

Page 1

vacon nxl
®
FREKVENČNÍ MĚNIČE
SYSTÉM ŘÍZENÍ MULTI-CONTROL
APLIKAČNÍ MANUÁL
Page 2

VACON • 1
Multifunkční software Vacon NXL (software ALFIFF20) Ver. 3.45
Verze: DPD01465A
Datum: 11.02.2014
OBSAH
1. Úvod ................................................................................................................................... 2
2. Řídicí I/O............................................................................................................................ 3
3. Seznamy parametrů ........................................................................................................... 4
3.1 Hodnoty monitorování (Ovládací panel: menu M1)................................................................. 4
3.2 Základní parametry (Ovládací panel: Menu P2 P2.1) .......................................................... 5
3.3 Vstupní signály (Ovládací panel: Menu P2 P2.2)................................................................. 7
3.4 Výstupní signály (Ovládací panel: Menu P2 P2.3) ............................................................... 9
3.5 Parametry řízení pohonu (Ovládací panel: Menu P2 P2.4).................................................. 10
3.6 Parametry pásma zakázaných frekvencí (Ovládací panel: Menu P2 P2.5) ............................. 10
3.7 Parametry řízení motoru (Ovládací panel: Menu P2 P2.6).................................................. 11
3.8 Ochrany (Ovládací panel: Menu P2 P2.7)........................................................................ 12
3.9 Parametry automatického restartu (Ovládací panel: Menu P2 P2.8) .................................... 13
3.10 Parametry PID regulace (Ovládací panel: Menu P2 P2.9) .................................................. 13
3.11 Kaskádní řízení čerpadel a ventilátorů (Ovládací panel: Menu P2 P2.10) ............................... 14
3.12 Řídicí menu panelu (Ovládací panel: Menu K3).................................................................... 15
3.13 Systémové menu (Ovládací panel: Menu S6) ...................................................................... 15
3.14 Přídavné karty (Ovládací panel: Menu E7) .......................................................................... 15
4. POPIS PARAMETRŮ........................................................................................................... 16
4.1 ZÁKLADNÍ PARAMETRY ................................................................................................... 16
4.2 VSTUPNÍ SIGNÁLY.......................................................................................................... 21
4.3 VÝSTUPNÍ SIGNÁLY ........................................................................................................ 25
4.4 ŘÍZENÍ POHONU ............................................................................................................ 29
4.5 PÁSMO ZAKÁZANÝCH FREKVENCÍ ..................................................................................... 33
4.6 ŘÍZENÍ MOTORU ............................................................................................................ 34
4.7 OCHRANY ..................................................................................................................... 37
4.8 PARAMETRY AUTOMATICKÉHO RESTARTU PO PORUŠE......................................................... 45
4.9 PARAMETRY PID REGULACE............................................................................................. 46
4.10 KASKÁDNÍ ŘÍZENÍ ČERPADEL A VENTILÁTORŮ (PFC)............................................................ 52
4.11 PARAMETRY ŘÍZENÍ OVLÁDACÍHO PANELU......................................................................... 61
5. Řídicí logika signálů.......................................................................................................... 62
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
1
Page 3

