


vacon®20
inverter ca
guida rapida
sicurezza vacon • 1
!
Doc: DPD00833F1 Versione: agosto 2014 Pacchetto SW: FW0107V010.vcx
Questa guida rapida include le operazioni essenziali per l'installazione
Prima della messa a punto dell'inverter, scaricare e leggere il manuale
e la configurazione dell'inverter Vacon 20.
utente Vacon 20 completo disponibile all'indirizzo:
www.vacon.com -> Downloads
1. SICUREZZA
L'INSTALLAZIONE DEI COMPONENTI ELETTRICI
VA AFFIDATA A UN ELET TR ICIS TA ESPER TO!
Questa guida rapida contiene avvertenze ben evidenziate che mirano a garantire la
sicurezza personale e ad evitare danni accidentali al prodotto o alle apparecchiature
ad esso collegate.
Leggere attentamente tali avvertenze:
I componenti dell'unità di potenza dell'inverter sono sotto
tensione quando l'inverter Vacon 20 è collegato alla rete
di alimentazione. Pertanto, il contatto con tali componenti
sotto tensione è estremamente pericoloso e può provocare
la morte o gravi lesioni.
I morsetti motore U, V, W (T1, T2, T3) e gli eventuali morsetti
del resistore di frenatura -/+ sono sotto tensione quando
l'inverter Vacon 20 è collegato alla rete, anche se il motore
non è in marcia.
I morsetti I/O di controllo sono isolati dall'alimentazione
di rete. Tuttavia, i morsetti delle uscite dei relè potrebbero
presentare una pericolosa tensione di controllo anche quando
l'inverter Vacon 20 è scollegato dalla rete di alimentazione.
La corrente di dispersione a terra degli inverter Vacon 20
supera i 3,5 mA CA. In conformità allo standard EN61800-5-1,
è necessario utilizzare un collegamento di terra rinforzato
Vedere il cap itolo 7!
Nel caso in cui l'inverter venga utilizzato quale parte di una
macchina, spetta al costruttore della macchina dotare la
stessa di un interruttore generale (EN 60204-1).
Anche se l'inverter Vacon 20 è scollegato dalla rete di
alimentazione mentre aziona il motore, rimane comunque
sotto tensione se il motore riceve energia dal processo.
In questo caso, il motore funge da generatore che alimenta
l'inverter.
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
1
2 • vacon sicurezza
Dopo aver scollegato l'inverter dalla rete di alimentazione,
attendere che la ventola si arresti e che i segmenti sul
display o i led di stato sul pannello frontale si spengano.
Attendere 5 minuti prima di iniziare a lavorare sui
collegamenti dell'inverter Vacon 20.
Il motore si avvia automaticamente dopo un guasto, se è stata
attivata la funzione di reset automatico.
1
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
installazione vacon • 3
=
M5
MI3
MI1
=M4
MI2
=M5
LOC
REM
BACK
RESET
OK
LOC
REM
BACK
RESET
OK
LOC
REM
BACK
RESET
OK
MI4
=M 6
=M 6
MI5
LOC
REM
BACK
RESET
OK
LOC
REM
BACK
RESET
OK
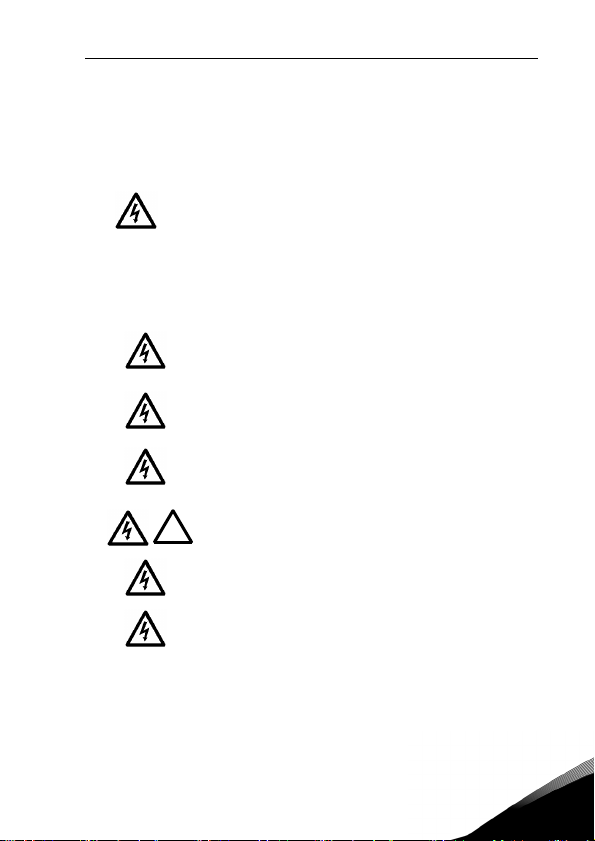
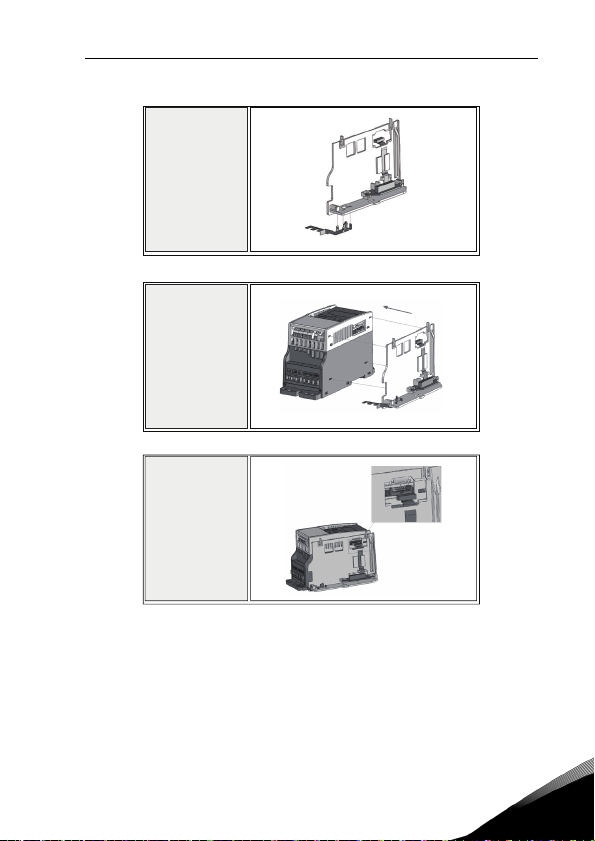
2. INSTALLAZIONE
2.1 Installazione meccanica
L'inverter Vacon 20 può essere montato a muro in due modi. Per le taglie MI1–MI3,
montaggio con viti o guida DIN; per le taglie MI4–MI5, montaggio con viti o a flangia.
Figura 1: Montaggio con viti, MI1–MI3
Figura 2: Montaggio con viti, MI4–MI5
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
2
4 • vacon installazione
12
LOC
REM
BACK
RESET
OK
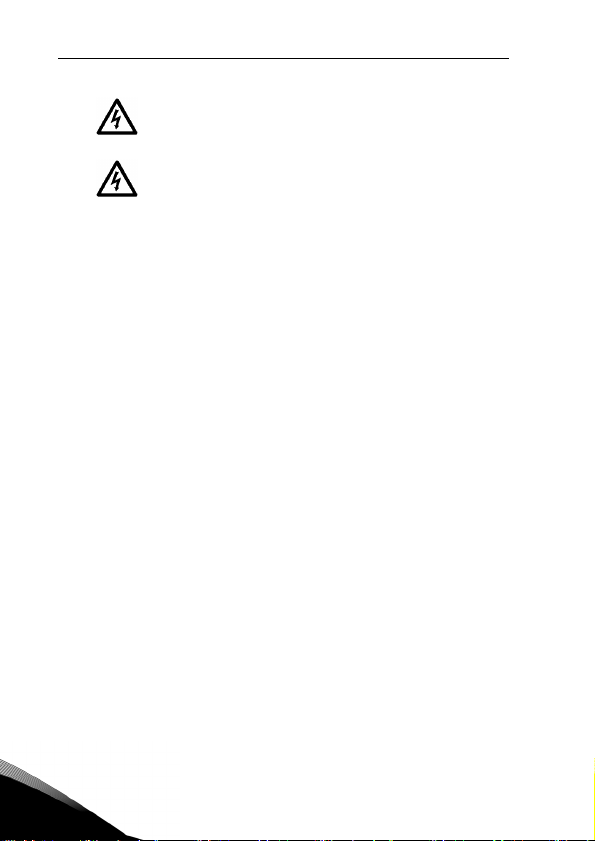
Figura 3: Montaggio con guida DIN, MI1–MI3
SI NOTI Vedere le misure per il montaggio sul retro dell'inverter.
Per favorire il raffreddamento, lasciare dello spazio vuoto sopra (100 mm),
sotto (50 mm) e ai lati (20 mm) dell'inverter Vacon 20. Per le taglie MI1–MI3,
l’installazione fianco a fianco è consentita solo se la temperatura ambiente
è inferiore ai 40°C; per le taglie MI4–MI5, l’installazione fianco a fianco non
è consentita.
Figura 4: Montaggio a flangia, MI4–MI5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
2
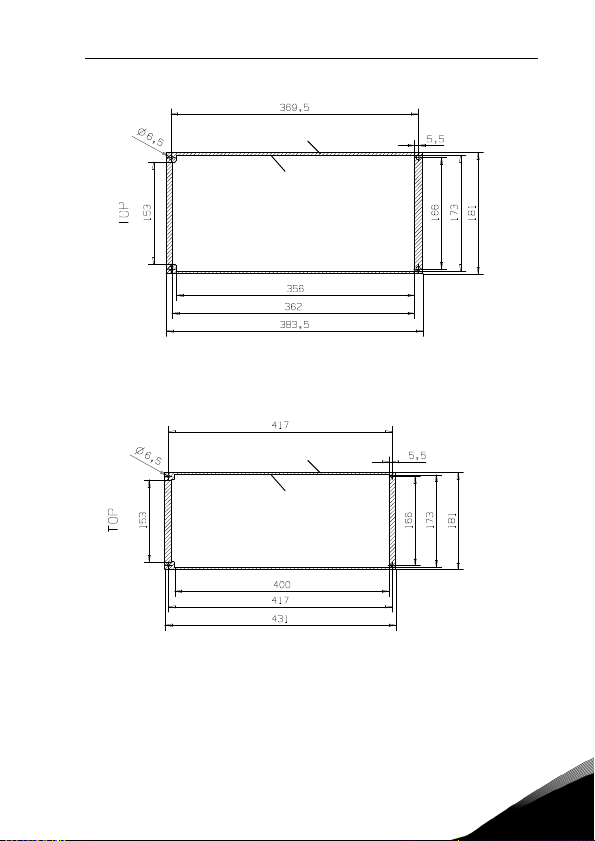
installazione vacon • 5
Profilo inverter
Profilo incasso
Profilo inverter
Profilo incasso
Figura 5: Misure dell'incasso per il montaggio a flangia per MI4
(Unità: mm)
Figura 6: Misure dell'incasso per il montaggio a flangia per MI5
(Unità: mm)
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
2
6 • vacon installazione
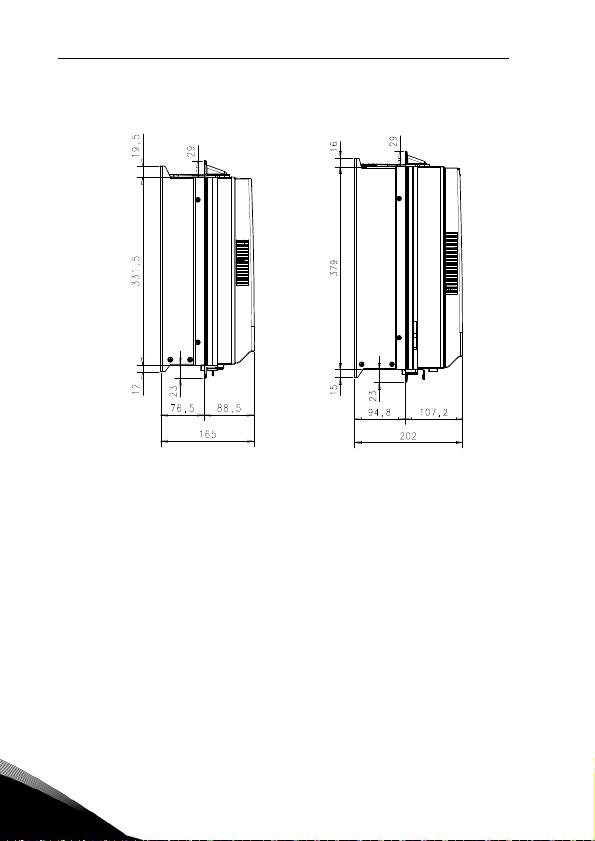
M15
M14
2
Figura 7: Spessori montaggio a flangia MI4 e MI5 (Unità: mm)
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
installazione vacon • 7
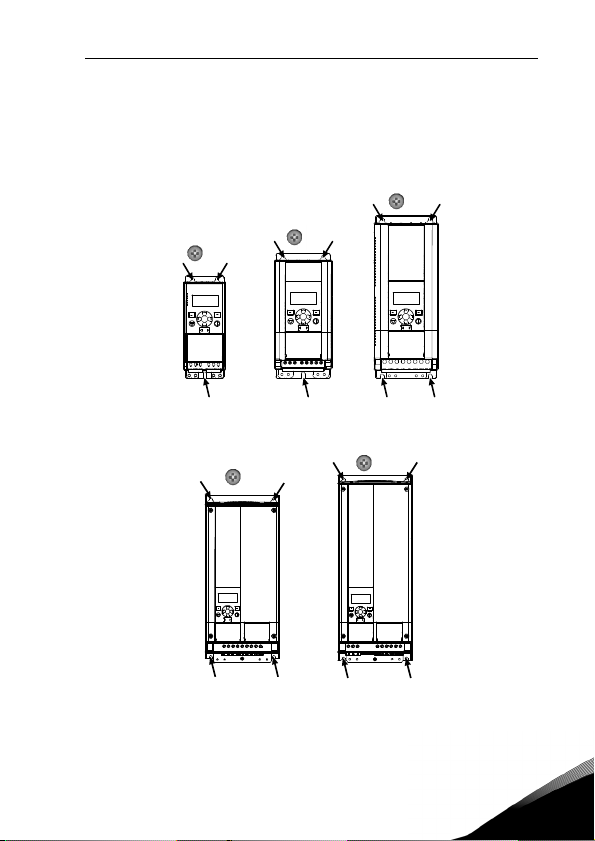
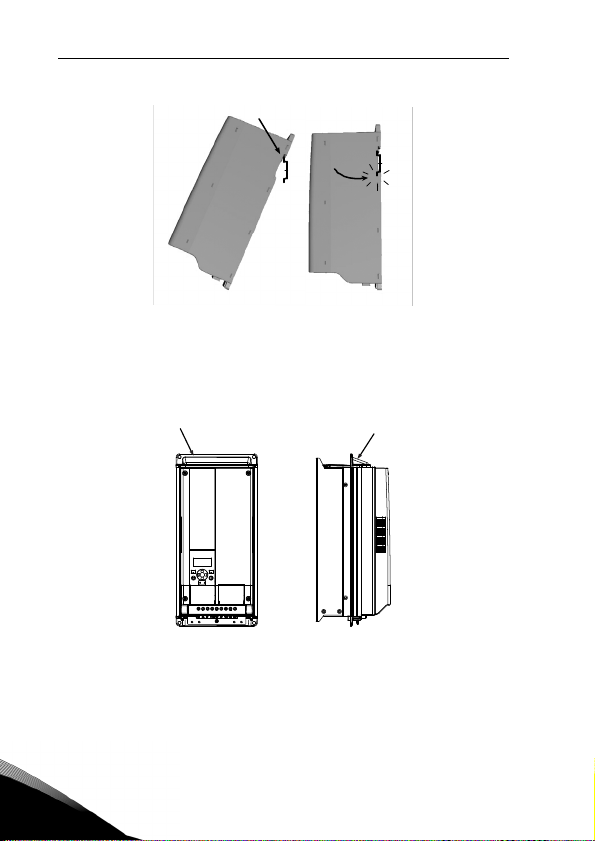
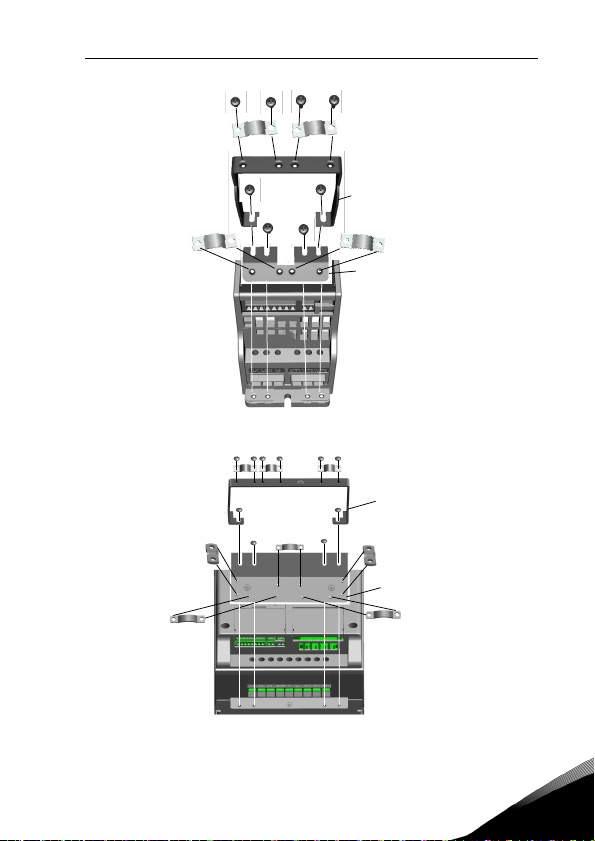
Montare il suppor to
DOPO aver installato
i cavi di alimentazione
Montare quest a placca
PRIMA di installare
i cavi di alimentazione
Montare il supporto
DOPO aver
installato
Montare questa placca
PRIMA di installare
i cavi di alimentazione
.
Figura 8: Montaggio della placca PE e del supporto cavi API, MI1–MI3
Figura 9: Montaggio della placca PE e del supporto cavi API, MI4–MI5
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
2
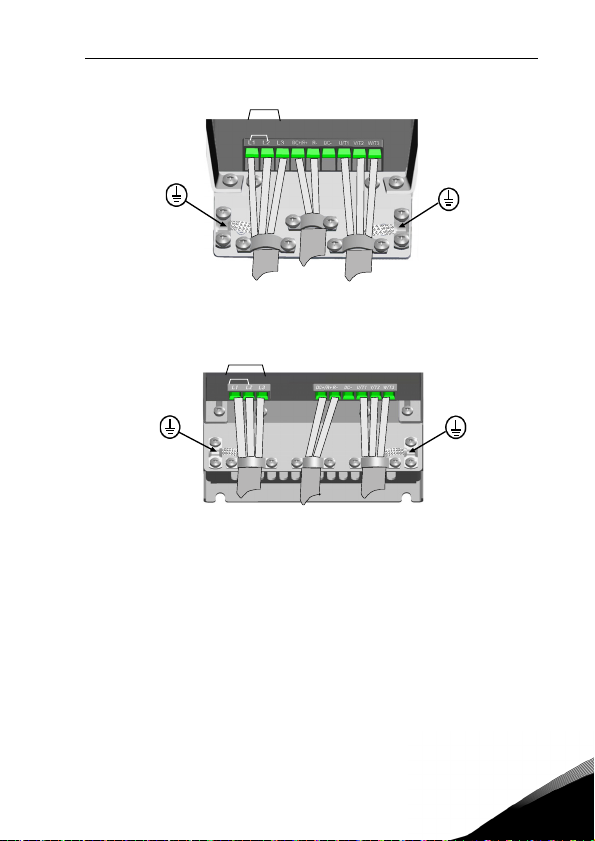
8 • vacon installazione
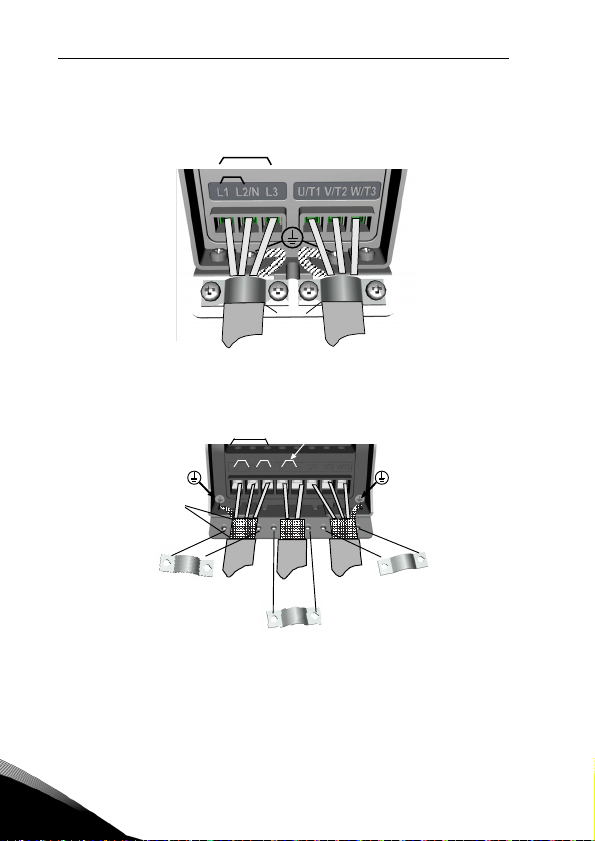
Uscita motore
Rimuovere il
rivestimento
di plastica
dei cavi per
la messa
a terra a 360°
RETE
ELETTRICA
MOTORE
3~ (230 V, 400 V)
1~ (230 V)
L1 L 2/N L3 U/T1 V/ T2 W/ T3R+ R-
1~ (230V) 1~ (115V)
Rimuovere il
rivest imento
di plastica
dei cavi
per la messa
a terra a 360°
RETE
ELETTRICA
MOTORE
RESISTORE
DI FRENATURA
Resistore
di frenatura esterno
3 ~ (230 V, 400 V, 600 V)
Uscita motore
3 ~ (230 V, 400 V, 600 V)
2.2 Cablaggio e connessioni
2.2.1 Cavi di alimentazione
SI NOTI La coppia di serraggio per i cavi di alimentazione è 0,5–0,6 Nm
Figura 10: Connessione per l'alimentazione di Vacon 20, MI1
2
Figura 11: Connessione per l'alimentazione di Vacon 20, MI2–MI3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
installazione vacon • 9
3 ~ (380, 480 V)
Uscita motore
MOTORE
RETE
ELETTRICA
RESISTORE
di frenatura
3 ~ (380, 480 V)
Uscita motore
MOTORE
RESISTORE
di frenatura
RETE
ELETTRICA
Figura 12: Connessioni per l'alimentazione di Vacon 20, MI4
Figura 13: Connessioni per l'alimentazione di Vacon 20, MI5
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
2
10 • vacon installazione
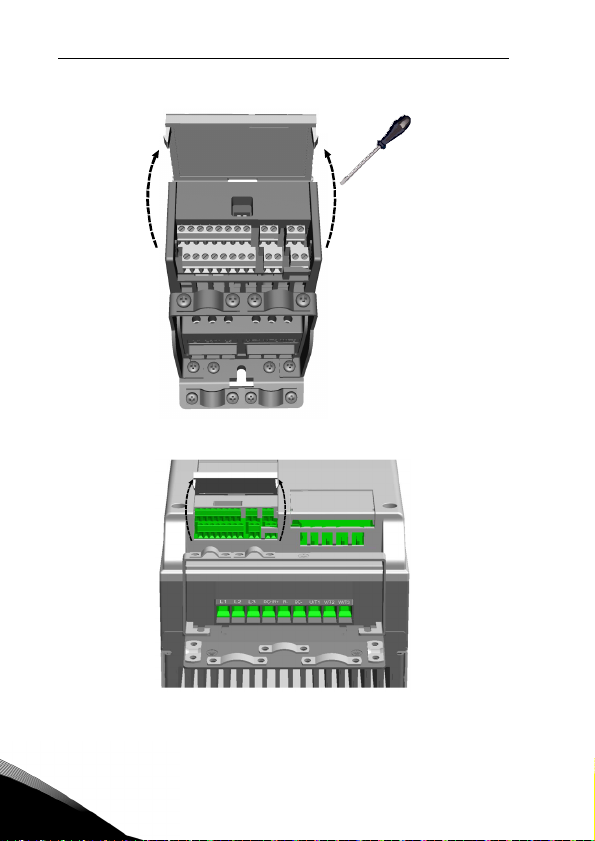
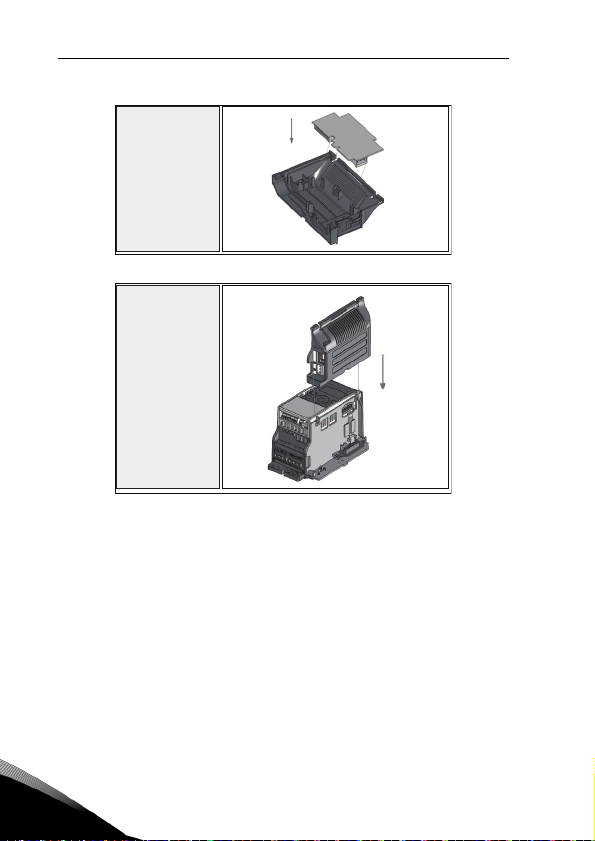
2.2.2 Cavi di controllo
Figura 14: Apertura del coperchio, MI1–MI3
2
Figura 15: Apertura del coperchio, MI4–MI5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
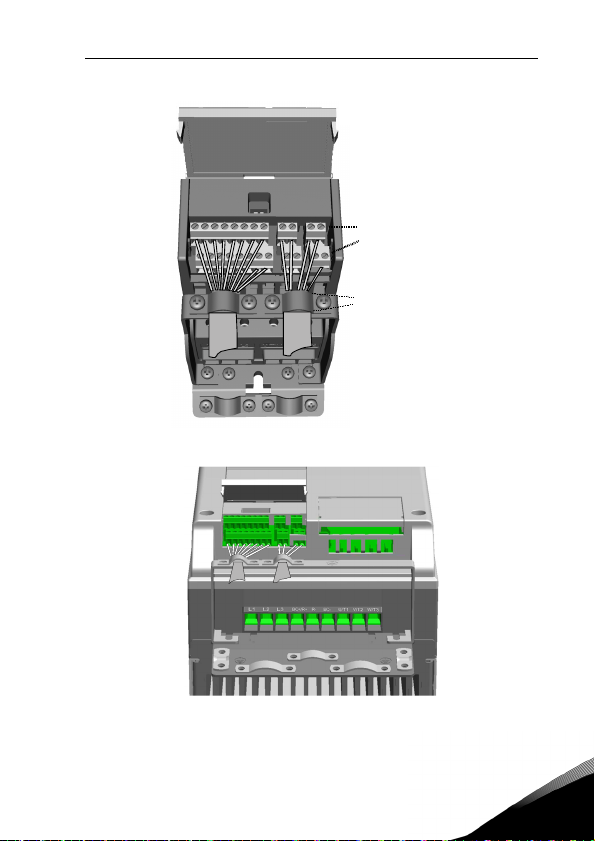
installazione vacon • 11
Coppia d i serraggio
per i cavi d i controllo
0,4 Nm
Rimuovere il rivestimento
di plastica dei cavi per
la messa a terra a 360°
Figura 16: Installazione dei cavi di controllo, MI1–MI3
Figura 17: Installazione dei cavi di controllo, MI4–MI5
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
2
12 • vacon installazione
SLOT
E6
B2
BHE3EC E7 B4 B5 BF
1
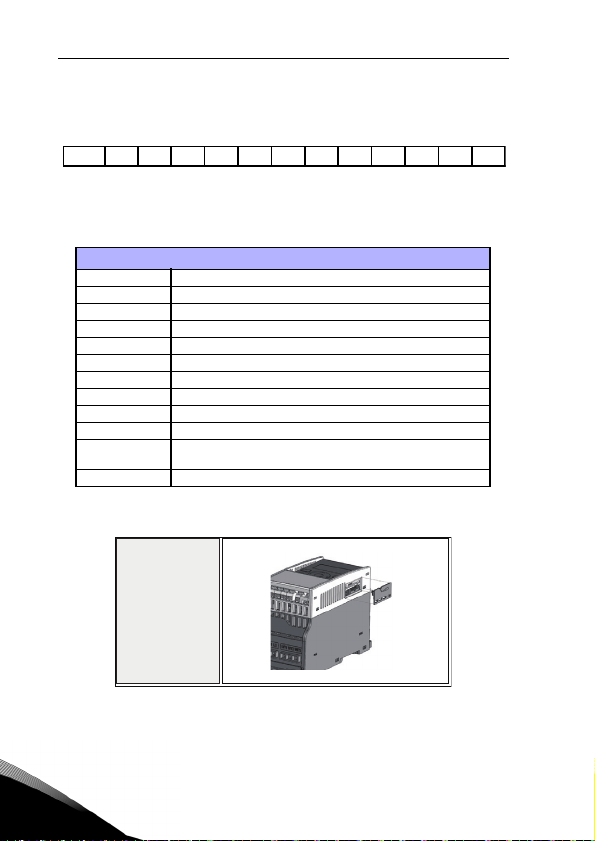
2.2.3 Schede opzionali consentite in Vacon20
Vedere di seguito per informazioni sulle schede opzionali consentite nello slot:
E5
SI NOTI Quando OPT-B1/OPT-B4 viene utilizzato in Vacon20, ai morsetti 6 (+24_out)
e 3 (GND) deve essere fornita alimentazione +24 V c.c. (±10%, min. 300 mA) nella
scheda di controllo.
Schede opzionali (tutte le schede sono verniciate)
OPT-EC-V EtherCat
OPT-E3-V Profibus DPV1 (connettore a vite)
OPT-E5-V Profibus DPV1 (connettore D9)
OPT-E6-V CANopen
OPT-E7-V DeviceNet
OPT-B1-V 6 x DI/DO, ciascun I/O può essere programmato singolarmente
OPT-B2-V 2 x Uscita relé + Termistore
OPT-B4-V 1 x AI, 2 x AO (isolati)
OPT-B5-V 3 x Uscita relé
OPT-B9-V 1 x RO, 5 x DI (42-240 VAC)
