

Page 1

VACON CX/CXL/CXS
TAAJUUSMUUTTAJAT
Erikoiskäyttösovellus II
KÄYTTÖOHJE
Oikeudet muutoksiin pidätetään
F O R S M O O T H C O N T R O L
Page 2

Sivu 2 Vacon
Erikoiskäyttösovellus II
Erikoiskäyttösovellus II
(Par. 0.1 = 0)
Sisältö
1 Yleistä ................................................. 3
2 Ohjausliityntä ...................................... 3
3 Ohjaussignaalilogiikka......................... 4
4 Parametriryhmä 0 ............................... 5
5 Perusparametrit, ryhmä 1 ................... 6
4.1 Parametritaulukko ..................... 6
4.2 Ryhmä 1, parametrien kuv. ....... 7
6 Erikoisparametrit, ryhmät 2—8 ......... 12
5.1 Parametritaulukot ....................
5.2
Ryhmät 2—10, parametrien
kuvaukset................................ 21
7 Vikakoodit ..........................................51
8 Valvottavat signaalit ........................... 51
12
Ohjelmatunnus: smf089xx
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 3
Vacon Sivu 3
Erikoiskäyttösovellus II
Erikoiskäyttösovellus II
1 Yleistä
Erikoiskäyttösovelluksessa taajuusohjeeksi voidaan
valita jompikumpi analogiatulo, sauvaohjaus,
moottoripotentiometri tai matemaattinen funktio
analogiatuloista. Vakionopeuksia tai ryömintänopeus
voidaan myös valita, jos digitaalituloja on ohjelmoitu
näihin toimintoihin. Digitaalitulot DIA1 ja DIA2 on
varattu käy/seis-logiikalle. Digitaalituloille DIA3—DIB6
on ohjelmoitavissa vakionopeus, ryömintänopeus,
moottoripotentiometri, ulkoinen vika, ramppiajan
valinta, viankuittaus ja DC-jarrukäskytoiminnot. Kaikki
lähdöt ovat vapaasti ohjelmoitavia.
Käytettävissä on myös kenttäväyläohjaukset, joista
tuettuna on Interbus, Modbus, Profibus, LONWorks
ja CAN-bus (sekä SDS ja DeviceNet).
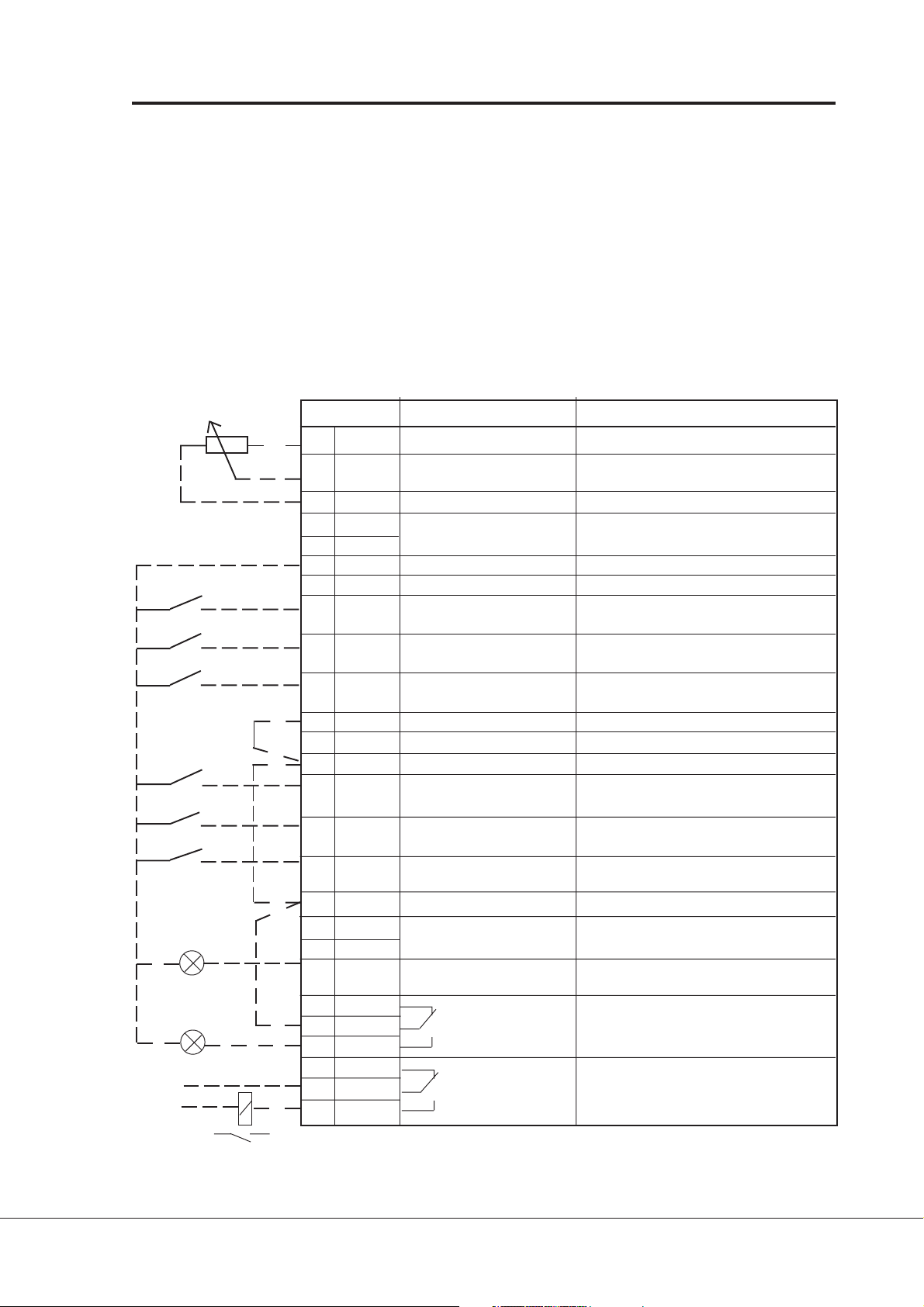
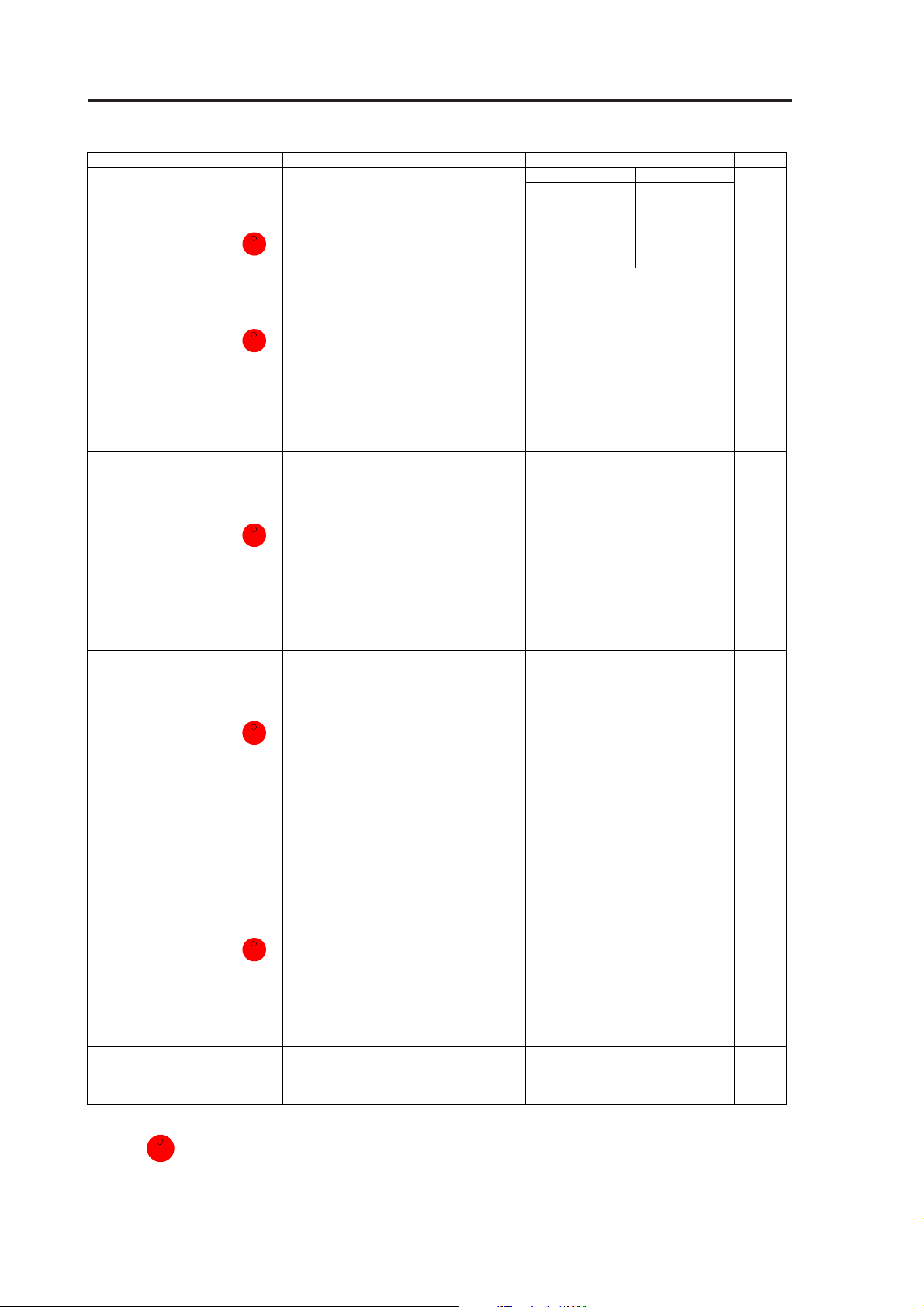
2 Ohjausliityntä
Ohjearvopotentiometri
VALMIS
KÄ Y
220
VAC
VIKA
HUOM! Muista kytkeä CMA- ja CMB-tulot.
Liitin Signaali Selitys
1 +10V
2 Uin+ Analogiatulo, Taajuusohje
3 GND I/O maa Jänniteohjearvon ja ohjaustulojen maa
4Iin+ Analogiatulo, Tehdasasetus: ei käytössä
5Iin- virta (ohjelmoitavissa) alue 0(4)—20 mA
6 +24V Ohjausjännitelähtö Apujännite, maks. 0,1 A esim. kytkim.
7 GND I/O maa Jänniteohjearvon ja ohjaustulojen maa
8 DIA1 KÄY eteenpäin Kosketin kiinni = käy eteenpäin
9 DIA2 KÄY taaksepäin Kosketin kiinni = käy taaksepäin
10 DIA3 Vian kuittaustulo Kosketin auki = ei kuittausta
11 CMA Yhteinen/ DIA1—DIA3 Kytke GND tai +24V
12 +24V Ohjausjännitelähtö Sama kuin liitin n:o 6
13 GND I/O maa Jänniteohjearvon ja ohjaustulojen maa
14 DIB4 Ryömintänopeus Kosketin auki = ei toimintaa
15 DIB5 Ulkoinen vika Kosketin auki = ei vikaa
16 DIB6 Kiihdytyd/hid. ajan valinta Kosk. auki = par. 1. 3 ja 1. 4 käytössä
17 CMB Yhteinen/ DIB4—DIB6 Kytke GND tai +24V
18 I
19 I
20 DO1 VALMIS-signaali Transistorilähtö, I <50 mA, U <48 V DC
21 RO1 Relelähtö 1 Rele aktivoitu = moottori pyörii
22 RO1 KÄY Ohjelmoitavissa ( parametri 3. 7)
23 RO1
24 RO2 Relelähtö 2 Rele aktivoitu = vikalaukaisu
25 RO2 VIKA on tapahtunut
26 RO2 Ohjelmoitavissa ( parametri 3. 8)
+ Analogialähtö Ohjelmoitavissa ( par. 3. 1)
out
-Lähtötaajuus Alue 0—20 mA/RL maks. 500 Ω
out
Ohjearvojännite Jännite ohjearvopotentiometrille tms.
ref
jännite (ohjelmoitavissa) alue 0—10 V DC
(ohjelmoitavissa)
(ohjelmoitavissa)
(ohjelmoitavissa) Kosketin kiinni = kuittaus
(ohjelmoitavissa) Kosketin kiinni = ryömintänopeus valittu
(ohjelmoitavissa) Kosketin kiinni = vika
(ohjelmoitavissa) Kosk. kiinni = par. 4. 3 ja 4. 4 käytössä
Ohjelmoitavissa ( parametri 3. 8)
Kuva 2-1 Erikoiskäyttösovelluksen ohjausliitynnän tehdasasetukset ja
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 4
Sivu 4 Vacon
Erikoiskäyttösovellus II
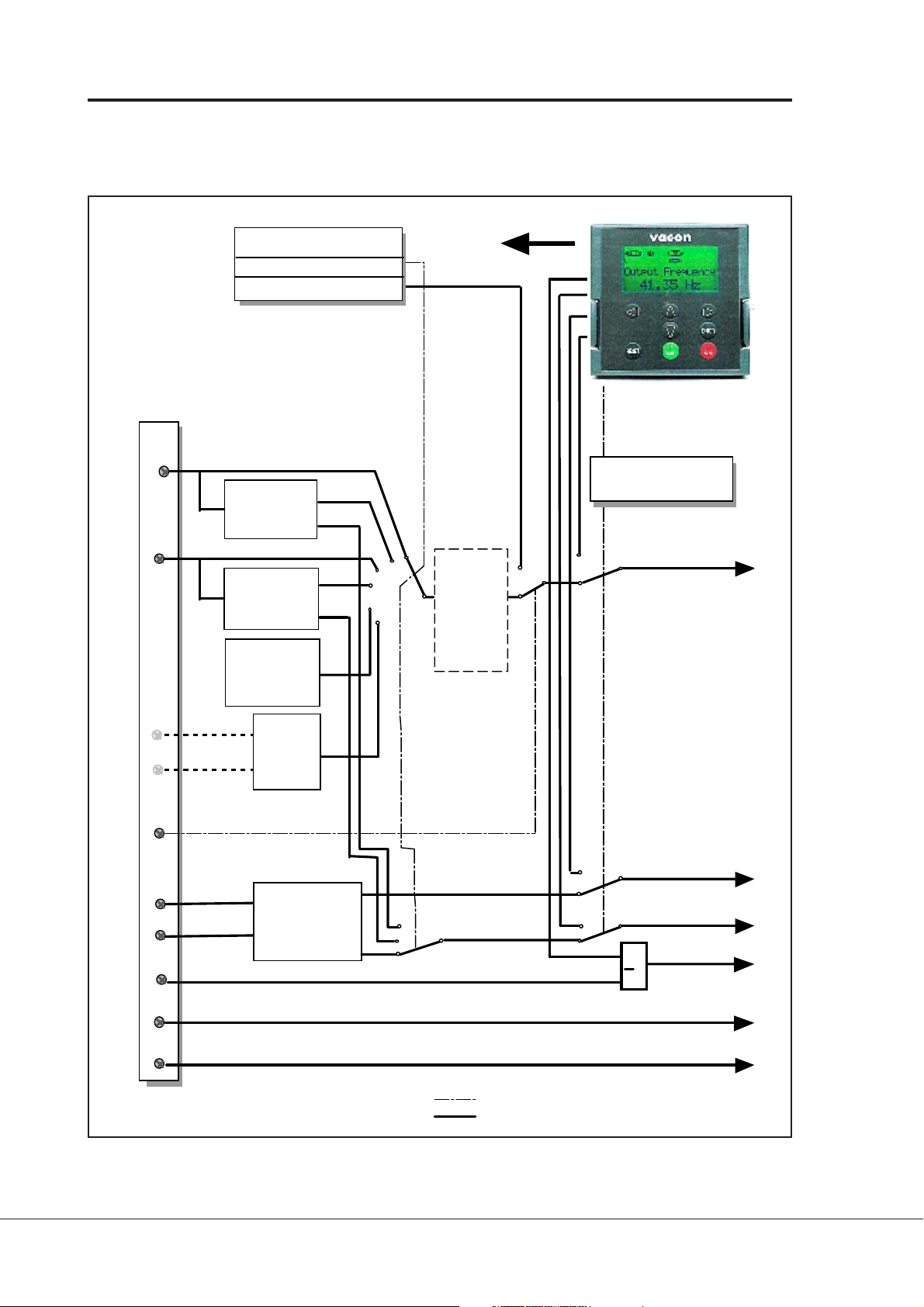
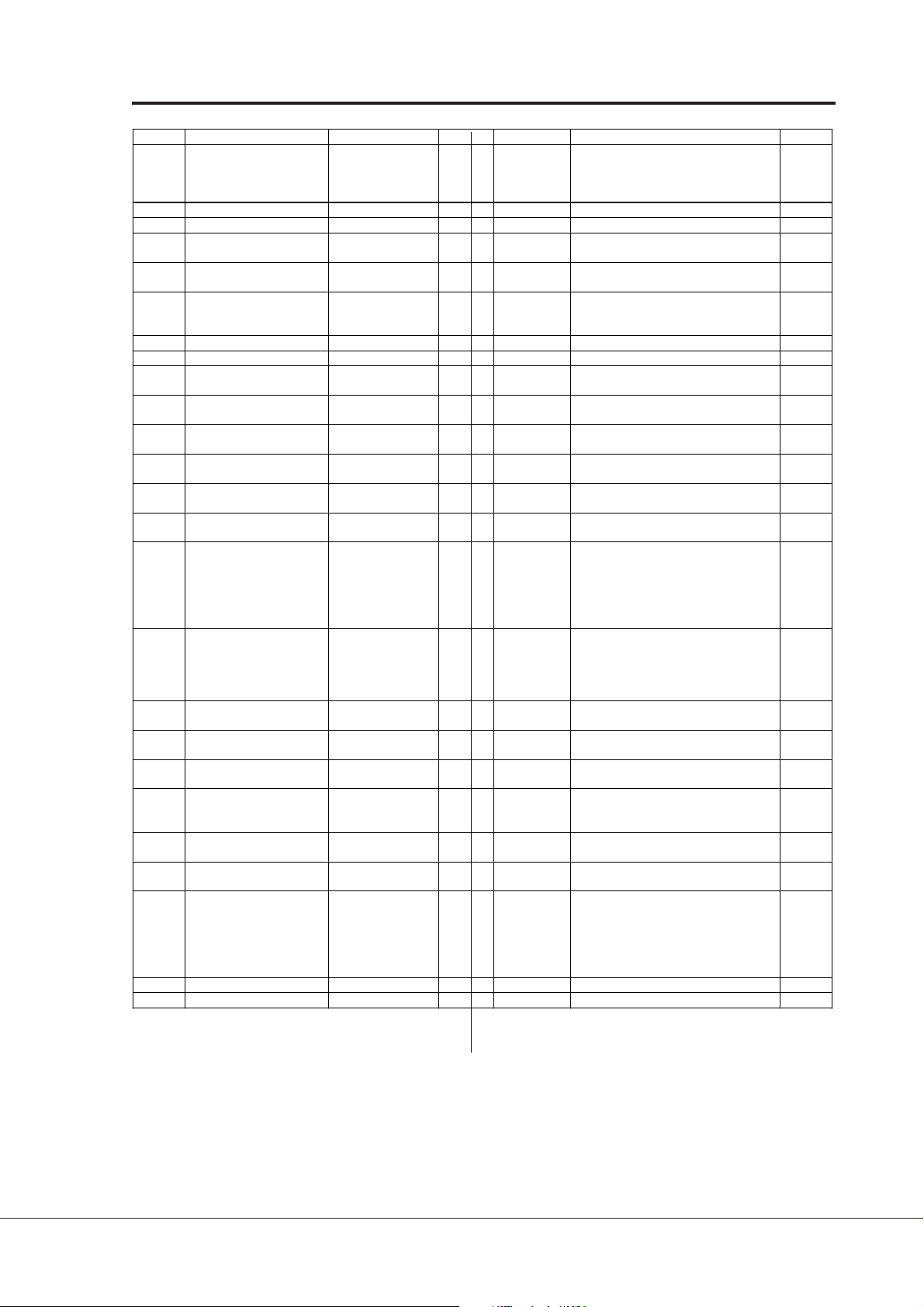
3 Ohjaussignaalien logiikka
Kuvassa 3-1 on kuvattu ohjaussignaalien ja paneelin näppäinpainallusten logiikka.
PAR AMETRIT
1. 5 Ohjearvon valinta
1. 6 Ry mint nopeus
Uin+
OHJELMOITAVA
PAINIKE 2
Sauva
Iin–
DIB5
DIB6
Yl s
Alas
-ohjaus
Sauva
-ohjaus
Uin + I
Uin - I
I
- U
in
Uin x I
Moottoripotentiometriohjearvo
P
Vakionopeudet
(Jos jokin
DI_ tulo
on ohjelmoitu sille
toiminnol-
in
le)
in
in
in
Sis inen
taajuusohjearvo
DIB4
Ry mint nopeuden val.
*)
P
DIA1
Ky eteen
*)
DIA2
Ky taakse
*)
DIA3
Vian kuittaus
*)
DIB5
Ulkoinen vika
*)
DIB6
Kiihtyvyys-/hidastuvuusajan valinta
*)
*) Ohje lmoitavissa
Ohjelmoitava
Ky/seis- ja
suunnanvaihtologiikka
ohjaus
=
signaali
=
P
Kuva 3-1 Ohjaussignaalilogiikka.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Sis inen
Ky/Seis
Sis inen
suunnanv.
Sis inen
vian kuittus
>1
UD012K05
Page 5
Vacon Sivu 5
Erikoiskäyttösovellus II
4 Parametriryhmä 0
Numero Parametrin nimi Alue Askel Oletus Kuvaus
0.1 Sovelluksen valinta 0 7 1 0 0=Erikoisk ytt sovellus II
(ladattu erikoissovellus)
1=Perussovellus
2=Vakiosovellus
3=Paikallis- /kauko ohjaussovellus
4=Vakionopeussovellus
5=PI-s t j sovellus
6=Erikoisk ytt sovellus
7=Pumppu- ja
puhallinautomatiikkasovellus
0.2 Parametrien siirto 0 5 1 0 0=Siirto valmis/ Valitse siirto
1=Lataa oletusasetukset
2=Lue parametrit k ytt j n
oletusarvoiksi
3=Aseta k ytt j n valitsemat
oletusarvot
4=Lue parametrit paneelille
(mik li k yt ss si on
graafinen paneeli)
5=Lue parametrit paneelilta
0.3 Parametrien siirto 0-2 1 0 0=Englanti
Taulukko 4-1. Parametriryhmä 0.
0.1 Sovelluksen valinta
Tällä parametrilla valitaan käytettävä sovellus. Mikäli laitteeseen on tehtaalta valmiiksi
tilattu Erikoiskäyttösovellus II, on tämä sovellus ladattu laitteeseen sovellukseksi 0.
Tällöin se on myös asetettu aktiiviseksi sovellukseksi. Tarkista kuitenkin vielä, että
valittu sovellus on numeroltaan 0, kun haluat käyttää Erikoiskäyttösovellus II:a.
Jos sovellus ladataan taajuusmuuttajaan erikseen, se täytyy aina latauksen jälkeen
asettaa aktiiviseksi valitsemalla parametrin 0.1 arvoksi 0.
0.2 Parametrien siirto
Katso Vacon CX/CXL/CXS-käsikirjan kappale 11.
0.3 Kielen valinta
Tällä parametrilla valitaan ohjauspaneelissa käytettävä kieli.
1=Saksa
2=Suomi
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 6
Sivu 6 Vacon
Erikoiskäyttösovellus II
5 Parametriryhmä 1
5.1 Parametritaulukko
Nro Parametri Alue Askel Oletus Asiakas Kuvaus Sivu
1.1 Minimitaajuus 0 120/500 Hz 1 Hz 0 Hz 7
1.2 Maksimitaajuus 0 120/500 Hz 1 Hz 50 Hz *) 7
1.3 Kiihtyvyysaika 1 0.1 3000 s 0.1 s 3 s f
1.4 Hidastuvuusaika 1 0.1 3000 s 0.1 s 3 s f
1.5 Taajuusohjeen valinta 0 15 1 0 0 = U
STOP
STOP
STOPSTOP
f
f
min
1.6 Ry mint taajuusohje
max
(1.1) (1.2)
1.7 Virtaraja 0.1 2.5 x I
STOP
STOP
1.8 U/f-suhteen valinta 0 2 1 0
1.9 U/f-k yr n optimointi 0 1 1 0
STOPSTOP
STOP
STOP
STOPSTOP
0.1 Hz 5 Hz 8
0.1 A 1.5 x I
nCX
cCX
230 V
1.10
1.11
Moottorin
nimellisj nnite
Moottorin
nimellistaajuus
STOP
STOP
STOPSTOP
STOP
STOP
STOPSTOP
180 690 1 V
30 500 Hz 1 Hz 50 Hz f
400 V
500 V
690 V
(1.1) ja f
min
(1.2) ja f
max
in
1 = I
in
2 = Uin + I
6 = U
in
(1.2) v linen aika 7
max
(1.1) v linen aika 7
min
3 = Uin I
4 = Iin U
in
5 = Uin * I
sauvaohjaus
in
in
in
7 = Iin sauvaohjaus
8 = ohje sis iselt moottoripoten-
tiometrilt
9 = ohje sis iselt moottoripoten-
tiometrilt ; nollautuu jos
Vacon pys ytet n
10 = ohje sis iselt moottoripoten-
tiometrilt (tallentuu muistiin
s hk katkoksessa)
11= Min (Uin, Iin)
12 = Max (Uin, Iin)
13 = Taajuusohje paneelilta r1
14 = Maksimitaajuus
15 = Uin/Iin valinta
Tulovirtaraja [A] 8
0 = Lineaarinen
1 = Neli llinen
2 = Ohjelmoitava
0 = Ei optimointia
1 = Autom. momentin maksimointi
Vacon CX/CXL2-sarja
Vacon CX/CXL/CXS4-sarja
Vacon CX/CXL/CXS5-sarja
Vacon CX6-sarja
moottorin arvokilvest 10
n
10
10
7
9
1.12
1.13 Moottorin nimellisvirta 2.5 x I
Moottorin
