


vacon nx
®
frekvensomriktare
all in one
applikationshandbok

A
J
B C D E F G H I
Index Min Max Unit Default
Cust
ID DescriptionParameter
INLEDNING VACON · 3
INLEDNING
Dokument-ID: DPD01210E
Datum: 1.12.2016
Programvarukod:
Grundapplikation = ASFIFF01
•
Standardapplikation = ASFIFF02
•
Lokal-/fjärrstyrningsapplikation =
•
ASFIFF03
Konstanthastighetsstyrning = ASFIFF04
•
PID-regleringsapplikation = ASFIFF05
•
Applikation för multifunktionsstyrning
•
NXS = ASFIFF06
-
NXP = APFIFF06
-
Applikation för pump- och fläktstyrning =
•
ASFIFF07
OM HANDBOKEN
Upphovsrätten för handboken tillhör Vacon Ltd. Alla rättigheter förbehålls. Handboken kan
komma att ändras utan föregående meddelande. Ursprungsspråket för dessa instruktioner
är engelska.
I den här handboken beskrivs funktionerna i frekvensomriktaren från VACON® och hur
omriktaren används.
Handboken innehåller många parametertabeller. De här instruktionerna anger hur
tabellerna ska tolkas.
A. Parameternumret, det vill säga
parameterns placering i menyn.
B. Parameterns namn.
C. Parameterns minimivärde.
D. Parameterns maximivärde.
E. Parameterns enhet. Enheter visas om
den är tillgänglig.
F. Det fabriksinställda värdet.
G. Kundens egna inställning.
H. Parameterns id-nummer.
I. En kort beskrivning av parameterns
värden och/eller funktion.
J. När symbolen visas går det att läsa mer
om parametern i avsnittet
Parameterbeskrivningar.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
INNEHÅLLSFÖRTECKNING VACON · 5
INNEHÅLLSFÖRTECKNING
Inledning
Om handboken 3
1 Grundapplikation 9
1.1 Introduktion 9
1.1.1 Motorskyddsfunktioner i grundapplikationen 9
1.2 Styr-I/O 10
1.3 Grundapplikationens styrsignallogik 12
1.4 Grundapplikation – Parameterlistor 12
1.4.1 Övervakningsvärden (manöverpanel: Meny M1) 12
1.4.2 Grundparametrar (manöverpanel: M2-menyn -> G2.1) 14
1.4.3 Panelstyrning (manöverpanel: Meny M3) 15
1.4.4 Systemmeny (manöverpanel: Meny M6) 16
1.4.5 Tilläggskort (manöverpanel: M7-menyn 16
2 Standardapplikation 17
2.1 Introduktion 17
2.2 Styr-I/O 18
2.3 Standardapplikationens styrsignallogik 20
2.4 Standardapplikation – parameterlistor 20
2.4.1 Övervakningsvärden (manöverpanel: Meny M1) 20
2.4.2 Grundparametrar (manöverpanel: M2-menyn -> G2.1) 22
2.4.3 Ingångssignaler (manöverpanel: M2-menyn -> G2.2) 23
2.4.4 Utgångssignaler (manöverpanel: M2-menyn -> G2.3 25
2.4.5 Frekvensomriktarens styrparametrar (manöverpanel: M2-menyn ->
G2.4 28
2.4.6 Förbjudna frekvenser (manöverpanel: M2-menyn -> G2.5) 29
2.4.7 Motorkontrollparametrar (manöverpanel: M2-menyn -> G2.6) 30
2.4.8 Skyddsfunktioner (manöverpanel: M2-menyn -> G2.7 33
2.4.9 Automatisk återstart (manöverpanel: M2-menyn -> G2.8) 35
2.4.10 Panelstyrning (manöverpanel: Meny M3) 35
2.4.11 Systemmeny (manöverpanel: Meny M6) 36
2.4.12 Tilläggskort (manöverpanel: M7-menyn 36
3 Lokal styrning/fjärrstyrning 37
3.1 Introduktion 37
3.2 Styr-I/O 38
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 6 INNEHÅLLSFÖRTECKNING
3.3 Styrsignallogik i Lokal styrning/fjärrstyrning 40
3.4 Lokal styrning/fjärrstyrning – Parameterlistor 40
3.4.1 Övervakningsvärden (manöverpanel: Meny M1) 40
3.4.2 Grundparametrar (manöverpanel: M2-menyn -> G2.1) 42
3.4.3 Ingångssignaler (manöverpanel: M2-menyn -> G2.2) 44
3.4.4 Utgångssignaler (manöverpanel: M2-menyn -> G2.3 48
3.4.5 Frekvensomriktarens styrparametrar (manöverpanel: M2-menyn ->
G2.4 52
3.4.6 Förbjudna frekvenser (manöverpanel: M2-menyn -> G2.5) 53
3.4.7 Motorkontrollparametrar (manöverpanel: M2-menyn -> G2.6) 54
3.4.8 Skyddsfunktioner (manöverpanel: M2-menyn -> G2.7 57
3.4.9 Automatisk återstart (manöverpanel: M2-menyn -> G2.8) 59
3.4.10 Panelstyrning (manöverpanel: Meny M3) 59
3.4.11 Systemmeny (manöverpanel: Meny M6) 60
3.4.12 Tilläggskort (manöverpanel: M7-menyn 60
4 Konstanthastighetsstyrning 61
4.1 Introduktion 61
4.2 Styr-I/O 62
4.3 Konstanthastighetsstyrningens styrsignallogik 64
4.4 Konstanthastighetsstyrning – Parameterlistor 64
4.4.1 Övervakningsvärden (manöverpanel: Meny M1) 64
4.4.2 Grundparametrar (manöverpanel: M2-menyn -> G2.1) 66
4.4.3 Ingångssignaler (manöverpanel: M2-menyn -> G2.2) 68
4.4.4 Utgångssignaler (manöverpanel: M2-menyn -> G2.3 71
4.4.5 Frekvensomriktarens styrparametrar (manöverpanel: M2-menyn ->
G2.4 75
4.4.6 Förbjudna frekvenser (manöverpanel: M2-menyn -> G2.5) 76
4.4.7 Motorkontrollparametrar (manöverpanel: M2-menyn -> G2.6) 77
4.4.8 Skyddsfunktioner (manöverpanel: M2-menyn -> G2.7) 80
4.4.9 Automatisk återstart (manöverpanel: M2-menyn -> G2.8) 82
4.4.10 Panelstyrning (manöverpanel: Meny M3) 82
4.4.11 Systemmeny (manöverpanel: Meny M6) 83
4.4.12 Tilläggskort (manöverpanel: M7-menyn 83
5 Styrning med PID-regulator 84
5.1 Introduktion 84
5.2 Styr-I/O 85
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
INNEHÅLLSFÖRTECKNING VACON · 7
5.3 PID-regleringsapplikationens styrsignallogik 87
5.4 PID-regleringsapplikation – Parameterlistor 87
5.4.1 Övervakningsvärden (manöverpanel: Meny M1) 87
5.4.2 Grundparametrar (manöverpanel: M2-menyn -> G2.1) 90
5.4.3 Insignaler 92
5.4.4 Utgångssignaler (manöverpanel: M2-menyn -> G2.3 98
5.4.5 Frekvensomriktarens styrparametrar (manöverpanel: M2-menyn ->
G2.4 102
5.4.6 Förbjudna frekvenser (manöverpanel: M2-menyn -> G2.5) 103
5.4.7 Motorkontrollparametrar (manöverpanel: M2-menyn -> G2.6) 104
5.4.8 Skyddsfunktioner (manöverpanel: M2-menyn -> G2.7 106
5.4.9 Automatisk återstart (manöverpanel: M2-menyn -> G2.8) 108
5.4.10 Panelstyrning (manöverpanel: Meny M3) 108
5.4.11 Systemmeny (manöverpanel: Meny M6) 109
5.4.12 Tilläggskort (manöverpanel: M7-menyn 109
6 Applikation för multifunktionsstyrning 110
6.1 Introduktion 110
6.2 Styr-I/O 112
6.3 Multifunktionsstyrningens styrsignallogik 114
6.4 Multifunktionsstyrning – Parameterlistor 114
6.4.1 Övervakningsvärden (manöverpanel: Meny M1) 114
6.4.2 Grundparametrar (manöverpanel: M2-menyn -> G2.1) 126
6.4.3 Insignaler 128
6.4.4 Utsignaler 135
6.4.5 Frekvensomriktarens styrparametrar (manöverpanel: M2-menyn ->
G2.4 144
6.4.6 Förbjudna frekvenser (manöverpanel: M2-menyn -> G2.5) 146
6.4.7 Motorkontrollparametrar (manöverpanel: M2-menyn -> G2.6) 147
6.4.8 Skyddsfunktioner (manöverpanel: M2-menyn -> G2.7 155
6.4.9 Automatisk återstart (manöverpanel: M2-menyn -> G2.8) 159
6.4.10 Fältbussparametrar (Manöverpanel: M2-menyn -> G2.9) 160
6.4.11 Momentstyrningsparametrar (Manöverpanelen: M2-menyn -> G2.10)
162
6.4.12 NXP-omriktare: Master–slavparametrar (Manöverpanelen: M2-menyn > G2.11) 164
6.4.13 Panelstyrning (manöverpanel: Meny M3) 165
6.4.14 Systemmeny (manöverpanel: Meny M6) 165
6.4.15 Tilläggskort (manöverpanel: M7-menyn 166
7 Pump- och fläktstyrningsapplikation 167
7.1 Introduktion 167
7.2 Styr-I/O 168
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 8 INNEHÅLLSFÖRTECKNING
7.3 Styrsignallogik i pump- och fläktstyrningsapplikation 172
7.4 Pump- och fläktstyrningsapplikation – Parameterlistor 172
7.4.1 Övervakningsvärden (manöverpanel: Meny M1) 172
7.4.2 Grundparametrar (manöverpanel: M2-menyn -> G2.1) 175
7.4.3 Insignaler 177
7.4.4 Utsignaler 184
7.4.5 Frekvensomriktarens styrparametrar (manöverpanel: M2-menyn ->
G2.4 191
7.4.6 Förbjudna frekvenser (manöverpanel: M2-menyn -> G2.5) 192
7.4.7 Motorkontrollparametrar (manöverpanel: M2-menyn -> G2.6) 193
7.4.8 Skyddsfunktioner (manöverpanel: M2-menyn -> G2.7 194
7.4.9 Automatisk återstart (manöverpanel: M2-menyn -> G2.8) 196
7.4.10 Parametrar för pump- och fläktstyrning (Manöverpanelen: M2-menyn > G2.9) 197
7.4.11 Panelstyrning (manöverpanel: Meny M3) 199
7.4.12 Systemmeny (manöverpanel: Meny M6) 200
7.4.13 Tilläggskort (manöverpanel: M7-menyn 200
8 Beskrivningar av övervakningsvärden 201
9 Parameterbeskrivningar 207
9.1 Panelstyrningsparametrar 355
9.2 Master-slavfunktion (endast NXP) 357
9.2.1 Master-slavlänkens fysiska kopplingar 357
9.2.2 Optisk fiberanslutning mellan frekvensomriktare med OPTD2 357
9.3 Extern bromsstyrning med ytterligare gränser (ID:n 315, 316, 346 till 349, 352, 353)
358
9.4 Parametrar för termiskt motorskydd (ID:n 704 till 708) 359
9.5 Parametrar för fastlåsningsskydd (ID:n 709 till 712) 360
9.6 Parametrar för undebelastningsskydd (ID:n 713 till 716) 360
9.7 Parametrar för fältbusstyrning (ID:n 850 till 859) 361
9.7.1 Processdata ut (slav -> master) 361
9.7.2 Strömskalning i olika enhetsstorlekar 362
9.7.3 Processdata in (master -> slav) 362
9.8 Closed loop-parametrar (ID:n 612 till 621) 363
9.9 Programmeringsprincipen ”Terminal till funktion” (TTF) 364
9.9.1 Definiera en ingång/utgång för en viss funktion på panelen 364
9.9.2 Definiera en plint för en viss funktion med NCDriveprogrammeringsverktyget 365
9.9.3 Definiera oanvända ingångar/utgångar 366
9.10 Varvtalsstyrningsparametrar (endast applikation 6) 367
9.11 Automatisk växling mellan omriktare (endast applikation 7) 369
9.12 Förreglingsval (P2.9.23) 370
9.13 Exempel på autoväxling och förreglingsval 371
9.13.1 Pump- och fläktautomatik med förregling men utan autoväxling 371
9.13.2 Pump- och fläktautomatik med förregling och autoväxling 372
10 Felsökning 375
10.1 Felkoder 375
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GRUNDAPPLIKATION VACON · 9
1 GRUNDAPPLIKATION
1.1 INTRODUKTION
Grundapplikationen är en enkel applikation som är lätt att använda. Detta är
standardinställningen vid leverans från fabriken. Välj annars grundapplikationen på M6menyn på sidan S6.2. Se produktens användarhandbok.
Digitalingång DIN3 är programmerbar.
Grundapplikationens parametrar förklaras i avsnitt 9 Parameterbeskrivningar i den här
handboken. Förklaringarna är ordnade efter parameterns enskilda ID-nummer.
1.1.1 MOTORSKYDDSFUNKTIONER I GRUNDAPPLIKATIONEN
Grundapplikationen ger nästan helt samma skyddsfunktioner som de andra applikationerna:
Skydd mot externt fel
•
Övervakning av ingångsfas
•
Underspänningsskydd
•
Övervakning av utgångsfaser
•
Jordfelsskydd
•
Termiskt motorskydd
•
Skydd mot termistorfel
•
Skydd mot fältbussfel
•
Skydd mot kortplatsfel
•
Till skillnad mot andra applikationer har grundapplikationen inga parametrar för val av
svarsfunktion eller gränsvärden för felen. Mer information om termiskt motorskydd finns
under ID704 i avsnitt 9 Parameterbeskrivningar.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
OPTA 2 / OPTA 3 *)
22
23
11
17
24
25
26
DIN4
DIN5
Matningsspänning till
potentiometer etc
Jord för referens- och
styrspänningar
Jord för referens- och styrspänningar
Jord för referens- och styrspänningar
Börvärde för
analogingång 2
Brytarspänningar(se #6)
Anslut till GND eller +24 V
FEL
Ingång för externt fel
Programmerbar (P2.17)
Anslut till GND eller +24 V
Kontakt öppen = ingen åtgärd
Kontakt stängd = felåterställning
Kontakt öppen = inget fel
Kontakt stängd = fel
Sluten kontakt = start framåt
Sluten kontakt = start bakåt
Öppen kollektor,
I≤50 mA, U≤48 VDC
DRIFT
mA
KLAR
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
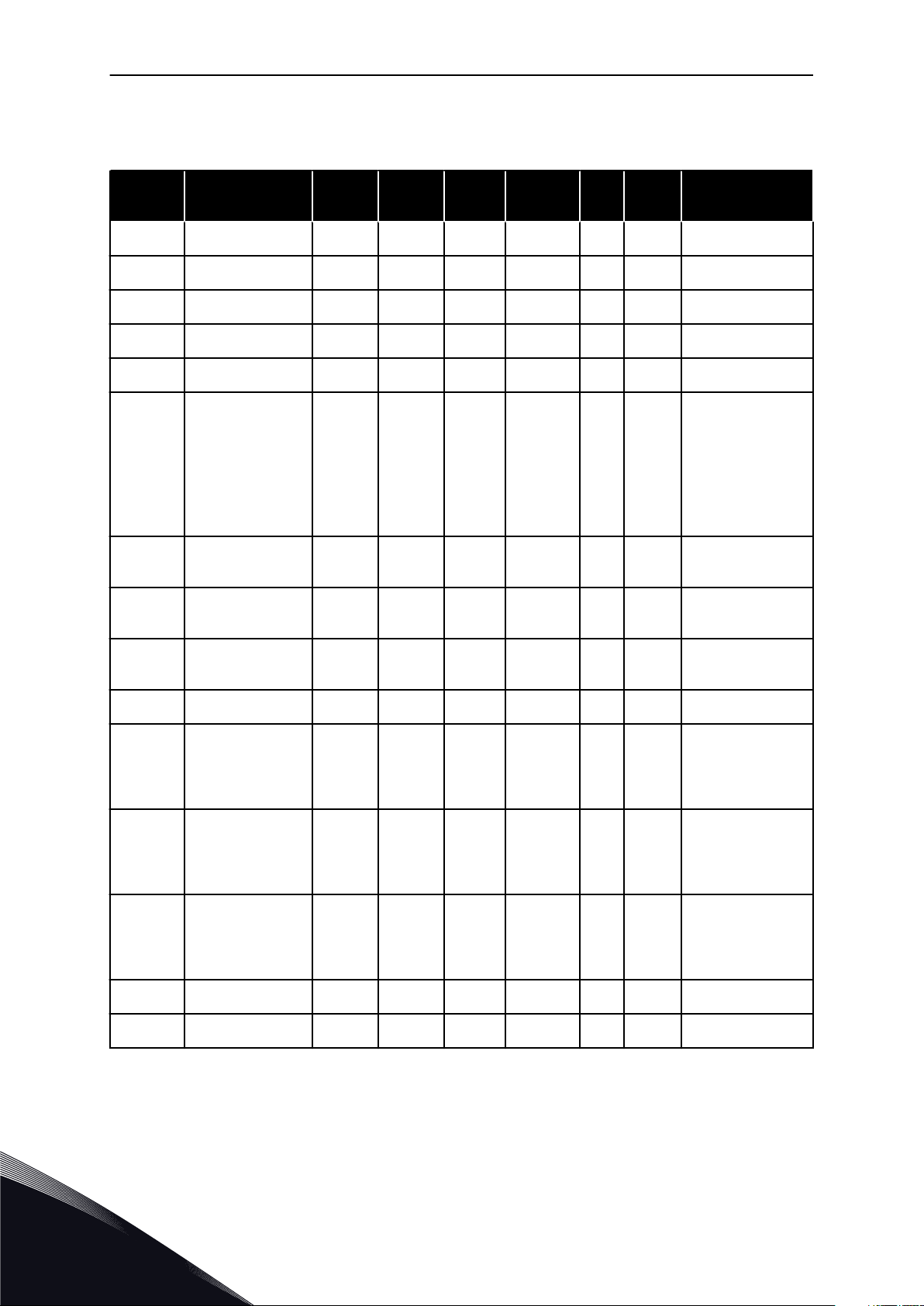
Standard I/O-kort
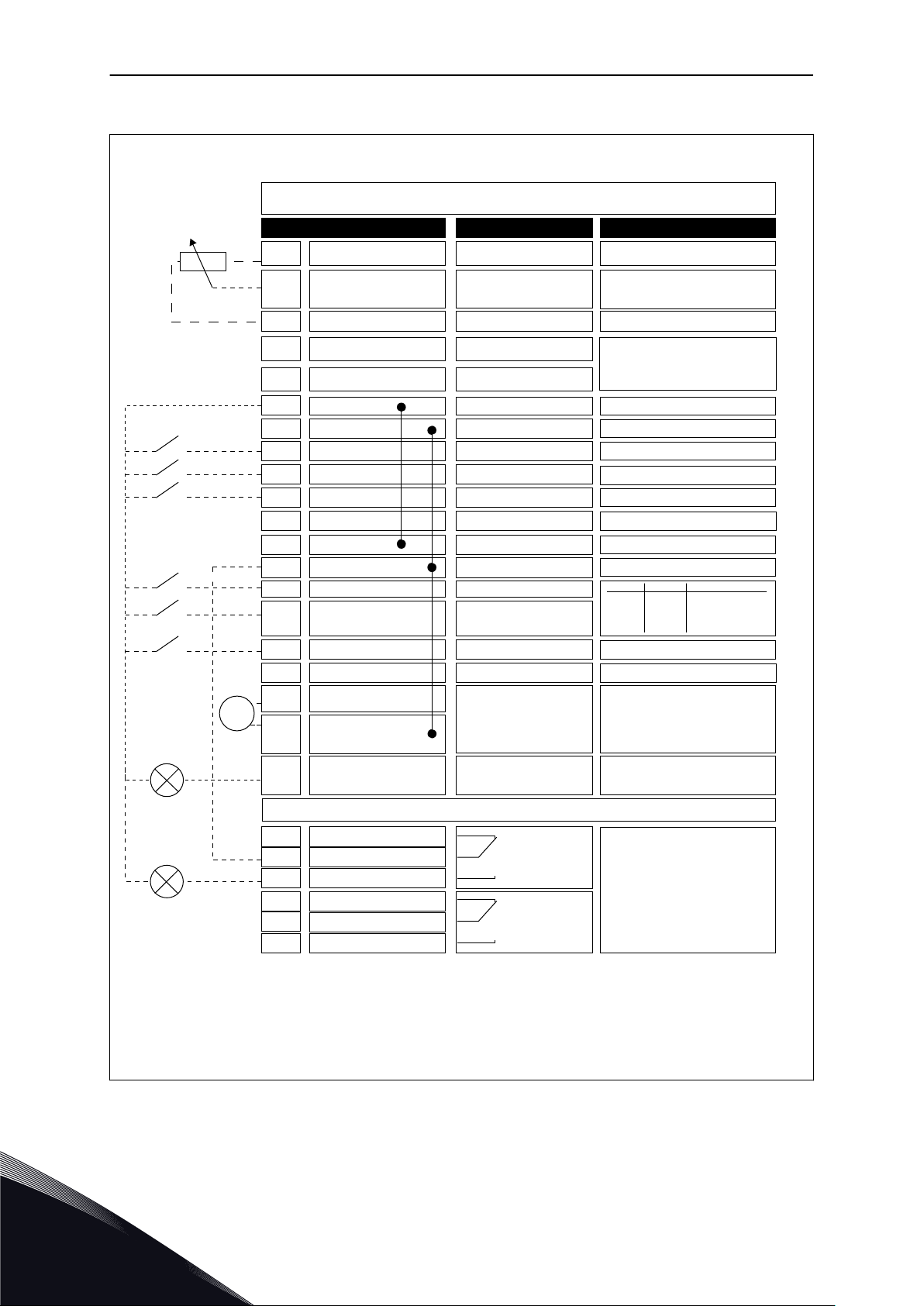
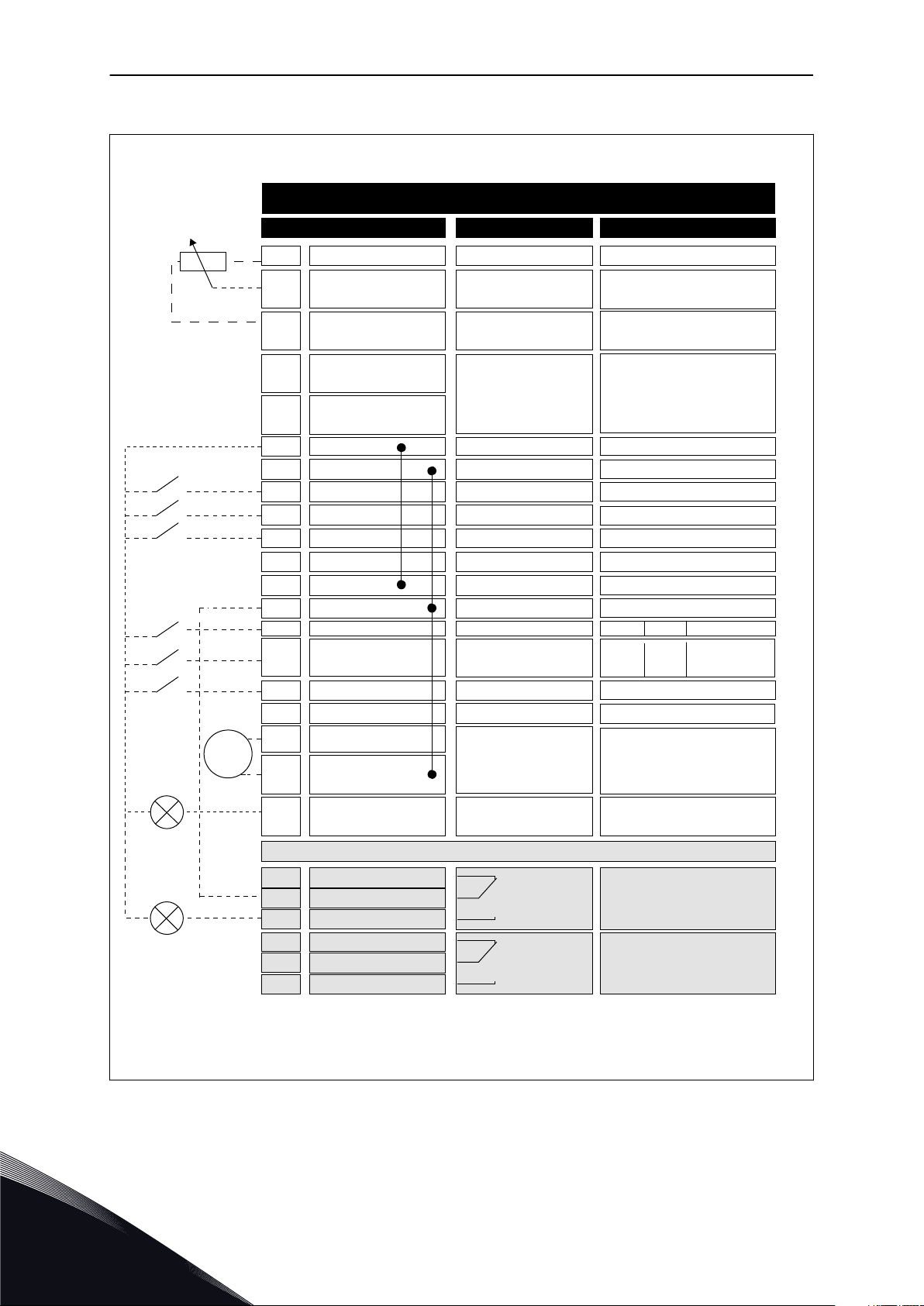
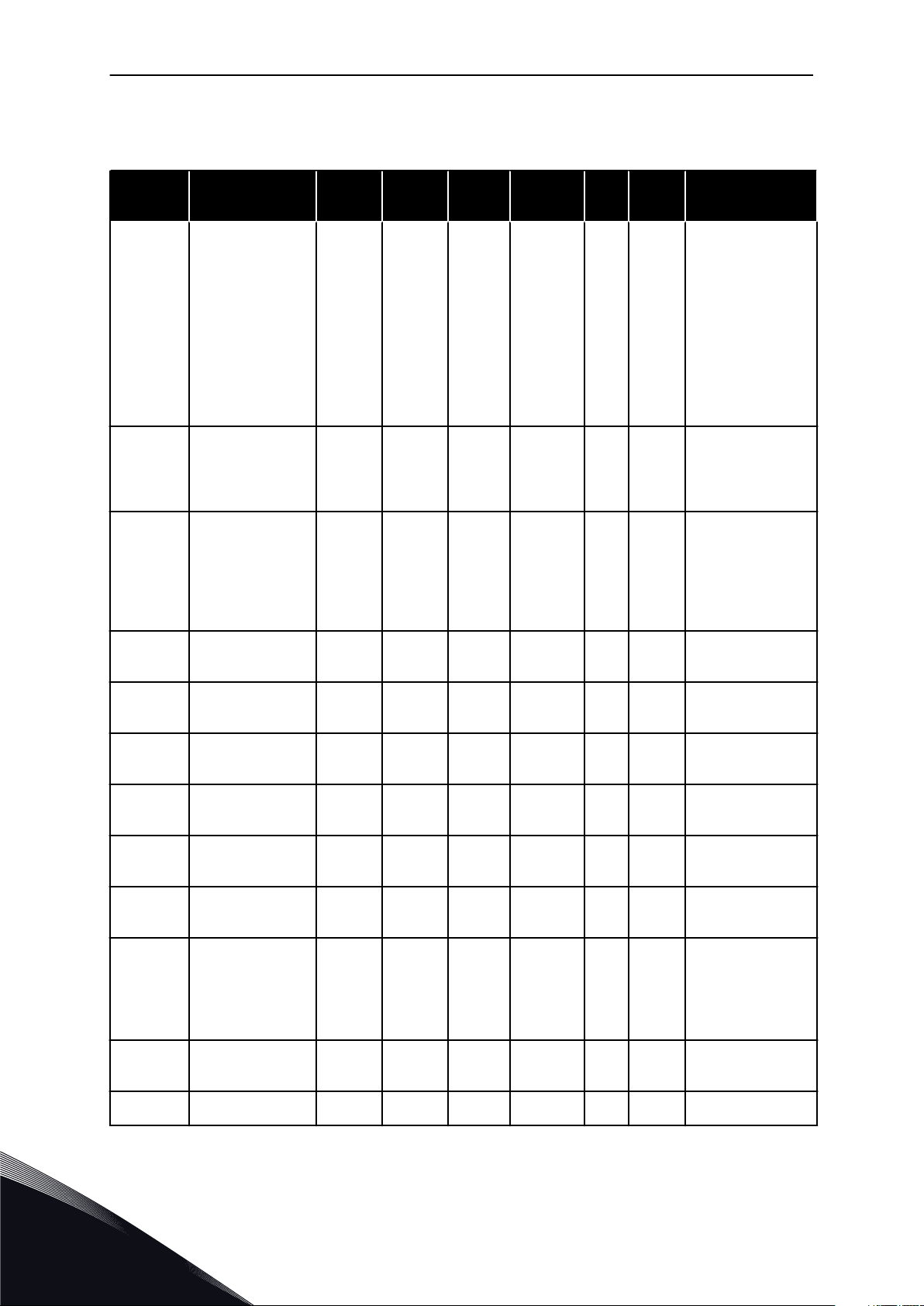
Anslutning Signal Beskrivning
+10V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Referensutgång
Analog ingång 1
Spänningsområde 0–10 V DC
Programmerbar (P2.14)
Analog ingång 2
Strömområde 0–20 mA
Utgång för styrspänning
I/O-signal till jord
I/O-signal till jord
Förvalt varvtal 1
Förvalt varvtal 2
Felåterställning
Gemensam för DIN 1–DIN 3
Gemensam för DIN4–DIN6
Utgång för styrspänning
I/O-signal till jord
Reläutgång 1
Reläutgång 2
AO1+
Börvärde för
analogingång 1
Matningsspänning till givare etc.,
max 0,1 A
Start framåt
Start bakåt
Frekv.ref.
Öppen
Stängd
Öppen
Stängd
Öppen
Öppen
Stängd
Stängd
I/O-börvärde (P2.14)
Förvalt varvt 1
Förvalt varvt 2
Max. frekvens
DRIFT
Referenspotentiometer,
1–10 kΩ
Programmerbar
utfrekvens för
analogutgång 1 (P2.16)
Område 0–20 mA/RL,
max. 500 Ω
Digitalutgång 1
KLAR
VACON · 10 GRUNDAPPLIKATION
1.2 STYR-I/O
Bild 1: Grundapplikationens I/O-standardkonfiguration
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
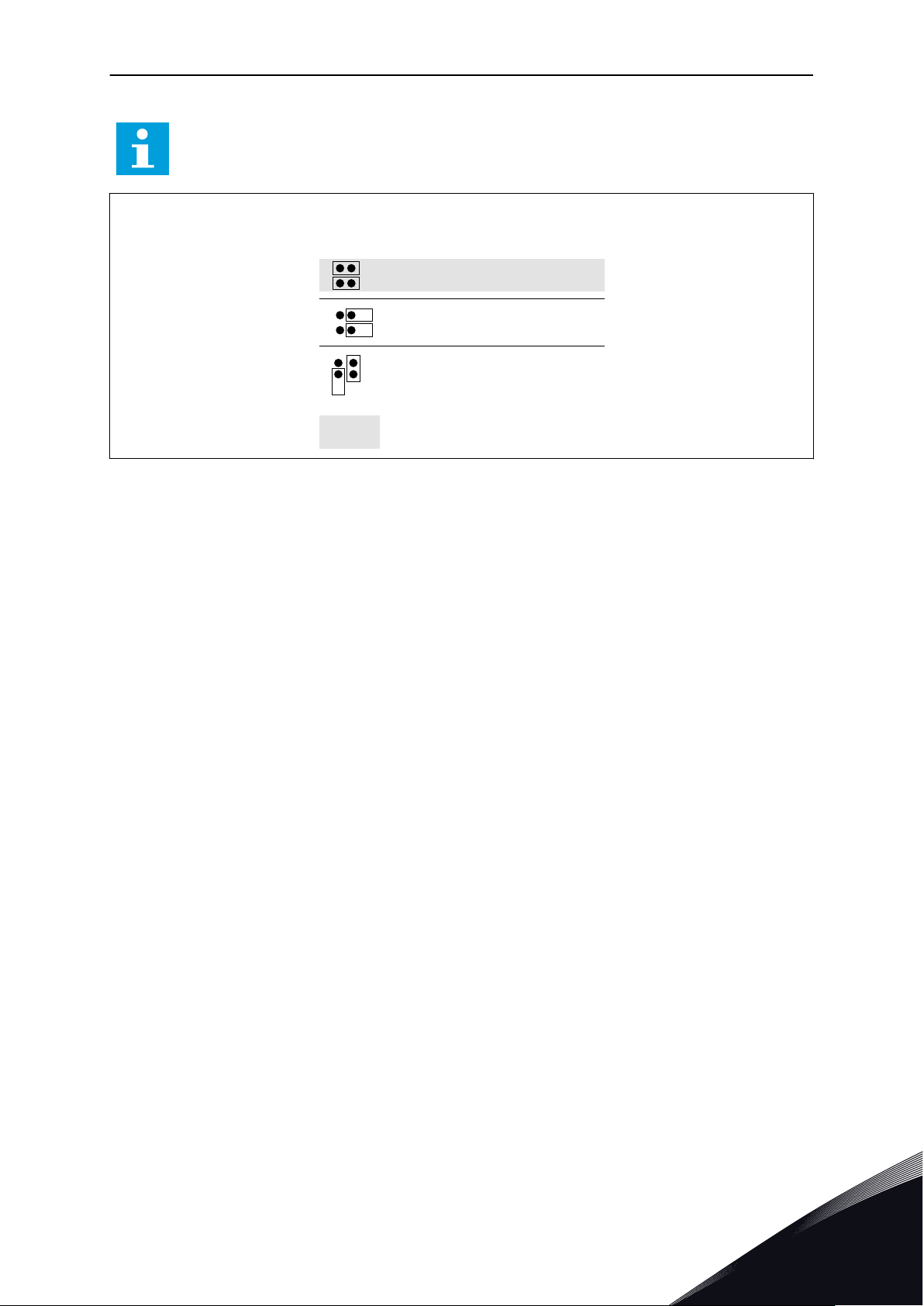
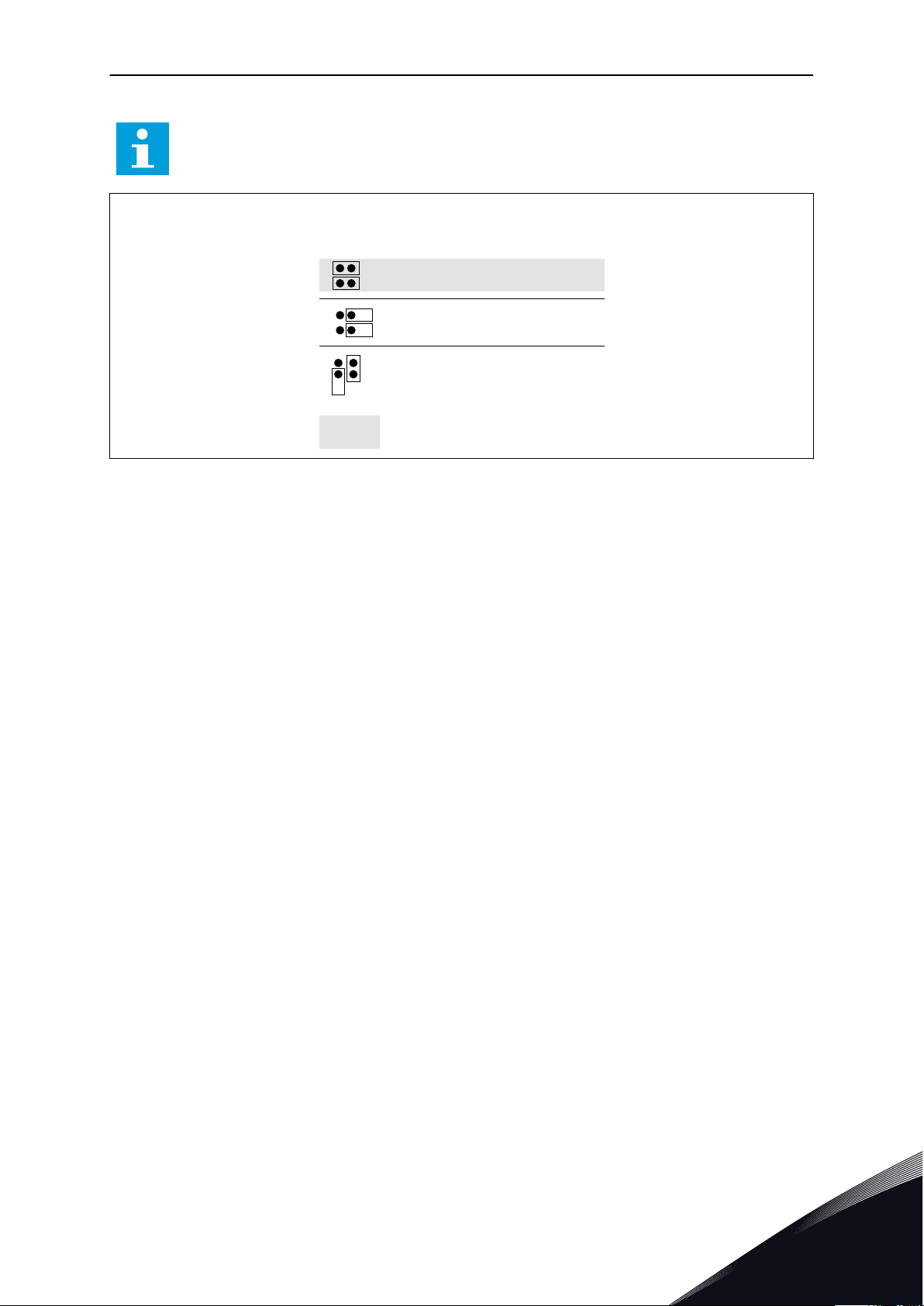
Bygelblock X3:
CMA- och CMB-jordning
CMB ansluten till GND
CMA ansluten till GND
CMB isolerad från GND
CMA isolerad från GND
