


vacon nxl
®
PRZEMIENNIKI CZĘSTOTLIWOŚCI
INSTRUKCJA OBSŁUGI
APLIKACJI MULTI-CONTROL

1
vacon • 1
Aplikacja Multi-Control firmy Vacon (oprogramowanie ALFIFF20), wer. 3.45
INDEKS
1. Wprowadzenie .......................................................................................... 2
2. Wejścia/wyjścia sterujące ........................................................................ 3
3. Lista parametrów ...................................................................................... 4
3.1 Wielkości monitorowane (panel sterowania: menu M1) ....................................... 4
3.2 Parametry podstawowe (panel st er owania: menu P2 B2.1) .............................. 5
3.3 Sygnały wejściowe (panel sterowania: menu P2 P2.2) .................................... 7
3.4 Sygnały wyjściowe (panel sterowania: menu P2 P2.3) .................................... 9
3.5 Parametry sterowania napędem (panel sterowania: menu P2 P2.4) ................ 10
3.6 Parametry częstotliwości zabronionych (panel sterowania: menu P2 P2.5) ....... 10
3.7 Parametry sterowania silnikiem (panel s te rowania: menu P2 P2.6) ................. 11
3.8 Zabezpieczenia (panel sterujący: menu P2 P2.7) ......................................... 12
3.9 Parametry automatycznego restartu (panel sterowania: menu P2 P2.8) ................. 13
3.10 Parametry regulatora PID (panel sterowania: menu P2 P2.9) .................................13
3.11 Parametry sterowania pomp i wentylatorów (panel sterowania: menu P2 P2.10) .... 14
3.12 Sterowanie z panelu (panel sterowania: menu K3) ........................................... 15
3.13 Menu systemowe (panel ster owania: menu S6) ............................................... 15
3.14 Karty rozszerzeń (panel sterowania: menu E7) ................................................ 15
4. Opis parametrów .................................................................................... 16
4.1 PARAMETRY PODSTAWOWE .......................................................................... 16
4.2 SYGNAŁY WEJŚCIOWE ................................................................................. 20
4.3 SYGNAŁY WYJŚCIOWE ................................................................................. 25
4.4 STEROWANIE NAPĘDEM ............................................................................... 29
4.5 CZĘSTOTLIWOŚCI ZABRONIONE ................................................................... 33
4.6 STEROWANIE SILNIKIEM ............................................................................. 34
4.7 ZABEZPIECZENIA ........................................................................................ 37
4.8 PARAMETRY AUTOMATYCZNEGO RESTARTU .................................................... 45
4.9 PARAMETRY RE G UL AT O RA PI D ...................................................................... 46
4.10 STEROWANIE POMP I WENTYLATORÓW (PFC) ................................................. 52
4.11 PARAMETRY PANELU STEROWANIA ................................................................ 61
5. Logika sygnałów sterowania ................................................................... 62
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

1
2 • vacon WPROWADZENIE
Aplikacja Multicontrol
1. WPROWADZENIE
Aplikacja Multicontrol dla przemiennika Vacon NXL domyślnie wykorzystuje bezpośrednie
zadawanie częstotliwości z analogowego wejścia 1. Jednak w zastosowaniach związanych
np. z pompami i
uniwersalne funkcje wewnętrznych pomiarów i regulacji. Bezpośrednie zadawanie częstotliwości
można wykorzystać do sterowania bez regulatora PID i można je wybrać dla wejść analogowych,
magistrali komunikacyjnej, panelu sterowania, prędkości stałych i motopotencjometru.
Parametry specjalne dla sterowania pomp i wentylatorów (grupa P2.10) można przeglądać
i edytować po zmianie wartości par. 2.9.1 na 2 (uaktywnienie sterowania pomp i wentylatorów).
Wartość zadaną regulatora PID można wybrać dla wejść analogowych, magistrali komunikacyjnej,
jako wartość zadaną 1 z panelu lub włączając wartość zadaną 2 z panelu za pomocą wejścia
cyfrowego. Wartość rzeczywistą regulatora PID można wybrać dla wejść analogowych, magistrali
komunikacyjnej lub wybranych chwilowych sygnałów silnika. Regulatora PID można również użyć,
gdy przemiennik częstotliwości jest sterowany za pomocą magistrali komunikacyjnej lub panelu
sterującego.
• Wejścia cyfrowe podstawowe DIN2, DIN3 (DIN4) i opcjonalne wejścia cyfrowe DIE1,
DIE2, DIE3 można swobodnie programować.
• Wyjścia podstawowe i opcjonalne cyfrowe/przekaźnikowe oraz wyjścia analogowe
można swobodnie programować.
• Wejście analogowe 1 można zaprogramować jako wejście prądowe, wejście napięciowe
lub wejście cyfrowe DIN4.
UWAGA! Jeśli wejście analogowe 1 zostało zaprogramowane jako DIN4 za pomocą
parametru 2.2.6 (zakres sygnału AI1), należy sprawdzić poprawność ustawienia zworek
(Rysunek 1-1).
Funkcje dodatkowe:
• Regulatora PID można użyć z miejsc sterowania: we/wy, panelu i magistrali komunikacyjnej
• Automatyczn a id entyfikacja para m etr ów silnika
• Kreator rozruchu
• Funkcja uśpienia
• W pełni programowalna funkcja monitorowania wartości rzeczywistej: wyłączenie, ostrzeżenie,
usterka
• Programowalna logika sygnału Start/Stop oraz Nawrót
• Skalowanie wartości zadanej
• 2 zadane prędkości stałe
• Wybór zakresu wejścia analogowego, skalowanie sygnału, inwersja i filtrowanie
• Monitorowanie limitu częstotliwości
• Programowalne funkcje Start i Stop
• Hamowanie prądem stałym podczas uruchamiania i zatrzymywania
• Obszar częstotliwości zabronionych
• Programowalna charakterystyka U/f i optymalizacja U/f
• Regulowana częstotliwość kluczowania
• Funkcja automatycznego ponowne go s tartu po usterce
• Ochrona i monitorowanie (całość w pełni programowalna; wyłączenie, ostrzeżenie, usterka):
• Usterka wejścia analogowego
• Usterka zewnętrzna
• Kontrola faz wyjściowych
• Zbyt niskie napięcie
• Doziemienie
wentylatorami można użyć regulatora PID, który jest wyposażony w
• Ochrona silnika przed
prądowego
przegrzaniem, utknięciem
i niedociążeniem
• Termistor
• Magistrala komunikacyjna
• Opcjonalna karta
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
2
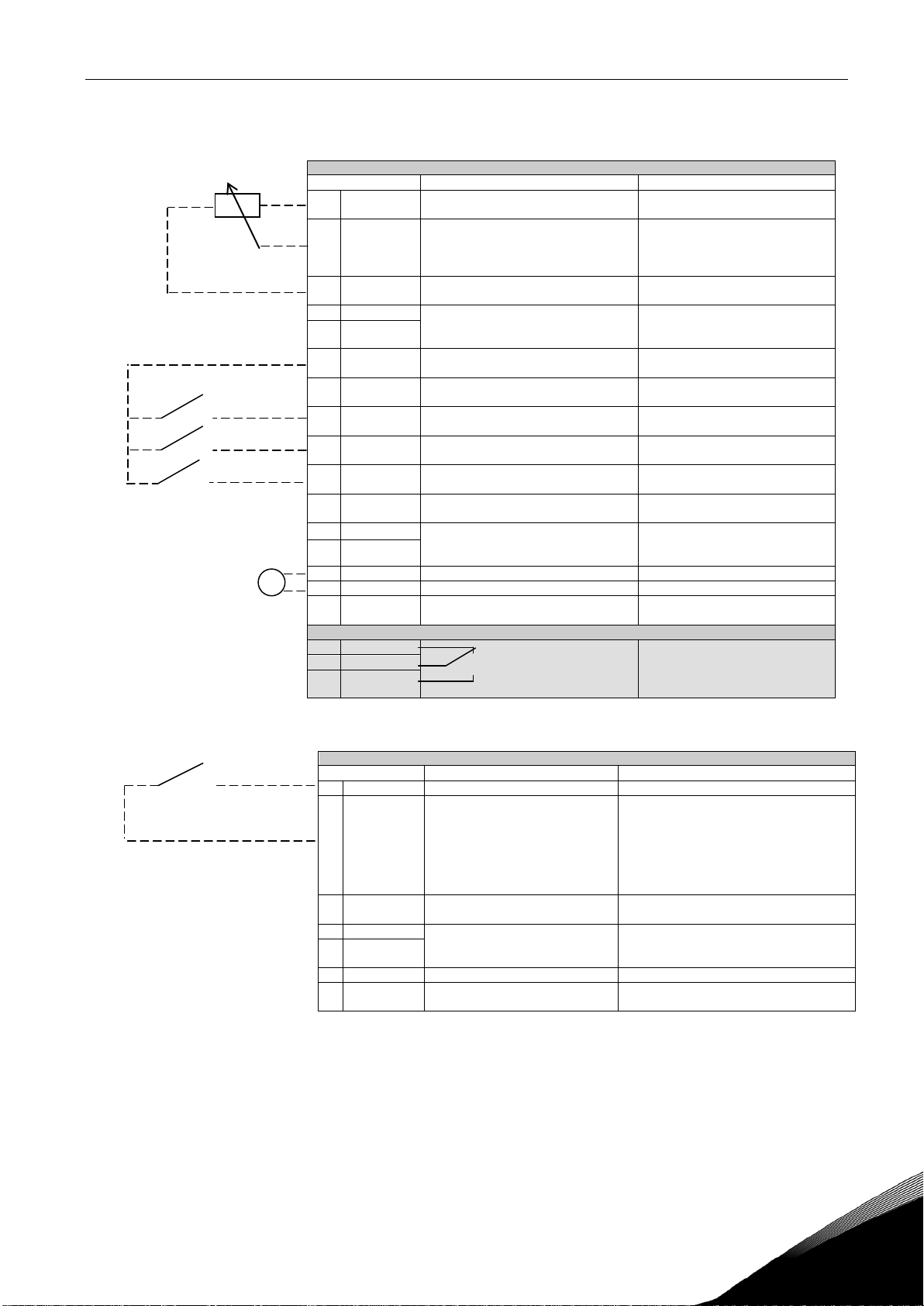
WEJŚCIA WYJŚCIA STERUJĄCE vacon • 3
Zacisk
Sygnał
Opis
zadających oraz sterujących
4
AI2+
Wejście analogowe, zakres
zakres prądowy 0/4−20 mA
Wejście prądowe zadające
Napięcie dla przekaźników
itp., maks. 0,1 A
Masa dla wejść/wyjść
Zestyk zamknięty = start do
tyłu
Wybór prędkości stałej 1
(programowalne)
Zestyk zamknięty = prędkość
stała
A
RS 485
Magistrala szeregowa
Różnicowy odbiornik/nadajnik
B
RS 485
Magistrala szeregowa
Różnicowy odbiornik/nadajnik
21
RO1
Wyjście przekaźnikowe 1
Programowalne
22
RO1
RO1
Zacisk
Sygnał
Opis
4
AI2+
6
+24 V
Wyjście napięcia sterującego
Masa dla wejść/wyjść zadających
Potencjometr
mA
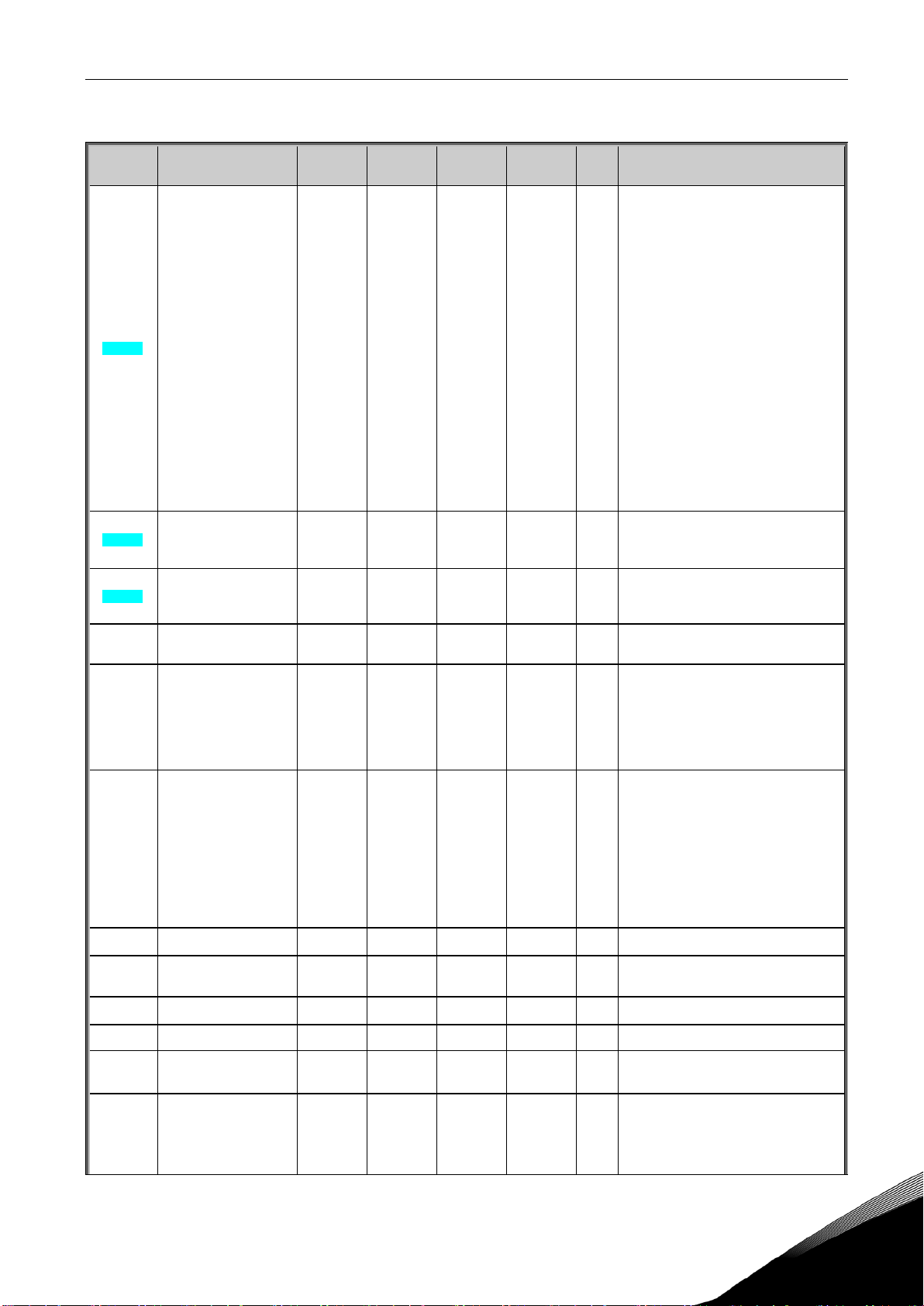
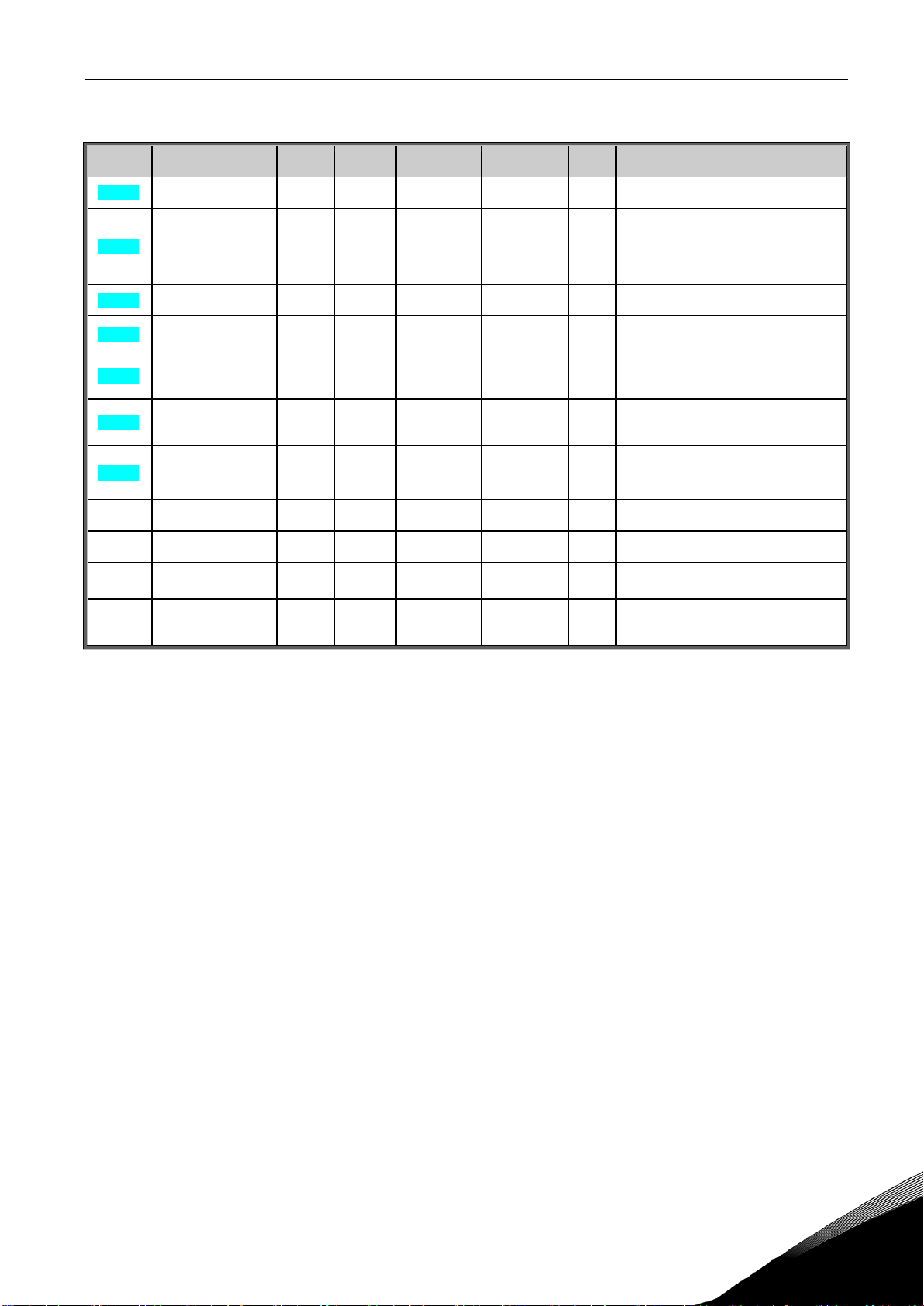
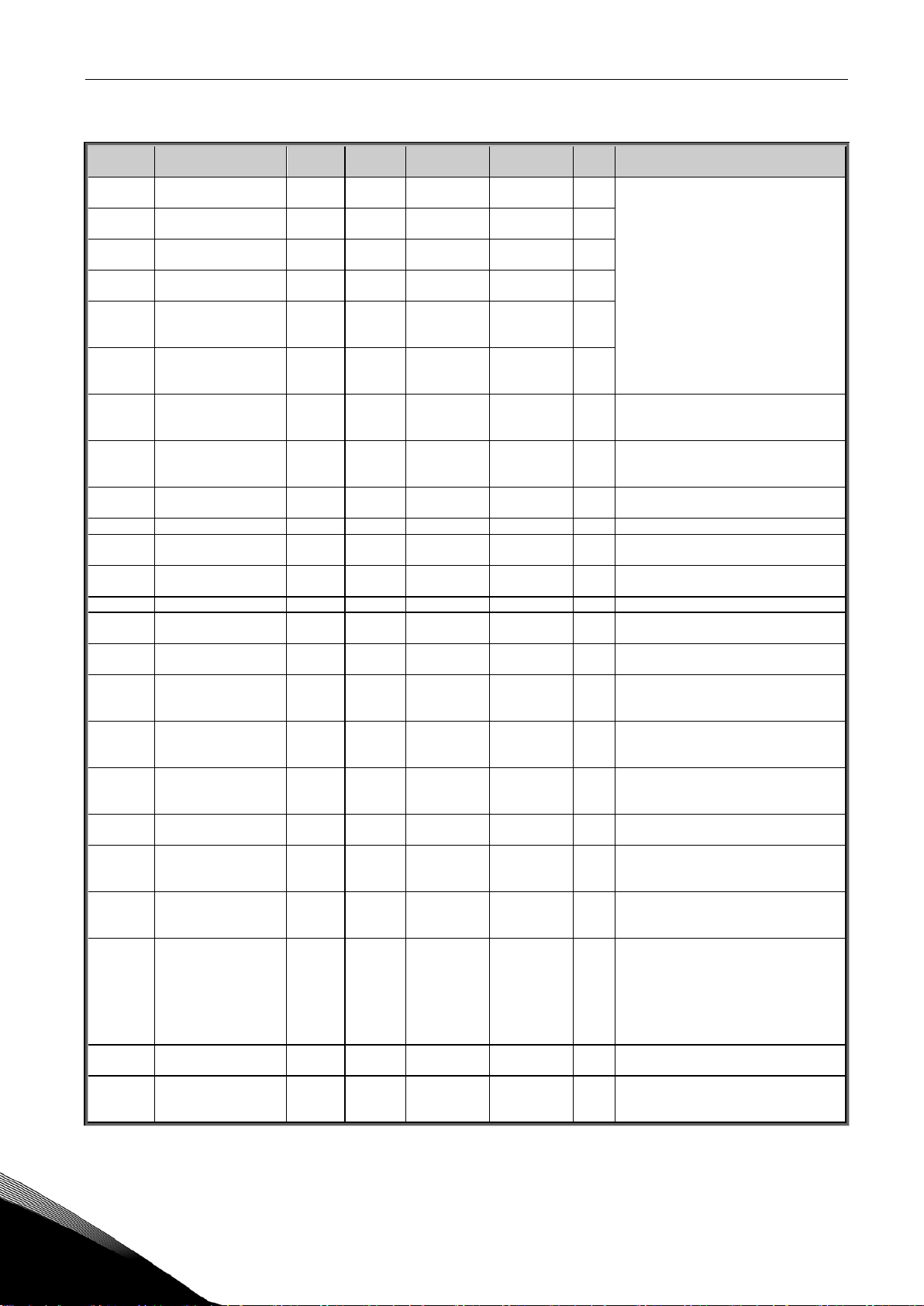
2. WEJŚCIA/WYJŚCIA STERUJĄCE
zadający
1 +10 V
2
3 AI1– Masa dla wejścia/wyjścia
Wyjście napięcia zadającego
zad
AI1+ Wejście analogowe, zakres
napięcia: 0−10VDC
Napięcie dla potencjometru
itp.
Wejście napięciowe zadające
częstotliwość
Można zaprogramować jako
DIN4
Masa dla wejść/wyjść
5 AI2-/GND
6 +24 V Wyjście napięcia sterującego
7 GND Masa dla wejść/wyjść
8 DIN1 Start do przodu
9 DIN2 Start do tyłu (programowalne)
10 DIN3
11 GND Masa dla wejść/wyjść
18
AO1+
19 AO1–
30 +24 V
23
napięciowy 0−10 V DC lub
Częstotliwość wyjściowa
Wyjście analogowe
Pomocnicze napięcie wejściowe
24 V
(USTERKA)
częstotliwość
zadających oraz sterujących
Zestyk zamknięty = start do
przodu
Masa dla wejść/wyjść
zadających oraz sterujących
Programowalne
Zakres: 0−20 mA/R
500 Ω
Awaryjne zasilanie sterowania
, maks.
L
Tabela 1-1. Fabryczna konfiguracja wejść/wyjść
aplikacji Multicontrol.
1 +10 V
2
3 AI1– Masa dla wejścia/wyjścia
5 AI2-/GND
7 GND Masa dla wejść/wyjść
Wyjście napięcia zadającego Napięcie dla potencjometru itp.
