

Page 1

vacon 100 flow
®
CONVERTIZOR DE FRECVENTĂ
MANUAL APLICAŢIE
Page 2

Page 3

PREFAŢĂ VACON · 3
PREFAŢĂ
DETALII DOCUMENT
ID document: DPD01260F
Data: 13.12.2016
Versiune software: FW0159V016
DESPRE ACEST MANUAL
Drepturile de autor asupra acestui manual sunt deţinute de Vacon Ltd. Toate drepturile
rezervate. Acest manual este supus modificării fără notificare prealabilă. Limba originală a
acestor instrucţiuni este engleza.
În acest manual puteţi citi despre funcţiile convertizorului de frecvenţă VACON® şi despre
cum se utilizează acest convertor de frecvenţă. Manualul are aceeaşi structură ca şi meniul
de comandă al variatorului de turaţie (capitolele 1 şi 4–8).
Capitolul 1, Ghidul de pornire rapidă
Cum se începe lucrul la panoul de control.
•
Capitolul 2, Experţii de configurare
Cum se efectuează o selecţie de configurare a aplicaţiilor.
•
Cum se configurează rapid o aplicaţie.
•
Diferite aplicaţii, însoţite de exemple.
•
Capitolul 3, Interfeţele cu utilizatorul
Tipuri de afişare şi cum se utilizează panoul de control.
•
Instrumentul pentru PC denumit VACON® Live.
•
Funcţiile protocoalelor Fieldbus.
•
Capitolul 4, Meniul de monitorizare
Date privind valorile de monitorizare.
•
Capitolul 5, Meniul de parametri
O listă a tuturor parametrilor variatorului de turaţie.
•
Capitolul 6, Meniul de diagnosticare
Capitolul 7, Meniul I/O (Intrare/Ieşire şi echipamente)
Capitolul 8, Setările, preferinţele şi meniurile la nivel de utilizator
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 4
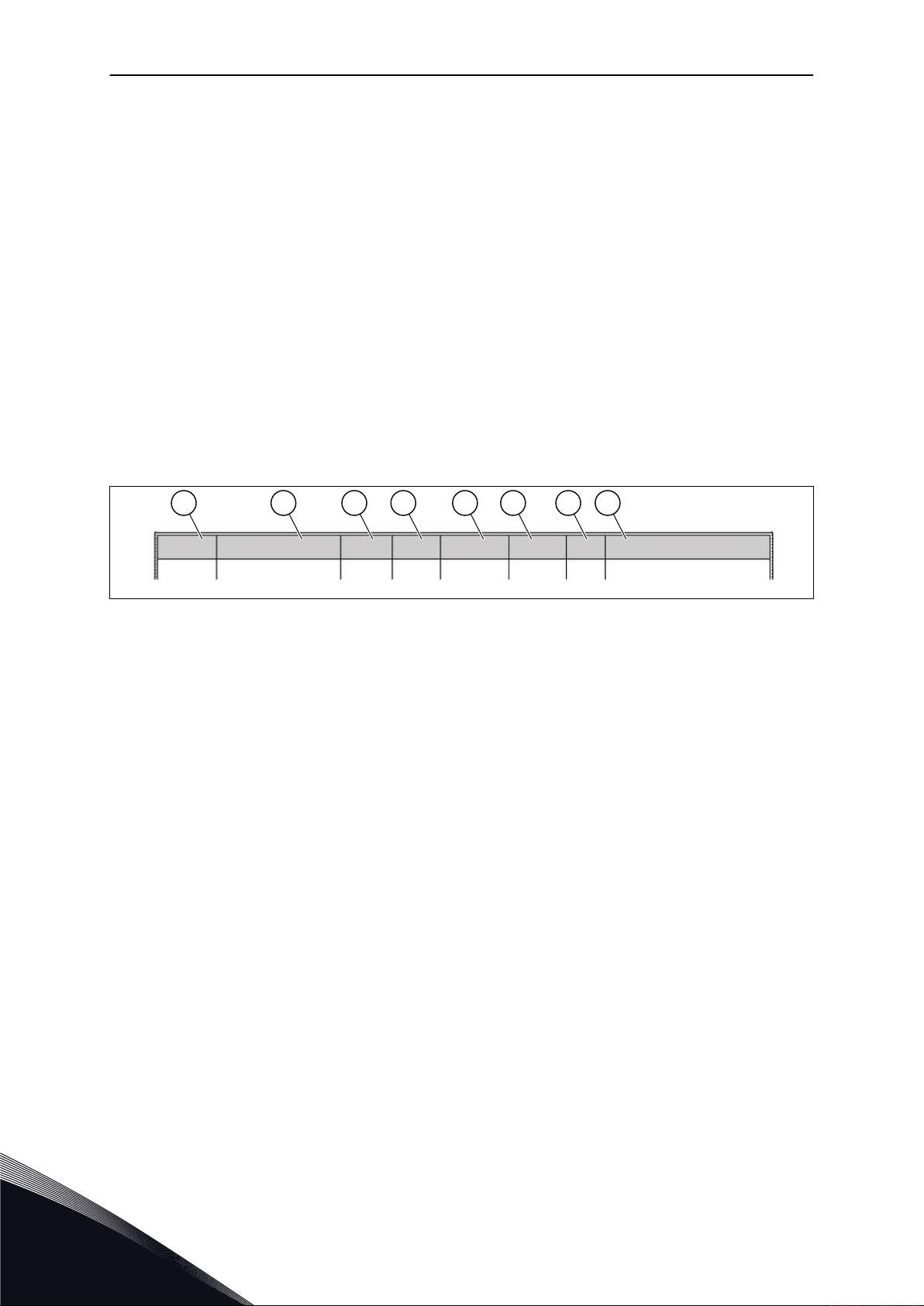
Index Min Max Unit Default ID DescriptionParameter
A B C D E F G H
VACON · 4 PREFAŢĂ
Capitolul 9, Descrierile valorilor de monitorizare
Capitolul 10, Descrierile parametrilor
Cum se utilizează parametrii.
•
Programarea intrărilor digitale şi analogice.
•
Funcţii specifice ale aplicaţiilor.
•
Capitolul 11, Identificarea erorilor
Erorile şi cauzele acestora.
•
Resetarea erorilor.
•
Capitolul 12, Anexa
Date privind diferitele valori implicite ale aplicaţiilor.
•
Acest manual include multe tabele de parametri. Aceste instrucţiuni vă spun cum se citesc
aceste tabele.
A. Locaţia parametrului în meniu, adică
numărul parametrului.
B. Numele parametrului.
C. Valoarea minimă a parametrului.
D. Valoarea maximă a parametrului.
E. Unitatea valorică a parametrului.
Unitatea indică dacă parametrul este
disponibil.
F. Valoarea care a fost setată din fabrică.
G. Numărul de ID al parametrului.
H. O scurtă descriere a valorilor
parametrului şi/sau a funcţiilor sale.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 5

PREFAŢĂ VACON · 5
FUNCŢIILE CONVERTIZORULUI DE FRECVENŢĂ VACON
Puteţi selecta aplicaţia necesară pentru procesul dvs.: Standard, HVAC, Comandă PID,
•
®
Pompe multiple (acţionare simplă) sau Pompe multiple (acţionare multiplă). Variatorul
efectuează automat setările necesare, făcând uşoară punerea în funcţiune.
Experţi de configurare pentru prima pornire şi modul Fire (Incendiu).
•
Experţi de configurare pentru fiecare aplicaţie: Standard, HVAC, Comandă PID, Pompe
•
multiple (acţionare simplă) sau Pompe multiple (acţionare multiplă).
Buton FUNCT (Funcţie) pentru o comutare rapidă între locaţia de control locală şi cea la
•
distanţă. Locaţia de control la distanţă poate fi de tip I/O (Intrare/Ieşire) sau protocol
Fieldbus. Puteţi efectua o selecţie a locaţiei de control la distanţă printr-un parametru.
8 frecvenţe presetate.
•
Funcţii de potenţiometru pentru motor.
•
O funcţie de golire.
•
2 timpi de urcare pe care îi puteţi programa, 2 supravegheri şi 3 intervale de frecvenţe
•
interzise.
O oprire forţată.
•
O pagină de comandă pentru acţionarea şi monitorizarea rapidă a celor mai importante
•
valori.
O mapare a datelor de protocol Fieldbus.
•
O resetare automată.
•
Diferite moduri pre-încălzire pentru a preveni problemele de condensare.
•
O frecvenţă maximă de ieşire de 320 Hz.
•
Un ceas în timp real şi funcţii de cronometru (este necesară o baterie opţională). Este
•
posibilă programarea a 3 canale temporale pentru a obţine funcţii diferite ale
variatorului de turaţie.
Este disponibil un controler PID (Proporţional, integral, derivativ) extern. Îl puteţi utiliza,
•
de exemplu, pentru a controla o supapă cu I/O (Intrarea/Ieşirea) variatorului de turaţie
pentru motoare CA.
Un mod repaus care activează şi dezactivează automat funcţionarea variatorului, pentru
•
a economisi energie.
Un controler PID cu 2 zone, având 2 semnale diferite de feedback: control minim şi
•
control maxim.
2 surse de valori de referinţă pentru controlerul PID. Puteţi efectua selecţia cu o intrare
•
digitală.
O funcţie pentru amplificarea valorii de referinţă PID.
•
O funcţie de reacţie pozitivă (feedforward), pentru a îmbunătăţi răspunsul la schimbările
•
de proces.
O supraveghere a valorii de proces.
•
O comandă pompe multiple pentru sistemele cu acţionare simplă şi acţionare multiplă.
•
Moduri multimaster (multi-coordonator) şi multifollower (multi-subordonat) în sistemul
•
multi-variator.
Un sistem pompe multiple care utilizează un ceas în timp real pentru schimbarea
•
automată a pompelor.
Un contor de întreţinere.
•
Funcţii comandă pompă: control pompă de amorsare, control pompă de presiune, auto-
•
curăţare rotor de pompă, supraveghere intrare pompă şi funcţie de protecţie anti-îngheţ.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 6

VACON · 6
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 7
CUPRINS VACON · 7
CUPRINS
Prefaţă
Detalii document 3
Despre acest manual 3
Funcţiile convertizorului de frecvenţă VACON® 5
1 Ghidul de pornire rapidă 12
1.1 Panou de control şi tastatură 12
1.2 Ecranele 12
1.3 Prima pornire 13
1.4 Descrierea aplicaţiilor 14
1.4.1 Aplicaţii standard şi HVAC 14
1.4.2 Aplicaţie comandă PID 22
1.4.3 Aplicaţie pompe multiple (acţionare simplă) 31
1.4.4 Aplicaţie pompe multiple (acţionare multiplă) 46
2 Asistenţi 81
2.1 Expertul de aplicaţie standard 81
2.2 Expertul de aplicaţie HVAC 82
2.3 Asistentul de aplicaţie pentru comandă PID 84
2.4 Asistent aplicaţie Pompe multiple (acţionare simplă) 86
2.5 Asistent aplicaţie Pompe multiple (acţionare multiplă) 90
2.6 Asistentul pentru mod incendiu 93
3 Interfeţele cu utilizatorul 95
3.1 Navigarea pe tastatură 95
3.2 Utilizarea ecranului grafic 97
3.2.1 Editarea valorilor 97
3.2.2 Resetarea unei erori 100
3.2.3 Butonul FUNCT (Funcţie) 100
3.2.4 Copierea parametrilor 104
3.2.5 Compararea parametrilor 105
3.2.6 Texte de ajutor 107
3.2.7 Utilizarea meniului Favourites (Preferinţe) 108
3.3 Utilizarea ecranului text 108
3.3.1 Editarea valorilor 109
3.3.2 Resetarea unei erori 110
3.3.3 Butonul FUNCT (Funcţie) 110
3.4 Structura meniului 114
3.4.1 Configurarea rapidă 115
3.4.2 Monitor 115
3.5 VACON® Live 117
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 8
VACON · 8 CUPRINS
4 Meniu de supraveghere 118
4.1 Supraveghere grup 118
4.1.1 Multimonitor 118
4.1.2 Curba de tendinţă 119
4.1.3 Baza 122
4.1.4 I/O 124
4.1.5 Intrări temperatură 124
4.1.6 Valori suplimentare şi avansate 126
4.1.7 Supraveghere funcţii cronometru 128
4.1.8 Supraveghere regulator PID 129
4.1.9 Supraveghere controler PID extern 130
4.1.10 Supravegherea pompelor multiple 130
4.1.11 Contoare de întreţinere 132
4.1.12 Monitorizare date de proces Fieldbus 133
4.1.13 Monitorizare personalizare acţionare 134
5 Meniu Parametri 135
5.1 Grupul 3.1: Setări motor 135
5.2 Grupul 3.2: Configurare Pornire/Oprire 139
5.3 Grupul 3.3: Referinţe 142
5.4 Grupul 3.4: Setare rampe şi frâne 146
5.5 Grupul 3.5: Configurare I/O 148
5.6 Grupul 3.6: Maparea datelor de pe busul de câmp 159
5.7 Grupul 3.7: Frecvenţe interzise 161
5.8 Grupul 3.8: Supravegheri 162
5.9 Grupul 3.9: Protecţii 164
5.10 Grupul 3.10: Resetare automată 171
5.11 Grupul 3.11: Setări pentru aplicaţie 172
5.12 Grupul 3.12: Funcţii cronometru 173
5.13 Grupul 3.13: Controler PID 176
5.14 Grupul 3.14: Controler PID extern 193
5.15 Grupul 3.15: Pompe multiple 198
5.16 Grupul 3.16: Contoare de întreţinere 202
5.17 Grupul 3.17: Modul incendiu 203
5.18 Grupul 3.18: Parametri preîncălzire motor 204
5.19 Grupul 3.19: Personalizare acţionare 205
5.20 Grupul 3.21: Comanda pompei 206
5.21 Grupul 3.23: Filtru armonic avansat 209
6 Meniu Diagnostic 210
6.1 Fault activ 210
6.2 Resetare erori 210
6.3 Istoric erori 210
6.4 Contoare totalizatoare 210
6.5 Contoare parţiale 212
6.6 Informaţii software 214
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 9
CUPRINS VACON · 9
7 Meniu I/O şi hardware 215
7.1 I/O de bază 215
7.2 Sloturi placă opţională 217
7.3 Ceas în timp real 218
7.4 Setări bloc de alimentare 218
7.5 Panou de comandă 220
7.6 Bus de câmp 221
8 Setările utilizatorului, meniul de favorite şi meniurile de la nivelul utilizatorilor 222
8.1 Setări utilizator 222
8.1.1 Setări utilizator 222
8.1.2 Copie de rezervă parametri 223
8.2 Preferinţe 223
8.2.1 Adăugarea unui element la Favourites (Preferinţe) 224
8.2.2 Eliminarea unui element din Favourites (Preferinţe) 224
8.3 Niveluri utilizator 225
8.3.1 Schimbarea codului de acces la nivelurile de utilizator 226
9 Descrieri valoare de supraveghere 228
9.1 Baza 228
9.2 I/O 229
9.3 Intrări temperatură 230
9.4 Valori suplimentare şi avansate 231
9.5 Funcţii cronometru 233
9.6 Controler PID 234
9.7 Controler PID extern 235
9.8 Pompe multiple 235
9.9 Contoare de întreţinere 237
9.10 Date bus de câmp 237
9.11 Personalizare acţionare 241
10 Descrieri parametri 243
10.1 Curba de tendinţă 243
10.2 Setări motor 244
10.2.1 Parametri de pe eticheta motorului 244
10.2.2 Parametri de comandă motor 245
10.2.3 Limite motor 249
10.2.4 Parametri buclă deschisă 250
10.2.5 Funcţia de pornire I/f 254
10.3 Configurare Pornire/Oprire 255
10.4 Referinţe 265
10.4.1 Referinţă frecvenţă 265
10.4.2 Frecvenţe presetate 266
10.4.3 Parametri potenţiometru motor 270
10.4.4 Golirea parametrilor 272
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 10
VACON · 10 CUPRINS
10.5 Setare rampe şi frâne 272
10.5.1 Rampă 1 272
10.5.2 Rampă 2 273
10.5.3 Magnetizare pornire 275
10.5.4 Frâna c.c. 275
10.5.5 Frânare prin flux 276
10.6 Configurare I/O 276
10.6.1 Programarea intrărilor digitale şi analogice 276
10.6.2 Funcţiile implicite ale intrărilor programabile 287
10.6.3 Intrări digitale 287
10.6.4 Intrări analogice 293
10.6.5 Ieşiri digitale 299
10.6.6 Ieşiri analogice 303
10.7 Hartă magistrală de date 307
10.8 Frecvenţe interzise 308
10.9 Supravegheri 310
10.10 Protecţii 311
10.10.1 Generalităţi 311
10.10.2 Protecţii termice motor 313
10.10.3 Protecţie blocare motor 316
10.10.4 Protecţia împotriva încărcării sub limită (pompă uscată) 318
10.10.5 Oprirea rapidă 320
10.10.6 Protecţia la nivel redus intrare analogică 322
10.11 Resetare automată 323
10.12 Setări pentru aplicaţie 325
10.13 Funcţii cronometru 325
10.14 Controler PID 330
10.14.1 Setări de bază 330
10.14.2 Puncte de referinţă 332
10.14.3 Semnal de răspuns 333
10.14.4 Reglajul anticipativ 334
10.14.5 Funcţia de aşteptare 335
10.14.6 Supravegherea semnalului de răspuns 338
10.14.7 Compensarea pierderii de presiune 340
10.14.8 Umplerea lentă 342
10.14.9 Supraveghere presiune intrare 344
10.14.10 Funcţia de repaus atunci când nu este detectată nicio solicitare 346
10.15 Controler PID extern 348
10.16 Funcţie pompe multiple 348
10.16.1 Listă de verificare pentru punerea în funcţiune a sistemului Pompe
multiple (acţionare multiplă) 348
10.16.2 Configurare sistem 351
10.16.3 Interblocări 356
10.16.4 Conectarea senzorului de răspuns într-un sistem pompe multiple 356
10.16.5 Supraveghere suprapresiune 367
10.16.6 Contoare durată de rulare pompe 368
10.16.7 Setări avansate 370
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 11

CUPRINS VACON · 11
10.17 Contoare de întreţinere 371
10.18 Modul incendiu 372
10.19 Funcţie preîncălzire motor 375
10.20 Personalizare acţionare 376
10.21 Comanda pompei 376
10.21.1 Curăţare automată 376
10.21.2 Pompa Jockey 379
10.21.3 Pompa de amorsare 381
10.21.4 Funcţie antiblocare 382
10.21.5 Protecţie contra îngheţului 382
10.22 întreţ. 383
10.22.1 Utilizarea contorului temporal 384
10.22.2 Utilizarea contorului parţial al timpului de funcţionare 384
10.22.3 Contorul duratei de rulare 385
10.22.4 Activarea contorului temporal 385
10.22.5 Contor de energie 385
10.22.6 Contor parţial energie 386
10.23 Filtru armonic avansat 388
11 Urmărirea erorilor 389
11.1 Este afişată o eroare 389
11.1.1 Resetarea cu butonul Reset 390
11.1.2 Resetarea cu un parametru din ecranul grafic 390
11.1.3 Resetarea cu un parametru din ecranul text 391
11.2 Istoric erori 392
11.2.1 Examinarea istoricului de erori în ecranul grafic 392
11.2.2 Examinarea istoricului de erori în ecranul text 393
11.3 Coduri eroare 395
12 Anexa 1 412
12.1 Valorile implicite ale parametrilor în cadrul diferitelor aplicaţii 412
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 12
A B C
I
H D
G F E
VACON · 12 GHIDUL DE PORNIRE RAPIDĂ
1 GHIDUL DE PORNIRE RAPIDĂ
1.1 PANOU DE CONTROL ŞI TASTATURĂ
Panoul de control este interfaţa dintre variatorul de turaţie pentru motoare CA şi utilizator.
Prin intermediul panoului de control, puteţi controla turaţia unui motor şi puteţi monitoriza
starea variatorului de turaţie pentru motoare CA. De asemenea, puteţi seta parametrii
variatorului de turaţie pentru motoare CA.
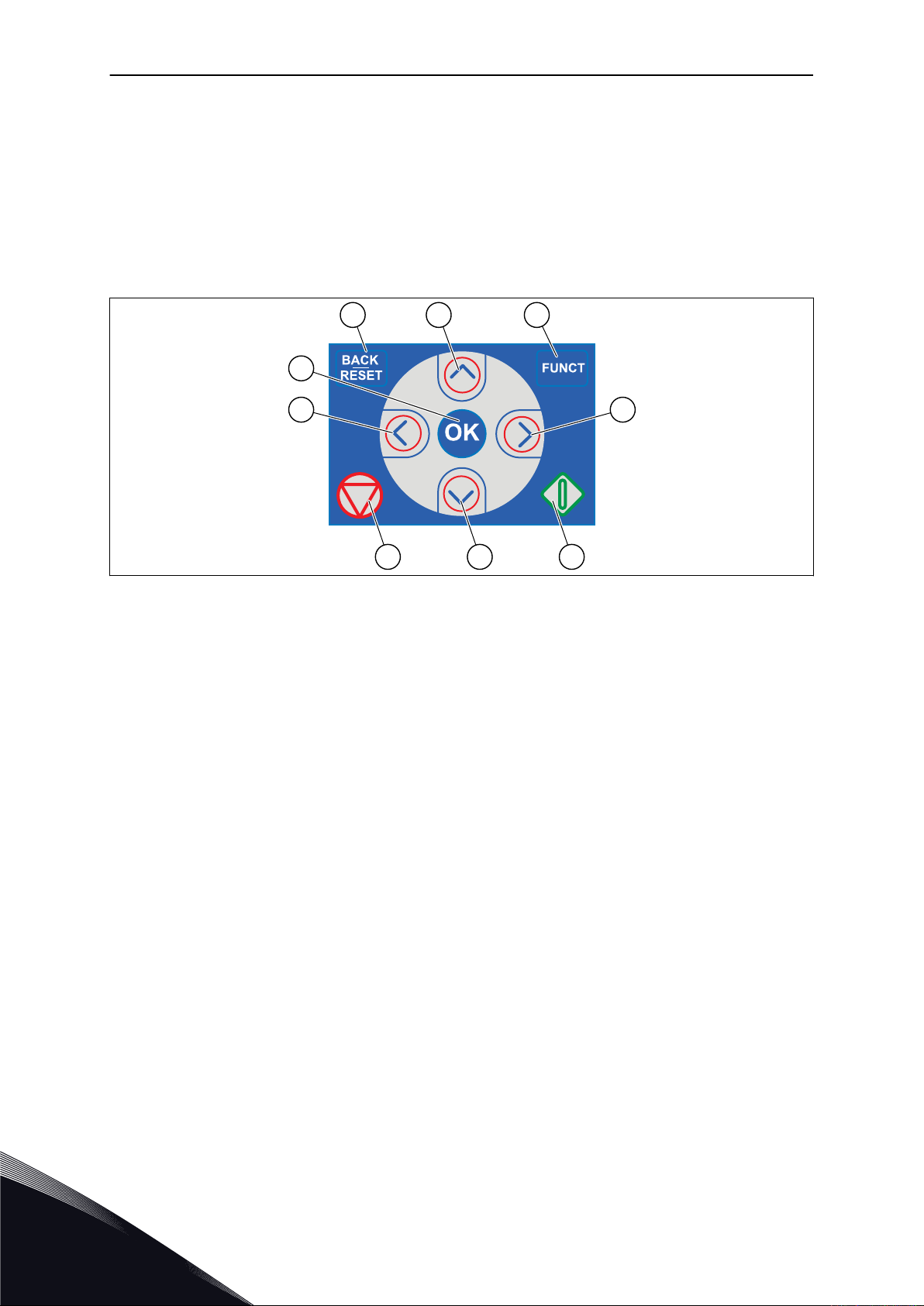
Fig. 1: Butoanele tastaturii
A. Butonul BACK/RESET (Înapoi/Resetare).
Utilizaţi-l pentru a naviga înapoi în
meniu, a părăsi modul Edit (Editare) sau
a reseta o eroare.
B. Butonul săgeată UP (Sus). Utilizaţi-l
pentru a defila în sus prin meniu şi
pentru a creşte o valoare.
C. Butonul FUNCT (Funcţie). Utilizaţi-l
pentru a schimba direcţia de rotaţie a
motorului, a accesa pagina de comandă
şi a schimba locaţia de control. Puteţi
găsi mai multe informaţii în Capitolul
3.3.3 Butonul FUNCT (Funcţie).
D. Butonul săgeată RIGHT (Dreapta).
E. Butonul START (Pornire).
F. Butonul săgeată DOWN (Jos). Utilizaţi-l
pentru a defila în jos prin meniu şi
pentru a descreşte o valoare.
G. Butonul STOP (Oprire).
H. Butonul săgeată LEFT (Stânga). Utilizaţi-
l pentru a deplasa cursorul la stânga.
I. Butonul OK. Utilizaţi-l pentru a accesa
un nivel sau un element activ sau pentru
a accepta o selecţie.
1.2 ECRANELE
Există 2 tipuri de ecrane: ecranul grafic şi ecranul text. Panoul de control are întotdeauna
aceeaşi tastatură şi aceleaşi butoane.
Ecranul afişează următoarele date:
Starea motorului şi a variatorului de turaţie.
•
Erorile motorului şi ale variatorului de turaţie.
•
Poziţia curentă în structura meniului.
•
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 13
STOP
READY I/O
Main Menu
A B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
A B
F
C
D
E
GHIDUL DE PORNIRE RAPIDĂ VACON · 13
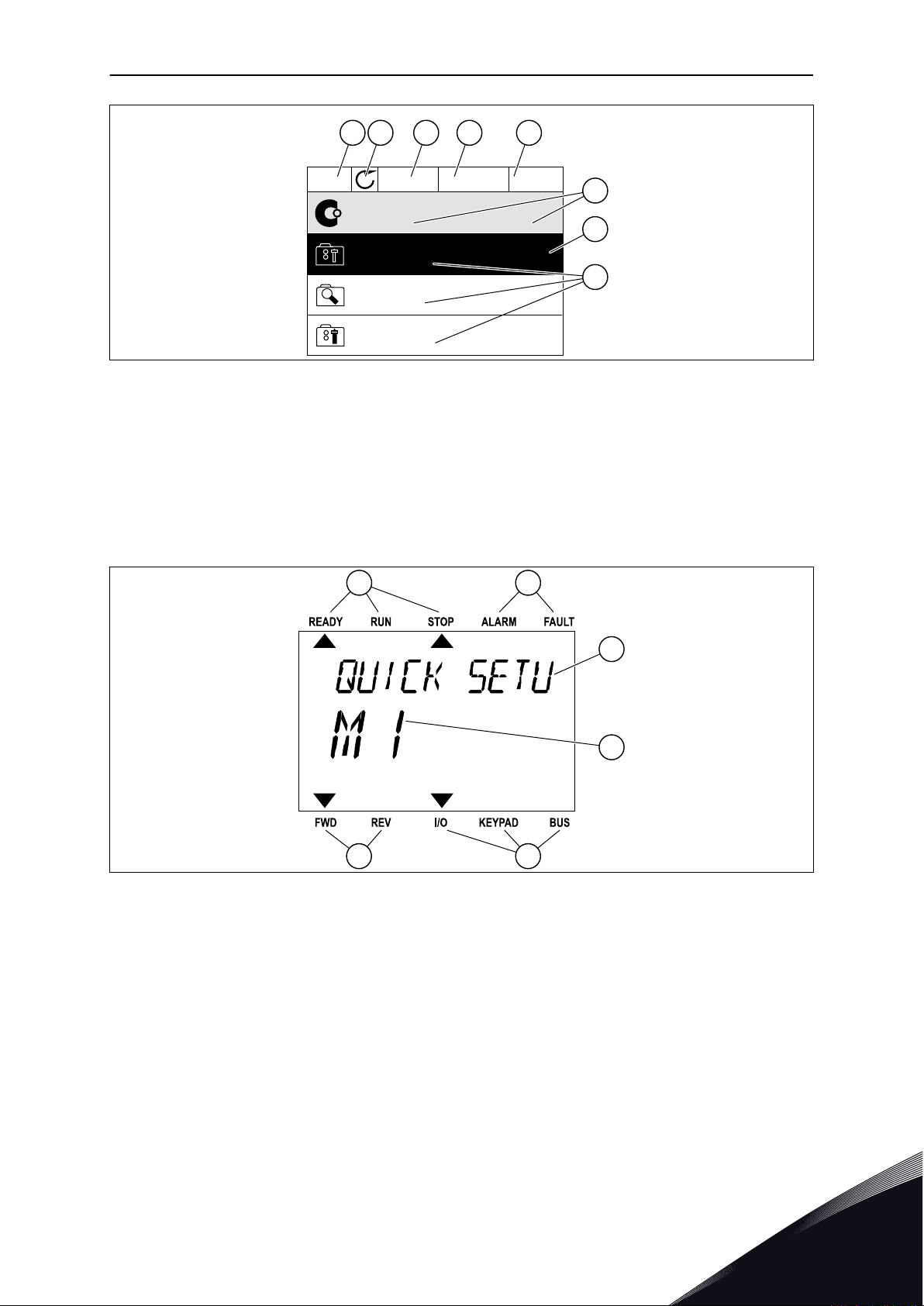
Fig. 2: Ecranul grafic
A. Primul câmp de stare: OPRIT/ÎN
FUNCŢIUNE
B. Direcţia de rotaţie a motorului
C. Al doilea câmp de stare: PREGĂTIT/
NEPREGĂTIT/EROARE
F. Câmpul de poziţie: numărul de ID al
parametrului şi poziţia curentă în meniu
G. Un grup sau un element activat
H. Numărul de elemente din grupul în
cauză
D. Câmpul de alarmă: ALARM/- (Alarmă/-)
E. Câmpul locaţiei de control: PC/IO/
PANOU DE COMANDĂ/BUS DE CÂMP
Fig. 3: Ecranul text. Dacă textul este prea lung de afişat, acesta defilează automat pe ecran.
A. Indicatorii de stare
B. Indicatorii de alarmă şi eroare
C. Numele grupului sau elementului din
poziţia actuală
1.3 PRIMA PORNIRE
După ce porniţi variatorul de turaţie, este iniţiat expertul de pornire.
Expertul de pornire vă solicită furnizarea datelor necesare pentru controlarea procedurii în
care utilizaţi variatorul de turaţie.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
D. Poziţia curentă în meniu
E. Indicatorii locaţiei de control
F. Indicatorii direcţiei de rotaţie
1
Page 14
VACON · 14 GHIDUL DE PORNIRE RAPIDĂ
1
2
3 Oră* (P5.5.2) oo:mm:ss
4 An* (P5.5.4) aaaa
5 Dată* (P5.5.3) zz.ll.
Selectare limbă (P6.1) Selecţia este diferită pentru fiecare pachet
lingvistic în parte
Daylight saving* (Ora de vară) (P5.5.5)
Rusia
SUA
UE
OPRIT
* Dacă este instalată o baterie, veţi vedea aceşti paşi
Doriţi să rulaţi asistentul de pornire?
6
Da
Nu
Selectaţi Yes (Da) şi apăsaţi butonul OK. Dacă selectaţi No (Nu), variatorul de turaţie pentru
motoare CA trece peste expertul de pornire.
Pentru a seta manual valorile parametrilor, selectaţi No (Nu) şi apăsaţi butonul OK.
Selectaţi aplicaţia (P1.2 Application, ID212)
Standard
HVAC
7
PID control (Comandă PID [Proporţional,
integral, derivativ])
Pompe multiple (acţionare simplă)
Pompe multiple (acţionare multiplă)
Pentru a continua către expertul aplicaţiei selectate la pasul 7, selectaţi Yes (Da) şi apăsaţi
butonul OK. Consultaţi descrierea experţilor de aplicaţie din Capitolul 2 Asistenţi.
Dacă selectaţi No (Nu) şi apăsaţi butonul OK, expertul de pornire se opreşte şi va trebui să
selectaţi în mod manual toate valorile parametrilor.
Pentru a porni din nou expertul de pornire, aveţi 2 alternative. Accesaţi parametrul P6.5.1
Restore Factory Defaults (Restabilire valori implicite din fabrică) sau parametrul B1.1.2
Startup Wizard (Expert de pornire). Apoi setaţi valoarea ca Activate (Activare).
1.4 DESCRIEREA APLICAŢIILOR
Utilizaţi parametrul P1.2 Application (Aplicaţie) pentru a efectua o selecţie a unei aplicaţii
pentru variatorul de turaţie. Imediat ce parametrul P 1.2 se modifică, un grup de parametri
îşi primeşte valorile presetate.
1.4.1 APLICAŢII STANDARD ŞI HVAC
Utilizaţi aplicaţiile Standard şi HVAC (Încălzire/Ventilaţie/Aer condiţionat) pentru a controla
pompele sau ventilatoarele, de exemplu.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 15