CMB och CMA internt
ihopkopplade, isolerade
från GND
= Fabriksinställning
GRUNDAPPLIKATION VACON · 11
*) Optionskortet A3 saknar plint för öppen kontakt på sin andra reläutgång (plint 24 saknas).
OBS!
Se bygellägen nedan. Mer information finns i produktens användarhandbok.
Bild 2: Bygellägen
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Panelbörvärde
3.1 Styrplats
Start framåt
Start bakåt
Start/Stop
Bakåt
Intern start/stopp
Intern reversering
Intern felåterställn.
Felåterställn.ingång
Externt fel, ingång (programmerbar)
Återställn.
knapp
Start-/stoppknappar
Börvärde från fältbuss
Start/stopp från fältbuss
Riktning från fältbuss
3.3 Panelriktning
2.14 I/O-börvärde
2.19 Förinställt varvtal 2
2.18 Förinställt varvtal 1
2.2 Maxfrekvens
Start-/stoppoch reverseringslogik
Internt
frekvensbörvärde
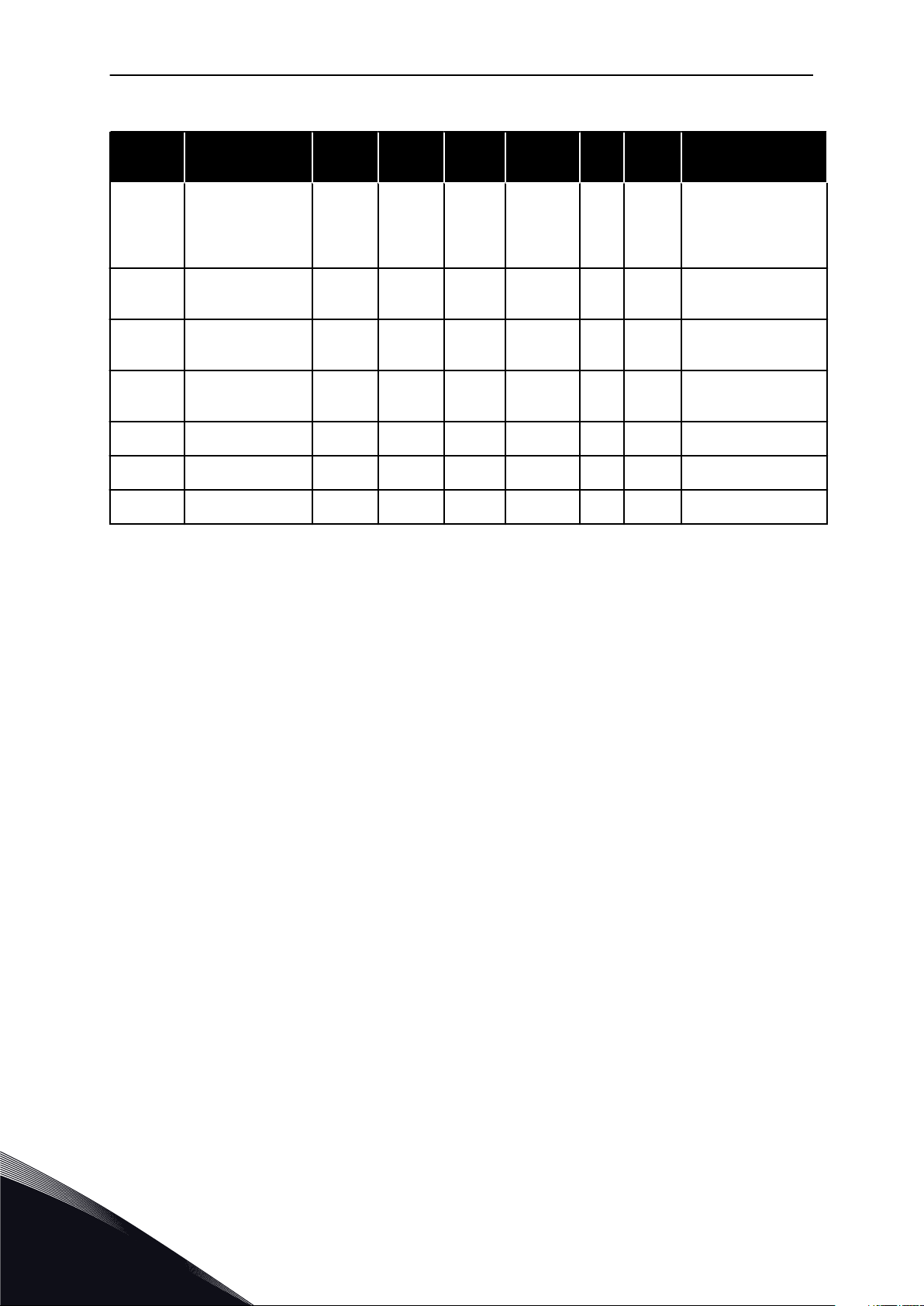
VACON · 12 GRUNDAPPLIKATION
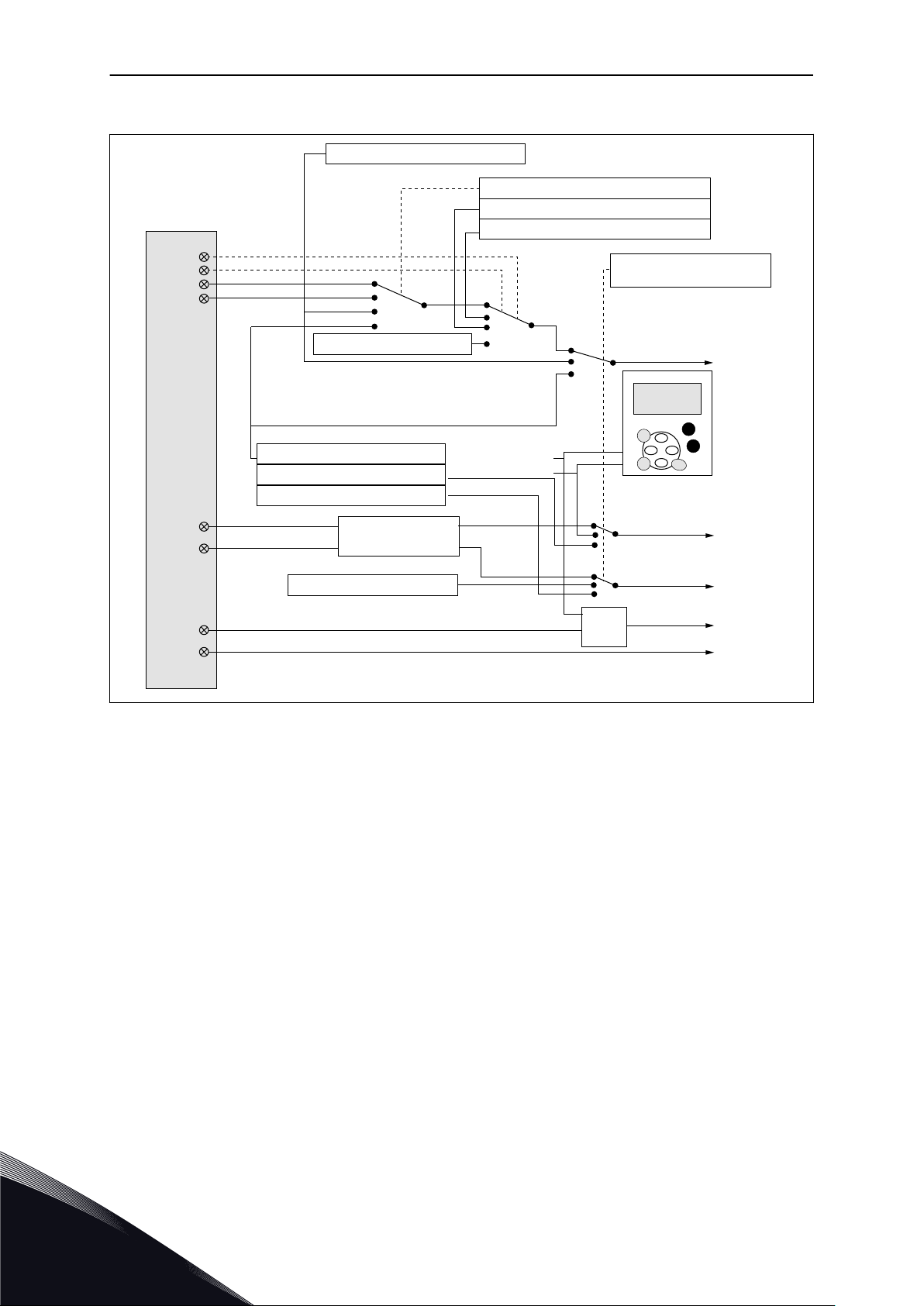
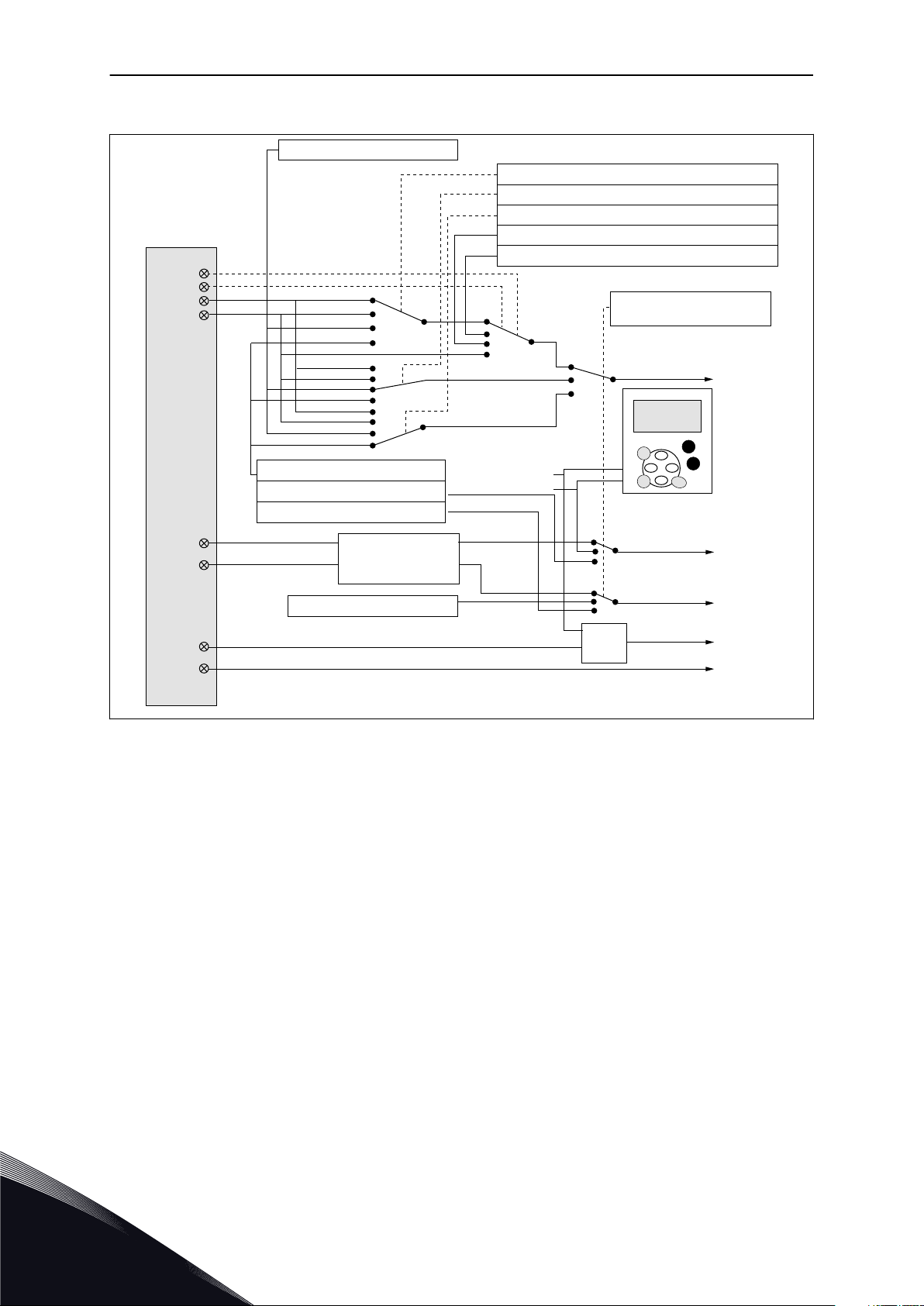
1.3 GRUNDAPPLIKATIONENS STYRSIGNALLOGIK
Bild 3: Grundapplikationens styrsignallogik
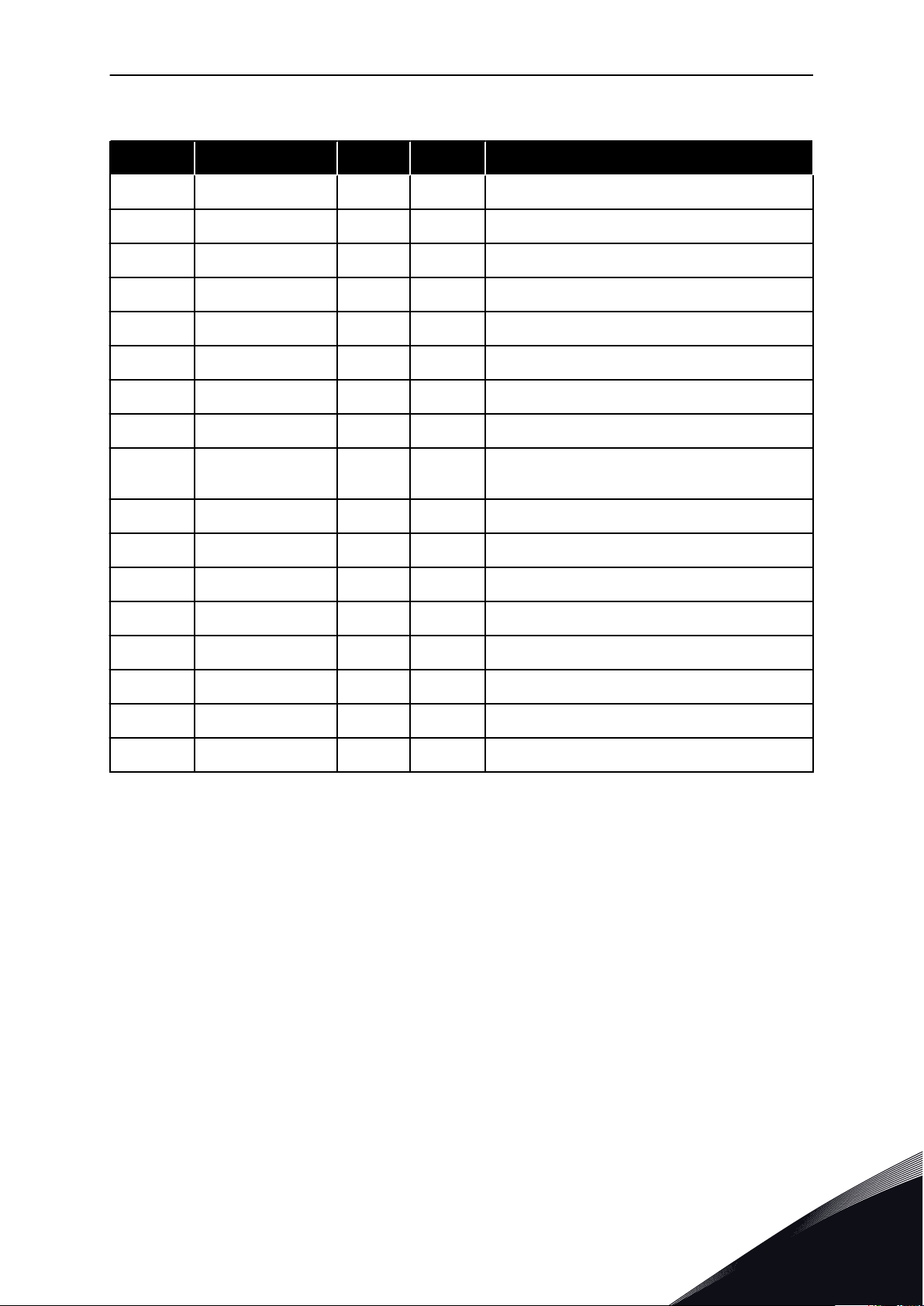
1.4 GRUNDAPPLIKATION – PARAMETERLISTOR
1.4.1 ÖVERVAKNINGSVÄRDEN (MANÖVERPANEL: MENY M1)
Övervakningsvärden utgörs av ärvärden för parametrar och signaler, status och uppmätta
värden. De kan inte redigeras.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
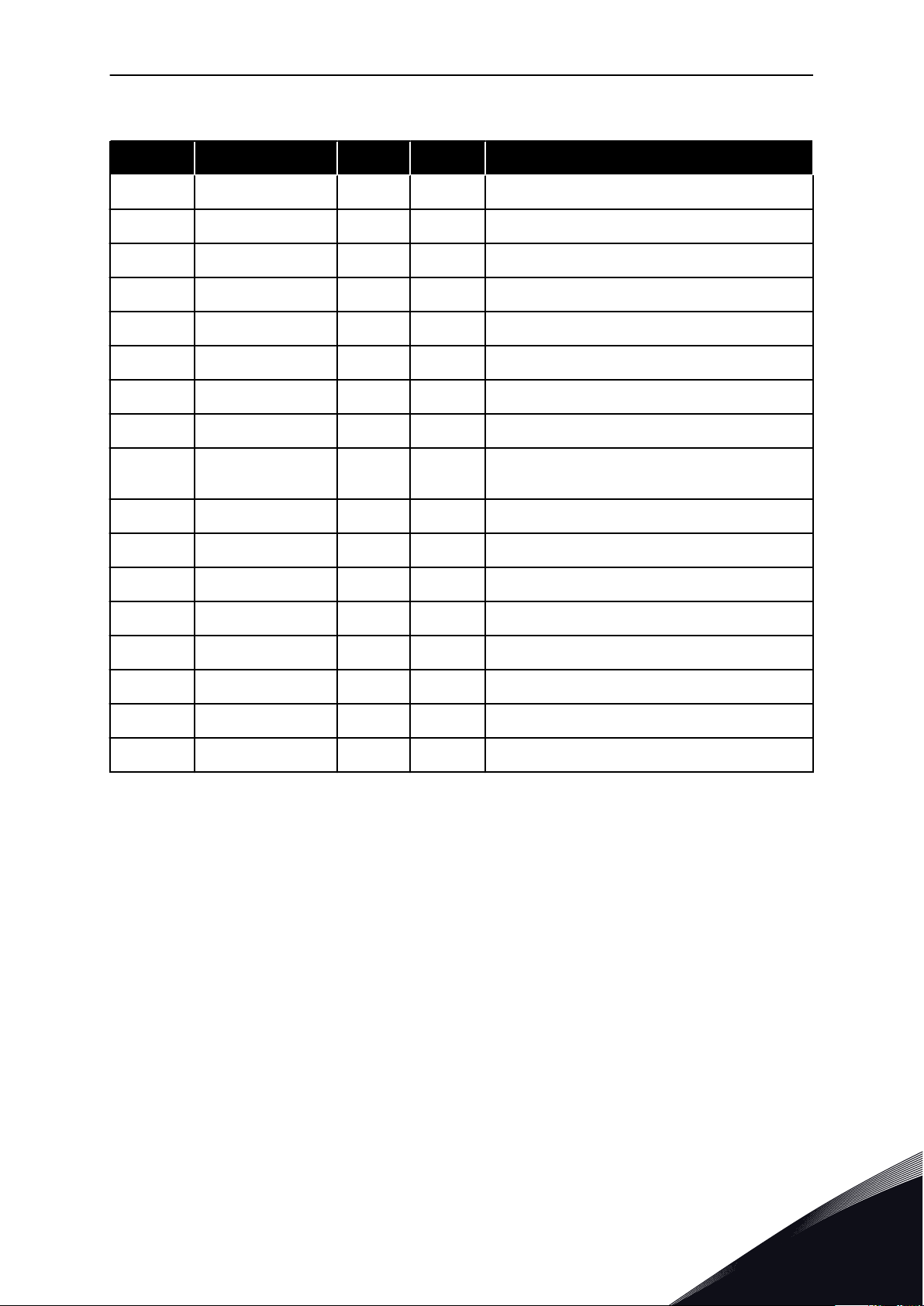
GRUNDAPPLIKATION VACON · 13
Tabell 1: Driftvärden
Index Övervakningsvärde Unit ID Beskrivning
V1.1 Utfrekvens Hz 1
V1.2 Frekvensreferens Hz 25
V1.3 Motorvarvtal rpm 2
V1.4 Motorström A 3
V1.5 Motormoment % 4
V1.6 Motoreffekt % 5
V1.7 Motorspänning V 6
V1.8 DC-spänning V 7
1.9
1.10 Motortemperatur % 9
V1.11 Analog ingång 1 V/mA 13
V1.12 Analog ingång 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17 Driftv. sida
Enhetens tempera-
tur
utgång
°C 8
mA 26
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 14 GRUNDAPPLIKATION
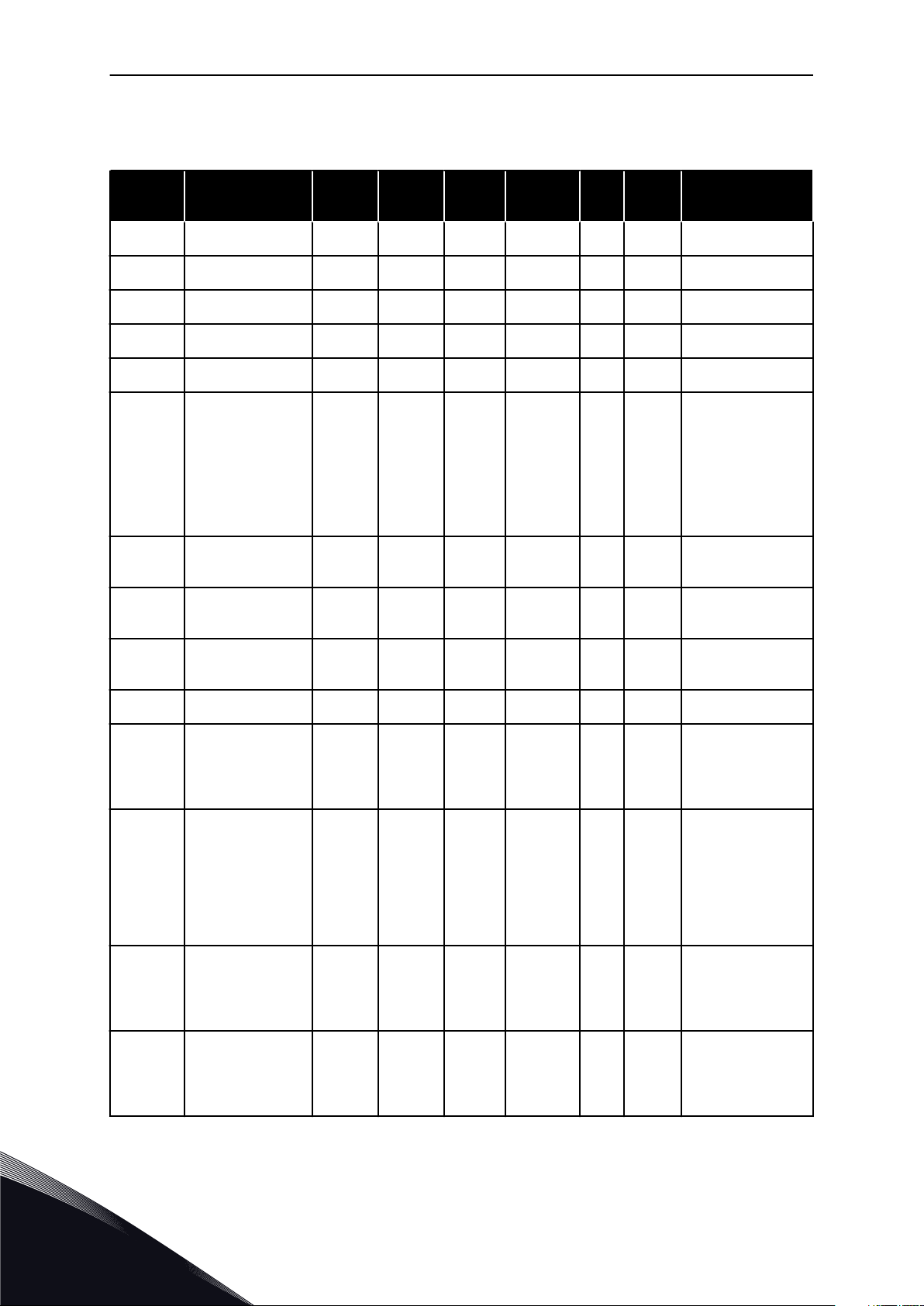
1.4.2 GRUNDPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.1)
Tabell 2: Grundparametrar G2.1
Index Parameter Min Max Enhet Förvalt Kun
d
P2.1 Min. frekvens 0.00 P2.2 Hz 0.00 101
P2.2 Max. frekvens P2.1 320.00 Hz 50.00 102
P2.3 Accelerationstid 1 0.1 3000.0 s 3.0 103
P2.4 Retardationstid 1 0.1 3000.0 s 3.0 104
P2.5 Strömgräns 0,1 x I
P2.6
P2.7
P2.8
Motorns nominella spänning
Motorns nomi-
nella frekvens
Motorns nomi-
nella varvtal
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 rpm 1440 112
2 x I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
L
V
V
V
id
107
110
Beskrivning
P2.9
P2.10 Motorns cos phi 0.30 1.00 0.85 120
P2.11 Startfunktion 0 2 0 505
P2.12 Stoppfunktion 0 3 0 506
P2.13 U/f-optimering 0 1 0 109
P2.14 I/O-referens 0 3 0 117
Motorns nomi-
nella ström
0,1 x I
2 x I
H
H
A I
H
113
0 = Ramp
1 = Flygande start
2 = Villkorad flygande start
0 = Utrullning
1 = 2 = Ramp +
Driftfrige utrullning
Ramp
3 = Utrullning +
Driftfrige ramp
0 = Används inte
1=Automatisk
momentmaximering
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
GRUNDAPPLIKATION VACON · 15
Tabell 2: Grundparametrar G2.1
Index Parameter Min Max Enhet Förvalt Kun
d
P2.15
P2.16
P2.17 Funktion för DIN3 0 7 1 301
Analogingång 2,
börvärdesoffset
Funktion för ana-
log utgång
0 1 1 302
0 8 1 307
Beskrivning
id
0 = 0–20 mA
1 = 4 mA–20 mA
0 = Används inte
1 = Utgångsfrekv.
(0–f
max
2 = Frekv.referens
(0–f
max
3=Motorvarvtal (0 Motorns märkvarvtal)
4=Utgångsström
(0-I
nMotor
5=Motormoment
(0-T
6=Motoreffekt (0P
nMotor
7=Motorspänning
(0-U
8=DC-bryggans
spänning
(0-1 000V)
0 = Används inte
1 = Ext fel, stänger
kont.
2 = Ext fel, öppnar
kont.
3 = Driftfrigivning,
stängd kont.
4 = Driftfrigivning,
öppen kont.
5 = Tvinga styrpl.
till IO
6 = Tvinga styrpl.
till panel
7 = Tvinga styrpl.
till fältbuss
)
)
nMotor
)
nMotor
)
)
)
P2.18
P2.19 Förvalt varvtal 2 0.00 P2.2 Hz 50.00 106
P2.20
Förvalt varvtal 1 0.00 P2.2 Hz 0.00 105
Automatisk åter-
start
0 1 0 731
0 = Förhindrad
2 = Tillåten
1.4.3 PANELSTYRNING (MANÖVERPANEL: MENY M3)
Parametrarna för val av styrplats och rotationsriktning från panelen visas nedan. Se
panelstyrningsmenyn i produktens användarhandbok.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 16 GRUNDAPPLIKATION
Tabell 3: Panelstyrningsparametrar, M3
Index Parameter Min Max Enhet Förvalt Kun
d
P3.1 Styrplats 1 3 1 125
P3.2 Panelreferens P2.1 P2.2 Hz 0.00
P3.3
R3.4 Stoppknapp 0 1 1 114
Rotationsriktning
(på panel)
0 1 0 123
Beskrivning
id
1 = I/0 styrning
2 = Panel
3 = Fältbuss
0=Begränsad funktion hos stoppknapp
1=Stoppknapp alltid aktiverad
1.4.4 SYSTEMMENY (MANÖVERPANEL: MENY M6)
För parametrar och funktioner kopplade till allmän användning av frekvensomriktaren,
såsom val av applikation och språk, användaranpassade parameteruppsättningar eller
information om hårdvara och programvara, se produktens användarhandbok.
1.4.5 TILLÄGGSKORT (MANÖVERPANEL: M7-MENYN
M7-menyn visar till tilläggs- och optionskort som är anslutna till styrkortet och information
om korten. Mer information finns i produktens användarhandbok.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STANDARDAPPLIKATION VACON · 17
2 STANDARDAPPLIKATION
2.1 INTRODUKTION
Välj standardapplikationen på M6-menyn på sidan S6.2.
Standardapplikationen används oftast i pump- och fläktapplikationer och till transportband
för vilka grundapplikationen är för begränsad men där inga specialfunktioner behövs.
Standardapplikationen har samma I/O-signaler och samma styrningslogik som
•
grundapplikationen.
Digitalingång DIN3 och alla utgångar är fritt programmerbara.
•
Övriga funktioner:
Programmerbar logik för start/stopp- och reversering
•
Referensskalning
•
Övervakning av en frekvensgräns
•
Programmering av andra ramper och S-formad ramp
•
Programmerbara start- och stoppfunktioner
•
Likströmsbroms vid stopp
•
Ett område för förbjuden frekvens
•
Programmerbar U/f-kurva och kopplingsfrekvens
•
Automatisk återstart
•
Skydd mot motoröverlast och fastlåsning: Programmerbar åtgärd; från, varning, fel
•
Standardapplikationens parametrar förklaras i avsnitt 9 Parameterbeskrivningar i den här
handboken. Förklaringarna är ordnade efter parameterns enskilda ID-nummer.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
DIN4
DIN5
mA
KLAR
DRIFT
AO1-
DO1
+ 24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
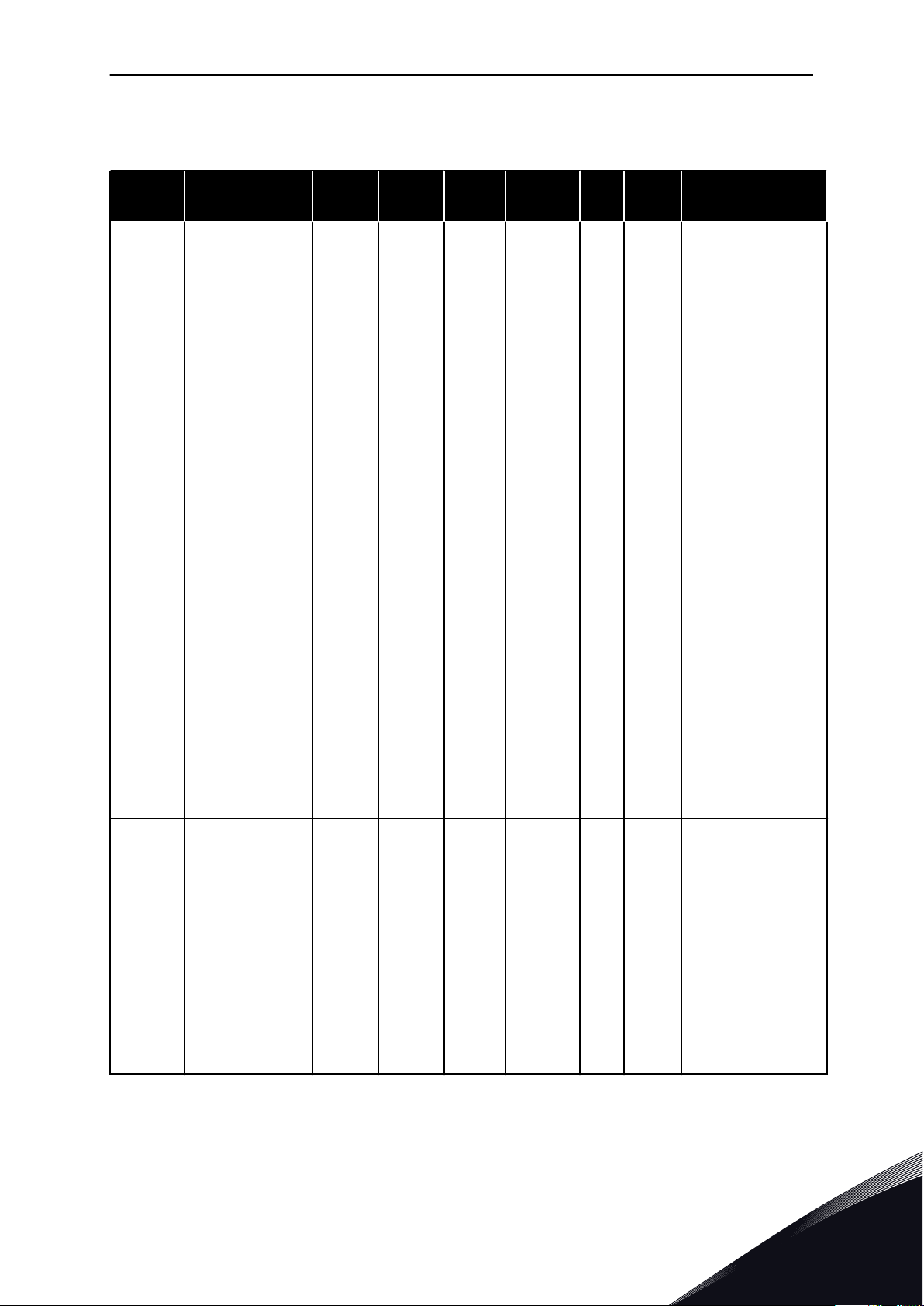
Anslutning Signal Beskrivning
+10 Vref
AI1+
AI1-
AI2+
AI2-
+24 V
Referensutgång
I/O jord
Analog ingång 2
Aktuellt område
0–20 mA
Utgång för styrspänning
I/O-signal till jord
Start framåt
Programmerbar logik (P2.2.1)
Start bakåt
Ri min. = 5 kΩ
Ingång för externt fel
Programmerbar (P2.2.2)
Förvalt varvtal 1
Förvalt varvtal 2
Felåterställning
Gemensam för DIN 1–DIN 3
Gemensam för DIN4–DIN6
Utgång för styrspänning
I/O-signal till jord
Analog utgång 1
Utgångsfrekvens
Programmerbar (P2.3.2)
Digitalutgång 1
KLAR
Programmerbar (P2.3.7)
Öppen kollektor,
I ≤50 mA, U ≤48 VDC
Reläutgång 1
DRIFT
Programmerbar
(P2.3.8)
Reläutgång 2
FEL
Programmerbar
(P2.3.9)
Område 0–20 mA/RL,
max. 500 Ω
Anslut till GND eller +24 V
Kontakt öppen = ingen åtgärd
Kontakt stängd = felåterställning
AO1+
Börvärde för
analogingång 1
Jord för referens- och
styrspänningar
Börvärde för
analogingång 2
Sluten kontakt = start framåt
Sluten kontakt = start bakåt
Kontakt öppen = inget fel
Kontakt stängd = fel
Frekv.ref.
Öppen
Stängd
Öppen
Stängd
Öppen
Öppen
Stängd
Stängd
I/O-börvärde
Förvalt varvt 1
Förvalt varvt 2
Analog ingång 2
Matningsspänning till
potentiometer etc
Analog ingång 1
Spänningsområde 0–10 V DC
Programmerbar (P2.1.11)
Matningsspänning till givare
etc., max 0,1 A
Brytarspänningar(se #6)
Anslut till GND eller +24 V
Jord för referens- och styrspänningar
Jord för referens- och styrspänningar
Referenspotentiometer,
1–10 kΩ
VACON · 18 STANDARDAPPLIKATION
2.2 STYR-I/O
Bild 4: I/O-standardkonfiguration för standardapplikation
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Bygelblock X3:
CMA- och CMB-jordning
CMB ansluten till GND
CMA ansluten till GND
CMB isolerad från GND
CMA isolerad från GND
CMB och CMA internt
ihopkopplade, isolerade
från GND
= Fabriksinställning
STANDARDAPPLIKATION VACON · 19
*) Optionskortet A3 saknar plint för öppen kontakt på sin andra reläutgång (plint 24 saknas).
OBS!
Se bygellägen nedan. Mer information finns i produktens användarhandbok.
Bild 5: Bygellägen
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Panelbörvärde
3.1 Styrplats
Start framåt
Start bakåt
Start/Stop
Bakåt
Intern start/stopp
Intern reversering
Intern felåterställn.
Felåterställn.ingång
Externt fel, ingång (programmerbar)
Återställn.
knapp
Start-/stoppknappar
Börvärde från fältbuss
Start/stopp från fältbuss
Riktning från fältbuss
3.3 Panelriktning
2.1.13 Fältbussbörvärde
2.1.15 Förinställt varvtal 2
2.1.14 Förinställt varvtal 1
2.1.11 I/O-börvärde
2..1.12 Panelstyrningsvarvtal 1
Programmerbar
logik för start/stopp
och reversering
Internt
frekvensbörvärde
(programmerbar)
(programmerbar)
VACON · 20 STANDARDAPPLIKATION
2.3 STANDARDAPPLIKATIONENS STYRSIGNALLOGIK
Bild 6: Standardapplikationens styrsignallogik
2.4 STANDARDAPPLIKATION – PARAMETERLISTOR
2.4.1 ÖVERVAKNINGSVÄRDEN (MANÖVERPANEL: MENY M1)
Övervakningsvärden utgörs av ärvärden för parametrar och signaler, status och uppmätta
värden. De kan inte redigeras.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARDAPPLIKATION VACON · 21
Tabell 4: Driftvärden
Index Övervakningsvärde Unit ID Beskrivning
V1.1 Utfrekvens Hz 1
V1.2 Frekvensreferens Hz 25
V1.3 Motorvarvtal rpm 2
V1.4 Motorström A 3
V1.5 Motormoment % 4
V1.6 Motoreffekt % 5
V1.7 Motorspänning V 6
V1.8 DC-spänning V 7
1.9
1.10 Motortemperatur % 9
V1.11 Analog ingång 1 V/mA 13
V1.12 Analog ingång 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17 Driftv. sida
Enhetens tempera-
tur
utgång
°C 8
mA 26
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 22 STANDARDAPPLIKATION
2.4.2 GRUNDPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.1)
Tabell 5: Grundparametrar G2.1
Index Parameter Min Max Enhet Förvalt Kun
d
P2.1.1 Min. frekvens 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Max. frekvens P2.1.1 320.00 Hz 50.00 102
P2.1.3 Accelerationstid 1 0.1 3000.0 s 0.0 103
P2.1.4 Retardationstid 1 0.1 3000.0 s 0.0 104
P2.1.5 Strömgräns 0,1 x I
P2.1.6
P2.1.7
P2.1.8
Motorns nominella spänning
Motorns nomi-
nella frekvens
Motorns nomi-
nella varvtal
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 rpm 1440 112
2 x I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
L
V
V
V
id
107
110
Beskrivning
P2.1.9
P2.1.10 Motorns cos phi 0.30 1.00 0.85 120
P2.1.11 I/O-referens 0 3 0 117
P2.1.12
P2.1.13
P2.1.14 Förvalt varvtal 1 0.00 P2.1.2 Hz 10.00 105
P2.1.15 Förvalt varvtal 2 0.00 P2.1.2 Hz 50.00 106
Motorns nomi-
nella ström
Panelstyrning,
börvärde
Fältbusstyrning,
börvärde
0,1 x I
0 3 2 121
0 3 3 122
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARDAPPLIKATION VACON · 23
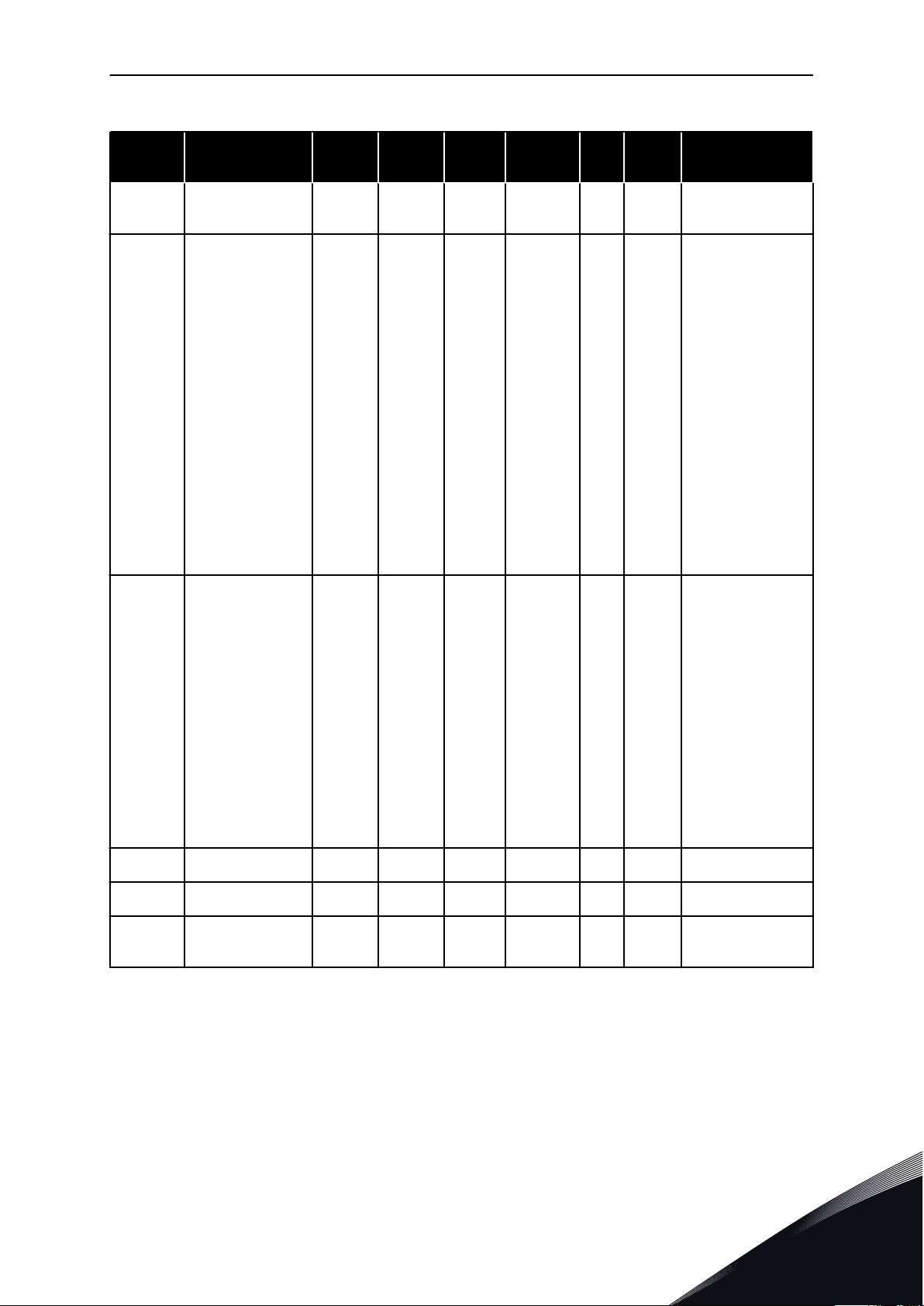
2.4.3 INGÅNGSSIGNALER (MANÖVERPANEL: M2-MENYN -> G2.2)
Tabell 6: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.1 Start/stopplogik 0 6 0 300
Beskrivning
ID
Logik = 0
Styrsignal 1 = Start
framåt
Styrsignal 2 = Start
back
Logik = 1
Styrsignal 1 = Start/
Stopp
Styrsignal 2 = Bakåt
Logik = 2
Styrsignal 1 = Start/
Stopp
Styrsignal 2 = Driftfrigivning
Logik = 3
Styrsignal 1 = Startpuls (flank)
Styrsignal 2 = Stoppuls
Logik = 4
Styrsignal 1 =
Framåt-puls (flank)
Styrsignal 2 = Backpuls (flank)
Logik = 5
Styrsignal 1 = Startpuls (flank)
Styrsignal 2 = Backpuls
Logik = 6
Styrsignal 1 = Startpuls (flank)
Styrsignal 2 = Aktivera-puls
P2.2.2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Funktion för DIN3 0 8 1 301
0 = Används inte
1 = Ext fel, stänger
kont.
2 = Ext fel, öppnar
kont.
3=Frigivning
4 = Acc./Ret. tid val.
5 = Tvinga styrpl. till
IO
6 = Tvinga styrpl. till
panel
7 = Tvinga styrpl. till
fältbuss
8 = Bakåt
2
VACON · 24 STANDARDAPPLIKATION
Tabell 6: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.3
P2.2.4
P2.2.5
P2.2.6
P2.2.7 Börvärdesfiltertid 0.00 10.00 s 0.10 306 0 = Inget filter
P2.2.8 *** AI1 signalval A1 377
P2.2.9 *** AI2 signalval A2 388
Analogingång 2,
börvärdesoffset
Börvärdesskal-
ning, minimivärde