AI1+
lub
DIN4
zad
Wejście analogowe, zakres
napięcia: 0−10VDC
Wejście analogowe, zakres
prądu: 0
—20 mA
Wejście napięciowe zadające
częstotliwość (MF2-3)
Wejście napięciowe/prądowe
zadające częstotliwość
(MF4-MF6)
Można zaprogramować jako
DIN4
Masa dla wejść/wyjść zadających
oraz sterujących
Wejście prądowe zadające
częstotliwość
oraz sterujących
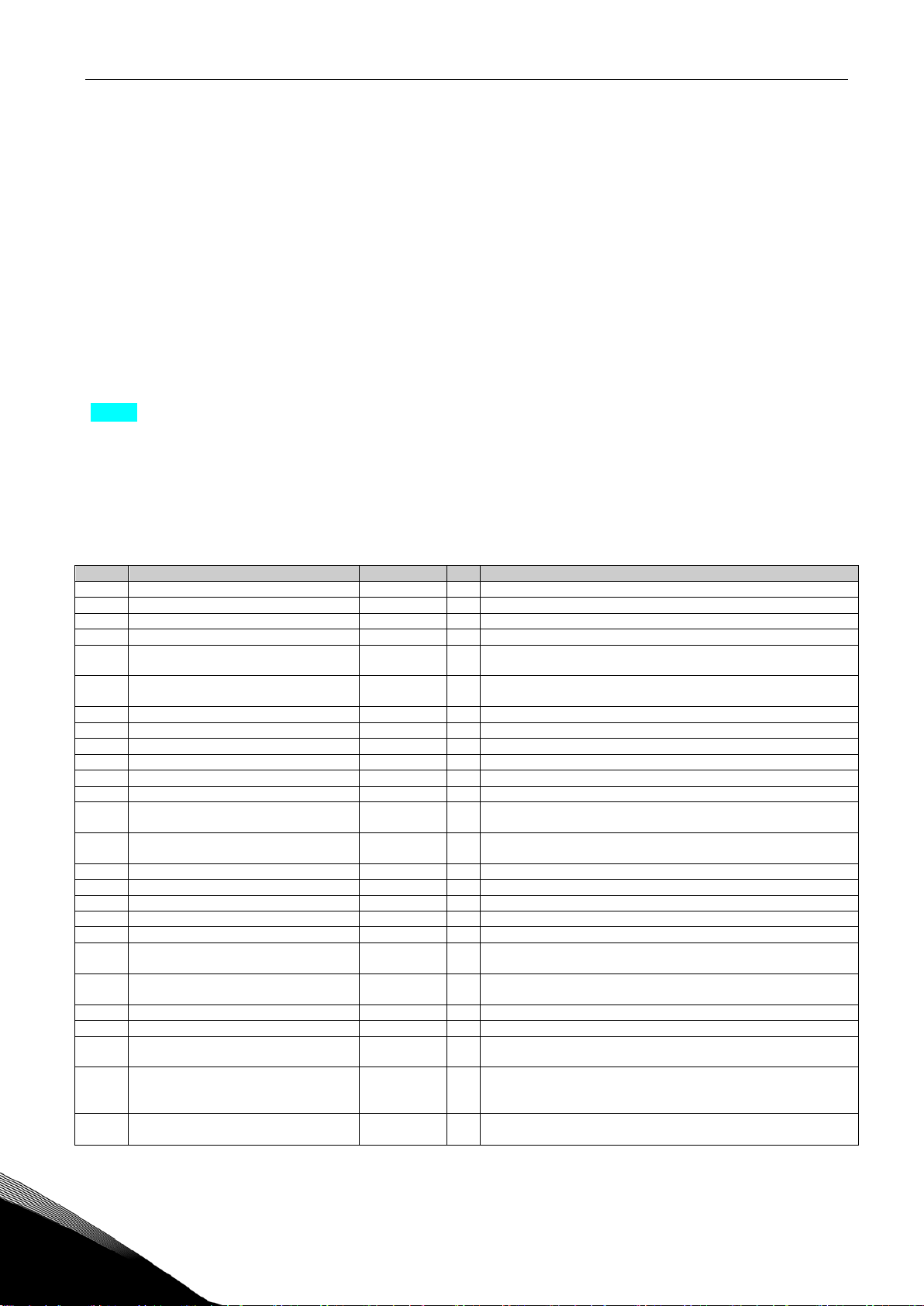
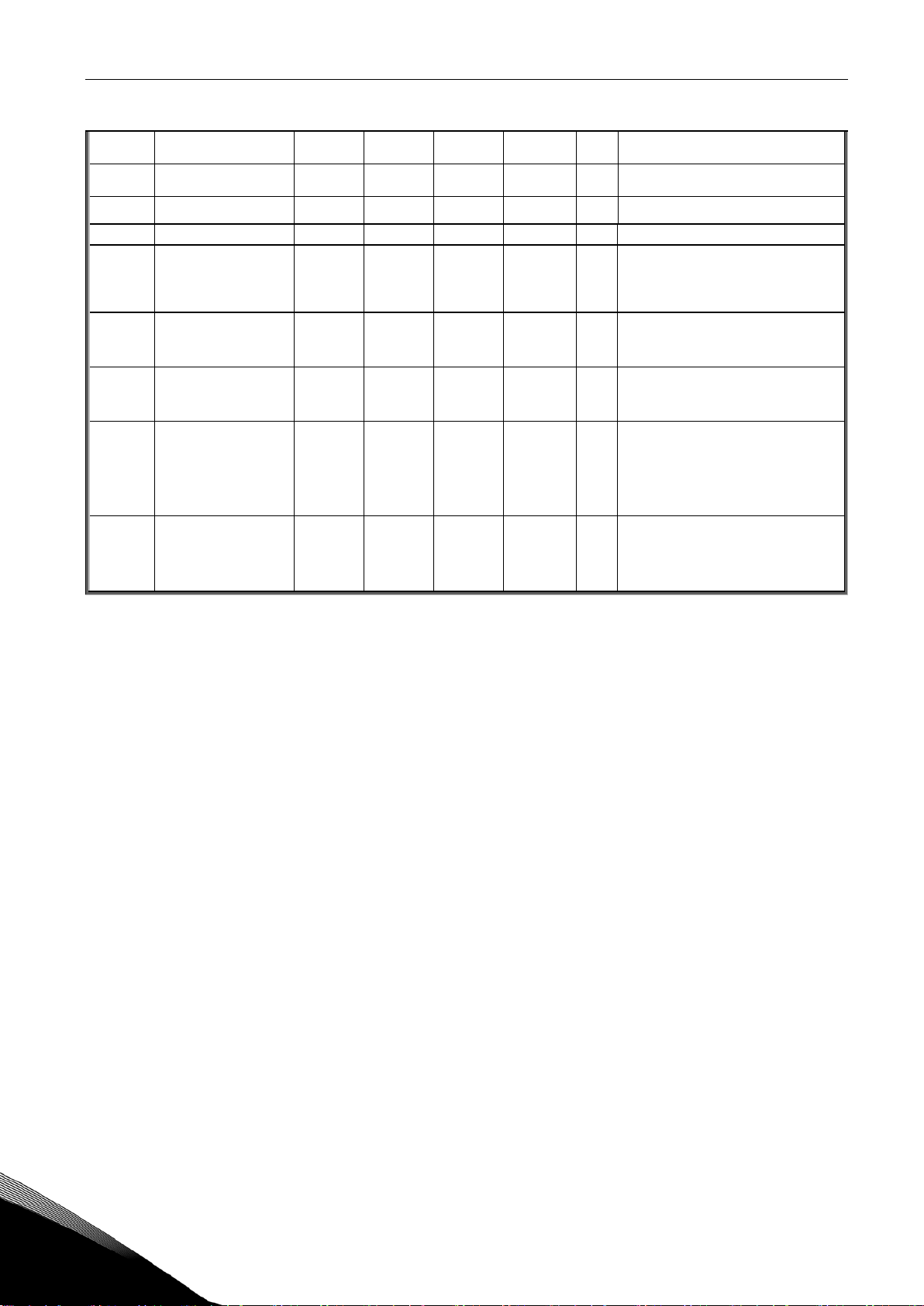
Tabela 1-2. Konfiguracja dla AI1 w przypadku zaprogramowania
jako DIN4
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
3
4 • vacon LISTA PARAMETRÓW
Kod
Parametr
Jednostka
Opis
V1.2
Częstotliwość zadana
Hz
25 V1.3
Prędkość silnika
obr./min
2
Wyliczona prędkość obrotowa silnika
V1.4
Prąd silnika
A
3
Zmierzony prąd silnika
Wyliczony stosunek chwilowego momentu obr otowego
silnika do znamionowego momentu obro tow ego
Wyliczony stosunek chwilowej mocy silnik a do
znamionowej mocy silnika
V1.7
Napięcie silnika
V
6
Wyliczone napięcie robocze silnika
V1.8
Napięcie na szynie DC
V
7
Zmierzone napięcie na szynie prądu stałego
V1.9
Temperatura przemiennika
°C
8
Temperatura radiatora
V1.10
Wejście analogowe 1
13
AI1 V1.11
Wejście analogowe 2
14
AI2 V1.12
Prąd wyjścia analogowego
mA
26
AO1
(na karcie rozszerzeń)
(na karcie rozszerzeń)
V1.16
DIE1, DIE2, DIE3
33
Karta rozszerzeń we/wy: stany wejść cyfrowych
V1.17
RO1
34
Stan wyjścia przekaźnikowego 1
V1.18
ROE1, ROE2, RO E 3
35
Karta rozsz. we/wy: stany wyjść przekaźnikowych
V1.19
DOE 1
36
Karta rozsz. we/wy: stan wyjścia cyfrowego 1
PID
dla procesu
regulatora PID
rzeczywistej
V1.23
Wyjście regulatora PID
%
23
W procentach maksymalnej możliwej wartości wyjściowej
pracy napędów 1, 2, 3
wentylatorami
4=Zaawansowany
Obliczona temperatura silnika, 1000 równa się
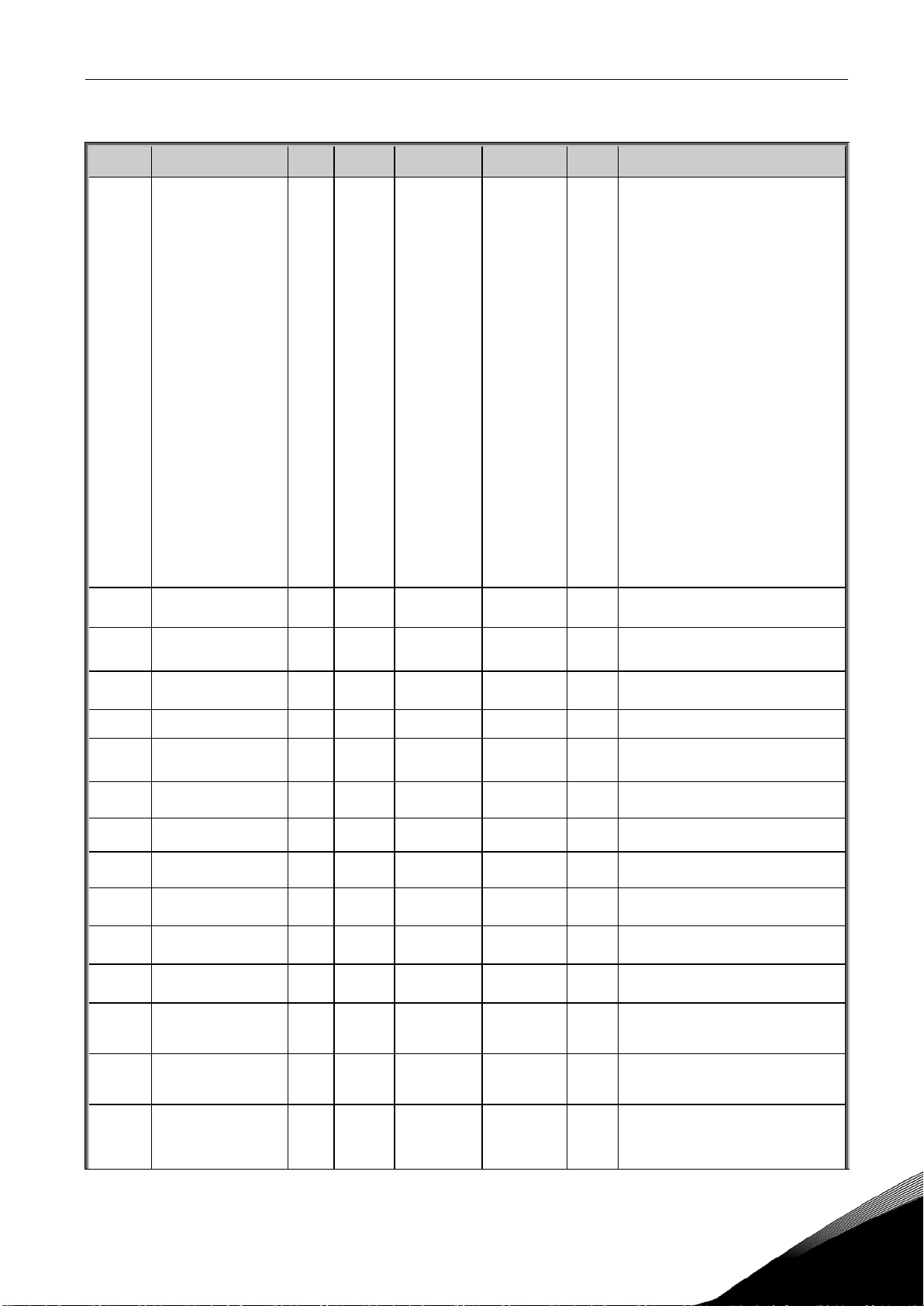
3. LISTA PARAMETRÓW
Na kolejnych stronach znajduje się lista parametrów podzielona na grupy. Każdy parametr
zawiera odsyłacz do opisu odpowiedniego parametru. Opisy parametrów znajdują się na
stronach od 16 do 46.
Objaśnienia kolumn:
Kod = lokalizacja w str ukturze menu; pokazuje operatorow i aktualny nume r parametru
Parametr = nazwa parametru
Min. = minimalna wartość parametru
Maks. = maksymalna wartość parametru
Jednostka = jednostka wartości parametru (jeśli dostępna)
Ust. fabryczne = wartość ustawiona w fabryce (domyślna)
Ust. użytk. = własne ustawienia użytkownika
ID = numer identyfikacyjny (ID) parametru (stosowany w
narzędziowych programach komputerowych)
= na kodzie parametru: wartość parametru można zmienić dopiero po zatrzymaniu
przemiennika częstotliwości.
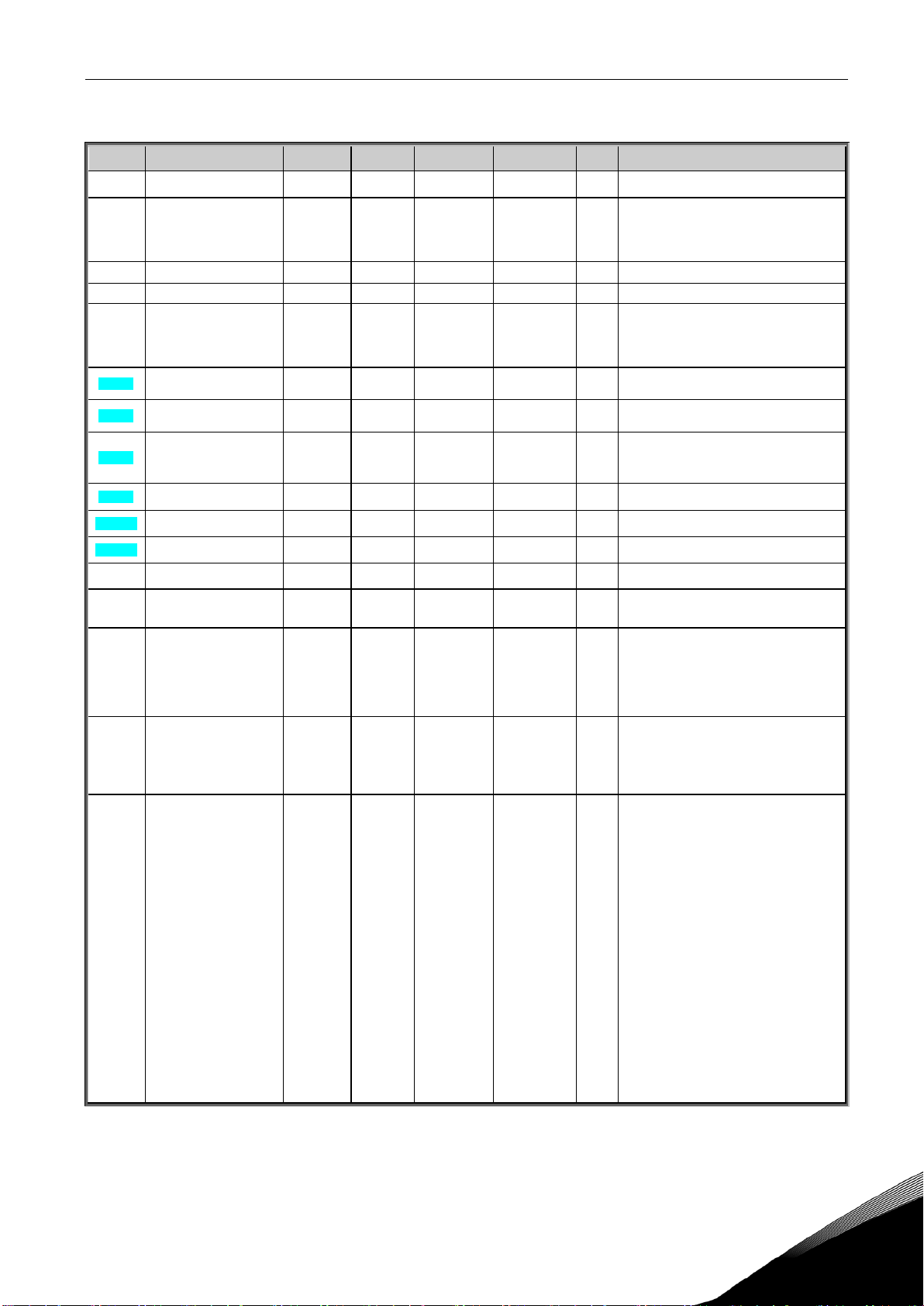
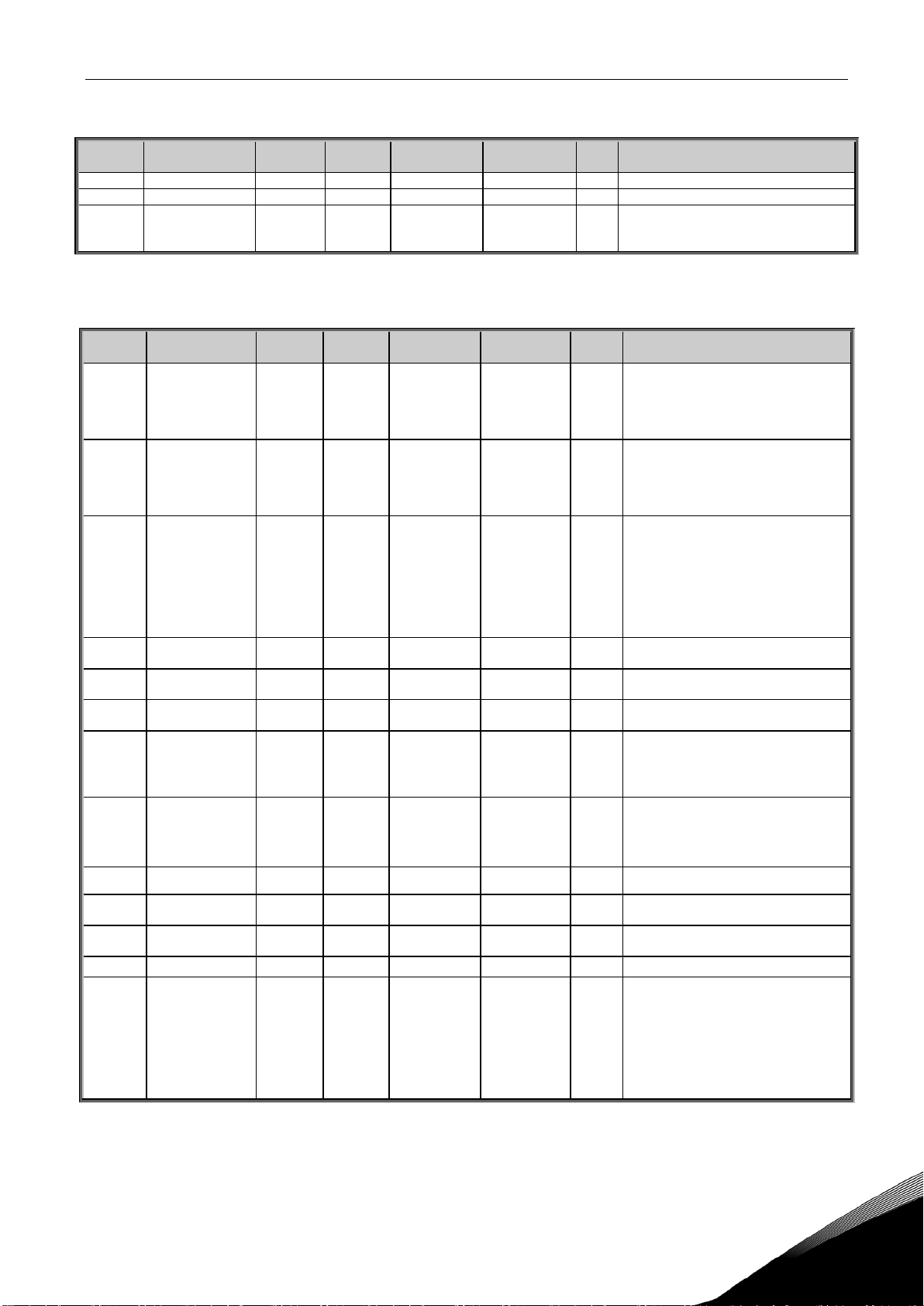
3.1 Wielkości monitorowane (panel sterowania: menu M1 )
Wartości monitorowane są to aktualne wartości wybranych parametrów, jak również stany oraz
wartości wybranych sygnałów mierzonych. Wartości monitorowanych nie można modyfikować.
Więcej informacji można znaleźć w Instrukcji obsługi przemiennika Vacon NXL, rozdział 7.4.1.
V1.1 Częstotliwość wyjściowa Hz 1 Częstotliwość podawana na silnik
V1.5 Moment obrotowy silnika % 4
V1.6 Moc na wale silnika % 5
V1.13
V1.14
V1.15 DIN1, DIN2, DIN3 15 Stany wejść cyfrowych
V1.20
V1.21
V1.22 Wartość uchybu regulatora PID % 22 W procentach maksymalnej możliwej wartości uchybu
V1.24
V1.25 Tryb pracy 66
Analogowe wyjście prądowe 1
Analogowe wyjście prądowe 2
Sygnał zadający dla regulatora
Wartość rzeczywista dla
Automatyczna zmiana kolejności
ID
mA 31
mA 32
% 20
% 21
30
W procentach maksymalnej możliwej wartości zadawanej
W procentach maksymalnej możliwej wartości
Używane wyłącznie do sterowania pompami oraz
Tryb pracy wyb ra n y kreatorem roz ruchu
1=Standard, 2=Wentylator , 3=Pom p a,
V1.26 Temperatura silnika % 9
Tabela 1-3. Wielkości monitorowane
100,0% = znamionowa temperatura silnik a.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
LISTA PARAMETRÓW vacon • 5
3
Kod Parametr
Min.
Maks.
Jednostka
Ust.
fabryczne
ID
Uwagi
UWAGA: Jeśli f
jest wyższa od
napędowego.
UWAGA: Wzory w przybliżeniu pasują do
się z fabryką.
Sprawdź tabliczkę znamionową na
Domyślne wartości dotyczą silnika 4-
wielkości.
Znamionowy prąd
silnika
Sprawdź tabliczkę znamionową na
silniku.
silniku.
0
1 = Lotny start
0 = Wybieg
1 = Wg liniowej ch-ki (rampy)
0 = nieużywany
momentu obrotowego
zadającego częstotliwość
0 = wejście analogowe AI1
5 = wybór AI1/AI2
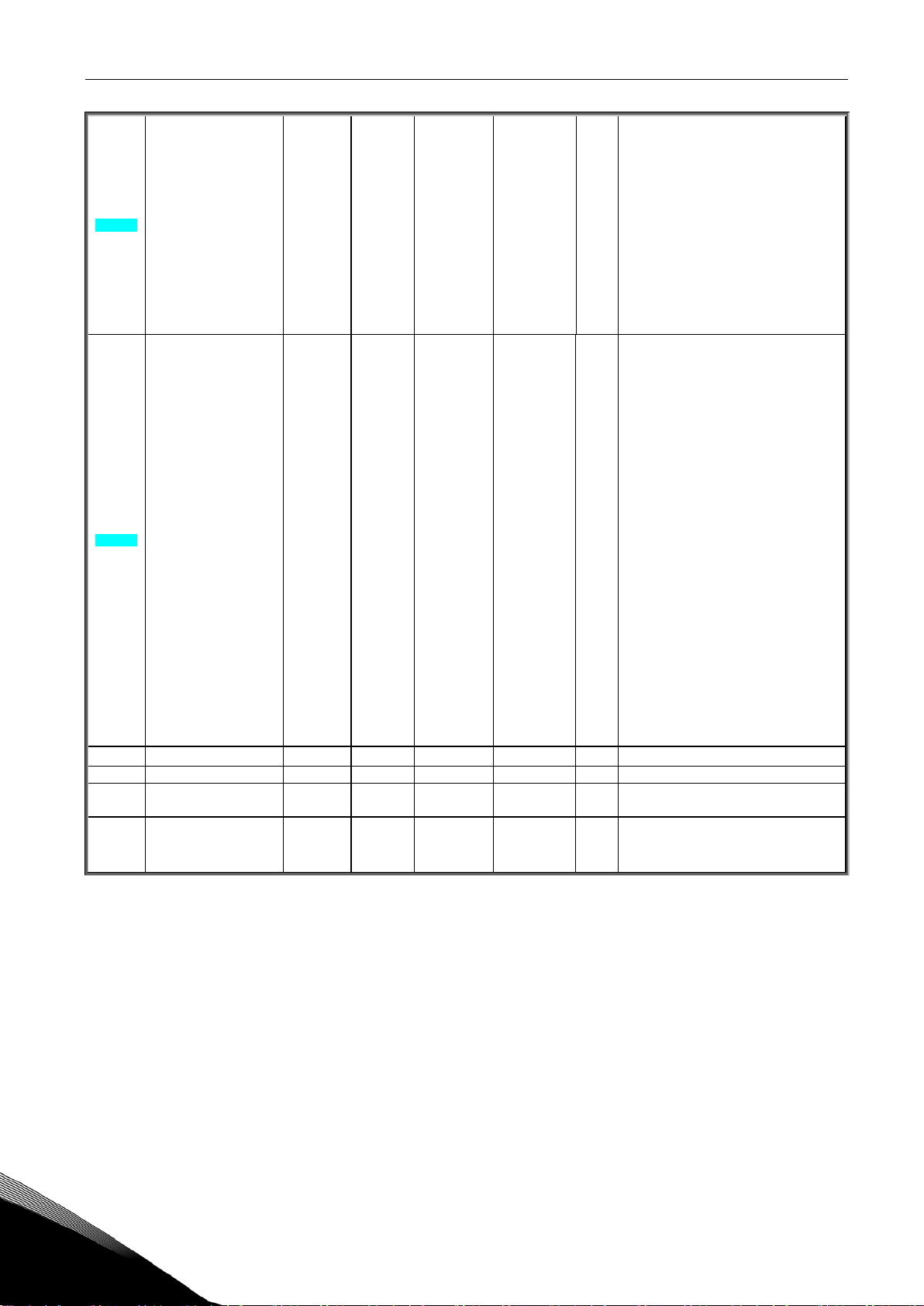
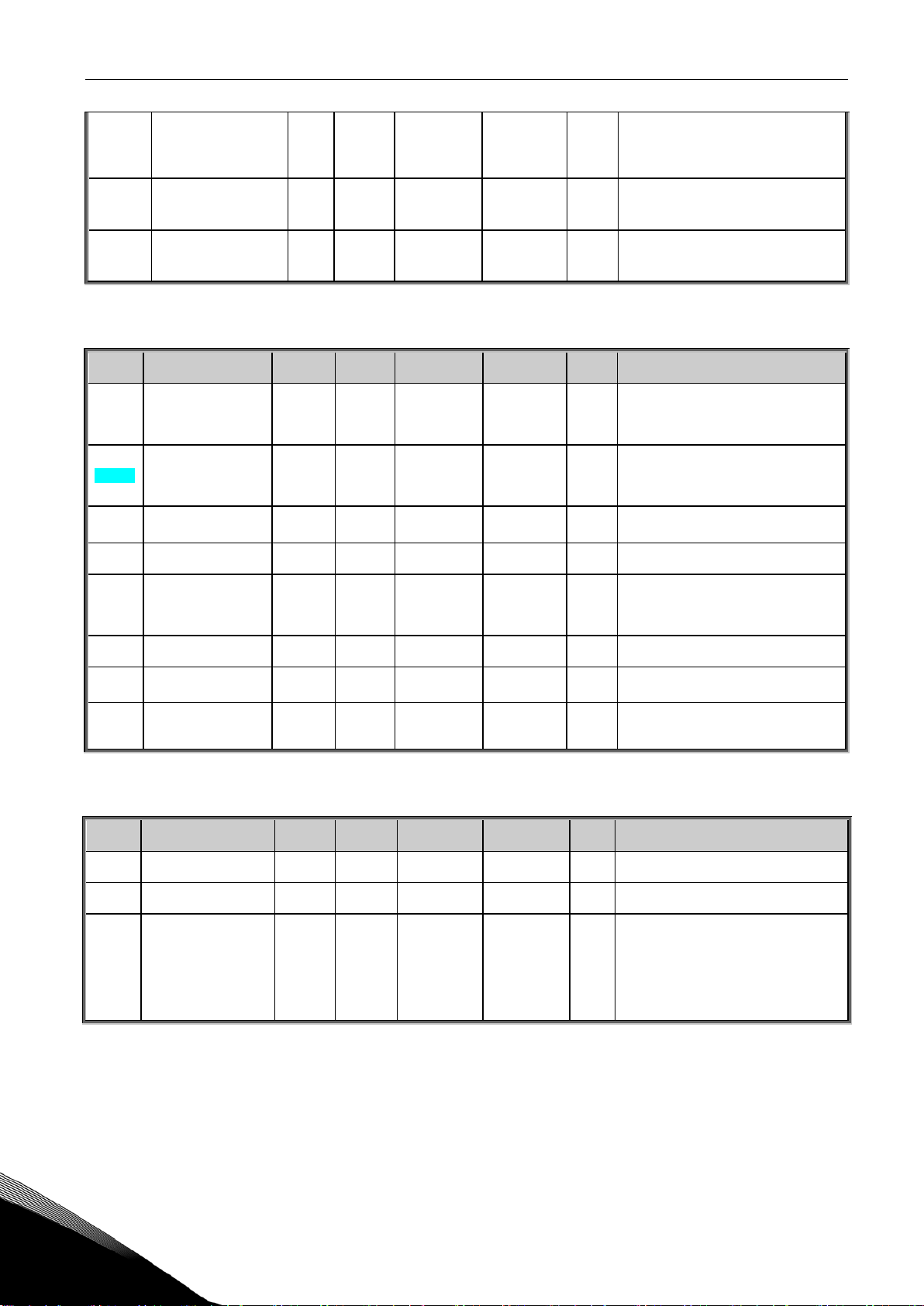
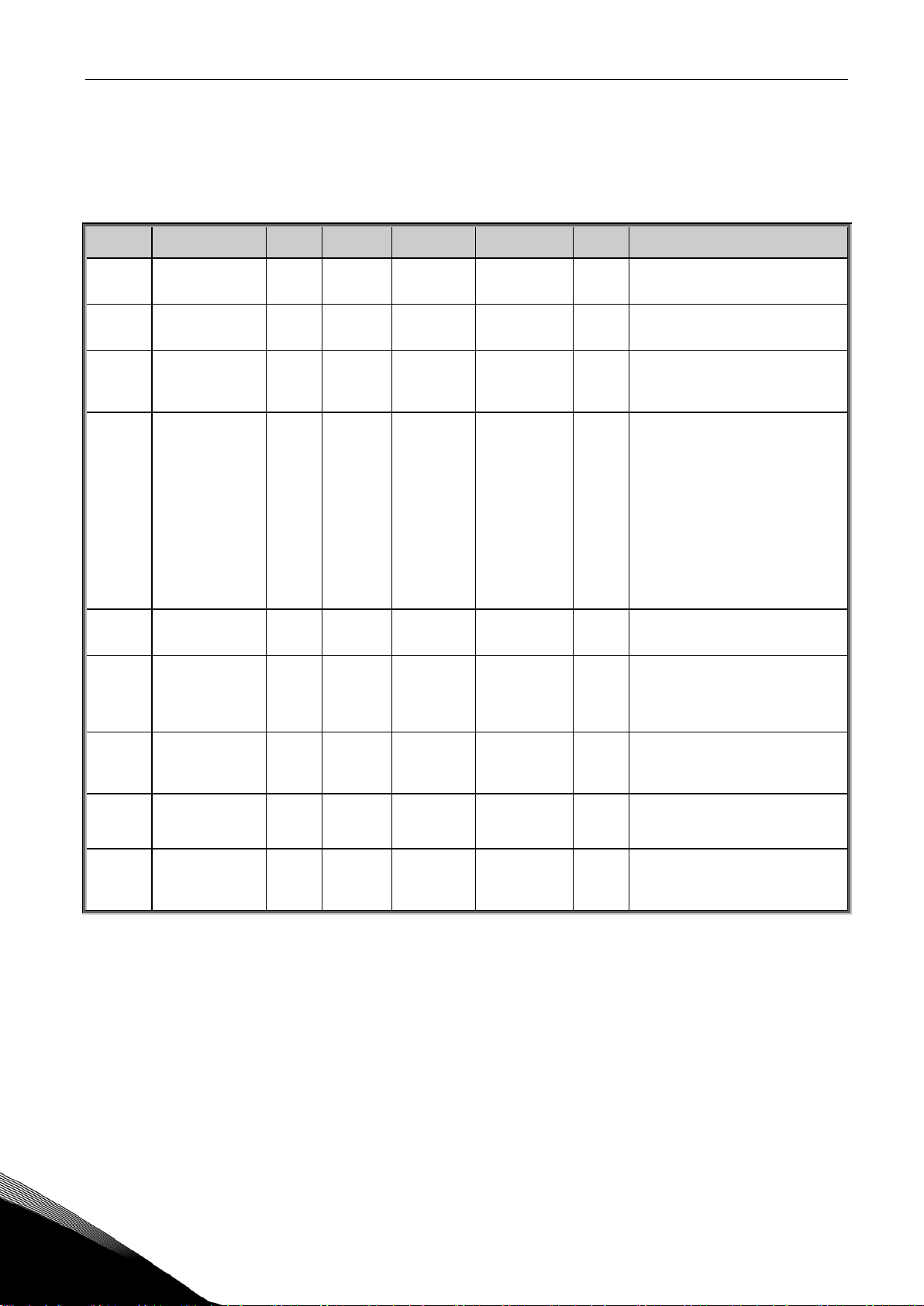
3.2 Parametry podstawowe (panel sterowania: menu P2 B2.1)
P2.1.1 Min. częstotliwość 0,00
P2.1.2 Maks. częstotliwość
P2.1.3 Czas przyspieszania 1 0,1 3000,0 s 1,0 103
P2.1.4 Czas hamowania 1 0,1 3000,0 s 1,0 104
P2.1.5 Limit prądu 0,1 × IL 1,5 × IL A IL 107
P2.1.6
P2.1.7
P2.1.8
P2.1.9
P2.1.10
P2.1.11 Funkcja Start 0 1 0 505
P2.1.12 Funkcja Stop 0 1 0 506
P2.1.13 Optymalizacja U/f 0 1 0 109
P2.1.14
P2.1.15
Znamionowe napięcie
silnika
Znamionowa
częstotliwość silnika
Znamionowa prędkość
silnika
cosϕ silnika
Wybór sygnału
jeżeli miejscem
sterowania są zaciski
WE/WY
Zakres sygnału wejścia
analogow e go AI2
Par.
