


vacon nx
®
convertisseurs de fréquence
all in one
manuel de l'applicatif

A
J
B C D E F G H I
Index Min Max Unit Default
Cust
ID DescriptionParameter
PRÉFACE VACON · 3
PRÉFACE
ID de document : DPD01215E
Date : 1.12.2016
Code du logiciel :
Applicatif de base = ASFIFF01
•
Applicatif standard = ASFIFF02
•
Applicatif de commande local/distant =
•
ASFIFF03
Applicatif de commande séquentielle =
•
ASFIFF04
Applicatif de régulation PID = ASFIFF05
•
Applicatif Multi-configuration
•
NXS = ASFIFF06
-
NXP = APFIFF06
-
Applicatif de commande pour pompes et
•
ventilateurs = ASFIFF07
À PROPOS DE CE MANUEL
Ce manuel relève du droit d'auteur de Vacon Ltd. All Rights Reserved. Ce manuel est sujet à
modification sans notification préalable. L'anglais est la langue d'origine des présentes
instructions.
Ce manuel présente les fonctions du convertisseur de fréquence VACON® et décrit comment
utiliser le convertisseur.
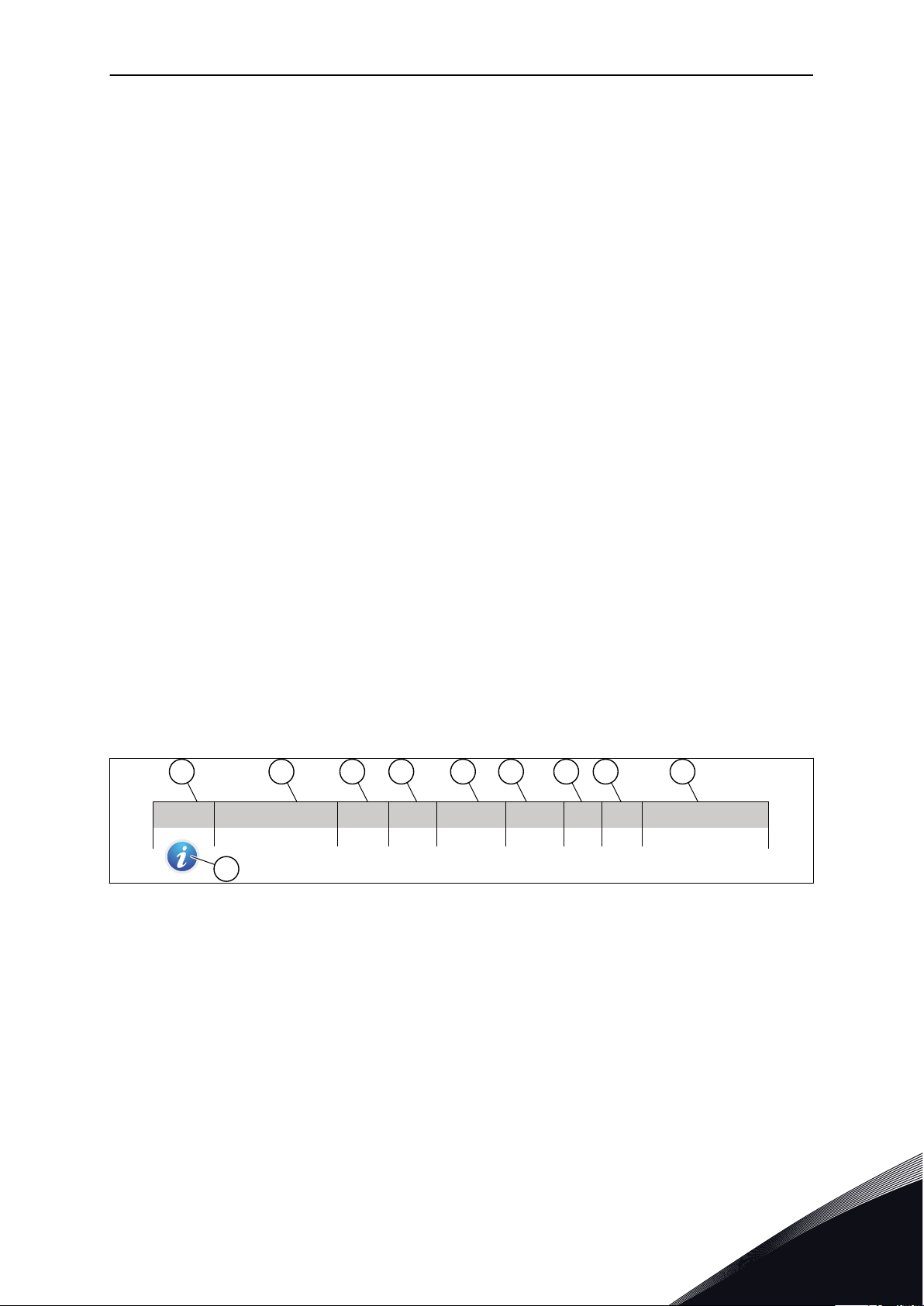
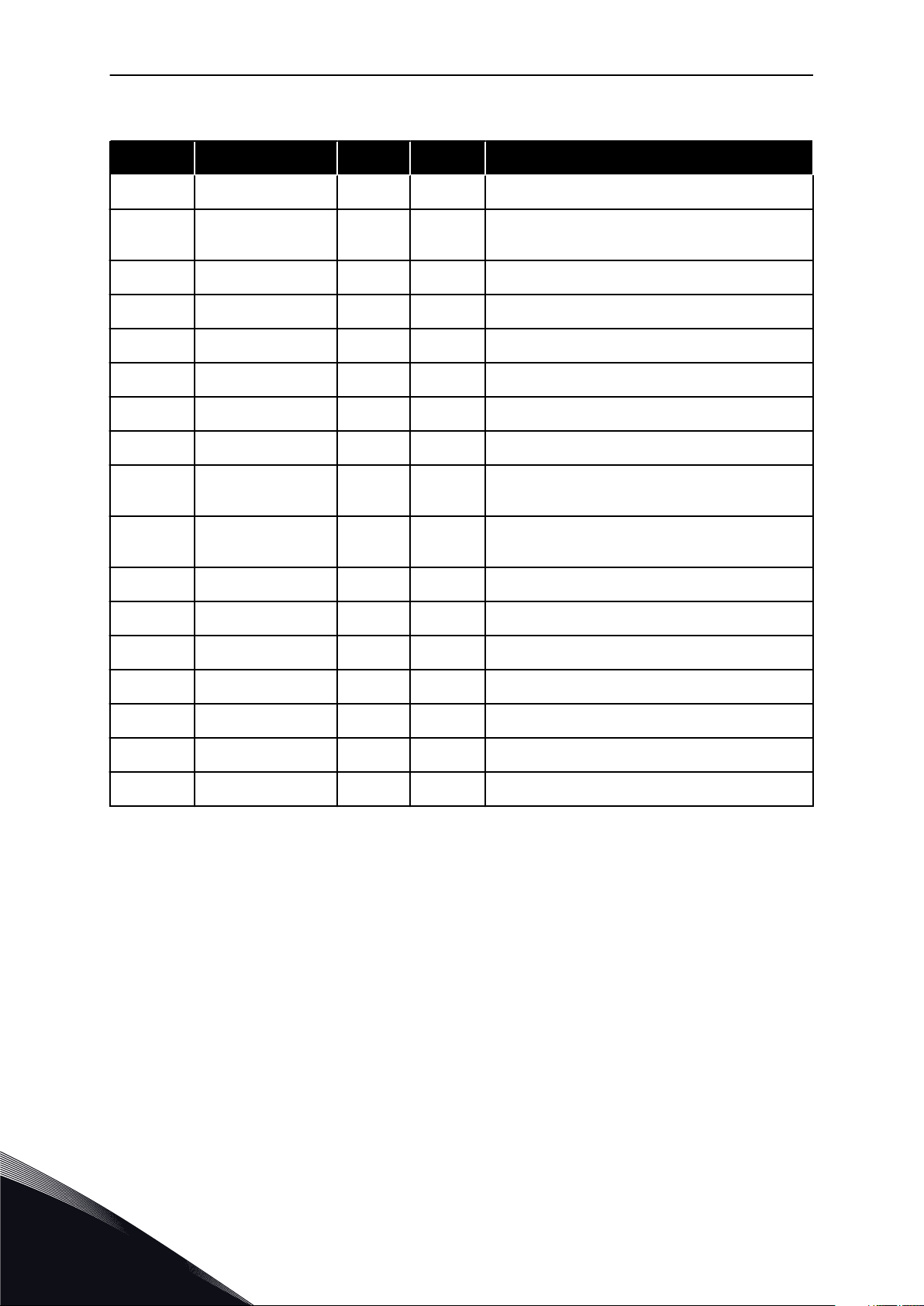
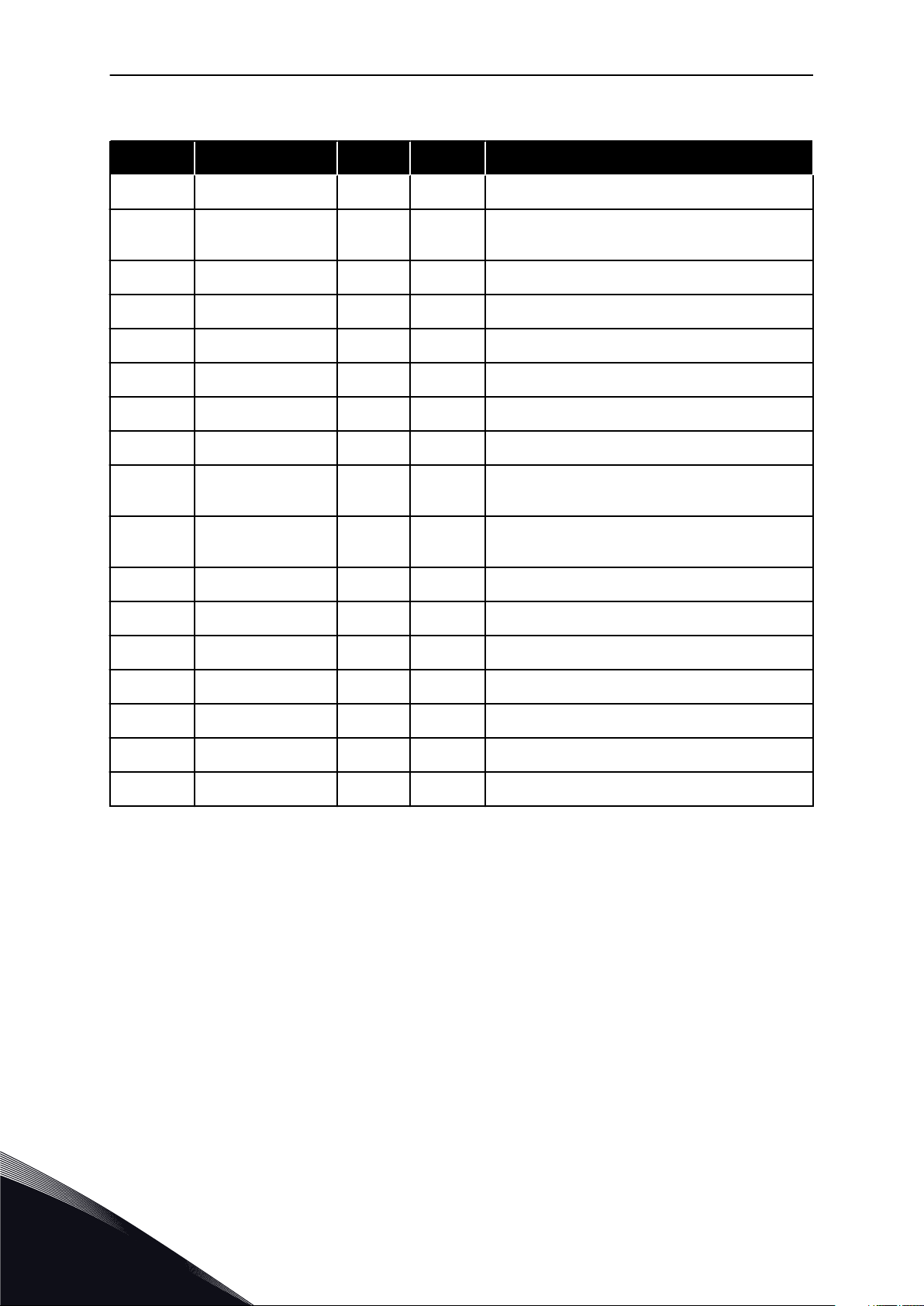
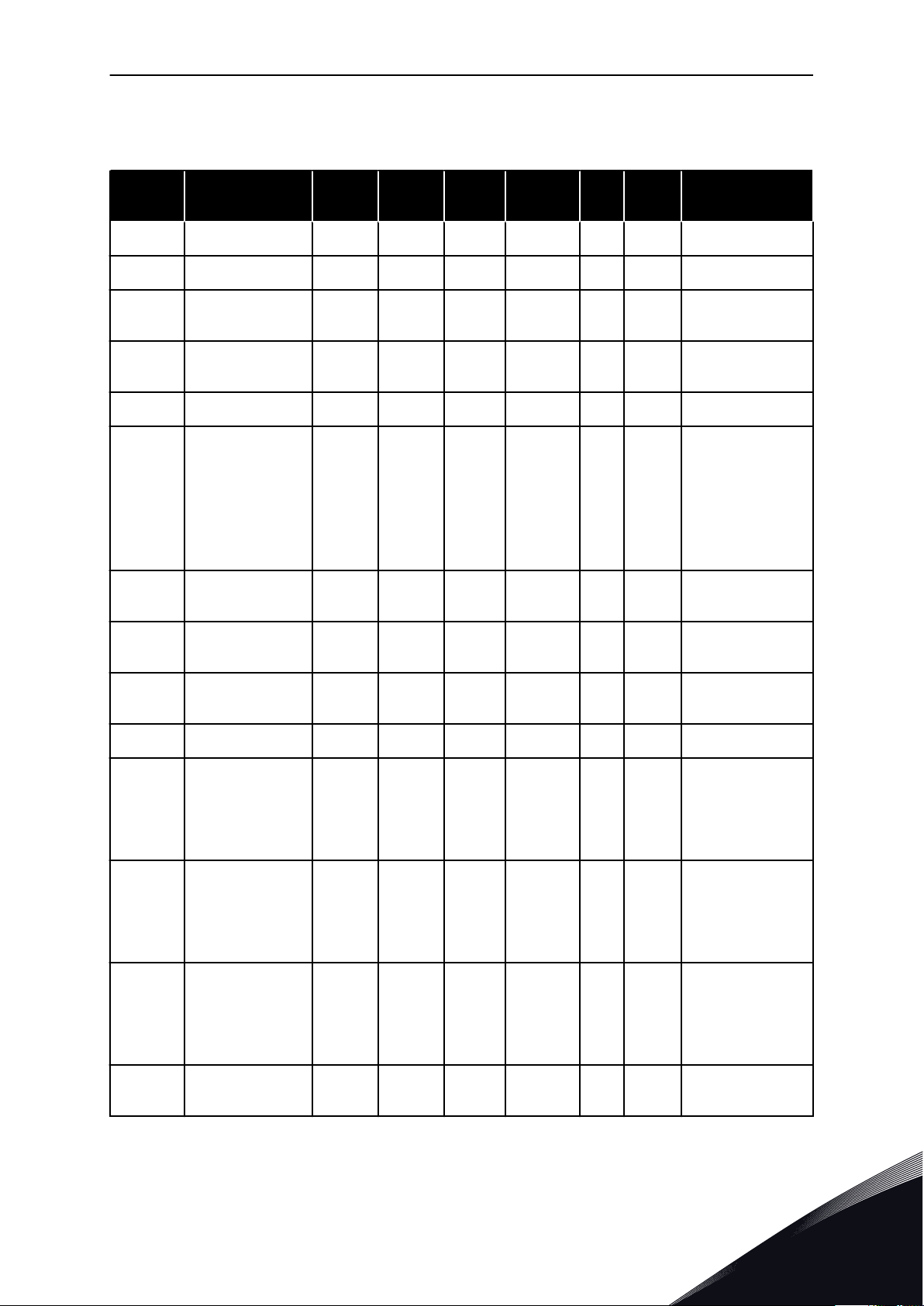
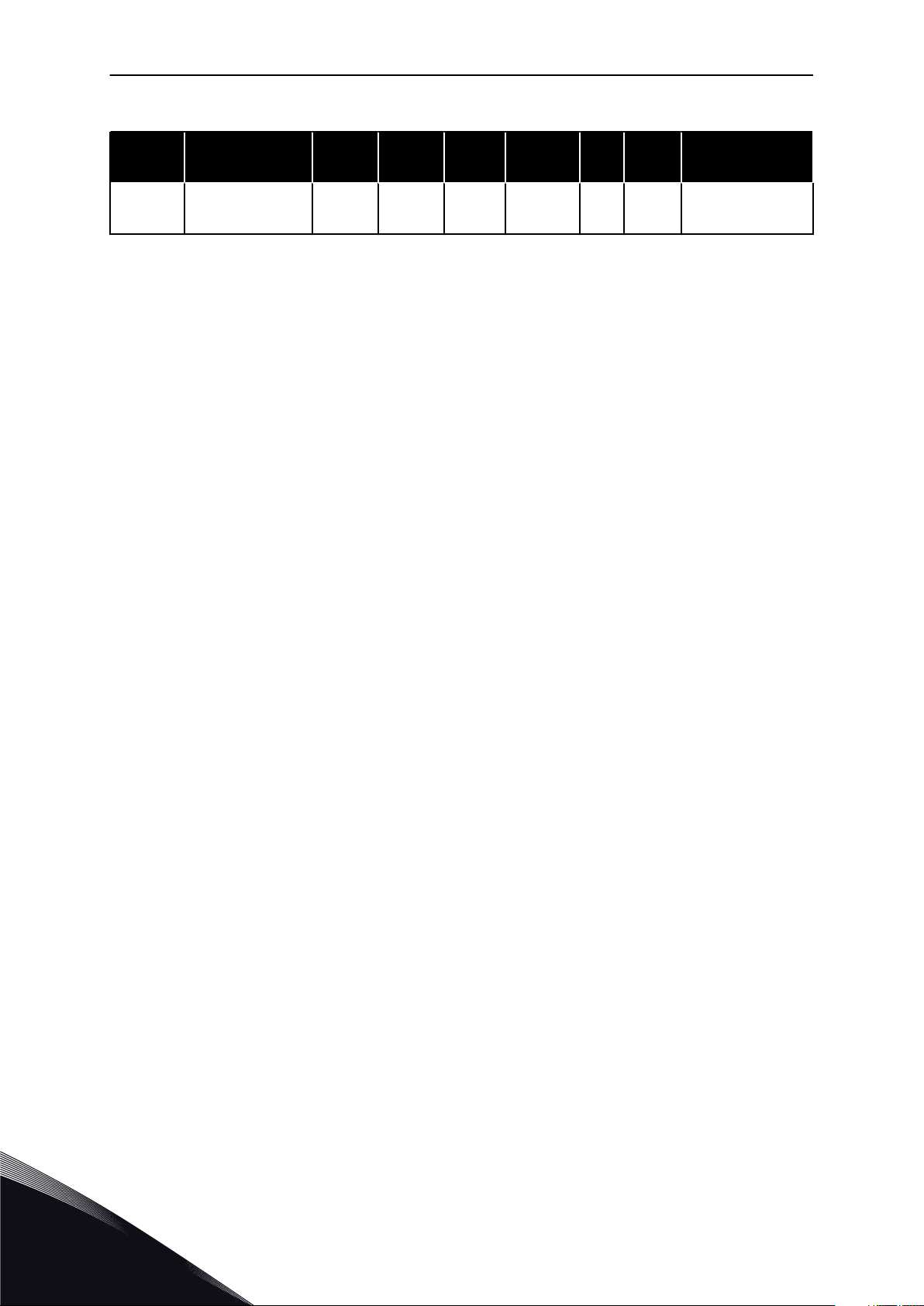
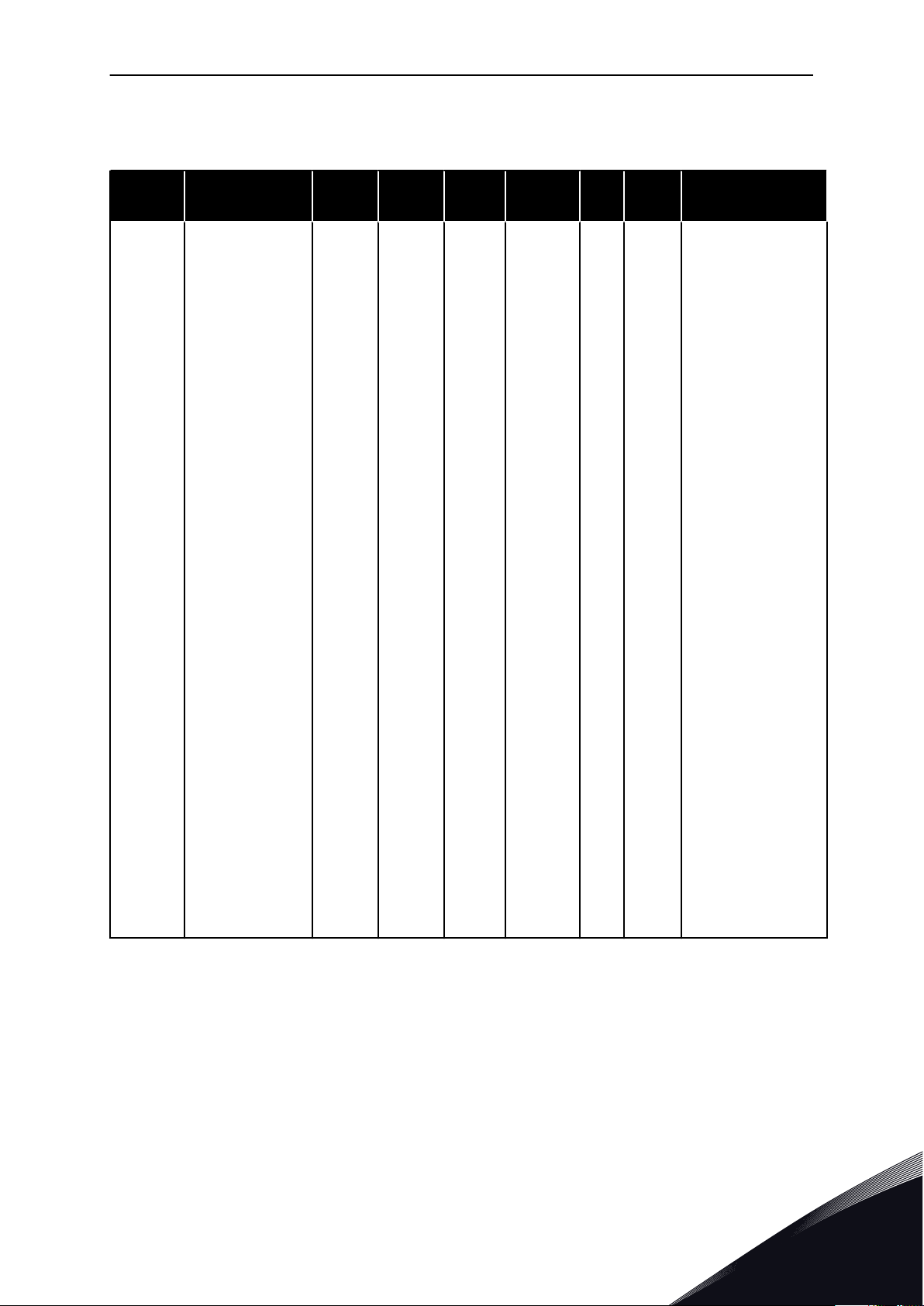