nimellisnopeus
300 20000 rpm 1 rpm 1440 rpm
STOP
STOP
STOPSTOP
STOP
STOP
STOPSTOP
nCX
0.1 A I
180 250 230 V Vacon CX/CXL2-sarja
1.14 Verkkoj nnite
STOP
STOP
STOPSTOP
380 440 400 V Vacon CX/CXL/CXS4-sarja
380 500 500 V Vacon CX/CXL/CXS5-sarja
525 690 690 V Vacon CX6-sarja
1.15
Parametrin
piilottaminen
01 1 0
1.16 Parametrilukko 0 1 1 0
STOP
STOP
HUOM! = Parametrin arvoa voi muuttaa vain
STOPSTOP
seis-tilassa.
*) Jos par. 1. 2 >moottorin nimellistaajuus, tarkista
soveltuvuus moottorin ja käytön kannalta.
**) Oletusarvo 4-napaisen nimellismoottorin
Taulukko 5-1 Ryhmä 1:n parametrit.
nCX
mukaan.
n
moottorin arvokilvest
n
In moottorin arvokilvest
Parametrit n kyvill :
0 = Kaikki parametriryhm t n kyvill
1 = Vain ryhm 1 n kyvill
Parametrimuutokset:
0 = Muutokset sallittu
1 = Muutokset ei sallittu
10
10
10
10
10
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 7
Vacon Sivu 7
Erikoiskäyttösovellus II
5.2 Ryhmä 1, parametrien kuvaukset
1. 1, 1. 2 Minimi-/maksimitaajuus
Määrittelee taajuusmuuttajan taajuusrajat.
Parametrien 1. 1 ja 1. 2 maksimirajan oletusarvo on 120 Hz. Asettamalla seis-
tilassa (RUN merkkivalo ei pala) parametrin 1. 2 arvoksi 120 Hz, muuttuu
parametrien 1. 1 ja 1. 2 maksimiraja 500 Hz:iin. Samalla paneelin taajuusohjeen
askel muuttuu 0,01 Hz:stä 0,1 Hz:iin.
Maksimirajan muuttaminen takaisin 500 Hz:stä 120 Hz tapahtuu asettamalla seistilassa parametri 1. 2 = 119 Hz.
1. 3, 1. 4 Kiihtyvyysaika 1, Hidastuvuusaika 1:
Näillä parametreilla valitaan aika, joka tarvitaan lähtötaajuuden muuttamiseksi
asetellusta minimitaajuudesta (par1. 1) aseteltuun maksimitaajuuteen (par1. 2)
ja kääntäen.
1. 5 Taajuusohjeen valinta
0 Analoginen jänniteohje liitimiltä 2—3, esim. potentiometri
1 Analoginen virtaohje liittimiltä 4—5, esim. signaalimuunnin
2 Ohje muodostetaan summaamalla analogiatulot
3 Ohje muodostetaan vähentämällä jännitetulon (U
) arvo virtatulon (Iin)
in
arvosta
4 Ohje muodostetaan vähentämällä virtatulon (Iin ) arvo jännitetulon (Uin)
arvosta
5 Ohje muodostetaan kertomalla analogiatulojen arvot keskenään
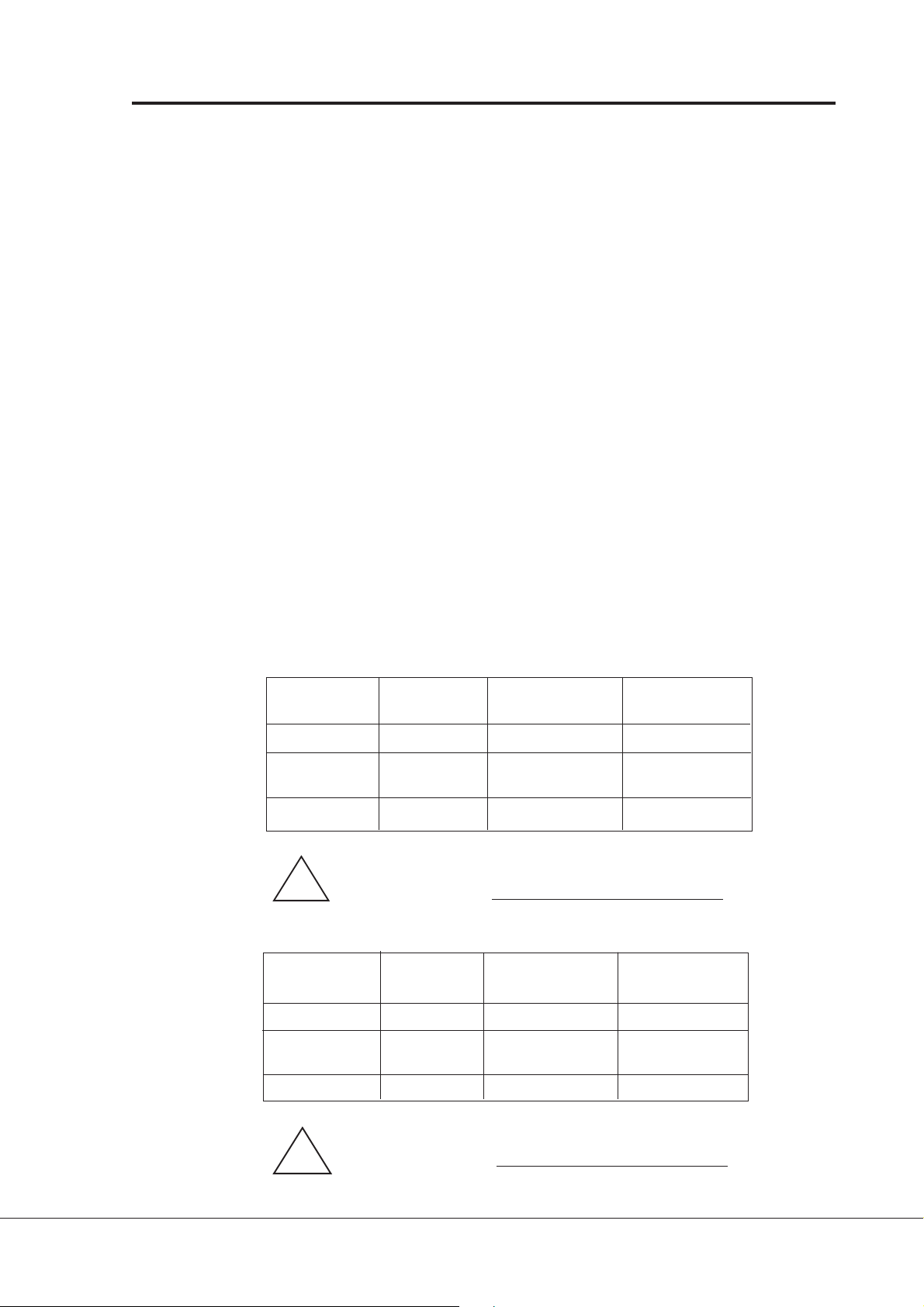
6 Sauvaohjaus jännitetulosta (Uin).
Signaalialue Maks. taakse Suunnanvaihto Maksimi eteen
-nopeus -nopeus
0—10 V 0 V 5 V +10 V
Asiakaskohtain par. 2. 7 x 10 V keskellä asiakask. par. 2. 8 x 10 V
signaalialuetta
-10V—+10 V -10 V 0 V +10 V
Varoitus! Käytä ainoastaan -10 V—+10 V signaalialuetta. Jos asiakaskoh-
tainen tai 0—10V signaalialue on käytössä ja signaali katoaa,
!
7 Sauvaohjaus virtatulosta (I
Signaalialue Maks. taakse Suunnanvaihto- Maksimi eteen
0—20 mA 0 mA 10 mA 20 mA
Asiakaskohtai- par. 2. 13 keskellä asiakask. par. 2. 14
4—20 mA 4 mA 12 mA 20 mA
alkaa käyttö pyöriä taaksepäin maksiminopeudella.
).
in
-nopeus nopeus -nopeus
nen x 20 mA signaalialuetta x 20 mA
Varoitus! Käytä ainoastaan 4—20 mA signaalialuetta. Jos asiakaskohtai-
nen tai 0 —20 mA signaalialue on käytössä ja signaali katoaa,
!
alkaa käyttö pyöriä taaksepäin maksiminopeudella.
Aseta par. 7.2 niin, että 4—20 mA signaalialueen vian sattuessa
käyttö pysähtyy jos signaali katoaa.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 8
Sivu 8 Vacon
Erikoiskäyttösovellus II
Huom! Kun käytetään sauvaohjausta niin suuntaohjaus tulee sauvaohja-
ukselta.
Analogiatulojen skaalaus, parametrit 2. 16—2. 19, eivät ole toiminnassa kun sauvaohjausta käytetään.
-10V
Fmin.
(par 1.1)
Fmin.
(par 1.1)
Fmax
(par 1.2)
Fout
hystereesi +/-2% (+/-0,2 V)
Fmax
(par 1.2)
+10V
Uin
-10V
Fmax
(par 1.2)
Fout
Fmax
(par 1.2)
+10V
Kun minimitaajuus (par 1. 1) >0, Kun minimitaajuus (par 1. 1) = 0,
suunnanvaihtokohdassa ± 2 % hystereesi suunnanvaihtokohdassa ei ole hystereesiä
Kuva 5-1. Sauvaohjaus -10V—+10V Uin signaalilla.
8 Taajuusohjetta muutetaan digitaalituloilla DIA4 ja DIA5.
- kytkin DIA3 tulossa suljettu = taajuusohje kasvaa
- kytkin DIA4 tulossa suljettu = taajuusohje pienenee
Taajuusohjeen muutosnopeus voidaan asettaa parametrilla 2. 20.
Uin
Uin
9 Sama toiminta kuin valinnalla 8, mutta taajuusohje asetetaan aina minimi-
taajuuteen (par. 1. 1) kun taajuusmuuttaja pysäytetään.
Kun parametrin 1. 5 arvoksi on asetettu 8 tai 9 parametrien 2. 4 ja 2. 5
arvoksi muuttuu automaattisesti 11.
10 Sama kuin kohdassa 8, mutta ohjearvo on talletettu muistiin ja asetukset ovat
voimassa jännitekatkoksen jälkeenkin.
11 Pienempi osa signeeleista Uin ja Iin ovat taajuusohjearvoja.
12 Suurempi osa signeeleista Uin ja Iin ovat taajuusohjearvoja.
13 Paneeliohjaus r1 on taajuusohjearvo.
14 Maksimi ohjearvovalinta puoltaa vain momenttisäätöä.
15 Digitaalitulon valinta Uin/Iin. Kts. par. 2.3.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 9
1. 6 Ryömintätaajuusohje
Parametriarvo määrittelee ryömintätaajuuden.
1. 7 Virtaraja
Parametri määrittää taajuusmuuttajan suurimman moottorivirran.
Estääksesi moottorin ylikuormituksen aseta tämä parametri moottorin nimellis-
virran mukaan.
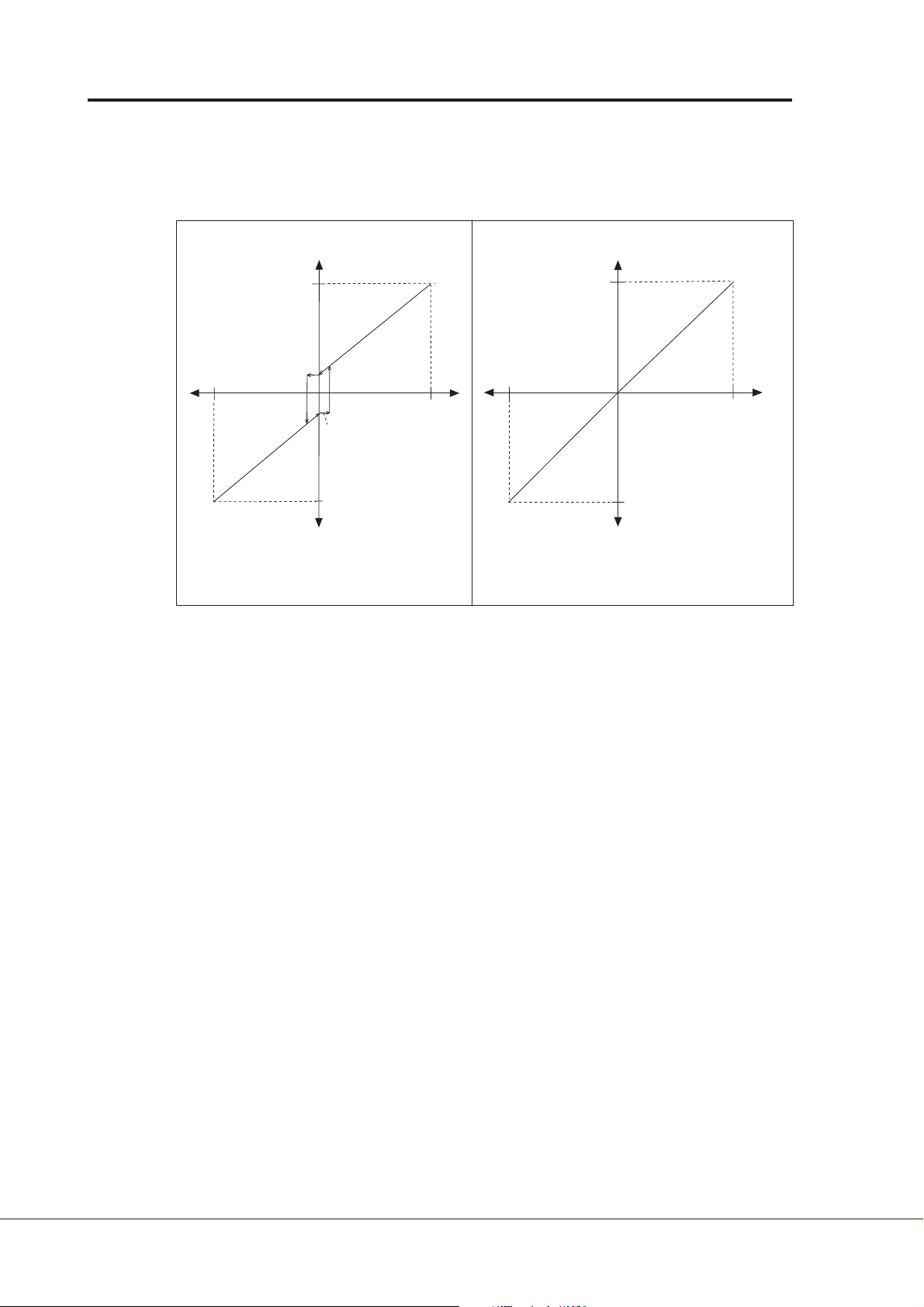
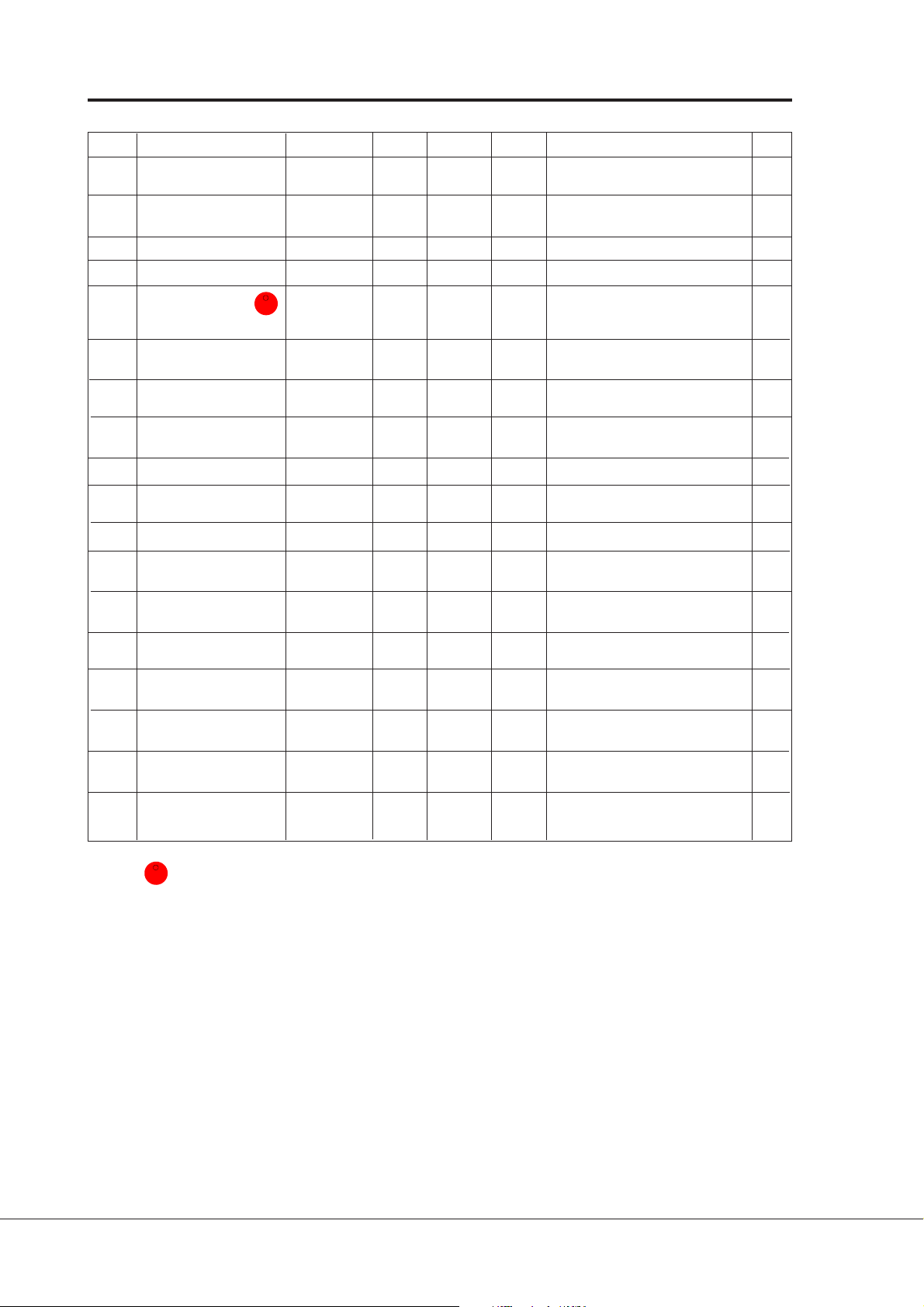
1. 8 U/f-suhteen valinta
Lineaarinen: Moottorijännite kasvaa lineaarisesti taajuuden mukana 0 Hz:stä
0 kentänheikennyspisteeseen. Kentänheikennyspisteessä ja sitä suu-
remmilla taajuuksilla moottorille syötetään nimellisjännite. Katso kuva
5-2. Lineaarista U/f-suhdetta on käytettävä vakiomomenttikäytöissä.
Tätä tehdasasetusta tulee käyttää, ellei ole erityistä syytä muuhun asetukseen.
Neliöllinen: Moottorin jännite kasvaa neliöllisesti taajuuden kasvaessa 0 Hz:stä
1 kentänheikennyspisteeseen. Kentänheikennyspisteessä ja sitä suu-
remmilla taajuuksilla moottorille syötetään nimellisjännite.
Katso kuva 5-2.
Moottori on alimagnetoitu nimellistaajuuden alapuolella. Se kykenee
tuottamaan vähemmän momenttia kuin lineaarisella U/f-suhteella
mutta on hiljaisempi. Neliöllistä U/f-suhdetta voidaan käyttää sovelluksissa, missä momentin tarve kasvaa nopeuden neliössä. Tällaisia
ovat mm. keskipakopuhaltimet ja -pumput.
U[V]
Un
(Par 6. 4)
Oletusarvo: moottorin
nimellisjännite
Lineaarinen
Neliöllinen
(Par. 6. 3)
Kuva 5-2 Lineaarinenja neliöllinen U/f-käyrä.
Kentänheikennyspiste
Oletusarvo: moottorin
nimellistaajuus
f[Hz]
UD012K07
Page 10
Sivu 10 Vacon
Erikoiskäyttösovellus II
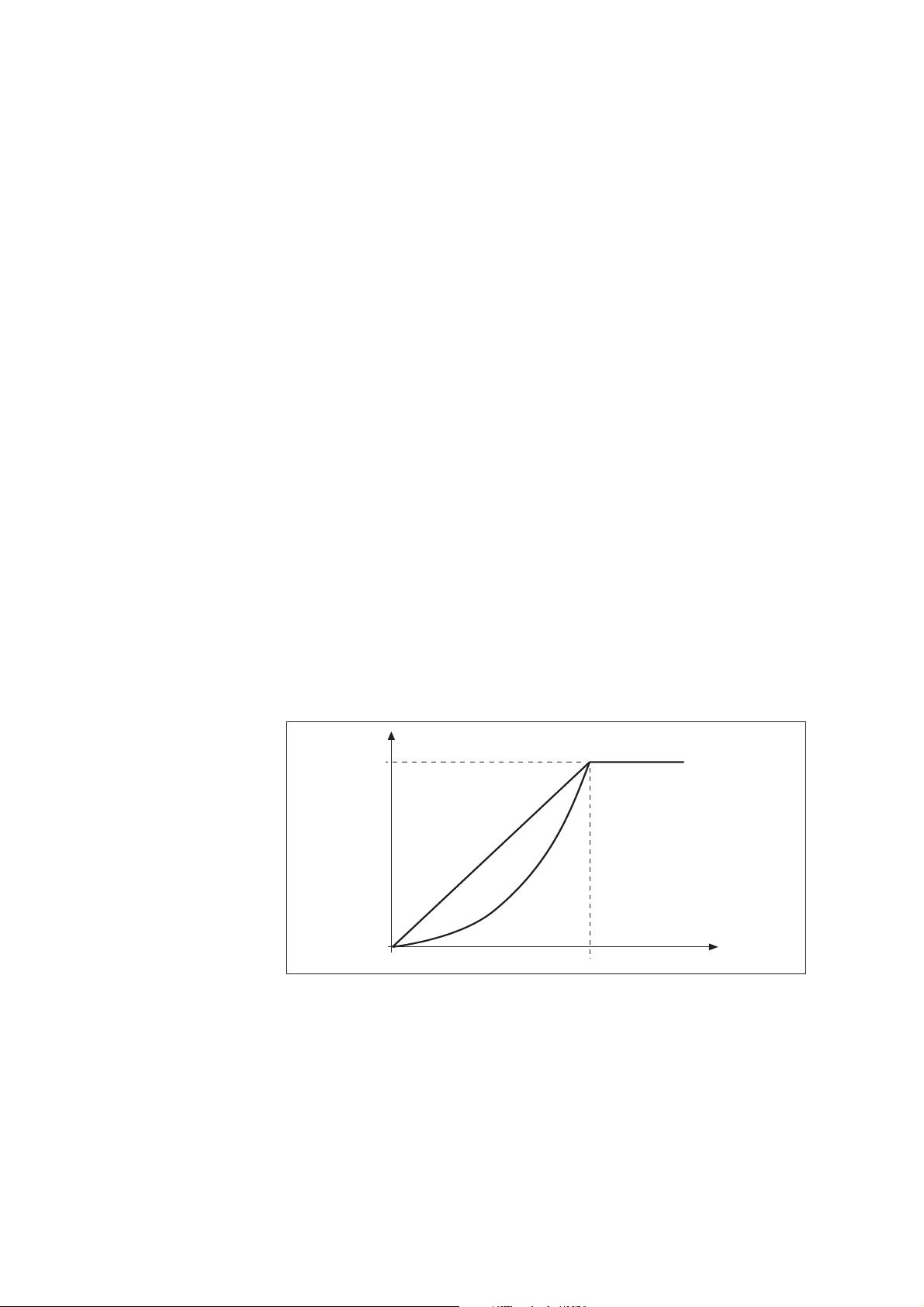
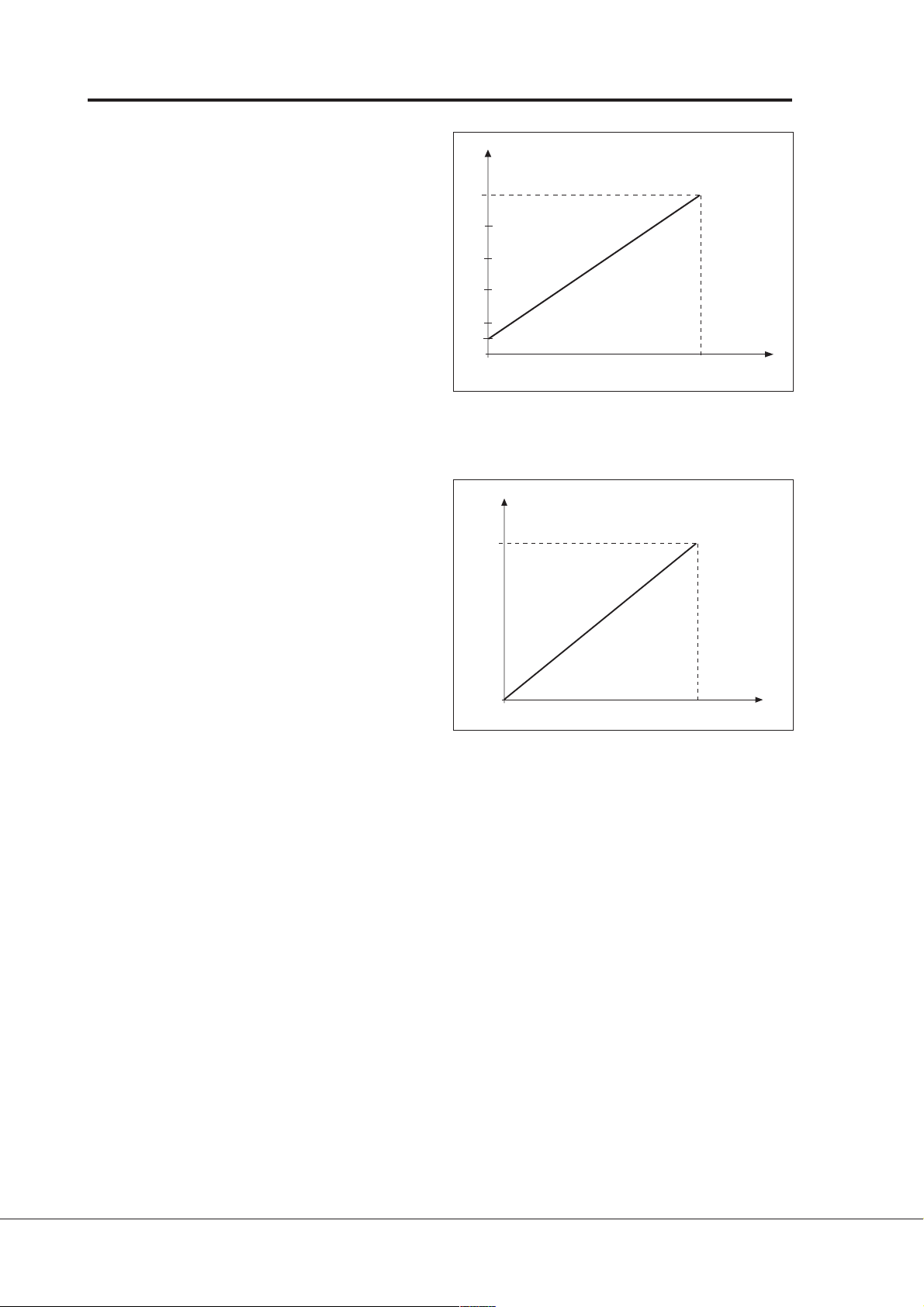
Ohjelm. Ohjelmoitava U/f-käyrä voidaan ohjelmoida kolmella eri pisteellä.
U/F-käyrä Pisteiden parametrit ovat ryhmässä 6. Ohjelmoitavaa U/f-käyrää
2 voidaan käyttää, mikäli sovelluksen vaatimukset ovat sellaisia, joita
muilla asetuksilla ei pystytä täyttämään. Katso kuva 5-3.
U[V]
Un
Par 6. 4
Par. 6. 6
(Olet. 10%)
Par. 6. 7
(Olet. 1.3%)
Oletusarvo: moottorin
nimellisjännite
Par. 6. 5
(Olet. 5 Hz)
Kentänheikennyspiste
Oletusarvo: moottorin
nimellistaajuus
Par. 6. 3
f[Hz]
UD012K08
Kuva 5-3 Ohjelmoitava U/f-käyrä
1. 9 U/f-käyrän optimointi
Automaattinen Moottorijännite kasvaa raskaissa käynnistyksissä automaattisesti
momentin tuottamaan riittävästi momenttia kuorman irrotukseen ja moottorin
maksimointi pyörimiseen pienillä nopeuksilla. Jännitteen nousu riippuu
moottorityypistä ja -tehosta.
Automaattista käynnistysmomentin maksimointia voidaan käyttää
sovelluksissa, joissa lähtökitka on suuri, esim. kuljettimissa.
HUOM! Ajettaessa moottoria pienillä taajuuksilla raskaalla momentilla ei
moottorin oma puhallin jäähdytä sitä riittävästi kaikissa olosuh-
!
teissa.
Jos moottorin pitää toimia pitkiä aikoja näissä olosuhteissa,
huolehdi erityisesti moottorin riittävästä jäähdytyksestä.
Käytä ulkopuolista jäähdytystä — esim. ylimääräistä jäähdytys
puhallinta — jos moottorin lämpötila pyrkii nousemaan liikaa.
.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 11

