


vacon® nx
ac drives
appfiff20
controle de pontes rolantes
manual de aplicação

controle de pontes rolantes apfiff20 VACON 3
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
MANUAL DE APLICAÇÃO DE CONTROLE DE PONTES
ROLANTES VACON®
ÍNDICE
Código do documento: DPD02129B
Código do software: APFIFF20V067
Data: 18.12.2018
1. Aplicação de controle de Pontes Rolantes Introdução ............................................................... 8
1.1 Geral ..................................................................................................................................................... 8
1.2 Características básicas ....................................................................................................................... 9
2. Recursos de comissionamento rápido para Pontes Rolantes .......................................................... 10
2.1 Controle e monitoramento de freio mecânico ................................................................................. 10
2.2 Operação em tandem para guindastes ............................................................................................ 11
2.3 Içamento em tandem (sincronização de eixos) ................................................................................ 11
2.4 Antibalanço ........................................................................................................................................ 12
2.5 Otimização de Velocidade (controle de velocidade dependente da potência) ................................ 13
2.6 Prevenção contra choque de carga .................................................................................................. 13
2.7 Prevenção contra cabo frouxo .......................................................................................................... 13
2.8 Segurança funcional integrada ......................................................................................................... 13
2.9 Estimativa de carga ........................................................................................................................... 14
3. Controle E/S ................................................................................................................................... 15
4. Princípio de programação "Terminal para Função" (TTF) ............................................................... 16
4.1 Definindo uma entrada/saída para uma determinada função no teclado ...................................... 16
4.2 Definindo um terminal para uma determinada função com a ferramenta
de programação NCDrive .................................................................................................................. 17
4.3 Definindo entradas/saídas não usadas ............................................................................................ 18
5. Aplicação de controle de Pontes Rolantes valores de monitoramento ......................................... 19
5.1 Valores de monitoramento .............................................................................................................. 20
5.1.1 Valores de monitoramento 2 ........................................................................................................ 21
5.1.2 Valores de monitoramento do fieldbus ........................................................................................ 22
5.1.3 Valores de monitoramento do Mestre/Seguidor ......................................................................... 22
5.1.4 Valores de monitoramento do controle PI ................................................................................... 23
5.1.5 Cadeia de frequência ..................................................................................................................... 23
5.1.6 Cadeia de torque ............................................................................................................................ 23
5.1.7 Controle do freio ............................................................................................................................ 24
5.1.8 Movimento ...................................................................................................................................... 24
5.1.9 Sincronização do eixo .................................................................................................................... 24
5.1.10 Valores de monitoramento ........................................................................................................... 25
5.1.11 Valores de monitoramento 2 ........................................................................................................ 27
5.1.12 Valores de monitoramento do fieldbus ........................................................................................ 30
5.1.13 Mestre/Seguidor ............................................................................................................................ 36
5.1.14 Monitoramento do controle PI ...................................................................................................... 39
5.1.15 Cadeia de frequência ..................................................................................................................... 39
5.1.16 Cadeia de torque ............................................................................................................................ 40
5.1.17 Controle do freio ............................................................................................................................ 40
5.1.18 Movimento ...................................................................................................................................... 41

VACON 4 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.19 Operação tandem (sincronização do eixo) ................................................................................... 41
5.1.20 Contadores ..................................................................................................................................... 42
6. Aplicação de controle de Pontes Rolantes Listas de parâmetros ................................................. 44
6.1 Parâmetros básicos ........................................................................................................................... 44
6.2 Manuseio de referência ..................................................................................................................... 45
6.2.1 Configurações básicas .................................................................................................................. 45
6.2.2 Referência constante .................................................................................................................... 45
6.2.3 Referência de torque ..................................................................................................................... 46
6.2.4 Parâmetros de frequência proibida.............................................................................................. 48
6.2.5 Potenciômetro eletrônico ............................................................................................................. 48
6.2.6 Ajustar referência .......................................................................................................................... 48
6.2.7 Manuseio de referência de limites finais ..................................................................................... 49
6.3 Controle de rampa ............................................................................................................................. 50
6.3.1 Configurações básicas .................................................................................................................. 50
6.3.2 Parada rápida ................................................................................................................................ 50
6.3.3 Opções de controle de rampa ....................................................................................................... 50
6.3.4 Funções de choque no cabo .......................................................................................................... 51
6.4 Sinais de entrada ............................................................................................................................... 52
6.4.1 Configurações básicas .................................................................................................................. 52
6.4.2 Entradas digitais ............................................................................................................................ 53
6.4.3 Entrada analógica 1 ....................................................................................................................... 54
6.4.4 Entrada analógica 2 ....................................................................................................................... 55
6.4.5 Entrada analógica 3 ....................................................................................................................... 56
6.4.6 Entrada analógica 4 ....................................................................................................................... 56
6.4.7 Opções ............................................................................................................................................ 57
6.5 Sinais de saída ................................................................................................................................... 58
6.5.1 Sinais de saída digital .................................................................................................................... 58
6.5.2 Saída analógica 1 ........................................................................................................................... 60
6.5.3 Saída analógica 2 ........................................................................................................................... 61
6.5.4 Saída analógica 3 ........................................................................................................................... 62
6.5.5 Analogue output 4 (Saída analógica 4) ......................................................................................... 62
6.5.6 Saída digital retardada 1 ............................................................................................................... 63
6.5.7 Saída digital retardada 2 ............................................................................................................... 64
6.5.8 Limites de supervisão ................................................................................................................... 65
6.6 Configurações de limite .................................................................................................................... 66
6.6.1 Manuseio de corrente ................................................................................................................... 66
6.6.2 Manuseio de torque ....................................................................................................................... 66
6.6.3 Manuseio de frequência ................................................................................................................ 68
6.6.4 Manuseio do barramento CC ........................................................................................................ 69
6.6.5 Opções de configurações de limite ............................................................................................... 69
6.7 Manuseio de fluxo e corrente CC ...................................................................................................... 70
6.7.1 Configurações de MA de manuseio de fluxo e corrente CC ........................................................ 70
6.7.2 Configurações de MF do manuseio de fluxo e corrente CC ........................................................ 70
6.8 Controle do motor.............................................................................................................................. 71
6.8.1 Configurações básicas de controle do motor .............................................................................. 71
6.8.2 Configurações de malha aberta ................................................................................................... 71
6.8.3 Configurações de controle de malha fechada ............................................................................. 72
6.8.4 Configurações de controle de PMSM ........................................................................................... 73
6.8.5 Estabilizadores .............................................................................................................................. 74
6.8.6 Parâmetros de ajuste .................................................................................................................... 74
6.8.7 Parâmetros de identificação ......................................................................................................... 75
6.8.8 Parâmetros de ajuste fino ............................................................................................................. 76
6.8.9 Parâmetros de ajuste do controle AOL ........................................................................................ 77
controle de pontes rolantes apfiff20 VACON 5
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.9 Controle de velocidade ...................................................................................................................... 77
6.9.1 Configurações básicas de controle de velocidade ....................................................................... 77
6.9.2 Configurações de MA de controle de velocidade ......................................................................... 77
6.9.3 Configurações de MF de controle de velocidade ......................................................................... 78
6.10 Controle do conversor de frequência ............................................................................................... 78
6.11 Parâmetros de controle de Mestre/Seguidor .................................................................................. 79
6.12 Proteções ........................................................................................................................................... 80
6.12.1 Configurações gerais .................................................................................................................... 80
6.12.2 Proteções do sensor de temperatura .......................................................................................... 80
6.12.3 Proteção contra rotor bloqueado ................................................................................................. 81
6.12.4 Monitoramento de erro de velocidade ......................................................................................... 81
6.12.5 Proteções térmicas do motor ....................................................................................................... 82
6.12.6 Monitoramento Zero Vivo .............................................................................................................. 83
6.12.7 Proteção contra subcarga ............................................................................................................. 83
6.12.8 Proteção contra falha de aterramento ......................................................................................... 83
6.12.9 Proteção contra resfriamento ...................................................................................................... 83
6.12.10 Proteção do fieldbus ...................................................................................................................... 84
6.12.11 Falha externa ................................................................................................................................. 84
6.12.12 Falha do encoder ........................................................................................................................... 84
6.13 Parâmetros de fieldbus ..................................................................................................................... 85
6.13.1 Controle do valor ........................................................................................................................... 86
6.13.2 Controle de ID DIN 1 ...................................................................................................................... 87
6.13.3 Controle de ID da DIN 2 ................................................................................................................. 87
6.13.4 Controle de ID da DIN 3 ................................................................................................................. 87
6.13.5 Saída digital de ID controlado 1 .................................................................................................... 88
6.13.6 Saída digital de ID controlado 2 .................................................................................................... 88
6.13.7 Atraso de DIN livre ........................................................................................................................ 88
6.14 Parâmetros de controle do freio ...................................................................................................... 89
6.14.1 Torque de partida do controle do freio para MF .......................................................................... 89
6.14.2 Controle de reversão para MF ...................................................................................................... 90
6.14.3 Manuseio de falha de freio ............................................................................................................ 90
6.14.4 Funções .......................................................................................................................................... 90
6.14.5 Função de teste do freio ................................................................................................................ 90
6.15 Parâmetros de redefinição automática ............................................................................................ 91
6.16 Parâmetros de controle de PI ........................................................................................................... 92
6.17 Sincronização do eixo ........................................................................................................................ 92
6.18 Estimativa de carga ........................................................................................................................... 93
6.19 Segurança funcional .......................................................................................................................... 93
6.20 Função antibalanço ........................................................................................................................... 93
6.21 Controle de teclado (Painel de controle: Menu M3) ........................................................................ 94
6.22 Menu do sistema (Painel de controle: Menu M6) ............................................................................ 94
6.23 Placas de expansão (Painel de controle: Menu M7) ........................................................................ 94
7. Descrição dos parâmetros .............................................................................................................. 95
7.1 Parâmetros Básicos .......................................................................................................................... 95
7.2 Manuseio de referência ...................................................................................... 105
7.2.1 Parâmetros Básicos .................................................................................................................... 106
7.2.2 Referência constante .................................................................................................................. 109
7.2.3 Referência de torque ................................................................................................................... 111
7.2.4 Frequências proibidas ................................................................................................................. 117
7.2.5 Potenciômetro eletrônico ........................................................................................................... 118
7.2.6 Ajustar referência ........................................................................................................................ 120
7.2.7 Manuseio de referência de limites finais ................................................................................... 122
7.3 Controle de rampa ........................................................................................................................... 124

VACON 6 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7.3.1 Opções de rampa ......................................................................................................................... 128
7.3.2 Cabo frouxo e choque de carga .................................................................................................. 130
7.4 Sinais de entrada ............................................................................................................................. 131
7.4.1 Configurações básicas ................................................................................................................ 131
7.4.2 Entradas digitais .......................................................................................................................... 133
7.4.3 Entradas analógicas 1 e 2 ........................................................................................................... 141
7.4.4 Entradas analógicas 3 e 4 ........................................................................................................... 147
7.4.5 Controle de inversão ................................................................................................................... 150
7.5 Sinais de saída ................................................................................................................................. 151
7.5.1 Sinais de saída digital .................................................................................................................. 151
7.5.2 Saídas analógicas 1, 2, 3 e 4 ....................................................................................................... 156
7.5.3 Saídas digitais retardadas 1 e 2 .................................................................................................. 160
7.5.4 Limites de supervisão ................................................................................................................. 163
7.6 Configurações de limites................................................................................................................. 165
7.6.1 Manuseio de limite de corrente .................................................................................................. 165
7.6.2 Manuseio do limite de torque ..................................................................................................... 166
7.6.3 Manuseio do limite de frequência .............................................................................................. 170
7.6.4 Manuseio do barramento CC ...................................................................................................... 172
7.6.5 Opções de limite .......................................................................................................................... 175
7.7 Manuseio de corrente CC e magnetização ..................................................................................... 176
7.7.1 Configurações de malha aberta ................................................................................................. 177
7.7.2 Configurações de malha fechada ............................................................................................... 180
7.8 Controle do motor............................................................................................................................ 182
7.8.1 Configurações de malha aberta ................................................................................................. 187
7.8.2 Configurações da malha fechada ............................................................................................... 192
7.8.3 Configurações do motor síncrono de ímã permanente............................................................. 195
7.8.4 Configurações de estabilização .................................................................................................. 200
7.8.5 Configurações de ajuste .............................................................................................................. 204
7.8.6 Configurações de identificação ................................................................................................... 205
7.8.7 Controle AOL para IM .................................................................................................................. 206
7.9 Configurações de controle de velocidade ...................................................................................... 207
7.10 Controle do conversor de frequência ............................................................................................. 213
7.11 Mestre/Seguidor .............................................................................................................................. 216
7.11.1 Mestre/Seguidor: Sistema padrão ............................................................................................. 216
7.11.2 Configuração Mestre/Seguidor ................................................................................................... 217
7.12 Proteções ......................................................................................................................................... 222
7.12.1 Configurações gerais .................................................................................................................. 222
7.12.2 Proteções do sensor de temperatura ........................................................................................ 223
7.12.3 Proteção contra rotor bloqueado ............................................................................................... 225
7.12.4 Erro de velocidade ....................................................................................................................... 227
7.12.5 Proteção do motor ....................................................................................................................... 228
7.12.6 Proteção contra sobrecarga ....................................................................................................... 231
7.12.7 Proteção de 4mA ......................................................................................................................... 232
7.12.8 Proteção contra subcarga ........................................................................................................... 233
7.12.9 Falha de terra .............................................................................................................................. 235
7.12.10 Proteção contra resfriamento .................................................................................................... 235
7.12.11 Comunicação com o Fieldbus ..................................................................................................... 236
7.12.12 Função da falha externa .............................................................................................................. 236
7.12.13 Função de falha do encoder ........................................................................................................ 237
7.13 Configurações do fieldbus ............................................................................................................... 238
7.13.1 Configurações gerais .................................................................................................................. 238
7.14 Funções de ID .................................................................................................................................. 243
7.14.1 Controle do valor ......................................................................................................................... 243
7.14.2 Controle de ID DIN ....................................................................................................................... 245

controle de pontes rolantes apfiff20 VACON 7
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7.14.3 DO controlado por ID ................................................................................................................... 246
7.14.4 Atraso de DIN livre ...................................................................................................................... 247
7.15 Controle do freio .............................................................................................................................. 248
7.15.1 Tempo de controle do tempo de frenagem em malha fechada ................................................ 249
7.15.2 Tempo de controle do freio em malha aberta ........................................................................... 250
7.15.3 Torque de partida ........................................................................................................................ 253
7.15.4 Controle de reversão para malha fechada................................................................................. 254
7.15.5 Função de monitoramento de freio ............................................................................................ 255
7.15.6 Funções ........................................................................................................................................ 256
7.15.7 Função de teste do freio .............................................................................................................. 256
7.16 Reset automático de falhas ............................................................................................................. 257
7.17 Controle de PI .................................................................................................................................. 261
7.18 Operação em tandem (sincronização de eixo) ............................................................................... 263
7.19 Estimativa de carga ......................................................................................................................... 264
7.20 Segurança funcional ........................................................................................................................ 265
7.21 Função antibalanço ......................................................................................................................... 265
7.22 Parâmetros de controle do teclado ................................................................................................ 268
8. Função de identificação do motor síncrono de ímã permanente ................................................... 269
8.1 Identificação com encoder absoluto. .............................................................................................. 269
8.2 Identificação com encoder incremental sem entrada de pulso Z................................................. 269
8.3 Identificação com encoder incremental com entrada de pulso Z................................................. 270
9. Palavra de status e controle em detalhes ..................................................................................... 271
9.1 Fieldbus ............................................................................................................................................ 271
9.1.1 Combinação 1, ProfiDrive - Padrão com placa opcional Profibus ............................................ 272
9.1.2 Combinação 2, ByPass - ProfiDrive ............................................................................................ 273
9.1.3 Combinação 3, ByPass - Padrão................................................................................................. 280
9.2 Application Status Word (Palavra de status da aplicação) ............................................................ 281
9.3 Regulator Status (Status do regulador) ......................................................................................... 281
9.4 Data Logger Trigger Word (Palavra do acionador do registrador de dados) ............................... 282
9.5 Palavra de status MC ....................................................................................................................... 282
9.6 Status de controle do freio .............................................................................................................. 283
10. Solução de problemas .................................................................................................................. 285
11. Códigos de falha ........................................................................................................................... 286
VACON 8 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1. APLICAÇÃO DE CONTROLE DE PONTES ROLANTES INTRODUÇÃO
Software APFIFF20, Aplicação de controle de Pontes Rolantes
A aplicação de Controle de Pontes Rolantes foi projetada para uso em sistemas de elevação.
1.1 Geral
Esta aplicação não é compatível com versões anteriores. Leia a nota de alteração da aplicação
ou o capítulo 2: Consulte as questões de compatibilidade das versões de Controle do freio
contidas neste manual para saber o que precisa ser observado ao atualizar a aplicação.
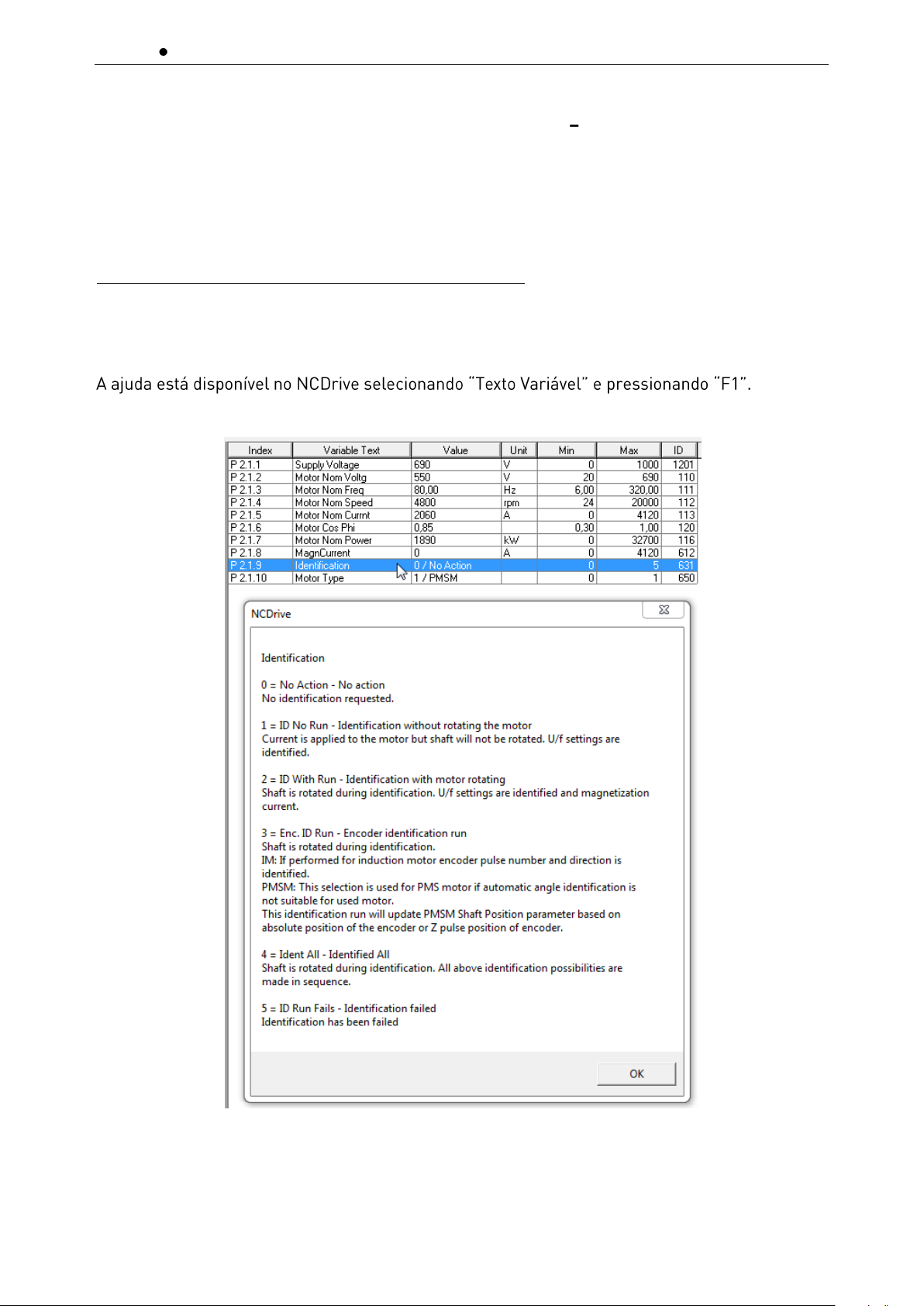
Consulte também a descrição atualizada do parâmetro no NCDrive durante o comissionamento.
Veja abaixo um exemplo do texto de ajuda do parâmetro Identification (Identificação) do NCDrive.

controle de pontes rolantes apfiff20 VACON 9
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1.2 Características básicas
A aplicação de Controle de Pontes Rolantes fornece uma ampla gama de parâmetros para
o controle de motores de indução e motores de ímã permanente. É possível utilizá-la em
varios tipos de processos diferentes, nos quais é necessária uma ampla flexibilidade de sinais
de E/S e apenas uma lógica simples de controle de PI.
Possibilidades de controle de ID flexíveis levam a um novo nível a adequação da aplicação
a diferentes processos, o que permite conectar qualquer entrada ou valor real a qualquer
parâmetro usando um fator de escala.
Funções adicionais:
• Zona morta de entrada do joystick
• Função Mestre/Seguidor
• Entrada do monitor de resfriamento da unidade de troca de calor com resposta
selecionável
• Entrada de monitoramento do freio e monitor de corrente real para fechamento
imediato do freio
• Ajuste de controle de velocidade separado para diferentes velocidades e cargas
• Função de avanço incremental com duas referências diferentes
• Possibilidade de conectar os dados de processo FB a qualquer parâmetro e alguns
valores de monitoramento
• As entradas analógicas 3 e 4 podem controlar qualquer parâmetro pelo número de ID
• Suporte para quatro saídas analógicas
• Suporte para duas placas PT100
• Controle de reversão e memória de torque
• Monitor de escorregamento do freio (partida para queda de carga)

