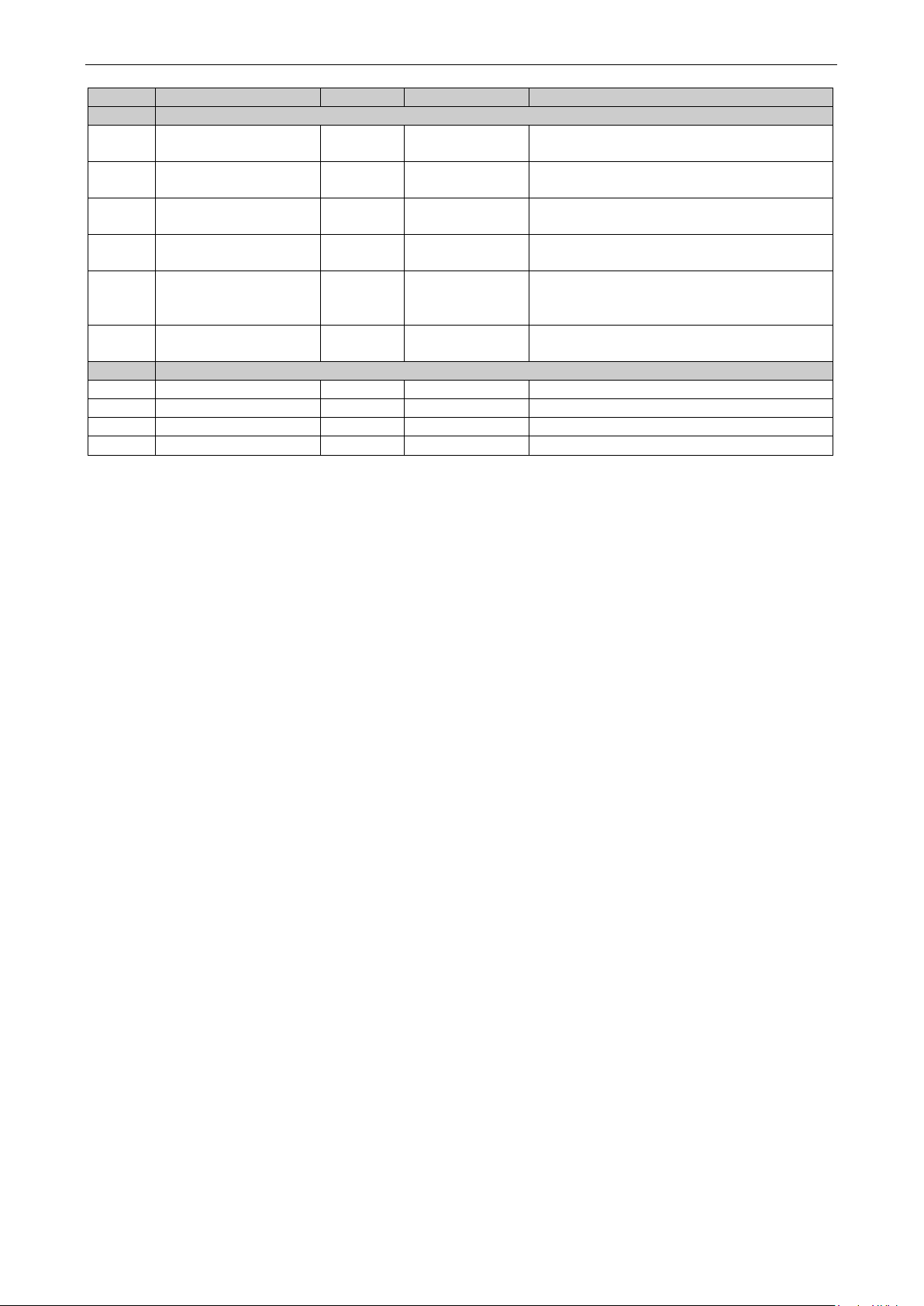
5 КОНТРОЛИРУЕМЫЕ ЗНАЧЕНИЯ (КЛАВИАТУРА ПАНЕЛИ УПРАВЛЕНИЯ: МЕНЮ M1)
Контролируемые значения — это фактические значения выбранных параметров и сигналов,
а также данные состояний и результаты измерений. Контролируемые значения нельзя
редактировать.
®
Дополнительную информацию см. в руководстве пользователя VACON
V1.1 Частота выхода Гц 1
V1.2 Задание частоты Гц 25
V1.5 Момент Двигат % 4
NXS/P.
V1.15 ROE1, ROE2, ROE3 35
out
V1.19
V1.20 Выход рег. скорости % 1633
V1.21
V1.22
V1.23
G1.24 МультиМонитор
момент двигателя
Расстояние
замедления
Температура
двигателя
% 1632
м 1634
1651
% 9
(R0E3 зарезервировано для
регулятора скорости
замедление от любой скорости до скорости
выравнивания (или нулевой скорости).
Значение отображает влияние различных
параметров на тормозное расстояние.
в процентах от номинальной температуры
три разных значения
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 15
vacon • 13
1
Код
Параметр
Ед. измер.
Идентификатор
Описание
V1.25
Контролируемые параметры 2
Абсолютное положение
абсолютного энкодера в гнезде С
Количество оборотов
абсолютного энкодера в гнезде С
Реакция на ступенчатое
воздействие
Реакция на ступенчатое
воздействие по частоте
Задание момента
на аналоговом входе
Масштабированное задание крутящего
момента с аналогового входа
Величина задания крутящего момента для
вращения значение линейно нарастает.
Расстояние, пройденное после начала
торможения во время предыдущей поездки.
V1.26
Прямой подход к этажу (скрыты, когда DTFMode = 0)
V1.26.1
Скорость м/с факт.
м/с
1993
Фактическая скорость, м/с
V1.26.2
Положение, мм
мм
1994
Положение кабины лифта, мм
V1.26.3
НеобрИмпАбсЭнк
имп.
1974
V1.26.4
CarAtFloorArea
Floo
1769
V1.25.1 Положение АбсЭнк имп. 54
V1.25.2 Обороты АбсЭнк r 55
V1.25.3
V1.25.4
V1.25.5 Задан. крут. момент % 1780
V1.25.6 РасстТормож м 1888
Гц 1132
% 1779
управления двигателем. После запроса
Табл. 5–1
5.1 Контролируемые значения
V1.1 Частота выхода [#,## Гц] ID 1
Выходная частота, то есть частота тока, подаваемого в обмотки двигателя.
Обновляется с интервалом в 10 мс.
V1.2 Задание частоты [#,## Гц] ID 25
Задание частоты для управления двигателем после функции масштабирования
скорости. Обновляется с интервалом в 1 мс.
V1.3 СкоростьДвигат [# об/мин] ID 2
Скорость двигателя, об/мин
V1.4 ТокДвигат [#,## А] ID 3
Разомкнутый контур:
линейная фильтрация 1 с.
Замкнутый контур:
фильтрация 32 мс.
V1.5 Момент Двигат [%] ID 4
В процентах от номинального крутящего момента двигателя.
Разомкнутый контур:
линейная фильтрация 1 с.
Замкнутый контур:
фильтрация 32 мс.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 16

14 • Vacon
APFIFF33 NXP Управление лифтом
Состояние
DIN1/DIN2/DIN3
Состояние
DIN4/DIN5/DIN6
b0
DIN3
DIN6
b1
DIN2
DIN5
b2
DIN1
DIN4
Состояние выходов
DO1, RO1, RO2
Состояние выходов
ROE1, ROE2, ROE3
b0
DO1
ROE1
b1
RO1
ROE2
b2
RO2
ROE3
V1.6 Мощность Мотора [#,# %] ID 5
Рассчитанная мощность двигателя.
V1.7 НапряжДвигат [#,# В] ID 6
Рассчитанное напряжение двигателя.
V1.8 Напр ПосТока [# В] ID 7
Измеренное напряжение в звене постоянного тока, фильтрованное.
V1.9 Температ ПЧ °C ID 8
Температура радиатора.
V1.10 Вход напряжения [#,## В] ID 13
V1.11 АналогВхТоковый [#,## мА] ID 14
Уровни сигналов на аналоговых входах, фильтрованные.
V1.12 DIN1, DIN2, DIN3 ID 15
V1.13 DIN4, DIN5, DIN6 ID 16
V1.14 DO1, RO1, RO2 ID 17
V1.15 ROE1, ROE2, ROE3 ID 35
V1.16 АналВыход Iout [#,## мА] ID 26
Значение сигнала аналогового выхода: 0 % = 0 мА/0 В, 100 % = 20 мА/10 В
V1.17 Скорость лифта [м/с] ID 1630
Линейная скорость кабины лифта.
V1.18 Скорость Энкодер [Гц] ID 1631
Скорость вращения в единицах частоты двигателя, фильтрованная с постоянной
времени Encoder1FiltTime.
V1.19 Момент двигателя без фильтр. [#,# %] ID 1632
Фактический крутящий момент в процентах от номинального крутящего момента
двигателя.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 17

vacon • 15
1
V1.20 Выход рег. скорости [#,# %] ID 1633
Задание крутящего момента на выходе регулятора скорости.
V1.21 Расстояние замедления [#,## м] ID 1634
Расстояние замедления от полной скорости до скорости выравнивания.
V1.21 ЧислоПарПолюсов [-] ID 1651
Количество пар полюсов, рассчитанное преобразователем частоты.
Если это значение отличается от значения на паспортной табличке двигателя,
следует уточнить значения номинальной частоты и номинальной скорости двигателя.
V1.23 ТемператДвигат [#,# %] ID 9
Расчетная температура двигателя
Порог аварийного отключения составляет 105 % (если реакцией является отказ).
5.2 Контролируемые значения 2
V1.25.1 Положение абс. энкодера ID 54
Абсолютное положение: положение в пределах оборота. Сведения о масштабных
коэффициентах см. в документации энкодера.
V1.25.2 Количество оборотов абс. энкодера ID 55
Абсолютное положение: количество оборотов.
V1.25.3 Реакция на ступенчатое воздействие Гц ID 1132
Ошибка частоты. Разница между выходной частотой ПЧ и фактической частотой
энкодера с погрешностью 0,001 Гц. Может использоваться для настройки
регулирования скорости в режиме управления с замкнутым контуром.
V1.25.4 Задание момента на аналоговом входе [#,#%] ID 1779
Масштабированное задание крутящего момента с аналогового входа.
V1.25.5 Задан. крут. момент [#,#%] ID 1780
Величина задания крутящего момента для управления двигателем. После запроса
вращения значение линейно нарастает.
V1.25.6 Расстояние торможения [#,### м] ID 1888
Расстояние, пройденное за время торможения при предыдущей поездке. Отсчет
расстояния начинается с момента, когда частота впервые начинает снижаться во
время поездки.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 18