OPT-BH-V
OPT-F1-V 1 x AO, 1 x DO, 1 x RO
Struttura gruppo schede opzionali:
3 x rilevazione temperatura (supporto dei sensori PT100,
PT1000, NI1000, KTY84-130, KTY84-150, KTY84-131)
B1
B9
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
installazione vacon • 13
2
3
4
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
2
14 • vacon installazione
5
6
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
api vacon 20 vacon • 15
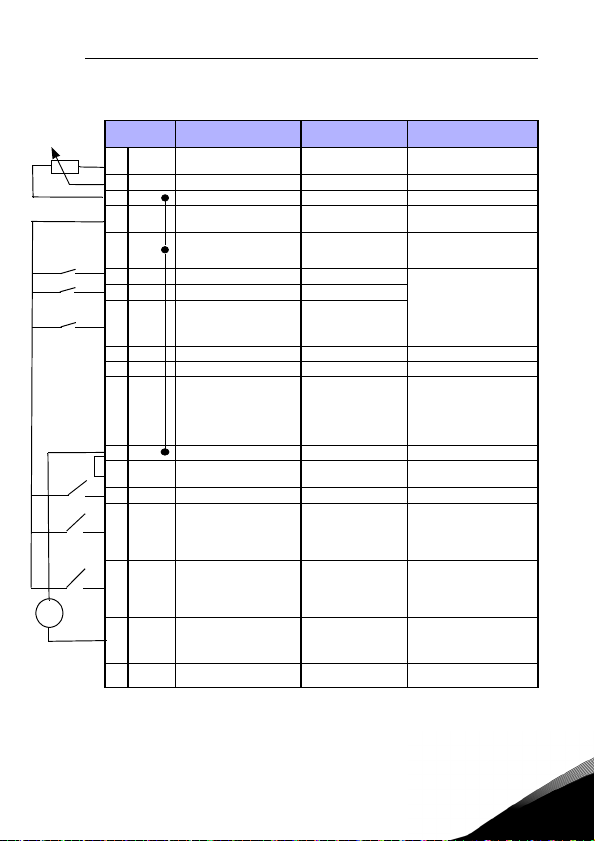
3. I/O E MORSETTI DI CONTROLLO
Vacon 20
1–10 k
Morsetto Segnale
+10
1
2 AI1 Segnale analogico in 1
3 GND Massa segnale I/O
6
7DI_C
Uscita rif. in tensione
Vref
Uscita
Uscita 24 V per DI
24 V
Ingresso digitale
comune
8 DI1 Ingresso digitale 1
9 DI2 Ingresso digitale 2
10 DI3 Ingresso digitale 3
A A RS485 segnale A Comunicazione FB
B B RS485 segnale B Comunicazione FB
4 AI2 Segnale analogico in 2
5 GND Massa segnale I/O
13 DO-
14 DI4 Ingresso digitale 4
Uscita digitale
comune
15 DI5 Ingresso digitale 5
16 DI6 Ingresso digitale 6
mA
18 AO Uscita analogica
20 DO Uscita segnale digitale
Tabella 1. Vacon 20 Multifunzione – Configurazione I/O predefinita e connessioni
per la scheda di controllo
P) = Funzione programmabile, vedere il Manuale utente:
elenchi di parametri e relative descrizioni per maggiori dettagli
Settaggio
di fabbrica
Freq. riferimento
Marcia avanti
Marcia indietro
Reset allarmi P)
Valore effettivo
PID e Freq.
riferimento P)
Veloc. preimp B0 P)
Veloc. preimp B1
Guasto esterno
Frequenza
di uscita P)
Attivo = PRONTO P)
Carico massimo 10 mA
P)
0–10 V, Ri = 250 kΩ
±20%, carico max. 50 mA
Ingresso digitale per DI1- DI6,
vedere la Tabella 2 per il
tipo di dissipatore DI
P)
Positivo,
Logica 1: 18–30 V,
P)
Logica 0: 0–5 V;
Negativo,
Logica 1: 0–10 V,
Logica 0: 18–30 V;
Ri = 10 KΩ (isolato da massa)
Negativo
Positivo
Impostazione predefinita:
0(4)–20 mA, Ri ≤ 250 Ω
Altro:
0–10 V, Ri = 250 kΩ
Selezionabile tramite
microinterruttore
Uscita digitale comune
AS DI1
As DI1,
Altro: Ingresso encoder A
P)
(frequenza fino a 10 kHz)
Selezionabile tramite
microinterruttore
As DI1,
Altro: Ingresso encoder B
P)
(frequenza fino a 10 kHz),
Ingresso treno di impulsi
(frequenza fino a 5 kHz)
0–10 V, RL ≥ 1 KΩ
0(4)–20 mA, RL ≤ 500 Ω
Selezionabile tramite
microinterruttore
Collettore aperto, carico
max. 35 V/50 mA
Descrizione
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
3
16 • vacon api vacon 20
20
DI
Enco Nor
AO
VmA
AI2
VmA
RS485
-term
ON
S1S2S3S4
J500
OFF
4 5 13 14 15 16 2018
123678910
22 23 26
2425
AI2 G ND DO- DI4 DI 5 DI 6 AO DO + R13 R14 * R24
+10V AI1 G ND 24V DI -C DI 1 DI2 DI3 A B R21 R2 2
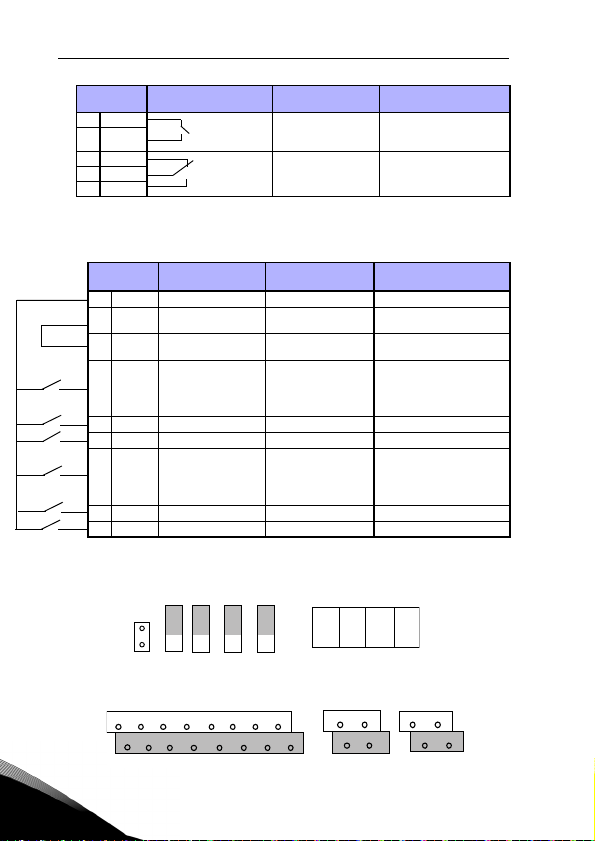
Morsetto Segnale
RO1 NO
22
23
RO1 CM
24
RO2 NC
25
RO2 CM
26
RO2 NO
Tabella 1. Vacon 20 Multifunzione – Configurazione I/O predefinita e connessioni
per la scheda di controllo
P) = Funzione programmabile, vedere il Manuale utente:
elenchi di parametri e relative descrizioni per maggiori dettagli
Uscita relè 1
Uscita relè 2
Morsetto Segnale
3 GND Massa segnale I/O
Uscita
6
7DI_C
24 V
Uscita 24 V per DI
Ingresso digitale
comune
8 DI1 Ingresso digitale 1
9 DI2 Ingresso digitale 2
10 DI3 Ingresso digitale 3
14 DI4 Ingresso digitale 4
15 DI5 Ingresso digitale 5
16 DI6 Ingresso digitale 6
Tabella 2. Tipo di dissipatore DI, rimuovere il jumper J500 and connettere il cavo
come da Tabella 2
Vacon 20 – Morsetti/O:
Figura 18: Microinterruttori
Settaggio
di fabbrica
Attivo = MARCIA
Attivo = GUASTO
Settaggio
di fabbrica
Marcia avanti
Marcia indi etro
Reset allarmi P)
Veloc. preimp B0 P)
Veloc. preimp B1
Guasto esterno
Descrizione
Carico di commutazio ne:
P)
250 V c.a./3 A, 24 V c.c. 3 A
Carico di commutazio ne:
P)
250 V c.a./3 A, 24 V c.c. 3 A
Descrizione
%, carico max. 50 mA
Ingresso digitale comune
per DI1–DI6
Positivo; Logica 1: 18–30 V,
Logica 0: 0–5 V;
P)
Negativo, Logica 1: 0–10 V,
Logica 0: 18–30 V;
Ri = 10 KΩ (isolato da massa)
P)
Positivo; Logica 1: 18–30 V,
Logica 0: 0–5 V;
Negativo, Logica 1: 0–10 V,
Logica 0: 18–30 V;
Ri = 10 KΩ (isolato da massa)
P)
Solo per DI.
P)
Solo per DI.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
selezione e installazione vacon • 17
FWD REV I/O KEYPAD BUS
REF
MON
PAR
SYS SYS
SYS SYS
SYS SYS
SYS SYS
FAUL TALARMSTOPREADY RUN
FWD REV I/O KEYPAD BUS
REF
PA R
FAU LTALARMSTOPREADY RUN
MON
FWD REV I/O KEYPA D BUS
REF
PAR
FAULTALARMSTOPREADY RUN
MON
FWD REV I/O KEYPAD BUS
REF
PAR
FAULTALARMSTOPREADY RUN
MON
FWD REV I/O KEYPAD BUS
REF
PAR
FAULTALARMSTOPREADY RUN
MON
FWD REV I/O KEYPAD BUS
REF
PAR
FAULTALARMSTOPRE ADY RUN
MON
FWD REV I/O KEYPAD BUS
REF
PAR
FAU LTALARMSTOPREADY RUN
MON
PRE-
MERE
PRE-
MERE
PRE-
MERE
PRE-
MERE
PREMERE
FWD REV I/O KEYPAD BUS
REF
MON
PAR
FAULTALARMSTOPREADY R UN
PREMERE
PREMERE
OK
OK
OK
OK
OK
Hz
Hz
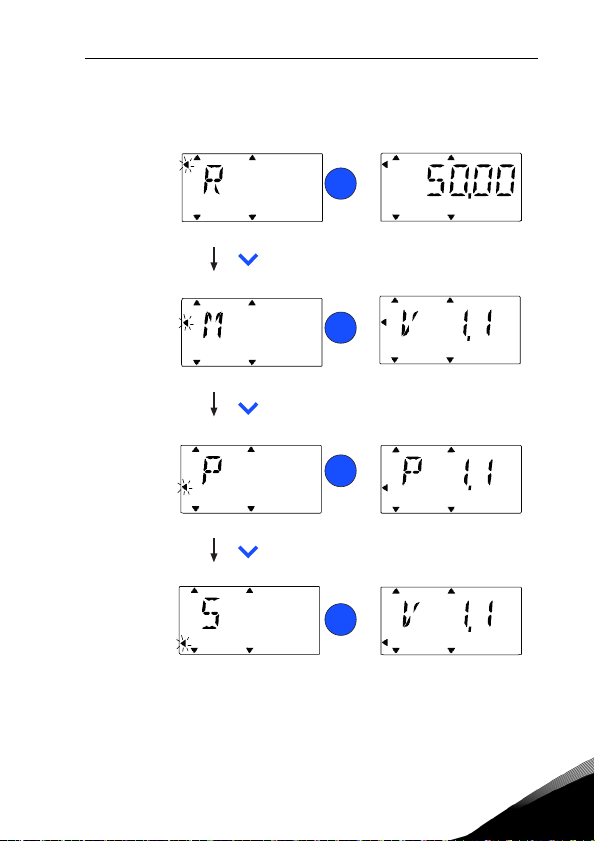
MENU
RIFERIMENTO
Consente di
visualizzare il valore
di riferimento pannello
indipendentemente
dalla postazione di
controllo selezionata.
MENU
MONITORAGGI O
In questo menu
è possibile visualizzare
i valori di monitoraggio.
MENU
PARAMETRI
In que sto menu
è possibile
visualizzare
e modificare
i parametri.
MENU
SISTEM A
Questo menu
consente di visualizzare
il sottomenu dei
parametri e degli
errori di sistema.
4. SELEZIONE E AVVIO
4. 1 Menu principali di Vacon 20
Figura 19: Menu principale di Vacon 20
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
4
18 • vacon selezione e avvio
4.2 Procedura guidata di messa a punto eavvio
4.2.1 Fasi della messa a punto:
1. Leggere le istruzioni a pagina 1
2. Eseguire il collegamento a terra e verificare
che i cavi siano conformi agli standard richiesti
3. Verificare la quantità e qualità dell'aria
di raffreddamento
4. Verificare che tutti gli interruttori
di marcia/arresto siano impostati su STOP
5. Collegare l'inverter alla rete di alimentazione 11. Vacon 20 è ora pronto per l'uso.
6. Eseguire la procedura guidata di avvio
e impostare tutti i parametri necessari
Tabella 3. Fasi della messa a punto
4.2.2 Proc. di avvio
Vacon 20 esegue la procedura guidata di avvio alla prima accensione. La procedura
guidata può essere eseguita impostando SYS Par.4.2 = 1. Le figure che seguono
illustrano la procedura.
SI NOTI L'esecuzione della procedura guidata di avvio determina sempre
il ripristino dei valori preimpostati in fabbrica per tutti i parametri.
SI NOTI La procedura guidata di avvio può essere ignorata premendo
continuamente il pulsante STOP p er 30 secondi
7. Eseguire un avvio di prova senza motore,
vedere il Manuale utente sul sito
www.vacon. com
8. Effettuare dei test a vuoto senza che
il motore sia collegato al processo
9. Eseguire l’identificazione (Par. ID631) ID631)
10. Collegare il motore al processo ed eseguire
di nuovo il test
4
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
selezione e installazione vacon • 19
FAULTALARMSTOPREADY
RUN
REF
MON
PAR
SYS
FAULTALARMSTOPREADY RUN
REF
MON
PAR
SYS
FAULTALARMSTOPREADY RUN
REF
MON
PAR
SYS
FWD REV I/O KEY PAD BUS
FWD REV I/O KEY P AD B US
FWD REV I/O KEY PAD BUS
FWD REV I/O KEY PAD BUS
2
1
4
3
FAULTALARMSTOPREADY RUN
REF
MON
PAR
SYS
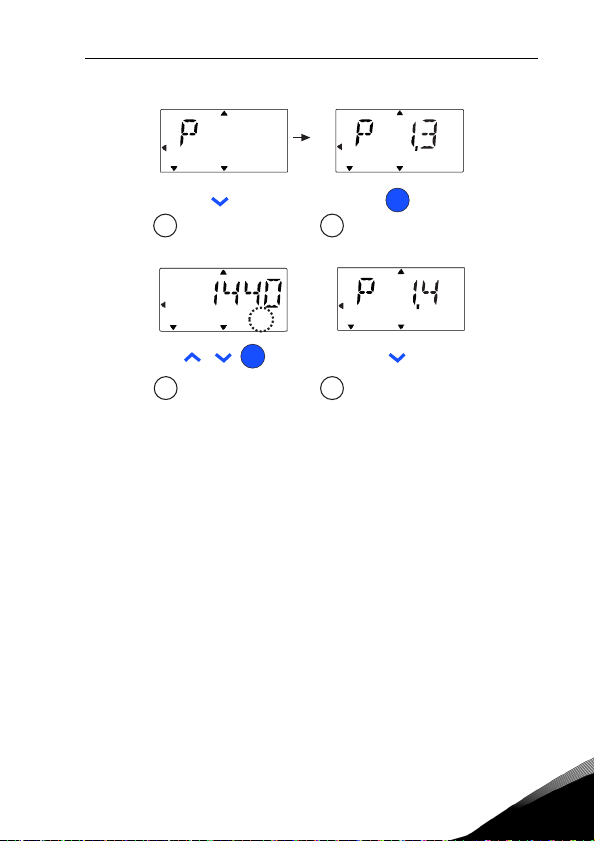
rpm
Modificare il valore P1.3
utili zzando il pulsante
Su/Giù e premere OK
per conferm are
Eseguire la stessa
procedura per P1. 4,
corrente nominale motore
Premere OK per accedere
alla modalità modifica
Accedere al menu Par.,
selezionare la velocità
nominale motore P1.3
OK
OK
Figura 20: Procedura guidata di avvio di Vacon 20
(applicazione standard)
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
4

