


vacon 100
®
ac drives
사용자 매뉴얼


vacon • 1
구성
document: DPD01654E
발행일: 11.25.2014
소프트웨어 패키지: FW0107V008.vcx
1. VACON 100 - 시작 ..................................................................................................... 3
1.1 시작마법사....................................................................................................................................................... 3
1.1.1 표준어플리케이션 마법사 ............................................................................................................... 5
1.1.2 Local / Remote 어플리케이션 마법사 ...................................................................................... 6
1.1.3 다단속 어플리케이션 마법사 ........................................................................................................ 7
1.1.4 PID 제어 어플리케이션 마법사 ................................................................................................... 8
1.1.5 Multi Purpose 어플리케이션 마법사 ..................................................................................... 11
1.1.6 모터 포텐셔미터 어플리케이션 마법사 ................................................................................ 12
1.2 멀티펌프 마법사 ........................................................................................................................................ 13
1.3 화재모드 마법사 ........................................................................................................................................ 15
2. 드라이브 키패드 ........................................................................................................ 16
2.1 버튼 ................................................................................................................................................................. 16
2.2 디스플레이.................................................................................................................................................... 16
2.3 키보드 내비게이션 ................................................................................................................................... 16
2.4 Vacon 그래픽 키패드 .............................................................................................................................. 18
2.4.1 그래픽 키보드 사용법 ................................................................................................................... 18
2.5 Vacon 텍스트 키패드 .............................................................................................................................. 26
2.5.1 키패드 화면 ....................................................................................................................................... 26
2.5.2 텍스트 키패드 사용법 ................................................................................................................... 27
2.6 메뉴 구성 ...................................................................................................................................................... 30
2.6.1 빠른 셋업 ............................................................................................................................................ 31
2.6.2 모니터 ................................................................................................................................................... 31
2.6.3 파라미터 .............................................................................................................................................. 32
2.6.4 진단 ........................................................................................................................................................ 32
2.6.5 I/O 및 하드웨어 .............................................................................................................................. 37
2.6.6 사용자설정 .......................................................................................................................................... 42
2.6.7 즐겨찾기 .............................................................................................................................................. 43
2.6.8 사용자 레벨 ....................................................................................................................................... 43
3. VACON 100 어플리케이션 ....................................................................................... 44
3.1 Vacon AC 드라이브의 특별 기능 ....................................................................................................... 44
3.2 빠른 셋업 파라미터 그룹 ..................................................................................................................... 45
3.2.1 표준 제어 어플리케이션 .............................................................................................................. 46
3.2.2 Local / Remote 제어 어플리케이션 ....................................................................................... 51
3.2.3 다단속 제어 어플리케이션 ......................................................................................................... 56
3.2.4 PID 제어 어플리케이션 ................................................................................................................ 61
3.2.5 Multi Purpose 제어 어플리케이션 .......................................................................................... 66
3.2.6 모터 포텐셔미터 제어 어플리케이션 .................................................................................... 72
3.3 모니터 그룹 ................................................................................................................................................. 77
3.3.1 멀티모니터 .......................................................................................................................................... 77
3.3.2 트렌드 곡선 ....................................................................................................................................... 77
3.3.3 베이직 ................................................................................................................................................... 79
3.4 I/O .................................................................................................................................................................... 80
3.3.5 온도 입력 ............................................................................................................................................ 80
3.3.7 타이머 기능 모니터링 ................................................................................................................... 83
3.3.8 PID 제어기 모니터링 ...................................................................................................................... 83
3.3.9 외부 PID-제어기 모니터링 ........................................................................................................... 84
3.3.10 멀티펌프 모니터링 ......................................................................................................................... 84
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com