VACON 10 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
2. RECURSOS DE COMISSIONAMENTO RÁPIDO PARA PONTES ROLANTES
2.1 Controle e monitoramento de freio mecânico
A função de Controle de freio mecânico no conversor de frequência oferece suporte para
aumento uniforme de torque contra o freio fechado antes de liberar o freio mecânico para uma
partida suave, e o conversor de frequência continuará fornecendo o torque até que o controle
de freio mecânico assuma o comando.
Os parâmetros de controle de freio mecânico estão contidos no grupo G 2.15.x.
Consulte o capítulo 8.15 Controle do freio para obter mais detalhes sobre parâmetros e seu
comportamento.
➢ Controle de reversão para MF
A função de reversão impede que a carga se movimente para baixo durante a abertura do freio.
Esta função é ativada no grupo do parâmetro G2.15.12.
Dicas de comissionamento fácil para Controle de freio mecânico:
O software da aplicação faz os cálculos necessários para a configuração dos parâmetros
durante a identificação do motor, com base nos parâmetros nominais do motor, no atraso de
abertura mecânica do freio (P2.15.3) e no atraso de fechamento mecânico do freio (P2.15.4).
1. Digite o valor da placa de identificação do motor G2.1 Basic Parameters (Parâmetros
Básicos).
a. Insira a corrente de magnetização do motor P2.1.8 se conhecida (calculada
a partir do Cos Phi caso não tenha sido fornecida).
2. Faça a identificação do motor em inatividade com P2.1.9 Identification (Identificação):
seleção 1 - ID No Run (Identificação sem funcionar o motor).
a. Se a corrente de magnetização não for conhecida, ajuste de modo que a seleção
de identificação 6 - U/f + magn ID run (Identificação do motor U/f + magn) possa
ser feita.
3. Após a identificação, faça o upload dos parâmetros do conversor de frequência.
4. Os parâmetros relacionados ao freio estão agrupados em G2.15.
a. Selecione a saída para controlar o freio P2.15.1 BrakeOpen, Direct (Freio Aberto,
Direto).
b. Selecione a entrada de realimentação, se usada: P2.15.2 Brake Feedback
(Realimentação de Freio).
c. Insira o atraso mecânico do freio para a abertura do freio: P2.15.3.
d. Insira o atraso mecânico do freio para o fechamento do freio: P2.15.4.
e. Dependendo do sistema, a identificação do motor do Tempo de Frenagem pode
ser feita.
5. Faça as alterações necessárias nos parâmetros para controlar o local e o sinal de
controle.
6. Faça a identificação do motor do guindaste quanto aos modos de içamento P2.1.11 Crane
Identification (Identificação do Guindaste).
a. Se forem encontradas temporizações precisas de modo para o freio durante
o comissionamento, recomenda-se refazer a Identificação da Ponte Rolante.
Consulte a lista detalhada de parâmetros modificados na explicação do P2.1.11.
7. Funcione o motor em Malha Aberta sem carga com os sinais de monitoramento abaixo.
a. Use um intervalo de monitoramento de aproximadamente 7 ms, se possível
(consulte o capítulo 10 Resolução de problemas).
controle de pontes rolantes apfiff20 VACON 11
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
- Valor: Palavra de status do freio
- Valor: Torque do motor
- Valor: Corrente do motor
- Valor: Frequência de saída de rampa
- Valor: Frequência de saída
- Valor: Frequência do eixo
- Valor: Tensão do motor
- Valor: Tensão CC
b. Monitore se a frequência do eixo do encoder está correta.
Em alguns casos, pode ser necessário filtrar alguns ms: P2.8.5.6.
c. Veja se a corrente e o torque não mostram comportamento anormal.
8. Mude o P2.8.1 Motor Control Mode (Modo de Controle do Motor) para Closed Loop
Control (Controle de Malha Fechada): 3 / Controle de velocidade de MF.
2.2 Operação em tandem para guindastes
➢ Mestre/Seguidor (compartilhamento de Velocidade-Torque)
A função Mestre/Seguidor (compartilhamento de Velocidade-Torque) é usada
principalmente quando eixos do motor são acoplados entre si para funcionarem com
uma carga comum. Neste caso, o mestre estará em modo de controle de velocidade
e o seguidor estará em modo de controle de torque.
Os sinais de controle externos são conectados somente ao NXP mestre. O mestre
controla os seguidores por meio de um barramento de sistema. Geralmente, a estação
mestre é controlada por velocidade e os outros conversores de frequência seguem sua
referência de torque.
Os parâmetros de Mestre/Seguidor estão no grupo G 2.11.x, no capítulo 6.11, e as descrições
dos parâmetros estão disponíveis no capítulo 7.11.
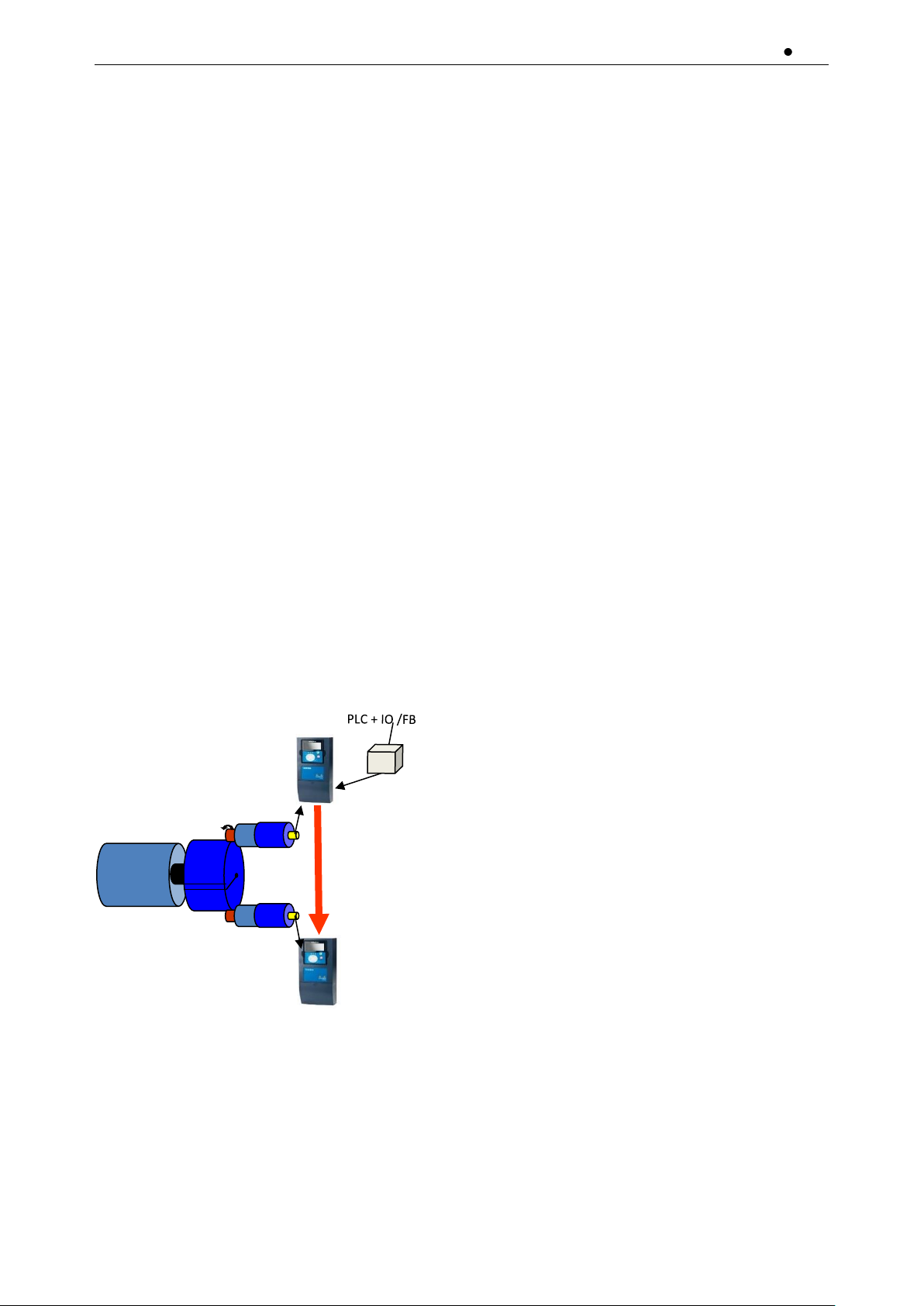
2.3 Içamento em tandem (sincronização de eixos)
A função de Içamento em tandem é usada para elevar uma carga de maior capacidade
com sincronização de dois eixos ao mesmo tempo.
Barramento de sistema
VACON 12 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
A operação em tandem ajuda a monitorar e a controlar a diferença de posição dos
ganchos e a sincronizar o movimento de cada guincho/trole.
➢ A sincronização dos eixos funciona entre eixos mestre-escravo através do barramento
de sistema e usando o software de aplicação de guindaste.
Pode-se sincronizar até quatro eixos.
A comunicação da operação em tandem é ativada com o modo Mestre/Seguidor
P2.11.1 (seleção 3 e 4). Consulte o capítulo 7.11 Mestre/Seguidor.
➢ Os parâmetros da operação em tandem (sincronização de eixos) estão nos grupos
G 2.11.x e G2.18.x, capítulos 7.11 e 8.18.
2.4 Antibalanço
Geralmente, as pontes ou pórticos rolantes são usados normalmente em processos de
fabricação e manutenção, nos quais a produtividade e segurança são considerados os requisitos
mais importantes. O balanço da carga durante o movimento do guindaste é um fenômeno
natural, uma vez que a carga é suspensa por um dispositivo de aperto por cabos e funciona
como um dispositivo pendular.
O NXP oferece um controle antibalanço sem sensor integrado, no qual não há necessidade de
encoders nem de comunicação com um mecanismo de içamento. O recurso Antibalanço deve
ser usado somente em movimentos de trole e translação.
A função Antibalanço está protegida por licença. Os usuários precisam comprar uma chave
de licença de um fornecedor Danfoss para tornar a função Antibalanço efetiva. O status da
chave de licença pode ser verificado no parâmetro de monitoramento V1.31.2.
Para eliminar o balanço, dois métodos diferentes estão disponíveis no software de aplicação
de Pontes Rolantes. O usuário precisa definir o período de balanço médio ou o comprimento
máximo do cabo.
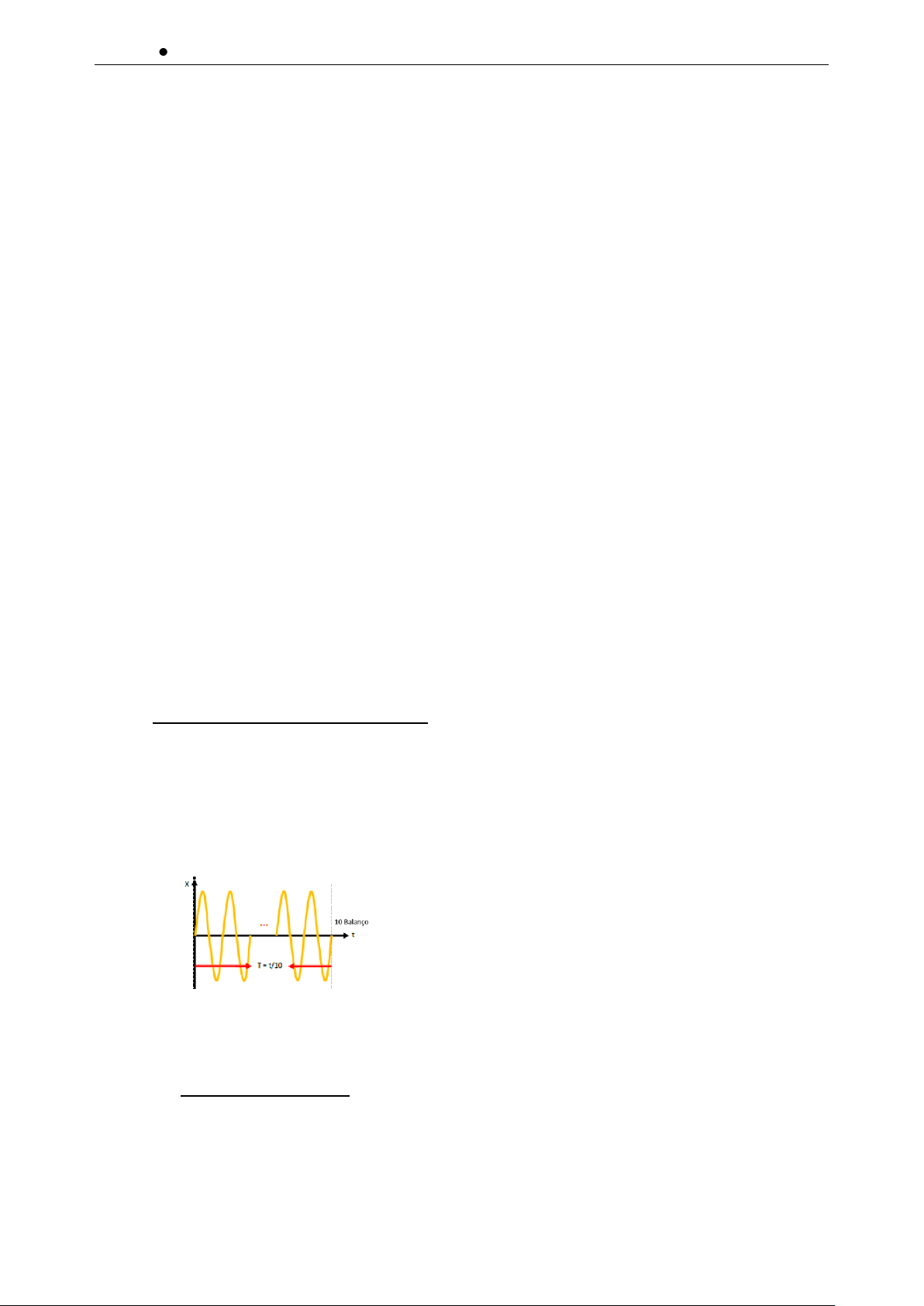
Como calcular o período de balanço
• Coloque o gancho ou carga na posição mais baixa possível. Não há necessidade de
conectar a carga no gancho.
• Acelere o guindaste com velocidade máxima e dê comando de parada.
• Meça o tempo de 5 a 10 balanços (para trás e para frente) e calcule o período de balanço.
• Coloque o período de balanço no parâmetro.
Os parâmetros do Antibalanço estão no grupo 2.21.x. Consulte o grupo 2.21.x para
diferentes modos para o método Antibalanço com período de balanço.
Comprimento do cabo
Comprimento máximo do cabo (em cm), a ser inserido no P 2.21.4. Do tambor até
o gancho tocar o chão, ou logo acima.
controle de pontes rolantes apfiff20 VACON 13
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
OBSERVAÇÃO: Se o método de período de balanço for usado, o parâmetro Rope Length
(Comprimento do Cabo) deve ser mantido zerado. Se o valor para Rope Length (Comprimento
do Cabo) for diferente de zero, o método de período de balanço não funcionará. Com o método
de com
Os parâmetros de antibalanço estão no grupo P2.21.x. Consulte os capítulos 6.20 e 7.21 para
obter mais detalhes.
2.5 Otimização de Velocidade (controle de velocidade dependente da potência)
A função de otimização de velocidade limita diretamente a velocidade no nível da potência (kW)
solicitada. Existem diferentes configurações para velocidade limite de avanço e velocidade limite
de reversão. Esta função será ativada nos parâmetros G2.6.3.7 e G2.6.3.8.
2.6 Prevenção contra choque de carga
A função de choque de carga permite uma coleta suave da carga até ela ficar suspensa. Isso
protege o guindaste contra uma tensão adicional proveniente de uma mudança súbita de carga
detectada pelo tambor e cabo de içamento em velocidades mais altas.
Com a Prevenção contra choque de carga, o mecanismo de içamento monitora a carga. Se a
Shock
load ref (Ref. de carga de choque)
prede
Shock load time (Tempo de carga
de choque)
tenha decorrido.
Os parâmetros Shock Load (Choque de carga) e Slack Rope (Cabo Frouxo) estão no grupo
P2.13.14.x. Consulte os capítulos 6.3.4 e 7.3.2 para obter mais detalhes.
2.7 Prevenção contra cabo frouxo
Quando a carga ou o gancho estiverem se aproximando do solo, isso irá gerar uma folga
no cabo, o que pode danificá-lo. O cabo pode também saltar para fora de suas guias se a
carga ou o gancho tocar o solo em uma velocidade alta.
O modo de proteção contra cabo frouxo pode ser ativado através do parâmetro P2.3.14.1.
Ao
Zero speed Reference
(Referência de velocidade zero)
Load off the
hook (Carga fora do gancho)
.
2.8 Segurança funcional integrada
Para ativar recursos de segurança funcional integrada em conformidade com SIL3/
preciso instalar uma placa opcional de segurança avançada no slot D. Existem disponíveis três
tipos de placas opcionais de segurança (OPTBL, OPTBM e OPTBN), que podem ser selecionados
de acordo com os requisitos da aplicação. Consulte o Guia de Operação de Segurança Funcional
Avançada VACON® para obter mais detalhes.

VACON 14 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
A aplicação de guindaste suporta a Função de Parada (STO, SQS, SS1 e SS2) e a Função de
Limite de Velocidade (SLS, SSR e SDI). Os parâmetros de segurança funcional podem ser
ativados no grupo do parâmetro P2.20.x. Consulte os capítulos 6.19 e 7.20 para obter mais
detalhes.
2.9 Estimativa de carga
O conversor de frequência de içamento estimará a carga no gancho para proteger o guindaste
contra o modo de sobrecarga. Isso significa que quando o conversor de frequência detecta uma
sobrecarga, ele emite um alarme e para o guindaste.
Para calcular a carga real, os parâmetros mecânicos de içamento precisam ser programados
no grupo P2.19.x.
É importante saber que a medição da carga real é baseada em parâmetros mecânicos de
içamento. Portanto, se os valores não forem inseridos corretamente, o conversor de frequência
não mostrará um valor preciso.
Consulte os capítulos 6.18 e 7.19 para obter mais detalhes.
controle de pontes rolantes apfiff20 VACON 15
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
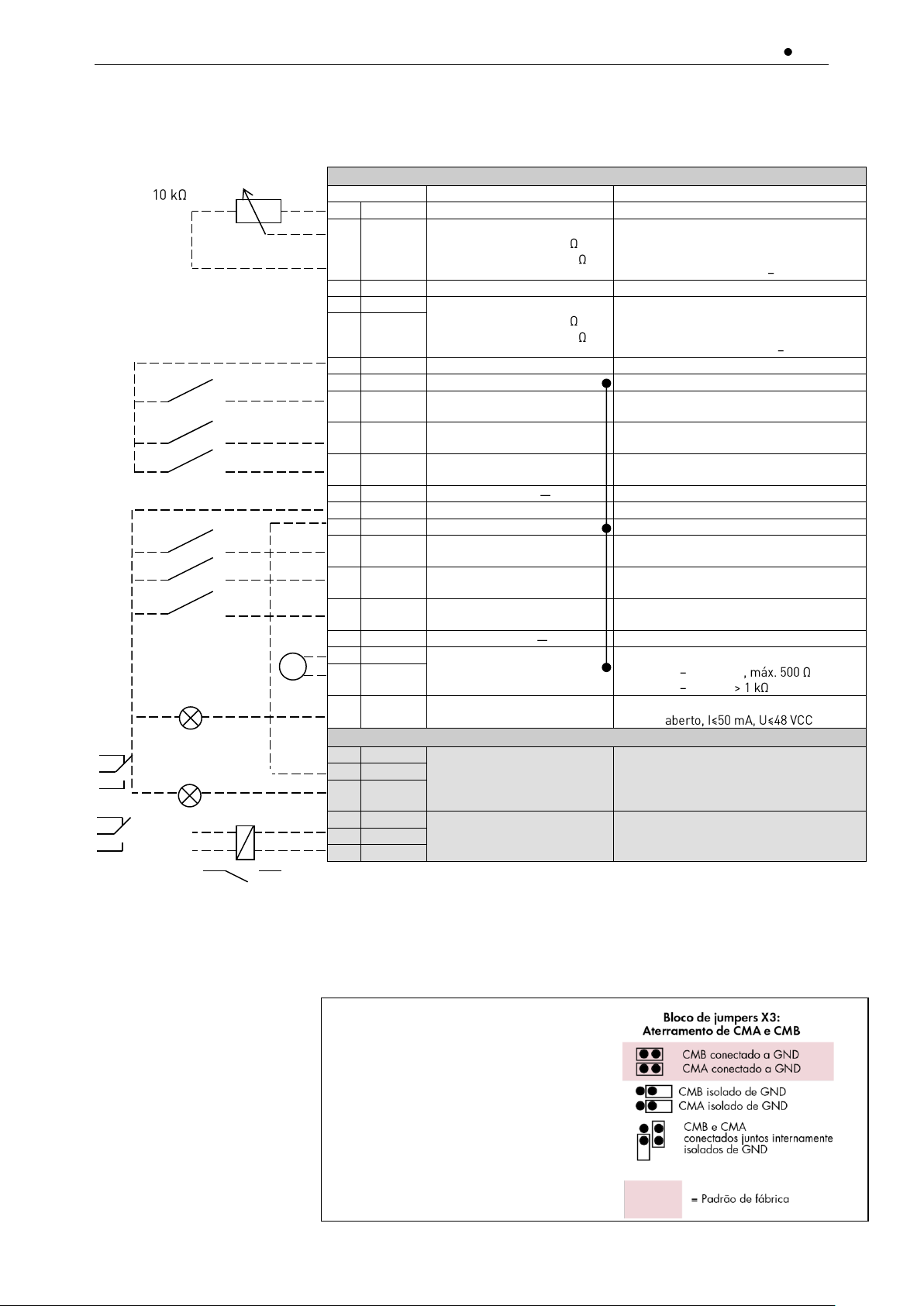
3. CONTROLE E/S
NXOPTA1
Terminal
Sinal
Descrição
1
+10Vref
Saída de tensão de referência
Tensão para potenciômetro, etc.
2
AI1+
Entrada analógica 1.
Faixa de 0-10 V, Ri = 200
Faixa de 0-20 mA Ri = 250
Referência de frequência da entrada
analógica 1.
Faixa de entrada selecionada por jumpers.
Faixa padrão: Tensão de 0 10 V
3
AI1-
Terra de E/S
Terra para referência e controles
4
AI2+
Entrada analógica 2.
Faixa de 0-10 V, Ri = 200
Faixa de 0-20 mA Ri = 250
Referência de frequência da entrada
analógica 2
Faixa de entrada selecionada por jumpers.
Faixa padrão: Corrente de 0 20 mA
5
AI2-
6
+24 V
Saída de tensão de controle
Tensão para interruptores etc., máx. 0,1 A
7
GND
Terra E/S
Terra para referência e controles
8
DIN1
Programável G2.2.7
Nenhuma função definida no padrão
9
DIN2
Programável G2.2.7
Nenhuma função definida no padrão
10
DIN3
Programável G2.2.7
Nenhuma função definida no padrão
11
CMA
Comum para DIN 1 DIN 3
Conecte a GND ou +24 V
12
+24 V
Saída de tensão de controle
Tensão para chaves (consulte #6)
13
GND
Terra E/S
Terra para referência e controles
14
DIN4
Programável G2.2.7
Nenhuma função definida no padrão
15
DIN5
Programável G2.2.7
Nenhuma função definida no padrão
16
DIN6
Programável G2.2.7
Nenhuma função definida no padrão
17
CMB
Comum para DIN4 DIN6
Conecte a GND ou +24 V
18
AOA1+
Saída analógica 1
Programável P2.3.1.2
Faixa de saída selecionada por jumpers.
Faixa de 0 20 mA. RL
Faixa de 0 10 V. RL
19
AOA1-
20
DOA1
Saída digital
Programável
Coletor
NXOPTA2
21
RO1
Saída de relé 1
Programável G2.3.3
Capacidade de chaveamento
24 VCC / 8 A
250 VCA / 8 A
125 VCC / 0,4 A
22
RO1
23
RO1
24
RO2
Saída de relé 2
Programável G2.3.3
Programável
Nenhuma função definida no padrão
25
RO2
26
RO2
Tabela 3-1. Configuração de E/S padrão da aplicação de controle
do freio e exemplo de conexão.
Observação: Consulte o Manual do Usuário, capítulo Conexões de controle, para obter
a especificação e configuração de hardware.
Observação: consulte as seleções de
jumpers abaixo. Mais informações no
Manual do Usuário do VACON® NX.
220
VCA
Potenciômetro de referência,
1-
mA
VACON 16 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4. PRINCÍPIO DE PROGRAMAÇÃO TERMINAL PARA FUNÇÃO (TTF)
O princípio de programação dos sinais de entrada e saída na Aplicação de controle
multifinalidade NXP, bem como na Aplicação de controle de bombas e ventiladores
(e parcialmente nas outras aplicações), é diferente do método convencional usado
em outras aplicações do VACON® NX.
No método de programação convencional, método
Programação de Função para Terminal (FTT)
,
é preciso ter uma entrada ou uma saída fixa para a qual uma determinada função é definida.
No entanto, as aplicações mencionadas acima usam o
método Programação de Terminal para
Função (TTF)
no qual o processo de programação é executado inversamente: Funções são
exibidas como parâmetros para os quais o operador define uma determinada entrada/saída.
Consulte
Aviso
na página 17.
4.1 Definindo uma entrada/saída para uma determinada função no teclado
A conexão de uma determinada entrada ou saída a uma determinada função (parâmetro) é feita
ao atribuir um valor apropriado ao parâmetro. O valor é formado pelo
Slot da placa
de controle
do VACON® NX (consulte o Manual do Usuário do VACON® NX) e pelo
respectivo número de
sinal
; consulte abaixo.
Nome da função
Slot Número do terminal
Tipo de terminal
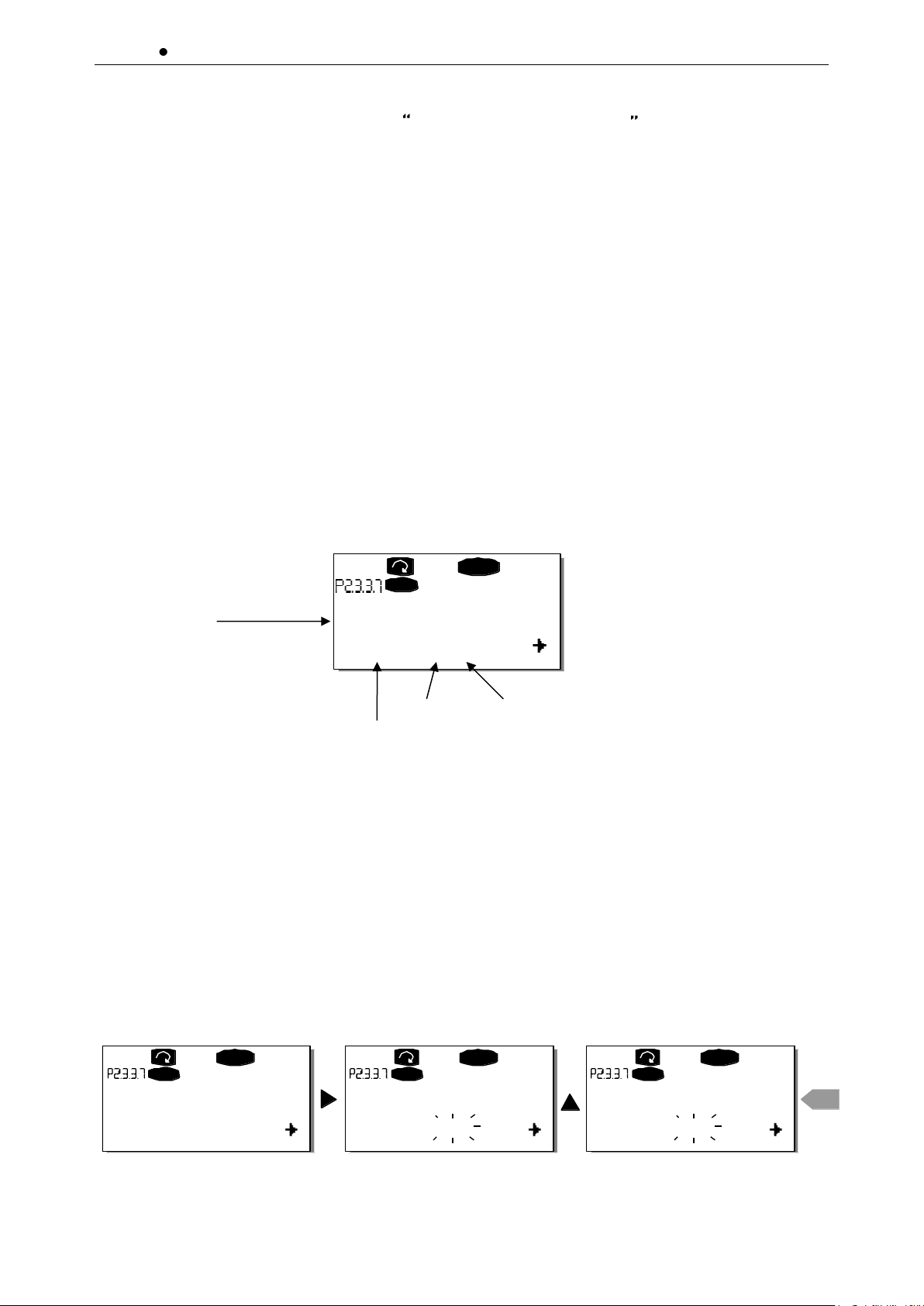
Exemplo: Você quer conectar a
Reference fault/warning (Falha/aviso de referência)
da função
de saída digital (parâmetro 2.3.3.7) à saída digital DO1 na placa básica NXOPTA1 (consulte
o Manual do Usuário do VACON® NX).
Localize o parâmetro 2.3.3.7 no teclado. Pressione o
botão Menu
uma vez para entrar no modo
de edição. Na
linha de valor
, você verá o tipo de terminal à esquerda (DigIN, DigOUT, An.IN,
An.OUT) e, à direita, a entrada/saída presente à qual a função está conectada (B.3, A.2 etc.),
ou se não estiver conectada, um valor (0.#).
Quando o valor estiver piscando, segure o
botão Browser para cima
ou
para baixo
para
encontrar o slot de placa desejado e o número de sinal. O programa percorrerá os slots das
placas, começando em 0 e prosseguindo de A a E, e a seleção de E/S de 1 a 10.
Após definir o valor desejado, pressione o
botão Enter
uma vez para confirmar a alteração.
READY
I/Oterm
DigOUT:B.1
AI Ref Faul/Warn
READY
I/Oterm
DigOUT:0.0
READY
I/Oterm
DigOUT:0.0
READY
I/Oterm
DigOUT:B.1
enter
AI Ref Faul/Warn AI Ref Faul/Warn AI Ref Faul/Warn
controle de pontes rolantes apfiff20 VACON 17
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
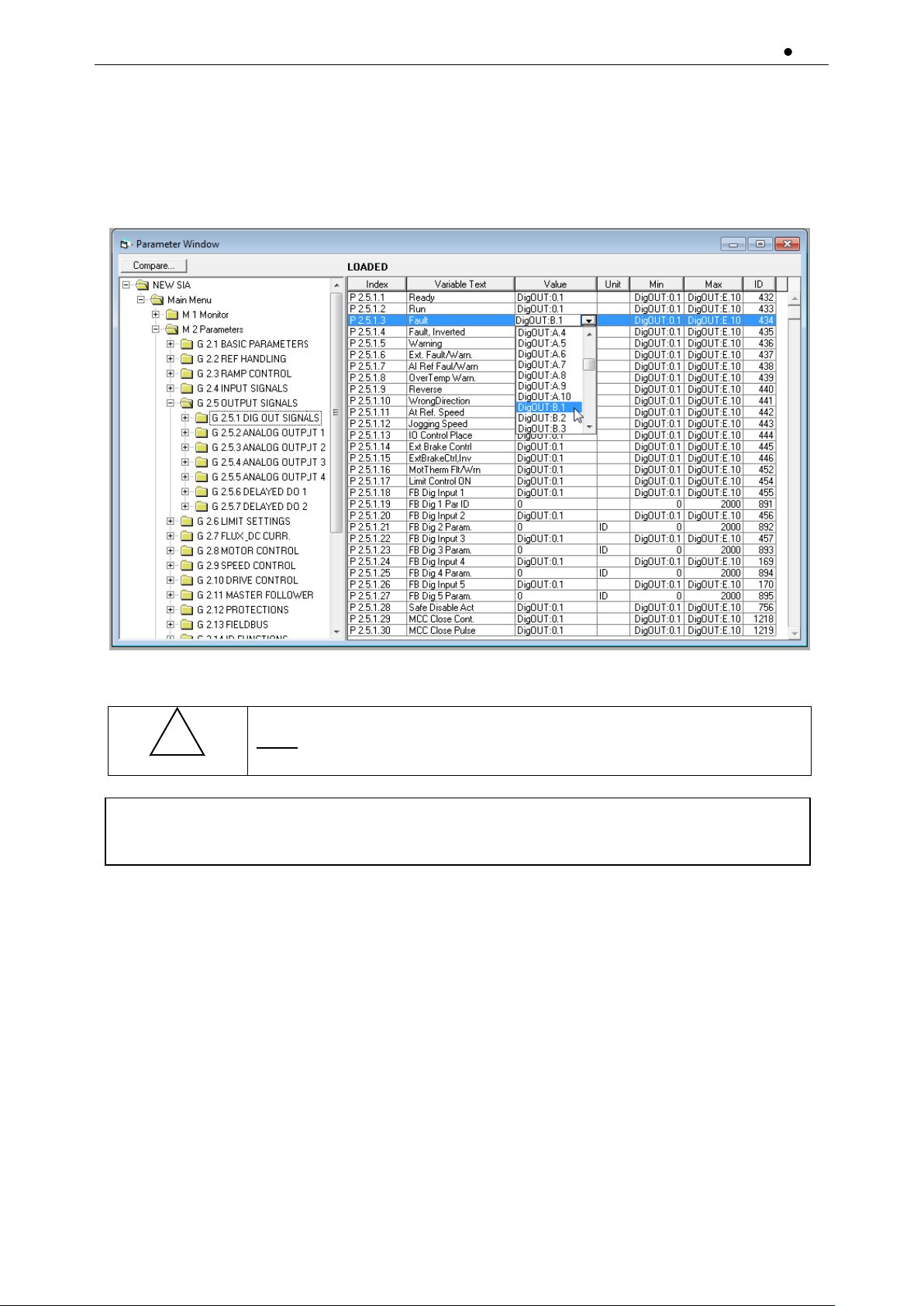
4.2 Definindo um terminal para uma determinada função com a ferramenta de programação
NCDrive
Se você usar a ferramenta de programação NCDrive para parametrizar, será necessário
estabelecer a conexão entre a função e entrada/saída da mesma forma que com o painel de
controle. Apenas capture o código de endereço do menu suspenso na coluna
Value (Valor)
(consulte a Figura abaixo).
Figura 4-1. Captura de tela da ferramenta de programação NCDrive; Introduzir o código de endereço
CERTIFIQUE-SE de não conectar duas funções em uma e a mesma
saída para evitar saturações de funções e garantir uma operação
sem falhas.
!
WARNING
Observação: As
entradas
, diferentemente das
saídas
, não podem ser alteradas no estado
de FUNCIONAMENTO.

