

Page 1

vacon® nx
ac drives
appfiff20
kransteuerung
applikationshandbuch
Page 2

Page 3

apfiff20 kransteuerung VACON 3
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
VACON KRANSTEUERUNG-APPLIKATIONSHANDBUCH
INHALTSVERZEICHNIS
Dokumentcode: DPD02128B
Softwarecode: APFIFF20V067
Datum: 18.12.2018
1. Kransteuerungsanwendung Einführung .................................................................................... 8
1.1 Allgemeines ......................................................................................................................................... 8
1.2 Grundlegende Merkmale .................................................................................................................... 9
2. Schnellinbetriebnahme für Kranfunktionen .............................................................................. 10
2.1 Mechanische Bremssteuerung und Überwachung ......................................................................... 10
2.2 Tandembetrieb für Kräne .................................................................................................................. 11
2.3 Tandem-Hubwerk (Wellensync) ....................................................................................................... 11
2.4 Pendeldämpfung................................................................................................................................ 12
2.5 Drehzahloptimierung (Leistungsabhängige Drehzahlregelung) .................................................... 13
2.6 Stoßlastvermeidung .......................................................................................................................... 13
2.7 Schlaffseilvermeidung ....................................................................................................................... 13
2.8 Integrierte funktionale Sicherheit .................................................................................................... 13
2.9 Lastschätzung .................................................................................................................................... 13
3. Steuer-E/A ................................................................................................................................... 14
4. Das TTF- ............................................................ 15
4.1 Definition eines Eingangs/Ausgangs für eine bestimmte Funktion auf dem Bedienteil ............... 15
4.2 Definition eines Anschlusses für eine bestimmte Funktion mit dem NCDrive-Programmiertool16
4.3 Nicht genutzte Eingänge/Ausgänge definieren ............................................................................... 17
5. Kransteuerungsanwendung Betriebsdaten ............................................................................. 18
5.1 Betriebsdaten .................................................................................................................................... 19
5.1.1 Betriebsdaten 2 ............................................................................................................................. 20
5.1.2 Feldbus-Betriebsdaten ................................................................................................................. 21
5.1.3 Master/Follower Betriebsdaten................................................................................................. 21
5.1.4 PI-Steuerung Betriebsdaten ......................................................................................................... 22
5.1.5 Frequenzkette ................................................................................................................................ 23
5.1.6 Drehmomentkette ......................................................................................................................... 23
5.1.7 Bremssteuerung............................................................................................................................ 23
5.1.8 Bewegung ...................................................................................................................................... 23
5.1.9 Wellensynchron ............................................................................................................................. 23
5.1.10 Betriebsdaten ................................................................................................................................ 24
5.1.11 Betriebsdaten 2 ............................................................................................................................. 26
5.1.12 Feldbus-Betriebsdaten ................................................................................................................. 29
5.1.13 Master/Follower ............................................................................................................................ 35
5.1.14 PI-Steuerung Überwachung ......................................................................................................... 38
5.1.15 Frequenzkette ................................................................................................................................ 38
5.1.16 Drehmomentkette ......................................................................................................................... 38
5.1.17 Bremssteuerung............................................................................................................................ 39
5.1.18 Bewegung ...................................................................................................................................... 40
5.1.19 Tandembetrieb (Wellensync) ........................................................................................................ 40
5.1.20 Zähler ............................................................................................................................................. 41
Page 4

VACON 4 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6. Kransteuerungsanwendung Parameterlisten ......................................................................... 43
6.1 Basisparameter ................................................................................................................................. 43
6.2 Sollwertbehandlung .......................................................................................................................... 44
6.2.1 Grundeinstellungen ....................................................................................................................... 44
6.2.2 Konstanter Sollwert ...................................................................................................................... 44
6.2.3 Drehmoment Sollwert ................................................................................................................... 45
6.2.4 Frequenzausblendungsparameter ............................................................................................... 46
6.2.5 Motorpotentiometer ...................................................................................................................... 46
6.2.6 Einstellen Sollwert ........................................................................................................................ 46
6.2.7 Endgrenzen-Sollwertverarbeitung ............................................................................................... 47
6.3 Rampensteuerung ............................................................................................................................. 48
6.3.1 Grundeinstellungen ....................................................................................................................... 48
6.3.2 Schnellstopp .................................................................................................................................. 48
6.3.3 Optionen Rampensteuerung ......................................................................................................... 48
6.3.4 Seilstoßfunktionen ......................................................................................................................... 49
6.4 Eingangssignale ................................................................................................................................. 50
6.4.1 Grundeinstellungen ....................................................................................................................... 50
6.4.2 Digital-Eingänge ............................................................................................................................ 51
6.4.3 Analogeingang 1 ............................................................................................................................ 52
6.4.4 Analog Eingang 2 ........................................................................................................................... 52
6.4.5 Analog Eingang 3 ........................................................................................................................... 53
6.4.6 Analog Eingang 4 ........................................................................................................................... 53
6.4.7 Optionen ......................................................................................................................................... 53
6.5 Ausgangssignale ................................................................................................................................ 54
6.5.1 Digital-Ausgang-Signale ............................................................................................................... 54
6.5.2 Analogausgang 1 ........................................................................................................................... 55
6.5.3 Analogausgang 2 ........................................................................................................................... 55
6.5.4 Analogausgang 3 ........................................................................................................................... 56
6.5.5 Analogausgang 4 ........................................................................................................................... 56
6.5.6 Verzögerungsdigitalausgang 1 ..................................................................................................... 57
6.5.7 Verzögerter Digital-Ausgang 2 ..................................................................................................... 57
6.5.8 Überwachungsgrenzen ................................................................................................................. 59
6.6 Grenzwerteinstellungen .................................................................................................................... 60
6.6.1 Handhabung Strom ....................................................................................................................... 60
6.6.2 Drehmomenthandhabung ............................................................................................................. 60
6.6.3 Handhabung Frequenz .................................................................................................................. 62
6.6.4 Handhabung DC-Zwischenkreis ................................................................................................... 63
6.6.5 Grenzeinstellungen Optionen .................................................................................................... 63
6.7 Fluss- und DC-Strom, Handhabung ................................................................................................. 64
6.7.1 Fluss- und DC-Strom, Handhabung OL-Einstellungen .............................................................. 64
6.7.2 Fluss- und DC-Strom, Handhabung CL-Einstellungen .............................................................. 64
6.8 Motor-Regler ..................................................................................................................................... 65
6.8.1 Motorregelung-Grundeinstellungen ............................................................................................ 65
6.8.2 Open Loop Einstellungen .............................................................................................................. 65
6.8.3 Closed Loop-Regelungseinstellungen ......................................................................................... 66
6.8.4 PMSM-Steuereinstellungen.......................................................................................................... 67
6.8.5 Stabilisatoren ................................................................................................................................. 68
6.8.6 Parameter Feineinstellung ........................................................................................................... 68
6.8.7 Identifikations-Parameter ............................................................................................................ 69
6.8.8 Feineinstellungs-Parameter ........................................................................................................ 70
6.8.9 AOL-Steuerung Feineinstellungs-Parameter ............................................................................. 70
6.9 Drehzahlregelung .............................................................................................................................. 71
6.9.1 Grundeinstellungen für Drehzahlregler ...................................................................................... 71
6.9.2 OL-Einstellungen für Drehzahlregler .......................................................................................... 71
Page 5

apfiff20 kransteuerung VACON 5
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.9.3 CL-Einstellungen für Drehzahlregler .......................................................................................... 72
6.10 Umrichtersteuerung .......................................................................................................................... 72
6.11 Master-Follower-Steuerparameter ................................................................................................. 73
6.12 Schutzfunktionen ............................................................................................................................... 74
6.12.1 Allgemeine Einstellungen ............................................................................................................. 74
6.12.2 Temperatursensor-Schutzfunktionen .......................................................................................... 74
6.12.3 Mot.blockierschu ........................................................................................................................... 75
6.12.4 Überwachung Drehzahlabweichung............................................................................................. 75
6.12.5 Motortemperatur-Schutzfunktionen ............................................................................................ 75
6.12.6 Überwachung versetzter Nullpunkt ............................................................................................. 76
6.12.7 Unterlastschutz ............................................................................................................................. 76
6.12.8 Schutz Erdschluss ......................................................................................................................... 76
6.12.9 Kühlungsschutz ............................................................................................................................. 76
6.12.10 Schutz Feldbus .............................................................................................................................. 77
6.12.11 Externer Fehler ............................................................................................................................. 77
6.12.12 Encoderfehler ................................................................................................................................ 77
6.13 Feldbus-Parameter ........................................................................................................................... 78
6.13.1 Wertsteuerung ............................................................................................................................... 79
6.13.2 DIN-ID-Steuerung 1 ...................................................................................................................... 80
6.13.3 DIN-ID-Steuerung 2 ...................................................................................................................... 80
6.13.4 DIN-ID-Steuerung 3 ...................................................................................................................... 80
6.13.5 ID-gesteuerter Digitalausgang 1 .................................................................................................. 80
6.13.6 ID-gesteuerter Digital-Ausgang 2 ................................................................................................ 80
6.13.7 Freie DIN-Verzögerung ................................................................................................................. 81
6.14 Bremsensteuerungsparameter ........................................................................................................ 82
6.14.1 Brems-Steuerung, Start-Drehmoment für CL ............................................................................ 82
6.14.2 Rück- Roll Überwachung für CL ................................................................................................... 82
6.14.3 Handhabung Brems-Fehler .......................................................................................................... 83
6.14.4 Funktionen ..................................................................................................................................... 83
6.14.5 Testfunktion Bremse ..................................................................................................................... 83
6.15 Automatische Reset Parameter ....................................................................................................... 84
6.16 PI-Steuer-Parameter ........................................................................................................................ 84
6.17 Wellensynchronisierung ................................................................................................................... 86
6.18 Lastschätzung .................................................................................................................................... 86
6.19 Funktionale Sicherheit ...................................................................................................................... 86
6.20 Pendeldämpfungs-Funktion ............................................................................................................. 86
6.21 Steuerung über Bedienteil Menü M3)............................................................................................... 87
6.22 Systemmenü (Bedienteil: Menü M6) ................................................................................................. 87
6.23 Zusatzkarten (Bedienteil: Menü M7) ................................................................................................ 87
7. Parameter-Beschreibungen ................................................................................................ ........ 88
7.1 Basis-Parameter ............................................................................................................................... 88
7.2 Sollwertbehandlung ............................................................................................. 98
7.2.1 Basis-Parameter ........................................................................................................................... 99
7.2.2 Konstanter Sollwert .................................................................................................................... 102
7.2.3 Drehmoment Sollwert ................................................................................................................. 104
7.2.4 Frequenzausblendung................................................................................................................. 110
7.2.5 Motorpotentiometer .................................................................................................................... 111
7.2.6 Einstellen Sollwert ...................................................................................................................... 113
7.2.7 Endgrenzen-Sollwertverarbeitung ............................................................................................. 115
7.3 Rampensteuerung ........................................................................................................................... 117
7.3.1 Rampenoptionen.......................................................................................................................... 121
7.3.2 Schlaffseil und Schocklast .......................................................................................................... 123
7.4 Eingang-Signale............................................................................................................................... 124
Page 6

VACON 6 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7.4.1 Grundeinstellungen ..................................................................................................................... 124
7.4.2 Digital-Eingänge .......................................................................................................................... 126
7.4.3 Analog-Eingang 1 und 2 .............................................................................................................. 132
7.4.4 Analog-Eingang 3 und 4 .............................................................................................................. 137
7.4.5 Inversionskontrolle ..................................................................................................................... 140
7.5 Ausgangssignale .............................................................................................................................. 141
7.5.1 Digital-Ausgang-Signale ............................................................................................................. 141
7.5.2 Analog-Ausgänge 1 & 2 & 3 & 4 ................................................................................................. 146
7.5.3 Verzögerung-Digital-Ausgang 1 und 2 ....................................................................................... 150
7.5.4 Überwachungsgrenzen ............................................................................................................... 153
7.6 Grenzwert-Einstellungen ................................................................................................................ 155
7.6.1 Strom-Grenze-Handhabung ....................................................................................................... 155
7.6.2 Drehmoment-Grenze-Handhabung ........................................................................................... 156
7.6.3 Frequenzgrenzhandhabung ........................................................................................................ 160
7.6.4 DC-Zwischenkreis-Handhabung ................................................................................................ 162
7.6.5 Grenz-Optionen............................................................................................................................ 165
7.7 Handhabung von DC-Strom und Magnetisierung .......................................................................... 166
7.7.1 Open Loop Einstellungen ............................................................................................................ 167
7.7.2 Closed Loop-Einstellungen ......................................................................................................... 170
7.8 Motor-Regler ................................................................................................................................... 172
7.8.1 Open Loop Einstellungen ............................................................................................................ 177
7.8.2 Closed Loop-Einstellungen ......................................................................................................... 181
7.8.3 Einstellungen für Dauermagnetsynchronmotor ....................................................................... 184
7.8.4 Stabilisierungseinstellungen ...................................................................................................... 189
7.8.5 Feineinstellungen ........................................................................................................................ 192
7.8.6 Identifikationseinstellungen ....................................................................................................... 193
7.8.7 AOL-Steuerung für IM ................................................................................................................. 194
7.9 Einstellungen für Drehzahlregler ................................................................................................... 195
7.10 Umrichtersteuerung ........................................................................................................................ 201
7.11 Master-Follower .............................................................................................................................. 204
7.11.1 Master-Follower: Standardsystem ............................................................................................ 204
7.11.2 Master-Follower-Konfiguration ................................................................................................. 205
7.12 Schutzfunktionen ............................................................................................................................. 210
7.12.1 Allgemeine Einstellungen ........................................................................................................... 210
7.12.2 Temperatursensor-Schutzfunktionen ........................................................................................ 211
7.12.3 Blockierschutz ............................................................................................................................. 213
7.12.4 Drehzahl Fehler ........................................................................................................................... 215
7.12.5 Motorschutz ................................................................................................................................. 216
7.12.6 Überlastschutz ............................................................................................................................. 219
7.12.7 4mA-Schutz ................................................................................................................................. 220
7.12.8 Unterlastschutz ........................................................................................................................... 221
7.12.9 Erdschluss ................................................................................................................................... 223
7.12.10 Kühlungsschutz ........................................................................................................................... 223
7.12.11 Feldbus-Kommunikation ............................................................................................................ 224
7.12.12 Funktion Externer Fehler ............................................................................................................ 224
7.12.13 Funktion Encoderfehler .............................................................................................................. 225
7.13 Feldbuseinstellungen ...................................................................................................................... 226
7.13.1 Allgemeine Einstellungen ........................................................................................................... 226
7.14 ID-Funktionen .................................................................................................................................. 230
7.14.1 Wertsteuerung ............................................................................................................................. 230
7.14.2 DIN-ID-Steuerung ....................................................................................................................... 232
7.14.3 ID-gesteuerter Digitalausgang ................................................................................................... 233
7.14.4 Freie DIN-Verzögerung ............................................................................................................... 234
7.15 Bremssteuerung .............................................................................................................................. 235
Page 7

apfiff20 kransteuerung VACON 7
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7.15.1 Bremszeit-Regelungszeit bei Closed Loop ................................................................................ 236
7.15.2 Bremsenregelungszeit bei Open Loop ....................................................................................... 237
7.15.3 Anlaufdrehmoment ..................................................................................................................... 240
7.15.4 Rückrollsteuerung für Closed Loop ........................................................................................... 241
7.15.5 Bremsüberwachungsfunktion .................................................................................................... 242
7.15.6 Funktionen ................................................................................................................................... 243
7.15.7 Testfunktion Bremse ................................................................................................................... 243
7.16 Automatische Fehlerquittierung ..................................................................................................... 244
7.17 PI-Steuerung .................................................................................................................................... 248
7.18 Tandembetrieb (Wellensynchronisierung) ..................................................................................... 250
7.19 Lastschätzung .................................................................................................................................. 251
7.20 Funktionale Sicherheit .................................................................................................................... 252
7.21 Pendeldämpfungsfunktion .............................................................................................................. 252
7.22 Parameter für die Steuerung über Bedienteil ............................................................................... 255
8. Identifikationsfunktion für Dauermagnetsynchronmotor ....................................................... 256
8.1 Identifikation mit absolutem Encoder. ........................................................................................... 256
8.2 Identifikation mit inkrementellem Encoder ohne Z-Impuls-Eingang .......................................... 256
8.3 Identifikation mit inkrementellem Encoder mit Z-Impuls-Eingang ............................................. 257
9. Zustands- und Steuerwort im Detail ......................................................................................... 258
9.1 Feldbus ............................................................................................................................................. 258
9.1.1 Kombination 1, ProfiDrive Standard mit Profibus-Zusatzkarte ............................................. 259
9.1.2 Kombination 2, ByPass ProfiDrive ........................................................................................... 260
9.1.3 Kombination 3, ByPass Standard ............................................................................................ 267
9.2 Anwendungsstatuswort ................................................................................................................... 268
9.3 Reglerstatus..................................................................................................................................... 268
9.4 Datenlogger-Auslöserwort ............................................................................................................. 269
9.5 MC Statuswort ................................................................................................................................. 269
9.6 Bremsensteuerungsstatus ............................................................................................................. 270
10. Problembehebung ...................................................................................................................... 272
11. Fehlercodes................................................................................................................................ 273
Page 8
VACON 8 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1. KRANSTEUERUNGSANWENDUNG EINFÜHRUNG
Software APFIFF20, Kransteuerungsanwendung
Die Kransteuerungsanwendung ist für den Einsatz in Kransystemen ausgelegt.
1.1 Allgemeines
Diese Anwendung ist nicht rückwärtskompatibel. Bitte lesen Sie den Anwendungsänderungshinweis
oder Kapitel 2: Kompatibilitätsprobleme bei der Bremssteuerung in diesem Handbuch zur
Feststellung, was bei der Aktualisierung der Anwendung zu beachten ist. Siehe auch die
aktualisierte Parameterbeschreibung in NCDrive bei der Inbetriebnahme.
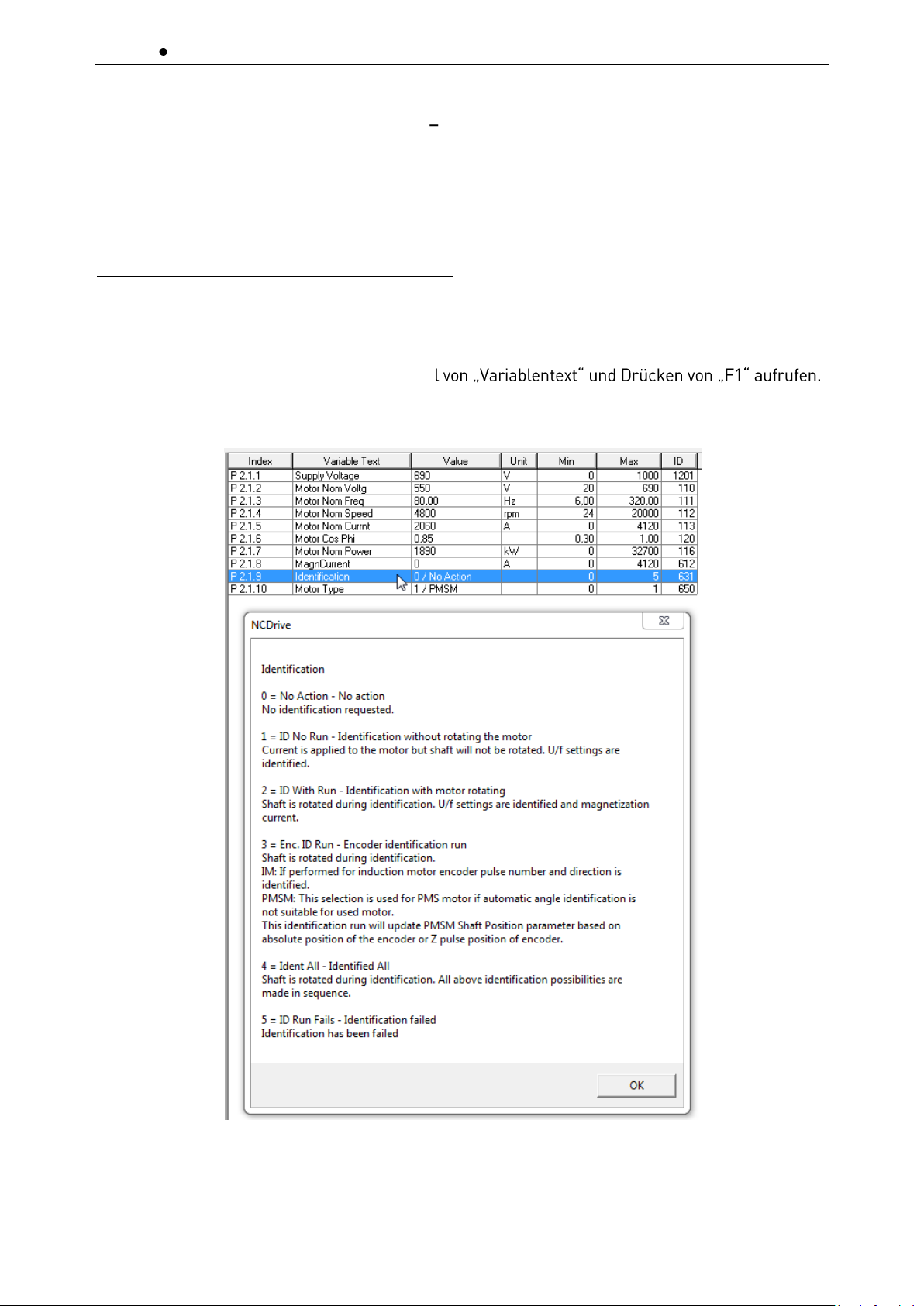
In NCDrive können Sie die Hilfe durch Auswah
Nachstehend finden Sie ein Beispiel aus dem Hilfetext des Identifizierungsparameters aus dem
NCDrive.
Page 9