2• vacon
3.4 추가 파라미터 정보 ............................................................................................................................... 153
3.5 폴트 추적 .................................................................................................................................................... 218
3.3.11 유지보수 카운터 .................................................................................................................... 84
3.3.12 필드버스 데이터 모니터링 ............................................................................................... 85
3.3.13 디지털 및 아날로그 입력의 프로그래밍 .................................................................... 86
3.3.14 그룹 3.1: 모터설정 ............................................................................................................... 93
3.3.15 그룹 3.2: 시작/정지 셋업 .................................................................................................. 97
3.3.16 그룹 3.3: 참조 ......................................................................................................................... 99
3.3.17 그룹 3.4: 램프 및 제동 설정 ......................................................................................... 107
3.3.18 그룹 3.5: I/O 구성 .............................................................................................................. 109
3.3.19 그룹 3.6: 필드버스 데이터 맵핑 .................................................................................. 116
3.3.20 그룹 3.7: 금지 주파수....................................................................................................... 117
3.3.21 그룹 3.8: 감시 감시 ........................................................................................................... 118
3.3.22 그룹 3.9: 보호 ....................................................................................................................... 119
3.3.23 그룹 3. 10: 자동 재설정 .................................................................................................. 125
3.3.24 그룹 3.11: 어플리케이션 설정 ...................................................................................... 126
3.3.25 그룹 3.12: 타이머기능 ...................................................................................................... 126
3.3.26 그룹 3.13: PID-제어기 1 .................................................................................................. 132
3.3.27 그룹 3.14: 외부 PID-제어기 ............................................................................................ 142
3.3.29 그룹 3.16: 유지보수 카운터 ........................................................................................... 147
3.3.30 그룹 3.17: 화재모드 ........................................................................................................... 147
3.3.31 그룹 3.18: 모터 예열 파라미터 .................................................................................... 149
3.3.32 그룹 3.20: 기계적 제동 .................................................................................................... 150
3.3.33 그룹 3.21: 펌프 제어 ......................................................................................................... 151
3.4.1 카운터 ..................................................................................................................................................... 212
3.5.1 폴트 상황 .......................................................................................................................................... 218
3.5.2 폴트 이력 .......................................................................................................................................... 218
3.5.3 폴트 코드 .......................................................................................................................................... 220
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
1. VACON 100 - 시작
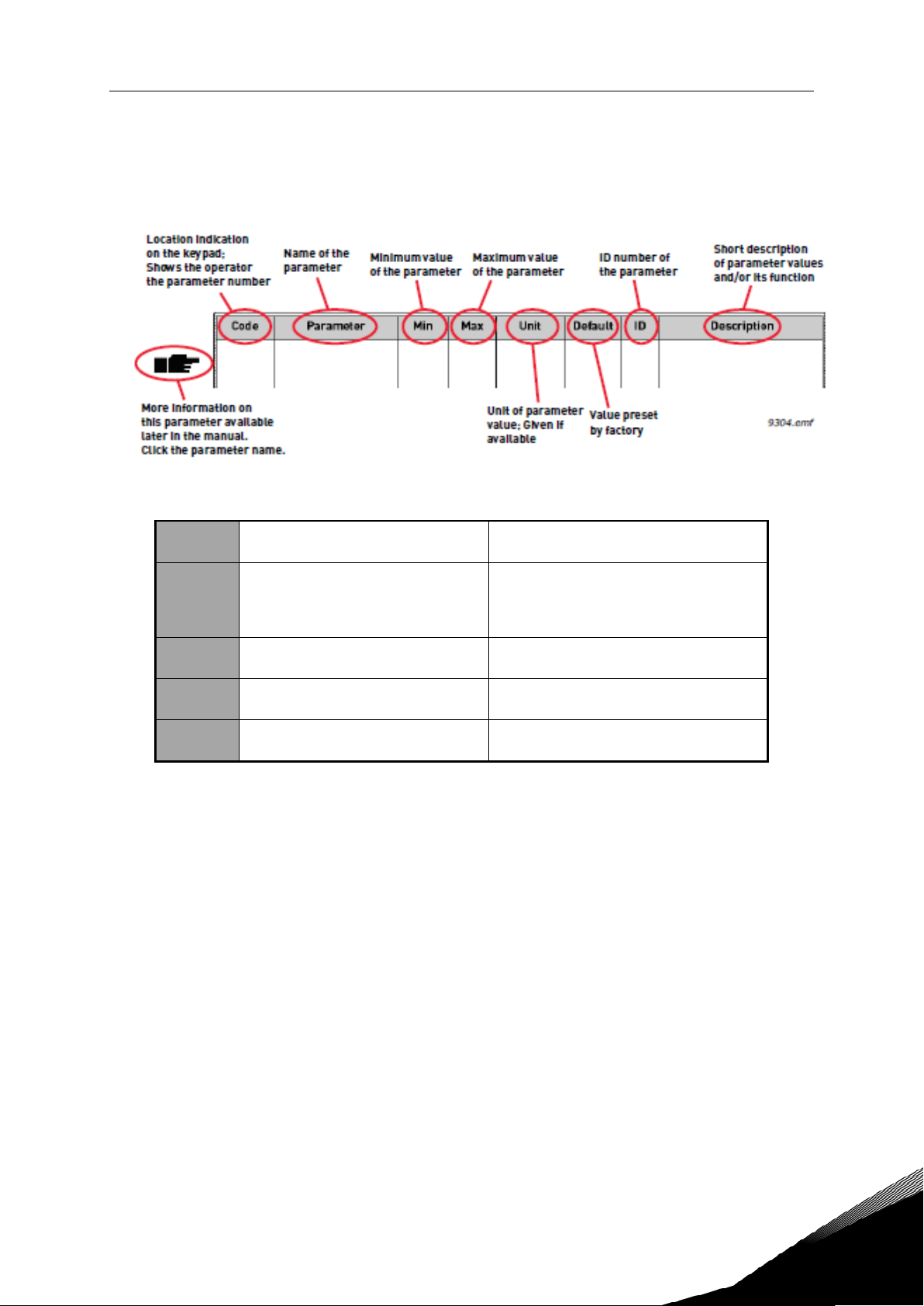
주의! 이 매뉴얼은 다량의 파라미터 표를 가지고 있습니다. 아래에 각 행의 이름과 설명을
찾을 수 있습니다.
1.1 시작마법사
vacon • 3
1
2
3
4
5
* 시작마법사에서 드라이브를 시작하기 위한 필요 정보를 얻을 수 있습니다.
언어 선택 (P6.1) 언어 패키지에 따라서 달라집니다.
러시아
데이라이트 저장* (P5.5.5)
시간* (P5.5.2) hh:mm:ss
년* (P5.5.4) yyyy
날짜* (P5.5.3) dd.mm.
미국
유럽
OFF
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
1
4• vacon
6
자동으로 파라미터 세팅을 하고 싶으시면,
7
8
9
10
런 스타트업 마법사
프리셋 어플리케이션 구성을
선택하십시오 (P1.2 어플리케이션 (ID
212))
P3.1.2.2 모터 타입을 선택하십시오
(명판값)
P3.1.1.1 모터 정격 전압을 위해 값을
입력하십시오 (명판값 )
P3.1.1.2 모터
정격 주파수값을 입력하십시오 (명판값).
예
아니오
‘Yes ’
를 선택하고 OK 버튼을 누르십시오.
표준
Local / Remote
다단속
PID 제어
Multi purpose
모터 포텐셔미터
주의 ! 보다 상세한 정보를 위해 챕터
3.4를 보십시오.
PM 모터
유도 모터
범위: 변동
범위: 8.00...320.00 Hz
11
12
13
시작모터가 Motor Type으로 선택되어 있을 경우 다음 질문이 나옵니다:PM 모터가
선택되어 있을 경우 파라미터P3.1.1.5, 모터 역률이 1.00으로 설정된 것이며, 파라미터는
바로 질문14로 이동합니다.
14
15
16
17
P3.1.1.3 모터 정격 속도 (명판값)을
입력하십시오.
P3.1.1.4 모터 정격 전류값을
입력하십시오.
P3.1.1.5 모터 역률값을 입력하십시오. 범위: 0.30-1.00
P3.3.1.1 최소 주파수 레퍼런스 값을
입력하십시오.
P3.3.1.2 최대
주파수 레퍼런스 값을 입력하십시오
P3.4.1.2 가속도 시간 1값을
입력하십시오.
P3.4.1.3 감속 시간 1값을 입력하십시오. 범위: 0.1...300.0 s
범위: 24...19200
범위: 변동
범위: 0.00...P3.3.1.2 Hz
범위:P3.3.1.1...320.00 Hz
범위: 0.1...300.0 s
1
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 5
18
특정 주제와 관련하여 마법사를 계속 진행하고 싶으시면,
누르십시오. 챕터1.1.1- 1.1.6에서 특정 어플리케이션과 관련된 설명을 찾으십시오.
이제 시작마법사가 끝났습니다.
시작마법사는 파라미터P6.5.1나 시작마법사의 파라미터B1.1.2를 활용하여 초기화 상태로
돌아갈 수 있습니다.
1.1.1 표준어플리케이션 마법사
어플리케이션 마법사는 사용자로 하여금 기본 파라미터와 관련된 어플리케이션을 시작하게
도와줍니다.
표준어플리케이션 마법사 파라미터P1.2 어플리케이션(ID 212)에서 키패드를 활용하여
‘표준’을 설정하면 작동됩니다.
주의 ! 어플리케이션 마법사가 시작마법사로 시작됐다면 , 마법사 11.질문으로 이동합니다.
런 어플리케이션 마법사
예
아니오
‘Yes’
를 선택하고 OK 버튼을
1
2
3
4
5
6
모터 타입을 선택하십시오 (P3.1.2.2)
(명판값)
P3.1.1.1 모터
정격 전압 (명판값)을 입력하십시오.
P3.1.1.2 모터
정격 주파수 (명판값) 을 입력하십시오
P3.1.1.3 모터
정격 속도 (명판값) 을 입력하십시오
P3.1.1.4 모터
정격 전류 (명판값)을 입력하십시오.
시작모터가 Motort Type으로 선택되어 있을 경우 다음 질문이 나옵니다:
파라미터P3.1.1.5, 모터 역률이 1.00으로 설정되면, 마법사가 7. 질문으로 이동합니다.
P3.3.1.5 모터 역률값을
입력하십시오. (명판값)
PM 모터
유도 모터
범위:변동
범위: 8.00...320.00 Hz
범위: 24...19200 rpm
범위: 변동
범위:0.3...1.00
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
1
6• vacon
7
8
9
10
11
1.1.2 Local / Remote 어플리케이션 마법사
P3.3.1.1 최소 주파수 레퍼런스값을
입력하십시오.
P3.3.1.1 최대 주파수 레퍼런스값을
입력하십시오.
P3.4.1.2 가속시간 1값을 입력하십시오. 범위 0.1...300.0 s
P3.4.1.2 감속시간 1값을 입력하십시오. 범위 0.1...300.0 s
제어위치를 선택하십시오. (드라이브
스타트/정지의 명령 및 주파수 레퍼런스)
이제 표준 어플리케이션 마법사가 끝났습니다.
어플리케이션 마법사는 사용자로 하여금 관련된 기본 파라미터 어플리케이션으로 들어가게
해줍니다.
Local/Remote 어플리케이션 마법사는 다음과 같은 상황에서 작동합니다: 키패드를
범위: 0.00...P3.3.1.2 Hz
범위: p3.3.1.1...320.00 Hz
I/O 단자대
필드버스
키패드
활용하여, P1.2
주의! 어플리케이션 마법사가 시작 마법사로 시작되었을 경우, 마법사11. 질문으로
이동합니다.
1
2
3
4
5
모터 타입을 선택하십시오 (P3.1.2.2)
(명판값)
P3.1.1.1 모터 정격 전압값을 입력하십시오
(명판값)
P3.1.1.2 모터 정격 주파수값을 입력하십시오
(명판값)
P3.1.1.3 모터 정격속도값을 입력하십시오
(명판값)
P3.1.1.4 모터 정격 전류값을 입력하십시오
(명판값)
시작모터가 Motor Type로 선택되어 있을 경우 다음 질문이 나옵니다: 파라미터 P3.1.1.5
모터역률
어플리케이션 (ID 212)
값이1.00 일 경우, 마법사는7. 질문으로 이동합니다.
‘Local/Remote’ 를 선택했을 경우.
PM 모터
유도 모터
범위: 변동
범위: 8.00...320.00 Hz
범위: 24...19200 rpm
범위: 변동
1
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 7
6
7
8
9
10
11
12
P3.1.1.5 모터 Cos
Phi값을 입력하십시오 (명판값)
P3.3.1.1 최소
주파수 레퍼런스 값을 입력하십시오
P3.3.1.2 최대
주파수 레퍼런스 값을 입력하십시오
P3.4.1.2 가속도
시간 1값을 입력하십시오.
P3.4.1.3 감속
시간 1값을 입력하십시오.
원격제어의 위치를 선택하십시오
(원격제어는 활성화되면 드라이브 스타트/정지
및 주파수 명령이 있는 곳)
I/O 단자대가 원격제어 위치로 선택되어 있을 경우 다음 질문이 나타납니다: (그렇지 않을
경우 마법사는 질문 14로 이동합니다.)
아날로그 입력 2 신호 범위
(P1.26)
범위: 0.30…1.00
범위: 0.00…P3.3.1.2 Hz
범위: P3.3.1.1…320.00 Hz
범위: 0.1…300.0 s
범위: 0.1…300.0 s
I/O 단자대
필드버스
0=0…10V / 0…20mA
1=2…10V / 4…20mA
Local제어의 위치를 선택하십시오 (모터
13
14
1.1.3 다단속 어플리케이션 마법사
제어는 활성화되면 드라이브 스타트/정지 및
주파수 명령이 있는 곳)
I/O (B) 단자대가
않을 경우, 마법사는 질문 16.으로 이동합니다.)
아날로그 입력 1 신호 범위
(P1.25)
이제 Local/Remote 어플리케이션 마법사가 끝났습니다.
어플리케이션 마법사는 사용자로 하여금 관련된 기본 파라미터 어플리케이션으로 들어가게
해줍니다.
다단속 어플리케이션마법사는 다음과 같은 상황에서 작동합니다: 키패드를 활용하여
파라미터 P1.2 어플리케이션 (ID 212)에서 ‘Multi-Step Speed’ 가 선택되어 있을 경우.
Local 제어 위치로 선택되어 있을 경우 다음 질문이 나타납니다: (그렇지
필드버스
키패드
I/O (B) 단자대
0=0…10V / 0…20mA
1=2…10V / 4…20mA
주의 ! 어플리케이션 마법사가 시작마법사로 시작되었을 경우, 마법사는 드라이브
I/O설정만 보여줍니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
1
8• vacon
1
2
3
4
5
6
7
P3.1.1.5 모터 CosPhi값을
입력하십시오 (명판값)
P3.3.1.1 최소 주파수 레퍼런스값을
입력하십시오
P3.3.1.2 최대 주파수 레퍼런스값을
입력하십시오
P3.4.1.2 가속도 시간 1값을
입력하십시오
P3.4.1.3 감속 시간 1값을
입력하십시오
시작모터가 Motor Type으로 선택되어 있을 경우 다음 질문이 나옵니다: 파라미터 P3.1.1.5
모터역률 값이1.00으로 설정되어 있을 경우, 마법사는 7. 질문으로 이동합니다.
P3.1.1.5 모터 Cos Phi값을
입력하십시오 (명판값)
P3.3.1.1 최소 주파수 레퍼런스
값을 입력하십시오
범위: 0.30…1.00
범위: 0.00…P3.3.1.2 Hz
범위: P3.3.1.1…320.00 Hz
범위: 0.1…300.0 s
범위: 0.1…300.0 s
범위: 0.30…1.00
범위: 0.00…P3.3.1.2 Hz
8
9
10
1.1.4 PID 제어 어플리케이션 마법사
P3.3.1.2 최대
주파수 레퍼런스 값을 입력하십시오
P3.4.1.2 가속도 시간 1값을 입력하십시오. 범위: 0.1…300.0 s
P3.4.1.3 감속 시간 1값을 입력하십시오 범위: 0.1…300.0 s
이제, 다단속 어플리케이션 마법사가 끝났습니다.
어플리케이션 마법사는 사용자로 하여금 관련된 기본 파라미터 어플리케이션으로 들어가게
해줍니다..
다단속 어플리케이션 마법사는 다음과 같은 상황에서 작동합니다: 키패드를 활용하여
파라미터P1.2 어플리케이션 (ID 212)에서 ‘PID 제어’가 선택되었을 경우.
주의! 어플리케이션 마법사가 시작 마법사로부터 시작되었을 경우, 마법사는 질문 11.으로
범위: P3.3.1.1…320.00 Hz
1
이동합니다.
1
모터 타입을 선택하십시오 (P3.1.2.2)
(명판값)
PM 모터
유도 모터
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 9
2
3
4
5
6
7
P3.1.1.1 모터 정격 전압을 위해 값을
입력하십시오 (명판값)
P3.1.1.2 모터 정격 주파수값을
입력하십시오(명판값)
P3.1.1.3 모터 정격 속도값을
입력하십시오 (명판값)
P3.1.1.4 모터 정격 전류값을
입력하십시오 (명판값)
시작모터가 Motor Type으로 선택되어 있을 경우 다음 질문이 나옵니다: 파라미터 P3.1.1.5
모터 역률의 값이 1.00으로 선택되었을 경우 마법사는 질문 7.으로 이동합니다.
P3.1.1.5 모터 Cos
Phi값을 입력하십시오 (명판값)
P3.3.1.1 최소 주파수 레퍼런스 값을
입력하십시오
범위: 변동
범위: 8.00…320.00 Hz
범위: 24…19200 rpm
범위: 변동
범위: 0.30…1.00
범위: 0.00…P3.3.1.2 Hz
8
9
10
11
12
13
P3.3.1.2 최대
주파수 레퍼런스 값을 입력하십시오
P3.4.1.2 가속도시간 1 값을 입력하십시오 범위: 0.1…300.0 s
P3.4.1.3 감속
시간 1값을 입력하십시오
제어의 위치를 선택하십시오 (드라이브
스타트/정지 명령을 주는 위치)
프로세스 유닛 선택 (P3.13.1.4) 여러 가지 선택
%가 아닌 다른 단위가 선택되었을 경우, 다음 질문이 나타납니다: 그렇지 않으면 마법사는
질문 17. 으로 바로 넘어갑니다.
최소프로세스 유닛 (P3.13.1.5) 질문 13에서 선택에 따라서 달집니다.
범위: P3.3.1.1…320.00 Hz
범위: 0.1…300.0 s
I/O 단자대
필드버스
키패드
14
15
16
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
최대프로세스 유닛 (P3.13.1.6) 질문 13에서 선택에 따라서 달집니다.
프로세스 유닛 소수 (P3.13.1.7) 범위: 0…4
피드백 1 소스 선택
(P3.13.3.3)
선택을 위해 134 페이지를 참조하십시오
1
10• vacon
아날로그 입력 중 하나가 선택되었다면, 질문18 나타납니다. 그렇지 않으면, 마법사는 질문
19으로 이동합니다.
17
18
19
아날로그 입력 중 하나가 선택되었다면, 질문21 이 나타납니다. 그렇지 않으면, 마법사는
질문 23. 으로 이동합니다.
‘Keypad Setpoint 1’ 혹은 ‘Keypad Setpoint 2’ 이 선택될 경우, 마법사는 질문22로
이동합니다.
20
21
22
아날로그 입력 신호 범위
오류 변환 (P3.13.1.8)
설정영역 소스 선택
(P3.13.2.6)
아날로그 입력 신호 범위
키패드 설정영역 (P3.13.2.1/
P3.13.2.2)
수면 기능
0 = 0…10V / 0…20mA
1 = 2…10V / 4…20mA
0 = 정상
1 = 변환됨
선택을 위해 133 페이지를 참조하십시오
0 = 0…10V / 0…20mA
1 = 2…10V / 4…20mA
질문 20에서 선택에 따라서
달라집니다.
0 = 아니오
1 = 예
옵션 ‘Yes´이 선택될 경우, 다음 질문들이 나타납니다. 그렇지 않으면, 마법사는 바로 끝으로
갑니다.
23
24
25
이제 PID 제어 어플리케이션 마법사가 끝났습니다.
수면 주파수 한계 (P3.34.7) 범위: 0.00…320.00 Hz
수면 딜레이 1 (P3.34.8) 범위: 0…3000 s
기상 레벨 (P3.34.9)
범위는 선택에 따라서 달라지는
프로세스 유닛입니다.
1
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 11
1.1.5 Multi Purpose 어플리케이션 마법사
어플리케이션 마법사는 사용자로 하여금 관련된 기본 파라미터 어플리케이션으로 들어가게
해줍니다.
표준 어플리케이션 마법사는 다음과 같은 상황에서 작동합니다: ‘Multi-Purpose’ 키패드를
활용하여 파라미터 P1.2어플리케이션 (ID 212)을 선택했을 경우.
주의! 어플리케이션 마법사가 시작 마법사로 시작되었을 경우, 시작 마법사, 마법사는 질문
11. 으로 이동합니다.
1
2
3
4
5
시작모터가 Motor Type으로 선택되어 있을 경우 다음 질문이 나옵니다: 파라미터 P3.1.1.5
모터역률의 값이 1.00으로 설정되어 있을 경우 마법사는 질문 7으로 이동합니다.
6
7
8
모터 타입을 선택하십시오 (P3.1.2.2)
(명판값)
P3.1.1.1 모터 정격 전압값을
입력하십시오. (명판값)
P3.1.1.2 모터 정격 주파수값을
입력하십시오. (명판값)
P3.1.1.3 모터 정격 속도값을
입력하십시오. (명판값)
P3.1.1.4 모터 정격 전류값을
입력하십시오. (명판값)
P3.1.1.5 모터 Cos
Phi값을 입력하십시오. (명판값)
P3.3.1.1 최소
주파수 레퍼런스 값을 입력하십시오.
P3.3.1.2 최대
주파수 레퍼런스 값을 입력하십시오.
PM 모터
유도 모터
범위: 변동
범위: 8.00…320.00 Hz
범위: 24…19200 rpm
범위: 변동
범위: 0.30…1.00
범위: 0.00…P3.3.1.2 Hz
범위: P3.3.1.1…320.00 Hz
9
10
11
이제 Multi Purpose 어플리케이션 마법사가 끝났습니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
P3.4.1.2 가속도
시간 1값을 입력하십시오.
P3.4.1.3 감속
시간 1값을 입력하십시오.
제어의 위치를 선택하십시오. (드라이브
스타트/정지 명령을 주는 곳)
범위: 0.1…300.0 s
범위: 0.1…300.0 s
I/O 단자대
필드버스
키패드
1
12• vacon
1.1.6 모터 포텐셔미터 어플리케이션 마법사
어플리케이션 마법사는 사용자로 하여금 관련된 기본 파라미터 어플리케이션으로 들어가게
해줍니다.
스탠다드 어플리케이션 마법사는 다음과 같은 상황에서 작동합니다: 키패드를 활용하여
파라미터 P1.2 어플리케이션 (ID 212) 에서 ‘모터포텐셔미터’를 선택했을 경우.
주의! 어플리케이션 마법사가 시작 마법사로부터 시작되었을 경우, 마법사는 질문 11으로
이동합니다.
1
2
3
4
5
시작모터가 Motor Type으로 선택되어 있을 경우 다음 질문이 나옵니다: 파라미터 P3.1.1.5
모터역률이 1.00으로 선택되었을 경우 마법사는 질문 7로 이동합니다.
6
모터 타입을 선택하십시오 (P3.1.2.2)
P3.1.1.1 정격정격 모터값을
입력하십시오.
P3.1.1.2 정격정격 모터값을
입력하십시오.
P3.1.1.3 정격정격 모터값을
입력하십시오.
P3.1.1.4 정격정격 모터값을
입력하십시오.
P3.1.1.5 모터 Cos
Phi값을 입력하십시오. (명판값)
PM 모터
유도 모터
범위: 변동
범위: 8.00…320.00 Hz
범위: 24…19200 rpm
범위: 변동
범위: 0.30…1.00
1
7
8
9
10
11
12
이제 모터 포텐셔미터 어플리케이션 마법사가 끝났습니다.
P3.3.1.1 최소
주파수 레퍼런스 값을 입력하십시오.
P3.3.1.2 최대
주파수 레퍼런스 값을 입력하십시오.
P3.4.1.2 가속 시간 1값을 입력하십시오. 범위: 0.1…300.0 s
P3.4.1.3 감속 시간 1값을 입력하십시오. 범위: 0.1…300.0 s
모터 포텐셔미터 램프 시간
(P1.36.1)
모터 포텐셔미터 리셋
(P1.36.2)
범위: 0.00…P3.3.1.2 Hz
범위: P3.3.1.1…320.00 Hz
범위: 0.1…500.0 Hz/s
0 = 아니오 reset
1 = 정지 상태
2 = 파워 다운
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
1.2 멀티펌프 마법사
vacon • 13
멀티펌프 마법사는
마법사는 멀티 펌프 시스템 설정에 필요한 챕터 중요한 질문들을 합니다. 이 마법사는
사용자가 PID 제어기에서 ”원 피드백/원 세트 포인트“를 사용한다는 가정을 하고 있습니다.
제어위치는 I/O A이며 기본 값은 ‘%’ 입니다.
멀티펌프 마법사 다음 값을 설정하기를 요청합니다:
1
‘%’가 아닌 다른 단위가 설정되었을 경우 다음 질문이 나타납니다: 그렇지 않으면 마법사는
바로 5단계로 넘어갑니다.
2
3
4
5
하나의 아날로그 입력이라도 선택되었다면 질문6이 나타납니다. 그렇지 않으면, 질문7으로
넘어갑니다.
프로세스 유닛 선택 (P3.13.1.4) 여러 가지 선택.
프로세스 유닛 최소 (P3.13.1.5) 1 단계 선택에 따라서 달라집니다.
프로세스 유닛 최대 (P3.13.1.6) 1 단계 선택에 따라서 달라집니다.
프로세스 유닛 소수 (P3.13.1.7) 0...4
피드백 1 소스 선택
(P3.13.3.3)
빠른 셋업 / 마법사 메뉴
(B1.1.3)에서 활성화 되었습니다.
선택을 위해 135 페이지를
참조하십시오.
멀티 펌프
0 = 0…10V / 0…20mA
6
7
8
하나의 아날로그 입력이라도 선택되었다면 질문 9 나타납니다. 그렇지 않으면, 질문11로
넘어갑니다.
키패드 Setpoint 1 혹은 2가 선택되었을 경우 질문10 이 나타납니다.
9
10
11
‘Yes’옵션이 선택되었을 경우, 3가지 값을 더 입력해야 합니다:
아날로그 입력 신호 범위
오류 변환 (P3.13.1.8)
설정영역 소스 선택
(P3.13.2.6)
아날로그 입력 신호 범위
키패드 설정영역 (P3.13.2.1/
P3.13.2.2)
수면 기능
1 = 2…10V / 4…20mA
111 페이지를 참조하십시오.
0 = 정상임
1 = 변환됨
선택을 위해 133 페이지를
참조하십시오.
0 = 0…10V / 0…20mA
1 = 2…10V / 4…20mA
111 페이지를 참조하십시오.
1 단계 선택에 따라서 달라집니다.
아니오
예
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
1
14• vacon
12
13
14
15
16
17
18
19
20
수면 주파수 한계 1 (P3.13.5.1) 0.00...320.00 Hz
수면 딜레이 1 (P3.13.5.2) 0...3000 s
기상 레벨 1 (P3.13.5.6)
모터의 수 (P3.15.1) 1...6
인터로크 기능 (P3.15.2)
오토 체인지(P3.15.4)
오토 체인지 기능이 활성화될 경우, 다음의 3개의 질문이 나타납니다. 오토 체인지가
사용되지 않을 경우 마법사는 바로 질문 21로 넘어갑니다.
포함하는 FC (P3.15.3)
오토 체인지 인터벌 (P3.15.5) 0.0...3000.0 h
오토 체인지: 주파수 한계
(P3.15.6)
범위는 선택에 따라서 달라지는 프로세스
유닛입니다.
0 = 사용 불가능
1 = 사용 가능
0 = 사용 불가능
1 = 사용 가능
0 = 사용 불가능
1 = 사용 가능
0.00...50.00 Hz
21
22
대역폭 (P3.15.8) 0...100%
대역폭 딜레이 (P3.15.9) 0...3600 s
그 다음에 키패드(그래픽 키포드만 해당)는 디지털 입력과 릴레이 출력 설정이 끝났음을
보여줍니다. 이 값들이 미래에 필요할 경우를 대비하여 기록해 놓습니다.
멀티펌프마법사는 빠른 셋업 / 마법사에서 파라미터 B1.1.3을 활용하여 재설정 할 수
있습니다.
1
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 15
1.3 화재모드 마법사
화재모드 마법사는 쉬운 화재모드 기능 작동을 위하여 만들어졌습니다. 화재모드마법사는
빠른 셋업 메뉴에서 파라미터 B1.1.4을 사용하여 시작할 수 있습니다.
주의 ! 사용전에 암호와 워런티에 관한 중요한 사항을 챕터 3.3.30에서 읽으십시오.
1
‘화재모드 주파수’
2
3
4
5
6
주파수 소스
(P3.17.2)
주파수 (P3.17.3) 8.00 Hz...최대주파수Ref (P3.3.1.2)
신호 활성화
열을때 활성화 (P3.17.4)/
닫을 때 활성화 (P3.17.5)
역방향(P3.17.6)
비밀번호(P3.17.1)
여러 가지 선택
외의 다른 것이 설정되었다면, 마법사는 질문3으로 이동합니다.
신호는 열거나 닫는 접점 때
활성화해야 합니까?
0 = 여는 접점
1 = 닫는 접점
챕터 3.3.13를 참고하십시오.
화재 모드 역방향을 입력할 디지털
입력을 선택합니다.
DigIn 슬롯0.1 = 항상
정방향
DigIn 슬롯0.2 = 항상
역방향
기능활성화를 위해 비밀번호를
선정합니다.
1234 = 테스트 모드 활성화
1002 = 활성화
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
1
16• vacon
2. 드라이브 키패드
제어 키패드는 Vacon 100 AC 드라이브와 사용자 사이에 인터페이스를 제공합니다. 제어
키패드로 모터의 속도를 조정하고, 각종 상태를 관리 감시할 수 있으며, AC 드라이브의
각종 파라미터를 설정할 수 있습니다.
키패드에는 두개의 사용자 인터페이스 종류가 있으며, 하나는 그래픽 디스플레이 다른
하나는 텍스트 키패드 입니다.
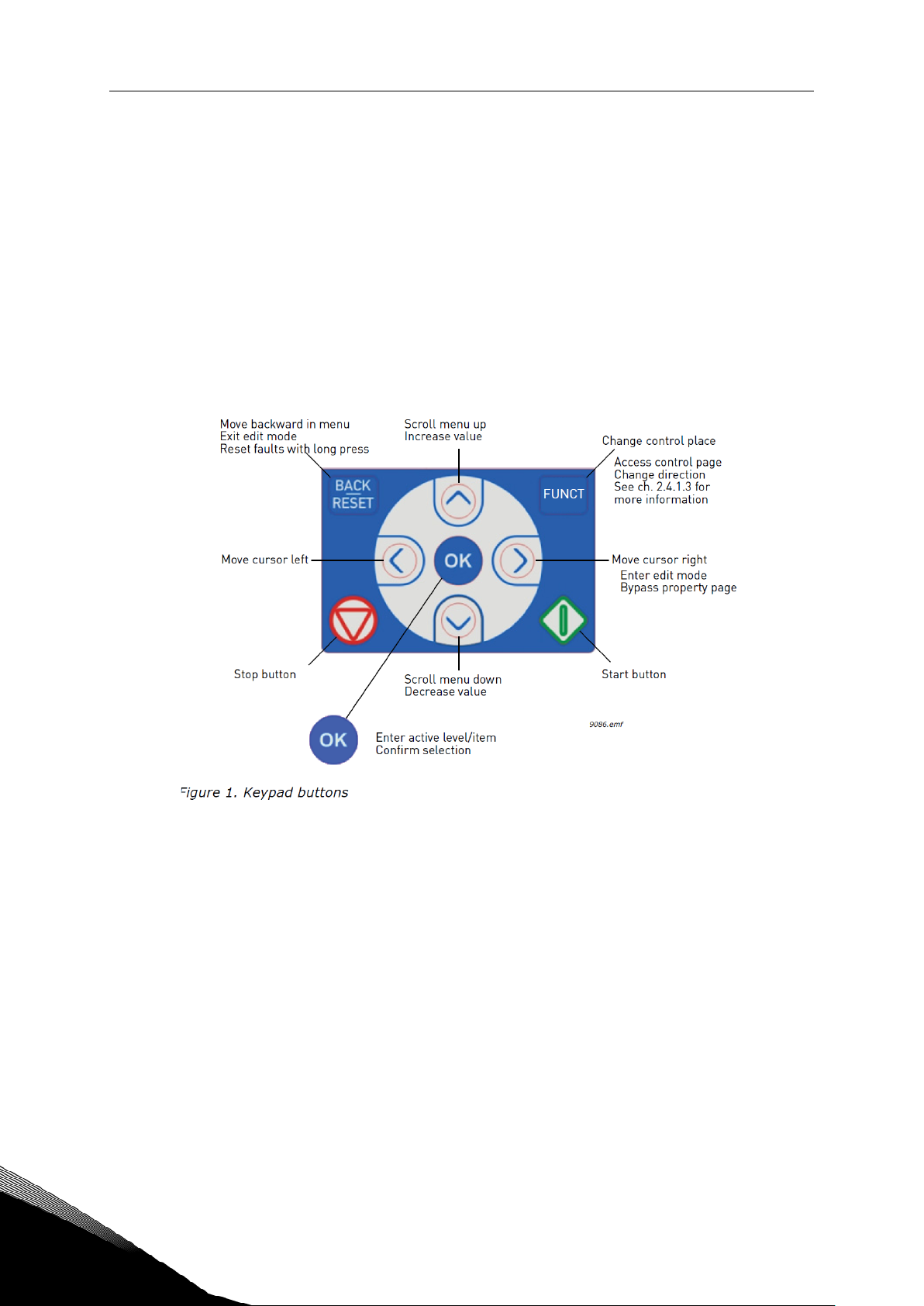
2.1 버튼
두 종류의 키패드 모두 같은 버튼을 가지고 있습니다.
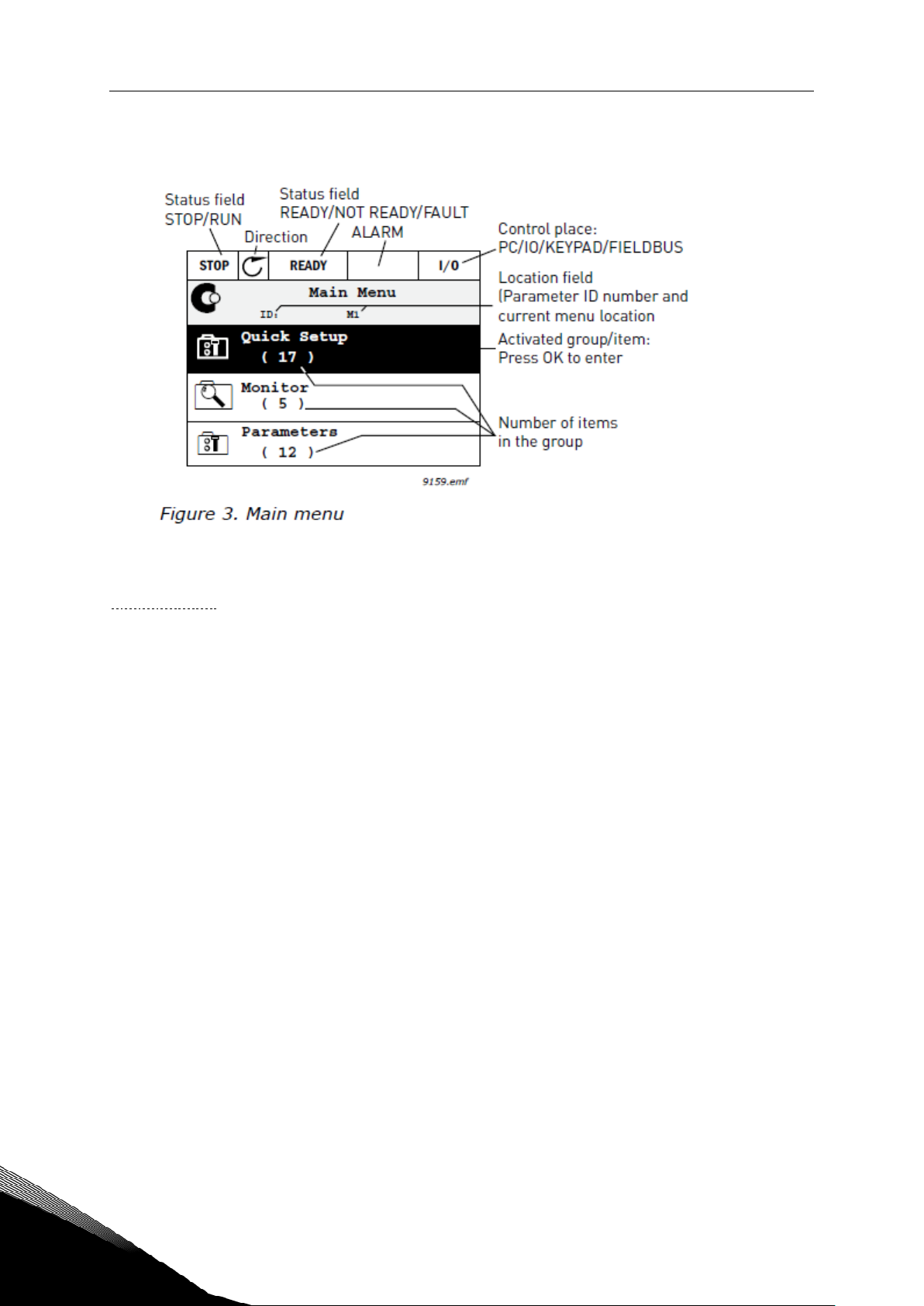
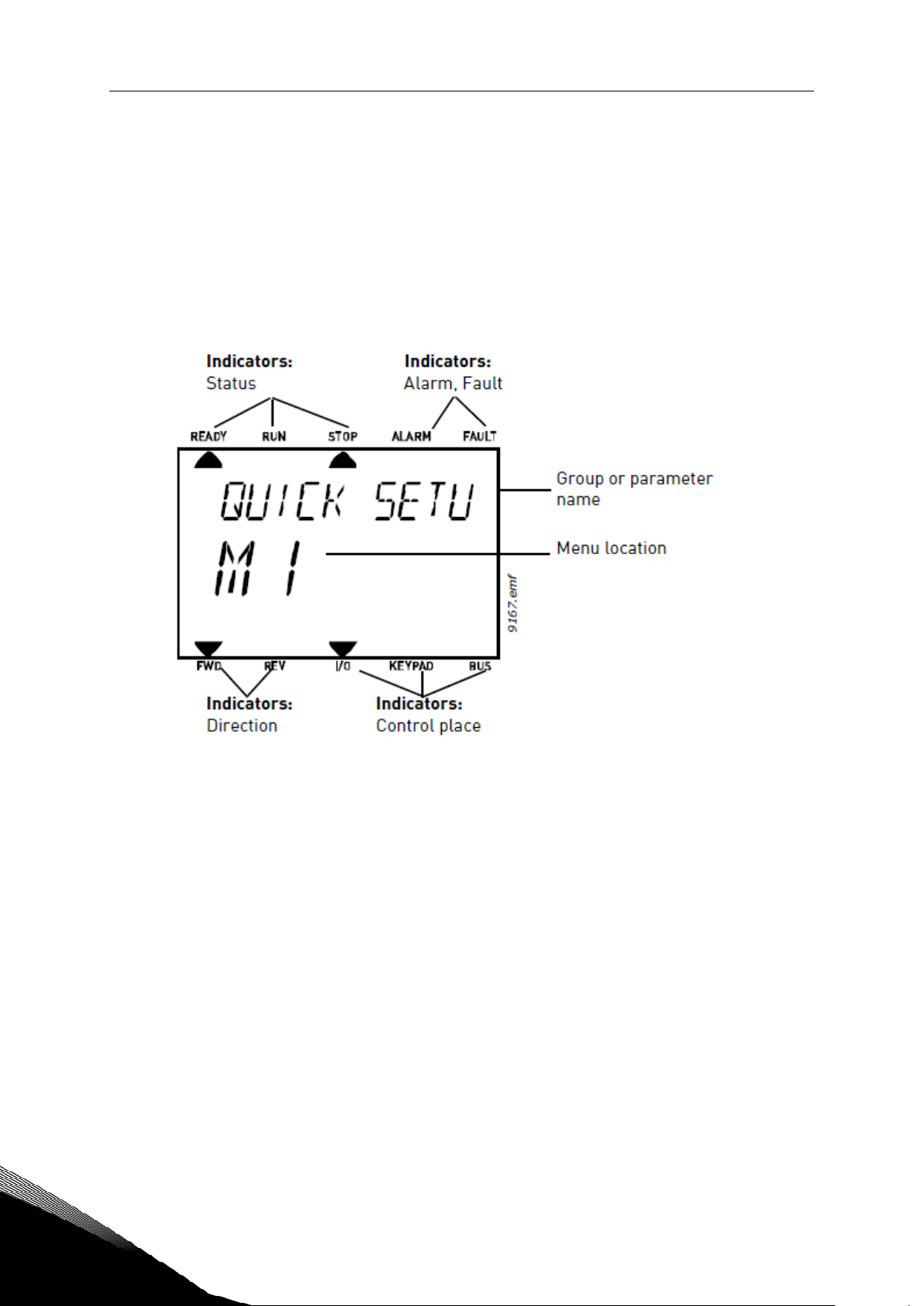
2.2 디스플레이
키패드 디스플레이는 모터와 드라이브 상태 및 여러 돌발 상황을 표시해줍니다. 화면에서
사용자는 드라이브에 관한 정보와 메뉴상에서의 위치를 보여줍니다.
2.3 키보드 내비게이션
제어 키패드 상의 데이터는 메뉴와 서브메뉴로 구성이 되어 있으며, 아래 위 버튼을
활용하여 메뉴 사이를 오갈 수 있습니다. 그룹 및 아이템은 OK 버튼을 눌러 들어갈 수
있으며, Back/Reset버튼을 활용하여 이전 화면 및 초기 화면으로 돌아갈 수 있습니다.
Location 필드는 현재 위치를 나타내며, Status 필드는 현재 드라이브의 상태에 관한 정보를
줍니다. 3장을 참조하십시오.
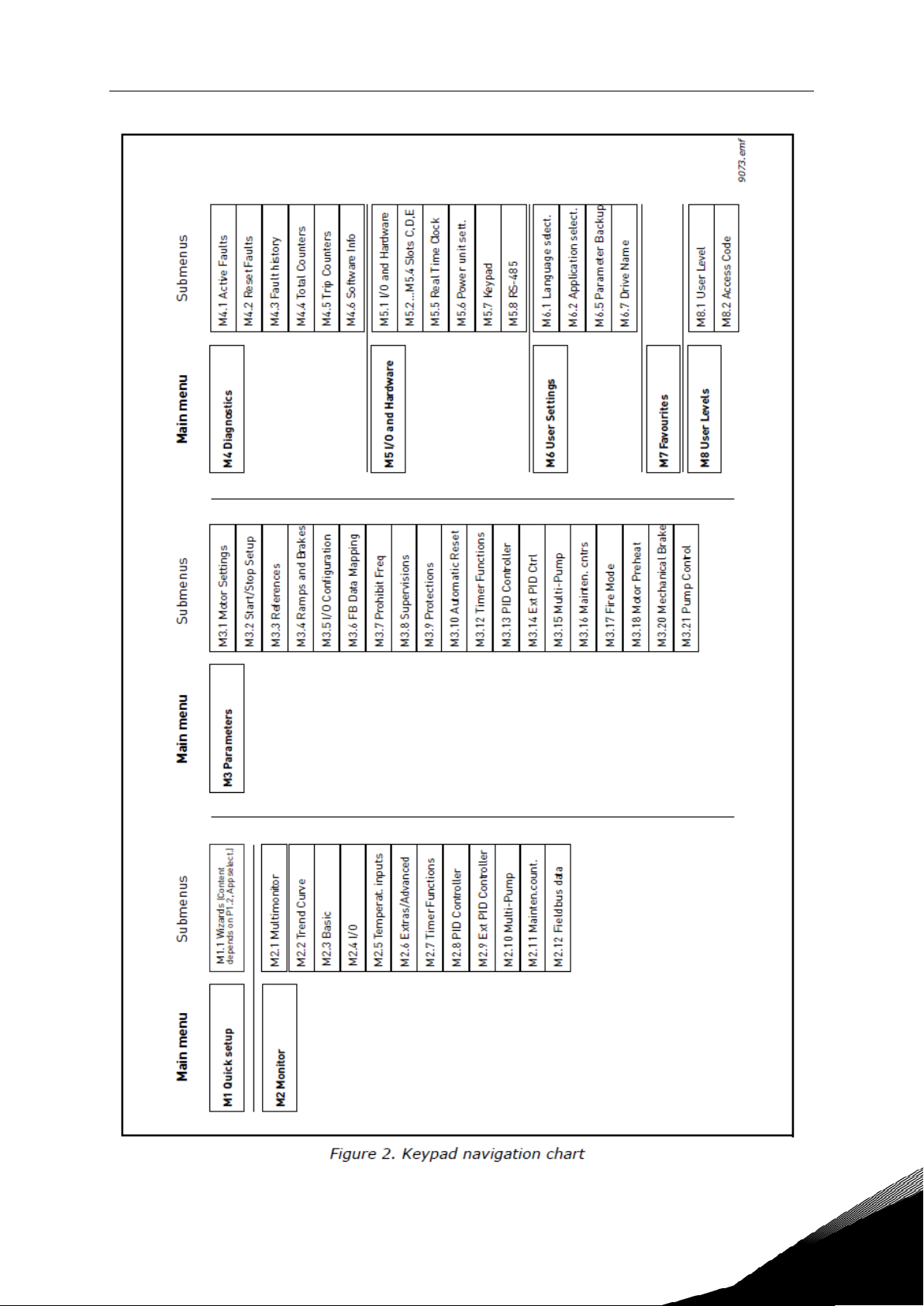
기본 메뉴 구성은 16페이지 에 나와있습니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
2
vacon • 17
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2
18• vacon
2.4 Vacon 그래픽 키패드
2.4.1 그래픽 키보드 사용법
2.4.1.1 값 수정
선택 가능한 값들은 2가지 방법으로 수정될 수 있습니다.
한가지 값의 파라미터
일반적으로 한 파라미터는 한가지 값을선택하며, 리스트에서 값(아래 참조)을 선택하거나
지정된 범위(0.00...50.00 Hz) 내의 파라미터를 입력하면 됩니다.
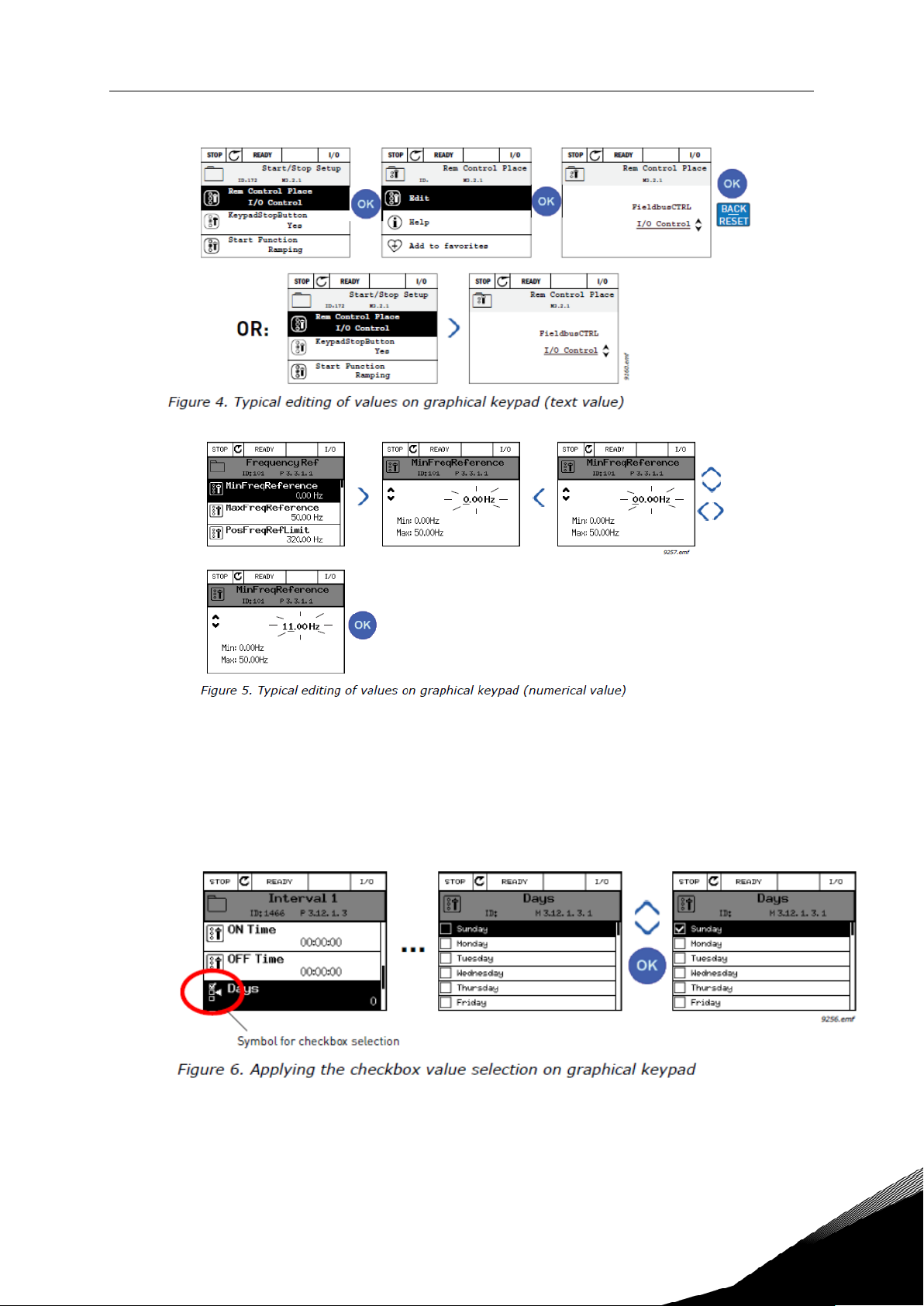
파라미터의 값은 다음과 같이 바꿀 수 있습니다.
1. 파라미터를 위치시키고,
2. Edit mode로 들어가서
3. 위 아래 버튼을 활용하여 새로운 값을 입력합니다. 또한 화살표 왼쪽 오른쪽 버튼을
활용하여 특정 값의 자리수를 바꿀 수 있으며, 숫자는 위 아래 버튼으로 바꿉니다.
4. 변동 사항을 OK 버튼을 눌러 적용하거나 Back/ Reset 버튼을 눌러 변경을
취소하십시오.
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 19
그림 5. 그래픽 키패드상의 전형적인 수치입력의 예
체크 박스 기능이 있는 파라미터
몇몇 파라미터는 여러 값을 동시에 선택할 수 있습니다. 아래와 같이 체크박스에
여러가지를 동시 선택이 가능합니다. 자세한 설명은 아래를 참조하십시오.
그림6. 그래픽 키패드상에서 체크박스 수치 선정 적용
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2