Vacon Sivu 11
Erikoiskäyttösovellus II
1. 10 Moottorin nimellisjännite
Aseta parametrin arvo verkon nimellisjännitteen mukaan.
Etsi asetusarvo U
moottorin arvokilvestä.
n
Tämän parametrin asettelu määrää lähtöjännitteen maksimiarvon, myös kentänheikennyspisteen parametri 6. 4 saa saman arvon. (100% x U
)
n
1. 11 Moottorin nimellistaajuus
Etsi asetusarvo f
moottorin arvokilvestä.
n
Tämän parametrin asettelu määrää taajuuden, jolla lähtöjännite saavuttaa maksimiarvon. Myös kentänheikennyspiste, parametri 6. 3, saa saman arvon.
1. 12 Moottorin nimellisnopeus
Etsi asetusarvo n
moottorin arvokilvestä.
n
1. 13 Moottorin nimellisvirta
Etsi asetusarvo I
moottorin arvokilvestä.
n
1. 14 Nimellinen verkkojännite
Parametriarvot on ennalta asetettu CX/CXL2, CX/CXL/CXS4, CX/CXL/CXS5 ja CX6
sarjoissa, katso taulukko 5-1.
1. 15 Parametrien piilottaminen
Määrittelee, mitkä parametriryhmät ovat käytettävissä:
0 = kaikki parametriryhmät näkyvillä
1 = vain ryhmä 1 näkyvillä
1. 16 Parametrilukko
Määrittelee, ovatko parametriarvot muutettavissa:
0 = parametriarvot ovat muutettavissa
1 = parametriarvot eivät ole muutettavissa
Useampia Erikoiskäyttösovelluksen toimintoja voi ohjelmoida parametriryhmien 2—
10 parametreilla. Katso kappale 6.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 12
Sivu 12 Vacon
Erikoiskäyttösovellus II
6 Erikoisparametrit
6.1 Parametritaulukot, Parametriryhmä 2: Tulosignaalien parametrit
Nro Parametrin nimi Alue Askel Oletus Kuvaus Sivu
K y/Seis-logiikan
2.1
valinta
STOP
STOP
STOPSTOP
STOP
STOP
STOPSTOP
04 1 0
2.2 DIA3:n toiminta 0 12 1 7
STOP
STOP
STOPSTOP
STOP
STOP
STOPSTOP
STOP
STOP
STOPSTOP
013 1 6
013 1 1
013 1 4
2.3
2.4
2.5
2.6 U
DIB4:n toiminta
(liitin 14)
DIB5:n toiminta
(liitin 15)
DIB6:n toiminta
(liitin 16)
signaalialue 0 2 1 0
in
DIA1 DIA2
0 = K y eteenp.
1 = K y/Seis
2 = K y/Seis
3 = K y pulssiohj.
4 = K y seis
K y taakse
Taaksep in
K y valmis
Seis pulssiohj.
K y valmis
pulssiohj.
0 = Ei k yt ss
1 = Ulkoinen vika, sulkeutuva kosk.
2 = Ulkoinen vika, avautuva kosk.
3 = K y-valmis
4 = Kiihtyv./Hidastuv.ajan valinta
5 = Taaksep in
6 = Ry mint nopeus
7 = Vian kuittaus
8 = Kiihtyv./hidastuv.toiminnan esto
9 = DC-jarrutuskomento
10 = Momenttiohjaus
11 = Momenttiohjeen etumerkki
12 = K y vapaasti
0 = Ei k yt ss
1 = Ulkoinen vika, sulkeutuva kosk.
2 = Ulkoinen vika, avautuva kosk.
3 = K y-valmis
4 = Kiihtyv./Hidastuv.ajan valinta
5 = Taaksep in
6 = Ry mint nopeus
7 = Vian kuittaus
8 = Kiihtyv./hidastuv.toiminnan esto
9 = DC-jarrutuskomento
10 = Vakionopeus 1
/ Uin valinta
11 = I
in
12 = K y vapaasti
13 = Kentt v yl ohjaus
0 = Ei k yt ss
1 = Ulkoinen vika, sulkeutuva kosk.
2 = Ulkoinen vika, avautuva kosk.
3 = K y-valmis
4 = Kiihtyv./Hidastuv.ajan valinta
5 = Taaksep in
6 = Ry mint nopeus
7 = Vian kuittaus
8 = Kiihtyv./hidastuv.toiminnan esto
9 = DC-jarrutuskomento
10 = Vakionopeus 2
11 = Moottoripotentiometri YL S
12 = K y vapaasti
13 = Kentt v yl ohjaus
0 = Ei k yt ss
1 = Ulkoinen vika, sulkeutuva kosk.
2 = Ulkoinen vika, avautuva kosk.
3 = K y-valmis
4 = Kiihtyv./Hidastuv.ajan valinta
5 = Taaksep in
6 = Ry mint nopeus
7 = Vian kuittaus
8 = Kiihtyv./hidastuv.toiminnan esto
9 = DC-jarrutuskomento
10 = Vakionopeus 3
11 = Moottoripotentiometri ALAS
12 = K y vapaasti
13 = Kentt v yl ohjaus
0 = 0 10 V
1 = Asiakaskohtainen asettelualue
2 = -10 +10 V (vain sauvaoh-
jauksessa)
20
21
22
22
22
23
STOP
STOP
Huom!
STOPSTOP
= Parametrin arvoa voi muuttaa vain seis-tilassa.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
(Jatkuu)
Page 13
Vacon Sivu 13
Erikoiskäyttösovellus II
Nro Parametrin nimi Alue Askel Oletus Kuvaus Sivu
0 = 0 10V
2.6 Uin-sinaalialue 0 2 1 0
1 = Custom setting range
2 = -10 - +10V (voidaan k ytt
vain Joystick-ohjauksella).
2.7 Uin asiakaskoht. Min. 0 100% 0,01% 7
2.8 Uin asiakaskoht. Max. 0 100% 0,01% 6
2.9
2.10
Analogiatulon U
knt
Analogiatulon U
suod. aika
in
in
01 1 1
0 10s 0,01s 0,1s 0 = ei suodatusta
0 = Ei k nnetty
1 = K nnetty
0 = 0 20 mA
2.11 Analogiatulon I
alue 0 2 1 0
in
1 = 4 20 mA
2 = Asiakaskohtainen asettelualue
2.12 Iin asiakaskoht. Min. 0 100% 0,01% 0,00%
2.13 Iin asiakaskoht. Max. 0 100% 0,01% 100,00%
2.14
2.15
Analogiatulon I
knt
Analogiatulon I
aika
in
in
suod.
2.16 Uin minimi skaalaus
2.17 Uin maksimi skaalaus
2.18 Iin minimi skaalaus
2.19 Iin maksimi skaalaus
01 1 0
0 10s 0,01s 0,1s 0 = Ei suodatusta
-320,00%
+320,00%
-320,00%
+320,00%
-320,00%
+320,00%
-320,00%
+320,00%
0% 0,01 0% = Ei minimin skaalausta
100% 0,01 100% = Ei maksimin skaalausta
0% 0,01 0% = Ei minimin skaalausta
100% 0,01 100% = Ei maksimin skaalausta
0 = Ei k nnetty
1 = K nnetty
0 = Ei k yt ss
in
1 = U
(analogiaj nnitetulo)
2.20
Vapaan analogiatulon
valinta
05 1 0
in
(analogiavirtatulo)
2 = I
in
1 (optiokortti)
3 = A
in
4 = A
2 (optiokortti)
5 = Signaali kentt v yl st
0 = Ei toimintoa
2.21
Vapaan analogiatulon
toiminta
04 1 0
1 = Virtarajan (par.1.7) skaalaus
2 = DC-jarrutusvirran skaalaus
3 = Kiihd. ja hid. ajan lyhennys
4 = Momentin valvontarajan skaal.
2.22
2.23
2.24
2.25
2.26
2.27
Moottoripotentiometrin
ohjeen muutosnopeus
Lis kortin A
in
1signaalin k nt
Lis kortin A
in
1signaalin suodatusaika
Lis kortin A
in
2signaalialue
Lis kortin A
in
2signaalin k nt
Lis kortin A
in
2signaalin suodatusaika
0,1 2000,0
Hz/s
01 1 0
0,1
Hz/s
10,0 Hz/s
0 = Ei k nt
1 = K nt
0 10s 0,01s 0,1s 0 = Ei suodatusta
0 = 0 20 mA
02 1 0
1 = 4 20 mA
2 = 0 10 V
01 1 0
0 = Ei k nt
1 = K nt
0 10s 0,01 s 0,1 s 0 = Ei suodatusta
0 = Ei k yt ss
1 = j nnitetulo
2.28 Skaalattava ohjearvo 0 5 1 0
2 = virtatulo
3 = AIN1 I/O-laajennus
4 = AIN2 I/O-laajennus
5 = Kentt v yl signaali
2.29 Skaalausprosentti 0,0% 200,0% 0,1% 0,0%
2.30 Skaalausoffset 0,0% 200,0% 0,1% 0,0%
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 14
Sivu 14 Vacon
Erikoiskäyttösovellus II
Ryhmä 3, lähtö- ja valvontaparametrit
Nro. Parametri Alue Askel Oletus Asiakas Määritelmä Sivu
3. 1 Analogialähdön sisältö 0—14 1 1 0 = ei käytössä
STOP
STOP
STOPSTOP
1 = lähtötaajuus (0—f
2 = moottorinop. (0—maks. nop.)
3 = lähtövirta (0—2.0 x I
4 = momentti (0—2 x T
5 = moottoriteho (0—2 x P
6 = moottorijännite (0—100% x U
7 = välipiirin jänn. (0—1000 V)
8 = tulosignaali Uin
9 = tulosignaali Iin
10 = taajuusohje
11 = momenttiohje
12 = moott.±mom.i (-2—+2xT
13 = moott.±teho (-2—+2xT
14 = O/P-taajuus (fmin—fmax)
3. 2 Anal.lähdön suod.aika 0,01—10 s 0,01 1,00 27
3. 3 Anal.lähdön kääntö 0—1 1 0 0 = ei käännetty 27
1 = käännetty
3. 4 Analogialähdön minimi 0—1 1 0 0 = 0 mA 27
1 = 4 mA
3. 5 Analogialähdön skaala 10—1000 % 1% 100% 27
3. 6 Digitaalilähdön sisältö 0—22 1 1 0 = Ei käytössä 28
1 = Valmis
STOP
STOP
STOPSTOP
2 = Käy
3 = Vika
4 = Vika käännetty
5 = Vacon ylilämpövaroitus
6 = Ulkoinen vika tai varoitus
7 = Ohjearvovika tai -varoitus
8 = Varoitus
9 = Suunta taaksepäin
10 = Ryömintänopeus valittu
11 = Asetetussa nopeudessa
12 = Moottorisäätäjä käytössä
13 = Lähtötaaj. valvontaraja 1 saav.
14 = Lähtötaaj. valvontaraja 2 saav.
15 = Momentin valvontaraja saav.
16 = Ohjearvon valvontaraja saav.
17 = Ulkoisen jarrun ohjaus
18 = Ohjaus I/O riviliittimiltä
19 = Taajuusmuuttajan lämpötila-
rajan valvonta
20 = Suunta eri kuin pyyntö
21 = Käänt. ulkoisen jarrun ohjaus
22 = Termistorivika tai -varoitus
3. 7 Relelähdön 1 sisältö 0—22 1 2 Kuten parametri 3. 628
STOP
STOP
STOPSTOP
Skaala 100 % 27
)
max
)
nCX
)
nCX
)
nCX
)
nM
)
nMOT
)
nMOT
STOP
STOP
3. 8 Relelähdön 2 sisältö 0—22 1 3 Kuten parametri 3. 628
STOPSTOP
3. 9Lähtötaaj. valvonta- 0—2 1 0 0 = Ei 28
rajan 1 toiminta 1 = Alaraja
2 = Yläraja
Huom! = Parametrin arvoa voi muuttaa vain seis-tilassa.
STOP
STOP
STOPSTOP
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 15
Vacon Sivu 15
Erikoiskäyttösovellus II
Nro. Parametri Alue Askel Oletus Asiakas Määritelmä Sivu
3. 10 Lähtötaaj. valvonta- 0—f
rajan 1 arvo (par. 1. 2)
STOP
STOP
STOPSTOP
0,1 Hz 0 Hz 28
max
3. 11 Lähtötaaj. valvonta- 0—2 1 0 0 = Ei 28
rajan 2 toiminta 1 = Alaraja
2 = Yläraja
3. 12 Lähtötaaj. valvonta- 0—f
max
0,1Hz 0 Hz 28
rajan 2 arvo (par. 1. 2)
3. 13 Momentin valvonta- 0—2 1 0 0 = Ei 29
rajan toiminta 1 = Alaraja
2 = Yläraja
3. 14 Momentin valvonta- 0—200 % 1 % 100 % 29
rajan arvo x T
nCX
3. 15 Ohjearvon valvonta- 0—2 1 0 0 = Ei 29
rajan toiminta 1 = Alaraja
2 = Yläraja
3. 16 Ohjearvon valvonta- 0—f
0,1 Hz 0 Hz 29
max
rajan arvo (par. 1. 2)
3. 17 Ulk. jarrun irtikytk. viive 0—100,0 s 0,1 s 0,5 s 29
3. 18 Ulkoisen jarrun 0—100,0 s 0,1 s 1,5 s 29
STOP
STOP
päällekytkentäviive
STOPSTOP
3. 19 Taajuusmuuttajan läm- 0—2 1 1 0 = Ei valvontaa 29
pötilarajan valvonta 1 = Alituksen valvonta
STOP
STOP
STOPSTOP
2 = Ylityksen valvonta
3. 20 Taajuusmuuttajan läm- -10—+75°C 1 +40°C30
pötilaraja-asett.
3. 21 I/O-laajennuskortin 0—14 1 3 Ks. parametri 3. 1 –
analogialähdön sisältö
3. 22 I/O-laajennuskortin 0,01—10 s 0,01 1,00 Ks. parametri 3. 2 –
anal. lähdön suod. aika
3. 23 I/O-laajennuskortin 0—1 1 0 Ks. parametri 3. 3 –
analogialähdön kääntö
3. 24 I/O-laajennuskortin 0—1 1 0 Ks. parametri 3. 4 –
analogialähdön minimi
3. 25 I/O-laajennuskortin 10—1000 % 1 % 100 % Ks. parametri 3. 5 –
analogialähdön skaala
3. 26 Analogialähdön offset -100— 1 100% 30
(peruskontrollikortti) 100,0%
3. 27 I/O-laajennuskortin (opt.) -100— 1 100% 30
analogialähdön offset +100,0%
3. 28 Digitaalilähdön DO1 0—320,00s 0,01 0,00 0,00 = viive ei käytössä 30
Päällekytkentäviive
3. 29 Digitaalilähdön DO1 0—320,00s 0,01 0,00 0,00 = viive ei käytössä 30
Irtikytkentäviive
3. 30 Relelähdön RO1 0—320,00s 0,01 0,00 0,00 = viive ei käytössä 30
Päällekytkentäviive
3. 31 Relelähdön RO1 0—320,00s 0,01 0,00 0,00 = viive ei käytössä 30
Irtikytkentäviive
3. 32 Relelähdön RO2 0—320,00s 0,01 0,00 0,00 = viive ei käytössä 30
Päällekytkentäviive
3.33 Relelähdön RO2 0—320,00s 0,01 0,00 0,00 = viive ei käytössä 30
Irtikytkentäviive
STOP
STOP
Huom! = Parametrin arvoa voi muuttaa vain seis-tilassa. (Jatkuu)
STOPSTOP
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 16
Sivu 16 Vacon
Erikoiskäyttösovellus II
Ryhmä 4, käytön ohjausparametrit
Nro. Parametri Alue Askel Oletus Asiakas Määritelmä Sivu
4. 1 Kiihd-/hid. rampin 1 0—10 s 0,1 s 0 0 = Lineaarinen 31
muoto >0 = S-käyrän kiih./hid. aika
4. 2 Kiihd./hid. rampin 2 0—10 s 0,1 s 0 0 = Lineaarinen 31
muoto >0 = S-käyrän kiih./hid. aika
4. 3 Kiihdytysaika 2 0,1—3000 s 0,1 s 10 s 32
4. 4 Hidastusaika 2 0,1—3000 s 0,1 s 10 s 32
4. 5 Jarrukatkoja 0—1 1 0 0 = Jarrukatkoja ei ole käytössä 32
4. 6Käynnistystoiminto 0—1 1 0 0 = Kiihdyttäen 32
4. 7Pysäytystoiminto 0—1 1 0 0 = Vapaasti pyörien 32
4. 8 DC-jarrutusvirta 0,15—1,5 0,1 A 0,5 x I
4. 9 DC-jarrutusaika/Seis-ohj. 0 — 250,0 s 0,1 s 0 s 0 = DC-jarru on pois 32
4. 10 DC-jarrutuksen alkamis- 0,1 — 10 Hz 0,1 Hz 1,5 Hz 33
taajuus hidastuksessa
4. 11 DC-jarrutusaika/Käy 0,0—25,0 s 0,1 s 0 s 0 = DC-jarru on pois 34
4. 12 Vakionopeusohje 1 f
4. 13 Vakionopeusohje 2 f
4. 14 Vakionopeusohje 3 f
4. 15 Vakionopeusohje 4 f
4. 16 Vakionopeusohje 5 f
4. 17 Vakionopeusohje 6 f
4. 18 Vakionopeusohje 7 f
STOP
STOP
STOPSTOP
x I
(A)
nCX
—f
min
max
(1. 1) (1. 2)
—f
min
max
(1. 1) (1. 2)
—f
min
max
(1. 1) (1. 2)
—f
min
max
(1. 1) (1. 2)
—f
min
max
(1. 1) (1. 2)
—f
min
max
(1. 1) (1. 2)
—f
min
max
(1. 1) (1. 2)
1 = Jarrukatkoja on käytössä
2 = Ulkoinen jarrukatkoja
1 = Vauhtikäynnistys
1 = Hidastaen
nCX
32
0,1 Hz 10 Hz 34
0,1 Hz 15 Hz 34
0,1 Hz 20 Hz 34
0,1 Hz 25 Hz 34
0,1 Hz 30 Hz 34
0,1 Hz 40 Hz 34
0,1 Hz 50 Hz 34
STOP
STOP
Huom! = Parametrin arvoa voi muuttaa vain seis-tilassa.
STOPSTOP
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 17

