

Page 1
convertidores de frecuencia
vacon
®
20
pfc manual de aplicación
Page 2

Índice
1. Seguridad 1
1.1 Advertencias 1
1.2 Instrucciones de seguridad 3
1.3 Tierra y protección frente a fallo de puesta a tierra 3
1.4 Antes de la puesta en marcha del motor 5
2. Recepción de la entrega 6
2.1 Código de designación de tipo 6
2.2 Almacenamiento 6
2.3 Mantenimiento 7
2.3.1 Recarga del condensador 7
2.4 Garantía 8
2.5 Declaración de conformidad del fabricante 9
3. Instalación 10
3.1 Instalación mecánica 10
3.1.1 Dimensiones de Vacon 20 14
3.1.2 Refrigeración 18
3.1.3 Pérdidas de potencia 19
3.1.4 Niveles EMC 26
3.1.5 Cambio de la clase de protección EMC de C2 o C3 a C4 27
3.2 Cableado y conexiones 29
3.2.1 Cableado de alimentación 29
3.2.2 Cableado de control 31
3.2.3 Tarjetas opcionales permitidas en Vacon20 35
3.2.4 Tornillería de cables 37
3.2.5 Especificaciones de los cables y fusibles 39
3.2.6 Reglas generales de cableado 42
3.2.7 Longitud de los cables de alimentación y del motor 43
3.2.8 Instalación de cables y normativa UL 43
3.2.9 Comprobar el aislamiento del cable y del motor 43
4. PUESTA EN MARCHA 45
4.1 Pasos de la puesta en marcha de Vacon 20 45
5. Localización de fallos 47
6. Interfaz del SISTEMA PFC 51
6.1 Señales I/O 51
7. Panel de control 56
7.1 General 56
7.2 Pantalla 56
7.3 Panel 57
7.4 Navegación en el panel de control de Vacon 20 59
Documento: DPD01626B
Fecha de publicación: 08.10.2014
Aplicación: ACCN1051V100
1
Page 3

7.4.1 Menú principal 59
7.4.2 Menú de referencia 60
7.4.3 Menú monitor 61
7.4.4 Menú de parámetros 62
7.4.5 Menú de sistema 64
8. Parámetros de aplicación PFC 66
8.1 Asistente de puesta en marcha 67
8.2 Monitorización 67
8.2.1 Valores básicos 67
8.2.2 I/O 68
8.2.3 Opciones Extras/Avanzadas 69
8.2.4 Control PID 69
8.3 Listas de parámetros principales (Menú PAR) 70
8.3.1 Ajustes del motor 70
8.3.2 Configuración de marcha/paro 72
8.3.3 Referencias 73
8.3.4 Rampas y frenos 74
8.3.5 Entradas digitales 75
8.3.6 Entradas analógicas 77
8.3.7 Salidas digitales 78
8.3.8 Salidas analógicas 79
8.3.9 Mapa Fieldbus 80
8.3.10 Frecuencias prohibidas 81
8.3.11 Protecciones 81
8.3.12 Reset automático 83
8.3.13 Controlador PID 84
8.3.14 PFC 85
8.3.15 Ajustes de la aplicación 87
8.4 Parámetros del sistema 87
9. Descripciones de parámetros 91
9.1 Ajustes del motor 91
9.2 Configuración de marcha/paro 94
9.3 Referencias 96
9.4 Rampas y frenos 97
9.5 Entradas digitales 99
9.6 Entradas analógicas 100
9.7 Salidas digitales 101
9.8 Salidas analógicas 102
9.9 MAPA FIELDBUS 103
9.10 Frecuencias prohibidas 104
9.11 Protecciones 105
1
Page 4

9.12 Reset automático 108
9.13 Controlador PID 109
9.14 PFC 111
9.15 Ajuste de la aplicación 114
10. Características técnicas 115
10.1 Características técnicas de Vacon 20 115
10.2 Rango de potencias 118
10.2.1 Vacon 20 – Tensión de alimentación 208–240 V 118
10.2.2 Vacon 20 – Tensión de alimentación 115 V 119
10.2.3 Vacon 20 – Tensión de alimentación 380–480 V 119
10.2.4 Vacon 20 – Tensión de alimentación 600 V 120
10.3 Resistencia de frenado 120
1
Page 5
seguridad vacon • 1
1. SEGURIDAD
LA INSTALACIÓN ELÉCTRICA SÓLO LA PUEDE REALIZAR
UN ELECTRICISTA PROFESIONAL.
Este manual contiene precauciones y advertencias claramente marcadas que están
pensadas para su seguridad personal y para evitar daños involuntarios al producto
o a los aparatos conectados.
Lea detenidamente la información incluida en las precauciones y las advertencias:
=Tensión peligrosa
Riesgo de muerte o de lesiones
graves
=Advertencia general
Riesgo de daños al producto
o a los aparatos conectados
1.1 Advertencias
Los componentes de la unidad de potencia del convertidor
están activos cuando Vacon 20 está conectado a
eléctrica. Es extremadamente peligroso entrar en contacto
con esta fuente de tensión, ya que podría provocar la
o
lesiones graves. La unidad de control está aislada de la red
eléctrica.
Los terminales U, V, W (T1, T2, T3) del motor y los posibles
terminales -/+ de la resistencia de frenado están activos
cuando Vacon 20 está conectado a la red eléctrica, aun cuando
el motor no esté en funcionamiento.
Los terminales de I/O de la unidad de control están aislados de
la red eléctrica. No obstante, los terminales de salida del relé
pueden portar tensión de control peligrosa, aun cuando Vacon
20 está desconectado de la red eléctrica.
La corriente de fuga a tierra de los convertidores Vacon 20
supera los 3,5 mA de CA. Según la norma EN61800-5-1,
debe garantizar una conexión a tierra de protección
se
reforzada.
Si el convertidor se utiliza como parte de un sistema,
el
fabricante del sistema es el responsable de suministrar
sistema con un dispositivo de desconexión de la red
el
de
alimentación (EN 60204-1).
la red
muerte
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
1
Page 6
2 • vacon seguridad
Si Vacon 20 se encuentra desconectado de la red eléctrica
mientras el motor está en funcionamiento, permanecerá
conectado si el proceso proporciona energía al motor. En este
caso, el motor funciona como un generador que suministra
energía al convertidor.
Después de desconectar el convertidor de la red eléctrica,
espere a que el ventilador se pare y a que los
pantalla se apaguen. Espere 5 minutos más antes de efectuar
cualquier acción en las conexiones de
El motor puede ponerse en marcha de forma automática
una situación de fallo, si se ha activado la función
después de
de
rearme automático.
indicadores de la
Vaco n 20.
1
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 7
seguridad vacon • 3
1.2 Instrucciones de seguridad
El convertidor Vacon 20 se ha diseñado únicamente para
instalaciones fijas.
No realice medidas cuando el convertidor e sté conectado
a la red eléctrica.
No realice pruebas de aislamiento en el convertidor Vacon 20.
La seguridad del producto se ha probado completamente
en
fábrica.
Antes de realizar medidas en el motor o en el cable del motor,
desconecte el cable del motor del convertidor.
No abra la cubierta de Vacon 20. La electricidad estática
puede
producir daños en el convertidor. Asimismo, al abrir
la
cubierta podría dañar el dispositivo. Si la cubierta de
Vacon
20 está abierta, la garantía quedará invalidada.
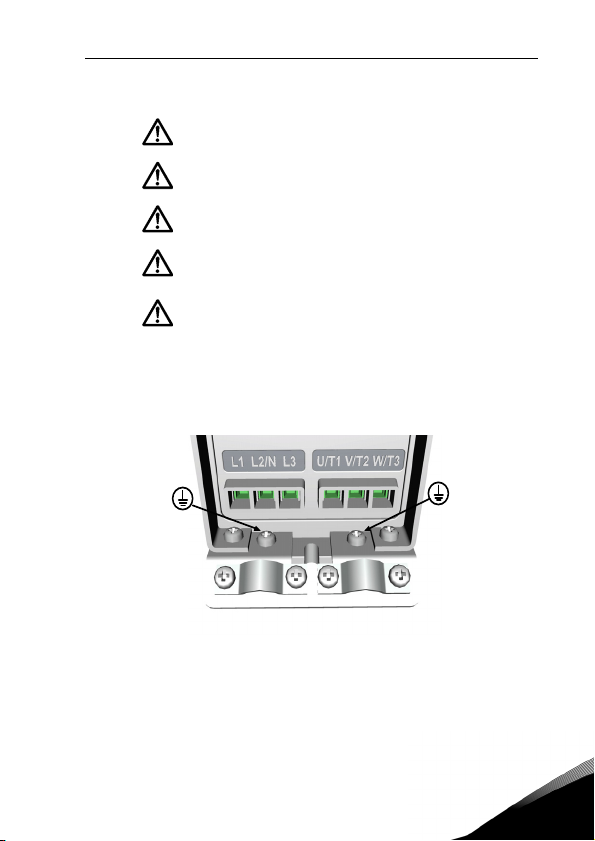
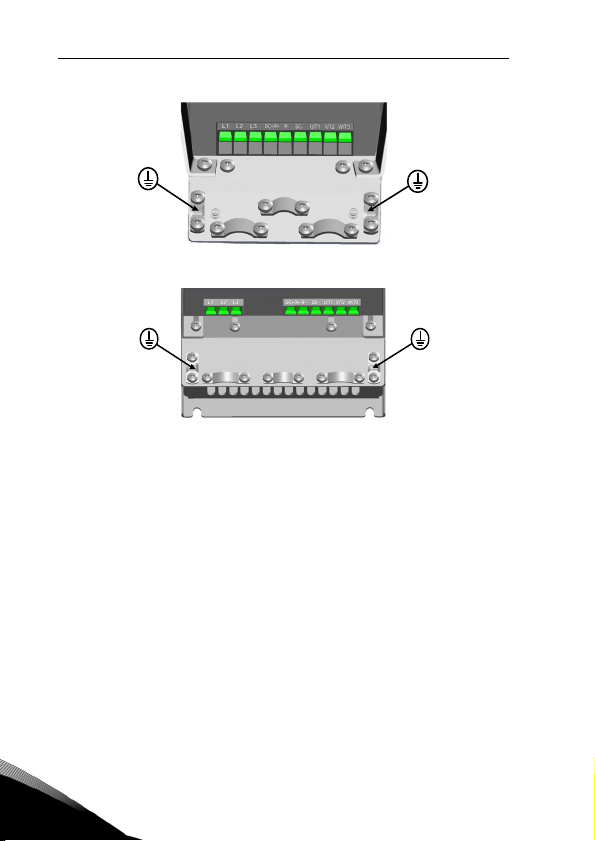
1.3 Tierra y protección frente a fallo de puesta a tierra
El convertidor de Vacon 20 debe estar siempre conectado a tierra con un conductor
de tierra conectado al terminal de tierra. Consulte la figura siguiente:
MI1–MI3
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
1
Page 8
4 • vacon seguridad
MI4
MI5
• La protección frente a fallo de puesta a tierra del interior del
convertidor protege sólo el propio convertidor contra derivaciones
a tierra.
• Si se utilizan interruptores de protección de corriente de fuga,
éstos se deben probar con la unidad con corriente de fuga a tierra
que se pueden producir en situaciones de fallo.
1
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 9
seguridad vacon • 5
1.4 Antes de la puesta en marcha del motor
Lista de comprobación:
Antes de poner en marcha el motor, compruebe que se
ha instalado debidamente y asegúrese de que el equipo
conectado al motor permite su puesta en marcha.
Establezca la velocidad máxima del motor (frecuencia) según
el motor y el equipo conectado al mismo.
Antes de invertir el sentido de giro del eje del motor,
asegúrese de que se puede realizar con seguridad.
Asegúrese de que no hay condensadores de corrección
del factor de potencia conectados al cable del motor.
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
1
Page 10

6 • vacon recepción de la entrega
Fase de entrada
+DLIT = Ita liano
+DLFR = Francés
+DLFI = Finé s
+DLES = Español
+DLDK = Danés
+DLDE = Alemán
+DLCZ = Checo
+DLCN = C hino
Lenguaje de la documentación
vacío = Inglés
+DLUS = Inglés de EE. UU.
+DLTR = Turco
+DLSE = Sueco
+DLRU = Ruso
+DLPT = Portugués
+DLN O = Noruego
+DLNL = Neerlandés
QFLG
QPES
EMC2
+ opciones
Voltaje de entrada
Intens idad
de salida
7 = 600V
4 = 380-480 V
2 = 208-230 V
1 = 115V
3L= trifásico
1L= monofásico
Vacon 20
+ opciones10001-1L-VACON 0020-
2. RECEPCIÓN DE LA ENTREGA
Después de desembalar el producto, compruebe que el producto no presenta
signos de daños causados en el transporte y que la entrega está completa
(compare la designación de tipo del producto con el código de más abajo).
Si el convertidor ha sufrido daños durante el envío, póngase en contacto
con la aseguradora de la mercancía o con los transportistas.
Si la entrega no se corresponde con el pedido, póngase inmediatamente en contacto
con el proveedor.
2.1 Código de designación de tipo
2
Figura 2.1: Código de designación de tipo de Vacon 20
2.2 Almacenamiento
Si el convertidor va a estar almacenado antes de su uso, asegúrese de que las
condiciones ambientales son adecuadas:
Temperatura de almacenamiento -40…+70 °C
Humedad relativa < 95%, sin condensación
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 11
recepción de la entrega vacon • 7
2.3 Mantenimiento
En situaciones de funcionamiento normales, los convertidores Vacon 20 no precisan
mantenimiento. Sin embargo, se recomienda un mantenimiento regular para
asegurar un funcionamiento sin problemas y una larga duración del convertidor.
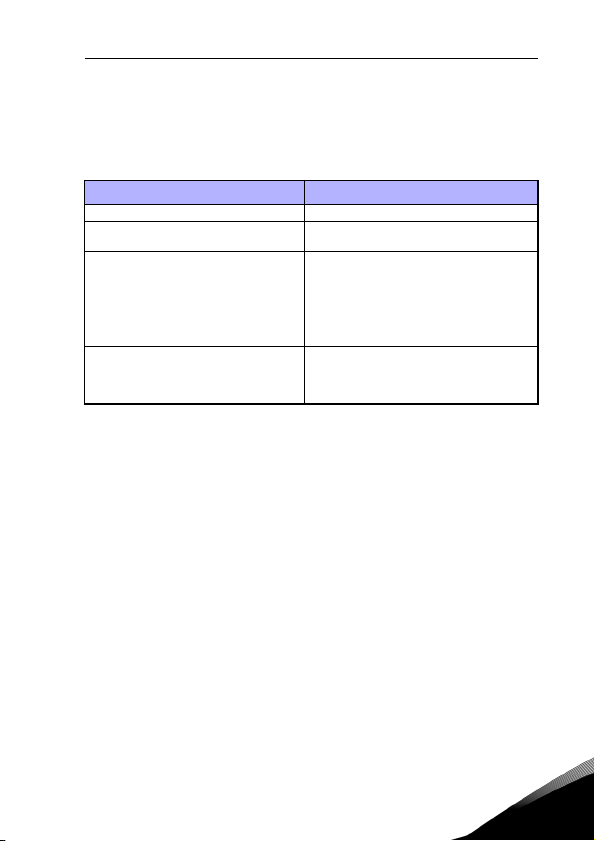
Se recomienda seguir la tabla que aparece a continuación con los intervalos de
mantenimiento.
Intervalo del mantenimiento Acción de mantenimiento
Siempre que sea necesario
Regular
12 meses (si se almacena)
6–24 meses (en función del entorno)
* Solo para bastidor 4 y bastidor 5
2.3.1 Recarga del condensador
Después de un período de almacenamiento prolongado, los condensadores deben
recargarse para evitar que se dañen. Se debe limitar la posible elevada corriente
de fuga a través de los condensadores. La mejor forma es utilizar una fuente de
alimentación de CC con límite de intensidad ajustable.
1) Establezca el límite de intensidad en 300…800 mA según el tamaño
del convertidor.
2) A continuación, conecte la fuente de alimentación de CC a la fase de entrada
L1 y L2.
3) A continuación, establezca la tensión de CC en el nivel de tensión del Bus CC
nominal del convertidor (1.35*VCA) y suministre alimentación al convertidor
durante al menos 1 hora.
Si no tiene tensión de CC disponible y la unidad estuvo almacenada durante mucho
más de 12 meses sin tensión, póngase en contacto con fábrica antes de conectarla
a la alimentación.
• Limpieza del disipador de calor*
• Comprobación de los pares de apriete
de los terminales
• Comprobación de los terminales de entrada
y salida, y los terminales de I/O de control
• Limpieza del túnel de refrigeración.*
• Comprobación del funcionamiento del
ventilador de refrigeración y de si hay
corrosión en terminales, barras de bus
y otras superficies.*
• Comprobación y limpieza de los ventiladores
de refrigeración:
Ventilador principal*
Ventilador interno*
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
2
Page 12