2.1.1
180 500 V
30,00 320,00 Hz 50,00 111
300 20 000 obr./min 1440 112
1,5 × IL A IL 113
0,3 × I
L
0,30 1,00 0,85 120
0 5 0 117
1 4 2 390
Par.
2.1.2
320,00 Hz 50,00 102
Hz 0,00 101
NXL2:230 V
NXL5:400 V
110
prędkości synchronicznej silnika,
należy sprawdzić, czy jest ona
dopuszczalna dla silnika oraz systemu
przemienników częstotliwości nie
większych niż MF3. W przypadku
większych jednostek należy skonsultować
silniku.
biegunowego oraz przemiennika
częstotliwości o znamionowej
Sprawdź tabliczkę znamionową na
= Wg liniowej ch-ki (rampy)
1 = automatyczne zwiększanie
1 = wejście analogowe AI2
2 = panel sterujący
3 = magis trala komunika c yjna
(FBSpeedReference)
4 = motopotencjometr
Nieużywane, jeśli AI2 min. <> 0% lub
AI2 maks. <> 100%
1 = 0–20 mA
2 = 4–20 mA
3 = 0–10 V
4 = 2–10 V
max
P2.1.16
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
Funkcja wyjścia
analogowego AO1
0 12 1 307
0 = nieużywany
1 = częstotliwość wyjściowa
(0–fmaks)
2 = częstotliwość zadana
(0–fmaks)
3 = prędkość obr. silnika
(0–n
4 = prąd wyjściowy
(0–I
5 = moment obr . silnika
(0– M
6 = moc na wale silnika
(0–P
7 = napięcie silnika
(0–U
8 = napięcie obwodu pośredniego DC
(0–1000 V)
9 = wartość zadana
regulatora PID
10 = wartość rzeczywista 1 regulatora
PID
11 = wartość uchybu regulatora PID
12 = wyjście regulatora PID
n silnika
n silnika
n silnika
n silnika
n silnika
)
)
)
)
)
3
6 • vacon LISTA PARAMETRÓW
0 = nieużywane
10 = blokada napędu 1
0 = nieużywane
0 = wszystkie menu oraz parametry są
1 = start do tyłu
(DIN1 = start do przodu)
2 = Nawrót (DIN 1 = st a rt)
3 = Impuls Stop
(DIN1 = impuls Start)
4 = usterka zewnętrzna, zestyk
P2.1.17
P2.1.18
P2.1.19 Prędkość stała 1 0,00 Par. 2.1.2 Hz 10,00 105
P2.1.20 Prędkość stała 2 0,00 Par. 2.1.2 Hz 50,00 106
P2.1.21
Funkcja wejścia
cyfrowego DIN2
Funkcja wejścia
cyfrowego DIN3
Automatyczny
ponowny start
0 10 1 319
0 17 6 301
0 1 0 731
zamknięty
5 = usterka zewnętrzna, zestyk
otwarty
6 = zezwolenie na pracę
7 = prędkość stała 2
8 = motopotencjometr – zwiększanie
prędkości (zestyk zamknięty)
9 = wyłączony regulator PID
(bezpośrednie zadawanie
częstotliwości)
1 = nawrót
2 = usterka zewnętrzna, zestyk
zamknięty
3 = usterka zewnętrzna, zestyk
otwarty
4 = kasowanie usterki
5 = zezwolenie na pracę
6 = prędkość stała 1
7 = prędkość stała 2
8 = polecenie hamowania prądem
stałym
9 = motopotencjometr – zwiększanie
prędkości (zestyk zamknięty)
10 = motopotencjomet r –
zmniejszanie prędkości (zestyk
zamknięty)
11 = wyłączony regulator PID
(bezpośrednie zadawanie
częstot.)
12 = wartość zadana 2 dla regulatora
PID z panelu
13 = blokada napędu 2
14 = wejście termistora
Uwaga! Patrz Instrukcja
obsługi przemiennika NXL,
Rozdział 6.2.4
15 = zmiana miejsca sterowania na
zaciski we/wy
16 = zmiana miejsca sterowania na
magistralę komunikacyjną
17 = wybór AI1/AI2 dla sterowania
częstotliwością z zacisków
we/wy
0 = nieużywany
1 = używany
P2.1.22 Ukrywanie parametrów 0 1 0 115
Tabela 1-4. Parametry podstawowe P2.1
widoczne
1 = tylko grupa P2.1 oraz menu od M1
do H5 są widoczne
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
LISTA PARAMETRÓW vacon • 7
3
Ust.
ne
0 = nieużywane
13 = blokada napędu 1
Używana, jeśli P2.2.6 = 0
par.2.2.3
10 = AI1 (1 = lokalne,
(2 = karta roz. 1 = wejście 2)
0 = wejście cyfrowe 4
Tryb AI1
Niestandardowy
zakres AI1, minimum
Niestandardowy
maksimum
0 = bez inwersji
1 = z inwersją
Wybór sygnału
Nieużywane, jeśli AI2 min. <>
4 = 2–10 V
3.3 Sygnały wejściowe (panel sterowania: menu P2 P2.2)
Kod Parametr Min. Maks.
P2.2.1
P2.2.2
P2.2.3
Funkcja wejścia
cyfrowego DIE1
karty rozszerzeń
Funkcja wejścia
cyfrowego DI E2
karty rozszerzeń
Funkcja wejścia
cyfrowego DI E3
karty rozszerzeń
0 13 7 368
0 13 4 330
0 13 11 369
Jednos
tka
fabrycz
ID Uwagi
1 = nawrót
2 = usterka zewnętrzna, zestyk
zamknięty
3 = usterka zewnętrzna, zestyk
otwarty
4 = kasowanie usterki
5 = zezwolenie na pracę
6 = prędkość stała 1
7 = prędkość stała 2
8 = polecenie hamowania prądem
stałym
9 = motopotencjometr –
zwiększanie prędkości (zestyk
zamknięty)
10 = motopotencjometr –
zmniejszanie prędkości
(zestyk zamknięty)
11 = wyłączony regulator PID
(bezpośrednie zadawanie
częstot.)
12 = wartość zadana 2 dla
regulatora PID z panelu
Jak dla par. 2.2.1 z wyjątkiem:
13 = blokada napędu 2
Jak dla par. 2.2.1 z wyjątkiem:
13 = blokada napędu 3
P2.2.4 Funkcja DIN4 (AI1) 0 13 2 499
P2.2.5
P2.2.6 Zakres sygnału AI1 1 4 3 379
P2.2.7
P2.2.8
P2.2.9 Inwersja AI1 0 1 0 387
P2.2.10 Czas filtracji AI1 0,00 10,00 s 0,10 378 0 = bez filtracji
P2.2.11
Wybór sygnału
wejścia analogowego
AI1
zakres AI1,
wejścia analogowego
AI2
0 10 377
0,00 100,00 % 0,00 380
0,00 100,00 % 100,00 381
0 11 388 Jak dla par. 2.2.5
Możliwości wyboru jak dla
0 = wejście 1)
11 = AI2 (1 = lokalne,
1 = wejście 2)
20 = AI1 karty rozsz.
(2 = karta roz.0 = wejście 1)
21 = AI2 karty rozsz.
1 = 0–20 mA (≥ MF4)
2 = 4–20 mA (≥ MF4)
3 = 0–10 V
4 = 2–10 V
Nieużywane, jeśli zakres
niestandardowy i
min. AI2 > 0% lub maks. AI2 <
100%
Uwaga! Patrz Instrukcja obsługi
przemiennika NXL, Rozdział 7.4.6
:
P2.2.12 Zakres sygnału AI2 1 4 2 390
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
0% lub AI2 maks. <> 100%
1 = 0–20 mA
2 = 4–20 mA
3 = 0–10 V
3
8 • vacon LISTA PARAMETRÓW
Niestandrdawy zakres
Niestandar owy zakres
0 = bez inwersji
1 = z inwersją
0 = bez zerowania
zasilania
Skalowanie minimum
Nie wpływa na zadawanie
par. 2.1.2).
Nie wpływa na zadawanie
par. 2.1.2).
0 = wejście analogowe AI1
5 = regulator PID
miejscem sterowania
P2.2.13
P2.2.14
P2.2.15 In wersja AI2 0 1 0 398
P2.2.16 Czas filtracji AI2 0,00 10,00 s 0,10 389 0 = bez filtracji
P2.2.17
AI2, minimum
AI2, maksimum
Kasowanie pamięci
częstotliwości
zadawanej
motopotencjometrem
0,00 100,00 % 0,00 391
0,00 100,00 % 100,00 392
0 2 1 367
1 = zerowanie po zatrzymaniu
lub wyłączeniu zasilania
2 = zerowanie po wyłączeniu
P2.2.18
P2.2.19
P2.2.20
P2.2.21
wartości zadanej
Skalowanie
maksimum wartości
zadanej
Wybór sygnału
zadającego jeżeli
panel jest miejscem
sterowania
Wybór sygnału
zadającego
częstotliwość jeżeli
magistrala jest
0,00 P2.2.19 0,00 344
P2.2.18 320,00 0,00 345
0 5 2 121
0 5 3 122 Patrz powyżej
Tabela 1-5. Sygnały wejściowe, P2.2
z magistrali komunikacyjnej
(skalowanej między par. 2 .1.1 i
z magistrali komunikacyjnej
(skalowanej między par. 2 .1.1 i
1 = wejście analogowe AI2
2 = panel sterujący
3 = magistrala komunikacyjna
(FBSpeedreference)
4 = motopotencjometr
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
LISTA PARAMETRÓW vacon • 9
3
Ust.
fabryczne
0 = nieużywane
20 = monitorowanie AI
Funkcja wyjścia
Funkcja wyjścia
Funkcja wyjścia
karty rozszerzeń
Funkcja wyjścia
Funkcja wyjścia
Funkcja wyjścia
karty rozszerzeń
Limit częstotliwości
funkcja
0 = nieużywany
2 = wzrost powyżej limitu
Limit częstotliwości
monitorowana
Wybór
Limit sygnału
3.4 Sygnały wyjściowe (panel sterowania: menu P2 P2.3)
Kod Parametr Min. Maks. Jednostka
P2.3.1
P2.3.2
Funkcja wyjścia
przekaźnikowego
RO1
przek. ROE1 ka rty
rozszerzeń
0 20 3 313
0 19 2 314 Jak dla parametru 2.3.1
ID Uwagi
1 = gotowość
2 = praca
3 = usterka
4 = inwersja usterki
5 = ostrzeżenie o przegrzaniu
przemiennika
6 = usterka zewnętrzna (lub
ostrzeżenie)
7 = usterka (lub ostrzeżenie)
sygnału zadającego
8 = ostrzeżenie
9 = nawrót
10 = wybrana prędkość stała 1
lub 2
11 = osiągnięcie prędkość
zadanej
12 = aktywny regulator silnika
13 = monitorowanie 1 limitu
częstotliwości wyjściowej
14 = miejsce sterowania: zacisk i
we/wy
15 = usterka/ostrzeżenie na
wejściu termistorowym
16 = monitorowanie wartości
rzeczywistej
17 = sterowanie automatyczną
zmianą napędu 1
18 = sterowanie automatyczną
zmianą napędu 2
19 = sterowanie automatyczną
zmianą napędu 3
P2.3.3
P2.3.4
P2.3.5
P2.3.6
P2.3.7
P2.3.8
P2.3.9
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14
przek. ROE2 ka rty
rozszerzeń
cyfrowego DOE 1
analogowego AO1
Czas filtracji
sygnału wyjścia
analogowego AO1
Inwersja wyjścia
analogowego AO1
Zakres sygnału
wyjścia analog. AO1
Skalowanie sygnału
wyjścia analog. AO1
analogowego AOE1
karty rozszerzeń
analogowego AOE2
wyjściowej 1;
wyjściowej 1;
wartość
monitorowanego
wejścia
analogowego
0 19 3 317 Jak dla parametru 2.3.1
0 19 1 312 Jak dla parametru 2.3.1
0 12 1 307 Patrz par. 2.1.16
0,00 10,00 s 1,00 308 0 = bez filtracji
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 12 0 472 Jak dla parametru 2.1.16
0 12 0 479 Jak dla parametru 2.1.16
0 2 0 315
0,00
Par.
2.1.2
0 2 0 356
Hz 0,00 316
0 = bez inwersji
1 = z inwersją
0 = 0-20 mA
1 = 4-20 mA
1 = spadek poniżej limitu
0 = nieużywane
1 = AI1
2 = AI2
P2.3.15
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
monitorowanego AI,
przy którym
następuje
wyłączenie wyjścia
0,00 100,00 % 10,00 357
3
10 • vacon LISTA PARAMETRÓW
Limit sygnału
Opóźnienie
Opóźnienie
Ust.
fabryczne
hamowania
0 = wyłączony
Czas hamowania DC
hamowania DC przy
zatrzymaniu
Czas hamowania DC
przed startem
0
0
wyłączone podczas startu
wartość prądu
Ust.
fabryczne
Dolna granica zakresu
zabronionych
monitorowanego AI,
P2.3.16
przy którym
następuje
załączenie wyjścia
0,00 100,00 % 90,00 358
P2.3.17
P2.3.18
załączenia wyjścia
przekaźnikowego
RO1
wyłączenia wyjścia
przekaźnikowego
RO1
0,00 320,00 s 0,00 487
0,00 320,00 s 0,00 488
Opóźnienie załączenia wyjścia
RO1
Opóźnienie wyłączenia wyjścia
RO1
Tabela 1-6. Sygnały wyjściowe, G2.3
3.5 Parametry sterowania napędem (panel sterowania: menu P2 P2.4)
Kod Parametr Min. Maks. Jednostka
Kształt 1
P2.4.1
P2.4.2 Moduł hamujący 0 3 0 504
P2.4.3 Prąd hamowania DC 0,15xI
P2.4.4
P2.4.5
P2.4.6
P2.4.7
P2.4.8
charakterystyki
przyspieszania/
przy zatrzymaniu
Częstotliwość
rozpoczęcia
Hamowanie
strumieniem
Hamowanie
strumieniem,
0,0 10,0 s 0,0 500
1,5 x
n
I
n
0,00
0,10 10,00 Hz 1,50 515
0,00
0,0
600,0
0
600,0
0 1 0 520
Zmien
ny
A Zmienny 507
s 0,00 508
s 0,00 516
A 0,0 519
Tabela 1-7. Parametry sterowania napędem, P2.4
ID Uwagi
0 = liniowy
> 0 = krzywa w kształcie litery S
1 = używany w stanie Praca
3 = używany w stanie Pracy
i Stop
0 = hamowanie DC jest
wyłączone przy zatrzymaniu
= hamowanie DC jest
0 = wyłączone
1 = włączone
3.6 Parametry częstotliwości zabronionych (panel sterowania: menu P2 P2.5)
Kod Parametr Min. Maks. Jednostka
P2.5.1
P2.5.2
P2.5.3
Tabela 1-8. Parametry częstotliwości zabronionych, P2.5
1
Górna granica
zakresu 1
Współczynnik
skalowania czasu
przyspieszania/
hamowania w
przedziale
częstotliwości
ID Uwagi
0,0
0,0
0,1 10,0 mnożnik 1,0 518
Par.
2.5.2
Par.
2.1.2
Hz 0,0 509 0 = nieużywany
Hz 0,0 510 0 = nieużywany
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
Mnożnik aktualnie wybranego
czasu przyspieszania / hamowania
LISTA PARAMETRÓW vacon • 11
3
Ust.
fabryczne
strumienia
Punkt osłabienia
pola
ie w punkcie
Częstotliwość
punktu środkowego
Napięcie punktu
w [%] napięcia
Napięcie wyjściowe
kluczowania
Regulator
nadnapięciowy
0 = nieużywany
1 = używany
3.7 Parametry sterowania silnikiem (panel sterowania: menu P2 P2.6)
Kod Parametr Min. Maks. Jednostka
P2.6.1
P2.6.2
P2.6.3
P2.6.4
P2.6.5
P2.6.6
P2.6.7
P2.6.8
P2.6.9
P2.6.10
P2.6.11
Tryb sterowania
silnikiem
Wybór
charakterystyki U/f
Napięc
osłabienia pola
krzywej U/f
środkowego
krzywej U/f
przy zerowej
częstotliwości
Częstotliwość
Regulator
podnapięciowy
Automatyczna
identyfikacja
parametrów silnika
0 1 0 600
0 3 0 108
30,00 320,00 Hz 50,00 602
10,00
0,00
0,00 100,00 % 100,00 605
0,00 40,00 % 0,00 606
1,0 16,0 kHz 6,0 601 Zależy od mocy w kW
200,00 % 100,00 603
par.
P2.6.3
0 1 1 607
0 1 1 608
0 1 0 631
Hz 50,00 604
Tabela 1-9. Parametry sterowania silnika, P2.6
ID Uwagi
0 = sterowanie częstotliwością
1 = sterowanie prędkością
0 = liniowa
1 = kwadratowa
2 = programowalna
3 = liniowa z optymalizacją
w [%] napięcia znamionowego
silnika
Un silnika
Maksimum = par. 2.6.4
w [%] napięcia znamionowego
silnika
0 = nieużywany
1 = używany
0 = brak akcji
1 = identyfikacja z nieruchomym
wałem silnika
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
3
12 • vacon LISTA PARAMETRÓW
Ust.
fabryczne
ID
usterkę <4mA
usterkę zewnętrzną
usterkę zbyt
wyjściowych
zwarć doziemnych
wg modelu
otoczenia silnika
przy zerowej
P2.7.10
Cykl pracy silnik a
0
100 % 100
708
Zabezpieczenie
przed utykiem
I
× 2
I
×
1,3
P2.7.13
Limit czasu utyku
1,00
120,00
s 15,00
711
utyku
2.1.2
przed
częstotliwości
zerowej
przed
usterkę termistora
komunikacyjnej
karty rozszerzeń
4 = usterka, jeśli powyżej limitu
Limit monitorowanej
wartości
wartości
3.8 Zabezpieczenia (panel sterujący: menu P2 P2.7)
Kod Parametr Min. Maks. Jednostka
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.11
P2.7.12 Limit prądu utyku 0,1
P2.7.14
P2.7.15
P2.7.16
Odpowiedź na
Odpowiedź na
Odpowiedź na
Kontrola faz
Zabezpieczenie
przed skutkami
Zabezpieczenie
termiczne silnika
Współczynnik
temperatury
Współczynnik
chłodzenia silnika
Cieplna stała
czasowa silnika
Limit częstotliwości
Zabezpieczenie
Krzywa
niedociążenia przy
0 3 0 700
0 3 2 701
1 3 2 727
0 3 2 702
0 3 2 703
0 3 2 704
–
100,0
0,0 150,0 % 40,0 706
1,0
10,0 150,0 % 50,0 714
100,0 % 0,0 705
1 200 min 45 707
0 3 1 709 Jak dla par. 2.7.1
nsilnika
P
0 3 0 713 Jak dla par. 2.7.1
A
Hz 25,0 712
nsilnika
0 = brak odpowiedzi
1 = ostrzeżenie
2 = usterka, stop według 2.1.12
3 = usterka, stop wybiegiem
710
Uwagi
P2.7.17
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
P2.7.24
Krzywa
niedociążenia przy
Limit czasu
zabezpieczenia
Odpowiedź na
Odpowiedź na
usterkę magistrali
Odpowiedź na
usterkę gniazda
Monitorowanie
wartości
rzeczywistej
Opóźnienie
monitorowania
5,0 150,0 % 10,0 715
2,00 600,00 s 20,00 716
0 3 2 732 Jak dla par. 2.7.1
0 3 2 733 Jak dla par. 2.7.1
0 3 2 734 Jak dla par. 2.7.1
0 4 0 735
0,0 100,0 % 10,0 736
0 3600 s 5 737
Tabela 1-10. Zabezpieczenia, P2.7
0 = brak odpowied z i
1 = ostrzeżenie, jeśli poniżej
limitu
2 = ostrzeżenie, jeśli powyżej
limitu
3 = usterka, jeśli poniżej limitu
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
LISTA PARAMETRÓW vacon • 13
3
Ust.
fabryczne
P2.8.1
Czas oczekiwania
0,10
10,00
s 0,50
717 P2.8.2
Czas próby
0,00
60,00
s 30,00
718
0
2 = według par. 2.4.6
Ust.
fabryczne
ID
0
0 = wejście AI1
3 = magi strala (ProcessDataIN 1 )
Wejście wartości
0 = sygnał AI1
regulatora PID
regulatora
Częstotliwość
uśpienia
Par.
2.1.1
Par.
2.1.2
uśpienia
poziomu war. zad.
3.9 Parametry automatycznego restartu (panel sterowania: menu P2 P2.8)
Kod Parametr Min. Maks. Jednostka
P2.8.3 Funkcja Start 0 2 0 719
ID Uwagi
= start wg rampy
1 = lotny start
Tabela 1-11. Parametry automatycznego ponownego startu, P2.8
3.10 Parametry regulatora PID (panel sterowania: menu menu P2 P2.9)
Kod Parametr Min. Maks. Jednostka
P2.9.1
P2.9.2
P2.9.3
P2.9.4
P2.9.5
P2.9.6
P2.9.7
P2.9.8
P2.9.9 Inwersja uchybu
Aktywacja
regulatora PID
Wartość zadana
regulatora PID
rzeczywistej
Wzmocnienie
regulatora PID
Czas regulacji I
Czas regulacji D
Skalowanie
minimum
wartości
rzeczywistej 1
Skalowanie
maksimum
wartości
rzeczywistej 1
0 1 0 163
0 3 2 332
0 6 1 334
0,0 1000,0 % 100,0 118
0,00 320,00 s 10,00 119
0,00 10,00 s 0,00 132
–
1000,0
–
1000,0
0 1 0 340
1000,0 % 0,00 336 0 = bez skalowania minimum
1000,0 % 100,0 337 100 = bez skalowania maksimum
= nieużywany
1 = regulator aktywny
2 = aktywne sterowanie pomp i
wentylatorów, widoczna grupa
P2.10
1 = wejście AI2
2 = panel sterowania
(wartość zad. 1)
1 = sygnał AI2
2 = magistrala (ProcessDataIN2)
3 = moment silnika
4 = prędkość silnika
5 = prąd silnika
6 = moc silnika
7 = AI1 – AI2
Uwagi
P2.9.10
P2.9.11
P2.9.12 Poziom budzenia 0,00 100,00 % 25,00 1018
P2.9.13 Funkcja budzenia 0 3 0 1019
Opóźnienie
Tabela 1-12. Parametry regulatora PID, P2.9
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
0 3600 s 30 1017
Hz 10,00 1016
0 = budzenie po spadku poniżej
poziomu 2.9.12
1 = budzenie po przekroczeniu
poziomu 2.9.12
2 = budzenie po spadku poniżej
poziomu war. zad.
3 = budzenie po przekroczeniu
3
14 • vacon LISTA PARAMETRÓW
dodatkowych
dodatkowych
zmiana kolejności
0 = nieużywany
dodatkowych
zmiany
0,0
zmianami
Automatyczna
dodatkowych
zmiany
napęd dodatkowy
1
3.11 Parametry sterowania pomp i wentylatorów (panel sterowania: menu P2
P2.10)
UWAGA! Grupa P2.10 jest widoczna tylko po ustawieniu wartości par. 2.9.1 na 2.
Kod Parametr Min. Maks. Jednostka
P2.10.1
P2.10.2
P2.10.3
P2.10.4
P2.10.5
Liczba
dodatkowych
napędów
Opóźnienie staru
napędów
Opóźnienie
zatrzymania
napędów
Automatyczna
pracy
Okres
automatycznej
0 3 1 1001
0,0 300,0 s 4,0 1010
0,0 300,0 s 2,0 1011
0 4 0 1027
0,0 3000,0 godz. 48,0 1029
Ust.
fabryczne
ID
1 = automatyczna zmiana tylko
pomp dodatkowyc h
2 = automatyczna zmiana
pompy regulowanej i pomp
dodatkowych
3 = automatyczna zmiana
i blokady tylko pomp
dodatkowych
4 = automatyczna zmiana
i blokady pompy
regulowanej i pomp
= TEST = 40 s
Czas pomiędzy automatycznymi
Uwagi
P2.10.6
P2.10.7
P2.10.8
P2.10.9
Tabela 1-13. Parametry sterowania pomp i wentylatorów, P2.10
zmiana;
maksymalna
liczba napędów
Limit
częstotliwości
automatycznej
Częstotliwość
startu, napęd
dodatkowy 1
Częstotliwość
zatrzymania,
0 3 1 1030
0,00
Par.