20 • vacon selezione e avvio
1
2
3
4
OK
OK
READY
RUN STOP ALARM
FAULT
REF
MON
PAR
SYS
READY
RUN STOP ALARM
FAULT
FWD REV I/O
KEY PAD
BUS FWD REV I/O
KEY PAD
BUS FWD REV I/O
KEY PAD
BUS
READY
RUN STOP ALARM
FAULT
REF
MON
PAR
SYS
REF
MON
PAR
SYS
READY
RUN STOP ALARM
FAULT
REF
MON
PAR
SYS
FWD REV I/O
KEY PAD
BUS
La procedura guidata
di avvio mostra il
numero di par. 17.1.
Premere OK per accedere
alla moda lità modifica.
Selezionare un valore
tra 0 e 3, vedere sotto!
Selezioni:
Parametri
interessati:
P1.7 Limi te di corren te (A)
P1.8 Modalità di controllo motore
P1.15 Boost coppia
P2.2 Funzione marcia
P2.3 Funzione arresto
P3.1 Frequenza min
P4.2 Tempo acc. (s)
P4.3 Tempo dec. (s)
Premere OK per
confermare la
configurazione
dell'inv erter
0 = Base
1 = Drive pompa
2 =Drive ventola
3 = Drive coppia elevata
1,5 x
I
NMOT
1,5 x
I
NMOT
1,1 x
I
NMOT
1,1 x
I
NMOT
P1.7
20 s
1 s
5 s
3 s
P4.2
20 s
1 s
5 s
3 s
20 Hz
20 Hz
0 Hz
0 Hz
P3.1
0=
Inerzi a
0=
Inerzi a
0=
Inerzi a
1=
Rampa
P2.3
0=
Rampa
1=
Aggancio
0=
Rampa
0=
Rampa
1=
In uso
0 =
Non
usato
0 =
Non
usato
1 =
Controllo
velocità a d
anello aperto
0=
Controllo
di frequenza
0=
Controllo
di frequenza
0=
Controllo
di frequenza
0 =
Non
usato
P4.3P2.2P1.15P1.8
4
Figura 21: Configurazione dell'inverter
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