GHIDUL DE PORNIRE RAPIDĂ VACON · 15
Este posibil să controlaţi variatorul de turaţie de la tastatură, din protocolul Fieldbus sau de
la terminalul I/O (Intrări/Ieşiri).
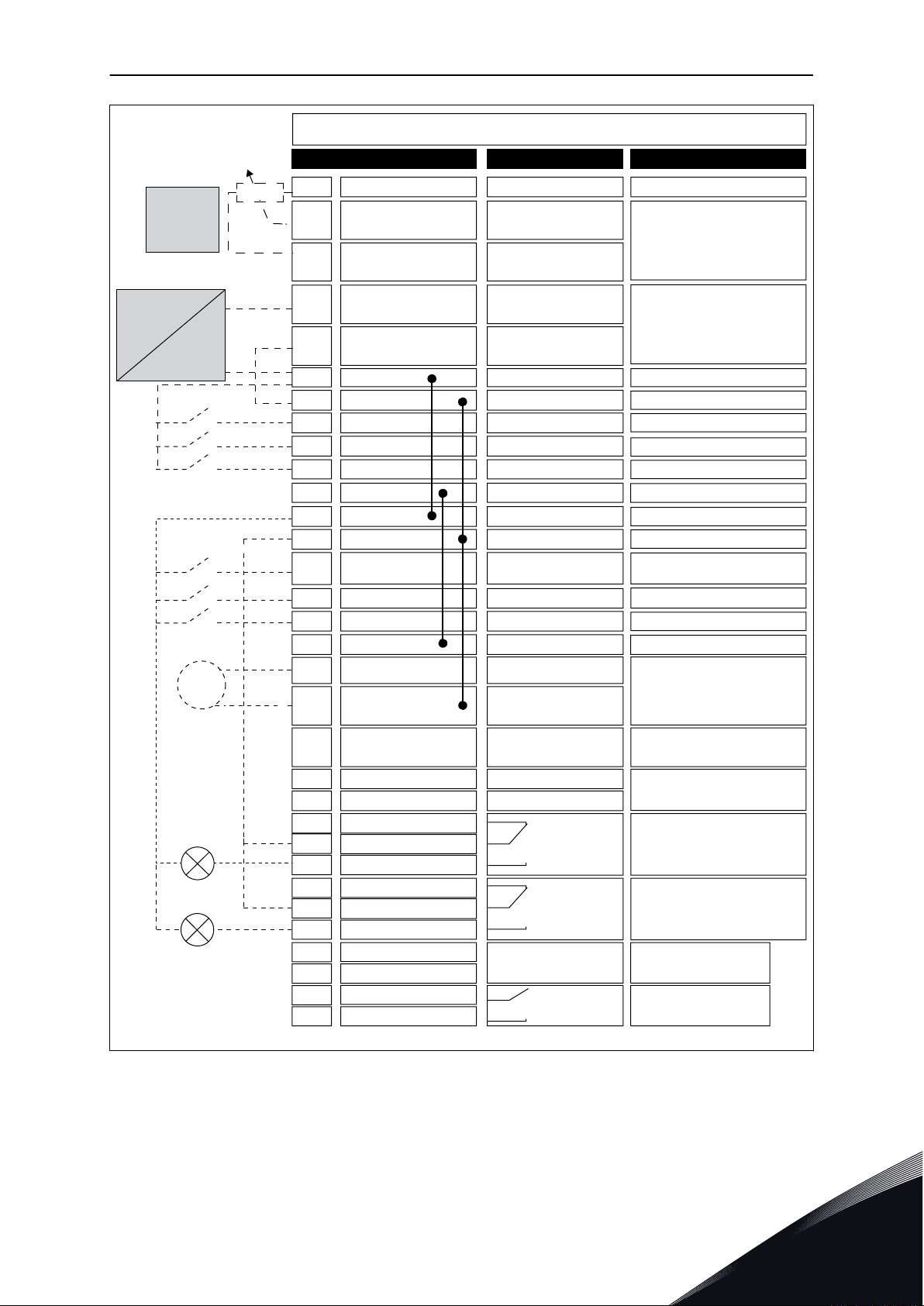
Când controlaţi variatorul de turaţie prin intermediul terminalului I/O, semnalul de referinţă
al frecvenţei este conectat la AI1 (0…10 V) sau AI2 (4…20 mA). Conexiunea este specificată de
către tipul semnalului. De asemenea, sunt disponibile 3 frecvenţe de referinţă presetate.
Puteţi activa frecvenţele de referinţă presetate prin DI4 şi DI5. Semnalele de pornire şi oprire
ale variatorului de turaţie sunt conectate la DI1 (pornire pozitivă) şi DI2 (pornire înapoi).
Este posibilă configurarea liberă a tuturor ieşirilor variatorului de turaţie în toate aplicaţiile.
Există 1 ieşire analogică (Output Frequency [Frecvenţă de ieşire]) şi 3 ieşiri prin releu (Run,
Fault, Ready [Rulare, eroare, pregătit]) pe placa de bază I/O.
Consultaţi descrierile parametrilor din Capitolul 10 Descrieri parametri.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 16
DI4
DI5
**)
*)
Modbus RTU,
N2, BACnet
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
28
29
mA
EROARE
ÎN FUNCŢIUNE
ÎN FUNCŢIUNE
AO1-
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NI
RO1/2 CM
RO1/3 ND
CM
CM
RS485
RS485
RO2/1 NI
RO2/2 CM
RO2/3 ND
RO3/2 CM
RO3/3 ND
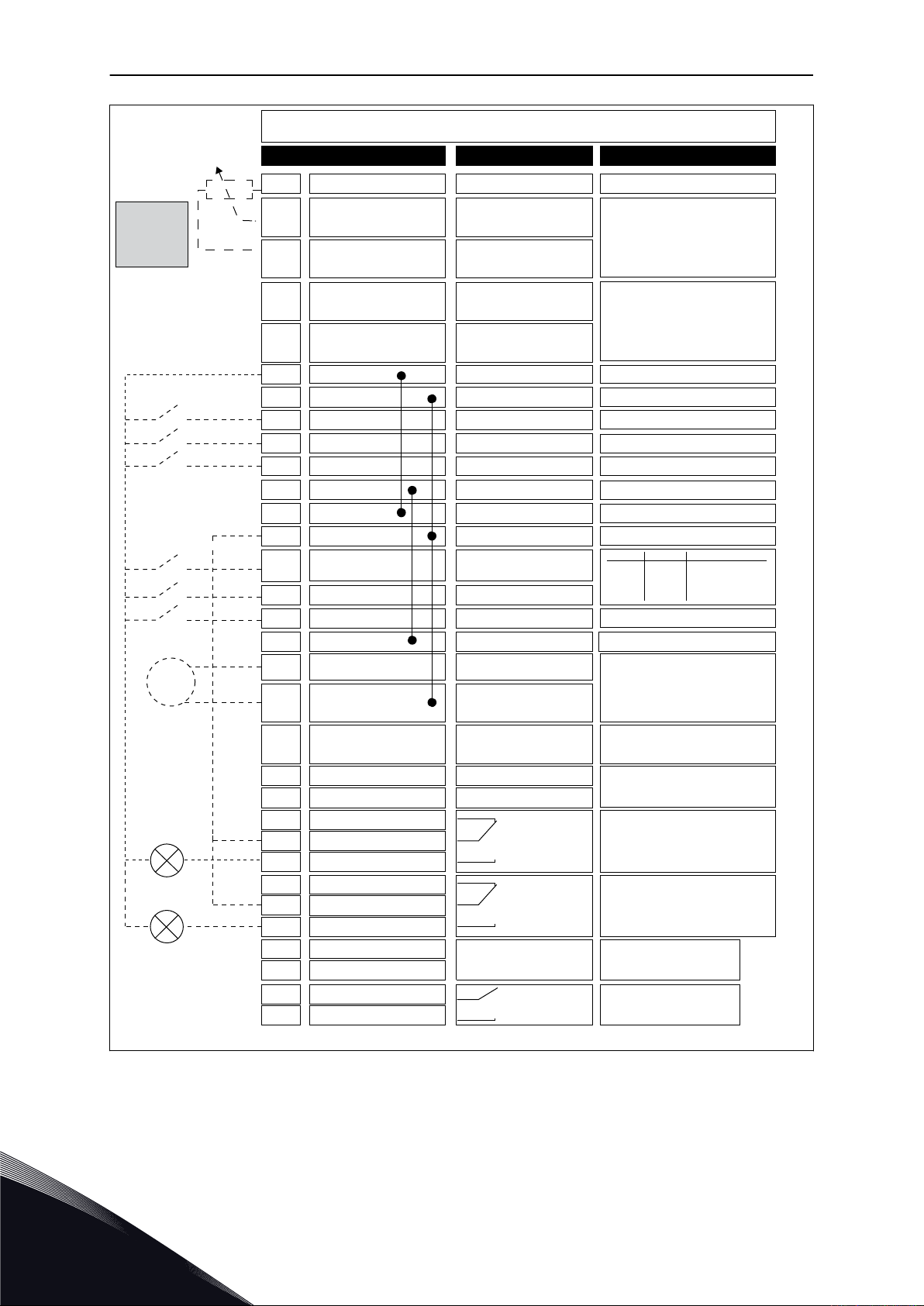
Placă I/O standard
Bornă Semnal Descriere
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 V ieşire
Ieşire de referinţă
Intrare analogică 1 +
Intrare analogică 1 -
Intrare analogică 2 +
Intrare analogică 2 -
24 V tensiune auxiliară
Masă I/O
Intrare digitală 1
Intrare digitală 2
Intrare digitală 3
Intrare digitală 4
Intrare digitală 5
Intrare digitală 6
Comun pentru DI1-DI6
Comun pentru DI1-DI6
24 V tensiune auxiliară
Masă I/O
Ieşire analogică 1 +
Ieşire analogică 1 -
PREGĂTIT
Bus serial, negativ
Bus serial, pozitiv
Ieşire releu 1
Ieşire releu 2
Ieşire releu 3
EROARE
Resetare eroare
AO1+
Frecvenţă de referinţă
(implicit 0...10 V)
Frecvenţă de referinţă
(implicit 4...20 mA)
Pornire înainte
Pornire înapoi
Eroare externă
Referinţă frecvenţă
Deschis
Închis
Deschis
Închis
Deschis
Deschis
Închis
Închis
Intrare analogică 1
Frecv. preset. 1
Frecv. preset. 2
Frecv. preset. 3
Referinţă
potenţiometru
1...10 kΩ
Frecvenţă de ieşire
(0...20 mA)
+24 Vin
24 V ieşire
24 V tensiune
auxiliară intrare
TI1+
TI1-
Intrare termistor
VACON · 16 GHIDUL DE PORNIRE RAPIDĂ
1
Fig. 4: Conexiunile de control implicite ale aplicaţiilor Standard şi HVAC (Încălzire/Ventilaţie/Aer
condiţionat)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 17
A
B
C
GHIDUL DE PORNIRE RAPIDĂ VACON · 17
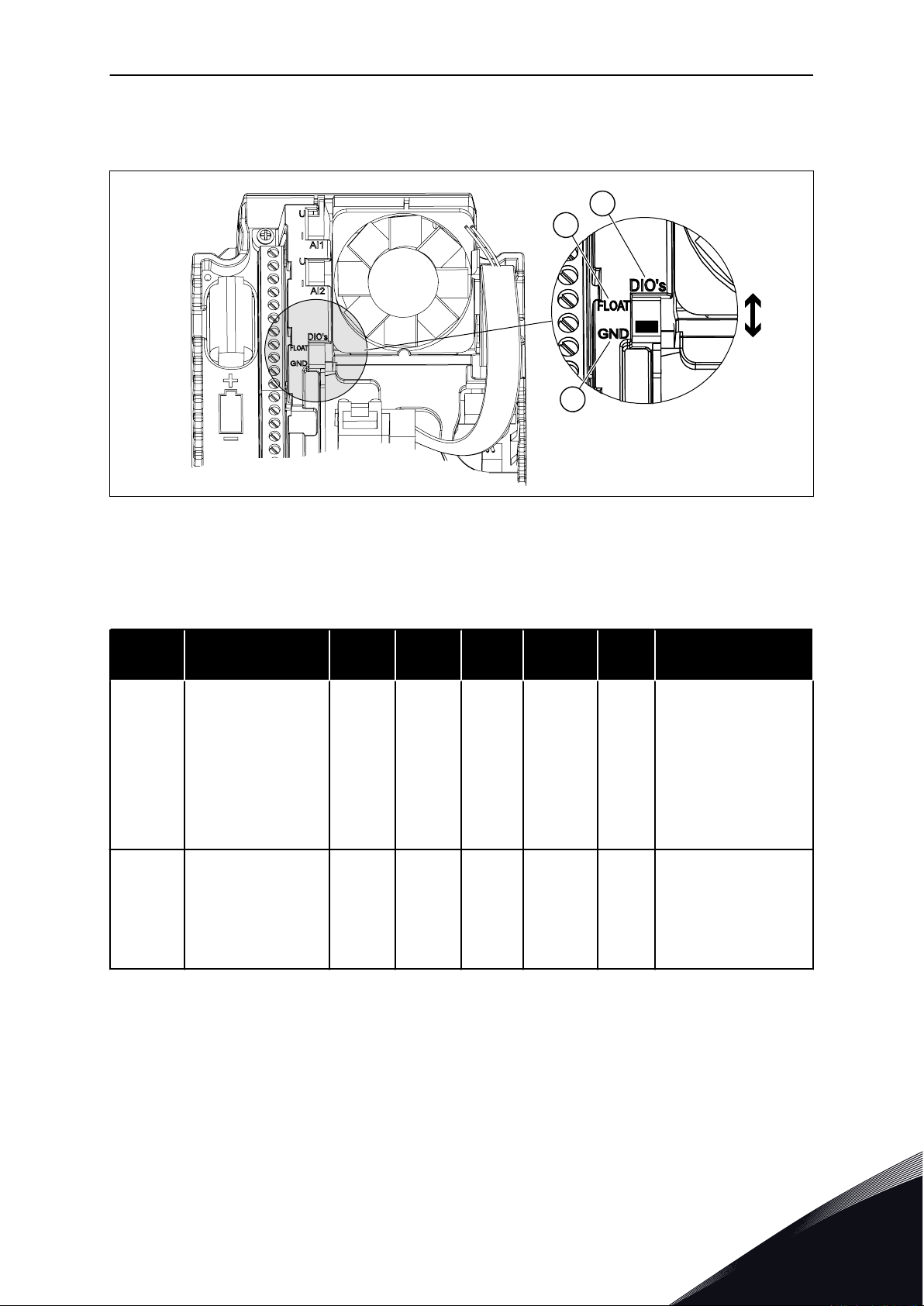
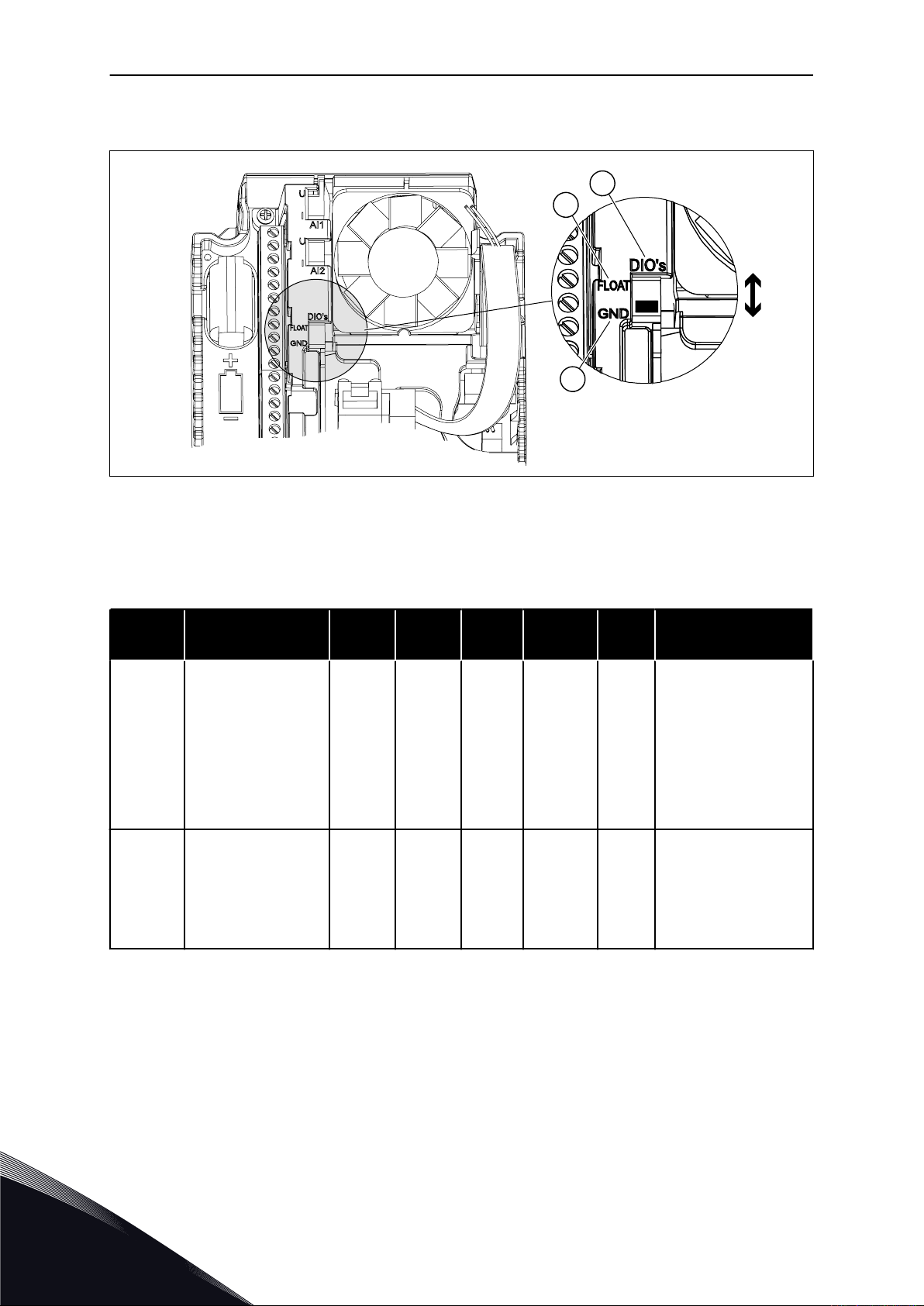
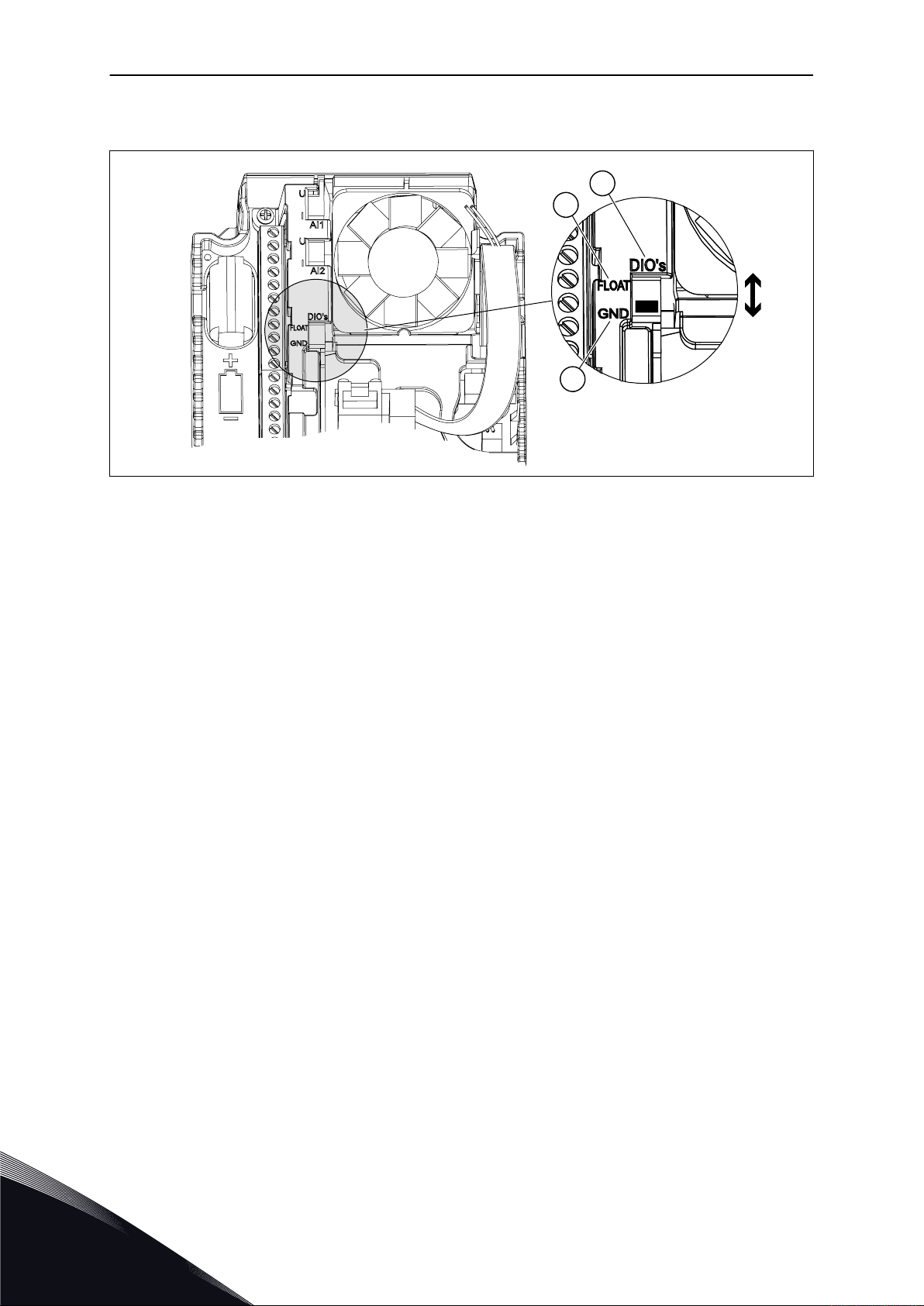
* = Disponibil numai în VACON® 100 X.
** = Pentru configuraţii de comutatoare DIP în VACON® 100 X, consultaţi manualul de
instalare VACON 100® X.
Fig. 5: Comutatorul DIP
A. Intrări digitale
C. Conectate la GND (implicit)
B. Flotor
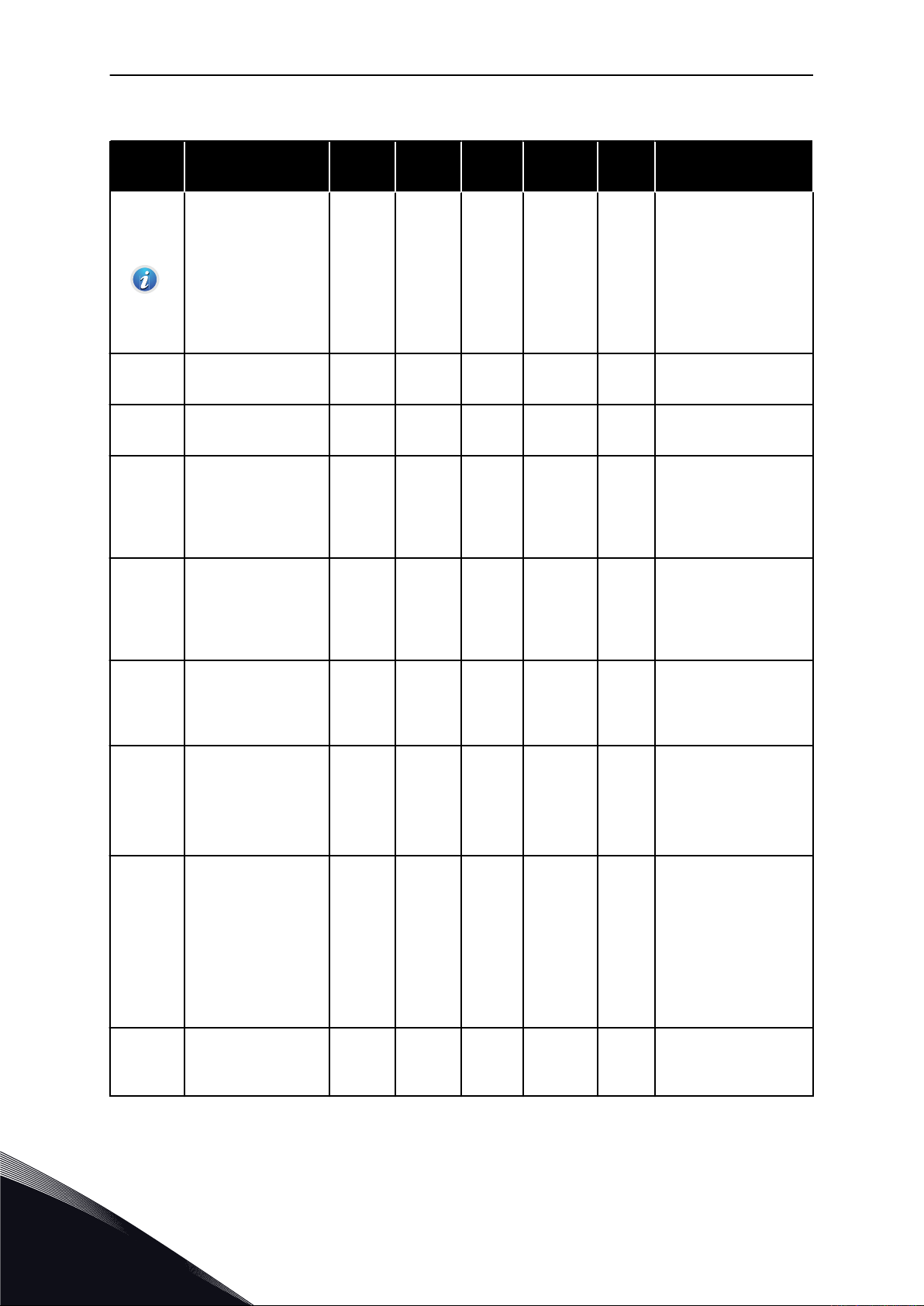
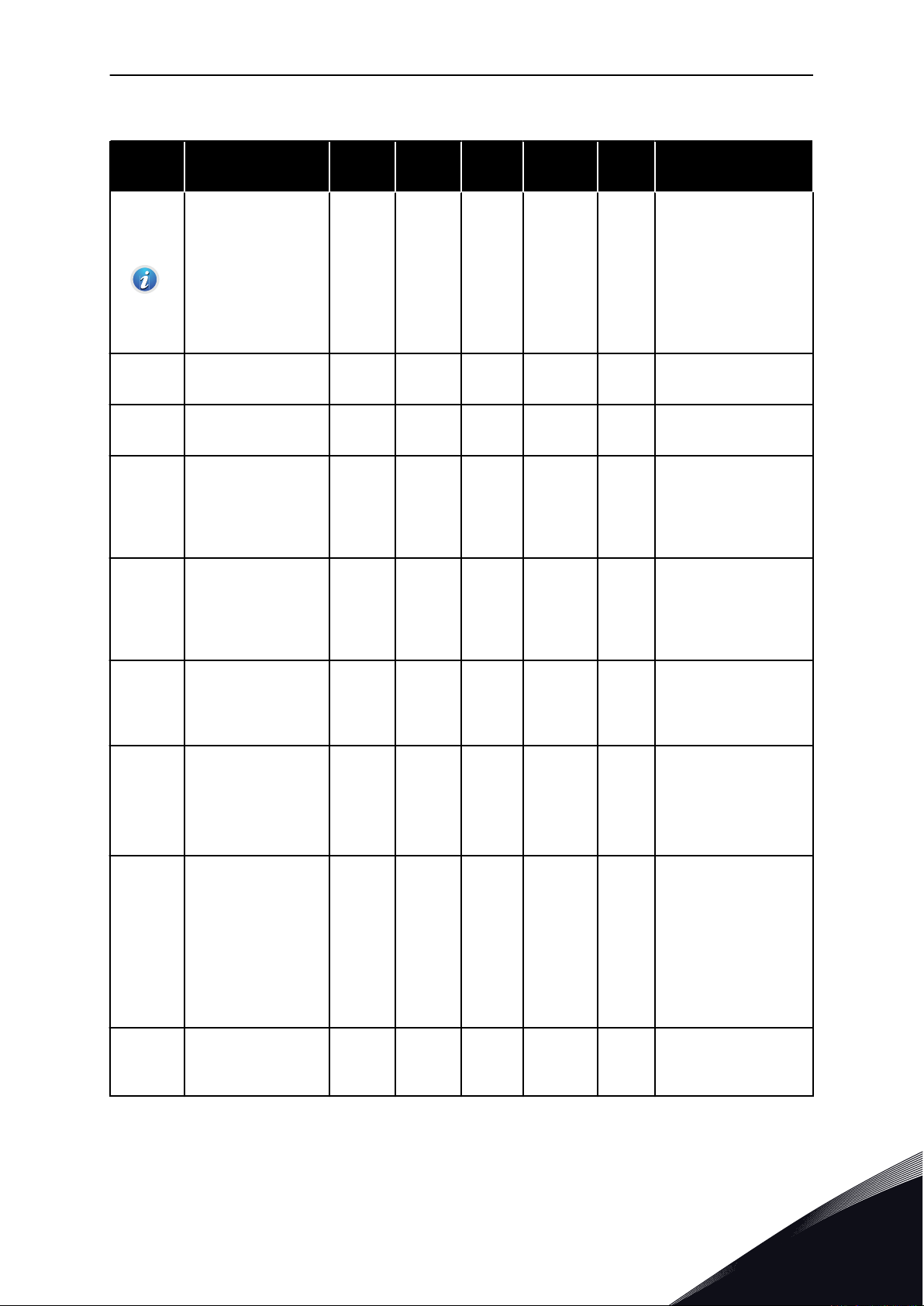
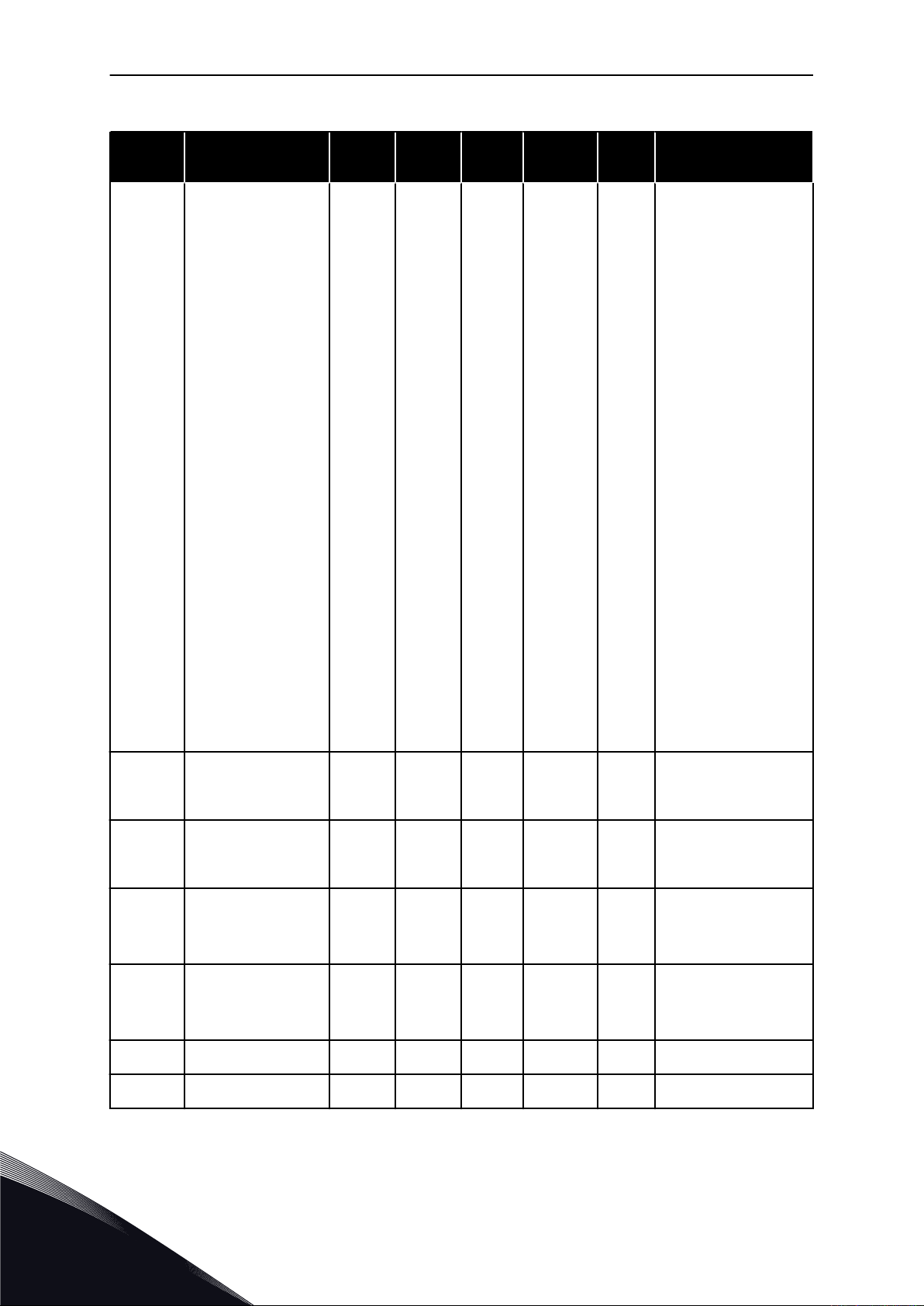
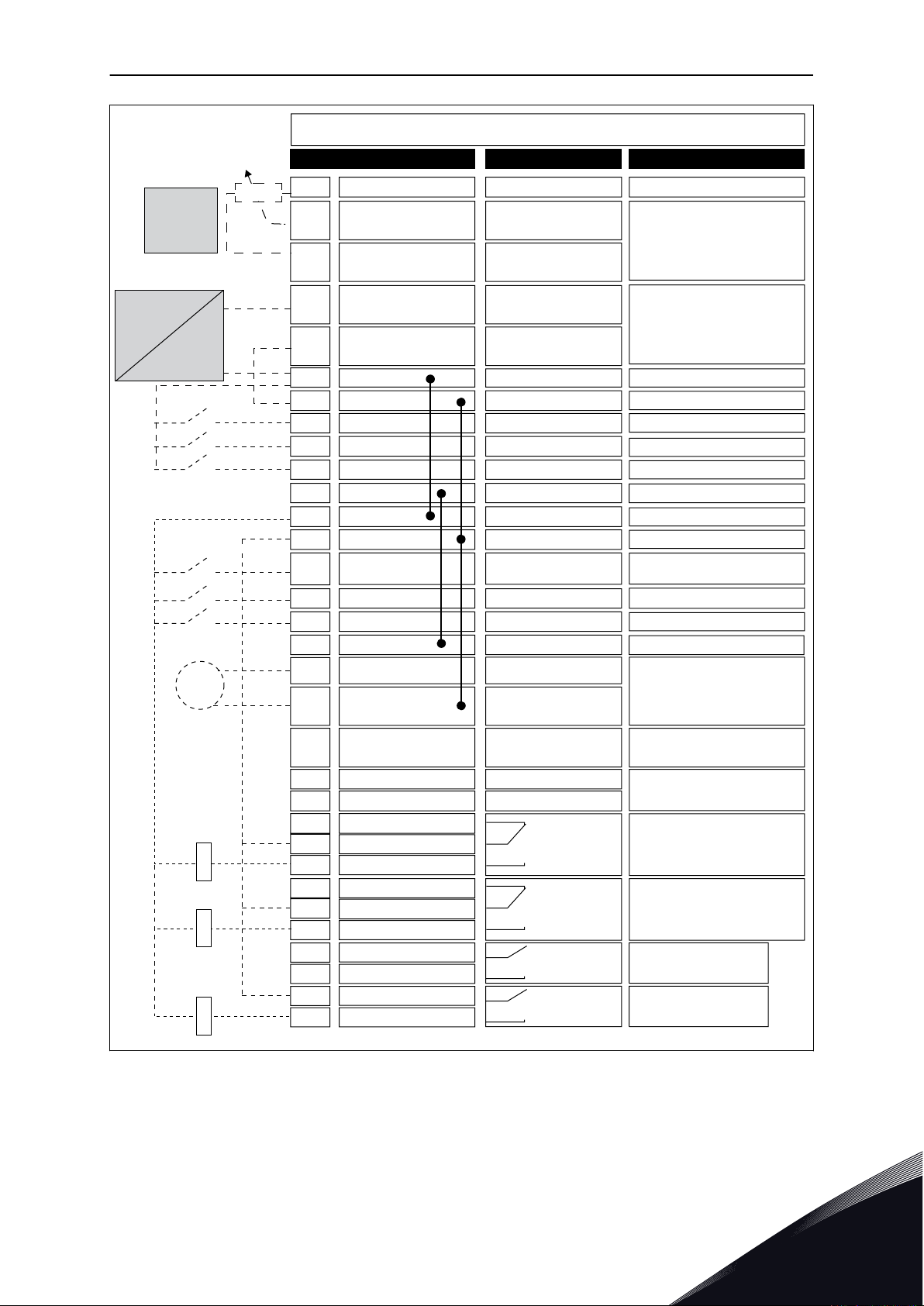
Tabel 2: M1.1 Asistenţi
Index Parametru Min Max Unitate
1.1.1 Activare asistent 0 1 0 1170
1.1.2 Asist. mod incendiu 0 1 0 1672
Predefini
t
ID Descriere
0 = Nu se activează
1 = Se activează
Selecţia Activate (Activare) porneşte expertul
de pornire (consultaţi
Capitolul Tabel 1 Exper-
tul de pornire).
Selecţia Activate (Activare) porneşte expertul
modului Fire (Incendiu)
(consultaţi Capitolul
2.6 Asistentul pentru
mod incendiu).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 18
VACON · 18 GHIDUL DE PORNIRE RAPIDĂ
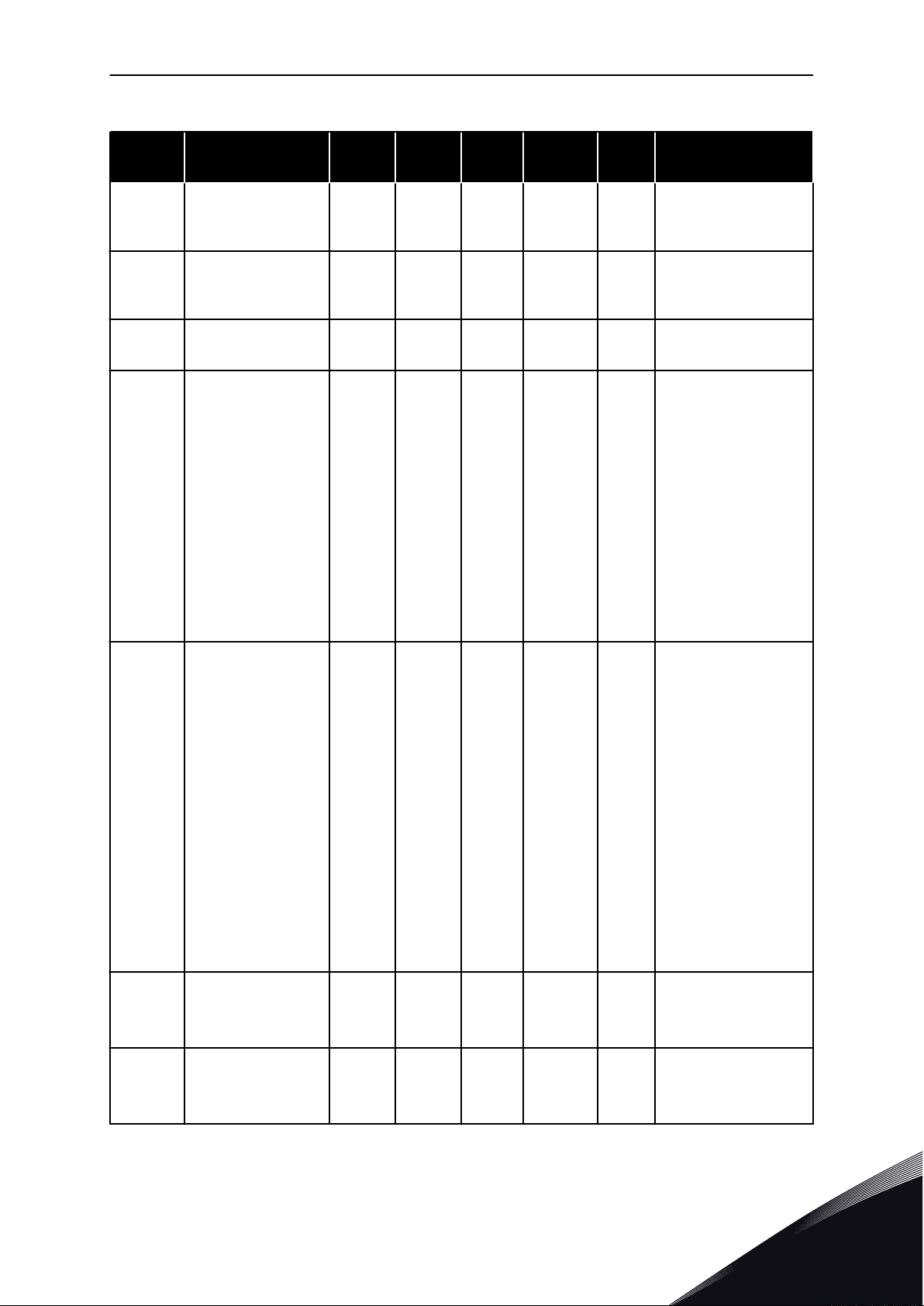
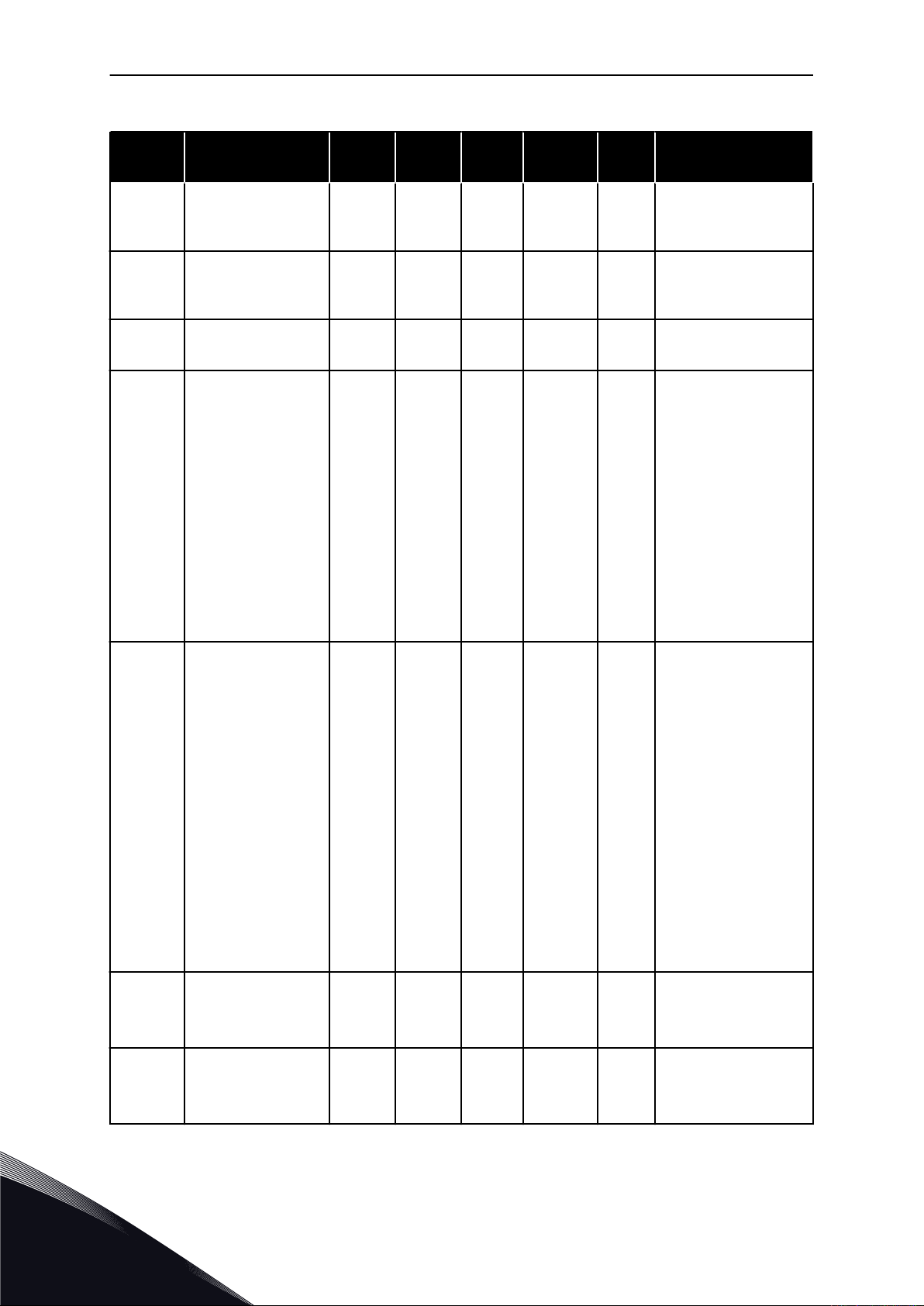
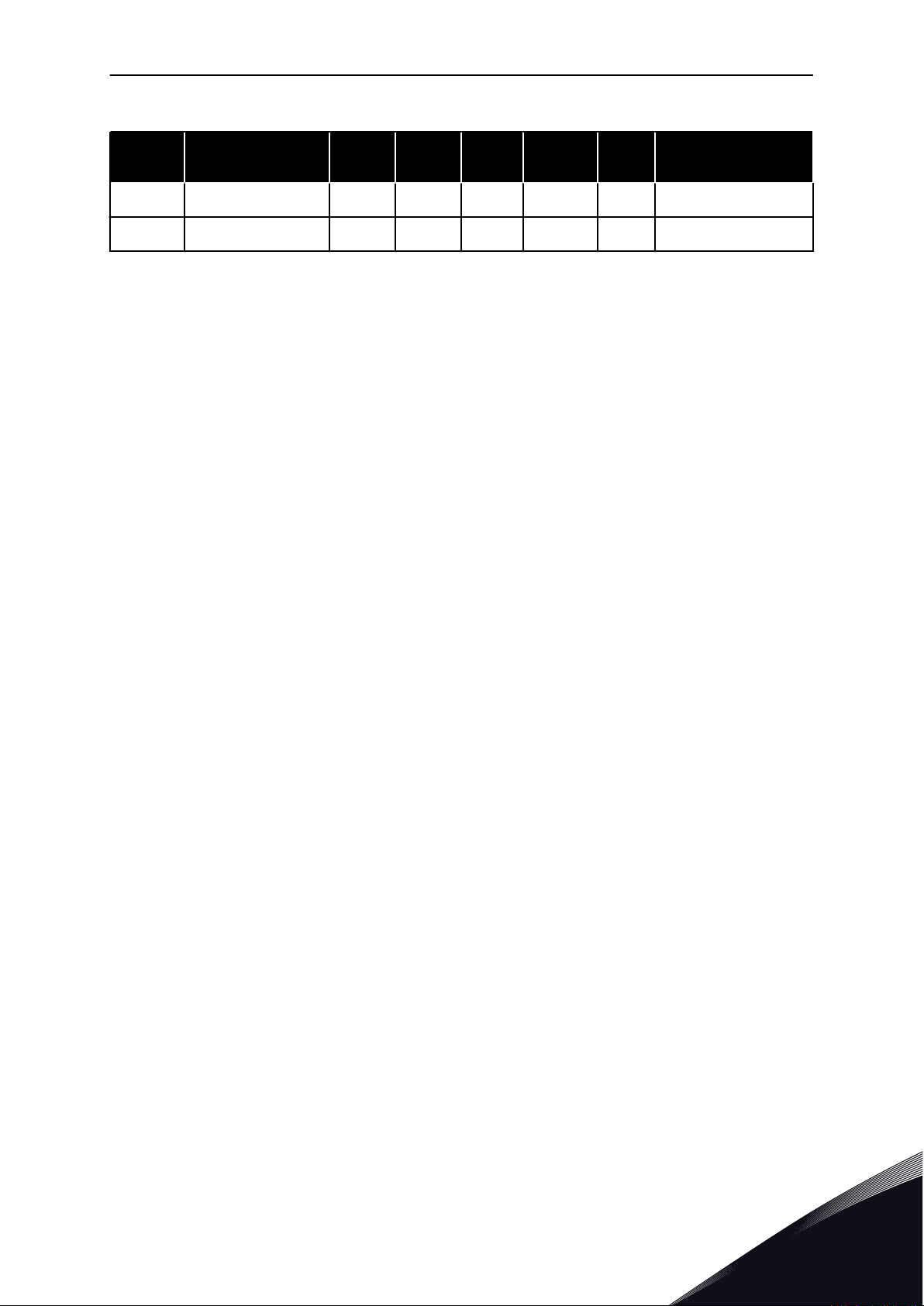
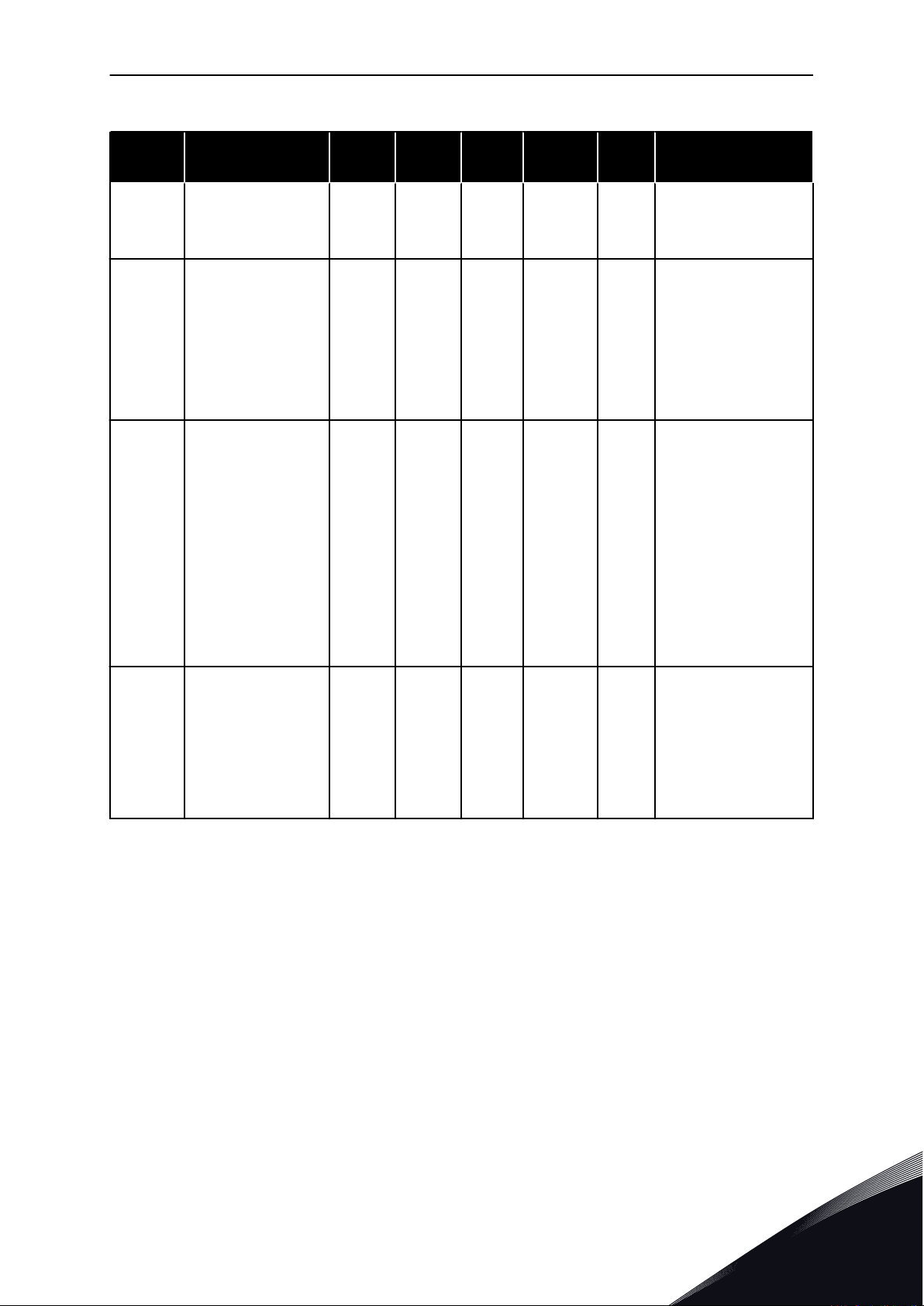
Tabel 3: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.2
Aplicaţie 0 4 0 212
1.3
1.4
1.5 Timp accelerare 1 0.1 3000.0 s 5.0 103
1.6 Timp decelerare 1 0.1 3000.0 s 5.0 104
Referinţă frecvenţă
minimă
Referinţă frecvenţă
maximă
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
Predefini
t
50.0 /
60.0
ID Descriere
0 = Standard
1 = HVAC
2=Comandă PID
3 = Pompe multiple
(acţionare simplă)
4 = Pompe multiple
(acţionare multiplă)
Frecvenţa de referinţă
minimă acceptată.
Frecvenţa de referinţă
102
maximă acceptată.
Furnizează intervalul
de timp necesar pentru
ca frecvenţa de ieşire
să crească de la 0 până
la maxim.
Furnizează intervalul
de timp necesar pentru
ca frecvenţa de ieşire
să scadă de la maxim
până la 0.
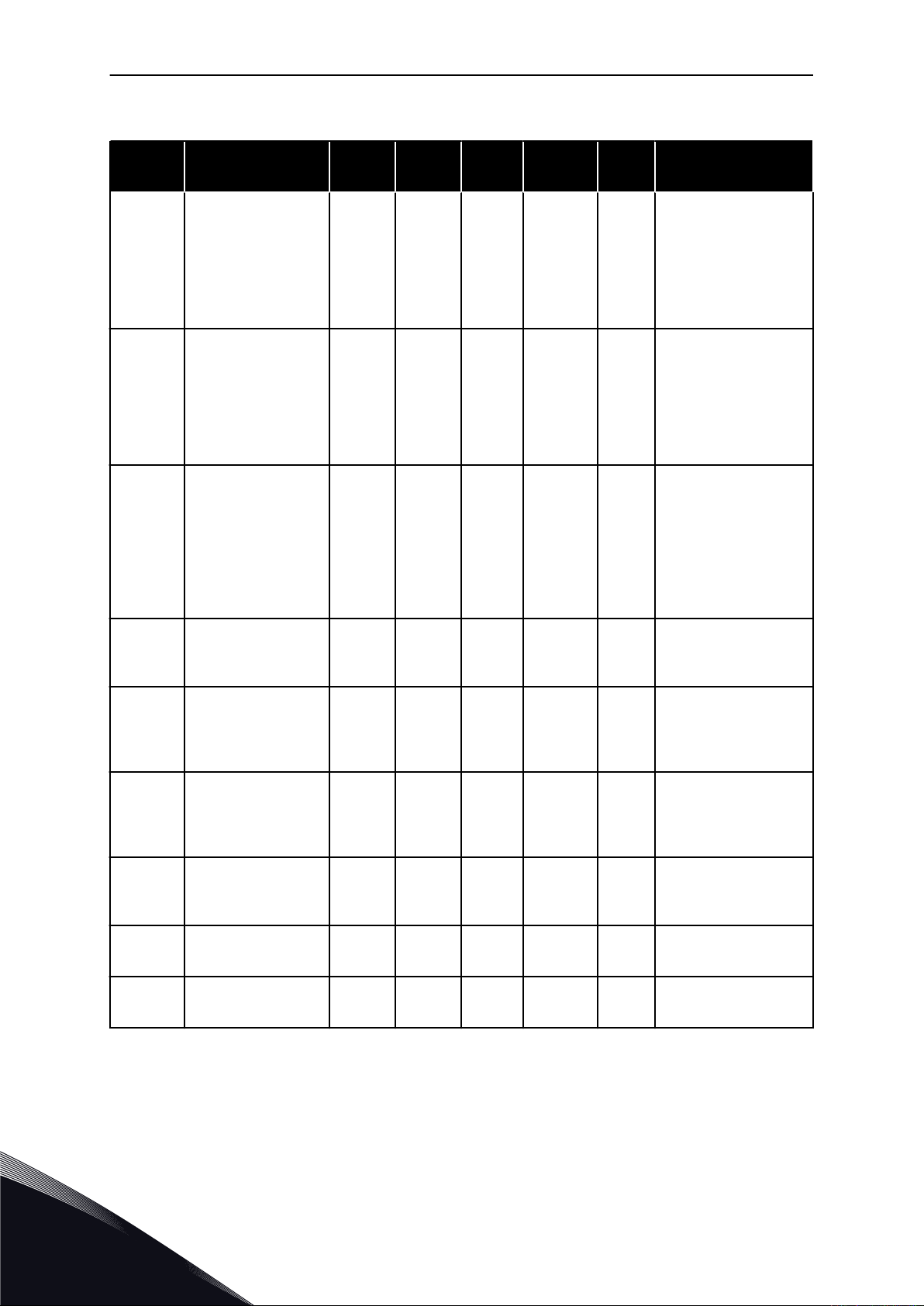
1.7 Limită curent motor IH*0.1 I
1.8 Tip motor 0 2 0 650
1.9
1.10
Tensiune nominală
motor
Frecvenţă nominală
motor
Variabil Variabil V Variabil 110
8.0 320.0 Hz 50 / 60 111
S
A Variabil 107
Curentul motor maxim
de la variatorul de
turaţie pentru motoare
CA.
0=Motor cu inducţie
1=Motor cu magneţi
permanenţi
2 = Motor cu repulsie
Găsiţi această valoare
Un pe eticheta motorului.
OBSERVAŢIE!
Aflaţi dacă conexiunea motorului este
Delta sau Star.
Găsiţi această valoare
fn pe eticheta motorului.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 19
GHIDUL DE PORNIRE RAPIDĂ VACON · 19
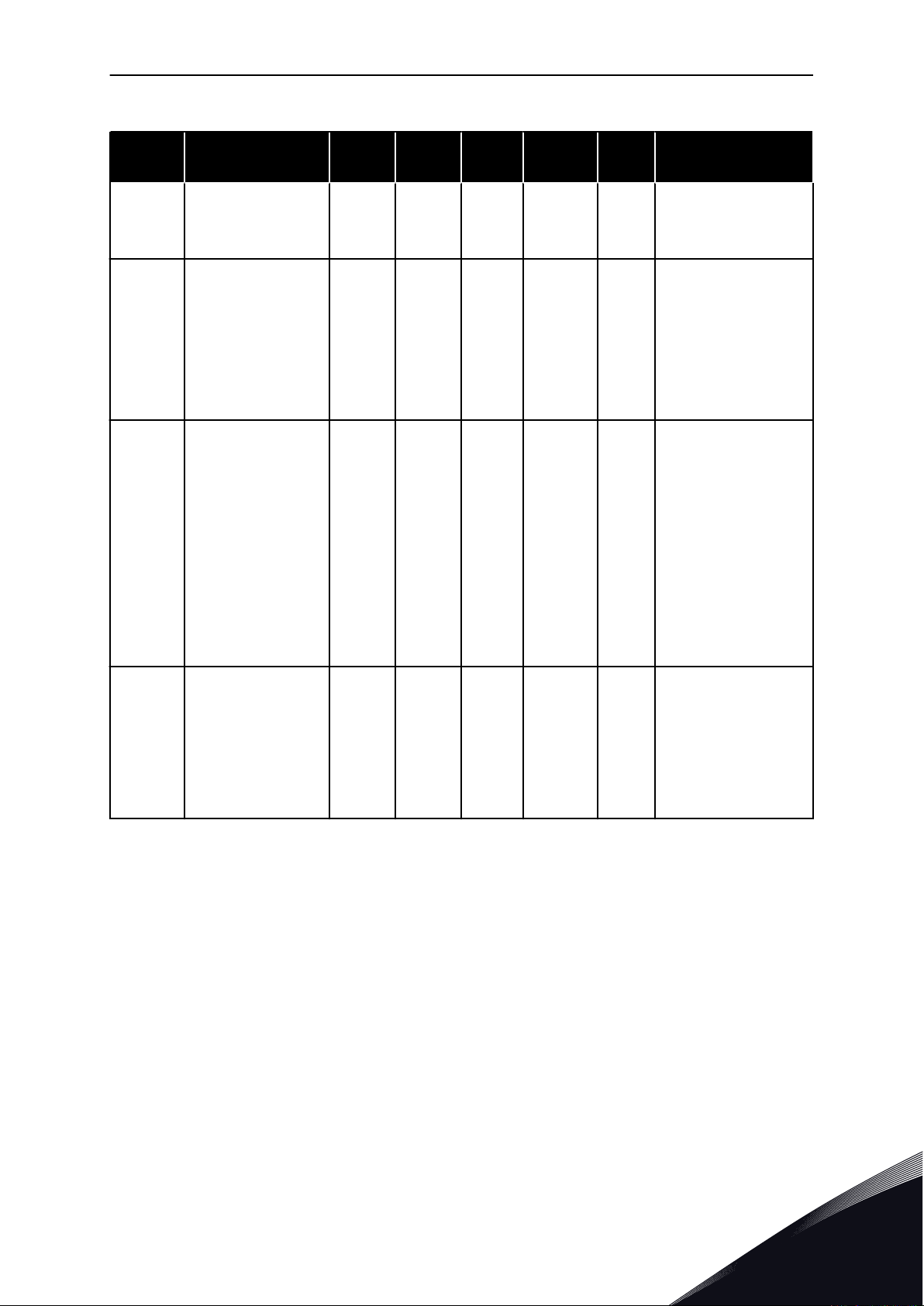
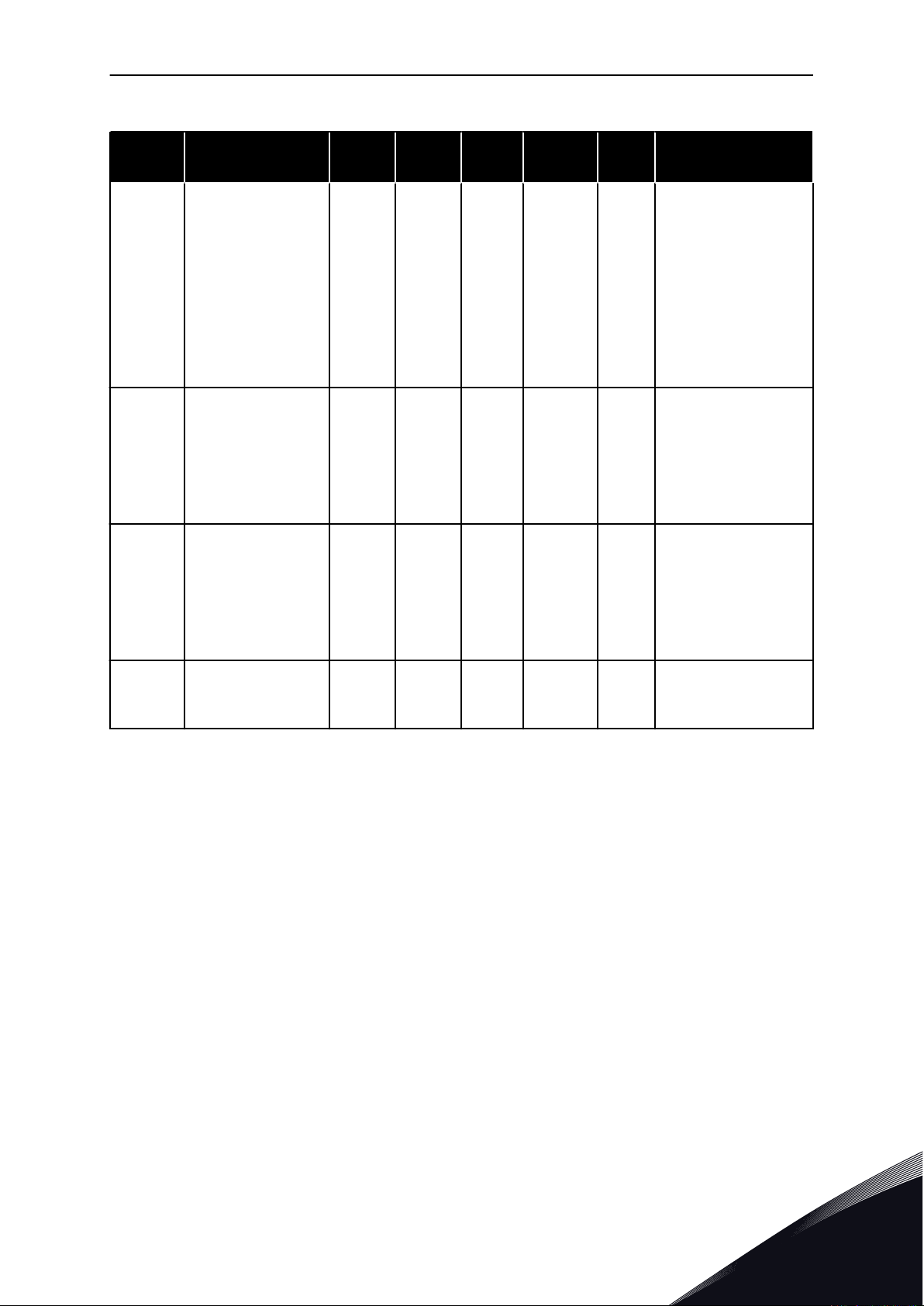
Tabel 3: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.11
1.12
1.13
1.14 Optimizarea energiei 0 1 0 666
Turaţie nominală
motor
Curent nominal
motor
Cos Phi Motor (Fac-
tor de putere)
24 19200 rot/min Variabil 112
IH * 0.1 IH * 2 A Variabil 113
0.30 1.00 Variabil 120
Predefini
t
ID Descriere
Găsiţi această valoare
nn pe eticheta motorului.
Găsiţi această valoare
In pe eticheta motorului.
Găsiţi această valoare
pe eticheta motorului.
Variatorul de turaţie
găseşte curentul motor
minim pentru a utiliza
mai puţină energie şi
pentru a reduce zgomotul motorului.
Această funcţie se utilizează, de exemplu, în
cazul proceselor pentru ventilatoare şi
pompe.
1.15 Identificare 0 2 0 631
1.16
Funcţie start 0 1 0 505
0 = Dezactivat
1 = Activat
Rularea de identificare
calculează sau
măsoară parametrii
motorului care sunt
necesari pentru un bun
control al motorului şi
vitezei.
0 = Fără acţiune
1 = În repaus
2 = În rotaţie
Înainte de a efectua
rularea de identificare,
trebuie să setaţi parametrii specificaţi pe
plăcuţa de identificare
a motorului.
0=Rampă
1=Pornire din mers
1.17 Funcţie stop 0 1 0 506
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Rotire inerţială
1=Rampă
1
Page 20
VACON · 20 GHIDUL DE PORNIRE RAPIDĂ
Tabel 3: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.18 Resetare automată 0 1 0 731
1.19
1.20
Răspuns la eroare
externă
Răspuns la eroare de
nivel redus intrare
analogică
0 3 2 701
0 5 0 700
Predefini
t
ID Descriere
0 = Dezactivat
1 = Activat
0 = Fără acţiune
1 = Alarmă
2 = Eroare (oprire conform modului de
oprire)
3 = Eroare (oprire prin
rotire inerţială)
0 = Fără acţiune
1 = Alarmă
2 = Alarmă + frecvenţă
presetată eroare
(P3.9.1.13)
3=Alarmă + frecvenţă
anterioară
4 = Eroare (oprire conform modului de
oprire)
5 = Eroare (oprire prin
rotire inerţială)
1.21
Punct de comandă
de la distanţă
Selecţia locaţiei de
control la distanţă
(pornire/oprire).
0 1 0 172
0=Comandă I/O
1=Comandă bus de
câmp
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 21
GHIDUL DE PORNIRE RAPIDĂ VACON · 21
Tabel 3: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.22
Selectare referinţă A
comandă I/O
0 20 5 117
Predefini
t
ID Descriere
Selecţia sursei frecvenţei de referinţă
atunci când locaţia de
control este I/O A.
0=PC
1 = Frecvenţă presetată 0
2 = Referinţă panou de
comandă
3 = Bus de câmp
4 = AI1
5 = AI2
5 = AI1 + AI2
7 = Referinţă PID
8 = Potenţiometru
motor
11 = Bloc 1 ieşire
12 = Bloc 2 ieşire
13 = Bloc 3 ieşire
14 = Bloc 4 ieşire
15 = Bloc 5 ieşire
16 = Bloc 6 ieşire
17 = Bloc 7 ieşire
18 = Bloc 8 ieşire
19 = Bloc 9 ieşire
20 = Bloc 10 ieşire
Selectare referinţă
1.23
1.24
1.25 Domeniu semnal AI1 0 1 0 379
1.26 Domeniu semnal AI2 0 1 1 390
comandă de la panou
de comandă
Selectare referinţă
comandă de la bus
de câmp
0 20 1 121
0 20 2 122
Aplicaţia pe care o
setaţi cu parametrul
1.2 furnizează valoarea
implicită.
Selecţia sursei frecvenţei de referinţă
atunci când locaţia de
control este tastatura.
A se vedea P1.22.
Selecţia sursei frecvenţei de referinţă
atunci când locaţia de
control este protocolul
Fieldbus.
A se vedea P1.22.
0= 0..10 V / 0..20 mA
1= 2..10 V / 4..20 mA
0= 0..10 V / 0..20 mA
1= 2..10 V / 4..20 mA
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 22
VACON · 22 GHIDUL DE PORNIRE RAPIDĂ
Tabel 3: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.27 Functie RO1 0 73 2 11001 A se vedea P3.5.3.2.1
1.28 Funcţie RO2 0 73 3 11004 A se vedea P3.5.3.2.1
1.29 Funcţie RO3 0 73 1 11007 A se vedea P3.5.3.2.1
1.30 Funcţie AO1 0 31 2 10050 A se vedea P3.5.4.1.1
Predefini
t
ID Descriere
Tabel 4: M1.31 Standard/M1.32 HVAC
Index Parametru Min Max Unitate
1.31.1
1.31.2
1.31.3
Frecvenţă presetată
1
Frecvenţă presetată
2
Frecvenţă presetată
3
P1.3 P1.4 Hz 10.0 105
P1.3 P1.4 Hz 15.0 106
P1.3 P1.4 Hz 20.0 126
Predefini
t
ID Descriere
Efectuaţi selecţia unei
frecvenţe presetate cu
intrarea digitală DI4.
Efectuaţi selecţia unei
frecvenţe presetate cu
intrarea digitală DI5.
Efectuaţi selecţia unei
frecvenţe presetate cu
intrările digitale DI4 şi
DI5.
1.4.2 APLICAŢIE COMANDĂ PID
Puteţi utiliza aplicaţia de comandă PID în cazul proceselor în cadrul cărora controlaţi
variabila de proces, ca de exemplu presiunea, prin intermediul controlului turaţiei motorului.
În cadrul acestei aplicaţii, controlerul PID intern al variatorului de turaţie este configurat
pentru 1 valoare de referinţă şi 1 semnal de feedback.
Puteţi utiliza 2 locaţii de control. Efectuaţi selecţia locaţiei de control A sau B prin
intermediul DI6. Când este activă locaţia de control A, DI1 dă comenzile de pornire şi oprire,
iar controlerul PID dă frecvenţa de referinţă. Când locaţia de control B este activă, DI4 dă
comenzile de pornire şi oprire, iar AI1 dă frecvenţa de referinţă.
Puteţi configura liber toate ieşirile variatorului de turaţie în toate aplicaţiile. Există 1 ieşire
analogică (Output Frequency [Frecvenţă de ieşire]) şi 3 ieşiri prin releu (Run, Fault, Ready
[Rulare, eroare, pregătit]) pe placa de bază I/O.
Consultaţi descrierile parametrilor din Capitolul Tabel 1 Expertul de pornire.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 23
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
32
33
Modbus RTU
+
-
*)
**)
TI1-
TI1+
mA
ÎN FUNCŢIUNE
ÎN
FUNCŢIUNE
AO1-/GND
+24 Vin
24Vieşire
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NI
RO1/2 CM
RO1/3 ND
CM
CM
RS485
RS485
RO2/1 NI
RO2/2 CM
RO2/3 ND
Placă I/O standard
Bornă Semnal Descriere
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 V ieşire
Ieşire de referinţă
Intrare analogică 1 +
Intrare analogică 1 -
Intrare analogică 2 +
Intrare analogică 2 -
24 V tensiune auxiliară
Masă I/O
Intrare digitală 1
Intrare digitală 2
Intrare digitală 3
Intrare digitală 4
Intrare digitală 5
Intrare digitală 6
Comun pentru DI1-DI6
Comun pentru DI1-DI6
24 V tensiune auxiliară
Masă I/O
Ieşire analogică 1 +
Ieşire analogică 1 -
24 V tensiune
auxiliară intrare
Bus serial, negativ
Bus serial, pozitiv
Ieşire releu 1
Ieşire releu 2
RO3/2 CM
RO3/3 ND
PREGĂTIT
Ieşire releu 3
EROARE
Resetare eroare
AO1+
Loc A: Valoare de referinţă
PID locaţia B: Frecvenţă
de referinţă
(implicit: 0...10 V)
Feedback PID
(valoare reală)
(implicit: 4...20 mA)
Loc A: Pornire înainte
(controler PID)
Eroare externă
Selectare punct comandă A/B
Referinţă
potenţiometru
1...10 kΩ
Frecvenţă presetată 1
I = (0)4...20 mA
Valoare
actuală
Transmiţător
cu două fire
Loc B: Pornire pozitivă
(Frecvenţă de referinţă P3.3.1.6)
Frecvenţă de ieşire
(0...20 mA)
EROARE
Intrare termistor
GHIDUL DE PORNIRE RAPIDĂ VACON · 23
Fig. 6: Conexiunile de control implicite ale aplicaţiei de control PID
* = Disponibil numai în VACON® 100 X.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 24
A
B
C
VACON · 24 GHIDUL DE PORNIRE RAPIDĂ
** = Pentru configuraţii de comutatoare DIP în VACON® 100 X, consultaţi manualul de
instalare VACON® 100 X.
Fig. 7: Comutatorul DIP
A. Intrări digitale
C. Conectate la GND (implicit)
B. Flotor
Tabel 5: M1.1 Asistenţi
Index Parametru Min Max Unitate
1.1.1 Activare asistent 0 1 0 1170
1.1.2 Asist. mod incendiu 0 1 0 1672
Predefini
t
ID Descriere
0 = Nu se activează
1 = Se activează
Selecţia Activate (Activare) porneşte expertul
de pornire (consultaţi
Capitolul 1.3 Prima por-
nire).
Selecţia Activate (Activare) porneşte expertul
modului Fire (Incendiu)
(consultaţi Capitolul
2.6 Asistentul pentru
mod incendiu).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 25
GHIDUL DE PORNIRE RAPIDĂ VACON · 25
Tabel 6: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.2
Aplicaţie 0 4 2 212
1.3
1.4
1.5 Timp accelerare 1 0.1 3000.0 s 5.0 103
1.6 Timp decelerare 1 0.1 3000.0 s 5.0 104
Referinţă frecvenţă
minimă
Referinţă frecvenţă
maximă
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
Predefini
t
50.0 /
60.0
ID Descriere
0 = Standard
1 = HVAC
2=Comandă PID
3 = Pompe multiple
(acţionare simplă)
4 = Pompe multiple
(acţionare multiplă)
Frecvenţa de referinţă
minimă acceptată.
Frecvenţa de referinţă
102
maximă acceptată.
Furnizează intervalul
de timp necesar pentru
ca frecvenţa de ieşire
să crească de la 0 până
la maxim.
Furnizează intervalul
de timp necesar pentru
ca frecvenţa de ieşire
să scadă de la maxim
până la 0.
1.7 Limită curent motor IH*0.1 I
1.8 Tip motor 0 2 0 650
1.9
1.10
Tensiune nominală
motor
Frecvenţă nominală
motor
Variabil Variabil V Variabil 110
8.0 320.0 Hz
S
A Variabil 107
50.0 /
60.0
111
Curentul motor maxim
de la variatorul de
turaţie pentru motoare
CA.
0=Motor cu inducţie
1=Motor cu magneţi
permanenţi
2 = Motor cu repulsie
Găsiţi această valoare
Un pe eticheta motorului.
OBSERVAŢIE!
Aflaţi dacă conexiunea motorului este
Delta sau Star.
Găsiţi această valoare
fn pe eticheta motorului.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 26
VACON · 26 GHIDUL DE PORNIRE RAPIDĂ
Tabel 6: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.11
1.12
1.13
1.14 Optimizarea energiei 0 1 0 666
Turaţie nominală
motor
Curent nominal
motor
Cos Phi Motor (Fac-
tor de putere)
24 19200 rot/min Variabil 112
IH * 0.1 I
0.30 1.00 Variabil 120
S
Predefini
t
A Variabil 113
ID Descriere
Găsiţi această valoare
nn pe eticheta motorului.
Găsiţi această valoare
In pe eticheta motorului.
Găsiţi această valoare
pe eticheta motorului.
Variatorul de turaţie
găseşte curentul motor
minim pentru a utiliza
mai puţină energie şi
pentru a reduce zgomotul motorului.
Această funcţie se utilizează, de exemplu, în
cazul proceselor pentru ventilatoare şi
pompe.
1.15 Identificare 0 2 0 631
1.16
Funcţie start 0 1 0 505
0 = Dezactivat
1 = Activat
Rularea de identificare
calculează sau
măsoară parametrii
motorului care sunt
necesari pentru un bun
control al motorului şi
vitezei.
0 = Fără acţiune
1 = În repaus
2 = În rotaţie
Înainte de a efectua
rularea de identificare,
trebuie să setaţi parametrii specificaţi pe
plăcuţa de identificare
a motorului.
0=Rampă
1=Pornire din mers
1
1.17 Funcţie stop 0 1 0 506
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Rotire inerţială
1=Rampă
Page 27
GHIDUL DE PORNIRE RAPIDĂ VACON · 27
Tabel 6: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.18 Resetare automată 0 1 0 731
1.19
1.20
Răspuns la eroare
externă
Răspuns la eroare de
nivel redus intrare
analogică
0 3 2 701
0 5 0 700
Predefini
t
ID Descriere
0 = Dezactivat
1 = Activat
0 = Fără acţiune
1 = Alarmă
2 = Eroare (oprire conform modului de
oprire)
3 = Eroare (oprire prin
rotire inerţială)
0 = Fără acţiune
1 = Alarmă
2 = Alarmă + frecvenţă
presetată eroare
(P3.9.1.13)
3=Alarmă + frecvenţă
anterioară
4 = Eroare (oprire conform modului de
oprire)
5 = Eroare (oprire prin
rotire inerţială)
1.21
Punct de comandă
de la distanţă
Selecţia locaţiei de
control la distanţă
(pornire/oprire).
0 1 0 172
0=Comandă I/O
1=Comandă bus de
câmp
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 28
VACON · 28 GHIDUL DE PORNIRE RAPIDĂ
Tabel 6: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.22
Selectare referinţă A
comandă I/O
1 20 6 117
Predefini
t
ID Descriere
Selecţia sursei frecvenţei de referinţă
atunci când locaţia de
control este I/O A.
0=PC
1 = Frecvenţă presetată 0
2 = Referinţă panou de
comandă
3 = Bus de câmp
4 = AI1
5 = AI2
6 = AI1+AI2
7 = Referinţă PID
8 = Potenţiometru
motor
11 = Bloc 1 ieşire
12 = Bloc 2 ieşire
13 = Bloc 3 ieşire
14 = Bloc 4 ieşire
15 = Bloc 5 ieşire
16 = Bloc 6 ieşire
17 = Bloc 7 ieşire
18 = Bloc 8 ieşire
19 = Bloc 9 ieşire
20 = Bloc 10 ieşire
Aplicaţia pe care o
setaţi cu parametrul
1.2 furnizează valoarea
implicită.
Selectare referinţă
1.23
1.24
1.25 Domeniu semnal AI1 0 1 0 379
1.26 Domeniu semnal AI2 0 1 1 390
1.27 Functie RO1 0 73 2 11001 A se vedea P3.5.3.2.1
1.28 Funcţie RO2 0 73 3 11004 A se vedea P3.5.3.2.1
comandă de la panou
de comandă
Selectare referinţă
comandă de la bus
de câmp
1 20 1 121
1 20 2 122
A se vedea P1.22.
A se vedea P1.22.
0= 0..10 V / 0..20 mA
1= 2..10 V / 4..20 mA
0= 0..10 V / 0..20 mA
1= 2..10 V / 4..20 mA
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 29
GHIDUL DE PORNIRE RAPIDĂ VACON · 29
Tabel 6: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.29 Funcţie RO3 0 73 1 11007 A se vedea P3.5.3.2.1
1.30 Funcţie AO1 0 31 2 10050 A se vedea P3.5.4.1.1
Predefini
t
ID Descriere
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 30
VACON · 30 GHIDUL DE PORNIRE RAPIDĂ
Tabel 7: Comandă PID M1.33
Index Parametru Min Max Unitate
1.33.1 Câştig PID 0.00 100.00 % 100.00 118
1.33.2 Durată integrare PID 0.00 600.00 s 1.00 119
1.33.3 Durată derivativă PID 0.00 100.00 s 0.00 1132
Predefini
t
ID Descriere
Dacă valoarea parametrului este setată la 100
%, o modificare de 10
% din valoarea de
eroare determină
modificarea ieşirii controlerului cu 10 %.
Dacă acest parametru
este setat la valoarea
1,00 s, o schimbare cu
10% a valorii de eroare
duce la modificarea
ieşirii controlerului cu
10,00%/s.
Dacă acest parametru
este setat la valoarea
1,00 s, o schimbare cu
10% a valorii de eroare
în timpul de 1,00 s
duce la modificarea
ieşirii controlerului cu
10,00%.
1.33.4
1.33.5 Minim unitate proces Variabil Variabil Variabil 1033
1.33.6
1.33.7
1.33.8
1.33.9
Selectare unitate
proces
Maxim unitate pro-
ces
Feedback 1 Source
Selection (Selectare
sursă feedback 1)
Selectare sursă
punct de referinţă 1
Punct de referinţă 1
panou comandă
1 44 1 1036
Variabil Variabil Variabil 1034
0 30 2 334
0 32 1 332
Variabil Variabil Variabil 0 167
Selectaţi unitatea de
proces. A se vedea
P3.13.1.4
Valoarea unităţii de
proces este aceeaşi cu
0% din semnalul de
feedback PID.
Valoarea unităţii de
proces este aceeaşi cu
100% din semnalul de
feedback PID.
A se vedea P3.13.3.3
A se vedea P3.13.2.6
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 31
GHIDUL DE PORNIRE RAPIDĂ VACON · 31
Tabel 7: Comandă PID M1.33
Index Parametru Min Max Unitate
SP1 Sleep Frequency
1.33.10
1.33.11 Temp. aştept. SP1 0 3000 s 0 1017
1.33.12
Limit (Limită de frec-
venţă repaus SP1)
SP1 Wake Up Level
(Nivel de reactivare
SP1)
0.0 320.0 Hz 0.0 1016
Variabil Variabil Variabil Variabil 1018
Predefini
t
ID Descriere
Variatorul de turaţie
intră în modul repaus
atunci când frecvenţa
ieşirii rămâne sub
această limită un timp
mai îndelungat decât
este specificat prin
parametrul Sleep
Delay (Amânare
repaus).
0 = Neutilizat
Durata de timp minimă
cât frecvenţa rămâne
sub nivelul de repaus
înainte ca variatorul de
frecvenţă să se
oprească.
0 = Neutilizat
Valoarea de reactivare
a supravegherii de
feedback PID. Nivelul
de reactivare 1 utilizează unităţile de proces selectate.
0 = Neutilizat
Frecvenţa presetată pe
care o selectează
intrarea digitală DI5.
1.33.12
Frecvenţă presetată
1
P1.3 P1.4 Hz 10.0 105
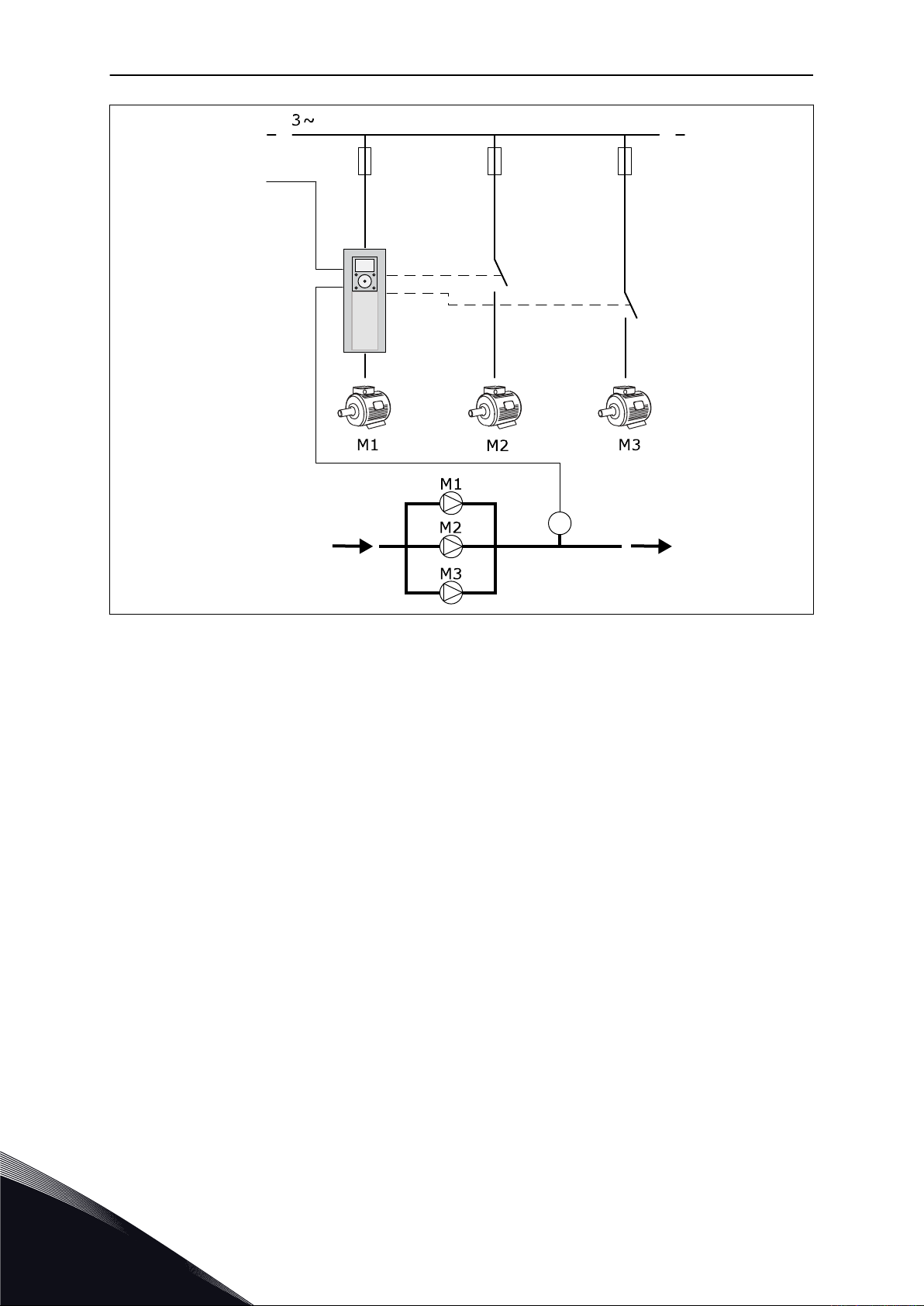
1.4.3 APLICAŢIE POMPE MULTIPLE (ACŢIONARE SIMPLĂ)
Puteţi utiliza aplicaţia Pompe multiple (acţionare simplă) în aplicaţii, unde 1 unitate de
acţionare comandă un sistem care are maxim 8 motoare în paralel, de exemplu, pompe,
ventilatoare sau compresoare. În mod implicit, aplicaţia Pompe multiple (acţionare simplă)
este configurată pentru 3 motoare în paralel.
Variatorul de turaţie este conectat la 1 dintre motoare, care devine motorul regulator.
Controlerul PID intern al variatorului de turaţie controlează turaţia motorului regulator şi
oferă semnale de comandă prin ieşirile releu, pentru a porni sau opri motoarele auxiliare.
Contactoarele externe (comutator) cuplează motoarele auxiliare la reţeaua electrică.
Puteţi controla o variabilă de proces, ca de exemplu presiunea, prin intermediul controlului
turaţiei motorului regulator şi prin intermediul numărului de motoare care funcţionează.
Consultaţi descrierile parametrilor din Capitolul 10 Descrieri parametri.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 32
PT
RO2
RO3
Pornire / Oprire
VACON · 32 GHIDUL DE PORNIRE RAPIDĂ
Fig. 8: Configurarea Pompe multiple (acţionare simplă)
Funcţia de schimbare automată (a ordinii de pornire) face uniformă uzura motoarelor din
sistem. Funcţia de schimbare automată monitorizează orele de funcţionare şi setează
ordinea de pornire a fiecărui motor. Motorul cu cele mai puţine ore de funcţionare porneşte
primul, iar motorul cu cele mai multe ore de funcţionare porneşte ultimul. Puteţi configura
pornirea schimbării automate pe baza intervalului de schimbare automată setat prin
intermediul ceasului intern în timp real (care necesită o baterie RTC) al variatorului de
turaţie.
Puteţi configura schimbarea automată pentru toate motoarele din sistem sau doar pentru
motoarele auxiliare.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 33
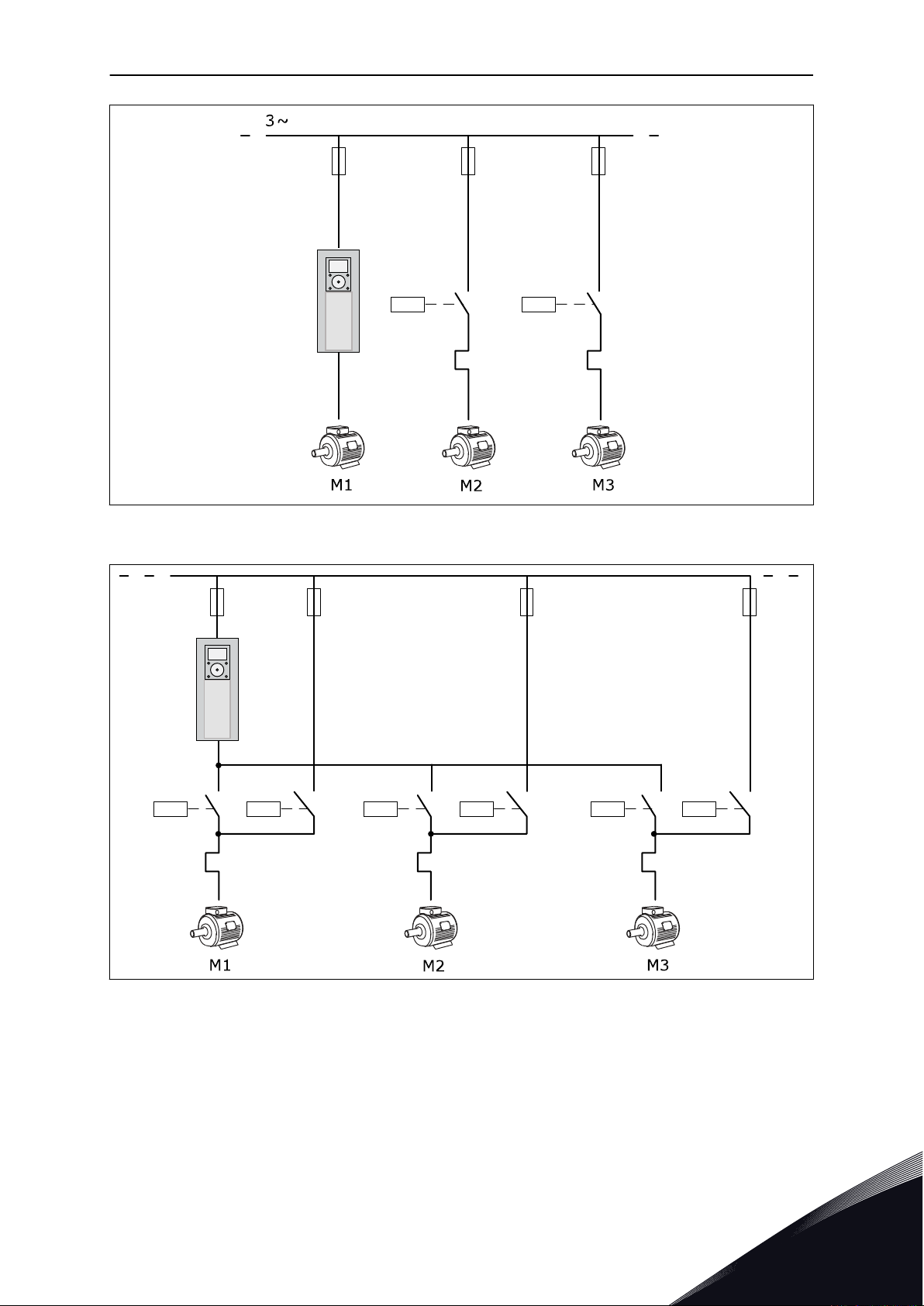
K2 K3
K1 K2 K2 K1.1 K2.1 K3.1
GHIDUL DE PORNIRE RAPIDĂ VACON · 33
Fig. 9: Diagrama de control, unde pot fi configurate pentru schimbare automată doar motoarele
auxiliare
Fig. 10: Diagrama de control, unde pot fi configurate pentru schimbare automată toate motoarele
Puteţi utiliza 2 locaţii de control. Efectuaţi selecţia locaţiei de control A sau B prin
intermediul DI6. Efectuaţi selecţia locaţiei de control A sau B prin intermediul DI6. Când este
activă locaţia de control A, DI1 dă comenzile de pornire şi oprire, iar controlerul PID dă
frecvenţa de referinţă. Când locaţia de control B este activă, DI4 dă comenzile de pornire şi
oprire, iar AI1 dă frecvenţa de referinţă.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 34