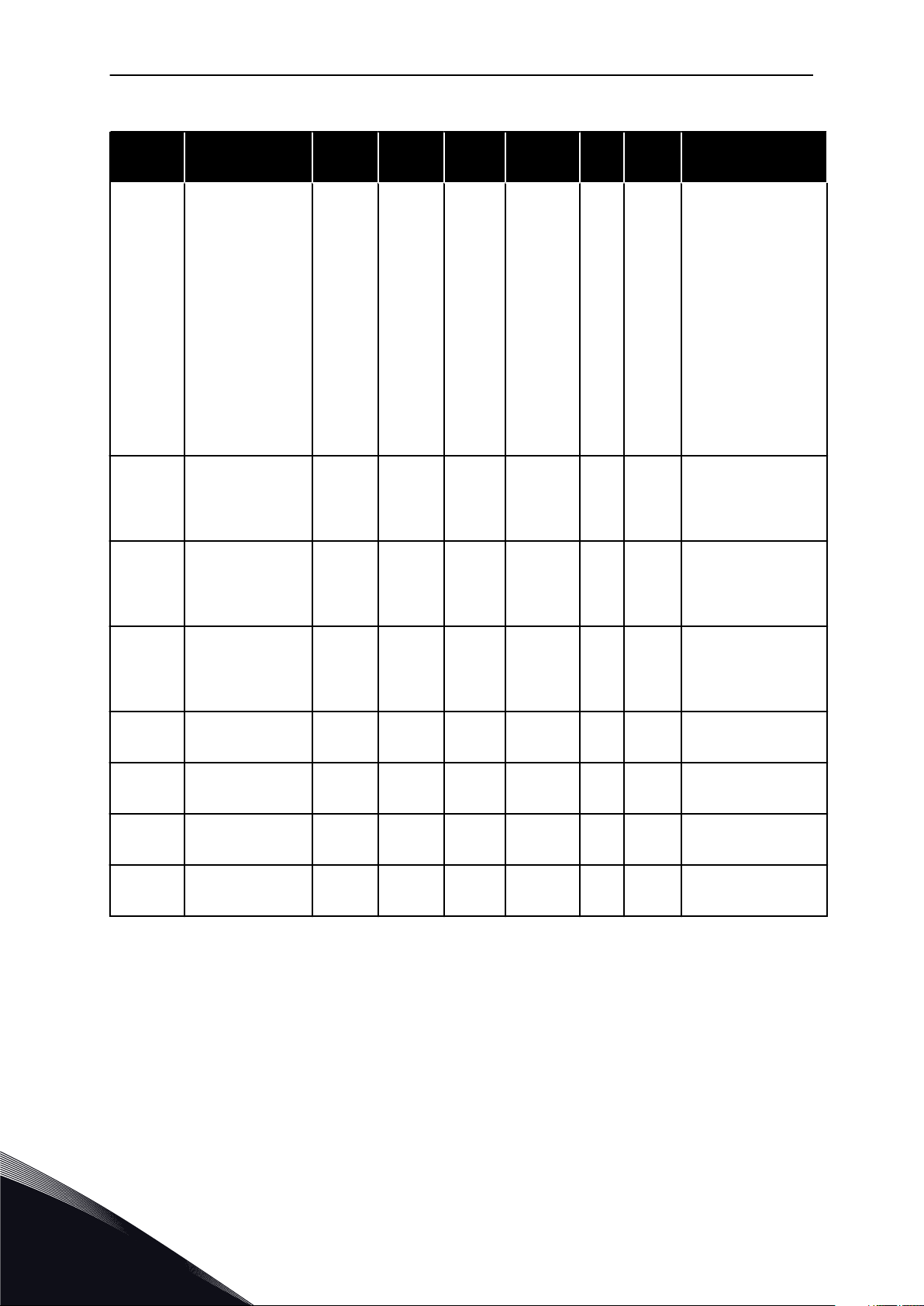
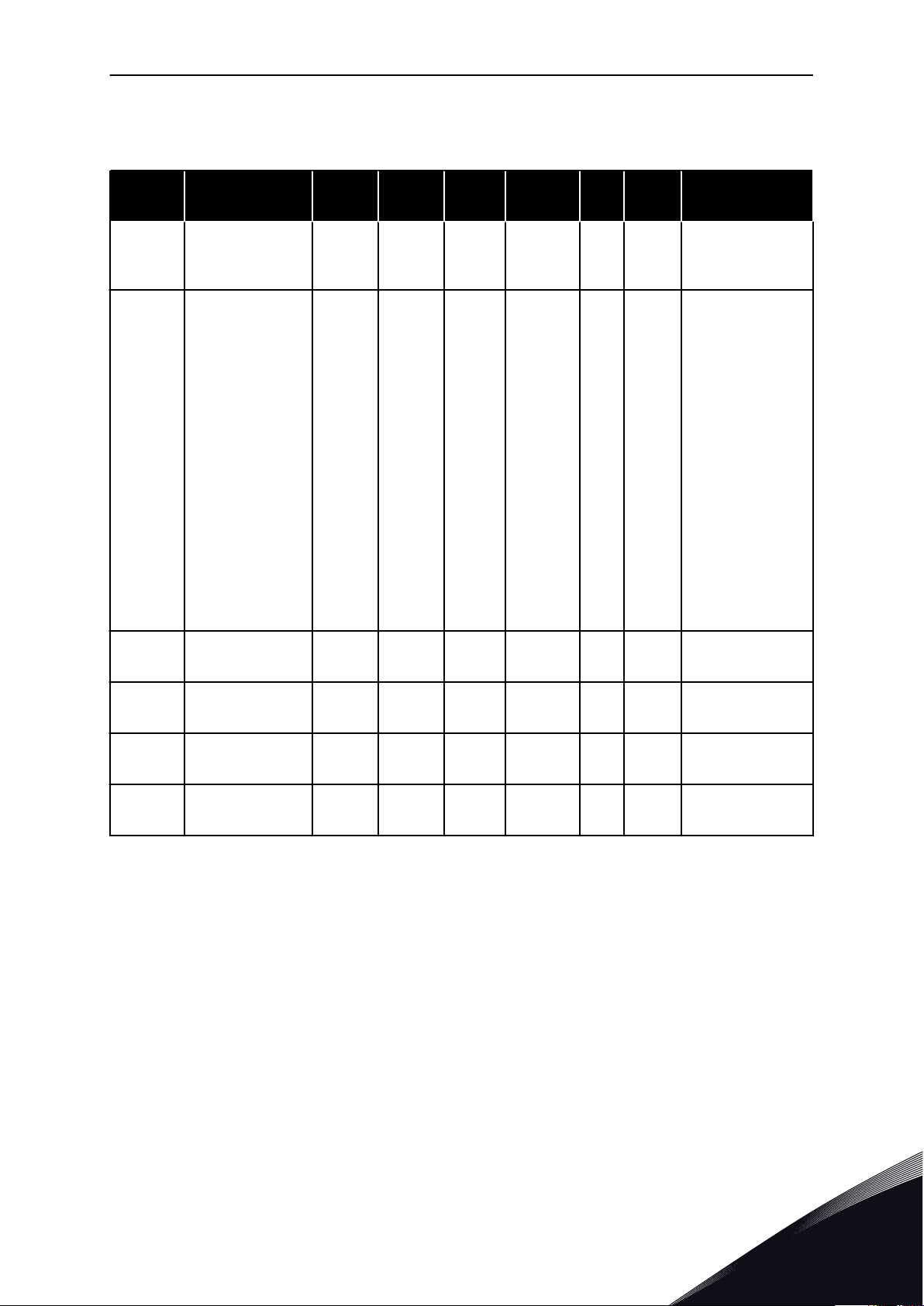
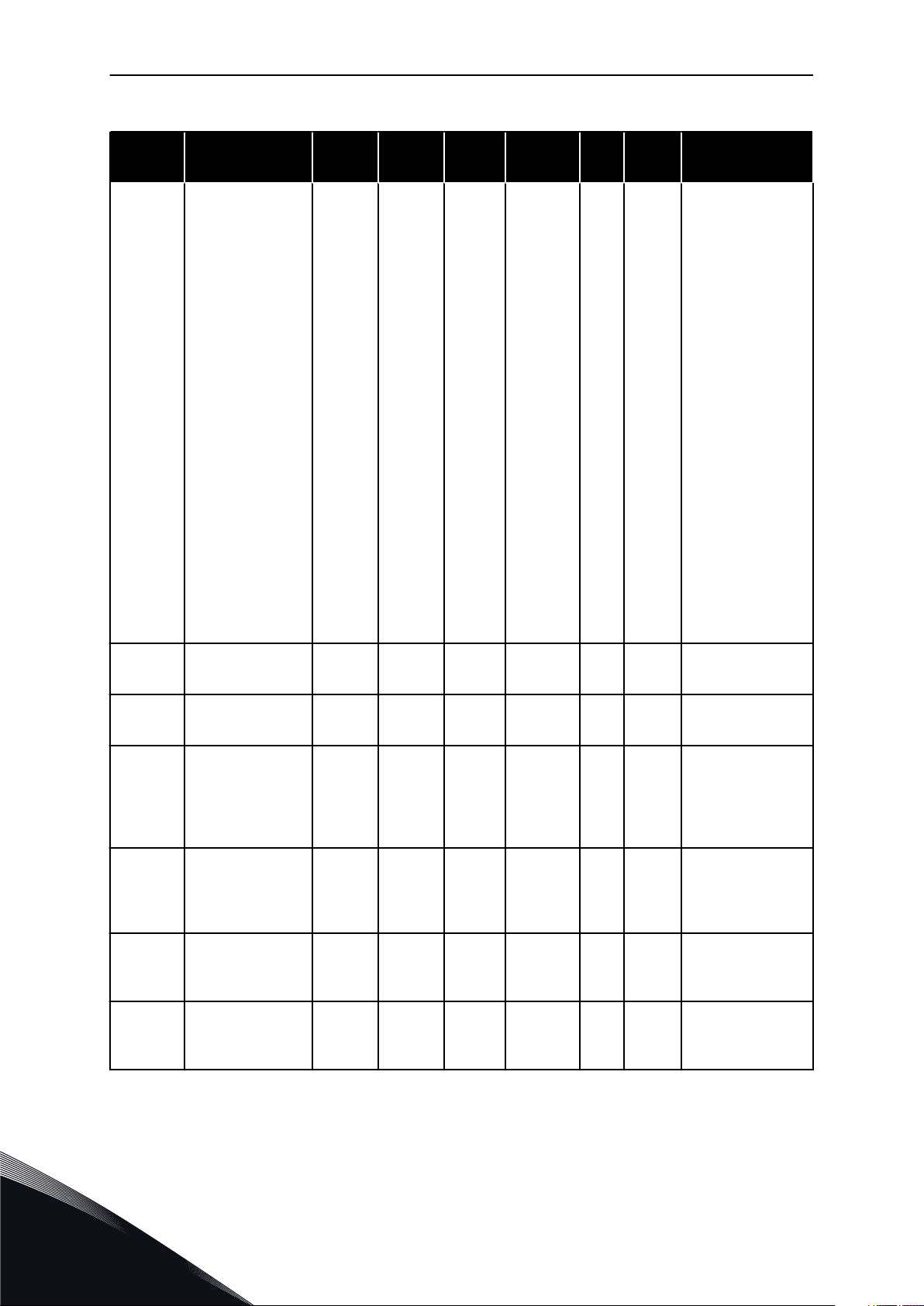
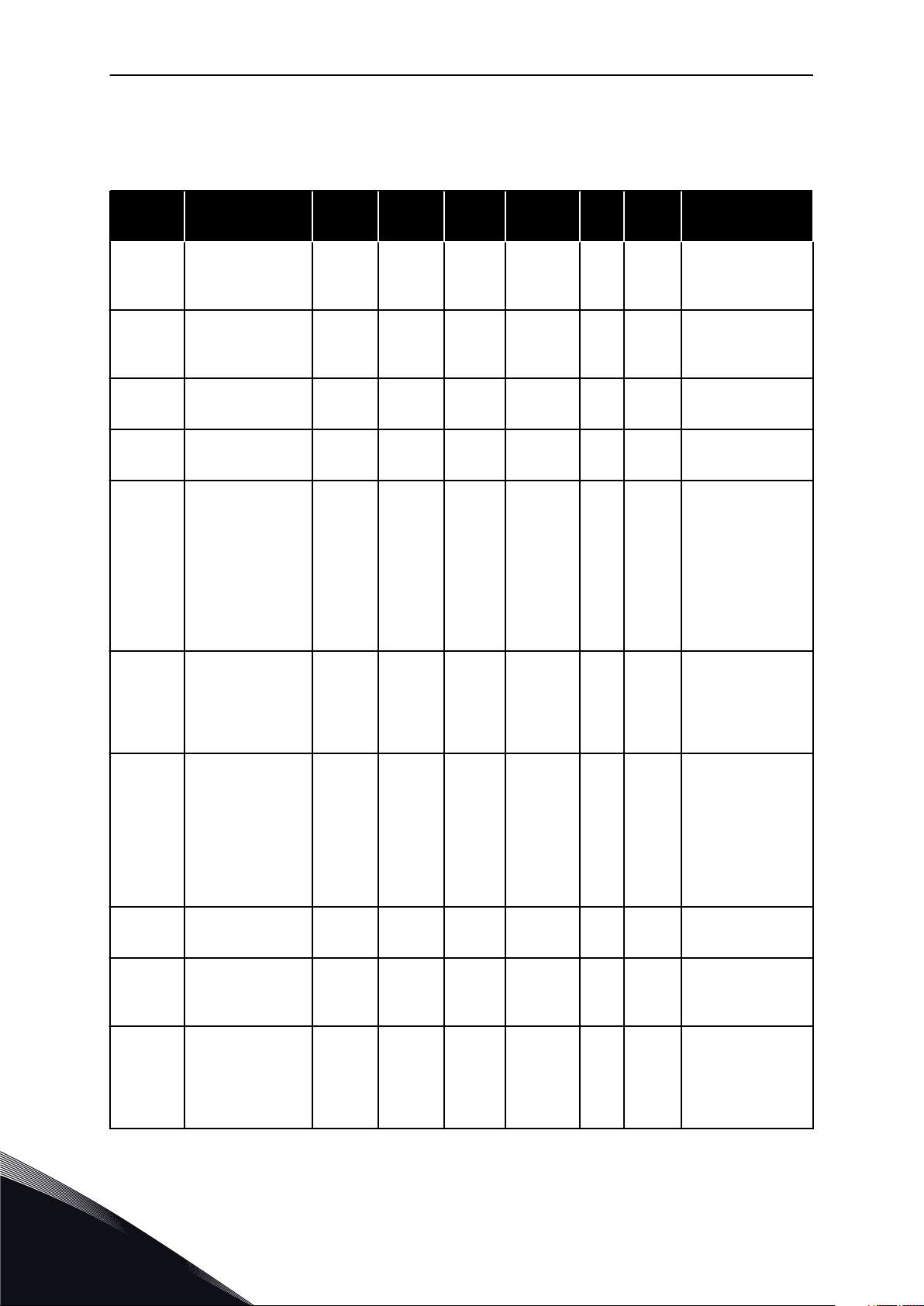
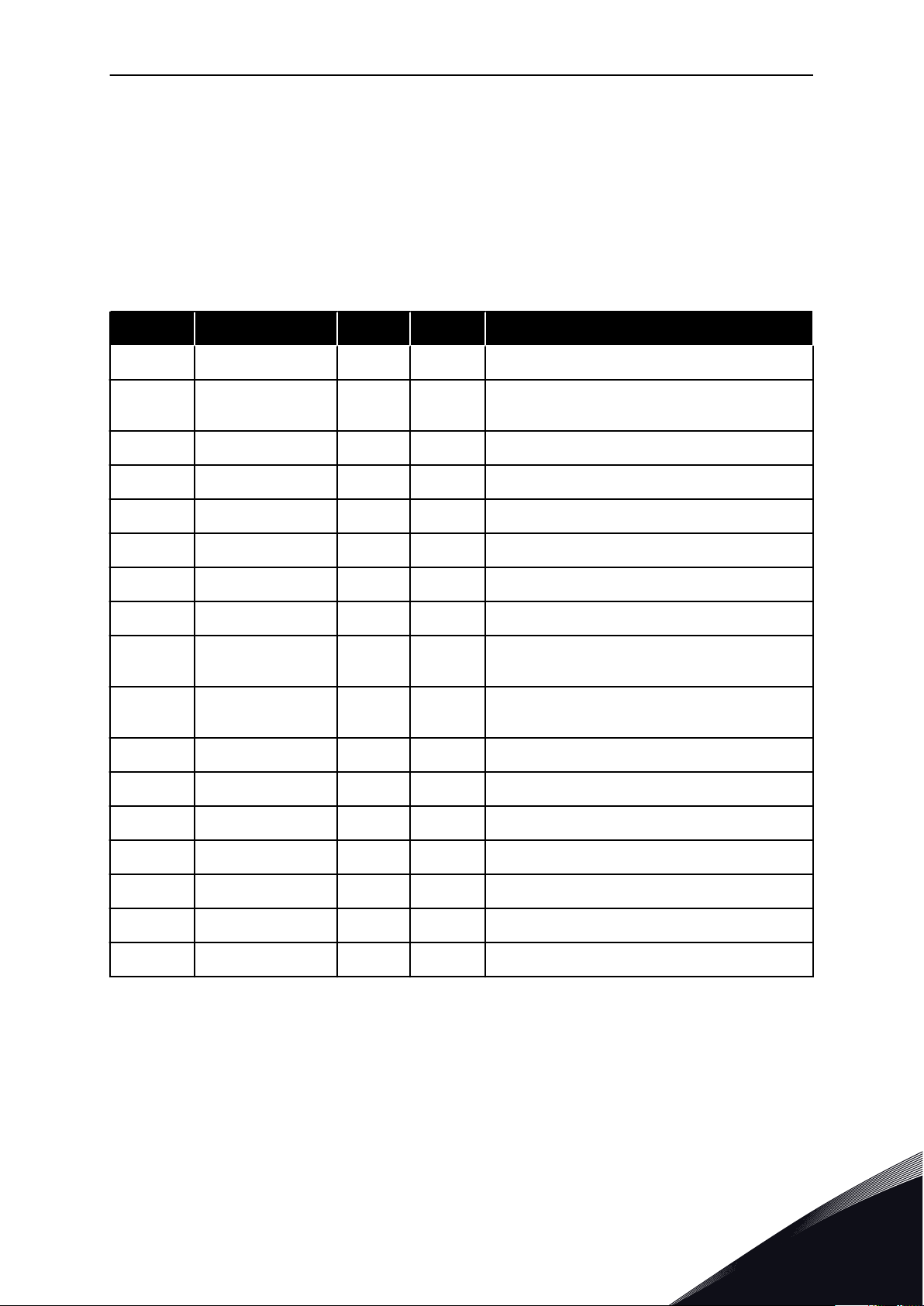
Ce manuel comporte un grand nombre de tableaux de paramètres. Les instructions
suivantes vous expliquent comment les lire.
A. Emplacement du paramètre dans le
menu, autrement dit, numéro du
paramètre.
B. Nom du paramètre.
C. Valeur minimale du paramètre.
D. Valeur maximale du paramètre.
E. Unité de valeur du paramètre. Affichée
uniquement si elle est disponible.
F. Valeur configurée en usine.
G. Réglage personnalisé par l'utilisateur.
H. Numéro d'identification du paramètre.
I. Brève description des valeurs du
paramètre et/ou de sa fonction.
J. Ce symbole indique que vous pouvez
trouver des informations
complémentaires sur le paramètre au
chapitre Description des paramètres.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 4 PRÉFACE
NOTE! You can download the English and French product manuals with applicable safety, warning and caution
information from http://drives.danfoss.com/knowledge-center/technical-documentation/.