20• vacon
2.4.1.2 폴트 리셋
폴트 리셋에 관한 자세한 사항은 챕터 3.5.1에 있습니다.
2.4.1.3 기능버튼
FUNCT 버튼은 4가지 기능이 있습니다:
1. 제어 페이지로의 빠른 접근 가능
2. Local 키패드와 Remote 키패드사이의 쉬운 변경
3. 회전방향 변경
4. 파라미터값의 빠른 변경
제어 위치
제어위치에서 드라이브를 시작하고 멈출 수 있으며, 모든 제어위치는 주파수 레퍼런스
소스를 선택할 수 있는 파라미터를 가지고 있습니다. Local 제어 위치는 항상 키패드이고,
Remote 제어위치는 파라미터 P3.2.1 (I/O or 필드버스)에 의해 결정되며, 선택된 제어
위치는 키패드의 상태 바에 나타납니다.
Remote 제어 위치
I/O A, I/O B와 필드버스는 리모트 제어위치로 쓰일 수 있습니다. I/O A와 필드버스는
우선순위가 떨어지며, 파라미터 P3.2.1 (Remote 제어 위치)을 통해 선택이 가능합니다. I/O
B는 디지털 입력을 사용하여 파라미터 P3.2.1로 변경할 수 있습니다. 디지털 입력은
파라미터 P3.5.1.7 (I/O B Ctrl Force) 으로 선택할 수 있습니다.
Local 제어
키패드는 Local 제어 안에서만 제어장소로 사용되며, Local 제어는 Remote 제어보다
우선순위에 있습니다. 설령 파라미터 P3.5.1.7에서 디지털 입력을 통하여 Remote 제어가
제어위치로 설정되어 있더라도, 제어 위치는 Local이 선택될 경우 자동으로 키패드로
바뀝니다. 키패드의 FUNCT 버튼을 누르거나, Local/Remote (ID211) 파라미터를 작동하면
Local 과 Remote 제어간의 스위칭이 가능합니다.
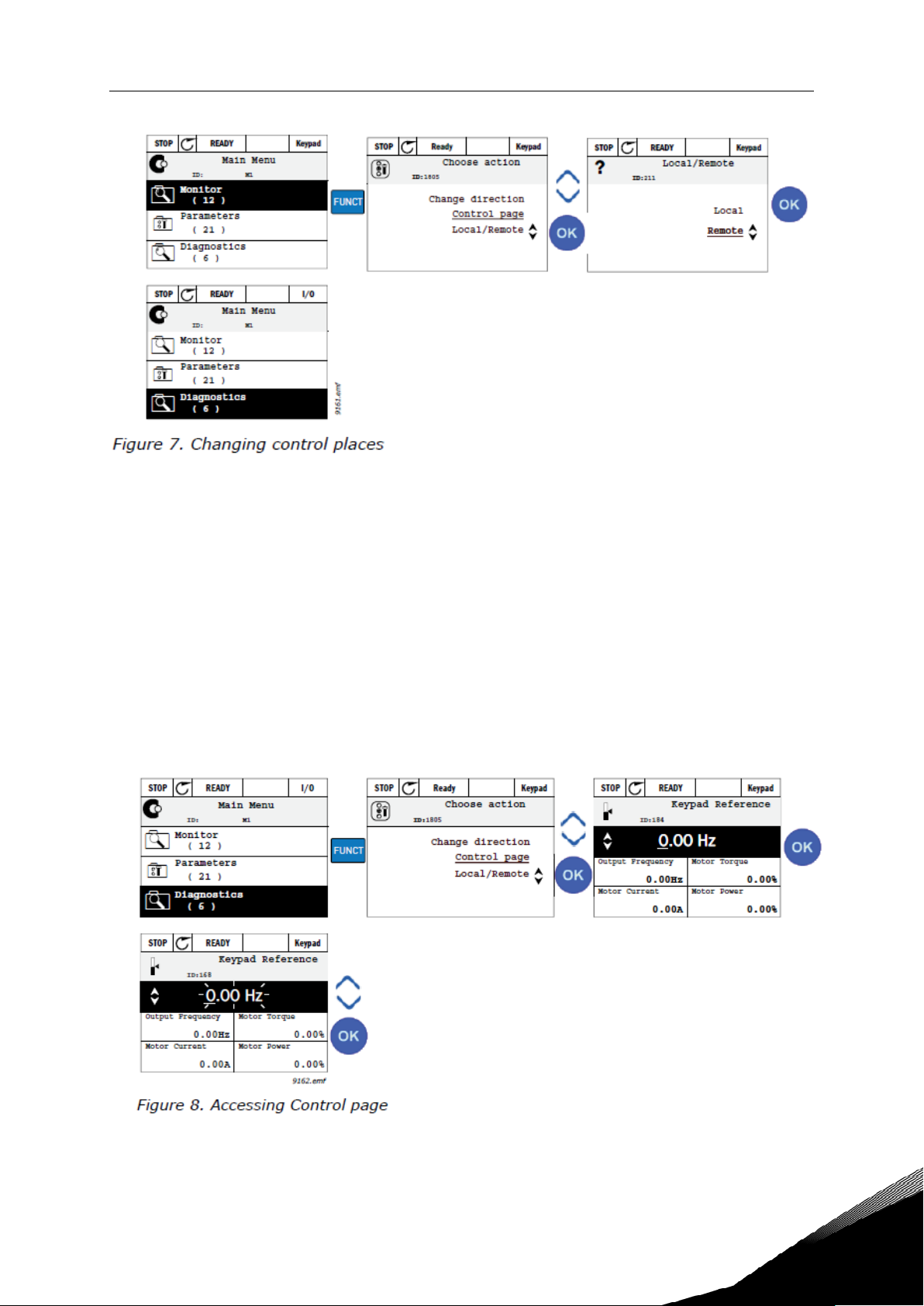
제어 위치 변경
Remote에서 Local로 제어위치 변경(키패드)
1. 메뉴 어디서나 FUNCT 버튼을 누르십시오.
2
2. 아래 위로 화살표를 움직여 Local/Remote 중 하나를 선택하고 OK 버튼으로
확인하십시오.
3. 다음 화면에서 Local 혹은 Remote 을 선택하고 OK 버튼으로 적용하십시오.
4. 화면은 같은 FUNCT 버튼이 누를 때와 같은 화면으로 돌아옵니다.
Remote 제어위치가 Local로 바뀔 경우 키패드를 봐야합니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 21
그림7. 제어위치의 변경
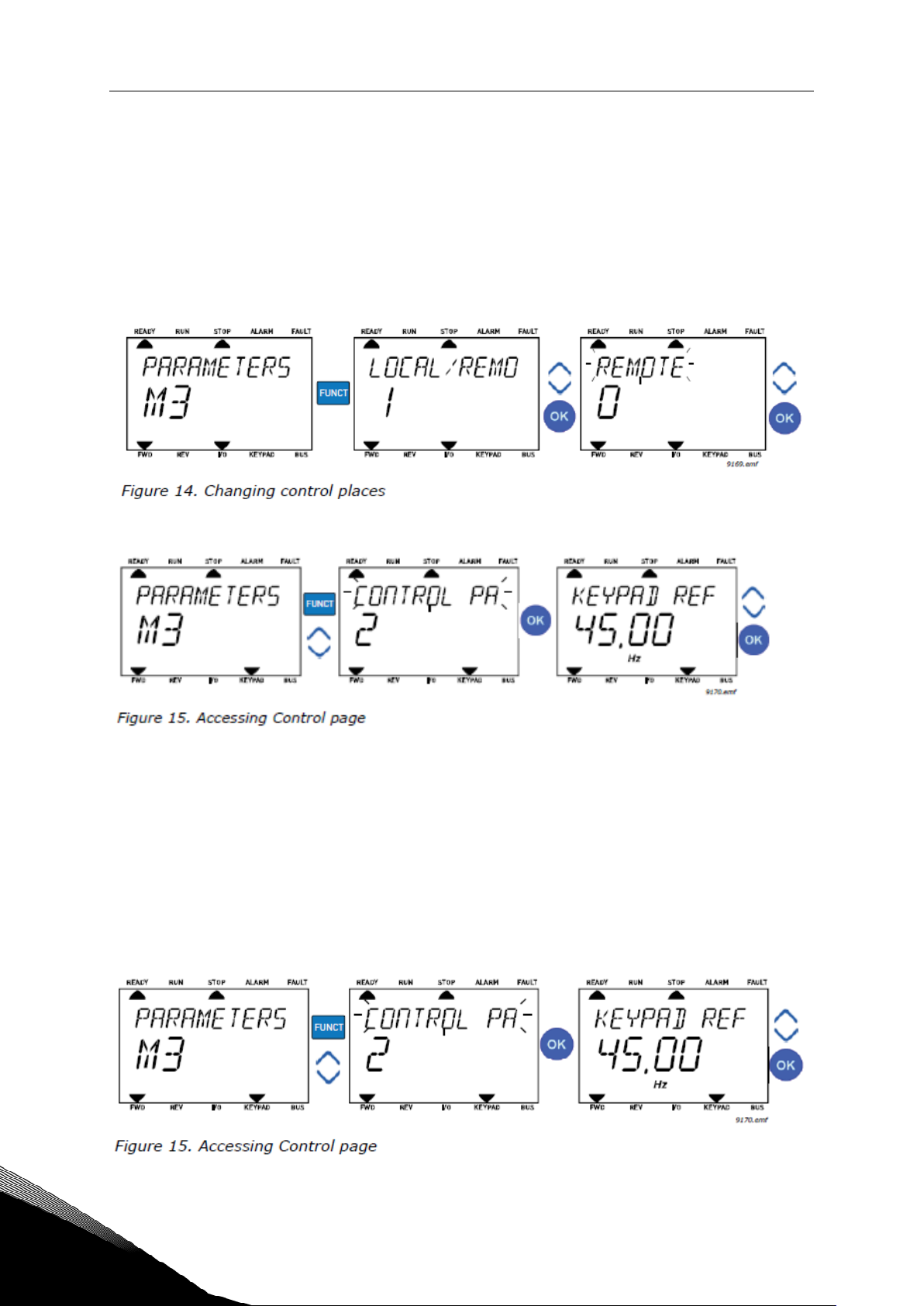
제어 페이지의 사용
제어 페이지는 필수 기능에 대하여 쉬운 조작과 모니터링을 위해 만들어졌습니다.
1. 메뉴의 어디서나 FUNCT 버튼을 누르십시오.
2. 화살표를 아래 위로 움직여서 제어 페이지를 선택하시고, OK 버튼을 누르십시오.
3. 제어 페이지가 나타납니다
키패드 제어 위치와 키패드 레퍼런스가 선택된 경우에는 OK 버튼을 누르면, 키패드
레퍼런스를 설정할 수 있습니다. 화면에 다른 제어 위치나 레퍼런스 값이 사용될 경우에
화면에는 수정할 수 없는 주파수 레퍼런스가 나타납니다. 같은 페이지에 다른 값들은
멀티모니터링 값이고, 여기에 나타나는 항목들을 선택하실 수 있습니다. (30쪽 참조).
그림8. 제어 페이지로의 접근
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2
22• vacon
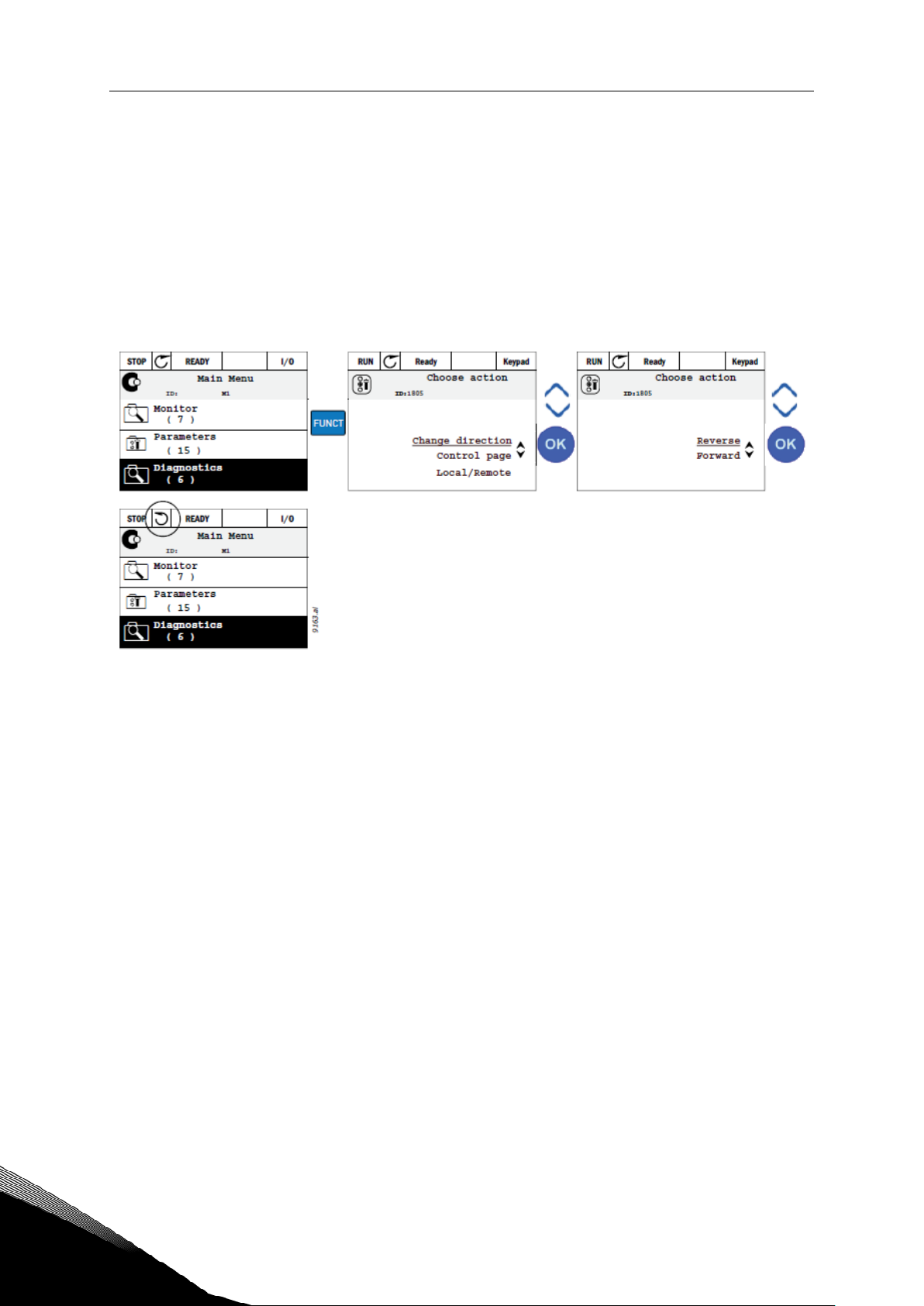
방향 변경
모터의 회전 방향은 FUNCT 버튼을 사용하여 빠르게 적용할 수 있습니다.
주의! 방향 변경 명령은 Local이 제어위치로 선택되어 있지 않는 한 보이지 않습니다.
1. 메뉴의 아무데서나 FUNCT 버튼을 누릅니다.
2. 화살표를 위 아래로 움직여 Change direction 을 선택한 후에 OK를 누릅니다.
3. 그 다음 회전하고자 하는 모터의 방향을 선택합니다. 현재 모터 회전 방향은 깜빡이고
있습니다. OK 버튼을 눌러 적용합니다.
4. 즉시 회전 방향은 변하며, 필드 상태에 나타나는 화살표 방향도 바뀝니다.
Quick edit
Quick edit기능을 활용하여 파라미터 ID 번호를 입력한 후에 원하는 파라미터에 바로 접근
가능합니다.
1. 메뉴 어디에서나 FUNCT 버튼을 누릅니다.
2. 화살표 키를 위 아래로 눌러 Quick Edit을 선택한 후 OK를 눌러 실행합니다.
3. 접근하고자 하거나, 모니터링 하고자하는 파라미터 ID를 입력하고 OK 버튼을 누릅니다.
4. 요청된 파라미터/모니터링 값이 화면(editing/monitoring 모드 시)나타납니다
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 23
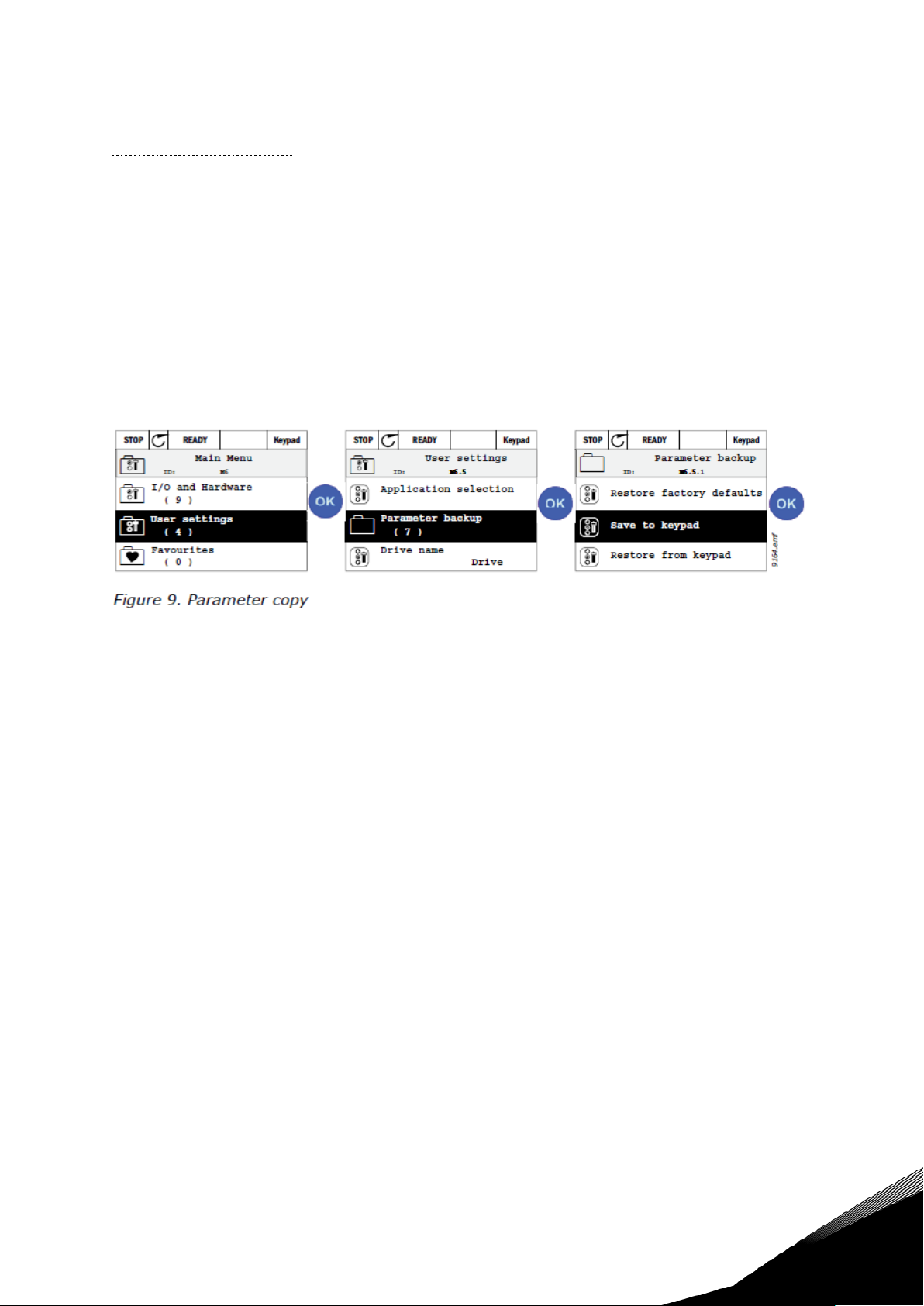
2.4.1.4 파라미터 복사하기
주의 ! 이 기능은 그래픽 키패드에서만 사용가능합니다.
파라미터 복사기능으로 한 드라이브에서 다른 드라이브로 파라미터를 복사할 수 있습니다.
파라미터는 먼저 키패드에 저장되어야 하고, 그 다음 키패드를 다른 드라이브에 연결
해야합니다. 그 다음에 저장된 키패드로 부터 파라미터가 다운로드 됩니다.
파라미터가 키패드로부터 드라이브로 복사되기 전에 드라이브는 멈춰있어야 합니다.
• 먼저 사용자 설정메뉴에서 parameter backup 하위 메뉴로 들어갑니다. 파라미터 백업
하위 메뉴에서 3개의 기능이 선택가능합니다:
• Restore factory defaults 는 공장초기화 상태로 되돌립니다.
• 키패드의 Save를 선택하여 모든 파라미터를 키패드로 복사할 수 있습니다.
• Restore from keypad를 선택하면 모든 파라미터가 키패드에서 드라이브로 복사됩니다.
주의: 키패드가 사이즈가 다른 드라이브 사이에서 사용될 때는 다음 복사된 파라미터는
사용되지 않습니다:
모터 정격 전류(P3.1.1.4)
모터 정격 전압(P3.1.1.1)
모터 정격 속도(P3.1.1.3)
모터 정격 출력(P3.1.1.6)
주파수모터 정격 주파수(P3.1.1.2)
모터 역률(P3.1.1.5)
주파수 스위칭 주파수(P3.1.2.3)
모터 전류한계(P3.1.3.1)
정지 전류한계(P3.9.3.2)
주파수 최고주파수(P3.3.1.2)
주파수 약계자 영역 주파수(P3.1.4.2)
주파수전압/주파수 중간점 주파수(P3.1.4.4)
주파수제로 주파수 전압(P3.1.4.6)
자화기동 전류(P3.4.3.1)
직류제동 전류(P3.4.4.1)
플럭스 브레이킹 전류(P3.4.5.2)
모터 써멀타임 상수(P3.9.2.4)
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2
24• vacon
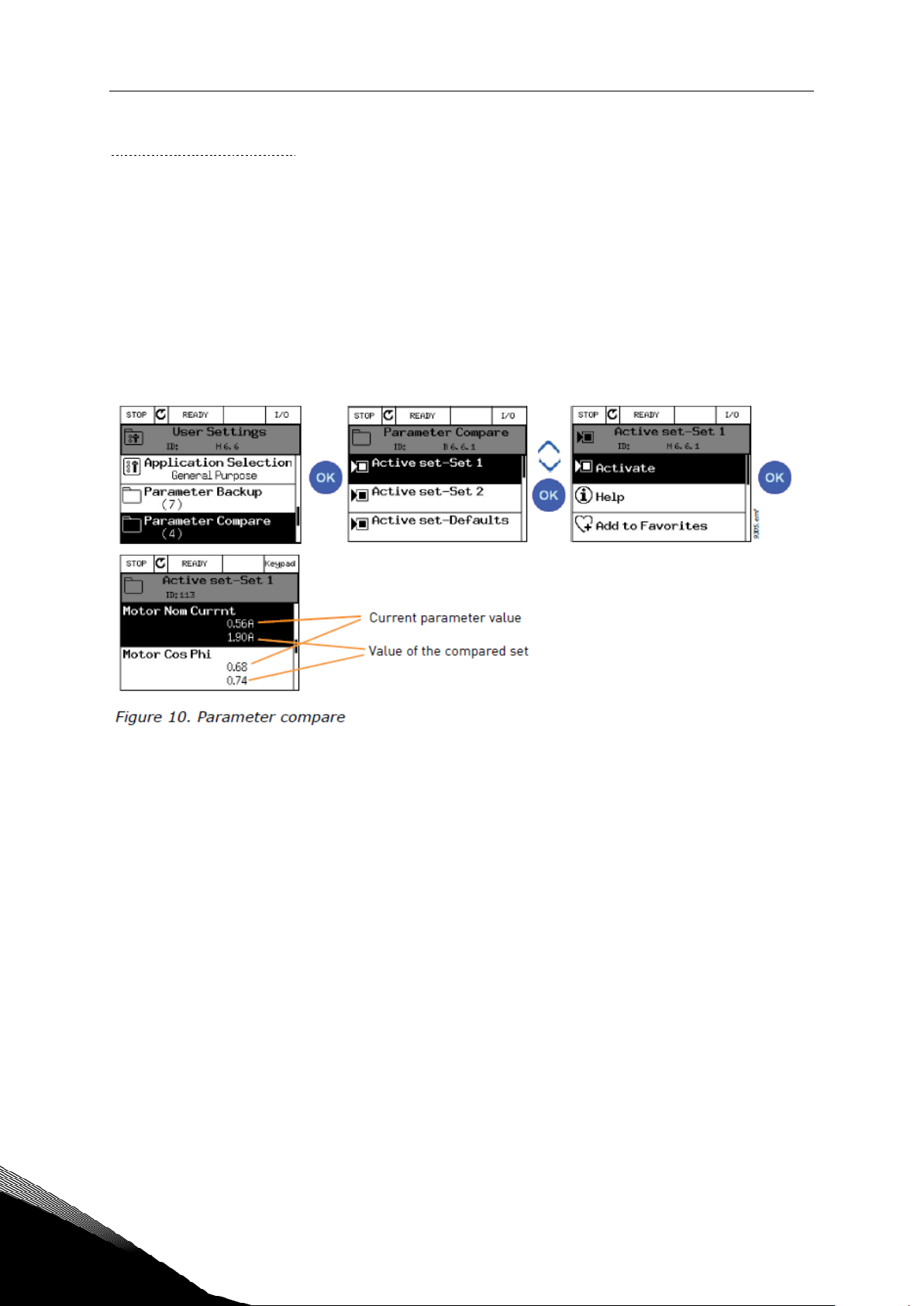
2.4.1.5 파라미터 비교하기
이 기능을 활용하여, 다음 4개 세트의 활성화된 파라미터 값을 비교할 수 있습니다:
• Set 1 (B6.5.4: Set 1으로 저장, 다음 챕터 참조: 2.6.6.1 )
• Set 2 (B6.5.6: Set 2로 저장, 다음 챕터 참조: 2.6.6.1)
• Defaults (공장초기값, 다음 챕터 참조: 2.6.6.1)
• Keypad set (B6.5.2: 키패드로 저장함, 다음 챕터 참조: 2.6.6.1)
아래 그림을 참조하십시오.
주의! 비교할 파라미터셋이 저장되지 않았다면, 디스플레이는 다음과 같은 메시지를
보입니다: “Comparing failed”
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 25
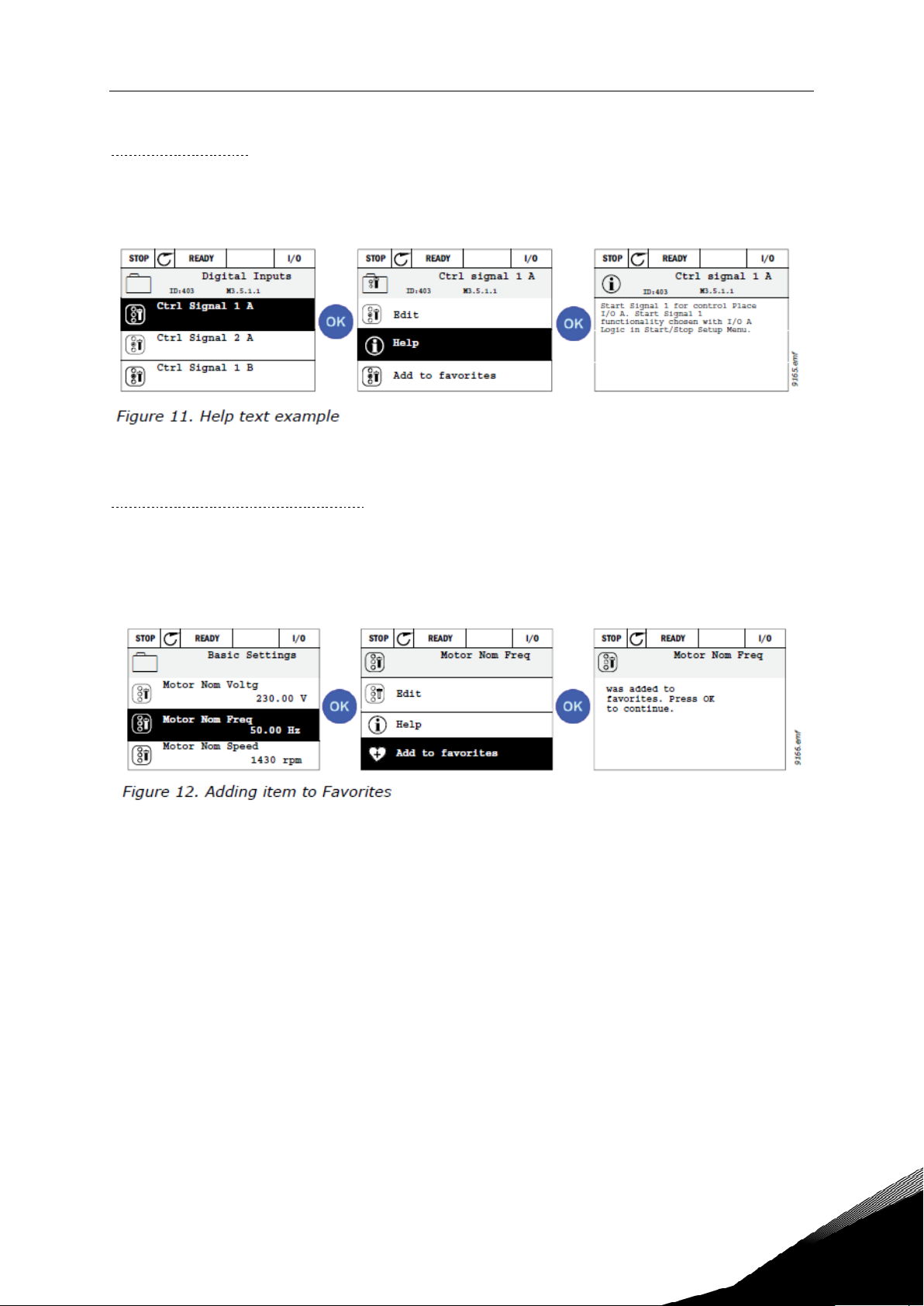
2.4.1.6 헬프 텍스트
그래픽 키패드는 여러 아이템의 정보를 보여주며, 모든 파라미터는 즉석 헬프 디스플레이를
표시할 수 있습니다. Help를 선택하고 OK 버튼을 누릅니다.
텍스트 정보는 폴트와 경고 및 시작 마법사에서도 사용가능합니다.
2.4.1.7 즐겨찾기에 아이템 추가하기
특정 파라미터값이나 아이템을 자주 사용하게 될 경우가 발생을 합니다. 각 파라미터나
아이템을 하나하나 찾아가는 대신에, 즐겨찾기라고 하는 폴더에 추가를 하면 쉽게 찾을 수
있습니다.
즐겨찾기에서 아이템을 제거할 경우 2.6.7장을 참조하십시오.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2
26• vacon
2.5 Vacon 텍스트 키패드
Text keypad라 불리는 사용자 인터페이스도 사용가능합니다. 그래픽 키패드와 같은 기능을
가지고 있으나, 그래픽 키패드에 비해 제약되는 부분들이 존재합니다.
2.5.1 키패드 화면
키패드 디스플레이는 모터와 드라이브의 상태 및 이 둘의 돌발상황을 표시합니다. 화면에서
드라이브에 관한 정보 및 메뉴에서의 현재 위치가 표시되며, 텍스트가 너무 길어 표시가
되지 않는 경우에는 텍스트가 왼쪽에서 오른쪽으로 스크롤되어 메시지를 표시합니다.
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 27
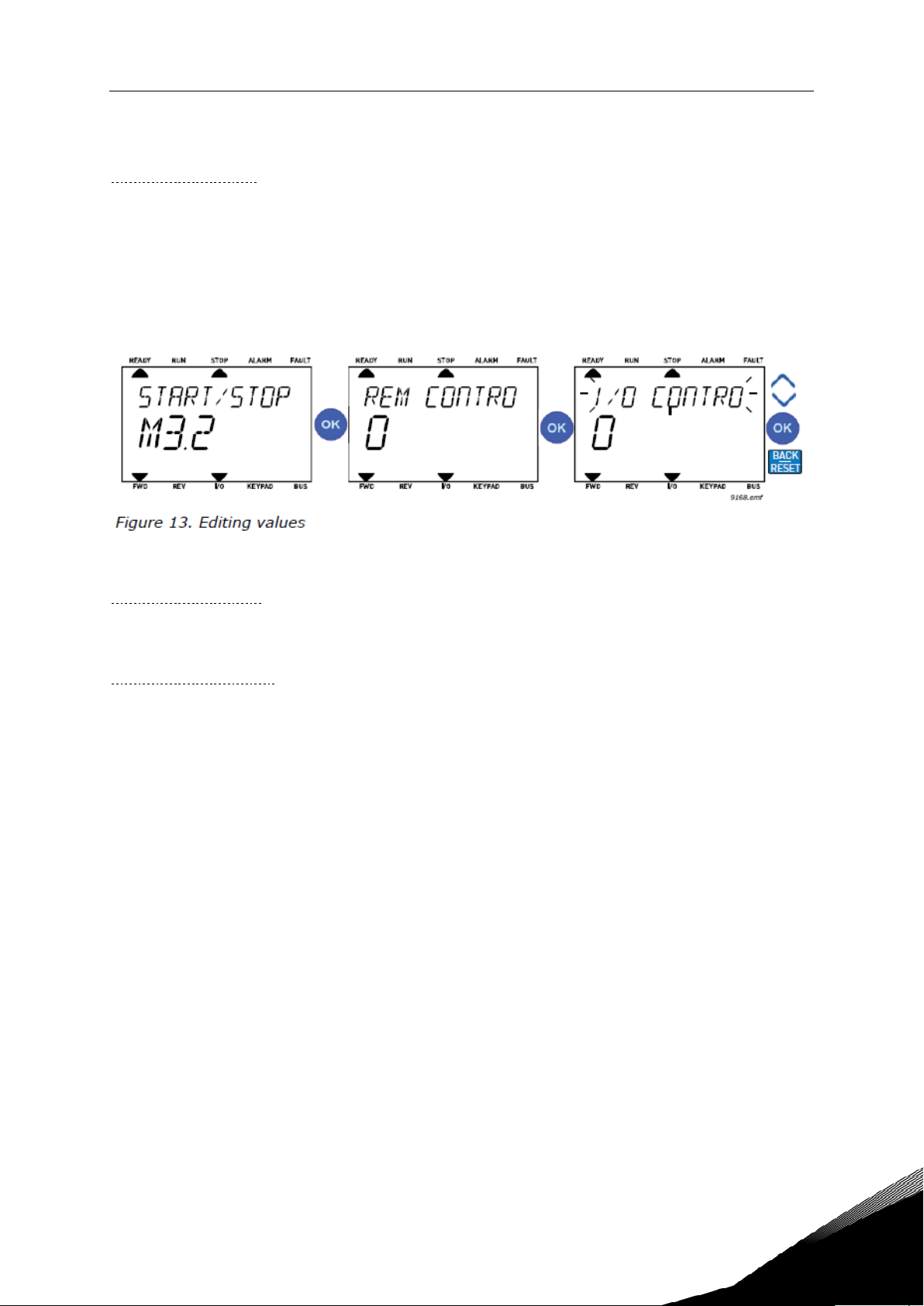
2.5.2 텍스트 키패드 사용법
2.5.2.1 Editing values
파라미터를 바꾸는 과정은 다음과 같습니다:
1. 파라미터를 선택합니다.
2. Enter Edit모드를 선택하고 OK를 누릅니다.
3. 아래 위 화살표 방향을 활용하여 새로운 값을세팅합니다. 화살표 왼쪽/오른쪽 버튼으로
자릿수를 바꿀 수 있으며, 값은 화살표 아래/위 버튼으로 바꿉니다.
4. OK 버튼을 눌러 적용하거나 Back/Reset 버튼을 눌러 취소합니다.
2.5.2.2 Resetting fault
폴트 리셋은 3.5.1을 참조하십시오.
2.5.2.3 Function button
FUNCT 버튼은 4가지 기능이 있습니다:
제어 위치
제어 위치로 드라이브를 시작하고 멈출 수 있습니다. 각각의 제어위치는 주파수를 선택할
수 있는 각기의 파라미터를 가지고 있으며, Local 제어 위치는 항상 키패드입니다. Remote
제어 위치는 파라미터 P3.2.1 (I/O or 필드버스)에서 정하며 선택된 제어 위치는 키패드의
상태 바에서 볼 수 있습니다.
Remote 제어 위치
I/O A, I/O B 와 필드버스를 Remote 제어 위치로 사용할 수 있습니다. I/O A 및 필드버스는
파라미터 P3.2.1 (Rem. 제어 위치)로 선택할 수 있으며, 우선순위는 최하위에 있습니다. I/O
B는 디지털 입력을 활용하여 파라미터 P3.2.1에서 설정할 수 있습니다. 디지털 입력은
파라미터 P3.5.1.7 (I/O B Ctrl Force)으로 선택합니다.
Local 제어
키패드는 local 제어 상태에서의 항상 제어위치로 사용됩니다. Local 제어는 remote 제어
보다 우선순위에 있으며, 파라미터 P3.5.1.7 로 remote 디지털입력을 사용하더라도 Local로
선택이 되어 있는 경우에는 무조건 키패드가 제어위치가 됩니다. Local과 Remote 제어는
키패드의 FUNCT 버튼을 누르거나 "Local/Remote" (ID211) 파라미터를 사용하면 변환됩니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2
28• vacon
위치제어 위치 변경
키패드에서 Remote에서 Local로 제어위치 변경하기
1. 메뉴 어디에서나 FUNCT 버튼을 누릅니다.
2. 화살표 버튼을 사용하여 Local/Remote를 선택하고,OK를 눌러 실행합니다.
3. 다음 화면에서 Local이나 Remote를 선택하고 OK를 눌러 실행합니다.
4. FUNCT 버튼을 누르면 화면은 원래 위치로 돌아옵니다.
Remote 제어 위치가 Local(Keypad)로 바뀌어 있으며, keypad 레퍼런스를 확인해야합니다.
제제 제제제 제제
제어 페이지는 중요값의 쉬운 작동과 모니터링을 위해 있습니다..
1. 메뉴 어디에서나 FUNCT 버튼을 누릅니다.
2. 화살표를 위 아래로 움직여 제어 페이지를 찾고 OK 버튼을 눌러 확인합니다
3. 제어 페이지가 나타납니다
키패드 제어위치와 키패드 레퍼런스가 선택되었으면 키패드 레퍼런스를 선택하고 OK
버튼으로 설정할 수 있습니다. 제어 위치나 레퍼런스 값은 화면에 나타나며 이것은 수정
불가능합니다.
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 29
방향 변경
FUNCT 버튼을 활용하여 회전 방향을 빠르게 변경가능합니다.
주의! 선택된 제어위치가 Local이 아닌 이상, Changing direction 명령은 메뉴에서 보이지
않습니다.
1. 메뉴 어디에서나 FUNCT 버튼을 누릅니다.
2. 화살표를 위 아래로 움직여 Change direction을 선택하고 OK를 눌러 실행합니다.
3. 모터가 회전할 방향을 선택합니다. 현재 회전 방향은 깜빡이고 있으며, OK를 눌러
적용합니다.
4. 즉시 회전 방향이 바뀌고 바뀐 방향은 필드 체인지 상태에서 보여집니다.
빠른 편집(Quick Edit)
빠른 편집기능을 활용하여, 파라미터 ID를 입력하면 원하는 파라미터에 접근할 수 있습니다.
1. 메뉴 어디에서나 FUNCT 버튼을 누릅니다.
2. 화살표 키를 위 아래로 눌러 Quick Edit을 선택하고 OK를 눌러 실행합니다.
3. 파라미터와 모니터링하고자 하는 값의 ID를 입력하고,OK 버튼을 누릅니다
4. 원하는 파라미터/모니터링 값이 화면에나타납니다. (에디팅/모니터링 모드 시.)
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2