VACON · 34 GHIDUL DE PORNIRE RAPIDĂ
Puteţi configura liber toate ieşirile variatorului de turaţie în toate aplicaţiile. Există 1 ieşire
analogică (Output Frequency [Frecvenţă de ieşire]) şi 3 ieşiri prin releu (Run, Fault, Ready
[Rulare, eroare, pregătit]) pe placa de bază I/O.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 35
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
Modbus RTU
*)
32
33
**)
+
-
A1
A1
A1
A2
A2
A2
TI1-
TI1+
mA
Control motor 1
(contactor multi-pompă K2)
Control motor 2
(contactor multi-pompă K2)
AO1-/GND
+24 Vin
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NI
RO1/2 CM
RO1/3 ND
CM
CM
RS485
RS485
RO2/1 NI
RO2/2 CM
RO2/3 ND
RO3/2 CM
RO3/3 ND
Placă I/O standard
Bornă Semnal Descriere
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 V ieşire
Ieşire de referinţă
Intrare analogică 1 +
Intrare analogică 1 -
Intrare analogică 2 +
Intrare analogică 2 -
24 V tensiune auxiliară
Masă I/O
Intrare digitală 1
Intrare digitală 2
Intrare digitală 3
Intrare digitală 4
Intrare digitală 5
Intrare digitală 6
Comun pentru DI1-DI6
Comun pentru DI1-DI6
24 V tensiune auxiliară
Masă I/O
Ieşire analogică 1 +
Ieşire analogică 1 -
Bus serial, negativ
Bus serial, pozitiv
Ieşire releu 1
Ieşire releu 2
Ieşire releu 3
Selectare punct comandă A/B
AO1+
Loc A: Neutilizat locaţia
B: Frecvenţă de referinţă
(implicit: 0...10 V)
Feedback PID
(valoare reală)
(implicit: ...20 mA)
Loc A: Pornire înainte
(controler PID)
Loc B: Pornire înainte
(referinţă frecvenţă P3.3.1.6)
Referinţă
potenţiometru
1...10 kΩ
I = (0)4...20 mA
Valoare
actuală
Transmiţător
cu două fire
Interblocare motor 1
Interblocare motor 2
Interblocare motor 3
24 V ieşire
Frecvenţă de ieşire
(implicit 0...20 mA)
24 V tensiune
auxiliară intrare
Control motor 3
(contactor multi-pompă K2)
Intrare termistor
GHIDUL DE PORNIRE RAPIDĂ VACON · 35
Fig. 11: Conexiunile de comandă implicite ale aplicaţiei Pompe multiple (acţionare simplă)
* = Disponibil numai în VACON® 100 X.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 36

