


vacon nx
®
frekvensomformere
all in one
applikationsmanual

A
J
B C D E F G H I
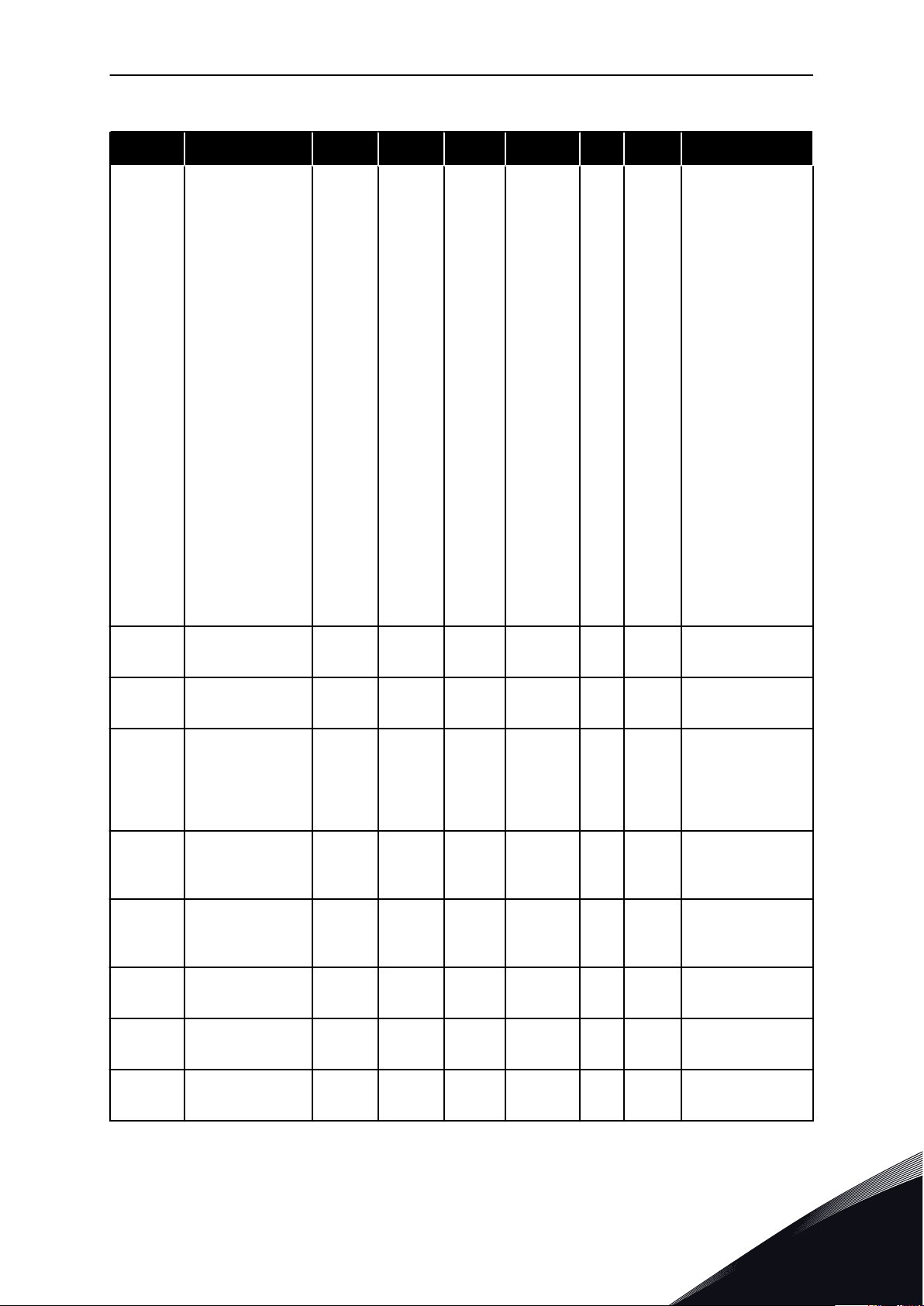
Index Min Max Unit Default
Cust
ID DescriptionParameter
INDLEDNING VACON · 3
INDLEDNING
Dokument ID: DPD01213E
Dato: 1.12.2016
Softwarekode:
Basisapplikation = ASFIFF01
•
Standardapplikation = ASFIFF02
•
Lokal-/fjernstyringsapplikation =
•
ASFIFF03
Applikation til styring af
•
flertrinshastighed = ASFIFF04
PID-styringsapplikation = ASFIFF05
•
Applikation til multifunktionsstyring
•
NXS = ASFIFF06
-
NXP = APFIFF06
-
Applikation til pumpe- og
•
ventilatorstyring = ASFIFF07
OM DENNE BETJENINGSVEJLEDNING
Vacon Ltd. har ophavsret til denne betjeningsvejledning. Alle rettigheder forbeholdes.
Vejledningen kan ændres uden varsel. Disse instruktioner er oprindeligt skrevet på engelsk.
I denne betjeningsvejledning kan du læse om funktionerne i VACON® ACfrekvensomformeren, og om hvordan du bruger den.
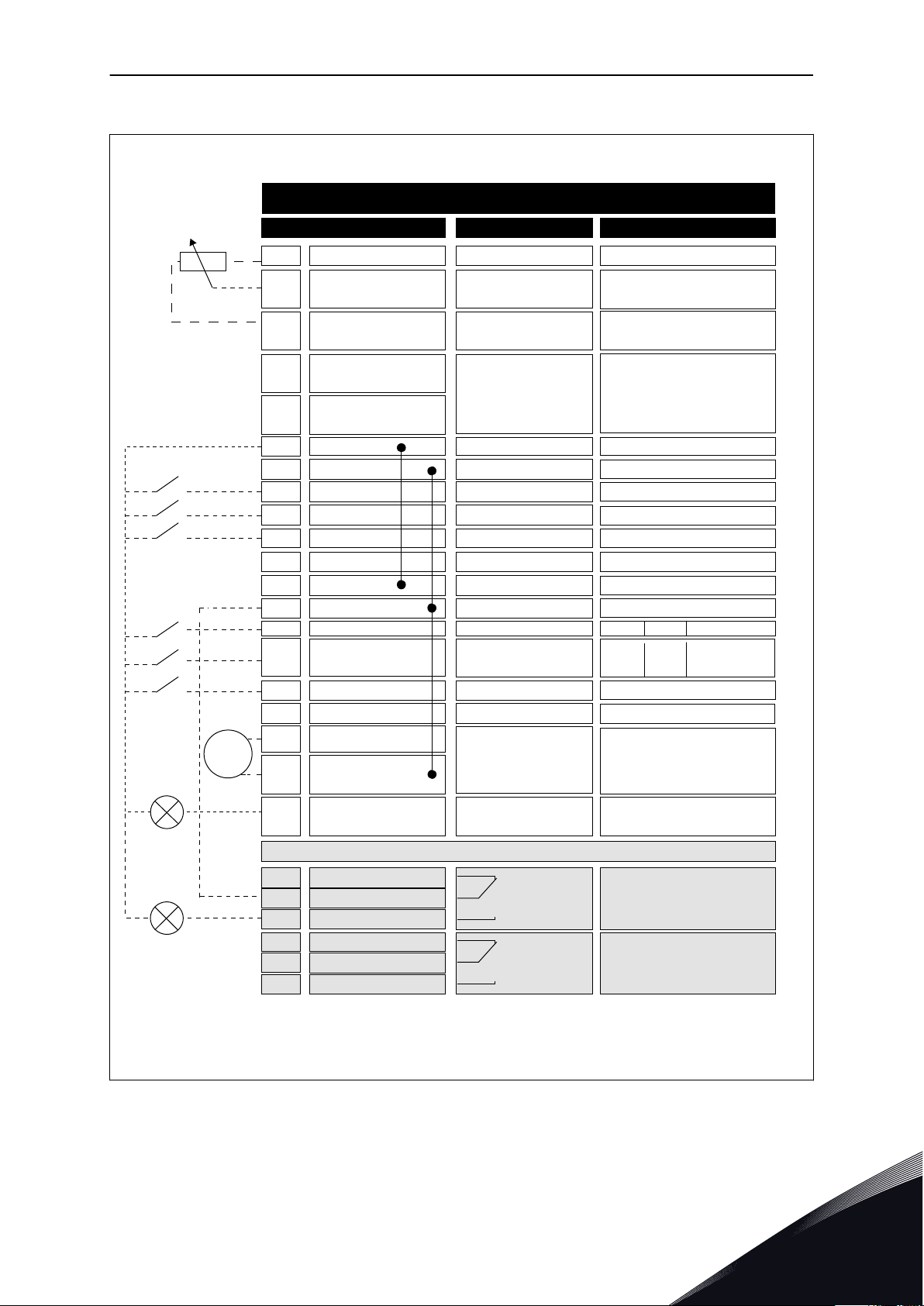
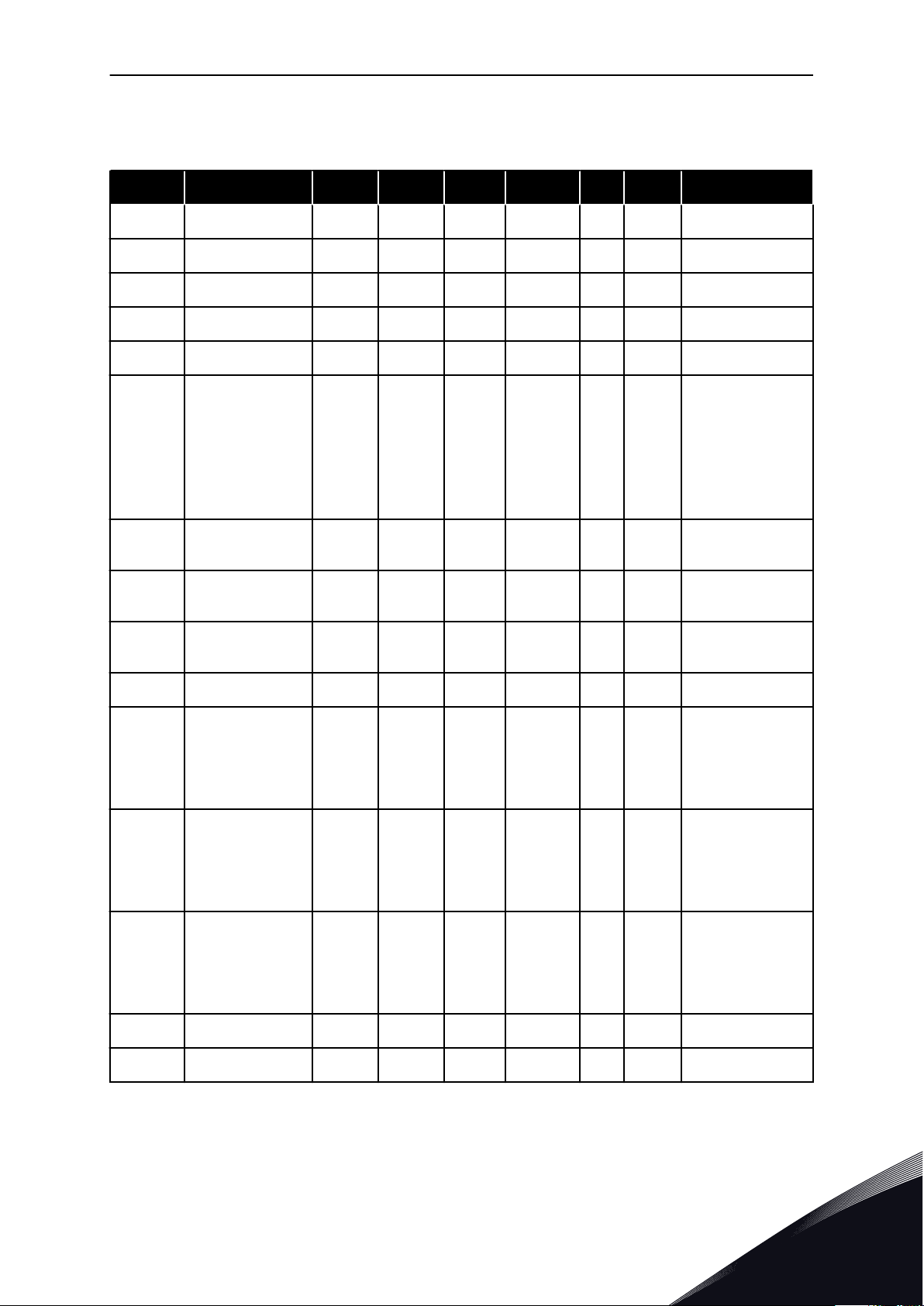
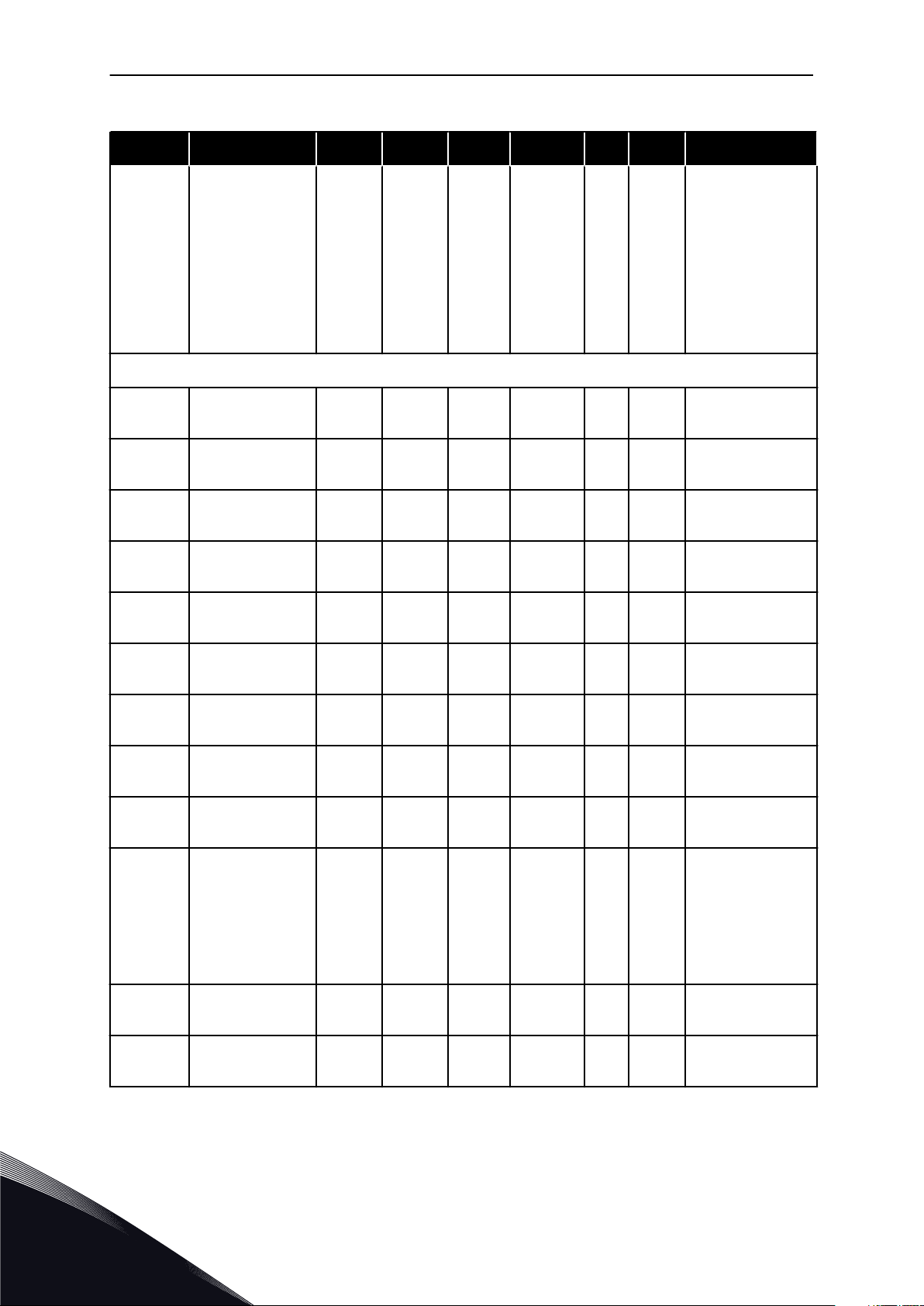
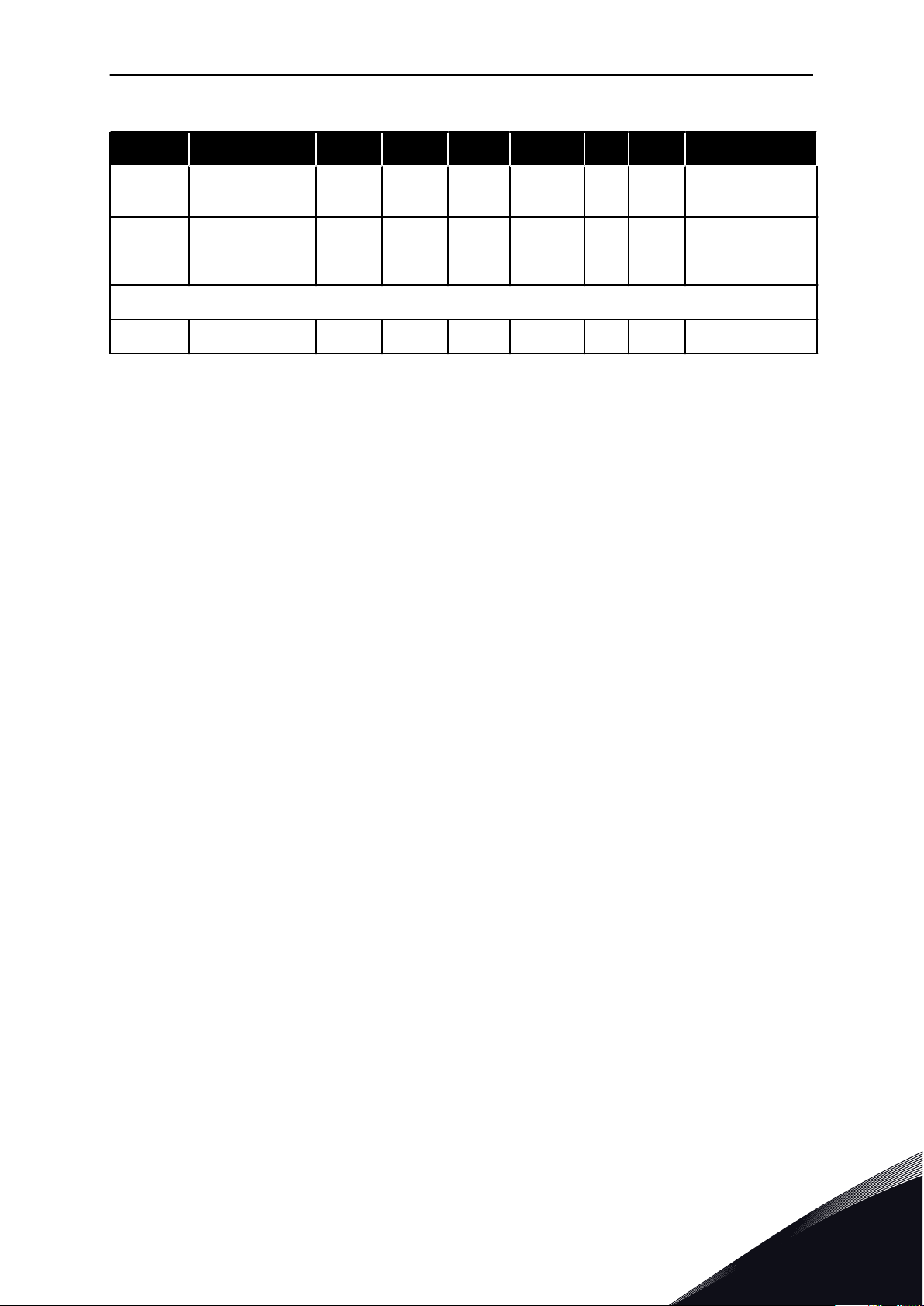
Betjeningsvejledningen indeholder en lang række parametertabeller. Vejledningen
indeholder oplysninger om, hvordan du skal læse parametertabellerne.
A. Parameterens placering i menuen, altså
parameternummeret.
B. Parameternavnet.
C. Parameterens mindsteværdi.
D. Parameterens maksimumværdi.
E. Parameterens enhedsværdi. Enheden
vises, hvis den er tilgængelig.
F. Værdien er fabriksindstillet.
G. Kundens egen indstilling.
H. Parameterens ID-nummer.
I. En kort beskrivelse af
parameterværdien og/eller dennes
funktion.
J. Når symbolet vises, kan du få flere
oplysninger om parameteren i kapitlet
Beskrivelse af parametre.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
INDHOLDSFORTEGNELSE VACON · 5
INDHOLDSFORTEGNELSE
Indledning
Om denne betjeningsvejledning 3
1 Basisapplikation 10
1.1 Introduktion 10
1.1.1 Motorbeskyttelsesfunktioner i basisapplikationen. 10
1.2 Styrings-I/O 11
1.3 Styringssignallogik i basisapplikation 13
1.4 Basisapplikation – parameterlister 13
1.4.1 Overvågningsværdier (betjeningspanel: menu M1) 13
1.4.2 Basisparametre (betjeningspanel: menu M2 -> G2.1) 15
1.4.3 Panelstyring (betjeningspanel: menu M3) 16
1.4.4 Systemmenu (betjeningspanel: menu M6) 17
1.4.5 Udvidelseskort (betjeningspanel: Menu M7 17
2 Standardapplikation 18
2.1 Introduktion 18
2.2 Styrings-I/O 19
2.3 Styringssignallogik i standardapplikation 21
2.4 Standardapplikation – parameterlister 21
2.4.1 Overvågningsværdier (betjeningspanel: menu M1) 21
2.4.2 Basisparametre (betjeningspanel: menu M2 -> G2.1) 23
2.4.3 Indgangssignaler (betjeningspanel: menu M2 -> G2.2) 24
2.4.4 Udgangssignaler (betjeningspanel: menu M2 -> G2.3 26
2.4.5 Kontrolparametre for frekvensomformer (betjeningspanel: menu M2 ->
G2.4 29
2.4.6 Parametre for udvigelse af frekvens (betjeningspanel: menu M2 -> G2.5)
30
2.4.7 Styreparametre for motor (betjeningspanel: menu M2 -> G2.6) 31
2.4.8 Sikringssystemer (betjeningspanel: menu M2 -> G2.7 34
2.4.9 Parameter for autogenstart (betjeningspanel: Menu M2 -> G2.8) 36
2.4.10 Panelstyring (betjeningspanel: menu M3) 36
2.4.11 Systemmenu (betjeningspanel: menu M6) 37
2.4.12 Udvidelseskort (betjeningspanel: Menu M7 37
3 Lokal-/fjernstyringsapplikation 38
3.1 Introduktion 38
3.2 Styrings-I/O 39
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 6 INDHOLDSFORTEGNELSE
3.3 Styringssignallogik i lokal-/fjernstyringsapplikation 41
3.4 Lokal-/fjernstyringsapplikation – parameterliste 41
3.4.1 Overvågningsværdier (betjeningspanel: menu M1) 41
3.4.2 Basisparametre (betjeningspanel: menu M2 -> G2.1) 43
3.4.3 Indgangssignaler (betjeningspanel: menu M2 -> G2.2) 45
3.4.4 Udgangssignaler (betjeningspanel: menu M2 -> G2.3 49
3.4.5 Kontrolparametre for frekvensomformer (betjeningspanel: menu M2 ->
G2.4 53
3.4.6 Parametre for udvigelse af frekvens (betjeningspanel: menu M2 -> G2.5)
54
3.4.7 Styreparametre for motor (betjeningspanel: menu M2 -> G2.6) 55
3.4.8 Sikringssystemer (betjeningspanel: menu M2 -> G2.7 58
3.4.9 Parameter for autogenstart (betjeningspanel: Menu M2 -> G2.8) 60
3.4.10 Panelstyring (betjeningspanel: menu M3) 60
3.4.11 Systemmenu (betjeningspanel: menu M6) 61
3.4.12 Udvidelseskort (betjeningspanel: Menu M7 61
4 Applikation til styring af flertrinshastighed 62
4.1 Introduktion 62
4.2 Styrings-I/O 63
4.3 Styringssignallogik i applikation til styring af flertrinshastighed 65
4.4 Applikation til styring af flertrinshastighed – parameterliste 65
4.4.1 Overvågningsværdier (betjeningspanel: menu M1) 65
4.4.2 Basisparametre (betjeningspanel: menu M2 -> G2.1) 67
4.4.3 Indgangssignaler (betjeningspanel: menu M2 -> G2.2) 69
4.4.4 Udgangssignaler (betjeningspanel: menu M2 -> G2.3 73
4.4.5 Kontrolparametre for frekvensomformer (betjeningspanel: menu M2 ->
G2.4 77
4.4.6 Parametre for udvigelse af frekvens (betjeningspanel: menu M2 -> G2.5)
78
4.4.7 Styreparametre for motor (betjeningspanel: menu M2 -> G2.6) 79
4.4.8 Sikringssystemer (betjeningspanel: menu M2 -> G2.7) 82
4.4.9 Parameter for autogenstart (betjeningspanel: Menu M2 -> G2.8) 84
4.4.10 Panelstyring (betjeningspanel: menu M3) 84
4.4.11 Systemmenu (betjeningspanel: menu M6) 85
4.4.12 Udvidelseskort (betjeningspanel: Menu M7 85
5 PID-styringsapplikation 86
5.1 Introduktion 86
5.2 Styrings-I/O 87
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
INDHOLDSFORTEGNELSE VACON · 7
5.3 Styringssignallogik i PID-styringsapplikation 89
5.4 PID-styringsapplikation – parameterlister 89
5.4.1 Overvågningsværdier (betjeningspanel: menu M1) 89
5.4.2 Basisparametre (betjeningspanel: menu M2 -> G2.1) 92
5.4.3 Indgangssignaler 94
5.4.4 Udgangssignaler (betjeningspanel: menu M2 -> G2.3 100
5.4.5 Kontrolparametre for frekvensomformer (betjeningspanel: menu M2 ->
G2.4 104
5.4.6 Parametre for udvigelse af frekvens (betjeningspanel: menu M2 -> G2.5)
105
5.4.7 Styreparametre for motor (betjeningspanel: menu M2 -> G2.6) 106
5.4.8 Sikringssystemer (betjeningspanel: menu M2 -> G2.7 108
5.4.9 Parameter for autogenstart (betjeningspanel: Menu M2 -> G2.8) 110
5.4.10 Panelstyring (betjeningspanel: menu M3) 110
5.4.11 Systemmenu (betjeningspanel: menu M6) 111
5.4.12 Udvidelseskort (betjeningspanel: Menu M7 111
6 Applikation til multifunktionsstyring 112
6.1 Introduktion 112
6.2 Styrings-I/O 114
6.3 Styringssignallogik i applikation til multifunktionsstyring 116
6.4 Applikation til multifunktionsstyring – parameterliste 116
6.4.1 Overvågningsværdier (betjeningspanel: menu M1) 116
6.4.2 Basisparametre (betjeningspanel: menu M2 -> G2.1) 128
6.4.3 Indgangssignaler 130
6.4.4 Udgangssignaler 139
6.4.5 Kontrolparametre for frekvensomformer (betjeningspanel: menu M2 ->
G2.4 148
6.4.6 Parametre for udvigelse af frekvens (betjeningspanel: menu M2 -> G2.5)
150
6.4.7 Styreparametre for motor (betjeningspanel: menu M2 -> G2.6) 151
6.4.8 Sikringssystemer (betjeningspanel: menu M2 -> G2.7 159
6.4.9 Parameter for autogenstart (betjeningspanel: Menu M2 -> G2.8) 163
6.4.10 Fieldbus-parametre (betjeningspanel: menu M2 -> G2.9) 164
6.4.11 Kontrolparametre for moment (betjeningspanel: menu M2 -> G2.10)
166
6.4.12 NXP-frekvensomformere: Master/Follower-parametre
(Betjeningspanel: menu M2 -> G2.11) 168
6.4.13 Panelstyring (betjeningspanel: menu M3) 169
6.4.14 Systemmenu (betjeningspanel: menu M6) 170
6.4.15 Udvidelseskort (betjeningspanel: Menu M7 170
7 Applikation til pumpe- og ventilatorstyring 171
7.1 Introduktion 171
7.2 Styrings-I/O 172
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 8 INDHOLDSFORTEGNELSE
7.3 Styringssignallogik i applikation til pumpe- og ventilatorstyring 176
7.4 Applikation til pumpe- og ventilatorstyring – parameterliste 176
7.4.1 Overvågningsværdier (betjeningspanel: menu M1) 176
7.4.2 Basisparametre (betjeningspanel: menu M2 -> G2.1) 180
7.4.3 Indgangssignaler 182
7.4.4 Udgangssignaler 189
7.4.5 Kontrolparametre for frekvensomformer (betjeningspanel: menu M2 ->
G2.4 196
7.4.6 Parametre for udvigelse af frekvens (betjeningspanel: menu M2 -> G2.5)
197
7.4.7 Styreparametre for motor (betjeningspanel: menu M2 -> G2.6) 198
7.4.8 Sikringssystemer (betjeningspanel: menu M2 -> G2.7 200
7.4.9 Parameter for autogenstart (betjeningspanel: Menu M2 -> G2.8) 202
7.4.10 Parametre til styring af pumper og ventilatorer (betjeningspanel: menu
M2 -> G2.9) 203
7.4.11 Panelstyring (betjeningspanel: menu M3) 205
7.4.12 Systemmenu (betjeningspanel: menu M6) 206
7.4.13 Udvidelseskort (betjeningspanel: Menu M7 206
8 Beskrivelser af overvågningsværdier 207
9 Beskrivelser af parametre 214
9.1 Panelstyringsparametre 363
9.2 Master/Follower-funktion (kun NXP) 364
9.2.1 Fysiske forbindelser til Master/Follower-link 365
9.2.2 Den optiske fiberforbindelse mellem AC-frekvensomformerne med
OPTD2 365
9.3 Ekstern bremsestyring med yderligere grænser (id'erne 315, 316, 346 til 349, 352,
353) 365
9.4 Parametrene for motorvarmebeskyttelse (id'erne 704 til 708) 367
9.5 Parametrene for stallbeskyttelse (id'erne 709 til 712) 368
9.6 Parametrene for underbelastningsbeskyttelse (id'erne 713 til 716) 368
9.7 Fieldbus-styringsparametre (id'erne 850 til 859) 369
9.7.1 Procesdata ud (slave -> master) 369
9.7.2 Strømskalering i forskellige enhedstørrelser 370
9.7.3 Procesdata ind (master -> slave) 370
9.8 Lukket løkke-parametre (id'erne 612 til 621) 371
9.9 "Programmeringsfunktionen "TFF" (Terminal to function) 372
9.9.1 Definition af en indgang/udgang for en bestemt funktion på panel 372
9.9.2 Definering af en klemme til en bestem funktion med NCDriveprogrammeringsværktøjet 373
9.9.3 Definering af ubrugte indgange/udgange 374
9.10 Parametre for hastighedsstyring (kun applikation 6) 375
9.11 Automatisk ændring mellem frekvensomformerne (kun applikation 7) 377
9.12 Valg af interlock (P2.9.23) 379
9.13 Eksempler på valg af automatisk autoskift og interlock 380
9.13.1 Pumpe- og ventilatorautomatik med interlocks og uden autoskift 380
9.13.2 Pumpe- og ventilatorautomatik med interlocks og autoskift 380
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

