


vacon nx
®
frequenzumrichter
all in one
applikationshandbuch

A
J
B C D E F G H I
Index Min Max Unit Default
Cust
ID DescriptionParameter
VORWORT VACON · 3
VORWORT
Dokument-ID: DPD01209E
Datum: 1.12.2016
Softwarecode:
Basisapplikation = ASFIFF01
•
Standardanwendung = ASFIFF02
•
Ort/Fern-Applikation = ASFIFF03
•
Multi-Festdrehzahlapplikation =
•
ASFIFF04
PID-Regler-Applikation = ASFIFF05
•
Universalapplikation
•
NXS = ASFIFF06
-
NXP = APFIFF06
-
Pumpen- u. Lüftersteuerung = ASFIFF07
•
ÜBER DIESE ANLEITUNG
Diese Anleitung ist urheberrechtliches Eigentum von Vacon Ltd. Alle Rechte vorbehalten. Die
Anleitung kann sich ohne Vorankündigung ändern. Die Originalsprache dieser Anleitung ist
Englisch.
In diesem Handbuch finden Sie Informationen zu den Funktionen und zur Verwendung des
VACON® Frequenzumrichters.
Dieses Handbuch enthält viele Parametertabellen. Diese Anleitung erklärt Ihnen, wie Sie
diese Tabellen richtig lesen.
A. Position des Parameters im Menü, d. h.
die Parameternummer
B. Name des Parameters
C. Mindestwert des Parameters
D. Höchstwert des Parameters
E. Einheit des Parameters; wird angezeigt,
sofern vorhanden
F. Werkseitig voreingestellter Wert
G. Eigene Einstellung des Kunden.
H. Identifikationsnummer des Parameters
I. Kurzbeschreibung der Werte und/oder
der Funktion des Parameters
J. Wenn Sie dieses Symbol sehen, finden
Sie weitere Informationen zu dem
Parameter in Kapitel
„Parameterbeschreibungen“.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
INHALTSVERZEICHNIS VACON · 5
INHALTSVERZEICHNIS
Vorwort
Über diese Anleitung 3
1 Basisapplikation 10
1.1 Einführung 10
1.1.1 Motorschutzfunktionen in der Basisapplikation 10
1.2 Steuer-E/A 11
1.3 Steuersignallogik in der Basisapplikation 13
1.4 Basisapplikation – Parameterlisten 13
1.4.1 Überwachungswerte (Steuertafel: Menü M1) 13
1.4.2 Basisparameter (Steuertafel: Menü M2 -> G2.1) 15
1.4.3 Steuerung über Steuertafel (Steuertafel: Menü M3) 17
1.4.4 Systemmenü (Steuertafel: Menü M6) 17
1.4.5 Zusatzkarten (Steuertafel: Menü M7 17
2 Standard 18
2.1 Einführung 18
2.2 Steuer-E/A 19
2.3 Steuersignallogik in der Standardapplikation 21
2.4 Standardapplikation – Parameterlisten 21
2.4.1 Überwachungswerte (Steuertafel: Menü M1) 21
2.4.2 Basisparameter (Steuertafel: Menü M2 -> G2.1) 23
2.4.3 Eingangssignale (Steuertafel: Menü M2 -> G2.2) 24
2.4.4 Ausgangssignale (Steuertafel: Menü M2 -> G2.3 26
2.4.5 Antriebssteuerparameter (Steuertafel: Menü M2 -> G2.4 29
2.4.6 Frequenzausblendungsparameter (Steuertafel: Menü M2 -> G2.5) 30
2.4.7 Motorsteuerparameter (Steuertafel: Menü M2 -> G2.6) 31
2.4.8 Schutzfunktionen (Steuertafel: Menü M2 -> G2.7 34
2.4.9 Parameter für automatischen Neustart (Steuertafel: Menü M2 -> G2.8)
36
2.4.10 Steuerung über Steuertafel (Steuertafel: Menü M3) 37
2.4.11 Systemmenü (Steuertafel: Menü M6) 37
2.4.12 Zusatzkarten (Steuertafel: Menü M7 37
3 Ort/Fern 38
3.1 Einführung 38
3.2 Steuer-E/A 39
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 6 INHALTSVERZEICHNIS
3.3 Steuersignallogik in der Ort/Fern-Applikation 41
3.4 Ort/Fern-Applikation – Parameterlisten 41
3.4.1 Überwachungswerte (Steuertafel: Menü M1) 41
3.4.2 Basisparameter (Steuertafel: Menü M2 -> G2.1) 43
3.4.3 Eingangssignale (Steuertafel: Menü M2 -> G2.2) 45
3.4.4 Ausgangssignale (Steuertafel: Menü M2 -> G2.3 50
3.4.5 Antriebssteuerparameter (Steuertafel: Menü M2 -> G2.4 54
3.4.6 Frequenzausblendungsparameter (Steuertafel: Menü M2 -> G2.5) 55
3.4.7 Motorsteuerparameter (Steuertafel: Menü M2 -> G2.6) 56
3.4.8 Schutzfunktionen (Steuertafel: Menü M2 -> G2.7 59
3.4.9 Parameter für automatischen Neustart (Steuertafel: Menü M2 -> G2.8)
61
3.4.10 Steuerung über Steuertafel (Steuertafel: Menü M3) 62
3.4.11 Systemmenü (Steuertafel: Menü M6) 62
3.4.12 Zusatzkarten (Steuertafel: Menü M7 62
4 Multi-Festdrehzahlapplikation 63
4.1 Einführung 63
4.2 Steuer-E/A 64
4.3 Steuersignallogik der Multi-Festdrehzahlapplikation 66
4.4 Multi-Festdrehzahlapplikation – Parameterlisten 66
4.4.1 Überwachungswerte (Steuertafel: Menü M1) 66
4.4.2 Basisparameter (Steuertafel: Menü M2 -> G2.1) 68
4.4.3 Eingangssignale (Steuertafel: Menü M2 -> G2.2) 70
4.4.4 Ausgangssignale (Steuertafel: Menü M2 -> G2.3 74
4.4.5 Antriebssteuerparameter (Steuertafel: Menü M2 -> G2.4 78
4.4.6 Frequenzausblendungsparameter (Steuertafel: Menü M2 -> G2.5) 79
4.4.7 Motorsteuerparameter (Steuertafel: Menü M2 -> G2.6) 80
4.4.8 Schutzfunktionen (Steuertafel: Menü M2 -> G2.7) 83
4.4.9 Parameter für automatischen Neustart (Steuertafel: Menü M2 -> G2.8)
85
4.4.10 Steuerung über Steuertafel (Steuertafel: Menü M3) 86
4.4.11 Systemmenü (Steuertafel: Menü M6) 86
4.4.12 Zusatzkarten (Steuertafel: Menü M7 86
5 PID-Regler 87
5.1 Einführung 87
5.2 Steuer-E/A 89
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
INHALTSVERZEICHNIS VACON · 7
5.3 Steuersignallogik in der PID-Regler-Applikation 91
5.4 PID-Regler-Applikation – Parameterlisten 91
5.4.1 Überwachungswerte (Steuertafel: Menü M1) 91
5.4.2 Basisparameter (Steuertafel: Menü M2 -> G2.1) 95
5.4.3 Eingangssignale 97
5.4.4 Ausgangssignale (Steuertafel: Menü M2 -> G2.3 103
5.4.5 Antriebssteuerparameter (Steuertafel: Menü M2 -> G2.4 107
5.4.6 Frequenzausblendungsparameter (Steuertafel: Menü M2 -> G2.5) 108
5.4.7 Motorsteuerparameter (Steuertafel: Menü M2 -> G2.6) 109
5.4.8 Schutzfunktionen (Steuertafel: Menü M2 -> G2.7 112
5.4.9 Parameter für automatischen Neustart (Steuertafel: Menü M2 -> G2.8)
115
5.4.10 Steuerung über Steuertafel (Steuertafel: Menü M3) 116
5.4.11 Systemmenü (Steuertafel: Menü M6) 116
5.4.12 Zusatzkarten (Steuertafel: Menü M7 116
6 Universalapplikation 117
6.1 Einführung 117
6.2 Steuer-E/A 119
6.3 Steuersignallogik der Universalapplikation 121
6.4 Universalapplikation – Parameterlisten 121
6.4.1 Überwachungswerte (Steuertafel: Menü M1) 121
6.4.2 Basisparameter (Steuertafel: Menü M2 -> G2.1) 133
6.4.3 Eingangssignale 136
6.4.4 Ausgangssignale 145
6.4.5 Antriebssteuerparameter (Steuertafel: Menü M2 -> G2.4 154
6.4.6 Frequenzausblendungsparameter (Steuertafel: Menü M2 -> G2.5) 156
6.4.7 Motorsteuerparameter (Steuertafel: Menü M2 -> G2.6) 157
6.4.8 Schutzfunktionen (Steuertafel: Menü M2 -> G2.7 166
6.4.9 Parameter für automatischen Neustart (Steuertafel: Menü M2 -> G2.8)
170
6.4.10 Feldbusparameter (Steuertafel: Menü M2 ->G2.9) 171
6.4.11 Drehmomentsteuerparameter (Steuertafel: Menü M2 -> G2.10) 173
6.4.12 NXP-Umrichter: Master-Follower-Parameter (Steuertafel: Menü M2 ->
G2.11) 175
6.4.13 Steuerung über Steuertafel (Steuertafel: Menü M3) 176
6.4.14 Systemmenü (Steuertafel: Menü M6) 177
6.4.15 Zusatzkarten (Steuertafel: Menü M7 177
7 Pumpen- und Lüftersteuerungsapplikation 178
7.1 Einführung 178
7.2 Steuer-E/A 180
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 8 INHALTSVERZEICHNIS
7.3 Steuersignallogik der Pumpen- und Lüftersteuerungsapplikation 184
7.4 Pumpen- und Lüftersteuerungsapplikation – Parameterlisten 184
7.4.1 Überwachungswerte (Steuertafel: Menü M1) 184
7.4.2 Basisparameter (Steuertafel: Menü M2 -> G2.1) 188
7.4.3 Eingangssignale 190
7.4.4 Ausgangssignale 197
7.4.5 Antriebssteuerparameter (Steuertafel: Menü M2 -> G2.4 204
7.4.6 Frequenzausblendungsparameter (Steuertafel: Menü M2 -> G2.5) 205
7.4.7 Motorsteuerparameter (Steuertafel: Menü M2 -> G2.6) 206
7.4.8 Schutzfunktionen (Steuertafel: Menü M2 -> G2.7 208
7.4.9 Parameter für automatischen Neustart (Steuertafel: Menü M2 -> G2.8)
211
7.4.10 Pumpen- und Lüftersteuerungsparameter (Steuertafel: Menü M2 ->
G2.9) 212
7.4.11 Steuerung über Steuertafel (Steuertafel: Menü M3) 214
7.4.12 Systemmenü (Steuertafel: Menü M6) 215
7.4.13 Zusatzkarten (Steuertafel: Menü M7 215
8 Beschreibungen wichtiger Kenngrößen 216
9 Parameterbeschreibungen 223
9.1 Parameter für die Steuerung über die Steuertafel 383
9.2 Master-Follower-Funktion (nur NXP) 385
9.2.1 Physische Anschlüsse der Master-Follower-Verbindung 385
9.2.2 Glasfaserverbindung zwischen Frequenzumrichtern mit OPTD2 385
9.3 Steuerung der externen Bremse mit zusätzlichen Grenzwerten (IDs 315, 316, 346
bis 349, 352, 353) 386
9.4 Parameter des Motortemperaturschutzes (IDs 704 bis 708) 388
9.5 Parameter für den Blockierschutz (IDs 709 bis 712) 389
9.6 Parameter für den Unterlastschutz (IDs 713 bis 716) 389
9.7 Feldbussteuerungsparameter (IDs 850 bis 859) 390
9.7.1 Prozessdaten OUT (Slave -> Master) 390
9.7.2 Stromskalierung bei unterschiedlichen Baugrößen 390
9.7.3 Prozessdaten IN (Master -> Slave) 391
9.8 Closed Loop-Parameter (IDs 612 bis 621) 392
9.9 Das TTF-Programmierprinzip („Terminal to function“) 393
9.9.1 Definition eines Eingangs/Ausgangs für eine bestimmte Funktion auf
der Steuertafel 393
9.9.2 Definition eines Anschlusses für eine bestimmte Funktion mit dem
NCDrive-Programmiertool 394
9.9.3 Nicht genutzte Eingänge/Ausgänge definieren 395
9.10 Parameter für die Drehzahlsteuerung (nur Applikation 6) 396
9.11 Automatischer Wechsel zwischen den Umrichtern (nur Applikation 7) 398
9.12 Interlock-Auswahl (P2.9.23) 400
9.13 Beispiele für Autowechsel- und Interlock-Auswahl 401
9.13.1 Pumpen- und Lüfterautomatik mit Interlock und ohne Autowechsel 401
9.13.2 Pumpen- und Lüfterautomatik mit Interlock und Autowechsel 402
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

INHALTSVERZEICHNIS VACON · 9
10 Fehlersuche 405
10.1 Fehlercodes 405
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 10 BASISAPPLIKATION
1 BASISAPPLIKATION
1.1 EINFÜHRUNG
Die Basisapplikation ist eine einfach zu bedienende Anwendung. Dies ist die
Werkseinstellung nach Auslieferung vom Werk. Andernfalls wählen Sie die Basisapplikation
im Menü M6 auf Seite S6.2. Näheres finden Sie in der Betriebsanleitung des Produkts.
Der Digitaleingang DIN3 ist programmierbar.
Die Parameter der Basisapplikation sind in Kapitel 9 Parameterbeschreibungen in diesem
Handbuch beschrieben. Die Beschreibungen sind nach den einzelnen ID-Nummern der
Parameter geordnet.
1.1.1 MOTORSCHUTZFUNKTIONEN IN DER BASISAPPLIKATION
Die Basisapplikation bietet fast dieselben Schutzfunktionen wie die anderen Applikationen:
Externer Fehlerschutz
•
Eingangsphase, Überwachung
•
Unterspannungsschutz
•
Ausgangsphasenüberwachung
•
Erdschlussschutz
•
Motortemperaturschutz
•
Thermistorfehlerschutz
•
Feldbusfehlerschutz
•
Steckplatzfehlerschutz
•
Anders als die anderen Applikationen bietet die Basisapplikation keine Parameter für die
Auswahl der Antwortfunktion oder der Grenzwerte für die Fehler. Weitere Informationen
über den Motortemperaturschutz finden Sie unter ID704 in Kapitel 9
Parameterbeschreibungen.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
OPTA 2 / OPTA 3 *)
22
23
11
17
24
25
26
DIN4
DIN5
Spannung für
Potentiometer usw.
Masseanschluss für Sollwerte
und Steuersignale
Masseanschluss für Sollwerte
und Steuersignale
Masseanschluss für Sollwerte
und Steuersignale
Frequenzsollwert
für Analogeingang 2
Spannung für Schalter (siehe # 6)
Anschluss an Masse oder +24 V
FAULT (FEHLER)
Externer Fehlereingang
Programmierbar (P2.17)
Anschluss an Masse oder +24 V
Kontakt geöffnet = keine Reaktion
Kontakt geschlossen = Fehlerquittierung
Kontakt geöffnet = kein Fehler
Kontakt geschlossen = Fehler
Kontakt geschlossen = Start vorwärts
Kontakt geschlossen =
Start rückwärts
Offener Kollektor,
I≤50 mA, U≤48 VDC
RUN (BETRIEB)
mA
READY (BEREIT)
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
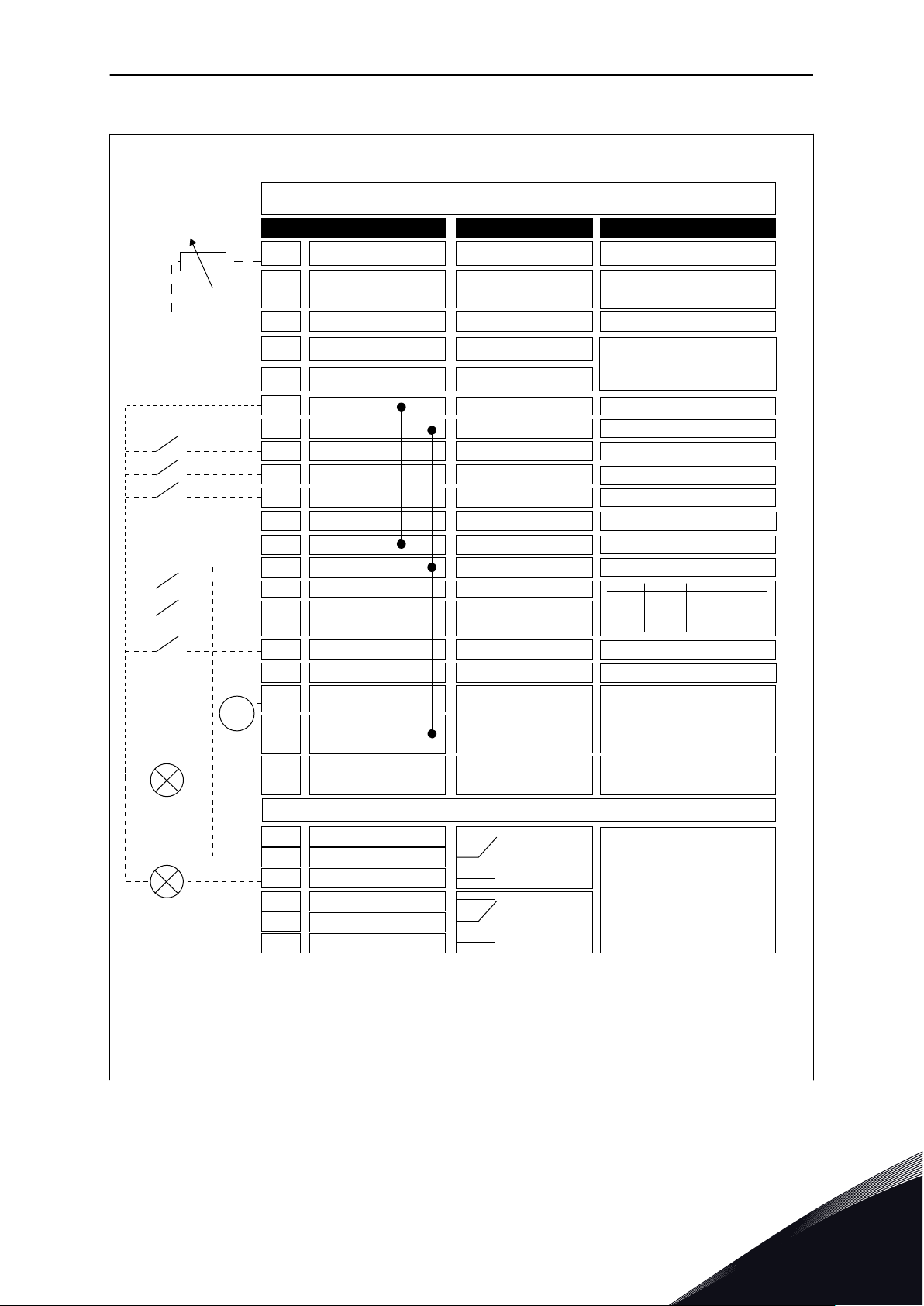
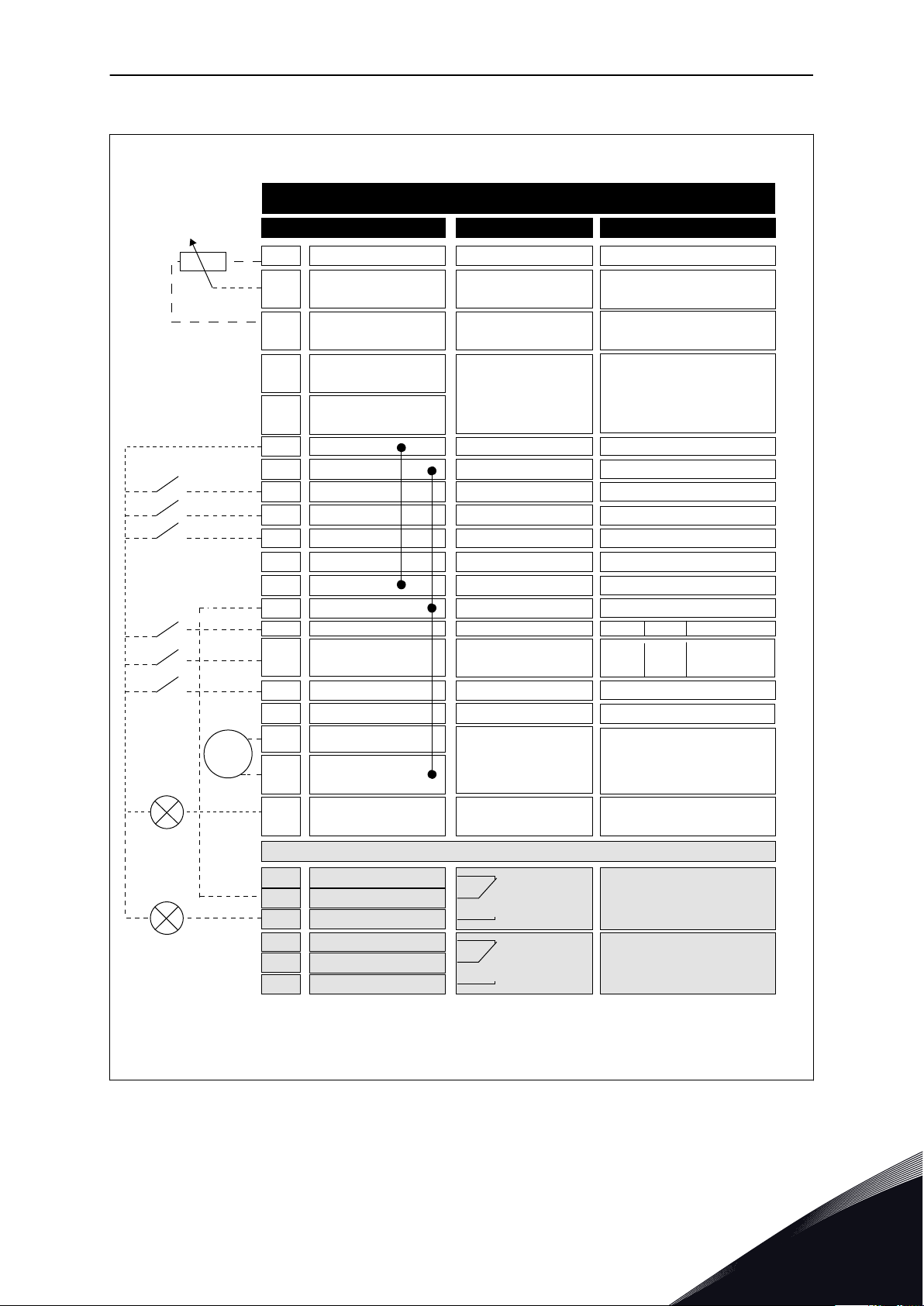
Standard-E/A-Karte
Klemme Signal Beschreibung
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Sollausgang
Analogeingang 1
Spannungsbereich 0–10 V DC
Programmierbar (P2.14)
Analogeingang 2
Strombereich 0–20 mA
Steuerspannungsausgang
E/A Masse
E/A Masse
Festdrehzahl Auswahl 1
Festdrehzahl Auswahl 2
Fehlerquittierung
Gemeinsamer Bezug
für DIN 1–DIN 3
Gemeinsamer Bezug
für DIN4-DIN6
Steuerspannungsausgang
E/A Masse
Relaisausgang 1
Relaisausgang 2
AO1+
Frequenzsollwert für
Analogeingang 1
Spannung für Schalter usw.