8 • vacon recepción de la entrega
2.4 Garantía
La garantía cubre únicamente los defectos de fabricación. El fabricante no se hace
responsable de los daños originados durante el transporte o como consecuencia del
transporte, recepción de la entrega, instalación, puesta en marcha o utilización.
En ningún caso y bajo ninguna circunstancia, se hará responsable al fabricante
por daños o averías a causa de una mala utilización, instalación inadecuada,
temperatura ambiente inaceptable, polvo, sustancias corrosivas o funcionamiento
que no se ajuste a las especificaciones nominales. Así como tampoco será
responsable el fabricante de daños consecuentes.
El periodo de garantía del fabricante es de 18 meses a partir de la entrega o de
12 meses desde la puesta en marcha, lo que finalice primero (Términos de garantía
de Vacon).
Es posible que el distribuidor local ofrezca un periodo de garantía diferente al
anterior. Este periodo de garantía se especificará en las condiciones comerciales
y de garantía del distr ibuidor. Vacon no asume responsabilidad alguna por cualquier
otra garantía que no sea la concedida por Vacon.
Para cualquier consulta referente a la garantía, póngase en contacto en primer
lugar con el distribuidor.
2
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 13
recepción de la entrega vacon • 9
DECLARACIÓN DE CONFORMIDAD DE LA CE
Nosotros
Nombre del fabricante: Vacon Oyj
Dirección del fabricante: Apartado po stal 25
Runsorintie 7
FIN-65381 Vaasa
Finlandia
Porelpresentesedeclaraqueelproducto
Nombre del producto: Convertidor Vacon 20
Nombre del modelo: Vacon 20 1L 0001 2…a 00092
Vacon 20 3L 0001 2…a 00382
Vacon 20 3L 0001 4…a 00384
Seguridad:
EN 60204 -1:2009 (según corresponda),
EN61800-5-1:2007
CEM: EN61800-3:2004 +A1:2012
En Vaasa, 16 de abril de 2014
Vesa L aisi
Presidente
Año en que se concedió la marca CE: 2011
ha sido diseñado y fabricado de acuerdo con las normas siguientes:
Mediante medidas internas y controles de calidad, se garantiza que
el producto cumple en todo momento los requisitos de la directiva
actual y normativa aplicable.
y cumple las disposiciones de seguridad correspondientes de la Directiva
de Baja Tensión 2006/95/CE y la Directiva de CEM 2004/108/CE.
2.5 Declaración de conformidad del fabricante
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
2
Page 14
10 • vacon instalación
=
M5
MI3
MI1
=M4
MI2
=M5
LOC
REM
BACK
RESET
OK
LOC
REM
BACK
RESET
OK
LOC
REM
BACK
RESET
OK
MI4
=M 6
=M 6
MI5
LOC
REM
BACK
RESET
OK
LOC
REM
BACK
RESET
OK
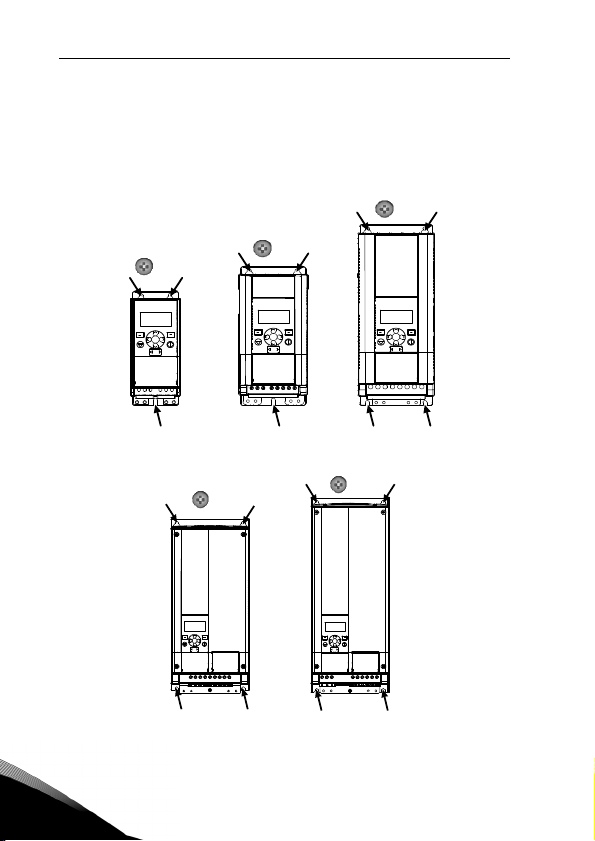
3. INSTALACIÓN
3.1 Instalación mecánica
Hay dos posibilidades distintas para monta r la unidad Vacon 20 sobre la pared. Para
MI1–MI3, montaje con tornillos o montaje sobre raíles DIN; para MI4–MI5, montaje
con tornillos o montaje con bridas.
Figura 3.1: Montaje con tornillos, MI1–MI3
Figura 3.2: Montaje con tornillos, MI4–MI5
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
3
Page 15
instalación vacon • 11
12
LOC
REM
BACK
RESET
OK
Nota: Consulte las dimensiones de montaje situadas en la parte posterior
de la unidad. Más detalles en el capítulo
Figura 3.3: Montaje con raíles DIN, MI1–MI3
Figura 3.4: Montaje con bridas, MI4–MI5
3.1.1.
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 16
12 • vacon instalación
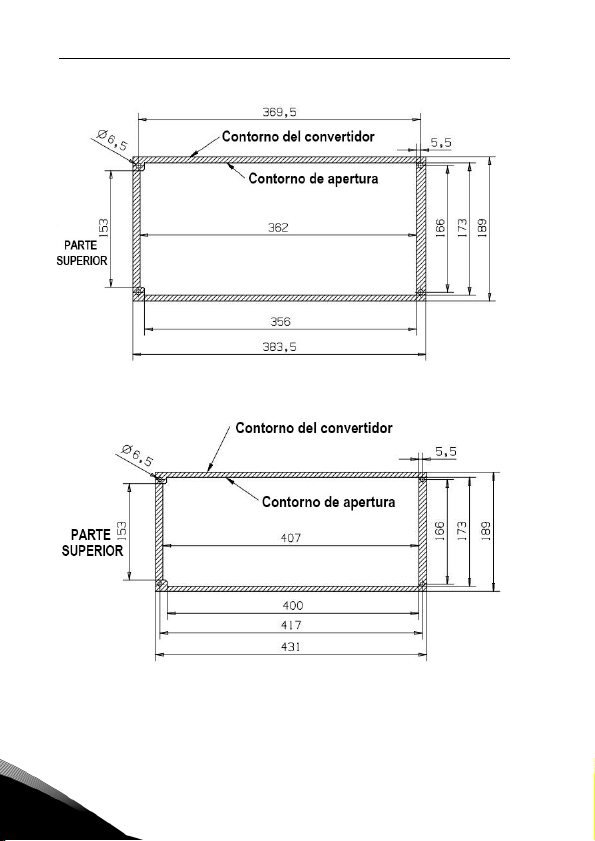
Figura 3.5: Dimensiones de corte del montaje con bridas para MI4 (Unidad: mm)
Figura 3.6: Dimensiones de corte del montaje con bridas para MI5 (Unidad: mm)
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
3
Page 17
instalación vacon • 13
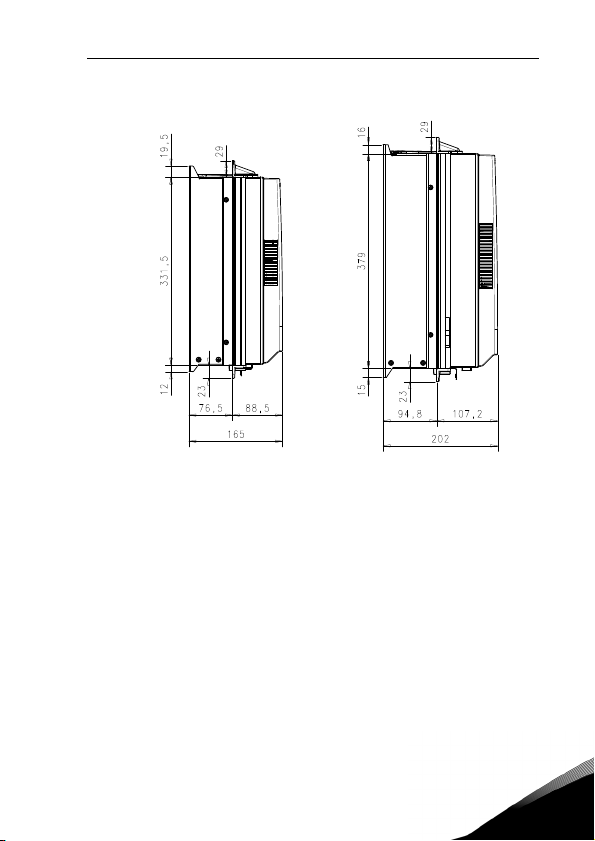
MI5
MI4
Figura 3.7: Dimensiones de profundidad para montaje con bridas para MI4 y MI5
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
(Unidad: mm)
3
Page 18
14 • vacon instalación
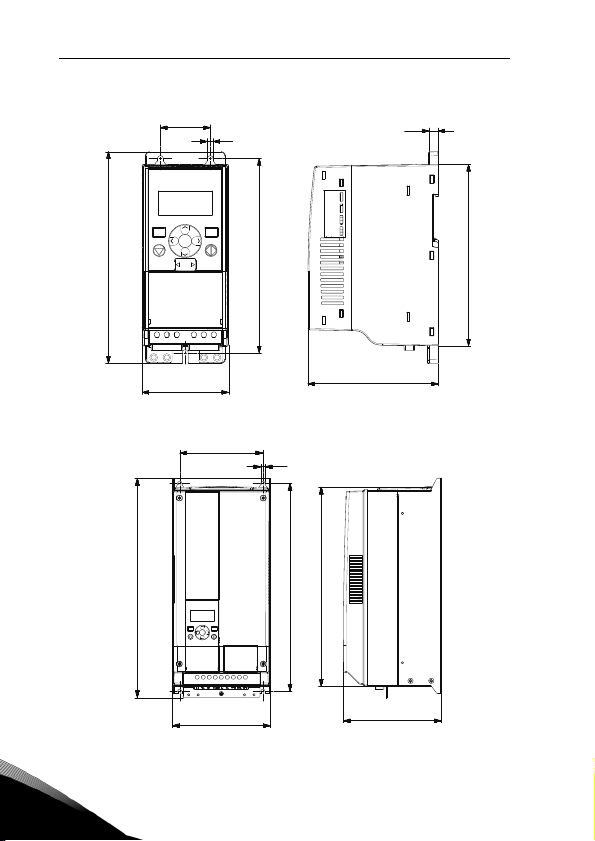
W2
W3
W (W1)
H (H1)
H2
H3
D2
D (D1)
W2
W3
H (H1)
W (W1)
D (D1)
H3
H2
3.1.1 Dimensiones de Vacon 20
Figura 3.8: Dimensiones de Vacon 20, MI1–MI3
3
Figura 3.9: Dimensiones de Vacon 20, MI4–MI5
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 19
instalación vacon • 15
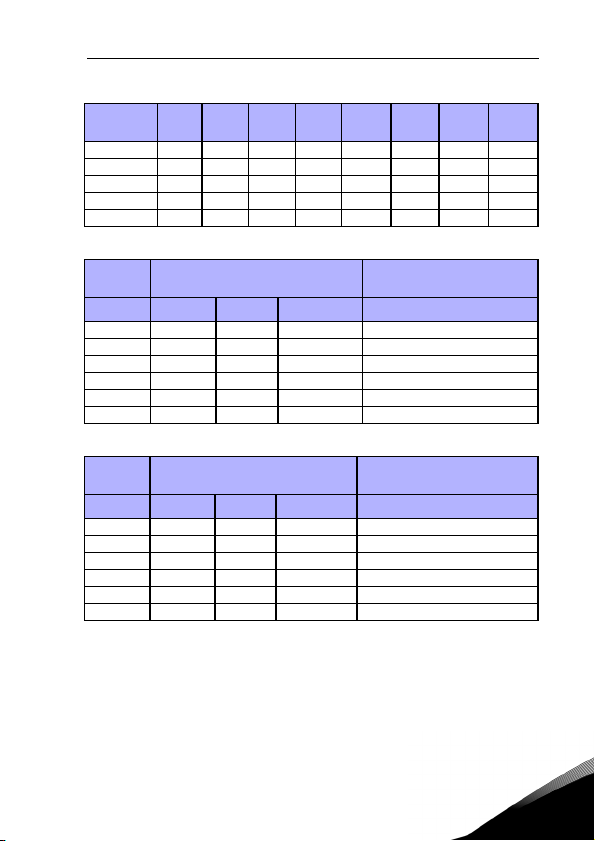
Tam año d e
bastidor
Tabla 3.1: Dimensiones de Vacon 20 en milímetros
Tamaño de
bastidor
H1 H2 H3 W1 W2 W3 D1 D2
MI1 160,1 147 137,3 65,5 37,8 4,5 98,5 7
MI2 195 183 170 90 62,5 5,5 101,5 7
MI3 254,3 244 229,3 100 75 5,5 108,5 7
MI4 370 350,5 336,5 165 140 7 165 MI5 414 398 383 165 140 7 202 -
Dimensiones (mm) Peso*
W H D (kg.)
MI1 66 160 98 0,5
MI2 90 195 102 0,7
MI3 100 254,3 109 1
MI4 165 370 165 8
MI5 165 414 202 10
Tabla 3.2: Dimensiones (mm) y pesos (kg) del bastidor de Vacon 20
Tam año de
bastidor
Dimensiones (in.) Peso*
*sin embalaje de transporte
W H D (Ibs.)
MI1 2,6 6,3 3,9 1,2
MI2 3,5 9,9 4 1,5
MI3 3,9 10 4,3 2,2
MI4 6,5 14,6 6,5 18
MI5 6,5 16,3 8 22
Tabla 3.3: Dimensiones (in) y pesos (lbs) del bastidor de Vacon 20
*sin embalaje de transporte
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 20
16 • vacon instalación
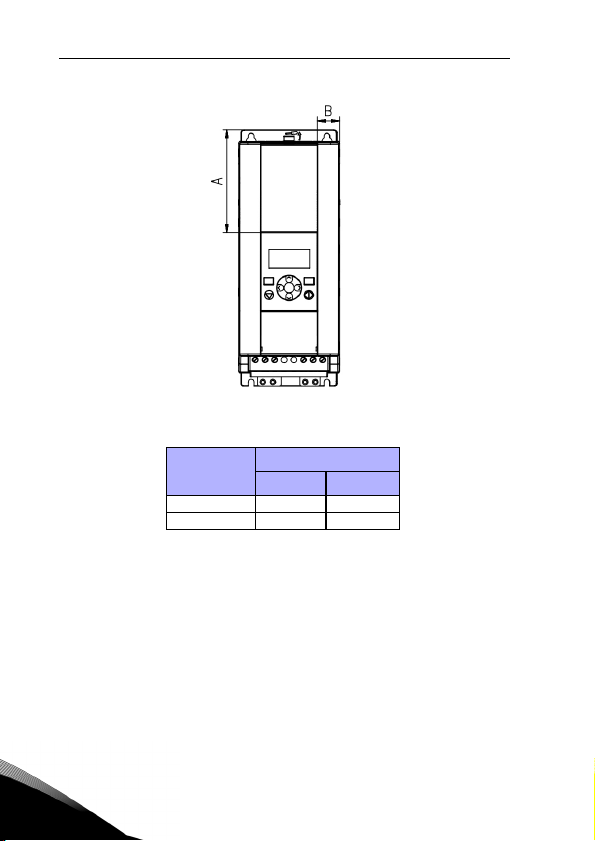
Figura 3.10: Dimensiones de Vacon20, MI2–3 Ubicación de la pantalla
3
Dimensiones
(mm)
A1722,3
B 44 102
Tamaño de bastidor
MI2 MI3
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 21
instalación vacon • 17
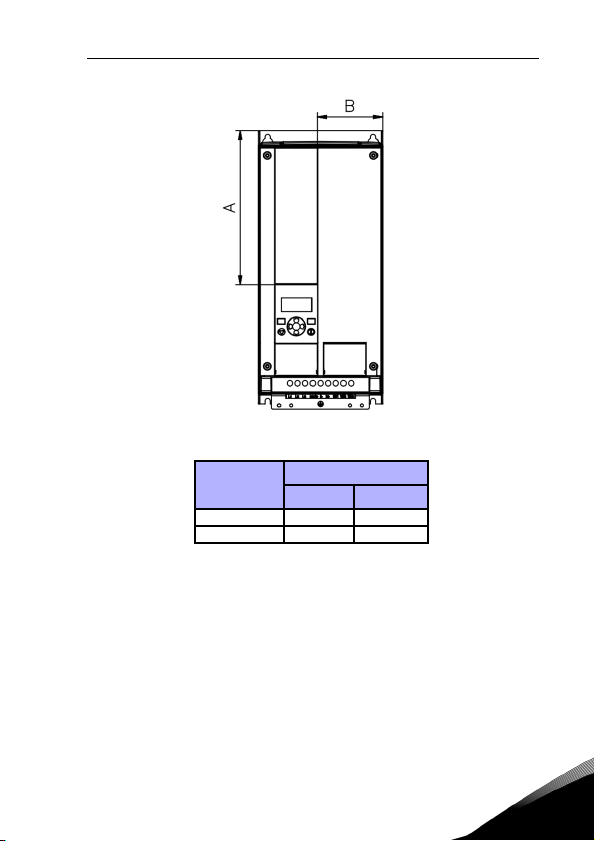
Figura 3.11: Dimensiones de Vacon20, MI4–5 Ubicación de la pantalla
Dimensiones
(mm)
A 205 248,5
B8787
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
Tamaño de bastidor
MI2 MI3
3
Page 22
18 • vacon instalación
B
C
B
A
D
A
3.1.2 Refrigeración
Se debe dejar espacio libre suficiente por encima y por debajo del convertidor para
garantizar que circula suficiente aire y que la refrigeración es suficiente. En la tabla
de más abajo, se especifican las dimensiones necesarias del espacio libre.
Tenga en cuenta que si se montan varias unidades una encima de otra, el espacio
libre necesario es de C + D (consulte figura siguiente). Además, el aire de salida que
utiliza la unidad inferior para refrigerar no debe d irigirse hacia la entrada de aire de
la unidad superior.
La cantidad de aire de refrigeración necesario se indica a continuación. Asegúrese
también de que la temperatura del aire de refrigeración no supere la temperatura
ambiente máxima del convertidor.
Separación mínima (mm)
Tamaño de
bastidor
Tabla 3.4: Separación mín. alrededor
del convertidor
*. La separación mínima A y B de las unidades
MI1 ~ MI3 puede ser 0 mm si la temperatura
ambiente es inferior a 40 grados.
A = separación alrededor del convertidor (véase también B)
B = distancia de un convertidor a otro o distancia a la pared del armario
C = espacio libre por encima del convertidor
D = espacio libre por debajo del convertidor
NOTA:
Deje espacio libre encima (100 mm), debajo (50 mm) y en los laterales (20 mm) de
Vacon 20 para que pueda refrigerarse. En MI1–MI3, la instalación lateral con otros
equipos solamente está permitida si la temperatura ambiente es inferior a 40 °C; para
MI4-MI5, está prohibida la instalación lateral con otros equipos.
Tabla 3.5: Aire de refrigeración necesario
3
A* B* C D
MI1 20 20 100 50
MI2 20 20 100 50
MI3 20 20 100 50
MI4 20 20 100 100
MI5 20 20 120 100
Figura 3.12: Espacio para
la instalación
Consulte las dimensiones de montaje situadas en la parte posterior del convertidor.
Tamaño de bastidor Aire de refrigeración necesario (m³/h)
MI1 10
MI2 10
MI3 30
MI4 45
MI5 75
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 23
instalación vacon • 19
Pérdida de potencia (kW)
Potencia en eje (kW)
Pérdida de potencia (kW)
Potencia en eje (kW)
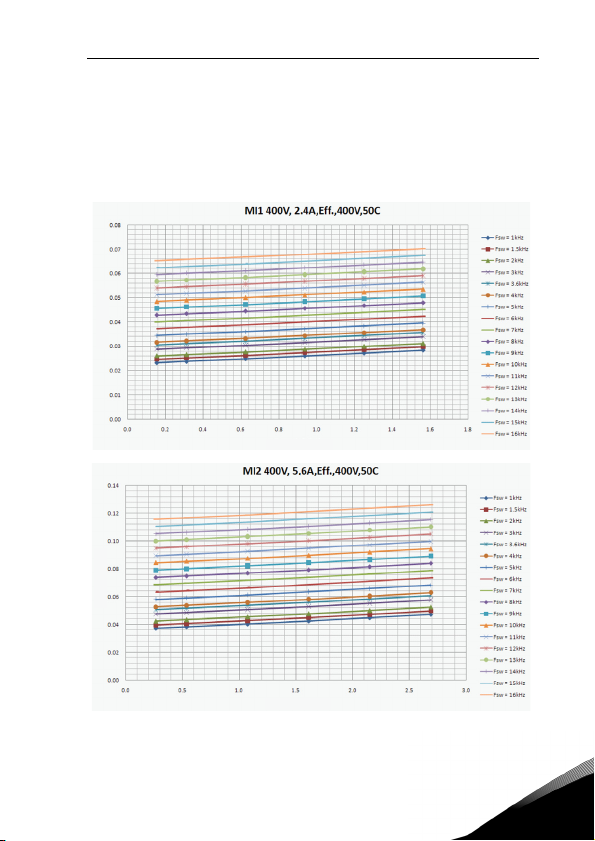
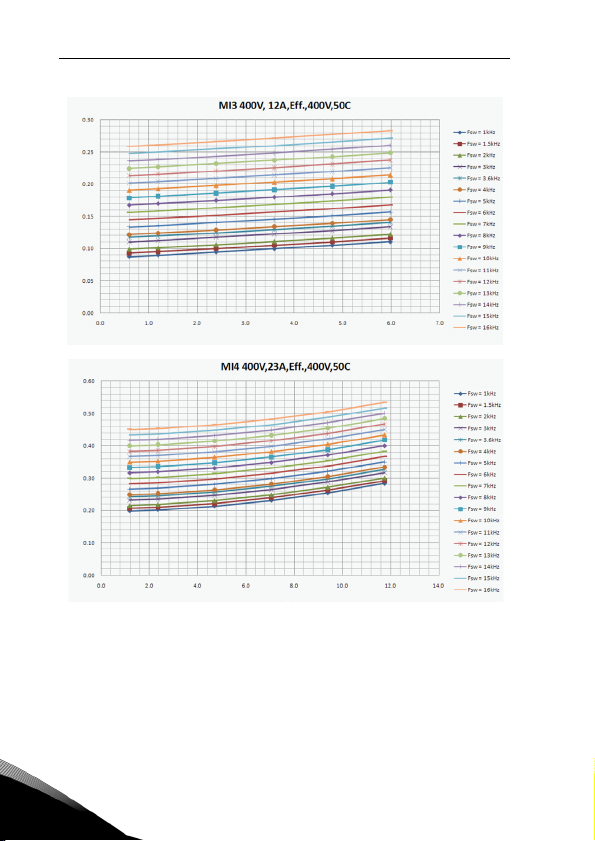
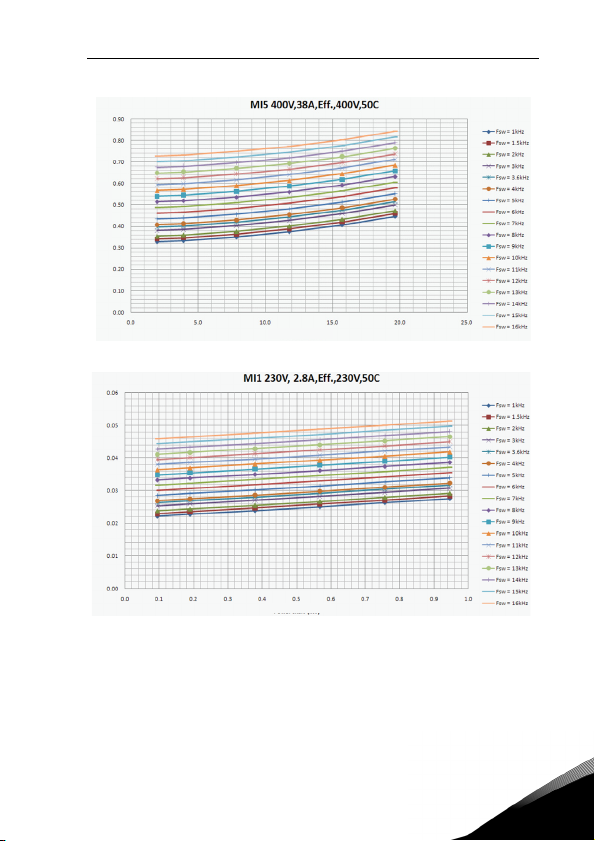
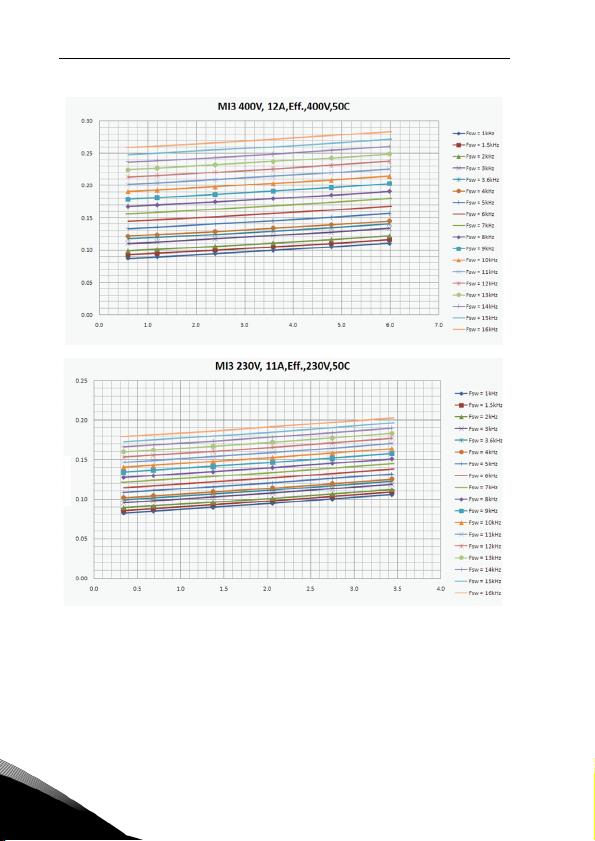
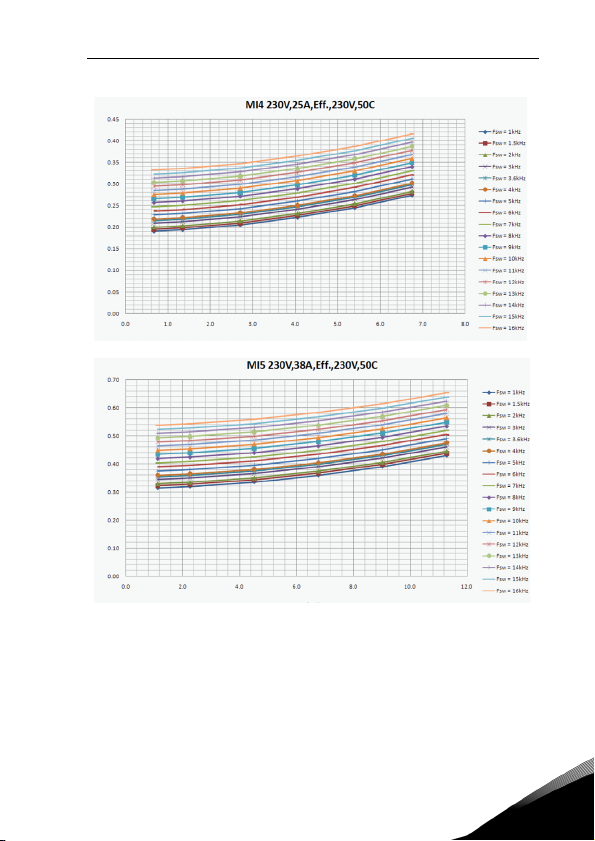
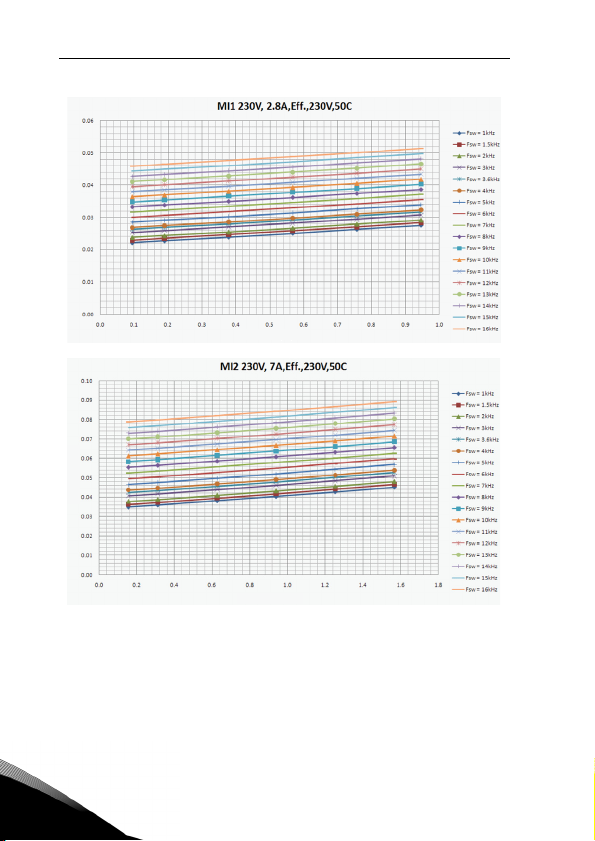
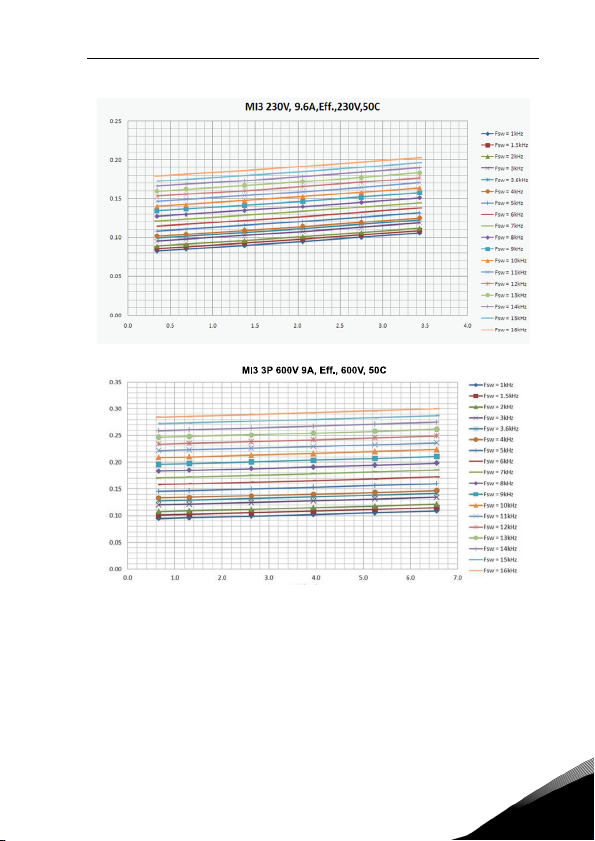
3.1.3 Pérdidas de potencia
Si el operador desea aumentar la frecuencia de conmutación del convertidor por
algún motivo (normalmente, p. ej., para reducir el ruido del motor), esto afecta de
forma inevitable a las pérdidas de potencia y los requisitos de refrigeración; para
una potencia del eje del motor diferente, el operador puede seleccionar la
frecuencia de conmutación según los siguiente gráficos.
MI1–MI5 PÉRDIDA DE POTENCIA 3P 380 V
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 24
20 • vacon instalación
Pérdida de potencia (kW)
Potencia en eje (kW)
Pérdida de potencia (kW)
Potencia en eje ( kW)
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
3
Page 25
instalación vacon • 21
Pérdida de potencia (kW)
Potencia en eje (kW)
Pérdida de potencia (kW)
Potencia en eje (kW)
MI1–MI5 PÉRDIDA DE POTENCIA 3P 230 V
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 26
22 • vacon instalación
Pérdida de potencia (kW)
Potencia en eje (kW )
Potencia en eje (kW)
Pérdida de potencia (kW)
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
3
Page 27
instalación vacon • 23
Pérdida de potencia (kW)
Potencia en eje (kW)
Pérdida de potencia (kW)
Potencia en eje (kW)
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 28
24 • vacon instalación
Pérdida de potencia (kW)
Potencia en eje (kW)
Pérdida de potencia (kW)
Potencia en eje (kW)
MI1–MI3 PÉRDIDA DE POTENCIA 1P 230 V
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
3
Page 29
instalación vacon • 25
Pérdida de potencia (kW)
Potencia en eje (kW)
Pérdida de potencia (kW)
Potencia en ej e (kW)
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 30