INDHOLDSFORTEGNELSE VACON · 9
10 Fejlfinding 383
10.1 Fejlkoder 383
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 10 BASISAPPLIKATION
1 BASISAPPLIKATION
1.1 INTRODUKTION
Basisapplikationen er en enkel og brugervenlig applikation. Den er standardindstillingen ved
levering fra fabrikken. Basisapplikationen kan også vælges i M6 på side S6.2. Se
brugermanualen til produktet.
Den digitale indgang DIN3 kan programmeres.
Basisapplikationens parametre er forklaret i kapitel 9 Beskrivelser af parametre i denne
manual. Forklaringerne er ordnet efter parameterens individuelle id-nummer.
1.1.1 MOTORBESKYTTELSESFUNKTIONER I BASISAPPLIKATIONEN.
Basisapplikationen har stort set de samme funktioner som de andre applikationer:
Ekstern fejlbeskyttelse
•
Indgangsfaseovervågning
•
Underspændingssikring
•
Udgangsfaseovervågning
•
Jordfejlsbeskyttelse
•
Motorvarmesikring
•
Beskyttelse mod termistorfejl
•
Beskyttelse mod fieldbus-fejl
•
Beskyttelse mod slotfejl
•
Modsat de andre applikationer har basisapplikationen ingen parametre til valg af
reaktionsfunktionen eller grænseværdierne for fejlene. Yderligere oplysninger om
motorvarmesikring finder du under ID704 i kapitel 9 Beskrivelser af parametre.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
OPTA 2 / OPTA 3 *)
22
23
11
17
24
25
26
DIN4
DIN5
Spænding for
potentiometer osv.
Jordforbindelse til
reference og styringer
Jordforbindelse til
reference og styringer
Jordforbindelse til
reference og styringer
Analog indgang 2,
frekvensreference
Spænding for kontakter (se nr. 6)
Tilslut til GND eller +24 V
FEJL
Ekstern fejlindgang
Programmerbar (P2.17)
Tilslut til GND eller +24 V
Kontakt åben = ingen handling
Kontakt lukket = fejlnulstilling
Kontakt åben = ingen fejl
Kontakt lukket = fejl
Kontakt lukket = start fremad
Kontakt lukket = start bak
Open collector,
I ≤ 50 mA, U ≤ 48 VDC
DRIFT
mA
KLAR
AO1-
DO1
+24V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
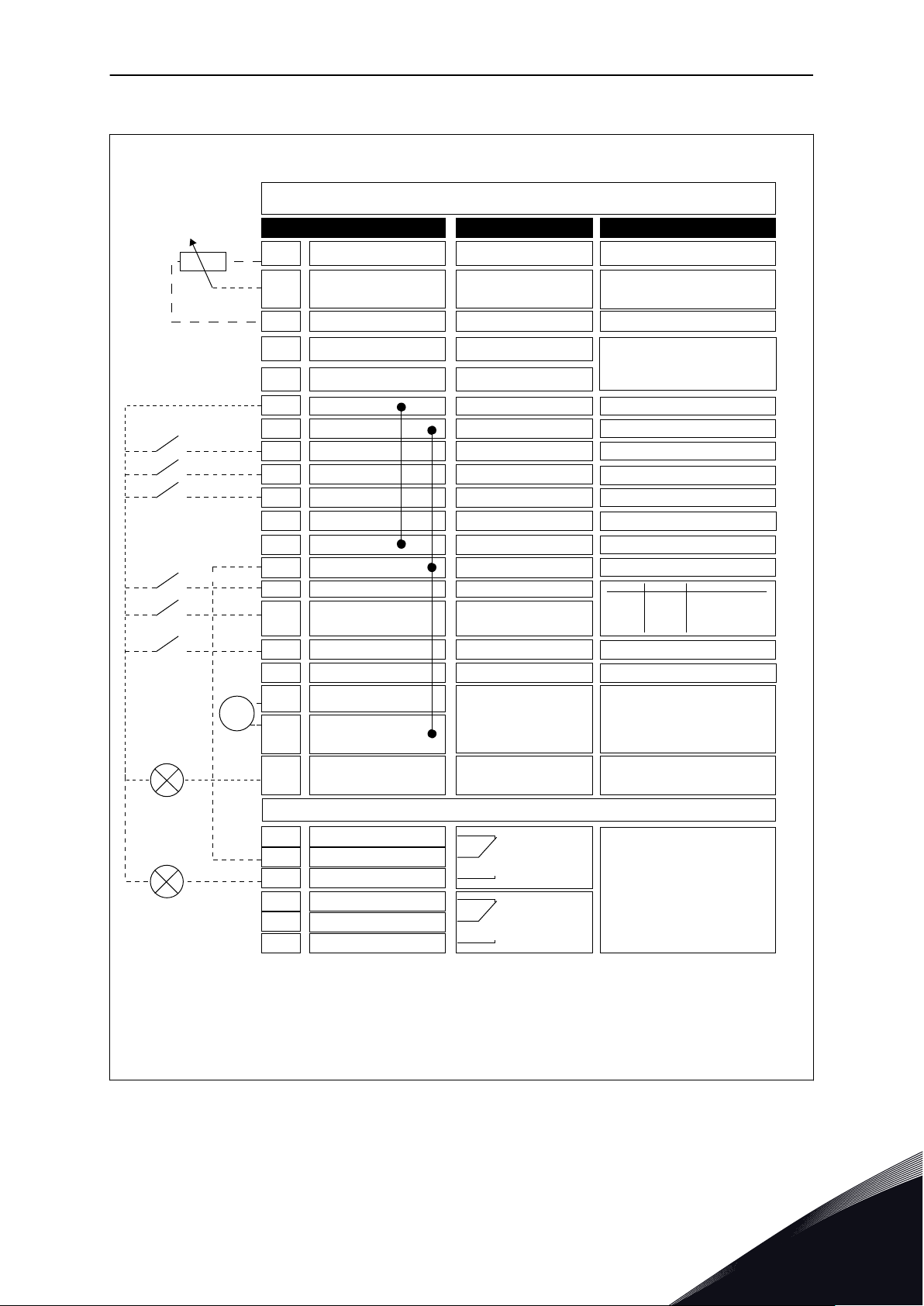
Standard I/O-kort
Terminal Signal Beskrivelse
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24V
Referenceudgang
Analog indgang 1
Spændingsområde 0-10 V DC
Programmerbar (P2.14)
Analog indgang 2
Strømområde 0-20 mA
Styringsspændingsudgang
I/O-jordforbindelse
I/O-jordforbindelse
Fast hastighed, valg 1
Fast hastighed, valg 2
Fejlnulstilling
Fælles for DIN 1-DIN 3
Fælles for DIN4-DIN6
Styringsspændingsudgang
I/O-jordforbindelse
Relæudgang 1
Relæudgang 2
AO1+
Analog indgang 1,
frekvensreference
Spænding for kontakter osv,
maks. 0,1 A
Start frem
Start bak
Frekv. ref.
Åben
Lukket
Åben
Lukket
Åben
Åben
Lukket
Lukket
I/O-ref. (P2.14)
Fast hastighed 1
Fast hastighed 2
Maks. frekvens
DRIFT
Referencepotentiometer
1-10 kΩ
Analog udgang 1,
udgangsfrekvens,
programmerbar
(P2.16)
Område 0-20 mA/RL,
maks. 500 Ω
Digital udgang 1
KLAR
BASISAPPLIKATION VACON · 11
1.2 STYRINGS-I/O
Fig. 1: Standardkonfiguration af I/O for basisapplikation
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
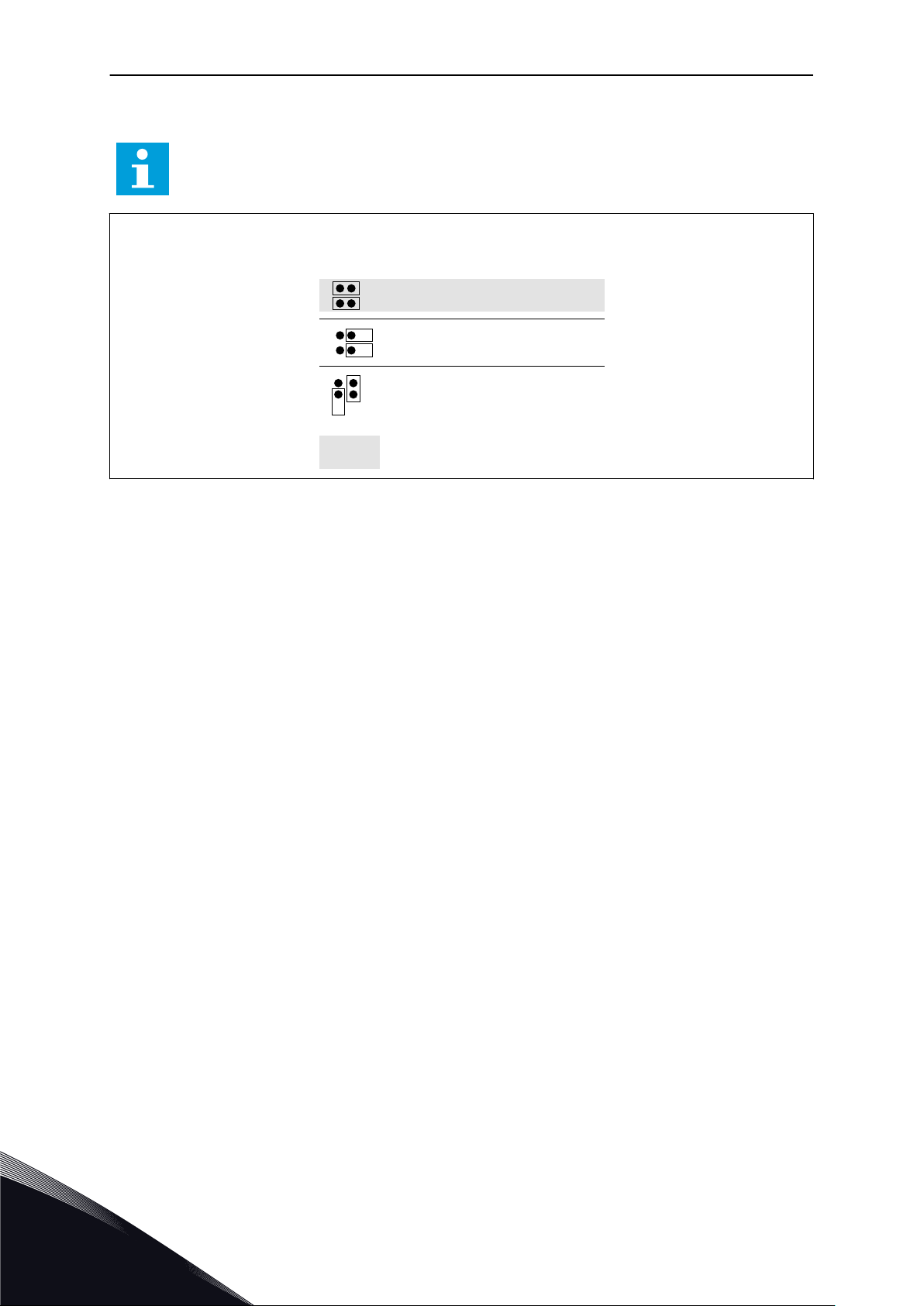
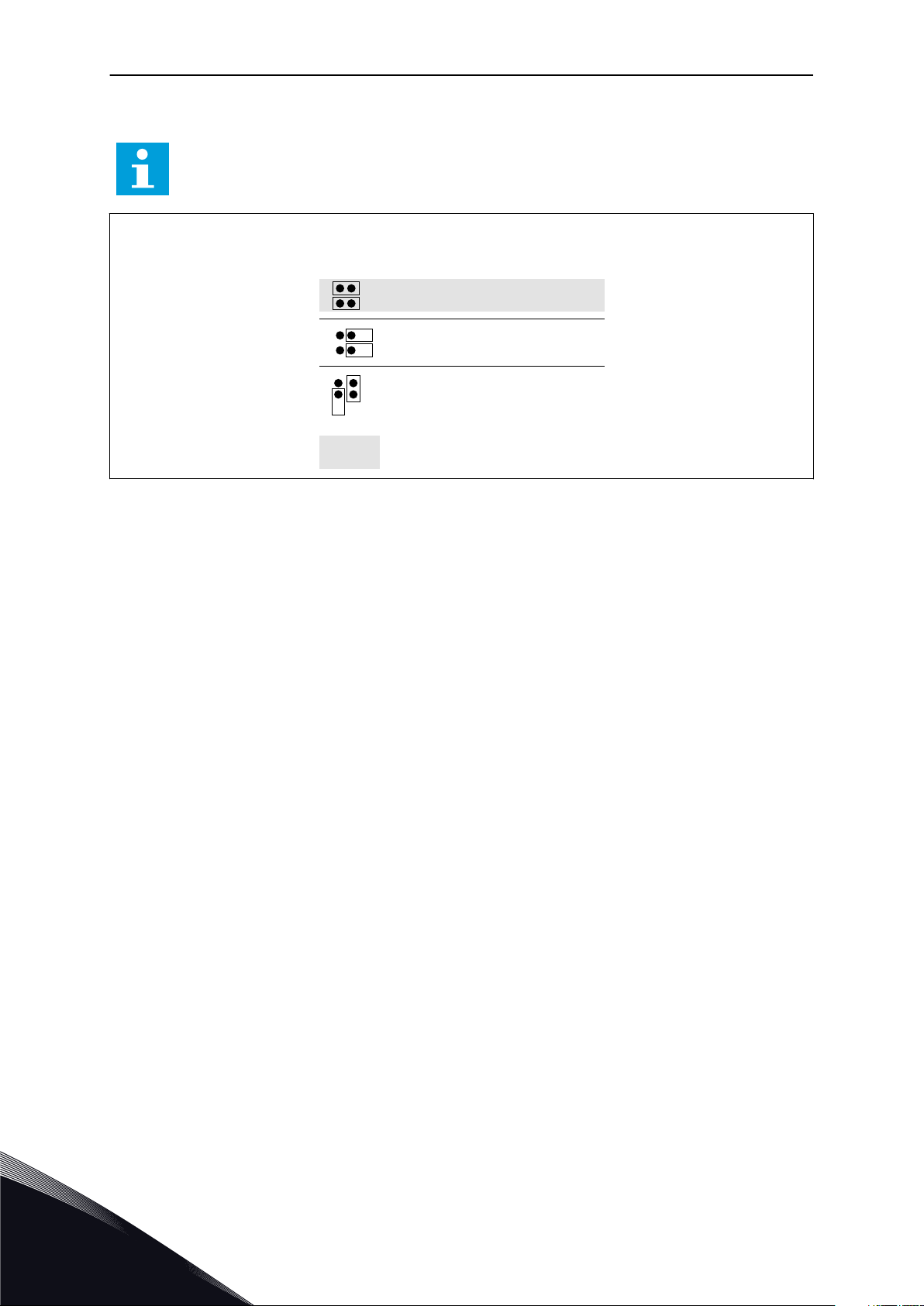
Jumperblok X3:
CMA- og CMB-jording
CMB tilsluttet til GND
CMA tilsluttet til GND
CMB isoleret fra GND
CMA isoleret fra GND
CMB og CMA er internet
forbundet; isoleret fra GND
= Fabriksstandard
VACON · 12 BASISAPPLIKATION
*) Optionskortet A3 har ingen klemme til åben kontakt på dens anden relæudgang (klemme
24 mangler).
BEMÆRK!
Se valg af jumpere herunder. Der er flere oplysninger i produktets brugermanual.
Fig. 2: Valg af jumpere
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
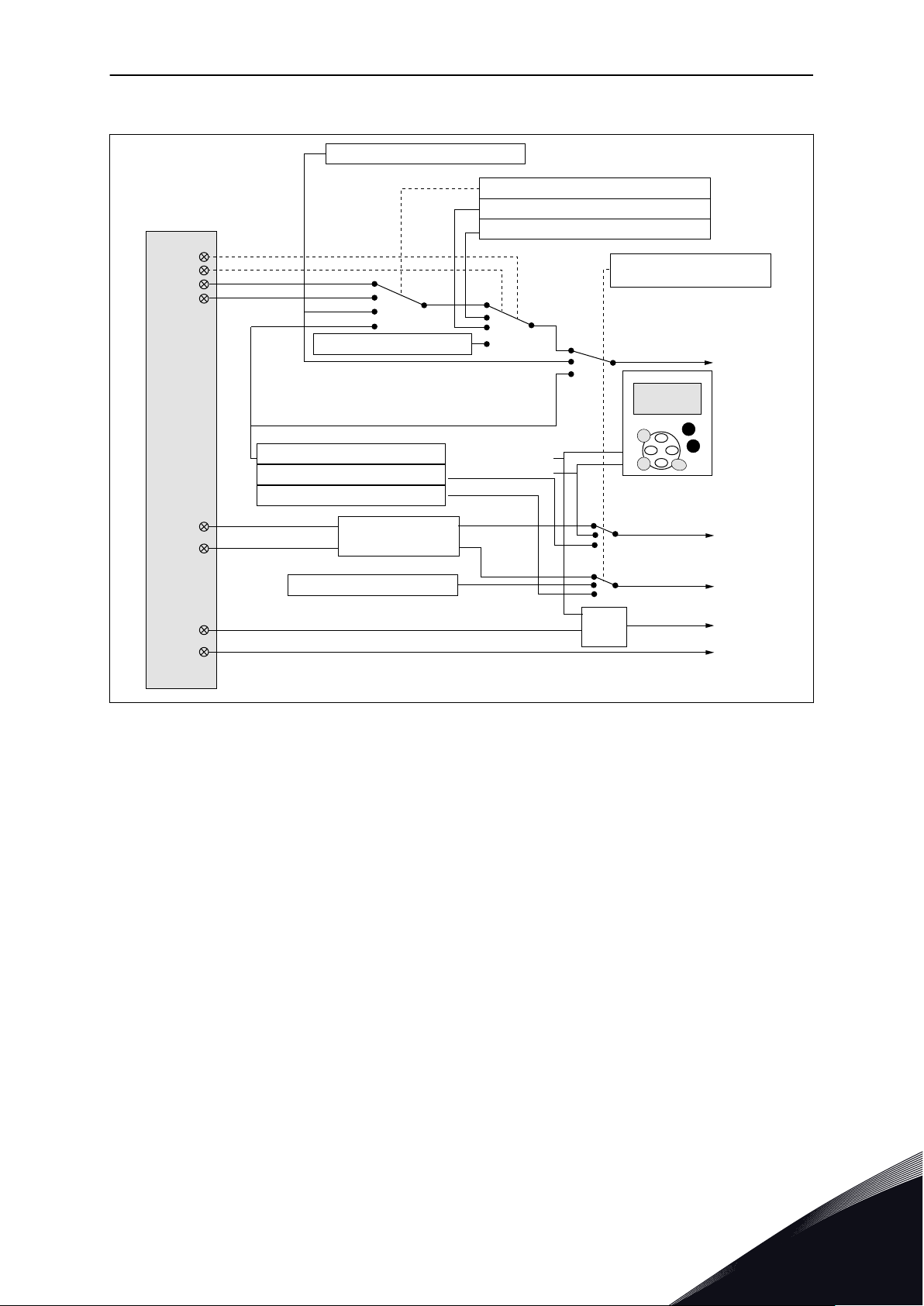
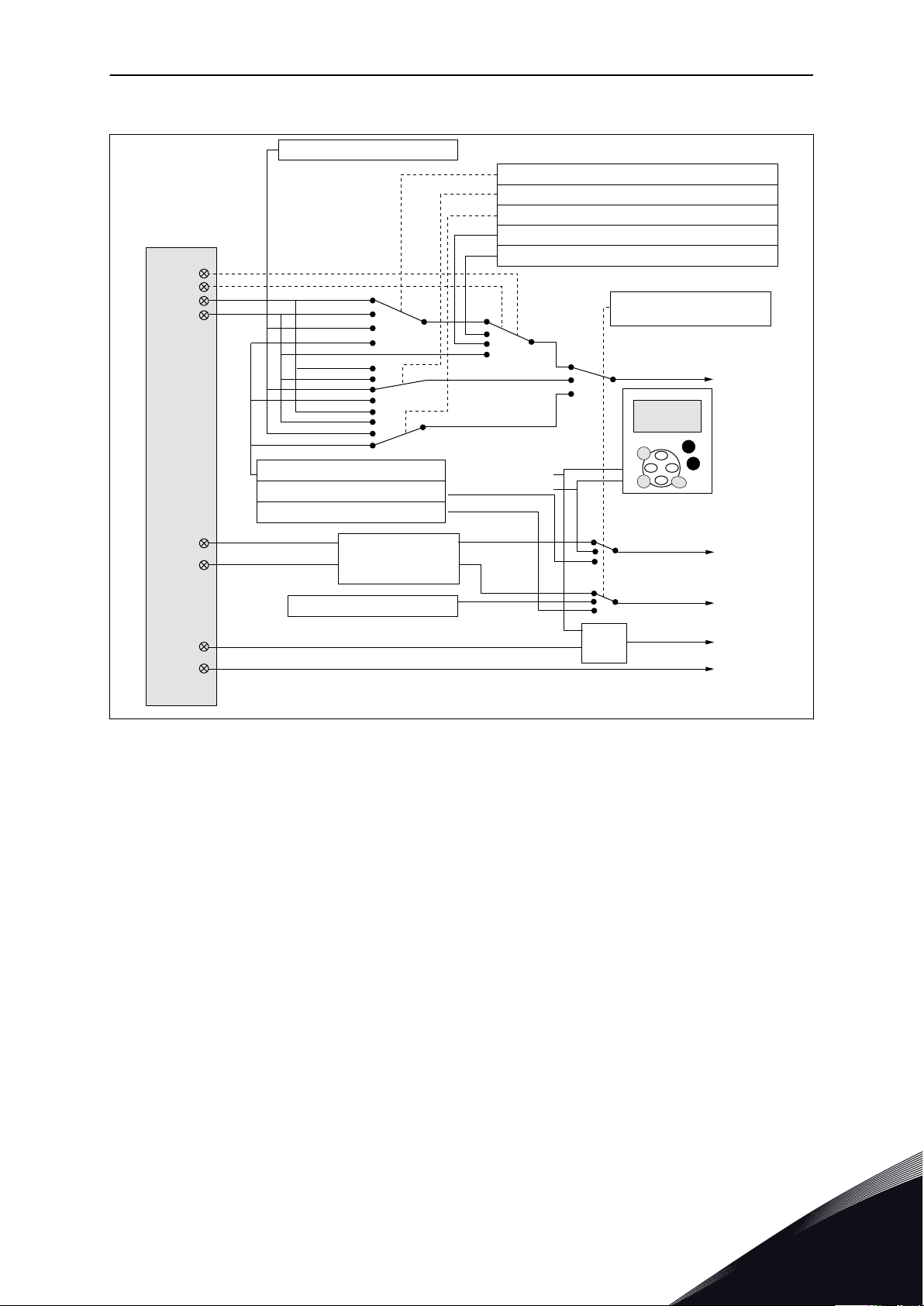
3.2 Panelreference
3.1 Styrested
Start frem
Start bak
Start/Stop
Baglæns
Intern start/stop
Intern bak
Nulstilling af intern fejl
Fejlnulstillingsindgang
Eksternfejlindgang (programmerbar)
Knappen Nulstil
Start-/stopknapper
Reference fra Fieldbus
Start/stop fra Fieldbus
Retning fra Fieldbus
3.3 Panelretning
2.14 I/O-reference
2.19 Fast hastighed 2
2.18 Fast hastighed 1
2.2 Maks. frekvens
Logik for start/
stop og bak
Intern
frekvensreference
BASISAPPLIKATION VACON · 13
1.3 STYRINGSSIGNALLOGIK I BASISAPPLIKATION
Fig. 3: Basisapplikationens styringssignallogik
1.4 BASISAPPLIKATION – PARAMETERLISTER
1.4.1 OVERVÅGNINGSVÆRDIER (BETJENINGSPANEL: MENU M1)
Overvågningsværdierne er de faktiske værdier af parametre og signaler samt statusser og
mål. Overvågningsværdier kan ikke redigeres.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 14 BASISAPPLIKATION
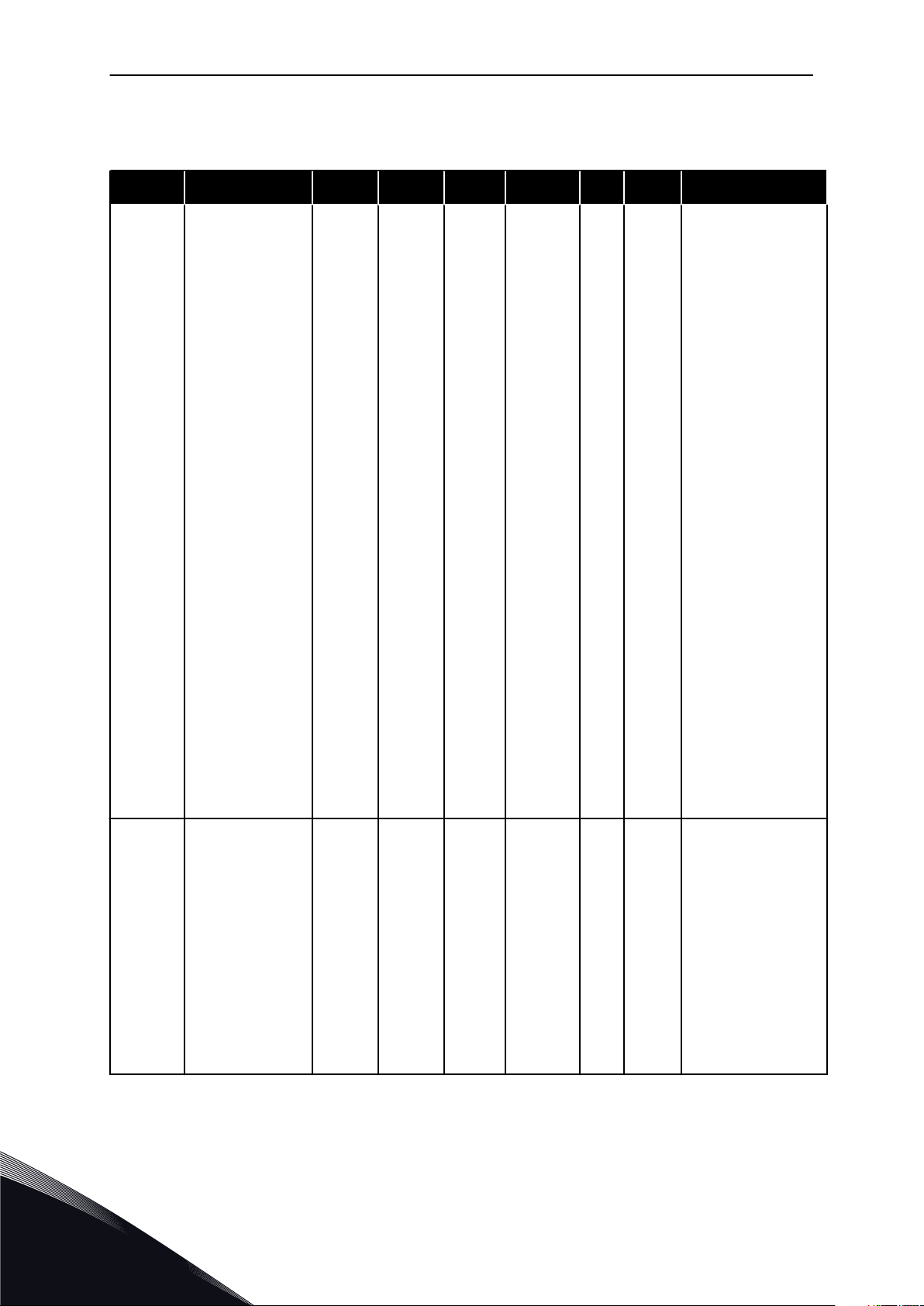
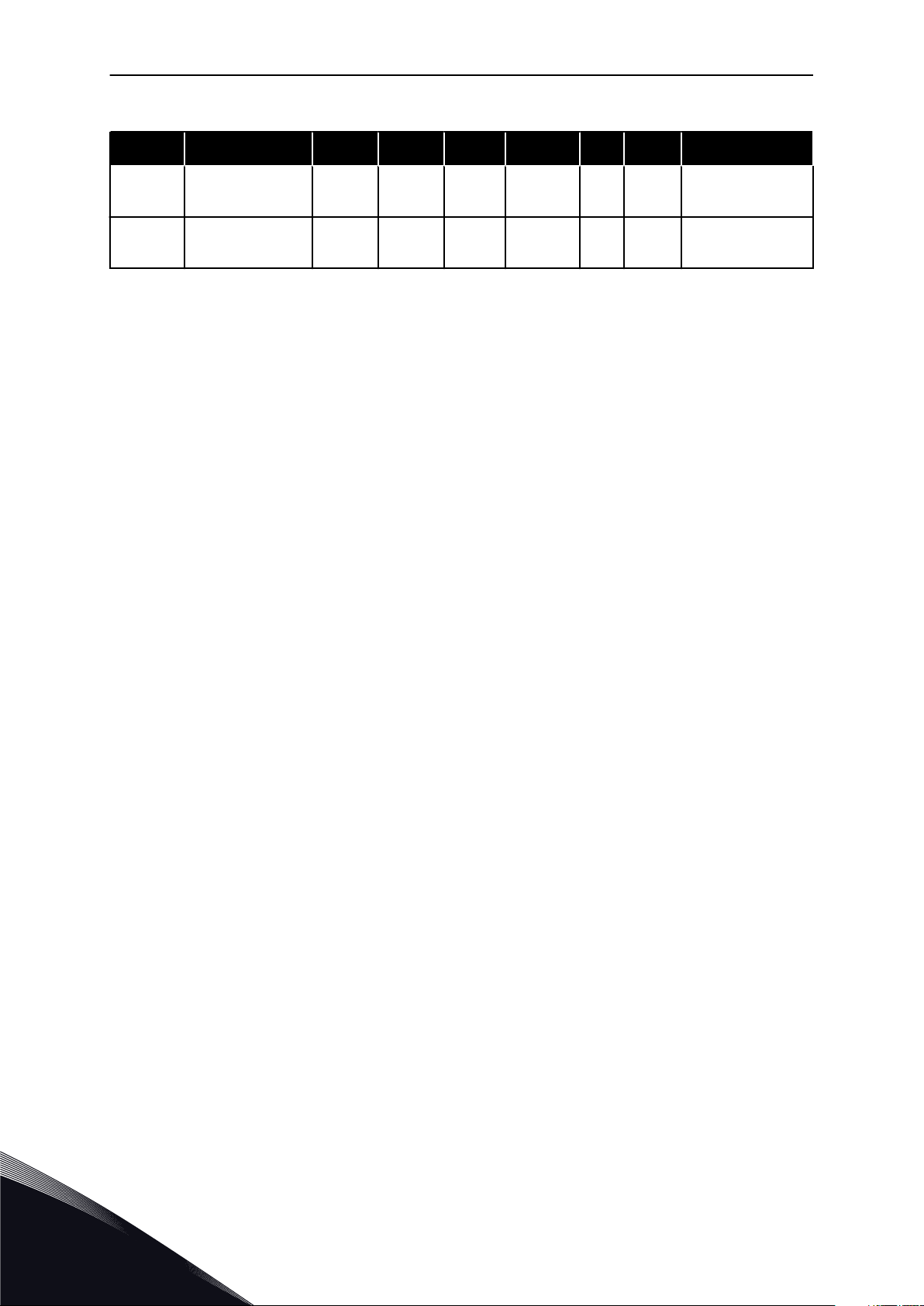
Tabel 1: Overvågningsværdier
Indeks Overvågningsværdi Unit ID Beskrivelse
V1.1 Udgangsfrekvens Hz 1
V1.2 Frekvensreference Hz 25
V1.3 Motorhastighed omdr. 2
V1.4 Motorstrøm A 3
V1.5 Motormoment % 4
V1.6 Motoreffekt % 5
V1.7 Motorspænding V 6
V1.8 DC-spænding V 7
1.9 Enhedstemperatur °C 8
1.10 Motortemperatur % 9
V1.11 Analog indgang 1 V/mA 13
V1.12 Analog indgang 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17
Elementer i multio-
vervågning
ud
mA 26
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
BASISAPPLIKATION VACON · 15
1.4.2 BASISPARAMETRE (BETJENINGSPANEL: MENU M2 -> G2.1)
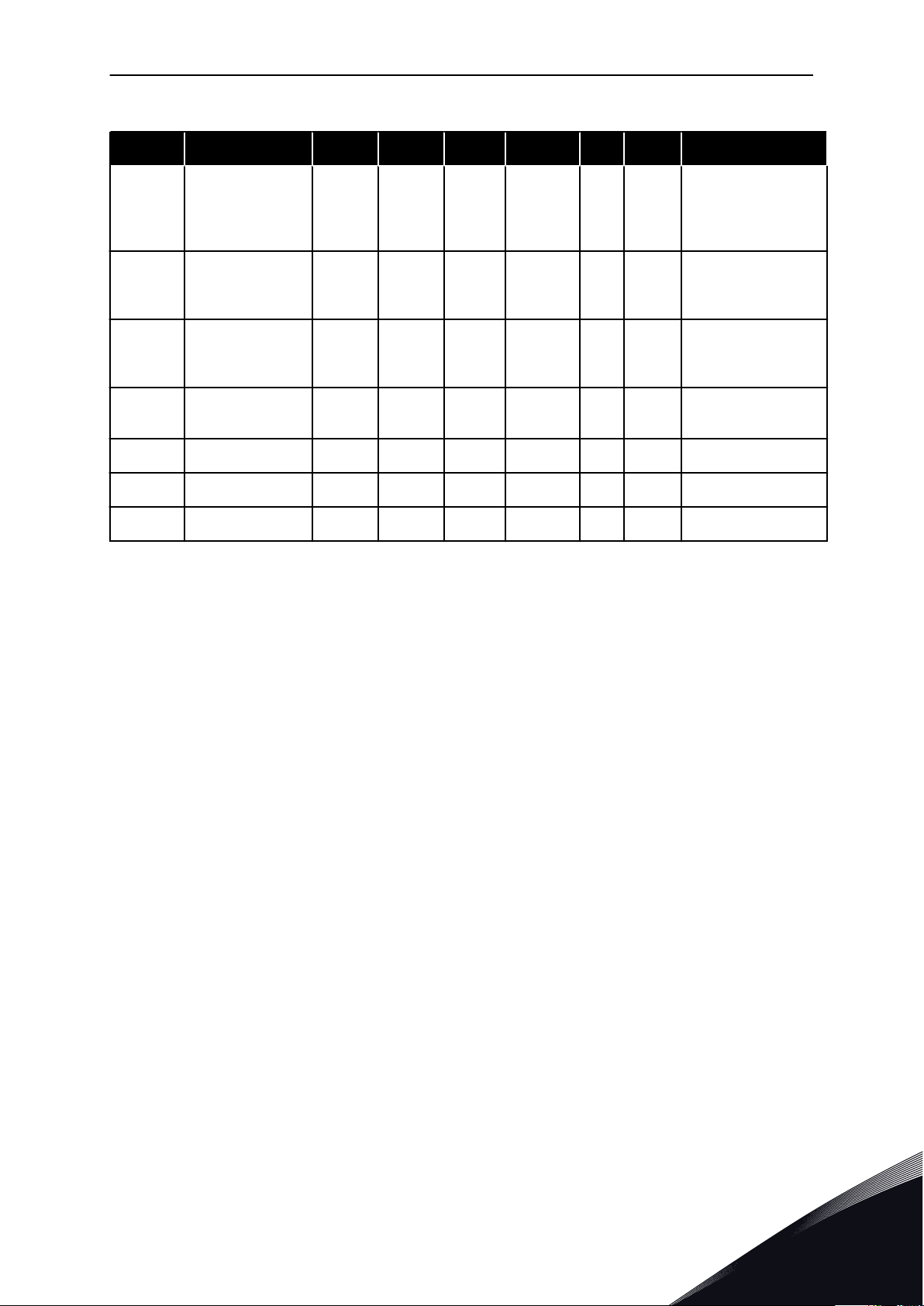
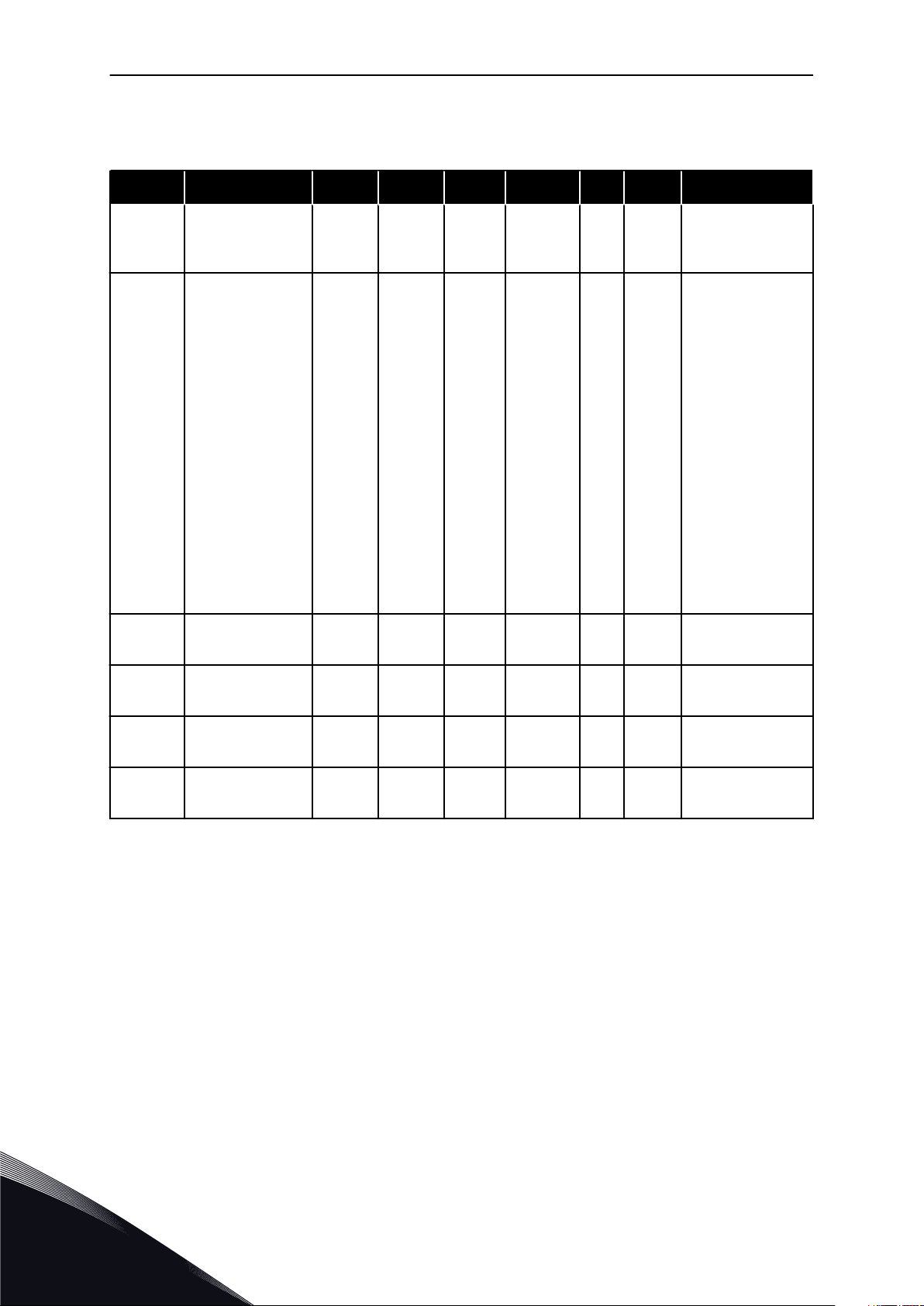
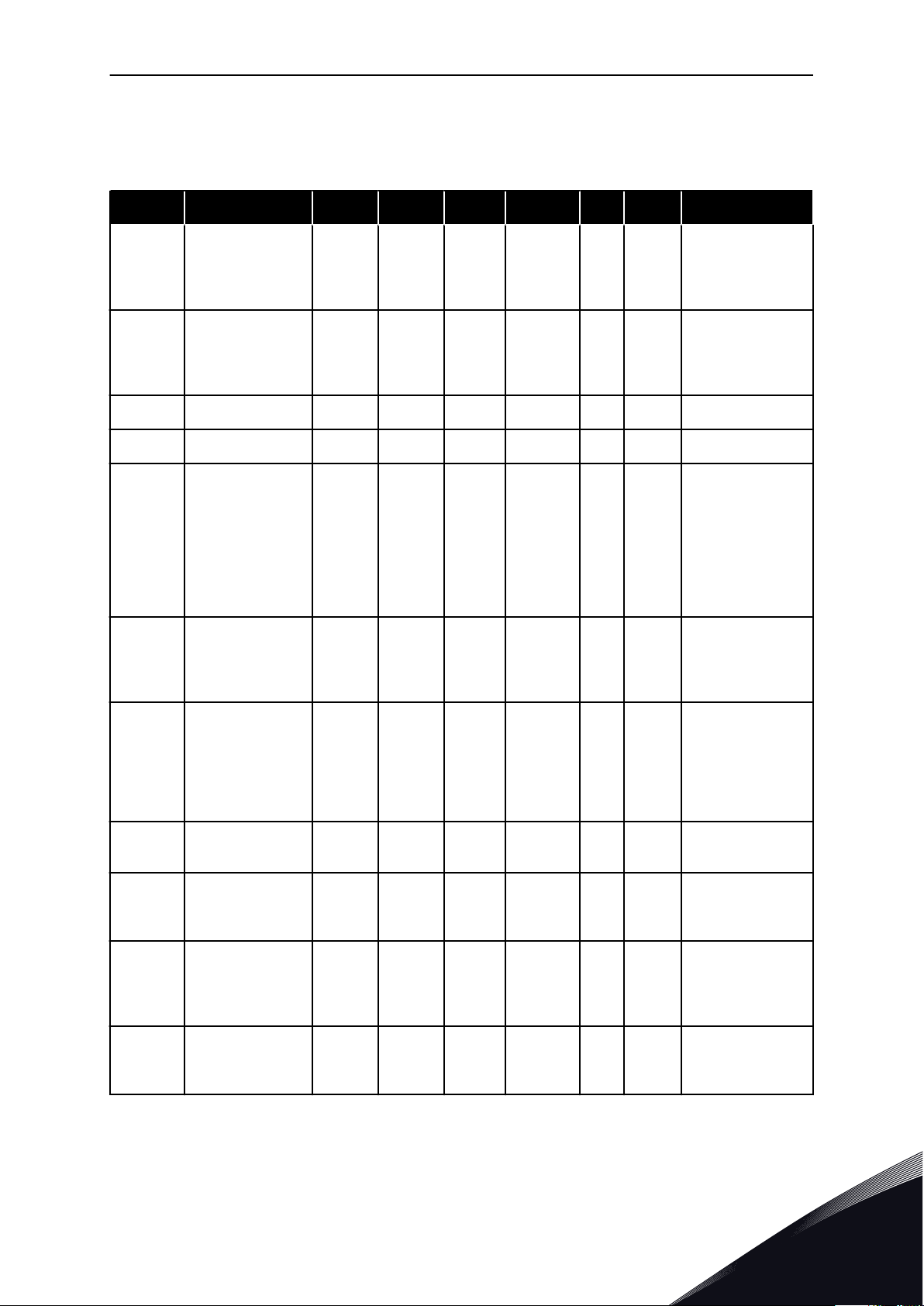
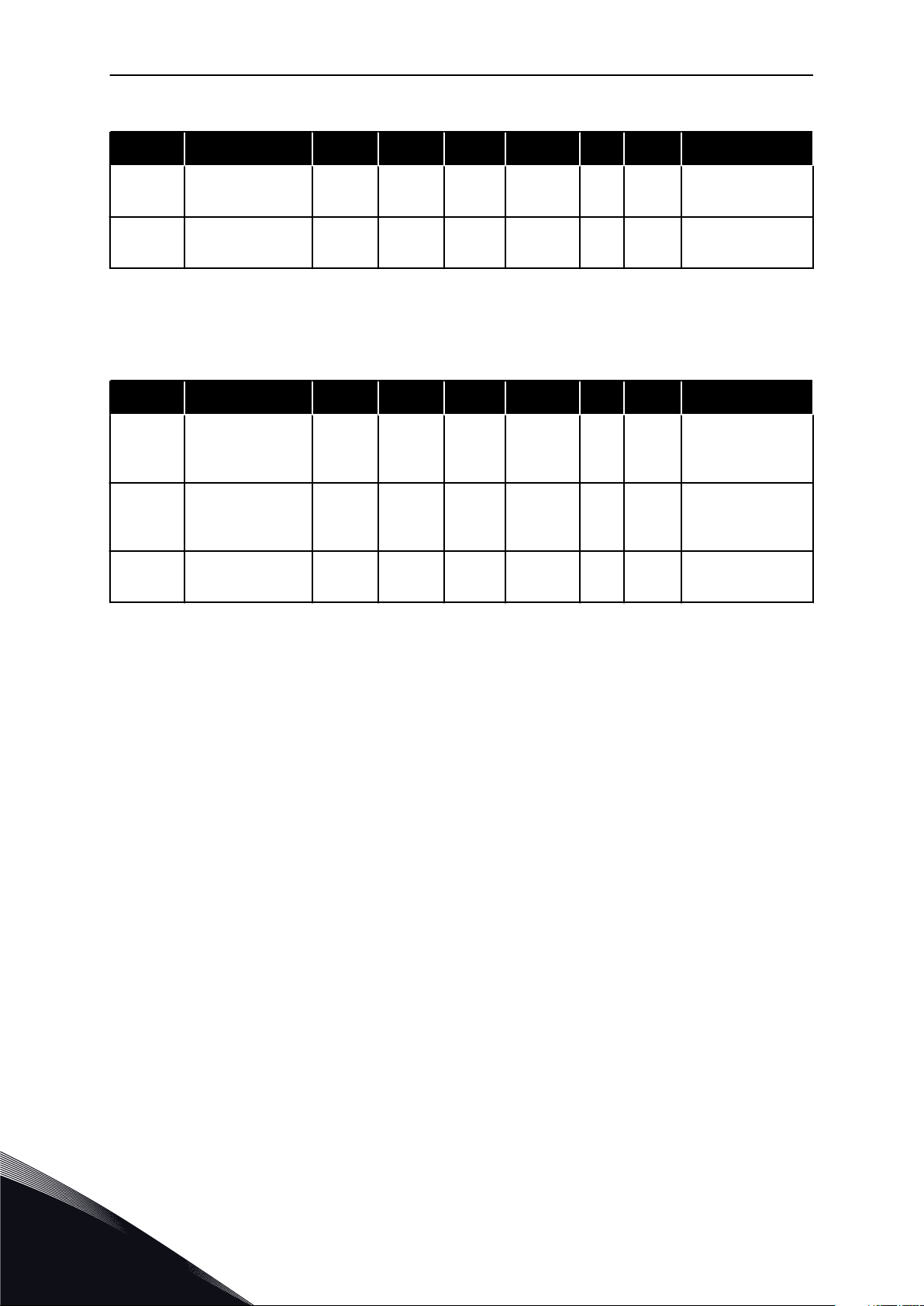
Tabel 2: Basisparametre G2.1
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.1 Min. frekvens 0.00 P2.2 Hz 0.00 101
P2.2 Maks. frekvens P2.1 320.00 Hz 50.00 102
P2.3 Accelerationstid 1 0.1 3000.0 s 3.0 103
P2.4 Decelerationstid 1 0.1 3000.0 s 3.0 104
P2.5 Aktuel grænse 0,1 x I
P2.6
P2.7
P2.8
P2.9
P2.10 Motor cos phi 0.30 1.00 0.85 120
P2.11 Startfunktion 0 2 0 505
Nominel motor-
spænding
Nominel motor-
frekvens
Nominel motorha-
stighed
Nominel motor-
spænding
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 omdr. 1440 112
0,1 x I
2 x I
H
H
2 X I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
A I
L
V
V
V
H
107
110
113
0 = Rampe
1 = Flyvende start
2 = Betinget flyvende start
P2.12 Stopfunktion 0 3 0 506
P2.13 U/f-optimering 0 1 0 109
P2.14 I/O-reference 0 3 0 117
0 = Friløb
1 = 2 = Rampe +
Drift aktiveret –
friløb
Rampe
3 = Friløb + Drift
aktiveret – rampe
0 = Anvendes ikke
1 = Automatisk
momentforstærkning
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 16 BASISAPPLIKATION
Tabel 2: Basisparametre G2.1
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Analog indgang 2,
P2.15
P2.16
P2.17 DIN3-funktion 0 7 1 301
referenceforskyd-
ning
Analog udgangs-
funktion
0 1 1 302
0 8 1 307
0 = 0-20 mA
1 = 4-20 mA
0 = Anvendes ikke
1 = udgangsfrek.
(0-f
2 = frekvensreference (0-f
3 = Motorhastighed
(0 - Nominel
motorhastighed)
4 = Udgangsstrøm
(0-I
5 = Motormoment
(0-T
6 = Motoreffekt (0P
nMotor
7 = Motorspænding
(0-U
8 = DC-spænding
(0-1000 V)
0 = Anvendes ikke
1 = Ekst. fejl, lukkekont.
2 = Ekst. fejl, åbnekont.
3 = Drift aktiveret,
lukkekont.
4 = Drift aktiveret,
åbnekont.
5 = Tving styrested
til I/O
6 = Tving styrested
til panel
7 = Tving styrested
til fieldbus
maks.
nMotor
nMotor
)
nMotor
)
maks.
)
)
)
)
P2.18
P2.19 Fast hastighed 2 0.00 P2.2 Hz 50.00 106
P2.20
Fast hastighed 1 0.00 P2.2 Hz 0.00 105
Automatisk gen-
start
0 1 0 731
1.4.3 PANELSTYRING (BETJENINGSPANEL: MENU M3)
Parametrene for valg af styrested og retning på panel er angivet herunder. Se
panelstyringsmenuen i produktets brugermanual.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Deaktiveret
2 = Aktiveret
BASISAPPLIKATION VACON · 17
Tabel 3: Panelstyringsparametre, M3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
1 = I/0-klemme
P3.1 Styrested 1 3 1 125
2 = Betjeningspanel
3 = Fieldbus
P3.2
P3.3 Retning (på panel) 0 1 0 123
R3.4 Stopknap 0 1 1 114
Betjeningspanel-
reference
P2.1 P2.2 Hz 0.00
0 = Stopknappen
har begrænset
funktion
1 = Stopknappen er
altid aktiveret
1.4.4 SYSTEMMENU (BETJENINGSPANEL: MENU M6)
Se i produktets brugermanual, når det gælder parametre og funktioner, der er relateret til
den generelle brug af AC-frekvensomformeren som f.eks. valg af applikation og sprog,
tilpassede parametersæt eller oplysninger om hardware og software.
1.4.5 UDVIDELSESKORT (BETJENINGSPANEL: MENU M7
Menu M7 viser de udvidelses- og optionskort, der er monteret på styrekortet, samt
kortrelaterede oplysninger. Der er flere oplysninger i produktets brugermanual.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 18 STANDARDAPPLIKATION
2 STANDARDAPPLIKATION
2.1 INTRODUKTION
Vælg standardapplikationen i menu M6 på side S6.2.
Standardapplikationen bruges typisk i pumpe- og ventilatorapplikationer samt til
transportbælter, for hvor hvilke basisapplikationen er for begrænset, men hvor der ikke
kræves nogen særlige funktioner.
Standardapplikationen har de samme I/O-signaler og den samme styringslogik som
•
basisapplikationen.
Den digitale indgang DIN3 og alle udgangene kan frit programmeres.
•
Yderligere funktioner:
Programmerbar signallogik for start/stop og baglæns
•
Referenceskalering
•
Overvågning af en frekvensgrænse
•
Programmering af sekundramper og ramper i S-form
•
Programmerbare start- og stopfunktioner
•
Jævnstrømsbremsning ved stop
•
Et forbudt frekvensområde
•
Programmerbar U/f-kurve og switchfrekvens
•
Autogenstart
•
Varme- og stallbeskyttelse af motor: Programmerbar handling; fra, advarsel, fejl
•
Standardapplikationens parametre er forklaret i kapitel 9 Beskrivelser af parametre i denne
manual. Forklaringerne er ordnet efter parameterens individuelle id-nummer.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
DIN4
DIN5
mA
KLAR
DRIFT
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Terminal Signal Beskrivelse
+10 Vref
AI1+
AI1-
AI2+
AI2-
+24V
Referenceudgang
I/O-jordforbindelse
Analog indgang 2
Strømområde
0-20 mA
Styringsspændingsudgang
I/O-jordforbindelse
Start frem Programmerbar
logik (P2.2.1)
Start bak
Ri min. = 5 kΩ
Ekstern fejlindgang
Programmerbar (P2.2.2)
Fast hastighed, valg 1
Fast hastighed, valg 2
Fejlnulstilling
Fælles for DIN 1-DIN 3
Fælles for DIN4-DIN6
Styringsspændingsudgang
I/O-jordforbindelse
Analog udgang 1
Udgangsfrekvens
Programmerbar (P2.3.2)
Digital udgang 1
KLAR
Programmerbar (P2.3.7)
Open collector, I ≤ 50 mA,
U ≤ 48 VDC
Relæudgang 1
DRIFT
Programmerbar
(P2.3.8)
Relæudgang 2
FEJL
Programmerbar
(P2.3.9)
Område 0-20 mA/RL,
maks. 500 Ω
Tilslut til GND eller +24 V
Kontakt åben = ingen handling
Kontakt lukket = fejlnulstilling
AO1+
Analog indgang 1,
frekvensreference
Jordforbindelse til
reference og styringer
Analog indgang 2,
frekvensreference
Kontakt lukket = start fremad
Kontakt lukket = start bak
Kontakt åben = ingen fejl
Kontakt lukket = fejl
Frekv. ref.
Åben
Lukket
Åben
Lukket
Åben
Åben
Lukket
Lukket
I/O-reference
Fast hastighed 1
Fast hastighed 2
Analog indgang 2
Spænding for potentiometer
osv.
Analog indgang 1
Spændingsområde 0-10 V DC
Programmerbar (P2.1.11)
Spænding for kontakter osv,
maks. 0,1 A
Spænding for kontakter (se nr. 6)
Tilslut til GND eller +24 V
Jordforbindelse til reference
og styringer
Jordforbindelse til reference
og styringer
Referencepotentiometer
1-10 kΩ
STANDARDAPPLIKATION VACON · 19
2.2 STYRINGS-I/O
Fig. 4: Standardkonfiguration af I/O for standardapplikation
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Jumperblok X3:
CMA- og CMB-jording
CMB tilsluttet til GND
CMA tilsluttet til GND
CMB isoleret fra GND
CMA isoleret fra GND
CMB og CMA er internet
forbundet; isoleret fra GND
= Fabriksstandard
VACON · 20 STANDARDAPPLIKATION
*) Optionskortet A3 har ingen klemme til åben kontakt på dens anden relæudgang (klemme
24 mangler).
BEMÆRK!
Se valg af jumpere herunder. Der er flere oplysninger i produktets brugermanual.
Fig. 5: Valg af jumpere
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Panelreference
3.1 Styrested
Start frem
Start bak
Start/Stop
Baglæns
Intern start/stop
Intern bak
Nulstilling af intern fejl
Fejlnulstillingsindgang
Eksternfejlindgang (programmerbar)
Knappen
Nulstil
Start-/stopknapper
Reference fra Fieldbus
Start/stop fra Fieldbus
Retning fra Fieldbus
3.3 Panelretning
2.1.13 Fieldbus-styrereference
2.1.15 Fast hastighed 2
2.1.14 Fast hastighed 1
2.1.11 I/O-reference
2..1.12 Panelstyrehastighed 1
Programmerbar
logik for start/stop
og baglæns
Intern
frekvensreference
(programmerbar)
(programmerbar)
STANDARDAPPLIKATION VACON · 21
2.3 STYRINGSSIGNALLOGIK I STANDARDAPPLIKATION
Fig. 6: Standardapplikationens styringssignallogik
2.4 STANDARDAPPLIKATION – PARAMETERLISTER
2.4.1 OVERVÅGNINGSVÆRDIER (BETJENINGSPANEL: MENU M1)
Overvågningsværdierne er de faktiske værdier af parametre og signaler samt statusser og
mål. Overvågningsværdier kan ikke redigeres.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 22 STANDARDAPPLIKATION
Tabel 4: Overvågningsværdier
Indeks Overvågningsværdi Unit ID Beskrivelse
V1.1 Udgangsfrekvens Hz 1
V1.2 Frekvensreference Hz 25
V1.3 Motorhastighed omdr. 2
V1.4 Motorstrøm A 3
V1.5 Motormoment % 4
V1.6 Motoreffekt % 5
V1.7 Motorspænding V 6
V1.8 DC-spænding V 7
1.9 Enhedstemperatur °C 8
1.10 Motortemperatur % 9
V1.11 Analog indgang 1 V/mA 13
V1.12 Analog indgang 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17
Elementer i multio-
vervågning
ud
mA 26
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARDAPPLIKATION VACON · 23
2.4.2 BASISPARAMETRE (BETJENINGSPANEL: MENU M2 -> G2.1)
Tabel 5: Basisparametre G2.1
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.1.1 Min. frekvens 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Maks. frekvens P2.1.1 320.00 Hz 50.00 102
P2.1.3 Accelerationstid 1 0.1 3000.0 s 0.0 103
P2.1.4 Decelerationstid 1 0.1 3000.0 s 0.0 104
P2.1.5 Aktuel grænse 0,1 x I
P2.1.6
P2.1.7
P2.1.8
P2.1.9
P2.1.10 Motor cos phi 0.30 1.00 0.85 120
P2.1.11 I/O-reference 0 3 0 117
Nominel motor-
spænding
Nominel motor-
frekvens
Nominel motorha-
stighed
Nominel motor-
spænding
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 omdr. 1440 112
0,1 x I
2 x I
H
H
2 X I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
A I
L
V
V
V
H
107
110
113
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
P2.1.12
P2.1.13
P2.1.14 Fast hastighed 1 0.00 P2.1.2 Hz 10.00 105
P2.1.15 Fast hastighed 2 0.00 P2.1.2 Hz 50.00 106
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Panelstyringsre-
ference
Fieldbus-styrings-
reference
0 3 2 121
0 3 3 122
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
2
VACON · 24 STANDARDAPPLIKATION
2.4.3 INDGANGSSIGNALER (BETJENINGSPANEL: MENU M2 -> G2.2)
Tabel 6: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Logik = 0
Styresignal 1 = Start
frem
Styresignal 2 = Start
bak
Logik = 1
Styresignal 1 = Start/
stop
Styresignal 2 = Baglæns
Logik = 2
Styresignal 1 = Start/
stop
Styresignal 2 = Drift
aktiveret
Logik = 3
Styresignal 1 = Star-
P2.2.1 Start/Stop-logik 0 6 0 300
timpuls (kant)
Styresignal 2 = Stopimpuls
Logik = 4
Styresignal 1 =
Fremimpuls (kant)
Styresignal 2 = Bakimpuls (kant)
Logik = 5
Styresignal 1 = Startimpuls (kant)
Styresignal 2 = Bakimpuls
Logik = 6
Styresignal 1 = Startimpuls (kant)
Styresignal 2 = Aktiveringsimpuls
2
P2.2.2
DIN3-funktion 0 8 1 301
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Anvendes ikke
1 = Ekst. fejl, lukkekont.
2 = Ekst. fejl, åbnekont.
3 = Drift mulig
4 = Acc./dec.tidsvalg
5 = Tving styrested til
I/O
6 = Tving styrested til
panel
7 = Tving styrested til
fieldbus
8 = Baglæns
STANDARDAPPLIKATION VACON · 25
Tabel 6: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Analog indgang 2
P2.2.3
P2.2.4
P2.2.5
P2.2.6
P2.2.7 Referencefiltertid 0.00 10.00 sek. 0.10 306 0 = Ingen filtrering
P2.2.8 *** AI1-signalvalg A1 377
P2.2.9 *** AI2-signalvalg A2 388
– referencefor-
skydning
Minimumsværdi
for referenceska-
lering
Maksimumsværdi
for referenceska-
lering
Referenceinver-
sion
0 1 1 302
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
0 1 0 305
0 = 0-20 mA (0-10 V)
**
1 = 4-20 mA (2-10 V)
**
0 = Ikke inverteret
1 = Inverteret
** = Husk at placere jumperne til blok X2 derefter. Se brugermanualen til produktet.
*** = Brug TTF-metoden til at programmere disse parametre.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 26 STANDARDAPPLIKATION
2.4.4 UDGANGSSIGNALER (BETJENINGSPANEL: MENU M2 -> G2.3
Tabel 7: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Valg af analogt
P2.3.1
P2.3.2
signal for udgang
1
Analog udgangs-
funktion
0 A.1 464
0 8 1 307
0 = Ikke anvendt
(20 mA/10 V)
1 = udgangsfrek.
(0-f
2 = frekvensreference (0-f
3 = Motorhastighed
(0 - Nominel
motorhastighed)
4 = motorstrøm (0I
nMotor
5 = Motormoment
(0-T
6 = Motoreffekt (0P
nMotor
7 = Motorspænding
(0-U
8 = DC-spænding
(0-1000 V)
maks.
)
nMotor
nMotor
)
)
maks.
)
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Filtreringstid for
analog udgang
Inversion af ana-
log udgang
Analog udgang
minimum
Skalering af ana-
log udgang
0.00 10.00 sek. 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Ingen filtrering
0 = Ikke inverteret
1 = Inverteret
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARDAPPLIKATION VACON · 27
Tabel 7: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Anvendes ikke
1 = Klar
2 = Drift
3 = Fejl
4 = Fejl inverteret
5 = Advarsel om
FC-overophedning
6 = Ekstern fejl
eller advarsel
7 = Fejl eller
advarsel for reference
P2.3.7
Funktionen til
digital udgang 1
0 16 1 312
8 = Advarsel
9 = Omvendt
10 = Fast hastighed 1
11 = I fart
12 = Motorregulator aktiv
13 = Åben frekvensgrænse 1 –
overvågn.
14 = Styrested: I/O
15 = Termistorfejl/-advarsel
16 = Fieldbus-DIN1
P2.3.8
P2.3.9 RO2-funktion 0 16 3 314
P2.3.10
P2.3.11
P2.3.12 *
P2.3.13
P2.3.14
P2.3.15
RO1-funktion 0 16 2 313
Overvågning af
udgangsfrekvens-
grænse 1
Udgangsfrekvensgrænse 1; overvå-
get værdi
Valg af analogt
signal for udgang
2
Funktion til ana-
log udgang 2
Filtertid for ana-
log udgang 2
Inversion af ana-
log udgang 2
0 2 0 315
0.00 320.00 Hz 0.00 316
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 sek. 1.00 473
0 1 0 474
Som parameter
2.3.7
Som parameter
2.3.7
0 = Ingen grænse
1 = Overvågning af
nedre grænse
2 = Overvågning af
øvre grænse
Som parameter
2.3.2
0 = Ingen filtrering
0 = Ikke inverteret
1 = Inverteret
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 28 STANDARDAPPLIKATION
Tabel 7: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.3.16
P.2.3.17
Analog udgang 2 –
minimum
Skalering af ana-
log udgang 2
0 1 0 475
10 1000 % 1.00 476
* = Brug TTF-metoden til at programmere disse parametre.
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARDAPPLIKATION VACON · 29
2.4.5 KONTROLPARAMETRE FOR FREKVENSOMFORMER (BETJENINGSPANEL: MENU M2 -> G2.4
Tabel 8: Kontrolparametre for frekvensomformer, G2.4
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Lineær
P2.4.1 Rampe 1-form 0.0 10.0 s 0.1 500
P2.4.2 Rampe 2-form 0.0 10.0 s 0.0 501
P2.4.3 Accelerationstid 2 0.1 3000.0 sek. 1.0 502
P2.4.4 Decelerationstid 2 0.1 3000.0 sek. 1.0 503
P2.4.5 Bremsechopper 0 4 0 504
100 = fuld acc./
dec., tider for øgn./
red.
0 = Lineær
100 = fuld acc./
dec., tider for øgn./
red.
0 = Deaktiveret
1 = Anvendt i drift
2 = Ekstern bremsechopper
3 = Anvendt ved
stop/i drift
4 = anvendt i drift
(ingen test)
P2.4.6 Startfunktion 0 2 0 505
P2.4.7 Stopfunktion 0 3 0 506
P2.4.8
P2.4.9
P2.4.10
P2.4.11
Bremsejævn-
strøm
Jævnstrøms-
bremsetid ved
stop
Frekvens til start
af jævnstrøms-
bremsning ved
rampestop
Jævnstrøms-
bremsetid ved
start
0.00 I
0.00 600.00 sek. 0.00 508
0.10 10.00 Hz 1.50 515
0.00 600.00 sek. 0.00 516
L
A 0,7 x I
H
507
0 = Rampe
1 = Flyvende start
2 = Betinget flyvende start
0 = Friløb
1 = rampe
2 = Rampe + Drift
aktiveret – friløb
3 = Friløb + Drift
aktiveret – rampe
0 = Jævnstrømsbremsning er fra
ved stop
0 = Jævnstrømsbremsning er fra
ved start
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 30 STANDARDAPPLIKATION
Tabel 8: Kontrolparametre for frekvensomformer, G2.4
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.4.12 * Flux-bremse 0 1 0 520
P2.4.13
Flux-bremse-
strøm
0.00 I
L
A I
H
0 = Fra
0 = Til
519
2.4.6 PARAMETRE FOR UDVIGELSE AF FREKVENS (BETJENINGSPANEL: MENU M2 -> G2.5)
Tabel 9: Parametre for undvigelse af frekvens, G2.5
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Undvigelse af fre-
P2.5.1
P2.5.2
P2.5.3
kvensområde 1,
nedre grænse
Undvigelse af fre-
kvensområde 1,
øvre grænse
Undvigelse af
acc./dec.-rampe
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.1 10.0 x 1.0 518
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STANDARDAPPLIKATION VACON · 31
2.4.7 STYREPARAMETRE FOR MOTOR (BETJENINGSPANEL: MENU M2 -> G2.6)
Tabel 10: Styreparametre for motor, G2.6
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Frekvensstyring
1 = Hastighedsstyring
NXP:
P2.6.1 *
P2.6.2 * U/f-optimering 0 1 0 109
Motorstyringstil-
stand
0 1/3 0 600
2 = Momentstyring
for åben løkke
3 = Hastighedsstyring for lukket
løkke
4 = Momentstyring
for lukket løkke
0 = Anvendes ikke
1 = Automatisk
momentforstærkning
P2.6.3 * Valg af U/f-forhold 0 3 0 108
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9 Switchfrekvens 1.0 Varierer kHz Varierer 601
P2.6.10
Feltsvækning-
spunkt
Spænding i felt-
svækningspunktet
Midtpunktsfre-
kvens for U/f-
kurve
U/f-kurvemidt-
punktsspænding
Udgangsspænding
ved nulfrekvens
Overspændings-
controller
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varierer 606
0 2 1 607
0 = Lineær
1 = Kvadratisk
2 = Programmerbar.
3 = Lineær med
flux-optim.
0 = Anvendes ikke
1 = Anvendes
(ingen ramping)
2 = Anvendes
(ramping)
P2.6.11
P2.6.12 Belastningsfald 0.00 100.00 % 0.00 620
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Underspændings-
controller
0 1 1 608
0 = Anvendes ikke
1 = Anvendes
2
VACON · 32 STANDARDAPPLIKATION
Tabel 10: Styreparametre for motor, G2.6
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Ingen handling
1 = Identifikation
uden kørsel
2 = Identifikation
P2.6.13 Identification 0 1/2 0 631
Lukket løkke-parametergruppe 2.6.14
med kørsel
3 = Kørsel af encoder-id
4 = Ingen handling
5 = Id-kørsel mislykkedes
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
Magnetiserings-
strøm
Hastighedsstyring
– P-forstærkning
Hastighedsstyring
– I-tid
Kompensering for
acceleration
Justering for glid-
ning
Magnetiserings-
strøm ved start
Magnetiseringstid
ved start
0-hastighedstid
ved start
0-hastighedstid
ved stop
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 sek. 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
H
L
A 0.00 612
A 0.00 627
P2.6.14.11 Moment ved start 0 3 0 621
P2.6.14.12
P2.6.14.13
2
Startmoment –
FREM
Startmoment –
BAK
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Anvendes ikke
1 = Momenthukommelse
2 = Momentreference
3 = Startmoment –
frem/bak
STANDARDAPPLIKATION VACON · 33
Tabel 10: Styreparametre for motor, G2.6
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.6.14.15
P2.6.14.17
Identifikationsparametergruppe 2.6.15
P2.6.15.1 Hastighedstrin -50.0 50.0 0.0 0.0 1252
Filtreringstid for
encoder
Nuværende sty-
ring – P-forstærk-
ning
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
* = Parameterværdi kan kun ændres, når AC-frekvensomformeren er blevet stoppet.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 34 STANDARDAPPLIKATION
2.4.8 SIKRINGSSYSTEMER (BETJENINGSPANEL: MENU M2 -> G2.7
Tabel 11: Sikringssystemer, G2.7
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Ingen reaktion
1 = Advarsel
2 = Advarsel + forrige frekvens
P2.7.1
Reaktion på 4 mA
referencefejl
0 5 0 700
3 = Adv. + fast frekvens 2.7.2
4 = Fejl, stop acc.
til 2.4.7
5 = Fejl, stop ved
friløb
P2.7.2
P2.7.3
P2.7.4
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
4 mA reference-
fejlsfrekvens
Reaktion på eks-
tern fejl
Indgangsfaseo-
vervågning
Reaktion på
underspændings-
fejl
Udgangsfaseover-
vågning
Jordfejlsbeskyt-
telse
Motorvarmesik-
ring
Faktor for motors
omgivelsestempe-
ratur
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
0 1 0 727
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
0 = Fejl lagret i
historik
Fejl ikke lagret
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
2
P2.7.10
P2.7.11
P2.7.12
P2.7.13 Stall-forebyggelse 0 3 0 709
Motors kølefaktor
ved nulhastighed
Motorvarmetids-
konstant
Cyklus for motor-
drift
0.0 150.0 % 40.0 706
1 200 min. Varierer 707
0 150 % 100 708
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb

STANDARDAPPLIKATION VACON · 35
Tabel 11: Sikringssystemer, G2.7
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.7.14 Stallstrøm 0.00 2 x I
P2.7.15 Stalltidsgrænse 1.00 120.00 sek. 15.00 711
P2.7.16
P2.7.17
P2.7.18 UP fra moment 10.0 150.0 % 50.0 714
P2.7.19
P2.7.20
P2.7.21
Stallfrekvens-
grænse
Beskyttelse mod
underbelastning
UP-nulfrekvens-
belastning
Tidsgrænse for
beskyttelse mod
underbelastning
Reaktion på ter-
mistorfejl
1.0 P2.1.2 Hz 25.00 712
0 3 0 713
5.0 150.0 % 10.0 715
2.00 600.00 sek. 20.00 716
0 3 2 732
H
A I
H
710
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
P2.7.22
P2.7.23
Reaktion på field-
bus-fejl
Reaktion på slot-
fejl
0 3 2 733
0 3 2 734
Se P2.7.21
Se P2.7.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 36 STANDARDAPPLIKATION
2.4.9 PARAMETER FOR AUTOGENSTART (BETJENINGSPANEL: MENU M2 -> G2.8)
Tabel 12: Parametre for autogenstart, G2.8
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.8.1 Ventetid 0.10 10.00 s 0.50 717
P2.8.2 Prøvetid 0.00 60.00 s 30.00 718
0 = Rampe
P2.8.3 Startfunktion 0 2 0 719
Antal forsøg efter
P2.8.4
P2.8.5
underspændings-
sikring
Antal forsøg efter
overspændings-
sikring
0 10 0 720
0 10 0 721
1 = Flyvende start
2 = I henhold til
P2.4.6
P2.8.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Antal forsøg efter
overstrømssikring
Antal forsøg efter
4 mA reference-
sikring
Antal forsøg efter
motortemperatur-
fejl
Antal forsøg efter
ekstern fejl
Antal forsøg efter
fejl ved underbe-
lastning
0 3 0 722
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
2.4.10 PANELSTYRING (BETJENINGSPANEL: MENU M3)
Parametrene for valg af styrested og retning på panel er angivet herunder. Se
panelstyringsmenuen i produktets brugermanual.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STANDARDAPPLIKATION VACON · 37
Tabel 13: Panelstyringsparametre, M3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
1 = I/0-klemme
P3.1 Styrested 1 3 1 125
2 = Betjeningspanel
3 = Fieldbus
P3.2
P3.3 Retning (på panel) 0 1 0 123
R3.4 Stopknap 0 1 1 114
Betjeningspanel-
reference
P2.1 P2.2 Hz 0.00
0 = Stopknappen
har begrænset
funktion
1 = Stopknappen er
altid aktiveret
2.4.11 SYSTEMMENU (BETJENINGSPANEL: MENU M6)
Se i produktets brugermanual, når det gælder parametre og funktioner, der er relateret til
den generelle brug af AC-frekvensomformeren som f.eks. valg af applikation og sprog,
tilpassede parametersæt eller oplysninger om hardware og software.
2.4.12 UDVIDELSESKORT (BETJENINGSPANEL: MENU M7
Menu M7 viser de udvidelses- og optionskort, der er monteret på styrekortet, samt
kortrelaterede oplysninger. Der er flere oplysninger i produktets brugermanual.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 38 LOKAL-/FJERNSTYRINGSAPPLIKATION
3 LOKAL-/FJERNSTYRINGSAPPLIKATION
3.1 INTRODUKTION
Vælg lokal-/fjernstyringsapplikationen i menu M6 på side S6.2.
Med lokal-/fjernstyringsapplikationen er muligt at have to forskellige styresteder.
Frekvensreferencen kan vælges for hvert styrested enten fra panelet, I/O-klemmen eller
fieldbussen. Det aktive styrested kan vælges med den digitale indgang DIN6.
Alle udgange kan frit programmeres.
•
Yderligere funktioner:
Programmerbar signallogik for start/stop og baglæns
•
Referenceskalering
•
Overvågning af en frekvensgrænse
•
Programmering af sekundramper og ramper i S-form
•
Programmerbare start- og stopfunktioner
•
Jævnstrømsbremsning ved stop
•
Et forbudt frekvensområde
•
Programmerbar U/f-kurve og switchfrekvens
•
Autogenstart
•
Varme- og stallbeskyttelse af motor: Programmerbar handling; fra, advarsel, fejl
•
Lokal-/fjernstyringsapplikations parametre er forklaret i kapitel 9 Beskrivelser af parametre i
denne manual. Forklaringerne er ordnet efter parameterens individuelle id-nummer.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