Vacon Sivu 17
Erikoiskäyttösovellus II
Ryhmä 5, estotaajuuksien parametrit
Nro. Parametri Alue Askel Oletus Asiakas Määritelmä Sivu
5. 1 Estotaajuusalue 1 0—f
max
0,1 Hz 0 Hz 34
alaraja
5. 2 Estotaajuusalue 1 0—f
max
0,1 Hz 0 Hz 0 = Estotaajuusalue 1ei ole 34
yläraja toiminnassa
5. 3 Estotaajuusalue 2 0—f
max
0,1 Hz 0 Hz 34
alaraja
5. 4 Estotaajuusalue 2 0—f
max
0,1 Hz 0 Hz 0 = Estotaajuusalue 2 ei ole 34
yläraja toiminnassa
5. 5 Estotaajuusalue 3 0—f
max
0,1 Hz 0 Hz 34
alaraja
5. 6 Estotaajuusalue 3 0—f
max
0,1 Hz 0 Hz 0 = Estotaajuusalue 3 ei ole 34
yläraja toiminnassa
Ryhmä 6, moottorin ohjausparametrtit
Nro. Parametri Alue Askel Oletus Asiakas Määritelmä Sivu
6. 1 Moottorin ohjaus- 0—2 1 0 0 = Taajuusohjaus 34
tapa 1 = Nopeusohjaus
STOP
STOP
STOPSTOP
2 = Momenttiohjaus
6. 2 Kytkentätaajuus 1—16 kHz 0,1 kHz 10/3,6 kHz 35
6. 3 Kentänheikennyspiste 30—500 Hz 1 Hz Param. 35
6. 4Jännite kentän- 15 —200 % 1% 100% 35
heikennyspisteessä x U
6. 5 U/f-käyrän keski- 0—500 Hz 1 Hz 0 Hz 35
pisteen taajuus
6. 6 U/f-käyrän keski- 0—100 % 0,01 % 0,00 % 35
pisteen jännite x U
6. 7Lähtöjännite 0—100 % 0,01 % 0,00 % 35
nollataajuudella x U
STOP
STOP
STOPSTOP
STOP
STOP
STOPSTOP
STOP
STOP
STOPSTOP
STOP
STOP
STOPSTOP
STOP
STOP
STOPSTOP
1. 11
nmot
nmot
nmot
6. 8 Ylijännitesätäjä 0—111 0 = Säätäjä ei käytössä 36
1 = Säätäjä on käytössä
6. 9 Alijännitesäätäjä 0—111 0 = Säätäjä ei käytössä 36
1 = Säätäjä on käytössä
STOP
STOP
Huom! = Parametrin arvoa voi muuttaa vain seis-tilassa.
STOPSTOP
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 18

Sivu 18 Vacon
Erikoiskäyttösovellus II
Ryhmä 7, Suojaukset
Nro Parametrin nimi Alue Askel Oletus Kuvaus Sivu
0 = Ei toimintaa
7.1 Ohjearvovian vaste 0 3 1 0
1 = Varoitus
2 = Vika, pys htyy par.4.7 mukaan
3 = Vika, pys htyy vap. py rien
0 = Ei toimintaa
Vaste ulkoiseen vi-
7.2
kaan
0 3 1 0
1 = Varoitus
2 = Vika, pys htyy par.4.7 mukaan
3 = Vika, pys htyy vap. py rien
0 = Ei toimintaa
7.3 Moottorin vaihevahti 0 2 2 2
1 = Varoitus
2 = Vika
0 = Ei toimintaa
7.4 Maasulkusuojaus 0 2 2 2
1 = Varoitus
2 = Vika
0 = Ei toimintaa
7.5 Moottorin l mp suoja 0 2 1 2
1 = Varoitus
2 = Vika
Moottorin l mp suojan
7.6
kulmapisteen virta
Moottorin l mp suojan
7.7
nollataajuuden virta
Moottorin l mp suojan
7.8
aikavakiot
Moottorin l mp suojan
7.9
kulmapisteen taajuus
50,0
150,0%*I
n
MOTOR
1,0% 100,0%
10,0 150,0% 1,0% 45,0%
0,5 300,0min 0,5min
10 500Hz 1Hz 35Hz
Oletusarvo on asetettu moottorin
nimellisvirran mukaan
0 = Ei toimintaa
7.10 Jumisuoja 0 2 1 1
1 = Varoitus
2 = Vika
7.11 Jumivirtaraja
10,0 200%*
n
I
MOTOR
1,0% 130,0%
7.12 Jumiaika 2,0 120s 1,0s 15,0s
7.13 Maksimijumitaajuus 1 - f
7.14
7.15
7.16
7.17
7.18
7.19
Alikuormitussuoja,
toiminto
Alikuormitussuoja,
kent n heikennysalueen kuorma
Alikuormitussuoja,
nollataajuuden kuorma
Alikuormitussuoja,
alikuormitusaika
Verkkoj nnitteen vaihevahti
I/O-laajennuskortin
termistoritulo
0 2 1 0
20,0 150,0%*
n
T
MOTOR
10,0 150,0%*
n
T
MOTOR
2,0 600,0s 1,0s 20,0s
0 2 2 2
0 2 1 2
max
1Hz 25Hz
0 = Ei toimintaa
1 = Varoitus
2 = Vika
1,0% 50,0%
1,0% 10,0%
0 = Ei toimintaa
1 = Varoitus
2 = Vika
0 = Ei toimintaa
1 = Varoitus
2 = Vika
0 = Ei toimintaa
7.20 Kentt v yl n vaste 0 2 1 0
1 = Varoitus
2 = Vika
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 19

Vacon Sivu 19
Erikoiskäyttösovellus II
Ryhmä 8, automaattisen jälleen käynnistyksen parametrit
Nro. Parametri Alue Askel Oletus Asiakas Määritelmä Sivu
8. 1 Autom. jälleenkäynnistys: 0—10 1 0 0 = Ei toiminnassa 43
yritysten lukumäärä
8. 2 Autom. jälleenkäynnistys: 1—6000 s 1 s 30 s 43
yritysaika
8. 3 Autom. jälleenkäynnistys: 0—1 1 0 0 = Kiihdyttäen 43
käynnistysmuoto 1 = Vauhtikäynnistys
8. 4 Autom. jälleenkäynnistys 0—1 1 0 0 = Ei 43
alijänniteviassa 1 = Kyllä
8. 5 Autom. jälleenkäynnistys 0—1 1 0 0 = Ei 43
ylijänniteviassa 1 = Kyllä
8. 6 Autom. jälleenkäynnistys 0—1 1 0 0 = Ei 44
ylivirtaviassa 1 = Kyllä
8. 7 Autom. jälleenkäynnistys 0—1 1 0 0 = Ei 44
ohjearvoviassa 1 = Kyllä
8. 8 Autom. jälleenkäynnistys 0—1 1 0 0 = Ei 44
yli/alilämpöviassa 1 = Kyllä
Ryhmä 9, Momenttisäätö
Nro Parametrin nimi Alue Askel Oletus Kuvaus Sivu
0 = Ei valintaa
1 = U
in
2 = I
Momenttiohjeen
9.1
valinta
Momenttiohjeen
9.2
offset
Momenttiohjeen
9.3
offsetin vahvistus
Momenttiohjauksen
9.4
aikavakio
Momenttiohjauksen
9.5
alaraja
06 1 0
100%--
+100%
320%--
+320%
1 1000 ms 1 ms 20 ms 44
0 10.00 Hz
100 = Ei kytss 44
1 100 100 = Ei vahvistusta 44
0.01
Hz
3.00 Hz 44
in
3 = Momenttiohje r2 paneelilta
4 = Ain1 (lis kortilta)
5 = Ain2 (lis kortilta)
6 = Kentt v yl ohjaus
44
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 20

Sivu 20 Vacon
Erikoiskäyttösovellus II
Ryhmä 10, Kenttäväyläparametrit
Nro Parametri Alue Askel Oletus Asiakas Kuvaus Sivu
10. 1 Kenttäväyläohj. valinta 0—1 1 0 0 = Ohjaus I/O-liittimiltä 45
1 = Ohjaus kenttäväyläkortilta
10. 2 DIC1-toiminto 0—1 0 1 0 = Kenttäväyläohjaus 45
(kenttäväyläkortin liitin 301) 1 = Ulkoinen vika
10. 3 Modbus Slave-osoite 1—247 1 1 45
10. 4 Modbusin 1—7 1 6 1 = 300 baud 45
tiedonsiirtonopeus 2 = 600 baud
3 = 1200 baud
4 = 2400 baud
5 = 4800 baud
6 = 9600 baud
7 = 19200 baud
10. 5 Modbus pariteettityyppi 0—2 1 0 0 = None 45
1 = Even
2 = Odd
10. 6 Modbusin aikakatkaisu 0—3600 s 1 s 0 s 0 = Ei aikakatkaisua 45
10.7 Profibus slave-osoite 2—126 1 126 46
10.8 Profibusin 1—10 1 10 1 = 9.6 kbaud 46
tiedonsiirtonopeus 2 = 19.2 kbaud
3 = 93.75 kbaud
4 = 187.5 kbaud
5 = 500 kbaud
6 = 1.5 Mbaud
7 = 3 Mbaud
8 = 6 Mbaud
9 = 12 Mbaud
10 = AUTO
10.9 Profibus PPO-tyyppi 1—4 1 1 1 = PPO 1 46
2 = PPO 2
3 = PPO 3
4 = PPO 4
10.10 Profibusin prosessidata 1 0—99 1 1 46
10.11. Profibusin prosessidata 2 0—99 1 2 46
10.12 Profibusin prosessidata 3 0—99 1 3 46
10.13 Profibusin prosessidata 4 0—99 1 99 46
10.14 LonWorks Service Button 0—110 46
Table 6-1 Erikoisparametrit, ryhmät 2–10
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 21