apfiff20 kransteuerung VACON 9
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1.2 Grundlegende Merkmale
Die Kransteuerungsanwendung verfügt über zahlreiche Parameter zur Steuerung von
Asynchronmotoren und Permanentmagnetmotoren. Sie kann für verschiedenste Prozesse
eingesetzt werden, bei denen eine große Flexibilität der E/A-Signale und eine einfache
PI-Steuerlogik benötigt werden.
Flexible ID-Steuerungsmöglichkeiten bringen die Anwendungseignung für verschiedene
Prozesse auf eine neue Ebene, so dass jeder Eingangs- und Istwert mit jedem Parameter
mit einem Skalierungsfaktor verbunden werden kann.
Zusätzliche Funktionen:
• Totzone des Joystick-Eingangs
• Master-Follower-Funktion
• Kühlüberwachungseingang von der Wärmetauschereinheit mit wählbarer
Rückmeldung
• Bremsüberwachungseingang und Iststromüberwachung für das unmittelbare
Schließen der Bremse
• Separate Drehzahlsteuerungseinstellung für unterschiedliche Drehzahlen und Lasten
• Tipp-Funktion mit zwei unterschiedlichen Sollwerten
• Möglichkeit, die FB-Prozessdaten mit einem beliebigen Parameter und einigen
Betriebsdaten zu verbinden
• Die Analogeingänge 3 und 4 können jeden Parameter nach ID-Nummer steuern
• Unterstützt vier Analogausgänge
• Unterstützt zwei PT100-Karten
• Rück- Roll Überwachung und Drehmomentspeicher
• Bremsenschlupfüberwachung (Start bei fallender Last)
Page 10
VACON 10 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
2. SCHNELLINBETRIEBNAHME FÜR KRANFUNKTIONEN
2.1 Mechanische Bremssteuerung und Überwachung
es Umrichters unterstützt den ruckfreien
Aufbau eines Drehmoments bei geschlossener Bremse, bevor die mechanische Bremse für
einen ruckfreien Anlauf gelöst wird, und der Umrichter liefert weiterhin Drehmoment, bis die
mechanische Bremssteuerung den Befehl übernimmt.
Die Parameter der mechanischen Bremssteuerung finden Sie in der Gruppe G 2.15.x.
Siehe Kapitel 8.15 Bremssteuerung für weitere Informationen zu Parametern und ihrem Verhalten.
➢ Rück- Roll Überwachung für CL
Die Rück-Roll Überwachung verhindert eine Abwärtsbewegung der Last beim Öffnen der
Bremse. Diese Funktion wird in Parametergruppe G2.15.12 aktiviert.
Tipps für eine einfache Inbetriebnahme der mechanischen Bremssteuerung:
Die Anwendungssoftware berechnet die Parametereinstellung während des Identifikationslaufs
basierend auf den Motornennparametern, der Öffnungsverzögerung der mechanischen Bremse
(P2.15.3) und der Schließverzögerung der mechanischen Bremse (P2.15.4).
1. Geben Sie die Motor-Typenschild Daten ein, G2.1 Basisparameter.
a. Geben Sie den Motor-Magnetisierungsstrom P2.1.8 ein, falls bekannt (berechnet
aus Cos Phi, falls nicht bekannt).
2. Führen Sie im Stillstand einen Identifikationslauf aus, mit P2.1.9 Identifikation: Auswahl
1 ID No Run.
a. Wenn der Magnetisierungsstrom nicht bekannt ist, arrangieren Sie, dass
Identifikationsauswahl 6 U/f + Magn ID-Lauf durchgeführt werden kann.
3. Laden Sie nach der Identifikation die Parameter vom Umrichter hoch.
4. Bremsenbezogene Parameter sind unter G2.15 zusammengefasst.
a. Wählen Sie den Ausgang zur Steuerung der Bremse P2.15.1 Bremse offen, Direkt.
b. Wählen Sie den Rückmeldungseingang, falls verwendet: P2.15.2 Bremse
Rückmeldung.
c. Geben Sie die Zeitverzögerung für das Öffnen der mechanischen Bremse ein: P2.15.3.
d. Geben Sie die Zeitverzögerung für das Schließen der mechanischen Bremse ein:
P2.15.4.
e. Je nach System kann ein Identifikationslauf für die Bremszeit durchgeführt werden.
5. Nehmen Sie die erforderlichen Parameteränderungen für Steuerplatz und Steuersignal vor.
6. Führen Sie einen Kran-ID-Lauf für das Heben P2.1.11 Kran-Identifikationsmodi durch.
a. Wenn während der Inbetriebnahme modusgenaue Zeitsteuerungen für die Bremse
festgestellt werden, wird empfohlen, die Kranidentifikation erneut durchzuführen.
Siehe detaillierte Liste der geänderten Parameter in P2.1.11 Erläuterung.
7. Führen Sie einen lastfreien Open Loop-Lauf mit den folgenden Betriebssignalen durch.
a. Nutzen Sie ein Betriebssignal von ~7 ms, falls möglich (siehe Kapitel 10
Problembehebung).
- Wert: Bremsstatuswort
- Wert: Motordrehmoment
- Wert: Motorstrom
- Wert: Freq.Rampenausgang
- Wert: Ausgangsfrequenz
- Wert: Wellenfrequenz
- Wert: Motorspannung
- Wert: DC-Spannung
Page 11
apfiff20 kransteuerung VACON 11
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
b. Überwachen Sie, dass die Wellenfrequenz vom Encoder korrekt ist.
In manchen Fällen ist ggf. eine Filterung von wenigen ms erforderlich: P2.8.5.6.
c. Vergewissern Sie sich, dass Strom und Drehmoment kein unnormales Verhalten
zeigen.
8. Wechseln Sie zu Closed Loop-Steuerung P2.8.1 Motorregelmodus: 3 / CL Drehzahlregelung.
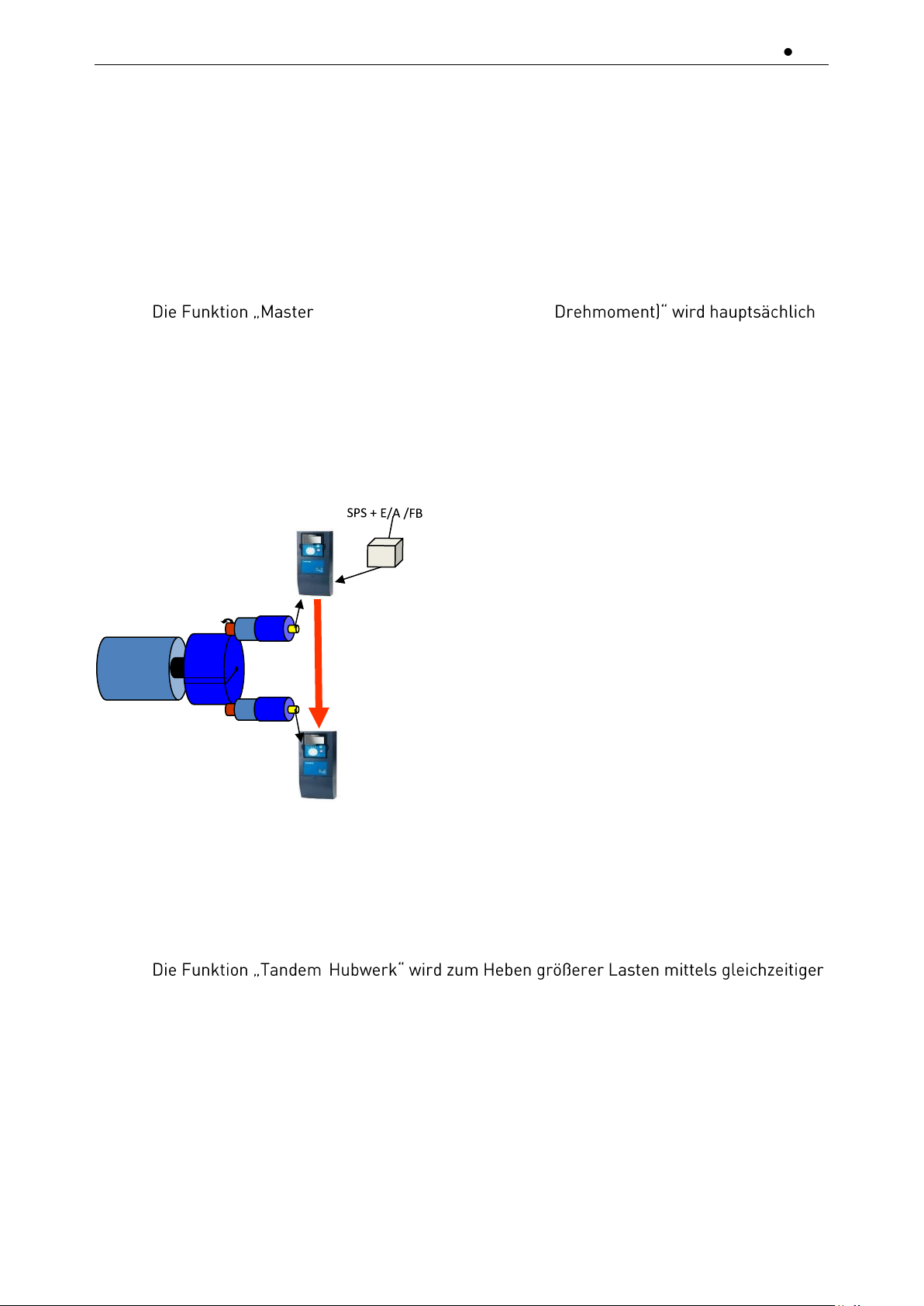
2.2 Tandembetrieb für Kräne
➢ Master-Follower (Verteilung Drehzahl-Drehmoment)
-Follower (Verteilung Drehzahlgenutzt, wenn die Motorwellen zum Antreiben einer gemeinsamen Last aneinander
gekoppelt sind. In diesem Fall befindet sich der Master im Drehzahlregelmodus und der
Follower im Drehmomentregelmodus.
Die externen Steuersignale werden nur am Master-NXP gekoppelt. Der Master steuert
die Follower-Umrichter durch einen Systembus. Die Masterstation ist in der Regel
drehzahlgeregelt und die anderen Umrichter folgen ihrem Drehmomentsollwert.
Master-Follower-Parameter finden Sie in der Gruppe G 2.11.x in Kapitel 6.11, und
Parameterbeschreibungen finden Sie in Kapitel 7.11.
2.3 Tandem-Hubwerk (Wellensync)
Synchronisierung von zwei Achsen verwendet.
Der Tandembetrieb hilft bei der Überwachung und Steuerung der Positionsdifferenz der
Haken und synchronisiert das Verfahren der Krankatze.
➢ Die Wellensynchronisierung arbeitet zwischen Master-Follower-Achsen über den
Systembus mit Krananwendungssoftware.
Es können maximal vier Achsen synchronisiert werden.
Die Kommunikation des Tandembetriebs wird über den Master-Follower-Modus P2.11.1
aktiviert (Auswahl 3 und 4). Siehe Kapitel 7.11 Master-Follower.
➢ Die Parameter für den Tandembetrieb (Wellensync) finden Sie in den Gruppen G 2.11.x
und G2.18.x in den Kapiteln 7.11 und 8.18.
System bus
Page 12
VACON 12 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
2.4 Pendeldämpfung
Laufkatzenkräne kommen häufig in Fertigungs- und Instandhaltungsprozessen zum Einsatz,
bei denen Produktivität und Sicherheit oberste Priorität genießen. Pendelnde Lasten bei
Kranbewegungen sind ein natürliches Phänomen, da die Last an einer Greifvorrichtung an
Seilen aufgehängt wird und wie ein Pendel wirkt.
NXP bietet eine integrierte sensorlose Pendeldämpfungssteuerung, bei der keine Encoder oder
Kommunikation mit einem Hubwerk-Umrichter erforderlich ist. Die Pendeldämpfungsfunktion
darf nur bei Krankatzen- und Fahrbewegungen verwendet werden.
Die Pendeldämpfungsfunktion ist lizenzrechtlich geschützt. Benutzer müssen zur Aktivierung
der Pendeldämpfungsfunktion bei einem Danfoss-Händler einen Lizenzschlüssel erwerben. Der
Status des Lizenzschlüssels kann im Betriebsparameter V1.31.2 überprüft und verifiziert werden.
Zur Vermeidung von Pendeln stehen in der Krananwendungssoftware zwei verschiedene
Methoden zur Verfügung. Die durchschnittliche Pendeldauer oder die maximale Seillänge
muss vom Benutzer eingestellt werden.
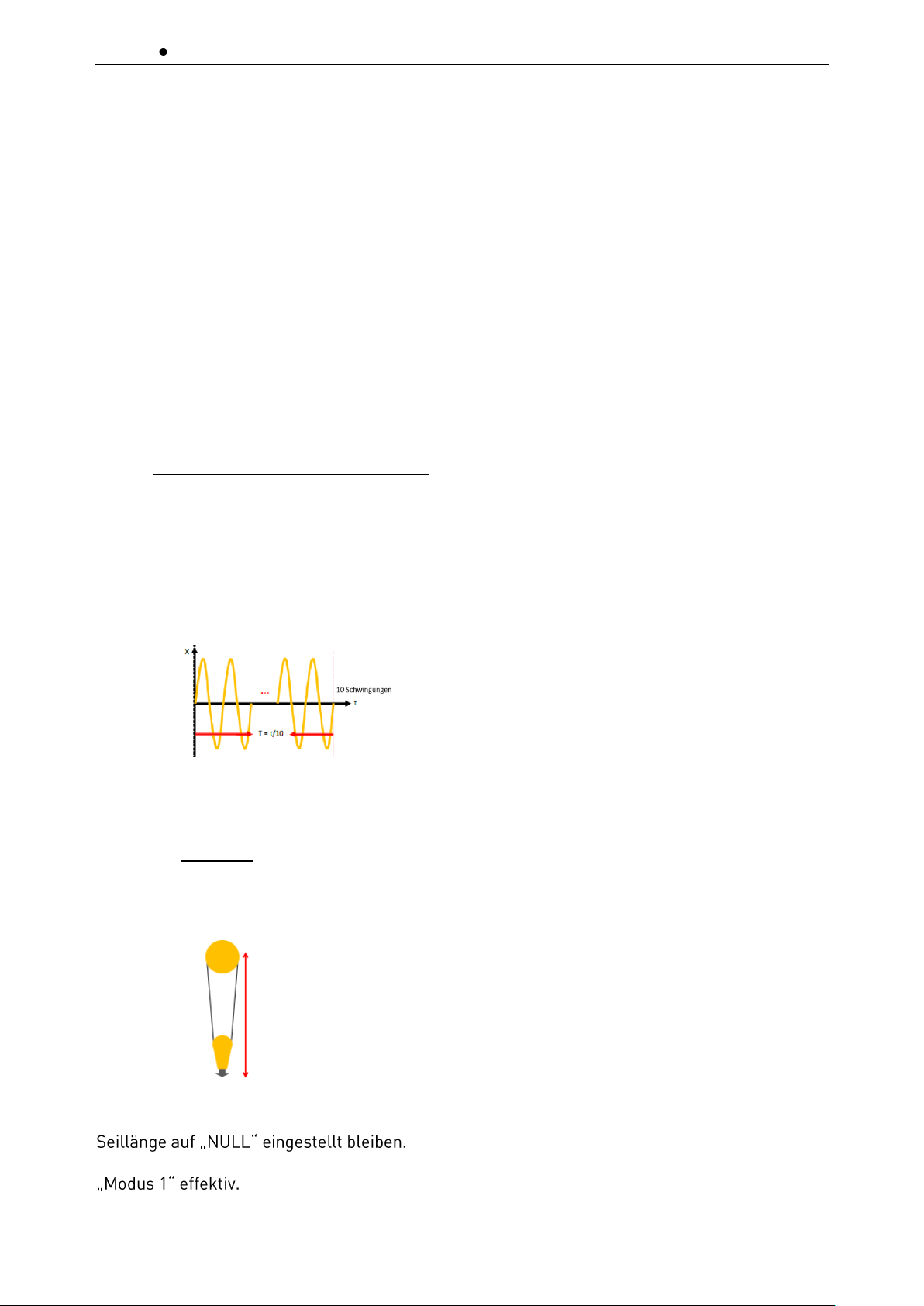
Berechnung der Schwingungsdauer
• Senken Sie den Haken in die tiefste mögliche Position ab. Das Anbringen einer Last an
den Haken ist nicht erforderlich.
• Bringen Sie den Kran auf volle Geschwindigkeit und geben Sie den Stopp-Befehl.
• Messen Sie die Dauer von 5 bis 10 Schwingungen (vor und zurück) und ermitteln Sie die
Schwingungsdauer.
• Geben Sie die Schwingungsdauer in die Parameter ein.
Die Parameter für die Pendeldämpfung finden Sie in Gruppe 2.21.x. Siehe Gruppe
2.21.x für verschiedene Modi der Pendeldämpfung mit Schwingungsdauermethode.
Seillänge
Maximale Seillänge (in cm), in P 2.21.4 einzugeben. Von der Trommel zum
Aufsetzpunkt des Kranhakens auf den Boden oder kurz darüber.
HINWEIS: Wenn die Schwingungsdauermethode verwendet wird, muss der Parameter für die
Wenn der Wert für die Seillänge ungleich null ist,
funktioniert die Schwingungsdauermethode nicht. Mit der Seillängenmethode funktioniert nur
Page 13
apfiff20 kransteuerung VACON 13
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Die Parameter für die Pendeldämpfung finden Sie in Gruppe P2.21.x. Siehe Kapitel 6.20 und 7.21
für nähere Informationen.
2.5 Drehzahloptimierung (Leistungsabhängige Drehzahlregelung)
Die Drehzahloptimierungsfunktion begrenzt die Drehzahl direkt auf das geforderte Leistungsniveau
(kW). Für die Vorwärtsbegrenzungsdrehzahl und die Rückwärtsbegrenzungsdrehzahl sind
verschiedene Einstellungen verfügbar. Sie können diese Funktion in den Parametern G2.6.3.7 und
G2.6.3.8 aktivieren.
2.6 Stoßlastvermeidung
Die Stoßlastfunktion ermöglicht eine ruckfreie Lastaufnahme, bis die Last in die Luft gehoben
wurde. Dies schützt den Kran vor zusätzlicher Belastung durch plötzliche Laständerungen,
die von der Seiltrommel und dem Seil bei höherer Drehzahl erkannt werden.
Bei aktivierter Stoßlastvermeidung überwacht der Hubwerk-Umrichter die Last. Wird diese zu
Stoßlastsollwert
bis
Stoßlastzeit
Die Parameter für Stoßlast und Schlaffseil finden Sie in Gruppe P2.13.14.x. Siehe Kapitel 6.3.4
und 7.3.2 für nähere Informationen.
2.7 Schlaffseilvermeidung
Wenn sich die Last oder der Haken dem Boden nähert, kommt es zu einem Durchhängen des
Seils, wodurch dieses beschädigt werden kann. Bei einem Auftreffen der Last oder des Hakens
auf den Boden mit hoher Geschwindigkeit kann das Seil sogar aus der Seilführung springen.
Sie können den Schlaffseilschutzmodus über den Parameter P2.3.14.1 aktivieren. Beim
Drehzahlsollwert null
-
Haken lastfrei
2.8 Integrierte funktionale Sicherheit
Zur Aktivierung integrierter funktionaler Sicherheitsfunktionen gemäß SIL3/ Ple muss eine
erweiterte Sicherheits-Zusatzkarte in Steckplatz D installiert werden. Es stehen drei Arten von
Sicherheits-Zusatzkarten zur Verfügung (OPTBL, OPTBM und OPTBN), die je nach
Anwendungsanforderung ausgewählt werden können. Weitere Details finden Sie in der
Betriebsanleitung zur VACON® Advanced Sicherheits-Zusatzkarte.
Die Krananwendung unterstützt die Stoppfunktion (STO, SQS, SS1 und SS2) und die
Drehzahlbegrenzungsfunktion (SLS, SSR und SDI). Sie können Funktionssicherheitsparameter
in Parametergruppe P2.20.x aktivieren. Siehe Kapitel 6.19 und 7.20 für nähere Informationen.
2.9 Lastschätzung
Der Hubwerk-Umrichter schätzt die Last am Haken, um den Kran vor dem Überlastmodus
zu schützen. Das bedeutet, dass der Umrichter bei Erkennung einer Überlastung einen Alarm
auslöst und den Kran stoppt.
Zur Berechnung der tatsächlichen Last müssen die mechanischen Parameter des Hubwerks
in Gruppe P2.19.x eingestellt werden.
Es ist wichtig zu beachten, dass die tatsächliche Lastmessung auf mechanischen Parametern
des Hubwerks basiert. Wenn die Werte nicht korrekt eingegeben wurden, zeigt der Umrichter
daher keinen genauen Wert an.
Siehe Kapitel 6.18 und 7.19 für nähere Informationen.
Page 14
VACON 14 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
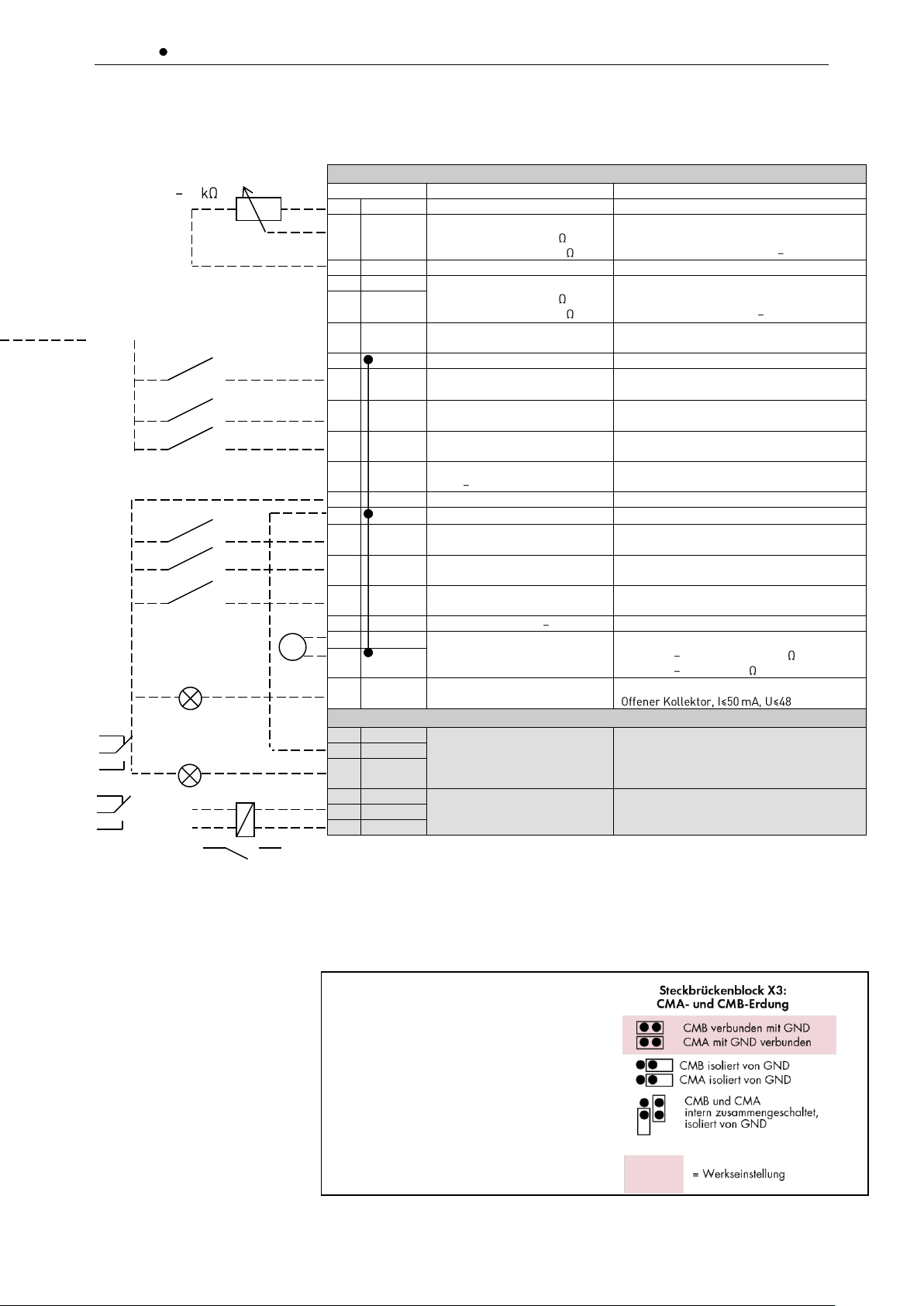
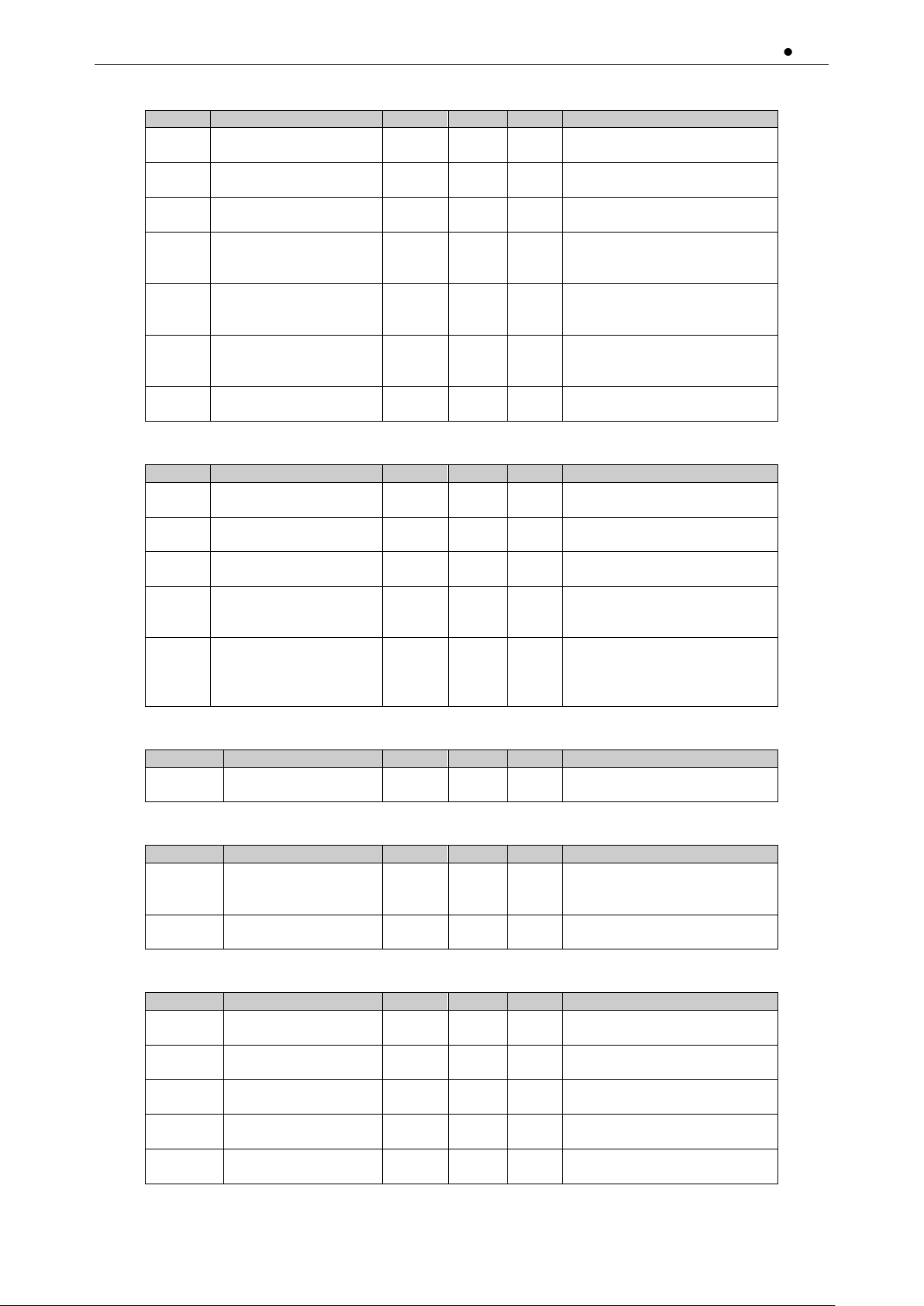
3. STEUER-E/A
NXOPTA1
Klemme
Signal
Beschreibung
1
+10 Vref
Referenzspannung, Ausgang
Spannung für Potentiometer usw.
2
AI1+
Analogeingang 1,
Bereich 0-10 V, Ri = 200
Bereich 0-20 mA Ri = 250
Frequenzsollwert für Analogeingang 1.
Eingangsbereich mit Steckbrücken einstellbar.
Standardbereich: Spannung 0 10 V
3
AI1-
E/A-Masse
Masseanschluss für Sollwerte und Steuersignale
4
AI2+
Analogeingang 2,
Bereich 0-10 V, Ri = 200
Bereich 0-20 mA Ri = 250
Frequenzsollwert für Analogeingang 2
Eingangsbereich mit Steckbrücken einstellbar.
Standardbereich: Strom 0 20 mA
5
AI2-
6
+24 V
Steuerspannungsausgang
Spannung für Schalter usw. (max. 0,1 A)
7
GND
E/A-Masse
Masseanschluss für Sollwerte und Steuersignale
8
DIN1
Programmierbar G2.2.7
Standardmäßig keine Funktion festgelegt
9
DIN2
Programmierbar G2.2.7
Standardmäßig keine Funktion festgelegt
10
DIN3
Programmierbar G2.2.7
Standardmäßig keine Funktion festgelegt
11
CMA
Gemeinsamer Bezug für
DIN 1 DIN 3
Anschluss an Masse oder +24 V
12
+24 V
Steuerspannungsausgang
Spannung für Schalter (siehe # 6)
13
GND
E/A-Masse
Masseanschluss für Sollwerte und Steuersignale
14
DIN4
Programmierbar G2.2.7
Standardmäßig keine Funktion festgelegt
15
DIN5
Programmierbar G2.2.7
Standardmäßig keine Funktion festgelegt
16
DIN6
Programmierbar G2.2.7
Standardmäßig keine Funktion festgelegt
17
CMB
Gemeinsam für DIN4 DIN6
Anschluss an Masse oder +24 V
18
AOA1+
Analogausgang 1
Programmierbar P2.3.1.2
Ausgangsbereich mit Steckbrücken einstellbar.
Bereich 0 20 mA. RL, max. 500
Bereich 0 10 V. RL > 1 k
19
AOA1-
20
DOA1
Digitalausgang
Programmierbar
VDC
NXOPTA2
21
RO1
Relaisausgang 1
Programmierbar G2.3.3
Schaltkapazität
24 VCD/8 A
250 VAC/8 A
125 VDC/0,4 A
22
RO1
23
RO1
24
RO2
Relaisausgang 2
Programmierbar G2.3.3
Programmierbar
Standardmäßig keine Funktion festgelegt
25
RO2
26
RO2
Tabelle 3-1. E/A-Standardkonfiguration der Bremssteuerungsanwendung
und Verbindungsbeispiel.
Hinweis: Siehe Betriebsanleitung, Kapitel Steueranschlüsse, für Hardware-Spezifikation und Konfiguration.
Hinweis: Siehe Steckbrückenauswahl
unten. Weitere Informationen finden
Sie in der Betriebsanleitung des
VACON® NX.
220
VAC
Sollwertpotentiometer
1 10
mA
Page 15
apfiff20 kransteuerung VACON 15
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
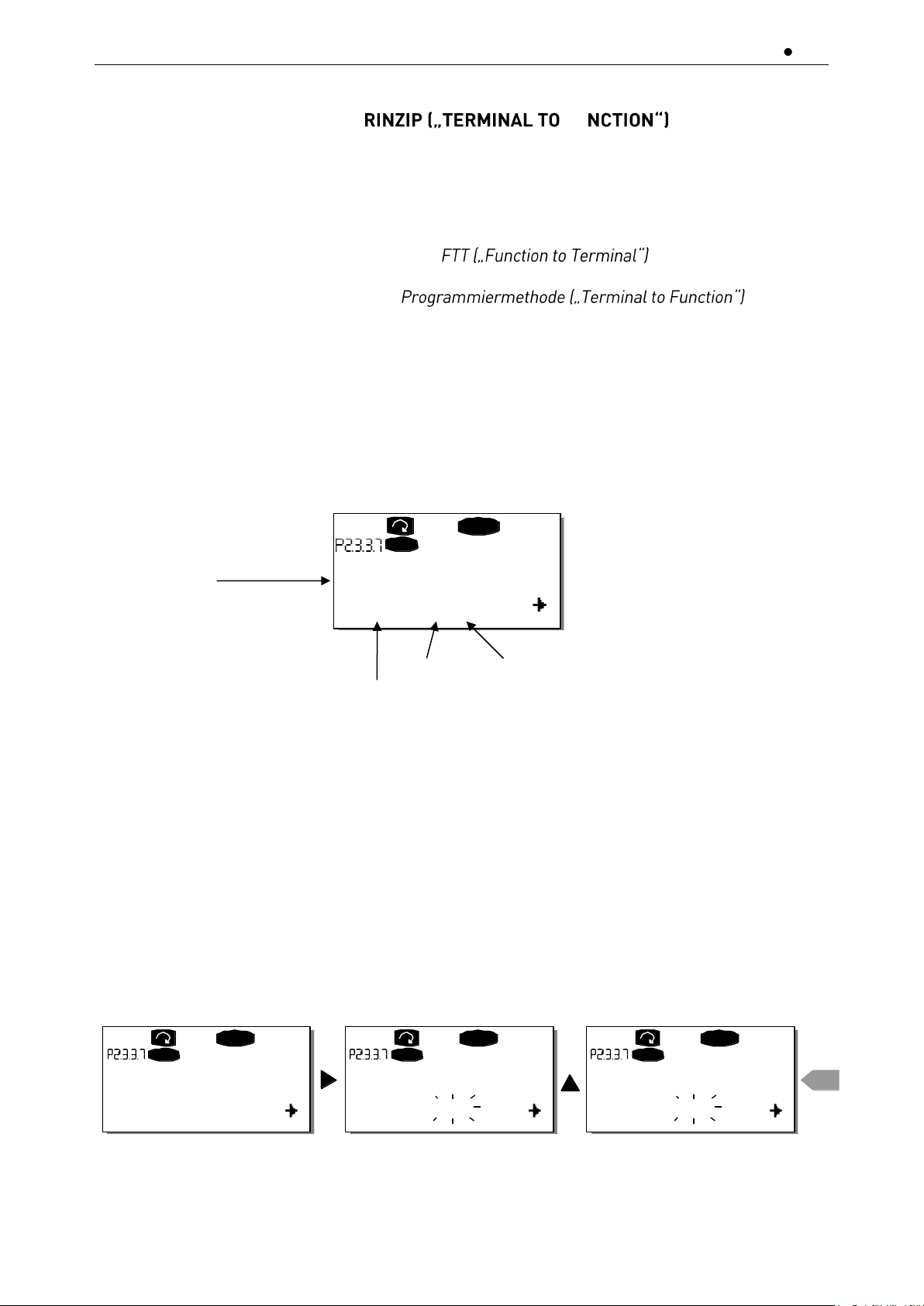
4. DAS TTF-PROGRAMMIERP FU
Das Programmierprinzip der Eingangs- und Ausgangssignale in der Universalanwendung NXP
sowie in der Pumpen- und Lüftersteuerungsanwendung (und teilweise in den anderen
Applikationen) unterscheidet sich gegenüber der konventionellen Methode, die in anderen
VACON® NX-Anwendungen verwendet wird.
Bei der konventionellen Programmiermethode haben Sie einen festen
Eingang oder Ausgang, für den Sie eine bestimmte Funktion definieren. Die oben genannten
Anwendungen verwenden jedoch die
TTF-
, wobei der
Programmierprozess in die andere Richtung erfolgt: Funktionen werden als Parameter dargestellt,
für die der Bediener einen bestimmten Eingang/Ausgang definiert. Siehe
Warnung
auf Seite 16.
4.1 Definition eines Eingangs/Ausgangs für eine bestimmte Funktion auf dem Bedienteil
Die Verknüpfung eines bestimmten Eingangs oder Ausgangs mit einer bestimmten Funktion
(Parameter) erfolgt, indem der Parameter einen entsprechenden Wert erhält. Der Wert besteht
aus dem
Kartensteckplatz
der VACON® NX-Steuerkarte (siehe Betriebsanleitung des VACON®
NX) und der
jeweiligen Signalnummer
, siehe unten.
Funktionsname
Steckplatz Anschlussnummer
Klemmleistentyp
Beispiel: Sie möchten die Digitalausgang-Funktion
Sollwert Fehler/Warnung
(Parameter
2.3.3.7) mit dem Digitalausgang DO1 auf der Basiskarte NXOPTA1 verknüpfen (siehe
Betriebsanleitung des VACON® NX).
Suchen Sie zunächst den Parameter 2.3.3.7 auf dem Bedienteil. Drücken Sie die
Menütaste (rechts)
,
um den Bearbeitungsmodus aufzurufen. In der
Wertezeile
sehen Sie den Klemmleistentyp links
(DigIN, DigOUT, An.IN, An.OUT). Auf der rechten Seite sehen Sie den aktuellen Eingang/Ausgang, mit
dem die Funktion verknüpft ist (B.3, A.2 usw.). Falls es keine Verknüpfung gibt, wird der Wert (0.#)
angezeigt.
Wenn der Wert blinkt, halten Sie die Taste zum
Durchsuchen aufwärts oder abwärts gedrückt
, um
den gewünschten Kartensteckplatz und die Signalnummer zu finden. Das Programm durchläuft
die Kartensteckplätze beginnend ab 0 und von A bis E sowie die E/A-Auswahl von 1 bis 10.
Nachdem Sie den gewünschten Wert eingestellt haben, drücken Sie einmal die
Eingabetaste
,
um die Änderung zu bestätigen.
READY
I/Oterm
DigOUT:B.1
AI Ref Faul/Warn
READY
I/Oterm
DigOUT:0.0
READY
I/Oterm
DigOUT:0.0
READY
I/Oterm
DigOUT:B.1
enter
AI Ref Faul/Warn AI Ref Faul/Warn AI Ref Faul/Warn
Page 16
VACON 16 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
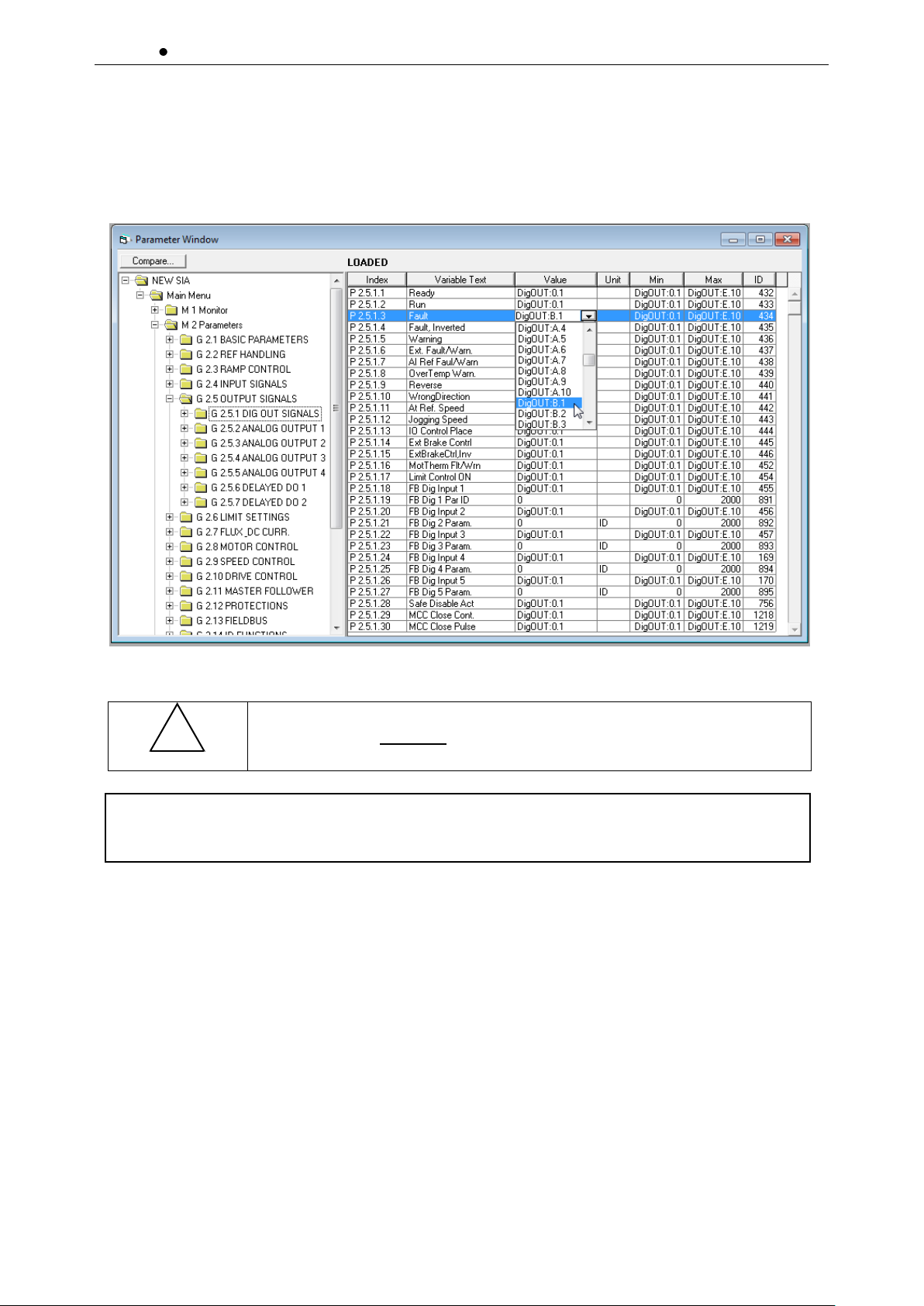
4.2 Definition eines Anschlusses für eine bestimmte Funktion mit dem NCDrive-
Programmiertool
Wenn Sie das NCDrive-Programmiertool für die Parametrisierung verwenden, müssen
Sie die Verbindung zwischen der Funktion und dem Eingang/Ausgang genauso wie auf dem
Bedienteil einrichten. Wählen Sie einfach den Adresscode aus dem Dropdown-Menü in der
Spalte
Value
(Wert) aus (siehe Abbildung unten).
Abbildung 4-1. Screenshot des NCDrive-Programmiertools; Eingabe des Adresscodes
Stellen Sie ABSOLUT sicher, dass Sie nicht beide Funktionen mit ein
und demselben Ausgang verknüpfen, um Überlauffehler zu vermeiden
und einen problemlosen Betrieb zu gewährleisten.
!
WARNING
Hinweis: Anders als die
Ausgänge
können die
Eingänge
im Status BETRIEB nicht
geändert werden.
Page 17
apfiff20 kransteuerung VACON 17
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4.3 Nicht genutzte Eingänge/Ausgänge definieren
Alle nicht genutzten Eingänge und Ausgänge müssen den Kartensteckplatzwert 0 und für die
Anschlussnummer den Wert 1 erhalten. Der Wert 0.1 ist außerdem der Standardwert für die
meisten Funktionen. Wenn Sie die Werte eines Digitaleingangssignals z. B. nur für Testzwecke
verwenden wollen, können Sie den Kartensteckplatzwert auf 0 und die Anschlussnummer auf
eine beliebige Nummer zwischen 2 und 10 setzen, um den Eingang in einen TRUE-Status zu
Bei Analogeingängen bedeutet die Zuweisung des Werts 1 für die Anschlussnummer einem
Signalpegel von 0 %, der Wert 2 entspricht 20 %, der Wert 3 entspricht 30 % usw. Die Zuweisung
des Werts 10 als Anschlussnummer entspricht einem Signalpegel von 100 %.
Page 18