Referencepotentiometer
1-10 kΩ
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Fjernreference
0(4) – 20 mA
DRIFT
KLAR
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Terminal Signal Beskrivelse
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24V
Referenceudgang
I/O-jordforbindelse
Analog indgang 2
Strømområde 0-20 mA
Programmerbar (P2.1.11)
Styringsspændingsudgang
I/O-jordforbindelse
Sted A: Start frem
Programmerbar logik (P2.2.1)
Sted A: Start bak
Ri min = 5 kΩ
Ekstern fejlindgang
Programmerbar (P2.2.2)
Sted B: Start frem
Programmerbar logik (P2.2.15)
Sted B: Start bak
Ri min. = 5 kΩ
Valg af sted A/B
Fælles for DIN 1-DIN 3
Fælles for DIN4-DIN6
Styringsspændingsudgang
I/O-jordforbindelse
Analog udgang 1
Udgangsfrekvens
Programmerbar (P2.3.2)
Digital udgang
KLAR
Programmerbar (P2.3.7)
Open collector, I ≤ 50 mA,
U ≤ 48 VDC
Relæudgang 1
DRIFT
Programmerbar
(P2.3.8)
Relæudgang 2
FEJL
Programmerbar
(P2.3.9)
Område 0-20 mA/RL,
maks. 500 Ω
Kontakt åben = sted A er aktiv
Kontakt lukket = sted B er aktiv
Kontakt lukket = start fremad
Kontakt lukket = start bak
AO1+
Analog indgang 1,
reference til sted B
Jordforbindelse til reference
og styringer
Analog indgang 2,
reference til sted A
Kontakt lukket = start fremad
Kontakt lukket = start bak
Kontakt åben = ingen fejl
Kontakt lukket = fejl
Spænding for potentiometer osv.
Analog indgang 1
Spændingsområde 0-10 V DC
Programmerbar (P2.1.12)
Spænding for kontakter osv,
maks. 0,1 A
Spænding for kontakter (se nr. 6)
Tilslut til GND eller +24 V
Tilslut til GND eller +24 V
Jordforbindelse til reference
og styringer
Jordforbindelse til
reference og styringer
LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 39
3.2 STYRINGS-I/O
Fig. 7: Standard I/O-konfiguration til lokal-/fjernstyringsapplikation
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