26 • vacon instalación
3.1.4 Niveles EMC
La norma EN61800-3 define la división de los convertidores en cuatro clases según
el nivel de perturbaciones electromagnéticas emitidas, los requisitos de una red de
sistema eléctrico y el entorno de instalación (consulte más abajo). La clase EMC de
cada producto se define en el código de designación de tipo.
Categoría C1: Los convertidores de esta clase cumplen los requisitos de la categoría
C1 de la norma de producto EN 61800-3 (2004). La Categoría C1 garantiza las
mejores características EMC y en ella se incluyen convertidores cuya tensión
estimada es inferior a 1000 V y cuyo uso está pensado para el 1er entorno.
NOTA: Los requisitos de la clase C se cumplen únicamente en cuanto a lo que
a las emisiones realizadas concierne.
Categoría C2: Los convertidores de esta clase cumplen los requisitos de la categoría
C2 de la norma de producto EN 61800-3 (2004). En la categoría C2 se incluyen
convertidores en instalaciones fijas cuya tensión estimada es inferior a 1000 V.
Los convertidores de la clase C2 se pueden utilizar tanto en el 1er como en
el 2º entorno.
Categoría C3: Los convertidores de esta clase cumplen los requisitos de la categoría
C3 de la norma de producto EN 61800-3 (2004). La categoría C3 incluye
convertidores con una tensión nominal inferior a 1000 V y destinados al uso
en el segundo entorno únicamente.
Categoría C4: Las unidades de esta clase no proporcionan protección contra
emisiones EMC. Estos tipos de unidades se montan en armarios.
Entornos de la norma de producto EN 61800-3 (2004)
Primer entorno: En este entorno se incluyen las instalaciones domésticas. También
se incluyen instalaciones que estén conectadas directamente sin transformadores
intermedios a una red de suministro de alimentación de baja tensión con fines
domésticos.
NOTA: Las casas, los apartamentos, los locales comerciales o las oficinas en
un edificio residencial constituyen ejemplos de ubicaciones de primer entorno.
Segundo entorno: En este entorno se incluyen todas las instalaciones distintas
de las que estén conectadas directamente a una red de suministro de alimentación
de baja tensión con fines domésticos.
NOTA: Las áreas industriales, las áreas técnicas de cualquier edificio que se
abastezca a partir de un transformador dedicado constituyen ejemplos de
ubicaciones de segundo entorno.
3
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 31

instalación vacon • 27
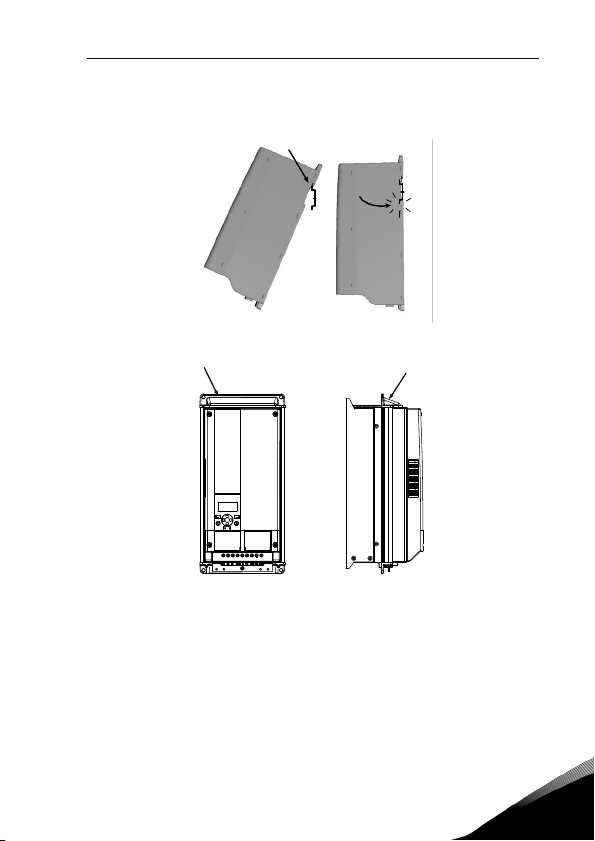
3.1.5 Cambio de la clase de protección EMC de C2 o C3 a C4
Para cambiar la clase de protección EMC de los convertidores MI1-3 de la clase C2
o C3 a la clase C4, quite el tornillo de desconexión de condensador EMC, consulte
la figura siguiente. MI4 y 5 también se pueden cambiar quitando los puentes EMC.
Nota: No intente volver a cambiar el nivel de EMC a clase C2 o C3. ¡Incluso si el
procedimiento anterior se invierte, el convertidor ya no cumplirá los requisitos EMC
de clase C2/C3!
Figura 3.13: Clase de protección EMC, MI1–MI3
Figura 3.14: Clase de protección EMC, MI4
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 32

28 • vacon instalación
Figura 3.15: Clase de protección EMC, MI5
Figura 3.16: Puentes
• Quite la cubierta principal del convertidor y localice los dos
puentes.
• Desconecte los filtros RFI de la puesta a tierra levantando
los puentes de sus posiciones por defecto. Vea la Fi gura 3. 16.
3
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 33

Pele la capa
protectora del
cable para una
conexión a tierra
de 360º
MOTOR
RED ELÉCTRICA
Salida del motor
3~ (230 V, 400 V)
1~ (230 V)
L1 L 2/N L3 U/ T1V/ T2 W /T3R+ R-
1~ (230V) 1~ ( 115V)
Pele la capa
protect ora del
cable para
una conex ión
a tierra de 360º
Resistencia de frenado externa
3~(230 V, 400 V, 600 V)
RESISTENCIA
DE FRENADO
MOTOR
RED ELÉCTRICA
3~(230 V, 400 V, 600 V)
Salida de l motor
instalación vacon • 29
3.2 Cableado y conexiones
3.2.1 Cableado de alimentación
Nota: El par de apriete de los cables de alimentación oscila entre 0,5 y 0,6 Nm.
Figura 3.17: Conexiones de alimentación de Vacon 20, MI1
Figura 3.18: Conexiones de alimentación de Vacon 20, MI2–MI3
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 34

30 • vacon instalación
3~(380, 480 V)
RESISTENCIA
DE FRENADO
Salida del motor
MOTOR
RED ELÉCTRICA
3~(380, 480 V)
RESISTENCIA
DE FRENADO
Salida del motor
MOTOR
RED ELÉCTRICA
Figura 3.19: Conexiones de alimentación de Vacon 20, MI4
Figura 3.20: Conexiones de alimentación de Vacon 20, MI5
3
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 35

instalación vacon • 31
Montar el soporte
DESPUÉS de
instalar los cables
de alimentación
Montar esta placa
ANTES de instalar
los cables de
alimentación
3.2.2 Cableado de control
Figura 3.21: Montaje de la placa PE y del soporte de cables API,
MI1–MI3
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 36

32 • vacon instalación
Montar esta placa
ANTES de instalar
los cables de
alimentación
Montar el soporte
DESPUÉS de
instalar los cables
de alimentación
3
Figura 3.22: Montaje de la placa PE y del soporte de cables API,
MI4–MI5
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 37

instalación vacon • 33
Figura 3.23: Abra la cubierta, MI1–MI3
Figura 3.24: Abra la cubierta, MI4–MI5
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 38

34 • vacon instalación
Par de a priete
del cable
de control:
0,4 Nm
Pele la capa
protectora
del cable para
una conexión
a tierra de 360º
3
Figura 3.25: Instalación de los cables de control. MI1–MI3.
Consultar capítulo 6.1
Figura 3.26: Instalación de los cables de control. MI4–MI5.
Consultar capítulo 6.1
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 39

instalación vacon • 35
5$185$
(
(
(
B2
B5
B4
BH BF
1
3.2.3 Tarjetas opcionales permitidas en Vacon20
Ver a continuación las tarjetas opcionales permitidas en la ranura:
( % %
Nota: OPT-B1 y OPT-B4 sólo admiten suministro de alimentación externa.
Estructura de montaje de tarjeta opcional:
2
3
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 40

36 • vacon instalación
4
5
6
3
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 41

instalación vacon • 37
Tornillos M4*8, 12 u
Tornillos M4*8, 10 uds
3.2.4 Tornillería de cables
Figura 3.27: Tornillos MI1
Figura 3.28: Tornillos MI2
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 42