(max. 0,1 A)
Start vorwärts
Start rückwärts
Freq.sollw.
Offen
Geschlossen
Offen
Geschlossen
Offen
Offen
Geschlossen
Geschlossen
E/A-Sollw. (P2.14)
Festdrehzahl 1
Festdrehzahl 2
Max. Frequenz
RUN (BETRIEB)
Sollwertpotentiometer
1–10 kΩ
Analogausgang 1
Ausgangsfrequenz
programmierbar
(P2.16)
Bereich 0–20 mA/RL,
max. 500 Ω
Digitalausgang 1
READY (BEREIT)
BASISAPPLIKATION VACON · 11
1.2 STEUER-E/A
Abb. 1: E/A-Standardkonfiguration der Basisapplikation
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
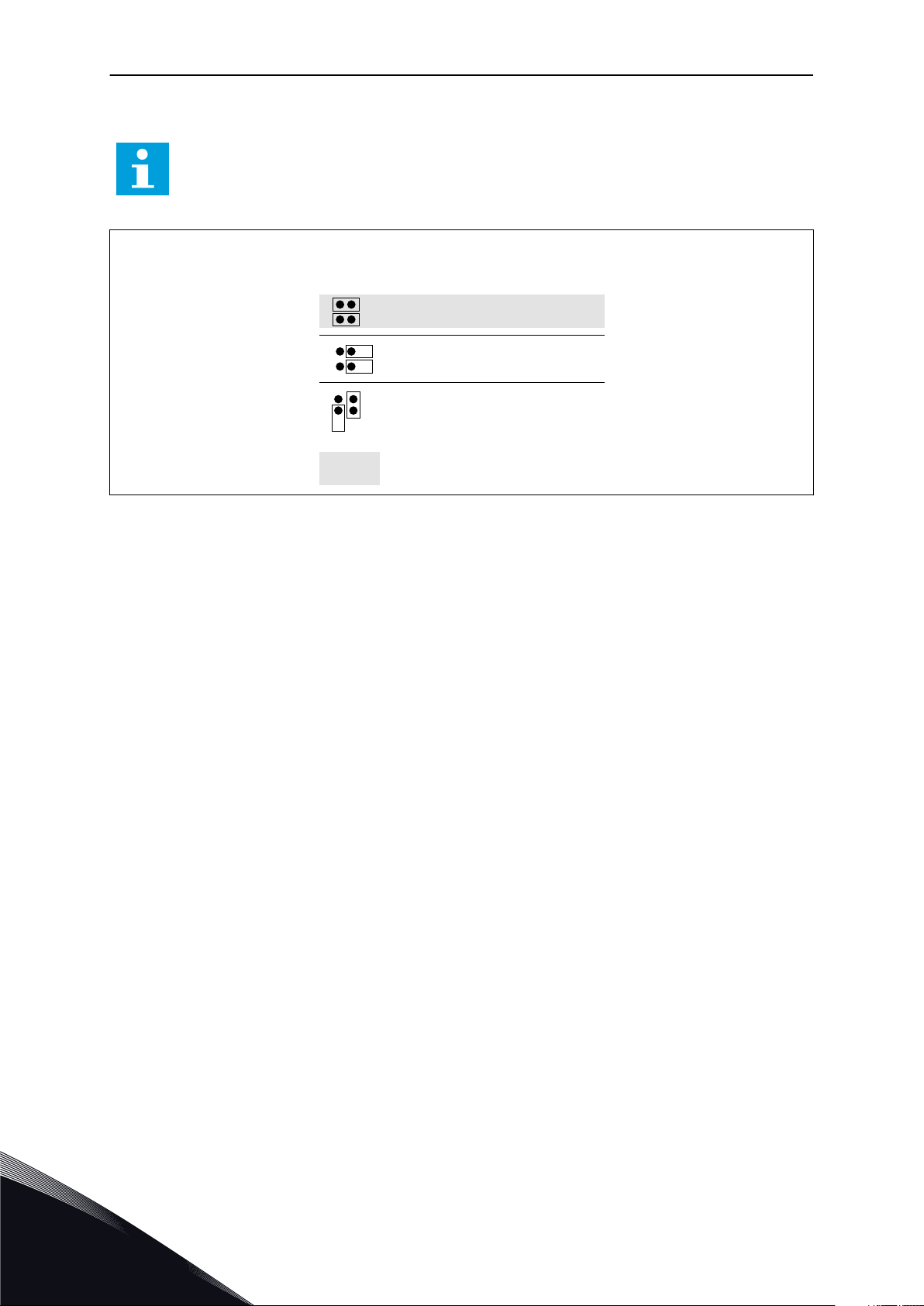
1
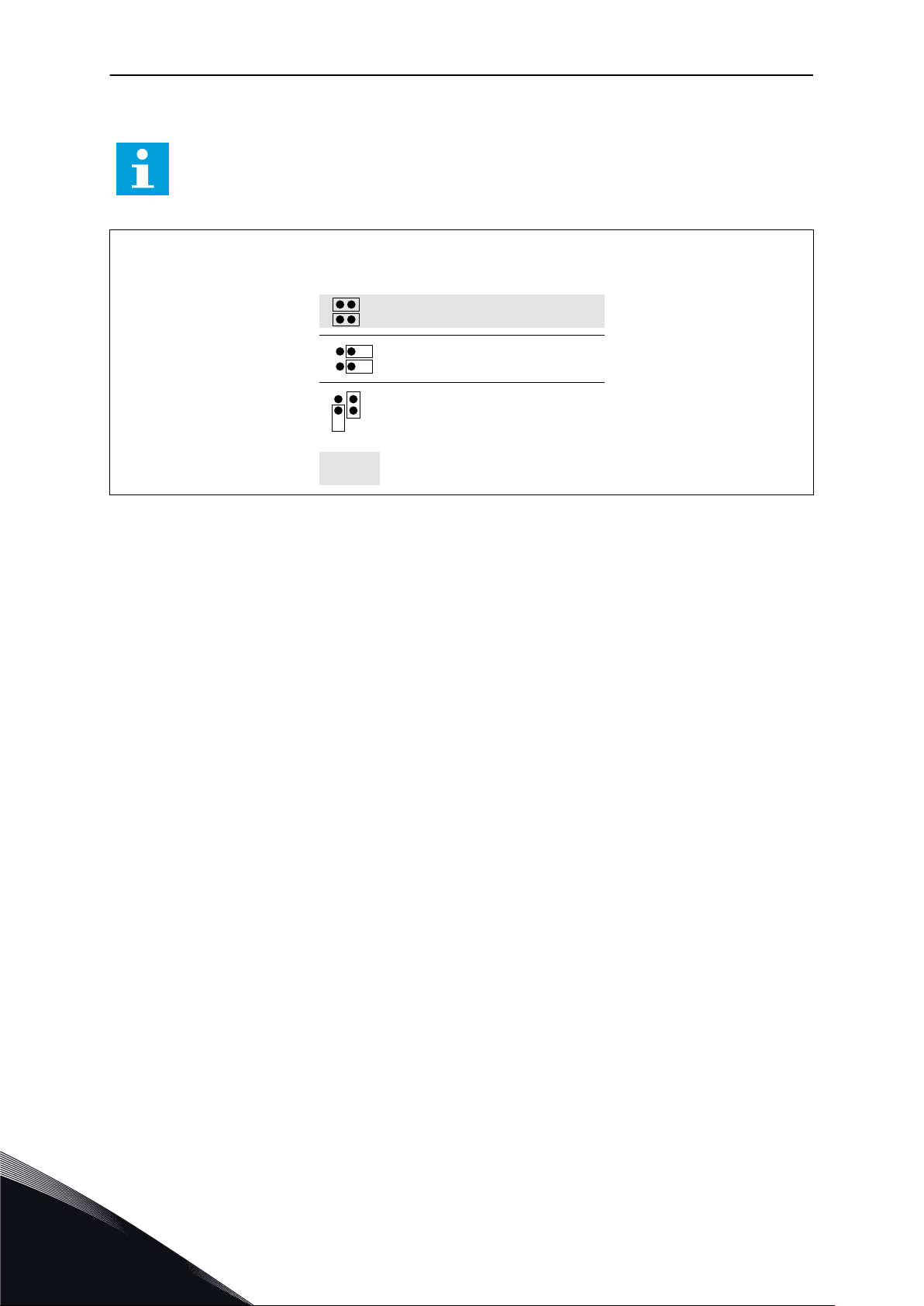
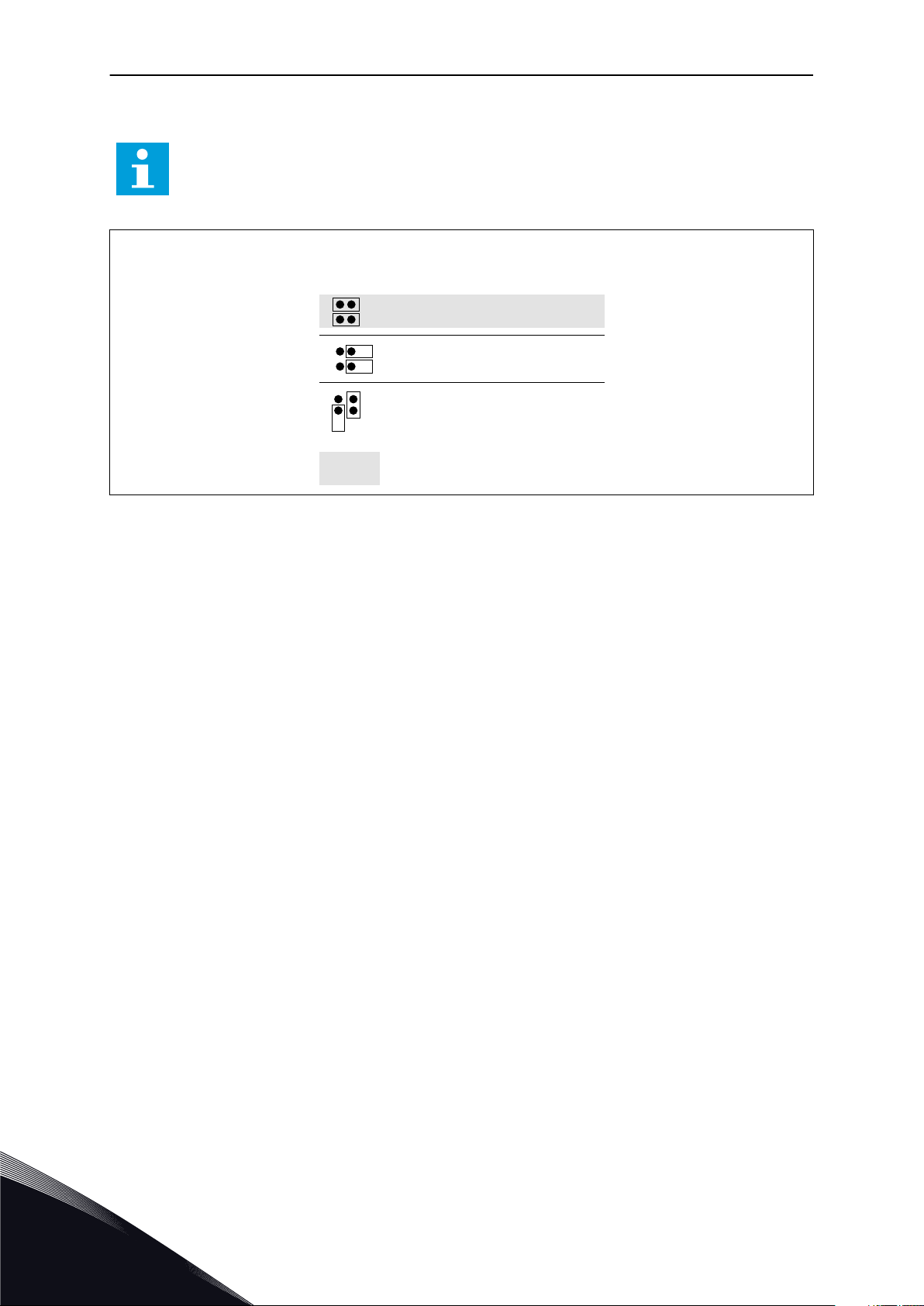
Steckbrückenblock X3:
CMA- und CMB-Erdung
CMB mit GND verbunden
CMA mit GND verbunden
CMB isoliert von GND
CMA isoliert von GND
CMB und CMA intern
miteinander verbunden,
von GND getrennt
= Werkseinstellung
VACON · 12 BASISAPPLIKATION
*) Die Zusatzkarte A3 hat keinen Anschluss für einen offenen Kontakt an ihrem zweiten
Relaisausgang (Anschluss 24 fehlt).
HINWEIS!
Siehe Steckbrückenauswahl unten. Weitere Informationen finden Sie im
Benutzerhandbuch zu dem Produkt.