A
B
C
VACON · 36 GHIDUL DE PORNIRE RAPIDĂ
** = Pentru configuraţii de comutatoare DIP în VACON® 100 X, consultaţi manualul de
instalare VACON® 100 X.
Fig. 12: Comutatorul DIP
A. Intrări digitale
C. Conectate la GND (implicit)
B. Flotor
Tabel 8: M1.1 Asistenţi
Index Parametru Min Max Unitate
1.1.1 Activare asistent 0 1 0 1170
1.1.2 Asist. mod incendiu 0 1 0 1672
Predefini
t
ID Descriere
0 = Nu se activează
1 = Se activează
Selecţia Activate (Activare) porneşte expertul
de pornire (consultaţi
Capitolul 1.3 Prima por-
nire).
Selecţia Activate (Activare) porneşte expertul
modului Fire (Incendiu)
(consultaţi Capitolul
2.6 Asistentul pentru
mod incendiu).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 37

GHIDUL DE PORNIRE RAPIDĂ VACON · 37
Tabel 9: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.2
Aplicaţie 0 4 2 212
1.3
1.4
1.5 Timp accelerare 1 0.1 3000.0 s 5.0 103
1.6 Timp decelerare 1 0.1 3000.0 s 5.0 104
Referinţă frecvenţă
minimă
Referinţă frecvenţă
maximă
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
Predefini
t
50.0 /
60.0
ID Descriere
0 = Standard
1 = HVAC
2=Comandă PID
3 = Pompe multiple
(acţionare simplă)
4 = Pompe multiple
(acţionare multiplă)
Frecvenţa de referinţă
minimă acceptată.
Frecvenţa de referinţă
102
maximă acceptată.
Furnizează intervalul
de timp necesar pentru
ca frecvenţa de ieşire
să crească de la 0 până
la maxim.
Furnizează intervalul
de timp necesar pentru
ca frecvenţa de ieşire
să scadă de la maxim
până la 0.
1.7 Limită curent motor IH*0.1 I
1.8 Tip motor 0 2 0 650
1.9
1.10
Tensiune nominală
motor
Frecvenţă nominală
motor
Variabil Variabil V Variabil 110
8.0 320.0 Hz
S
A Variabil 107
50.0 /
60.0
111
Curentul motor maxim
de la variatorul de
turaţie pentru motoare
CA.
0=Motor cu inducţie
1=Motor cu magneţi
permanenţi
2 = Motor cu repulsie
Găsiţi această valoare
Un pe eticheta motorului.
OBSERVAŢIE!
Aflaţi dacă conexiunea motorului este
Delta sau Star.
Găsiţi această valoare
fn pe eticheta motorului.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 38

VACON · 38 GHIDUL DE PORNIRE RAPIDĂ
Tabel 9: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.11
1.12
1.13
1.14 Optimizarea energiei 0 1 0 666
Turaţie nominală
motor
Curent nominal
motor
Cos Phi Motor (Fac-
tor de putere)
24 19200 rot/min Variabil 112
IH * 0.1 I
0.30 1.00 Variabil 120
S
Predefini
t
A Variabil 113
ID Descriere
Găsiţi această valoare
nn pe eticheta motorului.
Găsiţi această valoare
In pe eticheta motorului.
Găsiţi această valoare
pe eticheta motorului.
Variatorul de turaţie
găseşte curentul motor
minim pentru a utiliza
mai puţină energie şi
pentru a reduce zgomotul motorului.
Această funcţie se utilizează, de exemplu, în
cazul proceselor pentru ventilatoare şi
pompe.
1.15 Identificare 0 2 0 631
1.16
Funcţie start 0 1 0 505
0 = Dezactivat
1 = Activat
Rularea de identificare
calculează sau
măsoară parametrii
motorului care sunt
necesari pentru un bun
control al motorului şi
vitezei.
0 = Fără acţiune
1 = În repaus
2 = În rotaţie
Înainte de a efectua
rularea de identificare,
trebuie să setaţi parametrii specificaţi pe
plăcuţa de identificare
a motorului.
0=Rampă
1=Pornire din mers
1
1.17 Funcţie stop 0 1 0 506
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Rotire inerţială
1=Rampă
Page 39
GHIDUL DE PORNIRE RAPIDĂ VACON · 39
Tabel 9: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.18 Resetare automată 0 1 0 731
1.19
1.20
Răspuns la eroare
externă
Răspuns la eroare de
nivel redus intrare
analogică
0 3 2 701
0 5 0 700
Predefini
t
ID Descriere
0 = Dezactivat
1 = Activat
0 = Fără acţiune
1 = Alarmă
2 = Eroare (oprire conform modului de
oprire)
3 = Eroare (oprire prin
rotire inerţială)
0 = Fără acţiune
1 = Alarmă
2 = Alarmă + frecvenţă
presetată eroare
(P3.9.1.13)
3=Alarmă + frecvenţă
anterioară
4 = Eroare (oprire conform modului de
oprire)
5 = Eroare (oprire prin
rotire inerţială)
1.21
Punct de comandă
de la distanţă
Selecţia locaţiei de
control la distanţă
(pornire/oprire).
0 1 0 172
0=Comandă I/O
1=Comandă bus de
câmp
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 40

VACON · 40 GHIDUL DE PORNIRE RAPIDĂ
Tabel 9: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.22
Selectare referinţă A
comandă I/O
1 20 6 117
Predefini
t
ID Descriere
Selecţia sursei frecvenţei de referinţă
atunci când locaţia de
control este I/O A.
0=PC
1 = Frecvenţă presetată 0
2 = Referinţă panou de
comandă
3 = Bus de câmp
4 = AI1
5 = AI2
6 = AI1+AI2
7 = Referinţă PID
8 = Potenţiometru
motor
11 = Bloc 1 ieşire
12 = Bloc 2 ieşire
13 = Bloc 3 ieşire
14 = Bloc 4 ieşire
15 = Bloc 5 ieşire
16 = Bloc 6 ieşire
17 = Bloc 7 ieşire
18 = Bloc 8 ieşire
19 = Bloc 9 ieşire
20 = Bloc 10 ieşire
Aplicaţia pe care o
setaţi cu parametrul
1.2 furnizează valoarea
implicită.
Selectare referinţă
1.23
1.24
1.25 Domeniu semnal AI1 0 1 0 379
1.26 Domeniu semnal AI2 0 1 1 390
1.27 Functie RO1 0 73 2 11001 A se vedea P3.5.3.2.1
1.28 Funcţie RO2 0 73 3 11004 A se vedea P3.5.3.2.1
comandă de la panou
de comandă
Selectare referinţă
comandă de la bus
de câmp
1 20 1 121
1 20 2 122
A se vedea P1.22.
A se vedea P1.22.
0= 0..10 V / 0..20 mA
1= 2..10 V / 4..20 mA
0= 0..10 V / 0..20 mA
1= 2..10 V / 4..20 mA
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 41
GHIDUL DE PORNIRE RAPIDĂ VACON · 41
Tabel 9: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.29 Funcţie RO3 0 73 1 11007 A se vedea P3.5.3.2.1
1.30 Funcţie AO1 0 31 2 10050 A se vedea P3.5.4.1.1
Predefini
t
ID Descriere
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 42
VACON · 42 GHIDUL DE PORNIRE RAPIDĂ
Tabel 10: M1.34 Pompe multiple (acţionare simplă)
Min (Minim
Index Parametru
1.34.1 Câştig PID 0.00 100.00 % 100.00 118
1.34.2
1.34.3
Durată integrare
PID
Durată derivativă
PID
AI1
utilizat)
0.00 600.00 s 1.00 119
0.00 100.00 s 0.00 1132
Max Unitate
Predefi
nit
ID Descriere
Dacă valoarea
parametrului este
setată la 100 %, o
modificare de 10 %
din valoarea de
eroare determină
modificarea ieşirii
controlerului cu 10
%.
Dacă acest parametru este setat la
valoarea 1,00 s, o
schimbare cu 10%
a valorii de eroare
duce la modificarea
ieşirii controlerului
cu 10,00%/s.
Dacă acest parametru este setat la
valoarea 1,00 s, o
schimbare cu 10%
a valorii de eroare
în timpul de 1,00 s
duce la modificarea
ieşirii controlerului
cu 10,00%.
1.34.4
1.34.5
1.34.6
1.34.7
1.34.8
Selectare unitate
proces
Minim unitate
proces
Maxim unitate
proces
Feedback 1
Source Selection
(Selectare sursă
feedback 1)
Selectare sursă
punct de refe-
rinţă 1
1 44 1 1036
Variabil Variabil Variabil 1033
Variabil Variabil Variabil 1034
0 30 2 334
0 32 1 332
Selectaţi unitatea
de proces. A se
vedea P3.13.1.4
Valoarea unităţii de
proces este aceeaşi
cu 0% din semnalul
de feedback PID.
Valoarea unităţii de
proces este aceeaşi
cu 100% din semnalul de feedback
PID.
A se vedea
P3.13.3.3
A se vedea
P3.13.2.6
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 43
GHIDUL DE PORNIRE RAPIDĂ VACON · 43
Tabel 10: M1.34 Pompe multiple (acţionare simplă)
Index Parametru
Punct de refe-
1.34.9
1.34.10
1.34.11
rinţă 1 panou
comandă
SP1 Sleep Fre-
quency Limit
(Limită de frec-
venţă repaus
SP1)
Temp. aştept.
SP1
Min (Minim
AI1
utilizat)
Variabil Variabil Variabil 0 167
0.0 320.0 Hz 0.0 1016
0 3000 s 0 1017
Max Unitate
Predefi
nit
ID Descriere
Variatorul de turaţie intră în modul
repaus atunci când
frecvenţa ieşirii
rămâne sub
această limită un
timp mai îndelungat decât este specificat prin parametrul Sleep Delay
(Amânare repaus).
0 = Neutilizat
Durata de timp
minimă cât frecvenţa rămâne sub
nivelul de repaus
înainte ca variatorul de frecvenţă să
se oprească.
0 = Neutilizat
1.34.12
1.34.13
1.34.14
SP1 Wake Up
Level (Nivel de
reactivare SP1)
Mod pompe mul-
tiple
Număr de
pompe
Variabil Variabil Variabil Variabil 1018
0 2 0 1785
1 8 1 1001
Valoarea de reactivare a supravegherii de feedback PID.
Nivelul de reactivare 1 utilizează
unităţile de proces
selectate.
0 = Neutilizat
Selectează modul
pompe multiple.
0=O singură unitate de acţionare
1=Unităţi secundare multiple
2=Unităţi master
multiple
Număr total de
motoare (pompe/
ventilatoare) utilizate în sistemul
pompe multiple.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 44