2 • VACON ÚVOD
Multifunkční software pro Vacon NXL
1. ÚVOD
Multifunkční software Vacon NXL má analogový vstup 1 přednastavený jako přímou referenci frekvence.
Může být využitý také PID regulátor např. v kaskádním řízení čerpadel a ventilátorů, který má univerzální
možnosti nastavení. Při prvním spuštění měniče je přístupná jen skupina parametrů P2.1 (základní
parametry). Další speciální parametry můžou být zpřístupněné změnou hodnoty parametru 2.1.22 (Skrytí
parametrů).
Přímá reference frekvence může být využitá při řízení bez PID regulátoru a na výběr jsou tyto možnosti:
analogové vstupy, sběrnice, panel, přednastavené rychlosti a motor potenciometr.
Speciální parametry pro kaskádní řízení čerpadel a ventilátorů (Skupina P2.10) jsou zpřístupněné po
změnění hodnoty par 2.9.1 na 2 (Aktivace kaskádního řízení čerpadel a ventilátorů PFC).
Reference PID regulátoru může být vybrána z analogových vstupů, sběrnice, PID reference z panelu 1 nebo
aktivací PID reference z panelu 2 digitálním vstupem. Zpětná vazba PID m
vstupů, sběrnice nebo aktuálních veličin motoru. PID regulátor je možné také použít, když je frekvenční
měnič ovládaný přes komunikační sběrnici nebo ovládací panel.
• Digitální vstupy DIN2, DIN3, (DIN4) a digitální vstupy na přídavné kartě DIE1, DIE2, DIE3 jsou
programovatelné.
• Interní a přídavné digitální/reléové výstupy a analogové výstupy jsou programovatelné.
• Analogový vstup 1 může být naprogramovaný jako proudový, napěťový nebo digitální vstup
DIN4.
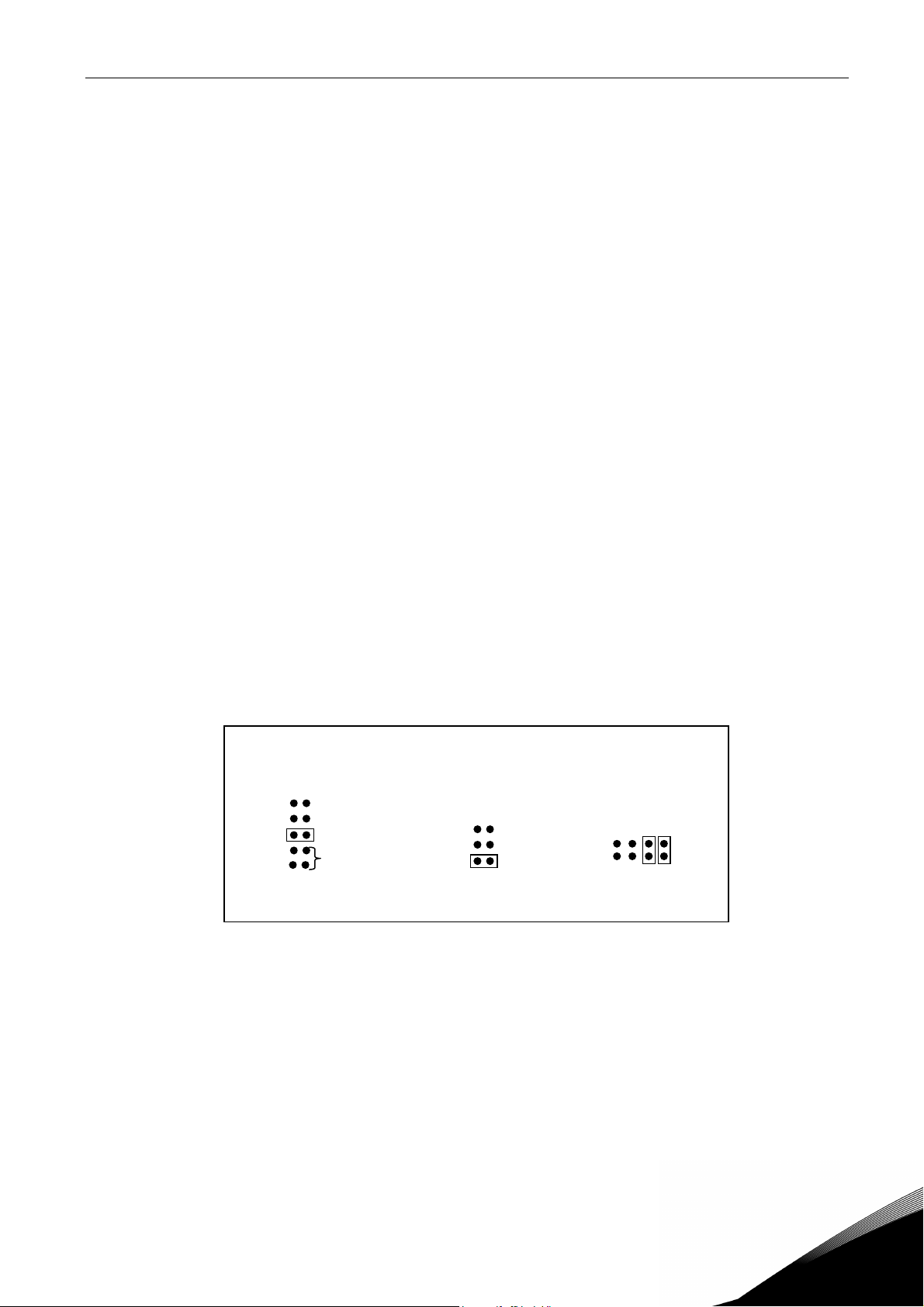
POZNÁMKA! Pokud byl analogový vstup 1 naprogramovaný jako DIN4 parametrem 2.2.6
(Rozsah signálu AI1), zkontrolujte, zda jsou propojky na správné pozici (Obr. 1-1).
Další funkce:
• PID regulátor je možné použít, když je frekvenční měnič ovládaný přes I/O svorkovnici,
komunikační sběrnici nebo ovládací panel
• Identifikace
• Průvodce spuštěním
• Funkce parkování (spánku)
• Funkce kontroly hodnoty zpětné vazby: programovatelná; vypnutá, varování, porucha
• Programovatelná logika start/stop a reverzace
• Změna měřítka reference
• Dvě p
• Výběr rozsahu analogového vstupu, změna měřítka signálu, inverze a filtrování
• Kontrola limitu frekvence
• Programovatelné funkce start a stop
• S.s. brzdění před startem a po zastavení
• Funkce přechodu zakázaných frekvencí
• Programovatelná U/f charakteristika a U/f optimalizace
• Nastavitelná spínací frekvence modulace
• Funkce automatického restartu po poruše
• Ochrany a kontrola (programovatelné; vypnuté, varování, porucha):
řednastavené rychlosti
• Porucha proudového vstupu
• Externí porucha
• Výstupní fáze
• Podpětí
• Zemní zkrat
• Tepelná ochrana motoru
• Ochrana zablokování a odlehčení motoru
• Termistor
• Komunikace po sběrnici
• Přídavné karty
ůže být vybrána z analogových
1
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 4
ŘÍDICÍ I/O VACON • 3
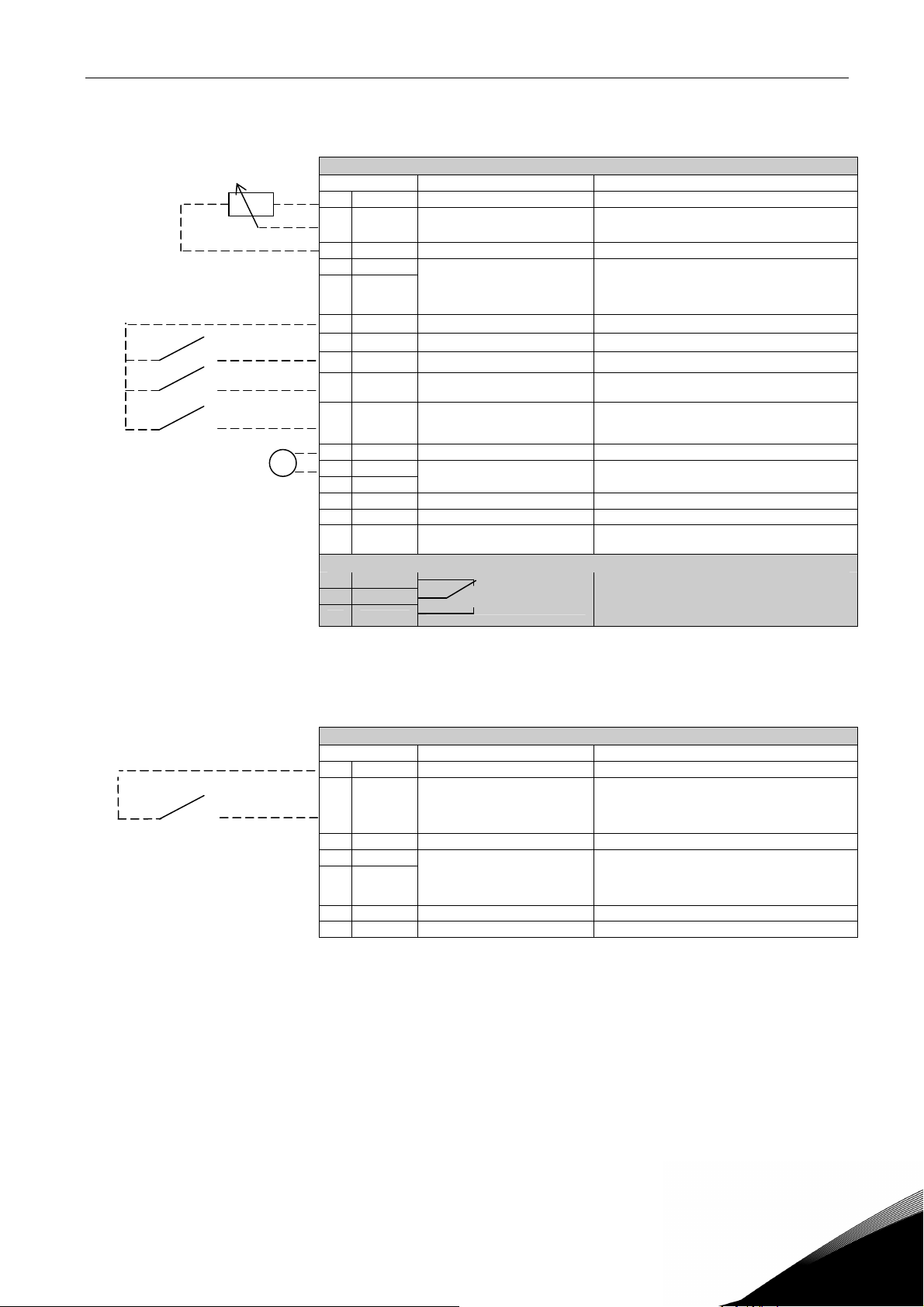
2. ŘÍDICÍ I/O
Potenciometr
reference 1-10 kΩ
mA
Svorka Signál Popis
1 +10V
2 AI1+
3 AI1- Zem I/O Zem pro reference a ovládání
4 AI2+
AI2-
5
/GND
6
+24V Výstupní řídicí napětí Napětí pro spínače apod., max 0,1 A
7 GND Zem I/O Zem pro reference a ovládání
8 DIN1 Start dopředu Kontakt sepnutý = start dopředu
9 DIN2
10 DIN3
11 GND Zem I/O Zem pro reference a ovládání
18 AO1+
19 AO1-
A RS 485 Sériová sběrnice Diferenciální přijímač/vysílač
B RS 485 Sériová sběrnice Diferenciální přijímač/vysílač
30 +24V
Referenční napětí Napětí pro potenciometr apod.
ref
Analogový vstup, rozsah
napětí 0–10 V DC.
Analogový vstup, rozsah
napětí 0–10 V DC, nebo
proudový rozsah
0/4–20 mA
Start dozadu
(programovatelný)
Výběr přednastavené
rychlosti 1
(programovatelný)
Analogový výstup,
Výstupní frekvence
Vstup pomocného napětí
24 V
Napěťový vstup reference frekvence
Může být naprogramovaný jako DIN4
Proudový vstup reference frekvence
Kontakt sepnutý = start dozadu
Kontakt sepnutý = přednast. rychlost 1
Programovatelný
Rozsah 0–20 mA/R
Záloha napájení řídicí části
, max. 500 Ω
L
21 RO1
22 RO1
23 RO1
Reléový výstup 1
PORUCHA
Programovatelný
Tab. 1-1. Přednastavená konfigurace I/O multifunkčního aplikačního softwaru NXL
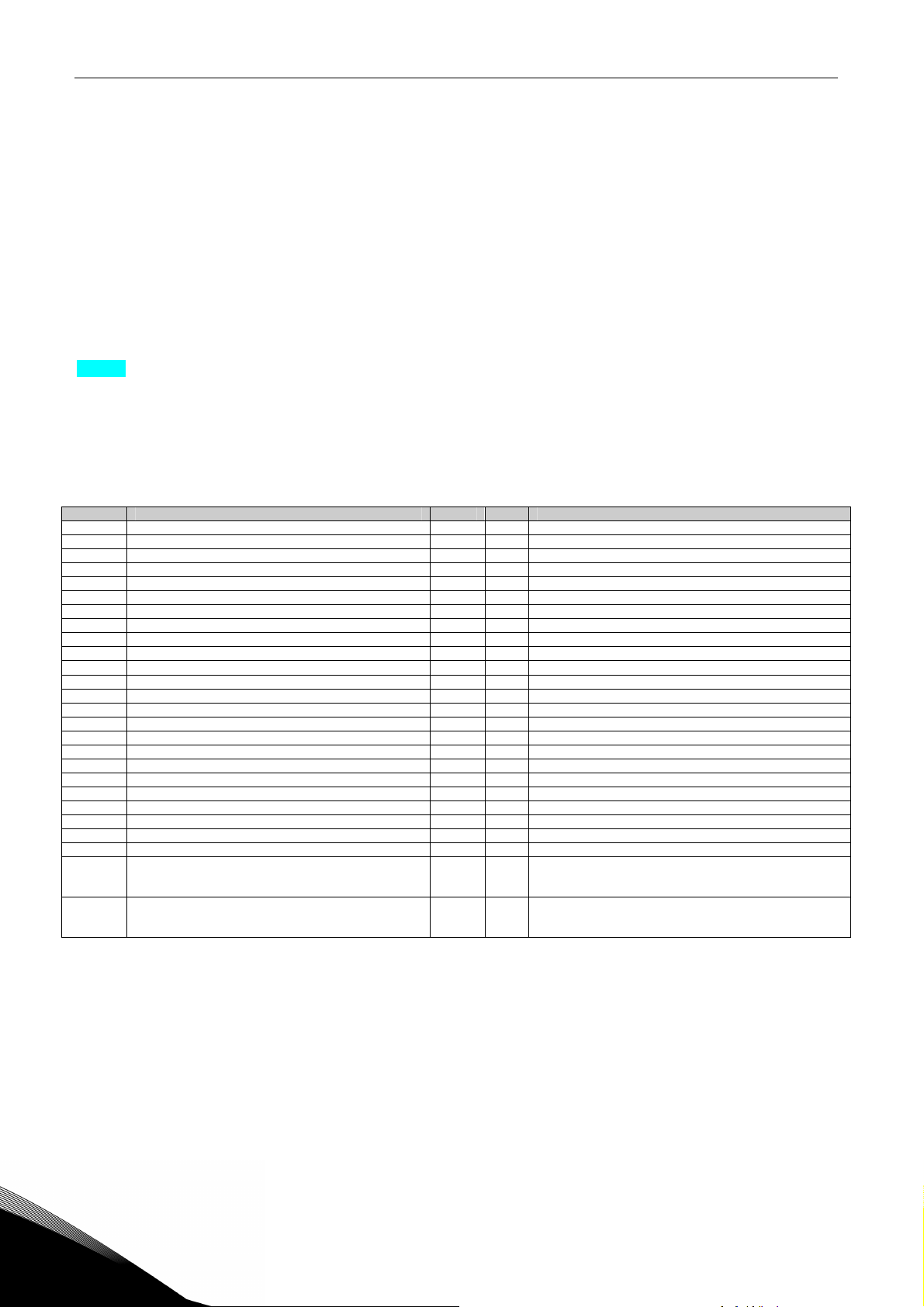
Svorka Signál Popis
1 +10V
2 AI1+
nebo
DIN 4
3 AI1- Zem I/O Zem pro reference a řízení
4 AI2+
5 AI2-
/GND
6 + 24 V Výstupní řídicí napětí Napětí pro spínače a pod., max 0,1 A
7 GND Zem I/O Zem pro reference a řízení
Tab. 1-2. Konfigurace AI1, když je naprogramovaný jako DIN4
Výstupní reference Napětí pro potenciometr apod.
ref
Analogový vstup, rozsah
napětí 0–10 V DC
Analogový vstup, rozsah
napětí 0–10 V DC nebo
proudový rozsah
0–20 mA
Napěťový vstup reference frekvence (MF2-3)
Napěťový/proudový vstup reference
frekvence (MF4-MF6)
Může být naprogramovaný jako DIN4
Napěťový nebo proudový vstup reference
frekvence
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
2
Page 5
4 • VACON SEZNAMY PARAMETRŮ
3. SEZNAMY PARAMETRŮ
Na dalších stranách najdete seznamy parametrů podle jednotlivých skupin parametrů. Seznamy parametrů
jsou na stranách 15 až 45.
Vysvětlivky:
Kód = Indikace pozice na panelu; zobrazuje operátorovi aktuální číslo parametru
Parametr = Název parametru
Min = Minimální hodnota parametru
Max = Maximální hodnota parametru
Jedn. = Jednotka hodnoty parametru; pokud je k dispozici
Přednastav. = Hodnota přednastavená výrobcem
Vlast. = Vlastní nastavení, které provedl uživatel
ID = ID (identifikační) číslo parametru (používá se v sw programech na PC)
= (barva) na kódu parametru: hodnota parametru se může změnit jen, když je motor
zastavený.
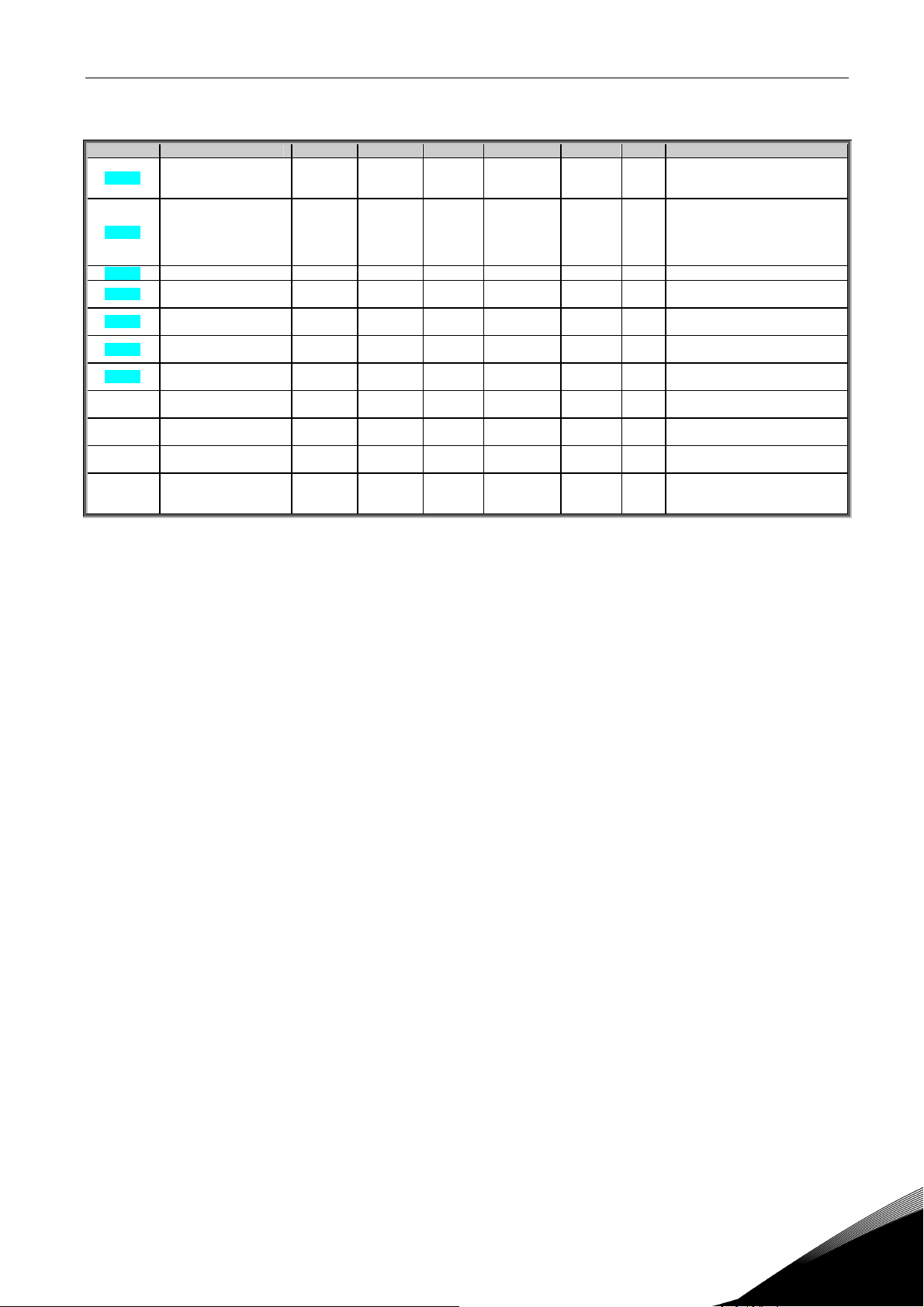
3.1 Hodnoty monitorování (Ovládací panel: menu M1)
Hodnoty monitorování reprezentují skutečné hodnoty parametrů a signálů, nebo také stavy a měřené
hodnoty. Hodnoty monitorování není možné editovat.
Podrobnější informace najdete v Příručce uživatele Vacon NXL v kapitole 7.4.1.
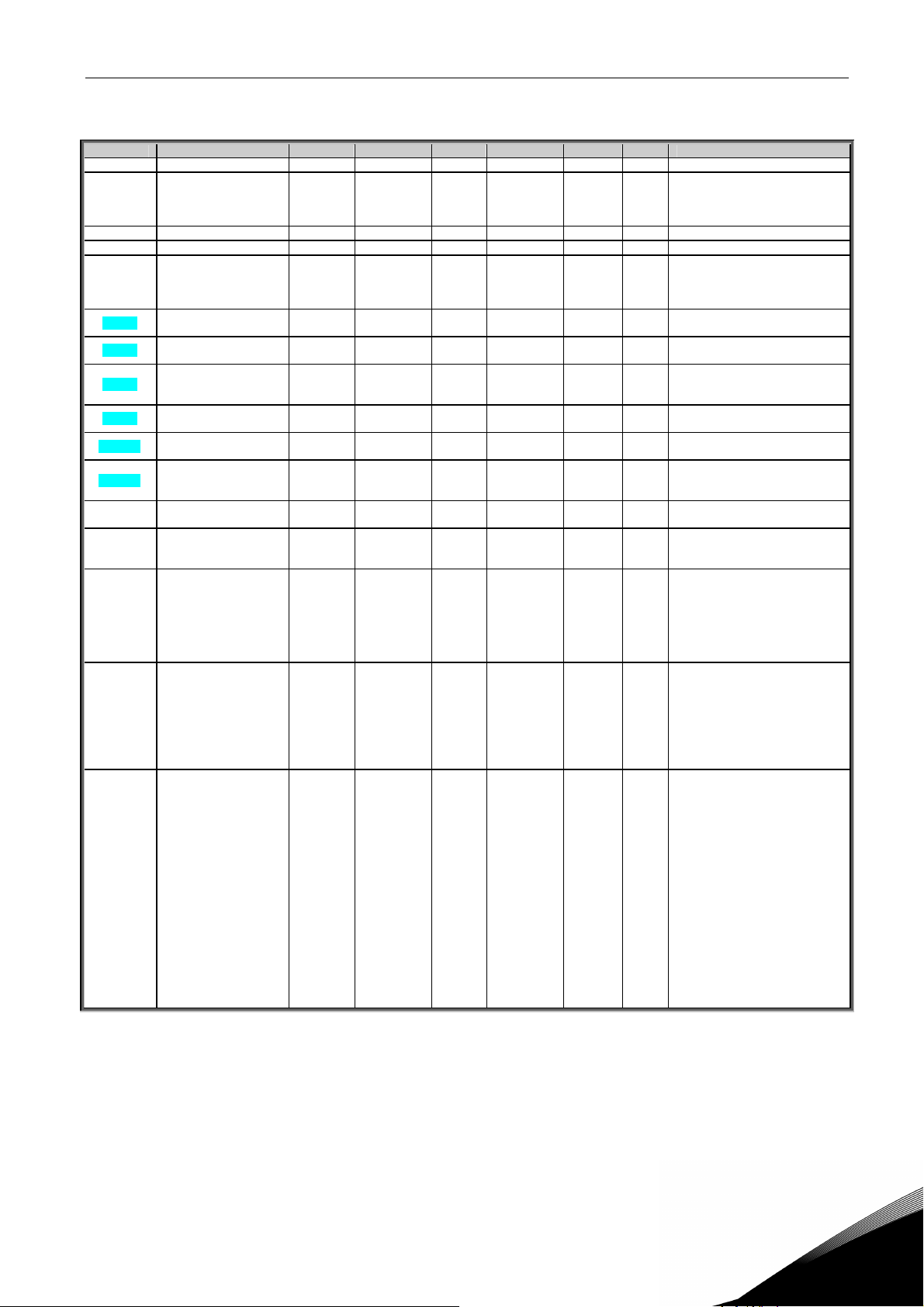
Kód Parametr Jedn. ID Popis
V1.1 Výstupní frekvence Hz 1 Výstupní frekvence na motor
V1.2 Reference frekvence Hz 25
V1.3 Otáčky motoru ot/min 2 Vypočítané otáčky motoru
V1.4 Proud motoru A 3 Měřený proud motoru
V1.5 Moment motoru % 4 Vypočítaný okamžitý moment / jmen. moment motoru
V1.6 Výkon motoru % 5 Vypočítaný okamžitý výkon / jmen. výkon motoru
V1.7 Napětí motoru V 6 Vypočítané napětí motoru
V1.8 Napětí s.s. meziobvodu V 7 Měřené napětí s.s. meziobvodu
V1.9 Teplota měniče ºC 8 Teplota chladiče měniče
V1.10 Analogový vstup 1 13 AI1
V1.11 Analogový vstup 2 14 AI2
V1.12 Proudový analogový výstup mA 26 AO1
V1.13 Proudový analogový výstup 1, přídavná karta mA 31
V1.14 Proudový analogový výstup 2, přídavná karta mA 32
V1.15 DIN1, DIN2, DIN3 15 Stav digitálních vstupů
V1.16 DIE1, DIE2, DIE3 33 Přídavná I/O karta: Stav digitálních vstupů
V1.17 RO1 34 Stav reléového výstupu 1
V1.18 ROE1, ROE2, ROE3 35 Přídavná I/O karta: stavy reléových výstupů
V1.19 DOE 1 36 Přídavná I/O karta: stav digitálního výstupu 1
V1.20 Reference PID % 20 V procentech z maxima procesní veličiny
V1.21 Zpětná vazba PID % 21 V procentech z maxima zpětné vazby
V1.22 Odchylka PID % 22 V procentech z maxima odchylky
V1.23 Výstup PID % 23 V procentech z maxima výstupu regulátoru
V1.24 Výstupy střídání 1, 2, 3 30 Použito jen při kaskádní regulaci čerpadel/ventilátorů
V1.25 Režim 66
V1.26 Teplota motoru % 9
Tab. 1-3. Hodnoty monitorování
Aktuální nastavení vybrané Průvodcem spuštění:
0=Žádné, 1=Standardní, 2=Ventilátor, 3=Čerpadlo,
4=Zvýšená dynamika
Vypočítaná teplota motoru v procentech jmenovité
provozní teploty, hodnota 1000 je rovna 100,0 %
jmenovité teploty motoru.
3
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 6
SEZNAMY PARAMETRŮ VACON • 5
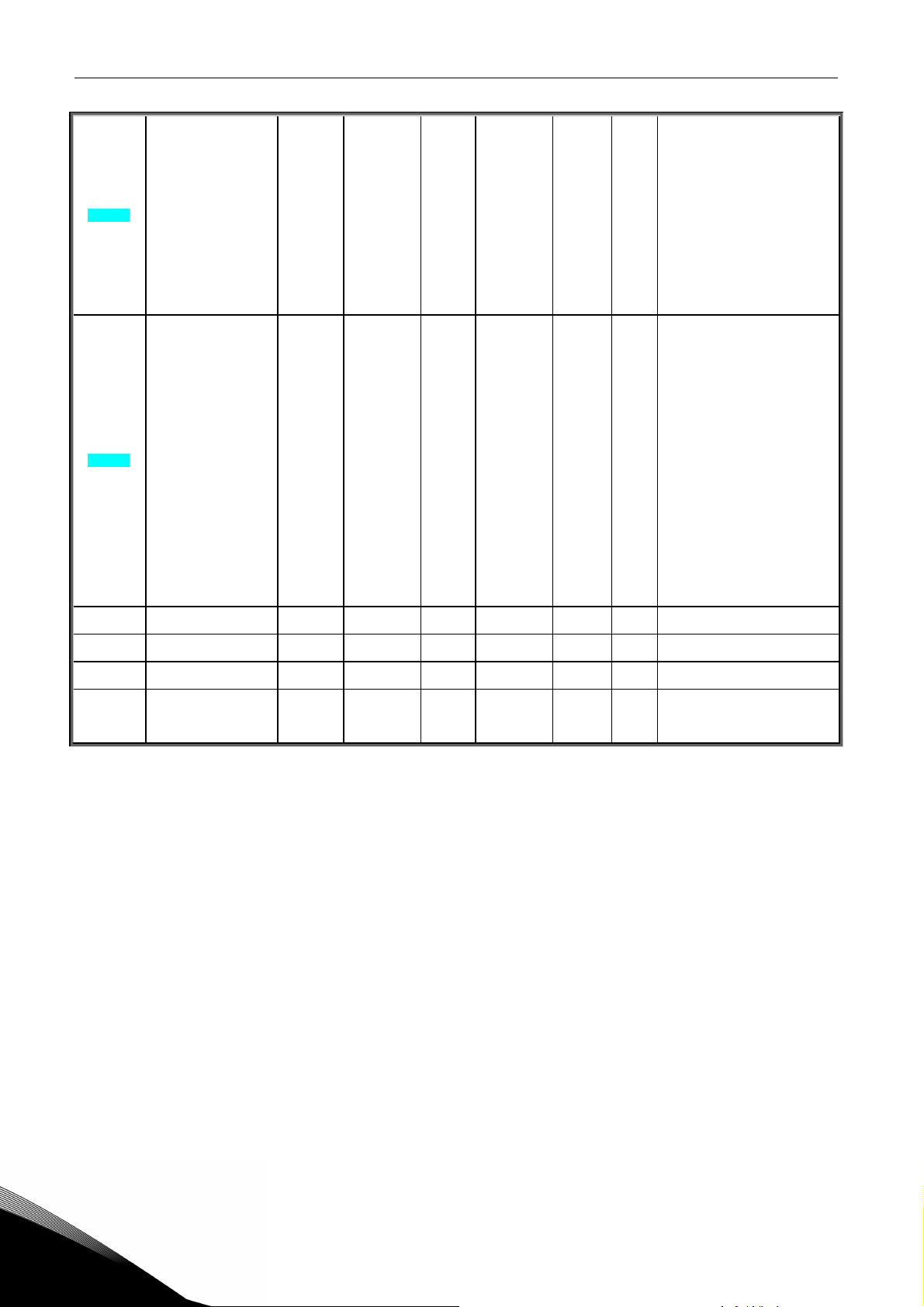
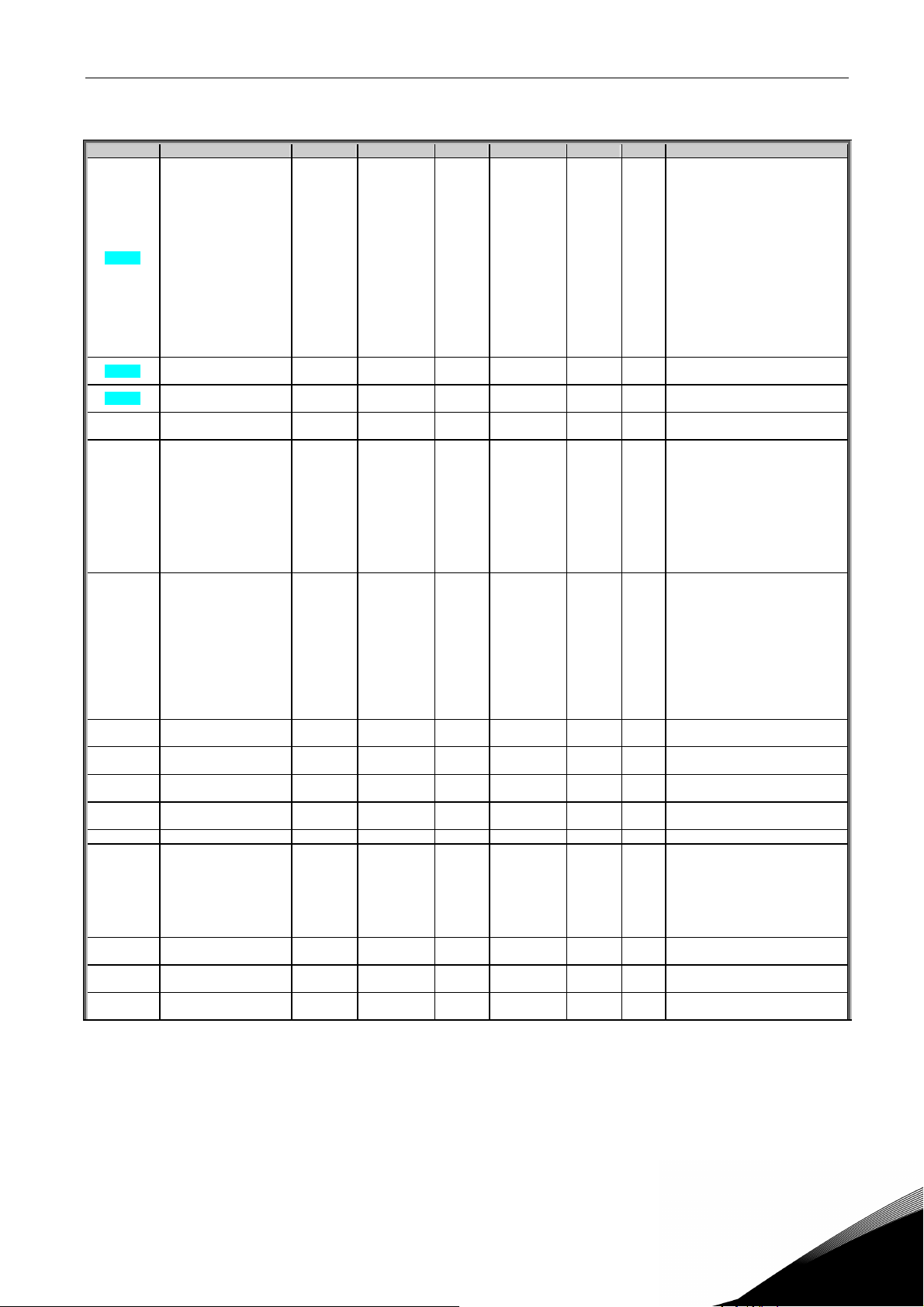
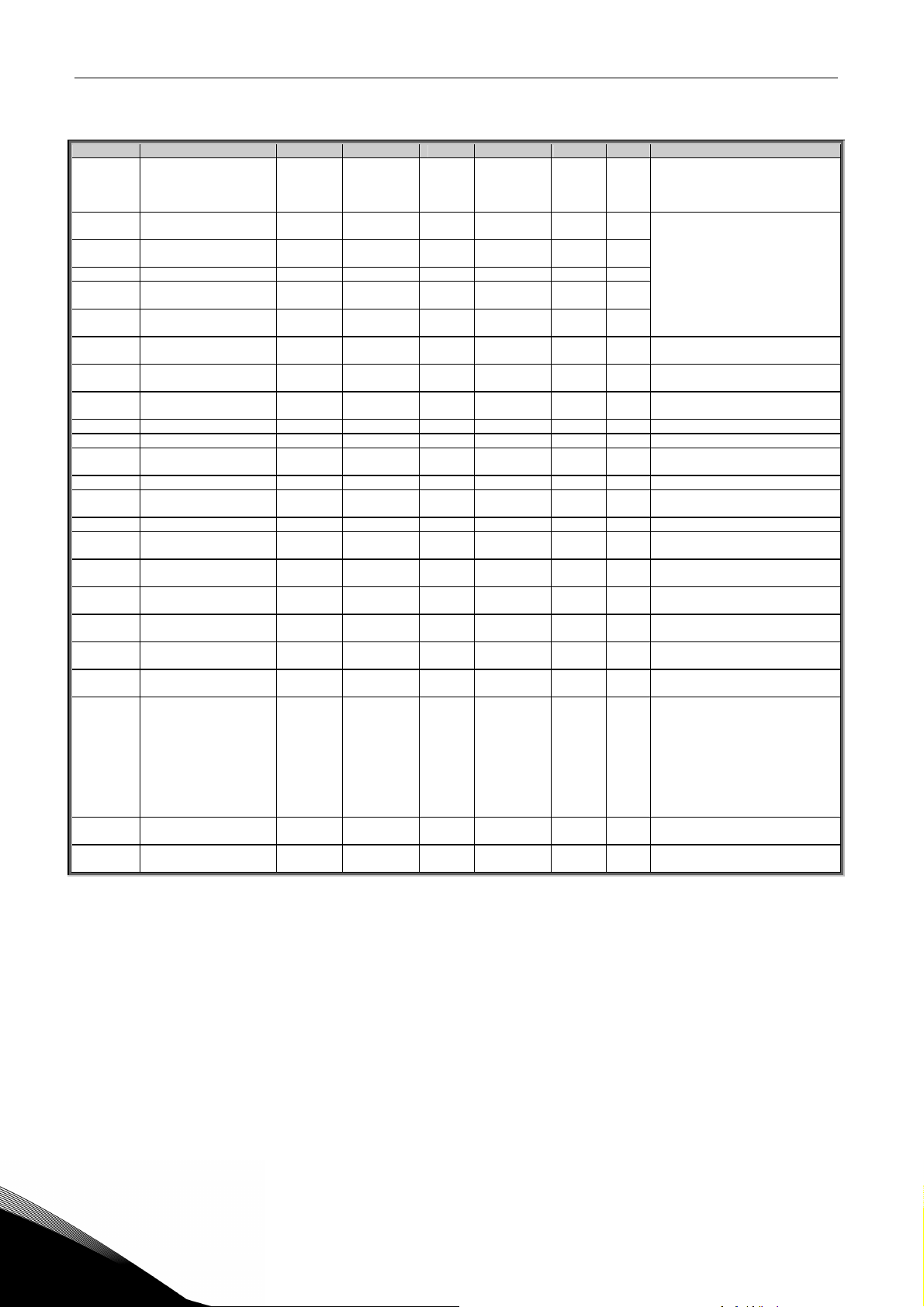
3.2 Základní parametry (Ovládací panel: Menu P2 P2.1)
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P2.1.1 Min. frekvence 0,00 Par. 2.1.2 Hz 0,00 101
P2.1.2 Max. frekvence Par. 2.1.1 320,00 Hz 50,00
P2.1.3 Čas rozběhu 1 0,1 3000,0 s 1,0 103
P2.1.4 Čas doběhu 1 0,1 3000,0 s 1,0 104
P2.1.5 Proudové omezení 0,1 x IL 1,5 x IL A IL
P2.1.6
P2.1.7
P2.1.8
P2.1.9
P2.1.10
Jmenovité napětí
motoru
Jmenovitá frekvence
motoru
Jmenovité otáčky
motoru
Jmenovitý proud
motoru
Účiník motoru
(cos φ)
180 690 V
30,00 320,00 Hz 50,00
300 20 000 min
0,3 x I
1,5 x IL A I
L
0,30 1,00 0,85
NXL2:230 V
NXL5:400 V
-1
1440
L
P2.1.11 Způsob startu 0 2 0
P2.1.12 Způsob zastavení 0 1 0
P2.1.13 Optimalizace U/f 0 1 0
P2.1.14 I/O reference 0 5 0
P2.1.15 Rozsah signálu AI2 1 4 2
P2.1.16
Funkce analogového
výstupu
0 12 1
POZNÁMKA: Pokud je f
větší než synchronní rychlost
102
motoru, ověřte vhodnost
max
motoru a celého pohonu
POZNÁMKA: Vzorce pro min.
a max. platí pro velikosti do
107
MF3 včetně. U větších měničů
kontaktujte výrobce.
110
Ověřte údaj na štítku motoru
111
Přednastavená hodnota platí
112
pro 4-pólový motor a
jmenovitý výkon měniče.
Ověřte údaj na štítku motoru
113
Ověřte údaj na štítku motoru
120
(cos φ)
0=Po rampě
505
1=Letmý start
2=Podmíněný letmý start
0=Volný doběh
506
1=Po rampě
0=Nevyužité
109
1=Automatické zvýšení
momentu
0=AI1
1=AI2
2=Reference z panelu
117
3=Reference ze sběrnice
(FBSpeedReference)
4=Motor potenciometr
5=Výběr AI1/AI2
Nevyužité pokud je AI2
uživatelské min <> 0% nebo
AI2 uživatelské max. <>
100%
390
1=0–20 mA
2=4–20 mA
3=0 V – 10 V
4=2 V – 10 V
0=Nevyužité
1=Výstupní frekvence (0-f
2=Referen. frekv. (0-f
3=Rychlost motoru (0- jmen.
max
max
)
)
rychl. motoru)
4=Výstupní proud
5=Moment motoru
307
(0-T
6=Výkon motoru
(0-P
7=Napětí motoru
(0-U
8=S.s. napětí (0-1000V)
nMotor
nMotor
nMotor
)
)
)
)
(0-I
nMotor
9=Reference PID
10=Zpětná vazba PID 1
11=Odchylka PID
12=Výstup PID
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 7
6 • VACON SEZNAMY PARAMETRŮ
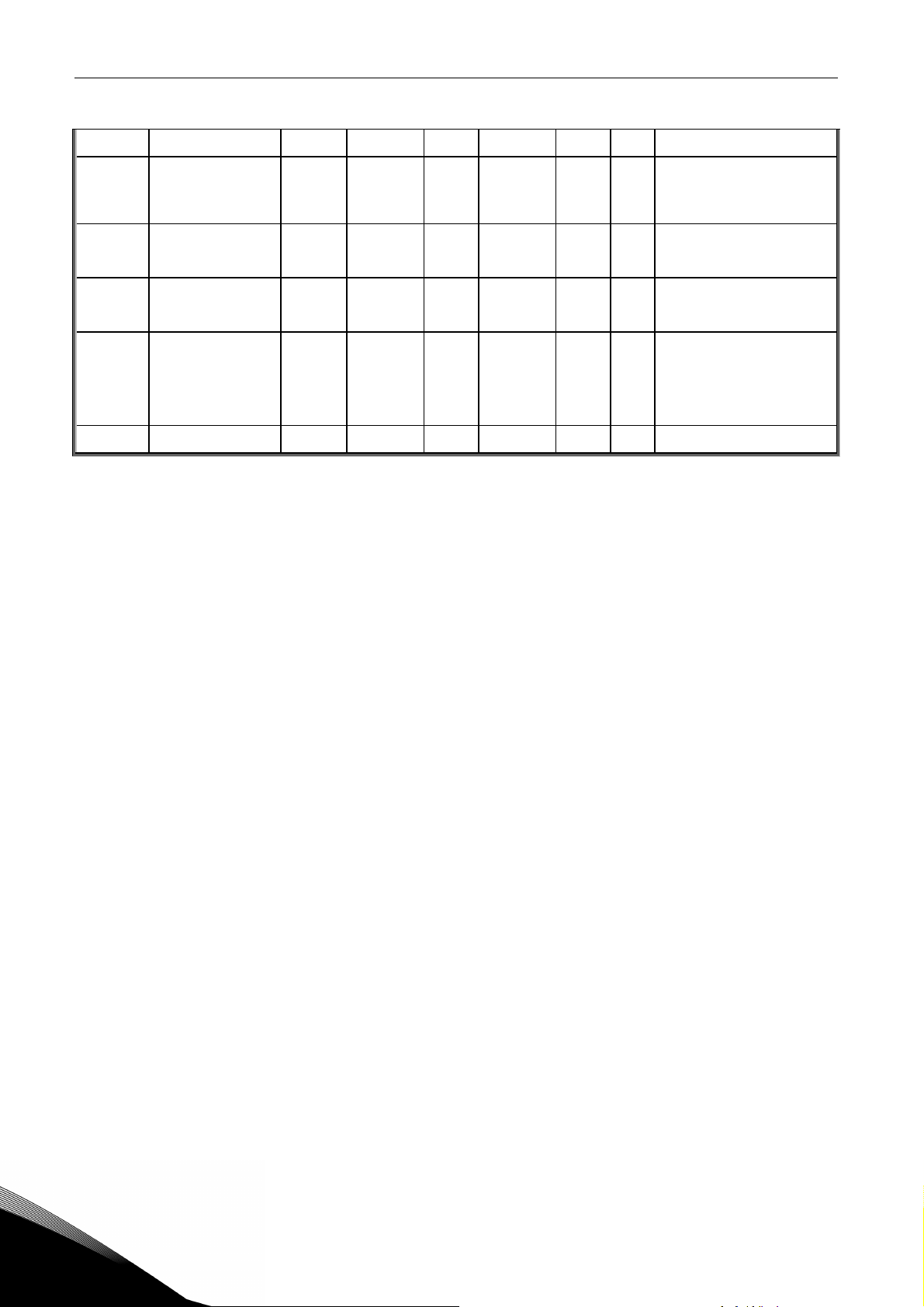
P2.1.17 Funkce DIN2 0 10 1
P2.1.18 Funkce DIN3 0 17 6
P2.1.19
P2.1.20
P2.1.21 Automatický restart 0 1 0
P2.1.22 Skrytí parametrů 0 1 0
Přednastavená
rychlost 1
Přednastavená
rychlost 2
0,00 Par. 2.1.2 Hz 10,00
0,00 Par. 2.1.2 Hz 50,00
Tab. 1-4. Základní parametry P2.1
0=Nevyužité
1=Start dozadu (DIN1=Start
dopředu)
2=Revers (DIN1=Start)
3=Impuls stop (DIN1= Impuls
start)
4=Externí porucha, cc
319
5=Externí porucha, oc
6=Start možný (Run enable)
7=Přednast. rychlost 2
8=Motor pot. NAHORU (cc)
9=Vyřazení PID (Přímá
reference frekvence)
10=„Zařazený 1“ (do
kaskády) (Interlock)
0=Nevyužité
1=Revers
2=Externí porucha, cc
3=Externí porucha, oc
4=Reset poruchy
5=Start možný (Run enable)
6=Přednast. rychlost 1
7=Přednast. rychlost 2
8=Povel na s.s. brzdění
9=Motor pot. NAHORU (cc)
10=Motor pot. DOLU (cc)
301
11=Vyřazení PID (Přímá
reference frekvence)
12=Výběr PID reference 2
13=„Zařazený 2“ (Interlock 2)
14=Vstup termistoru
Poznámka! Viz. Uživ.
příručku, kap. 6.2.4
15=Způsob ovl. I/O svork.
16=Způsob ovl. sběrnice
17=Výběr AI1/AI2 pro I/O
referenci
105
106
0=Nevyužitý
731
1=Využitý
0=Všechny menu a parametry
115
jsou viditelné
1=Viditelná je jen skupina
P2.1 a menu M1 – H5
3
ovl.= způsob ovládání
cc=kontakt sepnutý
oc=kontakt rozepnutý
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 8
SEZNAMY PARAMETRŮ VACON • 7
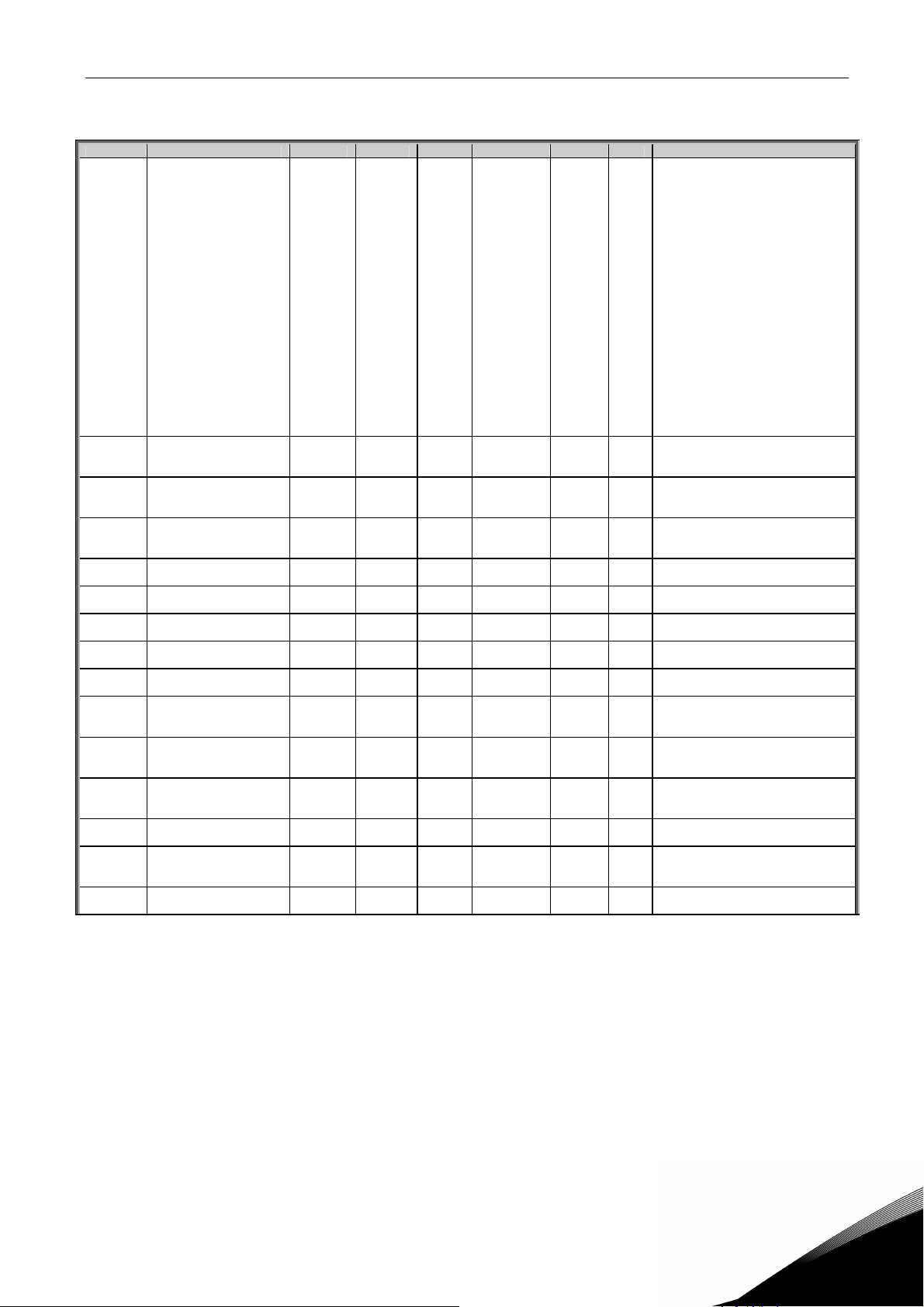
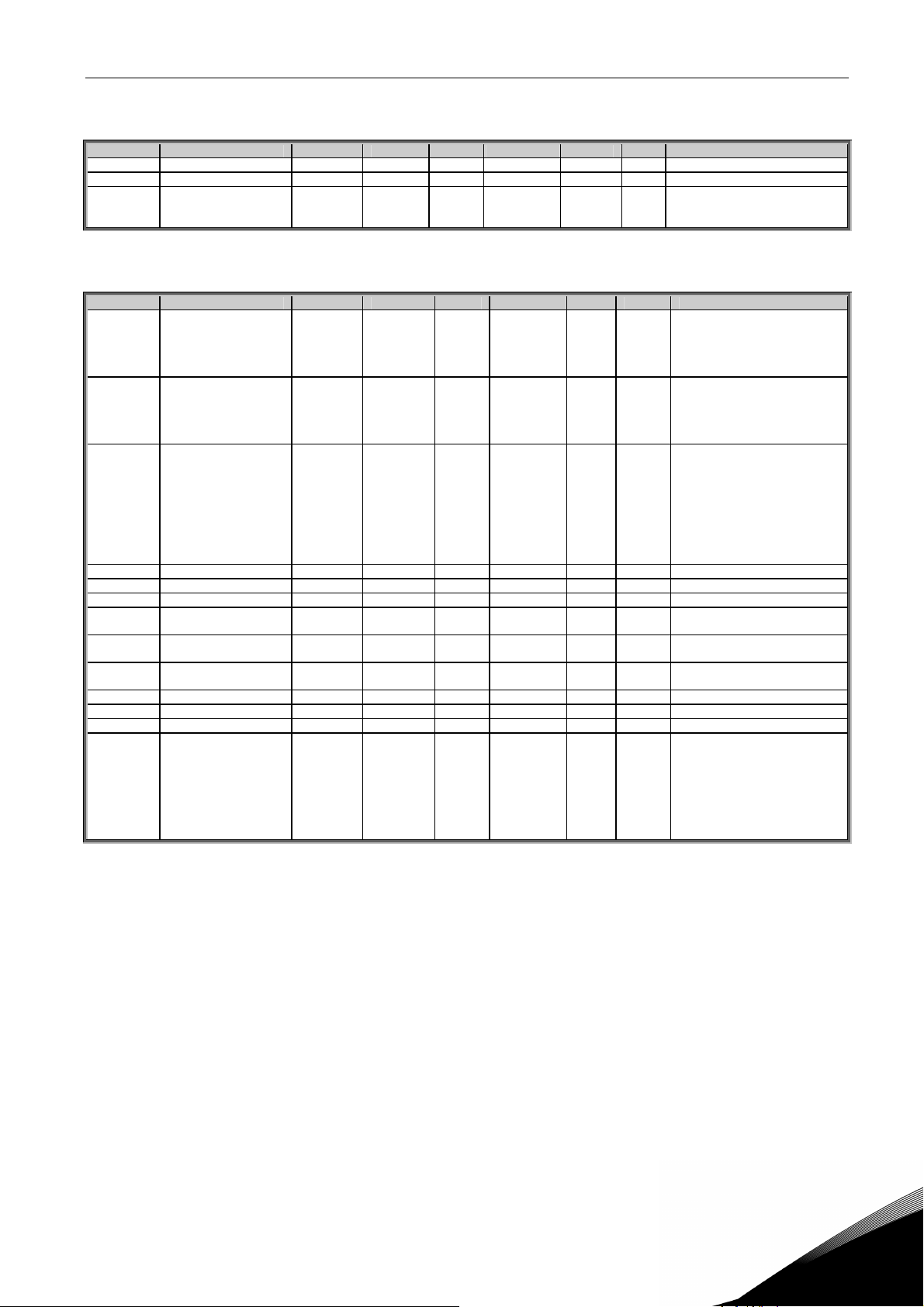
3.3 Vstupní signály (Ovládací panel: Menu P2 P2.2)
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P2.2.1
P2.2.2
P2.2.3
P2.2.4 Funkce DIN4 (AI1) 0 13 2
P2.2.5
P2.2.6 Rozsah signálu AI1 1 4 3
P2.2.7
P2.2.8
P2.2.9 Inverze AI1 0 1 0
P2.2.10
P2.2.11 Výběr signálu pro AI2 0 11 388 Jako par. 2.2.5
P2.2.12 Rozsah signálu AI2 1 4 2
P2.2.13
P2.2.14
P2.2.15 Inverze AI2 0 1 0
Funkce DIE1 na
přídavné kartě
Funkce DIE2 na
přídavné kartě
Funkce DIE3 na
přídavné kartě
Výběr signálu AI1
Uživatelské minimum
AI1
Uživatelské maximum
AI1
Časová konstanta filtru
AI1
Uživatelské minimum
AI2
Uživatelské maximum
AI2
0 13 7
0 13 4
0 13 11
0 10
0,00 100,00 % 0,00
0,00 100,00 % 100,00
0,00 10,00 s 0,10
0,00 100,00 % 0,00
0,00 100,00 % 100,00
368
330
369
499
377
379
380
381
387
378 0=Bez filtrace
390
391
392
398
0=Nevyužité
1=Revers
2=Externí porucha, cc
3=Externí porucha, oc
4=Reset poruchy
5=Start možný
6=Přednast. rychlost 1
7=Přednast. rychlost 2
8=Povel na s.s. brzdění
9=Motor pot. NAHORU (cc)
10=Motor pot. DOLU (cc)
11=Vyřazení PID (Přímá
reference frekvence)
12=Výběr PID reference 2
13=„Zařazený 1“
Jako par. 2.2.1, Mimo:
13=„Zařazený 2“
Jako par. 2.2.1, Mimo:
13=„Zařazený 3“
Použitý, pokud P2.2.6 = 0
Výběr jako par.2.2.3
10=AI1 (1=zákl. karta,
0=vstup 1)
11=AI2 (1=zákl. karta,
1=vstup 2)
20=Příd. AI1
(2=příd. karta
0=vstup 1)
21=Příd. AI2
(2=příd. karta
1=vstup 2)
0=Digitální vstup DIN4
1=0 mA – 20 mA (MF4-->)
2=4 mA – 20 mA (MF4-->)
3=0 V – 10 V
4=2 V – 10 V
Nevyužité pokud je uživ. min.
AI1 > 0 % nebo uživ. max.
AI1 < 100 %
Poznámka! Viz. Uživatel.
příručka NXL, kap. 7.4.6:
Režim AI1
0=Neinvertovaný
1=Invertovaný
Nevyužité pokud je uživ. min.
AI2 > 0 % nebo uživ. max.
AI2 < 100 %
1=0–20 mA
2=4–20 mA
3=0 V – 10 V
4=2 V – 10 V
0=Neinvertovaný
1=Invertovaný
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 9
8 • VACON SEZNAMY PARAMETRŮ
P2.2.16
P2.2.17
P2.2.18
P2.2.19
P2.2.20
P2.2.21
Časová konstanta filtru
AI2
Nulování paměti
reference motor
potenciometru
Minimální hodnota
reference
Maximální hodnota
reference
Výběr reference při
ovládání panelem
Výběr reference při
ovládaní sběrnicí
Tab. 1-5. Vstupní signály, P2.2
0,00 10,00 s 0,10
0 2 1
0,00 P2.2.19 Hz 0,00
P2.2.18 320,00 Hz 0,00
0 5 2
0 5 3
389 0=Bez filtrace
367
344
345
121
122 Viz. výše
0=Nikdy
1=Nulování po Stop a vypnutí
napájení
2=Nulování po vypnutí
napájení
Tento parametr neovlivňuje
referenci přes prům. sběrnici
(rozsah mezi par 2.1.1 a par
2.1.2)
Tento parametr neovlivňuje
referenci přes prům. sběrnici
(rozsah mezi par 2.1.1 a par
2.1.2)
0=AI1
1=AI2
2=Reference z panelu
3=Reference ze sběrnice
(FBSpeedreference)
4=Motor potenciometr
5=PID regulátor
ovl.= způsob ovládání
cc=kontakt sepnutý
oc=kontakt rozepnutý
3
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 10
SEZNAMY PARAMETRŮ VACON • 9
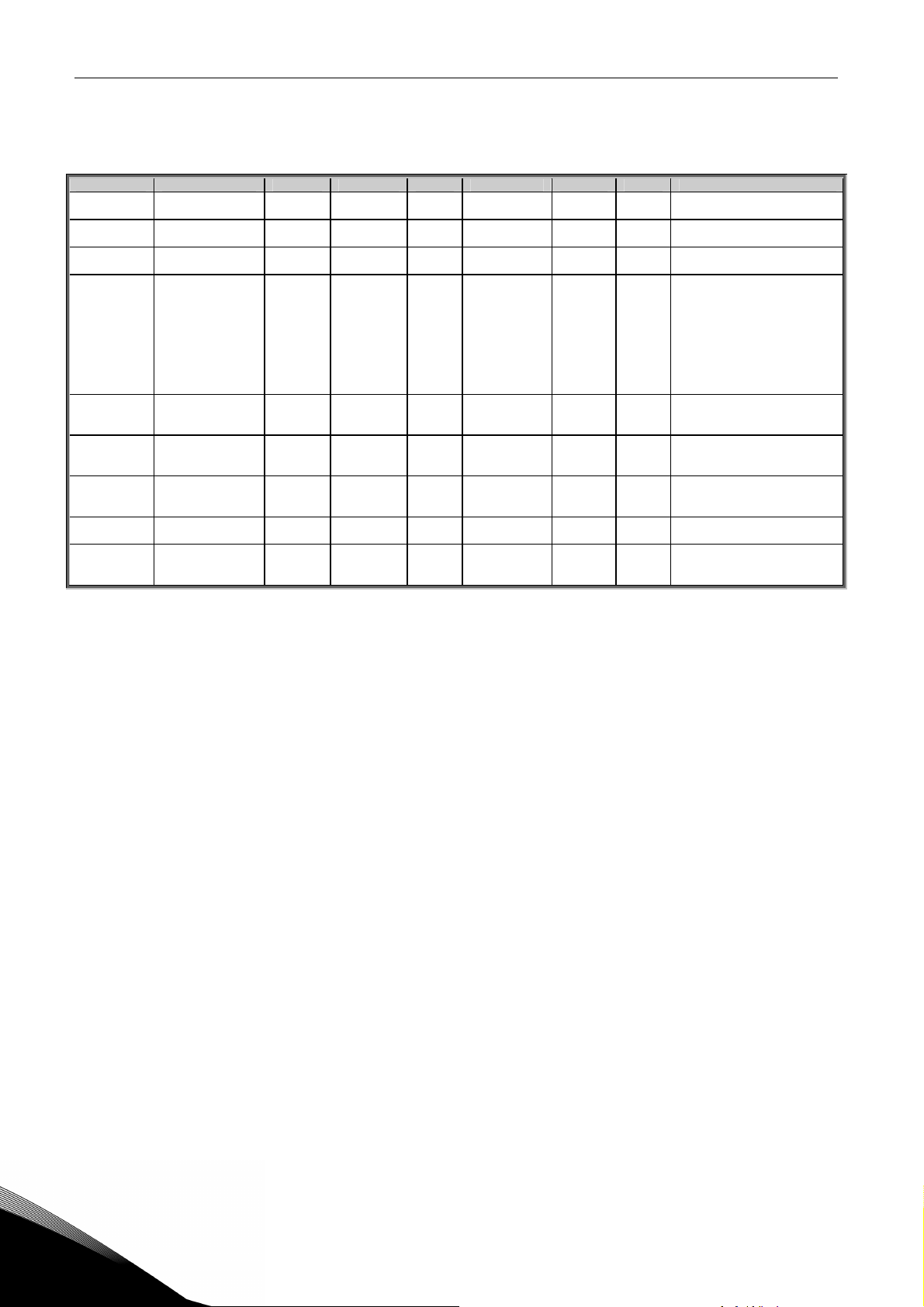
3.4 Výstupní signály (Ovládací panel: Menu P2 P2.3)
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P2.3.1
P2.3.2
P2.3.3
P2.3.4
P2.3.5
P2.3.6
P2.3.7
P2.3.8
P2.3.9
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14
P2.3.15
Funkce reléového
výstupu RO1
Funkce reléového
výstupu 1 na přídavné
kartě
Funkce reléového
výstupu 2 na přídavné
kartě
Funkce digitálního
výstupu 1 na přídavné
kartě
Funkce analog.
výstupu
Časová konst. filtru
analogového výstupu
Inverze analog.
výstupu
Minimum analog.
výstupu
Měřítko analog.
výstupu
Funkce analog.
výstupu 1 na přídavné
kartě
Funkce analog.
výstupu 2 na přídavné
kartě
Kontrola limitu výst.
frekvence 1
Hodnota limitu
kontroly výst. frekv. 1
Kontrola analogového
vstupu
Hranice vypnutí relé
kontroly AI
0 20 3
0 19 2
0 19 3
0 19 1
0 12 1
0,00 10,00 s 1,00
0 1 0
0 1 0
10 1000 % 100
0 12 0 472 Jako parametr 2.1.16
0 12 0
0 2 0
0,00
0 2 0
0,00 100,00 % 10,00
Par.
2.1.2
Hz 0,00
0=Nevyužité
1=Připravený (Ready)
2=Motor běží (Run)
3=Porucha (Fault)
4=Invertovaná porucha
5=Přehřátí FM - varování
6=Externí porucha/varování
7=Reference porucha/varování
8=Varování
9=Reverzovaný
313
10=Přednastavená rychlost
11=Reference dosažená
12=Regulátory omezení aktivní
13=Kontrola výst. frekv. 1
14=Způsob ovládání: I/O
15=Termistor porucha/ varování
16=Kontrola zp. vazby
17=Říz. autom. záměny 1
18=Říz. autom. záměny 2
19=Říz. autom. záměny 3
20=Kontrola AI
314 Jako parametr 2.3.1
317 Jako parametr 2.3.1
312 Jako parametr 2.3.1
307 Viz. parametr 2.1.16
308 0=Bez filtrace
0=Neinvertovaný
309
1=Invertovaný
0=0 mA
310
1=4 mA
311
479 Jako parametr 2.1.16
0=Žádný limit
315
1=Dolní limit
2=Horní limit
316
0= Nevyužité
356
1=AI1
2=AI2
357
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 11
10 • VACON SEZNAMY PARAMETRŮ
P2.3.16
P2.3.17 Zpoždění sepnutí RO1 0,00 320,00 s 0,00
P2.3.18 Zpoždění rozepnutí RO1 0,00 320,00 s 0,00
Hranice sepnutí relé
kontroly AI
0,00 100,00 % 90,00
Tab. 1-6. Výstupní signály, G2.3
358
Zpoždění sepnutí reléového
487
výstupu 1
Zpoždění rozepnutí reléového
488
výstupu 1
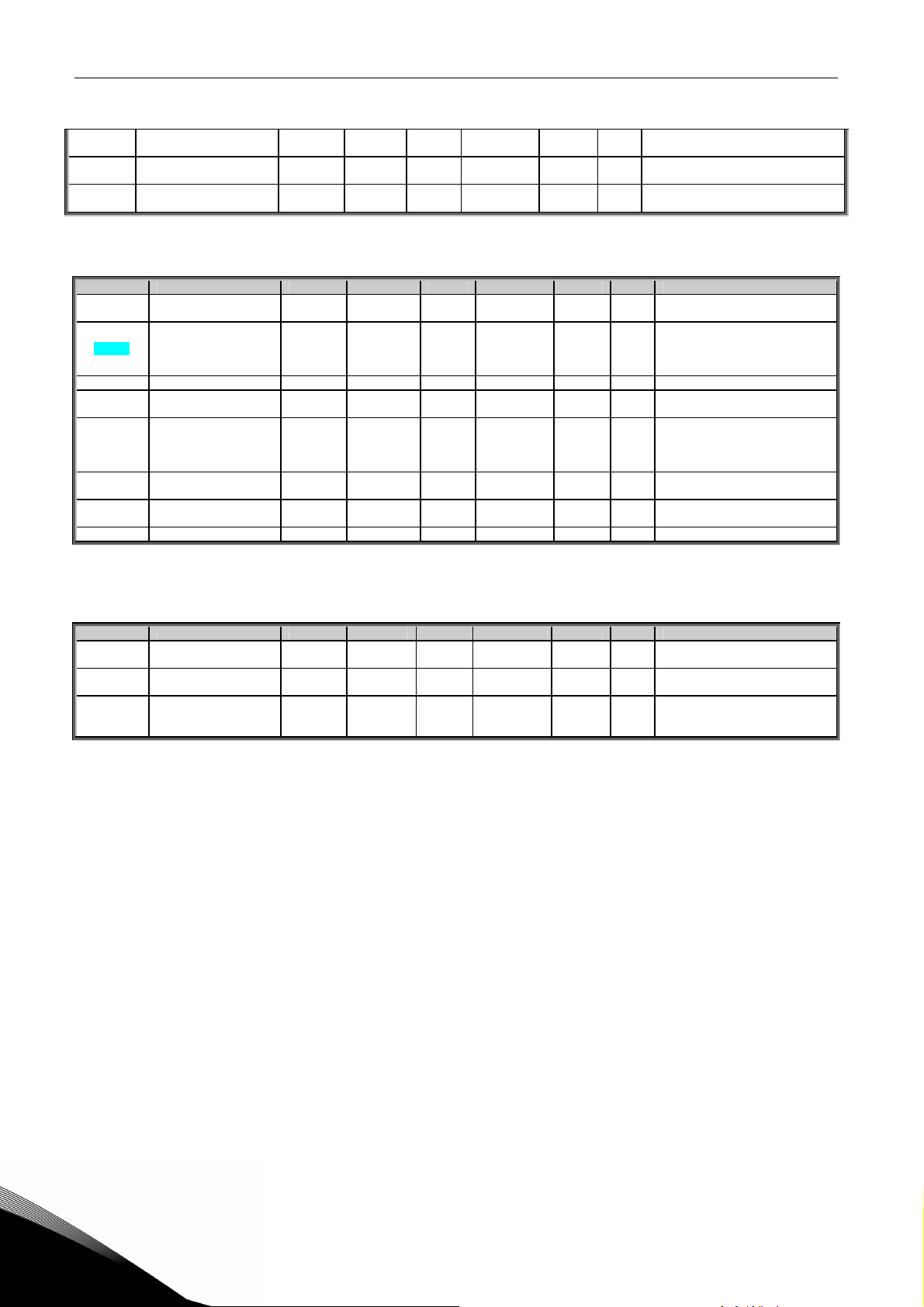
3.5 Parametry řízení pohonu (Ovládací panel: Menu P2 P2.4)
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P2.4.1 Tvar rampy 1 0,0 10,0 s 0,0
P2.4.2 Brzdný střídač 0 3 0
P2.4.3 Proud s.s. brzdění 0,15 x In 1,5 x In A Různý 507
P2.4.4
P2.4.5
P2.4.6
P2.4.7 Brzdění tokem 0 1 0
P2.4.8 Proud při brzdění tokem 0,0 Různé A 0,0 519
Čas s.s. brzdění při
zastavování
Frekv. spuštění s.s.
brzdění při zastavování
po rampě
Čas s.s. brzdění před
startem
0,00 600,00 s 0,00
0,10 10,00 Hz 1,50
0,00 600,00 s 0,00
Tab. 1-7. Parametry řízení pohonu, P2.4
0=Lineární
500
>0=Čas S-křivky
0=Vypnutý
1=Využitý při běhu
504
3=Využitý při běhu a
v režimu Stop
0=s.s. brzdění je při
508
515
516
520
zastavování vypnuto
Spouštění s.s. brzdění při
zastavování po rampě po
poklesu frekvence pod tuto
nastavenou hodnotu
0=S.s. brzdění je před
startem vypnuté
0=Vypnuté
1=Zapnuté
3.6 Parametry pásma zakázaných frekvencí (Ovládací panel: Menu P2 P2.5)
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P2.5.1
P2.5.2
P2.5.3
Tab. 1-8. Parametry pásma zakázaných frekvencí, P2.5
Dolní limit zakázané
frekv. 1
Horní limit zakázané
frekv. 1
Změna rampy při
přechodu zakázaným
pásmem
0,0
0,0
0,1 10,0 x 1,0
Par.
2.5.2
Par.
2.1.2
Hz 0,0
Hz 0,0
509 0=Nevyužité
510 0=Nevyužité
518
Násobek nastaveného času
rampy v zakázaném pásmu
frekvencí
3
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 12
SEZNAMY PARAMETRŮ VACON • 11
3.7 Parametry řízení motoru (Ovládací panel: Menu P2 P2.6)
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P2.6.1 Režim řízení motoru 0 1 0
P2.6.2 U/f charakteristika 0 3 0
P2.6.3 Začátek odbuzování 30,00 320,00 Hz 50,00 602
P2.6.4
P2.6.5
P2.6.6
P2.6.7
P2.6.8
P2.6.9 Regulátor přepětí 0 1 1
P2.6.10 Regulátor podpětí 0 1 1
P2.6.11 Identifikace 0 1 0
Napětí při začátku
odbuzování
Střední frekvence na
U/f křivce
Střední napětí na U/f
křivce
Napětí při nulové
frekvenci
Spínací frekvence
modulace
10,00 200,00 % 100,00
0,00
0,00 100,00 % 100,00
0,00 40,00 % 0,00
1,0 16,0 kHz 6,0
par.
P2.6.3
Hz 50,00
600
108
603 n% x U
604
605
606 n% x U
601 Závisí od výkonu
607
608
631
0=Frekvenční řízení (skalární)
1=Řízení rychlosti
(vektorové)
0=Lineární
1=Kvadratická
2=Programovatelná
3=Lineární s optimalizací
magnetického toku
nmot
n% x U
nmot
Max. hodnota = par. 2.6.4
nmot
0=Nevyužitý
1=Využitý
0=Nevyužitý
1=Využitý
0=Neaktivní
1=Identifikace bez otáčení
motoru
Tab. 1-9. Parametry řízení motoru, P2.6
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 13
12 • VACON SEZNAMY PARAMETRŮ
3.8 Ochrany (Ovládací panel: Menu P2 P2.7)
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P2.7.1
P2.7.2
P2.7.3
P2.7.4 Kontrola výstupní fáze 0 3 2 702
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10 Pracovní cyklus motoru 0 100 % 100 708
P2.7.11 Ochrana zablokování 0 3 1 709 Jako par. 2.7.1
P2.7.12
P2.7.13 Časový limit zablokování 1,00 120,00 s 15,00 711
P2.7.14
P2.7.15 Ochrana odlehčení 0 3 0 713 Jako par. 2.7.1
P2.7.16
P2.7.17
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22 Kontrola zpětné vazby 0 4 0
P2.7.23
P2.7.24
Reakce na poruchu
proudové smyčky 4mA
Reakce na externí
poruchu
Reakce na poruchu
podpětí
Ochrana před zemním
zkratem
Tepelná ochrana
motoru
Koeficient okolní
teploty motoru
Koeficient chlazení
motoru při 0 rychlosti
Tepelná časová konst.
motoru
Proudový limit
zablokování
Limit frekvence
zablokování
Zatížení v začátku
odbuzování
Zatížení při nulové
frekvenci
Časový limit ochrany
odlehčení
Reakce na poruchu
termistoru
Reakce na poruchu
prům. sběrnice
Reakce na poruchu
slotu
Limit kontroly zpětné
vazby
Zpoždění kontroly
zpětné vazby
0 3 0
0 3 2
1 3 2
0 3 2
0 3 2
–100,0 100,0 % 0,0
0,0 150,0 % 40,0
1 200 min 45
0,1 I
1,0 P 2.1.2 Hz 25,0
10,0 150,0 % 50,0
5,0 150,0 % 10,0
2,00 600,00 s 20,00
0 3 0
0 3 2
0 3 2
0,0 100,0 % 10,0
0 3600 s 5
x 2 A I
nmotor
nmotor
x 1,3
700
701
727
703
704
705
706
707
710
712
714
715
716
732 Jako par. 2.7.1
733 Jako par. 2.7.1
734 Jako par. 2.7.1
735
736
737
0=Žádná akce
1=Varování
2=Porucha, stop podle P2.1.12
3=Porucha, volný doběh
0=Žádná akce
1=Varování
2=Porucha, stop podle P2.1.12
3=Porucha, volný doběh
0=Žádná akce
1=Varování pokud je pod
limitem
2=Varování pokud je nad
limitem
3=Porucha pokud je pod
limitem
4=Porucha pokud je nad
limitem
Tab. 1-10. Ochrany, P2.7
3
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 14
SEZNAMY PARAMETRŮ VACON • 13
3.9 Parametry automatického restartu (Ovládací panel: Menu P2 P2.8)
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P2.8.1 Čas čekání 0,10 10,00 s 0,50 717
P2.8.2 Trvání pokusu 0,00 60,00 s 30,00 718
P2.8.3 Způsob startu 0 2 0
0=Po rampě
719
1=Letmý start
2=Podle parametru P2.4.6
Tab. 1-11. Parametry automatického restartu po poruše, P2.8
3.10 Parametry PID regulace (Ovládací panel: Menu P2 P2.9)
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P2.9.1 Aktivace PID 0 1 0
P2.9.2 Reference PID 0 3 2
P2.9.3 Vstup zpětné vazby 0 7 1
P2.9.4 Zesílení P složky 0,0 1000,0 % 100,0 118
P2.9.5 Čas. konst. I složky 0,00 320,00 s 10,00 119
P2.9.6 Čas. konst. D složky 0,00 10,00 s 0,00 132
P2.9.7
P2.9.8
P2.9.9 Inverze odchylky 0 1 0
P2.9.10 Frekvence parkování Par. 2.1.1 Par. 2.1.2 Hz 10,00 1016
P2.9.11 Zpoždění parkování 0 3600 s 30 1017
P2.9.12 Úroveň restartu 0,00 100,00 % 25,00 1018
P2.9.13 Funkce restartu 0 3 0
Měřítko zp. vazby
minimum
Měřítko zp. vazby
maximum
–1000,0 1000,0 % 0,00
–1000,0 1000,0 % 100,0
1019
0=Nevyužitý
1=PID regul. aktivovaný
163
2=Kaskádní řízení
čerpadel/ventilátorů,
skupina P2.10 přístupná
0=AI1
1=AI2
332
2=Ref. PID 1 z panelu
3=Reference ze sběrnice
(ProcessDataIN1)
0=AI1 signál
1=AI2 signál
2=Sběrnice
334
336 0=Min. měřítka nevyužité
337 100=Max. měřítka nevyužité
340
(ProcessDataIN2)
3=Moment motoru
4=Rychlost motoru
5=Proud motoru
6=Výkon motoru
7=AI1-AI2
0=Bez inverze
1=Invertovaný
0=Restart po poklesu pod
úroveň restartu (2.9.12)
1=Restart po překročení
úrovně restartu (2.9.12)
2=Restart po poklesu pod
úroveň restartu (ref. PID)
3=Restart po překročení
úrovně restartu (ref. PID)
Tab. 1-12. Parametry PID regulace, P2.9
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 15
14 • VACON SEZNAMY PARAMETRŮ
3.11 Kaskádní řízení čerpadel a ventilátorů (Ovládací panel: Menu P2 P2.10)
POZNÁMKA! Skupina P2.10 je přístupná jen, když je hodnota par. 2.9.1 nastavená na 2.
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P2.10.1
P2.10.2
P2.10.3
P2.10.4
P2.10.5 Interval střídání 0,0 3000,0 h 48,0
P2.10.6
P2.10.7
P2.10.8
P2.10.9
Tab. 1-13. Parametry kaskádního řízení čerpadel a ventilátorů, P2.10
Počet přídavných
pohonů
Zpoždění startu
přídavných pohonů
Zpoždění zastavení
přídavných pohonů
Automatické
střídání
Střídání; maximální
počet přídavných
pohonů
Limit frekvence pro
střídání
Frekvence startu,
přídavný pohon 1
Frekvence
zastavení, přídavný
pohon 1
0 3 1
0,0 300,0 s 4,0
0,0 300,0 s 2,0
0 4 0
0 3 1
0,00 par. 2.1.2 Hz 25,00
Par.
2.10.9
Par.
2.1.1
320,00 Hz 51,00
Par.
2.10.8
Hz 10,00
1001
1010
1011
0=Nevyužité
1=Střídání jen přídavných
1027
1029
1030
1031
1002
1003
2=Střídání FM a přídavných
3=Střídání se zařazenými
4=Střídání se zařazenými
0,0=TEST=40 s
Čas, po kterém se čerpadla
vystřídají.
Úroveň střídání pro přídavné
pohony
Úroveň frekvence pro
střídání pohonu
s frekvenčním měničem
čerpadel
čerpadel
(přídavné čerpadla)
(FM a přídavné čerpadla)
3
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 16
SEZNAMY PARAMETRŮ VACON • 15
3.12 Řídicí menu panelu (Ovládací panel: Menu K3)
Parametry pro výběr způsobu ovládání a směru z panelu jsou zobrazené v další tabulce. Viz. Řídicí menu
panelu v Příručce uživatele Vacon NXL.
Kód Parametr Min Max Jedn. Přednast. Vlast. ID Poznámka
P3.1 Způsob ovládání 1 3 1
R3.2 Reference z panelu Par. 2.1.1 Par. 2.1.2 Hz
P3.3 Směr z panelu 0 1 0
R3.4 Aktivace tlačítka Stop 0 1 1
R3.5 Reference PID 0,00 100,00 % 0,00
R3.6 Reference PID 2 0,00 100,00 % 0,00
Tab. 1-14. Parametry řídicího menu panelu, M3
1 = I/O svorkovnice
125
2 = Ovládací panel
3 = Sběrnice
0 = Dopředu
123
1 = Dozadu
0=Omezená funkce
114
1=Tlačítko Stop vždy aktivní
Může být vybrána digitálním
vstupem
3.13 Systémové menu (Ovládací panel: Menu S6)
Obsahuje parametry a funkce, které se týkají všeobecného použití frekvenčního měniče, např. uživatelské
sady parametrů nebo informace o hardware a software, viz. kapitola 7.4.6 v Příručce uživatele Vacon NXL.
3.14 Přídavné karty (Ovládací panel: Menu E7)
Menu E7 zobrazuje přídavné karty připojené k řídicí desce a s ní spojené informace. Více informací najdete
v Příručce uživatele Vacon NXL, kapitola 7.4.8.
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
3
Page 17

