

Page 1

vacon nxl
®
frequenzumrichter
mehrfachsteuerung
applikationshandbuch
Page 2

vacon • 1
Vacon Multi-Control-Applikation
(Software ALFIFF20) Ver. 3.45
INHALT
1. Einführung ......................................................................................................................... 2
2. Steuerklemmleiste ............................................................................................................ 4
3. Multi-Control-Applikation – Parameterlisten .................................................................... 5
3.1 Betriebsdaten (Steuertafel: Menü M1)....................................................................................... 5
3.2 Basisparameter (Steuertafel: Menü P2 P2.1) ....................................................................... 6
3.3 Eingangssignale (Steuertafel: Menü P2 P2.2) ....................................................................... 8
3.4 Ausgangssignale (Steuertafel: Menü P2 P2.3) .................................................................... 10
3.5 Antriebssteuerungsparameter (Steuertafel: Menü P2 P2.4) ............................................. 12
3.6 Frequenzausblendungsparameter (Steuertafel: Menü P2 P2.5) ....................................... 12
3.7 Motorregelungsparameter (Steuertafel: Menü P2 P2.6) .................................................... 13
3.8 Schutzfunktionen (Steuertafel: Menü P2 P2.7) ................................................................... 14
3.9 Parameter für automatischen Neustart (Steuertafel: Menü P2 A2.8) ............................... 15
3.10 Parameter für PID-Sollwert (Steuertafel: Menü P2 P2.9) .................................................. 15
3.11 Pumpen- und Lüfterregelungsparameter (Steuertafel: Menu P2 P2.10) .......................... 16
3.12 Steuerung über Steuertafel (Steuertafel: Menü K3) ............................................................... 17
3.13 System-Menü (Steuertafel: Menü S6) ...................................................................................... 17
3.14 Erweiterungskarten (Steuertafel: Menü E7) ............................................................................ 17
4. Parameterbeschreibungen .............................................................................................. 18
4.1 BASISPARAMETER ................................................................................................................... 18
4.2 EINGANGSSIGNALE .................................................................................................................. 23
4.3 AUSGANGSSIGNALE ................................................................................................................. 27
4.4 ANTRIEBSSTEUERUNG ............................................................................................................ 32
4.5 FREQUENZAUSBLENDUNG ..................................................................................................... 36
4.6 MOTORREGELUNG ................................................................................................................... 37
4.7 SCHUTZFUNKTIONEN .............................................................................................................. 40
4.8 PARAMETER FÜR AUTOMATISCHEN NEUSTART ................................................................... 48
4.9 PARAMETER FÜR PID-SOLLWERT .......................................................................................... 49
4.10 PUMPEN- UND LÜFTERREGELUNG ....................................................................................... 55
4.11 STEUERTAFELPARAMETER ..................................................................................................... 64
5. Steuersignallogik der Multi-Control-Applikation ............................................................. 65
Page 3

2 • vacon Einführung
Multi-Control-Applikation
1. EINFÜHRUNG
Die Multi-Control-Applikation des Vacon NXL ist werkseitig auf den direkten Frequenzsollwert
von Analogeingang 1 eingestellt. Es kann auch ein PID-Regler eingesetzt werden, zum Beispiel
bei Regelungsanwendungen für Pumpen und Lüfter. Dies ermöglicht flexible interne Messund Einstellmöglichkeiten. In diesem Fall sind keine externen Geräte erforderlich. Nach
Inbetriebnahme des Antriebs wird nur Parametergruppe B2.1 (Basisparameter) angezeigt.
Spezialparameter können nach Ändern des Werts von Parameter 2.1.22 (Parameteranzeige)
angezeigt und bearbeitet werden.
Speziale parameter für Pumpen- und Lüfterregelung (Gruppe P2.10) können durchblättert
und bearbeitet werden, wenn dem Parameter 2.9.1 der Wert 2 (Pumpen- und Lüfterregelung
aktiviert) gegeben wird.
Der Sollwert des PID-Reglers kann vorgegeben werden über Analogeingänge, Feldbus, PIDSteuertafelsollwert 1 oder durch Aktivierung von PID-Steuertafelsollwert 2 über den
Digitaleingang. Der Istwert des PID-Reglers kann über Analogeingänge, Feldbus oder aus den
Istwerten des Motors gewählt werden. Der PID-Regler kann auch eingesetzt werden, wenn die
Steuerung des Frequenzumrichters über Feldbus oder Steuertafel erfolgt.
• Die Digitaleingänge DIN2, DIN3, (DIN4) sowie die optionalen digitalen Eingänge DIE2
und DIE3 sind frei programmierbar.
• Interne Ausgänge, optionale Digital- und Relaisausgänge sowie Analogausgänge sind
frei programmierbar.
• Analogeingang 1 kann als Stromeingang, Spannungseingang oder
Digitaleingang DIN4 programmiert werden.
ACHTUNG! Steckbrückenauswahl (siehe Abbildung 4-1) überprüfen, wenn Analogeingang 1
durch Parameter 2.2.6 (AI1-Signalbereich) als DIN4 programmiert wurde.
1
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 4

