


技术样本
电液驱动器
PVED-CX 系列 4
powersolutions.danfoss.cn
技术样本
PVED-CX 系列 4 电液驱动器
修改历史记录
修订表
日期 更改 版本
2017 年 6 月 修正了阀芯位置数据
2014 年 9 月 修正了索引
2014 年 2 月 转换为丹佛斯布局 - DITA CMS
2009 年 10 月改为 2011 年 5 月 各种更新
0503
EB
EA
AA through DC
2 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
内容
参考资料
PVG 和 PVE 使用的缩略语............................................................................................................................................................7
PVG/PVE 产品参考文献.................................................................................................................................................................8
用于 PVED-CX 的标准.....................................................................................................................................................................8
概况信息
PVED-CX 简介.................................................................................................................................................................................... 9
PVED-CX 概述..................................................................................................................................................................................10
PVG 功能
PVG 功能........................................................................................................................................................................................... 12
PVED-CX 功能
PVED-CX 功能..................................................................................................................................................................................13
机械子系统...................................................................................................................................................................................... 13
壳体............................................................................................................................................................................................... 13
PVED-CX 线缆组件...................................................................................................................................................................13
安装形式......................................................................................................................................................................................14
线性可变差动传感器 (LVDT)...............................................................................................................................................14
阀芯中位弹簧............................................................................................................................................................................14
液压子系统...................................................................................................................................................................................... 15
电子和电气子系统........................................................................................................................................................................15
PVED-CX 通信..................................................................................................................................................................................16
计算子系统...................................................................................................................................................................................... 17
运行模式...........................................................................................................................................................................................18
完全运行模式............................................................................................................................................................................18
手动控制......................................................................................................................................................................................18
自动系统安全完整性自检 – ASSIST .............................................................................................................................. 18
PVED-CX 设置..................................................................................................................................................................................19
PVED-CX 日志记录........................................................................................................................................................................19
正常运行 – 自监控和近邻监控概念
设置点命令...................................................................................................................................................................................... 20
阀芯监督...........................................................................................................................................................................................20
电磁线圈控制................................................................................................................................................................................. 21
位置报告...........................................................................................................................................................................................21
近邻监督...........................................................................................................................................................................................21
微控制器监督................................................................................................................................................................................. 21
ASIC 监督.......................................................................................................................................................................................... 21
温度监督...........................................................................................................................................................................................21
PVED-CX 的节能.............................................................................................................................................................................21
PVED-CX 安全性说明
POST – 开机自检......................................................................................................................................................................... 22
ASSIST – 自动系统安全完整性自检.....................................................................................................................................22
PVED-CX 运行时故障监控..........................................................................................................................................................22
通信故障......................................................................................................................................................................................22
阀芯位置故障............................................................................................................................................................................22
系统数据故障............................................................................................................................................................................23
电气故障......................................................................................................................................................................................23
温度故障与修正....................................................................................................................................................................... 23
检测故障......................................................................................................................................................................................23
故障严重度...................................................................................................................................................................................... 23
PVED-CX 故障响应........................................................................................................................................................................24
故障报告...........................................................................................................................................................................................24
PVED-CX 故障恢复........................................................................................................................................................................25
技术数据
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 3

技术样本
PVED-CX 系列 4 电液驱动器
内容
PVED-CX 运行条件........................................................................................................................................................................26
性能.....................................................................................................................................................................................................26
PVED-CX 尺寸和布局................................................................................................................................................................... 26
PVED-CX 液压数据........................................................................................................................................................................30
PVED-CX 电气数据........................................................................................................................................................................31
通信.....................................................................................................................................................................................................32
阀芯控制...........................................................................................................................................................................................33
参数设置...........................................................................................................................................................................................34
安全相关功能................................................................................................................................................................................. 39
PVED-CX 阀门配置要点.............................................................................................................................................................. 41
使用层设置服务更改节点 ID....................................................................................................................................................42
步骤 1: 切换到配置模式..........................................................................................................................................................42
步骤 2: 配置节点 ID...................................................................................................................................................................43
步骤 3: 存储新分配的节点 ID............................................................................................................................................... 43
步骤 4: 切换到正常模式..........................................................................................................................................................44
LSS 查询服务...................................................................................................................................................................................44
SDO 访问 EDS..................................................................................................................................................................................46
PVED-CX LED ............................................................................................................................................................................. 32
CAN................................................................................................................................................................................................32
PVED-CX 阀芯位置...................................................................................................................................................................33
闭环控制......................................................................................................................................................................................33
阀芯监控、控制和故障反应...............................................................................................................................................33
节点 ID..........................................................................................................................................................................................34
EDS 参数 – 只读常量............................................................................................................................................................35
EDS 参数 – 可读写变量....................................................................................................................................................... 35
错误寄存器。只读变量.........................................................................................................................................................36
标识参数转换为可比较值....................................................................................................................................................36
产品代码和序列号的阅读指南.......................................................................................................................................... 36
字节读取指南............................................................................................................................................................................37
数字阅读指南 ...........................................................................................................................................................................37
错误日志。变量,只读,可变.......................................................................................................................................... 37
错误列表。只读变量..............................................................................................................................................................37
瞬时温度。只读变量..............................................................................................................................................................38
温度日志......................................................................................................................................................................................38
安全开关状态............................................................................................................................................................................38
紧急消息 (EMCY)...................................................................................................................................................................... 39
CAN 总线上的 EMCY 发布顺序...........................................................................................................................................39
重置紧急消息............................................................................................................................................................................39
EMCY 使用方行为....................................................................................................................................................................40
NMT 重置应用........................................................................................................................................................................... 40
NMT 重置通信........................................................................................................................................................................... 40
重新加载命令............................................................................................................................................................................41
切换到配置模式全局方法....................................................................................................................................................42
切换到配置模式选择性方法...............................................................................................................................................42
查询供应商 ID 命令.................................................................................................................................................................44
查询产品编码命令.................................................................................................................................................................. 44
查询修订号命令....................................................................................................................................................................... 45
查询序列号命令....................................................................................................................................................................... 45
查询设备节点 ID 命令............................................................................................................................................................46
设置 EDS 参数............................................................................................................................................................................46
设置 NNI 示例............................................................................................................................................................................46
查询 EDS 参数............................................................................................................................................................................47
查询 NNI 示例............................................................................................................................................................................47
查询错误日志示例.................................................................................................................................................................. 48
4 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
内容
阀门运行...........................................................................................................................................................................................48
ASSIST.................................................................................................................................................................................................53
状态机
关于 PVED-CX DSM 实施的要点..............................................................................................................................................58
启动状态:...................................................................................................................................................................................... 58
禁用状态:...................................................................................................................................................................................... 58
暂停状态:...................................................................................................................................................................................... 58
DEVICE_MODE_ACTIVE 状态:................................................................................................................................................ 59
FAULT_REACTION 状态:...........................................................................................................................................................61
故障暂停状态:.............................................................................................................................................................................61
故障状态:...................................................................................................................................................................................... 61
状态变换...........................................................................................................................................................................................61
限制和已知软件问题
警告
PVED-CX 警告..................................................................................................................................................................................64
错误代码
索引 1 • 常用名称: 保留...........................................................................................................................................................65
索引 2 • 常用名称: 电压过高.................................................................................................................................................65
索引 3 • 电压过低..........................................................................................................................................................................65
索引 4 • 非法状态命令................................................................................................................................................................ 66
索引 5 • 被零除,非法软件运算.............................................................................................................................................66
索引 6 • 内部表值损坏,非法软件运算...............................................................................................................................67
索引 7 • 错误数据解释,值截短.............................................................................................................................................67
索引 8 • 内插法错误,非法软件运算................................................................................................................................... 67
索引 9 • 与 uC 之间无握手.........................................................................................................................................................68
索引 10 • 监控器未启动..............................................................................................................................................................68
索引 11 • RTOS 错误......................................................................................................................................................................69
索引 12 • LVDT 验证错误............................................................................................................................................................69
索引 13 • 近邻 LVDT 故障...........................................................................................................................................................69
索引 14 • 温度传感器故障......................................................................................................................................................... 70
索引 15 • RAM 故障.......................................................................................................................................................................70
索引 16 • 平均温度过高..............................................................................................................................................................71
索引 17 • 代码内存检查错误.................................................................................................................................................... 71
索引 18 • 保留................................................................................................................................................................................. 71
索引 19 • EEPROM 写入故障......................................................................................................................................................72
正常运行......................................................................................................................................................................................48
NMT 启动对象........................................................................................................................................................................... 48
心跳消息......................................................................................................................................................................................48
进入设备激活模式.................................................................................................................................................................. 49
PVED-CX 节点 0x21..................................................................................................................................................................49
PVED-CX 节点 NID....................................................................................................................................................................50
设置点...........................................................................................................................................................................................51
同步消息:.................................................................................................................................................................................52
同步消息上 PVED-CX 阀芯位置 消息的传输................................................................................................................ 52
手动运行模式和完全运行模式配置 ................................................................................................................................53
ASSIST 预触发命令.................................................................................................................................................................. 53
ASSIST 运行命令.......................................................................................................................................................................54
ASSIST 的 LED ............................................................................................................................................................................55
取消 ASSIST 命令......................................................................................................................................................................56
ASSIST 中止消息.......................................................................................................................................................................57
PVED-CX 手动运行模式.........................................................................................................................................................60
PVED-CX 完全运行模式 ........................................................................................................................................................60
ASSIST 模式 ................................................................................................................................................................................60
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 5