16 • VACON POPIS PARAMETRŮ
4. POPIS PARAMETRŮ
4.1 ZÁKLADNÍ PARAMETRY
2.1.1, 2.1.2 Minimální/maximální frekvence
Definuje rozpětí frekvencí frekvenčního měniče.
Maximální hodnota parametrů 2.1.1 a 2.1.2 je 320 Hz.
Programové vybavení automaticky zkontroluje hodnoty parametrů 2.1.19, 2.1.20, 2.3.13,
2.5.1, 2.5.2 a 2.6.5.
2.1.3, 2.1.4 Čas rozběhu 1, čas doběhu 1
Těmito parametry jsou definované rampy zrychlení a zpomalování. Jsou to časy potřebné na
zvýšení výstupní frekvence z 0 na nastavené maximum frekvence (par. 2.1.2).
2.1.5 Proudové omezení
Tento parametr určuje maximální proud motoru z měniče frekvence. Abyste zamezili přetížení
motoru, nastavte tento parametr na jenovitý proud motoru. Proudové omezení je
přednastavené na jmenovitý proud frekvenčního měniče (I
2.1.6 Jmenovité napětí motoru
Tuto hodnotu U
počátku odbuzování (parametr 2.6.4) na 100 % x U
2.1.7 Jmenovitá frekvence motoru
Hodnotu f
počátku odbuzování (parametr 2.6.3) na té samé hodnotě.
2.1.8 Jmenovité otáčky motoru
Hodnotu n
2.1.9 Jmenovitý proud motoru
Hodnotu In najdete na štítku motoru.
2.1.10 Účiník motoru
Hodnotu účiníku motoru najdete na štítku motoru pod označením cos ϕ.
najdete na štítku motoru. Změnou tohoto parametru se nastaví napětí v bodě
n
najdete na štítku motoru. Změnou tohoto parametru zůstane napětí v bodě
n
najdete na štítku motoru.
n
nmotor
).
L
.
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 18