2.10.9 320,00 Hz 51,00 1002
Par.
2.1.1
Par.
2.1.2
Par.
2.10.8
Hz 25,00 1031
Hz 10,00 1003
Poziom automatycznej zmiany
dla napędów dodatkowych
Poziom częstotliwości
automatycznej zmiany dla
napędu o regulowanej prędkości
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
LISTA PARAMETRÓW vacon • 15
3
Ust.
fabryczne
1
komunikacyjna
Zadawanie
panelu
0
aktywny
3.12 Sterowanie z panelu (panel ste r o w ania: menu K 3)
Poniżej zostały wymienione parametry wyboru miejsca sterowania i kierunku. Patrz
menu panelu sterującego w Instrukcji obsługi przemiennika Vacon NXL.
Kod Parametr Min. Maks. Jednostka
P3.1 Miejsce sterowania 1 3 1
R3.2
P3.3
R3.4 Przycisk Stop 0 1 1
R3.5
częstotliwości z
Wybór kierunku
wirowania z panelu
Wartość zadana 1
dla regularora PID
Par.
2.1.1
0 1 0
0,00 100,00 % 0,00
Par.
2.1.2
Hz
ID Uwagi
= zacisk we/wy
2 = panel
125
3 = magistrala
0 = do przodu
123
1 = do tyłu
= ograniczone
zastosowanie
114
przycisku Stop
1 = przycisk Stop
jest zawsze
R3.6
Wartość zadana 2
dla regulatora PID
0,00 100,00 % 0,00
Wybór funkcji
wejściem cyfrowym
Tabela 1-14. Parametry panelu sterowania, M3
3.13 Menu systemowe (panel sterowania: menu S6)
Parametry i funkcje ogólne, związane z zastosowaniem przemiennika częstotliwości, takie jak
niestandardowe zestawy parametrów lub informacje o sprzęcie i oprogramowaniu, można
znaleźć w rozdziale 7.4.6 w Instrukcji obsługi przemiennika Vacon NXL.
3.14 Karty rozszerzeń (panel sterowania: menu E7)
Menu E7 pokazuje, jakie karty rozszerzeń podłączono do karty sterującej oraz udostępnia
parametry związane z poszczególnymi kartami. Więcej informacji można znaleźć w rozdziale
7.4.7 w Instrukcji obsługi przemiennika Vacon NXL.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
16 • vacon OPIS PARAMETRÓW
4. OPIS PARAMETRÓW
4.1 PARAMETRY PODSTAWOWE
2.1.1, 2.1.2 Częstotliwość minimalna/maksymalna
Definiuje limity częstotliwości wyjściowej przemiennika.
Maksymalna wartość parametrów 2.1.1 i 2.1.2 wynosi 320 Hz.
Oprogramowanie automatyczne sprawdza wartości parametrów 2.1.19, 2.1.20,
2.3.13, 2.5.1, 2.5.2 i 2.6.5.
2.1.3, 2.1.4 Czas przyspieszania 1, czas hamowania 1
Limity te odpowiadają czasowi wymaganemu, aby częstotliwość wyjściowa
przyspieszyła od częstotliwości zerowej do ustawionej częstotliwości maksymalnej
(par. 2.1.2) i odwrotnie.
2.1.5 Limit prądu
Ten parametr określa maksymalny prąd wyjściowy przemiennika częstotliwości.
Aby uniknąć przeciążenia silnika, parametr ten należy ustawić odpowiednio do
znamionowego prądu silnika. Domyślnie limit prądu jest równy znamionowemu
prądowi przemiennika (I
2.1.6 Znamionowe napięcie silnika
Należy wpisać wartość z tabliczki znamionowej silnika. Ten parametr ustawia napięcie
punktu osłabienia pola (para me tr 2. 6. 4) na wartość 100% × U
2.1.7 Znamionowa częstotliwość silnika
Należy wpisać wartość z tabliczki znamionowej silnika. Ten parametr ustawia punkt
osłabienia pola (parametr 2.6.3) na tę samą wartość.
2.1.8 Znamionowa prędkość silnika
Należy wpisać wartość z tabliczki znamionowej silnika.
2.1.9 Znamionowy prąd silnika
Należy wpisać wartość z tabliczki znamionowej silnika.
L
).
nsilnika.
2.1.10 Wartość cos ϕ silnika
Należy wpisać wartość z tabliczki znamionowej silnika.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
OPIS PARAMETRÓW vacon • 17
4
2.1.11 Funkcja Start
Przyspieszanie wg charakterystyki liniowej (tzw. rampy):
0 Przemiennik częstotliwości startuje od 0 Hz i przyspiesza do częstotliwości
maksymalnej w ustawionym cz asie przyspieszan ia. Bezwładność obciążenia
lub tarcie rozruchowe mogą powodować wydłużenie czasu przyspieszenia.
Lotny start:
1 Przemiennik częstotliwości może wystartować przy wirującym silniku,
generując niewielki moment obrotowy i szukając częstotliwości
odpowiadającej prędkości silnika. Wyszukiwanie rozpoczyna się od
częstotliwości maksymalnej w kierunku częstotliwości rzeczywistej do
chwili wykrycia prawidłowej wartości. Następnie częstotliwość wyjściowa
zostaje zwiększona/zmniejszona w celu osiągnięcia wartości zadawanej
zgodnie z parametrami przyspieszania/hamowania.
Tego trybu należy używać, jeśli silnik długo hamuje wybiegiem po wydaniu
polecenia startu. Korzystając z lotnego startu można zapewnić sterowanie
w przypadku krótkich przerw zasilania.
Warunkowy rozruch w biegu:
2 W tym trybie można odłączyć silnik od przemiennika częstotliwości lub
dołączyć do niego, nawet jeśli polecenie Start jest aktywne. Po ponownym
podłączeniu silnika napęd działa zgodnie z opisem w wyborze 1
2.1.12 Funkcja Stop
Wybieg:
0 Silnik hamuje wybiegiem do chwili zatrzymania bez sterowania przez
przemiennik częstotliwości po wydaniu komendy Stop.
Hamowanie wg charakterystyki liniowej (tzw. ramp y):
1 Po wydaniu polecenia Stop szybkość silnika jest zmniejszana zgodnie
z ustawionymi parametrami zwalniania.
Jeśli odzyskiwana energia jest duża, może być konieczne użycie
zewnętrznego rezystora hamowania w celu szybszego wyhamowania.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
18 • vacon OPIS PARAMETRÓW
1
Automatyczne zwiększanie momentu obrotowego
2.1.13 Optymalizacja charakterystyki U/f
0 Nieużywana
Napięcie silnika jest automatycznie podbijane co powoduje, że
silnik wytwarza wystarczający moment obrotowy do rozruchu
i pracy przy niskich częstotliwościach. Wzrost napięcia zależy
od typu i mocy silnika. Automatycznego zwiększanie momentu
obrotowego można używać w zastosowaniach, gdzie występuje
duży moment rozruchowy, np. w przenośnikach.
UWAGA! W zastosowaniach o dużym momencie obrotowym i niskiej
prędkości istnieje niebezpieczeństwo przegrzania silnika. Jeśli
silnik ma przez dłuższy czas pracować w takich warunkach,
należy zwrócić szczególną uwagę na jego chłodzenie. Jeśli
temperatura wykazuje tendencję do nadmiernego wzrostu,
należy stosować silniki z chłodzeniem obcym.
2.1.14 Wybór sygnału zadającego częstotliwość jeżeli miejscem sterowania są
zaciski WE/WY
Definiuje wybrane źródło częstotliwości zadanej, jeżeli napęd jest sterowany
z zacisków we/wy.
0 Zadawanie wejściem analogowym AI1 (zaciski 2 i 3, np. potencjometr)
1 Zadawanie wejściem analogowym AI2 (zaciski 5 i 6, np. przetwornik)
2 Zadawanie z panelu (parametr 3.2)
3 Zadawanie z magistrali komunikacyjnej (FBSpeedReference)
4 Zadawanie motopotencjometrem (wejścia cyfrowe szybciej/wolniej)
5 Wybór AI1/AI2. Wybór AI2 jest programowany za pomocą funkcji DIN3
(P2.1.18)
2.1.15 Zakres sygnału wejścia analogowego AI2 (I
1 Zakres sygnału 0…20 mA
2 Zakres sygnału 4…20 mA
3 Zakres sygnału 0…10 V
4 Zakres sygnału 2…10 V
Uwaga! Wybrane opcje są nieaktywne, jeśli par. 2.2.12 > 0% lub
par. 2.2.13 < 100%.
2.1.16 Funkcja wyjścia analogowego AO1
)
in
Ten parametr służy do wyboru żądanej funkcji wyjścia analogowego.
Możliwe opcje parametru zostały podane w tabeli na stronie 5.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 19
4
2.1.17 Funkcja wejścia cyfrowego DIN2
Ten parametr ma 10 opcji. Jeśli wejście cyfrowe DIN2 nie jest używane, należy
ustawić wartość parametru na 0.
1 Start do tyłu
2 Nawrót
3 Impuls Stop
4 Usterka zewnętrzna
Zestyk zamknięty: sygnalizowana jest usterka i silnik zatrzymany, jeśli
wejście jest aktywne
5 Usterka zewnętrzna
Zestyk otwarty: sygnalizowana jest usterka i silnik zatrzymany, jeśli wejście
jest nieaktywne
6 Zezwolenie na pracę
Zestyk otwarty: uruchomienie silnika nie jest możliwe
Zestyk zamknięty: uruchomienie silnika jest możliwe
Zatrzymanie wybiegiem jeżeli otwarcie nastąpi podczas pracy
7 Prędkość stała 2
8 Motopotencjometr – zwiększanie prędkości
Zestyk zamknięty: wartość zadana jest zwiększana do chwili otwarcia zestyku
9 Wyłącz regulator PID (bezpośrednie zadawanie częstotliwości)
10 Blokada napędu 1 (można wybrać tylko wówczas, gdy jest aktywne
sterowanie pomp i wentylatorów, P2.9.1 = 2)
2.1.18 Funkcja wejścia cyfrowego DIN3
Ten parametr ma 13 opcji. Jeśli wejście cyfrowe DIN3 nie jest używane, należy
ustawić wartość parametru na 0.
1 Nawrót
Zestyk otwarty: do przodu
Zestyk zamknięty: do tyłu
2 Usterka zewnętrzna
Zestyk zamknięty: sygnalizowana jest usterka i silnik zatrzymany, jeśli
wejście jest aktywne
3 Usterka zewnętrzna
Zestyk otwarty: sygnalizowana jest usterka i silnik zatrzymany, jeśli wejście
jest nieaktywne
4 Kasowanie aktywnych usterek
Zestyk zamknięty: kasowanie wszystkich aktywnych usterek
5 Zezwolenie na pracę
Zestyk otwarty: uruchomienie silnika nie jest możliwe
Zestyk zamknięty: uruchomienie silnika jest możliwe
Zatrzymanie wybiegiem jeżeli otwarcie nastąpi podczas pracy
6 Prędkość stała 1
7 Prędkość stała 2
8 Polecenie hamowania prądem stałym
Zestyk zamknięty: w trybie Stop hamowanie prądem stałym działa do chwili
otwarcia zestyku. Prąd hamowania prądem stałym wynosi około 10% wartości
wybranej dla par. 2.4.3.
9 Motopotencjometr – zwiększanie prędkości
Zestyk zamknięty: wartość zadana jest zwiększana do chwili otwarcia zestyku
10 Motopotencjometr – zmniejszanie prędkości
Zestyk zamknięty: wartość zadana jest zmniejszana do chwili otwarcia
zestyku
11 Wyłącz regulator PID (bezpośrednie zadawanie częstotliwości)
12 Wybór wartości zadanej 2 regulatora PID z panelu
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
20 • vacon OPIS PARAMETRÓW
13 Blokada napędu 2 (można wybrać tylko wówczas, gdy jest aktywne
sterowanie pompą i wentylatorem, P2.9.1 = 2)
14 Wejście termistora UWAGA! Patrz Instrukcja obsługi przemiennika NXL,
rozdział 6.2.4
15 Zmiana miejsca sterowania na we/wy
16 Zmiana miejsca sterowania na magistralę komunikacyjną
17 Wybór AI1/AI2 dla wartości zadawanej z we/wy (par. 2.1.14)
2.1.19 Prędkość stała 1
2.1.20 Prędkość stała 2
Wartości parametrów są automatycznie ograniczane w przedziale od częstotliwości
minimalnej do maksymalnej (par. 2.1.1 i 2.1.2).
2.1.21 Funkc j a automatycznego ponowne g o sta rtu
Automatyczny ponowny start jest auktywniany tym pa rametrem.
0 = wyłączony
1 = włączony (3 automatyczne próby ponownego rozruchu, patrz par. 2.8.1–2.8.3)
2.1.22 Ukrywanie par ametrów
Za pomocą tego parametru można ukryć wszystkie inne grupy parametrów
z wyjątkiem grupy parametrów podstawowych (B2.1).
Ustawienie fabryczne tego parametru jest równe 0.
0 = wyłączone (za pomocą panelu można przeglądać wszystkie grupy
parametrów)
1 = włączone (za pomocą panelu można przeglądać tylko podstawowe parametry
B2.1)
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 21
4
M F 2 :
M F 3 :
X4:
Wejście napięciowe;
Wejście napięciowe;
X4:
M F 4-6
X8:
Programowanie
4.2 SYGNAŁY WEJŚCIOWE
2.2.1 Funkcja wejścia cyfrowego DIE1 karty rozszerzeń
Ten parametr ma 12 opcji. Jeśli wejście cyfrowe DIN1 karty rozszerzeń nie jest
używane, należy ustawić wartość parametru na 0.
Opcje są takie same jak dla parametru 2.1.18, z wyjątkiem:
13 = blokada napędu 1
2.2.2 Funkcja wejścia cyfrowego DIE2 karty rozszerzeń
Opcje są takie same jak dla parametru 2.2.1, z wyjątkiem:
13 = blokada napędu 2
2.2.3 Funkcja wejścia cyfrowego DIE3 karty rozszerzeń
Opcje są takie same jak dla parametru 2.2.1.
13 = blokada napędu 3
2.2.4 Funkcja dodatkowego wejścia cyfrowego DIN4
Jeśli wartość par. 2.2.6 jest ustawiona na 0, wejście analogowe AI1 można
wykorzystać jako dodatkowe wejście cyfrowe DIN4.
Opcje są takie same jak dla parametru 2.2.3.
UWAGA! Jeśli wejście analogowe zostało zaprogramowane jako DIN4,
należy sprawdzić, czy ustawienia zworek są prawidłowe (patrz rysunek
poniżej).
Wejście napięciowe;
0...10V
0...10V
RS485
0...10V
:
Rysunek 1-1. Ustawienia zworek X4/X8, gdy AI1 jest zastosowane jako DIN4
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
22 • vacon OPIS PARAMETRÓW
Zmiana
2.2.5 Wybór sygnału wejścia analogoweg o AI 1
Za pomocą tego parametru można dołączyć sygnał AI1 do wybranego wejścia
analogowego.
STOP
READY
I/Oterm
STOP
READY
I/O term
wartości
nxlk29.fh8
Wskaźnik położenia
Numerwejścia
Rysunek 1-2. Wybór sygnału AI1
Wartość tego parametru jest tworzona ze wskaźnika karty i numeru odpowiedniego
zacisku wejściowego. Patrz rysunek 1-2 powyżej.
Wskaźnik karty 1 = wejścia lokalne
Wskaźnik karty 2 = wejścia karty rozszerzeń
Numer wejścia 0 = wejście 1
Numer wejścia 1 = wejście 2
Numer wejścia 2 = wejście 3
Numer wejścia 9 = wejście 10
Przykład:
W przypadku ustawienia wartości tego parametru na 10 dla sygnału AI1 zostanie
wybrane wejście
AI1 zostanie wybrane wejście 2
lokalne 1. Jeśli zaś wartość zostanie ustawiona na 21, dla sygnału
karty rozszerzeń
Jeśli wartości sygnału wejścia analogowego mają być używane np. tylko do celów
testowych, można ustawić wartość parametru z zakresu 0–9. W takim przypadku
wartość 0 odpowiada 0%, wartość 1 odpowiada 20%, a dowolna wartość z zakresu
od 2 do 9 odpowiada 100% wartości sygnału.
2.2.6 Zakres sygnału wejścia analogowego AI1
Za pomocą tego parametru można wybrać zakres sygnału AI1.
0 = AI1 jako DIN 4
1 = zakres sygnału 0…20 mA (tylko dla wielkości MF4 i większych)
2 = zakres sygnału 4…20 mA (tylko dla wielkości MF4 i większych)
3 = zakres sygnału 0…10 V
4 = zakres sygnału 2…10 V
Uwaga! Wybrane opcje są nieaktywne, jeśli par. 2.2.7 > 0% lub
par. 2.2.8 < 100%.
Jeśli wartość par. 2.2.6 jest ustawiona na 0, wejście analogowe AI1 jest spełnia
funkcję dodatkowego wejścia cyfrowego DIN4. Patrz par. 2.2.4.
.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 23
4
%
100%
63%
Par. 2.2.10
t [s]
nxlk30.fh8
Sygnał filtrowany
Sygnał niefiltrowany
2.2.7 Niestandardowe skalowanie minimum zakresu AI1
2.2.8 Niestandardowe skalowanie maksimum zakresu AI1
Ustaw niestandardowy poziom minimalny i maksymalny dla sygnału AI1 w zakresie
0…10 V.
2.2.9 Inwersja wejścia analogowego AI1
Po ustawieniu wartości parametru na 1 następuje inwersja sygnału AI1.
2.2.10 Czas filtracji sygnału wejścia analogowego AI1
Ten parametr, po nadaniu wartości większej od 0, uaktywnia funkcję odfiltrowującą
zakłócenia z przychodzącego sygnału
analogowego U
.
in
Długie czasy filtrowania spowalniają
odpowiedź regulacji. Patrz
Rysunek 1-3.
Rysunek 1-3. Filtrowanie sygnału AI1
2.2.11 Wybór sygnału wejścia analogowego AI2
Za pomocą tego parametru można dołączyć sygnał AI2 do wybranego wejścia analogowego.
Procedura ustawiania wartości jak dla par. 2.2.5.
2.2.12 Zakres sygnału AI2
1 = zakres sygnału 0…20 mA
2 = zakres sygnału 4…20 mA
3 = zakres sygnału 0…10 V
4 = zakres sygnału 2…10 V
Uwaga! Wybrane opcje są nieaktywne, jeśli par. 2.2.13 > 0% lub par. 2.2.14 <
100%.
2.2.13 Niestandardowe skalowanie minimum zakresu AI2
2.2.14 Niestandardowe skalowanie maksimum zakresu AI2
Te parametry umożliwiają skalowanie wejściowego sygnału prądowego w zakresie od
0 mA do 20 mA.
Porównaj parametry 2.2.7 i 2.2.8.
2.2.15 Inwersja analogowego sygnału wejściowego AI2
Po ustawieniu wartości parametru na 1 następuje inwersja sygnału AI2.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
24 • vacon OPIS PARAMETRÓW
0
0
Cz. wyjściowa
Par.2.1.1
9
Par.2.1.1
8
Cz. maksymalna par. 2.1.2
Cz. minimalna par. 2.1.2
Wejście
analogowe [%]
Wejście
analogowe [%]
Cz. maksymalna par. 2.1.2
Cz. minimalna par. 2.1.2
2.2.16 Czas filtracji analogowego sygnału wejściowego AI2
Patrz parametr 2.2.10.
2.2.17 Zerowanie pamięci motopotencjometru (wartości częstotliwości zadanej)
0 = brak zerowania
1 = zerowanie pamięci po zatrzymaniu lub wyłączeniu zasilania
2 = zerowanie pamięci po wyłączeniu zasilania
2.2.18 Skalowanie minimum wartości zadanej
2.2.19 Skalowanie maksimum wartości zadanej
Można przeskalować zakres częstotliwości zadanej w zakresie od częstotliwości
minimalnej do częstotliwości maksymalnej. Jeśli skalowanie jest niepotrzebne, należy
ustawić wartość parametru na 0.
Na poniższych rysunkach jako zadające zostało wybrane wejście napięciowe AI1
o zakresie sygnału 0…10 V.
Rysunek 1-4. Lewy: Par. 2.1.18 = 0 (bez skalowania wartości zadanej).
Prawy: Skalowanie wartości zadanej
2.2.20 Wybór sygnału zadającego jeżeli panel jest aktywnym miejscem sterowania
Definiuje wybrane źródło wartości zadanej, jeśli napęd jest sterowany z panelu.
0 Wartość zadana z AI1 (domyślnie AI1, zaciski 2 i 3, np. potencjometr)
1 Wartość zadana z AI2 (domyślnie AI2, zaciski 5 i 6, np. przetwornik)
2 Zadawanie z panelu (parametr 3.2)
3 Zadawanie poprzez magistralę komunikacyjną (FBSpeedReference)
4 Zadawanie motopotencjometrem
5 Wartość zadana z wyjścia regulatora PID
2.2.21 Wybór sygnału zadającego jeżeli magistrala jest aktywnym miejscem
sterowania
Definiuje wybrane źródło wartości zadanej, jeśli napęd jest sterowany z magistrali
komunikacyjnej. Wartości parametru, patrz par. 2.2.20.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
OPIS PARAMETRÓW vacon • 25
4
6 = zewnętrzna usterka lub
Usterka lub ostrzeżenie zależy od par. 2.7.1
16 = monitorowanie wartości
17 = sterowanie automatyczną
18 = sterowanie automatyczną
19 = sterowanie automatyczną
20 = monitorowanie sygnału
Przekaźnik jest włączany zgodnie z ustawieniami parametrów
4.3 SYGNAŁY WYJŚCIOWE
2.3.1 Funkcja wyjścia przekaźnikowego RO1
2.3.2 Funkcja wyjścia przekaźnikowego ROE1 karty rozszerzeń
2.3.3 Funkcja wyjścia przekaźnikowego ROE2 karty rozszerzeń
2.3.4 Funkcja wyjścia cyfrowego DOE1 karty rozszerzeń
Wybrana wartość Opis
0 = nieużywany Nie działa
1 = gotowość
2 = praca Silnik pracuje
3 = usterka Wystąpiła usterka
4 = inwersja usterki Nie
5 = ostrzeżenie o przegrzaniu
przemiennika częstotliwości
ostrzeżenie
7 = usterka lub ostrzeżenie
sygnału zadającego
8 = ostrzeżenie Zawsze, jeśli aktywne jest ostrzeżenie
9 = kierunek obrotów w tył Wybrany został kierunek obrotów w tył
10 = prędkość stała Wybrano jedną z prędkości stałych
11 = osiągnięcie prędkości
zadanej
12 = aktywny regulator
silnikowy
13 = monitorowanie limitu 1
częstotliwości wyjściowej
14 = sterowanie z zacisków
we/wy
15 = usterka lub ostrzeżenie na
wejściu termistorowym
Wyjście przekaźnikowe RO1 i programowalne przekaźniki
karty rozszerzeń (RO1, RO2) są uaktywniane, gdy:
Przemiennik częstotliwości jest gotowy do pracy
wystąpiła usterka
Temperatura radiatora przekracza +70°C
Usterka lub ostrzeżenie zależy od par. 2.7.2
– jeśli zakres sygnału zadającego wynosi 4-20 mA i sygnał
jest < 4 mA
Częstotliwość wyjściowa osiągnęła wartość zadaną
Aktywny regulator nadnapięciowy, podnapięciowy,
nadprądowy lub momentu
Częstotliwość wyjściowa jest mniejsza lub większa od
ustawionej częstotliwości granicznej (patrz parametry 2.3.12
i 2.3.13 poniżej)
Aktywnym miejscem sterowania (menu K3; par. 3.1) jest
listwa zacisków we/wy
Wejście termistora na opcjonalnej karcie wskazuje
przegrzanie silnika. Usterka lub ostrzeżenie, zależy od
wybranej opcji parametru 2.7.19.
rzeczywistej
zmianą kolejności pracy
napędu 1
zmianą kolejności pracy
napędu 2
zmianą kolejności pracy
napędu 3
wejścia analogowego AI
Parametry 2.7.22–2.7.24
Sterowanie pompą 1, parametry 2.10.1–2.10.7
Sterowanie pompą 2, parametry 2.10.1–2.10.7
Sterowanie pompą 3, parametry 2.10.1–2.10.7
2.3.14–2.3.16.
Tabela 1-15. Sygnały wyjść przekaźnikowych RO oraz cyfrowych DO
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
4
26 • vacon OPIS PARAMETRÓW
1.0
0
20 mA
4 mA
10 mA
0.5
0 mA
12 mA
nxlk32.fh8
Par. 2.3.9
= 200%
Par
. 2.3.9
= 100%
Par. 2.3.9
= 50%
Prąd wyjścia
analogowego
Maks. wartość sygnału
wybierana przez par.
%
100%
63%
t [s]
nxlk31.fh8
Par. 2.3.6
Sygnał filtrowany
Sygnał niefiltrowany
2.3.5 Funkcja wyjścia analogowego AO
Ten parametr służy do wyboru żądanej funkcji analogowego sygnału wyjściowego.
Wartości parametru zostały podane w tabeli na stronie 5.
2.3.6 Czas filtracji sygnału wyjścia analogowego
Definiuje czas filtrowania analogowego
sygnału wyjściowego.
W przypadku ustawienia tego
parametru na wartość 0 sygnał nie jest
filtrowany.
Rysunek 1-5. Filtrowanie sygnału wyjścia
analogowego
2.3.7 Inwersja sygnału wyjścia analogowego
Odwraca analogowy sygnał wyjściowy:
Maksymalny sygnał wyjściowy = 0%
Minimalny sygnał wyjściowy = maksymalna ustawiona wartość (parametr 2.3.9)
0 Bez inwersji
1 Odwrócony
Patrz parametr 2.3.9 poniżej.
Rysunek 1-6. Inwersja wyjścia analogowego
2.3.8 Wybór minimum zakresu sygnału wyjścia analogowego
Ustawia minimum sygnału na 0 mA lub 4 mA. Należy zwrócić uwagę na różnicę
skalowania wyjścia analogowego w pa ra metrze 2.3.9.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 27
4
1.0
0
20 mA
4 mA
10 mA
0.5
0 mA
nxlk49.fh8
12 mA
Par. 2.3.8 = 1
Par. 2.3.8 = 0
Par. 2.3.9=
200%
Par. 2.3.9=
100%
Par. 2.3.9=
50%
Prąd
wyjścia
analogow
Maks. wartość sygnału
wybranego przez par. 2.1.16
Sygnał
Maks. wartość sygnału
Częstotliwość wyjściowa
100% × f
max
znamionowa silnika
nsilnika
Moment obrotowy silnika
100% × M
nsilnika
Moc silnika
100% × P
nsilnika
Napięcie silnika
100% × U
nsilnika
Napięcie w obwodzie DC
1000 V
wartość wyjściowa
f[Hz]
t
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
nxlk33.fh8
Par 2.3.13
Par 2.3.12 = 2
Przykład:
Rysunek 1-7. Skalowanie sygnału
2.3.9 Skalowanie sygnału wyjścia analogowego
Współczynniki skalowania wyjścia analogowego.