38 • vacon instalación
Tornillos M4*8, 10 uds
Tornillos M4*10, 4 uds
Tornillos M4*9, 14 uds
Tornillos M4*17, 6 uds
Figura 3.29: Tornillos MI3
Figura 3.30: Tornillos MI4–MI5
3
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 43

instalación vacon • 39
3.2.5 Especificaciones de los cables y fusibles
Utilice cables con una resistencia térmica de al menos +70 °C. Las dimensiones
de los cables y fusibles deben determinarse conforme a las tablas siguientes.
La instalación de los cables de acuerdo con las normativas UL se encuentra en
el capítulo 3.2.8.
Los fusibles funcionan también como protección contra sobrecarga en los cables.
Estas instrucciones se aplican únicamente a los casos con un motor y una conexión
de cable desde el convertidor al motor. En calquier otro caso, póngase en contacto
con fábrica para obtener más información.
Categoría EMC cat. C2 cat. C3 cat. C4
Tipos de cables
de alimentación
eléctrica
Tipos de cables
del motor
Tipos de cables
de control
Tabla 3.6: Tipos de cables obligados a cumplir las normas.
Las categorías EMC se describen en el capítulo 3.1.4
Tipo de cable Descripción
Cable de alimentación designado para instalaciones fijas y la tensión
1
de alimentación específica. No precisa cable apantallado.
(NKCABLES/MCMK o similar recomendado).
Cable de alimentación equipado con cable de protección concéntrico
2
designado para tensión de alimentación específica.
(NKCABLES/MCMK o similar recomendado).
Cable de alimentación equipado con apantallamiento compacto de baja
impedancia designado para la tensión de alimentación específica.
3
(NKCABLES / MCCMK, SAB / ÖZCUY-J o similar recomendado).
*Se necesita una conexión a masa de 360º para la conexión de red y la del motor
para cumplir la norma.
Cable apantallado equipado con pantalla compacta de baja impedancia
4
(NKCABLES /Jamak, SAB / ÖZCuY-O o similar).
Tabla 3.7: Descripciones de tipos de cable
11 1
32 1
44 4
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 44

40 • vacon instalación
Tama ño
de
bastidor
Tipo
Fusible
[A]
Cable de
alimenta-
ción
Cu [mm
2
]
Tamaño de cable del terminal (mín. /máx.)
Cable del
Ter min al
principal
[mm
2
]
Ter min al
de tierra
[mm
motor
Cu [mm
2
]
2
]
Term in al
de
control
[mm
2
]
Term in al
MI2 0001–0004 20 2*2,5+2,5 3*1,5+1,5 1,5–4 1,5–4 0,5–1,5 0,5–1,5
MI3 0005 32 2*6+6 3*1,5+1,5 1,5–4 1,5–4 0,5–1,5 0,5–1,5
Tabla 3.8: Tamaños de cables y fusibles para Vacon 20, 115 V, 1~
Tama ño
de
bastidor
Tipo
Fusible
[A]
Cable de
alimenta-
ción
Cu [mm
2
]
Tamaño de cable del terminal (mín. /máx.)
Cable del
Ter min al
principal
[mm
2
]
Ter min al
de tierra
[mm
motor
Cu [mm
2
]
2
]
Term in al
de
control
[mm
2
]
Term in al
MI1 0001–0003 10 2*1,5+1,5 3*1,5+1,5 1,5–4 1,5–4 0,5–1,5 0,5–1,5
MI2 0004–0007 20 2*2,5+2,5 3*1,5+1,5 1,5–4 1,5–4 0,5–1,5 0,5–1,5
MI3 0009 32 2*6+6 3*1,5+1,5 1,5–6 1,5–6 0,5–1,5 0,5–1,5
Tabla 3.9: Tamaños de cables y fusibles para Vacon 20, 208–240 V, 1~
Tama ño
de
bastidor
Tipo
Fusible
[A]
Cable de
alimenta-
ción
Cu [mm
2
]
Tamaño de cable del terminal (mín. /máx.)
Cable del
Ter min al
principal
[mm
2
]
Ter min al
de tierra
[mm
motor
Cu [mm
2
]
2
]
Term in al
de
control
[mm
2
]
Term in al
MI1 0001–0003 6 3*1,5+1,5 3*1,5+1,5 1,5–4 1,5–4 0,5–1,5 0,5–1,5
MI2 0004–0007 10 3*1,5+1,5 3*1,5+1,5 1,5–4 1,5–4 0,5–1,5 0,5–1,5
MI3 0011 20 3*2,5+2,5 3*2,5+2,5 1,5–6 1,5–6 0,5–1,5 0,5–1,5
MI4 0012–00252025403*6+6 3*6+6 1–10 Cu 1–10 0,5–1,5 0,5–1,5
MI5 0031–0038 40 3*10+10 3*10+10
Tabla 3.10: Tamaños de cables y fusibles para Vacon 20, 208–240 V, 3~
2,5–50
2,5–35 0,5–1,5 0,5–1,5
Cu / Al
de relé
[mm
de relé
[mm
de relé
[mm
2
]
2
]
2
]
3
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 45

instalación vacon • 41
Tama ño
de
bastidor
Tipo
Fusib le
[A]
Cable de
alimenta-
ción
Cu [mm
2
]
Tamaño de cable del terminal (mín./máx.)
Cable del
Ter min al
principal
[mm
2
]
Term in al
de tierra
[mm
motor
Cu [mm
2
]
2
]
Ter min al
de
control
[mm
2
]
Term in al
MI1 0001–0003 6 3*1,5+1,5 3*1,5+1,5 1,5–4 1,5–4 0,5–1,5 0,5–1,5
MI2 0004–0006 10 3*1,5+1,5 3*1,5+1,5 1,5–4 1,5–4 0,5–1,5 0,5–1,5
MI3 0008–0012 20 3*2,5+2,5 3*2,5+2,5 1,5–6 1,5–6 0,5–1,5 0,5–1,5
MI4 0016–0023 25 3*6+6 3*6+6 1–10 Cu 1–10 0,5–1,5 0,5–1,5
MI5 0031–0038 40 3*10+10 3*10+10
Tabla 3.11: Tamaños de cables y fusibles para Vacon 20, 380–480 V, 3~
Cable de
Tama ño
de
bastidor
Tipo
Fusib le
[A]
alimenta-
ción
Cu [mm
2
]
Cable del
Cu [mm
2,5–50
2,5–35 0,5–1,5 0,5–1,5
Cu / Al
Tamaño de cable del terminal (mín./máx.)
Ter min al
principal
[mm
2
]
Term in al
de tierra
[mm
motor
2
]
2
]
Term in al
de
control
[mm
2
]
Ter min al
MI3 0002–0004 6 3*1,5+1,5 3*1,5+1,5 1,5–4 1,5–4 0,5–1,5 0,5–1,5
MI3 0005–0006 10 3*1,5+1,5 3*1,5+1,5 1,5–4 1,5–4 0,5–1,5 0,5–1,5
MI3 0009 20 3*2,5+2,5 3*2,5+2,5 1,5–6 1,5–6 0,5–1,5 0,5–1,5
Tabla 3.12: Tamaños de cables y fusibles para Vacon 20, 600 V,3~
Nota: Para cumplir la norma EN61800-5-1, el conductor de protección debe ser
de al menos 10 mm2 Cu o 16 mm2 Al. Otra posibilidad consiste en utilizar un
conductor de protección adicional de al menos el mismo tamaño que el original.
de relé
[mm
de relé
[mm
2
]
2
]
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 46

42 • vacon instalación
3.2.6 Reglas generales de cableado
Antes de comenzar la instalación, compruebe que ninguno de los componentes
1
del convertidor esté activo.
Coloque los cables del motor lo suficientemente alejados de otros cables:
• Evite colocar los cables del motor en líneas p aralelas prolongadas con
los demás cables.
• Si los cables del motor están dispuestos en paralelo con los cables
resta ntes, la distancia mínima entre el cable del motor y los demás cables
es de 0,3 m.
• La distancia proporcionada también se aplica entre los cables del motor
2
3
4
y los cables de señal de otros sistemas.
• La longitud máxima de los cables del motor de MI1-3 es de 30 m.
La longitud máxima de los cables del motor para MI4 y 5 es 50 m.
Si utiliza cable más largo, la precisión de la corriente disminuirá.
• Los cables del motor deben cruzarse con otros cables en un ángulo
de 90 grados.
Si es necesario comprobar el aislamiento de los cables, consulte el capítulo 3.2.9.
Conexión de los cables:
• Pele los cables de alimentación y del motor tal y como se indica en
la figura 3.31.
• Conecte los cables de alimentación, del motor y de control a sus respectivos
terminales. (Consulte las figuras 3.17–3.26).
• Tenga en cuenta los pares de apriete de los cables de alimentación
y los cables de control proporcionados en los apartados 3.2.1 y 3.2.2.
• Para obtener información acerca de la instalación de los cables conforme
a las normativas UL, consulte el capítulo 3.2.8 .
• Asegúrese de que los cables de control no entren en contacto con los
componentes electrónicos del convertidor.
• Si se utiliza una resistencia de frenado externa (opcional), conecte su cable
al terminal adecuado.
• Compruebe la conexión del cable de tierra al motor y los terminales
del convertidor marcados con
• Conecte la malla del cable del motor a la toma de tierra del convertidor,
motor y centro de alimentación eléctrica general.
3
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 47

8 mm
Conductor de tierra
8 mm
35 mm
20 mm
instalación vacon • 43
3.2.7 Longitud de los cables de alimentación y del motor
Figura 3.31: Corte de cables
Nota: Pele también la tapa de plástico de los cables para una conexión a tierra
de 360 grados. Consulte las figuras 3.17, 3.18 y 3.25.
3.2.8 Instalación de cables y normativa UL
Al objeto de cumplir la normativa UL (Underwriters Laboratories), es preciso utilizar
un cable de cobre aprobado por UL con una resistencia mínima al calor de +60/75 °C.
Utilice únicamente cable de Clase 1.
Las unidades son adecuadas para su uso en un circuito capaz de entregar no más
de 50.000 amperios simétricos rms y un máximo de 600 V, cuando se protege con
fusibles de clase T y J. Para MI4 sin reactancia de CC, la intensidad máxima de
corriente de cortocircuito debe ser inferior a 2,3 kA, para MI5 sin reactancia de CC,
la intensidad máxima de corriente de cortocircuito debe ser inferior a 3,8 kA.
La protección frente a cortocircuitos de estado sólido integrada no ofrece protección
de fuga a tierra. La protección de fuga a tierra debe ofrecerse de conformidad con
el código eléctrico nacional y los códigos locales vigentes. Protección para circuito
derivado proporcionada únicamente mediante fusibles.
Se ofrece protección frente a sobrecarga del motor al 110% de corriente a plena
carga.
3.2.9 Comprobar el aislamiento del cable y del motor
En el caso de que sospeche que falla el aislamiento de los cables o del motor, realice
estas comprobaciones de la siguiente manera.
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
3
Page 48

44 • vacon instalación
1. Comprobar el aislamiento del cable del motor
Desconecte el cable del motor de los terminales U / T1, V / T2 y W / T3 del convertidor
y del motor. Mida la resistencia de aislamiento del cable de motor entre cada fase,
así como entre cada fase y el conductor para la protección de toma a tierra.
La resistencia del aislamiento debe ser >1 MOhm.
2. Comprobar el aislamiento del cable de red eléctrica
Desconecte el cable de red eléctrica de los terminales L1, L2 / N y L3 del convertidor
y de la red eléctrica. Mida la resistencia de aislamiento del cable de entrada de la
red de alimentación entre cada fase, así como entre cada fase y el conductor para la
protección de toma a tierra. La resistencia del aislamiento debe ser >1 MOhm.
3. Comprobar el aislamiento del motor
Desconecte el cable del motor del motor y abra las conexiones de puente de la caja
de conexiones del motor. Mida la resistencia de aislamiento de cada bobinado del
motor. La tensión medida debe ser igual al menos a la tensión nominal del motor,
pero no puede superar los 1000 V. La resistencia del aislamiento debe ser >1 MOhm.
3
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 49

puesta en marcha vacon • 45
4. PUESTA EN MARCHA
Antes de la puesta en marcha, tenga en cuenta las instrucciones
y las advertencias que se encuentran en el capítulo 1.
4.1 Pasos de la puesta en marcha de Vacon 20
Lea y siga detenidamente las instrucciones de seguridad del capítulo 1.
1
Después de la instalación, asegúrese de lo siguiente:
• tanto el convertidor como el motor e stén conectados a tierra.
• los cables de alimentación y del motor cumplan los requisitos que se
proporcionan en el capítulo
2
3
4
5
6
• los cab les de co ntrol se encue ntran situados lo m ás lejos posible de los
cables de alimentación (vea el capítulo
de los cables estén conectados a la protección de toma a tierra.
Compruebe la calidad y la cantidad de aire de refrigeración (capítulo 3.1.2).
Compruebe que todos los interruptores de marcha/paro conectados
a los terminales de I/O se encuentren en posición de paro.
Conecte el convertidor a la red eléctrica.
Establezca los parámetros del grupo 1 conforme a los requisitos de la aplicación.
Se deben establecer como mínimo los siguiente parámetros:
• velocidad nominal del motor (par. 1.3)
• intensidad nominal del motor (par. 1.4)
Encont rará los valores n ecesarios para los pa rámetros en la placa
de
características del motor.
3.2.5.
3.2.6, paso 2) y de que las pantallas
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
4
Page 50

46 • vacon puesta en marcha
Realice una prueba de funcionamiento sin el motor. Realice la prueba A o la B:
A) Control desde los terminales de I/O:
• Ponga el interruptor de marcha/paro en posición ON.
• Cambie la referencia de frecuencia (potenciómetro).
• Compruebe el menú de monitor y asegúrese de que el valor de la
frecuencia de salida cambia según el cambio de referencia de frecuencia.
7
8
9
• Ponga el interruptor de marcha/paro en posición de paro (OFF).
B) Control desde el panel:
• Seleccione el panel como lugar de control con el par 2.1. También puede
cambiar al control de panel al pulsar el botón Loc/Rem o
el
control local con el par 2.5.
• Pulse el botón de marcha del panel.
• Compruebe el menú de monitor y asegúrese de que el valor de la
frecuencia de salida cambia según el cambio de referencia de frecuencia.
• Pulse el botón de paro del panel.
Ejecute las pruebas sin carga, sin que el motor esté conectado al proceso, si es
posible. En caso de que no fuera posible, asegúrese de que cada una de las
pruebas es segura antes de ejecutarla. Comunique a los compañeros la
realización de las pruebas.
• Desconecte la tensión de alimentación y espere hasta que el convertidor
se haya apagado.
• Conecte el cable del motor al motor y los terminales de cable del motor
al
convertidor.
• Asegúrese de que todos los interruptores de marcha/paro se encuentren
en posiciones de paro.
• Active el interruptor principal.
• Repita la prueba 7A o 7B.
Conecte el motor al proceso (si se ejecutó la prueba sin carga, sin que el motor
estuviese conectado).
• Antes de realizar las pruebas, asegúrese de que se pueden hacer
de
forma segura.
• Comunique a los compañeros la realización de las pruebas.
• Repita la prueba 7A o 7B.
seleccionar
4
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 51

localización de fallos vacon • 47
FT 2
Código de fallo (02 = sobretensión)
5. LOCALIZACIÓN DE FALLOS
Cuando el sistema de control electrónico del convertidor detecta un fallo crítico,
el convertidor se para y se muestran en pantalla el símbolo FT y el código de fallo
parpadeando con el siguiente formato, por ejemplo:
El fallo activo se puede resetear pulsando el botón BACK/RESET cuando la API está en
el nivel de menú de fallo activo (FT XX) o el botón BACK/RESET durante un tiempo
largo (> 2 s) cuando la API está en el nivel de submenú de fallo activo (F5.x ) o por medio
del terminal de I/O o Fieldbus. Puede resetear el historial de fallos (mantenga pulsado
durante > 5 s) cuando la API está en el nivel de submenú de historial de fallos (F6.x).
Los fallos con etiquetas de tiempo y subcódigo se almacenan en el submenú de
historial de fallos, que se puede examinar. En la tabla siguiente se presentan
los diferentes códigos de fallo, sus causas y acciones correctivas.
Código
de fallo
Tabla 5.1: Códigos de fallo
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
1
2
3
Nombre
del fallo
Sobreintensidad
Sobretensión
Fallo a tierra
Causa posible Acciones correctivas
El convertidor ha detectado una
intensidad demasiado alta (>4*I
en el cable del motor:
• aumento repentino de
la carga
• cortocircuito en los cables
del motor
• motor inadecuado
La tensión del bus de CC ha
superado el límite de seguridad
interno:
• tiempo de deceleración
demasiado corto
• altos picos de tensión
en la red eléctrica
El circuito de medida de
intensidad ha detectado que la
suma de las intensidades de las
fases del motor no es cero.
Detecció n de corriente d e fuga en
el arranque:
• fallo de aislamiento
en cables o motor
)
N
Comprobar carga.
Comprobar el tamaño
del motor.
Comprobar los cables.
Aumentar el tiempo
de deceleración
(par.4.3 o par.4.6)
Comprobar los cables
del motor y el motor.
5
Page 52

48 • vacon localización de fallos
Código
de fallo
Tabla 5.1: Códigos de fallo
8
9
11
13
14
15
Nombre
del fallo
Fallo del
sistema
Baja tensión
Fallo de fase de
salida
Baja
temperatura del
convertidor
Sobre
temperatura del
convertidor
Motor
bloqueado
Causa posible Acciones correctivas
Resetear el fallo y volver
a poner en marcha.
• fallo de componente
• funcionamiento incorrecto
La tensión del Bus de CC
ha descendido del límite
de seguridad interno:
• causa más probable: tensión
de alimentación demasiado
baja
• fallo interno del convertidor
• Fallo de alimentación
El sistema de medida de
intensidad ha detectado que
no circula intensidad por una
de la fases del motor.
La temperatura del radiador es
inferior a -10
Radiador sobrecalentado.
La protección contra bloqueo
del motor se ha activado.
°C
Si se vuelve a producir el
fallo, consultar al distribuidor.
NOTA: Si se produce el fallo
F8, busque el subcódigo del
fallo en el menú del historial
de fallos con el ID xxx.
En el caso de que se produzca
un corte de tensión de
alimentación temporal,
resetear el fallo y volver
a poner en marcha el
convertidor. Comprobar
la tensión de alimentación.
Si es correcta, se ha producido
un fallo interno.
Consultar al distribuidor
más próximo.
Comprobar el cableado del
motor y motor.
Comprobar la temperatura
ambiente.
Comprobar que el flujo de
aire de refrig eración no está
bloqueado.
Comprobar la temperatura
ambiente.
Limpiar la suciedad del
radiador.
Comprobar que la frecuencia
de conmutación no sea
demasiado alta en relación
con la temperatura ambiente
y la carga del motor.
Comprobar que el motor
puede girar libremente.
5
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 53

localización de fallos vacon • 49
Código
de fallo
Tabla 5.1: Códigos de fallo
16
17
22
25
27
29
34
35
41
50
Nombre
del fallo
Sobre
temperatura
del motor
Baja carga
Fallo e n
la EEPROM
Fallo d el mecanismo de control
del microcontrolador (Watchdog)
Protección de
fuerza contraelectromotriz (FCEM)
Fallo termistor
Comunicación
del bus interno
Fallo d e la
aplicación
Tem per atu ra
IGBT
Fallo de nivel bajo
de entrada analógica (AI) Selección de entrada
analógica 20%–
100% (rango de
señal seleccionado de 4 a 20
mA o de 2 a 10 V)
Causa posible Acciones correctivas
El modelo térmico del motor calculado por el convertidor ha detectado una sobre temperatura de
motor. El motor está sobrecargado.
Se ha activado la protección
de baja carga.
Ejemplo: falta de agua
de entrada.
Fallo al guardar parámetros
• funcionamiento incorrecto
• fallo de componente
• funcionamiento incorrecto
• fallo de componente
El convertidor ha detectado que
el motor magnetizado está
girando en situación de marcha.
La entrada del termistor de la
tarjeta opcional ha detectado un
aumento de la temperatura del
motor.
Interferencia del ambiente
o hardware defectuoso.
La aplicación no funciona
correctamente.
Cuando la temperatura de los IGBT
supera los 110 ºC, aparece un aviso.
La intensidad en la entrada
analógica es < 4 mA; la tensió n en
la entrada analógica es < 2 V.
• cable de control roto o suelto.
• fallo del origen de señal.
Reducir la carga del motor.
Si no existe sobreca rga del motor ,
comprobar los parámetros del
modelo térmico del motor.
Comprobar el motor y la carga,
así como los parámetros
relacionados con la detección
de baja carga (P11.14 - P11.16).
Ejemplo: correas rotas
o bombas sin agua
Consultar al distribuidor más
próximo.
Resetear el fallo y volver
a poner en marcha.
Si se vuelve a producir el
fallo, consultar al distribuidor.
Asegurarse de que no haya un
motor magnetizado girando
cuando se dé la orden de marcha.
Comprobar la refrigeración
y carga del motor. Comprobar
la conexión del termistor (si
la entrada de termistor de la
tarjeta opcional no está en
uso, se debe cortocircuitar).
Si se vuelve a producir el
fallo, consultar al distribuidor.
Consultar al distribuidor más
próximo.
Com probar c arga.
Comprobar el tam año del motor.
Comprobar el transductor
y su cableado
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
5
Page 54