POPIS PARAMETRŮ VACON • 17
2.1.11 Způsob startu
Po rampě:
0 Frekvenční měnič začíná na 0 Hz a zrychluje na nastavenou žádanou frekvenci po
dobu nastavené časem rozběhu. (Setrvačnost zátěže, nebo tření při rozběhu můžou
způsobit prodloužení doby rozběhu).
Letmý start:
1 Frekvenční měnič se dokáže spustit při točícím se motoru tak, že na motor
generuje malý moment a hledá frekvenci, která odpovídá rychlosti otáčení motoru.
Hledání začíná od maximální frekvence směrem k aktuální frekvenci, dokud není
zjištěna správná hodnota. Následně bude zvyšována /snižována výstupní frekvence
na nastavenou žádanou hodnotu, podle nastavených parametrů pro rozběh /
doběh.
Tento režim použijte, pokud motor při příkazu start motor ještě dobíhá. Pomocí
letmého startu je možné překonat krátké výpadky napájecího napětí.
Podmíněný letmý start
2 Pomocí tohoto režimu je možno odpojovat motor od frekvenčního měniče a
p
řipojovat motor k frekvenčnímu měniči i tehdy, je-li aktivní příkaz Start. Při
opětovném připojení motoru bude měnič pracovat způsobem popsaným v
souvislosti s volbou 1
2.1.12 Způsob zastavení
Volný doběh:
0 Po příkazu Stop motor dobíhá volně až po úplné zastavení, bez řízení
Po rampě:
1 Po příkazu Stop se rychlost motoru snižuje podle nastaveného času doběhu.
frekvenčníhm měničem.
Pokud je po dobu zastavování generovaná příliš velká energie, pro rychlejší brzdění
může být potřebné použít externí brzdný odpor.
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 19

18 • VACON POPIS PARAMETRŮ
2.1.13 Optimalizace U/f
0 Nevyužitá
1 Automatické zvýšení momentu
Napětí motoru se mění automaticky, což nutí motor produkovat
dostatečný moment na start a běh při nízkých frekvencích. Zvýšení
napětí závisí na typu a výkonu motoru. Automatické zvýšení momentu
je možné použít v aplikacích kde počáteční moment je kvůli suchému
tření vysoký, např. v dopravnících.
POZNÁMKA! V aplikacích s vysokým momentem a nízkou rychlostí, je
pravděpodobné že se motor přehřeje. Pokud má motor běžet za těchto
podmínek delší čas, musí se speciální pozornost věnovat chlazení
motoru. Použijte externí chlazení motoru pokud je předpoklad, že
teplota stoupne příliš vysoko.
2.1.14 I/O reference
Určuje, který zdroj žádané frekvence se vybere, pokud je nastavený způsob ovládání přes I/O.
0 Analogový vstup AI1 (svorky 2 a 3, např. potenciometr)
1 Analogový vstup AI2 (svorky 4 a 5, např. snímač tlaku)
2 Reference z panelu (parametr 3.2)
3 Reference ze sběrnice (FBSpeedReference)
4 Reference motor potenciometru (zvyšování a ubírání tlačítky)
5 Výběr AI1/AI2. Výběr analogového vstupu AI2 jako reference frekvence je provedeno
programovatelnou funkcí digitálního vstupu DIN3 (P2.1.18)
2.1.15 Rozsah signálu AI2 (I
1 Rozsah signálu 0…20 mA
2 Rozsah signálu 4…20 mA
3 Rozsah signálu 0...10 V
4 Rozsah signálu 2...10 V
Poznámka! Tento výběr se nebere v úvahu, pokud par. 2.2.12 > 0 %, nebo par. 2.2.13 <
100 %.
2.1.16 Funkce analogového výstupu
Tímto parametrem vyberete požadovanou veličinu jako signál analogového výstupu.
Hodnoty parametru jsou v tabulce na straně 5.
)
in
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 20

POPIS PARAMETRŮ VACON • 19
2.1.17 Funkce DIN2
U tohoto parametru je na výběr 10 možností. Pokud nebude digitální vstup DIN2 využívaný,
nastavte parametr na hodnotu 0.
1 Start dozadu (DIN1=Start dopředu)
2 Revers (DIN1=Start)
3 Impuls stop (DIN1= Impuls start)
4 Externí porucha,
Kontakt sepnutý: Porucha je zobrazená a motor zastavený, když je tento vstup aktivní.
5 Externí porucha,
Kontakt rozpojený: Porucha je zobrazená a motor zastavený, když tento vstup není aktivní.
6 Start možný (Run Enable)
Kontakt rozpojený: start motoru není možný
Kontakt sepnutý: start motoru je možný
Volný doběh motoru po deaktivaci signálu po dobu běhu motoru
7 Přednastavená rychlost 2
8 Motor potenciometr NAHORU
Kontakt sepnutý: Reference se zvyšuje dokud se kontakt nerozepne.
9 Vyřazení PID regulátoru (Přímá reference frekvence)
10 „Zařazený 1“ (Může být zvolený jen, když je aktivní kaskádní regulace, P2.9.1=2)
2.1.18 Funkce DIN3
Při tomto parametru je na výběr 13 možností. Pokud nebude digitální vstup DIN3 využívaný,
nastavte parametr na hodnotu 0.
1 Revers
Kontakt rozpojený: Dopředu
Kontakt sepnutý: Dozadu
2 Externí porucha
Kontakt sepnutý: Porucha je zobrazená a motor zastavený, když je tento vstup aktivní.
3 Externí porucha
Kontakt rozpojený: Porucha je zobrazená a motor zastavený, když tento vstup není aktivní.
4 Reset poruchy
Kontakt sepnutý: vyresetování všech poruch
5 Start možný (Run Enable)
Kontakt rozpojený: start motoru není možný
Kontakt sepnutý: start motoru je možný
Volný doběh motoru po deaktivaci signálu po dobu běhu motoru
6 Přednastavená rychlost 1
7 Přednastavená rychlost 2
8 Povel na s.s. brzdění
Kontakt sepnutý: V režimu STOP, stejnosměrné brzdění je v činnosti až dokud se kontakt nerozepne.
Proud s.s. brzdění je cca 10 % z hodnoty zadané parametrem par. 2.4.3.
9 Motor potenciometr NAHORU
Sepnutý kontakt: Žádaná hodnota frekvence se při sepnutém kontaktu ZVYŠUJE.
10 Motor potenciometr DOLU.
Sepnutý kontakt: Žádaná hodnota frekvence se při sepnutém kontaktu SNIŽUJE.
11 Vyřazení PID regulátoru (Přímá reference frekvence)
12 Výběr reference PID z panelu 2
13 „Zařazený 2“ (Může být zvolený jen, když je aktivní kaskádní regulace, P2.9.1=2)
14 Vstup termistoru POZNÁMKA! Viz. Příručka uživatele měniče NXL, Kapitola 6.2.4
15 Vnucení způ
16 Vnucení způsobu ovládání přes komunikační sběrnici
17 Výběr AI1/AI2 jako I/O reference (par 2.1.14)
sobu ovládání přes I/O svorkovnici
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 21

20 • VACON POPIS PARAMETRŮ
2.1.19 Přednastavená rychlost 1
2.1.20 Přednastavená rychlost 2
Hodnoty těchto parametrů jsou automaticky omezené od minimální po maximální frekvenci.
(par. 2.1.1 a 2.1.2)
2.1.21 Automatický restart (po poruše)
Tímto parametrem se aktivuje funkce automatického restartu po poruše.
0 = Neaktivní
1 = Aktivní (3 pokusy o automatický restart, viz. par. 2.8.1 – 2.8.3)
2.1.22 Skrytí parametrů
Umožňuje skrytí všech skupin parametrů mimo základních parametrů (B2.1).
Přednastavená hodnota tohoto parametru z výroby je 0.
0 = Neaktivní (všechny skupiny parametrů jsou v panelu zpřístupněné)
1 = Aktivní (v panelu jsou zpřístupněné jen základní parametry B2.1)
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 22
POPIS PARAMETRŮ VACON • 21
V
4.2 VSTUPNÍ SIGNÁLY
2.2.1 Funkce DIE1 na přídavné kartě
Na výběr je 12 funkcí. Pokud tento digitální vstup zůstane nevyužitý nastavte hodnotu
parametru na 0.
Na výběr jsou funkce jako u parametru 2.1.18, mimo:
13 = „Zařazený 1“
2.2.2 Funkce DIE2 na přídavné kartě
Na výběr jsou funkce jako u parametru 2.2.1, mimo:
13 = „Zařazený 2“
2.2.3 Funkce DIE3 na přídavné kartě
Na výběr jsou funkce jako u parametru 2.2.1, mimo:
13 = „Zařazený 3“
2.2.4 Funkce DIN4
Pokud je hodnota par. 2.2.6 nastavená na 0, AI1 je nastavený jako digitální vstup 4.
Na výběr jsou funkce jako u parametru 2.2.3.
POZNÁMKA! Pokud naprogramujete analogový vstup jako DIN4, zkontrolujte
správné pozice propojek (viz. následující obrázek).
MF2
X4:
RS485
progra mování
Napěťový vstup; 0...10 V
MF3
X4:
Napěťový vstup; 0...10 V Napěťový vstup; 0...10
Obr. 1-1. Výběr propojek X4/X8, když je AI1 nastavený jako DIN4
MF4-6
X8:
Jum per din4 .fh 8
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 23
22 • VACON POPIS PARAMETRŮ
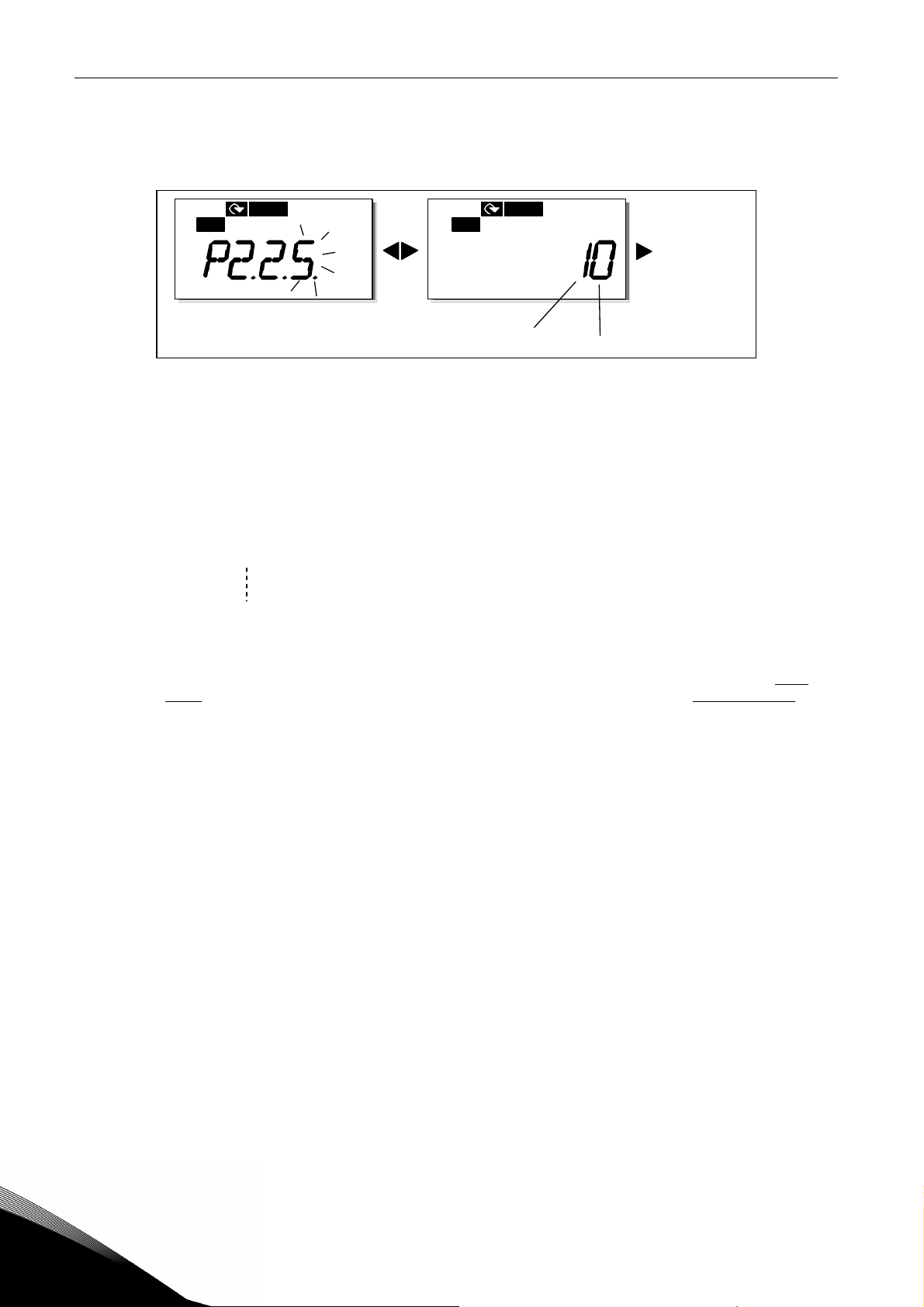
2.2.5 Výběr signálu AI1
Umožňuje přiřazení analogového vstupu podle vašeho výběru k signálu AI1.
STO P
Obr. 1-2. Výběr analogového vstupu pro signál AI1
I/O
nxlk29.fh8
READY
term
STO P
Hodnota tohoto parametru se skládá z indikátoru karty a příslušného pořadového čísla daného
vstupu na svorkovnici. Viz. Obr. 1-2.
Indikátor karty 1 = Vstupy na základní řídicí kartě
Indikátor karty 2 = Vstupy na přídavné kartě
Číslo vstupu 0 = Vstup 1
Číslo vstupu 1 = Vstup 2
Číslo vstupu 2 = Vstup 3
Číslo vstupu 9 = Vstup 10
Příklad:
Pokud nastavíte hodnotu tohoto parametru na 10, pro signál AI1 vyberete vstup 1 na řídicí
kartě. Pokud nastavíte hodnotu na 21, pro signál AI1 vyberete vstup 2 na přídavné kartě.
Pokud si přejete použít hodnoty analogového vstupního signálu např. na testovací účely,
můžete vybrat hodnotu parametru v rozsahu 0–9. V tomto případě, hodnota 0 odpovídá 0 %,
hodnota 1 odpovídá 20 % a libovolná hodnota mezi 2 až 9 odpovídá 100 %.
2.2.6 Rozsah signálu analogového vstupu AI1
Pomocí tohoto parametru si můžete zvolit rozsah signálu analogového vstupu AI1.
0 = DIN 4
1 = Rozsah signálu 0…20 mA (jen pro velikosti MF4 a větší)
2 = Rozsah signálu 4…20 mA (jen pro velikosti MF4 a větší)
3 = Rozsah signálu 0…10 V
4 = Rozsah signálu 2…10 V
Poznámka! Hodnota tohoto parametru se nebere do úvahy, pokud par. 2.2.7 > 0 %, nebo
par. 2.2.8 < 100 %.
Pokud je hodnota par. 2.2.6 nastavená na 0, AI1 má funkci digitálního vstupu 4. Viz. par.
2.2.4
READY
I/O
Místo
term
Změna
hodnoty
Číslo vstupu
4
2.2.7 Uživatelské minimum AI1
2.2.8 Uživatelské maximum AI1
Nastavení minimálních a maximálních hodnot pro signál AI1 v rozsahu 0…10 V.
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 24
POPIS PARAMETRŮ VACON • 23
2.2.9 Inverze signálu AI1
Pokud je hodnota tohoto parametru = 1, analogový signál Uin bude invertovaný.
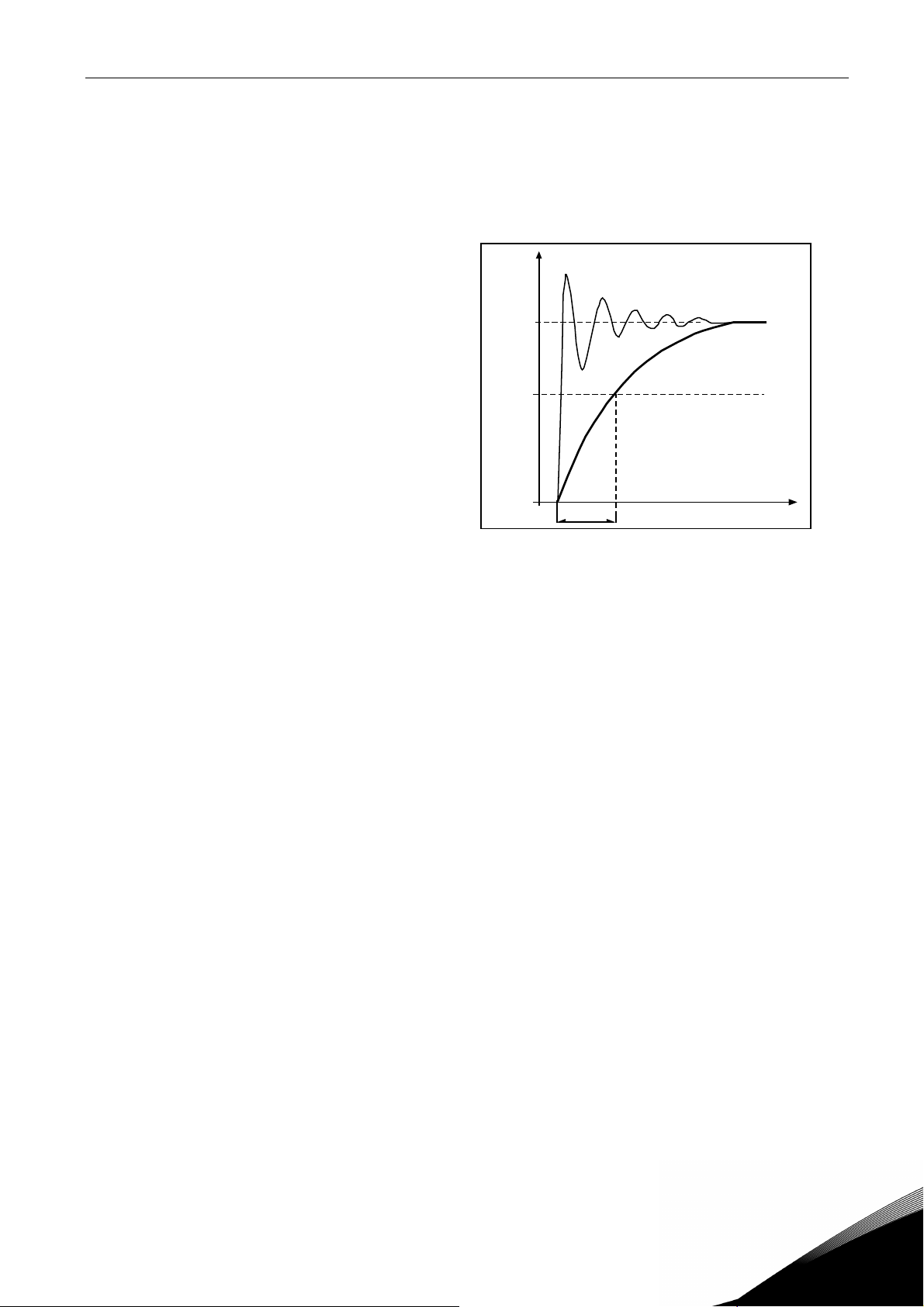
2.2.10 Časová konst. filtru signálu AI1
Pokud je tento parametr nastavený na hodnotu větší než 0, aktivuje se funkce která filtruje
poruchy vstupního analogového signálu.
Dlouhá filtrační časová konstanta snižuje
rychlost regulace, viz. Obr. 1-3.
%
Nefiltrovaný signál
100 %
Filtrovaný signál
63 %
t[s]
Par. 2.2.10
2.2.11 Výběr signálu AI2
Umožňuje přiřazení analogového vstupu podle vašeho výběru k signálu AI2. Pro nastavení
parametru viz. par. 2.2.5.
2.2.12 Rozsah signálu analogového vstupu AI2
1 = Rozsah signálu 0…20 mA
2 = Rozsah signálu 4…20 mA
3 = Rozsah signálu 0…10 V
4 = Rozsah signálu 2…10 V
Poznámka! Hodnota tohoto parametru se nebere do úvahy, pokud par. 2.2.13 > 0 %, nebo
par. 2.2.14 < 100 %.
2.2.13 Uživatelské minimum AI2
2.2.14 Uživatelské maximum AI2
Nastavení minimálních a maximálních hodnot pro signál AI2 v rozsahu 0...20 mA.
Podobně jako parametry 2.2.7 a 2.2.8.
2.2.15 Inverze signálu AI2
Viz. parametr 2.2.9.
Obr. 1-3. Filtrování signálu AI1
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 25
24 • VACON POPIS PARAMETRŮ
2.2.16 Časová konstanta filtru signálu AI2
Viz. parametr 2.2.10.
2.2.17 Nulování paměti reference motor potenciometru (reference frekvence)
0 = Nikdy
1 = Nulování po povelu stop a vypnutí napájení
2 = Nulování po vypnutí napájení
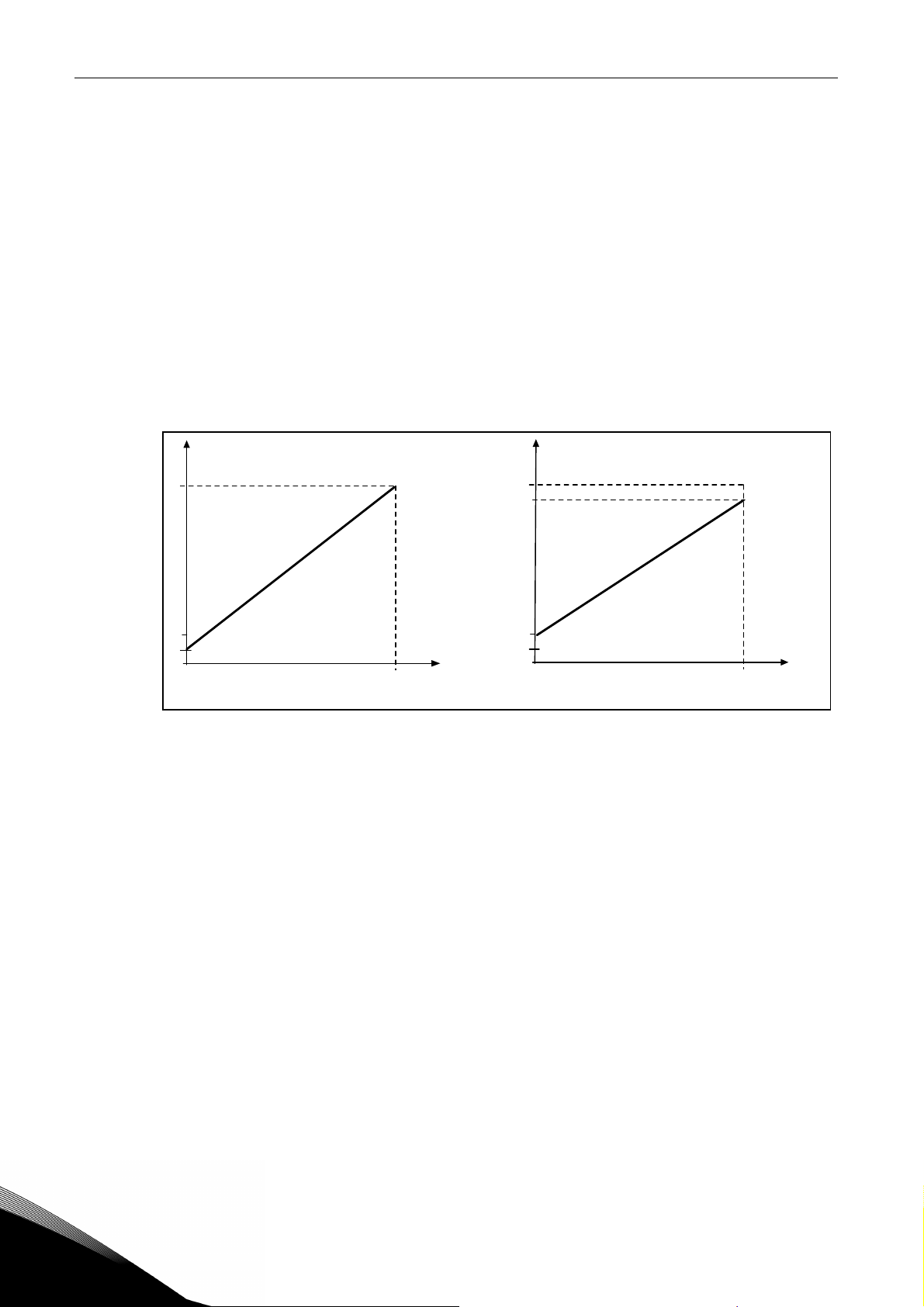
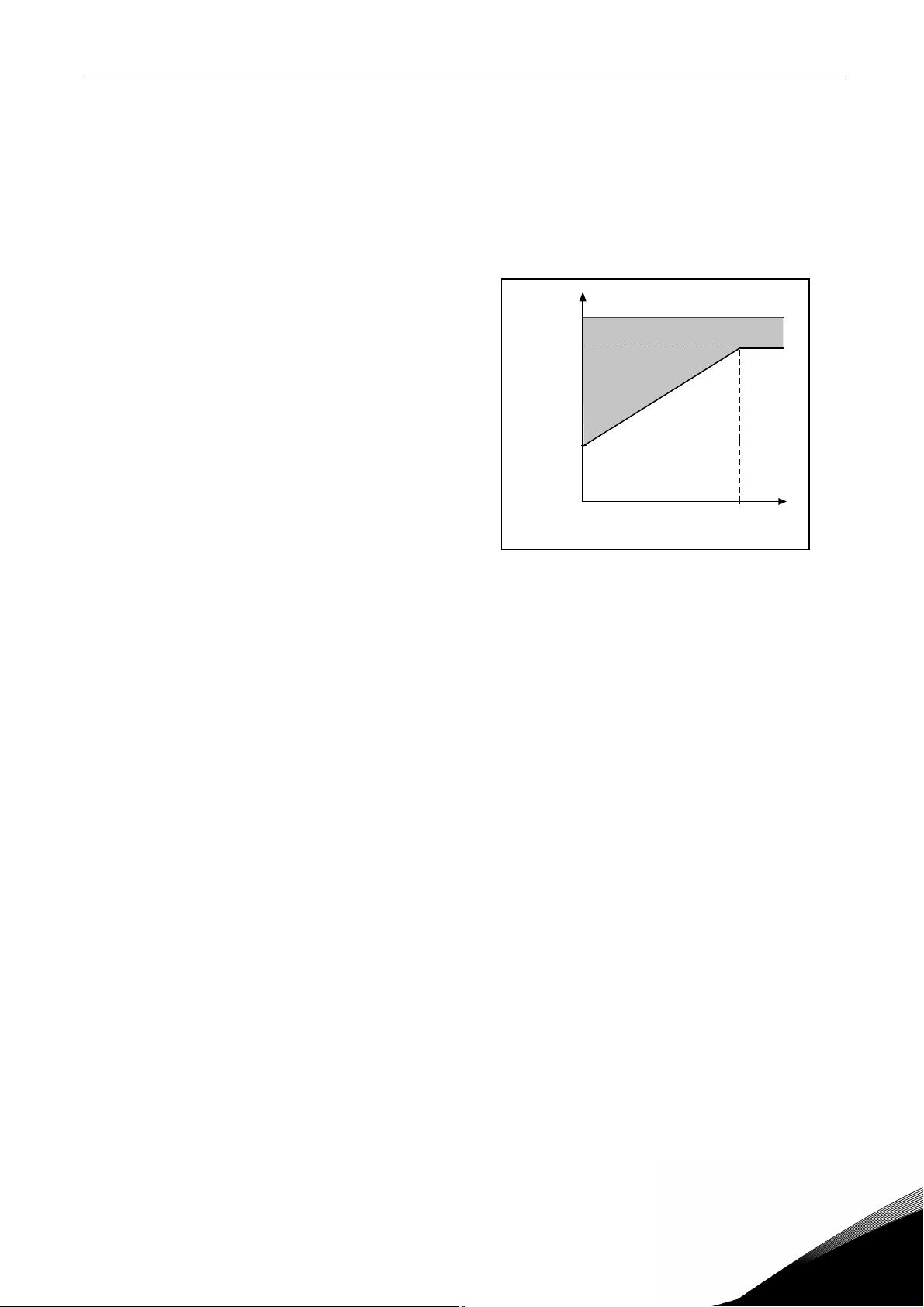
2.2.18 Minimální hodnota reference
2.2.19 Maximální hodnota reference
Můžete měnit minimum a maximum reference frekvence mezi Minimální a Maximální
frekvencí. Pokud nechcete hodnoty měnit, nastavte příslušný parametr na hodnotu 0.
Na obrázku dole je jako reference zvolený napěťový vstup AI1 s rozsahem 0…10 V.
Výstupní
frekvence
Max. frek. par 2.1.2 Max. frek. par 2.1.2
Par. 2.2.19
Min. frek. par 2.1.1 Min. frek. par 2.1.1
0
Analogový
vstup [A]
10
Par. 2.2.18
Obr. 1-4. Vlevo: Par. 2.1.18=0 (Bez změny měřítka), Vpravo: Změna měřítka
2.2.20 Výběr reference při ovládání panelem
Určuje, který zdroj žádané hodnoty frekvence se používá při způsobu ovládání přes panel.
0 AI1 reference (přednastavený je vstup AI1, svorky 2 a 3, např. potenciometr)
1 AI2 reference (přednastavený je vstup AI2, svorky 4 a 5, např. snímač)
2 Reference z panelu (parametr 3.2)
3 Reference ze sběrnice (FBSpeedReference)
4 Reference motor potenciometru (zvyšování a snižování tlačítky)
5 Reference PID regulátoru
2.2.21 Výběr reference při ovládaní přes sběrnici
Určuje, který zdroj žádané hodnoty frekvence se používá při způsobu ovládání přes sběrnici.
Hodnoty parametru jsou stejné jako pro par. 2.2.20.
Výstupní
frekvence
0
Analogový
vstup [A]
10
NX12K35
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 26