30• vacon
2.6 메뉴 구성
빠른 세트 업
모니터
파라미터 챕터 3 참조하십시오
진단
I/O 및 하드웨어
사용자 세팅
기호* 챕터 2.4.1.7. 참조하십시오
사용자 레벨 챕터 2.6.8. 참조하십시오
쳅터
챕터3.2 참조하십시오
멀티모니터*
추세선*
기본
I/O
엑스트라/어드밴스드
타이머 기능
PID 제어기
외부 PID 제어기
멀티펌프
유지보수 카운터
필드버스 데이터
활성화폴트
리셋 폴트
폴트 기록
토탈 카운터
트립 카운터
소프트웨어 정보
기본 I/O
슬롯 C
슬롯 D
슬롯 E
리얼 시간 클럭
전원 유닛세팅
키패드
RS-485
이더넷
언어 선택
어플리케이션 선택
파라미터 백업*
드라이브 이름
파라미터 컴페어
2
*. 키패드 텍스트에서 불가능
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 31
2.6.1 빠른 셋업
빠른 셋업 그룹은 여러 마법사들과 Vacon100 어플리케이션의 여러 파라미터 빠른셋업을
담고 있습니다. 이 파라미터 그룹의 더 자세한 챕터 3.2.에서 확인하십시오.
2.6.2 모니터
멀티모니터
주의:이 메뉴는 텍스트 키패드에서 가능합니다.
멀티모니터 페이지에서, 원하는 4개에서 9개의 모니터 값을 파라미터 3.11.4 를 활용하여
선택할 수 있습니다.
값이 있는 셀을 화살표 오른쪽 왼쪽 버튼을 활용하여 활성화 시키고 모니터될 값을 바꾼
뒤에 OK 버튼을 누르십시오. 그리고 모니터링값 리스트에 새로운 아이템을 선택하고 다시
OK를 누르십시오.
트렌드 커브
트렌드 곡선은 두가지 모니터 값을 한번에 그래프 값으로 나타냅니다.
베이직
기본 모니터링 값은 상태 및 측정 값 뿐만 아니라, 현재 선택된 파라미터의 값을나타냅니다.
I/O
여러가지 입출력의 상태와 레벨을 확인할 수 있으며, 더 자세한 것은 챕터 3.3.4.을
참조하십시오.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2

32• vacon
기타/어드벤스
필드버스값과 같은 여러 세부 값을 확인할 수 있습니다. 3.3.6 챕터를 참조하십시오.
타이머 기능
타이머 기능과 실제 시간을 모니터링합니다. 3.3.7 챕터를 참조하십시오.
PID 제어기
PID 제어기값을 모니터링합니다. 3.3.8 챕터를 참조하십시오.
외부PID 제어기
외부 PID 값을 모니터링합니다. 3.3.9 챕터를 참조하십시오.
멀티 펌프
여러 드라이브의 연관된 값을 모니터링합니다. 3.3.10 챕터를 참조하십시오.
유지보수 카운터
유지보수 카운터와 관련된 값을 모니터링합니다. 3.3.11 챕터를 참조하십시오.
필드버스데이터
필드버스데이터는 필드버스 작동과 같은 디버깅 상황에서 값을 모니터링해줍니다.
3.3.12챕터를 참조하십시오.
2.6.3 파라미터
이 하위메뉴를 활용하여 여러 파라미터 그룹과 파라미터를 찾을 수 있습니다. 더 자세한
정보는 챕터3의 파라미터를 참조하십시오
2.6.4 진단
이 메뉴에서는 활성화된 폴트와 리셋 폴트, 폴트히스토리, 카운터 및 스포트외 정보를 찾을
수 있습니다.
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

2.6.4.1
활성화 된 폴트
메뉴
활성화된 폴트
기능 주의참조
폴트가 나타날 때 디스플레이와 폴트
이름은 깜박이기 시작합니다.진단
메뉴로 돌아가면 OK 버튼 누르십시오.
활성화 서브메뉴가 폴트의 수를
표시합니다. 폴트-시간 데이터를 보면
폴트를 선택하시고 OK 버튼
누르십시오.
리셋 버튼(2초 동안 누르십시오)이나 I/O
단자대 또는 필드버스에서 또는 리셋
폴트를 선택하여 리셋 신호가 제거 때까지
오류가 활성 상태로 유지됩니다(아래
참조하십시오).
활성 폴트의 메모리는 보이는 순서대로
최대 10 폴트를 저장할 수 있습니다.
2.6.4.2 폴트 리셋
메뉴 기능 주의참조
vacon • 33
리셋 폴트
이 메뉴에서 리셋을 할 수 있습니다.
설명이 더 필요하시면 챕터 3.5.1.
참조하십시오.
주의! 드라이브의 실수로 다시 시작을
방지하기 위해 폴트를 재설정하기 전에
외부 제어 신호를 제거하십시오.
2.6.4.3 폴트 히스토리
메뉴 기능 주의참조
폴트 이력을 입력하고 선택한 폴트에 OK
버튼을 클릭하면 폴트 시간 데이터를
보여줍니다.(디테일)
폴트 기록
최근 40개의 폴트는 폴트 이력에
저장됩니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2

34• vacon
2.6.4.4
토탈 카운터
Tab l e 5 . 진단 메뉴, 토탈 카운터 파라미터
코드 파라미터 최소 최대 단위 공장 초기값 ID 설명
공급 네트워크에서 가져온
에너지양. 리셋이 불가능함.
참조:
표준 키패드의 최고 값은
MW입니다. 카운트된
V4.4.1
V4.4.3
V4.4.4
V4.4.5
V4.4.6
V4.4.7
V4.4.8
V4.4.9
에너지 카운터
작동 시간
(그래픽의
키패드)
작동 시간
(텍스트
키패드)
작동시간
(텍스트
키패드)
작동 시간
(텍스트
키패드)
런 시간
(그래픽의
키패드)
런 시간
(텍스트
키패드)
런시간
(텍스트
키패드)
변동
a d hh:최소
a
d
hh:최소:ss
a d hh:최소
a
d
2291
2298
2293
에너지가 999.9 MW를
초과하면 키패드에 아무런
단위도 보이지 않습니다.
주의: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
작동시간 단위
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
작동시간 단위
총 년수
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
작동시간 단위
총 일수
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
작동 시간 단위
시간, 분, 초
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
모터 런시간
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
런 총 년수 동안 모터
운전시간
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
런 총 날짜동안 모터
운전시간
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