Abb. 2: Steckbrückenauswahl
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
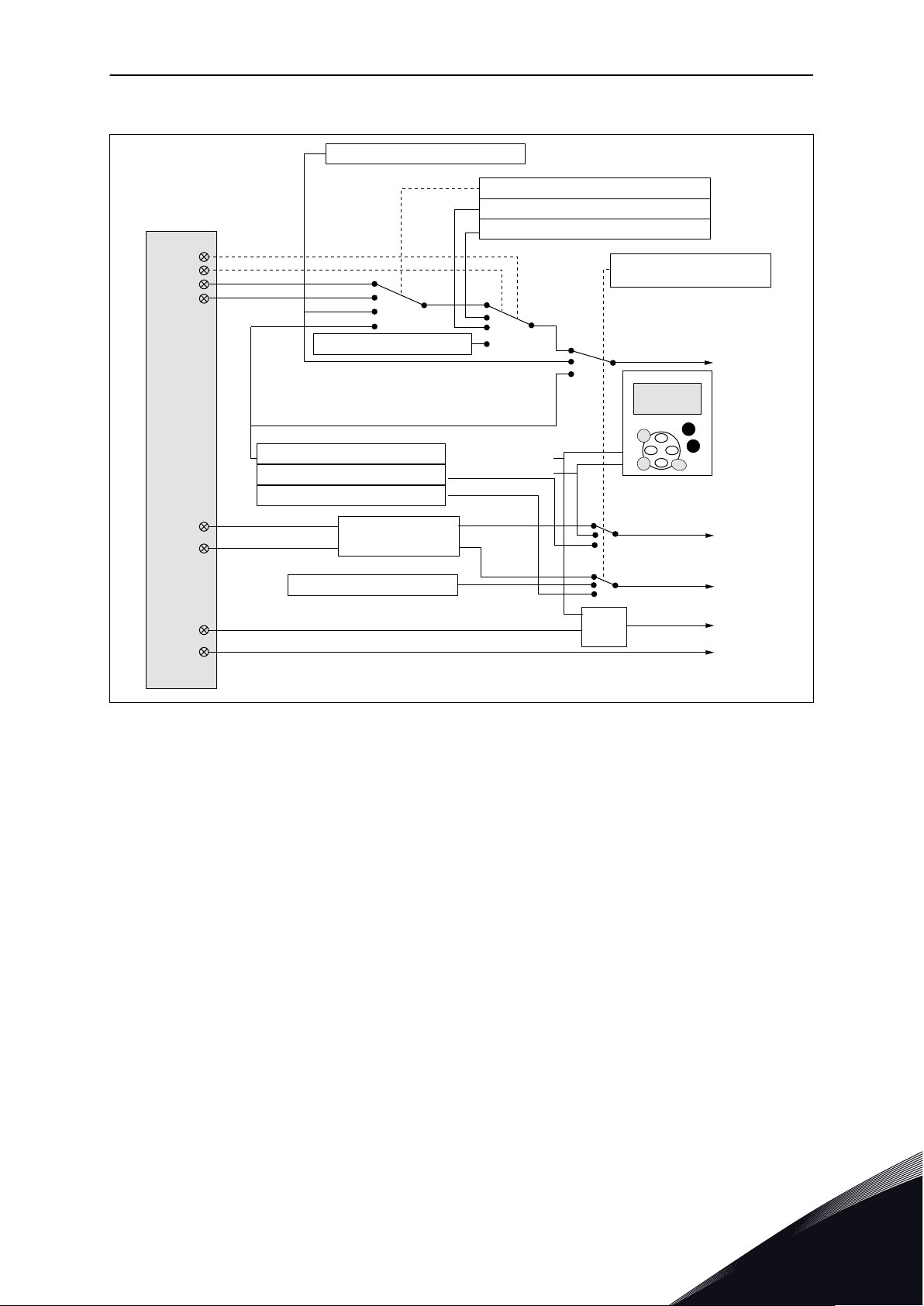
≥ 1
3.2 Steuertafelsollwert
3.1 Steuerplatz
Start vorwärts
Start rückwärts
Start/Stopp
Rückwärts
Interner Start/Stopp
Intern rückwärts
Interne Fehlerquittierung
Fehlerquittierungseingang
Externer Fehlereingang (programmierbar)
Schaltfläche
„Reset“
Start/Stopp-Tasten
Sollwert vom Feldbus
Start/Stopp vom Feldbus
Richtung vom Feldbus
3.3 Richtung:StTafel
2.14 E/A-Sollwert
2.19 Festdrehzahl 2
2.18 Festdrehzahl 1
2.2 Höchstfrequenz
Start/Stopp und
Rückwärts-Logik
Interner
Frequenzsollwert
BASISAPPLIKATION VACON · 13
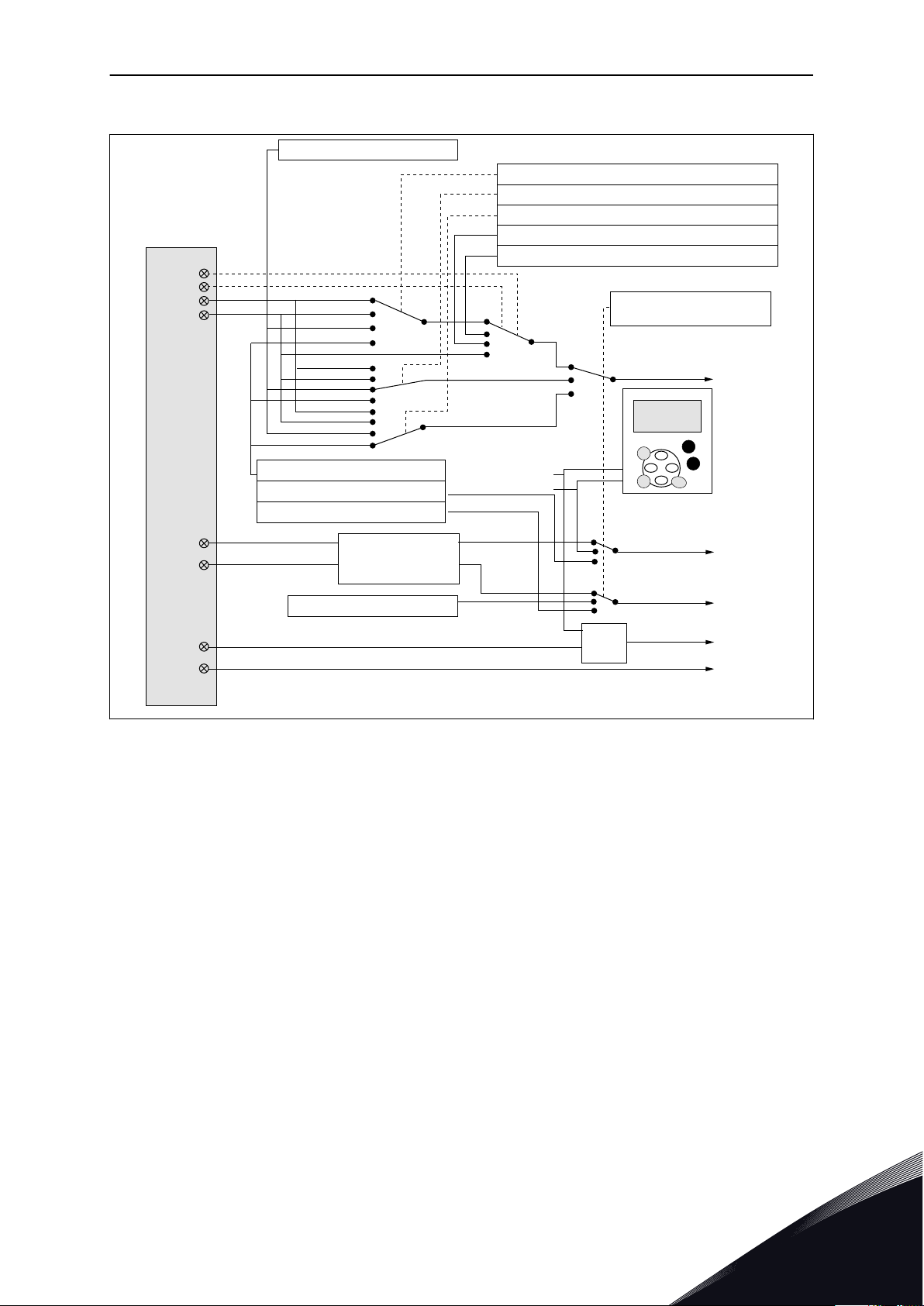
1.3 STEUERSIGNALLOGIK IN DER BASISAPPLIKATION
Abb. 3: Steuersignallogik der Basisapplikation
1.4 BASISAPPLIKATION – PARAMETERLISTEN
1.4.1 ÜBERWACHUNGSWERTE (STEUERTAFEL: MENÜ M1)
Bei den Betriebsdaten handelt es sich sowohl um die Istwerte der Parameter und Signale als
auch um Statusinformationen und Messwerte. Die Betriebsdaten können nicht bearbeitet
werden.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 14 BASISAPPLIKATION
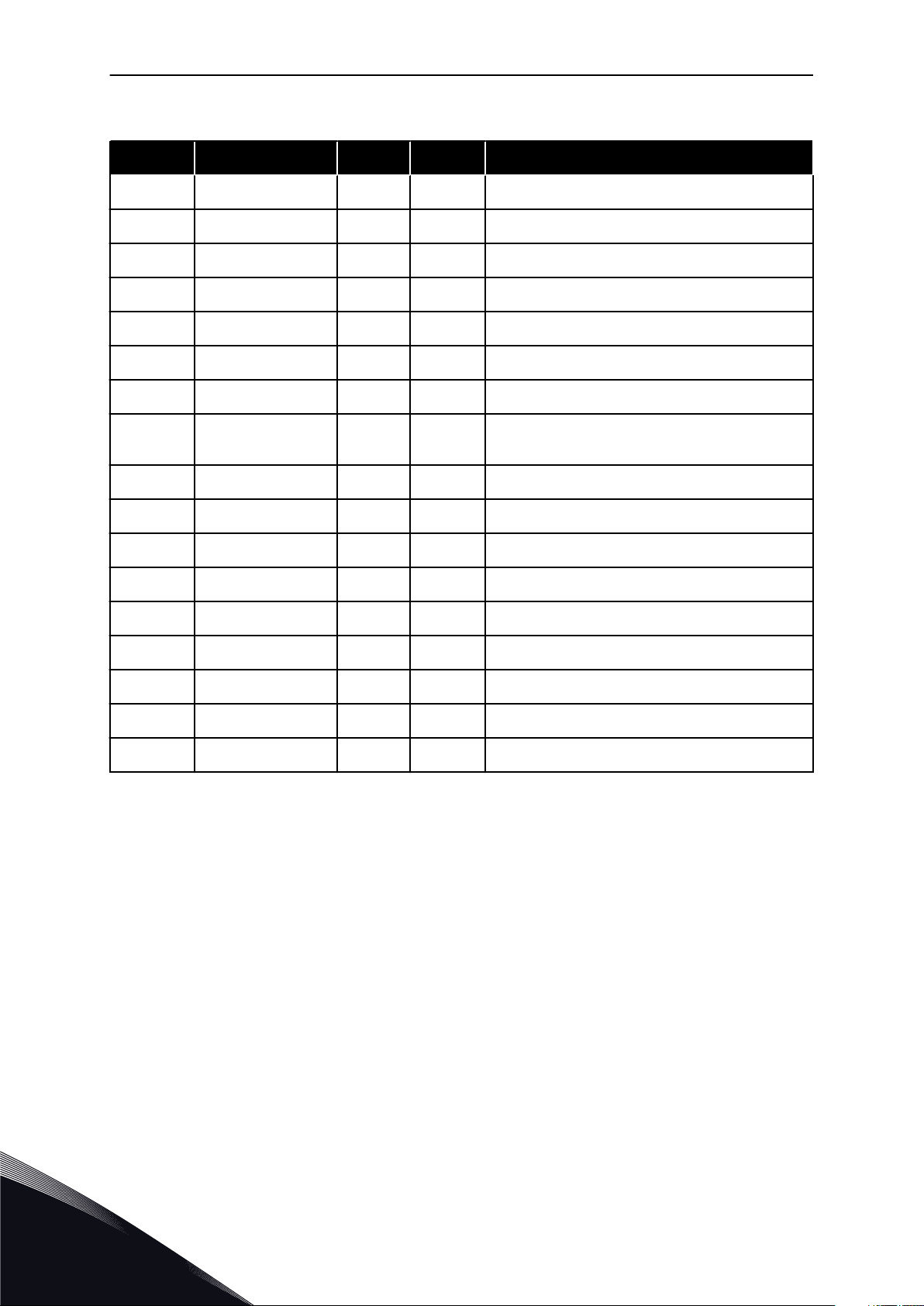
Tabelle 1: Betriebsdaten
Index Betriebswert Einheit ID Beschreibung
V1.1 Ausgangsfrequenz Hz 1
V1.2 Frequenzsollwert Hz 25
V1.3 Motordrehzahl UpM 2
V1.4 Motorstrom A 3
V1.5 Motordrehmoment % 4
V1.6 Motorleistung % 5
V1.7 Motorspannung V 6
V1.8
1.9 Gerätetemperatur °C 8
1.10 Motortemperatur % 9
V1.11 Analogeingang 1 V/mA 13
V1.12 Analogeingang 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17 Betriebsdaten
DC-Zwischenkreis-
Spannung
out
V 7
mA 26
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
BASISAPPLIKATION VACON · 15
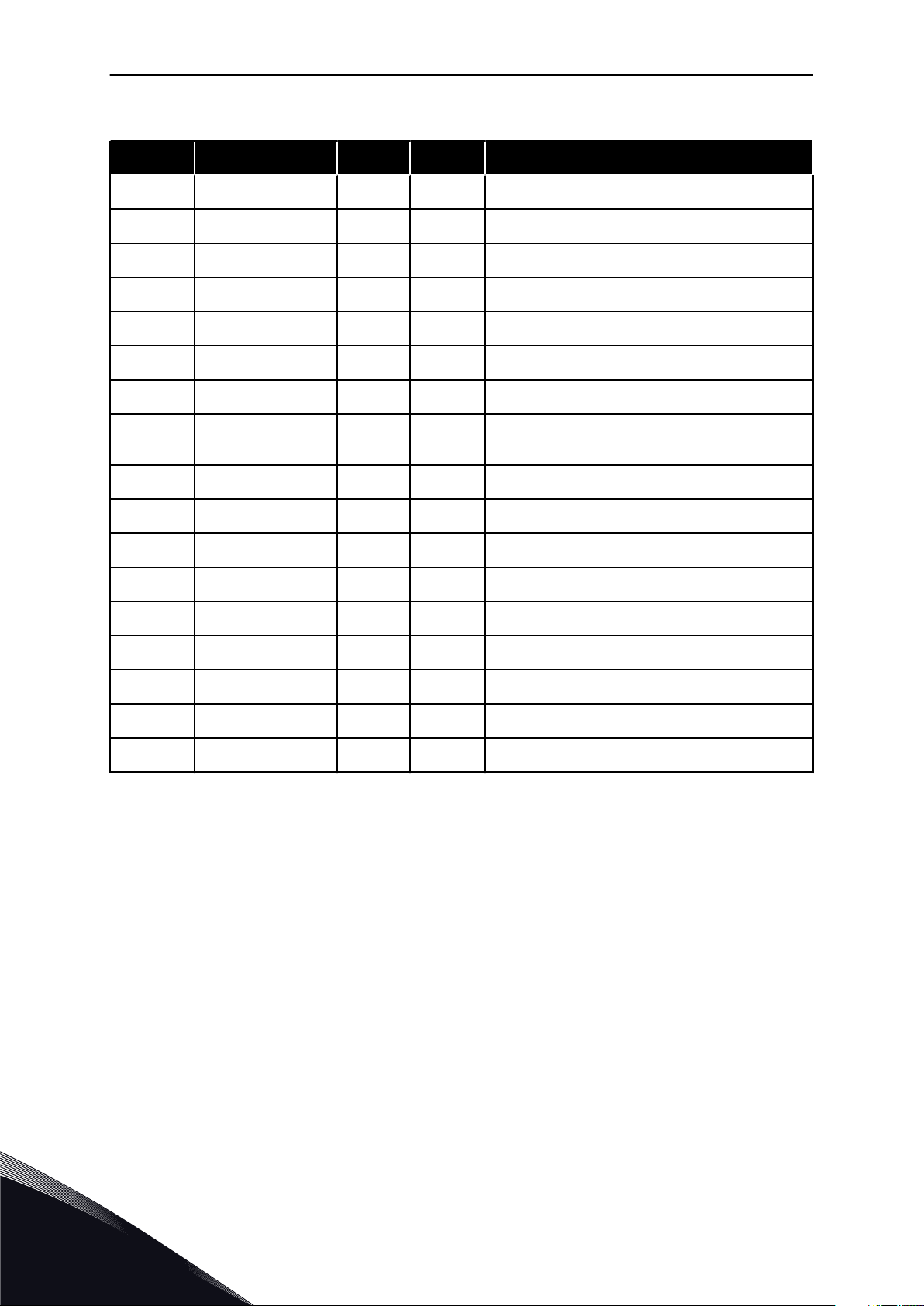
1.4.2 BASISPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.1)
Tabelle 2: Basisparameter G2.1
Index Parameter Min. Max. Einheit Werksein
st.
P2.1 Mindestfrequenz 0.00 P2.2 Hz 0.00 101
P2.2 Max. Frequenz P2.1 320.00 Hz 50.00 102
P2.3
P2.4 Bremszeit 1 0.1 3000.0 s 3.0 104
P2.5 Stromgrenze 0,1 x I
P2.6
P2.7
P2.8
Beschleunigungs-
zeit 1
Nennspannung
des Motors
Nennfrequenz des
Motors
Nenndrehzahl des
Motors
0.1 3000.0 s 3.0 103
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 UpM 1440 112
H
A I
NX2: 230
V
NX5: 400
V
NX6: 690
V
Ben
def.
L
ID
107
110
Beschreibung
P2.9
P2.10 cos phi, Motor 0.30 1.00 0.85 120
P2.11 Startfunktion 0 2 0 505
P2.12 Stoppfunktion 0 3 0 506
P2.13 U/f-Optimierung 0 1 0 109
Nennstrom des
Motors
0,1 x I
2 X I
H
H
A I
H
113
0 = Rampe
1 = Fliegender
Start
2=Bedingter fliegender Start
0 = Leerauslauf
1 = 2 = Leerlauf bei
Rampe + Lauf aktivieren
Rampe
3 = Rampe bei
Leerlauf + Lauf
aktivieren
0 = Nicht verwendet
1 = Automatische
Drehmomenterhöhung
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 16 BASISAPPLIKATION
Tabelle 2: Basisparameter G2.1
Index Parameter Min. Max. Einheit Werksein
st.
P2.14 E/A-Sollwert 0 3 0 117
Analogeingang 2,
P2.15
P2.16
Sollwert Signalbe-
reich
Analogausgang-
funktion
0 1 1 302
0 8 1 307
Ben
def.
Beschreibung
ID
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
0 = 0 – 20 mA
1 = 4 mA – 20mA
0 = Nicht verwendet
1 = Ausgangsfreq.
(0 – f
2 = Freq.sollwert
(0 – f
3 = Motordrehzahl
(0–Motornenndrehzahl)
4 = Ausgangsstrom
(0–I
nMotor
5 = Motordrehmoment (0–T
6 = Motorleistung
(0–P
7 = Motorspannung
(0–U
8 = Zwischenkreisspannung (0 – 1000
V)
)
max
)
max
nMotor
nMotor
)
nMotor
)
)
)
P2.17 DIN3 Funktion 0 7 1 301
P2.18
P2.19 Festdrehzahl 2 0.00 P2.2 Hz 50.00 106
Festdrehzahl 1 0.00 P2.2 Hz 0.00 105
0 = Nicht verwendet
1 = Externer Fehler, geschlossener
Kontakt
2 = Externer Fehler, offener Kontakt
3 = Startfreigabe,
geschl. Kont.
4 = Startfreigabe,
offener Kont.
5 = Steuerpl. zu
E/A zwingen
6 = Steuerpl. zu
Steuertafel zwingen
7 = Steuerpl. zu
Feldbus zwingen
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
BASISAPPLIKATION VACON · 17
Tabelle 2: Basisparameter G2.1
Index Parameter Min. Max. Einheit Werksein
st.
P2.20
Automatischer
Neustart
0 1 0 731
Ben
def.
Beschreibung
ID
0 = Gesperrt
2 = Freigegeben
1.4.3 STEUERUNG ÜBER STEUERTAFEL (STEUERTAFEL: MENÜ M3)
Die nachstehende Liste enthält die Parameter für die Auswahl des Steuerplatzes und der
Drehrichtung über die Steuertafel. Siehe Menü „Steuerung über die Steuertafel“ im
Benutzerhandbuch.
Tabelle 3: Parameter für die Steuerung über die Steuertafel, M3
Index Parameter Min. Max. Einheit Werksein
st.
P3.1 Steuerplatz 1 3 1 125
Sollwerteinstel-
P3.2
lung über die
Steuertafel
P2.1 P2.2 Hz 0.00
Ben
def.
Beschreibung
ID
1 = E/A-Klemmleiste
2 = Steuertafel
3 = Feldbus
P3.3
R3.4 Stopptaste 0 1 1 114
Drehrichtung
(über Steuertafel)
0 1 0 123
0 = Eingeschränkte
Funktion der
Stopptaste
1 = Stopptaste
immer aktiviert
1.4.4 SYSTEMMENÜ (STEUERTAFEL: MENÜ M6)
Die Parameter und Funktionen zum allgemeinen Gebrauch des Frequenzumrichters (z.B.
Applikations- und Sprachauswahl) und die benutzerdefinierten Parametersätze sowie die
Hardware- und Softwareangaben finden Sie im Benutzerhandbuch.
1.4.5 ZUSATZKARTEN (STEUERTAFEL: MENÜ M7
Das Menü M7 zeigt die an der Steuerplatine angeschlossenen Erweiterungs- und
Zusatzkarten sowie kartenbezogene Angaben an. Weitere Informationen finden Sie im
Benutzerhandbuch.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 18 STANDARD
2 STANDARD
2.1 EINFÜHRUNG
Wählen Sie die Standardapplikation im Menü M6 auf Seite S6.2.
Die Standardapplikationen wird in der Regel in Pumpen- und Lüfteranwendungen verwendet,
sowie für Fördersysteme, für die die Basisapplikation zu begrenzt ist, aber für die keine
speziellen Funktionen erforderlich sind.
Die Standardapplikation verwendet dieselben E/A-Signale und dieselbe Steuerlogik wie
•
die Basisapplikation.
Der Digitaleingang DIN3 und alle Ausgänge sind frei programmierbar.
•
Zusätzliche Funktionen:
Programmierbare Start/Stopp- und Rückwärts-Signallogik
•
Sollwertskalierung
•
Eine Frequenz-Grenzenüberwachung
•
Programmierung von zweiten Rampen und S-förmigen Rampen
•
Programmierbare Start- und Stoppfunktionen
•
DC-Bremse bei Stopp
•
Ein Frequenzausblendungsbereich
•
Programmierbare U/f-Kurve und Schaltfrequenz
•
Automatischer Neustart
•
Motortemperatur- und -blockierschutz: Programmierbare Aktion; Aus, Warnung, Fehler
•
Die Parameter der Standardapplikation sind beschrieben in Kapitel 9
Parameterbeschreibungen in diesem Handbuch beschrieben. Die Beschreibungen sind nach
den einzelnen ID-Nummern der Parameter geordnet.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
DIN4
DIN5
mA
READY
(BEREIT)
RUN
(BETRIEB)
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Klemme Signal Beschreibung
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Sollausgang
E/A-Masse
Analogeingang 2
Strombereich
0 – 20 mA
Steuerspannungsausgang
E/A Masse
Start vorwärts
Programmierbare Logik (P2.2.1)
Start rückwärts
Ri min = 5 kΩ
Externer Fehlereingang
Programmierbar (P2.2.2)
Festdrehzahl Auswahl 1
Festdrehzahl Auswahl 2
Fehlerquittierung
Gemeinsamer Bezug
für DIN 1–DIN 3
Gemeinsam für DIN4–DIN6
Steuerspannungsausgang
E/A Masse
Analogausgang 1
Ausgangsfrequenz
Programmierbar (P2.3.2)
Digitalausgang 1
READY (BEREIT)
Programmierbar (P2.3.7)
Offener Kollektor,
I≤50 mA, U≤48 VDC
Relaisausgang 1
RUN (BETRIEB)
Programmierbar
(P2.3.8)
Relaisausgang 2
FAULT (FEHLER)
Programmierbar
(P2.3.9)
Bereich 0–20 mA/RL,
max. 500 Ω
Anschluss an Masse oder +24 V
Kontakt geöffnet = keine Reaktion
Kontakt geschlossen = Fehlerquittierung
AO1+
Frequenzsollwert
für Analogeingang 1
Masseanschluss für
Sollwerte und Steuersignale
Frequenzsollwert
für Analogeingang 2
Kontakt geschlossen
= Start vorwärts
Kontakt geschlossen
= Start rückwärts
Kontakt geöffnet = kein Fehler
Kontakt geschlossen = Fehler
Freq.sollw.
Offen
Geschlossen
Offen
Geschlossen
Offen
Offen
Geschlossen
Geschlossen
E/A-Sollwert
Festdrehzahl 1
Festdrehzahl 2
Analogeingang 2
Spannung für Potentiometer
usw.
Analogeingang 1
Spannungsbereich 0–10 V DC
Programmierbar (P2.1.11)
Spannung für Schalter usw.
(max. 0,1 A)
Spannung für Schalter (siehe # 6)
Anschluss an Masse oder +24 V
Masseanschluss für
ollwerte und Steuersignale
Masseanschluss für
Sollwerte und Steuersignale
Sollwertpotentiometer
1–10 kΩ
STANDARD VACON · 19
2.2 STEUER-E/A
Abb. 4: E/A-Standardkonfiguration der Standardapplikation
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Steckbrückenblock X3:
CMA- und CMB-Erdung
CMB mit GND verbunden
CMA mit GND verbunden
CMB isoliert von GND
CMA isoliert von GND
CMB und CMA intern
miteinander verbunden,
von GND getrennt
= Werkseinstellung
VACON · 20 STANDARD
*) Die Zusatzkarte A3 hat keinen Anschluss für einen offenen Kontakt an ihrem zweiten
Relaisausgang (Anschluss 24 fehlt).
HINWEIS!
Siehe Steckbrückenauswahl unten. Weitere Informationen finden Sie im
Benutzerhandbuch zu dem Produkt.