VACON · 44 GHIDUL DE PORNIRE RAPIDĂ
Tabel 10: M1.34 Pompe multiple (acţionare simplă)
Index Parametru
1.34.15
1.34.16
Interblocare
pompă
Schimbare auto-
mată
Min (Minim
AI1
utilizat)
0 1 1 1032
0 2 1 1027
Max Unitate
Predefi
nit
ID Descriere
Activare/Dezactivare angrenări.
Angrenările comunică sistemului
dacă un motor este
sau nu conectat.
0 = Dezactivat
1 = Activat
Dezactivează/activează rotaţia ordinii
de pornire şi prioritatea motoarelor.
0 = Dezactivat
1= Activat (interval)
2= Activat (zilele
săptămânii)
1.34.17
1.34.18
1.34.19
Pompă schim-
bată automat
Interval schim-
bare automată
Autochange Days
(Zile de schimbare automată)
0 1 1 1028
0.0 3000.0 h 48.0 1029
0 127 15904
0 = Pompă auxiliară
1 = Toate pompele
Când se utilizează
timpul specificat de
acest parametru,
funcţia de schimbare automată porneşte. Dar schimbarea automată
porneşte doar în
cazul în care capacitatea este sub
nivelul parametrilor P1.34.21 şi
P1.34.22.
Domeniu
B0 = Duminică
B1 = Luni
B2 = Marţi
B3 = Miercuri
B4 = Joi
B5 = Vineri
B6 = Sâmbătă
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 45

GHIDUL DE PORNIRE RAPIDĂ VACON · 45
Tabel 10: M1.34 Pompe multiple (acţionare simplă)
Min (Minim
Index Parametru
Autochange Time
1.34.20
1.34.21
1.34.22
1.34.23 Lăţime de bandă 0 100 % 10 1097
of Day (Oră de
schimbare auto-
mată)
Schimbare automată: Frequency
Limit (Limită de
frecvenţă)
Schimbare auto-
mată: Pump
Limit (Limită
pompă)
AI1
utilizat)
00:00:00 23:59:59 Ora 15905
0.00 P3.3.1.2 Hz 25:00 1031
1 6 1030
Max Unitate
Predefi
nit
ID Descriere
Domeniu:
00:00:00-23:59:59
Aceşti parametri
setează nivelul sub
care trebuie să
rămână capacitatea pentru ca
schimbarea automată să aibă loc.
Procentajul valorii
de referinţă. De
exemplu
Punct de referinţă
= 5 bari
Lăţime de bandă =
10%
1.34.24
1.34.25
1.34.26
1.34.27
1.34.28
Tem-
por.lăţim.bdă
Interblocare
pompă 1
Interblocare
pompă 2
Interblocare
pompă 3
Interblocare
pompă 4
0 3600 s 10 1098
DigIN
Slot0.1
DigIN
Slot0.1
DigIN
Slot0.1
DigIN
Slot0.1
426
427
428
429
Când valoarea de
feedback rămâne
între 4,5 şi 5,5 bari,
motorul rămâne
conectat.
Când valoarea de
feedback se află în
afara lăţimii de
bandă, intervalul
după care sunt
adăugate sau
îndepărtate pompe.
DESCHIS = Nu este
activ
ÎNCHIS = Activ
Consultaţi 1.34.25
Consultaţi 1.34.25
Consultaţi 1.34.25
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 46

VACON · 46 GHIDUL DE PORNIRE RAPIDĂ
Tabel 10: M1.34 Pompe multiple (acţionare simplă)
Index Parametru
1.34.29
1.34.30
1.34.31
1.34.32
Interblocare
pompă 5
Interblocare
pompă 6
Interblocare
pompă 7
Interblocare
pompă 8
Min (Minim
AI1
utilizat)
Max Unitate
Predefi
nit
DigIN
Slot0.1
DigIN
Slot0.1
DigIN
Slot0.1
DigIN
Slot0.1
ID Descriere
430
486
487
488
Consultaţi 1.34.25
Consultaţi 1.34.25
Consultaţi 1.34.25
Consultaţi 1.34.25
1.4.4 APLICAŢIE POMPE MULTIPLE (ACŢIONARE MULTIPLĂ)
Puteţi utiliza aplicaţia Pompe multiple (acţionare multiplă) în cadrul unui sistem care are
maximum 8 motoare în paralel cu viteze diferite, de exemplu pompe, ventilatoare sau
compresoare. În mod implicit, aplicaţia Pompe multiple (acţionare multiplă) este configurată
pentru 3 motoare în paralel.
Consultaţi descrierile parametrilor din Capitolul 10 Descrieri parametri.
Lista de verificare pentru punerea în funcţiunea a unui sistem Pompe multiple (acţionare
multiplă) este prezentată în 10.16.1 Listă de verificare pentru punerea în funcţiune a sistemului
Pompe multiple (acţionare multiplă).
Fiecare motor are un variator de turaţie ce controlează motorul aplicabil. Variatoarele de
turaţie ale sistemului comunică între ele prin comunicaţii Modbus RTU.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 47

PT
FB
Pornire /
Oprire
PT
FB
GHIDUL DE PORNIRE RAPIDĂ VACON · 47
Fig. 13: Configurarea Pompe multiple (acţionare multiplă)
Puteţi controla o variabilă de proces, ca de exemplu presiunea, prin intermediul controlului
turaţiei motorului regulator şi prin intermediul numărului de motoare care funcţionează.
Controlerul PID intern din variatorul de turaţie al motorului regulator controlează viteza,
pornirea şi oprirea motoarelor.
Tipul de funcţionare a sistemului este specificat de către modul de funcţionare selectat. În
modul Multifollower (multi-subordonat), motoarele auxiliare urmează viteza motorului
regulator.
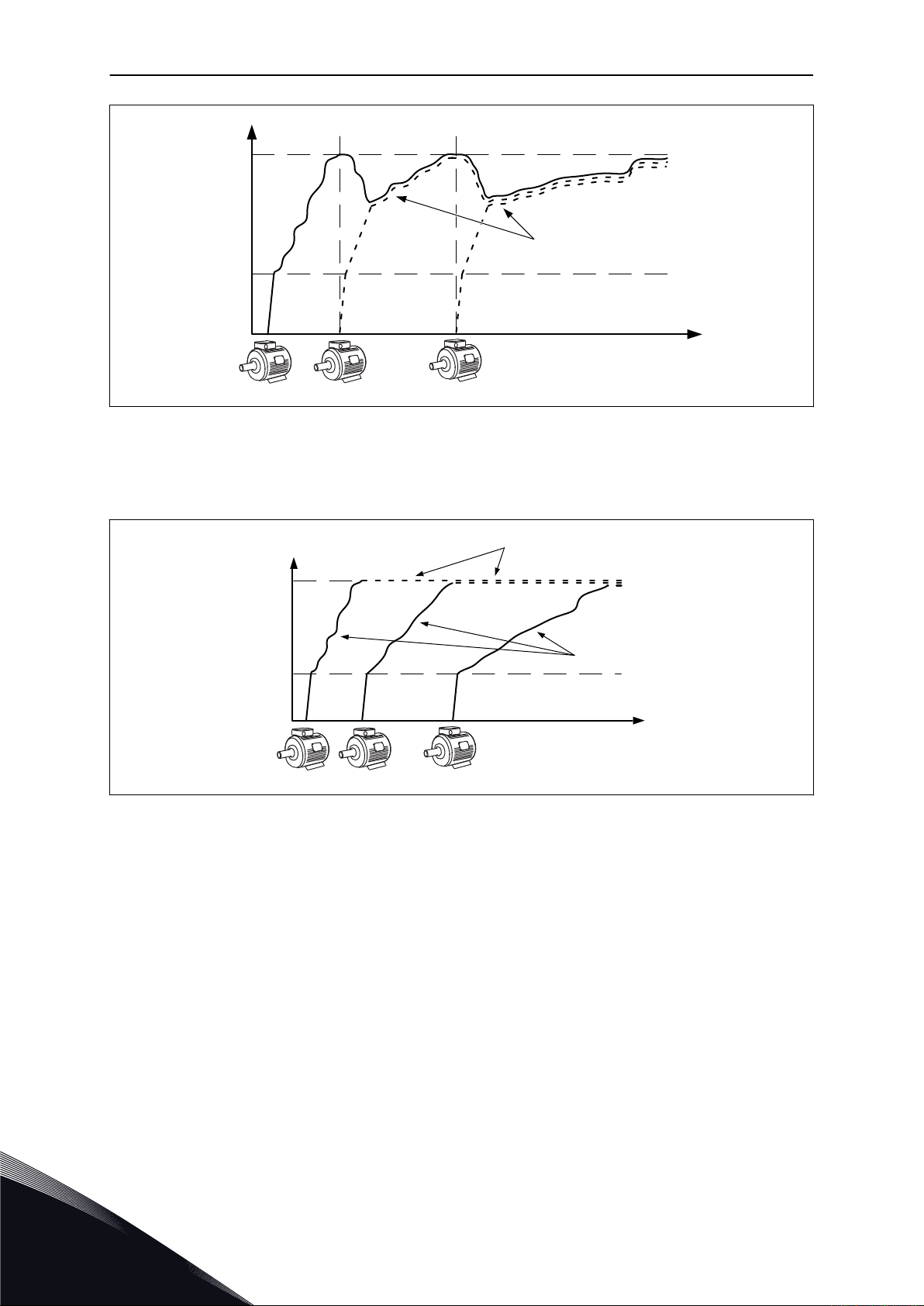
Pompa 1 controlează, iar pompele 2 şi 3 urmează viteza pompei 1, după cum ilustrează
curbele A.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 48
A
P1 P2 P3
f
maxim
f
minim
Rot./min.
t
A
B
f
maxim
f
minim
Rot./min.
t
P1
P2
P3
VACON · 48 GHIDUL DE PORNIRE RAPIDĂ
Fig. 14: Controlul în modul multi-subordonat
Figura de mai jos prezintă un exemplu al modului Multimaster (multi-coordonator), în cadrul
căruia viteza motorului regulator se stabileşte la viteza constantă de producţie B atunci când
porneşte motorul următor. Curbele A indică reglarea pompelor.
Fig. 15: Controlul în modul multi-coordonator
Funcţia de schimbare automată (a ordinii de pornire) face uniformă uzura motoarelor din
sistem. Funcţia de schimbare automată monitorizează orele de funcţionare şi setează
ordinea de pornire a fiecărui motor. Motorul cu cele mai puţine ore de funcţionare porneşte
primul, iar motorul cu cele mai multe ore de funcţionare porneşte ultimul. Puteţi configura
pornirea schimbării automate pe baza intervalului de schimbare automată sau pe baza
ceasului intern în timp real (care necesită o baterie RTC) al variatorului de turaţie.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 49

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
32
33
*)
**)
+
-
TI1+
TI1-
mA
ÎN FUNCŢIUNE
ÎN
FUNCŢIUNE
AO1-
+24 V
in
Valoare
actuală
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NI
RO1/2 CM
RO1/3 ND
CM
CM
RS485
RS485
RO2/1 NI
RO2/2 CM
RO2/3 ND
Placă I/O standard
Bornă Semnal Descriere
+10 V
ref
AI1+
AI1-
AI2+
AI2-
24 V
ieşire
24 V
ieşire
Ieşire de referinţă
Intrare analogică 1 +
Intrare analogică 1 -
Intrare analogică 2 +
Intrare analogică 2 -
24 V tensiune auxiliară
Masă I/O
Intrare digitală 1
Intrare digitală 2
Intrare digitală 3
Intrare digitală 4
Intrare digitală 5
Intrare digitală 6
Comun pentru DI1-DI6
Comun pentru DI1-DI6
24 V tensiune auxiliară
Masă I/O
Ieşire analogică 1 +
Ieşire analogică 1 -
24 V
tensiune de intrare auxiliară
Bus serial, negativ
Bus serial, pozitiv
Ieşire releu 1
Ieşire releu 2
RO3/2 CM
RO3/3 ND
PREGĂTIT
Ieşire releu 3
EROARE
Resetare eroare
Eroare externă
Frecvenţă de ieşire
(0...20 mA)
AO1+
Neutilizat în mod
implicit (implicit: 0...10 V)
Feedback PID
(valoare reală)
(implicit 4...20 mA)
Pornire înainte
Golire (Pornire pozitivă +
Frecvenţă de golire)
Selectare punct de referinţă PID
(Deschis = Panou de comandă SP1,
Închis = Panou de comandă SP2)
Interblocare pompă
(Deschis = Indisponibil, Închis = Disponibil)
Comunicare de la unitate
la unitate
(Modbus RTU)
Traductor cu două fire
Către
terminalul
A de pe alte
unităţi
de acţionare
Către terminalul B
de pe alte unităţi
de acţionare
EROARE
(0)4...20 mA
Intrare termistor
GHIDUL DE PORNIRE RAPIDĂ VACON · 49
Fig. 16: Conexiunile de comandă implicite ale aplicaţiei Pompe multiple (acţionare multiplă)
* = Disponibil numai în VACON® 100 X.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 50
A
B
C
VACON · 50 GHIDUL DE PORNIRE RAPIDĂ
** = Pentru configuraţii de comutatoare DIP în VACON® X, consultaţi manualul de instalare
VACON® 100 X.
Fig. 17: Comutatorul DIP
A. Intrări digitale
C. Conectate la GND (implicit)
B. Flotor
Fiecare variator de turaţie are un senzor de presiune. Când nivelul de redundanţă este
ridicat, senzorii de turaţie şi de presiune sunt redundanţi.
Dacă există o defecţiune a variatorului de turaţie, următorul variator de turaţie începe să
•
funcţioneze ca master (coordonator).
Dacă există o defecţiune a senzorului, următorul variator de turaţie (care are un senzor
•
separat) începe să funcţioneze ca master (coordonator).
Un comutator individual care are setare automată, oprită şi manuală pentru fiecare variator
de turaţie.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 51

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
UNITATEA 1
UNITATEA 1 UNITATEA 2 UNITATEA 3
VACON 100 FLOW
TRANSMIŢĂTOR
CU 2 FIRE
SENZOR
PRESIUNE 1
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
DIO
FLOTANT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
AUTO MAN
1S1
P1.2
Aplicaţie
= Pompe multiple (unităţi de acţionare multiple)
P3.15.3
Număr de ID pompă
= 1
P3.15.4
Pornire şi feedback
= Semnale conectate
GHIDUL DE PORNIRE RAPIDĂ VACON · 51
Fig. 18: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 1A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 52

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
UNITATEA 2
UNITATEA 1 UNITATEA 2 UNITATEA 3
VACON 100 FLOW
TRANSMIŢĂTOR
CU 2 FIRE
SENZOR
PRESIUNE 2
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
DIO
FLOTANT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
AUTO MAN
2S1
P1.2
Aplicaţie
= Pompe multiple (unităţi de acţionare multiple)
P3.15.3
Număr de ID pompă
= 2
P3.15.4
Pornire şi feedback
= Semnale conectate
VACON · 52 GHIDUL DE PORNIRE RAPIDĂ
Fig. 19: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 1B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 53

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
UNITATEA 3
UNITATEA 1 UNITATEA 2 UNITATEA 3
VACON 100 FLOW
TRANSMIŢĂTOR
CU 2 FIRE
SENZOR
PRESIUNE 3
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
DIO
FLOTANT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
AUTO MAN
3S1
P1.2
Aplicaţie
= Pompe multiple (unităţi de acţionare multiple)
P3.15.3
Număr de ID pompă
= 3
P3.15.4
Pornire şi feedback
= Semnale conectate
GHIDUL DE PORNIRE RAPIDĂ VACON · 53
Fig. 20: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 1C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 54

VACON · 54 GHIDUL DE PORNIRE RAPIDĂ
1 senzor este conectat la toate variatoarele de turaţie. Nivelul de redundanţă al sistemului
este scăzut, deoarece doar variatoarele de turaţie sunt redundante.
Dacă există o defecţiune a variatorului de turaţie, următorul variator de turaţie începe să
•
funcţioneze ca master (coordonator).
Dacă există o defecţiune de senzor, sistemul se opreşte.
•
Un comutator individual care are setare automată, oprită şi manuală pentru fiecare variator
de turaţie.
Terminalul 17 conectează +24 V între variatoarele de turaţie 1 şi 2. Între terminalele 1 şi 2
sunt conectate diode externe. Semnalele digitale de intrare utilizează o logică negativă (ON =
OV).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 55
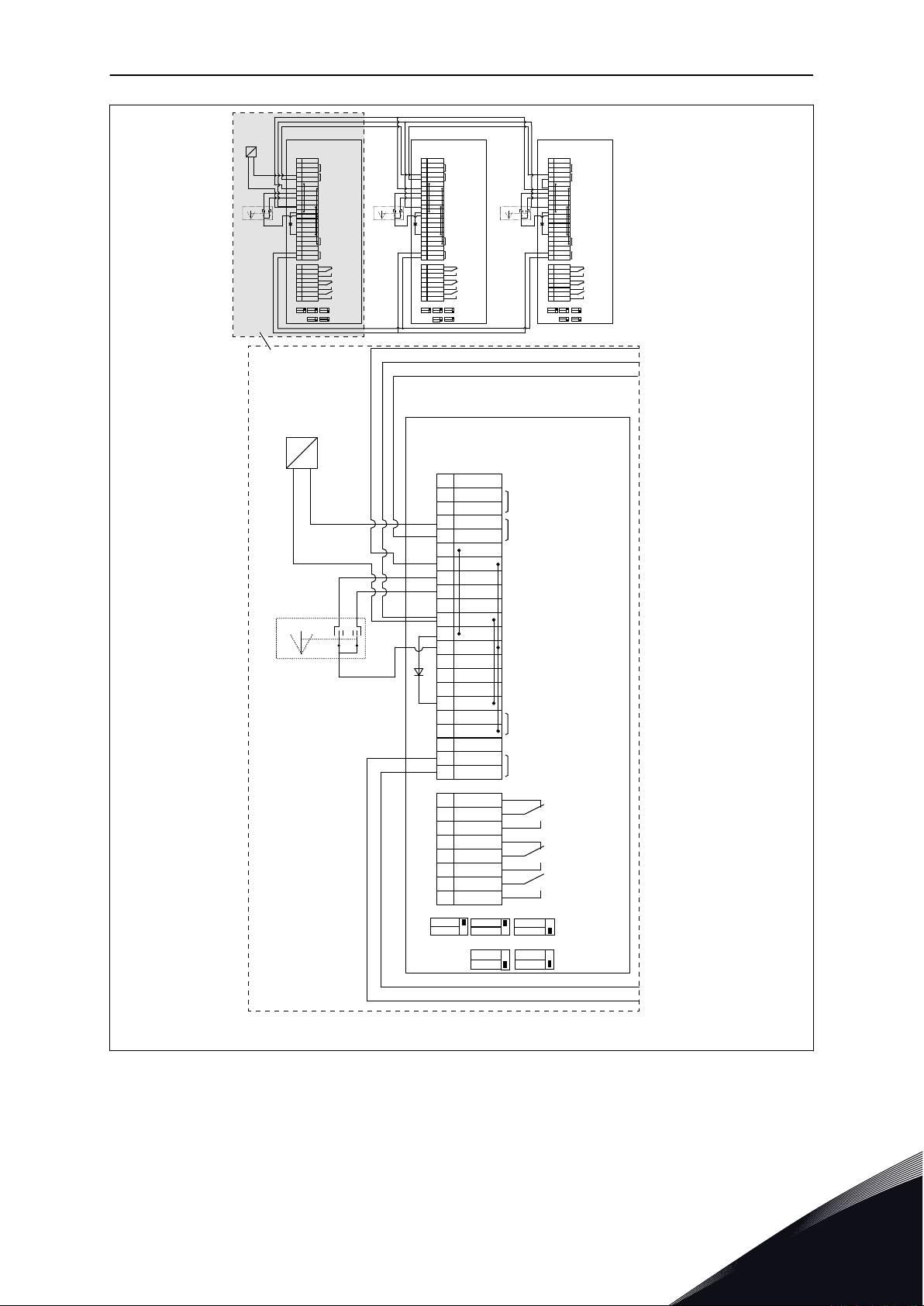
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
+ -
0
P
I
2
4
1
3
UNITATEA 1
VACON 100 FLOW
TRANSMIŢĂTOR
CU 2 FIRE
SENZOR
PRESIUNE 1
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIO
FLOTANT
GND
U
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 1
= Semnale conectate
GHIDUL DE PORNIRE RAPIDĂ VACON · 55
Fig. 21: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 2A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 56
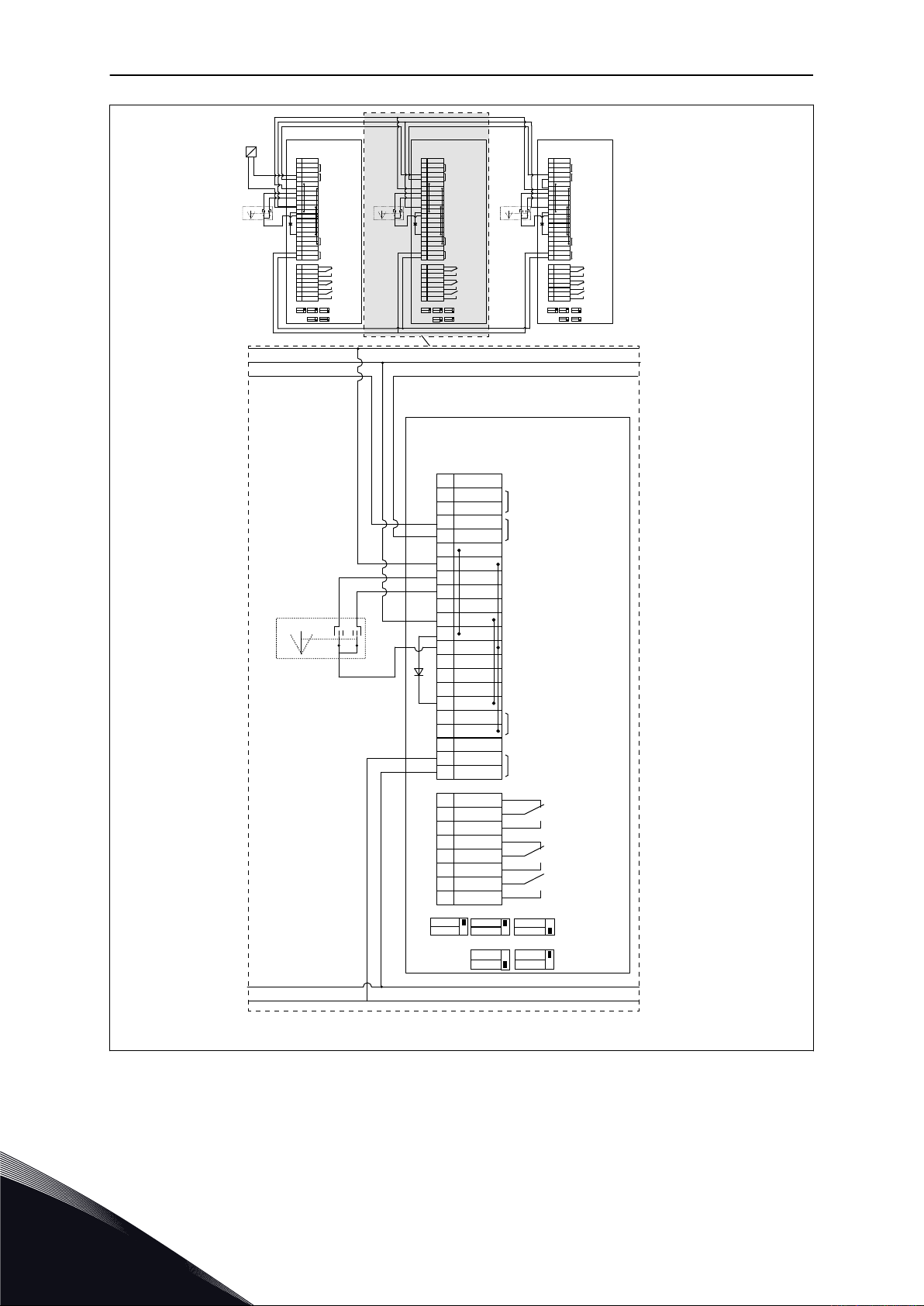
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
0
2
4
1
3
UNITATEA 2
VACON 100 FLOW
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
2S1
DIO
FLOTANT
GND
U
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 2
= Semnale conectate
VACON · 56 GHIDUL DE PORNIRE RAPIDĂ
Fig. 22: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 2B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 57

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
0
2
4
1
3
UNITATEA 3
VACON 100 FLOW
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
3S1
DIO
FLOTANT
GND
U
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 3
= Semnale conectate
GHIDUL DE PORNIRE RAPIDĂ VACON · 57
Fig. 23: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 2C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 58

VACON · 58 GHIDUL DE PORNIRE RAPIDĂ
2 variatoare de turaţie au senzori de presiune individuali. Nivelul de redundanţă al sistemului
este mediu, deoarece variatoarele de turaţie şi senzorii de presiune sunt duplicaţi.
Dacă există o defecţiune a variatorului de turaţie, al doilea variator de turaţie începe să
•
funcţioneze ca master (coordonator).
Dacă există o defecţiune a senzorului, al doilea variator de turaţie (care are un senzor
•
separat) începe să funcţioneze ca master (coordonator).
Un comutator individual care are setare automată, oprită şi manuală pentru fiecare variator
de turaţie.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 59
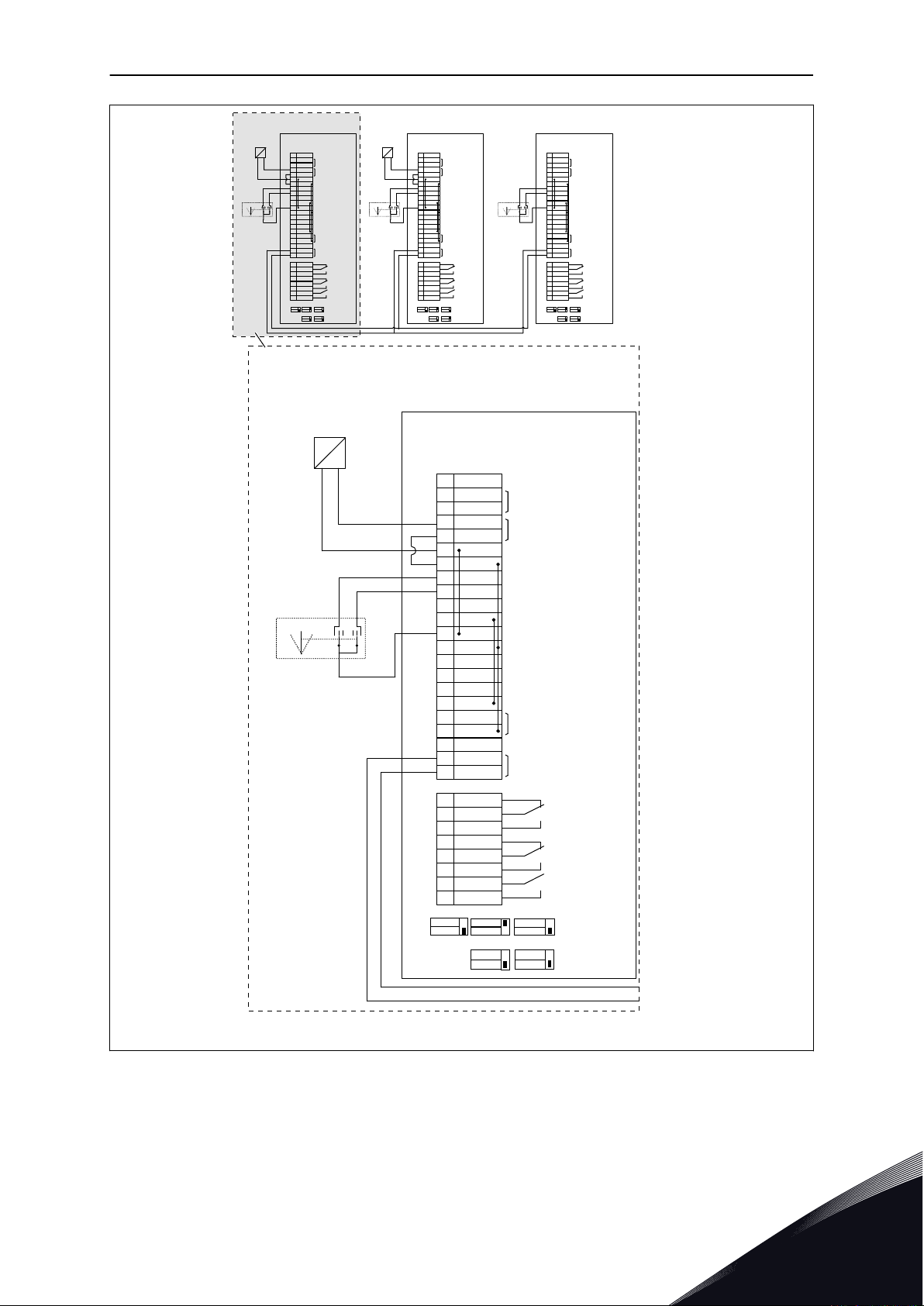
1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
+ -
0
P
I
2
4
1
3
UNITATEA 1
VACON 100 FLOW
TRANSMIŢĂTOR
CU 2 FIRE
SENZOR
PRESIUNE 1
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIO
FLOTANT
GND
U
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 1
= Semnale conectate
GHIDUL DE PORNIRE RAPIDĂ VACON · 59
Fig. 24: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 3A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 60

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
+ -
0
P
I
2
4
1
3
UNITATEA 1
VACON 100 FLOW
TRANSMIŢĂTOR
CU 2 FIRE
SENZOR
PRESIUNE 1
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIO
FLOTANT
GND
U
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 1
= Semnale conectate
VACON · 60 GHIDUL DE PORNIRE RAPIDĂ
Fig. 25: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 3B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 61

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
0
2
4
1
3
UNITATEA 3
VACON 100 FLOW
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
3S1
DIO
FLOTANT
GND
U
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 3
= Semnale conectate
GHIDUL DE PORNIRE RAPIDĂ VACON · 61
Fig. 26: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 3C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 62