VACON 18 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
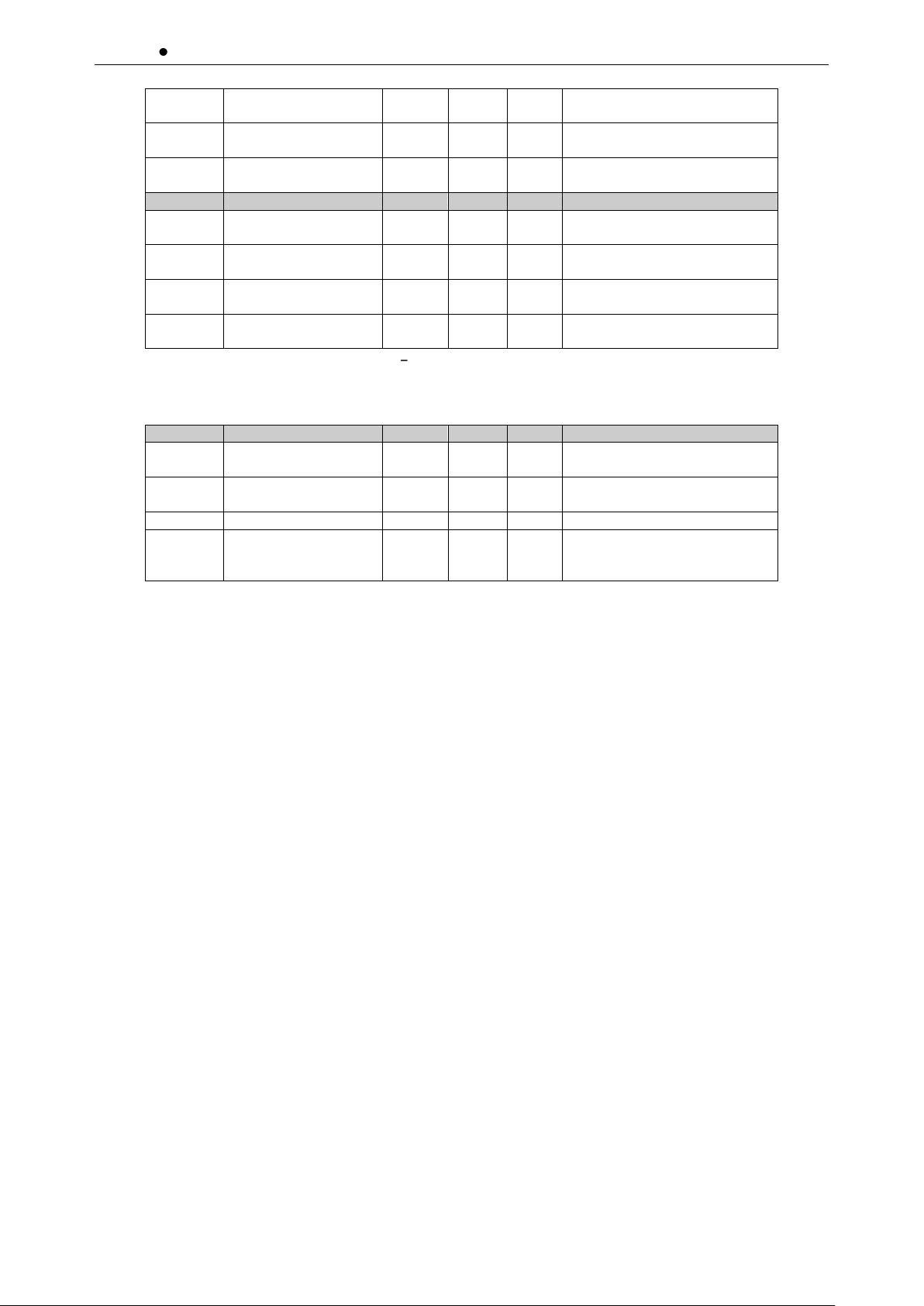
5. KRANSTEUERUNGSANWENDUNG BETRIEBSDATEN
Auf den nächsten Seiten finden Sie eine Auflistung der Parameter in den verschiedenen
Parametergruppen. Die Parameterbeschreibungen finden Sie auf den Seiten 88 bis 244. Die
Parameterbeschreibung enthält mehr Parameter, als in dieser Anwendung verfügbar sind;
siehe Parameterliste für Parameter, die in dieser Anwendung verfügbar sind.
Spaltenbeschreibungen:
Code = Positionsanzeigeauf dem Bedienteil; Zeigt dem Bediener die aktuelle
Parameternummer an
Parameter = Name des Parameters
Min. = Minimum Wert des Parameters
Max. = Maximal Wert des Parameters
Einheit = Einheit des Parameterwerts; wird je nach Verfügbarkeit angezeigt
Werkseinstellung = Werkseitig eingestellter Wert
Kunde = Benutzerdefiniert (Einstellung des Kunden)
ID = ID Nummer des Parameters
_____ = In Parametercode: Der Parameterwert kann nur geändert werden,
nachdem der Frequenzumrichter angehalten wurde.
_____ = Anwendung der TTF-Methode (Terminal to Function) auf diese Parameter
(siehe Kapitel 4)
_____ = Der Betriebswert kann mittels der ID-Nummer über den Feldbus
gesteuert werden
In diesem Handbuch werden Signale beschrieben, die normalerweise nicht als Betriebsdaten
angezeigt werden. Das heißt, dass es sich bei diesen nicht um Parameter oder
Standardbetriebssignale handelt. Diese Signale werden mit [Buchstabe] gekennzeichnet,
z. B. [FW]MotorRegelStatus
[V] Normales Betriebssignal
[P] Normaler Parameter in der Anwendung
[FW] Firmware-Signal. Kann mit NCDrive überwacht werden, wenn der Signaltyp Firmware
ausgewählt wird
[A] Anwendungssignal. Kann mit NCDrive überwacht werden, wenn der Signaltyp
Anwendung ausgewählt wird
[R] Sollwerttyp Parameter auf dem Bedienfeld
[F] Funktion. Signal wird als Ausgabe der Funktion empfangen
[DI] Digitaleingangssignal
Page 19
apfiff20 kransteuerung VACON 19
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
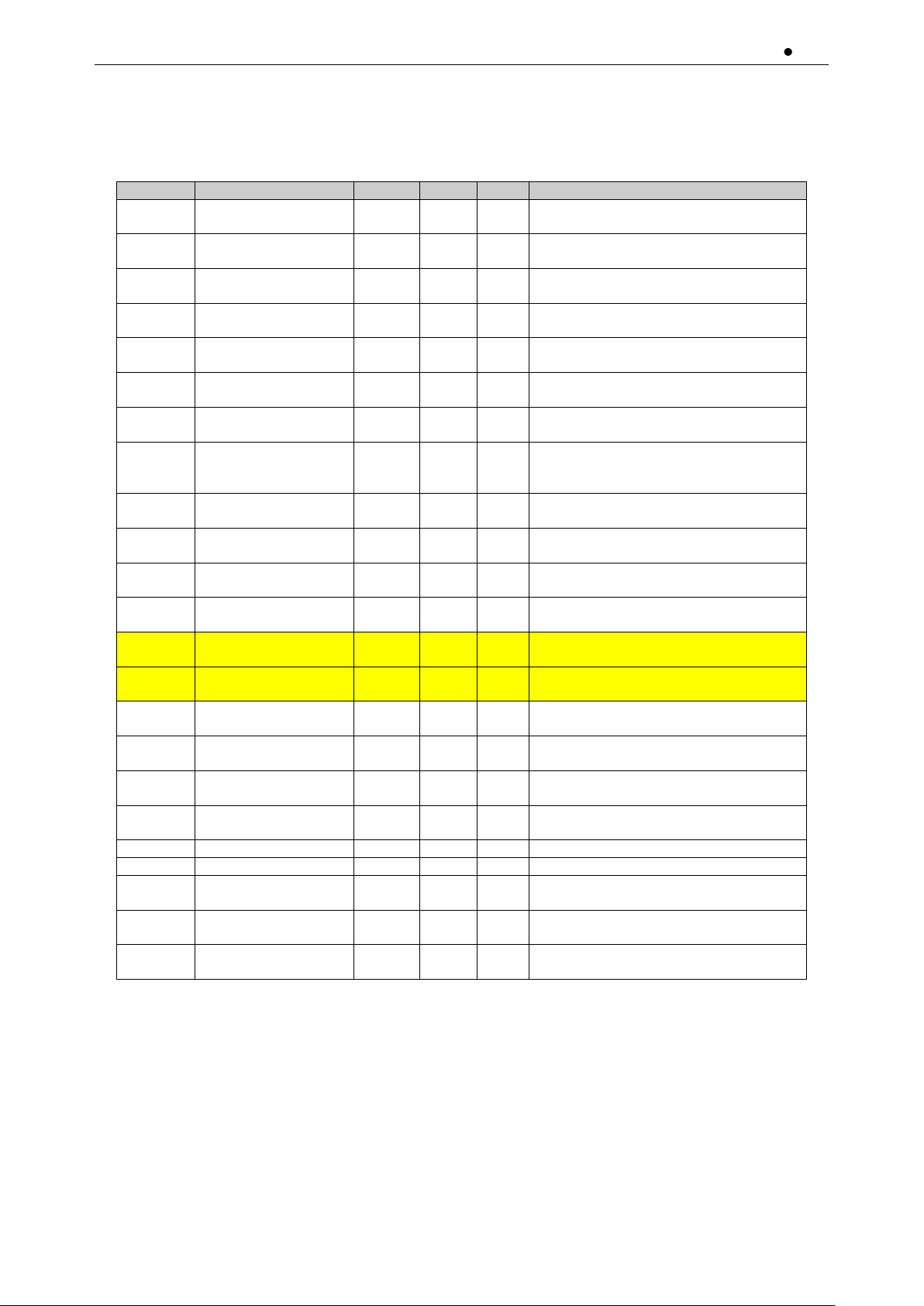
5.1 Betriebsdaten
Bei den Betriebsdaten handelt es sich sowohl um die Istwerte der Parameter und Signale als
auch um Statusinformationen und Messwerte.
Code
Parameter
Einheit
Form.
ID
Beschreibung
V1.1
Output frequency
(Ausgangsfrequenz)
Hz
#,##
1
Ausgangsfrequenz zum Motor
V1.2
Frequency reference
(Frequenzsollwert)
Hz
#,##
25
Frequenzsollwert zur Motorsteuerung
V1.3
Motor speed
(Motordrehzahl)
U/min
# 2 Motordrehzahl in U/min
V1.4
Motor current
(Motorstrom)
A
variiert
3
1 s lineare Filterung
V1.5
Moptor torue
(Motordrehmoment)
%
#,#
4
In % des Motornenndrehmoments
V1.6
Motor Power
(Motorleistung)
%
#,#
5
V1.7
Motor voltage
(Motorspannung)
V
#,#
6
Berechnete Motorspannung
V1.8
DC link voltage
(DC-ZwischenkreisSpannung)
V # 7
Gemessene gefilterte Gleichspannung
V1.9
Unit temperature
(Einheit Temperatur)
°C
# 8 Kühlkörpertemperatur
V1.10
Motor temperature
(Motortemperatur)
%
# 9 Berechnete Motortemperatur
V1.11
Analogue input 1
(Analogeingang 1)
%
#,##
13
AI1, ungefiltert.
V1.12
Analogue input 2
(Analog Eingang 2)
%
#,##
14
AI2, ungefiltert.
V1.13
Analogue input 3
(Analog Eingang 3)
%
#,##
27
AI3, ungefiltert.
V1.14
Analogue input 4
(Analog Eingang 4)
%
#,##
28
AI4, ungefiltert.
V1.15
Analogue Out 1
(Analogausgang 1)
%
#,##
26
AO1
V1.16
Analogue Out 2
(Analogausgang 2)
%
#,##
50
AO2
V1.17
Analogue Out 3
(Analogausgang 3)
%
#,##
51
AO3
V1.18
Analogue Out 4
(Analogausgang 4)
%
#,##
1526
V1.19
DIN1, DIN2, DIN3
15
Status Digitaleingänge
V1.20
DIN4, DIN5, DIN6
16
Status Digitaleingänge
V1.21
Torque reference
(Drehmomentsollwert)
%
#,#
18
Verwendeter Drehmomentsollwert
V1.22
PT-100 Temperature
(PT-100 Temperatur)
Cº
#,#
42
Höchste Temperatur der OPTB8-Karte.
4 s Filterung.
G1.23
Multimonitoring items
(Betriebsdaten)
Zeigt drei wählbare Betriebsdaten an
Tabelle 5-1. Betriebsdaten
Page 20
VACON 20 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
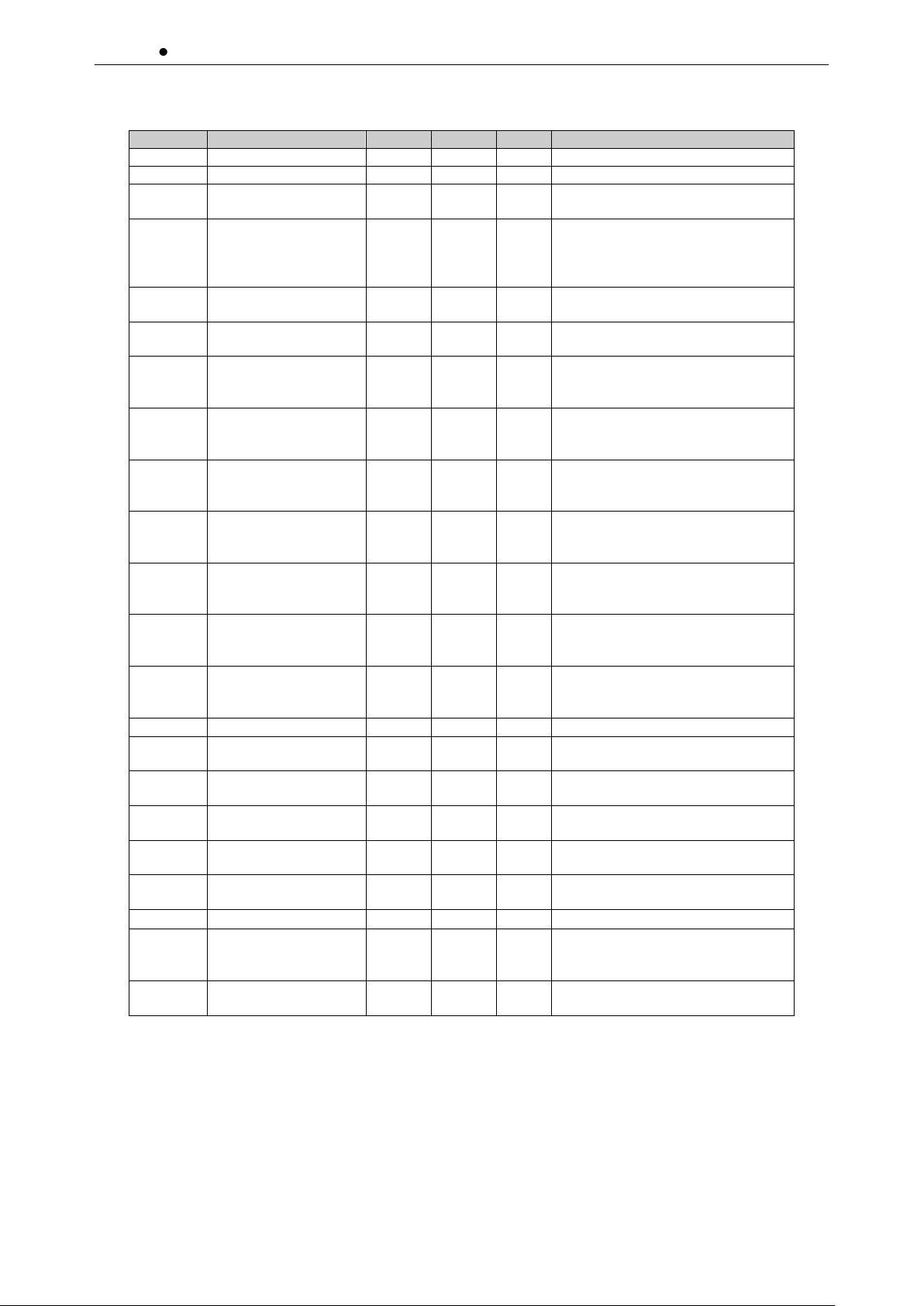
5.1.1 Betriebsdaten 2
Code
Parameter
Einheit
Form.
ID
Beschreibung
V1.24.1
Current (Strom)
A
variiert
1113
Ungefilterter Motorstrom
V1.24.2
Torque (Drehmoment)
%
#,#
1125
Ungefiltertes Motordrehmoment
V1.24.3
DC Voltage
(DC-Spannung)
V # 44
Ungefilterte DCZwischenkreisspannung
V1.24.4
Status word 1
(Application)
(Statuswort 1
(Anwendung))
43
V1.24.5
Encoder 1 Frequency
(Encoder 1 Frequenz)
Hz
#,##
1124
Ungefiltert
V1.24.6
Output Power
(Ausgang Leistung)
kW
variiert
1508
Ungefilterte elektrische Leistung
V1.24.7
Measured temperature
1 (Gemessene
Temperatur 1)
Cº
#,#
50
4 s Filterung.
V1.24.8
Measured temperature
2 (Gemessene
Temperatur 2)
Cº
#,#
51
4 s Filterung.
V1.24.9
Measured temperature
3 (Gemessene
Temperatur 3)
Cº
#,#
52
4 s Filterung.
V1.24.10
Measured temperature
4 (Gemessene
Temperatur 4)
Cº
#,#
69
4 s Filterung.
V1.24.11
Measured temperature
5 (Gemessene
Temperatur 5)
Cº
#,#
70
4 s Filterung.
V1.24.12
Measured temperature
6 (Gemessene
Temperatur 6)
Cº
#,#
71
4 s Filterung.
V1.24.13
ABS Encoder
Revolutions (ABSEncoder Umdrehungen)
r
#
55
V1.24.14
ABS-Encoder Position
#
54
V1.24.15
Step response
(Sprungantwort)
Hz
#,##
1132
V1.24.16
CosPhiiActual
(CosPhiiAktuell)
#,###
68 V1.24.17
Flux Current
(Flussstrom)
%
#,#
72
V1.24.18
Regulator Status
(Reglerstatus)
77 V1.24.19
Frequency Status
(Frequenz-Delta)
1847
V1.24.20
Rotor Flux (Rotorfluss)
%
#,#
1158
V1.24.21
DataLogger Trigger
Word (DatenloggerAuslöserwort)
97
V1.24.22
Ident Failure Code
(Ident Fehlercode)
98
Tabelle 5-2. Betriebsdaten 2
Page 21
apfiff20 kransteuerung VACON 21
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
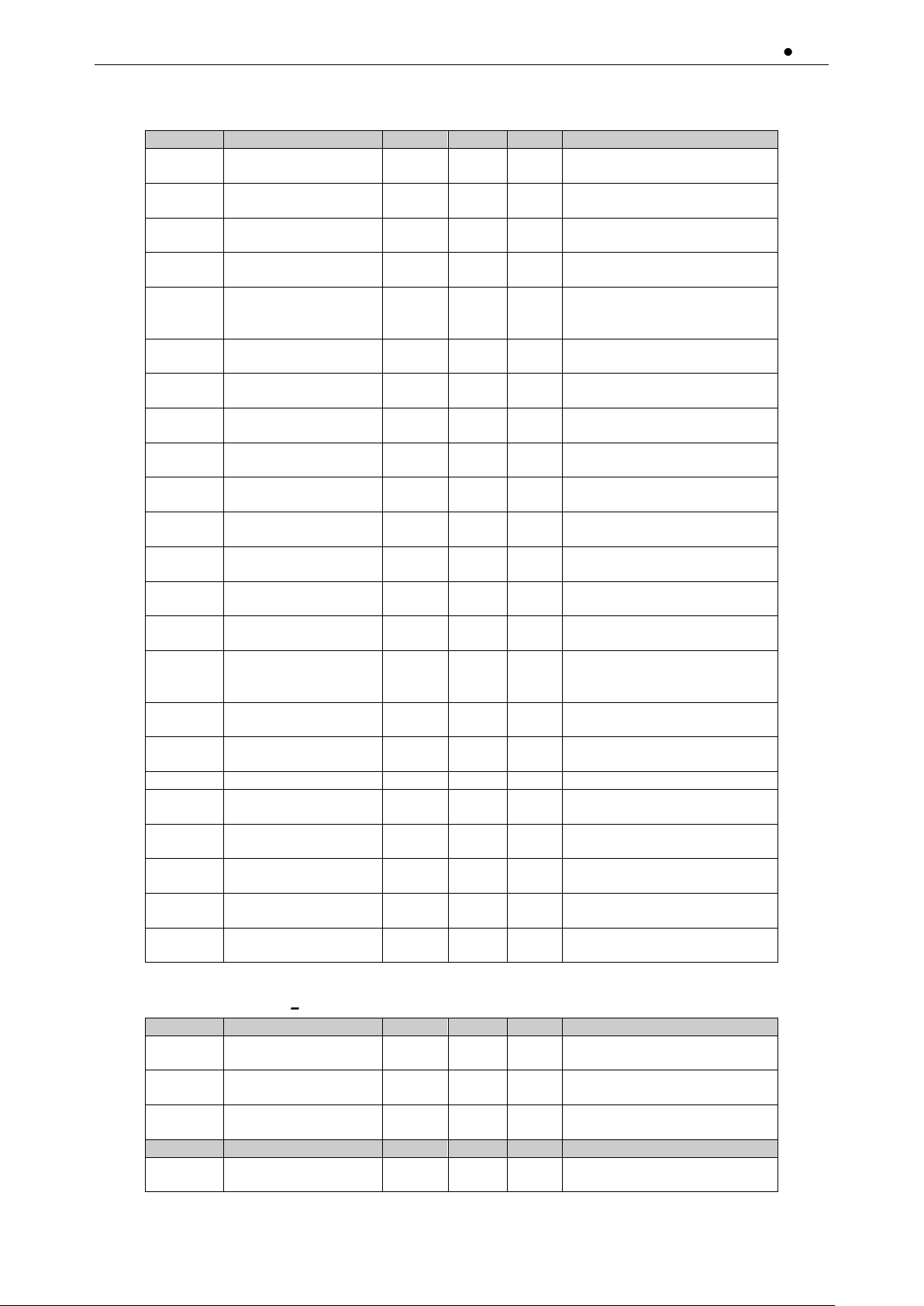
5.1.2 Feldbus-Betriebsdaten
Code
Parameter
Einheit
Form.
ID
Beschreibung
V1.25.1
FB Control Word
(FB Steuerwort)
1160
V1.25.2
FB Speed Reference
(FB Drehzahlsollwert)
875 V1.25.3
FB Status Word
(FB Zustandswort)
65
V1.25.4
FB Actual Speed
(FB-Istdrehzahl)
865
V1.25.5
FB Torque Reference
(FB Drehmoment
Sollwert)
%
#,#
1140
Werkseitige Regelung von FB PD 1
V1.25.6
FB Limit Scaling
(FB Grenz-Skalierung)
%
#,##
46
Werkseitige Regelung von FB PD 2
V1.25.7
FB Adjust reference
(FB Einstellen Sollwert)
%
#,##
47
Werkseitige Regelung von FB PD 3
V1.25.8
FB Analog Output
(FB Analogausgang)
%
#,##
48
Werkseitige Regelung von FB PD 4
V1.25.9
FB motor Current
(FB Motorstrom)
A
#,#
45
Motorstrom (antriebsunabhängig)
mit einer Dezimalstelle
V1.25.10
Fault Word 1
(Fehlerwort 1)
1172
V1.25.11
Fault word 2
(Fehlerwort 2)
1173
V1.25.12
Warning Word 1
(Warnungswort 1)
1174
V1.25.13
AuxStatusWord
(Erweitertes Statuswort)
1163
V1.25.14
Last Active Fault
(Letzter aktiver Fehler)
37
V1.25.15
AuxControlWord
(Erweitertes
Steuerwort)
1161
V1.25.16
Din Status Word
(Din Zustandswort)
56 V1.25.17
Din Status Word 2
(Din Zustandswort 2)
57
V1.25.18
MC Status
64
V1.25.19
Last Active Warning
(Letzte aktive Warnung)
74
V1.25.20
Encoder Rounds
(Encoder-Runden)
1170
V1.25.21
Encoder Angle
(Encoder-Winkel)
1169
V1.25.22
Fault Word 10
(Fehlerwort 10)
1202
V1.25.23
Warning Word 10
(Warnungswort 10)
1269
Tabelle 5-3. Feldbus-Betriebsdaten
5.1.3 Master/Follower Betriebsdaten
Code
Parameter
Einheit
Form.
ID
Beschreibung
V1.26.1
SB Systemstatus
(SB Systemstatus)
1601
V1.26.2
Total Current
(Gesamtstrom)
A
#,#
80
Summe Strom von allen
Umrichtern (DS)
V1.26.3
Master Control Word
(Master-Steuerwort)
93
Code
Parameter
Einheit
ID
Beschreibung
V1.26.4.1
Motor Current D1
(Motorstrom D1)
A 1616
Page 22
VACON 22 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.26.4.2
Motor Current D2
(Motorstrom D2)
A 1605
V1.26.4.3
Motor Current D3
(Motorstrom D3)
A 1606
V1.26.4.4
Motor Current D4
(Motorstrom D4)
A 1607
Code
Parameter
Einheit
ID
Beschreibung
V1.26.4.1
Status Word D1
(Zustandswort D1)
1615
V1.26.4.2
Status Word D2
(Zustandswort D2)
1602
V1.26.4.3
Status Word D3
(Zustandswort D3)
1603
V1.26.4.4
Status Word D4
(Zustandswort D4)
1604
Tabelle 5-4. Master/Follower Betriebswerte
5.1.4 PI-Steuerung Betriebsdaten
Code
Parameter
Einheit
Form.
ID
Beschreibung
V1.27.1
PI Reference
(PI-Sollwert)
20
Verwendeter PI-Sollwert
V1.27.2
PI Actual Value
(PI-Istwert)
21
PI-Istwert
V1.27.3
PI Output (PI-Ausgang)
23
PI-Ausgang vor Skalierung
V1.27.4
PI Output Scaled
(PI-Ausgang skaliert)
1807
Skalierter PI-Ausgang
Dies wird für den ID-Anschluss
verwendet
Page 23
apfiff20 kransteuerung VACON 23
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.5 Frequenzkette
Code
Parameter
Einheit
Form.
ID
Beschreibung
V1.28.1
Frequency Reference 1
(Frequenzsollwert 1)
Hz
1126
V1.28.2
Frequency Reference 2
(Frequenzsollwert 2)
Hz
1127
V1.28.3
Frequency reference
(Frequenzsollwert)
Hz
#,##
25
Frequenzsollwert zur
Motorsteuerung
V1.28.4
Frequency Reference
Actual (Frequenz
Sollwert Istwert)
Hz
1128
V1.28.5
Frequency Ramp Out
(Frequenz
Rampenausgang)
Hz
1129
V1.28.6
Frequency Reference
Final (Frequenzsollwert
endgültig)
Hz
1131
V1.28.7
Encoder Frequency
(Encoder-Frequenz)
Hz
1164
5.1.6 Drehmomentkette
Code
Parameter
Einheit
Form.
ID
Beschreibung
V1.29.1
Torque Reference
(Drehmoment Sollwert)
% 18 V1.29.2
Torque Reference 3
(Drehmomentsollwert 3)
% 1144
V1.29.3
Torque Ref Final
(DrehmSollw endgültig)
% 1145
V1.29.4
Speed Control Out
(Drehzahlregelungs-
ausgang)
% 1134
V1.29.5
Torque Reference Actual
(Drehmoment Sollwert
Istwert)
% 1180
Endgültiger
Drehmomentsollwert von
Drehzahlregelung und/oder
Drehmomentregelung
5.1.7 Bremssteuerung
Code
Parameter
Einheit
Form.
ID
Beschreibung
V1.30.1
Brake Status Word
(Bremse Zustandswort)
89
5.1.8 Bewegung
Code
Parameter
Einheit
Form.
ID
Beschreibung
V1.31.1
Serial Number Key
(Seriennummern-
schlüssel)
V1.31.2
License Status
(Lizenzstatus)
5.1.9 Wellensynchron
Code
Parameter
Einheit
Form.
ID
Beschreibung
V1.32.1
Master Rotations
(Master-Drehungen)
1820
V1.32.2
Own Rotations
(Eigene Drehungen)
1821 V1.32.3
Control Out
(Reglersausgang)
1822
V1.32.4
Rotation Error
(Drehungsfehler)
1823
V1.32.5
Position Ref
(Position Sollw)
1825
Page 24
VACON 24 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.10 Betriebsdaten
V1.1 Output frequency (Ausgangsfrequenz) [#,## Hz] ID1
Ausgangsfrequenz zu Motor, aktualisiert bei 10 ms Zeitebene.
V1.2 Frequency reference (Frequenzsollwert) [#,## Hz] ID 25
Frequenzsollwert der Motorsteuerung, nach der Drehzahlteilungsfunktion,
aktualisiert bei 1 ms Zeitebene.
V1.3 Motor Speed (Motordrehzahl) [# rpm] ID 2
Motordrehzahl in U/min
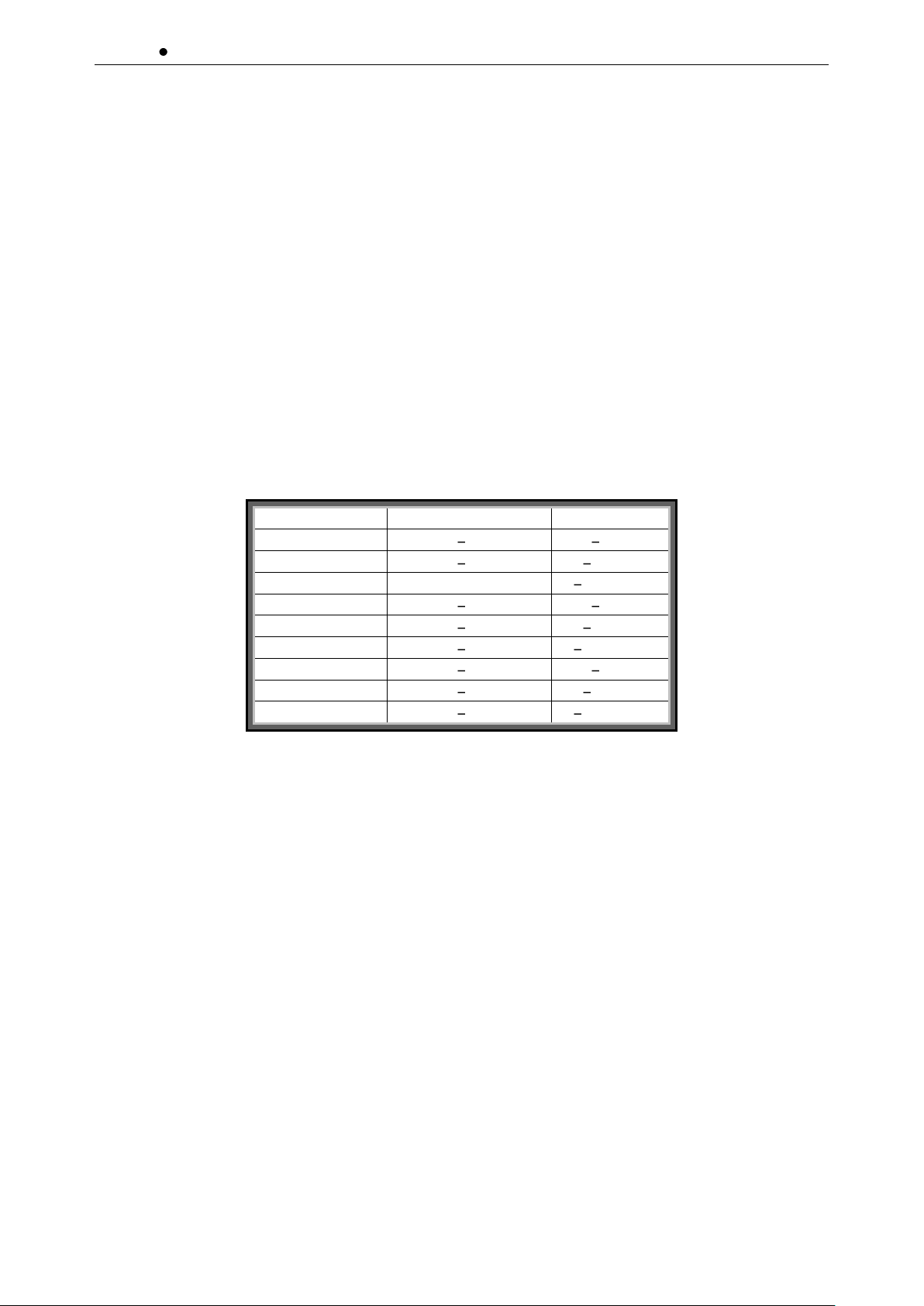
V1.4 Motor current (Motorstrom) [A] ID 3
Gemessener Motor-Effektivstrom
Stromskalierung bei unterschiedlichen Baugrößen
Hinweis: ID45, normalerweise Prozessdaten, Ausgang 3, wird skaliert und immer
mit einer Dezimalstelle angegeben.
Spannung
Größe
Skalierung
208-240 VAC
NX0001 NX0011
100 0,01 A
208-240 VAC
NX0012 NX0420
10 0,1 A
208-240 VAC
NX0530
1 1 A
380-500 VAC
NX0003 NX0007
100 0,01 A
380-500 VAC
NX0009 NX0300
10 0,1 A
380-500 VAC
NX0385 NX2643
1 1 A
525-690 VAC
NX0004 NX0013
100 0,01 A
525-690 VAC
NX0018 NX0261
10 0,1 A
525-690 VAC
NX0325 NX1500
1 1 A
V1.5 Motor torque (Motordrehmoment) % ID 4
In % des Motornenndrehmoments
V1.6 Motor Power (Motorleistung) % ID 5
Berechnete Motorleistung
V1.7 Motor voltage (Motorspannung) V ID 6
Berechnete Motorspannung
V1.8 DC link voltage (DC-Zwischenkreis-Spannung) V ID 7
Gemessene gefilterte Gleichspannung
V1.9 Unit temperature (Einheit Temperatur) C ID 8
Kühlkörpertemperatur
V1.10 Motor temperature (Motortemperatur) % ID 9
Berechnete Motortemperatur
105 % ist die Auslösegrenze, wenn die Antwort ein Fehler ist.
Page 25