VACON 18 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4.3 Definindo entradas/saídas não usadas
Todas as entradas e saídas não usadas devem receber o valor 0 do slot da placa e o valor do
terminal 1. O valor 0,1 também é o valor padrão para a maioria das funções. No entanto, se você
desejar usar os valores de um sinal de entrada digital para, por exemplo, apenas fins de teste,
será possível definir o valor do slot da placa como 0 e o número do terminal como qualquer
outro número entre 2 e 10 para atribuir um estado VERDADEIRO à entrada. Em outras palavras,
o valor 1 corresponde ao 'contato aberto' e os valores 2 a 10 ao 'contato fechado'.
No caso de entradas analógicas, atribuir o valor 1 ao número de terminal corresponde ao 0% do
nível de sinal, o valor 2 corresponde a 20%, o valor 3 a 30% e assim por diante. Atribuir um valor
10 ao número de terminal corresponde a 100% do nível de sinal.

controle de pontes rolantes apfiff20 VACON 19
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5. APLICAÇÃO DE CONTROLE DE PONTES ROLANTES VALORES DE
MONITORAMENTO
Nas próximas páginas você encontrará as listas de parâmetros nos respectivos grupos
de parâmetros. As descrições dos parâmetros estão nas páginas 95 a 257. A descrição
do parâmetro inclui mais do que está disponível nesta aplicação; consulte a lista para
os parâmetros que estão disponíveis nesta aplicação.
Explicações para as colunas:
Código = Indicação da localização no teclado; Mostra ao operador o número
do parâmetro atual
Parâmetro = Nome do parâmetro
Mín. = Valor mínimo do parâmetro
Máx. = Valor máximo do parâmetro
Unidade = Unidade do valor do parâmetro; fornecido caso disponível
Padrão = Valor predefinido em fábrica
Person. = Configuração própria do cliente
ID = Número de ID do parâmetro
_____ = No código do parâmetro: o valor do parâmetro somente poderá ser alterado
após a parada do conversor de frequência.
_____ = Aplique o método Terminal para Função (TTF) a estes parâmetros (consulte
o capítulo 4)
_____ = É possível monitorar o valor para controlar do fieldbus por meio do número de ID
O manual apresenta sinais que normalmente não são visíveis para monitoramento; isto é, não
é um parâmetro ou um sinal de monitoramento padrão. Estes sinais são apresentados com uma
[Letra]; por exemplo, para [FW]MotorRegulatorStatus
[V] Sinal de monitoramento normal
[P] Parâmetro normal na aplicação
[FW] Sinal de firmware, pode ser monitorado com o NCDrive quando o tipo de sinal Firmware
estiver selecionado
[A] Sinal de aplicação, pode ser monitorado com o NCDrive quando o tipo de sinal Aplicação
estiver selecionado
[R] Parâmetro de tipo de referência no teclado
[F] Função. O sinal é recebido como uma saída de função
[DI] Sinal de entrada digital
VACON 20 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
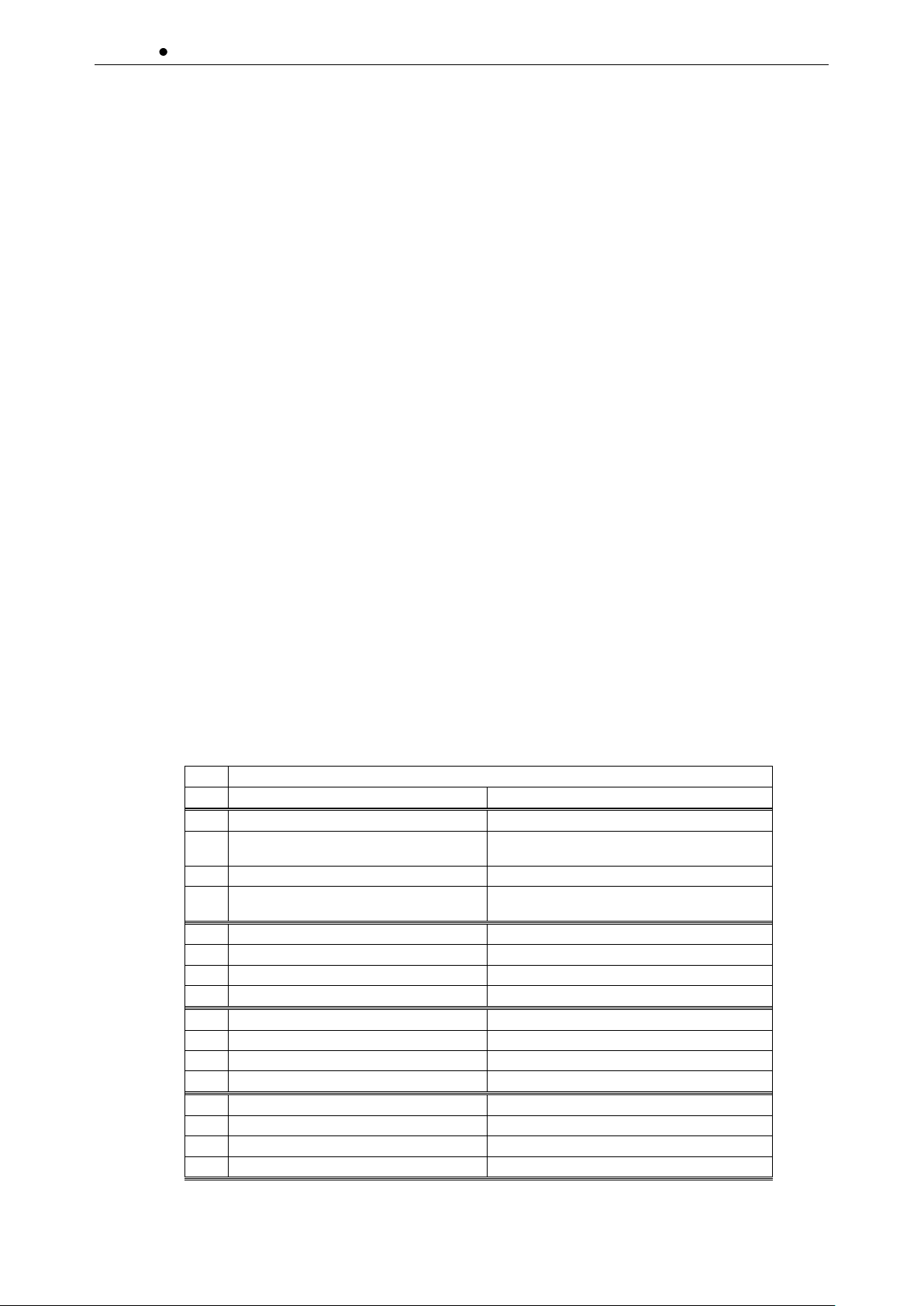
5.1 Valores de monitoramento
Os valores de monitoramento são os valores reais dos parâmetros e sinais, bem como os status
e as medições.
Código
Parâmetro
Unidade
Form.
ID
Descrição
V1.1
Output frequency
(Frequência de saída)
Hz
#,##
1
Frequência de saída para o motor
V1.2
Frequency reference
(Referência de
frequência)
Hz
#,##
25
Referência de frequência para o controle
do motor
V1.3
Motor speed
(Velocidade do motor)
rpm # 2
Velocidade do motor em rpm
V1.4
Motor current
(Corrente do motor)
A
Varia
3
Filtragem linear de 1 s
V1.5
Motor torque
(Torque do motor)
%
#,#
4
Em % de torque nominal do motor
V1.6
Motor Power
(Potência do motor)
%
#,#
5
V1.7
Motor voltage
(Tensão do motor)
V
#,#
6
Tensão calculada do motor
V1.8
DC link voltage
(Tensão do
barramento CC)
V # 7
Tensão CC medida, filtrada.
V1.9
Unit temperature
(Temperatura da
unidade)
°C
# 8 Temperatura do dissipador de calor
V1.10
Motor temperature
(Temperatura do motor)
%
# 9 Temperatura do motor calculada
V1.11
Analogue input 1
(Entrada analógica 1)
%
#,##
13
AI1, não filtrada.
V1.12
Analogue input 2
(Entrada analógica 2)
%
#,##
14
AI2, não filtrada.
V1.13
Analogue input 3
(Entrada analógica 3)
%
#,##
27
AI3, não filtrada.
V1.14
Analogue input 4
(Entrada analógica 4)
%
#,##
28
AI4, não filtrada.
V1.15
Analogue Out 1
(Saída analógica 1)
%
#,##
26
AO1
V1.16
Analogue Out 2
(Saída analógica 2)
%
#,##
50
AO2
V1.17
Analogue Out 3
(Saída analógica 3)
%
#,##
51
AO3
V1.18
Analogue Out 4
(Saída analógica 4)
%
#,##
1526
V1.19
DIN1, DIN2, DIN3
15
Status das entradas digitais
V1.20
DIN4, DIN5, DIN6
16
Status das entradas digitais
V1.21
Torque reference
(Referência de torque)
%
#,#
18
Referência de torque usada
V1.22
PT-100 Temperature
(Temperatura de
PT-100)
Cº
#,#
42
A temperatura mais alta da placa OPTB8.
Filtragem de 4 s.
G1.23
Multimonitoring
items (Itens de
multimonitoramento)
Exibe três valores de monitoramento
selecionáveis
Tabela 5-1. Valores de monitoramento
controle de pontes rolantes apfiff20 VACON 21
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
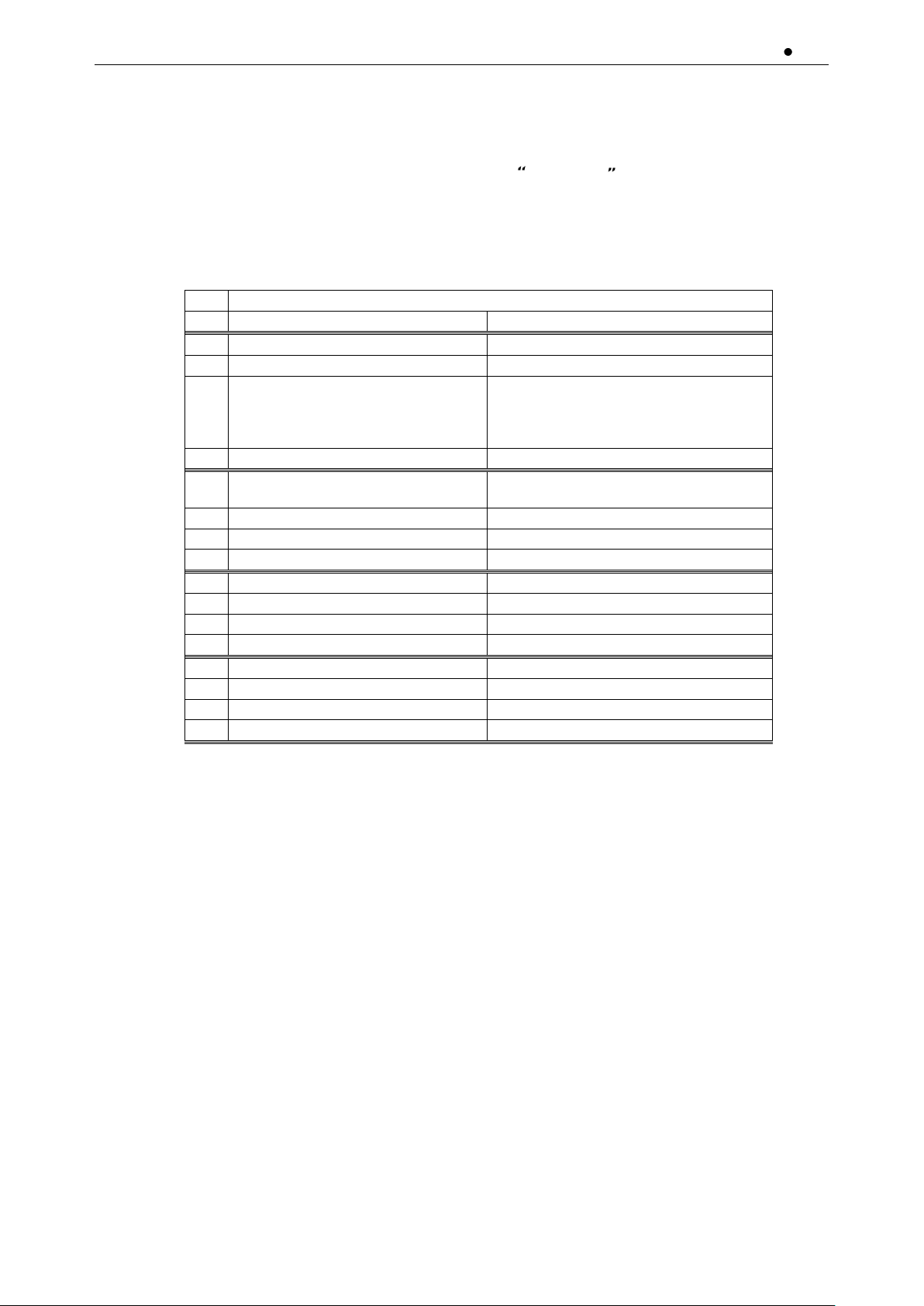
5.1.1 Valores de monitoramento 2
Código
Parâmetro
Unidade
Form.
ID
Descrição
V1.24.1
Current (Corrente)
A
Varia
1113
Corrente do motor não filtrada
V1.24.2
Torque
%
#,#
1125
Torque do motor não filtrado
V1.24.3
DC Voltage (Tensão CC)
V # 44
Tensão de barramento CC não
filtrada
V1.24.4
Status Word 1 (Palavra
de status 1) (Aplicação)
43
V1.24.5
Encoder 1 Frequency
(Frequência do
encoder 1)
Hz
#,##
1124
Não filtrada
V1.24.6
Output Power
(Potência de saída)
kW
Varia
1508
Potência elétrica não filtrada
V1.24.7
Measured temperature
1 (Temperatura
medida 1)
Cº
#,#
50
Filtragem de 4 s.
V1.24.8
Measured temperature
2 (Temperatura
medida 2)
Cº
#,#
51
Filtragem de 4 s.
V1.24.9
Measured temperature
3 (Temperatura
medida 3)
Cº
#,#
52
Filtragem de 4 s.
V1.24.10
Measured temperature
4 (Temperatura
medida 4)
Cº
#,#
69
Filtragem de 4 s.
V1.24.11
Measured temperature
5 (Temperatura
medida 5)
Cº
#,#
70
Filtragem de 4 s.
V1.24.12
Measured temperature
6 (Temperatura
medida 6)
Cº
#,#
71
Filtragem de 4 s.
V1.24.13
ABS Encoder
Revolutions
(Revoluções do
encoder ABS)
r
#
55
V1.24.14
ABS Encoder Position
(Posição do encoder
ABS)
#
54
V1.24.15
Step response
(Resposta do passo)
Hz
#,##
1132
V1.24.16
CosPhiiActual
#,###
68
V1.24.17
Flux Current
(Corrente de fluxo)
%
#,#
72
V1.24.18
Regulator Status
(Status do regulador)
77 V1.24.19
Frequency Delta
(Delta de frequência)
1847
V1.24.20
Rotor Flux
(Fluxo do rotor)
%
#,#
1158
V1.24.21
DataLogger Trigger
Word (Palavra
do acionador do
registrador de dados)
97
V1.24.22
Ident Failure
Code (Código de
identificação da falha)
98
Tabela 5-2. Valores de monitoramento 2
VACON 22 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.2 Valores de monitoramento do fieldbus
Código
Parâmetro
Unidade
Form.
ID
Descrição
V1.25.1
FB Control Word (Palavra
de controle de FB)
1160
V1.25.2
FB Speed Reference
(Referência de
velocidade de FB)
875
V1.25.3
FB Status Word (Palavra
de status de FB)
65
V1.25.4
FB Actual Speed
(Velocidade real de FB)
865
V1.25.5
FB Torque Reference
(Referência de torque
de FB)
%
#,#
1140
Controle padrão de FB PD 1
V1.25.6
FB Limit Scaling
(Escala de limite de FB)
%
#,##
46
Controle padrão de FB PD 2
V1.25.7
FB Adjust Reference
(Referência do ajuste
de FB)
%
#,##
47
Controle padrão de FB PD 3
V1.25.8
FB Analog Output
(Saída analógica de FB)
%
#,##
48
Controle padrão de FB PD 4
V1.25.9
FB Motor Current
(Corrente do motor
de FB)
A
#,#
45
Corrente do motor (independente
de conversor de frequência) com
uma casa decimal
V1.25.10
Fault Word 1
(Palavra de falha 1)
1172
V1.25.11
Fault Word 2
(Palavra de falha 2)
1173 V1.25.12
Warning Word 1
(Palavra de aviso 1)
1174
V1.25.13
AuxStatusWord (Palavra
de status auxiliar)
1163
V1.25.14
Last Active Fault
(Última falha ativa)
37
V1.25.15
AuxControlWord
(Palavre de controle
auxiliar)
1161
V1.25.16
Din Status Word
(Palavra de status DIN)
56
V1.25.17
Din Status Word 2
(Palavra de status DIN 2)
57
V1.25.18
MC Status (Status do MC)
64
V1.25.19
Last Active Warning
(Último aviso ativo)
74
V1.25.20
Encoder Rounds
(Revoluções do encoder)
1170
V1.25.21
Encoder Angle (Ângulo
do encoder)
1169
V1.25.22
Fault Word 10
(Palavra de falha 10)
1202
V1.25.23
Warning Word 10
(Palavra de Aviso 10)
1269
Tabela 5-3. Valores de monitoramento do fieldbus
5.1.3 Valores de monitoramento do Mestre/Seguidor
Código
Parâmetro
Unidade
Form.
ID
Descrição
V1.26.1
SB System Status
(Status do sistema SB)
1601
V1.26.2
Total Current
(Corrente total)
A
#,#
80
Soma da corrente de todos os
conversores de frequência (DS)
V1.26.3
Master Control Word
(Palavra de controle do
mestre)
93
controle de pontes rolantes apfiff20 VACON 23
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Código
Parâmetro
Unidade
ID
Descrição
V1.26.4.1
Motor Current D1
(Corrente do motor D1)
A 1616 V1.26.4.2
Motor Current D2
(Corrente do motor D2)
A 1605 V1.26.4.3
Motor Current D3
(Corrente do motor D3)
A 1606
V1.26.4.4
Motor Current D4
(Corrente do motor D4)
A 1607
Código
Parâmetro
Unidade
ID
Descrição
V1.26.4.1
Status Word D1
(Palavra de status D1)
1615
V1.26.4.2
Status Word D2
(Palavra de status D2)
1602 V1.26.4.3
Status Word D3
(Palavra de status D3)
1603
V1.26.4.4
Status Word D4
(Palavra de status D4)
1604
Tabela 5-4. Valores de monitoramento do Mestre/Seguidor
5.1.4 Valores de monitoramento do controle PI
Código
Parâmetro
Unidade
Form.
ID
Descrição
V1.27.1
PI Reference
(Referência PI)
20
Referência PI usada
V1.27.2
PI Actual Value
(Valor real PI)
21
Valor real PI
V1.27.3
PI Output (Saída PI)
23
Saída PI antes da escala
V1.27.4
PI Output Scaled (Saída
PI após a escala)
1807
Saída PI após a escala
Usada para conexão de ID
5.1.5 Cadeia de frequência
Código
Parâmetro
Unidade
Form.
ID
Descrição
V1.28.1
Frequency Reference 1
(Referência de frequência 1)
Hz 1126
V1.28.2
Frequency Reference 2
(Referência de frequência 2)
Hz 1127
V1.28.3
Frequency reference
(Referência de frequência)
Hz
#,##
25
Referência de frequência para
o controle do motor
V1.28.4
Frequency Reference
Actual (Referência de
frequência real)
Hz 1128
V1.28.5
Frequency Ramp Out
(Frequência de saída
de rampa)
Hz 1129
V1.28.6
Frequency Reference
Final (Referência de
frequência final)
Hz 1131
V1.28.7
Encoder Frequency
(Frequência do encoder)
Hz 1164
5.1.6 Cadeia de torque
Código
Parâmetro
Unidade
Form.
ID
Descrição
V1.29.1
Torque Reference
(Referência de torque)
% 18
V1.29.2
Torque Reference 3
(Referência de torque 3)
% 1144
V1.29.3
Torque Ref Final
(Referência de torque final)
% 1145
V1.29.4
Speed Control Out (Controle
da velocidade de saída)
% 1134
V1.29.5
Torque Reference Actual
(Referência de torque real)
% 1180
Referência de torque final de
controle de velocidade e/ou
controle de torque
VACON 24 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.7 Controle do freio
Código
Parâmetro
Unidade
Form.
ID
Descrição
V1.30.1
Brake Status Word
(Palavra de status
do freio)
89
5.1.8 Movimento
Código
Parâmetro
Unidade
Form.
ID
Descrição
V1.31.1
Serial Number Key
(Chave do número
de série)
V1.31.2
License Status (Status
da licença)
5.1.9 Sincronização do eixo
Código
Parâmetro
Unidade
Form.
ID
Descrição
V1.32.1
Master Rotations
(Rotações do mestre)
1820 V1.32.2
Own Rotations
(Rotações próprias)
1821 V1.32.3
Control Out (Saída
de controle)
1822
V1.32.4
Rotation Error (Erro
de rotação)
1823
V1.32.5
Position Ref (Referência
da posição)
1825
controle de pontes rolantes apfiff20 VACON 25
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.10 Valores de monitoramento
V1.1 Output frequency (Frequência de saída) [#,## Hz] ID1
Frequência de saída para o motor, atualizada a cada 10 ms.
V1.2 Frequency reference (Referência de frequência) [#,## Hz] ID 25
Referência de frequência para o controle do motor, após a função
de compartilhamento de velocidade, atualizada a cada 1 ms.
V1.3 Motor speed (Velocidade do motor) [ # rpm] ID 2
Velocidade do motor em rpm
V1.4 Motor current (Corrente do motor) [A] ID 3
Corrente RMS do motor medida
Escala de corrente em diferentes tamanhos de unidades
Observação: ID45, geralmente em dados de processo OUT 3, definido para estar
sempre com uma casa decimal.
Tensão
Tamanho
Escala
208 240 VCA
NX0001 NX0011
100 0,01 A
208 240 VCA
NX0012 NX0420
10 0,1 A
208 240 VCA
NX0530
1 1 A
380 - 500 VCA
NX0003 NX0007
100 0,01 A
380 - 500 VCA
NX0009 NX0300
10 0,1 A
380 - 500 VCA
NX0385 NX2643
1 1 A
525 690 VCA
NX0004 NX0013
100 0,01 A
525 690 VCA
NX0018 NX0261
10 0,1 A
525 690 VCA
NX0325 NX1500
1 1 A
V1.5 Motor torque (Torque do motor) % ID 4
Em % de torque nominal do motor
V1.6 Motor Power (Potência do motor) % ID 5
Potência do motor calculada
V1.7 Motor voltage (Tensão do motor) V ID 6
Tensão calculada do motor
V1.8 DC link voltage (Tensão do barramento CC) V ID 7
Tensão CC medida, filtrada.
V1.9 Unit temperature (Temperatura da unidade) C ID 8
Temperatura do dissipador de calor

VACON 26 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.10 Motor temperature (Temperatura do motor) % ID 9
Temperatura do motor calculada
105% é o limite do desarme se a resposta for falha.
V1.11 Analogue input 1 (Entrada analógica 1) % ID 13
V1.12 Analogue input 2 (Entrada analógica 2) % ID 14
Nível de entrada analógica não filtrada.
0% = 0 mA / 0 V, -100% = -10 V, 100% = 20 mA / 10 V.
A escala de monitoramento é determinada pelo parâmetro da placa opcional.
V1.13 Analogue input 3 (Entrada analógica 3) % ID 27
V1.14 Analogue input 4 (Entrada analógica 4) % ID 28
É possível ajustar este valor de entrada do fieldbus quando a seleção do terminal de
entrada for 0,1. Desta forma, é possível ajustar a entrada analógica independente do
fieldbus e ter todas as funções de entrada analógica disponíveis para os dados de
processo do fieldbus.
V1.15 Analogue Out 1 (Saída analógica 1) % ID 26
V1.16 Analogue Out 2 (Saída analógica 2) % ID 50
V1.17 Analogue Out 3 (Saída analógica 3) % ID 51
V1.18 Analogue Out 4 (Saída analógica 4) % ID 1526
Valor da saída analógica 0% = 0 mA / 0 V, 100% = 20 mA / 10 V
V1.19 DIN1, DIN2, DIN3 ID 15
V1.20 DIN4, DIN5, DIN6 ID 16
Status de
DIN1/DIN2/DIN3
Status DIN4/DIN5/DIN6
b0
DIN3
DIN6
b1
DIN2
DIN5
b2
DIN1
DIN4
V1.21 Torque reference (Referência de torque) % ID 18
Valor de referência de torque antes do compartilhamento de carga.
V1.22 PT-100 Temperature (Temperatura de PT-100) Cº ID 42
A temperatura mais alta da placa OPTB8. Filtragem de 4 s.
controle de pontes rolantes apfiff20 VACON 27
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.11 Valores de monitoramento 2
V1.24.1 Current (Corrente) A ID 1113
Corrente do motor não filtrada, sinal recomendado para o monitoramento do NCDrive.
V1.24.2 Torque % ID 1125
Torque do motor não filtrado, sinal recomendado para o monitoramento do NCDrive.
V1.24.3 DC Voltage (Tensão CC) V ID 44
Tensão do barramento CC não filtrada, sinal recomendado para o monitoramento
do NCDrive.
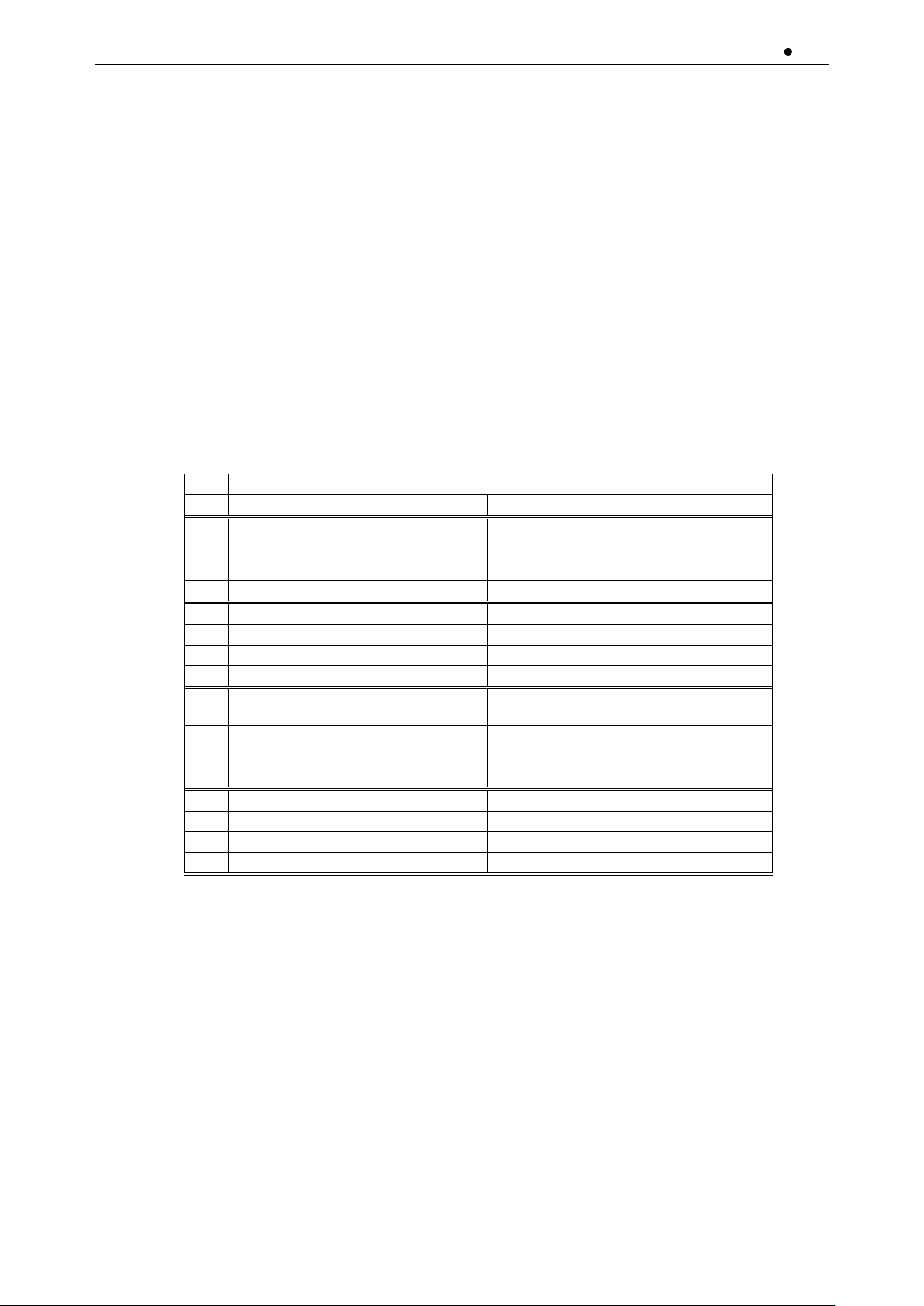
V1.24.4 Application Status Word (Palavra de status da aplicação) ID 43
A Palavra de status da aplicação combina diferentes status do conversor
de frequência em uma única palavra de dados.
Sinal recomendado para monitoramento do NCDrive.
Palavra de status da aplicação ID43
FALSO
VERDADEIRO
b0
Fluxo não pronto
Fluxo pronto (>90%)
b1
Não no estado Pronto
Pronto
b2
Não em funcionamento
Em funcionamento
b3
Não falha
Falha
b4
Sentido horário
Sentido anti-horário
b5
Parada de emergência ativa
Parada de emergência NÃO ativa
b6
Não permitir funcionamento
Permitir funcionamento
b7
Sem aviso
Aviso
b8
Potência positiva
Potência negativa, torque genérico ou limite
de corrente ativo
b9
b10
b11
Sem freio CC
Freio CC ativo
b12
Sem solicitação de funcionamento
Solicitação de funcionamento
b13
Controles de limite inativos
Controle de limite ativo
b14
Controle de freio externo DESATIVADO
Controle de freio externo ATIVADO
b15
V1.24.5 Shaft Frequency (Frequência do eixo) Hz ID 1124
Frequência do encoder após o filtro. P2.8.4.6 Encoder1FiltTime.
V1.24.6 Output Power (Potência de saída) [kw] ID1508
Potência de saída do conversor de frequência elétrica não filtrada.
VACON 28 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.24.7 Measured temperature 1 (Temperatura medida 1) Cº ID 50
V1.24.8 Measured temperature 2 (Temperatura medida 2) Cº ID 51
V1.24.9 Measured temperature 3 (Temperatura medida 3) Cº ID 52
V1.24.10 Measured temperature 4 (Temperatura medida 4) Cº ID 69
V1.24.11 Measured temperature 5 (Temperatura medida 5) Cº ID 70
V1.24.12 Measured temperature 6 (Temperatura medida 6) Cº ID 71
Medida separada das duas placas PT100. O sinal tem um tempo de filtragem de 4 s.
V1.24.13 ABS Encoder Revolutions (Revoluções do encoder ABS) ID55
Informações da revolução absoluta do encoder.
V1.24.14 ABS Encoder Position (Posição do encoder ABS) ID54
Posição absoluta do encoder em uma rotação. Consulte o manual do encoder para
obter informações sobre escala.
V1.24.15 Step response (Resposta do passo) Hz ID 1132
Erro de frequência. Compara a saída de rampa à frequência real do encoder com
precisão de 0,001 Hz. Pode ser usado para ajuste de controle da velocidade no
controle de malha fechada.
V1.24.16 CosPhiiActual ID 68
Cos Phii estimado.
V1.24.17 Flux Current (Corrente de fluxo) % ID 72
Corrente de fluxo parcial ou a corrente total. 100% = Corrente nominal do motor.
V1.24.18 Regulator Status (Status do regulador) ID 77
Status do regulador ID77
b0
Status do regulador de corrente do motor
b1
Status do regulador de corrente no
modo gerador
b2
Status do regulador de torque do motor
Para monitor de MF B0
b3
Status do regulador de torque no modo
gerador
Para monitor de MF B1
b4
Status do regulador de sobretensão
Tensão CC
b5
Status do regulador de subtensão
Tensão CC
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
controle de pontes rolantes apfiff20 VACON 29
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.24.19 Frequency Delta (Delta de frequência) ID 1847
Alteração da referência de frequência final em Hz/s.
V1.24.20 Rotor Flux (Fluxo do rotor) ID1158 Rotor Flux
Fluxo do rotor calculado.
V1.24.21 Data Logger Trigger Word (Palavra do acionador do registrador de dados) ID 97
Palavra do acionador do registrador de dados ID97
Função
Comentário
b0
Status de falha
O registrador é acionado quando há uma falha
b1
Status de aviso
O registrador é acionado quando há um aviso
b2
Aviso de redefinição automática
O registrador é acionado quando há uma
falha que foi definida para ser redefinida
automaticamente. Este bit pode ser usado
para obter a primeira situação de falha
b3
Status de falha OU Status de aviso
B0 OU B1 ocorreu uma situação de disparo
b4
Status de falha OU Aviso de redefinição
automática
B0 OU B2 ocorreu uma situação de disparo
b5
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
V1.24.22 Ident Failure Code (Código de identificação da falha) [Ident. de Código
de Falha] ID 98
Código de falha para identificação da falha:
1 = Compensação de medição de corrente
2 = Nível da corrente de identificação
3 = Tempo de aceleração muito longo
4 = Referência de frequência de identificação não alcançada
5 = Corrente de magnetização muito baixa ou alta
6 = Curva de fluxo fora dos níveis esperados
7 = PMSM, posição zero do encoder
8 = Limite de frequência máxima muito baixo
9 = PMSM, pulso zero do encoder não encontrado
10 = Tempo expirado de identificação Ls
11 = Corrente de identificação Ls
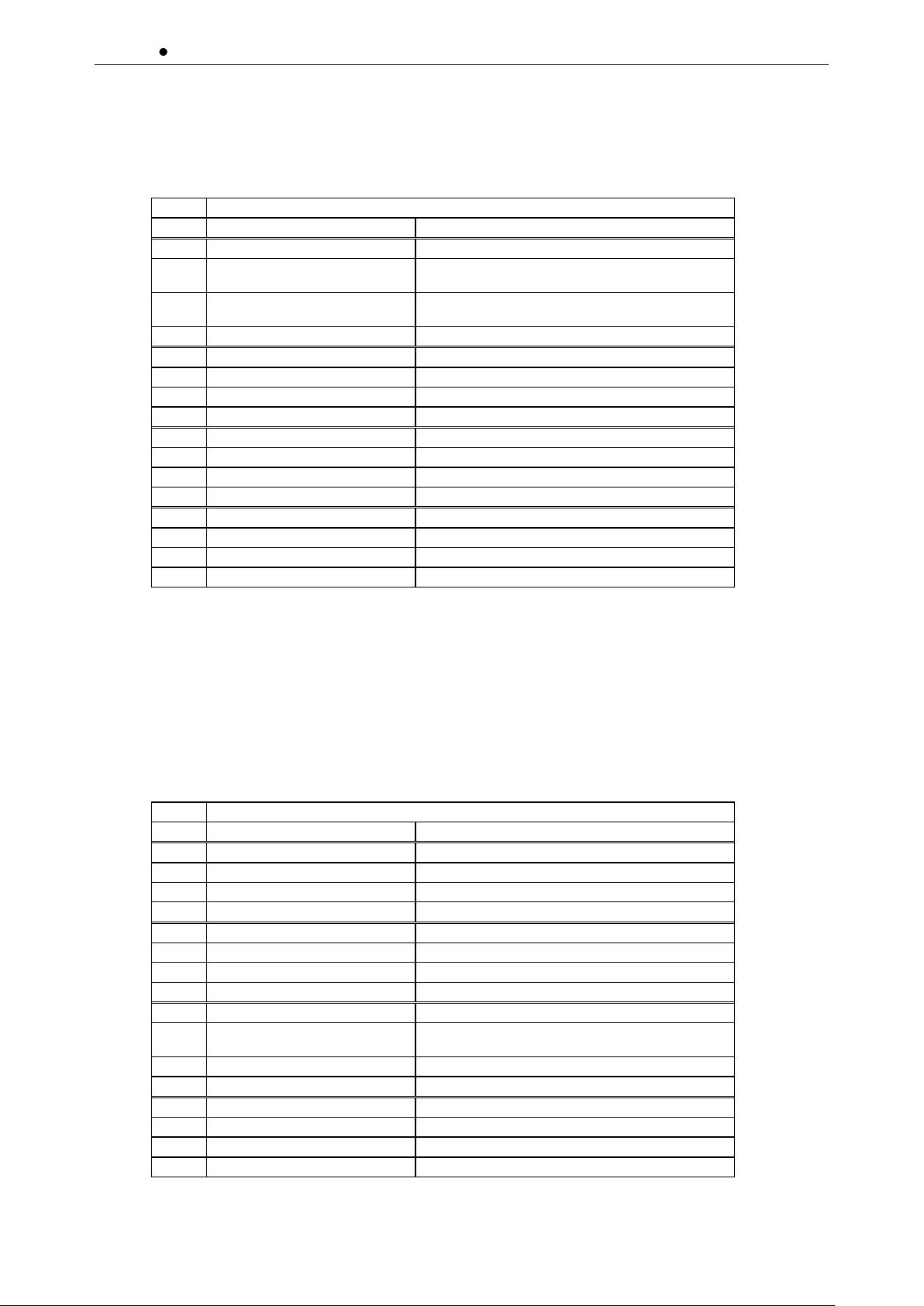
VACON 30 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.12 Valores de monitoramento do fieldbus
V1.25.1 FB Control Word (Palavra de controle de FB) ID1160
Palavra de controle usada no modo bypass. Consulte P2.13.22 e o ByPass da placa
opcional.
Bit
Descrição
Valor = 0
Valor = 1
0
DESLIGADO
LIGADO, Redefinir após falha, ou b1 e b2
1
Parada de emergência por
inércia
LIGADO, Em operação normal: Manter
VERDADEIRO
2
Parada de emergência por
rampa
LIGADO, Em operação normal: Manter
VERDADEIRO
3
SOLICITAÇÃO DE PARADA
SOLICITAÇÃO DE FUNCIONAMENTO
4
Forçar rampa para zero
Ativar rampa,
5
Congelar rampa
Ativar rampa,
6
Forçar referência para zero
Ativar rampa,
7
Nenhuma ação
REDEFINIÇÃO DE FALHA (0 -> 1)
8
Nenhuma ação
Avanço incremental 1
9
Nenhuma ação
Avanço incremental 2
10
Desativar controle do Profibus
Ativar controle do Profibus
11
Fieldbus DIN1=DESLIGADO
Fieldbus DIN1=LIGADO (Pulso do alarme)
12
Fieldbus DIN2=DESLIGADO
Fieldbus DIN2=LIGADO
13
Fieldbus DIN3=DESLIGADO
Fieldbus DIN3=LIGADO
14
Fieldbus DIN4=DESLIGADO
Fieldbus DIN4=LIGADO
15
Nenhuma ação
Nenhuma ação
V1.25.2 FB Speed Reference (Referência de velocidade de FB) ID875
Referência de velocidade de FB do fieldbus
V1.25.3 FB Status Word (Palavra de status de FB) ID65
Palavra de status do tipo Profibus. Gerado no nível da aplicação.
Precisa ser selecionado com P2.14.19 GSW para ser usado. Quando necessário com
a placa do profibus, o modo de operação precisa ser configurado para ByPass na placa
opcional e com P2.14.22 ProfiBus Mode (Modo ProfiBus), selecione: 2 / ProfiDrive
Bit
Descrição
Valor = 0
Valor = 1
0
Não está pronto para ativar
Pronto para ativar
1
Não está pronto para operar
Pronto para operar
2
Não em funcionamento
Em funcionamento
3
Não falha
Falha
4
Parada por inércia ativa
Parada por inércia não ativa
5
Parada rápida ativa
Parada rápida inativa
6
Chave não inibida
Chave inibida
7
Sem aviso
Aviso
8
Erro de velocidade
Velocidade na referência
9
Sem solicitação de controle
de FB
Controle de FB ativo
10
Fout < Fmax
Fout > Fmax
11
não usado
não usado
12
não usado
não usado
13
não usado
não usado
14
não usado
não usado
15
Fieldbus DIN1=DESLIGADO
Fieldbus DIN1=LIGADO (Pulso do alarme)