Einführung vacon • 3
Weitere Funktionen:
• Der PID-Regler kann auch über die
Steuerplätze E/A-Klemmleiste,
Steuertafel und Feldbus verwendet
werden
• Sleep-Funktion
• Überwachungsfunktion für Istwert: Voll
programmierbar (Aus, Warnung, Fehler)
• Programmierbare Start/Stopp- und
Rückwärts-Signallogik
• Sollwertskalierung
• Zwei Festdrehzahlen
• Auswahl des Signalbereichs für
Analogeingänge, Signalskalierung,
Signalinversion und Signalfilterung
• Überwachungsfunktion für
Frequenzgrenzwert
• Programmierbare Start- und
Stoppfunktionen
• DC-Bremsung bei Start und Stopp
• Frequenzausblendungsbereich
• Programmierbare U/f-Kurve und U/f-
Optimierung
• Einstellbare Schaltfrequenz
• Automatischer Neustart nach Fehler
• Voll programmierbare Schutz- und Über-
wachungsfunktionen (Aus, Warnung, Fehler):
Fehler in Stromeingang
Externer Fehler
Motorphase
Unterspannung
Erdschluss
Motortemperaturschutz, -blockierschutz
und -unterlastschutz
Thermistor
Feldbuskommunikation
Erweiterungskarte
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
1
Page 5
4 • vacon Parameterlisten
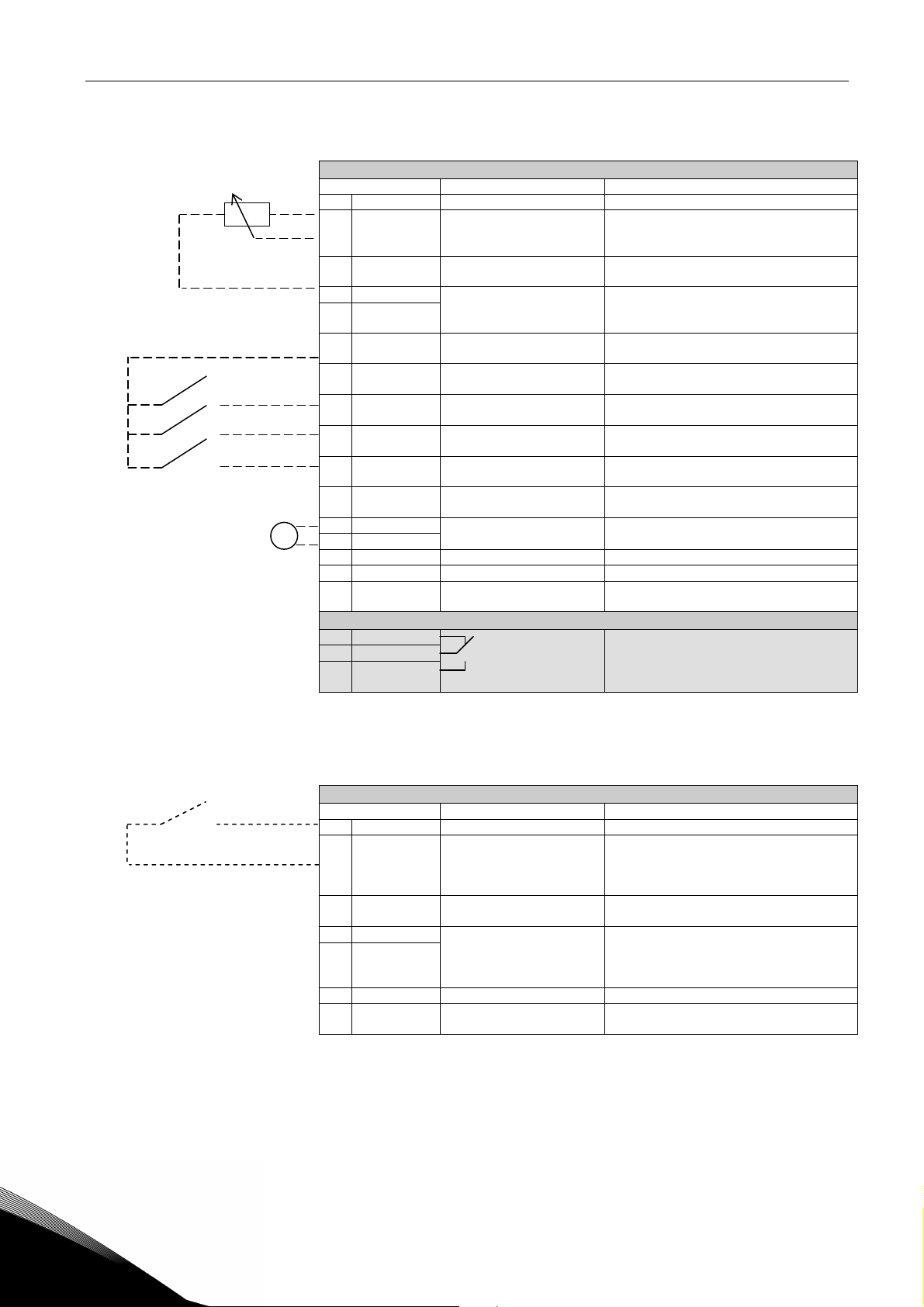
2. STEUERKLEMMLEISTE
Sollwertpotentiomete
mA
Anschlussklemme Signal Beschreibung
1 +10 V
2 AI1+ Analogeingang,
3 AI1- Masse Masseanschluss für Sollwerte und
4 AI2+ Analogeingang,
5 AI2-
6 +24V Steuerspannungsausgang Hilfsspannung für Schalter usw., max.
7
GND Masse
8 DIN1 Start/Stopp
9 DIN2 Start rückwärts
10 DIN3 Festdrehzahl 1
11 GND Masse Masseanschluss für Sollwerte und
18 AO1+
19 AO1-
A RS 485 Serielle Schnittstelle Abschlusswiderstand
B RS 485 Serielle Schnittstelle Abschlusswiderstand
30 +24V 24V aux.
Sollwertausgang Sollspannung für Potentiometer etc.
ref
Spannungsbereich 0 bis
10 VDC
Strombereich 0 bis 20 mA
Start vorwärts
(programmierbar)
(programm.)
Analogausgang
Eingangsspannung
Spannungseingang für Frequenzsollwert
Kann als DIN4 programmiert werden.
Steuersignale
Stromeingang für Frequenzsollwert
0,1 A
Masseanschluss für Sollwerte und
Steuersignale
Kontakt geschlossen = Start vorwärts
Kontakt geschlossen = Start rückwärts
Kontakt geschlossen = Festdrehzahl 1
Steuersignale
Programmierbar
Bereich 0–20 mA/R
Hilfsspannung für die Steuereinheit
, max. 500 Ω
L
21 RO1 Relaisausgang 1
22 RO1
23 RO1
FEHLER
Programmierbar
Tabelle 2-1. Werkseitige Klemmleistenbelegung der Multi-ControlApplikation (mit Zweidrahtsender)
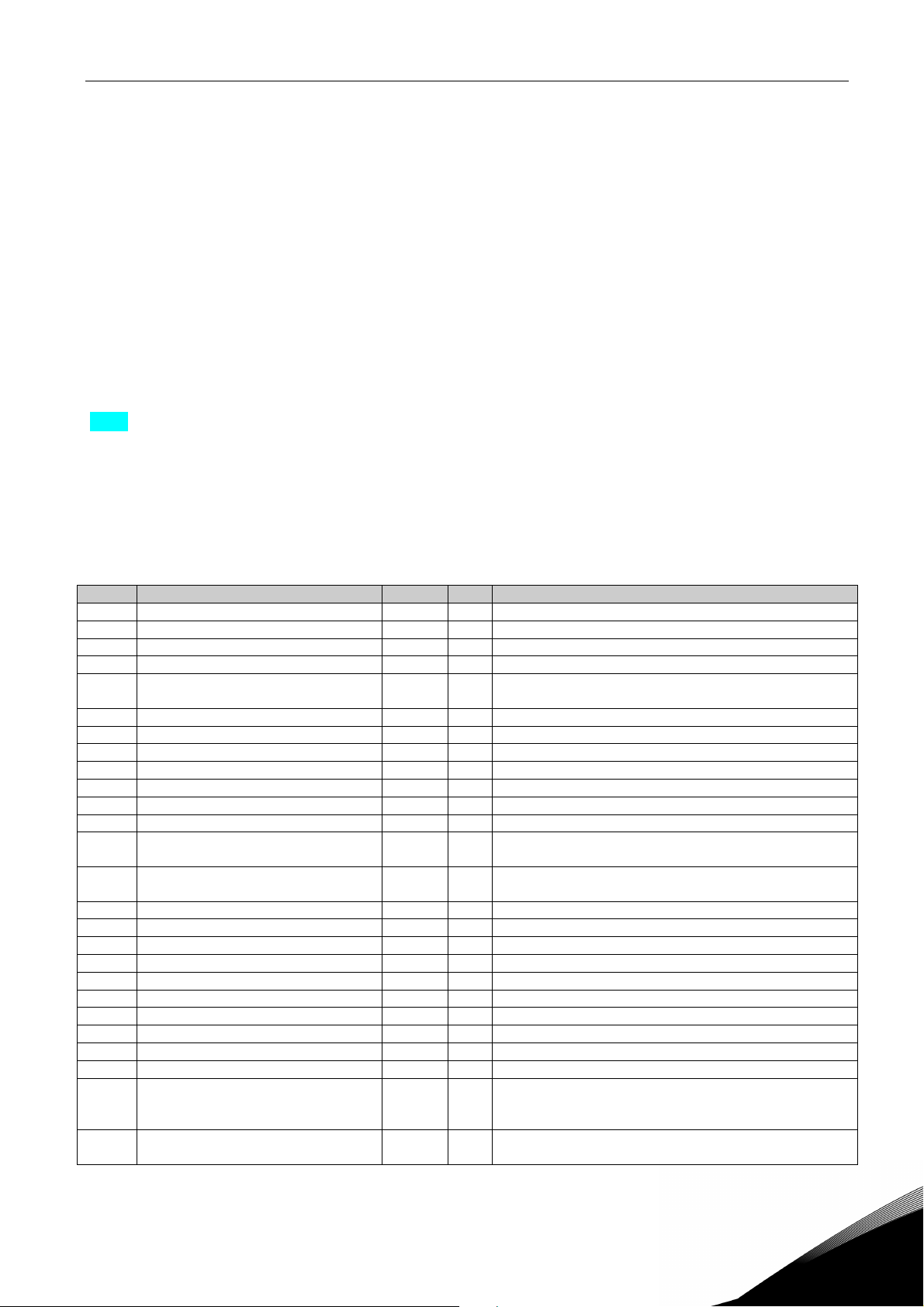
Anschlussklemme Signal Beschreibung
1 +10 V
2 AI1+
oder
DIN4
3 AI1- Masse Masseanschluss für Sollwerte und
4 AI2+ Analogeingang,
AI2-
6 +24 V Steuerspannungsausgang
7 GND Masse Masseanschluss für Sollwerte und
Sollwertausgang Sollspannung für Potentiometer etc.
ref
Analogeingang,
Spannungsbereich 0 bis
10 VDC
Strombereich 0 bis 20 mA
oder Spannungsbereich 0V
bis 10V
Spannungseingang für Frequenzsollwert
MF4-6: Spannungs-/Stromeingang für
Frequenzsollwert
Kann als DIN4 programmiert werden.
Steuersignale
Stromeingang/Spannungseingang für
Frequenzsollwert
Programmierbar
Steuersignale
Tabelle 2-2. AI1 als DIN4 programmieren
3
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 6
Parameterlisten vacon • 5
3. MULTI-CONTROL-APPLIKATION – PARAMETERLISTEN
Auf den nächsten Seiten finden Sie die Listen der in den jeweiligen Parametergruppen enthaltenen
Parameter. Die Parameterbeschreibungen finden Sie auf den Seiten 18 bis 64.
Erläuterungen zu den Tabellenspalten:
Code = Positionsangabe auf der Steuertafel: zeigt dem Bediener die aktuelle Parameternummer
an
Parameter = Parameterbezeichnung
Min. = Mindestwert des Parameters
Max. = Höchstwert des Parameters
Einheit = Einheit des Parameterwerts – wird je nach Verfügbarkeit angezeigt
Werkseinst. = Vom Hersteller voreingestellter Wert
Ben-def. = Einstellung des Kunden
ID = ID-Nummer des Parameters (bei Verwendung von PC-Tools)
= Im Parametercode: Parameterwerte können nur bei gestopptem Frequenzumrichter
geändert werden
.
3.1 Betriebsdaten (Steuertafel: Menü M1)
Bei den Betriebsdaten handelt es sich um die tatsächlichen Werte von Parametern und Signalen
sowie um Statusinformationen und Messwerte. Betriebsdaten können nicht bearbeitet werden.
Weitere Informationen erhalten Sie in der Vacon NXL-Betriebsanleitung, Kapitel 7.4.1.
Code Parameter Einheit ID Beschreibung
V1.1 Ausgangsfrequenz Hz 1 Frequenz zum Motor
V1.2 Frequenzsollwert Hz 25
V1.3 Motordrehzahl rpm 2 Berechnete Motordrehzahl
V1.4 Motorstrom A 3 Gemessener Motorstrom
V1.5
V1.6 Motorleistung % 5 Berechnete tats. Leistung/Nennleistung des Motors
V1.7 Motorspannung V 6 Berechnete Motorspannung
V1.8 DC-Zwischenkreisspannung V 7 Gemessene DC-Zwischenkreisspannung
V1.9 Gerätetemperatur ºC 8 Kühlkörpertemperatur
V1.10 Analogeingang 1 V 13 AI1
V1.11 Analogeingang 2 mA 14 AI2
V1.12 Analogausgangsstrom mA 26 AO1
V1.13
V1.14
V1.15 DIN1, DIN2, DIN3 15 Status Digitaleingänge
V1.16 DIE1, DIE2, DIE3 33 E/A-Zusatzkarte: Status Digitaleingänge
V1.17 RO1 34 Status Relaisausgang 1
V1.18 ROE1, ROE2, ROE3 35 E/A-Zusatzkarte: Status Relaisausgänge
V1.19 DOE1 36 E/A-Zusatzkarte: Status Digitalausgang 1
V1.20 PID-Sollwert % 20 In Prozent der Höchstfrequenz
V1.21 PID-Istwert % 21 In Prozent des maximalen Istwerts
V1.22 PID-Fehlerwert % 22 In Prozent des maximalen Fehlerwerts
V1.23 PID-Ausgang % 23 In Prozent des maximalen Ausgangswerts
V1.24 Autowechsel 1, 2, 3 Ausgänge 30 Wird nur in Pumpen- und Lüfterregelung verwendet
V1.25 Modus 66
V1.26 Motortemperatur % 9
Motordrehmoment
Analogausgangsstrom 1,
Zusatzkarte
Analogausgangsstrom 2,
Zusatzkarte
%
mA
mA 32
4 Berechnetes tats. Drehmoment/Nenndrehmoment des
Motors
31
Zeigt den mit dem Installationsassistent ausgewählten
Modus: 0=Nicht ausgewählt, 1=Standard, 2=Lüfter,
3=Pumpe, 4=High performance
Berechnete Motortemperatur, 1000 entspricht 100,0 % =
Nenntemperatur des Motors
Tabelle 3-1. Betriebsdaten
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
3
Page 7
6 • vacon Parameterlisten
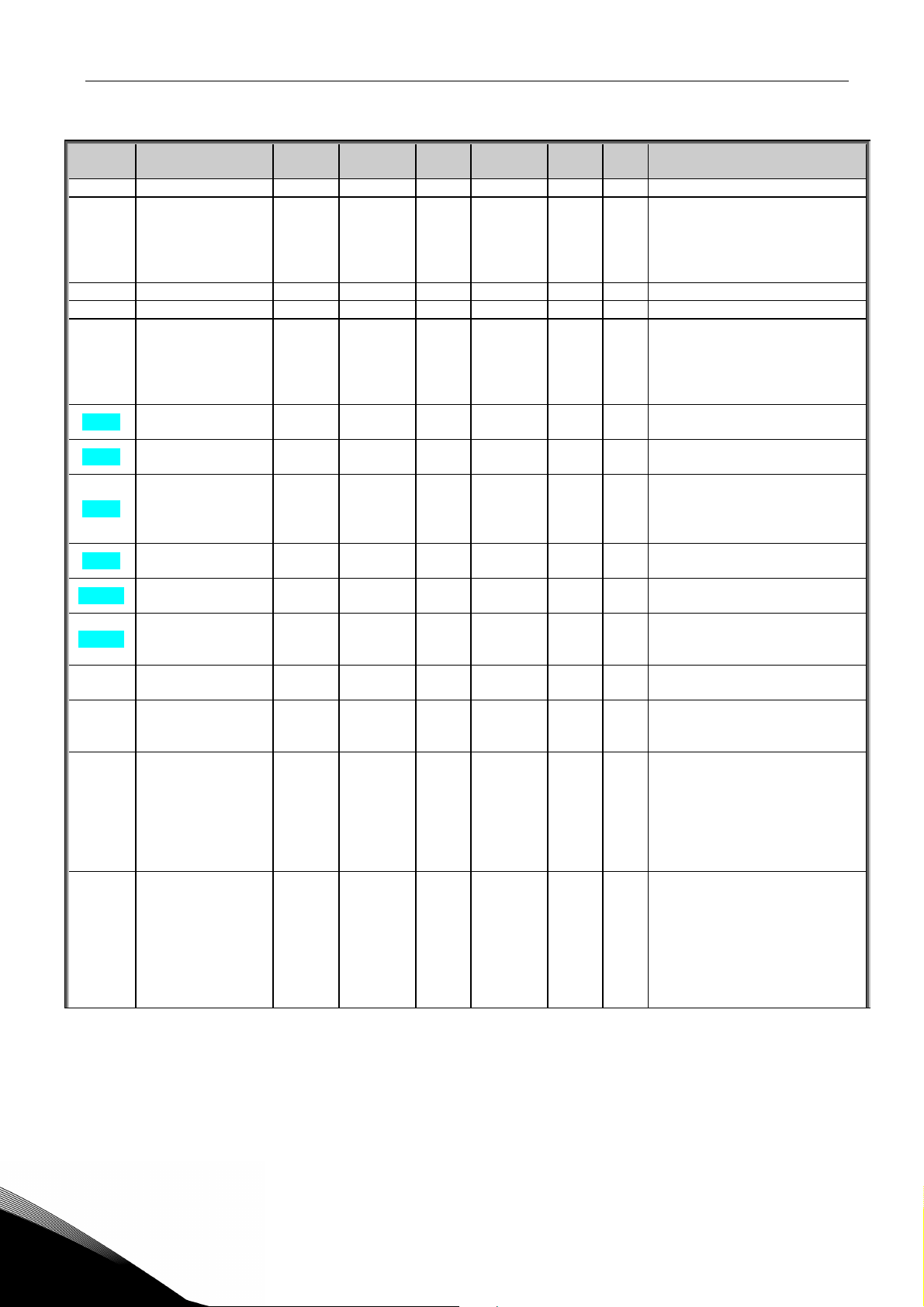
3.2 Basisparameter (Steuertafel: Menü P2 P2.1)
Code Parameter Min. Max. Ein-
heit
P2.1.1 Mindestfrequenz 0,00 Par. 2.1.2 Hz 0,00 101
P2.1.2 Höchstfrequenz Par. 2.1.1 320,00 Hz 50,00 102
P2.1.3 Beschleunigungszt. 1 0,1 3000,0 s 1,0 103
P2.1.4 Bremszeit 1 0,1 3000,0 s 1,0 104
P2.1.5 Stromgrenze 0,1 x IL 1,5 x IL A IL 107
P2.1.6
P2.1.7
P2.1.8
P2.1.9
P2.1.10
P2.1.11 Startfunktion 0 2 0 505
P2.1.12 Stoppfunktion 0 1 0 506
P2.1.13 U/f-Optimierung 0 1 0 109
P2.1.14
P2.1.15 AI2, Signalbereich 1 4 2 390
Nennspannung des
Motors
Nennfrequenz des
Motors
Nenndrehzahl des
Motors
Nennstrom des
Motors
Leistungsfaktor des
Motors (cos phi)
Klemmleistensteuer.,
Sollwertauswahl
180 690 V
30,00 320,00 Hz 50,00 111
300 20 000 rpm 1440 112
0,3 x I
0,30 1,00 0,85 120
0 5 0 117
1,5 x IL A I
L
Werks-
einst.
NXL2:230v
NXL5:400v
H
Ben-
def.
ID Anmerkung
Hinweis: Wenn f
die synchrone Drehzahl des
Motors ist, überprüfen Sie die
Eignung dieses Werts für das
Motor- und Antriebssystem.
Hinweis: Dies gilt ungefähr für
Frequenzumrichter bis Format
MF3. Informationen zu größeren
Formaten erhalten Sie beim
Hersteller.
110
Siehe Typenschild des Motors.
Die Voreinstellung gilt für einen
vierpoligen Motor und einen
Frequenzumrichter in
Nenngröße.
Siehe Typenschild des Motors.
113
Siehe Typenschild des Motors.
0=Rampe
1=Fliegender Start
2=Bedingter fliegender Start
0=Leerauslauf
1=Rampe
0=Nicht verwendet
1=Automatische
Momenterhöhung
0=AI1
1=AI2
2=Steuertafelsollwert
3=Feldbussollwert
(FBSpeedReference)
4=Motorpotentiometer
5= AI1/AI2 Auswahl
Nicht verwendet bei benutzerdefinierter Einstellung,
bei der 2.2.13 > 0 % oder 2.2.14 <
100 %
1=0 mA bis 20 mA
2=4 mA bis 20 mA
3=0V bis 10V
4=2V bis 10V
grösser als
max
3
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 8
Parameterlisten vacon • 7
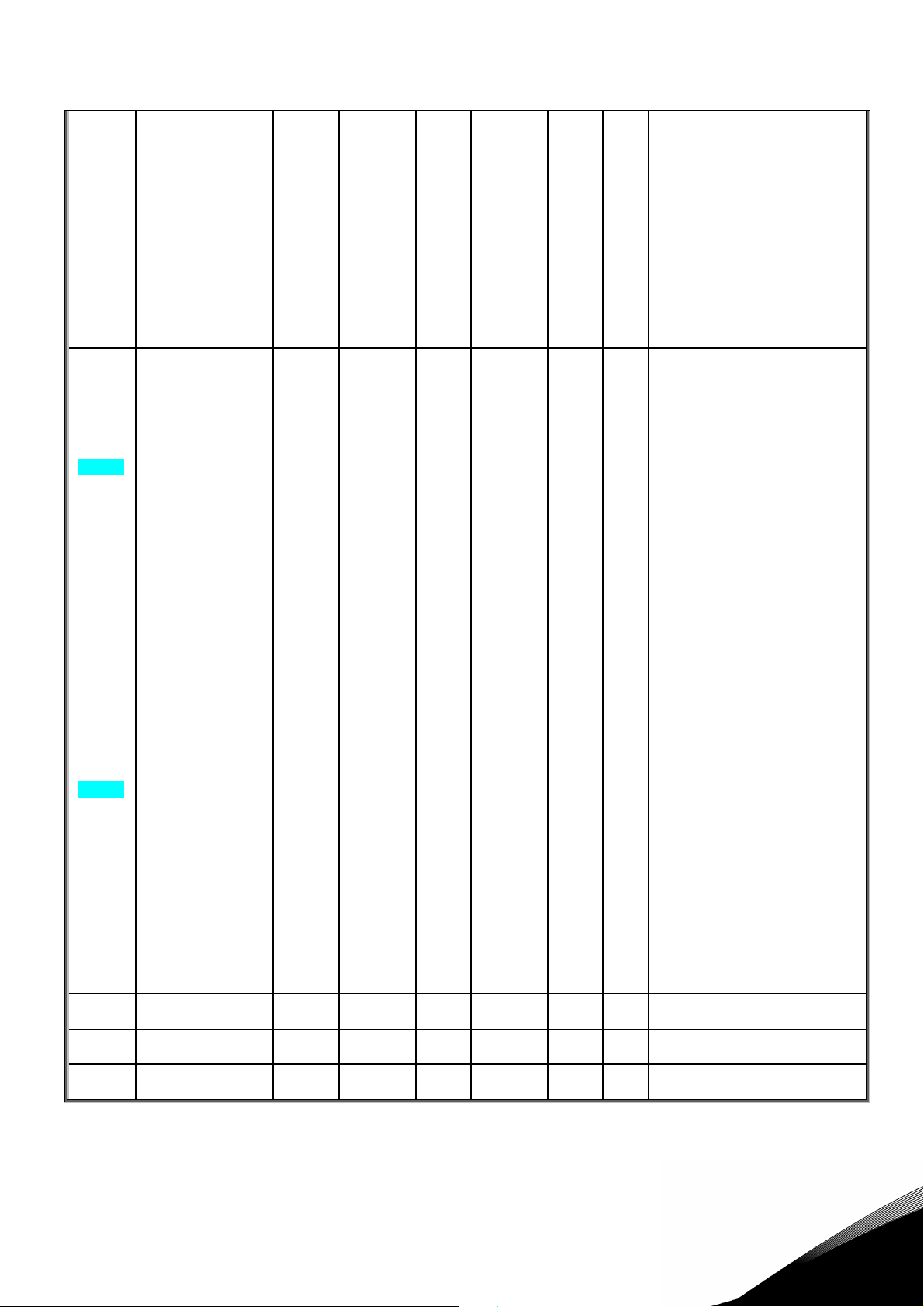
P2.1.16
Analogausgang,
Funktion
0 12 1
P2.1.17 DIN2, Funktion 0 10 1
P2.1.18 DIN3, Funktion 0 17 6
P2.1.19 Festdrehzahl 1 0,00 Par. 2.1.2 Hz 10,00
P2.1.20 Festdrehzahl 2 0,00 Par. 2.1.2 Hz 50,00
P2.1.21
Automatischer
Neustart
0 1 0
P2.1.22 Parameteranzeige 0 1 0
Tabelle 3-2. Basisparameter (P2.1)
0=Nicht verwendet
1=Ausgangsfrequenz (0–f
2=Frequenzsollwert (0–f
max
max
)
)
3=Motordrehzahl (0–Motornenn-
drehzahl)
4=Ausgangsstrom (0–I
5=Motordrehmom. (0–T
307
6=Motorleistung (0–P
7=Motorspannung (0–U
nMotor
nMotor
nMotor
nMotor
)
)
)
)
8=DC-Zw.kreisspann.(0-1000V)
9=PID-Regler, Sollwert
10=PID-Regler, Istwert 1
11=PID-Regler, Regelabw.
12=PID-Regler, Ausgang
0=Nicht verwendet
1=Start Rückwärts (DIN1=Start
vorwärts)
2=Rückwärts (DIN1=Start)
3=Stopp-Puls (DIN1=Start-Puls)
4=Ext.Fehler (geschl.Kontakt)
5=Ext.Fehler (off.Kontakt)
319
6=Startfreigabe
7=Festdrehzahl 2
8=Motorpotentiometer schneller
(geschl.Kontakt)
9=PID deaktivieren (Direkter
Freq.sollwert)
10=Interlock 1
0=Nicht verwendet
1=Rückwärts
2=Ext.Fehler (geschl.Kontakt)
3=Ext.Fehler (off.Kontakt)
4=Fehlerquittierung
5=Startfreigabe
6=Festdrehzahl 1
7=Festdrehzahl 2
8=DC-Bremsbefehl
9=Motorpotentiometer schneller
(geschl. Kontakt)
10=Motpoti langsamer
301
(geschl.Kontakt)
11=PID deaktivieren (Direkter
Freq.sollwert)
12=Auswahl PID-Steuertafelsoll-
wert 2
13=Interlock 2
14=Thermistoreingang (Siehe
Kapitel 6.2.4 in der
Betriebsanleitung)
15=Steuerplatz: Klemmleiste
16=Steuerplatz: Feldbus
17= AI1/AI2 Auswahl
105
106
0=Nicht verwendet
731
1=Verwendet
0=Alle Parameter anzeigen
115
1=Nur Gruppe P2.1 anzeigen
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
3
Page 9
8 • vacon Parameterlisten
3.3 Eingangssignale (Steuertafel: Menü P2 P2.2)
Code Parameter Min. Max. Ein-
heit
Funktionen
P2.2.1
P2.2.2
P2.2.3
P2.2.4 Funktion DIN4 (AI1)
P2.2.5 AI1, Signalauswahl
P2.2.6 AI1, Signalbereich
P2.2.7
P2.2.8
P2.2.9 AI1, Signalinversion
P2.2.10
P2.2.11 AI2, Signalauswahl
Erweiterungskarte
DIE1
Funktionen
Erweiter.karte DIE2
Funktionen
Erweiter.karte DIE3
AI1, benutzer-
definierter
Mindestwert
AI1, benutzer-
definierter Höchstwert
AI1-Signal, Filterzeit-
konstante
0 13 7 368
0 13 4 330
0 13 11 369
0
0
1
0,00
0,00
0
0,00
0
13 2 499
10 377
4 3 379
100,00 % 0,00 380
100,00 % 100,00 381
1 0 387
10,00 s 0,10 378 0 = Keine Filterung
Werks-
einst.
11 388 Wie Parameter 2.2.5
Ben-
def.
ID Anmerkung
0=Nicht verwendet
1=Rückwärts
2=Ext.Fehler (geschl.Kontakt)
3=Ext.Fehler (off.Kontakt)
4=Fehlerquittierung
5=Startfreigabe
6=Festdrehzahl 1
7=Festdrehzahl 2
8=DC-Bremsbefehl
9=Motorpotentiometer
schneller (geschl.Kontakt)
10=Motpoti langsamer
(geschl. Kontakt)
11=PID deaktivieren
(Auswahl PIDSteuerung)
12=Auswahl PID-
Steuertafelsollwert 2
13=Interlock 1
Siehe oben
13=Interlock 2
Siehe oben
13=Interlock 3
Verwendet, wenn P2.2.6=0
Siehe Auswahl oben.
13=Interlock 3
10=AI1(1=Intern, 0=Eing.1)
11=AI2(1=Intern, 0=Eing.2)
20=Erw.karte AI1
(2=Erw.karte 0=Eing.1)
21=Erw.karte AI2
(2=Erw.karte 1=Eing.2)
0=Digitaleingang 4
1=0 mA bis 20 mA (MF4->)
2=4 mA bis 20 mA (MF4->)
3=0 V bis 10 V
4=2 V bis 10 V
Nicht verwendet, wenn
Par. 2.2.13>0% oder
Par.2.2.14<100%
Achtung! Siehe Vacon NXLBetriebsanleitung, Kapitel
7.4.6: Modus AI1
0 = Nicht invertiert
1 = Invertiert
3
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 10
Parameterlisten vacon • 9
Nicht verwendet bei
benutzerdefinierter
Einstellung von AI2
minimal <> 0 % oder
P2.2.12 AI2, Signalbereich
AI2, benutzer-
P2.2.13
P2.2.14
P2.2.15 AI2, Inversion
P2.2.16
P2.2.17
P2.2.18
P2.2.19
P2.2.20
P2.2.21
definierter
Mindestwert
AI2, benutzer-
definierter
Höchstwert
AI2, Filter-
zeitkonstante
Motorpoti,
Frequenzsoll-
wertspeicher
zurücksetzen
Sollwertskalierung,
Mindestwert
Sollwertskalierung,
Höchstwert
Steuertafel,
Sollwertauswahl
Feldbussteuerung,
Sollwertauswahl
1
0,00
0,00
0
0,00
0
0,00
P2.2.18
0 5 2 121
0 5 3 122 Siehe oben
4 2 390
100,00 % 0,00 391
100,00 % 100,00 392
1 0 398
10,00 s 0,10 389 0=Keine Filterung
2 1 367
P2.2.19 0,00 344
320,00 0,00 345
maximal <> 100 %
1=0 bis 20 mA
2=4 bis 20 mA
3=0V bis 10V
4=2V bis 10V
0=Nicht invertiert
1=Invertiert
0=Nicht zurücksetzen
1=Zurücksetzen bei Stopp
oder Netzabschaltung
2=Zurücksetzen bei
Netzabschaltung
Hat kein Effekt auf den
Feldbussollwert (Der ist
skaliert zwischen par 2.1.1
und par 2.1.2)
Hat kein Effekt auf den
Feldbussollwert (Der ist
skaliert zwischen par 2.1.1
und par 2.1.2)
0 = AI1
1 = AI2
2 = Steuertafelsollwert
3 = Feldbussollwert
(FBSpeedreference)
4 = Motorpotentiometer
5 = PID-Regler
Tabelle 3-3. Eingangssignale P2.2
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
3
Page 11
10 • vacon Parameterlisten
3.4 Ausgangssignale (Steuertafel: Menü P2 P2.3)
Code Parameter Min. Max. Ein-
heit
P2.3.1
P2.3.2
P2.3.3
P2.3.4
P2.3.5
P2.3.6
P2.3.7
P2.3.8
P2.3.9
P2.3.10
P2.3.11
P2.3.12
Funktion
Relaisausgang 1
Funktion
Relaisausgang 1
Erweiterungskarte
Funktion
Relaisausgang 2
Erweiterungskarte
Funktion
Digitalausgang 1
Erweiterungskarte
Analogausgang,
Funktion
Analogausgang,
Filterzeitkonstante
Analogausgang,
Inversion
Analogausgang,
Mindestwert
Analogausgang,
Skalierung
Funktion
Analogausgang 1
Erweiterungskarte
Funktion
Analogausgang 2
Erweiterungskarte
Überwachung
Ausgangsfre-
quenzgrenze 1
0 20 3 313
0 20 2 314 Wie Parameter 2.3.1
0 20 3 317 Wie Parameter 2.3.1
0 20 1 312 Wie Parameter 2.3.1
0 12 1
0,00 10,00 s 1,00 308 0=Keine Filterung
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 12 0 472 Wie Parameter 2.1.16
0 12 0 479 Wie Parameter 2.1.16
0 2 0 315
Werks-
einst.
Ben-
def.
ID Anmerkung
0=Nicht verwendet
1=Betriebsbereit
2=Betrieb
3=Fehler
4=Fehler invertiert
5=Übertemp.warnung
(Frequenzumrichter)
6=Ext.Fehler oder Warng
7=Sollw.fehler od. Warng
8=Warnung
9=Drehrichtung
10=Festdrehzahl
11=Auf Drehzahl
12=Motorregler aktiv
13=Ausgangsfrequenz-
grenzenüberw. 1
14=Steuerplatz:
E/A-Klemmleiste
15=Therm.fehler/-
warnung
16=Überwachung Istwert
17=Autow. 1 Steuerung
18=Autow. 2 Steuerung
19=Autow. 3 Steuerung
20=AI Überwachung
307
Siehe Parameter 2.1.16
0=Nicht invertiert
1=Invertiert
0=0 mA
1=4 mA
0=Kein Grenzwert
1=Überw. untere Grenze
2=Überw. obere Grenze
3
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 12
Parameterlisten vacon • 11
Überwachungswert
P2.3.13
P2.3.14 AI Überwachung 0 2 0 356
P2.3.15
P2.3.16
P2.3.17
P2.3.18
Ausgangs-
frequenzgrenze 1
AI Überwachung,
OFF-Grenze
AI Überwachung,
ON-Grenze
Relaisausgang 1,
Ein-Verzögerung
Relaisausgang 1,
Aus-Verzögerung
0,00 Par. 2.1.2 Hz 0,00 316
0=Nicht verwendet
1=AI1
2=AI2
0,00 100,00 % 10,00 357
0,00 100,00 % 90,00 358
0,00 320,00 s 0,00 487 Ein-Verzögerung für RO1
0,00 320,00 s 0,00 488 Aus-Verzögerung für RO1
Tabelle 3-4. Ausgangssignale (P2.3)
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
3
Page 13
12 • vacon Parameterlisten
3.5 Antriebssteuerungsparameter (Steuertafel: Menü P2 P2.4)
Code Parameter Min. Max. Ein-
heit
P2.4.1 Rampe 1, Verschliff 0,0 10,0 s 0,0 500
P2.4.2 Bremschopper 0 3 0 504
P2.4.3 DC-Bremsstrom 0,15 x In 1,5 x I
P2.4.4
P2.4.5
P2.4.6
P2.4.7 Flussbremse 0 1 0 520
P2.4.8 Flussbremsstrom 0,0 Variiert A 0,0 519
DC-Bremszeit bei
Stopp
Startfrequenz für
DC-Bremsung bei
Rampenstopp
DC-Bremszeit bei
Start
0,00 600,00 s 0,00 508
0,10 10,00 Hz 1,50 515
0,00 600,00 s 0,00 516
n
Werks-
einst.
A Variiert 507
Ben-
def.
ID Anmerkung
Tabelle 3-5. Antriebssteuerungsparameter (P2.4)
3.6 Frequenzausblendungsparameter (Steuertafel: Menü P2 P2.5)
Code Parameter Min. Max. Ein-
heit
Frequenzaus-
P2.5.1
P2.5.2
P2.5.3
blendungsbereich 1,
untere Grenze
Frequenzaus-
blendungsbereich 1,
obere Grenze
Frequenzaus-
blendungsbereiche,
Rampenskalierung
0,0 Par. 2,5.2 Hz 0,0 509 0=Nicht verwendet
0,0 Par. 2.1.2 Hz 0,0 510 0=Nicht verwendet
0,1 10,0
Zeite
Werks-
einst.
n
1,0 518
Ben-
def.
ID Anmerkung
Tabelle 3-6. Frequenzausblendungsparameter (P2.5)
0=Linear
>0=S-Verschliff
0=Deaktiviert
1=In Status „Betrieb“
verwendet
2=In Status „Betrieb“ und
„Stopp“ verwendet
0=DC-Bremsung aus bei
Stopp
0=DC-Bremsung aus bei
Start
0=Aus
1=Ein
Multiplikator der
ausgewählter
Beschleunigungszeit
zwischen
Frequenzausblendungsbereichen
3
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 14
Parameterlisten vacon • 13
3.7 Motorregelungsparameter (Steuertafel: Menü P2 P2.6)
Code Parameter Min. Max. Ein-
heit
P2.6.1 Motorregelungsart 0 1 0 600
P2.6.2
P2.6.3 Feldschwächpunkt 30,00 320,00 Hz 50,00 602
P2.6.4
P2.6.5
P2.6.6
P2.6.7
P2.6.8 Schaltfrequenz 1,0 16,0 kHz 6 kHz 601 kW-abhängig
P2.6.9
P2.6.10
P2.6.11 Identifikation 0 1 0 631
U/f-Verhältnis-
auswahl
Spannung am
Feldschwächpunkt
U/f-Kurve,
Mittenfrequenz
U/f-Kurve,
Mittenspannung
Ausgangsspannung
bei Nullfrequenz
Überspannungs-
regler
Unterspannungs-
regler
0 3 0 108
10,00
0,00
0,00 100,00 % 100,00 605
0,00 40,00 % 0,00 606 n % x U
0 1 1 607
0 1 1 608
200,00 % 100,00 603 n % x U
Par.
P2.6.3
Hz 50,00 604
Werks-
einst.
Ben-
def.
ID Anmerkung
0=Frequenzregelung
1=Drehzahlregelung
0=Linear
1=Quadratisch
2=Programmierbar
3=Lin.mit
Flussoptimierung
nmot
n % x U
nmot
Parameterhöchstwert=Par
. 2.6.5
nmot
0=Nicht verwendet
1=Verwendet
0=Nicht verwendet
1=Verwendet
0 = Keine Aktion
1 = Identifikationslauf
Tabelle 3-7. Motorregelungsparameter (P2.6)
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
3
Page 15
14 • vacon Parameterlisten
3.8 Schutzfunktionen (Steuertafel: Menü P2 P2.7)
Code Parameter Min. Max.
P2.7.1
P2.7.2 Reaktion auf ext. Fehler 0 3 2 701
P2.7.3
P2.7.4
P2.7.5 Erdschluss-Schutz 0 3 2 703
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10 Motorlastspiel 0 100 % 100 708
P2.7.11 Blockierschutz 0 3 1 709 Wie Parameter 2.7.1
P2.7.12 Blockierstromgrenze 0,1 I
P2.7.13 Blockierzeitkonstante 1,00 120,00 s 15,00 711
P2.7.14 Blockierfrequenzgrenze 1,0 Par. 2.1.2 Hz 25,0 712
P2.7.15 Unterlastschutz 0 3 0 713 Wie Parameter 2.7.1
P2.7.16
P2.7.17
P2.7.18 Unterlastzeit 2,00 600,00 s 20,00 716
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
P2.7.24
Reaktion auf 4mA-
Sollwertfehler
Reaktion auf
Unterspannungsfehler
Motorphasen-
überwachung
Motortemperaturschut
z
Motorumgebungs-
temp.faktor
Kühlungsfaktor bei
Nullfrequenz
Motortemperatur-
zeitkonstante
Unterlastkurve bei
Nennfrequenz
Unterlastkurve bei
Nullfrequenz
Reaktion auf
Thermistorfehler
Reaktion auf
Feldbusfehler
Reaktion auf
Steckpl.fehler
Überwachungsfunktion
für Istwert
Grenzwert
Überwachungsfunktion
für Istwert
Verzögerung
Überwachungsfunktion
für Istwert
0 3 0 700
1 3 2 727
0 3 2 702
0 3 2 704
–100,0 100,0 % 0,0 705
0,0 150,0 % 40,0 706
1 200 min 45 707
nMotor
10,0 150,0 % 50,0 714
5,0 150,0 % 10,0 715
0 3 2 732 Wie Parameter 2.7.1
0 3 2 733 Wie Parameter 2.7.1
0 3 2 734 Wie Parameter 2.7.1
0 4 0 735
0,0 100,0 % 10,0 736
0 3600 s 5 737
Einheit
x 2 A I
Werks-
einst.
nMotor
Ben-
def.
x1,3 710
ID Anmerkung
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp
entsprechend 2.1.12
3=Fehler, Stopp mit
Leerauslauf
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp
entsprechend 2.1.12
3=Fehler, Stopp mit
Leerauslauf
0=Keine Reaktion
1=Warnung wenn Grenz-
wert unterschritten
2=Warnung wenn Grenz-
wert überschritten
3=Fehler wenn Grenzwert
unterschritten
4=Fehler wenn Grenzwert
überschritten
Tabelle 3-8. Schutzfunktionen (P2.7)
3
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 16
Parameterlisten vacon • 15
3.9 Parameter für automatischen Neustart (Steuertafel: Menü P2 A2.8)
Code Parameter Min. Max.
P2.8.1 Wartezeit 0,10 10,00 s 0,50 717
P2.8.2 Versuchszeit 0,00 60,00 s 30,00 718
P2.8.3 Startfunktion 0 2 0 719
Ein-
heit
Werks-
einst.
Ben-
def.
ID Anmerkung
0=Rampe
1=Fliegender Start
2=Entsprechend Par. 2.4.6
Tabelle 3-9. Parameter für automatischen Neustart (P2.8)
3.10 Parameter für PID-Sollwert (Steuertafel: Menü P2 P2.9)
Code Parameter Min. Max.
P2.9.1 PID-Aktivierung 0 2 0 163
P2.9.2 PID-Sollwert 0 3 2 332
P2.9.3 Eingang Istwert 0 6 1 334
P2.9.4
P2.9.5
P2.9.6
P2.9.7
P2.9.8
P2.9.9 Fehlerwertinversion
P2.9.10 Sleep-Frequenz
P2.9.11 Sleep-Verzögerung 0 3600 s 30 1017
P2.9.12 Wake-up-Pegel 0,00 100,00 % 25,00 1018
P2.9.13 Wake-up-Funktion
PID-Regler,
Verstärkung
PID-Regler,
I-Zeitkonstante
PID-Regler,
D-Zeitkonstante
Istwert 1, Mindestwert-
skalierung
Istwert 1, Höchstwert-
skalierung
0,0 1000,0 % 100,0 118
0,00 320,00 s 10,00 119
0,00 10,00 s 0,00 132
–1000,0
–1000,0
0
Par.
2.10.1
0
1000,0 % 0,00 336
1000,0 % 100,0 337
1 0 340
Par. 2.1.2 Hz 10,00 1016
1 0 1019
Einheit
Werks-
einst.
Ben-
def.
ID Anmerkung
0=Nicht verwendet
1=PID-Regler aktiviert
2=Pumpen und
Lüfterregelung aktiviert
0=AI1
1=AI2
2=Sollwert von Steuertafel
(PID-Sollw. 1)
3=Feldbussollwert
(ProcessDataIN1)
0=AI1-Signal
1=AI2-Signal
2=Feldbus (ProcessDataIN2)
3=Motordrehmoment
4=Motordrehzahl
5=Motorstrom
6=Motorleistung
7=AI1-AI2
0=Keine Mindestwert-
skalierung
100=Keine Höchstwert-
0=Wake-up bei Unter-
schreitung des Wake-up-
Pegels (2.9.12)
1=Wake-up bei Über-
schreitung des Wake-up-
Pegels (2.9.12)
2= Wake-up bei Unter-
schreitung des Wake-up-
Pegels (PID-Sollwert)
3= Wake-up bei Über-
schreitung des Wake-up-
Pegels (PID-Sollwert)
Tabelle 3-10. Parameter für PID-Sollwert (P2.9)
skalierung
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
3
Page 17
16 • vacon Parameterlisten
3.11 Pumpen- und Lüfterregelungsparameter (Steuertafel: Menu P2 P2.10)
ACHTUNG! Gruppe P2.10 ist sichtbar nur wenn dem Parameter 2.9.1 der Wert 2 gegeben wird.
Code Parameter Min Max
P2.10.1
P2.10.2
P2.10.3
P2.10.4 Autowechsel 0 4 0 1027
P2.10.5
P2.10.6
P2.10.7
P2.10.8
P2.10.9
Anzahl der
Hilfsantriebe
Startverzögerung,
Hilfsantriebe
Stoppverzögerung,
Hilfsantriebe
Autowechsel-
Intervall
Autowechsel, Max.
Anzahl von
Hilfsantrieben
Autowechsel-
Frequenzgrenze
Startfrequenz,
Hilfsantrieb 1
Stoppfrequenz,
Hilfsantrieb 1
0 3 1 1001
0,0 300,0 s 4,0 1010
0,0 300,0 s 2,0 1011
0,0 3000,0 h 48,0 1029 0,0=TEST=40 s
0 3 1 1030
0,00 par. 2.1.2 Hz 25,00 1031
Par.
2.10.9
Par.
2.1.1
320,00 Hz 51,00 1002
Par.
2.10.8
Ein-
heit
Hz 10,00 1003
Werks-
einst.
Ben-
def.
ID Anmerkung
0=Nicht verwendet
1=Autowechsel mit
Hilfsantriebe
2= Autowechsel mit
Frequenzumrichter und
Hilfsantriebe
3= Autowechsel und
Interlocks
(Hilfsantriebe)
4= Autowechsel und
Interlocks
(Frequenzumrichter
und Hilfsantriebe)
Tabelle 3-11. Pumpen- und Lüfterregelungsparameter, P2.10
3
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 18
Parameterlisten vacon • 17
3.12 Steuerung über Steuertafel (Steuertafel: Menü K3)
Die folgende Liste enthält die Parameter für die Auswahl des Steuerplatzes und der Drehrichtung
über die Steuertafel. Siehe Menü „Steuerung über Steuertafel“ in der Vacon NXL-Betriebsanleitung.
Code Parameter Min. Max.
P3.1 Steuerplatz 1 3 1 125
R3.2 Steuertafelsollwert
P3.3
R3.4 Stopp-Taste 0 1 1 114
P3,5 PID-Sollwert 0,00 100,00 % 0,00
P3.6 PID-Sollwert 2 0,00 100,00 % 0,00
Drehrichtung (über
die Steuertafel)
Par.
2.10.1
Par. 2.1.2 Hz
0 1 0 123
Ein-
heit
Werks-
einst.
Ben-
def.
ID Anmerkung
1=E/A-Klemmleiste
2=Steuertafel
3=Feldbus
0=Vorwärts
1=Rückwärts
0=Eingeschränkte
Funktion der StoppTaste
1=Stopp-Taste immer
aktiviert
Tabelle 3-12. Parameter für Steuerung über Steuertafel (M3)
3.13 System-Menü (Steuertafel: Menü S6)
Parameter und Funktionen zur allgemeinen Verwendung des Frequenzumrichters,
benutzerdefinierte Parametersätze oder Hardware- und Softwareinformationen finden Sie in Kapitel
7.4.6 der Vacon NXL-Betriebsanleitung.
3.14 Erweiterungskarten (Steuertafel: Menü E7)
Das Menü E7 enthält Informationen über die angeschlossene Erweiterungskarte sowie
kartenspezifische Informationen. Weitere Informationen erhalten Sie in Kapitel 7.4.7 der Vacon
NXL-Betriebsanleitung.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
3
Page 19