monitoraggio e parametri vacon • 21
5. MONITORAGGIO E PARAMETRI
NOTA! Questa guida tratta dell'applicazione standard Vacon 20. Per le de scrizioni
dettagliate dei parametri, scaricare il manuale dell'utente dal sito:
www.vacon.com -> Support & downloads.
5.1 Valori di monitoraggio
Codice Segnale di monitoraggio Unità ID Descrizione
V1.1 Frequenza di uscita Hz 1 Frequenza di uscita al motore
V1.2 Riferimento di frequenza Hz 25
V1.3 Velocità motore giri/min. 2 Velocità calcolata del motore
V1.4 Corrente mo tore A 3 Corrente misurata nel motore
V1.5 Coppia motore % 4
V1.6 Potenza del motore % 5
V1.7 Tensione motore V 6 Tensione motore
V1.8 Tensione DC link V 7 Tensione DC link misurata
V1.9 Temperatura unità °C 8
V1.10 Temperatura motore % 9 Temperatura calcolata del motore
V1.11 Potenza di uscita KW 79
V2.1 Ingresso analogico 1 % 59
V2.2 Ingresso analogico 2 % 60
V2.3 Uscita analogica % 81
Stato ingressi digitali DI1,
V2.4
DI2, DI3
Stato ingressi digitali DI4,
V2.5
DI5, DI6
V2.6 RO1, RO2, DO 17 Stato relè/uscite digitali
Ingresso encoder/treno
V2.7
di impulsi
V2.8 Giri/min. encoder giri/min. 1235
Tabella 4. Valori di monitoraggio
% 1234 Valore di scala 0–100%
Riferimento frequenza
a controllo motore
Coppia calcolata effettiva/nominale
del motore
Potenza calcolata effettiva/
nominale del motore
Temperatura del dissipatore di calore
Potenza di uscita da inverter a motore
Segnale in percentuale
dell'escursione segnale AI1
utilizzata
Segnale in percentuale
dell'escursione segnale AI2
utilizzata
Segnale in percentuale
dell'escursione segnale AO
utilizzata
15 Stato ingressi digitali
16 Stato ingressi digitali
Scalato in base al parametro
per gli impulsi/giri encoder
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

22 • vacon monitoraggio e parametri
Codice Segnale di monitoraggio Unità ID Descrizione
V2.11 Ingresso analogico E1 % 61
V2.12 Uscita analogica E1 % 31
V2.13 Uscita analogica E2 % 32
V2.14 DIE1, DIE2, DIE3 33
V2.15 DIE4, DIE5, DIE6 34
V2.16 DOE1,DOE2,DOE3 35
V2.17 DOE4,DOE5,DOE6 36
V2.18 Ingresso Temperatura 1 50
V2.19 Ingresso Temperatura 2 51
Tabella 4. Valori di monitoraggio
Segnale ingresso analogico 1 in %
dalla scheda opzionale, nascosto
finché non viene collegata una
scheda opzionale
Segnale uscita analogica 1 in %
dalla scheda opzionale, nascosto
finché non viene collegata una
scheda opzionale
Segnale uscita analogica 2 in %
dalla scheda opzionale, nascosto
finché non viene collegata una
scheda opzionale
Questo valore di monitoraggio
indica lo stato degli ingressi
digitali 1–3 dalla scheda opzionale,
nascosti finché non viene collegata
una scheda opzionale
Questo valore di monitoraggio
indica lo stato degli ingressi
digitali 4–6 dalla scheda opzionale,
nascosti finché non viene collegata
una scheda opzionale
Questo valore di monitoraggio
indica lo stato delle uscite relè 1–3
dalla scheda opzionale, nascosti
finché non viene collegata una
scheda opzionale
Questo valore di monitoraggio
indica lo stato delle uscite relè 4–6
dalla scheda opzionale, nascosti
finché non viene collegata una
scheda opzionale
Il valore rilevato per l'ingresso
temperatura 1 nell'unità della
temperatura (Celsius o Kelvin)
dall'impostazione dei parametri
nascosti finché non viene collegata
una scheda opzionale
Il valore rilevato per l'ingresso
temperatura 2 nell'unità della
temperatura (Celsius o Kelvin)
dall'impostazione dei parametri
nascosti finché non viene collegata
una scheda opzionale
5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

monitoraggio e parametri vacon • 23
Codice Segnale di monitoraggio Unità ID Descrizione
V2.20 Ingresso Temperatura 3 52
V3.1 Status Word inverter 43
V3.2 Status Word applicazione 89
V3.3 Status Word DIN 56
V4.1 Valore impostato PID % 20 Valore impostato regolatore
V4.2 Valore feedback PID % 21 Valore effettivo regolatore
V4.3 Errore PID % 2 2 E rrore rego latore
V4.4 Uscita PID % 23 Uscita regolatore
V4.5 Processo 29
Tabella 4. Valori di monitoraggio
Il valore rilevato per l'ingresso
temperatura 3 nell'unità della
temperatura (Celsius o Kelvin)
dall'impostazione dei parametri
nascosti finché non viene collegata
una scheda opzionale
Stato codificato in bit dell'inverter
B0 = Pronto
B1 = Marcia
B2 = Indietro
B3 = Guasto
B6 = RunEnable
B7 = AlarmActive
B12 = RunRequest
B13 = MotorRegulatorActive
Stato codificato in bit
dell'applicazione:
B3 = Rampa 2 attiva
B5 = Postaz. CTRL rem. 1 attiva
B6 = Postaz. CTRL rem. 2 attiva
B7 = Controllo bus di campo attivo
B8 = Controllo locale attivo
B9 = Controllo PC attivo
B10 = Frequenza preimpostate attive
B0 = DI1
B1 = DI2
B2 = DI3
B3 = DI4
B4 = DI5
B5 = DI6
B6 = DIE1
B7 = DIE2
B8 = DIE3
B9 = DIE4
B10 = DIE5
B11 = DIE6
Variabile di processo scalata
vedere par. 15.18
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

24 • vacon monitoraggio e parametri
P1.1
P1.2
P1.3
P1.4
P1.5
P1.7
P1.15
P2.2
P2.3
P3.1
P3.2
5.2 Parametri di configurazione rapida (menu Virtuale, visualizzato
quando
par. 17.2 = 1)
Codice Parametro AI1 AI1 Unità
Ten si on e
nominale del
motore
Frequenza
nominale motore
Veloci tà
nominale motore
Corrente
nominale del
motore
Cos motore
Limite corrente
Boost coppia 0 1 0 109
Selezione
postazione
P2.1
controllo
remoto 1
Funzione marcia
Funzione arresto
Frequenza min. 0,00 P3.2 Hz 0,00 101
Frequenza max. P3.1 320,00 Hz
Tabella 5. Parametri di impostazione rapida
180 690 V Varie 110
30,00 320,00 Hz
30 20000
2,0 x
0,2 x
I
I
Nunit
Nunit
0,30 1,00 0,85 120
2,0 x
0,2 x
I
I
Nunit
Nunit
0 2 0 172
0
1 0 505
0
1 0 506
Predefi-
giri/
min.
A
A
nito
50,00/
60,00
1440/
1720
I
Nunit
1,5 x
INunit
50,00/
60,00
ID Nota
Cont rollare la targhetta
con i dati caratteristici
del motore.
Cont rollare la targhetta
con i dati caratteristici
111
del motore.
I valori predefiniti si
112
applicano a un motore
a 4 poli.
Cont rollare la targhetta
con i dati caratteristici
113
del motore.
Cont rollare la targhetta
con i dati caratteristici
del motore.
Corrente massima
107
motore
0 = Non in uso
1 = In uso
0 = Morsetto I/O
1 = Bus di campo
2 = Pannello
0 = Rampa
1 = Aggancio in velocità
0 = Inerzia
1 = Rampa
Freq. riferimento
minima
Freq. riferimento
102
massima
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
5

monitoraggio e parametri vacon • 25
P4.2
P4.3
Codice Parame tro AI1 AI1 Unità
Selezione
frequenza
riferimento
P3.3
per Postazione
controllo
remoto 1
Veloc ità
P3.4
prefissata 0
Veloc ità
P3.5
preimpostata 1
Veloc ità
P3.6
preimpostata 2
Veloc ità
P3.7
preimpostata 3
Tem po d i
accelerazione 1
Tem po d i
decelerazione 1
Tabella 5. Parametri di impostazione rapida
1 Varie 7 117
P3.1 P3.2 Hz 5,00 180
P3.1 P3.2 Hz 10,00 105
P3.1 P3.2 Hz 15,00 106
P3.1 P3.2 Hz 20,00 126
0,1 3000,0 s 3,0 103
0,1 3000,0 s 3,0 104
Predefi-
nito
ID Nota
1 = Velocità
preimpostata 0
2 = Pannello
3 = Bus di campo
4 = AI1
5 = AI2
6 = PID
7 = AI1 + AI2
8 = Motopotenziometro
9 = Treno impulsi/
Encoder
10 = AIE1
11 = Ingresso
temperatura 1
12 = Ingresso
temperatura 2
13 = Ingresso
temperatura 3
Nota: Prestare attenzione alla posizione
dell'interruttore
DI/Encoder quando
è impostato con 9 = Treno
impulsi/encoder
La velocità preimpostata
0 viene utilizzata come
frequenza di riferimento
quando P3.3 = 1
Attivato da ingressi
digitali
Attivato da ingressi
digitali
Attivato da ingressi
digitali
Tempo di accelerazione
da 0 Hz alla frequenza
massima
Tempo di decelerazione
dalla frequenza
massima a 0 Hz
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

26 • vacon monitoraggio e parametri
P14.1
P1.1
P1.2
P1.3
P1.4
P1.5P1.6
Codice Parametro AI1 AI1 Unità
Escursione
P6.1
segnale AI1
Escursione
P6.5
segnale AI2
Reset automatico 0 1 0 731
Nascondi
P17.2
parametro
Tabella 5. Parametri di impostazione rapida
0 1 0 379
0 1 0 390
0 1 1 115
Predefi-
nito
ID Nota
0 = 0–100%
1 = 20%–100%
20% è la stessa
percentuale del livello
di segnale minimo 2 V.
0 = 0–100%
1 = 20%–100%
20% è la stessa
percentuale del livello
di segnale minimo 2 V
o 4 mA.
0 = Disabilita
1 = Abilita
0 = Tutti i parametri
visibili
1 = Visibili solo
i parametri di
impostazione rapida
5.3 Impostazioni motore (Pannello di controllo: Menu PAR -> P1)
Codice Para metro AI1 AI1 Unità
Ten si on e
nominale del
motore
Frequenza
nominale motore
Veloci tà
nominale
motore
Corrente
nominale del
motore
Cos motore
(Fattore di
potenza)
Tipo motore 0 1 0 650
Tabella 6. Impostazioni motore
180 690 V Varie 110
30,00 320,00 Hz
30 20000
2,0 x
0,2 x
I
I
Nunit
Nunit
0,30 1,00 0,85 120
Prede-
ID Nota
finito
Cont rollare la targhet ta con
i dati caratteristici del motore
50,00/
60,00
giri/
1440/
min.
1720
I
A
Nunit
Cont rollare la targhet ta con
111
i dati caratteristici del motore
I valori predefiniti si applicano
112
a un motore a 4 poli.
Cont rollare la targhet ta con
113
i dati caratteristici del motore
Cont rollare la targhet ta con
i dati caratteristici del motore
0 = Induzione
1 = Magnete permanente
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
5

monitoraggio e parametri vacon • 27
P1.7
P1.8
P1.9
P1.10
P1.11
P1.12
P1.13
P1.14
P1.15
P1.16
P1.17
Codice Parametro AI1 AI1 Unità
2,0 x
Limite corrente
Modo controllo
motore
Rapporto V/f 0 2 0 108
Punto di
indebolimento
campo
Tensione punto
di indebolimento
campo
Frequenza
intermedia V/f
Ten si on e
intermedia V/f
Ten si on e
frequenza zero
Boost coppia 0 1 0 109
Frequenza di
commutazione
Chopper frenat. 0 2 0 504
Tabella 6. Impostazioni motore
0,2 x
I
I
Nunit
Nunit
0 1 0 600
8,00
320,00 Hz
10,00 200,00 % 100,00 603
0,00 P1.10 Hz
0,00 P1.11 % 100,00 605
0,00 40,00 % Varie 606
1,5 16,0 kHz 4,0/2,0 601
Prede-
ID Nota
finito
1,5 x
A
107 Corrente massima motore
I
Nunit
50,00/
60,00
50,00/
60,00
0 = Controllo di frequenza
1 = Controllo velocità
ad anello aperto
0 = Lineare
1 = Quadrato
2 = Programmabile
Frequenza punto di
602
indebolimento campo
Tensione al punto di
indebolimento campo
com % di U
Frequenza intermedia V/f
604
programmabile
Tensione intermedia U/
programmabile come %
di U
Ten sio ne a 0 Hz c ome %
di U
0 = Disabilitato
1 = Disabil itato
Frequenza PWM. Se i valori
sono più alti di quelli
predefiniti, ridurre la
capacità di corrente
0 = Disabilitato
1 = Abilitato: Sempre
2 = Stato marcia
nmot
nmot
nmot
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