技术样本
PVED-CX 系列 4 电液驱动器
内容
索引 20 • EEPROM 内容错误......................................................................................................................................................72
索引 21 • EEPROM 镜像故障......................................................................................................................................................73
索引 22 • 死区参数超出范围.................................................................................................................................................... 73
索引 23 • 保留................................................................................................................................................................................. 73
索引 24 • CAN 错误帧警告.........................................................................................................................................................74
索引 25 • 丢失来自主设备的信号...........................................................................................................................................74
索引 26 • 从总线关闭恢复......................................................................................................................................................... 75
索引 27 • 命令信号错误..............................................................................................................................................................75
索引 28 • 保留................................................................................................................................................................................. 75
索引 29 • 保留................................................................................................................................................................................. 76
索引 30 • 阀芯未在设置点......................................................................................................................................................... 76
索引 31 • 阀芯超出中位..............................................................................................................................................................77
索引 32 • 启动时阀芯超出中位................................................................................................................................................77
索引 33 • 电子元件温度过高.................................................................................................................................................... 77
索引 34 • 来自近邻的 CAN 阀芯位置丢失...........................................................................................................................78
索引 35 • 近邻 CAN 阀芯位置故障......................................................................................................................................... 78
索引 36 • 无设置点........................................................................................................................................................................79
索引 37 • CAN 堆栈错误..............................................................................................................................................................79
索引 38 • DSM 初始化失败........................................................................................................................................................ 80
索引 39 • A/D 变压故障...............................................................................................................................................................80
索引 40 • ASSIST 状态故障.........................................................................................................................................................80
索引 41 • ASSIST 计时故障.........................................................................................................................................................81
索引 42 • 近邻 阀芯在启动时超出中位................................................................................................................................81
索引 43 • ASSIST 近邻报告故障............................................................................................................................................... 82
索引 44 • ASSIST 阀芯未返回中位.......................................................................................................................................... 82
索引 45 • ASSIST 步骤故障.........................................................................................................................................................82
索引 46 • ASSIST 近邻阀芯无法转出......................................................................................................................................83
索引 47 • ASSIST 近邻阀芯未返回中位.................................................................................................................................83
索引 48 • ASSIST: A 油口流量过高.......................................................................................................................................84
索引 49 • ASSIST: B 油口流量过高.......................................................................................................................................84
索引 50 • ASSIST: A 油口流量过低.......................................................................................................................................84
索引 51 • ASSIST: B 油口流量过低.......................................................................................................................................85
索引 52 • 近邻 阀芯超出中位................................................................................................................................................... 85
索引 53 • 近邻 阀芯未在设置点.............................................................................................................................................. 86
索引 54 • 近邻 阀芯位置报告故障..........................................................................................................................................86
索引 55 • 参考电压故障..............................................................................................................................................................87
索引 56 • 节点 ID 故障................................................................................................................................................................. 87
索引 57 • EEPROM 地址错误......................................................................................................................................................88
索引 58 • 错误代码缓冲区......................................................................................................................................................... 88
订购信息
设置协议...........................................................................................................................................................................................89
参数协议模板................................................................................................................................................................................. 89
PVE-CX 代码.....................................................................................................................................................................................91
备件 PVED-CX 的出厂设置................................................................................................................................................... 89
用于 PVG 的 PVED-CX 设置协议.........................................................................................................................................90
6 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503
技术样本
PVED-CX 系列 4 电液驱动器
参考资料
PVG 和 PVE 使用的缩略语
缩略语 描述
ASIC
ATEX
AVC
AVCTO
AVEF
CAN
CLC
CRC
-DI
DM1
DM2
DM3
DSM
ECU
EH
-F
FMEA
ISOBUS
J1939
LED
LS
LVDT 阀芯位置
传感器
NC
NC-H
NC-S
NO
PLC
PLUS+1
POST
Pp
PVB
PVBS
PVBZ
PVE
PVEA
PVED
PVEH
PVEM
PVEO
PVEP
PVES
PVEU
专用集成电路 - PVE 中阀芯位移传感器跟随控制器发送的位置设置
爆炸性环境使用认证
多路阀辅助控制命令 - 遵循用于多路阀控制的 ISOBUS/J1939 通讯协议
多路阀辅助命令超时 - 故障监控设置
多路阀辅助估算流量 - 用于多路阀反馈信号遵循 ISOBUS/J1939 协议
控制器局域网络 - PVED 所采用的通信方法
闭环控制
循环校验 - 确保数据有效性
带方向指示的 PVE
诊断消息 1 - 遵循 J1939 协议显示当前故障
诊断消息 2 - 遵循 J1939 协议显示历史故障
诊断消息 3 - 遵循 J1939 协议可以清楚故障历史
设备状态机。系统过程的明确说明
电子控制单元
电液
浮动阀芯的 PVE。两种型式: 4 针脚 :75%处进入浮动位。6 针脚:拥有单独浮动针脚。
故障模式效果分析
CAN 的通信标准
CAN 的通信标准
发光二极管
负载敏感
线性可变差动传感器 - 位置传感器
PVE 中的常闭电磁阀
PVEH 中的常闭标准电磁阀
PVES 中的常闭电磁阀
PVE 中的常开电磁阀
可编程逻辑电路
丹佛斯 控制器和编程工具专利
开机自检。PVED 的启动评估。
先导压力。PVE 驱动的油道
比例阀基本模块 - 工作联
比例阀基本模块阀芯
比例阀基本模块零泄漏
比例阀电驱动器
带 2-6 % 迟滞的 PVE 型号
通过 CAN 通信进行数字控制的 PVE 型号
带 4-9 % 迟滞的 PVE 型号
带 25-35 % 迟滞的 PVE 型号
带开关驱动的 PVE 型号
PWM 控制的 PVE 型号
带 0-2 % 迟滞的 PVE 型号
带美国 0-10V 的 PVE 型号
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 7
技术样本
PVED-CX 系列 4 电液驱动器
参考资料
缩略语 描述
PVG
PVHC
PVM
PVP
PVS
PVSK
PWM
S4 DJ
SAE
-R
-NP
-SP
uC
uCSM
U
U
多分区式比例阀组
带大电流控制的阀门驱动器的 PV 型号
带手柄比例阀手动控制
比例阀泵侧模块入口
比例阀端盖板
比例阀端盖板吊机。带阀芯控制的入口模块
脉宽调制
遵循 J1939 协议用于 4 系列数字电控模块 PVED-CC 的调试软件
汽车工程师协会
带斜坡功能的 PVE
中位电磁线圈禁用的 PVE
带阀芯位置反馈的 PVE
微控制器
微控制器状态机
DC
S
电源直接电流; 也称为 V
用于 PVE 控制的转向电压; 也称为 V
,表示电池电压
bat
S
PVG/PVE 产品参考文献
用于 PVED-CX 的标准
参考文献
文献标题 类型 订货号
PVG 32 比例阀组 技术样本
PVG 100 比例阀组 技术样本
PVG 120 比例阀组 技术样本
PVG 32 公制油口 技术样本
PVED-CC 电液驱动器 技术样本
PVED-CX 电液驱动器 技术样本
PVBZ 基本模块 技术样本
集成了分流和 P 口切断功能的 PVSK 模块 技术样本
PVPV / PVPM 泵侧模块 技术样本
PVGI 组合模块 技术样本
PVSP/M 优先模块 技术样本
国际标准组织:
•
ISO 11898-2 公路车辆,CAN,第 2 部分,高速介质访问单元(物理层)
‒
ISO 13766:2006(E) 地面移动机械,电磁兼容性
‒
ISO 13849 机械安全
‒
汽车行业的 CAN:
•
CiA 3.01 v4.02 CANopen 协议。
‒
CiA 4.08 v1.51 用于比例阀的设备特定协议。
‒
IEC 61508
•
520L0344
520L0720
520L0356
11051935
520L0665
11070179
520L0721
520L0556
520L0222
520L0405
520L0291
8 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503
W
技术样本
PVED-CX 系列 4 电液驱动器
概况信息
PVED-CX 简介
丹佛斯 PVED-CX 是用于 PVG 32 的 4 系列电比例 驱动模块。
CX 是 CAN 总线通讯和扩展安全性的缩写。
PVED-CX 适用于需要更高安全标准的目标应用。尤其适用于起重机、运送人员的电梯和伸缩臂叉
车。
PVG 结合 PVED-CX 是满足安全完整性等级 2 (SIL2) 要求的设计 因此根据欧盟机械要求符合
2006/42/EC 在执行风险和危险分析时,丹佛斯 客户可以不采用外部安全系统,事符合 IEC61508 认证
系统的简易方法。
产品特定的接线线束和针对起重机使用特制 丹佛斯 端盖板 (PVSK) ,都是 PVED-CX 概念的一部分。
PVED-CX 系统设备的 IEC61508 认证由德国慕尼黑的 TÜV SÜD 完成。
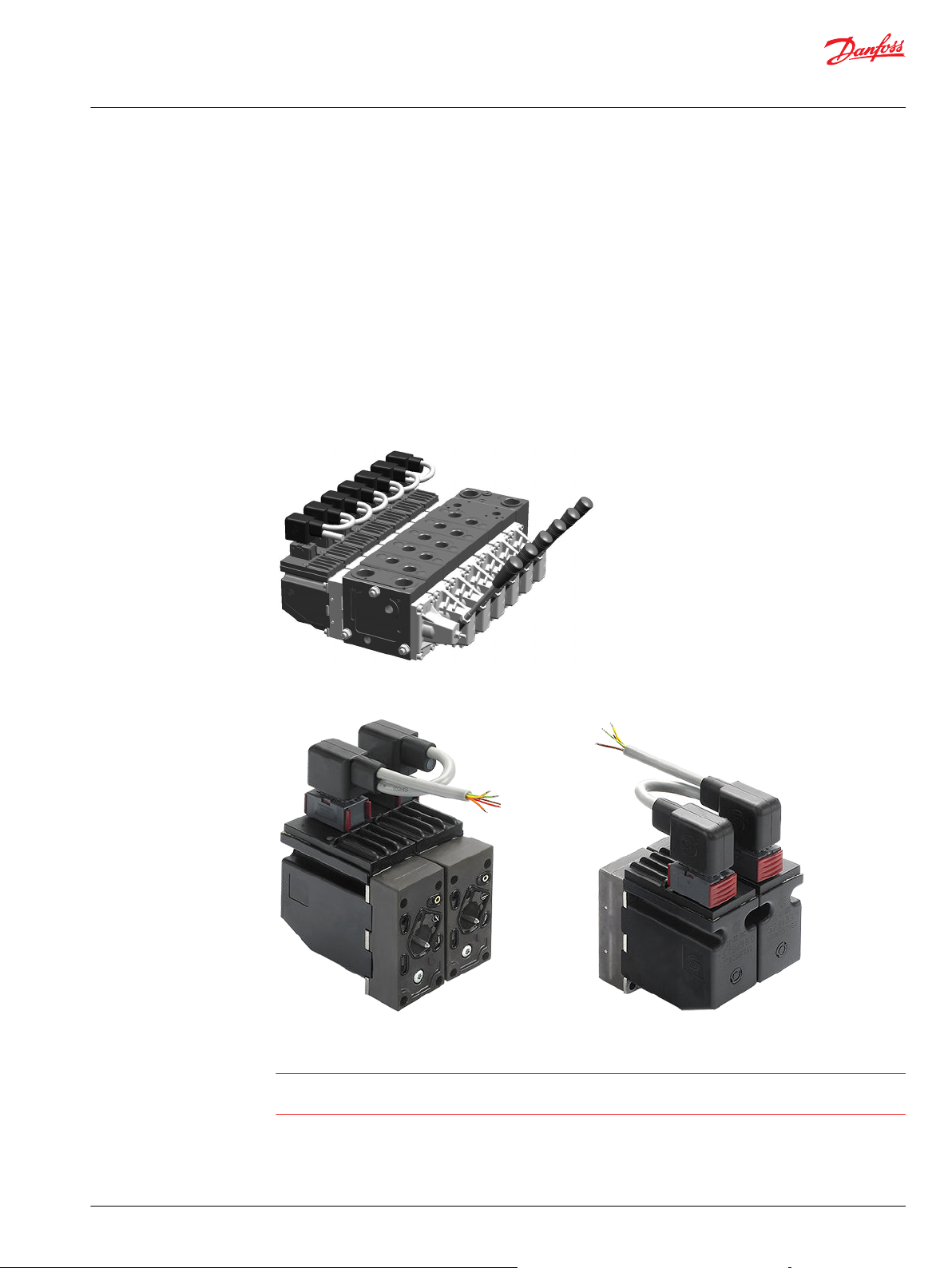
带
PVED-CX 的 PVG
PVED-CX
在任何应用中运行 PVED-CX 之前,请通读所有警告。警告列表不得视为潜在危险的完整列表。根据
应用和使用的不同,可能发生其他潜在危险。
警告
主视图
PVED-CX
后视图
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 9
W
技术样本
PVED-CX 系列 4 电液驱动器
概况信息
所有品牌和类型的方向控制阀(包括比例阀)都有可能发生故障,造成严重伤害。因此,全面分析
该应用非常重要。由于比例阀用于许多不同应用并且在不同操作条件下使用,因此机器生产商/系统
集成商应负责最终选择产品,确保达到应用的各项性能、安全与警告要求。
PVED-CX 概述
PVG 是一种片式滑阀,最多可串接 12 个控制模块。通过 PVED-CX,PVG 可以同时驱动一个或多个工
作模块。一个控制单元指的是由一个线缆组件连接的两到八个 PVED-CX 的组合,它们可以互相监
控,且当发现故障时任何 PVED 均可使整个阀组都进入安全状态。
工作口(A 或 B)的输出流量可通过以下组合进行控制:
•
•
•
警告
使用先导油压力控制阀芯位置的 PVED-CX。
阀芯机械手柄 (PVM)。
进入 PVG 的油液流量可使用电控主油阀门 (PVSK) 进行控制,与尾盖相同。PVED-CX 在 丹佛斯
SIL2 概念中可以作为 PVSK 控制器。PVSK 还可通过切换阀芯位置关闭 HPCO 油路,同时为 PVG 提
供油源
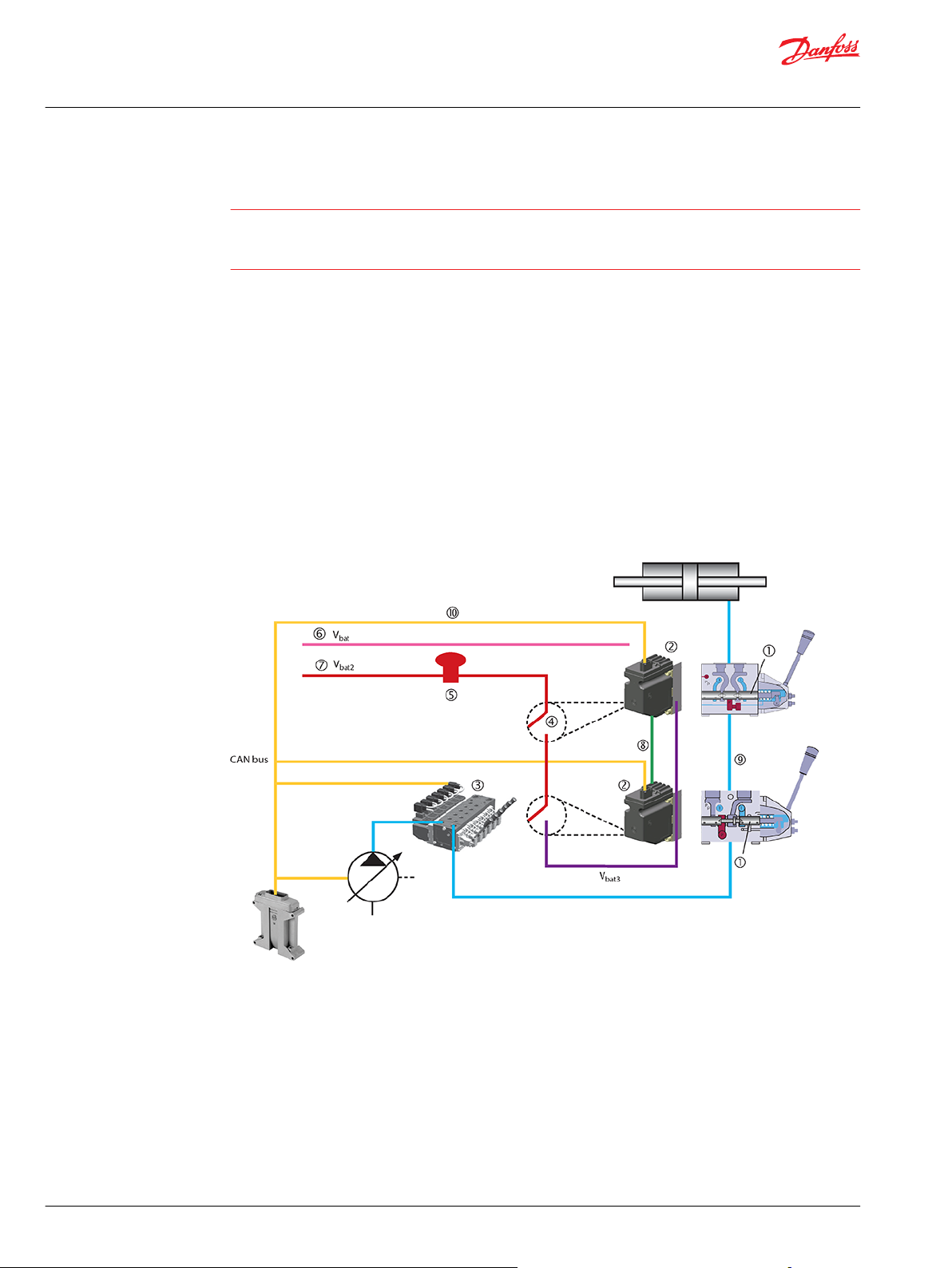
PVED-CX 功能 –
1 – 中位弹簧
2 – 电磁线圈
3 – PVED-CX 控制 的 PVG
4 – 安全开关
5 – 急停功能
框图
6 – 电子元件
7 – 电磁线圈电源
8 – 模拟近邻信息
9 – 近邻监控可以削减油液流量
10 – 设置点和反馈
10 | © Danfoss | 2017 年 6 月
PVED-CX 使用 CANopen 协议,因此沿用标准协议 CiA301v402,对于比例阀沿用设备特定的协议
CiA408v151,只需增加少量零部件。
CAN 通信的物理层适用于 ISO 11898-2 高速 CAN 通讯。
阀芯通过阀芯位置控制,每个方向拥有 127 个位移量且带有死区补偿。可以在受控模式下执行手动
操作。
11070179 | BC00000068zh-CN0503
技术样本
PVED-CX 系列 4 电液驱动器
概况信息
电子元件和阀芯控制单独供电,如果发生故障,监控系统可以关闭对应的工作模块的电控模式。
内部监控会持续评估阀芯位置、通信、电子元件、存储器、计算和温度。
为了避免不必要的功耗,PVED-CX 具有节能功能,当阀芯处于中位时功耗会下降大约 90%。
PVED-CX
总线控制
PVG 32
概览,
PVE
选择安装
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 11
V310072.A
PVE
Electronics
NC Solenoid valve
Pilot oil supply
B port
Oil
A port
PVB
PVM
Neutral spring
PVBS
NO solenoid valve
LVDT
<- Retract towards PVE
Extend away from PVE ->
P -> A
技术样本
PVED-CX 系列 4 电液驱动器
PVG 功能
PVG 功能
本章概述 PVG 及其功能。
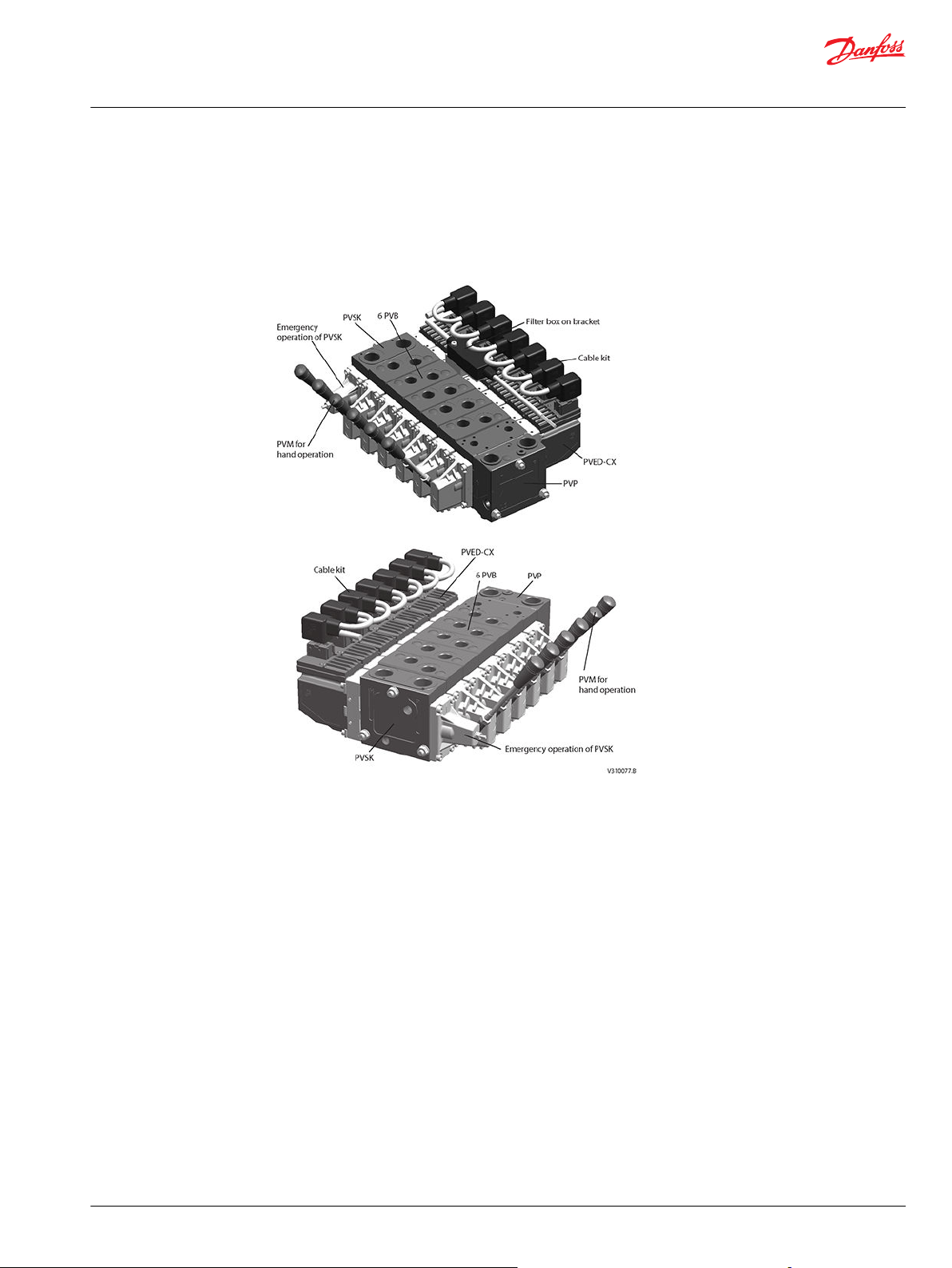
阀组标准安装—从
PVP
方向看过去
PVG 阀通过对应的工作模块将液压油分配到应用中的各执行机构 这是通过控制阀芯 (PVBS) 开度来实
现的。
根据所选的部件,工作油通过 PVP(比例阀泵侧模块)或 PVSK(用于吊机的比例阀端盖板)进入
PVG 阀组,通过 P 油口进入 PVB(比例阀基本模块),通过 T 油口回油。
上图是从 PVP 看向标准安装的 PVM 、 PVE 和 PVSK 的阀片。PVM 和 PVE 一般可以互换,称为可选安
装。
通过中位弹簧将阀芯保持在中位时,工作片的 P 通道与工作油口被阻断。
如图 4 所示,阀芯向 PVE 方向移动是打开 P 和 A 之间的油路,也会打开 B 和 T 之间的油路。可以通
过推动 PVM 或向 PVED 发送回缩命令完成。PVED 控制先导油压力 (Pp) 进去 PVBS 的右端,驱动阀
芯,同时释放 B 侧压力,从而移动阀芯。有关 PVG 的详细信息,请参考相关产品样本。
任何带有 PVM 的 PVG 均可由 PVM 单独操作,不需要电源供电 任何带有 PVED-CX 阀芯位移监控的
PVG 阀组都需要对电控模块供电和实现通讯
12 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503
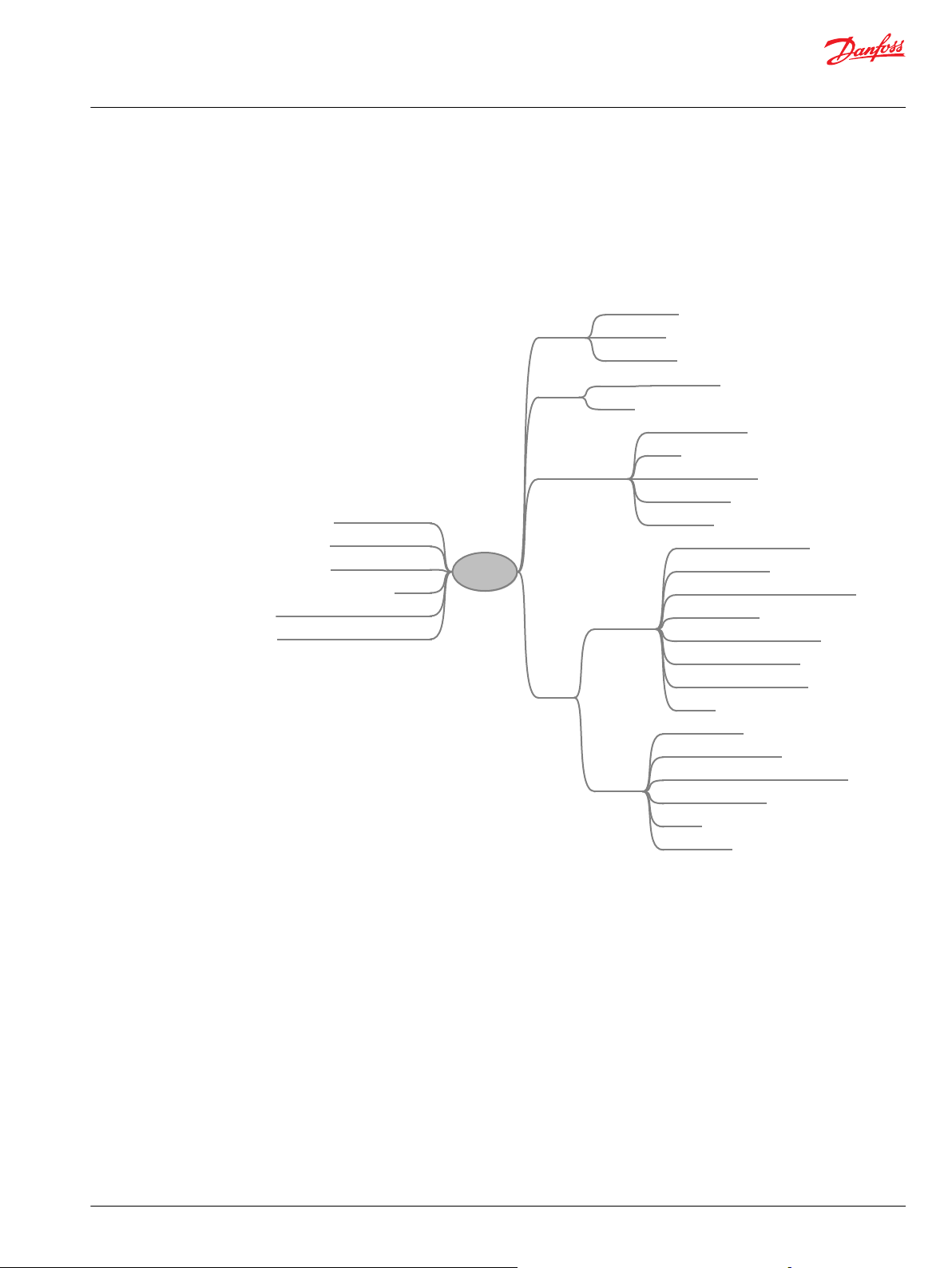
V310078.A
Oil pressure
Solenoids
Poppet valve
Function
Control
Communication
ASIC
LVDT
Closed loop
Set point via CAN
PWM
Analogue reporting
CAN reporting
LED status
CAN signal acceptance
Message sanity
Hand shake - component sanity
Memory check
Calculation vs execution
Redundant calculation
Component environment
Logging
Ignore input
Deactivate solenoids
Deactivate all modules in section
CANbus reporting
Logging
LED setting
Reaction
Safety
System controller
Neighbor module
PVED-CX section
Spool
Application hydraulic system
Application electrical system
Monitoring
PVED-CX
技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 功能
PVED-CX 功能
本节重点讲述 PVED-CX 的工作和交互方式。要了解模块设置和系统运行则必须了解此内容。
PVED-CX 是一个机电一体化设备,即一个与外部的机械、液压、电子元件、电气和计算机系统进行
交互的机械、液压、电子元件、电气和计算机系统。
PVED-CX
机电一体化设备
机械子系统
©
Danfoss | 2017 年 6 月
壳体
本产品的壳体将保护内部零件免受环境影响,其设计提供了与电缆、先导压力和阀芯的最佳接口。
PVED-CX 线缆组件
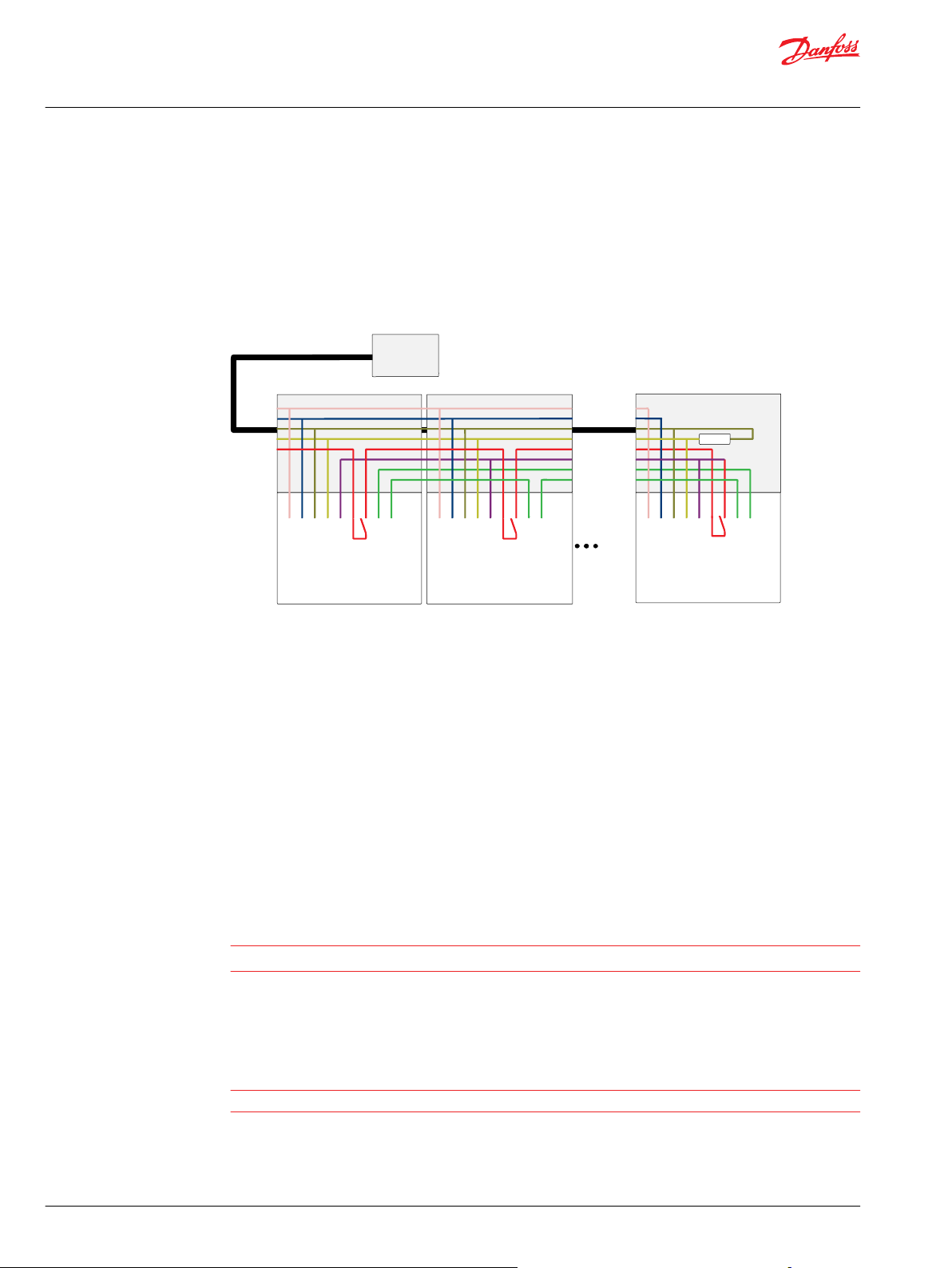
针对 PVED-CX 设计了一个特殊的线缆组件,使其能够在具有近邻监控的二到八个模块的控制区内运
行。
该线缆具有五个外接线:
11070179 | BC00000068zh-CN0503 | 13
System
Controller
Vbat
Vneg
CAN_H
CAN_L
Vbat2
CAN_H
Cable harness
Cable harness
PVED-CX #1 PVED-CX #2 PVED-CX #n
Cable harness
LVDT out
LVDT in
Vbat2 out
Vbat2 in
Vbat3
CAN_L
CAN_H
Vneg
Vbat
LVDT out
LVDT in
Vbat2 out
Vbat2 in
Vbat3
CAN_L
CAN_H
Vneg
Vbat
LVDT out
LVDT in
Vbat2 out
Vbat2 in
Vbat3
CAN_L
CAN_H
Vneg
Vbat
120 ohm
V310008.B
W
W
技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 功能
•
•
•
•
•
线缆组件原理
CAN 高信号线
CAN 低信号线
用于电子元件电源的 V
用于电磁线圈电源的 V
接地
bat
bat2
在模块之间增加了三个线:
1.
V
电源。此线在模块之间按照 V
bat2
bat2
关。
2.
V
电源是来自最后一个模块的 V
bat3
3.
LVDT out – LVDT in 信号线。此线将一个模块中的模拟阀芯位置信号关联到近邻微控制器。
bat2
最后一个接头中的端子是可选的。
安装形式
丹佛斯 PVG 概念基于部件可互换性。这对于 PVED-CX 也有效,可进行现场改装。
PVED 可安装在 PVB 的任何一侧。
•
通讯总线组件可从 PVP 旁边的第一个或最后一个接头进行安装。
•
通讯总线交货时可带也可不带 CAN 总线端子。
•
警告
不使用推荐扭矩可能损害性能和模块。
线性可变差动传感器 (LVDT)
线性可变差动传感器 (LVDT) 或位置传感器是机械系统(阀芯)和电子系统之间的接口。
警告
PVED 的 LVDT 绝不能进行机械调节、弯曲、损伤或部分堵塞,因为这样会导致阀芯位置信息出错。
out – V
in 的方式进行联接,并串接模块中的安全开
bat2
out 的变体,用于为电磁阀供电。
14 | © Danfoss | 2017 年 6 月
阀芯中位弹簧
PVBS 中位弹簧是一个重要的安全部件,在电磁阀禁用时用于将 PVBS 保持或移动到切断位置。只要
差压低于 6 bar,该弹簧就会将阀芯移动到 A 油口和 B 油口关闭位置。
11070179 | BC00000068zh-CN0503
Pp
NC3
NC1
Spool
NO4
NO2
Tank
LVDT
Set point
V310073.A
1.0 [0.039]
Electronics
W
技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 功能
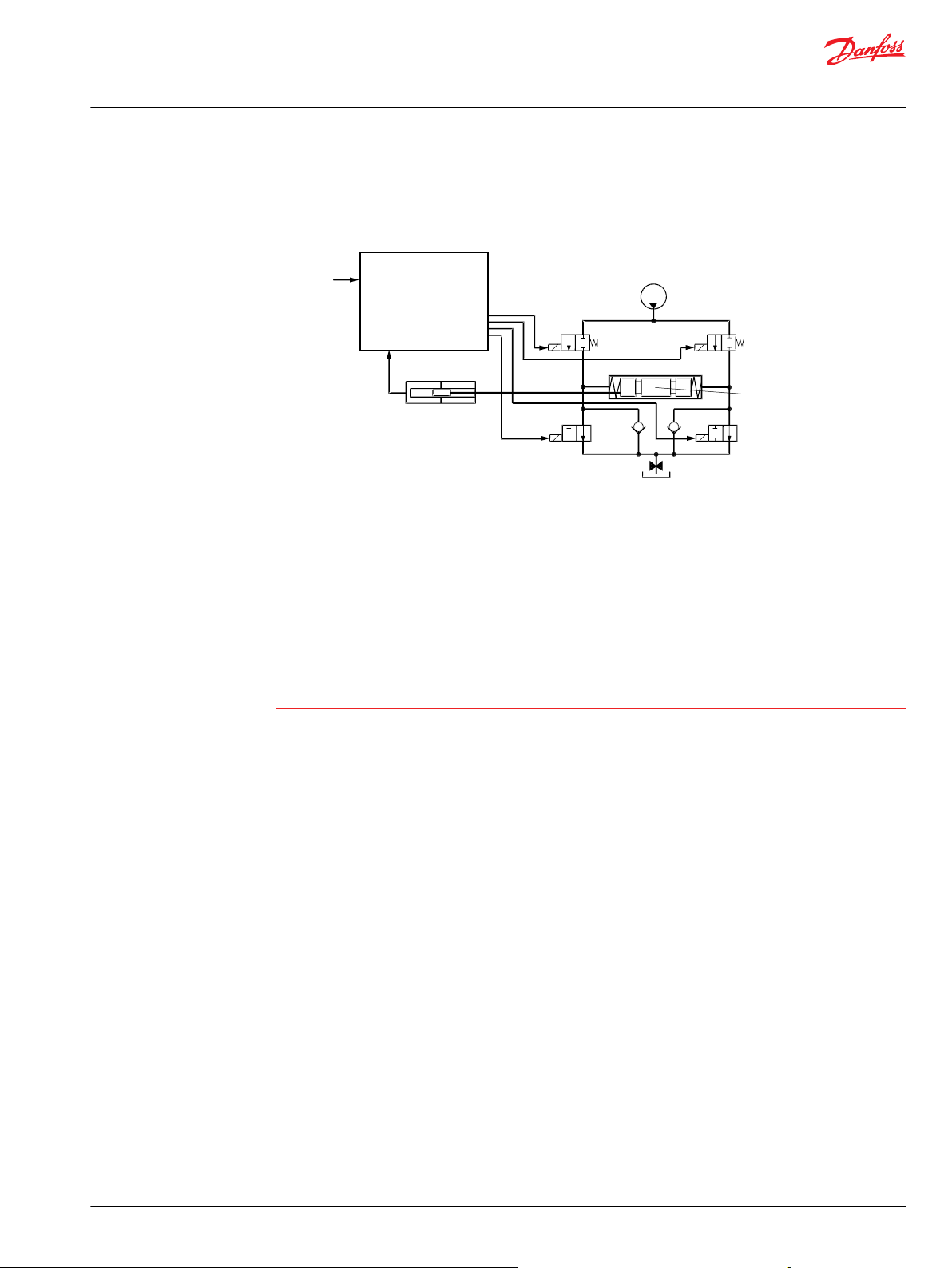
液压子系统
液压子系统用于移动阀芯,因此会打开用于执行机构的油路。
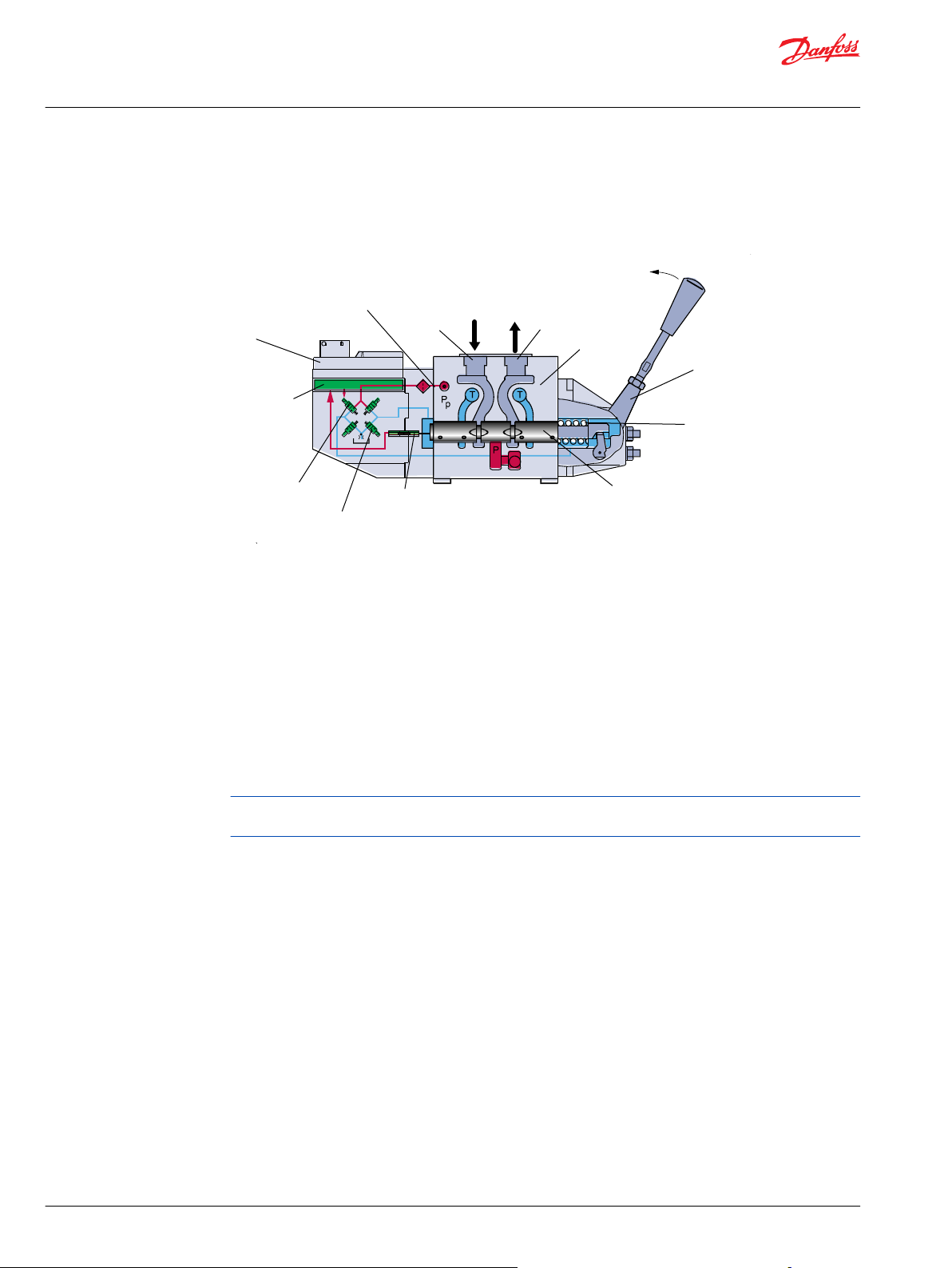
先导油简图
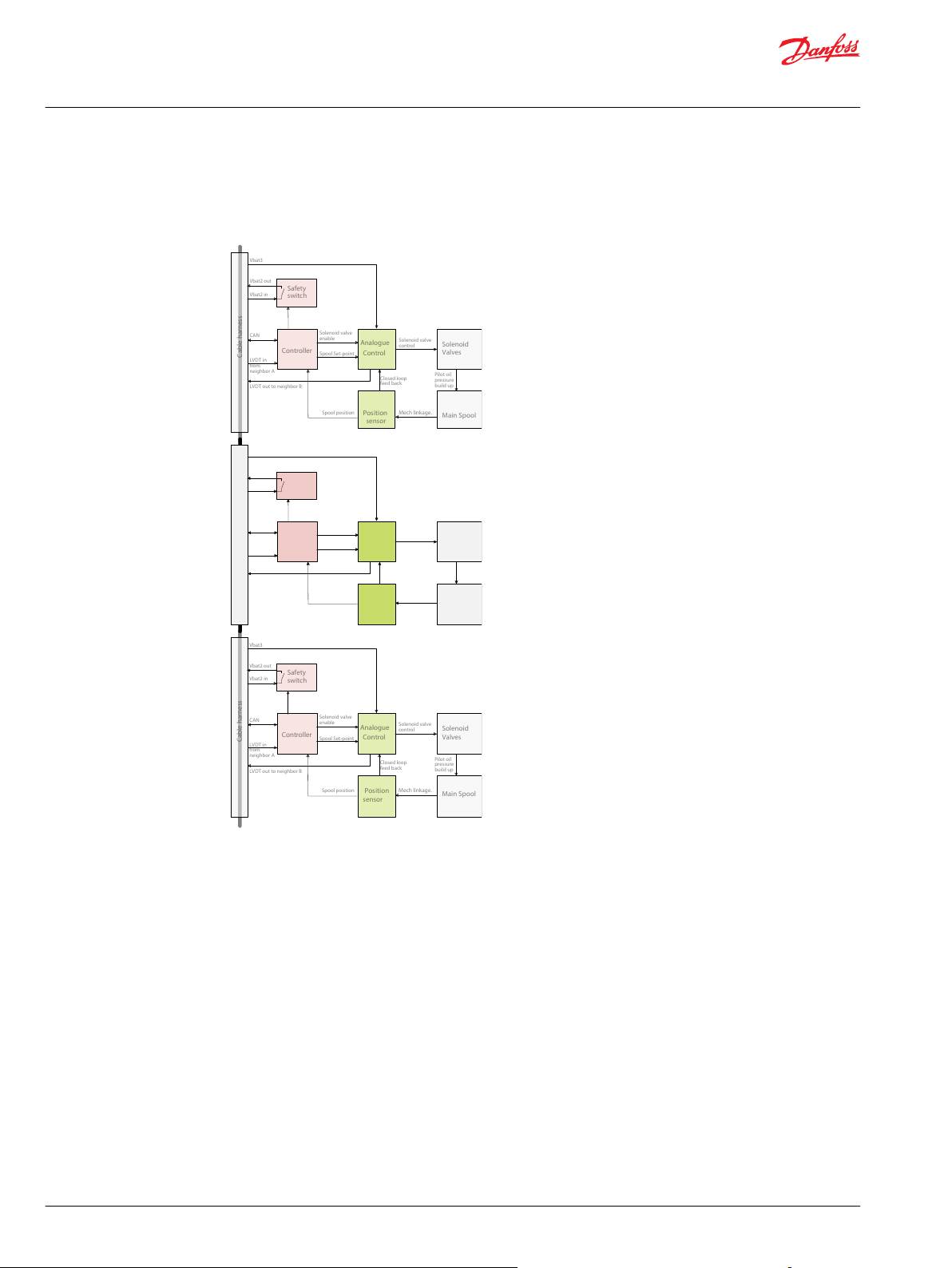
电子和电气子系统
液压子系统的核心是电磁阀桥。该子系统包括四个高速开关阀,上面两个为常闭状态 (NC-S) 但带有
可以实现小部分泄漏的阻尼,下面两个为常开状态 (NO)。
阀芯偏离中位时, Pp 先导压力作用于 PVBS 中位弹簧运行,当复位时则与该弹簧一起运行。由于 NO
(常开)电磁阀比 NC-S (常闭)的开口要大,所以阀芯回中要比阀芯开启的速度更快。
警告
Pp 的堵塞可能会影响对阀芯的有效控制。先导压力不足会对阀芯控制造成限制。过高的 Pp 先导油
压力可能会损坏系统。
PVED-CX 基于已知的 PVED-CC 系列 4 技术,以及控制电磁阀主要功能的 ASIC 为核心,此外还辅助了
一个微控制器系统作为模块安全管理器以及模拟 ASIC 和 CAN 总线通信的接口。该微控制器还监控其
相邻 PVED-CX,能够禁用整个阀组(2-8 片)的阀芯驱动。
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 15
Safety
switch
Controller
Analogue
Control
Solenoid
Valves
Main Spool
Position
sensor
Cable harness
CAN
Spool Set-point
Closed loop
feed back
LVDT out to neighbor B
LVDT in
from
neighbor A
Spool position
Solenoid valve
control
Vbat3
Vbat2 in
Vbat2 out
Pilot oil
pressure
build up
Mech linkage.
Solenoid valve
enable
Safety
switch
Controller
Analogue
Control
Solenoid
Valves
Main Spool
Position
sensor
Cable harness
CAN
Spool Set-point
Closed loop
feed back
LVDT out to neighbor B
LVDT in
from
neighbor A
Spool position
Solenoid valve
control
Vbat3
Vbat2 in
Vbat2 out
Pilot oil
pressure
build up
Mech linkage.
Solenoid valve
enable
Neighbor A
Neighbor B
Safety
switch
Controller
Analogue
Control
Solenoid
Valves
Main Spool
Position
sensor
Cable harness
CAN
Spool Set-point
Closed loop
feed back
LVDT out to neighbor B
LVDT in
from
neighbor A
Spool position
Solenoid valve
control
Vbat3
Vbat2 in
Vbat2 out
Pilot oil
pressure
build up
Mech linkage.
Solenoid valve
enable
V310 207.A
技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 功能
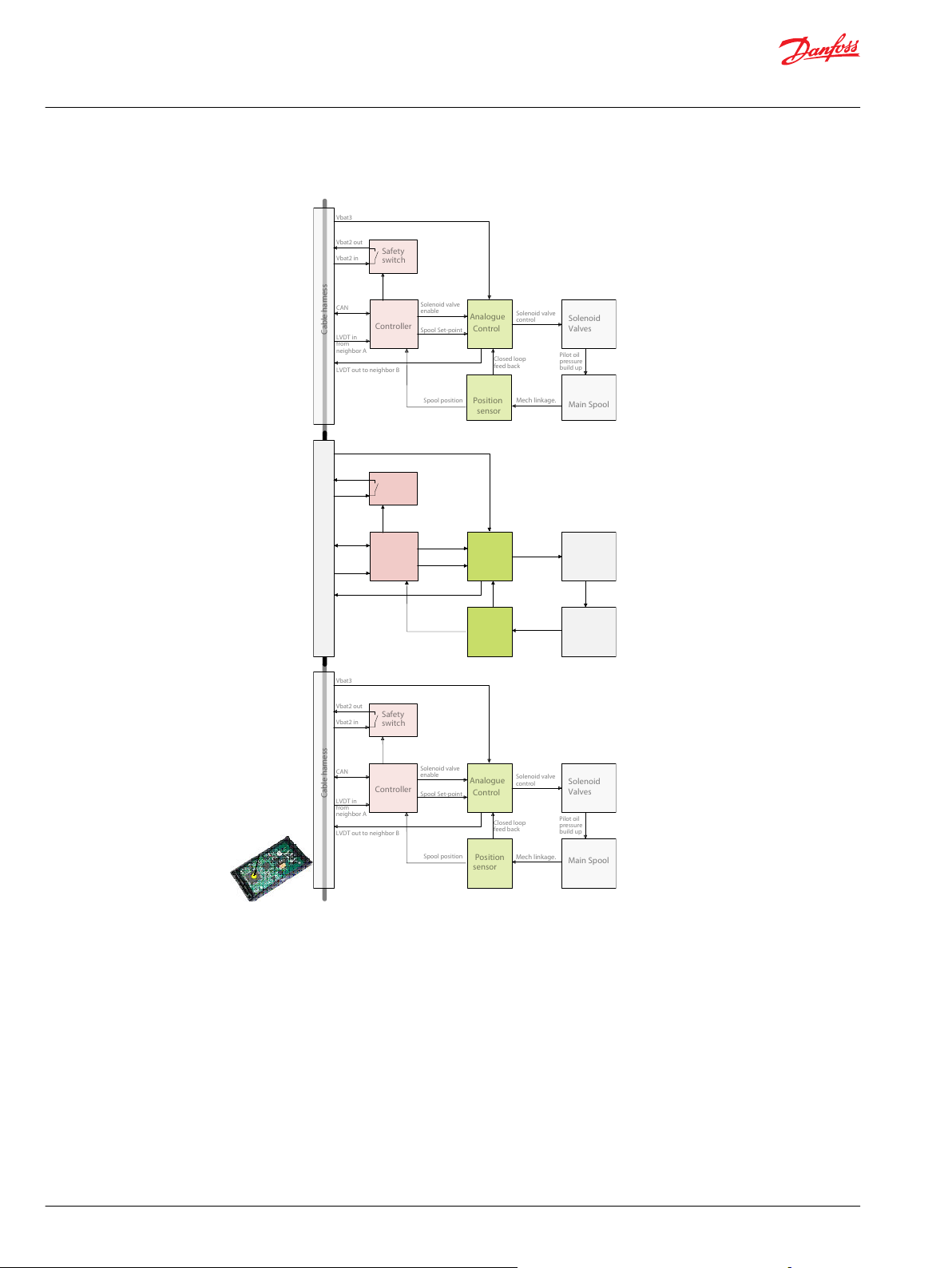
电子元件的功能模块
PVED-CX 通信
16 | © Danfoss | 2017 年 6 月
控制器: 内置的微控制器。
安全开关: 用于控制分区电磁线圈集体禁用的 MOSFET
位置传感器: 机械电气接口。
模拟控制: 基于阀芯位置控制闭环控制。将阀芯实时位置和错误状态反馈到电气控制系统中。
TPVED-CX 具有三种通信方法。
来自模块的光学通信
•
模拟单向通信
•
数字双向通信
•
11070179 | BC00000068zh-CN0503
NOT_READY
INIT
FAULTDISABLED
HOLD
FAULT_HOLD
DEVICE_MODE_
ACTIVE
FAULT_
REACTION
Operational
Pre-Operational
Stopped
Communication state machine
Initialisation
Reset
Application
Reset
Communication
Initialising
Device state machine
Power on
V310034.A
技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 功能
光学 - LED
实施的闪烁和常亮的灯光可用来简化维护和应用工程设计。
模拟
实施模拟通信。
从电控模块发出的模拟信号到故障监控模块,从而实现通讯简化。
受监督的模块在设置中称为邻居设置。
受监督模块(近邻)的运行模式决定了监控模块的行为。
数字 – CANopen
CANopen 通信是主要方法。该方式用于:
•
•
•
•
主模块进行的模块控制。主模块定义状态变换和设置点。
从模块到主模块的报告。模块报告阀芯位置和违反安全的信息
主模块对模块进行设置。某些参数可以更改。
从主模块到模块的查询。
计算子系统
CANopen 是汽车 CAN (CiA) 协会定义的通信协议。有关该协议的详细信息,参考 CiA。
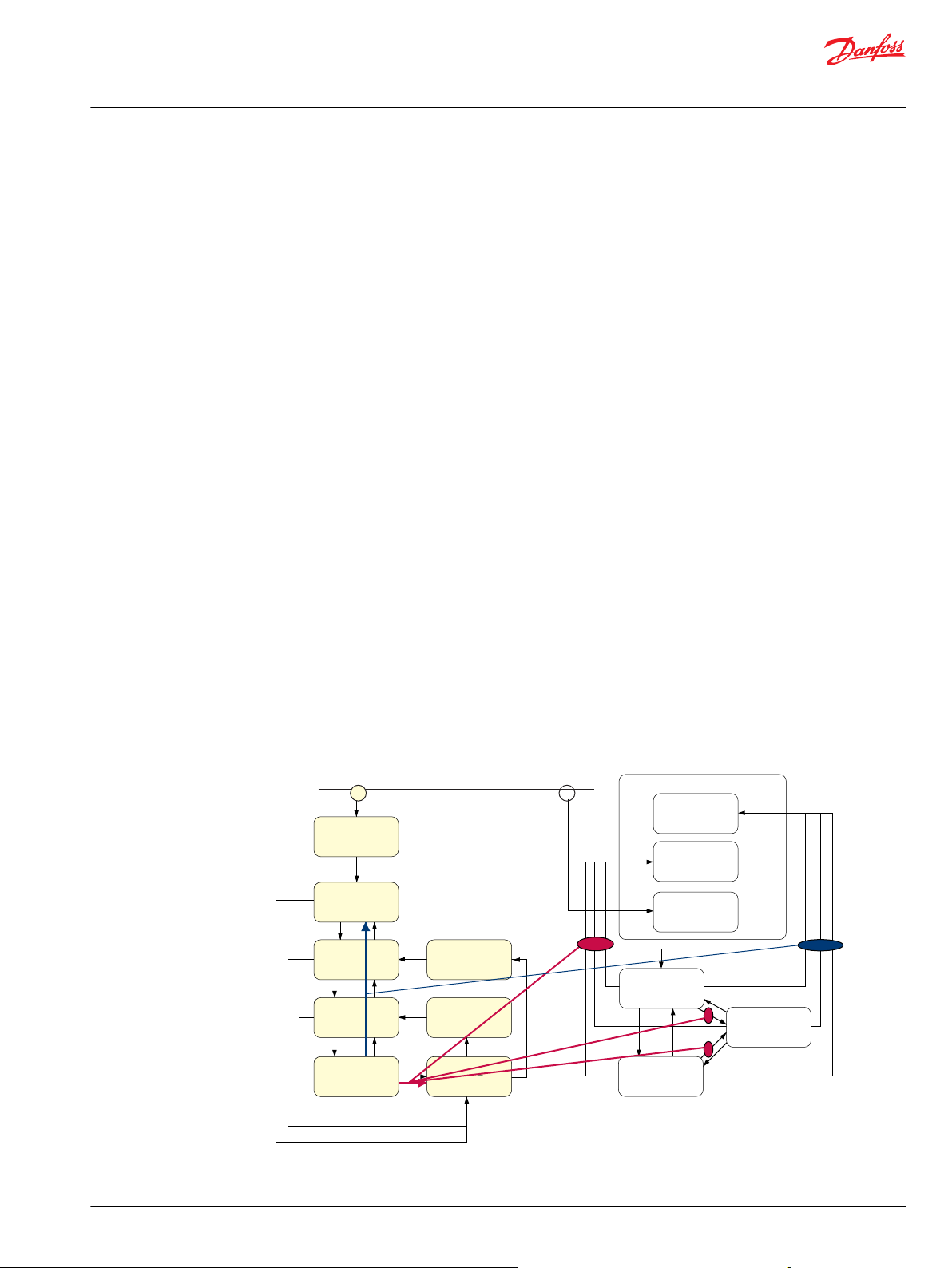
PVED-CX 运行基于所定义的设备状态机 (DSM),它提供了状态变换的条件。通信状态机 (CSM) 是 DSM
的前提条件。
状态变换取决于 PVED-CX 状况等内部条件,还可能取决于应用控制器命令以及正常阀门运行前提条
件的变化等外部条件。
用于
PVED-CX 的 DSM 和 CSM
©
Danfoss | 2017 年 6 月
PVED-CX 通电时,会启动组件,验证组件状态和参数设置。称为开机自检 (POST)。
11070179 | BC00000068zh-CN0503 | 17