V4.4.10
V4.4.11
V4.4.12
V4.4.13
V4.4.14
V4.4.15
런시간
(텍스트
키패드)
시간 당 출력
(그래픽의
키패드)
시간 당 출력
(텍스트
키패드)
시간 당 출력
(텍스트
키패드)
시간 당 출력
(텍스트
키패드)
스타트 명령
카운터
hh:최소:ss
a d hh:최소
a
d
hh:최소:ss
2294
2295
vacon • 35
달라집니다.
런시간, 분, 초단위로
모터가 운전한 시간
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
총 시간동안 출력단위가
나타남.
리셋 필요없슴
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
총 년수동안 시간 당 출력
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
총 날짜동안 시간 당 출력
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
시간, 분, 초단위 시간 당
출력
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
넘버 총 시간 동안 전원
유닛이 스타트함
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2

36• vacon
2.6.4.5 트립 카운터
코드 파라미터 최소 최대 단위 공장 초기값 ID 설명
리셋 에너지 카운터.
표준 키패드의 최고 값은
MW입니다. 카운트된 에너지가
999.9 MW를 초과하면 키패드에
아무런 단위도 보이지 않습니다.
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
P4.5.1 에너지 트립 카운터 변동
달라집니다.
표준 텍스트 키패드:
그래픽키보드에서 OK 버튼을
4초 동안 노른후 OK로 확인
리셋 페이지가 나타나서 다시
OK를 누르면 리셋됩니다.
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
P4.5.3
P4.5.4
P4.5.5
P4.5.6
작동 시간
(그래픽의 키패드)
작동 시간
(텍스트 키패드)
작동시간
(텍스트 키패드)
작동시간
(텍스트 키패드)
표 6. 진단 메뉴, 트립 카운터 파라미터
2.6.4.6 소프트웨어 정보
a d hh:최소
a
d
hh:최소:ss
리셋. P4.5.1.
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
총 년수동안 작동한 시간
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
총시간 동안 작동한 시간
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
시간, 분, 초단위로 작동한 시간
참조: 공장 초기값은
파라미터 1.2로 선택된
어플리케이션에 따라
달라집니다.
코드 파라미터 최소 최대 단위 공장 초기값 ID 설명
V4.6.1
V4.6.2
V4.6.3
V4.6.4 시스템 부하 0 100 % 2300 부하의 제어 단위 CPU.
소프트웨어 패키지
(그래픽의 키패드)
소프트웨어 패키지
ID
(텍스트 키패드)
소프트웨어 패키지
(텍스트 키패드)
소프트웨어 모터인식의 코드
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
2

vacon • 37
V4.6.5
V4.6.6 어플리케이션 ID
V4.6.7 어플리케이션 버전
어플리케이션 이름
(그래픽의 키패드)
표 7. 진단 메뉴, 소프트웨어 정보 파라미터
어플리케이션의 이름
어플리케이션 코드.
2.6.5 I/O 및 하드웨어
설정과 관련된 여러 옵션이 있으며, 이 값은 어플리케이션에 측정된 값이 아니라 본래의
값들입니다.
2.6.5.1 베이직 I/O
입출력 상태를 모니터합니다.
코드 파라미터 최소 최대 단위 공장 초기값 ID 설명
V5.1.1 디지털 입력 1 0 1 0 디지털 입력 신호 상태
V5.1.2 디지털 입력 2 0 1 0 디지털 입력 신호 상태
V5.1.3 디지털 입력 3 0 1 0 디지털 입력 신호 상태
V5.1.4 디지털 입력 4 0 1 0 디지털 입력 신호 상태
V5.1.5 디지털 입력 5 0 1 0 디지털 입력 신호 상태
V5.1.6 디지털 입력 6 0 1 0 디지털 입력 신호 상태
점퍼로 선택된 아날로그
입력 신호 모드 값을
V5.1.7 아날로그 입력 1 모드 1 3 3
V5.1.8 아날로그 입력 1 0 100 % 0.00 아날로그 입력 신호의 상태
V5.1.9 아날로그 입력 2 모드 1 3 3
V5.1.10 아날로그 입력 2 0 100 % 0.00 아날로그 입력 신호의 상태
V5.1.11
V5.1.12 아날로그 출력 1 0 100 % 0.00 아날로그 출력 신호의 신호
V5.1.13 릴레이 출력 1 0 1 0 릴레이 상태 출력 신호
V5.1.14 릴레이 출력 2 0 1 0 릴레이 상태 출력 신호
V5.1.15 릴레이 출력 3 0 1 0 릴레이 상택 출력 신호
아날로그 출력 1
모드
1 3 1
보입니다
1 = 0...20mA
3 = 0...10V
점퍼로 선택된 아날로그
입력 신호 모드 값을
보입니다
1 = 0...20mA
3 = 0...10V
점퍼로 선택된 아날로그
출력 신호 모드 값을
보입니다
1 = 0...20mA
3 = 0...10V
표 8. I/O 및 하드웨어 메뉴, 기본 I/O 파라미터
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2

38• vacon
2.6.5.2 옵션 보드 슬롯
이 파라미터 그룹은 설치된 옵션 보드에 따라 달라집니다. 슬롯 C, D 이나 E에 아무런 옵션
보드도 설치되지 않았다면 아무런 파라미터도 보이지 않습니다. 슬롯위치에 관해서는
3.3.13챕터를 참조하십시오.
옵션보드가 제거된 후에, info text30 Device removed 메시지가 나타납니다. 표 135를
참조하십시오.
메뉴 기능 주의
슬롯 C
슬롯 D
슬롯 E
표 9. 옵션 보드-관련된 파라미터
세팅 옵션 보드 관련된 세팅.
모니터링 모니터 옵션 보드-관련된 정보.
세팅 옵션 보드 관련된 세팅.
모니터링 모니터 옵션 보드-관련된 정보.
세팅 옵션 보드 관련된 세팅.
모니터링 모니터 옵션 보드-관련된 정보.
2.6.5.3 실시간 시계
코드 파라미터 최소 최대 단위 공장 초기값 ID 설명
배터리 상태
V5.5.1 배터리 상태 1 3 2 2205
V5.5.2 시간 hh:mm:ss 2201 하루의 전류 시간
V5.5.3 날짜 dd.mm. 2202 날짜의 전류
V5.5.4 년 yyyy 2203 년의 전류
V5.5.5 데이라이트 전장 1 4 1 2204
표 10. I/O 및 하드웨어 메뉴, 리얼 시간 클럭 파라미터
1 = 설치하지 않음
2 = 설치됨
3 = 배터리 바꿈
데이라이트 전장의 규칙
1 = Off
2 = 유럽; 3월 마지막
일요일에 시작하고 10월
마지막 일요일에 끝납니다
3 = 미국; 3월 두 번째
일요일에 시작하고 11월
처음 일요일에 끝납니다.
4 = 러시아 (영구적임)
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 39
2.6.5.4 파워 유닛 세팅
Fan
팬은 최적화 혹은 항상 On 모드에서 작동합니다. 최적화 모드에서 팬 속도는 드라이브의
측정된 온도에 내부 로직에 따라 조절되며, Ready 상태에서 5분 안에 정지합니다. 항상 On
모드에서는 팬은 멈추지 않고 최고 속도로 회전합니다.
코드 파라미터 최소 최대 단위 공장 초기값 ID 설명
P5.6.1.1 팬 제어 모드 0 1 1 2377
표 11. 전원 유닛세팅, 팬
제동 쵸퍼
코드 파라미터 최소 최대 단위
P5.6.2.1 제동 초퍼 모드 0 3 0
표 12. 전원 유닛세팅, 제동 초퍼
공장
초기값
ID 설명
0 = 항상 On
1 = 최적화됨
0 = 불가능
1 = 가능 (런작동)
2 = 가능 (런작동&정지)
3 = 가능 (런작동, 테스트가
없음)
싸인 필터
싸인 필터는 과모듈화의 깊이를 제어하고, 온도조절에서 스위칭 주파수가 감소하는 것을
방지합니다.
코드 파라미터 최소 최대 단위
P5.6.4.1 싸인 필터 0 1 0
표 13. 전원 유닛세팅, 싸인 필터
공장
초기값
ID 설명
0 = 불가능
1 = 가능
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2

40• vacon
2.6.5.5 키패드
코드 파라미터 최소 최대 단위
P5.7.1 타임아웃 시간 0 60 최소 0
P5.7.2
공장 초기값
페이지
0 4 0
공장
초기값
ID 설명
파라미터 P5.7.2로 정의된
시간뒤에 디스플레이로 돌아감
0 = 아니오
드라이브가 켜져있는 시간 혹은
P5.7.1로 정한 시간이 초과됨.
값이 0일 경우 마지막 페이지가
보입니다
0 = 아니오
1 = 엔터 메뉴표
2 = 메인 메뉴
3 = 제어 페이지
4 = 멀티모니터
P5.7.3 메뉴 인덱스
P5.7.4 콘트라스트* 30 70 % 50
P5.7.5 배면광 시간 0 60 최소 5
표 14. I/O 및 하드웨어 메뉴, 키패드 파라미터
*. 그래픽 키패드에서만 가능
원하는 페이지로 인덱스 설정
파라미터 P5.7.2 = 1.
디스플레이 명암
(30...70%).
벡라이트가 꺼지는 시간
(0...60 초). 0으로 설정하면
백라이트는 항상 온 상태
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 41
2.6.5.6 필드버스
각기의 필더버스와 관련된 파라미터는 I/O와 하드웨어 메뉴에서 찾을 수 있습니다. 이
파라미터는 각각의 필드버스 매뉴얼에 더 자세히 설명되어 있습니다.
표 15.
서브메뉴 레벨 1 서브메뉴 레벨 2 서브메뉴 레벨 3 서브메뉴 레벨 4
RS-485 공통 세팅 프로토콜 NA
이더넷 공통 세팅
Modbus/TCP 공통 세팅
BacNet IP 세팅
IP 주소 모드 NA
IP 주소 NA
서브넷 마스크 NA
공장 초기값
게이트웨이
MAC 주소 NA
모니터링
NA
연결 한계
슬레이브 주소
커뮤니케이션 타임아웃
사례 넘버
커뮤니케이션 타임아웃
사용하고 있는 프로토콜
BBMD IP
BBMD 포트
잔여시간
FB 프로토콜 상태
커뮤니케이션 상태
실지 사례
제어 워드
워드의 상태
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2

42• vacon
2.6.6 사용자설정
코드 파라미터 최소 최대 단위
P6.1 언어 선택 변동 변동 변동 802 언어 페이키지에 따라서 달라집니다.
P6.2 어플리케이션 선택 801
M6.5 파라미터 백업 챕터 2.6.6.1 아래 참조
M6.6 파라미터의 비교
M6.7 드라이브 이름 필요할 경우 드라이브명 입력
표 16. 세팅 메뉴의 사용자, 일반적인 세팅
공장
초기값
ID 설명
사용하는 어플리케이션을
선택하십시오
2.6.6.1 파라미터 백업
코드 파라미터 최소 최대 단위
P6.5.1 공장초기화 831 공장초기화 하고 시작 마법사 시작
공장
초기값
ID 설명
파라미터를 키패드에 저장하고
P6.5.2 키패드에 저장* 0 1 0
P6.5.3 키패드에서 복구*
P6.5.4 Set 1로 저장 커스텀 세트 저장
P6.5.5 Set 1에서 복구 드라이브로 커스텀 세트 복구
P6.5.6 Set 2로 저장 커스텀 세트 저장
P6.5.7 Set 2로 복구 드라이브로 커스텀 세트 복구
표 17. 세팅 메뉴의 사용자, 파라미터 백업 파라미터
다른 드라이브로 옮김
0 = 아니오
1 = 예
키패드에서 드라이브로 파라미터값
다운로드합니다.
*. 그래픽 키패드에서만 가능
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 43
2.6.7 즐겨찾기
주의: 이 메뉴는 텍스트 키패드에 존재하지 않습니다.
파라미터나 모니터링 신호를 모으기 위하여 즐겨찾기 메뉴를 사용할 수 있습니다.
아이템이나 파라미터를 즐겨찾기 폴더에 담을 수 있습니다. 자세한 사항은 2.4.1.7 챕터를
참조하십시오.
즐겨찾기에서 항목을 삭제할 경우 다음과 같이 하십시오:
2.6.8 사용자 레벨
사용자 레벨 파라미터는 권한을 부여하여 파라미터의 노출정도를 조절합니다.
코드 파라미터 최소 최대 단위
P8.1 레벨의 사용자 1 3 1 1194
P8.2 코드 액세스 0 99999 0 2362
표 18. 레벨 파라미터의 사용자
공장
초기값
ID 설명
1 = normal; 모든 메뉴에 적용.
메인메뉴에서 보임
2 = 모니터링; 사용자 레벨 메뉴만
적용. 메인메뉴에 보임
3 = Favorites; 즐겨찾기 메뉴만 적용.
메인메뉴에 보임
0보다 다른 값을 정상 사용자 레벨이
활성화된 같이 스위칭하기 전
모니터링으로 설정할 경우 다시 정상
로 돌아가기 위해서 코드를 묻습니다.
키패드의 값을 함부로 바꾸는 것을
방지.
주의 ! 코드를 잃어버린 경우 가까운
센터와 연락하십시오.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
2

44• vacon
3. VACON 100 어플리케이션
Vac o n AC 드라이브는 이미 다운로드되어 즉시 사용할 수 있는 Vacon 100 어플리케이션을
포함하고 있습니다. 이 어플리케이션은 이 매뉴얼의 챕터 3.3.13에 있으며 자세한 사항은
챕터3.4.을 참조하십시오.
3.1 Vacon AC드라이브의 특별 기능
특징
• 스타트업, PID 제어, 멀티펌프, 화재모드 및 쉬운 작동을 위한 확장 마법사 기능 보유
• Local과 Remote 제어 위치 사이의 빠른 전환을 위한‘Funct’버튼. 제어위치는 파라미터로
선택가능 합니다. (I/O 혹은필드버스)
• 8개의 미리 설정된 주파수
• 모터포텐셔미터 기능
• 조이스틱 기능
• 조깅 기능
• 2개의 프로그램 가능한 램프타임, 2 감시 주파수 및 3개의 금지된 주파수 범위
• 강제 정지
• 제어 페이지는중요값의 쉬운 작동과 모니터링을 위해 있습니다.
• 필드버스데이터 매핑
• 자동 리셋
• 응축 문제를 방지하는 여러 예열 모드
• 최대 출력 주파수 320Hz
• 실시간 시계와 타이머 기능(추가 배터리 필요). 3개의 프로그램 가능한 타임 채널 (예:
시작/정지 및 미리설정된 주파수)
• 외부PID-제어기가 사용 가능하며, AC 드라이브의 I/O에서 사용하는 밸브를 조정하는데
사용 가능.
• 설정된 레벨에서 에너지를 절약하기 위하여 작동되는 Sleep mode 기능.
• 2-zone PID-제어기 (2개의 다른 피드백 신호: 최소 및 최대 제어)
• 디지털 입력으로 선택 가능한 PID제어의 두개 Setpoint 소스
• PID setpoint boost 기능
• 프로세스 반응속도를 개선한 Feed 정방향 기능
• 프로세스값 감시
3
• 멀티펌프 제어
• 유지보수 카운터
• 펌프제어 기능: Priming Pump 제어, Jockey Pump 제어, 펌프 임펠러, 자동 세정,
펌프입력 압력 감시 및 결빙방지 기능
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 45
3.2 퀵 셋업 파라미터 그룹
퀵 셋업 메뉴는 설치와 운행시 많이 사용되는 파라미터를 모아놓았습니다. 쉽게 찾고
사용하기 위하여 첫번째 파라미터 그룹에 있으며, Parameter 메뉴에서 현재 파라미터를
통해 수정할 수 있습니다. 퀵 셋업의 파라미터 값을 바꾸면 현재 그룹의 파라미터값 또한
바뀝니다.
퀵 셋업 파라미터 그룹에서 여러가지 추가 마법사는 여러가지 필수 데이터를 제공하여
빠른 설치를 도웁니다.
퀵 셋업 파라미터 그룹에서 미리 설정된 어플리케이션 조합을 선택하는데 필요한 파라미터
(P1.2 어플리케이션)을 찾을 수 있습니다. 미리 설정된 어플리케이션 설정은 파라미터 P1.2
어플리케이션이 바뀔 때의 설정된 파라미터를 바로 적용합니다. 키패드를 활용하여
파라미터 P1.2 어플리케이션 (ID 212)의 값이 바뀔 경우 어플리케이션 마법사가 시작되며,
선택된 어플리케이션에 관련된 기본 파라미터 설정을 도와줍니다. 어플리케이션 마법사에
관하여 더 많은 정보는 챕터 1.1.1-1.1.6을 참조하십시오.
어플리케이션 선택은 파라미터 수정을 최소화 하면서 Vacon 100 드라이브의 쉬운 작동을
도와줍니다.
다음과 같은 미리 설정된 어플리케이션을 고를 수 있습니다:
어플리케이션 설명
표준
Local Remote 두개의 다른 제어 위치를 선택하는 데에서 사용
다단속 속도 여러개의 속도 레퍼런스가 필요한 경우에 사용
PID 제어
Multi purpose 발달된 모터 튜닝기능이 필요한 어플에서 사용
모터 포텐셔미터 디지털 입력으로 모터 주파수 레퍼런스를 변경하는 프로세스에 쓰임
스페셜 어플리케이션이 필요없는 일반 어플리케이션 (펌프, 팬, 컨베이어는
스페셜 어플리케이션 필요).
압력과 같이 바뀌는 값에 사용되는 어플리케이션으로 펌프나 팬으로 모터
속도를 조절합니다. 드라이브는 하나의 셋포인트와 하나의 피드백 신호로
설정되어 있으며 다이렉트 주파수 레퍼런스 와 PID 제어 주파수 레퍼런스로
스위칭하는 것이 가능합니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

46• vacon
3.2.1 표준 제어 어플리케이션
표준 어플리케이션은 특별 기능이 필요없는 간단한 속도 조절 어플리케이션(펌프, 팬,
컨베이어 등등)에서 사용됩니다.
드라이브는 키패드와 필드버스 그리고 I/O단자대에서 제어 가능합니다.
I/O 단자대 제어에서, 드라이브 주파수 신호는 레퍼런스 신호 타입에 따라 AI1 (0…10V)
혹은 AI2 (4…20mA)에 연결되어 있습니다. 3개의 미리 설정된 주파수도 있으며, 이
주파수들은 DI4와 DI5로 활성화 시킬 수 있습니다. Drive 시작/정지 신호는DI1 (스타트
정방향) 와 DI2 (스타트 역방향)에 연결되어 있습니다.
모든 드라이브 출력은 자유롭게 설정가능하며, 기본 I/O 보드에서, 한 아날로그 출력
(출력주파수)과 3개의 릴레이 출력 (Run, Fault, Ready)이 가능합니다.
제어 연결
표준 제어 어플리케이션이 제어 연결을 강제로 시킵니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 47
*) 디지털 입력은 DIP 스위치를 활용하여 접지에서 격리될 수 있습니다. 아래 그림을
참조하십시오.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

48• vacon
M1.1 마법사
코드 파라미터 최소 최대 단위
1.1.1 스타트업 마법사 0 1 0 1170
1.1.3 멀티펌프 마법사 0 1 0 1671
1.1.4 마법사 0 1 0 1672
공장
초기값
ID 설명
M1 퀵 셋업:
코드 파라미터 최소 최대 단위
1.2 어플리케이션 0 2 1 212
1.3
1.4
1.5 가속도 시간 1 0.1 300.0 s 5.0 103
1.6 감속 시간 1 0.1 300.0 s 5.0 103
최소 주파수
참고
최대 주파수
참고
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz 50.0 102
공장
초기값
0 = 활성화하지 마십시오
1 = 활성화됨
마법사액티브를 선택하면 스타트업
마법사를 시작하는 것임(챕터 1.1
참조하십시오).
마법사액티브를 선택하면 멀티펌프
마법사를 시작하는 것임
(챕터2.7 참조하십시오 ).
마법사액티브를 선택하면 마법사를
시작하는 것임. 챕터 1.3
참조하십시오).
ID 설명
0=표준
1=Local / Remote
2=다단속
3=PID 제어
4=Multi purpose
5=모터 포텐셔미터
최소 허용주파수
레퍼런스
최대 허용주파수
레퍼런스
0에서 최대 주파수까지 걸리는
시간
최대 주파수에서 0까지 거리는
시간
3
1.7 모터 전류 한계 I_H*0.1 I_S A 변동 107 AC 드라이브 의 최대 모터 전류
1.8 모터 타입 0 1 0 650
1.9 모터 정격전압 변동 변동 V 변동 110
1.10 모터 정격주파수 8,0 320,0 Hz 50 Hz 111 모터 명판에서 찾으십시오
1.11 모터 정격속도 24 19200 Rpm 변동 112 모터 명판에서 찾으십시오
1.12 모터 정격전류 I_H*0.1 I_S A 변동 113 모터 명판에서 찾으십시오
1.13 모터 역률 0.3 1.00 변동 120 모터 명판에서 찾으십시오
0=유도 모터
1=영구 자석 모터
모터 명판에서 찾으십시오
참조 :
연결도 사용 가능 (Delta/
Star).
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 49
코드 파라미터 최소 최대 단위
1.14 에너지 최적화 0 1 0 666
1.15 모터인식 0
2
1.16 스타트 기능 0 1 0 505
1.17 정지 기능 0 1 0 506
1.18 자동 리셋 0 1 0 731
1.19
1.20
1.21 Remote 제어 위치 0 1 0 172
외부 폴트 응답
폴트
AI Low 폴트 응답
폴트
0 3 2 701
0 5 0 700
공장
초기값
0 631
ID 설명
최소 모터 전류를 찾아
에너지를 절약하고 모터
소리를 줄임. 팬이나 펌프
어플리케이션에서 사용
가능
0=불가능
1=가능
자동 인식 기능은 모터의
최적화 속도를 찾아냄
0 = 아무런 작동 없음
1 = 정지상태
2 = 회전상태
주의: 모터 명판
파라미터는 이전에 이미
실행되어야 합니다.
0=램핑
1=재빠른 출발
0=코스팅
1=램핑
0=불가능
1=가능
0=아무런 작동 없음
1=경고
2=폴트 (정지 모드에 따른
정지)
3=폴트 (코스팅에 의한
정지))
0=아무런 작동 없음
1=경고
2=경고+프리셋폴트
주파수(par. P3.9.1.13)
3=경고 + 이전의 주파수
4=폴트 (정지 모드에 따른
정지)
5=폴트 (코스팅에 의한
정지))
Remote제어위치
선택(스타트/정지).
0=I/O 제어
1=필드버스 제어
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

50• vacon
코드 파라미터 최소 최대 단위
1.22
1.23
1.24
1.25 AI1 신호 범위 0 1 0 379
1.26 AI2 신호 범위 0 1 1 390
1.27 RO1 기능 0 51 2 1101 다음 파라미터 참조: P3.5.3.2.1
1.28 RO2 기능 0 51 3 1104 다음 파라미터 참조: P3.5.3.2.1
1.29 RO3 기능 0 51 1 1107 다음 파라미터 참조: P3.5.3.2.1
1.30 AO1 기능 0 31 2 10050 다음 파라미터 참조: P3.5.4.1.1
I/O 제어 참고
A 선택
키패드 제어
주파수 선택
필드버스 제어
주파수 선택
0 9 5 117
0 9 1 121 다음 파라미터 참조: P1.22.
0 9 2 122 다음 파라미터 참조: P1.22.
공장
초기값
ID 설명
위치제어위치가 I/O A에 있을때
주파수 소스 선택
0 = 프리셋주파수 0
1 = 키패드 참고
2 = 필드버스
3 = AI1
4 = AI2
5 = AI1+AI2
6 = PID 참고
7 = 모터 포텐셔미터
8 = 조이스틱 참고
9 = 조깅 참고
주의: 공장초기값
파라미터 1.2로 선택된 값에
달라집니다.
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
Mi.31 표준
코드 파라미터 최소 최대 단위
1.31.1 1.31.1 프리셋주파수 1 P1.3 P1.4 Hz 10,0 105
1.31.2 1.31.1 프리셋주파수 2 P1.3 P1.4 Hz 15,0 106
1.31.3 1.31.1 프리셋주파수 3 P1.3 P1.4 Hz 20,0 126
공장
초기값
ID 설명
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
디지털 입력 DI4.로
선택한 리셋 주파수
디지털 입력 DI5.로
선택한 리셋 주파수
디지털 입력 DI4-5.로
선택한 리셋 주파수
3

vacon • 51
3.2.2 Local / Remote 제어 어플리케이션
Local/Remote 어플리케이션은 두개의 다른 제어위치가 필요시에 사용되며, Local과
Remote사이의 제어위치 변경은 DI6을 통해 이루어집니다. 원거리 제어가 활성화 될 경우,
시작/정지 명령은 필드버스 혹은 I/O 단자대 (DI1 및 DI2)에서 주어질 수 있습니다. 로컬
제어가 활성화되어 있을 경우, 시작/정지 명령은 키패드, 필드버스및 I/O 단자대
(DI4와DI5)에서 주어질 수 있습니다.
각각의 제어위치에서 주파수 레퍼런스는 키패드, 필더버스 및 I/O 단자대(AI1 혹은 AI2)에서
각기 선택될 수 있습니다.
모든 드라이브는 자유롭게 설정가능 하며, 기본 I/O 보드에서 하나의 아날로그 출력과(출력
주파수) 3개의 릴레이출력 (Run, Fault, Ready)이 지원됩니다.
제어 연결
Local / Remote 제어 어플리케이션이 제어연결을 강제시킵니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