controle de pontes rolantes apfiff20 VACON 31
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.25.4 FB Speed Actual (Velocidade real do FB) ID865
Valor da velocidade real enviado ao fieldbus.
V1.25.5 FB Torque Reference (Referência de torque de FB) % ID 1140
Valor de referência de torque do fieldbus
Controle padrão de FB PD 1.
V1.25.6 FB Limit Scaling (Escala de limite de FB) % ID 46
Valor de entrada de escala limite do fieldbus.
Controle padrão de FB PD 2.
V1.25.7 FB Adjust Reference (Referência do ajuste de FB) % ID 47
Valor de ajuste de referência do fieldbus.
Controle padrão de FB PD 3.
V1.25.8 FB Analog Output (Saída analógica de FB) % ID 48
Valor do fieldbus para controlar a saída analógica.
Controle padrão de FB PD 4.
V1.25.9 FB Motor Current (Corrente do motor de FB) A ID 45
Corrente do motor (independente de conversor de frequência) com uma casa decimal.
V1.25.10 Fault Word 1 (Palavra de falha 1) ID 1172
Diferentes falhas são coletadas em duas palavras que podem ser lidas no fieldbus
ou com o software NCDrive para PC.
Palavra de falha 1 ID1172
Falha
Comentário
b0
Sobrecorrente ou IGBT
F1, F31, F41
b1
Sobretensão
F2
b2
Subtensão
F9
b3
Motor bloqueado
F15
b4
Falha de terra
F3
b5
Subcarga do motor
F17
b6
Superaquecimento do conversor
de frequência
F14
b7
Superaquecimento
F16, F56, F29
b8
Fase de entrada
F10
b9
Superaquecimento do resistor
de frenagem
F42
(Não implementado)
b10
Dispositivo substituído
F37, F38, F39, F40, F44, F45
(Não implementado)
b11
Teclado ou Controle de PC
F52
b12
FieldBus
F53
b13
Systembus
F59
b14
Slot
F54
b15
4 mA
F50

VACON 32 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.25.11 Fault Word 2 (Palavra de falha 2) ID 1173
Palavra de falha 2 ID1173
Falha
Comentário
b0
Fase de saída
F11
b1
Chave de carga
F5 (Não implementado)
b2
Encoder
F43
b3
Inversor
F4, F7 (Não implementado)
b4
b5
EEPROM
F22 (Não implementado)
b6
Externa
F51
b7
Chopper de frenagem
F12 (Não implementado)
b8
Alarme
F25 (Não implementado)
b9
IGBT
F31, F41
b10
Freio
F58
b11
Resfriamento por ventilador
F32
b12
Aplicação
F35 (Não implementado)
b13
Falha de controle
F33, F36, F8 (Não implementado)
b14
Chave principal aberta
F64 (Não implementado)
b15
V1.25.12 Warning Word 1 (Palavra de aviso 1) ID 1174
Palavra de aviso 1 ID1174
Falha
Comentário
b0
Motor bloqueado
W15
b1
Sobreaquecimento do motor
W16
b2
Subcarga do motor
W17
b3
Perda da fase de entrada
W10
b4
Perda da fase de saída
W11
b5
Desativação segura
W30 (Não implementado)
b6
Falha de comunicação com o Fieldbus
no slot D
W53 (Não implementado)
b7
Falha de comunicação com o Fieldbus
no slot E
W67 (Não implementado)
b8
Superaquecimento do conversor de
frequência
W14
b9
Entrada analógica < 4 mA
W50
b10
Não usado
b11
Parada de emergência
W63 (Não implementado)
b12
Funcionamento desativado
W62 (Não implementado)
b13
Não usado
b14
Freio mecânico
W58
b15
Não usado

controle de pontes rolantes apfiff20 VACON 33
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.25.13 AuxStatusWord (Palavra de status auxiliar) ID 1163
Palavra de status auxiliar ID1163
Falha
Comentário
b0
Reservado
Reservado
b1
Controle de janela ativo e velocidade fora
da janela
b2
Reservado
Reservado
b3
Reservado
Reservado
b4
Reservado
Reservado
b5
Reservado
Reservado
b6
Reservado
Reservado
b7
Nenhuma ação
Freio de saída é forçado aberto
b8
Reservado
Reservado
b9
Reservado
Reservado
b10
Reservado
Conversor de frequência em modo
de controle de torque
b11
Reservado
Reservado
b12
Reservado
Reservado
b13
Reservado
Reservado
b14
Reservado
Reservado
b15
Reservado
Reservado
V1.25.14 Fault History (Histórico de falhas) ID 37
Número de falha da última falha ativa.
V1.25.15 AuxControlWord (Palavre de controle auxiliar) ID 1161
Palavra de controle auxiliar ID1161
FALSO
VERDADEIRO
b0
Reservado
Reservado
b1
Reservado
Reservado
b2
Reservado
Reservado
b3
Reservado
Reservado
b4
Reservado
Reservado
b5
Reservado
Reservado
b6
Reservado
Reservado
b7
Nenhuma ação
Freio de saída é forçado aberto
b8
Reservado
Reservado
b9
Nenhuma ação
Redefinir posição do encoder
b10
Reservado
Reservado
b11
Reservado
Reservado
b12
Reservado
Reservado
b13
Reservado
Reservado
b14
Reservado
Reservado
b15
Reservado
Reservado

VACON 34 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.25.16 Din Status Word (Palavra de status DIN) ID 56
V1.25.17 Din Status Word 2 (Palavra de status DIN 2) ID 57
Palavra de status DIN 1
Palavra de status DIN 2
b0
DIN: A.1
DIN: C.5
b1
DIN: A.2
DIN: C.6
b2
DIN: A.3
DIN: D.1
b3
DIN: A.4
DIN: D.2
b4
DIN: A.5
DIN: D.3
b5
DIN: A.6
DIN: D.4
b6
DIN: B.1
DIN: D.5
b7
DIN: B.2
DIN: D.6
b8
DIN: B.3
DIN: E.1
b9
DIN: B.4
DIN: E.2
b10
DIN: B.5
DIN: E.3
b11
DIN: B.6
DIN: E.4
b12
DIN: C.1
DIN: E.5
b13
DIN: C.2
DIN: E.6
b14
DIN: C.3
b15
DIN: C.4
V1.25.18 MC Status (Status do MC) ID 64
Valor enviado ao fieldbus quando o fieldbus não utiliza sua própria máquina
de estados.
Palavra de status de controle do motor
FALSO
VERDADEIRO
b0
Não no estado Pronto
Pronto
b1
Não em funcionamento
Em funcionamento
b2
Sentido horário
Sentido anti-horário
b3
Não falha
Falha
b4
Sem aviso
Aviso
b5 Na velocidade de referência
b6 Na velocidade zero
b7 Fluxo pronto
b8 Limitador de velocidade TC ativo
b9
Sentido do encoder
Sentido anti-horário
b10 Parada rápida de subtensão
b11
Sem freio de CC
Freio CC ativo
b12
b13 Atraso de reinício ativo
b14
b15
V1.23.19 Warning (Aviso) ID 74
Último aviso ativo.
V1.25.20 EncoderRounds (Revoluções do encoder) ID 1170
Informações de revoluções do encoder incremental. O valor é redefinido quando
24 VCC é removido do conversor de frequência.

controle de pontes rolantes apfiff20 VACON 35
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.25.21 Encoder Angle (Ângulo do encoder) ID 1169
Informações de ângulo do encoder incremental. O valor é redefinido quando 24 VCC
é removido do conversor de frequência.
V1.25.22 Fault Word 10 (Palavra de falha 10) ID 1202
Palavra de falha 10 ID1202
Falha
Comentário
b0
Erro de velocidade
F61
b1
b2
Falha de sobrecarga ativa
F82
b3
Sem falha no motor
F83
b4
Falha PT100
F56 e F65
b5
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
V1.25.23 Warning Word 10 (Palavra de Aviso 10) ID 1269
Palavra de aviso 1 ID1269
Falha
Comentário
b0
Erro de velocidade
W61
b1
Aviso de falha de terra
W3
b2
Aviso de sobrecarga ativo
W82
b3
Sem aviso de motor
W83
b4
Aviso PT100
W56 e W65
b5
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15

VACON 36 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.13 Mestre/Seguidor
V1.26.1 SB SystemStatus (Status do sistema SB) ID 1601
Palavra de status do barramento do sistema ID1601
Sinal
Comentário
b0
b1
Conversor de frequência 1 pronto
b2
Conversor de frequência 1 em
funcionamento
b3
Falha do conversor de frequência 1
b4
b5
Conversor de frequência 2 pronto
b6
Conversor de frequência 2 em
funcionamento
b7
Falha do conversor de frequência 2
b8
b9
Conversor de frequência 3 pronto
b10
Conversor de frequência 3 em
funcionamento
b11
Falha do conversor de frequência 3
b12
b13
Conversor de frequência 4 pronto
b14
Conversor de frequência 4 em
funcionamento
b15
Falha do conversor de frequência 4
V1.26.2 Total Current (Corrente total) A ID 80
Mestre da operação de sincronização do conversor de frequência
Este valor é a corrente do sistema de sincronização do conversor de frequência
inteiro.
Seguidor da operação de sincronização do conversor de frequência
D1 e D2: Este valor é a corrente do sistema de sincronização do conversor
de frequência inteiro.
D2 e D4: Este valor é a soma das correntes da unidade de potência do conversor
de frequência e dos conversores de frequência com número de identificação do
barramento do sistema menor, a partir do conversor de frequência mestre.

controle de pontes rolantes apfiff20 VACON 37
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.26. 3 Master CW (Mestre no sentido horário) ID93
Palavra de controle do conversor de frequência mestre Mestre enviando,
seguidor recebendo.
Palavra de controle do mestre ID93
Mestre/Seguidor
Mestre/seguidor de sincronização
do conversor de frequência
b0
Status Pronta
b1
Permitir funcionamento
b2
Solicitação de funcionamento final
b3
Redefinição de falha
Redefinição de falha
b4
Em funcionamento
Em funcionamento
b5
Falha
b6
Controle do freio
Controle do freio
b7
Pulso WD
b8
Liberação da referência de controle
do freio
b9
Acionador do registrador de dados
Acionador do registrador de dados
b10
Parada da rampa ativa
b11
Atraso de partida ativo
b12
b13
b14
Desativar diagnóstico SB
Desativar diagnóstico SB
b15
V1.26.4.1 Motor Current D1 (Corrente do motor D1) A ID 1616
D1: Este valor é a corrente da unidade de potência do conversor de frequência
número 1.
D2, D3 e D4: Corrente da unidade de potência do conversor de frequência mestre.
V1.26.4.2 Motor Current D2 (Corrente do motor D2) A ID 1605
D1: Este valor é a corrente da unidade de potência do conversor de frequência
número 2.
D2, D3 e D4: Não atualizados.
V1.26.4.3 Motor Current D3 (Corrente do motor D3) A ID 1606
D1: Este valor é a corrente da unidade de potência do conversor número 3.
D2, D3 e D4: Não atualizados.
V1.26.4.4 Motor Current D4 (Corrente do motor D4) A ID 1607
D1: Este valor é a corrente da unidade de potência do conversor de frequência
número 4.
D2, D3 e D4: Não atualizados.

VACON 38 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.26.5.1 Status Word D1 (Palavra de status D1) ID 1615
V1.26.5.2 Status Word D2 (Palavra de status D2) ID 1602
V1.26.5.3 Status Word D3 (Palavra de status D3) ID 1603
V1.26.5.4 Status Word D4 (Palavra de status D4) ID 1604
Palavra de status do conversor de frequência seguidor
FALSO
VERDADEIRO
b0
Fluxo não pronto
Fluxo pronto (>90%)
b1
Não no estado Pronto
Pronto
b2
Não em funcionamento
Em funcionamento
b3
Não falha
Falha
b4 ChargeSwState
b5
b6
Não permitir funcionamento
Permitir funcionamento
b7
Sem aviso
Aviso
b8
b9
b10 Comunicação SB OK
b11
Sem freio CC
Freio CC ativo
b12
Sem solicitação de funcionamento
Solicitação de funcionamento
b13
Controles de limite inativos
Controle de limite ativo
b14
Controle de freio externo DESATIVADO
Controle de freio externo ATIVADO
b15 Batida ouvida

controle de pontes rolantes apfiff20 VACON 39
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.14 Monitoramento do controle PI
Este controle PI usa números de ID para sinais de entrada e saída. Consulte os detalhes no
capítulo de Controle PI.
V1.27.1 PI Reference (Referência PI) ID20
Referência PI usada, a referência é selecionada pelo número de ID.
V1.27.2 PI Actual Value (Valor real PI) ID21
Valor PI Real. A entrada real é selecionada pelo número de ID.
V1.27.3 PI Output (Saída PI) ID23
Saída PI antes da escala Este valor usa Saída PI Alta e Baixa como limitação.
V1.27.3 PI Output Scaled (Saída PI após a escala) ID1807
Saída PI após a escala.
Usada para conexão de ID. A função de escala é usada para escalar o valor mais
adequado para o sinal conectado. Por exemplo, quando a saída é conectada ao limite
de torque, o valor real precisa ser -1000...+1000 (-100,0%...+100,0%), mas a Saída PI
Alta e Baixa pode ser de -30000...+30000 para possibilitar um controle PI mais preciso.
5.1.15 Cadeia de frequência
V1.28.1 Frequency Reference 1 (Referência de frequência 1) Hz 1126
Referência de frequência antes do compartilhamento de velocidade.
O compartilhamento de velocidade também é usado para controle de
direção de referência.
V1.28.2 Frequency Reference 2 (Referência de frequência 2) Hz 1126
Referência de frequência após compartilhamento de velocidade e ajuste de
referência, mas antes do interpolador.
V1.28.3 Frequency Reference (Referência de frequência) Hz 25
Referência de frequência após o interpolador, mas antes da filtragem de segunda ordem.
V1.28.4 Frequency Reference Actual (Referência de frequência real) Hz 1128
Referência de frequência para controle de rampa.
V1.28.5 Frequency Ramp Out (Frequência de saída de rampa) Hz 1129
Saída do controle de rampa
V1.28.6 Frequency Reference Final (Referência de frequência final) Hz 1131
Referência final do controlador de velocidade. Após o gerador de rampa e após a
função de passo de velocidade, usados para ajuste de velocidade de malha fechada
quando juntos com a frequência do Encoder 1.
V1.28.7 Encoder 1 Frequency (Frequência do encoder 1) Hz 1164
Frequência do encoder, monitorado diretamente do encoder.

VACON 40 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.16 Cadeia de torque
V1.29.1 Torque reference (Referência de torque) % ID 18
Valor de referência de torque antes do compartilhamento de carga.
V1.29.2 Torque Reference 3 (Referência de torque 3) % 1144
Referência de torque após compartilhamento de carga e antes do passo de torque.
V1.29.3 Torque Ref Final (Referência de torque final) % 1145
Referência de torque final na cadeia de referência de torque, antes da compensação
de aceleração e da saída do controlador de velocidade.
V1.29.4 Speed Control Out (Controle da velocidade de saída) % 1134
Saída do controlador de velocidade de malha fechada.
V1.29.5 Torque Reference Actual (Referência de torque real) % 1180
Referência de torque final de controle de velocidade e controle de torque. Também
inclui o passo de torque e os fatores de compensação de aceleração.
5.1.17 Controle do freio
V1.30.1 Brake Status Word (Palavra de status do freio)
Palavra de status do freio ID89
FALSO
VERDADEIRO
b0
Fluxo não pronto
Fluxo pronto (>90%)
b1
Não no estado Pronto
Pronto
b2
Não em funcionamento
Em funcionamento
b3
Não falha
Falha
b4
Sem aviso
Aviso
b5
Sem solicitação de funcionamento
Solicitação de funcionamento
b6
Sem freio CC
Freio CC ativo
b7
Velocidade zero
Fora da velocidade zero
b8
Controle do freio fechado
Controle do freio aberto
b9
Freio fechado (atrasos mecânicos)
Freio aberto (atrasos mecânicos)
b10
Realimentação do freio BAIXA
Realimentação do freio ALTA
b11
Controles de limite inativos
Controle de limite ativo
b12
b13
b14
b15

controle de pontes rolantes apfiff20 VACON 41
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.18 Movimento
V1.31.1 Serial Number Key (Chave do número de série) ID1997
V1.31.2 License Status (Status da licença) ID1996
Este valor indica o status da ativação da chave de licença.
0 / Sem função
Se o PLC receber esse número desse ID, é provável que não haja nenhuma função
de licença na aplicação carregada no conversor de frequência.
1 / Sem código
Corrige a aplicação no conversor de frequência, mas a chave de licença não foi
fornecida.
2 / Código fornecido, não é possível verificar, não há nenhuma conexão com
a unidade de potência
A chave de licença foi fornecida, mas não há nenhuma conexão com a unidade
de potência para verificá-la.
Carregue a CC por pelo menos 20 s.
OBSERVAÇÃO! É possível que o conversor de frequência forneça nesse estado uma
falha de licença. Ligue a unidade de potência para que a placa de controle possa ler
o número de série do conversor de frequência.
3 / Código errado
O código que foi inserido está incorreto.
4 / Chave de licença inserida muitas vezes
Uma chave de licença incorreta foi inserida três vezes. Desligue o conversor
de frequência antes de tentar inserir um novo código.
5 / Código aceito
A chave correta foi inserida e as funções por trás da licença estão disponíveis.
6 / Erro desconhecido
O cálculo da chave de licença detectou um erro interno. Pegue as informações
de serviço e o arquivo de parâmetros do conversor de frequência quando a unidade
de potência estiver ligada. Envie esses arquivos para o suporte técnico do fabricante.
5.1.19 Operação tandem (sincronização do eixo)
V1.32.1 Master Rotations (Rotações do mestre) ID1820
Informações de posição do mestre recebidas pelo barramento do sistema.
1.000 é igual a uma rotação do eixo mestre.
V1.32.2 Own Rotations (Rotações próprias) ID1821
Informações da posição do próprio conversor de frequência recebidas do encoder
1.000 é igual a uma rotação do eixo mestre.
V1.32.3 Control Out (Saída de controle) ID1822
Saída do controlador de posição em Hz.
V1.32.4 Rotation Error (Erro de rotação) ID1823
Erro de posição do conversor de frequência seguidor, 1.000 é igual a uma rotação
do eixo mestre.
V1.32.5 Position Ref (Referência da posição) ID1825
Posição do mestre usada para controle de posição.

VACON 42 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.20 Contadores
Os valores dos contadores abaixo não são visíveis como um sinal de monitoramento padrão,
mas estão acessíveis com números de ID do fieldbus.
5.1.20.1 Contador de tempo de conversor energizado
Este temporizador está contando quando a placa de controle está energizada (isto é, contando
apenas quando há uma alimentação de 24 VCC na placa de controle).
ID10 PowerOnTimeTripCounter
Potência que pode ser reiniciada no contador de tempo.
Valor UINT. Acesso somente para LEITURA.
Use ID1050 para definir o formato.
Use ID1051 para redefinir o valor
ID1050 PowerOnTripCounterUnit
Leia ou selecione a potência no formato do contador.
Valor USINT. Acesso para GRAVAÇÃO.
1 = 1 ms
2 = 10 ms
3 = 100 ms
4 = 1 s
5 = 1 min
6 = 1 h (Padrão)
7 = 1 d
ID1051 ResetOnTimeTripCounter
Redefinir contador parcial energizado; a borda de subida reinicializará o contador.
Valor BOOL. Acesso para GRAVAÇÃO.
Escreva o valor INT 1 para redefinir se os dados de processo forem usados.
5.1.20.2 Monitoramento do contador do medidor de energia
ID11 EnergyMeter
Leia ID80 e ID81 para ver o formato usado.
Valor UINT. Acesso somente para LEITURA.
ID82 EnergyMeterFormat
Posição do ponto decimal no valor
60 = 6 número máximo de dígitos, 0 dígitos fracionários
61 = 6 número máximo de dígitos, 1 dígitos fracionários
62 = 6 número máximo de dígitos, 2 dígitos fracionários
Valor UINT. Acesso somente para LEITURA.
OBSERVAÇÃO: A maioria das demais aplicações usa o número de ID ID80
para essa variável.

controle de pontes rolantes apfiff20 VACON 43
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
ID81 EnergyMeterUnit
Unidade do medidor de energia
Valor USINT. Acesso somente para LEITURA.
1 = kWh
2 = MWh
3 = GWh
4 = TWh
5.1.20.3 Monitoramento do contador parcial de energia
ID12 EnergytripCounter
Contador parcial de energia, use o ID1052 para definir o formato.
Valor UINT. Acesso somente para LEITURA.
O valor máximo é 65.535 e, depois, esse valor é zerado e a contagem é reiniciada.
ID1052 EnergyTripCounterUnit
Acesso para GRAVAÇÃO. O valor unitário pode ser alterado através do valor .USINT
do fieldbus.
1 = 0,01 kWh
2 = 0,1 kWh
3 = 1 kWh
4 = 10 kWh
5 = 100 kWh
6 = 1 MWh
7 = 10 MWh
8 = 100 MWh
9 = 1 GWh
10 = 10 GWh
ID1053 ResetMWhTripCounter
Redefinir contador parcial de energia; a borda de subida reinicializará o contador.
Valor BOOL. Escreva o valor INT 1 para redefinir se os dados de processo forem
usados.