技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 功能
如果自检通过,PVED 则进入禁用状态,并让控制器了解为活动状态。否则进入故障模式,如果可能
还会生成一个故障消息。
当状态为活动设备模式或禁用设备模式时,可以信任模块报告,当处于故障状态时,有效性与故障
类型相关。
运行模式
PVED-CX 具有三种可访问的正常运行模式。
•
•
•
同一个控制分区内所有模块不一定均处于相同的运行模式。
故障监控的活动状态与运行模式无关。
参见 PVED-CX
完全运行模式
在完全运行模式下,PVED-CX 控制阀芯,同时监控近邻阀芯。
完全运行。阀芯位置受到控制和监控。设备活跃模式。
手动运行。阀芯位置受到监控。禁用设备模式。
自动系统安全完整性自检。设备活跃模式。
安全性说明
页 22 部分。
此模式的特征为:
设置点从主模块接收,且有模块执行操作
•
如果不处于节能模式,可以调节电磁阀启用
•
设置点和阀芯位置的近邻监控为激活状态
•
阀芯位置报告为激活状态
•
没有故障
•
LED 呈绿色
•
手动控制
在手动控制模式下,PVED-CX 无法控制阀芯。
此模式的特征为:
阀芯位置由 PVM 和阀芯中位弹簧限制
•
设置点不进行运算。主模块不必发送
•
电磁阀通过本地开关禁用
•
阀芯报告的近邻监控为激活状态
•
阀芯位置报告为激活状态
•
没有故障
•
LED 呈绿色。
•
18 | © Danfoss | 2017 年 6 月
自动系统安全完整性自检 – ASSIST
ASSIST 是一个最终检测和维护检测工具,尤其与部件更换和系统修改相关联。
在 ASSIST 中会自动进行检测系统将阀芯移动识别为故障和信号是否一致的能力。其中还包括线缆束
带来的冗余性。
将检测以下内容:
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 功能
•
•
•
•
•
•
此模式的特征为:
•
•
PVED-CX 设置
PVED-CX 提供了系统信息设置和系统运行设置。根据 CANopen 的要求,这些参数组织在了电子数据
表 (EDS) 中。这些可用参数既有固定参数也有可变参数。有关该协议的详细信息,参考 CiA。
PVED-CX 日志记录
复位弹簧将主阀芯复位并保持在中位
4 个电磁阀
LVDT 传感器
ASIC 阀芯位置报告
主阀芯位置的 ASIC 闭环控制
节点 ID 和近邻节点 ID 有效性
电磁阀激活但不受主设备控制
故障监控和报告具有模式特定的模式
在运行期间,PVED-CX 会记录数据,可以随时访问。
错误历史。运行时日志跟踪 FIFO 缓冲器中的错误顺序,此类日志会在重置和关闭电源时清除。
•
错误计数。对于每个错误代码,均在 EEPROM 中维护了一个发生次数计数器
•
温度(当前)
•
温度直方图。每 6 分钟运行时间记录一次当前温度
•
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 19
Safety
switch
Controller
Analogue
Control
Solenoid
Valves
Main Spool
Position
sensor
Cable harness
CAN
Spool Set-point
Closed loop
feed back
LVDT out to neighbor B
LVDT in
from
neighbor A
Spool position
Solenoid valve
control
Vbat3
Vbat2 in
Vbat2 out
Pilot oil
pressure
build up
Mech linkage.
Solenoid valve
enable
Safety
switch
Controller
Analogue
Control
Solenoid
Valves
Main Spool
Position
sensor
Cable harness
CAN
Spool Set-point
Closed loop
feed back
LVDT out to neighbor B
LVDT in
from
neighbor A
Spool position
Solenoid valve
control
Vbat3
Vbat2 in
Vbat2 out
Pilot oil
pressure
build up
Mech linkage.
Solenoid valve
enable
Neighbor A
Neighbor B
Safety
switch
Controller
Analogue
Control
Solenoid
Valves
Main Spool
Position
sensor
Cable harness
CAN
Spool Set-point
Closed loop
feed back
LVDT out to neighbor B
LVDT in
from
neighbor A
Spool position
Solenoid valve
control
Vbat3
Vbat2 in
Vbat2 out
Pilot oil
pressure
build up
Mech linkage.
Solenoid valve
enable
V310 207.A
技术样本
PVED-CX 系列 4 电液驱动器
正常运行 – 自监控和近邻监控概念
主阀芯被中位弹簧保持在中位。通过操纵机械手柄 (PVM) 或电磁阀结合 Pp,阀芯可以移动到任何位
置,从而为执行机构提供工作压力。
控制分区内的功能合作
设置点命令
阀芯监督
20 | © Danfoss | 2017 年 6 月
PVED 的设置点由系统主控制器/主模块通过 CAN 总线广播。在传输期间,总线上的所有模块均会评
估该信号是否正常,但仅针对该具体信号编程的模块会执行进一步计算。
收到时,微控制器(相关模块和近邻)会评估设置点的有效性。
如果设置点有效,且节能处于活动状态时未阻断,则微控制器会连接 ASIC 中的一个本地开关,启动
电磁阀。
控制器将数字消息转换为一个 PWM 信号,并将其发送到 ASIC。
ASIC 评估 PWM 是否处于有效范围内。
ASIC 在任何时候都会通过位置传感器 (LVDT) 反馈监控阀芯位置。这就确定了用于闭环控制回路的阀
芯位置。另外,阀芯位置作为模拟信号从 ASIC 发送到近邻微控制器,LVDT 反馈也提供到微控制器用
于生成 CAN 消息。
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
正常运行 – 自监控和近邻监控概念
电磁线圈控制
基于设置点和阀芯位置,ASIC 以固定频率执行闭式回路控制,控制电磁线圈桥。
位置报告
作为系统配置的模块运行时,PVED-CX 会持续发送阀芯位置的报告。这将用作应用控制器和近邻模
块进行比较的信息。
近邻监督
微控制器监督
ASIC 监督
CAN:
模拟: 阀芯位置作为模拟信号发送到近邻微控制器。
阀芯位置在 CAN 总线上进行计算和广播,且带有数据冗余呈现。
当阀芯位置离中位小于大约 0.7 mm 时,将报告为关闭。
当阀芯位置离中位大于大约 0.7 mm 时,将报告为开启。
当阀芯偏离中位的距离超过软件死区阈值时,阀芯位置将考量过去 50 毫秒内的平均值。
特制的 PVED-CX 线缆组件将确保监督模块拥有来自受监督模块的阀芯位置模拟值,还拥有通过 CAN
总线报告的阀芯位置。如果受监督模块为完全运行模式,则还会得到来自控制器的设置点信息。
近邻微控制器对模拟阀芯位置值和 CAN 阀芯位置值进行比较。在完全运行模式下,还会将阀芯位置
与设置点进行比较。任何偏差都会引发错误。
有关 PVG 中的阀芯监控,请参见
线缆组件原理
。
微控制器具有互为监控器功能,且由一个 PIC 提供关闭 ASIC 的冗余功能。该 PIC 还可以关闭 CAN 通
信。
用于 LVDT 的 ASIC 馈送信号由微控制器进行监控。
温度监督
PVED-CX 的节能
©
Danfoss | 2017 年 6 月
电子印刷电路板 (PCB) 的温度将持续监控。其目的有二:
计算的预期系统反应时间必须反应油液粘度中的温度变化。
•
组件温度条件位于指定范围内。
•
为了最大程度减少能耗,PVED-CX 具有节能功能。如果 PVED-CX 的设置点阻断时间超过 500 毫秒,
电磁阀则会被本地关闭活跃状态。这样会将功耗减少 90%。
11070179 | BC00000068zh-CN0503 | 21