Referensskalning
maxvärde
Börvärdesinver-
tering
0 1 1 302
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
0 1 0 305
Beskrivning
ID
0 = 0–20 mA (0–10 V)
**
1 = 4–20 mA (2–10 V)
**
0=Ej inverterad
1 = inverterat
** = Kom ihåg att placera byglarna för block X2 därefter. Se produktens användarhandbok.
*** = Programmera dessa parametrar med TTF-metoden.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARDAPPLIKATION VACON · 25
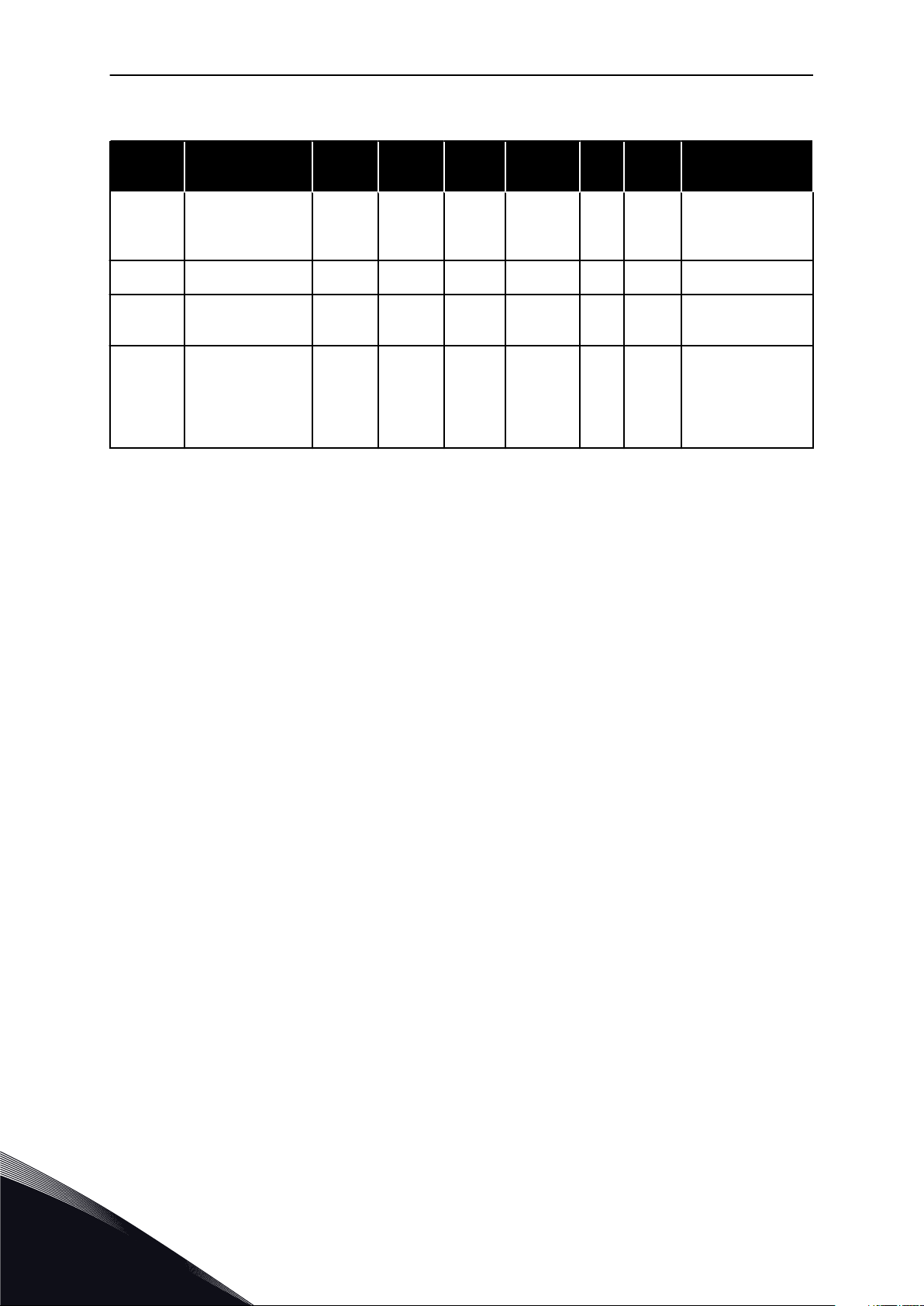
2.4.4 UTGÅNGSSIGNALER (MANÖVERPANEL: M2-MENYN -> G2.3
Tabell 7: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.1
P2.3.2
Signalval för ana-
logutgång 1
Funktion för ana-
log utgång
0 A.1 464
0 8 1 307
Beskrivning
id
0 = Används ej (20
mA/10 V)
1 = Utgångsfrekv.
(0–f
max
2 = Frekv.referens
(0–f
max
3=Motorvarvtal (0 Motorns märkvarvtal)
4 = Motorström (0–
I
nMotor
5=Motormoment
(0-T
6=Motoreffekt (0P
nMotor
7=Motorspänning
(0-U
8=DC-bryggans
spänning
(0-1 000V)
)
)
)
nMotor
)
nMotor
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Filtertid för ana-
log utgång
Invertering av
analogutgång
Analog utgång
minimum
Skalning av ana-
log utgång
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Inget filter
0=Ej inverterad
1 = inverterat
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 26 STANDARDAPPLIKATION
Tabell 7: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.7
Digitalutgång 1,
funktion
0 16 1 312
Beskrivning
id
0 = Används inte
1 = Driftklar
2 = Drift
3 = fel
4 = Fel inverterat
5=Överhettn.varning för
frekv.omriktare
6=Externt fel eller
varning
7=Ref.fel eller varning
8 = Varning
9 = Reverserad
10=Förvalt varvtal
1
11 = Varvtal uppnått
12=Motorreglering
aktiv
13 = Övervakn av
driftfrekv.gräns 1
14 = Styrplats: IO
15 = Termistorfel/varning
16 = Fältbuss DIN1
P2.3.8
P2.3.9 RO2 funktion 0 16 3 314
P2.3.10
P2.3.11
P2.3.12 *
P2.3.13
P2.3.14
P2.3.15
RO1 funktion 0 16 2 313
Övervakning av
utfrekvensgräns 1
Utfrekvensgräns
1; övervakat värde
Signalval för ana-
logutgång 2
Funktion för ana-
logutgång 2
Filtertid för analo-
gutgång 2
Invertering av
analogutgång 2
0 2 0 315
0.00 320.00 Hz 0.00 316
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
Som parameter
2.3.7
Som parameter
2.3.7
0=Ingen gräns
1 = Övervakning av
undre gräns
2 = Övervakning av
övre gräns
Som parameter
2.3.2
0 = Inget filter
0=Ej inverterad
1 = inverterat
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARDAPPLIKATION VACON · 27
Tabell 7: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.16
P.2.3.17
Analogutgång 2,
minimum
Skalning av analo-
gutgång 2
0 1 0 475
10 1000 % 1.00 476
* = Programmera dessa parametrar med TTF-metoden.
id
Beskrivning
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 28 STANDARDAPPLIKATION
2.4.5 FREKVENSOMRIKTARENS STYRPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.4
Tabell 8: Omriktarstyrningsparametrar, G2.4
Index Parameter Min Max Enhet Förvalt Kun
d
P2.4.1 Ramp 1 form 0.0 10.0 s 0.1 500
P2.4.2 Ramp 2 form 0.0 10.0 s 0.0 501
P2.4.3 Accelerationstid 2 0.1 3000.0 s 1.0 502
P2.4.4 Retardationstid 2 0.1 3000.0 s 1.0 503
P2.4.5 Bromschopper 0 4 0 504
P2.4.6 Startfunktion 0 2 0 505
Beskrivning
ID
0 = Linjär
100 = full acc/ret
ökn/minskn.tider
0 = Linjär
100 = full acc/ret
ökn/minskn.tider
0 = Förhindrad
1 = Används i drift
2 = Extern bromschopper
3 = Används i
stoppläge/drift
4 = Används i drift
(ingen testning)
0 = Ramp
1 = Flygande start
2 = Villkorad flygande start
P2.4.7 Stoppfunktion 0 3 0 506
P2.4.8 DC-bromsström 0.00 I
P2.4.9
P2.4.10
P2.4.11
P2.4.12 * Flödesbroms 0 1 0 520
DC-bromstid vid
stopp
Frekvens för att
starta DC-bromsning under ramp-
stopp
Bromstid vid start,
DC
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
L
A 0.7 x I
H
507
0 = Utrullning
1 = Ramp
2 = Ramp+Driftfrige utrullning
3 = Utrullning
+Driftfrige ramp
0 = DC-broms ej i
användning vid
stopp
0 = DC-broms ej i
användning vid
start
0 = normaltid
0 = På
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STANDARDAPPLIKATION VACON · 29
Tabell 8: Omriktarstyrningsparametrar, G2.4
Index Parameter Min Max Enhet Förvalt Kun
d
P2.4.13
Flödesbroms-
ström
0.00 I
L
A I
H
ID
519
2.4.6 FÖRBJUDNA FREKVENSER (MANÖVERPANEL: M2-MENYN -> G2.5)
Tabell 9: Parametrar för förbjuden frekvens, G2.5
Index Parameter Min Max Enhet Förvalt Kun
d
Förbjudet frek-
P2.5.1
P2.5.2
P2.5.3
vensintervall 1
undre gräns
Förbjudet frek-
vensintervall 1
övre gräns
Förbjud acc./
ret.ramp
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.1 10.0 × 1.0 518
id
Beskrivning
Beskrivning
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 30 STANDARDAPPLIKATION
2.4.7 MOTORKONTROLLPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.6)
Tabell 10: Motorstyrningsparametrar, G2.6
Index Parameter Min Max Enhet Förvalt Kun
d
P2.6.1 * Reglermetod 0 1/3 0 600
P2.6.2 * U/f-optimering 0 1 0 109
P2.6.3 *
Val av U/f-förhål-
lande
0 3 0 108
Beskrivning
id
0 = Frekvensstyrning
1 = Varvtalsstyrning
NXP:
2 = Open loopmomentstyrning
3 = Closed loopvarvtalsregl.
4 = Closed loopmomentstyrning
0 = Används inte
1=Automatisk
momentmaximering
0 = Linjär
1 = Kvadratisk
2 = Programmerbar
3=Linjärt med flödesoptimering
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
P2.6.10
P2.6.11
Fältförsvagnings-
punkt
Spänning vid fält-
försvagningspunkt
U/f-kurva mitt-
punktsfrekvens
U/f-kurva mitt-
punktsspänning
Utgångsspänning
vid nollfrekvens
Kopplingsfrek-
vens
Överspänningsre-
gulator
Underspännings-
regulator
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varierar 606
1.0 Varierar kHz Varierar 601
0 2 1 607
0 1 1 608
0 = Används inte
1 = Används (ingen
rampning)
2 = Används
(rampning)
0 = Används inte
1 = Används
2
P2.6.12 Load drooping 0.00 100.00 % 0.00 620
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STANDARDAPPLIKATION VACON · 31
Tabell 10: Motorstyrningsparametrar, G2.6
Index Parameter Min Max Enhet Förvalt Kun
d
P2.6.13 Identifiering 0 1/2 0 631
Closed Loop-parametergrupp 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
Magnetiserings-
ström
Varvtalsreglering,
P-förstärkning
Varvtalsreglering,
I-tid
Accelerations-
kompensation
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
H
A 0.00 612
Beskrivning
id
0 = Ingen åtgärd
1 = Identifiering
utan körning
2 = Identifiering
med körning
3 = ID-körning med
pulsgivare
4 = Ingen åtgärd
5 = ID-körning
misslyckades
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11 Moment vid start 0 3 0 621
P2.6.14.12
P2.6.14.13
Eftersläpningsjus-
tering
Magnetiserings-
ström vid start
Magnetiseringstid
vid start
Stilleståndstid vid
start
Stilleståndstid vid
stopp
Moment vid start
FRAMÅT
Moment vid start
BACK
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
L
A 0.00 627
0 = Används inte
1 = Momentminne
2 = Momentbörvärde
3 = Moment vid
start framåt/back
P2.6.14.15 Pulsgivarfiltertid 0.0 100.0 ms 0.0 618
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 32 STANDARDAPPLIKATION
Tabell 10: Motorstyrningsparametrar, G2.6
Index Parameter Min Max Enhet Förvalt Kun
d
P2.6.14.17
Identifieringsparametergrupp 2.6.15
P2.6.15.1 Varvtalssteg -50.0 50.0 0.0 0.0 1252
Strömreglering,
P-förstärkning
0.00 100.00 % 40.00 617
id
Beskrivning
* = Parametervärde kan endast ändras efter att frekvensomriktaren har stoppats.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STANDARDAPPLIKATION VACON · 33
2.4.8 SKYDDSFUNKTIONER (MANÖVERPANEL: M2-MENYN -> G2.7
Tabell 11: Skyddsfunktioner, G2.7
Index Parameter Min Max Enhet Förvalt Kun
d
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5
Reaktion på 4 mA
börvärdesfel
4 mA börvärdes-
felfrekvens
Reaktion på
externt fel
Övervakning av
ingångsfas
Reaktion på
underspännings-
fel
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
0 1 0 727
Beskrivning
id
0 = Ingen reaktion
1 = Varning
2 = Varning+tidigare frekv.
3 = Varn.+Förv.
frekv. 2.7.2
4 = Fel, stopp enl.
2.4.7
5 = Fel, stopp
genom utrullning
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
0 = Fel lagrat i
historiken
Fel ej sparat
P2.7.6
P2.7.7 Jordfelsskydd 0 3 2 703
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
P2.7.13 Fastlåsningsskydd 0 3 0 709
Övervakning av
utgångsfaser
Termiskt skydd
för motorn
Faktor för
motorns omgiv-
ningstemperatur
Motorns kylfaktor
vid stillastående
Motorns termiska
tidskonstant
Motorns driftför-
hållande
0 3 2 702
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Varierar 707
0 150 % 100 708
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 34 STANDARDAPPLIKATION
Tabell 11: Skyddsfunktioner, G2.7
Index Parameter Min Max Enhet Förvalt Kun
d
P2.7.14 Fastlåsn.ström 0.00 2 x I
P2.7.15 Fastlåsningstid 1.00 120.00 s 15.00 711
P2.7.16
P2.7.17 Underlastskydd 0 3 0 713
P2.7.18
P2.7.19
P2.7.20
P2.7.21
Fastlåsningsfrek-
vensgräns
ULS fnom
moment
ULS vid nollfrek-
vens
Tidsgräns för
underlastskydd
Reaktion på ter-
mistorfel
1.0 P2.1.2 Hz 25.00 712
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
H
A I
H
Beskrivning
id
710
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
P2.7.22
P2.7.23
Reaktion på fält-
bussfel
Reaktion på kort-
platsfel
0 3 2 733
0 3 2 734
Se P2.7.21
Se P2.7.21
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STANDARDAPPLIKATION VACON · 35
2.4.9 AUTOMATISK ÅTERSTART (MANÖVERPANEL: M2-MENYN -> G2.8)
Tabell 12: Parametrar för automatisk återstart, G2.8
Index Parameter Min Max Enhet Förvalt Kun
d
P2.8.1 Väntetid 0.10 10.00 s 0.50 717
P2.8.2 Försökstid 0.00 60.00 s 30.00 718
P2.8.3 Startfunktion 0 2 0 719
Antal försök efter
P2.8.4
P2.8.5
P2.8.6
P2.8.7
underspännings-
utlösn.
Antal försök efter
överspänningsut-
lösning
Antal försök efter
överströmsutlös-
ning
Antal försök efter
4 mA börvärde-
sutlösning
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
Beskrivning
ID
0 = Ramp
1 = Flygande start
2 = Enligt P2.4.6
Antal försök efter
P2.8.8
P2.8.9
P2.8.10
utlösning av
motortemperatur-
fel
Antal försök efter
utlösning av
externt fel
Antal försök efter
utlösning av
underbelastnings-
fel
0 10 0 726
0 10 0 725
0 10 0 738
2.4.10 PANELSTYRNING (MANÖVERPANEL: MENY M3)
Parametrarna för val av styrplats och rotationsriktning från panelen visas nedan. Se
panelstyrningsmenyn i produktens användarhandbok.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 36 STANDARDAPPLIKATION
Tabell 13: Panelstyrningsparametrar, M3
Index Parameter Min Max Enhet Förvalt Kun
d
P3.1 Styrplats 1 3 1 125
P3.2 Panelreferens P2.1 P2.2 Hz 0.00
P3.3
R3.4 Stoppknapp 0 1 1 114
Rotationsriktning
(på panel)
0 1 0 123
Beskrivning
id
1 = I/0 styrning
2 = Panel
3 = Fältbuss
0=Begränsad funktion hos stoppknapp
1=Stoppknapp alltid aktiverad
2.4.11 SYSTEMMENY (MANÖVERPANEL: MENY M6)
För parametrar och funktioner kopplade till allmän användning av frekvensomriktaren,
såsom val av applikation och språk, användaranpassade parameteruppsättningar eller
information om hårdvara och programvara, se produktens användarhandbok.
2.4.12 TILLÄGGSKORT (MANÖVERPANEL: M7-MENYN
M7-menyn visar till tilläggs- och optionskort som är anslutna till styrkortet och information
om korten. Mer information finns i produktens användarhandbok.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 37
3 LOKAL STYRNING/FJÄRRSTYRNING
3.1 INTRODUKTION
Välj Lokal styrning/fjärrstyrning på M6-menyn på sidan S6.2.
Med Lokal styrning/fjärrstyrning går det att ha två olika styrplatser. För varje styrplats kan
frekvensbörvärdet väljas från antingen styrpanelen, I/O-styrningen eller fältbussen. Den
aktiva styrplatsen väljs med digitalingång DIN6.
Alla utgångar är fritt programmerbara.
•
Övriga funktioner:
Programmerbar logik för start/stopp- och reversering
•
Referensskalning
•
Övervakning av en frekvensgräns
•
Programmering av andra ramper och S-formad ramp
•
Programmerbara start- och stoppfunktioner
•
Likströmsbroms vid stopp
•
Ett område för förbjuden frekvens
•
Programmerbar U/f-kurva och kopplingsfrekvens
•
Automatisk återstart
•
Skydd mot motoröverlast och fastlåsning: Programmerbar åtgärd; från, varning, fel
•
Parametrarna för Lokal styrning/fjärrstyrning förklaras i avsnitt 9 Parameterbeskrivningar i
den här handboken. Förklaringarna är ordnade efter parameterns enskilda ID-nummer.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
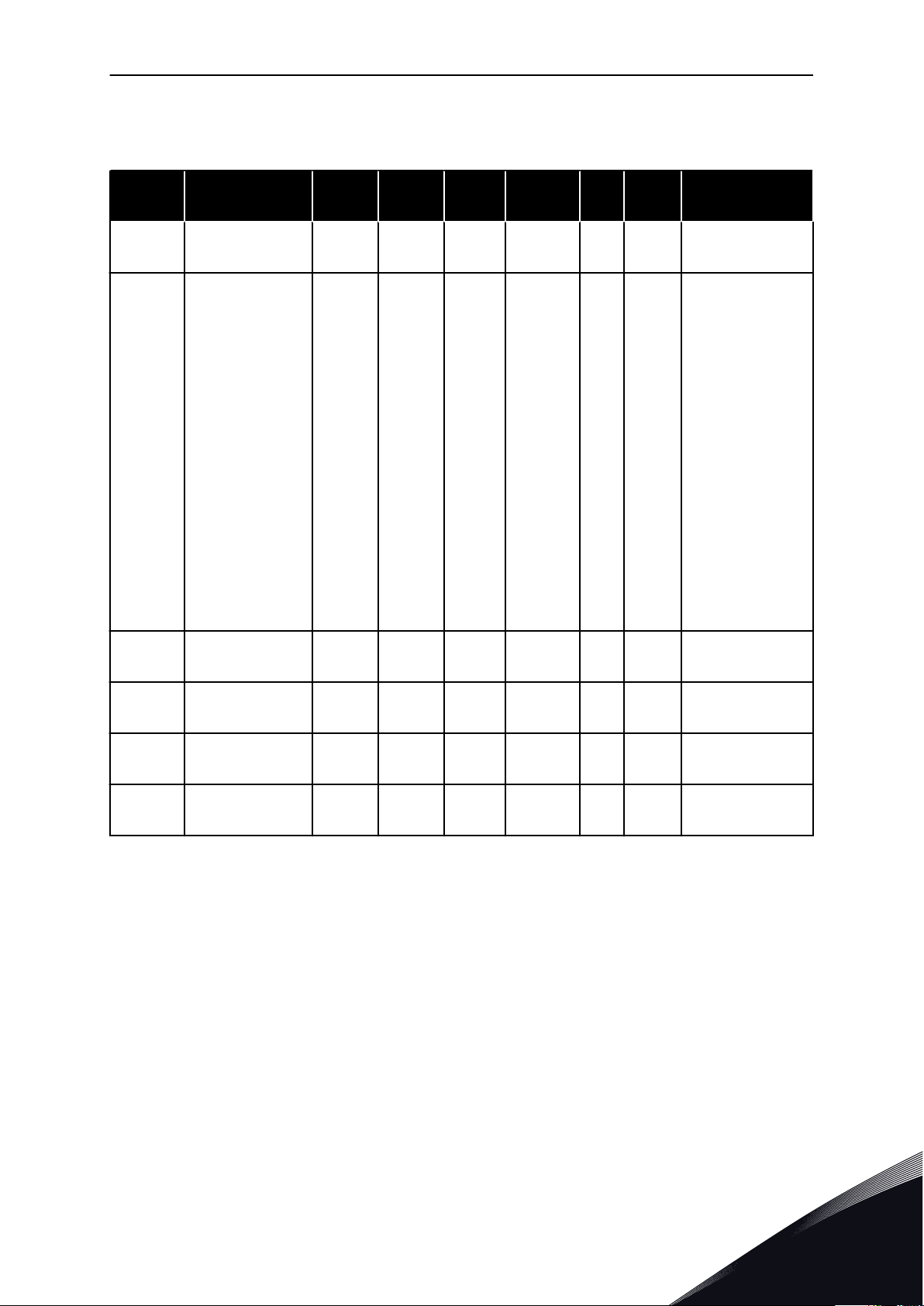
3