Abb. 5: Steckbrückenauswahl
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Steuertafelsollwert
3.1 Steuerplatz
Start vorwärts
Start rückwärts
Start/Stopp
Rückwärts
Interner Start/Stopp
Intern Rückwärts
Interne Fehlerquittierung
Fehlerquittierungseingang
Externer Fehlereingang (programmierbar)
Schaltfläche
„Reset“
Start/Stopp-Tasten
Sollwert vom Feldbus
Start/Stopp vom Feldbus
Richtung vom Feldbus
3.3 Richtung:Stafel
2.1.13 Feldbussteuersollwert
2.1.15 Festdrehzahl 2
2.1.14 Festdrehzahl 1
2.1.11 E/A-Sollwert
2.1.12 Strg.ü.St.tafel Drehzahl 1
Programmierbare
Start/Stopp- und
Rückwärts-Logik
Interner
Frequenzsollwert
(programmierbar)
(programmierbar)
STANDARD VACON · 21
2.3 STEUERSIGNALLOGIK IN DER STANDARDAPPLIKATION
Abb. 6: Steuersignallogik der Standardapplikation
2.4 STANDARDAPPLIKATION – PARAMETERLISTEN
2.4.1 ÜBERWACHUNGSWERTE (STEUERTAFEL: MENÜ M1)
Bei den Betriebsdaten handelt es sich sowohl um die Istwerte der Parameter und Signale als
auch um Statusinformationen und Messwerte. Die Betriebsdaten können nicht bearbeitet
werden.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 22 STANDARD
Tabelle 4: Betriebsdaten
Index Betriebswert Einheit ID Beschreibung
V1.1 Ausgangsfrequenz Hz 1
V1.2 Frequenzsollwert Hz 25
V1.3 Motordrehzahl UpM 2
V1.4 Motorstrom A 3
V1.5 Motordrehmoment % 4
V1.6 Motorleistung % 5
V1.7 Motorspannung V 6
V1.8
1.9 Gerätetemperatur °C 8
1.10 Motortemperatur % 9
V1.11 Analogeingang 1 V/mA 13
V1.12 Analogeingang 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17 Betriebsdaten
DC-Zwischenkreis-
Spannung
out
V 7
mA 26
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARD VACON · 23
2.4.2 BASISPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.1)
Tabelle 5: Basisparameter G2.1
Index Parameter Min. Max. Einheit Werksein
st.
P2.1.1 Mindestfrequenz 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Max. Frequenz P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4 Bremszeit 1 0.1 3000.0 s 0.0 104
P2.1.5 Stromgrenze 0,1 x I
P2.1.6
P2.1.7
P2.1.8
Beschleunigungs-
zeit 1
Nennspannung
des Motors
Nennfrequenz des
Motors
Nenndrehzahl des
Motors
0.1 3000.0 s 0.0 103
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 UpM 1440 112
H
A I
NX2: 230
V
NX5: 400
V
NX6: 690
V
Ben
def.
L
ID
107
110
Beschreibung
P2.1.9
P2.1.10 cos phi, Motor 0.30 1.00 0.85 120
P2.1.11 E/A-Sollwert 0 3 0 117
P2.1.12
P2.1.13
P2.1.14 Festdrehzahl 1 0.00 P2.1.2 Hz 10.00 105
P2.1.15 Festdrehzahl 2 0.00 P2.1.2 Hz 50.00 106
Nennstrom des
Motors
Steuersollwert,
Steuertafel
Steuersollwert,
Feldbus
0,1 x I
0 3 2 121
0 3 3 122
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 24 STANDARD
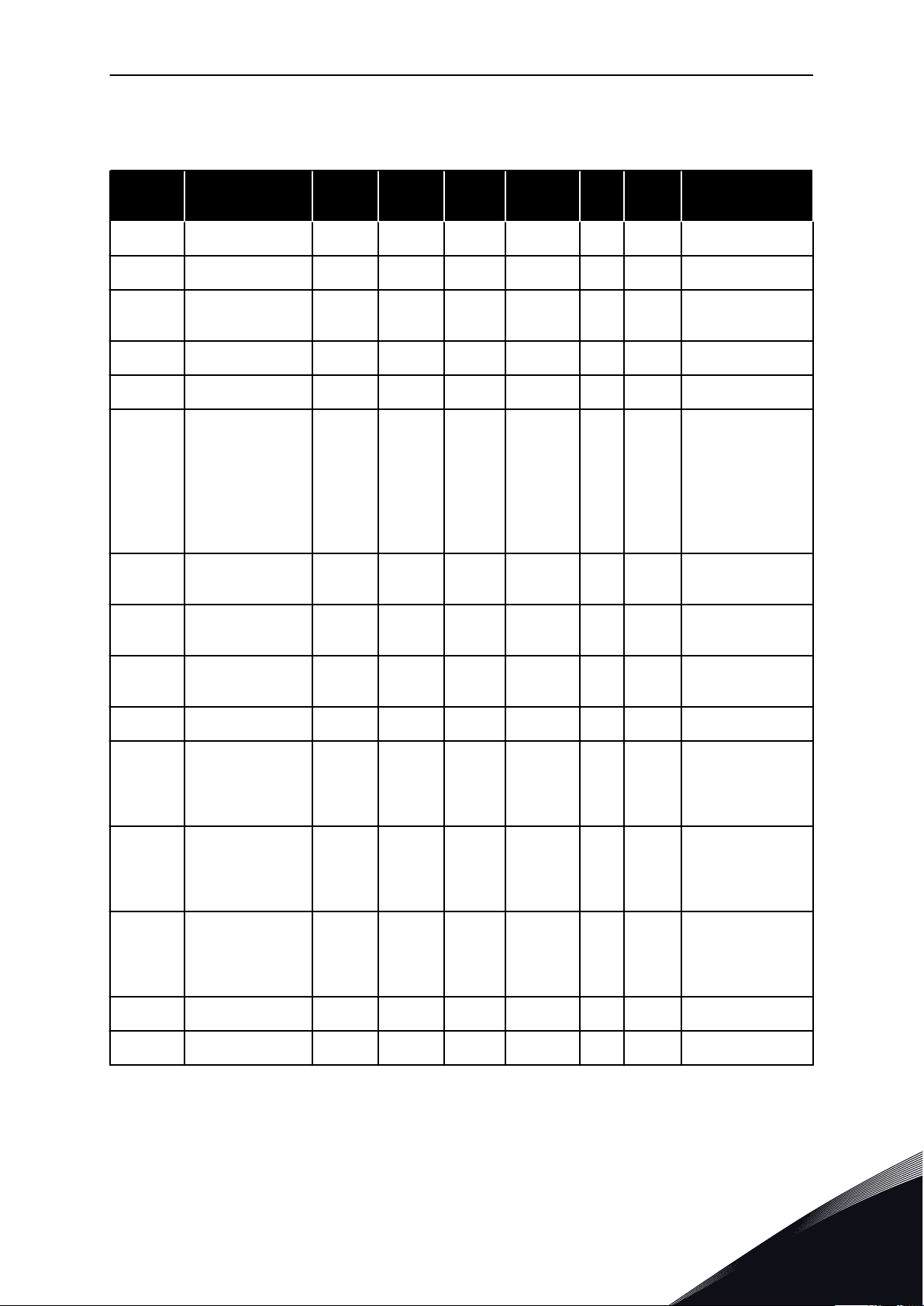
2.4.3 EINGANGSSIGNALE (STEUERTAFEL: MENÜ M2 -> G2.2)
Tabelle 6: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.1
Start/Stopp-Aus-
wahl
0 6 0 300
Ben
def.
Beschreibung
ID
Auswahl = 0
Steuersignal 1 =
Start vorwärts
Steuersignal 2 =
Start rückwärts
Auswahl = 1
Steuersignal 1 =
Start/Stopp
Steuersignal 2 =
Rückwärts
Auswahl = 2
Steuersignal 1 =
Start/Stopp
Steuersignal 2 =
Startfreigabe
Auswahl = 3
Steuersignal 1 =
Startpuls (Flanke)
Steuersignal 2 =
Stopppuls
Auswahl = 4
Steuersignal 1 = Vorwärtspuls (Flanke)
Steuersignal 2 =
Rückwärtspuls
(Flanke)
Auswahl = 5
Steuersignal 1 =
Startpuls (Flanke)
Steuersignal 2 =
Rückwärtspuls
Auswahl = 6
Steuersignal 1 =
Startpuls (Flanke)
Steuersignal 2 =
Freigabepuls
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARD VACON · 25
Tabelle 6: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.2 DIN3 Funktion 0 8 1 301
Analogeingang 2
P2.2.3
P2.2.4
Sollwert Signalbe-
reich
Sollwertskalie-
rung Mindestwert
0 1 1 302
0.00 320.00 Hz 0.00 303
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Externer Fehler,
geschlossener Kontakt
2 = Externer Fehler,
offener Kontakt
3 = Lauf aktivieren
4 = Beschl./Verzög.Zeit Auswahl
5 = Steuerpl. zu E/A
zwingen
6 = Steuerpl. zu Steuertafel zwingen
7 = Steuerpl. zu Feldbus zwingen
8 = Rückwärts
0 = 0 – 20 mA (0 – 10
V) **
1 = 4 – 20 mA (2 – 10
V) **
P2.2.5
P2.2.6 Sollwertinversion 0 1 0 305
P2.2.7 Sollwert-Filterzeit 0.00 10.00 s 0.10 306 0 = Keine Filterung
P2.2.8 *** AI1 Signalauswahl A1 377
P2.2.9 *** AI2 Signalauswahl A2 388
Sollwertskalie-
rung Höchstwert
0.00 320.00 Hz 0.00 304
0 = Nicht invertiert
1 = Invertiert
** = Die Steckbrücken von Block X2 müssen entsprechend platziert werden. Näheres finden
Sie in der Betriebsanleitung des Produkts.
*** = Wenden Sie die TTF-Methode zur Programmierung dieser Parameter an.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 26 STANDARD
2.4.4 AUSGANGSSIGNALE (STEUERTAFEL: MENÜ M2 -> G2.3
Tabelle 7: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
P2.3.1
P2.3.2
Analogausgang 1
Signalauswahl
Analogausgang-
funktion
0 A.1 464
0 8 1 307
Ben
def.
Beschreibung
ID
0 = Nicht verwendet (20 mA/10 V)
1 = Ausgangsfreq.
(0 – f
2 = Freq.sollwert
(0 – f
3 = Motordrehzahl
(0–Motornenndrehzahl)
4 = Motorstrom (0
– I
nMotor
5 = Motordrehmoment (0–T
6 = Motorleistung
(0–P
7 = Motorspannung
(0–U
8 = Zwischenkreisspannung (0 – 1000
V)
)
max
)
max
)
nMotor
nMotor
nMotor
)
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Analogausgang
Filterzeit
Analogausgang
Inversion
Analogausgang
Mindestwert
Analogausgangss-
kalierung
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Keine Filterung
0 = Nicht invertiert
1 = Invertiert
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARD VACON · 27
Tabelle 7: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
P2.3.7
Digitalausgang 1
Funktion
0 16 1 312
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Bereit
2 = Betrieb
3 = Fehler
4 = Fehler invertiert
5 = Warnung FU
überhitzt
6 = Ext. Fehler
oder Warnung
7 = Sollwertfehler
oder Warnung
8=Warnung
9 = Rückwärts
10 = Festdrehzahl
1
11 = Auf Drehzahl
12 = Motorregler
aktiv
13 = Überwach.
Ausgangsfreq.grenze 1
14 = Steuerplatz:
E/A
15 = Thermistorfehler/Warnung
16=Feldbus DIN1
P2.3.8
P2.3.9 RO2 Funktion 0 16 3 314
P2.3.10
P2.3.11
P2.3.12 *
P2.3.13
P2.3.14
RO1 Funktion 0 16 2 313
Ausg.freq.grenze
1, Überwachung
Ausg.freq.grenze
1, überwachter
Wert
Analogausgang 2
Signalauswahl
Analogausgang 2,
Funktion
Analogausgang 2,
Filterzeit
0 2 0 315
0.00 320.00 Hz 0.00 316
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
Wie Parameter
2.3.7
Wie Parameter
2.3.7
0 = Keine Grenze
1 = Überwachung
der unteren
Grenze
2 = Überwachung
der oberen Grenze
Wie Parameter
2.3.2
0 = Keine Filterung
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 28 STANDARD
Tabelle 7: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
P2.3.15
P2.3.16
P.2.3.17
Analogausgang 2,
Inversion
Analogausgang 2,
Mindestwert
Analogausgang 2
Skalierung
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
Ben
def.
ID
* = Wenden Sie die TTF-Methode zur Programmierung dieser Parameter an.
Beschreibung
0 = Nicht invertiert
1 = Invertiert
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARD VACON · 29
2.4.5 ANTRIEBSSTEUERPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.4
Tabelle 8: Antriebssteuerparameter, G2.4
Index Parameter Min. Max. Einheit Werksein
st.
P2.4.1
P2.4.2
P2.4.3
P2.4.4 Bremszeit 2 0.1 3000.0 s 1.0 503
P2.4.5 Brems-Chopper 0 4 0 504
Rampe 1, Ver-
schliff
Rampe 2, Ver-
schliff
Beschleunigungs-
zeit 2
0.0 10.0 s 0.1 500
0.0 10.0 s 0.0 501
0.1 3000.0 s 1.0 502
Ben
def.
Beschreibung
ID
0 = Linear
100 = volle
Beschl./Verzög.
Zu-/Abnahmezeiten
0 = Linear
100 = volle
Beschl./Verzög.
Zu-/Abnahmezeiten
0 = Gesperrt
1 = Verwendet im
Betrieb
2 = Externer
Bremschopper
3 = Verwendet bei
Stopp / im Betrieb
4 = verwendet im
Betrieb (kein Test)
P2.4.6 Startfunktion 0 2 0 505
P2.4.7 Stoppfunktion 0 3 0 506
P2.4.8 Bremsstrom (DC) 0.00 I
P2.4.9
P2.4.10
DC-Bremszeit bei
Stopp
Startfrequenz für
DC-Bremsung bei
Rampenstopp
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
L
A 0,7 x I
H
507
0 = Rampe
1 = Fliegender
Start
2=Bedingter fliegender Start
0 = Leerauslauf
1 = Rampe
2 = Leerlauf bei
Rampe + Lauf aktivieren
3 = Rampe bei
Leerlauf + Lauf
aktivieren
0 = DC-Bremse ist
aus bei Stopp
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 30 STANDARD
Tabelle 8: Antriebssteuerparameter, G2.4
Index Parameter Min. Max. Einheit Werksein
st.
P2.4.11
P2.4.12 * Flussbremse 0 1 0 520
P2.4.13 Flussbremsstrom 0.00 I
DC-Bremszeit bei
Start
0.00 600.00 s 0.00 516
L
A I
H
Ben
def.
Beschreibung
ID
0 = DC-Bremse ist
aus bei Start
0 = Aus
0 = Ein
519
2.4.6 FREQUENZAUSBLENDUNGSPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.5)
Tabelle 9: Frequenzausblendungsparameter, G2.5
Index Parameter Min. Max. Einheit Werksein
st.
Frequenzausblen-
P2.5.1
P2.5.2
dungsbereich 1
untere Grenze
Frequenzausblen-
dungsbereich 1
obere Grenze
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
Ben
def.
ID
Beschreibung
P2.5.3
Ausblendung,
Beschl./
Verzög.rampe
0.1 10.0 x 1.0 518
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STANDARD VACON · 31
2.4.7 MOTORSTEUERPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.6)
Tabelle 10: Motorregelungsparameter, G2.6
Index Parameter Min. Max. Einheit Werksein
st.
P2.6.1 * Motorregelmodus 0 1/3 0 600
P2.6.2 * U/f-Optimierung 0 1 0 109
P2.6.3 *
U/f-Verhältnis,
Auswahl
0 3 0 108
Ben
def.
Beschreibung
ID
0 = Frequenzregelung
1 = Drehzahlregelung
NXP:
2 = Open Loop
Drehmomentsteuerung
3 = Closed Loop
Drehzahlsteuerung
4 = Closed Loop
Drehmomentsteuerung
0 = Nicht verwendet
1 = Automatische
Drehmomenterhöhung
0 = Linear
1 = Quadratisch
2 = Programmierbar
3 = Linear bei
Flussoptim.
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9 Schaltfrequenz 1.0 variiert kHz variiert 601
Feldschwäch-
punkt
Spannung am
Feldschwäch-
punkt
U/f-Kurve, Mitten-
frequenz
U/f-Kurve, Mitten-
spannung
Ausgangsspan-
nung bei Nullfre-
quenz
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % variiert 606
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 32 STANDARD
Tabelle 10: Motorregelungsparameter, G2.6
Index Parameter Min. Max. Einheit Werksein
st.
P2.6.10
P2.6.11
P2.6.12 Load Drooping 0.00 100.00 % 0.00 620
P2.6.13 Identifikation 0 1/2 0 631
Überspannungs-
regler
Unterspannungs-
regler
0 2 1 607
0 1 1 608
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Verwendet
(keine Rampe)
2 = Verwendet
(Rampe)
0 = Nicht verwendet
1 = Verwendet
0 = Keine Aktion
1=Identifikation
ohne Betrieb
2 = Identifikation
mit Lauf
3 = Identifikationslauf mit Encoder
4 = Keine Aktion
5 = Identifikationslauf fehlgeschlagen
Closed Loop-Parametergruppe 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6 Schlupfkorrektur 0 500 % 100 619
P2.6.14.7
P2.6.14.8
P2.6.14.9
Magnetisierungs-
strom
Drehzahlsteue-
rung P-Verstär-
kung
Drehzahlsteue-
rung I-Zeit
Beschleunigungs-
kompensierung
Magnetisierungs-
strom beim Start
Magnetisierungs-
zeit beim Start
0-Geschwindig-
keitszeit beim
Start
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
H
L
A 0.00 612
A 0.00 627
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STANDARD VACON · 33
Tabelle 10: Motorregelungsparameter, G2.6
Index Parameter Min. Max. Einheit Werksein
st.
0-Geschwindig-
P2.6.14.10
P2.6.14.11
P2.6.14.12
P2.6.14.13
P2.6.14.15 Encoder-Filterzeit 0.0 100.0 ms 0.0 618
P2.6.14.17
keitszeit beim
Stopp
Anlaufdrehmo-
ment
Anlaufdrehmo-
ment VORWÄRTS
Anlaufdrehmo-
ment RÜCK-
WÄRTS
Stromsteuerung
P-Verstärkung
0 32000 ms 100 616
0 3 0 621
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.00 100.00 % 40.00 617
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Drehmomentspeicher
2 = Drehmomentsollwert
3 = Anlaufdrehmoment vorwärts/
rückwärts
Identifizierungsparametergruppe 2.6.15
P2.6.15.1 Drehzahlschritt -50.0 50.0 0.0 0.0 1252
* = Der Parameterwert kann nur geändert werden, nachdem der Frequenzumrichter
angehalten wurde.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 34 STANDARD
2.4.8 SCHUTZFUNKTIONEN (STEUERTAFEL: MENÜ M2 -> G2.7
Tabelle 11: Schutzfunktionen, G2.7
Index Parameter Min. Max. Einheit Werksein
st.
Reaktion auf 4-
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5
mA-Sollwertfeh-
ler
4 mA Sollwertfeh-
ler Frequenz
Reaktion auf
externen Fehler
Eingangsphase,
Überwachung
Reaktion auf
Unterspann.fehler
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
0 1 0 727
Ben
def.
Beschreibung
ID
0 = Keine Reaktion
1 = Warnung
2 = Warnung + vorher. Frequenz
3 = Warnung + voreingest. Frequenz
2.7.2
4 = Fehler, Stopp
gemäß 2.4.7
5 = Fehler, Stopp
durch Leerauslauf
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
0 = Fehler in Fehlerspeicher
Fehler nicht
gespeichert
P2.7.6
P2.7.7 Erdschlussschutz 0 3 2 703
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
Ausgangsphasen-
überwachung
Wärmeschutz,
Motor
Umgeb.temp.fak-
tor, Motor
Motorkühlfaktor
bei Nulldrehzahl
Motor-Tempera-
turzeitkonstante
Motoreinschalt-
dauer
0 3 2 702
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min variiert 707
0 150 % 100 708
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STANDARD VACON · 35
Tabelle 11: Schutzfunktionen, G2.7
Index Parameter Min. Max. Einheit Werksein
st.
P2.7.13 Blockierschutz 0 3 0 709
P2.7.14 Blockierstrom 0.00 2 x I
P2.7.15
P2.7.16
P2.7.17 Unterlastschutz 0 3 0 713
P2.7.18
Blockierzeit-
grenze
Blockierfrequenz-
grenze
Unterlastschutz
vom Drehmoment
1.00 120.00 s 15.00 711
1.0 P2.1.2 Hz 25.00 712
10.0 150.0 % 50.0 714
H
A I
H
Ben
def.
Beschreibung
ID
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
710
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
Nullfrequenzlast
vom Unterlast-
schutz
Zeitgrenze, Unter-
lastschutz
Reaktion auf
Thermistorfehler
Reaktion auf Feld-
busfehler
Reaktion auf
Steckplatzfehler
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 3 2 734
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
(siehe P2.7.21)
(siehe P2.7.21)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 36 STANDARD
2.4.9 PARAMETER FÜR AUTOMATISCHEN NEUSTART (STEUERTAFEL: MENÜ M2 -> G2.8)
Tabelle 12: Parameter für automatischen Neustart, G2.8
Index Parameter Min. Max. Einheit Werksein
st.