技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 安全性说明
默认情况下,安装状态变换的丹佛斯定义为: 阀芯位于阻断位置(中位)。PVED-CX 具有主动故障
反应,例如发生故障时系统进入安全状态。
PVED-CX 安全概念基于三个元素:
•
•
•
产品安全性的基本要素为:
•
•
•
•
POST – 开机自检
通过开机自检是完全运行模式和 ASSIST 的前提条件。
POST – 开机自检
ASSIST – 自动系统安全完整性自检
运行时故障监控和反应
模块持续监控
故障识别和反应
故障报告和记录
故障恢复
POST 评估内部信号、存储器状态、内部设置和近邻通讯。
ASSIST – 自动系统安全完整性自检
自动系统安全完整性自检评估电气接线、模块间通信、阀芯监控和阀芯驱动控制。
ASSIST 是一个可选检测,但在以下情况下必须通过该检测:
首次使用 PVG
•
设置变化
•
线缆组件更换和操作
•
模块更换
•
PVED-CX 运行时故障监控
故障监控是持续自我监控和近邻监控的组成部分。一些条件会强制设备状态机转换到故障模式。有
关详细信息,请参见以下部分: 数据部分和错误代码。
通信故障
通信故障会中断应用(系统)和模块合作。这些故障主要与接线故障、禁用的控制器和非法命令相
关。
通信丢失
•
与无效数据的有效通信
•
通信干扰
•
22 | © Danfoss | 2017 年 6 月
CAN 通信基于适用于 ISO 11898-2 高速 CAN 的物理层。此标准规定的故障与本文无关,此类故障将作
为异常通过总线关闭进行恢复。
阀芯位置故障
阀芯位置故障与应用的液压性能直接相关。这些故障表明了所要求阀芯位置与实际阀芯位置之间的
差异。
位置故障具有以下类别:
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 安全性说明
•
•
•
阀芯位置通过 LVDT 与阀芯端部的接触点确定。LVDT 故障被视为电气故障。
阀芯位置处理公差的方式如“数据”部分所述,会考虑机械延迟和温度影响。
系统数据故障
数据处理取决于所存储数据的质量以及输入数据的范围。为了避免故障,会监控以下内容:
•
•
•
•
•
•
•
•
阀芯超过要求位置。
阀芯方向与要求相反。
阀芯不在中位: 目标窗口监控
EEPROM 的降级。
FLASH 的降级。
查找表的完整性
未定义的计算 - 被 0 除
外部写入替代内部写入
不希望被外部干扰中断
中断的写入过程 - 数据镜像
阀芯位置计算中的不一致
电气故障
对以下电气信号的质量/存在进行监控,以保证其行为位于规范之内。
PIC 和微控制器之间的相互监控器信号
•
指定级别的电池电压
•
来自 ASIC 的 LVDT 反馈信号
•
有模拟量到数字量的转换器 ADC
•
从微处理器发送到 ASIC 的 PWM(脉宽调制)信号
•
温度故障与修正
电气组件可靠性、电子组件的使用寿命同油液黏度一样受到温度的影响。PCB 上的温度测量用于:
在 PCB 温度过高时阀芯控制会中断
•
在 PCB 平均温度过高时阀芯控制会中断
•
在 PCB 温度过低时阀芯监控会延迟造成控制超时
•
基于温度柱状图确定产品工作时长
•
检测故障
PVED 具有两个特殊状态检测。
POST。开机自检用于检测运行前的模块完整性。
•
ASSIST。自动系统安全完整性自检用于检测控制分区内的模块合作。
•
故障严重度
©
Danfoss | 2017 年 6 月
PVED-CX 具有三个故障严重度。
11070179 | BC00000068zh-CN0503 | 23