18 • vacon Parameterbeschreibungen
4. PARAMETERBESCHREIBUNGEN
4.1 BASISPARAMETER
2.1.1, 2.1.2 Mindest-/Höchstfrequenz
Dieser Parameter definiert die Frequenzgrenzen des Frequenzumrichters.
Der Höchstwert für die Parameter 2.1.1 und 2.1.2 beträgt 320 Hz.
Die Software überprüft den Wert von Parameter 2.1.19, 2.1.20, 2.3.13, 2.5.1, 2.5.2 und
2.6.5 automatisch.
2.1.3, 2.1.4 Beschleunigungszeit 1, Bremszeit 1
Diese Grenzwerte entsprechen der benötigten Zeit, um von der Frequenz Null auf die
eingestellte Höchstfrequenz zu beschleunigen und umgekehrt (Par. 2.1.2).
2.1.5 Stromgrenze
Dieser Parameter bestimmt den maximalen Strom vom Frequenzumrichter zum Motor.
Um eine Überlastung des Motors zu vermeiden, sollte dieser Parameter dem
Nennstrom des Motors entsprechend eingestellt werden. Die Stromgrenze ist
werkseitig dieselbe als der Nennstrom (I
2.1.6 Nennspannung des Motors
Dieser Wert (Un ) kann dem Typenschild des Motors entnommen werden. Mit diesem
Parameter wird die maximale Ausgangsspannung am Feldschwächpunkt (Parameter
2.6.4) auf 100 % x U
nMotor
gesetzt.
2.1.7 Nennfrequenz des Motors
Dieser Wert (fn) kann dem Typenschild des Motors entnommen werden. Mit diesem
Parameter wird der Feldschwächpunkt (Parameter 2.6.3) auf denselben Wert gesetzt.
2.1.8 Nenndrehzahl des Motors
Dieser Wert (nn) kann dem Typenschild des Motors entnommen werden.
).
L
2.1.9 Nennstrom des Motors
Dieser Wert (In) kann dem Typenschild des Motors entnommen werden.
2.1.10 Leistungsfaktor des Motors (cos phi)
Dieser Wert (cos phi) kann dem Typenschild des Motors entnommen werden.
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 20

Parameterbeschreibungen vacon • 19
2.1.11 Startfunktion
Rampe:
0 Der Frequenzumrichter startet bei 0 Hz und beschleunigt innerhalb der
eingestellten Beschleunigungszeit auf die festgelegte Sollfrequenz.
(Lastträgheit oder Anlaufreibung können zu längeren Beschleunigungszeiten
führen).
Fliegender Start:
1 Der Frequenzumrichter kann bei laufendem Motor starten, indem er die
Frequenz unter Zuführung eines kleinen Drehmoments der Drehzahl des
Motors anpasst. Der korrekte Frequenzwert wird durch einen Suchlauf
ermittelt, der bei der Höchstfrequenz beginnt und bei der tatsächlichen
Frequenz endet. Anschließend wird die Ausgangsfrequenz in
Übereinstimmung mit den eingestellten Beschleunigungs-/
Bremsparametern auf den festgelegten Sollwert erhöht bzw. gesenkt.
Dieser Modus sollte verwendet werden, wenn der Motor bei Erteilung des
Startbefehls leer ausläuft. Mit dem fliegenden Start ist ein Anfahren auch bei
kurzen Netzspannungsunterbrechungen möglich.
Bedingter fliegender Start:
2 Mithilfe dieser Betriebsart können Sie den Motor vom Frequenzumrichter
trennen und wieder verbinden, während der Startbefehl aktiv ist. Beim
erneuten Verbinden des Motors reagiert der Umrichter wie unter 1
beschrieben.
2.1.12 Stoppfunktion
Leerauslauf:
0 Der Motor läuft nach dem Stoppbefehl ohne Regelung über den
Frequenzumrichter leer aus.
Rampe:
1 Nach dem Stoppbefehl wird die Drehzahl des Motors entsprechend den
eingestellten Bremsparametern verringert.
Wenn die durch das generatorische Bremsen zurückgewonnene Energie
relativ hoch ist, kann der Einsatz eines externen Bremswiderstands
erforderlich sein, um das Abbremsen zu beschleunigen.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 21