P2.8.1 Wartezeit 0.10 10.00 s 0.50 717
P2.8.2 AFQ Zeitraum 0.00 60.00 s 30.00 718
P2.8.3 Startfunktion 0 2 0 719
Anzahl der Versu-
che nach einem
P2.8.4
P2.8.5
P2.8.6
Auslösen auf-
grund von Unter-
spannung
Anzahl der Versu-
che nach einem
Auslösen auf-
grund von Über-
spannung
Anzahl der Versu-
che nach einem
Auslösen auf-
grund von Über-
strom
0 10 0 720
0 10 0 721
0 3 0 722
Ben
def.
Beschreibung
ID
0 = Rampe
1 = Fliegender
Start
2 = Gemäß P2.4.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Anzahl der Versu-
che nach einem
Auslösen nach 4
mA Sollwert
Anzahl der Versu-
che nach einem
Auslösen auf-
grund eines
Motortemperatur-
fehlers
Anzahl der Versu-
che nach einem
Auslösen auf-
grund eines exter-
nen Fehlers
Anzahl der Versu-
che nach einem
Auslösen auf-
grund eines
Unterlastfehlers
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STANDARD VACON · 37
2.4.10 STEUERUNG ÜBER STEUERTAFEL (STEUERTAFEL: MENÜ M3)
Die nachstehende Liste enthält die Parameter für die Auswahl des Steuerplatzes und der
Drehrichtung über die Steuertafel. Siehe Menü „Steuerung über die Steuertafel“ im
Benutzerhandbuch.
Tabelle 13: Parameter für die Steuerung über die Steuertafel, M3
Index Parameter Min. Max. Einheit Werksein
st.
P3.1 Steuerplatz 1 3 1 125
Sollwerteinstel-
P3.2
P3.3
R3.4 Stopptaste 0 1 1 114
lung über die
Steuertafel
Drehrichtung
(über Steuertafel)
P2.1 P2.2 Hz 0.00
0 1 0 123
Ben
def.
Beschreibung
ID
1 = E/A-Klemmleiste
2 = Steuertafel
3 = Feldbus
0 = Eingeschränkte
Funktion der
Stopptaste
1 = Stopptaste
immer aktiviert
2.4.11 SYSTEMMENÜ (STEUERTAFEL: MENÜ M6)
Die Parameter und Funktionen zum allgemeinen Gebrauch des Frequenzumrichters (z.B.
Applikations- und Sprachauswahl) und die benutzerdefinierten Parametersätze sowie die
Hardware- und Softwareangaben finden Sie im Benutzerhandbuch.
2.4.12 ZUSATZKARTEN (STEUERTAFEL: MENÜ M7
Das Menü M7 zeigt die an der Steuerplatine angeschlossenen Erweiterungs- und
Zusatzkarten sowie kartenbezogene Angaben an. Weitere Informationen finden Sie im
Benutzerhandbuch.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 38 ORT/FERN
3 ORT/FERN
3.1 EINFÜHRUNG
Wählen Sie die Ort/Fern-Applikation im Menü M6 auf Seite S6.2.
Mit der Ort/Fern-Applikation ist es möglich, zwei unterschiedliche Steuerplätze zu
verwenden. Der Frequenzsollwert kann entweder über die Steuertafel, die E/A-Klemmleiste
oder den Feldbus für jeden Steuerplatz einzeln ausgewählt werden. Der aktive Steuerplatz
wird über den Digitaleingang DIN6 aktiviert.
Alle Ausgänge sind frei programmierbar.
•
Zusätzliche Funktionen:
Programmierbare Start/Stopp- und Rückwärts-Signallogik
•
Sollwertskalierung
•
Eine Frequenz-Grenzenüberwachung
•
Programmierung von zweiten Rampen und S-förmigen Rampen
•
Programmierbare Start- und Stoppfunktionen
•
DC-Bremse bei Stopp
•
Ein Frequenzausblendungsbereich
•
Programmierbare U/f-Kurve und Schaltfrequenz
•
Automatischer Neustart
•
Motortemperatur- und -blockierschutz: Programmierbare Aktion; Aus, Warnung, Fehler
•
Die Parameter der Ort/Fern-Applikation sind beschrieben in Kapitel 9
Parameterbeschreibungen in diesem Handbuch beschrieben. Die Beschreibungen sind nach
den einzelnen ID-Nummern der Parameter geordnet.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

Sollwertpotentiometer
1–10 kΩ
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Fernsollwert
0(4) – 20 mA
RUN (BETRIEB)
READY (BEREIT)
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Klemme Signal Beschreibung
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Sollausgang
E/A-Masse
Analogeingang 2
Strombereich 0–20 mA
Programmierbar (P2.1.11)
Steuerspannungsausgang
E/A Masse
Platz A: Start vorwärts
Programmierbare Logik (P2.2.1)
Platz A: Start rückwärts
Ri min = 5 kOhm
Externer Fehlereingang
Programmierbar (P2.2.2)
Platz B: Start vorwärts
Programmierbare Logik (P2.2.15)
Platz B: Start rückwärts
Ri min = 5 kΩ
Wahl: Platz A/B
Gemeinsamer Bezug
für DIN 1–DIN 3
Gemeinsam für DIN4–DIN6
Steuerspannungsausgang
E/A Masse
Analogausgang 1
Ausgangsfrequenz
Programmierbar (P2.3.2)
Digitalausgang
READY (BEREIT)
Programmierbar (P2.3.7)
Offener Kollektor,
I≤50 mA, U≤48 VDC
Relaisausgang 1
RUN (BETRIEB)
Programmierbar
(P2.3.8)
Relaisausgang 2
FAULT (FEHLER)
Programmierbar
(P2.3.9)
Bereich 0–20 mA/RL,
max. 500 Ω
Kontakt geöffnet = Platz A ist aktiv
Kontakt geschlossen = Platz B ist aktiv
Kontakt geschlossen = Start vorwärts
Kontakt geschlossen = Start rückwärts
AO1+
Analogeingang 1,
Sollwert für Platz B
Masseanschluss für Sollwerte
und Steuersignale
Analogeingang 2,
Sollwert für Platz A
Kontakt geschlossen = Start vorwärts
Kontakt geschlossen = Start rückwärts
Kontakt geöffnet = kein Fehler
Kontakt geschlossen = Fehler
Spannung für Potentiometer usw.
Analogeingang 1
Spannungsbereich 0–10 V DC
Programmierbar (P2.1.12)
Spannung für Schalter usw.
(max. 0,1 A)
Spannung für Schalter (siehe # 6)
Anschluss an Masse oder +24 V
Anschluss an Masse oder +24 V
Masseanschluss für Sollwerte
und Steuersignale
Masseanschluss für Sollwerte
und Steuersignale
ORT/FERN VACON · 39
3.2 STEUER-E/A
Abb. 7: E/A-Standardkonfiguration der Ort-/Fern-Applikation
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Steckbrückenblock X3:
CMA- und CMB-Erdung
CMB mit GND verbunden
CMA mit GND verbunden
CMB isoliert von GND
CMA isoliert von GND
CMB und CMA intern
miteinander verbunden,
von GND getrennt
= Werkseinstellung
VACON · 40 ORT/FERN
*) Die Zusatzkarte A3 hat keinen Anschluss für einen offenen Kontakt an ihrem zweiten
Relaisausgang (Anschluss 24 fehlt).
HINWEIS!
Siehe Steckbrückenauswahl unten. Weitere Informationen finden Sie im
Benutzerhandbuch zu dem Produkt.
Abb. 8: Steckbrückenauswahl
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

DIN3
≥ 1
DIN6
DIN2
DIN3
AI1
AI2
DIN1
DIN2
DIN3
DIN4
DIN5
A
B
A
B
A
B
Intern rückwärts
Interne
Fehlerquittierung
Fehlerquittierungseingang (programmierbar)
3.3 Richtung:StTafel
Interner Start/Stopp
Sollwert vom Feldbus
Start/Stopp vom Feldbus
Richtung vom Feldbus
Start/Stopp-Tasten
Schaltfläche „Reset“
Start vorwärts
(programmierbar)
Start rückwärts
(programmierbar)
Start vorwärts
Start rückwärts
(programmierbar)
(programmierbar)
Start/Stopp
Rückwärts
Auf
Ab
2.1.15 Tippen Drehzahlsollwert
2.1.14 Feldbussteuersollwert
2.1.13 Steuertafelsteuerungssollwert
2.1.12 E/A-B-Sollwert
2.1.11 E/A-A-Sollwert
R3.2 Steuertafelsollwert
Interner
Frequenzsollwert
Motorpotentiometer
3.1 Steuerplatz
Programmierbare Start/Stoppund RückwärtsLogik A
Programmierbare Start/Stoppund RückwärtsLogik B
ORT/FERN VACON · 41
3.3 STEUERSIGNALLOGIK IN DER ORT/FERN-APPLIKATION
Abb. 9: Steuersignallogik in der Ort/Fern-Applikation
3.4 ORT/FERN-APPLIKATION – PARAMETERLISTEN
3.4.1 ÜBERWACHUNGSWERTE (STEUERTAFEL: MENÜ M1)
Bei den Betriebsdaten handelt es sich sowohl um die Istwerte der Parameter und Signale als
auch um Statusinformationen und Messwerte. Die Betriebsdaten können nicht bearbeitet
werden.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 42 ORT/FERN
Tabelle 14: Betriebsdaten
Index Betriebswert Einheit ID Beschreibung
V1.1 Ausgangsfrequenz Hz 1
V1.2 Frequenzsollwert Hz 25
V1.3 Motordrehzahl UpM 2
V1.4 Motorstrom A 3
V1.5 Motordrehmoment % 4
V1.6 Motorleistung % 5
V1.7 Motorspannung V 6
V1.8
1.9 Gerätetemperatur °C 8
1.10 Motortemperatur % 9
V1.11 Analogeingang 1 V/mA 13
V1.12 Analogeingang 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17 Betriebsdaten
DC-Zwischenkreis-
Spannung
out
V 7
mA 26
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ORT/FERN VACON · 43
3.4.2 BASISPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.1)
Tabelle 15: Basisparameter G2.1
Index Parameter Min. Max. Einheit Werksein
st.
P2.1.1 Mindestfrequenz 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Max. Frequenz P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4 Bremszeit 1 0.1 3000.0 s 0.0 104
P2.1.5 Stromgrenze 0,1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
Beschleunigungs-
zeit 1
Nennspannung
des Motors
Nennfrequenz des
Motors
Nenndrehzahl des
Motors
0.1 3000.0 s 0.0 103
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 UpM 1440 112
H
A I
NX2: 230
V
NX5: 400
V
NX6: 690
V
Ben
def.
L
ID
107
110
Beschreibung
P2.1.9 *
P2.1.10 * cos phi, Motor 0.30 1.00 0.85 120
P2.1.11 * E/A-A-Sollwert 0 4 1 117
P2.1.12 * E/A-B-Sollwert 0 4 0 131
P2.1.13 *
Nennstrom des
Motors
Steuersollwert,
Steuertafel
0,1 x I
0 3 2 121
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
4 = Motorpotentiometer
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
4 = Motorpotentiometer
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 44 ORT/FERN
Tabelle 15: Basisparameter G2.1
Index Parameter Min. Max. Einheit Werksein
st.
P2.1.14 *
P2.1.15 *
Steuersollwert,
Feldbus
Tippen Geschwin-
digkeitssollwert
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
Ben
def.
ID
Beschreibung
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
* = Der Parameterwert kann nur geändert werden, nachdem der Frequenzumrichter
angehalten wurde.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ORT/FERN VACON · 45
3.4.3 EINGANGSSIGNALE (STEUERTAFEL: MENÜ M2 -> G2.2)
Tabelle 16: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
Platz A Start/
P2.2.1 ***
Stopp-Logik Aus-
wahl
0 8 0 300
Ben
def.
Beschreibung
ID
Logic = 0
Steuersignal 1 =
Start vorwärts
Steuersignal 2 =
Start rückwärts
Logic = 1
Steuersignal 1 =
Start/Stopp
Steuersignal 2 =
Rückwärts
Logic = 2
Steuersignal 1 =
Start/Stopp
Steuersignal 2 =
Startfreigabe
Logic = 3
Steuersignal 1 =
Startpuls (Flanke)
Steuersignal 2 =
Stopppuls
Logic = 4
Steuersignal 1 =
Start vorwärts
Steuersignal 2 =
Motorpotentiometer
schneller
Logic = 5
Steuersignal 1 =
Start vorwärts
(Flanke)
Steuersignal 2 =
Start rückwärts
(Flanke)
Logic = 6
Steuersignal 1 =
Start (Flanke) /
Stopp
Steuersignal 2 =
Rückwärts
Auswahl = 7
Steuersignal 1 =
Start (Flanke) /
Stopp
Steuersignal 2 =
Startfreigabe
Auswahl = 8
Steuersignal 1 =
Start vorwärts
(Flanke)
Steuersignal 2 =
Motorpotentiometer
schneller
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 46 ORT/FERN
Tabelle 16: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.2 DIN3 Funktion 0 13 1 301
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Externer Fehler,
geschlossener Kontakt
2 = Externer Fehler,
offener Kontakt
3 = Lauf aktivieren
4 = Beschl./Verzög.Zeit Auswahl
5 = Steuerpl. zu E/A
zwingen
6 = Steuerpl. zu
Steuertafel zwingen
7 = Steuerpl. zu
Feldbus zwingen
8 = Rückwärts
9 = Tippen
Geschwindigkeit
11 = Beschl./Brems.Funktion gesperrt
12 = DC-Bremsbefehl
13 = Motorpotentiometer langsamer
P2.2.3
****
P2.2.4 AI1 Signalbereich 0 2 0 320
P2.2.5
P2.2.6
P2.2.7
P2.2.8 AI1 Signalfilterzeit 0.00 10.00 s 0.10 324
P2.2.9
****
AI1 Signalauswahl 0.1 E.10 A1 377
AI1, Benutzerein-
stellung (Min.)
AI1, Benutzerein-
stellung (Max.)
AI1 Signalinver-
sion
AI2 Signalauswahl 0.1 E.10 A.2 388
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0 = 0 – 10 V (0 – 20
mA**)
1 = 2 – 10 V (4 – 20
mA**)
2=Benutzerdefiniert**
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ORT/FERN VACON · 47
Tabelle 16: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.10 AI2 Signalbereich 0 2 1 325
P2.2.11
P2.2.12
P2.2.13
P2.2.14 AI2 Signalfilterzeit 0.00 10.00 s 0.10 329
P2.2.15
***
AI2, Benutzerein-
stellung (Min.)
AI2, Benutzerein-
stellung (Max.)
AI2 Signalinver-
sion
Platz B Start/
Stopp-Logik Aus-
wahl
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
0 6 0 363
Ben
def.
Beschreibung
ID
0 = 0 – 10 V (0 – 20
mA**)
1 = 2 – 10 V (4 – 20
mA**)
2=Benutzerdefiniert**
Logic = 0
Steuersignal 1 =
Start vorwärts
Steuersignal 2 =
Start rückwärts
Logic = 1
Steuersignal 1 =
Start/Stopp
Steuersignal 2 =
Rückwärts
Logic = 2
Steuersignal 1 =
Start/Stopp
Steuersignal 2 =
Startfreigabe
Logic = 3
Steuersignal 1 =
Startpuls (Flanke)
Steuersignal 2 =
Stopppuls
Logic = 4
Steuersignal 1 = Vorwärtspuls (Flanke)
Steuersignal 2 =
Rückwärtspuls
(Flanke)
Logic = 5
Steuersignal 1 =
Startpuls (Flanke)
Steuersignal 2 =
Rückwärtspuls
Logic = 6
Steuersignal 1 =
Startpuls (Flanke)
Steuersignal 2 =
Freigabepuls
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 48 ORT/FERN
Tabelle 16: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
Platz A Sollwerts-
P2.2.16
P2.2.17
P2.2.18
P2.2.19
P2.2.20
P2.2.21
kalierung Min-
destwert
Platz A Sollwertskalierung Höchst-
wert
Platz B Sollwerts-
kalierung Min-
destwert
Platz B Sollwerts-
kalierung Höchst-
wert
Freier Analogein-
gang, Signalaus-
wahl
Freier Analogein-
gang, Funktion
0.00 320.00 Hz 0.00 303
0.00 304
0.00 320.00 Hz 0.00 364
0.00 320.00 Hz 0.00 365
0 2 0 361
0 4 0 362
Ben
def.
Beschreibung
ID
0.00 = Keine Skalierung
>0 = skalierter
Höchstwert
0 = Nicht verwendet
1 = Analogeingang 1
2 = Analogeingang 2
0 = Kein Reset
1 = Reduziert die
Stromgrenze (P2.1.5)
2 = Reduziert den
DC-Bremsstrom
3 = Reduziert die
Beschleunigungsund Bremszeiten
4 = Reduziert die
Drehmoment-Überwachungsgrenze
Rampenzeit
P2.2.22
P2.2.23
P2.2.24 Startpulsspeicher 0 1 0 498
Motorpotentiome-
ter
Speicher-Reset
Motorpotentiome-
ter-Frequenzsoll-
wert
0.1 2000.0 Hz/s 10.0 331
0 2 1 367
0 = Kein Reset
1 = Reset bei Anhalten oder Abschalten
2 = Reset bei
Abschalten der
Netzspg.
0 = Betriebsstatus
nicht kopiert
1 = Betriebsstatus
kopiert
** = Die Steckbrücken von Block X2 müssen entsprechend platziert werden. Näheres finden
Sie in der Betriebsanleitung des Produkts.
*** = Der Parameterwert kann nur geändert werden, nachdem der Frequenzumrichter
angehalten wurde.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ORT/FERN VACON · 49
**** = Wenden Sie die TTF-Methode zur Programmierung dieser Parameter an.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 50 ORT/FERN
3.4.4 AUSGANGSSIGNALE (STEUERTAFEL: MENÜ M2 -> G2.3
Tabelle 17: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
P2.3.1
P2.3.2
AO1 Signalaus-
wahl
Analogausgang-
funktion
0.1 E.10 A11 464
0 8 1 307
Ben
def.
Beschreibung
ID
0 = Nicht verwendet (20 mA/10 V)
1 = Ausgangsfreq.
(0 – f
2 = Freq.sollwert
(0 – f
3 = Motordrehzahl
(0–Motornenndrehzahl)
4 = Motorstrom (0
– I
nMotor
5 = Motordrehmoment (0–T
6 = 7 = Motorspannung (0–U
Motorleistung (0–
P
nMotor
8 = Zwischenkreisspannung (0 – 1000
V)
max
max
)
)
)
)
nMotor
nMotor
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Analogausgang
Filterzeit
Analogausgang
Inversion
Analogausgang
Mindestwert
Analogausgangss-
kalierung
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Keine Filterung
0 = Nicht invertiert
1 = Invertiert
0 = 0 mA (0 V)
1 = 4 mA (2 V)
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ORT/FERN VACON · 51
Tabelle 17: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
P2.3.7
Digitalausgang 1
Funktion
0 22 1 312
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Bereit
2 = Betrieb
3 = Fehler
4 = Fehler invertiert
5 = Warnung FU
überhitzt
6 = Ext. Fehler
oder Warnung
7 = Sollwertfehler
oder Warnung
8=Warnung
9 = Rückwärts
10 = Ausgewählte
Tippgeschwindigkeit
11 = Auf Drehzahl
12 = Motorregler
aktiv
13 = Überwach.
Ausgangsfreq.grenze 1
14 = Überwach.
Ausgangsfreq.grenze 2
15 = Drehmomentgrenzenüberwachung
16 = Sollwertgrenzenüberwachung
17 = Ext. Bremssteuerung
18 = Steuerplatz:
E/A
19 = FU-Temperaturgrenzenüberwachung
20 = Nicht angeforderte Drehrichtung
21 = Ext. Bremssteuerung invertiert
22 = Thermistor,
Fehler/Warnung
P2.3.8
P2.3.9 RO2 Funktion 0 22 3 314
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
RO1 Funktion 0 22 2 313
Wie Parameter
2.3.7
Wie Parameter
2.3.7
3

VACON · 52 ORT/FERN
Tabelle 17: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14
Ausg.freq.grenze
1, Überwachung
Ausg.freq.grenze
1, überwachter
Wert
Ausg.freq.grenze
2, Überwachung
Ausgangsfre-
quenzgrenze 2;
Überwachungs-
wert
Drehmoment-
grenzenüberwa-
chungsfunktion
0 2 0 315
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
Ben
def.
Beschreibung
ID
0 = Keine Grenze
1 = Überwachung
der unteren
Grenze
2 = Überwachung
der oberen Grenze
0 = Keine Grenze
1 = Überwachung
der unteren
Grenze
2 = Überwachung
der oberen Grenze
0 = Nein
1 = Untere Grenze
2 = Obere Grenze
P2.3.15
P2.3.16
P2.3.17
P2.3.18
P2.3.19
P2.3.20
Drehmoment-
grenzenüberwa-
chungswert
Sollwertgrenzen-
überwachungs-
funktion
Sollwertgrenzen-
überwachungs-
wert
Abschaltverzöge-
rung externe
Bremse
Einschaltverzöge-
rung externe
Bremse
Temperaturgren-
zwertüberwa-
chung Frequen-
zumrichter
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
0 = Nein
1 = Untere Grenze
2 = Obere Grenze
0 = Nein
1 = Untere Grenze
2 = Obere Grenze
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ORT/FERN VACON · 53
Tabelle 17: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
Temperaturgrenz-
P2.3.21
P2.3.22
P2.3.23
P2.3.24
P2.3.25
P2.3.26
P.2.3.27
wert Frequen-
zumrichter
Analogausgang 2
Skalierung
Analogausgang 2,
Funktion
Analogausgang 2,
Filterzeit
Analogausgang 2,
Inversion
Analogausgang 2,
Mindestwert
Analogausgang 2
Skalierung
-10 100 °C 40 355
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
Ben
def.