VACON · 62 GHIDUL DE PORNIRE RAPIDĂ
1 senzor de presiune comună este conectat la 2 variatoare de turaţie. Nivelul de redundanţă
al sistemului este scăzut, deoarece doar variatoarele de turaţie sunt redundante.
Dacă există o defecţiune a variatorului de turaţie, al doilea variator de turaţie începe să
•
funcţioneze ca master (coordonator).
Dacă există o defecţiune de senzor, sistemul se opreşte.
•
Un comutator individual care are setare automată, oprită şi manuală pentru fiecare variator
de turaţie.
Terminalul 17 conectează +24 V între variatoarele de turaţie 1 şi 2. Între terminalele 1 şi 2
sunt conectate diode externe. Semnalele digitale de intrare utilizează o logică negativă (ON =
OV).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 63
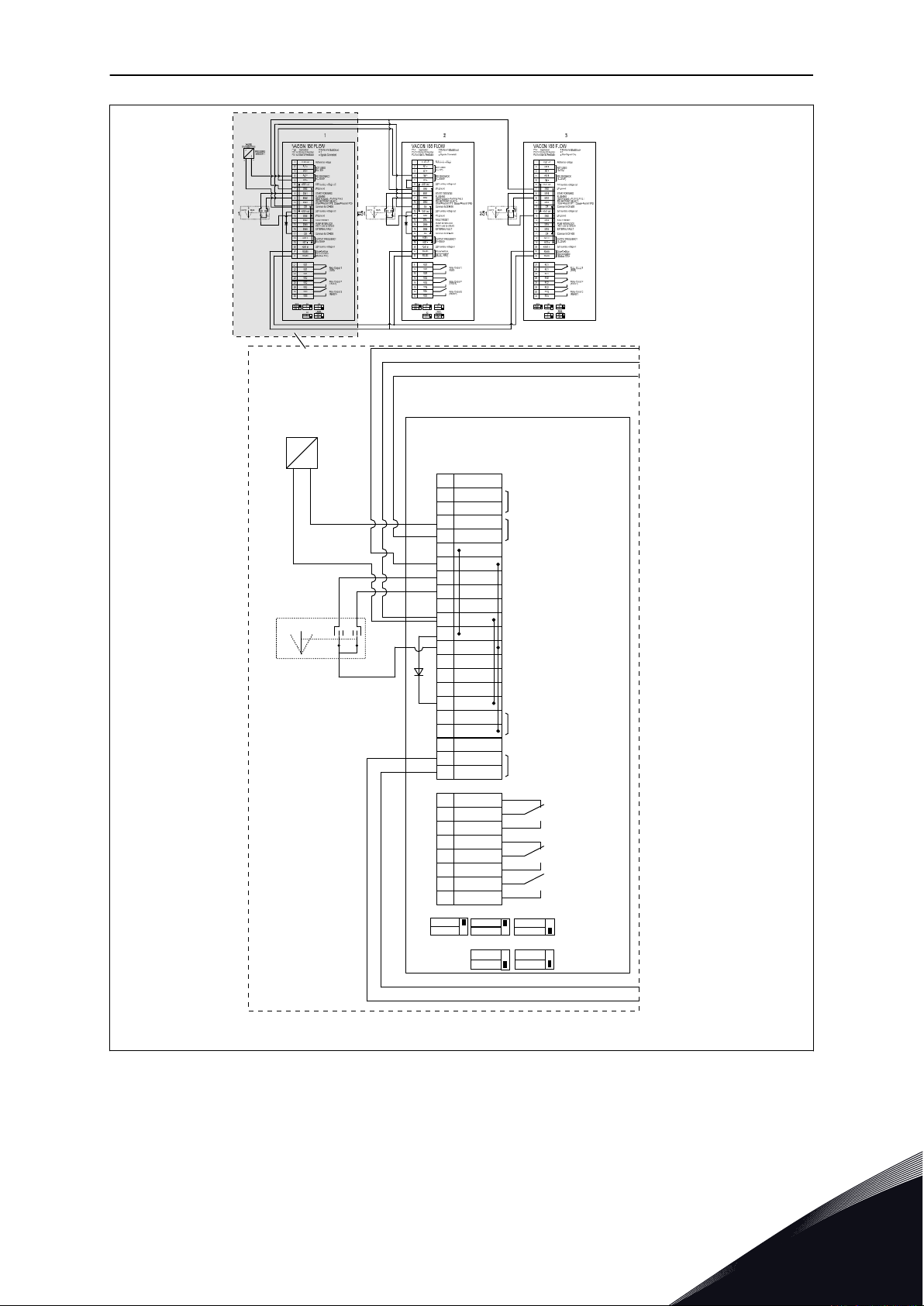
+ -
0
P
I
2
4
1
3
UNITATEA 1
VACON 100 FLOW
TRANSMIŢĂTOR
CU 2 FIRE
SENZOR
PRESIUNE 1
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIO
FLOTANT
GND
U
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 1
= Semnale conectate
GHIDUL DE PORNIRE RAPIDĂ VACON · 63
Fig. 27: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 4A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 64
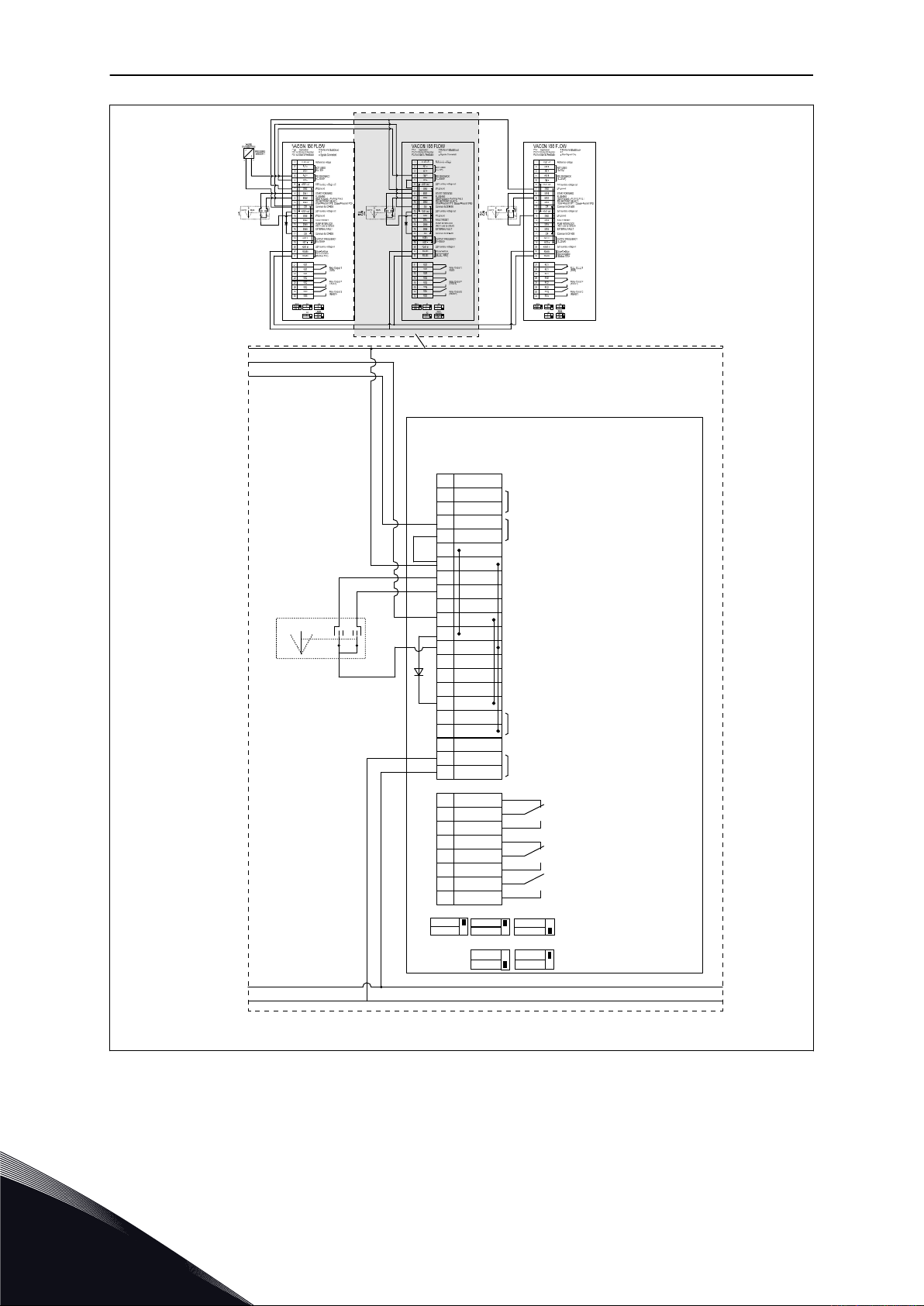
0
2
4
1
3
UNITATEA 2
VACON 100 FLOW
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE (0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ (Neutilizat în mod implicit)
Comunicaţii de la un variator de turaţie la altul
(Modbus RTU)
Ieşire releu 1 (RULARE)
Ieşire releu 2 (EROARE)
Ieşire releu 3 (PREGĂTIT)
GOLIRE (Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 Vref
AI2+
AI1-
AI2+
AI2-
+24 V ieşire
+24 V ieşire
GND
DIN1
DIN2
DIN3
CM
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 Vin
RS485
RS485
AUTO MAN
2S1
DIO
FLOTANT
GND
U
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 2
= Semnale conectate
VACON · 64 GHIDUL DE PORNIRE RAPIDĂ
Fig. 28: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 4B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 65

0
2
4
1
3
UNITATEA 3
VACON 100 FLOW
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
3S1
DIO
FLOTANT
GND
U
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 3
= Semnale conectate
GHIDUL DE PORNIRE RAPIDĂ VACON · 65
Fig. 29: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 4C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 66

VACON · 66 GHIDUL DE PORNIRE RAPIDĂ
1 senzor de presiune comună este conectat la primul variator de turaţie. Sistemul nu este
redundant, deoarece acesta se opreşte dacă există o defecţiune de variator de turaţie sau de
senzor.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 67
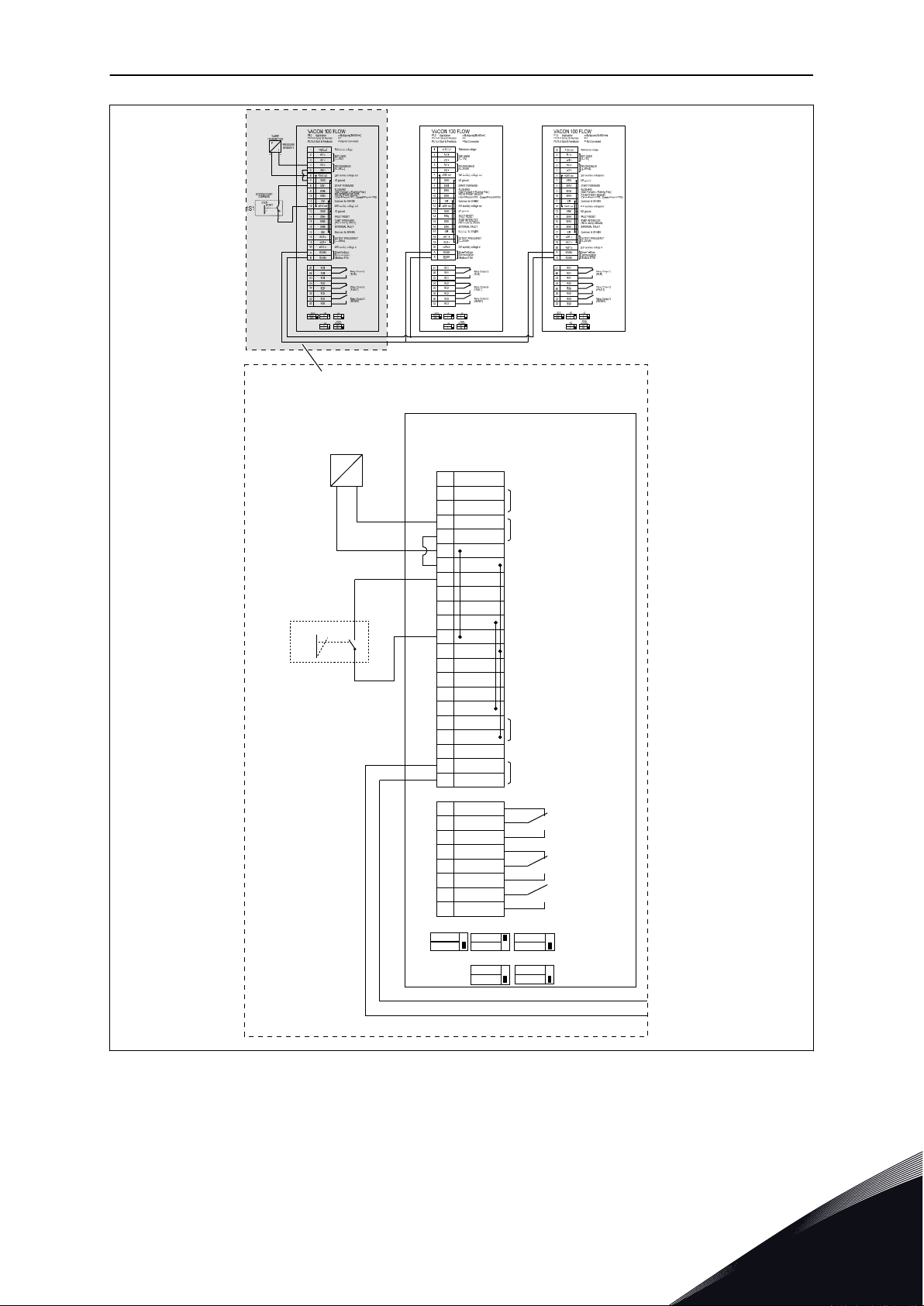
+ -
P
I
2
1
UNITATEA 1
UNITATEA 1 UNITATEA 2 UNITATEA 3
VACON 100 FLOW
TRANSMIŢĂTOR
CU 2 FIRE
SENZOR
PRESIUNE 1
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator
de turaţie la altul (Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
DIO
FLOTANT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
1S1
P1.2
Aplicaţie
= Pompe multiple (unităţi de acţionare multiple)
P3.15.3
Număr de ID pompă
= 1
P3.15.4
Pornire şi feedback
= Semnale conectate
OPRIRE
PORNIRE
COMANDĂ
PORNIRE
SISTEM
GHIDUL DE PORNIRE RAPIDĂ VACON · 67
Fig. 30: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 5A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 68

UNITATEA 2
VACON 100 FLOW
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE (0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ (Neutilizat în mod implicit)
Comunicaţii de la un variator de turaţie la altul
(Modbus RTU)
Ieşire releu 1 (RULARE)
Ieşire releu 2 (EROARE)
Ieşire releu 3 (PREGĂTIT)
GOLIRE (Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 Vref
AI2+
AI1-
AI2+
AI2-
+24 V ieşire
+24 V ieşire
GND
DIN1
DIN2
DIN3
CM
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 Vin
RS485
RS485
DIO
FLOTANT
GND
U
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 2
= Semnale conectate
VACON · 68 GHIDUL DE PORNIRE RAPIDĂ
Fig. 31: Diagramă de cablaj electric a sistemului Pompe multiple (acţionare multiplă), exemplul 5B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 69

UNITATEA 3
VACON 100 FLOW
Tensiune de referinţă
NEUTILIZAT (0...10 V)
FRECVENŢĂ DE IEŞIRE
(0...20 mA)
FEEDBACK PID (4...20 mA)
ieşire 24 V tensiune auxiliară
intrare 24 V tensiune auxiliară
Masă I/O
Masă I/O
RESETARE EROARE
EROARE EXTERNĂ
PORNIRE ÎNAINTE
Comun pentru DI1-DI6
Comun pentru DI1-DI6
ieşire 24 V tensiune auxiliară
ANGRENARE POMPĂ
(Neutilizat în mod implicit)
Comunicaţii de la un variator de turaţie la altul
(Modbus RTU)
Ieşire releu 1
(RULARE)
Ieşire releu 2
(EROARE)
Ieşire releu 3
(PREGĂTIT)
GOLIRE
(Pornire pozitivă + Frecvenţă de golire)
SELECTARE PUNCT DE REFERINŢĂ PID
(Deschis = Panou de comandă SP1, Închis = Panou de comandă SP2)
DIO
FLOTANT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
ieşire
GND
DIN1
DIN2
DIN3
CM
+24 V
ieşire
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
OPRIT
PORNIT
AI1
AI2
AO
Terminaţie
RS485
UNITATEA 1 UNITATEA 2 UNITATEA 3
P1.2
P3.15.3
P3.15.4
Aplicaţie
Număr de ID pompă
Pornire şi feedback
= Pompe multiple (unităţi de acţionare multiple)
= 3
= Semnale conectate
GHIDUL DE PORNIRE RAPIDĂ VACON · 69
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 70
VACON · 70 GHIDUL DE PORNIRE RAPIDĂ
Tabel 11: M1.1 Asistenţi
Index Parametru Min Max Unitate
1.1.1 Activare asistent 0 1 0 1170
1.1.2 Asist. mod incendiu 0 1 0 1672
Predefini
t
ID Descriere
0 = Nu se activează
1 = Se activează
Selecţia Activate (Activare) porneşte expertul
de pornire (consultaţi
Capitolul 1.3 Prima por-
nire).
Selecţia Activate (Activare) porneşte expertul
modului Fire (Incendiu)
(consultaţi Capitolul
1.3 Prima pornire).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 71
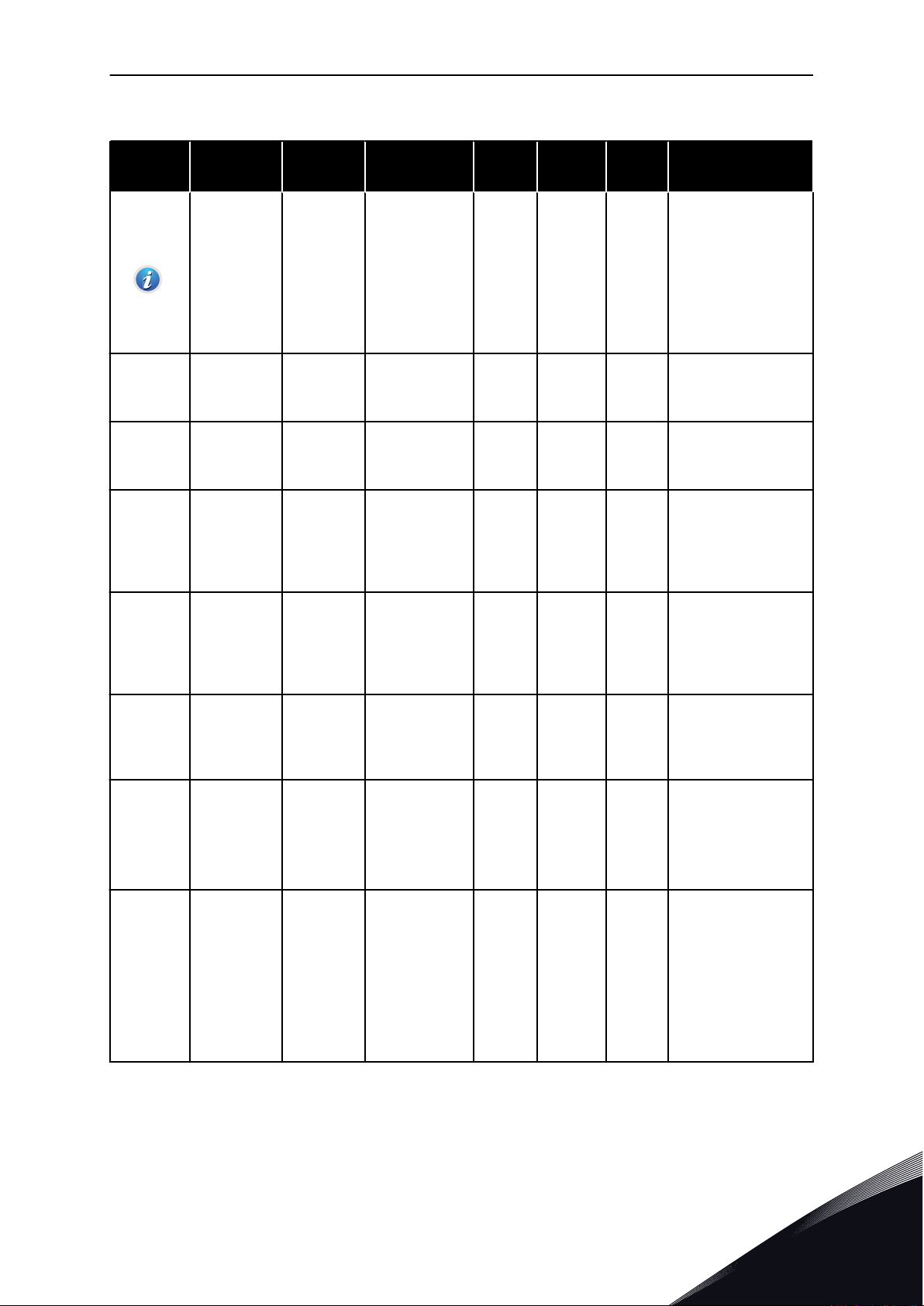
GHIDUL DE PORNIRE RAPIDĂ VACON · 71
Tabel 12: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.2
Aplicaţie 0 4 2 212
Referinţă
1.3
1.4
1.5
frecvenţă
minimă
Referinţă
frecvenţă
maximă
Timp acce-
lerare 1
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
0.1 3000.0 s 5.0 103
Predefin
it
50.0 /
60.0
ID Descriere
0 = Standard
1 = HVAC
2=Comandă PID
3 = Pompe multiple
(acţionare simplă)
4 = Pompe multiple
(acţionare multiplă)
Frecvenţa de referinţă minimă acceptată.
Frecvenţa de refe-
102
rinţă maximă acceptată.
Furnizează intervalul
de timp necesar pentru ca frecvenţa de
ieşire să crească de
la 0 până la maxim.
1.6
1.7
1.8 Tip motor 0 2 0 650
1.9
Timp dece-
lerare 1
Limită
curent
motor
Tensiune
nominală
motor
0.1 3000.0 s 5.0 104
IH*0.1 I
Variabil Variabil V Variabil 110
S
A Variabil 107
Furnizează intervalul
de timp necesar pentru ca frecvenţa de
ieşire să scadă de la
maxim până la 0.
Curentul motor
maxim de la variatorul de turaţie pentru
motoare CA.
0=Motor cu inducţie
1=Motor cu magneţi
permanenţi
2 = Motor cu repulsie
Găsiţi această
valoare Un pe eticheta motorului.
OBSERVAŢIE!
Aflaţi dacă conexiunea motorului este
Delta sau Star.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 72

VACON · 72 GHIDUL DE PORNIRE RAPIDĂ
Tabel 12: M1 Configurare rapidă
Index Parametru Min Max Unitate
Frecvenţă
1.10
1.11
1.12
1.13
1.14
nominală
motor
Turaţie
nominală
motor
Curent
nominal
motor
Cos Phi
Motor (Fac-
tor de
putere)
Optimizarea
energiei
8.0 320.0 Hz
24 19200 rot/min Variabil 112
IH * 0.1 I
0.30 1.00 Variabil 120
0 1 0 666
S
A Variabil 113
Predefin
it
50.0 /
60.0
ID Descriere
Găsiţi această
111
valoare fn pe eticheta
motorului.
Găsiţi această
valoare nn pe eticheta motorului.
Găsiţi această
valoare In pe eticheta
motorului.
Găsiţi această
valoare pe eticheta
motorului.
Variatorul de turaţie
găseşte curentul
motor minim pentru
a utiliza mai puţină
energie şi pentru a
reduce zgomotul
motorului. Această
funcţie se utilizează,
de exemplu, în cazul
proceselor pentru
ventilatoare şi
pompe.
1.15 Identificare 0 2 0 631
0 = Dezactivat
1 = Activat
Rularea de identificare calculează sau
măsoară parametrii
motorului care sunt
necesari pentru un
bun control al motorului şi vitezei.
0 = Fără acţiune
1 = În repaus
2 = În rotaţie
Înainte de a efectua
rularea de identificare, trebuie să
setaţi parametrii
specificaţi pe plăcuţa
de identificare a
motorului.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 73

GHIDUL DE PORNIRE RAPIDĂ VACON · 73
Tabel 12: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.16 Funcţie start 0 1 0 505
1.17 Funcţie stop 0 1 0 506
1.18
1.19
Resetare
automată
Răspuns la
eroare
externă
0 1 0 731
0 3 2 701
Predefin
it
ID Descriere
0=Rampă
1=Pornire din mers
0 = Rotire inerţială
1=Rampă
0 = Dezactivat
1 = Activat
0 = Fără acţiune
1 = Alarmă
2 = Eroare (oprire
conform modului de
oprire)
3 = Eroare (oprire
prin rotire inerţială)
1.20
1.21
Răspuns la
eroare de
nivel redus
intrare ana-
logică
Punct de
comandă de
la distanţă
0 5 0 700
0 1 0 172
0 = Fără acţiune
1 = Alarmă
2 = Alarmă + frecvenţă presetată
eroare (P3.9.1.13)
3=Alarmă + frecvenţă anterioară
4 = Eroare (oprire
conform modului de
oprire)
5 = Eroare (oprire
prin rotire inerţială)
Selecţia locaţiei de
control la distanţă
(pornire/oprire).
0=Comandă I/O
1=Comandă bus de
câmp
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 74
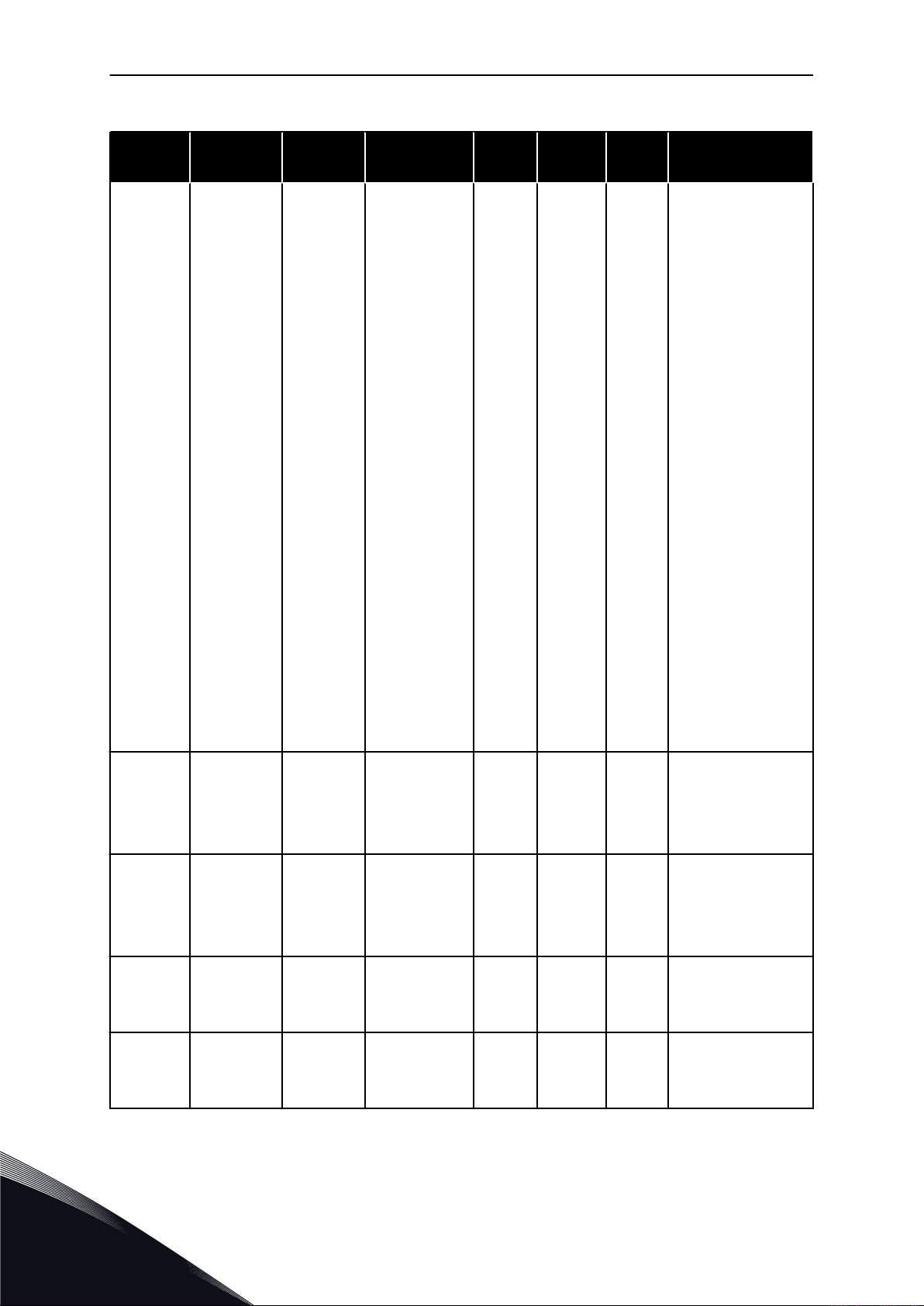
VACON · 74 GHIDUL DE PORNIRE RAPIDĂ
Tabel 12: M1 Configurare rapidă
Index Parametru Min Max Unitate
Selectare
1.22
referinţă A
comandă I/O
1 20 6 117
Predefin
it
ID Descriere
Selecţia sursei frecvenţei de referinţă
atunci când locaţia
de control este I/O A.
0=PC
1 = Frecvenţă presetată 0
2 = Referinţă panou
de comandă
3 = Bus de câmp
4 = AI1
5 = AI2
6 = AI1+AI2
7 = Referinţă PID
8 = Potenţiometru
motor
11 = Bloc 1 ieşire
12 = Bloc 2 ieşire
13 = Bloc 3 ieşire
14 = Bloc 4 ieşire
15 = Bloc 5 ieşire
16 = Bloc 6 ieşire
17 = Bloc 7 ieşire
18 = Bloc 8 ieşire
19 = Bloc 9 ieşire
20 = Bloc 10 ieşire
1.23
1.24
1.25
1.26
Selectare
referinţă
comandă de
la panou de
comandă
Selectare
referinţă
comandă de
la bus de
câmp
Domeniu
semnal AI1
Domeniu
semnal AI2
1 20 1 121
1 20 2 122
0 1 0 379
0 1 1 390
Aplicaţia pe care o
setaţi cu parametrul
1.2 furnizează valoarea implicită.
A se vedea P1.22.
A se vedea P1.22.
0= 0..10 V / 0..20 mA
1= 2..10 V / 4..20 mA
0= 0..10 V / 0..20 mA
1= 2..10 V / 4..20 mA
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 75

GHIDUL DE PORNIRE RAPIDĂ VACON · 75
Tabel 12: M1 Configurare rapidă
Index Parametru Min Max Unitate
1.27 Functie RO1 0 73 2 11001 A se vedea P3.5.3.2.1
1.28 Funcţie RO2 0 73 3 11004 A se vedea P3.5.3.2.1
1.29 Funcţie RO3 0 73 1 11007 A se vedea P3.5.3.2.1
1.30 Funcţie AO1 0 31 2 10050 A se vedea P3.5.4.1.1
Predefin
it
ID Descriere
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 76

VACON · 76 GHIDUL DE PORNIRE RAPIDĂ
Tabel 13: M1.35 Pompe multiple (acţionare multiplă)
Min (Minim
Index Parametru
1.35.1 Câştig PID 0.00 100.00 % 100.00 118
1.35.2
1.35.3
Durată integrare
PID
Durată derivativă
PID
AI1
utilizat)
0.00 600.00 s 1.00 119
0.00 100.00 s 0.00 1132
Max Unitate
Predefi
nit
ID Descriere
Dacă valoarea
parametrului este
setată la 100 %, o
modificare de 10 %
din valoarea de
eroare determină
modificarea ieşirii
controlerului cu 10
%.
Dacă acest parametru este setat la
valoarea 1,00 s, o
schimbare cu 10%
a valorii de eroare
duce la modificarea
ieşirii controlerului
cu 10,00%/s.
Dacă acest parametru este setat la
valoarea 1,00 s, o
schimbare cu 10%
a valorii de eroare
în timpul de 1,00 s
duce la modificarea
ieşirii controlerului
cu 10,00%.
1.35.4
1.35.5
1.35.6
1.35.7
1.35.8
Selectare unitate
proces
Minim unitate
proces
Maxim unitate
proces
Feedback 1
Source Selection
(Selectare sursă
feedback 1)
Selectare sursă
punct de refe-
rinţă 1
1 44 1 1036
Variabil Variabil Variabil 1033
Variabil Variabil Variabil 1034
0 30 2 334
0 32 1 332
Selectaţi unitatea
de proces. A se
vedea P3.13.1.4
Valoarea unităţii de
proces este aceeaşi
cu 0% din semnalul
de feedback PID.
Valoarea unităţii de
proces este aceeaşi
cu 100% din semnalul de feedback
PID.
A se vedea
P3.13.3.3
A se vedea
P3.13.2.6
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 77