20 • vacon Parameterbeschreibungen
2.1.13 U/f- Optimierung
0 Nicht verwendet
1 Automatische Momenterhöhung
Die Spannung zum Motor wird automatisch geändert, so dass der
Motor ein ausreichendes Drehmoment produziert, um bei
niedrigen Frequenzen anzulaufen. Der Spannungsanstieg hängt
vom Motor-typ und von der Motorleistung ab. Die automatische
Moment-erhöhung kann in Applikationen mit hohem
Losbrechmoment verwendet werden, wie z. B. bei Förderbändern.
ACHTUNG!
Bei Applikationen mit hohem Drehmoment und kleinen Drehzahlen
besteht die Gefahr einer Überhitzung des Motors. Wenn der Motor
bereits längere Zeit unter diesen Bedingungen betrieben wurde,
sollte insbesondere auf die Kühlung des Motors geachtet werden.
Bei zu hohen Temperaturen sollte der Motor mit einem externen
Kühlsystem ausgestattet werden.
2.1.14 Klemmleistensteuerung, Sollwertauswahl
Dieser Parameter dient zur Definition der Quelle des Frequenzsollwerts, wenn die
Steuerung des Antriebs über die E/A-Klemmleiste erfolgt.
0 AI1-Sollwert (Klemmen 2 und 3, z. B. Potentiometer)
1 AI2-Sollwert (Klemmen 4 und 5, z. B. Signalgeber)
2 Steuertafelsollwert (Parameter 3.2)
3 Sollwert vom Feldbus (FBSpeedReference)
4 Motorpotentiometersollwert
5 = Auswahl AI1/AI2. Die Auswahl von AI2 kann mit der DIN3-Funktion (Par 2.1.18)
programmiert werden
2.1.15 AI2 (Iin), Signalbereich
1 Signalbereich 0 bis 20 mA
2 Signalbereich 4 bis 20 mA
3 = Signalbereich 0 bis 10 V
4 = Signalbereich 2 bis 10 V
Achtung! Die Einstellungen haben keine Auswirkungen, wenn Par. 2.2.12 > 0 % oder
Par. 2.2.13 < 100 %.
2.1.16 Funktion Analogausgang
Mit diesem Parameter wird die gewünschte Funktion des Analogausgangssignals
ausgewählt.
Die Parameterwerte finden Sie in der Tabelle auf Seite 6.
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 22

Parameterbeschreibungen vacon • 21
2.1.17 Funktion DIN2
Für diesen Parameter stehen 9 Auswahlmöglichkeiten zur Verfügung. Wenn
Digitaleingang DIN2 nicht verwendet wird, setzen Sie den Parameterwert auf 0.
1 Start rückwärts
2 Rückwärts
3 Stopp-Puls
4 Externer Fehler
Kontakt geschlossen: Der Fehler wird angezeigt und der Motor gestoppt, wenn der Eingang
aktiv ist.
5 Externer Fehler
Kontakt offen: Der Fehler wird angezeigt und der Motor gestoppt, wenn der Eingang nicht
aktiv ist.
6 Startfreigabe
Kontakt offen: Motorstart nicht möglich
Kontakt geschlossen: Motor kann gestartet werden
7 Festdrehzahl 2
8 Motorpotentiometer schneller
Kontakt geschlossen: Sollwert wird erhöht, bis der Kontakt geöffnet wird.
9 PID-Regler deaktivieren (Direkter Frequenzsollwert)
10 Interlock 1 (Pumpen und Lüfterregelung muss aktiviert sein, P2.9.1=2)
2.1.18 Funktion DIN3
Für diesen Parameter stehen 12 Auswahlmöglichkeiten zur Verfügung. Parameterwert
auf 0 setzen, wenn Digitaleingang DIN3 nicht verwendet wird.
1 Rückwärts
Kontakt offen: Vorwärts
Kontakt geschlossen: Rückwärts
2 Externer Fehler
Kontakt geschlossen: Der Fehler wird angezeigt und der Motor gestoppt, wenn der
Eingang aktiv ist.
3 Externer Fehler
Kontakt offen: Der Fehler wird angezeigt und der Motor gestoppt, wenn der Eingang nicht
aktiv ist.
4 Fehlerquittierung
Kontakt geschlossen: Alle Fehler werden quittiert
5 Startfreigabe
Kontakt offen: Motorstart nicht möglich
Kontakt geschlossen: Motor kann gestartet werden
6 Festdrehzahl 1
7 Festdrehzahl 2
8 DC-Bremsbefehl
Kontakt geschlossen: Im Stoppmodus ist die DC-Bremsung aktiviert, bis der Kontakt geöffnet
wird. DCBremsungstrom ist etwa 10% vom Wert ausgewählt mit Par. 2.4.3.
9 Motorpotentiometer schneller
Kontakt geschlossen: Sollwert wird erhöht, bis der Kontakt geöffnet wird.
10 Motorpotentiometer langsamer
Kontakt geschlossen: Sollwert wird reduziert, bis der Kontakt geöffnet wird.
11 PID-Regler deaktivieren (Direkter Frequenzsollwert)
12 Auswahl PID-Steuertafelsollwert 2
13 Interlock 2 (Pumpen und Lüfterregelung muss aktiviert sein, P2.9.1=2)
14 Thermistoreingang. Siehe Kapitel 6.2.4 in der Betriebsanleitung!
15 Zwangsumschaltung auf Steuerplatz E/A-Klemmleiste
16 Zwangsumschaltung auf Steuerplatz Feldbus
17 = Auswahl AI1/AI2 für E/A-Sollwert
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 23

22 • vacon Parameterbeschreibungen
2.1.19 Festdrehzahl 1
2.1.20 Festdrehzahl 2
Die Parameterwerte werden automatisch auf einen Wert zwischen der Mindest- und der
Höchstfrequenz begrenzt. (Par. 2.1.1 und 2.1.2)
2.1.21 Funktion Automatischer Neustart:
Mit diesem Parameter wird der automatische Neustart aktiviert bzw. deaktiviert.
0 = Deaktiviert
1 = Aktiviert (3 Automatische Neustarts, siehe Par. 2.8.1 bis 2.8.3)
2.1.22 Parameteranzeige
Mit diesem Parameter können alle Parametergruppen bis auf die Basisparameter
(Gruppe P2.1) ausgeblendet werden.
Der Wert dieses Parameters ist werkseitig auf 0 eingestellt.
0 = Deaktiviert (Alle Parametergruppen können über die Steuertafel durchsucht werden)
1 = Aktiviert (Nur die Basisparametergruppe P2.1 kann über die Steuertafel durchsucht
werden)
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 24

Parameterbeschreibungen vacon • 23
4.2 EINGANGSSIGNALE
2.2.1 Funktionen Erweiterungskarte DIE1
Für diesen Parameter stehen 12 Auswahlmöglichkeiten zur Verfügung. Parameterwert
auf 0 setzen, wenn Digitaleingang DIN1 der Erweiterungskarte nicht verwendet wird.
Die Auswahlmöglichkeiten finden Sie unter Parameter 2.1.18. Achtung: 13 = Interlock 1
2.2.2 Funktionen Erweiterungskarte DIE2
Die Auswahlmöglichkeiten entsprechen denen von Parameter 2.2.1.
Achtung: 13 = Interlock 2
2.2.3 Funktionen Erweiterungskarte DIE3
Die Auswahlmöglichkeiten entsprechen denen von Parameter 2.2.1.
2.2.4
Achtung: 13 = Interlock 3
Funktion DIN4
Wenn der Wert von Par. 2.2.6 auf 0 gesetzt wird, entspricht AI1 Digitaleingang 4.
Die Auswahlmöglichkeiten entsprechen denen von Parameter 2.2.1. (13 = Interlock 3)
ACHTUNG! Einstellung von Steckbrückenblock X4 überprüfen, wenn der
Analogeingang als DIN4 programmiert wurde (siehe Abbildung unten).
MF2
X4:
RS485
Programmierung
Spannungseingang; 0...10V
MF3
X4:
Spannungseingang; 0...10V
MF4-6
X8:
Spannungseingang; 0...10V
Jumperdin4.fh8
Abbildung 4-1. Einstellung von Steckbrückenblock X4/X8 wenn AI1 als DIN4
programmiert.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 25

24 • vacon Parameterbeschreibungen
2.2.5 Signalauswahl AI1
Mit diesem Parameter kann das AI1-Signal mit dem gewünschten Analogeingang
verknüpft werden.
READY
STOP
I/O term
nxlk29.fh8
Abbildung 4-2. Signalauswahl AI2
Der Wert dieses Parameters setzt sich zusammen aus
Klemmennummer der entsprechenden Eingangsklemme
Kartenanzeige 1 = Interne Eingänge
Kartenanzeige 2 = Eingänge Erweiterungskarte
Eingangsklemme Nummer 0 = Eingang 1
Eingangsklemme Nummer 1 = Eingang 2
Eingangsklemme Nummer 2 = Eingang 3
Eingangsklemme Nummer 9 = Eingang 10
Beispiel:
Wenn der Wert dieses Parameters auf 10 gesetzt wird, ist der interne
AI1-Signal ausgewählt. Wenn der Wert dieses Parameters auf 21 gesetzt wird, ist der
Erweiterungskarteneingang
Wenn Sie jedoch die Werte des Analogeingangssignals zum Beispiel lediglich für
Testzwecke verwenden möchten, können Sie den Parameterwert zwischen 0 und 9
einstellen. Der Wert 0 entspricht 0 %, der Wert 1 entspricht 20 %, alle anderen Werte
zwischen 2 und 9 entsprechen 100 %.
2.2.6 AI1, Signalbereich
READY
STOP
I/O term
Wert
ändern
Kartenanzeige
Klemmennummer
Kartenanzeige
und
. Siehe Abbildung 4-2.
Eingang 1 für das
Klemmennummer 2 für das AI1-Signal ausgewählt.
4
Mit diesem Parameter kann der AI1-Signalbereich ausgewählt werden.
0 = DIN4
1 = Signalbereich 0 bis 20 mA
2 = Signalbereich 4 bis 20 mA
3 = Signalbereich 0 bis 10 V
4 = Signalbereich 2 bis 10 V
Achtung! Die Einstellungen haben keine Auswirkungen, wenn Par. 2.2.7 > 0 % oder Par.
2.2.8 < 100 %.
Wenn der Wert von Par. 2.2.6 auf 0 gesetzt wird, entspricht AI1 Digitaleingang 4. Siehe
Par. 2.2.4.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 26

Parameterbeschreibungen vacon • 25
2.2.7 AI1, benutzerdefinierter Mindestwert
2.2.8 AI1, benutzerdefinierter Höchstwert
Legen Sie den benutzerdefinierten Mindest- und Höchstwert für das AI1-Signal
innerhalb eines Bereichs von 0 bis 10 V fest.
2.2.9 AI1, Signalinversion
Wenn der Parameterwert auf 1
gesetzt wird, wird das AI1-Signal
invertiert.
%
Eingangsignal
2.2.10 AI1-Signal, Filterzeitkonstante
Wenn diesem Parameter ein Wert
zugewiesen wird, der größer als 0 ist,
wird die Funktion zum Ausfiltern von
Störungen aus dem eingehenden
Analogsignal (U
) aktiviert.
in
Lange Filterzeiten führen zu einer
Verzögerung der Regelzeiten. Siehe
Abbildung 4-3.
2.2.11 AI2, Signalauswahl
Mit diesem Parameter kann das AI2-Signal mit dem gewünschten Analogeingang
verknüpft werden. Zur Einstellung des Werts siehe Par. 2.2.5.
2.2.12 AI2, Signalbereich
0 Signalbereich 0 bis 20 mA
1 Signalbereich 4 bis 20 mA
Achtung! Die Einstellungen haben keine Auswirkungen, wenn Par. 2.2.13 > 0 % oder
Par. 2.2.14 < 100 %.
100%
Sollwertsignal
63%
Par. 2.2.10
Abbildung 4-3. AI1, Signalfilterung
nxlk30.fh8
t [s]
2.2.13 AI2, benutzerdefinierter Mindestwert
2.2.14 AI2, benutzerdefinierter Höchstwert
Mit diesen Parametern kann das Eingangsstromsignal in einem Bereich von 0 bis 20 mA
skaliert werden.
Vergleiche Parameter 2.2.7 und 2.2.8.
2.2.15 Analogeingang AI2, Signalinversion
Vgl. Parameter 2.2.9.
2.2.16 Analogeingang AI2, Filterzeitkonstante
Vgl. Parameter 2.2.10.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 27

26 • vacon Parameterbeschreibungen
2.2.17 Zurücksetzen des Motorpotentiometerspeichers (Frequenzsollwert)
0 = Keine Rücksetzung
1 = Rücksetzung des Speichers bei Stopp und Abschaltung
2 = Rücksetzung des Speichers bei Abschaltung
2.2.18 Sollwertskalierung Mindestwert
2.2.19 Sollwertskalierung Höchstwert
Sie können für den Frequenzsollwert einen Skalierungsbereich zwischen der Mindestund Höchstfrequenz auswählen. Wenn keine Skalierung erfolgen soll, setzen Sie den
Parameterwert auf 0.
In den folgenden Abbildungen wird Spannungseingang AI1 mit Signalbereich 0 bis 10 V
als Sollwert gewählt.
Ausgangsfrequenz
Max. freq. par 2.1.2
Min. freq. par 2.1.1
0
Analogeingang [V]
10
Par. 2.2.19
Par. 2.2.18
Ausgangsfrequenz
Max. freq. par 2.1.2
Min. freq. par 2.1.1
0
Abbildung 4-4. Links: Par. 2.2.18 = 0 (keine Sollwertskalierung) Rechts: Sollwertskalierung
2.2.20 Auswahl des Frequenzsollwerts über die Steuertafel
Dieser Parameter dient zur Definition der Sollwertquelle, wenn die Steuerung des
Antriebs über die Steuertafel erfolgt.
0 AI1-Sollwert (Werkseitig AI1, Klemmen 2 und 3, z. B. Potentiometer)
1 AI2-Sollwert (Werkseitig AI2, Klemmen 5 und 6, z. B. Signalgeber)
2 Steuertafelsollwert (Parameter 3.2)
3 Sollwert vom Feldbus (FBSpeedReference)
4 Motorpotentiometersollwert
5 PID-Reglersollwert
2.2.21 Auswahl des Frequenzsollwerts über den Feldbus
Analogeingang [V]
10
NX12K35
4
Dieser Parameter dient zur Definition der Sollwertquelle, wenn die Steuerung des
Antriebs über den Feldbus erfolgt. Die Parameterwerte finden Sie unter Par. 2.2.20.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 28

Parameterbeschreibungen vacon • 27
4.3 AUSGANGSSIGNALE
2.3.1 Funktion Relaisausgang 1
2.3.2 Funktion Relaisausgang 1 Erweiterungskarte
2.3.3 Funktion Relaisausgang 2 Erweiterungskarte
2.3.4 Funktion Digitalausgang 1 Erweiterungskarte
Einstellwert Signalinhalt
0 = Nicht verwendet Außer Betrieb
In folgenden Fällen wird Relaisausgang RO1 und das
1 = Betriebsbereit Der Frequenzumrichter ist betriebsbereit.
2 = Betrieb Der Frequenzumrichter ist in Betrieb (Motor läuft).
3 = Fehler Es ist eine Fehlerauslösung erfolgt.
4 = Fehler invertiert Fehlerauslösung ist nicht erfolgt.
programmierbare Relais (RO1, RO2) der
Erweiterungskarte aktiviert:
5 = Übertemperaturwarnung
(Frequenzumrichter)
6 = Externer Fehler oder Warnung Fehler oder Warnung, abhängig von Par. 2.7.2
7 = Sollwertfehler oder Warnung
8 = Warnung Immer, wenn eine Warnung ansteht.
9 = Drehrichtung Drehrichtungsbefehl wurde erteilt.
10 = Festdrehzahl Festdrehzahl wurde ausgewählt.
11 = Auf Drehzahl
12 = Motorregler aktiviert
13 = Überwachung
Ausgangsfrequenzgrenze 1
14 = Steuerung über E/A-Klemmleiste Externe Regelung (Menü K3; Par. 3.1)
15 = Thermistorfehler oder Warnung
Die Kühlkörpertemperatur überschreitet +70 °C.
Fehler oder Warnung, abhängig von Par. 2.7.1
– wenn Sollwert = 4–20 mA und Signal < 4 mA
Die Ausgangsfrequenz hat den eingestellten Sollwert
erreicht.
Überspannungs- oder Überstromregler wurde
aktiviert.
Ausgangsfrequenz außerhalb der eingestellten
Überwachungsunter-/-obergrenze (siehe Parameter
2.3.12 und 2.3.13)
Der Thermistoreingang der Erweiterungskarte zeigt
Übertemperatur an. Fehler oder Warnung, abhängig
von Par. 2.7.19.
16 = Überwachungsfunktion für Istwert
aktiviert
17 = Autowechsel 1 Steuerung Pumpe 1 Steuerung, Parameter 2.10.1 – 2.10.7
18 = Autowechsel 2 Steuerung Pumpe 2 Steuerung, Parameter 2.10.1 – 2.10.7
19 = Autowechsel 3 Steuerung Pumpe 3 Steuerung, Parameter 2.10.1 – 2.10.7
20 = AI Überwachung
Parameter 2.7.22 bis 2.7.24
Das Relais wird aktiviert abhängig von Parameter
2.3.14 – 2.3.16
Tabelle 4-1. Ausgangssignale über RO1 und Erweiterungskarte RO1, RO2 und DO1.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 29

28 • vacon Parameterbeschreibungen
2.3.5 Funktion, Analogausgang
Mit diesem Parameter wird die gewünschte Funktion des Analogausgangssignals
ausgewählt.
Siehe Tabelle 3-4. Ausgangssignale (P2.3)
auf Seite 11 und die möglichen
Auswahlen auf Seite 7 (Par. 2.1.16).
2.3.6 Analogausgang, Filterzeitkonstante
Dieser Parameter definiert die Filterzeit
des Analogausgangssignals.
Wenn dieser Parameter auf den Wert 0
gesetzt wird, wird die Filterung
deaktiviert.
2.3.7 Analogausgang, Inversion
Mit diesem Parameter wird das Analogausgangssignal invertiert:
Max. Ausgangssignal = Min. Einstellwert
(Parameter 2.3.3)
Min. Ausgangssignal = Max. Einstellwert
(Parameter 2.3.3)
%
Istwertsignal
100%
63%
Par. 2.3.6
Ausgang
nxlk31.fh8
Abbildung 4-5. Analogausgangsfilterung
Analogausgang
20 mA
t [s]
0 Nicht invertiert
1 Invertiert
Siehe Parameter 2.3.9.
2.3.8 Analogausgang, Mindestwert
Mit diesem Parameter wird der Signalmindestwert auf 0 oder 4 mA (versetzter
Nullpunkt) gesetzt. Beachten Sie die unterschiedliche Analogausgangsskalierung in
Parameter 2.3.9.
12 mA
10 mA
4 mA
Param. 2.3.9
= 200%
0 mA
0
0.5
1.0
Abbildung 4-6. Analogausgang, Inversion
Param. 2.3.9
= 50%
Param. 2.3.9
= 100%
nxlk32.fh8
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 30