16 • Vacon
APFIFF33 NXP Управление лифтом
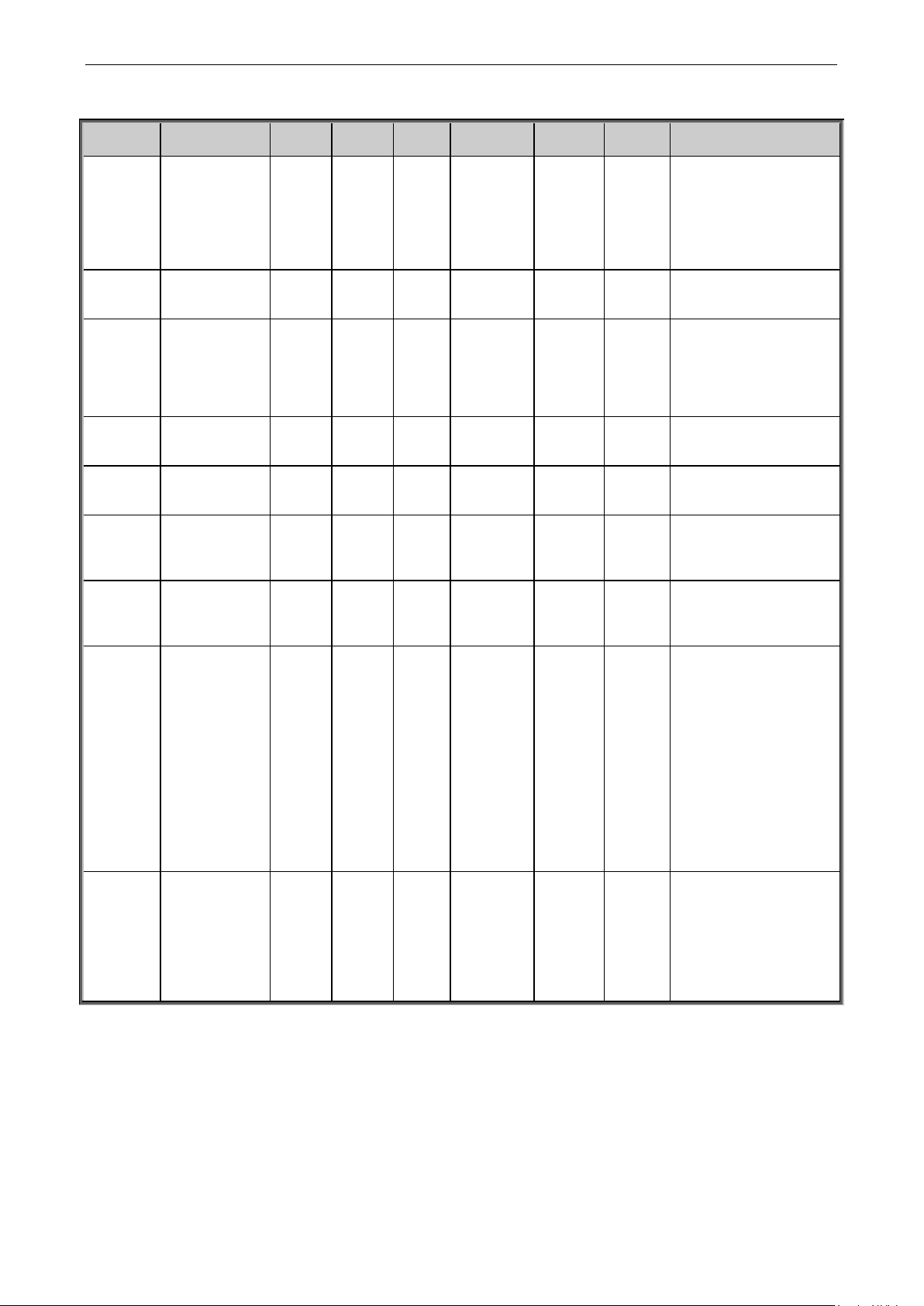
6 ПРИКЛАДНАЯ ПРОГРАММА УПРАВЛЕНИЯ ЛИФТОМ NXP: СПИСКИ ПАРАМЕТРОВ
На следующих страницах приведены перечни параметров, разделенных на соответствующие
группы. Каждый параметр содержит ссылку, нажав которую, можно перейти к его описанию.
Описания параметров приводятся на страницах 37—113.
Пояснения названий столбцов:
Код = указание расположения на клавиатуре: показывает оператору текущий
номер параметра
Параметр = название параметра
Мин. = минимальное значение параметра
Макс. = максимальное значение параметра
Ед. измер. = задаваемая единица измерения значения параметра, если имеется
По умолчанию = значение, предварительно установленное на заводе-изготовителе
Заказчик = собственная установка заказчика
Идентификатор = идентификационный номер параметра (используется с программами для ПК)
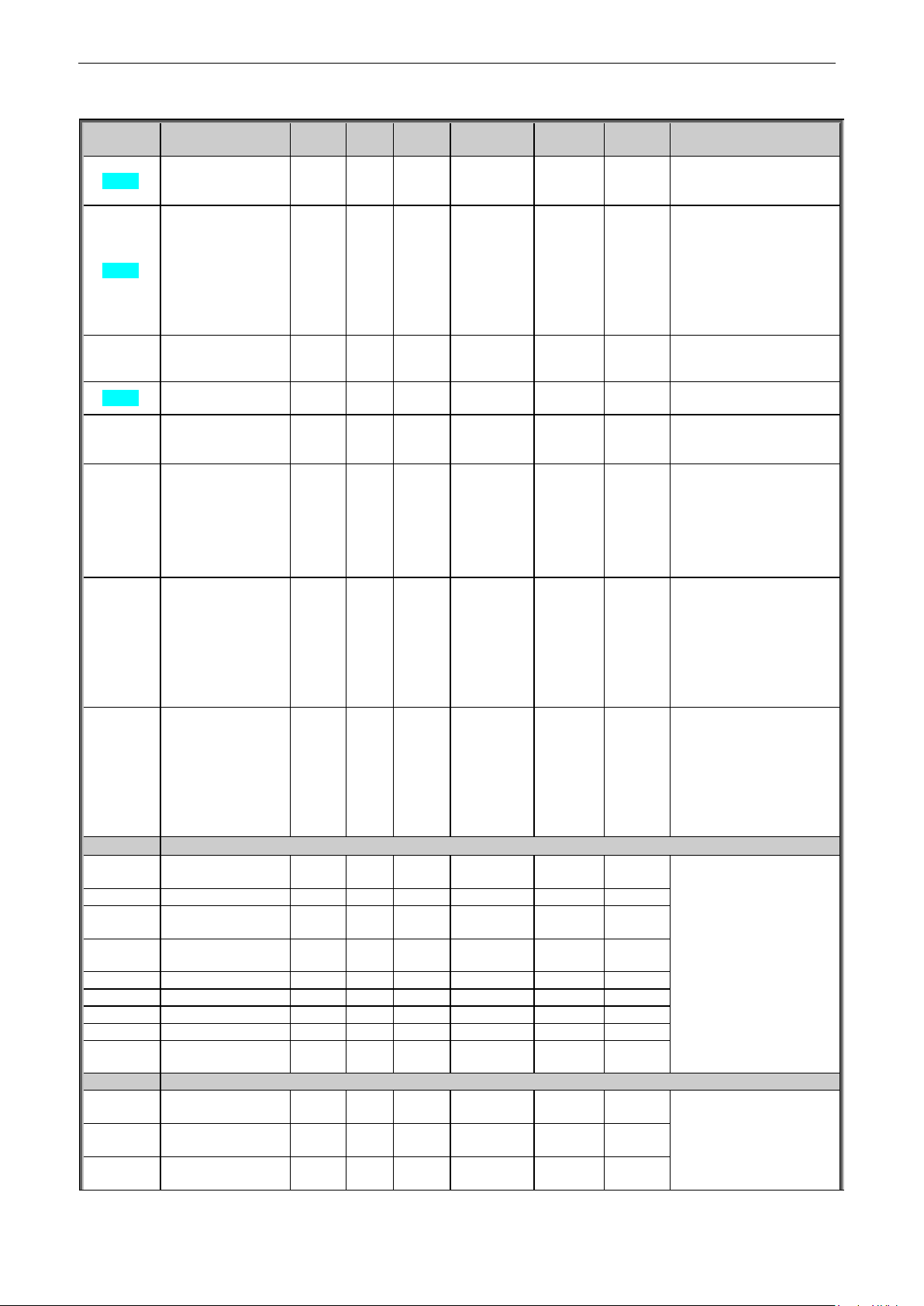
= эти параметры программируются методом TTF, см. главу 4
= код параметра выделен: значение параметра можно изменить только
после остановки преобразователя частоты
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 19
vacon • 17
1
Ед.
измер.
По
умолчанию
Идентификатор
Проверьте значение
(треугольник/звезда).
Номинальная
двигателя
Проверьте значение по
данных двигателя.
Значение по умол-
щего типоразмера.
Проверьте значение
данных двигателя.
Проверьте значение
данных двигателя.
Максимальный ток,
в обмотки двигателя.
0,00 А — значение
двигателя.
0 = нет действия
лирования частоты!
0 = асинхронный
других параметров.
6.1 Основные параметры (клавиатура панели управления: меню M2 G2.1)
Код Параметр Мин. Макс.
Номинальное
P2.1.1
P2.1.2
P2.1.3
P2.1.4
P2.1.5 Cos ϕ двигателя 0,30 1,00 0,85 120
P2.1.6 Предельный ток 0,1 x IH 2 x IH A IL
напряжение
двигателя
частота
Номинальная
скорость
двигателя
Номинальный
ток двигателя
20 690 В
4.00 320,00 Гц 50,00 111
5 20 000 об/мин 1 440 112
0,1 x IH 2 x IH A IH
NX2: 230 В
NX5: 400 В
NX6: 690 В
Заказчик
110
113
107
Примечание
по табличке технических
данных двигателя. Также
примите во внимание
используемую схему
соединения обмоток
табличке технических
чанию применимо для
4-полюсного двигателя
и преобразователя
частоты соответствую-
по табличке технических
по табличке технических
подаваемый преобразователем частоты
Ток
P2.1.7
P2.18 Идентификация 0 4 0
P2.1.9 Тип двигателя 0 1 0
намагни-
чивания
0,00 100,00 A 0,00
Табл. 6–1. Основные параметры G2.1
612
631
1650
рассчитывается исходя
из технических данных
1 = идентификация
без вращения
2 = идентификация
с вращением
3 = выполнение
идентификации
энкодера
ПРИМЕЧАНИЕ.
Перед идентификацией
установите в качестве
режима управления
двигателем режим регу-
двигатель
1 = синхронный
двигатель с постоян-
ными магнитами
Изменение типа двигателя ведет к изменению
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 20
18 • Vacon
APFIFF33 NXP Управление лифтом
Ед.
измер.
По
умолчанию
Идентификатор
Скорость лифта (м/с)
частоте двигателя.
0 = задание действия
6 = клавиатура
Время фиксации
задания
Функция прохода
полуэтажа
0 = нормальная работа
выключен
Расстояние замедления
«Время торможения».
Расстояние замедления
и «Сглаж. кон. торм. 2».
0 = не используется
кривую скорости 2.
P2.2.9.x
ЗАДАНИЕ СКОРОСТИ [м/с]
Скорость
выравнивания
2.2.10.
P2.2.9.2
Полная скорость
0,00
P2.2.1
м/с
1,00
1502
Ограниченная
скорость
1,5x
P2.2.1
P2.2.9.5
Задание скорости 4
0,00
P2.2.1
м/с
0,10
1505
P2.2.9.6
Задание скорости 5
0,00
P2.2.1
м/с
1,00
1506
P2.2.9.7
Задание скорости 6
0,00
P2.2.1
м/с
0,25
1507
P2.2.9.8
Задание скорости 7
0,00
P2.2.1
м/с
0,50
1508
1,5x
P2.2.1
P2.2.10.x
ЗАДАНИЕ СКОРОСТИ [Гц]
Скорость
выравнивания
пар.
2.1.2
Параметры соответствуют
пар.
2.1.2
Ограниченная
скорость
пар.
2.1.2
6.2 Параметры профиля скорости (клавиатура панели управления: меню M2 G2.2)
Код Параметр Мин. Макс.
P2.2.1
P2.2.2
P2.2.3
P2.2.4
P2.2.5
P2.2.6
Номинальная
линейная скорость
Выбор задания
скорости
Разрешение
рывков
Состояние
останова (DIN456)
Тормозное
расстояние 1
0,20 5,00 м/с 1,00
0 6 s
0 1 1
0,00 5,00 s
0 1
0 5,000 м
Заказчик
1500
117
1549
1509
1614
1777
Примечание
при номинальной
1 = задание действия
с направлением
2 = двоичное задание
3 = AI1 (вход напряжения)
4 = AI1 (вход тока)
5 = полевая шина
0 = запрещено
1 = разрешено
1 = останов, если DIN456
от полной скорости до
скорости выравнивания.
При изменении этого
параметра автоматически меняется параметр
P2.2.7
P2.2.8
P2.2.9.1
P2.2.9.3
P2.2.9.4 Скорость ревизии 0,00
P2.2.9.9 Скорость коррекции 0,00
Тормозное
расстояние 2
Внутреннее
переключение
изменения
скорости
0 5,000 м
0 P2.1.2 Гц 0
0,00 P2.2.1 м/с 0,10
0,00 P2.2.1 м/с 0,25
м/с 0,50
м/с 0,50
1776
1544
1501
1503
1504
1613
от скорости выравнивания до нулевой скорости.
При изменении этого
параметра автоматически
меняются параметры
«Сглаж. нач. торм. 2»
Данный параметр
определяет пороговую
частоту, по достижении
которой во время останова происходит переключение на заданную
Параметры соответствуют
параметрам группы
При изменении
параметров они
будут обновляться
автоматически.
Эти параметры
также обновляются
при изменении
параметра P2.2.1.
P2.2.10.1
P2.2.10.2 Полная скорость 0,00
P2.2.10.3
0,00
0,00
Гц 5,00
Гц 50,00
Гц 12,50
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
1604
1605
1606
параметрам группы 2.2.9.
При изменении
параметров они
будут обновляться
автоматически.
Page 21
vacon • 19
1
Ед.
измер.
По
умолчанию
Идентификатор
1,5x
P2.1.2
пар.
2.1.2
пар.
2.1.2
пар.
2.1.2
пар.
2.1.2
Скорость
коррекции
1,5x
P2.1.2
P2.2.11.x
КРИВАЯ СКОРОСТИ 1
P2.2.11.1
Разгона 1
0,20
2,00
м/с2
0,70
103
P2.2.11.2
Торможения 1
0,20
2,00
м/с2
0,70
104
Сглаживание
в начале разгона 1
Сглаживание
в конце разгона 1
Сглаживание
торможения 1
Сглаживание
торможения 1
P2.2.12.x
КРИВАЯ СКОРОСТИ 2
P2.2.12.1
Pазгона 2
0,20
2,00
м/с2
0,20
502
P2.2.12.2
Торможения 2
0,20
2,00
м/с2
0,20
503
Сглаживание
в начале разгона 2
Сглаживание
в конце разгона 2
Сглаживание
торможения 2
Сглаживание
торможения 2
Код Параметр Мин. Макс.
P2.2.10.4 Скорость ревизии 0,00
P2.2.10.5 Задание скорости 4 0,00
P2.2.10.6 Задание скорости 5 0,00
P2.2.10.7 Задание скорости 6 0,00
P2.2.10.8 Задание скорости 7 0,00
P2.2.10.9
P2.2.11.3
P2.2.11.4
P2.2.11.5
P2.2.11.6
в начале
в конце
0,00
0,01 3,00 s 0,50
0,01 3,00 s 0,25
0,01 3,00 s 0,25
0,01 3,00 s 0,50
Гц 25,00
Гц 5,00
Гц 50,00
Гц 12,50
Гц 25,00
Гц 5,00
Заказчик
Примечание
1607
1608
1609
1610
1611
1612
1540
1541
1542
1543
P2.2.12.3
P2.2.12.4
P2.2.12.5
P2.2.12.6
в начале
в конце
0,01 3,00 s 0,50
0,01 3,00 s 0,50
0,01 3,00 s 0,50
0,01 3,00 s 0,50
Табл. 6–2. Параметры профиля скорости G2.2
1545
1546
1547
1548
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 22
20 • Vacon
APFIFF33 NXP Управление лифтом
Ед.
измер.
По
умолчанию
Идентификатор
P2.3.1.x
РАЗОМКНУТЫЙ КОНТУР
Это значение изменяется
ток двигателя).
Предельный
крутящий момент
P2.3.1.3
Частота отпускания
0,00
P2.1.2
Гц
0,00
1553
Задержка
тормоза
Задержка отпускания
контуре.
P2.3.1.5
Частота наложения
0,01
P2.1.2
Гц
1,00
1555
Задержка наложения
контуре.
Макс. частота при
тормозе
Время реакции
тормоза
Ток торможения
пост. током
Различные
значения
0 = торможение
при пуске
0 = торможение
при останове
Частота,
останове
замедлением
Задержка
авар. останове
Наложение
вращения
P2.3.2.x
ЗАМКНУТЫЙ КОНТУР
Это значение изменяется
(Тип двигателя).
Уровень крутящего
тормоза)
Предельная
частота
Задержка
тормоза
Задержка отпускания
контуре: 100 = 1,00 с
6.3 Параметры управления механическим тормозом
(клавиатура панели управления: меню M2 G2.3)
Код Параметр Мин. Макс.
Уровень тока
P2.3.1.1
P2.3.1.2
P2.3.1.4
P2.3.1.6
P2.3.1.7
P2.3.1.8
P2.3.1.9
P2.3.1.10
(отпускания
тормоза)
отпускания
Задержка
наложени
наложенном
механического
Время торможения
постоянным током
при пуске
0 P2.1.4 A 0,2 x In
0,0 100,0 % 0,0
0,00 10,00 s 0,00
0,00 10,00 s 0,00
0,00
0,00 10,00 s 0,30
0,1 x In 1,5 x In A
0,000 60,000 s 0,500
1,5 x
P2.1.2
Гц 2,00
Заказчик
1551
1552
1554
1556
1557
1558
507
1559
Примечание
при настройке
параметра 2.1.4
(Номинальный
тормоза при разомкнутом
тормоза при разомкнутом
постоянным током
выключается
Время торможения
P2.3.1.11
P2.3.1.12
P2.3.1.13
P2.3.1.14
P2.3.2.1 Ограничение Тока 0 P2.1.4 A 0,2 x In
P2.3.2.2
постоянным током
при останове
при которой
включается
торможение пост.
током при
с линейным
наложения при
при запросе
момента
(отпускания
0,000 60,000 s 1,000
0,10 10,00 Гц 0,50
0,00 30,00 s 0,00
0 1 1
0 100,0 % 0
1560
515
1640
1641
1561
1562
постоянным током
выключается
Частота, при достижении
которой применяется
торможение пост. током.
0 = не активен
1 = активен
при настройке
параметра 2.1.4
(Номинальный ток
двигателя) или 2.1.9
P2.3.2.3
P2.3.2.4
отпускания
0 P2.1.2 Гц 0,00
0 10,00 s 0,00
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
1563
1564
тормоза при замкнутом
Page 23
vacon • 21
1
Ед.
измер.
По
умолчанию
Идентификатор
P2.3.2.5
Частота наложения
0
P2.1.2
Гц
0,01
1565
Задержка наложения
контуре: 100 = 1,00 с
Макс. Частота при
тормозе
Время реакции
тормоза
Тот же параметр,
контуре
Время 0 Гц при
пуске
Время 0 Гц при
останове
Время плавного
пуска
Частота плавного
пуска
Задержка
авар. останове
Наложение
вращения
Время намагничивания
с замкнутым контуром
Ток намагничивания
с замкнутым контуром
P2.3.3.x
ДИСКРЕТНЫЕ ВХОДЫ
Управление
внешним тормозом
Контроль внешнего
тормоза
Контроль внешнего
тормоза 2
P2.3.4.x
КОНТРОЛЬ ТОРМОЗОВ
Время контроля
внешнего тормоза
0/не инвертируется =
нормально замкнуты.
Контроль F55 при
пуске
0 = запрещено
1 = разрешено
Код Параметр Мин. Макс.
P2.3.2.6
P2.3.2.7
P2.3.2.8
P2.3.2.9
P2.3.210
P2.3.2.11
P2.3.2.12
P2.3.2.13
P2.3.2.14
P2.3.2.15
Задержка
наложения
наложенном
механического
наложения при
при запросе
Время намагни-
чивания для пуска
0 10,00 s 0,00
0 75,00 Гц 0,10
0 10,00 s 0,30
0 2,000 s 0,800
0 2,000 s 0,600
0 10,00 s 0,10
0 10,00 Гц 0,00
0,00 30,00 s 0,00
0 1 1
0,000 32,000 s 0,150
Заказчик
1566
1577
1558
615
616
1568
1569
1640
1641
628
Примечание
тормоза при замкнутом
что и при разомкнутом
0 = не активен
1 = активен
при пуске, управление
P2.3.2.16
P2.3.3.1
P2.3.3.2
P2.3.3.3
P2.3.4.1
P2.3.4.2
P2.3.4.3
Ток намагни-
чивания для пуска
Инвертированный
контроль внешнего
тормоза
0,00 IL s 0,00
0,1 F.2 0,2
0,1 F.2 0,1
0,1 F.2 0,1
0.00 5,00 s 2,00
0 1 1
0 1 0
Табл. 6–3. Параметры управления механическим тормозом, G2.3
627
1601
1602
1838
1603
1856
1857
при пуске, управление
См. главу
Программирование
входов/выходов.
выключатели тормоза
нормально разомкнуты.
1/инвертируется =
выключатели тормоза
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 24
22 • Vacon
APFIFF33 NXP Управление лифтом
Ед.
измер.
По
умолчанию
Идентиф
икатор
0 = не используется
без проверки
0 = выбег
частоты
Предельная
частота
1,5 x
P2.1.2
Используется, только если
функция останова = 2
Тормозное
расстояние
Время S-кривой
дистанцию
Коэффициент масшта-
изменения скорости
P2.4.7.x
УПРАВЛЕНИЕ КОНТАКТОРОМ ДВИГАТЕЛЯ
Задержка замыкания
контактора двигателя.
Подтверждение от
двигателя
Дискретный
от контактора двигателя.
P2.4.8.x
РАСШИРЕННЫЕ (скрытые)
Параметр изменения
3 = Software 3
Дополнительные
параметры 1
Дополнительные
параметры 2
Дополнительные
параметры 4
Дополнительные
параметры 5
Дополнительные
параметры 6
6.4 Параметры управления преобразователем частоты
(клавиатура панели управления: меню M2 G2.4)
Код Параметр Мин. Макс.
P2.4.1 Тормозн Прерыват 0 4 0
P2.4.2 Функция останова 0 2 2
P2.4.3
P2.4.4
P2.4.5
P2.4.6
Время S-образной
кривой
Коэффициент
масштабирования
0
0 1,5 м 0,0
0 1,00 s 0,15
0 200 % 70
Гц 5,00
Заказчик
Примечание
1 = используется во
время работы
2 = внешний тормозной
504
506
1624
1539 0 = не используется
1626
1625
прерыватель
3 = используется во время
останова/работы
4 = вращение,
1 = линейное изменение
скорости
2 = выбор по уровню
(сглаживание), которое
действует, только если
активирован останов
за фиксированную
бирования для времени
P2.4.7.1 Время замыкания 0,00 2,00 s 0,10
P2.4.7.2
P2.4.8.1 Тип модулятора 0 3 0
P2.4.8.2
P2.4.8.3
P2.4.8.4
P2.4.8.5
P2.4.8.6
контактора
0,1 F.2 0,1
0 65 535 0
0 65 535 0
0 65 535 0
0 65 535 0
0 65 535 0
Табл. 6–4. Параметры управления преобразователем частоты, G2.4
1660
1661
1775
1770
1771
1772
1773
1774
сигнал обратной связи
типа модулятора.
0 = ASIC
1 = Software 1
2 = Software 2
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 25
vacon • 23
1
Ед.
измер.
По
умолчанию
Идентификатор
0 = регулирование
2 = замкнутый контур
Различные
значения
Зависит от типоразмера
преобразователя частоты
Регулятор
напряжения
Регулятор
напряжения
Измеренное
сопр. статора
ki1 регулятора
контуром
kp1 регулятора
контуром
P2.5.8.x
Параметры U/F-характеристики
0 = не используется
момента
0 = линейное
льным потоком
Точка
поля
Этот параметр изменяется
P2.1.2
Напряжение
поля
Частота
кривой U/f
Напряжение
кривой U/f
Выходное
частоте
P2.5.9.x
ЗАМКНУТЫЙ КОНТУР
Предел
скорости 1
Предел
скорости 2
6.5 Параметры управления двигателем
(клавиатура панели управления: меню M2 G2.5)
Код Параметр Мин. Макс.
Режим
P2.5.1
P2.5.2 Частота ШИМ 1,0 16,0 кГц
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7
управления
двигателем
повышенного
пониженного
падение
напряжения на
скорости
с разомкнутым
скорости
с разомкнутым
0 2 1
0 1
0 1 1
0 10 000
0 10 000 300
0 10 000 мс 3 000
Заказчик
Примечание
частоты
1572
601
607
608
662
667 ki1 регулятора скорости
667 kp1 регулятора скорости
1 = регулирование
скорости
(разомкн. контур)
0 = выключено
1 = включено
0 = выключено
1 = включено
P2.5.8.1
P2.5.8.2
P2.5.8.3
P2.5.8.4
P2.5.8.5
P2.5.8.6
P2.5.8.7
P2.5.9.1
Оптимизация
U/f
Выбор типа
кривой U/f
ослабления
в точке
ослабления
в средней точке
в средней точке
напряжение
при нулевой
регулирования
0 1 1
0 3 0
5,00 320,00 Гц 50,00
10,00 200,00 % 100,00
0,00 P2.5.8.3 Гц 5,00
0,00 100,00 % 10,00
0,00 40,00 % 1,30
0
Пар.
2.5.9.2
5,00
1573
1574
602
603
1575
1576 n% x Uном. дв.
1577 n% x Uном. дв.
1618
1 = автоматическое
форсирование
1 = квадратичное
2 = программируется
3 = линейное с оптима-
при сбросе параметра
ном. дв.
n% x U
P2.5.9.2
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
регулирования
Пар.
2.5.9.1
0,01 Гц 10,00
1619
Page 26
24 • Vacon
APFIFF33 NXP Управление лифтом
Ед.
измер.
По
умолчанию
Идентификатор
Kp2 регулятора
скорости
Коэфф. усиления П-звена
регулятора скорости
Kp2 регулятора
скорости
Коэфф. усиления П-звена
регулятора скорости
Постоянная времени
тора скорости.
Постоянная времени
тора скорости.
Kp регулятора
тока
Коэфф. усиления П-звена
регулятора тока
Постоянная времени
тора тока.
Постоянная
тра энкодера 1
Постоянная времени
фильтра для фактического
значения скорости.
Регулировка
скольжения
Время линейного
задания момента.
0 = не используется
со входа AI1 или AI2
Задание
входе
Выбор аналогового входа
или AI2.
Минимальное
момента
Максимальное
момента
Задержка, по истечении
момента.
Показ.расш.
парам.
P2.5.9.18.x
СПОЛЗАНИЕ
Предотвращени
е сползания
0 = запрещено
1 = разрешено
Усиление для
ния сползания
Коэффициент усиления
сползания.
Начальный
ния сползания
Начальный крутящий
сползания.
Код Параметр Мин. Макс.
P2.5.9.3
P2.5.9.4
P2.5.9.5
P2.5.9.6
P2.5.9.7
P2.5.9.8
P2.5.9.9
P2.5.9.10
P2.5.9.11
Ti1 регулятора
скорости
Ti2 регулятора
скорости
Ti регулятора
тока
времени филь-
Время
линейного
изменения
момента
0 1 000 30
0 1 000 30
0 500 мс 30,0
0 500 мс 30,0
0 100 40,00
0 1 000 мс 1,5
0 100,0 мс 3,0
0 500 % 70
0 1,0 s 0,2
Заказчик
1620
1621
1622
1623
617
1627
618
619
1760
Примечание
интегрирования регуля-
интегрирования регуля-
интегрирования регуля-
изменения момента при
пуске и останове.
Используется при пуске в
случае использования
P2.5.9.12
P2.5.9.13
P2.5.9.14
P2.5.9.15
P2.5.9.16
P2.5.9.17
P2.5.9.18.1
Выбор задания
момента
момента на
аналоговом
значение
масштабиро-
вания задания
значение
масштабиро-
вания задания
Задержка
добавления
задания
момента
0 2 0
0 1 1
–300,00 300,0 % 0,00
–300,00 300,0 % 0,00
0,0 10,0 с 0,2
0 1 0
0 1 1
1 = память крутящего
621
641
643
642
1778
1969 Для точной настройки.
1687
момента
2 = задание момента
для ввода задания
крутящего момента: AI1
Крутящий момент,
соответствующий
минимальному уровню
сигнала задания.
Крутящий момент,
соответствующий
максимальному уровню
сигнала задания.
которой после запроса
вращения добавляется
задание крутящего
P2.5.9.18.2
P2.5.9.18.3
предотвраще-
момент для
предотвраще-
0 32 767 2 500
0,0 100,0 % 0,1
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
1689
1691
для предотвращения
момент после активации
предотвращения
Page 27
vacon • 25
1
Ед.
измер.
По
умолчанию
Идентификатор
Количество импульсов
поляцию энкодера.
P2.5.10.x
ДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ
P2.5.10.1
Положение
вала СДПМ
0 = автоматический
3 = по команде от дискр. вх.
Уровень тока при
угла вала.
Ток импульса
полярности
0 = идентификация
с импульсным током
0 = нет
1 = да
P2.5.10.7
ModIndexLimit
0
200 % 100
655
Амплит. 5-й
гарм. тока
Фаза 5-й
гармоники тока
Падение напряжения на
ось D: 2 560 = 100 %.
Падение напряжения на
ось Q: 2 560 = 100 %.
Kp регулятора
потока
Ti регулятора
потока
P2.5.10.14
Внешнее
задание Id
P2.5.10.15
Задан Id
НулСкор
P2.5.10.16
МаксЧаст
Задан Id
Код Параметр Мин. Макс.
Порог
P2.5.9.18.4
P2.5.10.2
P2.5.10.3
P2.5.10.4
P2.5.10.5
P2.5.10.6 Разр.идент.Rs 0 1 1
активации
предотвраще-
ния сползания
Режим идент.
нач. угла
Ток идент.
нач. угла
определения
Режим
идентификации
энкодера
0,01 10,0 3,0
0 65 565 0
0 3 0 1933
0 100 % 0,0 1938
–10,0 200,0 % 0,0
0 1 1
Заказчик
1690
1670
1800
1686
654
Примечание
энкодера для активации
предотвращения сползания. При использовании значений < 1 необходимо активировать интер-
1 = всегда принуд.
2 = при включении
идентификации
с пост. током
1 = автоматическая
идентификация
P2.5.10.8
P2.5.10.9
P2.5.10.10
P2.5.10.11
P2.5.10.12
P2.5.10.13
Падение
напряжения Lsd
Падение
напряжения Lsq
тока магнитного
тока магнитного
0,0 100,0 % 1868
0,0 360,0 ° 1867
–32 000 32 000 0
–32 000 32 000 0
0 32 000 500
0,0 100,0 мс 5,0
–150,0 150,0 % 0,0
0 150,0 % 0,0
0 P2.1.2 % 0,00
Табл. 6–5. Параметры управления двигателем, G2.5
1757
1758
651
652
1730
1805
1806
индуктивности статора,
индуктивности статора,
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 28
26 • Vacon
APFIFF33 NXP Управление лифтом
Ед.
измер.
По
умолчанию
Идентификатор
Демпфирование
Коэффициент
магнитами
значение 980.
P2.5.11.2
Усиление
момента
P2.5.11.3
Усиление
поля
P2.5.11.4
Предел
момента
P2.5.11.5
Усиление
потока
P2.5.11.6
Усиление
потока
P2.5.11.7
Пост. времени
потока
P2.5.11.8
Пост. времени
напряжения
Скорость демпфиро-
напряжения.
P2.5.11.9
Усиление
напряжения
P2.5.11.10
Предел
напряжения
6.6 Стабилизаторы (клавиатура панели управления: меню M2 G2.5.11)
Код Параметр Мин. Макс.
P2.5.11.1
стабилизатора
крутящего
момента
стабилизатора
крутящего
стабилизатора
крутящего
момента в точке
ослабления
стабилизатора
крутящего
стабилизатора
контура
магнитного
0 1 000 800
0 1 000 100
0 1 000 50
0 1 500 150
0 32 767 10 000
Заказчик
1413
1412
1414
1600
1550
Примечание
демпфирования
стабилизатора момента.
При выборе двигателя
с постоянными
по умолчанию принимает
Коэффициент усиления
стабилизатора крутящего
момента.
Коэффициент усиления
стабилизатора крутящего
момента в точке
ослабления поля.
Предел выхода
стабилизатора
крутящего момента.
Усиление стабилизатора контура
магнитного потока.
стабилизатора
магнитного
стабилизатора
контура
магнитного
стабилизатора
стабилизатора
стабилизатора
0 32 000 500
0 32 700 900
0 1 000 900 1698
0 100,0 % 10,0 1697
0 320,00 Гц 1,50 1696
Табл. 6–6. Стабилизаторы, G2.5.11
1797
1699
Усиление стабилизатора
магнитного потока.
Коэффициент фильтрации стабилизатора
тока идентификации
вания стабилизатора
Усиление стабилизатора
напряжения.
Предел выхода стабилизатора напряжения.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 29
vacon • 27
1
Ед.
измер.
По
умолчанию
Идентификатор
Магнитный
поток 10 %
P2.5.12.2
Магнитный
поток 20 %
P2.5.12.3
Магнитный
поток 30 %
P2.5.12.4
Магнитный
поток 40 %
P2.5.12.5
Магнитный
поток 50 %
P2.5.12.6
Магнитный
поток 60 %
P2.5.12.7
Магнитный
поток 70 %
P2.5.12.8
Магнитный
поток 80 %
P2.5.12.9
Магнитный
поток 90 %
P2.5.12.10
Магнитный
поток 100 %
P2.5.12.11
Магнитный
поток 110 %
P2.5.12.12
Магнитный
поток 120 %
P2.5.12.13
Магнитный
поток 130 %
P2.5.12.14
Магнитный
поток 140 %
P2.5.12.15
Магнитный
поток 150 %
P2.5.12.16
Используется
с разомкнутым контуром.
P2.5.12.17
Напряжение
компенсации
в нулевой точке
P2.5.12.18
Масштаб
компенсации
режиме
P2.5.12.19
Масштаб
компенсации
режиме
6.7
Идентифицируемые параметры
(клавиатура панели управления: меню M2 G2.5.12.x)
Ниже перечислены параметры, значения которых обновляются при выполнении
автоматического определения («идентификации») характеристик двигателя. Для запуска
идентификации необходимо задать параметр P2.1.8 равным «1», после чего в течение 20
с подать команду пуска. Эти параметры также можно менять вручную, но для этого нужно знать
их значения и понимать, как они влияют на управление двигателем.
Так как эти значения фигурируют как параметры, они могут быть сохранены и скопированы
в другой преобразователь частоты.
Код Параметр Мин. Макс.
P2.5.12.1
0 2 500 % 10
0 2 500 % 20
0 2 500 % 30
0 2 500 % 40
0 2 500 % 50
0 2 500 % 60
0 2 500 % 70
0 2 500 % 80
0 2 500 % 90
0 2 500 % 100
0 2 500 % 110
0 2 500 % 120
0 2 500 % 130
Заказчик
Примечание
1355
1356
1357
1358
1359
1360
1361
1362
1363
1364
1365
1366
1367
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Падение
напряжения Rs
IR-
IR-
в генераторном
IR-
в двигательном
0 2 500 % 140
0 2 500 % 150
0 30 000
0 30 000
0 30 000
0 30 000
Различные
значения
Различные
значения
Различные
значения
Различные
значения
1368
1369
для вычисления
662
664
665
667
крутящего момента
в режиме управления
Page 30
28 • Vacon
APFIFF33 NXP Управление лифтом
Ед.
измер.
По
умолчанию
Идентификатор
P2.5.12.20
Падение
напряжения Ls
P2.5.12.21
Напряжение
двигателя
P2.5.12.22
Смещение Iu
–32 000
32 000 0 668
P2.5.12.23
Смещение Iv
–32 000
32 000 0 669
P2.5.12.24
Смещение Iw
–32 000
32 000 0 670
Ед.
измер.
По
умолчанию
Идентификатор
DIN1
DIN2
Пуск
вперед
Пуск назад
P2.6.2.x
ДИСКРЕТНЫЕ ВХОДЫ
Внешний отказ,
контакта
Внешний отказ,
контакта
F.2
Гнездо
F.2
Гнездо
X.Y
F.2
Гнездо
X.Y
Выбор рампы
торможения
F.2
Гнездо
Останов
контакта
F.2
Гнездо
Останов
контакта
F.2
Гнездо
Скорость
коррекции
F.2
Гнездо
X.Y
Forced I/O
control
F.2
Гнездо
X.Y
Вход 1 выбора
скорости
F.2
Гнездо
X.Y
Вход 2 выбора
скорости
F.2
Гнездо
X.Y
Вход 3 выбора
скорости
F.2
Гнездо
X.Y
Повт. идент.
угла
F.2
Гнездо
X.Y
Задержка
вкл. DIN1
1,0
s
Задержка
вкл. DIN2
1,0
s
Код Параметр Мин. Макс.
0 3 000 0
противо-ЭДС
0,00 320,00 % 0
Заказчик
673
674
Табл. 6–7. Идентифицируемые параметры, G2.5.12
6.8 Входные сигналы (клавиатура панели управления: меню M2 G2.6)
Код Параметр Мин. Макс.
P2.6.1
P2.6.2.1
Логика
Пуск/Стоп
замыкание
0 2 0
0,1 F.2
Гнездо
X.Y
0,1
Заказчик
300
1513
0
1
2
вперед
Пуск/
останов
Пуск
Примечание
Примечание
Назад/
вперед
Пуск назад
P2.6.2.2
размыкание
0,1
P2.6.2.3 Сброс отказа 0,1
P2.6.2.4 Пуск разрешен 0,1
P2.6.2.5
P2.6.2.6
P2.6.2.7
P2.6.2.8
P2.6.2.9
P2.6.2.10
P2.6.2.11
P2.6.2.12
разгона/
выбегом,
замыкание
выбегом,
размыкание
0,1
0,1
0,1
0,1
0,1
0,1
0,1
0,1
X.Y 0,2
A,3
0,2
X.Y 0,1
X.Y
X.Y
0,1
0,2
0,1
0,1
A.4
A.5
A.6
1514
1515
1516
1517
1518
1519
1520
1521
1521
1522
1523
См. главу
Программирование
входов/выходов на стр.
10.
P2.6.2.13
P2.6.2.14
P2.6.2.15
0,1
0,0
0,0
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
0,1
0,0
0,0
1934
1833
1834
Page 31