apfiff20 kransteuerung VACON 25
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.11 Analogue input 1 % (Analogeingang 1 %) ID 13
V1.12 Analogue input 2 % (Analog Eingang 2 %) ID 14
Ungefilterter analoger Eingangspegel.
0 % = 0 mA / 0 V, 100 % = 10 V, 100 % = 20 mA / 10 V.
Die Skalierung der Betriebsdaten wird durch die Parameter der Optionskarte
festgelegt.
V1.13 Analogue input 3 % (Analog Eingang 3 %) ID 27
V1.14 Analogue input 4 % (Analog Eingang 4 %) ID 28
Es ist möglich, diesen Eingangswert über den Feldbus anzupassen, wenn die
Eingangsklemmenauswahl 0,1 ist. Auf diese Weise ist es möglich, den freien
Analogeingang über den Feldbus anzupassen und alle Funktionen des
Analogeingangs für Feldbus-Prozessdaten zur Verfügung zu stellen.
V1.15 Analogue Out 1 % (Analogausgang 1 %) ID 26
V1.16 Analogue Out 2 % (Analogausgang 2 %) ID 50
V1.17 Analogue Out 3 % (Analogausgang 3 %) ID 51
V1.18 Analogue Out 4 % (Analogausgang 4 %) ID 1526
Analogausgangswert: 0 % = 0 mA / 0 V, 100 % = 20 mA / 10 V
V1.19 DIN1, DIN2, DIN3 ID 15
V1.20 DIN4, DIN5, DIN6 ID 16
Status DIN1/DIN2/DIN3
Status DIN4/DIN5/DIN6
b0
DIN3
DIN6
b1
DIN2
DIN5
b2
DIN1
DIN4
V1.21 Torque reference (Drehmomentsollwert) % ID 18
Drehmomentsollwert vor Lastausgleich.
V1.22 PT-100 Temperature (PT-100 Temperatur) Cº ID 42
Höchste Temperatur der OPTB8-Karte. 4 s Filterung.
Page 26
VACON 26 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.11 Betriebsdaten 2
V1.24.1 Current (Strom) A ID 1113
Ungefilterter Motorstrom, empfohlenes Signal für NCDrive-Überwachung.
V1.24.2 Torque (Drehmoment) % ID 1125
Ungefiltertes Motordrehmoment, empfohlenes Signal für NCDrive-Überwachung.
V1.24.3 DC Voltage (DC-Spannung) V ID 44
Ungefilterte DC-Zwischenkreisspannung, empfohlenes Signal für NCDriveÜberwachung.
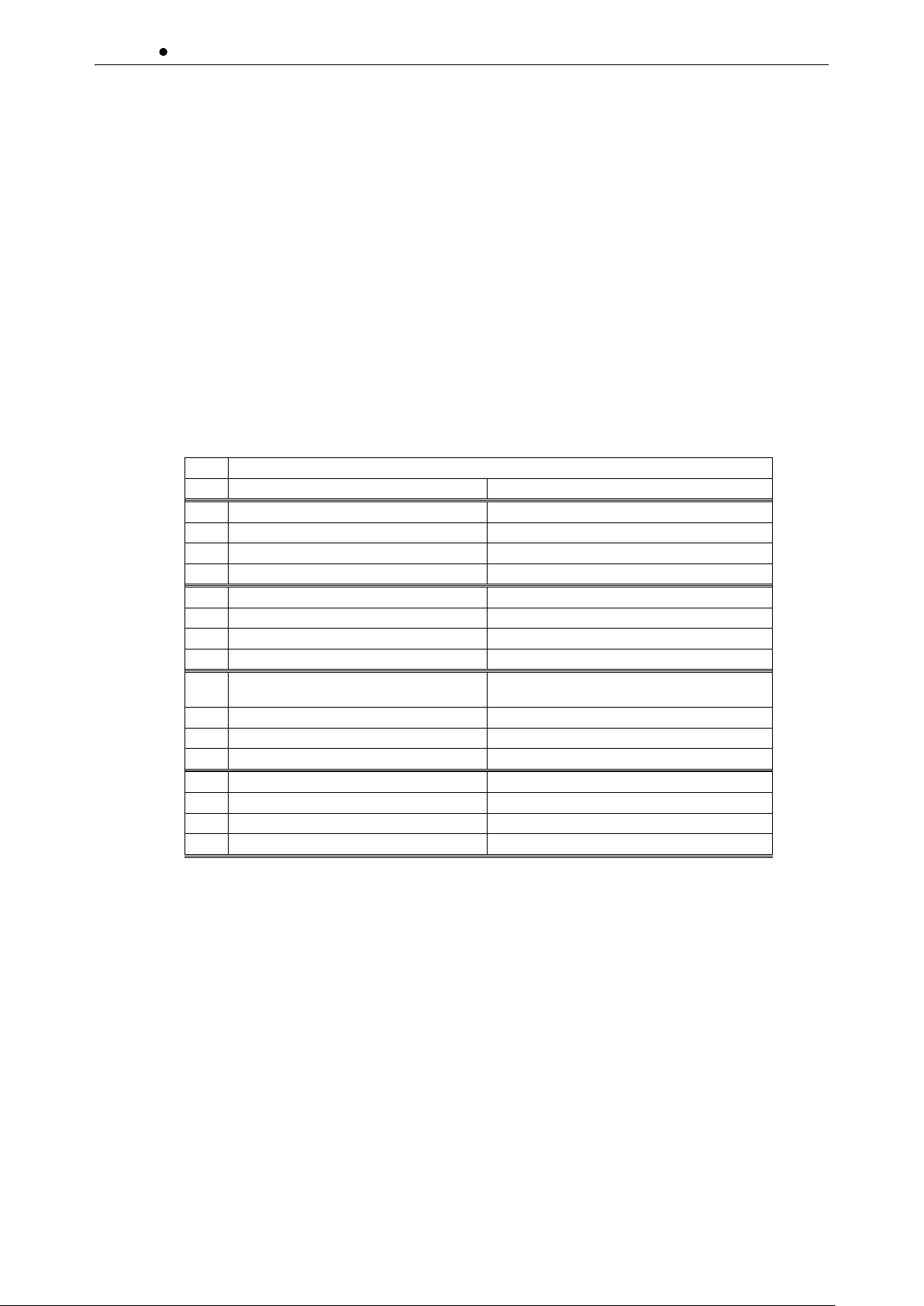
V1.24.4 Application Status Word (Anwendungsstatuswort) ID 43
In diesem Statuswort werden verschiedene Umrichterstatuswerte in einem
Datenwort kombiniert.
Empfohlenes Signal für NCDrive-Überwachung.
Anwendungsstatuswort, ID 43
Falsch
Wahr
b0
Fluss nicht bereit
Fluss bereit (>90 %)
b1
Nicht in Bereitschaft
Bereit
b2
Nicht in Betrieb
In Betrieb
b3
Kein Fehler
Fehler
b4
Richtung Vorwärts
Richtung Rückwärts
b5
Not-Aus aktiv
Not-Aus NICHT aktiv
b6
Start deaktiviert
Start Freigabe
b7
Keine Warnung
Warnung
b8
Leistung positiv
Leistung negativ oder Gen-Moment bzw.
Stromgrenze aktiv
b9
b10
b11
Keine DC-Bremse
DC-Bremse aktiv
b12
Keine Freigabeanforderung
Startanfrage
b13
Kein Begrenzer aktiv
Begrenzer aktiv
b14
Externe Bremssteuerung AUS
Externe Bremssteuerung EIN
b15
V1.24.5 Shaft Frequency (Wellenfrequenz) Hz ID 1124
Encoder-Frequenz nach Filter. P2.8.4.6 Encoder1 FilZeit.
V1.24.6 Output Power (Ausgang Leistung) [kw] ID1508
Ungefilterte elektrische Ausgangsleistung des Umrichters.
Page 27
apfiff20 kransteuerung VACON 27
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.24.7 Measured Temperature 1 (Gemessene Temperatur 1) Cº ID 50
V1.24.8 Measured Temperature 2 (Gemessene Temperatur 2) Cº ID 51
V1.24.9 Measured Temperature 3 (Gemessene Temperatur 3) Cº ID 52
V1.24.10 Measured Temperature 4 (Gemessene Temperatur 4) Cº ID 69
V1.24.11 Measured Temperature 5 (Gemessene Temperatur 5) Cº ID 70
V1.24.12 Measured Temperature 6 (Gemessene Temperatur 6) Cº ID 71
Separate Messung von zwei PT100-Karten. Die Filterzeit des Signals beträgt 4 s.
V1.24.13 ABS Encoder Revolutions (ABS-Encoder Umdrehungen) ID55
Drehungsinformationen des Absolut-Encoders.
V1.24.14 ABS-Encoder Position ID54
Absolut-Encoderposition innerhalb einer Drehung. Siehe Encoder-Handbuch für
Skalierung.
V1.24.15 Step response (Sprungantwort) Hz ID 1132
Frequenzfehler. Vergleicht den Rampenausgang mit der Encoder-Istfrequenz mit
einer Genauigkeit von 0,001 Hz. Kann für die Abstimmung der Drehzahlregelung bei
Closed Loop-Steuerung verwendet werden.
V1.24.16 CosPhiiActual (CosPhiiAktuell) ID 68
Cos Phii geschätzt.
V1.24.17 Flux current (Flussstrom) % ID 72
Flussstromanteil oder der Gesamtstrom. 100 % = Motornennstrom.
V1.24.18 Regulator status (Reglerstatus) ID 77
Reglerstatus ID77
b0
Motorstrom-Reglerstatus
b1
Generatorstrom-Reglerstatus
b2
Motordrehmoment-Reglerstatus
Für CL-Monitor B0
b3
Generatordrehmoment-Reglerstatus
Für CL-Monitor B1
b4
Überspannungs-Reglerstatus
DC-Spannung
b5
Unterspannungs-Reglerstatus
DC-Spannung
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
Page 28
VACON 28 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.24.19 Frequency Delta (Frequenz-Delta) ID 1847
Änderung des endgültigen Frequenzsollwerts in Hz/s.
V1.24.20 Rotor Flux (Rotorfluss) ID1158
Berechneter Rotorfluss.
V1.24.21 Data Logger Trigger Word (Datenlogger-Auslöserwort) ID 97
Datenlogger-Auslöserwort ID97
Funktion
Kommentar
b0
Fehlerstatus
Logger wird ausgelöst, wenn ein Fehler
vorliegt
b1
Warnungsstatus
Logger wird ausgelöst, wenn eine Warnung
vorliegt
b2
Auto Reset-Warnung
Der Logger wird ausgelöst, wenn ein Fehler
vorliegt, der zum automatischen Quittieren
definiert wurde. Dieses Bit kann zum
Abrufen der ersten Fehlersituation
verwendet werden.
b3
Fehlerstatus ODER Warnungsstatus
B0 OR B1 Auslösesituation ist aufgetreten
b4
Fehlerstatus ODER Auto ResetWarnung
B0 OR B2 Auslösesituation ist aufgetreten
b5
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
V1.24.22 Ident Failure Code (Ident Fehler Code) [Ident Fehler Code] ID 98
Fehlercode für fehlgeschlagene Identifikation:
1 = Strommessung Offset
2 = Identifikation Stromstärke
3 = Beschleunigungszeit zu lang
4 = Identifikation Frequenzsollwert nicht erreicht
5 = Zu geringer oder hoher Magnetisierungsstrom
6 = Flusskurve außerhalb des erwarteten Niveaus
7 = PMSM, Encoder-Nullposition
8 = Zu geringe maximale Frequenzgrenze
9 = PMSM, Encoder-Nullpuls nicht gefunden
10 = Ls-Identifikations-Zeitüberschreitung
11 = Ls-Identifikation Strom
Page 29
apfiff20 kransteuerung VACON 29
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.12 Feldbus-Betriebsdaten
V1.25.1 FB Control Word (FB Steuerwort) ID1160
Steuerwort verwendet im Bypass-Modus. Siehe P2.13.22 und Zusatzkarte ByPass.
Bit
Beschreibung
Wert = 0
Wert = 1
0
AUS
EIN, Reset nach Fehler oder b1 und b2
1
Not-Aus durch Freilauf
EIN, bei Normalbetrieb: WAHR halten
2
Not-Aus durch Rampe
EIN, bei Normalbetrieb: WAHR halten
3
STOPP-ANFORDERUNG
BETRIEBS-ANFORDERUNG
4
Rampe auf null erzwingen
Rampe aktivieren,
5
Rampe einfrieren
Rampe aktivieren,
6
Sollwert auf null erzwingen
Rampe aktivieren,
7
Keine Aktion
FEHLER-QUITTIERUNG (0 -> 1)
8
Keine Aktion
Tippen 1
9
Keine Aktion
Tippen 2
10
Profibus-Steuerung
deaktivieren
Profibus-Steuerung aktivieren
11
Feldbus-DIN1 = AUS
Feldbus-DIN1 = EIN (Watchdog-Puls)
12
Feldbus-DIN2 = AUS
Feldbus-DIN2 = EIN
13
Feldbus-DIN3 = AUS
Feldbus-DIN3 = EIN
14
Feldbus-DIN4 = AUS
Feldbus-DIN4 = EIN
15
Keine Aktion
Keine Aktion
V1.25.2 FB Speed Reference (FB Drehzahlsollwert) ID875
FB Drehzahlsollwert vom Feldbus
V1.25.3 FB Status Word (FB Zustandswort) ID65
Profibustyp-Zustandswort. Erzeugt auf Anwendungsebene.
Muss unter Verwendung von P2.14.19 GSW ausgewählt werden. Bei Bedarf mit
Profibus-Karte muss der Betriebsmodus in der Zusatzkarte auf ByPass und mit
P2.14.22 ProfiBus Modus gewählt werden: 2 / ProfiDrive.
Bit
Beschreibung
Wert = 0
Wert = 1
0
Nicht einschaltbereit
Einschaltbereit
1
Nicht betriebsbereit
Betriebsbereit
2
Nicht in Betrieb
In Betrieb
3
Kein Fehler
Fehler
4
Freilauf aktiv
Freilauf nicht aktiv
5
Schnellstopp aktiv
Schnellstopp nicht aktiv
6
Keine Schaltsperre
Einschaltsperre
7
Keine Warnung
Warnung
8
Drehzahl-Fehler
Drehzahl bei Sollwert
9
Keine FBSteuerungsanforderung
FB-Steuerung aktiv
10
Fout < Fmax
Fout > Fmax
11
Nicht verwendet
Nicht verwendet
12
Nicht verwendet
Nicht verwendet
13
Nicht verwendet
Nicht verwendet
14
Nicht verwendet
Nicht verwendet
15
Feldbus-DIN1 = AUS
Feldbus-DIN1 = EIN (Watchdog-Puls)
Page 30
VACON 30 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.25.4 FB Speed Actual (FB Drehzahl-Istwert) ID865
Drehzahlistwert an Feldbus gesendet.
V1.25.5 FB Drehmoment Sollwert (FB Torque Reference) % ID 1140
Drehmomentsollwert vom Feldbus
Werkseitige Regelung von FB PD 1.
V1.25.6 FB Limit Scaling (FB Grenz-Skalierung) % ID 46
Grenzwertskalierung Eingangswert vom Feldbus.
Werkseitige Regelung von FB PD 2.
V1.25.7 FB Adjust Reference (FB Einstellen Sollwert) % ID 47
Sollwert-Einstellwert vom Feldbus.
Werkseitige Regelung von FB PD 3.
V1.25.8 FB Analog Output (FB Analogausgang) % ID 48
Feldbuswert zur Steuerung des Analogausgangs.
Werkseitige Regelung von FB PD 4.
V1.25.9 FB Motor Current (FB Motorstrom) A ID 45
Motorstrom (antriebsunabhängig) mit einer Dezimalstelle.
V1.25.10 Fault Word 1 (Fehlerwort 1) ID 1172
Verschiedene Fehler werden zu zwei Worten zusammengefasst, die über den
Feldbus oder mit der PC-Software NCDrive ausgelesen werden können.
Fehlerwort 1 ID1172
Fehler
Kommentar
b0
Überstrom oder IGBT
F1, F31, F41
b1
Überspannung
F2
b2
Unterspannung
F9
b3
Motor blockiert
F15
b4
Erdschluss
F3
b5
Motorunterlast
F17
b6
Umrichter-Übertemperatur
F14
b7
Übertemperatur
F16, F56, F29
b8
Eingangsphase
F10
b9
Bremswiderstand-Übertemperatur
F42
(nicht implementiert)
b10
Gerät geändert
F37, F38, F39, F40, F44, F45
(nicht implementiert)
b11
Bedienteil oder PC-Steuerung
F52
b12
Feldbus
F53
b13
Systembus
F59
b14
Steckplatz
F54
b15
4 mA
F50
Page 31

apfiff20 kransteuerung VACON 31
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.25.11 Fault Word 2 (Fehlerwort 2) ID 1173
Fehlerwort 2 ID1173
Fehler
Kommentar
b0
Ausgangsphase
F11
b1
Ladeschütz
F5 (nicht implementiert)
b2
Encoder
F43
b3
Wechselrichter
F4, F7 (nicht implementiert)
b4
b5
EEPROM
F22 (nicht implementiert)
b6
Extern
F51
b7
Bremschopper
F12 (nicht implementiert)
b8
Watch Dog
F25 (nicht implementiert)
b9
IGBT
F31, F41
b10
Bremse
F58
b11
Lüfterkühlung
F32
b12
Applikation
F35 (nicht implementiert)
b13
Regelungsfehler
F33, F36, F8 (nicht implementiert)
b14
Hauptschalter offen
F64 (nicht implementiert)
b15
V1.25.12 Warning Word 1 (Warnungswort 1) ID 1174
Warnungswort 1 ID1174
Fehler
Kommentar
b0
Motor blockiert
W15
b1
Motor Übertemperatur
W16
b2
Motorunterlast
W17
b3
Verlust Netzphase
W10
b4
Verlust Motorphase
W11
b5
Safe Disable
W30 (nicht implementiert)
b6
Feldbus, Kommunikationsfehler
in Steckplatz D
W53 (nicht implementiert)
b7
Feldbus, Kommunikationsfehler
in Steckplatz E
W67 (nicht implementiert)
b8
Umrichter-Übertemperatur
W14
b9
Analogeingang < 4mA
W50
b10
Nicht verwendet
b11
Not-Aus
W63 (nicht implementiert)
b12
Start nicht freigegeben
W62 (nicht implementiert)
b13
Nicht verwendet
b14
Mechanische Bremse
W58
b15
Nicht verwendet
Page 32

VACON 32 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.25.13 Erweitertes Statuswort (AuxStatusWord) ID 1163
Zusatz Statuswort ID1163
Fehler
Kommentar
b0
Reserviert
Reserviert
b1
Fensterregelung aktiv und Drehzahl
außerhalb des Fensters
b2
Reserviert
Reserviert
b3
Reserviert
Reserviert
b4
Reserviert
Reserviert
b5
Reserviert
Reserviert
b6
Reserviert
Reserviert
b7
Keine Aktion
Öffnen der ext. Bremse erzwungen
b8
Reserviert
Reserviert
b9
Reserviert
Reserviert
b10
Reserviert
Umrichter in Drehmomenten-Regelung
b11
Reserviert
Reserviert
b12
Reserviert
Reserviert
b13
Reserviert
Reserviert
b14
Reserviert
Reserviert
b15
Reserviert
Reserviert
V1.25.14 Fault History (Fehlerspeicher) ID 37
Fehlernummer des letzten aktiven Fehlers.
V1.25.15 AuxControlWord (Erweitertes Steuerwort) ID 1161
Erweitertes Steuerwort ID1161
FALSCH
WAHR
b0
Reserviert
Reserviert
b1
Reserviert
Reserviert
b2
Reserviert
Reserviert
b3
Reserviert
Reserviert
b4
Reserviert
Reserviert
b5
Reserviert
Reserviert
b6
Reserviert
Reserviert
b7
Keine Aktion
Öffnen der ext. Bremse erzwungen
b8
Reserviert
Reserviert
b9
Keine Aktion
Encoderposition zurücksetzen
b10
Reserviert
Reserviert
b11
Reserviert
Reserviert
b12
Reserviert
Reserviert
b13
Reserviert
Reserviert
b14
Reserviert
Reserviert
b15
Reserviert
Reserviert
Page 33

apfiff20 kransteuerung VACON 33
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.25.16 Din Status Word (Din Zustandswort) ID 56
V1.25.17 Din Status Word 2 (DIN Zustandswort 2) ID 57
DIN Zustandswort 1
DIN Zustandswort 2
b0
DIN: A.1
DIN: C.5
b1
DIN: A.2
DIN: C.6
b2
DIN: A.3
DIN: D.1
b3
DIN: A.4
DIN: D.2
b4
DIN: A.5
DIN: D.3
b5
DIN: A.6
DIN: D.4
b6
DIN: B.1
DIN: D.5
b7
DIN: B.2
DIN: D.6
b8
DIN: B.3
DIN: E.1
b9
DIN: B.4
DIN: E.2
b10
DIN: B.5
DIN: E.3
b11
DIN: B.6
DIN: E.4
b12
DIN: C.1
DIN: E.5
b13
DIN: C.2
DIN: E.6
b14
DIN: C.3
b15
DIN: C.4
V1.25.18 MC Status (MC Status) ID 64
Wert an Feldbus gesendet, wenn der Feldbus nicht die eigene state machine
verwendet.
Motorregelung Statuswort
FALSCH
WAHR
b0
Nicht in Bereitschaft
Bereit
b1
Nicht in Betrieb
In Betrieb
b2
Im Uhrzeigersinn
Gegen den Uhrzeigersinn
b3
Kein Fehler
Fehler
b4
Keine Warnung
Warnung
b5 Bei Drehzahl Sollwert
b6 Bei Stillstand
b7 Fluss bereit
b8 TC Drehzahlbegrenzung aktiv
b9
Encoderrichtung
Gegen den Uhrzeigersinn
b10 Unterspannung Schnell Stopp
b11
Keine DC-Bremse
DC-Bremse aktiv
b12
b13 Verzögerung Neustart aktiv
b14
b15
V1.23.19 Warning (Warnung) ID 74
Letzte aktive Warnung.
V1.25.20 EncoderRounds (EncoderRunden) ID 1170
Rundeninformation vom inkrementellen Encoder. Der Wert wird zurückgesetzt,
wenn 24 VDC vom Umrichter getrennt werden.
Page 34

VACON 34 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.25.21 Encoder Angle (Encoder-Winkel) ID 1169
Winkelinformation vom inkrementellen Encoder. Der Wert wird zurückgesetzt,
wenn 24 VDC vom Umrichter getrennt werden.
V1.25.22 Fault Word 10 (Fehlerwort 10) ID 1202
Fehlerwort 10 ID1202
Fehler
Kommentar
b0
Drehzahl Fehler
F61
b1
b2
Überlastfehler aktiv
F82
b3
Kein Motorfehler
F83
b4
PT100-Fehler
F56 & F65
b5
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
V1.25.23 Warning Word 10 (Warnungswort 10) ID 1269
Warnungswort 1 ID1269
Fehler
Kommentar
b0
Drehzahl Fehler
W61
b1
Edschlusswarnung
B3
b2
Überlastwarnung aktiv
W82
b3
Keine Motorwarnung
W83
b4
PT100 Warnung
W56 & W65
b5
b6
b7
b8
b9
b10
b11
b12
b13
b14
b15
Page 35

apfiff20 kransteuerung VACON 35
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.13 Master/Follower
V1.26.1 SB SystemStatus (SB Systemstatus) ID 1601
Systembus Statuswort ID1601
Signal
Kommentar
b0
b1
Antrieb 1 bereit
b2
Antrieb 1 in Betrieb
b3
Antrieb 1 Fehler
b4
b5
Antrieb 2 bereit
b6
Antrieb 2 in Betrieb
b7
Antrieb 2 Fehler
b8
b9
Antrieb 3 bereit
b10
Antrieb 3 in Betrieb
b11
Antrieb 3 Fehler
b12
b13
Antrieb 4 bereit
b14
Antrieb 4 in Betrieb
b15
Antrieb 4 Fehler
V1.26.2 Total Current (Gesamtstrom) A ID 80
Umrichter Synch-Betrieb Master-Umrichter
Dieser Wert ist der Strom des gesamten Umrichter-Synch-Systems.
Umrichter Synch-Betrieb Follower-Umrichter
D1 und D2: Dieser Wert ist der Strom des gesamten Umrichter-Synch-Systems.
D2 und D4: Dieser Wert ist der Summenstrom der eigenen Leistungseinheit des
Umrichters und der Umrichter mit kleinerer Systembus-Identifikationsnummer
vom Master-Umrichter.
Page 36

VACON 36 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.26. 3 Master CW (Master CW) ID93
Master-Umrichter Steuerwort. Master sendet, Follower empfängt.
Master-Steuerwort ID93
Master-Follower
UmrichterSynch Master-Follower
b0
Bereit-Status
b1
Start Freigabe
b2
Endgültige Freigabeanforderung
b3
Fehlerquittierung
Fehlerquittierung
b4
In Betrieb
In Betrieb
b5
Fehler
b6
Bremssteuerung
Bremssteuerung
b7
WD-Puls
b8
Bremssteuerung Sollwertfreigabe
b9
Datenlogger-Auslösung
Datenlogger-Auslösung
b10
Rampenstopp aktiv
b11
Startverzögerung aktiv
b12
b13
b14
SB-Diagnose deaktivieren
SB-Diagnose deaktivieren
b15
V1.26.4.1 Motor Current D1 (Motorstrom D1) A ID 1616
D1: Dieser Wert ist der Strom der Leistungseinheit von Antrieb 1.
D2, D3 und D4: Master-Umrichter Leistungseinheitsstrom.
V1.26.4.2 Motor Current D2 (Motorstrom D2) A ID 1605
D1: Dieser Wert ist der Strom der Leistungseinheit von Antrieb 2.
D2, D3 und D4: Nicht aktualisiert.
V1.26.4.3 Motor Current D3 (Motorstrom D3) A ID 1606
D1: Dieser Wert ist der Strom der Leistungseinheit von Antrieb 3.
D2, D3 und D4: Nicht aktualisiert.
V1.26.4.4 Motor Current D4 (Motorstrom D4) A ID 1607
D1: Dieser Wert ist der Strom der Leistungseinheit von Antrieb 4.
D2, D3 und D4: Nicht aktualisiert.
Page 37

apfiff20 kransteuerung VACON 37
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.26.5.1 Status Word D1 (Zustandswort D1) ID 1615
V1.26.5.2 Status Word D2 (Zustandswort D2) ID 1602
V1.26.5.3 Status Word D3 (Zustandswort D3) ID 1603
V1.26.5.4 Status Word D4 (Zustandswort D4) ID 1604
Follower-Umrichter Statuswort
FALSCH
WAHR
b0
Fluss nicht bereit
Fluss bereit (>90 %)
b1
Nicht in Bereitschaft
Bereit
b2
Nicht in Betrieb
In Betrieb
b3
Kein Fehler
Fehler
b4 LadeSwZustand
b5
b6
Start deaktiviert
Start Freigabe
b7
Keine Warnung
Warnung
b8
b9
b10 SB Kommunikation OK
b11
Keine DC-Bremse
DC-Bremse aktiv
b12
Keine Freigabeanforderung
Startanfrage
b13
Kein Begrenzer aktiv
Begrenzer aktiv
b14
Externe Bremssteuerung AUS
Externe Bremssteuerung EIN
b15 Gehörter Takt
Page 38

VACON 38 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.14 PI-Steuerung Überwachung
Diese PI-Steuerung nutzt ID-Nummern für Eingangs- und Ausgangssignal. Nähere Informationen
finden Sie im Kapitel PI-Steuerung.
V1.27.1 PI Reference (PI-Sollwert) ID20
Verwendeter PI-Sollwert, Sollwert wird nach ID-Nummer gewählt.
V1.27.2 PI Actual Value (PI-Istwert) ID21
PI-Istwert. Istwert wird nach ID-Nummer gewählt.
V1.27.3 PI Output (PI-Ausgang) ID23
PI-Ausgang vor Skalierung. Dieser Wert nutzt PI Out High und Low zur Begrenzung.
V1.27.3 PI Output Scaled (PI-Ausgang skaliert) ID1807
Skalierter PI-Ausgang.
Dies wird für den ID-Anschluss verwendet. Die Skalierungsfunktion wird zur Skalierung
des für das angeschlossene Signal geeigneteren Werts verwendet. Wenn der Ausgang
beispielsweise mit der Drehmomentgrenze verbunden ist, muss der Istwert -1000 bis
+1000 (-100,0 % bis +100,0 %) betragen, PI Out High und Low können jedoch zwischen
-30000 und +30000 liegen, damit eine genauere PI-Regelung ermöglicht wird.
5.1.15 Frequenzkette
V1.28.1 Frequency Reference (Frequenzsollwert 1) Hz 1126
Frequenzsollwert vor Drehzahlausgleich. Der Drehzahlausgleich wird auch zur
Sollwertrichtungssteuerung verwendet.
V1.28.2 Frequency Reference 2 (Frequenzsollwert 2) Hz 1126
Frequenzsollwert nach Drehzahlausgleich und Sollwertanpassung, jedoch vor
Interpolator.
V1.28.3 Frequency Reference (Frequenzsollwert) Hz 25
Frequenzsollwert nach Interpolator, jedoch vor Filterung zweiter Ordnung.
V1.28.4 Frequency Reference Actual (Frequenz Sollwert Istwert) Hz 1128
Frequenzsollwert für Rampensteuerung.
V1.28.5 Frequency Ramp Out (Frequenz Rampenausgang) Hz 1129
Rampensteuerungsausgang.
V1.28.6 Frequency Reference Final (Frequenzsollwert endgültig) Hz 1131
Endgültiger Sollwert an Drehzahlregler. Nach dem Rampengenerator und nach der
Drehzahlschrittfunktion, verwendet für die Abstimmung der Closed Loop-Drehzahl
bei gemeinsamer Verwendung mit der Frequenz von Encoder 1.
V1.28.7 Encoder 1 Frequency (Encoder 1 Frequenz) Hz 1164
Encoder-Frequenz, direkt vom Encoder überwacht.
5.1.16 Drehmomentkette
V1.29.1 Torque reference (Drehmomentsollwert) % ID 18
Drehmomentsollwert vor Lastausgleich.
Page 39

apfiff20 kransteuerung VACON 39
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
V1.29.2 Torque Reference 3 (Drehmomentsollwert 3) % 1144
Drehmomentsollwert nach Lastausgleich und vor Drehmomentschritt.
V1.29.3 Torque Ref Final (DrehmSollw endgültig) % 1145
Endgültiger Drehmomentsollwert in Drehmomentsollwertkette, vor
Beschleunigungskompensation und Drehzahlreglerausgang.
V1.29.4 Speed Control Out (Drehzahlregelungsausgang) % 1134
Closed Loop-Drehzahlreglerausgang.
V1.29.5 Torque Reference Actual (Drehmoment Sollwert Istwert) % 1180
Endgültiger Drehmomentsollwert von Drehzahlregelung und Drehmomentregelung.
Enthält auch Drehmomentschritt- und Beschleunigungskompensationsfaktoren.
5.1.17 Bremssteuerung
V1.30.1 Brake Status Word (Bremse Zustandswort)
Bremse Statuswort ID89
FALSCH
WAHR
b0
Fluss nicht bereit
Fluss bereit (>90 %)
b1
Nicht in Bereitschaft
Bereit
b2
Nicht in Betrieb
In Betrieb
b3
Kein Fehler
Fehler
b4
Keine Warnung
Warnung
b5
Keine Freigabeanforderung
Startanfrage
b6
Keine DC-Bremse
DC-Bremse aktiv
b7
Stillstand
Nicht Stillstand
b8
Bremssteuerung geschlossen
Bremssteuerung geöffnet
b9
Bremse geschlossen
(Mech.Verzögerungen)
Bremse geöffnet (Mech.Verzögerungen)
b10
Bremse Rückm. NIEDRIG
Bremse Rückm. HOCH
b11
Kein Begrenzer aktiv
Begrenzer aktiv
b12
b13
b14
b15
Page 40

VACON 40 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.18 Bewegung
V1.31.1 Serial Number Key (Seriennummernschlüssel) ID1997
V1.31.2 License Status (Lizenzstatus) ID1996
Dieser Wert gibt den Status der Lizenzschlüsselaktivierung an.
0 / Keine Funktion
Wenn die SPS diese Nummer von dieser ID erhält, ist es wahrscheinlich, dass
es in der auf den Umrichter geladenen Anwendung keine Lizenzfunktion gibt.
1 / Kein Code
Korrekte Anwendung im Umrichter, der Lizenzschlüssel wurde jedoch nicht
angegeben.
2 / Code angegeben, Überprüfung nicht möglich, keine Verbindung zu
Leistungseinheit
Der Lizenzschlüssel wurde angegeben, es besteht jedoch keine Verbindung
zur Leistungseinheit, um ihn zu überprüfen.
Den DC mindestens 20 s lang laden.
Hinweis: Möglicherweise gibt der Umrichter in diesem Zustand einen Lizenzfehler
aus. Schalten Sie die Leistungseinheit ein, damit die Steuerkarte die Seriennummer
des Umrichters lesen kann.
3 / Code falsch
Der eingegebene Code ist falsch.
4 / Lizenzschlüssel zu oft eingegeben
Es wurde dreimal ein falscher Lizenzschlüssel eingegeben. Schalten Sie den
Umrichter aus, bevor Sie versuchen, einen neuen Code einzugeben.
5 / Code akzeptiert
Es wurde der korrekte Schlüssel eingegeben, und die lizenzgebundenen Funktionen
sind verfügbar.
6 / Unbekannter Fehler
Die Lizenzschlüsselberechnung hat einen internen Fehler erkannt. Nehmen
Sie die Serviceinformationen und die Parameterdatei vom Umrichter, wenn die
Leistungseinheit eingeschaltet wird. Senden Sie diese Dateien an den technischen
Support des Herstellers.
5.1.19 Tandembetrieb (Wellensync)
V1.32.1 Master Rotations (Master-Drehungen) ID1820
Master-Positionsinformation über Systembus empfangen.
1.000 entspricht einer Master-Wellendrehung.
V1.32.2 Own Rotations (Eigene Drehungen) ID1821
Umrichter-eigene Positionsinformation vom Encoder empfangen
1.000 entspricht einer Master-Wellendrehung.
V1.32.3 Control Out (Reglersausgang) ID1822
Positionsreglerausgang in Hz.
V1.32.4 Rotation Error (Drehungsfehler) ID1823
Follower-Umrichterpositionsfehler, 1.000 entspricht einer Master-Wellendrehung.
V1.32.5 Position Ref (Position Sollw) ID1825
Zur Positionssteuerung verwendete Master-Position.
Page 41

apfiff20 kransteuerung VACON 41
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5.1.20 Zähler
Die nachstehenden Zählerwerte sind als Standardüberwachungssignal nicht sichtbar, jedoch mit
ID-Nummern vom Feldbus zugänglich.
5.1.20.1 Betriebsdauerzähler
Dieser Timer zählt, wenn die Steuerkarte eingeschaltet wird (d. h. es wird gezählt, wenn nur 24
VDC an die Steuerkarte angelegt werden).
ID10 PowerOnTimeTripCounter
Rückstellbarer Betriebsdauerzähler.
UINT-Wert. Schreibgeschützter Zugriff.
Verwenden Sie ID1050 zum Definieren des Formats.
Verwenden Sie ID1051 zum Zurücksetzen des Werts
ID1050 PowerOnTripCounterUnit
Lesen oder wählen Sie das Betriebszählerformat aus.
USINT-Wert. Schreibzugriff.
1 = 1 ms
2 = 10 ms
3 = 100 ms
4 = 1 s
5 = 1/min
6 = 1 h (Werkseinstellung)
7 = 1 d
ID1051 ResetOnTimeTripCounter
Rückstellbarer Einschaltzähler, Anstiegsflanke setzt den Zähler zurück.
BOOL-Wert. Schreibzugriff.
Schreiben von INT-Wert 1 zum Zurücksetzen, wenn Prozessdaten verwendet
werden.
5.1.20.2 Überwachen der Energiezähler
ID11 EnergyMeter
Lesen von ID80 und ID81 zur Anzeige des verwendeten Formats.
UINT-Wert. Schreibgeschützter Zugriff.
ID82 EnergyMeterFormat
Dezimalstelle des Werts
60 = max. 6 Ziffernstellen, 0 Nachkommastellen
61 = max. 6 Ziffernstellen, 1 Nachkommastellen
62 = max. 6 Ziffernstellen, 2 Nachkommastellen
UINT-Wert. Schreibgeschützter Zugriff.
HINWEIS: Die meisten anderen Anwendungen verwenden die ID-Nummer ID80
für diese Variable.
Page 42

VACON 42 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
ID81 EnergyMeterUnit
Einheit für den Energiezähler
USINT-Wert. Schreibgeschützter Zugriff.
1 = kWh
2 = MWh
3 = GWh
4 = TWh
5.1.20.3 Überwachen des rückstellbaren Energiezählers
ID12 EnergytripCounter
Rückstellbarer Energiezähler, verwenden Sie ID1052 zum Definieren des Formats.
UINT-Wert. Schreibgeschützter Zugriff.
Der max. Wert ist 65 535, und nach diesem Wert wird auf Null zurückgesetzt und das
Zählen beginnt von vorn.
ID1052 EnergyTripCounterUnit
Schreibzugriff. Der Einheitenwert kann über den Feldbus geändert werden .USINTWert.
1 = 0,01 kWh
2 = 0,1 kWh
3 = 1 kWh
4 = 10 kWh
5 = 100 kWh
6 = 1 MWh
7 = 10 MWh
8 = 100 MWh
9 = 1 GWh
10 = 10 GWh
ID1053 ResetMWhTripCounter
Rückstellbare Energiezählereinheit zurücksetzen, Anstiegsflanke setzt den
Zähler zurück.
BOOL-Wert. Schreiben von INT-Wert 1 zum Zurücksetzen, wenn Prozessdaten
verwendet werden.
Page 43

apfiff20 kransteuerung VACON 43
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6. KRANSTEUERUNGSANWENDUNG PARAMETERLISTEN
6.1 Basisparameter
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.1.1
Maximum frequency
(Maximalfrequenz)
P2.1.1
320,00
Hz
50,00
102
HINWEIS: Wenn fmax > als
die Synchrondrehzahl des
Motors ist, überprüfen Sie
die Eignung für das Motorund Antriebssystem.
P2.1.2
Motor nominal voltage
(Motornennspannung)
180
690
V
NX2: 230 V
NX5: 400 V
NX6: 690 V
110
Siehe Typenschild des
Motors. Auch die
verwendete Schaltung
(Dreieck/Stern) beachten.
P2.1.3
Motor nominal
frequency
(Motornennfrequenz)
8,00
320,00
Hz
50,00
111
Siehe Typenschild des
Motors
P2.1.4
Motor nominal speed
(Motor Nenndrehzahl)
24
20 000
U/min
1440
112
Der Standardwert gilt für
einen 4-poligen Motor und
einen Frequenzumrichter
mit Nenngröße.
P2.1.5
Motor nominal
current
(Motornennstrom)
0,1 x
IH
2 x IH A IH
113
Siehe Typenschild des
Motors
P2.1.6
Motor cosϕ
(Leistungsfaktor des
Motorsϕ)
0,30
1,00 0,85
120
Siehe Typenschild des
Motors
P2.1.7
Motor Nominal
Power
(Motor Nennleistung)
0,0
3200,0
kW
0,0
116
Siehe Typenschild des
Motors
P2.1.8
Magnetizing current
(Magnetisierung
Strom)
0,00
100,00 A 0,00
612
0,00 A = Umrichter
verwendet geschätzten
Wert von MotorTypenschildwerten
P2.1.9
Identification
(Identifikation)
0
11 0
631
0=Keine Aktion
1=Identifikation im
Stillstand
2=Identifikation mit Lauf
3=Identifikationslauf mit
Encoder
4=Alle identifizieren
5=Absolut-Encoder,
gesperrter Rotor
6=U/f und Magn.Strom
P2.1.10
Motor type (Motortyp)
0
1 0
650
0=Asynchronmotor
1=PMS Motor
P2.1.11
Crane ID Run
(Kran-ID Betrieb)
0
3 0
1683
0=Keine Funktion
1=Hubanwendungen
2=Horizontal
3=Bremsenzeitsteuerung
P2.1.12
Movement Type
(Bewegung Typ)
0
2 0
1685
0=Nicht ausgewählt
1=Hubanwendungen
2=Horizontal
Tabelle 6-1. Basisparameter G2.1
Page 44