28 • vacon monitoraggio e parametri
P1.18
P1.19
P1.20
P1.21
P1.22
P1.23
Codice Para metro AI1 AI1 Unità
Soglia chopper
di frenatura
Identificazione
motore
Caduta di
tensione su Rs
Regolatore di
sovratensione
Regolatore di
sottotensione
Filtro
sinusoidale
Tabella 6. Impostazioni motore
0 911 V varia 1267
02 0631
0,00 100,00 % 0,00 662
02 1607
01 1608
01 0522
Prede-
finito
ID Nota
Soglia di attivazione
del controllo chopper
di frenatura in volt.
Per 240 V:
240*1,35*1,18 = 382 V
Per 400 V:
400*1,35*1,18 = 638 V
Notare che quando si
utilizza il chopper di
frenatura, il regolatore di
sovratensione può essere
spento oppure la soglia di
riferimento sovratensione
può essere impostata su un
valore superiore alla soglia
del chopper di frenatura.
0 = Non attivo
1 = Identificazione arresto
(il comando va eseguito
entro 20 sec per attivarsi)
2 = Identificazione con
rotazione del motore
(il comando va eseguito
entro 20 sec per attivarsi.
Disponibile solo in SW V026
alimentazione incluso in
FW01070V010 o versione
successiva)
Caduta di tensione su
avvolgimenti motore come
% di U
alla corrente
nmot
nominale.
0 = Disabilitato
1 = Abilitato,
Modalità standard
2 = Abilitato, Modalità
carichi a strappi
0 = Disabilita
1 = Abilita
0 = Non in uso
1 = In uso
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
5

monitoraggio e parametri vacon • 29
P1.24
P1.25
P1.26
P1.27
P1.28
P1.29
Codice Parametro AI1 AI1 Unità
Tipo di
modulatore
Ottimizzazione
efficienza*
Abilitazione
marcia I/f*
Limite
riferimento
frequenza
marcia I/f*
Riferimento
corrente
marcia I/f*
Abilitazione
limitatore
tensione*
Tabella 6. Impostazioni motore
SI NOTI
* Questi parametri sono disponibili solo in SW FWP00001V026 alimentazione incluso
in FW01070V010 o versione successiva.
0 65535 28928 648
0 1 0 666
0 1 0 534
1 100 % 10 535
0 100,0 % 80,0 536
0 1 1 1079
Prede-
finito
ID Nota
Word di configurazione
modulatore
B1 = Modulazione
discontinua (DPWMMIN)
B2 = Caduta di impulso
in sovramodulazione
B6 = Sottomodulazione
B8 = Compensazione
istantanea tensione CC*
B11 = Basso livello
di rumorosità
B12 = Compensazione
tempo morto*
B13 = Compensazione
errore di f lusso*
* Abilitato come
impostazione predefinita
Ottimizzazione energia,
l'inverter di frequenza cerca
la corrente minima al fine di
risparmiare energia e ridurre
il livello delle interferenze
nonché il rumore del motore
0 = Disabilitato
1 = Abilitato
0 = Disabilitato
1 = Abilitato
Limite frequenza di uscita al di
sotto del quale il motore riceve
la corrente marcia I/f definita.
Riferimento corrente
come percentuale della
corrente nominale del motore
[1 = 0,1%]
Selezionare la modalità
limitatore te nsione:
0 = Disabilitato
1 = Abilitato
SI NOTI Questi parametri compaiono se P17.2 = 0.
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

30 • vacon monitoraggio e parametri
P2.2
P2.3
P2.9
5.4 Impostazione marcia/arresto (Pannello di controllo: Menu PAR -> P2)
Codice Param etro AI1 AI1 Unità
Selezione
P2.1
postazione
controllo rem oto
Funzione marcia
Funzi one arres to
I/O Logica
P2.4
marcia/arresto
P2.5 Locale/Remoto 0 1 0 211
Direzione
P2.6
controllo da
pannello
Tasto di arresto
P2.7
del pannello
Selezione
postazione
P2.8
controllo
remoto 2
Blocco pulsanti
pannello di
comando
Tabella 7. Impostazione marcia/arresto
0
0
0
04 2300
01 0123
01 1114
0
0
Prede-
ID Nota
finito
20172
10505
10506
20173
1 0 15520
0 = Morsetti I/O
1 = Bus di campo
2 = Pannello
0 = Rampa
1 = Aggancio in velocità
0 = Inerzia
1 = Rampa
Controllo I/O Controllo I/O
segnale 1 segnale 2
0
Avanti Indie tro
1
Avanti(fronte) Arresto
2
Avanti(fronte) Indietro
3
Marcia Indie tro
4
Marcia (fronte) Ind ietro
0 = Controllo remoto
1 = Controllo locale
0 = Avanti
1 = Indietro
0 = Solo controllo
da pannello
1 = Sempre
0 = Morsetti I/O
1 = Bus di campo
2 = Pannello
0 = Sblocco di tutti i pulsanti
pannello di comando
1 = Blocco del pulsante
Lock/Rem
invertito
(fronte)
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
5

monitoraggio e parametri vacon • 31
P3.1
P3.2
5.5 Frequenze di riferimento (Pannello di controllo: Menu PAR -> P3)
Codice Parametro AI1 AI1 Unità
Frequenza min. 0,00 P3.2 Hz 0,00 101
Frequenza max. P3.1 320,00 Hz
Selezione
frequenza
riferimento per
P3.3
Postazione
controllo
remoto 1
Veloc ità
P3.4
prefissata 0
Veloc ità
P3.5
prefissata 1
Veloc ità
P3.6
prefissata 2
Veloc ità
P3.7
prefissata 3
Veloc ità
P3.8
prefissata 4
Veloc ità
P3.9
prefissata 5
Veloc ità
P3.10
prefissata 6
Veloc ità
P3.11
prefissata 7
Tabella 8. Frequenze di riferimento
1 Varie 7 117
P3.1 P3.2 Hz 5,00 180
P3.1 P3.2 Hz 10,00 105 Attivato da ingressi digitali
P3.1 P3.2 Hz 15,00 106 Attivato da ingressi digitali
P3.1 P3.2 Hz 20,00 126 Attivato da ingressi digitali
P3.1 P3.2 Hz 25,00 127 Attivato da ingressi digitali
P3.1 P3.2 Hz 30,00 128 Attivato da ingressi digitali
P3.1 P3.2 Hz 40,00 129 Attivato da ingressi digitali
P3.1 P3.2 Hz 50,00 130 Attivato da ingressi digitali
Prede-
finito
50,00/
60,00
ID Nota
Riferimento frequenza
minima consentita
Riferimento frequenza
102
massima consentita
1 = Velocità preimpostata 0
2 = Pannello
3 = Bus di campo
4 = AI1
5 = AI2
6 = PID
7 = AI1 + AI2
8 = Motopotenziometro
9 = Treno impulsi/Encoder
10 = AIE1
11
= Ingresso temperatura 1
12
= Ingresso temperatura 2
13
= Ingresso temperatura 3
Nota: Prestare attenzione
alla posizione dell'interruttore DI/Encoder quando
è impostato con 9 = Treno
impulsi/encoder
La velocità preimpostata
0 viene utilizzata come
frequenza di riferimento
quando P3.3 = 1
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

32 • vacon monitoraggio e parametri
P4.1
P4.2
P4.3
P4.4
P4.5
P4.6
Codice Parametro AI1 AI1 Unità
Selezione
frequenza
riferimento per
P3.12
Postazione
controllo
remoto 2
Rampa motopo-
P3.13
tenziomet ro
Reset del moto-
P3.14
potenziometro
Tabella 8. Frequenze di riferimento
1Varie 5 131Vedere P3.3
150Hz/s 5331
02 2367
Prede-
finito
ID Nota
Coefficiente variazione
velocità
0 = Nessun reset
1 = Reset in caso di arresto
2 = Reset in caso di
spegnimento
SI NOTI Questi parametri compaiono se P17.2 = 0.
5.6 Impostazione rampe e freni (Pannello di controllo: Menu PAR -> P4)
Codice Parametro AI1 AI1 Unità
Rampa a S 1 0,0 10,0 s 0,0 500
Tem po d i
accelerazione 1
Tem po d i
decelerazione 1
Rampa a S 2 0,0 10,0 s 0,0 501
Tem po d i
accelerazione 2
Tem po d i
decelerazione 2
Tabella 9. Impostazione rampe e freni
0,1 3000,0 s 3,0 103
0,1 3000,0 s 3,0 104
0,1 3000,0 s 10,0 502
0,1 3000,0 s 10,0 503
Prede-
finito
ID Nota
0 = Lineare
>0 = Rampa curva S
Definisce il tempo
necessario alla
frequenza di uscita per
passare da zero alla
frequenza massima.
Definisce il tempo
necessario alla
frequenza di uscita per
passare dalla frequenza
massima a zero.
Vedere il parametro P4.1
Vedere il parametro P4.2
Vedere il parametro P4.3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
5

monitoraggio e parametri vacon • 33
P4.7
P4.8
P4.9
P4.10
P4.11
P4.12
Codice Paramet ro AI1 AI1 Unità
Frenat. a flusso 0 3 0 520
2,0 x
Frenat. a flusso
Corrente
Corr frenat. CC
Tem po
arresto CC
Frequenza
arresto CC
Tempo marcia CC 0,00 600,00 s 0,00 516 0,00 = Non attivo
Soglia frequenza
P4.13
P4.14
P4.15
P4.16
P4.17
Tabella 9. Impostazione rampe e freni
accel2
Soglia frequenza
decel2
Freno esterno:
Ritardo apertura
Freno esterno:
Limite frequenza
apertura
Freno esterno:
Limite frequenza
chiusura
0,5 x
I
I
Nunit
Nunit
2,0 x
0,3 x
I
I
Nunit
Nunit
0,00 600,00 s 0,00 508
0,10 10,00 Hz 1,50 515
0,00 P3.2 Hz 0,00 527 0,00 = disabilitato
0,00 P3.2 Hz 0,00 528 0,00 = disabilitato
0,00 320,00 s 0,20 1544
0,00 P3.2 Hz 1,50 1535
0,00 P3.2 Hz 1,00 1539
Prede-
finito
I
A
Nunit
I
A
Nunit
ID Nota
0 = Off
1 = Decelerazione
2 = Chopper
3 = Modalità completa
Definisce la corrente
519
per la frenatura a flusso.
Definisce la corrente
dire tta al mo tore
507
durante l'azione
del freno CC.
Stabilisce se la
frenatura è ON oppure
OFF e determina il
tempo di frenatura CC
quando il motore
è in fase di arresto.
0,00 = Non attivo
La frequenza di uscita
alla quale entra in
azione la frenatura CC.
Ritardo di apertura
freno una volta
raggiunto il limite
frequenza apertura.
Frequenza di apertura
da marcia avanti
e marci a indietro.
Frequenza di chiusura
dalla direzione positiva
se nessun comando
di marcia è attivo.
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

34 • vacon monitoraggio e parametri
Codice Parametro AI1 AI1 Unità
Freno esterno:
Limite frequenza
P4.18
chiusura a Marcia
indietro
Freno esterno:
P4.19
Limite corrente
apertura/chiusura
Tabella 9. Impostazione rampe e freni
0,00 P3.2 Hz 1,50 1540
0,0 200,0 % 20,0 1585
Prede-
finito
ID Nota
Frequenza di chiusura
dalla direzione negativa
se nessun comando
di marcia è attivo.
Il freno non viene aperto
se la corrente non
supera questo valore e,
se aperto, viene chiuso
immediatamente se la
corrente scende sotto
questo valore.
Il valore di questo
parametro è espresso
come percentuale della
corrente nominale
del motore.
5.7 Ingressi digitali (Pannello di controllo: Menu PAR -> P5)
Codice Parametro AI1 AI1 Unità
P5.1
P5.2
P5.3 Indietro 0 Varie 0 412 Vedere 5.1
P5.4
P5.5
Tabella 10. Ingressi digitali
Segnale
controllo I/O 1
Segnale
controllo I/O 2
Chiusura guasto
esterno
Apertura guasto
esterno
0 Varie 1 403
0 Varie 2 404 Vedere 5.1
0 Varie 6 405 Vedere 5.1
0 Varie 0 406 Vedere 5.1
Prede-
finito
ID Nota
0 = Non in uso
1 = DI1
2 = DI2
3 = DI3
4 = DI4
5 = DI5
6 = DI6
7 = DIE1
8 = DIE2
9 = DIE3
10 = DIE4
11 = DIE5
12 = DIE6
5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

monitoraggio e parametri vacon • 35
Codice Parametro AI1 AI1 Unità
P5.6 Reset guasti 0 Varie 3 414 Vedere 5.1
P5.7 Abilitaz. marcia 0 Varie 0 407 Vedere 5.1
P5.8
P5.9
P5.10
P5.11
P5.12
P5.13
P5.14
P5.15
P5.16
P5.17
Tabella 10. Ingressi digitali
Veloci tà
preimpostata B0
Veloci tà
preimpostata B1
Veloci tà
preimpostata B2
Selezione tempo
di rampa 2
Motopotenziome-
tro su
Motopotenziome-
tro giù
Postazione
cont rollo remo to 2
Frequenza
riferimento
postazione di
cont rollo remo to 2
Valore impostato
PID 2
Prerisc. motore
attivo
0Varie 4 419Vedere 5.1
0Varie 5 420Vedere 5.1
0Varie 0 421Vedere 5.1
0Varie 0 408Vedere 5.1
0Varie 0 418Vedere 5.1
0Varie 0 417Vedere 5.1
0Varie 0 425
0Varie 0 343
0 Varie 0 1047
0 Varie 0 1044
Prede-
finito
ID Nota
Attiva la postazione
di controllo 2
Vedere 5.1
Attiva la postazione
di controllo 2
Vedi para metro 5 .1
Attiva riferimento 2
Vedere 5.1
Attiva il preriscaldamento motore
(corrente CC) in stato
di arresto quando il
parametro Prerisc.
motore è impostato
su 2
Vedere 5.1
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