POPIS PARAMETRŮ VACON • 25
4.3 VÝSTUPNÍ SIGNÁLY
2.3.1 Funkce reléového výstupu 1
2.3.2 Funkce reléového výstupu 1 na přídavné kartě
2.3.3 Funkce reléového výstupu 2 na přídavné kartě
2.3.4 Funkce digitálního výstupu 1 na přídavné kartě
Nastavená hodnota Funkce signálu
0 = Nevyužité Reléový výstup se nepoužívá
1 = Připravený (Ready) Frekvenční měnič je připravený na provoz
2 = Motor běží (Run) Frekvenční měnič je v chodu (motor běží)
3 = Porucha (Fault) Nastala porucha
4 = Invertovaná porucha (Fault Inverted) Porucha nenastala
5 = Přehřátí FM - varování
6 = Externí porucha/varování Porucha nebo varování v závislosti od par. 2.7.2
7 = Reference - porucha/varování
8 = Varování (Warning) Vždy, pokud nastalo aspoň jedno varování
9 = Reverzovaný Je aktivní opačný směr otáčení
10 = Přednastavená rychlost (Preset speed) Byla vybrána přednastavená rychlost
11 = Reference dosažená (At speed) Výstupní frekvence dosáhla nastavenou referenci
12 = Regulátory omezení aktivní Byly aktivovány regulátory přepětí nebo nadproudu
13 = Kontrola výstupní frekvence 1
14 = Způsob ovládání: I/O
15 = Termistor porucha/varování
Reléový výstup RO1 a programovatelné reléové výstupy
na přídavné kartě (RO1, RO2) jsou aktivní pokud:
Teplota chladiče přesáhla +70 °C
Porucha nebo varování v závislosti od par. 2.7.1
- pokud je analogová reference 4–20 mA a signál je < 4mA
Výstupní frekvence je mimo nastavené hranice kontroly
dolní/horní limit (viz.par. 2.3.12 a 2.3.13)
Vybrané místo ovládání (Menu K3; par. 3.1) je “I/O
svorkovnice”
Na vstupu termistoru na přídavné kartě je indikované
přehřátí. Porucha nebo varování v závislosti na
parametru 2.7.19.
16 = Kontrola zpětné vazby aktivní Parametry 2.7.22 – 2.7.24
17 = Řízení automatické záměny 1 Řízení pohonu 1, parametry 2.10.1 – 2.10.7
18 = Řízení automatické záměny 2 Řízení pohonu 2, parametry 2.10.1 – 2.10.7
19 = Řízení automatické záměny 3 Řízení pohonu 3, parametry 2.10.1 – 2.10.7
20 = Kontrola AI
Tab. 1-15. Výstupní signály přes RO1 a signály přídavné karty RO1, RO2 a DO1.
Relé se sepne v závislosti na nastavení parametrů
2.3.14 – 2.3.16.
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 27

26 • VACON POPIS PARAMETRŮ
2.3.5 Funkce analogového výstupu
Tento parametr vybírá požadovanou funkci pro signál analogového výstupu.
Hodnoty parametru jsou uvedené v tabulce na str. 5.
2.3.6 Časová konst. filtru analogového výstupu
Definuje filtrační časovou konstantu signálu
analogového výstupu.
Nastavení tohoto parametru na hodnotu 0,
deaktivuje filtrování.
2.3.7 Inverze analogového výstupu
Invertuje signál analogového výstupu:
Maximální výstupní signál = 0 %
Minimální výstupní signál = Maximální nastavená hodnota (parametr 2.3.9)
0 Bez inverze
1 Inverze
Viz. parametr 2.3.9 dále.
Proud
analog.
výstupu
20 mA
%
Nefiltrovaný signál
100 %
Filtrovaný signál
63%
Par. 2.3.6
Obr. 1-5. Filtrování analogového výstupu
t[s]
nxlk 31.f h8
4
2.3.8 Minimum analogového výstupu
Definuje minimum signálu na 0 mA nebo 4 mA. Všimněte si rozdíl v nastavení měřítka
analogového výstupu parametru 2.3.9.
12 mA
10 mA
4mA
Param. 2.3.9
= 200%
0mA
0
Obr. 1-6. Inverze analogového výstupu
0,5
Param. 2.3.9
=50%
Param. 2.3.9
=100%
Max. hodnota signálu
vybraná par. 2.3.2)
1,0
nxl k32.fh 8
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 28

POPIS PARAMETRŮ VACON • 27
2.3.9 Měřítko analogového výstupu
Změna měřítka analogového výstupu.
Signál Max. hodnota signálu
Výstupní frekvence 100 % x f
Rychlost motoru 100 % x jmenovité otáčky
Proud motoru 100 % x I
Moment motoru 100 % x T
Výkon motoru 100 % x P
Napětí motoru 100 % x U
Nap. S.S. meziobvodu
Reference PID
Zpětná vazba PID 1
Odchylka PID
Výstup PID
motoru
1000 V
100 % x max. ref. hodn.
100 % x max. zp. vazby
100 % x max. odchylky
100 % x max. výstupu
max
nMotor
nMotor
nMotor
nmotor
Tab. 1-16. Změna měřítka analogového výstupu
2.3.10 Funkce analogového výstupu 1 na přídavné kartě
2.3.11 Funkce analogového výstupu 2 na přídavné kartě
Tímto parametrem vyberete požadovanou veličinu jako signál analogového výstupu na
přídavné kartě. Hodnoty parametru jsou stejné jako u par. 2.1.16.
2.3.12 Kontrola limitu výstupní frekvence 1
0 Žádný limit
1 Dolní limit
2 Horní limit
Pokud výstupní frekvence překročí/klesne pod stanovenou hranici (par. 2.3.13), tato funkce
vygeneruje varování přes digitální výstup nebo reléové výstupy, v závislosti na nastavení
parametrů 2.3.1 – 2.3.4.
2.3.13 Hodnota limitu kontroly výstupní frekvence 1
Vybírá hodnotu frekvence kontrolovanou parametrem 2.3.12.
Proud
analog.
výstupu
20 mA
12 mA
10 mA
Par.2.3.8=1
4mA
Par.2.3.8=0
0mA
Par. 2.3.9=
200%
0,5
Par. 2.3.9=
100 %
Par. 2.3.9=
50%
Max. hodnotasignálu
vybraná par. 2.1.16
1,00
nxlk 49.f h8
Obr. 1-7. Změna měřítka analog. výstupu
Obr. 1-8. Kontrola limitu výstupní frekvence
Par 2.3.13
Příklad:
f[Hz]
21 RO1
22 RO1
23 RO1
Par 2.3.12 = 2
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
nxlk33.fh8
t
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 29

28 • VACON POPIS PARAMETRŮ
2.3.14 Kontrola analogového vstupu
Tímto parametrem můžete zvolit analogový vstup, který má být kontrolován.
0 = Nevyužité
1 = AI1
2 = AI2
2.3.15 Hranice vypnutí reléové kontroly analogového vstupu
Pokud signál analogového vstupu vybraného parametrem 2.3.14 klesne pod hranici
nastavenou tímto parametrem, reléový výstup se vypne.
2.3.16 Hranice sepnutí reléové kontroly analogového vstupu
Pokud signál analogového vstupu vybraného parametrem 2.3.14 stoupne nad hranici
nastavenou tímto parametrem, reléový výstup se sepne.
To znamená, že pokud je např. hranice sepnutí 60 % a hranice vypnutí 40 %, relé se zapne,
pokud úroveň signálu překročí 60 % a zůstane zapnuté pokud úroveň signálu neklesne pod
40 %.
2.3.17 Zpoždění sepnutí reléového výstupu RO1
2.3.18 Zpoždění rozepnutí reléového výstupu RO1
Těmito parametry můžete nastavit zpoždění sepnutí nebo rozepnutí reléového výstupu 1 (par
2.3.1).
Signál naprogra mov aný
na reléový výstup
Výstup RO1
Zpoždění sepnutí,
par 2.3.17
Obr. 1-9. Zpoždění sepnutí nebo rozepnutí RO1
Zpož dění vy pnutí
par. 2. 3.18
nxl k10 2
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 30

POPIS PARAMETRŮ VACON • 29
4.4 ŘÍZENÍ POHONU
2.4.1 Tvar rozběhové/doběhové rampy 1
Začátek a konec ramp rozběhu a doběhu je možné pomocí těchto parametrů zaoblit. Hodnota
0 zabezpečuje lineární průběh rychlosti při rozběhu a doběhu.
Nastavení hodnoty tohoto parametru v rozmezí 0,1 ... 10 sekund má za následek rozběh a
doběh po S-křivce. Doba rozběhu je určená parametry 2.1.3/2.1.4
[Hz]
2.1.3, 2.1.4
2.4.1
2.4.1
Obr. 1-10. Zrychlování/zpomalování (S-křivka)
2.4.2 Brzdný střídač
Poznámka! Všechny velikosti měničů NXL mimo velikost MF2 mají brzdný střídač
nainstalován.
0 Není použitý brzdný střídač
1 Brzdný střídač je použitý v režimu chodu.
3 Brzdný střídač je použitý v režimu chodu a v režimu stop.
Pokud frekvenční měnič zpomaluje motor tak energie, která vzniká vlivem setrvačnosti motoru
a zátěže, je mařená v externím brzdném odporu. To dovoluje, aby frekvenční měnič
zpomaloval zátěž se stejným momentem jako při rozběhu (za předpokladu, že byl vybraný
správný brzdný odpor). Viz. samostatná Příručka instalace brzdného odporu.
2.4.3 Proud stejnosměrného (s.s.) brzdění
Definuje proud motoru při stejnosměrném brzdění.
NX12K20
[t]
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 31

30 • VACON POPIS PARAMETRŮ
2.4.4 Čas s.s. brzdění při zastavování
Určuje zda je s.s. brzdění zapnuté (ON), nebo vypnuté (OFF) a brzdnou dobu stejnosměrné
brzdy při zastavování motoru. Činnost stejnosměrné brzdy závisí na vybraném způsobu
zastavení, parametr 2.1.12.
0 Stejnosměrná brzda není použita
>0 Stejnosměrná brzda se používá a jej činnost závisí na vybraném způsobu zastavení,
(par. 2.1.12). Čas brzdění v sekundách je určený hodnotou tohoto parametru.
Par. 2.1.12 = 0 (způsob zastavení = volný doběh):
Po příkazu stop, motor dobíhá až do zastavení bez řízení frekvence měničem.
Stejnosměrným brzděním je možné zastavit motor elektricky v nejkratší možné době, bez
použití přídavného externího brzdného odporu.
Čas brzdění se nastavuje podle frekvence v okamžiku začátku stejnosměrného brzdění. Pokud
je frekvence větší, nebo rovná jmenovité frekvenci motoru, brzdnou dobu určuje nastavená
hodnota parametru 2.4.4. Pokud je frekvence menší, nebo rovná 10% jmenovité frekvenci
motoru, brzdná doba je nastavená na 10 % z nastavené hodnoty parametru 2.4.4.
f
out
f
out
f
n
BĚH
STOP
Výstupní frekvence
Rychlost motoru
s.s. brzdění
zapnuto
t = 1 x Par. 2.4.4
f
n
0,1 x f
n
tt
BĚH
STOP
Obr. 1-11. Čas s.s. brzdění, způsob zastavení = volný doběh.
Výstupní frekvence
Rychlost motoru
s.s. brzdění
zapnuto
t = 0,1 x Par. 2.4 .4
nxlk3 4.fh8
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 32

POPIS PARAMETRŮ VACON • 31
Par. 2.1.12 = 1 (způsob zastavení = po rampě):
Po příkazu stop se rychlost motoru
snižuje podle nastavených parametrů
pro zpomalení, tak rychle jako je to
možné, na hodnotu definovanou
parametrem 2.4.5, při které se
spouští stejnosměrné brzdění.
Čas s.s. brzdění je definovaný
parametrem 2.4.4. Při vysokých
momentech setrvačnosti se pro
rychlejší zpomalení doporučuje použít
externí brzdný odpor. Viz. Obr. 1-12.
par. 2.4.5
Obr. 1-12. Čas s.s. brzdění, způsob zastavení = po rampě
f
out
BĚH
STOP
Rychlost motoru
Výstupní frekvence
s.s. brzdění
t
t = Par. 2. 4.4
nxlk50.fh8
2.4.5 Frekvence spuštění s.s. brzdění při zastavování po rampě
Výstupní frekvence, při které se spustí stejnosměrné brzdění, viz. Obr. 1-12.
2.4.6 Čas s.s. brzdění před startem
Výstupní
frekvence
Stejnosměrná brzda je aktivována po povelu
start. Tento parametr určuje čas, který uplyne
do odblokování brzdy. Po odblokování brzdy
se výstupní frekvence zvyšuje v souladu
s nastaveným způsobem startu parametr
2.1.11. Viz. Obr. 1-13.
Par 2.4.6
BĚH
STO P
Obr. 1-13. Čas s.s. brzdění před startem
2.4.7 Brzdění magnetickým tokem
Pro motory s výkonem menším, nebo rovným 15 kW je namísto s.s. brzdění výhodné použít
brzdění magnetickým tokem.
Pokud je potřeba brzdění, frekvence se sníží a zároveň se zvýší magnetický tok, čímž se zvýší
brzdné schopnosti motoru. Na rozdíl od stejnosměrného brzdění, rychlost motoru je při brzdění
řízena.
t
nxlk35 .fh8
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 33