Parameterbeschreibungen vacon • 29
r
r
r
2.3.9 Analogausgang, Skalierung
Skalierungsfaktor für den Analogausgang.
Signal Höchstwert des Signals
Ausgangsfrequenz
Motordrehzahl 100 % x Motornenndrehzahl
Ausgangsstrom 100 % x I
Motordrehmoment
Motorleistung 100 % x P
Motorspannung 100 % x U
DC-Zw.krspng
PI-Sollwert
PI-Istwert 1
PI-Fehlerwert
PI-Ausgang
100 % x f
100 % x T
max
nMoto
nMotor
nMoto
nMoto
1000 V
100 % x Sollwertmaximum
100 % x Istwertmaximum
100 % x Fehlerwertmaximum
20 mA
12 mA
10 mA
Par. 2.3.8 = 1
4 mA
Par. 2.3.8 = 0
0 mA
Analogausgang
0
Par. 2.3.9=
200%
0.5
Par. 2.3.9=
100%
1.0
nxlk49.fh8
Par. 2.3.9=
50%
Max. Wert des
Signals gewählt
mit Par. 2.1.16
100 % x Ausgangsmaximum
Tabelle 4-2. Analogausgangsskalierung Abbildung 4-7. Analogausgangsskalierung
2.3.10 Funktion Analogausgang 1 Erweiterungskarte
2.3.11 Funktion Analogausgang 2 Erweiterungskarte
Mit diesen Parametern werden die gewünschten Funktionen der Analogausgangssignale
der Erweiterungskarte gewählt. Die Parameterwerte finden Sie in Par. 2.1.16.
2.3.12 Überwachung Ausgangsfrequenzgrenze 1
0 Keine Überwachung
1 Überwachung untere Grenze
2 Überwachung obere Grenze
Wenn die Ausgangsfrequenz unter/über die eingestellten Grenzen (Par. 2.3.13) fällt bzw.
steigt, wird mit dieser Funktion abhängig von den Einstellungen der Parameter 2.3.1 bis
2.3.4 eine Warnmeldung über die Relaisausgänge ausgegeben.
2.3.13 Überwachungswert Ausgangsfrequenzgrenze 1
Mit diesen Parametern wird der Frequenzwert ausgewählt, der durch Parameter 2.3.12
überwacht werden soll.
f[Hz]
Par 2.3.13
Par 2.3.12 = 2
t
Beispiel:
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
21 RO1
22 RO1
23 RO1
nxlk33.fh8
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 31

30 • vacon Parameterbeschreibungen
Abbildung 4-8. Ausgangsfrequenzüberwachung
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 32

Parameterbeschreibungen vacon • 31
2.3.14 Analogeingang Überwachung
Mit diesem parameter kan der Analogeingang um überzuwachen gewählt werden.
0 = Nicht verwendet
1 = AI1
2 = AI2
2.3.15 Analogeingang Überwachung, OFF-grenze
Wenn das signal des Analogeingangs ausgewählt mit dem Parameter 2.3.14 fällt unter
die Grenze definiert mit diesem Parameter, geht das Relais aus.
2.3.16 Analogeingang Überwachung, ON-grenze
Wenn das signal des Analogeingangs ausgewählt mit dem parameter 2.3.14 geht über
die Grenze definiert mit diesem Parameter, wird das Relais angeshaltet.
Das bedeutet, dass wenn zum Beispiel die ON-Grenze 60% ist und die OFF-Grenze 40%,
wird das Relais angeschaltet, wenn das Signal über 60% geht und bleibt angeschaltet bis
das signal unter 40% fällt.
2.3.17 Relaisausgang 1, Ein-Verzögerung
2.3.18 Relaisausgang 1, Aus-Verzögerung
Mit diesen Parametern können Sie die Ein- und Aus-Verzögerungen für den
Relaisausgang 1 einstellen (Par 2.3.1).
Programmierter Signalinhalt des Relaisausgangs
RO1-Ausgang
EIN-Verzögerung,
par 2.3.17
Abbildung 4-9. Relaisausgang 1, Ein- und Aus-Verzögerung
AUS-Verzögerung,
par 2.3.18
nxlk102
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 33
32 • vacon Parameterbeschreibungen
4.4 ANTRIEBSSTEUERUNG
2.4.1 Rampe 1, Verschliff
Mit diesen Parametern kann am Anfang und Ende der Beschleunigungs-/Bremsphase
ein weiches Übergangsverhalten erreicht werden. Der Einstellwert 0 sorgt für einen
linearen Rampenverschliff, so dass Beschleunigungs- und Bremsverhalten unmittelbar
auf Änderungen des Sollwertsignals reagieren.
Wenn für diesen Parameter der Wert 0,1 bis 10 Sekunden eingestellt wird, erfolgt
daraus ein S-Verschliff der Beschleunigungs-/Bremsrampe. Die Beschleunigungszeit
wird durch die Parameter 2.1.3/2.1.4 bestimmt.
[Hz]
2.4.2
2.1.3, 2.1.4
2.4.1
2.4.1
Abbildung 4-10. Beschleunigungs-/Bremsrampe (S-Verschliff)
Bremschopper
NX12K20
[t]
Achtung! Alle Formate außer MF2 verfügen über einen internen Bremschopper.
0 Kein Bremschopper angeschlossen
1 Bremschopper angeschlossen und im Status „Betrieb“ verwendet
3 In Status „Betrieb“ und „Stopp“ verwendet
Wenn der Motor durch den Frequenzumrichter gebremst wird, werden das
Trägheitsmoment des Motors und die Last einem externen Bremswiderstand zugeführt.
Auf diese Weise kann der Frequenzumrichter die Last mit demselben Drehmoment
bremsen, das bei der Beschleunigung verwendet wird (sofern der richtige
Bremswiderstand ausgewählt wurde). Weitere Informationen finden Sie im
Installationshandbuch für den Bremswiderstand.
2.4.3 DC-Bremsstrom
Dieser Parameter dient zur Definition des Stroms, der dem Motor bei der DC-Bremsung
zugeführt wird.
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 34

Parameterbeschreibungen vacon • 33
2.4.4 DC-Bremszeit bei Stopp
Durch diesen Parameter werden der Bremsstatus (EIN oder AUS) und die Bremszeit der
DC-Bremse beim Stoppen des Motors bestimmt. Die Funktion der DC-Bremse hängt von
der Stoppfunktion ab (Parameter 2.1.12).
0 DC-Bremsung AUS
>0 DC-Bremsung EIN – Funktion abhängig von der Stoppfunktion (Param. 2.1.12).
Durch diesen Parameter wird die Bremszeit bestimmt.
Par. 2.1.12 = 0 (Stoppfunktion = Leerauslauf):
Nach dem Stoppbefehl läuft der Motor ohne Regelung über den Frequenzumrichter leer
aus.
Mit der DC-Bremsung kann der Motor in kürzester Zeit ohne Verwendung eines
optionalen externen Bremswiderstands elektrisch gestoppt werden.
Die Bremszeit wird beim Starten der DC-Bremsung durch die Frequenz skaliert. Wenn
die Frequenz die Nennfrequenz des Motors überschreitet, wird die Bremszeit durch den
Istwert von Parameter 2.4.4 bestimmt. Wenn die Frequenz ≤10 % der
Motornennfrequenz entspricht, beträgt die Bremszeit 10 % des Einstellwerts von
Parameter 2.4.4.
f
Ausg
.
f
n
Ausgangsfrequenz
Motor-Drehzahl
f
Ausg
.
f
n
Dauer
BETRIEB
STOP
Gleichstrombremsung
t = 1 x Par. 2.4.4
t
0,1 x f
n
BETRIEB
STOP
Abbildung 4-11. DC-Bremszeit bei Stoppmodus = Leerauslauf
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
Ausgangsfrequenz
Motordrehzahl
Dauer
Gleichstrombremsung
t = 0,1 x Par. 2.4.4
t
nxlk34.fh8
4
Page 35

34 • vacon Parameterbeschreibungen
Par. 2.1.12 = 1 (Stoppfunktion = Rampe):
Nach dem Stoppbefehl wird die Dreh-zahl des Motors in Übereinstimmung mit den
eingestellten Bremsparametern so schnell wie möglich auf die durch Parameter 2.4.5
definierte Drehzahl gesenkt, bei der
die DC-Bremsung einsetzt.
Die Bremszeit wird mit Parameter
f
Ausg.
Ausgangsfrequenz
Motordrehzahl
2.4.4 festgelegt. Bei hohen Trägheitsmomenten sollte ein externer Bremswiderstand eingesetzt werden, um
den Bremsvorgang zu beschleunigen.
Siehe Abbildung 4-12.
par. 2.4.5
BETRIEB
STOP
Dauer
Gleichstrombremsung
t = Par. 2.4.4
t
nxlk50.fh8
Abbildung 4-12. DC-Bremszeit bei Stoppmodus =
Rampe
2.4.5 DC-Bremsfrequenz bei Rampenstopp
Dieser Parameter bestimmt die
Ausgangsfrequenz, bei der die DCBremsung einsetzt. Siehe Abbildung 4-12.
2.4.6 DC-Bremszeit bei Start
Die DC-Bremsung wird bei Erteilung des
Startbefehls aktiviert. Mit diesem
Parameter wird die Zeit vor Auslösung der
Bremse definiert. Nach Auslösung der
Bremse steigt die Frequenz entsprechend
den durch Parameter 2.1.11 eingestellten
Startfunktion an. Siehe Abbildung 4-13.
2.4.7 Flussbremse
Flussbremsung ist eine nutzbare Bremsungsmethode anstelle der DC-Bremsung mit
Motoren ≤15kW.
Bei erhöhtem Bremsungsbedarf wird die Frequenz reduziert und der Motorfluß erhöht,
was wiederum die Fähigkeit des Motors zum Bremsen verbessert. Im Gegensatz zur DCBremsung bleibt der Motor während der Bremsung steuerbar.
Ausgangsfrequenz
Par 2.4.6
BETR.
STOP
nxlk35.fh8
Abbildung 4-13. DC-Bremszeit bei Start
t
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 36

Parameterbeschreibungen vacon • 35
Die Flussbremsung kann auf EIN oder AUS gesetzt werden.
0 = Flussbremsung AUS
1 = Flussbremsung EIN
Hinweis: Flußbremsung wandelt die Energie in Wärme im Motor um. Darum sollte
Flußbremsung nur periodisch eingesetzt werden, um Motorschäden zu vermeiden
2.4.8 Flussbremsstrom
Dieser Parameter definiert den Wert des Flussbremsstroms. Er kann auf einen Wert
zwischen 0,1 x I
und der Stromgrenze eingestellt werden.
nMot
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 37

36 • vacon Parameterbeschreibungen
4.5 FREQUENZAUSBLENDUNG
2.5.1 Frequenzausblendungsbereich 1, untere Grenze
2.5.2 Frequenzausblendungsbereich 1, obere Grenze
In einigen Systemen kann es aufgrund
von Problemen mit mechanischen
Reso-nanzen erforderlich sein,
Ausgangsfrequenz [Hz]
bestimmte Frequenzbereiche
auszublenden. Mit diesen Parametern
können die Grenz-werte für die
Frequenzbereiche einge-stellt werden,
die übersprungen werden sollen. Siehe
Abbildung 4-14.
2.5.1 2.5.2
Sollwert [Hz]
nxlk36.fh8
Abbildung 4-14. Einstellung des
Frequenzausblendungsbereichs
2.5.3 Skalierungsverhältnis der Rampengeschwindigkeit zwischen
Frequenzausblendungsgrenzen
Dieser Parameter dient zur Definition der Beschleunigungs-/ Bremszeit für Ausgangsfrequenzen, die zwischen den ausgewählten Frequenzausblendungsgrenzen (Parameter
2.5.1 und 2.5.2) liegen. Die Rampengeschwindigkeit (ausgewählte Beschleunigungs/Bremszeit 1 oder 2) wird mit diesem Faktor multipliziert. Bei Einstellung des Werts 0,1
ist die Bremszeit z. B. zehnmal kürzer als außerhalb der
Frequenzausblendungsgrenzen.
fout [Hz]
Par. 2.5.3 = 0,2
Par. 2.5.2
Par. 2.5.1
Par. 2.5.3 = 1,2
4
Zeit [s]
nxlk37.fh8
Abbildung 4-15. Rampengeschwindigkeitsskalierung zwischen Frequenzausblendungsgrenzen
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 38

Parameterbeschreibungen vacon • 37
4.6 MOTORREGELUNG
2.6.1 Motorregelungsart
0 Frequenzregelung: Die Sollwerte der E/A-Klemmleiste und der Steuertafel sind
Frequenzsollwerte, und der Frequenzumrichter regelt die
Ausgangsfrequenz (Ausgangsfrequenzauflösung = 0,01 Hz).
1 Drehzahlregelung: Die Sollwerte der E/A-Klemmleiste und der Steuertafel sind
Drehzahlsollwerte, und der Frequenzumrichter regelt die
Motordrehzahl (Genauigkeit ±0,5 %).
2.6.2 U/f-Verhältnisauswahl
Linear: Die Spannung des Motors ändert sich innerhalb des konstanten Flussbereichs
0 (0 Hz bis Feldschwächpunkt) linear zur Frequenz. Am Feldschwächpunkt wird
dem Motor die Nennspannung zugeführt. In Applikationen mit konstantem
Drehmoment sollte ein lineares U/f-Verhältnis verwendet werden. Siehe
Abbildung 4-16.
Die Werkseinstellung sollte nur geändert werden, wenn eine andere
Einstellung zwingend erforderlich ist.
Quadr.: Die Spannung des Motors ändert sich im Bereich von 0 Hz bis zum
1 Feldschwächpunkt quadratisch zur Frequenz. Am Feldschwächpunkt wird
dem Motor die Nennspannung zugeführt. Unterhalb des Feldschwächpunktes
wird der Motor untermagnetisiert betrieben und erzeugt weniger
Drehmoment und somit auch weniger elektromagnetische Geräusche. Ein
quadratisches U/f- Verhältnis kann in Applikationen verwendet werden, bei
denen sich das Drehmoment quadratisch zur Drehzahl verhält, z. B. in
Fliehkraftlüftern und Zentrifugalpumpen.
U[V]
Un
par.2.6.4
Werkseinst.:
Motornennspannung
Feldschwächpunkt
Linear
Quadratisch
par.2.6.3
Abbildung 4-16. Lineare und quadratische Änderung der Motorspannung
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
Werkseinst.: Motornennfrequenz
f[Hz]
nxlk38.fh8
4
Page 39

38 • vacon Parameterbeschreibungen
Programmierbare U/f-Kurve:
2 Die U/f-Kurve kann mit drei verschiedenen Punkten programmiert werden.
Die programmierbare U/f-Kurve kann verwendet werden, wenn die anderen
Einstellungen die Anforderungen der Applikation nicht erfüllen.
U[V]
Un
Par 2.6.4
Par. 2.6.7
(Werk: 10%)
Par. 2.6.8
(Werk. 1,3%)
Werkseinst.: Motornennspannung
Par. 2.6.6
(Werk: 5 Hz)
Feldschwächpunkt
Werksvorg.: Motor
Nennfrequenz
Par. 2.6.3
f[Hz]
nxlk39.fh8
Abbildung 4-17. Programmierbare U/f-Kurve
Linear mit Flussoptimierung:
3 Der Frequenzumrichter sucht nach dem Motormindeststrom und senkt den
Stör- und Geräuschpegel, um Energie zu sparen. Diese Option kann in
Applikationen mit konstanter Motorlast verwendet werden (z. B. in Lüftern
und Pumpen).
2.6.3 Feldschwächpunkt
Der Feldschwächpunkt ist die Ausgangsfrequenz, bei der die Ausgangsspannung den
eingestellten Höchstwert erreicht.
2.6.4 Spannung am Feldschwächpunkt
Oberhalb der Frequenz am Feldschwächpunkt bleibt die Ausgangsspannung auf dem
Höchstwert. Unterhalb der Frequenz am Feldschwächpunkt hängt die
Ausgangsspannung von der Einstellung der U/f-Kurvenparameter ab. Siehe Parameter
2.1.13, 2.6.2, 2.6.5 2.6.6 und 2.6.7 und Abbildung 4-17.
Wenn die Parameter 2.1.6 und 2.1.7 (Nennspannung und Nennfrequenz des Motors)
gesetzt werden, werden die Parameter 2.6.3 und 2.6.4 automatisch auf die
entsprechenden Werte eingestellt. Wenn andere Werte für den Feldschwächpunkt und
die maximale Ausgangsspannung erforderlich sind, ändern Sie diese Parameter erst,
nachdem Sie die Parameter 2.1.6 und 2.1.7 eingestellt haben.
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 40

Parameterbeschreibungen vacon • 39
2.6.5 U/f-Kurve, Mittenfrequenz
Dieser Parameter definiert die Frequenz am Mittelpunkt der programmierbaren U/fKurve, die mit Parameter 2.6.2 gewählt wurde. Siehe Abbildung 4-17.
2.6.6 U/f-Kurve, Mittenspannung
Dieser Parameter definiert die Spannung am Mittelpunkt der programmierbaren U/fKurve, die mit Parameter 2.6.2 gewählt wurde. Siehe Abbildung 4-17.
2.6.7 Ausgangsspannung bei Nullfrequenz
Dieser Parameter definiert die Nullfrequenzspannung der Kurve. Siehe Abbildung 4-17.
2.6.8 Schaltfrequenz
Durch Verwendung einer hohen Schaltfrequenz können die Motorgeräusche auf ein
Mindestmaß reduziert werden. Das Erhöhen der Schaltfrequenz verringert jedoch die
Kapazität des Frequenzumrichters.
Schaltfrequenz für Vacon NXL: 1 bis 16 kHz
2.6.9 Überspannungsregler
2.6.10 Unterspannungsregler
Mit diesen Parametern können die Unter-/Überspannungsregler deaktiviert werden.
Dies kann z. B. erforderlich sein, wenn die Netzspannung um mehr als –15 % bis +10 %
schwankt und die Applikation eine derartige Über-/Unterspannung nicht erlaubt. Dieser
Regler regelt die Ausgangsfrequenz entsprechend den Spannungsschwankungen.
Hinweis: Bei deaktivierten Reglern können Über-/ Unterspannungsauslösungen
auftreten.
0 Regler ausgeschaltet
1 Regler eingeschaltet
2.6.11 Identifikation
0 Keine Aktion
1 Identifikationslauf
Bei Auswahl von „Identifikationslauf“ führt der Antrieb einen Identifikationslauf aus,
sobald er über die ausgewählte Steuertafel gestartet wird. Der Antrieb muss innerhalb
von 20 Sekunden gestartet werden. Anderenfalls wird die Identifikation abgebrochen.
Während des Identifikationslaufs wird der Motor vom Antrieb nicht gedreht. Sobald der
Identifikationslauf beendet ist, wird der Antrieb gestoppt. Der Antrieb startet mit dem
nächsten Startbefehl normal.
Der Identifikationslauf verbessert die Drehmomentberechnungen und die
automatische Drehmomentverstärkung. Außerdem führt er zu einer besseren
Schlupfkompensation bei der Drehzahlregelung (genauere Drehzahlen).
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 41