50 • vacon localización de fallos
Código
de fallo
Tabla 5.1: Códigos de fallo
51
52
53
54
55
60
80
81
82
84
Nombre
del fallo
Fallo extern o
Fallo d e
comunicación
panel
Fallo d e
comunicación
Fieldbus
Fallo r anura
Fallo de funcionamiento de marcha incorrecto
Bomba no
detectada
Fallo d e
enclavamientos
Fallo d e
identificación
del sistema
Frecuencia de
salida<Frecuenci
a de referencia
Sobrepresión
Causa posible Acciones correctivas
Fallo de entrada digital. La
entrada digital se ha programado
como entrada de fallo externo
y esta entrada está activada.
Se ha interrumpido la conexión
entre el panel de control y el
convertidor.
Se ha interrumpido la conexión
de datos entre el maestro de
Fieldbus y la tarjeta de Fieldbus
del convertidor.
Fallo en tarjeta opcional o
ranura. Se ha perdido la conexión
entre la tarjeta opcional y la API.
La marc ha directa e invers a
están activadas
simultáneamente.
El convertidor no detecta ninguna
bomba conectada. Sólo si se utiliza
P14.1 = 2 (rotación total sin enclavamientos) y P14.23 = 1 (detección
de bombas sin enclavamientos).
Se ha seleccionado un tipo de
rotación con enclavamientos
(P1.7) y el variador no los está
detectando.
Fallo durante la identificación
del sistema hidráulico.
La bomba no puede girar a la velocidad deseada del sistema debido
a un consumo alto o a que la alimentación es demasiado baja.
Se ha disparado la protección
por sobrepresión
Comprobar la programación
y el dispositivo que indica la
información del fallo externo.
Comprobar también el
cableado de este dispositivo.
Comprobar la conexión del
panel y revisar conexionado
del kit de montaje en puerta
si se utiliza.
Comprobar la instalación.
Si la instalación es correcta,
consultar al distribuidor de
Vacon más próximo .
Comprobar tarjeta y ranura.
Consultar al distribuidor
Vacon más próximo .
Comprobar las señales de
control 1 y 2 de las I/O.
Comprobar la conexión
de la bomba
Utilizar el menú monitor
para comprobar el estado de
las entradas digitales y comprobar también su cableado.
Revisar que la salida del
grupo de presión se cierra
y se abre correctamente.
Comprobar el transductor.
Comprobar si se ha forzado
la detención durante la
identificación.
Revisar la red de la alimentación del convertidor y que la
bomba no esté atascada o
tenga suciedad en la impulsión.
Comprobar el proceso.
Comprobar el transductor o
límite de parámetro (P11.24).
5
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 55

Señales I/O de
0~20 mA
10 V/50 mA
api de vacon 20 vacon • 51
6. INTERFAZ DEL SISTEMA PFC
6.1 Señales I/O
Terminal Señal Función Descripción
A A RS 485 A Comunicación Modbus RTU
B B RS 485 B Comunicación Modbus RTU
1
2 AI1+ Entrada analógica 1
3GND
6 +24 V
7DI_COM
8 DIN1 Entrada digital 1
9 DIN2 Entrada digital 2
10 DIN3 Entrada digital 3
4 AI2+ Entrada analógica 2 Valor actual PID
5GND
13 DO- Común salida digital - 14 DIN4 Entrada digital 4
15 DIN5 Entrada digital 5
16 DIN6 Entrada digital 6
18 AO1+ Salida analógica
Tabla 6.1: Señales I/O
(P): La función es programable
+10 V
ref
Común entrada digital
Salida de tensión
de referencia
Tierra de señales
de I/O
Tensión auxiliar
+24VDC
para DIN1-DIN6
Tierra de señales
de I/O
Tensión para
potenciómetro
Referencia de
frecuencia
(P)
Máx. 10 mA
0 – +10 V Ri >= 200 k
Resolución: 11 bits,
precisión: ±1%
- -
Tensión auxiliar
+24VDC
Máx. 50 mA
- -
(P)
Marcha directa
Referencia
de PID 2
Selección de
referen cia 2 y lugar
de control
remoto 2
18–30 V, Ri > 5 K Ohm
18–30 V, Ri > 5 K Ohm
(P)
18–30 V, Ri > 5 K Ohm
(P)
Por defecto:
0(4)–20 mA, Ri <= 250
Otros:
0 – +10 V Ri >= 200 k
Resolución: 11 bits,
Precisión: ±1%
Selección de V/mA con
interruptores
- -
(P)
18-30 V, Ri > 5 K Ohm
Enclavamiento 1
Enclavamiento 2
Enclavamiento 3
Listo
(P)
18–30 V, Ri > 5 K Ohm
(P)
18–30 V, Ri > 5 K Ohm
0~10 V, carga > 1 K Ohm
0(4)~20 mA, carga < 500 Ohm
(P)
Selección de V/mA con
interruptores
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
6
Page 56

52 • vacon api de vacon 20
230 VCA
Autom.
M1/Vacon
K1
K1
K1
K1
K1.1
K1.1
K2
S1
RO1 RO2
22
23
14
DI5
DI424 VCC
25
26
15
S2
K2
K2
K2
K2.1
K2.1
M1/red de alimen tación M2/red de alimentació nM2/Vacon
Red eléctrica
Autom.
Red eléctrica
VACO N 20
Terminal Señal Fu nción Descripción
20 DO+ Salida digital
22 R13 Relé 1, contacto N.O.
Control bomba 3
Control bomba 1
23 R14 Relé 1, Común 24 R2 2 Relé 2, contacto N.C.
25 R21 Relé 2, Común 26 R24 Relé 2, contacto N.O.
Tabla 6.1: Señales I/O
(P): La función es programable
Figura 6.1: Rotación total de 2 bombas,
ejemplo del esquema de control
Control bomba 2
Sin fallos
(P)
(P)
Colector abierto
(P)
Máx. 48 VCC, máx. 50 mA
(P)
Carga de conmutación
máx.: 250 VCA/2 A
o 250 VCC/0,4 A
Carga de conmutación
máx.: 250 VCA/2 A
o 250 VCC/0,4 A
6
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 57

api de vacon 20 vacon • 53
230 VCA
M1/Vacon
K1
K1
K1
K1
K1
K1K1.1
K1.1
K2
S1
R4
R4
22
A
O
A
O
A
O
23
146
DI5 DI1 D0DI4
24 VCC
25
26
15 16 20
S2 S3
K2
K2
K3
K3
K3
K3.1
K3
K3
K3K2
K2
K2
K2.1
K2.1K2.1
M1/red de alimentaci ón M2/red de aliment aciónM2/Vacon M3/Vacon M3/r ed de alimentación
Red eléctrica
Red eléctrica Red eléctrica
VACON 20
Figura 6.2: Rotación total de 3 bombas,
ejemplo del esquema de control
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
6
Page 58

54 • vacon api de vacon 20
VAC ON
K1
L1
L1L2L2L3L3
Q1
F3 F1 F2
PE
PEPE
K1.1 K2.1
K2
Figura 6.3: Ejemplo de rotación total de 2 bombas,
6
esquema de potencia
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 59

api de vacon 20 vacon • 55
DI
Enco Nor
AO
VmA
AI2
VmA
RS485
-term
ON
S1S2S3S4
J500
OFF
4 5 13 14 15 16 2018
123678910
22 23 26
2425
AI2 GND DO - DI4 DI5 DI 6 AO DO+ R13 R14 * R24
+10V AI1 GND 24V DI- C DI1 DI2 DI3 A B R21 R2 2
Figura 6.4: Ejemplo de rotación total de 3 bombas,
esquema de potencia
Figura 6.5: Interruptores DIP
Terminales de I/O de Vacon 20:
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
6
Page 60

56 • vacon panel de control
7. PANEL DE CONTROL
7.1 General
El panel está integrado en la unidad y se compone de la tarjeta de I/O correspondiente con su tapa y una cubierta que contiene la pantalla y los botones.
El panel del usuario consta de una pantalla LCD alfanumérica con iluminación
y un teclado con 9 pulsadores (consulte la figura 7.1).
7.2 Pantalla
En la pantalla se incluyen 14 segmentos y 7 bloques de segmentos, punteros
y símbolos claros de unidades de texto. Los punteros (cuando se pueden ver)
proporcionan cierta información acerca de la unidad. Esta información aparece en
forma de texto claro en el idioma del usuario en la cubierta (números 1…14 de la figura
siguiente). Los punteros se agrupan en 3 grupos con los siguientes significados y con
los siguientes textos en inglés en la cubierta (consulte la figura 7.1):
Grupo 1–5; Estado del convertidor
1= El convertidor se encuentra listo para funcionar (READY)
2= El convertidor se encuentra en estado de marcha (RUN)
3= El convertidor se encuentra en estado de paro (STOP)
4= El estado de la alarma está activado (ALARM)
5= El convertidor se ha detenido debido a un fallo (FAULT)
Grupo 6–10; Selecciones de control
Cuando la API funciona con control de PC, no hay punteros en I/O, KEYPAD y BUS.
6= El motor está girando en sentido directo (FWD)
7= El motor está girando en sentido inverso (REV)
8= El lugar de control seleccionado es el bloque de terminales de I/O (I/O)
9= El lugar de control seleccionado es el panel (KEYPAD)
10= El lugar de control seleccionado es el Fieldbus (BUS)
Grupo 11–14; Menú principal de navegación
11= Menú principal de referencia (REF)
12= Menú principal de monitor (MON)
13= Menú principal de parámetros (PAR)
14= Menú principal de sistema (SYS)
7
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 61

panel de control vacon • 57
1 2 3 4 5
6 7 8 9 10
11
13
14
12
READY RUN STOP ALARM FAULT
FWD REV I/O KEYPAD BUS
SYS
PAR
REF
MON
BACK
RESET
LOC
REM
OK
7.3 Panel
La sección del teclado del panel de control consta de 9 botones (consulte
la figura 7.1). Los botones y sus funciones se describen en la tabla 7.1.
El convertidor se detiene al pulsar el botón de PARO del panel, independientemente
del lugar de control seleccionado cuando Par. 2.7 (botón de Paro del panel) es 1.
Si Par. 2.7 es 0, el convertidor se detiene al pulsar el botón de PARO del panel solo
si se ha seleccionado el panel como lugar de control. La unidad se inicia al pulsar el
botón MARCHA del panel cuando se ha seleccionado KEYPAD o control LOCAL.
Figura 7.1: Panel de control de Vacon 20
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
7
Page 62

58 • vacon panel de control
OK
BACK
RESET
LOC
REM
Símbolo
Tabla 7.1: Función del panel
NOTA: El estado de los 9 botones se encuentra disponible para el programa
de la aplicación.
Nombre
del botón
START PONER EN MARCHA el motor desde el panel
STOP PARO del motor desde el panel
OK
Back/Reset
Arriba y Abajo
Izquierda
y Derecha
Loc / Rem Cambio del lugar de control
Descripción de la función
Se utiliza para confirmación. Permite acceder
al modo de edición de parámetros. Alterna
la visualización entre el valor y el código del
parámetro
No es necesario pulsar el b otón OK para confirmar
el valor de la referencia de frecuencia.
Cancela el parámetro editado
Permite moverse hacia atrás en los niveles
de menú
Restablece la indicación de fallo
Permite seleccionar el número de parámetro en
la lista de parámetros raíz. Arriba disminuye/Abajo
aumenta el número de parámetro. Arriba
aumenta/Abajo disminuye el cambio del valor del
parámetro.
Disponibles en el ajuste de dígitos de parámetros
de los menús REF, PAR y SYS al cambiar un valor.
MON, PAR y SYS también pueden utilizar el botón
izquierdo y derecho para navegar por el grupo de
parámetros; por ejemplo, en el menú MON: utilice
el botón derecho desde V1.x a V2.x a V3.x.
Puede utilizarse para cambiar de dirección
en el menú REF en el modo local:
- La flecha derecha indicaría marcha inversa (REV)
- La flecha izquierda indicaría marcha hacia
delante (FWD)
7
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 63

panel de control vacon • 59
FWD R EV I/O KEYPAD BUS
REF
MON
PA R
SYS SYS
SYS SYS
SYS SYS
SYS SYS
FAU LTALARMSTOPREADY RUN
FWD REV I/O KEYPAD BU S
REF
PA R
FAULTALARMSTOPREAD Y RUN
MON
FW D REV I/O KEYPA D BUS
REF
PAR
FAUL TALARMSTOPREADY RUN
MON
FWD REV I/O KEYPAD BUS
REF
PAR
FAULTALARMSTOPREADY RUN
MON
FWD REV I/O KEYPAD BUS
REF
PAR
FAULTALARMSTOPRE ADY RUN
MON
FWD REV I/O KEYPAD BUS
REF
PAR
FAULTALARMSTOPREADY RUN
MON
FWD REV I/O KEYPAD BUS
REF
PAR
FAU LTALARMSTO PREAD Y RUN
MON
FWD REV I/O KEYPAD BUS
REF
MON
PAR
FAU LTALARMSTOPREADY R UN
OK
OK
OK
OK
OK
Hz
Hz
MENÚ DE
SISTEMA
MENÚ DE
PARÁMETROS
MENÚ DE
REFERENCIA
MENÚ DE
MONITOR
En este menú se
pueden supervisar
los parámetros
del sistema y el
submenú de fallos.
Muestra elvalor de
referencia depanel
independientemente
del lugar de control
seleccionado.
En este menú se
pueden supervisar
yeditarlos
parámetros.
En este menú se
pueden supervisar
los valoresde
monitor.
PULSAR
PULSAR
PULSAR
PULSAR
PULSAR
PULSAR
PULSAR
7.4 Navegación en el panel de control de Vacon 20
En este capítulo se proporciona información acerca de la navegación por los menús
de Vacon 20 y acerca de la edición de los valores de los parámetros.
7.4.1 Menú principal
La estructura del menú del software de control de Vacon 20 se compone de un menú
principal y de varios submenús. A continuación se muestra la navegación por el
menú principal:
Figura 7.2: Menú principal de Vacon 20
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
7
Page 64

60 • vacon panel de control
OK
SYS
FWD REV I/O KEYPAD BUS
REF
MON
PA R
FAU LTALARMSTOPREADY RUN
Hz
Modificar
valor
Pulsar para entrar en
"modo de edición"
7.4.2 Menú de referencia
Figura 7.3: Pantalla del menú de referencia
Desplácese hasta el menú de referencia con el botón ARRIBA/ABAJO (consulte
la figura 7.2). El valor de referencia se puede cambiar con el botón ARRIBA/ABAJO
como se muestra en la figura 7.3.
También es posible modificar el valor dígito a dígito. Pulse primero los botones
Izquierda y Derecha para seleccionar el dígito que tiene que cambiarse;
posteriormente pulse el botón Arriba para aumentar y el botón Abajo para disminuir
el valor en el dígito seleccionado. El cambio de frecuencia de referencia se aplicará
inmediatamente, sin necesidad de pulsar OK.
Nota: Pueden utilizarse los botones IZQUIERDA y DERECHA para
cambiar de dirección en el menú Ref en el modo de control
local.
7
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 65

panel de control vacon • 61
OK
OK
OK
1
2
3
5
4
FAULTALARMSTOPREADY RU N
REF
MON
PAR
SYS
REF
MON
PAR
SYS
FAULTALARMSTOPREADY RU N
FWD REV I/O KEY PAD BUS FWD REV I/O K EYPAD BUS
REF
MON
PAR
SYS
FAULTALARMSTOPREADY RUN
FWD REV I/O KEY PAD BUS
REF
MON
PAR
SYS
FAULTALARMSTOPREADY RU N
FWD REV I/O KEYPAD BUS
FAULTALARMSTOPREADY RU N
REF
MON
PAR
SYS
FWD REV I/O KEYPAD BUS
Pulsar OK para entrar
en el menú Monitor
Pulsar OK para
visualizar V4.5
Pulsar abajo para
supervisar V4.5
Pulsar Izquierda/Derecha
para supervisar otro grupo
de monitor
Pulsar OK para
visualizar el valor
7.4.3 Menú monitor
Los valores de monitor son valores reales de las señales medidas, así como los
estados de algunos de los ajustes de control. Son visibles en la pantalla de Vacon 20,
pero no pueden editarse. Vea el capítulo 8.2.
La pulsación del botón Izquierda/Derecha permite cambiar el parámetro actual
al primer parámetro del siguiente grupo, para navegar por el menú de monitor de
V1.x a V2.1 a V3.1 a V4.1. Tras acceder al grupo deseado, puede navegarse por los valores
de monitor pulsando el botón ARRIBA/ABAJO, como se muestra en la figura 7.4.
En el menú MON, la señal seleccionada y su valor alternan en la pantalla pulsando
el botón OK.
Nota: Al conectar la alimentación del convertidor, el puntero del
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
Figura 7.4: Pantalla del menú monitor
menú principal está en MON, V x.x o el valor del parámetro
de monitor Vx.x se muestra en el panel.
La visualización de Vx.x o el valor del parámetro de monitor de
Vx.x viene determinada por el último estado de visualización
antes de la desconexión de la alimentación. P. ej., si era V4.5,
también será V4.5 al volver a dar tensión al convertidor.
7
Page 66

62 • vacon panel de control
OK
OK
2
4
3
5
OK
6
FAULTALARMSTOPREADY RU N
REF
MON
PAR
SYS
REF
MON
PAR
SYS
REF
MON
PAR
SYS
FAUL TALARMSTOPREADY RU N
FAULTALARMSTOPREADY RUN
FWD R EV I/O KEYPAD BUS FWD R EV I/O KEYPAD BUS
FWD R EV I/O KEYPAD BUS
1
FAULTALARMSTOPREADY RUN
REF
MON
PAR
SYS
FWD REV I/O K EYPAD BUS
FAULTALARMSTOPREADY RU N
REF
MON
PAR
SYS
FWD REV I/O K EYPAD BUS
Hz
Pulsar OK para
confirmar
Pulsar Arriba/Abajo para modificar el valor
Pulsar OK para entrar en
el menú de parámetros
Pulsar Abajo para
supervisar P3.4
Pulsar OK para entrar
en modo edición
Pulsar Derecha para
supervisar otro grupo
de parámetros
7.4.4 Menú de parámetros
En el menú de parámetros solo se muestra por defecto la lista de parámetros
de configuración rápida. Al dar el valor 0 al parámetro 15.2, es posible acceder a los
otros grupos de parámetros avanzados. Las listas y las descripciones de los
parámetros se pueden encontrar en los capítulos 8 y 9.
En la siguiente figura se muestra la vista del menú de parámetros:
El parámetro puede cambiarse como la figura 7.5.
El botón Izquierda/Derecha está disponible en el menú de parámetros. La pulsación
del botón Izquierda/Derecha permite cambiar del parámetro actual al primer
parámetro del siguiente grupo (ejemplo: cualquier parámetro de P1… se muestra
-> botón DERECHO -> P2.1 se muestra -> botón DERECHO -> P3.1 se muestra…).
Tras acceder al grupo deseado, pulse el botón ARRIBA / ABAJO para seleccionar
el número del parámetro raíz y, posteriormente, pulse el botón OK para mostrar
el valor del parámetro y también acceder al modo de edición.
7
Figura 7.5: Menú de parámetros
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 67

panel de control vacon • 63
En el modo de edición, los botones Izquierda y Derecha se utilizan para seleccionar
el dígito que tiene que cambiarse y Arriba aumenta / Abajo disminuye el valor del
parámetro.
En el modo de edición, el valor de Px.x aparece parpadeando en el panel. Tras
aproximadamente 10 s, Px.x vuelve a aparecer en el panel si no pulsa ningún botón.
Nota: En el modo de edición, si edita el valor y no pulsa el botón OK,
el valor no se cambia.
En el modo de edición, si no edita el valor, puede pulsar
Reset/Back para volver a mostrar Px.x.
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
7
Page 68