vacon • 29
1
Ед.
измер.
По
умолчанию
Идентификатор
P2.6.3.x
ANALOG INPUTS
P2.6.3.1.x
АНАЛОГОВЫЙ ВХОД 1
Служит для подключения
аналоговому входу.
0 = нет смещения
2 = диапазон пользователя
Выбор частоты,
табирования
Выбор частоты,
табирования
Инверсия
задания AI1
0 = не инвертируется
1 = задание инвертируется
Пост. времени
задания AI1
Диапазон пользователя:
входного сигнала
Диапазон пользователя:
входного сигнала
P2.6.3.2.x
АНАЛОГОВЫЙ ВХОД 2
Служит для подключения
аналоговому входу.
0 = нет смещения
2 = диапазон пользователя
Выбор частоты,
табирования
Выбор частоты,
табирования
Инвертировани
е задания AI2
0 = не инвертируется
1 = задание инвертируется
Пост. времени
задания AI2
Диапазон пользователя:
входного сигнала
Диапазон пользователя:
входного сигнала
Код Параметр Мин. Макс.
P2.6.3.1.1
P2.6.3.1.2
P2.6.3.1.3
P2.6.3.1.4
P2.6.3.1.5
P2.6.3.1.6
P2.6.3.1.7
Выбор
сигнала AI1
Смещение тока
задания AI1
Миним.
значение
масштаби-
рования
задания AI1
Макс.
значение
масштаби-
рования
задания AI1
фильтра
Мин. устан.
знач. AI
0,1 F.2
0 2 1
0,00 320,00 Гц 0,00
0,00 320,00 Гц 0,00
0 1 0
0,00 10,00 s 0,10
–160,00 160,00 % 0,00
Гнездо
X.Y
A.1
Заказчик
Примечание
377
302
303
304
305
306 0 = нет фильтрации
380
сигнала AI к требуемому
1 = 4—20 мА
соответствующей
минимальному уровню
сигнала задания.
0,00 = нет масш-
соответствующей
максимальному уровню
сигнала задания.
0,00 = нет масш-
минимальный уровень
P2.6.3.1.8
P2.6.3.2.1
P2.6.3.2.2
P2.6.3.2.3
P2.6.3.2.4
P2.6.3.2.5
P2.6.3.2.6
P2.6.3.2.7
Макс. устан.
знач. AI
Выбор
сигнала AI2
Смещение тока
задания AI2
Миним.
значение
масштабирован
ия задания AI2
Макс. значение
масштабирован
ия задания AI2
фильтра
Мин. устан.
знач. A2
–160,00 160,00 % 0,00
0,1 F.2
0 2 1
0,00 320,00 Гц 0,00
0,00 320,00 Гц 0,00
0 1 0
0,00 10,00 s 0,10
–160,00 160,00 % 0,00
Гнездо
X.Y
A.2
381
388
390
393
394
398
389 0 = нет фильтрации
391
максимальный уровень
сигнала AI к требуемому
1 = 4—20 мА
соответствующей
минимальному уровню
сигнала задания.
0,00 = нет масш-
соответствующей
максимальному уровню
сигнала задания.
0,00 = нет масш-
минимальный уровень
P2.6.3.2.8
Табл. 6–8. Входные сигналы, G2.6
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Макс. устан.
знач. A2
–160,00 160,00 % 0,00
392
максимальный уровень
Page 32

30 • Vacon
APFIFF33 NXP Управление лифтом
Ед.
измер.
По
умолчанию
Идентификатор
P2.7.1.x
АНАЛОГОВЫЕ ВЫХОДЫ
0 = не используется
пост. тока (0—1 000 В)
Время
выхода
Инверсия
сигнала
Минимум
выхода
Масштаб
выхода
P2.7.2.x
ДИСКРЕТНЫЕ ВЫХОДЫ
0 = не используется
19 = управление
6.9 Выходные сигналы (клавиатура панели управления: меню M2 G2.7)
Код Параметр Мин. Макс.
Функция
P2.7.1.1
P2.7.1.2
P2.7.1.3
P2.7.1.4
аналогового
выхода
фильтрации
аналогового
аналогового
выходного
аналогового
0 8 1
0,00 10,00 s 1,00
0 1 0
0 1 0
Заказчик
Примечание
1 = вых. частота (0–fмакс.)
2 = задание частоты
(0—fmax)
3 = скорость двигателя
(0–номинальная
скорость двигателя)
307
308
309
310
4 = выходной ток (0—I
5 = крутящий момент
двигателя (0—T
6 = мощность двигателя
(0—PnMotor)
7 = напряжение двигателя
(0—UnMotor)
8 = напряжение звена
0 = не инвертируется
1 = инвертируется
0 = 0 мА
1 = 4 мА
nMotor)
nMotor)
P2.7.1.5
P2.7.2.1
аналогового
Функция
дискретного
выхода 1
10 1 000 % 100
0 22 3
311
312
1 = готов
2 = работа
3 = отказ
4 = инвертированный
отказ
5 = предупреждение
о перегреве ПЧ
6 = внешний отказ или
предупреждение
7 = отказ задания или
предупреждение
8 = предупреждение
9 = реверс
10 = предустановленная
скорость
11 = на скорости
12 = включен регулятор
двигателя
13 = контроль предельной
выходной частоты
14 = источник сигналов
управления:
входы/выходы
15 = тепловой отказ/
предупреждение
16 = FB, цифр. вход 1
17 = скорость ниже
предела
18 = крутящий момент
выше предела
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 33

vacon • 31
1
Ед.
измер.
По
умолчанию
Идентификатор
механическим
(пр. подх. к эт.)
Инверти-
выхода 1
Величина задержки
не используется
Задержка
выхода 1
Величина задержки
не используется
Функция
выхода 1
Инвертированн
выхода 1
Задержка
выхода 1
Величина задержки
не используется
Задержка
выхода 1
Величина задержки
не используется
Функция
выхода 2
Инвертированн
выхода 2
P2.7.3.x
КОНТРОЛИРУЕМЫЕ ПРЕДЕЛЬНЫЕ ЗНАЧЕНИЯ
Контрольный
скорости
Контроль
режиме
При значении «0»
в двигательном режиме).
Функция
частоты
0 = нет предела
предела
Код Параметр Мин. Макс.
P2.7.2.2
P2.7.2.3
P2.7.2.4
P2.7.2.5
P2.7.2.6
рование
функции дискр.
Задержка
включения
дискр. выхода 1
выключения
дискретного
релейного
ая функция
релейного
0 1 0
0 10,00 s 0,00
0 10,00 s 0,00
0 22 0
0 1 0
Заказчик
1530
1531
1657
313
1532
Примечание
тормозом
20 = инвертированное
управление
механическим
тормозом
21 = управл. контактором
двигателя
22 = на этаже
0 = нет инверсии
1= инвертируется
выхода DO1.
0,00 = задержка
выхода DO1.
0,00 = задержка
Те же функции, что и у
дискретного выхода.
0 = нет инверсии
1 = инвертируется
P2.7.2.7
P2.7.2.8
P2.7.2.9
P2.7.2.10
P2.7.3.1
P2.7.3.2
P2.7.3.3
включения
релейного
выключения
релейного
релейного
ая функция
релейного
предел
момента
в двигательном
Контроль
момента
в генераторном
режиме
0 10,00 s 0,00
0 10,00 s 0,00
0 22 19
0 1 0
0,00 5,00 м/с 0,15
0 200,0 % 150,0
–200 0 % 0,0
1533
1658
314
1534
1535
1536
1537
выхода RO1.
0,00 = задержка
выхода RO1.
0,00 = задержка
Те же функции, что
и у дискретного выхода.
0 = нет инверсии
1 = инвертирован
предельное значение
в двигательном
и генераторном
режимах определяется
параметром P2.7.3.2
(Контроль момента
контроля
P2.7.3.4
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
предельной
выходной
0 2 0
315
1 = контроль нижнего
предела
2 = контроль верхнего
Page 34

32 • Vacon
APFIFF33 NXP Управление лифтом
Ед.
измер.
По
умолчанию
Идентификатор
Контрольное
частоты
P2.7.4.x
РЕЛЕ РАСШИРЕНИЯ (не входят в стандартный комплект поставки)
P2.7.4.1
Выбор ROE1
0
F.2 0,1
1680
См. стр. 4.
Те же функции, что
и у дискретного выхода.
Инвертирование ROE1
0 = нет инверсии
1 = инвертируется
P2.7.4.4
Выбор ROE2
0
F.2 0,1
1683
См. стр. 4.
Те же функции, что
и у дискретного выхода.
Инвертирование ROE2
0 = нет инверсии
1 = инвертируется
Ед.
измер.
По
умолчанию
Идентификатор
P2.8.1.x
ОТКАЗЫ ВХОДОВ/ВЫХОДОВ
0 = нет реакции
выбегом
Отказ 4 мА:
е задание частоты
Реакция на
внешний отказ
P2.8.2.x
ОБЩИЕ ОТКАЗЫ
Контроль
входных фаз
Реакция на отказ
напряжения
Контроль
выходных фаз
Защита от
на землю
Реакция на отказ
полевой шины
Реакция на отказ
гнезда
P2.8.2.7
Перегрузка сист.
0
100 % 98
1850
Зад. отк.
вых. фазы
Время задержки выдачи
отказа выходной фазы.
Контроль выходных фаз
ние этого параметра x IH.
Код Параметр Мин. Макс.
значение
P2.7.3.5
P2.7.4.2 Функция ROE1 0 21 0
P2.7.4.3
P2.7.4.5 Функция ROE2 0 21 0
P2.7.4.6
предельной
выходной
0,00
0 1 0
0 1 0
1,5 x
P2.1.2
Гц 0,00
Заказчик
316
1681
1682
1684
1685
Табл. 6–9. Выходные сигналы, G2.7
6.10 Средства защиты (клавиатура панели управления: меню M2 G2.8)
Код Параметр Мин. Макс.
P2.8.1.1
Реакция на отказ
задания
0 5 0
Заказчик
700
Примечание
Примечание
1 = предупреждение
2 = предупреждение+
прежняя частота
3 = предупреждение+
предуст. частота2.8.1.2
4 = отказ, останов
в соотв. с 2.4.2
5 = отказ, останов
P2.8.1.2
P2.8.1.3
P2.8.2.1
P2.8.2.2
P2.8.2.3
P2.8.2.4
P2.8.2.5
P2.8.2.6
P2.8.2.8
P2.8.2.9
предустановленно
из-за
пониженного
замыкания
Пред. ток
отк. вых. фазы
0,00
0,10 2,00 s 2,00
1,0 50,0 % 2,5
1,5 x
P2.1.2
0 3 2
0 3 0
1 3 2
0 3 2
0 3 2
0 3 2
0 3 2
Гц 0,00
728
701
730
727
702
703
733
734
1821
1822
0 = нет реакции
1 = предупреждение
2 = отказ, останов
в соотв. с 2.4.2
3 = отказ, останов
выбегом
действует, когда ток двигателя превышает значе-
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 35

vacon • 33
1
Ед.
измер.
По
умолчанию
Идентификатор
P2.8.3.x
ОТКАЗЫ ДВИГАТЕЛЯ
0 = нет реакции
выбегом
Коэффициент,
среды двигателя
Коэффициент
скорости
Тепловая
двигателя
Рабочий цикл
двигателя (ТЗМ)
0 = нет реакции
выбегом
При изменении
номинального тока (In) эти
значения будут сброшены.
Макс. время нахо-
опрокидывания.
Предельная
опрокидывания
0 = нет реакции
выбегом
P2.8.4.x
КОНТРОЛЬ ЛИФТА
Реакция на отказ
тормозом
0/
2/(СДПМ)
0 = нет действия
2 = отказ
Время контроля
скорости вала
Время контроля
скорости вала
Предел контроля
[м/с]
Предел контроля
скорости вала [Гц]
1,5 x
P2.1.2
Код Параметр Мин. Макс.
Реакция на
P2.8.3.1
P2.8.3.2
P2.8.3.3
P2.8.3.4
P2.8.3.5
P2.8.3.6
перегрев
двигателя
учитывающий
температуру
окружающей
охлаждения
двигателя
при нулевой
постоянная
времени
Защита от
опрокидывания
0 3 2
–100,0 100,0 % 0,0
0,0 150,0 % 40,0
1 200 мин 45
0 100 % 100
0 3 0
Заказчик
704
705
706
707
708
709
Примечание
1 = предупреждение
2 = отказ, останов
в соотв. с 2.4.2
3 = отказ, останов
Коэфф. температуры
окружающего воздуха
Способность к охлаждению двигателя в неподвижном состоянии.
Тепловая постоянная времени двигателя в минутах.
1 = предупреждение
2 = отказ, останов
в соотв. с 2.4.2
3 = отказ, останов
P2.8.3.7
P2.8.3.8
P2.8.3.9
P2.8.3.10
P2.8.4.1
P2.8.4.2
P2.8.4.3
P2.8.4.4
P2.8.4.5
Ток
опрокидывания
Предел времени
опрокидывания
частота
Реакция на
thermistor fault
управления
внешним
Отказ скорости
двигателя
скорости вала
0,01
1,00 120,00 s 15,00
1,0
0 3 0
0 2 0
0 2
0,00 5,00 Гц 0,40
0 P2.2.1 м/с 0,30
0,00
2 x
P2.1.4
1,5 x
P2.1.2
A 1,3 x P2.1.4
Гц 25,0
(асинхр. дв.)
Гц 15,00
710
711
712
732
1580
1581
1582
1583
1584
ждения в состоянии
Макс. частота для защиты
от опрокидывания
1 = предупреждение
2 = отказ, останов
в соотв. с 2.4.2
3 = отказ, останов
0 = нет действия
1 = предупреждение
2 = отказ
1 = предупреждение
Те же параметры
с другими единицами
измерения
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 36

34 • Vacon
APFIFF33 NXP Управление лифтом
Ед.
измер.
По
умолчанию
Идентификатор
Реакция на отказ
момента
Время контроля
момента
Реакция на
в управлении
0 = нет действия
2 = отказ
P2.8.4.9
Минимальный ток
0
P2.1.4 A 0,00
1588
0= нет действия
0 = не используется
3 = отказ
Ед.
измер.
По
умолчанию
Идентификатор
P2.9.1
Время ожидания
0,10
10,00 s 0,50
717 P2.9.2
Время попыток
0,00
60,00 s 30,00
718
0 = линейное нарастание
2 = опред. сист.
Количество
напряжения
Число попыток
напряжения
Число попыток
по току
число попыток
из-за задания
число попыток
за температуры
двигателя
число попыток
отказа
Число попыток
входных фаз
Код Параметр Мин. Макс.
P2.8.4.6
P2.8.4.7
P2.8.4.8
P2.8.4.10
из-за
повышенного
конфликт
Реакция на
скорость 0 Гц
0 2 0
0 5,00 s 0,00
0 2 2
0 3 0
Табл. 6–10. Средства защиты, G2.8
6.11 Параметры автоматического перезапуска
(клавиатура панели управления: меню M2 G2.9)
Код Параметр Мин. Макс.
P2.9.3 Функция запуска 0 2 0
Заказчик
Заказчик
1585
1586
1587
1589
719
Примечание
0 = нет действия
1 = предупреждение
2 = отказ
1 = предупреждение
1 = предупреждение
2 = предупреждение+
останов
Примечание
частоты
1 = пуск на ходу
P2.9.4
P2.9.5
P2.9.6
P2.9.7
P2.9.8
P2.9.9
P2.9.10
попыток после
отключения
из-за
пониженного
после отключения
из-за
повышенного
после отключения
из-за перегрузки
после отключения
после отключения
из-
после отключения
из-за внешнего
после отключения
по отказу контроля
0 10 x 0
0 10 x 0
0 3 x 0
0 10 x 0
0 10 x 0
0 10 x 0
0 10 x 0
720
721
722
723
726
725
1659
Табл. 6–11. Параметры автоматического перезапуска, G2.9
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 37

vacon • 35
1
Ед.
измер.
По
умолчанию
Идентификатор
0 = не используется
2 = автоматический
См. главу
10.
Выбор
0 = 500 V
Motor
двигателем)
0 = регулирование
2 = замкнутый контур
Задержка
направления
Задержка изменения
проверке.
Время проверки
вп./наз.
Значение времени
проверки.
Значение времени
эвакуации.
0 = не используется
момента
Частота
кривой U/f
Частота в средней
кривой U/f.
Напряжение
кривой U/f
Напряжение двигателя
мируемой кривой U/f.
Напряжение
кривой U/f
Напряжение двигателя
мируемой кривой U/f.
Ток торможения
(макс. 5,6 А).
Продолжительность
в режиме эвакуации.
P2.10.14.x
МАКСИМАЛЬНАЯ СКОРОСТЬ ПРИ ЭВАКУАЦИИ
Max speed in
evacuation [m/s]
Те же параметры
40 % от номинального.
6.12 Параметры эвакуации (клавиатура панели управления: меню M2 G2.10)
Код Параметр Мин. Макс.
P2.10.1
P2.10.2
P2.10.3
P2.10.4
P2.10.5
P2.10.6
P2.10.7
P2.10.8
Режим
эвакуации
Вход активации
эвакуации
напряжения
control mode
(Режим
управления
изменения
Задержка
считывания
тока
Оптимизация
U/f
0 2 2 0
0,1 F.2 0,1
0 1 0
0 2 0
0 20,00 s 5,00
0 20,00 s 3,00
0 P2.10.5 s 1,50
0 1 0
Заказчик
1590
1591
2115
1592
1593
1594
1595
1596
Примечание
1 = ручной
Программирование
входов/выходов на стр.
1 = 230 V
частоты
1 = регулирование
скорости
направления при
проверки при
включенном режиме
1 = автоматическое
форсирование
P2.10.9
P2.10.10
P2.10.11
P2.10.12
P2.10.13
P2.10.14.1
P2.10.14.2
в средней точке
в средней точке
в нулевой точке
Ток торм.
пост. током
Время торм.
пост. током
при запуске
Max speed in
evacuation [Hz]
0,00 P2.1.2 Гц 5,00
0,00 100,00 % 10,00
0,00 40,00 % 1,30
0,00 6,00 A P2.1.4
0,000 60,000 s 0,500
0 P2.2.1 м/с 0,1
0 P2.1.2 Гц 5,00
Табл. 6–12. Параметры эвакуации, G2.10
1597
1598
1599
1663
1664
1616
1617
точке программируемой
в средней точке програм-
в нулевой точке програм-
постоянным током
в режиме эвакуации
торможения постоянным
током при запуске
с другими единицами
измерения. Макс.
значение составляет
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 38