REMARQUE Vous pouvez télécharger les versions anglaise et française des manuels produit contenant l'ensemble des informations de sécurité, avertissements et mises en garde applicables sur le site http://
drives.danfoss.com/knowledge-center/technical-documentation/.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 6
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
TABLE DES MATIÈRES VACON · 7
TABLE DES MATIÈRES
Préface
À propos de ce manuel 3
1 Applicatif de base 12
1.1 Introduction 12
1.1.1 Fonctions de protection moteur dans l'applicatif de base 12
1.2 E/S de commande 13
1.3 Logique des signaux de commande dans l'applicatif de base 15
1.4 Applicatif de base – Listes des paramètres 15
1.4.1 Valeurs d’affichage (panneau opérateur : menu M1) 15
1.4.2 Paramètres de base (panneau opérateur : Menu M2 - G2.1) 17
1.4.3 Contrôle du panneau opérateur (panneau opérateur : menu M3) 19
1.4.4 Menu Système (panneau opérateur : menu M6) 19
1.4.5 Cartes d'extension (panneau opérateur : menu M7) 19
2 Applicatif Standard 20
2.1 Introduction 20
2.2 E/S de commande 21
2.3 Logique des signaux de commande dans l'applicatif standard 23
2.4 Applicatif standard – Listes des paramètres 23
2.4.1 Valeurs d’affichage (panneau opérateur : menu M1) 23
2.4.2 Paramètres de base (panneau opérateur : Menu M2 - G2.1) 25
2.4.3 Signaux d'entrée (panneau opérateur : Menu M2 - G2.2) 27
2.4.4 Signaux de sortie (panneau opérateur : menu M2 -> G2.3) 29
2.4.5 Paramètres de commande d'entraînement (panneau opérateur :
menu M2 -> G2.4) 32
2.4.6 Paramètres de fréquences interdites (panneau opérateur : Menu M2 G2.5) 33
2.4.7 Paramètres de commande du moteur (panneau opérateur : Menu M2 G2.6) 34
2.4.8 Protections (panneau opérateur : menu M2 -> G2.7) 37
2.4.9 Paramètres de redémarrage automatique (panneau opérateur : Menu
M2 - G2.8) 39
2.4.10 Contrôle du panneau opérateur (panneau opérateur : menu M3) 40
2.4.11 Menu Système (panneau opérateur : menu M6) 40
2.4.12 Cartes d'extension (panneau opérateur : menu M7) 40
3 Applicatif de commande local/distance 41
3.1 Introduction 41
3.2 E/S de commande 42
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 8 TABLE DES MATIÈRES
3.3 Logique des signaux de commande dans l'applicatif de commande local/distance
44
3.4 Applicatif de commande local/distance – Listes des paramètres 45
3.4.1 Valeurs d’affichage (panneau opérateur : menu M1) 45
3.4.2 Paramètres de base (panneau opérateur : Menu M2 - G2.1) 46
3.4.3 Signaux d'entrée (panneau opérateur : Menu M2 - G2.2) 48
3.4.4 Signaux de sortie (panneau opérateur : menu M2 -> G2.3) 53
3.4.5 Paramètres de commande d'entraînement (panneau opérateur :
menu M2 -> G2.4) 57
3.4.6 Paramètres de fréquences interdites (panneau opérateur : Menu M2 -
G2.5) 58
3.4.7 Paramètres de commande du moteur (panneau opérateur : Menu M2 -
G2.6) 59
3.4.8 Protections (panneau opérateur : menu M2 -> G2.7) 62
3.4.9 Paramètres de redémarrage automatique (panneau opérateur : Menu
M2 - G2.8) 64
3.4.10 Contrôle du panneau opérateur (panneau opérateur : menu M3) 65
3.4.11 Menu Système (panneau opérateur : menu M6) 65
3.4.12 Cartes d'extension (panneau opérateur : menu M7) 65
4 Applicatif de controle de vitesse multi-CONFIGURATION 66
4.1 Introduction 66
4.2 E/S de commande 67
4.3 Logique des signaux de commande dans l'applicatif de commande séquentielle 69
4.4 Applicatif de commande séquentielle – Listes des paramètres 69
4.4.1 Valeurs d’affichage (panneau opérateur : menu M1) 69
4.4.2 Paramètres de base (panneau opérateur : Menu M2 - G2.1) 71
4.4.3 Signaux d'entrée (panneau opérateur : Menu M2 - G2.2) 73
4.4.4 Signaux de sortie (panneau opérateur : menu M2 -> G2.3) 77
4.4.5 Paramètres de commande d'entraînement (panneau opérateur :
menu M2 -> G2.4) 81
4.4.6 Paramètres de fréquences interdites (panneau opérateur : Menu M2 -
G2.5) 82
4.4.7 Paramètres de commande du moteur (panneau opérateur : Menu M2 -
G2.6) 83
4.4.8 Protections (panneau opérateur : Menu M2 - G2.7) 86
4.4.9 Paramètres de redémarrage automatique (panneau opérateur : Menu
M2 - G2.8) 89
4.4.10 Contrôle du panneau opérateur (panneau opérateur : menu M3) 90
4.4.11 Menu Système (panneau opérateur : menu M6) 90
4.4.12 Cartes d'extension (panneau opérateur : menu M7) 90
5 Applicatif de régulation PID 91
5.1 Introduction 91
5.2 E/S de commande 93
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
TABLE DES MATIÈRES VACON · 9
5.3 Logique des signaux de commande dans l'applicatif de régulation PID 95
5.4 Applicatif de régulation PID – Listes des paramètres 95
5.4.1 Valeurs d’affichage (panneau opérateur : menu M1) 95
5.4.2 Paramètres de base (panneau opérateur : Menu M2 - G2.1) 99
5.4.3 Signaux d’entrée 101
5.4.4 Signaux de sortie (panneau opérateur : menu M2 -> G2.3) 108
5.4.5 Paramètres de commande d'entraînement (panneau opérateur :
menu M2 -> G2.4) 112
5.4.6 Paramètres de fréquences interdites (panneau opérateur : Menu M2 -
G2.5) 113
5.4.7 Paramètres de commande du moteur (panneau opérateur : Menu M2 -
G2.6) 114
5.4.8 Protections (panneau opérateur : menu M2 -> G2.7) 117
5.4.9 Paramètres de redémarrage automatique (panneau opérateur : Menu
M2 - G2.8) 120
5.4.10 Contrôle du panneau opérateur (panneau opérateur : menu M3) 121
5.4.11 Menu Système (panneau opérateur : menu M6) 121
5.4.12 Cartes d'extension (panneau opérateur : menu M7) 121
6 Applicatif Multi-configuration 122
6.1 Introduction 122
6.2 E/S de commande 124
6.3 Logique des signaux de commande dans l'applicatif multi-configuration 126
6.4 Applicatif multi-configuration – Listes des paramètres 126
6.4.1 Valeurs d’affichage (panneau opérateur : menu M1) 126
6.4.2 Paramètres de base (panneau opérateur : Menu M2 - G2.1) 138
6.4.3 Signaux d’entrée 141
6.4.4 Signaux de sortie 150
6.4.5 Paramètres de commande d'entraînement (panneau opérateur :
menu M2 -> G2.4) 160
6.4.6 Paramètres de fréquences interdites (panneau opérateur : Menu M2 -
G2.5) 162
6.4.7 Paramètres de commande du moteur (panneau opérateur : Menu M2 -
G2.6) 163
6.4.8 Protections (panneau opérateur : menu M2 -> G2.7) 172
6.4.9 Paramètres de redémarrage automatique (panneau opérateur : Menu
M2 - G2.8) 176
6.4.10 Paramètres du bus de terrain (Panneau opérateur : Menu M2 -> G2.9)
177
6.4.11 Paramètres de contrôle du couple (panneau opérateur : Menu M2 -
G2.10) 179
6.4.12 Variateurs NXP : Paramètres maître/suiveur (Commande Panneau :
Menu M2 - G2.11) 181
6.4.13 Contrôle du panneau opérateur (panneau opérateur : menu M3) 182
6.4.14 Menu Système (panneau opérateur : menu M6) 183
6.4.15 Cartes d'extension (panneau opérateur : menu M7) 183
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 10 TABLE DES MATIÈRES
7 Applicatif de commande pour pompes et ventilateurs 184
7.1 Introduction 184
7.2 E/S de commande 186
7.3 Logique des signaux de commande dans l'applicatif de commande pour pompes et
ventilateurs 190
7.4 Applicatif de commande pour pompes et ventilateurs – Listes des paramètres 190
7.4.1 Valeurs d’affichage (panneau opérateur : menu M1) 190
7.4.2 Paramètres de base (panneau opérateur : Menu M2 - G2.1) 194
7.4.3 Signaux d’entrée 196
7.4.4 Signaux de sortie 203
7.4.5 Paramètres de commande d'entraînement (panneau opérateur :
menu M2 -> G2.4) 211
7.4.6 Paramètres de fréquences interdites (panneau opérateur : Menu M2 -
G2.5) 212
7.4.7 Paramètres de commande du moteur (panneau opérateur : Menu M2 -
G2.6) 213
7.4.8 Protections (panneau opérateur : menu M2 -> G2.7) 215
7.4.9 Paramètres de redémarrage automatique (panneau opérateur : Menu
M2 - G2.8) 218
7.4.10 Paramètres de commande pour pompes et ventilateurs (panneau
opérateur : Menu M2 - G2.9) 219
7.4.11 Contrôle du panneau opérateur (panneau opérateur : menu M3) 222
7.4.12 Menu Système (panneau opérateur : menu M6) 222
7.4.13 Cartes d'extension (panneau opérateur : menu M7) 222
8 Description des valeurs affichées 223
9 Description des paramètres 230
9.1 Paramètres de contrôle du panneau opérateur 387
9.2 Fonction maître/suiveur (NXP uniquement) 389
9.2.1 Connexions physiques entre le maître et le suiveur 389
9.2.2 Connexion par fibre optique entre les convertisseurs de fréquence avec
la carte OPTD2 390
9.3 Commande de frein externe avec des limites supplémentaires (ID 315, 316, 346 à
349, 352, 353) 390
9.4 Paramètres de la protection thermique du moteur (ID 704 à 708) 392
9.5 Paramètres de la protection contre le calage (ID 709 à 712) 393
9.6 Paramètres de la protection contre les sous-charges (ID 713 à 716) 393
9.7 Paramètres de commande du bus de terrain (ID 850 à 859) 394
9.7.1 Sortie données de traitement (esclave -> maître) 394
9.7.2 Mise à l'échelle du courant dans une taille différente de modules 395
9.7.3 Entrée de données de traitement (maître -> esclave) 396
9.8 Paramètres de boucle fermée (ID 612 à 621) 397
9.9 Principe de programmation TTF (Terminal To Function) 398
9.9.1 Définition d'une entrée/sortie pour une certaine fonction sur le panneau
opérateur 398
9.9.2 Définition d'une borne pour une certaine fonction à l'aide de l'outil de
programmation NCDrive 399
9.9.3 Définition d'entrées/sorties inutilisées 400
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

TABLE DES MATIÈRES VACON · 11
9.10 Paramètres de contrôle de vitesse (applicatif 6 uniquement) 401
9.11 Changement automatique entre les entraînements (applicatif 7 uniquement) 403
9.12 Sélection d'interverrouillage (P2.9.23) 405
9.13 Exemples de sélection de permutation et d'interverrouillage 406
9.13.1 Automatismes de pompe et de ventilateur avec interverrouillages et
sans permutation 406
9.13.2 Automatismes de pompe et de ventilateur avec interverrouillages et
permutation 407
10 Localisation des défauts 410
10.1 Codes de défaut 410
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 12 APPLICATIF DE BASE
1 APPLICATIF DE BASE
1.1 INTRODUCTION
L'applicatif de base est un applicatif simple à comprendre et à utiliser. Il correspond au
réglage par défaut en sortie de fabrication. Dans le cas contraire, sélectionnez Applicatif de
base dans le menu M6, à la page S6.2. Voir le Manuel d'utilisation du produit.
L'entrée logique DIN3 est programmable.
Les paramètres de l’applicatif de base sont décrits au chapitre 9 Description des paramètres
de ce manuel. Les explications sont ordonnées selon le numéro ID individuel du paramètre.
1.1.1 FONCTIONS DE PROTECTION MOTEUR DANS L'APPLICATIF DE BASE
L'applicatif de base fournit quasiment toutes les fonctions de protection proposées par les
autres applicatifs :
Protection contre les défauts externes
•
Supervision de la phase réseau
•
Protection contre les sous-tensions
•
Supervision de phase moteur
•
Protection contre les défauts de terre
•
Protection thermique moteur
•
Protection contre les défauts de thermistance
•
Protection contre les défauts de bus de terrain
•
Protection contre les défauts de slot
•
À la différence des autres applicatifs, l'applicatif de base ne fournit aucun paramètre
permettant de choisir une fonction de réponse ou des valeurs limites pour les défauts. Pour
plus d'informations sur la protection thermique du moteur, voir ID704 au chapitre 9
Description des paramètres.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
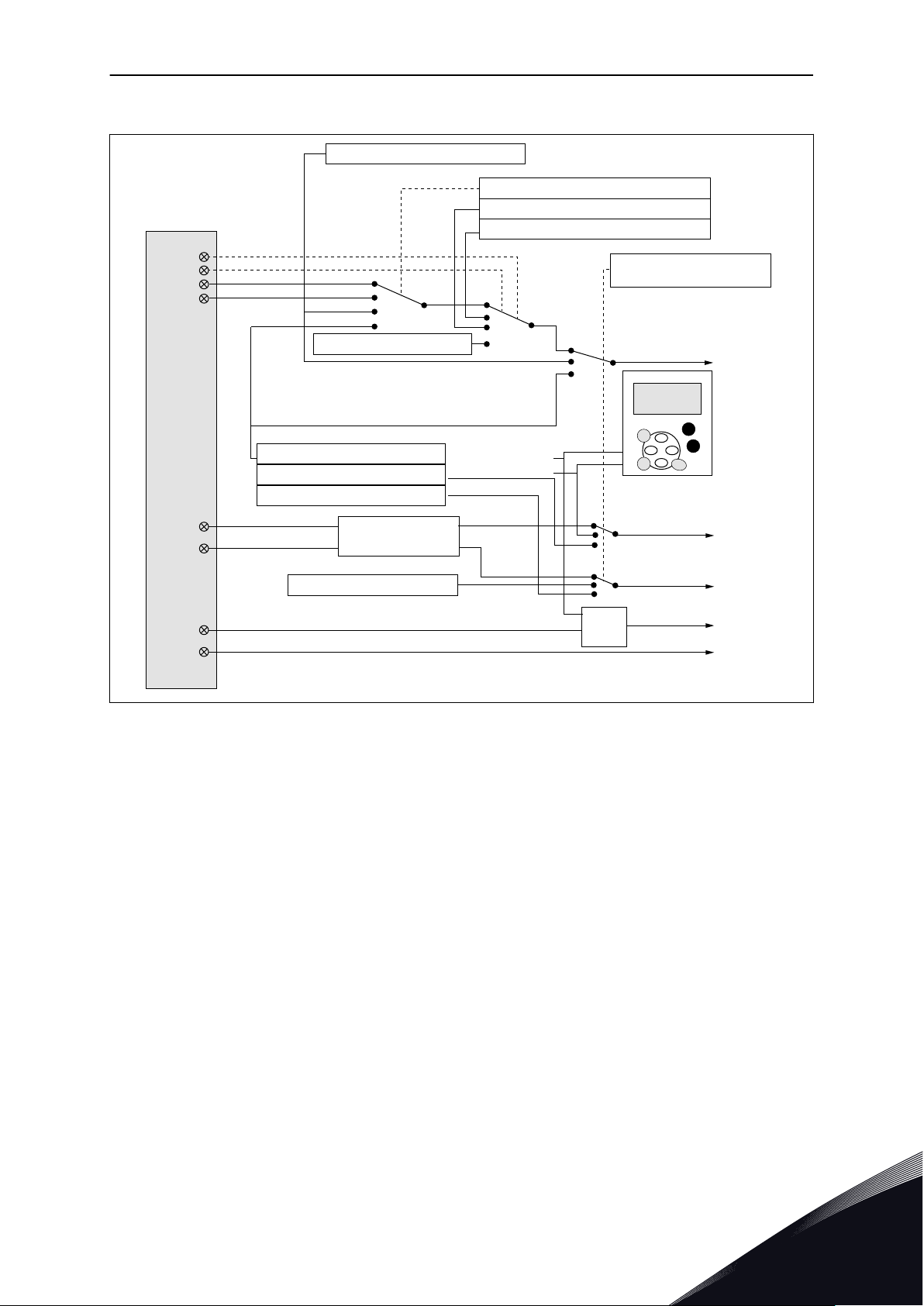
OPTA 2 / OPTA 3 *)
22
23
11
17
24
25
26
DIN4
DIN5
Tension du potentiomètre, etc.
Terre pour la référence
et les commandes
Terre pour la référence et
les commandes
Terre pour la référence
et les commandes
Entrée analogique 2,
référence de fréquence
Tension pour les
interrupteurs (voir #6)
Connexion à TERRE ou +24 V
DÉFAUT
Entrée de défaut externe
Programmable (P2.17)
Connexion à TERRE ou +24 V
Contact ouvert = aucune action
Contact fermé = réarmement défaut
Contact ouvert = aucun défaut
Contact fermé = défaut
Contact fermé = marche avant
Contact fermé = marche arrière
Collecteur ouvert,
I≤50 mA, U≤48 Vc.c.
MARCHE
mA
PRÊT
AO1-
DO1
+24V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
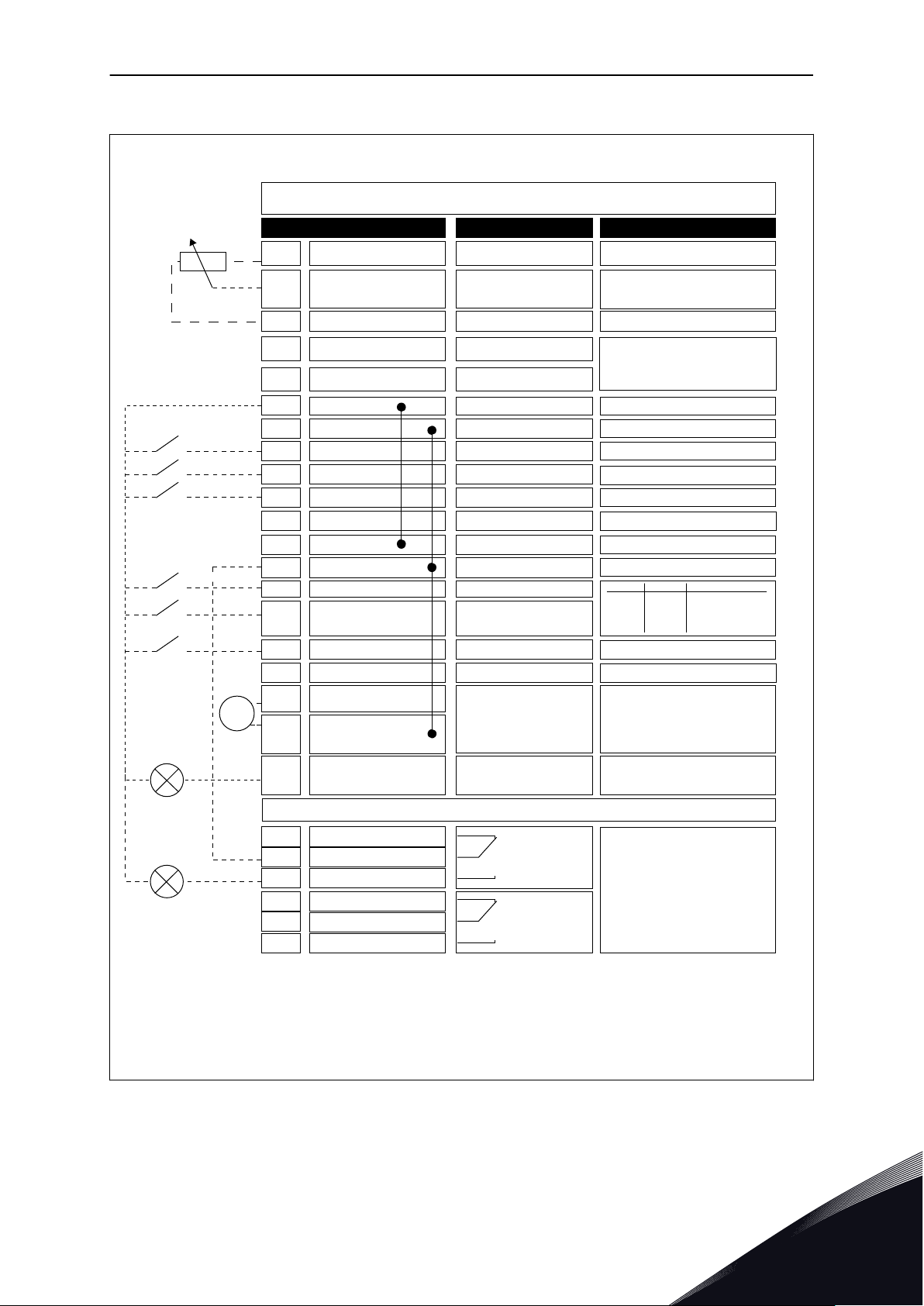
Carte d'E/S standard
Borne Affichage Description
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24V
Sortie de référence
Entrée analogique 1
Plage de tension 0–10 Vc.c.
Programmable (P2.14)
Entrée analogique 2
Plage de courant 0-20 mA
Sortie de tension
de commande
Terre E/S
Terre E/S
Sélect. vitesse constante 1
Sélect. vitesse
constante 2
Réarmement défaut
Commun pour DIN 1—DIN 3
Commun pour DIN4-DIN6
Sortie de tension
de commande
Terre E/S
Sortie relais 1
Sortie relais 2
AO1+
Entrée analogique 1,
référence de fréquence
Tension pour les interrupteurs,
etc. 0,1 A max.
Marche avant
Marche arrière
Réf. fréquence
Ouvert
Fermé
Ouvert
Fermé
Ouvert
Ouvert
Fermé
Fermé
Réf. E/S (P2.14)
Vitesse constante 1
Vitesse constante 2
Fréquence maxi
MARCHE
Potentiomètre de
référence, 1-10 kΩ
Sortie analogique 1
Fréquence de sortie
programmable
(P2.16)
Plage 0–20 mA/RL,
max. 500 Ω
Sortie logique 1
PRÊT
APPLICATIF DE BASE VACON · 13
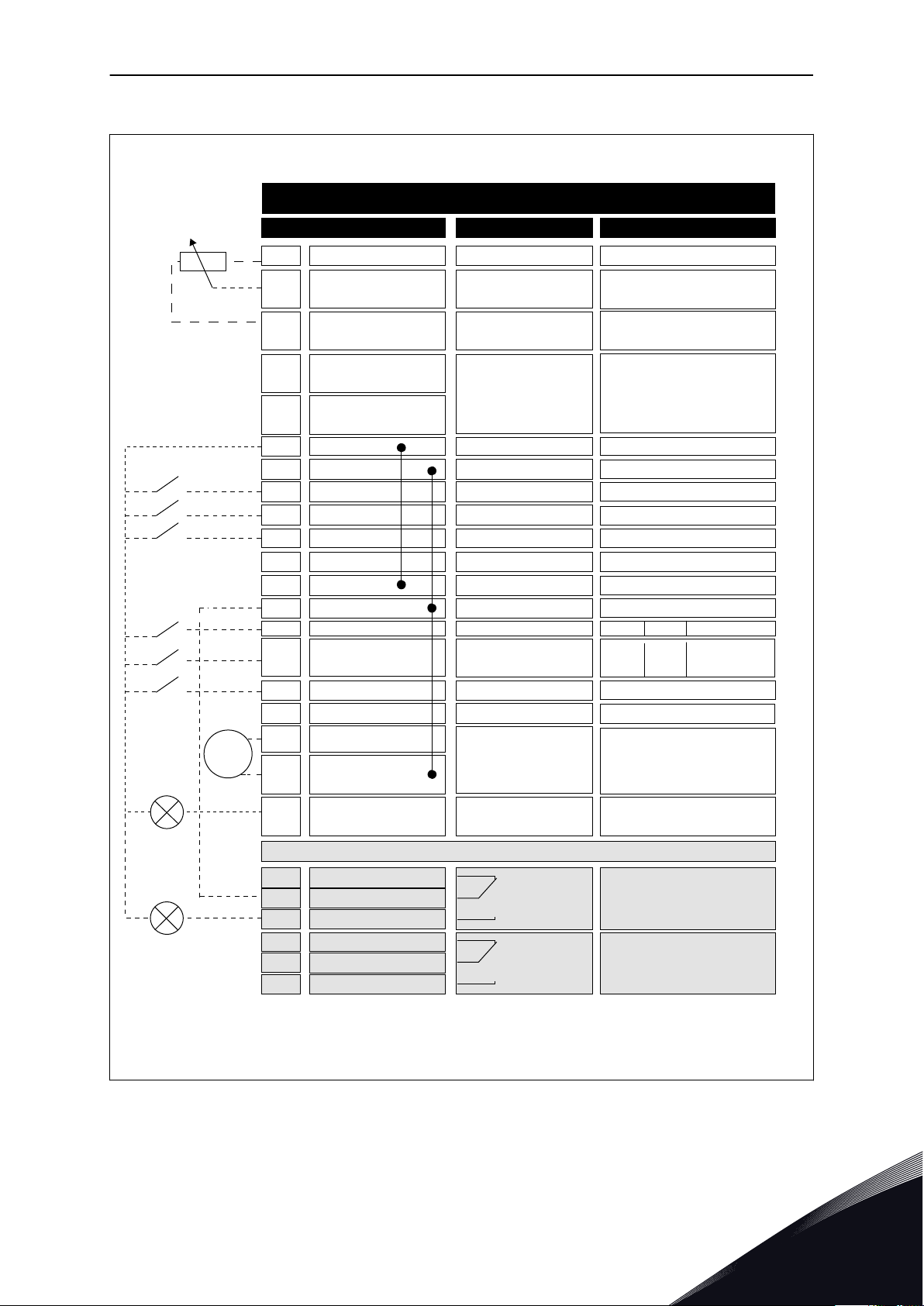
1.2 E/S DE COMMANDE
Fig. 1: Applicatif de base – Configuration des E/S par défaut
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
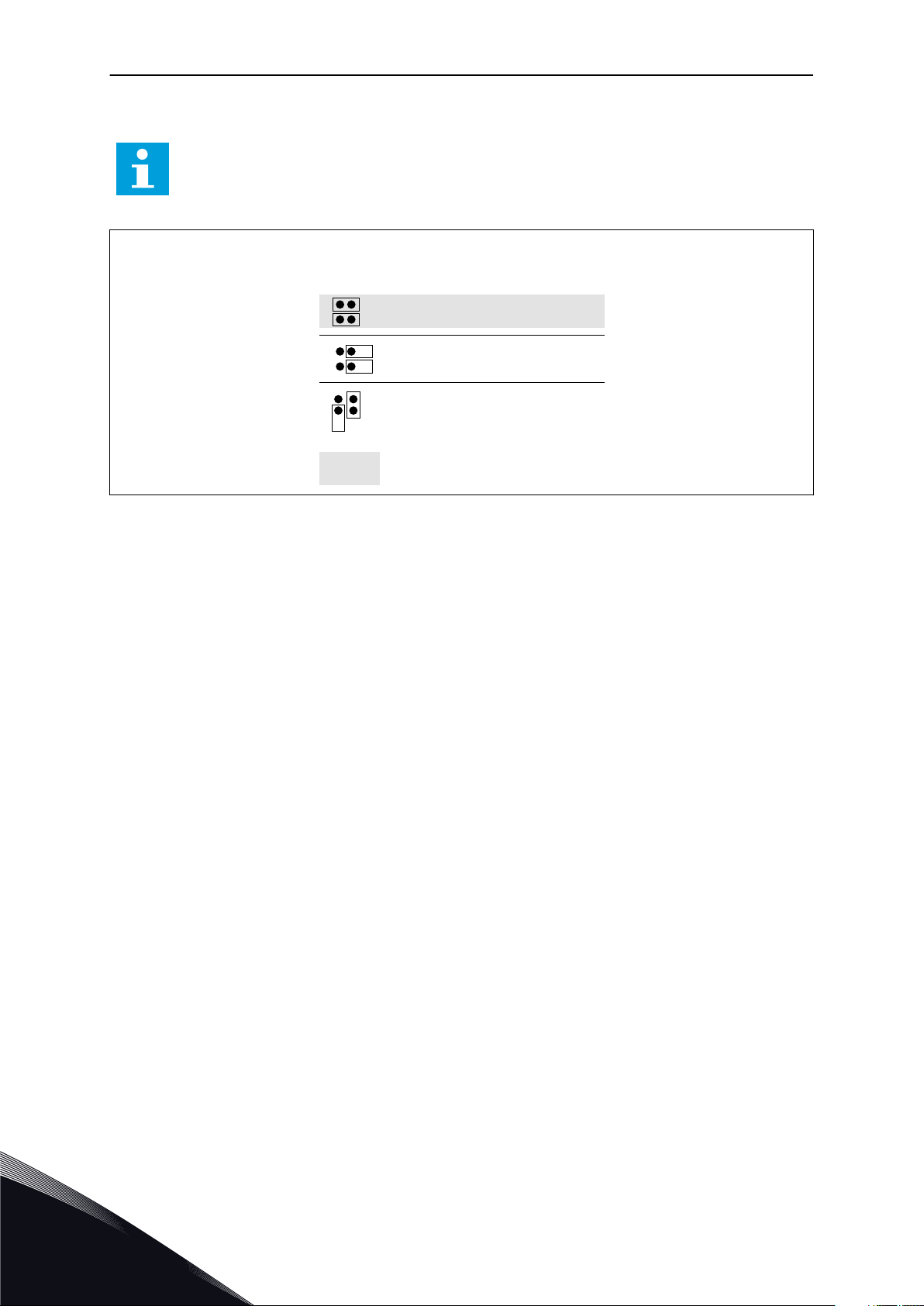
1
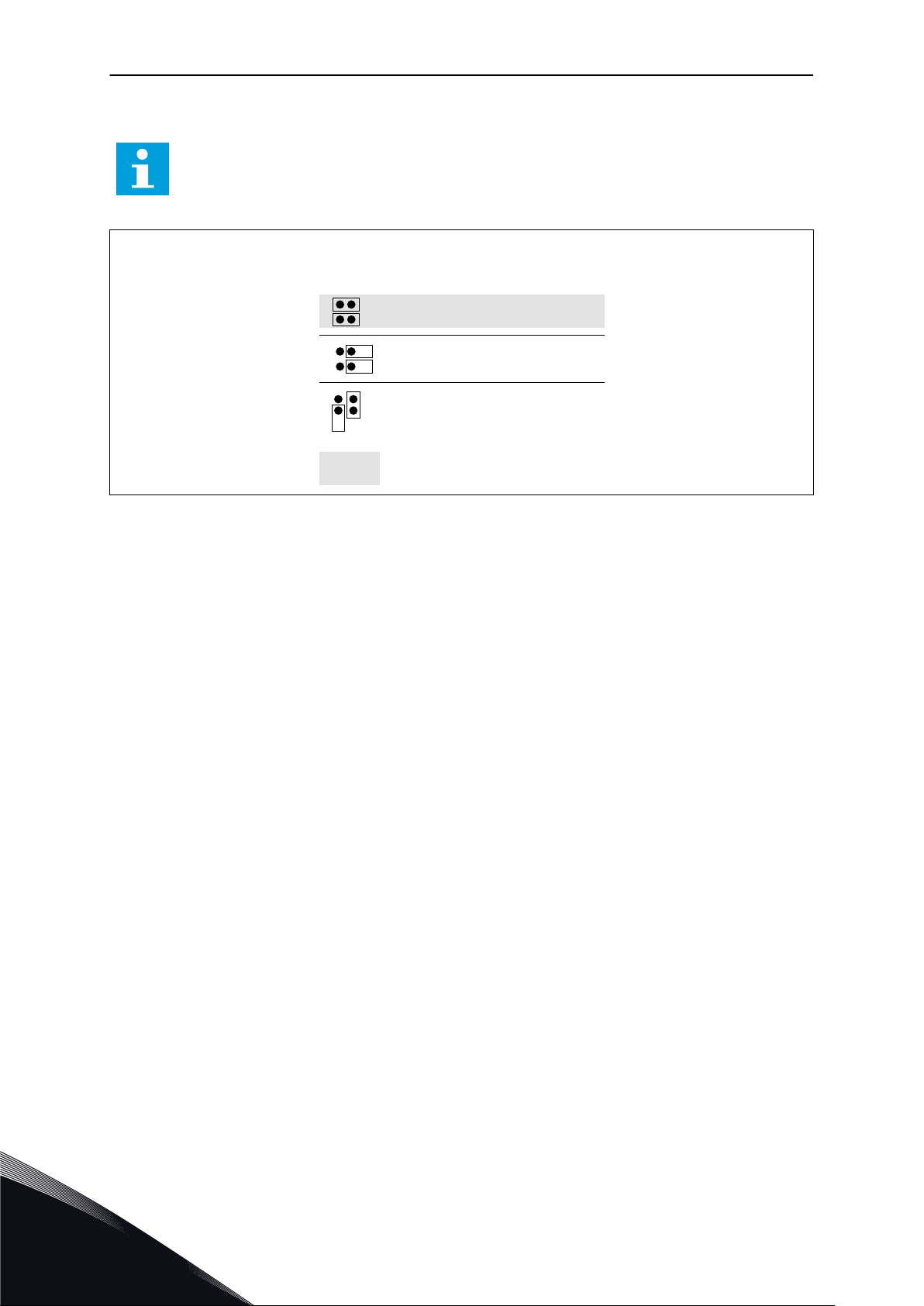
Groupe de cavaliers X3 :
Mise à la terre de CMA et CMB
CMB raccordé à TERRE
CMA raccordé à TERRE
CMB isolé de TERRE
CMA isolé de TERRE
CMB et CMA raccordés
ensemble en interne,
isolés de TERRE
= Préréglage usine
VACON · 14 APPLICATIF DE BASE
*) La carte optionnelle A3 n'a pas de borne pour contact ouvert sur sa deuxième sortie relais
(borne 24 manquante).