32 • VACON POPIS PARAMETRŮ
Brzdění magnetickým tokem je možné zapnout (ON), nebo vypnout (OFF).
0 = Brzdění magnetickým tokem je vypnuté (OFF)
1 = Brzdění magnetickým tokem je zapnuté (ON)
Poznámka: Při brzdění magnetickým tokem se mechanická energie motoru přeměňuje na
teplo a proto by se mělo používat jen zřídka, aby se předešlo poškození motoru.
2.4.8 Proud při brzdění tokem
Definuje velikost proudu pro brzdění magnetickým tokem. Hodnota může být z rozsahu 0,3×I
až Omezení proudu.
H
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 34
POPIS PARAMETRŮ VACON • 33
4.5
PÁSMO ZAKÁZANÝCH FREKVENCÍ
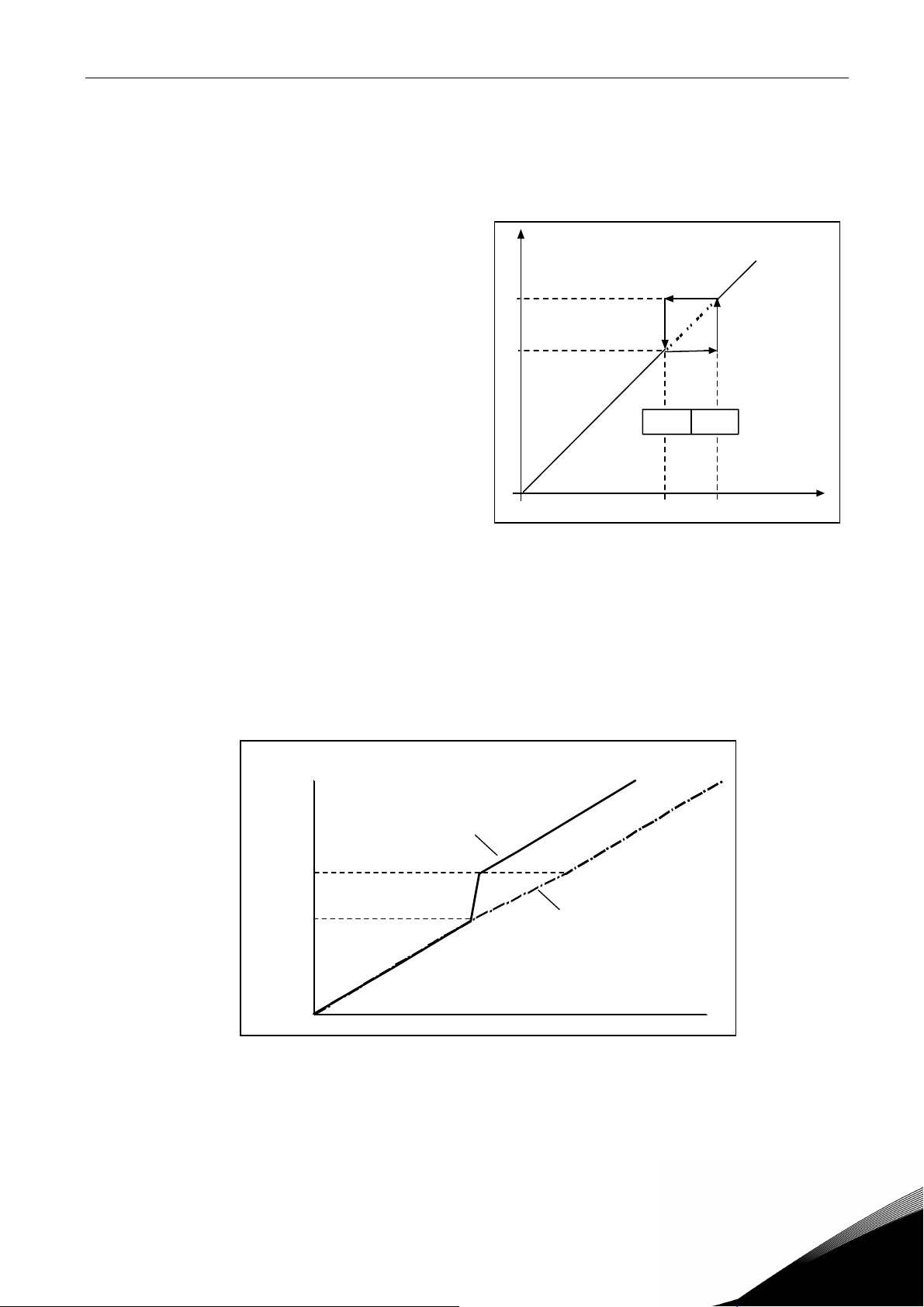
2.5.1 Dolní limit zakázané frekvence 1
2.5.2 Horní limit zakázané frekvence 1
V některých pohonech může být nutné
vyloučit určité frekvence kvůli problémům
s mechanickou rezonancí. Pomocí těchto
parametrů je možné nastavit hranice
oblasti zakázaných frekvencí. Viz Obr. 1-14.
Výstupní
frekvence [Hz]
2.5.1 2.5.2
Reference [Hz]
nxl k36. fh8
Obr. 1-14. Nastavení pásma zakázaných frekv.
2.5.3 Změna rampy při přechodu zakázaným pásmem
Definuje čas rozběhu/doběhu, pokud je výstupní frekvence v pásmu zakázaných frekvencí
(parametry 2.5.1 a 2.5.2). Sklon rampy (nastavený čas rozběhu/doběhu 1, nebo 2) je
násobený tímto faktorem. Například hodnota 0,1 snižuje dobu rozběhu 10krát než je mimo
pásma zakázaných frekvencí.
fout [Hz]
Pa r. 2. 5. 3 = 0,2
Par. 2.5.2
Par. 2.5.1
Obr. 1-15. Změna rampy při přechodu zakázaným pásmem
Pa r. 2. 5. 3 = 1,2
nxlk37.fh8
Čas [s]
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 35
34 • VACON POPIS PARAMETRŮ
4.6 ŘÍZENÍ MOTORU
2.6.1 Režim řízení motoru
0 Frekvenční řízení: Žádané hodnoty z I/O svorkovnice a panelu jsou žádanými
hodnotami frekvence a frekvenční měnič řídí výstupní frekvenci
(rozlišení výstupní frekvence = 0,01 Hz)
1 Řízení rychlosti: Žádané hodnoty z I/O svorkovnice a panelu jsou žádanými
hodnotami rychlosti a frekvenční měnič řídí rychlost motoru
(přesnost ±0,5%).
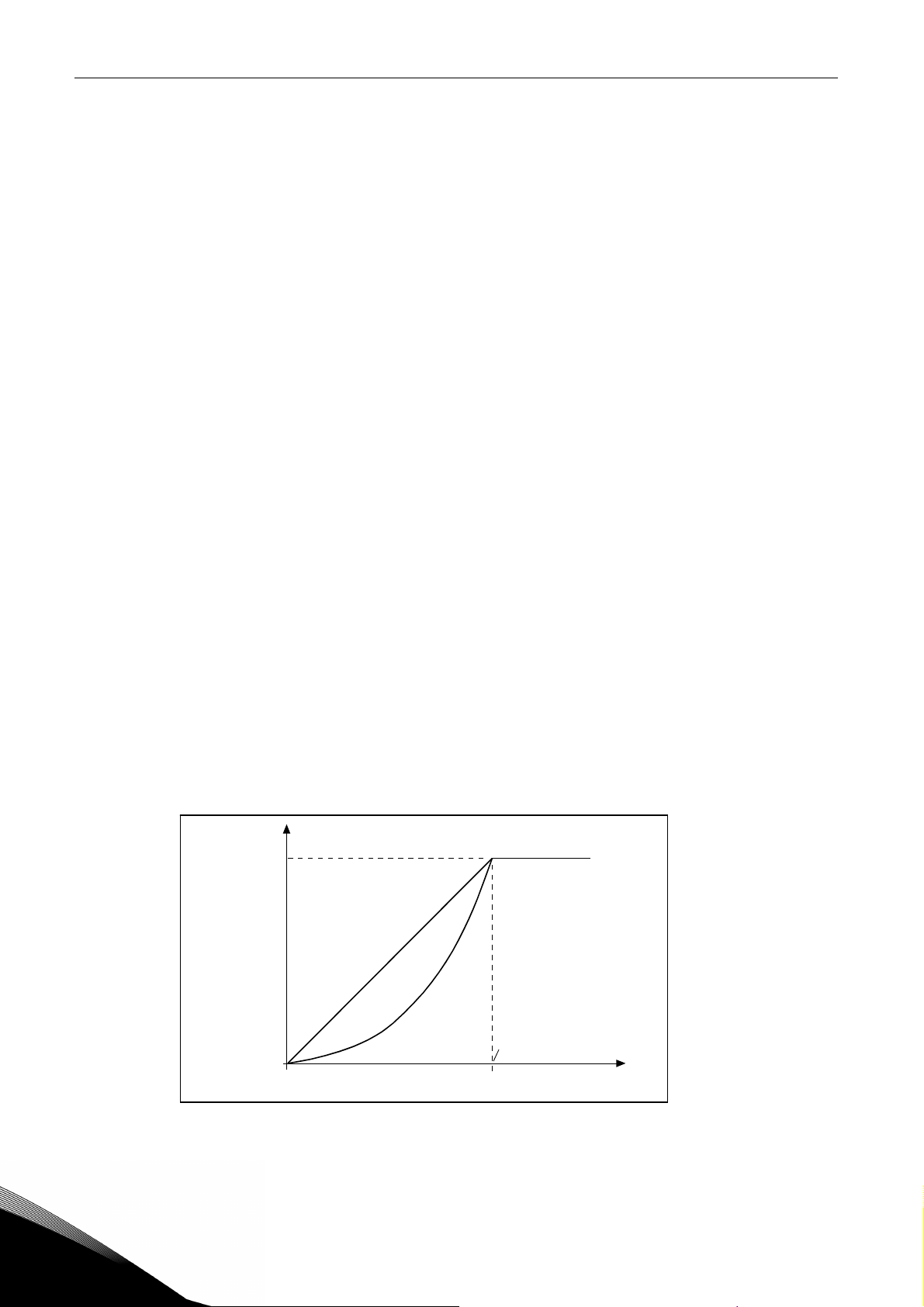
2.6.2 U/f charakteristika
Lineární: Napětí motoru se lineárně mění s frekvencí v oblasti konstantního
0 toku od 0 Hz do bodu počátku odbuzování, kde je motor napájený jmenovitým
napětím. Lineární závislost U/f by měla být použitá pro aplikace s konstantním
momentem. Obr. 1-16.
Tato závislost U/f přednastavená výrobcem, by měla být použitá,
pokud není žádný speciální požadavek na jiné nastavení.
Kvadratická: Napětí motoru se mění kvadraticky v závislosti na frekvenci, v oblasti
1 od 0 Hz do bodu začátku odbuzování, kde je motor napájený také jmenovitým
napětím. Pod bodem počátku odbuzování motor pracuje se zmenšením
buzením a generuje menší moment a méně elektromechanického šumu.
Kvadratickou závislost U/f je možné použít v aplikacích, kde je požadavek na
moment úměrný druhé mocnině rychlosti, např. v odstředivých ventilátorech a
č
erpadlech.
Obr. 1-16. Lineární a kvadratická U/f charakteristika
4
U[V]
Un
par.2.6.4
par.2.6.6, 2.6.7
Přednastaveno:
jmenovité napětí motoru
Lineární
Kvadratická
Programovatelná závislost U/f:
Začátek
odbuzování
Přednastaveno:
jmenovitá frekvence
motoru
par.2.6.3
nxlk38.fh8
f[Hz]
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 36
POPIS PARAMETRŮ VACON • 35
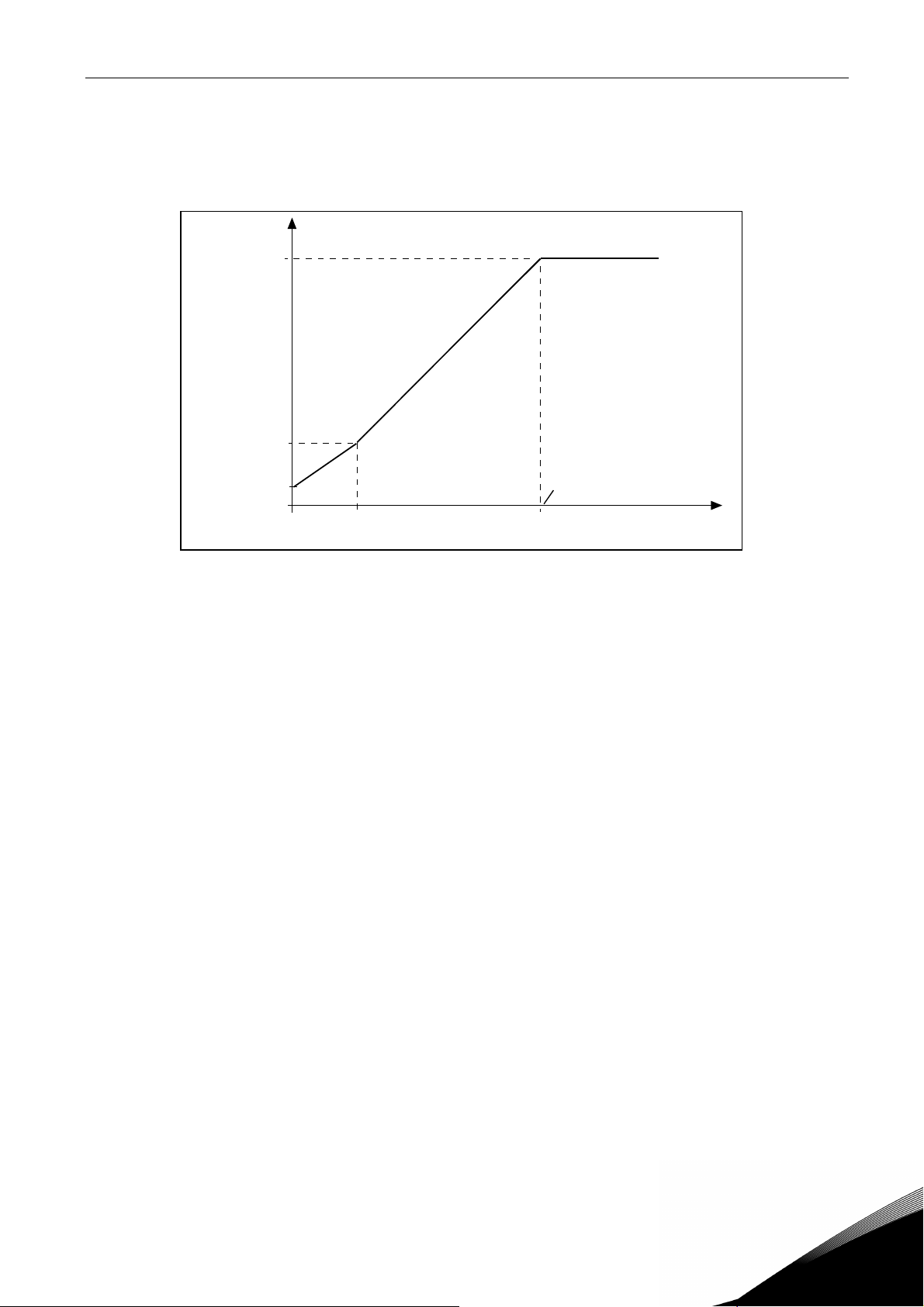
2 U/f charakteristiku je možné naprogramovat ve třech různých bodech.
Programovatelná U/f charakteristika se používá pokud jiné nastavení
nepostačuje pro požadavky aplikace.
Obr. 1-17. Programovatelná křivka U/f
U[V]
Un
Par 2.6.4
Přednastaveno:
jmenovité napětí motoru
Začátek
odbuzování
Par. 2.6.6
(Nast. 10%)
Přednastaveno:
jmenovitá frekvence
Par. 2.6.7
(Nast. 1,3%)
Par. 2.6.5
Lineární s optimalizací magnetického toku:
3 Měnič frekvence začne hledat minimální proud motoru za účelem úspory
energie, snížení úrovně rušení a hluku. Tuto funkci je možné použít
v aplikacích, kde často nedochází ke změnám zatížení např.: ventilátory,
čerpadla atd.
2.6.3 Začátek odbuzování
Bod počátku odbuzování je výstupní frekvence, při které výstupní napětí dosáhne hodnotu
nastavenou parametrem 2.6.4.
2.6.4 Napětí při začátku odbuzování
Pro frekvence vyšší než je bod počátku odbuzování, výstupní napětí zůstává na nastavené
maximální hodnotě. Pro frekvence nižší než je bod počátku odbuzování, výstupní napětí závisí
na nastavení parametrů závislosti U/f, viz. parametry 2.1.13, 2.6.2, 2.6.5 2.6.6 a 2.6.7 a
Obr. 1-17.
Pokud jsou změněny parametry 2.1.6 a 2.1.7 (jmenovité napětí a jmenovitá frekvence
motoru), parametrům 2.6.3 a 2.6.4 jsou automaticky přiřazeny odpovídající hodnoty. Pokud
potřebujete jiné hodnoty pro bod počátku odbuzování a maximální výstupní napětí, změňte
tyto parametry až
2.6.5 Střední frekvence na U/f křivce
Pokud byla parametrem 2.6.2 zvolena programovatelná závislost U/f, tento parametr definuje
frekvenci v středním bodě křivky, viz. Obr. 1-17.
(Nast. 5 Hz)
po nastavení parametrů 2.1.6 a 2.1.7.
motoru
Par. 2.6.3
f[Hz]
nxlk39.fh8
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 37

36 • VACON POPIS PARAMETRŮ
2.6.6 Střední napětí na U/f křivce
Pokud byla parametrem 2.6.2 zvolená programovatelná závislost U/f, tento parametr definuje
napětí v prostředním bodě křivky, viz. Obr. 1-17.
2.6.7 Napětí při nulové frekvenci
Tento parametr definuje výstupní napětí na křivce U/f při nulové frekvenci, viz. Obr. 1-17.
2.6.8 Spínací frekvence modulace
Hluk motoru je možné snížit pomocí vyšší spínací frekvence. Se zvyšováním spínací frekvence
se zvyšují tepelné ztráty frekvenčního měniče.
Spínací frekvence pro Vacon NXL: 1…16 kHz
2.6.9 Regulátor přepětí
2.6.10 Regulátor podpětí
Tyto parametry umožňují vyřadit z činnosti regulátory podpětí/přepětí. Může to být užitečné
například, pokud napájecí napětí se mění více jak –15 % až +10 % a aplikační software
netoleruje toto podpětí/přepětí. V tomto případě regulátor řídí výstupní frekvenci s tím, že
zohledňuje kolísání napájení.
Poznámka: Pokud jsou tyto regulátory vyřazené z činnosti, mů
vyskytovat poruchy přepětí a podpětí.
0 Regulátor je vypnutý
1 Regulátor je zapnutý
2.6.11 Identifikace
0 Neaktivní
1 Identifikace bez otáčení motoru
Po volbě identifikace bez otáčení motoru měnič provede identifikační chod ihned po zadání
povelu start ze zvoleného místa ovládání. Povel na start musí být zadán do 20 sekund od
změny tohoto parametru, jinak identifikace neproběhne.
Měnič po dobu identifikace motorem neotáčí. Po ukončení identifikace přejde do režimu stop.
Po dalším povelu na start se motor rozběhne normálně.
Identifikační chod zlepší výpočetní model momentu motoru a funkci automatického
záběrového momentu. Také bude zlepšena přesnost regulace rychlosti v rychlostním
režimu řízení motoru (přesnější výpočet otáček).
žou se po dobu provozu
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 38

POPIS PARAMETRŮ VACON • 37
4.7 OCHRANY
2.7.1 Reakce na poruchu proudové smyčky 4mA
0 = Žádná akce
1 = Varování
2 = Porucha, po poruše zastavení motoru podle parametru 2.1.12
3 = Porucha, volný doběh motoru po poruše
Varování, porucha a hlášení je generováno, pokud je použit signál žádané hodnoty 4...20 mA a
tento signál klesne pod 3,5 mA po dobu 5 sekund, nebo pod 0,5 mA na 0,5 sekundy. Tato
funkce může být naprogramována také na reléové výstupy.
2.7.2 Reakce na externí poruchu
0 = Žádná akce
1 = Varování
2 = Porucha, po poruše zastavení motoru podle parametru 2.1.12
3 = Porucha, volný doběh motoru po poruše
Varování, porucha a hlášení je generováno, pokud je aktivní signál externí poruchy
z programovatelných digitálních vstupů. Tato funkce může být naprogramována také na
reléové výstupy.
2.7.3 Reakce na poruchu podpětí
1 = Varování
2 = Porucha, po poruše zastavení motoru podle parametru 2.1.12
3 = Porucha, volný doběh motoru po poruše
Hranice podpětí najdete v Příručce uživatele Vacon NXL, Tab. 4-3.
Poznámka: Tato ochrana nemůže být deaktivována.
2.7.4 Kontrola výstupní fáze
0 = Žádná akce
1 = Varování
2 = Porucha, po poruše zastavení motoru podle parametru 2.1.12
3 = Porucha, volný doběh motoru po poruše
Kontrola výstupní fáze motoru zaručuje, že přes fáze motoru teče přibližně stejný proud.
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 39

38 • VACON POPIS PARAMETRŮ
2.7.5 Ochrana před zemním zkratem
0 = Žádná akce
1 = Varování
2 = Porucha, po poruše zastavení motoru podle parametru 2.1.12
3 = Porucha, volný doběh motoru po poruše
Ochrana před zemním zkratem zaručuje, že součet proudů ve fázích motoru je nulový.
Nadproudová ochrana je v činnosti za každých okolností a chrání frekvenční měnič před
zemními zkraty s velkými proudy.
Parametry 2.7.6–2.7.10, Tepelná ochrana motoru:
Všeobecně
Tepelná ochrana motoru chrání motor před přehřátím. Měniče Vacon mají možnost dodávat do motoru
větší jak jmenovitý proud. Pokud zátěž vyžaduje takto vysoký proud, může docházet k tepelnému
přetěžování motoru zejména v oblasti nízkých frekvencí. Při nízkých frekvencích se účinnost vlastního
chlazení motoru snižuje. Pokud je motor vybaven externím nuceným chlazením snížení zatížení při nízkých
rychlostech je malé.
Tepelná ochrana motoru je založená na teplotním modelu motoru, využívá výstupní proud měniče na
zjištění zatížení motoru.
Těmito parametry může být tepelná ochrana motoru nastavená. Tepelný proud I
nad kterým je motor přetěžovaný. Tato hranice proudu je funkcí výstupní frekvence.
!
2.7.6 Tepelná ochrana motoru
POZOR! Tepelný model nechrání motor, pokud je proudění vzduchu do motoru
snížené zablokováním vstupní mřížky ventilátoru motoru.
0 = Žádná akce
1 = Varování
2 = Porucha, po poruše zastavení motoru podle parametru 2.1.12
3 = Porucha, volný doběh motoru po poruše
Pokud je vybraná porucha, pohon se zastaví a aktivuje se poruchový stav.
Deaktivace ochrany, tj. nastavení parametru na 0, nastaví teplotní stupeň motoru na 0%.
Nastavením hodnoty 0 pro parametr se deaktivuje ochrana a vynuluje čítače doby zastavení
při přetížení.
určuje zátěžný proud,
T
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 40
POPIS PARAMETRŮ VACON • 39
2.7.7 Tepelná ochrana motoru: Koeficient okolní teploty motoru
Pokud má být braná do úvahy teplota okolí motoru, je doporučené nastavit hodnotu tohoto
parametru. Hodnota koeficientu může být nastavená mezi –100.0 % až 100.0 %, kde –100.0 %
odpovídá 0 °C a 100.0 % maximální teplotě okolí běžícího motoru. Nastavení tohoto parametru
na 0 % předpokládá, že teplota okolí je stejná jako teplota chladiče měniče po připojení
napájení.
2.7.8 Tepelná ochrana motoru: Koeficient
chlazení motoru při nulové rychlosti
Výkon chlazení může být nastavený
v rozsahu 0-150.0 % krát výkon chlazení
při jmenovité frekvenci, viz. Obr. 1-18.
P
chlad.
100%*
I
nm ot
Par.
2.7.8=40%
Oblast přetížení
nxlk51.fh8
f
n
0
I
T
f
Obr. 1-18. Výkon chlazení motoru
2.7.9 Tepelná ochrana motoru: Tepelná časová konstanta motoru
Tento čas může být nastavený v rozmezí 1 až 200 minut.
Tento parametr reprezentuje tepelnou časovou konstantu motoru. Čím větší je motor, tým
větší je časová konstanta. Tato časová konstanta představuje čas, za který vypočítaný teplotní
stupeň dosáhne 63 % z konečné hodnoty.
Tepelná časová konstanta motoru závisí na návrhu motoru a mění se pro různé výrobce
motorů.
Pokud je parametr motoru čas-t6 (t6 je čas v sekundách, po dobu kterého může motor
bezpečně pracovat s proudem, který 6-násobně překračuje jmenovitý proud) známý (poskytl
ho výrobce motoru), parametr „časová konstanta“ může být nastavený podle něho. Tepelná
časová konstanta motoru v minutách je rovná 2xt6. Pokud se měnič nachází v režimu stop,
časová konstanta se vnitřně zvýší na trojnásobek nastavené hodnoty parametru. V režimu
stop je ochlazování zabezpečené prouděním tepla a časová konstanta se zvýší, viz. Obr. 1-19.
Poznámka: Pokud jsou změněny parametry jmenovitá rychlost (par. 2.1.8) nebo jmenovitý
proud (par. 2.1.9) motoru, tento parametr je automaticky nastaven na p
hodnotu (45).
řednastavenou
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 41

40 • VACON POPIS PARAMETRŮ
Tepl ota m otoru
Oblast poruchy
105 %
Proud
motoru
I/I
T
Časová kon stanta T
Teplota motoru
nxl k40.fh 8
*)
Obr. 1-19. Výpočet teploty motoru
2.7.10 Tepelná ochrana motoru: Pracovní cyklus motoru
Definuje jaká část jmenovité zátěže motoru se využívá.
Tato hodnota může být nastavená na 0 %...100 %.
= (I/IT)2x(1-e
Mění se s velikostímotoru a je
nastavitelná parametrem 2.7.9
*)
Porucha/varování
par. 2.7.6
-t/T
)
Čas
Parametr 2.7.11, Ochrana zablokování:
Všeobecné informace
Ochrana motoru před přetížením chrání motor před krátkodobým přetížením, jako je například zablokovaný
hřídel. Nastavený reakční čas ochrany před přetížením může být kratší než v případě tepelné ochrany
motoru. Stav přetížení je definovaný dvěma parametry, 2.7.12 (Proudový limit zablokování) a 2.7.13
(Časový limit zablokování). Pokud je proud vyšší než nastavené omezení a výstupní frekvence je nižší než
nastavená hranice, dochází k přetížení. Ve skutečnosti se nevyužívá informace o otáčení hřídele. Ochrana
před přetížením je určitým typem nadproudé ochrany.
2.7.11 Ochrana zablokování
0 = Žádná akce
1 = Varování
2 = Porucha, po poruše zastavení motoru podle parametru 2.1.12
3 = Porucha, volný doběh motoru po poruše
Nastavení parametru na 0 deaktivuje ochranu a vynuluje čítač času přetížení.
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 42

POPIS PARAMETRŮ VACON • 41
2.7.12 Proudový limit zablokování
Proud může být nastavený v rozmezí
0,0…I
*2. Aby nastalo přetížení,
nMotor
I
proud musí přesáhnout tuto hranici, viz.
Obr. 1-20. Programové vybavení
neumožňuje zápis větší hodnoty než
I
*2. Pokud se změní parametr
nMotor
Jmenovitý proud motoru par. 2.1.9, tento
parametr se automaticky přepíše na
Oblast
zablokování
počáteční (přednastavenou) hodnotu
(I
*1,3).
nMotor
Par. 2.7.12
f
2.7.13 Časový limit zablokování
Tento čas je možné nastavit
v rozmezí 1,0 až 120,0 s.
Je to maximální čas, který je
dovolený pro fázi přetížení. Čas
přetížení se počítá vnitřním vratným
čítačem.
Pokud hodnota čítače doby přetížení
překročí tuto hranici, ochrana způsobí
vypnutí (viz. Obr. 1-21)
Obr. 1-20. Nastavení charakteristiky zablokování motoru
Čítač času
zablokování
Oblast poruchy
Par. 2.7.13
Par. 2.7.14
Porucha/Varování
par. 2.7.11
Čas
nxlk41.fh8
2.7.14 Limit frekvence zablokování
Frekvence může být nastavená v rozsahu 1-f
K poruše zablokování může dojít, pokud výstupní frekvence zůstane pod touto hranicí.
Zablokovaný
Nezablokovaný
Obr. 1-21. Výpočet času přetížení
(par. 2.1.2).
max
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 43

42 • VACON POPIS PARAMETRŮ
Parametry 2.7.15–2.7.18, Ochrana odlehčení:
Všeobecné informace
Účelem ochrany motoru před odlehčením je zabezpečit, aby byl motor zatížený, pokud je pohon v chodu.
Ztráta zatížení může být způsobená problémem v procesu, například roztrhnutým pásem, nebo
zavzdušněným čerpadlem. Ochranu před odlehčením motoru je možné nastavit pomocí křivky odlehčení s
parametry 2.7.16 (Křivka odlehčení při jmen. frekvenci) a 2.7.17 (Křivka odlehčení při 0 frekvenci), viz.
dále. Křivka odlehčení má kvadratický průběh a nachází se mezi nulovou frekvencí a bodem počátku
odbuzování. Ochrana není aktivní pro frekvence nižší než 5 Hz (čítač času odlehčení je zastaven).
Hodnoty momentu pro nastavení křivky odlehčení jsou nastavené v procentech vzhledem k jmenovitému
momentu motoru. Na určení měřítka pro hodnotu vnitřního momentu jsou použité štítkové údaje motoru,
jmenovitý proud motoru a jmenovitý proud měniče I
přesnost výpočtu momentu se snižuje.
2.7.15 Ochrana odlehčení
0 = Žádná akce
1 = Varování
2 = Porucha, po poruše zastavení motoru podle parametru 2.1.12
3 = Porucha, volný doběh motoru po poruše
Pokud je nastavená akce porucha, měnič se vypne a aktivuje poruchový stav.
Deaktivace ochrany, tj. nastavení parametru na 0, vynuluje čítač času odlehčení.
2.7.16 Ochrana odlehčení: Zatížení v začátku odbuzování
Hranice momentu je možné nastavit v rozmezí 10,0–150,0 % x T
Tento parametr nastavuje hodnotu pro minimální přípustný moment, pokud je výstupní
frekvence vyšší než je bod počátku odbuzování, viz. Obr. 1-22.
Pokud změníte parametr 2.1.9 (Jmenovitý proud motoru), tento parametr je automaticky
přepsán na počáteční (přednastavenou) hodnotu.
. Pokud na měnič není připojen předepsaný motor,
L
.
nMotor
4
Moment
Par. 2.7.16
Par. 2.7.17
5 Hz
Obr. 1-22. Nastavení minimálního zatížení
Ob last
odle hčení
Začátek odbuz.
par. 2.6.3
f
nxlk43.fh8
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 44

POPIS PARAMETRŮ VACON • 43
2.7.17 Ochrana odlehčení: Zatížení při nulové frekvenci
Hranici momentu je možné nastavit v rozmezí 5,0–150,0 % x T
Tento parametr nastavuje hodnotu pro minimální přípustný moment při nulové frekvenci, viz.
Obr. 1-22.
Pokud změníte parametr 2.1.9 (Jmenovitý proud motoru), tento parametr je automaticky
přepsán na počáteční (přednastavenou) hodnotu.
2.7.18 Časový limit ochrany odlehčení
Tento čas může být nastavený v rozmezí
2,0 až 600,0 s.
Je to maximální přípustný čas existence
odlehčení. Vnitřní vratný čítač počítá
akumulovaný čas odlehčení. Pokud
hodnota čítače odlehčení přesáhne tuto
hranici, ochrana vykoná akci podle
nastavení parametru 2.7.15. Pokud je
měnič zastaven, čítač odlehčení se
vynuluje,
viz. Obr. 1-23.
Par. 2.7.18
Čít ač času
odlehčení
.
nMotor
Oblast poruchy
Porucha/Varování
par. 2.7.15
2.7.19 Reakce na poruchu termistoru
0 = Žádná akce
1 = Varování
2 = Porucha, po poruše zastavení motoru podle parametru 2.1.12
3 = Porucha, volný doběh motoru po poruše
Nastavení parametru na 0 deaktivuje ochranu.
2.7.20 Reakce na poruchu průmyslové sběrnice
Tímto parametrem nastavíte režim odezvy na poruchu průmyslové sběrnice, pokud je použita
karta průmyslové sběrnice. Podrobnější informace najdete v příslušné Příručce karty pro
průmyslovou sběrnici (Fieldbus Board Manual).
Viz. parametr 2.7.19.
2.7.21 Reakce na poruchu slotu
Tímto parametrem nastavíte režim odezvy na poruchu slotu karty způsobenou chybějící nebo
poškozenou kartou.
Viz. parametr 2.7.19.
Odlehčený
Neodlehčený
Obr. 1-23. Činnost čítače času odlehčení
nxlk44.fh8
Čas
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 45

44 • VACON POPIS PARAMETRŮ
2.7.22 Kontrola hodnoty zpětné vazby
0 = Žádná akce
1 = Varování, pokud je hodnota zpětné vazby pod limitem nastaveným par. 2.7.23
2 = Varování, pokud je hodnota zpětné vazby nad limitem nastaveným par. 2.7.23
3 = Porucha, pokud je hodnota zpětné vazby pod limitem nastaveným par. 2.7.23
4 = Porucha, pokud je hodnota zpětné vazby nad limitem nastaveným par. 2.7.23
2.7.23 Limit kontroly zpětné vazby
Tímto parametrem můžete nastavit hranici kontroly hodnoty zpětné vazby nastavenou
par. 2.7.22.
2.7.24 Zpoždění kontroly zpětné vazby
Tímto parametrem můžete nastavit zpoždění funkce kontroly zpětné vazby (par. 2.7.22).
Pokud je tento parametr aktivní (>0), funkce par. 2.7.22 vyhlásí poruchu/varování, až když
hodnota zpětné vazby zůstane mimo definovaný limit déle než je čas nastavený tímto
parametrem.
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 46