Beschreibung
ID
Wie Parameter
2.3.2
0 = Keine Filterung
0 = Nicht invertiert
1 = Invertiert
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 54 ORT/FERN
3.4.5 ANTRIEBSSTEUERPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.4
Tabelle 18: Antriebssteuerparameter, G2.4
Index Parameter Min. Max. Einheit Werksein
st.
P2.4.1
P2.4.2
P2.4.3
P2.4.4 Bremszeit 2 0.1 3000.0 s 1.0 503
P2.4.5 Brems-Chopper 0 4 0 504
Rampe 1, Ver-
schliff
Rampe 2, Ver-
schliff
Beschleunigungs-
zeit 2
0.0 10.0 s 0.1 500
0.0 10.0 s 0.0 501
0.1 3000.0 s 1.0 502
Ben
def.
Beschreibung
ID
0 = Linear
100 = volle
Beschl./Verzög.
Zu-/Abnahmezeiten
0 = Linear
100 = volle
Beschl./Verzög.
Zu-/Abnahmezeiten
0 = Gesperrt
1 = Verwendet im
Betrieb
2 = Externer
Bremschopper
3 = Verwendet bei
Stopp / im Betrieb
4 = verwendet im
Betrieb (kein Test)
P2.4.6 Startfunktion 0 2 0 505
P2.4.7 Stoppfunktion 0 3 0 506
P2.4.8 Bremsstrom (DC) 0.00 I
P2.4.9
P2.4.10
DC-Bremszeit bei
Stopp
Startfrequenz für
DC-Bremsung bei
Rampenstopp
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
L
A 0,7 x I
H
507
0 = Rampe
1 = Fliegender
Start
2=Bedingter fliegender Start
0 = Leerauslauf
1 = Rampe
2 = Leerlauf bei
Rampe + Lauf aktivieren
3 = Rampe bei
Leerlauf + Lauf
aktivieren
0 = DC-Bremse ist
aus bei Stopp
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ORT/FERN VACON · 55
Tabelle 18: Antriebssteuerparameter, G2.4
Index Parameter Min. Max. Einheit Werksein
st.
P2.4.11
P2.4.12 * Flussbremse 0 1 0 520
P2.4.13 Flussbremsstrom 0.00 I
DC-Bremszeit bei
Start
0.00 600.00 s 0.00 516
L
A I
H
Ben
def.
Beschreibung
ID
0 = DC-Bremse ist
aus bei Start
0 = Aus
0 = Ein
519
3.4.6 FREQUENZAUSBLENDUNGSPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.5)
Tabelle 19: Frequenzausblendungsparameter, G2.5
Index Parameter Min. Max. Einheit Werksein
st.
Frequenzausblen-
P2.5.1
P2.5.2
dungsbereich 1
untere Grenze
Frequenzausblen-
dungsbereich 1
obere Grenze
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
Ben
def.
Beschreibung
ID
0 = Ausblendungsbereich 1 ist abgeschaltet
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7
Frequenzausblen-
dungsbereich 2
untere Grenze
Freq.ausbl.bereic
h 2, obere Grenze
Frequenzausblen-
dungsbereich 3
untere Grenze
Freq.ausbl.bereic
h 3, obere Grenze
Ausblendung,
Beschl./
Verzög.rampe
0.00 320.00 Hz 0.00 511
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = Ausblendungsbereich 2 ist abgeschaltet
0 = Ausblendungsbereich 3 ist abgeschaltet
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 56 ORT/FERN
3.4.7 MOTORSTEUERPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.6)
Tabelle 20: Motorregelungsparameter, G2.6
Index Parameter Min. Max. Einheit Werksein
st.
P2.6.1 * Motorregelmodus 0 1/3 0 600
P2.6.2 * U/f-Optimierung 0 1 0 109
P2.6.3 *
U/f-Verhältnis,
Auswahl
0 3 0 108
Ben
def.
Beschreibung
ID
0 = Frequenzregelung
1 = Drehzahlregelung
NXP:
2 = Open Loop
Drehmomentsteuerung
3 = Closed Loop
Drehzahlsteuerung
4 = Closed Loop
Drehmomentsteuerung
0 = Nicht verwendet
1 = Automatische
Drehmomenterhöhung
0 = Linear
1 = Quadratisch
2 = Programmierbar
3 = Linear bei
Flussoptim.
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9 Schaltfrequenz 1.0 variiert kHz variiert 601
Feldschwäch-
punkt
Spannung am
Feldschwäch-
punkt
U/f-Kurve, Mitten-
frequenz
U/f-Kurve, Mitten-
spannung
Ausgangsspan-
nung bei Nullfre-
quenz
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % variiert 606
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ORT/FERN VACON · 57
Tabelle 20: Motorregelungsparameter, G2.6
Index Parameter Min. Max. Einheit Werksein
st.
P2.6.10
P2.6.11
P2.6.12 Load Drooping 0.00 100.00 % 0.00 620
P2.6.13 Identifikation 0 1/2 0 631
Überspannungs-
regler
Unterspannungs-
regler
0 2 1 607
0 1 1 608
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Verwendet
(keine Rampe)
2 = Verwendet
(Rampe)
0 = Nicht verwendet
1 = Verwendet
0 = Keine Aktion
1=Identifikation
ohne Betrieb
2 = Identifikation
mit Lauf
3 = Identifikationslauf mit Encoder
4 = Keine Aktion
5 = Identifikationslauf fehlgeschlagen
Closed Loop-Parametergruppe 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6 Schlupfkorrektur 0 500 % 100 619
P2.6.14.7
P2.6.14.8
P2.6.14.9
Magnetisierungs-
strom
Drehzahlsteue-
rung P-Verstär-
kung
Drehzahlsteue-
rung I-Zeit
Beschleunigungs-
kompensierung
Magnetisierungs-
strom beim Start
Magnetisierungs-
zeit beim Start
0-Geschwindig-
keitszeit beim
Start
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
H
L
A 0.00 612
A 0.00 627
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 58 ORT/FERN
Tabelle 20: Motorregelungsparameter, G2.6
Index Parameter Min. Max. Einheit Werksein
st.
0-Geschwindig-
P2.6.14.10
P2.6.14.11
P2.6.14.12
P2.6.14.13
P2.6.14.15 Encoder-Filterzeit 0.0 100.0 ms 0.0 618
P2.6.14.17
keitszeit beim
Stopp
Anlaufdrehmo-
ment
Anlaufdrehmo-
ment VORWÄRTS
Anlaufdrehmo-
ment RÜCK-
WÄRTS
Stromsteuerung
P-Verstärkung
0 32000 ms 100 616
0 3 0 621
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.00 100.00 % 40.00 617
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Drehmomentspeicher
2 = Drehmomentsollwert
3 = Anlaufdrehmoment vorwärts/
rückwärts
Identifizierungsparametergruppe 2.6.15
P2.6.15.1 Drehzahlschritt -50.0 50.0 0.0 0.0 1252
* = Der Parameterwert kann nur geändert werden, nachdem der Frequenzumrichter
angehalten wurde.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ORT/FERN VACON · 59
3.4.8 SCHUTZFUNKTIONEN (STEUERTAFEL: MENÜ M2 -> G2.7
Tabelle 21: Schutzfunktionen, G2.7
Index Parameter Min. Max. Einheit Werksein
st.
Reaktion auf 4-
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5
mA-Sollwertfeh-
ler
4 mA Sollwertfeh-
ler Frequenz
Reaktion auf
externen Fehler
Eingangsphase,
Überwachung
Reaktion auf
Unterspann.fehler
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
0 1 0 727
Ben
def.
Beschreibung
ID
0 = Keine Reaktion
1 = Warnung
2 = Warnung + vorher. Frequenz
3 = Warnung + voreingest. Frequenz
2.7.2
4 = Fehler, Stopp
gemäß 2.4.7
5 = Fehler, Stopp
durch Leerauslauf
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
0 = Fehler in Fehlerspeicher
Fehler nicht
gespeichert
P2.7.6
P2.7.7 Erdschlussschutz 0 3 2 703
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
Ausgangsphasen-
überwachung
Wärmeschutz,
Motor
Umgeb.temp.fak-
tor, Motor
Motorkühlfaktor
bei Nulldrehzahl
Motor-Tempera-
turzeitkonstante
Motoreinschalt-
dauer
0 3 2 702
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min variiert 707
0 150 % 100 708
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
VACON · 60 ORT/FERN
Tabelle 21: Schutzfunktionen, G2.7
Index Parameter Min. Max. Einheit Werksein
st.
P2.7.13 Blockierschutz 0 3 0 709
P2.7.14 Blockierstrom 0.00 2 x I
P2.7.15
P2.7.16
P2.7.17 Unterlastschutz 0 3 0 713
P2.7.18
Blockierzeit-
grenze
Blockierfrequenz-
grenze
Unterlastschutz
vom Drehmoment
1.00 120.00 s 15.00 711
1.0 P2.1.2 Hz 25.00 712
10.0 150.0 % 50.0 714
H
A I
H
Ben
def.
Beschreibung
ID
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
710
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
Nullfrequenzlast
vom Unterlast-
schutz
Zeitgrenze, Unter-
lastschutz
Reaktion auf
Thermistorfehler
Reaktion auf Feld-
busfehler
Reaktion auf
Steckplatzfehler
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 3 2 734
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
(siehe P2.7.21)
(siehe P2.7.21)
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ORT/FERN VACON · 61
3.4.9 PARAMETER FÜR AUTOMATISCHEN NEUSTART (STEUERTAFEL: MENÜ M2 -> G2.8)
Tabelle 22: Parameter für automatischen Neustart, G2.8
Index Parameter Min. Max. Einheit Werksein
st.
P2.8.1 Wartezeit 0.10 10.00 s 0.50 717
P2.8.2 AFQ Zeitraum 0.00 60.00 s 30.00 718
P2.8.3 Startfunktion 0 2 0 719
Anzahl der Versu-
che nach einem
P2.8.4
P2.8.5
P2.8.6
Auslösen auf-
grund von Unter-
spannung
Anzahl der Versu-
che nach einem
Auslösen auf-
grund von Über-
spannung
Anzahl der Versu-
che nach einem
Auslösen auf-
grund von Über-
strom
0 10 0 720
0 10 0 721
0 3 0 722
Ben
def.
Beschreibung
ID
0 = Rampe
1 = Fliegender
Start
2 = Gemäß P2.4.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Anzahl der Versu-
che nach einem
Auslösen nach 4
mA Sollwert
Anzahl der Versu-
che nach einem
Auslösen auf-
grund eines
Motortemperatur-
fehlers
Anzahl der Versu-
che nach einem
Auslösen auf-
grund eines exter-
nen Fehlers
Anzahl der Versu-
che nach einem
Auslösen auf-
grund eines
Unterlastfehlers
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 62 ORT/FERN
3.4.10 STEUERUNG ÜBER STEUERTAFEL (STEUERTAFEL: MENÜ M3)
Die nachstehende Liste enthält die Parameter für die Auswahl des Steuerplatzes und der
Drehrichtung über die Steuertafel. Siehe Menü „Steuerung über die Steuertafel“ im
Benutzerhandbuch.
Tabelle 23: Parameter für die Steuerung über die Steuertafel, M3
Index Parameter Min. Max. Einheit Werksein
st.
P3.1 Steuerplatz 1 3 1 125
Sollwerteinstel-
P3.2
P3.3
R3.4 Stopptaste 0 1 1 114
lung über die
Steuertafel
Drehrichtung
(über Steuertafel)
P2.1 P2.2 Hz 0.00
0 1 0 123
Ben
def.
Beschreibung
ID
1 = E/A-Klemmleiste
2 = Steuertafel
3 = Feldbus
0 = Eingeschränkte
Funktion der
Stopptaste
1 = Stopptaste
immer aktiviert
3.4.11 SYSTEMMENÜ (STEUERTAFEL: MENÜ M6)
Die Parameter und Funktionen zum allgemeinen Gebrauch des Frequenzumrichters (z.B.
Applikations- und Sprachauswahl) und die benutzerdefinierten Parametersätze sowie die
Hardware- und Softwareangaben finden Sie im Benutzerhandbuch.
3.4.12 ZUSATZKARTEN (STEUERTAFEL: MENÜ M7
Das Menü M7 zeigt die an der Steuerplatine angeschlossenen Erweiterungs- und
Zusatzkarten sowie kartenbezogene Angaben an. Weitere Informationen finden Sie im
Benutzerhandbuch.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 63
4 MULTI-FESTDREHZAHLAPPLIKATION
4.1 EINFÜHRUNG
Wählen Sie die Multi-Festdrehzahlapplikation im Menü M6 auf Seite S6.2.
Die Multi-Festdrehzahlapplikation kann bei Anwendungen eingesetzt werden, bei denen
feste Drehzahlsollwerte notwendig sind. Insgesamt können 15 + 2 verschiedene Drehzahlen
programmiert werden: eine Grunddrehzahl, 15 mehrstufige Drehzahlen und eine TippDrehzahl. Die Drehzahlschritte werden mit den Digitalsignalen DIN3, DIN4, DIN5 und DIN6
ausgewählt. Wenn die Tipp-Drehzahl verwendet wird, kann DIN3 von der Fehlerquittierung
auf die Auswahl der Tipp-Drehzahl programmiert werden.
Der Grunddrehzahlsollwert kann ein Spannungs- oder Stromsignal über analoge
Eingangsklemmen (2/3 oder 4/5) sein. Der andere analoge Eingang kann für andere Zwecke
programmiert werden.
Alle Ausgänge sind frei programmierbar.
•
Zusätzliche Funktionen:
Programmierbare Start/Stopp- und Rückwärts-Signallogik
•
Sollwertskalierung
•
Eine Frequenz-Grenzenüberwachung
•
Programmierung von zweiten Rampen und S-förmigen Rampen
•
Programmierbare Start- und Stoppfunktionen
•
DC-Bremse bei Stopp
•
Ein Frequenzausblendungsbereich
•
Programmierbare U/f-Kurve und Schaltfrequenz
•
Automatischer Neustart
•
Motortemperatur- und -blockierschutz: Programmierbare Aktion; Aus, Warnung, Fehler
•
Die Parameter der Multi-Festdrehzahlapplikation sind beschrieben in Kapitel 9
Parameterbeschreibungen in diesem Handbuch beschrieben. Die Beschreibungen sind nach
den einzelnen ID-Nummern der Parameter geordnet.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Basissollwert
(optional)
RUN
(BETRIEB)
READY
(BEREIT)
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
CMA
CMB
OPTA1
OPTA2 /OPTA3 *)
Klemme Signal Beschreibung
+10 Vref
AI1+
AI1-
AI2+
AI2-
+24 V
Sollausgang
E/A-Masse
Analogeingang 2,
Strombereich 0–20 mA
Programmierbar
(P2.1.11)
Steuerspannungsausgang
E/A Masse
Start vorwärts
Programmierbare Logik (P2.2.1)
Start rückwärts
Ri min = 5 kΩ
Externer Fehlereingang
Programmierbar (P2.2.2)
Festdrehzahl Auswahl 1
Festdrehzahl Auswahl 2
Festdrehzahl Auswahl 3
Gemeinsamer Bezug für
DIN 1–DIN 3
Gemeinsam für DIN4–DIN6
Steuerspannungsausgang
E/A Masse
Analogausgang 1:
Ausgangsfrequenz
Programmierbar (P2.3.2)
Digitalausgang
READY (BEREIT)
Programmierbar (P2.3.7)
Offener Kollektor, I≤50 mA,
U≤48 VDC
Relaisausgang 1
RUN (BETRIEB)
Programmierbar
Programmierbar
Programmierbar
(P2.3.8)
Relaisausgang 2
FAULT (FEHLER)
Programmierbar
(P2.3.9)
Bereich 0–20 mA/RL,
max. 500 Ω
AO1+
Frequenzsollwert für
Analogeingang 1
Masseanschluss für Sollwerte
und Steuersignale
Frequenzsollwert
für Analogeingang 2
Werkseitiger Sollwert
Kontakt geschlossen
= Start vorwärts
Kontakt geschlossen
= Start rückwärts
Kontakt geöffnet = kein Fehler
Kontakt geschlossen = Fehler
Sollwertpotentiometer
1–10 kΩ
Spannung für Potentiometer usw.
Analogeingang 1,
Spannungsbereich
0–10 V DC
Spannung für Schalter usw.
(max. 0,1 A)
Spannung für Schalter
(siehe # 6)
Anschluss an Masse oder +24 V
Anschluss an Masse oder +24 V
Masseanschluss für Sollwerte
und Steuersignale
Masseanschluss für Sollwerte
und Steuersignale
sel1sel2 sel3 sel4 (mit DIN3)
0 0 0 0 E/A-Sollw.
1 0 0 0 Drehzahl 1
0 1 0 0 Drehzahl 2
---- ------1 1 1 1 Drehzahl 15
RO1
RO1
RO1
RO2
RO2
RO2
VACON · 64 MULTI-FESTDREHZAHLAPPLIKATION
4.2 STEUER-E/A
4
Abb. 10: E/A-Standardkonfiguration der Multi-Festdrehzahlapplikation
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

Steckbrückenblock X3:
CMA- und CMB-Erdung
CMB mit GND verbunden
CMA mit GND verbunden
CMB isoliert von GND
CMA isoliert von GND
CMB und CMA intern
miteinander verbunden,
von GND getrennt
= Werkseinstellung
MULTI-FESTDREHZAHLAPPLIKATION VACON · 65
*) Die Zusatzkarte A3 hat keinen Anschluss für einen offenen Kontakt an ihrem zweiten
Relaisausgang (Anschluss 24 fehlt).
HINWEIS!
Siehe Steckbrückenauswahl unten. Weitere Informationen finden Sie im
Benutzerhandbuch zu dem Produkt.
Abb. 11: Steckbrückenauswahl
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN3
DIN6
DIN3
DIN3
3.2 Steuertafelsollwert
2.1.11 E/A-Sollwert
2.1.12 Steuertafelsteuerungssollwert
2.1.13 Feldbussteuersollwert
2.1.15 Festdrehzahl 1
...2.1.29 Festdrehzahl 15
3.1 Steuerplatz
Interner
Frequenzsollwert
Start vorwärts
(programmierbar)
Start rückwärts
(programmierbar)
Start/Stopp
Rückwärts
Interner Start/Stopp
Intern rückwärts
Interne Fehlerquittierung
Fehlerquittierungseingang
Schaltfläche
„Reset“
Start/Stopp-Tasten
Sollwert vom Feldbus
Start/Stopp vom Feldbus
Richtung vom Feldbus
3.3 Richtung:StTafel
Festdrehzahl 1
Festdrehzahl 2
Festdrehzahl 3
Festdrehzahl 4
2.1.14 Tippen Sollwert
(programmierbar)
≥ 1
Programmierbare
Start/Stopp- und
Rückwärts-Logik
VACON · 66 MULTI-FESTDREHZAHLAPPLIKATION
4.3 STEUERSIGNALLOGIK DER MULTI-FESTDREHZAHLAPPLIKATION
Abb. 12: Steuersignallogik der Multi-Festdrehzahlapplikation
4.4 MULTI-FESTDREHZAHLAPPLIKATION – PARAMETERLISTEN
4.4.1 ÜBERWACHUNGSWERTE (STEUERTAFEL: MENÜ M1)
Bei den Betriebsdaten handelt es sich sowohl um die Istwerte der Parameter und Signale als
auch um Statusinformationen und Messwerte. Die Betriebsdaten können nicht bearbeitet
werden.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 67
Tabelle 24: Betriebsdaten
Index Betriebswert Einheit ID Beschreibung
V1.1 Ausgangsfrequenz Hz 1
V1.2 Frequenzsollwert Hz 25
V1.3 Motordrehzahl UpM 2
V1.4 Motorstrom A 3
V1.5 Motordrehmoment % 4
V1.6 Motorleistung % 5
V1.7 Motorspannung V 6
V1.8
1.9 Gerätetemperatur °C 8
1.10 Motortemperatur % 9
V1.11 Analogeingang 1 V/mA 13
V1.12 Analogeingang 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17 Betriebsdaten
DC-Zwischenkreis-
Spannung
out
V 7
mA 26
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 68 MULTI-FESTDREHZAHLAPPLIKATION
4.4.2 BASISPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.1)
Tabelle 25: Basisparameter G2.1
Index Parameter Min. Max. Einheit Werksein
st.
P2.1.1 Mindestfrequenz 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Max. Frequenz P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4 Bremszeit 1 0.1 3000.0 s 0.0 104
P2.1.5 Stromgrenze 0,1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
Beschleunigungs-
zeit 1
Nennspannung
des Motors
Nennfrequenz des
Motors
Nenndrehzahl des
Motors
0.1 3000.0 s 0.0 103
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 UpM 1440 112
H
A I
NX2: 230
V
NX5: 400
V
NX6: 690
V
Ben
def.