Jumperblok X3:
CMA- og CMB-jording
CMB tilsluttet til GND
CMA tilsluttet til GND
CMB isoleret fra GND
CMA isoleret fra GND
CMB og CMA er internet
forbundet; isoleret fra GND
= Fabriksstandard
VACON · 40 LOKAL-/FJERNSTYRINGSAPPLIKATION
*) Optionskortet A3 har ingen klemme til åben kontakt på dens anden relæudgang (klemme
24 mangler).
BEMÆRK!
Se valg af jumpere herunder. Der er flere oplysninger i produktets brugermanual.
Fig. 8: Valg af jumpere
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

DIN3
≥ 1
DIN6
DIN2
DIN3
AI1
AI2
DIN1
DIN2
DIN3
DIN4
DIN5
A
B
A
B
A
B
Intern bak
Nulstilling af intern fejl
Fejlnulstillingsindgang (programmerbar)
3.3 Panelretning
Intern start/stop
Reference fra Fieldbus
Start/stop fra Fieldbus
Retning fra Fieldbus
Start-/stopknapper
Knappen Nulstil
Start frem
(programmerbar)
Start bak
(programmerbar)
Start frem
Start bak
(programmerbar)
(programmerbar)
Start/Stop
Baglæns
Op
Ned
3.1 Styrested
2.1.15 Kickstartshastighedsref.
2.1.14 Fieldbus-styrereference
2.1.13 Panelstyringsreference
2.1.12 I/O – B-reference
2.1.11 I/O – A-reference
R3.2 Panelreference
Intern
frekvensref.
Motorpotentiometer
Programmerbar logik for
start/stop og
baglæns A
Programmerbar logik for
start/stop og
baglæns B
LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 41
3.3 STYRINGSSIGNALLOGIK I LOKAL-/FJERNSTYRINGSAPPLIKATION
Fig. 9: Styringssignallogik for lokal-/fjernstyringsapplikation
3.4 LOKAL-/FJERNSTYRINGSAPPLIKATION – PARAMETERLISTE
3.4.1 OVERVÅGNINGSVÆRDIER (BETJENINGSPANEL: MENU M1)
Overvågningsværdierne er de faktiske værdier af parametre og signaler samt statusser og
mål. Overvågningsværdier kan ikke redigeres.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 42 LOKAL-/FJERNSTYRINGSAPPLIKATION
Tabel 14: Overvågningsværdier
Indeks Overvågningsværdi Unit ID Beskrivelse
V1.1 Udgangsfrekvens Hz 1
V1.2 Frekvensreference Hz 25
V1.3 Motorhastighed omdr. 2
V1.4 Motorstrøm A 3
V1.5 Motormoment % 4
V1.6 Motoreffekt % 5
V1.7 Motorspænding V 6
V1.8 DC-spænding V 7
1.9 Enhedstemperatur °C 8
1.10 Motortemperatur % 9
V1.11 Analog indgang 1 V/mA 13
V1.12 Analog indgang 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17
Elementer i multio-
vervågning
ud
mA 26
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 43
3.4.2 BASISPARAMETRE (BETJENINGSPANEL: MENU M2 -> G2.1)
Tabel 15: Basisparametre G2.1
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.1.1 Min. frekvens 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Maks. frekvens P2.1.1 320.00 Hz 50.00 102
P2.1.3 Accelerationstid 1 0.1 3000.0 s 0.0 103
P2.1.4 Decelerationstid 1 0.1 3000.0 s 0.0 104
P2.1.5 Aktuel grænse 0,1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
P2.1.9 *
P2.1.10 * Motor cos phi 0.30 1.00 0.85 120
P2.1.11 * I/O – A-reference 0 4 1 117
Nominel motor-
spænding
Nominel motor-
frekvens
Nominel motorha-
stighed
Nominel motor-
spænding
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 omdr. 1440 112
0,1 x I
2 x I
H
H
2 X I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
A I
L
V
V
V
H
107
110
113
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
4 = Motorpotentiometer
P2.1.12 * I/O – B-reference 0 4 0 131
P2.1.13 *
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Panelstyringsre-
ference
0 3 2 121
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
4 = Motorpotentiometer
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
3

VACON · 44 LOKAL-/FJERNSTYRINGSAPPLIKATION
Tabel 15: Basisparametre G2.1
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
P2.1.14 *
P2.1.15 *
Fieldbus-styrings-
reference
Hastighedsrefe-
rence ved kick-
start
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
* = Parameterværdi kan kun ændres, når AC-frekvensomformeren er blevet stoppet.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 45
3.4.3 INDGANGSSIGNALER (BETJENINGSPANEL: MENU M2 -> G2.2)
Tabel 16: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Logik = 0
Styresignal 1 = Start
frem
Styresignal 2 = Start
bak
Logik = 1
Styresignal 1 = Start/
stop
Styresignal 2 = Baglæns
Logik = 2
Styresignal 1 = Start/
stop
Styresignal 2 = Drift
aktiveret
Logik = 3
Styresignal 1 = Startimpuls (kant)
Styresignal 2 = Stopimpuls
Logik = 4
Styresignal 1 = Start
P2.2.1 ***
Valg af start-/
stoplogik ved sted
A
0 8 0 300
frem
Styresignal 2 =
Motorpotentiometer
UP
Logik = 5
Styresignal 1 = start
frem (kant)
Styresignal 2 = Start
bak (kant)
Logik = 6
Styresignal 1 = Start
(kant)/stop
Styresignal 2 = Baglæns
Logik = 7
Styresignal 1 = Start
(kant)/stop
Styresignal 2 = Drift
aktiveret
Logik = 8
Styresignal 1 = start
frem (kant)
Styresignal 2 =
Motorpotentiometer
UP
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 46 LOKAL-/FJERNSTYRINGSAPPLIKATION
Tabel 16: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Anvendes ikke
1 = Ekst. fejl, lukkekont.
2 = Ekst. fejl, åbnekont.
3 = Drift mulig
4 = Acc./dec.tidsvalg
5 = Tving styrested til
I/O
6 = Tving styrested til
P2.2.2 DIN3-funktion 0 13 1 301
panel
7 = Tving styrested til
fieldbus
8 = Baglæns
9 = Kickstartshastighed
11 = Acc/Dec-drift
forbudt
12 = DC-bremsekommando
13 = Motorpotentiometer NED
P2.2.3
****
P2.2.4 AI1-signalområde 0 2 0 320
P2.2.5
P2.2.6
P2.2.7
P2.2.8 AI1-signalfiltertid 0.00 10.00 s 0.10 324
P2.2.9
****
P2.2.10 AI2-signalområde 0 2 1 325
AI1-signalvalg 0.1 E.10 A1 377
Tilpasset indstil-
ling for AI1-mini-
mum
Tilpasset indstil-
ling for AI1-mak-
simum
AI1-signalinverte-
ring
AI2-signalvalg 0.1 E.10 A.2 388
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = Tilpasset indstillingsområde**
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = Tilpasset indstillingsområde**
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 47
Tabel 16: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Tilpasset indstil-
P2.2.11
P2.2.12
ling for AI2-mini-
mum
Tilpasset indstil-
ling for AI2-mak-
simum
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
P2.2.13
P2.2.14 AI2-signalfiltertid 0.00 10.00 s 0.10 329
P2.2.15
***
AI2-signalinverte-
ring
Valg af start-/
stoplogik ved sted
B
0 1 0 328
0 6 0 363
Logik = 0
Styresignal 1 = Start
frem
Styresignal 2 = Start
bak
Logik = 1
Styresignal 1 = Start/
stop
Styresignal 2 = Baglæns
Logik = 2
Styresignal 1 = Start/
stop
Styresignal 2 = Drift
aktiveret
Logik = 3
Styresignal 1 = Startimpuls (kant)
Styresignal 2 = Stopimpuls
Logik = 4
Styresignal 1 =
Fremimpuls (kant)
Styresignal 2 = Bakimpuls (kant)
Logik = 5
Styresignal 1 = Startimpuls (kant)
Styresignal 2 = Bakimpuls
Logik = 6
Styresignal 1 = Startimpuls (kant)
Styresignal 2 = Aktiveringsimpuls
Minimumsværdi
P2.2.16
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
for referenceska-
lering – sted A
0.00 320.00 Hz 0.00 303
3

VACON · 48 LOKAL-/FJERNSTYRINGSAPPLIKATION
Tabel 16: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Maksimumsværdi
P2.2.17
P2.2.18
for referenceska-
lering – sted A
Minimumsværdi
for referenceska-
lering – sted B
0.00 304
0.00 320.00 Hz 0.00 364
P2.2.19
P2.2.20
P2.2.21
P2.2.22
P2.2.23
Maksimumsværdi
for referenceska-
lering – sted B
Fri analog ind-
gang, valg af sig-
nal
Fri analog ind-
gang, funktion
Rampetid for
motorpotentiome-
ter
Nulstilling af
motorpotentiometerets frekvensre-
ference i hukom-
melse
0.00 320.00 Hz 0.00 365
0 2 0 361
0 4 0 362
0.1 2000.0 Hz/sek. 10.0 331
0 2 1 367
0,00 = ingen skalering
> 0 = skaleret maksimumsværdi
0 = Anvendes ikke
1 = Analog indgang 1
2 = Analog indgang 2
0 = Ingen nulstilling
1 = Reducerer
strømgrænse
(P2.1.5)
2 = Reducerer DCbremsestrøm
3 = Reducerer accelations- og decelerationstider
4 = Reducerer overvågningsgrænse for
moment
0 = Ingen nulstilling
1 = Nulstil, hvis stoppet eller slukket
2 = Nulstil, hvis slukket
P2.2.24
Start impulshu-
kommelse
0 1 0 498
** = Husk at placere jumperne til blok X2 derefter. Se brugermanualen til produktet.
*** = Parameterværdi kan kun ændres, når AC-frekvensomformeren er blevet stoppet.
**** = Brug TTF-metoden til at programmere disse parametre.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Kørselsstatus
ikke kopieret
1 = Kørselsstatus
kopieret

LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 49
3.4.4 UDGANGSSIGNALER (BETJENINGSPANEL: MENU M2 -> G2.3
Tabel 17: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.3.1 AO1-signalvalg 0.1 E.10 A11 464
0 = Ikke anvendt
(20 mA/10 V)
1 = udgangsfrek.
P2.3.2
Analog udgangs-
funktion
0 8 1 307
(0-f
2 = frekvensreference (0-f
3 = Motorhastighed
(0 - Nominel
motorhastighed)
4 = motorstrøm (0I
nMotor
5 = Motormoment
(0-T
6 = 7 = Motorspænding (0U
nMotor
Motoreffekt (0P
nMotor
8 = DC-spænding
(0-1000 V)
maks.
)
nMotor
)
)
)
maks.
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Filtreringstid for
analog udgang
Inversion af ana-
log udgang
Analog udgang
minimum
Skalering af ana-
log udgang
0.00 10.00 sek. 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Ingen filtrering
0 = Ikke inverteret
1 = Inverteret
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 50 LOKAL-/FJERNSTYRINGSAPPLIKATION
Tabel 17: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Anvendes ikke
1 = Klar
2 = Drift
3 = Fejl
4 = Fejl inverteret
5 = Advarsel om
FC-overophedning
6 = Ekstern fejl
eller advarsel
7 = Fejl eller
advarsel for reference
8 = Advarsel
9 = Omvendt
10 = Valg af kickstarthastighed
11 = I fart
12 = Motorregulator aktiv
13 = Overvågning
af åben frekvensgrænse 1
14 = Overvågning
af åben frekvensgrænse 2
15 = Overvågning
af momentgrænse
16 = Overvågning
af referencegrænse
17 = Ekstern
bremsestyring
18 = Styrested: I/O
19 = FC – Overvågning af temperaturgrænse
20 = Ikke-anmodet
rotationsretning
21 = Ekstern
bremsestyring
inverteret
22 = Termistorfejl/-advarsel
P2.3.7
Funktionen til
digital udgang 1
0 22 1 312
3
P2.3.8
P2.3.9 RO2-funktion 0 22 3 314
P2.3.10
RO1-funktion 0 22 2 313
Overvågning af
udgangsfrekvens-
grænse 1
0 2 0 315
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Som parameter
2.3.7
Som parameter
2.3.7
0 = Ingen grænse
1 = Overvågning af
nedre grænse
2 = Overvågning af
øvre grænse

LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 51
Tabel 17: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Udgangsfrekvens-
P2.3.11
P2.3.12
P2.3.13
grænse 1; overvå-
get værdi
Overvågning af
udgangsfrekvens-
grænse 2
Udgangsfrekvens-
grænse 2; over-
vågningsværdi
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 = Ingen grænse
1 = Overvågning af
nedre grænse
2 = Overvågning af
øvre grænse
P2.3.14
P2.3.15
P2.3.16
P2.3.17
P2.3.18
P2.3.19
P2.3.20
Funktion til over-
vågning af
momentgrænse
Overvågnings-
grænse for
momentgrænse
Funktion til over-
vågning af refe-
rencegrænse
Overvågnings-
værdi til referen-
cegrænse
Forsinkelse på
ekstern bremse
fra
Forsinkelse på
ekstern bremse til
Overvågning af
temperatur-
grænse i fre-
kvensomformer
0 2 0 348
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 sek. 0.5 352
0.0 100.0 sek. 1.5 353
0 2 0 354
0 = Nej
1 = Lav grænse
2 = Høj grænse
0 = Nej
1 = Lav grænse
2 = Høj grænse
0 = Nej
1 = Lav grænse
2 = Høj grænse
Værdi af tempera-
P2.3.21
P2.3.22
P2.3.23
P2.3.24
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
turgrænse i frekvensomformer
Skalering af ana-
log udgang 2
Funktion til ana-
log udgang 2
Filtertid for ana-
log udgang 2
-10 100 °C 40 355
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 sek. 1.00 473
Som parameter
2.3.2
0 = Ingen filtrering
3

VACON · 52 LOKAL-/FJERNSTYRINGSAPPLIKATION
Tabel 17: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.3.25
P2.3.26
P.2.3.27
Inversion af ana-
log udgang 2
Analog udgang 2 –
minimum
Skalering af ana-
log udgang 2
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
0 = Ikke inverteret
1 = Inverteret
0 = 0 mA (0 V)
1 = 4 mA (2 V)
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 53
3.4.5 KONTROLPARAMETRE FOR FREKVENSOMFORMER (BETJENINGSPANEL: MENU M2 -> G2.4
Tabel 18: Kontrolparametre for frekvensomformer, G2.4
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Lineær
P2.4.1 Rampe 1-form 0.0 10.0 s 0.1 500
P2.4.2 Rampe 2-form 0.0 10.0 s 0.0 501
P2.4.3 Accelerationstid 2 0.1 3000.0 sek. 1.0 502
P2.4.4 Decelerationstid 2 0.1 3000.0 sek. 1.0 503
P2.4.5 Bremsechopper 0 4 0 504
100 = fuld acc./
dec., tider for øgn./
red.
0 = Lineær
100 = fuld acc./
dec., tider for øgn./
red.
0 = Deaktiveret
1 = Anvendt i drift
2 = Ekstern bremsechopper
3 = Anvendt ved
stop/i drift
4 = anvendt i drift
(ingen test)
P2.4.6 Startfunktion 0 2 0 505
P2.4.7 Stopfunktion 0 3 0 506
P2.4.8
P2.4.9
P2.4.10
P2.4.11
Bremsejævn-
strøm
Jævnstrøms-
bremsetid ved
stop
Frekvens til start
af jævnstrøms-
bremsning ved
rampestop
Jævnstrøms-
bremsetid ved
start
0.00 I
0.00 600.00 sek. 0.00 508
0.10 10.00 Hz 1.50 515
0.00 600.00 sek. 0.00 516
L
A 0,7 x I
H
507
0 = Rampe
1 = Flyvende start
2 = Betinget flyvende start
0 = Friløb
1 = rampe
2 = Rampe + Drift
aktiveret – friløb
3 = Friløb + Drift
aktiveret – rampe
0 = Jævnstrømsbremsning er fra
ved stop
0 = Jævnstrømsbremsning er fra
ved start
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 54 LOKAL-/FJERNSTYRINGSAPPLIKATION
Tabel 18: Kontrolparametre for frekvensomformer, G2.4
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.4.12 * Flux-bremse 0 1 0 520
P2.4.13
Flux-bremse-
strøm
0.00 I
L
A I
H
0 = Fra
0 = Til
519
3.4.6 PARAMETRE FOR UDVIGELSE AF FREKVENS (BETJENINGSPANEL: MENU M2 -> G2.5)
Tabel 19: Parametre for undvigelse af frekvens, G2.5
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Undvigelse af fre-
P2.5.1
P2.5.2
P2.5.3
kvensområde 1,
nedre grænse
Undvigelse af fre-
kvensområde 1,
øvre grænse
Undvigelse af fre-
kvensområde 2,
nedre grænse
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
0 = Undvigelsesområde 1 er fra
P2.5.4
P2.5.5
P2.5.6
P2.5.7
Undvigelse af fre-
kvensområde 2,
øvre grænse
Undvigelse af fre-
kvensområde 3,
nedre grænse
Undvigelse af fre-
kvensområde 3,
øvre grænse
Undvigelse af
acc./dec.-rampe
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = Undvigelsesområde 2 er fra
0 = Undvigelsesområde 3 er fra
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 55
3.4.7 STYREPARAMETRE FOR MOTOR (BETJENINGSPANEL: MENU M2 -> G2.6)
Tabel 20: Styreparametre for motor, G2.6
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Frekvensstyring
1 = Hastighedsstyring
NXP:
P2.6.1 *
P2.6.2 * U/f-optimering 0 1 0 109
Motorstyringstil-
stand
0 1/3 0 600
2 = Momentstyring
for åben løkke
3 = Hastighedsstyring for lukket
løkke
4 = Momentstyring
for lukket løkke
0 = Anvendes ikke
1 = Automatisk
momentforstærkning
P2.6.3 * Valg af U/f-forhold 0 3 0 108
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9 Switchfrekvens 1.0 Varierer kHz Varierer 601
P2.6.10
Feltsvækning-
spunkt
Spænding i felt-
svækningspunktet
Midtpunktsfre-
kvens for U/f-
kurve
U/f-kurvemidt-
punktsspænding
Udgangsspænding
ved nulfrekvens
Overspændings-
controller
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varierer 606
0 2 1 607
0 = Lineær
1 = Kvadratisk
2 = Programmerbar.
3 = Lineær med
flux-optim.
0 = Anvendes ikke
1 = Anvendes
(ingen ramping)
2 = Anvendes
(ramping)
P2.6.11
P2.6.12 Belastningsfald 0.00 100.00 % 0.00 620
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Underspændings-
controller
0 1 1 608
0 = Anvendes ikke
1 = Anvendes
3

VACON · 56 LOKAL-/FJERNSTYRINGSAPPLIKATION
Tabel 20: Styreparametre for motor, G2.6
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Ingen handling
1 = Identifikation
uden kørsel
2 = Identifikation
P2.6.13 Identification 0 1/2 0 631
Lukket løkke-parametergruppe 2.6.14
med kørsel
3 = Kørsel af encoder-id
4 = Ingen handling
5 = Id-kørsel mislykkedes
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
Magnetiserings-
strøm
Hastighedsstyring
– P-forstærkning
Hastighedsstyring
– I-tid
Kompensering for
acceleration
Justering for glid-
ning
Magnetiserings-
strøm ved start
Magnetiseringstid
ved start
0-hastighedstid
ved start
0-hastighedstid
ved stop
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 sek. 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
H
L
A 0.00 612
A 0.00 627
P2.6.14.11 Moment ved start 0 3 0 621
P2.6.14.12
P2.6.14.13
3
Startmoment –
FREM
Startmoment –
BAK
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Anvendes ikke
1 = Momenthukommelse
2 = Momentreference
3 = Startmoment –
frem/bak

LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 57
Tabel 20: Styreparametre for motor, G2.6
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.6.14.15
P2.6.14.17
Identifikationsparametergruppe 2.6.15
P2.6.15.1 Hastighedstrin -50.0 50.0 0.0 0.0 1252
Filtreringstid for
encoder
Nuværende sty-
ring – P-forstærk-
ning
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
* = Parameterværdi kan kun ændres, når AC-frekvensomformeren er blevet stoppet.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 58 LOKAL-/FJERNSTYRINGSAPPLIKATION
3.4.8 SIKRINGSSYSTEMER (BETJENINGSPANEL: MENU M2 -> G2.7
Tabel 21: Sikringssystemer, G2.7
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Ingen reaktion
1 = Advarsel
2 = Advarsel + forrige frekvens
P2.7.1
Reaktion på 4 mA
referencefejl
0 5 0 700
3 = Adv. + fast frekvens 2.7.2
4 = Fejl, stop acc.
til 2.4.7
5 = Fejl, stop ved
friløb
P2.7.2
P2.7.3
P2.7.4
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
4 mA reference-
fejlsfrekvens
Reaktion på eks-
tern fejl
Indgangsfaseo-
vervågning
Reaktion på
underspændings-
fejl
Udgangsfaseover-
vågning
Jordfejlsbeskyt-
telse
Motorvarmesik-
ring
Faktor for motors
omgivelsestempe-
ratur
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
0 1 0 727
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
0 = Fejl lagret i
historik
Fejl ikke lagret
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
3
P2.7.10
P2.7.11
P2.7.12
P2.7.13 Stall-forebyggelse 0 3 0 709
Motors kølefaktor
ved nulhastighed
Motorvarmetids-
konstant
Cyklus for motor-
drift
0.0 150.0 % 40.0 706
1 200 min. Varierer 707
0 150 % 100 708
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb

LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 59
Tabel 21: Sikringssystemer, G2.7
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.7.14 Stallstrøm 0.00 2 x I
P2.7.15 Stalltidsgrænse 1.00 120.00 sek. 15.00 711
P2.7.16
P2.7.17
P2.7.18 UP fra moment 10.0 150.0 % 50.0 714
P2.7.19
P2.7.20
P2.7.21
Stallfrekvens-
grænse
Beskyttelse mod
underbelastning
UP-nulfrekvens-
belastning
Tidsgrænse for
beskyttelse mod
underbelastning
Reaktion på ter-
mistorfejl
1.0 P2.1.2 Hz 25.00 712
0 3 0 713
5.0 150.0 % 10.0 715
2.00 600.00 sek. 20.00 716
0 3 2 732
H
A I
H
710
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
P2.7.22
P2.7.23
Reaktion på field-
bus-fejl
Reaktion på slot-
fejl
0 3 2 733
0 3 2 734
Se P2.7.21
Se P2.7.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 60 LOKAL-/FJERNSTYRINGSAPPLIKATION
3.4.9 PARAMETER FOR AUTOGENSTART (BETJENINGSPANEL: MENU M2 -> G2.8)
Tabel 22: Parametre for autogenstart, G2.8
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.8.1 Ventetid 0.10 10.00 s 0.50 717
P2.8.2 Prøvetid 0.00 60.00 s 30.00 718
0 = Rampe
P2.8.3 Startfunktion 0 2 0 719
Antal forsøg efter
P2.8.4
P2.8.5
underspændings-
sikring
Antal forsøg efter
overspændings-
sikring
0 10 0 720
0 10 0 721
1 = Flyvende start
2 = I henhold til
P2.4.6
P2.8.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Antal forsøg efter
overstrømssikring
Antal forsøg efter
4 mA reference-
sikring
Antal forsøg efter
motortemperatur-
fejl
Antal forsøg efter
ekstern fejl
Antal forsøg efter
fejl ved underbe-
lastning
0 3 0 722
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
3.4.10 PANELSTYRING (BETJENINGSPANEL: MENU M3)
Parametrene for valg af styrested og retning på panel er angivet herunder. Se
panelstyringsmenuen i produktets brugermanual.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL-/FJERNSTYRINGSAPPLIKATION VACON · 61
Tabel 23: Panelstyringsparametre, M3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
1 = I/0-klemme
P3.1 Styrested 1 3 1 125
2 = Betjeningspanel
3 = Fieldbus
P3.2
P3.3 Retning (på panel) 0 1 0 123
R3.4 Stopknap 0 1 1 114
Betjeningspanel-
reference
P2.1 P2.2 Hz 0.00
0 = Stopknappen
har begrænset
funktion
1 = Stopknappen er
altid aktiveret
3.4.11 SYSTEMMENU (BETJENINGSPANEL: MENU M6)
Se i produktets brugermanual, når det gælder parametre og funktioner, der er relateret til
den generelle brug af AC-frekvensomformeren som f.eks. valg af applikation og sprog,
tilpassede parametersæt eller oplysninger om hardware og software.
3.4.12 UDVIDELSESKORT (BETJENINGSPANEL: MENU M7
Menu M7 viser de udvidelses- og optionskort, der er monteret på styrekortet, samt
kortrelaterede oplysninger. Der er flere oplysninger i produktets brugermanual.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 62 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
4 APPLIKATION TIL STYRING AF
FLERTRINSHASTIGHED
4.1 INTRODUKTION
Vælg Applikation til styring af flertrinshastighed i menuen M6 på side S6.2.
Applikationen til styring af flertrinshastighed kan benyttes i applikationer, hvor der er behov
for faste hastigheder. Der kan i alt programmeres 15 + 2 forskellige hastigheder: en
basishastighed, 15 flertrinshastigheder og en kickstartshastighed. Hastighedstrinnene
vælges vha. de digitale signaler DIN3, DIN4, DIN5 og DIN6. Hvis der anvendes
kickstartshastighed, kan DIN3 programmeres fra fejlnulstilling til valg af
kickstartshastighed.
Basisreferencen for hastighed kan enten være spændings- eller strømsignal via analoge
indgangsklemmer (2/ 3 eller 4/5). Den anden af de analoge indgange kan programmeres til
andre formål.
Alle udgange kan frit programmeres.
•
Yderligere funktioner:
Programmerbar signallogik for start/stop og baglæns
•
Referenceskalering
•
Overvågning af en frekvensgrænse
•
Programmering af sekundramper og ramper i S-form
•
Programmerbare start- og stopfunktioner
•
Jævnstrømsbremsning ved stop
•
Et forbudt frekvensområde
•
Programmerbar U/f-kurve og switchfrekvens
•
Autogenstart
•
Varme- og stallbeskyttelse af motor: Programmerbar handling; fra, advarsel, fejl
•
Applikation til styring af flertrinshastigheds parametre er forklaret i kapitel 9 Beskrivelser af
parametre i denne manual. Forklaringerne er ordnet efter parameterens individuelle id-
nummer.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Basisreference
(valgfrit)
DRIFT
KLAR
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
CMA
CMB
OPTA1
OPTA2 /OPTA3 *)
Terminal Signal Beskrivelse
+10 Vref.
AI1+
AI1-
AI2+
AI2-
+24V
Referenceudgang
I/O-jordforbindelse
Analog indgang 2.
Strømområde 0-20 mA
Programmerbar
(P2.1.11)
Styringsspændingsudgang
I/O-jordforbindelse
Start frem
Programmerbar logik (P2.2.1)
Start bak
Ki min. = 5 kΩ
Ekstern fejlindgang
Programmerbar (P2.2.2)
Fast hastighed, valg 1
Fast hastighed, valg 2
Fast hastighed, valg 3
Fælles for DIN 1-DIN 3
Fælles for DIN4-DIN6
Styringsspændingsudgang
I/O-jordforbindelse
Analog udgang 1:
Udgangsfrekvens
Programmerbar (P2.3.2)
Digital udgang
KLAR
Programmerbar (P2.3.7)
Open collector,
I ≤ 50 mA, U ≤ 48 VDC
Relæudgang 1
DRIFT
Programmerbar
Programmerbar
Programmerbar
(P2.3.8)
Relæudgang 2
FEJL
Programmerbar
(P2.3.9)
Område 0-20 mA/RL,
maks. 500 Ω
AO1+
Analog indgang 1, frekvensreference
Jordforbindelse til
reference og styringer
Analog indgang 2,
frekvensreference
Standardreferencefejl
Kontakt lukket = start fremad
Kontakt lukket = start bak
Kontakt åben = ingen fejl
Kontakt lukket = fejl
Referencepotentiometer
1-10 kΩ
Spænding for potentiometer osv.
Analog indgang 1.
Spændingsområde 0-10 V DC
Spænding for kontakter osv,
maks. 0,1 A
Spænding for kontakter (se nr. 6)
Tilslut til GND eller +24 V
Tilslut til GND eller +24 V
Jordforbindelse til reference
og styringer
Jordforbindelse til reference og styringer
valg1valg2 valg3 valg4 (med DIN3)
0 0 0 0 I/O-ref.
1 0 0 0 Hastighed 1
0 1 0 0 Hastighed 2
---- ------1 1 1 1 Hastighed 15
RO1
RO1
RO1
RO2
RO2
RO2
APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 63
4.2 STYRINGS-I/O
Fig. 10: Standard-I/O-konfiguration til applikation til styring af flertrinshastighed.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

Jumperblok X3:
CMA- og CMB-jording
CMB tilsluttet til GND
CMA tilsluttet til GND
CMB isoleret fra GND
CMA isoleret fra GND
CMB og CMA er internet
forbundet; isoleret fra GND
= Fabriksstandard
VACON · 64 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
*) Optionskortet A3 har ingen klemme til åben kontakt på dens anden relæudgang (klemme
24 mangler).
BEMÆRK!
Se valg af jumpere herunder. Der er flere oplysninger i produktets brugermanual.
Fig. 11: Valg af jumpere
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN3
DIN6
DIN3
DIN3
3.2 Panelreference
2.1.11 I/O-reference
2.1.12 Panelstyringsreference
2.1.13 Fieldbus-styrereference
2.1.15 Fast hastighed 1
...2.1.29 Fast hastighed 15
3.1 Styrested
Intern
frekvensreference
Start frem
(programmerbar)
Start bak
(programmerbar)
Start/Stop
Baglæns
Intern start/stop
Intern bak
Nulstilling af intern fejl
Fejlnulstillingsindgang
Knappen
Nulstil
Start-/
stopknapper
Reference fra Fieldbus
Start/stop fra Fieldbus
Retning fra Fieldbus
3.3 Panelretning
Fast hastighed 1
Fast hastighed 2
Fast hastighed 3
Fast hastighed 4
(programmerbar)
≥ 1
Programmerbar
logik for start/
stop og baglæns
2.1.14 Hastighedsreference ved kickstart
APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 65
4.3 STYRINGSSIGNALLOGIK I APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
Fig. 12: Styringssignallogik i applikation til flertrinshastighed
4.4 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED –
4.4.1 OVERVÅGNINGSVÆRDIER (BETJENINGSPANEL: MENU M1)
Overvågningsværdierne er de faktiske værdier af parametre og signaler samt statusser og
mål. Overvågningsværdier kan ikke redigeres.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
PARAMETERLISTE
4

VACON · 66 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
Tabel 24: Overvågningsværdier
Indeks Overvågningsværdi Unit ID Beskrivelse
V1.1 Udgangsfrekvens Hz 1
V1.2 Frekvensreference Hz 25
V1.3 Motorhastighed omdr. 2
V1.4 Motorstrøm A 3
V1.5 Motormoment % 4
V1.6 Motoreffekt % 5
V1.7 Motorspænding V 6
V1.8 DC-spænding V 7
1.9 Enhedstemperatur °C 8
1.10 Motortemperatur % 9
V1.11 Analog indgang 1 V/mA 13
V1.12 Analog indgang 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17
Elementer i multio-
vervågning
ud
mA 26
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
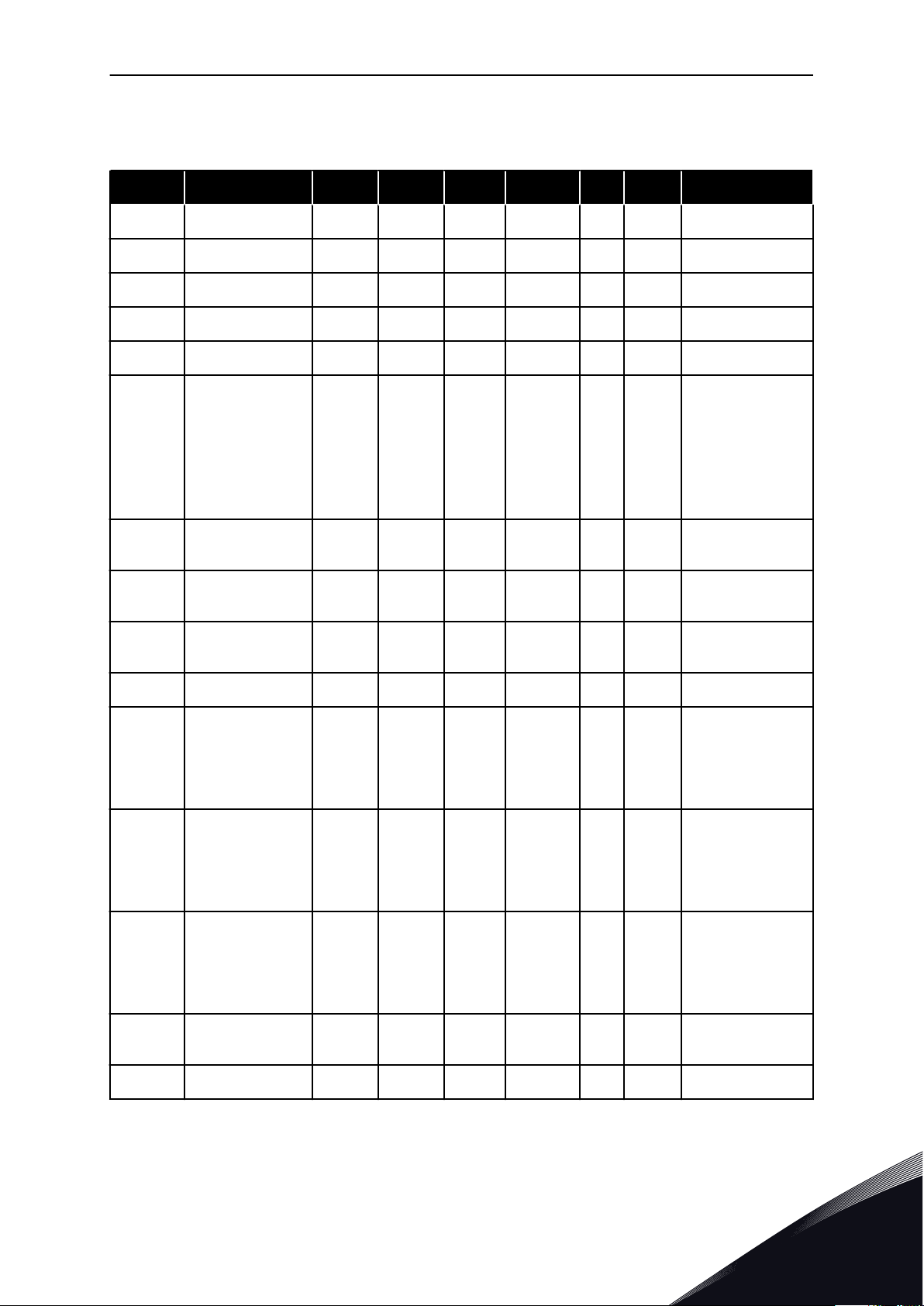
APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 67
4.4.2 BASISPARAMETRE (BETJENINGSPANEL: MENU M2 -> G2.1)
Tabel 25: Basisparametre G2.1
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.1.1 Min. frekvens 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Maks. frekvens P2.1.1 320.00 Hz 50.00 102
P2.1.3 Accelerationstid 1 0.1 3000.0 s 0.0 103
P2.1.4 Decelerationstid 1 0.1 3000.0 s 0.0 104
P2.1.5 Aktuel grænse 0,1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
P2.1.9 *
P2.1.10 * Motor cos phi 0.30 1.00 0.85 120
P2.1.11 * I/O-reference 0 3 1 117
Nominel motor-
spænding
Nominel motor-
frekvens
Nominel motorha-
stighed
Nominel motor-
spænding
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 omdr. 1440 112
0,1 x I
2 x I
H
H
2 X I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
A I
L
V
V
V
H
107
110
113
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
P2.1.12 *
P2.1.13 *
P2.1.14
P2.1.15 Fast hastighed 1 0.00 P2.1.2 Hz 5.00 105
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Panelstyringsre-
ference
Fieldbus-styrings-
reference
Kickstartshastig-
hedsref.
0 3 2 121
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
0 = AI1
1 = AI2
2 = Betjeningspanel
3 = Fieldbus
4