Referenspotentiometer,
1–10 kΩ
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Fjärrbörvärde
0(4) – 20 mA
DRIFT
KLAR
AO1-
DO1
+ 24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Anslutning Signal Beskrivning
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Referensutgång
I/O jord
Analog ingång 2
Strömområde 0–20 mA
Programmerbar (P2.1.11)
Utgång för styrspänning
I/O-signal till jord
Plats A: Start framåt
Programmerbar logik (P2.2.1)
Plats A: Start bakåt
Ri min. = 5 kohm
Ingång för externt fel
Programmerbar (P2.2.2)
Plats B: Start framåt
Programmerbar logik (P2.2.15)
Plats B: Start bakåt
Ri min. = 5 kΩ
Val av plats A/B
Gemensam för DIN 1–DIN 3
Gemensam för DIN4–DIN6
Utgång för styrspänning
I/O-signal till jord
Analog utgång 1
Utgångsfrekvens
Programmerbar (P2.3.2)
Digital utgång
KLAR
Programmerbar (P2.3.7)
Öppen kollektor, I ≤50 mA,
U ≤48 VDC
Reläutgång 1
DRIFT
Programmerbar
(P2.3.8)
Reläutgång 2
FEL
Programmerbar
(P2.3.9)
Område 0–20 mA/RL,
max. 500 Ω
Kontakt öppen = plats A är aktiv
Kontakt stängd = plats B är aktiv
Sluten kontakt = start framåt
Sluten kontakt = start bakåt
AO1+
Analogingång 1-börvärde
för plats B
Jord för referens- och
styrspänningar
Analogingång 2-börvärde
för plats A
Sluten kontakt = start framåt
Sluten kontakt = start bakåt
Kontakt öppen = inget fel
Kontakt stängd = fel
Matningsspänning till
potentiometer etc
Analog ingång 1
Spänningsområde 0–10 V DC
Programmerbar (P2.1.12)
Matningsspänning till givare etc.,
max 0,1 A
Brytarspänningar(se #6)
Anslut till GND eller +24 V
Anslut till GND eller +24 V
Jord för referens- och styrspänningar
Jord för referens- och
styrspänningar
VACON · 38 LOKAL STYRNING/FJÄRRSTYRNING
3.2 STYR-I/O
Bild 7: I/O-standardkonfiguration för Lokal styrning/fjärrstyrning
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

