


vacon nx
®
convertidores de frecuencia
all in one
manual de aplicación

A
J
B C D E F G H I
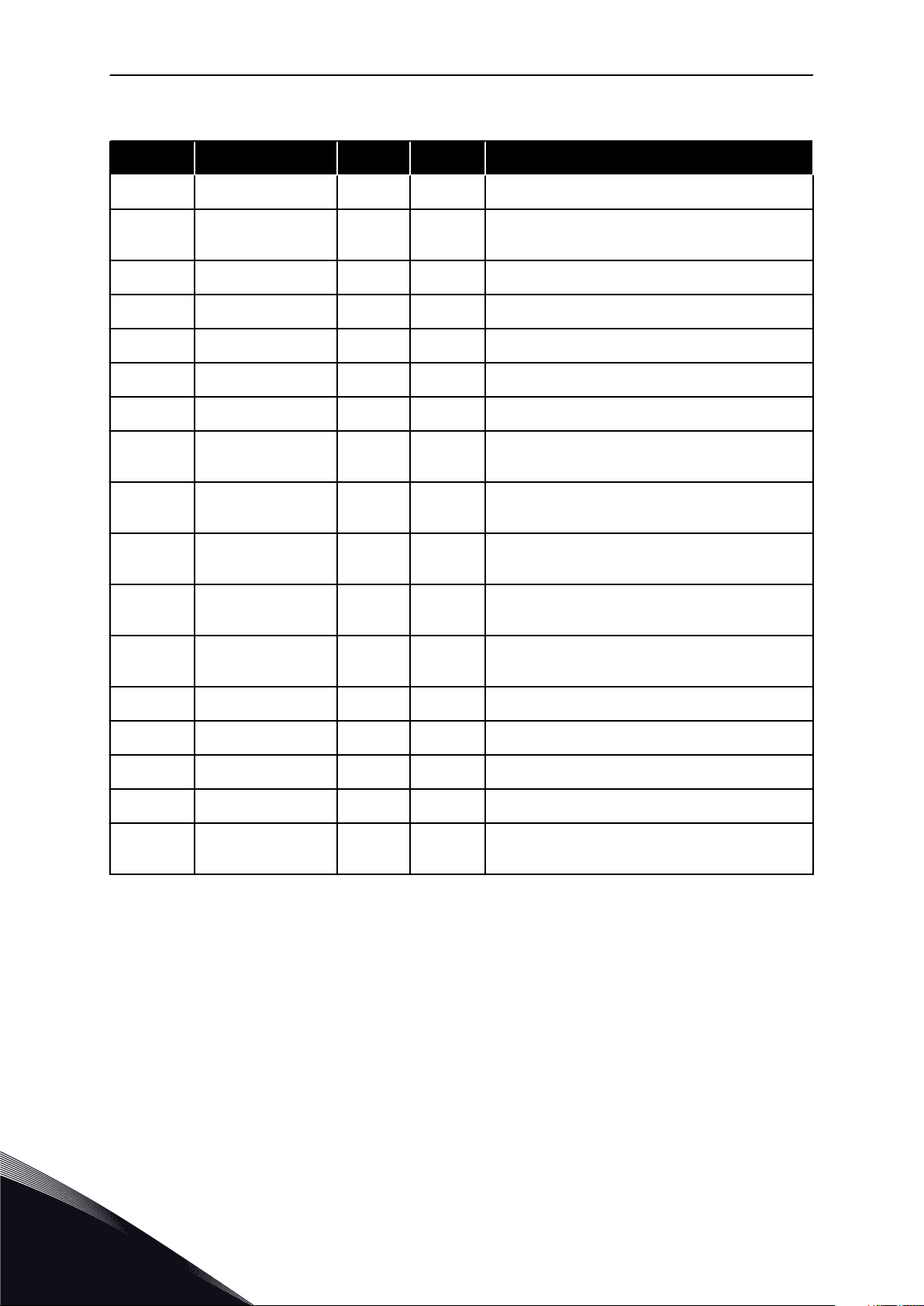
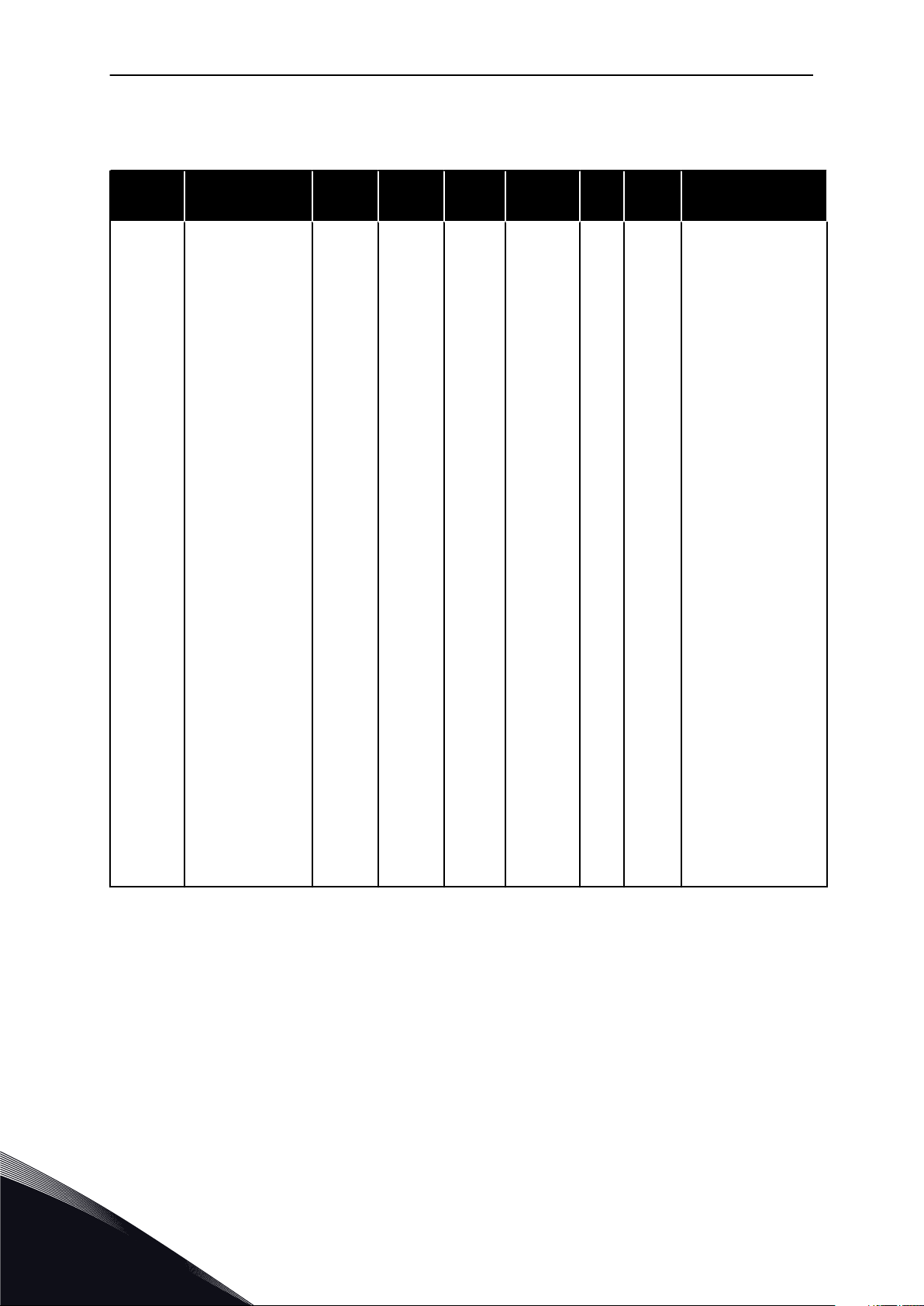
Index Min Max Unit Default
Cust
ID DescriptionParameter
PREFACIO VACON · 3
PREFACIO
ID de documento: DPD01211E
Fecha: 1.12.2016
Código de software:
Aplicación básica = ASFIFF01
•
Aplicación estándar = ASFIFF02
•
Aplicación de control local/remoto =
•
ASFIFF03
Aplicación de control de multi-
•
-velocidades = ASFIFF04
Aplicación de control PID= ASFIFF05
•
Aplicación de control multi-propósito
•
NXS = ASFIFF06
-
NXP = APFIFF06
-
Aplicación de control de bombas y
•
ventiladores = ASFIFF07
ACERCA DE ESTE MANUAL
Los derechos de autor de este manual son de Vacon Ltd. Todos los derechos reservados. El
manual está sujeto a cambios sin previo aviso. El idioma original de estas instrucciones es
inglés.
En este manual puede consultar las funciones del convertidor de frecuencia VACON® y su
modo de uso.
Este manual incluye una gran cantidad de tablas de parámetros. Estas instrucciones indican
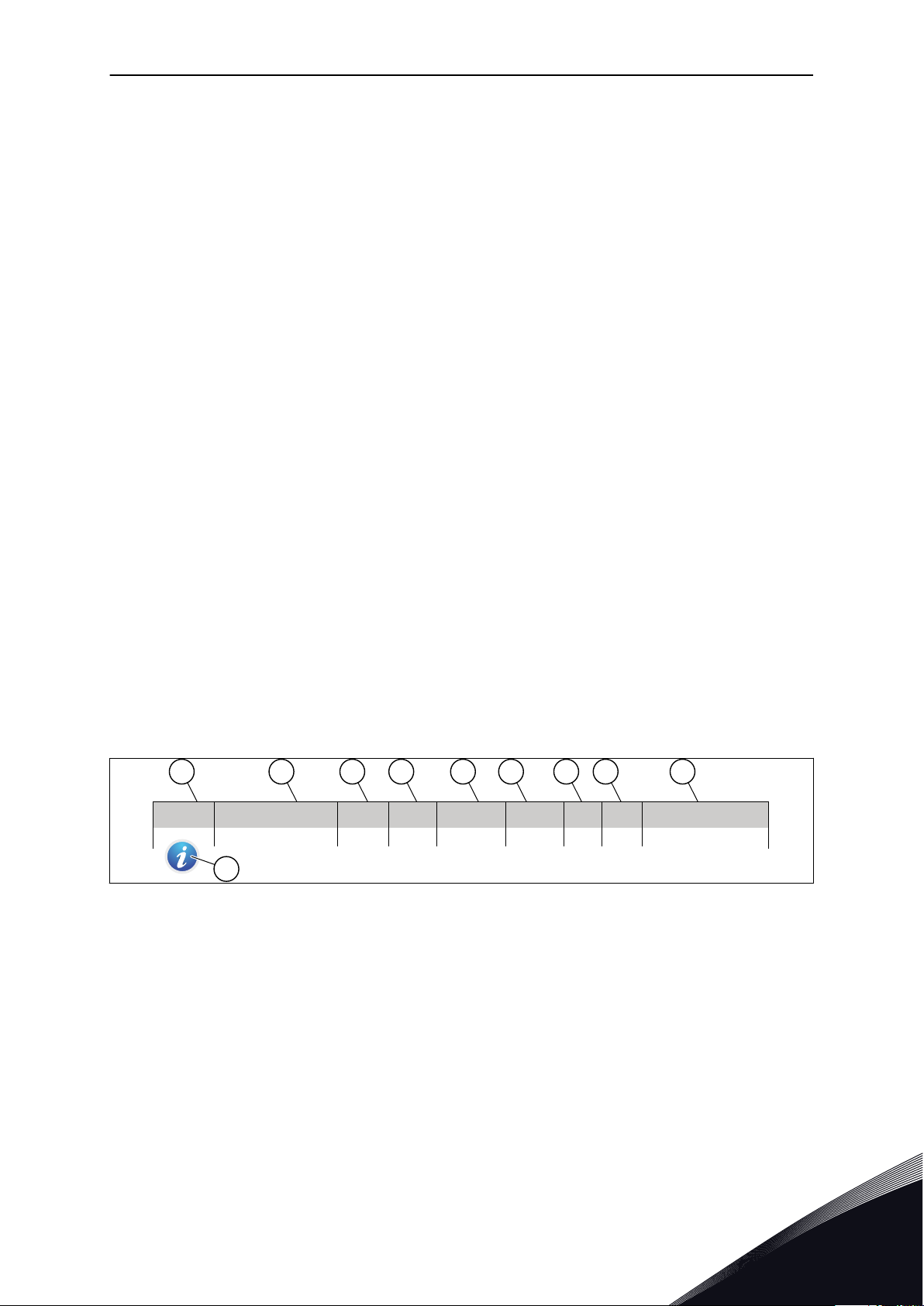
cómo leer las tablas.
A. La ubicación del parámetro en el menú,
es decir, el número de parámetro
B. El nombre del parámetro
C. El valor mínimo del parámetro
D. El valor máximo del parámetro
E. La unidad del valor del parámetro La
unidad muestra si está disponible
F. El valor que se ha establecido en la
fábrica
G. El ajuste personalizado del cliente.
H. El número ID del parámetro
I. Una descripción breve de los valores del
parámetro y/o su función
J. Cuando aparezca el símbolo, puede
consultar más datos sobre el parámetro
en el capítulo Descripciones de
parámetros.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
ÍNDICE VACON · 5
ÍNDICE
Prefacio
Acerca de este manual 3
1 Aplicación básica 10
1.1 Introducción 10
1.1.1 Funciones de protección del motor en la Aplicación básica 10
1.2 I/O de control 11
1.3 Lógica de señales de control en la Aplicación básica 13
1.4 Aplicación básica - Listas de parámetros 13
1.4.1 Valores de monitor (Panel de control: Menú M1) 13
1.4.2 Parámetros básicos (Panel de control: Menú M2 -> G2.1) 15
1.4.3 Control de panel (Panel de control: Menú M3) 17
1.4.4 Menú del sistema (Panel de control: Menú M6) 17
1.4.5 Tarjetas de expansión (Panel de control: Menú M7 17
2 Aplicación estándar 18
2.1 Introducción 18
2.2 I/O de control 19
2.3 Lógica de señales de control en la Aplicación estándar 21
2.4 Aplicación estándar - Listas de parámetros 21
2.4.1 Valores de monitor (Panel de control: Menú M1) 21
2.4.2 Parámetros básicos (Panel de control: Menú M2 -> G2.1) 23
2.4.3 Señales de entrada (Panel de control: Menú M2 -> G2.2) 24
2.4.4 Señales de salida (Panel de control: Menú M2 -> G2.3 26
2.4.5 Parámetros de control del convertidor (Panel de control: Menú M2 ->
G2.4 29
2.4.6 Parámetros de frecuencias prohibidas (Panel de control: Menú M2 ->
G2.5) 30
2.4.7 Parámetros de control de motor (Panel de control: Menú M2 -> G2.6)
31
2.4.8 Protecciones (Panel de control: Menú M2 -> G2.7 34
2.4.9 Parámetros de rearranque automático (Panel de control: Menú M2 ->
G2.8) 36
2.4.10 Control de panel (Panel de control: Menú M3) 37
2.4.11 Menú del sistema (Panel de control: Menú M6) 37
2.4.12 Tarjetas de expansión (Panel de control: Menú M7 37
3 Aplicación de control local/remoto 38
3.1 Introducción 38
3.2 I/O de control 39
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 6 ÍNDICE
3.3 Lógica de señales de control en la Aplicación de control local/remoto 41
3.4 Aplicación de control local/remoto - Listas de parámetros 41
3.4.1 Valores de monitor (Panel de control: Menú M1) 41
3.4.2 Parámetros básicos (Panel de control: Menú M2 -> G2.1) 43
3.4.3 Señales de entrada (Panel de control: Menú M2 -> G2.2) 45
3.4.4 Señales de salida (Panel de control: Menú M2 -> G2.3 50
3.4.5 Parámetros de control del convertidor (Panel de control: Menú M2 ->
G2.4 54
3.4.6 Parámetros de frecuencias prohibidas (Panel de control: Menú M2 ->
G2.5) 56
3.4.7 Parámetros de control de motor (Panel de control: Menú M2 -> G2.6)
57
3.4.8 Protecciones (Panel de control: Menú M2 -> G2.7 60
3.4.9 Parámetros de rearranque automático (Panel de control: Menú M2 ->
G2.8) 62
3.4.10 Control de panel (Panel de control: Menú M3) 63
3.4.11 Menú del sistema (Panel de control: Menú M6) 63
3.4.12 Tarjetas de expansión (Panel de control: Menú M7 63
4 Aplicación de control de multi-velocidades 64
4.1 Introducción 64
4.2 I/O de control 65
4.3 Lógica de señales de control en la Aplicación de control de multi-velocidades 67
4.4 Aplicación de control de multi-velocidades - Listas de parámetros 67
4.4.1 Valores de monitor (Panel de control: Menú M1) 67
4.4.2 Parámetros básicos (Panel de control: Menú M2 -> G2.1) 69
4.4.3 Señales de entrada (Panel de control: Menú M2 -> G2.2) 71
4.4.4 Señales de salida (Panel de control: Menú M2 -> G2.3 75
4.4.5 Parámetros de control del convertidor (Panel de control: Menú M2 ->
G2.4 79
4.4.6 Parámetros de frecuencias prohibidas (Panel de control: Menú M2 ->
G2.5) 81
4.4.7 Parámetros de control de motor (Panel de control: Menú M2 -> G2.6)
82
4.4.8 Protecciones (Panel de control: Menú M2 -> G2.7) 85
4.4.9 Parámetros de rearranque automático (Panel de control: Menú M2 ->
G2.8) 88
4.4.10 Control de panel (Panel de control: Menú M3) 89
4.4.11 Menú del sistema (Panel de control: Menú M6) 89
4.4.12 Tarjetas de expansión (Panel de control: Menú M7 89
5 Aplicación de control PID 90
5.1 Introducción 90
5.2 I/O de control 92
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
ÍNDICE VACON · 7
5.3 Lógica de señales de control en la Aplicación de control PID 94
5.4 Aplicación de control PID - Listas de parámetros 94
5.4.1 Valores de monitor (Panel de control: Menú M1) 94
5.4.2 Parámetros básicos (Panel de control: Menú M2 -> G2.1) 97
5.4.3 Señales de entrada 99
5.4.4 Señales de salida (Panel de control: Menú M2 -> G2.3 105
5.4.5 Parámetros de control del convertidor (Panel de control: Menú M2 ->
G2.4 109
5.4.6 Parámetros de frecuencias prohibidas (Panel de control: Menú M2 ->
G2.5) 111
5.4.7 Parámetros de control de motor (Panel de control: Menú M2 -> G2.6)
112
5.4.8 Protecciones (Panel de control: Menú M2 -> G2.7 115
5.4.9 Parámetros de rearranque automático (Panel de control: Menú M2 ->
G2.8) 118
5.4.10 Control de panel (Panel de control: Menú M3) 119
5.4.11 Menú del sistema (Panel de control: Menú M6) 119
5.4.12 Tarjetas de expansión (Panel de control: Menú M7 119
6 Aplicación de control multi-propósito 120
6.1 Introducción 120
6.2 I/O de control 122
6.3 Lógica de señales de control en la Aplicación de control multi-propósito 124
6.4 Aplicación de control multi-propósito - Listas de parámetros 124
6.4.1 Valores de monitor (Panel de control: Menú M1) 124
6.4.2 Parámetros básicos (Panel de control: Menú M2 -> G2.1) 137
6.4.3 Señales de entrada 140
6.4.4 Señales de salida 149
6.4.5 Parámetros de control del convertidor (Panel de control: Menú M2 ->
G2.4 159
6.4.6 Parámetros de frecuencias prohibidas (Panel de control: Menú M2 ->
G2.5) 161
6.4.7 Parámetros de control de motor (Panel de control: Menú M2 -> G2.6)
162
6.4.8 Protecciones (Panel de control: Menú M2 -> G2.7 171
6.4.9 Parámetros de rearranque automático (Panel de control: Menú M2 ->
G2.8) 176
6.4.10 Parámetros de fieldbus (Panel de control: Menú M2 -> G2.9) 177
6.4.11 Parámetros de control de par (Panel de control: Menú M2 -> G2.10) 179
6.4.12 Convertidores NXP: Parámetros de maestro-seguidor (Panel de control:
Menú M2 -> G2.11) 181
6.4.13 Control de panel (Panel de control: Menú M3) 182
6.4.14 Menú del sistema (Panel de control: Menú M6) 183
6.4.15 Tarjetas de expansión (Panel de control: Menú M7 183
7 Aplicación de control de bombas y ventiladores 184
7.1 Introducción 184
7.2 I/O de control 186
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 8 ÍNDICE
7.3 Lógica de señales de control en la Aplicación de control de bombas y ventiladores
190
7.4 Aplicación de control de bombas y ventiladores - Listas de parámetros 190
7.4.1 Valores de monitor (Panel de control: Menú M1) 190
7.4.2 Parámetros básicos (Panel de control: Menú M2 -> G2.1) 194
7.4.3 Señales de entrada 196
7.4.4 Señales de salida 204
7.4.5 Parámetros de control del convertidor (Panel de control: Menú M2 ->
G2.4 212
7.4.6 Parámetros de frecuencias prohibidas (Panel de control: Menú M2 ->
G2.5) 214
7.4.7 Parámetros de control de motor (Panel de control: Menú M2 -> G2.6)
215
7.4.8 Protecciones (Panel de control: Menú M2 -> G2.7 217
7.4.9 Parámetros de rearranque automático (Panel de control: Menú M2 ->
G2.8) 220
7.4.10 Parámetros de control de bombas y ventiladores (Panel de control:
Menú M2 -> G2.9) 221
7.4.11 Control de panel (Panel de control: Menú M3) 223
7.4.12 Menú del sistema (Panel de control: Menú M6) 224
7.4.13 Tarjetas de expansión (Panel de control: Menú M7 224
8 Descripciones de los valores de monitor 225
9 Descripciones de parámetros 232
9.1 Parámetros de control del panel 389
9.2 Función maestro/seguidor (solo NXP) 391
9.2.1 Conexiones físicas de enlace de maestro/seguidor 391
9.2.2 Conexión de fibra óptica entre convertidores de frecuencia con OPTD2
391
9.3 Control de freno externo con límites adicionales (ID 315, 316, 346 a 349, 352, 353)
392
9.4 Parámetros de protección térmica del motor (ID 704 a 708) 394
9.5 Parámetros de protección frente a bloqueo (ID 709 a 712) 395
9.6 Parámetros de protección frente baja carga (ID 713 a 716) 395
9.7 Parámetros de control de bus de campo (ID 850 a 859) 396
9.7.1 Salida de datos de proceso (esclavo -> maestro) 396
9.7.2 Escalado de intensidad en tamaños distintos de unidades 397
9.7.3 Entrada de datos de proceso (maestro -> esclavo) 397
9.8 Parámetros de lazo cerrado (ID 612 a 621) 398
9.9 Principio de programación "Terminal to function" (TTF) 399
9.9.1 Definición de una entrada/salida para una función determinada en el
panel 399
9.9.2 Definición de un terminal para una función determinada con la
herramienta de programación NCDrive 400
9.9.3 Definición de entradas/salidas no utilizadas 401
9.10 Parámetros de control de velocidad (sólo aplicación 6) 402
9.11 Cambio automático entre unidades (solo aplicación 7) 404
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ÍNDICE VACON · 9
9.12 Selección de enclavamiento (P2.9.23) 406
9.13 Ejemplos de selección de rotación automática y enclavamiento 407
9.13.1 Procesos automáticos de bombas y ventiladores con enclavamientos y
sin rotación automática 407
9.13.2 Procesos automáticos de bombas y ventiladores con enclavamientos y
rotación automática 408