VACON 44 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6. APLICAÇÃO DE CONTROLE DE PONTES ROLANTES LISTAS DE PARÂMETROS
6.1 Parâmetros básicos
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.1.1
Maximum
frequency
(Frequência
máxima)
P2.1.1
320,00
Hz
50,00
102
OBSERVAÇÃO: Se fmax > do
que a velocidade síncrona
do motor, verifique a
adequação para o motor e
o sistema do conversor de
frequência
P2.1.2
Motor nominal
voltage (Tensão
nominal do motor)
180
690
V
NX2: 230 V
NX5: 400 V
NX6: 690 V
110
Verifique a placa de
classificação do motor.
Observe também a conexão
usada Delta/Estrela
P2.1.3
Motor nominal
frequency
(Frequência
nominal do motor)
8,00
320,00
Hz
50,00
111
Verifique a placa de
classificação do motor
P2.1.4
Motor nominal
speed (Velocidade
nominal do motor)
24
20 000
rpm
1440
112
O padrão se aplica a um
motor de 4 polos e a um
conversor de frequência
de tamanho nominal.
P2.1.5
Motor nominal
current (Corrente
nominal do motor)
0,1 x IH
2 x IH A IH
113
Verifique a placa de
classificação do motor.
P2.1.6
Motor cosϕ
(Cosϕ do motor)
0,30
1,00 0,85
120
Verifique a placa de
classificação do motor
P2.1.7
Motor Nominal
Power (Potência
nominal do motor)
0,0
3200,0
kW
0,0
116
Verifique a placa de
classificação do motor
P2.1.8
Magnetizing
current (Corrente
de magnetização)
0,00
100,00 A 0,00
612
0,00 A = O conversor de
frequência usa um valor
estimado proveniente dos
valores da placa de
identificação do motor
P2.1.9
Identification
(Identificação)
0
11 0 631
0=Nenhuma ação
1=Identificação sem
funcionamento
2=Identificação com
funcionamento
3=Identificação do motor
do encoder
4=Identificar tudo
5=Encoder absoluto, rotor
travado
6=U/f e corrente magn.
P2.1.10
Motor type
(Tipo de motor)
0
1 0 650
0=Motor de indução
1=Motor PMS
P2.1.11
Crane ID Run
(Identificação do
motor do
guindaste)
0
3 0
1683
0=Sem função
1=Içamento
2=Horizontal
3=Temporização do freio
P2.1.12
Movement Type
(Tipo de
movimento)
0
2 0
1685
0=Não selecionado
1=Içamento
2=Horizontal
Tabela 6-1. Parâmetros básicos G2.1

controle de pontes rolantes apfiff20 VACON 45
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.2 Manuseio de referência
6.2.1 Configurações básicas
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.2.1
I/O Reference
(Referência de E/S)
0
19 0 117
0=AI1
1=AI2
2=AI1+AI2
3=AI1-AI2
4=AI2-AI1
5=AI1xAI2
6=AI1 Joystick
7=AI2 Joystick
8=Teclado
9=Fieldbus
10=Potenciômetro eletrônico
11=AI1, AI2 mínimo
12=AI1, AI2 máximo
13=Frequência máxima
14=Seleção AI1/AI2
15=Encoder 1
16=Encoder 2
17=Velocidades predefinidas
18=Referência mestre
19=Saída de rampa mestre
P2.2.2
Keypad reference
selector (Seletor
de referência do
teclado)
0
19 8 121
Consulte par 2.2.1
P2.2.3
Fieldbus control
reference
(Referência de
controle de fieldbus)
0
19 9 122
Consulte o par. 2.2.1
P2.2.4
I/O Reference 2
(Referência de E/S 2)
0
19 1 131
Consulte ID117 e ID422
P2.2.5
Speed Share
(Compartilhament
o de velocidade)
-300,00
300,00
%
100,00
1241 P2.2.6
Load Share
(Compartilhament
o de carga)
0,0
500,0 % 100,0
1248
6.2.2 Referência constante
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.2.7.1
Jogging speed
reference
(Referência de
velocidade de
jogging)
0,00
320,00
Hz
5,00
124
P2.2.7.2
Preset speed 0
(Velocidade
predefinida 0)
0,00
320,00
Hz
0,00
1810
P2.2.7.3
Preset speed 1
(Velocidade
predefinida 1)
0,00
320,00
Hz
10,00
105
Velocidade multipassos 1
P2.2.7.4
Preset speed 2
(Velocidade
predefinida 2)
0,00
320,00
Hz
15,00
106
Velocidade multipassos 2
P2.2.7.5
Preset speed 3
(Velocidade
predefinida 3)
0,00
320,00
Hz
20,00
126
Velocidade multipassos 3
P2.2.7.6
Preset speed 4
(Velocidade
predefinida 4)
0,00
320,00
Hz
25,00
127
Velocidade multipassos 4

VACON 46 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.2.7.7
Preset speed 5
(Velocidade
predefinida 5)
0,00
320,00
Hz
30,00
128
Velocidade multipassos 5
P2.2.7.8
Preset speed 6
(Velocidade
predefinida 6)
0,00
320,00
Hz
40,00
129
Velocidade multipassos 6
P2.2.7.9
Preset speed 7
(Velocidade
predefinida 7)
0,00
320,00
Hz
50,00
130
Velocidade multipassos 7
P2.2.7.10
Inching reference 1
(Referência de avanço
incremental 1)
-320,00
320,00
Hz
2,00
1239 P2.2.7.11
Inching reference 2
(Referência de avanço
incremental 2)
-320,00
320,00
Hz
-2,00
1240
6.2.3 Referência de torque
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.2.8.1
Torque reference
selection
(Seleção de
referência de torque)
0
9 0 641
0=Não usado
1=AI1
2=AI2
3=AI3
4=AI4
5=AI1 joystick (-10 10 V)
6=AI2 joystick (-10 10 V)
7=Referência de torque do
teclado, R3.5
8=Referência de torque FB
9=Torque mestre
P2.2.8.2
Torque reference
max. (Referência de
torque máximo)
300,0
300,0 % 100
642 P2.2.8.3
Torque reference
min. (Referência de
torque mínimo)
300,0
300,0 % 0,0
643
P2.2.8.4
Torque reference
filtering time (Tempo
de filtragem de
referência de torque)
0
32000
ms
0
1244 P2.2.8.5
Torque Reference
Dead Zone (Zona
morta da referência
de torque)
0,0
300,0 % 0,00
1246
P2.2.8.6
Torque Select
(Seleção de torque)
0
5 2
1278
0=Controle de velocidade
1=Limite máximo de
frequência
2=Saída de rampa
3=Mínimo
4=Máximo
5=Janela
P2.2.8.7
Window negative
(Janela negativa)
0,00
50,00
Hz
2,00
1305 P2.2.8.8
Window positive
(Janela positiva)
0,00
50,00
Hz
2,00
1304
P2.2.8.9
Window negative off
(Janela negativa
desativada)
0,00
P2.10.11
Hz
0,00
1307 P2.2.8.10
Window positive off
(Janela positiva
desativada)
0,00
P2.10.12
Hz
0,00
1306

controle de pontes rolantes apfiff20 VACON 47
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.2.3.1 Configurações de MA da referência de torque
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.2.8.11.1
Open loop torque
control minimum
frequency
(Frequência
mínima de controle
de torque de malha
aberta)
0,00
50,00
Hz
3,00 636
P2.2.8.11.2
Open loop torque
controller P gain
(Ganho P do
controlador de
torque de malha
aberta)
0
32000 150 639 P2.2.8.11.3
Open loop torque
controller I gain
(Ganho I do
controlador de
torque de malha
aberta)
0
32000 10 640

VACON 48 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.2.4 Parâmetros de frequência proibida
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.2.9.1
Prohibit frequency
range 1 low limit
(Limite inferior da
faixa de frequência
proibida 1)
-1,00
320,00
Hz
0,00
509
0=Não usado
P2.2.9.2
Prohibit frequency
range 1 high limit
(Limite superior da
faixa de frequência
proibida 1)
0,00
320,00
Hz
0,00
510
0=Não usado
P2.2.9.3
Ramp time factor
(Fator de tempo
da rampa)
0,1
10,0 x 1,0
518
Multiplicador do tempo
de rampa atualmente
selecionado entre os limites
de frequência proibida.
Tabela 6-2. Frequências proibidas (G2.5)
6.2.5 Potenciômetro eletrônico
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.2.10.1
Motor potentiometer
ramp rate (Taxa de
rampa do
potenciômetro
eletrônico)
0,10
2000,00
Hz/s
1,00
331
Taxa de rampa do
potenciômetro eletrônico
P2.2.10.2
Motor potentiometer
frequency reference
memory reset (Reset
da memória de
referência da
frequência do
potenciômetro
eletrônico)
0
3 1 367
0=Sem reset
1=Reset em estado de
parada
2=Reset em desligado
3=StopReq;Fout
P2.2.10.3
Motor potentiometer
reference copy
(Cópia da referência
do potenciômetro
eletrônico)
0
2 0 366
0=Não copiar
1=Copiar referência
2=Copiar frequência de
saída
Tabela 6-3. Potenciômetro eletrônico (G2.5)
6.2.6 Ajustar referência
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.2.11.1
Adjust input
(Ajustar entrada)
0
5 0 493
0=Não usado
1=AI1
2=AI2
3=AI3
4=AI4
5=Fieldbus
P2.2.11.2
Adjust minimum
(Ajustar mínimo)
0,0
100,0 % 0,0 494
Ajustar limite para
diminuir referência
P2.2.11.3
Adjust maximum
(Ajustar máximo)
0,0
100,0 % 0,0 495
Ajustar limite para
aumentar referência

controle de pontes rolantes apfiff20 VACON 49
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.2.7 Manuseio de referência de limites finais
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.2.12.1
Disable Negative
Direction
(Desativar direção
negativa)
0,1
E.10
DigIn
0,2 1814
P2.2.12.2
Disable Positive
Direction
(Desativar direção
positiva)
0,1
E.10
DigIn
0,2 1813
P2.2.12.3
Limit Negative
Reference DI
(Referência do
limite negativo DI)
0,1
E.10
DigIn
0,2 1827
P2.2.12.4
Limit Positive
Reference DI
(Referência do
limite positivo DI)
0,1
E.10
DigIn
0,2 1828
P2.2.12.5
Limited Negative
Reference Hz
(Referência
negativa limitada
Hz)
-320,00
0,00
Hz
-10,00
1829
P2.2.12.6
Limited Positive
Reference Hz
(Referência positiva
limitada Hz)
0,00
320,00
Hz
10,00
1830
P2.2.12.7
Limit Negative
Reference DI 2
(Referência do
limite negativo DI 2)
0,1
E.10
DigIn
0,2 1831
P2.2.12.8
Limit Positive
Reference DI 2
(Referência do
limite positivo DI 2)
0,1
E.10
DigIn
0,2 1842
P2.2.12.9
Limited Negative
Reference Hz 2
(Referência
negativa limitada
Hz 2)
-320,00
0,00
Hz
-2,00
1845
P2.2.12.10
Limited Positive
Reference Hz 2
(Referência positiva
limitada Hz 2)
0,00
320,00
Hz
2,00
1848
P2.2.12.11
End Limit Ramp
Time (Tempo de
rampa do limite
final)
0,1
320,0 s 1,0 1815
P2.2.12.12
Anti-Swing at End
Limits (Antibalanço
nos limites finais)
0
3 0 1856
0=Antibalanço ativo
1=Desligado em
desativado
2=Desligado em
desativado e 2º limite
3=Desligado em todos os
limites

VACON 50 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.3 Controle de rampa
6.3.1 Configurações básicas
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.3.1
Start function
(Função de partida)
0
1 0 505
0=Rampa
1= Partida dinâmica
P2.3.2
Stop function
(Função de parada)
0
1 1 506
0=Parada por inércia
1=Rampa
P2.3.3
Acceleration time 1
(Tempo de
aceleração 1)
0,2
3270,0 s 3,0 103
0 Hz para frequência
máxima
P2.3.4
Deceleration time 1
(Tempo de
desaceleração 1)
0,2
3270,0 s 3,0 104
Frequência máxima para 0
Hz
P2.3.5
Ramp 1 shape
(Forma da rampa 1)
0
100 % 2 500
0=Linear
>0=Tempo de rampa da
curva S
P2.3.6
Acceleration time 2
(Tempo de
aceleração 2)
0,2
3270,0
s
10,0 502
P2.3.7
Deceleration time 2
(Tempo de
desaceleração 2)
0,2
3270,0
s
10,0 503 P2.3.8
Ramp 2 shape
(Forma da rampa 2)
0
100 % 4 501
0=Linear
>0=Tempo de rampa da
curva S
P2.3.9
Inching Ramp
(Rampa de avanço
incremental)
0,01
320,00
s
1,00
1257
P2.3.10
Reducing of
acc./dec. times
(Redução de
tempos de
aceleração/desacel
eração )
0
5 0 401
Escala a rampa ativa de
100% a 10%.
0=Não usado
1=AI1
2=AI2
3=AI3
4=AI4
5=Fieldbus
P2.3.11
Disabled direction
ramp (Rampa de
direção desativada)
0
3270,0 s 1,0 1815
6.3.2 Parada rápida
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.3.12.1
Quick Stop Mode
(Modo de parada
rápida)
0
1 1 1276
0=Parada por inércia
1= Rampa
P2.3.13.2
Quick Stop Ramp
time (Tempo de
rampa de parada
rápida)
0,1
3200,0
s
10,0
1256
6.3.3 Opções de controle de rampa
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.3.13.1
Ramp Skip S2
(Rampa: Ignorar S2)
0
1 1 1900
P2.3.13.2
CL Ramp Follower
Encoder Frequency
(Frequência do
encoder do
seguidor de rampa
de MF)
0
1 0 1902

controle de pontes rolantes apfiff20 VACON 51
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.3.13.3
Ramp Input
Interpolator TC
(Interpolador de
entrada de
rampa TC)
0
200
ms
1 1184
6.3.4 Funções de choque no cabo
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P 2.3.14.1
Slack Rope Mode
(Modo de cabo
frouxo)
1
0
0 / Não
está
em uso
1930
P 2.3.14.2
ShockLoadMode
1
0
0 / Não
está
em uso
1933
P 2.3.14.3
LoadOnHookTorq
300 0 %
20 1931
P 2.3.14.4
LoadOfHookTorq
300 0 %
10 1932
P 2.3.14.5
ShockLoadTorq
300
-300 % 30 1934
P 2.3.14.6
ShockLoadTime
10000 0 ms
500
1935
P 2.3.14.7
ShockTorqRiseTim
10000 0 ms
50 1936
P 2.3.14.8
ShockLoadRef
50 0 Hz
1 1937

VACON 52 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.4 Sinais de entrada
6.4.1 Configurações básicas
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.4.1.1
Start/Stop logic
selection (Seleção
de lógica de
partida/parada)
0
8 5 300
Start signal
1 (Sinal de
partida 1)
(Padrão:
DIN1)
Start signal 2
(Sinal de
partida 2)
(Padrão: DIN2)
0
1
2
3
4
5
6
7
8
Partida
para frente
Partida/
Parada
Partida/
Parada
Pulso de
partida
Partida
Partida
para frente*
Partida*/
Parada
Partida*/
Parada
Pulso de
partida
Partida em
reverso
Reverso
Ativar
funcionamento
Pulso de
parada
PotMot para
cima
Partida em
reverso*
Reverso
Permitir
funcionamento
Pulso de
parada
Tabela 6-4. Sinais de entrada: configurações básicas, G2.2.1
* = Borda de subida necessária
para partida

controle de pontes rolantes apfiff20 VACON 53
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.4.2 Entradas digitais
Código
Parâmetro
Mín.
Padrão
Person.
ID
Observação
P2.4.2.1
Start signal 1 (Sinal de partida 1)
0,1
0,1 403
Avanço; consulte ID300
P2.4.2.2
Start signal 2 (Sinal de partida 2)
0,1
0,1 404
Reverso. Consulte ID300
P2.4.2.3
Run enable (Ativar funcionamento)
0,1
0,2 407
Partida do motor ativada (cf)
P2.4.2.4
Reverse (Reverso)
0,1
0,1 412
Sentido horário
Sentido anti-horário
P2.4.2.5
Preset speed 1
(Velocidade predefinida 1)
0,1
0,1 419
Consulte as velocidades predefinidas
no grupo de parâmetros básicos G2.1
P2.4.2.6
Preset speed 2
(Velocidade predefinida 2)
0,1
0,1 420
P2.4.2.7
Preset speed 3
(Velocidade predefinida 3)
0,1
0,1 421
P2.4.2.8
Motor potentiometer reference
DOWN (Referência de
potenciômetro eletrônico
para baixo)
0,1
0,1 417
Referência de pot. mot. diminui (cf)
P2.4.2.9
Motor potentiometer reference UP
(Referência de potenciômetro
eletrônico para cima)
0,1
0,1 418
Referência de pot. mot. aumenta (cf)
P2.4.2.10
Fault reset (Reset de falha)
0,1
0,1 414
Reset de todas as falhas (cf)
P2.4.2.11
External fault (Falha externa)
(fechamento)
0,1
0,1 405
Falha externa exibida (cc)
P2.4.2.12
External fault (Falha externa)
(abertura)
0,1
0,2 406
Falha externa exibida (oc)
P2.4.2.13
Acc/Dec time selection (Sel.
tempo acel./desacel.)
0,1
0,1 408
Tempo acel./desacel. 1 (oc)
Tempo de acel./desacel. 2 (cc)
P2.4.2.14
Acc/Dec prohibit (Ac./desac.
proibida)
0,1
0,1 415
Acel./desacel. proibida (cc)
P2.4.2.15
DC braking (Frenagem CC)
0,1
0,1 416
Frenagem CC ativa (cc)
P2.4.2.16
Jogging speed (Velocidade
de jogging)
0,1
0,1 413
Velocidade de jogging selecionada para
referência de frequência (cc)
P2.4.2.17
IO reference 1 / 2 selection
(Referência de E/S 1 / Seleção 2)
0,1
0,1 422
Seleção de referência de E/S:14 ID117
P2.4.2.18
Control from I/O terminal
(Controle de terminais de E/S)
0,1
0,1 409
Força o local de controle para terminal
de E/S (cc)
P2.4.2.19
Control from keypad (Controle
do teclado)
0,1
0,1 410
Força o local de controle para o teclado
(cc)
P2.4.2.20
Control from fieldbus (Controle
de fieldbus)
0,1
0,1 411
Força o local de controle para fieldbus
(cc)
P2.4.2.21
Parameter set 1/set 2 selection
(Seleção de conjunto de
parâmetros 1/2)
0,1
0,1 496
Cont. fechado = Conjunto 2 é usado
Cont. aberto = Conjunto 1 é usado
P2.4.2.22
Motor control mode 1/2 (Modo de
controle do motor 1/2)
0,1
0,1 164
Cont. fechado = Modo 2 é usado
Cont. aberto = Modo 1 é usado
Consulte os parâmetros 2.6.1, 2.6.12
P2.4.2.23
External Brake Acknowledge
(Confirmação de freio externo)
0,1
0,2
1210
Sinal de monitoramento de freio
mecânico.
P2.4.2.24
Cooling Monitor
(Monitor de resfriamento)
0,1
0,2 750
Usado com a unidade resfriada a
líquido
P2.4.2.25
Enable Inching
(Ativar avanço incremental)
0,1
0,1 532
Ativa a função de avanço incremental
P2.4.2.26
Inching 1 (Avanço incremental 1)
0,1
0,1 531
Referência de avanço incremental 1
(avanço padrão de 2 Hz. Consulte
P2.4.16). Isso iniciará o conversor
de frequência.
P2.4.2.27
Inching 2 (Avanço incremental 2)
0,1
0,1 532
Referência de avanço incremental 2
(reverso padrão -2 Hz. Consulte
P2.4.17). Isso iniciará o conversor
de frequência.
P2.4.2.28
2nd frequency Limit
(2º limite de frequência)
0,1
0,1
1511
Ativa o segundo limite de frequência
P2.2.7.31 2º limite de frequência

VACON 54 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.4.2.29
Reset Position (Redefinir posição)
0,1
0,1
1090 P2.4.2.30
MF Mode 2 (Modo MF 2)
0,1
0,1
1092 P2.4.2.31
Quick Stop (Parada rápida)
0,1
0,2
1213
P2.4.2.32
Motoring Torque Limit 1
(Limite de torque do motor 1)
0,1
0,1
1624 P2.4.2.33
Generator Torque Limit 1
(Limite de torque no modo gerador 1)
0,1
0,1
1626
P2.4.2.34
PID Activation (Ativação PID)
0,1
0,1
1804
P2.4.2.35
Store Parameter Set
(Armazenar conjunto
de parâmetros)
0,1
0,1
1753
Armazena o conjunto de parâmetros
ativo para o conjunto de parâmetros
selecionado
P2.4.2.36
Start Place A/B
(Local de partida A/B)
0,1
0,1 425
Altera os sinais de partida entre os
locais A e B.
P2.4.2.37
Start signal 1B (Sinal de partida 1B)
0,1
0,1 403
Avanço; consulte ID300
P2.4.2.38
Start signal 2B (Sinal de partida 2B)
0,1
0,1 404
Reverso. Consulte ID300
P2.4.2.39
Disable Negative Direction
(Desativar direção negativa)
0,1
0,2
1814
P2.4.2.40
Disable Positive Direction
(Desativar direção positiva)
0,1
0,2
1813
Tabela 6-5. Sinais de entrada digital, G2.2.4
6.4.3 Entrada analógica 1
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.4.3.1
AI1 signal selection
(Seleção do sinal AI1)
0,1
E.10 A.1
377
Slot . Entrada de placa nº
P2.4.3.2
AI1 filter time
(Tempo de filtro AI1)
0,000
32,000
s
0,000
324
0=Sem filtragem
P2.4.3.3
AI1 signal range
(Faixa de sinal AI1)
0
3 0 320
0
1
2= -
3= Faixa personalizada*
P2.4.3.4
AI1 custom minimum
setting (Configuração
mínima personalizada
AI1)
-160,00
160,00
%
0,00
321
Faixa personalizada:
Entrada mínima
P2.4.3.5
AI1 custom maximum
setting (Configuração
máxima
personalizada AI1)
-160,00
160,00
%
100,00
322
Faixa personalizada:
Entrada máxima
P2.4.3.6
AI1 reference scaling,
minimum value
(Escala de referência
AI1, valor mínimo)
0,00
320,00
Hz
0,00
303
Seleciona a frequência que
corresponde ao sinal de
referência mín.
P2.4.3.7
AI1 reference scaling,
maximum value
(Escala de referência
AI1, valor máximo)
0,00
320,00
Hz
0,00
304
Seleciona a frequência que
corresponde ao sinal de
referência máx.
P2.4.3.8
AI1 joystick Dead
Zone (Zona Morta do
joystick AI1)
0,00
20,00
%
2,00
384
Zona morta da entrada do
joystick
P2.4.3.9
AI1 sleep limit (Limite
de suspensão AI1)
0,00
100,00
%
0,00
385
O conversor de frequência
irá parar se a entrada
permanecer abaixo desse
limite por este tempo.
P2.4.3.10
AI1 sleep delay
(Atraso de suspensão
AI1)
0,00
320,00
s
0,00
386
P2.4.3.11
AI1 joystick offset
(Compensação de
joystick AI1)
-100,00
100,00
%
0,00
165
Pressione 'Enter' por 1 s
para definir a
compensação
Tabela 6-6. Parâmetros da entrada analógica 1, G2.2.2
*Lembre-se de posicionar os jumpers do bloco X2 de
forma correspondente. Consulte o Manual do Usuário
do NX, capítulo 6.2.2.2

controle de pontes rolantes apfiff20 VACON 55
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.4.4 Entrada analógica 2
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.4.4.1
AI2 signal selection
(Seleção de sinal AI2)
0,1
E.10 A.2
388
Slot . Entrada de placa nº
P2.4.4.2
AI2 filter time
(Tempo de filtro AI2)
0,000
32,000
s
0,000
329
0=Sem filtragem
P2.4.4.3
AI2 signal range
(Intervalo de sinal AI2)
0
3 1 325
0
1 4 mA Falha
2= -
3=Faixa personalizada*
P2.4.4.4
AI2 custom
minimum setting
(Configuração
mínima
personalizada AI2)
-160,00
160,00
%
0,00
326
Faixa personalizada:
Entrada mínima
P2.4.4.5
AI2 custom
maximum setting
(Configuração
máxima
personalizada AI2)
-160,00
160,00
%
100,00
327
Faixa personalizada:
Entrada máxima
P2.4.4.6
AI2 reference
scaling, minimum
value (Escala de
referência AI2, valor
mínimo)
0,00
320,00
Hz
0,00
393
Seleciona a frequência que
corresponde ao sinal de
referência mín.
P2.4.4.7
AI2 reference
scaling, maximum
value (Escala de
referência AI2, valor
máximo)
0,00
320,00
Hz
0,00
394
Seleciona a frequência que
corresponde ao sinal de
referência máx.
P2.4.4.8
AI2 joystick Dead
Zone (Zona Morta
do joystick AI2)
0,00
20,00
%
2,00
395
Zona morta da entrada do
joystick
P2.4.4.9
AI2 sleep limit
(Limite de
suspensão AI2)
0,00
100,00
%
0,00
396
O conversor de frequência
irá parar se a entrada
permanecer abaixo desse
limite por este tempo.
P2.4.4.10
AI2 sleep delay
(Atraso de
suspensão AI2)
0,00
320,00
s
0,00
397
P2.4.4.11
AI2 joystick offset
(Compensação de
joystick AI2)
-100,00
100,00
%
0,00
166
Pressione 'Enter' por 1 s
para definir a
compensação
Tabela 6-7. Parâmetros da entrada analógica 2, G2.2.3

VACON 56 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.4.5 Entrada analógica 3
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.4.5.1
AI3 signal selection
(Seleção de sinal AI3)
0,1
E.10 0,1 141
Slot . Entrada de placa nº
Se 0.1 ID27 pode ser
controlado a partir de FB
P2.4.5.2
AI3 filter time
(Tempo de filtro AI3)
0,000
32,000
s
0,000
142
0=Sem filtragem
P2.4.5.3
AI3 custom
minimum setting
(Configuração
mínima
personalizada AI3)
-160,00
160,00
%
0,00
144
Faixa personalizada
sempre ativa. Consulte
ID326
P2.4.5.4
AI3 custom maximum
setting (Configuração
máxima
personalizada AI3)
-160,00
160,00
%
100,00
145
Faixa personalizada
sempre ativa. Consulte
ID327
P2.4.5.5
AI3 signal inversion
(Inversão de sinal AI3)
0
1 0 151
0=Não invertido
1=Invertido
P2.4.5.6
AI3 reference scaling,
minimum value
(Escala de referência
AI3, valor mínimo)
-32000
32000 0 1037
Seleciona o valor que
corresponde ao sinal de
referência mínima
P2.4.5.7
AI3 reference scaling,
maximum value
(Escala de referência
AI3, valor máximo)
-32000
32000 0 1038
Seleciona o valor que
corresponde ao sinal de
referência máxima
P2.4.5.8
AI3 Controlled ID (ID
Controlado AI3)
0
10000 0 1509
Selecione o parâmetro
que você deseja controlar
por número de ID.
Tabela 6-8. Parâmetros da entrada analógica 3, G2.2.4
6.4.6 Entrada analógica 4
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.4.6.1
AI4 signal selection
(Seleção de sinal AI4)
0,1
E.10 0,1 152
Slot . Entrada de placa nº
Se 0.1 ID28 pode ser
controlado a partir de FB
P2.4.6.2
AI4 filter time
(Tempo de filtro AI4)
0,000
32,000
s
0,000
153
0=Sem filtragem
P2.4.6.3
AI4 custom minimum
setting (Configuração
mínima personalizada
AI4)
-160,00
160,00
%
0,00 155
Faixa personalizada
sempre ativa. Consulte
ID326
P2.4.6.4
AI4 custom maximum
setting (Configuração
máxima
personalizada AI4)
-160,00
160,00
%
100,00
156
Faixa personalizada
sempre ativa. Consulte
ID327
P2.4.6.5
AI4 signal inversion
(Inversão de sinal AI4)
0
1 0 162
0=Não invertido
1=Invertido
P2.4.6.6
AI3 reference scaling,
minimum value (Escala
de referência AI3, valor
mínimo)
-32000
-32000 0 1039
Seleciona o valor que
corresponde ao sinal de
referência mínima
P2.4.6.7
AI3 reference scaling,
maximum value
(Escala de referência
AI3, valor máximo)
-32000
32000 0 1040
Seleciona o valor que
corresponde ao sinal de
referência máxima
P2.4.6.8
AI4 Controlled ID (ID
Controlado AI4)
0
10000 0 1510
Selecione o parâmetro
que você deseja controlar
por número de ID.
Tabela 6-9. Parâmetros da entrada analógica 4, G2.2.5
**Lembre-se de posicionar os jumpers do bloco X2 de
forma correspondente. Consulte o Manual do Usuário
do NX, capítulo 6.2.2.2

controle de pontes rolantes apfiff20 VACON 57
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.4.7 Opções
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.4.7.1
Input signal
inversion Control
(Controle de
inversão do sinal
de entrada)
0
65535 2 1091