52• vacon
3
*) 디지털 입력은 DIP 스위치를 활용하여 접지에서 격리될 수 있습니다.
아래그림을 참조하십시오
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

M1.1 마법사
vacon • 53
코드 파라미터 최소 최대 단위
1.1.1 스타트업 마법사 0 1 0 1170
1.1.3 멀티펌프 마법사 0 1 0 1671
1.1.4 마법사 0 1 0 1672 마법사 (다음 참조:챕터1.3).
공장
초기값
ID 설명
0 = 작동하지 마십시오
1 = 작동하십시오
시작 마법사 시작 (다음
참조:
챕터 1.1).
멀티펌프 마법사
시작(다음 참조: 챕터 1.1).
M1 퀵 셋업:
코드 파라미터 최소 최대 단위
1.2
1.3
1.4
어플리케이션 0 5 1 212
최소 주파수
참고
최대 주파수
참고
0.00 P1.4 Hz 0.0 101
P1.3 320 Hz 50.0 102
공장
초기값
ID 설명
0=표준
1=Local / Remote
2=다단속
3=PID 제어
4=Multi purpose
5=모터 포텐셔미터
최소 허용주파수
레퍼런스
최대 허용주파수
레퍼런스
1.5 가속도 시간 1 0.1 300.0 s 5.0 103
1.6 감속 시간 1 0.1 300.0 s 5.0 104
1.7 모터 전류 한계 I_H*0.1 I_S A 변동 107
1.8 모터 타입 0 1 0 650
1.9 모터 정격 전압 변동 변동 V 변동 110
1.10 모터 정격 주파수 8,0 320,0 Hz 50 Hz 111
1.11 모터 정격 속도 24 19200 Rpm 변동 112
1.12 모터 정격전류 I_H*0.1 I_S A 변동 113
1.13 모터 역률 0.30 1.00 변동 120
0에서 최대 주파수
도달하는데 걸리는 시간
정의
최대주파수에서 0으로
도달하는데 걸리는 시간
정의
최대 모터 전류 (AC
드라이브.)
0=유도 모터
1=영구 자석 모터
Un 값을 모터 명판에서
찾습니다. 주의
다음 연결도
가능함(Delta/Star).
fn 값을 모터 명판에서
찾습니다.
값 nn 값을 모터
명판에서 찾습니다.
In 값을 모터 명판에서
찾습니다.
이 값을 모터 명판에서
찾습니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

54• vacon
II/O A가 주파수 소스 제어
코드 파라미터 최소 최대 단위
1.14 에너지 최적화 0 1 0 666
1.15 모터인식 0 2 0 631
1.16 스타트 기능 0 1 0 505
1.17 정지기능 0 1 0 506
1.18 지동 리셋 0 1 0 731
1.19
1.20
1.21 리모트 제어 위치 0 1 0 172
외부 폴트 응답
폴트
AI Low 폴트 응답
폴트
0 3 2 701
0 5 0 700
공장
초기값
ID 설명
최소 모터 전류를 찾아
에너지를 절약하고 모터
소리를 줄임. 팬이나 펌프
어플리케이션에서 사용 가능
0=불가능
1=가능
자동 인식 기능은 모터의
최적화 속도를 찾아냄
0 = 아무런 작동 없음
1 = 정지상태
2 = 회전상태
주의: 모터 명판 파라미터는
이전에 이미 실행되어야
합니다
0=램핑
1=재빠른 출발
0=코스팅
1=램핑
0=불가능
1=가능
0=아무런 작동 없음
1=경고
2=폴트 (정지 모드에 따른
정지)
3=폴트 (코스팅에 의한
정지))
0=아무런 작동 없음
1=경고
2=경고+프리셋폴트
주파수(par. P3.9.1.13)
3=경고 + 이전의 주파수
4=폴트 (정지 모드에 따른
정지)
5=폴트 (코스팅에 의한
정지))
리모트 제어 위치 선택
(스타트/정지).
0=I/O 제어
1=필드버스 제어
1.22
1.23
3
I/O 제어 참고
A 선택
키패드 제어
레퍼가동스 선택
위치일 때
0 = 프리셋주파수 0
1 = 키패드 참고
2 = 필드버스
3 = AI1
0 9 3 117
0 9 1 121 다음 파라미터 참조: P1.22.
4 = AI2
5 = AI1+AI2
6 = PID 참고
7 = 모터 포텐셔미터
8 = 조이스틱 참고
9 = 조깅 참고
주의: 공장초기값
파라미터 1.2로 선택된 값에
달라집니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 55
코드 파라미터 최소 최대 단위
1.24
1.25 AI1 신호 범위 0 1 0 379
1.26 AI2 신호 범위 0 1 1 390
1.27 RO1 기능 0 51 2 11001
1.28 RO2 기능 0 51 3 11004
1.29 RO3 기능 0 51 1 11007
1.30 AO1 기능 0 51 2 10050
필드버스 제어
레퍼런스 선택
0 9 2 122 다음 파라미터 참조: P1.22.
공장
초기값
ID 설명
Mi.32 Local/Remote
코드 파라미터 최소 최대 단위
1.32.1
1.32.2 I/O B 제어를 강제함
1.32.3
1.32.4 제어 신호 1 B
1.32.5 제어 신호 2 B
1.32.6 키패드 제어를 강제함
1.32.7
1.32.8 외부 폴트 (Close)
1.32.9 폴트 리셋 (Close)
I/O 제어 참고
B 선택
I/O B 레퍼런스를
강제함
필드버스 제어를
강제함
1 20 4 131 다음 파라미터 참조: P1.22
공장
초기값
DigIN
슬롯A.6
DigIN
슬롯A.6
DigIN
슬롯A.4
DigIN
슬롯A.5
DigIN
슬롯A.1
DigIN
슬롯0.1
DigIN
슬롯A.3
DigIN
슬롯0.1
ID 설명
425 TRUE=I/O B로 제어위치 변경
343
423
424
410 키패드로 제어위치 변경
411 필드버스로 제어위치 변경
405
414 모든 활성화 폴트 리셋
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.4.1.1
TRUE= I/O B 주파수
레퍼런스 파라미터
(P1.32.1)로 레퍼런스 변경
I/O B가 제어장소일 때 일
스타트 신호 1
I/O B가 제어장소일 때 일
스타트 신호 2
FALSE = OK
TRUE = 외부 폴트
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

56• vacon
3.2.3 다단속 제어 어플리케이션
다단속 제어 어플리케이션은 테스트 벤치와 같은 여러 개의 고정된 레퍼런스 속도가
필요할 때 쓰입니다. 총 7+1(1개의 기본 레퍼런스 (AI1 혹은 AI2)와 7개 미리 설정된
레퍼런스)개의 주파수 레퍼런스가 사용될 수 있습니다.
미리설정된 레퍼런스는 디지털 신호 DI4와 DI5 와 DI6으로 설정됩니다. 이들 입력중
활성화된 것이 없을 경우, 주파수 레퍼런스는 아날로그 입력 (AI1 혹은 AI2)에서 받아지며,
시작/정지 명령은 I/O terminal (DI1 및 DI2)에서 주어집니다.
모든 드라이브 출력은 자유롭게 설정가능하며, 기본 I/O 보드에서 하나의 아날로그
출력과(출력 주파수) 3개의 릴레이출력 (Run, Fault, Ready)이 지원됩니다.
제어 연결
다단속 제어 어플리케이션 제어 연결을 공장초기값으로 시킵니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 57
*) 디지털 입력은 DIP 스위치를 활용하여 접지에서 격리될 수 있습니다.
아래 그림을 참조하십시오:
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

58• vacon
M1.1 마법사
코드 파라미터 최소 최대 단위
1.1.1 스타트업 마법사 0 1 0 1170
1.1.3 멀티-펌프 마법사 0 1 0 1671
1.1.4 마법사 0 1 0 1672 (다음 참조:챕터1.3).
공장
초기값
ID 설명
0 = 작동하지 마십시오
1 = 작동하십시오
(다음 참조: 챕터 1.1).
M1 퀵 셋업:
코드 파라미터 최소 최대 단위
1.2
1.3
1.4
1.5 가속도 시간 1 0.1 300.0 Hz 5.0 103
어플리케이션 0 5 2 212
최소 주파수
참고
최대 주파수
참고
0.00 P1.4 0.0 101
P1.3 320.0 Hz 50.0 102
공장
초기값
ID 설명
0=표준
1=Local / Remote
2=다단속
3=PID 제어
4=Multi purpose
5=모터 포텐셔미터
최소 허용주파수
레퍼런스
최대 허용주파수
레퍼런스
0에서 최대 주파수에
도달하는 시간
1.6 감속 시간 1 0.1 300.0 s 5.0 104
1.7 모터 전류 한계 I_GH*0.1 I_S s 변동 107
1.8 모터 타입 0 1 0 650
1.9 모터 정격 전압 변동 변동 변동 110
1.10 모터 정격 주파수 8,0 320,0 V 0 111
1.11 모터 정격 속도 24 19200 Hz 변동 112
1.12 모터 정격 전류 I_H*0.1 I_S Rpm 변동 113
1.13 모터 역률 0.30 1.00 A 변동 120
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
최대 주파수에서 0에
도달하는 시간
AC 드라이브. 최대 모터
전류
0=유도 모터
1=영구 자석 모터
Un 값을 모터 명판에서
찾습니다. 주의 :
다음 연결도
가능함(Delta/
Star).
fn 값을 모터 명판에서
찾습니다.
값 nn 값을 모터
명판에서 찾습니다.
In 값을 모터 명판에서
찾습니다.
이 값을 모터 명판에서
찾습니다.
3

vacon • 59
코드 파라미터 최소 최대 단위
1.14 에너지 최적화 0 1 0 666
1.15 모터인식 0 2 0 631
1.16 스타트 기능 0 1 0 505
1.17 정지 기능 0 1 0 506
1.18 자동 리셋 0 1 0 731
1.19
1.20
1.21
외부 폴트 응답
폴트
AI Low 폴트
응답
폴트
리모트 제어
위치
0 3 2 701
0 5 0 700
0 1 0 172
공장
초기값
ID 설명
최소 모터 전류를 찾아
에너지를 절약하고 모터
소리를 줄임. 팬이나 펌프
어플리케이션에서 사용 가능
0=불가능
1=가능
자동 인식 기능은 모터의
최적화 속도를 찾아냄
0 = 아무런 작동 없음
1 = 정지상태
2 = 회전상태
주의: 모터 명판 파라미터는
이전에 이미 실행되어야
합니다
0=램핑
1=재빠른 출발
0=코스팅
1=램핑
0=불가능
1=가능
0=아무런 작동 없음
1=경고
2=폴트 (정지 모드에 따른
정지)
3=폴트 (코스팅에 의한
정지))
0=아무런 작동 없음
1=경고
2=경고+프리셋폴트
주파수(par. P3.9.1.13)
3=경고 + 이전의 주파수
4=폴트 (정지 모드에 따른
정지)
5=폴트 (코스팅에 의한
정지))
리모트 제어 위치선택
(스타트/정지).
0=I/O 제어
1=필드버스 제어
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

60• vacon
코드 파라미터 최소 최대 단위
1.22
1.23
1.24
1.25 AI1 신호 범위 0 1 0 379
1.26 AI2 신호 범위 0 1 1 390
1.27 RO1 기능 0 51 2 11001
1.28 RO2 기능 0 51 3 11004
1.29 RO3 기능 0 51 1 11007
1.30 AO1 기능 0 31 2 10050
I/O 제어 참고
A 선택
키패드 제어
주파수 선택
필드버스 제어
주파수 선택
0 9 5 117
0 9 1 121 다음 파라미터 참조: P1.22.
0 9 2 122 다음 파라미터 참조: P1.22.
공장
초기값
ID 설명
II/O A가 주파수 소스 제어
위치일 때
0 = 프리셋 주파수 0
1 = 키패드 참고
2 = 필드버스
3 = AI1
4 = AI2
5 = AI1+AI2
6 = PID 참고
7 = 모터 포텐셔미터
8 = 조이스틱 참고
9 = 조깅 참고
주의: 공장초기값
파라미터 1.2로 선택된
값에 달라집니다.
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.4.1.1
M1.33 다단속
코드 파라미터 최소 최대 단위 공장 초기값 ID 설명
1.33.1 프리셋 주파수 1 P1.3 P1.4 Hz 10,0 105
1.33.2 프리셋 주파수 2 P1.3 P1.4 Hz 15,0 106
1.33.3 프리셋 주파수 3 P1.3 P1.4 Hz 20,0 126
1.33.4 프리셋 주파수 4 P1.3 P1.4 Hz 25,0 127
1.33.5 프리셋 주파수 5 P1.3 P1.4 Hz 30,0 128
1.33.6 프리셋 주파수 6 P1.3 P1.4 Hz 40,0 129
1.33.7 프리셋 주파수 7 P1.3 P1.4 Hz 50,0 130
1.33.8 프리셋주파수 모드 0 1 0 128
1.33.9 외부 폴트 (Close)
1.33.10 폴트 리셋 (Close)
DigIN
슬롯A.3
DigIN
슬롯0.1
405
414
0=Binary 코드
1=입력된 주파수 넘버
FALSE = OK
TRUE = 외부 폴트
TRUE일 때 모든 폴트
리셋
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
3

vacon • 61
3.2.4 PID 제어 어플리케이션
PID 제어 어플리케이션은 압력과 같은 변동될 수 있는 값을 제어하는데 쓰이며, 모터의
속도를 조절함으로써 제어합니다. 이 설정에서 PID 제어 어플리케이션은 추가 구성요소
없이 제어 패키지의 통합된 측정으로 부드러운 제어를 제공합니다.
2개의 제어위치가 사용될 수 있으며, 제어위치 A와 B사이의 선택은 DI6을 통해 이루어지며,
제어위치 A가 활성화 되어 있을 경우 시작/정지 명령은 DI1에 의해 주어지며 주파수
레퍼런스는 PID 제어기로부터 옵니다. 제어위치 B가 활성화 되어 있을 경우 스타트/스톱
명령은 DI4에 의해 주어지며, 주파수 레퍼런스는 AI1에서부터 나옵니다.
모든 드라이브 출력은 자유롭게 설정가능하며, 기본 I/O 보드에서 하나의 아날로그
출력과(출력주파수) 3개의 릴레이출력 (Run, Fault, Ready)이 지원됩니다.
제어 연결
PID 제어 어플리케이션 제어 연결을 강제 시킵니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

62• vacon
3
*) 디지털 입력은 DIP 스위치를 활용하여 접지에서 격리될 수 있습니다.
아래 그림을 참조하십시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

M1.1 마법사
vacon • 63
코드 파라미터 최소 최대 단위
1.1.1 스타트업 마법사 0 1
1.1.3 멀티-펌프 마법사 0 1
1.1.4 마법사 0 1
M1 퀵 셋업:
코드 파라미터 최소 최대 단위
1.2
1.3
1.4
어플리케이션 0 5 3 212
최소 주파수
레퍼런스
최대 주파수
레퍼런스
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz 50.0 102
공장
초기값
0 1170
0 1671
0 1672
공장
초기값
ID 설명
0 = 작동하지 마십시오
1 = 작동하십시오
스타트업 마법사 활성화
(다음 참조: 챕터 1.1).
마법사 활성화(다음 참조:
챕터 1.3).
ID 설명
0=표준
1=Local / Remote
2=다단속
3=PID 제어
4=Multi purpose
5=모터 포텐셔미터
최소 허용주파수
레퍼런스
최대 허용주파수
레퍼런스
0에서 최대 주파수
1.5 가속도 시간 1 0.1 300.0 s 5.0 103
1.6 감속 시간 1 0.1 300.0 s 5.0 104
1.7 모터 전류 한계 I_H*0.1 I_S A 변동 107
1.8 모터 타입 0 1 0 650
1.9 모터 정격 전압 변동 변동 V 변동 110
1.10 모터 정격 주파수 8,0 320,0 Hz 50 Hz 111
1.11 모터 정격 속도 24 19200 Rpm 변동 112
1.12 모터 정격 전류 I_H*0.1 I_S A 변동 113
1.13 모터 역률 0,30 1.00 변동 120
1.14 에너지 최적화 0 1 0 666 최소 모터 전류를 찾아
도달하는데 걸리는 시간
정의
최대주파수에서 0으로
도달하는데 걸리는 시간
정의
최대 모터 전류 (AC
드라이브.)
0=유도 모터
1=영구 자석 모터
Un 값을 모터 명판에서
찾습니다. 주의
다음 연결도
가능함(Delta/
Star).
fn 값을 모터 명판에서
찾습니다.
값 nn 값을 모터
명판에서 찾습니다.
In 값을 모터 명판에서
찾습니다.
이 값을 모터 명판에서
찾습니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

64• vacon
코드 파라미터 최소 최대 단위
1.15 모터인식 0 2 0 631
1.16 스타트 기능 0 1 0 505
1.17 정지 기능 0 1 0 506
1.18 자동 리셋 0 1 0 731
1.19
1.20
1.21
외부 폴트에 대한
응답
AI 낮음
폴트에 대한 응답
리모트 제어
위치
0 3 2 701
0 5 0 700
0 1 0 172
공장
초기값
ID 설명
에너지를 절약하고 모터
소리를 줄임. 팬이나
펌프 어플리케이션에서
사용 가능
0=불가능
1=가능
자동 인식 기능은 모터의
최적화 속도를 찾아냄
0 = 아무런 작동 없음
1 = 정지상태
2 = 회전상태
주의: 모터 명판
파라미터는 이 전에 이미
실행되어야 합니다
0=램핑
1=재빠른 출발
0=코스팅
1=램핑
0=불가능
1=가능
0=아무런 작동 없음
1=경고
2=폴트 (정지 모드에
따른 정지)
3=폴트 (코스팅에 의한
정지))
0=아무런 작동 없음
1=경고
2=경고+p리셋 폴트
주파수(par. P3.9.1.13)
3=경고 + 이전의 주파수
4=폴트 (정지 모드에
따른 정지)
5=폴트 (코스팅에 의한
정지))
리모트 제어 위치 선택
(스타트/정지).
0=I/O 제어
1=필드버스 제어
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 65
코드 파라미터 최소 최대 단위
1.22
1.23
1.24
1.25 AI1 신호 범위 0 1 0 379
1.26 AI2 신호 범위 0 1 1 390
1.27 RO1 기능 0 51 2 11001
1.28 RO2 기능 0 51 3 11004
1.29 RO3 기능 0 51 1 11007
1.30 AO1 기능 0 31 2 10050
I/O 제어 참고
A 선택
키패드 제어 주파수
선택
필드버스 제어
주파수 선택
0 9 6 117
0 9 1 121 다음 파라미터 참조: P1.22.
0 9 2 122 다음 파라미터 참조: P1.22.
공장
초기값
ID 설명
I I/O A가 주파수 소스
제어 위치일 때
0 = P리셋 주파수 0
1 = 키패드 참고
2 = 필드버스
3 = AI1
4 = AI2
5 = AI1+AI2
6 = PID 참고
7 = 모터 포텐셔미터
8 = 조이스틱 참고
9 = 조깅 참고
주의: 공장초기값
파라미터 1.2로 선택된
값에 달라집니다.
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.4.1.1
M1.34 PID 제어
코드 파라미터 최소 최대 단위
1.34.1 PID 게인 0.00 100.00 % 100.00 18
1.34.2 PID 집성 시간 0.00 600.00 s 1.00 119
1.34.3 PID 유도 시간 0.00 100.00 s 0.00 1132
1.34.4
1.34.5
1.34.6 키패드 설정영역 1 변동 변동 변동 0 167
피드백 1 소스
선택
설정영역 1 소스
선택
0 30 2 334
0 32 1 332
공장
초기값
ID 설명
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
이 파라미터값을 100%로
설정할 경우 10%값을
변경할 경우 제어기
출력은 10% 변경됩니다.
1.00초 동안 10%를
설정할 경우 제어기
출력은 10%.00/초로
변합니다
이 파라미터 값을 100%로
설정할 경우 10%값을
변경할 경우 제어기
출력은 10% 변경됩니다.
다음 파라미터 참조:
P3.13.3.3
다음 파라미터 참조:
P3.13.2.6
3

66• vacon
코드 파라미터 최소 최대 단위
공장
초기값
ID 설명
1.34.7
1.34.8 수면 딜레이 1 0 3000 s 0 1017
1.34.9 기상레벨 1 변동 변동 변동 변동 1018
1.34.10 프리셋주파수 1 P1.3 P1.4 Hz 10,0 105
수면 주파수
한계 1
0.0 320.0 Hz 0.0 1016
정전 모드에서
드라이브의 수면 주파수
한도를 정합니다.
드라이브가 멈추기 전
수면 레벨에 머무는
시간을 정합니다
PID피드백 값의
기상레벨을 정합니다
디지털 입력 DI5로
선택한 프리셋주파수
3.2.5 Multi Purpose 제어 어플리케이션
Multi Purpose 제어 어플리케이션은 모터를 제어할 수 있는 다양한 파라미터를 제공합니다.
컨베이어와 같은 다양한 모터 튜닝 기능이 필요한 여러 프로세스에서 사용될 수 있습니다.
드라이브는 키패드, 필드버스 또는 I/O 단자대에서 제어할 수 있습니다. I/O 단자대
제어에서 시작/정지 명령은 DI1와 DI2를 통해서 주어지며, 주파수 레퍼런스는 AI1 혹은
AI2에서 주어집니다.
두개의 가속/감속 램프가 있으며, Ramp1과 Ramp2의 선택은 DI6을 통해서 합니다.
모든 드라이브 출력은 자유롭게 설정가능하며, 기본 I/O 보드에서 하나의 아날로그
출력과(출력 주파수) 3개의 릴레이출력 (Run, Fault, Ready)이 지원됩니다.
제어 연결
Multi Purpose 제어 어플리케이션 연결을 강제 시킵니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 67
*) 디지털 입력은 DIP 스위치를 활용하여 접지에서 격리될 수 있습니다. 아래 그림을
참조하십시오.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

68• vacon
M1.1 마법사
코드 파라미터 최소 최대 단위
1.1.1 스타트업 마법사 0 1 0 1170
1.1.3 멀티펌프 마법사 0 1 0 1671
1.1.4 화재 모드 마법사 0 1 0 1672 (다음 참조: 챕터 1.3).
공장
초기값
ID 설명
0 = 작동하지 마십시오
1 = 작동하십시오
(다음 참조: 챕터 1.1).
M1 퀵 셋업:
코드 파라미터 최소 최대 단위
1.2
1.3
1.4
1.5 가속도 시간 1 0.1 300.0 s 5.0 103
1.6 감속 시간 1 0.1 300.0 s 5.0 104
1.7 모터 전류 한계 I_H*0.1 I_S A 변동 107
1.8 모터 타입 0 1 0 650
1.9 모터 정격 전압 변동 변동 V 변동 110
1.10 모터 정격 주파수 8,0 320,0 Hz 50 Hz 111
1.11 모터 정격 속도 24 19200 Rpm 변동 112
1.12 모터 정격 전류 I_H*0.1 I_S 변동 113
1.13 모터 역률 0.30 1.00 변동 120
어플리케이션 0 5 4 212
최소 주파수
참고
최대 주파수
참고
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz 50.0 102
공장
초기값
ID 설명
0=표준
1=Local / Remote
2=다단속 속도
3=PID 제어
4=Multi purpose
5=모터 포텐셔미터
최소 허용주파수
레퍼런스
최대 허용주파수
레퍼런스
0에서 최대 주파수에
도달하는 시간
최대 주파수에서 0에
도달하는 시간
AC 드라이브로부터의.
최대 모터 전류
0=유도 모터
1=영구 자석 모터
Un 값을 모터
명판에서 찾습니다.
주의
다음 연결도
가능함(Delta/Star).
fn 값을 모터
명판에서 찾습니다.
값 nn 값을 모터
명판에서 찾습니다.
In 값을 모터 명판에서
찾습니다.
이 값을 모터
명판에서 찾습니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 69
코드 파라미터 최소 최대 단위
1.14 에너지 최적화 0 1 0 666
1.15 모터인식 0 2 0 631
1.16 스타트 기능 0 1 0 505
공장
초기값
ID 설명
최소 모터 전류를 찾아
에너지를 절약하고 모터
소리를 줄임. 팬이나
펌프 어플리케이션에서
사용 가능
0=불가능
1=가능
자동 인식 기능은
모터의 최적화 속도를
찾아냄
0 = 아무런 작동 없음
1 = 정지상태
2 = 회전상태
주의: 모터 명판
파라미터는 이 전에
이미 실행되어야 합니다
0=램핑
1=재빠른 출발
1.17 정지 기능 0 1 0 506
1.18 자동 리셋 0 1 0 731
1.19
1.20
1.21 리모트 제어 위치 0 1 0 172
외부 폴트 응답
폴트
AI 낮음 폴트 응답
0 3 0 701
0 5 0 700
0=코스팅
1=램핑
0=불가능
1=가능
0=아무런 작동 없음
1=경고
2=폴트 (정지 모드에
따른 정지)
3=폴트 (코스팅에 의한
정지))
0=아무런 작동 없음
1=경고
2=경고+p리셋 폴트
주파수(par. P3.9.1.13)
3=경고 + 이전의
주파수
4=폴트 (정지 모드에
따른 정지)
5=폴트 (코스팅에 의한
정지))
리모트 제어 챕터소
선택 (스타트/정지).
0=I/O 제어
1=필드버스 제어
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