64 • vacon panel de control
OK
1
2
3
REF
MON
PAR
SYS
FAULTALARMSTOP
FWD R EV I/O K EYPAD BUS
READY RU N
OK
4
REF
MON
PAR
SYS
FAULTALARMSTOPREADY RUN
FWD R EV I/O KEY PAD BUS
5
REF
MON
PAR
SYS
FAULTALARMSTOPRE ADY RUN
FWD REV I/O KEYPAD B US
REF
MON
PAR
SYS
FAULTALA RMSTOPREADY RUN
FWD R EV I/O K EYPAD BUS
REF
MON
PAR
SYS
FAULTALARMSTOPRE ADY RUN
FWD REV I/O KEYPAD BUS
Supervisar el código de
fallo (C xx), sub-código
(Id xx),días (d xx),ho ras
(H xx), minutos (M xx)
Pulsar OK para examinar
un fal lo
Pulsar Abajo para
supervisar el menú
de fallos activos
Pulsar Izquierda/Derecha
para supervisar otros
grupos
Pulsar OK paraentrar
en V1.1
7.4.5 Menú de sistema
El menú SYS incluye el submenú de fallos, el submenú de Fieldbus y el submenú
de parámetros del sistema. La pantalla y el funcionamiento del submenú
de parámetros del sistema es similar a los menús PAR ó MON.
En el submenú de parámetros del sistema, hay algunos parámetros editables (P)
y algunos parámetros no editables (V).
El submenú de fallos del menú SYS incluye el submenú de fallo activo y el submenú
del historial de fallos.
En una situación de fallo activo, el puntero FALLO parpadea y en la pantalla
parpadea el elemento de menú del fallo activo con el código de fallo. Si hay varios
fallos activos, puede comprobarlo accediendo al submenú de fallos activos F5.x. F5.1
es siempre el código de fallo activo más reciente Los fallos activos pueden
resetearse pulsando el botón BACK/RESET durante un tiempo largo (>2 s), cuando
la API está en el nivel de submenú de fallo activo (F5.x). Si no se puede resetear
el fallo, el parpadeo continúa. Es posible seleccionar otros menús en pantalla
durante un fallo activo, pero en este caso la pantalla vuelve de forma automática
al menú de fallos si no se pulsa ningún botón en 10 segundos. Los valores código
7
Figura 7.6: Menú de fallos
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 69

panel de control vacon • 65
de fallo, subcódigo, así como el día, hora y minuto de funcionamiento en el momento
del fallo se muestran en el menú de valores
(horas de funcionamiento = lectura que se muestra).
Nota: El historial de fallos puede resetearse con una pul sación larga
del botón BACK / RESET durante un tiempo de 5 segundos;
cu and o la API es tá e n el niv el de submenú del historial de fallos
(F6.x), también borrará todos los fallos activos.
Consulte en el capítulo 5 Descripción de fallos.
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
7
Page 70

66 • vacon parámetros
8. PARÁMETROS DE APLICACIÓN PFC
En las siguientes páginas encontrará las listas de parámetros dentro de los
respectivos grupos de parámetros. Las descripciones de los parámetros se
encuentran en el capítulo 9.
Explicaciones:
Código: Indicación de ubicación en el panel. Muestra al operador el número
Parámetro: Nombre del parámetro o del valor de monitor
Mín.: Valor mínimo del parámetro
Máx: Valor máximo del parámetro
Unidad: Unidad de valor del parámetro; se proporciona, en caso de que esté
Por defecto: Valor por defecto de fábrica
Id.: Número de Id. del parámetro (se utiliza con el control de Fielbus)
de valor de monitor o el número de parámetro actual.
disponible
Para obtener más información acerca de este parámetro,
consulte el capítulo 9: ‘Descripciones de parámetros’ y haga clic
en el nombre del parámetro.
Modificable solo en estado de paro
8
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 71

parámetros vacon • 67
8.1 Asistente de puesta en marcha
Configure los parámetros como se indica en la tabla siguiente para realizar
el asistente de puesta en marcha.
Código Parámetro ID Descripción
P1.1 Tensión nominal del motor 110 Ver la placa de características del motor
P1.2 Frecuencia nominal del motor 111 Ver la placa de características del motor
P1.3 Velocidad nominal del motor 112 Ver la placa de características del motor
P1.4 Intensidad nominal del motor 113 Ver la placa de características del motor
P1.5 Cos phi del motor 120 Ver la placa de características del motor
P3.1 Frecuencia mínima 101
P14.1 Tipo de rotación 1623
P14.2 Número de bombas auxiliares 1600 Bombas auxiliares en el sistema
P14.3 Presión de trabajo 1 (kg) 1670 Presión de trabajo deseada en kg
8.2 Monitorización
Variables de solo lectura que informan de las señales y medidas de convertidor/motor.
8.2.1 Valores básicos
Código Monitorización Unidad ID Descripción
V1.1 Frecuencia de salida Hz 1 Frecuencia de salida al motor
V1.2 Referencia de frecuencia Hz 25
V1.3 Velocidad del motor rpm 2 Velocidad del motor calculada
V1.4 Intensidad del motor A 3 Intensidad del motor medida
V1.5 Par del motor % 4 % de par motor nominal
V1.6 Potencia eje motor % 5 % de potencia de nominal de motor
V1.7 Tensión del motor V 6 Tensión de salida al motor.
V1.8 Tensión del Bus de CC V 7 Tensión del Bus de CC
Referencia de frecuencia mínima
permitida.
0 = Sin rotación
1 = Rotación de bombas aux.
sin enclavamientos
2 = Rotación de todas las bombas
sin enclavamientos
3 = Rotación de bombas aux.
con enclavamientos
4 = Rotación de todas las bombas
con enclavamientos
Referencia de frecuencia para
control del motor
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 72

68 • vacon parámetros
Código Monitorización Unidad ID Descripción
Temperatura
V1.9
del convertidor
V1.10 Temperatura del motor % 9 Temperatura calculada del motor
V1.11 Potencia de salida kW 79
8.2.2 I/O
Código Monitorización Unidad ID Descripción
V2.1 Entrada analógica 1 (AI1) % 59 Entrada analógica AI1
V2.2 Entrada analógica 2 (AI2) % 60 Entrada analógica AI2
V2.3 Salida analógica 1 % 81 Salida analógica
V2.4 DIN1, DIN2, DIN3 15 Estado de entradas digitales
V2.5 DIN4, DIN5, DIN6 16 Estado de entradas digitales
V2.6 RO1, RO2, DO 17 Estado de salidas digitales
V2.14 DIE1, DIE2, DIE3 33
V2.15 DIE4, DIE5, DIE6 34
V2.16 DOE1, DOE2, DOE3 35
V2.17 DOE4, DOE5, DOE6 36
°C 8 Temperatura del radiador
Potencia de salida del convertidor
en kW
Este valor de monitor muestra el
estado de las entradas digitales 1–3
de la tarjeta opcional, oculto hasta
que se conecte una tarjeta opcional.
Este valor de monitor muestra el
estado de las entradas digitales 4–6
de la tarjeta opcional, oculto hasta
que se conecte una tarjeta opcional.
Este valor de monitor muestra el
estado de las salidas de relé 1–3 de
la tarjeta opcional, oculto hasta que
se conecte una tarjeta opcional.
Este valor de monitor muestra el
estado de las salidas de relé 4–6 de
la tarjeta opcional, oculto hasta que
se conecte una tarjeta opcional.
8
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 73

parámetros vacon • 69
8.2.3 Opciones Extras/Avanzadas
Código Monitorización Unidad ID Descripción
Status Word del
V3.1
converti dor
Status Word de
V3.2
la aplicación
V3.3 DIN Status Word
8.2.4 Control PID
43
Código Monitorización Unidad ID Descripción
V4.1 Referencia del PID % 20 Referencia de regulador
V4.2 Valo r actua l de PI D % 21 Va lor real del reg ulador
V4.3 Error de PID % 22 Error del regulador
V4.4 Salida PID % 23 Salida del regulador
V4.5 Proceso 29 Variable de proceso a escala
V4.6 Valor actual de presión Kg 1616 Valor actual de presión en kg.
Estado codificado en bits del convertidor.
B0 = Listo
B1 = Marcha
B2 = Inverso
B3 = Fallo
B6 = Permiso de marcha
B7 = Alarma activa
B10 =
B11 =
B12 = Solicitud de marcha,
B13 = Regulador del motor activado
Estado de la aplicación codificado
en bits.
B0 =
B1 =
B2 =
B3 = Rampa 2 activa
B4 =
B5 = Lugar de CTRL remoto 1 activado
89
B6 = Lugar de CTRL remoto 2 activado
B7 = Control Fieldbus activo
B8 = Control Local activo
B9 = Control PC activo
B10 = Frecuencias fijas activas
B11 =
B12 =
B13 =
B14 =
Palabra de 16 bits donde cada bit es
el estado de una entrada digital. La
palabra 1 empieza en la entrada 1 de
56
la ran ura A (bi t 0) y va h asta la e ntrada
6 de la ranura A (bit 5).
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 74

70 • vacon parámetros
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
P1.8
P1.9
P1.10
P1.11
P1.12
P1.13
P1.14
P1.15
P1.16
8.3 Listas de parámetros principales (Menú PAR)
8.3.1 Ajustes del motor
Uni-
dad
A
A
Por
ID Descripción
defecto
50,00/
111
60,00
1440/
112
1720
In
113
1,5 x In
107
50.00/
602
60,00
50.00/
604
60,00
Código Pará metro Mín. Máx.
Tensión nominal
del motor
Frecuencia
nominal del motor
Velocidad nominal
del motor
Intensidad
nominal del motor
Cos phi del motor 0,30 1,00 0,85 120
Tipo de motor 0 1 0 650
Límite de
intensidad
Modo control
motor
Relación U/f * 0 2 0 108
Frecuencia en el
punto de desexcitación del motor *
Ten sió n en el
punto de desexcitación del motor *
Frecuencia
en el punto medio
de U/f *
Ten sión en
el punto medio
de U/f *
Ten sió n de
frecuencia cero
de U/f *
Sobrepar
automático
Frecuencia de
conmutación
8
180 690 V varía 110
30,00 320,00 Hz
30 20000 rpm
0,2 x I
2 x In
n
0,2 x I
2 x In
n
0 1 0 600
8,00 320,00 Hz
10,00 200,00 % 100,00 603
0,00 P1.10 Hz
0,00 P1.11 % 100,00 605
0,00 40,00 % varía 606
0 1 0 109
1,5 16,0 kHz 4,0/2,0 601
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Ver la placa de
características del motor
Ver la placa de
características del motor
Ver la placa de
características del motor
Ver la placa de
características del motor
Ver la placa de
características del motor
0 = Inducción
1 = Imán permanente
Intensidad máxima del
motor desde el convertidor
0: Control frecuencia
1: Control velocidad en lazo
abierto
0: Lineal
1: Cuadrática
2: Programable
Frecuencia de punto
de desexcitación
Tensión en el punto de
desexcitación en % de la
tensión nominal del motor
Frecuencia en
el punto medio para
U/f programable
Tensión en el punto medio
para U/f programable en %
de la tensión nominal del
motor
Tensión de frecuencia 0
de la curva U/f en % de la
tensión nominal del motor.
0: Deshabilitado
1: Habilitado
Frecuencia de PWM Si se
supera n los valores po r
defecto, se reduce la
capacidad del convertidor.
Page 75

parámetros vacon • 71
P1.17
P1.18
P1.20
P1.21
P1.22
Uni-
Código Pará metro Mín. Máx.
Chopper de
frenado
Nivel chopper
de frenado
Caída de tensión
Rs *
Controlador de
sobretensión
Controlador de
baja de tensión
0 2 0 504
0 Varía V 911 1267
0,00 100.00 % 0,00 662
0 2 1 607
0 1 1 608
dad
Por
ID Descripción
defecto
0: Deshabilitado
1: Habilitado: Siempre
2: Habilitado: En estado
de marcha
Nivel de activación del
control del chopper
de frenado en voltios.
Para un suministro de
240 V: 240*1,35*1,18 = 382 V
Para un suministro de
400 V: 400*1,35*1,18 = 638
Tenga en cuenta que,
cuando se utiliza el chopper de frenado, el controlador de sobretensión se
puede desactivar o el nivel
de referencia de sobretensión se puede ajustar por
encima del nivel del
chopper de frenado.
Caída de tensión en los
bobinados del motor en %
de la tensión nominal del
motor a intensidad
nominal.
0 = Desactivado
1 = Activado (sin rampa):
para pequeños ajustes
de frecuencia
2 = Activado (rampa):
el controlador ajusta
la frecuencia de salida
hasta su máximo
0 = Desactivado
1 = Activado
V
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 76

72 • vacon parámetros
P1.23
P1.24
P2.2
P2.3
Uni-
Código Parámetro Mín. Máx.
Filtro senoidal 0 1 0 522
Tipo de
modulador
8.3.2 Configuración de marcha/paro
Código Parámetro Mín. Máx.
Selección
de lugar
P2.1
de control
remoto 1
Tipo de
Marcha
Tipo de Paro 0 1 1 506
Lógica de
P2.4
marcha/paro
de I/O
0 65535 28928 648
Uni-
dad
defecto
0 2 0 172
0 1 0 505
0 4 0 300
Por
dad
defecto
Por
ID Descripción
Control de marcha y dirección
0: Ter min ales de I /O
1: Fieldbus
2: Panel
0: Rampas
1: Arranque al vuelo
0: Libre
1: Rampas
Lógica = 0
Señal de control 1 de I/O = Marcha directa
Señal de control 2 de I/O = Marcha inversa
Lógica = 1
Señal de control 1 de I/O = Marcha directa (flanco)
Señal de control 2 de I/O = Paro invertido
Lógica = 2
Señal de control 1 de I/O = Marcha directa (flanco)
Señal de control 2 de I/O = Marcha inversa (flanco)
Lógica = 3
Señal de control 1 de I/O = Marcha
Señal de control 2 de I/O = Inversión de giro
Lógica = 4
Señal de control 1 de I/O = Marcha (flanco)
Señal de control 2 de I/O = Inversión de giro
ID Descripción
0 = No está en uso
1 = En uso
Bit 1 = Modulación
discontinua
Bit 2 = Reducción de pulsos en sobremodulación
Bit 6 = Baja modulación
Bit 8 = Compensación
instantánea de tensión CC
Bit 11 = Ruido bajo
Bit 12 = Compensación
de tiempo muerto
Bit 13 = Compensación
de error de flujo
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
8
Page 77

parámetros vacon • 73
P2.9
P3.1
P3.2
Uni-
Código Parámetro Mí n. Máx.
Local/
P2.5
Remoto
Dirección
P2.6
control panel
Botón de
P2.7
Paro desde
panel
Selección
de lugar
P2.8
de control
remoto 2
Bloqueo de
botones del
panel
8.3.3 Referencias
Código Pará metro Mín. Máx. Unidad
Frecuencia
Frecuencia
Selección de
refere ncia de
P3.3
frecuencia para
lugar de control
remoto 1
0 1 0 211
0 1 0 123
0 1 1 114
0 2 0 173
0 1 0
mínima
máxima
0,00 P3.2 Hz 30,00 101
P3.1 320,00 Hz
1 Varía 6 117
dad
Por
ID Descripción
defecto
Parámetro para cambiar entre local
y remoto. Se accede al mismo
parámetro con el botón loc/rem.
Local es siempre el panel.
0 = Ctrl remoto
1 = Ctrl local
Válido solo si el lugar de control
es el panel.
0: Directa
1: Inversión de giro
Define si el paro desde panel está
activado siempre o solo cuando
el lugar de control es panel.
0: Solo si lugar de control panel está
activo
1: Siempre
Lugar de control de marcha y dirección
alternativo. Forzado desde entrada
digital.
0: Terminales de I/O
1: Fieldbus
2: Panel
0 = Desbloquear todos los botones
155
del panel
20
1 = Botón Loc/Rem bloqueado
Por
defecto
51,00/
61,00
ID Descripción
Referencia de frecuencia
mínima
Referencia de frecuencia
102
máxima
Cont rol de re ferencia
de frecuencia
1: Frecuencia fija 0
2: Panel
3: Fieldbus
4: AI1
5: AI2
6: PID
7: AI1+AI2
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 78

74 • vacon parámetros
P4.1
P4.2
P4.3
P4.4
P4.5
P4.6
P4.7
P4.8
P4.9
Código Parámetro Mín. Máx. Unidad
P3.4 Frecuencia fija 0 P3.1 P3.2 Hz 10,00 180
Selección de
referenc ia de
P3.5
frecuencia para
lugar de control
remoto 2
8.3.4 Rampas y frenos
Código Parámetro Mín. Máx. Unidad
Curva S1 0.0 10.0 s 0.0 500
Tiempo de
aceleración 1
Tiempo de
deceleración 1
Curva S2 0.0 10.0 s 0.0 501
Tiempo de
aceleración 2
Tiempo de
deceleración 2
Frenado por flujo 0 3 0 520
Intensidad de
frenado por flujo
Intensidad
de freno CC
1 Varía 1 131
0,1 3000,0 s 5,0 103
0,1 3000,0 s 5,0 104
0,1 3000,0 s 60,0 502
0,1 3000,0 s 10,0 503
0,5x I
2 x In
n
2 x In
0,3 x I
n
Por
defecto
Por
defecto
A varía 519
In
A
ID Descripción
Referencia de frecuencia
cuando la selección de
referencia de frecuencia
es = frecuencia fija 0.
Igual que el lugar de
control remoto 1.
ID Descripción
Tiempo de rampa
de curva en S1.
Gracias a este parámetro
se puede suavizar el
principio y el final de las
rampas de aceleración
y deceleración.
Tiempo de 0 a frecuencia
máxima
Tiempo de frecuencia
máxima a 0
Tiempo de rampa
de curva en S2.
Gracias a este parámetro
se puede suavizar el
principio y el final de las
rampas de aceleración
y deceleración.
Tiempo de 0 a frecuencia
máx.
Tiempo de frecuencia
máx. a 0
0 = Desactivado (Off)
1 = Deceleración
2 = Chopper
3 = Modo total
Define el nivel de
intensidad para el frenado
por flujo.
Define la intensidad que
507
se inyecta al motor
durante el freno CC.
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
8
Page 79

parámetros vacon • 75
P4.10
P4.11
P4.12
Código Pará metro Mín. Máx. Unidad
Tiempo de freno
CC al paro
Frecuencia para
iniciar freno CC
durante paro
en rampa
Tiempo de freno
CC a la marcha
Punto de cambio
Punto de cambio
P5.1
P5.2
tiempo
aceleración
de 1 a 2
tiempo
deceleración
de 1 a 2
Señal de control
1 de I/O
Señal de control
2 de I/O
P4.13
P4.14
8.3.5 Entradas digitales
Código Parám etro Mín. Máx. Unidad
0,00 600,00 s 0,00 508
0,10 10,00 Hz 1,50 515
0,00 600,00 s 0,00 516
0,00 P3.2 Hz 0,00 527
0,00 P3.2 Hz 0,00 528
0 Varía 1 403
0 Varía 0 404
Por
defecto
Por
ID Descripción
defecto
ID Descripción
Tiempo de frenado del
freno por CC cuando el
motor se está parando.
0 = no activo
Frecuencia de salida en
la que se aplica el frenado
por CC
Tiempo de frenado del
freno por CC cuando el
motor está en marcha.
0 = no activo
Define la frecuencia
por encima de la cual
se utiliza el tiempo de
aceleración 2 en lugar del
tiempo de aceleración 1.
0 = No usado
Define la frecuencia por
encima de la cual se utiliza el tiempo de deceleración 2 en lugar del
tiempo de deceleración 2.
0 = No usado
Consulte la función en P2.4.
0: no se utiliza
1: DIN1
2: DIN2
3: DIN3
4: DIN4
5: DIN5
6: DIN6
7: DIE1
8: DIE2
9: DIE3
10: DIE4
11: DIE5
12: DIE6
Consulte en P2.6 las funciones. Consulte en P5.1 las
selecciones.
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 80