VACON 58 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5 Sinais de saída
6.5.1 Sinais de saída digital
Código
Parâmetro
Mín.
Padrão
Person.
ID
Observação
P2.5.1.1
Ready (Pronto)
0,1
0,1
432
Pronto para funcionamento
P2.5.1.2
Run (Funcionamento)
0,1
0,1
433
Em funcionamento
P2.5.1.3
Fault (Falha)
0,1
0,1
434
Conversor de frequência em
estado de falha
P2.5.1.4
Inverted fault (Falha invertida)
0,1
0,1
435
O conversor de frequência
não está em estado de falha
P2.5.1.5
Warning (Aviso)
0,1
0,1
436
Aviso ativo
P2.5.1.6
External fault (Falha externa)
0,1
0,1
437
Falha externa ativa
P2.5.1.7
Reference fault/warning
(Falha/aviso de referência)
0,1
0,1
438
Falha de 4 mA ativa
P2.5.1.8
Over temperature warning
(Aviso de superaquecimento)
0,1
0,1
439
Aviso de superaquecimento
do conversor de frequência
ativo
P2.5.1.9
Reverse (Reverso)
0,1
0,1
440
Frequência de saída < 0 Hz
P2.5.1.10
Unrequested direction
(Direção não solicitada)
0,1
0,1
441
Referência <> Frequência de
saída
P2.5.1.11
At speed (Na velocidade)
0,1
0,1
442
Referência = Frequência de
saída
P2.5.1.12
Jogging speed (Velocidade
de jogging)
0,1
0,1
443
Comando de velocidade de
jogging ou predefinida ativo
P2.5.1.13
External control place
(Local de controle externo)
0,1
0,1
444
Controle de E/S ativo
P2.5.1.14
External brake contro, Direct
(Controle de freio externo,
Direto)
0,1
0,1
446
Consulte as explicações no
capítulo Controle do freio
P2.5.1.15
External brake control, Invert
(Controle de freio externo,
Invertido)
0,1
0,1
445
P2.5.1.16
Output frequency limit 1
supervision (Supervisão do
limite de frequência de saída 1)
0,1
0,1
447
Consulte ID315
P2.5.1.17
Output frequency limit 2
supervision (Supervisão do
limite de frequência de saída 2)
0,1
0,1
448
Consulte ID346
P2.5.1.18
Reference limit supervision
(Supervisão de limite de
referência)
0,1
0,1
449
Consulte ID350
P2.5.1.19
Temperature limit supervision
(Supervisão de limite de
temperatura)
0,1
0,1
450
Supervisão de temperatura
do conversor de frequência.
Consulte ID354
P2.5.1.20
Torque limit supervision
(Supervisão de limite de torque)
0,1
0,1
451
Consulte ID348
P2.5.1.21
Motor thermal protection
(Proteção térmica do motor)
0,1
0,1
452
Falha ou aviso do termistor
P2.5.1.22
Analogue input supervision
limit (Sinal de supervisão de
entrada analógica)
0,1
0,1
463
Consulte ID356
P2.5.1.23
Motor regulator activation
(Ativação do regulador do motor)
0,1
0,1
454
Um controlador de limite
está ativo
P2.5.1.24
Fieldbus digital input 1
(Entrada digital de fieldbus 1)
0,1
0,1
455
FB CW B11
P2.5.1.25
FB Dig 1 Parameter
(Parâmetro FB Dig 1)
ID0
ID0
891
Selecione o parâmetro para
controle
P2.5.1.26
Fieldbus digital input 2
(Entrada digital de fieldbus 2)
0,1
0,1
456
FB CW B12
P2.5.1.27
FB Dig 2 Parameter
(Parâmetro FB Dig 2)
ID0
ID0
892
Selecione o parâmetro para
controle

controle de pontes rolantes apfiff20 VACON 59
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.5.1.28
Fieldbus digital input 3
(Entrada digital de fieldbus 3)
0,1
0,1
457
FB CW B13
P2.5.1.29
FB Dig 3 Parameter
(Parâmetro FB Dig 3)
ID0
ID0
893
Selecione o parâmetro para
controle
P2.5.1.30
Fieldbus digital input 4
(Entrada digital de fieldbus 4)
0,1
0,1
169
FB CW B14
P2.5.1.31
FB Dig 4 Parameter
(Parâmetro FB Dig 4)
ID0
ID0
894
Selecione o parâmetro para
controle
P2.5.1.32
Fieldbus digital input 5
(Entrada digital de fieldbus 5)
0,1
0,1
170
FB CW B15
P2.5.1.33
FB Dig 5 Parameter
(Parâmetro FB Dig 5)
ID0
ID0
895
Selecione o parâmetro para
controle
P2.5.1.34
Safe Disable Active
(Desativação segura ativa)
0,1
0,1
756
P2.5.1.35
Brake Slipping
(Escorregamento de freio)
0,1
0,1
1786

VACON 60 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5.2 Saída analógica 1
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.5.2.1
Analogue output 1
signal selection
(Seleção de sinal de
saída analógica 1)
0,1
E.10 A.1
464
Programação TTF
Consulte os capítulos
3.1 e 3.2
P2.5.2.2
Analogue output 1
function (Função de
saída analógica 1)
0
20 0 307
0=Não usado (4 mA/2 V)
1=Frequência de saída
(0 fmax)
2=Referência de frequência
(0 fmax)
3=Velocidade do motor
(0 Velocidade nominal
do motor)
4=Corrente do motor
(0 InMotor)
5=Torque do motor
(0 TnMotor)
6=Potência do motor
(0 PnMotor)
7=Tensão do motor
(0-UnMotor)
8=Tensão do barramento
CC (0 1000 V)
9=AI1
10=AI2
11=Frequência de saída
(fmin - fmax)
12=-
13=-
14=Temperature do PT100
15=Saída analógica de FB
16= -
+2xVelocidade
17= Velocidade do encoder
(0 Velocidade nominal do
motor)
18=Referência de
frequência final
19= Saída de controle
do valor
20=Potência de saída do
conversor de frequência
P2.5.2.3
Analogue output 1
filter time (Tempo do
filtro da saída
analógica 1)
0,00
10,00 s 1,00
308
0=Sem filtragem
P2.5.2.4
Analogue output 1
inversion (Inversão
da saída analógica 1)
0
1 0 309
0=Não invertido
1=Invertido
P2.5.2.5
Analogue output 1
minimum (Saída
analógica mínima 1)
0
1 0 310
0=0 mA (0%)
1=4 mA (20%)
P2.5.2.6
Analogue output 1
scale (Escala da
saída analógica 1)
10
1000 % 100
311 P2.5.2.7
Analogue output 1
offset (Compensação
da saída analógica 1)
-100,00
100,00
%
0,00
375
Tabela 6-10. Parâmetros da saída analógica 1, G2.3.5

controle de pontes rolantes apfiff20 VACON 61
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5.3 Saída analógica 2
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.5.3.1
Analogue output 2
signal selection
(Seleção de sinal da
saída analógica 2)
0,1
E.10 0,1
471
Programação TTF
Consulte os capítulos
3.1 e 3.2
P2.5.3.2
Analogue output 2
function (Função da
saída analógica 2)
0
20 4 472
Consulte o P2.5.2.2
P2.5.3.3
Analogue output 2
filter time (Tempo do
filtro da saída
analógica 2)
0,00
10,00 s 1,00
473
0=Sem filtragem
P2.5.3.4
Analogue output 2
inversion (Inversão
da saída analógica 2)
0
1 0 474
0=Não invertido
1=Invertido
P2.5.3.5
Analogue output 2
minimum (Saída
analógica 2 mínima)
0
1 0 475
0=0 mA (0%)
1=4 mA (20%)
P2.5.3.6
Analogue output 2
scale (Escala de
saída analógica 2)
10
1000 % 100
476
P2.5.3.7
Analogue output 2
offset (Compensação
da saída analógica 2)
-100,00
100,00
%
0,00
477
Tabela 6-11. Parâmetros da saída analógica 2, G2.3.6

VACON 62 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5.4 Saída analógica 3
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.5.4.1
Analogue output 3
signal selection
(Seleção do sinal de
saída analógica 3)
0,1
E.10 0,1
478
Programação TTF
Consulte os capítulos
3.1 e 3.2
P2.5.4.2
Analogue output 3
function (Função da
saída analógica 3)
0
20 5 479
Consulte o P2.5.2.2
P2.5.4.3
Analogue output 3
filter time (Tempo do
filtro da saída
analógica 3)
0,00
10,00
s
1,00
480
0=Sem filtragem
P2.5.4.4
Analogue output 3
inversion (Inversão
da saída analógica 3)
0
1 0 481
0=Não invertido
1=Invertido
P2.5.4.5
Analogue output 3
minimum (Saída
analógica 3 mínima)
0
1 0 482
0=0 mA (0%)
1=4 mA (20%)
P2.5.4.6
Analogue output 3
scale (Escala da
saída analógica 3)
10
1000 % 100
483
P2.5.4.7
Analogue output 3
offset (Compensação
da saída analógica 3)
-100,00
100,00
%
0,00
484
Tabela 6-12. Parâmetros da saída analógica 3, G2.3.7
6.5.5 Analogue output 4 (Saída analógica 4)
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.5.5.1
Analogue output 4
signal selection
(Seleção do sinal da
saída analógica 4)
0,1
E.10 0,1
1527
Programação TTF
Consulte os capítulos
3.1 e 3.2
P2.5.5.2
Analogue output 4
function (Função da
saída analógica 4)
0
20 5 1520
Consulte o P2.5.2.2
P2.5.5.3
Analogue output 4
filter time (Tempo do
filtro da saída
analógica 4)
0,00
10,00 s 1,00
1521
0=Sem filtragem
P2.5.5.4
Analogue output 4
inversion (Inversão
da saída analógica 4)
0
1 0 1522
0=Não invertido
1=Invertido
P2.5.5.5
Analogue output 4
minimum (Saída
analógica 4 mínima)
0
1 0 1523
0=0 mA (0%)
1=4 mA (20%)
P2.5.5.6
Analogue output 4
scale (Escala da
saída analógica 4)
10
1000 % 100
1525
P2.5.5.7
Analogue output 4
offset (Compensação
da saída analógica 4)
-100,00
100,00
%
0,00
1524
Tabela 6-13. Parâmetros da saída analógica 4, G2.3.8

controle de pontes rolantes apfiff20 VACON 63
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5.6 Saída digital retardada 1
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.5.6.1
Digital output 1
signal selection
(Seleção do sinal da
saída digital 1)
0,1
E.10 0,1
486
Possibilidade de inversão
por ID1091 Comandos INV
P2.5.6.2
Digital output 1
function (Função da
saída digital 1)
0
28 1 312
0=Não usado
1=Pronto
2=Funcionamento
3=Falha
4=Falha inversa
5=Aviso de
superaquecimento de FC
6=Aviso ou falha externa
7=Aviso ou falha de
referência
8=Aviso
9=Reverso
10=Velocidade de jogging
selecionada
11=Na velocidade
12=Regulador do motor
ativado
13=Supervisão do limite
de frequência 1
14=Supervisão do limite
de frequência 2
15=Supervisão do limite
de torque
16=Supervisão do limite
de referência
17=Controle do freio externo
18=Local de controle
de E/S ativado
19=Supervisão do limite
de temperatura de FC
20=Referência invertida
21=Controle do freio
externo invertido
22=Aviso ou falha do
termistor
23=Ligar/desligar controle
24=Dados de entrada
do fieldbus 1
25=Dados de entrada
do fieldbus 2
26=Dados de entrada
do fieldbus 3
27=Reset do conjunto
de avisos
28=Seleção do bit de ID
P2.5.6.3
Digital output 1 on
delay (Saída digital
1 em atraso)
0,00
320,00
s
0,00
487
0,00 = Atraso de ligação
não está em uso
P2.5.6.4
Digital output 1 off
delay (Atraso
desligado da saída
digital 1)
0,00
320,00
s
0,00
488
0,00 = Atraso de
desligamento não
está em uso
P2.5.6.5
Invert delayed DO1
(Inverter DO1
retardada)
0
1 0
1587
0=Não invertido
1=Invertido
P2.5.6.6
ID.Bit Free DO (DO
livre do bit de ID)
0,00
2000,15
0,00
1217
Tabela 6-14. Parâmetros da saída digital retardada 1, G2.3.1

VACON 64 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5.7 Saída digital retardada 2
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.5.7.1
Digital output 2
signal selection
(Seleção do sinal de
saída digital 2)
0,1
E.10 0,1
489
Possibilidade de inversão
por ID1091 Comandos INV
P2.5.7.2
Digital output 2
function (Função da
saída digital 2)
0
28 0 490
Consulte o P2.5.6.2
P2.5.7.3
Digital output 2 on
delay (Saída digital
2 em atraso)
0,00
320,00
s
0,00
491
0,00 = Atraso de ligação
não está em uso
P2.5.7.4
Digital output 2 off
delay (Saída digital
2 sem atraso)
0,00
320,00
s
0,00
492
0,00 = Atraso de
desligamento não
está em uso
P2.5.7.5
Invert delayed DO2
(Inverter DO2
retardada)
0
1 0
1588
0=Não invertido
1=Invertido
P2.5.7.6
ID.Bit Free DO (DO
livre do bit de ID)
0,00
2000,15
0,00
1385
Tabela 6-15. Parâmetros da saída digital retardada 2, G2.3.2

controle de pontes rolantes apfiff20 VACON 65
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5.8 Limites de supervisão
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.5.8.1
Output frequency
limit 1 supervision
(Supervisão do limite
de frequência de
saída 1)
0
2 0 315
0=Sem limite
1=Supervisão de limite baixo
2=Supervisão de limite alto
P2.5.8.2
Output frequency
limit 1; Supervised
value (Limite de
frequência de saída 1;
Valor supervisionado)
0,00
320,00
Hz
0,00
316
P2.5.8.3
Output frequency
limit 2 supervision
(Supervisão do limite
de frequência de
saída 2)
0
2 0 346
0=Sem limite
1=Supervisão de limite baixo
2=Supervisão de limite alto
P2.5.8.4
Output frequency
limit 2; Supervised
value (Limite de
frequência de saída 2;
Valor supervisionado)
0,00
320,00
Hz
0,00
347
P2.5.8.5
Torque limit
supervision
(Supervisão de limite
de torque i)
0
2 0 348
0=Não usado
1=Supervisão de limite baixo
2=Supervisão de limite alto
P2.5.8.6
Torque limit
supervision value
(Valor de supervisão
de limite de torque)
-300,0
300,0
%
100,0
349
P2.5.8.7
Reducing of torque
supervision limit
(Redução do limite de
supervisão de torque)
0
5 0 402
P2.5.8.8
Reference limit
supervision
(Supervisão do limite
de referência)
0
2 0 350
0=Não usado
1=Limite baixo
2=Limite alto
P2.5.8.9
Reference limit
supervision value
(Valor de supervisão
do limite de
referência)
0,00
100,0
%
0,00
351
P2.5.8.10
FC temperature
supervision
(Supervisão da
temperatura de FC)
0
2 0 354
0=Não usado
1=Limite baixo
2=Limite alto
P2.5.8.11
FC temperature
supervised value
(Valor supervisionado
da temperatura de FC)
10
100
°C
40 355
P2.5.8.12
Analogue supervision
signal (Sinal de
supervisão analógico)
0
4 0 356
0=Não usado
1=AI1
2=AI2
3=AI3
4=AI4
P2.5.8.13
Analogue supervision
low limit (Limite
inferior de supervisão
analógica)
0,00
100,00
%
10,00
357
Redefinir o limite
P2.5.8.14
Analogue supervision
high limit (Limite
superior de
supervisão analógica)
0,00
100,00
%
90,00
358
Definir o limite
Tabela 6-16. Configurações de limite de supervisão, G2.3.4

VACON 66 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.6 Configurações de limite
6.6.1 Manuseio de corrente
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.6.1.1
Current limit
(Limite de
corrente)
0
2 x IH
A
Máximo da
unidade
107
Atingir o limite diminuirá
a frequência de saída
P2.6.1.2
Scaling of current
limit (Escala do
limite de corrente)
0
5 0
399
Escala de 0 a ID107
0=Não usado
1=AI1
2=AI2
3=AI3
4=AI4
5=Escala do limite de FB ID46
P2.6.1.3
Current Limit Kp
(Kp do limite de
corrente)
1
32000 Varia
1451
P2.6.1.4
Current Limit Ki
(Ki do limite de
corrente)
1
32000 Varia
1452
6.6.2 Manuseio de torque
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.6.2.1
Torque Limit
(Limite de torque)
0,0
300,0
%
300,0
609
Limite máximo geral
P2.6.2.2
Motoring Torque
Limit (Limite de
torque do motor)
0,0
300,0
%
300,0
1287
Limite de torque do lado
motor
P2.6.2.3
Generator Torque
Limit (Limite de
torque do gerador)
0,0
300,0
%
300,0
1288
Limite de torque do lado
gerador
P2.6.2.4
Motoring Torque
Limit 1 (Limite de
torque do motor 1)
0,0
300,0
%
300,0
1625
P2.6.2.5
Generator Torque
limit 1 (Limite de
torque no modo
gerador 1)
0,0
300,0
%
300,0
1627
P2.6.2.6
Scaling Motoring
Torque limit (Escala
do limite de torque
do motor)
0
5 0 485
Escala de 0 a ID1287
0=Não usado
1=AI1
2=AI2
3=AI3
4=AI4
5=Escala do limite de FB ID46
P2.6.2.7
Scaling Generator
Torque limit (Escala
do limite de torque
do gerador)
0
5 0 1087
Escala de 0 a ID1288
Como o parâmetro P2.6.3.9
6.6.2.1 Configurações de MA de manuseio de torque
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.6.2.8.1
Torque limit control
P-gain (Ganho P de
controle de limite
de torque)
0,0
32000
3000
610
P2.6.2.8.2
Torque limit control
I-gain (Ganho I de
controle do limite
de torque)
0,0
32000 200
611

controle de pontes rolantes apfiff20 VACON 67
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.6.2.2 Configurações de MF de manuseio de torque
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.6.2.9.1
SPC Out Limit
(Limite de saída SPC)
0,0
300,0 % 300,0
1382 P2.6.2.9.2
SPC Pos Limit
(Limite positivo SPC)
0,0
300,0 % 300,0
646 P2.6.2.9.3
SPC Neg Limit
(Limite negativo SPC)
0,0
300,0 % 300,0
645 P2.6.2.9.4
Pull Out Torque
(Torque de retirada)
0,0
600,0 % 500,0
1291

VACON 68 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.6.2.3 Execute uma captura de carga para MF
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.6.2.10.1
Generator Torque
limit increase speed
level (Limite de
torque do gerador
aumenta o nível de
velocidade)
0,00
320,00
Hz
0,00
1547
Função desativada quando
estiver em zero. Aponte onde
as estrelas de limite de torque
do Gerador aumentam.
P2.6.2.10.2
Generator Torque
limit increase
maximum speed
limit (Limite de
torque do gerador
aumenta o limite de
velocidade máxima)
0,00
320,00
Hz
100,00
1548
Aponte onde o valor de torque
de ID1549 é adicionado ao
limite de torque do gerador
de base.
P2.6.2.10.3
Generator Torque
limit increase
maximum addition
(Limite de torque do
gerador aumenta a
adição máxima)
0,0
300,0 % 300,0
1549
6.6.3 Manuseio de frequência
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.6.3.1
Max Frequency 2
(Frequência
máxima 2)
0,00
320,00
Hz
35,00
1512
Limite de frequência máxima
ativada pela entrada digital.
P2.6.3.2
Negative frequency
limit (Limite de
frequência negativa)
-320,00
320,00
Hz
-320,00
1286
Limite alternativo para
direção negativa
P2.6.3.3
Positive frequency
limit (Limite de
frequência positiva)
-320,00
320,00
Hz
320,00
1285
Limite alternativo para
direção positiva
P2.6.3.4
Zero Frequency limit
(Limite de
frequência zero)
0,00
320,00
Hz
1,00
1283
P2.6.3.5
Minimum Frequency
Open Loop (Malha
aberta de frequência
mínima)
0,00
50,00
Hz
Varia
101
Calculada durante a
identificação do motor
do freio
P2.6.3.6
Minimum Frequency
Closed Loop (Malha
fechada de
frequência mínima)
0,00
50,00
Hz
0,00
215
Calculada durante a
identificação do motor
do freio
P2.6.3.7
Acceleration Power
Limit Forward
(Avanço do limite de
potência de
aceleração)
0,00
600,0
%
300,0
1903 P2.6.3.8
Acceleration Power
Limit Reverse
(Reversão do limite
de potência de
aceleração)
0,00
600,0
%
300,0
1904

controle de pontes rolantes apfiff20 VACON 69
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.6.4 Manuseio do barramento CC
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.6.4.1
Overvoltage controller
(Controlador de
sobretensão)
0
2 0 607
0=Não usado
1=Usado (sem rampa)
2=Usado (rampa)
P2.6.4.2
Over Voltage Reference
selector (Seletor de
referência da
sobretensão)
0
2 1 1262
0=Tensão alta
1=Tensão normal
2=Nível do chopper de
frenagem
P2.6.4.3
Brake chopper
(Chopper de frenagem)
0
4 0 504
0=Desativado
1=Usado em funcionamento
2=Chopper de frenagem
externo
3=Usado quando parado/em
funcionamento
4=Usado em funcionamento
(sem teste)
P2.6.4.4
Brake Chopper Level
(Nível do chopper
de frenagem)
5: 605
6: 836
5: 797
6: 1099
V
1267 P2.6.4.5
Undervoltage
controller (Controlador
de subtensão)
0
2 0 608
0=Não usado
1=Usado (sem rampa)
2=Usado (rampa a zero)
P2.6.4.6
Under Voltage Ref
Selector (Seletor
de referência
de subtensão)
0
1 1 1537
0=Referência de subtensão
1= 0,8 * Tensão CC estimada
P2.6.4.6
Under Voltage
Reference (Referência
de subtensão)
5: 410
6: 567
5: 540
6: 745
V
Varia
1538
6.6.4.1 Configurações de MF de manuseio do barramento CC
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.6.4.8.1
Over voltage
reference (Referência
de sobretensão)
94,00
130,00
%
118,00
1528
P2.6.4.8.2
Over voltage motoring
side torque limit
(Limite de torque do
lado motor de
sobretensão)
0,0
300,0 % 10,0
1623
Torque máximo do motor
quando o controlador de
sobretensão está ativo.
P2.6.4.8.3
CL Under Voltage
Reference
(Referência de
subtensão de MF)
60,00
80,00
%
65,00
1567
6.6.5 Opções de configurações de limite
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.6.6.1
Limit Total Current
In Closed Loop
(Limitar corrente
total em malha
fechada)
0
1 0 1901
0=Não
1=Sim

VACON 70 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.7 Manuseio de fluxo e corrente CC
6.7.1 Configurações de MA de manuseio de fluxo e corrente CC
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.7.1.1
DC braking current
(Corrente de
frenagem CC)
0,00
IL A 0,00
507
Calculada durante a
identificação do freio
P2.7.1.2
DC braking time at
start (Frenagem CC
na partida)
0,00
600,00
s
0,00
516
Calculada durante a
identificação do freio
P2.7.1.3
DC braking time at
stop (DC braking time
at start (Frenagem
CC na parada)
0,00
600,00
s
0,00
508
Calculada durante a
identificação do freio
P2.7.1.4
Frequency to start DC
braking during ramp
stop (Frequência para
iniciar a frenagem CC
durante parada de
rampa)
0,10
10,00
Hz
1,50
515
P2.7.1.5
DC-Brake Current in
Stop (Corrente do
freio de CC na
parada)
0,00
IL A Varia
1080
P2.7.1.6
Flux brake (Freio
de fluxo)
0
1 0 520
0=Desligado
1=Ligado
P2.7.1.7
Flux braking current
(Corrente da
frenagem de fluxo)
0,00
IL A IH 519
6.7.2 Configurações de MF do manuseio de fluxo e corrente CC
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.7.2.1
Magnetizing current
at start (Corrente de
magnetização na
partida)
0
IL A 0,00 627
Calculada durante a
identificação do freio
P2.7.2.2
Magnetizing time at
start (Tempo de
magnetização na
partida)
0,0
600,0 s 0,0 628
Calculada durante a
identificação do freio
P2.7.2.3
Flux Reference
(Referência de fluxo)
0,0
500,0
%
100,0
1250
P2.7.2.4
Flux Off Delay (Atraso
de desligamento de
fluxo)
-1
32000 s 0 1402
-1=sempre
P2.7.2.5
Stop State Flux (Fluxo
de estado de parada)
0,0
150,0
%
100,0
1401
P2.7.2.6
Reduced Flux Level
(Nível de fluxo
reduzido)
0,0
500,0
%
100,0
1613
P2.7.2.7
Reduced Flux
Frequency
(Frequência de
fluxo reduzido)
0,00
32,00
Hz
0,00
1614

controle de pontes rolantes apfiff20 VACON 71
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.8 Controle do motor
6.8.1 Configurações básicas de controle do motor
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.8.1
MC mode
(Modo MC)
0
3 0 694
0= Malha Aberta
1= Malha Fechada
2= Sem sensor
3= Controle AOL
P2.8.3
Torque Select
(Seleção de torque)
0
6 1 1278
0=Controle de frequência
1=Controle de velocidade
2=Torque
3=Torque; Saída da rampa
4=Torque; Mín.
5=Torque; Máx.
6=Torque; Janela
6.8.2 Configurações de malha aberta
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.8.3.1
U/f optimisation
(Otimização U/f)
0
1 0 109
0=Não usado
1=Impulso de torque
automático
P2.8.3.2
U/f ratio selection
(Seleção da razão U/f)
0
3 0 108
0=Linear
1=Quadrática
2=Programável
3=Linear com otimização
de fluxo
P2.8.3.3
Field weakening
point (Ponto de
enfraquecimento
do campo)
6,00
320,00
Hz
50,00
602
P2.8.3.4
Voltage at field
weakening point
(Tensão no ponto
de enfraquecimento
de campo)
10,00 200,00
%
100,00
603
n% x Unmot
P2.8.3.5
U/f curve midpoint
frequency
(Frequência do
ponto médio da
curva de U/f)
0,00
P2.8.3.3
Hz
50,00
604
P2.8.3.6
U/f curve midpoint
voltage (Tensão do
ponto médio da
curva de U/f)
0,00
100,00
%
100,00
605
n% x Unmot
Valor máximo do
parâmetro = P2.6.5
P2.8.3.7
Output voltage at
zero frequency
(Tensão de saída em
frequência zero)
0,00
40,00
%
0,00
606
n% x Unmot
P2.8.3.8
Freq. Dir. Change
(Freq. Dir. Mudança)
0
32000
25000
1682
P2.8.3.9
Hoisting ID UF
Strength (Força UF
de ID de içamento)
33
200 % 90
1905
P2.8.3.10
I/f Start (Partida I/f)
0
1 0 1809
P2.8.3.11
I/f Current
(Corrente de I/f)
0,0
150,0
120,0
1693
P2.8.3.12
I/f Control Limit
(Limite de
controle de I/f)
0,0
300,0
10,0
1790
Calculada durante a
identificação do guindaste

VACON 72 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.8.3 Configurações de controle de malha fechada
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.8.4.1
Current control P
gain (Ganho P de
controle de
corrente)
0,00
100,00
%
40,00
617 P2.8.4.2
Current control
I Time (Tempo I
de controle de
corrente)
0,0
3200,0
ms
1,5 657
P2.8.4.3
Slip adjust (Ajuste
de escorregamento)
0
500 % 75 619
P2.8.4.4
Acceleration
compensation
(Compensação de
aceleração)
0,00
300,00
s
0,00 626
P2.8.4.5
Speed Error Filter
TC (TC do filtro de
erro de velocidade)
0
1000
ms
0 1311 P2.8.4.6
Encoder filter time
(Tempo do filtro do
encoder)
0
1000
ms
0 618
P2.8.4.7
Encoder Selection
(Seleção do
encoder)
0
1 0 1595
0=Entrada do encoder 1
1=Entrada do encoder 2
P2.8.4.8
Motor Temperature
Compensation
mode (Modo de
compensação da
temperatura do
motor)
0
2 0 1426
0=Não usado
1=Interno
2=Temperatura medida
P2.8.4.9
SC Torque Chain
Select (Seleção da
cadeia de torque SC)
0
65535 0 1557
Padrão 96 após a
identificação.
P2.8.4.10
CL MC Mode (Modo
MC de MF)
0
1 1 691
0=Modelo de fluxo 1
1=Modelo de fluxo 2

controle de pontes rolantes apfiff20 VACON 73
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.8.4 Configurações de controle de PMSM
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.8.5.1
PMSM Shaft
Position (Posição
do eixo do PMSM)
0
65535 0 649
P2.8.5.2
Start Angle
Identification mode
(Modo de
identificação do
ângulo de partida)
0
10 0 1691
0=Automática
1=Forçado
2=Depois de ligar
3=Desativado
P2.8.5.3
Start Angle
Identification DC
Current (Corrente
CC de identificação
do ângulo de
partida)
0,0
150,0 % 0,0
1756
P2.8.5.4
Polarity Pulse
Current (Corrente
de pulso de
polaridade)
-10,0
200,0 % 0,0
1566
P2.8.5.5
Start Angle ID Time
(Tempo de ID do
ângulo de partida)
0
32000
ms
0 1755
P2.8.5.6
I/f Current
(Corrente de I/f)
0,0
150,0 % 50,0
1693
P2.8.5.7
I/f Control Limit
(Limite de controle
de I/f)
0,0
300,0 % 10,0
1790 P2.8.5.8
Flux Current Kp
(Kp da corrente
de fluxo)
0
32000
5000
651
P2.8.5.9
Flux Current Ti
(Ti da corrente de
fluxo)
0
1000 25 652
P2.8.5.10
External Id
Reference
(Referência de
Id externa)
-150,0
150,0 % 0,0
1730
P2.8.5.11
Enable Rs
Identification
(Ativar identificação
de Rs)
0
1 1 654
0=Não
1=Sim
P2.8.5.12
Lsd Voltage Drop
(Queda de tensão
em Lsd)
-32000
32000 0 1757
P2.8.5.13
Lsq Voltage Drop
(Queda de tensão
em Lsq)
-32000
32000 0 1758
P2.8.5.14
EncIDCurrent
0,0
150,0 % 90,0
1734
P2.8.5.15
Polarity ID Mode
(Modo de ID de
polaridade)
0
1
1737
P2.8.5.16
Polarity Pulse
Length
(Comprimento do
pulso de polaridade)
0
1000
ms
200
1742
P2.8.5.17
Polarity Detection
Angle (Ângulo de
detecção de
polaridade)
0,0
360,0
Deg
1,5
1748
P2.8.5.18
Angle Identification
Mode (Modo de
identificação do
ângulo)
0
2
1749
P2.8.5.19
Current Control Kp
d (Kp d do controle
de corrente)
0
32000
%
1761