技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 安全性说明
•
•
•
警告
如果故障预期来自外部来源,PVED 性能在状态过去后不会受到影响,只是进入警告状态。警告对近
邻模块活动没有影响。
重要
如果系统定义元素的可靠性可能会受到威胁,则进入重要故障状态。重要等级对近邻模块活动有影
响。
严重
如果系统可靠性可能会受到威胁,则进入严重故障状态。严重等级对近邻模块活动有影响。
临界值未通过
如果存在故障前提条件,PVED 会进行跟踪但是会根据要求运行,直到通过最终的临界值,例如阀芯
未处于所要求位置但时间很短。
对于与时间或发生次数临界值相关的每个故障,都会创建一个计数器。
警告
重要
严重
PVED-CX 故障响应
故障报告
计数器根据取决于故障的方案进行启动和重置。
故障响应在 PVED-CX 中的优先级最高。根据故障的不同,PVED 会立即进入定义的故障状态。任何严
重度更高的故障都会覆盖现存的严重度稍低的故障。
警告
重要和严重
故障报告属于通信任务的一部分,比故障反应的优先级要低。
CAN 总线 恰当的紧急消息要根据 CANopen 标准发出。
错误日志 故障存储在 RAM 的 EDS 日志中,使用先进先出缓冲区存储过去的 50 个错误。
发光二极管 为了确保简便的维护,PVED-CX 使用 LED 来显示模块的状态。
本地切换被禁用。电磁阀禁用。
阀芯监控和报告仍然活跃。禁用设置点与实际位置的比较
根据运行模式,故障监控仍然活跃。
近邻监控仍然活跃
安全开关被禁用。整个控制分区内的电磁阀禁用。
阀芯监控和报告仍然活跃。禁用设置点与实际位置的比较
根据运行模式,故障监控仍然活跃。
近邻监控仍然活跃
如果发生多个错误,严重的故障优先级高于重要故障,重要故障优先级高于警告。
相同严重度的错误按照发生顺序广播。
故障存储在 EEPROM 的 EDS 日志中,显示每个故障 ID 的发生次数。最多为 255
个。
EEPROM 中的错误日志无法重置。
24 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
PVED-CX 安全性说明
PVED-CX 故障恢复
模块和系统故障恢复需要所有故障均消失。
警告 可以使用软件重置命令进行恢复。
重要 可以使用软件重置命令进行恢复。
严重 只能通过重新上电来恢复。
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 25
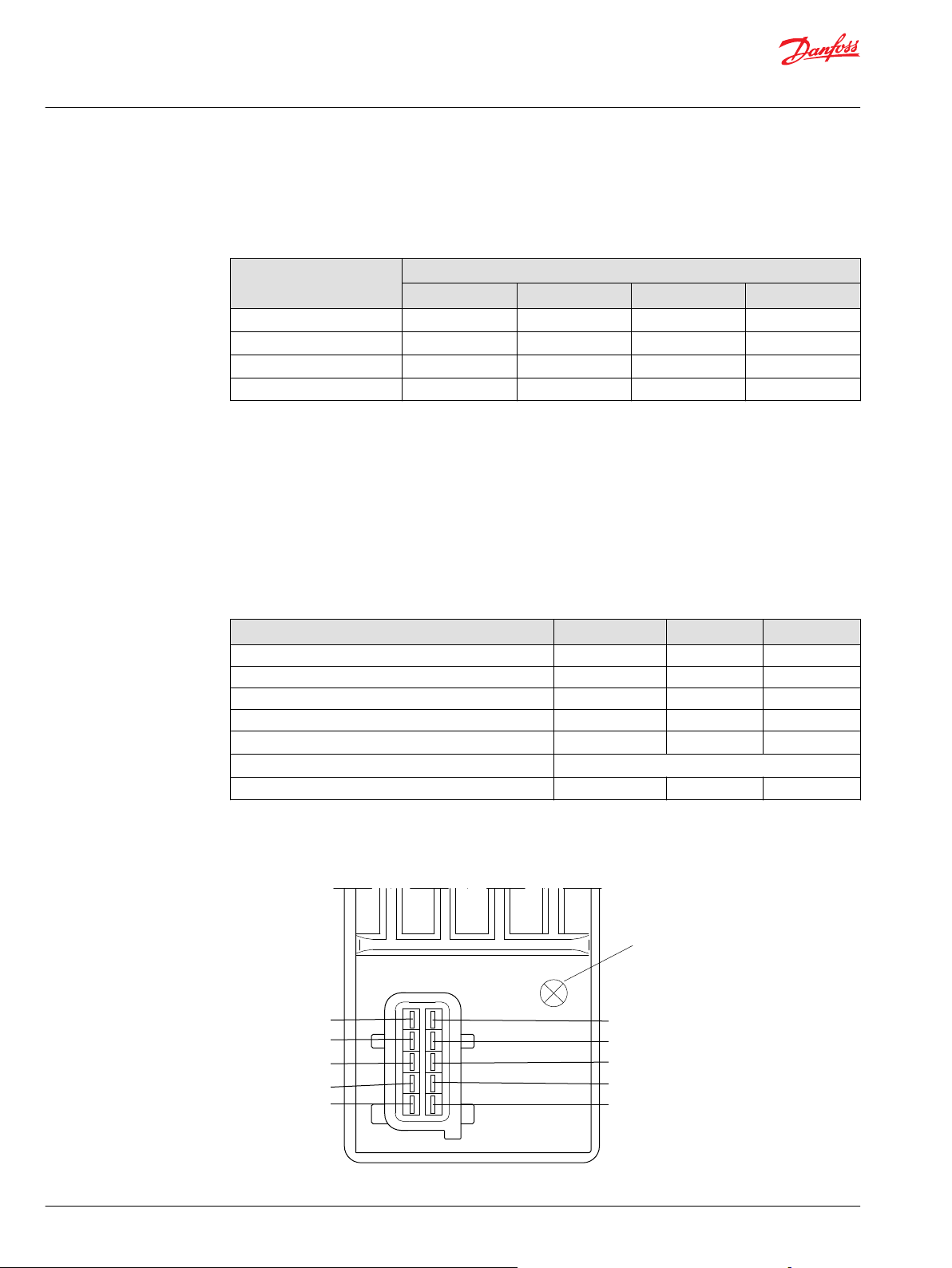
5 SP_POS_IN
4 not connected
2 Vbat2 IN
1 Vbat2 OUT
10 SP_POS_OUT
9 CAN_L
8 CAN_H
7 Vneg
6 Vbat
3 Vbat 3
LED
V310 021.A
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
PVED-CX 运行条件
PVED-CX 只能根据此表运行。
运行条件
模式 供电
电气检测 POST 必需 可选 可选 可选
系统检测 ASSIST 必需 必需 必需 已禁用
手动运行 可选
完全运行 必需 必需 必需 必需
*
如果需要阀芯位置信息则必需
**
获得符合本产品样本的电气性能的前提条件是控制分区内 PVED-CX 的相互关联。一个控制分区是通
过电缆组件连接的两个到八个 PVED-CX。
丹佛斯 定义阀芯设置到阻断位置/中位时的安全状态。
如果需要液压性能。
功率 CAN 控制 先导油压力 主油压
*
可选
*
可选 必需
**
**
性能
PVED-CX 尺寸和布局
驱动的反应时间(油液粘度:21 ± 0.5 cSt,先导压力 (P-T):13.3 ± 0.5 bar)
响应时间 - 功能 电磁线圈 最小 最大
从中位到最大阀芯动作 通电
从阀芯最大开度到中位 通电
从通电到最大阀芯动作 通电
从阀芯最大开度到中位 已禁用
通电; 从通电到 CAN 活动
每个模块的 ASSIST 运行时间 4 秒
0.02Hz 时的迟滞
- - 1000 ms
- 0 % 1 %
50 ms 200 ms
- 150 ms
1000 ms 4000 ms
- 175 ms
接头针脚输出
26 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503
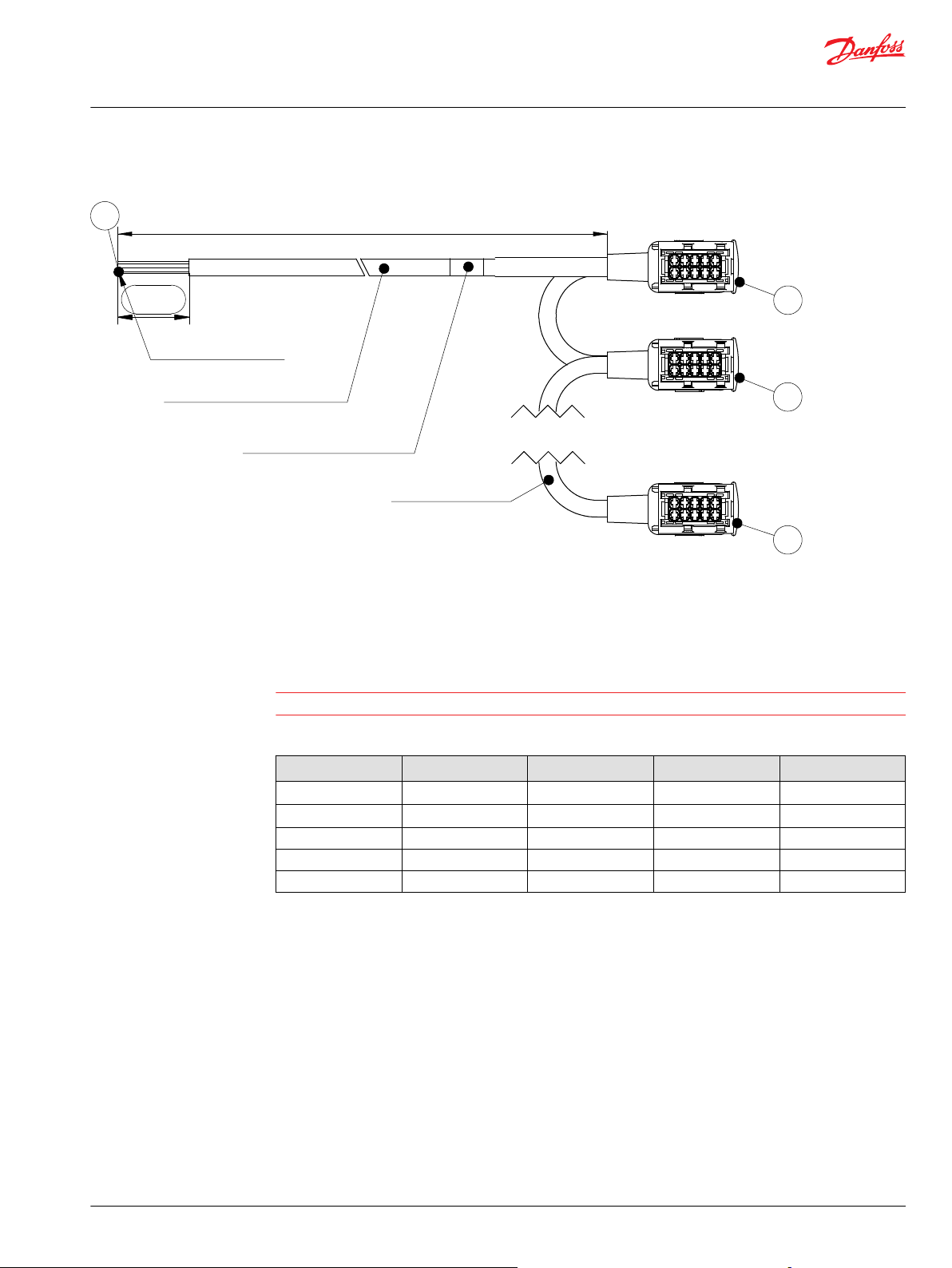
J0
J1
J2
Jn
Jn Strip + Wirequard 51418
2 x 1.5 mm2 + 3 x 0.75 mm2 Roboslepp
8 x 0.75 mm2 Roboslepp
Long cable 4000 ±50 mm / Short cable 1000 ±50 mm
135
Marking Part No. + prod. week-year
V310192.B
W
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
电缆尺寸
长线缆组件 (4000 mm) 不带 CAN 总线端子。
短线缆组件 (1000 mm) 在接头 Jn 中带有 120 Ohm CAN 总线端子。
警告
线缆专门用于 PVED-CX。在 0°C [32°F] 以下温度处理线缆时,避免扭曲和粗暴拿放。
线缆颜色代码和外部链接
描述 J0 / 线缆端头
CAN 低位
CAN 高位 橙色
接地 棕色
Vbat
Vbat 2
*
CAN 线缆仅用于符合 ISO 11898-2 标准的通信。
*
黄色
红色
绿色
J1 J2 Jn
9 9 9
8 8 8
7 7 7
6 6 6
2
– –
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 27
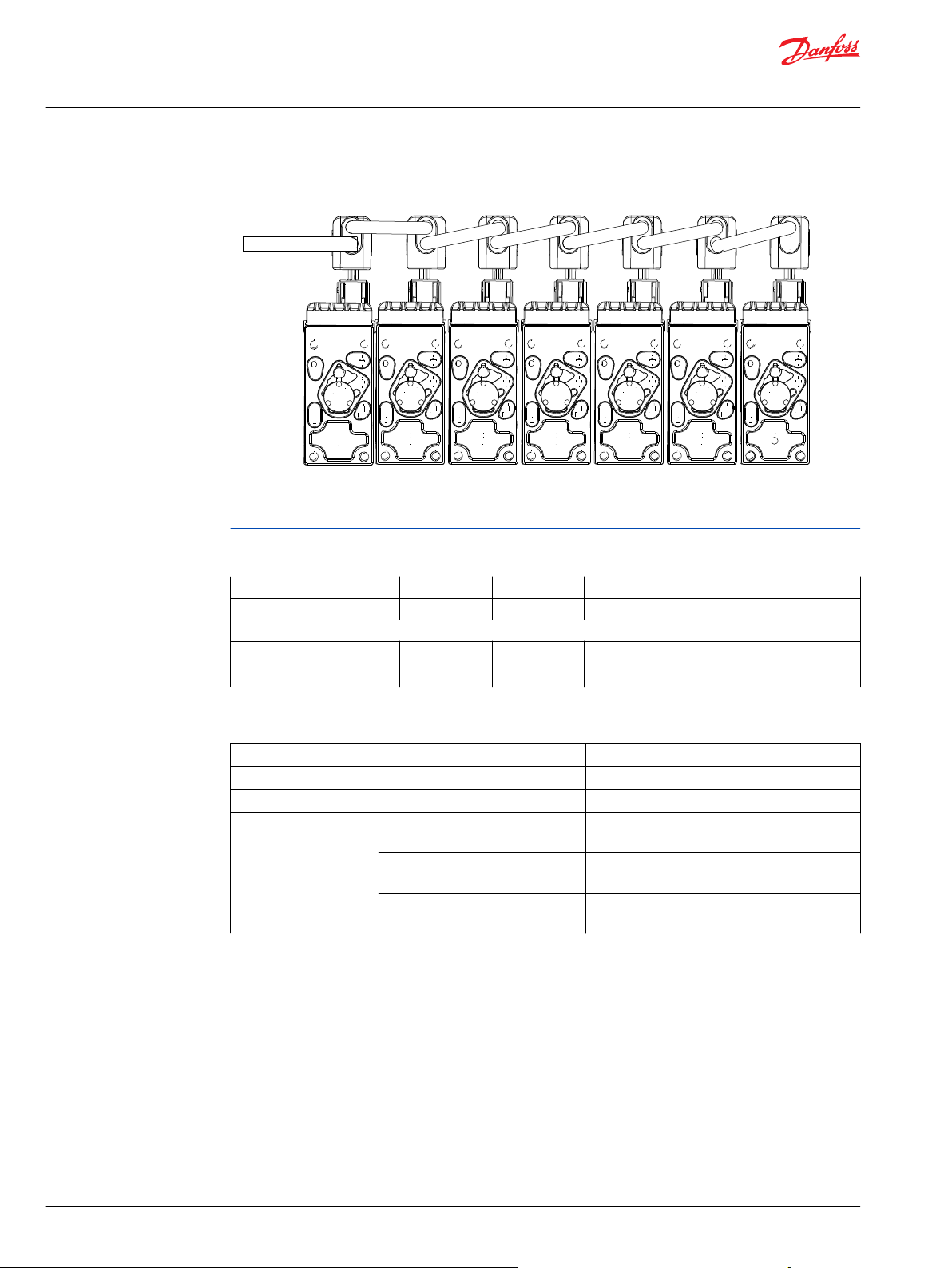
J0
J1 J2 J3 J4 J6 J7J5
V310199.B
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
带线缆组件的
PVED-CX
线缆安装时可以让 J1 位于最右侧。
近邻指南
节点接头
近邻接头
示例
节点 ID
近邻节点 ID
J1 J2 J3 ... Jn
Jn J1 J2 ... Jn-1
20 21 22 ... 26
26 20 21 ... 25
线缆组件规格
电压 - V
bat,Vbat2
功率 最大 80 W
机箱等级 - 带 AMP JPT 接头版本
环境温度 使用 -30 °C → +90 °C
存储 -40 °C → +100 °C
在包装内长时间储存条件建议 +10 °C → +30 °C
最大 36 V
IP 66
[-22 °F → +194 °F]
[-40 °F → +212 °F]
[50 °F → +86 °F]
28 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