36 • vacon monitoraggio e parametri
5.8 Ingressi analogici (Pannello di controllo: Menu PAR -> P6)
Codice Pa rametro AI1 AI1 Unità
Escursione
P6.1
segnale AI1
P6.2 Autocal. min AI1
P6.3 Autocal. max AI1
P6.4 Tempo filtro AI1 0,0 10,0 s 0,1 378 0 = nessun filtro
P6.5 Escurs. segn AI2 0 1 0 390 Vedere P6.1
P6.6 Autocal. min AI2
P6.7 Autocal. max AI2
P6.8 Tempo filtro AI2 0,0 10,0 s 0,1 389 Vedere P6.4
Escursione
P6.9
segnale AIE1
P6.10
P6.11
P6.12 Tempo filtro AIE1
Tabella 11. Ingressi analogici
Autocal.
min AIE1
Autocal.
max AIE1
01 0379
-100,00
100,00 % 0,00 380
-100,00
300,00 % 100,00 381
-100,00
100,00 % 0,00 391 Vedere P6.2
-100,00
300,00 % 100,00 392 Vedere P6.3
01 0143
-100,00 100,00
-100,00 300,00
0,0 10,0
Prede-
ID Nota
finito
0,00
%
100,00
%
s
0,1
0 = 0–100% (0–10 V)
1 = 20%–100% (2–10 V)
0,00 = nessuna
scalatura min.
100,00 = nessuna
scalatura max.
Vedere P6.1, na scosti
finché non viene
collegata una
scheda opzionale
Vedere P6.2, na scosti
finché non viene
144
collegata una
scheda opzionale
Vedere P6.3, na scosti
finché non viene
145
collegata una
scheda opzionale
Vedere P6.4, na scosti
finché non viene
142
collegata una
scheda opzionale
5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

monitoraggio e parametri vacon • 37
P7.7
5.9 Treno impulsi/Encoder (Pannello di controllo: Menu PAR -> P7)
Codice Parametro AI1 AI1 Unità
Frequenza
P7.1
impulsi min.
Frequenza
P7.2
impulsi max
Rif. freq a freq.
P7.3
impulsi min.
Rif. freq. a freq.
P7.4
impulsi max.
Direzione
P7.5
encoder
Impulsi/giri
P7.6
encoder
Config DI5
and DI6
Tabella 12. Treno impulsi/Encoder
0 10000 Hz 0 1229
0,0 10000 Hz 10000 1230
0,00
P3.2 Hz 0,00 1231
0,00
P3.2 Hz
02 01233
1 65535 ppr 256 629
0
2 0 1165
Predefi-
nito
50,00/
60,00
ID Nota
Frequenza impulsi
da interpretare
come segnale 0%.
Frequenza impulsi
da interpretare
come segnale 100%.
Frequenza corris-
pondente a 0% se
usata come frequenza
di riferimento.
Frequenza corris-
pondente a 100% se
1232
usata come frequenza
di riferimento.
0 = Disabilita
1 = Abilita/Normale
2 = Abilita/Inversione
Numero impulsi
encoder per giro.
Usato esclusivamente
per scalare il valore di
monitoraggio dei giri/
min. dell'encoder.
0 = DI5 e DI6 sono
per l'ingresso digitale
normale
1 = DI6 è per il treno
di impulsi
2 = DI5 e DI6 sono
per la modalità di
frequenza encoder
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

38 • vacon monitoraggio e parametri
5.10 Uscite digitali (Pannello di controllo: Menu PAR -> P8)
Codice Parametro AI1 AI1 Unità
Selezione
P8.1
segnale RO1
Selezione
P8.2
segnale RO2
Selezione
P8.3
segnale DO1
P8.4 Inversione RO2 0 1 0 1588
P8.5 Ritardo RO2 ON 0,00 320,00 s 0,00 460 0,00 = Nessun ritardo
P8.6 Ritardo RO2 OFF 0,00 320,00 s 0,00 461 0,00 = Nessun ritardo
P8.7 Inversione RO1 0 1 0 1587
P8.8 Ritardo RO1 ON 0,00 320,00 s 0,00 458 0,00 = Nessun ritardo
P8.9 Ritardo RO1 OFF 0,00 320,00 s 0,00 459 0,00 = Nessun ritardo
Selezione
P8.10
segnale DOE1
Tabella 13. Uscite digitali
0 Var ie 2 313
0 Var ie 3 314 Vede re 8.1
0 Var ie 1 312 Vede re 8.1
0 Var ie 0 317
Prede-
finito
ID Selezioni
0 = Non in uso
1 = Pronto
2 = Marcia
3 = Guasto
4 = Inversione Guasto
5 = Avvertenza
6 = Inversione
7 = Alla velocità
8 = Regolatore motore attivo
9 = Word di controllo FB13
10 =
Word di c ontrollo F B.B14
11 =
Word di c ontrollo F B.B15
12 = Superv. frequenza uscita
13 = Superv. coppia uscita
14 = Superv. temperatura
unità
15 = Superv. ingresso
analogico
16 = Velocità prefissata attiva
17 = Ctrl freno esterno
18 = Controllo da pannello
di comando attivo
19 = Controllo da pannello
attivo
20 = Supervisione
temperatura
0 = Nessuna inversione
1 = Inversione
0 = Nessuna inversione
1 = Inversione
Vedere 8.1, nascosti finché
non viene collegata una
scheda opzionale
5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

monitoraggio e parametri vacon • 39
Codice Parametro AI1 AI1 Unità
Selezione
P8.11
segnale DOE2
Selezione
P8.12
segnale DOE3
Selezione
P8.13
segnale DOE4
Selezione
P8.14
segnale DOE5
Selezione
P8.15
segnale DOE6
Tabella 13. Uscite digitali
0 Var ie 0 318
0 Var ie 0 1386
0 Var ie 0 1390
0 Var ie 0 1391
0 Var ie 0 139
Prede-
ID Selezioni
finito
Vedere 8.1, nascosti finché
non viene collegata una
scheda opzionale
Vedere 8.1, nascosti finché
non viene collegata una
scheda opzionale
Vedere 8.1, nascosti finché
non viene collegata una
scheda opzionale
Vedere 8.1, nascosti finché
non viene collegata una
scheda opzionale
Vedere 8.1, nascosti finché
non viene collegata una
scheda opzionale
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

40 • vacon monitoraggio e parametri
5.11 Uscite analogiche (Pannello di controllo: Menu PAR -> P9)
Codice Paramet ro AI1 AI1 Unità
Selezione
segnale uscita
P9.1
analogica
Minimo uscita
P9.2
analogica
Scalatura uscita
P9.3
analogica
Tempo filtro
P9.4
uscita analogica
Selezione
segnale E1
P9.5
uscita analogica
Minimo uscita
P9.6
analogica E1
Tabella 14. Uscite analogiche
0 14 1 307
0 1 0 31 0
0,0 1000,0 % 100,0 311 Fattore di scala
0,00
10,00 s 0,10 308 Tempo filtro
0
14 0 472
0
1 0 475
Prede-
finito
ID Selezioni
0 = Non in uso
1 = Freq uscita (0–f
2 = Corrente di uscita
(0–I
)
nMotor
3
= Coppia motore (0–T
4 = Uscita PID (0–100%)
5 = Rifer. freq. (0–f
6 = Velocità motore (0–n
7 = Potenza motore
(0–P
)
nMotor
8 = Tensione motore
(0–U
)
nMotor
9 = Tensione DC link
(0–1000 V)
10 = Ingresso dati
di
processo 1
(0–10000)
11 = Ingresso dati
di
processo 2
(0–10000)
12 = Ingresso dati
di
processo 3
(0–10000)
13 = Ingresso dati
di
processo 4
(0–10000)
14 = Test 100%
0 = 0 V/0 mA
1 = 2 V/4 mA
Vedere P9.1, nascost i
finché
non viene collegata
una scheda opzionale
Vedere P9.2, nascost i
finché
non viene collegata
una scheda opzionale
max
max
)
nMotor
)
max
)
)
5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

monitoraggio e parametri vacon • 41
Codice Parametro AI1 AI1 Unità
Scalatura uscita
P9.7
analogica E1
Tem po f ilt ro
uscita analogica
P9.8
Selezione
segnale E2
P9.9
uscita analogica
Minimo uscita
P9.10
analogica E2
Scalatura uscita
P9.11
analogica E2
Tem po f ilt ro
uscita analogica
P9.12
Tabella 14. Uscite analogiche
0,0 1000,0
0,00 10,00
E1
0
14 0 479
0
1 0 482
0,0 1000,0
0,00 10,00
E2
Prede-
ID Selezioni
finito
100,0
%
0,10
s
100,0
%
0,10
s
Vede re P9.3, nascosti
finché
476
non viene collegata
una scheda opzionale
Vede re P9.4, nascosti
finché
473
non viene collegata
una scheda opzionale
Vede re P9.1, nascosti
finché
non viene collegata
una scheda opzionale
Vede re P9.2, nascosti
finché
non viene collegata
una scheda opzionale
Vede re P9.3, nascosti
finché
483
non viene collegata
una scheda opzionale
Vede re P9.4, nascosti
finché
480
non viene collegata
una scheda opzionale
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

42 • vacon monitoraggio e parametri
5.12 Mappatura dati del bus di campo (Pannello di controllo: Menu PAR -> P10)
Codice Parametro AI1 AI1 Unità
Selezione Uscita
P10.1
P10.2
P10.3
P10.4
P10.5
P10.6
P10.7
P10.8
P10.9
Tabella 15. Mappatura dati del bus di campo
dati FB 1
Selezione Uscita
dati FB 2
Selezione Uscita
dati FB 3
Selezione Uscita
dati FB 4
Selezione Uscita
dati FB 5
Selezione Uscita
dati FB 6
Selezione Uscita
dati FB 7
Selezione Uscita
dati FB 8
Selezione
Ingresso dati
CW aus.
0 Varie 0 852
0
Varie 1 853
0
Varie 2 854
0
Varie 4 855
0
Varie 5 856
0
Varie 3 857
0
Varie 6 858
0
Varie 7 859
0
5 0 1167
Prede-
finito
ID Nota
0 = Frequenza
riferimento
1 = Uscita riferimento
2 = Velocità motore
3 = Corrente motore
4 = Tensione motore
5 = Coppia motore
6 = Potenza motore
7 = Tensione DC link
8 = Codice guasto attivo
9 = AI1 analogico
10 = AI2 analogico
11 = Stato ingresso
digitale
12 = Valore feed back PID
13 = Valore impostato PID
14 = Ingresso treno
impulsi/encoder(%)
15 = Treno impulsi/
encoder()
16 = AIE1
Variabile mappata su PD2
Variabile mappata su PD3
Variabile mappata su PD4
Variabile mappata su PD5
Variabile mappata su PD6
Variabile mappata su PD7
Variabile mappata su PD8
PDI per CW aus.
0 = Non usato
1 = PDI1
2 = PDI2
3 = PDI3
4 = PDI4
5 = PDI5
5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

monitoraggio e parametri vacon • 43
5.13 Frequenze proibite (Pannello di controllo: Menu PAR -> P11)
Codice Parametro AI1 AI1 Unità
Freque nza proibi ta –
P11.1
Limite inf. gamma 1
Freque nza proibi ta –
P11.2
Limite sup. gamma 1
Freque nza proibi ta –
P11.3
Limite inf. gamma 2
Freque nza proibi ta –
P11.4
Limite sup. gamma 2
Tabella 16. Frequenze proibite
0,00 P3.2 Hz 0,00 509
0,00 P3.2 Hz 0,00 510
0,00 P3.2 Hz 0,00 511
0,00 P3.2 Hz 0,00 512
5.14 Limite supervisioni (Pannello di controllo: Menu PAR -> P12)
Codice Parametro AI1 AI1 Unità
Funzione
P12.1
supervisione
freq. uscita
P12.2
P12.3
P12.4
P12.5
P12.6
P12.7
P12.8
Tabella 17. Limite supervisioni
Limite
supervisione
freq. uscita
Funzione
supervisione
coppia
Limite
supervisione
coppia
Supervisione
temperatura
unità
Limite
supervisione
temperatura
unità
Segnale
supervisione
ingresso
analogico
Livello superv
AI ON
02 0315
0,00 P3.2 Hz 0,00 316
02 0348
0,0 300,0 % 0,0 349
02 0354
-10 100
0Varie 0 356
0,00 100,00 % 80,00 357 Soglia superv AI ON
Prede-
ID Nota
finito
Prede-
finito
40 355
°C
Limite inferiore
0,00 = Non usato
Limite superiore
0,00 = Non usato
Limite inferiore
0,00 = Non usato
Limite superiore
0,00 = Non usato
ID Nota
0 = Non usato
1 = Limite inferiore
2 = Limite superiore
Soglia supervisione
frequenza uscita
0 = Non usato
1 = Limite inferiore
2 = Limite superiore
Soglia supervisione
coppia
0 = Non usato
1 = Limite inferiore
2 = Limite superiore
Soglia supervisione
temperatura unità
0 = AI1
1 = AI2
2 = AIE1
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

44 • vacon monitoraggio e parametri
Codice Parametro AI1 AI1 Unità
Livello superv
P12.9
P12.10
P12.11
P12.12
Tabella 17. Limite supervisioni
AI OFF
Ingresso
supervisione
temperatura
Funzione
supervisione
temperatura
Limite
supervisione
temperatura
0,00 100,00 % 40,00 358 Soglia superv AI OFF
1 7 1 1431
0 2 2 1432
-50,0/
200,0/
223,2
473,2
Prede-
finito
80,0 1433
ID Nota
Selezione con codifica
binaria dei segnali
da usare per la
supervisione della
temperatura
B0 = Ingresso
temperatura 1
B1 = Ingresso
temperatura 2
B2 = Ingresso
temperatura 3
NOTA! Nascosti fino
a quando non viene
collegata una scheda
opzionale
Vedere 12.1, nascosti
finché non viene collegata
una scheda opzionale
Soglia supervisione
temperatura, nascosta
inché non viene collegata
f
una scheda opzionale
5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

monitoraggio e parametri vacon • 45
P13.2
P13.3
P13.4
P13.5
P13.6
P13.7
P13.8
P13.9
P13.10
P13.11
5.15 Protezioni (Pannello di controllo: Menu PAR -> P13)
Codice Parametro AI1 AI1 Unità
Errore basso
P13.1
livello ingresso
analogico
Guasto da
sottotensione
Guasto terra
Guasto fase
in uscita
Protezione
da stallo
Protezione da
sotto carico
Protezione
termica del
motore
Mtp:Tempera-
tura ambiente
Mtp:Raffredda-
mento a velocità
zero
Mtp:Costante
temporale
protezione
termica
Corrente di
stallo
Tabella 18. Protezioni
04 1700
12 2727
0
32703
0
3 2 702 Vedere 13.3
0
3 0 709 Vedere 13.3
0
3 0 713 Vedere 13.3
0
3 2 704 Vedere 13.3
-20
100
0,0
150,0 % 40,0 706
1
200 min Varie 707
2,0 x
0,00
I
Nunit
Prede-
ID Nota
finito
40 705 Temperatura ambiente
°C
I
A
Nunit
0 = Nessuna azione
1 = Allarme
2 = Allarme, frequenza
allarme preimpostata
3 = Guasto:
Funzi one arrest o
4 = Guasto: Inerzia
1 = Nessuna risposta
(nessun guasto
generato ma l'inverter
interrompe ancora
la modulazione)
2 = Guato:Inerzia
0 = Nessuna azione
1 = Allarme
2 = Guasto:
Funzi one arrest o
3 = Guasto: Inerzia
Raffreddamento come
% a velocità 0
Costante temporale
protezione termica
motore
Perché si verifichi
una fase di stallo,
710
la corrente deve aver
superato questo limite
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