40 • vacon Parameterbeschreibungen
4.7 SCHUTZFUNKTIONEN
2.7.1 Reaktion auf 4mA-Sollwertfehler
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stoppmodus nach Fehler entsprechend Parameter 2.1.12
3 = Fehler, Stoppmodus nach Fehler immer mit Leerauslauf
Wenn das 4 bis 20 mA-Sollwertsignal verwendet wird und das Signal für 5 Sekunden
unter 3,5 mA bzw. für 0,5 Sekunden unter 0,5 mA fällt, wird eine Warnung bzw. ein
Fehler mit einer Meldung ausgegeben. Die Informationen können bei entsprechender
Programmierung auch über die Relaisausgänge ausgegeben werden.
2.7.2 Reaktion auf externen Fehler
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stoppmodus nach Fehler entsprechend Parameter 2.1.12
3 = Fehler, Stoppmodus nach Fehler immer mit Leerauslauf
Durch das externe Fehlersignal an den programmierbaren Digitaleingängen wird eine
Warnung bzw. ein Fehler mit Meldung erzeugt. Die Informationen können bei
entsprechender Programmierung auch über die Relaisausgänge ausgegeben werden.
2.7.3 Reaktion auf Unterspannungsfehler
1 = Warnung
2 = Fehler, Stoppmodus nach Fehler entsprechend Parameter 2.1.12
3 = Fehler, Stoppmodus nach Fehler immer mit Leerauslauf
Die Unterspannungsgrenzen finden Sie in der Vacon NXL-Betriebsanleitung, Tabelle 4-3.
Hinweis: Diese Schutzfunktion kann nicht deaktiviert werden.
2.7.4 Motorphasenüberwachung
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stoppmodus nach Fehler entsprechend Parameter 2.1.12
3 = Fehler, Stoppmodus nach Fehler immer mit Leerauslauf
4
Durch die Motorphasenüberwachung wird geprüft, ob die Motorphasen ungefähr die
gleiche Stromaufteilung haben.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 42

Parameterbeschreibungen vacon • 41
2.7.5 Erdschluss-Schutz
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stoppmodus nach Fehler entsprechend Parameter 2.1.12
3 = Fehler, Stoppmodus nach Fehler immer mit Leerauslauf
Durch die Erdschlussüberwachung wird geprüft, ob die Summe der Motorphasenströme
gleich Null ist. Der Überstromschutz ist ständig in Betrieb und schützt den
Frequenzumrichter vor Erdschlüssen mit hohen Strömen.
Parameter 2.7.6 bis 2.7.10, Motortemperaturschutz:
Allgemeines
Der Motortemperaturschutz soll den Motor vor Überhitzung schützen. Der vom Vacon-Umrichter
gelieferte Strom kann unter Umständen höher als der Nennstrom des Motors sein. Wenn die Last
einen derart hohen Strom erfordert, besteht die Gefahr einer thermischen Überlastung des Motors.
Dies ist insbesondere bei niedrigen Frequenzen der Fall. Bei niedrigen Frequenzen wird die
Kühlwirkung des Motors in gleichem Maße wie seine Belastbarkeit reduziert. Wenn der Motor mit
einem Fremdlüfter ausgestattet ist, ist die Lastreduzierung bei niedrigen Drehzahlen gering.
Der Motortemperaturschutz basiert auf einem Rechenmodell und verwendet den Motorstrom des
Antriebs zur Bestimmung der Motorlast.
Der Motortemperaturschutz kann über Parameter eingestellt werden. Der thermische Strom I
entspricht dem Laststrom bei maximaler thermischer Belastbarkeit des Motors. Dieser Grenzstrom
ist eine Funktion der Ausgangsfrequenz.
!
ACHTUNG!
Das Rechenmodell kann den Motor nicht schützen, wenn der
Kühlluftstrom zum Motor beeinträchtigt wird.
T
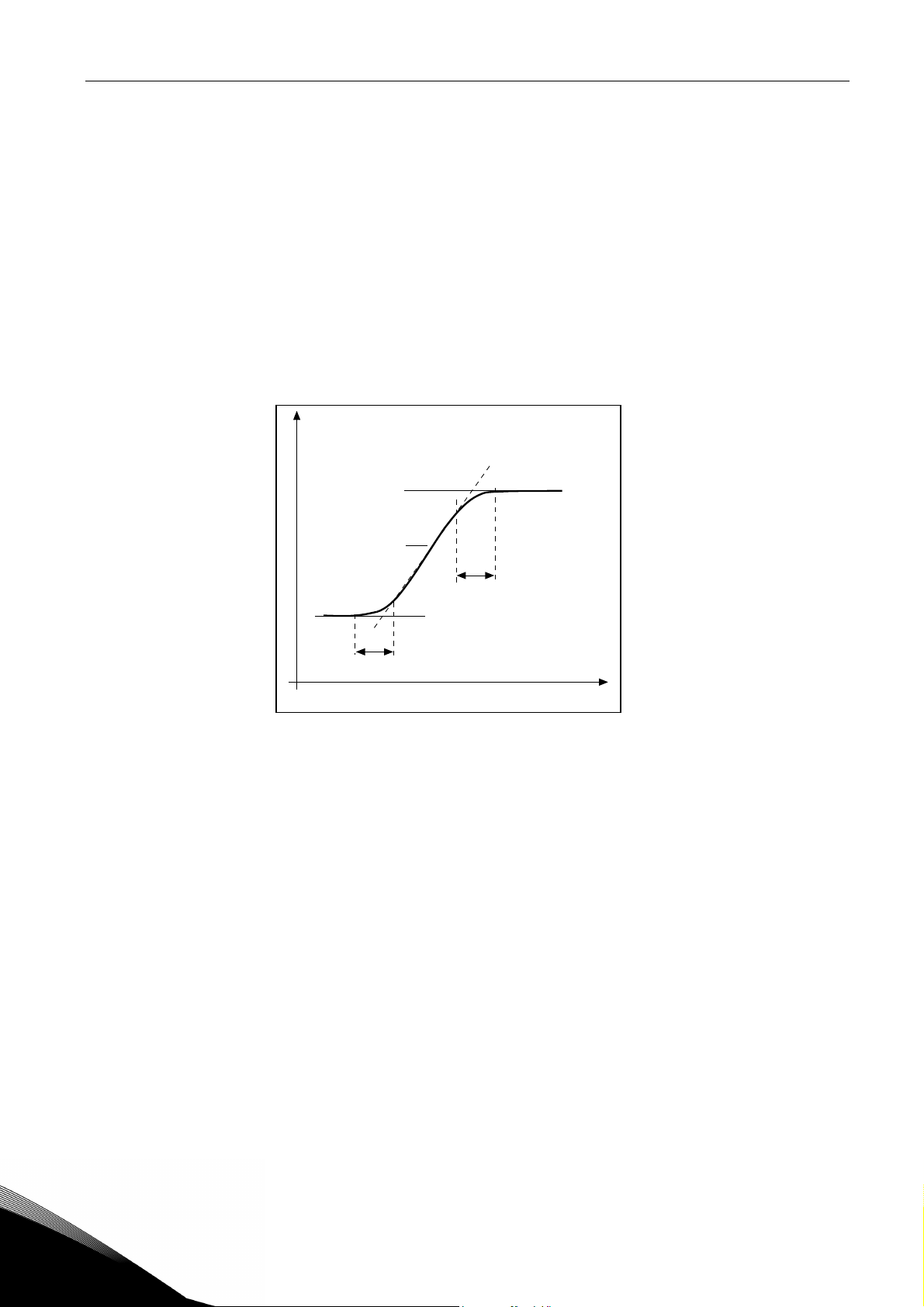
2.7.6 Motortemperaturschutz
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stoppmodus nach Fehler entsprechend Parameter 2.1.12
3 = Fehler, Stoppmodus nach Fehler immer mit Leerauslauf
Bei Auslösung der Schutzfunktion mit Fehler wird der Antrieb gestoppt und der
Fehlerzustand ausgelöst.
Wenn die Schutzfunktion deaktiviert und der Parameter somit auf 0 gesetzt wird, wird
das Wärmemodell des Motors auf 0 % zurückgesetzt.
2.7.7 Motortemperaturschutz: Motorumgebungstemperaturfaktor
Wenn die Motorumgebungstemperatur berücksichtigt werden muss, sollte für diesen
Parameter ein Wert eingestellt werden. Der Faktor kann auf einen Wert zwischen –
100,0 % und 100,0 % eingestellt werden, wobei –100,0 % einer Temperatur von 0
und 100,0 % der maximalen Betriebstemperatur des Motors entspricht. Wenn dieser
Parameterwert auf 0 % gesetzt wird, wird von einer Umgebungstemperatur
ausgegangen, die der Temperatur des Kühlkörpers bei eingeschalteter
Stromversorgung entspricht.
Wenn die Schutzfunktion deaktiviert (d. h. der Parameter auf 0 gesetzt) wird, wird der
Blockierzeitzähler zurückgesetzt.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
°C
4
Page 43

42 • vacon Parameterbeschreibungen
2.7.8 Motortemperaturschutz: Kühlungsfaktor bei Nullfrequenz
Der Faktor kann auf einen Wert von 0
bis 150,0 % x Strom bei Nennfrequenz
gesetzt werden. Siehe Abbildung 4-18.
P
Kühlung
100%*
I
nmot
Par.
2.7.8=40%
Überlast
I
T
f
nxlk51.fh8
f
n
0
Abbildung 4-18. Motorkühlungsleistung
2.7.9 Motortemperaturschutz: Zeitkonstante
Diese Zeitkonstante kann auf einen Wert zwischen 1 und 200 Minuten gesetzt werden.
Hierbei handelt es sich um die Temperaturzeitkonstante des Motors. Je größer der
Motor, desto größer die Zeitkonstante. Die Zeitkonstante bestimmt den Zeitraum, in dem
der berechnete Wärmestatus 63 % seines Endwerts erreicht hat.
Die Temperaturzeitkonstante hängt vom Motordesign ab und ist von Hersteller zu
Hersteller unterschiedlich.
Wenn die t6-Zeit des Motors (t6 ist der Zeitraum in Sekunden, über den der Motor bei
sechsfachem Nennstrom sicher betrieben werden kann) bekannt ist (beim Hersteller zu
erfahren), können die Zeitkonstantenparameter basierend auf diesem Wert gesetzt
werden. Gemäß Daumenregel entspricht die Temperaturzeitkonstante des Motors 2 x t6.
Wenn der Antrieb gestoppt ist, wird die Zeitkonstante intern auf das Dreifache des
eingestellten Parameterwerts erhöht. In der Stopp-Phase basiert die Kühlung des
Motors auf Konvektion, und die Zeitkonstante wird erhöht. Siehe auch Abbildung 4-19.
Hinweis: Wenn die Nenndrehzahl (Par. 2.1.8) oder der Nennstrom (Par. 2.1.9) des
Motors geändert wird, wird dieser Parameter automatisch auf die Werkseinstellung (45)
zurückgesetzt.
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 44

Parameterbeschreibungen vacon • 43
Motortemperatur
Auslösebereich
105%
Motorstrom
I/I
T
nxlk40.fh8
Zeitkonstante T
Motortemperatur Zeit
*)
Variieert nach Motorgröße und
wird mit Parameter 2.7.9 eingestellt
Θ
= (I/I
Abschaltung/Warnung
*)
-t/T
)2 x (1-e
T
par. 2.7.6
)
Abbildung 4-19. Berechnung der Motortemperatur
2.7.10 Motortemperaturschutz: Motorlastspiel
Dieser Parameter bestimmt, welcher Anteil der Motornennlast angelegt wird.
Der Wert kann auf 0 % bis 100 % eingestellt werden.
Parameter 2.7.11, Blockierschutz:
Allgemeines
Der Motorblockierschutz schützt den Motor vor kurzzeitigen Überbelastungen, die z. B. durch eine
blockierte Welle verursacht werden können. Eine echte Kontrolle der Wellendrehung ist nicht
vorhanden. Der Blockierschutz ist eine Art Überstromschutz.
2.7.11 Blockierschutz
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stoppmodus nach Fehler entsprechend Parameter 2.1.12
3 = Fehler, Stoppmodus nach Fehler immer mit Leerauslauf
Wenn der Parameter auf 0 gesetzt wird, wird die Schutzfunktion deaktiviert und der
Blockierzeitzähler zurückgesetzt.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 45

44 • vacon Parameterbeschreibungen
2.7.12 Blockierstromgrenze
Der Strom kann auf einen Wert von 0,0 – 2 x
Par. 2.1.9 gesetzt werden. Eine Blokkierung tritt auf, wenn der Strom diesen
Grenzwert überschreitet (siehe Abbildung
4-20). Das Eingeben eines größeren Wertes
als 2 x I
ist programmatisch verhindert.
nMotor
Wenn der Nennstrom des Motors
(Parameter 2.1.9) geändert wird, wird
dieser Parameter automatisch auf die
Werkseinstellung (1,3 x I
gesetzt.
2.7.13 Blockierzeit
Diese Zeitkonstante kann auf einen Wert
zwischen 1,0 und 120,0 Sekunden gesetzt
werden. Sie bestimmt die zulässige
Höchst-dauer für eine Blockierung. Die
Blockierzeit wird von einem internen
Zähler gezählt. Wenn der Wert des
Blockierzeitzählers diesen Grenzwert
überschreitet, wird die Schutzfunktion
ausgelöst (siehe Abbildung 4-21).
nMotor
) zurück-
I
Blockierbereich
Par. 2.7.12
f
Par. 2.7.14
nxlk41.fh8
Abbildung 4-20. Blockierschutzeinstellungen
Blockierzeitzähler
Par. 2.7.13
Blockierzustand
keine Blockierzustand
Auslösebereich
Abschaltung/Warnung
Par. 2.7.11
Zeit
nxlk42.fh8
2.7.14 Blockierfrequenzgrenze
Die Frequenz kann auf einen Wert zwischen 1 und f
Eine Blockierung tritt auf, wenn die Frequenz diesen Grenzwert unterschreitet.
Abbildung 4-21. Blockierzeitzählung
gesetzt werden (Par. 2.1.2).
max
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 46

Parameterbeschreibungen vacon • 45
Parameter 2.7.15 bis 2.7.18, Unterlastschutz:
Allgemeines
Der Motorunterlastschutz soll sicherstellen, dass der Motor belastet wird, wenn der Antrieb in
Betrieb ist. Eine Verringerung der Motorlast kann auf ein Problem mit der Arbeitsmaschine, z. B.
einen gerissenen Riemen oder eine trockengelaufene Pumpe, zurückzuführen sein.
Der Motorunterlastschutz kann über die Unterlastkurve mit den Parametern 2.7.16 (Last im
Feldschwächbereich) und 2.7.17 (Last bei Nullfrequenz) eingestellt werden (siehe unten). Die
Unterlastkurve ist eine quadratische Kurve zwischen der Nullfrequenz und dem Feldschwächpunkt.
Unter 5 Hz ist die Schutzfunktion nicht aktiv (der Unterlastzeitzähler wird gestoppt).
Die Drehmomentwerte für die Einstellung der Unterlastkurve werden in Prozent angegeben und
beziehen sich auf das Nennmoment des Motors. Das Skalierungsverhältnis für den internen
Drehmomentwert wird anhand der Daten auf dem Typenschild des Motors, des Motornennstroms
und des Antriebsnennstroms I
ermittelt. Wenn ein anderer als der dem Umrichter zugeordnete
L
Nennmotor mit dem Antrieb verwendet wird, nimmt die Genauigkeit der Drehmomentberechnung
ab.
2.7.15 Unterlastschutz
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stoppmodus nach Fehler entsprechend Parameter 2.1.12
3 = Fehler, Stoppmodus nach Fehler immer mit Leerauslauf
Bei Auslösung der Schutzfunktion wird der Antrieb gestoppt und der Fehlerzustand
aktiviert.
Wenn der Parameter auf 0 gesetzt und der Unterlastschutz somit deaktiviert wird, wird
der Zeitzähler zurückgesetzt.
2.7.16 Unterlastschutz, Last im Feldschwächbereich
Die Drehmomentgrenze kann auf einen Wert zwischen 10,0 und 150,0 % x T
werden.
Dieser Parameter bestimmt den kleinsten zulässigen Wert des Drehmoments, wenn die
Ausgangsfrequenz über dem Feldschwächpunkt liegt. Siehe Abbildung 4-22.
Wenn Parameter 2.1.9 (Motornennstrom) geändert wird, wird dieser
Parameter automatisch auf die Werks-
Par. 2.7.16
einstellung zurückgesetzt.
Drehmoment
nMotor
gesetzt
Par. 2.7.17
Abbildung 4-22. Einstellen der Mindestlast
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
5 Hz
Unterlastbereich
Feldschwächpunkt
Par. 2.6.3
f
nxlk43.fh8
4
Page 47

46 • vacon Parameterbeschreibungen
2.7.17 Unterlastschutz, Last bei Nullfrequenz
Die Drehmomentgrenze kann auf einen Wert zwischen 5,0 und 150,0 % x T
werden.
Dieser Parameter bestimmt den kleinsten zulässigen Wert des Drehmoments bei
Nullfrequenz. Siehe Abbildung 4-22.
Wenn der Wert von Parameter 2.1.9 (Motornennstrom) geändert wird, wird dieser
Parameter automatisch auf die Werkseinstellung zurückgesetzt.
2.7.18 Unterlastzeit
Diese Zeitkonstante kann auf einen Wert
zwischen 2,0 und 600,0 Sekunden gesetzt
werden.
Sie bestimmt die zulässige Höchstdauer für
einen Unterlastzustand. Die Unterlastzeit
wird von einem Umkehrzähler gezählt. Wenn
der Wert des Unterlastzählers diesen
Grenzwert überschreitet, wird die
Schutzfunktion ent-sprechend Parameter
2.7.15 ausgelöst. Wenn der Antrieb gestoppt
wird, wird der Unterlast-zähler auf 0
zurückgesetzt. Siehe Abbildung 4-23.
Par. 2.7.18
Unterlastzustand
kein Unterlastzustand
Unterlastzeitzähler
Auslösebereich
nMotor
gesetzt
Abschaltung/Warnung
Par. 2.7.15
Zeit
nxlk44.fh8
2.7.19 Reaktion auf Thermistorfehler
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stoppmodus nach Fehler entsprechend Parameter 2.1.12
3 = Fehler, Stoppmodus nach Fehler immer mit Leerauslauf
Wenn der Parameter auf 0 gesetzt wird, wird die Schutzfunktion deaktiviert.
2.7.20 Reaktion auf Feldbusfehler
Hier wird die Reaktion auf Feldbusfehler eingestellt, falls eine Feldbuskarte verwendet
wird. Weitere Informationen finden Sie im Handbuch zu der jeweiligen Feldbuskarte.
Siehe Parameter 2.7.19.
2.7.21 Reaktion auf Steckplatzfehler
Hier wird die Reaktion auf Steckplatzfehler aufgrund von fehlenden oder beschädigten
Karten eingestellt.
Siehe Parameter 2.7.19.
Abbildung 4-23. Funktion des
Unterlastzeitzählers
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 48