Vacon Sivu 21
Erikoiskäyttösovellus II
6.2 Ryhmien 2—10 parametrien kuvaus
2. 1 Käy/seis-logiikan valinta
0: DIA1: sulkeutunut kosketin = käy eteen
DIA2: sulkeutunut kosketin = käy taakse,
Katso kuva 6-1.
Eteen
Taakse
DIA1
DIA2
Lähtötaajuus
Seis-toiminto
(par 4. 7)
= vap. pyörien
1 2 3
UD012K09
Kuva 6-1 Käy eteen/Käy taakse.
1 Ensiksi valitulla suunnalla on aina korkein prioriteetti
2 Kun kosketin DIA1 avautuu, pyörimissuunta alkaa muuttua
3 Jos Käy eteen (DIA1) ja Käy taakse (DIA2) koskettimet sulkeutuvat
yhtäaikaa, Käy eteen-signaali (DIA1) hallitsee.
1: DIA1: sulkeutunut kosketin = käy avautunut kosketin = seis
DIA2: sulkeutunut kosketin = taakse avautunut kosketin = eteen
Katso kuva 6-2.
t
Eteen
Taakse
Lähtötaajuus
Seis-toiminto
(par 4. 7)
= vap. pyörien
DIA1
DIA2
Kuva 6-2 Käy/Seis, taakse.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
t
UD012K10
Page 22

Sivu 22 Vacon
Erikoiskäyttösovellus II
2: DIA1: sulk. kosketin = Käy avautunut kosketin = Seis
DIA2: sulk. kosketin = Käy valmis avautunut kosketin = Käy estetty
3: 3-johdinohjaus (pulssiohjaus):
DIA1: sulk. kosketin = Käy-pulssi
DIA2: sulk. kosketin = Seis-pulssi
(Tulo DIA3 voidaan ohjelmoida taakse-ohjaukseen)
Katso kuva 6-3.
Eteen
Taakse
DIA1
Käy
DIA2
Seis
Lähtötaajuus
min 50 ms
Seis-toiminto
(par 4. 7)
= vap. pyörien
Kuva 6-3 Käy-pulssi /Seis-pulssi.
4: DIA1: closed contact = start / stop pulse
DIA2: closed contact = start enable
Output
FWD
frequency
Jos käy- ja seis-pulssit
ovat samanaikaisia,
voittaa seis-pulssi
t
UD012K11
REV
DIA1
Start
DIA2
Stop
Run Enable
min. 50 ms
Kuva 6-4 Start / Stop pulse, käynnistys mahdollinen
t
UD009K12
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 23

Vacon Sivu 23
Erikoiskäyttösovellus II
2. 2 DIA3 toiminto
1: Ulkoinen vika, sulk. kosketin = vika näytetään ja moottori pysähtyy, kun
kosketin sulkeutuu
2: Ulkoinen vika, avautuva kosk. = vika näytetään ja moottori pysähtyy, kun
kosketin avautuu
3: Käy-valmis kosketin avoin = moottorin käynnistäminen estetty
kosketin sulk. = moottori on käynnistettävissä
4: Kiihd.- /hid.- kosketin avoin = kiihdytys-/hidastusaika 1 valittu
ajan valinta kosketin sulk. = kiihdytys-/hidastusaika 2 valittu
5: Taakse kosketin avoin = eteen Voidaan käyttää taaksepäin
kosketin sulk. = taakse pyöritt., jos par.2. 1 on 3
6: Ryömintätaaj. kosketin sulk. = ryömintätaajuus valittu taajuusohjeeksi
7: Vikakuittaus kosketin sulk. = kuittaa kaikki viat
8: Kiihd./hid.-toiminnat estetty
kosketin sulk. = lopettaa kiihdyttämisen ja hidastamisen,
kunnes kontakti avataan
9: DC-jarrutuskäsky
kosketin sulk. = DC-jarrutus toimii, kunnes kontakti avataan,
katso kuva 6-4.
Dc-jarruvirta asetetaan parametrilla 4. 8.
10: Momenttiohjaus
kosketin sulk. = Moottorin ohjaus tapahtuu
11: Momenttiohjeen etumerkki
kosketin sulk. = Vaihtaa momenttiohjeen etumerkin
12: Käy vapaasti
kosketin avoin = Käynnistys estetty (pysähtyy vapaasti
kosketin sulk. = Käynnistys mahdollinen
momenttiohjauksella
pyörien)
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 24

Sivu 24 Vacon
Erikoiskäyttösovellus II
Lähtötaajuus
Param. 4. 10
DIA3
KÄY
SEIS
a) DIA3: DC-jarrun ohjaustulo, seis-ohjelmointi = hidastaen
Lähtötaajuus
UD012K32
t
t
Kuva 6-5 DIA3 DC-jarrun aktivointitulona.
2. 3 DIB4-toiminto
Valinnat samat kuin parametrilla 2. 2 paitsi :
10: Vakionopeusvalinta 1 kosketin sulk. = valinta 1 aktiivinen
11: Digitaalinen taajuusohjeen valinta (Uin/Iin)
13: Kenttäväyläohjaus: Valitaan joko I/O- tai kenttäväyläohjaus
14: Parametri 1.5 / Uin
15: Parametri 1.5 / Iin
2. 4 DIB5-toiminto
Valinnat samat kuin parametrilla 2. 2 paitsi :
10: Vakionopeusvalinta 2 kosketin sulk. = Valinta 2 aktiivinen
11: Moottoripotentiom. YLÖS kosketin sulk. = Ohjearvo kasvaa kunnes
13
: Kenttäväyläohjaus: Valitaan joko I/O- tai kenttäväyläohjaus
DIA3
KÄY
SEIS
b) DIA3: DC-jarrun ohjaustulo, seis-ohjelmointi = vapaasti
pyörien
UD012K32
kosketin avataan
2. 5 DIB6-toiminto
Valinnat samat kuin parametrilla 2. 2 paitsi :
10: Vakionopeusvalinta 3 kosketin sulk. = Valinta 3 aktiivinen
11: Moottoripotentiom. ALAS kosketin sulk. = ohjearvo pienenee, kunnes
kontakti avataan
13: Kenttäväyläohjaus: Valitaan joko I/O- tai kenttäväyläohjaus
Huom! (Par. 2.3, 2.4, 2.5): Väyläohjauksessa parametrit 10.1 = 1 ja 10.2 = 0.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 25

Vacon Sivu 25
Erikoiskäyttösovellus II
2. 6 U
signaalialue
in
0 = signaalialue 0—10 V
1 = asiakaskohtainen asettelualue asiakaskohtaisesta minimistä (par. 2. 4)
asiakaskohtaiseen maksimiin (par. 2. 5)
2 = signaalialue -10—+10 V, voidaan käyttää ainoastaan sauvaohjauksella
2. 7 U
asiakaskohtainen minimi/maksimi
in
2. 8 Näillä parametreilla voit asettaa U
Minimiasetus: Aseta Uin signaali minimitasolleen, valitse parametri 2. 7,
paina Enter-painiketta
Maksimiasetus: Aseta Uin signaali maksimitasolleen, valitse parametri 2. 8,
paina Enter-painiketta
Parametriarvot voidaan asetella vain tällä menetelmällä (ei
2. 9 U
signaalin kääntö
in
Parametri 2. 9 = 0, ei kääntöä
analogiselle U
signaalille.
in
Parametri 2. 9 = 1, analogisen
U
signaalin kääntö.
in
signaalialueen mihin tahansa välillä 0—10 V.
in
Selainnäppäimillä
).
2. 10 U
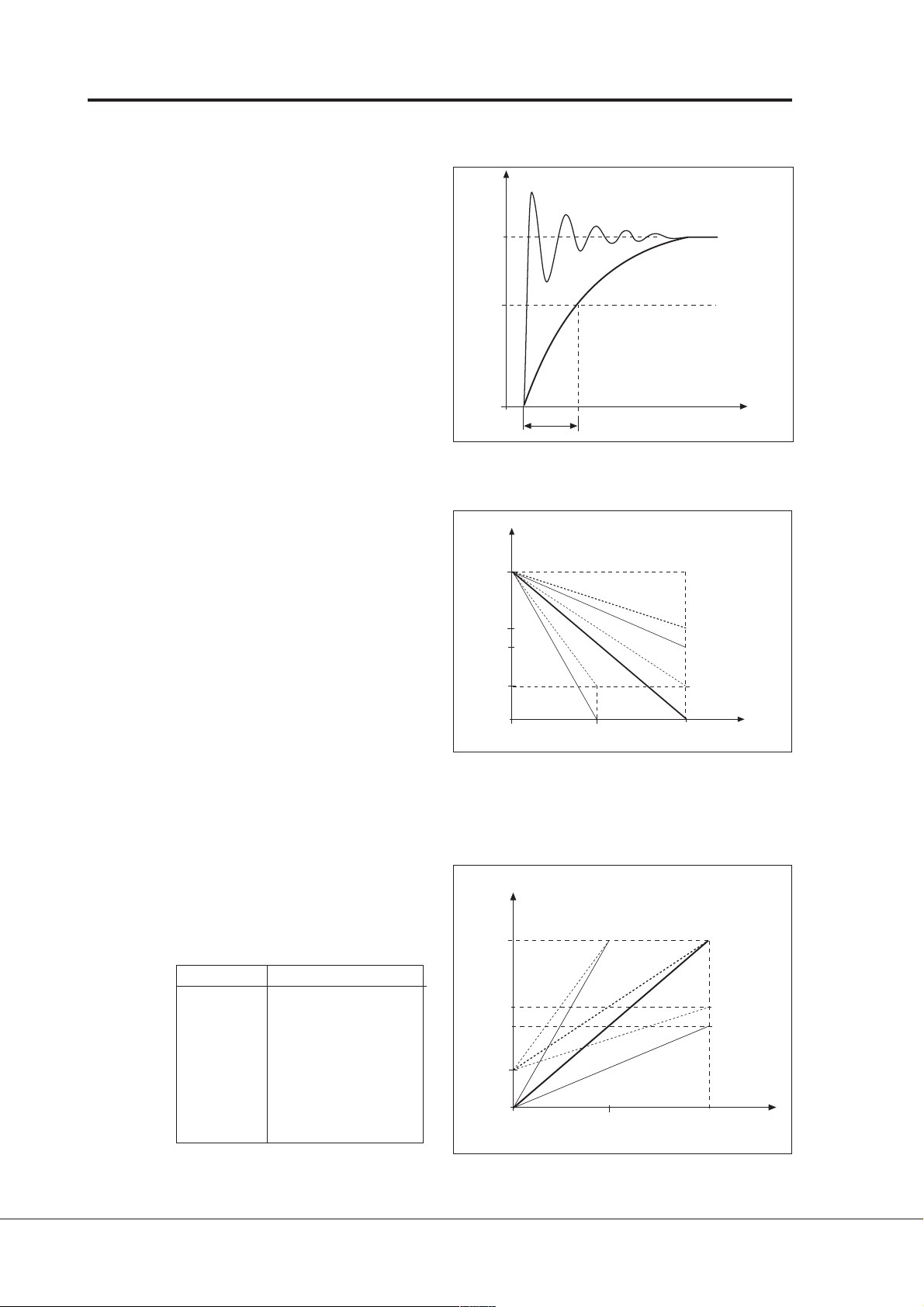
signaalin suodatusaika
in
Suodattaa häiriöitä analogisesta
U
signaalista.
in
Pitkä suodatusaika hidastaa ohjauksen vasteaikaa.
Katso kuva 6-6.
Kuva 6-6 Uin -signaalin suodatus.
2. 1 1 Analogiatulon Iin signaalialue
0 = 0—20 mA
1 = 4—20 mA
2 = asiakaskoht. signaalialue
100%
63%
%
Suodattamaton
signaali
Par. 2. 10
Suodatettu
signaali
t [s]
UD012K37
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 26

Sivu 26 Vacon
Erikoiskäyttösovellus II
2. 12 Analogiatulon Iin asiakaskoh-
2. 13 tainen minimi/maksimi
Näillä parametreilla voit asettaa
I
signaalialeen mihin tahansa
in
välillä 0—20 mA.
Minimi asetus:
Aseta I
in minimi tasolle, valitse
parametri 2.12 ja paina enteriä.
%
100%
Suodattamaton
signaali
Maksimi asetus:
Aseta I
parametri 2.13 ja paina enteriä.
in maksimi tasolle, valitse
63%
Suodatettu
signaali
Huom! Nämä parametrit voi määrätä
vain tällä menetelmällä ( ei selainpainikkeilla )
t [s]
2. 14 Analogiatulon I
kääntö
in
Par. 2. 15
UD012K40
Parametri 2. 14 = 0, ei analogiasignaalin I
kääntöä.
in
Kuva 6-7 Analogiatulon Iin suodatusaika.
Parametri 2. 14 = 1, analogiasignaalin I
kääntö.
in
2. 15 Analogiatulon Iin suodatusaika
Suodattaa häiriöitä analogisesta tulosignaalista I
jauksen vasteaikaa.
Katso kuva 6-7.
2. 16 U
2. 17 U
2. 18 I
2. 19 I
signaalin minimin skaalaus
in
Asettaa U
signaalin maksimin skaalaus
in
Asettaa U
signaalin minimin skaalaus
in
Asettaa I
signaalin maksimin skaalaus
in
Asettaa I
signaalin skaalauksen minimipisteen, katso kuva 6-8.
in
signaalin skaalauksen maksimipisteen, katso kuva 6-8.
in
signaalin skaalauksen minimipisteen, katso kuva 6-8.
in
signaalin skaalauksen maksimipisteen, katso kuva 6-8.
in
. Pitkä suodatusaika hidastaa oh-
in
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 27

Vacon Sivu 27
Erikoiskäyttösovellus II
Skaalattu
oloarvo [%]
100
Par. 2. 19 = 30%
Par. 2. 20 = 80%
Oloarvotulo [%]
16,0
16,8
1008030
10,0 V
8,03,0
20,0 mA
0
0
0
6,0
8,8 20,0 mA
4
Kuva 6-8 Esimerkkejä Uin- ja Iin-tulojen skaalauksesta.
2. 20 Vapaan analogiatulon valinta
Parametrin avulla valitaan vapaan ( ei ohjearvokäytössä olevan ) analogiatulon
signaali:
0 = ei käytössä
1 = jännitetulo U
2 = virtatulo I
in
in
3 = Jännitesignaali Ain1 I/O-laajennuskortin liittimistä 202-203
4 = Analoginen signaali Ain 2 I/O-laajennuskortin liittimistä 202-203
- virtasignaali Vacon CX100OPT-laajennuskortilta
- jännitesignaali Vacon CX102OPT-laajennuskortilta
5 = Kenttäväyläsignaali
- signaali tulee kenttäväylän läpi ja riippuu käytetystä optiokortista
(15,3 mA)
-30
100
76,5
17,7
(3,5 mA)
Skaalattu
oloarvo [%]
Par. 2. 19 = -30%
Par. 2. 20 = 140%
0
0
0
4
100 140
10,0 V
20,0 mA
20,0 mA
Oloarvotulo [%]
UD012K34
2. 21 V apaan analogiatulon toiminta
Parametrin avulla valitaan toiminto, johon se vaikuttaa:
0 = toiminto ei käytössä
1 = virtarajan (par. 1. 7) skaa-
laus.
Vapaallla analogiatulosignaalilla voidaan skaalata taajuusmuuttajan moottorille
syötettävän virran maksimiarvoa välillä 0—par. 1. 7
aseteltu arvo.
Katso kuva 6-9.
Kuva 6-9 Virran maksimiarvon skaalaus.
2 = DC-jarrutusvirran
vähentäminen
Jarrutusvirtaa voidaan
säätää vapaalla analogia-
tulolla välillä 0,15 x I
nCX
param. 4. 8 asetettu arvo.
Katso kuvaa 6-10.
Kuva 6-10 DC-jarrutusvirran vähentäminen.
—
100%
Par. 1. 7
100%
Par. 4. 8
0,15 x I
nCX
0 V
0 mA
4 mA
Vapaa
DC-jarrutusvirta
0
Signaalialue
Signaalialue
10 V
20 mA
20 mA
Vapaa
Analogiatulo
UD012K61
Vapaa analogiatulo
UD012K58
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 28
Sivu 28 Vacon
Erikoiskäyttösovellus II
3 = Kiihdytys-./Hidastusajan
lyhentäminen
Muutoskerroin R
Kiihdytys- ja hidastusaikaa
voidaan muuttaa vapaalla
analogiatulolla seuraavan
kaavan mukaan:
Muuttunut Kiihd.(Hid.) aika =
param. 1. 3 (1. 4, 4. 3, 4. 4) asetusarvo /(muutoskerroin R
(kuvasta 6-11).
Kuva 6-11 Kiihd./Hid.ajan lyhentäminen.
4 = Momentin valvontarajan
skaalaus
Momentin valvontarajaa
voidaan muuttaa vapaalla
analogiatulolla välillä 0—
parametrilla 3.14 aseteltu
valvontaraja.
Katso kuva 6-12.
10
2
1
100%
Par. 3. 14
Momenttiraja
Signaalialue
Vapaa analogiatulo
UD012K59
Kuva 6-12 Momentin valvontarajan
skaalaus.
0
2. 22 Moottoripotentiometrin laskentanopeus
Määrittelee, kuinka nopeasti ohjearvo muuttuu moottoripotentiometriohjausta
käytettäessä.
2.23 Ain1-signaalin kääntö (I/O-laajennuskortti)
Parametri 2.23 0 = Ei signaalin kääntöä
2.24 Ain1-signaalin suodatusaika
Analogisen Ain1-tulosignaalin häiriösuodatus. Mitä pidempi suodatusaika, sitä
hitaampi vaste.
2.25 Ain2-tulosignaalin (I/O-laajennuskortti) alue
0 = 0—20 mA
1 = 4—20 mA
2 = 0—10 V (Käytettävä 102OPT-laajennuskortin kanssa)
2.26 Ain2-signaalin kääntö (I/O-laajennuskortti)
Parametri 2.26 = 0 = Ei signaalin kääntöä
Signaalialue
Vapaa analogiatulo
UD012K60
2.27 Ain2-signaalin suodatusaika (I/O-laajennuskortti)
Analogisen Ain2-tulosignaalin häiriösuodatus. Mitä pidempi suodatusaika, sitä
hitaampi vaste.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 29