REMARQUE!
Voir les positions du cavalier ci-dessous. Des informations supplémentaires sont
disponibles dans le Manuel d'utilisation du produit.
Fig. 2: Positionnement des cavaliers
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
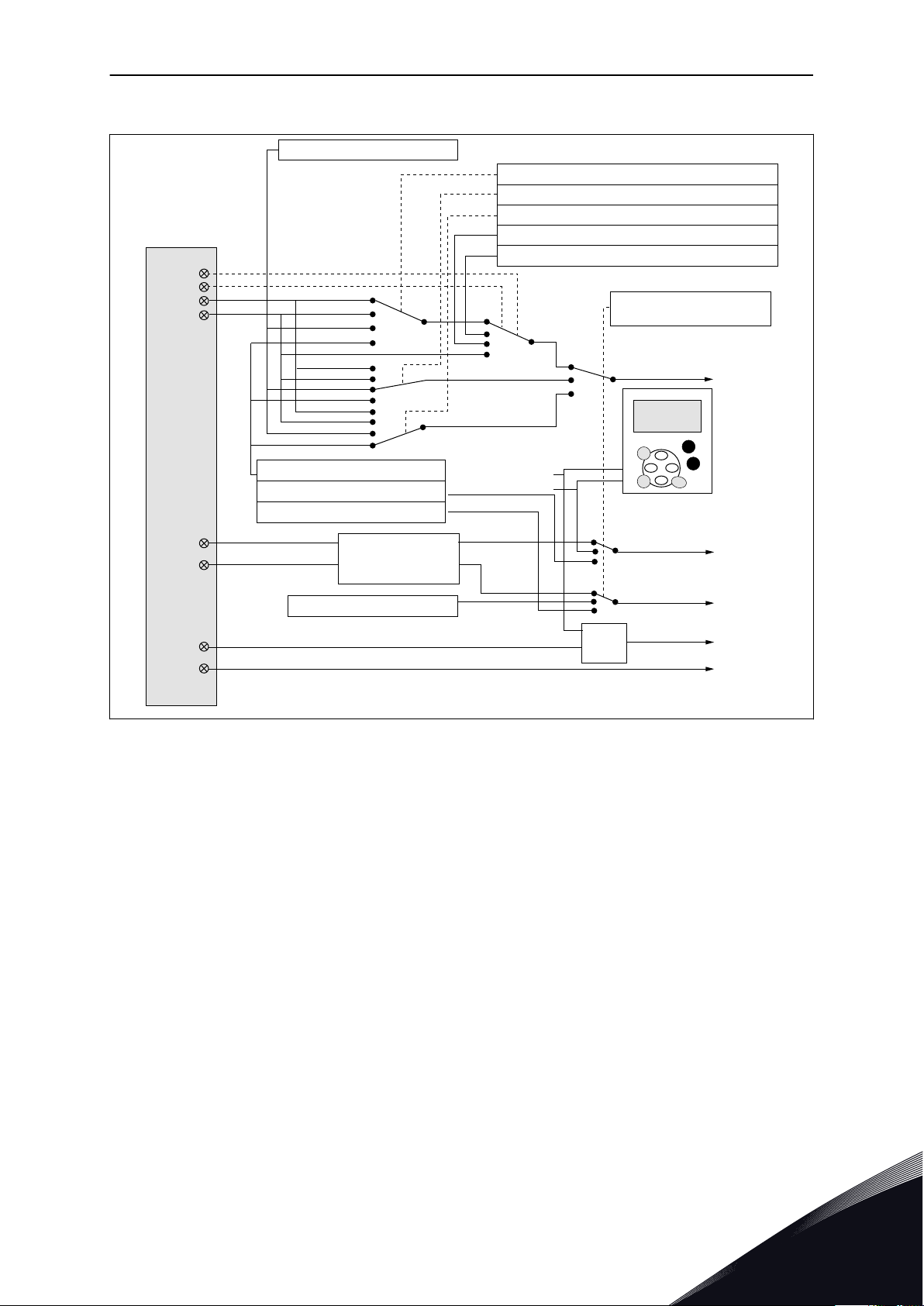
≥ 1
3.2 Réf. panneau op.
3.1 Source de
commande
Marche avant
Marche arrière
Marche/Arrêt
Inversion
Marche/arrêt interne
Inversion interne
Réarmement de
défaut interne
Entrée de réarmement de défaut
Entrée de défaut externe (programmable)
Touche de
réarmement
Touches Marche/Arrêt
Référence du bus de terrain
Marche/arrêt à partir du bus
de terrain
Direction à partir du bus
de terrain
3.3 Direction panneau op.
2.14 Référence E/S
2.19 Vitesse constante 2
2.18 Vitesse constante 1
2.2 Fréquence max.
Marche/arrêt et
logique inverse
Référence de
fréquence interne
APPLICATIF DE BASE VACON · 15
1.3 LOGIQUE DES SIGNAUX DE COMMANDE DANS L'APPLICATIF DE BASE
Fig. 3: Logique des signaux de commande de l'applicatif de base
1.4 APPLICATIF DE BASE – LISTES DES PARAMÈTRES
1.4.1 VALEURS D’AFFICHAGE (PANNEAU OPÉRATEUR : MENU M1)
Les valeurs d’affichage sont les valeurs réelles des paramètres et des signaux ainsi que des
états et des mesures. Les valeurs d’affichage ne peuvent pas être modifiées.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 16 APPLICATIF DE BASE
Table 1: Valeurs d’affichage
Index Valeur affichée Unité ID Description
V1.1 Fréquence de sortie Hz 1
V1.2
V1.3 Vitesse moteur t/mn 2
V1.4 Courant moteur A 3
V1.5 Couple moteur % 4
V1.6 Puissance moteur % 5
V1.7 Tension moteur V 6
V1.8 Tension bus c.c. V 7
1.9
1.10
V1.11 Entrée analogique 1 V/mA 13
V1.12 Entrée analogique 2 V/mA 14
V1.13 DIN 1, 2, 3 15
Référence de fré-
quence
Température de
l'unité
Température du
moteur
Hz 25
°C 8
% 9
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 I
V1.17 3 valeurs affichées
analogique mA 26
out
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APPLICATIF DE BASE VACON · 17
1.4.2 PARAMÈTRES DE BASE (PANNEAU OPÉRATEUR : MENU M2 - G2.1)
Table 2: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.1 Fréquence mini 0.00 P2.2 Hz 0.00 101
P2.2 Fréquence maxi P2.1 320.00 Hz 50.00 102
P2.3
P2.4
P2.5 Limite de courant 0,1 x I
P2.6
P2.7
Temps d'accélé-
ration 1
Temps de décélé-
ration 1
Tension nominale
du moteur
Fréquence nomi-
nale du moteur
0.1 3000.0 s 3.0 103
0.1 3000.0 s 3.0 104
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
A I
NX2 :
230 V
NX5 :
400 V
NX6 :
690 V
L
ID
107
110
Description
P2.8
P2.9
P2.10 Cos phi moteur 0.30 1.00 0.85 120
P2.11 Mode Marche 0 2 0 505
P2.12 Mode Arrêt 0 3 0 506
P2.13 Optimisation U/f 0 1 0 109
Vitesse nominale
du moteur
Courant nominal
du moteur
24 20 000 t/mn 1440 112
0,1 x I
2 x I
H
H
A I
H
113
0 = Arrêt sur
rampe
1 = Reprise au vol
2 = Reprise au vol
conditionnelle
0 = Roue libre
1 = 2 = Rampe +
Valid. marche en
roue libre
Rampe
3 = Roue libre +
Valid. marche
rampe
0 = Non utilisé
1 = Surcouple
automatique
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 18 APPLICATIF DE BASE
Table 2: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.14 Référence d'E/S 0 3 0 117
Entrée analogi-
P2.15
P2.16
que 2, écart de
référence
Fonction de sortie
analogique
0 1 1 302
0 8 1 307
Description
ID
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
0 = 0-20 mA
1 = 4-20 mA
0 = Non utilisé
1 = Fréq. sortie (0f
max
2 = Réf. fréquence
(0-f
max
3 = Vitesse moteur
(0 - Vitesse nominale moteur)
4 = Courant sortie
(0-I
nMot
5 = Couple moteur
(0-T
6 = Puissance
moteur (0-P
7 = Tension moteur
(0-U
8 = Tension bus
c.c. (0-1000 V)
)
nMot
nMot
)
)
)
)
nMot
)
P2.17 Fonction DIN3 0 7 1 301
P2.18
P2.19
Vitesse constante
1
Vitesse constante
2
0.00 P2.2 Hz 0.00 105
0.00 P2.2 Hz 50.00 106
0 = Non utilisé
1 = Défaut ext., fermeture cont.
2 = Défaut ext.,
ouverture cont.
3 = Valid. marche,
f.c.
4 = Valid. marche,
o.c.
5 = Forcer srce
com. sur E/S
6 = Forcer srce
com. sur panneau
opér.
7 = Forcer srce
com. sur bus de
terrain
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APPLICATIF DE BASE VACON · 19
Table 2: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.20
Redémarrage
automatique
0 1 0 731
ID
Description
0 = Désactivé
2 = Activé
1.4.3 CONTRÔLE DU PANNEAU OPÉRATEUR (PANNEAU OPÉRATEUR : MENU M3)
Les paramètres de sélection de source de commande et de direction du panneau opérateur
sont répertoriés ci-dessous. Voir le menu Contrôle du panneau opérateur dans le Manuel
d'utilisation du produit.
Table 3: Paramètres de contrôle du panneau opérateur, M3
Index Paramètre Min. Max. Unité PréréglageUtil.
P3.1
P3.2 Réf. panneau op. P2.1 P2.2 Hz 0.00
P3.3
Source de com-
mande
Direction (sur le
panneau opéra-
teur)
1 3 1 125
0 1 0 123
Description
ID
1 = Bornier d’E/S
2 = Panneau opérateur
3 = Bus de terrain
0 = Fonction limitée de la touche
R3.4 Touche Arrêt 0 1 1 114
Arrêt
1 = Touche Arrêt
toujours activée
1.4.4 MENU SYSTÈME (PANNEAU OPÉRATEUR : MENU M6)
Pour plus d’informations sur les paramètres et les fonctions relatifs à l’utilisation générale
du convertisseur de fréquence, notamment la sélection de l’applicatif et de la langue, les
ensembles de paramètres personnalisés ou pour en savoir plus sur le matériel et le logiciel,
voir le Manuel d'utilisation du produit.
1.4.5 CARTES D'EXTENSION (PANNEAU OPÉRATEUR : MENU M7)
Le menu M7 affiche les cartes optionnelles et les cartes d’extension connectées à la carte de
commande, ainsi que les informations relatives à ces cartes. Pour plus d'informations, voir
le Manuel d'utilisation du produit.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 20 APPLICATIF STANDARD
2 APPLICATIF STANDARD
2.1 INTRODUCTION
Sélectionnez Applicatif standard dans le menu M6, à la page S6.2.
L'applicatif standard est généralement utilisé dans les applications de pompage et de
ventilation, ainsi que dans les convoyeurs, pour lesquels l'applicatif de base est trop limité,
mais dans lesquels aucune fonction spéciale n'est requise.
L'applicatif standard dispose des mêmes signaux d'E/S et de la même logique de
•
contrôle que l'applicatif de base.
L'entrée logique DIN3 et toutes les sorties sont librement programmables.
•
Fonctions supplémentaires :
Logique de signal d'inversion et Marche/Arrêt programmable
•
Échelonnement de référence
•
Une supervision de limite de fréquence
•
Rampes en secondes et programmation de rampe en S
•
Fonctions Marche/Arrêt programmables
•
Freinage CC à l'arrêt
•
Une zone de fréquences interdites
•
Courbe U/f et fréquence de découpage programmables
•
Redémarrage automatique
•
Protection thermique et contre le calage du moteur : action programmable ; off, alarme,
•
défaut
Les paramètres de l’applicatif standard sont décrits au chapitre 9 Description des paramètres
de ce manuel. Les explications sont ordonnées selon le numéro ID individuel du paramètre.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
DIN4
DIN5
mA
PRÊT
MARCHE
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Borne Affichage Description
+10 Vref
AI1+
AI1-
AI2+
AI2-
+24V
Sortie de référence
Terre E/S
Entrée analogique 2
Plage de courant
0–20 mA
Sortie de tension
de commande
Terre E/S
Marche avant
Logique programmable (P2.2.1)
Marche arrière
Ri min = 5 kΩ
Entrée de défaut externe
Programmable (P2.2.2)
Sélect. vitesse constante 1
Sélect. vitesse constante 2
Réarmement défaut
Commun pour DIN 1—DIN 3
Commun pour DIN4—DIN6
Sortie de tension
de commande
Terre E/S
Sortie analogique 1
Fréquence de sortie
Programmable (P2.3.2)
Sortie logique 1
PRÊT
Programmable (P2.3.7)
Collecteur ouvert,
I≤50 mA, U≤48 Vc.c.
Sortie relais 1
MARCHE
Programmable
(P2.3.8)
Sortie relais 2
DÉFAUT
Programmable
(P2.3.9)
Plage 0–20 mA/RL,
500 Ω max.
Connexion à TERRE ou +24 V
Contact ouvert = aucune action
Contact fermé = réarmement défaut
AO1+
Entrée analogique 1,
référence de fréquence
Terre pour la référence
et les commandes
Entrée analogique 2,
référence de fréquence
Contact fermé = marche avant
Contact fermé = marche arrière
Contact ouvert = aucun défaut
Contact fermé = défaut
Réf. fréquence
Ouvert
Fermé
Ouvert
Fermé
Ouvert
Ouvert
Fermé
Fermé
Référence d'E/S
Vitesse constante 1
Vitesse constante 2
Entrée analog. 2
Tension du potentiomètre, etc.
Entrée analogique 1
Plage de tension 0–10 Vc.c.
Programmable (P2.1.11)
Tension pour les interrupteurs,
etc. 0,1 A max.
Tension pour les interrupteurs
(voir #6)
Connexion à TERRE ou +24 V
Terre pour la référence
et les commandes
Terre pour la référence
et les commandes
Potentiomètre de
référence, 1-10 kΩ
APPLICATIF STANDARD VACON · 21
2.2 E/S DE COMMANDE
Fig. 4: Applicatif standard – Configuration des E/S par défaut
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Groupe de cavaliers X3 :
Mise à la terre de CMA et CMB
CMB raccordé à TERRE
CMA raccordé à TERRE
CMB isolé de TERRE
CMA isolé de TERRE
CMB et CMA raccordés
ensemble en interne,
isolés de TERRE
= Préréglage usine
VACON · 22 APPLICATIF STANDARD
*) La carte optionnelle A3 n'a pas de borne pour contact ouvert sur sa deuxième sortie relais
(borne 24 manquante).
REMARQUE!
Voir les positions du cavalier ci-dessous. Des informations supplémentaires sont
disponibles dans le Manuel d'utilisation du produit.
Fig. 5: Positionnement des cavaliers
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Réf. panneau op.
3.1 Source de
commande
Marche avant
Marche arrière
Marche/Arrêt
Inversion
Marche/arrêt interne
Inversion interne
Réarmement de
défaut interne
Entrée de réarmement de défaut
Entrée de défaut externe (programmable)
Touche de
réarmement
Touches Marche/Arrêt
Référence du bus de terrain
Marche/arrêt à partir du bus
de terrain
Direction à partir du bus
de terrain
3.3 Direction panneau op.
2.1.13 Référence cmde bus de terrain
2.1.15 Vitesse constante 2
2.1.14 Vitesse constante 1
2.1.11 Référence E/S
2..1.12 Vitesse cmde panneau op. 1
Logique d'inversion
et Marche/Arrêt
programmable
Référence de
fréquence interne
(programmable)
(programmable)
APPLICATIF STANDARD VACON · 23
2.3 LOGIQUE DES SIGNAUX DE COMMANDE DANS L'APPLICATIF STANDARD
Fig. 6: Logique des signaux de commande de l'applicatif standard
2.4 APPLICATIF STANDARD – LISTES DES PARAMÈTRES
2.4.1 VALEURS D’AFFICHAGE (PANNEAU OPÉRATEUR : MENU M1)
Les valeurs d’affichage sont les valeurs réelles des paramètres et des signaux ainsi que des
états et des mesures. Les valeurs d’affichage ne peuvent pas être modifiées.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 24 APPLICATIF STANDARD
Table 4: Valeurs d’affichage
Index Valeur affichée Unité ID Description
V1.1 Fréquence de sortie Hz 1
V1.2
V1.3 Vitesse moteur t/mn 2
V1.4 Courant moteur A 3
V1.5 Couple moteur % 4
V1.6 Puissance moteur % 5
V1.7 Tension moteur V 6
V1.8 Tension bus c.c. V 7
1.9
1.10
V1.11 Entrée analogique 1 V/mA 13
V1.12 Entrée analogique 2 V/mA 14
V1.13 DIN 1, 2, 3 15
Référence de fré-
quence
Température de
l'unité
Température du
moteur
Hz 25
°C 8
% 9
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 I
V1.17 3 valeurs affichées
analogique mA 26
out
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APPLICATIF STANDARD VACON · 25
2.4.2 PARAMÈTRES DE BASE (PANNEAU OPÉRATEUR : MENU M2 - G2.1)
Table 5: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.1.1 Fréquence mini 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Fréquence maxi P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5 Limite de courant 0,1 x I
P2.1.6
P2.1.7
Temps d'accélé-
ration 1
Temps de décélé-
ration 1
Tension nominale
du moteur
Fréquence nomi-
nale du moteur
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
A I
NX2 :
230 V
NX5 :
400 V
NX6 :
690 V
L
ID
107
110
Description
P2.1.8
P2.1.9
P2.1.10 Cos phi moteur 0.30 1.00 0.85 120
P2.1.11 Référence d'E/S 0 3 0 117
P2.1.12
P2.1.13
P2.1.14
Vitesse nominale
du moteur
Courant nominal
du moteur
Référence de
commande du
panneau opéra-
teur
Référence de
commande de bus
de terrain
Vitesse constante
1
24 20 000 t/mn 1440 112
0,1 x I
0 3 2 121
0 3 3 122
0.00 P2.1.2 Hz 10.00 105
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 26 APPLICATIF STANDARD
Table 5: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.1.15
Vitesse constante
2
0.00 P2.1.2 Hz 50.00 106
ID
Description
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APPLICATIF STANDARD VACON · 27
2.4.3 SIGNAUX D'ENTRÉE (PANNEAU OPÉRATEUR : MENU M2 - G2.2)
Table 6: Signaux d’entrée, G2.2
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.2.1
Logique marche/
arrêt
0 6 0 300
Description
ID
Logique = 0
Signal cmd 1 = Marche avant
Signal cmd 2 = Marche arrière
Logique = 1
Signal cmd 1 = Marche/Arrêt
Signal cmd 2 = Inversion
Logique = 2
Signal cmd 1 = Marche/Arrêt
Signal cmd 2 = Validation marche
Logique = 3
Signal cmd 1 =
Impulsion de marche
(front)
Signal cmd 2 =
Impulsion d'arrêt
Logique = 4
Signal cmd 1 =
Impulsion d'avance
(front)
Signal cmd 2 =
Impulsion de recul
(front)
Logique = 5
Signal cmd 1 =
Impulsion de marche
(front)
Signal cmd 2 =
Impulsion de recul
Logique = 6
Signal cmd 1 =
Impulsion de marche
(front)
Signal cmd 2 =
Impulsion de validation
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 28 APPLICATIF STANDARD
Table 6: Signaux d’entrée, G2.2
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.2.2 Fonction DIN3 0 8 1 301
Entrée analogi-
P2.2.3
P2.2.4
que 2, écart de
référence
Valeur minimale
de mise à
l'échelle de réfé-
rence
0 1 1 302
0.00 320.00 Hz 0.00 303
Description
ID
0 = Non utilisé
1 = Défaut ext., fermeture cont.