L
ID
107
110
Beschreibung
P2.1.9 *
P2.1.10 * cos phi, Motor 0.30 1.00 0.85 120
P2.1.11 * E/A-Sollwert 0 3 1 117
P2.1.12 *
P2.1.13 *
P2.1.14 Jogging Sollwert 0.00 P2.1.2 Hz 0.00 124
P2.1.15 Festdrehzahl 1 0.00 P2.1.2 Hz 5.00 105
P2.1.16 Festdrehzahl 2 0.00 P2.1.2 Hz 10.00 106
Nennstrom des
Motors
Steuersollwert,
Steuertafel
Steuersollwert,
Feldbus
0,1 x I
0 3 2 121
0 3 3 122
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
0 = AI1
1 = AI2
2 = Steuertafel
3 = Feldbus
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 69
Tabelle 25: Basisparameter G2.1
Index Parameter Min. Max. Einheit Werksein
st.
P2.1.17 Festdrehzahl 3 0.00 P2.1.2 Hz 12.50 126
P2.1.18 Festdrehzahl 4 0.00 P2.1.2 Hz 15.00 127
P2.1.19 Festdrehzahl 5 0.00 P2.1.2 Hz 17.50 128
P2.1.20 Festdrehzahl 6 0.00 P2.1.2 Hz 20.00 129
P2.1.21 Festdrehzahl 7 0.00 P2.1.2 Hz 22.50 130
P2.1.22 Festdrehzahl 8 0.00 P2.1.2 Hz 25.00 133
P2.1.23 Festdrehzahl 9 0.00 P2.1.2 Hz 27.50 134
P2.1.24 Festdrehzahl 10 0.00 P2.1.2 Hz 30.00 135
P2.1.25 Festdrehzahl 11 0.00 P2.1.2 Hz 32.50 136
P2.1.26 Festdrehzahl 12 0.00 P2.1.2 Hz 35.00 137
P2.1.27 Festdrehzahl 13 0.00 P2.1.2 Hz 40.00 138
P2.1.28 Festdrehzahl 14 0.00 P2.1.2 Hz 45.00 139
Ben
def.
ID
Beschreibung
P2.1.29 Festdrehzahl 15 0.00 P2.1.2 Hz 50.00 140
* = Der Parameterwert kann nur geändert werden, nachdem der Frequenzumrichter
angehalten wurde.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 70 MULTI-FESTDREHZAHLAPPLIKATION
4.4.3 EINGANGSSIGNALE (STEUERTAFEL: MENÜ M2 -> G2.2)
Tabelle 26: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.1 ***
Start/Stopp-Aus-
wahl
0 6 0 300
Ben
def.
Beschreibung
ID
Logic = 0
Steuersignal 1 =
Start vorwärts
Steuersignal 2 =
Start rückwärts
Logic = 1
Steuersignal 1 =
Start/Stopp
Steuersignal 2 =
Rückwärts
Logic = 2
Steuersignal 1 =
Start/Stopp
Steuersignal 2 =
Startfreigabe
Logic = 3
Steuersignal 1 =
Startpuls (Flanke)
Steuersignal 2 =
Stopppuls
Logic = 4
Steuersignal 1 = Vorwärtspuls (Flanke)
Steuersignal 2 =
Rückwärtspuls
(Flanke)
Logic = 5
Steuersignal 1 =
Startpuls (Flanke)
Steuersignal 2 =
Rückwärtspuls
Logic = 6
Steuersignal 1 =
Startpuls (Flanke)
Steuersignal 2 =
Freigabepuls
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 71
Tabelle 26: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.2 DIN3 Funktion 0 13 1 301
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Externer Fehler,
geschlossener Kontakt
2 = Externer Fehler,
offener Kontakt
3 = Lauf aktivieren
4 = Beschl./Verzög.Zeit Auswahl
5 = Steuerpl. zu E/A
zwingen
6 = Steuerpl. zu
Steuertafel zwingen
7 = Steuerpl. zu
Feldbus zwingen
8 = Rückwärts (wenn
P2.2.1 ≠ 2, 3 oder 6)
9 = Tippen
Geschwindigkeit
10 = Fehlerquittierung
11 = Beschl./Brems.Funktion gesperrt
12 = DC-Bremsbefehl
13 = Festdrehzahl
P2.2.3
****
P2.2.4 AI1 Signalbereich 0 2 0 320
P2.2.5
P2.2.6
P2.2.7
P2.2.8 AI1 Signalfilterzeit 0.00 10.00 s 0.10 324
P2.2.9
****
AI1 Signalauswahl 0.1 E.10 A1 377
AI1, Benutzerein-
stellung (Min.)
AI1, Benutzerein-
stellung (Max.)
AI1 Signalinver-
sion
AI2 Signalauswahl 0.1 E.10 A.2 388
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0 = 0 – 10 V (0 – 20
mA**)
1 = 2 – 10 V (4 – 20
mA**)
2=Benutzerdefiniert**
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 72 MULTI-FESTDREHZAHLAPPLIKATION
Tabelle 26: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.10 AI2 Signalbereich 0 2 1 325
P2.2.11
P2.2.12
P2.2.13
P2.2.14 AI2 Signalfilterzeit 0.00 10.00 s 0.10 329
P2.2.15
P2.2.16
AI2, Benutzerein-
stellung (Min.)
AI2, Benutzerein-
stellung (Max.)
AI2 Signalinver-
sion
Sollwertskalie-
rung Mindestwert
Sollwertskalie-
rung Höchstwert
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
Ben
def.
Beschreibung
ID
0 = 0 – 10 V (0 – 20
mA**)
1 = 2 – 10 V (4 – 20
mA**)
2=Benutzerdefiniert**
0.00 = Keine Skalierung
>0 = skalierter
Höchstwert
P2.2.17
P2.2.18
Freier Analogein-
gang, Signalaus-
wahl
Freier Analogein-
gang, Funktion
0 2 0 361
0 4 0 362
0 = Nicht verwendet
1 = AI1
2 = AI2
0 = Keine Funktion
1 = Reduziert die
Stromgrenze (P2.1.5)
2 = Reduziert den
DC-Bremsstrom,
P2.4.8
3 = Reduziert die
Beschleunigungsund Bremszeiten
4 = Reduziert die
Drehmoment-Überwachungsgrenze
P2.3.15
CP = Steuerplatz
cc = geschlossener Kontakt
oc = geöffneter Kontakt
** = Die Steckbrücken von Block X2 müssen entsprechend platziert werden. Näheres finden
Sie in der Betriebsanleitung des Produkts.
*** = Der Parameterwert kann nur geändert werden, nachdem der Frequenzumrichter
angehalten wurde.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 73
**** = Wenden Sie die TTF-Methode zur Programmierung dieser Parameter an.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 74 MULTI-FESTDREHZAHLAPPLIKATION
4.4.4 AUSGANGSSIGNALE (STEUERTAFEL: MENÜ M2 -> G2.3
Tabelle 27: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
P2.3.1 *
P2.3.2
AO1 Signalaus-
wahl
Analogausgang-
funktion
0.1 E.10 A11 464
0 8 1 307
Ben
def.
Beschreibung
ID
0 = Nicht verwendet (20 mA/10 V)
1 = Ausgangsfreq.
(0 – f
2 = Freq.sollwert
(0 – f
3 = Motordrehzahl
(0–Motornenndrehzahl)
4 = Motorstrom (0
– I
nMotor
5 = Motordrehmoment (0–T
6 = Motorleistung
(0–P
7 = Motorspannung
(0–U
8 = Zwischenkreisspannung (0 – 1000
V)
)
max
)
max
)
nMotor
nMotor
nMotor
)
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Analogausgang
Filterzeit
Analogausgang
Inversion
Analogausgang
Mindestwert
Analogausgangss-
kalierung
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Keine Filterung
0 = Nicht invertiert
1 = Invertiert
0 = 0 mA (0 V)
1 = 4 mA (2 V)
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 75
Tabelle 27: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
P2.3.7
Digitalausgang 1
Funktion
0 22 1 312
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Bereit
2 = Betrieb
3 = Fehler
4 = Fehler invertiert
5 = Warnung FU
überhitzt
6 = Ext. Fehler
oder Warnung
7 = Sollwertfehler
oder Warnung
8=Warnung
9 = Rückwärts
10 = Ausgewählte
Tippgeschwindigkeit
11 = Auf Drehzahl
12 = Motorregler
aktiv
13 = Überwach.
Ausgangsfreq.grenze 1
14 = Überwach.
Ausgangsfreq.grenze 2
15 = Drehmomentgrenzenüberwachung
16 = Sollwertgrenzenüberwachung
17 = Ext. Bremssteuerung
18 = Steuerplatz:
E/A
19 = FU-Temperaturgrenzenüberwachung
20 = Nicht angeforderte Drehrichtung
21 = Ext. Bremssteuerung invertiert
22 = Thermistor,
Fehler/Warnung
P2.3.8
P2.3.9 RO2 Funktion 0 22 3 314
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
RO1 Funktion 0 22 2 313
Wie Parameter
2.3.7
Wie Parameter
2.3.7
4

VACON · 76 MULTI-FESTDREHZAHLAPPLIKATION
Tabelle 27: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14
Ausg.freq.grenze
1, Überwachung
Ausg.freq.grenze
1, überwachter
Wert
Ausg.freq.grenze
2, Überwachung
Ausgangsfre-
quenzgrenze 2;
Überwachungs-
wert
Drehmoment-
grenzenüberwa-
chungsfunktion
0 2 0 315
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
Ben
def.
Beschreibung
ID
0 = Keine Grenze
1 = Überwachung
der unteren
Grenze
2 = Überwachung
der oberen Grenze
0 = Keine Grenze
1 = Überwachung
der unteren
Grenze
2 = Überwachung
der oberen Grenze
0 = Nein
1 = Untere Grenze
2 = Obere Grenze
P2.3.15
P2.3.16
P2.3.17
P2.3.18
P2.3.19
P2.3.20
Drehmoment-
grenzenüberwa-
chungswert
Sollwertgrenzen-
überwachungs-
funktion
Sollwertgrenzen-
überwachungs-
wert
Abschaltverzöge-
rung externe
Bremse
Einschaltverzöge-
rung externe
Bremse
Temperaturgren-
zwertüberwa-
chung Frequen-
zumrichter
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
0 = Nein
1 = Untere Grenze
2 = Obere Grenze
0 = Nein
1 = Untere Grenze
2 = Obere Grenze
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 77
Tabelle 27: Ausgangssignale, G2.3
Index Parameter Min. Max. Einheit Werksein
st.
Temperaturgrenz-
P2.3.21
P2.3.22 *
P2.3.23 *
P2.3.24 *
P2.3.25 *
P2.3.26 *
P.2.3.27 *
wert Frequen-
zumrichter
Analogausgang 2
Skalierung
Analogausgang 2,
Funktion
Analogausgang 2,
Filterzeit
Analogausgang 2,
Inversion
Analogausgang 2,
Mindestwert
Analogausgang 2
Skalierung
-10 100 °C 40 355
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
Ben
def.
ID
* = Wenden Sie die TTF-Methode zur Programmierung dieser Parameter an
Beschreibung
Wie Parameter
2.3.2
0 = Keine Filterung
0 = Nicht invertiert
1 = Invertiert
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 78 MULTI-FESTDREHZAHLAPPLIKATION
4.4.5 ANTRIEBSSTEUERPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.4
Tabelle 28: Antriebssteuerparameter, G2.4
Index Parameter Min. Max. Einheit Werksein
st.
P2.4.1
P2.4.2
P2.4.3
P2.4.4 Bremszeit 2 0.1 3000.0 s 1.0 503
P2.4.5 Brems-Chopper 0 4 0 504
Rampe 1, Ver-
schliff
Rampe 2, Ver-
schliff
Beschleunigungs-
zeit 2
0.0 10.0 s 0.1 500
0.0 10.0 s 0.0 501
0.1 3000.0 s 1.0 502
Ben
def.
Beschreibung
ID
0 = Linear
100 = volle
Beschl./Verzög.
Zu-/Abnahmezeiten
0 = Linear
100 = volle
Beschl./Verzög.
Zu-/Abnahmezeiten
0 = Gesperrt
1 = Verwendet im
Betrieb
2 = Externer
Bremschopper
3 = Verwendet bei
Stopp / im Betrieb
4 = verwendet im
Betrieb (kein Test)
P2.4.6 Startfunktion 0 2 0 505
P2.4.7 Stoppfunktion 0 3 0 506
P2.4.8 Bremsstrom (DC) 0.00 I
P2.4.9
P2.4.10
DC-Bremszeit bei
Stopp
Startfrequenz für
DC-Bremsung bei
Rampenstopp
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
L
A 0,7 x I
H
507
0 = Rampe
1 = Fliegender
Start
2=Bedingter fliegender Start
0 = Leerauslauf
1 = Rampe
2 = Leerlauf bei
Rampe + Lauf aktivieren
3 = Rampe bei
Leerlauf + Lauf
aktivieren
0 = DC-Bremse ist
aus bei Stopp
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 79
Tabelle 28: Antriebssteuerparameter, G2.4
Index Parameter Min. Max. Einheit Werksein
st.
P2.4.11
P2.4.12 * Flussbremse 0 1 0 520
P2.4.13 Flussbremsstrom 0.00 I
DC-Bremszeit bei
Start
0.00 600.00 s 0.00 516
L
A I
H
Ben
def.
Beschreibung
ID
0 = DC-Bremse ist
aus bei Start
0 = Aus
0 = Ein
519
4.4.6 FREQUENZAUSBLENDUNGSPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.5)
Tabelle 29: Frequenzausblendungsparameter, G2.5
Index Parameter Min. Max. Einheit Werksein
st.
Frequenzausblen-
P2.5.1
P2.5.2
dungsbereich 1
untere Grenze
Frequenzausblen-
dungsbereich 1
obere Grenze
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
Ben
def.
Beschreibung
ID
0 = Ausblendungsbereich 1 ist abgeschaltet
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7
Frequenzausblen-
dungsbereich 2
untere Grenze
Freq.ausbl.bereic
h 2, obere Grenze
Frequenzausblen-
dungsbereich 3
untere Grenze
Freq.ausbl.bereic
h 3, obere Grenze
Ausblendung,
Beschl./
Verzög.rampe
0.00 320.00 Hz 0.00 511
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = Ausblendungsbereich 2 ist abgeschaltet
0 = Ausblendungsbereich 3 ist abgeschaltet
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 80 MULTI-FESTDREHZAHLAPPLIKATION
4.4.7 MOTORSTEUERPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.6)
Tabelle 30: Motorregelungsparameter, G2.6
Index Parameter Min. Max. Einheit Werksein
st.
P2.6.1 * Motorregelmodus 0 1/3 0 600
P2.6.2 * U/f-Optimierung 0 1 0 109
P2.6.3 *
U/f-Verhältnis,
Auswahl
0 3 0 108
Ben
def.
Beschreibung
ID
0 = Frequenzregelung
1 = Drehzahlregelung
NXP:
2 = Open Loop
Drehmomentsteuerung
3 = Closed Loop
Drehzahlsteuerung
4 = Closed Loop
Drehmomentsteuerung
0 = Nicht verwendet
1 = Automatische
Drehmomenterhöhung
0 = Linear
1 = Quadratisch
2 = Programmierbar
3 = Linear bei
Flussoptim.
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9 Schaltfrequenz 1.0 variiert kHz variiert 601
Feldschwäch-
punkt
Spannung am
Feldschwäch-
punkt
U/f-Kurve, Mitten-
frequenz
U/f-Kurve, Mitten-
spannung
Ausgangsspan-
nung bei Nullfre-
quenz
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % variiert 606
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 81
Tabelle 30: Motorregelungsparameter, G2.6
Index Parameter Min. Max. Einheit Werksein
st.
P2.6.10
P2.6.11
P2.6.12 Load Drooping 0.00 100.00 % 0.00 620
P2.6.13 Identifikation 0 1/2 0 631
Überspannungs-
regler
Unterspannungs-
regler
0 2 1 607
0 1 1 608
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Verwendet
(keine Rampe)
2 = Verwendet
(Rampe)
0 = Nicht verwendet
1 = Verwendet
0 = Keine Aktion
1=Identifikation
ohne Betrieb
2 = Identifikation
mit Lauf
3 = Identifikationslauf mit Encoder
4 = Keine Aktion
5 = Identifikationslauf fehlgeschlagen
Closed Loop-Parametergruppe 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6 Schlupfkorrektur 0 500 % 100 619
P2.6.14.7
P2.6.14.8
P2.6.14.9
Magnetisierungs-
strom
Drehzahlsteue-
rung P-Verstär-
kung
Drehzahlsteue-
rung I-Zeit
Beschleunigungs-
kompensierung
Magnetisierungs-
strom beim Start
Magnetisierungs-
zeit beim Start
0-Geschwindig-
keitszeit beim
Start
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
H
L
A 0.00 612
A 0.00 627
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 82 MULTI-FESTDREHZAHLAPPLIKATION
Tabelle 30: Motorregelungsparameter, G2.6
Index Parameter Min. Max. Einheit Werksein
st.
0-Geschwindig-
P2.6.14.10
P2.6.14.11
P2.6.14.12
P2.6.14.13
P2.6.14.15 Encoder-Filterzeit 0.0 100.0 ms 0.0 618
P2.6.14.17
keitszeit beim
Stopp
Anlaufdrehmo-
ment
Anlaufdrehmo-
ment VORWÄRTS
Anlaufdrehmo-
ment RÜCK-
WÄRTS
Stromsteuerung
P-Verstärkung
0 32000 ms 100 616
0 3 0 621
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.00 100.00 % 40.00 617
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Drehmomentspeicher
2 = Drehmomentsollwert
3 = Anlaufdrehmoment vorwärts/
rückwärts
Identifizierungsparametergruppe 2.6.15
P2.6.15.1 Drehzahlschritt -50.0 50.0 0.0 0.0 1252
* = Der Parameterwert kann nur geändert werden, nachdem der Frequenzumrichter
angehalten wurde.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 83
4.4.8 SCHUTZFUNKTIONEN (STEUERTAFEL: MENÜ M2 -> G2.7)
Tabelle 31: Schutzfunktionen, G2.7
Index Parameter Min. Max. Einheit Werksein
st.
Reaktion auf 4-
P2.7.1
P2.7.2
P2.7.3
P2.7.4
mA-Sollwertfeh-
ler
4 mA Sollwertfeh-
ler Frequenz
Reaktion auf
externen Fehler
Eingangsphase,
Überwachung
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 3 730
Ben
def.
Beschreibung
ID
0 = Keine Reaktion
1 = Warnung
2 = Warnung + vorher. Frequenz
3 = Warnung + voreingest. Frequenz
2.7.2
4 = Fehler, Stopp
gemäß 2.4.7
5 = Fehler, Stopp
durch Leerauslauf
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
P2.7.5
P2.7.6
P2.7.7 Erdschlussschutz 0 3 2 703
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
Reaktion auf
Unterspann.fehler
Ausgangsphasen-
überwachung
Wärmeschutz,
Motor
Umgeb.temp.fak-
tor, Motor
Motorkühlfaktor
bei Nulldrehzahl
Motor-Tempera-
turzeitkonstante
Motoreinschalt-
dauer
0 1 0 727
0 3 2 702
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min variiert 707
0 150 % 100 708
0 = Fehler in Fehlerspeicher
Fehler nicht
gespeichert
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 84 MULTI-FESTDREHZAHLAPPLIKATION
Tabelle 31: Schutzfunktionen, G2.7
Index Parameter Min. Max. Einheit Werksein
st.
P2.7.13 Blockierschutz 0 3 0 709
P2.7.14 Blockierstrom 0.00 2 x I
P2.7.15
P2.7.16
P2.7.17 Unterlastschutz 0 3 0 713
Blockierzeit-
grenze
Blockierfrequenz-
grenze
1.00 120.00 s 15.00 711
1.00 P2.1.2 Hz 25.00 712
H
A 1
Ben
def.
H
ID
710
Beschreibung
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
Schneller Motor-
nennfrequenz
Drehmoment
Nullfrequenzlast
vom Unterlast-
schutz
Zeitgrenze, Unter-
lastschutz
Reaktion auf
Thermistorfehler
Reaktion auf Feld-
busfehler
Reaktion auf
Steckplatzfehler
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 3 734
0 = Keine Reaktion
1 = Warnung
2 = Fehler, Stopp
gemäß 2.4.7
3 = Fehler, Stopp
durch Leerauslauf
(siehe P2.7.21)
(siehe P2.7.21)
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

MULTI-FESTDREHZAHLAPPLIKATION VACON · 85
4.4.9 PARAMETER FÜR AUTOMATISCHEN NEUSTART (STEUERTAFEL: MENÜ M2 -> G2.8)
Tabelle 32: Parameter für automatischen Neustart, G2.8
Index Parameter Min. Max. Einheit Werksein
st.