10 Localización de fallos 411
10.1 Códigos de fallo 411
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 10 APLICACIÓN BÁSICA
1 APLICACIÓN BÁSICA
1.1 INTRODUCCIÓN
La Aplicación básica es una aplicación sencilla y fácil de utilizar. Es el ajuste por defecto
cuando se entrega de fábrica. Si no es así, seleccione la Aplicación básica en el menú M6, en
la página S6.2. Consulte el Manual de usuario del producto.
La entrada digital DIN3 es programable.
Los parámetros de la Aplicación básica se explican en el capítulo 9 Descripciones de
parámetros de este manual. Las explicaciones se organizan según el número ID individual
del parámetro.
1.1.1 FUNCIONES DE PROTECCIÓN DEL MOTOR EN LA APLICACIÓN BÁSICA
La Aplicación básica proporciona prácticamente todas las funciones de protección que el
resto de aplicaciones:
Protección a frente fallos externos
•
Supervisión de fase de entrada
•
Protección contra baja tensión
•
Fase de salida
•
Protección frente a fallo de tierras
•
Protección térmica del motor
•
Protección frente a fallo del termistor
•
Protección frente a fallo del fieldbus
•
Protección frente a fallos de ranura
•
A diferencia de otras aplicaciones, la Aplicación básica no proporciona ningún parámetro
para elegir la función de respuesta o los valores de límite de los fallos. Para obtener más
información sobre la protección térmica del motor, consulte ID704 en el capítulo 9
Descripciones de parámetros.
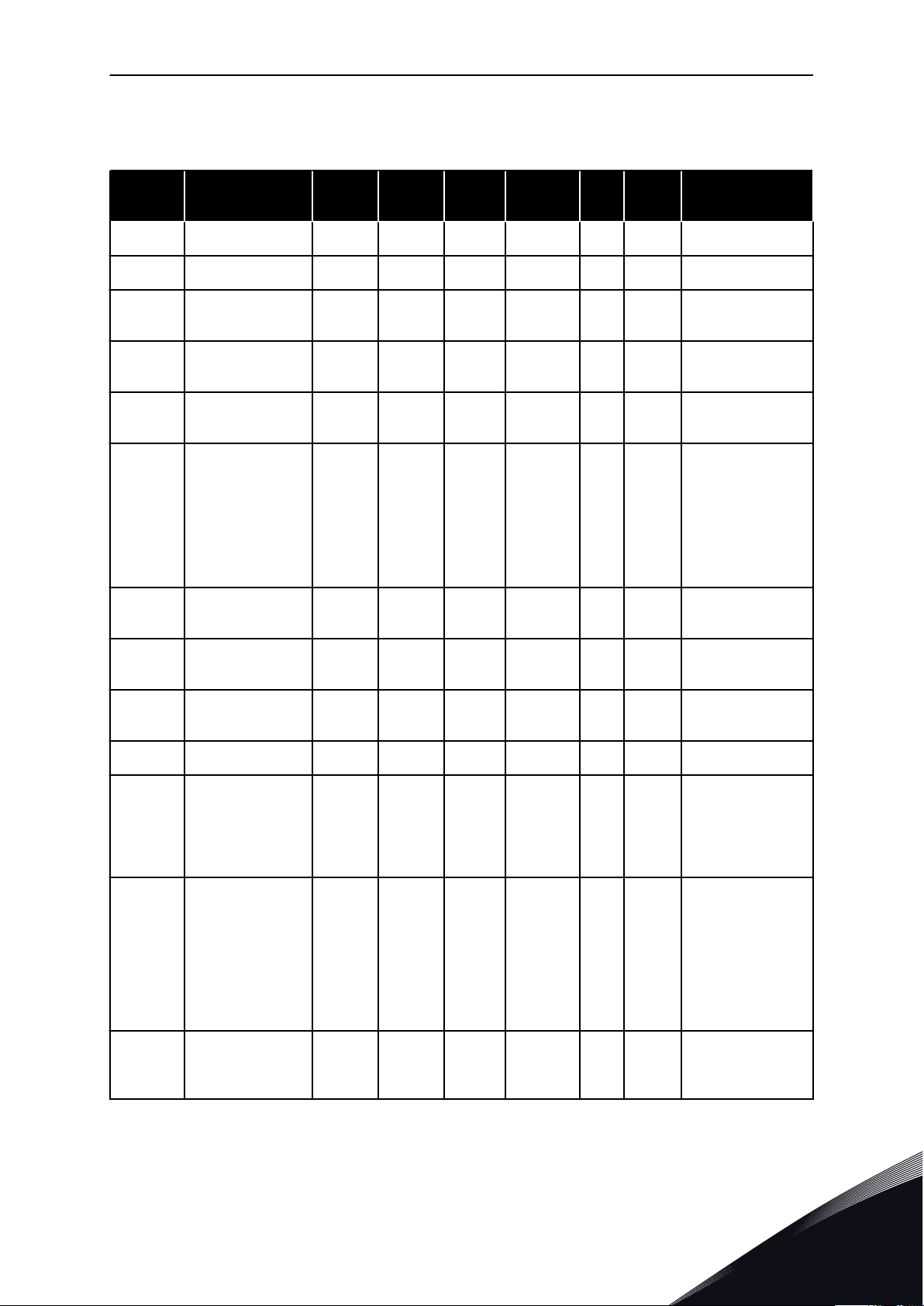
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
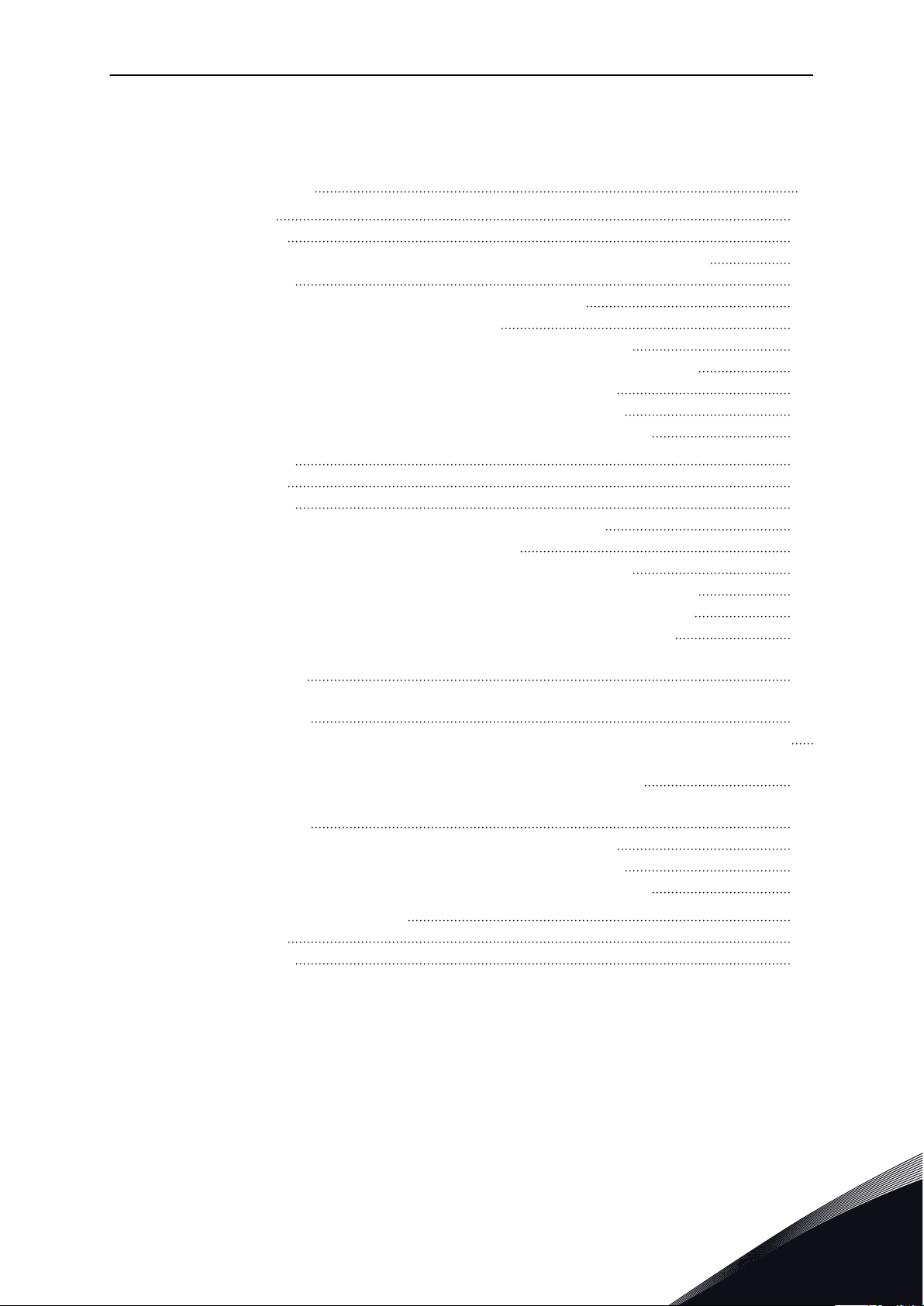
OPTA 2 / OPTA 3 *)
22
23
11
17
24
25
26
DIN4
DIN5
Tensión para potenciómetro, etc.
Tierra para referencia y controles
Tierra para referencia y controles
Tierra para referencia y controles
Referencia de frecuencia
de entrada analógica 2
Tensión para conmutadores (ver n.º 6)
Conectar a GND o +24 V
FALLO
Entrada de fallo externo
Programable (P2.17)
Conectar a GND o +24 V
Contacto abierto = sin acción
Contacto cerrado = reset de fallo
Contacto abierto = sin fallo
Contacto cerrado = fallo
Contacto cerrado = marcha directa
Contacto cerrado = marcha inversa
Colector abierto,
I≤50 mA, U≤48 VCC
MARCHA
mA
LISTO
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
Placa de I/O estándar
Terminal Señal Descripción
+10V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Salida de referencia
Entrada analógica 1 (AI1)
Rango de tensión 0—10 V CC
Programable (P2.14)
Entrada analógica 2 (AI2)
Rango de intensidad
0-20 mA
Salida de control de tensión
GND de I/O
GND de I/O
Seleccionar velocidad fija 1
Seleccionar velocidad
fija 2
Reset de fallo
Común para DIN 1—DIN 3
Común para DIN4-DIN6
Salida de tensión de control
GND de I/O
Salida de relé 1
Salida de relé 2
AO1+
Referencia de frecuencia
de entrada analógica 1
Tensión para conmutadores,
etc. máx. 0,1 A
Marcha directa
Marcha inversa
Ref. de frec.
Abierto
Cerrado
Abierto
Cerrado
Abierto
Abierto
Cerrado
Cerrado
Ref. I/O (P2.14)
Velocidad constante 1
Velocidad constante 2
Frecuencia máx.
MARCHA
Potenciómetro para
referencia, 1-10 kΩ
Salida analógica 1
Frecuencia de salida
Programable (P2.16)
Rango 0—20 mA/RL,
máx. 500 Ω
Salida digital 1
LISTO
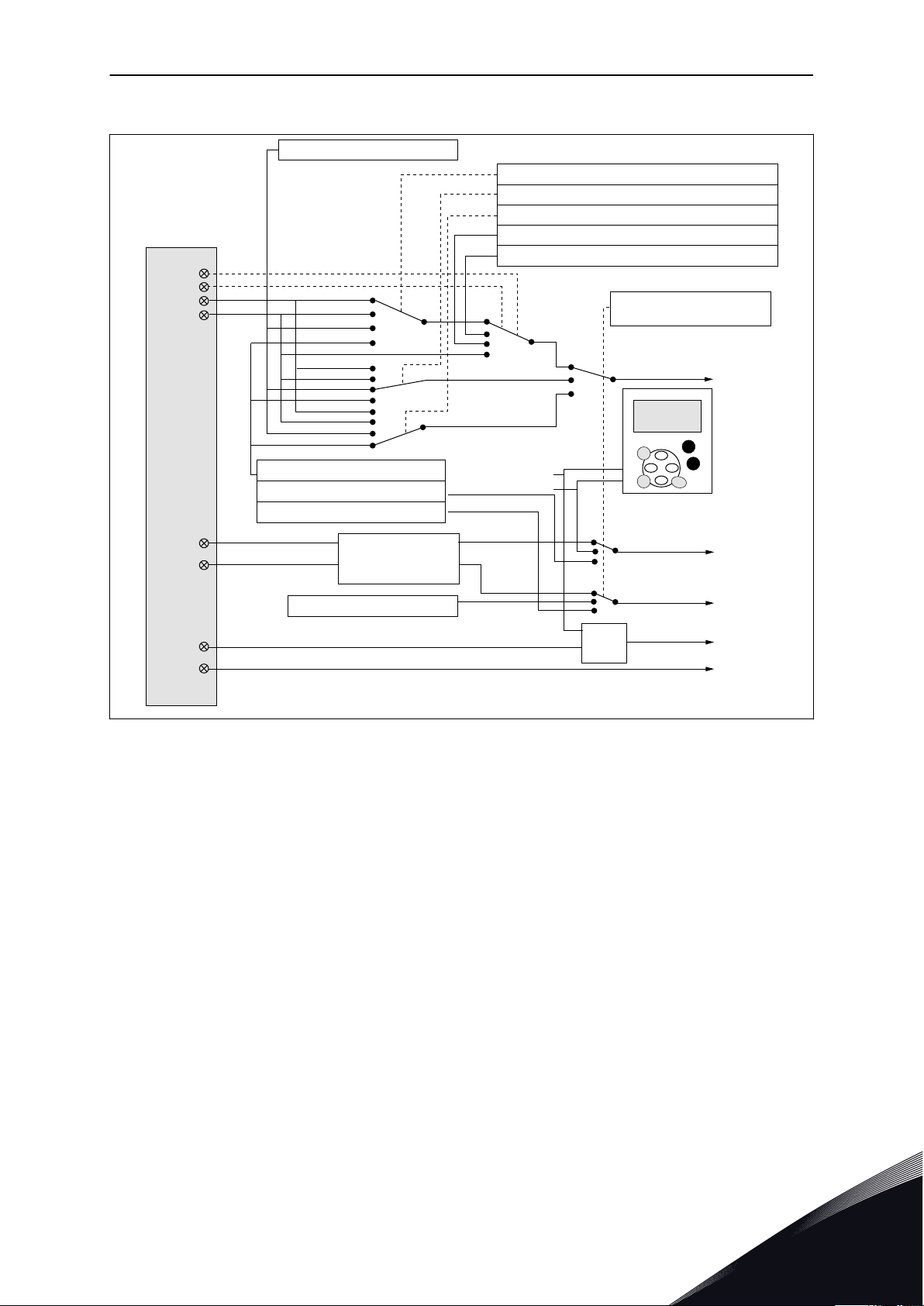
APLICACIÓN BÁSICA VACON · 11
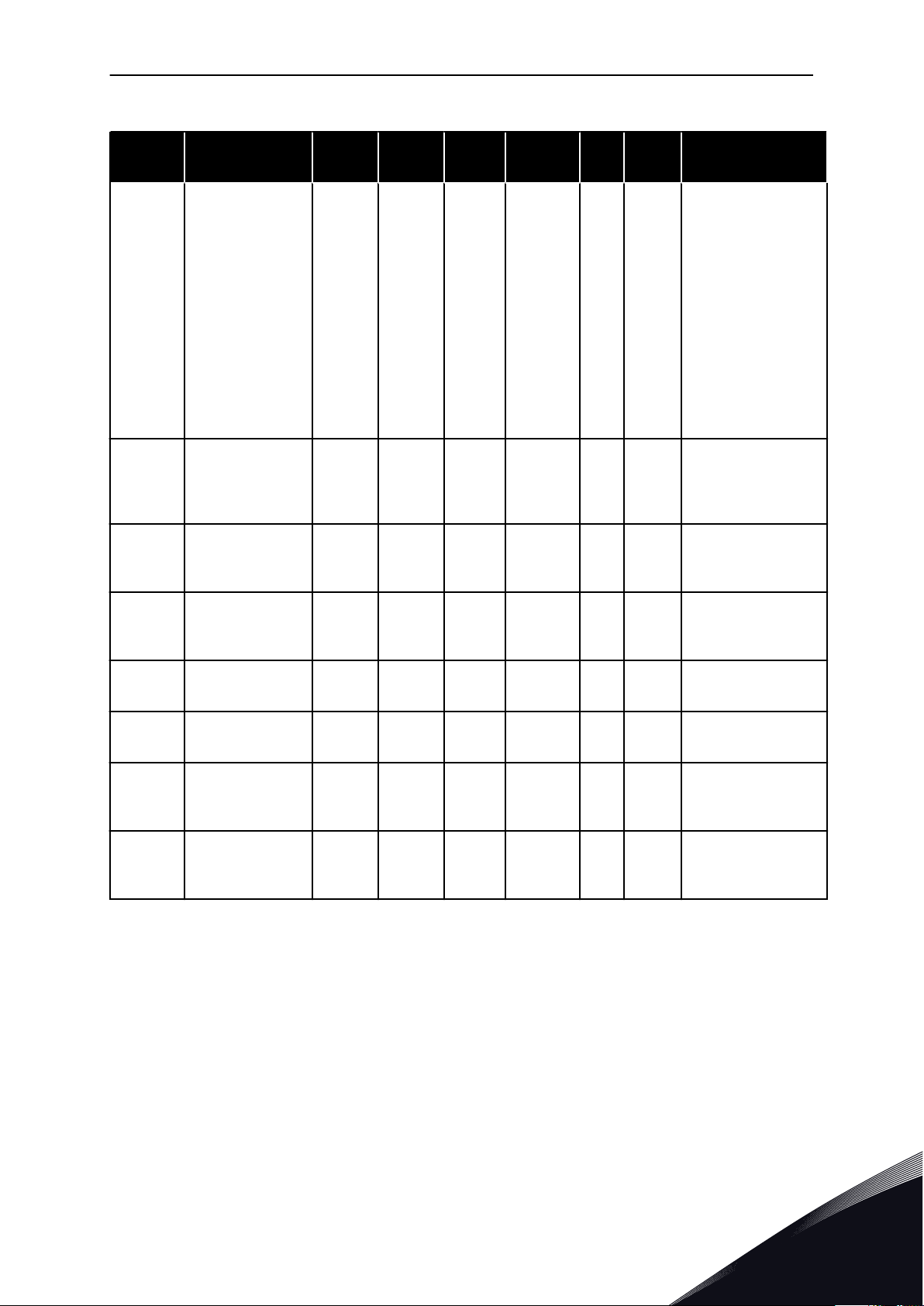
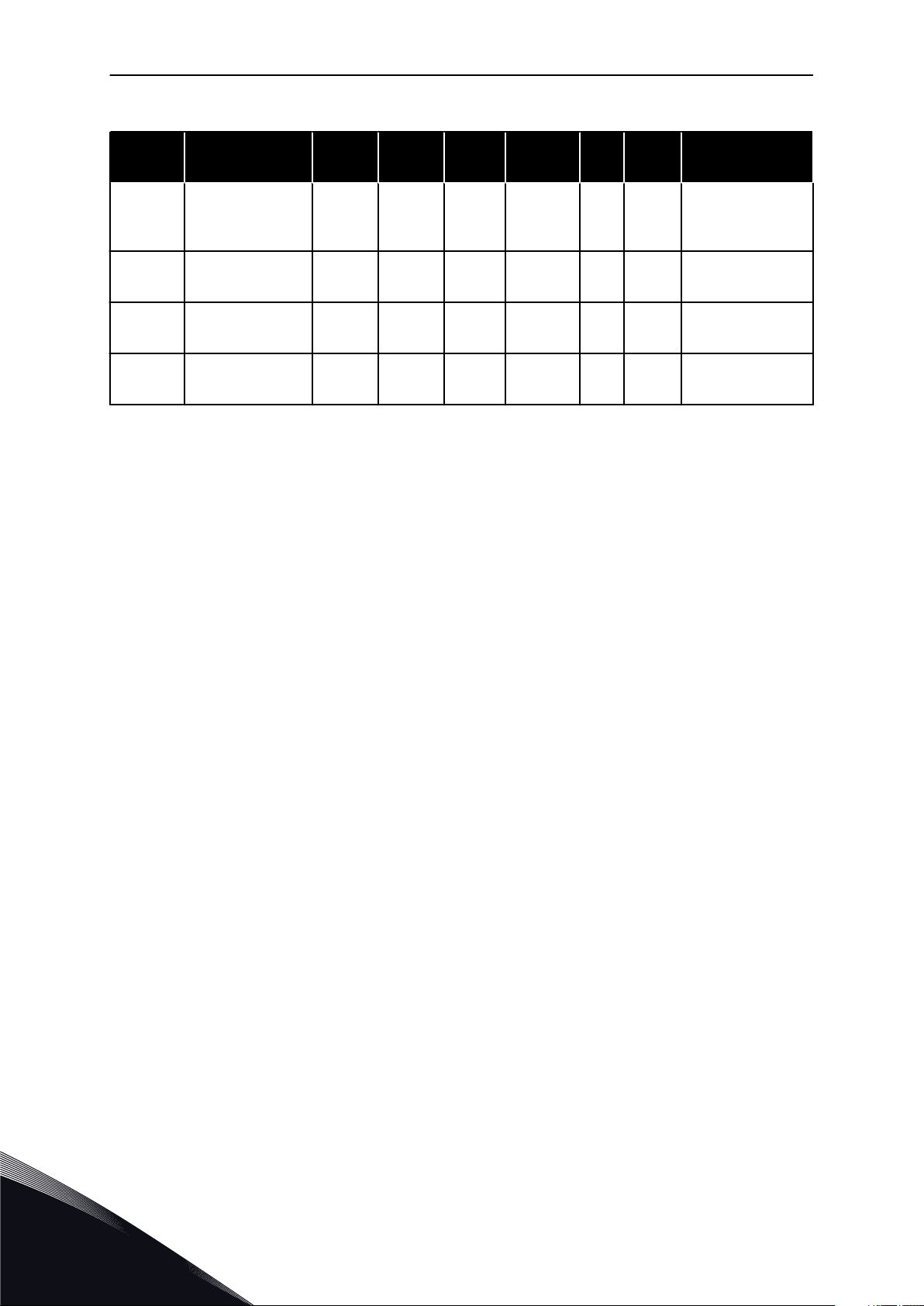
1.2 I/O DE CONTROL
Imag. 1: Configuración de I/O por defecto de la Aplicación básica
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
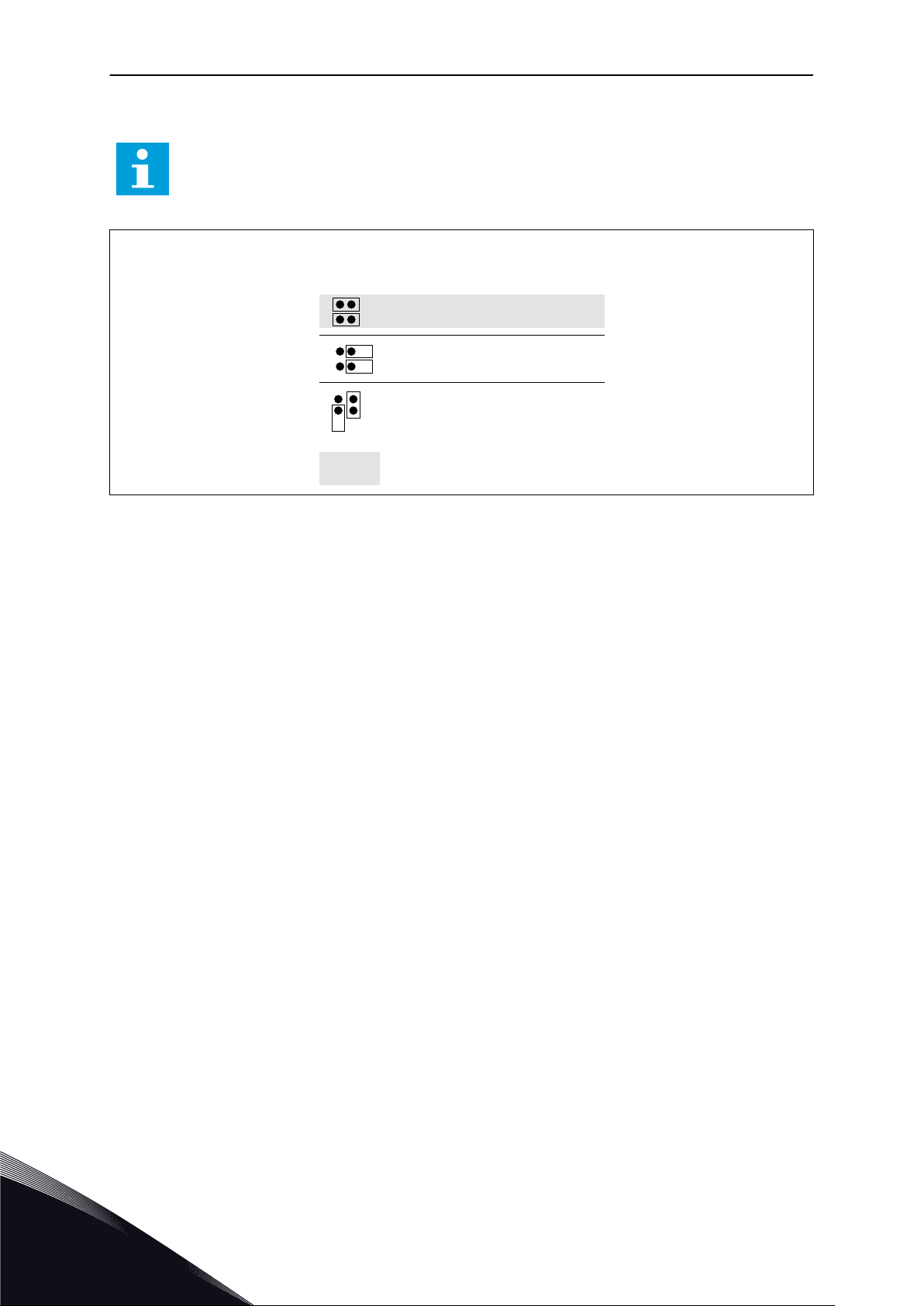
Bloque de puentes X3:
Toma de tierra de CMA y CMB
CMB conectado a TIERRA
CMA conectado a TIERRA
CMB aislado de TIERRA
CMA aislado de TIERRA
CMB y CMA conectados juntos
internamente, aislados de
TIERRA
= Ajustes por defecto de fábrica
VACON · 12 APLICACIÓN BÁSICA
*) La tarjeta opcional A3 no cuenta con un terminal para contacto abierto en su segunda
salida de relé (sin terminal 24).
NOTA!
Consulte las selecciones de puentes a continuación. Puede obtener más
información en el Manual de usuario del producto.
Imag. 2: Selecciones de puente
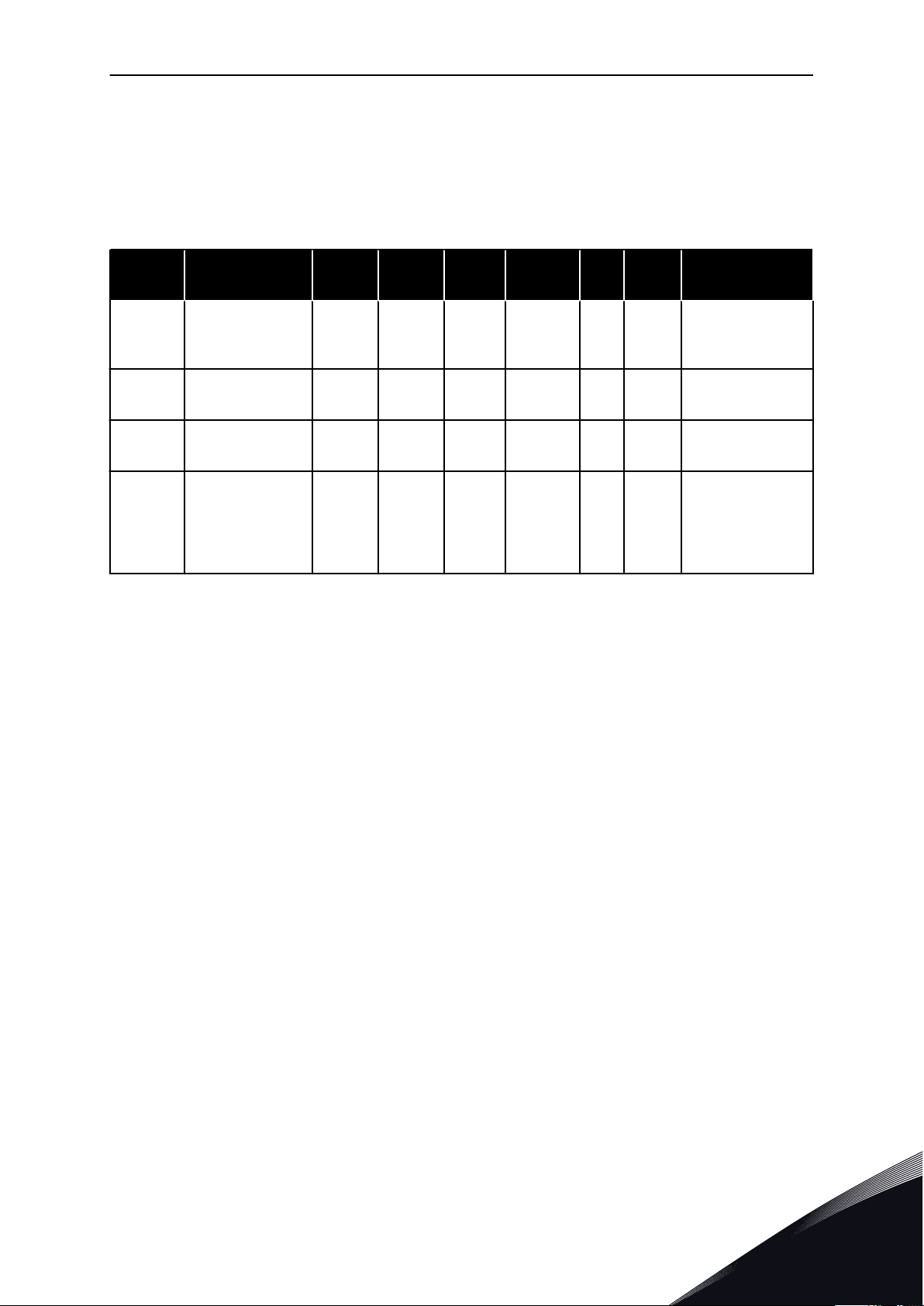
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
DIN4
DIN5
AnIN1
AnIN2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Referencia de panel
3.1 Lugar de control
Marcha directa
Marcha inversa
Marcha/Parada
Inversión de giro
Marcha/paro interno
Inversa interna
Reset de fallo interno
Entrada de reset de fallo
Entrada de fallo externo (programable)
Botón reset
Botones marcha/paro
Referencia de bus de campo
Marcha/paro de bus de campo
Dirección desde bus de campo
3.3 Dirección del teclado
2.14 Referencia de I/O
2.19 Velocidad fija 2
2.18 Velocidad fija 1
2.2 Frecuencia máx.
Marcha/paro y
lógica inversa
Referencia de
frecuencia interna
APLICACIÓN BÁSICA VACON · 13
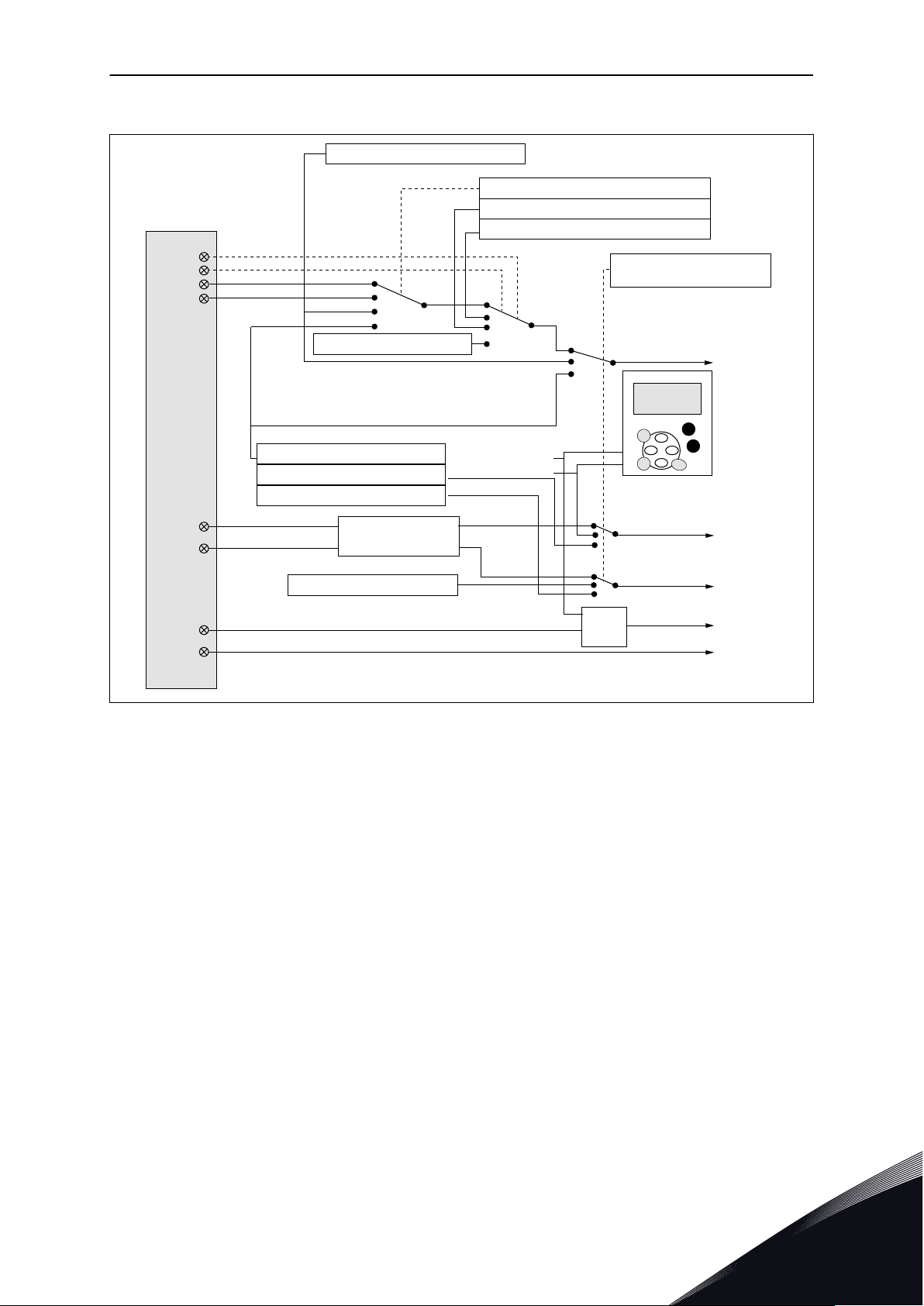
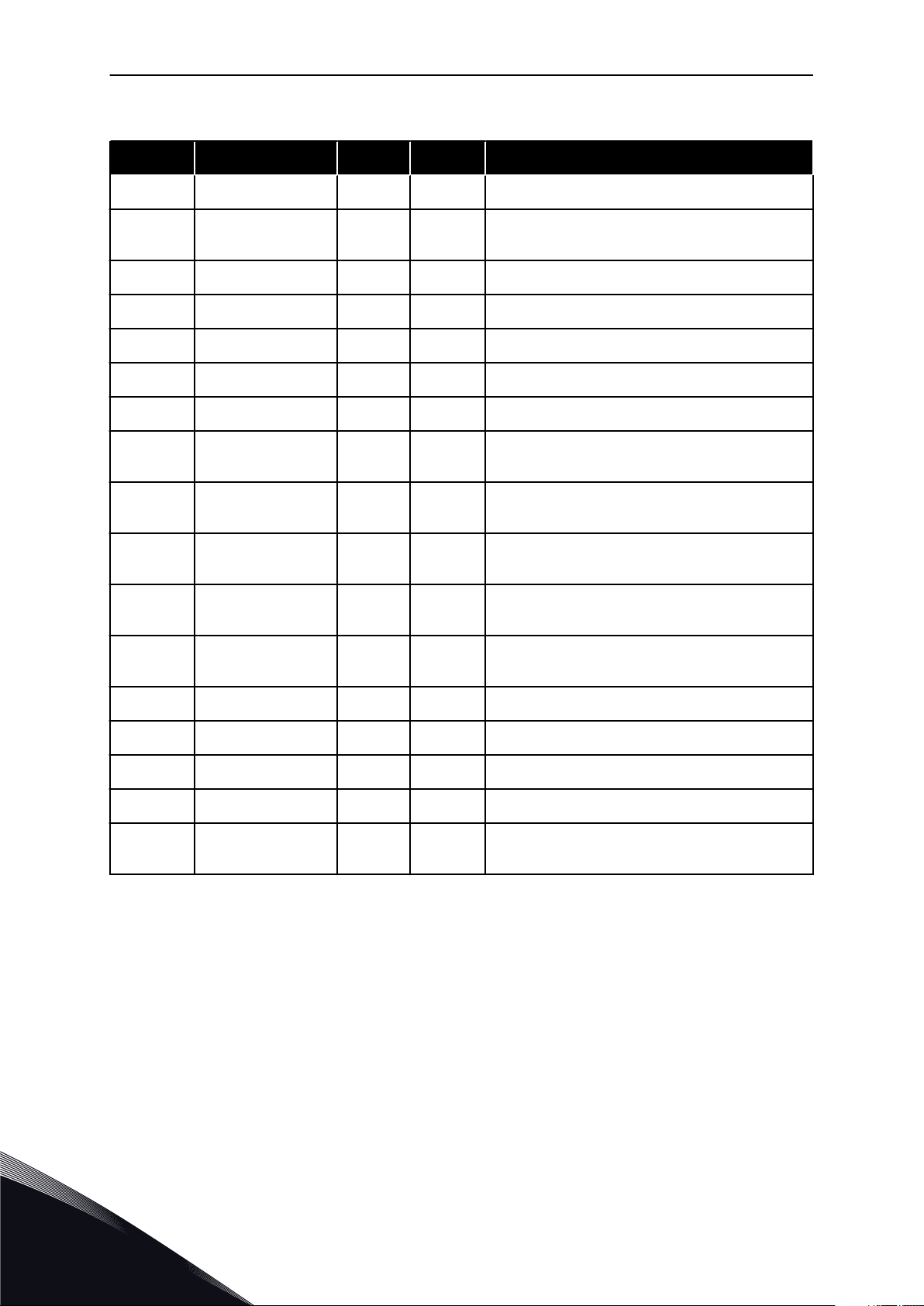
1.3 LÓGICA DE SEÑALES DE CONTROL EN LA APLICACIÓN BÁSICA
Imag. 3: Lógica de señales de control de la Aplicación básica
1.4 APLICACIÓN BÁSICA - LISTAS DE PARÁMETROS
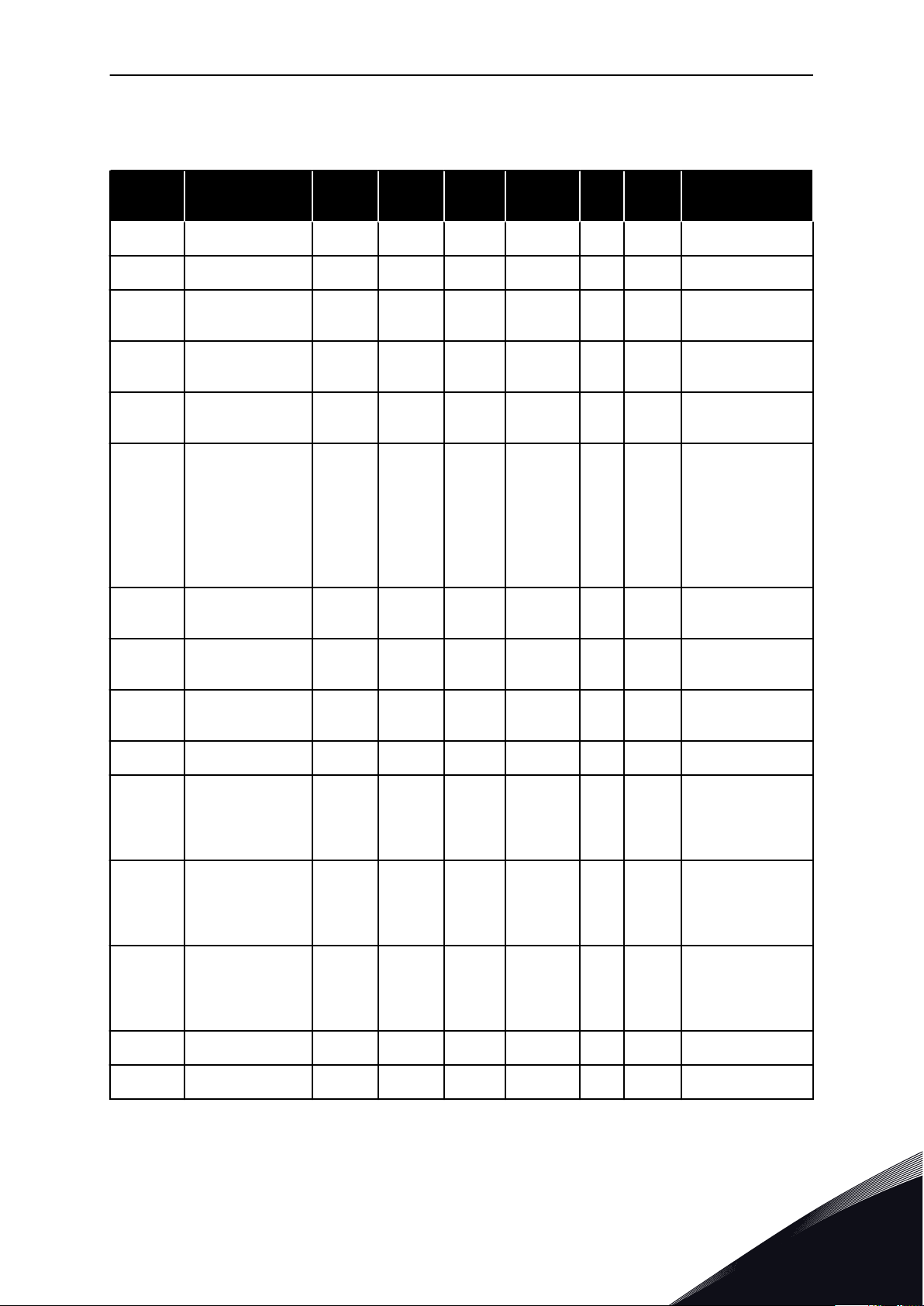
1.4.1 VALORES DE MONITOR (PANEL DE CONTROL: MENÚ M1)
Los valores de monitor son valores reales de las señales y los parámetros, así como de los
estados y las mediciones. No se pueden editar los valores de monitor.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 14 APLICACIÓN BÁSICA
Tabla 1: Valores de monitor
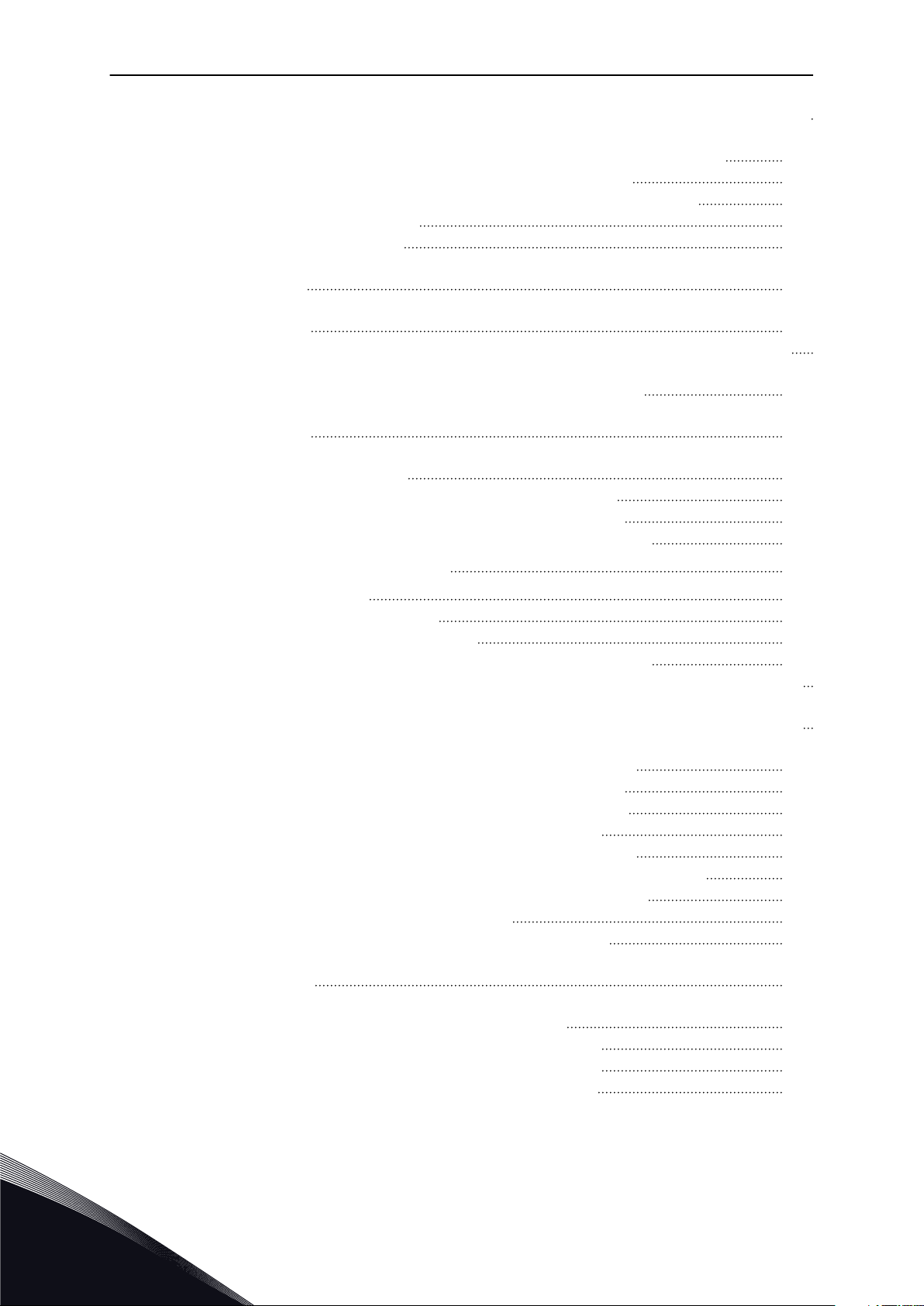
Índice Valor de monitor Unidad ID Descripción
V1.1 Frecuencia de salida Hz 1
V1.2
V1.3 Velocidad del motor rpm 2
V1.4 Intensidad del motor A 3
V1.5 Par del motor % 4
V1.6 Potencia del motor % 5
V1.7 Tensión del motor V 6
V1.8
1.9
1.10
V1.11
V1.12
Referencia de fre-
cuencia
Tensión del Bus de
CC
Temperatura varia-
dor
Temperatura del
motor
Entrada analógica 1
(AI1)
Entrada analógica 2
(AI2)
Hz 25
V 7
°C 8
% 9
V/mA 13
V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 I
V1.17
Elementos de moni-
analógica mA 26
salida
torización múltiple
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APLICACIÓN BÁSICA VACON · 15
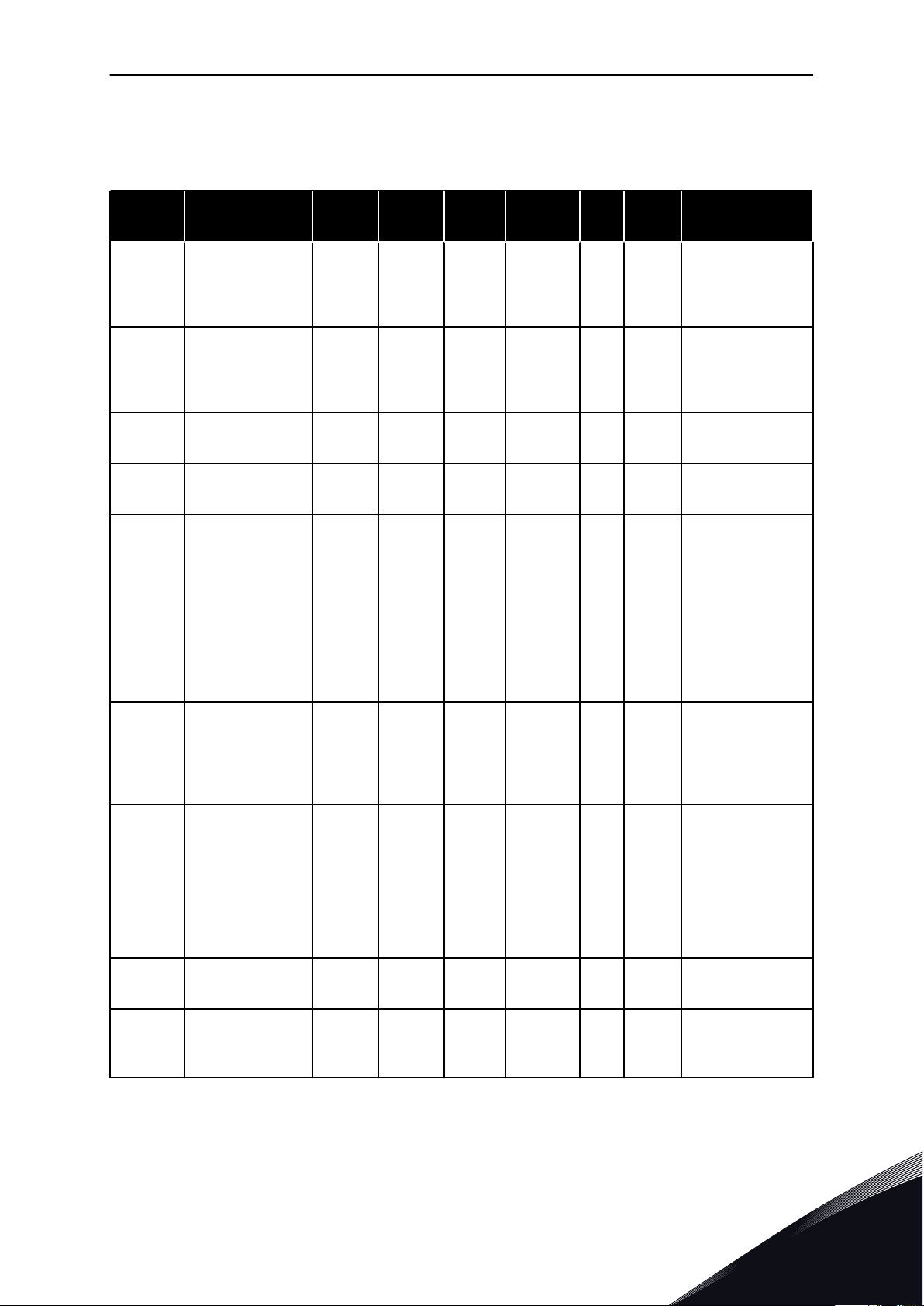
1.4.2 PARÁMETROS BÁSICOS (PANEL DE CONTROL: MENÚ M2 -> G2.1)
Tabla 2: Parámetros básicos G2.1
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.1 Frecuencia mín. 0.00 P2.2 Hz 0.00 101
P2.2 Frecuencia máx. P2.1 320.00 Hz 50.00 102
P2.3
P2.4
P2.5
P2.6
P2.7
Tiempo de acele-
ración 1
Tiempo de decele-
ración 1
Límite de intensi-
dad
Tensión nominal
del motor
Frecuencia nomi-
nal del motor
0.1 3000.0 s 3.0 103
0.1 3000.0 s 3.0 104
0,1 x I
180 690 V
8.00 320.00 Hz 50.00 111
2 x I
H
H
A I
NX2: 230
V
NX5: 400
V
NX6: 690
V
Usu
ario
L
ID
107
110
Descripción
P2.8
P2.9
P2.10 Cos phi del motor 0.30 1.00 0.85 120
P2.11 Tipo de marcha 0 2 0 505
P2.12 Tipo de paro 0 3 0 506
P2.13 Optimización U/f 0 1 0 109
Velocidad nominal
del motor
Intensidad nomi-
nal del motor
24 20 000 rpm 1440 112
0,1 x I
2 X I
H
H
A I
H
113
0 = Rampa
1 = Arranque al
vuelo
2 = Arranque al
vuelo condicional
0 = Frenado libre
1 = 2 = Rampa +
Permiso marcha
paro libre
Rampa
3 = Paro libre +
Permiso marcha
rampa
0 = Deshabilitado
1 = Sobrepar automático
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 16 APLICACIÓN BÁSICA
Tabla 2: Parámetros básicos G2.1
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.14 Referencia de I/O 0 3 0 117
Entrada analógica
P2.15
P2.16
2, compensación
de referencia
Función de salida
analógica
0 1 1 302
0 8 1 307
Usu
ario
Descripción
ID
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
0 = 0-20 mA
1 = 4 mA-20 mA
0 = Deshabilitado
1 = Frec. salida (0-
-f
máx.
2 = Referencia de
frecuencia (0-
-f
máx.
3 =Velocidad del
motor (0 - Velocidad nominal del
motor)
4=Intensidad de
salida (0-I
5=Par de motor (0-
-T
nMotor
6=Potencia de
motor (0-P
7=Tensión de
motor (0-U
8 = Tensión del bus
de CC (0-1000 V)
)
)
nMotor
)
nMotor
nMotor
)
)
)
P2.17
P2.18
P2.19 Velocidad fija 2 0.00 P2.2 Hz 50.00 106
P2.20
Función salida
analógica 1 (DIN3)
Velocidad fija 1 0.00 P2.2 Hz 0.00 105
Rearranque auto-
mático
0 7 1 301
0 1 0 731
0 = Deshabilitado
1 = Fallo externo,
contacto cerrado
2 = Fallo externo,
contacto abierto
3 = Permiso de
marcha, cc
4 = Permiso de
marcha, oc
5 = Forzar cp. a ES
6 = Forzar cp. a
panel
7 = Forzar cp. a
fieldbus
0 = Deshabilitado
2 = Habilitado
(Intervalo)
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APLICACIÓN BÁSICA VACON · 17
1.4.3 CONTROL DE PANEL (PANEL DE CONTROL: MENÚ M3)
A continuación se enumeran los parámetros para la selección del lugar de control y el
sentido de giro en el panel. Consulte el menú de control de panel en el Manual de usuario
del producto.
Tabla 3: Parámetros de control del panel, M3
Índice Ocultación Mín. Máx. Unidad Por
defecto
P3.1 Lugar de control 1 3 1 125
P3.2
P3.3
R3.4 Botón de paro 0 1 1 114
Referencia de
panel
Sentido de giro
(en el panel)
P2.1 P2.2 Hz 0.00
0 1 0 123
Usu
ario
Descripción
ID
1 = Terminal de I/O
2 = Panel
3 = Fieldbus
0=Función limitada
del botón de
parada
1=Botón de parada
siempre activado
1.4.4 MENÚ DEL SISTEMA (PANEL DE CONTROL: MENÚ M6)
Para parámetros y funciones asociados al uso general del convertidor de frecuencia, como la
selección de aplicaciones e idiomas, la configuración personalizada de parámetros o la
información sobre el hardware y el software, consulte el Manual de usuario del producto.
1.4.5 TARJETAS DE EXPANSIÓN (PANEL DE CONTROL: MENÚ M7
El menú M7 muestra las tarjetas de expansión y opcionales conectadas a la tarjeta de
control e información relativa a la tarjeta. Para obtener más información, consulte el Manual
de usuario del producto.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 18 APLICACIÓN ESTÁNDAR
2 APLICACIÓN ESTÁNDAR
2.1 INTRODUCCIÓN
Seleccione la Aplicación estándar en el menú M6, en la página S6.2.
La Aplicación estándar se utiliza normalmente en aplicaciones de bombas y ventiladores y en
cintas transportadoras para las que la Aplicación básica es demasiado limitada, pero en las
que no se necesitan características especiales.
La Aplicación estándar tiene las mismas señales de I/O y la misma lógica de control que
•
la Aplicación básica.
La entrada digital DIN3 y todas las salidas se pueden programar libremente.
•
Funciones adicionales:
Marcha/Paro programable y lógica de señal de inversión
•
Escalado de referencia
•
Supervisión de límite de una frecuencia
•
Programación de segundas rampas y rampas en forma de S
•
Funciones de arranque y parada programables
•
Freno de CC al parar
•
Un área de frecuencia prohibida
•
Curva U/f programable y frecuencia de conmutación
•
Rearranque automático
•