Bygelblock X3:
CMA- och CMB-jordning
CMB ansluten till GND
CMA ansluten till GND
CMB isolerad från GND
CMA isolerad från GND
CMB och CMA internt
ihopkopplade, isolerade
från GND
= Fabriksinställning
LOKAL STYRNING/FJÄRRSTYRNING VACON · 39
*) Optionskortet A3 saknar plint för öppen kontakt på sin andra reläutgång (plint 24 saknas).
OBS!
Se bygellägen nedan. Mer information finns i produktens användarhandbok.
Bild 8: Bygellägen
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

DIN3
≥ 1
DIN6
DIN2
DIN3
AI1
AI2
DIN1
DIN2
DIN3
DIN4
DIN5
A
B
A
B
A
B
Intern reversering
Intern felåterställn.
Felåterställning, ingång (programmerbar)
3.3 Panelriktning
Intern start/stopp
Börvärde från fältbuss
Start/stopp från fältbuss
Riktning från fältbuss
Start-/stoppknappar
Återställn.knapp
Start framåt
(programmerbar)
Start bakåt
(programmerbar)
Start framåt
Start bakåt
(programmerbar)
(programmerbar)
Start/Stop
Bakåt
Upp
Ned
3.1 Styrplats
2.1.15 Joggningsvarvtalsbörv.
2.1.14 Fältbussbörvärde
2.1.13 Panelstyrningsbörvärde
2.1.12 I/O B-börvärde
2.1.11 I/O A-börvärde
R3.2 Panelbörvärde
Internt
frekvensbörv.
Motorpotentiometer
Programmerbar
logik A för
start/stopp och
reversering
Programmerbar
logik B för
start/stopp och
reversering
VACON · 40 LOKAL STYRNING/FJÄRRSTYRNING
3.3 STYRSIGNALLOGIK I LOKAL STYRNING/FJÄRRSTYRNING
Bild 9: Styrsignallogik i Lokal styrning/fjärrstyrning
3.4 LOKAL STYRNING/FJÄRRSTYRNING – PARAMETERLISTOR
3.4.1 ÖVERVAKNINGSVÄRDEN (MANÖVERPANEL: MENY M1)
Övervakningsvärden utgörs av ärvärden för parametrar och signaler, status och uppmätta
värden. De kan inte redigeras.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 41
Tabell 14: Driftvärden
Index Övervakningsvärde Unit ID Beskrivning
V1.1 Utfrekvens Hz 1
V1.2 Frekvensreferens Hz 25
V1.3 Motorvarvtal rpm 2
V1.4 Motorström A 3
V1.5 Motormoment % 4
V1.6 Motoreffekt % 5
V1.7 Motorspänning V 6
V1.8 DC-spänning V 7
1.9
1.10 Motortemperatur % 9
V1.11 Analog ingång 1 V/mA 13
V1.12 Analog ingång 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17 Driftv. sida
Enhetens tempera-
tur
utgång
°C 8
mA 26
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 42 LOKAL STYRNING/FJÄRRSTYRNING
3.4.2 GRUNDPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.1)
Tabell 15: Grundparametrar G2.1
Index Parameter Min Max Enhet Förvalt Kun
d
P2.1.1 Min. frekvens 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Max. frekvens P2.1.1 320.00 Hz 50.00 102
P2.1.3 Accelerationstid 1 0.1 3000.0 s 0.0 103
P2.1.4 Retardationstid 1 0.1 3000.0 s 0.0 104
P2.1.5 Strömgräns 0,1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
Motorns nominella spänning
Motorns nomi-
nella frekvens
Motorns nomi-
nella varvtal
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 rpm 1440 112
2 x I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
L
V
V
V
id
107
110
Beskrivning
P2.1.9 *
P2.1.10 * Motorns cos phi 0.30 1.00 0.85 120
P2.1.11 * I/O A-börvärde 0 4 1 117
P2.1.12 * I/O B-börvärde 0 4 0 131
P2.1.13 *
Motorns nomi-
nella ström
Panelstyrning,
börvärde
0,1 x I
0 3 2 121
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
4 = Motorpotentiometer
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
4 = Motorpotentiometer
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 43
Tabell 15: Grundparametrar G2.1
Index Parameter Min Max Enhet Förvalt Kun
d
P2.1.14 *
P2.1.15 *
Fältbusstyrning,
börvärde
Krypvarvtalsrefe-
rens
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
id
Beskrivning
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
* = Parametervärde kan endast ändras efter att frekvensomriktaren har stoppats.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 44 LOKAL STYRNING/FJÄRRSTYRNING
3.4.3 INGÅNGSSIGNALER (MANÖVERPANEL: M2-MENYN -> G2.2)
Tabell 16: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.1 ***
Plats A start-/
stopplogikval
0 8 0 300
Beskrivning
id
Logik = 0
Styrsignal 1 = Start
framåt
Styrsignal 2 = Start
back
Logik = 1
Styrsignal 1 = Start/
Stopp
Styrsignal 2 = Bakåt
Logik = 2
Styrsignal 1 = Start/
Stopp
Styrsignal 2 = Driftfrigivning
Logik = 3
Styrsignal 1 = Startpuls (flank)
Styrsignal 2 = Stoppuls
Logik = 4
Styrsignal 1 = Start
framåt
Styrsignal 2 = Motorpotentiometer UPP
Logik = 5
Styrsignal 1 = Start
framåt (flank)
Styrsignal 2 = Start
back (flank)
Logik = 6
Styrsignal 1 = Start
(flank)/stopp
Styrsignal 2 = Bakåt
Logik = 7
Styrsignal 1 = Start
(flank)/stopp
Styrsignal 2 = Driftfrigivning
Logik = 8
Styrsignal 1 = Start
framåt (flank)
Styrsignal 2 = Motorpotentiometer UPP
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 45
Tabell 16: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.2 Funktion för DIN3 0 13 1 301
P2.2.3
****
AI1 signalval 0.1 E.10 A1 377
Beskrivning
id
0 = Används inte
1 = Ext fel, stänger
kont.
2 = Ext fel, öppnar
kont.
3=Frigivning
4 = Acc./Ret. tid val.
5 = Tvinga styrpl. till
IO
6 = Tvinga styrpl. till
panel
7 = Tvinga styrpl. till
fältbuss
8 = Bakåt
9 = Krypvarvtal
11 = Acc/Ret.drift
förbjuden
12 = Likströmsbromskommando
13 = Motorpotentiometer NED
P2.2.4 AI1 signalområde 0 2 0 320
P2.2.5
P2.2.6
P2.2.7 AI1 signalinvert 0 1 0 323
P2.2.8 AI1 signal filtertid 0.00 10.00 s 0.10 324
P2.2.9
****
P2.2.10 AI2 signalområde 0 2 1 325
AI1 egen inställ-
ning, minimum
AI1 eget maxi-
mum
AI2 signalval 0.1 E.10 A.2 388
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 = 0–10 V (0–20
mA**)
1 = 2–10 V (4–20
mA**)
2 = Eget inställningsområde**
0 = 0–10 V (0–20
mA**)
1 = 2–10 V (4–20
mA**)
2 = Eget inställningsområde**
P2.2.11
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
AI2 egen inställ-
ning, minimum
-160.00 160.00 % 0.00 326
3

VACON · 46 LOKAL STYRNING/FJÄRRSTYRNING
Tabell 16: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.12
P2.2.13
P2.2.14 AI2 signal filtertid 0.00 10.00 s 0.10 329
P2.2.15
***
AI2 eget maxi-
mum
AI2 signalinver-
tering
Plats B val av
start-/stopplogik
-160.00 160.00 % 100.00 327
0 1 0 328
0 6 0 363
Beskrivning
id
Logik = 0
Styrsignal 1 = Start
framåt
Styrsignal 2 = Start
back
Logik = 1
Styrsignal 1 = Start/
Stopp
Styrsignal 2 = Bakåt
Logik = 2
Styrsignal 1 = Start/
Stopp
Styrsignal 2 = Driftfrigivning
Logik = 3
Styrsignal 1 = Startpuls (flank)
Styrsignal 2 = Stoppuls
Logik = 4
Styrsignal 1 =
Framåt-puls (flank)
Styrsignal 2 = Backpuls (flank)
Logik = 5
Styrsignal 1 = Startpuls (flank)
Styrsignal 2 = Backpuls
Logik = 6
Styrsignal 1 = Startpuls (flank)
Styrsignal 2 = Aktivera-puls
3
P2.2.16
P2.2.17
P2.2.18
Plats A börvär-
desskalning, mini-
mivärde
Plats A börvär-
desskalning, max-
imivärde
Plats B börvär-
desskalning, mini-
mivärde
0.00 320.00 Hz 0.00 303
0.00 304
0.00 320.00 Hz 0.00 364
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 47
Tabell 16: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
Plats B börvär-
P2.2.19
P2.2.20
P2.2.21
P2.2.22
P2.2.23
desskalning, max-
imivärde
Ledig analoging-
ång, signalval
Ledig analoging-
ång, funktion
Motorpotentiome-
ter ramptid
Återställning av
motorpotentiome-
terns frekvens-
börvärdesminne
0.00 320.00 Hz 0.00 365
0 2 0 361
0 4 0 362
0.1 2000.0 Hz/s 10.0 331
0 2 1 367
Beskrivning
id
0.00 = Ingen skalning
>0 = skalat maxvärde
0 = Används inte
1 = Analog ingång 1
2 = Analog ingång 2
0 = Ingen nollställning
1 = Minskar strömgränsen (P2.1.5)
2 = Minskar likströmsbromsström
3 = Minskar accel.och retard.tider
4 = Minskar momentövervakningsgränsen
0 = Ingen nollställning
1=Nollställning vid
stopp eller avstängning
2 = Nollställning vid
spänningsfrånslag
0 = Driftstatus ej
P2.2.24 Startpulsminne 0 1 0 498
kopierad
1 = Driftstatus kopierad
** = Kom ihåg att placera byglarna för block X2 därefter. Se produktens användarhandbok.
*** = Parametervärde kan endast ändras efter att frekvensomriktaren har stoppats.
**** = Programmera dessa parametrar med TTF-metoden.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 48 LOKAL STYRNING/FJÄRRSTYRNING
3.4.4 UTGÅNGSSIGNALER (MANÖVERPANEL: M2-MENYN -> G2.3
Tabell 17: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.1 AO1 signalval 0.1 E.10 A11 464
P2.3.2
P2.3.3
Funktion för ana-
log utgång
Filtertid för ana-
log utgång
0 8 1 307
0.00 10.00 s 1.00 308
Beskrivning
ID
0 = Används ej (20
mA/10 V)
1 = Utgångsfrekv.
(0–f
2 = Frekv.referens
(0–f
3=Motorvarvtal (0 Motorns märkvarvtal)
4 = Motorström (0–
I
nMotor
5=Motormoment
(0-T
6 = 7 = Motorspänning (0-U
Motoreffekt (0P
nMotor
8=DC-bryggans
spänning
(0-1 000V)
0 = Inget filter
)
max
)
max
)
nMotor
)
nMotor
)
)
P2.3.4
P2.3.5
P2.3.6
Invertering av
analogutgång
Analog utgång
minimum
Skalning av ana-
log utgång
0 1 0 309
0 1 0 310
10 1000 % 100 311
0=Ej inverterad
1 = inverterat
0 = 0 mA (0 V)
1 = 4 mA (2 V)
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 49
Tabell 17: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.7
Digitalutgång 1,
funktion
0 22 1 312
Beskrivning
ID
0 = Används inte
1 = Driftklar
2 = Drift
3 = fel
4 = Fel inverterat
5=Överhettn.varning för
frekv.omriktare
6=Externt fel eller
varning
7=Ref.fel eller varning
8 = Varning
9 = Reverserad
10 = Krypvarvt. valt
11 = Varvtal uppnått
12=Motorreglering
aktiv
13 = Driftfrekv.
övervakn.gränsv. 1
14 = Driftfrekv.
övervakn.gränsv.2
15 = Moment övervakn.gränsv.
16 = Börv. övervakn.gränsv.
17 = Ext. bromsstyrning
18 = Styrplats: IO
19 =
Frekv.omr.temp.
övervakn.gränsv.
20 = Obegärd rotationsriktning
21 = Ext. bromsstyrn. inverterad
22 = Termistorfel/varning
P2.3.8
P2.3.9 RO2 funktion 0 22 3 314
P2.3.10
P2.3.11
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
RO1 funktion 0 22 2 313
Övervakning av
utfrekvensgräns 1
Utfrekvensgräns
1; övervakat värde
0 2 0 315
0.00 320.00 Hz 0.00 316
Som parameter
2.3.7
Som parameter
2.3.7
0=Ingen gräns
1 = Övervakning av
undre gräns
2 = Övervakning av
övre gräns
3