VACON 44 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.2 Sollwertbehandlung
6.2.1 Grundeinstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.2.1
I/O Reference
(E/A Sollwert)
0
19 0 117
0=AI1
1=AI2
2=AI1+AI2
3=AI1-AI2
4=AI2-AI1
5=AI1xAI2
6=AI1 Joystick
7=AI2 Joystick
8=Bedienteil
9=Feldbus
10=Motorpotentiometer
11=AI1, AI2 Minimum
12=AI1, AI2 Maximum
13=Max Frequenz
14=AI1/AI2 Auswahl
15=Encoder 1
16=Encoder 2
17=Festdrehzahlen
18=Master-Sollwert
19=Master Rampen Ausgang
P2.2.2
Keypad reference
selector (Auswahl
Bedienteil-Sollwert)
0
19 8 121
Siehe Par. 2.2.1
P2.2.3
Fieldbus control
reference (Feldbus
Steuer Sollwert)
0
19 9 122
Siehe Par. 2.2.1
P2.2.4
I/O Reference 2
(E/A-Sollwert 2)
0
19 1 131
Siehe ID117 & ID422
P2.2.5
Speed Share
(Drehzahlausgleich)
-300,00
300,00
%
100,00
1241
P2.2.6
Load Share
(Lastausgleich)
0,0
500,0 % 100,0
1248
6.2.2 Konstanter Sollwert
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.2.7.1
Jogging speed
reference (Jog-
Drehzahl-Sollwert)
0,00
320,00
Hz
5,00
124
P2.2.7.2
Preset speed 0
(Festdrehzahl 0)
0,00
320,00
Hz
0,00
1810
P2.2.7.3
Preset speed 1
(Festdrehzahl 1)
0,00
320,00
Hz
10,00
105
Mehrstufige Drehzahl 1
P2.2.7.4
Preset speed 2
(Festdrehzahl 2)
0,00
320,00
Hz
15,00
106
Mehrstufige Drehzahl 2
P2.2.7.5
Preset speed 3
(Festdrehzahl 3)
0,00
320,00
Hz
20,00
126
Mehrstufige Drehzahl 3
P2.2.7.6
Preset speed 4
(Festdrehzahl 4)
0,00
320,00
Hz
25,00
127
Mehrstufige Drehzahl 4
P2.2.7.7
Preset speed 5
(Festdrehzahl 5)
0,00
320,00
Hz
30,00
128
Mehrstufige Drehzahl 5
P2.2.7.8
Preset speed 6
(Festdrehzahl 6)
0,00
320,00
Hz
40,00
129
Mehrstufige Drehzahl 6
P2.2.7.9
Preset speed 7
(Festdrehzahl 7)
0,00
320,00
Hz
50,00
130
Mehrstufige Drehzahl 7
P2.2.7.10
Inching reference 1
(Tippen Sollwert 1)
-320,00
320,00
Hz
2,00
1239
P2.2.7.11
Inching reference 2
(Tippen Sollwert 2)
-320,00
320,00
Hz
-2,00
1240
Page 45

apfiff20 kransteuerung VACON 45
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.2.3 Drehmoment Sollwert
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.2.8.1
Torque reference
selection (Auswahl
Drehmoment-
Sollwert)
0
9 0 641
0=Nicht verwendet
1=AI1
2=AI2
3=AI3
4=AI4
5=AI1 Joystick (-10 10 V)
6=AI2 Joystick (-10 10 V)
7=Drehmoment-Sollwert
von Bedienteil, R3.5
8=FB DrehmomentSollwert
9=Master Drehmoment
P2.2.8.2
Torque reference max.
(Drehmomentsollwert
max.)
300,0
300,0 % 100
642
P2.2.8.3
Torque reference min.
(Drehmomentsollwert
min.)
300,0
300,0 % 0,0
643
P2.2.8.4
Torque reference
filtering time
(Drehmoment-
Sollwert-Filterzeit)
0
32000
ms
0
1244
P2.2.8.5
Torque Reference
Dead Zone
(Drehmomentsollwert-
Totzone)
0,0
300,0 % 0,00
1246
P2.2.8.6
Torque Select
(Drehmoment
Auswahl)
0
5 2
1278
0=Drehzahlregelung
1=Maximale
Frequenzgrenze
2=Rampenausgang
3=Min
4=Max
5=Fenster
P2.2.8.7
Window negative
(Fenster negativ)
0,00
50,00
Hz
2,00
1305
P2.2.8.8
Window positive
(Fenster positiv)
0,00
50,00
Hz
2,00
1304
P2.2.8.9
Window negative off
(Fenster negativ aus)
0,00
P2.10.11
Hz
0,00
1307
P2.2.8.10
Window positive off
(Fenster positiv aus)
0,00
P2.10.12
Hz
0,00
1306
6.2.3.1 Drehmomentsollwert OL-Einstellungen
Code
Parameter
Min. Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.2.8.11.1
Open loop torque
control minimum
frequency
(Mindestfrequenz
für Open Loop-
Drehmomentsteuerung)
0,0
0
50,00
Hz
3,00
636
P2.2.8.11.2
Open loop torque
controller P gain
(Open Loop-
Drehmomentregler
P-Verstärkung)
0
32000 150
639 P2.2.8.11.3
Open loop torque
controller I gain
(Open Loop-
Drehmomentregler
I-Verstätkung)
0
32000 10
640
Page 46

VACON 46 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.2.4 Frequenzausblendungsparameter
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.2.9.1
Prohibit frequency
range 1 low limit
(Frequenzausblendu
ngsbereich 1 untere
Grenze)
-1,00
320,00
Hz
0,00
509
0=Nicht verwendet
P2.2.9.2
Prohibit frequency
range 1 high limit
(Frequenzausblendu
ngsbereich 1 obere
Grenze)
0,00
320,00
Hz
0,00
510
0=Nicht verwendet
P2.2.9.3
Ramp time factor
(Rampenzeitfaktor)
0,1
10,0 x 1,0
518
Multiplikationsfaktor
der aktuell ausgewählten
Rampenzeit zwischen
den Einstellwerten von
Frequenzausblendungen.
Tabelle 6-2. Ausblendungsfrequenzen (G2.5)
6.2.5 Motorpotentiometer
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.2.10.1
Motor potentiometer
ramp rate
(Motorpotentiometer
-Rampenrate)
0,10
2000,00
Hz/s
1,00
331
Rampenrate für
Motorpotentiometer
P2.2.10.2
Motor potentiometer
frequency reference
memory reset
(Speicher-Reset
Motorpotentiometer-
Frequenzsollwert)
0
3 1
367
0=Kein Reset
1=Reset in Stopp-Status
2=Reset bei Abschalten
der Netzspg.
3=StopReq;Fout
P2.2.10.3
Motor potentiometer
reference copy
(Motorpotentiometer
-Sollwert-Kopie)
0
2 0
366
0=Keine Kopie
1=Sollwertekopie
2=Kopie
Ausgangsfrequenz
Tabelle 6-3. Motorpotentiometer (G2.5)
6.2.6 Einstellen Sollwert
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.2.11.1
Adjust input
(Einstellen
Eingang)
0
5 0 493
0=Nicht verwendet
1=AI1
2=AI2
3=AI3
4=AI4
5=Feldbus
P2.2.11.2
Adjust minimum
(Anpassung des
Tiefstwerts)
0,0
100,0 % 0,0
494
Anpassung der Grenze
zur Sollwertreduzierung
P2.2.11.3
Adjust maximum
(Anpassung des
Höchstwerts)
0,0
100,0 % 0,0
495
Anpassung der Grenze
zur Sollwerterhöhung
Page 47

apfiff20 kransteuerung VACON 47
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.2.7 Endgrenzen-Sollwertverarbeitung
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.2.12.1
Disable Negative
Direction (Negative
Richtung
deaktivieren)
0,1
E.10
DigIn
0,2
1814
P2.2.12.2
Disable Positive
Direction
(Positive Richtung
deaktivieren)
0,1
E.10
DigIn
0,2
1813
P2.2.12.3
Limit Negative
Reference DI
(Grenze negativer
Sollwert DI)
0,1
E.10
DigIn
0,2
1827
P2.2.12.4
Limit Positive
Reference DI
(Grenze positiver
Sollwert DI)
0,1
E.10
DigIn
0,2
1828
P2.2.12.5
Limited Negative
Reference Hz
(Begrenzter
negativer Sollwert
Hz)
-320,00
0,00
Hz
-10,00
1829
P2.2.12.6
Limited Positive
Reference Hz
(Begrenzter
positiver Sollwert
Hz)
0,00
320,00
Hz
10,00
1830
P2.2.12.7
Limit Negative
Reference DI 2
(Grenze negativer
Sollwert DI 2)
0,1
E.10
DigIn
0,2
1831
P2.2.12.8
Limit Positive
Reference DI 2
(Grenze positiver
Sollwert DI 2)
0,1
E.10
DigIn
0,2
1842
P2.2.12.9
Limited Negative
Reference Hz 2
(Begrenzter
negativer Sollwert
Hz 2)
-320,00
0,00
Hz
-2,00
1845
P2.2.12.10
Limited Positive
Reference Hz 2
(Begrenzter
positiver Sollwert
Hz 2)
0,00
320,00
Hz
2,00
1848
P2.2.12.11
End Limit Ramp
Time (Endgrenze
Rampenzeit)
0,1
320,0 s 1,0
1815
P2.2.12.12
Anti-Swing at End
Limits
(Pendeldämpfung
an Endgrenzen)
0
3 0
1856
0=Pendeldämpfung aktiv
1=Aus wenn deaktiviert
2=Aus wenn deaktiviert
und 2. Grenze
3=Aus bei allen Grenzen
Page 48

VACON 48 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.3 Rampensteuerung
6.3.1 Grundeinstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.3.1
Start function
(Startfunktion)
0
1 0 505
0=Rampe
1=Fliegender Start
P2.3.2
Stop function
(Stopp Funktion)
0
1 1 506
0=Freilauf
1=Rampe
P2.3.3
Acceleration time
1 (Beschleunigung
Zeit 1)
0,2
3270,0 s 3,0
103
0 Hz bis Max. Frequenz
P2.3.4
Deceleration time 1
(Verzögerung Zeit 1)
0,2
3270,0 s 3,0
104
Max. Frequenz auf 0 Hz
P2.3.5
Ramp 1 shape
(Rampe 1 Verschliff)
0
100 % 2 500
0=Linear
>0=S-Verschliff Rampenzeit
P2.3.6
Acceleration time
2 (Beschleunigung
Zeit 2)
0.2
3270,0 s 10,0
502
P2.3.7
Deceleration time 2
(Verzögerung Zeit 2)
0,2
3270,0 s 10,0
503
P2.3.8
Ramp 2 shape
(Rampe 2 Verschliff)
0
100 % 4 501
0=Linear
>0=S-Verschliff
Rampenzeit
P2.3.9
Inching Ramp
(Tippen Rampe)
0,01
320,00 s 1,00
1257
P2.3.10
Reducing of
acc./dec. times
(Reduzierung der
Beschl./Verzög.
zeiten)
0
5 0 401
Skaliert die aktive Rampe
von 100 % auf 10 %.
0=Nicht verwendet
1=AI1
2=AI2
3=AI3
4=AI4
5=Feldbus
P2.3.11
Disabled direction
ramp (Deaktivierte
Richtung Rampe)
0
3270,0 s 1,0
1815
6.3.2 Schnellstopp
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.3.12.1
Quick Stop Mode
(Schnellstopp-
Modus)
0
1 1
1276
0=Freilauf
1=Rampe
P2.3.13.2
Quick Stop Ramp
time (Schnell
Stopp Rampenzeit)
0,1
3200,0 s 10,0
1256
6.3.3 Optionen Rampensteuerung
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.3.13.1
Ramp: Skip S2
(Rampe: S2
überspringen)
0
1 1
1900
P2.3.13.2
CL Ramp Follower
Encoder Frequency
(CL-Rampe
Follower Encoder-
Frequenz)
0
1 0
1902
P2.3.13.3
Ramp Input
Interpolator TC
(Rampe Eingang
Interpolator TC)
0
200
ms
1
1184
Page 49

apfiff20 kransteuerung VACON 49
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.3.4 Seilstoßfunktionen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P 2.3.14.1
Slack Rope Mode
(Schlaffseil-
Modus)
1
0
0 / Nicht
verwendet
1930
P 2.3.14.2
ShockLoadMode
1
0
0 / Nicht
verwendet
1933
P 2.3.14.3
LoadOnHookTorq)
300 0 %
20
1931
P 2.3.14.4
LoadOfHookTorq
300 0 %
10
1932
P 2.3.14.5
ShockLoadTorq
300
-300 % 30
1934
P 2.3.14.6
ShockLoadTime
10000
0
ms
500
1935
P 2.3.14.7
ShockTorqRiseTim
10000
0
ms
50
1936
P 2.3.14.8
ShockLoadRef
50 0 Hz
1
1937
Page 50

VACON 50 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.4 Eingangssignale
6.4.1 Grundeinstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.4.1.1
Start/Stop logic
selection
(Auswahl Start/
Stopp-Logik)
0
8 5 300
Startsignal
1
(Werksein
stellung:
DIN1)
Startsignal
2
(Werksein
stellung:
DIN2)
0
1
2
3
4
5
6
7
8
Start
vorwärts
Start/Stopp
Start/Stopp
Startpuls
Start
Start
vorwärts*
Start*/Stopp
Start*/Stopp
Startpuls
Start
rückwärts
Rückwärts
Startfreigabe
Stopppuls
MotPot
SCHNELLER
Start
rückwärts*
Rückwärts
Start
Freigabe
Stopppuls
Tabelle 6-4. Eingangssignale: Grundeinstellungen, G2.2.1
* = Für den Start Anstiegsflanke
erforderlich
Page 51

apfiff20 kransteuerung VACON 51
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.4.2 Digital-Eingänge
Code
Parameter
Min.
Werkseins
tellung
Kunde
ID
Hinweis
P2.4.2.1
Start Signal 1
0,1
0,1 403
Vorwärts, siehe ID300
P2.4.2.2
Start Signal 2
0,1
0,1 404
Rückwärts. Siehe ID300
P2.4.2.3
Run enable (Startfreigabe)
0,1
0,2 407
Motorstart ist aktiviert (geschlossener Kontakt)
P2.4.2.4
Reverse (Rückwärts)
0,1
0,1 412
Richtung Vorwärts (offener Kontakt)
Richtung Rückwärts (geschlossener Kontakt)
P2.4.2.5
Preset speed 1 (Festdrehzahl 1)
0,1
0,1 419
Siehe Festdrehzahlen in
Basisparametergruppe G2.1
P2.4.2.6
Preset speed 2 (Festdrehzahl 2)
0,1
0,1 420 P2.4.2.7
Preset speed 3 (Festdrehzahl 3)
0,1
0,1 421
P2.4.2.8
Motor potentiometer reference DOWN
(Motorpotentiometersollwert verringern)
0,1
0,1 417
Motorpotentiometersollwert nimmt
ab (geschlossener Kontakt)
P2.4.2.9
Motor potentiometer reference UP
(Motorpotentiometersollwert erhöhen)
0,1
0,1 418
Motorpotentiometersollwert nimmt
zu (geschlossener Kontakt)
P2.4.2.10
Fault reset (Fehler Quittierung)
0,1
0,1 414
Alle Fehler werden quittiert (geschlossener
Kontakt)
P2.4.2.11
External fault (close)
(Externer Fehler (Schließen))
0,1
0,1 405
Ext. Fehler angezeigt (geschl. Kont.)
P2.4.2.12
External fault (open)
(Externer Fehler (Öffnen))
0,1
0,2 406
Ext. Fehler angezeigt (off. Kont.)
P2.4.2.13
Acc/Dec time selection (Beschl./Verzög.
Zeitwahl)
0,1
0,1 408
Beschl./Verzög. Zeit 1 (offener Kontakt)
Beschl./Verzög. Zeit 2 (geschlossener Kontakt)
P2.4.2.14
Acc/Dec prohibit
(Beschl./Verzög. gesperrt)
0,1
0,1 415
Beschl./Verzög. gesperrt (geschlossener
Kontakt)
P2.4.2.15
DC braking (DC-Bremsung)
0,1
0,1 416
DC-Bremse aktiv (geschlossener Kontakt)
P2.4.2.16
Jogging speed (Jog-Geschwindigkeit)
0,1
0,1 413
Jog-Geschwindigkeit für den Frequenzsollwert
ausgewählt (geschlossener Kontakt)
P2.4.2.17
IO reference 1 / 2 selection (Auswahl
E/A-Sollwert 1 / 2)
0,1
0,1 422
Auswahl E/A-Sollwert:14 ID117
P2.4.2.18
Control from I/O terminal (Steuerung
über E/A-Klemme)
0,1
0,1 409
Steuerplatz auf E/A-Klemmleiste
erzwingen (geschlossener Kontakt)
P2.4.2.19
Control from keypad
(Steuerung von dem Bedienteil)
0,1
0,1 410
Steuerplatz mit Bedienteil erzwingen
(geschlossener Kontakt)
P2.4.2.20
Control from fieldbus
(Steuerung vom Feldbus)
0,1
0,1 411
Steuerplatz auf Feldbus erzwingen
(geschlossener Kontakt)
P2.4.2.21
Parameter set 1/set 2 selection
(Auswahl Parametersatz 1/2)
0,1
0,1 496
Geschlossener Kontakt = Satz 2 wird verwendet
Offener Kontakt = Satz 1 wird verwendet
P2.4.2.22
Motor control mode 1/2
(Motor-Regler-Modus 1/2)
0,1
0,1 164
Geschlossener Kontakt = Modus 2 wird
verwendet
Offener Kontakt = Modus 1 wird verwendet
Siehe Par 2.6.1, 2.6.12
P2.4.2.23
External Brake Acknowledge
(Quittierung der externen Bremse)
0,1
0,2 1210
Betriebssignal von der mechanischen
Bremse
P2.4.2.24
Cooling Monitor
(Kühlungsüberwachung)
0,1
0,2 750
Verwendet bei wassergekühlter Einheit.
P2.4.2.25
Enable Inching (Tippen aktivieren)
0,1
0,1 532
Aktiviert die Tippen-Funktion
P2.4.2.26
Inching 1 (Tippen 1)
0,1
0,1 531
Tipp-Sollwert 1 (Werkseinst. vorwärts 2 Hz.
Siehe P2.4.16). Startet den Umrichter.
P2.4.2.27
Inching 2 (Tippen 2)
0,1
0,1 532
Tipp-Sollwert 2 (Werkseinst. rückwärts -2
Hz. Siehe P2.4.17). Startet den Umrichter.
P2.4.2.28
2nd frequency Limit
(zweite Frequenzgrenze)
0,1
0,1 1511
Aktiviert zweite Freq.- Grenzwert
P2.2.7.31 zweite Frequenzgrenze
P2.4.2.29
Reset Position (Position zurücksetzen)
0,1
0,1 1090 P2.4.2.30
MF Mode 2 (MF-Modus 2)
0,1
0,1 1092 P2.4.2.31
Quick Stop (Schnellstopp)
0,1
0,2 1213
P2.4.2.32
Motoring Torque Limit 1
(Motorseitige Drehmoment Grenze 1)
0,1
0,1 1624
P2.4.2.33
Generator Torque Limit 1 (Generator
Drehmoment Grenze 1)
0,1
0,1 1626
P2.4.2.34
PID Activation (PID Aktivierung)
0,1
0,1 1804
P2.4.2.35
Store Parameter Set
(Parametersatz speichern)
0,1
0,1 1753
Speichert den aktiven Parametersatz im
ausgewählten Parametersatz
P2.4.2.36
Start Place A/B (Start Platz A/B)
0,1
0,1 425
Ändert Startsignale zwischen den Stellen A
und B.
P2.4.2.37
Start Signal 1B
0,1
0,1 403
Vorwärts, siehe ID300
P2.4.2.38
Start Signal 2B
0,1
0,1 404
Rückwärts. Siehe ID300
P2.4.2.39
Disable Negative Direction (Negative
Richtung deaktivieren)
0,1
0,2 1814
P2.4.2.40
Disable Positive Direction (Positive
Richtung deaktivieren)
0,1
0,2 1813
Tabelle 6-5. Digitaleingangssignale, G2.2.4
Page 52

VACON 52 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.4.3 Analogeingang 1
Code
Parameter
Min.
Max.
Einheit
Werkseinste
llung
Kunde
ID
Hinweis
P2.4.3.1
AI1 signal selection (AI1
Signalauswahl)
0,1
E.10 A.1
377
Steckplatz . Karteneingang Nr.
P2.4.3.2
AI1 filter time
(AI1 Filterzeit)
0,000
32,000
s
0,000
324
0=Keine Filterung
P2.4.3.3
AI1 signal range
(AI1 Signalauswahl)
0
3 0
320
0 %*
1 %* 4 mA Fehler
2=-
3=Benutzerdefiniert*
P2.4.3.4
AI1 custom minimum
setting (AI1,
Benutzereinstellung
(min.))
-160,00
160,00
%
0,00
321
Benutzerbereich:
Minimaler Eingang
P2.4.3.5
AI1 custom maximum
setting (AI1,
Benutzereinstellung
(max.))
-160,00
160,00
%
100,00
322
Benutzerbereich:
Maximal Eingang
P2.4.3.6
AI1 reference scaling,
minimum value (AI1
Sollwertskalierung,
Mindestwert)
0,00
320,00
Hz
0,00
303
Wählt die Frequenz aus,
die dem minimalen
Sollwertsignal entspricht
P2.4.3.7
AI1 reference scaling,
maximum value (AI1
Sollwertskalierung,
Höchstwert)
0,00
320,00
Hz
0,00
304
Wählt die Frequenz aus,
die dem maximalen
Sollwertsignal entspricht
P2.4.3.8
AI1 joystick Dead Zone
(AI1 Joystick-Totzone)
0,00
20,00 % 2,00
384
Totzone für Joystick-Eingang
P2.4.3.9
AI1 sleep limit
(AI1 Sleep-Grenze)
0,00
100,00
%
0,00
385
Der Umrichter geht in den
Stopp, wenn das
Eingangssignal diesen
Grenzwert für den festgelegten
Zeitraum unterschreitet.
P2.4.3.10
AI1 sleep delay
(AI1 Sleep-Verzög.)
0,00
320,00
s
0,00
386
P2.4.3.11
(AI1 Joystick-Offset)
-100,00
100,00
%
0,00
165
Enter-Taste für 1 s drücken,
um den Offset einzustellen.
Tabelle 6-6. Parameter für Analogeingang 1, G2.2.2
6.4.4 Analog Eingang 2
Code
Parameter
Min.
Max.
Einheit
Werkseinste
llung
Kunde
ID
Hinweis
P2.4.4.1
AI2 signal selection
(AI2 Signalauswahl)
0,1
E.10 A.2
388
Steckplatz . Karteneingang
Nr.
P2.4.4.2
AI2 filter time
(AI2 Filterzeit)
0,000
32,000
s
0,000
329
0=Keine Filterung
P2.4.4.3
AI2 signal range
(AI2 Signalauswahl)
0
3 1
325
0 %*
1 %* 4 mA Fehler
2=-
3=Benutzerbereich*
P2.4.4.4
AI2 custom minimum
setting
(AI2 Benutzereinstellung
(min.))
-160,00
160,00
%
0,00
326
Benutzerbereich:
Minimaler Eingang
P2.4.4.5
AI2 custom maximum
setting (AI2
Benutzereinstellung
(max.))
-160,00
160,00
%
100,00
327
Benutzerbereich:
Maximal Eingang
P2.4.4.6
AI2 reference scaling,
minimum value
(AI2 Sollwertskalierung,
Mindestwert)
0,00
320,00
Hz
0,00
393
Wählt die Frequenz aus,
die dem minimalen
Sollwertsignal entspricht
P2.4.4.7
AI2 reference scaling,
maximum value (AI2
Sollwertskalierung,
maximaler Wert)
0,00
320,00
Hz
0,00
394
Wählt die Frequenz aus,
die dem maximalen
Sollwertsignal entspricht
P2.4.4.8
AI2 joystick Dead Zone
(AI2 Joystick-Totzone)
0,00
20,00 % 2,00
395
Totzone für Joystick-Eingang
P2.4.4.9
AI2 sleep limit
(AI2 Sleep-Grenze)
0,00
100,00
%
0,00
396
Der Umrichter geht in den
Stopp, wenn das
Eingangssignal diesen
Grenzwert für den festgelegten
Zeitraum unterschreitet.
P2.4.4.10
AI2 sleep delay
(AI2 Sleep-Verzög.)
0,00
320,00
s
0,00
397
P2.4.4.11
AI2 joystick offset
(AI2 Joystick-Offset)
-100,00
100,00
%
0,00
166
Enter-Taste für 1 s drücken,
um den Offset einzustellen.
Tabelle 6-7. Analogeingang 2, Parameter G2.2.3
*Die Steckbrücken von Block X2 müssen entsprechend
platziert werden. Weitere Informationen zu diesem Thema
finden Sie in Kapitel 6.2.2.2 der Betriebsanleitung für den NX
Page 53

apfiff20 kransteuerung VACON 53
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.4.5 Analog Eingang 3
Code
Parameter
Min.
Max.
Einheit
Werkseinste
llung
Kunde
ID
Hinweis
P2.4.5.1
AI3 signal selection (AI3
Signalauswahl)
0.1
E.10 0.1
141
Steckplatz . Karteneingang
Nr.
Wenn 0.1 ID27 über den
Feldbus geregelt werden
kann
P2.4.5.2
AI3 filter time
(AI3 Filterzeit)
0,000
32,000
s
0,000
142
0=Keine Filterung
P2.4.5.3
AI3 custom minimum
setting (AI3
Benutzereinstellung
(min.))
-160,00
160,00
%
0,00
144
Einstellwert immer aktiv.
Siehe ID326
P2.4.5.4
AI3 custom maximum
setting (AI3
Benutzereinstellung
(max.)
-160,00
160,00
%
100,00
145
Einstellwert immer aktiv.
Siehe ID327
P2.4.5.5
AI3 signal inversion (AI3
Signalinversion)
0
1 0 151
0=Nicht invertiert
1=invertiert
P2.4.5.6
AI3 reference scaling,
minimum value
(AI3 Sollwertskalierung,
min. Wert)
-32000
32000 0
1037
Wählt den Wert aus, der
dem min. Sollwertsignal
entspricht
P2.4.5.7
AI3 reference scaling,
maximum value (AI3
Sollwertskalierung,
max. Wert)
-32000
32000 0
1038
Wählt den Wert aus, der
dem max. Sollwertsignal
entspricht
P2.4.5.8
AI3 Controlled ID (Al3-
gesteuerte ID)
0
10000 0
1509
Wählen Sie den Parameter,
den Sie mittels ID-Nummer
regeln möchten.
Tabelle 6-8. Parameter für Analogeingang 3, G2.2.4
6.4.6 Analog Eingang 4
Code
Parameter
Min.
Max.
Einheit
Werkseinste
llung
Kunde
ID
Hinweis
P2.4.6.1
AI4 signal selection
(AI4 Signalauswahl)
0,1
E.10 0,1
152
Steckplatz . Karteneingang
Nr.
Wenn 0.1 ID28 über den
Feldbus geregelt werden
kann
P2.4.6.2
AI4 filter time
(AI4 Filterzeit)
0,000
32,000
s
0,000
153
0=Keine Filterung
P2.4.6.3
AI4 custom minimum
setting (AI4
Benutzereinstellung
(min.))
-160,00
160,00
%
0,00
155
Einstellwert immer aktiv.
Siehe ID326
P2.4.6.4
AI4 custom maximum
setting (AI4
Benutzereinstellung
(max.))
-160,00
160,00
%
100,00
156
Einstellwert immer aktiv.
Siehe ID327
P2.4.6.5
AI4 signal inversion (AI4
Signalinversion)
0
1 0 162
0=Nicht invertiert
1=invertiert
P2.4.6.6
AI3 reference scaling,
minimum value (AI3
Sollwertskalierung, min.
Wert)
-32000
-32000 0 1039
Wählt den Wert aus, der
dem min. Sollwertsignal
entspricht
P2.4.6.7
AI3 reference scaling,
maximum value (AI3
Sollwertskalierung, max.
Wert)
-32000
32000 0 1040
Wählt den Wert aus, der
dem max. Sollwertsignal
entspricht
P2.4.6.8
AI4 Controlled ID (Al4-
gesteuerte ID)
0
10000 0 1510
Wählen Sie den Parameter,
den Sie mittels ID-Nummer
regeln möchten.
Tabelle 6-9. Parameter für Analogeingang 4, G2.2.5
6.4.7 Optionen
Code
Parameter
Min.
Max.
Einheit
Werkseinste
llung
Kunde
ID
Hinweis
P2.4.7.1
Input signal
inversion Control
(Eingangssignalinver
sionsregelung)
0
65535 2 1091
**Die Steckbrücken von Block X2 müssen entsprechend
platziert werden. Weitere Informationen zu diesem Thema
finden Sie in Kapitel 6.2.2.2 der Betriebsanleitung für den NX
Page 54

VACON 54 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5 Ausgangssignale
6.5.1 Digital-Ausgang-Signale
Code
Parameter
Min.
Werkseinst
ellung
Kunde
ID
Hinweis
P2.5.1.1
Ready (Bereit)
0,1
0,1
432
Betriebsbereit
P2.5.1.2
Run (Betrieb (Run))
0,1
0,1
433
In Betrieb
P2.5.1.3
Fault (Fehler)
0,1
0,1
434
Antrieb im Fehlerstatus
P2.5.1.4
Inverted fault
(Invertierter Fehler)
0,1
0,1
435
Antrieb nicht im Fehlerstatus
P2.5.1.5
Warning (Warnung)
0,1
0,1
436
Warnung aktiv
P2.5.1.6
External fault (Externer Fehler)
0,1
0,1
437
Externer Fehler aktiv
P2.5.1.7
Reference fault/warning
(Sollwertfehler/-warnung)
0,1
0,1
438
4 mA-Fehler aktiv
P2.5.1.8
Over temperature warning
(Übertemperaturwarnung)
0,1
0,1
439
Umrichter-Übertemperatur
aktiv
P2.5.1.9
Reverse (Rückwärts)
0,1
0,1
440
Ausgangsfrequenz < 0 Hz
P2.5.1.10
Unrequested direction
(Nicht angeforderte Richtung)
0,1
0,1
441
Sollwert <> Ausgangsfrequenz
P2.5.1.11
At speed (Auf Drehzahl)
0,1
0,1
442
Sollwert = Ausgangsfrequenz
P2.5.1.12
Jogging speed
(Jog-Geschwindigkeit)
0,1
0,1
443
Jogging- oder
Festdrehzahlbefehl aktiv
P2.5.1.13
External control place
(Externer Steuerplatz)
0,1
0,1
444
E/A-Steuerung aktiv
P2.5.1.14
External brake control, Direct
(Externe Bremssteuerung, Direkt)
0,1
0,1
446
Siehe Beschreibungen im
Kapitel Bremssteuerung
P2.5.1.15
External brake control, Invert
(Externe Bremssteuerung,
Invertiert)
0,1
0,1
445
P2.5.1.16
Output frequency limit 1 supervision
(Ausg.Freq.Grenze 1, Überwachung)
0,1
0,1
447
Siehe ID315
P2.5.1.17
Output frequency limit 2
supervision (Ausg.freq.grenze 2,
Überwachung)
0,1
0,1
448
Siehe ID346
P2.5.1.18
Reference limit supervision
(Sollwert-Grenze-Überwachung)
0,1
0,1
449
Siehe ID350
P2.5.1.19
Temperature limit supervision
(Temperaturgrenzwert-
Überwachung)
0,1
0,1
450
FrequenzumrichterTemperatur-Überwachung
Siehe ID354
P2.5.1.20
Torque limit supervision
(Drehmoment-Grenze-
Überwachung)
0,1
0,1
451
Siehe ID348
P2.5.1.21
Motor thermal protection
(Motortemperaturschutz)
0,1
0,1
452
Thermistor-Fehler oder
Warnung
P2.5.1.22
Analogue input supervision limit
(Analogeingang
Überwachungsgrenze)
0,1
0,1
463
Siehe ID356
P2.5.1.23
Motor regulator activation
(Motorregler-Aktivierung)
0,1
0,1
454
Einer der Grenzregler ist aktiv
P2.5.1.24
Fieldbus digital input 1
(Feldbus-Digitaleingang 1)
0,1
0,1
455
FB CW B11
P2.5.1.25
FB Dig 1 Parameter
ID0
ID0
891
Wählen Sie den zu regelnden
Parameter
P2.5.1.26
Fieldbus digital input 2
(Feldbus-Digitaleingang 2)
0,1
0,1
456
FB CW B12
P2.5.1.27
FB Dig 2 Parameter
ID0
ID0
892
Wählen Sie den zu regelnden
Parameter
P2.5.1.28
Fieldbus digital input 3 (Feldbus-
Digitaleingang 3)
0,1
0,1
457
FB CW B13
P2.5.1.29
FB Dig 3 Parameter
ID0
ID0
893
Wählen Sie den zu regelnden
Parameter
P2.5.1.30
Fieldbus digital input 4 (Feldbus-
Digitaleingang 4)
0,1
0,1
169
FB CW B14
P2.5.1.31
FB Dig 4 Parameter
ID0
ID0
894
Wählen Sie den zu regelnden
Parameter
P2.5.1.32
Feldbus-Digitaleingang 5 (Fieldbus
digital input 5)
0,1
0,1
170
FB CW B15
P2.5.1.33
FB Dig 5 Parameter
ID0
ID0
895
Wählen Sie den zu regelnden
Parameter
P2.5.1.34
Safe Disable Active (Sicher
deaktivieren aktiv)
0,1
0,1
756
P2.5.1.35
Brake Slipping (Bremsschlupf)
0,1
0,1
1786
Page 55

apfiff20 kransteuerung VACON 55
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5.2 Analogausgang 1
Code
Parameter
Min.
Max.
Einheit
Werkseinstel
lung
Kunde
ID
Hinweis
P2.5.2.1
Analogue output 1
signal selection
(Analogausgang 1
Signalauswahl)
0,1
E.10 A.1
464
TTF-Programmierung
Siehe Kapitel 3.1 und 3.2
P2.5.2.2
Analogue output 1
function (Analogausgang
1, Funktion)
0
20 0
307
0=Nicht verwendet
(4 mA/2 V)
1=Ausgangsfreq. (0 fmax)
2=Frequenzsollwert (0 fmax)
3=Motordrehzahl
(0 Motornenndrehzahl)
4=Motorstrom (0 InMotor)
5=Motordrehmoment
(0 TnMotor)
6=Motorleistung (0 PnMotor)
7=Motorspannung (0 UnMotor)
8=DC-Zwischenkreiss-pannung
(0 1000 V)
9=AI1
10=AI2
11=Ausgangsfreq. (fmin - fmax)
12=-
2xDrehmoment
13=- 2xLeistung
14=PT100-Temperatur
15=FB Analogausgang
16=- 2xDrehzahl
17=Encoderdrehzahl
(0 Motornenndrehzahl)
18=Endgültiger Freq.-Sollwert
19=Wertsteuerungsausgang
20=Ausgangsleistung des Antriebs
P2.5.2.3
Analogue output 1 filter
time (Analogausgang 1,
Filterzeit)
0,00
10,00 s 1,00
308
0=Keine Filterung
P2.5.2.4
Analogue output 1
inversion (Analogausgang
1, Inversion)
0 1 0
309
0=Nicht invertiert
1=invertiert
P2.5.2.5
Analogue output 1
minimum
(Analogausgang 1,
Mindestwert)
0 1 0
310
0=0 mA (0 %)
1=4 mA (20 %)
P2.5.2.6
Analogue output 1 scale
(Analogausgang 1,
Skalierung)
10
1000 % 100
311
P2.5.2.7
Analogue output 1 offset
(Analogausgang 1 Offset)
-100,00
100,00
%
0,00
375
Tabelle 6-10. Parameter für Analogausgang 1, G2.3.5
6.5.3 Analogausgang 2
Code
Parameter
Min.
Max.
Einheit
Werkseinstel
lung
Kunde
ID
Hinweis
P2.5.3.1
Analogue output 2
signal selection
(Analogausgang 2
Signalauswahl)
0,1
E.10 0,1
471
TTF-Programmierung
Siehe Kapitel 3.1 und 3.2
P2.5.3.2
Analogue output 2
function (Analog
Ausgang 2, Funktion)
0
20 4
472
Siehe P2.5.2.2
P2.5.3.3
Analogue output 2 filter
time (Analogausgang 2,
Filterzeit)
0,00
10,00 s 1,00
473
0=Keine Filterung
P2.5.3.4
Analogue output 2
inversion (Analogue
output 2 inversion)
0 1 0
474
0=Nicht invertiert
1=invertiert
P2.5.3.5
Analogue output 2
minimum (Analog
Ausgang 2, min.)
0 1 0
475
0=0 mA (0 %)
1=4 mA (20 %)
P2.5.3.6
Analogue output 2 scale
(Analogausgang 2,
Skalierung)
10
1000 % 100
476
P2.5.3.7
Analogue output 2 offset
(Analogausgang 2 Offset)
-100,00
100,00
%
0,00
477
Tabelle 6-11. Parameter für Analogausgang 2, G2.3.6
Page 56