100.3 [3.95]
69.5 [2.74]
25.0 [0.98]
V310033.A
102.6 [4.04]
92.7 [3.65]
23.6 [0.93]
118.4 [4.66]
106 [4.17]
55.3 [2.18]
24.5 [0.97]
V310202.B
290.5 [11.44]
109.5 [4.31]
171.2 [6.74]
62.7 [2.47]
33.5 [1.32]
56.7 [2.23]
3.5 [0.14]
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
PVED-CX
尺寸,
mm [in]
在
PVG 32
上使用的
PVED-CX,mm [in]
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 29

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
PVED-CX 液压数据
一个 PVED-CX 的先导油耗
断电的电磁线圈
先导油锁定的阀芯
连续驱动
一次驱动(中位到最大动作)
油液粘度: 21.0 ± 0.5 cSt,先导; 先导压力 (P→T): 13.3 ±0.5 bar
液压系统过滤
运行清洁度等级要求 18/16/13(ISO 4406, 1999 年版)
如需了解更多信息,请参阅 丹佛斯 文档“液压油与润滑剂”,产品样本 520L0463。
油液粘度
油液粘度 范围
最小
最大
0.2 ÷ 0.4 l/min [0.05 ÷ 0.10 US gal/min]
0.1 ÷ 0.2 l/min [0.03 ÷ 0.05 US gal/min]
0.9 ÷ 1.1 l/min [0.24 ÷ 0.29 US gal/min]
0.002 l/min [0.0005 US gal]
12 ÷ 75 mm2/s [65 ÷ 347 SUS]
4 mm2/s [39 SUS]
460 mm2/s [2128 SUS]
先导压力
先导压力(与 T 油口压力相关) 正常
最小
最大
13.5 bar [196 psi]
10.0 bar [145 psi]
15.0 bar [217 psi]
油温
油温 范围 30 ÷ 60‒C [86 ÷ 140‒F]
最小 -30‒C [-22‒F]
最大 90‒C [194 ‒F]
工作温度
最小值 最大值
环境 -30‒C [-22‒F] 70‒C [158‒F]
储存 -40‒C [-40‒F] 90‒C [194‒F]
在包装内长时间储存建议 10‒C [50‒F] 30‒C [86‒F]
30 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

157-520.11
0
0 1 2 l/min
bar
20
10
15
5
3 4 5
psi
50
100
150
200
250
300
0
0 0.25 0.5 0.75 1.0 1.25 US gal/min
Max.
Min.
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
PVP
PVED-CX 电气数据
模块,先导压力曲线
PCB 温度
PCB 温度 范围 0 - 85‒C [32 - 185‒F]
带 AMP JPT 接头版本
机箱等级
*
软件死区限制配置为 EDS 参数。
电压和电流
供电电压 (DC)
标称(V
bat
最小(V
bat
最大(V
bat
最大波动量
电流消耗
12V 完全运行模式下的电流耗量
完全运行模式下的功耗
手动运行模式或节能模式下 12 V 时的电流耗量
手动运行模式或节能模式下的功耗
功耗与电压无关。
低于正常值的低电压激活的电磁阀允许短暂的异常,最长为运行时间的 10% 且每小时最多 5 分钟。
9-10 V 激活的电磁阀会降低阀门性能。
高于 36 V 和低于 8 V 的电压的情况下将关闭电子元件。
©
Danfoss | 2017 年 6 月
PVED-CX 符合欧盟 EMC 指令 2004/108/EC,以及标准 ISO 13766:2006 (E) 路面行走机械 – 电磁兼容
性。
*
和 V
和 V
和 V
bat2)
bat2)
bat2)
最小 -30‒C [-22‒F]
最大平均温度 85‒C [185‒F]
最大即时温度 100‒C [212‒F]
IP 66
10 - 32 V
9.5 V(软件报警 9.0 V)
33.5 V(软件报警 35.5 V)
5%
750 mA
9 W
90 mA
1.1 W
11070179 | BC00000068zh-CN0503 | 31

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
通信
PVED-CX LED
LED 颜色解释
LED
绿色 完全运行模式 已启用 已启用 已启用
橙色 重要或严重故障 已启用 已禁用 已禁用
红色 严重故障内部通讯 已禁用 已禁用 已禁用
LED 闪烁解释
LED
绿色
橙色
橙色
状态
节能 已启用 已启用 已禁用
手动控制 已启用 已启用 已禁用
警告 已启用 已启用 已禁用
频率 指示
20 Hz
10 Hz
1 Hz
阀芯超出有效设置点导致的软件死区(EDS 0x6343 和 EDS 0x6344)。没有故障。
近邻上的故障。错误代码 0x8309、0x830A 或 0x8308。
LED 进行的近邻报告优先于 LED 的自我报告。
丢失近邻时也会发生这种情况
固件下载结束后 需要对 EEPROM 进行初始化。
如果关闭电源之前初始化过程未完成,该过程则在下一次启动时重启,然后在完成
时闪烁。
CAN Vbat2
本地开关/ASIC
CAN
CAN 数据
物理层 ISO11898-2 高速 CAN
协议 ISO11783-7 / SAE J1939(29 位标识符)
波特率
位正时
250 Kbps
TSEG1 = 13
TSEG2 = 4
SJW = 0
BRP = 1
根据数据表计算的此时间份额 tq = 200 n.s.(考虑到 fcpu = 20 MHz)。
因此:
采样点之前 [t(TSEG1)] = (TSEG1 + 1) x tq = 14 x 200 = 2800 n.s.
•
采样点之后 [t(TSEG2)] = (TSEG2 + 1) x tq = 5 x 200 = 1000 n.s.
•
t(sync-seg) = 1 x tq = 200 n.s.
•
1 bit 时间 = t(sync-seg) + t(TSEG1) + t(TSEG2) = 200 + 2800 + 1000 = 4000 n.s.
•
75% 时一个采样点。
•
根据 250 kbps,1 bit 时间 = 4000 n.s
•
32 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
阀芯控制
PVED-CX 阀芯位置
•
•
阀芯位置
设置点
反馈
液压油 流量 无油液流出(大约 -1.5mm 到 1.5 mm)机械死区 流量
名称 完全回缩 机械死区 软件 * 死区目标窗口 阻断 目标窗口 软件 * 死区机械死区 完全伸展
安全 -1.0 mm 目标窗口 1.0 mm
* EDS 索引 0x6343 子索引 1 和索引 0x6344 子索引 1。
伸展定义为阀芯移出 PVE,等于正值。
回缩定义为阀芯移向 PVE,等于负值。
-7 mm -1.5 mm -1.3 mm -1.0 mm 0 mm 1.0 mm 1.3 mm 1.5 mm 7 mm
-127 -1
-127
0x81
-1
-
-
0
0
-
-
1
1
-
-
127
127
0x7F
闭环控制
ASIC: 在完全运行模式下电磁阀切换频率为 40Hz
在节能模式下,电磁阀停止切换。监控仍然继续工作。
阀芯监控、控制和故障反应
处于阻断状态时,超出 1.0 mm(目标窗口)的阀芯位置识别为故障。
•
处于流量状态时,超出设置点 0.8 mm 的阀芯位置识别为故障。
•
当阀芯位置故障存在的时间超过设置极限时间时,PVED 进入故障状态。
•
当设置点处于阻断位置/中位时间超过设置极限时间时,进入节能状态。
•
极限设置时间相对于 PCB 温度定义。
•
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 33

V310035.A
Temperature vs spool monitoring time-out
Temperature ranges, min [degrees celsius]
Time out value [ms]
-40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 100 110 120 130
4500
4000
3500
3000
2500
2000
1500
1000
500
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
温度范围 超时值 (ms) 节能和阀芯监控超时
最小值 最大值
-40 -30 4000
-30 -20 3000
-20 -10 2000
-10 0 1000
0 10 500
10 20 500
20 30 500
30 40 500
40 50 500
50 60 500
60 70 500
70 80 500
80 90 500
90 100 500
100 110 500
110 120 500
120 130 500
参数设置
PVED-CX 中的参数设置根据 CANopen 标准中的说明通过电子数据表 (EDS) 进行。所有参数均定义为
索引、子索引和值。相关 EDS 文件的示例通过您的丹佛斯销售代表提供。
节点 ID
备件 PVED-CX 的默认设置为:
节点 ID: 0xFF
•
近邻节点 ID: 0xFF
•
节点 ID 为 FF 的 PVED-CX 不会运行,也不会发送启动消息。PVED 仍然会响应查询 LSS 地址。
要运行 PVED-CX,节点 ID 和近邻节点 ID 的值必须从图 26 中选择,且位于同一个控制组设置中。节
点 ID 和近邻节点 ID 必须不同。节点 ID 和近邻节点 ID 设置在“使用 LSS 更改节点 ID”部分讲述。
节点 ID 和近邻节点 ID 会更改所有只读 (RO) COB-ID 的 EDS 中的所有 COB-ID。
控制分区中的节点 ID
Ctrl sec
1 0x10
2 0x18
3 0x20
34 | © Danfoss | 2017 年 6 月
4 0x28
5 0x30
6 0x38
*
分区的基本节点 ID。
节点 ID 和近邻节点 ID 组合
*
0x11 0x12 0x13 0x14 0x15 0x16 0x17
*
0x19 0x1A 0x1B 0x1C 0x1D 0x1E 0x1F
*
0x21 0x22 0x23 0x24 0x25 0x26 0x27
*
0x29 0x2A 0x2B 0x2C 0x2D 0x2E 0x2F
*
0x31 0x32 0x33 0x34 0x35 0x36 0x37
*
0x39 0x3A 0x3B 0x3C 0x3D 0x3E 0x3F
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
近邻节点命名指南
插头
近邻接头
示例
节点 ID
近邻节点 ID
接头 J1 受接头 Jn 的监督,例如带有 J1 的 PVED 将 Jn 编程为邻居。
•
J0 连接控制器。
•
相对于 PVP-PVS(K) 的线缆方向是可选的。
•
J1 J2 J3
Jn J1 J2
20 21 22
26 20 21
…
…
…
…
EDS 参数 – 只读常量
EDS 中的固定参数
名称 默认值 索引,子索引
设备类型 408: 比例液压阀
COB-ID 同步 帧类型 0: 11-bit ID (CAN 2.0A) 11bit SYNC-COB-ID: 128
制造商设备名称
制造商硬件版本 对于现有版本: K
制造商软件版本
监控时间
COB-ID EMCY
供应商 ID
产品代码 0x4317BA10,转换为 155C4960
修订号
序列号 例如 0x411ccb6f,转换为 wwydxxxx
组件 ID 字符串 157B4960N wwydxxxx(如 188A7087)
设备供应商名称 丹佛斯
*
* 有关转换,请参见
标识参数到可比较值的转换
PVED-CX 0x1008, -
格式 - 字母顺序: A, ..., Z, ZA, ..., ZZ, ZZA, ...
CANopen_R5.31 0x100A, 0 0x100C, 帧类型 0: 11-bit ID (CAN 2.0A) 11bit COB-ID: 161
0x1000019 0x1018, 1
0x503010 (5.31) 0x1018, 3
*
*
。
Jn
Jn-1
26
25
0x1000, 0x1005, -
0x1009, -
0x1014, -
0x1018, 2
0x1018, 4
0x2201, 0x6057, -
EDS 参数 – 可读写变量
EDS 中的可配置参数
名称 默认值 范围 索引,子索引
节点 ID
EMCY 禁止时间
生产商心跳时间
设置点时间监控
近邻阀芯位置时间监控
vpoc_neighbor_monitoring _additional_tolerence_in_IR
自 TWM 超时
近邻 TWM 超时
同步消息事件计时器
设备说明
©
Danfoss | 2017 年 6 月
1)
2)
4)
5)
0xFF
0xC8
0x0
0x64 0x0 - 0xFA 0x1400, 5
0x64 0x0 - 0xFA 0x1402, 5
3)
200 0 - 1000 0x2101, 0xC8 0x0 - 0x1F4 0x2102, 1
0xC8 0x0 - 0x1F4 0x2102, 2
0x32 0x0 - 0xFA 0x2103, CANopen_R5.31
参见
阀芯位置
0x64 - 0xC8,DEC 100 毫秒的倍数
如果不使用则为 0。
自由选择 32 个 ASCII
11070179 | BC00000068zh-CN0503 | 35
0x1015, 0x1017, -
0x6053, -
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
EDS 中的可配置参数 (续)
名称 默认值 范围 索引,子索引
死区补偿 A
死区补偿 B
1)
CAN 上发布的两个 EMCY 之间的最短时间
2)
参见“心跳消息”
3)
CAN 位置和模拟位置之前的距离
4)
从阻断设置点到情况好转监控的时间
5)
从上次同步到强制暂停状态的时间
错误寄存器。只读变量
错误寄存器解释
Bit
0 M
1 O
2 O
3 O
4 O
5 O
6 O
7 O
必需/可选 解释
186 100 - 1000 0x6343, 1
-186 (-100) - (-1000) 0x6344, 1
一般故障
电流
电压
温度
通信错误
设备概要文件专用
保留(永远为 0)
制造商专用
在 EDS 的索引 1001,当前错误状态通过一个字节设置。对于任何故障,都会通过字节 0=1 和字节
6=0 设置。
标识参数转换为可比较值
为了优化 EDS 文件十六进制数字的数据存储,使用 ASCII 值和反向写入。
产品代码和序列号的阅读指南
产品代码和序列号是数字和字母组合。
节点 ID 为 0x21 的 PVED-CX 的数据字符串将以此形式提供产品代码查询的回答。
请注意,产品代码是软件部件号,不是销售部件号。
5A1 8 43 18 10 02 10 BA 17 43
标识符 数据长度 产品代码
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
0x580+NID 8 0x43 0x18 0x10 0x02 0x10 0xBA 0x17 0x43
标识对象字节 2 和字节 1
10 18
子索引字节 3
2
字母字节 7
36 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
0x43 = ASCII C
数字字节 6 和字节 5 和字节 4
0x17BA10 = 1554960 十六进制到十进制
然后数字和字母必须组合为 155C4960
来自 PVED-CX 的该数据字符串形式作为 LSS 产品代码查询的回答。
7E4 8 5B 10 BA 17 43 00 00 00
标识符 数据长度 产品代码
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
0x7E4 8 0x5B 0x10 0xBA 0x17 0x43 0x00 0x00 0x00
字节读取指南
标识对象字节 0 0x5B
字母字节 4 0x43 = ASCII C
数字字节 3 和字节 2 和字节 1
0x17BA10 = 1554960 十六进制到十进制
然后数字和字母必须组合为 155C4960
数字阅读指南
节点 ID 为 0x21 的 PVED-CX 的数据字符串将以此形式提供温度直方图值查询的回答。
5A1 8 43 01 23 09 E1 05 00 00
标识对象字节 2 和字节 1 23 01
子索引字节 3 09
数字字节 7 和字节 6 和字节 5 和字节 4
0x 000005E1 = 1505 十六进制到十进制
标识符 数据长度 产品代码
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
0x580+NID 8 0x43 0x01 0x23 0x09 0xE1 0x05 0x00 0x00
错误日志。变量,只读,可变
存储在 RAM(可变)的过去 50 个错误的 FIFO 故障日志位于 EDS 中。
位置: 索引,子索引: 从 0x1003, 1 到 0x1003, 32(均含)。
错误列表。只读变量
从 0 到 255 的每个故障编码的发生计数日志
©
Danfoss | 2017 年 6 月
从索引 0x2000 到索引 0x2039(均含)。
子索引 0: 条目数: 5
•
子索引 1: 紧急错误代码: 广播错误代码
•
子索引 2: 错误寄存器: 错误类型
•
子索引 3: 发生次数计数器: 发生次数
•
子索引 4: 严重度: 系统反应模式
•
11070179 | BC00000068zh-CN0503 | 37
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
有关详细信息,参见“错误代码”部分。
瞬时温度。只读变量
当前温度由 PCB 上的专用电路进行持续监测。
信息位于 EDS 的索引 0x2300, 1 处
温度日志
PVED-CX 每 6 分钟运行时间会记录一次当前温度。然后相关温度间隔计数增加“1”。对于每次温度
记录,都会重新计算平均温度。
温度日志
间隔 限制 平均值 位置
间隔 1 < -31 ‒C [< -23.8‒F] -35 ‒C [-31 ‒F]
间隔 2 -30 -> -21 ‒C [-22 -> -5.2 ‒F] -25 ‒C [-13 ‒F]
间隔 3 -20 -> -11 ‒C [-4 -> -12.2 ‒F] -15 ‒C [5 ‒F]
间隔 4 -10 -> -1 ‒C [14 -> 30.2 ‒F] -5 ‒C [23 ‒F]
间隔 5 0 -> 9 ‒C [32 -> 48.2 ‒F] 5 ‒C [41 ‒F]
间隔 6 10 -> 19 ‒C [50 -> 66.2 ‒F] 15 ‒C [59 ‒F]
间隔 7 20 -> 29 ‒C [68 -> 84.2 ‒F] 25 ‒C [77 ‒F]
间隔 8 30 -> 39 ‒C [86 -> 102.2 ‒F] 35 ‒C [95 ‒F]
间隔 9 40 -> 49 ‒C [104 -> 120.2 ‒F] 45 ‒C [113 ‒F]
间隔 10 50 -> 59 ‒C [122 -> 138.2 ‒F] 55 ‒C [131 ‒F]
间隔 11 60 -> 69 ‒C [140 -> 156.2 ‒F] 65 ‒C [149 ‒F]
间隔 12 70 -> 79 ‒C [158 -> 174.2 ‒F] 75 ‒C [167 ‒F]
间隔 13 80 -> 89 ‒C [176 -> 192.2 ‒F] 85 ‒C [185 ‒F]
间隔 14 90 -> 99 ‒C [194 -> -210.2 ‒F] 95 ‒C [203 ‒F]
间隔 15 100 -> 109 ‒C [212 -> -228.2 ‒F] 105 ‒C [221 ‒F]
间隔 16 110 -> 119 ‒C [230 -> -246.2 ‒F] 115 ‒C [239 ‒F]
间隔 17 > 120 ‒C [> 248 ‒F] 125 ‒C [257 ‒F]
0x2301, 1
0x2301, 2
0x2301, 3
0x2301, 4
0x2301, 5
0x2301, 6
0x2301, 7
0x2301, 8
0x2301, 9
0x2301, A
0x2301, B
0x2301, C
0x2301, D
0x2301, E
0x2301, F
0x2301, 10
0x2301, 11
平均温度可基于温度日志进行计算。
安全开关状态
PVED-CX 电源的状态位于 EDS 中。参见图 6。线缆组件原理。
如果 Vbat2 In 超过 1.9 V,读数则为 TRUE。
•
如果 Vbat3 超过 10 V,读数则为 TRUE。
•
CEDS 参数。安全开关
名称 默认值 范围 索引,子索引
Safety_Switch_Status NA 2700
词条数
VBAT2_IN_above_1.9V
VBAT3_above_10V
38 | © Danfoss | 2017 年 6 月
2 NA 2700sub0
0(假) 0 或 1
0(假) 0 或 1
2700sub1
2700sub2
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
安全相关功能
紧急消息 (EMCY)
这些消息符合 Ref.3,扩展部分为“制造专用错误字段”的字节 3 显示发生次数计数器,字节 7 提供
相关错误的严重度。
EMCY 消息帧
COB-ID
PVED-CX Node0x21
0x0A1 8
…
PVED-CX n
0x80+NID 8
数据长度 错误消息
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
错误代码 错误寄存器
LSB MSB
错误代码 错误寄存器
LSB MSB
OC
OC
严重度
严重度
EMCY 重置框架
COB-ID
PVED-CX Node0x21
0x0A1 4
…
PVED-CX n
0x80+NID 4
CAN 总线上的 EMCY 发布顺序
系统上的第一个活动错误一旦由于某些故障在系统中被激活,将立即在 CAN 总线上发布。
如果同时发生多个错误,例如在配置的 EMCY 禁止时间内发生多个错误,消息则按照严重度顺序发
布,严重错误首先发布,然后按照发生顺序发布。
EMCY 禁止时间(索引 0x1015)是 CAN 总线上发布的两个连续 EMCY 消息之间的最小时间延迟,以
毫秒表示。
重置紧急消息
PVED-CX 设备只要被取消激活,就会针对每个故障在 CAN 总线上发布一个重置 EMCY 消息。
数据长度 重置错误消息
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
重置错误代码 错误寄存器 制造商专用错误字段
LSB MSB
错误代码 错误寄存器 制造商专用错误字段
LSB MSB
©
Danfoss | 2017 年 6 月
字节 0 - 字节 1: 16 位 EMCY 错误代码
字节 2: 错误寄存器在 OD-Index 0x1001 处的记录
EMCY 重置代码对于任何故障类型都是固定的,如 0x0000
PVED-CX 设备分别设置/重置此 8 位错误寄存器的各自错误位。
11070179 | BC00000068zh-CN0503 | 39
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
EMCY 使用方行为
如果 EMCY 消息是由 CAN 总线上的主设备发出的,且带有指定错误代码,PVED-CX 设备则会接收该
消息。
从主设备收到此类 EMCY 消息时,PVED-CX NMT 状态机和 DSM 分别变换到已停止状态和故障暂停状
态。
PVED-CX 设备对其按照上述方式作出的 EMCY 反应消息如下:
来自主设备的 EMCY 消息
COB-ID
0x081 8 0x00 0x10 xx xx xx xx xx xx
数据长度 重置错误消息
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
错误代码 错误寄存器 制造商专用错误字段
LSB MSB
COB-ID = 0x80 + 主设备节点 ID = 0x81
错误代码 = 0x10000
字节 2 到字节 7: 无关
NMT 重置应用
要重置应用,例如取消激活所有非严重错误、将对象库和设备专用参数的制造部分重置为默认值,
要使用重置应用命令。重置应用命令的帧格式如下所示:
重置应用命令格式
标识符 数据长度 NMT 重置应用
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
0x000 2
如: PVED-CX Node-ID = 0x20
0x000 2 0x81 0x20
如: PVED-CX Node-ID = 0x21
0x000 2 0x81 0x21
命令
指定符
节点 ID
xx xx xx xx xx xx
设备状态:
0x81 - 重置应用,对网络 0x00 中所有 PVED-CX 模块执行重置应用命令用于“Node-ID”。
这是一个未确认服务,如 PVED-CX 不会发送任何响应。
NMT 重置通信
要重置通信,如取消激活通信类型的所有非严重错误,则使用重置通信命令。重置通信命令的帧格
式如下所示:
40 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
重置通信命令格式
标识符 数据长度 NMT 重置通信
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
0x000 2
如: PVED-CX Node-ID = 0x20
0x000 2 0x80 0x20
如: PVED-CX Node-ID = 0x21
0x000 2 0x80 0x21
命令
指定符
节点 ID
设备状态:
0x82 - 重置通信
对网络 0X00 中用于“Node-ID”的左右 PVED-CX 模块执行重置通信命令
这是一个未确认服务,如 PVED-CX 不会发送任何响应。
xx xx xx xx xx xx
重新加载命令
使用此命令,主设备可以重新加载 PVED-CX,且所有参数或部分参数组的启动值位于非可变内存
中,如 EEPROM
重新加载启动参数
标识符 数据
长度
COB-ID
发送重新加载命令
0x600+NID 8 0x22 0x11 0x10 0x01 0x6C* 0x6F 0x61 0x64
PVED-CX 设备响应
0x580+NID 8 0x60 0x11 0x10 0x01 0x00 0x00 0x00 0x00
* ASCII ‘I’
将参数重新加载到 EEPROM
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
命令
指定符
OD-Index
子索引 ‘l’ ‘o’ ‘a’ ‘d’
保留
成功重新加载之后,PVED-CX 发送正面确认 字节 0: 命令指示符,如 0x60 表示正面确认
COB-ID: 0x600 + Node-ID
字节 3: 子索引定义重新加载参数。
BYTE-3
0x01
0x02
0x03
0x04
描述
重新加载所有参数
重新加载通信参数
重新加载应用参数
重新加载制造商参数
PVED-CX 阀门配置要点
©
Danfoss | 2017 年 6 月
如果启动阀门时节点 ID 值超出有效范围,即不在 {0x10, 0x3F} 范围内,则节点 ID 相关 COB-ID 将初始
化为 0x80000000,即未定义值,因此没有任何设置点 RxPDO 映射条目会映射到设置点索引 0x3300
子索引 0 以及近邻设置点索引 0x2100 子索引 1。
11070179 | BC00000068zh-CN0503 | 41