VACON · 68 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
Tabel 25: Basisparametre G2.1
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.1.16 Fast hastighed 2 0.00 P2.1.2 Hz 10.00 106
P2.1.17 Fast hastighed 3 0.00 P2.1.2 Hz 12.50 126
P2.1.18 Fast hastighed 4 0.00 P2.1.2 Hz 15.00 127
P2.1.19 Fast hastighed 5 0.00 P2.1.2 Hz 17.50 128
P2.1.20 Fast hastighed 6 0.00 P2.1.2 Hz 20.00 129
P2.1.21 Fast hastighed 7 0.00 P2.1.2 Hz 22.50 130
P2.1.22 Fast hastighed 8 0.00 P2.1.2 Hz 25.00 133
P2.1.23 Fast hastighed 9 0.00 P2.1.2 Hz 27.50 134
P2.1.24 Fast hastighed 10 0.00 P2.1.2 Hz 30.00 135
P2.1.25 Fast hastighed 11 0.00 P2.1.2 Hz 32.50 136
P2.1.26 Fast hastighed 12 0.00 P2.1.2 Hz 35.00 137
P2.1.27 Fast hastighed 13 0.00 P2.1.2 Hz 40.00 138
P2.1.28 Fast hastighed 14 0.00 P2.1.2 Hz 45.00 139
P2.1.29 Fast hastighed 15 0.00 P2.1.2 Hz 50.00 140
* = Parameterværdi kan kun ændres, når AC-frekvensomformeren er blevet stoppet.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 69
4.4.3 INDGANGSSIGNALER (BETJENINGSPANEL: MENU M2 -> G2.2)
Tabel 26: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Logik = 0
Styresignal 1 = Start
frem
Styresignal 2 = Start
bak
Logik = 1
Styresignal 1 = Start/
stop
Styresignal 2 = Baglæns
Logik = 2
Styresignal 1 = Start/
stop
Styresignal 2 = Drift
aktiveret
Logik = 3
Styresignal 1 = Star-
P2.2.1 *** Start/stop-logik 0 6 0 300
timpuls (kant)
Styresignal 2 = Stopimpuls
Logik = 4
Styresignal 1 =
Fremimpuls (kant)
Styresignal 2 = Bakimpuls (kant)
Logik = 5
Styresignal 1 = Startimpuls (kant)
Styresignal 2 = Bakimpuls
Logik = 6
Styresignal 1 = Startimpuls (kant)
Styresignal 2 = Aktiveringsimpuls
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 70 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
Tabel 26: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Anvendes ikke
1 = Ekst. fejl, lukkekont.
2 = Ekst. fejl, åbnekont.
3 = Drift mulig
4 = Acc./dec.tidsvalg
5 = Tving styrested til
I/O
6 = Tving styrested til
panel
P2.2.2 DIN3-funktion 0 13 1 301
7 = Tving styrested til
fieldbus
8 = Bak (hvis P2.2.1 ≠
2,3 eller 6)
9 = Kickstartshastighed
10 = Nulstiller fejl
11 = Acc/Dec-drift
forbudt
12 = DC-bremsekommando
13 = Fast hastighed
P2.2.3
****
P2.2.4 AI1-signalområde 0 2 0 320
P2.2.5
P2.2.6
P2.2.7
P2.2.8 AI1-signalfiltertid 0.00 10.00 s 0.10 324
P2.2.9
****
AI1-signalvalg 0.1 E.10 A1 377
Tilpasset indstil-
ling for AI1-mini-
mum
Tilpasset indstil-
ling for AI1-mak-
simum
AI1-signalinverte-
ring
AI2-signalvalg 0.1 E.10 A.2 388
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = Tilpasset indstillingsområde**
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
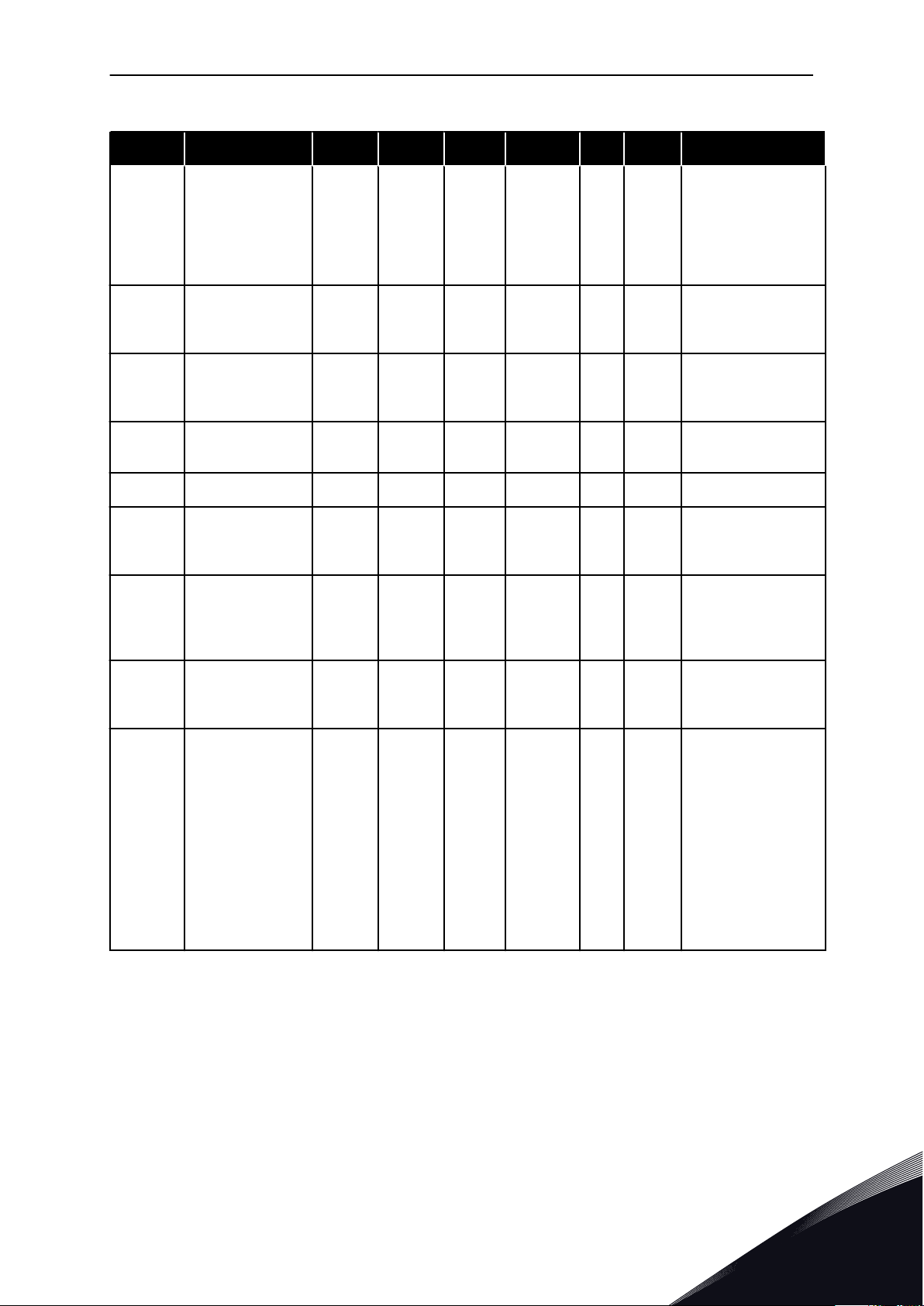
APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 71
Tabel 26: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = 0-10 V (0-20
mA**)
P2.2.10 AI2-signalområde 0 2 1 325
Tilpasset indstil-
P2.2.11
P2.2.12
ling for AI2-mini-
mum
Tilpasset indstil-
ling for AI2-mak-
simum
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
1 = 2-10 V (4-20
mA**)
2 = Tilpasset indstillingsområde**
P2.2.13
P2.2.14 AI2-signalfiltertid 0.00 10.00 s 0.10 329
P2.2.15
P2.2.16
P2.2.17
P2.2.18
AI2-signalinverte-
ring
Minimumsværdi
for referenceska-
lering
Maksimumsværdi
for referenceska-
lering
Fri analog ind-
gang, valg af sig-
nal
Fri analog ind-
gang, funktion
0 1 0 328
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
0 2 0 361
0 4 0 362
0,00 = ingen skalering
> 0 = skaleret maksimumsværdi
0 = Anvendes ikke
1 = AI1
2 = AI2
0 = Ingen funktion
1 = Reducerer
strømgrænse
(P2.1.5)
2 = Reducerer DCbremsestrøm, P2.4.8
3 = Reducerer accelations- og decelerationstider
4 = Reducerer overvågningsgrænse for
moment, P2.3.15
CP = styrested
cc = lukning af kontakt
oc = åbning af kontakt
** = Husk at placere jumperne til blok X2 derefter. Se brugermanualen til produktet.
*** = Parameterværdi kan kun ændres, når AC-frekvensomformeren er blevet stoppet.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 72 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
**** = Brug TTF-metoden til at programmere disse parametre.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 73
4.4.4 UDGANGSSIGNALER (BETJENINGSPANEL: MENU M2 -> G2.3
Tabel 27: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.3.1 * AO1-signalvalg 0.1 E.10 A11 464
0 = Ikke anvendt
(20 mA/10 V)
1 = udgangsfrek.
P2.3.2
Analog udgangs-
funktion
0 8 1 307
(0-f
2 = frekvensreference (0-f
3 = Motorhastighed
(0 - Nominel
motorhastighed)
4 = motorstrøm (0I
nMotor
5 = Motormoment
(0-T
6 = Motoreffekt (0P
nMotor
7 = Motorspænding
(0-U
8 = DC-spænding
(0-1000 V)
maks.
)
nMotor
nMotor
)
)
maks.
)
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Filtreringstid for
analog udgang
Inversion af ana-
log udgang
Analog udgang
minimum
Skalering af ana-
log udgang
0.00 10.00 sek. 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Ingen filtrering
0 = Ikke inverteret
1 = Inverteret
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 74 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
Tabel 27: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Anvendes ikke
1 = Klar
2 = Drift
3 = Fejl
4 = Fejl inverteret
5 = Advarsel om
FC-overophedning
6 = Ekstern fejl
eller advarsel
7 = Fejl eller
advarsel for reference
8 = Advarsel
9 = Omvendt
10 = Valg af kickstarthastighed
11 = I fart
12 = Motorregulator aktiv
13 = Overvågning
af åben frekvensgrænse 1
14 = Overvågning
af åben frekvensgrænse 2
15 = Overvågning
af momentgrænse
16 = Overvågning
af referencegrænse
17 = Ekstern
bremsestyring
18 = Styrested: I/O
19 = FC – Overvågning af temperaturgrænse
20 = Ikke-anmodet
rotationsretning
21 = Ekstern
bremsestyring
inverteret
22 = Termistorfejl/-advarsel
P2.3.7
Funktionen til
digital udgang 1
0 22 1 312
4
P2.3.8
P2.3.9 RO2-funktion 0 22 3 314
P2.3.10
RO1-funktion 0 22 2 313
Overvågning af
udgangsfrekvens-
grænse 1
0 2 0 315
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Som parameter
2.3.7
Som parameter
2.3.7
0 = Ingen grænse
1 = Overvågning af
nedre grænse
2 = Overvågning af
øvre grænse

APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 75
Tabel 27: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Udgangsfrekvens-
P2.3.11
P2.3.12
P2.3.13
grænse 1; overvå-
get værdi
Overvågning af
udgangsfrekvens-
grænse 2
Udgangsfrekvens-
grænse 2; over-
vågningsværdi
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 = Ingen grænse
1 = Overvågning af
nedre grænse
2 = Overvågning af
øvre grænse
P2.3.14
P2.3.15
P2.3.16
P2.3.17
P2.3.18
P2.3.19
P2.3.20
Funktion til over-
vågning af
momentgrænse
Overvågnings-
grænse for
momentgrænse
Funktion til over-
vågning af refe-
rencegrænse
Overvågnings-
værdi til referen-
cegrænse
Forsinkelse på
ekstern bremse
fra
Forsinkelse på
ekstern bremse til
Overvågning af
temperatur-
grænse i fre-
kvensomformer
0 2 0 348
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 sek. 0.5 352
0.0 100.0 sek. 1.5 353
0 2 0 354
0 = Nej
1 = Lav grænse
2 = Høj grænse
0 = Nej
1 = Lav grænse
2 = Høj grænse
0 = Nej
1 = Lav grænse
2 = Høj grænse
Værdi af tempera-
P2.3.21
P2.3.22 *
P2.3.23 *
P2.3.24 *
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
turgrænse i frekvensomformer
Skalering af ana-
log udgang 2
Funktion til ana-
log udgang 2
Filtertid for ana-
log udgang 2
-10 100 °C 40 355
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 sek. 1.00 473
Som parameter
2.3.2
0 = Ingen filtrering
4

VACON · 76 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
Tabel 27: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.3.25 *
P2.3.26 *
P.2.3.27 *
Inversion af ana-
log udgang 2
Analog udgang 2 –
minimum
Skalering af ana-
log udgang 2
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
* = Brug TTF-metoden til at programmere disse parametre
0 = Ikke inverteret
1 = Inverteret
0 = 0 mA (0 V)
1 = 4 mA (2 V)
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 77
4.4.5 KONTROLPARAMETRE FOR FREKVENSOMFORMER (BETJENINGSPANEL: MENU M2 -> G2.4
Tabel 28: Kontrolparametre for frekvensomformer, G2.4
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Lineær
P2.4.1 Rampe 1-form 0.0 10.0 s 0.1 500
P2.4.2 Rampe 2-form 0.0 10.0 s 0.0 501
P2.4.3 Accelerationstid 2 0.1 3000.0 sek. 1.0 502
P2.4.4 Decelerationstid 2 0.1 3000.0 sek. 1.0 503
P2.4.5 Bremsechopper 0 4 0 504
100 = fuld acc./
dec., tider for øgn./
red.
0 = Lineær
100 = fuld acc./
dec., tider for øgn./
red.
0 = Deaktiveret
1 = Anvendt i drift
2 = Ekstern bremsechopper
3 = Anvendt ved
stop/i drift
4 = anvendt i drift
(ingen test)
P2.4.6 Startfunktion 0 2 0 505
P2.4.7 Stopfunktion 0 3 0 506
P2.4.8
P2.4.9
P2.4.10
P2.4.11
Bremsejævn-
strøm
Jævnstrøms-
bremsetid ved
stop
Frekvens til start
af jævnstrøms-
bremsning ved
rampestop
Jævnstrøms-
bremsetid ved
start
0.00 I
0.00 600.00 sek. 0.00 508
0.10 10.00 Hz 1.50 515
0.00 600.00 sek. 0.00 516
L
A 0,7 x I
H
507
0 = Rampe
1 = Flyvende start
2 = Betinget flyvende start
0 = Friløb
1 = rampe
2 = Rampe + Drift
aktiveret – friløb
3 = Friløb + Drift
aktiveret – rampe
0 = Jævnstrømsbremsning er fra
ved stop
0 = Jævnstrømsbremsning er fra
ved start
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 78 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
Tabel 28: Kontrolparametre for frekvensomformer, G2.4
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.4.12 * Flux-bremse 0 1 0 520
P2.4.13
Flux-bremse-
strøm
0.00 I
L
A I
H
0 = Fra
0 = Til
519
4.4.6 PARAMETRE FOR UDVIGELSE AF FREKVENS (BETJENINGSPANEL: MENU M2 -> G2.5)
Tabel 29: Parametre for undvigelse af frekvens, G2.5
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Undvigelse af fre-
P2.5.1
P2.5.2
P2.5.3
kvensområde 1,
nedre grænse
Undvigelse af fre-
kvensområde 1,
øvre grænse
Undvigelse af fre-
kvensområde 2,
nedre grænse
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
0 = Undvigelsesområde 1 er fra
P2.5.4
P2.5.5
P2.5.6
P2.5.7
Undvigelse af fre-
kvensområde 2,
øvre grænse
Undvigelse af fre-
kvensområde 3,
nedre grænse
Undvigelse af fre-
kvensområde 3,
øvre grænse
Undvigelse af
acc./dec.-rampe
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = Undvigelsesområde 2 er fra
0 = Undvigelsesområde 3 er fra
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 79
4.4.7 STYREPARAMETRE FOR MOTOR (BETJENINGSPANEL: MENU M2 -> G2.6)
Tabel 30: Styreparametre for motor, G2.6
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Frekvensstyring
1 = Hastighedsstyring
NXP:
P2.6.1 *
P2.6.2 * U/f-optimering 0 1 0 109
Motorstyringstil-
stand
0 1/3 0 600
2 = Momentstyring
for åben løkke
3 = Hastighedsstyring for lukket
løkke
4 = Momentstyring
for lukket løkke
0 = Anvendes ikke
1 = Automatisk
momentforstærkning
P2.6.3 * Valg af U/f-forhold 0 3 0 108
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9 Switchfrekvens 1.0 Varierer kHz Varierer 601
P2.6.10
Feltsvækning-
spunkt
Spænding i felt-
svækningspunktet
Midtpunktsfre-
kvens for U/f-
kurve
U/f-kurvemidt-
punktsspænding
Udgangsspænding
ved nulfrekvens
Overspændings-
controller
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varierer 606
0 2 1 607
0 = Lineær
1 = Kvadratisk
2 = Programmerbar.
3 = Lineær med
flux-optim.
0 = Anvendes ikke
1 = Anvendes
(ingen ramping)
2 = Anvendes
(ramping)
P2.6.11
P2.6.12 Belastningsfald 0.00 100.00 % 0.00 620
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Underspændings-
controller
0 1 1 608
0 = Anvendes ikke
1 = Anvendes
4

VACON · 80 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
Tabel 30: Styreparametre for motor, G2.6
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Ingen handling
1 = Identifikation
uden kørsel
2 = Identifikation
P2.6.13 Identification 0 1/2 0 631
Lukket løkke-parametergruppe 2.6.14
med kørsel
3 = Kørsel af encoder-id
4 = Ingen handling
5 = Id-kørsel mislykkedes
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
Magnetiserings-
strøm
Hastighedsstyring
– P-forstærkning
Hastighedsstyring
– I-tid
Kompensering for
acceleration
Justering for glid-
ning
Magnetiserings-
strøm ved start
Magnetiseringstid
ved start
0-hastighedstid
ved start
0-hastighedstid
ved stop
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 sek. 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
H
L
A 0.00 612
A 0.00 627
P2.6.14.11 Moment ved start 0 3 0 621
P2.6.14.12
P2.6.14.13
4
Startmoment –
FREM
Startmoment –
BAK
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Anvendes ikke
1 = Momenthukommelse
2 = Momentreference
3 = Startmoment –
frem/bak

APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 81
Tabel 30: Styreparametre for motor, G2.6
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.6.14.15
P2.6.14.17
Identifikationsparametergruppe 2.6.15
P2.6.15.1 Hastighedstrin -50.0 50.0 0.0 0.0 1252
Filtreringstid for
encoder
Nuværende sty-
ring – P-forstærk-
ning
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
* = Parameterværdi kan kun ændres, når AC-frekvensomformeren er blevet stoppet.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 82 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
4.4.8 SIKRINGSSYSTEMER (BETJENINGSPANEL: MENU M2 -> G2.7)
Tabel 31: Sikringssystemer, G2.7
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Ingen reaktion
1 = Advarsel
2 = Advarsel + forrige frekvens
3 = Adv. + fast frekvens 2.7.2
4 = Fejl, stop acc.
til 2.4.7
5 = Fejl, stop ved
friløb
P2.7.1
Reaktion på 4 mA
referencefejl
0 5 0 700
P2.7.2
P2.7.3
P2.7.4
P2.7.5
P2.7.6
P2.7.7
P2.7.8
P2.7.9
4 mA reference-
fejlsfrekvens
Reaktion på eks-
tern fejl
Indgangsfaseo-
vervågning
Reaktion på
underspændings-
fejl
Udgangsfaseover-
vågning
Jordfejlsbeskyt-
telse
Motorvarmesik-
ring
Faktor for motors
omgivelsestempe-
ratur
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 3 730
0 1 0 727
0 3 2 702
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
0 = Fejl lagret i
historik
Fejl ikke lagret
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
4
P2.7.10
P2.7.11
P2.7.12
Motors kølefaktor
ved nulhastighed
Motorvarmetids-
konstant
Cyklus for motor-
drift
0.0 150.0 % 40.0 706
1 200 min. Varierer 707
0 150 % 100 708
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 83
Tabel 31: Sikringssystemer, G2.7
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Ingen reaktion
1 = Advarsel
P2.7.13 Stall-forebyggelse 0 3 0 709
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
P2.7.14 Stallstrøm 0.00 2 x I
P2.7.15 Stalltidsgrænse 1.00 120.00 sek. 15.00 711
P2.7.16
P2.7.17
P2.7.18 UP fnom. moment 10.0 150.0 % 50.0 714
P2.7.19
P2.7.20
P2.7.21
Stallfrekvens-
grænse
Beskyttelse mod
underbelastning
UP-nulfrekvens-
belastning
Tidsgrænse for
beskyttelse mod
underbelastning
Reaktion på ter-
mistorfejl
1.00 P2.1.2 Hz 25.00 712
0 3 0 713
5.0 150.0 % 10.0 715
2.00 600.00 sek. 20.00 716
0 3 2 732
H
A 1
H
710
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
0 = Ingen reaktion
1 = Advarsel
2 = Fejl, stop acc.
til 2.4.7
3 = Fejl, stop ved
friløb
P2.7.22
P2.7.23
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Reaktion på field-
bus-fejl
Reaktion på slot-
fejl
0 3 2 733
0 3 734
Se P2.7.21
Se P2.7.21
4