VACON 56 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5.4 Analogausgang 3
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.5.4.1
Analogue output 3
signal selection
(Analogausgang 3
Signalauswahl)
0,1
E.10 0,1
478
TTF-Programmierung
Siehe Kapitel 3.1 und 3.2
P2.5.4.2
Analogue output 3
function
(Analogausgang 3,
Funktion)
0
20 5
479
Siehe P2.5.2.2
P2.5.4.3
Analogue output 3
filter time
(Analogausgang 3,
Filterzeit)
0,00
10,00
s
1,00
480
0=Keine Filterung
P2.5.4.4
Analogue output 3
inversion (Analog
Ausgang 3, Inversion)
0
1 0
481
0=Nicht invertiert
1=invertiert
P2.5.4.5
Analogue output 3
minimum (Analog
Ausgang 3, min.)
0
1 0
482
0=0 mA (0 %)
1=4 mA (20 %)
P2.5.4.6
Analogue output 3
scale (Analogausgang
3, Skalierung)
10
1000 % 100
483
P2.5.4.7
Analogue output 3
offset (Analog
Ausgang 3 Offset)
-100,00
100,00
%
0,00
484
Tabelle 6-12. Parameter für Analogausgang 3, G2.3.7
6.5.5 Analogausgang 4
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.5.5.1
Analogue output 4
signal selection
(Analogausgang 4,
Signalauswahl)
0,1
E.10 0,1
1527
TTF-Programmierung
Siehe Kapitel 3.1 und 3.2
P2.5.5.2
Analogue output 4
function
(Analogausgang 4,
Funktion)
0
20 5
1520
Siehe P2.5.2.2
P2.5.5.3
Analogue output 4
filter time
(Analogausgang 4,
Filterzeit)
0,00
10,00
s
1,00
1521
0=Keine Filterung
P2.5.5.4
Analogue output 4
inversion (Analog
Ausgang 4, Inversion)
0
1 0
1522
0=Nicht invertiert
1=invertiert
P2.5.5.5
Analogue output 4
minimum
(Analog Ausgang 4,
Mindestwert)
0
1 0
1523
0=0 mA (0 %)
1=4 mA (20 %)
P2.5.5.6
Analogue output 4
scale
(Analogausgang 4,
Skalierung)
10
1000 % 100
1525
P2.5.5.7
Analogue output 4
offset (Analog
Ausgang 4, Offset)
-100,00
100,00
%
0,00
1524
Tabelle 6-13. Parameter für Analogausgang 4, G2.3.8
Page 57

apfiff20 kransteuerung VACON 57
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5.6 Verzögerungsdigitalausgang 1
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.5.6.1
Digital output 1
signal selection
(Digitalausgang 1
Signalauswahl)
0,1
E.10 0,1
486
Möglichkeit des
Invertierens mittels ID1091
INV-Befehle
P2.5.6.2
Digital output 1
function
(Digitalausgang 1
Funktion)
0
28 1
312
0=Nicht verwendet
1=Bereit
2=Betrieb
3=Fehler
4=Fehler invertiert
5=Warnung FU überhitzt
6=Ext. Fehler oder Warnung
7=Sollwertfehler oder
Warnung
8=Warnung
9=Rückwärts
10=Ausgewählte Jog-
Geschwindigkeit
11=Auf Drehzahl
12=Motorregler aktiv
13=Überwach. Freq.grenze 1
14=Überwach. Freq.grenze 2
15=Überwachung
Drehmomentgrenze
16=Überwachung der
Sollwertgrenze
17=Externe Bremssteuerung
18=E/A-Steuerplatz aktiv
19=Überwachung FU-
Temperaturgrenze
20=Sollwert invertiert
21=Ext. Bremssteuerung
invertiert
22=Thermistorfehler oder -
warnung
23=Ein/Aus-Steuerung
24=Feldbus Eingangsdaten 1
25=Feldbus Eingangsdaten 2
26=Feldbus Eingangsdaten 3
27=Warnung Einst. Quitt.
28=ID.Bit Auswahl
P2.5.6.3
Digital output 1 on
delay
(Digitalausgang 1,
Einschaltverzö-
gerung)
0,00
320,00
s
0,00
487
0,00 = Ein-Verzögerung
nicht verwendet
P2.5.6.4
Digital output 1 off
delay (Digitalausgang
1 Ausschaltverzö-
gerung)
0,00
320,00
s
0,00
488
0,00 = Aus-Verzögerung
nicht verwendet
P2.5.6.5
Invert delayed DO1
(Invertiert
Verzögerung DO1)
0
1 0
1587
0=Nicht invertiert
1=invertiert
P2.5.6.6
ID.Bit Free DO
(ID-Bit Frei DO)
0,00
2000,15
0,00
1217
Tabelle 6-14. Parameter für verzögerten Digital-Ausgang 1, G2.3.1
6.5.7 Verzögerter Digital-Ausgang 2
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.5.7.1
Digital output 2
signal selection
(Digitalausgang 2
Signalauswahl)
0,1
E.10 0,1
489
Möglichkeit des
Invertierens mittels
ID1091 INV-Befehle
P2.5.7.2
Digital output 2
function
(Digitalausgang 2
Funktion)
0
28 0
490
Siehe P2.5.6.2
Page 58

VACON 58 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.5.7.3
Digital output 2 on
delay (Digitalausgang
2, Einschaltverzö-
gerung)
0,00
320,00
s
0,00
491
0,00 = Ein-Verzögerung
nicht verwendet
P2.5.7.4
Digital output 2 off
delay (Digitalausgang
2 Ausschaltverzö-
gerung)
0,00
320,00
s
0,00
492
0,00 = Aus-Verzögerung
nicht verwendet
P2.5.7.5
Invert delayed DO2
(Invertiert
Verzögerung DO2)
0
1 0
1588
0=Nicht invertiert
1=invertiert
P2.5.7.6
ID.Bit Free DO
(ID-Bit Frei DO)
0,00
2000,15
0,00
1385
Tabelle 6-15. Parameter für verzögerten Digital-Ausgang 2, G2.3.2
Page 59

apfiff20 kransteuerung VACON 59
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.5.8 Überwachungsgrenzen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.5.8.1
Output frequency limit 1
supervision
(Ausgangsfrequenzgren
ze 1, Überwachung)
0
2 0 315
0=Keine Grenze
1=Überwachung der unteren
Grenze
2=Überwachung der oberen
Grenze
P2.5.8.2
Output frequency limit 1;
Supervised value
(Ausgangsfrequenz
Grenze 1;
Überwachter Wert)
0,00
320,00
Hz
0,00
316
P2.5.8.3
Output frequency limit 2
supervision
(Ausgangsfrequenz
Grenze 2,
Uberwachung)
0
2 0 346
0=Keine Grenze
1=Überwachung der unteren
Grenze
2=Überwachung der oberen
Grenze
P2.5.8.4
Output frequency limit 2;
Supervised value
(Ausgangsfrequenz
Grenze 2;
Überwachter Wert)
0,00
320,00
Hz
0,00
347
P2.5.8.5
Torque limit
supervision
(DrehMoment
Grenzenüberwachung)
0
2 0 348
0=Nicht verwendet
1=Überwachung der unteren
Grenze
2=Überwachung der oberen
Grenze
P2.5.8.6
Torque limit
supervision value
(Drehmoment
Grenzenüberwachungs
wert)
-300,0
300,0
%
100,0
349 P2.5.8.7
Reducing of torque
supervision limit
(Reduzierung der
Drehmoment-
Überwachungsgrenze)
0
5 0 402
P2.5.8.8
Reference limit
supervision (Sollwert
Grenzenüberwachung)
0
2 0 350
0=Nicht verwendet
1=Untere Grenze
2=Obere Grenze
P2.5.8.9
Reference limit
supervision value
(Sollwert
Grenzenüberwachungs-
Wert)
0,00
100,0 % 0,00
351
P2.5.8.10
FC temperature
supervision
(Frequenzumrichter-
Temperatur-
Überwachung)
0
2 0 354
0=Nicht verwendet
1=Untere Grenze
2=Obere Grenze
P2.5.8.11
FC temperature
supervised value
(Frequenzumrichter
Temperatur
Grenzwertüberwachung)
10
100
°C
40
355
P2.5.8.12
Analogue supervision
signal (Analoges
Überwachungssignal)
0
4 0 356
0=Nicht verwendet
1=AI1
2=AI2
3=AI3
4=AI4
P2.5.8.13
Analogue supervision
low limit
(Analogeingang untere
Überwachungsgrenze)
0,00
100,00
%
10,00
357
Reset Grenze
P2.5.8.14
Analogue supervision
high limit
(Analogeingang obere
Überwachungsgrenze)
0,00
100,00
%
90,00
358
Grenze einstellen
Tabelle 6-16. Einstellungen für die Überwachungsgrenze, G2.3.4
Page 60

VACON 60 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.6 Grenzwerteinstellungen
6.6.1 Handhabung Strom
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.6.1.1
Current limit
(Stromgrenze)
0
2 x IH
A
Einheit
Max.
107
Bei Erreichen der Grenze
wird die Ausgangsfrequenz
reduziert
P2.6.1.2
Scaling of current
limit (Skalierung
der Stromgrenze)
0
5 0 399
Skalierung von 0 bis ID107
0=Nicht verwendet
1=AI1
2=AI2
3=AI3
4=AI4
5=FB Grenzwert Skalierung
ID46
P2.6.1.3
Current Limit Kp
(Strom Grenze Kp)
1
32000
variiert
1451
P2.6.1.4
Current Limit Ki
(Strom Grenze Ki)
1
32000
variiert
1452
6.6.2 Drehmomenthandhabung
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.6.2.1
Torque Limit
(Drehmoment
Grenze)
0,0
300,0 % 300,0
609
Allgemein max. Grenze
P2.6.2.2
Motoring Torque
Limit (Motorseitige
Drehmomentgrenze)
0,0
300,0 % 300,0
1287
Motorseitige
Drehmomentgrenze
P2.6.2.3
Generator Torque
Limit (Generator
Drehmomentgrenze)
0,0
300,0 % 300,0
1288
Generatorseitige
Drehmomentgrenze
P2.6.2.4
Motoring Torque
Limit 1 (Motorseitige
Drehmoment
Grenze 1)
0,0
300,0 % 300,0
1625
P2.6.2.5
Generator Torque limit
1 (Generatorseitige
Drehmomentgrenze 1)
0,0
300,0 % 300,0
1627
P2.6.2.6
Scaling Motoring
Torque limit
(Skalierung der
Drehmomentgrenze
im Motorbetrieb)
0
5 0 485
Skalierung von 0 bis ID1287
0=Nicht verwendet
1=AI1
2=AI2
3=AI3
4=AI4
5=FB Grenzwert Skalierung
ID46
P2.6.2.7
Scaling Generator
Torque limit
(Skalierung der
generatorseitigen
Drehmomentgrenze)
0
5 0
1087
Skalierung von 0 bis ID1288
Als Parameter P2.6.3.9
6.6.2.1 Handhabung Drehmoment OL-Einstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.6.2.8.1
Torque limit control
P-gain (Drehmoment
Grenze Regelung
P-Verstärkung)
0,0
32000
3000
610
P2.6.2.8.2
Torque limit control
I-gain (Drehmoment
Grenze Regelung
I-Verstärkung)
0,0
32000 200
611
Page 61

apfiff20 kransteuerung VACON 61
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.6.2.2 Handhabung Drehmoment CL-Einstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.6.2.9.1
SPC Out Limit (SPC
Out Grenze)
0,0
300,0 % 300,0
1382
P2.6.2.9.2
SPC Pos Limit (SPC
Pos Grenze)
0,0
300,0 % 300,0
646
P2.6.2.9.3
SPC Neg Limit
(SPC Neg Grenze)
0,0
300,0 % 300,0
645
P2.6.2.9.4
Pull Out Torque
(Kippmoment)
0,0
600,0 % 500,0
1291
Page 62

VACON 62 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.6.2.3 Durchführen für Fangen der Last für CL
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.6.2.10.1
Generator Torque
limit increase speed
level (Generatorische
Drehmomentgrenze
erhöht den
Geschwindigkeits-
Level)
0,00
320,00
Hz
0,00
1547
Funktion deaktiviert
bei Null. Punkt, an
dem sich die Generator
Drehmomentgrenze
zu erhöhen beginnt.
P2.6.2.10.2
Generator Torque
limit increase
maximum speed
limit (Generator
Drehmomentgrenze
erhöht die maximale
Drehzahlgrenze)
0,00
320,00
Hz
100,00
1548
Punkt, an dem der
Drehmomentwert von
ID1549 zur Basis-Generator
Drehmomentgrenze addiert
wird.
P2.6.2.10.3
Generator Torque
limit increase
maximum addition
(Generator
Drehmomentgrenze
erhöht die maximale
Addition)
0,0
300,0 % 300,0
1549
6.6.3 Handhabung Frequenz
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.6.3.1
Max Frequency 2
(Max. Frequenz 2)
0,00
320,00
Hz
35,00
1512
Maximale Frequenz-Grenze,
die durch den Digitaleingang
aktiviert wird.
P2.6.3.2
Negative frequency
limit (Negative
Frequenz-Grenze)
-320,00
320,00
Hz
-320,00
1286
Alternative Grenze
für negative Richtung
P2.6.3.3
Positive frequency
limit (Positive
Frequenz-Grenze)
-320,00
320,00
Hz
320,00
1285
Alternative Grenze
für positive Richtung
P2.6.3.4
Zero Frequency
limit (Null-
Frequenz-Grenze)
0,00
320,00
Hz
1,00
1283
P2.6.3.5
Minimum
Frequency Open
Loop (Min.
Frequenz Open
Loop)
0,00
50,00
Hz
variiert
101
Berechnet während
des BremsenIdentifikationslaufs
P2.6.3.6
Minimum Frequency
Closed Loop (Min.
Frequenz Closed
Loop)
0,00
50,00
Hz
0,00
215
Berechnet während
des BremsenIdentifikationslaufs
P2.6.3.7
Acceleration Power
Limit Forward
(Beschleunigung
Leistung-Grenze
vorwärts)
0,00
600,0 % 300,0
1903
P2.6.3.8
Acceleration Power
Limit Reverse
(Beschleunigung-
Leistung-Grenze
rückwärts)
0,00
600,0 % 300,0
1904
Page 63

apfiff20 kransteuerung VACON 63
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.6.4 Handhabung DC-Zwischenkreis
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.6.4.1
Overvoltage controller
(Überspannungs-
Regler)
0
2 0 607
0=Nicht verwendet
1=Verwendet (keine Rampe)
2=Verwendet (Rampe)
P2.6.4.2
Over Voltage
Reference selector
(Überspannungs-
Sollwert-Selektor)
0
2 1
1262
0=Hochspannung
1=Normale Spannung
2=Bremschopperniveau
P2.6.4.3
Brake chopper
(Bremschopper)
0
4 0 504
0=Deaktiviert
1=Verwendet im Betrieb
2=Externer Bremschopper
3=Verwendet bei Stopp / im
Betrieb
4=Verwendet im Betrieb
(kein Test)
P2.6.4.4
Brake Chopper Level
(Bremschopper-
Niveau)
5: 605
6: 836
5: 797
6: 1099
V
1267
P2.6.4.5
Undervoltage
controller
(Unterspannungs-
Regler)
0
2 0 608
0=Nicht verwendet
1=Verwendet (keine Rampe)
2=Verwendet (Rampe auf
Null)
P2.6.4.6
Under Voltage Ref
Selector
(Überspannungs-
Sollw.-Selektor)
0
1 1
1537
0=Unterspannungs-Sollwert
1=0,8 * Geschätzte DC-
Spannung.
P2.6.4.6
Under Voltage
Reference
(Unterspannungs-
sollwert)
5: 410
6: 567
5: 540
6: 745
V
variiert
1538
6.6.4.1 DC-Zwischenkreis, Handhabung CL-Einstellungen
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.6.4.8.1
Over voltage
reference
(Überspannungs-
Sollwert)
94,00
130,00
%
118,00
1528
P2.6.4.8.2
Over voltage
motoring side torque
limit (Überspannung
motorseitige
Drehmomentgrenze)
0,0
300,0 % 10,0
1623
Maximales
Motordrehmoment, wenn
Überspannungs-Regler
aktiv ist.
P2.6.4.8.3
CL Under Voltage
Reference (CL-
Unterspannungs-
Sollwert)
60,00
80,00 % 65,00
1567
6.6.5 Grenzeinstellungen Optionen
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.6.6.1
Limit Total Current In
Closed Loop (Grenze
Gesamtstrom in
Closed Loop)
0
1 0
1901
0=Nein
1=Ja
Page 64

VACON 64 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.7 Fluss- und DC-Strom, Handhabung
6.7.1 Fluss- und DC-Strom, Handhabung OL-Einstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.7.1.1
DC braking current
(DC-Bremsstrom)
0,00
IL A 0,00
507
Berechnet während des
Bremsen-Identifikationslaufs
P2.7.1.2
DC braking time at
start (DC-Bremszeit
bei Start)
0,00
600,00 s 0,00
516
Berechnet während des
Bremsen-Identifikationslaufs
P2.7.1.3
DC braking time at
stop (DC-Bremszeit
bei Stopp)
0,00
600,00 s 0,00
508
Berechnet während des
Bremsen-Identifikationslaufs
P2.7.1.4
Frequency to start DC
braking during ramp
stop (Startfrequenz für
DC-Bremsung bei
Rampenstopp)
0,10
10,00
Hz
1,50
515
P2.7.1.5
DC-Brake Current in
Stop (DC-Bremsstrom
bei Stopp)
0,00
IL A variiert
1080
P2.7.1.6
Flux brake
(Flussbremse)
0
1 0 520
0=Aus
1=Ein
P2.7.1.7
Flux braking current
(Fluss-Bremsstrom)
0,00
IL A IH 519
6.7.2 Fluss- und DC-Strom, Handhabung CL-Einstellungen
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.7.2.1
Magnetizing current
at start
(Magnetisierungsstrom
beim Start)
0
IL A 0,00
627
Berechnet während des
Bremsen-Identifikationslaufs
P2.7.2.2
Magnetizing time at
start
(Magnetisierungs-
Zeit beim Start)
0,0
600,0 s 0,0
628
Berechnet während des
Bremsen-Identifikationslaufs
P2.7.2.3
Flux Reference
(FluxSollwert)
0,0
500,0 % 100,0
1250
P2.7.2.4
Flux Off Delay (Fluss-
Ausschaltverzögerung)
-1
32000 s 0
1402
-1=Immer an
P2.7.2.5
Stop State Flux (Stopp-
Status Fluss)
0,0
150,0 % 100,0
1401
P2.7.2.6
Reduced Flux Level
(Reduziertes
Flussniveau)
0,0
500,0 % 100,0
1613
P2.7.2.7
Reduced Flux
Frequency (Reduzierte
Flussfrequenz)
0,00
32,00
Hz
0,00
1614
Page 65

apfiff20 kransteuerung VACON 65
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.8 Motor-Regler
6.8.1 Motorregelung-Grundeinstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.8.1
MC mode (MC-Modus)
0
3 0 694
0=Open Loop
1=Closed Loop
2=Sensorlos
3=AOL-Steuerung
P2.8.3
Torque Select
(Drehmoment
Auswahl)
0
6 1
1278
0=Frequenzregelung
1=Drehzahlregelung
2=Drehmoment
3=Drehmoment;
Rampenausgang
4=Drehmoment; Min.
5=Drehmoment; Max.
6=Drehmoment; Fenster
6.8.2 Open Loop Einstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.8.3.1
U/f optimisation
(U/f-Optimierung)
0
1 0 109
0=Nicht verwendet
1=Automatischer
Drehmoment-Boost
P2.8.3.2
U/f ratio selection
(U/f-Verhältnis,
Auswahl)
0
3 0 108
0=Linear
1=Quadratisch
2=Programmierbar
3=Linear bei
Flussoptimierung
P2.8.3.3
Field weakening point
(Feldschwacher Punkt)
6,00
320,00
Hz
50,00
602
P2.8.3.4
Voltage at field
weakening point
(Spannung am
Feldschwächpunkt)
10,00 200,00
%
100,00
603
n% x Unmot
P2.8.3.5
U/f curve midpoint
frequency (U/f-Kurve,
Mittenfrequenz)
0,00
P2.8.3.3
Hz
50,00
604 P2.8.3.6
U/f curve midpoint
voltage (U/f-Kurve,
Mittenspannung)
0,00
100,00
%
100,00
605
n% x Unmot
Parameter max. Wert =
P2.6.5
P2.8.3.7
Output voltage at zero
frequency
(Ausgangsspannung
bei Nullfrequenz)
0,00
40,00
%
0,00
606
n% x Unmot
P2.8.3.8
Freq. Dir. Change
(Freq. Richt.
Änderung)
0
32000
25000
1682
P2.8.3.9
Hoisting ID UF
Strength
(Hub-ID UF-Stärke)
33
200 % 90
1905
P2.8.3.10
I/f Start
0
1 0
1809
P2.8.3.11
I/f Current (I/f-Strom)
0,0
150,0
120,0
1693
P2.8.3.12
I/f Control Limit (I/f-
Regler-Grenze)
0,0
300,0
10,0
1790
Berechnet während des
Kran-Identifikationslaufs
Page 66

VACON 66 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.8.3 Closed Loop-Regelungseinstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.8.4.1
Current control
P gain
(Stromsteuerung
P-Verstärkung)
0,00
100,00
%
40,00
617 P2.8.4.2
Current control
I Time
(Stromsteuerung
I-Zeit)
0,0
3200,0
ms
1,5
657
P2.8.4.3
Slip adjust (Schlupf
einstellen)
0
500 % 75
619
P2.8.4.4
Acceleration
compensation
(Beschleunigungs-
Kompensation)
0,00
300,00 s 0,00
626
P2.8.4.5
Speed Error Filter TC
(Geschwindigkeit
Fehler,
Filterzeitkonstante)
0
1000
ms
0
1311
P2.8.4.6
Encoder filter time
(Encoder-Filterzeit)
0
1000
ms
0 618
P2.8.4.7
Encoder Selection
(Encoder-Auswahl)
0
1 0
1595
0=Encodereingang 1
1=Encodereingang 2
P2.8.4.8
Motor Temperature
Compensation mode
(Motortemperatur-
Kompensationsmodus)
0
2 0
1426
0=Nicht verwendet
1=Intern
2=Gemessene Temperatur
P2.8.4.9
SC Torque Chain
Select
(SC-Drehmoment-
kettenauswahl)
0
65535 0
1557
Werkseinstellung 96 nach
Identifikation.
P2.8.4.10
CL MC Mode
(CL MC-Modus)
0
1 1 691
0=Flussmodell 1
1=Flussmodell 2
Page 67

apfiff20 kransteuerung VACON 67
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.8.4 PMSM-Steuereinstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.8.5.1
PMSM Shaft
Position (Stellung
der Antriebswelle
am Dauermagnet-
Synchronmotor)
0
65535 0
649
P2.8.5.2
Start Angle
Identification
mode (DC-
Winkellagen-
Identifikations-
modus)
0
10 0
1691
0=Automatisch
1=Erzwungen
2=Nach Einschaltung
3=Deaktiviert
P2.8.5.3
Start Angle
Identification DC
Current
(Winkellagenidenti-
fikation DC-Strom)
0,0
150,0 % 0,0
1756
P2.8.5.4
Polarity Pulse
pulsstrom)
-10,0
200,0 % 0,0
1566
P2.8.5.5
Start Angle ID
Time (Winkellage-
ID-Zeit)
0
32000
ms
0
1755
P2.8.5.6
I/f Current
(I/f-Strom)
0,0
150,0
%
50,0
1693
P2.8.5.7
I/f Control Limit
(I/f-Regler-Grenze)
0,0
300,0
%
10,0
1790
P2.8.5.8
Flux Current Kp
(Flux Strom Kp)
0
32000
5000
651
P2.8.5.9
Flux Current Ti
(Flux Strom Ti)
0
1000 25
652
P2.8.5.10
External Id
Reference
(Externe ID
Sollwert)
-150,0
150,0 % 0,0
1730
P2.8.5.11
Enable Rs
Identification
(Rs-Identifikation
aktivieren)
0
1 1
654
0=Nein
1=Ja
P2.8.5.12
Lsd Voltage Drop
(Lsd-
Spannungsabfall)
-32000
32000 0
1757
P2.8.5.13
Lsq Voltage Drop
(Lsq-
Spannungsabfall)
-32000
32000 0
1758
P2.8.5.14
EncIDCurrent
0,0
150,0
%
90,0
1734
P2.8.5.15
Polarity ID Mode
(Polarität ID-
Modus)
0
1
1737
P2.8.5.16
Polarity Pulse
Length (Polaritäts-
pulslänge)
0
1000
ms
200
1742
P2.8.5.17
Polarity Detection
Angle
(Polaritätserken-
nungswinkel)
0,0
360,0
Deg
1,5
1748
P2.8.5.18
Angle Identification
Mode (Winkel-
Identifikations-
modus)
0
2
1749
P2.8.5.19
Current Control
Kp d (Strom-
Regler Kp d)
0
32000
%
1761
Page 68

VACON 68 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.8.5 Stabilisatoren
Code
Parameter
Min.
Max.
Einheit
Werkseinstel
lung
Kunde
ID
Hinweis
P2.8.6.1
Torque Stabilator Gain
(Drehmoment
Stabilisator
Verstärkung)
0
1000 100
1412
P2.8.6.2
Torque Stabilator
Damping
(Momentstabilisator-
Dämpfung)
0
1000 800
1413
Mit PMSM 980 verwenden
P2.8.6.3
Torque Stabilator Gain
in FWP (Drehmoment
Stabilisator Verstärkung
in FWP)
0
1000 50
1414
P2.8.6.4
Torque Stabilator Limit
(Drehmoment
Stabilisator Grenzwert)
0
1500 150
1720
P2.8.6.5
Flux Circle Stabilator
Gain (Flusskreis
Stabilisator-
Verstärkung)
0
32767 10000
1550
P2.8.6.6
Flux Circle Stabilator TC
(Flusskreis Stabilisator
TC)
0
32700 900
1551
P2.8.6.7
Flux Stabilator Gain
(Fluss Stabilisator
Verstärkung)
0
32000 500
1797 P2.8.6.8
Flux Stab Coeff
(Flussstab-Koeff)
-30000
30000 1796
P2.8.6.9
Voltage Stabilator Gain
(Spannung Stabilisator
Verstärkung)
0
100,0 % 10,0
1738
P2.8.6.10
Voltage Stabilator TC
(Spannung
Stabilisator TC)
0
1000 900
1552
P2.8.6.11
Voltage Stabilator Limit
(Spannungsstabilisator-
Grenzwert)
0
320,00
Hz
1,50
1553
6.8.6 Parameter Feineinstellung
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.8.7.1
Fly Start Options
(Optionen für
Fliegenden Start)
0
65535 0
1610 P2.8.7.2
MC Options (MC-
Optionen)
0
65535 0
1740
P2.8.7.3
Resonance Damping
Select
(Resonanzdämpfung
Auswahl)
0
200 0,00
1760
P2.8.7.4
Damping Frequency
(Dämpfungsfrequenz)
0
320,00
Hz
0
1763
P2.8.7.5
Damping Gain
0
32000 0
1764
P2.8.7.6
Damping Phase
(Dämpfung-Phase)
0
360 0,00
1765
P2.8.7.7
Damping Activation
Frequency (Dämpfung-
Aktivierungsfrequenz)
0
320,00 % 0
1770
P2.8.7.8
Damping Filter Time
Constant (Dämpfung-
Filterzeitkonstante)
0
32700 105
1771
P2.8.7.9
Over Modulation Limit
(Übermodulation
Grenze)
50
120 % 105
1515
Wenn Sie einen Sinusfilter
verwenden, stellen Sie diesen
Wert auf 101 % ein
P2.8.7.10
Modulator Index Limit
(Modulatorindex-Grenze)
0
200 % 100
655
P2.8.7.11
DC Voltage Filter
(DC Spannung Filter)
0,0
500,0 0,0
1591
Page 69

apfiff20 kransteuerung VACON 69
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.8.7 Identifikations-Parameter
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.8.8.1
Flux 10 %
(Fluss 10 %)
0
2500 % 10
1355
P2.8.8.2
Flux 20 %
(Fluss 20 %)
0
2500 % 20
1356
P2.8.8.3
Flux 30 %
(Fluss 30 %)
0
2500 % 30
1357
P2.8.8.4
Flux 40 %
(Fluss 40 %)
0
2500 % 40
1358
P2.8.8.5
Flux 50 %
(Fluss 50 %)
0
2500 % 50
1359
P2.8.8.6
Flux 60 %
(Fluss 60 %)
0
2500 % 60
1360
P2.8.8.7
Flux 70 %
(Fluss 70 %)
0
2500 % 70
1361
P2.8.8.8
Flux 80 %
(Fluss 80 %)
0
2500 % 80
1362
P2.8.8.9
Flux 90 %
(Fluss 90 %)
0
2500 % 90
1363
P2.8.8.10
Flux 100 %
(Fluss 100 %)
0
2500 % 100
1364
P2.8.8.11
Flux 110 %
(Fluss 110 %)
0
2500 % 110
1365
P2.8.8.12
Flux 120 %
(Fluss 120 %)
0
2500 % 120
1366
P2.8.8.13
Flux 130 %
(Fluss 130 %)
0
2500 % 130
1367
P2.8.8.14
Flux 140 %
(Fluss 140 %)
0
2500 % 140
1368
P2.8.8.15
Flux 150 %
(Fluss 150 %)
0
2500 % 150
1369
P2.8.8.16
Rs voltage drop
(Rs-
Spannungsabfall)
0
30000
variiert
662
Für die
Drehmomentberechnung
in Open Loop verwendet
P2.8.8.17
Ir add zero point
voltage (Ir
Ausgangsspann
ung hinzufügen)
0
30000
variiert
664
P2.8.8.18
Ir add generator
scale (Ir
Generatorskala
hinzufügen)
0
30000
variiert
665
P2.8.8.19
Ir add motoring
scale (Ir
Überwachungss
kala hinzufügen)
0
30000
variiert
667
P2.8.8.20
Ls Voltage Dropp
(Ls-
Spannungsabfall)
0
3000 0
673
P2.8.8.21
Motor BEM
Voltage (Motor-
BEM-Spannung)
0,00
320,00 % 0
674
P2.8.8.22
Iu Offset
-32000
32000 0
668 P2.8.8.23
Iv Offset
-32000
32000 0
669 P2.8.8.24
Iw Offset
-32000
32000 0
670
P2.8.8.25
Estimator Kp
(Schätzer Kp)
0
32000 400
1781
P2.8.8.26
Estimator Kp
(Schätzer Ki)
0
3200
2000
1782
P2.8.8.27
Speed step
(Drehzahlschritt)
-50,0
50,0
0,0
0,0
1252
NCDrive-
Drehzahleinstellung
P2.8.8.28
Torque step
(Drehmomentsc
hritt)
-100,0
100,0
0,0
0,0
1253
NCDrive-
Drehmomenteinstellung
Page 70

VACON 70 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.8.8.29
Original UF Zero
Point Voltage
Nullpunkts-
pannung)
0,00
20,00
%
0,00
681
P2.8.8.30
Voltage Drop
(Spannungsabfall)
0,00
20,00
%
0,00
671
Tabelle 6-17. Identifikations-Parameter, G2.6.4
6.8.8 Feineinstellungs-Parameter
Code
Parameter
Min.
Max.
Einheit
Werkseinstellung
Kunde
ID
Hinweis
P 2.8.9.1
DeadTimeComp.
1751
P 2.8.9.2
DeadTieContCurL
1752
P 2.8.9.3
DeadTHWCompDisab
1750
P 2.8.9.4
MakeFluxTime
660
P 2.8.9.5
CurrMeasFCompTC
1554
P 2.8.9.6
TCDunDampGain
1576
P 2.8.9.7
TCDynDampTC
1577
P 2.8.9.8
CurrLimOptions
1702 P 2.8.9.9
AdConvStartShift
1701
P 2.8.9.10
VoltageCorr. Kp
1783
P 2.8.9.11
VoltageCorr. Ki
1784
P 2.8.9.12
GearRatioMultipl
1558
P 2.8.9.13
GearRatioDivider
1559
Tabelle 6-18. Feineinstellungs-Parameter
6.8.9 AOL-Steuerung Feineinstellungs-Parameter
Code
Parameter
Min.
Max.
Einheit
Werkseinstellung
Kunde
ID
Hinweis
P 2.8.10.1
Freq. 0
0
3200 % 10
1684 P 2.8.10.2
Freq. 1
0
3200 % 20
1707 P 2.8.10.3
Freq. 2
0
300 % 20
1791 P 2.8.10.4
Freq. 3
0
100 % 30
635 P 2.8.10.5
MinCurrentRef
0
100 % 70
622 P 2.8.10.6
NoLoadFluxCurr
0
100 % 70
623
P 2.8.10.7
M5 StrayFluxCurr
(M5 StreuFlußStro)
0
100 % 55
624
P 2.8.10.8
0 Speed Current
(0 Drehz. Strom)
0
250 % 125
625 P 2.8.10.9
DeltaAngleFWD
0
2500 560
692 P 2.8.10.10
DeltaAngleREV
0
2500 1536
693
P 2.8.10.11
Flux Current Kp
(Flux Strom Kp)
0
32000 5000
1708
P 2.8.10.12
Flux Current Ti
(Flux Strom Ti)
0
3200 4
1709
P 2.8.10.13
FluxStabGain1
0
32000 100
1541
P 2.8.10.14
FluxStabGainFWP
0
32000 300
1542
P 2.8.10.15
FluxStabLimit
0
32000 300
1543
P 2.8.10.16
FluxCurrentDamp
0
32000 50
1546
Tabelle 6-19. AOL-Steuerung Feineinstellungsparameter
Page 71

apfiff20 kransteuerung VACON 71
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.9 Drehzahlregelung
6.9.1 Grundeinstellungen für Drehzahlregler
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.9.1
Load Drooping
(Last-Drooping)
0,00
100,00 % 0,00
620 P2.9.2
Load Drooping Time
(Last -Drooping-Zeit)
0
32000
ms
0 656
Für dynamische
Änderungen
P2.9.3
Load Drooping
Removal (Last-
Drooping-Beseitigung)
0
2 0
1534
0=Normal
1= Bei Null Freq.Grnz
2=Linear Null an Fnom
Tabelle 6-20. Grundeinstellungen für Drehzahlregler
6.9.2 OL-Einstellungen für Drehzahlregler
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.9.4.1
Speed controller
P gain (open loop)
(Drehzahlregler
P-Verstärkung (Open
Loop))
0
32767
3000
637 P2.9.4.2
Speed controller
I gain (open loop)
(Drehzahlregler
I-Verstärkung
(Open Loop))
0
32767 300
638
Tabelle 6-21. OL-Einstellungen für Drehzahlregler
Page 72