36 • Vacon
APFIFF33 NXP Управление лифтом
Ед.
измер.
По
умолчанию
Идентификатор
0 = управление с ПК
3 = полевая шина
Задание
с клавиатуры
Направление
(на клавиатуре)
0 = вперед
1 = назад
0 = ограниченная функция
всегда разрешена
P3.5
В резерве
0 1 0
0 P3.6
В резерве
0 1 0
0 P3.7
В резерве
0 1 0
0 P3.8
В резерве
0 1 0
0
P3.9
В резерве
0 1 0
0
Сброс отказа
тормоза
6.13 Управление с клавиатуры (клавиатура панели управления: меню M3)
Ниже перечислены параметры для выбора источника сигналов управления
и направления с помощью клавиатуры. См. описание меню управления с клавиатуры
®
в руководстве по эксплуатации VACON
NXS/P.
Код Параметр Мин. Макс.
Источник
P3.1
R3.2
P3.3
P3.4
P3.10
сигналов
управления
Кнопка
останова
контроля
1 3 2 125
P2.1.1 P2.1.2 Гц 0,00
0 1 0 123
0 1 1 114
0 1 0 0
Заказчик
Табл. 6–13. Параметры управления с клавиатуры, M3
6.14 Системное меню (клавиатура панели управления: меню M6)
Примечание
1 = клемма входа/выхода
2 = клавиатура
кнопки останова
1 = кнопка останова
0 = нажатие Enter
1 = нажатие сброса
Сведения об общих параметрах и функциях преобразователя частоты (таких как выбор
прикладной программы и языка, наборы параметров, настраиваемых заказчиком, или
информация об аппаратных и программных средствах) см. В руководстве по эксплуатации
®
VACON
NXS/P.
6.15 Платы расширения (клавиатура панели управления: меню M7)
Меню M7 показывает платы расширения и дополнительные платы, присоединенные
к платеуправления, и информацию о платах. Дополнительные сведения см. В руководстве по
®
эксплуатации VACON
NXS/P.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 39

vacon • 37
1
7 ОПИСАНИЕ ПАРАМЕТРОВ
7.1 Основные параметры
P2.1.1 НомНапряжДвигат ID110 «НомНапряжДвигат»
Возьмите эту величину Un из паспортной таблички двигателя.
Этот параметр определяет номинальное напряжение в точке ослабления поля.
P2.1.2 Номинальная частота двигателя ID111 «НомЧастотДвигат»
Возьмите это значение fn из паспортной таблички двигателя. Значению этого
параметра также становится равен параметр «Точка ослабления поля»
(в группе параметров управления двигателем).
Номинальная частота двигателя соответствует номинальной скорости лифта
(параметр 2.2.1).
P2.1.3 Номинальная скорость двигателя ID112 «Ном Скор Мотора»
Возьмите это значение nn из паспортной таблички двигателя. Также примите
во внимание номинальную частоту.
Иногда значение номинальной скорости двигателя указывается с точностью
до одного разряда после запятой. В этом случае такое значение округляют до
ближайшего целого значения и корректируют номинальную частоту двигателя
с таким расчетом, чтобы преобразователь частоты правильно вычислял значение
V 1.22 (ЧислоПарПолюсов).
P2.1.4 Номинальный ток двигателя ID113 «Ном Ток Мотора»
Возьмите это значение In из паспортной таблички двигателя Если известно
значение тока намагничивания, перед выполнением идентификации также
задайте параметр P2.1.7 (Ток намагничивания).
P2.1.5 Cos Phi двигателя ID120 «Cos Phi Мотора»
Возьмите это значение «cos phi» из паспортной таблички двигателя.
P2.1.6 Предельный ток ID107 «Ограничение Тока»
Этот параметр определяет максимальный ток двигателя, поступающий от привода
переменного тока. Чтобы избежать перегрузки двигателя, установите этот параметр
в соответствии с номинальным током двигателя. По умолчанию предельный ток
в 1,5 раза больше номинального тока преобразователя частоты (I
После прерывания напряжения питания прикладная программа устанавливает
данный параметр равным номинальному максимальному току преобразователя
частоты.
L).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 40

38 • Vacon
APFIFF33 NXP Управление лифтом
P2.1.7 Ток намагничивания ID612 «Ток Намагничиван»
Введите в этот параметр значение тока намагничивания двигателя (без нагрузки)
при 2/3 от номинальной скорости двигателя.
При нулевом значении этого параметра ток намагничивания вычисляется по
номинальным параметрам двигателя.
=
5 1
5
[
. .]. .
(. . .
=
(.
)
(.)> (. ..
,
)
Если значение этого параметра известно до выполнения автоматического
определения (идентификации) параметров двигателя, оно используется в качестве
справочного для настройки параметров кривой U/f при выполнении идентификации
без вращения двигателя.
P2.1.8 Идентификация ID631 «Идентификация»
Выполнение идентификации — это часть настройки особых параметров двигателя
и привода. Этот инструмент используется при вводе преобразователя частоты
в эксплуатацию и его последующем обслуживании. Он позволяет определить наиболее подходящие значения параметров для применяемого двигателя. Средство
автоматической идентификации двигателя рассчитывает или измеряет параметры
двигателя, которые требуются для оптимального управления двигателем и скоростью.
ПРИМЕЧАНИЕ. Перед идентификацией установите в качестве режима управления
двигателем режим регулирования частоты.
ПРИМЕЧАНИЕ. Во время выполнения идентификации преобразователь частоты
в целях обеспечения безопасности не отпускает механический тормоз. Если для
вращения двигателя необходимо отпустить тормоз, это нужно сделать с помощью
внешних средств.
ПРИМЕЧАНИЕ. Во время выполнения идентификации предельные значения
крутящего момента и мощности должны быть больше 100 %. Кроме того, предельный
ток должен быть больше номинального тока двигателя.
ПРИМЕЧАНИЕ. Во время выполнения идентификации время разгона не должно
превышать 20 с.
ПРИМЕЧАНИЕ. Если значение частоты коммутации (ШИМ) изменяется после
идентификации, рекомендуется выполнить идентификацию ещё раз.
ПРИМЕЧАНИЕ. В случае двигателей небольшой мощности и при большой длине
кабелей для успешного выполнения идентификации может потребоваться
уменьшить значение частоты ШИМ.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 41

vacon • 39
1
0 = «Нет Действия» — нет действия
Идентификация не запрашивается
1 = «ID Нет Вращен» — идентификация без вращения двигателя
Ток подается в обмотки двигателя, но вал двигателя не вращается. В этом режиме
определяются параметры кривой U/f. Это минимальная необходимая идентификация
при управлении двигателем в режиме с разомкнутым контуром (т. е. без обратной связи).
При возможности рекомендуется выполнять идентификацию с вращением двигателя.
Пример выполнения
2 = «ID с Вращен» — идентификация с вращением двигателя
Вал двигателя вращается во время выполнения идентификации.
Для выполнения идентификации с вращением вал двигателя должен быть
отсоединен от нагрузки. В этом режиме определяются параметры кривой U/f
и ток намагничивания. Независимо от конечного режима управления (то есть
с замкнутым или разомкнутым контуром) следует по возможности использовать
именно этот способ идентификации, так как он позволят обеспечить более точное и
качественное управление двигателем.
Пример выполнения
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 42

40 • Vacon
APFIFF33 NXP Управление лифтом
3 = «Вып. иден. энк.» — выполнение идентификации энкодера
АД. При выполнении этой операции для асинхронного двигателя (АД)
определяются направление и количество импульсов энкодера. Если данные
энкодера неизвестны, можно воспользоваться этой операцией. Точные результаты
можно получить, только если двигатель отсоединен от нагрузки.
СДПМ. Для синхронного двигателя с постоянными магнитами (СДПМ) эта операция
используется в том случае, когда автоматическое определение начального угла не
подходит для используемого двигателя (угол определяется автоматически при каждом
пуске, если параметр положения вала СДПМ содержит нулевое значение).
При выполнении данного вида идентификации значение параметра положения
вала СДПМ обновляется с учетом абсолютного положения абсолютного энкодера
или положения нулевой метки (Z-импульса) инкрементального энкодера.
При принимаемых по умолчанию значениях параметров положение вала
СДПМ определяется методом импульсного тока. Если данный метод не подходит
для используемого двигателя и (или) вал может свободно вращаться во время
выполнения идентификации, можно использовать позиционирование с подачей
постоянного тока. Дополнительные сведения см. в описании параметра «Режим
идентификации энкодера» (группа G: параметры управления двигателем/СДПМ).
Примечание. Если положение энкодера относительно двигателя будет изменено
(например, после ремонта), идентификацию потребуется выполнить повторно.
5 = «Сбой иден. энк.» — не удалось выполнить идентификацию
Последняя попытка выполнить идентификацию завершилась сбоем.
Перед выполнением идентификации необходимо правильно задать основные
параметры, указанные на паспортной табличке двигателя:
- P2.1.1—P2.1.7. Основные данные двигателя.
- P2.1.7. Перед выполнением идентификации без вращения двигателя также
можно задать ток намагничивания, если он известен. Введенное значение
будет использоваться для настройки параметров кривой U/f.
- P2.1.9. Тип двигателя.
При управлении с замкнутым контуром с установленным энкодером также
необходимо задать параметр количества импульсов/оборотов (в меню M7).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 43

vacon • 41
1
Чтобы выполнить автоматическую идентификацию, необходимо задать для этого
параметра требуемое значение, после чего подать команду пуска в запрошенном
направлении. Команда пуска должна быть подана на преобразователь частоты
в течение 20 с. Если команда пуска не поступит в течение 20 с, выполнение
идентификации будет отменено и параметр будет сброшен к значению по умолчанию.
Выполнение идентификации можно остановить в любое время с помощью обычной
команды останова. Параметр при этом сбрасывается к значению по умолчанию.
Если во время выполнения идентификации выявляется какой-либо сбой или
неполадка, преобразователь частоты пытается довести идентификацию до конца,
если это возможно. Если не все запрошенные типы идентификации удалось
выполнить успешно, по завершении идентификации выдается предупреждение.
Во время выполнения идентификации управление тормозом не действует.
Примечание. После выполнения идентификации запустить двигатель можно только
новой командой пуска (преобразователь частоты ожидает нарастающий фронт).
P2.1.9 Тип двигателя ID1650 «Тип двигателя»
Данный параметр служит для выбора типа используемого двигателя.
0 «Асинхронный» — асинхронный двигатель
Асинхронный двигатель
1 «СДПМ» — синхронный двигатель с постоянными магнитами
Прежде чем использовать преобразователь частоты с двигателем с внешним
намагничиванием, проконсультируйтесь с производителем.
См. описание связанного параметра в группе «G2.5.10: параметры управления
двигателем/СДПМ».
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 44
42 • Vacon
APFIFF33 NXP Управление лифтом
DIN
Параметры
Задание скорости
Приоритет
Направление
[0;0;0]
2.2.9.1/2.2.10.1
(скорость
)
0 низкий
неприменимо
2
неприменимо
2.2.9.3/2.2.10.
3
(ограниченная
скорость)
2 высокий
неприменимо
[0;0;1]
2.2.9.4/2.2.10.
4
(контрольная скорость)
3 наивысший
неприменимо
7.2 Профиль скорости
P2.2.1 Номинальная линейная скорость ID 1500 «Ном. лин. скорость»
Номинальная линейная скорость соответствует скорости лифта на номинальной
частоте двигателя (параметр 2.1.2)
Параметры скорости группы 2.2.9 вводятся в линейных величинах, а параметры
группы 2.2.10 — в герцах. Линейные скорости и частоты связаны между собой
внутренней зависимостью. Параметры обеих групп соответствуют друг другу.
Если значение номинальной линейной скорости изменяется, соответствующим
образом пересчитываются параметры группы 2.2.10.
P2.2.2 Выбор задания скорости ID 117 «Выбор зад. скор.»
Определяет, какой выбирается источник задания при управлении входными/
выходными сигналами. Значение по умолчанию равно 0.
0 = кодирование действия
1 = кодирование действия с направлением
2 = двоичное кодирование
3 = вход напряжения (AI1)
4 = вход тока (AI2)
5 = полевая шина
6 = клавиатура
Задание скорости может определяться с помощью дискретных входов тремя
разными способами. Дискретные входы являются программируемыми (см. стр. 10).
Первый столбец содержит состояния дискретных входов (показаны используемые
по умолчанию входы DIN4, DIN5 и DIN6). Требуемые входы можно назначить
с помощью параметров 2.6.2.10, 2.6.2.11 и 2.6.2.12.
Второй столбец указывает параметр, а следующий — соответствующее задание
скорости. Столбец приоритета определяет, какая включается скорость, если активизируется более одного дискретного входа. Если задание скорости будет разным при
вращении в разных направлениях, направление определяется в столбце направления.
0 = кодирование действия
Могут выбираться четыре фиксированные скорости.
[4,5,6]
[1;0;0]
[0;1;0]
Табл. 7–1. Задание действия
2.2.9.2/2.2.10.
выравнивания
(полная скорость) 1 средний
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 45

vacon • 43
1
DIN
[4,5,6]
Параметры
Задание скорости
Приоритет
Направлен
скорость
выравнивания)
низкий
вперед
[1;0;0]
2.2.9.2/2.2.10.
2
(полная скорость)
1 средний
вперед
3
)
вперед
2.2.9.4/2.2.10.
4
(контрольная скорость)
3 наивысший
вперед
[0;0;0]
2.2.9.5/2.2.10.
5
(предустановленная
4)
0 низкий
назад
6
предустановленная
скорость 5)
средний
назад
[0;1;0]
2.2.9.7/2.2.10.
7
(предустановленная
6)
2 высокий
назад
8
7)
назад
DIN
[4,5,6]
Параметры
Задание скорости
Приоритет
Направлен
[0;0;0]
2.2.9.1/2.2.10.1
(скорость
)
—
неприменимо
2
—
неприменимо
[0;1;0]
2.2.9.3/2.2.10.
3
(ограниченная
скорость)
—
неприменимо
[1;1;0]
2.2.9.4/2.2.10.
4
(контрольная скорость)
—
неприменимо
5
предуст. скор
—
неприменимо
[1;0;1]
2.2.9.6/2.2.10.
6
(предуст. скор. 5)
—
неприменимо
7
—
неприменимо
2.2.9.8/2.2.10.
8
(предуст. скор. 7)
—
неприменимо
1 = кодирование действия с направлением
Фиксированные скорости выбирают в соответствии с состоянием дискретных
входов и направления вращения двигателя. Для каждого направления предусмотрено
четыре разные скорости.
[0;0;0] 2.2.9.1/2.2.10.1 (
[0;1;0]
[0;0;1]
[1;0;0]
[0;0;1]
Табл. 7–2. Задание действия с направлением
2.2.9.3/2.2.10.
2.2.9.6/2.2.10.
2.2.9.8/2.2.10.
(ограниченная
скорость
скорость
(
скорость
(предустановленная
скорость
0
2 высокий
1
3 наивысший
2 = двоичное кодирование
В соответствии с двоичным словом, формируемым с помощью дискретных входов,
выбираются восемь разных фиксированных скоростей.
[1;0;0]
[0;0;1]
[0;1;1]
[1;1;1]
Табл. 7–3. Двоичное задание
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
2.2.9.2/2.2.10.
2.2.9.5/2.2.10.
2.2.9.7/2.2.10.
выравнивания
(полная скорость)
(
(предуст. скор. 6)
. 4)
Page 46

44 • Vacon
APFIFF33 NXP Управление лифтом
P2.2.3 Разрешение рывков ID 1549 «Разреш. сглаж.»
0 = запрещено
1 = разрешено
Скругление ускорения и замедления с помощью рывков может быть запрещено
путем установки этого параметра на 0. Если установлено значение 0 (запрещено)
величины рывков влияния не оказывают.
P2.2.4 Время фиксации задания ID 1509 «Фиксация задания»
Параметр определяет, в течение какого времени фиксируется задание частоты
после сигнала пуска. В течение этого времени задание скорости не меняется.
Эту функцию также называют «проходом полуэтажа» (half floor ride). Входные
сигналы пуска и останова на эту функцию не влияют.
Время фиксации задания начинается, когда частота возвращается после
пуска к номинальному значению. Это происходит после отпускания механического
тормоза и истечения времени задержки реакции тормоза и времени плавного пуска.
После того как время фиксации задания истекает, на форму кривой скорости начинают
влиять параметры 2.2.11.4 (Время сглаживания в конце разгона) и 2.2.11.5 (Время
сглаживания в начале торможения) (см. приведенный ниже рисунок).
P2.2.5 Состояние останова (DIN456) ID 1641 «Сост Остан»
Рис. 2. Время фиксации задания
0 = нормальная работа
1 = останов, если DIN456 выключены
Особый режим останова, если выбрано значение 1. Состояние останова
активизируется, когда все входы задания скорости выключены (значения по
умолчанию: DIN4, DIN5 и DIN6, см. параметр 2.2.2).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 47

vacon • 45
1
Примечание. Состояние останова активизируется, даже если вход DIN1 или DIN2
включен, а входы DIN4,5,6 выключены.
Для следующего запуска требуется, чтобы входы DIN1 и DIN2 были выключены.
P2.2.6 Тормозное расстояние 1 ID 1777 «Торм. расст. 1»
Расстояние замедления от полной скорости до скорости выравнивания.
Тормозное расстояние 1 задается в метрах. Если заданное значение отличается
от нуля и от первоначального значения, прикладная программа вычисляет и обновляет
значение параметра «Замедление 1» на основании значений номинальной скорости,
скорости выравнивания и времени сглаживания в начале торможения 1
(Сглаж. нач. торм. 1).
Рассчитанное значение является ориентировочным.
P2.2.7 Тормозное расстояние 2 ID 1776 «Торм. расст. 2»
Расстояние замедления от скорости выравнивания до нулевой скорости.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 48

46 • Vacon
APFIFF33 NXP Управление лифтом
Тормозное расстояние 2 задается в метрах. Если заданное значение отличается
от нуля и от первоначального значения, прикладная программа вычисляет и обновляет
значения параметров «Сглаж. нач. торм. 2» и «Сглаж. кон. торм. 2» на основании
значения скорости выравнивания.
Если задается ненулевое значение, параметр P2.2.8 (Частота внутреннего переключения
изменения скорости) устанавливается равным частоте, соответствующей скорости
выравнивания.
Рассчитанное значение является ориентировочным.
P2.2.8 Частота внутреннего переключения
изменения скорости ID 1544 «Внутр. перекл. измен. скор.»
0 = Не используется
Данный параметр используется для перехода на другую кривую торможения во время
остановки лифта (для замедления от скорости выравнивания до нулевой скорости).
Набор параметров изменения скорости 2 (параметры кривой скорости 2) может
активироваться самим преобразователем частоты. Переключение на второй
набор параметров изменения скорости происходит после того, как скорость при
торможении оказывается меньше заданной частоты внутреннего переключения
изменения скорости и достигается скорость установившегося состояния.
ПРИМЕЧАНИЕ. Частоту внутреннего переключения изменения скорости
можно также задать меньшей или равной скорости выравнивания. В этом
случае для торможения при останове всегда будут использоваться параметры
кривой скорости 2, даже если скорость движения ни разу не превысит скорость
выравнивания (так называемый «короткий этаж»).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 49

vacon • 47
1
Когда на преобразователь частоты перестает подаваться запрос вращения, происходит
возврат к набору параметров изменения скорости 1 (параметрам кривой скорости 1).
ПРИМЕЧАНИЕ. Если используется функция останова по расстоянию (параметр 2.4.4),
функция внутреннего переключения изменения скорости не действует.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 50