GHIDUL DE PORNIRE RAPIDĂ VACON · 77
Tabel 13: M1.35 Pompe multiple (acţionare multiplă)
Index Parametru
Punct de refe-
1.35.9
1.35.10
1.35.11
rinţă 1 panou
comandă
SP1 Sleep Fre-
quency Limit
(Limită de frec-
venţă repaus
SP1)
Temp. aştept.
SP1
Min (Minim
AI1
utilizat)
Variabil Variabil Variabil 0 167
0.0 320.0 Hz 0.0 1016
0 3000 s 0 1017
Max Unitate
Predefi
nit
ID Descriere
Variatorul de turaţie intră în modul
repaus atunci când
frecvenţa ieşirii
rămâne sub
această limită un
timp mai îndelungat decât este specificat prin parametrul Sleep Delay
(Amânare repaus).
0 = Neutilizat
Durata de timp
minimă cât frecvenţa rămâne sub
nivelul de repaus
înainte ca variatorul de frecvenţă să
se oprească.
0 = Neutilizat
1.35.12
1.35.13
1.35.14
SP1 Wake Up
Level (Nivel de
reactivare SP1)
Mod pompe mul-
tiple
Număr de
pompe
Variabil Variabil Variabil Variabil 1018
0 2 0 1785
1 8 1 1001
Valoarea de reactivare a supravegherii de feedback PID.
Nivelul de reactivare 1 utilizează
unităţile de proces
selectate.
0 = Neutilizat
Selectează modul
pompe multiple.
0 = O singură unitate de acţionare
1 = Unităţi secundare multiple
2 = Unităţi master
multiple
Număr total de
motoare (pompe/
ventilatoare) utilizate în sistemul
pompe multiple.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 78
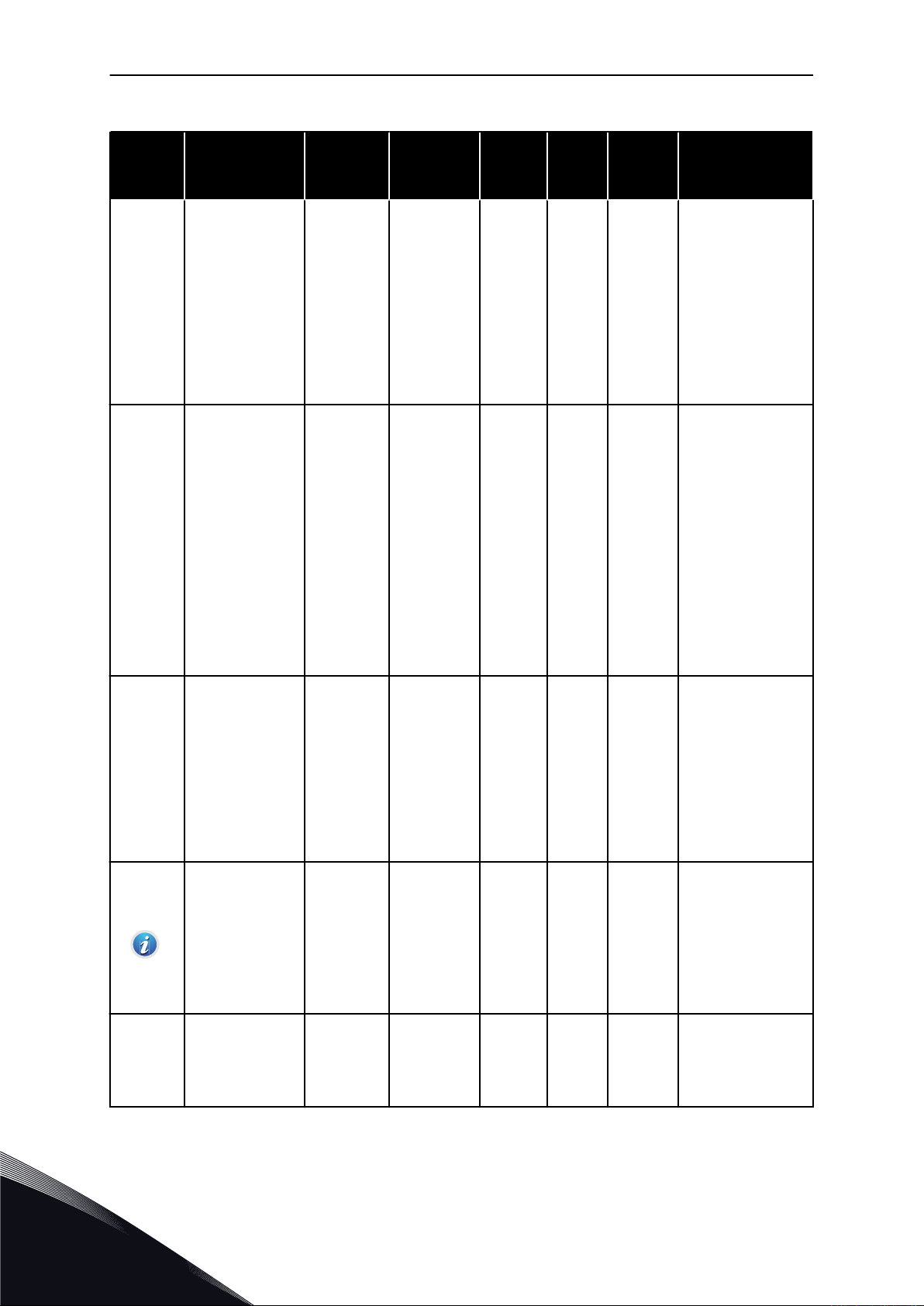
VACON · 78 GHIDUL DE PORNIRE RAPIDĂ
Tabel 13: M1.35 Pompe multiple (acţionare multiplă)
Index Parametru
1.35.15
1.35.16
Număr de ID
pompă
Semnale de por-
nire şi de
răspuns
Min (Minim
AI1
utilizat)
1 8 1 1500
0 2 1 1782
Max Unitate
Predefi
nit
ID Descriere
Numărul de ordine
al variatorului de
turaţie din sistemul
de pompare. Acest
parametru este
folosit doar în
modurile Multifollower (multi-subordonat) şi Multimaster (multicoordonator).
Utilizaţi acest parametru pentru a
selecta semnalul
de pornire şi/sau
semnalele răspuns
PID sunt conectate
la unitatea de
acţionare.
0=Neconectat
1=Numai semnal
de pornire conectat
2= Ambele semnale conectate
1.35.17
1.35.18
1.35.19
Interblocare
pompă
Schimbare auto-
mată
Pompă schim-
bată automat
0 1 1 1032
0 1 1 1027
0 1 1 1028
Activare/Dezactivare angrenări.
Angrenările comunică sistemului
dacă un motor este
sau nu conectat.
0 = Dezactivat
1 = Activat
Dezactivează/activează rotaţia ordinii
de pornire şi prioritatea motoarelor.
0 = Dezactivat
1= Activat (interval)
0 = Pompă auxiliară
1 = Toate pompele
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 79
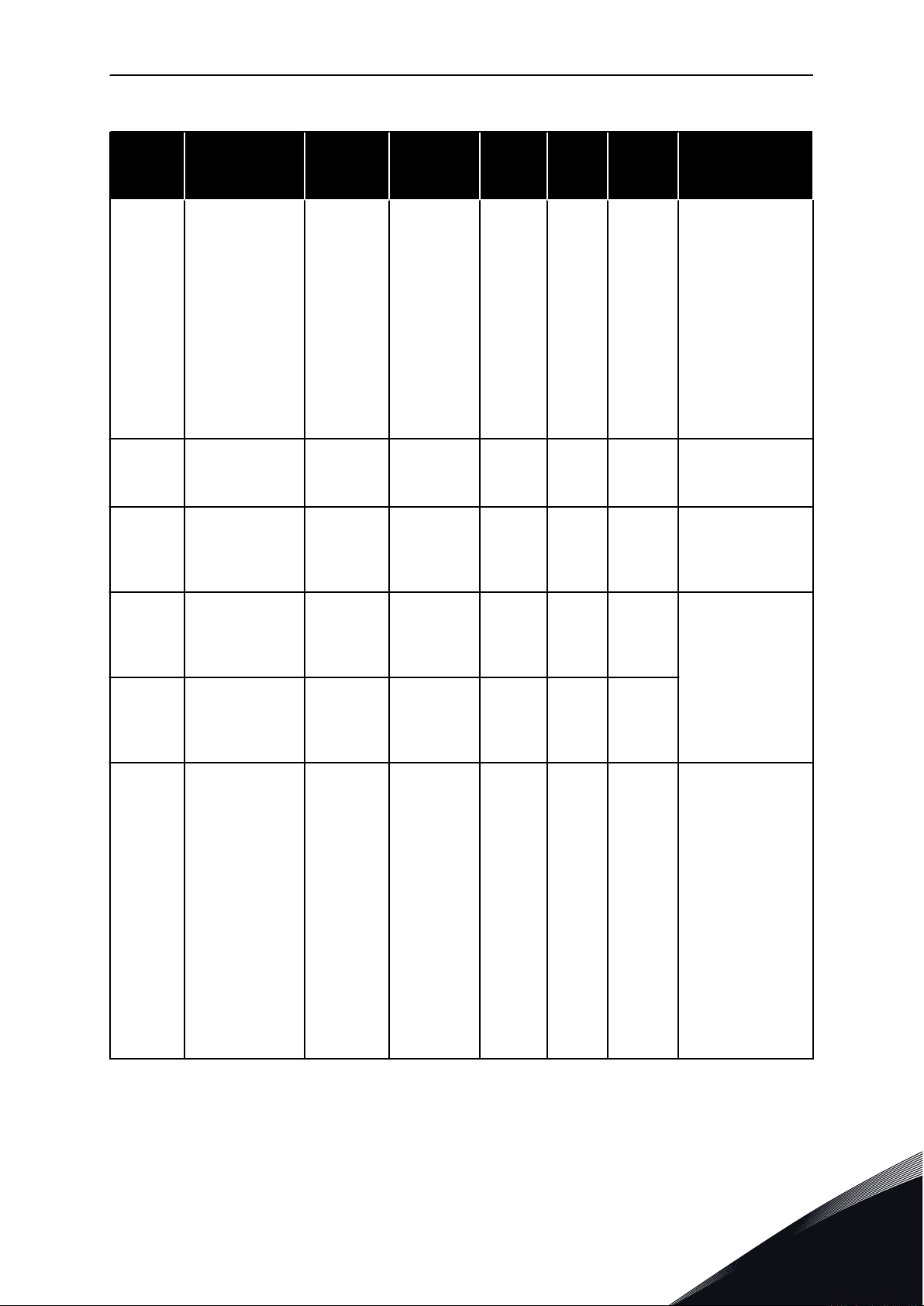
GHIDUL DE PORNIRE RAPIDĂ VACON · 79
Tabel 13: M1.35 Pompe multiple (acţionare multiplă)
Index Parametru
1.35.20
1.35.21
1.35.22
Interval schim-
bare automată
Autochange Days
(Zile de schimbare automată)
Autochange Time
of Day (Oră de
schimbare auto-
mată)
Min (Minim
AI1
utilizat)
0.0 3000.0 h 48.0 1029
0 127 1786
Max Unitate
Ora 1787
Predefi
nit
ID Descriere
Când se utilizează
timpul specificat de
acest parametru,
funcţia de schimbare automată porneşte. Dar schimbarea automată
porneşte doar în
cazul în care capacitatea este sub
nivelul parametrilor P1.35.23 şi
P1.35.24.
Domeniu: De luni
până duminică
Domeniu: De la
00:00:00 până la
23:59:59
Schimbare auto-
1.35.23
1.35.24
1.35.25 Lăţime de bandă 0 100 % 10 1097
mată: Frequency
Limit (Limită de
frecvenţă)
Schimbare auto-
mată: Pump
Limit (Limită
pompă)
0.00 P3.3.1.2 Hz 25:00 1031
1 6 1030
Aceşti parametri
setează nivelul sub
care trebuie să
rămână capacitatea pentru ca
schimbarea automată să aibă loc.
Când valoarea de
feedback rămâne
între 4,5 şi 5,5 bari,
motorul rămâne
conectat.
Punct de referinţă
= 5 bari
Lăţime de bandă =
10%
Când valoarea de
feedback rămâne
între 4,5 şi 5,5 bari,
motorul rămâne
conectat.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 80

VACON · 80 GHIDUL DE PORNIRE RAPIDĂ
Tabel 13: M1.35 Pompe multiple (acţionare multiplă)
Index Parametru
1.35.26
1.35.27
1.35.28
Tem-
por.lăţim.bdă
Viteză constantă
de producţie
Interblocare
pompă 1
Min (Minim
AI1
utilizat)
0 3600 s 10 1098
0 100 % 100 1513
Max Unitate
Predefi
nit
DigIN
Slot0.1
ID Descriere
Când valoarea de
feedback se află în
afara lăţimii de
bandă, intervalul
după care sunt
adăugate sau
îndepărtate pompe.
Furnizează turaţia
constantă la care
se fixează pompa
atunci când
aceasta trece la
frecvenţa maximă.
Pompa următoare
porneşte regularizarea în modul
multimaster
(multi-coordonator).
426
DESCHIS = Nu este
activ
ÎNCHIS = Activ
1.35.29 Referinţă golire
Maximum
reference
(Referinţă
maximă)
Maximum
reference
(Referinţă
maximă)
HZ 50.00 1239
Furnizează frecvenţa de referinţă
atunci când este
activată funcţia de
golire.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 81
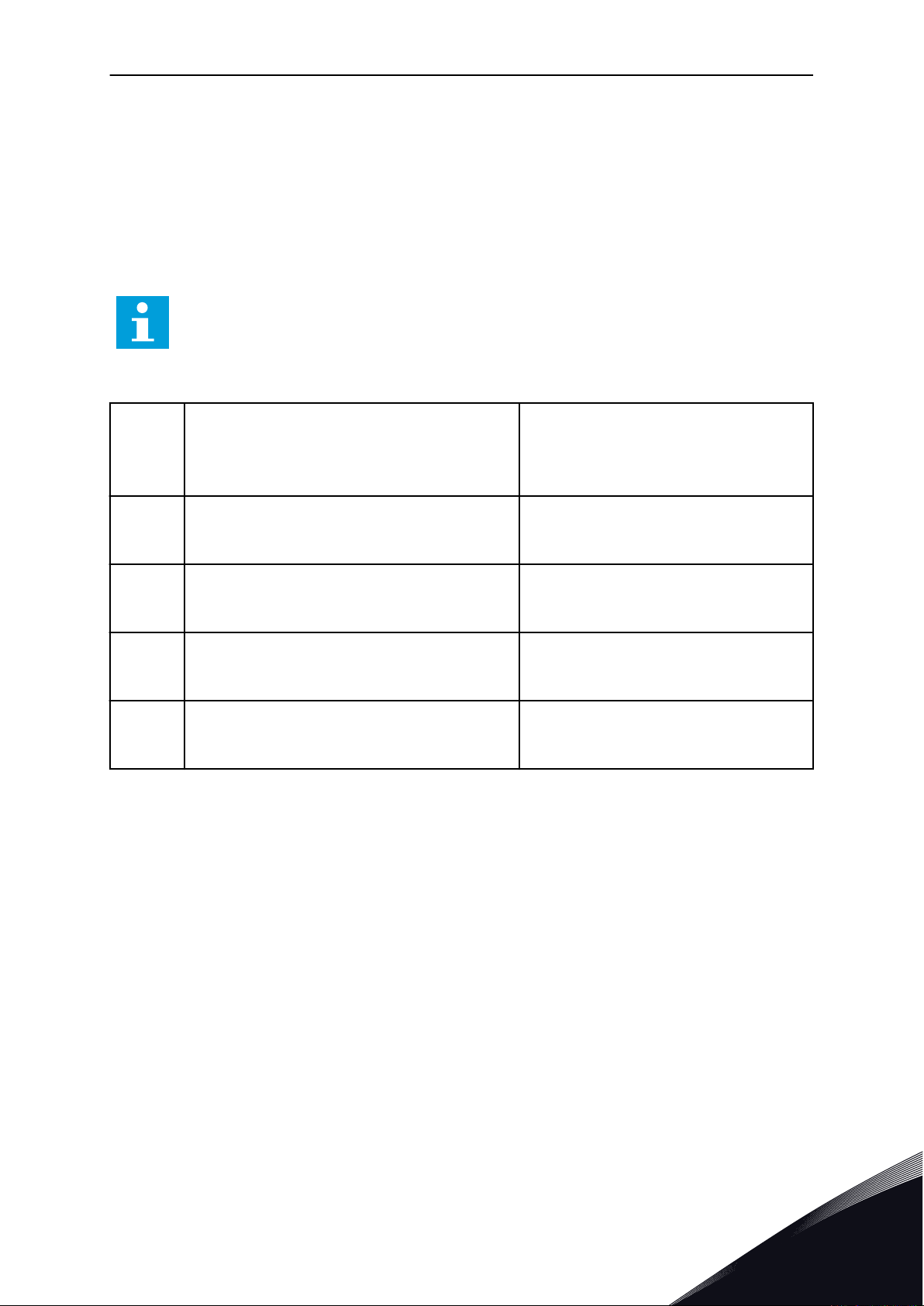
ASISTENŢI VACON · 81
2 ASISTENŢI
2.1 EXPERTUL DE APLICAŢIE STANDARD
Expertul de aplicaţie vă ajută să setaţi parametrii de bază legaţi de aplicaţie.
Pentru a porni expertul de aplicaţie standard, setaţi valoarea Standard pentru parametrul
P1.2 Application (Aplicaţie) (ID 212) din tastatură.
OBSERVAŢIE!
Dacă porniţi expertul de aplicaţie standard din expertul de pornire, expertul trece
direct la pasul 11.
Setaţi o valoare pentru P3.1.2.2 Motor Type (Tip
1
motor) (astfel încât să corespundă cu plăcuţa de
identificare a motorului)
Motor PM
Motor cu inducţie
Motor cu repulsie
Setaţi o valoare pentru P3.1.1.1 Motor Nominal Vol-
2
3
4
5
tage (Tensiune nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.2 Motor Nominal Frequency (Frecvenţă nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.3 Motor Nominal
Speed (Viteză nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.4 Motor Nominal Current (Curent nominal motor) (astfel încât să corespundă cu plăcuţa de identificare a motorului)
Domeniu: Variabil
Domeniu: 8.00-320.00 Hz
Domeniu: 24 – 19.200 rot./min.
Domeniu: Variabil
Pasul 6 este afişat doar dacă aţi selectat Induction Motor (Motor cu inducţie) la pasul 1.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 82

VACON · 82 ASISTENŢI
6
7
8
9
10 Setaţi valoarea pentru P3.4.1.3 Timp decelerare 1 Domeniu: 0,1 – 3.000,0 s
11
Setaţi o valoare pentru P3.1.1.5 Motor Cos Phi (Cos
fi motor)
Setaţi o valoare pentru P3.3.1.1 Minimum Frequency Reference (Frecvenţă de referinţă minimă)
Setaţi valoarea pentru P3.3.1.2 Referinţă frecvenţă
maximă
Setaţi o valoare pentru P3.4.1.2 Acceleration Time 1
(Timp de accelerare 1)
Selectaţi locaţia de control care furnizează variatorului de turaţie comenzile de pornire sau oprire şi
frecvenţa de referinţă.
Domeniu: 0.30-1.00
Domeniu: 0,00 – P3.3.1.2 Hz
Domeniu: P3.3.1.1 – 320,00 Hz
Domeniu: 0,1 – 3.000,0 s
Terminal I/O
Bus de câmp
Panou de comandă
Expertul de aplicaţie standard este finalizat.
2.2 EXPERTUL DE APLICAŢIE HVAC
Expertul de aplicaţie vă ajută să setaţi parametrii de bază legaţi de aplicaţie.
Pentru a porni expertul de aplicaţie HVAC, setaţi valoarea HVAC pentru parametrul P1.2
Application (Aplicaţie) (ID 212) din tastatură.
Selectaţi tipul sau procesul (ori aplicaţia) pe care îl
controlaţi.
1
Compresor
Ventilator
Pompă
Altele
Unii parametri au valori presetate, specificate prin selecţia efectuată la pasul 1. Consultaţi
parametrii şi valorile acestora la finalul capitolul curent din Tabel 14.
2
Setaţi o valoare pentru P3.2.11 Restart Delay (Amânare repornire).
Domeniu: 0 – 20 min.
Pasul 2 este afişat doar dacă aţi selectat Compressor (Compresor) la pasul 1.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 83
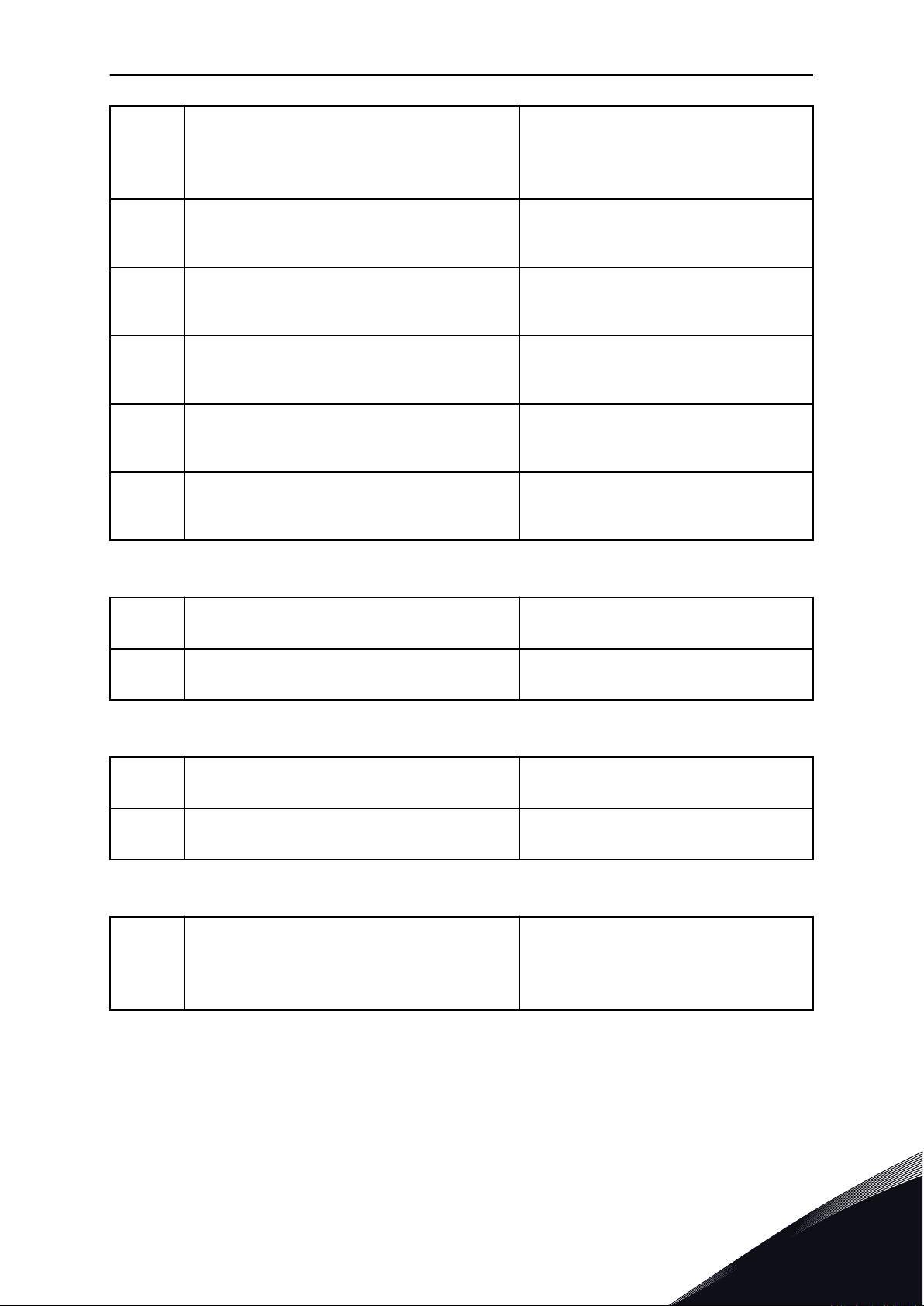
ASISTENŢI VACON · 83
Setaţi o valoare pentru P3.1.2.2 Motor Type (Tip
3
motor) (astfel încât să corespundă cu plăcuţa de
identificare a motorului)
Motor PM
Motor cu inducţie
Motor cu repulsie
Setaţi o valoare pentru P3.1.1.1 Motor Nominal Vol-
4
5
6
7
8
tage (Tensiune nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.2 Motor Nominal Frequency (Frecvenţă nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.3 Motor Nominal
Speed (Viteză nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.4 Motor Nominal Current (Curent nominal motor) (astfel încât să corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.5 Motor Cos Phi (Cos
fi motor) (astfel încât să corespundă cu plăcuţa de
identificare a motorului)
Domeniu: Variabil
Domeniu: 8.00-320.00 Hz
Domeniu: 24 – 19.200 rot./min.
Domeniu: Variabil
Domeniu: 0.30-1.00
Pasul 8 este afişat doar dacă aţi selectat Induction Motor (Motor cu inducţie) la pasul 3.
10
9
Setaţi o valoare pentru P3.3.1.1 Minimum Frequency Reference (Frecvenţă de referinţă minimă)
Setaţi o valoare pentru P3.3.1.2 Maximum Frequency Reference (Frecvenţă de referinţă maximă)
Domeniu: 0.00-3.3.1.2 Hz
Domeniu: P3.3.1.1 – 320,00 Hz
Paşii 11 şi 12 sunt afişaţi doar dacă aţi selectat Other (Altele) la pasul 1.
11
12
Setaţi o valoare pentru P3.4.1.2 Acceleration Time 1
(Timp de accelerare 1)
Setaţi o valoare pentru P3.4.1.3 Deceleration Time 1
(Timp de decelerare 1)
Domeniu: 0,1 – 3.000,0 s
Domeniu: 0,1 – 3.000,0 s
Apoi expertul trece la paşii care sunt specificaţi de către aplicaţie.
Selectaţi locaţia de control (de unde furnizaţi
13
comenzile de pornire şi oprire şi frecvenţa de referinţă)
Terminal I/O
Bus de câmp
Panou de comandă
Expertul de aplicaţie HVAC este finalizat.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 84

VACON · 84 ASISTENŢI
Tabel 14: Valori presetate ale parametrilor
Tip de proces
Index Parametru
Pompă Ventilator Compresor
P3.1.4.1 Raport U/f Liniar Pătratic Liniar
P3.2.4 Funcţie start Rampă Pornire din mers Rampă
P3.2.5 Funcţie stop Rampă Rotire inerţială Rampă
P3.4.1.2 Timp de accelerare 5,0 s 30,0 s 3,0 s
P3.4.1.3 Timp de decelerare 5,0 s 30,0 s 3,0 s
2.3 ASISTENTUL DE APLICAŢIE PENTRU COMANDĂ PID
Expertul de aplicaţie vă ajută să setaţi parametrii de bază legaţi de aplicaţie.
Pentru a porni expertul aplicaţiei de control PID, setaţi valoarea PID control (Comandă PID)
pentru parametrul P1.2 Application (Aplicaţie) (ID 212) din tastatură.
OBSERVAŢIE!
Dacă porniţi expertul de aplicaţie din expertul de pornire, expertul trece direct la
pasul 11.
Setaţi o valoare pentru P3.1.2.2 Motor Type (Tip
1
2
3
4
5
motor) (astfel încât să corespundă cu plăcuţa de
identificare a motorului)
Setaţi o valoare pentru P3.1.1.1 Motor Nominal Voltage (Tensiune nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.2 Motor Nominal Frequency (Frecvenţă nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.3 Motor Nominal
Speed (Viteză nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.4 Motor Nominal Current (Curent nominal motor) (astfel încât să corespundă cu plăcuţa de identificare a motorului)
Motor PM
Motor cu inducţie
Motor cu repulsie
Domeniu: Variabil
Domeniu: 8.00…320.00 Hz
Domeniu: 24…19200 rot/min
Domeniu: Variabil
Pasul 6 este afişat doar dacă aţi selectat Induction Motor (Motor cu inducţie) la pasul 1.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 85

ASISTENŢI VACON · 85
6
7
8
9
10 Setaţi valoarea pentru P3.4.1.3 Timp decelerare 1 Domeniu: 0,1 – 3.000,0 s
11
12
Setaţi o valoare pentru P3.1.1.5 Motor Cos Phi (Cos
fi motor)
Setaţi o valoare pentru P3.3.1.1 Minimum Frequency Reference (Frecvenţă de referinţă minimă)
Setaţi valoarea pentru P3.3.1.2 Referinţă frecvenţă
maximă
Setaţi o valoare pentru P3.4.1.2 Acceleration Time 1
(Timp de accelerare 1)
Efectuaţi o selecţie a locaţiei de control (de unde
furnizaţi comenzile de pornire şi oprire şi frecvenţa
de referinţă)
Setaţi o valoare pentru P3.13.1.4 Process Unit
Selection (Selectare unitate de proces)
Domeniu: 0.30-1.00
Domeniu: 0,00 – P3.3.1.2 Hz
Domeniu: P3.3.1.1 – 320,00 Hz
Domeniu: 0,1 – 3.000,0 s
Terminal I/O
Bus de câmp
Panou de comandă
Mai mult de 1 selecţie
Dacă selecţia dvs. este alta decât %, veţi vedea întrebările următoare. Dacă selecţia dvs. este
%, expertul trece direct la pasul 16.
13
14
15
16
Setaţi o valoare pentru P3.13.1.5 Process Unit Min
(Minimum unitate de proces)
Setaţi o valoare pentru P3.13.1.6 Process Unit Max
(Maximum unitate de proces)
Setaţi o valoare pentru P3.13.1.7 Process Unit Decimals (Zecimale unitate de proces)
Setaţi o valoare pentru P3.13.3.3 Feedback 1 Source
Selection (Selectare sursă feedback 1)
Intervalul este specificat de către selecţia de
la pasul 12.
Intervalul este specificat de către selecţia de
la pasul 12.
Domeniu: 0-4
Consultaţi tabelul Setări feedback din Capitolul Tabel 75 Setări semnale de răspuns
Dacă efectuaţi o selecţie a unui semnal analogic de intrare, consultaţi pasul 18. În cazul altor
selecţii, expertul trece la pasul 19.
Setaţi intervalul de semnal al intrării analogice
17
18
19
Setaţi o valoare pentru P3.13.1.8 Error Inversion
(Inversare eroare)
Setaţi o valoare pentru P3.13.2.6 Setpoint Source
Selection (Selectare sursă valoare de referinţă)
0 = 0 – 10 V / 0 – 20 mA
1 = 2 – 10 V / 4 – 20 mA
0 = Normal
1 = Inversat
Consultaţi tabelul Puncte de referinţă din
Capitolul Tabel 75 Setări semnale de răspuns
Dacă selectaţi un semnal analogic de intrare, este afişat pasul 21. În cazul altor selecţii,
expertul trece la pasul 23.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 86
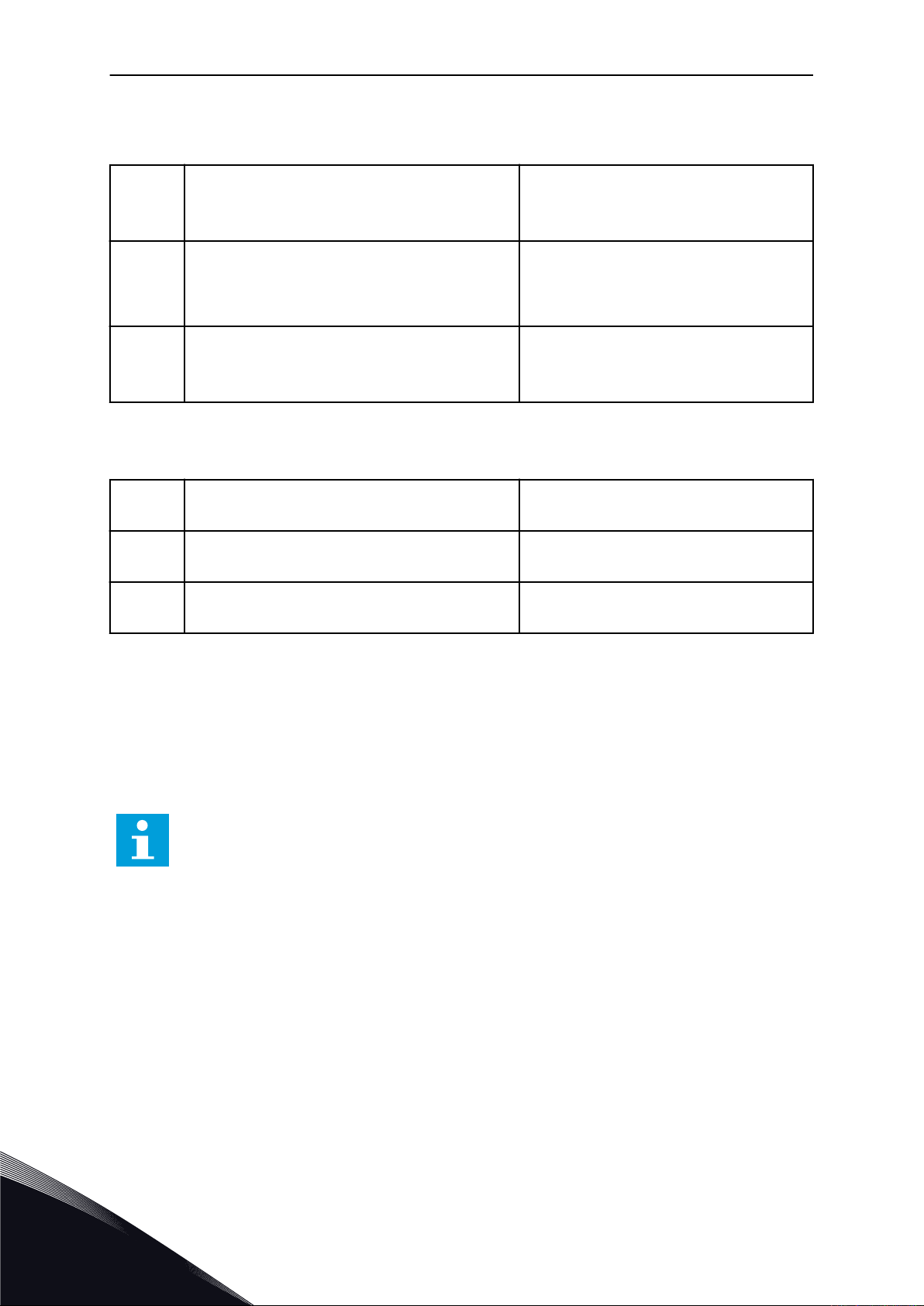
VACON · 86 ASISTENŢI
Dacă setaţi ca valoare Keypad Setpoint 1 (Valoare de referinţă tastatură 1) sau Keypad Setpoint
2 (Valoare de referinţă tastatură 2), expertul trece direct la pasul 22.
Setaţi intervalul de semnal al intrării analogice
20
0 = 0 – 10 V / 0 – 20 mA
1 = 2 – 10 V / 4 – 20 mA
21
22
Setaţi o valoare pentru P3.13.2.1 (Keypad Setpoint
1) (Valoare de referinţă tastatură 1) şi P3.13.2.2
(Keypad Setpoint 2) (Valoare de referinţă tastatură
2)
Utilizaţi funcţia Sleep (Repaus)
Specificată prin intervalul setat la pasul 20
0 = Nu
1 = Da
Dacă furnizaţi valoarea Yes (Da) la întrebarea 22, veţi vedea următoarele 3 întrebări. Dacă
furnizaţi valoarea No (Nu), expertul este finalizat.
23
24
25
Setaţi o valoare pentru P3.13.5.1 SP1 Sleep Frequency Limit (Limită frecvenţă de aşteptare)
Setaţi o valoare pentru P3.13.5.2 SP1 Sleep Delay
(Întârziere mod în aşteptare).
Setaţi o valoare pentru P3.13.5.3 SP1 Wake Up
Level (Nivel de reactivare)
Domeniu: 0.00-320.00 Hz
Domeniu: 0 – 3.000 s
Intervalul este specificat de către unitatea de
proces setată.
Expertul aplicaţiei de comandă PID este finalizat.
2.4 ASISTENT APLICAŢIE POMPE MULTIPLE (ACŢIONARE SIMPLĂ)
Expertul de aplicaţie vă ajută să setaţi parametrii de bază legaţi de aplicaţie.
Pentru a porni asistentul aplicaţie Pompe multiple (acţionare simplă), setaţi valoarea Pompe
multiple (acţionare simplă) pentru parametrul P1.2 Aplicaţie (ID 212) din tastatură.
OBSERVAŢIE!
Dacă porniţi expertul de aplicaţie din expertul de pornire, expertul trece direct la
pasul 11.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 87

ASISTENŢI VACON · 87
Setaţi o valoare pentru P3.1.2.2 Motor Type (Tip
1
motor) (astfel încât să corespundă cu plăcuţa de
identificare a motorului)
Motor PM
Motor cu inducţie
Motor cu repulsie
Setaţi o valoare pentru P3.1.1.1 Motor Nominal Vol-
2
3
4
5
tage (Tensiune nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.2 Motor Nominal Frequency (Frecvenţă nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.3 Motor Nominal
Speed (Viteză nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.4 Motor Nominal Current (Curent nominal motor) (astfel încât să corespundă cu plăcuţa de identificare a motorului)
Domeniu: Variabil
Domeniu: 8.00-320.00 Hz
Domeniu: 24 – 19.200 rot./min.
Domeniu: Variabil
Pasul 6 este afişat doar dacă aţi selectat Induction Motor (Motor cu inducţie) la pasul 1.
6
7
8
Setaţi o valoare pentru P3.1.1.5 Motor Cos Phi (Cos
fi motor)
Setaţi o valoare pentru P3.3.1.1 Minimum Frequency Reference (Frecvenţă de referinţă minimă)
Setaţi valoarea pentru P3.3.1.2 Referinţă frecvenţă
maximă
Domeniu: 0.30-1.00
Domeniu: 0,00 – P3.3.1.2 Hz
Domeniu: P3.3.1.1 – 320,00 Hz
9
10 Setaţi valoarea pentru P3.4.1.3 Timp decelerare 1 Domeniu: 0,1 – 3.000,0 s
11
12
Setaţi o valoare pentru P3.4.1.2 Acceleration Time 1
(Timp de accelerare 1)
Efectuaţi o selecţie a locaţiei de control (de unde
furnizaţi comenzile de pornire şi oprire şi frecvenţa
de referinţă)
Setaţi o valoare pentru P3.13.1.4 Process Unit
Selection (Selectare unitate de proces)
Domeniu: 0,1 – 3.000,0 s
Terminal I/O
Bus de câmp
Panou de comandă
Mai mult de 1 selecţie
Dacă selecţia dvs. este alta decât %, veţi vedea următorii 3 paşi. Dacă selecţia dvs. este %,
expertul trece direct la pasul 16.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 88

VACON · 88 ASISTENŢI
13
14
15
16
Setaţi o valoare pentru P3.13.1.5 Process Unit Min
(Minimum unitate de proces)
Setaţi o valoare pentru P3.13.1.6 Process Unit Max
(Maximum unitate de proces)
Setaţi o valoare pentru P3.13.1.7 Process Unit Decimals (Zecimale unitate de proces)
Setaţi o valoare pentru P3.13.3.3 Feedback 1 Source
Selection (Selectare sursă feedback 1)
Intervalul este specificat de către selecţia de
la pasul 12.
Intervalul este specificat de către selecţia de
la pasul 12.
Domeniu: 0-4
Consultaţi tabelul Setări feedback din Capitolul Tabel 75 Setări semnale de răspuns
Dacă efectuaţi o selecţie a unui semnal analogic de intrare, consultaţi pasul 17. În cazul altor
selecţii, expertul trece la pasul 18.
Setaţi intervalul de semnal al intrării analogice
17
18
19
Setaţi o valoare pentru P3.13.1.8 Error Inversion
(Inversare eroare)
Setaţi o valoare pentru P3.13.2.6 Setpoint Source
Selection (Selectare sursă valoare de referinţă)
0 = 0 – 10 V / 0 – 20 mA
1 = 2 – 10 V / 4 – 20 mA
0 = Normal
1 = Inversat
Consultaţi tabelul Puncte de referinţă din
Capitolul Tabel 74 Setările valorilor de referinţă
Dacă selectaţi un semnal analogic de intrare, este afişat mai întâi pasul 20, iar apoi pasul 22.
În cazul altor selecţii, expertul trece la pasul 21.
Dacă setaţi ca valoare Keypad Setpoint 1 (Valoare de referinţă tastatură 1) sau Keypad Setpoint
2 (Valoare de referinţă tastatură 2), expertul trece direct la pasul 22.
Setaţi intervalul de semnal al intrării analogice
20
21
22
Setaţi o valoare pentru P3.13.2.1 (Keypad Setpoint
1) (Valoare de referinţă tastatură 1) şi P3.13.2.2
(Keypad Setpoint 2) (Valoare de referinţă tastatură
2)
Utilizaţi funcţia Sleep (Repaus)
0 = 0 – 10 V / 0 – 20 mA
1 = 2 – 10 V / 4 – 20 mA
Specificată prin intervalul setat la pasul 19
0 = Nu
1 = Da
Dacă furnizaţi valoarea Yes (Da) la pasul 22, veţi vedea următorii 3 paşi. Dacă furnizaţi
valoarea No (Nu), expertul trece la pasul 26.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 89