Protección térmica de motor y contra bloqueo: Acción programable; desactivada,
•
advertencia, fallo
Los parámetros de la Aplicación estándar se explican en el capítulo 9 Descripciones de
parámetros de este manual. Las explicaciones se organizan según el número ID individual
del parámetro.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
DIN4
DIN5
mA
LISTO
MARCHA
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Terminal Señal Descripción
+10 Vref
AI1+
AI1-
AI2+
AI2-
+24 V
Salida de referencia
Masa de E/S
Entrada analógica
2 (AI2)
Rango de intensidad
0—20mA
Salida de control de tensión
GND de I/O
Marcha directa
Lógica programable (P2.2.1)
Marcha inversa
Ri mín. = 5 kΩ
Entrada de fallo externo
Programable (P2.2.2)
Seleccionar velocidad fija 1
Seleccionar
velocidad fija 2
Reset de fallo
Común para DIN 1—DIN 3
Común para DIN4—DIN6
Salida de control de tensión
GND de I/O
Salida analógica 1
Frecuencia de salida
Programable (P2.3.2)
Salida digital 1
LISTO
Programable (P2.3.7)
Colector abierto,
I≤50 mA, U≤48 VCC
Salida de relé 1
MARCHA
Programable
(P2.3.8)
Salida de relé 2
FALLO
Programable
(P2.3.9)
Rango 0—20 mA/RL,
máx. 500 Ω
Conectar a GND o +24 V
Contacto abierto = sin acción
Contacto cerrado = reset de fallo
AO1+
Referencia de frecuencia
de entrada analógica 1
Tierra para referencia
y controles
Referencia de frecuencia
de entrada analógica 2
Contacto cerrado =
marcha directa
Contacto cerrado =
marcha inversa
Contacto abierto = sin fallo
Contacto cerrado = fallo
Ref. de frec.
Abierto
Cerrado
Abierto
Cerrado
Abierto
Abierto
Cerrado
Cerrado
Referencia I/O
Velocidad constante 1
Velocidad constante 2
Entrada analógica 2
Tensión para potenciómetro, etc.
Entrada analógica 1 (AI1)
Rango de tensión 0—10V CC
Programable (P2.1.11)
Tensión para conmutadores,
etc. máx. 0,1 A
Tensión para conmutadores (ver n.º 6)
Conectar a GND o +24 V
Tierra para referencia y controles
Tierra para referencia y controles
Potenciómetro para
referencia, 1-10 kΩ
APLICACIÓN ESTÁNDAR VACON · 19
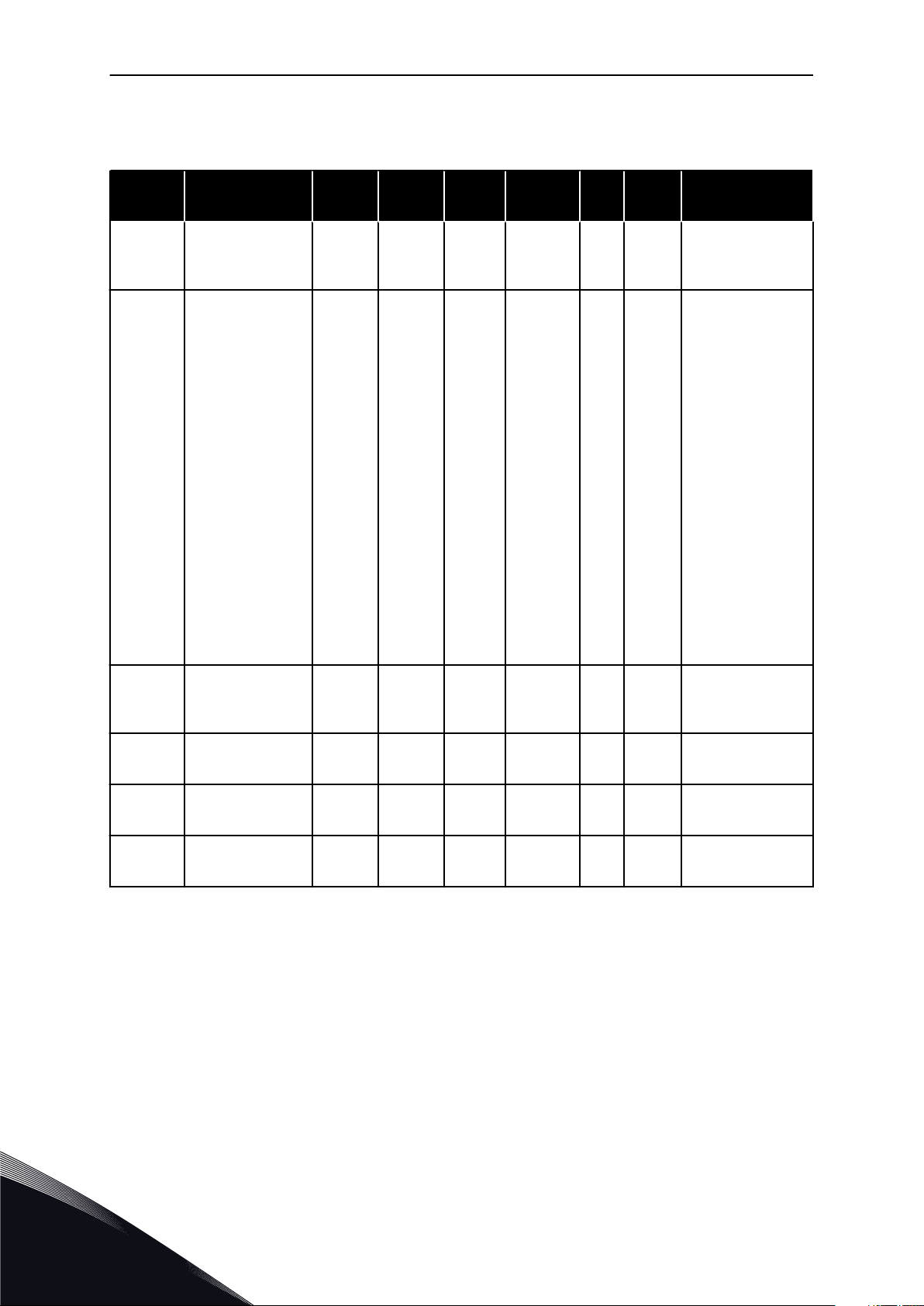
2.2 I/O DE CONTROL
Imag. 4: Configuración de I/O por defecto de la Aplicación estándar
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Bloque de puentes X3:
Toma de tierra de CMA y CMB
CMB conectado a TIERRA
CMA conectado a TIERRA
CMB aislado de TIERRA
CMA aislado de TIERRA
CMB y CMA conectados juntos
internamente, aislados de
TIERRA
= Ajustes por defecto de fábrica
VACON · 20 APLICACIÓN ESTÁNDAR
*) La tarjeta opcional A3 no cuenta con un terminal para contacto abierto en su segunda
salida de relé (sin terminal 24).
NOTA!
Consulte las selecciones de puentes a continuación. Puede obtener más
información en el Manual de usuario del producto.
Imag. 5: Selecciones de puente
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
DIN4
DIN5
AnIN1
AnIN2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Referencia de panel
3.1 Lugar de control
Marcha directa
Marcha inversa
Marcha/Parada
Inversión de giro
Marcha/paro interno
Inversa interna
Reset de fallo interno
Entrada de reset de fallo
Entrada de fallo externo (programable)
Botón reset
Botones marcha/paro
Referencia de bus de campo
Marcha/paro de bus de campo
Dirección desde bus de campo
3.3 Dirección del teclado
2.1.13 Referencia ctrl. bus de campo
2.1.15 Velocidad fija 2
2.1.14 Velocidad fija 1
2.1.11 Referencia de I/O
2.1.12 Velocidad ctrl. panel 1
Referencia de
frecuencia interna
(programable)
(programable)
Marcha/paro
programable y
lógica de inversión
APLICACIÓN ESTÁNDAR VACON · 21
2.3 LÓGICA DE SEÑALES DE CONTROL EN LA APLICACIÓN ESTÁNDAR
Imag. 6: Lógica de señales de control de la Aplicación estándar
2.4 APLICACIÓN ESTÁNDAR - LISTAS DE PARÁMETROS
2.4.1 VALORES DE MONITOR (PANEL DE CONTROL: MENÚ M1)
Los valores de monitor son valores reales de las señales y los parámetros, así como de los
estados y las mediciones. No se pueden editar los valores de monitor.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 22 APLICACIÓN ESTÁNDAR
Tabla 4: Valores de monitor
Índice Valor de monitor Unidad ID Descripción
V1.1 Frecuencia de salida Hz 1
V1.2
V1.3 Velocidad del motor rpm 2
V1.4 Intensidad del motor A 3
V1.5 Par del motor % 4
V1.6 Potencia del motor % 5
V1.7 Tensión del motor V 6
V1.8
1.9
1.10
V1.11
V1.12
Referencia de fre-
cuencia
Tensión del Bus de
CC
Temperatura varia-
dor
Temperatura del
motor
Entrada analógica 1
(AI1)
Entrada analógica 2
(AI2)
Hz 25
V 7
°C 8
% 9
V/mA 13
V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 I
V1.17
Elementos de moni-
analógica mA 26
salida
torización múltiple
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APLICACIÓN ESTÁNDAR VACON · 23
2.4.2 PARÁMETROS BÁSICOS (PANEL DE CONTROL: MENÚ M2 -> G2.1)
Tabla 5: Parámetros básicos G2.1
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.1.1 Frecuencia mín. 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Frecuencia máx. P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5
P2.1.6
P2.1.7
Tiempo de acele-
ración 1
Tiempo de decele-
ración 1
Límite de intensi-
dad
Tensión nominal
del motor
Frecuencia nomi-
nal del motor
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
0,1 x I
180 690 V
8.00 320.00 Hz 50.00 111
2 x I
H
H
A I
NX2: 230
V
NX5: 400
V
NX6: 690
V
Usu
ario
L
ID
107
110
Descripción
P2.1.8
P2.1.9
P2.1.10 Cos phi del motor 0.30 1.00 0.85 120
P2.1.11 Referencia de I/O 0 3 0 117
P2.1.12
P2.1.13
P2.1.14 Velocidad fija 1 0.00 P2.1.2 Hz 10.00 105
P2.1.15 Velocidad fija 2 0.00 P2.1.2 Hz 50.00 106
Velocidad nominal
del motor
Intensidad nomi-
nal del motor
Referencia de
control del panel
Referencia de
control de field-
bus
24 20 000 rpm 1440 112
0,1 x I
0 3 2 121
0 3 3 122
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 24 APLICACIÓN ESTÁNDAR
2.4.3 SEÑALES DE ENTRADA (PANEL DE CONTROL: MENÚ M2 -> G2.2)
Tabla 6: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.2.1
Lógica de mar-
cha/paro
0 6 0 300
Usu
ario
Descripción
ID
Lógica = 0
Señal de control 1 =
Marcha directa
Señal de control 2 =
Marcha inversa
Lógica = 1
Señal de control 1 =
Marcha/Paro
Señal de control 2 =
Inversión
Lógica = 2
Señal de control 1 =
Marcha/Paro
Señal de control 2 =
Permiso de marcha
Lógica = 3
Señal de control 1 =
Pulso de arranque
(flanco)
Señal de control 2 =
Pulso de paro
Lógica = 4
Señal de control 1 =
Pulso directo (flanco)
Señal de control 2 =
Pulso inverso (flanco)
Lógica = 5
Señal de control 1 =
Pulso de arranque
(flanco)
Señal de control 2 =
Pulso inverso
Lógica = 6
Señal de control 1 =
Pulso de arranque
(flanco)
Señal de control 2 =
Habilitar pulso
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APLICACIÓN ESTÁNDAR VACON · 25
Tabla 6: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.2.2
P2.2.3
P2.2.4
Función salida
analógica 1 (DIN3)
Entrada analógica
2, compensación
de referencia
Valor mínimo de
escalado de refe-
rencia
0 8 1 301
0 1 1 302
0.00 320.00 Hz 0.00 303
Usu
ario
Descripción
ID
0 = Deshabilitado
1 = Fallo externo,
contacto cerrado
2 = Fallo externo,
contacto abierto
3 = Permiso de marcha
4 = Selección tiempo
acel./decel.
5 = Forzar cp. a ES
6 = Forzar cp. a panel
7 = Forzar cp. a fieldbus
8 = Inversión
0 = 0-20 mA (0-10 V)
**
1 = 4-20 mA (2-10 V)
**
Valor máximo de
P2.2.5
P2.2.6
P2.2.7
P2.2.8 ***
P2.2.9 ***
escalado de refe-
rencia
Inversión de refe-
rencia
Tiempo de filtrado
de referencia
Selección de
señal de entrada
analógica 1 (AI1)
Selección de
señal de entrada
analógica 2 (AI2)
0.00 320.00 Hz 0.00 304
0 1 0 305
0.00 10.00 s 0.10 306
A1 377
A2 388
0 = No invertido
1 = Invertido
0 = Sin filtrado
** = Recuerde colocar puentes de bloque X2 según sea necesario. Consulte el Manual de
usuario del producto.
*** = Utilice el método TTF para programar estos parámetros.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 26 APLICACIÓN ESTÁNDAR
2.4.4 SEÑALES DE SALIDA (PANEL DE CONTROL: MENÚ M2 -> G2.3
Tabla 7: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
Selección de
P2.3.1
P2.3.2
señal de salida
analógica 1
Función de salida
analógica
0 A.1 464
0 8 1 307
Usu
ario
Descripción
ID
0 = Sin utilizar (20
mA/10 V)
1 = Frec. salida (0-
-f
máx.
2 = Referencia de
frecuencia (0-
-f
máx.
3 =Velocidad del
motor (0 - Velocidad nominal del
motor)
4 = Intensidad de
salida (0-I
5=Par de motor (0-
-T
nMotor
6=Potencia de
motor (0-P
7=Tensión de
motor (0-U
8 = Tensión del bus
de CC (0-1000 V)
)
)
nMotor
)
nMotor
nMotor
)
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Tiempo de filtro
de salida analó-
gica
Inversión de
salida analógica
Mínimo de salida
analógica
Escala de salida
analógica
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Sin filtrado
0 = No invertido
1 = Invertido
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APLICACIÓN ESTÁNDAR VACON · 27
Tabla 7: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.3.7
Función de salida
digital 1
0 16 1 312
Usu
ario
Descripción
ID
0 = Deshabilitado
1 = Listo
2 = Marcha
3 = Fallo
4 = Fallo invertido
5 = Advertencia de
sobrecalentamiento FC
6 = Fallo externo o
advertencia
7 = Fallo de referencia o advertencia
8 = Advertencia
9 = Inversión de
giro
10 = Velocidad fija
1
11 = En velocidad
12 = Regulador de
motor activo
13 = Límite de
supervisión de
frec. OP 1
14 = Lugar de control: I/O
15 = Fallo de termistor/advertencia
16 = Fieldbus DIN1
P2.3.8
P2.3.9
P2.3.10
P2.3.11
P2.3.12 *
P2.3.13
Función salida
analógica 1 (RO1)
Función salida
analógica 1 (RO2)
Límite de supervisión de frecuencia
de salida 1
Límite de frecuen-
cia de salida 1;
Valor supervisado
Selección de
señal de salida
analógica 2
Función de salida
analógica 2
0 16 2 313
0 16 3 314
0 2 0 315
0.00 320.00 Hz 0.00 316
0.1 E.10 0.1 471
0 8 4 472
Como el parámetro 2.3.7
Como el parámetro 2.3.7
0 = Sin límite
1 = Límite bajo de
supervisión
2 = Límite alto de
supervisión
Como el parámetro 2.3.2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 28 APLICACIÓN ESTÁNDAR
Tabla 7: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
Tiempo de filtrado
P2.3.14
P2.3.15
P2.3.16
P.2.3.17
de salida analó-
gica 2
Inversión de
salida analógica 2
Mínimo de salida
analógica 2
Escalado de salida
analógica 2
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
* = Utilice el método TTF para programar estos parámetros.
Usu
ario
Descripción
ID
0 = Sin filtrado
0 = No invertido
1 = Invertido
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
APLICACIÓN ESTÁNDAR VACON · 29
2.4.5 PARÁMETROS DE CONTROL DEL CONVERTIDOR (PANEL DE CONTROL: MENÚ M2
-> G2.4
Tabla 8: Parámetros de control del convertidor, G2.4
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.4.1 Forma de rampa 1 0.0 10.0 s 0.1 500