Prędkość silnika 100% × prędkość
Prąd wyjściowy 100% × I
Wartość zadana
regulatora PID
Wartość rzeczywista 1
regulatora PID
Wartość uchybu
regulatora PID
Wyjście regulatora PI
100% × maksymalna
wartość zadana
100% × maksymalna
wartość rzeczywista
100% × maksymalna
wartość uchybu
100% × maksymalna
wyjścia analogowego
Tabela 1-16. Skalowanie wyjścia analogowego
2.3.10 Funkcja wyjścia analogowego AOE1 karty rozszerzeń
2.3.11 Funkcja wyjścia analogowego AOE2 karty rozszerzeń
Te parametry służą do wyboru żądanych funkcji analogowych sygnałów wyjściowych
karty rozszerzeń. Wartości parametru, patrz par. 2.1.16.
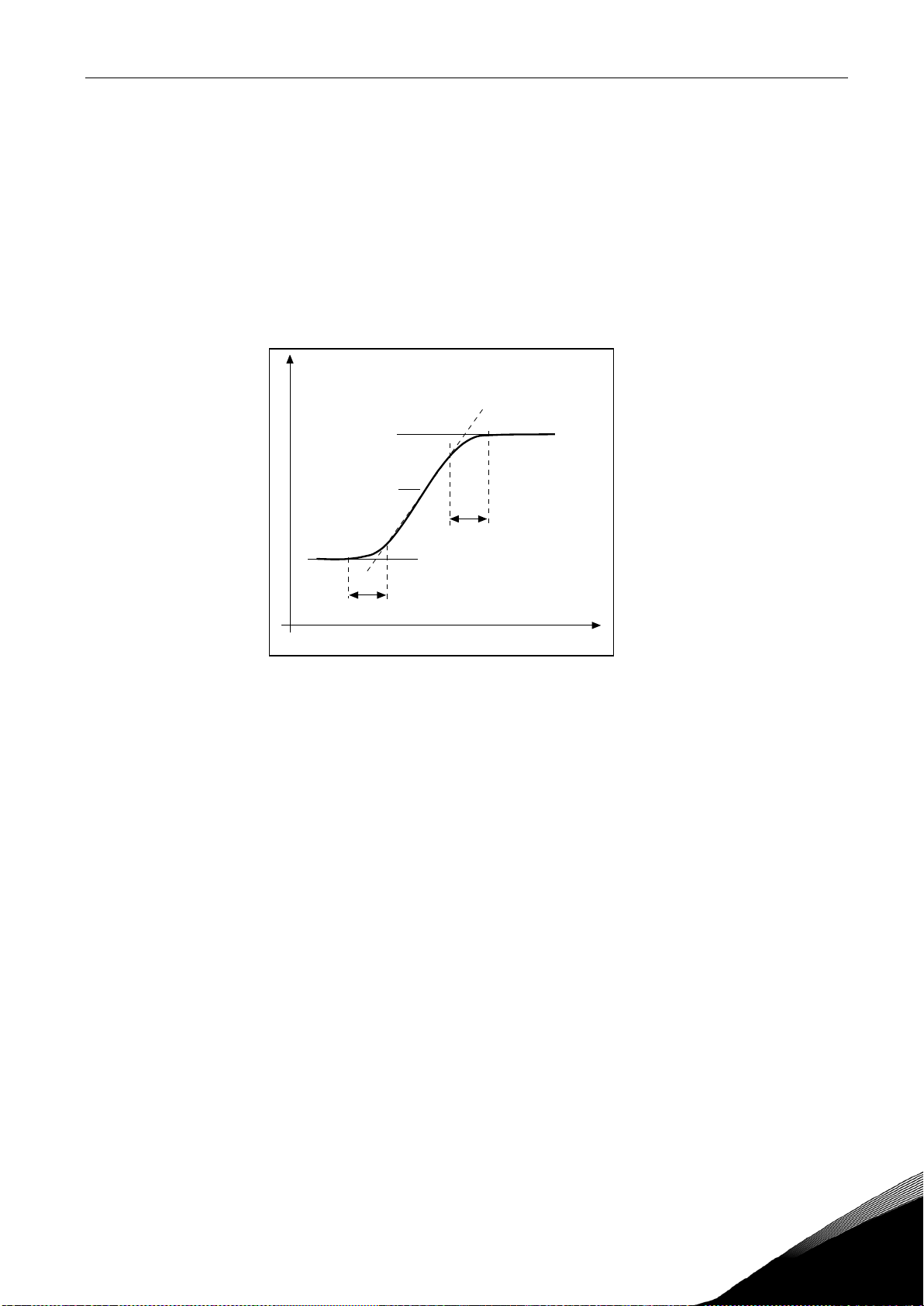
2.3.12 Funkcja monitorowania limitu 1 częstotliwości wyjściowej
0 Bez monitorowania
1 Monitorowan ie dolnego lim itu
2 Monitorowanie górnego limitu
Jeśli częstotliwość wyjściowa wykroczy w górę/w dół poza ustalony limit (par. 2.3.13),
ta funkcja wygeneruje komunikat ostrzegawczy za pomocą wyjść przekaźnikowych w
zależności od ustawień parametrów 2.3.1–2.3.4.
2.3.13 Monitorowana wartość limitu częstotliwości wyjściowej 1
Wybiera wartość częstotliwości monitorowaną przez parametr 2.3.12.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
Rysunek 1-8. Monitorowanie częstotliwości
wyjściowej
4
28 • vacon OPIS PARAMETRÓW
nxlk102
Opóźnienie włączenia,
par. 2.3.17
Opóźnienie wyłączenia,
par. 2.3.18
Sygnał zaprogramowany
dla wyjścia przekaźnikowego
Wyjście
RO1
2.3.14 Monitorowanie wejścia analogowego
Za pomocą tego parametru można wybrać monitorowane wejście analogowe.
0 = nieużywany
1 = AI1
2 = AI2
2.3.15 Monitorowanie wejścia analogowego – poziom wyłączenia
Jeśli sygnał wejścia analogowego wybrany za pomocą par. 2.3.14 spadnie poniżej
limitu ustawionego za pomocą tego parametru, zostanie wyłączone wyjście
przekaźnikowe.
2.3.16 Monitorowanie wejścia analogowego – poziom załączenia
Jeśli sygnał wejścia analogowego wybrany za pomocą par. 2.3.14 przekroczy limit
ustawiony za pomocą tego parametru, zostanie włączone wyjście przekaźnikowe.
Oznacza to, że na przykład w przypadku ustawienia limitu włączenia na 60%, a limitu
wyłączenia na 40%, przekaźnik włączy się, gdy sygnał przekroczy 60% i pozostanie
włączony do chwili zmniejszenia się sygnału poniżej 40%.
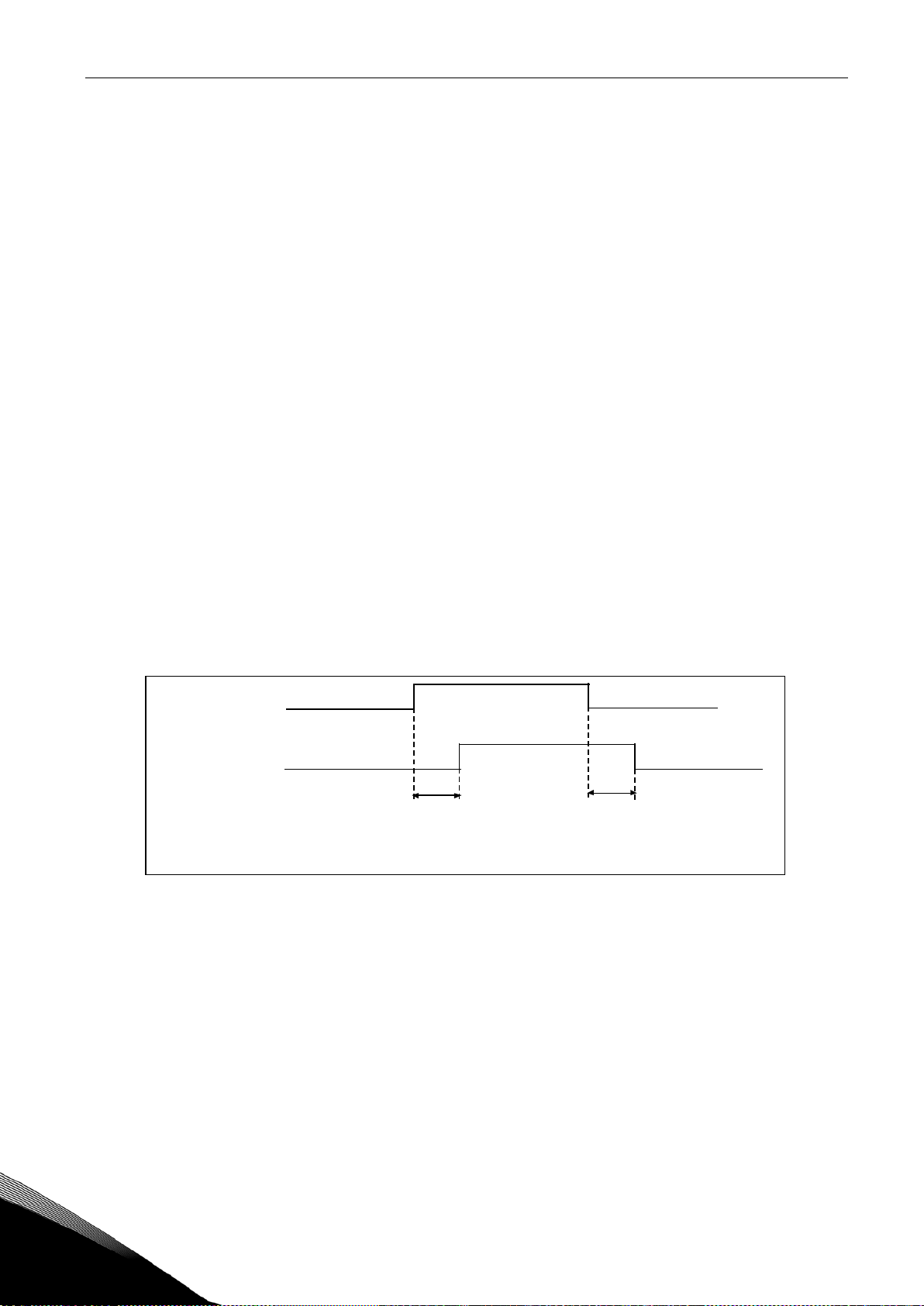
2.3.17 Opóźnienie włączenia wyjścia przekaźnikowego RO1
2.3.18 Opóźnienie wyłączenia wyjścia przekaźnikowego RO1
Za pomocą tych parametrów można ustawić opóźnienie włączenia i wyłączenia
wyjścia przekaźnikowego 1 (par. 2.3.1).
Rysunek 1-9. Opóźnienia włączenia i wyłączenia wyjścia przekaźnikowego 1
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
OPIS PARAMETRÓW vacon • 29
4
4.4 STEROWANIE NAPĘDEM
2.4.1 Kształt charakterystyki 1 przyspieszania / hamowania
Parametr pozwala wygładzić charakterystykę przyspieszania / hamowania w
początkowej i końcowej fazie zmiany prędkości. Ustawienie wartości 0 daje liniowy
kształt charakterystyki, który powoduje natychmiastowe przyspieszanie lub
hamowanie w chwili zmiany sygnału zadającego.
Ustawienie wartości tego parametru w zakresie 0,1…10 s daje krzywą
przyspieszania/zwalniania w kształcie litery S. Czas przyspieszania jest określany za
pomocą parametrów 2.1.3/2.1.4.
[Hz]
2.1.3, 2.1.4
Rysunek 1-10. Przyspieszanie/hamowanie
(rampa w kształcie litery S)
2.4.2 Moduł hamujący
Uwaga! Wewnętrzny moduł hamujący jest instalowany we wszystkich wielkościach
mechanicznych z wyjątkiem MF2.
0 Moduł hamujący nie jest używany
1 Moduł hamujący jest używany w stanie Praca
3 Używany w stanie Praca i Stop
Gdy przemiennik częstotliwości hamuje silnik, energia bezwładności silnika i
obciążenia jest przekazywana na zewnętrzny rezystor hamowania. Umożliwia to
przemiennikowi częstotliwości hamowanie obciążenia przy momencie obrotowym
równym momentowi przyspieszania (zakładając, że został wybrany prawidłowy
rezystor hamowania). Patrz oddzielna Instrukcja instalacji rezystorów hamowania.
2.4.1
2.4.1
NX12K20
[t]
2.4.3 Prąd hamowania DC
Określa prąd silnika podczas hamowania prądem stałym.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
4
30 • vacon OPIS PARAMETRÓW
f
n
f
n
t t
t = 1 x Par. 2.4.4
t = 0,1 x Par. 2.4.4
nxlk34.fh8
0,1 x f
n
PRACA
STOP
PRACA
STOP
Częstotliwość
wyjściowa
Prędkość silnika
Częstotliwość
wyjściowa
Prędkość silnika
Hamowanie prądem
stałym WŁĄCZONE
Hamowanie
prądem stałym
WŁĄCZONE
f
out
f
out
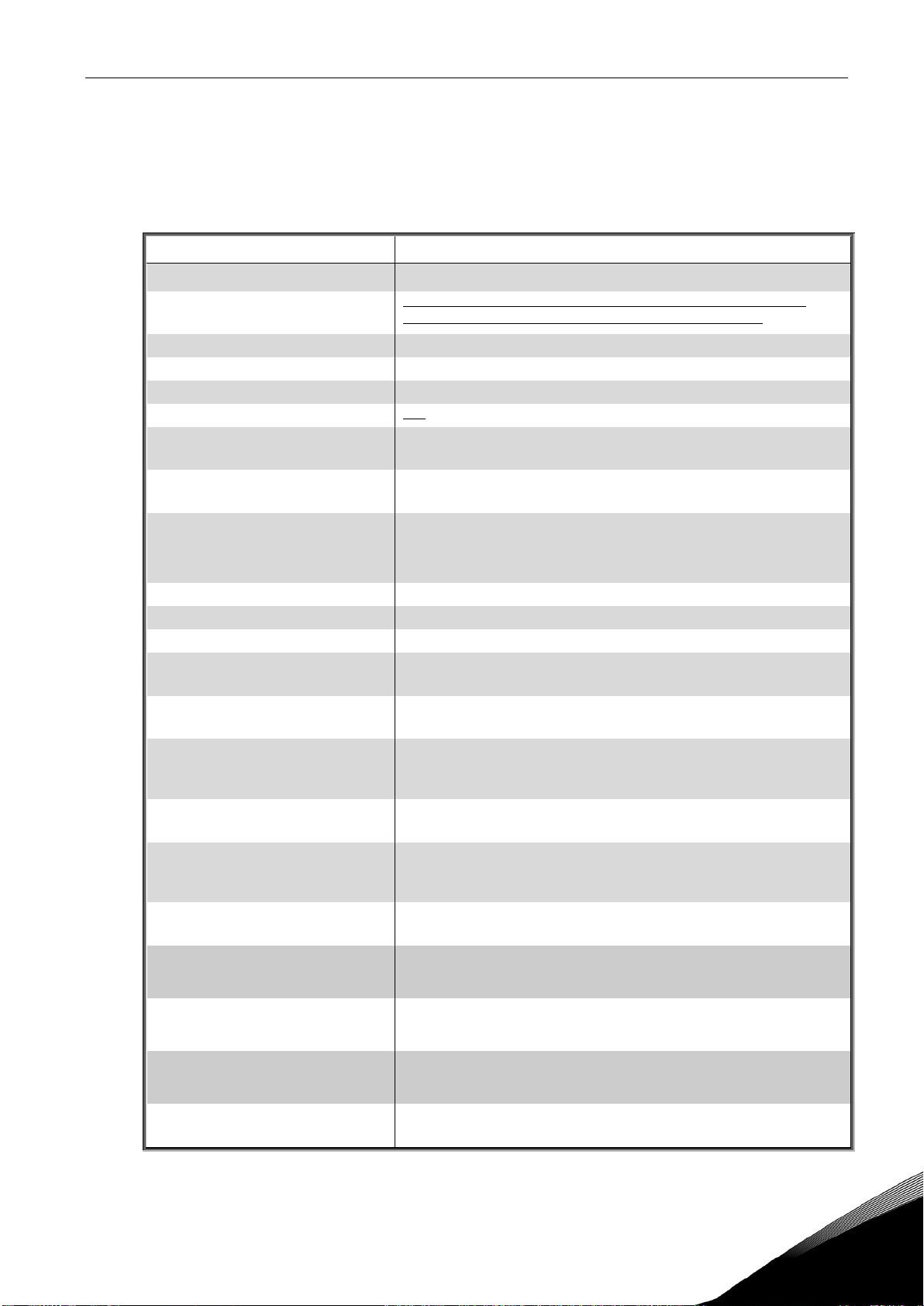
2.4.4 Czas hamowania DC po zatrzymaniu
Określa, czy hamowanie jest włączone czy też wyłączone oraz czas hamowania prądem
stałym podczas zatrzymywania silnika. Funkcja hamowania prądem stałym zależy od
funkcji Stop, parametr 2.1.12.
0 Hamowanie prądem stałym nie jest używane
> 0 Hamowanie prądem stałym jest używane i jego funkcja zależy od funkcji
Stop (par. 2.1.12). Ten parametr określa czas hamowania prądem stałym.
Par. 2.1.12 = 0 (funkcja Stop = wybiegiem):
Po wydaniu polecenia Stop silnik obraca się swobodnie do chwili zatrzymania bez
sterowania ze strony przemiennika częstotliwości.
Dzięki podaniu prądu stałego silnik można elektrycznie zatrzymać w najkrótszym
możliwym czasie bez korzystania z opcjonalnego zewnętrznego rezystora
hamowania.
Czas hamowania jest skalowany przez częstotliwość, gdy zostanie uruchomione
hamowanie prądem stałym. Jeśli częstotliwość jest większa od częstotliwości
znamionowej silnika, ustawiona wartość parametru 2.4.4 określa czas hamowania.
Jeśli częstotliwość jest ≤ 10% znamion owej, czas ha mowania wy n osi 10% ust a w ionej
wartości parametru 2.4.4.
Rysunek 1-11. Czas hamowania prądem stałym, gdy tryb
Stop = wybiegiem
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 31
4
Par. 2.1.12 = 1 (funkcja Stop = wg liniowej charakterystyki, tzw. rampy):
Po wydaniu komendy Stop prędkość silnika
jest zmniejszana zgodnie z ustawionymi
parametrami zwalniania tak szybko, jak
tylko to możliwe, do częstotliwości
zdefiniowanej za pomocą parametru
2.4.5, przy której rozpoczyna się
hamowanie prądem stałym.
Czas hamowania jest definiowany za
pomocą parametru 2.4.4. W
przypadku istnienia dużej
bezwładności, zaleca się użycie
zewnętrznego rezystora hamowania
w celu przyspieszenia hamowania.
Patrz Rysunek 1-12.
Rysunek 1-12. Czas hamowania prądem
stałym, gdy tryb Stop = wg rampy
2.4.5 Częstotliwość rozpoczęcia hamowania DC podczas hamowania wg rampy
Częstotliwość wyjściowa, przy której następuje rozpoczęcie hamowania prądem
stałym. Patrz Rysunek 1-12.
2.4.6 Czas hamowania DC przed startem
Hamowanie prądem stałym jest
uaktywniane po wydaniu komendy Start.
Ten parametr określa czas do zwolnienia
hamulca. Po zwolnieniu hamulca
częstotliwość wyjściowa wzrasta zgodnie z
funkcją Start ustawioną w parametrze
2.1.11. Patrz Rysunek 1-13.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
Rysunek 1-13. Czas hamowania prądem
stałym podczas startu

4
32 • vacon OPIS PARAMETRÓW
2.4.7 Hamowanie strumieniem
Zamiast hamowania prądem stałym do zatrzymania silników o mocy ≤ 15 kW można
zastosować hamowanie strumieniem.
Gdy wystąpi potrzeba hamowania, częstotliwość zostaje zmniejszona i wzrasta
strumień w silniku, który z kolei zwiększa zdolność hamowania silnika. W odróżnieniu
od hamowania prądem stałym prędkość silnika jest kontrolowana w czasie
hamowania.
Hamowanie strumieniem można włączyć lub wyłączyć.
0 = hamowanie strumieniem wyłączone
1 = hamowanie strumieniem włączone
Uwaga: Hamowanie strumieniem przekształca energię w ciepło w silniku i powinno
być stosowane z przerwami w celu uniknięcia uszkodzenia silnika.
2.4.8 Prąd hamowania strumieniem
Określa wartość prądu hamowania strumieniem. Wartość tę można ustawić w
zakresie od 0,3 × I
(w przybliżeniu) do limitu prądu.
H
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 33
4
2.5.12.5.
2
nxlk36.fh
8
Zadana[Hz
]
Par.2.5.2
Par.2.5.1
Par.2.5.3=0,2
Par.2.5.3=1,2
nxlk37.fh
8
fwy[Hz]
Czas[s]
4.5 CZĘSTOTLIWOŚCI ZABRONIONE
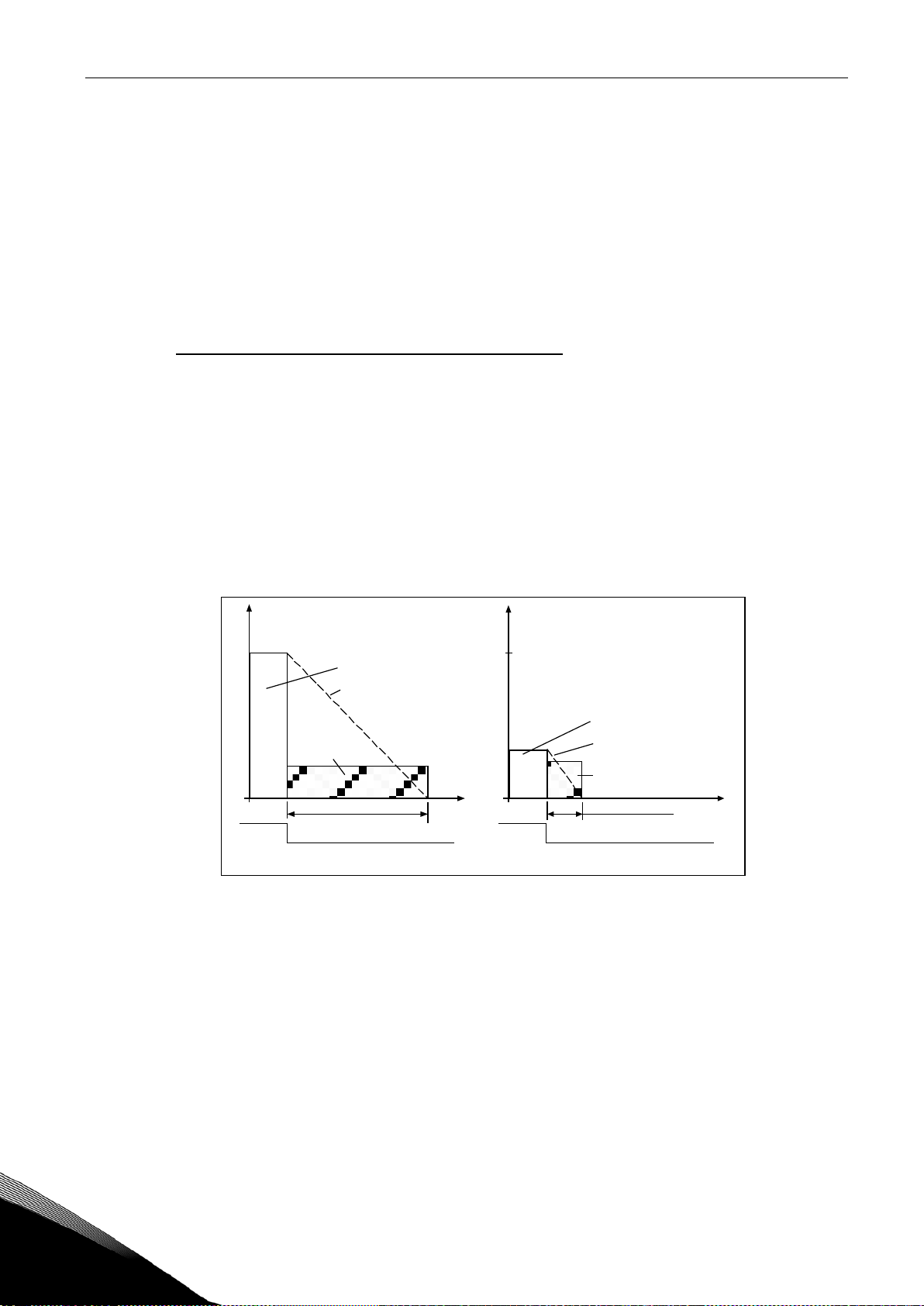
2.5.1 Obszar częstotliwości zabronionych 1; limit dolny
2.5.2 Obszar częstotliwości zabronionych 1; limit górny
W niektórych systemach może być
konieczne unikanie p ewnych
Częstotliwość
wyjściowa[Hz]
częstotliwości, które mogą
powodować problemy z rezonansem
mechanicznym. Za pomocą tych
parametrów można ustawić limit
zakresu „pomijanych częstotliwości”.
Patrz Rysunek 1-14.
Rysunek 1-14. Ustawianie zakresu
częstotliwości zabronionych
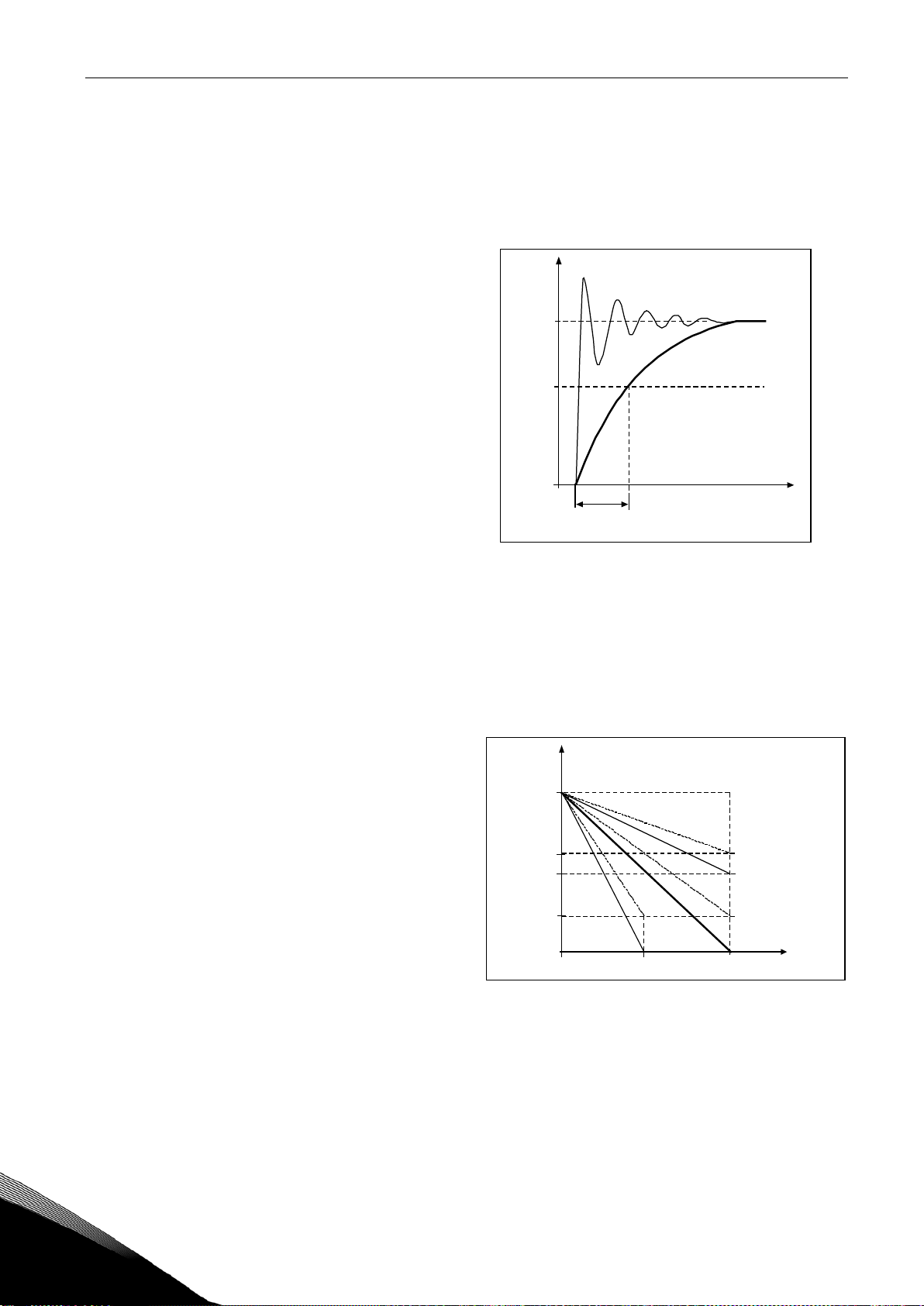
2.5.3 Współczynnik skalowania szybkości przyspieszania/zwalniania między
limitami zabronionej częstotliwości
Definiuje czas przyspieszanie/zwalniania, gdy częstotliwość wyjściowa znajduje się w
obrzarze częstotliwości zabronionych (parametry 2.5.1 i 2.5.2). Czas rampy
(wybrany czas przyspieszania/zwalniania 1 lub 2) jest mnożony przez ten
współczynnik. Na przykład wartość 0,1 powoduje, że czas rampy jest 10 razy krótszy
niż poza ograniczeniami zakresu zabronionej częstotliwości.