Vacon Sivu 29
Erikoiskäyttösovellus II
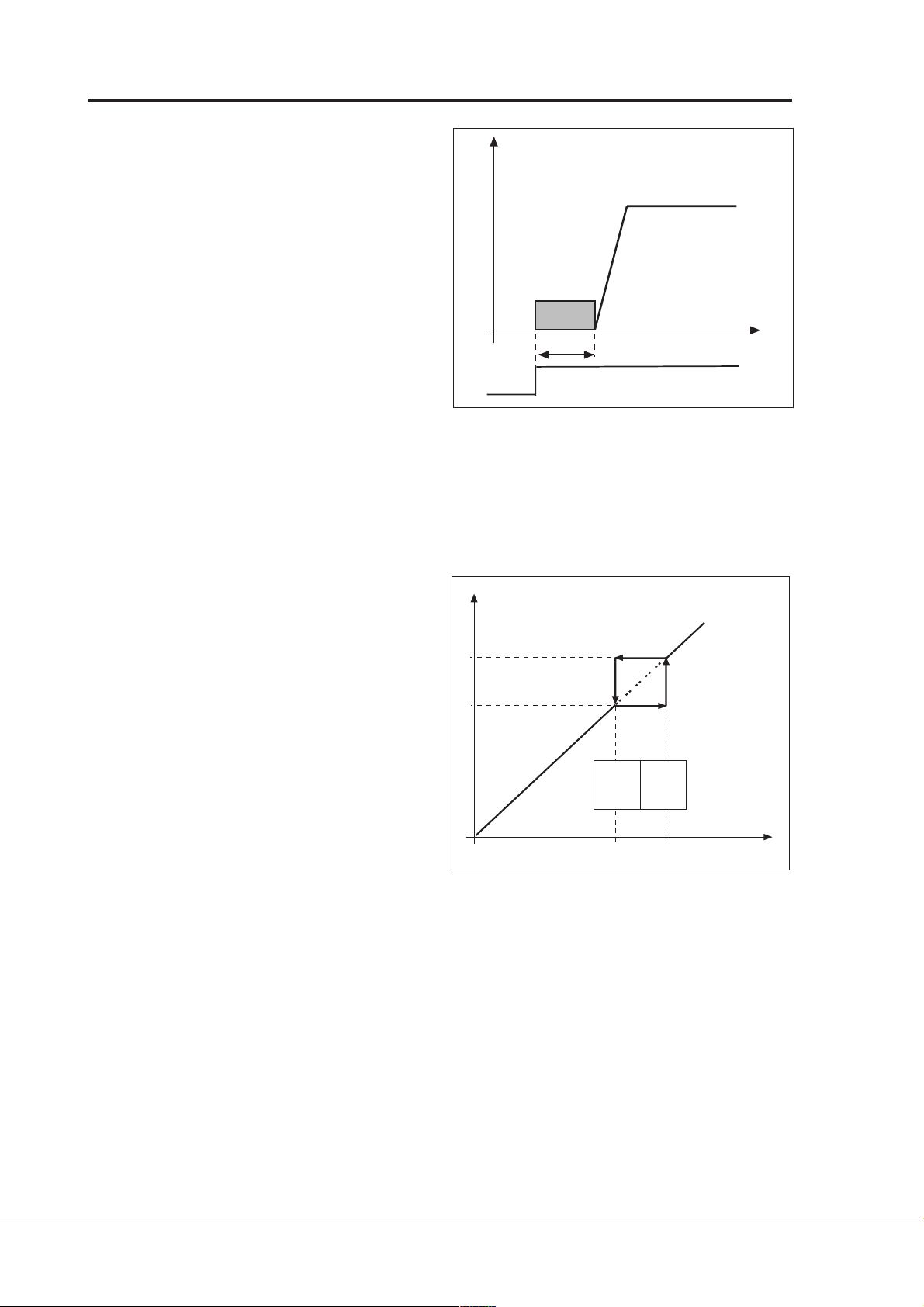
2.28 Säätötulo
Alue: 0 -5
Askel: 1
Oletus: 0
Määritelmä:
0 = Ei käytössä
1 = Jännitetulo
2 = Virtatulo
3 = Ain 1 I/O-laajennuskortti
4 = Ain 2 I/O-laajennuskortti
5 = Kenttäväyläsignaali
2.29 Säätöprosentti
Alue: 0.0 % - 200.0 %
Askel: 0.1 %
Oletus: 0.0 %
2.30 Säätöpoikkeama
Alue: 0.0 % - 100.0 %
Askel: 0.1 %
Oletus: 0.0 %
f/Hz
Taaju usmuuttaja
(Par.1.5)
O
Parametri 2.29
Parametri 2.30
OFFSET
0%
50%
O
100%
O
100%
(0 %)
(25 %)
(50%)
200%
Adjprcnt.fh8
St-
%
Prosentti
Kuva 6-13 Parametrien 2.29 ja 2.30 asetukset
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 30
Sivu 30 Vacon
Erikoiskäyttösovellus II
3. 1 Analogialähdön sisältö
100%
%
Suodattamaton
signaali
Parametrilla valitaan analogialähdön sisältö 7 mahdollisuudesta, katso sivu 14.
3. 2 Analogialähdön suodatusaika
Suodattaa analogialähtöä.
Katso kuva 6-14.
Kuva 6-14 Analogialähdön suodatus.
3. 3 Analogialähdön kääntö
Kääntää analogialähtösignaalin:
max. lähtösign. = minimi asetusarvo
min. lähtösign. = max. asetusarvo
63%
Analog.
lähtövirta
20 mA
12 mA
10 mA
4 mA
0 mA
0
Par. 3. 2
Suodatettu
signaali
Param. 3. 5
= 200%
0.5
UD012K16
Param. 3. 5
= 50%
Param. 3. 5
= 100%
Param. 3. 1:lla valittu
signaalin maks. arvo
1.0
UD012K17
t [s]
Kuva 6-15 Analogialähdön kääntö.
3. 4 Analogialähdön minimi
Määrittelee analogialähdön ole-
maan joko 0 mA tai 4 mA (elävä
nolla ). Katso kuva 6-15.
3. 5 Analogialähdön skaalaus
Analogialähdön skaalaus.
Katso kuva 6-16.
Signaali Signaalin max.arvo
Lähtötaajuus Max.taajuus (p. 1. 2)
Lähtövirta 2 x I
Moot. nopeus Max.nopeus (nnx f
Momentti 2 x T
Moot. teho 2 x P
Moot.jännite 100% x U
Välip.jännite 1000 V
Uin signaali Max Uin
Iin sign aali Max Iin
Kuva 6-16 Analogialähdön skaala.
nCX
nCX
nCX
nmoottori
max/fn
Analog.
lähtövirta
20 mA
12 mA
)
10 mA
Par. 3. 4 = 1
4 mA
Par. 3. 4 = 0
0 mA
0
Par. 3. 5
= 200%
0.5
Par. 3. 5
= 100%
Par. 3. 5
= 50%
Param. 3. 1:llä valitun
signaalin maks. arvo
1.0
UD012K18
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 31

Vacon Sivu 31
Erikoiskäyttösovellus II
3. 6 Digitaalilähdön sisältö
3. 7 Relelähdön 1 sisältö
3. 8 Relalähdön 2 sisältö
Asetusarvo Selitys
0 = Ei käytössä Ei toiminnassa
Digitaalilähtö DO1 on alhaalla ja johtaa virtaa sekä ohjelmoitavat relelähdöt (RO1, RO2) ovat aktiivisia, kun:
1 = Valmis Taajuusmuuttaja on valmis toimimaan
2= Käy Taajuusmuuttaja toimii
3 = Vika On tapahtunut vikalaukaisu
4 = Vika käännetty Lähtö on aktiivinen, kun vikalaukaisua ei ole tapahtunut
6 = Vacon ylilämpövaroitus Jäähdytyselementin lämpötila on saavuttanut +70°C
6 = Ulkoinen vika tai varoitus Vika tai varoitus riippuen parametrista 7.2
7 = Ohjearvovikatai -varoitus Vika tai varoitus riippuen parametrista 7. 1
- jos analogiaohje on 4—20 mA ja signaali on <4mA
8 = Varoitus Aina kun varoitus on voimassa,
9 = Taaksepäin Taaksepäin-ohjaus on annettu
10= Ryömintätaajuus Ryömintätaajuus-ohjaus on annettu
11= Asetellussa nopeudessa Lähtötaajuus on saavuttanut ohjearvon
12= Moottorisäätäjä aktiivinen Ylijännite- tai ylivirtasäätäjä on toiminnassa
13= Lähtötaajuusvalvonta 1 Lähtötaajuus on alittanut / ylittänyt asetellun
Alarajan/ Ylärajan (par. 3. 9 ja par. 3. 10)
14= Lähtötaajuusvalvonta 2 Lähtötaajuus on alittanut / ylittänyt asetellun
Alarajan/ Ylärajan (par. 3. 11 ja par. 3. 12)
15= Momentinvalvonta Momentti ei valvonta-alueella
Alarajan/ Ylärajan (par. 3. 13 ja par. 3. 14)
16= Ohjearvon valvonta Ohjearvo ei valvonta-alueella
Alarajan/ Ylärajan (par. 3. 15 ja par. 3. 16)
17= Ulkoisen jarrun ohjaus Ulkoinen jarru päälle/pois-ohjaus aseteltavilla viiveillä
(param. 3. 17 ja 3. 18)
18= Ohjaus riviliittimiltä Ulkoiset ohjaukset valittu käyttöön ohjelm. painikk. n:o 2
19= Taajuusmuuttajan lämpötila Taajuusmuuttajan lämpötila on ylittänyt/alittanut asetel-
rajan valvonta lun valvontarajan (par. 3. 19 ja par. 3. 20)
20= Suunta eri kuin pyyntö Moottorin pyörimissuunta on ohjauskäskyn vastainen
21 = Käänt. ulkoisen jarrun ohjaus Käänteinen jarrun ON/OFF ohjaus (par. 3.17 ja 3.18),
ulostulo aktiivinen kun jarrun ohjaus OFF
22 = Termistorivika tai -varoitus Lisäkortin termistoritulo ilmoittaa ylilämmöstä. Vika- tai
varoitustoiminto aktivoituu parametrin 7.19 valinnasta
riippuen.
Taulukko 6-2 Digitaalilähdön DO1 ja lähtöreleiden RO1 and RO2 sisältö.
3. 9 Lähtötaajuuden valvontaraja 1, valvontatoiminta
3. 11 Lähtötaajuuden valvontaraja 2, valvontatoiminta
0 = ei valvontaa
1 = alarajavalvonta
2 = ylärajavalvonta
Jos lähtötaajuus alittaa/ylittää asetellun rajan (3. 10, 3. 12), aktivoituu digitaalilähtö DO1 tai relelähtö RO1 tai RO2 riippuen parametrien 3. 6—3. 8 asetuksesta.
3. 10 Lähtötaajuuden valvontarajan 1 arvo
3. 12 Lähtötaajuuden valvontarajan 2 arvo
Lähtötaajuuden arvo, jota valvotaan parametriasetuksilla 3. 9 ( ja 3. 11).
Katso kuva 6-17.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 32

Sivu 32 Vacon
Erikoiskäyttösovellus II
3. 13 Momentin valvonta, toiminnan
määrittely
0 = ei valvontaa
1 = alarajan valvonta
2 = ylärajan valvonta
Par 3. 10
Jos laskennallinen momentin
arvo alittaa/ylittää asetellun rajan
(3. 14), aktivoituu digitaalähtö
DO1 tai relelähtö RO1 tai RO2
riippuen parametrien 3. 6—3. 8
Esim:
asetuksesta.
Kuva 6-17 Lähtötaajuuden
valvonta.
3. 14 Momentin valvontarajan arvo
Laskennallisen momentin raja-arvo, jota valvotaan parametriasetuksilla 3. 13.
3. 15 Ohjearvon valvonta, toiminnan määrittely
0 = Ei valvontaa
1 = Alarajan valvonta
2 = Ylärajan valvonta
Jos ohjearvo alittaa/ylittää asetetun rajan (3. 16), aktivoituu digitaalilähtö DO1
tai relelähtö RO1 tai RO2 riippuen parametrien 3. 6—3. 8 asetuksesta. Valvottu ohje
on aktiivinen ohje. Ohje voi tulla joko A- tai B-paikasta DIB6 tulosta riippuen
tai paneelilta, jos paneeli on valittu aktiiviseksi ohjauspaikaksi.
f[Hz]
21 RO1
22 RO1
23 RO1
Par 3. 9 = 2
21 RO1
22 RO1
23 RO1
UD012K19
21 RO1
22 RO1
23 RO1
t
3. 16 Ohjearvon valvontarajan arvo
Taajuusarvo, jota valvotaan parametriasetuksella 3. 15.
3. 17 Ulkoisen jarrun poiskytkentäviive
3. 18 Ulkoisen jarrun päällekytkentäviive
Parametrien avulla ulkoisen jarrun poiskytkentä ja päällekytkentä voidaan "tahdistaa" Seis- ja Käy-signaaleihin halutulla viiveellä, ks. kuva 6-19.
Jarrun ohjaussignaali voidaan ohjelmoida joko digitaalilähtöön DO1 tai relelähtöön
RO1 tai RO2, ks. parametrit 3. 6—3. 8.
3. 19 Taajuusmuuttajan lämpötilarajan valvontatoiminto
0 = Ei valvontaa
1 = Alituksen valvonta
2 = Ylityksen valvonta
Jos taajuusmuuttajan jäähdytyselementin lämpötila ylittää/alittaa parametrilla 3. 20
asetellun rajan saadaan varoitussignaali joko digitaalilähtöön DO1 tai relelähtöön
RO1 tai RO2, ks. parametrit 3. 6—3. 8.
3.20 Taajuusmuuttajan lämpötilavalvonnan asetusarvo
Taajuusmuuttajan lämpötila, jonka ylitystä/alitusta valvotaan parametrilla 3. 19.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 33

Vacon Sivu 33
Erikoiskäyttösovellus II
3.21 I/O laajennuskortin (opt.) analogisenlähdön sisältö
0 = Ei käytössä Asteikko 100 %
1 = O/P taajuus ( 0 - f
max )
2 = Moottorinopeus ( 0 - max.nopeus )
3 = O/P juoksu ( 0 -2.0 x InCX )
4 = Moottorin momentti ( 0 - 2 x TnCX )
5 = Moottoriteho ( 0 - 2 x PnCX )
6 = Mottorin jännite ( 0 - 100% x UnM )
7 = DC-välipiirin jännite ( 0 - 1000 V )
8 = Tulosignaali Uin
9 = Tulosignaali Iin
10 = Taajuusohje
11 = Momenttiohje
12 = Moottori ± momentti ( -2 - +2 x TnMOT )
13 = Moottori ± voima ( -2 - +2 x TnMOT )
14 = O/P taajuus ( fmin - fmax )
3.22 I/O-laajennuskortin analogialähdön suodatusaika
Alue: 0.01 - 10 s
Askel: 0.01
Oletus: 1.00
3.23 I/O-laajennuskortin analogalähdön kääntö
0 = Ei käännetty
1 = Käännetty
Oletus: 0 = Ei käännetty
3.24 I/O-laajennuskortin analogialähdön minimi
0 = 0 mA
1 = 4 mA
Oletus: 0 = 0 mA
3.25 I/O-laajennuskortin analogialähdön skaalaus
Alue: 10 % - 1000 %
Askel: 1 %
Oletus: 100 %
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 34

Sivu 34 Vacon
Erikoiskäyttösovellus II
3.26 Analogialähdön offset
3.27 I/O-laajennuskortin analogialähdön offset
Näillä parametreilla säädetään kontrollikortin ja I/O-laajennuskortin analogilähtöjen
offsetit. Katso kuva 6-18.
An alog .
lhtvirta
20 mA
Pa ram. 3. 26
= 2 5% (+5 mA)
0 mA
0
0. 5
Para m. 3. 5
= 100%
1.0
Pa ram. 3. 26
= -30% (- 6mA)
Pa ram . 3. 1: ll
valitunsignaalin
maks. arvo
ao-o ffs e.fh3
Kuva 6-18. Analogialähdön offset
3.28 Digitaalilähdön DO1 päällekytkentäviive
3.29 Digitaalilähdön DO1 irtikytkentäviive
3.30 Relelähdön RO1 päällekytkentäviive
3.31 Relelähdön RO1 irtikytkentäviive
3.32 Relelähdön RO2 päällekytkentäviive
3.33 Relelähdön RO2 irtikytkentäviive
Näillä parametreillä voidaan asettaa päälle- ja irtikytkentäviiveet digitaali- ja relelähdöille. Kts.
kuva 6-19.
Digitaali- t ai relel ht n
ohjelmoitu signaali
DO-, RO1- tai RO2-l ht
P llekytkent viive Irt ikytk ent v iive
ud 182k_ 2
Kuva 6-19. Digitaali- ja relelähtöjen irti- ja päällekytkentäviiveet
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 35

Vacon Sivu 35
j
j
a)
Ulkoin en jarru:
EI jarrutusta
arru tus ON
DIA1: K y eteenp.
Seis
DIA2: K y taaksep.
Seis
b)
Ulkoin en jarru:
EI jarrutusta
arru tus ON
DIA1: K y pulssi
DIA2: Seis pulssi
Erikoiskäyttösovellus II
t
= Par. 3. 17 tON = Par. 3. 18
OFF
= Par. 3. 17 tON = Par. 3. 18
t
OFF
Digitaali- tai
relel ht
UD012K45
Digitaali- tai
rel el h t
t
t
Kuva 6-20. Ulkoinen jarruohjaus: Käy/Seis-logiikan valinta, par. 2.1=0, 1 tai 2
Käy/Seis-logiikan valinta, par. 2.1=3.
4. 1 Kiihtyv./ Hidastuv. rampin 1 muoto
4. 2 Kiihtyv./ Hidastuv. rampin 2 muoto
Kun nopeuden muutoksiin halutaan pehmeyttä, käytetään lineaarisen muutoksen
sijasta ns. S-käyrää. Tässä kiihdytys- tai hidastusrampin alku- ja loppupäähän
muodostetaan pyöristys kuvan 6-21 mukaan. Pyöristys muodostetaan parametrilla 4. 1
kiihdytys- ja hidastusaikaa 1 koskevilla nopeuden muutoksilla. Parametrilla 4. 2
pyöristetään muutosta kiihdytys- ja hidastusajan 2 ollessa kysymyksessä.
Asettamalla ko. parametrin arvo nollaksi
kiihtyvyys ja hidastuvuus toimivat
[Hz]
lineaarisesti ilman pyöristyksiä.
Asettamalla tämä arvo 0,1—10 s välille,
saadaan sitä pehmeämpi nopeuden
muutos mitä suurempaa arvoa
käytetään. Katso kuva 6-21.
1. 3, 1. 4
(4. 3, 4. 4)
4. 1 (4. 2)
Kuva 6-21. S-käyrä kiihdytyksessä ja hidastuksessa
4. 1 (4. 2)
[t]
UD012K20
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 36

Sivu 36 Vacon
Erikoiskäyttösovellus II
4. 3 Kiihtyvyysaika 2
4. 4 Hidastuvuusaika 2
Kiihtyvyysaika on se aika, mikä kuluu lähtötaajuuden nousemiseen asetetusta
minimitaajuudesta (par.1.1) asetettuun maksimitaajuuteen (par1.2) askelmaisessa
ohjearvon muutoksessa. Hidastuvuusaika määritellään päinvastaisessa
muutoksessa. Tämä parametripari antaa mahdollisuuden käyttää kahta kiihdytys-/
hidastusaikaparia samassa sovellutuksessa. Muutosajat 2 saadaan käyttöön tässä
sovelluksessa digitaalitulolla, joka on ohjelmoitu tähän valintaan, ks parametrit 2.18
ja 2.19.
4. 5 Jarrukatkoja
0 = ei jarrukatkojaa
1 = jarrukatkoja ja -vastus on asennettu
2 = Ulkoinen jarrukatkoja
Kun jarrukatkoja on valittu käyttöön, kuorman ja moottorin hitausmassan energia voidaan syöttää jarrukatkojalla vastukseen. Näin voidaan käyttää hidastuksessa yhtä
suurta momenttia kuin kiihdytyksessä.
4. 6 Käynnistystoiminto
Kiihdyttäen:
0 Taajuusmuuttaja käynnistyy 0 Hz:llä ja kiihdyttää aseteltuun ohjetaajuuteen ase-
tellulla kiihdytysajalla. (Kuorman hitausmassa saattaa kuitenkin pidentää kiihdytysaikaa.)
Vauhtikäynnistys:
1 Taajuusmuuttaja on mahdollista käynnistää pyörivään moottoriin sitä pysäyttä-
mättä. Taajuusmuuttaja etsii automaattisesti nopeuden, jolla moottori pyörii.
Tämän jälkeen se muuttaa lähtötaajuuden aseteltua kiihdytys- tai hidastuvuus-
aikaa käyttäen ohjetaajuuteen.
Tätä käynnistysmuotoa kannattaa käyttää silloin, kun et halua tai et voi
pysäyttää moottoria ennen sen kytkemistä taajuusmuuttajan ohjaukseen.
4. 7 Pysäytystoiminto
Vapaasti pyörien:
0 Kun taajuusmuuttaja saa seis-ohjauksen, se jättää moottorin vapaasti pyöri-
mään ilman ohjausta.
Hidastaen:
1 Kun taajuusmuuttaja saa seis-ohjauksen, se hidastaa moottoria asetettua hi-
dastusaikaa käyttäen tai, jos kuorman hitausmassa on suuri aseteltuun hidastukseen nähden, niin nopeasti kuin se on mahdollista ilman ylijännitelaukaisua.
Mikäli hidastusta halutaan nopeuttaa, on käytettävä jarrukatkojaa ja -vastusta.
4. 8 DC-jarrutusvirta
Määrittelee tasavirran, joka ohjataan moottoriin DC-jarrutuksen aikana.
4. 9 DC-jarrutusaika pysäytyksessä
Määrittelee jarrutustoiminnon ja jarrutusajan pysäytyksessä.
Katso kuva 6-22.
0 DC-jarrutus ei käytössä
>0 DC-jarrutus käytössä ja sen toiminta riippuu pysäytystoiminnon asettelusta,
(param. 4. 7), ja jarrutusaika parametrin 4. 9 arvosta:
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 37