2 = Défaut ext.,
ouverture cont.
3 = Validation marche
4 = Sélect. tps acc./
déc.
5 = Forcer srce com.
sur E/S
6 = Forcer srce com.
sur panneau opér.
7 = Forcer srce com.
sur bus de terrain
8 = Inversion
0 = 0-20 mA (0-10 V)
**
1 = 4-20 mA (2-10 V)
**
Valeur maximale
P2.2.5
P2.2.6
P2.2.7
P2.2.8 ***
P2.2.9 ***
de mise à
l'échelle de réfé-
rence
Inversion de réfé-
rence
Temps de filtrage
de référence
AI1 : sélection du
signal
AI2 : sélection du
signal
0.00 320.00 Hz 0.00 304
0 1 0 305
0.00 10.00 s 0.10 306
A1 377
A2 388
0 = Non inversé
1 = Inversé
0 = Pas de filtrage
** = Veillez à placer les cavaliers du groupe X2 en conséquence. Voir le Manuel d'utilisation
du produit.
*** = Utilisez la méthode TTF pour programmer ces paramètres.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APPLICATIF STANDARD VACON · 29
2.4.4 SIGNAUX DE SORTIE (PANNEAU OPÉRATEUR : MENU M2 -> G2.3)
Table 7: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
Sélection du
P2.3.1
P2.3.2
signal de la sortie
analogique 1
Fonction de sortie
analogique
0 A.1 464
0 8 1 307
Description
ID
0 = Non utilisé
(20 mA/10 V)
1 = Fréq. sortie (0f
max
2 = Réf. fréquence
(0-f
max
3 = Vitesse moteur
(0 - Vitesse nominale moteur)
4 = Courant
moteur (0-I
5 = Couple moteur
(0-T
6 = Puissance
moteur (0-P
7 = Tension moteur
(0-U
8 = Tension bus
c.c. (0-1000 V)
)
nMot
nMot
)
)
nMot
)
)
nMot
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Temps filtr. sortie
analogique
Inversion de sortie
analogique
Sortie analogique
minimum
Échelle de sortie
analogique
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Pas de filtrage
0 = Non inversé
1 = Inversé
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 30 APPLICATIF STANDARD
Table 7: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.3.7
Fonction de la
sortie logique 1
0 16 1 312
Description
ID
0 = Non utilisé
1 = Prêt
2 = Marche
3 = Défaut
4 = Défaut inversé
5 = Alarme surchauffe convert.
6 = Alarme ou
défaut ext.
7 = Alarme ou
défaut réf.
8 = Alarme
9 = Inversé
10 = Vitesse cste 1
11 = Vitesse
atteinte
12 = Régul. moteur
actif
13 = Superv. limite
fréq. ouverte 1
14 = Source de
commande : ES
15 = Défaut/
Alarme thermist.
16 = DIN1 de bus
de terrain
P2.3.8
P2.3.9 Fonction RO2 0 16 3 314
P2.3.10
P2.3.11
P2.3.12 *
P2.3.13
Fonction RO1 0 16 2 313
Supervision de
limite de fré-
quence de sortie 1
Limite de fré-
quence de sor-
tie 1 ; valeur
supervisée
Sélection du
signal de la sortie
analogique 2
Fonction de la
sortie analogi-
que 2
0 2 0 315
0.00 320.00 Hz 0.00 316
0.1 E.10 0.1 471
0 8 4 472
Idem paramètre
2.3.7
Idem paramètre
2.3.7
0 = Pas de limite
1 = Supervision
limite basse
2 = Supervision
limite haute
Idem paramètre
2.3.2
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF STANDARD VACON · 31
Table 7: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
Temps de filtrage
P2.3.14
P2.3.15
P2.3.16
P.2.3.17
de la sortie analo-
gique 2
Inversion de la
sortie analogi-
que 2
Minimum de la
sortie analogi-
que 2
Mise à l'échelle de
la sortie analogi-
que 2
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
* = Utilisez la méthode TTF pour programmer ces paramètres.
Description
ID
0 = Pas de filtrage
0 = Non inversé
1 = Inversé
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 32 APPLICATIF STANDARD
2.4.5 PARAMÈTRES DE COMMANDE D'ENTRAÎNEMENT (PANNEAU OPÉRATEUR : MENU M2 -> G2.4)
Table 8: Paramètres de commande d'entraînement, G2.4
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.4.1 Forme de rampe 1 0.0 10.0 s 0.1 500
P2.4.2 Forme de rampe 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4
P2.4.5 Hacheur freinage 0 4 0 504
Temps d'accélé-
ration 2
Temps décéléra-
tion 2
0.1 3000.0 s 1.0 502
0.1 3000.0 s 1.0 503
Description
ID
0 = Linéaire
100 = tps aug/dim
acc/déc cplets
0 = Linéaire
100 = tps aug/dim
acc/déc cplets
0 = Désactivé
1 = Utilisé en rotation
2 = Hacheur de
freinage externe
3 = Utilisé à
l'arrêt/en rotation
4 = utilisé en rotation (sans test)
P2.4.6 Mode Marche 0 2 0 505
P2.4.7 Mode Arrêt 0 3 0 506
P2.4.8
P2.4.9
P2.4.10
Courant de frei-
nage c.c.
Durée freinage
c.c. à l'arrêt
Fréquence de
démarrage du
freinage c.c. pen-
dant l'arrêt sur
rampe
0.00 I
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
L
A 0,7 x I
H
507
0 = Arrêt sur
rampe
1 = Reprise au vol
2 = Reprise au vol
conditionnelle
0 = Roue libre
1= Rampe
2 = Rampe + Valid.
marche en roue
libre
3 = Roue libre +
Valid. marche
rampe
0 = Le freinage c.c.
est désactivé à
l'arrêt
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF STANDARD VACON · 33
Table 8: Paramètres de commande d'entraînement, G2.4
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.4.11
P2.4.12 * Freinage flux 0 1 0 520
P2.4.13
Freinage c.c. au
démarrage
Courant freinage
flux
0.00 600.00 s 0.00 516
0.00 I
L
A I
H
Description
ID
0 = Le freinage c.c.
est désactivé au
démarrage
0 = Désactivé
0 = Marche
519
2.4.6 PARAMÈTRES DE FRÉQUENCES INTERDITES (PANNEAU OPÉRATEUR : MENU M2
- G2.5)
Table 9: Paramètres de fréquences interdites, G2.5
Index Paramètre Min. Max. Unité PréréglageUtil.
Plage de fréquen-
P2.5.1
ces interdites 1 :
limite basse
0.00 320.00 Hz 0.00 509
ID
Description
P2.5.2
P2.5.3
Plage de fréquen-
ces interdites 1 :
limite haute
Rampe acc./déc.
interdite
0.00 320.00 Hz 0.00 510
0.1 10.0 x 1.0 518
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 34 APPLICATIF STANDARD
2.4.7 PARAMÈTRES DE COMMANDE DU MOTEUR (PANNEAU OPÉRATEUR : MENU M2 G2.6)
Table 10: Paramètres de commande du moteur, G2.6
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.6.1 *
P2.6.2 * Optimisation U/f 0 1 0 109
P2.6.3 *
Mode de contrôle
moteur
Sélection du rap-
port U/f
0 1/3 0 600
0 3 0 108
Description
ID
0 = Régulation fréquence
1=Contrôle de
vitesse
NXP :
2 = Contrôle de
couple en boucle
ouverte
3=Cont. vitesse
boucle fermée
4 = Contrôle de
couple en boucle
fermée
0 = Non utilisé
1 = Surcouple
automatique
0 = Linéaire
1 = Quadratique
2 = Programmable
3 = Linéaire avec
optimisation du
flux
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
Zone d’affaiblisse-
ment du champ
Tension au point
d’affaiblissement
du champ
Fréquence au
point intermé-
diaire de la
courbe U/f
Tension au point
intermédiaire de
la courbe U/f
Tension de sortie
à fréquence nulle
Fréquence de
commutation
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Variable 606
1.0 Variable kHz Variable 601
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF STANDARD VACON · 35
Table 10: Paramètres de commande du moteur, G2.6
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.6.10
P2.6.11
P2.6.12 Statisme 0.00 100.00 % 0.00 620
P2.6.13 Identification 0 1/2 0 631
Groupe de paramètres de boucle fermée 2.6.14
Régulateur de
surtension
Régulateur de
sous-tension
0 2 1 607
0 1 1 608
Description
ID
0 = Non utilisé
1 = Utilisé (sans
rampe)
2 = Utilisé (avec
rampe)
0 = Non utilisé
1 = Utilisé
0 = Aucune action
1 = Identification
sans rotation
2 = Identification
avec rotation
3 = Identification
de marche du
codeur
4 = Aucune action
5 = Échec marche
d'id.
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
Courant magnéti-
sant
Gain P de régula-
tion de vitesse
Temps I de régu-
lation de vitesse
Compensation
d'accélération
Ajust. de glisse-
ment
Courant magnéti-
sant au démar-
rage
Temps de magné-
tisation au démar-
rage
Temps de vitesse
nulle au démar-
rage
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
H
L
A 0.00 612
A 0.00 627
P2.6.14.10
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Temps de vitesse
nulle à l'arrêt
0 32000 ms 100 616
2

VACON · 36 APPLICATIF STANDARD
Table 10: Paramètres de commande du moteur, G2.6
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.6.14.11
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Groupe de paramètres d'identification 2.6.15
P2.6.15.1 Phase de vitesse -50.0 50.0 0.0 0.0 1252
Couple de démar-
rage
Couple de démar-
rage AVT
Couple de démar-
rage AR
Temps de filtrage
de codeur
Gain P de régula-
tion du courant
0 3 0 621
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
Description
ID
0 = Non utilisé
1 = Mémoire de
couple
2 = Référence de
couple
3 = Couple de
démarrage avt/ar
* = La valeur du paramètre peut être modifiée une fois seulement que le convertisseur de
fréquence a été arrêté.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF STANDARD VACON · 37
2.4.8 PROTECTIONS (PANNEAU OPÉRATEUR : MENU M2 -> G2.7)
Table 11: Protections, G2.7
Index Paramètre Min. Max. Unité PréréglageUtil.
Réponse à un
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5
défaut de réfé-
rence 4 mA
Fréquence défaut
référence 4 mA
Action du défaut
externe
Supervision de la
phase réseau
Réponse au défaut
de sous-tension
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
0 1 0 727
Description
ID
0 = Pas d’action
1 = Alarme
2 = Alarme+fréq.
précédente
3 = Alarm.+Fréq.
cste 2.7.2
4 = Défaut, arrêt
selon 2.4.7
5 = Défaut, arrêt
en roue libre
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
0 = Le défaut est
stocké dans l’historique
Défaut non stocké
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
Supervision de
phase moteur
Protection contre
les défauts de
terre
Protection ther-
mique du moteur
Facteur de tem-
pérature
ambiante du
moteur
Facteur de refroi-
dissement du
moteur à vitesse
nulle
Constante de
temps thermique
du moteur
Cycle de service
du moteur
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Variable 707
0 150 % 100 708
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 38 APPLICATIF STANDARD
Table 11: Protections, G2.7
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.7.13
P2.7.14 PCM : courant 0.00 2 x I
P2.7.15 PCM : tempo 1.00 120.00 s 15.00 711
P2.7.16 Seuil fréquence 1.0 P2.1.2 Hz 25.00 712
P2.7.17
P2.7.18
Protection contre
le calage moteur
Protection contre
les sous-charges
Protection contre
ss-charges du
couple
0 3 0 709
H
0 3 0 713
10.0 150.0 % 50.0 714
A I
H
Description
ID
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
710
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
Charge à fréq.
nulle de protec-
tion contre ss-
charges
Délai de protec-
tion contre les
sous-charges
Réponse au défaut
de thermistance
Réponse au défaut
de bus de terrain
Réponse au défaut
de slot
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 3 2 734
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
Voir P2.7.21
Voir P2.7.21
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF STANDARD VACON · 39
2.4.9 PARAMÈTRES DE REDÉMARRAGE AUTOMATIQUE (PANNEAU OPÉRATEUR : MENU M2 - G2.8)
Table 12: Paramètres de redémarrage automatique, G2.8
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.8.1
P2.8.2
P2.8.3 Mode Marche 0 2 0 719
P2.8.4
P2.8.5
P2.8.6
Temporisation de
réarmement
Temporisation du
réarmement
Nombre de tenta-
tives après
déclenchement de
sous-tension
Nombre de tenta-
tives après
déclenchement de
surtension
Nombre de tenta-
tives après
déclenchement de
surintensité
0.10 10.00 s 0.50 717
0.00 60.00 s 30.00 718
0 10 0 720
0 10 0 721
0 3 0 722
Description
ID
0 = Arrêt sur
rampe
1 = Reprise au vol
2 = Selon P2.4.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Nombre de tenta-
tives après
déclenchement de
référence 4 mA
Nombre de tenta-
tives après
déclenchement du
défaut de tempé-
rature moteur
Nombre de tenta-
tives après
déclenchement du
défaut externe
Nombre de tenta-
tives après
déclenchement du
défaut de sous-
charge
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 40 APPLICATIF STANDARD
2.4.10 CONTRÔLE DU PANNEAU OPÉRATEUR (PANNEAU OPÉRATEUR : MENU M3)
Les paramètres de sélection de source de commande et de direction du panneau opérateur
sont répertoriés ci-dessous. Voir le menu Contrôle du panneau opérateur dans le Manuel
d'utilisation du produit.
Table 13: Paramètres de contrôle du panneau opérateur, M3
Index Paramètre Min. Max. Unité PréréglageUtil.
P3.1
P3.2 Réf. panneau op. P2.1 P2.2 Hz 0.00
P3.3
R3.4 Touche Arrêt 0 1 1 114
Source de com-
mande
Direction (sur le
panneau opéra-
teur)
1 3 1 125
0 1 0 123
Description
ID
1 = Bornier d’E/S
2 = Panneau opérateur
3 = Bus de terrain
0 = Fonction limitée de la touche
Arrêt
1 = Touche Arrêt
toujours activée
2.4.11 MENU SYSTÈME (PANNEAU OPÉRATEUR : MENU M6)
Pour plus d’informations sur les paramètres et les fonctions relatifs à l’utilisation générale
du convertisseur de fréquence, notamment la sélection de l’applicatif et de la langue, les
ensembles de paramètres personnalisés ou pour en savoir plus sur le matériel et le logiciel,
voir le Manuel d'utilisation du produit.
2.4.12 CARTES D'EXTENSION (PANNEAU OPÉRATEUR : MENU M7)
Le menu M7 affiche les cartes optionnelles et les cartes d’extension connectées à la carte de
commande, ainsi que les informations relatives à ces cartes. Pour plus d'informations, voir
le Manuel d'utilisation du produit.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 41
3 APPLICATIF DE COMMANDE LOCAL/DISTANCE
3.1 INTRODUCTION
Sélectionnez l'applicatif de commande local/distance dans le menu M6, à la page S6.2.
L'applicatif de commande local/distance permet de disposer de deux sources de commande
différentes. Pour chaque source de commande, la référence de fréquence peut être
sélectionnée à partir du panneau opérateur, du bornier d'E/S ou du bus de terrain. La source
de commande active est sélectionnée avec l'entrée logique DIN6.
Toutes les sorties sont librement programmables.
•
Fonctions supplémentaires :
Logique de signal d'inversion et Marche/Arrêt programmable
•
Échelonnement de référence
•
Une supervision de limite de fréquence
•
Rampes en secondes et programmation de rampe en S
•
Fonctions Marche/Arrêt programmables
•
Freinage CC à l'arrêt
•
Une zone de fréquences interdites
•
Courbe U/f et fréquence de découpage programmables
•
Redémarrage automatique
•
Protection thermique et contre le calage du moteur : action programmable ; off, alarme,
•
défaut
Les paramètres de l’applicatif de commande local/distance sont décrits au chapitre 9
Description des paramètres de ce manuel. Les explications sont ordonnées selon le numéro
ID individuel du paramètre.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

Potentiomètre de
référence, 1-10 kΩ
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Référence à distance
0(4) - 20 mA
MARCHE
PRÊT
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Borne Affichage Description
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24V
Sortie de référence
Terre E/S
Entrée analogique 2
Plage de courant 0–20 mA
Programmable (P2.1.11)
Sortie de tension de commande
Terre E/S
Source A : Marche avant
Logique programmable (P2.2.1)
Source A : Marche arrière
Ri min = 5 kohm
Entrée de défaut externe
Programmable (P2.2.2)
Source B : Marche avant
Logique programmable (P2.2.15)
Source B : Marche arrière
Ri min = 5 kΩ
Sélection source A/B
Commun pour DIN 1—DIN 3
Commun pour DIN4—DIN6
Sortie de tension de commande
Terre E/S
Sortie analogique 1
Fréquence de sortie
Programmable (P2.3.2)
Sortie logique
PRÊT
Programmable (P2.3.7)
Collecteur ouvert, I≤50 mA,
U≤48 Vc.c.
Sortie relais 1
MARCHE
Programmable
(P2.3.8)
Sortie relais 2
DÉFAUT
Programmable
(P2.3.9)
Plage 0–20 mA/RL,
500 Ω max.
Contact ouvert = source A active
Contact fermé = source B active
Contact fermé = marche avant
Contact fermé = marche arrière
AO1+
Référence d'entrée analogique 1
pour la source B
Terre pour la référence
et les commandes
Référence d'entrée analogique 2
pour la source A
Contact fermé = marche avant
Contact fermé = marche arrière
Contact ouvert = aucun défaut
Contact fermé = défaut
Tension du potentiomètre, etc.
Entrée analogique 1
Plage de tension 0–10 Vc.c.
Programmable (P2.1.12)
Tension pour les interrupteurs,
etc. 0,1 A max.
Tension pour les interrupteurs (voir #6)
Connexion à TERRE ou +24 V
Connexion à TERRE ou +24 V
Terre pour la référence
et les commandes
Terre pour la référence et les commandes
VACON · 42 APPLICATIF DE COMMANDE LOCAL/DISTANCE
3.2 E/S DE COMMANDE
Fig. 7: Applicatif de commande local/distance – Configuration des E/S par défaut
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

Groupe de cavaliers X3 :
Mise à la terre de CMA et CMB
CMB raccordé à TERRE
CMA raccordé à TERRE
CMB isolé de TERRE
CMA isolé de TERRE
CMB et CMA raccordés
ensemble en interne,
isolés de TERRE
= Préréglage usine
APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 43
*) La carte optionnelle A3 n'a pas de borne pour contact ouvert sur sa deuxième sortie relais
(borne 24 manquante).
REMARQUE!
Voir les positions du cavalier ci-dessous. Des informations supplémentaires sont
disponibles dans le Manuel d'utilisation du produit.
Fig. 8: Positionnement des cavaliers
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

DIN3
≥ 1
DIN6
DIN2
DIN3
AI1
AI2
DIN1
DIN2
DIN3
DIN4
DIN5
A
o
A
o
A
o
Inversion interne
Réarmement de
défaut interne
Entrée de réarmement de défaut (programmable)
3.3 Direction panneau op.
Marche/arrêt interne
Référence du bus de terrain
Marche/arrêt à partir du bus de terrain
Direction à partir du bus de terrain
Touches Marche/Arrêt
Touche de réarmement
Marche avant
(programmable)
Marche arrière
(programmable)
Marche avant
Marche arrière
(programmable)
(programmable)
Marche/Arrêt
Inversion
Haut
Bas
3.1 Source
de commande
2.1.15 Réf. de vitesse de jog
2.1.14 Référence cmde bus de terrain
2.1.13 Réf. cmde panneau op.
2.1.12 Référence E/S B
2.1.11 Référence E/S A
R3.2 Réf. panneau op.
Réf. fréquence
interne
Logique
d'inversion et
Marche/Arrêt
programmable A
Logique
d'inversion et
Marche/Arrêt
programmable B
Motopotentiomètre
VACON · 44 APPLICATIF DE COMMANDE LOCAL/DISTANCE
3.3 LOGIQUE DES SIGNAUX DE COMMANDE DANS L'APPLICATIF DE COMMANDE LOCAL/DISTANCE
Fig. 9: Logique des signaux de commande de l'applicatif de commande local/distance
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 45
3.4 APPLICATIF DE COMMANDE LOCAL/DISTANCE – LISTES DES PARAMÈTRES
3.4.1 VALEURS D’AFFICHAGE (PANNEAU OPÉRATEUR : MENU M1)
Les valeurs d’affichage sont les valeurs réelles des paramètres et des signaux ainsi que des
états et des mesures. Les valeurs d’affichage ne peuvent pas être modifiées.
Table 14: Valeurs d’affichage
Index Valeur affichée Unité ID Description
V1.1 Fréquence de sortie Hz 1
V1.2
V1.3 Vitesse moteur t/mn 2
V1.4 Courant moteur A 3
V1.5 Couple moteur % 4
V1.6 Puissance moteur % 5
V1.7 Tension moteur V 6
V1.8 Tension bus c.c. V 7
1.9
1.10
V1.11 Entrée analogique 1 V/mA 13
V1.12 Entrée analogique 2 V/mA 14
V1.13 DIN 1, 2, 3 15
Référence de fré-
quence
Température de
l'unité
Température du
moteur
Hz 25
°C 8
% 9
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 I
V1.17 3 valeurs affichées
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
analogique mA 26
out
3

VACON · 46 APPLICATIF DE COMMANDE LOCAL/DISTANCE
3.4.2 PARAMÈTRES DE BASE (PANNEAU OPÉRATEUR : MENU M2 - G2.1)
Table 15: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.1.1 Fréquence mini 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Fréquence maxi P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5 Limite de courant 0,1 x I
P2.1.6 *
P2.1.7 *
Temps d'accélé-
ration 1
Temps de décélé-
ration 1
Tension nominale
du moteur
Fréquence nomi-
nale du moteur
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
A I
NX2 :
230 V
NX5 :
400 V
NX6 :
690 V
L
ID
107
110
Description
P2.1.8 *
P2.1.9 *
P2.1.10 * Cos phi moteur 0.30 1.00 0.85 120
P2.1.11 * Référence E/S A 0 4 1 117
P2.1.12 * Référence E/S B 0 4 0 131
Vitesse nominale
du moteur
Courant nominal
du moteur
24 20 000 t/mn 1440 112
0,1 x I
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
4 = Motopotentiomètre
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
4 = Motopotentiomètre
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 47
Table 15: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
Référence de
P2.1.13 *
P2.1.14 *
P2.1.15 *
commande du
panneau opéra-
teur
Référence de
commande de bus
de terrain
Référence de
vitesse de jog
0 3 2 121
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
Description
ID
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
* = La valeur du paramètre peut être modifiée une fois seulement que le convertisseur de
fréquence a été arrêté.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 48 APPLICATIF DE COMMANDE LOCAL/DISTANCE
3.4.3 SIGNAUX D'ENTRÉE (PANNEAU OPÉRATEUR : MENU M2 - G2.2)
Table 16: Signaux d’entrée, G2.2
Index Paramètre Min. Max. Unité PréréglageUtil.
Sélection de logi-
P2.2.1 ***
que Marche/Arrêt
source A
0 8 0 300
Description
ID
Logique = 0
Signal cmd 1 = Marche avant
Signal cmd 2 = Marche arrière
Logique = 1
Signal cmd 1 = Marche/Arrêt
Signal cmd 2 = Inversion
Logique = 2
Signal cmd 1 = Marche/Arrêt
Signal cmd 2 = Validation marche
Logique = 3
Signal cmd 1 =
Impulsion de marche
(front)
Signal cmd 2 =
Impulsion d'arrêt
Logique = 4
Signal cmd 1 = Marche avant
Signal cmd 2 = Motopotentiomètre +Vite
Logique = 5
Signal cmd 1 = Marche avant (front)
Signal cmd 2 = Marche arrière (front)
Logique = 6
Signal cmd 1 = Marche (front) / Arrêt
Signal cmd 2 = Inversion
Logique = 7
Signal cmd 1 = Marche (front) / Arrêt
Signal cmd 2 = Validation marche
Logique = 8
Signal cmd 1 = Marche avant (front)
Signal cmd 2 = Motopotentiomètre +Vite
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 49
Table 16: Signaux d’entrée, G2.2
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.2.2 Fonction DIN3 0 13 1 301
Description
ID
0 = Non utilisé
1 = Défaut ext., fermeture cont.