P2.4.2 Forma de rampa 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4
P2.4.5
Tiempo de acele-
ración 2
Tiempo de decele-
ración 2
Chopper de fre-
nado
0.1 3000.0 s 1.0 502
0.1 3000.0 s 1.0 503
0 4 0 504
Usu
ario
Descripción
ID
0 = Lineal
100 = acel./dec.
completa tiempos
de inc/dec
0 = Lineal
100 = acel./dec.
completa tiempos
de inc/dec
0 = Deshabilitado
1 = Se utiliza en la
marcha
2 = Chopper de
frenado externo
3 = Se utiliza en
paro/marcha
4 = Se utiliza en la
marcha (sin
prueba)
P2.4.6 Tipo de marcha 0 2 0 505
P2.4.7 Tipo de paro 0 3 0 506
P2.4.8
P2.4.9
Intensidad de
freno CC
Tiempo de freno
CC al paro
0.00 I
0.00 600.00 s 0.00 508
L
A 0.7 x I
H
507
0 = Rampa
1 = Arranque al
vuelo
2 = Arranque al
vuelo condicional
0 = Libre
1 = Rampa
2 = Rampa + Permiso marcha paro
libre
3 = Paro libre +
Permiso marcha
rampa
0 = El freno CC
está desactivado al
parar
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
VACON · 30 APLICACIÓN ESTÁNDAR
Tabla 8: Parámetros de control del convertidor, G2.4
Índice Ocultación Mín. Máx. Unidad Por
defecto
Frecuencia para
P2.4.10
P2.4.11
P2.4.12 * Freno por flujo 0 1 0 520
P2.4.13
iniciar el freno CC
durante la parada
de rampa
Tiempo de freno
CC en el arranque
Intensidad fre-
nado por flujo
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
0.00 I
L
A I
Usu
ario
H
Descripción
ID
0 = El freno CC
está desactivado al
arrancar
0 = Desactivado.
0 = Activado
519
2.4.6 PARÁMETROS DE FRECUENCIAS PROHIBIDAS (PANEL DE CONTROL: MENÚ M2 -> G2.5)
Tabla 9: Parámetros de frecuencias prohibidas, G2.5
Índice Ocultación Mín. Máx. Unidad Por
defecto
Usu
ario
ID
Descripción
P2.5.1
P2.5.2
P2.5.3
Límite bajo de
rango 1 de fre-
cuencias prohibi-
das
Límite alto de
rango 1 de fre-
cuencias prohibi-
das
Rampa de ac./dec.
prohibida
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.1 10.0 x 1.0 518
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN ESTÁNDAR VACON · 31
2.4.7 PARÁMETROS DE CONTROL DE MOTOR (PANEL DE CONTROL: MENÚ M2 -> G2.6)
Tabla 10: Parámetros de control del motor, G2.6
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.6.1 *
P2.6.2 * Optimización U/f 0 1 0 109
P2.6.3 *
P2.6.4 *
Modo control
motor
Selección relación
U/f
Punto de desexci-
tación del motor
0 1/3 0 600
0 3 0 108
8.00 320.00 Hz 50.00 602
Usu
ario
Descripción
ID
0 = Control de frecuencia
1 = Control de
velocidad
NXP:
2 = Control de par
de lazo abierto
3 = Ctrl. de velocidad de lazo
cerrado
4 = Control de par
de lazo cerrado
0 = Deshabilitado
1 = Sobrepar automático
0 = Lineal
1 = Cuadrático
2 = Programable
3 = Lineal con
optim. de flujo
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
P2.6.10
P2.6.11
Tensión en el
punto de desexci-
tación del motor
Curva U/f fre-
cuencia punto
medio
Curva U/f tensión
punto medio
Tensión de salida
a frecuencia cero
Frecuencia de
conmutación
Controlador de
sobretensión
Controlador de
baja tensión
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varía 606
1.0 Varía kHz Varía 601
0 2 1 607
0 1 1 608
0 = Deshabilitado
1 = Utilizado (sin
rampa)
2 = Utilizado
(rampa)
0 = Deshabilitado
1 = Se utiliza
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 32 APLICACIÓN ESTÁNDAR
Tabla 10: Parámetros de control del motor, G2.6
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.6.12 Caída de carga 0.00 100.00 % 0.00 620
P2.6.13 Identificación 0 1/2 0 631
Grupo de parámetros de lazo cerrado 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
Intensidad mag-
netiz.
Ganancia de P de
control de veloci-
dad
Tiempo I de control de velocidad
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
H
A 0.00 612
Usu
ario
Descripción
ID
0 = Sin acción
1 = Identificación
sin funcionamiento
2 = Identificación
con funcionamiento
3 = Marcha ID de
encoder
4 = Sin acción
5 = Fallo de marcha ID
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11
Compensación de
aceleración
Ajuste de desliza-
miento
Intensidad mag-
netizante en
arranque
Tiempo de mag-
netización en
arranque
Tiempo de veloci-
dad 0 en arranque
Tiempo de veloci-
dad 0 en paro
Par de puesta en
marcha
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
0 3 0 621
L
A 0.00 627
0 = Deshabilitado
1 = Memoria de
par
2 = Referencia de
par
3 = Par de puesta
en marcha dir/inv
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN ESTÁNDAR VACON · 33
Tabla 10: Parámetros de control del motor, G2.6
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Grupo de parámetros de identificación 2.6.15
P2.6.15.1 Paso de velocidad -50.0 50.0 0.0 0.0 1252
Par de puesta en
marcha DIRECTO
Par de puesta en
marcha INVERSO
Tiempo de filtrado
de encoder
Ganancia de P de
control de intensi-
dad
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
Usu
ario
ID
Descripción
* = El valor del parámetro solo se puede cambiar después de haber detenido el convertidor
de frecuencia.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 34 APLICACIÓN ESTÁNDAR
2.4.8 PROTECCIONES (PANEL DE CONTROL: MENÚ M2 -> G2.7
Tabla 11: Protecciones, G2.7
Índice Ocultación Mín. Máx. Unidad Por
defecto
Repuesta a fallo
P2.7.1
P2.7.2
P2.7.3
P2.7.4
de referencia 4
mA
Frecuencia de
fallo de referencia
4 mA
Respuesta frente
a fallo externo
Supervisión de
fase de entrada
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
Usu
ario
Descripción
ID
0 = Sin respuesta
1 = Advertencia
2 = Advertencia
+Frec. anterior
3 = Adver.+Frec.
fija 2.7.2
4 = Fallo, parada
de acuerdo con
2.4.7
5 = Fallo, parada
por paro libre
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
0 = Fallo almace-
P2.7.5
P2.7.6 Fase de salida 0 3 2 702 0 = Sin respuesta
P2.7.7
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12 Ciclo carga motor 0 150 % 100 708
Repuesta a fallo
de baja tensión
Protección frente
a fallo de tierras
Protección térmica del motor
Factor de tempe-
ratura ambiente
motor
Factor refrige-
rante del motor a
velocidad cero
Constante de
tiempo térmico
del motor
0 1 0 727
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Varía 707
nado en el historial
Fallo no almacenado
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN ESTÁNDAR VACON · 35
Tabla 11: Protecciones, G2.7
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.7.13
P2.7.14
P2.7.15
P2.7.16
P2.7.17
Protección contra
bloqueo
Intensidad de blo-
queo
Límite de tiempo
de bloqueo
Límite de frecuen-
cia de bloqueo
Protección contra
baja carga
0 3 0 709
0.00 2 x I
1.00 120.00 s 15.00 711
1.0 P2.1.2 Hz 25.00 712
0 3 0 713
H
A I
Usu
ario
H
Descripción
ID
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
710
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
Protección de baja
carga del par
Carga de frecuen-
cia cero de pro-
tección de baja
carga
Límite de tiempo
de protección de
baja carga
Respuesta a fallo
termistor
Respuesta a fallo
de fieldbus
Respuesta a fallo
de ranura
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 3 2 734
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
Consulte P2.7.21
Consulte P2.7.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 36 APLICACIÓN ESTÁNDAR
2.4.9 PARÁMETROS DE REARRANQUE AUTOMÁTICO (PANEL DE CONTROL: MENÚ M2 -
-> G2.8)
Tabla 12: Parámetros de rearranque automático, G2.8
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.8.1 Tiempo de espera 0.10 10.00 s 0.50 717
P2.8.2 Tiempo de prueba 0.00 60.00 s 30.00 718
P2.8.3 Tipo de marcha 0 2 0 719
Número de inten-
P2.8.4
P2.8.5
P2.8.6
tos tras la desco-
nexión automática
por baja tensión
Número de inten-
tos tras la desco-
nexión automática
por sobretensión
Número de inten-
tos tras la desco-
nexión automática
por sobreintensi-
dad
0 10 0 720
0 10 0 721
0 3 0 722
Usu
ario
Descripción
ID
0 = Rampa
1 = Arranque al
vuelo
2 = De acuerdo con
P2.4.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Número de intentos tras el disparo
por referencia 4
mA
Número de intentos tras el disparo
por fallo de tem-
peratura del
motor
Número de intentos tras el disparo
por fallo externo
Número de inten-
tos tras disparo
por fallo de baja
carga
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN ESTÁNDAR VACON · 37
2.4.10 CONTROL DE PANEL (PANEL DE CONTROL: MENÚ M3)
A continuación se enumeran los parámetros para la selección del lugar de control y el
sentido de giro en el panel. Consulte el menú de control de panel en el Manual de usuario
del producto.
Tabla 13: Parámetros de control del panel, M3
Índice Ocultación Mín. Máx. Unidad Por
defecto
P3.1 Lugar de control 1 3 1 125
P3.2
P3.3
R3.4 Botón de paro 0 1 1 114
Referencia de
panel
Sentido de giro
(en el panel)
P2.1 P2.2 Hz 0.00
0 1 0 123
Usu
ario
Descripción
ID
1 = Terminal de I/O
2 = Panel
3 = Fieldbus
0=Función limitada
del botón de
parada
1=Botón de parada
siempre activado
2.4.11 MENÚ DEL SISTEMA (PANEL DE CONTROL: MENÚ M6)
Para parámetros y funciones asociados al uso general del convertidor de frecuencia, como la
selección de aplicaciones e idiomas, la configuración personalizada de parámetros o la
información sobre el hardware y el software, consulte el Manual de usuario del producto.
2.4.12 TARJETAS DE EXPANSIÓN (PANEL DE CONTROL: MENÚ M7
El menú M7 muestra las tarjetas de expansión y opcionales conectadas a la tarjeta de
control e información relativa a la tarjeta. Para obtener más información, consulte el Manual
de usuario del producto.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 38 APLICACIÓN DE CONTROL LOCAL/REMOTO
3 APLICACIÓN DE CONTROL LOCAL/REMOTO
3.1 INTRODUCCIÓN
Seleccione la Aplicación de control local/remoto en el menú M6, en la página S6.2.
Con la Aplicación de control local/remoto, se puede disponer de dos lugares de control
distintos. Para cada lugar de control, la referencia de frecuencia se puede seleccionar desde
el panel de control, el terminal de I/O o el fieldbus. El lugar de control activo se selecciona
con la entrada digital DIN6.
Todas las salidas se pueden programar libremente.
•
Funciones adicionales:
Marcha/Paro programable y lógica de señal de inversión
•
Escalado de referencia
•
Supervisión de límite de una frecuencia
•
Programación de segundas rampas y rampas en forma de S
•
Funciones de arranque y parada programables
•
Freno de CC al parar
•
Un área de frecuencia prohibida
•
Curva U/f programable y frecuencia de conmutación
•
Rearranque automático
•
Protección térmica de motor y contra bloqueo: Acción programable; desactivada,
•
advertencia, fallo
Los parámetros de la Aplicación de control local/remoto se explican en el Capítulo 9
Descripciones de parámetros de este manual. Las explicaciones se organizan según el
número ID individual del parámetro.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