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
设备将保留在 LSS-Init 状态,而不会发出 NMT 启动消息。
如果节点 ID 或近邻节点 ID 值在启动时超出有效范围,设备则会针对启动时的
CANOPEN_STACK_ERROR 发出 EMCY 帧。
PVED-CX 设备不会检查属于同一个组的节点 ID 和近邻节点 ID,一旦出现出现这种情况则无法运行。
使用层设置服务更改节点 ID
使用层设置服务 (LSS) 时,可以更改设备节点 ID。
此服务在以下两种方式下均可运行。
•
•
如果 LSS 主设备希望将某个特定的 LSS 从设备切换为 LSS 配置状态,LSS 主设备则会请求一个带有已
知 LSS 地址的切换模式。主设备等 LSS 地址(供应商 ID、产品代码、修订号和序列号),了解具体
设备的 LSS 地址。
如果网络中只有一个 LSS 从设备,LSS 主设备则可以请求开关模式全局服务。
切换到配置模式全局方法: 这种方式下,一次只能有一个 PVED-CX 设备连接 CAN 总线进行配
置。
切换到配置模式选择性方法: 这种方式下,所有其他设备可能会保持与 CAN 总线的连接,主设
备基于 LSS 地址在其中选择一个 PVED-CX 设备进行配置。
步骤 1: 切换到配置模式
切换到配置模式全局方法
如果主设备只连接一个 PVED-CX,则可以使用此过程。
只有阀门已经配置为有效的运行节点 ID 时才需要转换为 NMT 已停止状态。
切换到配置模式全球通用方法
标识符 数据长度 转换为 NMT 已停止
字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7 字节 8
转换为 NMT 已停止请求字节 3 到 8 为无关:
0x000 2 0x02 0x00
请求(进入 LSS 全局)
7E5 8 0x04 0x01 0x00 0x00 0x00 0x00 0x00 0x00
切换到配置模式选择性方法
如果主设备连接多个 PVED-CX,则必须使用此过程
总线上一次只能有一个未配置的 PVED-CX。
EDS 索引 0x1018 的所有值均可通过查询收集,参见 LSS 查询服务。
由主系统负责跟踪值和节点 ID 之间的关系。
切换到配置模式选择性方法
标识符 数据长度 LSS 开关状态选择
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
命令
指定符
42 | © Danfoss | 2017 年 6 月
LSS 地址 保留
LSB MSB
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
切换到配置模式选择性方法 (续)
标识符 数据长度 LSS 开关状态选择
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
发送供应商名称,LSS 地址的一部分(索引 0x1018 子索引 0x01)
0x7E5 8 0x40
发送产品名称,LSS 地址的一部分(索引 0x1018 子索引 0x02)
0x7E5 8 0x41
发送修订号,LSS 地址的一部分(索引 0x1018 子索引 0x03)
0x7E5 8 0x42
发送序列号,LSS 地址的一部分(索引 0x1018 子索引 0x04)
0x7E5 8 0x43
PVED-CX 设备响应
0x7E4 8 0x44 0x00 0x00 0x00 0x00 0x00 0x00 0x00
供应商 ID
产品代码
修订号
序列号
步骤 2: 配置节点 ID
0x00 0x00 0x00
0x00 0x00 0x00
0x00 0x00 0x00
0x00 0x00 0x00
配置节点 ID
标识符 数据长度 节点 ID 配置
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
向设备发送新的节点 ID
0x7E5 8 0x11 0x20 0x00 0x00 0x00 0x00 0x00 0x00
PVED-CX 设备响应
0x7E4 8 0x11 0x00 0x00 0x00 0x00 0x00 0x00 0x00
命令
指定符
新的节点 ID 保留
在响应中,数据字节 1 到 2 表示错误代码。非零值表示配置节点 ID 时出错。
步骤 3: 存储新分配的节点 ID
设备收到存储命令时将新配置的节点 ID 存储在非可变内存中,帧格式如下:
存储节点 ID
标识符 数据长度 存储节点 ID
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
将节点 ID 存储到设备
0x7E5 8 0x17 0x00 0x00 0x00 0x00 0x00 0x00 0x00
PVED-CX 设备响应
0x7E4 8 0x17 0x00 0x00
命令
指定符
保留
保留
©
Danfoss | 2017 年 6 月
在响应中,数据字节 1 到 2 表示错误代码。如果为非零值,则表示存储设备的节点 ID 时出错。
11070179 | BC00000068zh-CN0503 | 43

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
步骤 4: 切换到正常模式
一旦在设备中配置和存储了新的节点 ID 后,主设备则必须执行命令以退出配置模式,帧格式如下:
切换到正常模式
标识符 数据长度 切换到正常模式
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
请求切换为正常模式
0x7E5 8 0x04 0x01 0x00 0x00 0x00 0x00 0x00 0x00
PVED-CX 设备在新的节点 ID 上响应启动消息
0x720 8 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
LSS 查询服务
命令
指定符
切换模式 保留
使用这些服务,主设备能够了解设备的 LSS 地址和节点 ID
执行任何此类命令之前,主设备都会将设备从正常模式更改为配置模式,即查询服务只能由处于配
置模式的设备进行响应。使用切换到配置模式全局方法。
提供以下信息:
供应商 ID
•
产品代码
•
修订号
•
序列号
•
节点 ID
•
查询可以任意顺序执行,即这些命令互相没有关联。
查询供应商 ID 命令
此操作根据 CiA 识别 丹佛斯 产品。
查询供应商 ID
标识符 数据长度 查询服务: 供应商 ID
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
0x7E5 8 0x5A 0x00 0x00 0x00 0x00 0x00 0x00 0x00
PVED-CX 设备在新的节点 ID 上响应启动消息
0x7E4 8 0x5A 0x19 0x00 0x00 0x01 0x00 0x00 0x00
命令
指定符
保留
供应商 ID (LSB --->MSB) 保留
44 | © Danfoss | 2017 年 6 月
查询产品编码命令
此信息提供设备的软件产品编码。
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
查询产品编码
标识符 数据长度 查询服务: 产品代码
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
发送
0x7E5 8 0x5B 0x00 0x00 0x00 0x00 0x00 0x00 0x00
PVED-CX 设备响应
0x7E4 8 0x5B 0xA2 0xF9 0x17 0x42 0x00 0x00 0x00
查询修订号
标识符 数据长度 查询服务: 修订号
COB-ID
0x7E5 8 0x5C 0x00 0x00 0x00 0x00 0x00 0x00 0x00
PVED-CX 设备响应
0x7E4 8 0x5C 0x05 0x03 0x01 0x00 0x00 0x00 0x00
用于修订版 5.31。
命令
指定符
保留
产品编码 (LSB --->MSB) 保留
查询修订号命令
此信息提供设备的软件修订号。
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
命令
指定符
保留
修订号 (LSB —>MSB) 保留
查询序列号命令
此信息提供设备的产品序列号。
查询序列号
标识符 数据长度 查询服务: 序列号
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
0x7E5 8 0x5D 0x00 0x00 0x00 0x00 0x00 0x00 0x00
PVED-CX 设备响应
0x7E4 8 0x5D 0x39 0xFD 0x13 0x44 0x00 0x00 0x00
用于 131D0009 (W:13, Y:1, D:Thursday, SN:0009)
©
Danfoss | 2017 年 6 月
命令
指定符
保留
修订号 (LSB --->MSB) 保留
11070179 | BC00000068zh-CN0503 | 45

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
查询设备节点 ID 命令
查询设备节点 ID
标识符 数据长度 查询服务: 节点 ID
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
0x7E5 8 0x5E 0x00 0x00 0x00 0x00 0x00 0x00 0x00
PVED-CX 设备响应
0x7E4 8 0x5E 0x20 0x00 0x00 0x00 0x00 0x00 0x00
SDO 访问 EDS
命令
指定符
保留
节点 ID 保留
设置 EDS 参数
设置 EDS 参数
标识符 数据长度EDS 参数的设置
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
0x600+NID 8 0x22 I LSB I MSB SUB I 0xP 1 0xP 2 0xP 3 0xP 4
设备响应
0x580+NID 8 0x60 I LSB I MSB SUB I 0x00 0x00 0x00 0x00
发送
标识符 数据长度将参数保存到 EEPROM
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
发送
0x600+NID 8 0x22 0x10 0x10 0x01 0x73 0x61 0x76 0x65
PVED-CX 设备响应
0x580+NID 8 0x60 0x10 0x10 0x01 0x00 0x00 0x00 0x00
I LSB: EDS 索引 LSB; I MSB: EDS 索引 MSB; SUB I: EDS 子索引
P 1: 参数字节 LSB; P 2: 参数字节更重要字节; P 3: 参数字节更更重要字节; P 4: 参数字节 MSB
命令指定符
OD-Index
子索引 ‘s’ ‘a’ ‘v’ ‘e’
46 | © Danfoss | 2017 年 6 月
设置 NNI 示例
设置 NNI 示例
标识符 数据长度节点 0xNN 的近邻节点 ID (0xYY) 设置
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
请求(ID 为 0xNID 的 PVED-CX 监控 ID 为 0xYY 的阀门)
0x600+NID 8 0x22 0x00 0x30 0x00 0xYY 0x00 0x00 0x00
PVED-CX 设备响应
0x580+NID 8 0x60 0x00 0x30 0x00 0x00 0x00 0x00 0x00
发送
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
设置 NNI 示例 (续)
标识符 数据长度节点 0xNN 的近邻节点 ID (0xYY) 设置
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
标识符 数据长度将参数保存到
字节
0
COB-ID
发送保存命令
0x600+NID 8 0x22 0x10 0x10 0x01 0x73 0x61 0x76 0x65
PVED-CX 设备响应
0x580+NID 8 0x60 0x10 0x10 0x01 0x00 0x00 0x00 0x00
命令指定符
查询 EDS 参数
查询 EDS 参数
标识符 数据长度 请求节点 NN 正在监控的节点的 ID YY
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
发送请求
0x600+NID 8 0x40 I LSB I MSB SUB I 0x00 0x00 0x00 0x00
PVED-CX 设备响应
0x580+NID 8 0xnn I LSB I MSB SUB I 0xP 1 0xP 2 0xP 3 0xP 4
I LSB: EDS 索引 LSB
I MSB: EDS 索引 MSB
SUB I: EDS 子索引
0xnn: 一般命令指定符
命令指定符
OD-Index
EEPROM
字节 1字节 2字节
OD-Index
子索引
P 1: 参数字节 LSB
P 2: 参数字节更重要字节
P 3: 参数字节更更重要字节
P 4: 参数字节 MSB
3
字节 4字节 5字节 6字节
子索引 ‘s’ ‘a’ ‘v’ ‘e’
7
查询 NNI 示例
查询 NNI 示例
标识符 数据长度 请求节点 NN 正在监控的节点的 ID YY
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
0x600+NID 8 0x40 0x00 0x30 0x00 0x00 0x00 0x00 0x00
PVED-CX 设备响应
0x580+NID 8 0xCS 0x00 0x30 0x00 0xNNI 0x00 0x00 0x00
对于来自设备的正面确认,数据字节 (0) 命令指示符应为 0x80 之外的内容
数据字节 (4): 近邻节点 ID
©
Danfoss | 2017 年 6 月
命令指定符
OD-Index
11070179 | BC00000068zh-CN0503 | 47

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
查询错误日志示例
查询错误日志示例
标识符 数据长度 请求错误日志
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
发送错误代码 ID 的请求
0x600+NID 8 0x40 0xRR 0x20 0x01 0x00 0x00 0x00 0x00
PVED-CX 设备响应
0x580+NID 8 0x4F 0xRR 0x20 0x01 0xError
发送发生次数请求
0x600+NID 8 0x40 0xRR 0x20 0x03 0x00 0x00 0x00 0x00
PVED-CX 设备响应
0x580+NID 8 0x4F 0xRR 0x20 0x03 0xcount LSB 0xcount 0xcount 0xcount
RR 为 EDS 索引中的 LSB。RR [ 0x00 ; 0x39 ]。
该错误日志有 58 条内容。必须所有这些值进行重复 [ 0x00 ; 0x39 ]。
次数 (0xcount) 必须根据 XXX 部分的说明进行处理。
命令指定符
OD-Index
子索引
code Id LSB
0xError
code Id
0xError
code Id
0xError
code Id
MSB
MSB
阀门运行
正常运行
下面的内容说明了运行一个已配置 PVED-CX 的情况:
NMT 启动对象
PVED-CX 使用节点 ID 在启动时发出消息。
NMT 启动对象 - 地址声明
标识符 数据长度 NMT 启动消息
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
如: PVED-CX Node-ID = 0x20
0x720 1 0x00
如: PVED-CX Node-ID = 0x21
0x721 1 0x00
…
PVED-CX n
0x700+NID 1 0x00
“地址声明”消息符合 CANopen 协议。
通电之后,NMT 消息在 CAN 总线上存在大约 1 秒。
48 | © Danfoss | 2017 年 6 月
心跳消息
心跳消息是 PVED-CX 根据 OD 索引 0x1017 的定义传输的循环消息。
这些消息为 NMT 提供模块状态。
11070179 | BC00000068zh-CN0503
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
一旦心跳生成方配置了非零期段,PVED-CX 马上开始发送心跳消息。传输之间的心跳值为 10ms。
来自 PVED-CX 的心跳消息
标识符 数据长度 心跳消息
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
NMT 状态
如: PVED-CX Node-ID = 0x20
0x720 1 0x00
如: PVED-CX Node-ID = 0x21
0x721 1 0x00
…
如: PVED-CX Node-ID n
0x700+NID 1 0x00
字节 0 NMT 状态
0x00
0x04
0x05
0x7F
xx xx xx xx xx xx xx
启动
已停止
运行
运行前
进入设备激活模式
需首先强制每个 PVED-CX 通过状态机进入称为“活动设备模式”的最终状态,然后才能向 PVED-CX
发送设置点命令。以下顺序描述了将 PVED-CX 通过状态机进入“活动设备模式”所需的 CAN 通信,
接下来显示了整个控制分区是如何接受命令进入“设备活跃模式”的。
PVED-CX 节点 0x21
将 PVED 0x21 设置为活动设备模式
标识符 数据长度 将 PVED-CX 1 进入“运行状态”
字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7 字节 8
0x000 2 0x01 0x21
20 ms(禁用)
0x621 8 0x22 0x40 0x60 0x00 0x09 0x00 0x00 0x00
PVED-CX 响应
0x5A1 8 0x60 0x40 0x60 0x00 0x00 0x00 0x00 0x00
20 ms(暂停)
0x621 8 0x22 0x40 0x60 0x00 0x0B 0x00 0x00 0x00
PVED-CX 响应
0x5A1 8 0x60 0x40 0x60 0x00 0x00 0x00 0x00 0x00
20 ms(完全运行模式)
0x621 8 0x22 0x42 0x60 0x00 0x01 0x00 0x00 0x00
PVED-CX 响应
0x5A1 8 0x60 0x42 0x60 0x00 0x00 0x00 0x00 0x00
20 ms(活动)
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 49