48 • Vacon
APFIFF33 NXP Управление лифтом
7.3 Параметры задания скорости [м/с] (M2 -> G2.2.9)
Параметры группы 2.2.9 определяют задание скорости в линейных величинах [м/с]. Параметры
соответствуют параметрам группы 2.2.10 и будут автоматически корректироваться в случае
изменения значений. Они также будут корректироваться, если изменяется параметр 2.2.1.
P2.2.9.1 Скорость выравнивания ID 1501 «Скорость выравнивания»
Этот параметр определяет максимальную скорость лифта и задается в [м/с].
Значение этого параметра обновляется при изменении параметра P2.2.10.1.
P2.2.9.2 Полная скорость ID 1502 «ПолнСкорость»
Этот параметр определяет максимальную скорость лифта и зависит от значения
параметра P2.2.1. Задается в [м/с]. Значение этого параметра также обновляется
при изменении параметра P2.2.10.2.
P2.2.9.3 Ограниченная скорость ID 1503 «Ограниченная скорость»
P2.2.9.4 Скорость ревизии ID 1504 «Скорость ревизии»
P2.2.9.5 Задание скорости 4 ID 1505 «Задан Скорости4»
P2.2.9.6 Задание скорости 5 ID 1506 «Задан Скорости5»
P2.2.9.7 Задание скорости 6 ID 1507 «Задан Скорости6»
P2.2.9.8 Задание скорости 7 ID 1508 «Задан Скорости7»
P2.2.9.9 Скорость ручной коррекции ID 1613 «Скорость коррекции»
Этот параметр определяет значение скорости, вступающее в силу при активации
дискретного входа, назначенного в качестве входа «Скорость коррекции»
(группа «Входные сигналы/дискретные входы»)
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 51

vacon • 49
1
7.4 Параметры задания скорости [Гц] (M2 -> G2.2.10)
Параметры группы 2.2.10 определяют задание скорости в виде частоты [Гц]. Параметры
соответствуют параметрам группы 2.2.9 и будут автоматически корректироваться в случае
изменения значений в других группам.
P2.2.10.1 Скорость выравнивания ID 1604 «Скорость выравнивания»
Этот параметр определяет максимальную скорость лифта и задается в [Гц]. Значение
этого параметра обновляется при изменении параметра P2.2.9.1.
P2.2.10.2 Полная скорость ID 1605 «ПолнСкорость»
Этот параметр определяет максимальную скорость лифта и зависит от значения
параметра P2.2.1. Задается в [Гц]. Значение этого параметра также обновляется
при изменении параметра P2.2.9.2.
P2.2.10.3 Ограниченная скорость ID 1606 «Ограниченная скорость»
P2.2.10.4 Скорость ревизии ID 1607 «Скорость ревизии»
P2.2.10.5 Задание скорости 4 ID 1608 «Задан Скорости4»
P2.2.10.6 Задание скорости 5 ID 1609 «Задан Скорости5»
P2.2.10.7 Задание скорости 6 ID 1610 «Задан Скорости6»
P2.2.10.8 Задание скорости 7 ID 1611 «Задан Скорости7»
P2.2.10.9 Скорость ручной коррекции ID 1612 «Скорость коррекции»
Этот параметр определяет значение скорости, вступающее в силу при активации
дискретного входа, назначенного в качестве входа «Скорость коррекции»
(группа «Входные сигналы/дискретные входы»)
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 52

50 • Vacon
APFIFF33 NXP Управление лифтом
v [m
/s]
t [s]
a [m/s2]
t [s]
P 2.2.11.3 P 2.2.11.4
v [м/с]
a [м/с2]
t [с]
t [с]
7.5 Параметры рампы скорости 1 [(M2 -> G2.2.11)
Кривая скорости 1 используется в качестве значений по умолчанию для ускорения
и замедления и рывков.
P2.2.11.1 Ускорения 1 ID 103 «Ускорение1»
P2.2.11.2 Замедления 1 ID 104 «Замедление1»
Ускорение и замедление кабины лифта представляются в метрах в секунду
2
за секунду [м/с
]. На кривые ускорения и замедления также влияют настройки
рывковых интервалов.
P2.2.11.3 Сглаживание в начале разгона 1 ID 1540 «Сглаж. нач. разг. 1»
Рывок увеличения ускорения 1
Длительности интервалов сглаживания представляются в секундах [с].
P2.2.11.4 Сглаживание в конце разгона 1 ID 1541 «Сглаж. кон. разг. 1»
Рывок уменьшения ускорения 1.
P2.2.11.5 Сглаживание в начале торможения 1 ID 1542 «Сглаж. нач. торм. 1»
Рывок увеличения замедления 1
P2.2.11.6 Сглаживание в конце торможения 1 ID 1543 «Сглаж. кон. торм. 1»
Рывок уменьшений замедления 1.
Рис. 3: Рывки, относяциеся к скорости и ускорению
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 53

vacon • 51
1
7.6 Параметры рампы скорости 2 [(M2 -> G2.2.12)
Параметры кривой скорости в группе 2 используются, когда активизируется функция
внутреннего изменения кривой разгона (см. параметр P2.2.8). Тогда параметры кривой
скорости 1 будут заменяться параметрами кривой скорости 2. Переключение на кривую 2 также
может быть выполнено по сигналу на дискретном входе (см. описание параметра P2.6.2.5).
P2.2.12.1 Ускорение 2 ID 502 «Ускорение2»
P2.2.12.2 Замедление 2 ID 503 «Замедление2»
Ускорение и замедление кабины лифта представляются в метрах в секунду
за секунду [м/с
интервалов сглаживания рывков.
2
]. На кривые ускорения и замедления также влияют параметры
P2.2.12.3 Сглаживание в начале разгона 2 ID 1545 «Сглаж. нач. разг. 2»
Рывок увеличения ускорения 2. См. Рис. 3.
P2.2.12.4 Сглаживание в конце разгона 2 ID 1546 «Сглаж. кон. разг. 2»
Рывок уменьшения ускорения 2.
P2.2.12.5 Сглаживание в начале торможения 2 ID 1547 «Сглаж. нач. торм. 2»
Рывок увеличения замедления 2
P2.2.12.6 Сглаживание в конце торможения 2 ID 1548 «Сглаж. кон. торм. 2»
Рывок уменьшений замедления 2.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 54

52 • Vacon
APFIFF33 NXP Управление лифтом
7.7 Управление механическим тормозом
Параметры управления механическим тормозом оказывают воздействие на управление
механическим тормозом, функцию плавного пуска и останова и функции защиты.
Механический тормоз может быть настроен на отпускание по входному сигналу тока,
крутящего момента, частоты или по внешнему входному сигналу. Можно настроить включение
тормоза по частоте, внешнему входному сигналу или сигналу запуска. В случае неисправности
тормоз срабатывает немедлено, без задержки.
Режимы управления механическим тормозом с разомкнутым контуром (без обратной связи)
и с замкнутым контуром ( с обратной связью) различаются между собой. Параметры разделены
на две разные группы. Параметры группы управления с замкнутым контуром не действительны
для режима управления с разомкнутым контуром, и наоборот. Также имеется несколько общих
параметров. На Рис. 4 и рис. 5 в графическом виде представлена логика управления тормозом.
Рис. 4. Логика управления механическим тормозом с разомкнутым контуром.
(*) Сигнал начала задержки отпускания тормоза, когда ток, частота и крутящий момент превышают
пределы, заданные параметрами. Внешний вход, если используется, должен быть включен.
(**) Дискретный вход (если используется) должен включиться в течение времени контроля
тормоза.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 55

vacon • 53
1
Рис. 5. Логика управления механическим тормозом с замкнутым контуром.
*) Пусковой сигнал задержки отпускания тормоза, когда ток, частота и крутящий момент превышают
пределы, определяемые параметрами. Внешний вход (если используется) должен быть включен.
**) В течение времени контроля тормоза дискретный вход, если используется, должен быть
включен.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 56

54 • Vacon
APFIFF33 NXP Управление лифтом
7.7.1 Логика управления механическим тормозом
Рис. 6. Логика управления механическим тормозом
Сигнал управления внешним механическим тормозом может подаваться по выбору на любой
дискретный или релейный выход.
В верхней части Рис. 6 показана логика отпускания механического тормоза. Для отпускания
механического тормоза требуются пять сигналов и задержка. Если для отпускания тормоза
не требуется сигнал тока, крутящего момента или частоты, эти параметры могут быть
установлены равными нулю. Входной сигнал внешнего тормоза может программироваться,
и для этой цели может использоваться любой дискретный вход.
В нижней части Рис. 6 показана логика наложения механического тормоза. Схема наложения
тормоза имеет более высокий приоритет, чем схема его отпускания. Так, если активен сигнал
наложения, механический тормоз будет приведен в действие.
Тормоз будет включаться немедленно в случае отказа, или внешнего сигнала контроля,
или если двигатель остановлен.
При нормальной работе тормоз накладывается, когда частота опускается ниже предельной частоты
наложения (P2.3.x.5) после выключения сигнала запроса вращения. Если логика наложения тормоза
не требует сигнала предельной частоты наложения, этот сигнал может быть установлен равным
нулю. После того как эти условия оказываются выполненными, отсчитывается время задержки
наложения тормоза (P2.3.x.6), по истечении которого накладывается тормоз.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 57

vacon • 55
1
7.7.2 Параметры управления с разомкнутым контуром (M2 -> G2.3.1)
Параметры группы 2.3.1.x действительны только в режиме управления с разомкнутым контуром.
(параметр 2.5.1= 0 или 1).
P2.3.1.1 Уровень тока (отпускания тормоза) [А] ID 1551 «Ограничение Тока»
Параметр определяет фактический предельный ток, который должен быть превышен
для отпускания тормоза. Если параметр установлен на нуль, это условие исключается.
Это значение всегда обновляется при настройке номинального тока двигателя
(параметр 2.1.4) (см. Рис. 6).
P2.3.1.2 Уровень крутящего момента
(отпускания тормоза) [%] ID 1552 «Предел Момента»
Параметр определяет величину крутящего момента, которая должна быть превышена
для отпускания тормоза. Если параметр установлен равным нулю, это условие
исключается.
100 % соответствует расчетному номинальному крутящему моменту двигателя
(см. Рис. 6).
P2.3.1.3 Частота отпускания [Гц] ID 1553 «Част. отпуск.»
Параметр определяет величину выходной частоты, которая должна быть
превышена для отпускания тормоза. Если параметр установлен на нуль, это условие
исключается (см. Рис. 6).
P2.3.1.4 Задержка отпускания [с] ID 1554 «Задерж. отп. торм.»
Задержка, которая отсчитывается после выполнения условий отпускания
тормоза (см. параметры 2.3.1.1–2.3.1.3) (см. Рис. 6).
P2.3.1.5 Частота наложения [Гц] ID 1555 «Част. налож.»
Величина выходной частоты должна быть ниже данного значения для наложения
тормоза. Чтобы сигнал мог действовать, должен быть отключен сигнал запроса
вращения.
P2.3.1.6 Задержка наложения [с] ID 1556 «Задерж. налож. торм.»
Включение тормоза задерживается на заданное время. Если параметр установлен
на нуль, задержка между условием включения и фактическим включением тормоза
отсутствует.
P2.3.1.7 Максимальная частота при
наложенном тормозе [Гц] ID 1557 «Макс. част. при налож. торм.»
Выходная частота не превышает это значение, когда механический тормоз
приведен в действие. Когда изменяете этот параметр, убедитесь, что новое
значение позволяет отпускание тормоза с помощью частоты (см. параметр 2.3.1.3).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 58

56 • Vacon
APFIFF33 NXP Управление лифтом
Ток
пост. током
«Ток ТормПостТоко»
Время
постоянным
током при останове
«Врем ТормПТ Стоп»
P2.3.1.8 Время реакции
механического тормоза [с] ID 1558 «Время реаг. торм.»
Время реакции механического тормоза будет фиксировать задание скорости
в течение заданного времени. Это время фиксации должно быть установлено
в соответствии с временем реакции механического тормоза (см. Рис. 4).
P2.3.1.9
торможения
[А] ID 507
Определяет ток, подаваемый в двигатель в режиме торможения постоянным током.
P2.3.1.10 Время торможения постоянным
током при пуске [с] ID 1559 «Врем ТормПТ Пуск»
При подаче команды пуска включается торможение постоянным током.
Этот параметр определяет время до отпускания тормоза.
P2.3.1.11
торможения
[с] ID 1560
Определяет, будет ли действовать торможение постоянным током при остановке
двигателя, и задает время торможения постоянным током. Режим торможения
постоянным током зависит от выбранной функции останова (параметр 2.4.2).
0 Торможение постоянным током не используется
>0 Торможение постоянным током используется, а его работа зависит от
функции останова (пар. 2.4.2). Этот параметр определяет продолжительность
торможения постоянным током.
Пар. 2.4.2 = 0; функция останова = СвободВращен:
После получения команды останова двигатель останавливается выбегом без
управления преобразователем частоты.
При подаче постоянного тока двигатель может быть остановлен электрическими
средствами в самое короткое время без использования дополнительного внешнего
тормозного резистора.
Время торможения масштабируется в соответствии с частотой, при которой
начинается торможение постоянным током. Если частота ≥ номинальной
частоты двигателя, время торможения определяется заданным значением
параметра 2.3.1.11 (Частота начала торможения постоянным током при останове).
Если частота ≤10 % номинального значения, время торможения составляет 10 %
от установленного значения параметра 2.3.1.11.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 59

vacon • 57
1
Рис. 7. Время торможения постоянным током в режиме останова выбегом
Пар. 2.4.2 = 1; функция останова = линейное замедление
После команды останова скорость двигателя снижается в соответствии
с установленными параметрами замедления так быстро, как это возможно,
до скорости, определяемой параметром 2.3.1.12, когда начинается торможение
постоянным током.
Время торможения задается параметром 2.3.1.11. В случае большой инерции для
обеспечения более быстрого замедления рекомендуется использовать внешний
тормозной резистор.
Рис. 8. Время торможения постоянным током в режиме останова с линейным замедлением
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 60

58 • Vacon
APFIFF33 NXP Управление лифтом
Пар. 2.4.2 = 2; функция останова = останов по предельной частоте
Режим останова зависит от фактической частоты частоты двигателя. Если частота
превышает предельное значение (пар. 2.4.3), останов осуществляется в режиме свободного вращения (выбега) (см. рис. 7). Если частота равна предельному значению или
меньше его, останов выполняется в режиме линейного замедления (см. рис. 8).
P2.3.1.12 Частота начала торможения
пост. током при останове [Гц] ID 515 «Част ТормПТ Стоп»
Значение выходной частоты, при котором начинает применяться торможение
постоянным током (см. рис. 8).
P2.3.1.13 Задержка наложения
при авар. останове [с] ID 1640 «Задержка торм.»
0 = функция не активна
Этот параметр можно использовать для обеспечения плавного останова кабины
в аварийной ситуации. Данная задержка применяется в случае отказа, аварийного
останова или пропадания сигнала контроля тормоза.
P2.3.1.14 Включение при запросе вращения [ - ] ID 1641 «Налож. при запросе вращ.»
0 = не выбрано
1 = активизировано
Этим параметром может быть деактивизирован сигнал запроса вращения во время
наложения тормоза. При нормальной работе команда наложения тормоза требует,
чтобы сигнал запроса вращения перешел на низкий уровень. Если параметр равен 0,
тормоз будет приводиться в действие, когда частота оказывается ниже предельного
значения.
ПРИМЕЧАНИЕ. Если выбирается значение 0, частота наложения (P2.3.1.5 или P2.3.2.5)
должна быть меньше максимальной частоты наложения тормоза (P2.3.1.7 или P2.3.2.7).
В противном случае логика управления тормозом не действует.
7.7.3 Параметры управления с замкнутым контуром (M2 -> G2.3.2)
Параметры группы 2.3.2.x действительны только при управлении двигателем в режиме
с замкнутым контуром (параметр 2.5.1 = 2).
P2.3.2.1 Ограничение Тока [А] ID 1561 «Ограничение Тока»
Параметр определяет фактический предельный ток, который должен быть
превышен для отпускания тормоза. Если параметр установлен равным нулю,
это условие исключается. Это значение всегда обновляется при настройке
номинального тока двигателя (параметр 2.1.4) (см. Рис. 6).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 61

vacon • 59
1
P2.3.2.2 Уровень крутящего момента
(отпускания тормоза) [%] ID 1562 «Предел Момента»
Параметр определяет величину крутящего момента, которая должна быть
превышена для отпускания тормоза. Если параметр установлен равным нулю, это
условие исключается.
100 % соответствует расчетному номинальному крутящему моменту двигателя
(см. Рис. 6).
P2.3.2.3 Частота отпускания [Гц] ID 1563 «Част. отпуск.»
Параметр определяет величину выходной частоты, которая должна быть
превышена для отпускания тормоза. Если параметр задан равным нулю, это условие
исключается (см. Рис. 6).
P2.3.2.4 Задержка отпускания [с] ID 1564 «Задерж. отп. торм.»
Задержка, которая отсчитывается после выполнения условий отпускания тормоза
(см. параметры 2.3.2.1—2.3.2.3) (см. Рис. 6).
P2.3.2.5 Частота наложения [Гц] ID 1565 «Част. налож.»
Величина выходной частоты должна быть ниже данного значения для наложения
тормоза. Чтобы сигнал мог действовать, должен быть отключен сигнал запроса
вращения.
P2.3.2.6 Задержка наложения [с] ID 1566 «Задерж. налож. торм.»
Наложение тормоза задерживается на заданное время. Если параметр задан
равным нулю, задержка между выполнением условия наложения и фактическим
наложением тормоза отсутствует.
P2.3.2.7 Максимальная частота
при наложенном тормозе [Гц] ID 1567 «Макс. част. при налож. торм.»
Выходная частота не превышает это значение, когда наложен механический
тормоз. При изменении этого параметра убедитесь, что при новом значении будет
возможно отпускание тормоза по частоте (см. параметр 2.3.2.3).
P2.3.2.8 Время реакции
механического тормоза [с] ID 1558 «Время реаг. торм.»
Задание скорости будет удерживаться в течение времени, которое задано этим
параметром. Это время удержания должно быть задано в соответствии с временем
реакции механического тормоза (см. Рис. 4).
P2.3.2.9 Время 0 Гц при пуске [с] ID 615 «Время 0 Гц при пуске»
P2.3.2.10 Время 0 Гц при останове [с] ID 616 «Время 0 Гц при останове»
Время нулевой частоты при пуске и останове. В течение этого времени двигатель
может намагничиваться и создавать крутящий момент. Время нулевой частоты при
пуске следует задать большим, чем время намагничивания. Сразу после времени
нулевой частоты начинается время плавного пуска (пар. 2.3.2.10). Когда это
происходит, должно инициироваться отпускание механического тормоза (см. Рис. 4).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 62

60 • Vacon
APFIFF33 NXP Управление лифтом
P2.3.2.11 Время плавного пуска [с] ID 1568 «Вр. плавн. пуска»
Функция плавного пуска используется в режиме управления с замкнутым контуром.
В режиме управления с разомкнутым контуром данная функция использоваться не
может. После того как подана команда пуска, привод вращает вал двигателя с очень
низкой частотой (пар. 2.3.2.12), чтобы преодолеть статическое трение.
Время плавного пуска будет начинаться сразу после времени нулевой частоты
(пар. 2.3.2.9). Механический тормоз должен быть настроен на отпускание именно
в этот момент. Это достигается установкой одинакового значения предельной
частоты (пар. 2.3.2.3) и частоты плавного пуска (пар. 2.3.2.12).
Когда время плавного пуска истечет, выходная частота начнет изменяться
в соответствии с рампой.
P2.3.2.12 Частота плавного пуска [Гц] ID 1569 «Част. плавн. пуска»
Частота плавного пуска представляет собой опорную частоту, которая используется
во время плавного пуска. Необходимо установить очень низкое значение этого
параметра.
P2.3.2.13 Задержка наложения
при авар. останове [с] ID 1642 «Зад. налож. при авар. ост.»
0 = функция не активна
Этот параметр можно использовать для обеспечения плавного останова
кабины в аварийной ситуации. Данная задержка применяется в случае отказа,
аварийного останова или пропадания сигнала контроля тормоза.
P2.3.2.14 Наложение при запросе вращения [ - ] ID 1643 «Налож. при запросе вращ.»
0 = не выбрано
1 = активизировано
Этим параметром можно деактивировать сигнал запроса вращения при наложении
тормоза. При обычной работе для выполнения команды наложения тормоза требуется,
чтобы сигнал запроса вращения был выключен. Если этот параметр равен 0, тормоз
накладывается, когда частота опускается ниже предельного уровня.
ПРИМЕЧАНИЕ. Если выбирается значение 0, частота наложения (P2.3.2.5) должна
быть меньше максимальной частоты наложения тормоза (P2.3.2.7). В противном случае
логика управления тормозом не действует.
P2.3.2.15 Время намагничивания для пуска [с] ID 628 «ПускНамагнВремя»
Определяет, в течение какого времени при пуске к двигателю применяется ток
намагничивания, заданный параметром P2.3.2.16.
P2.3.2.16 Ток намагничивания для пуска [А] ID 627 «ПускНамагничТок»
Определяет силу тока намагничивания при пуске. Обычно используется значение
номинального тока (In). Этот параметр принимает значение номинального тока
двигателя (In), когда тот задается с помощью параметра P2.1.4.
При использовании этой функции двигатель намагничивается намного быстрее,
чем при обычном значении тока намагничивания.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 63

vacon • 61
1
7.7.4 Внешний тормоз (M2 -> G2.3.3)
P2.3.3.1 Внешнее управление тормозом [ - ] ID 1601 «Упр Внешн Тормоз»
Программируемый дискретный вход для управления внешним тормозом.
Если выбирается дискретный вход, он должен быть включен до отпускания тормоза.
Если вход не используется, установите для этого параметра значение по умолчанию
(0.2 = постоянно ИСТИНА).
P2.3.3.2 Контроль внешнего тормоза [ - ] ID 1602 «КонтВнешТор»
Программируемый дискретный вход для контроля внешнего тормоза. После того
как механический тормоз отпущен, выбранный вход может использоваться для
проверки отпущенного состояния тормоза. Если вход не используется,
установите для этого параметра значение по умолчанию (0.1 = постоянно ЛОЖЬ).
Если дискретный вход используется, после отпускания тормоза на него в течение
заданного времени (параметр 2.3.4.1) должен поступить сигнал. При отсутствии
сигнала формируется сигнал отказа внешнего тормоза.
Реакцию на отказ внешнего тормоза можно установить с помощью параметра 2.8.4.1.
P2.3.3.3 Контроль внешнего тормоза 2 [ - ] ID 1838 «КонтВнешТор2»
См. описание параметра контроля внешнего тормоза выше.
7.7.5 Контроль тормозов (M2 -> G2.3.4)
P2.3.4.1 Время контроля внешнего тормоза [ - ] ID 1603 «ВремяКонтВнешТор»
Промежуток времени, в течение которого должен активироваться вход контроля
внешнего тормоза (пар. 2.3.3.2) после отпускания тормоза.
P2.3.4.2 Инвертированный контроль
внешнего тормоза [ - ] ID 1856 «ИнвКонтВнТор»
0 = не инвертируется (выключатели тормоза нормально разомкнуты)
1 = инвертируется (выключатели тормоза нормально замкнуты)
Этот параметр определяет нормальное состояние контактов выключателей
тормозов. В настоящем документе при описании работы предполагается,
что контакты применяемых выключателей нормально замкнуты, поэтому для
данного параметра используется значение по умолчанию «1= инвертируется».
P2.3.4.3 Контроль F55 при пуске [ - ] ID 1857 «КонтF55Пуск»
0 = запрещено
1 = разрешено
Лифт может быть остановлен при пуске в случае обнаружения данного отказа.
Если выбрано значение 0 («запрещено»), лифт не останавливается. После прибытия
лифта на целевой этаж должно быть выполнено аварийное отключение по отказу.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 64