Potenciómetro para referencia,
1-10 kΩ
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Referencia remota
0(4) - 20 mA
MARCHA
LISTO
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Terminal Señal Descripción
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Salida de referencia
Masa de E/S
Entrada analógica 2 (AI2)
Rango de intensidad 0-20 mA
Programable (P2.1.11)
Salida de control de tensión
GND de I/O
Lugar A: Marcha directa
Lógica programable (P2.2.1)
Lugar A: Marcha inversa
Ri mín. = 5 kohm
Entrada de fallo externo
Programable (P2.2.2)
Lugar B: Marcha directa
Lógica programable (P2.2.15)
Lugar B: Marcha inversa
Ri mín. = 5 kΩ
Selección de lugar A/B
Común para DIN 1—DIN 3
Común para DIN4—DIN6
Salida de control de tensión
GND de I/O
Salida analógica 1
Frecuencia de salida
Programable (P2.3.2)
Salida digital
LISTO
Programable (P2.3.7)
Colector abierto, I≤50 mA,
U≤48 VCC
Salida de relé 1
MARCHA
Programable
(P2.3.8)
Salida de relé 2
FALLO
Programable
(P2.3.9)
Rango 0—20 mA/RL,
máx. 500 Ω
Contacto abierto = El lugar A está activo
Contacto cerrado = El lugar B está activo
Contacto cerrado = marcha directa
Contacto cerrado = marcha inversa
AO1+
Referencia de entrada
analógica 1 para lugar B
Tierra para referencia y controles
Referencia de entrada
analógica 2 para lugar A
Contacto cerrado = marcha directa
Contacto cerrado = marcha inversa
Contacto abierto = sin fallo
Contacto cerrado = fallo
Tensión para potenciómetro, etc.
Entrada analógica 1 (AI1)
Rango de tensión 0—10V CC
Programable (P2.1.12)
Tensión para conmutadores,
etc. máx. 0,1 A
Tensión para conmutadores
(ver n.º 6)
Conectar a GND o +24 V
Conectar a GND o +24 V
Tierra para referencia y controles
Tierra para referencia y controles
APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 39
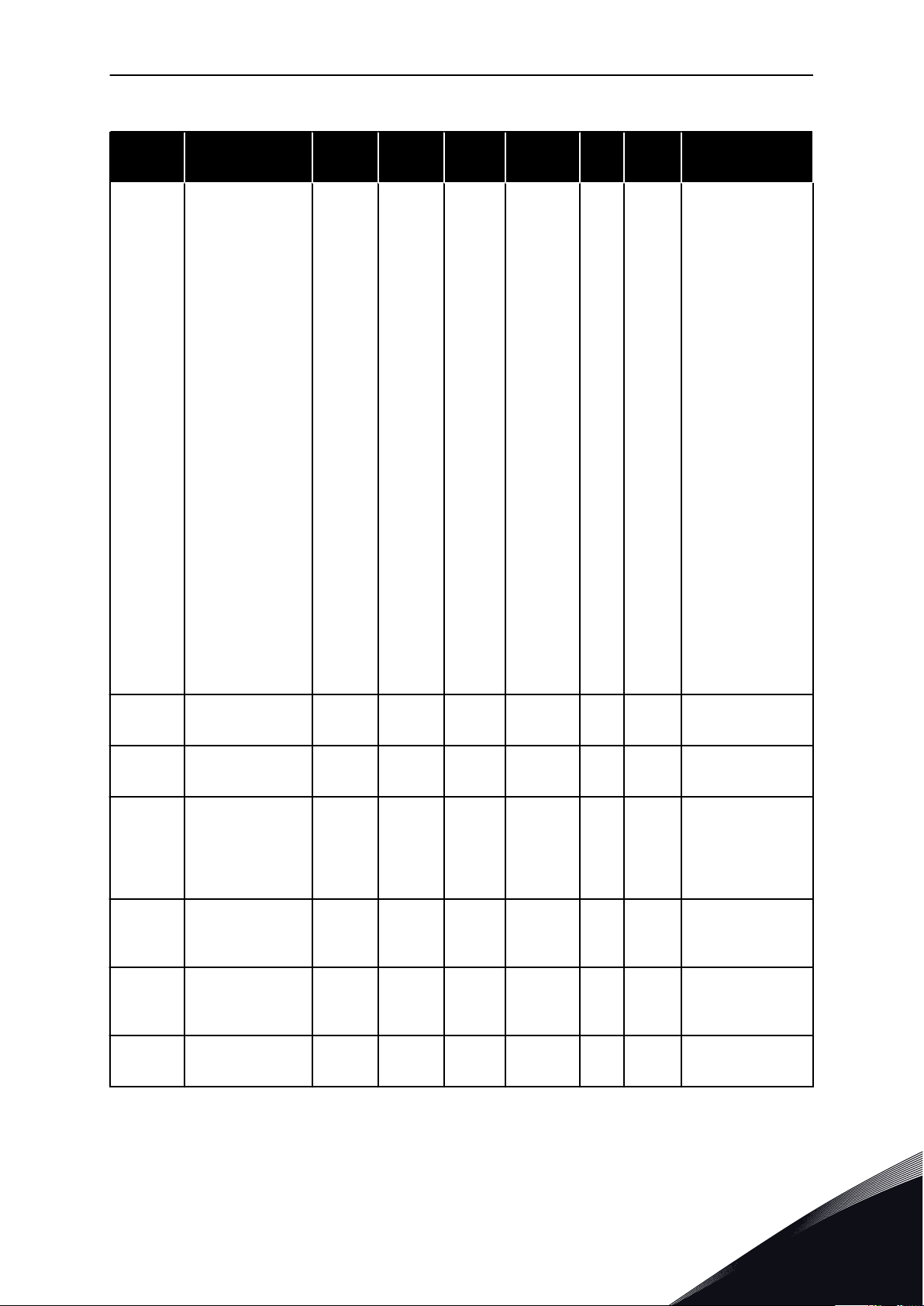
3.2 I/O DE CONTROL
Imag. 7: Configuración de I/O por defecto de la aplicación de control local/remoto
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