VACON · 50 LOKAL STYRNING/FJÄRRSTYRNING
Tabell 17: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.12
P2.3.13
P2.3.14
P2.3.15
P2.3.16
P2.3.17
Övervakning av
utfrekvensgräns 2
Utfrekvensgräns
2; övervaknings-
värde
Funktion för
momentgränsö-
vervakning
Övervakning av
momentgräns-
värde
Övervakning av
börvärdesgräns-
funktion
Övervakning av
börvärdesgräns-
värde
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
Beskrivning
ID
0=Ingen gräns
1 = Övervakning av
undre gräns
2 = Övervakning av
övre gräns
0 = nej
1 = Nedre gräns
2 = Övre gräns
0 = nej
1 = Nedre gräns
2 = Övre gräns
P2.3.18
P2.3.19
P2.3.20
P2.3.21
P2.3.22
P2.3.23
P2.3.24
P2.3.25
Extern broms-
frånslagsfördröj-
ning
Extern bromstills-
lagsfördröjning
Övervakning av
temperaturgräns
för frekvensom-
riktare
Frekv.omr. tem-
peraturgräns-
värde
Skalning av analo-
gutgång 2
Funktion för ana-
logutgång 2
Filtertid för analo-
gutgång 2
Invertering av
analogutgång 2
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
0 = nej
1 = Nedre gräns
2 = Övre gräns
Som parameter
2.3.2
0 = Inget filter
0=Ej inverterad
1 = inverterat
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 51
Tabell 17: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.26
P.2.3.27
Analogutgång 2,
minimum
Skalning av analo-
gutgång 2
0 1 0 475
10 1000 % 1.00 476
ID
Beskrivning
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 52 LOKAL STYRNING/FJÄRRSTYRNING
3.4.5 FREKVENSOMRIKTARENS STYRPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.4
Tabell 18: Omriktarstyrningsparametrar, G2.4
Index Parameter Min Max Enhet Förvalt Kun
d
P2.4.1 Ramp 1 form 0.0 10.0 s 0.1 500
P2.4.2 Ramp 2 form 0.0 10.0 s 0.0 501
P2.4.3 Accelerationstid 2 0.1 3000.0 s 1.0 502
P2.4.4 Retardationstid 2 0.1 3000.0 s 1.0 503
P2.4.5 Bromschopper 0 4 0 504
P2.4.6 Startfunktion 0 2 0 505
Beskrivning
ID
0 = Linjär
100 = full acc/ret
ökn/minskn.tider
0 = Linjär
100 = full acc/ret
ökn/minskn.tider
0 = Förhindrad
1 = Används i drift
2 = Extern bromschopper
3 = Används i
stoppläge/drift
4 = Används i drift
(ingen testning)
0 = Ramp
1 = Flygande start
2 = Villkorad flygande start
P2.4.7 Stoppfunktion 0 3 0 506
P2.4.8 DC-bromsström 0.00 I
P2.4.9
P2.4.10
P2.4.11
P2.4.12 * Flödesbroms 0 1 0 520
DC-bromstid vid
stopp
Frekvens för att
starta DC-bromsning under ramp-
stopp
Bromstid vid start,
DC
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
L
A 0.7 x I
H
507
0 = Utrullning
1 = Ramp
2 = Ramp+Driftfrige utrullning
3 = Utrullning
+Driftfrige ramp
0 = DC-broms ej i
användning vid
stopp
0 = DC-broms ej i
användning vid
start
0 = normaltid
0 = På
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 53
Tabell 18: Omriktarstyrningsparametrar, G2.4
Index Parameter Min Max Enhet Förvalt Kun
d
P2.4.13
Flödesbroms-
ström
0.00 I
L
A I
H
ID
519
3.4.6 FÖRBJUDNA FREKVENSER (MANÖVERPANEL: M2-MENYN -> G2.5)
Tabell 19: Parametrar för förbjuden frekvens, G2.5
Index Parameter Min Max Enhet Förvalt Kun
d
Förbjudet frek-
P2.5.1
P2.5.2
P2.5.3
vensintervall 1
undre gräns
Förbjudet frek-
vensintervall 1
övre gräns
Förbjudet frek-
vensintervall 2
undre gräns
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
id
Beskrivning
Beskrivning
0 = Förbj. område
1 är av
P2.5.4
P2.5.5
P2.5.6
P2.5.7
Förbjudet frekvensintervall 2,
övre gräns
Förbjudet frek-
vensintervall 3
undre gräns
Förbjudet frekvensintervall 3,
övre gräns
Förbjud acc./
ret.ramp
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 × 1.0 518
0 = Förbj. område
2 är av
0 = Förbj. område
3 är av
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 54 LOKAL STYRNING/FJÄRRSTYRNING
3.4.7 MOTORKONTROLLPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.6)
Tabell 20: Motorstyrningsparametrar, G2.6
Index Parameter Min Max Enhet Förvalt Kun
d
P2.6.1 * Reglermetod 0 1/3 0 600
P2.6.2 * U/f-optimering 0 1 0 109
P2.6.3 *
Val av U/f-förhål-
lande
0 3 0 108
Beskrivning
id
0 = Frekvensstyrning
1 = Varvtalsstyrning
NXP:
2 = Open loopmomentstyrning
3 = Closed loopvarvtalsregl.
4 = Closed loopmomentstyrning
0 = Används inte
1=Automatisk
momentmaximering
0 = Linjär
1 = Kvadratisk
2 = Programmerbar
3=Linjärt med flödesoptimering
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
P2.6.10
P2.6.11
Fältförsvagnings-
punkt
Spänning vid fält-
försvagningspunkt
U/f-kurva mitt-
punktsfrekvens
U/f-kurva mitt-
punktsspänning
Utgångsspänning
vid nollfrekvens
Kopplingsfrek-
vens
Överspänningsre-
gulator
Underspännings-
regulator
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varierar 606
1.0 Varierar kHz Varierar 601
0 2 1 607
0 1 1 608
0 = Används inte
1 = Används (ingen
rampning)
2 = Används
(rampning)
0 = Används inte
1 = Används
3
P2.6.12 Load drooping 0.00 100.00 % 0.00 620
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 55
Tabell 20: Motorstyrningsparametrar, G2.6
Index Parameter Min Max Enhet Förvalt Kun
d
P2.6.13 Identifiering 0 1/2 0 631
Closed Loop-parametergrupp 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
Magnetiserings-
ström
Varvtalsreglering,
P-förstärkning
Varvtalsreglering,
I-tid
Accelerations-
kompensation
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
H
A 0.00 612
Beskrivning
id
0 = Ingen åtgärd
1 = Identifiering
utan körning
2 = Identifiering
med körning
3 = ID-körning med
pulsgivare
4 = Ingen åtgärd
5 = ID-körning
misslyckades
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11 Moment vid start 0 3 0 621
P2.6.14.12
P2.6.14.13
Eftersläpningsjus-
tering
Magnetiserings-
ström vid start
Magnetiseringstid
vid start
Stilleståndstid vid
start
Stilleståndstid vid
stopp
Moment vid start
FRAMÅT
Moment vid start
BACK
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
L
A 0.00 627
0 = Används inte
1 = Momentminne
2 = Momentbörvärde
3 = Moment vid
start framåt/back
P2.6.14.15 Pulsgivarfiltertid 0.0 100.0 ms 0.0 618
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 56 LOKAL STYRNING/FJÄRRSTYRNING
Tabell 20: Motorstyrningsparametrar, G2.6
Index Parameter Min Max Enhet Förvalt Kun
d
P2.6.14.17
Identifieringsparametergrupp 2.6.15
P2.6.15.1 Varvtalssteg -50.0 50.0 0.0 0.0 1252
Strömreglering,
P-förstärkning
0.00 100.00 % 40.00 617
id
Beskrivning
* = Parametervärde kan endast ändras efter att frekvensomriktaren har stoppats.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 57
3.4.8 SKYDDSFUNKTIONER (MANÖVERPANEL: M2-MENYN -> G2.7
Tabell 21: Skyddsfunktioner, G2.7
Index Parameter Min Max Enhet Förvalt Kun
d
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5
Reaktion på 4 mA
börvärdesfel
4 mA börvärdes-
felfrekvens
Reaktion på
externt fel
Övervakning av
ingångsfas
Reaktion på
underspännings-
fel
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
0 1 0 727
Beskrivning
id
0 = Ingen reaktion
1 = Varning
2 = Varning+tidigare frekv.
3 = Varn.+Förv.
frekv. 2.7.2
4 = Fel, stopp enl.
2.4.7
5 = Fel, stopp
genom utrullning
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
0 = Fel lagrat i
historiken
Fel ej sparat
P2.7.6
P2.7.7 Jordfelsskydd 0 3 2 703
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
P2.7.13 Fastlåsningsskydd 0 3 0 709
Övervakning av
utgångsfaser
Termiskt skydd
för motorn
Faktor för
motorns omgiv-
ningstemperatur
Motorns kylfaktor
vid stillastående
Motorns termiska
tidskonstant
Motorns driftför-
hållande
0 3 2 702
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Varierar 707
0 150 % 100 708
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 58 LOKAL STYRNING/FJÄRRSTYRNING
Tabell 21: Skyddsfunktioner, G2.7
Index Parameter Min Max Enhet Förvalt Kun
d
P2.7.14 Fastlåsn.ström 0.00 2 x I
P2.7.15 Fastlåsningstid 1.00 120.00 s 15.00 711
P2.7.16
P2.7.17 Underlastskydd 0 3 0 713
P2.7.18
P2.7.19
P2.7.20
P2.7.21
Fastlåsningsfrek-
vensgräns
ULS fnom
moment
ULS vid nollfrek-
vens
Tidsgräns för
underlastskydd
Reaktion på ter-
mistorfel
1.0 P2.1.2 Hz 25.00 712
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
H
A I
H
Beskrivning
id
710
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
P2.7.22
P2.7.23
Reaktion på fält-
bussfel
Reaktion på kort-
platsfel
0 3 2 733
0 3 2 734
Se P2.7.21
Se P2.7.21
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

LOKAL STYRNING/FJÄRRSTYRNING VACON · 59
3.4.9 AUTOMATISK ÅTERSTART (MANÖVERPANEL: M2-MENYN -> G2.8)
Tabell 22: Parametrar för automatisk återstart, G2.8
Index Parameter Min Max Enhet Förvalt Kun
d
P2.8.1 Väntetid 0.10 10.00 s 0.50 717
P2.8.2 Försökstid 0.00 60.00 s 30.00 718
P2.8.3 Startfunktion 0 2 0 719
Antal försök efter
P2.8.4
P2.8.5
P2.8.6
P2.8.7
underspännings-
utlösn.
Antal försök efter
överspänningsut-
lösning
Antal försök efter
överströmsutlös-
ning
Antal försök efter
4 mA börvärde-
sutlösning
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
Beskrivning
ID
0 = Ramp
1 = Flygande start
2 = Enligt P2.4.6
Antal försök efter
P2.8.8
P2.8.9
P2.8.10
utlösning av
motortemperatur-
fel
Antal försök efter
utlösning av
externt fel
Antal försök efter
utlösning av
underbelastnings-
fel
0 10 0 726
0 10 0 725
0 10 0 738
3.4.10 PANELSTYRNING (MANÖVERPANEL: MENY M3)
Parametrarna för val av styrplats och rotationsriktning från panelen visas nedan. Se
panelstyrningsmenyn i produktens användarhandbok.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
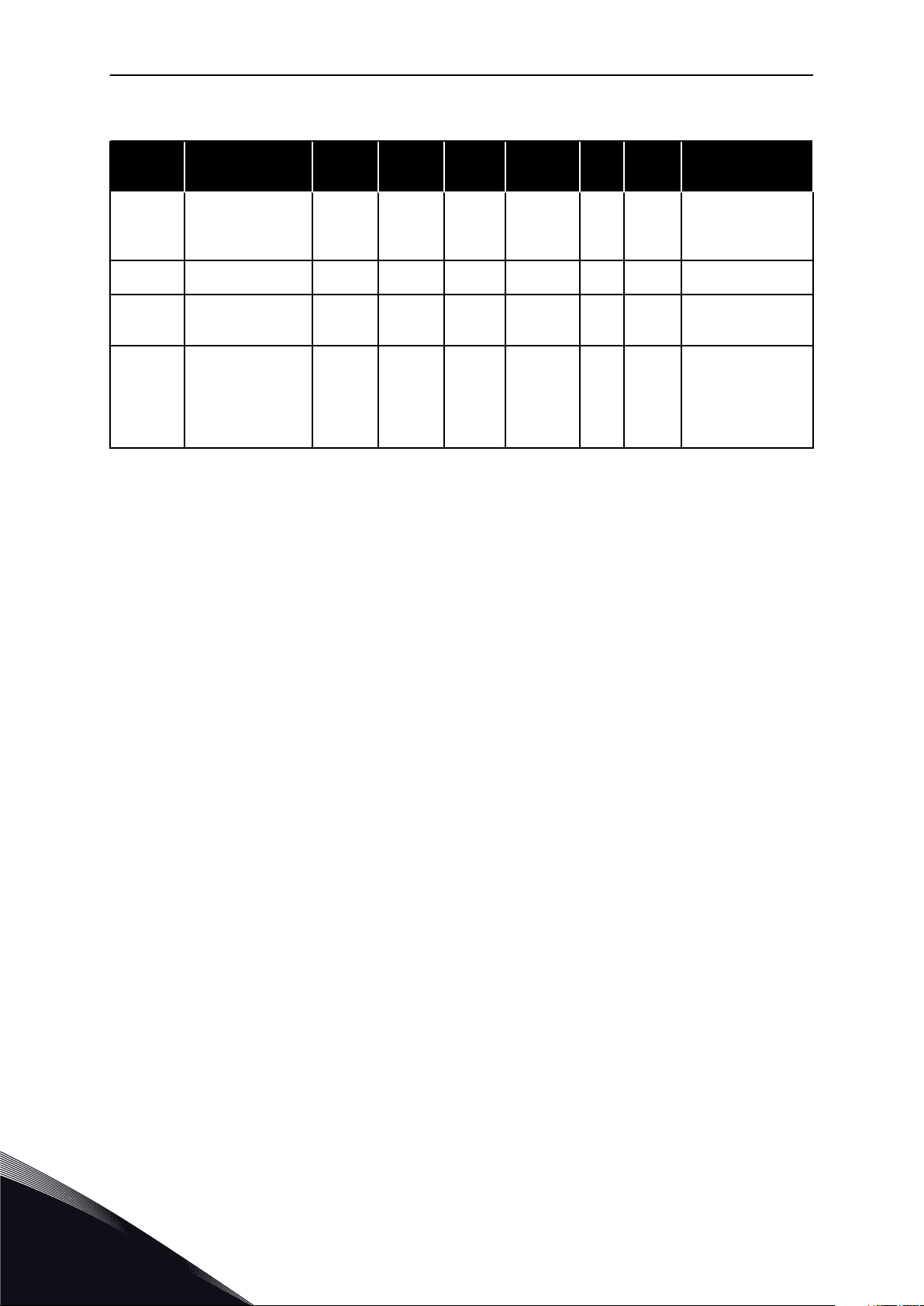
VACON · 60 LOKAL STYRNING/FJÄRRSTYRNING
Tabell 23: Panelstyrningsparametrar, M3
Index Parameter Min Max Enhet Förvalt Kun
d
P3.1 Styrplats 1 3 1 125
P3.2 Panelreferens P2.1 P2.2 Hz 0.00
P3.3
R3.4 Stoppknapp 0 1 1 114
Rotationsriktning
(på panel)
0 1 0 123
Beskrivning
id
1 = I/0 styrning
2 = Panel
3 = Fältbuss
0=Begränsad funktion hos stoppknapp
1=Stoppknapp alltid aktiverad
3.4.11 SYSTEMMENY (MANÖVERPANEL: MENY M6)
För parametrar och funktioner kopplade till allmän användning av frekvensomriktaren,
såsom val av applikation och språk, användaranpassade parameteruppsättningar eller
information om hårdvara och programvara, se produktens användarhandbok.
3.4.12 TILLÄGGSKORT (MANÖVERPANEL: M7-MENYN
M7-menyn visar till tilläggs- och optionskort som är anslutna till styrkortet och information
om korten. Mer information finns i produktens användarhandbok.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KONSTANTHASTIGHETSSTYRNING VACON · 61
4 KONSTANTHASTIGHETSSTYRNING
4.1 INTRODUKTION
Välj Konstanthastighetsstyrning på M6-menyn på sidan S6.2.
Kontstanthastighetsstyrning kan användas i applikationer där flera fasta hastigheter krävs.
Totalt kan 15 + 2 olika hastigheter programmeras: en grundhastighet, 15
konstanthastigheter och ett joggningsvarvtal. Varvtalsstegen väljs med de digitala signalerna
DIN3, DIN4, DIN5 och DIN6. Om joggningsvarvtal används kan DIN3 programmeras från
felåterställning till val av joggningsvarvtal.
Grundvarvtalsbörvärdet kan vara antingen volt- eller strömsignal via analogingångsplintar
(2/ 3 eller 4/5). Den andra analogingången kan programmeras för andra ändamål.
Alla utgångar är fritt programmerbara.
•
Övriga funktioner:
Programmerbar logik för start/stopp- och reversering
•
Referensskalning
•
Övervakning av en frekvensgräns
•
Programmering av andra ramper och S-formad ramp
•
Programmerbara start- och stoppfunktioner
•
Likströmsbroms vid stopp
•
Ett område för förbjuden frekvens
•
Programmerbar U/f-kurva och kopplingsfrekvens
•
Automatisk återstart
•
Skydd mot motoröverlast och fastlåsning: Programmerbar åtgärd; från, varning, fel
•
Parametrarna för Konstanthastighetsstyrning förklaras i avsnitt 9 Parameterbeskrivningar i
den här handboken. Förklaringarna är ordnade efter parameterns enskilda ID-nummer.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Grundbörvärde
(valfritt)
DRIFT
KLAR
AO1-
DO1
+ 24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
CMA
CMB
OPTA1
OPTA2 /OPTA3 *)
Anslutning Signal Beskrivning
+10 Vbörv.
AI1+
AI1-
AI2+
AI2-
+24 V
Referensutgång
I/O jord
Analogingång 2.
Strömområde 0–20 mA
Programmerbar
(P2.1.11)
Utgång för styrspänning
I/O-signal till jord
Start framåt
Programmerbar logik (P2.2.1)
Start bakåt
Ri min. = 5 kΩ
Ingång för externt fel
Programmerbar (P2.2.2)
Förvalt varvtal 1
Förvalt varvtal 2
Förvalt varvtal 3
Gemensam för DIN 1–DIN 3
Gemensam för DIN4–DIN6
Utgång för styrspänning
I/O-signal till jord
Analogutgång 1:
Utgångsfrekvens
Programmerbar (P2.3.2)
Digital utgång
KLAR
Programmerbar (P2.3.7)
Öppen kollektor,
I ≤50 mA, U ≤48 VDC
Reläutgång 1
DRIFT
Programmerbar
Programmerbar
Programmerbar
(P2.3.8)
Reläutgång 2
FEL
Programmerbar
(P2.3.9)
Område 0–20 mA/RL,
max. 500 Ω
AO1+
Börvärde för
analogingång 1
Jord för referensoch styrspänningar
Börvärde för
analogingång 2
Standardbörvärde
Sluten kontakt = start framåt
Sluten kontakt = start bakåt
Kontakt öppen = inget fel
Kontakt stängd = fel
Referenspotentiometer,
1–10 kΩ
Matningsspänning till
potentiometer etc
Analogingång 1.
Spänningsområde
0–10 V DC
Matningsspänning till givare etc.,
max 0,1 A
Brytarspänningar(se #6)
Anslut till GND eller +24 V
Anslut till GND eller +24 V
Jord för referens- och styrspänningar
Jord för referens- och styrspänningar
val1 val2 val3 val4(med DIN3)
0 0 0 0 I/O-börv.
1 0 0 0 Varvtal 1
0 1 0 0 Varvtal 2
---- ------1 1 1 1 Varvtal 15
RO1
RO1
RO1
RO2
RO2
RO2
VACON · 62 KONSTANTHASTIGHETSSTYRNING
4.2 STYR-I/O
Bild 10: Konstanthastighetsstyrningens I/O-standardkonfiguration
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