ASISTENŢI VACON · 89
23
24
25
26
27
28
Setaţi o valoare pentru P3.13.5.1 SP1 Sleep Frequency Limit (Limită frecvenţă de aşteptare)
Setaţi o valoare pentru P3.13.5.2 SP1 Sleep Delay
(Întârziere mod în aşteptare).
Setaţi o valoare pentru P3.13.5.3 SP1 Wake Up
Level (Nivel de reactivare)
Setaţi o valoare pentru P3.15.2 Number of pumps
(Număr de pompe)
Setaţi o valoare pentru P3.15.5 Pump Interlocking
(Angrenare pompă)
Setaţi o valoare pentru P3.15.6 Autochange (Schimbare automată)
Domeniu: 0.00-320.00 Hz
Domeniu: 0 – 3.000 s
Intervalul este specificat de către unitatea de
proces setată.
Domeniu: 1-8
0 = Neutilizat
1 = Activat
0 = Dezactivat
1 = Activat (interval)
2 = Activat (timp real)
Dacă setaţi valoarea Enabled (Activat) (Interval sau Real Time [Timp real]) pentru parametrul
Autochange (Schimbare automată), sunt afişaţi paşii 29 – 34. Dacă setaţi ca valoare Disabled
(Dezactivat) pentru parametrul Autochange (Schimbare automată), expertul trece direct la
pasul 35.
Setaţi o valoare pentru P3.15.7 Autochanged pumps
29
(Pompe schimbate automat)
0 = Pompe auxiliare
1 = Toate pompele
Pasul 30 este afişat doar dacă setaţi valoarea Enabled (Activat) (Interval) pentru parametrul
Autochange (Schimbare automată) de la pasul 28.
30
Setaţi o valoare pentru P3.15.8 Autochange Interval
(Interval de schimbare automată)
Domeniu: 0-3000 h
Paşii 31 şi 32 sunt afişaţi doar dacă setaţi valoarea Enabled (Activat) (Real Time [Timp real])
pentru parametrul Autochange (Schimbare automată) de la pasul 28.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 90
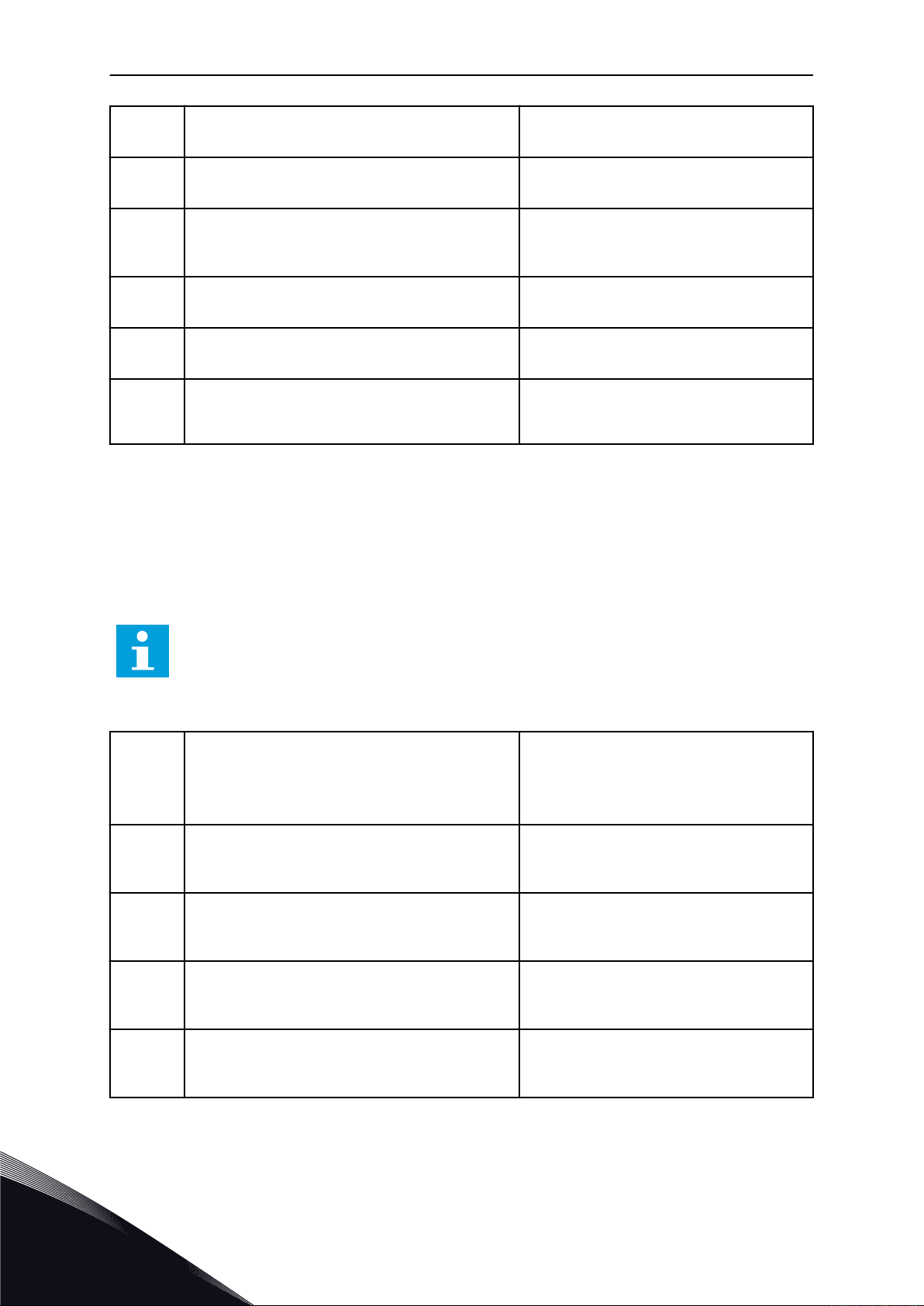
VACON · 90 ASISTENŢI
31
32
33
34
35
36
Setaţi o valoare pentru P3.15.9 Autochange Days
(Zile de schimbare automată)
Setaţi o valoare pentru P3.15.10 Autochange Time
of Day (Oră de schimbare automată)
Setaţi o valoare pentru P3.15.11 Autochange Frequency Limit (Limită de schimbare automată frecvenţă)
Setaţi o valoare pentru P3.15.12 Autochange Pump
Limit (Limită de schimbare automată pompă)
Setaţi o valoare pentru P3.15.13 Bandwidth (Lăţime
de bandă)
Setaţi o valoare pentru P3.15.14 Bandwidth Delay
(Amânare lăţime de bandă)
Domeniu: De luni până duminică
Domeniu: De la 00:00:00 până la 23:59:59
Domeniu: P3.3.1.1 – P3.3.1.2 Hz
Domeniu: 1-8
Domeniu: 0-100%
Domeniu: 0 – 3.600 s
Asistentul aplicaţie Pompe multiple (acţionare simplă) este finalizat.
2.5 ASISTENT APLICAŢIE POMPE MULTIPLE (ACŢIONARE MULTIPLĂ)
Expertul de aplicaţie vă ajută să setaţi parametrii de bază legaţi de aplicaţie.
Pentru a porni asistentul aplicaţie Pompe multiple (acţionare multiplă), setaţi valoarea
Pompe multiple (acţionare multiplă) pentru parametrul P1.2 Aplicaţie (ID 212) din tastatură.
OBSERVAŢIE!
Dacă porniţi expertul de aplicaţie din expertul de pornire, expertul trece direct la
pasul 11.
Setaţi o valoare pentru P3.1.2.2 Motor Type (Tip
1
2
3
4
motor) (astfel încât să corespundă cu plăcuţa de
identificare a motorului)
Setaţi o valoare pentru P3.1.1.1 Motor Nominal Voltage (Tensiune nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.2 Motor Nominal Frequency (Frecvenţă nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Setaţi o valoare pentru P3.1.1.3 Motor Nominal
Speed (Viteză nominală motor) (astfel încât să
corespundă cu plăcuţa de identificare a motorului)
Motor PM
Motor cu inducţie
Motor cu repulsie
Domeniu: Variabil
Domeniu: 8.00-320.00 Hz
Domeniu: 24 – 19.200 rot./min.
Setaţi o valoare pentru P3.1.1.4 Motor Nominal Cur-
5
rent (Curent nominal motor) (astfel încât să corespundă cu plăcuţa de identificare a motorului)
Domeniu: Variabil
Pasul 6 este afişat doar dacă aţi selectat Induction Motor (Motor cu inducţie) la pasul 1.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 91
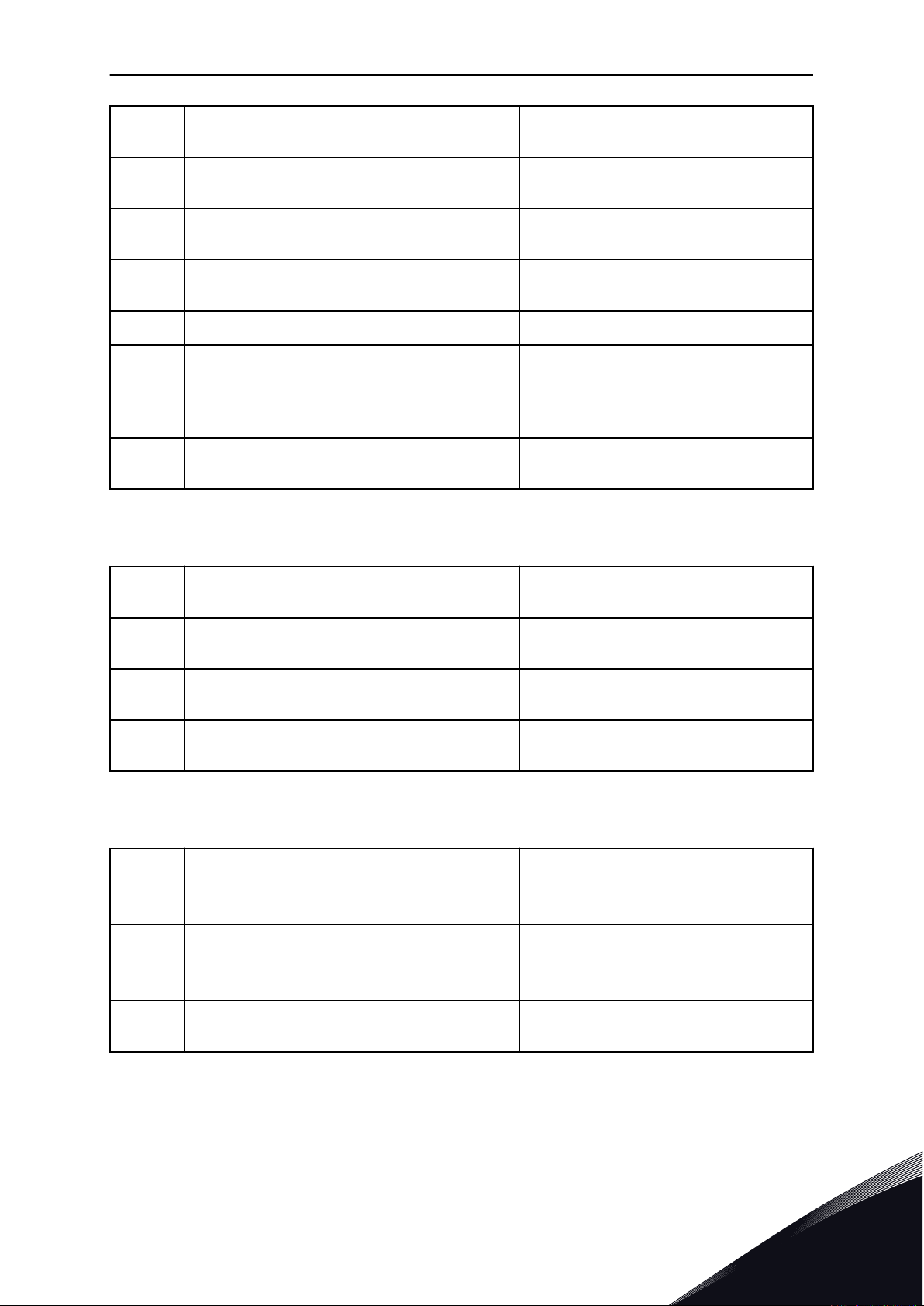
ASISTENŢI VACON · 91
6
7
8
9
10 Setaţi valoarea pentru P3.4.1.3 Timp decelerare 1 Domeniu: 0,1 – 3.000,0 s
11
12
Setaţi o valoare pentru P3.1.1.5 Motor Cos Phi (Cos
fi motor)
Setaţi o valoare pentru P3.3.1.1 Minimum Frequency Reference (Frecvenţă de referinţă minimă)
Setaţi valoarea pentru P3.3.1.2 Referinţă frecvenţă
maximă
Setaţi o valoare pentru P3.4.1.2 Acceleration Time 1
(Timp de accelerare 1)
Efectuaţi o selecţie a locaţiei de control (de unde
furnizaţi comenzile de pornire şi oprire şi frecvenţa
de referinţă)
Setaţi o valoare pentru P3.13.1.4 Process Unit
Selection (Selectare unitate de proces)
Domeniu: 0.30-1.00
Domeniu: 0,00 – P3.3.1.2 Hz
Domeniu: P3.3.1.1 – 320,00 Hz
Domeniu: 0,1 – 3.000,0 s
Terminal I/O
Bus de câmp
Panou de comandă
Mai mult de 1 selecţie
Dacă selecţia dvs. este alta decât %, veţi vedea următorii 3 paşi. Dacă selecţia dvs. este %,
expertul trece direct la pasul 16.
13
14
15
16
Setaţi o valoare pentru P3.13.1.5 Process Unit Min
(Minimum unitate de proces)
Setaţi o valoare pentru P3.13.1.6 Process Unit Max
(Maximum unitate de proces)
Setaţi o valoare pentru P3.13.1.7 Process Unit Decimals (Zecimale unitate de proces)
Setaţi o valoare pentru P3.13.3.3 Feedback 1 Source
Selection (Selectare sursă feedback 1)
Intervalul este specificat de către selecţia de
la pasul 12.
Intervalul este specificat de către selecţia de
la pasul 12.
Domeniu: 0-4
Consultaţi tabelul Setări feedback din Capitolul Tabel 74 Setările valorilor de referinţă
Dacă efectuaţi o selecţie a unui semnal analogic de intrare, consultaţi pasul 17. În cazul altor
selecţii, expertul trece la pasul 18.
Setaţi intervalul de semnal al intrării analogice
17
18
19
Setaţi o valoare pentru P3.13.1.8 Error Inversion
(Inversare eroare)
Setaţi o valoare pentru P3.13.2.6 Setpoint Source
Selection (Selectare sursă valoare de referinţă)
0 = 0 – 10 V / 0 – 20 mA
1 = 2 – 10 V / 4 – 20 mA
0 = Normal
1 = Inversat
Consultaţi tabelul Puncte de referinţă din
Capitolul Tabel 74 Setările valorilor de referinţă
Dacă selectaţi un semnal analogic de intrare, este afişat mai întâi pasul 20, iar apoi pasul 22.
În cazul altor selecţii, expertul trece la pasul 21.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 92

VACON · 92 ASISTENŢI
Dacă setaţi ca valoare Keypad Setpoint 1 (Valoare de referinţă tastatură 1) sau Keypad Setpoint
2 (Valoare de referinţă tastatură 2), expertul trece direct la pasul 22.
Setaţi intervalul de semnal al intrării analogice
20
0 = 0 – 10 V / 0 – 20 mA
1 = 2 – 10 V / 4 – 20 mA
21
22
Setaţi o valoare pentru P3.13.2.1 (Keypad Setpoint
1) (Valoare de referinţă tastatură 1) şi P3.13.2.2
(Keypad Setpoint 2) (Valoare de referinţă tastatură
2)
Utilizaţi funcţia Sleep (Repaus)
Specificată prin intervalul setat la pasul 19
0 = Nu
1 = Da
Dacă furnizaţi valoarea Yes (Da) la pasul 22, veţi vedea următorii 3 paşi. Dacă furnizaţi
valoarea No (Nu), expertul trece la pasul 26.
23
24
25
26
Setaţi o valoare pentru P3.13.5.1 SP1 Sleep Frequency Limit (Limită frecvenţă de aşteptare)
Setaţi o valoare pentru P3.13.5.2 SP1 Sleep Delay
(Întârziere mod în aşteptare).
Setaţi o valoare pentru P3.13.5.3 SP1 Wake Up
Level (Nivel de reactivare)
Setarea unei valori pentru P3.15.1 Mod pompe multiple
Domeniu: 0.00-320.00 Hz
Domeniu: 0 – 3.000 s
Intervalul este specificat de către unitatea de
proces setată.
Unităţi secundare multiple
Unităţi master multiple
27
28
29
30
31
Setaţi o valoare pentru P3.15.3 Pump ID Number
(Număr de ID pompă)
Setaţi o valoare pentru P3.15.4 Start and Feedback
(Pornire şi feedback)
Setaţi o valoare pentru P3.15.2 Number of pumps
(Număr de pompe)
Setaţi o valoare pentru P3.15.5 Pump Interlocking
(Angrenare pompă)
Setaţi o valoare pentru P3.15.6 Autochange (Schimbare automată)
Domeniu: 1-8
0=Neconectat
1=Numai semnal de pornire conectat
2= Ambele semnale conectate
Domeniu: 1-8
0 = Neutilizat
1 = Activat
0 = Dezactivat
1 = Activat (interval)
2 = Activat (zilele săptămânii)
Dacă setaţi valoarea Enabled (Activat) (Interval) pentru parametrul Autochange (Schimbare
automată), este afişat pasul 33. Dacă setaţi valoarea Enabled (Activat) (Weekdays [Zilele
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 93
ASISTENŢI VACON · 93
săptămânii]) pentru parametrul Autochange (Schimbare automată), este afişat pasul 34.
Dacă setaţi ca valoare Disabled (Dezactivat) pentru parametrul Autochange (Schimbare
automată), expertul trece direct la pasul 36.
Setaţi o valoare pentru P3.15.7 Autochanged pumps
32
(Pompe schimbate automat)
0 = Pompe auxiliare
1 = Toate pompele
Pasul 33 este afişat doar dacă setaţi valoarea Enabled (Activat) (Interval) pentru parametrul
Autochange (Schimbare automată) de la pasul 31.
33
Setaţi o valoare pentru P3.15.8 Autochange Interval
(Interval de schimbare automată)
Domeniu: 0-3000 h
Paşii 34 şi 35 sunt afişaţi doar dacă setaţi valoarea Enabled (Activat) (Weekdays [Zilele
săptămânii]) pentru parametrul Autochange (Schimbare automată) de la pasul 31.
34
35
36
37
Setaţi o valoare pentru P3.15.9 Autochange Days
(Zile de schimbare automată)
Setaţi o valoare pentru P3.15.10 Autochange Time
of Day (Oră de schimbare automată)
Setaţi o valoare pentru P3.15.13 Bandwidth (Lăţime
de bandă)
Setaţi o valoare pentru P3.15.14 Bandwidth Delay
(Amânare lăţime de bandă)
Domeniu: De luni până duminică
Domeniu: De la 00:00:00 până la 23:59:59
Domeniu: 0-100%
Domeniu: 0 – 3.600 s
Asistentul aplicaţie Pompe multiple (acţionare multiplă) este finalizat.
2.6 ASISTENTUL PENTRU MOD INCENDIU
Pentru a porni expertul modului Fire (Incendiu), selectaţi Activate (Activare) pentru
parametrul 1.1.2 din meniul de configurare rapidă.
ATENŢIE!
Înainte de a continua, citiţi informaţiile privind parola şi garanţia din Capitolul 10.18
Modul incendiu.
Setaţi o valoare pentru parametrul P3.17.2 Fire
1
Mode Frequency Source (Sursă de frecvenţă mod
incendiu)
Mai mult de 1 selecţie
Dacă setaţi altă valoare decât Fire mode frequency (Frecvenţă mod incendiu), expertul trece
direct la pasul 3.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 94
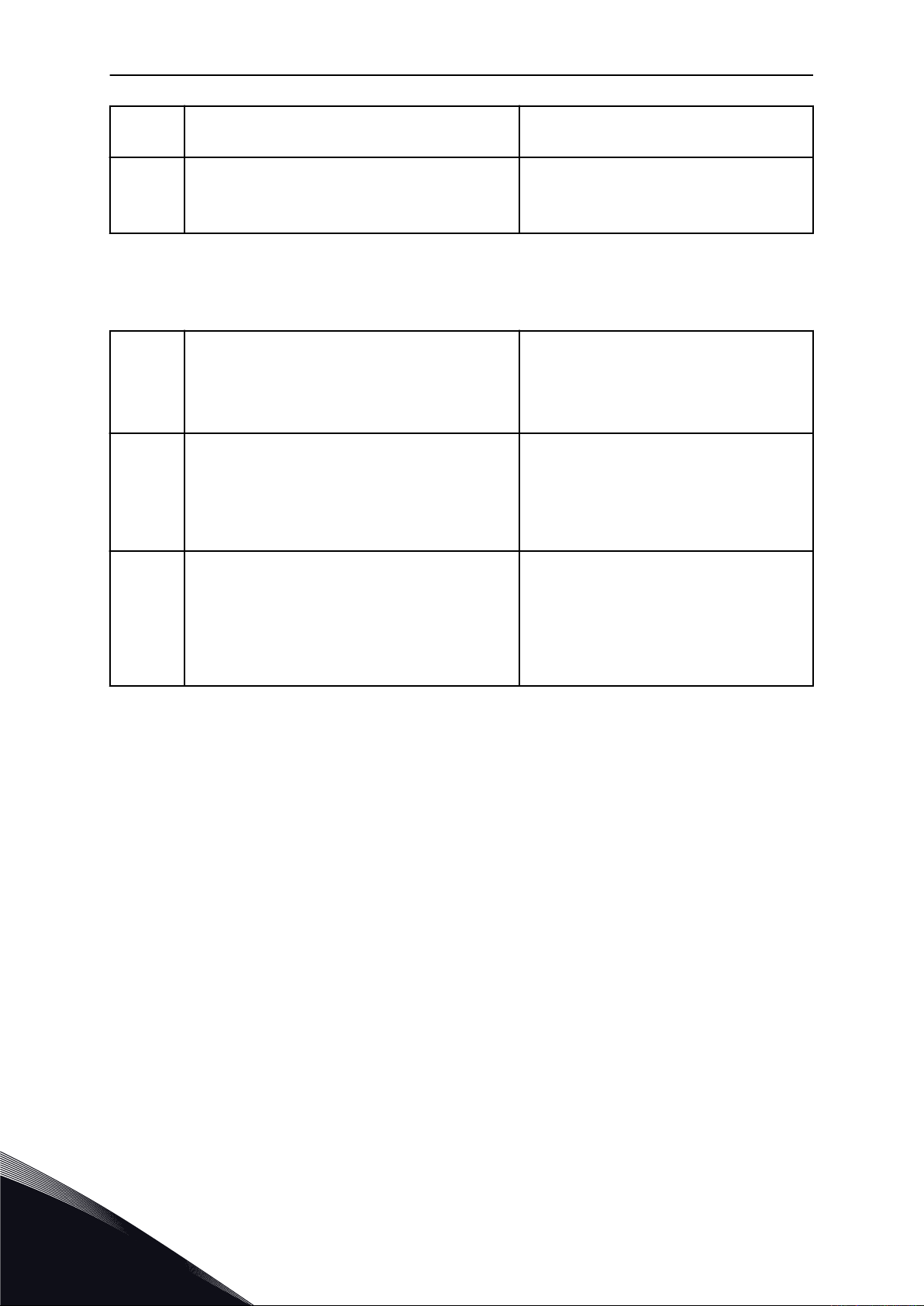
VACON · 94 ASISTENŢI
2
3
Setaţi o valoare pentru parametrul P3.17.3 Fire
Mode Frequency (Frecvenţă mod incendiu)
Activaţi semnalul atunci când contactul se deschide
sau se închide
Domeniu: variază
0 = Deschidere contact
1 = Închidere contact
Dacă setaţi valoarea Open contact (Contact deschis) la pasul 3, expertul trece direct la pasul
5. Dacă setaţi valoarea Closed contact (Contact închis) la pasul 3, pasul 5 nu mai este
necesar.
Setaţi valoarea Open (DESCHIDERE) pentru parametrul 3.17.4 Fire Mode Activation (Activare mod
4
5
incendiu) sau valoarea CLOSE (ÎNCHIDERE) pentru
parametrul P3.17.5 Fire Mode Activation (Activare
mod incendiu)
Setaţi o valoare pentru parametrul P3.17.6 Fire
Mode Reverse (Inversare mod incendiu)
Setaţi o valoare pentru parametrul P3.17.1 Fire
Mode Password (Parolă mod incendiu)
Selectaţi o intrare digitală pentru activarea
modului Fire (Incendiu). De asemenea, consultaţi Capitolul 10.6.1 Programarea intrărilor
digitale şi analogice.
Selectaţi o intrare digitală pentru activarea
direcţiei inverse în modul Fire (Incendiu).
DigIn Slot0.1 = FORWARD (În sens pozitiv)
DigIn Slot0.2 = REVERSE (În sens invers)
Setaţi o parolă pentru activarea modului Fire
(Incendiu).
6
1234 = Activare mod test
1002 = Enable Fire mode (Activare mod
incendiu)
Expertul de aplicaţie a modului Fire (Incendiu) este finalizat.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 95

INTERFEŢELE CU UTILIZATORUL VACON · 95
3 INTERFEŢELE CU UTILIZATORUL
3.1 NAVIGAREA PE TASTATURĂ
Datele variatorului de turaţie pentru motoare CA sunt ordonate în meniuri şi sub-meniuri.
Pentru a vă deplasa între meniuri, utilizaţi butoanele săgeată Up (Sus) şi Down (Jos). Pentru
a accesa un grup sau un element, apăsaţi butonul OK. Pentru a reveni la nivelul unde vă
aflaţi anterior, apăsaţi butonul Back/Reset (Înapoi/Resetare).
Pe ecran puteţi observa poziţia dvs. curentă în meniu, de exemplu M3.2.1. De asemenea,
puteţi observa numele grupului sau elementului din poziţia dvs. actuală.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 96

Meniu principal
Submeniuri Submeniuri Submeniuri
Meniu principal Meniu principal
M2
Supraveghere
M1 Configurare
rapidă
M11 Asistenţi
(Conţinut funcţie de
P1.2, Select. aplic.)
M2.1 Supraveghere
multiplă
M3.1 Setări motor
M3.2
Config. Porn./Opr.
M3.3 Referinţe
M3.4
Rampe şi frâne
M3.5
Configurare I/O
M3.6
Map.date bus câmp
M3.10
Resetare autom.
M3.11
Setări aplicaţie
M3.12
Funcţii cronom.
M3.19
Program de particularizare
variator de turaţie
M3.13 Controler PID
M3.14
C-troler PID ext.
M3.15
Pompe multiple
M3.16
Contoare întreţ.
M3.17 Mod incendiu
M3.21
Comandă pompă
M3.18
Pre-încălzire motor
M3.7 Frecv. interzisă
M3.8 Supravegheri
M3.9 Protecţii
M2.2 Curbă tendinţă
M2.3 De bază
M2.4 I/O
M2.5 Intrări temp.
M2.6 Suplim./
Avansate
M2.7
Funcţii cronom.
M2.8
Controler PID
M2.9
Controler PID ext.
M2.10
Pompe multiple
M2.11 Contor întreţin.
M2.12 Date bus câmp
M3
Parametri
M8 Niveluri
utilizator
M7 Favorite
M4
Diagnoză
M5 I/O şi
hardware
M6 Setări
utilizator
M4.4 Contoare totaliz.
M4.5 Contoare parţiale
M4.6 Informaţii
despre software
M5.1 I/O de bază
M5.2...M5.4
Slot C,D,E
M5.5 Ceas timp real
M5.6 Set. bloc alim.
M5.8 RS-485
M5.9 Ethernet
M6.1 Selectare limbă
M6.5 Copie sig. param.
M6.6
Comparare parametri
M6.7 Nume unit. acţ.
M8.1 Nivel utilizator
M8.2 Cod acces
VACON · 96 INTERFEŢELE CU UTILIZATORUL
Fig. 32: Structura de bază a meniului variatorului de turaţie pentru motoare CA
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 97

STOP
READY I/O
Main Menu
A B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
STOP
READY
I/O
Rem Control Place
I/O Control
KeypadStopButton
Yes
Start Function
Ramping
Start / Stop Setup
M3.2.1ID:172
INTERFEŢELE CU UTILIZATORUL VACON · 97
3.2 UTILIZAREA ECRANULUI GRAFIC
Fig. 33: Meniul principal al ecranului grafic
A. Primul câmp de stare: OPRIT/ÎN
FUNCŢIUNE
B. Direcţia de rotaţie
C. Al doilea câmp de stare: PREGĂTIT/
NEPREGĂTIT/EROARE
D. Câmpul de alarmă: ALARM/- (Alarmă/-)
E. Locaţia de control: PC/IO/PANOU DE
COMANDĂ/BUS DE CÂMP
F. Câmpul de poziţie: numărul de ID al
parametrului şi poziţia curentă în meniu
G. Un grup sau un element activat: apăsaţi
OK pentru a accesa
H. Numărul de elemente din grupul în
cauză
3.2.1 EDITAREA VALORILOR
Pe ecranul grafic există 2 proceduri diferite de editare a valorii unui element.
De regulă, puteţi seta doar 1 valoare pentru un parametru. Selectaţi dintr-o listă de valori
text sau dintr-un interval de valori numerice.
SCHIMBAREA VALORII TEXT A PARAMETRULUI
1 Găsiţi parametrul cu butoanele săgeată.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 98

STOP
READY
I/O
Rem Control Place
M3.2.1ID:
Edit
Help
Add to favourites
STOP
READY
I/O
Rem Control Place
M3.2.1ID:
FieldbusCTRL
I/O Control
STOP
READY
I/O
Frequency Ref
P3.3.1.1ID:101
MaxFreqReference
0.00 Hz
MinFreqReference
50.00 Hz
PosFreqRefLimit
320.00 Hz
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
0.00 Hz
Min: 0.00Hz
Max: 50.00Hz
VACON · 98 INTERFEŢELE CU UTILIZATORUL
2 Pentru a accesa modul Edit (Editare), apăsaţi
butonul OK de 2 ori sau apăsaţi butonul săgeată
Right (Dreapta).
3 Pentru a seta o nouă valoare, apăsaţi butoanele
săgeată Up (Sus) şi Down (Jos).
4 Pentru a accepta modificarea, apăsaţi butonul OK.
Pentru a ignora modificarea, utilizaţi butonul Back/
Reset (Înapoi/Resetare).
EDITAREA VALORILOR NUMERICE
1 Găsiţi parametrul cu butoanele săgeată.
2 Accesaţi modul Edit (Editare).
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 99

STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
00.00 Hz
Min: 0.00Hz
Max: 50.00Hz
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
11.00 Hz
Min: 0.00Hz
Max: 50.00Hz
STOP
READY
I/O
P3.12.1.3ID:1466
Interval 1
00:00:00
00:00:00
ON Time
OFF Time
Days
0
A
INTERFEŢELE CU UTILIZATORUL VACON · 99
3 Dacă valoarea este numerică, treceţi de la o cifră la
alta cu ajutorul butoanelor Left (Stânga) şi Right
(Dreapta). Modificaţi cifrele cu butoanele săgeată
Up (Sus) şi Down (Jos).
4 Pentru a accepta modificarea, apăsaţi butonul OK.
Pentru a ignora modificarea, reveniţi la nivelul
unde vă aflaţi anterior apăsând butonul Back/Reset
(Înapoi/Resetare).
SELECŢIA MAI MULTOR VALORI
Unii parametri vă permit selectarea mai multor valori. Bifaţi o casetă de selectare la fiecare
valoare necesară.
1 Găsiţi parametrul. Există un simbol pe ecran atunci
când este posibilă bifarea unei casete de selectare.
A. Simbolul de bifare a casetei
de selectare
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 100

STOP
READY
I/O
M 3.12.1.3.1ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
STOP
READY
I/O
M 3.12.1.3.1ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
VACON · 100 INTERFEŢELE CU UTILIZATORUL
2 Pentru a vă deplasa în lista de valori, utilizaţi
butoanele săgeată Up (Sus) şi Down (Jos).
3 Pentru a adăuga o valoare la selecţia dvs., bifaţi
caseta din dreptul acesteia cu butonul săgeată
Right (Dreapta).
3.2.2 RESETAREA UNEI ERORI
Pentru a reseta o eroare, puteţi utiliza butonul Reset (Resetare) sau parametrul Reset Faults
(Resetare erori). Consultaţi instrucţiunile din 11.1 Este afişată o eroare.
3.2.3 BUTONUL FUNCT (FUNCŢIE)
Puteţi utiliza butonul FUNCT (Funcţie) pentru 4 funcţii.
Pentru a avea acces la pagina de comandă.
•
Pentru a comuta rapid între locaţia de control LOCAL (Locală) şi cea Remote (La
•
distanţă).
Pentru a schimba direcţia de rotaţie.
•
Pentru a edita rapid valoarea unui parametru.
•
Selecţia locaţiei de control stabileşte de unde provin comenzile de pornire şi oprire ale
variatorului de turaţie. Toate locaţiile de control au un parametru pentru selectarea sursei
frecvenţei de referinţă. Locaţia de control locală este întotdeauna tastatura. Locaţia de
control Remote (La distanţă) este de tip I/O (Intrare/Ieşire) sau protocol Fieldbus. Puteţi
vedea locaţia de control curentă pe bara de stare a ecranului.
Este posibil să utilizaţi ca locaţii de control Remote (La distanţă) I/O A, I/O B şi protocolul
Fieldbus. I/O A şi Fieldbus au cea mai redusă prioritate. Puteţi efectua o selecţie a acestora
prin parametrul P3.2.1 (Remote Control Place – Locaţie de control la distanţă). I/O B poate
ocoli locaţiile de control Remote (La distanţă) I/O A şi Fieldbus cu o intrare digitală. Puteţi
efectua o selecţie a intrării digitale prin parametrul P3.5.1.7 (I/O B Control Force – Forţare
control I/O B).
Atunci când locaţia de control este Local (Locală), se utilizează întotdeauna tastatura.
Controlul local are o prioritate mai înaltă decât controlul la distanţă. De exemplu, când aveţi
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...