Parameterbeschreibungen vacon • 47
2.7.22 Überwachungsfunktion für Istwert
0 Nicht verwendet
1 Warnung, wenn der Istwert unter den mit Parameter 2.7.23 eingestellten Grenzwert
sinkt
2 Warnung, wenn der Istwert den mit Parameter 2.7.23 eingestellten Grenzwert
überschreitet
3 Fehler, wenn der Istwert unter den mit Parameter 2.7.23 eingestellten Grenzwert
sinkt
4 Fehler, wenn der Istwert den mit Parameter 2.7.23 eingestellten Grenzwert
überschreitet
2.7.23 Grenzwert Überwachungsfunktion für Istwert
Mit diesem Parameter können Sie den Grenzwert für den mit Hilfe von Parameter 2.7.22
überwachten Istwert einstellen.
2.7.24 Verzögerung Überwachungsfunktion für Istwert
Mit diesem Parameter können Sie die Verzögerung für die Überwachungsfunktion des
Istwerts (Par. 2.7.22) einstellen.
Wenn dieser Parameter aktiviert ist, wird die gewählte Funktion des Par. 2.7.22 wirksam
erst, wenn der Istwert außerhalb der festgesetzten Grenze für die mit diesem Parameter
bestimmte Zeit bleibt.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 49

48 • vacon Parameterbeschreibungen
4.8 PARAMETER FÜR AUTOMATISCHEN NEUSTART
Die automatische Neustartfunktion ist aktiviert, wenn Par. 2.1.21 = 1. Es werden immer drei
Neustartversuche ausgeführt.
2.8.1 Automatischer Neustart: Wartezeit
Dieser Parameter legt die Wartezeit fest, nach der der Frequenzumrichter nach
Beseitigung des Fehlers einen Neustart des Motors versucht.
2.8.2 Automatischer Neustart: Versuchszeit
Der Frequenzumrichter wird durch die automatische Neustartfunktion erneut gestartet,
wenn alle Fehler beseitigt wurden und die Wartezeit abgelaufen ist.
Abschaltung
Motor Stopp-Signal
Motor Start-Signal
Überwachung
Fehlerzustand
RESET/
Fehlerquittierung
Warte zeit
Par. 2.8.1
Wartezeit
Par. 2.8.1
Neustart 1 Neustart 2
Versu chsz eit
Par. 2.8.2
Autom. Neustart: (3 Versuche)
Wartezeit
Par. 2.8.1
Wartezei t
Par. 2.8.1
Neustart 3
nxlk52.fh8
Abbildung 4-24. Automatischer Neustart
Die Zeitzählung beginnt ab dem ersten automatischen Neustart. Wenn die Anzahl der
während der Versuchszeit auftretenden Fehler drei überschreitet, wird der
Fehlerzustand aktiviert. Andernfalls wird der Fehler nach Ablauf der Versuchszeit
quittiert und die Versuchszeitzählung mit dem nächsten Fehler neu begonnen.
Wenn ein Fehler während der Versuchszeit auch weiterhin bestehen bleibt, ist der
Fehlerzustand aktiv.
2.8.3 Automatischer Neustart, Startfunktion
Mit diesem Parameter wird die Funktion des automatischen Neustarts ausgewählt.
Dieser Parameter bestimmt den Startmodus:
0 = Start mit Rampe
1 = Fliegender Start
2 = Start gemäß Par. 2.1.11
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 50

Parameterbeschreibungen vacon • 49
4.9 PARAMETER FÜR PID-SOLLWERT
2.9.1 PID-Aktivierung
Mit diesem Parameter können Sie den PID-Regler aktivieren bzw. deaktivieren.
0 = PID-Regler deaktiviert
1 = PID-Regler aktiviert
2 = Pumpen- und Lüfterregelung aktiviert
2.9.2 PID-Sollwert
Dieser Parameter definiert, welche Frequenzsollwertquelle für den PID-Regler
ausgewählt wird.
Der Wert ist werkseitig auf 2 eingestellt.
0 = AI1-Sollwert
1 = AI2-Sollwert
2 = PID-Sollwert von der Steuertafelseite (Gruppe K3, Parameter P3.5)
3 = Sollwert vom Feldbus (FBProcessDataIN1)
2.9.3 Eingang Istwert
0 AI1
1 AI2
2 Feldbus (
3 Motordrehmoment
4 Motordrehzahl
5 Motorstrom
6 Motorleistung
7 AI1 – AI2
Istwert 1:
FBProcessDataIN2;
Istwert 2
: FBProcessDataIN3)
2.9.4 PID-Regler, Verstärkung
Dieser Parameter bestimmt die Verstärkung des PID-Reglers. Wenn der Parameter auf
100 % gesetzt wird, bewirkt eine Fehlerwertabweichung von 10 % eine Änderung der
Ausgangsfrequenz des Reglers um 10 %.
Wenn der Parameter auf 0 gesetzt wird, arbeitet der PID-Regler als ID-Regler.
Siehe Beispiele unten.
2.9.5 PID-Regler, I-Zeitkonstante
Dieser Parameter bestimmt die Integrationszeitkonstante des PID-Reglers. Wenn dieser
Parameter auf 1,00 Sekunden gesetzt wird, bewirkt eine Fehlerwertabweichung von
10 % eine Änderung der Ausgangsfrequenz um 10,00 %/s. Wenn der Parameter auf
0,00 s gesetzt wird, arbeitet der PID-Regler als PD-Regler. Siehe Beispiele unten.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 51

50 • vacon Parameterbeschreibungen
2.9.6 PID-Regler, D-Zeitkonstante
Parameter 2.9.6 bestimmt die Derivationszeit des PID-Reglers. Wenn dieser Parameter
auf 1,00 Sekunden gesetzt wird, bewirkt eine Fehlerwertabweichung von 10 % innerhalb
1,00 s eine Änderung der Ausgangsfrequenz um 10,00 %. Wenn der Parameter auf 0,00 s
gesetzt wird, arbeitet der PID-Regler als PI-Regler.
Siehe Beispiele unten.
Beispiel 1:
Um den Fehlerwert mit den vorgegebenen Werten auf Null zu reduzieren, verhält sich
der Frequenzumrichter wie folgt:
Vorgegebene Werte:
Par. 2.9.4, P = 0 % Oberer PID-Grenzw.= 100,0 %
Par. 2.9.5, I-Zeitkonst. = 1,00 s Unterer PID-Grenzw. = 0,0 %
Par. 2.9.6, D-Zeitkonst. = 0,00 s Mindestfrequenz = 0 Hz
Fehlerw.(Sollw. – Prozessw.) = 10,00 % Höchstfrequenz = 50 Hz
In diesem Beispiel arbeitet der PID-Regler praktisch nur als I-Regler.
Entsprechend dem durch Parameter 2.9.5 (I-Zeitkonstante) vorgegebenen Wert erhöht
sich die PID-Ausgangsfrequenz jede Sekunde um 5 Hz (10 % der Differenz zwischen
Höchst- und Mindestfrequenz), bis der Fehlerwert 0 ist.
Hz
PID-Ausg.frequenz
PID
Fehlerwert
10%
I-Teil=5 Hz/s
I
10%
10%
10%
Fehlerwert=10%
1s
I-Teil=5 Hz/s
I-Teil=5 Hz/s
I-Teil=5 Hz/s
I-Teil=5 Hz/s
NX12k70
a
Abbildung 4-25. Funktion des PID-Reglers als I-Regler
4
Beispiel 2:
Vorgegebene Werte:
Par. 2.9.4, P = 100 % Oberer PID-Grenzw. = 100,0 %
Par. 2.9.5, I-Zeitkonst. = 1,00 s Unterer PID-Grenzw. = 0,0 %
Par. 2.9.6, D-Zeitkonst. = 1,00 s Mindestfrequenz = 0 Hz
Fehlerw.(Sollw. – Prozessw.) = ±10 % Höchstfrequenz = 50 Hz
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 52

Parameterbeschreibungen vacon • 51
Wenn der Startbefehl gesetzt wird, ermittelt das System die Differenz zwischen Sollwert
und tatsächlichem Prozesswert und erhöht bzw. senkt (falls der Fehlerwert negativ ist)
die PID-Ausgangsfrequenz entsprechend der I-Zeitkonstante. Nachdem die Differenz
zwischen Sollwert und Prozesswert auf 0 reduziert wurde, wird die Ausgangsfrequenz
um den mit Parameter 2.9.5 übereinstimmenden Wert gesenkt.
Wenn der Fehlerwert negativ ist, reagiert der Frequenzumrichter mit einer
entsprechenden Reduzierung der Ausgangsfrequenz. Siehe Abbildung 4-26.
Hz
PID Ausg.frequenz
D-Teil
D-Teil
D-Teil
Fehlerwert
P-Teil=5 Hz
Fehlerwert=10%
Fehlerwert= -10%
P-Teil= -5 Hz
t
NX12k69
Abbildung 4-26. PID-Ausgangskurve mit den Werten aus Beispiel 2
Beispiel 3:
Vorgegebene Werte:
Par. 2.9.4, P = 100 % Oberer PID-Grenzw. = 100,0 %
Par. 2.9.5, I-Zeitkonst. = 0,00 s Unterer PID-Grenzw. = 0,0 %
Par. 2.9.6, D-Zeitkonst. = 1,00 s Mindestfrequenz = 0 Hz
Fehlerw.(Sollw. – Prozessw.) = ±10 %/s Höchstfrequenz = 50 Hz
Mit dem Anstieg des Fehlerwerts erhöht sich auch die PID-Ausgangsfrequenz
entsprechend den Einstellwerten (D-Zeitkonstante = 1,00 s). Siehe Abbildung 4-27.
Hz
PID Ausg.frequenz
Fehlerwert
D-Teil=10%=5,00 Hz
D-Teil= -10%= -5,00 Hz
P-Teil=100% *PID-Fehler = 5,00Hz/s
10%
1,00 s
NX12k72
Abbildung 4-27. PID-Ausgangsfrequenz mit den Werten aus Beispiel 3
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
a
4
Page 53

52 • vacon Parameterbeschreibungen
2.9.7
Istwert 1, Mindestwertskalierung
Dieser Parameter dient zur Einstellung der Mindestwertskalierung für Istwert 1. Siehe
Abbildung 4-28.
2.9.8 Istwert 1, Höchstwertskalierung
Dieser Parameter dient zur Einstellung der Höchstwertskalierung für Istwert 1. Siehe
Abbildung 4-28.
Skaliertes
Eingangssignal[%]
100
Par.2.9.7=30%
Par.2.9.8=80%
0
0
0
4
6,0
8,8 20,0 mA
Abbildung 4-28. Beispiel für die Istwertsignalskalierung
2.9.9 PID-Fehlerwertinversion
Dieser Parameter ermöglicht die Inversion des Fehlerwerts des PID-Reglers (und somit
die Inversion der PID-Reglerfunktion).
0 Keine Inversion
1 Invertiert
2.9.10 Sleep-Frequenz
Der Frequenzumrichter stoppt automatisch, wenn die Frequenz des Antriebs für einen
längeren als den durch Parameter 2.9.11 bestimmten Zeitraum unter den durch diesen
Parameter definierten Sleep-Pegel fällt. In der Stopp-Phase schaltet der PID-Regler
den Frequenzumrichter wieder in den Betriebsstatus, wenn das Istwertsignal unter den
durch Parameter 2.9.12 festgelegten Wake-up-Pegel fällt bzw. diesen überschreitet.
Siehe Par. 2.9.13 und Abbildung 4-29.
16,0
16,8
nxlk45.fh8
Analogeing. [%]
1008030
10,0 V8,03,0
20,0 mA
2.9.11 Sleep-Verzögerung
Dieser Parameter bestimmt den Mindestzeitraum, in dem der Frequenzumrichter
unterhalb des Sleep-Pegels bleiben muss, bevor der Frequenzumrichter gestoppt wird.
Siehe Abbildung 4-29.
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 54

Parameterbeschreibungen vacon • 53
2.9.12 Wake-up-Pegel
Der Wake-up-Pegel definiert den Wert, unter den der Istwert fallen bzw. den er
überschreiten muss, bevor der Betriebsstatus des Frequenzumrichters
wiederhergestellt wird. Siehe Abbildung 4-29.
2.9.13 Wake-up-Funktion
Dieser Parameter bestimmt, ob der Betriebsstatus wiederhergestellt wird, wenn das
Istwertsignal unter den Wake-up-Pegel (Par. 2.9.12) fällt oder diesen überschreitet.
Siehe Abbildung 4-29 und Tabelle 4-3.
Istwert
Wake up Pegel (Par. 2.1.17)
Zeit
Ausgangsfrequenz
Ausgangsfrequenz
t ≤ Par. 2.1.16)t < (Par.2.1.16)
Sleep
Pegel
(Par. 2.1.15)
Betrieb/sleep
Zustand des
Frequenzumrichter
Betrieb
"Sleep"
nxlk46.fh8
Zeit
Abbildung 4-29. Sleep-Funktion des Frequenzumrichters
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 55

54 • vacon Parameterbeschreibungen
Par.
wert
0
1
Funktion Grenze
Der Betriebsstatus
wird wiederhergestellt, wenn das
Istwertsignal unter
den Wake-up
Pegel fällt.
Der Betriebsstatus
wird wiederhergestellt, wenn das
Istwertsignal den
Wake-up-Pegel
überschreitet
Der durch Parameter 2.9.12 bestimmte Wert wird
in Prozent vom
Istwert-höchstwert
angegeben
Der durch Parameter 2.9.12 bestimmte Wert wird
in Prozent vom
Istwert-höchstwert
angegeben
Beschreibung
Istwertsignal
100%
Istwertsignal
100%
Par. 2.9.12=60%
Start
Stopp
Start
Stopp
Par. 2.9.12=30%
Zeit
Zeit
Der Betriebsstatus
2
wird wiederhergestellt, wenn das
Istwertsignal unter
den Wake-up
Pegel fällt.
Der Betriebsstatus
3
wird wiederhergestellt, wenn das
Istwertsignal den
Wake-up-Pegel
überschreitet
Der durch Parameter 2.9.12 bestimmte Wert wird
in Prozent vom
aktuellen Sollwert
angegeben.
Der durch Parameter 2.9.12 bestimmte Wert wird
in Prozent vom
aktuellen Sollwert
angegeben.
Tabelle 4-3. Wählbare Wake-up-Funktionen.
Istwertsignal
Istwertsignal
100%
Sollwert=50%
Par.2.9.12=60%
Grenze=60%*Sollwert=30%
Start
Stopp
100%
Par.2.9.12=140%
Grenze=140%*Sollwert=70%
Sollwert=50%
Start
Stopp
NXLk59.fh8
Zeit
Zeit
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 56

Parameterbeschreibungen vacon • 55
4.10 PUMPEN- UND LÜFTERREGELUNG
Mit der Pumpen- und Lüfterapplikation können ein Regelantrieb und bis zu drei Hilfsantriebe
gesteuert werden. Der interne PID-Regler des Frequenzumrichters steuert die Drehzahl des
Regelantriebs und gibt Steuersignale zum Starten und Stoppen der Hilfsantriebe, um den
Gesamtfluss zu regeln. Neben den acht standardmäßig bereitgestellten Parametergruppen ist auch
eine Parametergruppe für Funktionen zur Regelung mehrerer Pumpen und Lüfter verfügbar.
Wie der Name schon sagt, wird die Pumpen- und Lüfterapplikation zum Regeln von Pumpen und
Lüftern eingesetzt. Die Applikation verwendet externe Schütze, um zwischen den an den
Frequenzumrichtern angeschlossenen Motoren umzuschalten. Die Autowechsel-Funktion bietet die
Möglichkeit, die Startreihenfolge der Hilfsantriebe zu ändern.
4.10.1 Kurzbeschreibung der Funktion und der hauptsächlichen Parameter
Automatischer Antriebswechsel (Autowechsel P2.10.4)
Der automatische Wechsel der Start- und Stoppreihenfolge wird aktiviert und je nach der
Einstellung für Parameter 2.10.4 (
Hilfsantriebe und den vom Frequenzumrichter geregelten Antrieb angewendet.
Mit Hilfe der
Lüfterautomatik gesteuerten Antriebe in bestimmten Intervallen geändert werden. Der über den
Frequenzumrichter gesteuerte Antrieb kann ebenfalls in die automatische Änderungs- und
Sperrsequenz eingeschlossen werden (Par 2.10.4). Mit der Autowechsel-Funktion können die
Betriebszeiten der Motoren ausgeglichen werden. Außerdem verhindert sie z.B. das Blockieren von
Pumpen aufgrund zu langer Betriebsunterbrechungen.
• Die Autowechsel-Funktion kann mit Parameter 2.10.4 (
• Der automatische Wechsel erfolgt, wenn die mit Parameter 2.10.5 (
eingestellte Zeit abgelaufen ist und die Ausgangsfrequenz unter dem durch Parameter 2.10.5
Autowechsel-Frequenzgrenze
(
• Die Antriebe werden gestoppt und in der neuen Reihenfolge neu gestartet.
• Externe Schütze, die über die Relaisausgänge des Frequenzumrichters angesteuert werden,
stellen die Verbindung zwischen den Antrieben und dem Frequenzumrichter bzw. dem
Versorgungsnetz dar. Wenn der vom Frequenzumrichter geregelte Motor in die AutowechselSequenz einbezogen wird, wird er grundsätzlich über den zuerst aktivierten Relaisausgang
gesteuert. Die anderen, später aktivierten Relais übernehmen die Steuerung der Hilfsantriebe
Mit diesem Parameter werden die Interlock-Eingänge aktiviert (Werte 3 & 4). Die
Verriegelungssignale werden von den Steuerschaltern für die Motoren ausgegeben. Die Signale
(Funktionen) werden mit den Digitaleingängen verknüpft, die unter Verwendung der
entsprechenden Parameter als Interlock-Eingänge programmiert werden. Die Automatik für die
Pumpen- und Lüfterregelung steuert lediglich die Motoren mit Steuerschaltern in AutomatikPosition.
Autowechsel-Funktion
Automatikwahl
kann der Start- und Stoppbefehl der von der Pumpen- und
) definierten Niveau liegt
) entweder nur auf die Hilfsantriebe oder auf die
Autowechsel)
, aktiviert werden.
Autowechsel-Intervall
)
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 57

56 • vacon Parameterbeschreibungen
• Wenn die Verriegelung eines Hilfsantriebs deaktiviert wird und ein anderer, nicht verwendeter
Hilfsantrieb verfügbar ist, wird dieser in Betrieb genommen, ohne den Frequenzumrichter zu
stoppen.
• Wenn die Verriegelung des geregelten Antriebs deaktiviert wird, werden alle Motoren gestoppt
und dann mit der neuen Konfiguration gestartet.
• Wenn die Verriegelung im Status „Betrieb“ reaktiviert wird, werden alle Motoren gestoppt und
dann mit der neuen Konfiguration gestartet. Beispiel:
[P1 P3] [P2 LOCKED] [STOP]
[P1 P2 P3]
Siehe Kapitel 4.10.2, „Beispiele“.
Parameter 2.10.5, Autowechsel-Intervall
Wenn die mit diesem Parameter festgelegte Zeit abgelaufen ist und die Ausgangsfrequenz unter
dem durch Parameter 2.10.7 (
Hilfsantrieben
Ausgangsfrequenz den Wert von P2.10.7 überschreiten, wird der automatische Wechsel nicht
durchgeführt, bevor sie unter diesen Grenzwert sinkt
) definierten Niveau liegt, erfolgt der automatische Wechsel. Sollte die
Autowechsel-Frequenzgrenze
) und 2.10.6 (
Maximale Anzahl von
• Die Zeitzählung wird nur aktiviert, wenn die Start/Stopp-Anforderung an Steuerplatz A aktiv ist.
• Nach dem automatischen Wechsel bzw. nach Entfernen der Start-Anforderung an Steuerplatz A
wird die Zeitzählung zurückgesetzt
Parameter 2.10.6, Maximale Anzahl von Hilfsantrieben und
2.10.7, Autowechsel-Frequenzgrenze
Diese Parameter definieren das Niveau, unter dem die Ausgangsfrequenz bleiben muss, damit der
automatische Wechsel erfolgen kann.
Dieses Niveau wird wie folgt definiert:
• Wenn die Anzahl der laufenden Hilfsantriebe kleiner als der Wert von Parameter 2.10.6 ist, kann
der automatische Wechsel durchgeführt werden.
• Wenn die Anzahl der laufenden Antriebe dem Wert von Parameter 2.10.6 entspricht und die
Frequenz des geregelten Antriebs unterhalb des Werts von Parameter 2.10.7 liegt, kann der
automatische Wechsel durchgeführt werden.
• Wenn der Wert von Parameter 2.10.7 gleich 0,0 Hz ist, kann der automatische Wechsel nur in
Ruhestellung (Stopp und Sleep) erfolgen – unabhängig vom Wert von Parameter 2.10.6.
Telefon: +358-201-2121 • Fax: +358-201-212 205
4
Page 58