76 • vacon parámetros
Código Parámetro Mín. Máx. Unidad
P5.3 Inversión de giro 0 Varía 0 412
Fallo externo
P5.4
cerrado
Fallo externo
P5.5
abierto
P5.6 Reset de fallo 0 Varía 0 414
Permiso de
P5.7
marcha
Selección
P5.8
de tiempo
de rampa 2
Lugar de control
P5.9
remoto 2
Referencia de
frecuencia para
P5.10
lugar de control
remoto 2
P5.11 Referencia PID2 0 Varía 2 1047
P5.12 Enclavamiento 1 0 6 4 1621
P5.13 Enclavamiento 2 0 6 5 1622
P5.14 Enclavamiento 3 0 6 6 1623
0 Varía 0 405
0 Varía 0 406
0 Varía 0 407
0 Varía 0 408
0 Varía 3 425
0 Varía 3 343
Por
ID Descripción
defecto
Independiente de P2.4. Consulte en P5.1 las selecciones.
Fallo si la señal está activa.
Consulte en P5.1 las selecciones.
OPEN = OK
CLOSED = Fallo externo
Fallo si la señal está inactiva
Consulte en P5.1 las selecciones.
OPEN = Fallo externo
CLOSED = OK
Reset de fallo (en flanco)
Consulte en P5.1 las selecciones.
Debe estar activo para establecer el convertidor en
estado Listo y poder habilitar
el control del motor
Consulte en P5.1 las selecciones.
Activa la rampa 2
Consulte en P5.1 las selecciones.
Activa el lugar de control 2
Consulte en P5.1 las selecciones.
Activa la referencia 2
Consulte en P5.1 las
selecciones.
Activa la referencia PID2
Consulte en P5.1 las
selecciones.
8
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 81

parámetros vacon • 77
8.3.6 Entradas analógicas
Código Parám etro Mín. Máx. Unidad
P6.1 Rango AI1 0 1 0 379
Mín. entrada
P6.2
analógica 1 (AI1)
usuario
Máx. entrada
P6.3
analógica 1 (AI1)
usuario
Tiempo
de filtrado
P6.4
de entrada
analógica 1 (AI1)
P6.5 Rango AI2 0 1 1 390
Mín. entrada
P6.6
analógica 1 (AI2)
usuario
Máx. entrada
P6.7
analógica 1 (AI2)
usuario
Tiempo
de filtrado
P6.8
de entrada
analógica 2 (AI2)
-100,00 100,00 % 0,00 380
-100,00 300,00 % 100,00 381
0,0 10,0 s 0,1 378
-100,00 100,00 % 0,00 391
-100,00 300,00 % 100,00 392
0,0 10,0 s 0,1 389
Por
ID Descripción
defecto
0 = 0–100%
1 = 20%–100%
20% es igual que el nivel
de señal mínimo de 2 V.
Nivel de señal mín.
de usuario
Nivel de señal máx.
de usuario
Constante de tiempo
de filtrado
0 = 0–100%
1 = 20%–100%
20% es igual que el nivel de
señal mínimo de 2 V o 4 mA.
Nivel de señal mín.
de usuario
Nivel de señal mín.
de usuario
Constante de tiempo
de filtrado
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 82

78 • vacon parámetros
8.3.7 Salidas digitales
Código Parámetro Mín. Máx. Unidad
Selección de
P7.1
salida de relé 1
(R01)
Selección de
P7.2
salida de relé 2
(R02)
Selección de
P7.3
salida digital 1
(D01)
P7.4 Inversión de RO1 0 1 0 1587
P7.5 Inversión RO2 0 1 0 1588
Selección de
señal de salida
P7.6
digital 1 de tarjeta
opcional (DOE1)
Selección de
señal de salida
P7.7
digital 2 de tarjeta
opcional (DOE2)
Selección de
señal de salida
P7.8
digital 3 de tarjeta
opcional (DOE3)
Selección de
señal de salida
P7.9
digital 4 de tarjeta
opcional (DOE4)
Selección de
señal de salida
P7.10
digital 5 de tarjeta
opcional (DOE5)
Selección de
señal de salida
P7.11
digital 6 de tarjeta
opcional (DOE6)
0 23 9 313
0 Varía 10 314 Consulte P7.1
0 Varía 11 312 Consulte P7.1
0 Varía 0 317
0 Varía 0 318
0 Varía 0 1386
0 Varía 0 1390
0 Varía 0 1391
0 Varía 0 1395
Por
ID Descripción
defecto
0: No usado
1: Listo
2: Marcha
3: Fallo
4: Fallo invertido
5: Alarma
6: Inversión de giro
7: En velocidad
8: Regulador del motor
activado
9: Control de bomba 1
10: Control de bomba 2
11: Control de bomba 3
0: sin inversión
1: señal invertida
0: sin inversión
1: señal invertida
Como el parámetro 8.1,
oculto hasta que se conecte
una tarjeta opcional.
Como el parámetro 8.1,
oculto hasta que se conecte
una tarjeta opcional.
Como el parámetro 8.1,
oculto hasta que se conecte
una tarjeta opcional.
Como el parámetro 8.1,
oculto hasta que se conecte
una tarjeta opcional.
Como el parámetro 8.1,
oculto hasta que se conecte
una tarjeta opcional.
Como el parámetro 8.1,
oculto hasta que se conecte
una tarjeta opcional.
8
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 83

parámetros vacon • 79
Código Parám etro Mín. Máx. Unidad
Habilitar salida
analógica (AO)
P7.12
como sali da
digital (DO)
Función salida
P7.13
digital (AO)
8.3.8 Salidas analógicas
Código Parám etro Mín. Máx. Unidad
Selección de
P8.1
señal de salida
analógica
Mínimo de salida
P8.2
analógica
Escalado de
P8.3
salida analógica
Tiempo de
P8.4
filtrado de salida
analógica
0 1 0 1621
0 3 0 1624
0 14 1 307
0 1 0 310
0,0 1000,0 % 100,0 311 Factor de escalado
0,00 10,00 s 0,10 308
Por
ID Descripción
defecto
Por
ID Descripción
defecto
Habilitar salida analógica
(AO) como salida digital (DO)
0 = Listo
1 = Marcha
2 = Fallo
3 = Fallo invertido
Nota Debe activarse salida
analógica (AO) como salida
digital (DO) en parámetro
(P7.12)
0: Test 0% (No se utiliza)
1: Frecuencia de salida
(0–f
)
máx
2: Intensidad de salida
)
(0–I
nMotor
3: Par motor (0–T
4: Salida PID (0-100%)
5: Ref. de frec. (0–f
6: Velocidad del motor
(0 – n
)
máx
7: Potencia de motor
(0–P
)
nMotor
8: Tensión de motor
)
(0–U
nMotor
9: Tensión de Bus de CC
(0–1000 V)
10: Process Data IN1
(0–10000)
11: Process Data IN2
(0–10000)
12: Process Data IN3
(0–10000)
13: Process Data IN4
(0–10000)
14: Test 100%
0 = 0 mA
1 = 4 mA
Tiempo de filtrado de salida
analógica
nMotor
máx
)
)
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 84

80 • vacon parámetros
8.3.9 Mapa Fieldbus
Uni-
Código Parámetro Mín. Máx.
Selección FB
P9.1
Process Data Out 1
Selección FB
P9.2
Process Data Out 2
Selección FB
P9.3
Process Data Out 3
Selección FB
P9.4
Process Data Out 4
Selección FB
P9.5
Process Data Out 5
Selección FB
P9.6
Process Data Out 6
Selección FB
P9.7
Process Data Out 7
Selección FB
P9.8
Process Data Out 8
P9.9 Aux. CW Data IN 0 5 0 1167
0 Varía 0 852
0 Varía 1 853 Variable asignada en PD2
0 Varía 2 854 Variable asignada en PD3
0 Varía 4 855 Variable asignada en PD4
0 Varía 5 856 Variable asignada en PD5
0 Varía 3 857 Variable asignada en PD6
0 Varía 6 858 Variable asignada en PD7
0 Varía 7 859 Variable asignada en PD8
dad
Por
ID Descripción
defecto
Variable asignada en PD1
0: Referencia de frecuencia
1: Frecuencia de salida
2: Velocidad del motor
3: Intensidad del motor
4: Tensión del motor
5: Par del motor
6: Potencia del motor
7: Tensión de Bus de CC
8: Código de fallo activo
9: AI1
10: AI2
11: Estado de entradas
digitales
12: Valor actual PID
13: Referencia PID
PDI para Aux CW
0: No usado
1: PDI1
2: PDI2
3: PDI3
4: PDI4
5: PDI5
8
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 85

parámetros vacon • 81
P11.20
P11.3
P11.4
P11.5
8.3.10 Frecuencias prohibidas
Uni-
Código Parámetro Mín. Máx.
Rango de frecuen-
P10.1
cias prohibidas 1:
límite bajo
Rango de frecuen-
P10.2
cias prohibidas 1:
límite alto
Rango de frecuen-
P10.3
cias prohibidas 2:
límite bajo
Rango de frecuen-
P10.4
cias prohibidas 2:
límite alto
8.3.11 Protecciones
Código Parámetro Mín . Máx. Unidad
Protección de nivel
P11.1
bajo de entrada
analógica
Fallo de Baja
Ten sió n
Fallo de pue sta
a tierra
Fallo d e fase
de salida
Protección contra
bloqueo de motor
0,00 P3.2 Hz 0,00 509 Límite bajo
0,00 P3.2 Hz 0,00 510 Límite alto
0,00 P3.2 Hz 0,00 511 Límite bajo
0,00 P3.2 Hz 0,00 512 Límite alto
0 4 4 700
1 2 2 727
0 3 2 703
0 3 2 702
0 3 0 709
dad
Por
defecto
Por
defecto
ID Descripción
ID Descripción
0: Sin acción
1: Alarma
2: Alarma, frecuencia fija
para alarma
3: Fallo : Paro de a cuerdo
con función de paro
4: Fallo: Paro libre
1: Sin respuesta (no se
genera ningún fallo pero
el convertidor sigue
deteniendo la modulación)
2: Fallo: Paro libre
0: Sin acción
1: Alarma
2: Fallo : Paro de a cuerdo
con función de paro
3: Fallo: Paro libre
0: Sin acción
1: Alarma
2: Fallo : Paro de a cuerdo
con función de paro
3: Fallo: Paro libre
0: Sin acción
1: Alarma
2: Fallo : Paro de a cuerdo
con función de paro
3: Fallo: Paro libre
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 86

82 • vacon parámetros
P11.6
P11.7
P11.8
P11.9
P11.10
P11.11
P11.12
P11.13
P11.14
P11.15
P11.16
P11.18
Código Parámet ro Mín. Máx. Unidad
Protección contra
baja carga del motor
Protección térmica
del motor (PTM)
PTM: Temperatura
ambiente del motor
PTM: Factor de
refri gerac ión
a velocidad cero
PTM: Constante
de tiempo térmica
del motor
Intensidad
de bloqueo
del motor
Límite de tiempo de
bloqueo de motor
Límite de frecuencia
de bloqueo de motor
Baja carga: punto de
par a frecuencia
nominal del motor
Baja carga: punto de
par a frecuencia cero
Ba ja c arga : l ími te d e
tiempo
Retraso protección
P11.17
de nivel bajo de
entrada analógica
Fallo externo 0 3 2 701
0 3 0 713
0 3 2 704
–20 100 °C 40 705 Temperatura ambiente
0,0 150,0 % 40,0 706
1 200 min varía 707
2xI
0.00
0,00 300,00 s 15,00 711
0,10 320,00 Hz 25,00 712
10,0 150,0 % 50,0 714
5,0 150,0 % 10,0 715
1,0 300,0 s 20,0 716
0,0 10,0 s 0,5 1430 Límite de tiempo
A
N
Por
ID Descrip ción
defecto
IN
710
0: Sin acción
1: Alarma
2: Fallo: Paro de a cuerdo
con función de paro
3: Fallo: Paro lib re
0: Sin acción
1: Alarma
2: Fallo: Paro de a cuerdo
con función de paro
3: Fallo: Paro lib re
Factor de refrigeración
como % a velocidad 0
Constante de tiempo
térmica del motor.
Para que se presente
un estado de bloqueo
la intensidad debe haber
superado este límite.
Tiempo máximo permitido
antes de entrar en el
estado de bloqueo.
Para que se presente el
estado de bloqueo, la frecuencia de salida debe permaner por debajo de este
límite durante el tiempo
programado en P11.12
Par mínimo permitido
cuando el motor se
encuentra trabajando a su
frecuencia nominal.
Par mínimo permitido
a frecuencia cero.
Límite de tiempo de baja
carga
0: Sin acción
1: Alarma
2: Fallo: Paro de a cuerdo
con función de paro
3: Fallo: Paro lib re
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
8
Page 87

parámetros vacon • 83
P12.1
P12.2
P12.3
P12.4
P12.5
Código Parámetro Mín . Máx. Unidad
P11.19 Fallo Fieldbus 0 4 3 733
Frecuencia fija para
P11.20
P11.21
P11.22
P11.23
P11.24
8.3.12 Reset automático
Código Parámetro Mín. Máx. Unidad
alarma
Bloqueo de
parámetros
Supervisión
conflicto marcha
directa/inversa
(FWD/REV)
Tiempo de
protección de baja
frecuencia
Límite de
sobrepresión
Reset
automático
Tiempo
de espera
Tiempo de
intentos
Número de
intentos
Función de
rearranque
P3.1 P3.2 Hz 25.00 183
0 1 0 819
0 3 1 1463 Como el parámetro P11.3
0 99,99 10.00 1621
0 200 % 150 1901 Límite de sobrepresión
0 1 0 731
0,10 10,00 s 0,50 717
0,00 60,00 s 30,00 718
1 10 3 759
0 2 2 719
Por
ID Descripción
defecto
Por
defecto
ID Descripción
0: Sin acción
1: Alarma
2: Alarma, frecuencia fija
para alarma
3: Fallo : Paro de a cuerdo
con función de paro
4: Fallo: Paro libre
Frecuencia utilizada
cuando la respuesta
a un fallo es
Alarma+Frecuencia fija
para alarma
0: Cambios permitidos
1: Cambios no permitidos
Si la frecuencia de salida se
encuentra por debajo de
la frecuencia de referencia
durante el tiempo programado, se activará el fallo F82.
0: Deshabilitado
1: Habilitado
Tiempo de espera
después de fallo
Tiempo máximo para
intentos
Número máximo
de intentos
0: Rampa
1: Arranque al vuelo
2: Rearranque de
acuerdo con función
de marcha
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 88

84 • vacon parámetros
8.3.13 Controlador PID
Código Parámetro Mín. Máx. Unidad
Selección
P13.1
P13.2
P13.3
P13.4
P13.5
P13.6
P13.7
P13.8
P13.9
P13.10
Referencia PID
Referencia PID1
(%)
Referencia PID2
(%)
Selección Valor
Actual
Valor A ctual
mínimo
Valor A ctual
máximo
Ganancia
de PID (P)
Tiempo Integral
de PID (I)
Tiempo Derivada
de PID (D)
Inversión error
PID
0 11 0 332
0,0 100,0 % 50,0 167 Referencia PID1 en %
0,0 100,0 % 50,0 168
0 7 1 334
0,0 50,0 % 0,0 336 Valor a señal mínima
10,0 300,0 % 100,0 337 Valor a señal máxima
0,0 1000,0 % 125,0 118 Ganancia proporcional
0,00 320,00 s 1,00 119 Tiempo de integración
0,00 10,00 s 0,00 132 Tiempo de derivación
0 1 0 340
Por
ID Descripción
defecto
0: Referencia panel PID
1: AI1
2: AI2
3: ProcessDataIN1 (0-100%)
4: ProcessDataIN2 (0-100%)
5: ProcessDataIN3 (0-100%)
6: ProcessDataIN4 (0-100%)
Aviso: ProcessDataINs se
tratan como enteros con
dos decimales comprendidos dentro del rango de 0
(0,00%) a 10000 (100,00%).
Referencia PID2 en %
alternativa.
Seleccionable con DI
0: AI1
1: AI2
2: ProcessDataIN1 (0-100%)
3: ProcessDataIN2 (0-100%)
4: ProcessDataIN3 (0-100%)
5: ProcessDataIN4 (0-100%)
6: AI2-AI1
Aviso: ProcessDataINs se
tratan como enteros con
dos decimales comprendidos dentro del rango de 0
(0,00%) a 10000 (100,00%).
0: Normal
1: Invertido
8
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 89

parámetros vacon • 85
Código Parámetro Mín . Máx. Unidad
Origen unidades
P13.11
de proceso
Decimales
P13.12
unidades de
proceso
Valor mínimo
P13.13
unidades de
proceso
Valor máximo
P13.14
unidades de
proceso
Incremento Ref.
P13.15
PI. a la marcha
8.3.14 PFC
Código Parámetro Mín. Máx. Unidad
P14.1 Tipo de rotación 0 4 - 4 1603
Número de
P14.2
bombas auxiliares
Presión de trabajo
P14.3
P14.4
1 (kg)
Presión de trabajo
2 (kg)
0 6 0 1513
0 3 1 1035 Decimales visualizados
0,0 P15.21 0 1033 Valor mín. de proceso
P15.20 3200,0 100.0 1034 Valor máx. de proceso
0 162,75 s 5 1614
0 3 - 1 1600
0 P14.13 kg. 4,0 1670
0 P14.13 kg. 5,0 1617
Por
ID Descripción
defecto
Por
defecto
ID Descripción
Selecció n de variable
proporcional para proceso
0: Valor Actual de PID
1: Frecuencia de salida
2: Velocidad del motor
3: Par del motor
4: Potencia del motor
5: Intensidad del motor
Tiempo de retraso antes
de que la referencia de
presión alcance el 100%
al dar marcha.
0 = Sin rotación
1 = Rotación de bombas
aux. sin enclavamientos
2 = Rotación de todas
las bombas sin
enclavamientos
3 = Rotación de bombas
aux. con enclavami entos
4 = Rotación de todas
las bombas con
enclavamientos
Bombas auxiliares
en el sistema
Presión de trabajo 1
en kg
Segunda referencia
de presión.
Activada mediante DI
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 90