Bloque de puentes X3:
Toma de tierra de CMA y CMB
CMB conectado a TIERRA
CMA conectado a TIERRA
CMB aislado de TIERRA
CMA aislado de TIERRA
CMB y CMA conectados juntos
internamente, aislados de
TIERRA
= Ajustes por defecto de fábrica
VACON · 40 APLICACIÓN DE CONTROL LOCAL/REMOTO
*) La tarjeta opcional A3 no cuenta con un terminal para contacto abierto en su segunda
salida de relé (sin terminal 24).
NOTA!
Consulte las selecciones de puentes a continuación. Puede obtener más
información en el Manual de usuario del producto.
Imag. 8: Selecciones de puente
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

DIN3
≥ 1
DIN6
DIN2
DIN3
AnIN1
AnIN2
DIN1
DIN2
DIN3
DIN4
DIN5
A
B
A
B
A
B
Inversa interna
Reset de fallo interno
Entrada de reset de fallo (programable)
3.3 Dirección del teclado
Marcha/paro interno
Referencia de bus de campo
Marcha/paro de bus de campo
Dirección desde bus de campo
Botones marcha/paro
Botón reset
Marcha directa
(programable)
Marcha inversa
(programable)
Marcha directa
Marcha inversa
(programable)
(programable)
Marcha/Parada
Inversión
de giro
Arriba
Abajo
3.1 Lugar
de control
2.1.15 Ref. velocidad de jogging
2.1.14 Referencia ctrl. bus de campo
2.1.13 Referencia de control de panel
2.1.12 Referencia I/O B
2.1.11 Referencia I/O A
R3.2 Referencia de panel
Marcha/paro
programable y
lógica de
inversión A
Marcha/paro
programable y
lógica de
inversión B
Ref. frecuencia
interna
Potenciómetro motorizado
APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 41
3.3 LÓGICA DE SEÑALES DE CONTROL EN LA APLICACIÓN DE CONTROL LOCAL/REMOTO
Imag. 9: Lógica de señales de control de la Aplicación de control local/remoto
3.4 APLICACIÓN DE CONTROL LOCAL/REMOTO - LISTAS DE PARÁMETROS
3.4.1 VALORES DE MONITOR (PANEL DE CONTROL: MENÚ M1)
Los valores de monitor son valores reales de las señales y los parámetros, así como de los
estados y las mediciones. No se pueden editar los valores de monitor.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 42 APLICACIÓN DE CONTROL LOCAL/REMOTO
Tabla 14: Valores de monitor
Índice Valor de monitor Unidad ID Descripción
V1.1 Frecuencia de salida Hz 1
V1.2
V1.3 Velocidad del motor rpm 2
V1.4 Intensidad del motor A 3
V1.5 Par del motor % 4
V1.6 Potencia del motor % 5
V1.7 Tensión del motor V 6
V1.8
1.9
1.10
V1.11
V1.12
Referencia de fre-
cuencia
Tensión del Bus de
CC
Temperatura varia-
dor
Temperatura del
motor
Entrada analógica 1
(AI1)
Entrada analógica 2
(AI2)
Hz 25
V 7
°C 8
% 9
V/mA 13
V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 I
V1.17
Elementos de moni-
analógica mA 26
salida
torización múltiple
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 43
3.4.2 PARÁMETROS BÁSICOS (PANEL DE CONTROL: MENÚ M2 -> G2.1)
Tabla 15: Parámetros básicos G2.1
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.1.1 Frecuencia mín. 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Frecuencia máx. P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5
P2.1.6 *
P2.1.7 *
Tiempo de acele-
ración 1
Tiempo de decele-
ración 1
Límite de intensi-
dad
Tensión nominal
del motor
Frecuencia nomi-
nal del motor
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
0,1 x I
180 690 V
8.00 320.00 Hz 50.00 111
2 x I
H
H
A I
NX2: 230
V
NX5: 400
V
NX6: 690
V
Usu
ario
L
ID
107
110
Descripción
P2.1.8 *
P2.1.9 *
P2.1.10 * Cos phi del motor 0.30 1.00 0.85 120
P2.1.11 * Referencia I/O A 0 4 1 117
P2.1.12 * Referencia I/O B 0 4 0 131
P2.1.13 *
Velocidad nominal
del motor
Intensidad nomi-
nal del motor
Referencia de
control del panel
24 20 000 rpm 1440 112
0,1 x I
0 3 2 121
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
4 = Potenciómetro
motorizado
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
4 = Potenciómetro
motorizado
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 44 APLICACIÓN DE CONTROL LOCAL/REMOTO
Tabla 15: Parámetros básicos G2.1
Índice Ocultación Mín. Máx. Unidad Por
defecto
Referencia de
P2.1.14 *
P2.1.15 *
control de field-
bus
Referencia de
velocidad jogging
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
Usu
ario
ID
Descripción
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
* = El valor del parámetro solo se puede cambiar después de haber detenido el convertidor
de frecuencia.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 45
3.4.3 SEÑALES DE ENTRADA (PANEL DE CONTROL: MENÚ M2 -> G2.2)
Tabla 16: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
Selección de
P2.2.1 ***
lógica de Marcha/
Paro de lugar A
0 8 0 300
Usu
ario
Descripción
ID
Lógica = 0
Señal de control 1 =
Marcha directa
Señal de control 2 =
Marcha inversa
Lógica = 1
Señal de control 1 =
Marcha/Paro
Señal de control 2 =
Inversión
Lógica = 2
Señal de control 1 =
Marcha/Paro
Señal de control 2 =
Permiso de marcha
Lógica = 3
Señal de control 1 =
Pulso de arranque
(flanco)
Señal de control 2 =
Pulso de paro
Lógica = 4
Señal de control 1 =
Marcha directa
Señal de control 2 =
ASCENSO Potenciómetro motorizado
Lógica = 5
Señal de control 1 =
Marcha directa
(flanco)
Señal de control 2 =
Marcha inversa
(flanco)
Lógica = 6
Señal de control 1 =
Marcha (flanco) /
Paro
Señal de control 2 =
Inversión
Lógica = 7
Señal de control 1 =
Marcha (flanco) /
Paro
Señal de control 2 =
Permiso de marcha
Lógica = 8
Señal de control 1 =
Marcha directa
(flanco)
Señal de control 2 =
ASCENSO Potenciómetro motorizado
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 46 APLICACIÓN DE CONTROL LOCAL/REMOTO
Tabla 16: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.2.2
Función salida
analógica 1 (DIN3)
0 13 1 301
Usu
ario
Descripción
ID
0 = Deshabilitado
1 = Fallo externo,
contacto cerrado
2 = Fallo externo,
contacto abierto
3 = Permiso de marcha
4 = Selección tiempo
acel./decel.
5 = Forzar cp. a ES
6 = Forzar cp. a
panel
7 = Forzar cp. a fieldbus
8 = Inversión
9 = Velocidad de jogging
11 = Operación de
ac./dec. prohibida
12 = Orden de freno
CC
13 = Potenciómetro
motorizado DESCENSO
P2.2.3
****
P2.2.4
P2.2.5
P2.2.6
P2.2.7
P2.2.8
Selección de
señal de entrada
analógica 1 (AI1)
Rango de señal de
entrada analógica
1 (AI1)
Ajuste mínimo
personalizado de
AI1
Ajuste máximo
personalizado de
AI1
Inversión de señal
de entrada analó-
gica 1 (AI1)
Tiempo de filtro
de señal de
entrada analógica
2 (AI1)
0.1 E.10 A1 377
0 2 0 320
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0.00 10.00 s 0.10 324
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = Rango de ajuste
personalizado**
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 47
Tabla 16: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.2.9
****
P2.2.10
P2.2.11
P2.2.12
P2.2.13
P2.2.14
Selección de
señal de entrada
analógica 2 (AI2)
Rango señal
entrada analógica
2 (AI2)
Ajuste mínimo
personalizado de
AI2
Ajuste máximo
personalizado de
AI2
Inversión de señal
de entrada analó-
gica 2 (AI2)
Tiempo de filtro
de señal de
entrada analógica
2 (AI2)
0.1 E.10 A.2 388
0 2 1 325
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
0.00 10.00 s 0.10 329
Usu
ario
Descripción
ID
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = Rango de ajuste
personalizado**
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 48 APLICACIÓN DE CONTROL LOCAL/REMOTO
Tabla 16: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.2.15
***
Selección de
lógica de Marcha/
Paro de lugar B
0 6 0 363
Usu
ario
Descripción
ID
Lógica = 0
Señal de control 1 =
Marcha directa
Señal de control 2 =
Marcha inversa
Lógica = 1
Señal de control 1 =
Marcha/Paro
Señal de control 2 =
Inversión
Lógica = 2
Señal de control 1 =
Marcha/Paro
Señal de control 2 =
Permiso de marcha
Lógica = 3
Señal de control 1 =
Pulso de arranque
(flanco)
Señal de control 2 =
Pulso de paro
Lógica = 4
Señal de control 1 =
Pulso directo (flanco)
Señal de control 2 =
Pulso inverso
(flanco)
Lógica = 5
Señal de control 1 =
Pulso de arranque
(flanco)
Señal de control 2 =
Pulso inverso
Lógica = 6
Señal de control 1 =
Pulso de arranque
(flanco)
Señal de control 2 =
Habilitar pulso
3
P2.2.16
P2.2.17
P2.2.18
Valor mínimo de
escalado de refe-
rencia de lugar A
Valor máximo de
escalado de refe-
rencia de lugar A
Valor mínimo de
escalado de refe-
rencia de lugar B
0.00 320.00 Hz 0.00 303
0.00 304
0.00 320.00 Hz 0.00 364
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 49
Tabla 16: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
Valor máximo de
P2.2.19
P2.2.20
P2.2.21
P2.2.22
escalado de refe-
rencia de lugar B
Entrada analógica
libre, selección de
señal
Entrada analógica
libre, función
Tiempo de rampa
del potenciómetro
motorizado
0.00 320.00 Hz 0.00 365
0 2 0 361
0 4 0 362
0.1 2000.0 Hz/s 10.0 331
Usu
ario
Descripción
ID
0,00 = Sin escalado
>0 = valor máx. escalado
0 = Deshabilitado
1 = Entrada analógica 1
2=Entrada analógica
2
0 = Sin Reset
1 = Reduce el límite
de intensidad
(P2.1.5)
2 = Reduce la intensidad de freno CC
3 = Reduce los tiempos de acel. y decel.
4 = Reduce el límite
de supervisión de
par
P2.2.23
P2.2.24
Reset de memoria
de la referencia
de frecuencia del
potenciómetro
motorizado
Memoria de pulso
de marcha
0 2 1 367
0 1 0 498
0 = Sin Reset
1 = Resetear si se
detiene o se apaga
2 = Se resetea si se
apaga
0 = Estado de marcha no copiado
1 = Estado de marcha copiado
** = Recuerde colocar puentes de bloque X2 según sea necesario. Consulte el Manual de
usuario del producto.
*** = El valor del parámetro solo se puede cambiar después de haber detenido el convertidor
de frecuencia.
**** = Utilice el método TTF para programar estos parámetros.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 50 APLICACIÓN DE CONTROL LOCAL/REMOTO
3.4.4 SEÑALES DE SALIDA (PANEL DE CONTROL: MENÚ M2 -> G2.3
Tabla 17: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
Selección de
P2.3.1
P2.3.2
señal de entrada
analógica 1 (AO1)
Función de salida
analógica
0.1 E.10 A11 464
0 8 1 307
Usu
ario
Descripción
ID
0 = Sin utilizar (20
mA/10 V)
1 = Frec. salida (0-
-f
máx.
2 = Referencia de
frecuencia (0-
-f
máx.
3 =Velocidad del
motor (0 - Velocidad nominal del
motor)
4 = Intensidad de
salida (0-I
5=Par de motor (0-
-T
nMotor
6 = 7 = Tensión del
motor (0-U
Potencia de motor
(0-P
8 = Tensión del bus
de CC (0-1000 V)
)
)
)
nMotor
nMotor
nMotor
)
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Tiempo de filtro
de salida analó-
gica
Inversión de
salida analógica
Mínimo de salida
analógica
Escala de salida
analógica
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Sin filtrado
0 = No invertido
1 = Invertido
0 = 0 mA (0 V)
1 = 4 mA (2 V)
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 51
Tabla 17: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.3.7
Función de salida
digital 1
0 22 1 312
Usu
ario
Descripción
ID
0 = Deshabilitado
1 = Listo
2 = Marcha
3 = Fallo
4 = Fallo invertido
5 = Advertencia de
sobrecalentamiento FC
6 = Fallo externo o
advertencia
7 = Fallo de referencia o advertencia
8 = Advertencia
9 = Inversión de
giro
10 = Veloc. jogging
seleccionada
11 = En velocidad
12 = Regulador de
motor activo
13 = Límite de
supervisión de
frec. OP 1
14 = Límite de
supervisión de
frec.2
15 = Límite de
supervisión de par
16 = Límite de
supervisión de ref.
17 = Control de
freno externo
18 = Lugar de control: I/O
19 = Límite de
supervisión de
temp. FC
20 = Dirección de
giro no solicitada
21 = Control de
freno ext. invertido
22 = Fallo de termistor/advertencia
P2.3.8
P2.3.9
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Función salida
analógica 1 (RO1)
Función salida
analógica 1 (RO2)
0 22 2 313
0 22 3 314
Como el parámetro 2.3.7
Como el parámetro 2.3.7
3

VACON · 52 APLICACIÓN DE CONTROL LOCAL/REMOTO
Tabla 17: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
Límite de supervi-
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14
sión de frecuencia
de salida 1
Límite de frecuen-
cia de salida 1;
Valor supervisado
Límite de supervisión de frecuencia
de salida 2
Límite de frecuen-
cia de salida 2;
Valor de supervi-
sión
Función de límite
de supervisión de
par
0 2 0 315
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
Usu
ario
Descripción
ID
0 = Sin límite
1 = Límite bajo de
supervisión
2 = Límite alto de
supervisión
0 = Sin límite
1 = Límite bajo de
supervisión
2 = Límite alto de
supervisión
0 = No
1 = Límite inferior
2 = Límite superior
P2.3.15
P2.3.16
P2.3.17
P2.3.18
P2.3.19
P2.3.20
P2.3.21
Valor de límite de
supervisión de par
Función de límite
de supervisión de
referencia
Valor de límite de
supervisión de
referencia
Retardo de desac-
tivación de freno
externo
Retardo de activa-
ción de freno
externo
Límite de supervi-
sión de tempera-
tura de converti-
dor de frecuencia
Valor de límite de
temperatura de
convertidor de
frecuencia
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0 = No
1 = Límite inferior
2 = Límite superior
0 = No
1 = Límite inferior
2 = Límite superior
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 53
Tabla 17: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.3.22
P2.3.23
P2.3.24
P2.3.25
P2.3.26
P.2.3.27
Escalado de salida
analógica 2
Función de salida
analógica 2
Tiempo de filtrado
de salida analó-
gica 2
Inversión de
salida analógica 2
Mínimo de salida
analógica 2
Escalado de salida
analógica 2
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
Usu
ario
Descripción
ID
Como el parámetro 2.3.2
0 = Sin filtrado
0 = No invertido
1 = Invertido
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 54 APLICACIÓN DE CONTROL LOCAL/REMOTO
3.4.5 PARÁMETROS DE CONTROL DEL CONVERTIDOR (PANEL DE CONTROL: MENÚ M2
-> G2.4
Tabla 18: Parámetros de control del convertidor, G2.4
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.4.1 Forma de rampa 1 0.0 10.0 s 0.1 500
P2.4.2 Forma de rampa 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4
P2.4.5
Tiempo de acele-
ración 2
Tiempo de decele-
ración 2
Chopper de fre-
nado
0.1 3000.0 s 1.0 502
0.1 3000.0 s 1.0 503
0 4 0 504
Usu
ario
Descripción
ID
0 = Lineal
100 = acel./dec.
completa tiempos
de inc/dec
0 = Lineal
100 = acel./dec.
completa tiempos
de inc/dec
0 = Deshabilitado
1 = Se utiliza en la
marcha
2 = Chopper de
frenado externo
3 = Se utiliza en
paro/marcha
4 = Se utiliza en la
marcha (sin
prueba)
P2.4.6 Tipo de marcha 0 2 0 505
P2.4.7 Tipo de paro 0 3 0 506
P2.4.8
P2.4.9
Intensidad de
freno CC
Tiempo de freno
CC al paro
0.00 I
0.00 600.00 s 0.00 508
L
A 0.7 x I
H
507
0 = Rampa
1 = Arranque al
vuelo
2 = Arranque al
vuelo condicional
0 = Libre
1 = Rampa
2 = Rampa + Permiso marcha paro
libre
3 = Paro libre +
Permiso marcha
rampa
0 = El freno CC
está desactivado al
parar
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 55
Tabla 18: Parámetros de control del convertidor, G2.4
Índice Ocultación Mín. Máx. Unidad Por
defecto
Frecuencia para
P2.4.10
P2.4.11
P2.4.12 * Freno por flujo 0 1 0 520
P2.4.13
iniciar el freno CC
durante la parada
de rampa
Tiempo de freno
CC en el arranque
Intensidad fre-
nado por flujo
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
0.00 I
L
A I
Usu
ario
H
519
Descripción
ID
0 = El freno CC
está desactivado al
arrancar
0 = Desactivado.
0 = Activado
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 56 APLICACIÓN DE CONTROL LOCAL/REMOTO
3.4.6 PARÁMETROS DE FRECUENCIAS PROHIBIDAS (PANEL DE CONTROL: MENÚ M2 -> G2.5)
Tabla 19: Parámetros de frecuencias prohibidas, G2.5
Índice Ocultación Mín. Máx. Unidad Por
defecto
Límite bajo de
P2.5.1
P2.5.2
P2.5.3
P2.5.4
P2.5.5
rango 1 de fre-
cuencias prohibi-
das
Límite alto de
rango 1 de fre-
cuencias prohibi-
das
Límite bajo de
rango 2 de fre-
cuencias prohibi-
das
Límite alto de
rango 2 de fre-
cuencias prohibi-
das
Límite bajo de
rango 3 de fre-
cuencias prohibi-
das
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
Usu
ario
Descripción
ID
0 = El rango de
prohibición 1 está
desactivado
0 = El rango de
prohibición 2 está
desactivado
P2.5.6
P2.5.7
Límite alto de
rango 3 de fre-
cuencias prohibi-
das
Rampa de ac./dec.
prohibida
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = El rango de
prohibición 3 está
desactivado
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 57
3.4.7 PARÁMETROS DE CONTROL DE MOTOR (PANEL DE CONTROL: MENÚ M2 -> G2.6)
Tabla 20: Parámetros de control del motor, G2.6
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.6.1 *
P2.6.2 * Optimización U/f 0 1 0 109
P2.6.3 *
P2.6.4 *
Modo control
motor
Selección relación
U/f
Punto de desexci-
tación del motor
0 1/3 0 600
0 3 0 108
8.00 320.00 Hz 50.00 602
Usu
ario
Descripción
ID
0 = Control de frecuencia
1 = Control de
velocidad
NXP:
2 = Control de par
de lazo abierto
3 = Ctrl. de velocidad de lazo
cerrado
4 = Control de par
de lazo cerrado
0 = Deshabilitado
1 = Sobrepar automático
0 = Lineal
1 = Cuadrático
2 = Programable
3 = Lineal con
optim. de flujo
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
P2.6.10
P2.6.11
Tensión en el
punto de desexci-
tación del motor
Curva U/f fre-
cuencia punto
medio
Curva U/f tensión
punto medio
Tensión de salida
a frecuencia cero
Frecuencia de
conmutación
Controlador de
sobretensión
Controlador de
baja tensión
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varía 606
1.0 Varía kHz Varía 601
0 2 1 607
0 1 1 608
0 = Deshabilitado
1 = Utilizado (sin
rampa)
2 = Utilizado
(rampa)
0 = Deshabilitado
1 = Se utiliza
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 58 APLICACIÓN DE CONTROL LOCAL/REMOTO
Tabla 20: Parámetros de control del motor, G2.6
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.6.12 Caída de carga 0.00 100.00 % 0.00 620
P2.6.13 Identificación 0 1/2 0 631
Grupo de parámetros de lazo cerrado 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
Intensidad mag-
netiz.
Ganancia de P de
control de veloci-
dad
Tiempo I de con-
trol de velocidad
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
H
A 0.00 612
Usu
ario
Descripción
ID
0 = Sin acción
1 = Identificación
sin funcionamiento
2 = Identificación
con funcionamiento
3 = Marcha ID de
encoder
4 = Sin acción
5 = Fallo de marcha ID
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11
Compensación de
aceleración
Ajuste de desliza-
miento
Intensidad mag-
netizante en
arranque
Tiempo de mag-
netización en
arranque
Tiempo de veloci-
dad 0 en arranque
Tiempo de veloci-
dad 0 en paro
Par de puesta en
marcha
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
0 3 0 621
L
A 0.00 627
0 = Deshabilitado
1 = Memoria de
par
2 = Referencia de
par
3 = Par de puesta
en marcha dir/inv
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 59
Tabla 20: Parámetros de control del motor, G2.6
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Grupo de parámetros de identificación 2.6.15
P2.6.15.1 Paso de velocidad -50.0 50.0 0.0 0.0 1252
Par de puesta en
marcha DIRECTO
Par de puesta en
marcha INVERSO
Tiempo de filtrado
de encoder
Ganancia de P de
control de intensi-
dad
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
Usu
ario
ID
Descripción
* = El valor del parámetro solo se puede cambiar después de haber detenido el convertidor
de frecuencia.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 60 APLICACIÓN DE CONTROL LOCAL/REMOTO
3.4.8 PROTECCIONES (PANEL DE CONTROL: MENÚ M2 -> G2.7
Tabla 21: Protecciones, G2.7
Índice Ocultación Mín. Máx. Unidad Por
defecto
Repuesta a fallo
P2.7.1
P2.7.2
P2.7.3
P2.7.4
de referencia 4
mA
Frecuencia de
fallo de referencia
4 mA
Respuesta frente
a fallo externo
Supervisión de
fase de entrada
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
Usu
ario
Descripción
ID
0 = Sin respuesta
1 = Advertencia
2 = Advertencia
+Frec. anterior
3 = Adver.+Frec.
fija 2.7.2
4 = Fallo, parada
de acuerdo con
2.4.7
5 = Fallo, parada
por paro libre
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
0 = Fallo almace-
P2.7.5
P2.7.6 Fase de salida 0 3 2 702 0 = Sin respuesta
P2.7.7
P2.7.8
P2.7.9
P2.7.10
P2.7.11
P2.7.12 Ciclo carga motor 0 150 % 100 708
Repuesta a fallo
de baja tensión
Protección frente
a fallo de tierras
Protección térmica del motor
Factor de tempe-
ratura ambiente
motor
Factor refrige-
rante del motor a
velocidad cero
Constante de
tiempo térmico
del motor
0 1 0 727
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
1 200 min Varía 707
nado en el historial
Fallo no almacenado
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 61
Tabla 21: Protecciones, G2.7
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.7.13
P2.7.14
P2.7.15
P2.7.16
P2.7.17
Protección contra
bloqueo
Intensidad de blo-
queo
Límite de tiempo
de bloqueo
Límite de frecuen-
cia de bloqueo
Protección contra
baja carga
0 3 0 709
0.00 2 x I
1.00 120.00 s 15.00 711
1.0 P2.1.2 Hz 25.00 712
0 3 0 713
H
A I
Usu
ario
H
Descripción
ID
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
710
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
P2.7.18
P2.7.19
P2.7.20
P2.7.21
P2.7.22
P2.7.23
Protección de baja
carga del par
Carga de frecuen-
cia cero de pro-
tección de baja
carga
Límite de tiempo
de protección de
baja carga
Respuesta a fallo
termistor
Respuesta a fallo
de fieldbus
Respuesta a fallo
de ranura
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 3 2 733
0 3 2 734
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
Consulte P2.7.21
Consulte P2.7.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 62 APLICACIÓN DE CONTROL LOCAL/REMOTO
3.4.9 PARÁMETROS DE REARRANQUE AUTOMÁTICO (PANEL DE CONTROL: MENÚ M2 -
-> G2.8)
Tabla 22: Parámetros de rearranque automático, G2.8
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.8.1 Tiempo de espera 0.10 10.00 s 0.50 717
P2.8.2 Tiempo de prueba 0.00 60.00 s 30.00 718
P2.8.3 Tipo de marcha 0 2 0 719
Número de inten-
P2.8.4
P2.8.5
P2.8.6
tos tras la desco-
nexión automática
por baja tensión
Número de inten-
tos tras la desco-
nexión automática
por sobretensión
Número de inten-
tos tras la desco-
nexión automática
por sobreintensi-
dad
0 10 0 720
0 10 0 721
0 3 0 722
Usu
ario
Descripción
ID
0 = Rampa
1 = Arranque al
vuelo
2 = De acuerdo con
P2.4.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Número de intentos tras el disparo
por referencia 4
mA
Número de intentos tras el disparo
por fallo de tem-
peratura del
motor
Número de intentos tras el disparo
por fallo externo
Número de inten-
tos tras disparo
por fallo de baja
carga
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL LOCAL/REMOTO VACON · 63
3.4.10 CONTROL DE PANEL (PANEL DE CONTROL: MENÚ M3)
A continuación se enumeran los parámetros para la selección del lugar de control y el
sentido de giro en el panel. Consulte el menú de control de panel en el Manual de usuario
del producto.
Tabla 23: Parámetros de control del panel, M3
Índice Ocultación Mín. Máx. Unidad Por
defecto
P3.1 Lugar de control 1 3 1 125
P3.2
P3.3
R3.4 Botón de paro 0 1 1 114
Referencia de
panel
Sentido de giro
(en el panel)
P2.1 P2.2 Hz 0.00
0 1 0 123
Usu
ario
Descripción
ID
1 = Terminal de I/O
2 = Panel
3 = Fieldbus
0=Función limitada
del botón de
parada
1=Botón de parada
siempre activado
3.4.11 MENÚ DEL SISTEMA (PANEL DE CONTROL: MENÚ M6)
Para parámetros y funciones asociados al uso general del convertidor de frecuencia, como la
selección de aplicaciones e idiomas, la configuración personalizada de parámetros o la
información sobre el hardware y el software, consulte el Manual de usuario del producto.
3.4.12 TARJETAS DE EXPANSIÓN (PANEL DE CONTROL: MENÚ M7
El menú M7 muestra las tarjetas de expansión y opcionales conectadas a la tarjeta de
control e información relativa a la tarjeta. Para obtener más información, consulte el Manual
de usuario del producto.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