VACON 74 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.8.5 Estabilizadores
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.8.6.1
Torque Stabilator
Gain (Ganho do
estabilizador de
torque)
0
1000 100
1412
P2.8.6.2
Torque Stabilator
Damping
(Amortecimento
do estabilizador de
torque)
0
1000 800
1413
Com PMSM, use 980
P2.8.6.3
Torque Stabilator
Gain in FWP (Ganho
do estabilizador de
torque em FWP)
0
1000 50 1414
P2.8.6.4
Torque Stabilator
Limit (Limite do
estabilizador de
torque)
0
1500 150
1720
P2.8.6.5
Flux Circle Stabilator
Gain (Ganho do
estabilizador do
círculo de fluxo)
0
32767
10000
1550
P2.8.6.6
Flux Circle Stabilator
TC (TC do
estabilizador do
círculo de fluxo)
0
32700 900
1551
P2.8.6.7
Flux Stabilator Gain
(Ganho do
estabilizador de fluxo)
0
32000 500
1797
P2.8.6.8
Flux Stab Coeff
(Coeficiente do
estabilizador de fluxo)
-30000
30000
1796
P2.8.6.9
Voltage Stabilator
Gain (Ganho do
estabilizador de
tensão)
0
100,0 % 10,0
1738
P2.8.6.10
Voltage Stabilator TC
(TC do estabilizador
de tensão)
0
1000 900
1552
P2.8.6.11
Voltage Stabilator
Limit (Limite do
estabilizador de
tensão)
0
320,00
Hz
1,50
1553
6.8.6 Parâmetros de ajuste
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.8.7.1
Fly Start Options
(Opções de partida
dinâmica)
0
65535 0 1610 P2.8.7.2
MC Options (Opções
de MC)
0
65535 0 1740
P2.8.7.3
Resonance Damping
Select (Seleção de
amortecimento de
ressonância)
0
200 0,00
1760
P2.8.7.4
Damping Frequency
(Frequência de
amortecimento)
0
320,00
Hz
0 1763
P2.8.7.5
Damping Gain (Ganho
de amortecimento)
0
32000 0 1764

controle de pontes rolantes apfiff20 VACON 75
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.8.7.6
Damping Phase (Fase
de amortecimento)
0
360 0,00
1765
P2.8.7.7
Damping Activation
Frequency
(Frequência de
ativação do
amortecimento)
0
320,00 % 0 1770
P2.8.7.8
Damping Filter Time
Constant (Constante
do tempo do filtro de
amortecimento)
0
32700 105
1771
P2.8.7.9
Over Modulation Limit
(Limite de
sobremodulação)
50
120 % 105
1515
Se o filtro seno for usado,
defina para 101%.
P2.8.7.10
Modulator Index Limit
(Limite do índice do
modulador)
0
200 % 100
655
P2.8.7.11
DC Voltage Filter
(Filtro de tensão CC)
0,0
500,0 0,0
1591
6.8.7 Parâmetros de identificação
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.8.8.1
Flux 10%
(10% de fluxo)
0
2500 % 10
1355
P2.8.8.2
Flux 20%
(20% de fluxo)
0
2500 % 20
1356
P2.8.8.3
Flux 30%
(30% de fluxo)
0
2500 % 30
1357
P2.8.8.4
Flux 40%
(40% de fluxo)
0
2500 % 40
1358
P2.8.8.5
Flux 50%
(50% de fluxo)
0
2500 % 50
1359
P2.8.8.6
Flux 60%
(60% de fluxo)
0
2500 % 60
1360
P2.8.8.7
Flux 70%
(70% de fluxo)
0
2500 % 70
1361
P2.8.8.8
Flux 80%
(80% de fluxo)
0
2500 % 80
1362
P2.8.8.9
Flux 90%
(90% de fluxo)
0
2500 % 90
1363
P2.8.8.10
Flux 100%
(100% de fluxo)
0
2500 % 100
1364
P2.8.8.11
Flux 110%
(110% de fluxo)
0
2500 % 110
1365
P2.8.8.12
Flux 120%
(120% de fluxo)
0
2500 % 120
1366
P2.8.8.13
Flux 130%
(130% de fluxo)
0
2500 % 130
1367
P2.8.8.14
Flux 140%
(140% de fluxo)
0
2500 % 140
1368
P2.8.8.15
Flux 150%
(150% de fluxo)
0
2500 % 150
1369
P2.8.8.16
Rs voltage drop
(Queda de tensão
em Rs)
0
30000
Varia
662
Usado para cálculo de
torque em malha aberta
P2.8.8.17
Ir add zero point
voltage (Tensão
de ponto zero de
adição de RI)
0
30000
Varia
664

VACON 76 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.8.8.18
Ir add generator
scale (Escala do
gerador de
adição de RI)
0
30000
Varia
665
P2.8.8.19
Ir add motoring
scale (Escala de
motor de adição
de RI)
0
30000
Varia
667
P2.8.8.20
Ls Voltage Dropp
(Queda de tensão
em Ls)
0
3000 0 673
P2.8.8.21
Motor BEM
Voltage (Tensão
do motor BEM)
0,00
320,00 % 0 674
P2.8.8.22
Iu Offset
(Compensação
de lu)
-32000
32000 0 668
P2.8.8.23
Iv Offset
(Compensação
de Iv)
-32000
32000 0 669
P2.8.8.24
Iw Offset
(Compensação
de Iw)
-32000
32000 0 670
P2.8.8.25
Estimator Kp
(Kp do estimador)
0
32000 400
1781
P2.8.8.26
Estimator Ki (Ki
do estimador)
0
3200 2000
1782
P2.8.8.27
Speed step
(Passo de
velocidade)
-50,0
50,0
0,0
0,0
1252
Ajuste de velocidade
de NCDrive
P2.8.8.28
Torque step
(Passo de torque)
-100,0
100,0
0,0
0,0
1253
Ajuste de torque
do NCDrive
P2.8.8.29
Original UF Zero
Point Voltage
(Tensão no ponto
zero do UF
original)
0,00
20,00 % 0,00
681 P2.8.8.30
Voltage Drop
(Queda de
tensão)
0,00
20,00 % 0,00
671
Tabela 6-17. Parâmetros de identificação, G2.6.4
6.8.8 Parâmetros de ajuste fino
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P 2.8.9.1
DeadTimeComp.
1751
P 2.8.9.2
DeadTieContCurL
1752 P 2.8.9.3
DeadTHWCompDisab
1750 P 2.8.9.4
MakeFluxTime
660 P 2.8.9.5
CurrMeasFCompTC
1554 P 2.8.9.6
TCDunDampGain
1576 P 2.8.9.7
TCDynDampTC
1577 P 2.8.9.8
CurrLimOptions
1702 P 2.8.9.9
AdConvStartShift
1701 P 2.8.9.10
VoltageCorr. Kp
1783 P 2.8.9.11
VoltageCorr. Ki
1784 P 2.8.9.12
GearRatioMultipl
1558 P 2.8.9.13
GearRatioDivider
1559
Tabela 6-18. Parâmetros de ajuste fino

controle de pontes rolantes apfiff20 VACON 77
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.8.9 Parâmetros de ajuste do controle AOL
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P 2.8.10.1
Freq. 0
0
3200 % 10
1684 P 2.8.10.2
Freq. 1
0
3200 % 20
1707 P 2.8.10.3
Freq. 2
0
300 % 20
1791 P 2.8.10.4
Freq. 3
0
100 % 30 635 P 2.8.10.5
MinCurrentRef
0
100 % 70 622 P 2.8.10.6
NoLoadFluxCurr
0
100 % 70 623 P 2.8.10.7
M5 StrayFluxCurr
0
100 % 55 624
P 2.8.10.8
0 Speed Current
(Corrente de velocidade 0)
0
250 % 125
625 P 2.8.10.9
DeltaAngleFWD
0
2500 560
692 P 2.8.10.10
DeltaAngleREV
0
2500 1536
693
P 2.8.10.11
Flux Current Kp
(Kp da corrente de fluxo)
0
32000 5000
1708
P 2.8.10.12
Flux Current Ti
(Ti da corrente de fluxo)
0
3200 4
1709
P 2.8.10.13
FluxStabGain1
0
32000 100
1541
P 2.8.10.14
FluxStabGainFWP
0
32000 300
1542
P 2.8.10.15
FluxStabLimit
0
32000 300
1543
P 2.8.10.16
FluxCurrentDamp
0
32000 50
1546
Tabela 6-19. Parâmetros de ajuste do controle AOL
6.9 Controle de velocidade
6.9.1 Configurações básicas de controle de velocidade
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.9.1
Load drooping
(Queda de carga)
0,00
100,00
%
0,00
620
P2.9.2
Load Drooping Time
(Tempo de queda de
carga)
0
32000
ms
0 656
Para alterações dinâmicas
P2.9.3
Load Drooping Removal
(Remoção de queda de
carga)
0
2 0 1534
0=Normal
1= No limite de frequência zero
2=Zero linear a Fnom
Tabela 6-20. Configurações básicas de controle de velocidade
6.9.2 Configurações de MA de controle de velocidade
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.9.4.1
Speed controller P
gain (open loop)
(Ganho P do
controlador de
velocidade (malha
aberta))
0
32767
3000
637
P2.9.4.2
Speed controller I
gain (open loop)
(Ganho I do
controlador de
velocidade (malha
aberta))
0
32767 300
638
Tabela 6-21 Configurações de MA de controle de velocidade

VACON 78 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.9.3 Configurações de MF de controle de velocidade
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.9.5.1
Speed control
P gain (Ganho
P de controle
de velocidade)
0
1000 30 613 P2.9.5.2
Speed control
I time (Tempo
I de controle de
velocidade)
-32000
32000
ms
100
614
Valor negativo usa o formato
de 0,1 ms em vez de 1 ms.
P2.9.5.3
0-speed time at
start (Tempo de
velocidade 0 na
partida)
0
32000
ms
100
615
P2.9.5.4
0-speed time at
stop (Tempo de
velocidade 0 na
parada)
0
32000
ms
100
616
P2.9.5.5
SPC f1 Point
(Ponto SPC f1)
0,00
320,00
Hz
0,00
1301 P2.9.5.6
SPC f0 Point
(Ponto SPC f0)
0,00
320,00
Hz
0,00
1300
P2.9.5.7
SPC Kp f0
0
1000 % 100
1299 P2.9.5.8
SPC Kp FWP
0
1000 % 100
1298
P2.9.5.9
SPC Torque
minimum
(Torque de SPC
mínimo)
0
400,0 % 0,0
1296 P2.9.5.10
SPC Torque
minimum Kp
(Kp de torque
de SPC mínimo)
0
1000 % 100
1295
P2.9.5.11
SPC Kp TC
Torque (Torque
de SPC Kp TC)
0
1000
ms
0 1297
Tabela 6-212.Configurações de MF de controle de velocidade
6.10 Controle do conversor de frequência
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.10.1
Switching frequency
(Frequência de
chaveamento)
1,0
Varia
kHz
Varia
601
P2.10.2
Modulator Type
(Tipo de modulador)
0
3 0 1516
P2.10.3
Control Options
(Opções de controle)
0
65535 64
1084
P2.10.4
Control Options 2
(Opções de controle 2)
0
65535 0 1798
P2.10.5
Advanced Options 1
(Opções avançadas 1)
0
65535 0 1560
P2.10.6
Advanced Options 2
(Opções avançadas 2)
0
65535 0 1561
P2.10.7
Advanced Options 4
(Opções avançadas 4)
0
65535 0 1563
P2.10.8
Advanced Options 5
(Opções avançadas 5)
0
65535 0 1564
P2.10.9
Advanced Options 6
(Opções avançadas 6)
0
65535 0 1565
P2.10.10
Restart Delay
(Atraso de reinício)
0
65535
s
Varia
1424
P2.10.11
Restart Delay CL (Atraso
de reinício em MF)
0
60,000
s
Varia
672
MF e partida dinâmica
Tabela 6-22.Controle do conversor de frequência

controle de pontes rolantes apfiff20 VACON 79
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.11 Parâmetros de controle de Mestre/Seguidor
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.11.1
Master Follower
Mode (Modo de
Seguidor/Mestre)
0
4 0 1324
0=Não Usado
1=Mestre
2=Seguidor
3=Sincronizar mestre
4=Sincronizar seguidor
P2.11.2
Follower Speed
Reference Select
(Seleção de
referência de
velocidade do
seguidor)
0
18 17
1081
0=AI1
1=AI2
2=AI1+AI2
3=AI1-AI2
4=AI2-AI1
5=AI1xAI2
6=AI1 Joystick
7=AI2 Joystick
8=Teclado
9=Fieldbus
10=Potenciômetro
eletrônico
11=AI1, AI2 mínimo
12=AI1, AI2 máximo
13=Frequência máxima
14=Seleção AI1/AI2
15=Encoder 1
16=Encoder 2
17=Referência mestre
18=Saída de rampa mestre
P2.11.3
Follower Torque
Reference Select
(Seleção de
referência de
torque do
seguidor)
0
10 10
1083
0=Não usado
1=AI1
2=AI2
3=AI3
4=AI4
5=Joystick AI1
6=Joystick AI2
7=Referência de torque do
teclado, R3.5
8=Referência de torque FB
9=Torque de MA do mestre
10=Torque de MF do mestre
P2.11.4
Follower Stop
Function (Função
de parada do
seguidor)
0
2 2 1089
0=Parada por inércia
1=Rampa
2=Como mestre
P2.11.5
MF Brake Logic
(Lógica do freio
MF)
0
3 2 1326
Não usado quando
seguidor de rampa ou em
modo de sincronização do
conversor de frequência
0=Mestre ou Próprio
1=Próprio
2=Mestre e Próprio, o
mestre monitora também
o status do freio do seguidor
3=Mestre
P2.11.6
MF Mode 2
(Modo MF 2)
0
4 0 1093
P2.11.1
P2.11.7
System Bus Fault
(Falha de
barramento do
sistema)
0
3 1 1082
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.11.8
System Bus Fault
Delay (Atraso
de falha de
barramento
do sistema)
0,00
320,00
s
3,00
1352
P2.11.9
Follower Fault
(Falha do seguidor)
0
3 1 1536
Consulte o P2.11.6
Tabela
6-234
. Parâmetros de controle de Mestre/Seguidor, G2.11

VACON 80 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.12 Proteções
6.12.1 Configurações gerais
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.1.1
Input phase supervision
(Supervisão da fase
de entrada)
0
3 0 730
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.12.1.2
Response to
undervoltage fault
(Resposta à falha
de subtensão)
0
1 0 727
0=Falha armazenada no
histórico
1=Falha não armazenada
P2.12.1.3
Output phase
supervision (Supervisão
da fase de saída)
0
3 2 702
Consulte o P2.12.1.1
P2.12.1.4
Response to slot fault
(Resposta à falha
de slot)
0
3 2 734
Consulte o P2.12.1.1
P2.12.1.5
Safe Disable Response
(Resposta de
desativação segura)
0
2 1 755
Consulte o P2.12.1.1
Tabela 6-245. Configurações comuns
6.12.2 Proteções do sensor de temperatura
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.2.1
No. of used inputs
on board 1 (Nº de
entradas usadas na
placa 1)
0
5 0 739
0=Não usada (Gravação de ID)
1 = Sensor 1 em uso
2 = Sensores 1 e 2 em uso
3 = Sensores 1, 2 e 3 em uso
4 = Sensores 2 e 3 em uso
5 = Sensor 3 em uso
P2.12.2.2
Response to
temperature fault
(Resposta à falha
de temperatura)
0
3 2 740
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.12.2.3
Board 1 warning
limit (Limite de
aviso da placa 1)
30,0
200,0
Cº
120,0
741 P2.12.2.4
Board 1 fault limit
(Limite de falha da
placa 1)
30,0
200,0
Cº
130,0
742
P2.12.2.5
No. of uses inputs
on board 2 (Nº de
entradas usadas na
placa 2)
0
5 0 743
0=Não usada (Gravação de ID)
1 = Sensor 1 em uso
2 = Sensores 1 e 2 em uso
3 = Sensores 1, 2 e 3 em uso
4 = Sensores 2 e 3 em uso
5 = Sensor 3 em uso
P2.12.2.6
Response to
temperature fault
(Resposta à falha
de temperatura)
0
3 2 766
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.12.2.7
Board 2 warning
limit (Limite de
aviso da placa 2)
30,0
200,0
Cº
120,0
745
P2.12.2.8
Board 2 fault limit
(Limite de falha da
placa 2)
30,0
200,0
Cº
130,0
746
P2.12.2.9.1
Channel 1B Warn
(Aviso do canal 1B)
-30,0
200,0
Cº
0,0 764

controle de pontes rolantes apfiff20 VACON 81
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.12.2.9.2
Channel 1B Fault
(Falha do canal 1B)
-30,0
200,0
Cº
0,0 765 P2.12.2.9.3
Channel 1C Warn
(Aviso do canal 1C)
-30,0
200,0
Cº
0,0 768
P2.12.2.9.4
Channel 1C Warn
(Falha do canal 1C)
-30,0
200,0
Cº
0,0 769
P2.12.2.9.5
Channel 2B Warn
(Aviso do canal 2B)
-30,0
200,0
Cº
0,0 770 P2.12.2.9.6
Channel 2B Fault
(Falha do canal 2B)
-30,0
200,0
Cº
0,0 771 P2.12.2.9.7
Channel 2C Warn
(Aviso do canal 2C)
-30,0
200,0
Cº
0,0 772
P2.12.2.9.8
Channel 2C Fault
(Falha do canal 2C)
-30,0
200,0
Cº
0,0 773
Tabela 6-25. Proteções do PT-100
6.12.3 Proteção contra rotor bloqueado
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.3.1
Stall protection
(Proteção contra
rotor bloqueado)
0
3 0 709
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.12.3.2
Stall current
(Corrente de rotor
bloqueado)
0,1
2 x IH A IH 710 P2.12.3.3
Stall time limit
(Limite de tempo de
rotor bloqueado)
1,00
120,00
s
15,00
711
P2.12.3.4
Stall frequency
limit (Limite de
frequência de rotor
bloqueado)
1,0
P2.1.2
Hz
25,0
712
Tabela 6-26. Proteção contra rotor bloqueado
6.12.4 Monitoramento de erro de velocidade
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.4.1
Speed Error Mode
(Modo de erro de
velocidade)
0
3 0 752
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.12.4.2
Speed Error Limit
(Limite de erro de
velocidade)
0,0
100,0 % 5,0 753 P2.12.4.3
Speed Fault Delay
(Atraso da falha de
velocidade)
0,00
100,00 S 0,1 754
P2.12.4.4
Over Sped Limit
(Limite de excesso
de velocidade)
0,00
50,00
Hz
5,00
1812
Histerese para excesso de
velocidade, quando excede os
limites de frequência
positiva/negativa
Tabela 6-27. Monitoramento de erro de velocidade

VACON 82 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.12.5 Proteções térmicas do motor
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.5.1
Thermal
protection of the
motor (Proteção
térmica do motor)
0
3 2 704
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.12.5.2
Motor ambient
temperature
factor (Fator de
temperatura
ambiente do
motor)
100,0
100,0 % 0,0 705
P2.12.5.3
Motor cooling
factor at zero
speed (Fator de
arrefecimento do
motor em
velocidade zero)
0,0
150,0 % 40,0
706
P2.12.5.4
Motor thermal
time constant
(Constante de
tempo térmica
do motor)
1
200
mín.
45 707
P2.12.5.5
Motor duty cycle
(Ciclo de trabalho
do motor)
0
100 % 100 708
P2.12.5.6
Response to
thermistor fault
(Resposta à falha
do termistor)
0
3 2 732
Consulte o P2.12.5.1
P2.12.5.7
Over Load
Response
(Resposta de
sobrecarga)
0
2 1 1838
0=Sem resposta
1=Aviso
2=Falha
P2.12.5.8
Over Load Signal
(Sinal de
sobrecarga)
0
2 0 1837
0=Não Usado
1=Corrente
2=Torque
3=Potência
P2.12.5.9
Over Load
Maximum Input
(Entrada máxima
de sobrecarga)
0,0
300,0
%
150,0
1839
P2.12.5.10
Over Load
maximum Step
(Passo máximo
de sobrecarga)
0
10000 200
1840
Tabela 6-28. Proteções térmicas do motor

controle de pontes rolantes apfiff20 VACON 83
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.12.6 Monitoramento Zero Vivo
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.6.1
Response to 4mA
reference fault
(Resposta à falha de
referência de 4mA)
0
5 0 700
0=Sem resposta
1=Aviso
2=Aviso+Frequência anterior
3=Aviso+Redefinição da
frequência 2.12.6.2
4=Falha,parada de acordo
com 2.3.2
5=Falha, parada por inércia
P2.12.6.2
4mA reference fault
frequency
(Frequência de
falha de referência
de 4mA)
0,00
P2.1.2
Hz
0,00
728
Tabela 6-290. Monitoramento Zero Vivo
6.12.7 Proteção contra subcarga
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.7.1
Underload protection
(Proteção contra
subcarga)
0
3 0 713
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.12.7.2
Field weakening area
load (Carga da área
de enfraquecimento
de campo)
10,0
150,0 % 50,0
714
P2.12.7.3
Zero frequency load
(Carga de frequência
zero)
5,0
150,0 % 10,0
715
P2.12.7.4
Underload protection
time limit (Limite de
tempo de proteção de
subcarga)
2,00
600,00
s
20,00
716
Tabela 6-31. Proteção contra subcarga
6.12.8 Proteção contra falha de aterramento
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.8.1
Earth fault protection
(Proteção contra falha
de aterramento)
0
3 2 703
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.12.8.2
Eart fault current
limit (Limite de
corrente de falha de
aterramento)
0,0
100,0 % 50,0
1333
Tabela 6-32. Proteção contra falha de aterramento
6.12.9 Proteção contra resfriamento
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.9.1
Cooling Fault
Response
(Resposta à falha
de resfriamento)
1
2 2 762
0= Sem ação, Aviso
1= Aviso, Aviso
2= Aviso, Falha
3= Sem ação, Falha
P2.12.9.2
Cooling Fault delay
(Atraso de falha de
resfriamento)
0,00
7,00 s 2,00
751
Tabela 6-33. Proteção contra resfriamento

VACON 84 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.12.10 Proteção do fieldbus
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.10.1
Fieldbus
Communication
response (Resposta
de comunicação do
fieldbus)
0
3 2 733
0=Sem ação
1=Aviso
2= Falha
3= Falha, parada por inércia
4=Aviso; Frequência anterior
P2.12.10.2
FB Fault Delay (Atraso
de falha de FB)
0,00
60,00 s 0,50
1850
Atraso na falha quando
a resposta de FB for 4
P2.12.10.3
FB Watchdog Delay
(Atraso de alarme
de FB)
0,00
30,00 s 0,00
1354
Atraso quando pulso WD
estiver ausente. 0,00 s =
desativado
Tabela 6-34. Proteção do fieldbus
6.12.11 Falha externa
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.11.1
Response to
external fault 1
(Resposta à falha
externa 1)
0
3 2 701
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.12.11.2
Response to
external fault 2
(Resposta à falha
externa 2)
0
3 2 747
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
6.12.12 Falha do encoder
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.12.12.1
Encoder Supervision
(Supervisão do
encoder)
1
3 2 1353
1=Aviso
2=Falha
3=Aviso, para malha aberta
P2.12.12.2
Encoder Fast Hz
Limit (Limite de Hz
rápido do encoder)
0,00
320,00
Hz
1801
P2.12.12.3
Fast Time Limit
(Limite de tempo
rápido)
0,00
32,00
s
1805
P2.12.12.4
Iq Fault Limit
(Limite de falha Iq)
0
300
%
1800

controle de pontes rolantes apfiff20 VACON 85
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.13 Parâmetros de fieldbus
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.13.1
Fieldbus min scale
(Escala mín. de
fieldbus)
0,00
320,00
Hz
0,00
850 P2.13.2
Fieldbus max scale
(Escala máx. de
fieldbus)
0,00
320,00
Hz
0,00
851
P2.13.3
Fieldbus process
data out 1 selection
(Seleção de saída de
dados de processo do
fieldbus 1)
0
10000 1 852
Escolha dados de
monitoramento com
ID de parâmetro
Def: Frequência de saída
P2.13.4
Fieldbus process
data out 2 selection
(Seleção de saída de
dados de processo do
fieldbus 2)
0
10000 2 853
Escolha dados de
monitoramento com
ID de parâmetro
Def: Velocidade do motor
P2.13.5
Fieldbus process
data out 3 selection
(Seleção de saída de
dados de processo do
fieldbus 3)
0
10000 45 854
Escolha dados de
monitoramento com
ID de parâmetro
Def: Corrente do motor
para FB
P2.13.6
Fieldbus process
data out 4 selection
(Seleção de saída de
dados de processo do
fieldbus 4)
0
10000 4 855
Escolha dados de
monitoramento com
ID de parâmetro
Def: Torque do motor
P2.13.7
Fieldbus process
data out 5 selection
(Seleção de saída de
dados de processo do
fieldbus 5)
0
10000 5 856
Escolha dados de
monitoramento com
ID de parâmetro
Def: Motor Power
(Potência do motor)
P2.13.8
Fieldbus process
data out 6 selection
(Seleção de saída de
dados de processo do
fieldbus 6)
0
10000 6 857
Escolha dados de
monitoramento com
ID de parâmetro
Def: Tensão do motor
P2.13.9
Fieldbus process
data out 7 selection
(Seleção de saída de
dados de processo do
fieldbus 7)
0
10000 7 858
Escolha dados de
monitoramento com
ID de parâmetro
Def: Tensão do
barramento CC
P2.13.10
Fieldbus process
data out 8 selection
(Seleção de saída de
dados de processo do
fieldbus 8)
0
10000 37 859
Escolha dados de
monitoramento com
ID de parâmetro
Def: Last Active Fault
(Última falha ativa)
P2.13.11
Fieldbus process
data in 1 selection
(Seleção de entrada
de dados de processo
do fieldbus 1)
0
10000
1140
876
Escolha dados controlados
com ID de parâmetro.
Def: FB Torque Reference
(Referência de torque de FB)
P2.13.12
Fieldbus process
data in 2 selection
(Seleção de entrada
de dados de processo
do fieldbus 2)
0
10000 46 877
Escolha dados controlados
com ID de parâmetro.
Def: FB Limit Scaling
(Escala de limite de FB)
P2.13.13
Fieldbus process
data in 3 selection
(Seleção de entrada
de dados de processo
do fieldbus 3)
0
10000 47 878
Escolha dados controlados
com ID de parâmetro.
Def: FB Adjust Reference
(Referência do ajuste de FB)

VACON 86 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.13.14
Fieldbus process
data in 4 selection
(Seleção de entrada
de dados de processo
do fieldbus 4)
0
10000 48 879
Escolha dados controlados
com ID de parâmetro.
Def: Saída analógica de FB.
P2.13.15
Fieldbus process
data in 5 selection
(Seleção de entrada
de dados de processo
do fieldbus 5)
0
10000 0 880
Escolha dados controlados
com ID de parâmetro
P2.13.16
Fieldbus process
data in 6 selection
(Seleção de entrada
de dados de processo
do fieldbus 6)
0
10000 0 881
Escolha dados controlados
com ID de parâmetro
P2.13.17
Fieldbus process
data in 7 selection
(Seleção de entrada
de dados de processo
do fieldbus 7)
0
10000 0 882
Escolha dados controlados
com ID de parâmetro
P2.13.18
Fieldbus process
data in 8 selection
(Seleção de entrada
de dados de processo
do fieldbus 8)
0
10000 0 883
Escolha dados controlados
com ID de parâmetro
P2.13.19
General Status Word
ID (ID da palavra de
status geral)
0
10000 64 897
Escolha dados de
monitoramento na
Palabra de Status Geral
Def: MC Status (Status do MC)
P2.13.20
FB Actual Speed
Mode (Modo de
velocidade real de FB)
0
1 0 1741
0=Calculada
1=Real
P2.13.21
Control Slot Selector
(Seletor do slot de
controle)
0
8 0 1440
0=Todos 4=Slot D
5=Slot E
P2.13.22
State Machine
(Máquina de estado)
1
2 1 896
1 = Padrão
2 = ProfiDrive
P2.13.23
FB Custom
Minimum (Mínima
personalizada de FB)
-32000
+32000 0 898
Escala mínima de referência
de velocidade de FB
P2.13.24
FB Custom
Maximum (Máxima
personalizada de FB)
-32000
+32000
+10000
899
Escala máxima de referência
de velocidade de FB
Tabela 6-35. Parâmetros de fieldbus
6.13.1 Controle do valor
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.14.1.1
Control Input Signal ID
(ID do sinal de entrada
de controle)
0
10000
ID
0 1580
P2.14.1.2
Control Input Off Limit
(Entrada de controle
fora do limite)
-32000
32000 0 1581 P2.14.1.3
Control Input On Limit
(Entrada de controle
dentro do limite)
-32000
32000 0 1582 P2.14.1.4
Control Output Off
Value (Saída de
controle fora do valor)
-32000
32000 0 1583
P2.14.1.5
Control Output On
Value (Saída de
controle dentro do
valor)
-32000
32000 0 1584

controle de pontes rolantes apfiff20 VACON 87
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.14.1.6
Control Output Signal
ID (ID do sinal de saída
de controle)
0
10000
ID
0 1585
P2.14.1.7
Control Mode
(Modo de controle)
0
5 0 1586
0=SR ABS
1=Escala ABS
2=Escala ABS INV
3=SR
4=Escala
5=Escala INV
P2.14.1.8
Control Output
Filtering rime
(Tempo de filtragem
da saída de controle)
0,000
32,000
s
0,000
1721
Tabela 6-36. Seleção do sinal de entrada da referência de potência, G2.2.8
6.13.2 Controle de ID DIN 1
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.14.2.1
ID Control DIN (DIN
de controle do ID)
0,1
E.10 0,1
1570
Slot . Entrada de placa nº
P2.14.2.2
Controlled ID
(ID controlado)
0
10000
ID
0 1571
Selecione o ID que é
controlado pela entrada
digital
P2.14.2.3
False value
(Valor falso)
-32000
32000 0 1572
Valor quando a DI está
baixa
P2.14.2.4
True value
(Valor verdadeiro)
-32000
32000 0 1573
Valor quando a DI está alta
Tabela 6-37. Parâmetros de controle de ID da DIN
6.13.3 Controle de ID da DIN 2
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.14.3.1
ID Control DIN (DIN
de controle do ID)
0,1
E.10 0,1
1590
Slot . Entrada de placa nº
P2.14.3.2
Controlled ID
(ID controlado)
0
10000
ID
0 1575
Selecione o ID que é
controlado pela entrada
digital
P2.14.3.3
False value
(Valor falso)
-32000
32000 0 1592
Valor quando a DI está
baixa
P2.14.3.4
True value
(Valor verdadeiro)
-32000
32000 0 1593
Valor quando a DI está alta
Tabela 6-38. Parâmetros de controle de ID da DIN
6.13.4 Controle de ID da DIN 3
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.14.4.1
ID Control DIN (DIN
de controle do ID)
0,1
E.10 0,1
1578
Slot . Entrada de placa nº
P2.14.4.2
Controlled ID
(ID controlado)
0
10000
ID
0 1579
Selecione o ID que é
controlado pela entrada
digital
P2.14.4.3
False value
(Valor falso)
-32000
32000 0 1594
Valor quando a DI está
baixa
P2.14.4.4
True value
(Valor verdadeiro)
-32000
32000 0 1596
Valor quando a DI está alta
Tabela 6-39. Parâmetros de controle de ID da DIN