70• vacon
코드 파라미터 최소 최대 단위
1.22
1.23
1.24
1.25 AI1 신호 범위 0 1 0 379
1.26 AI2 신호 범위 0 1 0 390
1.27 RO1 기능 0 51 2 11001
1.28 RO2 기능 0 51 3 11004
1.29 RO3 기능 0 51 1 11007
1.30 AO1 기능 0 31 2 10050
I/O 제어 참고
A 선택
키패드 제어 주파수
선택
필드버스 제어
주파수 선택
0 9 5 117
0 9 1 121 다음 파라미터 참조: P1.22.
0 9 2 122 다음 파라미터 참조: P1.22.
공장
초기값
ID 설명
I I/O A가 주파수 소스
제어 위치일 때
0 = P리셋 주파수 0
1 = 키패드 참고
2 = 필드버스
3 = AI1
4 = AI2
5 = AI1+AI2
6 = PID 참고
7 = 모터 포텐셔미터
8 = 조이스틱 참고
9 = 조깅 참고
주의: 공장초기값 파라미터
1.2로 선택된 값에
달라집니다.
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.4.1.1
3
M1.35 Multi-Purpose
코드 파라미터 최소 최대 단위
1.35.1 제어 모드 0 0 0 600
1.35.2 자동 토크 부스트 0 1 0 109
1.35.3 가속도 시간 2 0.1 300.0 s 10.0 502
1.35.4 감속 시간 2 0.1 300.0 s 10.0 503
1.35.5 프리셋주파수 1 P1.3 P1.4 Hz 5.0 105 DI4로 선택된 프리셋 주파수
1.35.6 U/f 비율 선택 0 2 0 108
공장
초기값
ID 설명
0=U/f 주파수 제어 오픈 루프
1= 속도 제어 오픈 루프
2 =토크 제어 오픈 루프
0=불가능
1=가능
0에서 최대 주파수 도달하는데
걸리는 시간 정의
최대주파수에서 0으로
도달하는데 걸리는 시간 정의
제로 주파수 및 약계자 영역
사이의 U/f 커브
0=비례
1=제곱
2=프로그램 가능
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 71
코드 파라미터 최소 최대 단위
1.35.7
1.35.8 약계자 영역 전압 10.00 200.00 % 100.00 603
1.35.9
1.35.10 U/f 중간영역 전압 0.0 100.00 % 100.0 605
1.35.11 제로 주파수 전압 0.00 40.00 % 변동 606
1.35.12
약계자 영역
주파수
U/f 중간영역
주파수
자화기동
전류
8.00 P1.4 Hz 변동 602
0.0 P1.35.7 Hz 변동 604
0.00 변동 A 변동 517
공장
초기값
ID 설명
출력 전압이 약계자 영역
전압을 도달 하는 주파수
약계자 영역의 전압을 모터
정격 전압의 %로 나타냄
U/f 커브가 선택되었다는
가정하에(par. P1.35.6), 이
파라미터는 커브의 중간
주파수를 정합니다
U/f 커브가 선택되었다는
가정하에(par. P1.35.6), 이
파라미터는 커브의 중간
전압을 정합니다
이 파라미터는 커브의 제로
주파수 전압을 정합니다.
공장 초기값 값은 유닛
사이즈에 따라 다릅니다.
스타트시 모터에 공급되는
DC 전류 0일 경우 불가능
1.35.13
1.35.14 DC 제동 전류 변동 변동 A 변동 507
1.35.15
1.35.16
1.35.17 부하 감소 0.00 50.00 % 0.00 620 %로 감소하는 속도를 정의
1.35.18 부하 감소시간 0.00 2.00 s 0.00 656
1.35.19 부하 감소 모드 0 1 0 1354
자화기동
시간
정지시 DC 제동
시간
램핑 정지시 DC
제동 시작하는
주파수
0.00 600.00 s 0.00 516
0.00 600.00 s 0.00 508
0.10 50.00 % 0.00 515 적용되는 출력 주파수
가속이 시작되기 전 얼마나
오래 모터에 DC 전류를
공급할 것인가 결정
DC브레이킹시 공급되는
전류
0 = 불가능
제동을 작동시킬 것인지 안
시킬 것인지, 브레이킹
시간도 정의
적용되는 레벨 까지 감소
하는 속도를 정의
0 = 아니오; 모든 주파수
범위에서 적용
1 = 비례: 정격 주파수에서
제로 주파수까지 제거
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

72• vacon
3.2.6 모터 포텐셔미터 제어 어플리케이션
모터 포텐셔미터 제어 어플리케이션은 디지털 입력을 활용하여 모터 주파수 레퍼런스를
증가시키거나 감소시키는데 사용하는 설정값입니다..
이 설정에서, I/O 단자대가 공장 초기값 제어장소로 설정되어 있으며, 시작/정지 명령은
DI1과 DI2를 통해 주어집니다. 모터 주파수 레퍼런스는 DI5를 통해 증가하고, DI6을 통해
감소합니다.
모든 드라이브 출력은 자유롭게 설정가능하며, 기본 I/O 보드에서 하나의 아날로그
출력과(출력 주파수) 3개의 릴레이출력 (Run, Fault, Ready)이 지원됩니다.
제어 연결
모터 포텐셔미터 제어 어플리케이션 연결을 디폴트 시킵니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 73
*) 디지털 입력은 DIP 스위치를 활용하여 접지에서 격리될 수 있습니다.
아래 그림을 참조하십시오.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

74• vacon
M1.1 마법사
코드 파라미터 최소 최대 단위 공장 초기값 ID 설명
0 = 작동하지 마십시오
1.1.1 스타트업 마법사 0 1 0 1170
1 = 작동하십시오
시작 마법사 시작
(다음 참조: 챕터 1.1).
1.1.3 멀티펌프 마법사 0 1 0 1671
1.1.4 마법사 0 1 0 1672
멀티펌프 마법사 시작(다음
참조: 챕터 1.1).
마법사 (다음
참조:챕터1.3).
M1 퀵 셋업:
코드 파라미터 최소 최대 단위 공장 초기값 ID 설명
0=표준
1=Local / Remote
1.2
1.3
1.4
1.5 가속도 시간 1 0.1 300.0 s 5.0 103
1.6 감속 시간 1 0.1 300.0 s 5.0 104
1.7 모터 전류 한계 I_S I_H*0.1 A 변동 107
1.8 모터 타입 0 1 0 650
1.9 모터 정격 전압 변동 변동 V 변동 110
1.10 모터 정격 주파수 8,0 320,0 Hz
1.11 모터 정격 속도 24 19200 Rpm 변동 112
1.12 모터 정격 전류 I_S I_H*0.1 A 변동 113
1.13 모터 역률 0.30 1.00 변동 120
어플리케이션 0 5 5 212
최소 주파수
참고
최대 주파수
참고
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz 50.0 102
50Hz/
60Hz
2=다단속
3=PID 제어
4=Multi purpose
5=모터 포텐셔미터
최소 허용주파수
레퍼런스
최대 허용주파수
레퍼런스
0에서 최대 주파수
도달하는데 걸리는 시간
정의
최대주파수에서 0으로
도달하는데 걸리는 시간
정의
최대 모터 전류 (AC
드라이브.)
0=유도 모터
1=영구 자석 모터
Un 값을 모터 명판에서
찾습니다. 주의
다음 연결도 가능함(Delta/
Star).
fn 값을 모터 명판에서
111
찾습니다.
값 nn 값을 모터 명판에서
찾습니다.
In 값을 모터 명판에서
찾습니다.
이 값을 모터 명판에서
찾습니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 75
코드 파라미터 최소 최대 단위
1.14 에너지 최적화 0 1 0 666
1.15 모터인식 0 2 0 631
1.16 스타트 기능 0 1 0 505
1.17 정지 기능 0 1 0 506
1.18 자동 리셋 0 1 0 731
공장
초기값
ID 설명
최소 모터 전류를 찾아 에너지를
절약하고 모터 소리를 줄임.
팬이나 펌프 어플리케이션에서
사용 가능
0=불가능
1=가능
자동 인식 기능은 모터의 최적화
속도를 찾아냄
0 = 아무런 작동 없음
1 = 정지상태 : 정지
2 = 회전상태 : 회전
주의: 모터 명판 파라미터는 이
전에 이미 실행되어야 합니다
0=램핑
1=재빠른 출발
0=코스팅
1=램핑
0=불가능
1=가능
1.19 외부 폴트 응답 0 3 2 701
1.20
1.21
AI 낮음 폴트
응답
리모트 제어
위치
0 5 0 700
0 1 0 172
0=아무런 작동 없음
1=경고
2=폴트 (정지 모드에 따른 정지)
3=폴트 (코스팅에 의한 정지))
0=아무런 작동 없음
1=경고
2=경고+p리셋 폴트 주파수( pa r.
P3.9.1.13)
3=경고 + 이전의 주파수
4=폴트 (정지 모드에 따른 정지)
5=폴트 (코스팅에 의한 정지))
리모트 제어 챕터소 선택
(스타트/정지).
0=I/O 제어
1=필드버스 제어
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

76• vacon
코드 파라미터 최소 최대 단위
.22
1.23
1.24
1.25 AI1 신호 범위 0 1 0 379
1.26 AI2 신호 범위 0 1 1 390
1.27 RO1 기능 0 51 2 11001
1.28 RO2 기능 0 51 3 11004
1.29 RO3 기능 0 51 1 11007
1.30 AO1 기능 0 31 2 10050
I/O 제어 참고
A 선택
키패드 제어 주파수
선택
필드버스 제어
주파수 선택
0 9 7 117
0 9 1 121 다음 파라미터 참조: P1.22.
0 9 2 122 다음 파라미터 참조: P1.22.
공장
초기값
ID 설명
I I/O A가 주파수 소스 제어
위치일 때
0 = P리셋 주파수 0
1 = 키패드 참고
2 = 필드버스
3 = AI1
4 = AI2
5 = AI1+AI2
6 = PID 참고
7 = 모터 포텐셔미터
8 = 조이스틱 참고
9 = 조깅 참고
주의: 공장 초기값
파라미터 1.2로 선택된 값에
달라집니다.
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.3.2.1
다음 파라미터 참조:
P3.5.4.1.1
3
M1.36 모터포텐셔미터
코드 파라미터 최소 최대 단위
1.36.1
1.31.2
1.31.2 프리셋 주파수 1 P1.3 P1.4 Hz 10,0 105
모터 포텐셔미터
램프 시간
모터 포텐셔미터
리셋
0.1 500.0 Hs/s 10.0 331
0 2 1 367
공장
초기값
ID 설명
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
모터 포텐셔미터 레퍼런스가
변화하는 비율
(DI5와 DI6로 각기
증가/감소).
값이 0으로 리셋되었을
경우.
0 = 아니오 리셋
1 = 리셋 (멈출시)
2 = 리셋 (전력 차단)
디지털 입력 DI4에 의해
선택된 프리셋 주파수

vacon • 77
3.3 모니터 그룹
Vacon 100 AC 드라이브는 상태나 측정 값뿐만 아니라, 파라미터의 현재 값을 모니터링할
수 있습니다. 모니터링 될 값은 사용자에 의해 변경될 수 있습니다.
3.3.1 멀티모니터
멀티모니터 페이지에서, 4개에서 9개의 모니터하고자 하는 값을 파라미터3.11.4. 으로
설정할 수 있습니다.
3.3.2 트렌드 곡선
트렌드 곡선은 두개의 모니터링 값을 동시에 표현합니다 트렌드 곡선 하위메뉴에서, 트렌드
곡선을 볼 수 있으며, 신호 선택을 할 수 있습니다. 또한 최소 및 최대값을 설정하고
있으며, 자동검출 기능을 활용하거나, 샘플링 주기를 설정할 수도 있습니다. 모니터링 할
값을 바꾸는 과정은 다음과 같습니다:
1. 모니터에서 트렌드 곡선을 찾고 OK 버튼을 누릅니다.
2. 트렌드 곡선 메뉴를 OK를 다시 눌러서 들어갑니다.
3. 현재 선택된 모니터링 값은 주파수 레퍼런스이며, 모터속도는 화면 아래쪽에 표시됩니다.
4. 트랜드 곡선에서 2개의 값만 동시에 표현되며, 현재값 중 바꾸고 싶은 값을 화살표로
선택하고 OK 버튼을 누릅니다.
5. 모니터링할 값의 리스트를 화살표로 이동하며 선택하고 싶은 값을누르고 OK 버튼을
누릅니다.
6. 바뀐 트렌드 곡선 값이 화면에 보입니다.
트렌드 곡선은 또한 진행을 정지시키고 정확한 특정값을 읽을 수 도 있습니다.
1. 트렌드 곡선에서 커브상에 보고자하는 영역에서 화살표로 움직인후 OK를 누릅니다.
수직선이 화면에 나타납니다.
2. 화면은 멈추고 값이 화면의 하단부에 나타납니다.
3. 화살표를 좌우로 움직여, 수직선을 다른 값의 영역으로 이동합니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

78• vacon
코드 파라미터 최소 최대 단위 공장 초기값 ID 설명
M2.2.1 트렌드 커브 보기 커브 모양 보기
P2.2.2 샘플링 인터벌 100 432000 ms 100 2368 샘플링 주기 설정
P2.2.3 채널 1 최소 -214748 1000 -1000 2369
P2.2.4 채널 1 최대 -1000 214748 1000 2370
P2.2.5 채널 2 최소 -214748 1000 -1000 2371
P2.2.6 채널 2 최대 -1000 214748 1000 2372
P2.2.7 오토 스케일 0 1 0 2373
표 19. 트렌드 곡선 파라미터
스케일링 조정시 사용
조정 필요
스케일링 조정시 사용
조정 필요
스케일링 조정시 사용
조정 필요
스케일링 조정시 사용
조정 필요
이 파라미터 값이
1이면 자동으로
최소와 최대값
사이에서 스케일링
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 79
3.3.3 베이직
베이직 모니터링 값은 표20을 참조하십시오.
주의 !
모니터 메뉴에서 표준 I/O 보드 상태만 표시가 됩니다. I/O 및 하드웨어 시스템 메뉴에서 I/O 보
드 신호 기본 데이터를 찾을 수 있습니다.
I/O 및 하드웨어 시스템에서 필요할 경우 확장 I/O 보드 상태를 확인할 수 있습니다.
코드 모니터링값 단위 스케일 ID 설명
V2.3.1 출력 주파수 Hz 0.01 1 모터로의 출력 주파수
V2.3.2 주파수 레퍼런스 Hz 0.01 25 모터 제어기의 주파수 레퍼런스
V2.3.3 모터 속도 rpm 1 2 모터 현재 속도rpm
V2.3.4 모터 전류 A 변동 3
V2.3.5 모터 토크 % 0.01 4 계산된 샤프트 토크
V2.3.7 모터 샤프트 파워 % 0.01 5 계산된 모터 샤프트 파워 %
V2.3.8 모터 샤프트 파워 kW/hp 변동 73
V2.3.9 모터 전압 V 0.01 6 모터로의 출력 전압
V2.3.10 DC 링크 전압 V 1 7 DC-링크 에서 측정된 드라이브 전압
V2.3.11 단위 온도 °C 0.01 8 히트싱크 온도 °C 혹은 °F
V2.3.12 모터 온도 % 0.01 9 계산된 모터 온도의 정격 작동 온도 %
V2.3.13 모터 예열온도 1 1228
V2.3.14 토크 레퍼런스 % 0.01 18 모터로의 토크 레퍼런스
표 20. 모니터링 메뉴 아이템
계산된 모터 샤프트 파워 kW 혹은 hp.
단위는 단위 선택 파라미터에 따라 달라짐
예열온도 기능.
0 = OFF
1 = 난방 (DC전류 공급)
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

80• vacon
3.4 I/O
표 21. I/O 시그널 모니터링
코드 모니터링값 단위 스케일 ID 설명
V2.4.1 슬롯 A DIN 1, 2, 3
V2.4.2 슬롯 A DIN 4, 5, 6
V2.4.3 슬롯 B RO 1, 2, 3
V2.4.4 아날로그 입력 1 % 0.01 59
V2.4.5 아날로그 입력 2 % 0.01 60
V2.4.6 아날로그 입력 3 % 0.01 61
V2.4.7 아날로그 입력 4 % 0.01 62
V2.4.8 아날로그 입력 5 % 0.01 75
V2.4.9 아날로그 입력 6 % 0.01 76
V2.4.10 슬롯 A AO1 % 0.01 81
1 15 디지털 입력 1-3 슬롯 A 상태 (표준 I/O)
1 16 디지털 입력 4-6슬롯 A 상태 (표준 I/O)
1 17 릴레이 입력 1-3 슬롯 B 상태
슬롯A 1를 공장 초기값으로 사용하는
범위의 입력 신호 %.
슬롯A 2를 공장 초기값으로 사용하는
범위의 입력 신호 %.
슬롯D 1을 공장 초기값으로 사용하는
범위의 입력 신호 %.
슬롯D 2를 공장 초기값으로 사용하는
범위의 입력 신호 %.
슬롯E 1을 공장 초기값으로 사용하는
범위의 입력 신호 %.
슬롯E 2를 공장 초기값으로 사용하는
범위의 입력 신호 %.
슬롯A.(표준 I/O)를 공장 초기값으로
사용하는 범위의 입력 신호 %.
3.3.5 온도 입력
주의 !이 파라미터 그룹은 OPT-BH 온도 측정이 설치된 옵션 보드에서만 볼 수 있습니다.
표 22. 온도 입력들을 모니터한 값
코드 모니터링값 단위 스케일 ID 설명
슬롯 A부터 슬롯 E까지 온도 입력을
V2.5.1 온도 입력 1 °C 0.1 50
V2.5.2 온도 입력 2 °C 0.1 51 온도입력 2의 측정값
V2.5.3 온도 입력 3 °C 0.1 52 온도입력 3의 측정값
V2.5.4 온도 입력 4 °C 0.1 69 온도입력 4의 측정값
V2.5.5 온도 입력 5 °C 0.1 70 온도입력 5의 측정값
V2.5.6 온도 입력 6 °C 0.1 71 온도입력 6의 측정값
보여주며, 센서가 없을 경우 측정된 저항이
끝이 없습니다. 입력을 핸드와이어링하여 최소
값으로 설정할 수 있습니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

코드 모니터링값 단위 스케일 ID 설명
Bit 코드 워드
B1=준비됨
B2=런
B3=폴트
V2.6.1
.6.2 준비된 상태 1 78
V2.6.3
드라이브 상태
워드
어플리케이션
상태 워드1
1 43
1 89
B6=런 가능
B7=경고활성화
B10=정지시DC 전류
B11=DC 제동 활성화
B12=런 요청
B13=모터 레귤레이터 활성화
Bit 준비 단계 코드 정보
드라이브가 준비되지 않은 상태에
디버깅하는데 유용하며, 값은 그래픽키패드에
보이는 체크박스로 체크(x)되면 값이 활성화
됩니다.
B0: 런 높은 수준으로 가동 활성화
B1: 아니오 폴트 활성화
B2: 충전 스위치 닫힘
B3: DC 전압한계한도내
B4: 파워 매니저 시작
B5: 전원 유닛이 블로킹 스타트를 안함
B6: 시스템 소프트웨어 블로킹 스타트를 안함
Bit 코드
값은 그래픽키패드에 보이는 체크박스로
체크(x)되면 값이 활성화 됩니다.
B0=인터로크 1
B1=인터로크 2
B2=역으로 됨
B3=램프 2 활성화
B4=기계적 제동 제어
B5=I/O A 제어 활성화
B6=I/O B 제어 활성화
B7=필드버스 제어 활성화
B8=Local 제어 활성화
B9=PC 제어 활성화
B10=프리셋주파수 활성화
B11=조깅 활성화
B12= 활성화
B13=모터 예열온도 활성화
B14=빠른 정지활성화
B15=키패드로 드라이브 정지
V2.6.4 어플리케이션
vacon • 81
Bit 코드.
값은 그래픽키패드에 보이는 체크박스로
체크(x)되면 값이 활성화 됩니다.
B0=Acc/Dec 금지
V2.6.4
어플리케이션
상태 워드2
1 90
B1=모터 스위치 개방
B5=자키 펌프 활성화
B6=프라이밍 펌프 활성화
B7=입력 압력 감시 (경고/폴트)
B8=결빙보호 (경고/폴트)
B9=오토 클리닝 활성화
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

82• vacon
표 23. 더 진보된 수치 모니터링
코드 모니터링값 단위 스케일 ID 설명
16-bit 워드는 디지털 입력의 상태를
나타냅니다. 6 디지털 입력이 각 슬롯마다
V2.6.5 DIN 상태 워드 1 1 56
V2.6.6 DIN 상태 워드 2 1 57
V2.6.7 모터 전류 1 소수 0.1 45
읽히며 워드 1 은
입력 1 슬롯 A (bit0) 에서 시작하여
입력 4슬롯 C (bit15)로 끝납니다.
16-bit 워드는 디지털 입력의 상태를
나타냅니다. 6 디지털 입력이 각 슬롯마다
읽히며 워드 1 은
입력 1 슬롯 A (bit0) 에서 시작하여
입력 4슬롯 C (bit15)
입력 6 슬롯 E (bit13) 로 끝납니다.
모터 전류 모니터 값은 특정 자리수로 프레임
사이즈와 상관없이 필터링 시간을 줄여서
모터전류 값을 모니터링할 수 있습니다.
2.6.8
V2.6.9
V2.6.10
V2.6.11
V2.6.12
주파수 레퍼런스
소스
마지막
활성화폴트 코드
마지막
활성화폴트 ID
마지막
활성화경고 코드
마지막
활성화경고 ID
현재 주파수 레퍼런스 소스를 보여줍니다
0=PC
1=프리셋 주파수
2=키패드 레퍼런스
3=필드버스
4=AI1
5=AI2
1 1495
1 37 리셋되지 않은 가장 최근의 폴트 코드
1 95 리셋되지 않은 가장 최근의 폴트 ID
1 74 리셋되지 않은 가장 최근의 경고코드
1 94 리셋되지 않은 가장 최근의 경고ID
6=AI1+AI2
7=PID 제어기
8=모터 포텐셔미터
9=조이스틱
10=조깅
100=설정되지 않음
101=경고,프리셋 주파수
102=오토 클리닝
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 83
3.3.7 타이머 기능 모니터링
여기서 타이머 기능과 실시간 시계를 볼 수 있습니다.
표 24. 타이머 기능 모니터링
코드 모니터링값 단위 스케일 ID 설명
V2.7.1 TC 1, TC 2, TC 3 1 1441 3개의 시간 채널 (TC) 상태 모니러링
V2.7.2 인터벌 1 1 1442 타이머 주기 상태
V2.7.3 인터벌 2 1 1443 타이머 주기 상태
V2.7.4 인터벌 3 1 1444 타이머 주기 상태
V2.7.5 인터벌 4 1 1445 타이머 주기 상태
V2.7.6 인터벌 5 1 1446 타이머 주기 상태
V2.7.7 타이머 1 s 1 1447 타이머 활성화시 남은 시간
V2.7.8 타이머 2 s 1 1448 타이머 활성화시 남은 시간
V2.7.9 타이머 3 s 1 1449 타이머 활성화시 남은 시간
V2.7.10 Real 시간 클럭 1450 hh:mm:ss
3.3.8 PID제어기 모니터링
표 25. PID-제어기 값 모니터링
코드 모니터링값 단위 스케일 ID 설명
프로세스 유닛의 PID 제어기
V2.8.1 PID1 설정영역 변동
V2.8.2 PID1 피드백 변동
P3.13.1.7에
따름
P3.13.1.7
에 따름
설정영역값.
20
프로세스 유닛은 파라미터로
선택됩니다.
프로세스 유닛의 PID 제어기
설정영역값.
21
프로세스 유닛은 파라미터로
선택됩니다.
V2.8.3 PID1 오류값 변동
V2.8.4 PID1 출력 % 0.01 23
V2.8.5 PID1 상태 1 24
P3.13.1.7
에 따름
22
파라미터로 선택된 프로세스 유닛
값과의 차이
PID 출력% (0..100%). 이 값은 모터
제어기 (주파수 레퍼런스) 혹은
아날로그 출력으로 들어갑니다.
0=정지함
1=런 가동함
3=수면 모드
4=Dead band상태 (다음 참조: 132)
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

84• vacon
3.3.9 외부PID-제어기 모니터링
표 26.외부PID-제어기 값 모니터링
코드 모니터링값 단위 스케일 ID 설명
프로세스 유닛의 외부 PID 제어기
83
설정영역값. 프로세스 유닛은 파라미터로
선택됩니다.
프로세스 유닛의 외부 PID제어기
84
설정영역값. 프로세스 유닛은 파라미터로
선택됩니다.
V2.9.1 ExtPID 설정영역 변동
V2.9.2 ExtPID 피드백 변동
P3.14.1.10에
따름
P3.14.1.10
에 따름
V2.9.3 ExtPID 오류 값 변동 P3.14.1.10
에 따름
V2.9.4 ExtPID 출력 % 0.01 86
V2.9.5 ExtPID 상태 1 87
파라미터로 선택된 프로세스 유닛 값과의
85
차이
PID 출력 % (0..100%). 이 값은 아날로그
출력으로 들어갑니다.
0=정지함
1=런가동함
2= Dead band 상태 (다음 참조: 132)
3.3.10 멀티펌프 모니터링
표 27. 멀티펌프모니터링
코드 모니터링값 단위 스케일 ID 설명
V2.10.1 모터 런닝 1 30 멀티펌프 기능 사용시 작동 모터 개수
V2.10.2 오토 체인지 1 1113 오토 체인지 요청
3.3.11 유지보수 카운터
표 28. 유지보수 카운터 모니터링
코드 모니터링값 단위 스케일 ID 설명
3
V2.11.1
유지보수
카운터 1
h/
kRev
변동 1101
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
유지보수 카운터의 상태, 1000 혹은 시간
단위로 표시가 되며 자세한 사항은 그룹
3.16카운터를 참조하십시오.