Rysunek 1-15. Skalowanie czasu przyspieszania / zwalniania w obszarze
częstotliwości zabronionych
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
34 • vacon OPIS PARAMETRÓW
par.2.6.4
f[Hz]
nxlk38.fh
8
Dom
yślnie:znamionowe
Liniowa
Kwadratow
a
punktosłabienia
pol
a
Dom
yślnie:
znamionow
a
4.6 STEROWANIE SILNIKIEM
2.6.1 Tryb sterowania silnikiem
0 Sterowanie częstotliwością: wartość zadana zadaje częstotliwość wyjściową
(rozdzielczość częstotliwości wyjściowej =
0,01 Hz).
1 Sterowanie prędkością: wartośc zadana steruje prędkością silnika
(dokładność ± 0,5%).
2.6.2 Wybór charakterystyki U/f
Liniowa: napięcie silnika zmienia się liniowo wraz ze zmianami częstoliwości w
0 obrzarze stałego pola od 0Hz do punktu osłabienia pola, w którym
napięcie silnika osiąga wartość nominalną. Liniowa charakterystyka U/f
powinna być stosowana w aplikacjach tzw. stałomomentowych. Patrz
Rysunek 1-16.
Jeżeli nie ma specjalnych wskazań do stosowania innych opcji,
nie należy zmieniać ustawionej fabrycznie liniowej
charakterystyki U/f.
Kwadratowa: napięcie silnika w funkcji częstotliwości wyjściowej zmienia się
1 zgodnie z kształtem charakterystyki tzw. kwadratowej od 0 Hz do
punktu osłabienia pola, w którym napięcie silnika osiąga wartośc
nominalną. Silnik pracuje niedomagnesowany poniżej punktu
osłabienia pola i wytwarza mniejszy moment obrotowy oraz mniejszy
hałas. Kwadratowa charakterystyka U/f może być wykorzystywana w
aplikacjach, w których wymagany moment obciążenia jest kwadratową
charakterystyką prędkośc, np. w odśrodkowych pompach i
wentylatorach.
U[V]
Un
napięcie silnika
częstotliwość
par. 2.6.3
silnika
par.2.6.6, 2.6.7
Rysunek 1-16. Liniowa i kwadratowa charakterystyka U/f
(napięcia silnika)
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 35
4
U
n
Par2.6.
4
Par.2.6.3
U[V
]
f[Hz]
nxlk39.fh
8
Par.2.6.5
Par.2.6.6
(dom.10%)
Par.2.6.7
Dom
yślnie:znamionowe
nap
ięciesilnik
a
punktosłabienia
pol
a
Dom
yślni
e
:
c
zęstotliw
o
ś
ć
znamionow
a
sil
n
ika
(dom.1.3%)
(dom. 5Hz)
Programowalna charakterystyka U/f:
2 Charakterystykę U/f można zaprogramować zmieniając współrzędne
trzech punktów. Programowalną charakterystykę należy stosować,
jeżeli inne ustawienia nie zepwniają wystarczającego momentu
obrotowego w funkcji częstoliwości.
Rysunek 1-17. Programowalna charakterystyka U/f
Liniowa z optymalizacją strumienia:
3 Przemiennik częstotliwości dobiera napięcie w sposób zapewniający
minimalizację prądu silnika w celu oszczędzania energii, obniżenia
poziomu zakłóceń i szumów. Można stosować w aplikacjach z
wolnozmieniającym się obciążeniem silnika, np. wentylatory, pompy
itp.
2.6.3 Punkt osłabienia pola
Punkt osłabienia pola to częstotliwość wyjściowa, przy której napięcie wyjściowe
osiąga wartość ustawioną za pomocą par. 2.6.4.
2.6.4 Napięcie w punkcie osłabienia pola
W zakresie częstotliwości wyjściowych powyżej punktu osłabienia pola napięcie
wyjściowe pozostaje na stałym poziomie, ustawionym za pomocą tego parametru. W
zakresie częstotliwości poniżej punktu osłabienia pola napięcie wyjściowe zmienia się
zgodnie z wybraną charakterystyką U/f. Patrz parametry 2.1.13, 2.6.2, 2.6.5, 2.6.6 i
2.6.7 oraz Rysunek 1-17.
Po ustawieniu parametrów 2.1.6 i 2.1.7 (napięcie znamionowe i częstotliwość
znamionowa silnika) parametrom 2.6.3 i 2.6.4 zostaną automatycznie nadane
odpowiednie nowe wartości. Jeśli potrzebne są inne wartości punktu osłabienia pola i
napięcia, należy zmienić te parametry po ustawieniu parametrów 2.1.6 i 2.1.7.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
36 • vacon OPIS PARAMETRÓW
2.6.5 Częstotliwość punktu środkowego charakterystyki U/f
Jeśli za pomocą parametru 2.6.2 została wybrana programowalna charakterystyka
U/f, ten parametr definiuje częstotliwość w punkcie środkowym charakterystyki.
Patrz Rysunek 1-17.
2.6.6 Napięcie punktu środkowego charakterystyki U/f
Jeśli za pomocą parametru 2.6.2 została wybrana programowalna charakterystyka
U/f, ten parametr definiuje napięcie w punkcie środkowym charakterystyki. Patrz
Rysunek 1-17.
2.6.7 Napięcie wyjściowe przy zerowej częstotliwości charakterystyki U/f
Parametr ten określa wartość napięcia charakterystyki U/f dla częstotliwości
wyjściowej równej zeru. Patrz Rysunek 1-17.
2.6.8 Częstotliwość kluczowania
Można zminimalizować szumy silnika za pomocą wysokiej częstotliwości przełączania
tranzystorów przemiennika. Zwiększanie częstotliwości przełączania powoduje
zwiększenie mocy strat i w konsekwencji silniejsze nagrzewania przemiennika.
Częstotliwość kluczowania dla przemienników Vacon NXL: 1…16 kHz
2.6.9 Regulator nadnapięciowy
2.6.10 Regulator podnapięciowy
Parametry te umożliwiają wyłączanie regulatorów zbyt niskiego / zbyt wysokiego
napięcia. Może to być przydatne, jeżeli napięcie zasilające przemiennik waha się w
zakresie większym niż –15% do +10%, a w danym zastosowaniu są tolerowane takie
wahania. Regulatory sterują częstotliwością wyjściową przemiennika z
uwzględnieniem fluktuacji napięcia zasilającego.
Uwaga: Wyłączenia z powodu za wysokiego/za niskiego napięcia mogą wystąpić,
gdy regulatory są wyłączane.
0 Regulator wyłączony
1 Regulator włączony
2.6.11 Automatyczna identyfikacja parametrów silnika
0 Brak działania
1 Identyfikacja z nieruchomym wałem silnika
Po uaktywnieniu identyfikacji przemiennik przeprowadzi automatycznie bieg
identyfikacyjny po otrzymaniu komendy Start z aktywnego w danej chwili miejsca
sterowania. Komenda Start musi zostać podana w czasie 20 sekund od aktywacji
tego parametru, w przeciwnym wypadku identyfikacja nie zostanie wykonana.
Wykonanie identyfikacji poprawia dokładność obliczeń momentu
obrotowego oraz poprawia działanie funkcji automatycznego zwiększania
momentu obrotowego. Powoduje również poprawę kompensacji poślizgu w
trybie sterowania prędkością (dokładniejsza regulacja prędkości).
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 37
4
4.7 ZABEZPIECZENIA
2.7.1 Odpowiedź na usterkę sygnału zadającego < 4 mA
0 = brak odpowiedzi
1 = ostrzeżenie
2 = usterka, tryb Stop po usterce według parametru 2.1.12
3 = usterka, tryb Stop po usterce zawsze wybiegiem
Ostrzeżenie lub usterka wraz z odpowiednim komunikatem są generowane, jeśli jest
używany sygnał wartości zadanej 4…20 mA i spadnie on poniżej wartości 3,5 mA na
5 s lub poniżej wartości 0,5 mA na 0,5 s. Sygnał informujący o ostrzeżeniu albo
usterce można zaprogramować na wyjściu cyfrowym.
2.7.2 Odpowiedź na usterkę zewnętrzną
0 = brak odpowiedzi
1 = ostrzeżenie
2 = usterka, tryb Stop po usterce według parametru 2.1.12
3 = usterka, tryb Stop po usterce zawsze wybiegiem
Ostrzeżenie lub usterka wraz z odpowiednim komunikatem są generowane po
otrzymaniu sygnału usterki zewnętrznej na wejściu cyfrowym. Sygnał informujący o
ostrzeżeniu albo usterce można zaprogramować na wyjściu cyfrowym.
2.7.3 Odpowiedź na usterkę zbyt niskiego napięcia
1 = ostrzeżenie
2 = usterka, tryb Stop po usterce według parametru 2.1.12
3 = usterka, tryb Stop po usterce zawsze wybiegiem
Limity zbyt niskiego napięcia można znaleźć w Instrukcji obsługi przemiennika Vacon
NXL, w tabeli 4-3.
Uwaga: Tego zabezpieczenia nie można wyłączyć.
2.7.4 Kontrola faz wyjściowych
0 = brak odpowiedzi
1 = ostrzeżenie
2 = usterka, tryb Stop po usterce według parametru 2.1.12
3 = usterka, tryb Stop po usterce zawsze wybiegiem
Kontrola faz wyjściowych sprawdza symetrie prądu wszystkich faz silnika.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
38 • vacon OPIS PARAMETRÓW
2.7.5 Zabezpieczenie przed skutkami zwarć doziemnych
0 = brak odpowiedzi
1 = ostrzeżenie
2 = usterka, tryb Stop po usterce według parametru 2.1.12
3 = usterka, tryb Stop po usterce zawsze wybiegiem
Zabezpieczenie przed skutkami zwarć doziemnych sprawdza, czy suma prądów faz
silnika jest w przybliżeniu równa zeru. Ponadto cały czas jest aktywne zabezpieczenie
nadprądowe wyłączające duże prądy wyjściowe, występujące w stanach zwarcia.
Parametry 2.7.6–2.7.10, Zabezpieczenie termiczne silnika:
Informacje ogólne
Zabezpieczenie termiczne silnika służy do ochrony silnika przed przegrzaniem. Napęd
Vacon ma możliwość dostarczania do silnika prądu większego niż znamionowy. Jeśli
obciążenie wymaga dużego prądu, istnieje ryzyko cieplnego przeciążenia silnika. Zdarza
się to najczęściej przy niskich częstotliwościach, przy których ulega pogorszeniu
zdolność chłodzenia silnika. Jeśli silnik jest wyposażony w chłodzenie obce,
zmniejszenie obciążenia przy małych prędkościach może być niewielkie.
Zabezpieczenie termiczne silnika jest oparte na modelu obliczeniowym i wykorzystuje
wyjściowy napędu w celu określenia obciążenia silnika.
prąd
Zabezpieczenie termiczne silnika można dostosować za pomocą parametrów.
Prąd termiczny I
określa prąd obciążenia, powyżej którego silnik jest przeciążony.
T
To ograniczenie prądu jest funkcją częstotliwości wyjściowej.
UWAGA!
Model obliczeniowy nie ochroni silnika, jeśli przepływ powietrza
chłodzącego jest tłumiony np. przez zablokowanie kratki wlotu
powietrza.
2.7.6 Zabezpieczenie termiczne silnika
0 = brak odpowiedzi
1 = ostrzeżenie
2 = usterka, tryb Stop po usterce według parametru 2.1.12
3 = usterka, tryb Stop po usterce zawsze wybiegiem
W przypadku wybrania wyłączenia napęd zatrzyma się i uaktywniony zostanie stan
usterki.
Wyłączenie zabezpieczenia, tzn. ustawienie parametru na 0, spowoduje wyzerowanie
modelu cieplnego silnika (0%).
Ustawienie parametru na 0 spowoduje wyłączenie zabezpieczenia i wyzerowanie
licznika czasu utyku.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 39
4
f
f
n
Par.
2.7.8=40%
100% *
I
nsilnika
0
nxlk51.fh8
I
T
Obszar przeciążenia
P
chłodzenie
2.7.7 Zabezpieczenie termiczne silnika: współczynnik temperatury otoczenia
silnika
Ponieważ należy uwzględnić temperaturę otoczenia silnika, zaleca się ustawienie
wartości tego parametru. Wartość współczynnika można ustawić w zakresie od –
100,0% do 100,0%, gdzie –100,0% odpowiada temperaturze 0°C, a 100,0% –
maksymalnej temperaturze otoczenia podczas pracy silnika. Ustawienie wartości tego
parametru na 0% powoduje, że założona temperatura otoczenia silnika jest taka
sama, jak temperatura radiatora przemiennika w chwili włączenia zasilania.
2.7.8 Zabezpieczenie termiczne silnika: współczynnik chłodzenia silnika przy
zerowej prędkości
Moc chłodzenia można ustawić
w zakresie 0–150,0% × moc
chłodzenia przy częstotliwości
znamionowej. Patrz Rysunek 1-18.
Rysunek 1-18. Moc chłodzenia silnika
2.7.9 Zabezpieczenie termiczne silnika: termiczna stała czasowa
Ten czas można ustawić w zakresie od 1 do 200 minut.
Jest to termiczna stała czasowa silnika. Im większy silnik, tym większa stała
czasowa. Stała czasowa jest to czas, w ciągu którego obliczona temperatura osiągnie
63% swojej wartości końcowej.
Cieplna stała czasowa zależy od konstrukcji silnika i jest różna dla różnych
producentów si l ni k ów.
Jeśli czas t6 silnika (t6 jest to czas w sekundach, przez który silnik może bezpiecznie
pracować przy sześciokrotnym przekroczeniu prądu znamionowego) jest znany
(podany przez producenta silnika), parametr stałej czasowej można wyznaczyć na
jego podstawie. Zgodnie z regułą praktyczną cieplna stała czasowa silnika w
minutach jest równa 2 × t6. Jeśli napęd jest zatrzymany, stała czasowa jest
wewnętrznie zwiększana do potrójnej ustawionej wartości parametru. Chłodzenie w
stanie zatrzymania opiera się na konwekcji i stała czasowa zwiększa się. Patrz także
Rysunek 1-19.
Uwaga: Jeśli parametry prędkość znamionowa (par. 2.1.8) lub prąd znamionowy
(par. 2.1.9) silnika zostaną zmienione, ten parametr zostanie automatycznie
ustawiony na wartość domyślną (40).
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
40 • vacon OPIS PARAMETRÓW
par.2.7.6
=(I/IT)2x(1-e
-t/
T
)
T
nxlk40.fh
8
Obszarautomatyczneg
o
Temperaturasilnik
a
Prąd
*) Zależy od wielkości silnika.
Temperatura silnika
105%
silnika
wyłączenia
Usterka/ostrzeżenie
I/I
Stał a czasowa T*)
Θ
Regulacja parametrem 2.7.9
Rysunek 1-19. Obliczanie temperatury silnika
2.7.10 Zabezpieczenie termiczne silnika: cykl pracy silnika
Określa wielkość stosowanego obciążenia w stosunku do znamionowego obciążenia
silnika. Wartość można ustawić w zakresie 0%…100%.
Czas
Parametr 2.7.11, zabezpieczenie przed utykiem:
Informacje ogólne
Zabezpieczenie silnika przed utkiem chroni silnik przed krótkotrwałymi przeciążeniami,
takimi jak powodowane przez zablokowany wał. Ustawienie czasu reakcji
zabezpieczenia przed utykiem może być krótsze niż zabezpieczenie termiczne silnika.
Stan utyku jest definiowany za pomocą dwóch parametrów: 2.7.12 (prąd utyku)
i 2.7.13 (częstotliwość utyku). Jeśli prąd jest większy niż ustawiony limit i częstotliwość
wyjściowa jest niższa niż ustawiony limit, stan interpretowany jest jako utyk.
W rzeczywistości nie wykorzystuje się czujnika obrotów wału. Zabezpieczenie przed
utykiem jest rodzajem zabezpieczenia przed przekroczeniem dopuszczalnej wartości
prądu.
2.7.11 Zabezpieczenie przed utykiem
0 = brak odpowiedzi
1 = ostrzeżenie
2 = usterka, tryb Stop po usterce według parametru 2.1.12
3 = usterka, tryb Stop po usterce zawsze wybiegiem
Ustawienie parametru na 0 spowoduje wyłączenie zabezpieczenia i wyzerowanie
licznika czasu utyku.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
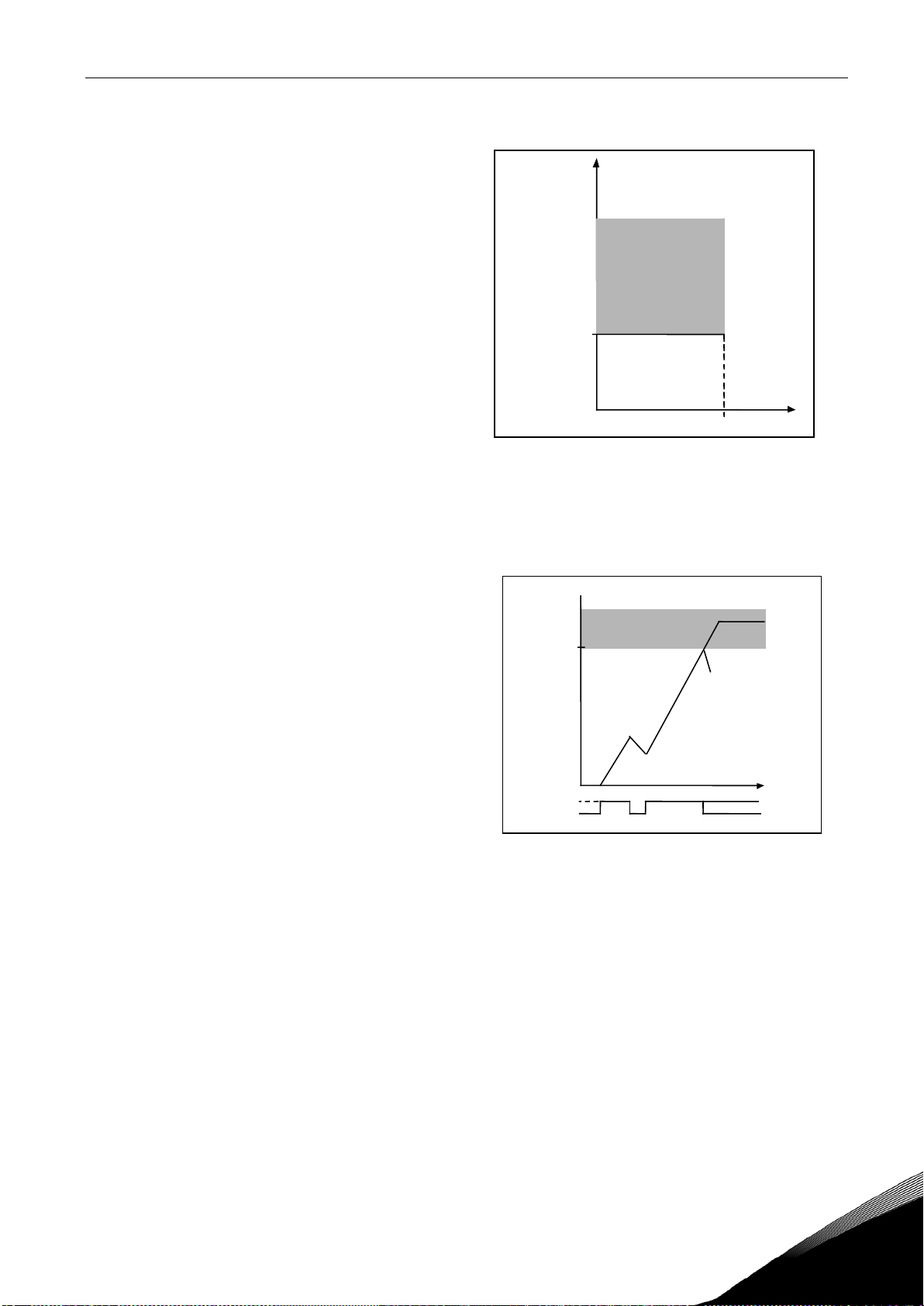
OPIS PARAMETRÓW vacon • 41
4
I
Par.2.7.1
2
Par.2.7.1
4
nxlk41.fh
8
Par.2.7.1
3
nxlk42.fh
8
Obszarautomatyczneg
o
w
y
ł
ą
czeni
a
Cza
s
Utknięcie
Brakutknięcia
W
y
ł
ą
czenie/ostrzeżeni
e
2.7.12 Limit prądu utyku
Prąd można ustawić w zakresie
0,0…I
*2. Aby wystąpiło utknięcie,
nsilnika
prąd musi przekroczyć ten limit. Patrz
rysunek 1- 20. Oprogramowanie nie
zezwala na wprowadzenie wartości
większej niż I
2.1.9 prąd znamionowy silnika
*2. Jeśli parametr
nsilnika
Obszar utyku
zostanie zmieniony, zostanie
automatycznie przywrócona wartość
domyślna tego parametru
nsilnika
*1,3).
(I
f
Rysunek 1-20. Programowanie obsz a ru
utyku
2.7.13 Czas utyku
Wartość tego parametru można ustawiać w zakresie od 1,0 s do 120,0 s.
Jest to czas, po upływie którego praca
w obszarze utyku sygnalizowana jest
jako utyk. Czas utyku jest zliczany
przez wewnętrzny licznik zliczający w
górę/w dół. Jeśli licznik czasu utyku
przekroczy limit, zabezpieczenie
spowoduje wyłączenie (patrz Rysunek
1-21).
2.7.14 Maksymalna częstotliwość utyku
Częstotliwość można ustawić w zakresie 1−f
Aby wystąpiło utknięcie, częstotliwość wyjściowa musi pozostawać poniżej tego
limitu.
Licznik czasu utyku
par. 2.7.11
Rysunek 1-21. Licznik czasu utyku
(par. 2.1.2).
maks.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
42 • vacon OPIS PARAMETRÓW
Par.2.7.1
6
Par.2.7.1
7
f
Obszarniedoci
ą
ż
eni
a
obrotow
y
Punkt
par.2.6.3
Parametry 2.7.15–2.7.18, zabezpieczenie przed niedociążeniem:
Informacje ogólne
Celem zabezpieczenia silnika przed niedociążeniem jest zapewnienie, że silnik jest cały
czas obciążony podczas pracy napędu. Jeśli silnik utracił obciążenie, może to oznaczać
problem w pracy, np. pęknięcie pasa lub suchobieg pompy.
Zabezpieczenie silnika przed niedociążeniem można regulować, ustawiając krzywą
ograniczającą obszar niedociążenia za pomocą parametrów 2.7.16 (Krzywa
niegociążenia w obrzarze osłabionego pola) i 2.7.17 (krzywa niedociążenia przy zerowej
częstotliwości), patrz poniżej. Krzywa niedociążenia jest krzywą paraboliczną ustawianą
między częstotliwością zerową i punktem osłabienia pola. Zabezpieczenie nie działa
poniżej 5 Hz (licznik czasu niedociążenia jest zatrzymywany).
Wartości momentu obrotowego do ustawienia krzywej niedociążenia są wyrażone w
procentach znamionowego momentu obrotowego silnika. Dane z tabliczki znamionowej
silnika, parametr Znamionowy prąd silnika i Znamionowy prąd przemiennika I
używane
L
są do wyznaczenia współczynnika skalowania wartości wewnętrznego momentu
obrotowego. Jeśli z przemiennikiem pracuje silnik inny niż znamionowy, dokładność
obliczenia momentu obrotowego ulega pogorszeniu.
2.7.15 Zabezpieczenie przed niedociążeniem
0 = brak odpowiedzi
1 = ostrzeżenie
2 = usterka, tryb Stop po usterce według parametru 2.1.12
3 = usterka, tryb Stop po usterce zawsze wybiegiem
W przypadku wybrania wyłączenia napęd się zatrzyma i uaktywniony zostanie stan
usterki.
Wyłączenie zabezpieczenia przez ustawienie parametru na 0 spowoduje wyzerowanie
licznika czasu niedociążenia.
2.7.16 Zabezpieczenie przed niedociążeniem, obszar osłabionego pola
Limit momentu obrotowego można ustawić w zakresie
10,0–150,0% × M
nsilnika
.
Moment
Ten parametr określa wartość
minimalnego dopuszczalnego momentu
obrotowego w obrzarze częstotliwości
wyjściowej powyżej punktu osłabienia
pola. Patrz Rysunek 1-22.
W przypadku zmiany parametru 2.1.9
(prąd znamionowy silnika) zostanie
automatycznie przywrócona wartość
domyślna tego parametru.
5 Hz
osłabieniapola
nxlk4 3. fh8
Rysunek 1-22. Programowanie obsz a ru
niedociążenia
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 43
4
Par.2.7.1
8
nxlk44.fh
8
Obszarautomatyczneg
o
wyłączeni
a
Cza
s
Licznikczasuniedociążenia
Niedociążenie
Brakniedociążenia
Wyłączenie/ostrzeżeni
e
par.2.7.1
5
2.7.17 Zabezpieczenie przed niedociążeniem, moment przy zerowej częstotliwości
Limit momentu obrotowego można ustawić w zakresie 5,0–150,0% × M
Ten parametr określa wartość minimalnego dopuszczalnego momentu obrotowego
dla zerowej częstotliwości wyjściowej. Patrz Rysunek 1-22.
W przypadku zmiany wartości parametru 2.1.9 (prąd znamionowy silnika) zostanie
automatycznie przywrócona wartość domyślna tego parametru.
2.7.18 Czas niedociążenia
Ten czas można ustawić w zakresie od
2,0 s do 600,0 s.
Jest to maksymalny dopuszczalny czas
istnienia stanu niedociążenia.
Wewnętrzny licznik góra/dół zlicza
łączny czas niedociążenia. Jeśli wartość
licznika niedociążenia przekroczy ten
limit, zabezpieczenie spowoduje
wyłączenie zgodnie z
parametrem 2.7.15. Jeśli napęd
zostanie zatrzymany, licznik
niedociążenia zostanie wyzerowany.
Patrz . Rysunek 1-23. Rysunek 1-23. Funkcja
licznika czasu
niedociążenia
nsilnika
.
2.7.19 Odpowiedź na usterkę termistora
0 = brak odpowiedzi
1 = ostrzeżenie
2 = usterka, tryb Stop po usterce według parametru 2.1.12
3 = usterka, tryb Stop po usterce zawsze wybiegiem
Ustawienie parametru na 0 spowoduje wyłączenie zabezpieczenia.
2.7.20 Odpowiedź na usterkę magistrali komunikacyjnej
Parametr określa tryb odpowiedzi na usterkę magistrali komunikacyjnej w przypadku
korzystania z karty magistrali komunikacyjnej. Więcej informacji można znaleźć
w odpowiedniej instrukcji obsługi karty magistrali komunikacyjnej.
Patrz parametr 2.7.19.