VACON 72 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.9.3 CL-Einstellungen für Drehzahlregler
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.9.5.1
Speed control P
gain
(Drehzahlsteu-
erung
P-Verstärkung)
0
1000 30
613
P2.9.5.2
Speed control I
time
(Drehzahlsteu-
erung I-Zeit)
-32000
32000
ms
100
614
Negativer Wert verwendet
0,1 ms Genauigkeit statt 1 ms
P2.9.5.3
0-speed time at
start (0-Drehzahl
Zeit beim Start)
0
32000
ms
100
615
P2.9.5.4
0-speed time at
stop (0-Drehzahl
Zeit beim Stopp)
0
32000
ms
100
616
P2.9.5.5
SPC f1 Point
(SPC f1-Punkt
0,00
320,00
Hz
0,00
1301
P2.9.5.6
SPC f0-Punkt)
0,00
320,00
Hz
0,00
1300 P2.9.5.7
SPC Kp f0
0
1000 % 100
1299 P2.9.5.8
SPC Kp FWP
0
1000 % 100
1298
P2.9.5.9
SPC Torque
minimum (SPC-
Drehmoment
min.)
0
400.0 % 0.0
1296
P2.9.5.10
SPC Torque
minimum Kp
(SPC-
Drehmoment
min. Kp)
0
1000 % 100
1295
P2.9.5.11
SPC Kp TC
Torque (SPC Kp
TC-Drehmoment)
0
1000
ms
0
1297
Tabelle 6-212. CL-Einstellungen für Drehzahlregler
6.10 Umrichtersteuerung
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.10.1
Switching frequency
(Taktfrequenz)
1,0
variiert
kHz
variiert
601
P2.10.2
Modulator Type
(Modulatortyp)
0
3 0
1516
P2.10.3
Control Options
(Steuerungsoptionen)
0
65535 64
1084
P2.10.4
Control Options 2
(Steueroptionen 2)
0
65535 0
1798
P2.10.5
Advanced Options 1
(Erweiterte Optionen 1)
0
65535 0
1560
P2.10.6
Advanced Options 2
(Erweiterte Optionen 2)
0
65535 0
1561
P2.10.7
Advanced Options 4
(Erweiterte Optionen 4)
0
65535 0
1563
P2.10.8
Advanced Options 5
(Erweiterte Optionen 5)
0
65535 0
1564
P2.10.9
Advanced Options 6
(Erweiterte Optionen 6)
0
65535 0
1565
P2.10.10
Restart Delay
(Verzögerung Neustart)
0
65535
s
variiert
1424
P2.10.11
Restart Delay CL
(Verzögerung CL
Neustart)
0
60,000
s
variiert
672
CL und Fliegender Start
Tabelle 6-22. Umrichtersteuerung
Page 73

apfiff20 kransteuerung VACON 73
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.11 Master-Follower-Steuerparameter
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.11.1
Master Follower
Mode (Master-
Follower-Modus)
0
4 0
1324
0=Nicht verwendet
1=Master
2=Follower
3=Synch-Master
4=Synch-Follower
P2.11.2
Follower Speed
Reference Select
(Follower-
Drehzahlsollwert
Auswahl)
0
18 17
1081
0=AI1
1=AI2
2=AI1+AI2
3=AI1-AI2
4=AI2-AI1
5=AI1xAI2
6=AI1 Joystick
7=AI2 Joystick
8=Bedienteil
9=Feldbus
10=Motorpotentiometer
11=AI1, AI2 Minimum
12=AI1, AI2 Maximum
13=Max Frequenz
14=AI1/AI2 Auswahl
15=Encoder 1
16=Encoder 2
17=Master-Sollwert
18=Ausgang Rampe für
Master
P2.11.3
Follower Torque
Reference Select
(Follower-
Drehmoment-
Sollwert Auswahl)
0
10 10
1083
0=Nicht verwendet
1=AI1
2=AI2
3=AI3
4=AI4
5=AI1 Joystick
6=AI2 Joystick
7=Drehmoment-Sollwert
von Bedienteil, R3.5
8=FB DrehmomentSollwert
9=Drehmoment OL Master
10=Drehmoment CL Master
P2.11.4
Follower Stop
Function
(Follower-
Stoppfunktion)
0
2 2
1089
0=Freilauf
1=Rampe
2=Als Master
P2.11.5
MF Brake Logic
(MF-Bremslogik)
0
3 2
1326
Nicht verwendet bei
Rampen-Follower oder im
Umrichtersync-Modus
0=Master oder Eigener
1=Eigener
2=Master und Eigener,
Master überwacht auch
den Follower-BremsenStatus.
3=Master
P2.11.6
MF Mode 2
(MF-Modus 2)
0
4 0
1093
P2.11.1
P2.11.7
System Bus Fault
(Systembus-
Fehler)
0
3 1
1082
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß
2.3.2
3=Fehler, Stopp bei Freilauf
P2.11.8
System Bus Fault
Delay
(Verzögerung
Systembus-Fehler)
0,00
320,00 s 3,00
1352
P2.11.9
Follower Fault
(Follower-Fehler)
0
3 1
1536
Siehe P2.11.6
Tabelle 6-234. Master-Follower-Steuerparameter, G2.11
Page 74

VACON 74 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.12 Schutzfunktionen
6.12.1 Allgemeine Einstellungen
Code
Parameter
Min.
Max.
Einheit
Werkseinstel
lung
Kunde
ID
Hinweis
P2.12.1.1
Input phase supervision
(Eingangsphase,
Überwachung)
0 3
0 730
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
P2.12.1.2
Response to undervoltage
fault (Reaktion auf
Unterspannung-Fehler)
0 1
0 727
0=Fehler in Fehlerspeicher
1=Fehler nicht gespeichert
P2.12.1.3
Output phase supervision
(Ausgangsphasen-
Überwachung)
0 3
2 702
Siehe P2.12.1.1
P2.12.1.4
Response to slot fault
(Reaktion auf
Steckplatzfehler)
0 3
2 734
Siehe P2.12.1.1
P2.12.1.5
Safe Disable Response
(Sicherer Halt-Reaktion)
0 2
1 755
Siehe P2.12.1.1
Tabelle 6-245. Allgemeine Einstellungen
6.12.2 Temperatursensor-Schutzfunktionen
Code
Parameter
Min.
Max.
Einheit
Werkseinstel
lung
Kunde
ID
Hinweis
P2.12.2.1
No. of used inputs on
board 1 (Anzahl der
verwendeten Eingänge
an Karte 1)
0 5
0 739
0=Nicht verwendet (ID Schreiben)
1=Sensor 1 verwendet
2=Sensor 1 u. 2 verwendet
3=Sensor 1 u. 2 u. 3 verwendet
4=Sensor 2 u. 3 verwendet
5=Sensor 3 verwendet
P2.12.2.2
Response to
temperature fault
(Reaktion auf
Temperatur-Fehler)
0 3
2 740
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
P2.12.2.3
Board 1 warning limit
(Karte 1 Warngrenze)
30,0
200,0
Cº
120,0
741 P2.12.2.4
Board 1 fault limit
(Karte 1 Fehlergrenze)
30,0
200,0
Cº
130,0
742
P2.12.2.5
No. of uses inputs on
board 2 (Anzahl der
verwendeten Eingänge
an Karte 2)
0 5
0 743
0=Nicht verwendet (ID
Schreiben)
1=Sensor 1 verwendet
2=Sensor 1 u. 2 verwendet
3=Sensor 1 u. 2 u. 3 verwendet
4=Sensor 2 u. 3 verwendet
5=Sensor 3 verwendet
P2.12.2.6
Response to
temperature fault
(Reaktion auf
Temperatur-Fehler)
0 3
2 766
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
P2.12.2.7
Board 2 warning limit
(Karte 2 Warngrenze)
30,0
200,0
Cº
120,0
745 P2.12.2.8
Board 2 fault limit
(Karte 2 Fehlergrenze)
30,0
200,0
Cº
130,0
746
P2.12.2.9.1
Channel 1B Warn
(Kanal 1B Warn)
-30,0
200,0
Cº
0,0
764
P2.12.2.9.2
Channel 1B Fault
(Kanal 1B Fehler)
-30,0
200,0
Cº
0,0
765 P2.12.2.9.3
Channel 1C Warn
(Kanal 1C Warn)
-30,0
200,0
Cº
0,0
768 P2.12.2.9.4
Channel 1C Fault
(Kanal 1C Fehler)
-30,0
200,0
Cº
0,0
769 P2.12.2.9.5
Channel 2B Warn
(Kanal 2B Warn)
-30,0
200,0
Cº
0,0
770 P2.12.2.9.6
Channel 2B Fault
(Kanal 2B Fehler)
-30,0
200,0
Cº
0,0
771 P2.12.2.9.7
Channel 2C Warn
(Kanal 2C Warn)
-30,0
200,0
Cº
0,0
772
P2.12.2.9.8
Channel 2C Fault
(Kanal 2C Fehler)
-30,0
200,0
Cº
0,0
773
Tabelle 6-25. PT-100-Schutzfunktionen
Page 75

apfiff20 kransteuerung VACON 75
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.12.3 Mot.blockierschu
Code
Parameter
Min.
Max.
Einheit
Werkseinste
llung
Kunde
ID
Hinweis
P2.12.3.1
Stall protection
(Blockierschutz)
0
3 0 709
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
P2.12.3.2
Stall current
(Blockierstrom)
0,1
2 x IH A IH 710 P2.12.3.4
Stall time limit
(Blockierzeitgrenze)
1,00
120,00 s 15,00
711
P2.12.3.3
Stall frequency limit
(Blockierfrequenz-
grenze)
1,0
P2.1.2
Hz
25,0
712
Tabelle 6-26. Blockierschutz
6.12.4 Überwachung Drehzahlabweichung
Code
Parameter
Min.
Max.
Einheit
Werkseinste
llung
Kunde
ID
Hinweis
P2.12.4.1
Speed Error Mode
(Drehzahl-Fehler
Modus)
0
3 0 752
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
P2.12.4.2
Speed Error Limit
(Drehzahl-Fehler
Grenze)
0,0
100,0 % 5,0
753
P2.12.4.3
Speed Fault Delay
(Verzögerung
Drehzahl-Fehler)
0,00
100,00 S 0,1
754
P2.12.4.4
Over Sped Limit
0,00
50,00
Hz
5,00
1812
Hysterese für Überdrehzahl bei
Überschreitung von Pos/Neg
Frequenz-Grenzen
Tabelle 6-27. Überwachung Drehzahlabweichung
6.12.5 Motortemperatur-Schutzfunktionen
Code
Parameter
Min.
Max.
Einheit
Werkseinste
llung
Kunde
ID
Hinweis
P2.12.5.1
Thermal protection of
the motor
(Wärmeschutz,
Motor)
0
3 2 704
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
P2.12.5.2
Motor ambient
temperature factor
(Umgeb.temp. faktor,
Motor)
100,0
100,0 % 0,0
705
P2.12.5.3
Motor cooling factor
at zero speed
(Motorkühlfaktor bei
Nulldrehzahl)
0,0
150,0 % 40,0
706
P2.12.5.4
Motor thermal time
constant (Motor-
Temperaturzeitkonst
ante)
1
200
Min.
45 707
P2.12.5.5
Motor duty cycle
(Motoreinschalt-
dauer)
0
100 % 100
708
P2.12.5.6
Response to
thermistor fault
(Reaktion auf
Thermistor-Fehler)
0
3 2 732
Siehe P2.12.5.1
P2.12.5.7
Over Load Response
(Reaktion Überlast)
0
2 1 1838
0=Keine Reaktion
1=Warnung
2=Fehler
P2.12.5.8
Over Load Signal
(Signal Überlast)
0
2 0 1837
0=Nicht verwendet
1=Strom
2=Drehmoment
3=Leistung
P2.12.5.9
Over Load Maximum
Input (Überlast
Maximaler Eingang)
0,0
300,0 % 150,0
1839
P2.12.5.10
Over Load maximum
Step (Überlast
Maximaler Schritt)
0
10000 200
1840
Tabelle 6-28. Motortemperatur-Schutzfunktionen
Page 76

VACON 76 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.12.6 Überwachung versetzter Nullpunkt
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.12.6.1
Response to 4mA
reference fault
(Reaktion auf 4mA
Sollwertfehler)
0
5 0 700
0=Keine Reaktion
1=Warnung
2=Warnung + vorher.
Frequenz
3=Warnung + voreingest.
Frequenz 2.12.6.2
4=Fehler, Stopp gemäß 2.3.2
5=Fehler, Stopp bei Freilauf
P2.12.6.2
4mA reference fault
frequency
(4mA Sollwertfehler
Frequenz)
0,00
P2.1.2
Hz
0,00
728
Tabelle 6-290. Überwachung versetzter Nullpunkt
6.12.7 Unterlastschutz
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.12.7.1
Underload protection
(Unterlastschutz)
0
3 0 713
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
P2.12.7.2
Field weakening area
load (Last im
Feldschwächungs-
bereich)
10,0
150,0 % 50,0
714
P2.12.7.3
Zero frequency load
(Nullfrequenzlast)
5,0
150,0 % 10,0
715
P2.12.7.4
Underload protection
time limit
(Zeitgrenze,
Unterlastschutz)
2,00
600,00 s 20,00
716
Tabelle 6-31. Unterlastschutz
6.12.8 Schutz Erdschluss
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.12.8.1
Earth fault protection
(Erdschluss-Schutz)
0
3 2 703
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
P2.12.8.2
Eart fault current
limit (Stromgrenze
Erdschluss-Fehler)
0,0
100,0 % 50,0
1333
Tabelle 6-32. Erdschluss-Schutz
6.12.9 Kühlungsschutz
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.12.9.1
Cooling Fault
Response (Reaktion
auf Kühlung-
Fehler)
1
2 2 762
0=Keine Aktion, Warnung
1=Warnung, Warnung
2=Warnung, Fehler
3=Keine Aktion, Fehler
P2.12.9.2
Cooling Fault delay
(Verzögerung
Kühlung-Fehler)
0,00
7,00 s 2,00
751
Tabelle 6-33. Kühlung-Schutz
Page 77

apfiff20 kransteuerung VACON 77
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.12.10 Schutz Feldbus
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.12.10.1
Fieldbus
Communication
response (Reaktion
auf Feldbus-
Kommunikations-
fehler)
0
3 2 733
0=Keine Aktion
1=Warnung
2=Fehler
3=Fehler, Stopp bei Freilauf
4=Warnung; Vorh Freq
P2.12.10.2
FB Fault Delay
(Verzogerung
FBFehler)
0,00
60,00 s 0,50
1850
Verzögerung bis Fehler,
wenn FB-Reaktion 4 ist
P2.12.10.3
FB Watchdog Delay
(Verzögerung FB-
Watchdog)
0,00
30,00 s 0,00
1354
Verzögerung, wenn WDPuls fehlt. 0,00 s =
Deaktiviert
Tabelle 6-34. Schutz Feldbus
6.12.11 Externer Fehler
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.12.11.1
Response to external
fault 1 (Reaktion auf
externen Fehler 1)
0
3 2 701
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
P2.12.11.2
Response to external
fault 2 (Reaktion auf
externen Fehler 2)
0
3 2 747
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
6.12.12 Encoderfehler
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.12.12.1
Encoder Supervision
(Encoder-
Überwachung)
1
3 2
1353
1=Warnung
2=Fehler
3=Warnung, in Open Loop
P2.12.12.2
Encoder Fast Hz
Limit (Encoder
Schnelle Hz-Grenze)
0,00
320,00
Hz
1801
P2.12.12.3
Fast Time Limit
(Schnell Zeit.Grenz)
0,00
32,00
s
1805
P2.12.12.4
Iq Fault Limit (Iq
Fehler-Grenze)
0
300
%
1800
Page 78

VACON 78 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.13 Feldbus-Parameter
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.13.1
Fieldbus min scale
(Feldbus Min. Skalier.)
0,00
320,00
Hz
0,00
850
P2.13.2
Fieldbus max scale
(Feldbus Max.
Skalier.)
0,00
320,00
Hz
0,00
851
P2.13.3
Fieldbus process data
out 1 selection
(Feldbus-
Prozessdaten Aus 1
Auswahl)
0
10000 1 852
Betriebsdaten auswählen mit
Parameter-ID
Def: Ausgangsfrequenz
P2.13.4
Fieldbus process data
out 2 selection
(Feldbus-
Prozessdaten Aus 2
Auswahl)
0
10000 2 853
Betriebsdaten auswählen mit
Parameter-ID
Def: Motordrehzahl
P2.13.5
Fieldbus process data
out 3 selection
(Feldbus-
Prozessdaten Aus 3
Auswahl)
0
10000 45
854
Betriebsdaten auswählen mit
Parameter-ID
Def: Motorstrom an FB
P2.13.6
Fieldbus process data
out 4 selection
(Feldbus-
Prozessdaten Aus 4
Auswahl)
0
10000 4 855
Betriebsdaten auswählen mit
Parameter-ID
Def: Motordrehmoment
P2.13.7
Fieldbus process data
out 5 selection
(Feldbus-
Prozessdaten Aus 5
Auswahl)
0
10000 5 856
Betriebsdaten auswählen mit
Parameter-ID
Def: Motorleistung
P2.13.8
Fieldbus process data
out 6 selection
(Feldbus-
Prozessdaten Aus 6
Auswahl)
0
10000 6 857
Betriebsdaten auswählen mit
Parameter-ID
Def: Motorspannung
P2.13.9
Fieldbus process data
out 7 selection
(Feldbus-
Prozessdaten Aus 7
Auswahl)
0
10000 7 858
Betriebsdaten auswählen mit
Parameter-ID
Def: DCZwischenkreisspannung
P2.13.10
Fieldbus process data
out 8 selection
(Feldbus-
Prozessdaten Aus 8
Auswahl)
0
10000 37
859
Betriebsdaten auswählen mit
Parameter-ID
Def: Letzter aktiver Fehler
P2.13.11
Fieldbus process data
in 1 selection
(Feldbus-
Prozessdaten Ein 1
Auswahl)
0
10000 1140
876
Gesteuerte Daten mit
Parameter-ID auswählen.
Def: FB Drehmoment
Sollwert
P2.13.12
Fieldbus process data
in 2 selection
(Feldbus-
Prozessdaten Ein 2
Auswahl)
0
10000 46
877
Gesteuerte Daten mit
Parameter-ID auswählen.
Def: FB Grenz-Skalierung
P2.13.13
Fieldbus process data
in 3 selection
(Feldbus-
Prozessdaten Ein 3
Auswahl)
0
10000 47
878
Gesteuerte Daten mit
Parameter-ID auswählen.
Def: FB Einstellen Sollwert
P2.13.14
Fieldbus process data
in 4 selection
(Feldbus-
Prozessdaten Ein 4
Auswahl)
0
10000 48
879
Gesteuerte Daten mit
Parameter-ID auswählen.
Def: FB Analogausgang.
P2.13.15
Fieldbus process data
in 5 selection
(Feldbus-
Prozessdaten Ein 5
Auswahl)
0
10000 0 880
Gesteuerte Daten mit
Parameter-ID auswählen
Page 79

apfiff20 kransteuerung VACON 79
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.13.16
Fieldbus process data
in 6 selection
(Feldbus-
Prozessdaten Ein 6
Auswahl)
0
10000 0 881
Gesteuerte Daten mit
Parameter-ID auswählen
P2.13.17
Fieldbus process data
in 7 selection
(Feldbus-
Prozessdaten Ein 7
Auswahl)
0
10000 0 882
Gesteuerte Daten mit
Parameter-ID auswählen
P2.13.18
Fieldbus process data
in 8 selection
(Feldbus-
Prozessdaten Ein 8
Auswahl)
0
10000 0 883
Gesteuerte Daten mit
Parameter-ID auswählen
P2.13.19
General Status Word
ID (Allgemeines
Statuswort ID)
0
10000 64
897
Überwachungsdaten im
allgemeinen Zustandswort
auswählen
Def: MC Status
P2.13.20
FB Actual Speed Mode
(FB-Istdrehzahl-
Modus)
0
1 0
1741
0=Berechnet
1=Istwert
P2.13.21
Control Slot Selector
(Auswahl steuernder
Steckplatz)
0
8 0
1440
0=Alle 4=Steckplatz D
5=Steckplatz E
P2.13.22
State Machine (State
Machine)
1
2 1 896
1=Standard
2=ProfiDrive
P2.13.23
FB Custom Minimum
(FB
Benutzereinstellung
min.)
-32000
+32000 0 898
FB Drehzahl-Sollwert min.
Skalierung
P2.13.24
FB Custom Maximum
(FB
Benutzereinstellung
(max.))
-32000
+32000
+10000
899
FB Drehzahl-Sollwert max.
Skalierung
Tabelle 6-35. Feldbus-Parameter
6.13.1 Wertsteuerung
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.14.1.1
Control Input Signal ID
(Steuereingang Signal
ID)
0
10000
ID
0
1580
P2.14.1.2
Control Input Off Limit
(Steuereingang Aus-
Grenze)
-32000
32000 0
1581
P2.14.1.3
Control Input On Limit
(Steuereingang Ein-
Grenze)
-32000
32000 0
1582
P2.14.1.4
Control Output Off
Value
(Steuerungsausgang
Aus-Wert)
-32000
32000 0
1583
P2.14.1.5
Control Output On
Value
(Steuerungsausgang
Ein-Wert)
-32000
32000 0
1584
P2.14.1.6
Control Output Signal
ID (Steuerungsausgang
Signal-ID)
0
10000
ID
0
1585
P2.14.1.7
Control Mode
(Steuermodus)
0
5 0
1586
0=SR ABS
1=Skal. ABS
2=Skal. INV ABS
3=SR
4=Skalierung
5=Skal. INV
P2.14.1.8
Control Output
Filtering rime
(Steuerungsausgang
Filterzeit)
0,000
32,000
s
0,000
1721
Tabelle 6-36. Auswahl Leistungs-Sollwert Eingangssignal, G2.2.8
Page 80

VACON 80 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.13.2 DIN-ID-Steuerung 1
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.14.2.1
ID Control DIN
(DIN-ID-Steuerung)
0,1
E.10 0,1
1570
Steckplatz .
Karteneingang Nr.
P2.14.2.2
Controlled ID
(Gesteuerte ID)
0
10000
ID
0 1571
ID auswählen, die durch
den Digital-Eingang
gesteuert wird.
P2.14.2.3
False value
(Falsch-Wert)
-32000
32000 0 1572
Wert, wenn der DigitalEingang LOW ist
P2.14.2.4
True value
(Wahr-Wert)
-32000
32000 0 1573
Wert, wenn der DigitalEingang HIGH ist
Tabelle 6-37. DIN-ID-Steuerungs-Parameter
6.13.3 DIN-ID-Steuerung 2
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.14.3.1
ID Control DIN
(DIN-ID-Steuerung)
0,1
E.10
0,1
1590
Steckplatz .
Karteneingang Nr.
P2.14.3.2
Controlled ID
(Gesteuerte ID)
0
10000
ID
0 1575
ID auswählen, die durch
den Digital-Eingang
gesteuert wird.
P2.14.3.3
False value
(Falsch-Wert)
-32000
32000
0
1592
Wert, wenn der DigitalEingang LOW ist
P2.14.3.4
True value
(Wahr-Wert)
-32000
32000
0 1593
Wert, wenn der DigitalEingang HIGH ist
Tabelle 6-38. DIN-ID-Steuerungs-Parameter
6.13.4 DIN-ID-Steuerung 3
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P2.14.4.1
ID Control DIN
(DIN-ID-Steuerung)
0,1
E,10
0,1
1578
Steckplatz .
Karteneingang Nr.
P2.14.4.2
Controlled ID
(Gesteuerte ID)
0
10000
ID
0 1579
ID auswählen, die durch
den Digital-Eingang
gesteuert wird.
P2.14.4.3
False value
(Falsch-Wert)
-32000
32000
0
1594
Wert, wenn der DigitalEingang LOW ist
P2.14.4.4
True value
(Wahr-Wert)
-32000
32000
0 1596
Wert, wenn der DigitalEingang HIGH ist
Tabelle 6-39. DIN-ID-Steuerungsparameter
6.13.5 ID-gesteuerter Digitalausgang 1
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.14.5.1
ID.Bit Free DO
(ID-Bit Frei DO)
0,00
2000,15
ID.Bit
0,00
1216
P2.14.5.2
Free DO Sel
(Freie DO-Ausw.)
0,1
E.10 0,1
1574
Tabelle 6-40. ID-gesteuerte Digitalausgangs-Parameter, G2.3.10
6.13.6 ID-gesteuerter Digital-Ausgang 2
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.14.6.1
ID.Bit Free DO
(ID-Bit Frei DO)
0,00
2000,15
ID.Bit
0,00
1386
P2.14.6.2
Free DO Sel
(Freie DO-Ausw.)
0,1
E.10 0,1
1574
Tabelle 6-41. ID-gesteuerte Digitalausgangs-Parameter, G2.3.10
Page 81

apfiff20 kransteuerung VACON 81
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.13.7 Freie DIN-Verzögerung
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.14.7.1
ID.Bit Free DIN
(ID-Bit Frei DIN)
0,00
2000,15
ID.Bit
0,00
1832
P2.14.7.2
On Delay
(Einschaltverzö-
gerung)
0,00
320,00
s
0,00
1833
P2.14.7.3
Off Delay
(Ausschaltverzö-
gerung)
0,00
320,00
s
0,00
1834
P2.14.7.4
Mono Time
(Mono-Zeit)
0,00
320,00
s
0,00
1836
P2.14.7.5
Control Out ID
(Steuer-Ausgang-ID)
0
10000 0
1835
Tabelle 6-42. ID-gesteuerte Digitalausgangs-Parameter, G2.3.10
Page 82

VACON 82 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.14 Bremsensteuerungsparameter
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.15.1
Brake Open, Direct
(Bremse geöffnet,
direct)
0,1
E.10
DigOUT
0,1
446 P2.15.2
Brake FeedBack
(Bremse
Rückmeldung)
0,1
E.10
DigIN
0,2
1210
P2.15.3
Brake Open Delay
(Verzögerung Bremse
öffnen)
0,00
320,00 s 0,50
1544
Zeit die erforderlich ist zum
Öffnen der Bremse
P2.15.4
Brake Close Delay
(Verzögerung Bremse
schließen)
0,00
320,00 s 0,50
1545
P2.15.5
Brake Open FreqLim
Open Loop (Bremse
öffnen FreqGrnz Open
Loop)
0,00
320,00
Hz
0,00
1535
Grenze Bremse öffnen und
maximale Sollwert-Grenze
wenn die Bremse
geschlossen ist im Open
Loop.
P2.15.6
Brake OpenFreqLim
Closed Loop
(Bremsöffnung FreqGrnz
Closed Loop)
0,00
320,00
Hz
0,00
1555
Grenze Bremse öffnen und
maximale Sollwert-Grenze
wenn die Bremse
geschlossen ist im Closed
Loop.
P2.15.7
Brake Close FreqLim
Open Loop (Bremse
schließen FreqGrnz
Open Loop)
0,00
320,00
Hz
0,00
1539
0,00 = Intern berechnet
P2.15.8
Brake Close FreqLim
Closed Loop (Bremse
schließen FreqGrnz
Closed Loop)
0,00
320,00
Hz
0,00
1540
0,00 = Intern berechnet
P2.15.9
Brake Close/Open
Current Limit (Bremse
schließen/-öffnen
Stromgrenze)
0,00
320,00 A 0,00
1085
Bremse ist geschlossen
sobald der id-Strom diesen
Wert unterschreitet.
P2.15.10
Brake Options 1
(Brems-Optionen 1)
0
65535 0 1600
Tabelle 6-43. Bremse Steuerungs-Parameter, G2.3.9
6.14.1 Brems-Steuerung, Start-Drehmoment für CL
Code
Parameter
Min.
Max.
Einheit
Werkseinste
llung
Kunde
ID
Hinweis
P2.15.11.1
Start-up torque (Start-
Drehmoment)
0
3 0 621
0=Nicht verwendet
1=Drehmoment-Speicher
2=Drehmoment-Sollwert
3=Start-Drehmoment
vorwärts/rückwärts
P2.15.11.2
Start-up torque FWD
(Start-Drehmoment
vorwärts)
300,0
300,0 s 0,0
633 P2.15.11.3
Start-up torque REV
(Start-Drehmoment
rückwärts)
300,0
300,0 s 0,0
634
P2.15.11.4
Start Up Torque Time
(Zeit Start-
Drehmoment)
-1
10000
ms
-1
1371
-1 = Automatisch
6.14.2 Rück- Roll Überwachung für CL
Code
Parameter
Min.
Max.
Einheit
Werkseinste
llung
Kunde
ID
Hinweis
P2.15.12.1
Roll Back Kp (Rückroll-
Kp)
-32000
32000 0 1787
P2.15.12.2
Roll Back Torque
(Rückroll-Drehmoment)
-3200
3200 0,0
1788
P2.15.12.3
Roll Back Level
(Rückrollniveau)
-32000
32000 3 1789
Page 83

apfiff20 kransteuerung VACON 83
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.14.3 Handhabung Brems-Fehler
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.15.13.1
Brake Closed Fault
(Fehler Bremse
geschlossen)
1
3 1
1316
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
P2.15.13.2
Brake Open Fault
(Fehler Bremse
geöffnet)
1
4 1 777
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
4=Warnung; Start Halten
P2.15.13.3
Feed Back Open
Delay
(Rückmeldung
Verzögerung
Bremse öffnen)
0,00
320,00 s 0,00
1317
P2.15.13.4
Feed Back Close
Delay
(Rückmeldung
Verzögerung
Bremse schließen)
0,00
320,00 s 0,00
1733
P2.15.13.5
Brake Slip
Response (Reaktion
Brems-Schlupf)
0
4 1
1785
0=Keine Reaktion
1=Warnung
2=Fehler, Stopp gemäß 2.3.2
3=Fehler, Stopp bei Freilauf
4=Warnung, Start Umrichter
6.14.4 Funktionen
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.15.14.1
Load Floating Time
(Zeit Lastzunahme)
0,00
320,00 s 0,00
1282
6.14.5 Testfunktion Bremse
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.15.15.1
Brake Test
(Bremsen-Test)
0
1 0
1843
P2.15.15.2
Testing Torque
(Prüfmoment)
-300
300 % 50,0
1844
P2.15.15.3
Brake Timing Torque
Reference (Brems-
Zeit Drehmoment-
Sollwert)
-300
300 % 40,0
1849
Page 84

VACON 84 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.15 Automatische Reset Parameter
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.16.1
Wait time (Wartezeit)
0,10
10,00 s 0,50
717
P2.16.2
Trial time
(Versuchszeit)
0,00
60,00 s 0,10
718
P2.16.3
Start function (Start-
Funktion)
0
2 2
719
0=Rampe
1=Fliegender Start
2=Gemäß Stopp-Funktion
P2.16.4
Number of tries after
undervoltage trip
(Anzahl der Versuche
nach einem Auslösen
aufgrund von
Unterspannung)
0
10 0
720 P2.16.5
Number of tries after
overvoltage trip
(Anzahl der Versuche
nach einem Auslösen
aufgrund von
Überspannung)
0
10 0
721
P2.16.6
Number of tries after
overcurrent trip
(Anzahl der Versuche
nach einem Auslösen
aufgrund von
Überstrom)
0
3 0
722
P2.16.7
Number of tries after
reference trip
(Anzahl der Versuche
nach einem Auslösen
nach Sollwert)
0
10 0
723
P2.16.8
Number of tries after
motor temperature
fault trip (Anzahl der
Versuche nach einem
Auslösen aufgrund
eines
Motortemperaturfehl
ers)
0
10 0
726
P2.16.9
Number of tries after
external fault trip
(Anzahl der Versuche
nach einem Auslösen
aufgrund eines
externen Fehlers)
0
10 0
725 P2.16.10
Number of tries after
underload fault trip
(Anzahl der Versuche
nach einem Auslösen
aufgrund eines
Unterlastfehlers)
0
10 0
738
P2.16.11
Fault Simulation
(Fehler-Simulation)
0
65535 0
1569
Tabelle 6-44. Parameter für automatischen Neustart, G2.16
6.16 PI-Steuer-Parameter
Code
Parameter
Min.
Max.
Einheit
Schritt
Werkseins
tellung
ID
Hinweis
P2.17.1
PI controller gain
(PI-Reglervers-
tärkung)
0,0
1000,0
% 100,0
118
P2.17.2
PI controller I-time
(PI-Regler, I-Zeit)
0,00
320,00
s 1,00
119
P2.17.3
PI Reference (PI-
Sollwert)
-32000
32000
0
167
Page 85

apfiff20 kransteuerung VACON 85
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.17.4
PI controller
reference signal
ID (PI-Regler-
Sollwertsignal ID)
0
10000
167
332
Werkseinstellung P2.17.3
P2.17.5
PI Actual value ID
(PI-Istwert-ID)
0
10000
0
333
P2.17.6
PI Controller output
ID (PI-Regler,
Ausgang-ID)
0
10000
0
1802
P2.17.7
PI Controller Scale
(PI-
Reglerskalierung)
-32000
32000
1
340
> = 1 = Keine Invertierung
< =-1 = Invertiert
0 = Unzulässiger Wert
P2.17.8
PI Low limit (PI
Untere Grenze)
-32000
32000
359
P2.17.9
PI High limit (PI
Obere Grenze)
-32000
32000
10000
360
P2.17.10
PI Controller Output
scale (PI-Regler,
Ausgangsska-
lierung)
-3200,0
3200,0
% 100,0
1803
P2.17.11
PI Stop state value
(PI-Stopp-Status
Wert)
-32000
32000
0
1806
Tabelle 6.45. PI-Reglerparameter, G2.15
Page 86