POPIS PARAMETRŮ VACON • 45
4.8 PARAMETRY AUTOMATICKÉHO RESTARTU PO PORUŠE
Funkce automatického restartu měniče po poruše je aktivní, pokud par. 2.1.21 = 1. Provedou se vždy tři
pokusy o opětovné spuštění motoru.
2.8.1 Automatický restart: Čas čekání
Definuje čas, po kterém se frekvenční měnič pokusí znovu spustit motor, poté co porucha
přestala být aktivní.
2.8.2 Automatický restart: Trvání pokusu o restart
Funkce automatického restartu se znovu pokusí spustit frekvenční měnič, poté co porucha
přestala být aktivní a uplynul čas čekání.
čeká ní
par. 2.8.1
Okamžik poruchy
Signál stop mot oru
Restart 1 Restart 2
Signál start motoru
Supervize
Porucha aktivní
RESET/
res et poruchy
Funkce automatického resetu poruchy (3 pokusy): P2.1.21 = 1
Obr. 1-24. Automatický restart.
Počítání času začíná při prvním autorestartu. Pokud počet poruch, které se vyskytly po dobu
trvání pokusu o restart přesáhne tři, aktivuje se poruchový stav. V ostatních případech je
porucha vynulovaná po uplynutí trvání pokusu o restart a následující porucha znova spouští
čítač trvání pokusu.
Pokud po dobu trvání pokusu trvá jedna porucha, měnič vyhlásí poruchový stav.
2.8.3 Automatický restart: Způsob startu
Tímto parametrem je vybrán způsob startu po automatickém restartu. Tento parametr
definuje způsob restartu:
0 = Start po rampě
1 = Letmý start (start do volně dobíhajícího motoru)
2 = Způsob startu podle nastavení par. 2.1.11
čeká ní
par. 2.8.1
čekání
par. 2.8.1
Čas po kusu
par. 2.8.2
Restart 3
čeká ní
par. 2.8 .1
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 47

46 • VACON POPIS PARAMETRŮ
4.9 PARAMETRY PID REGULACE
2.9.1 Aktivace PID regulace
Tímto parametrem můžete aktivovat nebo deaktivovat PID regulátor nebo zviditelnit
parametry kaskádní regulace čerpadel a ventilátorů (PFC).
0 = PID regulátor neaktivní
1 = PID regulátor aktivní
2 = Aktivace kaskádní regulace čerpadel a ventilátorů. Skupina parametrů P2.10 bude
viditelná.
2.9.2 Reference PID
Definuje zdroj reference pro PID regulátor.
Přednastavená hodnota je 2.
0 = Reference z AI1
1 = Reference z AI2
2 = Reference z ovládacího panelu (Skupina K3, parametr P3.5)
3 = Reference z průmyslové sběrnice (FBProcessDataIN1)
2.9.3 Vstup zpětné vazby
0 AI1
1 AI2
2 Sběrnice (Zpětná vazba 1: FBProcessDataIN2; Zpětná vazba 2: FBProcessDataIN3)
3 Moment motoru
4 Rychlost motoru
5 Proud motoru
6 Výkon motoru
7 AI1-AI2
2.9.4 Zesílení P složky
Tento parametr určuje zesílení P složky PID regulátoru. Pokud je hodnota parametru
nastavená na 100 % , změna hodnoty odchylky o 10% způsobí změnu výstupu regulátoru
o 10 %.
Pokud je parametr nastavený na 0, PID regulátor pracuje jak ID-regulátor.
Viz. příklady dále.
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 48

POPIS PARAMETRŮ VACON • 47
2.9.5 Časová konstanta I složky
Tento parametr určuje integrační časovou konstantu PID regulátoru. Pokud je parametr
nastaven na 1,00 s, změna hodnoty odchylky o 10 % způsobí změnu výstupu regulátoru o
10,00 %/s. Pokud je hodnota parametru nastavená na 0,00 s, PID regulátor pracuje jako PD
regulátor.
Viz. příklady dále.
2.9.6 Časová konstanta D složky
Tento parametr určuje derivační časovou konstantu PID regulátoru. Pokud je tento parametr
nastavený na 1,00 s, změna hodnoty regulační odchylky o 10 % po dobu 1,00 s způsobí
změnu výstupu o 10 %. Pokud je hodnota parametru nastavená na 0,00 s, PID regulátor se
správa jako PI regulátor.
Viz. příklady dále.
Příklad 1:
Za účelem snížení hodnoty odchylky na nulu se zadanými hodnotami, se měnič frekvence
chová následovně:
Zadané hodnoty:
Par. 2.9.4, P = 0 % PID max. limit = 100,0 %
Par. 2.9.5, I-složka = 1,00 s PID min. limit = 0,0 %
Par. 2.9.6, D-složka = 0,00 s Min frekv. = 0 Hz
Odchylka (žádaná – skutečná) = 10,00 % Max frekv. = 50 Hz
V tomto příkladě pracuje PID regulátor prakticky jen jako I regulátor.
Na základě zadané hodnoty parametru 2.9.5 (integrační čas), se výstup PID zvýší o 5 Hz
(10 % z rozdílu mezi maximální a minimální frekvencí) každou sekundu, až dokud bude
odchylka rovná 0.
Hz
I-slož.=5 Hz/s
10%
10%
10%
10%
I-složka=5 Hz/s
I-složka=5 Hz/s
I-složka=5 Hz/s
odchylka=10 % I-složka=5 Hz/s
1s
Obr. 1-25. PID regulátor ve funkci I regulátoru
NX12k70
výstup PID
hodnota odchylky
t
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 49
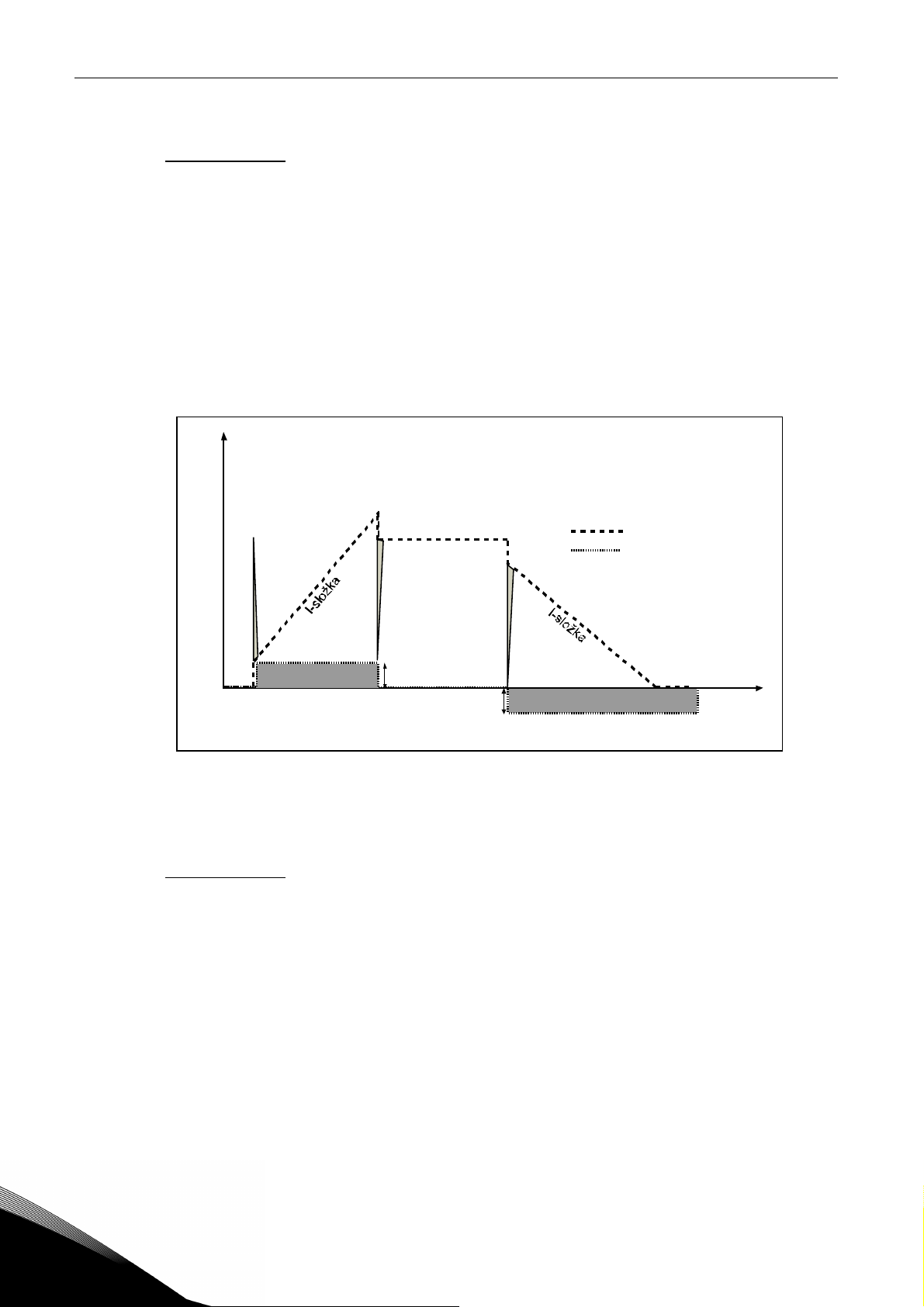
48 • VACON POPIS PARAMETRŮ
Příklad 2:
Zadané hodnoty:
Par. 2.9.4, P = 100 % PID max. limit = 100,0 %
Par. 2.9.5, I-složka = 1,00 s PID min. limit = 0,0 %
Par. 2.9.6, D-složka = 1,00 s Min frekv. = 0 Hz
Odchylka (žádaná – skutečná) = ±10 % Max frekv. = 50 Hz
Po zapnutí napájení systém zjistí odchylku mezi požadovanou a skutečnou hodnotou a začne
zvyšovat nebo snižovat (v případě, že je regulační odchylka záporná) výstup PID na základě
integrační časové konstanty. Jakmile se rozdíl mezi požadovanou a skutečnou hodnotou sníží
na 0, výstup se sníží o hodnotu odpovídající hodnotě parametru 2.9.5.
V případě, že je regulační odchylka záporná, měnič frekvence zareaguje odpovídajícím
snížením výstupu.
Hz
D-složka
D-složka
D-složka
P-složka=5 Hz Odchylka=10 %
Odchylka= -10 %
P-složka= -5 Hz
Obr. 1-26. Průběh výstupu PID regulátoru s hodnotami z příkladu 2
Příklad 3:
Zadané hodnoty:
Par. 2.9.4, P = 100 % PID max. limit = 100,0 %
Par. 2.9.5, I-složka = 0,00 s PID min. limit = 0,0 %
Par. 2.9.6, D-složka = 1,00 s Min frekv. = 0 Hz
Odchylka (žádaná – skutečná) = ± 10%/s Max frekv. = 50 Hz
S narůstající odchylkou také výstup PID narůstá na základě nastavených hodnot (derivační
časová konstanta = 1,00 s).
výstup PID
hodnota odchylky
t
NX12 k69
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 50
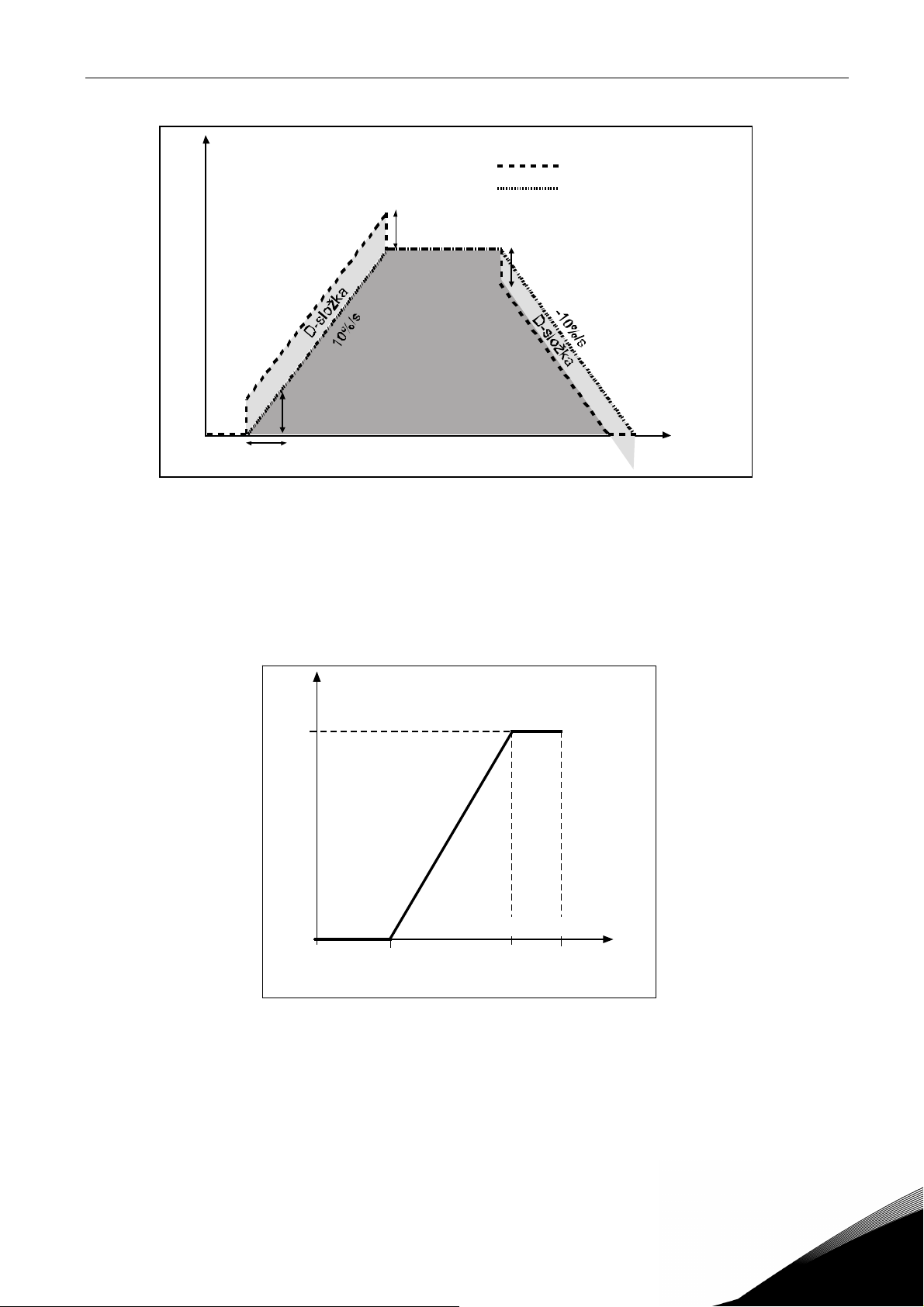
POPIS PARAMETRŮ VACON • 49
Hz
výstup PID
hodnota odchylky
D-složka=10 %=5,00 Hz
D-složka= -10 %= -5,00 Hz
P-složka=100 % *PID odch. = 5,00 Hz/s
10%
1,00 s
Obr. 1-27. Výstup PID regulátoru s hodnotami z příkladu 3.
2.9.7 Měřítko zpětné vazby 1 minimum
Nastavuje bod minima měřítka pro signál zpětné vazby 1, viz. Obr. 1-28
2.9.8 Měřítko zpětné vazby 1 maximum
Nastavuje maximální bod měřítka pro signál zpětné vazby 1, viz. Obr. 1-28
Změna měř ít ka
vstupního signálu [%]
100
Par.2.9.7=30 %
Par.2.9.8=80 %
NX12k72
t
Anal og ový
vstup [%]
0
0
0
4
Obr. 1-28. Příklad nastavení měřítka signálu zpětné vazby
6,0
8,8 20,0 mA
nxlk45.fh8
16,0
16,8
1008030
10,0 V8,03,0
20,0 mA
2.9.9 Inverze odchylky
Tento parametr vám umožňuje invertovat hodnotu regulační odchylky PID regulátoru (a tak
také činnost PID regulátoru).
0 Bez inverze
1 Invertovaný
2.9.10 Frekvence parkování
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 51
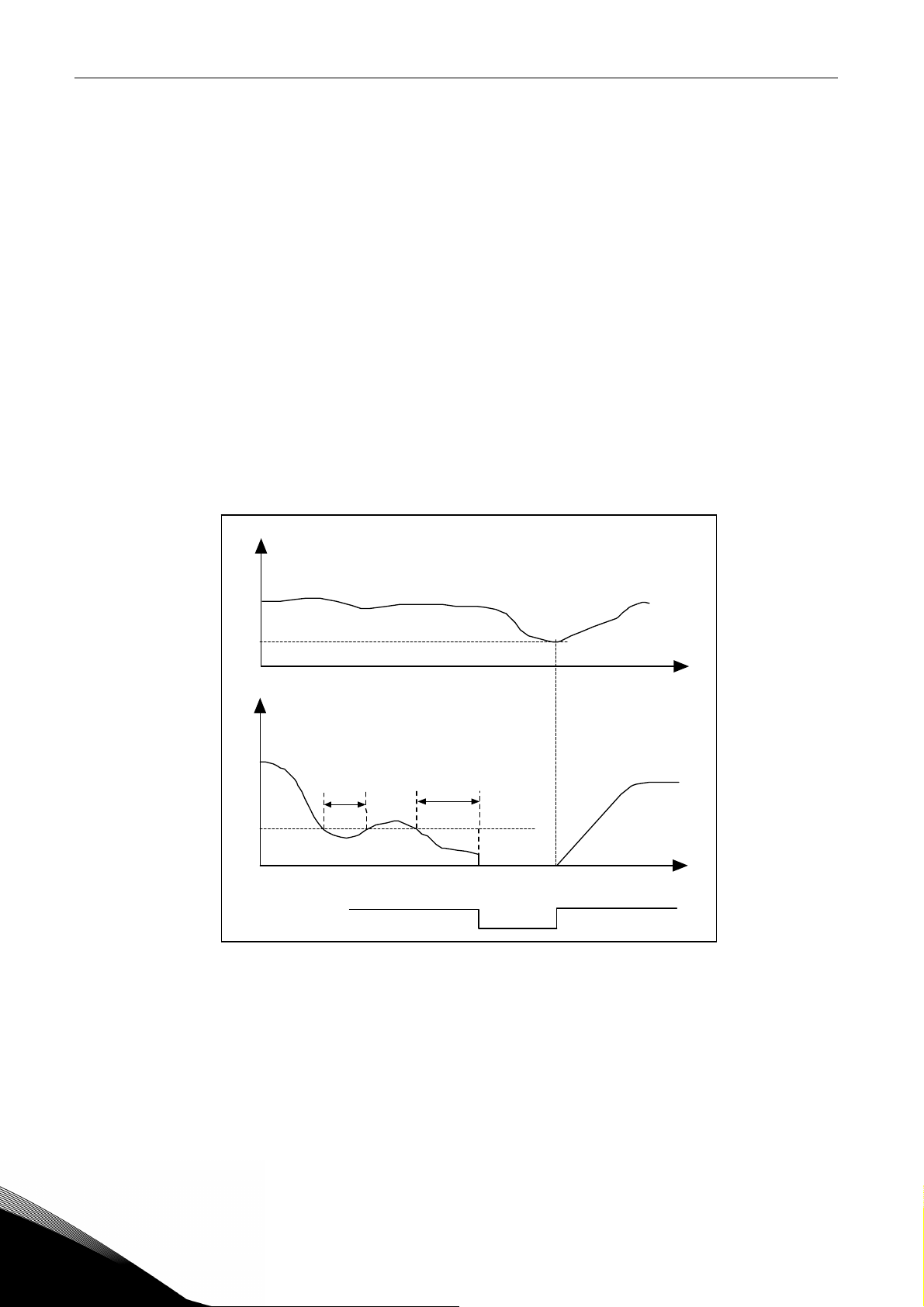
50 • VACON POPIS PARAMETRŮ
Frekvenční měnič automaticky zastaví motor (přejde do režimu stop) při poklesu frekvence
pod frekvenci parkování definovanou tímto parametrem, na čas delší než je nastavený
parametrem 2.9.11. Po dobu stavu Stop je v činnosti PID regulátor, který opětovně přepne
frekvenční měnič do stavu chodu (zapne motor), pokud signál skutečné hodnoty klesne pod,
nebo překročí (viz. par. 2.9.13) úroveň restartu určenou parametrem 2.9.12, viz. Obr. 1-29.
2.9.11 Zpoždění parkování
Minimální čas po dobu kterého musí frekvence setrvat pod frekvencí parkování, aby mohl být
frekvenční měnič přepnut do režimu stop (motor zastavený), viz. Obr. 1-29.
2.9.12 Úroveň restartu
Úroveň restartu definuje hranici, pod kterou musí klesnout hodnota zpětné vazby (skutečná
hodnota), nebo kterou je nutné překročit, aby byl obnoven stav chodu frekvenčního měniče
(motor běží), viz. Obr. 1-29.
2.9.13 Funkce restartu
Tento parametr definuje, zda dojde k opětovnému spuštění motoru, pokud signál skutečné
hodnoty poklesne pod, nebo přesáhne Úroveň restartu (par. 2.9.12). Viz. Obr. 1-29 a Obr. 1-
30.
Měřená hodnota
Úroveň restartu (param. 2.9.12)
Výstupní frekvence
t < par. 2 .9.11
Parkování
par. 2.9.10
Start/stop
měniče
Obr. 1-29. Funkce parkování frekvenčního měniče
t > par 2.9.11
běží
sto p
nxl k46.fh8
Čas
Čas
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 52
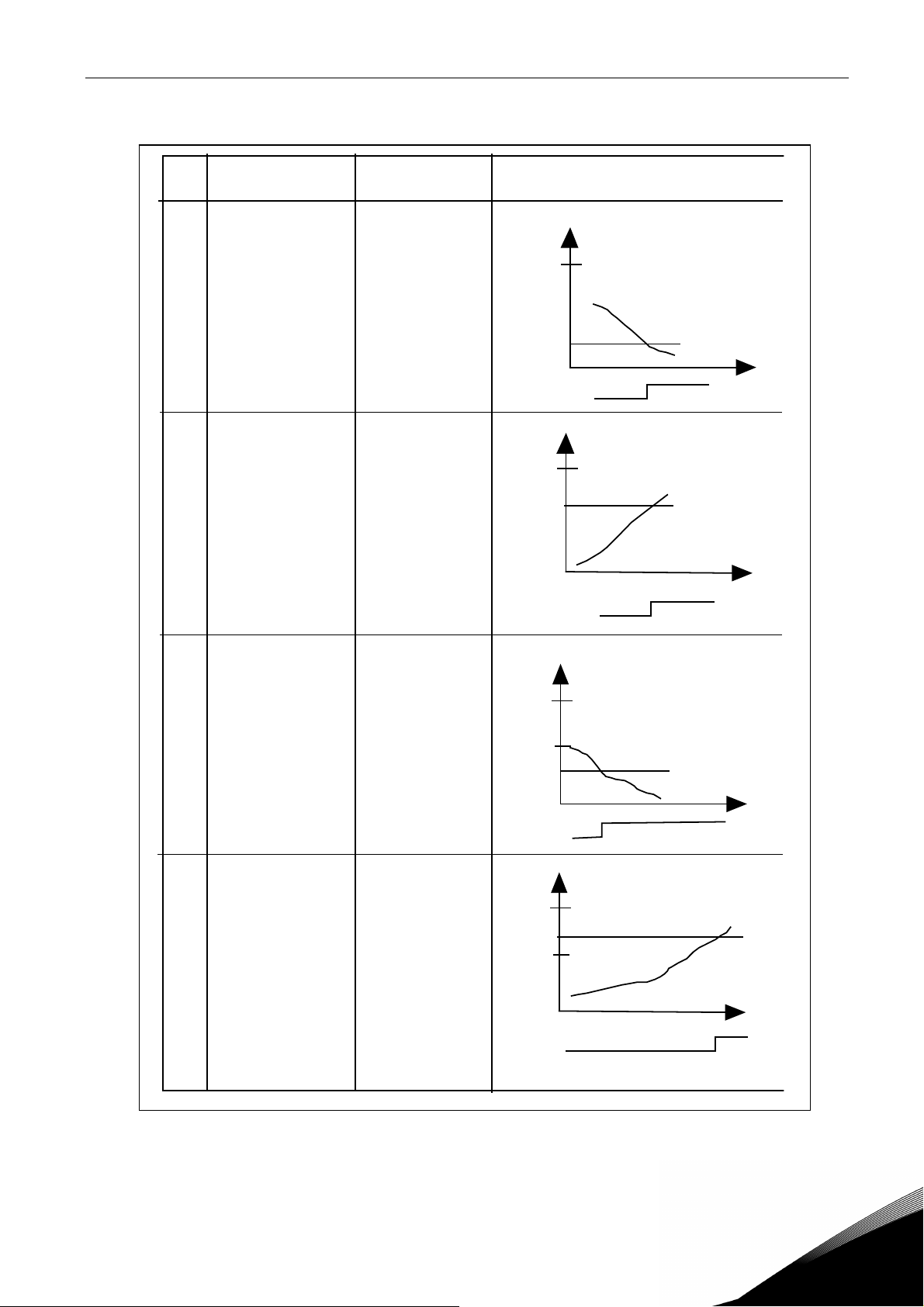
POPIS PARAMETRŮ VACON • 51
Hodn.
param.
0
1
Fu nkc e Om e ze ní Po pis
Motor se rozběhne,
pokud měřená
hodnota kle sne pod
omezení
Je definované
parametrem 2.9.12
vprocentech
z maximální
Signál měřené veličiny
hodnoty měřené
veličiny
Motor se rozběhne,
pokud měřená
hodnota překročí
omezení
Je definované
parametrem 2.9.12
vprocentech
z maximální
Signál měřené veličiny
100 %
hodnoty měřené
veličiny
100 %
Start
Stop
Par. 2.9.12=60 %
Start
Stop
Par. 2.9.12=30%
čas
čas
Motor se rozběhne,
2
pokud měřená
hodnota kle sne pod
omezení
Je definované
parametrem 2.9.12
vprocentech
z aktuální
hodnoty reference
Motor se rozběhne,
3
pokud měřená
hodnota překročí
omezení
Je definované
parametrem 2.9.12
vprocentech
z aktuální
hodnoty reference
Obr. 1-30. Výběr způsobu opětovného startu po parkování
Signál měřené veličiny
100 %
reference=50 %
Par. 2.9.12=60 %
limit=60%*reference=30%
Start
Stop
Signál měřené veličiny
100 %
Par. 2.9.12=140 %
limit=140 %*reference=70%
reference=50%
NXLk59. fh8
Sta rt
Sto p
čas
čas
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 53
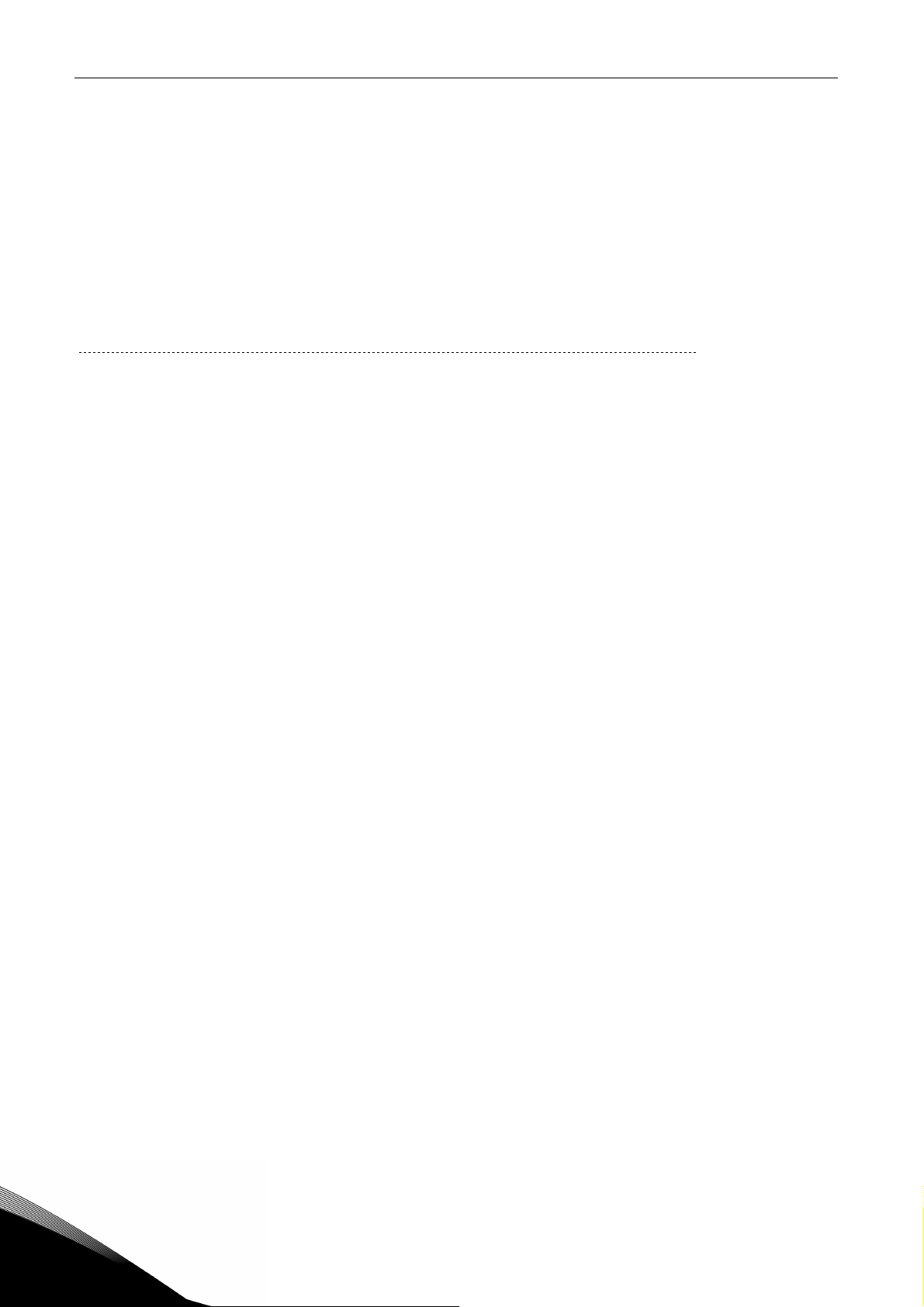
52 • VACON POPIS PARAMETRŮ
4.10 KASKÁDNÍ ŘÍZENÍ ČERPADEL A VENTILÁTORŮ (PFC)
Kaskádní řízení čerpadel a ventilátorů (PFC - Pump & Fan Control) se může použít na řízení jednoho
regulovaného pohonu a až třech přídavných pohonů. PID regulátor frekvenčního měniče řídí rychlost
regulovaného pohonu a pro řízení celkového průtoku dává řídicí signály na spuštění a vypnutí přídavných
pohonů. Mimo standardních osmi skupin parametrů je k dispozici skupina parametrů pro funkce řízení
několika čerpadel a ventilátorů.
Jak už samotný název naznačuje, že se tato skupina parametrů používá na řízení činnosti čerpadel a
ventilátorů. Na přepínání motorů připojených na frekvenční měnič se používají externí stykače. Funkce
automatické záměny nabízí možnost měnit pořadí spouštění přídavných pohonů.
4.10.1 Krátký popis funkcí PFC a základních parametrů
Automatické střídání mezi pohony (Výběr automatického střídání a „zařazený“, P2.10.4)
Automatické střídání pořadí spouštění a zastavování je aktivováno a aplikováno buď pouze na přídavné
pohony, nebo na přídavné pohony a také pohon řízený frekvenčním měničem v závislosti na nastavení
parametru 2.10.4.
Funkce automatického střídání umožňuje střídání pořadí spouštění a zastavování pohonů řízených PFC
automatikou v požadovaných intervalech. Také pohon regulovaný frekvenčním měničem může být
„zařazený“ do sekvence střídání pohonů (par 2.10.4). Funkce automatického střídání zabezpečuje stejný
počet motohodin jednotlivých pohonů, tím se předchází např. zablokování čerpadel v důsledku dlouhých
přestávek v provozu.
• Funkci automatického střídání aktivujete parametrem 2.10.4 Automatické střídání.
• Pohony se vystř
je pod úrovní definovanou parametrem 2.10.7 Limit frekvence pro střídání.
• Běžící pohony jsou zastaveny a opět spuštěny podle nového pořadí.
• Externí stykače ovládané reléovými výstupy frekvenčního měniče připínají motory k frekvenčnímu
měniči nebo na síť. Pokud je motor řízený frekvenčním měničem zařazený do automatického střídání,
je vždy ovládaný přes reléový výstup, který je aktivován jako první. Ostatní relé jsou spínány později
a ovládají přídavné pohony.
Parametr 2.10.4 se využívá na aktivaci vstupů zařazený (hodnoty 3 a 4). Na signály zařazený můžou být
využity pomocné kontakty motorových spouštěčů. Tyto signály jsou připojeny na digitální vstupy, které
mají příslušným parametrem nastavenou funkci Zařazený. Automatika řízení čerpadel a ventilátorů potom
řídí pouze motory, které mají aktivní signál „zařazený“.
• Pokud je signál „zařazený“ přídavného pohonu deaktivovaný a další přídavný pohon je dispozici, volný
pohon bude použit bez zastavení frekvenčního měniče.
• Pokud je signál „zařazený“ regulovaného pohonu deaktivovaný, všechny motory budou zastaveny
a znovu spuštěny v novém pořadí.
• Pokud je signál „zařazený“ znovu aktivován po dobu běhu, automatika zastaví všechny motory a
znovu je spustí v novém pořadí. Příklad: [P1 P3] [P2 SEPNUTÝ] [STOP] [P1 P2 P3]
ídají, když uplyne čas nastavený parametrem 2.10.5 Interval střídání a aktuální výkon
4
Viz. kapitola 4.10.2 Příklady.
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 54