2.7.21 Odpowiedź na usterkę gniazda karty rozszerzeń
Parametr określa tryb odpowiedzi na usterkę gniazda, spowodowany brakiem
komunikacji lub uszkodzeniem karty.
Patrz parametr 2.7.19.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
44 • vacon OPIS PARAMETRÓW
2.7.22 Funkcja monitorowania wartości rzeczywistej
0 = nieużywany
1 = ostrzeżenie, jeśli wartość rzeczywista spadnie poniżej limitu określonego za
pomocą par. 2.7.23
2 = ostrzeżenie, jeśli wartość rzeczywista przekroczy limit określony za pomocą par.
2.7.23
3 = usterka, jeśli wartość rzeczywista spadnie poniżej limitu określonego za pomocą
par. 2.7.23
4 = usterka, jeśli wartość rzeczywista przekroczy limit określony za pomocą par.
2.7.23
2.7.23 Limit monitorowanej wartości rzeczywistej
Za pomocą tego parametru można ustawić limit wartości rzeczywistej monitorowanej
w sposób określony pararametrem 2.7.22.
2.7.24 Opóźnienie monitorowania wartości rzeczywistej
Tutaj należy ustawić opóźnienie funkcji monitorowania wartości rzeczywistej
(par. 2.7.22).
Jeśli parametr jest używany, funkcja par. 2.7.22 będzie aktywna tylko, gdy wartość
rzeczywista będzie poza określonym limitem przez czas określony przez ten parametr.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 45
4
nxlk52.fh8
Sygnał usterki
Sygnał zatrzymania
silnika
Sygnał uruchomienia
silnika
Monitorowanie
Czas
oczekiwania
Par. 2.8.1
Ponowne
uruchomienie 1
Czas próby
Par. 2.8.2
Usterka aktywna
RESET/
zerowanie usterki
Funkcja automatycznego zerowania: (3 próby)
Czas
oczekiwania
Par. 2.8.1
Czas
oczekiwania
Par. 2.8.1
Czas
oczekiwania
Par
. 2.8.1
Ponowne
uruchomienie 2
Ponowne
uruchomienie 3
4.8 PARAMETRY AUTOMATYCZNEGO PONOWNEGO STARTU
Funkcja automatycznego ponownego startu jest aktywna, jeśli wartość par. 2.1.21 = 1.
Zawsze są podejmowane trzy próby ponownego startu.
2.8.1 Automatyczny ponowny start: czas oczekiwania
Określa czas przed podjęciem przez przemiennik częstotliwości próby
automatycznego ponownego uruchomienia silnika po zniknięciu usterki.
2.8.2 Automatyczny ponowny start: czas próby
Funkcja automatycznego ponownego startu umożliwia ponowne uruchomienie
przemiennika częstotliwości po zniknięciu usterki i upłynięciu czasu oczekiwania.
2.8.3 Automatyczny ponowny start: funkcja Start
Rysunek 1-24. Automatyczny po nowny start.
Zliczanie czasu rozpoczyna się od pierwszego automatycznego ponownego startu.
Jeśli liczba usterek występujących w czasie próby przekroczy trzy, zostanie
uaktywniony stan us t erki. W przeciwnym razie usterka jest kasowana po upłynięciu
czasu próby i z następną usterką ponownie jest uruchamiane zliczanie czasu próby.
Jeżeli po upływie czasu próby usterka pozostaje, stan usterka staje się aktywny.
Za pomocą tego parametru jest wybierana funkcja Start dla automatycznego
ponownego startu. Ten parametr określa tryb startu:
0 = start wg liniowej charakterystyki (rampy)
1 = lotny start
2 = start zgodnie z par. 2.1.11
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
46 • vacon OPIS PARAMETRÓW
4.9 PARAMETRY REGULATORA PID
2.9.1 Aktywacja regulatora PID
Za pomocą tego parametru można włączyć lub wyłączyć regulator PID lub auktywnić
grupę parametrów sterowania pompowo-wentylatorowego.
0 = regulator PID wyłączony
1 = regulator PID włączony
2 = aktywne sterowanie pompowo-wentylatorowe. Widoczna staje się grupa
parametrów P2.10.
2.9.2 Wartość zadana regulatora PID
Określa, jakie źródło wartości częstotliwości zadanej zostało wybrane dla regulatora
PID.
Wartość domyślna jest równa 2.
0 = wartość zadana z wejścia analogowego AI1
1 = wartość zadana z wejścia analogowego AI2
2 = wartość zadana regulatora PID z panelu (grupa K3, parametr P3.5)
3 = wartość zadana z magistrali komunikacyjnej (FBProcessDataIN1)
2.9.3 Wejście sygnału wartości rzeczywistej regulatora PID
0 wejście analogowe AI1
1 wejście analogowe AI2
2 magistrala komunikacyjna (wartość rzeczywista 1: FBProcessDataIN2;
wartość rzeczywista 2: FBProcessDataIN3)
3 momen t obr ot o w y si l nika
4 prędkość silnika
5 prąd silnika
6 moc si l ni ka
7 AI1 – AI2
2.9.4 Wzmocnienie P regulatora PID
Ten parametr określa wzmocnienie regulatora PID. Jeśli wartość parametru zostanie
ustawiona na 100%, zmiana wartości uchybu o 10% powoduje zmianę wyjścia
regulatora o 10%.
Jeśli wartość parametru jest ustawiona na 0, regulator PID pracuje jako regulator ID.
Patrz przykłady poniżej.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 47
4
t1s
10%
10%
10%
10%I=5Hz/
s
I=5Hz/s
I=5Hz/s
I=5Hz/s
wyjście PID
2.9.5 Czas regulacji I regulatora PID
Ten parametr określa czas całkowania regulatora PID. Jeśli ten parametr zostanie
ustawiony na 1,00 s, zmiana wartości uchybu o 10% powoduje zmianę wyjścia
regulatora o 10,00%/s. Jeśli wartość parametru jest ustawiona na 0,00 s regulator
PID pracuje jako regulator PD. Patrz przykłady poniżej.
2.9.6 Czas regulacji D regulatora PID
Ten parametr określa czas różniczkowania regulatora PID. Jeśli ten parametr zostanie
ustawiony na 1,00 s, zmiana wartości uchybu o 10% w ciągu 1,00 s powoduje zmianę
wyjścia regulatora o 10,00%. Jeśli wartość parametru jest ustawiona na 0,00, regulator
PID pracuje jako regulator PI.
Patrz przykłady poniżej.
Przykład 1:
W celu zmniejszenia wartości uchybu do zera przy zadawanych wartościach wyjście
przemiennika częstotliwości będzie zachowywać się w następujący sposób:
Zadawane wartości:
Par. 2.9. 4, P = 0% Limit maksimum regulatora PI D = 100,0%
Par. 2.9.5, czas I = 1,00 s Limit minimum regu latora PID = 0,0%
Par. 2.9.6, czas D = 0,00 s Minimalna częstotliwość = 0 Hz
Wartość uchybu (sygnał zadający Maksymalna częstotliwość = 50 Hz
– wartośc procesowa) = 10,00%
W tym przykładzie regulator PID pracuje praktycznie tylko jako regulator ID.
Zgodnie z zadawaną wartością parametru 2.9.5 (czas I) wyjście regulatora PID
zwiększa się o 5 Hz (10% różnicy między częstotliwością maksymalną i minimalną)
co sekundę do chwili osiągnięcia przez uchyb wartości 0.
Hz
uchyb PID
I=5Hz/s
uchyb=10%
NX12k70
Rysunek 1-25. Praca regulatora PID jako regulatora I
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
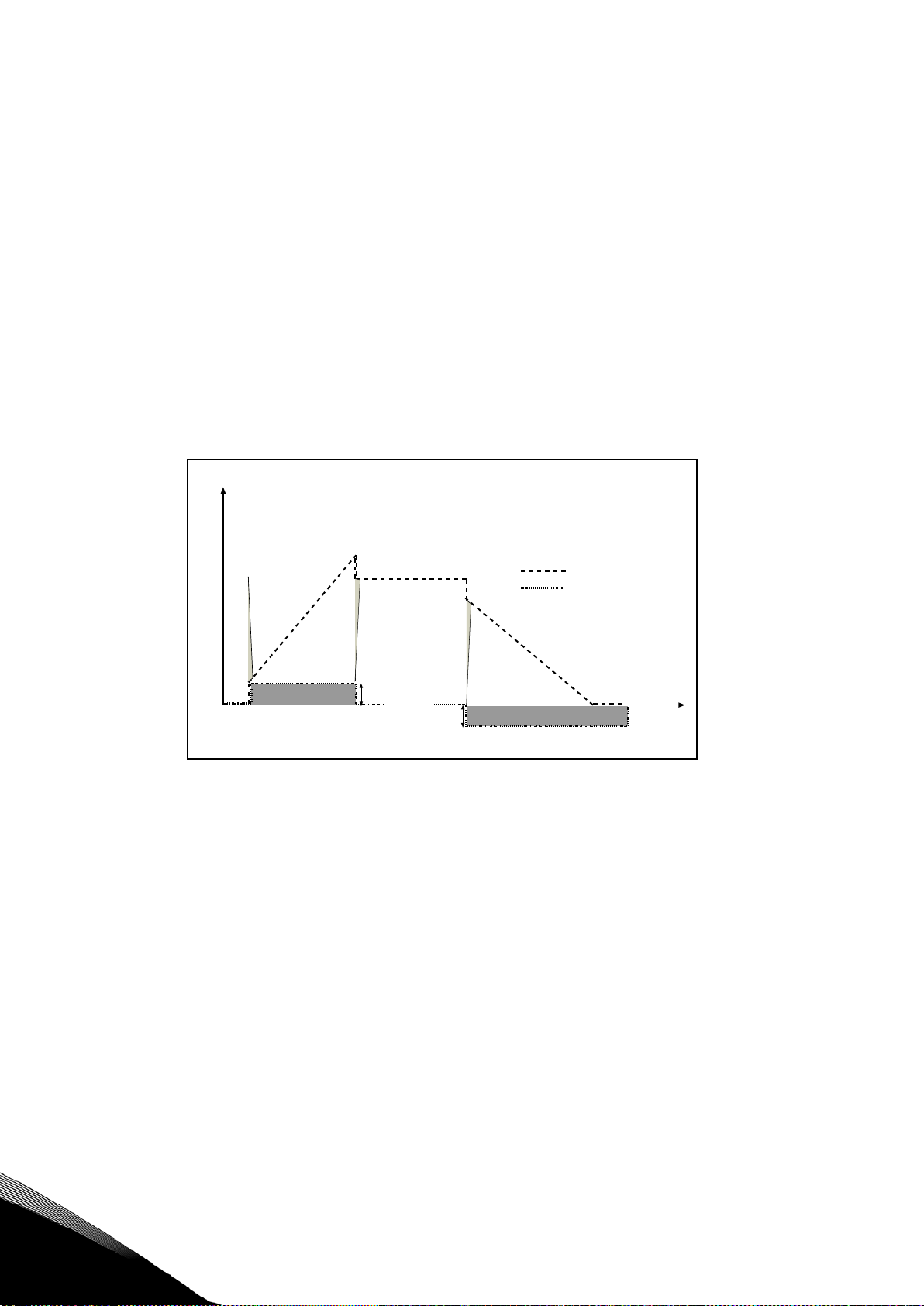
4
48 • vacon OPIS PARAMETRÓW
t
D
D
P=5Hz
P
NX12k69
Przykład 2:
Zadawane wartości:
Par. 2.9. 4, P = 100 % Limit maksimum r egu lato ra PID = 10 0,0%
Par. 2.9.5, czas I = 1,0 0 s Limit min imum reg ula tora PID = 0, 0%
Par. 2.9.6, czas D = 1,0 0 s Minimalna częstotliwość = 0 Hz
Wartość uchybu (sygnał zadający Maksymalna częstotliwość = 50 Hz
– wartośc procesowa) = ±10,00%
Po załączeniu zasilania system wykrywa różnicę między wartością zadaną i wartością
rzeczywistą z procesu i zaczyna zwiększać albo zmniejszać (w przypadku ujemnej
wartości uchybu) wyjście regulatora PID zgodnie z czasem regulacji I. Gdy różnica
między punktem ustawienia i wartością procesu spadnie do 0, sygnał wyjściowy jest
zmniejszany o wielkość odpowiadającą wartości parametru 2.9.5.
W przypadku ujemnej wartości uchybu przemiennik częstotliwości reaguje,
odpowiednio zmniejszając sygnał wyjściowy.
Hz
wyjście PID
uchyb PID
I
I
D
uchyb = 10%
uchyb = -10%
= -5 Hz
Rysunek 1-26. Sygnał wyjściowy regulatora PID dla wartości
z przykładu 2
Przykład 3:
Zadawane wartości:
Par. 2.9.4, P = 100% Limit maks im um re gula tora PID = 10 0,0%
Par. 2.9.5, czas I = 0,0 0 s Limit min imum reg ula tora PID = 0, 0%
Par. 2.9.6, czas D = 1,0 0 s Minimalna częstotliwość = 0 Hz
Wartość uchybu (sygnał zadający Maksymalna częstotliwość = 50 Hz
– wartośc procesowa) = 10,00%/s
W miarę wzrostu wartości uchybu również wyjście regulatora PID zwiększa się
zgodnie z ustawionymi wartościami (czas regulacji D = 1,00 s).
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 49
4
H
z
t
D
= 1 0 % = 5 , 0 0 H
z
D
= - 1 0 % = - 5 , 0 0 H
z
P
= 1 0 0 % * P I
D uchyb
=
5 , 0
0
1 , 0
0 s
1 0 %
wyjście PID
N X 1 2 k 7 2
uchyb PID
Hz/s
100
0
1008030
0
0
4
10,0 V8,03,0
20,0 mA16,06,0
16,8
8,8 20,0 mA
Par.2.9.7=30%
Par.2.9.8=80%
nxlk45.fh8
Skalowany sygnał
wejściowy [%]
Wejście
analogowe [%]
Rysunek 1-27. Wyjście regulatora PID dla wartości z przykładu 3
2.9.7 Skalowanie minimum wartości rzeczywistej 1
Parametr ten określa wartość rzeczywistą 1 odpowiadającą minimum wartości
zadanej. Patrz Rysunek 1-28.
2.9.8 Skalowanie maksimum wartości rzeczywistej 1
Parametr ten określa wartość rzeczywistą 1 odpowiadającą maksimum wartości
zadanej. Patrz Rysunek 1-28.
Rysunek 1-28. Przykład skalowania sygnału
wartości rzeczywistej
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
50 • vacon OPIS PARAMETRÓW
t<param.2.9.1
1
Poziombudzenia(par.2.9.12
)
Warto
ś
ć
rzeczywista
Częstotliwośćwyjściow
a
par.2.9.1
0
p
rędkośc
i
działając
y
2.9.9 Inwersja wartości uchybu regulatora PID
Ten parametr umożliwia odwrócenie wartości uchybu regulatora PID (czyli działania
regulatora PID).
0 Bez inwersji
1 Odwrócony
2.9.10 Częstotliwość uśpienia
Przemiennik częstotliwości jest automatycznie zatrzymywany, jeżeli częstotliwość
sterowanego napędu spadnie poniżej poziomu uśpienia określonego tym parametrem
i utrzyma się w tym zakresie przez czas dłuższy niż określony przez parametr 2.9.11.
W trakcie uśpienia regulator PID spowoduje rozruch napędu, jeżeli sygnał wartości
rzeczywistej spadnie poniżej lub wzrośnie powyżej (patrz par. 2.9.13) poziomu
budzenia, określonego parametrem 2.9.12. Patrz Rysunek 1-29.
2.9.11 Opóźnienie uśpienia
Minimalny czas, przez który częstotliwość powinna pozostawać poniżej poziomu
uśpienia przed zatrzymaniem przemiennika częstotliwości. Patrz Rysunek 1-29.
2.9.12 Poziom budz e ni a
Poziom budzenia stanowi limit, poniżej którego musi spaść lub powyżej którego musi
wzrosnąć wartość rzeczywista aby nastąpiło przywróceniem stanu pracy
przemiennika częstotliwości. Patrz Rysunek 1-29.
2.9.13 Funkcja budzenia
Parametr ten określa, czy nastąpi przywrócenie stanu pracy, jeśli sygnał wartości
rzeczywistej spadnie poniżej czy wzrośnie powyżej poziomu budzenia (par. 2.9.12).
Patrz Rysunek 1-29 i Rysunek 1-30.
Cza s
t = par 2.9.11
Poziom
uśpienia
StanStart/Stop
napęduo zmiennej
zatrzyma ny
nxlk46.fh8
Czas
Rysunek 1-29. Funkcja uśpienia przemiennika
częstotliwości
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 51
4
1 0 0 %
1
2
P a r .
2 . 9 . 1 2 = 3 0 %
P a r .
2 . 9 . 1 2 = 6 0 %
1 0 0 %
1 0 0 %
N X L k 5 9 . f h 8
3
.
F u n k c j a
L i m i t
O p i s
B u d z e n i e
n a s t
ę p u j e ,
j e
ś l i
r z e c z y w i s t a
w a r t o
ś ć
s p a d n i e
ż e j
B u d z e n i e
n a s t
ę p u j e ,
j e
ś l i
ś ć
l i m i t
P a r . 2 . 9 . 1 2 = 6 0 %
c z a s
S t o p
ł
ś c i
ł
ś c i
c z a s
S t o p
c z a s
Cz. Zadawana = 50%
P a r . 2 . 9 . 1 2 = 1 4 0 %
B u d z e n i e
ę p u j e ,
ś l i
r z e c z y w i s t a
w a r t o
ś ć
s p a d n i e
n a s t
ę p u j e ,
j e
ś l i
r z e c z y w i s t a
w a r t o
ś ć
p r z e k r o c z y
l i m i t
ł
ś c i
ł
ś c i
wyrażony jest w
% maksymalnej
Limit określony
wyrażony jest w
Limit określony
wyrażony jest w
wyrażony jest w
poniżej limitu
Wartość
p a r
S y g n a
w a r t o
r z e c z y w i s t e j
w a r t o
1 0 0 %
S t a r t
r z e c z y w i s t e j
c z a s
0
Limit określony
par. 2.9.12
p o n i
r z e c z y w i s t a
w a r t o
l i m i t u
p r z e k r o c z y
wartości
rzeczywistej
par. 2.9.12
% maksymalnej
S y g n a
wartości
rzeczywistej
n a s t
B u d z e n i e
S t a r t
S t o p
S y g n a
w a r t o
r z e c z y w i s t e j
j e
par. 2.9.12
% aktualnej
wartości
sygnału
zadającego
Limit określony
par. 2.9.12
% aktualnej
wartości
S y g n a
w. zadana = 5 0 %
l i m i t = 6 0 % * c z . z a d a w a n a = 3 0 %
S t a r t
w a r t o
r z e c z y w i s t e j
l i m i t = 1 4 0 % *war. zad. = 7 0 %
sygnału
zadającego
S t a r t
S t o p
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
Rysunek 1-30. Możliwe opcje funkcji budzenia

4
52 • vacon OPIS PARAMETRÓW
4.10 STEROWANIE POMP I WENTYLATORÓW (PFC)
Sterowanie pompo-wentylatorowe służy do sterowania jednym napędem o regulowanej
prędkości i co najwyżej trzema napędami dodatkowymi. Regulator PID przemiennika
częstotliwości steruje prędkością napędu o regulowanej prędkości i podaje sygnały
sterujące Start i Stop do napędów dodatkowych w celu sterowania przepływem
całkowitym całego zestawu. Oprócz standardowych ośmiu grup parametrów dostępna
jest grupa parametrów do programowania sterowania wieloma pompami lub
wentylatorami.
Zgodnie ze swoją nazwą sterowanie pompowo-wentylatorowe służy do sterowania
działaniem pomp i wentylatorów. W aplikacji są stosowane styczniki zewnętrzne do
przełączania się między silnikami podłączonymi do przemiennika częstotliwości. Funkcja
automatycznej zmiany kolejności pracy umożliwia zmianę kolejności uruchamiania
napędów dodatkowych.
4.10.1 Krótki opis funkcji i najważniejszych parametrów PFC
Automatyczne przełączanie się między napędami (funkcja automatycznej zmiany
kolejności pracy i blokowanie wybranego napędu, P2.10.4)
Automatyczna zmiana kolejności uruchamiania i zatrzymywania jest uaktywniana i
stosowana tylko dla napędów dodatkowych albo do napędów dodatkowych i napędu
sterowanego przez przemiennik częstotliwości, w zależności od ustawienia
parametru 2.10.4.
Funkcja automatycznej zmiany umożliwia zmianę kolejności uruchamiania i
zatrzymywania napędów przez układ sterowania pompy lub wentylatora w żądanych
odstępach czasu. Napęd sterowany przez przemiennik częstotliwości może również
zostać włączony do sekwencji automatycznej zmiany i blokowania (par. 2.10.4).
Funkcja automatycznej zmiany umożliwia wyrównanie czasów pracy silników i
zapobieganie utknięciom np. pompy ze względu na zbyt długo trwające przerwy w
pracy.
• Zastosuj funkcję automatycznej zmiany parametrem 2.10.4, Automatyczna zmiana.
• Automatyczna zmiana nastąpi, gdy upłynie czas ustawiony za pomocą
parametru 2.10.5, Okres automatycznej zmiany, i aktualna wydajność spadnie
poniżej poziomu zdefiniowanego parametrem 2.10.7 Limit częstotliwości
automatycznej zmiany.
• Pracujące napędy zostaną zatrzymane i ponownie uruchomione zgodnie z nową
kolejnością.
• Zewnętrzne styczniki sterowane za pomocą wyjść przekaźnikowych przemiennika
częstotliwości dołączają napędy do przemiennika częstotliwości lub do zasilania.
Jeśli silnik sterowany przemiennikiem częstotliwości jest włączony do sekwencji
automatycznej zmiany, jest on zawsze sterowany przez wyjście przekaźnikowe
włączane jako pierwsze. Pozostałe, później włączane przekaźniki sterują napędami
dodatkowymi.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 53
4
Parametr ten służy do uaktywniania wejść blokujących napędy (wartości 3 i 4). Sygnały
blokad pochodzą z przełączników poszczególnych silników. Sygnały (funkcje) są
podłączone do wejść cyfrowych, które zostały zaprogramowane jako wejścia blokujące
za pomocą odpowiednich parametrów. Logika sterowania pompowo-wentylatorowego
steruje tylko te silniki, które nie zostały zablokowane.
• Jeśli blokada napędu dodatkowego jest nieaktywna i jest dostępny inny nieużywany
napęd dodatkowy, ten ostatni zostanie uruchomiony bez zatrzymywania
przemiennika częstotliwości.
• Jeśli blokada napędu regulowanego jest nieaktywna, wszystkie silniki zostaną
zatrzymane i ponownie uruchomione zgodnie z nową konfiguracją.
• Jeśli blokada zostanie ponownie uaktywniona w stanie pracy, układ automatyki
zatrzyma wszystkie silniki i ponownie je uruchomi zgodnie z nową konfiguracją.
Przykład: [P1
P3] [P2 ZABLOKOWANY] [STOP] [P1 P2 P3]
Patrz rozdział 4.10.2, Przykłady.
Parametr 2.10.5, Okres automatycznej zmiany
Po upłynięciu czasu określonego za pomocą tego parametru zostanie uruchomiona
funkcja automatycznej zmiany, jeśli aktualna wydajność znajduje się poniżej poziomu
określonego za pomocą parametrów 2.10.7 (limit częstotliwości automatycznej zmiany)
i 2.10.6 (maksymalna liczba pracujących napędów dodatkowych). Jeśli wydajność
przekroczy wartość par. 2.10.7, automatyczna zmiana nie nastąpi, zanim wydajność
nie spadnie poniżej tego limitu.
• Licznik czasu jest włączany tylko wtedy, jeśli jest aktywna komenda Start/Stop.
• Licznik czasu jest zerowany po przeprowadzeniu automatycznej zmiany lub po
usunięciu komendy Start.
Parametry 2.10.6, Maksymalna liczba napędów dodatkowych
2.10.7, Limit częstotliwości automatycznej zmiany
Te parametry określają poziom, poniżej którego musi pozostawać wydajność, aby
możliwe było przeprowadzenie automatycznej zmiany kolejności.
Ten poziom jest definiowany w następujący sposób:
• Jeśli liczba pracujących napędów dodatkowych jest mniejsza niż wartość parametru
2.10.6, możliwe jest wykonanie automatycznej zmiany.
• Jeśli liczba pracujących napędów dodatkowych jest równa wartości parametru
2.10.6 i częstotliwość sterowanego napędu jest poniżej wartości parametru 2.10.7,
możliwe jest wykonanie automatycznej zmiany.
• Jeśli wartość parametru 2.10.7 wynosi 0,0 Hz, automatyczną zmianę można
wykonać tylko w stanie spoczynku (zatrzymanie i uśpienie) bez względu na wartość
parametru 2.10.6.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
54 • vacon OPIS PARAMETRÓW
Zacisk
Sygnał
1
+10 V
zad
Wyjście napięcia zadającego
Wejście napięciowe zadające częstotliwość jako
3
AI1–
Masa dla wejścia/wyjścia
4
AI2+
Wartość rzeczywista dla regulatora PID
5
AI2–
6
+24 V
Wyjście napięcia sterującego
7
8
DIN1
START
9
DIN2
Blokada 1 (par. 2.1.17 = 10)
10
DIN3
Blokada 2 (par. 2.1.18 = 13)
11 GND
Masa dla wejścia/wyjścia
18
AO1+
Wyjście analogowe
19
AO1–
B
RS 485
Magistrala szeregowa
21
RO1
22
RO1
23
RO1
OPT-B5
22
23
25
26
RO2/2
28
29
RO3/2
Wartość
+ –
Potencjometr wartości
4.10.2 Przykłady
Sterowanie pompowo-wentylatorowe (PFC) z blokadami i automatyczną zmianą dla 3
pomp (wymagana jest karta opcjonalnai OPT-AA lub OPT-B5)
Sytuacja: 1 napęd regulowany i 2 napędy dodatkowe.
Ustawienia parametru: 2.10.1 = 2
Są używane sygnały sprzężenia zwrotnego blokad, jest używana
automatyczna zmiana dla wszystkich napędów.
Ustawienie parametru: 2.10.4 = 4
Aktywne DIN4 (par.2.2.6 = 0)
Sygnały sprzężenia zwrotnego blokad pochodzą z wejść cyfrowych DIN4
(AI1), DIN2 i DIN3 wybieranych za pomocą parametrów 2.1.17, 2.1.18 i
2.2.4.