46 • vacon monitoraggio e parametri
P13.12
P13.13
P13.14
P13.15
P13.16
P13.18
Codice Parametro AI1 AI1 Unità
Tem po d i sta llo
Frequenza
di stallo
UL:Carico al
punto di
indebolimento
campo
UL:Carico
freq. zero
UL:Tempo
limite
Ritardo errore
basso livello
P13.17
P13.19
P13.20
P13.21
P13.22 Guasto termist. 0 3 2 732
Tabella 18. Protezioni
ingresso
analogico
Guasto esterno
Guasto bus
di campo
Frequenza
allarme
prefissata
Blocco modifica
parametri
0,00
300,00 s 15,00 711 Tempo di stallo limitato
0,10
320,00 Hz 25,00 712 Frequenza min. di stallo
10,0
150,0 % 50,0 714
5,0
150,0 % 10,0 715 Coppia minima a f0
1,0
300,0 s 20,0 716
0,0
10,0 s 0,5 1430
0
3 2 701
0 4 3 733 Vedere 13.1
P3.1 P3.2 Hz 25,00 183
0 1 0 819
Prede-
finito
ID Nota
Coppia minima al punto
di indebolimento campo
Questo è il tempo
massimo consentito per
la persistenza di uno
stato di sottocarico
Tem po di rita rdo
per guasto ingresso
analogico basso
0 = Nessuna azione
1 = Allarme
2 = Guasto:
Funzione arresto
3 = Guasto: Inerzia
Frequenza usata
quando la rispsota
di guasto è Allarme +
Frequenza predefinita
0 = Modifica abilitata
1 = Modifica disabilitata
0 = Nessuna azione
1 = Allarme
2 = Guasto:
Funzione arresto
3 = Guasto: Inerzia
Nascosti fino a quando
non viene collegata una
scheda opzionale
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
5

monitoraggio e parametri vacon • 47
P13.28
P13.29
Codice Parametro AI1 AI1 Unità
Supervisione
conflitti marcia
P13.23
P13.24
P13.25
P13.26
P13.27
Tabella 18. Protezioni
AVANTI /
INDIETRO
Erro re
temperatu ra
Errore ingre sso
temperatu ra
Modal ità errore
temperatu ra
Limit e errore
temperatu ra
Guasto fase
in ingresso*
Temperatura
motore
modalità
memoria*
SI NOTI
* Questi parametri sono disponibili solo in SW FWP00001V026 alimentazione incluso
in FW01070V010 o versione successiva.
0 3 1 1463 Vedere P13.3
03 0740
17 1739
02 2743
-50,0/
200,0/
223,2
473,2
03 3730
02 2
Prede-
finito
100,0 742
ID Nota
Vedere P13.3, nascosti
finché non viene collegata
una scheda OPTBH
Selezione con codifica
binaria dei segnali da
usare per attivare la
condizione di allarme
e guasto
B0 = Ingresso
temperatu ra 1
B1 = Ingresso
temperatu ra 2
B2 = Ingresso
temperatu ra 3
SI NOTI Nascosti finché
non viene collegata
una scheda OPTBH
0 = Non in uso
1 = Limite inferiore
2 = Limite superiore
Soglia errore temperatura, nascosta
non viene collegata
scheda OPTBH
Come parametro P13.3
0 =
Disabilitato
15521
1 =
Modalità costante
2 =
Modalità ultimo valore
finché
SI NOTI Questi parametri compaiono se P17.2 = 0.
una
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

48 • vacon monitoraggio e parametri
P14.1
P14.2
P14.3
P14.4
P14.5
5.16 Parametri reset automatico guasto
(pannello
di controllo: Menu PA R -> P14)
Codice Parametro AI1 AI1 Unità
Reset automatico 0 1 0 731
Tempo di attesa 0,10 10,00 s 0,50 717
Tempo tentativi 0,00 60,00 s 30,00 718
Numero di
tentativi
Funzione riavvio 0 2 2 719
Tabella 19. Parametri autoreset guasto
1 10 3 759 Num. max. tentativi
SI NOTI Questi parametri compaiono se P17.2 = 0.
5.17 Parametri controllo PID (Pannello di controllo: Menu PAR -> P15)
Codice Parametro AI1 AI1 Unità
Selezione
P15.1
origine valore
impostato
Valore
P15.2
impostato
Tabella 20. Parametri controllo PID
fisso
0Varie 0 332
0,0 100,0 % 50,0 167 Valore impostato fisso
Prede-
finito
Prede-
finito
ID Nota
0 = Disabilitato
1 = Abilita
Tem po d i at tes a
dopo il guasto
Tempo massimo
per i tentativi
0 = Rampa
1 = Aggancio in velocità
2 = Da funzione Marcia
ID Nota
0 = % valore impo stato fisso
1 = AI1
2 = AI2
3 = ProcessDataIn1
(0–100%)
4 = ProcessDataIn2
(0–100%)
5 = ProcessDataIn3
(0–100%)
6 = ProcessDataIn4
(0–100%)
7 = Treno impulsi/encoder
8 = AIE1
9 = Ingresso temperatura 1
10
= Ingresso temperatura 2
11
= Ingresso temperatura 3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
5

monitoraggio e parametri vacon • 49
Codice Parametro AI1 AI1 Unità
Valore
P15.3
impostato
fisso 2
Selezione
P15.4
origine
feedback
Valore
P15.5
feedback
minimo
Valore
P15.6
feedback
massimo
P15.7 Guadagno P 0,0 1000,0 % 100,0 118 Guadagno proporzionale
P15.8 Tempo I 0,00 320,00 s 10,00 119 Tempo integrativo
P15.9 Tempo D 0,00 10,00 s 0,00 1 32 Tempo derivativo
Inversione
P15.10
valore di
errore
Frequenza
P15.11
minima
Stand-by
Tabella 20. Parametri controllo PID
0,0 100,0 % 50,0 168
0Varie 1334
0,0 50,0 % 0,0 336 Valore al segnale minimo
10,0 300,0 % 100,0 337 Valore al segnale massimo
01 0340
0,00 P3.2 Hz 25,00 1016
Prede-
finito
ID Nota
Valore impostato fisso
alternativo, selezionabile
con DI
0 = AI1
1 = AI2
2 = ProcessDataIn1
(0–100%)
3 = ProcessDataIn2
(0–100%)
4 = ProcessDataIn3
(0–100%)
5 = ProcessDataIn4
(0–100%)
6 = AI2–AI1
7 = Treno impulsi/encoder
8 = AIE1
9 = Ingresso temperatura 1
10 = Ingresso temperatura 2
11 = Ingresso temperatura 3
0 = Diretto (Feedback
< Valore impostato
->Incremento uscita PID)
1 = Inversione (Feedback >
Valore impostato
->Decremento uscita PID)
L'inverter va in Stand- by
quando la frequenza di
uscita rimane sotto questo
limite per un tempo
maggiore di quello definito
dal parametro Ritardo
Stand-by.
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

50 • vacon monitoraggio e parametri
P15.16
P15.17
Codice Parametro AI1 AI1 Unità
Ritardo
P15.12
standby
P15.13 Errore riavvio 0,0 100,0 % 5,0 1018 Soglia uscita da Stand-by
Ottimizzazione
P15.14
P15.15
P15.18
P15.19
P15.20
P15.21
Tabella 20. Parametri controllo PID
valore
impostato
Stand-by
Tem po
ottimizzazione
valore
impostato
Perdita
massima
Stand-by
Tem po ver if ica
perdita
Stand-by
Selezione
origine unità
processo
Cifre decimali
unità processo
Valore minimo
unità processo
Valore
massimo unità
processo
0 3600 s 30 1017 Ritardo per Stand-by
0,0 50,0 % 10,0 1071 Riferito al valore impostato
0 60 s 10 1072 Tempo di boost dopo P15.12
0,0 50,0 % 5,0 1509
1 300 s 30 1510 Tempo dopo il boost P15.15
0 6 0 1513
0 3 1 1035 Decimali sul display
0,0 P15.21 0,0 1033 Valore min. processo
P15.20 3200,0 100,0 1034 Valore max. processo
Prede-
finito
ID Nota
Riferito al valore di
feedback dopo il boost
0 = Valore feedback PID
1 = Frequenza di uscita
2 = Velocità motore
3 = Coppia motore
4 = Potenza motore
5 = Corrente motore
6 = Treno impulsi/Encoder
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
5

monitoraggio e parametri vacon • 51
Codice Parametro AI1 AI1 Unità
Valore m in.
P15.22
temperatu ra
Valore max.
P15.23
temperatu ra
Tabella 20. Parametri controllo PID
-50,0/
P15.23 0,0 1706
223,2
200,0/
P15.22
473,2
Prede-
finito
100,0 1707
ID Nota
SI NOTI Questi parametri compaiono se P17.2 = 0.
5.18 Motore c (pannello di controllo: Menu PAR -> P16)
Codice Parametro AI1 AI1 Unità
Funzi one preri-
scaldamento
P16.1
P16.2
Tabella 21. Preriscaldamento motore
motore
Corrente preri-
scaldamento
motore
0 2 0 1225
0,5 x
0
I
Nunit
Prede-
finito
A 0 1227
Valore minimo temperatura
per PID e scala di
riferimento di frequenza,
nascosto finché non viene
collegata una scheda OPTBH
Valore massimo temperatura
per PID e scala di
riferimento di frequenza,
nascosto finché non viene
collegata una scheda OPTBH
ID Nota
0 = Non in uso
1 = Sempre in stato
di arresto
2 = Controllato tramite
ingresso digitale
La corrente CC per il
preriscaldamento di
motore e inverter in stato
di arresto. Attivo in stato
di arresto o tramite
ingresso digitale durante
lo stato di arresto.
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

52 • vacon monitoraggio e parametri
P17.1
5.19 Menu di facile uso (Pannello di controllo: Menu PAR -> P17)
Codice Parametro AI1 AI1 Unità
Tipo di
applicazione
Nascondi
P17.2
parametro
Unità di
P17.3
temperatura
Password
di accesso
P17.4
all'applica-
zione*
Tabella 22. Parametri menu di facile uso
SI NOTI
* Questi parametri sono disponibili solo in SW FWP00001V026 alimentazione i ncluso
in FW01070V010 o versione successiva.
03 0540
01 1115
01 01197
0 30000 0 2362
Prede-
finito
ID Nota
0 = Base
1 = Pompa
2 = Drive ventola
3 = Coppia superiore
SI NOTI Visibili solo quando
è attiva la procedura guidata
di avvio.
0 = Tutti i parametri visibili
1 = Visibili solo i parametri
di impostazione rapida
0 = Celsius
1 = Kelvin
NOTA! Nascosti finché non
viene collegata una scheda
OPTBH
Immettere la password
corretta per rivedere il
gruppo di parametri 18.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205
5

monitoraggio e parametri vacon • 53
5.20 Parametri di sistema
Codice Parametro AI1 AI1
Informazioni software (MENU SYS -> V1)
V1.1 ID SW API 2314
V1.2 Versione SW API 835
V1.3 ID SW aliment. 2315
V1.4 Vers. SW aliment. 834
V1.5 ID applicazione 837
V1.6 Revisione applicazione 838
V1.7 Carico sistema 839
Quando non sono installate schede opzionali bus di campo o schede OPT-BH,
V2.1 Stato comunicazione 808
P2.2 Protocollo bus di campo 0 1 0 809
P2.3 Indirizzo slave 1 255 1 810
P2.4 Veloc. baud 0 8 5 811
Tabella 23. Parametri di sistema
i parametri di comunicazione sono i seguenti
Prede-
finito
ID Nota
Stato della
comunicazione
Modbus.
Formato: xx.yyy
dove xx = 0–64
(Numero di messaggi
di errore) yyy = 0–999
(Numero di messaggi
buoni)
0 = Non in uso
1 = Modbus in uso
Impostazione
predefinita:
Nessuna parità,
1 bit di arresto
0 = 300
1 = 600
2 = 1200
3 = 2400
4 = 4800
5 = 9600
6 = 19200
7 = 38400
8 = 57600
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

54 • vacon monitoraggio e parametri
Codice Parametro AI1 AI1
P2.6 Tipo parità 0 2 0 813
P2.7 Timeout comunicazione 0 255 10 814
P2.8
Quando è installata la scheda Canopen E6, i parametri di comunicazione sono i seg uenti
V2.1
P2.2
P2.3 ID nodo Canopen 1 127 1 14001
P2.4
Tabella 23. Parametri di sistema
Reset stato
comunicazione
Stato comunicazione
Canopen
Modalità operativa
Canopen
Veloc ità tra smissi one
Canopen
Prede-
finito
01 0 815
1 2 1 14003
3 8 6 14002
ID Nota
14004
0 = Nessuno
1 = Pari
2 = Dispari
Il bit di arresto
è 2 bit quando il
tipo di parità è
0 = Nessuno;
Il bit di arresto
è 1 bit quando il
tipo di parità è
1 = Pari o 2 = Dispari
0 = Non in uso
1 = 1 sec
2 = 2 sec, ecc
0 = Inizializzazione
4 = Arrestato
5 = Operativo
6 = Pre_operativo
7
= Reset applicazione
8 = Reset
comunicazione
9 = Sconosciuto
1 = Profilo inverter
2 = Bypass
3 = 50 kbaud
4 = 100 kbaud
5 = 125 kbaud
6 = 250 kbaud
7 = 500 kbaud
8 = 1000 kbaud
5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

monitoraggio e parametri vacon • 55
Codice Parametro AI1 AI1
Quando è installata la scheda DeviceNet E7, i parametri di comunicazione sono i seguenti
V2.1 Stato comunicazione 14014
P2.2 Tipo assieme uscite 20 111 21 14012 20, 21, 23, 25, 101, 111
P2.3 ID MAC 0 63 63 14010
P2.4 Veloc. baud 1 3 1 14011
P2.5 Tipo assi eme ingressi 70 117 71 14013 70, 71, 73, 75, 107, 117
Quando è install ata la scheda ProfidBus E3/E5,
i parametri di comunicazione sono i seguenti
V2.1 Stato comunicazione 14022
V2.2 Stato protoc. FB 14023
V2.3 Protocollo attivo 14024
Veloci tà trasmi ssione
V2.4
V2.5 Tipo telegramma 14027
P2.6 Mod. operativa 1 3 1 14021
P2.7 Indirizzo slave 2 126 126 14020
Tabella 23. Parametri di sistema
attiva
Prede-
finito
ID Nota
Stato della
comunicazione
Modbus. Formato:
XXXX.Y, X = Contatore
msg DeviceNet
Y = Stato DeviceNet
0 = Non presente
o alimentazione
bus assente
1 = Stato di
configurazione
2 = Stabilito
3 = Timeout
1 = 125 kbit/s
2 = 250 kbit/s
3 = 500 kbit/s
14025
1 = Profidrive
2 = Bypass
3 = Eco
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