Bygelblock X3:
CMA- och CMB-jordning
CMB ansluten till GND
CMA ansluten till GND
CMB isolerad från GND
CMA isolerad från GND
CMB och CMA internt
ihopkopplade, isolerade
från GND
= Fabriksinställning
KONSTANTHASTIGHETSSTYRNING VACON · 63
*) Optionskortet A3 saknar plint för öppen kontakt på sin andra reläutgång (plint 24 saknas).
OBS!
Se bygellägen nedan. Mer information finns i produktens användarhandbok.
Bild 11: Bygellägen
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN3
DIN6
DIN3
DIN3
3.2 Panelbörvärde
2.1.11 I/O-börvärde
2.1.12 Panelstyrningsbörvärde
2.1.13 Fältbussbörvärde
2.1.15 Förinställt varvtal 1
...2.1.29 Förinställt varvtal 15
3.1 Styrplats
Internt
frekvensbörvärde
Start framåt
(programmerbar)
Start bakåt
(programmerbar)
Start/Stop
Bakåt
Intern start/stopp
Intern reversering
Intern felåterställn.
Felåterställn.ingång
Återställn.
knapp
Start-/
stoppknappar
Börvärde från fältbuss
Start/stopp från fältbuss
Riktning från fältbuss
3.3 Panelriktning
Förvalt varvt 1
Förvalt varvt 2
Förvalt varvt 3
Förvalt varvt 4
(programmerbar)
≥ 1
Programmerbar
logik för start/
stopp och
reversering
2.1.14 Krypvarvtalsreferens
VACON · 64 KONSTANTHASTIGHETSSTYRNING
4.3 KONSTANTHASTIGHETSSTYRNINGENS STYRSIGNALLOGIK
Bild 12: Konstanthastighetsapplikationens styrsignallogik
4.4 KONSTANTHASTIGHETSSTYRNING – PARAMETERLISTOR
4.4.1 ÖVERVAKNINGSVÄRDEN (MANÖVERPANEL: MENY M1)
Övervakningsvärden utgörs av ärvärden för parametrar och signaler, status och uppmätta
värden. De kan inte redigeras.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KONSTANTHASTIGHETSSTYRNING VACON · 65
Tabell 24: Driftvärden
Index Övervakningsvärde Unit ID Beskrivning
V1.1 Utfrekvens Hz 1
V1.2 Frekvensreferens Hz 25
V1.3 Motorvarvtal rpm 2
V1.4 Motorström A 3
V1.5 Motormoment % 4
V1.6 Motoreffekt % 5
V1.7 Motorspänning V 6
V1.8 DC-spänning V 7
1.9
1.10 Motortemperatur % 9
V1.11 Analog ingång 1 V/mA 13
V1.12 Analog ingång 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analog I
V1.17 Driftv. sida
Enhetens tempera-
tur
utgång
°C 8
mA 26
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 66 KONSTANTHASTIGHETSSTYRNING
4.4.2 GRUNDPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.1)
Tabell 25: Grundparametrar G2.1
Index Parameter Min Max Enhet Förvalt Kun
d
P2.1.1 Min. frekvens 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Max. frekvens P2.1.1 320.00 Hz 50.00 102
P2.1.3 Accelerationstid 1 0.1 3000.0 s 0.0 103
P2.1.4 Retardationstid 1 0.1 3000.0 s 0.0 104
P2.1.5 Strömgräns 0,1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
Motorns nominella spänning
Motorns nomi-
nella frekvens
Motorns nomi-
nella varvtal
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 rpm 1440 112
2 x I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
L
V
V
V
id
107
110
Beskrivning
P2.1.9 *
P2.1.10 * Motorns cos phi 0.30 1.00 0.85 120
P2.1.11 * I/O-referens 0 3 1 117
P2.1.12 *
P2.1.13 *
P2.1.14
P2.1.15 Förvalt varvtal 1 0.00 P2.1.2 Hz 5.00 105
P2.1.16 Förvalt varvtal 2 0.00 P2.1.2 Hz 10.00 106
Motorns nomi-
nella ström
Panelstyrning,
börvärde
Fältbusstyrning,
börvärde
Krypvarvtalsrefe-
rens
0,1 x I
0 3 2 121
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
0 = AI1
1 = AI2
2 = Panel
3 = Fältbuss
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KONSTANTHASTIGHETSSTYRNING VACON · 67
Tabell 25: Grundparametrar G2.1
Index Parameter Min Max Enhet Förvalt Kun
d
P2.1.17 Förvalt varvtal 3 0.00 P2.1.2 Hz 12.50 126
P2.1.18 Förvalt varvtal 4 0.00 P2.1.2 Hz 15.00 127
P2.1.19 Förvalt varvtal 5 0.00 P2.1.2 Hz 17.50 128
P2.1.20 Förvalt varvtal 6 0.00 P2.1.2 Hz 20.00 129
P2.1.21 Förvalt varvtal 7 0.00 P2.1.2 Hz 22.50 130
P2.1.22 Förvalt varvtal 8 0.00 P2.1.2 Hz 25.00 133
P2.1.23 Förvalt varvtal 9 0.00 P2.1.2 Hz 27.50 134
P2.1.24 Förvalt varvtal 10 0.00 P2.1.2 Hz 30.00 135
P2.1.25 Förvalt varvtal 11 0.00 P2.1.2 Hz 32.50 136
P2.1.26 Förvalt varvtal 12 0.00 P2.1.2 Hz 35.00 137
P2.1.27 Förvalt varvtal 13 0.00 P2.1.2 Hz 40.00 138
P2.1.28 Förvalt varvtal 14 0.00 P2.1.2 Hz 45.00 139
id
Beskrivning
P2.1.29 Förvalt varvtal 15 0.00 P2.1.2 Hz 50.00 140
* = Parametervärde kan endast ändras efter att frekvensomriktaren har stoppats.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 68 KONSTANTHASTIGHETSSTYRNING
4.4.3 INGÅNGSSIGNALER (MANÖVERPANEL: M2-MENYN -> G2.2)
Tabell 26: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.1 *** Start/stopplogik 0 6 0 300
ID
Beskrivning
Logik = 0
Styrsignal 1 = Start
framåt
Styrsignal 2 = Start
back
Logik = 1
Styrsignal 1 = Start/
Stopp
Styrsignal 2 = Bakåt
Logik = 2
Styrsignal 1 = Start/
Stopp
Styrsignal 2 = Driftfrigivning
Logik = 3
Styrsignal 1 = Startpuls (flank)
Styrsignal 2 = Stoppuls
Logik = 4
Styrsignal 1 =
Framåt-puls (flank)
Styrsignal 2 = Backpuls (flank)
Logik = 5
Styrsignal 1 = Startpuls (flank)
Styrsignal 2 = Backpuls
Logik = 6
Styrsignal 1 = Startpuls (flank)
Styrsignal 2 = Aktivera-puls
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KONSTANTHASTIGHETSSTYRNING VACON · 69
Tabell 26: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.2 Funktion för DIN3 0 13 1 301
P2.2.3
****
AI1 signalval 0.1 E.10 A1 377
Beskrivning
ID
0 = Används inte
1 = Ext fel, stänger
kont.
2 = Ext fel, öppnar
kont.
3=Frigivning
4 = Acc./Ret. tid val.
5 = Tvinga styrpl. till
IO
6 = Tvinga styrpl. till
panel
7 = Tvinga styrpl. till
fältbuss
8 = Rvs (om P2.2.1 ≠
2,3 eller 6)
9 = Krypvarvtal
10=Felåterställning
11 = Acc/Ret.drift
förbjuden
12 = Likströmsbromskommando
13 = Förvalt varvtal
P2.2.4 AI1 signalområde 0 2 0 320
P2.2.5
P2.2.6
P2.2.7 AI1 signalinvert 0 1 0 323
P2.2.8 AI1 signal filtertid 0.00 10.00 s 0.10 324
P2.2.9
****
P2.2.10 AI2 signalområde 0 2 1 325
AI1 egen inställ-
ning, minimum
AI1 eget maxi-
mum
AI2 signalval 0.1 E.10 A.2 388
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 = 0–10 V (0–20
mA**)
1 = 2–10 V (4–20
mA**)
2 = Eget inställningsområde**
0 = 0–10 V (0–20
mA**)
1 = 2–10 V (4–20
mA**)
2 = Eget inställningsområde**
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 70 KONSTANTHASTIGHETSSTYRNING
Tabell 26: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.11
P2.2.12
P2.2.13
P2.2.14 AI2 signal filtertid 0.00 10.00 s 0.10 329
P2.2.15
P2.2.16
P2.2.17
P2.2.18
AI2 egen inställ-
ning, minimum
AI2 eget maxi-
mum
AI2 signalinver-
tering
Börvärdesskal-
ning, minimivärde
Referensskalning
maxvärde
Ledig analoging-
ång, signalval
Ledig analoging-
ång, funktion
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
0 2 0 361
0 4 0 362
Beskrivning
ID
0.00 = Ingen skalning
>0 = skalat maxvärde
0 = Används inte
1 = AI1
2 = AI2
0 = Ingen funktion
1 = Minskar strömgränsen (P2.1.5)
2 = Minskar likströmsbromsströmmen, P2.4.8
3 = Minskar accel.och retard.tider
4 = Minskar momentövervakningsgränsen P2.3.15
CP = styrplats
cc = stänger kontakt
oc = öppnar kontakt
** = Kom ihåg att placera byglarna för block X2 därefter. Se produktens användarhandbok.
*** = Parametervärde kan endast ändras efter att frekvensomriktaren har stoppats.
**** = Programmera dessa parametrar med TTF-metoden.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KONSTANTHASTIGHETSSTYRNING VACON · 71
4.4.4 UTGÅNGSSIGNALER (MANÖVERPANEL: M2-MENYN -> G2.3
Tabell 27: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.1 * AO1 signalval 0.1 E.10 A11 464
P2.3.2
P2.3.3
Funktion för ana-
log utgång
Filtertid för ana-
log utgång
0 8 1 307
0.00 10.00 s 1.00 308
Beskrivning
ID
0 = Används ej (20
mA/10 V)
1 = Utgångsfrekv.
(0–f
2 = Frekv.referens
(0–f
3=Motorvarvtal (0 Motorns märkvarvtal)
4 = Motorström (0–
I
nMotor
5=Motormoment
(0-T
6=Motoreffekt (0P
nMotor
7=Motorspänning
(0-U
8=DC-bryggans
spänning
(0-1 000V)
0 = Inget filter
)
max
)
max
)
nMotor
nMotor
)
)
)
P2.3.4
P2.3.5
P2.3.6
Invertering av
analogutgång
Analog utgång
minimum
Skalning av ana-
log utgång
0 1 0 309
0 1 0 310
10 1000 % 100 311
0=Ej inverterad
1 = inverterat
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 72 KONSTANTHASTIGHETSSTYRNING
Tabell 27: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.7
Digitalutgång 1,
funktion
0 22 1 312
Beskrivning
ID
0 = Används inte
1 = Driftklar
2 = Drift
3 = fel
4 = Fel inverterat
5=Överhettn.varning för
frekv.omriktare
6=Externt fel eller
varning
7=Ref.fel eller varning
8 = Varning
9 = Reverserad
10 = Krypvarvt. valt
11 = Varvtal uppnått
12=Motorreglering
aktiv
13 = Driftfrekv.
övervakn.gränsv. 1
14 = Driftfrekv.
övervakn.gränsv.2
15 = Moment övervakn.gränsv.
16 = Börv. övervakn.gränsv.
17 = Ext. bromsstyrning
18 = Styrplats: IO
19 =
Frekv.omr.temp.
övervakn.gränsv.
20 = Obegärd rotationsriktning
21 = Ext. bromsstyrn. inverterad
22 = Termistorfel/varning
4
P2.3.8
P2.3.9 RO2 funktion 0 22 3 314
P2.3.10
P2.3.11
RO1 funktion 0 22 2 313
Övervakning av
utfrekvensgräns 1
Utfrekvensgräns
1; övervakat värde
0 2 0 315
0.00 320.00 Hz 0.00 316
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Som parameter
2.3.7
Som parameter
2.3.7
0=Ingen gräns
1 = Övervakning av
undre gräns
2 = Övervakning av
övre gräns

KONSTANTHASTIGHETSSTYRNING VACON · 73
Tabell 27: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.12
P2.3.13
P2.3.14
P2.3.15
P2.3.16
P2.3.17
Övervakning av
utfrekvensgräns 2
Utfrekvensgräns
2; övervaknings-
värde
Funktion för
momentgränsö-
vervakning
Övervakning av
momentgräns-
värde
Övervakning av
börvärdesgräns-
funktion
Övervakning av
börvärdesgräns-
värde
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
Beskrivning
ID
0=Ingen gräns
1 = Övervakning av
undre gräns
2 = Övervakning av
övre gräns
0 = nej
1 = Nedre gräns
2 = Övre gräns
0 = nej
1 = Nedre gräns
2 = Övre gräns
P2.3.18
P2.3.19
P2.3.20
P2.3.21
P2.3.22 *
P2.3.23 *
P2.3.24 *
P2.3.25 *
Extern broms-
frånslagsfördröj-
ning
Extern bromstills-
lagsfördröjning
Övervakning av
temperaturgräns
för frekvensom-
riktare
Frekv.omr. tem-
peraturgräns-
värde
Skalning av analo-
gutgång 2
Funktion för ana-
logutgång 2
Filtertid för analo-
gutgång 2
Invertering av
analogutgång 2
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
0 = nej
1 = Nedre gräns
2 = Övre gräns
Som parameter
2.3.2
0 = Inget filter
0=Ej inverterad
1 = inverterat
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 74 KONSTANTHASTIGHETSSTYRNING
Tabell 27: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.26 *
P.2.3.27 *
Analogutgång 2,
minimum
Skalning av analo-
gutgång 2
0 1 0 475
10 1000 % 1.00 476
* = Programmera dessa parametrar med TTF-metoden
ID
Beskrivning
0 = 0 mA (0 V)
1 = 4 mA (2 V)
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KONSTANTHASTIGHETSSTYRNING VACON · 75
4.4.5 FREKVENSOMRIKTARENS STYRPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.4
Tabell 28: Omriktarstyrningsparametrar, G2.4
Index Parameter Min Max Enhet Förvalt Kun
d
P2.4.1 Ramp 1 form 0.0 10.0 s 0.1 500
P2.4.2 Ramp 2 form 0.0 10.0 s 0.0 501
P2.4.3 Accelerationstid 2 0.1 3000.0 s 1.0 502
P2.4.4 Retardationstid 2 0.1 3000.0 s 1.0 503
P2.4.5 Bromschopper 0 4 0 504
P2.4.6 Startfunktion 0 2 0 505
Beskrivning
ID
0 = Linjär
100 = full acc/ret
ökn/minskn.tider
0 = Linjär
100 = full acc/ret
ökn/minskn.tider
0 = Förhindrad
1 = Används i drift
2 = Extern bromschopper
3 = Används i
stoppläge/drift
4 = Används i drift
(ingen testning)
0 = Ramp
1 = Flygande start
2 = Villkorad flygande start
P2.4.7 Stoppfunktion 0 3 0 506
P2.4.8 DC-bromsström 0.00 I
P2.4.9
P2.4.10
P2.4.11
P2.4.12 * Flödesbroms 0 1 0 520
DC-bromstid vid
stopp
Frekvens för att
starta DC-bromsning under ramp-
stopp
Bromstid vid start,
DC
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
L
A 0.7 x I
H
507
0 = Utrullning
1 = Ramp
2 = Ramp+Driftfrige utrullning
3 = Utrullning
+Driftfrige ramp
0 = DC-broms ej i
användning vid
stopp
0 = DC-broms ej i
användning vid
start
0 = normaltid
0 = På
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 76 KONSTANTHASTIGHETSSTYRNING
Tabell 28: Omriktarstyrningsparametrar, G2.4
Index Parameter Min Max Enhet Förvalt Kun
d
P2.4.13
Flödesbroms-
ström
0.00 I
L
A I
H
ID
519
4.4.6 FÖRBJUDNA FREKVENSER (MANÖVERPANEL: M2-MENYN -> G2.5)
Tabell 29: Parametrar för förbjuden frekvens, G2.5
Index Parameter Min Max Enhet Förvalt Kun
d
Förbjudet frek-
P2.5.1
P2.5.2
P2.5.3
vensintervall 1
undre gräns
Förbjudet frek-
vensintervall 1
övre gräns
Förbjudet frek-
vensintervall 2
undre gräns
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
id
Beskrivning
Beskrivning
0 = Förbj. område
1 är av
P2.5.4
P2.5.5
P2.5.6
P2.5.7
Förbjudet frekvensintervall 2,
övre gräns
Förbjudet frek-
vensintervall 3
undre gräns
Förbjudet frekvensintervall 3,
övre gräns
Förbjud acc./
ret.ramp
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 × 1.0 518
0 = Förbj. område
2 är av
0 = Förbj. område
3 är av
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KONSTANTHASTIGHETSSTYRNING VACON · 77
4.4.7 MOTORKONTROLLPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.6)
Tabell 30: Motorstyrningsparametrar, G2.6
Index Parameter Min Max Enhet Förvalt Kun
d
P2.6.1 * Reglermetod 0 1/3 0 600
P2.6.2 * U/f-optimering 0 1 0 109
P2.6.3 *
Val av U/f-förhål-
lande
0 3 0 108
Beskrivning
id
0 = Frekvensstyrning
1 = Varvtalsstyrning
NXP:
2 = Open loopmomentstyrning
3 = Closed loopvarvtalsregl.
4 = Closed loopmomentstyrning
0 = Används inte
1=Automatisk
momentmaximering
0 = Linjär
1 = Kvadratisk
2 = Programmerbar
3=Linjärt med flödesoptimering
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
P2.6.10
P2.6.11
Fältförsvagnings-
punkt
Spänning vid fält-
försvagningspunkt
U/f-kurva mitt-
punktsfrekvens
U/f-kurva mitt-
punktsspänning
Utgångsspänning
vid nollfrekvens
Kopplingsfrek-
vens
Överspänningsre-
gulator
Underspännings-
regulator
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varierar 606
1.0 Varierar kHz Varierar 601
0 2 1 607
0 1 1 608
0 = Används inte
1 = Används (ingen
rampning)
2 = Används
(rampning)
0 = Används inte
1 = Används
P2.6.12 Load drooping 0.00 100.00 % 0.00 620
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
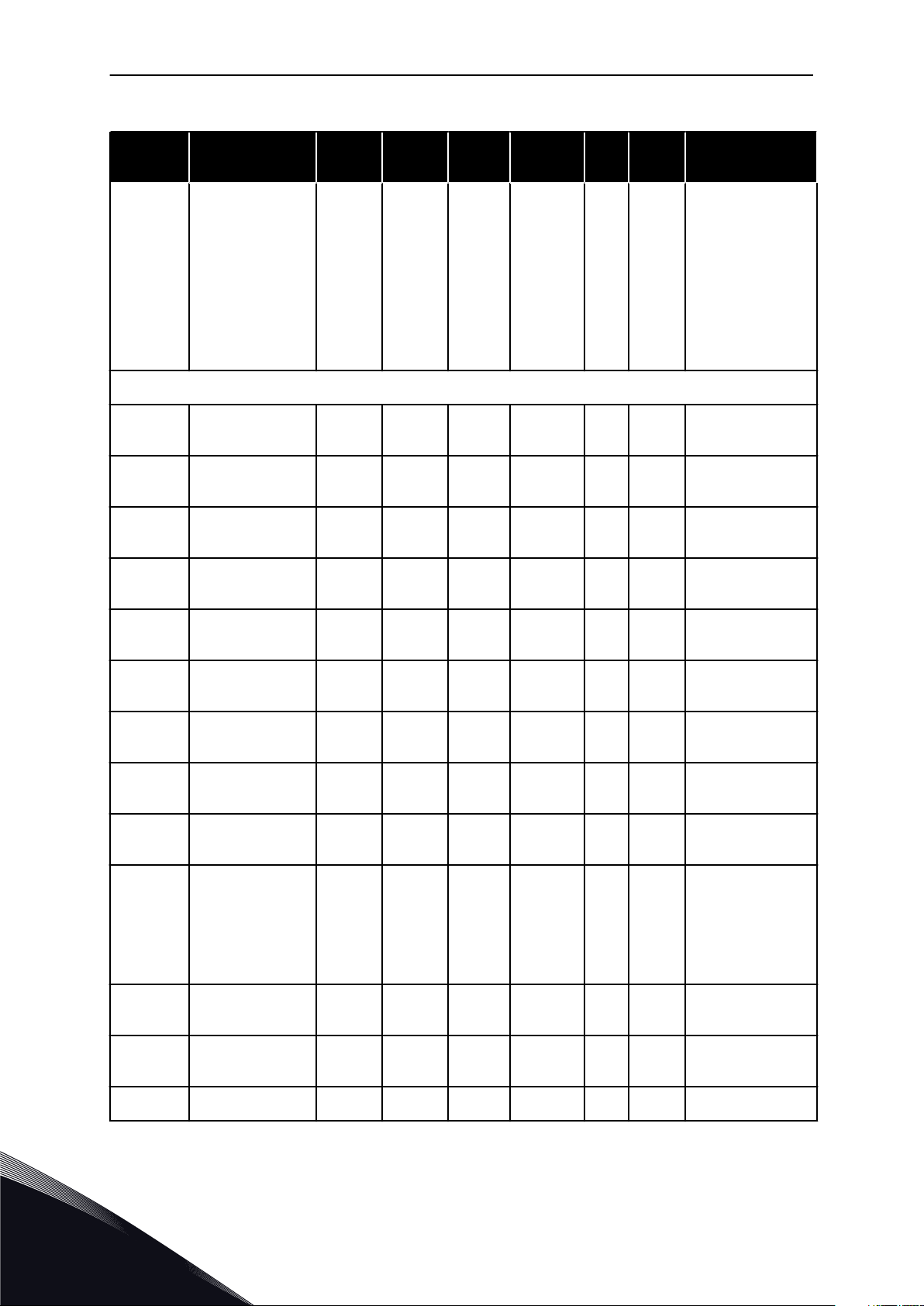
VACON · 78 KONSTANTHASTIGHETSSTYRNING
Tabell 30: Motorstyrningsparametrar, G2.6
Index Parameter Min Max Enhet Förvalt Kun
d
P2.6.13 Identifiering 0 1/2 0 631
Closed Loop-parametergrupp 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
P2.6.14.5
Magnetiserings-
ström
Varvtalsreglering,
P-förstärkning
Varvtalsreglering,
I-tid
Accelerations-
kompensation
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
H
A 0.00 612
Beskrivning
id
0 = Ingen åtgärd
1 = Identifiering
utan körning
2 = Identifiering
med körning
3 = ID-körning med
pulsgivare
4 = Ingen åtgärd
5 = ID-körning
misslyckades
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11 Moment vid start 0 3 0 621
P2.6.14.12
P2.6.14.13
Eftersläpningsjus-
tering
Magnetiserings-
ström vid start
Magnetiseringstid
vid start
Stilleståndstid vid
start
Stilleståndstid vid
stopp
Moment vid start
FRAMÅT
Moment vid start
BACK
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
L
A 0.00 627
0 = Används inte
1 = Momentminne
2 = Momentbörvärde
3 = Moment vid
start framåt/back
P2.6.14.15 Pulsgivarfiltertid 0.0 100.0 ms 0.0 618
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KONSTANTHASTIGHETSSTYRNING VACON · 79
Tabell 30: Motorstyrningsparametrar, G2.6
Index Parameter Min Max Enhet Förvalt Kun
d
P2.6.14.17
Identifieringsparametergrupp 2.6.15
P2.6.15.1 Varvtalssteg -50.0 50.0 0.0 0.0 1252
Strömreglering,
P-förstärkning
0.00 100.00 % 40.00 617
id
Beskrivning
* = Parametervärde kan endast ändras efter att frekvensomriktaren har stoppats.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 80 KONSTANTHASTIGHETSSTYRNING
4.4.8 SKYDDSFUNKTIONER (MANÖVERPANEL: M2-MENYN -> G2.7)
Tabell 31: Skyddsfunktioner, G2.7
Index Parameter Min Max Enhet Förvalt Kun
d
P2.7.1
P2.7.2
P2.7.3
P2.7.4
Reaktion på 4 mA
börvärdesfel
4 mA börvärdes-
felfrekvens
Reaktion på
externt fel
Övervakning av
ingångsfas
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 3 730
Beskrivning
id
0 = Ingen reaktion
1 = Varning
2 = Varning+tidigare frekv.
3 = Varn.+Förv.
frekv. 2.7.2
4 = Fel, stopp enl.
2.4.7
5 = Fel, stopp
genom utrullning
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
Reaktion på
P2.7.5
P2.7.6
P2.7.7 Jordfelsskydd 0 3 2 703
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12
underspännings-
fel
Övervakning av
utgångsfaser
Termiskt skydd
för motorn
Faktor för
motorns omgiv-
ningstemperatur
Motorns kylfaktor
vid stillastående
Motorns termiska
tidskonstant
Motorns driftför-
hållande
0 1 0 727
0 3 2 702
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Varierar 707
0 150 % 100 708
0 = Fel lagrat i
historiken
Fel ej sparat
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KONSTANTHASTIGHETSSTYRNING VACON · 81
Tabell 31: Skyddsfunktioner, G2.7
Index Parameter Min Max Enhet Förvalt Kun
d
P2.7.13 Fastlåsningsskydd 0 3 0 709
P2.7.14 Fastlåsn.ström 0.00 2 x I
P2.7.15 Fastlåsningstid 1.00 120.00 s 15.00 711
P2.7.16
P2.7.17 Underlastskydd 0 3 0 713
Fastlåsningsfrek-
vensgräns
1.00 P2.1.2 Hz 25.00 712
H
A 1
H
id
710
Beskrivning
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
ULS fnom
moment
ULS vid nollfrek-
venslast
Tidsgräns för
underlastskydd
Reaktion på ter-
mistorfel
Reaktion på fält-
bussfel
Reaktion på kort-
platsfel
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 3 734
0 = Ingen reaktion
1 = Varning
2 = Fel, stopp enl.
2.4.7
3 = Fel, stopp
genom utrullning
Se P2.7.21
Se P2.7.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 82 KONSTANTHASTIGHETSSTYRNING
4.4.9 AUTOMATISK ÅTERSTART (MANÖVERPANEL: M2-MENYN -> G2.8)
Tabell 32: Parametrar för automatisk återstart, G2.8
Index Parameter Min Max Enhet Förvalt Kun
d
P2.8.1 Väntetid 0.10 10.00 s 0.50 717
P2.8.2 Försökstid 0.00 60.00 s 30.00 718
P2.8.3 Startfunktion 0 2 0 719
Antal försök efter
P2.8.4
P2.8.5
P2.8.6
P2.8.7
underspännings-
utlösn.
Antal försök efter
överspänningsut-
lösning
Antal försök efter
överströmsutlös-
ning
Antal försök efter
4 mA börvärde-
sutlösning
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
Beskrivning
ID
0 = Ramp
1 = Flygande start
2 = Enligt P2.4.6
Antal försök efter
P2.8.8
P2.8.9
P2.8.10
utlösning av
motortemperatur-
fel
Antal försök efter
utlösning av
externt fel
Antal försök efter
utlösning av
underbelastnings-
fel
0 10 0 726
0 10 0 725
0 10 0 738
4.4.10 PANELSTYRNING (MANÖVERPANEL: MENY M3)
Parametrarna för val av styrplats och rotationsriktning från panelen visas nedan. Se
panelstyrningsmenyn i produktens användarhandbok.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KONSTANTHASTIGHETSSTYRNING VACON · 83
Tabell 33: Panelstyrningsparametrar, M3
Index Parameter Min Max Enhet Förvalt Kun
d
P3.1 Styrplats 1 3 1 125
P3.2 Panelreferens P2.1.1 P2.1.2 Hz 0.00
P3.3
R3.4 Stoppknapp 0 1 1 114
Rotationsriktning
(på panel)
0 1 0 123
Beskrivning
id
1 = I/0 styrning
2 = Panel
3 = Fältbuss
0=Begränsad funktion hos stoppknapp
1=Stoppknapp alltid aktiverad
4.4.11 SYSTEMMENY (MANÖVERPANEL: MENY M6)
För parametrar och funktioner kopplade till allmän användning av frekvensomriktaren,
såsom val av applikation och språk, användaranpassade parameteruppsättningar eller
information om hårdvara och programvara, se produktens användarhandbok.
4.4.12 TILLÄGGSKORT (MANÖVERPANEL: M7-MENYN
M7-menyn visar till tilläggs- och optionskort som är anslutna till styrkortet och information
om korten. Mer information finns i produktens användarhandbok.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 84 STYRNING MED PID-REGULATOR
5 STYRNING MED PID-REGULATOR
5.1 INTRODUKTION
Välj PID-regleringsapplikationen på M6-menyn på sidan S6.2
I PID-regleringsapplikationen finns två I/O-styrplatser; plats A är PID-regulatorn och källa B
är det direkta frekvensbörvärdet. Styrplatsen A eller B väljs med digitalingång DIN6.
PID-regulatorbörvärdet kan väljas från analogingångar, fältbuss och motoriserad
potentiometer för att aktivera PID-börvärde 2 eller använda manöverpanelbörvärdet. PIDregulatorns ärvärde kan väljas från analogingångar, fältbuss, motorns ärvärden eller genom
dessas matematiska funktioner.
Frekvensbörvärdet kan användas för styrning utan PID-regulator och kan väljas från
analogingångar, fältbuss, motorpotentiometer eller panel.
PID-applikationen används som regel till att styra nivåmätning, pumpar eller fläktar. I dessa
applikationer fungerar styrning med PID-regulator som en smidig paketlösning där styrning
och mätning är integrerade och inga ytterligare komponenter krävs.
Digitalingångarna DIN2, DIN3, DIN5 och alla utgångar är fritt programmerbara.
•
Övriga funktioner:
Val av signalområde för analogingång
•
Övervakning av två frekvensgränser
•
Övervakning av momentgräns
•
Övervakning av börvärdesgräns
•
Programmering av andra ramper och S-formad ramp
•
Programmerbara start- och stoppfunktioner
•
DC-bromsning vid start och stopp
•
Tre områden för förbjuden frekvens
•
Programmerbar U/f-kurva och kopplingsfrekvens
•
Automatisk återstart
•
Skydd mot motoröverlast och fastlåsning: Fullt programmerbar; från, varning, fel
•
Skydd mot underlast av motorn
•
In- och utgångsfasövervakning
•
Tillägg av frekvenssumma till PID-utsignal
•
PID-regulatorn kan dessutom användas från styrplatserna I/O B, panel och fältbuss
•
Mjuk övergångsfunktion
•
Vilolägesfunktion
•
PID-regleringsapplikationens parametrar förklaras i avsnitt 9 Parameterbeskrivningar i den
här handboken. Förklaringarna är ordnade efter parameterns enskilda ID-nummer.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