POPIS PARAMETRŮ VACON • 53
Parametr 2.10.5, Interval střídání
Po uplynutí času nastaveným tímto parametrem se pohony vystřídají, pokud je aktuální výkon pod úrovní
definovanou parametrem 2.10.7 (Limit frekvence pro střídání) a počet použitých přídavných pohonů je
menší než 2.10.6 (Maximální počet přídavných pohonů). Pokud je výkon vyšší než hodnota nastavená
parametrem 2.10.7, střídání se nevykoná před tím, než výkon klesne pod tuto hranici.
• Počítání času začne pouze, pokud je požadavek na start/stop aktivní.
• Čítač času se vynuluje po vystřídání pohonů nebo deaktivaci povelu na start.
Parametry 2.10.6, Maximální počet přídavných pohonů
2.10.7, Limit frekvence pro střídání
Tyto parametry definují úroveň, pod kterou musí zůstat výkon, aby se uskutečnilo automatické střídání.
Tato úroveň je definovaná následovně:
• Pokud je počet běžících přídavných pohonů menší než hodnota parametru 2.10.6, vystřídání pohon
může uskutečnit.
• Pokud je počet běžících přídavných pohonů stejný jako je hodnota parametru 2.10.6, a frekvence
regulovaného je pod hodnotou parametru 2.10.7, vystřídání pohonů se může uskutečnit.
• Pokud je hodnota parametru 2.10.7 nastavená na 0 Hz, automatické střídání se může uskutečnit
pouze v klidovém stavu (stop a parkování) bez ohledu na hodnotu parametru 2.10.6.
ů se
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 55

54 • VACON POPIS PARAMETRŮ
4.10.2 Příklady
PFC se signály „zařazený“ a se střídáním třech čerpadel (je potřeba přídavná karta OPT-AA nebo OPT-
B5)
Situácia: 1 regulovaný pohon a 2 přídavné pohony.
Nastavení parametru: 2.10.1 = 2
Využity jsou zpětnovazebné signály „zařazený“ a automatické střídání mezi všemi pohony.
Nastavení parametru: 2.10.4 = 4
DIN4 aktivní (par.2.2.6=0)
Zpětnovazebné signály „zařazený“ využívají digitální vstupy DIN4 (AI1), DIN2 a DIN3 vybrané
parametry 2.1.17, 2.1.18 a 2.2.4.
Řízení čerpadla 1 (par.2.3.1=17) je povolené signálem „Zařazený 1“ (DIN2, 2.1.17=10), řízení
čerpadla 2 (par.2.3.2=18) signálem „Zařazený 2“ (DIN3, par. 2.1.18=13) a řízení čerpadla 3
(par.2.3.3=19) signálem „Zařazený 3“ (DIN4)
Snímač skuteč.
hodnoty
(0)4…20 mA
I
–
+
mA
Svorka Signál
1 +10V
2 AI1+ Digitální vstup DIN4
3 AI1- Zem I/O
4 AI2+
5 AI26 +24V Výstupní řídicí napětí
7 GND Zem I/O
8 DIN1 START
9 DIN2 „Zařazený 1“ (par 2.1.17 = 10)
10 DIN3 „Zařazený 2“ (par 2.1.18 = 13)
11 GND Zem I/O
18 AO1+
19 AO1-
A RS 485 Sériová sběrnice
B RS 485 Sériová sběrnice
21 RO1
22 RO1
23 RO1
OPT-B5
22 RO1/1
Výstupní reference
ref
Zpětná vazba PID regulátoru
Výstupní frekvence
Analogový výstup
Reléový výstup 1
PORUCHA
Střídání 1 (řízení čerpadla 1), par 2.3.2 = 17
23 RO1/2
25 RO2/1
26 RO2/2
28 RO3/1
29 RO3/2
Střídání 2 (řízení čerpadla 2), par 2.3.3 = 18
Střídání 3 (řízení čerpadla 3), par 2.3.4 = 19
Tab. 1-17. Příklad I/O konfigurace PFC řízení se signály „zařazený“ a se střídáním
třech čerpadel
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 56
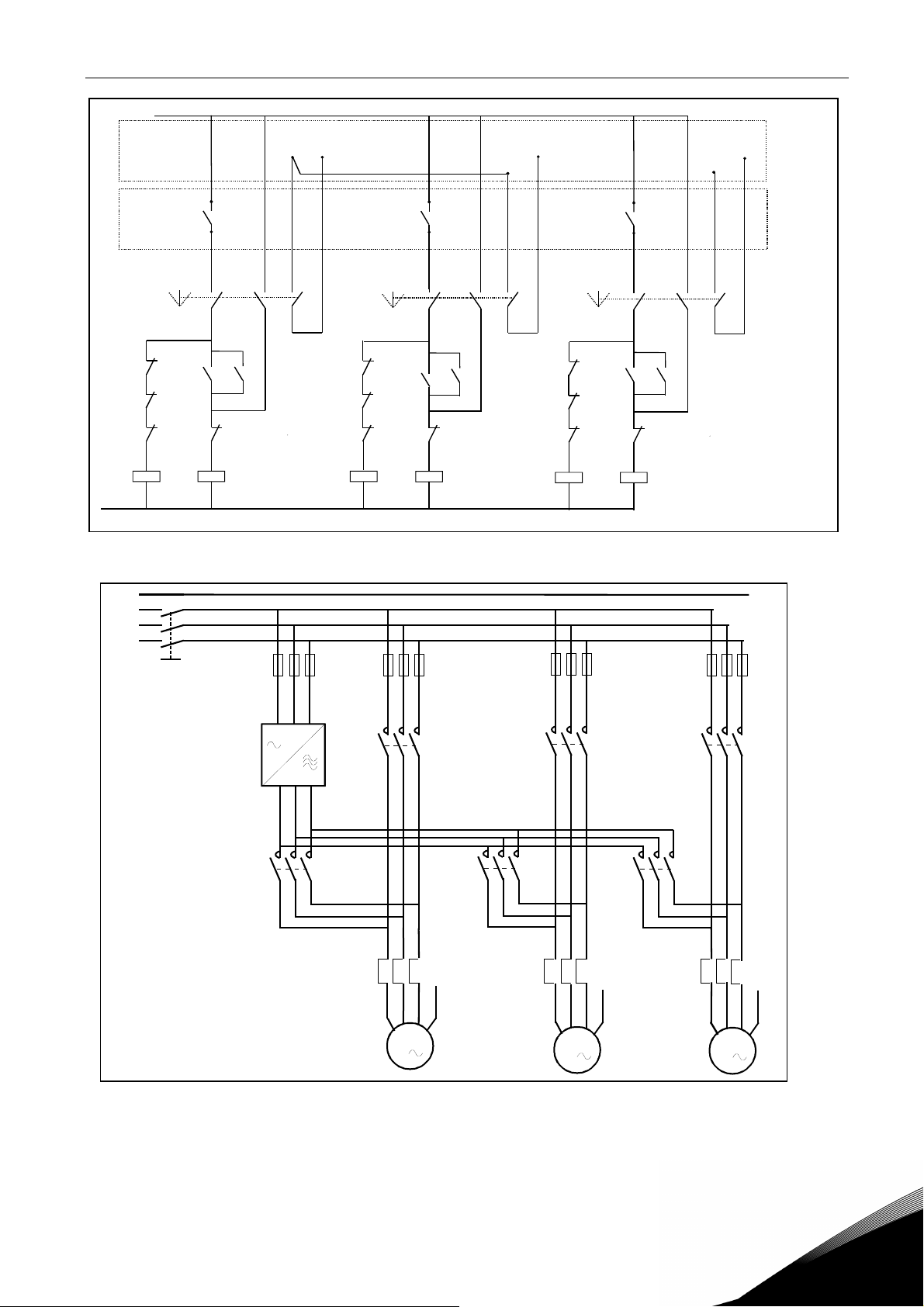
POPIS PARAMETRŮ VACON • 55
230 VAC
VACON NXL
DIN2
24 VDC
68
DIN3
9
AI1
10V
10
K2.1
K1
K2
M2/mains
25
26
AOMains
S3
K3
K1
K2
K3.1
K3
M3/Vacon M3/mains
28
29
K2
K3
K3.1
NXOPTB5
K3
K2
K1.1
K1
M1/Vacon
AOMains
S1
K1.1
K2
K1
M1/mains
22
23
AOMains
S2
K3
K3
K1
K2.1
K2
Vacon
M2/
Obr. 1-31. Systém automatického střídání s třemi čerpadly, principiální schéma zapojení
PE
L1
L2
L3
Q1
F3
F1
F2
K1
NX12k106.dsf
F2
VACON
NX12k104.ds4
K1
L1 L2 L3
UVW
M1
K1.1
K2
PE
UVW
M
3
K2.1
M2
Obr. 1-32. Automatické střídání s třemi čerpadly, zapojení silové části
UVW
M
3
PE
K3
M2
K3.1
PE
UVW
M
3
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 57
56 • VACON POPIS PARAMETRŮ
PFC se signály „zařazený“ a se střídáním dvou čerpadel (je potřeba přídavná karta OPT-AA nebo OPT-
B5)
Situácia: 1 regulovaný pohon a 1 přídavný pohon.
Nastavení parametru: 2.10.1=1
Využity jsou zpětnovazební signály „zařazený“ a automatické střídání mezi všemi pohony.
Nastavení parametru: 2.10.4=4
Zpětnovazební signály „zařazený“ využívají digitální vstupy DIN2 (par. 2.1.17) a DIN3, (par.
2.1.18).
Řízení čerpadla 1 (par.2.3.1=17) je povoleno signálem „Zařazený 1“ (DIN2, P2.1.17), řízení
čerpadla 2 (par.2.3.2=18) signálem „Zařazený 2“ (par. 2.1.18=13)
Potenciometr
reference
Snímač skuteč.
hodnoty
I
(0)4…20 mA
Svorka Signál
1 +10V
2 AI1+
–
+
mA
3 AI1- Zem I/O
4 AI2+
5 AI2-
6 +24V Výstupní řídicí napětí
7
GND Zem I/O
8 DIN1 START
9 DIN2 „Zařazený 1“ (par 2.1.17 = 10)
10 DIN3 „Zařazený 2“ (par 2.1.18 = 13)
11 GND Zem I/O
18 AO1+
19 AO1-
A RS 485 Sériová sběrnice
B RS 485 Sériová sběrnice
21 RO1
22 RO1
23 RO1
Výstupní reference
ref
Napěťový vstup/DIN4
Zpětná vazba PID regulátoru
Výstupní frekvence
Analogový výstup
Střídání 1 (řízení čerpadla 1)
par 2.3.1. = 17
OPT-AA
X1
1 +24V Výstupní řídicí napětí max. 150 mA
2 GND Zem I/O pro ovládání, např. +24 V a DO
3 DIN1 Přednastavená rychlost 2, par 2.2.1 = 7
4 DIN2 Reset poruchy, par 2.2.2 = 4
5 DIN3 Vyřazení PID (reference frekvence z AI1), par 2.2.3 = 11
6 DO1 Připravený, par 2.3.4 = 1
X2
22 RO1/NO
23 RO1/COM
Výstup, otevřený kolektor, 50 mA/48 V
Střídání 2 (řízení čerpadla 2), par 2.3.2 = 18
Tab. 1-18. Příklad I/O konfigurace PFC řízení se signály „zařazený“ a se střídáním
dvou čerpadel
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 58

POPIS PARAMETRŮ VACON • 57
230 VAC
OPT-AA
K1
K2
K1.1
M1/Vacon
Autom.OMains
S1
K1.1
K2
K1
M1/mains
22
23
RO1
DIN2
VACON NXOPTA2
24 VDC
12
9
DIN2
K2
K1
K2.1
S2
M2/
Vacon
Autom.OMains
K2.1
RO1
K1
K2
M2/mains
25
RO2
26
NX12k105.dsf
DIN3
DIN3
10
Obr. 1-33. Systém automatického střídání s dvěma čerpadly, principiální schéma zapojení
PE
L1
L2
L3
Q1
F3
F1
F2
VACON
NX12k107.ds4
K1
L1 L2 L3
UVW
M1
K1.1
K2
PE
UVW
M
3
K2.1
M2
Obr. 1-34. Automatické střídání s dvěma čerpadly, zapojení silové části
PE
UVW
M
3
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 59

58 • VACON POPIS PARAMETRŮ
4.10.3
2.10.1 Počet přídavných pohonů
2.10.2 Zpoždění startu přídavných pohonů
2.10.3 Zpoždění zastavení přídavných pohonů
2.10.4 Automatické střídání pohonů
Popis parametrů kaskádního řízení čerpadel a ventilátorů
Tímto parametrem se definuje počet použitých přídavných pohonů. Funkce, které ovládají
přídavné pohony (parametry 2.10.4 až 2.10.7) můžou být naprogramovány na reléové
výstupy.
Dříve než se spustí přídavný pohon, frekvence pohonu regulovaného frekvenčním měničem
musí zůstat nad spouštěcí frekvencí přídavného pohonu po dobu definovanou tímto
parametrem. Definované zpoždění se použije pro všechny přídavné pohony. Zabraňuje to
zbytečným spouštěním v důsledku krátkodobého překročení hranice spuštění.
Dříve než se vypne přídavný pohon, frekvence pohonu regulovaného frekvenčním měničem
musí zůstat pod hranicí vypnutí přídavného pohonu po dobu definovanou tímto parametrem.
Definované zpoždě
vypnutím v důsledku krátkodobého poklesu pod hranici vypnutí.
0= Nevyužité
1= Automatické střídání jen přídavných čerpadel
Pohon regulovaný frekvenčním měničem zůstává stejný. Proto je síťový stykač potřeba
pouze pro jeden přídavný pohon.
ní se použije pro všechny přídavné pohony. Zabraňuje to zbytečným
M
Příd. pohon 1 Příd. pohon 2
M
Obr. 1-35. Střídání jen přídavných pohonů.
Va co n
M
nx12k96.fh8
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 60

POPIS PARAMETRŮ VACON • 59
2= Všechny pohony jsou zahrnuty do postupnosti automatického střídání
Pohon regulovaný frekvenčním měničem je zahrnut do automatiky a je potřeba stykač na
připojení všech pohonů na elektrickou síť nebo na frekvenční měnič.
Vac o n
pomoc né
zapojení
Pohon 1 Pohon 2
Obr. 1-36. Střídání se všemi pohony
3= Automatické střídání se zařazenými (jen přídavné pohony)
Pohon regulovaný frekvenčním měničem zůstává stejný. Proto je síťový stykač potřeba
pouze pro přídavný pohon. Vstup „zařazený“ pro výstupy střídání 1, 2, 3 (nebo DIE1,2,3)
můžete vybrat par. 2.1.17 a 2.1.18.
4= Automatické střídání se zařazenými (frekvenční měnič a přídavné pohony)
Pohon regulovaný frekvenčním měničem je zahrnut do automatiky a je potřeba stykač na
připojení všech pohonů na elektrickou síť nebo na frekvenční měnič. DIN 1 je automaticky
vstupem „zařazený“ pro automatické střídání výstup 1. Vstup „zařazený“ pro výstupy
střídání 1, 2, 3 (nebo DIE1,2,3) můžete vybrat par. 2.1.17 a 2.1.18.
2.10.5 Interval střídání
Po uplynutí času nastaveným tímto parametrem se pohony vystř
pod úrovní definovanou parametrem 2.10.7, (Limit frekvence pro střídání) a počet použitých
přídavných pohonů je menší než 2.10.6 (Maximální počet přídavných pohonů). Pokud je výkon
vyšší než hodnota nastavená parametrem 2.10.7, střídání se nevykoná, před tím než výkon
klesne pod tuto hranici.
• Počítání času začne pouze, pokud je požadavek na start/stop aktivní.
• Čítač času se vynuluje po vystřídání pohonů nebo deaktivaci povelu na start
M
pomocné
za poje ní
M
NX12k97.fh 8
ídají, pokud je aktuální výkon
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 61

60 • VACON POPIS PARAMETRŮ
2.10.6 Maximální počet přídavných pohonů
2.10.7 Limit frekvence pro střídání
Tyto parametry definují úroveň, pod kterou musí zůstat výkon, aby se uskutečnilo automatické
střídání.
Tato úroveň je definovaná následovně:
• Pokud je počet běžících přídavných pohonů menší jak hodnota parametru 2.10.6,
vystřídání pohonů se může uskutečnit.
• Pokud je počet běžících přídavných pohonů stejný jako je hodnota parametru 2.10.6, a
frekvence regulovaného je pod hodnotou parametru 2.10.7, vystřídání pohonů se může
uskutečnit.
• Pokud je hodnota parametru 2.10.7 nastavená na 0 Hz, automatické střídání se může
uskutečnit pouze v klidovém stavu (stop a parkování) bez ohledu na hodnotu parametru
2.10.6.
Výstupní
frekvence
Par. 2.10.6 = 1
Maximální počet
přídavných pohonů
Okamžik záměny
Par. 2.10.7
Frekvence
aut. záměny
Par. 2.10.5
Inter val záměny
Řízení
příd. pohonu 1
Řízení
příd. pohonu 2
Obr. 1-37. Intervaly automatického střídání a hranice
2.10.8 Frekvence startu, přídavný pohon 1
Dříve než se spustí přídavný pohon, frekvence pohonu řízeného frekvenčním měničem musí
překročit hranici definovanou těmito parametry o 1 Hz. Přesah o 1 Hz vytváří hysterezi
potřebnou na zabránění vzniku nežádoucích spuštění a vypnutí, viz. parametry 2.1.1 a 2.1.2.
2.10.9 Frekvence zastavení, přídavný pohon 1
Dříve než se vypne přídavný pohon, frekvence pohonu regulovaného frekvenčním měničem
musí klesnout o 1 Hz pod hranici definovanou těmito parametry. Hranice frekvence vypnutí
definuje také frekvenci, na kterou poklesne frekvence pohonu regulovaného frekvenčním
měničem po spuštění přídavného pohonu.
Čas
Par. 2.10.5
Interval záměny
NXLK56.fh8
4
Tel.: +358-201-2121 • Fax:+358-201-212 205
Page 62

POPIS PARAMETRŮ VACON • 61
4.11 PARAMETRY ŘÍZENÍ OVLÁDACÍHO PANELU
3.1 Způsob ovládání
Tímto parametrem může být změněn způsob ovládání měniče. Více informací najdete
v Příručce uživatele Vacon NXL, kapitola 7.4.3.
3.2 Reference z panelu
Tento parametr slouží na nastavování reference frekvence přes panel. Více informací najdete v
Příručce uživatele Vacon NXL, kapitola 7.4.3.2.
3.3 Směr z panelu
0 Dopředu: Motor se točí směrem dopředu, pokud je panel nastavený jako aktivní
způsob ovládání.
1 Dozadu: Motor se točí směrem dozadu, pokud je panel nastavený jako aktivní
způsob ovládání.
Více informací najdete v Příručce uživatele Vacon NXL, kapitola 7.4.3.3.
3.4 Aktivace tlačítka Stop
Přednastavená hodnota je 1. Tehdy se po stisknutí tlačítka stop motor vždy zastaví, bez
ohledu na způsob ovládání frekvenčního měniče. Viz. Příručka uživatele Vacon NXL, kapitola
7.4.3.
Viz. parametr 3.1.
3.5 Reference PID
Reference PID regulátoru z panelu může být nastavena od 0 % do 100 %. Tato reference je
aktivní reference pro PID, pokud je parametr 2.9.2 = 2.
3.6 Reference PID 2
Reference PID regulátoru z panelu 2 m
aktivní, pokud je funkce digitálního vstupu DIN#=12 a kontakt DIN# je sepnutý.
ůže být nastavena od 0 % do 100 %. Tato reference je
24hodinová podpora: +358-40-8371 150 • E-mail: vacon@vacon.com
4
Page 63

62 • VACON ŘÍDICÍ LOGIKA SIGNÁLŮ
5. ŘÍDICÍ LOGIKA SIGNÁLŮ
DIN3
DIE1
DIE3
DIN2
DIN3
AI1
AI2
DIN1
DIN2
Přednast.rych.1
Přednast.rych.2
> 1
Vyřazení PID
2.2.21 Refer. při ovl. zběrnicí
2.2.20 Refer. při ovl. panelem
2.1.14 Refer. při ovl. I/O
Up
Motor
Down
potentiometr
2.9.2 Reference PID
P3 .5 Refe r. PID z pa ne lu
Reference
ze sběrnice
(F BProcessD at a IN 1)
R3.2 Reference z panelu
Reference ze sběrnice
Start/Stop ze sběrn ice
Směr ze sběrnice
Start dopředu
Programovatelná
logika start/stop
Start d ozadu
(programovatelný)
a reverzace
0
1
2
PID
3
0
1
2
I/ORef.
3
2.1.14
4
0
1
2
P
3
4
5
0
1
2
3
Z
4
5
3.3 Směr z panelu
DIN3 & DIE1
Aktivace ref. PID z panelu 2 (DIN#=12)
2.1.2 Max. frekvence
2.1.20 Přednast.rych.1
DIN3
DIE1
2.1.21 Přednast.rych.2
R3.6 Ref. PID panelu 2
Zpětná vazba
PID, par. 2.9.3
P2.9 .1 Aktivace PID
3.1 Způ sob ovládání
Panel
Sběrnice
I/O
Interní reference
frekvence
Tlačítko reset
Tlačítka start/stop
Interní start/stop
Interní reverzace
PID
DIE2
nx lk47. fh8
Reset poruchy (programovatelný)
Obr. 1-38. Řídicí logika signálů při multifunkčním aplikačním softwaru pro Vacon NXL
Tel.: +358-201-2121 • Fax:+358-201-212 205
5
Interní reset poruchy
>1
 Loading...
Loading...