86 • vacon parámetros
Código Parámetro Mín. Máx. Unidad
Intervalo de
P14.5
P14.6
P14.7
P14.8
P14.9
P14.10
P14.11
P14.12 Histéresis PI 0 50,0 % 0,5 1613 Histéresis PI
P14.13 Frecuencia dormir 0,00 P3.2 Hz 35,00 1016
P14.14 Retraso dormir 0 3600 s 15,0 1017 Retraso modo dormir
P14.15
P14.16
P14.17
P14.18
P14.19 Nivel de despertar 0,0 100,0 % 92,0 1611
rotaci ón
Límite de bombas
auxiliares para
rotaci ón
Límite de
frecuencia para
rotaci ón
Frecuencia de
conexión de bomba
auxiliar
Retraso de
conexión de bomba
auxiliar
Frecuencia de
desconexión de
bomba auxiliar
Retraso de
desconexión de
bomba auxiliar
Referencia sobre-
presión al dormir
Tiempo sobrepre-
sión al dormir
Máxima pérdida
al dormir
Tiempo de
comprobación de
pérdida al dormir
0 3000,0 h 48,0 1604
0 3 - 0 1605
Fre-
0
cuencia
máx.
Fre-
cuencia
320,00 hz 51,00 1607
mín.
0 200,0 S 4,0 1601
Fre-
Fre-
cuencia
cuencia
mín.
máx.
0 200,0 S 2,0 1602
0,0 50,0 % 0,0 1071
0 60 s 0,0 1072
0,0 50,0 % 0,0 1509
1 300 s 0,0 1510
Por
ID Descripción
defecto
hz 0.00 1606
hz 31,00 1608
0,0 = Prueba 16 s.
Tiempo para realizar la
rotación si el resto de
condiciones se cumplen.
Límite de bombas
auxiliares para rotación
Nivel de frecuencia de
salida del controlador
para rotación automática
Nivel de frecuencia
de salida en el cual la
siguiente bomba auxiliar
será conectada en un
sistema multibomba
Retraso antes de activar
la siguiente bomba
auxiliar en un sistema
multibomba.
Nivel de frecuencia
de salida en el cual la
siguiente bomba auxiliar
será desconectada en
un sistema multibomba
Retraso antes de
desactivar la siguiente
bomba auxiliar en un
sistema multibomba.
Por debajo de esta frecuencia, el convertidor
puede entrar en modo
dormir
En base a la referencia
PID seleccionada
Tiempo sobrepresión
al dormir tras P14.14
Referenciado al valor
actual PID tras
sobrepresión al dormir
Tiempo después de
sobrepresión al dormir
P8.16
Nivel de despertar en %
de l a referenc ia PID
8
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 91

parámetros vacon • 87
Código Parámetro Mín. Máx. Unidad
Actualización de
P14.20
enclavamientos
Escala de trans-
P14.21
ductor de presión
P15.2
Selección
de unidades
de proceso
Detección de
bombas sin
enclavamientos
Ocultación
parámetros
P14.22
P14.23
8.3.15 Ajustes de la aplicación
Código Parámetro Mín. Máx. Unidad
0 1 - 0 1620
0 100,0 kg. 10,0 1615
0 1 1 1618
0 1 1 1612
0 1 1 115
Por
defecto
Por
defecto
ID Descripción
0 = Siempre
1 = Solo en estado
de paro
Presión máxima
permitida por el
transductor de presión.
0 = %
1 = Kg
0 = Desactivado
1 = Activado (cuando
P14.1 = 2, la bomba
regulada cambia
si no está conectada)
ID Descripción
0 = Todos los parámetros
visibles
1 = Solo grupo de configuración rápida visible
8.4 Parámetros del sistema
Código Parámet ro Mín. Máx.
V1.1 ID SW sistema API 2314
V1.2 Versión del software API 835
V1.3 ID SW potencia 2315
V1.4 Versión SW potencia 834
V1.5 ID de la aplicación 837
V1.6 Versión de la aplicación 838
V1.7 Carga del sistema 839
Cuando no hay tarjeta opcional de Fieldbu s o no se ha instalado una tarjeta OPT-BH,
Información de software (MENÚ PAR -> V1)
los parámetros de Modbus comunes son los siguientes
Por
defecto
ID Nota
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 92

88 • vacon parámetros
Código Pa rámetro Mín. Máx.
V2.1 Estado de comunicación 808
P2.2 Protocolo Fieldbus 0 1 0 809
P2.3 Dirección de esclavo 1 255 1 810
P2.4 Velocidad transmisión 0 8 5 811
P2.6 Tipo paridad 0 2 0 813
P2.7 Comunicación Timeout 0 255 10 814
P2.8
Cuando se ha instalado la tarjeta CanOpen E6, los parámetros comunes son los siguientes
V2.1
P2.2
P2.3 Nodo ID CanOpen 1 127 1 14001
P2.4
Resetear estado
comunicación
Estado de comunicación
de CanOpen
Modo de operación
de CanOpen
Velocidad de transmisión
de CanOpen
Cuando se ha instalado una tarjeta DeviceNet E7, los parámetros comunes son
01 0815
1 2 1 14003
1 8 6 14002
los sigu ientes
Por
defecto
ID Nota
Estado de la
comunica ción con
Modbus
Formato: xx.yyy donde
xx = 0–64 (número de
mensajes de error)
yyy = 0–999 (número
de mensajes correctos)
0 = No se utiliza
1 = Modbus
0 = 300
1 = 600
2 = 1200
3 = 2400
4 = 4800
5 = 9600
6 = 19200
7 = 38400
8 = 57600
0 = Ninguna
1 = Par
2 = Impar
0 = No usado
1 = 1 s
2 = 2 s, etc.
0 = Inicializando
4 = Detenido
5 = Operativo
14004
6 = Pre_operativo
7 = Reset_aplicación
8 = Reset_comunicación
9 = Desconocido
1 = Driver Profile
2 = Bypass
1 = 10 kBaudios
2 = 20 kBaudios
3 = 50 kBaudios
4 = 100 kBaudios
5 = 125 kBaudios
6 = 250 kBaudios
7 = 500 kBaudios
8 = 1000 kBaudios
8
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 93

parámetros vacon • 89
Código Parámet ro Mín. Máx.
V2.1 Estado de comunicación 14014
P2.2 Trama de salida 20 111 21 14012 20, 21, 23, 25, 101, 111
P2.3 ID MAC 0 63 63 14010
P2.4 Velocidad transmisión 1 3 1 14011
P2.5 Trama de entrada 70 117 71 14013 70, 71, 73, 75, 107, 117
Cuando se ha instalado una tarjeta ProfidBus E3/E5, los parámetros comunes son
V2.1 Estado de comunicación 14022
V2.2 Estado protocolo FB 14023
V2.3 Protocolo activo 14024
Velocidad de transmisión
V2.4
V2.5 Tipo de trama 14027
P2.6 Modo de operación 1 3 1 14021
P2.7 Dirección de esclavo 2 126 126 14020
Cuando se ha instalado la tarjeta OPT-BH, los parámetros comunes son los siguientes
P2.1 Tipo sensor 1 0 6 0 14072
P2.2 Tipo sensor 2 0 6 0 14073
activa
los sigu ientes
Por
defecto
ID Nota
Estado de la comunicación
con Modbus Formato:
XXXX.Y, X = Contador de
mensajes de DeviceNet.
Y = Estado de DeviceNet.
0 = Inexistente o sin
alimentación el bus
1 = Estado de
configuración
2 = Establecido
3 = Timeout
1 = 125 kbit/s
2 = 250 kbit/s
3 = 500 kbit/s
14025
1 = Profidrive
2 = Bypass
3 = Echo
0 = Sin sensor
1 = PT100
2 = PT1000
3 = Ni1000
4 = KTY84
5 = 2 x PT100
6 = 3 x PT100
0 = Sin sensor
1 = PT100
2 = PT1000
3 = Ni1000
4 = KTY84
5 = 2 x PT100
6 = 3 x PT100
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
8
Page 94

90 • vacon parámetros
P4.2
P4.5
P4.6
Código Pa rámetro Mín. Máx.
P2.3 Tipo sensor 3 0 6 0 14074
V3.1 Contador MWh 827
V3.2 Días de funcionamiento 828
V3.3 Horas de funcionamiento 829
V3.4 Días en estado de marcha 840
V3.5 Horas en estado de marcha 841
V3.6 Fallo contador 842
Monitorización del estado
V3.7
del juego de parámetros
de Panel
Restaurar parámetros
por defecto de fábrica
P4.3 Contraseña 0000 9999 0000 832
P4.4 Tiempo iluminación 0 99 5 833
Guardar juego de
parámetros al panel
Restaurar juego de
parámetros desde panel
F5.x Menú de fallos activos
F6.x Menú de historial de fallos
Información adicional
01 0831
0 1 0 Oculto al conectar un PC.
0 1 0 Oculto al conectar un PC.
Por
defecto
ID Nota
0 = Sin sensor
1 = PT100
2 = PT1000
3 = Ni1000
4 = KTY84
5 = 2 x PT100
6 = 3 x PT100
Oculto al conectar un PC.
Restaura todos los
parámetros a su
configuración por
defecto de fábrica
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
8
Page 95

descripciones de parámetros vacon • 91
9. DESCRIPCIONES DE PARÁMETROS
En las siguientes páginas encontrará las descripciones de determinados
parámetros. Estas descripciones se han dispuesto según el grupo y el número
del parámetro.
9.1 Ajustes del motor
P1.1 TENSIÓN NOMINAL DEL MOTOR
P1.2 FRECUENCIA NOMINAL DEL MOTOR
P1.3 VELOCIDAD NOMINAL DEL MOTOR
P1.4 INTENSIDAD NOMINAL DEL MOTOR
P1.5 COS PHI DEL MOTOR
P1.6 TIPO DE MOTOR
P1.7 LÍMITE DE INTENSIDAD
P1.8 MODO DE CONTROL DEL MOTOR
P1.9 RELACIÓN U/F
El valor se debe leer en la placa de características del motor. Al cambiar
el valor, se establecerá la tensión en el punto de desexcitación del motor
(P1.11) en el valor 100%.
El valor se debe leer en la placa de características del motor. Al cambiar
el valor, se establecerá frecuencia en el punto de desexcitación del
motor (P1.10) en el mismo valor.
El valor se debe leer en la placa de características del motor.
La velocidad debe referirse a la frecuencia nominal y a la condición
de carga nominal (no a la velocidad de sincronismo).
El valor se debe leer en la placa de características del motor.
El valor se debe leer en la placa de características del motor.
Configura el control del motor para un motor de inducción o un motor
de imanes permanentes.
Intensidad máxima del motor suministrada desde el convertidor.
0: Control frecuencia
1: Control de velocidad (control sin sensor)
En el control de velocidad, el deslizamiento del motor se compensa
y el sobrepar siempre se activa automáticamente.
0: lineal
(de tensión P1.14 a 0 Hz a tensión P1.11 con frecuencia P1.10)
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
9
Page 96

92 • vacon descripciones de parámetros
1: cuadrática
(de tensión P1.14 a 0 Hz a tensión P1.11 con frecuencia P1.10)
2: programable
(lineal de tensión P1.14 a 0Hz a tensión P1.13 con frecuencia P1.12
+ lineal de tensión P1.13 con frecuencia P1.12 a tensión P1.11 con
frecuencia P1.10)
P1.10 FRECUENCIA EN EL PUNTO DE DESEXCITACIÓN DEL MOTOR
P1.11 TENSIÓN EN EL PUNTO DE DESEXCITACIÓN DEL MOTOR
P1.12 FRECUENCIA EN EL PUNTO MEDIO DE U/F
P1.13 TENSIÓN EN EL PUNTO MEDIO DE U/F
P1.14 TENSIÓN DE FRECUENCIA CERO DE U/F
P1.15 SOBREPRESIÓN AL DORMIR
Refuerzo de tensión automático (mejora el par motor).
P1.16 FRECUENCIA DE CONMUTACIÓN
Frecuencia de salida correspondiente a la tensión máx.
Nota: si la frecuencia nominal del motor P1.2 se cambia, este parámetro
se establecerá en el mismo valor.
Tensión del motor cuando la frecuencia es superior a la frecuencia del
punto de desexcitación del motor (FWP), definida como % de la tensión
nominal.
Nota: si la tensión nominal del motor P1.1 se cambia, este parámetro
se establecerá en el 100%.
Habilitado si P1.9 = 2.
Habilitado si P1.9 = 2.
Tensión del motor a frecuencia cero.
0: Deshabilitado
1: Habilitado
Frecuencia de PWM Si se supera el valor por defecto, se puede producir
una sobrecarga térmica del convertidor.
Al aumentar la frecuencia de conmutación se reduce la capacidad del
convertidor.
Se recomienda utilizar una frecuencia inferior cuando el cable del motor
sea largo para reducir al mínimo las intensidades capacitivas en el
cable. El ruido del motor también se puede reducir al mínimo mediante
una frecuencia de conmutación alta.
9
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 97

descripciones de parámetros vacon • 93
P1.17 CHOPPER DE FRENADO
P1.18 NIVEL CHOPPER DE FRENADO
P1.20 CAÍDA DE TENSIÓN RS
P1.21 CONTROLADOR DE SOBRETENSIÓN
P1.22 CONTROLADOR DE BAJA TENSIÓN
P1.23 FILTRO SENOIDAL
0: Chopper deshabilitado
1: Chopper habilitado: en estado de marcha
2: Chopper habilitado: Siempre
Nivel de activación del control del chopper de frenado en voltios.
Para un suministro de 240 V: 240*1,35*1,18 = 382 V
Para un suministro de 400 V: 400*1,35*1,18 = 638 V
Tenga en cuenta que, cuando se utiliza el chopper de frenado,
el controlador de sobretensión se puede desactivar o el nivel
de referencia de sobretensión se puede ajustar por encima del
nivel del chopper de frenado.
Caída de tensión en los bobinado s del motor en % de la tensión nominal
del motor a intensidad nominal. El valor afecta a la estimación del par
motor, a la compensación de deslizamiento y al aumento de la tensión.
0 = Desactivado
1 = Activado (sin rampa): para pequeños ajustes de frecuencia
2 = Activado (rampa): el controlador ajusta la frecuencia de salida
hasta su máximo.
Estos parámetros permiten desactivar el funcionamiento de los
controladores de baja tensión y sobretensión. Esto puede ser útil,
por ejemplo, si la tensión de la fuente de alimentación varía más del
rango de -15% a +10% y la aplicación no puede tolerar esta baja tensión
sobretensión. En este caso, el regulador controla la frecuencia de
o
salida teniendo en cuenta las fluctuaciones del suministro.
Un filtro senoidal normalmente está dimensionado para una frecuencia
de conmutación determinada. Al activar este parámetro, se deshabilita
reducción automática de la frecuencia de conmutación, que reduciría
frecuencia de conmutación en determinadas circunstancias, por
la
ejemplo, para evitar el sobrecalentamiento.
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
9
Page 98

94 • vacon descripciones de parámetros
P1.24 TIPO DE MODULADOR
Palabra de configuración del modulador:
B1 = Modulación discontinua
B2 = Reducción de pulsos en sobremodulación
B6 = Baja modulación
B8 = Compensación instantánea de tensión CC *
B11 = Ruido bajo
B12 = Compensación de tiempo muerto *
B13 = Compensación de error de flujo *
* Activado por defecto
9.2 Configuración de marcha/paro
P2.1 SELECCIÓN DE LUGAR DE CONTROL REMOTO 1
P2.2 TIPO DE MARCHA
P2.3 TIPO DE PARO
P2.4 LÓGICA DE MARCHA/PARO DE I/O
Control de marcha y dirección. Un segundo lugar de control
es programable en P2.8.
0: Terminales de I/O
1: Fielbus
2: Panel
0: Rampas
1: Arranque al vuelo
0: Libre
1: Rampas
Nota: en caso de pérdida de la señal de Permiso de marcha, si se
encuentra configurada, el tipo de paro siempre será libre.
Esta lógica se basa en Señal de control 1 de I/O y Señal de control 2 de
I/O (definidas con P5.1 y P5.2). Normalmente, están emparejadas con las
entradas DIN1 y DIN2.
0: Señal de control 1 de I/O = Marcha directa
Señal de control 2 de I/O = Marcha inversa
La primera señal tiene prioridad.
1: Señal de control 1 de I/O = Marcha directa (flanco)
Señal de control 2 de I/O = Paro invertido
9
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
Page 99

descripciones de parámetros vacon • 95
La dirección debe proceder de una tercera entrada
(Inversión
2: Señal de control 1 de I/O = Marcha directa (flanco)
3: Señal de control 1 de I/O = Marcha
4: Señal de control 1 de I/O = Marcha (flanco)
Nota: en los modos 1, 2 y 4, el pulso de marcha se adquiere solo si
la unidad está preparada y el lugar de control actual son los terminales
de I/O.
P2.5 LOCAL/REMOTO
P2.6 DIRECCIÓN CONTROL PANEL
P2.7 BOTÓN DE PARO DESDE PANEL
P2.8 SELECCIÓN DE LUGAR DE CONTROL REMOTO 2
Parámetro para cambiar entre el control local y remoto. También se
accede al mismo parámetro con el botón Loc/Rem.
Local siempre es el control de panel y remoto se programa con P2.1.
Selección de lugar de control remoto 1. También hay un segundo lugar
de control remoto que se puede activar mediante entrada digital.
0 = Control remoto
1 = Control local
Válido si el lugar de control es panel
0: Directa
1: Inversión de giro
Define si el paro desde panel está activado siempre o solo cuando
el lugar de control es panel.
0: Solo si lugar de control panel está activo
1: Siempre
Control de marcha y dirección. Se activa mediante entrada digital,
configurable con P5.9.
0: Terminales de I/O
1: Fieldbus
2: Panel
de giro).
Señal de control 2 de I/O = Marcha inversa (flanco)
Señal de control 2 de I/O = Inversión de giro
Señal de control 2 de I/O = Inversión de giro
Soporte 24 h: +34 93 807 499 023 • Email: vacon@vacon.es
9
Page 100

96 • vacon descripciones de parámetros
P2.9 BLOQUEO DE BOTONES DEL PANEL
Cuando se establece este parámetro, afecta a las acciones
de los botones del panel
0: Desbloquear todos los botones del panel
1: Botón Loc/Rem bloqueado
9.3 Referencias
P3.1 FRECUENCIA MÍNIMA
P3.2 FRECUENCIA MÁXIMA
P3.3 SELECCIÓN DE REFERENCIA DE FRECUENCIA PARA LUGAR
P3.4 FRECUENCIA FIJA 0
P3.5 SELECCIÓN DE REFERENCIA DE FRECUENCIA PARA LUGAR
Referencia de frecuencia mínima.
Nota: si se alcanza el límite de intensidad del motor, la frecuencia
de salida real podría ser inferior al valor del parámetro. Si esto no es
aceptable, se debe activar la protección contra el bloqueo del motor.
Referencia de frecuencia máxima.
DE CONTROL REMOTO 1
Define el origen de la referencia de frecuencia para lugar de control
remoto 1. Un segundo origen de referencia es programable en P3.5.
1: Frecuencia fija 0
2: Panel
3: Fieldbus
4: AI1
5: AI2
6: PID
7: AI1+AI2
Velocidad cuando P3.3 o P3.5 se establecen en la frecuencia fija 0.
DE CONTROL REMOTO 2
Origen de referencia de frecuencia para lugar de control remoto 2 alternativo.
Se activa mediante la entrada digital definida en P5.10 o Fieldbus.
1: Frecuencia fija 0
2: Panel
3: Fieldbus
4: AI1
5: AI2
6: PID
7: AI1+AI2
9
Tel. +34 93 877 45 06 • Fax +34 93 877 00 09
 Loading...
Loading...