62 • Vacon
APFIFF33 NXP Управление лифтом
7.7.6 Настройка отпускания тормоза при управлении с замкнутым контуром
Простой пуск
T1: время выполнения условий для отпускания тормоза
Отсчет этого времени начинается после поступления команды начала движения на
преобразователь частоты. В течение этого времени преобразователь частоты готовит
двигатель к запуску, подавая в его обмотки ток для создания необходимого магнитного
потока. После того как необходимый магнитный поток создан, с релейного выхода 1
или релейного выхода 2 может быть подана команда отпускания тормоза. Данное
время можно уменьшить с помощью параметров «Время намагничивания при пуске»
и «Ток намагничивания при пуске». Если заданное значение параметра
«Ток намагничивания при пуске» превышает ток намагничивания, рабочий магнитный
поток будет создан быстрее. Параметры «Ток намагничивания при пуске»
и «Время намагничивания при пуске» очень важны при большой мощности двигателя,
так как они помогают ускорить пуск лифта.
T2: Время реакции механического тормоза
Параметр: «Время реакции механического тормоза». Время, в течение которого
механический тормоз полностью отпускается, то есть перестает стопорить лебедку
лифта, с учетом задержки срабатывания контакторов и других задержек. Если это
время слишком мало, двигатель начинает вращаться при наложенном тормозе,
вследствие чего пусковой ток очень велик.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 65

vacon • 63
1
T3: время нулевой частоты при пуске
Это время не зависит от значений времени T1 и T2. Оно начинает отсчитываться вместе
с временем T1. Это время используется, чтобы гарантировать намагничивание
двигателя в период, когда фактически происходит отпускание тормоза. Задав это время
достаточно большим, например 1,5 с или 2 с, можно точно определить задержку
отпускания тормоза и время готовности магнитного потока. На практике значение этого
параметра должно немного превышать фактическое время, необходимое для
намагничивания двигателя. (Время готовности магнитного потока можно определить
с помощью NcDrive и глобальной переменной MC_FluxReady).
Усовершенствованный плавный пуск
T4: плавный пуск
Если на пуск лифта оказывает влияние трение в механической системе, можно добавить
дополнительный интервал для обеспечения плавного пуска. Параметры Время плавного
пуска и Частота плавного пуска продлевают время пуска. Значение параметра Частота
плавного пуска должно быть очень маленьким, порядка 0,01–0,02 Гц.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 66

64 • Vacon
APFIFF33 NXP Управление лифтом
7.8 Управление преобразователем частоты
P2.4.1 Тормозн Прерыват [ - ] ID 504 «Тормозной Ключ»
Когда преобразователь частоты замедляет вращение двигателя, инерция
двигателя и нагрузка передают энергию внешнему тормозному резистору.
Это позволяет преобразователю частоты развивать тормозной момент, равный
крутящему моменту при ускорении (при условии правильного выбора тормозного
резистора). См. отдельную инструкцию по установке тормозного резистора. В режиме
проверки тормозного прерывателя на тормозной резистор каждую секунду подается
импульс. При отсутствии нормального ответа на импульс (что свидетельствует
об отсутствие резистора или прерывателя) формируется отказ F12.
0 = «Не Использ» — тормозной прерыватель не используется.
Тормозной прерыватель в звене постоянного тока не используется или
отсутствует. ПРИМЕЧАНИЕ. Уровень регулирования повышенного
напряжения задается немного меньшим.
1 = «On, Пуск» — тормозной прерыватель используется и проверяется во время
вращения.
При работе преобразователя частоты в режиме вращения задействуется встроенный тормозной прерыватель преобразователя частоты. Преобразователь
частоты также отправляет проверочные импульсы на тормозной резистор
иожидает реакции на них.
2 = «Внешний» — внешний тормозной прерыватель (без проверки).
Система оснащена устройством для обеспечения напряжения звена
постоянного тока. Это может быть активный выпрямитель или внешний блок
тормозного прерывателя. Если выбирается этот вариант, уровень регулирования
повышенного напряжения преобразователя частоты задается немного большим,
чтобы работа этой функции согласовалась с работой активного выпрямителя
или внешнего блока тормозного прерывателя.
3 = «On,Пуск+Стоп» — используется и проверяется в состоянии «ГОТОВ»
и во время вращения.
Тормозной прерыватель также действует, когда преобразователь частоты
не находится в состоянии вращения. Данный вариант можно использовать,
например, в ситуации, когда несколько приводов работают в генераторном
режиме, но уровни энергии достаточно малы и могут быть погашены одним
преобразователем частоты.
4 = «On, НетТеста» — используется при вращении (без проверки).
Тормозной прерыватель работает во время вращения, но проверочные импульсы
на тормозной резистор не подаются.
Примечание. В системном меню предусмотрен параметр «ВнутрТормРезистор».
Он служит для вычислений, связанных с контролем перегрева тормозного резистора.
Если к преобразователю частоты подключен внешний тормозной резистор, для этого
параметра нужно выбрать значение «Не подключен», чтобы температурные
вычисления не производились.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 67

vacon • 65
1
2
P2.4.2 Функция останова [ - ] ID 506 «Функц Остановки»
Выбег:
0 После получения команды останова двигатель останавливается выбегом,
при этом преобразователь частоты им не управляет.
Линейное замедление:
1 После получения команды останова скорость двигателя снижается
в соответствии с параметрами замедления.
Если энергия рекуперации велика, то для более интенсивного замедления
может потребоваться использование внешнего тормозного резистора.
Частота отпускания:
Останов выбегом, если при подаче запроса останова частота двигателя превы-
шает предельную частоту (пар. 2.4.3). Останов линейным замедлением, если при
выдаче запроса останова частота двигателя не больше предельной частоты.
P2.4.3 Частота отпускания [Гц] ID 1624 «ПределУглЧастU/f»
Определяет предельную частоту для функции останова, если выбран останов
по предельной частоте (пар. 2.4.2=2).
Если частота двигателя превышает предельную частоту, двигатель останавливается
выбегом, а если не превышает, то останов производится линейным замедлением.
P2.4.4 Тормозное расстояние [м] ID 1602 «Дист. остан.»
0 = не используется
Функция активна, только если в качестве функции останова выбран останов
по предельной частоте (параметр 2.4.2=2).
Параметр определяет расстояние от определенного этажного выключателя
до полной остановки на этаже. Значение параметра задается в метрах.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 68

66 • Vacon
APFIFF33 NXP Управление лифтом
Примечание.
Если используется функция останова по расстоянию, функция
не действует.
Расстояние до остановки (тормозное расстояние) вычисляется по значениям
номинальной линейной скорости (параметр 2.2.1) и номинальной частоты
двигателя (параметр 2.1.2). Вычисленное расстояние будет правильным только
в том случае, если оба указанных параметра установлены правильно и если
замедление для останова будет линейным (параметр 2.4.5=0).
Если закон изменения скорости при останове будет не линейным, а S-образным
(используется S-образная кривая), тормозное расстояние необходимо скорректировать с помощью параметра 2.4.6.
внутреннего переключения изменения скорости (параметр 2.2.8)
P2.4.5 Время S-образной кривой [с] ID 1626 «ВремяСглажОстРасст»
Время особого увеличения и уменьшения замедления, если выбран останов с помощью
функции расстояния. Этот рывковый интервал активизируется, когда скорость замедляется до значения ниже предельной частоты и достигается опорная частота.
Пока частота превышает предельную, используются интервалы сглаживания из
группы параметров кривой скорости 1. Интервалы сглаживания из группы параметров
кривой скорости 1 вновь вступают в силу, когда преобразователь частоты входит
в режим останова.
P2.4.6 Коэффициент масштабирования [%] ID 1625 «МасштКоэффЛинЗамедл»
Коэффициент масштабирования изменения скорости для функции тормозного
расстояния. Тормозное расстояние вычисляется исходя из линейного изменения
скорости. Тормозное расстояние будет вычислено точно только в том случае,
если не используются рывковые интервалы (параметр 2.2.3=0 или параметр 2.4.5=0).
Если рывковые интервалы используются, расстояние останова будет больше,
чем должно быть. Коэффициент масштабирования может использоваться для
тонкой настройки тормозного расстояния. Коэффициент масштабирования
пересчитывает время линейного уменьшения скорости.
7.9 Параметры управления контактором двигателя (M2 -> G2.4.7)
Цель управления контактором двигателя состоит в том, чтобы сначала замкнуть контактор
двигателя и лишь после этого начать подавать ток на двигатель. Эта логика управления
применяется лишь в том случае, если запрограммировано выходное реле для управления
контактором двигателя (см. группу параметров 2.7).
P2.4.7.1 Время замыкания
Значение этого параметра следует задать с таким расчетом, чтобы оно слегка
превышало время срабатывания контактора двигателя. Преобразователь частоты
начинает подавать ток на двигатель по истечении этого времени задержки. Данный
параметр игнорируется, если используется вход сигнала подтверждения от контактора
двигателя, выбранный с помощью параметра P2.4.7.2.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 69

vacon • 67
1
M
ПЧ
Вход
Контактор
двигателя
P2.4.7.2 Подтверждение от контактора двигателя
Входной сигнал, подтверждающий замыкание главного контактора. В качестве
источника такого сигнала должен использоваться вспомогательный контакт
(нормально разомкнутый) контактора двигателя. При использовании этого сигнала
параметр P2.4.7.1 игнорируется.
Если сигнал подтверждения не поступает в течение 1 с, активируется отказ F64.
подтв.
7.10 Расширенные параметры
P2.4.8.1 Тип модулятора ID1775 «ModulatorType»
Выберите тип модулятора. Для некоторых операций необходим программный
модулятор.
0 = модулятор ASIC
Классическая подача третьей гармоники. Спектр немного лучше,
чем у программного модулятора 1.
ПРИМЕЧАНИЕ. Модулятор ASIC нельзя использовать, если используется система
DriveSynch или двигатель с постоянными магнитами с инкрементальным
энкодером.
1 = программный модулятор 1
Модулятор симметричных векторов с симметричными нулевыми векторами.
Искажение синусоидальности тока имеет меньшее значение, чем у программного
модулятора 2, если выполняется форсирование.
ПРИМЕЧАНИЕ. Рекомендуется для DriveSynch (установлено по умолчанию, если
активирован DS) и необходим при использовании двигателя с постоянными
магнитами с инкрементальным энкодером.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 70

68 • Vacon
APFIFF33 NXP Управление лифтом
2 = программный модулятор 2
Одна фаза из трех не модулируется IGBT-ключами на протяжении 60-градусного
интервала периода выходной частоты. Эта немодулируемая фаза подключается
к положительному или отрицательному полюсу шины постоянного тока.
Такой тип модуляции позволяет на треть уменьшить коммутационные потери
и равномерно распределить нагрузку между всеми ключами.
Данный вид модуляции полезен, когда напряжение составляет более 80 % от
максимального напряжения, то есть когда двигатель вращается со скоростью,
близкой к полной скорости. В то же время, при низкой скорости двигателя
пульсация момента будет в два раза выше по сравнению с вариантом 1.
3 = программный модулятор 3
При этом варианте модуляции в течение 120-градусного интервала один ключ
постоянно открыт и соединяет фазу с отрицательным полюсом шины постоянного
тока с целью снижения коммутационных потерь. При этом, однако, верхний и нижний
ключи нагружены неравномерно и спектр шире.
P.2.4.8.2 Дополнительные параметры 1 ID1770 «Доп Параметры 1»
Зарезервирован для будущего использования. Состояниями некоторых битов
управляет прикладная программа, поэтому значение может отличаться от нуля.
P.2.4.8.3 Дополнительные параметры 2 ID1771 «Доп Параметры 2»
Зарезервирован для будущего использования. Состояниями некоторых битов
управляет прикладная программа, поэтому значение может отличаться от нуля.
P.2.4.8.4 Дополнительные параметры 4 ID1772 «Доп Параметры 4»
b0 = +1= активировать предотвращение сползания = 1
b1 = +2= выполнять идентификацию начального угла СДПМ только один раз после
подачи питания = 1
P.2.4.8.5 Дополнительные параметры 5 ID1773 «Доп Параметры 5»
b0 = +1= управл. СДПМ, коррекция настройки энкодера, 1 = активно
P.2.4.8.6 Дополнительные параметры 6 ID1774 «Доп Параметры 6»
Зарезервирован для будущего использования. Состояниями некоторых битов
управляет прикладная программа, поэтому значение может отличаться от нуля.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 71

vacon • 69
1
0
1
2
Тип
Минимальная
[кГц]
Максимальная
[кГц]
По умолчанию
[кГц]
0003–0061 NX_5
0072–0520 NX_5
1,0
10,0
3,6
0041–0062 NX_6
0144–0208 NX_6
7.11 Управление двигателем
P2.5.1 Режим управления двигателем ID 1572 «Реж Упр Мотором»
Регулирование частоты: Задания с клемм входов/выходов
и с клавиатуры являются заданиями частоты,
преобразователь частоты регулирует выходную
частоту (разрешение по выходной частоте = 0,01 Гц).
Регулирование скорости: Задания с клемм входов/выходов
и с клавиатуры являются заданиями скорости,
преобразователь частоты регулирует скорость
двигателя (точность ± 0,5 %).
Регулирование скорости CL: Регулирование скорости в режиме с замкнутым
контуром. Задания с клемм входов/выходов
и с клавиатуры являются заданиями скорости,
преобразователь частоты регулирует скорость
двигателя. Требуется энкодер. Параметры
управления с замкнутым контуром (группа G2.5.9)
должны быть настроены соответствующим
образом.
P2.5.2 Частота ШИМ ID 601 «Частота ШИМ»
Повышая частоту коммутации, можно снизить шум двигателя. Следует, однако,
помнить, что чем выше частота коммутации (частота ШИМ), тем выше потери
в преобразователе частоты. При использовании маломощного двигателя с
длинным кабелем также следует уменьшить частоту ШИМ.
Диапазон этого параметра зависит от типоразмера преобразователя частоты:
0003–0061 NX_2
Табл. 7.11–1. Частота переключения в зависимости от размера
1,0 16,0 10,0
1,0 6,0 1,5
ПРИМЕЧАНИЕ.
Фактическая частота переключений может быть уменьшена до 1,5 кГц функциями
терморегулирования. Это необходимо учитывать при использовании синусфильтров или других входных фильтров с низкой резонансной частотой.
ПРИМЕЧАНИЕ.
Если значение частоты ШИМ изменено, необходимо вновь выполнить идентификацию.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 72

70 • Vacon
APFIFF33 NXP Управление лифтом
1
s
n
R U I n 2560
=
Пад. напр. на сопр. стат
P2.5.3 Регулятор повышенного напряжения ID 607 «Регулят Перенапр»
P2.5.4 Регулятор пониженного напряжения ID 608 «Регулят НизкНапр»
Данные параметры позволяют выключать регуляторы повышенного/пониженного
напряжения. Это может потребоваться, например, если напряжение питающей сети
отклоняется более чем на –15 % — +10 %, что для данной прикладной программы
недопустимо. В этом случае регулятор изменяет выходную частоту с учетом колебаний
напряжения питания.
Примечание. Когда регуляторы выключаются, возможно отключение из-за
повышенного/пониженного напряжения. Регулятор пониженного напряжения
автоматически выключается, если активен режим экакуации.
0 Регулятор выключен
Регулятор включен
P2.5.5. Измеренное падение напряжения
на сопротивлении статора ID 662 «ИзмПадНапрСтатор»
Измеряемое падение напряжения на сопротивлении статора между двумя фазами
двигателя при номинальном токе двигателя. Этот параметр определяется во время
выполнения идентификации.
Этот параметр определяет сопротивление статора двигателя по величине падения
напряжения при номинальном токе двигателя. Значение параметра определяется
по следующей формуле с использованием значений номинального напряжения и тока
двигателя, а также фактического сопротивления статора:
P2.5.6 ki1 регулятора скорости
с разомкнутым контуром ID 1655 «РегСкор_ki(РК)»
Определяет коэффициент усиления И-звена для регулирования скорости в режиме
с разомкнутым контуром.
P2.5.7 kp1 регулятора скорости
с разомкнутым контуром ID 1656 «РегСкор_kp(РК)»
Определяет коэффициент усиления П-звена для регулирования скорости в режиме
с разомкнутым контуром.
.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 73

vacon • 71
1
7.11.1 Параметры U/F-характеристики
Параметры кривой U/f в основном используются в режимах управления с разомкнутым
контуром, за исключением параметра Напряжение в точке ослабления поля, который также
применяется при замкнутом управлении в качестве предельного напряжения. Параметры
кривой U/f служат для определения величины напряжения, подаваемого на двигатель,
при различных значениях частоты и разной нагрузке.
Необходимые изменения для пуска под нагрузкой при нулевой скорости
♦ Сначала задайте номинальные параметры двигателя (группа параметров
2.1).
Вариант 1: автоматическая настройка
Шаг 1. Выполните идентификацию с вращением двигателя.
Шаг 2 (если требуется). Активируйте регулирование скорости или оптимизацию U/f
(форсирование момента).
Шаг 3 (если требуется). Активируйте и регулирование скорости, и оптимизацию U/f.
Вариант 2: настройка вручную
Шаг 1.
Запустите двигатель, установив 2/3 номинальной частоты двигателя в качестве
задания частоты. Посмотрите значение тока двигателя в меню контроля или
®
с помощью программы VACON
в параметр тока намагничивания двигателя.
NCDrive. Это значение тока следует ввести
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 74

72 • Vacon
APFIFF33 NXP Управление лифтом
ПРИМЕЧАНИЕ.
В приложениях, характеризующихся высоким крутящим моментом
двигателю приходится работать при таких условиях
имо обратить особое внимание
охлаждение двигателя. Если происходит чрезмерное возрастание
температуры, используйте внешнее охлаждение.
Автоматическое
Напряжение на двигателе изменяется пропорционально
требуемому моменту, благодаря чему двигатель обеспечивает
больший момент при пуске и при работе на низких частотах.
Автоматическое форсирование крутящего момента может
приложениях, в которых пусковой момент,
обусловленный пусковой функцией, имеет большую величину,
ирование момента полезно даже
случае линейной зависимости U/f. Но наилучшие результаты
в действие программируемая зависимость U/f.
Поменяйте значение параметра выбора отношения U/f на «Программир» (= 2).
Запустите двигатель с нулевым заданием частоты и увеличивайте напряжение
в нулевой точке, пока ток двигателя не станет примерно равен току намагничивания
двигателя. (Если двигатель работает в области низкой частоты лишь короткие периоды
времени, можно использовать уровень тока до 65 % от номинального тока двигателя.)
После этого задайте напряжение в средней точке равным √2 * напряжение
в нулевой точке
и
частоту в средней точке равной (напряжение в нулевой точке/100 %) * номинальная
частота двигателя.
Шаг 2 (если требуется). Активируйте регулирование скорости или оптимизацию U/f
(форсирование момента).
Шаг 3 (если требуется). Активируйте и регулирование скорости, и оптимизацию U/f.
и низкой скоростью, существует вероятность перегрева двигателя.
Если
продолжительное время, необход
на
P2.5.8.1 Оптимизация U/f ID1573 «Оптимизация U/f»
форсирование
крутящего
момента
использоваться в
напимер в конвейерах. Форс
в
достигаются после выполнения идентификации, когда вступает
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 75

vacon • 73
1
Линейная:
ейно изменяется от напряжения
нулевой точке до точки ослабления поля, где на двигатель
Квадратичная:
я от напряжения в нулевой
по квадратичному закону от нулевой частоты до точки
ослабления поля. Двигатель работает с намагничиванием ниже
создает меньший крутящий момент.
Программируемая кривая U/f:
2
Кривая U/f может задаваться тремя различными точками.
выполнить идентификацию (ID631).
Линейная зависимость с оптимизацией магнитного потока
3
Преобразователь частоты начинает поиск минимального тока
уменьшить энергопотребление. Эта функция может
как вентиляторы, насосы и т.п.
P2.5.8.2 Выбор типа кривой U/f ID1574 «Выбор Отнош U/f»
0
1
Напряжение двигателя лин
в
подается напряжение в точке ослабления поля.
Напряжение двигателя изменяетс
точке
точки ослабления поля и
Квадратичная зависимость U/f может использоваться в применениях, где требуемый момент пропорционален квадрату скорости,
например в центробежных вентиляторах и насосах
1. Напряжение в нулевой точке.
2. Частота в средней точке и напряжение в средней точке.
3. Точка ослабления поля и напряжение в точке ослабления поля.
Программируемую зависимость U/f можно использовать, если при низких
частотах требуется больший момент. Для оптимальной настройки следует
двигателя, чтобы
использоваться в приложениях с постоянной нагрузкой двигателя, таких
P2.5.8.3 Точка ослабления поля ID602 «Точка ОслаблПоля»
Точка ослабления поля определяет выходную частоту, при которой выходное
напряжение достигает напряжения в точке ослабления поля.
P2.5.8.4 Напряжение в точке ослабления поля ID603 «Напр ТочОслПоля»
На частотах выше точки ослабления поля выходное напряжение сохраняет
установленное максимальное значение. При частоте ниже точки ослабления
поля выходное напряжение зависит от установки параметров кривой U/f.
При настройке параметра Номинальная частота двигателя в параметр Точка ослабления
поля автоматически записывается соответствующее значение. Если для точки
ослабления поля и максимального выходного напряжения нужно использовать другие
значения, измените эти параметры после установки Номинальной частоты.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 76