56 • vacon monitoraggio e parametri
Codice Parametro AI1 AI1
Quando è installata la scheda OPT-BH, i parametri di comunicazione sono i seguenti
P2.1 Tipo di sensore 1 0 6 0 14072
P2.2 Tipo di sensore 2 0 6 0 14073
P2.3 Tipo di sensore 3 0 6 0 14074
Se è installata la scheda OPT-EC, i parametri di comunicazione sono i seguen ti
V2.1 numero versione 0
V2.2 Stato scheda 0
Altre informazioni
V3.1 Contatore MWh 827 Milioni di Watt Ora
V3.2 Giorni di accensione 828
V3.3 Ore di accensione 829
Contatore avviamenti:
V3.4
V3.5
V3.6 Contatore guasti 842
V3.7
Tabella 23. Parametri di sistema
Giorni
Contatore avviamenti:
Ore
Monitor stato set di
parametri del pannello
Prede-
finito
ID Nota
0 = Nessun sensore
1 = PT100
2 = PT1000
3 = Ni1000
4 = KTY84
5 = 2 x PT100
6 = 3 x PT100
0 = Nessun sensore
1 = PT100
2 = PT1000
3 = Ni1000
4 = KTY84
5 = 2 x PT100
6 = 3 x PT100
0 = Nessun sensore
1 = PT100
2 = PT1000
3 = Ni1000
4 = KTY84
5 = 2 x PT100
6 = 3 x PT100
Numero versione del
software della scheda
Stato dell'applicazione
della scheda OPTEC
840
841
Nascosto se collegato
al PC.
5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

monitoraggio e parametri vacon • 57
P4.2
P4.5
P4.6
Codice Parametro AI1 AI1
Ripristina val. fabbrica 0 1 0 831
P4.3 Password 0000 9999 0000 832
Tempo retrolluminazione
P4.4
pannello e display LCD
Salvataggio set di
parametri nel pannello
Ripristino set di
parametri dal pannello
F5.x Menu Guasti attivo
F6.x Menu Cronologia guasti
Tabella 23. Parametri di sistema
Prede-
finito
099 5 833
01 0
01 0
ID Nota
1 = Ripristina i valori
preimpostati in
fabbrica per tutti
i parametri
Nascosto se collegato
al PC.
Nascosto se collegato
al PC.
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
5

58 • vacon monitoraggio guasti
6. MONITORAGGIO GUASTI
Codice
guasto
1
2
3
8
9
11
13
14
15
16
17
22
25
Tabella 24. Codici dei guasti. Vedere il Manuale utente per le descrizioni
dettagliate dei guasti.
Nome guasto
Sovracorrente
Sovratensione
Guasto terra
Guasto di sistema
Sottotensione
Guasto fase in uscita
Temperatura insufficiente
tipo di inverter
Sovratemperatura
tipo di inverter
Stallo motore
Surriscaldamento motore
Sottocarico motore
Erro re di che cksum
della EEPROM
Guasto watchdog
microprocessore
Codice
guasto
27
29
34
35
41
50
51
52
53
54
55
57
111
Nome guasto
Protezione da corrente
indotta
Guasto termist.
Comunicazione bus
interno
Guasto applicazione
Sovratemperatura IGBT
Selezione ingresso
analogico 20%–100%
(escursione segnale
selezionata da 4 a 20 mA
o da 2 a 10 V)
Guasto esterno
Guasto del pannello
Guasto bus di campo
Guasto slot
Guasto per marcia errata
(conflitto FWD/REV)
Errore di iden tificazione
Errore te mperatura
6
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

dati generali vacon • 59
7. DATI GENERALI
Larghezza
(mm)
max. 1 min/10 min
N
Profondità (mm) Peso (kg)
alla temperatura ambien te massima
N
Dimen-
sioni e peso
Rete di
distribuzione
Collegamento del
motore
Collegamento di
controllo
Dimensioni Altezza (mm)
MI1 157 6,2 6 6 2,6 98 3,9 0,5 1,1
MI2 195 7,7 9 0 3,5 102 4 0,7 1,5
MI3 262 10,3 100 3,9 109 4,3 1 2,2
MI4 370 14,6 165 6,5 165 6,5 8 17,6
MI5 414 16,3 165 6,5 202 8 10 22
Reti
Corrente di corto
circuito
Tensione di uscita
Corrente di uscita
Ingresso digitale
Ingresso analogico
in tensione
Ingresso analogico
in corrente
Uscita analogica
Uscita digitale Collettore aperto, carico max. 35 V/50 mA (isolato da massa)
Uscita relè Carico di commutazione: 250 V c.a./3 A, 24 V c.c. 3 A
Tensione ausiliaria ± 20%, carico max. 50 mA
mm pollici mm pollici mm pollici kg lb.
Le unità Vacon 20 con combinazioni di filtri diverse da EMC4 non
possono essere utilizzate sulle reti delta power (corner grounded)
La corrente massima di corto circuito deve essere < 50 kA.
Per la taglia MI4 senza reattanza CC, la corrente massima di corto
circuito deve essere < 2,3 kA, per l a taglia MI5 senza reattanza CC,
la corrente massima di corto circuito deve essere < 3,8 kA.
0–U
in
Corrente continuativa I
di +50 ºC (dipende dalle dimensioni dell'unità), sovraccarico di
1,5 x I
Positivo; Logica 1: 18–30 V, Logica 0: 0–5 V; Negativo, Logica 1:
0–10 V, Logica 0: 18–30 V; Ri = 10 KΩ (isola to da massa)
0–10 V, Ri = 250 KΩ
0(4)–20 mA, Ri ≤ 250Ω
0–10 V, RL ≥ 1 KΩ; 0(4)–20 mA, RL ≤ 500Ω,
selezionabile tramite microinterruttore
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
7

60 • vacon dati generali
-10°C (senza congelamento)–40/50°C (di pende dalla
taglia dell'unità): capacità di carico nominale I
Per le taglie MI1-3 la temperatura massima di installazione fianco
a fianco è sempre 40°C. Anche per l'opzione P21/Nema1 delle taglie
MI1-3 la temperatura massima è 40°C.
-40°C–70°C
Da 0 a 95% RH, non condensante, non corrosiva, niente perdite
d'acqua
100% capacità di carico (senza declassamento) fino a 1000 m. 1%
di declassamento ogni 100 m oltre 1000 m; max. 2000 m
IP20/IP21/Nema1 per MI1-3, IP21/Nema 1 per MI4-5
PD2
230 V: Conforme ai requisiti EMC categoria C2. Con filtro RFI interno.
Le taglie MI4 e 5 sono conformi alla categoria C2 con reattanze CC
e CM opzionali.
400 V: Conforme ai requisiti EMC categoria C2. Con filtro RFI
interno. Le taglie MI4 e 5 sono conformi alla categoria C2
con reattanze CC e CM opzionali.
Entrambi: Nessuna protezione contro le emissioni EMC
(Vacon livello N): Senza filtro RFI
Per EMC: EN61800-3,
Per la sicurezza: UL508C, EN61800-5
Per la sicurezza: CE, UL, cUL, KC
Per EMC: CE, KC
(vedere la targhetta dell'unità per il dettaglio delle approvazioni)
N
Condizioni
ambiente
EMC
Standard
Certificati
e dichiarazioni di conformità de l
produttore
Temperatura
ambiente di
funzionamento
Temperatura
di stoccaggio
Umidità relativa
Altitudine
Classe di
protezione
Grado di
inquinamento
Immunità Conforme agli standard EN50082-1, -2, EN61800-3
Emissioni (vedere
le descri zioni
dettagliate nel
Manuale utente di
Vacon 20 sul sito:
www.vacon.com)
7
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

dati generali vacon • 61
Dimensioni Fusibile (A)
Requisiti dei
cavi e fusibili
(Informazioni
dettagliate nel
Manuale utente
di Vacon 20 su:
www.vacon.com)
380–480 V, 3~
208–240 V, 3~
115 V, 1~
208–240, 1~
600 V
– Con i fusibili sopra menzionati l'inverter può essere collegato a un alimentatore
la cui corrente di corto circuito deve essere massimo 50 kA
– Usare cavi in grado di resistere a una temperatura di almeno +70°C.
– I fusibili fungono anche da protezione da sovraccarico per i cavi.
– Queste istruzioni valgono esclusivamente nei casi in cui un solo motore è connesso
all'inverter da un solo cavo.
– Per essere conforme allo standard EN61800-5-1, il conduttore di protezione
deve essere almeno da 10 mm2 Cu o 16 mm2 Al. In alternativa, si può utilizzare
un conduttore di protezione aggiuntivo avente almeno le stesse dimensioni
di quello originale.
MI1 6
MI2 10
MI3 20 3*2,5+2,5 1,5–6
20
25
40
MI4
(20 e 40
solo per
208–240 V, 3~)
MI5 40 3*10+10
MI2 20 2*2,5+2,5
MI3 32 2*6+6
MI1 10 2*1,5+1,5
MI2 20 2*2,5+2,5
MI3 32 2*6+6 1,5–6
MI3 6
MI3 10
MI3 20 3*2,5+2,5 1,5–6
Cavo di alimentazione Cu
3*1,5+1,5 1,5–4
3*6+6 1–10 Cu 1–10
3*1,5+1,5 1,5–4
Cavo min-max morsetto (mm2)
2
Alimenta-
)
zione
2,5–50
Cu/Al
Ter ra
2,5–35
1,5–4
Controllo
e relè
0,5–1,5
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
7

62 • vacon dati generali
Potenze nominali degli inverter Vacon 20
Tensione di alimentazione 208–240 V, 50/60 Hz, serie 1~
Capacità di carico nominale
Tipo di
inverter
Corrente
continuativa
100% I
0001 1,7 2,6 0,33 0,25 4,2 MI1 0,55
0002 2,4 3, 6 0,5 0,37 5,7 MI1 0,55
0003 2,8 4,2 0,75 0,55 6,6 MI1 0,55
0004 3,7 5, 6 1 0,75 8,3 MI2 0,7
0005 4,8 7,2 1,5 1,1 11,2 MI2 0,7
0007 7 10,5 2 1,5 14,1 MI2 0,7
0009* 9,6 14,4 3 2,2 22,1 MI3 0,99
Tabella 25. Potenze nominali di Vacon 20, 208–240 V
N
[ A ]
Corrente di
sovraccarico
150%
[A]
Potenza
del motore
P
[HP]P[KW]
La temperatura operativa massima di questo inverter è 40°C!
Tensione di alimentazione 208–240 V, 50/60 Hz, serie 3~
Capacità di carico nominale
Tipo di
inverter
Corrente
continuativa
100% I
0001 1,7 2,6 0,33 0,25 2,7 MI1 0,55
0002 2,4 3,6 0,5 0,37 3,5 MI1 0,55
0003 2,8 4,2 0,75 0,55 3,8 MI1 0,55
0004 3,7 5,6 1 0,75 4,3 MI2 0,7
0005 4,8 7,2 1,5 1,1 6,8 MI2 0,7
0007* 7 10,5 2 1,5 8,4 MI2 0,7
0011* 11 16,5 3 2,2 13,4 MI3 0,99
0012 12,5 18,8 4 3 14,2 MI4 9
0017 17,5 26,3 5 4 20,6 MI4 9
0025 25 37,5 7,5 5,5 30,3 MI4 9
0031 31 46,5 10 7,5 36,6 MI5 11
0038 38 57 15 11 44,6 MI5 11
Tabella 26. Potenze nominali di Vacon 20, 208–240 V, 3~
N
[ A ]
Corrente di
sovraccarico
150%
[A]
* La temperatura operativa massima di questo inverter è +40°C!
Potenza
del motore
P
[HP]P[KW]
Corrente
d'ingresso
nominale
[A]
Corrente
d'ingresso
nominale
[A]
Taglia
meccanica
Tag lia
meccanica
Peso
(kg)
Peso
(kg)
7
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

dati generali vacon • 63
Tensione alimentazione di rete 115 V, 50/60 Hz, serie 1~
Capacità di carico nominale
Tipo di
inverter
Corrente
continu ativa
100% I
0001 1,7 2,6 0,33 0,25 9,2 MI2 0,7
0002 2,4 3,6 0, 5 0,37 11,6 MI2 0,7
0003 2,8 4,2 0,75 0,55 12,4 MI2 0,7
0004 3,7 5,6 1 0,75 15 MI2 0,7
0005 4,8 7,2 1,5 1,1 16,5 MI3 0,99
Tabella 27. Potenze nominali di Vacon 20, 115 V, 1~
N
[ A ]
Corrente di
sovraccarico
150%
[A]
Potenza del
motore
P
[HP]P[KW]
Tensione di alimentazione 380–480 V, 50/60 Hz, serie 3~
Capacità di carico nominale
Tipo di
inverter
Corrente
continu ativa
100% I
0001 1,3 2 0,5 0,37 2,2 MI1 0,55
0002 1,9 2,9 0,75 0,55 2, 8 MI1 0,55
0003 2,4 3,6 1 0,75 3,2 MI1 0,55
0004 3,3 5 1,5 1,1 4 MI2 0,7
0005 4,3 6,5 2 1,5 5,6 MI2 0,7
0006 5,6 8,4 3 2,2 7,3 MI2 0,7
0008 7,6 11,4 4 3 9,6 MI3 0,99
0009 9 13,5 5 4 11,5 MI3 0,99
0012 12 18 7,5 5,5 14,9 MI3 0,99
0016 16 24 10 7,5 17,1 MI4 9
0023 23 34,5 15 11 25,5 MI4 9
0031 31 46 ,5 20 15 33 MI5 11
0038 38 57 25 18,5 41,7 MI5 11
Tabella 28. Potenze nominali di Vacon 20, 380–480 V
[A]
N
Corrente di
sovraccarico
150%
[A]
Potenza del
motore
P
[HP]P[ KW ]
Corrente
d'ingresso
corrente
[A]
Corrente
d'ingresso
nominale
[A]
Tag li a
meccanica
Taglia
meccanica
Peso
(kg)
Peso
(kg)
supporto 24 ore +358 (0)201 212 575 • E-mail: vacon@vacon.com
7

64 • vacon dati generali
Tensione alimentazione di rete 600 V, 50/60 Hz, serie 3~
Capacità di carico nominale
Tipo di
inverter
Corrente
continuativa
100% I
0002 1,7 2,6 1 0,75 2 MI3 0,99
0003 2,7 4,2 2 1,5 3, 6 MI3 0,99
0004 3,9 5,9 3 2,2 5 MI3 0,99
0006 6,1 9,2 5 4 7,6 MI3 0,99
0009 9 13,5 7,5 5,5 10,4 MI3 0,99
Tabella 29. Potenze nominali di Vacon 20, 600 V
N
[ A ]
Corrente di
sovraccarico
150% [A]
Potenza del
motore
P
[HP]P[KW]
Nota 1: Le correnti d'ingresso sono calcolate con un trasformatore di linea da 100 kVA.
Nota 2: Per il motore PM, selezionare la potenza nominale inverter in base alla potenza
motore e non alla corrente nominale.
Configurazione rapida Modbus
A: Selezionare il bus di campo come postazione di controllo:
P2.1 = 1 – Bus di campo
1
B: Impostare il protocollo Modbus RTU su “ON”: SYS da P2.2 a 1 – Modbus
A. Impostare la Control Word su “0” (2001)
B. Impostare la Control Word su “1” (2001)
C. Lo stato dell'inverter è MARCIA
D. Impostare il valore di riferimento su “5000” (50,00%) (2003)
2
E. La velocità effettiva è 5000 (25,00 Hz se FreqMin è 0,00 Hz e FreqMax è 50,00 Hz)
F. Impostare la Control Word su “0” (2001)
G. Lo stato dell'inverter è ARRESTO
Corrente
d'ingresso
corrente
[A]
Tag li a
meccanica
Peso
(kg)
7
Tel. +358 (0)201 2121 • Fax +358 (0)201 212205

È possibile trovare l'ufficio Vacon
di zona su Internet all'indirizzo:
www.vacon.com
Creazione manuale:
documentation@vacon.com
Vacon Plc.
Runsorintie 7
65380 Vaasa
Finlandia
Soggetto a variazioni senza preavviso
© 2013 Vacon Plc.
ID documento:
Rev. F1
 Loading...
Loading...