Sterowanie pompy 1 (par.2.3.1 = 17) jest włączane za pomocą blokady 1
(DIN2, 2.1.17 = 10), sterowanie pompy 2 (par.2.3.2 = 18) – za pomocą
blokady 2 (DIN3, par. 2.1.18 = 13), a sterowanie pompy 3
(par.2.3.3 = 19) – za pomocą blokady 3 (DIN4).
zadanej
rzeczywista
I
(0)4…20 mA
mA
2 AI1+
A RS 485 Magistrala szeregowa
GND
RO1/1 Automatyczna zmiana 1 (sterowanie pompy 1),
RO1/2
RO2/1 Automatyczna zmiana 2 (sterowanie pompy 2),
RO3/1 Automatyczna zmiana 3 (sterowanie pompy 3),
DIN4
Masa dla wejścia/wyjścia
Częstotliwość wyjściowa
Wyjście przekaźnikowe 1
FAULT (USTERKA)
par. 2.3.2 = 17
par. 2.3.3 = 18
par. 2.3.4 = 19
Tabela 1-17. Przykład konfiguracji we/wy sterowania PFC z
blokadami i automatyczną zmianą dla 3 pomp
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 55
4
22
23
DIN2
AOMains
AOMains
25
26
230 VAC
S1
K1
K1.1
K1.1
K2
K2
K1
NXOPTB5
K1
K2
K2
K2.1
M1/Vacon
M2/
Vacon
M2/mains
M1/mains
24 VDC
S2
K3
K3
K2.1
K1
K3
DIN3
K3
28
29
AOMains
S3
K3
K3.1
K3.1
K2
K2
K3
M3/Vacon M3/mains
K1
K1
AI1
NX12k106.dsf
9
6 8
10
VACON NXL
10V
Rysunek 1-31. System automatycznej zmiany dla 3 pomp, główny schemat sterowania
PE
L1
L2
L3
M1
F1
K1.1
U V W
3
F2
K2.1
K2
PE
M
U V W
M2
K3
PE
M
3
F2
K3.1
U V W
M2
M
3
Q1
F3
L1 L2 L3
VACON
U V W
K1
NX12k104.ds4
PE
Rysunek 1-32. Przykład automatycznej zmiany dla 3 pomp, schemat główny
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl

4
56 • vacon OPIS PARAMETRÓW
ref
3
AI1–
Masa dla wejścia/wyjścia
4
AI2+
Wartość rzeczywista dla regulatora PID
6
+24 V
Wyjście napięcia sterującego
8
DIN1
START
9
DIN2
Blokada 1 (par. 2.1.17 = 10)
10
DIN3
Blokada 2 (par. 2.1.18 = 13)
11 GND
Masa dla wejścia/wyjścia
18
AO1+
Częstotliwość wyjściowa
A
RS 485
Magistrala szeregowa
B
RS 485
Magistrala szeregowa
21
RO1
Automatyczna zmiana 1 (sterowanie pompą 1)
22
RO1
23
RO1
OPT-AA
X1
2
GND
Masa dla sygnałów sterujących, np. dla +24 V oraz DO
3
DIN1
Zadana prędkość stała 2, par. 2.2.1 = 7
4
DIN2
Kasowanie usterki, pa r. 2.2.2 = 4
5
DIN3
Wyłączenie regulatora PID (wartość zadawana
częstotliwości z AI1), par. 2.2.3 = 11
6
DO1
Gotowość, par. 2.3.4 = 1
Wyjście z otwartym kolektorem, 50 mA/48 V
X2
Automatyczna zmiana 2 (sterowanie pompy 2),
wspólny
–
Sterowanie pompowo-wentylatorowe (PFC) z blokadami i automatyczną zmianą dla 2
pomp (wymagana jest karta opcjonalna OPT-AA lub OPT-B5)
Sytuacja: 1 sterowany napęd i 1 napęd dodatkowy.
Ustawienie parametru: 2.10.1 = 1
Są używane sygnały sprzężenia zwrotnego blokad, jest używana
automatyczna zmiana kolejności pomp.
Ustawienie parametru: 2.10.4 = 4
Sygnały sprzężenia zwrotnego blokad pochodzą z wejścia cyfrowego DIN2
(par. 2.1.17) i wejścia cyfrowego DIN3 (par. 2.1.18).
Sterowanie pompą 1 (par.2.3.1 = 17) jest włączane za pomocą blokady 1
(DIN2, P2.1.17), a sterowanie pompą 2 (par.2.3.2 = 18) – za pomocą
blokady 2 (par. 2.1.18 = 13).
Potencjometr wartości
zadanej
Zacisk
1 +10
V
2 AI1+ Wejście napięciowe zadające częstotliwość jako DIN4
Sygnał
Wyjście napięcia zadającego
Wartość
rzeczywista
I
(0)4…20 mA
+
mA
5 AI2–
7
GND
19 AO1–
1 +24 V Wyjście napięcia sterującego, maks. 150 mA
Masa dla wejścia/wyjścia
Wyjście analogowe
par. 2.3.1. = 17
Tabela 1-18. Przykład konfiguracji we/wy sterowania PFC z
blokadami i automatyczną zmianą dla 2 pomp
22 RO1/NO
23 RO1/
par. 2.3.2 = 18
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
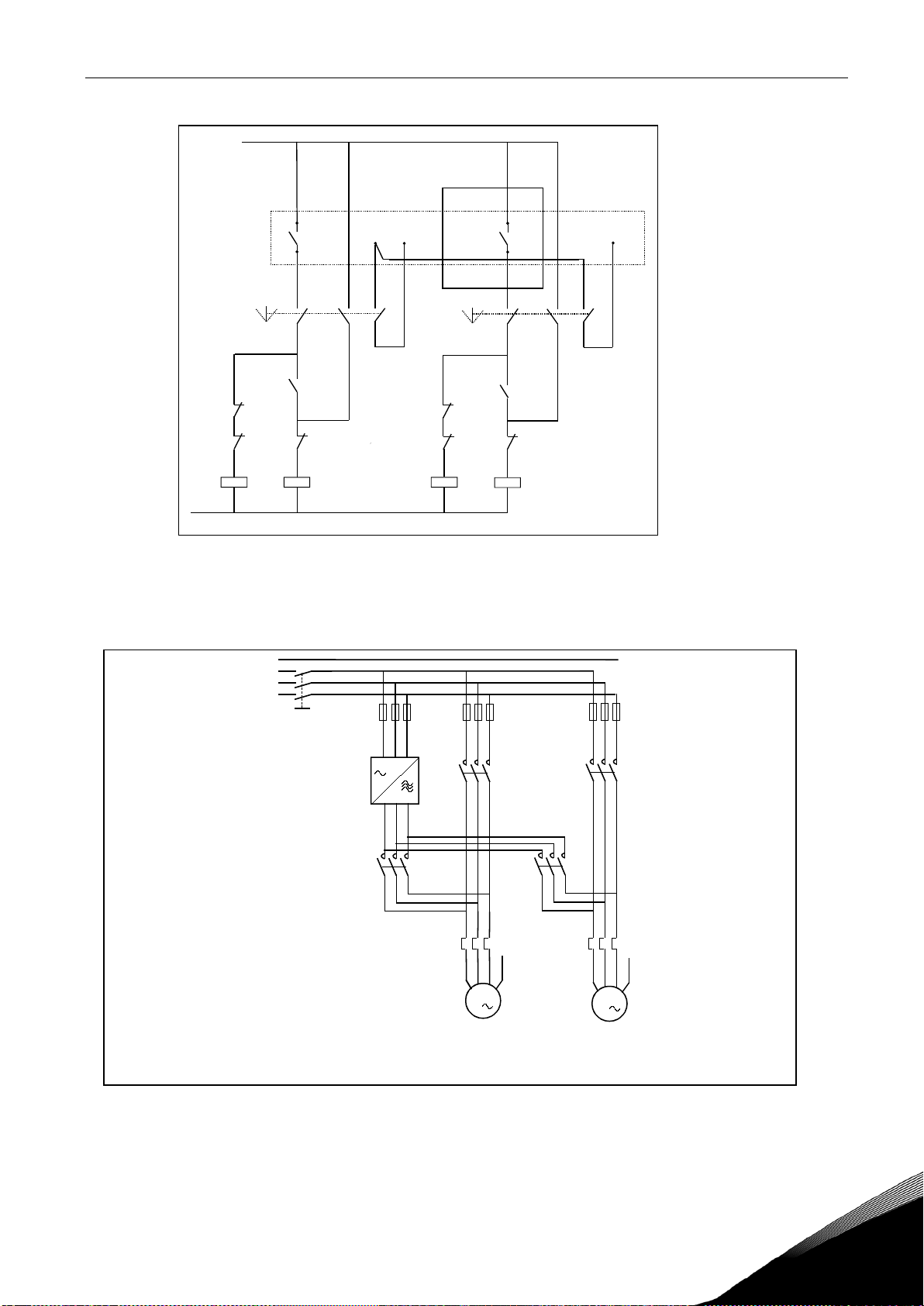
OPIS PARAMETRÓW vacon • 57
4
22
23
12
9
Autom.OSieć
25
26
230 VAC
S1
K1
K1.1
K1.1
K2
K2
K1
OPT-AA
K1
K2
K2
K2.1
M1/Vacon
M2/
Vacon
M2/sieć
M1/sieć
24 VDC
S2
K2.1
K1
10
RO1
RO2
DIN2
DIN3
Autom.OSieć
NX12k105.dsf
OPT-AA
DIN3
DIN
PE
L1
L2
L3
U V W
PE
U V W
PE
M1
M2
F1
F2
F3
VACON
U V W
L1 L2 L3
Q1
K1
K2
K1.1
K2.1
M
M
3
3
NX12k107.ds4
RO1
Rysunek 1-33. System automatycznej zmiany dla 2 pomp,
główny schemat sterowania
Rysunek 1-34. Przykład automatycznej zmiany dla 2 pomp, schemat główny
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
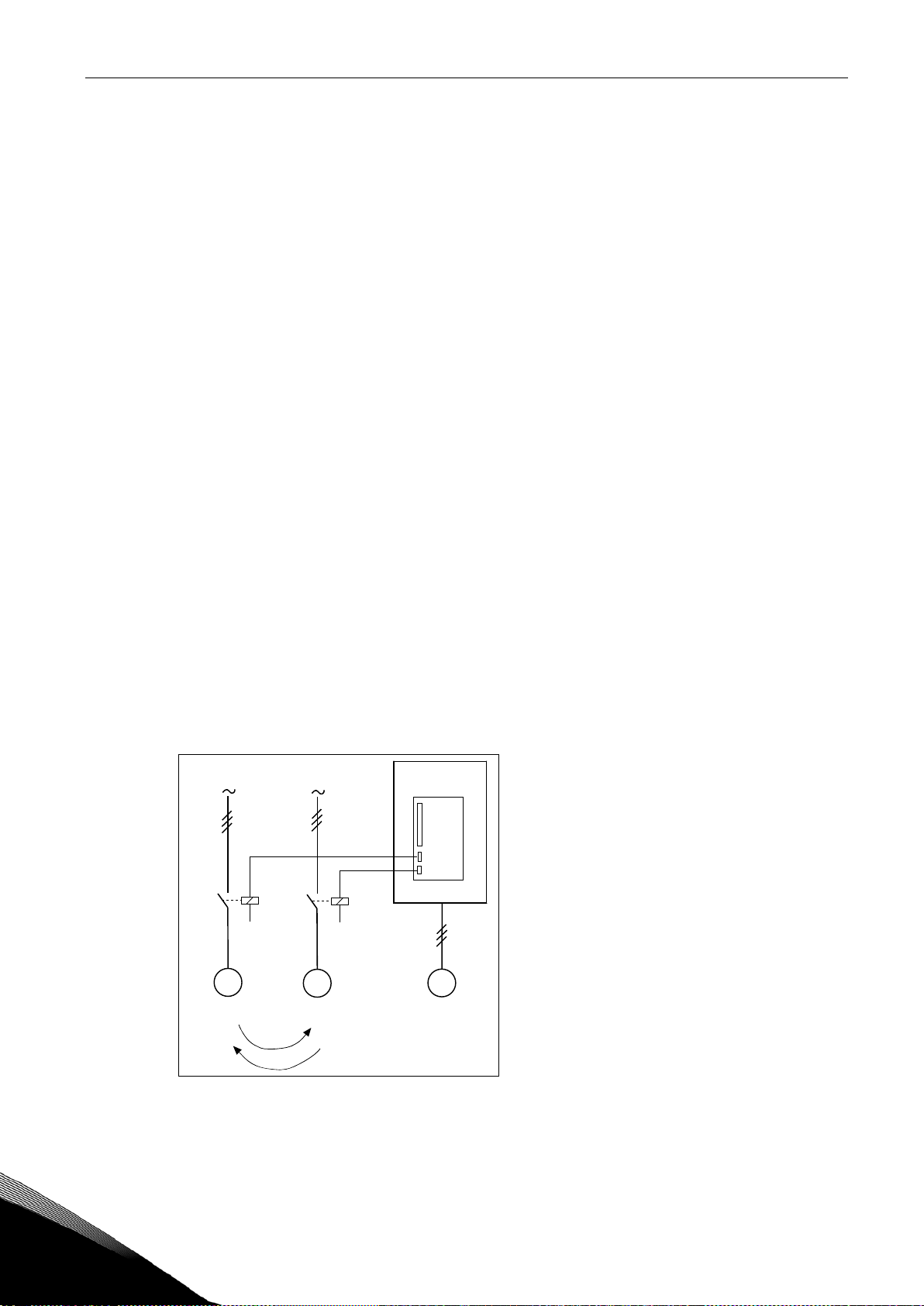
4
58 • vacon OPIS PARAMETRÓW
M
M
Vacon
M
Dodatkowy 1
Dodatkowy 2
4.10.3 Opis parametrów sterowania pompowo-wentylatorowego
2.10.1 Liczba napędów dodatkowych
Za pomocą tego parametru można określić liczbę używanych napędów dodatkowych.
Funkcje sterujące napędami dodatkowymi (parametry 2.10.4–2.10.7) można
zaprogramować dla wyjść przekaźnikowych.
2.10.2 Opóźnienie uruchomienia napędów dodatkowych
Częstotliwość napędu sterowanego przez przemiennik częstotliwości musi
pozostawać powyżej częstotliwości maksymalnej przez czas określany przez ten
parametr przed uruchomieniem napędu dodatkowego. Opóźnienie dotyczy wszystkich
napędów dodatkowych. Zapobiega to niepotrzebnym uruchomieniom powodowanym
przez chwilowe przekroczenia limitu uruchomienia.
2.10.3 Opóźnienie zatrzymania napędów dodatkowych
Częstotliwość napędu sterowanego przez przemiennik częstotliwości musi
pozostawać poniżej częstotliwości minimalnej przez czas określany przez ten
parametr przed zatrzymaniem napędu dodatkowego. Opóźnienie dotyczy wszystkich
napędów dodatkowych. Zapobiega to niepotrzebnym zatrzymaniom powodowanym
przez chwilowy spadek poniżej limitu zatrzymania.
2.10.4 Automatyczna zmiana kolejności pracy
0 = nieużywana
1 = automatyczna zmiana tylko pomp dodatkowych
Napęd sterowany przez przemiennik częstotliwości pozostaje bez zmian. W
związku z tym tylko jeden stycznik zasilania jest potrzebny dla napędu
dodatkowego.
Rysunek 1-35. Automatyczna zmiana zastosowana tylko
do napędów dodatkowych
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 59
4
Vacon
M
M
Napęd 1
Napęd 2
sprzężenie
sprzężenie
2.10.5 Okres automatycznej zmiany
2 = automatyczna zmiana napędu regulowanego i napędów dodatkowych
Napęd sterowany przez przemiennik częstotliwości jest włączony do automatyki
i stycznik jest potrzebny dla każdego napędu w celu podłączenia go do zasilania
albo do przemiennika częstotliwości.
Rysunek 1-36. Automatyczna zmiana wszystkich napędów
3 = automatyczna zmiana i blokady (tylko pompy dodatkowe)
Napęd sterowany przez przemiennik częstotliwości pozostaje bez zmian. W
związku z tym tylko jeden stycznik zasilania jest potrzebny dla napędu
dodatkowego. Blokady dla wyjść automatycznej zmiany 1, 2, 3 (lub DIE1,2,3)
można wybrać za pomocą par. 2.1.17 i 2.1.18.
4 = automatyczna zmiana i blokady (przetwornik częstotliwości i pompy dodatkowe)
Napęd sterowany przez przemiennik częstotliwości jest włączony do automatyki
i stycznik jest potrzebny dla każdego napędu w celu podłączenia go do zasilania
albo do przemiennika częstotliwości. DIN 1 jest automatycznie blokadą dla
wyjścia napędu dodatkowego 1. Blokady dla wyjść automatycznej zmiany 1, 2,
3 (lub DIE1,2,3) można wybrać za pomocą par. 2.1.17 i 2.1.18.
Po upłynięciu czasu określonego za pomocą tego parametru zostanie
uruchomiona funkcja automatycznej zmiany, jeśli wykorzystywana wydajność
znajduje się poniżej poziomu określonego za pomocą parametrów 2.10.7
(limit częstotliwości automatycznej zmiany) i 2.10.6 (maksyma lna liczba
pracujących napędów dodatkowych). Jeśli wydajność przekracza wartość
P2.10.7, automatyczna zmiana nie nastąpi, zanim wydajność nie spadnie
poniżej tego limitu.
NX12k97.fh8
• Licznik czasu jest włączany tylko wtedy, jeśli jest aktywna komenda
Start/Stop.
• Licznik czasu jest zerowany po przeprowadzeniu automatycznej zmiany
lub po usunięciu komendy Start.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
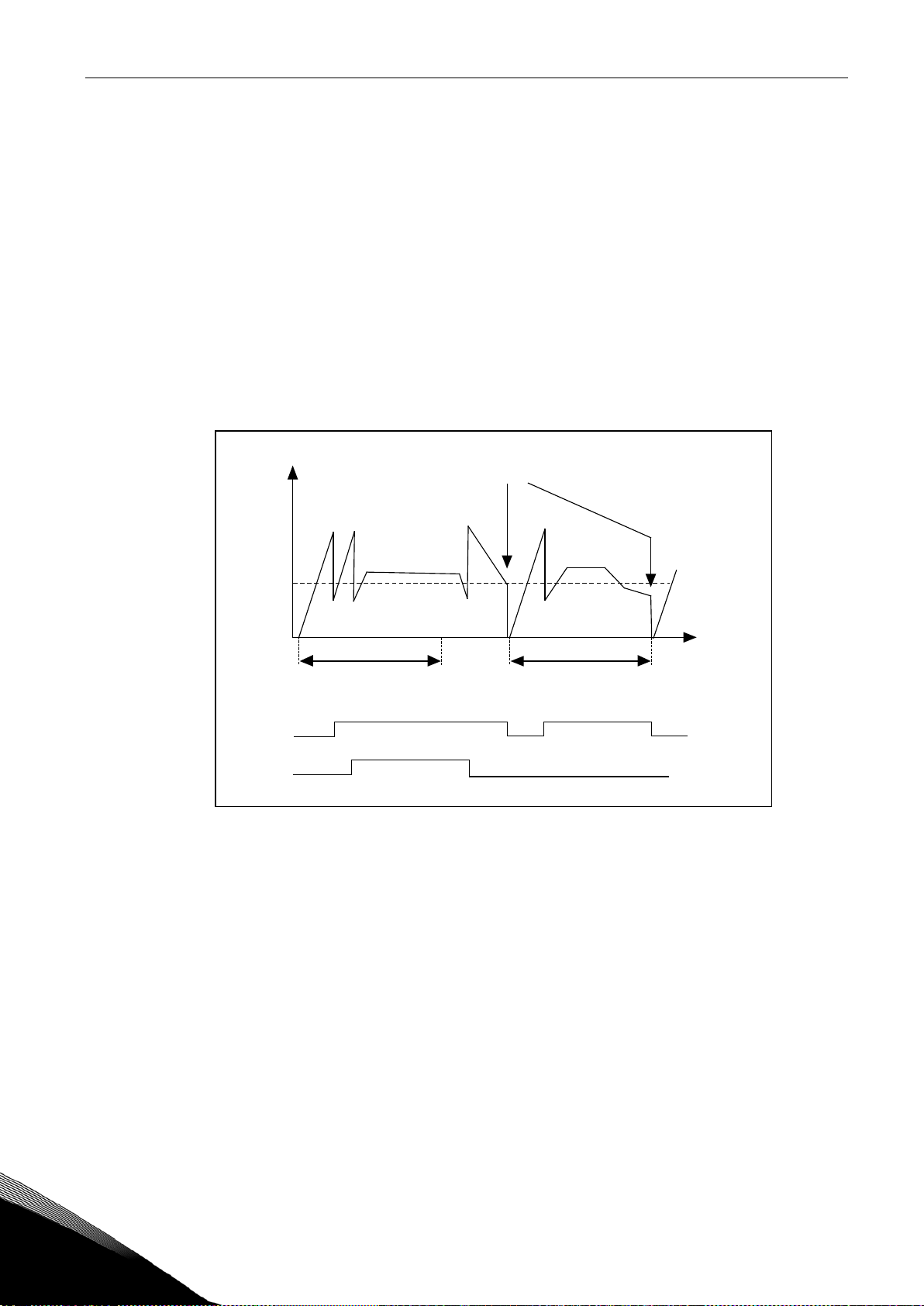
4
60 • vacon OPIS PARAMETRÓW
NXLK56.fh8
Czas
Częstotliwość
wyjściowa
Par. 2.10.5
Par. 2.10.5
Okres automatycznej zmiany
Par. 2.10.7
Poziom
automatycznej
zmiany,
częstotliwość
Okres automatycznej zmiany
Moment zmiany
Sterowanie
dodatkowego
napędu 1
Par. 2.10.6 = 1
Maks. liczba
dodatkowych
napędów
Sterowanie
dodatkowego
napędu 2
2.10.6 Maksymalna liczba pracujących napędów dodatkowych
2.10.7 Limit częstotliwości automatycznej zmiany
Te parametry określają poziom, poniżej którego musi pozostawać wydajność, aby
można było przeprowadzić automatyczną zmianę.
Ten poziom jest definiowany w następujący sposób:
• Jeśli ilość pracujących napędów dodatkowych jest mniejsza niż wartość
parametru 2.10.6, można wykonać automatyczną zmianę.
• Jeśli ilość pracujących napędów dodatkowych jest równa wartości parametru
2.10.6 i częstotliwość sterowanego napędu jest poniżej wartości parametru
2.10.7, można wykonać automatyczną zmianę.
• Jeśli wartość parametru 2.10.7 wynosi 0,0 Hz, automatyczną zmianę można
wykonać tylko w stanie spoczynku (zatrzymanie i uśpienie) bez względu na
wartość parametru 2.10.6.
Rysunek 1-37. Okres i limity automatycznej zmiany kolejności pracy napędów
2.10.8 Częstotliwość startu, napęd dodatkowy 1
Częstotliwość napędu sterowanego przez przemiennik częstotliwości musi
przekraczać limit określony za pomocą tych parametrów o 1 Hz przed uruchomieniem
napędu dodatkowego. Przekroczenie o 1 Hz zapewnia histerezę pozwalającą uniknąć
2.10.9 Częstotliwość zatrzymania, napęd dodatkowy 1
zbędnych uruchomień i zatrzymań. Patrz również parametry 2.1.1 i 2.1.2.
Częstotliwość napędu sterowanego przez przemiennik częstotliwości musi spaść
poniżej limitu określonego za pomocą tych parametrów o 1 Hz przed zatrzymaniem
napędu dodatkowego. Limit częstotliwości zatrzymania określa również częstotliwość,
do której spada częstotliwość napędu sterowanego przez przemiennik częstotliwości
po uruchomieniu napędu dodatkowego.
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12

OPIS PARAMETRÓW vacon • 61
4
4.11 PARAMETRY PANELU STEROWANIA
3.1 Miejsce sterowania
Za pomocą tego parametru można zmienić aktywne miejsce sterowania. Więcej
informacji można znaleźć w Instrukcji obsługi przemiennika Vacon NXL, rozdział
7.4.3.
3.2 Sterowanie z panelu
Za pomocą tego parametru można z panelu regulować częstotliwość zadaną. Więcej
informacji można znaleźć w Instrukcji obsługi przemiennika Vacon NXL, rozdział
7.4.3.2.
3.3 Zmiana kierunku wirowania z panelu sterowania
0 Do przodu: silnik obraca się do przodu, gdy aktywnym miejscem sterowania
jest panel.
1 Do tyłu: silnik obraca się do tyłu, gdy aktywnym miejscem sterowania
jest panel.
Więcej informacji można znaleźć w Instrukcji obsługi przemiennika Vacon NXL,
rozdział 7.4.3.3.
3.4 Aktywacja przycisku Stop
Jeśli przycisk Stop ma zostać przyciskiem szybkiego dostępu, który zawsze
zatrzymuje napęd bez względu na wybrane miejsce sterowania, należy nadać temu
parametrowi wartość 1 (domyślna). Patrz Instrukcja obsługi przemiennika Vacon
NXL, rozdział 7.4.3.
Patrz również parametr 3.1.
3.5 Wartość zadana 1 regulatora PID
Wartość zadaną z panelu można ustawić w zakresie od 0% do 100%. Ta wartość
zadana jest aktywną wartością zadawaną regulatora PID, jeśli parametr 2.9.2 = 2.
3.6 Wartość zadana 2 regulatora PID
Wartość zadaną 2 z panelu można ustawić w zakresie od 0% do 100%. Ta wartość
zadana jest aktywna, jeśli funkcja DIN# = 12 i zestyk DIN# jest zamknięty.
Serwis: 603 386 894 • E-mail: vacon@metex.com.pl
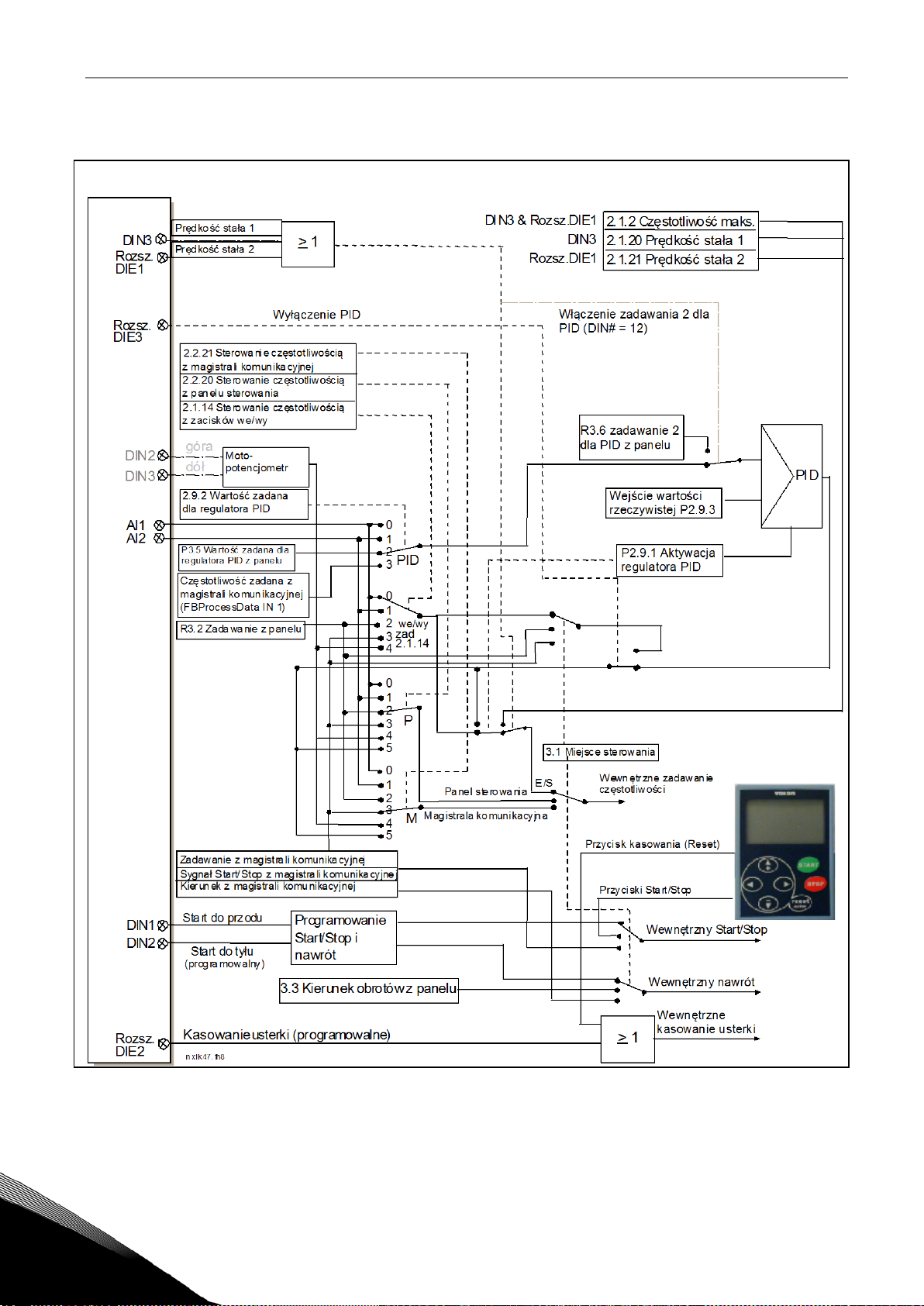
4
62 • vacon OPIS PARAMETRÓW
5. Logika sygnałów sterujących
Rysunek 1-38. Logika sygnałów sterujących aplikacji Multi-Control
Telefon: (22) 330 12 00 • Faks: (22) 330 12 12
 Loading...
Loading...