74 • Vacon
APFIFF33 NXP Управление лифтом
В режиме управления с замкнутым контуром данный параметр определяет
максимальное напряжение, подаваемое на двигатель, и может быть увеличен
при наличии достаточного уровня напряжения в звене постоянного тока.
P2.5.8.5 Частота в средней точке кривой U/f ID1575 «Част СреднТочU/f»
Если с помощью параметра выбора отношения U/f выбрана программируемая
кривая U/f, данный параметр определяет частоту в средней точке этой кривой.
См. также описание параметра Напряжение в средней точке.
При выборе программируемой кривой U/f этот параметр устанавливается равным
10 % от номинальной частоты двигателя.
P2.5.8.6 Напряжение в средней
точке кривой U/f ID1576 «Напр СреднТочU/f»
Если с помощью параметра выбора отношения U/f выбрана программируемая
кривая U/f, данный параметр определяет напряжение в средней точке этой кривой.
См. также описание параметра Частота в средней точке.
При выборе программируемой кривой U/f этот параметр устанавливается равным
10 % от номинального напряжения двигателя.
P2.5.8.7 Выходное напряжение
при нулевой частоте ID1577 «Напр НульЧастU/f»
Этот параметр определяет выходное напряжение при нулевой частоте для кривой U/f.
Значение по умолчанию данного параметра зависит от типоразмера преобразователя
частоты.
ПРИМЕЧАНИЕ. При изменении значения параметра Выбор Отнош U/f этот
параметр принимает нулевое значение.
7.11.2 Параметры для управления с замкнутым контуром
Формула регулирования скорости:
1
=
1 +
()= ( 1)+ [()( 1
)
+
(
)
]
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 77

vacon • 75
1
Limit 1 Limit 2
f/Hz
t/ms
Ti 1
Ti 2
Предел 1
Предел 2
Ti 2
Ti 1
t, мс
f, Гц
P2.5.9.1 Предел регулирования скорости 1 ID 1618 «ПредРегСкор1»
P2.5.9.2 Предел регулирования скорости 2 ID 1619 «ПредРегСкор2»
Изменяют пределы коэффициента усиления регулятора скорости и постоянной
времени интегрирования. Когда выходная частота ниже точки перехода 1 (пар. 2.5.9.1),
значение коэффициента усиления равно параметру 2.5.9.3. Если выходная частота
выше точки перехода 2 (пар. 2.5.9.2), значение коэффициента усиления равно
параметру 2.5.9.4. Переход между двумя этими точками является линейным.
См. Рис. 9 и Рис. 10.
P2.5.9.3 Kp2 регулятора скорости ID 1620 «Kp 1 РегСкор»
P2.5.9.4 Kp2 регулятора скорости ID 1621 «Kp 2 РегСкор»
Коэффициент усиления регулятора скорости при управлении двигателем в режиме
с замкнутым контуром. Значение усиления 100 означает, что номинальное задание
крутящего момента на выходе регулятора скорости создается при ошибке частоты
в 1 Гц.
Когда выходная частота меньше «предела регулирования скорости 1», используется
коэффициент усиления регулятора скорости Kp1 (%/Гц), а когда выходная частота
больше «предела регулирования скорости 2», используется коэффициент усиления
регулятора скорости Kp2. Между двумя этими точками значение меняется
по линейному закону. См. Рис. 9 и Рис. 10.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 78

76 • Vacon
APFIFF33 NXP Управление лифтом
Limit 1
Limit 2
f/Hz
Kp
Kp
2
Kp1
Предел 1
Предел 2
Kp2
Kp2
Kp
f, Гц
Рис. 9. Изменение коэффициента усиления Kp пропорционального регулятора скорости
P2.5.9.5 Ti2 регулятора скорости ID 1622 «Ti1 РегСкор»
P2.5.9.6 Ti2 регулятора скорости ID 1623 «Ti2 РегСкор»
Устанавливает постоянную времени интегрирования регулятора скорости. Чем больше
этот параметр, тем выше стабильность, но тем больше время реакции по скорости.
Kp 30, Ti 100
Kp 30, Ti 300
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 79

vacon • 77
1
Limit 1
Limit 2
f/Hz
t/ms
Ti 1
Ti 2
Предел 1
Предел 2
Ti 2
Ti 1
t, мс
f, Гц
Когда выходная частота меньше «предела регулирования скорости 1», используется
постоянная времени интегрирования Ti 1, а когда выходная частота больше «предела
регулирования скорости 2», используется постоянная времени интегрирования Ti 2.
Рис. 10. Кривая постоянной времени интегрирования Ti пропорционального регулятора
скорости
P2.5.9.7 Усиление P при регулировании тока ID617 «Kp РегулятТока»
Устанавливает усиление для регулятора тока. Регулятор подает в модулятор задание
вектора напряжения. Данный коэффициент усиления также используется для
реализации пуска на ходу при разомкнутом управлении. При выборе значения
Соединен для параметра активации синус-фильтра (параметр P6.7.5 в системном
меню) данный параметр принимает значение 20,00 %.
При использовании синхронного двигателя с постоянными магнитами это значение
определяется автоматически при выполнении идентификации с вращением
двигателя. При низкой скорости вращения двигателя значение может возрасти до
300 %. При высокой скорости двигателя и при использовании синус-фильтра
в цепи двигателя значение коэффициента усиления может составлять 10...40 %.
P2.5.9.8 Ti регулятора тока ID657 «Ti РегулятТока»
Постоянная времени интегрирования регулятора тока.
P2.5.9.9 Постоянная времени
фильтра энкодера ID618 «Врем Фильт Энкод»
Устанавливает постоянную времени фильтра для измерения скорости.
Параметр может использоваться для устранения шума в сигнале энкодера. Слишком
большое значение постоянной времени фильтра уменьшает стабильность скорости
контроля. В общем случае значения свыше 10 мс использовать не рекомендуется.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 80

78 • Vacon
APFIFF33 NXP Управление лифтом
P2.5.9.10 Регулировка скольжения ID619 «Настр Скольжения»
Для вычисления номинального скольжения используется скорость из паспортной
таблички двигателя. Это значение используется для регулировки напряжения
двигателя, когда он нагружен. Указываемое на паспортной табличке значение
скорости иногда бывает неточным и может быть скорректировано с помощью
этого параметра. Уменьшение значения корректировки скольжения увеличивает
напряжение двигателя, когда он нагружен.
P2.5.9.11 Время линейного изменения момента ID1760 «ВремяЛинИзМом»
Время линейного изменения момента при пуске и останове. Применяется при пуске
в случае использования задания момента. Используется при останове с линейным
замедлением для уменьшения ступенчатого перепада момента.
P2.5.9.12 Выбор задания момента ID621 «ВыборИстЗадМом»
0 = не используется
1 = память крутящего момента
2 = задание момента со входа AI1 или AI2
Аналоговый вход может быть выбран с помощью параметра P2.5.9.13 (Задание
момента). Минимальное и максимальное значения можно выбрать с помощью
параметров P 2.5.9.14 (Мин ЗаданияМомен) и P2.5.9.15 (МаксЗаданияМомен).
Постоянная времени фильтра выбирается с помощью параметров P2.6.3.6.1
(Время фильтр. зад. AI1) или P2.6.3.2.6 (Время фильтр. зад. AI2). Величину задания
после масштабирования и фильтрации сигнала задания можно посмотреть в контролируемом значении V.1.25.4.
P2.5.9.13 Задание момента
на аналоговом входе ID641 «ЗаданМом AI»
С помощью этого параметра можно выбрать задание крутящего момента с аналогового
входа A1 или A2.
P2.5.9.14 Масштабирование задания момента,
минимальное значение ID643 «Мин ЗаданияМомен»
Минимальное значение задания крутящего момента при использовании
аналогового входа в качестве источника задания момента.
P2.5.9.15 Масштабирование задания момента,
максимальное значение ID642 «МаксЗаданияМомен»
Максимальное значение задания крутящего момента при использовании аналогового
входа в качестве источника задания момента.
P2.5.9.16 Задержка добавления
задания момента ID1778 «ЗадержДобЗадМом»
Задержка, по истечении которой после запроса вращения добавляется задание
крутящего момента.
P2.5.9.17 Показать расширенные параметры ID1969 «Показ.расш.парам.»
Параметры для тонкой настройки.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 81

vacon • 79
1
1
7.11.2.1 Сползание
P2.5.18.1 Предотвращение сползания ID 1687 «Контр Сполз»
Функция предотвращения сползания предусматривается в основном в приводах лифтов.
Она предназначена для противодействия движению кабины лифта в противоположном
направлении во время пуска. Хотя эту функцию можно использовать и для асинхронного
двигателя, более всего она полезна в системе с безредукторным приводом на базе
двигателя с постоянными магнитами. В системе такого типа движение вала двигателя
непосредственно передается лифтовой кабине. Под действием противовеса пустая
кабина стремится перемещаться вверх, что желательно исключить, если лифт должен
опускаться.
Предотвращение сползания активируется при достижении заданного порогового уровня
активации предотвращения сползания и отключается после того, как задание скорости
становится больше нуля, то есть когда начинается разгон. На практике предотвращение
сползания действует в течение времени P2.3.2.9 Время нулевой частоты при пуске.
Данный параметр позволяет разрешить или запретить предотвращение сползания.
0 Запрещено
Разрешено
P2.5.18.2 Усиление для предотвращения
сползания ID 1689 «Усил Контр Сполз»
Данный параметр задает коэффициент усиления для предотвращения сползания.
Обычно он задается равным от 2 000 до 5 000. Значение зависит от конструкции
лифтовой системы.
Чем больше коэффициент усиления, тем большее влияние оказывается на контур
регулирования скорости и тем слабее проявляется эффект сползания кабины после
отпускания механического тормоза.
P2.5.18.3 Начальный момент для
предотвращения сползания ID 1691 «НачМом Контр Сполз»
Значение начального момента определяет величину ступенчатого изменения крутящего
момента, применяемого при наступлении условий активации предотвращения
сползания. Задается в процентах от номинального момента двигателя.
P2.5.18.4 Порог активации
предотвращения сползания ID 1690 «Порог Контр Сполз»
Данный параметр задает пороговый уровень, при котором начинает действовать
предотвращение сползания. Заданное значение этого параметра сравнивается
с количеством поступивших импульсов энкодера.
Если используется инкрементальный энкодер, значение меньше 1,00 задать
невозможно. При установке дробного значения меньше 1,00 (например, 0,50) требуется
активировать интерполяцию для энкодера с интерфейсом Endat с помощью
параметров дополнительной платы. Такое значение сравнивается с фазой импульсов
канала Sin, считываемой, например, из энкодера с интерфейсом Endat.
Дробная часть имеет значение, только если значение параметра меньше 1,00.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 82

80 • Vacon
APFIFF33 NXP Управление лифтом
7.11.3 Параметры синхронного двигателя с постоянными магнитами (СДПМ)
В режиме управления с замкнутым контуром положение магнитов можно определять
одним из трех способов. При первом способе положение магнитов двигателя определяется
(«идентифицируется») при каждом пуске, если используется инкрементальный энкодер без
нулевой метки (Z-импульса). При втором способе используется Z-импульс инкрементального
энкодера, а третий способ основан на использовании данных абсолютного энкодера.
Чтобы выбрать способ правильно, ознакомьтесь с параграфом «Функция идентификации
для синхронного двигателя с постоянными магнитами».
P2.5.10.1 Положение вала СДПМ ID1670 «ПоложВала СДПМ»
После выполнения идентификации энкодера в этот параметр записывается
значение положения абсолютного энкодера, соответствующее такому положению
вала, в котором ось магнитов ротора совмещается с осью магнитов фазы U статора.
Если применяется инкрементальный энкодер с каналом Z-импульсов, сюда
записывается положение Z-импульса. В зависимости от фактического положения
вала двигателя этот параметр может иметь разные значения, так как каждой паре
полюсов двигателя соответствует одно верное значение.
P2.5.10.2 Режим идентификации
начального угла ID1933 «Режим идент. нач. угла»
Идентификация начального угла, т. е. положения оси магнитов ротора относительно
оси магнитов фазы U статора, требуется, если не используются абсолютный или
инкрементальный энкодер. Эта функция определяет, как выполняется идентификация
начального угла в этих случаях. Время идентификации зависит от электрических
характеристик двигателя и обычно составляет от 50 до 200 мс.
Если используется абсолютный энкодер, значение начального угла определяется
непосредственно по значению абсолютного угла, сообщаемого энкодером. В то же
время, для синхронизации будет автоматически использоваться Z-импульс
инкрементального энкодера, если его положение определено в параметре P2.5.10.1
и отличается от нуля. Для абсолютных энкодеров значение P2.5.10.1 также должно
отличаться от нуля. В противном случае оно будет интерпретироваться как
невыполненная идентификация энкодера и вращение будет запрещено,
за исключением случаев, когда абсолютный канал пропущен идентификацией
начального угла.
0 = автоматический
Решение о выполнении идентификации начального угла принимается автоматически
на основании типа подключенного к приводу энкодера. Применяется в общих случаях.
Поддерживает платы OPT-A4, OPT-A5, OPT-A7 и OPT-AE.
1 = принудительный
Обходит автоматическую логику привода и принудительно активирует идентификацию
начального угла. Может использоваться, например, с абсолютными энкодерами
для пропуска информации об абсолютном канале и выполнении вместо этого
идентификации начального угла.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 83

vacon • 81
1
2 = при включении питания
По умолчанию идентификация начального угла будет повторяться при каждом пуске,
если функция идентификации активна. Этот параметр позволяет выполнять
идентификацию только при первом пуске после включения питания привода. При
последующих пусках информация об угле будет обновляться с учетом подсчета
импульсов энкодера.
3 = определяется дискретным входом
Можно назначить (методом TTF) дискретный вход, сигнал на котором будет указывать
преобразователю частоты, должна ли при следующем пуске выполняться
идентификация начального угла.
P2.5.10.3 Ток идентификации начального угла ID1938 «Ток идент. нач. угла»
Этот параметр устанавливает уровень тока, используемого при идентификации
начального угла. Правильный уровень зависит от используемого типа двигателя.
Обычно достаточно 50 % от номинального тока двигателя, но, в зависимости,
например, от уровня насыщения двигателя, может потребоваться более высокий
ток.
P2.5.10.4 Ток импульса определения полярности ID1800 «ТокИмпулПоляр»
Этот параметр устанавливает уровень тока для проверки направления полярности оси
магнитов во время идентификации начального угла (P2.5.10.2). Значение 0 означает,
что используется внутренний уровень тока, который обычно немного выше,
чем обычный ток идентификации, определяемый параметром P2.5.10.3. Проверка
направления полярности требуется нечасто, так как сама идентификация уже задает
правильное направление. Поэтому в большинстве случаев эту функцию можно
отключить, установив для параметра любое отрицательное значение. Это особенно
рекомендуется, если во время процесса идентификации происходят отказы F1.
P2.5.10.5 Режим идентификации энкодера ID1686 «РежимИдентЭнк»
Определяет используемый способ идентификации энкодера.
0 = постоянный ток; начальный угол определяется путем подачи постоянного тока
в двигатель в течение определенного времени. Если вал двигателя может свободно
вращаться, это автоматически вернет ротор в «нулевое положение». Значение угла
сохраняется в параметр P2.5.10.1.
1 = импульсный ток; для определения положения магнитов в обмотки двигателя
подаются импульсы постоянного тока. Эти импульсы подразделяются на две группы.
Первая группа импульсов служит для определения нулевого положения, а вторая
позволяет проверить полярность. Уровни этих постоянных токов регулируются,
соответственно, параметрами P2.5.10.3 (Ток идентификации начального угла)
и P2.5.10.4 (Ток импульса определения полярности).
P2.5.10.6 Разрешить идентификацию Rs ID654 «Разр.идент.Rs»
С помощью этого параметра можно разрешить определение сопротивления статора
(Rs) при каждом пуске для операций торможения постоянным током и управления
с замкнутым контуром. Если была успешно выполнена идентификация параметров
двигателя, идентификацию сопротивления статора рекомендуется запретить.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 84

82 • Vacon
APFIFF33 NXP Управление лифтом
P2.5.10.7 Предельная глубина модуляции ID655 «ModIndexLimit»
Глубина модуляции в процентах для управления с замкнутым контуром. Увеличивая это
значение, можно повысить величину напряжения, подаваемого на клеммы двигателя.
7.11.3.1 Падения напряжения по осям D и Q
Если определены реактивные составляющие сопротивлений обмоток статора
(величины падения напряжения) по осям d и q, преобразователь частоты вычисляет
оптимальное задание тока по оси d исходя из этих значений и крутящего момента двигателя,
тем самым учитывая реактивную составляющую момента. За счет этого можно повысить
отношение крутящего момента к току двигателя.
P2.5.10.10 Падение напряжения Lsd ID1757 «Падение напряжения Lsd»
Падение напряжения на индуктивности статора, ось D: 2 560 = 100 %.
Задает величину падения напряжения на индуктивности статора в процентах при
номинальных значениях тока и частоты.
[
]
=
[]
[]
2 560
3
[]
P2.5.10.11 Падение напряжения Lsq ID1758 «Падение напряжения Lsq»
Падение напряжения на индуктивности статора, ось Q: 2 560 = 100 %.
Задает величину падения напряжения на индуктивности статора в процентах при
номинальных значениях тока и частоты.
[
[]
[]
2 560
]
=
3
[]
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 85

vacon • 83
1
7.11.3.2 Регулятор тока магнитного потока
Регулятор тока магнитного потока используется во время работы синхронного двигателя
с постоянными магнитами в зоне ослабления поля при управлении с замкнутым контуром.
Эта функция регулирует отрицательный ток по оси d в статоре двигателя с постоянными
магнитами в зоне ослабления поля. В результате напряжение на клеммах двигателя не
превышает максимальный уровень (определяемый напряжением в точке ослабления поля,
максимальным выходным напряжением преобразователя частоты). Работа в зоне ослабления
поля зависит от конструкции двигателя и для некоторых двигателей невозможна.
При возникновении нестабильности в зоне ослабления поля можно уменьшить коэффициент
усиления и (или) увеличить постоянную времени.
P2.5.10.12 Kp регулятора тока магнитного потока ID 651 «Kp РегТокПотока»
Определяет коэффициент усиления регулятора тока магнитного потока при
использовании двигателя с постоянными магнитами. В зависимости от конструкции
двигателя и параметров изменения скорости, используемых для перехода в зону
ослабления поля, может потребоваться большое усиление, чтобы выходное
напряжение не достигало максимального предельного значения и не препятствовало
нормальному управлению двигателем. При слишком большом усилении управление
может быть нестабильным. В данном случае для стабильности управления большее
значение имеет время интегрирования.
P2.5.10.13 Ti регулятора тока магнитного потока ID 652 «Ti РегТокПотока»
Определяет время интегрирования для регулятора тока магнитного потока при
использовании двигателя с постоянными магнитами. В зависимости от конструкции
двигателя и параметров изменения скорости, используемых для перехода в зону
ослабления поля, может потребоваться небольшое время интегрирования,
чтобы выходное напряжение не достигало максимального предельного значения
и не препятствовало нормальному управлению двигателем. Слишком короткое
время интегрирования также может нарушить стабильность управления.
P2.5.10.14 Внешнее задание Id ID1730 «ВнешЗадан Id»
Это значение задания может использоваться для внешнего управления током
двигателя по оси d (т. е. реактивным током). Обычно в этом нет необходимости,
поскольку для управления уже используется оптимальное значение. Данное
значение задания добавляется к внутренним значениям в преобразователе
частоты, но, например, регулятор зоны ослабления тока может скорректировать
поданное задание при работе в зоне ослабления поля.
P2.5.10.15 Задание тока по оси Id
при нулевой скорости ID1805 «Задан Id НулСкор»
Если путем установки параметра МаксЧаст Задан Id > 0 разрешено линейное
изменение задания тока по оси d при малых частотах, этот параметр определяет
величину задания тока по оси d при нулевом значении частоты (Рис. 11).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 86

84 • Vacon
APFIFF33 NXP Управление лифтом
ExtIDRef [%]
Frequency [Hz]
IdRefAtZeroSpeed
IdRefMaxFreq
Задан Id НулСкор
МаксЧаст Задан Id
Частота, Гц
ВнешЗадан Id [%]
P2.5.10.16 МаксЧаст Задан Id ID1806 «Задан Id НулСкор»
Максимальная частота для линейного изменения задания тока по оси d в области
малых частот.
0 = линейное изменение задания тока по оси d запрещено. Используется значение
параметра P2.5.10.15 (Внешнее задание Id).
>0 = задание тока по оси d в области малых частот изменяется по линейному
закону, как показано на Рис. 11. При значениях частоты выше «МаксЧаст Задан Id»
задание тока по оси d равно нулю.
7.11.4 Параметры стабилизации
7.11.4.1 Стабилизатор крутящего момента
Стабилизатор крутящего момента по существу представляет собой фильтр верхних частот первого
порядка для расчетного крутящего момента []. Выходным значением этого фильтра является
поправка частоты , которая добавляется к заданию выходной частоты. Предназначение
стабилизатора крутящего момента состоит в том, чтобы стабилизировать возможные колебания
расчетного крутящего момента. В диапазоне между нулевой частотой и частотой в точке
ослабления поля коэффициент усиления регулятора изменяется по линейному закону.
Коэффициенты усиления при нулевой частоте и в точке ослабления поля можно задавать
раздельно. Стабилизатор работает при значениях частоты выше 3 Гц.
Дискретная реализация фильтра:
Где
сопряжения фильтра могут быть заданы с помощью описанных ниже параметров.
Рис. 11 Линейное изменение тока по оси d
1 000
=
— суммарный коэффициент усиления фильтра. Коэффициент усиления и частота
1 000
(
)
+
=
(
)
+
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 87

vacon • 85
1
P2.5.11.1 Демпфирование стабилизатора
крутящего момента ID1413 «ДемпфСтабКрутМом»
В случае управления синхронным двигателем с постоянными магнитами в режиме
с разомкнутым контуром вместо 800 рекомендуется использовать значение 980.
Значение «980» устанавливается автоматически при выборе синхронного
двигателя с постоянными магнитами.
Данный параметр определяет частоту сопряжения фильтра верхних частот.
Постоянная времени фильтра рассчитывается по формуле:
=
1 000
= 1
1 000
Частота сопряжения фильтра обратна постоянной времени:
1
=
/
К примеру, если демпфирование стабилизатора крутящего момента = 600,
= 1,5 мс, а
то
= 667 рад/с.
P2.5.11.2 Усиление стабилизатора
крутящего момента ID1412 «УсилСтабКрутМом»
Эти параметры вместе с параметром «Демпфирование стабилизатора крутящего
момента» определяют фактическое усиление фильтра. Параметром «Усиление
стабилизатора крутящего момента» задается усиление при нулевой частоте. Параметр
«Усиление стабилизатора крутящего момента в точке ослабления поля» задает
усиление при частоте в точке ослабления поля (fтоп). При изменении частоты между
двумя этими точками коэффициент усиления изменяется линейно и поэтому может
быть выражен следующим образом:
f
= FWP +
, если f < f
f
= FWP, f f
Итоговый коэффициент усиления вычисляется с учетом значения «Демпфирование
стабилизатора крутящего момента» и масштабирования, при котором значению
256 соответствует коэффициент усиления = 1. В свете сказанного, итоговый
фактический коэффициент усиления фильтра можно определить по формуле:
1 000
=
256
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 88