VACON 88 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.13.5 Saída digital de ID controlado 1
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.14.5.1
ID.Bit Free DO (DO
livre do bit de ID)
0,00
2000,15
ID.Bit
0,00
1216
P2.14.5.2
Free DO Sel
(Seleção de DO
livre)
0,1
E.10 0,1
1574
Tabela 6-40. Parâmetros de saída digital de ID controlado, G2.3.10
6.13.6 Saída digital de ID controlado 2
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.14.6.1
ID.Bit Free DO (DO
livre do bit de ID)
0,00
2000,15
ID.Bit
0,00
1386
P2.14.6.2
Free DO Sel
(Seleção de DO
livre)
0,1
E.10 0,1
1574
Tabela 6-41. Parâmetros de saída digital de ID controlado, G2.3.10
6.13.7 Atraso de DIN livre
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.14.7.1
ID.Bit Free DIN (DIN
livre do bit de ID)
0,00
2000,15
ID.Bit
0,00
1832
P2.14.7.2
On Delay
(Atraso ligado)
0,00
320,00
s
0,00
1833 P2.14.7.3
Off Delay
(Atraso desligado)
0,00
320,00
s
0,00
1834
P2.14.7.4
Mono Time
(Tempo mono)
0,00
320,00
s
0,00
1836
P2.14.7.5
Control Out ID
(ID da saída de
controle)
0
10000 0 1835
Tabela 6-42. Parâmetros de saída digital de ID controlado, G2.3.10

controle de pontes rolantes apfiff20 VACON 89
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.14 Parâmetros de controle do freio
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.15.1
Brake Open, Direct
(Abertura do freio,
Direta)
0,1
E.10
Sdig
0,1 446 P2.15.2
Brake FeedBack
(Realimentação
de freio)
0,1
E.10
DigIN
0,2
1210 P2.15.3
Brake Open Delay
(Atraso de abertura
do freio)
0,00
320,00
s
0,50
1544
Tempo necessário para
abrir o freio
P2.15.4
Brake Close
Delay (Atraso de
fechamento do freio)
0,00
320,00
s
0,50
1545
P2.15.5
Brake Open FreqLim
Open Loop (Limite
de frequência de
abertura do freio
em malha aberta)
0,00
320,00
Hz
0,00
1535
Limite de abertura do
freio e limite máximo de
referência quando o freio
é fechado em malha
aberta.
P2.15.6
Brake OpenFreqLim
Closed Loop (Limite
de frequência
de abertura do freio
em malha fechada)
0,00
320,00
Hz
0,00
1555
Limite de abertura do
freio e limite máximo de
referência quando o freio
é fechado em malha
fechada.
P2.15.7
Brake Close FreqLim
Open Loop (Limite
de frequência de
fechamento do freio
em malha aberta)
0,00
320,00
Hz
0,00
1539
0,00 = Calculado
internamente
P2.15.8
Brake Close FreqLim
Closed Loop (Limite
de frequência de
fechamento do freio
em malha fechada)
0,00
320,00
Hz
0,00
1540
0,00 = Calculado
internamente
P2.15.9
Brake Close/Open
Current Limit (Limite
de corrente de
fechamento/abertura
do freio)
0,00
320,00
A
0,00
1085
O freio é fechado
imediatamente se a
corrente de id cair abaixo
desse valor.
P2.15.10
Brake Options 1
(Opções de freio 1)
0
65535 0 1600
Tabela 6-43. Parâmetros de controle do freio, G2.3.9
6.14.1 Torque de partida do controle do freio para MF
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.15.11.1
Start-up torque
(Torque de partida)
0
3 0 621
0=Não usado
1=Memória do torque
2=Referência de torque
3=Torque de partida
avanço/reverso
P2.15.11.2
Start-up torque
FWD (Torque de
partida AVANÇO)
300,0
300,0 s 0,0
633
P2.15.11.3
Start-up torque
REV (Torque de
partida REVERSO)
300,0
300,0 s 0,0
634
P2.15.11.4
Start Up Torque
Time (Tempo de
torque de partida)
-1
10000
ms
-1
1371
-1 = Automático

VACON 90 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.14.2 Controle de reversão para MF
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.15.12.1
Roll Back Kp
(Kp de reversão)
-32000
32000 0 1787
P2.15.12.2
Roll Back Torque
(Torque de reversão)
-3200
3200 0,0
1788
P2.15.12.3
Roll Back Level
(Nível de reversão)
-32000
32000 3 1789
6.14.3 Manuseio de falha de freio
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.15.13.1
Brake Closed Fault
(Falha de freio
fechado)
1
3 1 1316
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
P2.15.13.2
Brake Open Fault
(Falha de abertura
do freio)
1
4 1 777
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
4=Aviso; retenção da partida
P2.15.13.3
Feed Back Open
Delay (Atraso de
abertura da
realimentação)
0,00
320,00
s
0,00
1317
P2.15.13.4
Feed Back Close
Delay (Atraso de
fechamento da
realimentação)
0,00
320,00
s
0,00
1733
P2.15.13.5
Brake Slip
Response
(Resposta de
escorregamento
do freio)
0
4 1 1785
0=Sem resposta
1=Aviso
2=Falha, parada de acordo
com 2.3.2
3=Falha, parada por inércia
4=Aviso, inicialização do
conversor de frequência
6.14.4 Funções
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.15.14.1
Load Floating Time
(Tempo de
flutuação da carga)
0,00
320,00
s
0,00
1282
6.14.5 Função de teste do freio
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.15.15.1
Brake Test
(Teste do freio)
0
1 0 1843
P2.15.15.2
Testing Torque
(Torque de teste)
-300
300 % 50,0
1844
P2.15.15.3
Brake Timing Torque
Reference
(Referência de torque
de temporização
do freio)
-300
300 % 40,0
1849

controle de pontes rolantes apfiff20 VACON 91
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.15 Parâmetros de redefinição automática
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.16.1
Wait time (Tempo
de espera)
0,10
10,00
s
0,50 717 P2.16.2
Trial time (Tempo
de avaliação)
0,00
60,00
s
0,10 718
P2.16.3
Start function
(Função de partida)
0
2 2 719
0=Rampa
1=Partida dinâmica
2=De acordo com a função
de parada
P2.16.4
Number of tries
after undervoltage
trip (Número de
tentativas após o
desarme por
subtensão)
0
10 0 720
P2.16.5
Number of tries
after overvoltage
trip (Número de
tentativas após
desarme por
sobretensão)
0
10 0 721
P2.16.6
Number of tries
after overcurrent
trip (Número de
tentativas após
desarme por
sobrecorrente)
0
3 0 722
P2.16.7
Number of tries
after reference trip
(Número de
tentativas após
desarme de
referência)
0
10 0 723
P2.16.8
Number of tries
after motor
temperature fault
trip (Número de
tentativas após
desarme da falha
de temperatura)
0
10 0 726
P2.16.9
Number of tries
after external fault
trip (Número de
tentativas após
desarme de falha
externa)
0
10 0 725
P2.16.10
Number of tries
after underload
fault trip (Número
de tentativas após
desarme de falha
de subcarga)
0
10 0 738
P2.16.11
Fault Simulation
(Simulação de
falha)
0
65535 0 1569
Tabela 6-44. Parâmetros de partida automática, G2.16

VACON 92 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.16 Parâmetros de controle de PI
Código
Parâmetro
Mín.
Máx.
Unidade
Passo
Padrão
ID
Observação
P2.17.1
PI controller gain
(Ganho do
controlador PI)
0,0
1000,0
% 100,0
118 P2.17.2
PI controller I-time
(Tempo I do
controlador PI)
0,00
320,00
s 1,00
119
P2.17.3
PI Reference
(Referência PI)
-32000
32000
0
167
P2.17.4
PI controller
reference signal ID
(ID de sinal de
referência do
controlador PI)
0
10000
167
332
Padrão P2.17.3
P2.17.5
PI Actual value ID (ID
do valor real do PI)
0
10000
0
333
P2.17.6
PI Controller output
ID (ID de saída do
controlador PI)
0
10000
0
1802
P2.17.7
PI Controller Scale
(Escala do
controlador PI)
-32000
32000
1
340
>= 1 = Sem inversão
<=-1 = Invertido
0 = Valor ilegal
P2.17.8
PI Low limit (Limite
inferior de PI)
-32000
32000
359
P2.17.9
PI High limit (Limite
superior de PI)
-32000
32000
10000
360
P2.17.10
PI Controller
Output scale
(Escala de saída do
controlador PI)
-3200,0
3200,0
% 100,0
1803
P2.17.11
PI Stop state value
(Valor de estado de
parada de PI)
-32000
32000
0
1806
Tabela 6-45. Parâmetros do controlador PI, G2.15
6.17 Sincronização do eixo
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.18.1
Enable Synch
(Ativar sincronização)
0,1
E.10
DigIn
0,1 1816
P2.18.2
Synch Kp (Kp de
sincronização)
0
1000 100
1817 P2.18.3
Synch Ti (Ti de
sincronização)
0
20000
ms
500
1818
P2.18.4
MaxRefCorrection
0,00
20,00
Hz
2,00
1819 P2.18.5
ZeroErrorLimit
0
1000 10 1824
P2.18.6
Fault Limit (Limite
de falha)
0
100 1 1826
0 = Desativado
P2.18.7
Reset Position
(Redefinir posição)
0,1
E.10 0,1 1090

controle de pontes rolantes apfiff20 VACON 93
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.18 Estimativa de carga
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.19.1
Motor Nominal
Torque (Torque
nominal do motor)
0,0
3200,0
Nm
0,0 1906
P2.19.2
Rotor Inertia
(Inércia do rotor)
0,0
10,0
kgm2
0,0 1907
P2.19.3
Gear Box Inertia
(Inércia da caixa de
engrenagens)
0,0
1000
kgm2
0,0 1908
P2.19.4
Drum Inertia
(Inércia do tambor)
0,0
1000
kgm2
0,0 1909 P2.19.5
Gear Ratio (Relação
da engrenagem)
0,0
1000
1/x
1 1910 P2.19.6
Drum Radius (Raio
do tambor)
0,0
1000 m 1 1911 P2.19.7
Rope Multiply
(Multiplicação de cabo)
0
100 x 1 1912
6.19 Segurança funcional
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P2.20.1
SQS Reaction
(Reação SQS)
0
1 1 545
0=Sem ação
1=Parada rápida
P2.20.2
SS1 Reaction
(Reação SS1)
0
1 1 542
0=Sem ação
1=Parada
P2.20.3
SS2 Reaction
(Reação SS2)
0
1 1 546
0=Sem ação
1=Velocidade Zero
P2.20.4
SDI Reaction
(Reação SDI)
0
1 1 544
0=Sem ação
1=Desativar Dir
P2.20.5
SLS Reaction
(Reação SLS)
0
1 1 543
0=Sem ação
1=Ref. de Limite Final
P2.20.6
SSR Reaction
(Reação SSR)
0
1 1 547
0=Sem ação
1=Velocidade limite
6.20 Função antibalanço
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P 2.21.1
License Key (Chave
de licença)
0
65535 0 1995
P 2.21.2
Anti-Swing Mode
(Modo antibalanço)
0
4 0 1846
0=Não usado
1=Modo 1
2=Modo 2
3=Modo 3
4=Modo 4
P 2.21.3
Swinning Period
(Período de balanço)
0,0
100,0
s
0,0 1743
P 2.21.4
Rope Length
(Comprimento do cabo)
0
32000
cm
0,0 1686 P 2.21.5
Smoothing TC
(TC de suavização)
0
32000
ms
0 1186 P2.21.6
Disable Anti-Swing
(Desativar antibalanço)
0,1
E.10
DigIN
0,1 1853
P2.21.7
Low Speed
Positioning Run
(Funcionamento em
posição de
velocidade baixa)
0
5 0 1854
0=Não usado
1=Modo 1
2=Modo 2
3=Modo 3
4=Modo 4
5=Modo 5
P2.21.8
Low Speed Positioning
Maximum Frequency
(Frequência máxima
em posição de
velocidade baixa)
0,00
320,00
Hz
0,00 1855

VACON 94 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.21 Controle de teclado (Painel de controle: Menu M3)
Os parâmetros para a seleção do local de controle e direção no teclado estão listados abaixo.
Consulte o menu de controle do teclado no Manual do Usuário do VACON® NX.
Código
Parâmetro
Mín.
Máx.
Unidade
Padrão
Person.
ID
Observação
P3.1
Control place
(Local de controle)
1
3 2 125
0=Controle do PC
1=Terminal de E/S
2=Teclado
3=Fieldbus
R3.2
Keypad reference
(Referência do
teclado)
P2.1.1
P2.1.2
Hz
0,00
P3.3
Direction ((Direção)
(no teclado))
0
1 0 123
0=Avanço
1=Reverso
P3.4
Stop button (Botão
de parada)
0
1 1 114
0=Função limitada do botão
de parada
1=Botão de parada sempre
ativado
R3.5
Torque reference
(Referência de
torque)
0,0
100,0 % 0,0
Tabela 6-46. Parâmetros de controle do teclado, M3
6.22 Menu do sistema (Painel de controle: Menu M6)
Para obter informações sobre parâmetros e funções relacionados ao uso geral do conversor
de frequência, como seleção de aplicação e idioma, conjuntos de parâmetros personalizados
ou informações sobre hardware e software, consulte o Manual do Usuário do VACON® NX.
6.23 Placas de expansão (Painel de controle: Menu M7)
O menu M7 mostra as placas expansoras e opcionais conectadas à placa de controle e
informações relacionadas às placas. Para obter mais informações, consulte o Manual do
Usuário do VACON® NX.

controle de pontes rolantes apfiff20 VACON 95
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7. DESCRIÇÃO DOS PARÂMETROS
7.1 Parâmetros Básicos
P2.1.1 Maximum frequency (Frequência máxima) ID102
Define o limite máximo de frequência para as direções negativa e positiva.
Os limites de frequência dependentes da direção podem ser dados em
Configurações de limite \
Observação: Quando o conversor de frequência estiver no estado de operação,
não altere esse parâmetro para um valor menor que a frequência de saída atual.
A alteração será feita sem rampa.
P2.1.2 Motor Nominal Voltage (Tensão nominal do motor) ID110
Encontre esse valor Un na placa de classificação nominal do motor.
P2.1.3 Motor Nominal Frequency (Frequência nominal do motor) ID111
Nom
Encontre este valor fn na placa de classificação nominal do motor. Este parâmetro
define o ponto de enfraquecimento de campo com o mesmo valor em G: Controle
do motor \
P2.1.4 Motor nominal speed (Velocidade nominal do motor) ID112
Encontre este valor nn na placa de classificação nominal do motor. Observe também
a frequência nominal.
Em alguns casos, a velocidade nominal do motor é mostrada com uma casa decimal.
Neste caso, recomenda-se fornecer o número inteiro mais próximo e ajustar a
frequência nominal do motor para que o conversor de frequência calcule o
[FW]PolePairNumber correto.
P2.1.5 Motor nominal current (Corrente nominal do motor) ID113
Encontre este valor In na placa de classificação nominal do motor. Se a corrente de
magnetização for fornecida, ajuste também a corrente de magnetização P2.1.9 antes
da identificação do motor.
Operação de sincronização do conversor de frequência
A corrente nominal do motor apresentada na placa de identificação do motor /
número de conversores de frequência em paralelo usando o VACON® Drive Synch.
P2.1.6 Motor cos phi (Cos phi do motor) ID120
Encontre este valor cosphi na placa de classificação nominal do motor.
P2.1.7 Motor Nominal Power (Potência nominal do motor) ID116
Encontre este valor na placa de classificação nominal do motor.

VACON 96 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.1.8 Magnetizing current (Corrente de magnetização) ID612
Defina aqui a corrente de magnetização do motor (corrente sem carga).
É possível medi-la com o motor em funcionamento sem carga a 2/3 da velocidade
nominal.
Quando o valor for igual a zero, a corrente de magnetização é calculada a partir dos
parâmetros nominais do motor; fórmulas abaixo:
Se dado antes da identificação do motor, este é usado como referência para o ajuste
de U/f ao fazer a identificação sem girar o motor.
P2.1.9 Identification (Identificação) ID631
A identificação do motor é uma parte do ajuste do motor e dos parâmetros
específicos do conversor de frequência. Ela é uma ferramenta para o
comissionamento e serviço do conversor, com o objetivo de encontrar valores
de parâmetro o melhor possível para a maioria dos conversores. A identificação
automática do motor calcula ou mede os parâmetros do motor necessários para
controle ótimo do motor e da velocidade.
OBSERVAÇÃO: Defina o modo de controle do motor para Controle de frequência
antes da identificação.
OBSERVAÇÃO: Durante a identificação, o conversor de frequência não abrirá o freio
mecânico por razões de segurança. Se a rotação do motor exigir que o freio seja
aberto, isso precisará ser alcançado externamente.
OBSERVAÇÃO: Durante a identificação do motor, os limites de torque e potência
devem estar acima de 100%. O limite de corrente também deve estar acima da
corrente nominal do motor.
OBSERVAÇÃO: Durante a identificação do motor, o tempo de aceleração deve ser
inferior a 20 segundos.
OBSERVAÇÃO: Se a frequência de chaveamento for alterada após a identificação,
recomendamos executar novamente a identificação do motor.
OBSERVAÇÃO: Um pequeno motor com um longo cabo do motor pode exigir uma
redução da frequência de chaveamento se a identificação não for bem-sucedida.
Nenhuma ação
Nenhuma identificação solicitada.

controle de pontes rolantes apfiff20 VACON 97
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
- Identificação sem girar o motor
Corrente é aplicada ao motor, mas o eixo não será girado. As configurações
de U/f são identificadas.
Essa identificação é um requisito mínimo se o motor for usado apenas em controle
de malha aberta. No entanto, recomenda-se fazer a identificação sempre com o
motor em rotação caso haja necessidade de controle de malha fechada após a
mecânica estar conectada ao eixo.
Exemplo de comportamento
Parâmetros atualizados durante essa identificação
AM:
PM:
P2.1.8 MagnCurrent (Corrente
de magnetização)
P2.8.4.2 U/f Ratio Select (Seleção
de razão U/f)
P2.8.4.2 U/f Ratio Select (Seleção
de razão U/f)
P2.8.4.5 U/f Mid Freq (Freq. méd. U/f)
P2.8.4.5 U/f Mid Freq (Freq. méd. U/f)
P2.8.4.6 U/f Mid Voltg (Tensão méd. U/f)
P2.8.4.6 U/f Mid Voltg (Tensão méd. U/f)
P2.8.4.7 Zero Freq Voltg (Tensão freq. zero)
P2.8.4.7 Zero Freq Voltg (Tensão freq.
zero)
P2.8.5.1 CurrentControlKp (Kp do
controle de corrente)
P2.8.9.16 RsVoltageDrop (Queda
de tensão em Rs)
P2.8.6.12 LsdVoltageDrop (Queda
de tensão em Lsd)
P2.8.9.17 IrAddZeroPVoltag (Tensão
de ponto zero de adição de RI)
P2.8.6.13 LsqVoltageDrop (Queda
de tensão em Lsq)
P2.8.9.22-24 Ix Offset (Compensação
de Ix)
P2.8.6.19 Curr. Contr. Kp d (Kp d
de controle de corrente)
P2.8.9.29 Org UF ZeroPVolt (Tensão
de ponto zero de UF org)
P2.8.9.16 RsVoltageDrop (Queda
de tensão em Rs)
P2.8.9.17 IrAddZeroPVoltag (Tensão
de ponto zero de adição de RI)
P2.8.9.20 LsVoltageDrop (Queda
de tensão em Ls)
P2.8.9.22-24 Ix Offset (Compensação
de Ix)
P2.8.9.25 Estimador Kp (Kp do
estimador)
P2.8.9.29 Org UF ZeroPVolt (Tensão
de ponto zero de UF org)

VACON 98 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
- Identificação com o motor girando
O eixo é girado durante a identificação.
Esta identificação deve funcionar sem carga no eixo do motor. As configurações de U/f
e a corrente de magnetização são identificadas. Essa identificação deve ser executada
independentemente do modo de operação final (malha fechada ou malha aberta) para obter
o melhor desempenho do motor. Quando a identificação com a rotação do motor é concluída
com sucesso, o conversor de frequência começa a usar o calculador de escorregamento
interno para compensar a temperatura do motor alterada. SCTorqueChainSelect B5 e B6.
Exemplo de comportamento
Parâmetros atualizados durante essa identificação
AM:
PM:
P2.1.8 MagnCurrent (Corrente
de magnetização)
P2.8.4.2 U/f Ratio Select (Seleção de
razão U/f)
P2.8.4.2 U/f Ratio Select (Seleção de
razão U/f)
P2.8.4.3 Field WeakngPnt (Ponto enfraq.
campo)
P2.8.4.5 U/f Mid Freq (Freq. méd. U/f)
P2.8.4.5 U/f Mid Freq (Freq. méd. U/f)
P2.8.4.6 U/f Mid Voltg (Tensão méd. U/f)
P2.8.4.6 U/f Mid Voltg (Tensão méd. U/f)
P2.8.4.7 Zero Freq Voltg (Tensão freq. zero)
P2.8.4.7 Zero Freq Voltg (Tensão freq. zero)
P2.8.9.16 RsVoltageDrop (Queda de
tensão em Rs)
P2.8.5.1 CurrentControlKp (Kp do controle
de corrente)
P2.8.9.17 IrAddZeroPVoltag (Tensão
de ponto zero de adição de RI)
P2.8.6.12 LsdVoltageDrop (Queda de tensão
em Lsd)
P2.8.9.22-24 Ix Offset (Compensação de Ix)
P2.8.6.13 LsqVoltageDrop (Queda de tensão
em Lsq)
P2.8.9.29 Org UF ZeroPVolt (Tensão
de ponto zero de UF org)
P2.8.6.19 Curr. Contr. Kp d (Kp d de controle
de corrente)
P2.8.5.8 Temp.Compen.Mode (Modo
de comp. de temp.)
P2.8.9.16 RsVoltageDrop (Queda de tensão
em Rs)
P2.8.9.1-15 Flux X %
P2.8.9.17 IrAddZeroPVoltag (Tensão de ponto
zero de adição de RI)
P2.8.9.20 LsVoltageDrop (Queda de tensão
em Ls)
P2.8.9.21 MotorBEMVoltage (Tensão do
motor BEM)
P2.8.9.22-24 Ix Offset (Compensação de Ix)
P2.8.9.25 Estimador Kp (Kp do estimador)
P2.8.9.29 Org UF ZeroPVolt (Tensão de ponto
zero de UF org)
P2.8.5.8 Temp.Compen.Mode (Modo de
comp. de temp.)

controle de pontes rolantes apfiff20 VACON 99
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
- Identificação do motor do encoder
O eixo do motor gira durante a identificação.
IM: Se executado para um motor de indução, o número e a direção do pulso do
encoder são identificados. Pode ser usado se não houver informações do encoder
disponíveis, o resultado correto só pode ser alcançado quando o motor estiver
descarregado.
PMSM: Esta seleção é usada para o motor PMS se a identificação automática do
ângulo não for adequada para o motor usado (o ângulo é identificado automaticamente
em cada partida se o parâmetro PMSM Shaft Position (Posição do eixo do PMSM)
for zero).
Esta identificação do motor atualizará o parâmetro PMSM Shaft Position (Posição
do eixo do PMSM) com base na posição absoluta do encoder ou na posição do pulso
Z do encoder do tipo incremental.
Observação: A identificação precisa de ser refeita se a posição do encoder
relacionada com o motor for alterada, por exemplo, devido à manutenção.
Parâmetros atualizados durante essa identificação
AM:
PM:
P2.1.8 MagnCurrent (Corrente de
magnetização)
P2.8.6.1 PMSMShaftPositio (Posição
do eixo do PMSM)
P2.8.4.2 U/f Ratio Select (Seleção de
razão U/f)
P2.8.9.22-24 Ix Offset (Compensação
de Ix)
P2.8.4.5 U/f Mid Freq (Freq. méd. U/f)
P2.8.9.25 Estimador Kp (Kp do estimador)
P2.8.4.6 U/f Mid Voltg (Tensão méd. U/f)
P2.8.4.7 Zero Freq Voltg (Tensão
freq. zero)
P2.8.9.16 RsVoltageDrop (Queda
de tensão em Rs)
P2.8.9.17 IrAddZeroPVoltag (Tensão
de ponto zero de adição de RI)
P2.8.9.22-24 Ix Offset (Compensação
de Ix)
P2.8.9.29 Org UF ZeroPVolt (Tensão
de ponto zero de UF org)
P2.8.5.8 Temp.Compen.Mode (Modo
de comp. de temp.)
P2.8.9.1-15 Flux X %
P7.3.1.2 Pulse revolution (Revolução
de pulso)
P7.3.1.3 Invert direction (Inverter direção)

VACON 100 controle de pontes rolantes apfiff20
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
- Todos identificados
O eixo é girado durante a identificação.
Todas as seleções de identificação acima são feitas em sequência.
Parâmetros atualizados durante essa identificação
AM:
PM:
P2.1.8 MagnCurrent (Corrente de
magnetização)
P2.8.4.2 U/f Ratio Select (Seleção de
razão U/f)
P2.8.4.2 U/f Ratio Select (Seleção de
razão U/f)
P2.8.4.3 Field WeakngPnt (Ponto enfraq.
campo)
P2.8.4.6 U/f Mid Voltg (Tensão méd. U/f)
P2.8.4.5 U/f Mid Freq (Freq. méd. U/f)
P2.8.4.7 Zero Freq Voltg (Tensão freq. zero)
P2.8.4.6 U/f Mid Voltg (Tensão méd. U/f)
P2.8.4.5 U/f Mid Freq (Freq. méd. U/f)
P2.8.4.7 Zero Freq Voltg (Tensão freq. zero)
P2.8.9.16 RsVoltageDrop (Queda
de tensão em Rs)
P2.8.5.1 CurrentControlKp (Kp do controle
de corrente)
P2.8.9.17 IrAddZeroPVoltag (Tensão
de ponto zero de adição de RI)
P2.8.6.12 LsdVoltageDrop (Queda de tensão
em Lsd)
P2.8.9.29 Org UF ZeroPVolt (Tensão
de ponto zero de UF org)
P2.8.6.13 LsqVoltageDrop (Queda de tensão
em Lsq)
P2.8.9.22-24 Ix Offset (Compensação de Ix)
P2.8.6.19 Curr. Contr. Kp d (Kp d de controle
de corrente)
P2.8.5.8 Temp.Compen.Mode (Modo de
comp. de temp.)
P2.8.9.16 RsVoltageDrop (Queda de tensão
em Rs)
P2.8.9.1-15 Flux X %
P2.8.9.17 IrAddZeroPVoltag (Tensão de
ponto zero de adição de RI)
P2.8.9.20 LsVoltageDrop (Queda de tensão
em Ls)
P2.8.9.21 MotorBEMVoltage (Tensão do
motor BEM)
P2.8.9.22-24 Ix Offset (Compensação de Ix)
P2.8.9.25 Estimador Kp (Kp do estimador)
P2.8.9.29 Org UF ZeroPVolt (Tensão de
ponto zero de UF org)
P2.8.5.8 Temp.Compen.Mode (Modo de
comp. de temp.)
P2.8.6.1 PMSMShaftPositio (Posição do
eixo do PMSM)
Encoder absoluto quando o rotor estiver bloqueado
Identificação da posição zero do encoder absoluto quando o rotor é bloqueado durante a
utilização de motor de ímã permanente.
Recomenda-se que o eixo seja bloqueado durante este modo de identificação.
Parâmetros atualizados durante essa identificação
PM:
P2.8.6.1 PMSMShaftPositio (Posição do eixo do PMSM)
P2.8.9.22-24 Ix Offset (Compensação de Ix)
P2.8.9.25 Estimador Kp (Kp do estimador)
 Loading...
Loading...