VACON · 64 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
4 APLICACIÓN DE CONTROL DE MULTI-
-VELOCIDADES
4.1 INTRODUCCIÓN
Seleccione la Aplicación de control de multi-velocidades en el menú M6, en la página S6.2.
La Aplicación de control de multi-velocidades se puede utilizar en aplicaciones en las que se
necesitan velocidades fijas. En total, se pueden programar 15 + 2 velocidades diferentes: una
velocidad básica, 15 multi-velocidades y una velocidad de jogging. Los pasos de velocidad se
seleccionan a través de las señales digitales DIN3, DIN4, DIN5 y DIN6. Si se utiliza la
velocidad de jogging, se puede programar DIN3 a partir del reset de fallo a la velocidad de
jogging seleccionada.
La referencia de velocidad básica puede ser una señal de tensión o intensidad a través de los
terminales de entrada analógica (2/ 3 o 4/5). Las demás entradas analógicas se pueden
programar para otros fines.
Todas las salidas se pueden programar libremente.
•
Funciones adicionales:
Marcha/Paro programable y lógica de señal de inversión
•
Escalado de referencia
•
Supervisión de límite de una frecuencia
•
Programación de segundas rampas y rampas en forma de S
•
Funciones de arranque y parada programables
•
Freno de CC al parar
•
Un área de frecuencia prohibida
•
Curva U/f programable y frecuencia de conmutación
•
Rearranque automático
•
Protección térmica de motor y contra bloqueo: Acción programable; desactivada,
•
advertencia, fallo
Los parámetros de la Aplicación de control de multi-velocidad se explican en el Capítulo 9
Descripciones de parámetros de este manual. Las explicaciones se organizan según el
número ID individual del parámetro.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Referencia básica
(opcional)
MARCHA
LISTO
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
CMA
CMB
OPTA1
OPTA2 /OPTA3 *)
Terminal Señal Descripción
+10Vref.
AI1+
AI1-
AI2+
AI2-
+24 V
Salida de referencia
Masa de E/S
Entrada analógica 2.
Rango de intensidad
0-20 mA
Programable (P2.1.11)
Salida de control de tensión
GND de I/O
Marcha directa
Lógica programable (P2.2.1)
Marcha inversa
Ri mín. = 5 kΩ
Entrada de fallo externo
Programable (P2.2.2)
Seleccionar velocidad fija 1
Seleccionar velocidad fija 2
Seleccionar velocidad fija 3
Común para DIN 1—DIN 3
Común para DIN4—DIN6
Salida de control de tensión
GND de I/O
Salida analógica 1:
Frecuencia de salida
Programable (P2.3.2)
Salida digital
LISTO
Programable (P2.3.7)
Colector abierto, I≤50 mA,
U≤48 VCC
Salida de relé 1
MARCHA
Programable
Programable
Programable
(P2.3.8)
Salida de relé 2
FALLO
Programable
(P2.3.9)
Rango 0—20 mA/RL,
máx. 500 Ω
AO1+
Referencia de frecuencia
de entrada analógica 1
Tierra para referencia
y controles
Referencia de frecuencia
de entrada analógica 2
Referencia predeterminada
Contacto cerrado =
marcha directa
Contacto cerrado =
marcha inversa
Contacto abierto = sin fallo
Contacto cerrado = fallo
Potenciómetro para
referencia, 1-10 kΩ
Tensión para potenciómetro, etc.
Entrada analógica 1.
Rango de tensión 0—10V CC
Tensión para conmutadores,
etc. máx. 0,1 A
Tensión para conmutadores
(ver n.º 6)
Conectar a GND o +24 V
Conectar a GND o +24 V
Tierra para referencia y controles
Tierra para referencia y controles
sel1 sel2 sel3 sel4(con DIN3)
0 0 0 0 Ref. I/O
1 0 0 0 Velocidad 1
0 1 0 0 Velocidad 2
---- -------
1 1 1 1 Velocidad 15
RO1
RO1
RO1
RO2
RO2
RO2
APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 65
4.2 I/O DE CONTROL
Imag. 10: Configuración de I/O por defecto de la aplicación de control de multi-velocidades
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

Bloque de puentes X3:
Toma de tierra de CMA y CMB
CMB conectado a TIERRA
CMA conectado a TIERRA
CMB aislado de TIERRA
CMA aislado de TIERRA
CMB y CMA conectados juntos
internamente, aislados de
TIERRA
= Ajustes por defecto de fábrica
VACON · 66 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
*) La tarjeta opcional A3 no cuenta con un terminal para contacto abierto en su segunda
salida de relé (sin terminal 24).
NOTA!
Consulte las selecciones de puentes a continuación. Puede obtener más
información en el Manual de usuario del producto.
Imag. 11: Selecciones de puente
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

DIN4
DIN5
AnIN1
AnIN2
DIN1
DIN2
DIN3
DIN6
DIN3
DIN3
3.2 Referencia de panel
2.1.11 Referencia de I/O
2.1.12 Referencia de control de panel
2.1.13 Referencia ctrl. bus de campo
2.1.15 Velocidad fija 1
...2.1.29 Velocidad fija 15
3.1 Lugar de control
Referencia de
frecuencia interna
Marcha directa
(programable)
Marcha inversa
(programable)
Marcha/Parada
Inversión de giro
Marcha/paro interno
Inversa interna
Reset de fallo interno
Entrada de reset de fallo
Botón
reset
Botones
marcha/paro
Referencia de bus de campo
Marcha/paro de bus de campo
Dirección desde bus de campo
3.3 Dirección del teclado
Velocidad constante 1
Velocidad constante 2
Velocidad constante 3
Velocidad constante 4
2.1.14 Referencia de
velocidad jogging
(programable)
≥ 1
Marcha/paro
programable y
lógica de
inversión
APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 67
4.3 LÓGICA DE SEÑALES DE CONTROL EN LA APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
Imag. 12: Lógica de señales de control de la Aplicación de control de multi-velocidades
4.4 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES - LISTAS DE
4.4.1 VALORES DE MONITOR (PANEL DE CONTROL: MENÚ M1)
Los valores de monitor son valores reales de las señales y los parámetros, así como de los
estados y las mediciones. No se pueden editar los valores de monitor.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
PARÁMETROS
4

VACON · 68 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
Tabla 24: Valores de monitor
Índice Valor de monitor Unidad ID Descripción
V1.1 Frecuencia de salida Hz 1
V1.2
V1.3 Velocidad del motor rpm 2
V1.4 Intensidad del motor A 3
V1.5 Par del motor % 4
V1.6 Potencia del motor % 5
V1.7 Tensión del motor V 6
V1.8
1.9
1.10
V1.11
V1.12
Referencia de fre-
cuencia
Tensión del Bus de
CC
Temperatura varia-
dor
Temperatura del
motor
Entrada analógica 1
(AI1)
Entrada analógica 2
(AI2)
Hz 25
V 7
°C 8
% 9
V/mA 13
V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 I
V1.17
Elementos de moni-
analógica mA 26
salida
torización múltiple
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 69
4.4.2 PARÁMETROS BÁSICOS (PANEL DE CONTROL: MENÚ M2 -> G2.1)
Tabla 25: Parámetros básicos G2.1
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.1.1 Frecuencia mín. 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Frecuencia máx. P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5
P2.1.6 *
P2.1.7 *
Tiempo de acele-
ración 1
Tiempo de decele-
ración 1
Límite de intensi-
dad
Tensión nominal
del motor
Frecuencia nomi-
nal del motor
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
0,1 x I
180 690 V
8.00 320.00 Hz 50.00 111
2 x I
H
H
A I
NX2: 230
V
NX5: 400
V
NX6: 690
V
Usu
ario
L
ID
107
110
Descripción
P2.1.8 *
P2.1.9 *
P2.1.10 * Cos phi del motor 0.30 1.00 0.85 120
P2.1.11 * Referencia de I/O 0 3 1 117
P2.1.12 *
P2.1.13 *
P2.1.14
P2.1.15 Velocidad fija 1 0.00 P2.1.2 Hz 5.00 105
Velocidad nominal
del motor
Intensidad nomi-
nal del motor
Referencia de
control del panel
Referencia de
control de field-
bus
Ref. velocidad de
jogging
24 20 000 rpm 1440 112
0,1 x I
0 3 2 121
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
0 = AI1
1 = AI2
2 = Panel
3 = Fieldbus
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 70 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
Tabla 25: Parámetros básicos G2.1
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.1.16 Velocidad fija 2 0.00 P2.1.2 Hz 10.00 106
P2.1.17 Velocidad fija 3 0.00 P2.1.2 Hz 12.50 126
P2.1.18 Velocidad fija 4 0.00 P2.1.2 Hz 15.00 127
P2.1.19 Velocidad fija 5 0.00 P2.1.2 Hz 17.50 128
P2.1.20 Velocidad fija 6 0.00 P2.1.2 Hz 20.00 129
P2.1.21 Velocidad fija 7 0.00 P2.1.2 Hz 22.50 130
P2.1.22 Velocidad fija 8 0.00 P2.1.2 Hz 25.00 133
P2.1.23 Velocidad fija 9 0.00 P2.1.2 Hz 27.50 134
P2.1.24 Velocidad fija 10 0.00 P2.1.2 Hz 30.00 135
P2.1.25 Velocidad fija 11 0.00 P2.1.2 Hz 32.50 136
P2.1.26 Velocidad fija 12 0.00 P2.1.2 Hz 35.00 137
P2.1.27 Velocidad fija 13 0.00 P2.1.2 Hz 40.00 138
Usu
ario
ID
Descripción
P2.1.28 Velocidad fija 14 0.00 P2.1.2 Hz 45.00 139
P2.1.29 Velocidad fija 15 0.00 P2.1.2 Hz 50.00 140
* = El valor del parámetro solo se puede cambiar después de haber detenido el convertidor
de frecuencia.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 71
4.4.3 SEÑALES DE ENTRADA (PANEL DE CONTROL: MENÚ M2 -> G2.2)
Tabla 26: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.2.1 ***
Lógica de mar-
cha/paro
0 6 0 300
Usu
ario
Descripción
ID
Lógica = 0
Señal de control 1 =
Marcha directa
Señal de control 2 =
Marcha inversa
Lógica = 1
Señal de control 1 =
Marcha/Paro
Señal de control 2 =
Inversión
Lógica = 2
Señal de control 1 =
Marcha/Paro
Señal de control 2 =
Permiso de marcha
Lógica = 3
Señal de control 1 =
Pulso de arranque
(flanco)
Señal de control 2 =
Pulso de paro
Lógica = 4
Señal de control 1 =
Pulso directo (flanco)
Señal de control 2 =
Pulso inverso
(flanco)
Lógica = 5
Señal de control 1 =
Pulso de arranque
(flanco)
Señal de control 2 =
Pulso inverso
Lógica = 6
Señal de control 1 =
Pulso de arranque
(flanco)
Señal de control 2 =
Habilitar pulso
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 72 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
Tabla 26: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.2.2
Función salida
analógica 1 (DIN3)
0 13 1 301
Usu
ario
Descripción
ID
0 = Deshabilitado
1 = Fallo externo,
contacto cerrado
2 = Fallo externo,
contacto abierto
3 = Permiso de marcha
4 = Selección tiempo
acel./decel.
5 = Forzar cp. a ES
6 = Forzar cp. a
panel
7 = Forzar cp. a fieldbus
8 = Rvs (si P2.2.1 ≠
2,3 o 6)
9 = Velocidad de jogging
10 = Reset de fallo
11 = Operación de
ac./dec. prohibida
12 = Orden de freno
CC
13 = Velocidad fija
P2.2.3
****
P2.2.4
P2.2.5
P2.2.6
P2.2.7
P2.2.8
Selección de
señal de entrada
analógica 1 (AI1)
Rango de señal de
entrada analógica
1 (AI1)
Ajuste mínimo
personalizado de
AI1
Ajuste máximo
personalizado de
AI1
Inversión de señal
de entrada analó-
gica 1 (AI1)
Tiempo de filtro
de señal de
entrada analógica
2 (AI1)
0.1 E.10 A1 377
0 2 0 320
-160.00 160.00 % 0.00 321
-160.00 160.00 % 100.00 322
0 1 0 323
0.00 10.00 s 0.10 324
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = Rango de ajuste
personalizado**
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 73
Tabla 26: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.2.9
****
P2.2.10
P2.2.11
P2.2.12
P2.2.13
P2.2.14
Selección de
señal de entrada
analógica 2 (AI2)
Rango señal
entrada analógica
2 (AI2)
Ajuste mínimo
personalizado de
AI2
Ajuste máximo
personalizado de
AI2
Inversión de señal
de entrada analó-
gica 2 (AI2)
Tiempo de filtro
de señal de
entrada analógica
2 (AI2)
0.1 E.10 A.2 388
0 2 1 325
-160.00 160.00 % 0.00 326
-160.00 160.00 % 100.00 327
0 1 0 328
0.00 10.00 s 0.10 329
Usu
ario
Descripción
ID
0 = 0-10 V (0-20
mA**)
1 = 2-10 V (4-20
mA**)
2 = Rango de ajuste
personalizado**
P2.2.15
P2.2.16
P2.2.17
P2.2.18
Valor mínimo de
escalado de refe-
rencia
Valor máximo de
escalado de refe-
rencia
Entrada analógica
libre, selección de
señal
Entrada analógica
libre, función
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
0 2 0 361
0 4 0 362
0,00 = Sin escalado
>0 = valor máx. escalado
0 = Deshabilitado
1 = AI1
2 = AI2
0 = Sin función
1 = Reduce el límite
de intensidad
(P2.1.5)
2 = Reduce la intensidad de freno CC,
P2.4.8
3 = Reduce los tiempos de acel. y decel.
4 = Reduce el límite
de supervisión de
par P2.3.15
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 74 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
CP = lugar de control
cc = contacto cerrado
oc = contacto abierto
** = Recuerde colocar puentes de bloque X2 según sea necesario. Consulte el Manual de
usuario del producto.
*** = El valor del parámetro solo se puede cambiar después de haber detenido el convertidor
de frecuencia.
**** = Utilice el método TTF para programar estos parámetros.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 75
4.4.4 SEÑALES DE SALIDA (PANEL DE CONTROL: MENÚ M2 -> G2.3
Tabla 27: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
Selección de
P2.3.1 *
P2.3.2
señal de entrada
analógica 1 (AO1)
Función de salida
analógica
0.1 E.10 A11 464
0 8 1 307
Usu
ario
Descripción
ID
0 = Sin utilizar (20
mA/10 V)
1 = Frec. salida (0-
-f
máx.
2 = Referencia de
frecuencia (0-
-f
máx.
3 =Velocidad del
motor (0 - Velocidad nominal del
motor)
4 = Intensidad de
salida (0-I
5=Par de motor (0-
-T
nMotor
6=Potencia de
motor (0-P
7=Tensión de
motor (0-U
8 = Tensión del bus
de CC (0-1000 V)
)
)
nMotor
)
nMotor
nMotor
)
)
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
Tiempo de filtro
de salida analó-
gica
Inversión de
salida analógica
Mínimo de salida
analógica
Escala de salida
analógica
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Sin filtrado
0 = No invertido
1 = Invertido
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 76 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
Tabla 27: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.3.7
Función de salida
digital 1
0 22 1 312
Usu
ario
Descripción
ID
0 = Deshabilitado
1 = Listo
2 = Marcha
3 = Fallo
4 = Fallo invertido
5 = Advertencia de
sobrecalentamiento FC
6 = Fallo externo o
advertencia
7 = Fallo de referencia o advertencia
8 = Advertencia
9 = Inversión de
giro
10 = Veloc. jogging
seleccionada
11 = En velocidad
12 = Regulador de
motor activo
13 = Límite de
supervisión de
frec. OP 1
14 = Límite de
supervisión de
frec.2
15 = Límite de
supervisión de par
16 = Límite de
supervisión de ref.
17 = Control de
freno externo
18 = Lugar de control: I/O
19 = Límite de
supervisión de
temp. FC
20 = Dirección de
giro no solicitada
21 = Control de
freno ext. invertido
22 = Fallo de termistor/advertencia
4
P2.3.8
P2.3.9
Función salida
analógica 1 (RO1)
Función salida
analógica 1 (RO2)
0 22 2 313
0 22 3 314
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Como el parámetro 2.3.7
Como el parámetro 2.3.7