2 = Défaut ext.,
ouverture cont.
3 = Validation marche
4 = Sélect. tps acc./
déc.
5 = Forcer srce com.
sur E/S
6 = Forcer srce com.
sur panneau opér.
7 = Forcer srce com.
sur bus de terrain
8 = Inversion
9 = Vitesse de jog
11 = Opération acc./
déc. interdite
12 = Commande de
freinage c.c.
13 = Motopotentiomètre -Vite
P2.2.3
****
P2.2.4
P2.2.5
P2.2.6
P2.2.7
P2.2.8
P2.2.9
****
AI1 : sélection du
signal
AI1 : plage de
signal
AI1 : réglage utili-
sateur minimal
AI1 : réglage utili-
sateur maximal
AI1 : inversion du
signal
AI1 : temps fil-
trage
AI2 : sélection du
signal
0.1 E.10 A1 377
0 2 0 320
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0.00 10.00 s 0.10 324
0.1 E.10 A.2 388
0 = 0-10 V
(0-20 mA**)
1 = 2-10 V
(4-20 mA**)
2 = Plage utilisateur**
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 50 APPLICATIF DE COMMANDE LOCAL/DISTANCE
Table 16: Signaux d’entrée, G2.2
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.2.10
P2.2.11
P2.2.12
P2.2.13
P2.2.14
AI2 : plage de
signal
AI2 : réglage utili-
sateur minimal
AI2 : réglage utili-
sateur maximal
AI2 : inversion du
signal
AI2 : temps de fil-
trage du signal
0 2 1 325
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
0.00 10.00 s 0.10 329
Description
ID
0 = 0-10 V
(0-20 mA**)
1 = 2-10 V
(4-20 mA**)
2 = Plage utilisateur**
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 51
Table 16: Signaux d’entrée, G2.2
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.2.15
***
Sélection de logi-
que Marche/Arrêt
source B
0 6 0 363
Description
ID
Logique = 0
Signal cmd 1 = Marche avant
Signal cmd 2 = Marche arrière
Logique = 1
Signal cmd 1 = Marche/Arrêt
Signal cmd 2 = Inversion
Logique = 2
Signal cmd 1 = Marche/Arrêt
Signal cmd 2 = Validation marche
Logique = 3
Signal cmd 1 =
Impulsion de marche
(front)
Signal cmd 2 =
Impulsion d'arrêt
Logique = 4
Signal cmd 1 =
Impulsion d'avance
(front)
Signal cmd 2 =
Impulsion de recul
(front)
Logique = 5
Signal cmd 1 =
Impulsion de marche
(front)
Signal cmd 2 =
Impulsion de recul
Logique = 6
Signal cmd 1 =
Impulsion de marche
(front)
Signal cmd 2 =
Impulsion de validation
Valeur minimale
P2.2.16
P2.2.17
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
de mise à
l'échelle de réfé-
rence, source A
Valeur maximale
de mise à
l'échelle de réfé-
rence, source A
0.00 320.00 Hz 0.00 303
0.00 304
3

VACON · 52 APPLICATIF DE COMMANDE LOCAL/DISTANCE
Table 16: Signaux d’entrée, G2.2
Index Paramètre Min. Max. Unité PréréglageUtil.
Valeur minimale
P2.2.18
P2.2.19
P2.2.20
P2.2.21
de mise à
l'échelle de réfé-
rence, source B
Valeur maximale
de mise à
l'échelle de réfé-
rence, source B
Entrée analogique
libre, sélection du
signal
Entrée analogique
libre, fonction
0.00 320.00 Hz 0.00 364
0.00 320.00 Hz 0.00 365
0 2 0 361
0 4 0 362
Description
ID
0,00 = Pas de mise à
l'échelle
>0 = valeur max.
mise à l'échelle
0 = Non utilisé
1 = Entrée analogique 1
2=Entrée analogique
2
0 = Pas de remise à
zéro
1 = Réduit la limite
de courant (P2.1.5)
2 = Réduit le courant
de freinage c.c.
3 = Réduit les temps
d'accél. et de décél.
4 = Réduit la limite
de supervision du
couple
Motopotentiomè-
P2.2.22
P2.2.23
P2.2.24
tre : temps de
rampe
Remise à zéro de
la mémoire de
référence de fréquence du moto-
potentiomètre
Mémoire d'impul-
sion de marche
0.1 2000.0 Hz/s 10.0 331
0 2 1 367
0 1 0 498
0 = Pas de remise à
zéro
1 = Remise à zéro en
cas d'arrêt ou de
mise hors tension
2 = Remise à zéro en
cas de mise hors
tension
0 = État Marche non
copié
1 = État Marche
copié
** = Veillez à placer les cavaliers du groupe X2 en conséquence. Voir le Manuel d'utilisation
du produit.
*** = La valeur du paramètre peut être modifiée une fois seulement que le convertisseur de
fréquence a été arrêté.
**** = Utilisez la méthode TTF pour programmer ces paramètres.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 53
3.4.4 SIGNAUX DE SORTIE (PANNEAU OPÉRATEUR : MENU M2 -> G2.3)
Table 17: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.3.1 AO1 : sélection 0.1 E.10 A11 464
P2.3.2
P2.3.3
Fonction de sortie
analogique
Temps filtr. sortie
analogique
0 8 1 307
0.00 10.00 s 1.00 308
Description
ID
0 = Non utilisé
(20 mA/10 V)
1 = Fréq. sortie (0f
max
2 = Réf. fréquence
(0-f
3 = Vitesse moteur
(0 - Vitesse nominale moteur)
4 = Courant
moteur (0-I
5 = Couple moteur
(0-T
6 = 7 = Tension
moteur (0-U
teur
Puissance moteur
(0-P
8 = Tension bus
c.c. (0-1000 V)
0 = Pas de filtrage
)
)
max
nMot
)
nMoteur
)
nMot
)
nMo-
)
P2.3.4
P2.3.5
P2.3.6
Inversion de sortie
analogique
Sortie analogique
minimum
Échelle de sortie
analogique
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Non inversé
1 = Inversé
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 54 APPLICATIF DE COMMANDE LOCAL/DISTANCE
Table 17: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.3.7
Fonction de la
sortie logique 1
0 22 1 312
Description
ID
0 = Non utilisé
1 = Prêt
2 = Marche
3 = Défaut
4 = Défaut inversé
5 = Alarme surchauffe convert.
6 = Alarme ou
défaut ext.
7 = Alarme ou
défaut réf.
8 = Alarme
9 = Inversé
10 = Vitesse jog
sélectionnée
11 = Vitesse
atteinte
12 = Régul. moteur
actif
13 = Superv. limite
fréq. ouverte 1
14 = Superv. limite
fréq. ouverte 2
15 = Superv. limite
du couple
16 = Supervis.
limite réf.
17 = Cmde freinage ext.
18 = Source de
commande : ES
19 = Superv. limite
temp. conv. fréq.
20 = Sens de rotation non demandé
21 = Cmde freinage ext. inversée
22 = Déft/alarm.
thermistance
3
P2.3.8
P2.3.9 Fonction RO2 0 22 3 314
P2.3.10
Fonction RO1 0 22 2 313
Supervision de
limite de fré-
quence de sortie 1
0 2 0 315
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Idem paramètre
2.3.7
Idem paramètre
2.3.7
0 = Pas de limite
1 = Supervision
limite basse
2 = Supervision
limite haute

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 55
Table 17: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
Limite de fré-
P2.3.11
P2.3.12
P2.3.13
P2.3.14
P2.3.15
quence de sor-
tie 1 ; valeur
supervisée
Supervision de
limite de fré-
quence de sortie 2
Limite de fréquence de sortie 2 ; valeur de
supervision
Fonction de
supervision de
limite du couple
Valeur de supervi-
sion de limite du
couple
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
-300.0 300.0 % 0.0 349
Description
ID
0 = Pas de limite
1 = Supervision
limite basse
2 = Supervision
limite haute
0 = Non
1 = Limite basse
2 = Limite haute
P2.3.16
P2.3.17
P2.3.18
P2.3.19
P2.3.20
P2.3.21
Fonction de
supervision de
limite de réfé-
rence
Valeur de supervi-
sion de limite de
référence
Temporisation de
désactivation du
frein externe
Temporisation
d'activation du
frein externe
Supervision de
limite de tempé-
rature du conver-
tisseur de fré-
quence
Valeur limite de
température du
convertisseur de
fréquence
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0 = Non
1 = Limite basse
2 = Limite haute
0 = Non
1 = Limite basse
2 = Limite haute
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 56 APPLICATIF DE COMMANDE LOCAL/DISTANCE
Table 17: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
Mise à l'échelle de
P2.3.22
P2.3.23
P2.3.24
P2.3.25
P2.3.26
P.2.3.27
la sortie analogi-
que 2
Fonction de la
sortie analogi-
que 2
Temps de filtrage
de la sortie analo-
gique 2
Inversion de la
sortie analogi-
que 2
Minimum de la
sortie analogi-
que 2
Mise à l'échelle de
la sortie analogi-
que 2
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
Description
ID
Idem paramètre
2.3.2
0 = Pas de filtrage
0 = Non inversé
1 = Inversé
0 = 0 mA (0 V)
1 = 4 mA (2 V)
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 57
3.4.5 PARAMÈTRES DE COMMANDE D'ENTRAÎNEMENT (PANNEAU OPÉRATEUR : MENU M2 -> G2.4)
Table 18: Paramètres de commande d'entraînement, G2.4
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.4.1 Forme de rampe 1 0.0 10.0 s 0.1 500
P2.4.2 Forme de rampe 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4
P2.4.5 Hacheur freinage 0 4 0 504
Temps d'accélé-
ration 2
Temps décéléra-
tion 2
0.1 3000.0 s 1.0 502
0.1 3000.0 s 1.0 503
Description
ID
0 = Linéaire
100 = tps aug/dim
acc/déc cplets
0 = Linéaire
100 = tps aug/dim
acc/déc cplets
0 = Désactivé
1 = Utilisé en rotation
2 = Hacheur de
freinage externe
3 = Utilisé à
l'arrêt/en rotation
4 = utilisé en rotation (sans test)
P2.4.6 Mode Marche 0 2 0 505
P2.4.7 Mode Arrêt 0 3 0 506
P2.4.8
P2.4.9
P2.4.10
Courant de frei-
nage c.c.
Durée freinage
c.c. à l'arrêt
Fréquence de
démarrage du
freinage c.c. pen-
dant l'arrêt sur
rampe
0.00 I
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
L
A 0,7 x I
H
507
0 = Arrêt sur
rampe
1 = Reprise au vol
2 = Reprise au vol
conditionnelle
0 = Roue libre
1= Rampe
2 = Rampe + Valid.
marche en roue
libre
3 = Roue libre +
Valid. marche
rampe
0 = Le freinage c.c.
est désactivé à
l'arrêt
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 58 APPLICATIF DE COMMANDE LOCAL/DISTANCE
Table 18: Paramètres de commande d'entraînement, G2.4
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.4.11
P2.4.12 * Freinage flux 0 1 0 520
P2.4.13
Freinage c.c. au
démarrage
Courant freinage
flux
0.00 600.00 s 0.00 516
0.00 I
L
A I
H
Description
ID
0 = Le freinage c.c.
est désactivé au
démarrage
0 = Désactivé
0 = Marche
519
3.4.6 PARAMÈTRES DE FRÉQUENCES INTERDITES (PANNEAU OPÉRATEUR : MENU M2
- G2.5)
Table 19: Paramètres de fréquences interdites, G2.5
Index Paramètre Min. Max. Unité PréréglageUtil.
Plage de fréquen-
P2.5.1
ces interdites 1 :
limite basse
0.00 320.00 Hz 0.00 509
ID
Description
P2.5.2
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7
Plage de fréquen-
ces interdites 1 :
limite haute
Plage de fréquen-
ces interdites 2 :
limite basse
Plage de fréquen-
ces interdites 2 :
limite haute
Plage de fréquen-
ces interdites 3 :
limite basse
Plage de fréquen-
ces interdites 3 :
limite haute
Rampe acc./déc.
interdite
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = La plage interdite 1 est désactivée
0 = La plage interdite 2 est désactivée
0 = La plage interdite 3 est désactivée
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 59
3.4.7 PARAMÈTRES DE COMMANDE DU MOTEUR (PANNEAU OPÉRATEUR : MENU M2 G2.6)
Table 20: Paramètres de commande du moteur, G2.6
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.6.1 *
P2.6.2 * Optimisation U/f 0 1 0 109
P2.6.3 *
Mode de contrôle
moteur
Sélection du rap-
port U/f
0 1/3 0 600
0 3 0 108
Description
ID
0 = Régulation fréquence
1=Contrôle de
vitesse
NXP :
2 = Contrôle de
couple en boucle
ouverte
3=Cont. vitesse
boucle fermée
4 = Contrôle de
couple en boucle
fermée
0 = Non utilisé
1 = Surcouple
automatique
0 = Linéaire
1 = Quadratique
2 = Programmable
3 = Linéaire avec
optimisation du
flux
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
Zone d’affaiblisse-
ment du champ
Tension au point
d’affaiblissement
du champ
Fréquence au
point intermé-
diaire de la
courbe U/f
Tension au point
intermédiaire de
la courbe U/f
Tension de sortie
à fréquence nulle
Fréquence de
commutation
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Variable 606
1.0 Variable kHz Variable 601
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 60 APPLICATIF DE COMMANDE LOCAL/DISTANCE
Table 20: Paramètres de commande du moteur, G2.6
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.6.10
P2.6.11
P2.6.12 Statisme 0.00 100.00 % 0.00 620
P2.6.13 Identification 0 1/2 0 631
Groupe de paramètres de boucle fermée 2.6.14
Régulateur de
surtension
Régulateur de
sous-tension
0 2 1 607
0 1 1 608
Description
ID
0 = Non utilisé
1 = Utilisé (sans
rampe)
2 = Utilisé (avec
rampe)
0 = Non utilisé
1 = Utilisé
0 = Aucune action
1 = Identification
sans rotation
2 = Identification
avec rotation
3 = Identification
de marche du
codeur
4 = Aucune action
5 = Échec marche
d'id.
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
Courant magnéti-
sant
Gain P de régula-
tion de vitesse
Temps I de régu-
lation de vitesse
Compensation
d'accélération
Ajust. de glisse-
ment
Courant magnéti-
sant au démar-
rage
Temps de magné-
tisation au démar-
rage
Temps de vitesse
nulle au démar-
rage
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
H
L
A 0.00 612
A 0.00 627
3
P2.6.14.10
Temps de vitesse
nulle à l'arrêt
0 32000 ms 100 616
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 61
Table 20: Paramètres de commande du moteur, G2.6
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.6.14.11
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Groupe de paramètres d'identification 2.6.15
P2.6.15.1 Phase de vitesse -50.0 50.0 0.0 0.0 1252
Couple de démar-
rage
Couple de démar-
rage AVT
Couple de démar-
rage AR
Temps de filtrage
de codeur
Gain P de régula-
tion du courant
0 3 0 621
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
Description
ID
0 = Non utilisé
1 = Mémoire de
couple
2 = Référence de
couple
3 = Couple de
démarrage avt/ar
* = La valeur du paramètre peut être modifiée une fois seulement que le convertisseur de
fréquence a été arrêté.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 62 APPLICATIF DE COMMANDE LOCAL/DISTANCE
3.4.8 PROTECTIONS (PANNEAU OPÉRATEUR : MENU M2 -> G2.7)
Table 21: Protections, G2.7
Index Paramètre Min. Max. Unité PréréglageUtil.
Réponse à un
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5
défaut de réfé-
rence 4 mA
Fréquence défaut
référence 4 mA
Action du défaut
externe
Supervision de la
phase réseau
Réponse au défaut
de sous-tension
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
0 1 0 727
Description
ID
0 = Pas d’action
1 = Alarme
2 = Alarme+fréq.
précédente
3 = Alarm.+Fréq.
cste 2.7.2
4 = Défaut, arrêt
selon 2.4.7
5 = Défaut, arrêt
en roue libre
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
0 = Le défaut est
stocké dans l’historique
Défaut non stocké
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
Supervision de
phase moteur
Protection contre
les défauts de
terre
Protection ther-
mique du moteur
Facteur de tem-
pérature
ambiante du
moteur
Facteur de refroi-
dissement du
moteur à vitesse
nulle
Constante de
temps thermique
du moteur
Cycle de service
du moteur
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Variable 707
0 150 % 100 708
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 63
Table 21: Protections, G2.7
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.7.13
P2.7.14 PCM : courant 0.00 2 x I
P2.7.15 PCM : tempo 1.00 120.00 s 15.00 711
P2.7.16 Seuil fréquence 1.0 P2.1.2 Hz 25.00 712
P2.7.17
P2.7.18
Protection contre
le calage moteur
Protection contre
les sous-charges
Protection contre
ss-charges du
couple
0 3 0 709
H
0 3 0 713
10.0 150.0 % 50.0 714
A I
H
Description
ID
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
710
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
Charge à fréq.
nulle de protec-
tion contre ss-
charges
Délai de protec-
tion contre les
sous-charges
Réponse au défaut
de thermistance
Réponse au défaut
de bus de terrain
Réponse au défaut
de slot
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 3 2 734
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
Voir P2.7.21
Voir P2.7.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 64 APPLICATIF DE COMMANDE LOCAL/DISTANCE
3.4.9 PARAMÈTRES DE REDÉMARRAGE AUTOMATIQUE (PANNEAU OPÉRATEUR : MENU M2 - G2.8)
Table 22: Paramètres de redémarrage automatique, G2.8
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.8.1
P2.8.2
P2.8.3 Mode Marche 0 2 0 719
P2.8.4
P2.8.5
P2.8.6
Temporisation de
réarmement
Temporisation du
réarmement
Nombre de tenta-
tives après
déclenchement de
sous-tension
Nombre de tenta-
tives après
déclenchement de
surtension
Nombre de tenta-
tives après
déclenchement de
surintensité
0.10 10.00 s 0.50 717
0.00 60.00 s 30.00 718
0 10 0 720
0 10 0 721
0 3 0 722
Description
ID
0 = Arrêt sur
rampe
1 = Reprise au vol
2 = Selon P2.4.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Nombre de tenta-
tives après
déclenchement de
référence 4 mA
Nombre de tenta-
tives après
déclenchement du
défaut de tempé-
rature moteur
Nombre de tenta-
tives après
déclenchement du
défaut externe
Nombre de tenta-
tives après
déclenchement du
défaut de sous-
charge
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE COMMANDE LOCAL/DISTANCE VACON · 65
3.4.10 CONTRÔLE DU PANNEAU OPÉRATEUR (PANNEAU OPÉRATEUR : MENU M3)
Les paramètres de sélection de source de commande et de direction du panneau opérateur
sont répertoriés ci-dessous. Voir le menu Contrôle du panneau opérateur dans le Manuel
d'utilisation du produit.
Table 23: Paramètres de contrôle du panneau opérateur, M3
Index Paramètre Min. Max. Unité PréréglageUtil.
P3.1
P3.2 Réf. panneau op. P2.1 P2.2 Hz 0.00
P3.3
R3.4 Touche Arrêt 0 1 1 114
Source de com-
mande
Direction (sur le
panneau opéra-
teur)
1 3 1 125
0 1 0 123
Description
ID
1 = Bornier d’E/S
2 = Panneau opérateur
3 = Bus de terrain
0 = Fonction limitée de la touche
Arrêt
1 = Touche Arrêt
toujours activée
3.4.11 MENU SYSTÈME (PANNEAU OPÉRATEUR : MENU M6)
Pour plus d’informations sur les paramètres et les fonctions relatifs à l’utilisation générale
du convertisseur de fréquence, notamment la sélection de l’applicatif et de la langue, les
ensembles de paramètres personnalisés ou pour en savoir plus sur le matériel et le logiciel,
voir le Manuel d'utilisation du produit.
3.4.12 CARTES D'EXTENSION (PANNEAU OPÉRATEUR : MENU M7)
Le menu M7 affiche les cartes optionnelles et les cartes d’extension connectées à la carte de
commande, ainsi que les informations relatives à ces cartes. Pour plus d'informations, voir
le Manuel d'utilisation du produit.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 66 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
4 APPLICATIF DE CONTROLE DE VITESSE MULTI-
CONFIGURATION
4.1 INTRODUCTION
Sélectionnez l'applicatif de commande séquentielle dans le menu M6, à la page S6.2.
L’applicatif de commande séquentielle est utilisable dans les applications nécessitant des
vitesses constantes. Au total, il est possible de programmer 15 + 2 vitesses différentes : une
vitesse de base, 15 vitesses programmables et une vitesse de jog. Les paliers de vitesse sont
sélectionnés via les signaux logiques DIN3, DIN4, DIN5 et DIN6. Si la vitesse de jog est
utilisée, le signal DIN3 peut être programmé du réarmement du défaut jusqu'à la sélection
de la vitesse de jog.
La référence de vitesse de base peut être un signal de courant ou de tension via des bornes
d’entrée analogiques (2/ 3 ou 4/5). L'autre des entrées analogiques peut être programmé
pour d'autres objectifs.
Toutes les sorties sont librement programmables.
•
Fonctions supplémentaires :
Logique de signal d'inversion et Marche/Arrêt programmable
•
Échelonnement de référence
•
Une supervision de limite de fréquence
•
Rampes en secondes et programmation de rampe en S
•
Fonctions Marche/Arrêt programmables
•
Freinage CC à l'arrêt
•
Une zone de fréquences interdites
•
Courbe U/f et fréquence de découpage programmables
•
Redémarrage automatique
•
Protection thermique et contre le calage du moteur : action programmable ; off, alarme,
•
défaut
Les paramètres de l’applicatif de commande séquentielle sont décrits au chapitre 9
Description des paramètres de ce manuel. Les explications sont ordonnées selon le numéro
ID individuel du paramètre.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Référence de base
(facultative)
MARCHE
PRÊT
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
CMA
CMB
OPTA1
OPTA2 /OPTA3 *)
Borne Affichage Description
+10 Vréf.
AI1+
AI1-
AI2+
AI2-
+24V
Sortie de référence
Terre E/S
Entrée analogique 2.
Plage de courant
0–20 mA
Programmable (P2.1.11)
Sortie de tension de commande
Terre E/S
Marche avant
Logique programmable (P2.2.1)
Marche arrière
Ri min. = 5 kΩ
Entrée de défaut externe
Programmable (P2.2.2)
Sélect. vitesse constante 1
Sélect. vitesse constante 2
Sélect. vitesse constante 3
Commun pour DIN 1—DIN 3
Commun pour DIN4—DIN6
Sortie de tension
de commande
Terre E/S
Sortie analogique 1 :
Fréquence de sortie
Programmable (P2.3.2)
Sortie logique
PRÊT
Programmable (P2.3.7)
Collecteur ouvert,
I≤50 mA, U≤48 Vc.c.
Sortie relais 1
MARCHE
Programmable
Programmable
Programmable
(P2.3.8)
Sortie relais 2
DÉFAUT
Programmable
(P2.3.9)
Plage 0–20 mA/RL,
500 Ω max.
AO1+
Entrée analogique 1,
référence de fréquence
Terre pour la référence
et les commandes
Entrée analogique 2,
référence de fréquence
Référence par défaut
Contact fermé = marche avant
Contact fermé = marche arrière
Contact ouvert = aucun défaut
Contact fermé = défaut
Potentiomètre de
référence, 1-10 kΩ
Tension du potentiomètre, etc.
Entrée analogique 1.
Plage de tension 0–10 Vc.c.
Tension pour les interrupteurs,
etc. 0,1 A max.
Tension pour les interrupteurs
(voir #6)
Connexion à TERRE ou +24 V
Connexion à TERRE ou +24 V
Terre pour la référence
et les commandes
Terre pour la référence et les commandes
sél1 sél2 sél3 sél4 (avec DIN3)
0 0 0 0 Réf. E/S
1 0 0 0 Vitesse 1
0 1 0 0 Vitesse 2
---- -------
1 1 1 1 Vitesse 15
RO1
RO1
RO1
RO2
RO2
RO2
APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 67
4.2 E/S DE COMMANDE
Fig. 10: Applicatif de commande séquentielle – Configuration des E/S par défaut
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

Groupe de cavaliers X3 :
Mise à la terre de CMA et CMB
CMB raccordé à TERRE
CMA raccordé à TERRE
CMB isolé de TERRE
CMA isolé de TERRE
CMB et CMA raccordés
ensemble en interne,
isolés de TERRE
= Préréglage usine
VACON · 68 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
*) La carte optionnelle A3 n'a pas de borne pour contact ouvert sur sa deuxième sortie relais
(borne 24 manquante).