Vacon Sivu 37
Erikoiskäyttösovellus II
Parametri 4. 7 (Pysäytystoiminto) = 0 (vapaasti pyörien):
Kun taajuusmuuttaja saa Seis-ohjauksen, se alkaa välittömästi syöttää asetel-
tua tasavirtaa moottorille. Tällä tavalla moottori voidaan pysäyttää nopeimmalla
mahdollisella tavalla ilman jarrukatkojaa.
Jarrutusaika riippuu asetellun ajan lisäksi lähtötaajuuden arvosta, jolla seisohjaus annetaan. Jos lähtötaajuus on
>moottorin nimellistaajuus (par 1. 11),
on jarrutusaika aseteltu (param.4. 9). Jarrutusaika lyhenee lineaarisesti lähtö-
taajuuden laskiessa. Kun lähtötaajuus on <10 % nimellisestä, on jarrutusaika
10 % asetellusta jarrutusajasta.
f
out
f
out
f
n
KÄY
SEIS
Lähtötaajuus
Moottorin nopeus
DC-jarru päällä
t = 1 x par. 4. 9
t
0,1 x f
f
n
Lähtötaajuus
n
KÄY
SEIS
Moottorin nopeus
DC-jarru päällä
t = 0,1 x par. 4. 9
t
UD012K21
Kuva 6-22 DC-jarrutusaika, kun param.4. 7 = 0.
Param. 4. 7 (Pysäytystoiminto) = 1 (hidastaen):
Kun taajuusmuuttaja saa Seis-ohjauksen, se hidastaa moottorin nopeutta ase-
tettujen hidastuvuusparametrien mukaan parametrilla 4. 10 määrättyyn taajuu-
teen, jossa DC-jarrutus alkaa.
Jarrutusaika määritellään parametrilla 4. 9.
Jos kuorma sisältää suuren
hitausmassan, suositellaan
käytettäväksi jarrukatkojaa ja
-vastusta.Katso kuva 6-23.
f
out
Moottorin nopeus
Lähtötaajuus
4.10 DC-jarrutuksen aloitustaajuus
Katso kuva 6-23.
Param. 4. 10
Kuva 6-23 DC-jarrutusaika, kun
par.4.7 = 1
KÄY
SEIS
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
DC-jarrutus
t
t = param. 4. 9
UD012K23
Page 38
Sivu 38 Vacon
Erikoiskäyttösovellus II
4. 11 Jarrutusaika käynnistyksessä
Lähtötaajuus
0 DC-jarrutusta ei käytetä
>0 DC-jarrutusta käytössä
käynnistyksessä.
Tällä parametrilla määritellään DCjarrutuksen aika.
Jarrutuksen jälkeen lähtötaajuus
nousee siten kuin parametriasetuksilla
on määrätty (käynnistystoiminto par.
4.6; muutosajat param.1.3 ja 1.4 / 4.3
KÄY
SEIS
Par 4. 11
ja 4.4). Katso kuva 6-24.
Kuva 6-24. DC-jarrutus käynnistyksessä.
4. 12 - 4. 18 Vakionopeudet 1—7
Parametrien arvot määrittelevät digitaalituloilla valitut vakionopeudet.
5. 1—5. 6 Estotaajuuksien alue
Alaraja /Yläraja
[Hz]
t
UD012K22
Joissakin sovellutuksissa tietyt
lähtötaajuudet aihettavat mekaanisia
resonansseja. Näillä parametreilla voidaan asetella kolme estotaajuusaluetta
välillä 0—f
. Katso kuva 6-25.
max
Estotaajuusalueen yli "hypätään"
kiihtyvyys- ja hidastuvuusaikojen
mukaisesti.
Kuva 6-25 Esimerkki estotaajuus-
alueen asetuksesta.
6. 1 Moottorin ohjausmuodot
0 = Taajuusohjaus: Riviliittimen ja paneelin ohjearvot ovat
1 = Nopeussäätö: Riviliittimen ja paneelin ohjearvot ovat
lähtötaajuus
5. 1 5. 2
5. 3 5. 4
5. 5 5. 6
[Hz]
UD012K33
taajuusohjeita ja taajuusmuuttaja säätää
lähtötaajuutta (lähtötaajuuden resoluutio 0,01
Hz).
nopeusohjeita ja taajuusmuuttaja säätää
moottorin pyörimisnopeutta (säätötarkkuus ±
0,5%).
2 = Momenttiohjaus Riviliittimen ja paneelin ohjearvot ovat
momenttiohjeita ja taajuusmuuttaja säätää
moottorin momenttia (säätötarkkuus ± 3%;
Viritys tehtävä tarkasti: moottorin arvokilven
arvot, U/f-asetukset).
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 39

Vacon Sivu 39
Erikoiskäyttösovellus II
6. 2 Kytkentätaajuus
Moottorin ääni pienenee kykentätaajuutta nostamalla. Kykentätaajuuden nostaminen
lisää laitteen häviöitä ja pienentää sen jatkuvaa kuormitettavuutta.
Ennenkuin muutat kytkentätaajuutta tehdasasetuksesta 10 kHz (3,6 kHz >30 kW
tehoilla), tarkista sallittu kuormitettavuus käyttöohjekirjan kappaleen 5.2 kuvissa 5.23 olevista käyristä.
6. 3 Kentänheikennyspiste
6. 4 Kentänheikennyspisteen jännite
Kentänheikennyspiste on lähtötaajuus, jossa lähtöjännite saavuttaa maksimiarvonsa (par. 6. 4). Kentänheikennyspisteen yläpuolella lähtöjännite pysyy asetellussa
maksimiarvossaan.
Kentänheikennyspisteen alapuolella lähtöjännite riippuu U/f-käyrän asetteluparametreista 1. 8, 1. 9, 6. 5, 6. 6 ja 6. 7. Katso kuva 6-26.
Kun parametrit 1. 10 ja 1. 11,moottorin nimellisjännite ja nimellistaajuus, on asetettu,
myös parametrit 6. 3 and 6. 4 asettuvat automaattisesti vastaaviin arvoihin.
Jos haluat käyttää kentänheikennyspisteelle ja maksimijännitteelle poikkeavia
arvoja, muuta nämä parametrit
vasta, kun olet asettanut parametrit 1. 10 ja 1.11.
6. 5 U/f-käyrä, keskipisteen taajuus
Jos ohjelmoitava U/f-käyrä on valittu parametrilla 1. 8, tällä parametrilla määri-
tetään käyrän keskipisteen taajuus. Katso kuva 6-26.
6. 6 U/f-käyrä, keskipisteen jännite
Jos ohjelmoitava U/f-käyrä on valittu parametrilla 1. 8, tällä parametrilla määri-
tetään käyrän keskipisteen jännite. Katso kuva 6-26.
6. 7 Lähtöjännite nollataajuudella
Jos ohjelmoitava U/f-käyrä on valittu parametrilla 1. 8, tällä parametrilla määri-
tetään nollataajuuden jännite. Katso kuva 6-26.
U[V]
Un
Par 6. 4
Par. 6. 6
(Olet. 10%)
Par. 6. 7
(Olet. 1.3%)
Oletusarvo: moottorin
nimellisjännite
Par. 6. 5
(Olet. 5 Hz)
Kentänheikennyspiste
Oletusarvo: moottorin
nimellistaajuus
Par. 6. 3
f[Hz]
UD012K08
Kuva 6-26. Ohjelmoitava U/f-käyrä.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 40

Sivu 40 Vacon
Erikoiskäyttösovellus II
6. 8 Ylijännitesäätäjä
6. 9 Alijännitesäätäjä
Jos käyttösovellus edellyttää vakiona pysyvää taajuutta jännitevaihteluista huolimatta,
voidaan näillä parameteilla kytkeä ylijännite- ja /tai alijännitesäätäjä pois toiminnasta.
Säätäjien toiminnan poiskytkentä saattaa auttaa tilanteissa, joissa syöttöverkon jännite
vaihtelee enemmän kuin -15%—+10% ja tästä johtuen taajuusmuuttajan lähtötaajuus
vaihtelee vastaavasti.
Jännitesäätäjien poiskytkentä saattaa puolestaan aiheuttaa yli-/alijännitelaukaisuja.
7. 1 Ohjearvovian vaste
0 = ei vastetta
1 = Varoitus
2 = Vikailmoitus, pysäytystoiminto vian havaitsemisen jälkeen parametrin 4.7
mukaan
3 = Vikailmoitus, pysäytystoiminto vian havaitsemisen jälkeen aina vapaasti pyörien
Varoitus- tai vikailmoitus generoidaan, jos 4—20 mA ohjearvosignaalia käytetään ja signaali putoaa alle 4 mA. Varoitus- tai vikailmoitus voidaan ohjelmoida
digitaalilähtöön DO1 ja/tai relelähtöön RO1 tai RO2.
7. 2 Vaste ulkoiseen vikaan
0 = Ei vastetta
1 = Varoitus
2 = Vikailmoitus, pysäytystoiminto vian havaitsemisen jälkeen parametrin 4.7
mukaan
3 = Vikailmoitus, pysäytystoiminto vian havaitsemisen jälkeen aina vapaasti pyörien
Ulkoinen vika on ohjelmoitava johonkin digitaalituloon. Varoitus- tai vikailmoitus
generoituu, kun digitaalitulossa DIA3 on aktiivinen ulkoinen vikasignaali. Katso
parametri 2. 2. Varoitus- tai vikailmoitus voidaan ohjelmoida digitaalilähtöön DO1 ja/
tai relelähtöön RO1 tai RO2.
7. 3 Moottorin vaihevahti
0 = ei toimintaa
2 = Vikailmoitus
Moottorin vaihevahti valvoo, että jokaisessa moottorin vaiheessa kulkee
likimäärin saman suuruinen virta. Tällä parametrilla tämä toiminto voidaan
ohjelmoida pois päältä.
7. 4 Maasulkusuojaus
0 = ei toimintaa
2 = Vikailmoitus
Maasulkusuojaus valvoo, että moottorin vaihevirtojen summa on nolla. Tällä parametrilla tämä toiminto voidaan ohjelmoida pois päältä. Taajuusmuuttajan ylivirtasuoja on
kuitenkin aina toiminnassa ja suojaa laitteen suurivirtaisissa maasuluissa.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 41

Vacon Sivu 41
Erikoiskäyttösovellus II
Moottorin lämpösuojaparametrit 7. 5—7. 9
Yleistä
Moottorin lämpösuojan tarkoituksena on suojata moottoria ylikuumenemiselta. Taajuusmuuttaja
voi syöttää moottorille sen nimellisvirtaa suurempaa virtaa. Jos moottorin kuormitustilanne vaatii
virtaa, joka on suurempi kuin moottorin nimellisvirta, moottori voi ylikuumeta. Ylikuumeneminen
on mahdollista etenkin alhaisilla pyörimisnopeuksilla, sillä silloin moottorin jäähdytyskyky on
heikentynyt ja kuormitettavuus on vastaavasti pienempi. Jos moottori on varustettu ulkoisella
jäähdytyspuhaltimella, kuormitettavuuden pieneneminen ei ole niin suuri.
Moottorin lämpösuojan toiminta perustuu laskentamalliin, joka käyttää taajuusmuuttajan lähtövirtaa
moottorin kuormitustilanteen laskentaan. Kun taajuusmuuttaja kytketään jännitteiseksi, laskentamalli käyttää jäähdytyselementin lämpötilaa moottorin käynnistyshetken lämpötilan oletusarvona ja
moottorin ympäristön läpötilalle arvoa +40°C.
Moottorin lämpösuojaa voidaan säätää parametriasetteluilla. Virtaraja IT määrittelee kuormitusvir-
ran, jonka yläpuolella moottori ylikuormittuu. Tämä
virtaraja on riippuvainen lähtötaajuudesta ja se
asetellaan parametreilla 7. 6, 7. 7 ja 7. 9, katso
kuva 6-27. Parametrien oletusarvoina on nimellismoottorin lajikilven mukaiset arvot.
VAROITUS!
!
Laskentamalliin perustuva lämpösuoja ei suojaa moottoria
ylikuumenemiselta, jos moottorin jäähdytys on huonontunut
jäähdytysilman kierron estymisen, lian tai pölyn vaikutuksesta.
7. 5 Moottorin lämpösuoja
Toiminnot:
0 = ei käytössä
1 = varoitusilmoitus
2 = vikailmoitus
Lämpenemäkäyrä muuttuu suhteessa lähtövirran
neliöön. Lähtövirran arvolla IT lämpösuojan toimintakäyrä saavuttaa nimellispisteensä 100 %. Virran
arvolla 75 % x IT lämpenemä saavuttaa 56 %:n
tason ja virralla 120 % x IT lämpenemä saavuttaa
144 %:n tason. Lämpösuoja toimii (ks. par. 7. 5),
kun lämpenemä saavuttaa 105 %: tason.
Lämpösuojan toimintanopeutta voidaan muuttaa
parametrilla 7. 8. Mitä suurempi moottori on, sitä
hitaammin se saavuttaa loppulämpenemänsä.
Moottorin lämpenemää valvotaan käyttöpaneelin
näytön avulla, ks. käyttöohjeen taulukko 7-1:
Valvottavat/mitattavat signaalit.
Vika- ja varoitustoiminnot antavat näyttöön saman ilmoituskoodin. Jos vikatoiminto
on käytössä, käyttö pysähtyy ja aktivoi vikailmoituksen lämpörajan ylittyessä. Lämpö-
suojauksen poistaminen käytöstä nollaa moottorin lämpenemän 0 %:ksi.
7. 6 Moottorin lämpösuojan kulmapisteen virta
Virta-arvo voidaan asetella välillä 50,0—150,0 % x I
nMotor
.
Parametrilla asetellaan lämpenemäkäyrän kulmapisteen (par. 7. 9) yläpuolella
oleva toiminta-arvo, ks. kuva 6-27.
Arvo asetellaan prosentteina parametrilla 1. 13 asetellusta moottorin nimellisvirrasta
(ei taajuusmuuttajan lähtövirrasta).
Moottorin nimellisvirta on virta, jolla moottoria voi nimellisolosuhteissa kuormittaa
ilman että se ylikuumenee. Jos parametria 1. 13 muutetaan, muuttuu parametrin 7.
6 arvo automaattisesti oletusarvoksi.
Parametrin 7. 6 (tai parametrin 1. 13) muuttaminen ei vaikuta taajuusmuuttajan maksimilähtövirtaan, joka asetellaan parametrilla 1. 7.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 42

Sivu 42 Vacon
Erikoiskäyttösovellus II
I
Virtaraja
par. 1. 7
Ylikuormitusalue
Par. 7. 6
Par. 7. 7
I
T
f
Kuva 6-27 Moottorin kuormitet-
tavuuden asettelut.
Par. 7. 9
UMCH7_91
7. 7 Moottorin lämpösuojan nollataajuuden virta
Virta-arvo voidaan asetella välillä 10,0—150,0 % x I
Parametrilla asetellaan lämpenemäkäyrän nollataajuuden virta-arvo.
Ks. kuva 6-27.
Oletusarvo on määritelty olettaen, että moottorilla ei ole ulkoista jäähdytys-
puhallinta. Jos moottori on varustettu ulkoisella puhaltimella, tämän parametrin
arvoksi voidaan asetella ~90 %.
Arvo asetellaan prosentteina parametrilla 1. 13 asetellusta moottorin
nimellisvirrasta (ei taajuusmuuttajan
lähtövirrasta). .
Moottorin nimellisvirta on virta, jolla
moottoria voi nimellisolosuhteissa
kuormittaa ilman että se ylikuumenee.
7. 8 Moottorin lämpösuojan aikavakio
Aikavakio voidaan asetella välillä 0,5—300 min.
Aikavakio vastaa moottorin lämpenemäaikavakiota. Mitä suurempi moottori on sitä
pidempi on aikavakio. Lämpösuojan laskentamallissa aikavakio on aika, jona
laskennallinen lämpenemäkäyrä saavuttaa 63 % loppuarvostaan.
Moottorin lämpöaikavakio määräytyy
moottorin konstruktion perusteella ja se on
valmistajakohtainen.
Aikavakion oletusarvo lasketaan parametreilla 1. 12 ja 1. 13 annetuista moottorin
nimellistiedoista. Jos jompaa kumpaa
parametreista muutetaan, muuttuu
aikavakion arvo automaattisesti uuteen
oletusarvoonsa.
.
nMotor
Jos parametria 1. 13 muutetaan, muuttuu parametrin 7. 7 arvo automaattisesti oletusarvoksi.
Parametrin 7. 7 (tai parametrin 1. 13) muuttaminen
ei vaikuta taajuusmuuttajan maksimilähtövirtaan,
joka asetellaan parametrilla 1. 7.
Jos moottorin t6 -aika on tunnettu (moottorivalmistajan antama), voidaan aikavakio asetella
sen mukaan. Peukalosäännön mukaan
aikavakio voidaan laskea: T [min] = 2 x t6 [s] (t
on aika, jonka moottori voi käydä
ylikuumenematta kuusinkertaisella nimellisvirralla). Jos taajuusmuuttaja kytketään seistilaan, muuttuu aikavakio auto-maattisesti
kolminkertaiseksi, koska tällöin moottorin
jäähdytys perustuu ilman vapaaseen kiertoon.
6
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 43
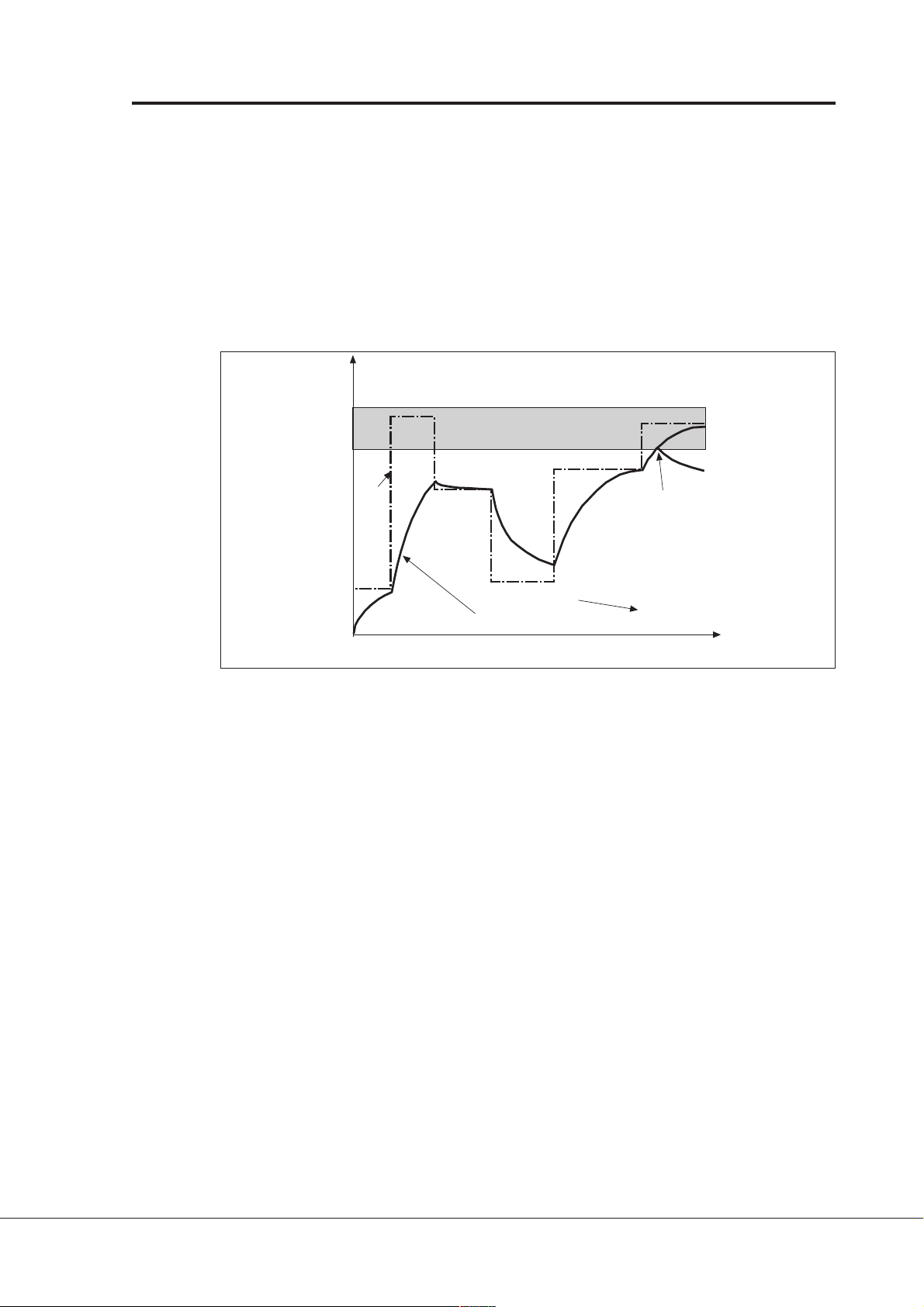
Vacon Sivu 43
Erikoiskäyttösovellus II
7. 9 Moottorin lämpösuojan kulmapisteen taajuus
Taajuus voidaan asetella välillä 10—500 Hz.
Lämpenemäkäyrän kulmpiste on taajuus, jonka yläpuolella moottorin kuormitettavuuden oletetaan pysyvän vakiona. Katso kuva 6-27.
Parametrin oletusarvo määräytyy parametrilla 1. 11. asetetusta moottorin nimellistaajuudesta. 50 Hz:n moottorilla se on 35 Hz ja 60 Hz:n moottorilla 42 Hz, yleisesti
se on 70 % kentänheikennyspisteen taajuudesta (parametri 6. 3). Jos parametreja
1. 11 tai 6. 3 muutetaan, muuttuu tämän parametrin arvo automaattisesti uuden
oletusarvon mukaiseksi.
Moottorin lämpötila
Laukaisualue
105%
Moottorivirta
I/I
T
Aikavakio T
Moottorin lämpötila
*)
Θ = (I/IT)2 x (1-e
*)
Muuttuu moottorikoon mukaan,
asetellaan parametrilla 7. 8
Laukaisu/varoitus
par. 7. 5
-t/T
)
UMCH7_92
Aika
Kuva 6-28 Moottorin lämpötilan määrittäminen.
Jumisuoja, parametrit 7. 10— 7. 13
Yleistä
Jumisuoja suojaa moottoria lyhyen ajan ylikuormitus tilanteissa kuten jumittuneesta akselista.
Jumisuojan reaktioaika voidaan asettaa lyhyemmäksi kuin moottorin lämpösuojan. Jumitila
määritellään kahden parametrin, 7.11. jumivirran ja 7.13 jumitaajuuden, perusteella. Jos virta on
suurempi kuin sille asetettu arvo ja ulostulo taajuus pienempi kuin sille asetettu arvo, jumitila on
tosi. Itse asiassa mitään suoraa tietoa akselin pyörimisestä ei ole vaan jumisuoja on eräänlainen
ylivirtasuoja.
7. 10 Jumisuoja
Toiminnot:
0 = ei käytössä
1 = varoitusilmoitus
2 = vikailmoitus
Vika- ja varoitustoiminnot antavat näyttöön saman ilmoituskoodin. Jos vikatoiminto
on käytössä, käyttö pysähtyy ja aktivoi vikailmoituksen.
Jumisuojauksen poistaminen käytöstä nollaa jumiaikalaskurin.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 44