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 77
Tabla 27: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
Límite de supervi-
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14
sión de frecuencia
de salida 1
Límite de frecuen-
cia de salida 1;
Valor supervisado
Límite de supervisión de frecuencia
de salida 2
Límite de frecuen-
cia de salida 2;
Valor de supervi-
sión
Función de límite
de supervisión de
par
0 2 0 315
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
0 2 0 348
Usu
ario
Descripción
ID
0 = Sin límite
1 = Límite bajo de
supervisión
2 = Límite alto de
supervisión
0 = Sin límite
1 = Límite bajo de
supervisión
2 = Límite alto de
supervisión
0 = No
1 = Límite inferior
2 = Límite superior
P2.3.15
P2.3.16
P2.3.17
P2.3.18
P2.3.19
P2.3.20
P2.3.21
Valor de límite de
supervisión de par
Función de límite
de supervisión de
referencia
Valor de límite de
supervisión de
referencia
Retardo de desac-
tivación de freno
externo
Retardo de activa-
ción de freno
externo
Límite de supervi-
sión de tempera-
tura de converti-
dor de frecuencia
Valor de límite de
temperatura de
convertidor de
frecuencia
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0 = No
1 = Límite inferior
2 = Límite superior
0 = No
1 = Límite inferior
2 = Límite superior
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 78 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
Tabla 27: Señales de salida, G2.3
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.3.22 *
P2.3.23 *
P2.3.24 *
P2.3.25 *
P2.3.26 *
P.2.3.27 *
Escalado de salida
analógica 2
Función de salida
analógica 2
Tiempo de filtrado
de salida analó-
gica 2
Inversión de
salida analógica 2
Mínimo de salida
analógica 2
Escalado de salida
analógica 2
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
* = Utilice el método TTF para programar estos parámetros
Usu
ario
Descripción
ID
Como el parámetro 2.3.2
0 = Sin filtrado
0 = No invertido
1 = Invertido
0 = 0 mA (0 V)
1 = 4 mA (2 V)
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 79
4.4.5 PARÁMETROS DE CONTROL DEL CONVERTIDOR (PANEL DE CONTROL: MENÚ M2
-> G2.4
Tabla 28: Parámetros de control del convertidor, G2.4
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.4.1 Forma de rampa 1 0.0 10.0 s 0.1 500
P2.4.2 Forma de rampa 2 0.0 10.0 s 0.0 501
P2.4.3
P2.4.4
P2.4.5
Tiempo de acele-
ración 2
Tiempo de decele-
ración 2
Chopper de fre-
nado
0.1 3000.0 s 1.0 502
0.1 3000.0 s 1.0 503
0 4 0 504
Usu
ario
Descripción
ID
0 = Lineal
100 = acel./dec.
completa tiempos
de inc/dec
0 = Lineal
100 = acel./dec.
completa tiempos
de inc/dec
0 = Deshabilitado
1 = Se utiliza en la
marcha
2 = Chopper de
frenado externo
3 = Se utiliza en
paro/marcha
4 = Se utiliza en la
marcha (sin
prueba)
P2.4.6 Tipo de marcha 0 2 0 505
P2.4.7 Tipo de paro 0 3 0 506
P2.4.8
P2.4.9
Intensidad de
freno CC
Tiempo de freno
CC al paro
0.00 I
0.00 600.00 s 0.00 508
L
A 0.7 x I
H
507
0 = Rampa
1 = Arranque al
vuelo
2 = Arranque al
vuelo condicional
0 = Libre
1 = Rampa
2 = Rampa + Permiso marcha paro
libre
3 = Paro libre +
Permiso marcha
rampa
0 = El freno CC
está desactivado al
parar
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 80 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
Tabla 28: Parámetros de control del convertidor, G2.4
Índice Ocultación Mín. Máx. Unidad Por
defecto
Frecuencia para
P2.4.10
P2.4.11
P2.4.12 * Freno por flujo 0 1 0 520
P2.4.13
iniciar el freno CC
durante la parada
de rampa
Tiempo de freno
CC en el arranque
Intensidad fre-
nado por flujo
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
0.00 I
L
A I
Usu
ario
H
519
Descripción
ID
0 = El freno CC
está desactivado al
arrancar
0 = Desactivado.
0 = Activado
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 81
4.4.6 PARÁMETROS DE FRECUENCIAS PROHIBIDAS (PANEL DE CONTROL: MENÚ M2 -> G2.5)
Tabla 29: Parámetros de frecuencias prohibidas, G2.5
Índice Ocultación Mín. Máx. Unidad Por
defecto
Límite bajo de
P2.5.1
P2.5.2
P2.5.3
P2.5.4
P2.5.5
rango 1 de fre-
cuencias prohibi-
das
Límite alto de
rango 1 de fre-
cuencias prohibi-
das
Límite bajo de
rango 2 de fre-
cuencias prohibi-
das
Límite alto de
rango 2 de fre-
cuencias prohibi-
das
Límite bajo de
rango 3 de fre-
cuencias prohibi-
das
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
0.00 320.00 Hz 0.00 512
0.00 320.00 Hz 0.00 513
Usu
ario
Descripción
ID
0 = El rango de
prohibición 1 está
desactivado
0 = El rango de
prohibición 2 está
desactivado
P2.5.6
P2.5.7
Límite alto de
rango 3 de fre-
cuencias prohibi-
das
Rampa de ac./dec.
prohibida
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = El rango de
prohibición 3 está
desactivado
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 82 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
4.4.7 PARÁMETROS DE CONTROL DE MOTOR (PANEL DE CONTROL: MENÚ M2 -> G2.6)
Tabla 30: Parámetros de control del motor, G2.6
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.6.1 *
P2.6.2 * Optimización U/f 0 1 0 109
P2.6.3 *
P2.6.4 *
Modo control
motor
Selección relación
U/f
Punto de desexci-
tación del motor
0 1/3 0 600
0 3 0 108
8.00 320.00 Hz 50.00 602
Usu
ario
Descripción
ID
0 = Control de frecuencia
1 = Control de
velocidad
NXP:
2 = Control de par
de lazo abierto
3 = Ctrl. de velocidad de lazo
cerrado
4 = Control de par
de lazo cerrado
0 = Deshabilitado
1 = Sobrepar automático
0 = Lineal
1 = Cuadrático
2 = Programable
3 = Lineal con
optim. de flujo
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9
P2.6.10
P2.6.11
Tensión en el
punto de desexci-
tación del motor
Curva U/f fre-
cuencia punto
medio
Curva U/f tensión
punto medio
Tensión de salida
a frecuencia cero
Frecuencia de
conmutación
Controlador de
sobretensión
Controlador de
baja tensión
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Varía 606
1.0 Varía kHz Varía 601
0 2 1 607
0 1 1 608
0 = Deshabilitado
1 = Utilizado (sin
rampa)
2 = Utilizado
(rampa)
0 = Deshabilitado
1 = Se utiliza
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 83
Tabla 30: Parámetros de control del motor, G2.6
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.6.12 Caída de carga 0.00 100.00 % 0.00 620
P2.6.13 Identificación 0 1/2 0 631
Grupo de parámetros de lazo cerrado 2.6.14
P2.6.14.1
P2.6.14.2
P2.6.14.3
Intensidad mag-
netiz.
Ganancia de P de
control de veloci-
dad
Tiempo I de con-
trol de velocidad
0.00 2 x I
1 1000 30 613
0.0 3200.0 ms 30.0 614
H
A 0.00 612
Usu
ario
Descripción
ID
0 = Sin acción
1 = Identificación
sin funcionamiento
2 = Identificación
con funcionamiento
3 = Marcha ID de
encoder
4 = Sin acción
5 = Fallo de marcha ID
P2.6.14.5
P2.6.14.6
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11
Compensación de
aceleración
Ajuste de desliza-
miento
Intensidad mag-
netizante en
arranque
Tiempo de mag-
netización en
arranque
Tiempo de veloci-
dad 0 en arranque
Tiempo de veloci-
dad 0 en paro
Par de puesta en
marcha
0.00 300.00 s 0.00 626
0 500 % 100 619
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
0 3 0 621
L
A 0.00 627
0 = Deshabilitado
1 = Memoria de
par
2 = Referencia de
par
3 = Par de puesta
en marcha dir/inv
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 84 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
Tabla 30: Parámetros de control del motor, G2.6
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Grupo de parámetros de identificación 2.6.15
P2.6.15.1 Paso de velocidad -50.0 50.0 0.0 0.0 1252
Par de puesta en
marcha DIRECTO
Par de puesta en
marcha INVERSO
Tiempo de filtrado
de encoder
Ganancia de P de
control de intensi-
dad
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
Usu
ario
ID
Descripción
* = El valor del parámetro solo se puede cambiar después de haber detenido el convertidor
de frecuencia.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 85
4.4.8 PROTECCIONES (PANEL DE CONTROL: MENÚ M2 -> G2.7)
Tabla 31: Protecciones, G2.7
Índice Ocultación Mín. Máx. Unidad Por
defecto
Repuesta a fallo
P2.7.1
P2.7.2
P2.7.3
P2.7.4
de referencia 4
mA
Frecuencia de
fallo de referencia
4 mA
Respuesta frente
a fallo externo
Supervisión de
fase de entrada
0 5 0 700
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 3 730
Usu
ario
Descripción
ID
0 = Sin respuesta
1 = Advertencia
2 = Advertencia
+Frec. anterior
3 = Adver.+Frec.
fija 2.7.2
4 = Fallo, parada
de acuerdo con
2.4.7
5 = Fallo, parada
por paro libre
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
P2.7.5
P2.7.6 Fase de salida 0 3 2 702
P2.7.7
P2.7.8
P2.7.9
P2.7.10
Repuesta a fallo
de baja tensión
Protección frente
a fallo de tierras
Protección térmica del motor
Factor de tempe-
ratura ambiente
motor
Factor refrige-
rante del motor a
velocidad cero
0 1 0 727
0 3 2 703
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
0 = Fallo almacenado en el historial
Fallo no almacenado
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 86 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
Tabla 31: Protecciones, G2.7
Índice Ocultación Mín. Máx. Unidad Por
defecto
Constante de
P2.7.11
P2.7.12 Ciclo carga motor 0 150 % 100 708
P2.7.13
P2.7.14
P2.7.15
P2.7.16
tiempo térmico
del motor
Protección contra
bloqueo
Intensidad de blo-
queo
Límite de tiempo
de bloqueo
Límite de frecuen-
cia de bloqueo
1 200 min Varía 707
0 3 0 709
0.00 2 x I
1.00 120.00 s 15.00 711
1.00 P2.1.2 Hz 25.00 712
H
A 1
Usu
ario
H
ID
710
Descripción
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
P2.7.17
P2.7.18
P2.7.19
P2.7.20
P2.7.21
Protección contra
baja carga
ASCENSO desde
par
Carga de frecuen-
cia cero de pro-
tección de baja
carga
Límite de tiempo
de protección de
baja carga
Respuesta a fallo
termistor
0 3 0 713
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
0 = Sin respuesta
1 = Advertencia
2 = Fallo, parada
de acuerdo con
2.4.7
3 = Fallo, parada
por paro libre
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 87
Tabla 31: Protecciones, G2.7
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.7.22
P2.7.23
Respuesta a fallo
de fieldbus
Respuesta a fallo
de ranura
0 3 2 733
0 3 734
Usu
ario
Descripción
ID
Consulte P2.7.21
Consulte P2.7.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 88 APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES
4.4.9 PARÁMETROS DE REARRANQUE AUTOMÁTICO (PANEL DE CONTROL: MENÚ M2 -
-> G2.8)
Tabla 32: Parámetros de rearranque automático, G2.8
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.8.1 Tiempo de espera 0.10 10.00 s 0.50 717
P2.8.2 Tiempo de prueba 0.00 60.00 s 30.00 718
P2.8.3 Tipo de marcha 0 2 0 719
Número de inten-
P2.8.4
P2.8.5
P2.8.6
tos tras la desco-
nexión automática
por baja tensión
Número de inten-
tos tras la desco-
nexión automática
por sobretensión
Número de inten-
tos tras la desco-
nexión automática
por sobreintensi-
dad
0 10 0 720
0 10 0 721
0 3 0 722
Usu
ario
Descripción
ID
0 = Rampa
1 = Arranque al
vuelo
2 = De acuerdo con
P2.4.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
Número de intentos tras el disparo
por referencia 4
mA
Número de intentos tras el disparo
por fallo de tem-
peratura del
motor
Número de intentos tras el disparo
por fallo externo
Número de inten-
tos tras disparo
por fallo de baja
carga
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL DE MULTI-VELOCIDADES VACON · 89
4.4.10 CONTROL DE PANEL (PANEL DE CONTROL: MENÚ M3)
A continuación se enumeran los parámetros para la selección del lugar de control y el
sentido de giro en el panel. Consulte el menú de control de panel en el Manual de usuario
del producto.
Tabla 33: Parámetros de control del panel, M3
Índice Ocultación Mín. Máx. Unidad Por
defecto
P3.1 Lugar de control 1 3 1 125
P3.2
P3.3
R3.4 Botón de paro 0 1 1 114
Referencia de
panel
Sentido de giro
(en el panel)
P2.1.1 P2.1.2 Hz 0.00
0 1 0 123
Usu
ario
Descripción
ID
1 = Terminal de I/O
2 = Panel
3 = Fieldbus
0=Función limitada
del botón de
parada
1=Botón de parada
siempre activado
4.4.11 MENÚ DEL SISTEMA (PANEL DE CONTROL: MENÚ M6)
Para parámetros y funciones asociados al uso general del convertidor de frecuencia, como la
selección de aplicaciones e idiomas, la configuración personalizada de parámetros o la
información sobre el hardware y el software, consulte el Manual de usuario del producto.
4.4.12 TARJETAS DE EXPANSIÓN (PANEL DE CONTROL: MENÚ M7
El menú M7 muestra las tarjetas de expansión y opcionales conectadas a la tarjeta de
control e información relativa a la tarjeta. Para obtener más información, consulte el Manual
de usuario del producto.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4

VACON · 90 APLICACIÓN DE CONTROL PID
5 APLICACIÓN DE CONTROL PID
5.1 INTRODUCCIÓN
Seleccione la Aplicación de control PID en el menú M6, en la página S6.2.
En la Aplicación de control PID hay dos lugares de control de terminales de I/O; el lugar A es
el controlador PID y la fuente B es la referencia de frecuencia directa. El lugar de control A o
B se selecciona con la entrada digital DIN6.
La referencia del controlador PID se puede seleccionar a partir de las entradas analógicas,
el fieldbus, el potenciómetro motorizado, habilitando la referencia PID 2 o aplicando la
referencia del panel de control. El valor real del controlador PID se puede seleccionar a
partir de las entradas analógicas, el fieldbus, los valores reales del motor o a través de las
funciones matemáticas de estos.
La referencia de frecuencia directa se puede utilizar para el control sin el controlador PID y
seleccionarse a partir de las entradas analógicas, el fieldbus, el potenciómetro motorizado o
el panel.
La Aplicación PID normalmente se utiliza para controlar la medición de nivel o las bombas y
los ventiladores. En estas aplicaciones, la Aplicación PID proporciona un control fácil y un
paquete integrado de medición y control, por lo que no es necesario el uso de componentes
adicionales.
Las entradas digitales DIN2, DIN3, DIN5 y todas las salidas se pueden programar
•
libremente.
Funciones adicionales:
Selección de rango de señal de entrada analógica
•
Dos supervisiones de límite de frecuencia
•
Supervisión de límite de par
•
Supervisión de límite de referencia
•
Programación de segundas rampas y rampas en forma de S
•
Funciones de arranque y parada programables
•
Freno CC al arrancar y parar
•
Tres áreas de frecuencia prohibida
•
Curva U/f programable y frecuencia de conmutación
•
Rearranque automático
•
Protección térmica de motor y contra bloqueo: totalmente programable; desactivado,
•
advertencia, fallo
Protección de baja carga del motor
•
Supervisión de fase de salida y entrada
•
Adición de frecuencia de punto de suma a salida PID
•
El controlador PID se puede utilizar también desde los lugares de control I/O B, el panel
•
y el fieldbus
Función de cambio fácil
•
Función dormir
•
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL PID VACON · 91
Los parámetros de la Aplicación de control PID se explican en el capítulo 9 Descripciones de
parámetros de este manual. Las explicaciones se organizan según el número ID individual
del parámetro.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

-
+
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
Transmisor de 2 cables
Potenciómetro para
referencia, 1-10 kΩ
mA
MARCHA
LISTO
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Terminal Señal Descripción
+10V
ref.
AI1+
AI1-
AI2+
AI2-
+24 V
Salida de referencia
Masa de E/S
Entrada analógica 2 (AI2)
Rango de intensidad 0-20 mA
Programable (P2.2.9)
Salida de control de tensión
GND de I/O
Lugar A: Marcha directa
Ri mín. = 5kΩ
Reset de fallo
Programable (P2.2.2)
Entrada de fallo externo
Programable (P2.2.2)
Lugar B: Marcha directa
Ri mín. = 5 kΩ
Selección de velocidad de jogging
Programable (P2.2.3)
Selección del lugar
de control A/B
Contacto cerrado = velocidad
de jogging activa
Señal de marcha para lugar de control B
Referencia de frecuencia (P2.2.5.)
Común para DIN 1—DIN 3
Común para DIN4—DIN6
Salida de control
de tensión
GND de I/O
Salida analógica 1
Frecuencia de salida
Programable (P2.3.2)
Salida digital
LISTO
Programable (P2.3.7)
Colector abierto, I≤50 mA,
U≤48 VCC
Salida de relé 1
MARCHA
Programable
(P2.3.8)
Salida de relé 2
FALLO
Programable
(P2.3.9)
AO1+
Entrada analógica 1 (AI1)
Referencia PID
Tierra para referencia
y controles
Entrada analógica 2 (AI2)
Valor real PID 1
Contacto cerrado = marcha directa
Contacto cerrado = reset de fallo
Contacto cerrado = marcha inversa
Contacto cerrado = fallo
Contacto abierto = sin fallo
Tensión de referencia
de potenciómetro etc.
Entrada analógica 1 (AI1)
Rango de tensión 0—10V CC
Programable (P2.1.11)
Tensión para conmutadores,
etc. máx. 0,1 A
Tensión para conmutadores (ver n.º 6)
Conectar a GND o +24 V
Real
valor
(0) 4-20
mA
Conectar a GND o +24 V
Tierra para referencia y controles
Tierra para referencia
y controles
Rango 0—20 mA/RL,
máx. 500 Ω
Contacto abierto = El lugar de control
A está activo Contacto cerrado = El
lugar de control B está activo
VACON · 92 APLICACIÓN DE CONTROL PID
5.2 I/O DE CONTROL
5
Imag. 13: Configuración de I/O por defecto de la aplicación PID (con transmisor de 2 cables)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

Bloque de puentes X3:
Toma de tierra de CMA y CMB
CMB conectado a TIERRA
CMA conectado a TIERRA
CMB aislado de TIERRA
CMA aislado de TIERRA
CMB y CMA conectados juntos
internamente, aislados de
TIERRA
= Ajustes por defecto de fábrica
APLICACIÓN DE CONTROL PID VACON · 93
*) La tarjeta opcional A3 no cuenta con un terminal para contacto abierto en su segunda
salida de relé (sin terminal 24).
NOTA!
Consulte las selecciones de puentes a continuación. Puede obtener más
información en el Manual de usuario del producto.
Imag. 14: Selecciones de puente
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

DIN2
DIN5
DIN3
DIN2
DIN3
DIN5
DIN6
DIN2
DIN3
AnIN1
AnIN2
0
1
2
3
4
0
1
2
3
4
5
+A
A
B
0
1
2
3
4
5
0
1
2
3
4
5
K
0
1
2
3
4
5
F
PID
+
DIN1
DIN4
A
B
A
B
A/B
Inversa interna
Reset de fallo interno
Entrada de reset de fallo (programable)
3.3 Dirección del teclado
Marcha/paro interno
Referencia de bus de campo
Marcha/paro de
bus de campo
Dirección desde
bus de campo
Fallo externo (programable)
Velocidad de jogging (programable)
Selección de lugar A/B
2.2.4 Referencia principal PID
Arriba
Abajo
2.1.11 Referencia PID
I/O inverso
R3.4 Ref. panel PID
R3.2 Ref. panel
R3.5 Ref. panel PID 2
Habilitar ref. panel
PID 2 (DIN5=13)
Marcha; Lugar A
Marcha; Lugar B
Marcha/Parada
Botones marcha/paro
Ref. frecuencia
interna
2.1.19 Ref. velocidad de jogging
Panel
Fieldbus
Botón reset
3.1 Lugar de control
2.2.7 Referencia ctrl. bus de campo
2.2.6 Referencia ctrl. de panel
2.2.5 Referencia I/O B
≥ 1
Potenciómetro
motor
Selección
valor real
par. 2.2.8
Selección
valor real,
par.2.2.9
y 2.2.10
Real
1
Real
2
VACON · 94 APLICACIÓN DE CONTROL PID
5.3 LÓGICA DE SEÑALES DE CONTROL EN LA APLICACIÓN DE CONTROL PID
Imag. 15: Lógica de señales de control de la Aplicación de control PID
5.4 APLICACIÓN DE CONTROL PID - LISTAS DE PARÁMETROS
5.4.1 VALORES DE MONITOR (PANEL DE CONTROL: MENÚ M1)
Los valores de monitor son valores reales de las señales y los parámetros, así como de los
estados y las mediciones. No se pueden editar los valores de monitor.
NOTA!
Los valores de monitor V1.19 a V1.22 se encuentran disponibles únicamente con la
aplicación de control PID.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL PID VACON · 95
Tabla 34: Valores de monitor
Índice Valor de monitor Unidad ID Descripción
V1.1 Frecuencia de salida Hz 1
V1.2
V1.3 Velocidad del motor rpm 2
V1.4 Intensidad del motor A 3
V1.5 Par del motor % 4
V1.6 Potencia del motor % 5
V1.7 Tensión del motor V 6
V1.8
1.9
1.10
V1.11
V1.12
Referencia de fre-
cuencia
Tensión del Bus de
CC
Temperatura varia-
dor
Temperatura del
motor
Entrada analógica 1
(AI1)
Entrada analógica 2
(AI2)
Hz 25
V 7
°C 8
% 9
V/mA 13
V/mA 14
V1.13
V1.14
V1.15 DIN 1, 2, 3 15
V1.16 DIN 4, 5, 6 16
V1.17 DO1, RO1, RO2 17
V1.18 I
V1.19 Referencia PID % 20
V1.20 Valor real PID % 21
V1.21 Valor error PID % 22
V1.22 Salida PID % 23
V1.23
Entrada analógica 3
(AI3)
Entrada analógica 4
(AI4)
analógica mA 26
salida
Visualización espe-
cial de valor real
27
28
29
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 96 APLICACIÓN DE CONTROL PID
Tabla 34: Valores de monitor
Índice Valor de monitor Unidad ID Descripción
V1.24
G1.25
V1.26.1 Current A 1113
V1.26.2 Torque % 1125
V1.26.3 Tensión CC V 44
V1.26.4 Código de estado 43
Temperatura de
PT-100
Elementos de moni-
torización
ºC 42
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL PID VACON · 97
5.4.2 PARÁMETROS BÁSICOS (PANEL DE CONTROL: MENÚ M2 -> G2.1)
Tabla 35: Parámetros básicos G2.1
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.1.1 Frecuencia mín. 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Frecuencia máx. P2.1.1 320.00 Hz 50.00 102
P2.1.3
P2.1.4
P2.1.5
P2.1.6 *
P2.1.7 *
Tiempo de acele-
ración 1
Tiempo de decele-
ración 1
Límite de intensi-
dad
Tensión nominal
del motor
Frecuencia nomi-
nal del motor
0.1 3000.0 s 0.0 103
0.1 3000.0 s 0.0 104
0,1 x I
180 690 V
8.00 320.00 Hz 50.00 111
2 x I
H
H
A I
NX2: 230
V
NX5: 400
V
NX6: 690
V
Usu
ario
L
ID
107
110
Descripción
P2.1.8 *
P2.1.9 *
P2.1.10 * Cos phi del motor 0.30 1.00 0.85 120
P2.1.11 *
P2.1.12
P2.1.13
P2.1.14
Velocidad nominal
del motor
Intensidad nomi-
nal del motor
Señal de referen-
cia de controlador
PID (Lugar A)
Ganancia del con-
trolador PID
Tiempo I del con-
trolador PID
Tiempo D del con-
trolador PID
24 20 000 rpm 1440 112
0,1 x I
0 4 1 332
0.0 1000.0 % 100.0 118
0.00 320.00 s 1.00 119
0.00 100.00 s 0.00 132
2 X I
H
H
A I
H
113
0 = AI1
1 = AI2
2 = Ref. PID de
página de control
del panel, P3.4
3 = Ref. PID del
fieldbus (ProcessDataIN 1)
4 = Potenciómetro
motorizado
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 98 APLICACIÓN DE CONTROL PID
Tabla 35: Parámetros básicos G2.1
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.1.15
P2.1.16 Retraso de dormir 0 3600 s 30 1017
P2.1.17 Nivel de despertar 0.00 100.00 % 25.00 1018
P2.1.18 Función despertar 0 1 0 1019
P2.1.19
Frecuencia de
dormir
Referencia de
velocidad jogging
0.00 P2.1.2 Hz 10.00 1016
0.00 P2.1.2 Hz 10.00 124
Usu
ario
Descripción
ID
0 = Despertar al
caer por debajo del
nivel de despertar
(2.1.17)
1 = Despertar al
superar el nivel de
despertar (2.1.17)
* = El valor del parámetro solo se puede cambiar después de haber detenido el convertidor
de frecuencia.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

APLICACIÓN DE CONTROL PID VACON · 99
5.4.3 SEÑALES DE ENTRADA
Tabla 36: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.2.1 **
Función salida
analógica 1 (DIN2)
0 13 1 319
Usu
ario
Descripción
ID
0 = Deshabilitado
1 = Fallo externo
cc
2 = Fallo externo
oc
3 = Permiso de
marcha
4 = Selección
tiempo acel./dec.
5 = CP: Terminal
I/O (ID125)
6 = CP: Panel
(ID125)
7 = CP: Fieldbus
(ID125)
8 = Directo/Inverso
9 = Frecuencia de
jogging (cc)
10 = Reset de fallo
(cc)
11 = Acel./dec.
prohibidas (cc)
12 = Orden de
freno CC
13 = Pot. motor UP
(cc)
P2.2.2 **
P2.2.3 **
P2.2.4 **
Función salida
analógica 1 (DIN3)
Función salida
analógica 1 (DIN5)
Referencia de
punto de suma de
PID
0 13 10 301
0 13 9 330
0 7 0 376
Véase lo anterior
excepto:
13 = Pot. motor
DOWN (cc)
Véase lo anterior
excepto:
13 = Habilitar referencia PID 2
0 = Valor de salida
PID directa
1 = AI1+salida PID
2 = AI2+salida PID
3 = AI3+salida PID
4 = AI4+salida PID
5 = Panel PID
+salida PID
6 = Fieldbus+salida
PID (ProcessDataIN3)
7 = Pot. motorizado
+salida PID
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5

VACON · 100 APLICACIÓN DE CONTROL PID
Tabla 36: Señales de entrada, G2.2
Índice Ocultación Mín. Máx. Unidad Por
defecto
P2.2.5 **
P2.2.6 **
P2.2.7 **
P2.2.8 **
Selección de refe-
rencia I/O lugar B
Selección de la
referencia de con-
trol del panel
Selección de la
referencia de con-
trol Fieldbus
Selección de valor
real
0 7 1 343
0 7 4 121
0 7 5 122
0 7 0 333
Usu
ario
Descripción
ID
0 = AI1
1 = AI2
2 = AI3
3 = AI4
4 = Referencia
Panel
5 = Referencia de
fieldbus (FBSpeedReference)
6 = Potenciómetro
motorizado
7 = Controlador
PID
Como en P2.2.5
Como en P2.2.5
0 = Valor real 1
1 = Real 1 + Real 2
2 = Real 1 – Real 2
3 = Real 1 * Real 2
4 = Mín(Real 1,
Real 2)
5 = Máx(Real 1,
Real 2)
6 = Media(Real 1,
Real 2
7 = Raíz (Real1) +
Raíz (Real2)
P2.2.9 **
Selección de valor
real 1
0 10 2 334
0 = Deshabilitado
1 = Señal AI1 (c-
-tarjeta)
2 = Señal AI2 (c-
-tarjeta)
3 = AI3
4 = AI4
5 = Fieldbus ProcessDataIN2
6 = Par del motor
7 = Velocidad del
motor
8 = Intensidad del
motor
9 = Potencia del
motor
10 = Frecuencia de
encoder
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...