3.3.12 필드버스 데이터 모니터링
표 29. 필드버스 데이터 모니터링
코드 모니터링 값 단위 스케일 ID 설명
바이패스 모드/포맷 어플리케이션에서
사용되는 필드버스 제어기 워드
V2.12.1 FB 제어 워드 1 874
V2.12.2 FB 속도 레퍼런스 변동 875
필드버스 타입에 따라 데이터는
어플리케이션으로 보내지기 전에 수정될 수
있습니다.
속도 레퍼런스는 최소와 최대 주파수 사이에
검출됩니다. 최소값 및 최대값은 레퍼런스
숫자를 받은 후에 레퍼런스에 영향을 주지
않고 수정할 수 있습니다.
vacon • 85
V2.12.3 FB 데이터 입력 1 1 876
V2.12.4 FB 데이터 출력 2 1 877
V2.12.5 FB 데이터 출력 3 1 878
V2.12.6 FB 데이터 출력 4 1 879
V2.12.7 FB 데이터 출력 5 1 880
V2.12.8 FB 데이터 출력 6 1 881
V2.12.9 FB 데이터 출력 7 1 882
V2.12.10 FB 데이터 출력 8 1 883
V2.12.11 FB 상태 워드 1 864
V2.12.12 실제 FB속도 0.01 865
V2.12.13 FB 데이터 출력 1 1 866
V2.12.14 FB 데이터 출력 2 1 867
V2.12.15 FB 데이터 출력 3 1 868
V2.12.16 FB 데이터 출력 4 1 869
V2.12.17 FB 데이터 출력 5 1 870
V2.12.18 FB 데이터 출력 6 1 871
V2.12.19 FB 데이터 출력 7 1 872
V2.12.20 FB 데이터 출력 8 1 873
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
바이패스 모드/포맷 어플리케이션에서
사용되는 필드버스 상태 워드
필드버스 타입에 따라 데이터는
어플리케이션으로 보내지기 전에 수정될 수
있습니다.
최소 및 최대 주파수에 따라 현재 속도의%.
0 - 100% 현재 최소 최대 출력 주파수에
따라 값이 바뀝니다.
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
32-bit 신호로 된 포멧에서의 로(raw)
프로세스 데이터
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

86• vacon
3.3.13 디지털 및 아날로그 입력의 프로그래밍
Vacon 100의 범용 어플리케이션의 입력 프로그래밍은 매우 손쉬우며, 사용자의 선택에
따라 표준 및 옵션 I/O가 사용될 수 있습니다. 보드 슬롯 C, D 및 E에 삽입되는 옵션
보드로 사용 가능한 I/O를 통하여 확장될 수 있습니다. 설치 매뉴얼에서 옵션보드의
설치법에 관하여 볼 수 있습니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 87
3.3.13.1 디지털 입력
파라미터 그룹M3.5.1의 파라미터에 디지털 입력에 적용가능한 기능들이 나와있습니다.
파라미터에 주어지는 레퍼런스는 주어진 디지털 입력 기능의 레퍼런스이며, 기능에 관한 더
자세한 내용은 109쪽을 참조하십시오.
Vacon 100 AC 드라이브의 표준 I/O 보드에서는 6개의 디지털 입력이 사용가능합니다. (슬롯
A 단자대 8,9,10,14,15,16) 프로그래밍에서는 이 입력이 다음과 같습니다:
표 30.
입력 타입
(그래픽의 키패드)
DigIN dI A. 1
DigIN dI A. 2
DigIN dI A. 3
DigIN dI A. 4
DigIN dI A. 5
DigIN dI A. 6
입력 타입
(텍스트 키패드)
슬롯 입력 # 설명
디지털 입력 #1 (단자대 8) 보드슬롯
A (표준 I/O 보드).
디지털 입력 #2 (단자대 9) 보드슬롯
A (표준 I/O 보드).
디지털 입력 #3 (단자대 10)
보드슬롯 A (표준 I/O 보드).
디지털 입력 #4 (단자대 14)
보드 슬롯 A (표준 I/O 보드).
디지털 입력 #5 (단자대 15)
보드 슬롯 A (표준 I/O 보드).
디지털 입력 #6 (단자대 16)
보드 슬롯 A (표준 I/O 보드).
18번 도표에서 외부 폴트 닫힘은 메뉴M3.5.1에 파라미터P3.5.1.11로 존재하며 공장 초기값
값은 DigIN SlotA.3 (그래픽 키패드)혹은 dI A.3 (텍스트 키패드) 입니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

88• vacon
이에 따라 외부 폴트 닫힘은 DI3 (단자대10)으로 전해지는 디지털 신호를 통해 제어됩니다.
코드 파라미터 공장 초기값 ID 설명
P3.5.1.11 외부 폴트 close
선택된 입력을 바꾼다고 가정하십시오. 표준 I/O에서 DI3대신에 DI6 (단자대 16)을
사용하려고 할 경우에 다음과 같이 바꾸시면 됩니다:
DigIN
슬롯A.3
405
FALSE = OK
TRUE = 외부 폴트
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 89
표 31. 프로그래밍 디지털 입력
프로그래밍 명령
그래픽의 키패드 텍스트 키패드
1. 파라미터 선택 후 오른쪽 화살표 버튼을
누르십시오
2. 수정모드에서 슬롯값 DigIN 슬롯A이 깜빡이고,
밑줄이 쳐져 있습니다. (더 많은 디지털 입력이
I/O에 있을 경우 여기서 선택 가능합니다. 17을
참조하십시오.
3. 화살표 오른쪽 버튼을 또 누르고 단자대값 3을
활성화합니다.
4. 화살표위버튼을 눌러 3개의시간을 단자대값
6으로 바꾸고 OK 버튼을 눌러 적용합니다.
5. 주의 ! 디지털입력 DI6이 벌써 다른 기능으로
사용될 경우 메시지가 표시되며 선택사항을
변경해야 합니다.
1. 파라미터 선택 후 Ok를 누르십시오
2. 수정모드에서 슬롯값 DigIN 슬롯A이 깜빡이고,
밑줄이 쳐져 있습니다. (더 많은 디지털 입력이
I/O에 있을 경우 여기서 선택 가능합니다. 17을
참조하십시오.
3. 화살표 오른쪽 버튼을 또 누르고 단자대값 3을
활성화합니다. dstops라는 글자가 깜빡입니다.
4. 화살표위버튼을 눌러 3개의시간을 단자대값
6으로 바꾸고 OK 버튼을 눌러 적용합니다.
5. 주의! 디지털입력 DI6이 벌써 다른 기능으로
사용될 경우 메시지가 표시되며 선택사항을
변경해야 합니다.
이제 외부폴트 기능 닫힘 기능은 디지털 입력 DI6 (단자대16)을 통해서 제어됩니다.
이 기능은 어떤 단자대에 해당되지 않으며 입력은 항상 False로 설정되어 있습니다. 이
값은DigIN 슬롯0.1 (그래픽의 키패드) 혹은 dI 0.1 (텍스트 키패드)입니다. 이 초기값은
주의 !
주의 ! 타임 채널 또한 디지털 입력으로 지정될 수 있습니다. 125쪽을 참조하십시오.
파라미터그룹 M3.5.1내 대다수의 초기값입니다.
반면 몇몇 입력은 초기화 상태에서 항상 Tr ue상태입니다. 그 값은 항상 DigIN 슬롯0.2
(그래픽의 키패드) 혹은 dI 0.2 (텍스트 키패드)로 보입니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

90• vacon
3.3.13.2 아날로그 입력
아날로그 입력을 활용하여 아날로그 주파수 레퍼런스 신호의 목표 입력값을 선택할 수
있습니다.
Vacon 100 AC 드라이브의 표준 I/O 보드에서, 2개의 아날로그 입력이 있습니다 (Slot A
terminals 2/3 및 4/5). 프로그래밍 측면에서는 다음과 같습니다:
표 32. 프로그래밍 아날로그 입력
입력 타입
(그래픽의 키패드)
AnIN AI A. 1
AnIN AI A. 2
Figure 21에서 파라미터 AI1의 신호 선택이 메뉴 M3.5.2.1에 파라미터 코드 P3.5.2.1.1로
입력되어 있으며 공장 초기값은 AnIN SlotA.1 (그래픽 키패드) 혹은 AI A.1 (텍스트
키패드)입니다. 이는 현재 아날로그 주파수 레퍼런스의 목표입력은 AI1 (단자대 2/3
위치)임을 의미합니다. 신호가 전압과 전류인지는 딥(dip) 스위치를 통하여 결정해야합니다.
더 많은 정보를 위하여 설치매뉴얼을 참조하십시오.
입력 타입
(텍스트 키패드)
슬롯 입력 # 설명
아날로그 입력 #1 (단자대s 2/3)
보드슬롯 A (표준 I/O 보드).
아날로그 입력 #2 (단자대s 4/5)
보드슬롯 A (표준 I/O 보드).
3
파라미터 리스트는 111쪽을 참조하십시오.
코드 파라미터 최소 최대 단위
P3.5.2.1.1 AI1 신호 선택
공장
초기값
AnIN
슬롯A.1
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
ID 설명
이 파라미터로 AI1 신호를
377
아날로그 입력에 연결합니다.

vacon • 91
선택된 입력을 바꾼다는 가정하에, AI1 대신에 슬롯 C의 아날로그 입력을 사용하는 방법은
다음과 같습니다.
프로그래밍 명령
그래픽의 키패드 텍스트 키패드
1. 파라미터 선택후 오른쪽 화살표 버튼을
누르십시오
2. 수정모드에서 슬롯 값 DigIN 슬롯A이
깜빡이고, 밑줄이 쳐져있습니다. (더 많은
디지털 입력이 I/O에 있을 경우 여기서 선택
가능합니다.
3. 화살표 위쪽 버튼을 눌러 슬롯 값을 AnIN
슬롯C. 으로 바꾸고 OK를 눌러 적용합니다.
1. 파라미터 선택 후 Ok를 누르십시오
2. 수정모드에서 슬롯 값 DigIN 슬롯A이 깜빡이고,
밑줄이 쳐져있습니다. (더 많은 디지털 입력이
I/O에 있을 경우 여기서 선택 가능합니다.
3. 화살표 위쪽 버튼을 눌러 슬롯 값을 AnIN
슬롯C. 으로 바꾸고 OK를 눌러 적용합니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

92• vacon
3.3.13.3 시그널 소스에 대한 설명
표 33. 시그널 소스에 대한 설명
소스 기능
슬롯0.#
슬롯A.# 넘버(#)는 슬롯 A에서 디지털 입력에 대응함.
슬롯B.# 넘버(#)는 슬롯 B에서 디지털 입력에 대응함.
디지털 입력:
디지털 입력은 강제로 FAL S E 혹은 TRUE상태로 놓을 수
있습니다.
예를 들어, 몇몇 신호가 생산자에 의해 항상 TRUE 상태로
있으며, 파라미터 P3.5.1.15 (런
enable) 바꾸지 않으면 그 신호는 항상 on상태입니다.
# = 1: 항상 거짓 (FALSE)
# = 2-10: 항상 참 (TRUE)
아날로그 입력 (테스트 용도로 사용):
# = 1: 아날로그 입력 = 0% 신호 강도
# = 2: 아날로그 입력 = 20% 신호 강도
# = 3: 아날로그 입력 = 30% 신호 강도 기타 등등
# = 10: 아날로그 입력 = 100% 신호 강도
슬롯C.# 넘버(#)는 슬롯 C에서 디지털 입력에 대응함.
슬롯D.# 넘버(#)는 슬롯 D에서 디지털 입력에 대응함.
슬롯E.# 넘버(#)는 슬롯 E에서 디지털 입력에 대응함.
시간채널.#
필드버스 CW.# 넘버(#)는 비트 숫자에 대응함.
필드버스 PD.# 넘버(#)는 포로세스 데이터 1비트에 대응함.
넘버(#)는 1=시간채널1, 2=시간
채널2, 3=시간채널3에 대응함.
3.3.13.4 Vacon 100 어플리케이션의 디지털 및 아날로그 입력의 공장 초기값 설정
디지털 및 아날로그 입력은 특정 기능으로 설정되어 있으며, 이 어플리케이션에서 공장
초기값 설정은 다음과 같습니다 :
표 34. 입력값들의 공장 초기값 설정
입력 단자대(s) 참고 A신호로 된 기능 파라미터 코드
DI1 8 A.1 제어 신호 1 A P3.5.1.1
DI2 9 A.2 제어 신호 2 A P3.5.1.2
3
DI3 10 A.3 외부 폴트 닫힘 P3.5.1.11
DI4 14 A.4 프리셋 주파수 선택 0 P3.5.1.21
DI5 15 A.5 프리셋 주파수 선택 1 P3.5.1.22
DI6 16 A.6 외부 폴트 닫힘 P3.5.1.13
AI1 2/3 A.1 AI1 신호 선택 P3.5.2.1.1
AI2 4/5 A.2 AI2 신호 선택 P3.5.2.2.1
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

3.3.14 그룹 3.1: 모터설정
3.3.14.1 그룹 3.1.1: 모터 명판
표 35.모터 명판 파라미터
코드 파라미터 최소 최대 단위
P3.1.1.1 모터 정격 전압 변동 변동 V 변동 110
P3.1.1.2
P3.1.1.3 모터 정격 속도 24 19200 rpm 변동 112
P3.1.1.4 모터 정격 전류 IH * 0.1 IH * 0.1 A I_S 113
P3.1.1.5 모터 역률 0.30 1.00 변동 120
P3.1.1.6 모터 정격 파워 변동 변동 kW 변동 116
모터 정격 주파수 8.00 320.00 Hz 50 Hz 111
공장
초기값
ID 설명
vacon • 93
Un값을 모터 명판에서
찾습니다. 주의 !
다음 연결도 가능함(Delta/
Star).
fn값을 모터 명판에서
찾습니다.
nn값을 모터 명판에서
찾습니다.
In값을 모터 명판에서
찾습니다.
이 값을 모터 명판에서
찾습니다.
이 값을 모터 명판에서
찾습니다.
3.3.14.2 모터제어 설정
표 36. 모터 제어 설정
공장
초기값
0 600
0 650
ID 설명
코드 파라미터 최소 최대 단위
P3.1.2.1 제어 모드 0 2
P3.1.2.2 모터 타입 0 1
3.1.2.3 스위칭 주파수 1.5 변동 kHz 변동 601
0 = U/f 주파수 제어 오픈 루프
1 = 속도 제어 오픈 루프
2 = 토크 제어 오픈 루프
0 = 유도 모터
1 = PM 모터
스위칭 주파수가 증가하면 AC
드라이브의 커패시티가 줄어들며,
모터 케이블이 길수록 낮은 주파수를
쓸 것을 권장합니다. 이는 케이블의
capacitive 전류를 최소화 하고 이로
모터 소음을 줄일 수 있습니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

94• vacon
표 36 모터 제어 세팅
코드 파라미터 최소 최대 단위
P3.1.2.4
P3.1.2.5 자화전류 0.0 2*IH A 0.0 612
P3.1.2.6
모터인식 0 2 0 631
모터
스위치
0 1 0 653
공장
초기값
ID 설명
자동 모터 인식은 모터의
최적화와 속도 제어를 위하여
모터 파라미터값을 측정 또는
계산합니다.
0 = 아무런 작동 없음
1 = 정지상태
2 = 회전상태
주의 : 모터 명판
파라미터 (메뉴 M3.1.1)에서 인식
작동을 하기 전에 모터 명판을
설정하십시오.
모터 자화전류
(No-부하 전류). U/f 파라미터
값은 자성화 전류로 인식 되고
값이 0으로 되어있을 경우
내부적으로 계산됩니다.
플라잉 스타트시 모터 스위치가
닫혀있거나 열려있을때
드라이브가 트립을 못하게
막습니다.
0 = 불가능
1 = 가능
P3.1.2.7 부하 감소 0.00 50.00 % 0.00 620
P3.1.2.8
P3.1.2.9
P3.1.2.10
P3.1.2.11
부하 감소
시간
부하 감소
모드
과전압
제어
저전압
제어
0.00 2.00 s 0.00 656
0 1 0 1534
0 1 1 607
0 1 1 608
부하의 기능 중 하나로 속도를
떨어트립니다. 드루핑은 정격
부하에서 정격 속도의 %로
정의됩니다.
부하를 바꾸면서 동적으로 속도
드루핑을 하기 위하여 부하
드루핑을 사용하며, 이
파라미터는 속도가 변화분의
63%가 되는 시간을 정의합니다.
0 = 아니오; 모든 주파수
범위에서 드루핑
1 = 비례 ; 정격주파수에서 제로
주파수까지 드루핑이 제거됨.
0 = 불가능
1 = 가능
0 = 불가능
1 = 가능
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 95
코드 파라미터 최소 최대 단위
P3.1.2.12
P3.1.2.13
에너지
최적화
스테이터
전압 조정
0 1 0 666
50.0 150.0 % 100.0 659
공장
초기값
ID 설명
에너지를 절약하고 모터의 소음을
줄이기 위하여 드라이브가 최소 모터
전류를 찾습니다.
이는 팬 및 펌프 어플리케이션에서
사용할 수 있으나 빠른 FID 제어
프로세스에서는 사용이
불가능합니다.
0 = 불가능
1 = 가능
영구 자석 모터에서 스테이터 전압
조절 파라미터
3.3.14.3 한계
표 37. 모터 한계 설정
코드 파라미터 최소 최대 단위
P3.1.3.1
P3.1.3.2 모터 토크 한계 0.0 300.0 % 300.0 1287 최대 모터토크 한계
모터 전류 한계 I_H*0.1 I_S A 변동 107 AC 드라이브최대 모터 전류
공장
초기값
ID 설명
P3.1.3.3
P3.1.3.4 모터 파워 한계 0.0 300.0 % 300.0 1290 최대 모터파워 한계
P3.1.3.5
제너레이터 토크
한계
제너레이터 파워
한계
0.0 300.0 % 300.0 1288 최대 발전토크 한계
0.0 300.0 % 300.0 1289 최대 발전파워 한계
3.3.14.4 오픈 루프설정
표 38. 오픈 루프설정
코드 파라미터 최소 최대 단위
P3.1.4.4
P3.1.4.5
U/f 중간영역
주파수
U/f 중간영역
전압
0.00 P3.1.4.2 Hz 변동 604
0.0 100.0 % 100.0 605
공장
초기값
ID 설명
U/f 커브가 선택되었다는
가정하에(par. P1.35.6), 이
파라미터는 커브의 중간
주파수를 정합니다
U/f 커브가 선택되었다는
가정하에(par. P1.35.6), 이
파라미터는 커브의 중간 전압을
정합니다
P3.1.4.6
Zero 주파수
전압
0.00 40.00 % 변동 606
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
이 파라미터는 커브의 제로
주파수 전압을 정합니다. 공장
초기값은 유닛 사이즈에 따라
다릅니다.
3

96• vacon
체크박스 선택:
B0 = 샤프트 주파수를
레퍼런스 주파수와 같은
P3.1.4.7
P3.1.4.8
P3.1.4.9
P3.1.4.10
P3.1.4.11
M3.1.4.12 I/f 스타트 이메뉴는 3개의 파라미터가 있습니다 다음 챕터를 참조하십시오.
빠른 스타트
옵션
빠른 스타트
스캔 전류
자동 토크
부스트
토크 부스트
모터
게인
토크 부스트
제너레이터
게인
0 1 0 1590
0.0 100.0 % 45.0 1610 모터 정격 전류. %
0 1 0 109
0.0 100.0 % 100.0 665
0.0 100.0 % 0.0 667
방향으로 검색
B1 = AC 스캐닝 불능화
B4 = 주파수초기화
예상목적으로 주파수
레퍼가동스값 사용
B5 = DC펄스 불능화
0=불가능
1=가능
토크 부스터 사용시 모터
쪽의R-보정 스케일링요소
토크 부스터 사용시 발전
쪽의R-보정 스케일링요소
I/f 스타트
I/f 스타트 기능은 전형적으로 영구 자석 모터 (PM)의 모터 시작과 전류 제어를 위해
사용됩니다. 이 저항이 낮고 U/f 커브 튜닝이 어려운 고출력의 모터에서 주로 사용됩니다.
I/f 스타트 기능은 모터를 시작과 동시에 충분한 토크를 공급하는데 매우 유용합니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

표 39. I/f 스타트 파라미터
코드 파라미터 최소 최대 단위
P3.1.4.12.1
I/f 스타트 0 1 0 534
공장
초기값
vacon • 97
ID 설명
0 = 불가능
1 = 가능
P3.1.4.12.2
P3.1.4.12.3 I/f 스타트 전류 0.0 100.0 % 80.0 536
I/f 스타트 주파수 0.0 P3.1.1.2 Hz 15.0 535
I/f 스타트 전류 이하의
출력 주파수 한계
I/f 스타트 기능 활성화시
모터로 전류 공급.
3.3.15 그룹 3.2: 시작/정지 셋업
시작/정지 명령은 제어 위치에 따라 다르게 주어집니다.
Remote 제어 위치 (I/O A): 시작, 정지 및 역회전 명령은 파라미터 P3.5.1.1 및 P3.5.1.2
기능/로직에서 선택된 2개의 디지털 입력에 의해 제어되며, 이 입력들은 파리미터
P3.2.6으로 선택됩니다.(이 그룹에서)
Remote 제어 위치 (I/O B): 시작, 정지 및 역회전 명령은 파라미터 P3.5.1.4 와 P3.5.1.5.
기능/로직에서 선택된 2개의 디지털 입력에 의해 제어되며, 이 입력들은 파라미터
P3.2.7으로 선택합니다.
Local 제어 위치 (키패드): 시작 및 정지 명령은 키패트 버튼에서 오며, 회전 방향은
파라미터 P3.3.1.9으로 선택합니다.
Remote 제어 위치 (필드버스): 시작, 정지 및 역회전 명령은 필드버스로부터 옵니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
3

98• vacon
표 40. 시작/정지 셋업 메뉴
코드 파라미터 최소 최대 단위
P3.2.1 리모트 제어 위치 0 1 0 172
P3.2.2 로컬 / 리모트 0 1 0 211
P3.2.3 키패드 정지 버튼 0 1 0 114
공장
초기값
ID 설명
리모트 제어 위치 선택
(스타트/정지). Vacon
Live에서 망가진 패널로
인하여 리모트 제어로
사용하려는 경우. 0=I/O
제어
1=필드버스 제어
Local 리모트 제어 사이
스위칭
0=리모트
1=Local
0=정지 버튼 항상 가능(예)
1=정지버튼의 한정된 기능
(아니오)
P3.2.4 스타트 기능 0 1 0 505
P3.2.5
P3.2.6
P3.2.7
정지 기능 0 1 0 506
I/O A 스타트/정지
로직
I/O B 스타트/정지
로직
0 1 1 300
0 1 1 363 위를 참조하십시오.
0=램핑
1=재빠른 출발
0=코스팅
1=램핑
로직 = 0:
Ctrl sgn 1 = 정방향
Ctrl sgn 2 = 역방향
로직 = 1:
Ctrl sgn 1 = 정방향 (에지)
Ctrl sgn 2 = 변환정지
Ctrl sgn 3 = 역방향 (에지)
로직 = 2:
Ctrl sgn 1 = 정방향 (에지)
Ctrl sgn 2 = 역방향 (에지)
로직 = 3:
Ctrl sgn 1 = 스타트
Ctrl sgn 2 = 역역
로직 = 4:
Ctrl sgn 1 = 스타트 (에지)
Ctrl sgn 2 = 역역
3
P3.2.8
P3.2.9 스타트 딜레이 0.000 60.000 s 0.000 524
P3.2.10
필드버스 스타트
로직
리모트에서
로컬로의 기능
0 1 0 889
0 1 2 181
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
0=라이징 에지가 필요함
1=상태
스타트 명령과 실재 스타트
사이의 딜레이
런 상태와 레퍼런스를
리모트에서 Local(키패드로)
변경
제어:
0 = 런가동 유지
1 = 런가동 및 레퍼런스
유지
2 = 정지
 Loading...
Loading...