REMARQUE!
Voir les positions du cavalier ci-dessous. Des informations supplémentaires sont
disponibles dans le Manuel d'utilisation du produit.
Fig. 11: Positionnement des cavaliers
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN3
DIN6
DIN3
DIN3
3.2 Réf. panneau op.
2.1.11 Référence E/S
2.1.12 Réf. cmde panneau op.
2.1.13 Référence cmde bus de terrain
2.1.15 Vitesse constante 1
...2.1.29 Vitesse constante 15
3.1 Source de commande
Référence de
fréquence interne
Marche avant
(programmable)
Marche arrière
(programmable)
Marche/Arrêt
Inversion
Marche/arrêt interne
Inversion interne
Réarmement de
défaut interne
Entrée de réarmement de défaut
Touche de
réarmement
Touches
Marche/Arrêt
Référence du bus de terrain
Marche/arrêt à partir du
bus de terrain
Direction à partir du bus
de terrain
3.3 Direction panneau op.
Vitesse constante 1
Vitesse constante 2
Vitesse constante 3
Vitesse constante 4
2.1.14 Référence
de vitesse de jog
(programmable)
≥ 1
Logique
d'inversion et
Marche/Arrêt
programmable
APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 69
4.3 LOGIQUE DES SIGNAUX DE COMMANDE DANS L'APPLICATIF DE COMMANDE SÉQUENTIELLE
Fig. 12: Logique des signaux de commande de l'applicatif de commande séquentielle
4.4 APPLICATIF DE COMMANDE SÉQUENTIELLE – LISTES DES PARAMÈTRES
4.4.1 VALEURS D’AFFICHAGE (PANNEAU OPÉRATEUR : MENU M1)
Les valeurs d’affichage sont les valeurs réelles des paramètres et des signaux ainsi que des
états et des mesures. Les valeurs d’affichage ne peuvent pas être modifiées.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 70 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
Table 24: Valeurs d’affichage
Index Valeur affichée Unité ID Description
V1.1 Fréquence de sortie Hz 1
V1.2
V1.3 Vitesse moteur t/mn 2
V1.4 Courant moteur A 3
V1.5 Couple moteur % 4
V1.6 Puissance moteur % 5
V1.7 Tension moteur V 6
V1.8 Tension bus c.c. V 7
1.9
1.10
V1.11 Entrée analogique 1 V/mA 13
V1.12 Entrée analogique 2 V/mA 14
V1.13 DIN 1, 2, 3 15
Référence de fré-
quence
Température de
l'unité
Température du
moteur
Hz 25
°C 8
% 9
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 I
V1.17 3 valeurs affichées
analogique mA 26
out
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 71
4.4.2 PARAMÈTRES DE BASE (PANNEAU OPÉRATEUR : MENU M2 - G2.1)
Table 25: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.1.1 Fréquence mini 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Fréquence maxi P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5 Limite de courant 0,1 x I
P2.1.6 *
P2.1.7 *
Temps d'accélé-
ration 1
Temps de décélé-
ration 1
Tension nominale
du moteur
Fréquence nomi-
nale du moteur
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
A I
NX2 :
230 V
NX5 :
400 V
NX6 :
690 V
L
ID
107
110
Description
P2.1.8 *
P2.1.9 *
P2.1.10 * Cos phi moteur 0.30 1.00 0.85 120
P2.1.11 * Référence d'E/S 0 3 1 117
P2.1.12 *
P2.1.13 *
P2.1.14
Vitesse nominale
du moteur
Courant nominal
du moteur
Référence de
commande du
panneau opéra-
teur
Référence de
commande de bus
de terrain
Réf. de vitesse de
jog
24 20 000 t/mn 1440 112
0,1 x I
0 3 2 121
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
0 = AI1
1 = AI2
2 = Panneau opérateur
3 = Bus de terrain
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 72 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
Table 25: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.1.15
P2.1.16
P2.1.17
P2.1.18
P2.1.19
P2.1.20
P2.1.21
P2.1.22
Vitesse constante
1
Vitesse constante
2
Vitesse constante
3
Vitesse constante
4
Vitesse constante
5
Vitesse constante
6
Vitesse constante
7
Vitesse cons-
tante 8
0.00 P2.1.2 Hz 5.00 105
0.00 P2.1.2 Hz 10.00 106
0.00 P2.1.2 Hz 12.50 126
0.00 P2.1.2 Hz 15.00 127
0.00 P2.1.2 Hz 17.50 128
0.00 P2.1.2 Hz 20.00 129
0.00 P2.1.2 Hz 22.50 130
0.00 P2.1.2 Hz 25.00 133
ID
Description
P2.1.23
P2.1.24
P2.1.25
P2.1.26
P2.1.27
P2.1.28
P2.1.29
Vitesse cons-
tante 9
Vitesse cons-
tante 10
Vitesse cons-
tante 11
Vitesse cons-
tante 12
Vitesse cons-
tante 13
Vitesse constante
14
Vitesse constante
15
0.00 P2.1.2 Hz 27.50 134
0.00 P2.1.2 Hz 30.00 135
0.00 P2.1.2 Hz 32.50 136
0.00 P2.1.2 Hz 35.00 137
0.00 P2.1.2 Hz 40.00 138
0.00 P2.1.2 Hz 45.00 139
0.00 P2.1.2 Hz 50.00 140
* = La valeur du paramètre peut être modifiée une fois seulement que le convertisseur de
fréquence a été arrêté.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 73
4.4.3 SIGNAUX D'ENTRÉE (PANNEAU OPÉRATEUR : MENU M2 - G2.2)
Table 26: Signaux d’entrée, G2.2
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.2.1 ***
Logique marche/
arrêt
0 6 0 300
Description
ID
Logique = 0
Signal cmd 1 = Marche avant
Signal cmd 2 = Marche arrière
Logique = 1
Signal cmd 1 = Marche/Arrêt
Signal cmd 2 = Inversion
Logique = 2
Signal cmd 1 = Marche/Arrêt
Signal cmd 2 = Validation marche
Logique = 3
Signal cmd 1 =
Impulsion de marche
(front)
Signal cmd 2 =
Impulsion d'arrêt
Logique = 4
Signal cmd 1 =
Impulsion d'avance
(front)
Signal cmd 2 =
Impulsion de recul
(front)
Logique = 5
Signal cmd 1 =
Impulsion de marche
(front)
Signal cmd 2 =
Impulsion de recul
Logique = 6
Signal cmd 1 =
Impulsion de marche
(front)
Signal cmd 2 =
Impulsion de validation
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 74 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
Table 26: Signaux d’entrée, G2.2
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.2.2 Fonction DIN3 0 13 1 301
Description
ID
0 = Non utilisé
1 = Défaut ext., fermeture cont.
2 = Défaut ext.,
ouverture cont.
3 = Validation marche
4 = Sélect. tps acc./
déc.
5 = Forcer srce com.
sur E/S
6 = Forcer srce com.
sur panneau opér.
7 = Forcer srce com.
sur bus de terrain
8 = Inv (si P2.2.1 ≠ 2,
3 ou 6)
9 = Vitesse de jog
10 = Réarmement
défaut
11 = Opération acc./
déc. interdite
12 = Commande de
freinage c.c.
13 = Vitesse cste
P2.2.3
****
P2.2.4
P2.2.5
P2.2.6
P2.2.7
P2.2.8
P2.2.9
****
AI1 : sélection du
signal
AI1 : plage de
signal
AI1 : réglage utili-
sateur minimal
AI1 : réglage utili-
sateur maximal
AI1 : inversion du
signal
AI1 : temps fil-
trage
AI2 : sélection du
signal
0.1 E.10 A1 377
0 2 0 320
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0.00 10.00 s 0.10 324
0.1 E.10 A.2 388
0 = 0-10 V
(0-20 mA**)
1 = 2-10 V
(4-20 mA**)
2 = Plage utilisateur**
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 75
Table 26: Signaux d’entrée, G2.2
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.2.10
P2.2.11
P2.2.12
P2.2.13
P2.2.14
P2.2.15
AI2 : plage de
signal
AI2 : réglage utili-
sateur minimal
AI2 : réglage utili-
sateur maximal
AI2 : inversion du
signal
AI2 : temps de fil-
trage du signal
Valeur minimale
de mise à
l'échelle de réfé-
rence
0 2 1 325
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
0.00 10.00 s 0.10 329
0.00 320.00 Hz 0.00 303
Description
ID
0 = 0-10 V
(0-20 mA**)
1 = 2-10 V
(4-20 mA**)
2 = Plage utilisateur**
Valeur maximale
P2.2.16
P2.2.17
P2.2.18
de mise à
l'échelle de réfé-
rence
Entrée analogique
libre, sélection du
signal
Entrée analogique
libre, fonction
0.00 320.00 Hz 0.00 304
0 2 0 361
0 4 0 362
srce com. = source de commande
f.c. = fermeture du contact
o.c. = ouverture du contact
0,00 = Pas de mise à
l'échelle
>0 = valeur max.
mise à l'échelle
0 = Non utilisé
1 = AI1
2 = AI2
0 = Aucune fonction
1 = Réduit la limite
de courant (P2.1.5)
2 = Réduit le courant
de freinage c.c.,
P2.4.8
3 = Réduit les temps
d'accél. et de décél.
4 = Réduit la limite
de supervision du
couple P2.3.15
** = Veillez à placer les cavaliers du groupe X2 en conséquence. Voir le Manuel d'utilisation
du produit.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 76 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
*** = La valeur du paramètre peut être modifiée une fois seulement que le convertisseur de
fréquence a été arrêté.
**** = Utilisez la méthode TTF pour programmer ces paramètres.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
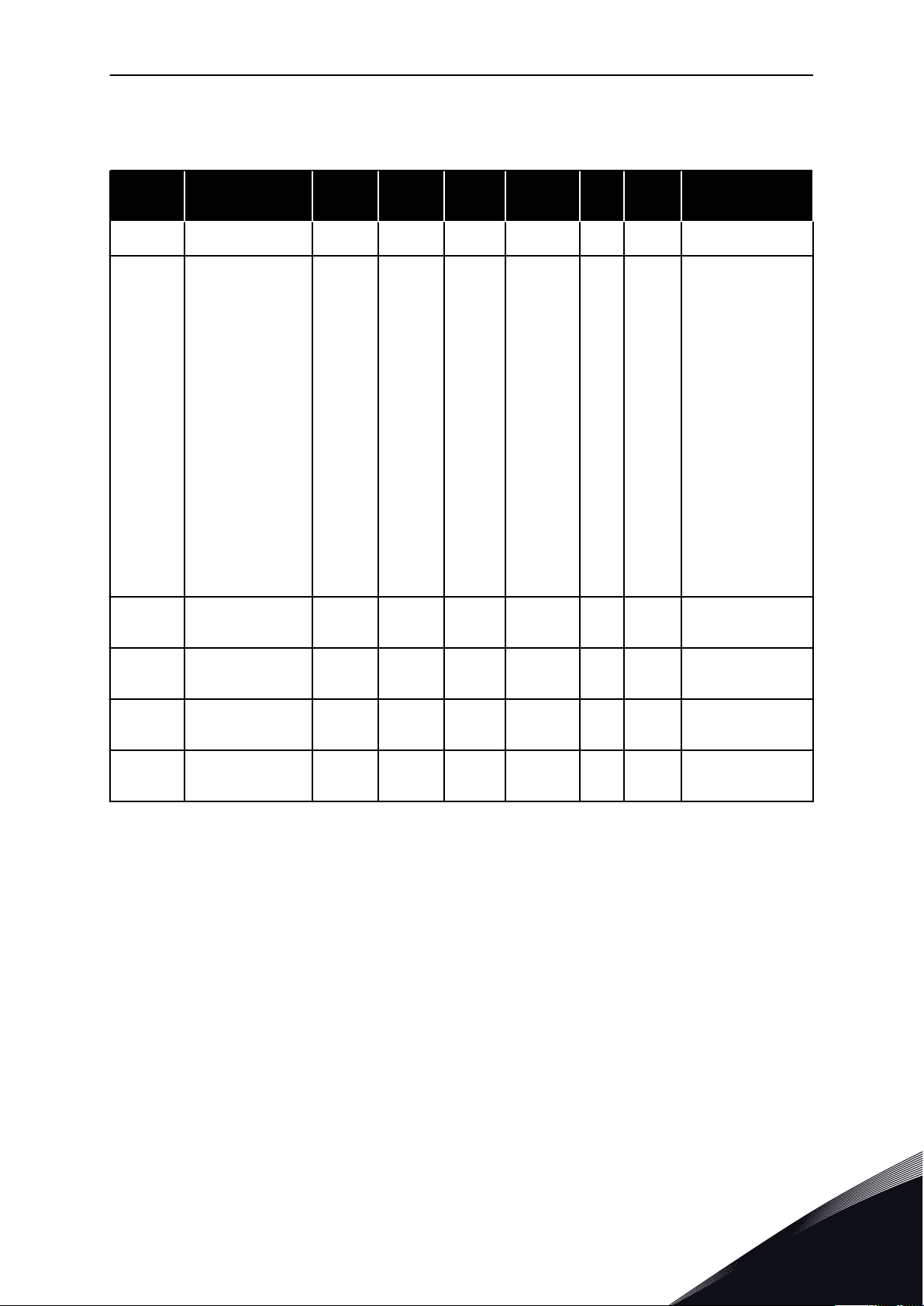
APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 77
4.4.4 SIGNAUX DE SORTIE (PANNEAU OPÉRATEUR : MENU M2 -> G2.3)
Table 27: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.3.1 * AO1 : sélection 0.1 E.10 A11 464
P2.3.2
P2.3.3
Fonction de sortie
analogique
Temps filtr. sortie
analogique
0 8 1 307
0.00 10.00 s 1.00 308
Description
ID
0 = Non utilisé
(20 mA/10 V)
1 = Fréq. sortie (0f
max
2 = Réf. fréquence
(0-f
max
3 = Vitesse moteur
(0 - Vitesse nominale moteur)
4 = Courant
moteur (0-I
5 = Couple moteur
(0-T
6 = Puissance
moteur (0-P
7 = Tension moteur
(0-U
8 = Tension bus
c.c. (0-1000 V)
0 = Pas de filtrage
)
nMot
nMot
)
)
nMot
)
)
nMot
)
P2.3.4
P2.3.5
P2.3.6
Inversion de sortie
analogique
Sortie analogique
minimum
Échelle de sortie
analogique
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Non inversé
1 = Inversé
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 78 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
Table 27: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.3.7
Fonction de la
sortie logique 1
0 22 1 312
Description
ID
0 = Non utilisé
1 = Prêt
2 = Marche
3 = Défaut
4 = Défaut inversé
5 = Alarme surchauffe convert.
6 = Alarme ou
défaut ext.
7 = Alarme ou
défaut réf.
8 = Alarme
9 = Inversé
10 = Vitesse jog
sélectionnée
11 = Vitesse
atteinte
12 = Régul. moteur
actif
13 = Superv. limite
fréq. ouverte 1
14 = Superv. limite
fréq. ouverte 2
15 = Superv. limite
du couple
16 = Supervis.
limite réf.
17 = Cmde freinage ext.
18 = Source de
commande : ES
19 = Superv. limite
temp. conv. fréq.
20 = Sens de rotation non demandé
21 = Cmde freinage ext. inversée
22 = Déft/alarm.
thermistance
4
P2.3.8
P2.3.9 Fonction RO2 0 22 3 314
P2.3.10
Fonction RO1 0 22 2 313
Supervision de
limite de fré-
quence de sortie 1
0 2 0 315
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Idem paramètre
2.3.7
Idem paramètre
2.3.7
0 = Pas de limite
1 = Supervision
limite basse
2 = Supervision
limite haute
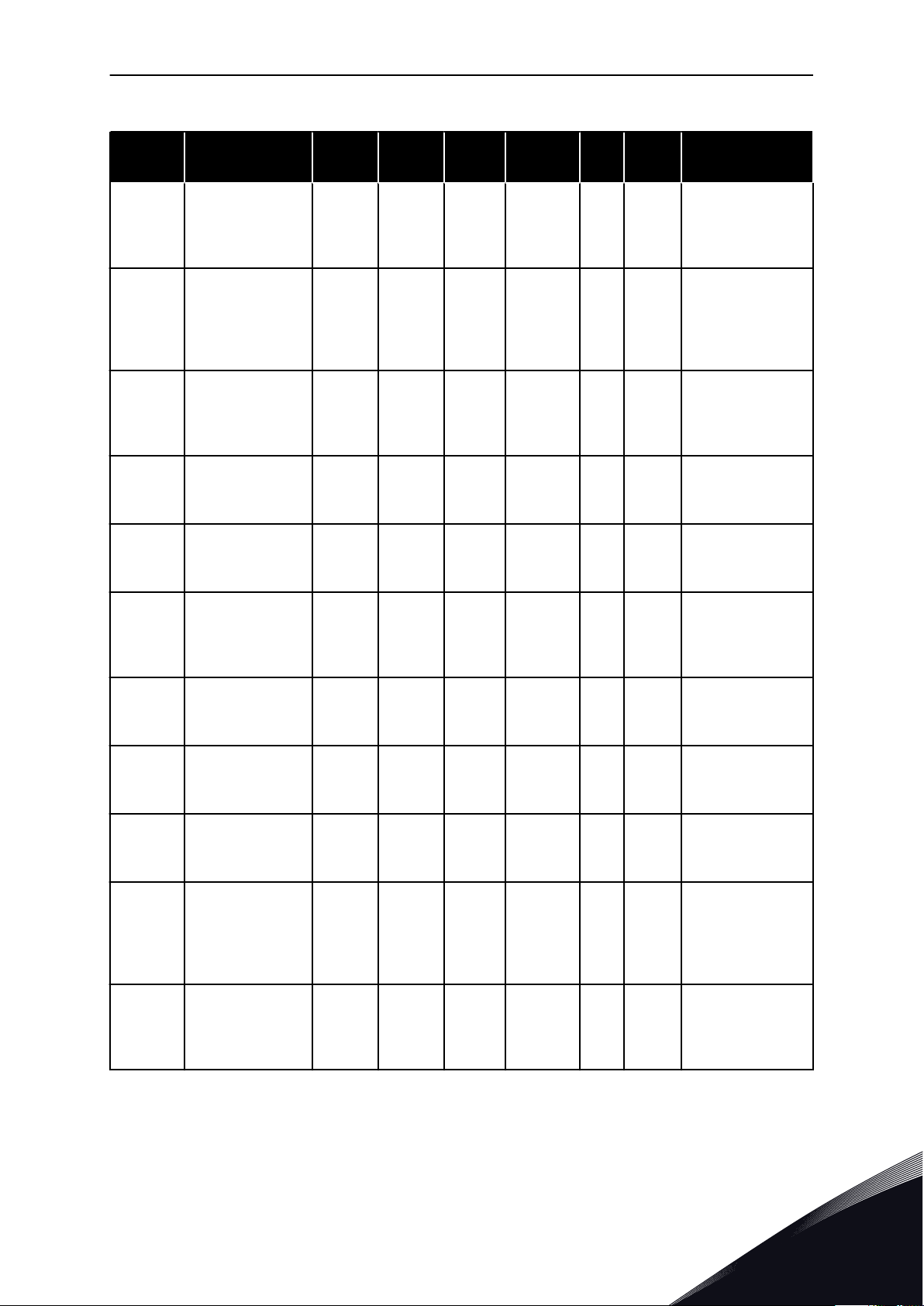
APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 79
Table 27: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
Limite de fré-
P2.3.11
P2.3.12
P2.3.13
P2.3.14
P2.3.15
quence de sor-
tie 1 ; valeur
supervisée
Supervision de
limite de fré-
quence de sortie 2
Limite de fréquence de sortie 2 ; valeur de
supervision
Fonction de
supervision de
limite du couple
Valeur de supervi-
sion de limite du
couple
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
-300.0 300.0 % 0.0 349
Description
ID
0 = Pas de limite
1 = Supervision
limite basse
2 = Supervision
limite haute
0 = Non
1 = Limite basse
2 = Limite haute
P2.3.16
P2.3.17
P2.3.18
P2.3.19
P2.3.20
P2.3.21
Fonction de
supervision de
limite de réfé-
rence
Valeur de supervi-
sion de limite de
référence
Temporisation de
désactivation du
frein externe
Temporisation
d'activation du
frein externe
Supervision de
limite de tempé-
rature du conver-
tisseur de fré-
quence
Valeur limite de
température du
convertisseur de
fréquence
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0 = Non
1 = Limite basse
2 = Limite haute
0 = Non
1 = Limite basse
2 = Limite haute
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 80 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
Table 27: Signaux de sortie, G2.3
Index Paramètre Min. Max. Unité PréréglageUtil.
Mise à l'échelle de
P2.3.22 *
P2.3.23 *
P2.3.24 *
P2.3.25 *
P2.3.26 *
P.2.3.27 *
la sortie analogi-
que 2
Fonction de la
sortie analogi-
que 2
Temps de filtrage
de la sortie analo-
gique 2
Inversion de la
sortie analogi-
que 2
Minimum de la
sortie analogi-
que 2
Mise à l'échelle de
la sortie analogi-
que 2
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
Description
ID
Idem paramètre
2.3.2
0 = Pas de filtrage
0 = Non inversé
1 = Inversé
0 = 0 mA (0 V)
1 = 4 mA (2 V)
* = Utilisez la méthode TTF pour programmer ces paramètres
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 81
4.4.5 PARAMÈTRES DE COMMANDE D'ENTRAÎNEMENT (PANNEAU OPÉRATEUR : MENU M2 -> G2.4)
Table 28: Paramètres de commande d'entraînement, G2.4
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.4.1 Forme de rampe 1 0.0 10.0 s 0.1 500
P2.4.2 Forme de rampe 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4
P2.4.5 Hacheur freinage 0 4 0 504
Temps d'accélé-
ration 2
Temps décéléra-
tion 2
0.1 3000.0 s 1.0 502
0.1 3000.0 s 1.0 503
Description
ID
0 = Linéaire
100 = tps aug/dim
acc/déc cplets
0 = Linéaire
100 = tps aug/dim
acc/déc cplets
0 = Désactivé
1 = Utilisé en rotation
2 = Hacheur de
freinage externe
3 = Utilisé à
l'arrêt/en rotation
4 = utilisé en rotation (sans test)
P2.4.6 Mode Marche 0 2 0 505
P2.4.7 Mode Arrêt 0 3 0 506
P2.4.8
P2.4.9
P2.4.10
Courant de frei-
nage c.c.
Durée freinage
c.c. à l'arrêt
Fréquence de
démarrage du
freinage c.c. pen-
dant l'arrêt sur
rampe
0.00 I
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
L
A 0,7 x I
H
507
0 = Arrêt sur
rampe
1 = Reprise au vol
2 = Reprise au vol
conditionnelle
0 = Roue libre
1= Rampe
2 = Rampe + Valid.
marche en roue
libre
3 = Roue libre +
Valid. marche
rampe
0 = Le freinage c.c.
est désactivé à
l'arrêt
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 82 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
Table 28: Paramètres de commande d'entraînement, G2.4
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.4.11
P2.4.12 * Freinage flux 0 1 0 520
P2.4.13
Freinage c.c. au
démarrage
Courant freinage
flux
0.00 600.00 s 0.00 516
0.00 I
L
A I
H
Description
ID
0 = Le freinage c.c.
est désactivé au
démarrage
0 = Désactivé
0 = Marche
519
4.4.6 PARAMÈTRES DE FRÉQUENCES INTERDITES (PANNEAU OPÉRATEUR : MENU M2
- G2.5)
Table 29: Paramètres de fréquences interdites, G2.5
Index Paramètre Min. Max. Unité PréréglageUtil.