Parameterbeschreibungen vacon • 57
4.10.2 Beispiele
Pumpen- und Lüfterautomatik mit Verriegelungen und automatischem Wechsel zwischen 3 Pumpen
(Zusatzkarte OPT-AA oder OPT-B5 erforderlich)
Situation: Ein geregelter Antrieb und zwei Hilfsantriebe.
Parametereinstellungen: 2.10.1= 2
Verwendung von Verriegelungsrückmeldungssignalen, Autowechsel-Funktion zwischen
alle Antriebe aktiviert.
Parametereinstellungen: 2.10.4=4
DIN4 aktiviert (Par 2.2.6 = 0)
Die Verriegelungsrückmeldungssignale werden über den Digitaleingang DIN4 (AI1) und
die Digitaleingänge DIN2 & DIN3 ausgegeben, die mit den Parametern 2.1.17, 2.1.18 und
2.2.4 ausgewählt wurden.
Die Steuerung für Pumpe 1 (par.2.3.1=17) wird über Interlock 1 (DIN 2) aktiviert, die
Steuerung für Pumpe 2 (par.2.3.2=18) über Interlock 2 (par. 2.1.18=10) und die
Steuerung für Pumpe 3 (par.2.3.3=19) über Interlock 3 (DIN4).
Zweidrahtgeber
Sollwertpotenti
o-meter
Istwert
I
(0)4…20 mA
Anschlusskl. Signal
1 +10V
2 AI1+ Spannungseingang Frequenzsollwert /DIN4
3 AI1- Masse
–
+
4 AI2+ PID Istwert
5 AI2-
6 +24V Steuerspannungsausgang
7
GND Masse
8 DIN1 START
9 DIN2 Interlock 1 (par 2.1.17 = 10)
10 DIN3 Interlock 2 (par 2.1.18 = 13)
11 GND Masse
Sollwertausgang
ref
mA
18 AO1+ Ausgangsfrequenz
19 AO1-
A RS 485 Serielle Schnittstelle
B RS 485 Serielle Schnittstelle
21 RO1 Relaisausgang 1
22 RO1
23 RO1
OPT-B5
22 RO1/1 Autowechsel 1 (Pumpe 1 Steuerung), par 2.3.2 = 17
23 RO1/2
25 RO2/1 Autowechsel 2 (Pumpe 2 Steuerung), par 2.3.3 = 18
26 RO2/2
28 RO3/1 Autowechsel 3 (Pumpe 3 Steuerung), par 2.3.4 = 19
29 RO3/2
Analogausgang
FEHLER
Tabelle 4-4. Anschlussbeispiel der Pumpen- und Lüfterautomatik mit
Verriegelungen und automatischem Wechsel zwischen 3 Pumpen
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 59

58 • vacon Parameterbeschreibungen
230 VAC
VACON NXL
24 VDC
DIN2
68
DIN3
9
AI1
10V
10
K2.1
K1
K2
M2/mains
25
26
AOMains
S3
K3
K1
K2
K3.1
K3
M3/Vacon M3/mains
K3.1
NXOPTB5
K3
K2
K1.1
K1
M1/Vacon
AOMains
S1
K1.1
K2
K1
M1/mains
22
23
AOMains
S2
K3
K3
K1
K2.1
K2
Vacon
M2/
Abbildung 4-30. Autowechsel-System mit drei Pumpen, Steuerstromkreis
PE
L1
L2
L3
Q1
F3
F1
F2
28
29
K1
K2
K3
NX12k106.dsf
F2
VACON
NX12k104.ds4
K1
L1 L2 L3
UVW
M1
K1.1
K2
PE
UVW
M
3
M2
K2.1
UVW
M
3
PE
K3
M2
K3.1
PE
UVW
M
3
Abbildung 4-31. Beispiel für den automatischen Wechsel zwischen drei Pumpen, Hauptstromkreis
4
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 60

Parameterbeschreibungen vacon • 59
Pumpen- und Lüfterautomatik mit Verriegelungen und automatischem Wechsel zwischen 3 Pumpen
(Zusatzkarte OPT-AA oder OPT-B5 erforderlich)
Situation: Ein geregelter Antrieb und ein Hilfsantrieb.
Parametereinstellungen: 2.10.1= 1
Verwendung von Verriegelungsrückmeldungssignalen, Autowechsel-Funktion zwischen
alle Antriebe aktiviert.
Parametereinstellungen: 2.10.4=4
Die Verriegelungsrückmeldungssignale werden über den Digitaleingang DIN2 (par.
2.1.17) und DIN3 (par. 2.1.18) ausgegeben.
Die Steuerung für Pumpe 1 (par.2.3.1=17) wird über Interlock 1 (DIN2, P2.1.17) aktiviert
und die Steuerung für Pumpe 2 (par.2.3.2=18) über Interlock 3 (par. 2.1.18=13)
Sollwertpotentiometer
Anschlusskl. Signal
1 +10V
2 AI1+ Spannungseingang Frequenzsollwert /DIN4
Sollwertausgang
ref
Zweidrahtgeber
Istwert
I
(0)4…20 mA
3 AI1- Masse
–
+
mA
4 AI2+ PID Istwert
5 AI2-
6 +24V Steuerspannungsausgang
7
GND Masse
8 DIN1 START
9 DIN2 Interlock 1 (par 2.1.17 = 10)
10 DIN3 Festdrehzahl 1 (par 2.1.18 = 6)
11 GND Masse
18 AO1+ Ausgangsfrequenz
19 AO1-
A RS 485 Serielle Schnittstelle
B RS 485 Serielle Schnittstelle
21 RO1 Autowechsel 1 (Pumpe 1 Steuerung)
22 RO1
23 RO1
Analogausgang
par 2.3.1. = 17
OPT-AA
X1
1 +24V Steuerspannungsausgang max. 150 mA
2 GND Masseanschluss für Steuerung, z. B. für +24V und DO
3 DIN1 Festdrehzahl 2, par 2.2.1 = 7
4 DIN2 Fehlerquittierung, par 2.2.2 = 4
5 DIN3 PID deaktivieren (Frequenzsollwert aus AI1), par 2.2.3 = 11
6 DO1 Betrieb, par 2.3.4 = 1
X2
22 RO1/NO Autowechsel 2 (Pumpe 1 Steuerung), par 2.3.2 = 18
23 RO1/COM
Offener Kollektor Ausgang, 50 mA/48V
Tabelle 4-5. Anschlussbeispiel der Pumpen- und Lüfterautomatik mit
Verriegelungen und automatischem Wechsel zwischen 2 Pumpen
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 61

60 • vacon Parameterbeschreibungen
230 VAC
OPT-AA
22
23
RO1
VACON NXOPTA2
24 VDC
DIN2
12
9
DIN2 DIN3
25
RO2
RO1
26
DIN3
10
K1
K2.1
K2
M2/
Autom.OMains
S2
Vacon
K1
K2
K2.1
NX12k105.dsf
M2/mains
K1
K2
K1.1
M1/Vacon
Autom.OMains
S1
K2
K1
K1.1
M1/mains
Abbildung 4-32. Autowechsel-System mit zwei Pumpen, Steuerstromkreis
PE
L1
L2
L3
Q1
F3
L1 L2 L3
VACON
UVW
F1
K1.1
F2
K2.1
4
K1
NX12k107.ds4
UVW
M1
K2
PE
UVW
M
3
M2
PE
M
3
Abbildung 4-33. Beispiel für den automatischen Wechsel zwischen zwei Pumpen, Hauptstromkreis
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 62

Parameterbeschreibungen vacon • 61
4.10.3 Parameterbeschreibungen
2.10.1 Anzahl der Hilfsantriebe
Mit diesem Parameter wird die Anzahl der eingesetzten Hilfsantriebe definiert. Die
Funktionen zur Steuerung der Hilfsantriebe (Parameter 2.10.4 bis 2.10.7) können mit
Relais- oder Digitalausgängen verknüpft werden.
2.10.2 Startverzögerung der Hilfsantriebe
Die Frequenz des über den Frequenzumrichter geregelten Antriebs muss für die Dauer
der mit diesem Parameter definierten Zeit oberhalb der Startfrequenz des Hilfsantriebs
bleiben, bevor dieser gestartet wird. Die eingestellte Verzögerung gilt für alle
Hilfsantriebe. Dadurch werden unnötige Starts aufgrund kurzfristiger Überschreitungen
der Startfrequenz vermieden.
2.10.3 Stoppverzögerung der Hilfsantriebe
Die Frequenz des über den Frequenzumrichter geregelten Antriebs muss für die Dauer
der mit diesem Parameter definierten Zeit oberhalb der Stoppfrequenz des Hilfsantriebs
bleiben, bevor dieser gestoppt wird. Die eingestellte Verzögerung gilt für alle
Hilfsantriebe. Dadurch werden unnötige Stopps aufgrund kurzzeitiger
Unterschreitungen der Stoppgrenze vermieden.
2.10.4 Autowechsel
0= Autowechsel deaktiviert
1= Autowechsel aktiviert für Hilfspumpen.
Der über den Frequenzumrichter geregelte Antrieb bleibt unverändert. Nur das
Hauptschütz wird für die einzelnen Hilfsantriebe benötigt.
M
Motor aux.1
M
Motor aux.2
Va c on
M
Abbildung 4-34. Nur auf die Hilfsantriebe angewendeter automatischer Wechsel.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 63

62 • vacon Parameterbeschreibungen
2= Autowechsel für den Frequenzumrichter und die Hilfsantriebe.
Der über den Frequenzumrichter geregelte Antrieb wird in die Automatik eingeschlossen, und
es werden zwei Schütze pro Antrieb für den Anschluss an das Netz bzw. an den
Frequenzumrichter benötigt
Va c on
Hilfskontakt
M
NX12k97.fh8
Antrieb 1
Hilfskontakt
M
Antrieb 2
Abbildung 4-35. Automatischer Wechsel mit allen Antrieben
3= Autowechsel und Interlocks (nur Hilfsantriebe)
Der über den Frequenzumrichter geregelte Antrieb bleibt unverändert. Nur das Hauptschütz
wird für die einzelnen Hilfsantriebe benötigt. Interlocks für Autowechselausgänge 1, 2, 3 (oder
DIE1,2,3) können mit den Parametern 2.1.17, 2.1.18 und 2.2.4 ausgewählt werden.
4= Autowechsel und Interlocks (Frequenzumrichter und Hilfsantriebe)
Der über den Frequenzumrichter geregelte Antrieb wird in die Automatik eingeschlossen, und
es werden zwei Schütze pro Antrieb für den Anschluss an das Netz bzw. an den
Frequenzumrichter benötigt. Interlocks für Autowechselausgänge 1, 2, 3 (oder DIE1,2,3)
können mit den Parametern 2.1.17, 2.1.18 und 2.2.4 ausgewählt werden.
4
2.10.5
Autowechsel-Intervall
Wenn die mit diesem Parameter festgelegte Zeit abgelaufen ist und die
Ausgangsfrequenz unter dem durch Parameter 2.10.7 (
und 2.10.6 (
Maximale Anzahl von Hilfsantrieben
) definierten Niveau liegt, erfolgt der
Autowechsel-Frequenzgrenze
automatische Wechsel. Sollte die Ausgangsfrequenz den Wert von P2.10.7,
überschreiten, wird der automatische Wechsel nicht durchgeführt, bevor sie unter
diesen Grenzwert sinkt.
• Die Zeitzählung wird nur aktiviert, wenn die Start/Stopp-Anforderung aktiv ist.
• Die Zeitzählung wird nach dem automatischen Wechsel zurückgesetzt.
Telefon: +358-201-2121 • Fax: +358-201-212 205
)
Page 64

Parameterbeschreibungen vacon • 63
2.10.6 Maximale Anzahl von Hilfsantrieben
2.10.7 Autowechsel-Frequenzgrenze
Diese Parameter definieren das Niveau, unter dem die Anzahl der laufenden
Hilfsantrieve bzw. die Ausgangsfrequenz bleiben muss, damit der automatische Wechsel
erfolgen kann.
Dieses Niveau wird wie folgt definiert:
• Wenn die Anzahl der laufenden Hilfsantriebe kleiner als der Wert von Parameter
2.10.6 ist, kann der automatische Wechsel durchgeführt werden.
• Wenn die Anzahl der laufenden Antriebe dem Wert von Parameter 2.10.6 entspricht
und die Frequenz des geregelten Antriebs unterhalb des Werts von Parameter 2.10.7
liegt, kann der automatische Wechsel durchgeführt werden.
• Wenn der Wert von Parameter 2.10.7 gleich 0.0 Hz ist, kann der automatische
Wechsel nur in Ruhestellung (Stopp und Sleep) erfolgen – unabhängig vom Wert von
Parameter 2.10.6.
2.10.8
Ausgangsfrequenz
Par. 2.10.7
Autowechsel,
Frequenzgrenze
Ein-/AusSteuerung von
Hilfsantrieb 1
Ein-/AusSteuerung von
Hilfsantrieb 2
Par. 2.10.6 = 1
Hilfsantriebe,
maximale Anzahl
Par. 2.10.5
Autowechsel-Intervall
Autowechsel
Zeit
Par. 2.10.5
Autowechsel-Intervall
NXLK56.fh8
Abbildung 4-36. Autochange interval and limits
Startfrequenz, Hilfsantrieb 1
Der Antrieb wird gestartet, wenn die Frequenz des über den Frequenzumrichter
geregelten Antriebs den mit diesen Parametern definierten Grenzwert um 1Hz
überschreitet. Die Überfrequenz von 1 Hz bildet eine Hysterese, um ein unnötiges
Starten und Stoppen zu vermeiden. Siehe auch Parameter 2.1.1 und 2.1.2 auf Seite 18.
2.10.9 Stoppfrequenz, Hilfsantrieb 1
Der Hilfsantrieb wird gestoppt, wenn die Frequenz des über den Frequenzumrichter
geregelten Antriebs den mit diesen Parametern definierten Grenzwert um 1 Hz
unterschreitet. Die Stoppfrequenzgrenze definiert außerdem den Wert, auf den die
Frequenz des über den Frequenzumrichter geregelten Antriebs nach dem Starten des
Hilfsantriebs fällt.
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
Page 65

64 • vacon Parameterbeschreibungen
4.11 STEUERTAFELPARAMETER
3.1 Steuerplatz
Mit diesem Parameter kann der aktive Steuerplatz gewechselt werden. Weitere
Informationen erhalten Sie in der Vacon NXL-Betriebsanleitung, Kapitel 7.4.3.
3.2 Steuertafelsollwert
Mit diesem Parameter kann der Frequenzsollwert über die Steuertafel eingestellt
werden. Weitere Informationen erhalten Sie in der Vacon NXL-Betriebsanleitung, Kapitel
7.4.3.2
3.3 Drehrichtung (über die Steuertafel)
0 Vorwärts: Wenn die Steuertafel aktiver Steuerplatz ist, dreht der Motor vorwärts.
1 Rückwärts:Wenn die Steuertafel aktiver Steuerplatz ist, dreht der Motor
Weitere Informationen erhalten Sie in der Vacon NXL-Betriebsanleitung, Kapitel 7.4.3.3.
3.4 Stop-Taste aktiviert
Wenn die Stop-Taste als „Notaus“ fungieren soll, über die der Antrieb unabhängig von
dem gewählten Steuerplatz gestoppt werden kann, setzen Sie diesen Wert auf 1.
Siehe auch Parameter 3.1.
3.5 PID-Sollwert 1
Der Steuertafelsollwert 1 des PID-Reglers kann auf einen Wert zwischen 0 % und 100 %
eingestellt werden. Dieser Sollwert ist der aktive PID-Sollwert, wenn Parameter
2.9.2 = 2.
3.6 PID-Sollwert 2
rückwärts.
4
Der Steuertafelsollwert 2 des PID-Reglers kann auf einen Wert zwischen 0 % und 100 %
eingestellt werden. Dieser Sollwert ist aktiv, wenn die Funktion des gewählten
Digitaleingangs = 12 (siehe Seiten 7 und 8) und der Kontakt geschlossen ist.
Telefon: +358-201-2121 • Fax: +358-201-212 205
Page 66

Parameterbeschreibungen vacon • 65
5. STEUERSIGNALLOGIK DER MULTI-CONTROL-APPLIKATION
DIN3
Erw.DIE1
Erw.DIE3
DIN2
DIN3
AI1
AI2
Festdrehzahl 1
Festdrehzahl 2
> 1
PID-Regler aus
2.2.21 Sollw.ausw., Feldbus
2.2.20 Sollw.ausw., St.tafel
2.1.14 Sollw.ausw., Klemml.
Schneller
Langs.
Motorpotentiometer
2.9.2 PID-Sollwert
P3.5 PID-Sollwert
Sollwert über
Feldbus
(FBProcessData IN 1)
R3.2 St.tafelsollwert
0
1
2
PID
3
0
1
2
I/OSollw.
3
2.1.14
4
DIN3 & Erw.DIE1
DIN3
Erw.DIE1
PID-Sollwer t 2 (DIN#=12)
freigeg eben
R3.6 PID-Sollwert 2
Istwerteingang, par. 2.9.3
2.1.2 Höchstfrequenz
2.1.20 Festdrehzahl 1
2.1.21 Festdrehzahl 2
PID
P2.9.1 Aktivierung
des PID-Reglers
0
1
2
K
3
4
DIN1
DIN2
Sollwert über Feldbus
Start/Stop über Feldbus
Drehrichtung ü. Feldbus
Vorwärts
Programmierb.
Start/Stopp u.
Rückwärts
(prog rammier bar)
Drehrichtungslogik
5
0
1
2
3
F
4
5
3.3 Drehrichtung
St.tafel
Feldbus
3.1 St eu er pla t z
I/O
Interner
Frequenzsollwert
Reset-Taste
Start/Stop-Tasten
Interner Start/Stopp
Interne Drehrichtung
(ü. Steuertafel)
ERW DIE2 Fehlerquittierung (programmierbar) > Interne Fehlerquittierung
Abbildung 5-1. Steuersignallogik der Multi-Control-Applikation
24.Stunden-Service +358 40 837 1150 • Email: vacon@vacon.com
4
 Loading...
Loading...