P2.8.1 Wartezeit 0.10 10.00 s 0.50 717
P2.8.2 AFQ Zeitraum 0.00 60.00 s 30.00 718
P2.8.3 Startfunktion 0 2 0 719
Anzahl der Versu-
che nach einem
P2.8.4
P2.8.5
P2.8.6
Auslösen auf-
grund von Unter-
spannung
Anzahl der Versu-
che nach einem
Auslösen auf-
grund von Über-
spannung
Anzahl der Versu-
che nach einem
Auslösen auf-
grund von Über-
strom
0 10 0 720
0 10 0 721
0 3 0 722
Ben
def.
Beschreibung
ID
0 = Rampe
1 = Fliegender
Start
2 = Gemäß P2.4.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Anzahl der Versu-
che nach einem
Auslösen nach 4
mA Sollwert
Anzahl der Versu-
che nach einem
Auslösen auf-
grund eines
Motortemperatur-
fehlers
Anzahl der Versu-
che nach einem
Auslösen auf-
grund eines exter-
nen Fehlers
Anzahl der Versu-
che nach einem
Auslösen auf-
grund eines
Unterlastfehlers
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 86 MULTI-FESTDREHZAHLAPPLIKATION
4.4.10 STEUERUNG ÜBER STEUERTAFEL (STEUERTAFEL: MENÜ M3)
Die nachstehende Liste enthält die Parameter für die Auswahl des Steuerplatzes und der
Drehrichtung über die Steuertafel. Siehe Menü „Steuerung über die Steuertafel“ im
Benutzerhandbuch.
Tabelle 33: Parameter für die Steuerung über die Steuertafel, M3
Index Parameter Min. Max. Einheit Werksein
st.
P3.1 Steuerplatz 1 3 1 125
Sollwerteinstel-
P3.2
P3.3
R3.4 Stopptaste 0 1 1 114
lung über die
Steuertafel
Drehrichtung
(über Steuertafel)
P2.1.1 P2.1.2 Hz 0.00
0 1 0 123
Ben
def.
Beschreibung
ID
1 = E/A-Klemmleiste
2 = Steuertafel
3 = Feldbus
0 = Eingeschränkte
Funktion der
Stopptaste
1 = Stopptaste
immer aktiviert
4.4.11 SYSTEMMENÜ (STEUERTAFEL: MENÜ M6)
Die Parameter und Funktionen zum allgemeinen Gebrauch des Frequenzumrichters (z.B.
Applikations- und Sprachauswahl) und die benutzerdefinierten Parametersätze sowie die
Hardware- und Softwareangaben finden Sie im Benutzerhandbuch.
4.4.12 ZUSATZKARTEN (STEUERTAFEL: MENÜ M7
Das Menü M7 zeigt die an der Steuerplatine angeschlossenen Erweiterungs- und
Zusatzkarten sowie kartenbezogene Angaben an. Weitere Informationen finden Sie im
Benutzerhandbuch.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PID-REGLER VACON · 87
5 PID-REGLER
5.1 EINFÜHRUNG
Wählen Sie die PID-Regler-Applikation im Menü M6 auf Seite S6.2.
In der PID-Regler-Applikation gibt es zwei E/A-Klemmleistensteuerplätze; Platz A ist der
PID-Regler, Quelle B ist der direkte Frequenzsollwert. Der Steuerplatz A oder B wird über
den Digitaleingang DIN6 aktiviert.
Der PID-Reglersollwert kann über die Analogeingänge, den Feldbus, das motorbetriebene
Potentiometer, durch Aktivierung von PID-Sollwert 2 oder durch Anwendung des
Steuertafelsollwerts für die Steuerung ausgewählt werden. Der PID-Regler-Istwert kann
über die Analogeingänge, den Feldbus, die Istwerte des Motors oder die mathematischen
Funktionen derselben ausgewählt werden.
Der direkte Frequenzsollwert kann für die Steuerung ohne den PID-Regler verwendet und
über die Analogeingänge, den Feldbus, das Motorpotentiometer oder die Steuertafel
ausgewählt werden.
Die PID-Applikation wird in der Regel verwendet, um die Pegelmessung oder Pumpen und
Lüfter zu steuern. In diesen Anwendungen sorgt der PID-Regler für eine gleichmäßige
Steuerung und verfügt über ein integriertes Mess- und Steuerungspaket, für das keine
zusätzlichen Komponenten erforderlich sind.
Die Digitaleingänge DIN2, DIN3 und DIN5 und alle Ausgänge sind frei programmierbar.
•
Zusätzliche Funktionen:
Bereichsauswahl für das analoge Eingangssignal
•
Zwei Frequenz-Grenzenüberwachungen
•
Drehmomentgrenzenüberwachung
•
Sollwertgrenzenüberwachung
•
Programmierung von zweiten Rampen und S-förmigen Rampen
•
Programmierbare Start- und Stoppfunktionen
•
DC-Bremse bei Start und Stopp
•
Drei Frequenzausblendungsbereiche
•
Programmierbare U/f-Kurve und Schaltfrequenz
•
Automatischer Neustart
•
Motortemperatur- und -blockierschutz: vollständig programmierbar; Aus, Warnung,
•
Fehler
Motorunterlastschutz
•
Eingangs- und Ausgangsphasenüberwachung
•
Addition der Punktfrequenz zum PID-Ausgang
•
Der PID-Regler kann zusätzlich von den Steuerplätzen E/A B, der Steuertafel und vom
•
Feldbus verwendet werden
Funktion SanfteÄnd d. StP
•
Sleep-Funktion
•
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 88 PID-REGLER
Die Parameter der PID-Regler-Applikation sind beschrieben in Kapitel 9
Parameterbeschreibungen in diesem Handbuch beschrieben. Die Beschreibungen sind nach
den einzelnen ID-Nummern der Parameter geordnet.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

-
+
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
2-Anschluss-Geber
Sollwertpotentiometer
1–10 kΩ
mA
RUN (BETRIEB)
READY (BEREIT)
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Klemme Signal Beschreibung
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Sollausgang
E/A-Masse
Analogeingang 2
Strombereich 0–20 mA
Programmierbar (P2.2.9)
Steuerspannungsausgang
E/A Masse
Platz A: Start vorwärts
Ri min. = 5 kΩ
Fehlerquittierung
Programmierbar (P2.2.2)
Externer Fehlereingang
Programmierbar (P2.2.2)
Platz B: Start vorwärts
Ri min. = 5 kΩ
Auswahl der Tippgeschwindigkeit
Programmierbar (P2.2.3)
Auswahl Steuerplatz A/B
Kontakt geschlossen =
Tippgeschwindigkeit aktiv
Startsignal für Steuerplatz B
Frequenzsollwert (P2.2.5.)
Gemeinsamer Bezug
für DIN 1–DIN 3
Gemeinsam für DIN4–DIN6
Steuerspannungsausgang
E/A Masse
Analogausgang 1
Ausgangsfrequenz
Programmierbar (P2.3.2)
Digitalausgang
READY (BEREIT)
Programmierbar (P2.3.7)
Offener Kollektor, I≤50 mA,
U≤48 VDC
Relaisausgang 1
RUN (BETRIEB)
Programmierbar
(P2.3.8)
Relaisausgang 2
FAULT (FEHLER)
Programmierbar
(P2.3.9)
AO1+
Analogeingang 1
PID-Sollwert
Masseanschluss für Sollwerte
und Steuersignale
Analogeingang 2
PID Istwert 1
Kontakt geschlossen = Start vorwärts
Kontakt geschlossen =
Fehlerquittierung
Kontakt geschlossen = Start rückwärts
Kontakt geschlossen = Fehler
Kontakt geöffnet = kein Fehler
Spannungssollwert für
Potentiometer usw.
Analogeingang 1
Spannungsbereich 0–10 V DC
Programmierbar (P2.1.11)
Spannung für Schalter usw.
(max. 0,1 A)
Spannung für Schalter (siehe # 6)
Anschluss an Masse oder +24 V
Ist- Wert
(0) 4 – 20 mA
Anschluss an Masse oder +24 V
Masseanschluss für Sollwerte
und Steuersignale
Masseanschluss für Sollwerte
und Steuersignale
Bereich 0–20 mA/RL,
max. 500 Ω
Kontakt offen = Steuerplatz A
ist aktiv Kontakt geschlossen =
Steuerplatz B ist aktiv
PID-REGLER VACON · 89
5.2 STEUER-E/A
Abb. 13: E/A-Standardkonfiguration der PID-Applikation (mit 2-Draht-Messumformer)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

Steckbrückenblock X3:
CMA- und CMB-Erdung
CMB mit GND verbunden
CMA mit GND verbunden
CMB isoliert von GND
CMA isoliert von GND
CMB und CMA intern
miteinander verbunden,
von GND getrennt
= Werkseinstellung
VACON · 90 PID-REGLER
*) Die Zusatzkarte A3 hat keinen Anschluss für einen offenen Kontakt an ihrem zweiten
Relaisausgang (Anschluss 24 fehlt).
HINWEIS!
Siehe Steckbrückenauswahl unten. Weitere Informationen finden Sie im
Benutzerhandbuch zu dem Produkt.
Abb. 14: Steckbrückenauswahl
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

DIN2
DIN5
DIN3
DIN2
DIN3
DIN5
DIN6
DIN2
DIN3
AI1
AI2
0
1
2
3
4
0
1
2
3
4
5
+A
A
B
0
1
2
3
4
5
0
1
2
3
4
5
K
0
1
2
3
4
5
F
PID
+
DIN1
DIN4
A
B
A
B
A/B
Intern rückwärts
Interne Fehlerquittierung
Fehlerquittierungseingang (programmierbar)
3.3 Richtung:StTafel
Interner Start/Stopp
Sollwert vom Feldbus
Start/Stopp vom Feldbus
Richtung vom Feldbus
Externer Fehler (programmierbar)
Tippgeschwindigkeit (programmierbar)
Wahl: Platz A/B
2.2.4 PID-Hauptsollwert
Auf
Ab
2.1.11 PID-Sollwert
E/A Rückwärts
R3.5 PID-Steuertafelsollwert 2
PID-Steuertafelsollwert 2
aktivieren (DIN5 = 13)
Start; Platz A
Start; Platz B
Start/Stopp
Start/Stopp-Tasten
Interner
Frequenzsollwert
2.1.19 Tippen Drehzahlsollwert
Steuertafel
Feldbus
Schaltfläche „Reset“
3.1 Steuerplatz
2.2.7 Feldbussteuersollwert
2.2.6 Steuertafelsteuerungssollwert
2.2.5 E/A-B-Sollwert
≥ 1
R3.2 Steuertafelsollwert
R3.4 PID-Steuertafelsollwert
Istwertauswahl
Par. 2.2.9
& 2.2.10
Istwertauswahl
Par. 2.2.8
Aktiv
1
Aktiv
2
Motor
Potentiometer
PID-REGLER VACON · 91
5.3 STEUERSIGNALLOGIK IN DER PID-REGLER-APPLIKATION
Abb. 15: Steuersignallogik der PID-Regler-Applikation
5.4 PID-REGLER-APPLIKATION – PARAMETERLISTEN
5.4.1 ÜBERWACHUNGSWERTE (STEUERTAFEL: MENÜ M1)
Bei den Betriebsdaten handelt es sich sowohl um die Istwerte der Parameter und Signale als
auch um Statusinformationen und Messwerte. Die Betriebsdaten können nicht bearbeitet
werden.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 92 PID-REGLER
HINWEIS!
Die Überwachungswerte V1.19 bis V1.22 stehen nur in der PID-Regler-Applikation
zur Verfügung.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PID-REGLER VACON · 93
Tabelle 34: Betriebsdaten
Index Betriebswert Einheit ID Beschreibung
V1.1 Ausgangsfrequenz Hz 1
V1.2 Frequenzsollwert Hz 25
V1.3 Motordrehzahl UpM 2
V1.4 Motorstrom A 3
V1.5 Motordrehmoment % 4
V1.6 Motorleistung % 5
V1.7 Motorspannung V 6
V1.8
1.9 Gerätetemperatur °C 8
1.10 Motortemperatur % 9
V1.11 Analogeingang 1 V/mA 13
V1.12 Analogeingang 2 V/mA 14
V1.13 Analogeingang 3 27
V1.14 Analogeingang 4 28
V1.15 DIN 1, 2, 3 15
V1.16 DIN 4, 5, 6 16
V1.17 DO1, RO1, RO2 17
V1.18 Analog I
V1.19 PID Sollwert % 20
V1.20 PID-Istwert % 21
DC-Zwischenkreis-
Spannung
out
V 7
mA 26
V1.21
V1.22 PIDAusgWert % 23
V1.23
V1.24 PT-100 Temperatur ºC 42
G1.25
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
PID-Regelabwei-
chung
Sonderanzeige für
den Istwert
Überwachungsele-
mente
% 22
29
5

VACON · 94 PID-REGLER
Tabelle 34: Betriebsdaten
Index Betriebswert Einheit ID Beschreibung
V1.26.1 Strom A 1113
V1.26.2 Drehmoment % 1125
V1.26.3 DC-Spannung V 44
V1.26.4 Statuswort 43
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PID-REGLER VACON · 95
5.4.2 BASISPARAMETER (STEUERTAFEL: MENÜ M2 -> G2.1)
Tabelle 35: Basisparameter G2.1
Index Parameter Min. Max. Einheit Werksein
st.
P2.1.1 Mindestfrequenz 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Max. Frequenz P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4 Bremszeit 1 0.1 3000.0 s 0.0 104
P2.1.5 Stromgrenze 0,1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
Beschleunigungs-
zeit 1
Nennspannung
des Motors
Nennfrequenz des
Motors
Nenndrehzahl des
Motors
0.1 3000.0 s 0.0 103
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 UpM 1440 112
H
A I
NX2: 230
V
NX5: 400
V
NX6: 690
V
Ben
def.
L
ID
107
110
Beschreibung
P2.1.9 *
P2.1.10 * cos phi, Motor 0.30 1.00 0.85 120
P2.1.11 *
P2.1.12
P2.1.13 PID-Regler, I-Zeit 0.00 320.00 s 1.00 119
P2.1.14
P2.1.15 Sleep-Frequenz 0.00 P2.1.2 Hz 10.00 1016
Nennstrom des
Motors
PID-Regler, Soll-
wertsignal (Platz
A)
PID-Regler, Ver-
stärkung
PID-Regler, D-
Zeit
0,1 x I
0 4 1 332
0.0 1000.0 % 100.0 118
0.00 100.00 s 0.00 132
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = PID-Sollwert
von Regelseite
Steuertafel, P3.4
3 = PID-Sollwert
von Feldbus (ProcessDataIN1)
4 = Motorpotentiometer
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 96 PID-REGLER
Tabelle 35: Basisparameter G2.1
Index Parameter Min. Max. Einheit Werksein
st.
P2.1.16
P2.1.17 Wakeup-Pegel 0.00 100.00 % 25.00 1018
P2.1.18 Wakeup-Funktion 0 1 0 1019
P2.1.19
Sleep-Verzöge-
rung
Tippen Geschwin-
digkeitssollwert
0 3600 s 30 1017
0.00 P2.1.2 Hz 10.00 124
Ben
def.
Beschreibung
ID
0 = Wakeup bei
Unterschreitung
des WakeupPegels (2.1.17)
1 = Wakeup bei
Überschreitung
des WakeupPegels (2.1.17)
* = Der Parameterwert kann nur geändert werden, nachdem der Frequenzumrichter
angehalten wurde.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PID-REGLER VACON · 97
5.4.3 EINGANGSSIGNALE
Tabelle 36: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.1 ** DIN2 Funktion 0 13 1 319
Ben
def.
Beschreibung
ID
0 = Nicht verwendet
1 = Externer Fehler (geschl. Kont.)
2 = Externer Fehler (geöff. Kont.)
3 = Lauf aktivieren
4 = Rampe:Zeitwahl
5=Steuerpl.: E/AKlemmleiste
(ID125)
6=Steuerpl.: Steuertafel (ID125)
7=Steuerpl.: Feldbus (ID125)
8 = Vorwärts/
Rückwärts
9 = Tippen-Frequenz (geschlossener Kontakt)
10 = Fehlerquittierung (geschlossener Kontakt)
11 = Beschl./
Brems. gesperrt
(geschlossener
Kontakt)
12 = DC-Bremsbefehl
13 = Motor.Pot.
Schneller
(geschlossener
Kontakt)
P2.2.2 **
P2.2.3 ** DIN5 Funktion 0 13 9 330
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
DIN3 Funktion 0 13 10 301
Siehe oben, außer:
13 = Motor.Pot.
Langsamer
(geschlossener
Kontakt)
Siehe oben, außer:
13 = PID-Sollwert 2
aktivieren
5

VACON · 98 PID-REGLER
Tabelle 36: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.4 **
P2.2.5 **
PID-Summe
Punktsollwert
E/A B Auswahl
Sollwert
0 7 0 376
0 7 1 343
Ben
def.
Beschreibung
ID
0 = Direkter PIDAusgangswert
1 = AI1+PID-Ausgang
2 = AI2+PID-Ausgang
3 = AI3+PID-Ausgang
4 = AI4+PID-Ausgang
5 = PID-Steuertafel
+PID-Ausgang
6 = Feldbus+PIDAusgang (ProcessDataIN3)
7 = Mot.pot.+PIDAusgang
0 = AI1
1 = AI2
2 = AI3
3 = AI4
4 = Steuertafelsollwert
5 = Feldbus-Sollwert (FB
Drehz.Sollwert)
6 = Motorpotentiometer
7 = PID-Regler
P2.2.6 **
P2.2.7 **
P2.2.8 ** Istwertauswahl 0 7 0 333
Steuertafelsoll-
wert, Auswahl
Feldbussollwert,
Auswahl
0 7 4 121
0 7 5 122
Wie in P2.2.5
Wie in P2.2.5
0 = Istwert 1
1 = Istwert 1 + Istwert 2
2 = Istwert 1 – Istwert 2
3 = Istwert 1 * Istwert 2
4=Min(Istwert 1,
Istwert 2)
5=Max(Istwert 1,
Istwert 2)
6 = Mittelwert(Istwert 1, Istwert 2)
7 = Wurzel(Istwert
1) + Wurzel(Istwert
2)
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PID-REGLER VACON · 99
Tabelle 36: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.9 ** Istwert 1, Auswahl 0 10 2 334
P2.2.10 ** Istwert 2 Eingang 0 10 0 335
Ben
def.
ID
Beschreibung
0 = Nicht verwendet
1 = AI1-Signal
(Steuerkarte)
2 = AI2-Signal
(Steuerkarte)
3 = AI3
4 = AI4
5 = Feldbus ProcessDataIN2
6 = Motordrehmoment
7 = Motordrehzahl
8 = Motorstrom
9 = Motorleistung
10 = Encoder-Frequenz
0 = Nicht verwendet
1=AI1-Signal
2=AI2-Signal
3 = AI3
4 = AI4
5 = Feldbus ProcessDataIN3
6 = Motordrehmoment
7 = Motordrehzahl
8 = Motorstrom
9 = Motorleistung
10 = Encoder-Frequenz
P2.2.11
P2.2.12
P2.2.13
P2.2.14
P2.2.15
***
Istwert 1, Min-
destskalierung
Istwert 1, Höchst-
skalierung
Istwert 2, Min-
destskalierung
Istwert 2, Höchst-
skalierung
AI1 Signalauswahl 0.1 E.10 A.1 377
–1600.0 1600.0 % 0.0 336
–1600.0 1600.0 % 100.0 337
–1600.0 1600.0 % 0.0 338
–1600.0 1600.0 % 100.0 339
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 100 PID-REGLER
Tabelle 36: Eingangssignale, G2.2
Index Parameter Min. Max. Einheit Werksein
st.
P2.2.16 AI1 Signalbereich 0 2 0 320
P2.2.17
P2.2.18
P2.2.19 AI1, Inversion 0 1 0 323
P2.2.20 AI1 Filterzeit 0.00 10.00 s 0.10 324
P2.2.21 AI2 Signalauswahl 0.1 E.10 A.2 388
AI1, Benutzerein-
stellung (min.)
AI1, Benutzerein-
stellung (max.)
–160.00 160.00 % 0.00 321
–160.00 160.00 % 100.0 322
Ben
def.
Beschreibung
ID
0 = 0 – 10 V (0 – 20
mA*)
1=2–10 V (4–20
mA*)
2=Benutzerdefiniert*
0 = Nicht invertiert
1 = Invertiert
0=0–20 mA (0–10 V
*)
1 = 4 – 20 mA (2 –
10 V *)
2=Benutzerdefiniert*
P2.2.22 AI2 Signalbereich 0 2 1 325
P2.2.23
P2.2.24
P2.2.25 AI2, Inversion 0 1 0 328
P2.2.26 AI2 Filterzeit 0.00 10.00 s 0.10 329
P2.2.27
P2.2.28
AI2, Benutzerein-
stellung (min.)
AI2, Benutzerein-
stellung (max.)
Rampenzeit
Motorpotentiome-
ter
Speicher-Reset
Motorpotentiome-
ter-Frequenzsoll-
wert
-160.00 160.00 % 0.00 326
-160.00 160.00 % 0.00 327
0.1 2000.0 Hz/s 10.0 331
0 2 1 367
0 = 0 – 20 mA*
1 = 4 – 20 mA*
2=Benutzerdefiniert*
0 = Nicht invertiert
1 = Invertiert
0 = Kein Reset
1 = Reset bei
Anhalten oder
Abschalten
2 = Reset bei
Abschalten der
Netzspg.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...