86 • Vacon
APFIFF33 NXP Управление лифтом
P2.5.11.3 Усиление стабилизатора крутящего
момента в зоне ослабления поля ID1414 «ТочОслПоляУсилFWP»
Коэффициент усиления стабилизатора крутящего момента в точке ослабления
поля в режиме управления с разомкнутым контуром. См. описание параметра
«Усиление стабилизатора крутящего момента» выше.
P2.5.11.4 Предел стабилизатора
крутящего момента ID1600 «ПределСтабКрутМом»
Этот параметр определяет степень влияния стабилизатора крутящего момента
на выходную частоту.
7.11.4.2 Стабилизатор контура магнитного потока
P2.5.11.5 Усиление стабилизатора
контура магнитного потока ID1550 «УсилСтабКонтПоток»
Коэффициент усиления стабилизатора контура магнитного потока. Служит
для восстановления исходного магнитного потока при обнаружении ошибки.
Выходное значение регулятора добавляется к выходной частоте. Действие этого
стабилизатора менее выражено при малых частотах, где более эффективен
стабилизатор магнитного потока. Данный стабилизатор используется в области
частот, при которых выходное напряжение достигает максимального предела
(заданного напряжением в точке ослабления поля или максимальным выходным
напряжением преобразователя частоты).
7.11.4.3 Стабилизатор магнитного потока
Стабилизатор магнитного потока представляет собой фильтр верхних частот первого порядка
для расчетного тока, создающего магнитный поток (
).
Выходным значением этого фильтра является поправка , которая добавляется к заданию
выходного напряжения. Коэффициент усиления и
частота сопряжения фильтра могут быть заданы с помощью описанных ниже параметров.
P2.5.11.6 Усиление стабилизатора
магнитного потока ID1797 «УсилСтабПоток»
Коэффициент усиления стабилизатора магнитного потока равен нулю при нулевой
скорости и линейно возрастает с ростом частоты до значения, определяемого
параметром «УсилСтабПоток», которое достигается при частоте 1 Гц.
Таким образом, коэффициент усиления определяется по формуле:
= , < 1
= , 1
Для коэффициента усиления используется масштабный множитель 1 000, поэтому
фактический коэффициент усиления определяется по формуле:
=
1 000
=
1 000
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 89

vacon • 87
1
P2.5.11.7 Пост. времени стабилизатора
магнитного потока ID1699 «ПостВрСтабПоток»
Постоянная времени стабилизатора магнитного потока определяет частоту
сопряжения фильтра верхних частот. Постоянная времени фильтра рассчитывается
по формуле:
65 536 2
=
2
= 1(
2
65 536
1)
Например, если «ПостВрСтабПоток» = 64, то T
= 511 мс, а
= 1,96 рад/с.
7.11.4.4 Стабилизатор напряжения
Стабилизатор напряжения действует аналогично стабилизатору крутящего момента, регулируя
изменение напряжения в звене постоянного тока при частотах свыше 3 Гц. Он представляет
собой фильтр верхних частот первого порядка для измеренного напряжения звена
постоянного тока
. Выходным значением этого фильтра является поправка частоты ,
которая добавляется к заданию выходной частоты. Усиление корректируется в зависимости
от расчетного крутящего момента. По мере роста крутящего момента от 10 % до 50 % от
номинального крутящего момента двигателя коэффициент усиления регулятора уменьшается
от значения «Усиление стабилизатора напряжения» до нуля. Коэффициент усиления и частота
сопряжения фильтра могут быть заданы с помощью описанных ниже параметров.
P2.5.11.8 Постоянная времени
стабилизатора напряжения ID1698 «ПостВрСтабНапр»
Данный параметр определяет частоту сопряжения фильтра верхних частот.
Постоянная времени фильтра рассчитывается по формуле:
=
1 000
= 1
1 000
P2.5.11.9 Усиление стабилизатора напряжения ID1697 «УсилСтабНапряж»
Коэффициент усиления стабилизатора напряжения является функцией крутящего
момента. При крутящем моменте ниже 15 % коэффициент усиления определяется
параметром «Усиление стабилизатора напряжения». При крутящем моменте более
50 % коэффициент усиления равен 0. С ростом крутящего момента в интервале от
15 % до 50 % коэффициент усиления линейно уменьшается от величины
«Усиление стабилизатора напряжения» до нуля. Другими словами,
= , T < 15 %
=
35 %
50 %
(%)
, 15 % T < 50 %
= 0, T > 15 %
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 90

88 • Vacon
APFIFF33 NXP Управление лифтом
s
n
R U I
n
2 560
=
ПадНапрСопрСтат
Итоговый коэффициент усиления вычисляется с учетом значения «Постоянная
времени стабилизатора напряжения» и масштабирования, при котором значению
256 соответствует коэффициент усиления = 1. В свете сказанного, итоговый
фактический коэффициент усиления фильтра можно определить по формуле:
1 000
=
256
P2.5.11.10 Предел стабилизатора напряжения ID1696 «ПределСтабНапряж»
Этот параметр задает предельные уровни для выхода стабилизатора напряжения.
Максимальное и минимальное значение для поправки частоты в масштабе частоты.
7.11.5 Измеренные параметры
P2.5.12.1 ...
P2.5.12.15 Магнитный поток 10…150 % ID1355–ID1369
Напряжение двигателя, соответствующее 10...150 % магнитного потока в процентах
от напряжения номинального магнитного потока. Измеряется во время
идентификации.
P2.5.12.16 Измеренное падение напряжения
на сопротивлении статора ID662 «ПадНапрСопрСтат»
Измеренное падение напряжения на сопротивлении статора между двумя фазами
при номинальном токе двигателя. Этот параметр определяется во время
выполнения идентификации.
Этот параметр определяет сопротивление статора двигателя по величине падения
напряжения при номинальном токе двигателя. Значение параметра определяется
по следующей формуле с использованием значений номинального напряжения
и тока двигателя, а также фактического сопротивления статора:
P2.5.12.17 Ir: напряжение компенсации
в нулевой точке ID664 «НапрКомпIrНулТочк»
Определяет величину напряжения, подаваемого на двигатель при нулевой
скорости, когда используется форсирование крутящего момента.
P2.5.12.18 Ir: масштаб компенсации
в генераторном режиме ID665 «МасшКомпIrГенер»
Определяет коэффициент масштабирования для IR-компенсации в генераторном
режиме при использовании форсирования момента.
.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 91

vacon • 89
1
DIN1
FWD
t
DIN2
Fault
REV
1
2 3
ВПЕРЕД
НАЗАД
DIN1
DIN2
Отказ
P2.5.12.19 Ir: масштаб компенсации
в двигательном режиме ID667 «МасшКомпIrДвиг»
Определяет коэффициент масштабирования для IR-компенсации в двигательном
режиме при использовании форсирования момента.
P2.5.12.20 Измеренное падение напряжения Ls ID673 «ПадНапрИндСтат»
Падение напряжения индуктивности рассеяния с номинальным током и частотой
двигателя. Этот параметр определяет падение напряжения Ls между двумя фазами.
Для определения оптимальных настроек выполните идентификацию.
P2.5.12.21 Напряжение противо-ЭДС двигателя ID674 «Противо-ЭДС Двиг»
Напряжение противоэлектродвижущей силы двигателя.
P2.5.12.22 Смещение IU ID668 «Смещение IU»
P2.5.12.23 Смещение IV ID669 «Смещение IV»
P2.5.12.24 Смещение IW ID670 «Смещение IW»
Величины смещения для измерения токов фазы. Определяются во время
выполнения идентификации.
7.12 Входные сигналы
P2.6.1 Выбор логики пуска/останова ID 300 «Логика Пуск/Стоп»
0 DIN1: замкнутый контакт = пуск вперед (требуется импульс с нарастающим фронтом)
DIN2: замкнутый контакт = пуск назад (требуется импульс с нарастающим фронтом)
Рис. 12. Пуск вперед/пуск назад
Если оба переключателя DIN одновременно включены, активируется отказ.
Сброс отказа.
Привод может быть перезапущен после сброса отказа и если оба
переключателя DIN находятся в положении OFF (выключено).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 92

90 • Vacon
APFIFF33 NXP Управление лифтом
DIN1
FWD
t
DIN2
REV
ВПЕРЕД
НАЗАД
DIN1
DIN2
1 DIN1: замкнутый контакт = пуск разомкнутый контакт = останов
DIN2: замкнутый контакт = назад разомкнутый контакт = вперед
Рис. 13. Пуск, останов, реверс
7 DIN1: замкнутый контакт = пуск вперед
DIN2: замкнутый контакт = пуск назад
Как и вариант 0, за исключением того, что импульс с нарастающим фронтом
не требуется.
Если оба переключателя DIN включены, отказ не активизируется.
7.12.1 Дискретные входы (M2 -> G2.6.7)
Все дискретные входы (кроме DIN1 и DIN2) могут программироваться. См. указания
на стр. 8.
P2.6.2.1 Внешний отказ, замыкание контакта ID 1513 «Внеш Отказ Замык»
P2.6.2.2 Внешний отказ, размыкание контакта ID 1514 «Внеш Отказ Разм»
P2.6.2.3 Сброс отказа ID 1515 «Сброс Отказа»
P2.6.2.4 Разрешение Пуска ID 1516 «Разрешение Пуска»
P2.6.2.5 Выбор рампы разгона/торможения ID 1517 «ВыборВремУск/Зам»
Кривая скорости, используемая при активации входа.
P2.6.2.6 Останов выбегом,
замыкание контакта ID 1518 «СтопВыбег_ЗК»
P2.6.2.7 Останов выбегом,
размыкание контакта ID 1519 «СтопВыбег_РК»
P2.6.2.8 Скорость ручной коррекции ID 1520 «Скорость коррекции»
P2.6.2.9 Принудительное управление
вводом/выводом ID 1521 «Принуд Упр вх/вых»
P2.6.2.10 Вход 1 выбора скорости ID 1510 «Вх1 ВыборСкор»
P2.6.2.11 Вход 2 выбора скорости ID 1511 «Вх2 ВыборСкор»
P2.6.2.12 Вход 3 выбора скорости ID 1512 «Вх3 ВыборСкор»
Параметры 2.6.2.10—2.6.2.12 определяют входы выбора задания скорости
(см. Также описание параметра 2.2.2).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 93

vacon • 91
1
P2.6.2.13 Повтор идентификации
начального угла СДПМ ID 1934 «Повт. идент. угла»
При наличии сигнала на этом дискретном входе во время пуска повторно
выполняется идентификация начального угла.
P2.6.2.14 Задержка DIN1 ID 1833 «Задержка Вкл DIN1»
Определяет задержку активации для дискретного входа DIN1.
P2.6.2.15 Задержка DIN2 ID 1834 «Задержка Вкл DIN2»
Определяет задержку активации для дискретного входа DIN2.
7.12.2 Аналоговые входы 1 и 2
P2.6.3.1.1 Выбор сигнала AAI1 ID 377 «AI1 ВыборСигнала»
P2.6.3.2.1 Выбор сигнала AI2 ID 388 «AI2 ВыборСигнала»
Служит для подключения сигнала AI1/AI2 к требуемому аналоговому входу. Более
подробная информация о методе программирования TTF приведена в главе 4.
P2.6.3.1.2 Смещение задания
на аналоговом входе 1 ID 302 «Смещение AI1»
P2.6.3.2.2 Смещение задания
на аналоговом входе 2 ID 390 «Смещение AI2»
0 Без смещения.
1 Смещение 4 мА («действующий нуль»): обеспечивает контроль нулевого уровня
сигнала. Реакцию на отказ задания можно программировать с помощью
параметра 2.8.1.1.
2 Диапазон пользователя: можно по своему усмотрению задать уровни входного
сигнала, соответствующие минимальному и максимальному значениям
частоты.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 94

92 • Vacon
APFIFF33 NXP Управление лифтом
P2.6.3.1.3 Минимальное значение
масштаба задания AI1 ID 303 «AI1 МинМасштЗад»
P2.6.3.2.3 Минимальное значение
масштаба задания AI2 ID 393 «AI2 МинМасштЗад»
P2.6.3.1.4 Максимальное значение
масштаба задания AI1 ID 304 «AI1 МаксМасштЗад»
P2.6.3.2.4 Максимальное значение
масштаба задания A2 ID 394 «AI2 МаксМасштЗад»
Дополнительное масштабирование задания. Путем настройки масштаба задания
с аналогового входа можно задать нужные граничные значения частоты,
отличающиеся от максимальной и минимальной частоты. При нулевом максимальном
значении масштабирование не действует.
P2.6.3.1.5 Инверсия задания AI1 ID305 «Инверс. зад. AI1»
P2.6.3.2.5 Инверсия задания AI2 ID398 «Инверс. зад. AI2»
Инверсия сигнала задания: макс. сигнал задания = мин. уст. частота; мин. сигнал
задания = макс. уст. частота
0 Нет инверсии
1 Задание инвертировано
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 95

vacon • 93
1
P2.6.3.1.6 Постоянная времени
фильтра задания AI1 ID 306 «Время фильтр. зад. AI1»
P2.6.3.2.6 Постоянная времени
фильтра задания AI2 ID 389 «Время фильтр. зад. AI2»
С помощью этого параметра от входящего аналогового сигнала отфильтровываются
помехи. При большой постоянной времени фильтра реакция регулятора замедляется.
P2.6.3.1.7 Минимальная пользовательская
установка AI1 ID 380 «AI1 МинУстанЗнач»
P2.6.3.2.7 Минимальная пользовательская
установка AI2 ID 391 «AI2 МинУстанЗнач»
P2.6.3.1.8 Максимальная пользовательская
установка AI1 ID 381 «AI1 МаксУстЗнач»
P2.6.3.2.8 Максимальная пользовательская
установка A2 ID 392 «AI2 МаксУстЗнач»
С помощью этих параметров можно установить любой требуемый диапазон
входного аналогового сигнала в пределах от –160 до 160 %. Например, если для
входного сигнала задан масштаб 40 %...80 %, сигнал задания может изменяться от
8 мА (для минимальной частоты) до 16 мА (для максимальной частоты).
7.13 Выходные сигналы
7.13.1.1 Аналоговый выход
P2.7.1.1 Функция аналогового выхода ID 307 «Содержание Iout»
С помощью этого параметра выбирается нужная функция для аналогового выходного
сигнала. Относительно значений параметров см. Табл.
На стр. 30.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
6–9. Выходные сигналы
, G2
.
Page 96

94 • Vacon
APFIFF33 NXP Управление лифтом
P2.7.1.2 Время фильтрации
аналогового выхода ID 308 «Время Фильт Iout»
Определяет время фильтрации аналогового выходного сигнала.
Рис. 14. Фильтрация аналогового выходного сигнала
P2.7.1.3 Инверсия аналогового
выходного сигнала ID 309 «Инверсия Iout»
Инвертирует аналоговый выходной сигнал:
макс. вых. сигнал = мин. уст. знач.
мин. вых. сигнал = макс. уст. знач.
Рис. 15. Инверсия аналогового выходного сигнала
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 97

vacon • 95
1
Сигнал
Макс. значение сигнала
Частота выхода
Ном. частота (пар. 2.1.2)
Задание частоты
Ном. частота (пар. 2.1.2)
СкоростьДвигат
Ном. скорость двигателя 1xn
Выходной ток
Ном. ток двигателя 1xInMotor
Момент двигателя
Ном. крутящий момент двигателя 1xT
Мощность двигателя
Ном. мощность двигателя 1xPnMotor
НапряжДвигат
100 % x U
Напр ПосТока
1 000 В
P2.7.1.4 Минимум аналогового выхода ID 310 «Минимум Iout»
Определяет в качестве минимума сигнала 0 мА или 4 мА (действующий нуль).
Обратите внимание на различие в выборе масштаба аналогового выхода
в параметре 2.7.1.5 (см. Рис. 16).
0 Установить в качестве минимального значения 0 мА
1 Установить в качестве минимального значения 4 мА
P2.7.1.5 Масштаб аналогового выхода ID 311 «Масштаб Iout»
Коэффициент масштабирования для аналогового выхода.
mMotor
nMotor
Табл. 7.13–1. Масштабирование аналогового выходного сигнала
Рис. 16. Масштабирование аналогового выходного сигнала
nmotor
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 98

96 • Vacon
APFIFF33 NXP Управление лифтом
Установка значения
Смысл сигнала
Дискретный выход DO1 отбирает ток, а программируемое
5 = предупреждение
Vacon о перегреве
6 = внешний отказ
или предупреждение
7 = отказ задания
или предупреждение
Отказ или предупреждение в зависимости от пар. 2.8.1.1
- если аналоговое задание составляет 4—20 mA и сигнал < 4 мА
10 = предустановленная
Предустановленная скорость выбрана с помощью дискретного
12 = включен регулятор
двигателя
Регулятор повышенного или пониженного напряжения был
включен
13 = контроль выходной
частоты
Выходная частота вышла за установленный нижний или
верхний предел
14 = управление
Выбран режим управления с помощью входов/выходов
(в меню M3)
15 = тепловой
отказ/предупреждение
18 = контроль предельного
Крутящий момент двигателя вышел за установленный нижний
19 = управление
механическим тормозом
Двухпозиционное управление внешним тормозом
(см. группу параметров G2.3).
20 = инвертированное
тормозом
Двухпозиционное управление внешним тормозом
параметров G2.3). Выход активен, когда
управление тормозом выключено.
21 = управление
контактором двигателя
7.13.1.2 Дискретные выходы
P2.7.2.1 Функция дискретного выхода 1 ID 312 «Функция DO1»
0 = не используется Не работает
1 = готов Привод переменного тока готов к работе
2 = работа Привод переменного тока работает (двигатель вращается)
3 = отказ Произошло аварийное отключение
4 = инвертированный отказ Аварийного отключения не произошло
8 = предупреждение Всегда, если существует предупреждение
9 = реверс Выбрана команда реверса
скорость
11 = на скорости Выходная частота достигла заданного значения
реле (RO1, RO2) срабатывает, когда:
+70 °C
Отказ или предупреждение в зависимости от пар. 2.8.1.3
входа
с клемм ввода/вывода
16 = DIN1 для полевой шины
17 = скорость ниже предела Скорость лифта стала меньше нижнего предела
момента
управление механическим
22 = на этаже (пр. подх. к эт.) Прямой подход к этажу, на этаже
Табл. 7.13–2. Выходные сигналы, выдаваемые дискретным выходом DO1 и выходными реле RO1,
RO2, ROE1 и ROE2.
Активны тепловой отказ/предупреждение
или верхний контрольный предел.
(см. Группу
Управление контактором двигателя
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 99

vacon • 97
1
Error! Reference source not found.
P2.7.2.2 Инвертированная функция
дискретного выхода 1 ID 1530 «Инверсия DO1»
0 = DO1 не инвертируется
1 = DO1 инвертируется
P2.7.2.3 Задержка включения
дискретного выхода 1 ID 1531 «Задержка Вкл DO1»
Задержка таймера включения для дискретного выхода 1.
P2.7.2.4 Задержка выключения
дискретного выхода 1 ID 1657 «Задержка Отк DO1»
Таймер задержки выключения для дискретного выхода 1.
P2.7.2.5 Функция релейного выхода 1 ID 313 «Функция RO1»
См. описание параметра 2.7.2.1.
P2.7.2.6 Инвертированная функция
релейного выхода 1 ID 1532 «Инверсия RO1»
0 = RO1 не инвертируется
1 = RO1 инвертируется
P2.7.2.7 Задержка включения
релейного выхода 1 ID 1533 «Задержка Вкл RO1»
Задержка таймера включения для релейного выхода 1.
P2.7.2.8 Задержка выключения
релейного выхода 1 ID 1658 «Задержка Отк RO1»
Таймер задержки выключения для релейного выхода 1.
P2.7.2.9 Функция релейного выхода 2 ID 314 «Функция RO2»
См. описание параметра 2.7.2.1.
P2.7.2.10 Инвертированная функция
релейного выхода 2 ID 1534 «Инверсия RO2»
0 = RO2 не инвертируется
1 = RO2 инвертируется
7.13.1.3 Контролируемые предельные значения
Функция контроля позволяет задавать предельные значения некоторых величин и контролировать
их соблюдение. Если фактическое значение контролируемого параметра становится больше или
меньше заданного предела, на дискретный выход может быть подан сигнал.
P2.7.3.1 Контрольный предел скорости ID 1535 «КонтПредСкор.»
Если скорость лифта ниже контрольного предела скорости, сигнал нижнего
предела скорости является ИСТИННЫМ. Относительно сигнала «нижний предел
скорости» см. Функция дискретного выхода 1
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
.
Page 100

98 • Vacon
APFIFF33 NXP Управление лифтом
0
1
2
P2.7.3.2 Контроль момента в двигательном
режиме ID 1536 «КонтКрМомДвиг»
Предельный крутящий момент при работе в двигательном режиме. Если фактический
крутящий момент двигателя превышает контролируемый предел крутящего момента
двигателя в течение заданного времени (пар. 2.8.4.7), устанавливается внутренний
сигнал «повышенного крутящего момента». Реакцию на этот сигнал можно задать
с помощью параметра P2.8.4.6.
P2.7.3.3 Контроль момента в генераторном
режиме ID 1537 «КонтКрутМомГенер»
Предельный крутящий момент при работе в генераторном режиме. При заданном
значении 0,0 % этот параметр игнорируется, предельное значение в этом случае
определяется параметром P2.7.3.2.
P2.7.3.4 Функция контроля предельной
выходной частоты ID 315 «Дейст1КонтрЧаст»
нет контроля
контроль нижнего предела
контроль верхнего предела
Если выходная частота выходит за установленный нижний или верхний предел,
эта функция выдает предупреждающий сигнал посредством дискретного выхода
DO1 либо релейного выхода RO1 или RO2 (в зависимости от настройки параметров
2.7.2.1, 2.7.2.5 и 2.7.2.9).
P2.7.3.5 Контрольное значение предельной
выходной частоты ID 316 «Знач Част Контр1»
Задает контролируемое значение частоты.
Рис. 17. Контроль выходной частоты
7.13.1.4 Реле расширения
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
 Loading...
Loading...