VACON · 84 APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED
4.4.9 PARAMETER FOR AUTOGENSTART (BETJENINGSPANEL: MENU M2 -> G2.8)
Tabel 32: Parametre for autogenstart, G2.8
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.8.1 Ventetid 0.10 10.00 s 0.50 717
P2.8.2 Prøvetid 0.00 60.00 s 30.00 718
0 = Rampe
P2.8.3 Startfunktion 0 2 0 719
Antal forsøg efter
P2.8.4
P2.8.5
underspændings-
sikring
Antal forsøg efter
overspændings-
sikring
0 10 0 720
0 10 0 721
1 = Flyvende start
2 = I henhold til
P2.4.6
P2.8.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Antal forsøg efter
overstrømssikring
Antal forsøg efter
4 mA reference-
sikring
Antal forsøg efter
motortemperatur-
fejl
Antal forsøg efter
ekstern fejl
Antal forsøg efter
fejl ved underbe-
lastning
0 3 0 722
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
4.4.10 PANELSTYRING (BETJENINGSPANEL: MENU M3)
Parametrene for valg af styrested og retning på panel er angivet herunder. Se
panelstyringsmenuen i produktets brugermanual.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APPLIKATION TIL STYRING AF FLERTRINSHASTIGHED VACON · 85
Tabel 33: Panelstyringsparametre, M3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
1 = I/0-klemme
P3.1 Styrested 1 3 1 125
2 = Betjeningspanel
3 = Fieldbus
P3.2
P3.3 Retning (på panel) 0 1 0 123
R3.4 Stopknap 0 1 1 114
Betjeningspanel-
reference
P2.1.1 P2.1.2 Hz 0.00
0 = Stopknappen
har begrænset
funktion
1 = Stopknappen er
altid aktiveret
4.4.11 SYSTEMMENU (BETJENINGSPANEL: MENU M6)
Se i produktets brugermanual, når det gælder parametre og funktioner, der er relateret til
den generelle brug af AC-frekvensomformeren som f.eks. valg af applikation og sprog,
tilpassede parametersæt eller oplysninger om hardware og software.
4.4.12 UDVIDELSESKORT (BETJENINGSPANEL: MENU M7
Menu M7 viser de udvidelses- og optionskort, der er monteret på styrekortet, samt
kortrelaterede oplysninger. Der er flere oplysninger i produktets brugermanual.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 86 PID-STYRINGSAPPLIKATION
5 PID-STYRINGSAPPLIKATION
5.1 INTRODUKTION
Vælg PID-styringsapplikation i menuen M6 på side S6.2
I PID-styringsapplikation er der to styresteder med I/O-klemmer; sted A er PID-controlleren,
og kilde B er den direkte frekvensreference. Styrestedet A eller B kan vælges med den
digitale indgang DIN6.
PID-styringsreferencen kan vælges blandt de analoge indgange, fieldbussen, den
motoriserede potentiometer, hvormed PID-reference 2 aktiveres eller
betjeningspanelreferencen anvendes. Den faktiske værdi for PID-styringen kan vælges
blandt de analoge indgange, fieldbussen, de faktiske motorværdier eller via disse
matematiske funktioner.
Den direkte frekvensreference kan bruges til styring uden PID-controlleren og kan vælges
mellem de analoge indgange, fieldbussen, motorpotentiometeret eller panelet.
PID-applikationen bruges typisk til at styre niveaumåling eller pumper og ventilatorer. Ved
sådanne anvendelser kan PID-applikationen give en jævn styring og har integreret målingsog styringspakke, hvor der ikke er brug for yderligere komponenter.
De digitale indgange DIN2, DIN3, DIN5 og alle udgangene kan frit programmeres.
•
Yderligere funktioner:
Valg af analogt indgangssignalområde
•
Overvågninger af to frekvensgrænser
•
Overvågning af momentgrænse
•
Overvågning af referencegrænse
•
Programmering af sekundramper og ramper i S-form
•
Programmerbare start- og stopfunktioner
•
Jævnstrømsbremsning ved start og stop
•
Tre forbudte frekvensområder
•
Programmerbar U/f-kurve og switchfrekvens
•
Autogenstart
•
Varme- og stallbeskyttelse af motor: fuldt programmerbar; fra, advarsel, fejl
•
Beskyttelse mod underbelastning af motor
•
Overvågning af indgangs- og udgangsfase
•
Tilføjelse af sumpunktsfrekvens til PID-udgang
•
PID-styringen kan derudover bruges fra styrestederne I/O B, panelet og fieldbussen
•
Nem skiftefunktion
•
Dvalefunktion
•
PID-styringsapplikationens parametre er forklaret i kapitel 9 Beskrivelser af parametre i
denne manual. Forklaringerne er ordnet efter parameterens individuelle id-nummer.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

-
+
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
2-tråds transmitter
Referencepotentiometer
1-10 kΩ
mA
DRIFT
KLAR
AO1-
DO1
+24V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Terminal Signal Beskrivelse
+10 V
ref.
AI1+
AI1-
AI2+
AI2-
+24V
Referenceudgang
I/O-jordforbindelse
Analog indgang 2
Strømområde 0-20 mA
Programmerbar (P2.2.9)
Styringsspændingsudgang
I/O-jordforbindelse
Sted A: Start frem
Ri min. = 5 kΩ
Fejlnulstilling
Programmerbar (P2.2.2)
Ekstern fejlindgang
Programmerbar (P2.2.2)
Sted B: Start frem
Ri min. = 5 kΩ
Valg af kickstarthastighed
Programmerbar (P2.2.3)
Styringssted A/B-valg
Startsignal for styrested B
Frekvensreference (P2.2.5.)
Fælles for DIN 1-DIN 3
Fælles for DIN4-DIN6
Styringsspændingsudgang
I/O-jordforbindelse
Analog udgang 1
Udgangsfrekvens
Programmerbar (P2.3.2)
Digital udgang
KLAR
Programmerbar (P2.3.7)
Open collector, I ≤ 50 mA,
U ≤ 48 VDC
Relæudgang 1
DRIFT
Programmerbar
(P2.3.8)
Relæudgang 2
FEJL
Programmerbar
(P2.3.9)
AO1+
Analog indgang 1
PID-reference
Jordforbindelse til
reference og styringer
Analog indgang 2
PID-aktuel værdi 1
Kontakt lukket = start fremad
Kontakt lukket = fejlnulstilling
Kontakt lukket = start bak
Kontakt lukket = fejl
Kontakt åben = ingen fejl
Referencespænding for
potentiometer osv.
Analog indgang 1
Spændingsområde 0-10 V DC
Programmerbar (P2.1.11)
Spænding for kontakter osv,
maks. 0,1 A
Spænding for kontakter (se nr. 6)
Tilslut til GND eller +24 V
Faktisk
værdi
(0) 4-20
mA
Kontakt åben = Styrested A er aktivt,
Kontakt lukket = Styrested B er aktivt
Tilslut til GND eller +24 V
Jordforbindelse til reference
og styringer
Jordforbindelse til
reference og styringer
Område 0-20 mA/RL,
maks. 500 Ω
Kontakt lukket = Kickstartshatighed aktiv
PID-STYRINGSAPPLIKATION VACON · 87
5.2 STYRINGS-I/O
Fig. 13: Standard I/O-konfiguration til PID-applikation (med 2-tråds transmitter)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

Jumperblok X3:
CMA- og CMB-jording
CMB tilsluttet til GND
CMA tilsluttet til GND
CMB isoleret fra GND
CMA isoleret fra GND
CMB og CMA er internet
forbundet; isoleret fra GND
= Fabriksstandard
VACON · 88 PID-STYRINGSAPPLIKATION
*) Optionskortet A3 har ingen klemme til åben kontakt på dens anden relæudgang (klemme
24 mangler).
BEMÆRK!
Se valg af jumpere herunder. Der er flere oplysninger i produktets brugermanual.
Fig. 14: Valg af jumpere
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

DIN2
DIN5
DIN3
DIN2
DIN3
DIN5
DIN6
DIN2
DIN3
AI1
AI2
0
1
2
3
4
0
1
2
3
4
5
+A
A
B
0
1
2
3
4
5
0
1
2
3
4
5
K
0
1
2
3
4
5
F
PID
+
DIN1
DIN4
A
B
A
B
A/B
Intern bak
Nulstilling af intern fejl
Fejlnulstillingsindgang (programmerbar)
3.3 Panelretning
Intern start/stop
Reference fra Fieldbus
Start/stop fra Fieldbus
Retning fra Fieldbus
Ekstern fejl (programmerbar)
Kickstarthastighed (programmerbar)
Valg af sted A/B
2.2.4 PID-hovedreference
Op
Ned
2.1.11 PID-reference
I/O-bak
R3.4 PID-panelreference
R3.2 Panelreference
R3.5 PID-panelreference 2
Aktiver PID-panelreference
2 (DIN5 = 13)
Start; sted A
Start; sted B
Start/Stop
Start-/stopknapper
Intern
frekvensref.
2.1.19 Kickstartshastighedsref.
Panel
Fieldbus
Knappen Nulstil
3.1 Styrested
2.2.7 Fieldbus-styrereference
2.2.6 Panelstyringsreference
2.2.5 I/O – B-reference
≥ 1
Motorpotentiometer
Valg af
faktisk
værdi,
par. 2.2.9
og 2.2.10
Valg af
faktisk værdi
par. 2.2.8
Akt.
1
Akt.
2
PID-STYRINGSAPPLIKATION VACON · 89
5.3 STYRINGSSIGNALLOGIK I PID-STYRINGSAPPLIKATION
Fig. 15: PID-styringsapplikations styringssignallogik
5.4 PID-STYRINGSAPPLIKATION – PARAMETERLISTER
5.4.1 OVERVÅGNINGSVÆRDIER (BETJENINGSPANEL: MENU M1)
Overvågningsværdierne er de faktiske værdier af parametre og signaler samt statusser og
mål. Overvågningsværdier kan ikke redigeres.
BEMÆRK!
Overvågningsværdierne V1.19 til V1.22 er kun tilgængelige med PIDstyringsapplikationen.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 90 PID-STYRINGSAPPLIKATION
Tabel 34: Overvågningsværdier
Indeks Overvågningsværdi Unit ID Beskrivelse
V1.1 Udgangsfrekvens Hz 1
V1.2 Frekvensreference Hz 25
V1.3 Motorhastighed omdr. 2
V1.4 Motorstrøm A 3
V1.5 Motormoment % 4
V1.6 Motoreffekt % 5
V1.7 Motorspænding V 6
V1.8 DC-spænding V 7
1.9 Enhedstemperatur °C 8
1.10 Motortemperatur % 9
V1.11 Analog indgang 1 V/mA 13
V1.12 Analog indgang 2 V/mA 14
V1.13 Analog indgang 3 27
V1.14 Analog indgang 4 28
V1.15 DIN 1, 2, 3 15
V1.16 DIN 4, 5, 6 16
V1.17 DO1, RO1, RO2 17
V1.18 Analog I
V1.19 PID Reference % 20
V1.20 PID-aktuel værdi % 21
V1.21 PID-fejlværdi % 22
V1.22 PID Udgang % 23
V1.23
Særvisning til faktisk
ud
værdi
mA 26
29
5
V1.24 PT-100-temperatur ºC 42
G1.25
V1.26.1 Current A 1113
Overvågningsele-
menter
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PID-STYRINGSAPPLIKATION VACON · 91
Tabel 34: Overvågningsværdier
Indeks Overvågningsværdi Unit ID Beskrivelse
V1.26.2 Torque % 1125
V1.26.3
V1.26.4 Statusord 43
Jævnstrømsspæn-
ding
V 44
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 92 PID-STYRINGSAPPLIKATION
5.4.2 BASISPARAMETRE (BETJENINGSPANEL: MENU M2 -> G2.1)
Tabel 35: Basisparametre G2.1
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.1.1 Min. frekvens 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Maks. frekvens P2.1.1 320.00 Hz 50.00 102
P2.1.3 Accelerationstid 1 0.1 3000.0 s 0.0 103
P2.1.4 Decelerationstid 1 0.1 3000.0 s 0.0 104
P2.1.5 Aktuel grænse 0,1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
P2.1.9 *
P2.1.10 * Motor cos phi 0.30 1.00 0.85 120
P2.1.11 *
Nominel motor-
spænding
Nominel motor-
frekvens
Nominel motorha-
stighed
Nominel motor-
spænding
Referencesignal
for PID-controller
(sted A)
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 omdr. 1440 112
0,1 x I
0 4 1 332
2 x I
H
H
2 X I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
A I
L
V
V
V
H
107
110
113
0 = AI1
1 = AI2
2 = PID-ref. fra
panelstyringsside,
P3.4
3 = PID.-ref fra
fieldbus (ProcessDataIN 1)
4 = Motorpotentiometer
5
P2.1.12
P2.1.13
P2.1.14
P2.1.15 Dvalefrekvens 0.00 P2.1.2 Hz 10.00 1016
P2.1.16 Dvaleforsinkelse 0 3600 s 30 1017
PID-controller,
forstærkning
PID-controller, I-
tid
PID-controller, D-
tid
0.0 1000.0 % 100.0 118
0.00 320.00 s 1.00 119
0.00 100.00 s 0.00 132
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PID-STYRINGSAPPLIKATION VACON · 93
Tabel 35: Basisparametre G2.1
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.1.17 Opvågningsniveau 0.00 100.00 % 25.00 1018
0 = Opvågning ved
værdi under
opvågningsniveau
P2.1.18
P2.1.19
Opvågningsfunk-
tion
Hastighedsrefe-
rence ved kick-
start
0 1 0 1019
0.00 P2.1.2 Hz 10.00 124
(2.1.17)
1 = Opvågning ved
værdi over opvågningsniveau
(2.1.17)
* = Parameterværdi kan kun ændres, når AC-frekvensomformeren er blevet stoppet.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 94 PID-STYRINGSAPPLIKATION
5.4.3 INDGANGSSIGNALER
Tabel 36: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Anvendes ikke
1 = Ekstern fejl,
lukkekont.
2 = Ekstern fejl,
åbnekont.
3 = Drift mulig
4 = Acc/dec.-tidsvalg
5 = Styrested: I/Oklemme (ID125)
6 = Styrested:
Panel (ID125)
P2.2.1 ** DIN2-funktion 0 13 1 319
7 = Styrested:
Fieldbus (ID125)
8 = Frem/bak
9 = Kickstartfrekvens (cc)
10 = Fejlnulstilling
(cc)
11 = Acc/dec. forbudt (lukkekont.)
12 = DC-bremsekommando
13 = Motorpot. OP
(lk)
P2.2.2 **
P2.2.3 ** DIN5-funktion 0 13 9 330
P2.2.4 **
DIN3-funktion 0 13 10 301
PID-sumpunkts-
reference
0 7 0 376
Se ovenfor, undtagen:
13 = Motorpot.
NED (lk)
Se ovenfor, undtagen:
13 = Aktiver PIDreference 2
0 = Direkte PIDudgangsværdi
1 = AI1+PIDudgang
2 = AI2+PIDudgang
3 = AI3+PIDudgang
4 = AI4+PIDudgang
5 = PID-panel+PIDudgang
6 = Fieldbus+PIDudgang (ProcessDataIN3)
7 = Mot.pot.+PIDudgang
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PID-STYRINGSAPPLIKATION VACON · 95
Tabel 36: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = AI1
1 = AI2
2 = AI3
3 = AI4
4 = Panelreference
5 = Fieldbus-reference (FB-hastighedsreference)
6 = Motorpotentiometer
7 = PID-controller
P2.2.5 **
Valg af I/O B-refe-
rence
0 7 1 343
P2.2.6 **
P2.2.7 **
P2.2.8 **
P2.2.9 **
Valg af panelsty-
ringsreference
Valg af Fieldbus-
styringsreference
Valg af faktisk
værdi
Valg af faktisk
værdi 1
0 7 4 121
0 7 5 122
0 7 0 333
0 10 2 334
Som i P2.2.5
Som i P2.2.5
0 = Faktisk værdi 1
1 = Faktisk 1 +
Faktisk 2
2 = Faktisk 1 –
Faktisk 2
3 = Faktisk 1 *
Faktisk 2
4 = Min(Faktisk 1,
Faktisk 2)
5 = Maks.(Faktisk
1, Faktisk 2)
6 = Middel(Faktisk1, Faktisk2)
7 = Kvd (Faktisk1)
+ Kvd (Faktisk2)
0 = Anvendes ikke
1 = AI1-signal (ckort)
2 = AI2-signal (ckort)
3 = AI3
4 = AI4
5 = Fieldbus – ProcessDataIN2
6 = Motormoment
7 = Motorhastighed
8 = Motorstrøm
9 = Motoreffekt
10 = Encoderfrekvens
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 96 PID-STYRINGSAPPLIKATION
Tabel 36: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = Anvendes ikke
1 = AI1-signal
2 = AI2-signal
3 = AI3
4 = AI4
5 = Fieldbus – ProcessDataIN3
6 = Motormoment
7 = Motorhastighed
8 = Motorstrøm
9 = Motoreffekt
10 = Encoderfrekvens
P2.2.10 **
Indgang af faktisk
værdi 2
0 10 0 335
P2.2.11
P2.2.12
P2.2.13
P2.2.14
P2.2.15
***
P2.2.16 AI1-signalområde 0 2 0 320
P2.2.17
P2.2.18
Minimumsskala
for faktisk værdi 1
Maksimumsskala
for faktisk værdi 1
Minimumsskala
for faktisk værdi 2
Maksimumsskala
for faktisk værdi 2
AI1-signalvalg 0.1 E.10 A.1 377
Tilpasset indstil-
ling for AI1-mini-
mum
Tilpasset indstil-
ling for AI1-mak-
simum
–1600.0 1600.0 % 0.0 336
–1600.0 1600.0 % 100.0 337
–1600.0 1600.0 % 0.0 338
–1600.0 1600.0 % 100.0 339
–160.00 160.00 % 0.00 321
–160.00 160.00 % 100.0 322
0 = 0-10 V (0-20
mA*)
1 = 2-10 V (4-20
mA*)
2 = Tilpasset
område*
5
P2.2.19 AI1-inversion 0 1 0 323
P2.2.20 AI1-filtertid 0.00 10.00 s 0.10 324
P2.2.21 AI2-signalvalg 0.1 E.10 A.2 388
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Ikke inverteret
1 = Inverteret
0 = 0-20 mA (0-10
V *)
1 = 4-20 mA (2-10
V *)
2 = Tilpasset
område*

PID-STYRINGSAPPLIKATION VACON · 97
Tabel 36: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
0 = 0-20 mA*
P2.2.22 AI2-signalområde 0 2 1 325
Tilpasset indstil-
P2.2.23
P2.2.24
ling for AI2-mini-
mum
Tilpasset indstil-
ling for AI2-mak-
simum
-160.00 160.00 % 0.00 326
-160.00 160.00 % 0.00 327
1 = 4-20 mA*
2 = Tilpasset*
P2.2.25 AI2-inversion 0 1 0 328
P2.2.26 AI2-filtertid 0.00 10.00 s 0.10 329
Rampetid for
P2.2.27
P2.2.28
P2.2.29
P2.2.30
motorpotentiome-
ter
Nulstilling af
motorpotentiometerets frekvensre-
ference i hukom-
melse
Nulstilling af
motorpotentiome-
terets PID-refe-
rence i hukom-
melse
PID-minimums-
grænse
0.1 2000.0 Hz/s 10.0 331
0 2 1 367
0 2 0 370
-1600.0 P2.2.31 % 0.0 359
0 = Ikke inverteret
1 = Inverteret
0 = Ingen nulstilling
1 = Nulstil, hvis
stoppet eller slukket
2 = Nulstil, hvis
slukket
0 = Ingen nulstilling
1 = Nulstil, hvis
stoppet eller slukket
2 = Nulstil, hvis
slukket
P2.2.31
P2.2.32
P2.2.33
P2.2.34
P2.2.35
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
PID-maksimums-
grænse
Invertering af fejl-
værdi
Stigningstid for
PID-reference
Faldtid for PID-
reference
Minimumsværdi
for referenceska-
lering, sted B
P2.2.30 1600.0 % 100.0 360
0 1 0 340
0.1 100.0 sek. 5.0 341
0.1 100.0 sek. 5.0 342
0.00 320.0 Hz 0.00 344
0 = Ingen inversion
1 = Inversion
5

VACON · 98 PID-STYRINGSAPPLIKATION
Tabel 36: Indgangssignaler, G2.2
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
Maksimumsværdi
P2.2.36
P2.2.37 Nemt skift 0 1 0 366
for referenceska-
lering, sted B
0.00 320.0 Hz 0.00 345
0 = Bevar reference
1 = Kopier faktisk
reference
P2.2.38
***
P2.2.39 AI3-signalområde 0 1 1 143
P2.2.40 AI3-inversion 0 1 0 151
P2.2.41 AI3-filtertid 0.00 10.00 s 0.10 142
P2.2.42
***
P2.2.43 AI4-signalområde 0 1 1 154
P2.2.44 AI4-inversion 0 1 0 162
P2.2.45 AI4-filtertid 0.00 10.00 s 0.10 153
P2.2.46
AI3-signalvalg 0.1 E.10 0.1 141
AI4-signalvalg 0.1 E.10 0.1 152
Særvisning af
minimum for fak-
tisk værdi
0 30000 0 1033
0 = Signalområde
0-10 V
1 = Signalområde
2-10 V
0 = Ikke inverteret
1 = Inverteret
0 = Signalområde
0-10 V
1 = Signalområde
2-10 V
0 = Ikke inverteret
1 = Inverteret
P2.2.47
P2.2.48
P2.2.49
CP = styrested
lukkekont. = kontakt
oc = åbning af kontakt
5
Særvisning af
maksimum for
faktisk værdi
Særvisning af
decimaler for fak-
tisk værdi
Særvisning af
enhed for faktisk
værdi
0 30000 100 1034
0 4 1 1035
Se ID1036 i kapitel
0 29 4 1036
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
9 Beskrivelser af
parametre.

PID-STYRINGSAPPLIKATION VACON · 99
* = Husk at placere jumperne til blok X2 derefter. Se brugermanualen til produktet.
** = Parameterværdi kan kun ændres, når FC er blevet stoppet.
*** = Brug TTF-metoden til at programmere disse parametre.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 100 PID-STYRINGSAPPLIKATION
5.4.4 UDGANGSSIGNALER (BETJENINGSPANEL: MENU M2 -> G2.3
Tabel 37: Udgangssignaler, G2.3
Indeks Parameter Min. Maks. Enhed Standard Tilp. ID Beskrivelse
P2.3.1 * AO1-signalvalg 0.1 E.10 A.1 464
0 = Anvendes ikke
1 = udgangsfrek.
P2.3.2
Analog udgangs-
funktion
0 14 1 307
(0-f
2 = frekvensreference (0-f
3 = Motorhastighed
(0 - Nominel
motorhastighed)
4 = motorstrøm (0I
nMotor
5 = Motormoment
(0-T
6 = Motoreffekt (0P
nMotor
7 = Motorspænding
(0-U
8 = DC-spænding
(0-1000 V)
9 = PID-controller
– ref.værdi
10 = PID-controller
– faktisk værdi 1
11 = PID-controller
– faktisk værdi 2
12 = PID-controller
– fejlværdi
13 = PID-controller
– udgang
14 = PT100-temperatur
maks.
)
nMotor
nMotor
)
)
maks.
)
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Filtreringstid for
analog udgang
Inversion af ana-
log udgang
Analog udgang
minimum
Skalering af ana-
log udgang
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Ikke inverteret
1 = Inverteret
0 = 0 mA (0 V)
1 = 4 mA (2 V)
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...