Sivu 44 Vacon
Erikoiskäyttösovellus II
7. 11 Jumivirtaraja
Jumivirtaraja voidaan asetella
välillä 0,0—200 % x I
Jumitilassa moottorivirran tulee
olla tämän rajan yläpuolella parametrilla 7. 12 asetellun jumiajan
ennenkuin suoja toimii. Katso
kuva 6-29. Parametriarvo asetellaan prosentteina parametrilla
1. 13 asetellusta moottorin nimellisvirrasta. Jos parametria 1. 13
muutetaan, muuttuu tämän parametrin arvo automaattisesti
uuden oletusarvon mukaiseksi.
Kuva 6-29 Jumisuojan parametrien asettelu.
7. 12 Jumiaika
Aika voidaan asetella välillä 2,0—120 s.
Jumisuojan toiminta perustuu ylös-/alaslaskuriin, joka laskee kokonaisjumiaikaa,
katso kuva 6-30.
Jos kokonaisjumiaika ylittää tällä parametrilla asetetun ajan, toimii jumisuoja
parametrilla 7. 10 määritellyllä tavalla.
nMotor
I
.
Jumialue
Par. 7. 11
f
Par. 7. 13
UMCH7_11
7. 13 Maksimijumitaajuus
Taajuus voidaan asetella välillä
1—f
(par. 1. 2).
max
Jumialue rajoittuu tällä parametrilla asetetun lähtötaajuuden alapuolelle, katso kuva 6-29.
Kuva 6-30 Jumiajan laskeminen.
Par. 7. 12
Jumi
Ei jumia
Jumiaikalaskuri
Laukaisualue
Lauk./varoitus
par. 7. 10
UMCH7_12
Aika
Alikuormitussuoja, parametrit 7. 14— 7. 17
Yleistä
Moottorin alikuormitussuojan tehtävänä on valvoa, että käyttö ei pyöri ilman kuormitusta. Jos
moottorin akselilta poistuu kuormitus, saattaa prosessissa tai käytön mekaanisissa osissa olla
jotain vialla, esim. katkennut käyttöhihna tai kuiva pumppu.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 45

Vacon Sivu 45
Erikoiskäyttösovellus II
Moottorin alikuormitussuojan toiminta voidaan
asetella parametreilla 7. 15 ja 7. 16. Alikuormitussuojan toimintakäyrä on nollataajuuden ja kentänheikennystaajuuden (par. 6. 3) kautta kulkeva
neliöllinen käyrä. Alle 5 Hz:n taajuuksilla alikuormitussuojan toiminta on estetty, katso kuva 6-31.
Alikuormitussuojan parametriarvot asetellaan prosentteina moottorin nimellismomentista. Parametria
1. 13, moottorin nimellisvirta ja taajuusmuuttajan
nimellisvirtaa ICT käytetään parametrien oletus-
arvojen määrittämiseen. Jos moottorina käytetään
muuta kuin nimelliskokoista moottoria, huononee
momentin laskentatarkkuus.
7. 14 Alikuormitussuojan toiminto
Toiminnot:
0 = ei käytössä
1 = varoitusilmoitus
2 = vikailmoitus
Vika- ja varoitustoiminnot antavat näyttöön saman ilmoituskoodin. Jos vikatoiminto
on käytössä, käyttö pysähtyy ja aktivoi vikailmoituksen.
Alikuormitussuojauksen poistaminen käytöstä nollaa alikuormitusaikalaskurin.
7. 15 Alikuormitussuoja, kentänheikennysalueen kuorma
Momenttiraja voidaan asetella välillä 20,0—150 % x T
Tämä parametriarvo määrittää
Momentti
pienimmän sallitun kuormitettavuuden kentänheikennyspisteen
taajuutta suuremmilla lähtötaajuuksilla. Katso kuva 6-31.
Par. 7. 15
nMotor
.
Jos parametria 1. 13 muutetaan,
muuttuu tämän parametrin arvo
automaattisesti uuden oletusarvon mukaiseksi.
Par. 7. 16
Kuva 6-31 Minimikuormitusrajan
asettelut.
7. 16 Alikuormitussuoja, nollataajuuden virta
Momenttiraja voidaan asetella välillä 10,0—150 % x T
Tämä parametriarvo määrittää pienimmän sallitun kuormitettavuuden nolla-
taajuudella. Katso kuva 6-31. Jos parametria 1. 13 muutetaan, muuttuu tämän
parametrin arvo automaattisesti uuden oletusarvon mukaiseksi.
7. 17 Alikuormitussuoja, alikuormitusaika
Aika voidaan asetella välillä 2,0—600,0 s.
Tämä parametri määrittää pisimmän mahdollisen alikuormitustilanteen kestoajan.
Alikuormitussuojan toiminta perustuu ylös-/alaslaskuriin, joka laskee
kokonaisalikuormitusaikaa, katso kuva 6-32. Jos laskurin arvo ylittää tällä parametrilla
asetetun arvon, suoja toimii parametrilla 7. 14 määritellyllä tavalla. Jos käyttö
pysäytetään, aikalaskuri nollautuu.
5 Hz
Alikuormitusalue
Kentänheikennyspiste par. 6. 3
.
nMotor
f
UMCH7_15
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 46

Sivu 46 Vacon
Erikoiskäyttösovellus II
Par. 7. 17
Alikuorma-aikalaskuri
Laukaisualue
Lauk./
varoitus
par. 7. 14
UMCH7_17
Aika
Kuva 6-32 Alikuormitusajan laskeminen.
7.18 Verkkojännitteen vaihevahti
0 = Ei toimintaa
2 = Vika
Jos parametrin arvoksi annetaan 0, verkkojännitteen vaihevahti ei aiheuta
vikalaukaisua.
7.19 I/O-laajennuskortin termistoritulo
0 = Ei toimintaa
1 = Varoitus
2 = Vika
I/O-laajennuskortin termistorituloon kytketty termistori valvoo moottorin lämpötilaa.
Parametrillä 7.19 voidaan määrätä se, miten taajuusmuuttaja reagoi termistorin
ilmoittaessa ylilämmöstä.
7.20 Kenttäväylävian vaste
0 = Ei vastetta
1 = Varoitus
2 = Vika; pysäytys parametrin 4.7 mukaan
Kenttäväyläkortilta tulee varoitus- tai vikailmoitus, jos väyläsysteemin fyysisessä
kerroksessa ilmenee virhe.
Alikuorma
Ei alik.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 47

Vacon Sivu 47
Erikoiskäyttösovellus II
8. 1 Automaattinen jälleenkäynnistys: yritysten lukumäärä
8. 2 Automaattinen jälleen käynnistys: yritysaika
Automaattinen jälleenkäynnistys kuittaa vian ja käynnistää moottorin parametreilla
8. 4—8. 8.valittujen vikalaukaisujen jälkeen. Käynnistystoiminto jälleenkäynnistyksessä määritellään parametrilla 8. 3.
Parametri 8. 1 määrittelee, kuinka monta yritystä voidaan tehdä parametrillä
8. 2 määritettynä yritysaikana.
Vikojen lukumäärä
ajassa t = t
4
3
2
1
t
trial
trial
t
trial
Par. 8. 2 = 3
t
= par. 8. 1
trial
t
kolme vikaa
KÄY
SEIS
neljä vikaa
Kuva 6-33 Automaattinen jälleenkäynnistys.
Yritysten lukumäärän laskenta alkaa ensimmäisestä jälleenkäynnistyksestä. Jos
lukumäärä ei ylitä parametrin 8. 1 arvoa yritysaikana, yritysten laskenta nollataan,
kun yritysaika on kulunut umpeen. Lukumäärän laskenta alkaa taas seuraavasta
jälleenkäynnistyksestä. Katso kuva 6-33.
Jos yritysmääräksi ohjelmoidaan nolla, automaattinen jälleenkäynnistys ei ole
käytössä.
8. 3 Automaattinen jälleenkäynnistys: käynnistystoiminta
Parametri määrittelee käynnistystavan:
0 = Käynnistys kiihdyttäen
1 = Vauhtikäynnistys, katso parametri 4. 6.
8. 4 Automaattinen jälleenkäynnistys alijännitevian jälkeen
0 = Ei automaattista jälleenkäynnistystä alijännitevian jälkeen
1 = Automaattinen jälleenkäynnistys alijännitevian jälkeen, kun välipiirin
jännite on palannut normaalitasolle
UD012K25
8. 5 Automaattinen jälleenkäynnistys ylijännitevian jälkeen
0 = Ei automaattista jälleenkäynnistystä ylijännitevian jälkeen
1 = Automaattinen jälleenkäynnistys ylijännitevian jälkeen, kun välipiirin
jännite on palannut normaalitasolle
8. 6 Automaattinen jälleenkäynnistys ylivirtavian jälkeen
0 = Ei automaattista jälleenkäynnistystä ylivirtavian jälkeen
1 = Automaattinen jälleenkäynnistys ylivirtavian jälkeen
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 48

Sivu 48 Vacon
Erikoiskäyttösovellus II
8. 7 Automaattinen jälleenkäynnistys ohjearvovian jälkeen
0 = Ei automaattista jälleenkäynnistystä ohjearvovian jälkeen
1 = Automaattinen jälleenkäynnistys ohjearvovian jälkeen, kun ohjearvo
on palannut normaalitasolle 4—20 mA (
>4 mA).
8. 8 Automaattinen jälleenkäynnistys yli-/alilämpövian jälkeen
0 = Ei automaattista jälleenkäynnistystä yli-/alilämpövian jälkeen
1 = Automaattinen jälleenkäynnistys yli-/alilämpövian jälkeen, kun
jäähdytyselementin lämpötila on palannut normaalitasolle
-10C°—+75C°.
Momenttiohjaus
Momenttiohjaus aktivoidaan valitsemalla parametrille 6.1 arvo 2 tai ottamalla digitaalitulolle DIA3
käyttöön toiminto 10. Momenttiohjeen signaali valitaan parametrilla 9.1 ja ohjeen skaalaus parametreilla 9.2 ja 9.3.
9.1 Momenttiohjeen signaalin valinta
Määrittelee momenttiohjeen signaalin.
0 = Ei käytössä
1 = U
in
2 = I
in
3 = Momenttiohje paneelilta (r2)
4 = Ain1 (optiokortti)
5 = Ain2 (optiokortti)
6 = Kenttäväyläohjaus
9.2 Momenttiohjeen skaalauksen offset
9.3 Momenttiohjeen skaalauksen vahvistus
Momenttiohjetta voidaan skaalata lisää näillä parametreillä. Momenttiohje
syötetään momenttisäätäjään aina, vaikkei sitä aktivoitaisikaan.
T
ref.out
= gain x T
+ offset
ref.in
9.4 Momenttisäätäjän aikavakio
Määrittää momenttisäätäjälle aikavakion. Mitä lyhyempi aikavakio, sitä nopeampi
vaste.
9.5 Momenttisäätäjän minimisäätöraja
Määrittää taajuuden, jonka alapuolella taajuusmuuttaja toimii normaalisti
taajuusohjauksessa.
Taajuusmuuttajan sisäinen momentinlaskenta on epätarkka alhaisilla nopeuksilla
(pienemmillä kuin moottorin nimellisjättämä). Siksi suosittelemme
taajuusohjauksen käyttöä alhaisilla nopeuksilla.
Taajuusohjauskäytössä ohjearvo valitaan parametrilla 1.5.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 49

Vacon Sivu 49
Erikoiskäyttösovellus II
Kenttäväyläohjaus
Kenttäväyläohjaus otetaan käyttöön parametrilla 10.1. Taajuus- tai nopeusohje sekä Käy/seisja Taakse-ohjaus saadaan silloin kenttäväylältä.
Parametriryhmän 10 kaksi ensimmäistä parametria koskevat kaikkia kenttäväyliä. Sen sijaan
parametrit 10.3–10.6 ovat käytössä vain Modbus-kenttäväylän, parametrit 10.7–10.13 vain
Profibus-kenttäväylän ja 10.14 vain LonWorks-kenttäväylän yhteydessä.
10.1 Kenttäväyläohjaus
Määrittää aktiivisen ohjauspaikan:
0 = ohjaus riviliittimeltä
1 = kenttäväyläohjaus
10.2 DIC1-toiminta
0 = Kenttäväyläohjaus, kosketin avoin = Riviliitin aktiivisena ohjauspaikkana
kosketin sulk. = Kenttäväylä aktiivisena
ohjauspaikkana
1 = Ulkoinen vika, sulk. kosketin = Tulee vikailmoitus ja moottori
pysähtyy, kun tulo on aktiivinen
Parametrit 10.3–10.6 ovat käytössä ainoastaan Modbus-protokollan yhteydessä
10.3 Slave-osoite
Määrittelee slave-laitteen osoitteen. Parametrin arvot kulkevat välillä 1–247.
10.4 Tiedonsiirtonopeus
1 = 300 baudia
2 = 600 baudia
3 = 1200 baudia
4 = 2400 baudia
5 = 4800 baudia
6 = 9600 baudia
7 = 19200 baudia
10.5 Pariteettityyppi
0 = None
1 = Even
2 = Odd
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 50

Sivu 50 Vacon
Erikoiskäyttösovellus II
10.6 Modbusin aikakatkaisu
Tämä parametri määrittelee sen, kuinka kauan kenttäväyläkortti odottaa viestiä
master-laitteelta. Aika voidaan asettaa välille 0–3600 s, jossa 0 s tarkoittaa "Ei
aikakatkaisua".
Parametrit 10.7–10.13 ovat käytössä ainoastaan Profibus DP-protokollan yhteydessä
10.7 Profibus slave
Määrittää slave-laitteen osoitteen arvovälillä 2–126.
10.8 Profibusin tiedonsiirtonopeus
1 = 9,6 kbaudia
2 = 19,2 kbaudia
3 = 93,75 kbaudia
4 = 187,5 kbaudia
5 = 500 kbaudia
6 = 1,5 Mbaudia
7 = 3 Mbaudia
8 = 6 Mbaudia
9 = 12 Mbaudia
10 =AUTO (automaattinen tiedonsiirtonopeuden valinta)
10.9 Profibusin PPO-tyyppi
Profibusin PPO-tyypin valinta.
1 = PPO 1 (Parametridata 8 tavua, kontrollidata 4 tavua)
2 = PPO 2 (Parametridata 8 tavua, kontrollidata 4 tavua)
3 = PPO 3 (Kontrollidata 4 tavua)
4 = PPO 4 (Kontrollidata 12 tavua)
10.10 Profibusin Prosessidata 1
10.11 Profibusin Prosessidata 2
10.12 Profibusin Prosessidata 3
10.13 Profibusin Prosessidata 4
Profibusin prosessidatan paikan valinta.
Arvo 1–22 Valvottavan arvon numero (= valvontavalikon arvot V1–V22)
99 Aktiivinen vika -koodi
Parametri 10.14 on käytössä ainoastaan LonWorks-protokollan yhteydessä
10.14 LonWorks-painike
Kun tämän parametrin arvo muutetaan 0:sta 1:ksi tai päinvastoin ja Enterpainiketta painetaan, kortti lähettää LonWorksin yksilöivän tunnistusnumeron
verkkoon.
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 51

Vacon Sivu 51
Erikoiskäyttösovellus II
7 VIKAKOODIT
Erikoiskäyttösovellus II:ssa on käytössä yksi erikoisvikakoodi, joka on kuvattu alla olevassa
taulukossa. Muut vikakoodit löydät Vacon-käyttöohjeen kappaleista 7.7 tai 9.
Vikakoodi Vika Mahdollinen syy Toimenpiteet
27 Kentt v yl n
kommunikointivirhe
V yl systeemi on joko
palautettu alkutilaan tai siin on
virhe (fyysisess kerroksessa)
Kuittaa vika ja k ynnist
uudelleen. Mik li vika ilmenee
j lleen,
- tarkista is nt j rjestelm
- tarkista kaapelit
8 V AL VOTT A V A T SIGNAALIT
Erikoiskäyttösovelluksessa on neljä erityistä valvontasignaalia (V21 - V24). Kts. taulukko 8-1
Signaalin Signaalin nimi Yksikkö Signaalin kuvaus
numero name
V1 Lähtötaajuus Hz Moottorille lähtevä taajuus
V2 Moottorin nopeus rpm Moottorin laskennallinen nopeus
V3 Moottorin virta A Mitattu moottorin ottama virta
V4 Moottorin momentti % Laskennallinen momentti/Yksikön nimellismomentti
V5 Moottorin teho % Laskennallinen teho/Yksikön nimellisteho
V6 Moottorin jännite V Moottorin laskennallinen jännite
V7 DC-piirin jännite V Mitattu DC-piirin jännite
V8 Lämpötila °CJäähdytyselementin lämpötila
V9 Käyttöpäivälaskuri DD.dd Käyttöpäivät 1), ei voi nollata
V10 Käyttötunnit, HH.hh Käyttötunnit 2), voidaan nollata ohjelmoitavalla
osa-aikalaskuri painikkeella n:o 3
V11 MWh-laskuri MWh MWh koko käyttöaikana, ei voi nollata
V12 MWh-laskuri, MWh Voidaan nollata ohjelmoitavalla painikkeella n:o 4
osa-aikalaskuri
V13 Jänniteanalogiatulo V Analogiatulon Uin+ (liitin 2) arvo
V14 Virta-analogiatulo mA Analogiatulojen Iin+ ja Iin- (liittimet 4 ja 5) arvo
V15 Digitaalitulon tila, ryhmä A
V16 Digitaalitulon tila, ryhmä B
V17 Digitaali- ja relelähtöjen
tila
V18 Ohjelmaversio Ohjausohjelman versionumero
V19 Yksikön nimellisteho kW Näyttää yksikön nimellistehon
V20 Moottorin lämpenemä % 100%= moottorin lämpötila on noussut nim.lämpöön
V21 Taajuusohje Hz
V22 Momenttiohje % Momenttiohje momenttiohjauksessa
V23 Digitaalitulot (lisäkortti)
V24 Kenttäväylän tila Käytössä vain Profibus-kenttäväylän
yhteydessä.
0 = Master-Slave communication not started
1 = Master-Slave communication is starting up
2 = Master-Slave communication started and OK.
1)
DD = täydet päivät, dd = päivän desimaaliosa
2)
HH = täydet tunnit, hh = tunnin desimaaliosa
Taulukko 8-1 Valvottavat signaalit
Vacon Oyj Puhelin: 020 1212 1 Fax: 020 1212 205
Päivystys: 040-8371 150 E-mail: vacon@vacon.com
Page 52

UD00183C
10.10.2000
Vacon Oyj
PL 25
Runsorintie 7
65381 VAASA
Puh: 0201 2121
Fax: 0201 212 205
Päivystys: 040-8371 150
E-mail: vacon@vacon.com
http://www.vacon.com
 Loading...
Loading...