VACON 86 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6.17 Wellensynchronisierung
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.18.1
Enable Synch
(Synch aktivieren)
0,1
E.10
DigIn
0,1
1816
P2.18.2
Synch Kp
0
1000 100
1817 P2.18.3
Synch Ti
0
20000
ms
500
1818
P2.18.4
MaxRefCorrection
(MaxSollwKorrektur)
0,00
20,00
Hz
2,00
1819
P2.18.5
ZeroErrorLimit
0
1000 10
1824
P2.18.6
Fault Limit
(Fehlergrenze)
0
100 1
1826
0 = Gesperrt
P2.18.7
Reset Position
(Position
zurücksetzen)
0,1
E.10 0,1
1090
6.18 Lastschätzung
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.19.1
Motor Nominal
Torque (Motor-
Nenndrehmoment)
0,0
3200,0
Nm
0,0
1906
P2.19.2
Rotor Inertia
(Rotorträgheit)
0,0
10,0
kgm2
0,0
1907
P2.19.3
Gear Box Inertia
(Getriebeträgheit)
0,0
1000
kgm2
0,0
1908
P2.19.4
Drum Inertia
(Trommelträgheit)
0,0
1000
kgm2
0,0
1909
P2.19.5
Gear Ratio
(Getriebeübersetzung)
0,0
1000
1/x
1
1910
P2.19.6
Drum Radius
(Trommelradius)
0,0
1000 m 1
1911
P2.19.7
Rope Multiply
(Seil multiplizieren)
0
100 x 1
1912
6.19 Funktionale Sicherheit
Code
Parameter
Min.
Max.
Einheit
Werkseinst
ellung
Kunde
ID
Hinweis
P2.20.1
SQS Reaction
(SQS-Reaktion)
0
1 1 545
0=Keine Aktion
1=Schnell-Stopp
P2.20.2
SS1 Reaction
(SS1 Reaktion)
0
1 1 542
0=Keine Aktion
1=Stopp
P2.20.3
SS2 Reaction
(SS2 Reaktion)
0
1 1 546
0=Keine Aktion
1=Stillstand
P2.20.4
SDI Reaction
(SDI-Reaktion)
0
1 1 544
0=Keine Aktion
1=Richtung deaktivieren
P2.20.5
SLS Reaction
(SLS-Reaktion)
0
1 1 543
0=Keine Aktion
1=Endgrenze Sollw
P2.20.6
SSR Reaction
(SSR-Reaktion)
0
1 1 547
0=Keine Aktion
1=Grenze Drehzahl
6.20 Pendeldämpfungs-Funktion
Code
Parameter
Min.
Max.
Einheit
Werkseinstellung
Kunde
ID
Hinweis
P 2.21.1
License Key
(Lizenzschlüssel)
0
65535 0
1995
P 2.21.2
Anti-Swing Mode
(Pendeldämpfungs-
Modus)
0
4 0
1846
0=Nicht
verwendet
1=Modus 1
2=Modus 2
3=Modus 3
4=Modus 4
Page 87

apfiff20 kransteuerung VACON 87
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P 2.21.3
Swinning Period
(Schwingungsdauer)
0,0
100,0 s 0,0
1743
P 2.21.4
Rope Length
(Seillänge)
0
32000
cm
0,0
1686
P 2.21.5
Smoothing TC
(Glättung TC)
0
32000
ms
0
1186
P2.21.6
Disable Anti-Swing
(Pendeldämpfung
deaktivieren)
0,1
E.10
DigIN
0,1
1853
P2.21.7
Low Speed
Positioning Run
(Positionierungslauf
bei niedriger
Geschwindigkeit)
0
5 0
1854
0=Nicht
verwendet
1=Modus 1
2=Modus 2
3=Modus 3
4=Modus 4
5=Modus 5
P2.21.8
Low Speed Positioning
Maximum Frequency
(Positionieren bei
niedriger Drehzahl
Maximale Frequenz)
0,00
320,00
Hz
0,00
1855
6.21 Steuerung über (Bedienteil Menü M3)
Die nachstehende Liste enthält die Parameter für die Auswahl des Steuerplatzes und der
Drehrichtung über das Bedienteil. Siehe Bedienteil- Menü in der VACON® NX-Betriebsanleitung.
Code
Parameter
Min.
Max.
Einheit
Werksein
stellung
Kunde
ID
Hinweis
P3.1
Control place
(Steuerplatz)
1
3 2
125
0=PC-Steuerung
1=I/O-Klemme
2=Bedienteil
3=Feldbus
R3.2
Keypad reference
(Sollwerteinstellung
mit Bedienteil)
P2.1.1
P2.1.2
Hz
0,00
P3.3
Direction (on
keypad)
(Drehrichtung (mit
Bedienteil))
0
1 0
123
0=Vorwärts
1=Rückwärts
P3.4
Stop button
(Stopp-Taste)
0
1 1
114
0=Eingeschränkte
Funktion der Stopp-Taste
1=Stopp-Taste immer
aktiviert
R3.5
Torque reference
(Drehmoment-
Sollwert)
0,0
100,0 % 0,0
Tabelle 6-46. Parameter für die Steuerung mit dem Bedienteil, M3
6.22 Systemmenü (Bedienteil: Menü M6)
Die Parameter und Funktionen zur Bedienung des Frequenzumrichters (z. B. Applikations- und
Sprachauswahl) sowie die benutzerdefinierten Parametersätze oder Informationen zu Hard- und
Software sind in der VACON® NX-Betriebsanleitung zu finden.
6.23 Zusatzkarten (Bedienteil: Menü M7)
Das Menü M7 zeigt die an der Steuerplatine angeschlossenen Erweiterungs- und Zusatzkarten
sowie kartenbezogene Angaben an. Weitere Informationen finden Sie in der VACON® NXBetriebsanleitung.
Page 88

VACON 88 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7. PARAMETER-BESCHREIBUNGEN
7.1 Basis-Parameter
P2.1.1 Maximum frequency (Maximal-Frequenz) ID102 Max Frequency
Definiert die maximale Frequenzgrenze sowohl in negativer als auch in positiver
Richtung. Richtungsabhängige Frequenz-Grenze stehen zur Verfügung unter
\
Hinweis: Wenn sich der Frequenzumrichter im Betriebszustand befindet,
ändern Sie diesen Parameter nicht auf einen Wert, der niedriger ist als die
aktuelle Ausgangsfrequenz. Die Änderung wird ohne Rampe durchgeführt.
P2.1.2 Motor Nominal Voltage (Motor-Nennspannung) ID110 Motor Nom Voltg
Dieser Wert (Un) kann dem Motor-Typenschild entnommen werden.
P2.1.3 Motor Nominal Frequency (Motor-Nennfrequenz) ID111 -
Dieser Wert (fn) kann dem Motor-Typenschild entnommen werden.
Dieser Parameter setzt den Feldschwäche-Punkt auf den gleiche Wert in
Motor Steuerung \ U/f Einstel
P2.1.4 Motor nominal speed (Motor Nenndrehzahl) ID112 Motor Nom Speed
Dieser Wert (nn) kann dem Motor-Typenschild entnommen werden. Beachten
Sie auch die Motor-Nennfrequenz.
In einigen Fällen wird die Motor-Nenndrehzahl mit einer Dezimalstelle angezeigt.
In diesem Fall ist es üblich, die nächste Ganzzahl anzugeben und die
Motornennfrequenz so einzustellen, dass der Antrieb die
korrekte[FW]PolePairNumber berechnet.
P2.1.5 Motor nominal current (Motor-Nennstrom) ID113 Motor Nom Currnt
Dieser Wert (In) kann dem Motor-Typenschild entnommen werden. Wenn der
Magnetisierungsstrom angegeben ist, stellen Sie vor dem Identifikationslauf auch
den Magnetisierungs-Strom P2.1.9ID612 ein.
DriveSynch-Betrieb
Motor-Nennstrom gemäß Typenschild/Anzahl parallel geschalteter Umrichter mit
VACON® DriveSynch.
P2.1.6 Motor cos phi (cos phi, Motor) ID120 Motor Cos Phi
-Typenschild entnommen werden.
P2.1.7 Motor Nominal Power (Motor Nennleistung) ID116 Motor Nom Power
Dieser Wert kann dem Typenschild des Motors entnommen werden.
Page 89

apfiff20 kransteuerung VACON 89
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.1.8 Magnetizing current (Magnetisierung Strom) ID612 MagnCurrent
Stellen Sie hier den Magnetisierungs-Strom des Motors (Leerlaufstrom) ein.
Kann bei laufendem Motor ohne Last bei 2/3 der Nenndrehzahl gemessen werden.
Wenn der Wert Null ist, wird der Magnetisierungs-Strom aus den Motor-Parametern
berechnet, siehe folgende Formeln:
Wenn vor dem Identifikationslauf angegeben, wird dies als Referenz für die U/fAbstimmung verwendet, wenn die Identifizierung ohne Drehung des Motors
durchgeführt wird.
P2.1.9 Identification (Identifikation) ID631 Identification
Der Identifikations-Lauf optimiert automatisch die optimalen Einstellungen für den
Motor. Sie ist ein Tool für die Inbetriebnahme und Wartung des Frequenzumrichters
mit dem Ziel, die bestmöglichen Werte für die meisten Frequenzumrichter zu finden.
Bei der automatischen Motoridentifikation werden die Motorparameter berechnet
bzw. gemessen, die für die optimale Motor- und Drehzahlsteuerung erforderlich
sind.
HINWEIS: Stellen Sie den Motor-Regelungsmodus vor der Identifikation auf
Frequenz-Regelung!
HINWEIS: Während der Identifizierung öffnet der Frequenzumrichter aus
Sicherheitsgründen die mechanische Bremse nicht. Wenn die Motordrehung
ein Öffnen der Bremse erfordert, muss dies extern erfolgen.
HINWEIS: Während des Identifikationslaufs sollten die Drehmoment- und
Leistungsgrenzen über 100 % liegen. Auch die Stromgrenze sollte über dem
Motor-Nennstrom liegen.
HINWEIS: Während des Identifikationslaufs sollte die Beschleunigungszeit unter
20 Sekunden liegen.
HINWEIS: Wird die Schaltfrequenz nach der Identifikation geändert, empfehlen wir
Ihnen, den Identifikationslauf erneut durchzuführen.
HINWEIS: Ein kleiner Motor mit einem langen Motorkabel kann eine Reduzierung
der Schaltfrequenz erfordern, wenn die Identifizierung nicht erfolgreich ist.
Keine Reaktion
Keine Identifikation gewünscht.
Page 90

VACON 90 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Identifikation ohne Drehung des Motors
Der Strom wird an den Motor angelegt, aber die Welle wird nicht gedreht. U/fEinstellungen werden identifiziert.
Der Identifikations-Lauf ist eine Mindestanforderung wenn der Motor in Open Loop
betrieben wird Es wird empfohlen, den Identifikations-Lauf immer bei drehendem
Motor vorzunehmen, falls die Regelung für Closed Loop erforderlich ist, nachdem
die Mechanik mit der Welle verbunden wurde.
Beispiel für ein Verhalten
Aktualisiert Parameter während des Identifikationlaufs
AM:
PM:
P2.1.8 MagnCurrent
(Magnet. Strom)
P2.8.4.2 U/f Ratio Select
(U/f Verhältnis Auswahl)
P2.8.4.2 U/f Ratio Select
(U/f Verhältnis Auswahl)
P2.8.4.5 U/f Mid Freq
(U/f MittpktFreq.)
P2.8.4.5 U/f Mid Freq
(U/f MittpktFreq.)
P2.8.4.6 U/f Mid Voltg
(U/f MittpktSpg.)
P2.8.4.6 U/f Mid Voltg
(U/f MittpktSpg.)
P2.8.4.7 Zero Freq Voltg
(Spannung 0Hz)
P2.8.4.7 Zero Freq Voltg
(Spannung 0Hz)
P2.8.5.1 CurrentControlKp
(StromReglKp)
P2.8.9.16 RsVoltageDrop
(Rs Spannungsabfall)
P2.8.6.12 LsdVoltageDrop
(Lsd Spannungsabfall)
P2.8.9.17 IrAddZeroPVoltag
(IrAddZeroPVoltag)
P2.8.6.13 LsqVoltageDrop
(Lsq Spannungsabfall)
P2.8.9.22-24 Ix Offse
P2.8.6.19 Curr. Contr. Kp d
(Strom Contr. Kp d)
P2.8.9.29 Org UF ZeroPVolt
P2.8.9.16 RsVoltageDrop
(Rs Spannungsabfall)
P2.8.9.17 IrAddZeroPVoltag
(IrAddZeroPVoltag)
P2.8.9.20 LsVoltageDrop
(Ls Spannungsabfall)
P2.8.9.22-24 Ix Offset
P2.8.9.25 Estimator Kp
P2.8.9.29 Org UF ZeroPVolt
Page 91

apfiff20 kransteuerung VACON 91
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
2 = ID With Run Identifikationslauf mit Drehung des Motors
Die Welle dreht sich während dem Identifikationslauf.
Der Identifikationslauf muss ohne Belastung der Motorwelle erfolgen. U/f-Einstellungen
und Magnetisierungs-Strom werden identifiziert. Der Identifikationslauf sollte
unabhängig von der endgültigen Betriebsart (Closed Loop oder Open Loop)
durchgeführt werden, um die beste Leistung des Motors zu erzielen. Wenn der
Identifikationslauf mit Motordrehung erfolgreich abgeschlossen ist, kompensiert
der Umrichter intern die geänderte Motortemperatur. SCTorqueChainSelect B5 & B6.
Beispiel für ein Verhalten
Aktualisiert Parameter während des Identifikationlaufs
AM:
PM:
P2.1.8 MagnCurrent
(Magnet. Strom)
P2.8.4.2 U/f Ratio Select
(U/f Verhältnis Auswahl)
P2.8.4.2 U/f Ratio Select
(U/f Verhältnis Auswahl)
P2.8.4.3 Field WeakngPnt
(FeldschwächPunkt)
P2.8.4.5 U/f Mid Freq
(U/f MittpktFreq.)
P2.8.4.5 U/f Mid Freq
(U/f MittpktFreq.)
P2.8.4.6 U/f Mid Voltg
(U/f MittpktSpg.)
P2.8.4.6 U/f Mid Voltg
(U/f MittpktSpg.)
P2.8.4.7 Zero Freq Voltg
(Spannung 0Hz)
P2.8.4.7 Zero Freq Voltg
(Spannung 0Hz)
P2.8.9.16 RsVoltageDrop
(Rs Spannungsabfall)
P2.8.5.1 CurrentControlKp
(StromReglKp)
P2.8.9.17 IrAddZeroPVoltag
(IrAddZeroPVoltag)
P2.8.6.12 LsdVoltageDrop
(Lsd Spannungsabfall)
P2.8.9.22-24 Ix Offset
P2.8.6.13 LsqVoltageDrop
(Lsq Spannungsabfall)
P2.8.9.29 Org UF ZeroPVolt
P2.8.6.19 Curr. Contr. Kp d
(Strom Contr. Kp d)
P2.8.5.8 Temp.Compen.Mode
P2.8.9.16 RsVoltageDrop
(Rs Spannungsabfall)
P2.8.9.1-15 Flux X %
P2.8.9.17 IrAddZeroPVoltag
P2.8.9.20 LsVoltageDrop
(Ls Spannungsabfall)
P2.8.9.21 MotorBEMVoltage
P2.8.9.22-24 Ix Offset
P2.8.9.25 Estimator Kp
P2.8.9.29 Org UF ZeroPVolt
P2.8.5.8 Temp.Compen.Mode
Page 92

VACON 92 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
3 = Enc. ID Run Identifikationslauf des Gebers
Die Motorwelle dreht sich während der Identifikation.
IM: Bei Ausführung für Induktionsmotor werden Impulszahl und Richtung des Encoders
identifiziert. Kann verwendet werden, wenn keine Encoderinformation verfügbar ist, das
korrekte Ergebnis kann nur bei unbelastetem Motor erreicht werden.
PMSM: Diese Auswahl wird für den PMS-Motor verwendet, wenn die automatische
Winkelerkennung für den verwendeten Motor nicht geeignet ist (der Winkel wird bei
jedem Start automatisch erkannt, wenn der Parameter PMSM Wellenposition Null ist).
Dieser Identifikationslauf aktualisiert den Parameter PMSM Wellenposition
basierend auf der absoluten Position des Gebers oder der Z-Impulsposition des
inkrementalen Encoders.
Hinweis: Die Identifizierung muss neu durchgeführt werden, wenn die Geberposition
in Bezug auf den Motor geändert wird, z. B. bei Wartungsarbeiten.
Aktualisiert Parameter während des Identifikationlaufs
AM:
PM:
P2.1.8 MagnCurrent
(Magnet. Strom)
P2.8.6.1 PMSMShaftPositio
(PMSMWellenPosition)
P2.8.4.2 U/f Ratio Select
(U/f Verhältnis Auswahl)
P2.8.9.22-24 Ix Offset
P2.8.4.5 U/f Mid Freq.
(U/f MittpktFreq.)
P2.8.9.25 Estimator Kp
P2.8.4.6 U/f Mid Voltg.
(U/f MittpktSpg.)
P2.8.4.7 Zero Freq Voltg
(Spannung 0Hz)
P2.8.9.16 Rs RsVoltageDrop
(Rs Spannungsabfall)
P2.8.9.17 IrAddZeroPVoltag
P2.8.9.22-24 Ix Offset
P2.8.9.29 Org UF ZeroPVolt
P2.8.5.8 Temp.Compen.Mode
P2.8.9.1-15 Flux X %
P7.3.1.2 Pulse revolution (Pulszahl)
P7.3.1.3 Invert direction
(Umkehr. Drehricht)
Page 93

apfiff20 kransteuerung VACON 93
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Identifiziert Alle
Die Welle dreht sich während dem Identifikationslauf.
Alle oben genannten Identifikations-Auswahloptionen werden nacheinander durchgeführt.
Aktualisiert Parameter während des Identifikationlaufs
AM:
PM:
P2.1.8 MagnCurrent
(Magnet. Strom)
P2.8.4.2 U/f Ratio Select
(U/f Verhältnis Auswahl)
P2.8.4.2 U/f Ratio Select
(U/f Verhältnis Auswahl)
P2.8.4.3 Field WeakngPnt
(FeldschwächPunkt)
P2.8.4.5 U/f Mid Freq.
(U/f MittpktFreq.)
P2.8.4.5 U/f Mid Freq
(U/f MittpktFreq.)
P2.8.4.6 U/f Mid Voltg.
(U/f MittpktSpg.)
P2.8.4.6 U/f Mid Voltg
(U/f MittpktSpg.)
P2.8.4.7 Zero Freq Voltg
(Spannung 0Hz)
P2.8.4.7 Zero Freq Voltg
(StromReglKp)
P2.8.9.16 RsVoltageDrop
(Rs Spannungsabfall)
P2.8.5.1 CurrentControlKp
(Lsd Spannungsabfall)
P2.8.9.17 IrAddZeroPVoltag
(IrAddZeroPVoltag)
P2.8.6.12 LsdVoltageDrop
(Lsq Spannungsabfall)
P2.8.9.22-24 Ix Offset
P2.8.6.13 LsqVoltageDrop
(Strom Contr. Kp d)
P2.8.9.29 Org UF ZeroPVolt
P2.8.6.19 Curr. Contr. Kp d
(Rs Spannungsabfall)
P2.8.5.8 Temp.Compen.Mode
P2.8.9.16 RsVoltageDrop
(Rs Spannungsabfall)
P2.8.9.1-15 Flux X %
P2.8.9.17 IrAddZeroPVoltag
P2.8.9.20 LsVoltageDrop
(Ls Spannungsabfall)
P2.8.9.21 MotorBEMVoltage
P2.8.9.22-24 Ix Offset
P2.8.9.25 Estimator Kp
P2.8.9.29 Org UF ZeroPVolt
P2.8.5.8 Temp.Compen.Mode
P2.8.6.1 PMSMShaftPositio
(PMSMWellenPosition)
Absolute-Encoder bei blockiertem Rotor
Absolute Encoder-Nullpositions-Identifikation bei blockiertem Rotor unter
Verwendung eines Permanentmagnetmotors.
Es wird empfohlen, die Welle während dieses Identifikationsmodus zu blockieren.
Aktualisiert Parameter während des Identifikationlaufs
PM:
P2.8.6.1 PMSMShaftPositio (PMSMWellenPosition)
P2.8.9.22-24 Ix Offset
P2.8.9.25 Estimator Kp
Page 94

VACON 94 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
U/f Kurve und Magnetisierungs-Strom
Die Welle dreht sich während dem Identifikationslauf.
Diese Identifikationsauswahl führt nicht zu einer Identifizierung der Sättigungskurve
und öffnet die Bremse, wenn die Startdrehung beginnt.
Da die Sättigungskurve nicht ausgeführt wird, ist die Laufzeit kürzer, auch bei
angeschlossenem Hebehaken.
Beispiel für ein Verhalten
Aktualisiert Parameter während des Identifikationlaufs
- P2.1.8 MagnCurrent (Magnet. Strom)
- P2.8.4.2 U/f Ratio Select (U/f Verhältnis Auswahl)
- P2.8.4.5 U/f Mid Freq (U/f MittpktFreq.)
- P2.8.4.6 U/f Mid Voltg. (U/f MittpktSpg.)
- P2.8.4.7 Zero Freq Voltg (Spannung 0Hz)
- P2.8.5.8 Temp.Compen.Mode
- P2.8.9.16 RsVoltageDrop (Rs Spannungsabfall)
- P2.8.9.17 IrAddZeroPVoltag
- P2.8.9.22-24 Ix Offset
- P2.8.9.29 Org UF ZeroPVolt
Identifikation der Totzeit-Kompensierung
Der Strom wird an den Motor angelegt, aber die Welle wird nicht gedreht.
Dieser Identifikationsmodus wird für die Open Loop Steuerung benötigt, Ident All
kann stattdessen verwendet werden.
Page 95

apfiff20 kransteuerung VACON 95
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
- Identifikation fehlgeschlagen
Identifikation im letzten Versuch fehlgeschlagen.
Die grundlegenden Motortypenschild-Daten müssen vor der Durchführung des
Identifikationslaufs korrekt eingestellt werden:
- P2.1.3 P2.1.8. Grunddaten des Motors.
- P2.1.9 Der Magnetisierungs-Strom kann auch angegeben werden, wenn er
vorhanden ist, wenn er vor der Identifikation ohne drehenden Motor angegeben
wird; Die U/f-Kurve wird entsprechend dem gegebenen Magnetisierungs-Strom
abgestimmt.
- P2.1.11 Motor-Typ.
Für Closed Loop-Regelkreis muss für den installiertem Encoder der Parameter für
Impulse / Umdrehungen (im Menü M7) eingestellt werden.
Sie aktivieren die automatische Identifikation, indem Sie diesen Parameter auf den
entsprechenden Wert setzen und einen Startbefehl in die gewünschte Richtung
geben. Der Startbefehl an den Antrieb muss innerhalb von 20 s erteilt werden.
Wird innerhalb von 20 s kein Startbefehl gegeben, wird der Identifikationslauf
abgebrochen und der Parameter auf die Werkseinstellung zurückgesetzt. Die
Identifikation kann jederzeit mit dem normalen Stopp-Befehl gestoppt werden,
woraufhin der Parameter zu seiner Standardeinstellung zurückkehrt. Wenn der
Identifikationslauf Fehler oder andere Probleme feststellt, wird der
Identifikationslauf nach Möglichkeit abgeschlossen. Nach Abschluss der
Identifikation wird eine Warnung ausgegeben, wenn die Identifikations-Daten
nicht erfolgreich aufgelesen wurden.
Während des Identifikationslaufs ist die Bremssteuerung deaktiviert.
Hinweis: Nach der Identifizierung erfordert der Antrieb eine steigende Flanke des
Start-Befehls.
Hinweis: Die Bremsensteuerungsanwendung hat alle identifizierten Werte in
Parametern gespeichert. Eine erneute Identifikation ist nicht erforderlich, wenn
frühere Parameter in den Antrieb zurückgeladen werden, z. B. bei einem Wechsel
der Steuerplatine.
DriveSynch-Operation: Aktivieren Sie die Identifikation nur vom Master-Umrichter
aus:
P2.1.10 Motor Type (Motor-Typ) ID650 Motor Type
Mit diesem Parameter den verwendeten Motor-Typ auswählen
0 Asynchronmotor
-Asynchronmotor
1 Permanentmagnet Synchronmotor
- Wenden Sie sich vor der Verwendung mit einem extern magnetisierten
Motor an das Werk.
\
Page 96

VACON 96 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.1.11 Crane Identification modes (Kranidentifikations Modus) ID1683
Wählen Sie die Identifikationseinstellungen für den Betrieb der Bremssteuerung.
Vor der Kranidentifikation ist mindestens eine Identififikation im Stillstand (P2.1.9)
vorzunehmen, bei der die grundlegende U/f-Kurve abgestimmt wird.
Diese Identifikations-Modi verwenden mechanische Verzögerungen der Bremse
und Verzögerungen der Bremsrückmeldung, um die richtigen bremsbezogenen
Parameter zu berechnen (G2.15 Bremssteuerung). Stellen Sie diese
Verzögerungszeiten vor der Identifizierung ein, falls bekannt, oder geben Sie gute
Schätzwerte ein. Wenn genauere Werte gefunden werden, wird empfohlen, die
Kranerkennung erneut durchzuführen.
0
1
Diese Auswahl berechnet die richtigen Antriebseinstellungen für die HebeAnwendung.
Diese Identifikation berechnet Werte für:
o P2.7.1.1 DC-Brake Current (DC-Bremsstrom)
o P2.7.2.1 Start Magnetization Current (Start Magnetisierungs-Strom)
o P2.7.1.2 Start DC-Brake Time (Start DC-Bremszeit)
o P2.7.2.2 Start Magnetization Time (Start Magnetisierungs-Zeit)
o P2.15.5 Brake Open Frequency Limit Open Loop (Bremse offen Frequenz-
Grenze Open Loop)
o P2.6.3.5 Minimum Frequency Open Loop (Minimum Frequenz Open Loop)
o P2.7.1.4 Stop DC-Brake Frequency (Stopp DC-Bremse Frequenz)
o P2.8.3.7 Zero Frequency Voltage (Null Frequenz Spannung)
o P2.8.3.6 U/f Middle Voltage (U/f Mittenspannung)
o P2.8.3.5 U/f Middle Frequency (U/f Mittenfrequenz)
o P2.8.3.12 I/f Control Lim (I/f Control Lim)
o P2.7.1.3 Stop DC-Brake Time (Stopp DC-Bremse Zeit)
o P2.9.5.4 Stop 0 Speed Time (Stopp 0 Drehzahl Zeit)
o P2.1.12 Movement Type. (Movement Type.)
o P2.15.7 Brake Close Frequency Limit OL calculated internally if kept Zero.
(Bremse geschlossen Frequenz-Grenze OL intern berechnet, wenn Null
gehalten wird.)
o P2.15.8 Brake Close Frequency Limit CL calculated internally if kept Zero.
(Bremse geschlossen Frequenz-Grenze OL intern berechnet, wenn Null
gehalten wird.)
2
Diese Auswahl berechnet die richtigen Antriebseinstellungen für die horizontale
Bewegung. Grundeinstellungen für die Haltebremse.
Diese Identifikation berechnet Werte für:
o P2.7.1.1 DC- Brake Current (DC-Bremsstrom)
o P2.7.2.1 Start Magnetization Current (Start Magnetisierungs-Strom)
o P2.7.1.2 Start DC-Brake Time (Start DC-Bremszeit)
o P2.7.2.2 Start Magnetization Time (Start Magnetisierungs-Zeit)
o P2.15.5 Brake OpenFrequency Limit Open Loop (Brake OpenFrequency
Limit Open Loop)
o P2.7.1.4 Stop DC-Brake Frequency (Stopp DC-Bremse Frequenz)
o P2.7.1.3 Stop DC-Brake Time (Stopp DC-Bremse Zeit)
o P2.9.5.4 Stop 0 Speed Time (Stopp 0 Drehzahl Zeit)
o P2.1.12 Movement Type. (Movement Type.)
Page 97

apfiff20 kransteuerung VACON 97
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
o P2.15.7 Bremse geschlossen Frequenz-Grenze OL intern berechnet,
wenn Null gehalten wird. (Bremse geschlossen Frequenz-Grenze OL
intern berechnet, wenn Null gehalten wird.)
o P2.15.8 Bremse geschlossen Frequenz-Grenze OL intern berechnet,
wenn Null gehalten wird. (Bremse geschlossen Frequenz-Grenze OL
intern berechnet, wenn Null gehalten wird.)
Dies ist eine reine Berechnung, es ist nicht notwendig, einen Startbefehl zu geben.
3
Dieser Identifikations-Modus misst die Bremszeit im Closed Loop-Regelkreis,
für die ein Startbefehl erforderlich ist.
Stellen Sie den Umrichter auf Closed Loop-Regelkreis ein.
Die Bremssteuerung DO muss aktiviert werden.
Der Umrichter läuft 7 Sekunden lang bei Fenster-Drehmomentsteuerung mit
Nulldrehzahl-Sollwert. Mit 2-Hz-Fenster. Die Bremse gilt als geöffnet, wenn die
Encoder-Frequenz mehr als 0,5 Hz beträgt. In der Mitte des ID-Laufs wird die
Bremse wieder geschlossen und die Bremse gilt als geschlossen, wenn die
Frequenz unter 0,5 Hz liegt. Nach dem Identifikationslauf stoppt der Umrichter.
Der verwendete Drehmomentbezug während des Identifikationslaufs kann in der
Gruppe G2.15.15.15 Bremsenprüfung eingestellt werden.
P2.1.12 Movement Type (Bewegung Typ)
Wählen Sie, für welche Art von Bewegung dieser Umrichter verwendet wird.
0
Der Antrieb arbeitet wie ein Standardantrieb, es ist keine kranbezogene
Funktionalität aktiviert.
1
Die Umrichterfunktionen werden für Hebevorgänge aktiviert.
o Bei der Steuerung im Open Loop-Regelkreis ist die dynamische
Minimalfrequenzregelung aktiviert.
2
Die Umrichterfunktionen werden für horizontale Bewegung aktiviert.
o Die dynamische Minimal-Frequenz ist deaktiviert.
Page 98

VACON 98 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7.2 Sollwertbehandlung
Prioritätsreihenfolge der Drehzahlreferenzkette der Bremssteuerungsanwendung.
AUSW
G
IN 0
IN 1
Endgültige Sollwertposition
PC PC-Steuerung
PC PC-Sollwert
AUSW
G
IN 0
IN 1
UND
IN 1
IN 2
F Follower
F Sollw. vom Master
AUSW
G
IN 0
IN 1
FW KonstanterFreqSollw6
FW KonstanterFreqSollw7
F Rampe Follower
AUSW
G
IN 0
IN 1
DI Tippen aktivieren
P Tippen Sollwert 1 / 2
AUSW
G
IN 0
IN 1
DI
(F)
Festdrehzahl
P(F) Festdrehzahlen
F 4-mA-Fehler
AUSW
G
IN 0
IN 1
P 4mAFehler Freq.
P Steuerplatz
P E/A Sollwert
P Bedieneinheit Sollw Ausw
P Feldbus Steuer Sollw
AUSW
G
IN 0
IN 1
P E/A-Sollwert 2
DI E/A-Sollw. 1/2
MUX
K
IN 0
IN 1
IN 2
IN 3
MIN
IN 1
IN 2
AUSW
G
IN 0
IN 1
DI Max Frequenz 2
P Max Frequenz
P Max Frequenz 2
Drehzahlsollwertkette vor der Rampen-Steuerung
P Geschwindigkeits Aufteilung
C 100,00
ADD
+
+
+
F Einstellen Sollwert
FW FreqSollw2
GRENZE
MN
IN
MX
P Max Frequenz
P Pos. Freq Grenze
GRENZE
MN
IN
MX
P -Max Frequency
P Neg. Freq Grenze
GRENZE
MN
IN
MX
Filt x2
IN
ZK
OUT
V Freq.Sollwert
FW FreqSollwFilterTC
FW FreqSollwAktuell
Schalter
IN
ZEIT
OUT
P Start 0Hz Zeit
FW FreqSollw1
Endgültige Sollwertposition
RampControlIn
MULDIV
WERT
MULTIP
DIVIS
Page 99

apfiff20 kransteuerung VACON 99
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7.2.1 Basis-Parameter
P2.2.1 I/O frequency reference selection (Auswahl E/A-Frequenz-Sollwert 1) ID117
I/O Reference
Legt fest, welche Frequenz-Sollwert-Quelle verwendet wird, wenn der Steuerplatz
der E/A-Klemme P3.1 Steuerplatz, ist
Analog-Eingang 1.
\
Analog-Eingang 2.
\ Analog Eingang 2
Analog-Eingang 1 + Analog-Eingang 2.
Mit alternativer Referenzskalierung in der Analogeingangsgruppe können 100 %
der Eingangswerte so eingestellt werden, dass sie 25 Hz entsprechen, d. h. wenn
beide bei 100 % des Endsollwerts liegen, beträgt sie 50 Hz.
-
Analog-Eingang 1 Analog-Eingang 2.
-
Analog-Eingang 2 Analog-Eingang 1.
Analog-Eingang 1 x Analog-Eingang 2
Analog-Eingang 1, -10 VDC ... +10 VDC
Analog-Eingang 2, -10 VDC ... +10 VDC
Sollwert von Bedienteil R3.2
Der Sollwert wird vom Feldbus genommen, eine alternative Skalierung kann in
Motor-Potentiometer.
Sollwert wird mit zwei di Signale \
Handhabung Sollwert \ Motor-
Das Minimum von Analog-Eingang 1 und Analog-Eingang 2 wird als Sollwert
verwendet.
Das Maximum von Analog-Eingang 1 und Analog-Eingang 2 wird als Sollwert
verwendet.
Maximum Frequenz
P2.1.2 Max Frequenz wird als Sollwert verwendet.
AI1/AI2 Auswahl
Der Digital- Sollwert Eingang 1 und Analog-
von 14 (dieser Parameter) abweicht.
Sollwert wird von Encoder-Eingang 1 gelesen.
Sollwert wird von Encoder-Eingang 2 gelesen. Diese Auswahl ist für Doppel-
Encoder-Karten verwendbar. Kann z. B. für die Drehzahlsynchronisation
verwendet werden, bei der zwei Motoren mit gleicher Drehzahl, aber nicht
unbedingt mit gleichem Winkel laufen müssen.
Page 100

VACON 100 apfiff20 kransteuerung
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
P2.2.2 Keypad frequency reference selection (Auswahl des Frequenz-Sollwerts
mit Bedienteil) ID121 Keypad Ref Sel
Legt fest, welche Frequenz-Sollwert-Quelle verwendet wird, mit dem Bedienteil
unter P3.1 Steuerplatz
Analog-Eingang 1.
\
Analog-Eingang 2.
\ Analog Eingang 2
Analog-Eingang 1 + Analog-Eingang 2.
Mit alternativer Sollwert-Skalierung in der Analog-Eingangsgruppe können 100 %
der Eingangswerte so eingestellt werden, dass sie 25 Hz entsprechen, d. h. wenn
beide bei 100 % des Endsollwerts liegen, beträgt sie 50 Hz.
-
Analog-Eingang 1 Analog-Eingang 2.
-
Analog-Eingang 2 Analog-Eingang 1.
Analog-Eingang 1 x Analog-Eingang 2
Analog-Eingang 1, -10 VDC ... +10 VDC
Analog-Eingang 2, -10 VDC ... +10 VDC
Sollwert von Bedienteil R3.2
Der Sollwert wird vom Feldbus übernommen, eine alternative Skalierung kann in
P2.2.3 Fieldbus frequency reference selection (Auswahl des Feldbus-Frequenz-
Sollwerts) ID122 Fielbus Ctr Ref
Legt fest, welche Frequenz-Sollwert-Quelle verwendet wird, wenn der Steuerplatz
Feldbus P3.1 ist. Steuerplatz
Analog-Eingang 1.
\
Analog-Eingang 2.
Signalskali \ Analog Eingang 2
Analog-Eingang 1 + Analog-Eingang 2.
Mit alternativer Referenzskalierung in der Analogeingangsgruppe können 100 %
der Eingangswerte so eingestellt werden, dass sie 25 Hz entsprechen, d. h. wenn
beide bei 100 % des Endsollwerts liegen, beträgt sie 50 Hz.
-
Analog-Eingang 1 Analog-Eingang 2.
-
Analog-Eingang 2 Analog-Eingang 1.
Analog-Eingang 1 x Analog-Eingang 2
Analog-Eingang 1, -10 VDC ... +10 VDC
Analog-Eingang 2, -10 VDC ... +10 VDC
Sollwert von Bedienteil R3.2
Der Sollwert wird vom Feldbus übernommen, eine alternative Skalierung kann in
 Loading...
Loading...