Plage de fréquen-
P2.5.1
ces interdites 1 :
limite basse
0.00 320.00 Hz 0.00 509
ID
Description
P2.5.2
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7
Plage de fréquen-
ces interdites 1 :
limite haute
Plage de fréquen-
ces interdites 2 :
limite basse
Plage de fréquen-
ces interdites 2 :
limite haute
Plage de fréquen-
ces interdites 3 :
limite basse
Plage de fréquen-
ces interdites 3 :
limite haute
Rampe acc./déc.
interdite
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = La plage interdite 1 est désactivée
0 = La plage interdite 2 est désactivée
0 = La plage interdite 3 est désactivée
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
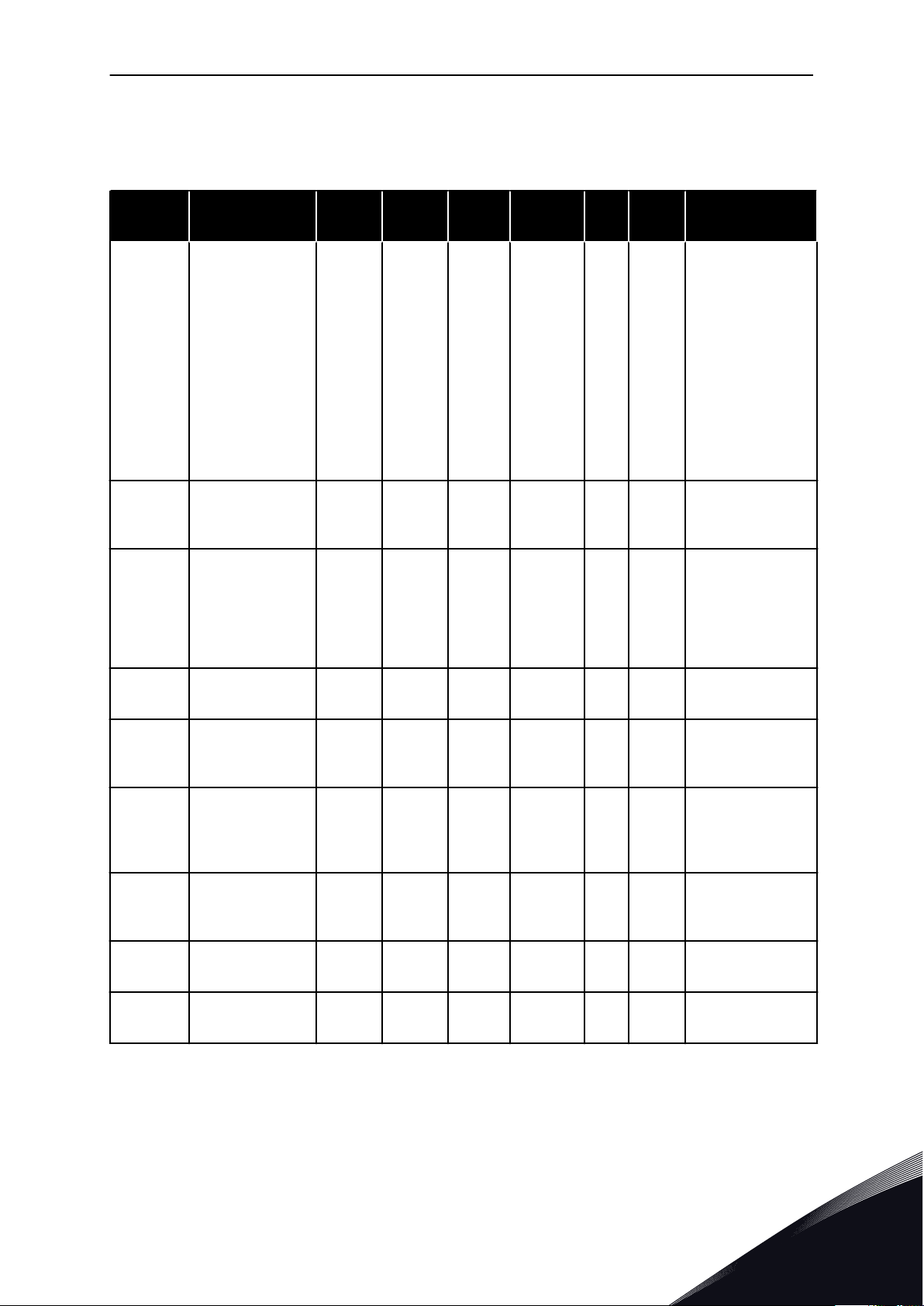
APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 83
4.4.7 PARAMÈTRES DE COMMANDE DU MOTEUR (PANNEAU OPÉRATEUR : MENU M2 G2.6)
Table 30: Paramètres de commande du moteur, G2.6
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.6.1 *
P2.6.2 * Optimisation U/f 0 1 0 109
P2.6.3 *
Mode de contrôle
moteur
Sélection du rap-
port U/f
0 1/3 0 600
0 3 0 108
Description
ID
0 = Régulation fréquence
1=Contrôle de
vitesse
NXP :
2 = Contrôle de
couple en boucle
ouverte
3=Cont. vitesse
boucle fermée
4 = Contrôle de
couple en boucle
fermée
0 = Non utilisé
1 = Surcouple
automatique
0 = Linéaire
1 = Quadratique
2 = Programmable
3 = Linéaire avec
optimisation du
flux
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
Zone d’affaiblisse-
ment du champ
Tension au point
d’affaiblissement
du champ
Fréquence au
point intermé-
diaire de la
courbe U/f
Tension au point
intermédiaire de
la courbe U/f
Tension de sortie
à fréquence nulle
Fréquence de
commutation
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Variable 606
1.0 Variable kHz Variable 601
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 84 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
Table 30: Paramètres de commande du moteur, G2.6
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.6.10
P2.6.11
P2.6.12 Statisme 0.00 100.00 % 0.00 620
P2.6.13 Identification 0 1/2 0 631
Groupe de paramètres de boucle fermée 2.6.14
Régulateur de
surtension
Régulateur de
sous-tension
0 2 1 607
0 1 1 608
Description
ID
0 = Non utilisé
1 = Utilisé (sans
rampe)
2 = Utilisé (avec
rampe)
0 = Non utilisé
1 = Utilisé
0 = Aucune action
1 = Identification
sans rotation
2 = Identification
avec rotation
3 = Identification
de marche du
codeur
4 = Aucune action
5 = Échec marche
d'id.
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
Courant magnéti-
sant
Gain P de régula-
tion de vitesse
Temps I de régu-
lation de vitesse
Compensation
d'accélération
Ajust. de glisse-
ment
Courant magnéti-
sant au démar-
rage
Temps de magné-
tisation au démar-
rage
Temps de vitesse
nulle au démar-
rage
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
H
L
A 0.00 612
A 0.00 627
4
P2.6.14.10
Temps de vitesse
nulle à l'arrêt
0 32000 ms 100 616
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 85
Table 30: Paramètres de commande du moteur, G2.6
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.6.14.11
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Groupe de paramètres d'identification 2.6.15
P2.6.15.1 Phase de vitesse -50.0 50.0 0.0 0.0 1252
Couple de démar-
rage
Couple de démar-
rage AVT
Couple de démar-
rage AR
Temps de filtrage
de codeur
Gain P de régula-
tion du courant
0 3 0 621
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
Description
ID
0 = Non utilisé
1 = Mémoire de
couple
2 = Référence de
couple
3 = Couple de
démarrage avt/ar
* = La valeur du paramètre peut être modifiée une fois seulement que le convertisseur de
fréquence a été arrêté.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 86 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
4.4.8 PROTECTIONS (PANNEAU OPÉRATEUR : MENU M2 - G2.7)
Table 31: Protections, G2.7
Index Paramètre Min. Max. Unité PréréglageUtil.
Réponse à un
P2.7.1
P2.7.2
P2.7.3
P2.7.4
défaut de réfé-
rence 4 mA
Fréquence défaut
référence 4 mA
Action du défaut
externe
Supervision de la
phase réseau
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 3 730
Description
ID
0 = Pas d’action
1 = Alarme
2 = Alarme+fréq.
précédente
3 = Alarm.+Fréq.
cste 2.7.2
4 = Défaut, arrêt
selon 2.4.7
5 = Défaut, arrêt
en roue libre
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
P2.7.10
Réponse au défaut
de sous-tension
Supervision de
phase moteur
Protection contre
les défauts de
terre
Protection ther-
mique du moteur
Facteur de tem-
pérature
ambiante du
moteur
Facteur de refroi-
dissement du
moteur à vitesse
nulle
0 1 0 727
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
0 = Le défaut est
stocké dans l’historique
Défaut non stocké
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 87
Table 31: Protections, G2.7
Index Paramètre Min. Max. Unité PréréglageUtil.
Constante de
P2.7.11
P2.7.12
P2.7.13
P2.7.14 PCM : courant 0.00 2 x I
P2.7.15 PCM : tempo 1.00 120.00 s 15.00 711
P2.7.16 Seuil fréquence 1.00 P2.1.2 Hz 25.00 712
P2.7.17
temps thermique
du moteur
Cycle de service
du moteur
Protection contre
le calage moteur
Protection contre
les sous-charges
1 200 min Variable 707
0 150 % 100 708
0 3 0 709
H
0 3 0 713
A 1
H
ID
710
Description
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22
Protection contre
ss-charges du
couple
Charge à fréq.
nulle de protec-
tion contre ss-
charges
Délai de protec-
tion contre les
sous-charges
Réponse au défaut
de thermistance
Réponse au défaut
de bus de terrain
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 = Pas d’action
1 = Alarme
2=Déf., arrêt selon
2.4.7
3 = Défaut, arrêt
en roue libre
Voir P2.7.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 88 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
Table 31: Protections, G2.7
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.7.23
Réponse au défaut
de slot
0 3 734
ID
Description
Voir P2.7.21
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION VACON · 89
4.4.9 PARAMÈTRES DE REDÉMARRAGE AUTOMATIQUE (PANNEAU OPÉRATEUR : MENU M2 - G2.8)
Table 32: Paramètres de redémarrage automatique, G2.8
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.8.1
P2.8.2
P2.8.3 Mode Marche 0 2 0 719
P2.8.4
P2.8.5
P2.8.6
Temporisation de
réarmement
Temporisation du
réarmement
Nombre de tenta-
tives après
déclenchement de
sous-tension
Nombre de tenta-
tives après
déclenchement de
surtension
Nombre de tenta-
tives après
déclenchement de
surintensité
0.10 10.00 s 0.50 717
0.00 60.00 s 30.00 718
0 10 0 720
0 10 0 721
0 3 0 722
Description
ID
0 = Arrêt sur
rampe
1 = Reprise au vol
2 = Selon P2.4.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Nombre de tenta-
tives après
déclenchement de
référence 4 mA
Nombre de tenta-
tives après
déclenchement du
défaut de tempé-
rature moteur
Nombre de tenta-
tives après
déclenchement du
défaut externe
Nombre de tenta-
tives après
déclenchement du
défaut de sous-
charge
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 90 APPLICATIF DE CONTROLE DE VITESSE MULTI-CONFIGURATION
4.4.10 CONTRÔLE DU PANNEAU OPÉRATEUR (PANNEAU OPÉRATEUR : MENU M3)
Les paramètres de sélection de source de commande et de direction du panneau opérateur
sont répertoriés ci-dessous. Voir le menu Contrôle du panneau opérateur dans le Manuel
d'utilisation du produit.
Table 33: Paramètres de contrôle du panneau opérateur, M3
Index Paramètre Min. Max. Unité PréréglageUtil.
P3.1
P3.2 Réf. panneau op. P2.1.1 P2.1.2 Hz 0.00
P3.3
R3.4 Touche Arrêt 0 1 1 114
Source de com-
mande
Direction (sur le
panneau opéra-
teur)
1 3 1 125
0 1 0 123
Description
ID
1 = Bornier d’E/S
2 = Panneau opérateur
3 = Bus de terrain
0 = Fonction limitée de la touche
Arrêt
1 = Touche Arrêt
toujours activée
4.4.11 MENU SYSTÈME (PANNEAU OPÉRATEUR : MENU M6)
Pour plus d’informations sur les paramètres et les fonctions relatifs à l’utilisation générale
du convertisseur de fréquence, notamment la sélection de l’applicatif et de la langue, les
ensembles de paramètres personnalisés ou pour en savoir plus sur le matériel et le logiciel,
voir le Manuel d'utilisation du produit.
4.4.12 CARTES D'EXTENSION (PANNEAU OPÉRATEUR : MENU M7)
Le menu M7 affiche les cartes optionnelles et les cartes d’extension connectées à la carte de
commande, ainsi que les informations relatives à ces cartes. Pour plus d'informations, voir
le Manuel d'utilisation du produit.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE RÉGULATION PID VACON · 91
5 APPLICATIF DE RÉGULATION PID
5.1 INTRODUCTION
Sélectionnez l'applicatif de régulation PID dans le menu M6, à la page S6.2.
Dans l'applicatif de régulation PID, il existe deux sources de commande via le bornier d'E/S ;
la source A est le régulateur PID et la source B est la référence de fréquence directe. La
source de commande A ou B est sélectionnée avec l'entrée logique DIN6.
Il est possible de sélectionner la référence du régulateur PID à partir des entrées
analogiques, du bus de terrain ou du motopotentiomètre, en activant la référence PID 2 ou en
appliquant la référence du panneau opérateur. Il est possible de sélectionner la valeur réelle
du régulateur PID à partir des entrées analogiques, du bus de terrain et des valeurs réelles
du moteur, ou via leurs fonctions mathématiques.
La référence de fréquence directe peut être utilisée pour la commande sans le régulateur
PID et sélectionnée à partir des entrées analogiques, du bus de terrain, du
motopotentiomètre ou du panneau opérateur.
L'applicatif de régulation PID est généralement utilisé pour commander la mesure des
niveaux de pompes et de ventilateurs. Dans ces applications, l'applicatif de régulation PID
permet une commande sans à-coups avec des fonctions intégrées de mesure et de
régulation ne nécessitant aucun investissement supplémentaire.
Les entrées logiques DIN2, DIN3 et DIN5, et toutes les sorties sont librement
•
programmables.
Fonctions supplémentaires :
Sélection de l'échelle d'entrée analogique
•
Deux supervisions de limite de fréquence
•
Supervision de limite du couple
•
Supervision de limite de référence
•
Rampes en secondes et programmation de rampe en S
•
Fonctions Marche/Arrêt programmables
•
Frein c.c. pour marche /arrêt
•
Trois zones de fréquences interdites
•
Courbe U/f et fréquence de découpage programmables
•
Redémarrage automatique
•
Protection thermique et contre le calage du moteur : intégralement programmable ; off,
•
alarme, défaut
Protection contre la sous-charge du moteur
•
Supervision de phase réseau et moteur
•
Ajout de fréquence au point de cumul à la sortie PID
•
Le régulateur PID peut être également utilisé à partir des sources de commande E/S B,
•
panneau opérateur et bus de terrain
Fonction Changemt facile
•
Fonction veille
•
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 92 APPLICATIF DE RÉGULATION PID
Les paramètres de l’applicatif de régulation PID sont décrits au chapitre 9 Description des
paramètres de ce manuel. Les explications sont ordonnées selon le numéro ID individuel du
paramètre.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

-
+
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
Transmetteur 2 fils
Potentiomètre de
référence, 1-10 kΩ
mA
MARCHE
PRÊT
AO1-
DO1
+24V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Borne Affichage Description
+10 V
réf.
AI1+
AI1-
AI2+
AI2-
+24V
Sortie de référence
Terre E/S
Entrée analogique 2
Plage de courant 0–20 mA
Programmable (P2.2.9)
Sortie de tension de commande
Terre E/S
Source A : Marche avant
Ri min. = 5 kΩ
Réarmement défaut
Programmable (P2.2.2)
Entrée de défaut externe
Programmable (P2.2.2)
Source B : Marche avant
Ri min. = 5 kΩ
Sélection de vitesse de jog.
Programmable (P2.2.3)
Sélection source
de commande A/B
Contact fermé = Vitesse de jog active
Signal de démarrage de la source de commande B
Référence de fréquence (P2.2.5.)
Commun pour DIN 1—DIN 3
Commun pour DIN4—DIN6
Sortie de tension de commande
Terre E/S
Sortie analogique 1
Fréquence de sortie
Programmable (P2.3.2)
Sortie logique
PRÊT
Programmable (P2.3.7)
Collecteur ouvert, I≤50 mA,
U≤48 Vc.c.
Sortie relais 1
MARCHE
Programmable
(P2.3.8)
Sortie relais 2
DÉFAUT
Programmable
(P2.3.9)
AO1+
Entrée analogique 1
Référence PID
Terre pour la référence
et les commandes
Entrée analogique 2
Valeur réelle PID 1
Contact fermé = marche avant
Contact fermé = réarmement défaut
Contact fermé = marche arrière
Contact fermé = défaut
Contact ouvert = aucun défaut
Tension de référence pour
le potentiomètre, etc.
Entrée analogique 1
Plage de tension 0–10 Vc.c.
Programmable (P2.1.11)
Tension pour les interrupteurs,
etc. 0,1 A max.
Tension pour les interrupteurs (voir #6)
Connexion à TERRE ou +24 V
Valeur
réelle
(0) 4-20
mA
Connexion à TERRE ou +24 V
Terre pour la référence
et les commandes
Terre pour la référence
et les commandes
Plage 0–20 mA/RL,
500 Ω max.
Contact ouvert = Source de
commande A active Contact fermé =
Source de commande B active
APPLICATIF DE RÉGULATION PID VACON · 93
5.2 E/S DE COMMANDE
Fig. 13: Applicatif de régulation PID – Configuration des E/S par défaut (avec transmetteur 2 fils)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

Groupe de cavaliers X3 :
Mise à la terre de CMA et CMB
CMB raccordé à TERRE
CMA raccordé à TERRE
CMB isolé de TERRE
CMA isolé de TERRE
CMB et CMA raccordés
ensemble en interne,
isolés de TERRE
= Préréglage usine
VACON · 94 APPLICATIF DE RÉGULATION PID
*) La carte optionnelle A3 n'a pas de borne pour contact ouvert sur sa deuxième sortie relais
(borne 24 manquante).
REMARQUE!
Voir les positions du cavalier ci-dessous. Des informations supplémentaires sont
disponibles dans le Manuel d'utilisation du produit.
Fig. 14: Positionnement des cavaliers
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

DIN2
DIN5
DIN3
DIN2
DIN3
DIN5
DIN6
DIN2
DIN3
AI1
AI2
0
1
2
3
4
0
1
2
3
4
5
+A
A
o
0
1
2
3
4
5
0
1
2
3
4
5
K
0
1
2
3
4
5
F
PID
+
DIN1
DIN4
A
o
A
o
A/B
Inversion interne
Réarmement de défaut interne
Entrée de réarmement de défaut (programmable)
3.3 Direction panneau op.
Marche/arrêt interne
Direction à partir du
bus de terrain
Défaut externe (programmable)
Vitesse de jog (programmable)
Sélection source A/B
2.2.4 Référence principale PID
Haut
Bas
2.1.11 Référence PID
Inversion E/S
R3.2 Réf. panneau op.
Act. 1
Act. 2
Activation réf. panneau
op. PID 2 (DIN5=13)
Marche ; Source A
Marche ; Source B
Marche/Arrêt
Touches Marche/Arrêt
Réf. fréquence
interne
2.1.19 Réf. de vitesse de jog
Panneau opérateur
Bus de terrain
Touche de réarmement
3.1 Source de commande
2.2.7 Référence cmde bus de terrain
2.2.6 Réf. cmde panneau op.
2.2.5 Référence E/S B
≥ 1
Sélection de
valeur réelle,
par. 2.2.9
& 2.2.10
Sélection de
valeur réelle
par. 2.2.8
R3.4 Réf.
panneau op. PID
R3.5 Réf. panneau op. PID 2
Marche/arrêt à partir
du bus de terrain
Référence du bus de terrain
Motopotentiomètre
APPLICATIF DE RÉGULATION PID VACON · 95
5.3 LOGIQUE DES SIGNAUX DE COMMANDE DANS L'APPLICATIF DE RÉGULATION PID
Fig. 15: Logique des signaux de commande de l'applicatif de régulation PID
5.4 APPLICATIF DE RÉGULATION PID – LISTES DES PARAMÈTRES
5.4.1 VALEURS D’AFFICHAGE (PANNEAU OPÉRATEUR : MENU M1)
Les valeurs d’affichage sont les valeurs réelles des paramètres et des signaux ainsi que des
états et des mesures. Les valeurs d’affichage ne peuvent pas être modifiées.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 96 APPLICATIF DE RÉGULATION PID
REMARQUE!
Les valeurs d'affichage V1.19 à V1.22 sont disponibles uniquement avec l'applicatif
de régulation PID.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE RÉGULATION PID VACON · 97
Table 34: Valeurs d’affichage
Index Valeur affichée Unité ID Description
V1.1 Fréquence de sortie Hz 1
V1.2
V1.3 Vitesse moteur t/mn 2
V1.4 Courant moteur A 3
V1.5 Couple moteur % 4
V1.6 Puissance moteur % 5
V1.7 Tension moteur V 6
V1.8 Tension bus c.c. V 7
1.9
1.10
V1.11 Entrée analogique 1 V/mA 13
V1.12 Entrée analogique 2 V/mA 14
V1.13 Entrée analogique 3 27
Référence de fré-
quence
Température de
l'unité
Température du
moteur
Hz 25
°C 8
% 9
V1.14 Entrée analogique 4 28
V1.15 DIN 1, 2, 3 15
V1.16 DIN 4, 5, 6 16
V1.17 DO1, RO1, RO2 17
V1.18 I
V1.19 Ref.PID % 20
V1.20 Valeur réelle PID % 21
V1.21 Valeur d'erreur PID % 22
V1.22 Sortie PID % 23
V1.23
V1.24 Température PT-100 ºC 42
G1.25 Éléments d'affichage
analogique mA 26
out
Affichage spécial de
la valeur réelle
29
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
VACON · 98 APPLICATIF DE RÉGULATION PID
Table 34: Valeurs d’affichage
Index Valeur affichée Unité ID Description
V1.26.1 Courant A 1113
V1.26.2 Couple % 1125
V1.26.3 Tension c.c. V 44
V1.26.4 Mot d’état 43
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLICATIF DE RÉGULATION PID VACON · 99
5.4.2 PARAMÈTRES DE BASE (PANNEAU OPÉRATEUR : MENU M2 - G2.1)
Table 35: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.1.1 Fréquence mini 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Fréquence maxi P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5 Limite de courant 0,1 x I
P2.1.6 *
P2.1.7 *
Temps d'accélé-
ration 1
Temps de décélé-
ration 1
Tension nominale
du moteur
Fréquence nomi-
nale du moteur
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
H
A I
NX2 :
230 V
NX5 :
400 V
NX6 :
690 V
L
ID
107
110
Description
P2.1.8 *
P2.1.9 *
P2.1.10 * Cos phi moteur 0.30 1.00 0.85 120
P2.1.11 *
P2.1.12
P2.1.13
P2.1.14
Vitesse nominale
du moteur
Courant nominal
du moteur
Signal de réfé-
rence du régula-
teur PID
(source A)
Gain du régula-
teur PID
Temps I du régu-
lateur PID
Temps D du régu-
lateur PID
24 20 000 t/mn 1440 112
0,1 x I
0 4 1 332
0.0 1000.0 % 100.0 118
0.00 320.00 s 1.00 119
0.00 100.00 s 0.00 132
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Réf. PID provenant de la page du
panneau opérateur
P3.4
3 = Réf. PID depuis
le bus de terrain
(ProcessDataIN 1)
4 = Motopotentiomètre
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 100 APPLICATIF DE RÉGULATION PID
Table 35: Paramètres de base G2.1
Index Paramètre Min. Max. Unité PréréglageUtil.
P2.1.15
P2.1.16
P2.1.17 Niveau de reprise 0.00 100.00 % 25.00 1018
P2.1.18
P2.1.19
Fréquence de
veille
Temporisation de
veille
Fonction de
reprise
Référence de
vitesse de jog
0.00 P2.1.2 Hz 10.00 1016
0 3600 s 30 1017
0 1 0 1019
0.00 P2.1.2 Hz 10.00 124
Description
ID
0 = Reprise en cas
de chute sous le
niveau de reprise
(2.1.17)
1 = Reprise en cas
de dépassement
du niveau de
reprise (2.1.17)
* = La valeur du paramètre peut être modifiée une fois seulement que le convertisseur de
fréquence a été arrêté.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...