-
+
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
2-trådig sändare
Referenspotentiometer,
1–10 kΩ
mA
DRIFT
KLAR
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Anslutning Signal Beskrivning
+10 V
börv.
AI1+
AI1-
AI2+
AI2-
+24 V
Referensutgång
I/O jord
Analog ingång 2
Strömområde 0–20 mA
Programmerbar (P2.2.9)
Utgång för styrspänning
I/O-signal till jord
Plats A: Start framåt
Ri min. = 5kΩ
Felåterställning
Programmerbar (P2.2.2)
Ingång för externt fel
Programmerbar (P2.2.2)
Plats B: Start framåt
Ri min. = 5 kΩ
Joggningsvarvtalsval
Programmerbar (P2.2.3)
Val av styrplats A/B
Kontakt stängd =
Joggningsvarvtal aktivt
Startsignal för styrplats B
Frekvensbörvärde (P2.2.5.)
Gemensam för DIN 1–DIN 3
Gemensam för DIN4–DIN6
Utgång för styrspänning
I/O-signal till jord
Analog utgång 1
Utgångsfrekvens
Programmerbar (P2.3.2)
Digital utgång
KLAR
Programmerbar (P2.3.7)
Öppen kollektor, I ≤50 mA,
U ≤48 VDC
Reläutgång 1
DRIFT
Programmerbar
(P2.3.8)
Reläutgång 2
FEL
Programmerbar
(P2.3.9)
AO1+
Analog ingång 1
PID-referens
Jord för referens- och
styrspänningar
Analog ingång 2
PID-ärvärde 1
Sluten kontakt = start framåt
Kontakt stängd = felåterställning
Sluten kontakt = start bakåt
Kontakt stängd = fel
Kontakt öppen = inget fel
Börvärdespänning för
potentiometer osv.
Analog ingång 1
Spänningsområde 0–10 V DC
Programmerbar (P2.1.11)
Matningsspänning till givare etc.,
max 0,1 A
Brytarspänningar(se #6)
Anslut till GND eller +24 V
Är
värde
(0) 4–20
mA
Kontakt öppen = Styrplats A är aktiv
Kontakt stängd = Styrplats B är aktiv
Anslut till GND eller +24 V
Jord för referens- och
styrspänningar
Jord för referens- och
styrspänningar
Område 0–20 mA/RL,
max. 500 Ω
STYRNING MED PID-REGULATOR VACON · 85
5.2 STYR-I/O
Bild 13: PID-regulatorns I/O-standardkonfiguration (med 2-trådig sändare)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

Bygelblock X3:
CMA- och CMB-jordning
CMB ansluten till GND
CMA ansluten till GND
CMB isolerad från GND
CMA isolerad från GND
CMB och CMA internt
ihopkopplade, isolerade
från GND
= Fabriksinställning
VACON · 86 STYRNING MED PID-REGULATOR
*) Optionskortet A3 saknar plint för öppen kontakt på sin andra reläutgång (plint 24 saknas).
OBS!
Se bygellägen nedan. Mer information finns i produktens användarhandbok.
Bild 14: Bygellägen
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

DIN2
DIN5
DIN3
DIN2
DIN3
DIN5
DIN6
DIN2
DIN3
AI1
AI2
0
1
2
3
4
0
1
2
3
4
5
+A
A
B
0
1
2
3
4
5
0
1
2
3
4
5
K
0
1
2
3
4
5
F
PID
+
DIN1
DIN4
A
B
A
B
A/B
Intern reversering
Intern felåterställn.
Felåterställning, ingång (programmerbar)
3.3 Panelriktning
Intern start/stopp
Börvärde från fältbuss
Start/stopp från fältbuss
Riktning från fältbuss
Externt fel, (programmerbart)
Joggningsvarvtal (programmerbart)
Val av plats A/B
2.2.4 PID-huvudbörvärde
Upp
Ned
2.1.11 PID-börvärde
I/O-reversering
R3.4 PID-panelbörvärde
R3.2 Panelbörvärde
Är 1
Är 2
R3.5 PID-panelbörvärde 2
Start; plats A
Start; plats B
Start/Stop
Start-/stoppknappar
Internt
frekvensbörv.
2.1.19 Joggningsvarvtalsbörv.
Panel
Fältbuss
Återställn.knapp
3.1 Styrplats
2.2.7 Fältbussbörvärde
2.2.6 Panelstyrningsbörvärde
2.2.5 I/O B-börvärde
≥ 1
Val av
ärvärde,
par. 2.2.9
och 2.2.10
Par. f. val
av ärvärde
2.2.8
Motorpotentiometer
Aktivera PID-panelbörvärde
2 (DIN5=13)
STYRNING MED PID-REGULATOR VACON · 87
5.3 PID-REGLERINGSAPPLIKATIONENS STYRSIGNALLOGIK
Bild 15: PID-regleringsapplikationens styrsignallogik
5.4 PID-REGLERINGSAPPLIKATION – PARAMETERLISTOR
5.4.1 ÖVERVAKNINGSVÄRDEN (MANÖVERPANEL: MENY M1)
Övervakningsvärden utgörs av ärvärden för parametrar och signaler, status och uppmätta
värden. De kan inte redigeras.
OBS!
Övervakningsvärdena V1.19 till V1.22 är endast tillgängliga med PIDregleringsapplikationen.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 88 STYRNING MED PID-REGULATOR
Tabell 34: Driftvärden
Index Övervakningsvärde Unit ID Beskrivning
V1.1 Utfrekvens Hz 1
V1.2 Frekvensreferens Hz 25
V1.3 Motorvarvtal rpm 2
V1.4 Motorström A 3
V1.5 Motormoment % 4
V1.6 Motoreffekt % 5
V1.7 Motorspänning V 6
V1.8 DC-spänning V 7
1.9
1.10 Motortemperatur % 9
V1.11 Analog ingång 1 V/mA 13
V1.12 Analog ingång 2 V/mA 14
V1.13 Analog ingång 3 27
V1.14 Analog ingång 4 28
V1.15 DIN 1, 2, 3 15
V1.16 DIN 4, 5, 6 16
V1.17 DO1, RO1, RO2 17
V1.18 Analog I
V1.19 PID börvärde % 20
V1.20
V1.21 PID-avvikelse % 22
Enhetens tempera-
tur
utgång
PID-återförings-
värde
°C 8
mA 26
% 21
5
V1.22 PID utgång % 23
V1.23
V1.24 PT-100-temperatur ºC 42
G1.25 Övervakningsobjekt
V1.26.1 Ström A 1113
Specialvisning av
ärvärde
29
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STYRNING MED PID-REGULATOR VACON · 89
Tabell 34: Driftvärden
Index Övervakningsvärde Unit ID Beskrivning
V1.26.2 Moment % 1125
V1.26.3 DC-spänning V 44
V1.26.4 Statusord 43
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 90 STYRNING MED PID-REGULATOR
5.4.2 GRUNDPARAMETRAR (MANÖVERPANEL: M2-MENYN -> G2.1)
Tabell 35: Grundparametrar G2.1
Index Parameter Min Max Enhet Förvalt Kun
d
P2.1.1 Min. frekvens 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Max. frekvens P2.1.1 320.00 Hz 50.00 102
P2.1.3 Accelerationstid 1 0.1 3000.0 s 0.0 103
P2.1.4 Retardationstid 1 0.1 3000.0 s 0.0 104
P2.1.5 Strömgräns 0,1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
Motorns nominella spänning
Motorns nomi-
nella frekvens
Motorns nomi-
nella varvtal
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 rpm 1440 112
2 x I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
L
V
V
V
id
107
110
Beskrivning
P2.1.9 *
P2.1.10 * Motorns cos phi 0.30 1.00 0.85 120
P2.1.11 *
P2.1.12
P2.1.13
P2.1.14
P2.1.15
Motorns nomi-
nella ström
PID-regulatorns
börvärdesignal
(Plats A)
PID-regulatorns
förstärkning
PID-regulatorns I-
tid
PID-regulatorns
D-tid
Insomningsfrek-
vens
0,1 x I
0 4 1 332
0.0 1000.0 % 100.0 118
0.00 320.00 s 1.00 119
0.00 100.00 s 0.00 132
0.00 P2.1.2 Hz 10.00 1016
2 x I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = PID-börv. från
panelstyrningssidan, P3.4
3 = PID-börv. från
fältbuss (ProcessDataIN 1)
4 = Motorpotentiometer
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STYRNING MED PID-REGULATOR VACON · 91
Tabell 35: Grundparametrar G2.1
Index Parameter Min Max Enhet Förvalt Kun
d
P2.1.16
P2.1.17 Uppvakningsnivå 0.00 100.00 % 25.00 1018
P2.1.18
P2.1.19
Insomningsförd-
röjning
Uppvakningsfunk-
tion
Krypvarvtalsrefe-
rens
0 3600 s 30 1017
0 1 0 1019
0.00 P2.1.2 Hz 10.00 124
Beskrivning
id
0 = Uppvakning vid
underskriden uppvakningsgräns
(2.1.17)
1 = Uppvakning vid
överskriden uppvakningsgräns
(2.1.17)
* = Parametervärde kan endast ändras efter att frekvensomriktaren har stoppats.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 92 STYRNING MED PID-REGULATOR
5.4.3 INSIGNALER
Tabell 36: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.1 ** Funktion för DIN2 0 13 1 319
Beskrivning
id
0 = Används inte
1 = Externt fel,
stängd kont.
2 = Externt fel,
öppen kont.
3=Frigivning
4 = Acc/Ret Tid Val
5 = Styrpl.: I/Ostyrning (ID125)
6 = Styrpl.: Panel
(ID125)
7 = Styrpl.: Fältbuss (ID125)
8 = Framåt/reversering
9 = Joggningsfrekvens (stängd kont.)
10 = Felåterställn
(stängd kont.)
11 = Acc/Ret förbjuden (stängd
kont.)
12 = Likströmsbromskommando
13=Motorpot. UPP
(slutkont)
P2.2.2 **
P2.2.3 ** DIN5 funktion 0 13 9 330
P2.2.4 **
Funktion för DIN3 0 13 10 301
PID-summebör-
värde
0 7 0 376
Se ovan förutom:
13=Motorpot. NED
(slutkont)
Se ovan förutom:
13 = Aktivera PIDbörvärde 2
0 = Direkt PIDutsignalvärde
1 = AI1+PID-utsignal
2 = AI2+PID-utsignal
3 = AI3+PID-utsignal
4 = AI4+PID-utsignal
5 = PID-panel+PIDutsignal
6 = Fältbuss+PIDutsignal (ProcessDataIN3)
7 = Mot.pot.+PIDutsignal
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STYRNING MED PID-REGULATOR VACON · 93
Tabell 36: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.5 **
P2.2.6 **
P2.2.7 **
P2.2.8 ** Val av ärvärde 0 7 0 333
Val av I/O B-bör-
värde
panelstyrning, val
av börvärde
Fältbusstyrning,
val av börvärde
0 7 1 343
0 7 4 121
0 7 5 122
Beskrivning
id
0 = AI1
1 = AI2
2 = AI3
3 = AI4
4 = Panelreferens
5 = Fältbussbörvärde (FBSpeedReference)
6 = Motorpotentiometer
7 = PID-regulator
Som i P2.2.5
Som i P2.2.5
0 = Ärvärde 1
1 = Är 1 + Är 2
2 = Är 1 – Är 2
3 = Är 1 * Är 2
4 = Min. (Är 1, Är 2)
5 = Max. (Är 1, Är
2)
6 = Medel (Är1, Är2
7 = Kvrt (är1) +
Kvrt (är2)
P2.2.9 ** Val av ärvärde 1 0 10 2 334
0 = Används inte
1 = AI1-signal (ckort)
2 = AI2-signal (ckort)
3 = AI3
4 = AI4
5 = Fältbuss (ProcessDataIN2)
6 = Motormoment
7 = Motorvarvtal
8 = Motorström
9 = Motoreffekt
10 = Pulsgivarfrekvens
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 94 STYRNING MED PID-REGULATOR
Tabell 36: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.10 **
P2.2.11
P2.2.12
P2.2.13
P2.2.14
Ingång för ärvärde
2
Minskalning av
återföringsvärde 1
Maxskalning av
återföringsvärde 1
Minskalning av
återföringsvärde 2
Maxskalning av
återföringsvärde 2
0 10 0 335
–1600.0 1600.0 % 0.0 336
–1600.0 1600.0 % 100.0 337
–1600.0 1600.0 % 0.0 338
–1600.0 1600.0 % 100.0 339
Beskrivning
id
0 = Används inte
1 = AI1-signal
2 = AI2-signal
3 = AI3
4 = AI4
5 = Fältbuss ProcessDataIN3
6 = Motormoment
7 = Motorvarvtal
8 = Motorström
9 = Motoreffekt
10 = Pulsgivarfrekvens
P2.2.15
***
P2.2.16 AI1 signalområde 0 2 0 320
P2.2.17
P2.2.18
P2.2.19 AI1-invertering 0 1 0 323
P2.2.20 AI1 filtertid 0.00 10.00 s 0.10 324
P2.2.21 AI2 signalval 0.1 E.10 A.2 388
AI1 signalval 0.1 E.10 A.1 377
AI1 egen mini-
miinställning
AI1 egen maxi-
miinställning
–160.00 160.00 % 0.00 321
–160.00 160.00 % 100.0 322
0 = 0–10 V (0–20
mA*)
1 = 2–10 V (4–20
mA*)
2 = Eget område*
0=Ej inverterad
1 = inverterat
0 = 0–20 mA (0–10
V *)
1 = 4–20 mA (2–10
V *)
2 = Eget område*
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STYRNING MED PID-REGULATOR VACON · 95
Tabell 36: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
P2.2.22 AI2 signalområde 0 2 1 325
P2.2.23
P2.2.24
P2.2.25 AI2-invertering 0 1 0 328
P2.2.26 AI2 filtertid 0.00 10.00 s 0.10 329
P2.2.27
P2.2.28
AI2 egen mini-
miinställning
AI2 egen maxi-
miinställning
Motorpotentiome-
ter ramptid
Återställning av
motorpotentiome-
terns frekvens-
börvärdesminne
-160.00 160.00 % 0.00 326
-160.00 160.00 % 0.00 327
0.1 2000.0 Hz/s 10.0 331
0 2 1 367
Beskrivning
id
0 = 0–20 mA*
1 = 4–20 mA*
2 = Anpassad*
0=Ej inverterad
1 = inverterat
0 = Ingen nollställning
1=Nollställning vid
stopp eller
avstängning
2 = Nollställning
vid spänningsfrånslag
Återställning av
P2.2.29
P2.2.30 PID-minimigräns -1600.0 P2.2.31 % 0.0 359
P2.2.31 PID-maximigräns P2.2.30 1600.0 % 100.0 360
P2.2.32
P2.2.33
P2.2.34
P2.2.35
motorpotentiome-
terns PID-börvär-
desminne
Regleravvikelse
invertering
PID-börvärde, sti-
gande tid
PID-börvärde, fal-
lande tid
Minimivärde för
börvärdesskal-
ning, plats B
0 2 0 370
0 1 0 340
0.1 100.0 s 5.0 341
0.1 100.0 s 5.0 342
0.00 320.0 Hz 0.00 344
0 = Ingen nollställning
1=Nollställning vid
stopp eller
avstängning
2 = Nollställning
vid spänningsfrånslag
0 = Ingen invertering
1 = Invertering
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 96 STYRNING MED PID-REGULATOR
Tabell 36: Insignaler, G2.2
Index Parameter Min Max Enhet Förvalt Kun
d
Maximivärde för
P2.2.36
P2.2.37
P2.2.38
***
P2.2.39 AI3 signalområde 0 1 1 143
P2.2.40 AI3-invertering 0 1 0 151
P2.2.41 AI3 filtertid 0.00 10.00 s 0.10 142
P2.2.42
***
börvärdesskal-
ning, plats B
Mjuk ref. över-
gång
AI3 signalval 0.1 E.10 0.1 141
AI4 signalval 0.1 E.10 0.1 152
0.00 320.0 Hz 0.00 345
0 1 0 366
Beskrivning
id
0 = Behåll börvärde
1 = Kopiera faktiskt börvärde
0 = Signalområde
0–10 V
1 = Signalområde
2–10 V
0=Ej inverterad
1 = inverterat
P2.2.43 AI4 signalområde 0 1 1 154
P2.2.44 AI4-invertering 0 1 0 162
P2.2.45 AI4 filtertid 0.00 10.00 s 0.10 153
P2.2.46
P2.2.47
P2.2.48
P2.2.49
Specialvisning av
ärvärde, minimum
Specialvisning av
ärvärde, maxi-
mum
Specialvisning av
ärvärde, decima-
ler
Specialvisning av
ärvärde, enhet
0 30000 0 1033
0 30000 100 1034
0 4 1 1035
0 29 4 1036
CP = styrplats
cc = kontakt
oc = öppnar kontakt
0 = Signalområde
0–10 V
1 = Signalområde
2–10 V
0=Ej inverterad
1 = inverterat
Se ID1036 i avsnitt
9 Parameterbeskrivningar.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STYRNING MED PID-REGULATOR VACON · 97
* = Kom ihåg att placera byglarna för block X2 därefter. Se produktens användarhandbok.
** = Parametervärde kan endast ändras när frekvensomriktaren har stoppats.
*** = Programmera dessa parametrar med TTF-metoden.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 98 STYRNING MED PID-REGULATOR
5.4.4 UTGÅNGSSIGNALER (MANÖVERPANEL: M2-MENYN -> G2.3
Tabell 37: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.1 * AO1 signalval 0.1 E.10 A.1 464
P2.3.2
Funktion för ana-
log utgång
0 14 1 307
Beskrivning
ID
0 = Används inte
1 = Utgångsfrekv.
(0–f
2 = Frekv.referens
(0–f
3=Motorvarvtal (0 Motorns märkvarvtal)
4 = Motorström (0–
I
nMotor
5=Motormoment
(0-T
6=Motoreffekt (0P
nMotor
7=Motorspänning
(0-U
8=DC-bryggans
spänning
(0-1 000V)
9 = PID-regulator,
börvärde
10 = PID-regulator,
ärvärde 1
11 = PID-regulator,
ärvärde 2
12 = PID-regulator,
felvärde
13 = PID-regulatorutsignal
14 = PT100-temperatur
)
max
)
max
)
nMotor
nMotor
)
)
)
5
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Filtertid för ana-
log utgång
Invertering av
analogutgång
Analog utgång
minimum
Skalning av ana-
log utgång
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0=Ej inverterad
1 = inverterat
0 = 0 mA (0 V)
1 = 4 mA (2 V)

STYRNING MED PID-REGULATOR VACON · 99
Tabell 37: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.7
Digitalutgång 1,
funktion
0 23 1 312
Beskrivning
ID
0 = Används inte
1 = Driftklar
2 = Drift
3 = fel
4 = Fel inverterat
5=Överhettn.varning för
frekv.omriktare
6=Externt fel eller
varning
7=Ref.fel eller varning
8 = Varning
9 = Reverserad
10=Förvalt varvtal
1
11 = Varvtal uppnått
12=Motorreglering
aktiv
13 = Driftfrekv.
övervakn.gränsv. 1
14 = Driftfrekv.
övervakn.gränsv.2
15 = Moment övervakn.gränsv.
16 = Börv. övervakn.gränsv.
17 = Ext. bromsstyrning
18 = Styrplats: IO
19 =
Frekv.omr.temp.
övervakn.gränsv.
20 = Obegärd rotationsriktning
P2.3.7
P2.3.8 RO1 funktion 0 23 2 313
P2.3.9 RO2 funktion 0 23 3 314
P2.3.10
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Digitalutgång 1,
funktion
Övervakning av
utfrekvensgräns 1
0 23 1 312
0 2 0 315
21 = Ext. bromsstyrn. inverterad
22 = Termistorfel/varning
23 = Fältbuss DIN1
Som parameter
2.3.7
Som parameter
2.3.7
0=Ingen gräns
1 = Övervakning av
undre gräns
2 = Övervakning av
övre gräns
5

VACON · 100 STYRNING MED PID-REGULATOR
Tabell 37: Utgångssignaler, G2.3
Index Parameter Min Max Enhet Förvalt Kun
d
P2.3.11
P2.3.12
P2.3.13
P2.3.14
P2.3.15
P2.3.16
Utfrekvensgräns
1; övervakat värde
Övervakning av
utfrekvensgräns 2
Utfrekvensgräns
2; övervaknings-
värde
Funktion för
momentgränsö-
vervakning
Övervakning av
momentgräns-
värde
Övervakning av
börvärdesgräns-
funktion
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
-300.0 300.0 % 100.0 349
0 2 0 350
Beskrivning
ID
0=Ingen gräns
1 = Övervakning av
undre gräns
2 = Övervakning av
övre gräns
0 = nej
1 = Nedre gräns
2 = Övre gräns
0 = nej
1 = Nedre gräns
2 = Övre gräns
P2.3.17
P2.3.18
P2.3.19
P2.3.20
P2.3.21
P2.3.22
P2.3.23
P2.3.24
Övervakning av
börvärdesgräns-
värde
Extern broms-
frånslagsfördröj-
ning
Extern bromstills-
lagsfördröjning
Övervakning av
temperaturgräns
för frekvensom-
riktare
Övervakat värde
för frekvensom-
riktartemperatur
Skalning av analo-
gutgång 2
Funktion för ana-
logutgång 2
Filtertid för analo-
gutgång 2
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0.1 E.10 0.1 471
0 14 4 472
0.00 10.00 s 1.00 473
0 = nej
1 = Nedre gräns
2 = Övre gräns
Som parameter
2.3.2
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...