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
将 PVED 0x21 设置为活动设备模式 (续)
标识符 数据长度 将 PVED-CX 1 进入“运行状态”
字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7 字节 8
0x621 8 0x22 0x40 0x60 0x00 0x0F 0x00 0x00 0x00
PVED-CX 响应
0x5A1 8 0x60 0x40 0x60 0x00 0x00 0x00 0x00 0x00
1ms
.. PVED-CX nr. 2
1ms
..
状态
状态 索引 子索引 值
禁用
暂停
活动
0x6040 0 0x09
0x6040 0 0x0B
0x6040 0 0x0F
来自设备 0x00 的确认
模式 索引 子索引 值
完全运行模式
手动控制
0x6042 0 0x01
0x6042 0 0x02
PVED-CX 节点 NID
将 PVED 节点 NID 设置为设备活跃模式
标识符 数据长度 将 PVED-CX n 进入“设备活跃模式”
字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7 字节 8
0x000 2 0x01
20 ms
0x600+NID 8 0x22 0x40 0x60 0x00 0x09 0x00 0x00 0x00
PVED-CX 响应
0x580+NID 8 0x60 0x40 0x60 0x00 0x00 0x00 0x00 0x00
20 ms
0x600+NID 8 0x22 0x40 0x60 0x00 0x0B 0x00 0x00 0x00
PVED-CX 响应
0x580+NID 8 0x60 0x40 0x60 0x00 0x00 0x00 0x00 0x00
20 ms
0x600+NID 8 0x22 0x42 0x60 0x00 0x01 0x00 0x00 0x00
PVED-CX 响应
0x580+NID 8 0x60 0x42 0x60 0x00 0x00 0x00 0x00 0x00
20 ms
0x600+NID 8 0x22 0x40 0x60 0x00 0x0F 0x00 0x00 0x00
节点 ID
50 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
将 PVED 节点 NID 设置为设备活跃模式 (续)
标识符 数据长度 将 PVED-CX n 进入“设备活跃模式”
字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7 字节 8
PVED-CX 响应
0x580+NID 8 0x60 0x40 0x60 0x00 0x00 0x00 0x00 0x00
通过 PDO 将控制分区设置为设备活跃模式
标识符
向所有 PVED-CX 设备发送 NMT 运行
0x000 2 0x01 0x00
设备控制 RPDO 消息
发送禁用状态
0x300+Base NID 3 0x09 0x00 0x01
发送暂停状态
0x300+Base NID 3 0x0B 0x00 0x01
发送主动设备模式状态
0x300+Base NID 3 0x0F 0x00 0x01
Dlc
将控制分区 1 进入“设备活跃模式”
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
DSM 状态 模式
xx xx xx xx xx
仅更改标识符即可选择需要更改其状态和模式的控制分区。
选择 PVED-CX 的控制分区的标识符配置如下:
•
COB-ID = 0x300 + 分区的基本节点 ID,参见图 28。
•
设置点
设置点 RxPDO 消息的时间监控仅在 PVED-CX 处于“设备激活模式”和“完全运行模式”时有效。
CANopen 设置点包含了一个控制分区中所有阀门的设置点。如果不存在节点 ID,则应该阻断设置
点,即 0。只有在“完全运行模式”下才沿用该设置点。
控制分区的设置点
标识符 数据
长度
0x220 +Base NID 8 set0 set1 set2 set3 set4 set5 set6 set7
设置点消息
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
字节 0 是控制分区内的最低节点 ID,即 0x20
字节 7 是控制分区内的最高节点 ID,即 0x27
如果多个控制分区活动,则需要附加的设置点消息。
控制分区 1 的设置点
标识符 数据长度 设置点消息
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
0x210 8 set0 set1 set2 set3 set4 set5 set6 set7
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 51

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
每个设置点都是一个带签名的 8 字节。间隔从 -127 (0x81) 到 127 (0x7F),中位设置点为 0。
同步消息:
同步消息必须从主设备进行传输。
同步消息,全局
标识符 数据长度 同步消息
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
0x80 0
10 ms
0x80 0
字节 0 – 7 中无信息。
同步消息上 PVED-CX 阀芯位置 消息的传输
对于来自控制器的每第 n 个同步消息,PVED-CX 发送一次经过筛选的阀芯位置。
对于第 n 个同步消息,设备必须根据传输类型发送其阀芯位置。
•
阀芯位置 TPDO 的传输类型可在 OD 索引 0x1800 子索引 02 处配置。
•
例如,配置的传输类型为 4 组,则在收到四个连续同步消息时,会打开一个同步时间段,且在下
•
面四个同步消息的时间跨度内 会发送一个阀芯位置实际值。
来自 1 号阀门的实际值消息:
实际值消息
标识符 数据长度 实际值
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
0x180+NID 0
实际 反向
实际值消息是一个经过签名的 8 字节。间隔从 -127 (0x81) 到 127 (0x7F),中位设置点为 0。反向数据
是实际值的位反向版本。
实际阀芯位置 – 帧格式
标识符
由 PVED-CX Node-ID 0x20 发送
0x1A0 2 0x00 0xFF xx xx xx xx xx xx
由 PVED-CX Node-ID 0x11 发送
0x191 2 0x84 0x7B xx xx xx xx xx xx
由 PVED-CX Node-ID 0x3D 发送
0x1BD 2 0x9B 0x64 xx xx xx xx xx xx
字节 0: 实际阀芯位置
字节 1: 反向阀芯位置
Dlc
发送 TxPDO(阀芯位置信息)
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
52 | © Danfoss | 2017 年 6 月
来自主设备的同步消息的速率应为 10 ms。这些 PDO 传输类型的默认值为 4。
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
手动运行模式和完全运行模式配置
使用索引 0x6042 和子索引 0x00 处的对象,主设备可以将设备从手动运行模式更改为完全运行模
式,或者从完全运行模式更改为手动运行模式:
手动运行模式和完全运行模式之间的转换
标识符
向 PVED-CX Node-ID 0x20 发送完全运行模式
0x620 8 0x22 0x42 0x60 0x00 0x01 0x00 0x00 0x00
PVED-CX 响应
0x5A0 8 0x60 0x42 0x60 0x00 0x00 0x00 0x00 0x00
向 PVED-CX Node-ID 0x21 发送手动运行模式
0x621 8 0x22 0x42 0x60 0x00 0x02 0x00 0x00 0x00
PVED-CX 响应
0x5A1 8 0x60 0x42 0x60 0x00 0x00 0x00 0x00 0x00
…
…
发送新模式
0x600+NID 8 0x22 0x42 0x60 0x00
PVED-CX 响应
0x5An 8 0x60 0x42 0x60 0x00 0x00 0x00 0x00 0x00
Dlc
设备状态“暂停”
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
命令
指定符
OD-Index
子索引 模式
模式
0x00 0x00 0x00
主设备也可以根据通过 PDO 将设备带入主动模式的说明,使用设备控制 RPDO 更改 DSM 状态和模
式。
模式 索引 子索引 值
完全运行模式
手动控制
0x6042 0 0x01
0x6042 0 0x02
ASSIST
ASSIST 用于测试电气接线、阀芯监控和阀芯控制。ASSIST 将分别自动测试控制分区内的每个设备。
ASSIST 只能对一整个控制分区进行。
要执行 ASSIST,需要按照给定的顺序执行一组命令:
1.
ASSIST 预触发
2.
NMT 重置应用
3.
ASSIST 运行命令
如果 ASSIST 成功完成,则会由第一个测试的设备发送一个完成消息。ASSIST 可由主设备通过 ASSIST
取消命令进行取消。ASSIST 取消或成功完成之后,需要进行重置应用命令。
ASSIST 预触发命令
要启动 ASSIST,主设备必须发送一条预触发 ASSIST 命令,向控制分区内的 PVED-CX 设备表明它们需
要执行 ASSIST。
ASSIST 预触发命令的帧格式如下所示:
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 53
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
ASSIST 预触发命令
标识符 数据长度 ASSIST 预触发命令
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
设备 ID 组编号 命令类型 其他信息
向控制分区 1 发送 ASSIST 预触发命令
0x281 4 0x01 0x00 0x01 0x00
向控制分区 2 发送 ASSIST 预触发命令
0x281 4 0x01 0x01 0x01 0x00
…
向控制分区 n 发送 ASSIST 预触发命令
0x281 4 0x01 0x(n-1) 0x01 0x00
ASSIST 运行命令
收到 ASSIST 预触发和后续的 NMT 重置应用后,PVED-CX 设备准备执行 ASSIST 并等待来自主设备的
ASSIST 运行命令。
xx xx xx xx
此命令的帧格式如下所示:
ASSIST 运行命令
标识符 数据
长度
向控制分区 1 中的节点 0x10 发送 ASSIST 运行命令以首先启动 ASSIST
0x281 4 0x01 0x00 0x02 0x10
ASSIST 运行命令
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
设备 ID 组编号 命令类型 节点
ID
在字节 3(节点 ID)中,控制分区中的任何 PVED-CX 均可设置为启动 ASSIST 的第一个设备。
字节 0(设备 ID)表明了在网络中此命令要用于 PVED-CX 设备。
收到 ASSIST 运行命令之后,字节 3 PVED-CX 将开始执行 ASSIST,控制分区内的其他设备将转入侦
•
听模式。
执行 ASSIST 的设备将针对设备在 ASSIST 中完成的不同阶段发送 ASSIST 相关消息。
•
一个设备的 ASSIST 完成之后,其近邻设备将继续。第一个设备从近邻处收到 ASSIST 完成消息自
•
后,将针对整个控制分区进行确认。
设备用于在 CAN 总线上传达 ASSIST 相关消息的消息 ID 如下所示: COB-ID: 0x290 + 节点 ID
例如,如果节点 ID 为 0x10 且要执行 ASSIST,它会针对消息 ID 0x2A0 发送响应,之后是控制分区内
的其他设备。
执行 ASSIST 的节点 ID 为 0x10 的设备的响应消息如下所示:
xx xx xx xx
设备 ASSIST 步骤确认
标识符 数据
长度
COB-ID
节点 0x10 的 ASSIST 已启动消息
0x2A0 2 0x01 0x00
PVED-CX 的 ASSIST 步骤确认
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
命令类型 信息
54 | © Danfoss | 2017 年 6 月
xx xx xx xx xx xx
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
技术数据
设备 ASSIST 步骤确认 (续)
标识符 数据
长度
节点 0x10 的 ASSIST 步骤完成消息:(完成步骤 1 之后)A 侧转出
COB-ID
0x2A0 2 0x02 0x00
节点 0x10 的 ASSIST 步骤完成消息:(完成步骤 2 之后)返回中位
COB-ID
0x2A0 2 0x02 0x01
节点 0x10 的 ASSIST 步骤完成消息:(完成步骤 3 之后)B 侧转入
COB-ID
0x2A0 2 0x02 0x02
节点 0x10 的 ASSIST 步骤完成消息:(完成步骤 4 之后)返回中位
COB-ID
0x2A0 2 0x02 0x03
PVED-CX 的 ASSIST 步骤确认
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
命令类型 步骤
命令类型 步骤
命令类型 步骤
命令类型 步骤
xx xx xx xx xx xx
xx xx xx xx xx xx
xx xx xx xx xx xx
xx xx xx xx xx xx
在 ASSIST 期间,设备会针对自己发送它们的 TxPDO(即没有同步消息),执行 ASSIST 时不需要主设
备来发送同步消息。
此消息表明在整个控制分区上 ASSIST 已成功执行。
ASSIST 成功完成
标识符 数据
长度
COB-ID
节点 0x10 的 ASSIST 已完成消息
0x282 3 0x10 0xFF 0x00
控制分区 ASSIST 已完成
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
节点 ID ASSIST 结果信息
ASSIST 的 LED
ASSIST 期间,LED 闪烁以表明检测的当前状态。
4 个 PVED-CX 的示例:
#2 监控 #1
#3 监控 #2
#4 监控 #3
#1 监控 #4
xx xx xx xx xx
©
Danfoss | 2017 年 6 月
检测顺序和操作人员反馈
模块活动 PVED-CX 的 LED 状态
#1 #2 #3 #4
正常运行模式
ASSIST 已启动
#1 故障注入 A 油口
===== ===== ===== =====
G G G G
GGGG GGGG G G
11070179 | BC00000068zh-CN0503 | 55
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
检测顺序和操作人员反馈 (续)
模块活动 PVED-CX 的 LED 状态
#2 检测故障
#2 释放 vbat_2
#1 故障注入 B 油口
#2 检测故障
#2 释放 vbat_2
2# 故障注入 A 油口
#3 检测故障
#3 释放 vbat_2
#2 故障注入 B 油口
#3 检测故障
#3 释放 vbat_2
#3 故障注入 A 油口
#4 检测故障
#4 释放 vbat_2
#3 故障注入 B 油口
#4 检测故障
#4 释放 vbat_2
#4 故障注入 A 油口
#1 检测故障
#1 释放 vbat_2
#4 故障注入 B 油口
#1 检测故障
#1 释放 vbat_2
#1 #2 #3 #4
GGGG YYYY G G
GGGG GGGG G G
GGGG GGGG G G
GGGG YYYY G G
GGGG GGGG G G
G GGGG GGGG G
G GGGG YYYY G
G GGGG GGGG G
G GGGG GGGG G
G GGGG YYYY G
G ===== GGGG G
G ===== GGGG GGGG
G ===== GGGG YYYY
G ===== GGGG GGGG
G ===== GGGG GGGG
G ===== GGGG YYYY
G ===== ===== GGGG
GGGG ===== ===== GGGG
YYYY ===== ===== GGGG
GGGG ===== ===== GGGG
GGGG ===== ===== GGGG
YYYY ===== ===== GGGG
===== ===== ===== =====
56 | © Danfoss | 2017 年 6 月
图例:
===== 灯光常绿
G 绿色闪烁 (1 Hz)
GGGG 绿色闪烁 (4 Hz)
YYYY 黄色闪烁 (4 Hz)
取消 ASSIST 命令
通过使用此命令可以在控制分区执行检测时取消 ASSIST。ASSIST 取消发送到的节点必须与 ASSIST 运
行命令发送到的节点相同。
PVED-CX 收到此命令时将挂起 ASSIST 并进入安全状态,即 DSM 状态变为已禁用状态。
取消 ASSIST 命令的帧格式:
11070179 | BC00000068zh-CN0503
技术样本
PVED-CX 系列 4 电液驱动器
技术数据
ASSIST 取消
标识符 数据长度 主设备的 ASSIST 取消
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
COB-ID
发送 ASSIST 取消
0x281 4 0x10 0x01 0x00 0x00
ASSIST 中止消息
PVED-CX 设备将中止,并在 CAN 总线上发送 ASSIST 中止消息,如果检测到任何问题故障,则还会在
消息中带有故障错误代码。
其帧格式如下:
ASSIST 已中止
标识符 数据长度 ASSIST 由 PVED-CX 取消
COB-ID
节点 ID 组编号 命令类型 信息
字节 0 字节 1 字节 2 字节 3 字节 4 字节 5 字节 6 字节 7
节点 ID ASSIST 结果错误代码
xx xx xx xx xx
xx xx xx xx
节点 0x12 的 ASSIST 已中止消息
0x282 3 0x12 0x00 0x2B
上述消息表明 ASSIST 被控制分区中的节点 0x12 中止,且带有错误代码 0x2B。收到 ASSIST 中止时,
控制分区内的所有 PVED-CX 将转入禁用状态。
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 57

NOT_READY
INIT
FAULTDISABLED
HOLD
FAULT_HOLD
DEVICE_MODE_
ACTIVE
FAULT_
REACTION
Operational
Pre-Operational
Stopped
Communication state machine
Initialisation
Reset
Application
Reset
Communication
Initialising
Device state machine
Power on
V310034.A
技术样本
PVED-CX 系列 4 电液驱动器
状态机
关于 PVED-CX DSM 实施的要点
设备状态机
(DSM)
启动状态:
禁用状态:
与通信系统相关的基本启动之后,模块进入启动状态,然后进入“运行前”模式。
安全开关: 已禁用
•
ASIC 电磁线圈驱动电路: 已禁用
•
RPDO 的时间监控已禁用
•
PVED-CX 不发送实际值 PDO。
•
PVED-CX 不控制阀芯。
•
自身设置点和实际值的比较启用
•
近邻监控启用
•
进入此状态的前提条件是通信状态机应为“运行”状态。即“安全”状态。
安全开关: 已禁用
•
ASIC 电磁线圈驱动电路: 已禁用
•
实际近邻值 RPDO 和设置点 RPDO 的时间监控禁用
•
PVED-CX 发送实际值 PDO。
•
PVED-CX 不控制阀芯。
•
自身设置点和实际值的比较启用
•
暂停状态:
58 | © Danfoss | 2017 年 6 月
在此状态下,主设备通过 SDO 消息具有到索引 0x6042 (DEVICE_MODE) 的写入消息
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
状态机
主设备可以将阀门的 DEVICE_MODE 更改为 ASSIST 模式、手动运行模式或完全运行模式。
•
•
•
•
•
•
•
•
•
DEVICE_MODE_ACTIVE 状态:
在此状态下,不允许通过 SDO 写入索引 0x6042 的权限。模块处于暂停状态设置的模式
手动运行模式
•
•
•
•
•
•
•
•
•
安全开关启用
ASIC 电磁线圈驱动电路: 已禁用
近邻实际值 RPDO 的时间监控启用
主设备设置点 RPDO 的时间监控禁用
PVED-CX 发送实际值 PDO。
PVED-CX 不控制阀芯。
设置点和实际值的比较启用。
近邻阀门模拟和数字实际值的比较禁用(手动运行模式)或启用(完全运行模式)。
近邻设置点和近邻实际值(数字)的比较禁用(手动运行模式)或启用(完全运行模式),具体
取决于所选择的“设备模式”。
安全开关: 已启用
ASIC 电磁线圈驱动电路: 已禁用
近邻实际值 RPDO 的时间监控启用
设置点 RPDO 的时间监控禁用
PVED-CX 设备发送实际值 PDO。
PVED-CX 不控制阀芯。使用手柄控制阀门。
自身设置点和实际值的比较禁用
近邻阀门模拟和数字实际值的比较启用
近邻设置点和近邻实际值(模拟)的比较禁用
©
Danfoss | 2017 年 6 月
完全运行模式
在此状态下,所有功能均启用。
安全开关: 已启用
•
ASIC 电磁线圈驱动电路: 已启用
•
近邻实际值 RPDO 的时间监控启用
•
设置点 RPDO 的时间监控启用
•
PVED-CX 在 CAN 总线上发送实际值 PDO
•
PVED-CX 按照设置点值的定义控制阀芯
•
自身设置点和实际值的比较启用
•
近邻阀门模拟和数字实际值的比较启用
•
近邻设置点和近邻实际值(模拟)的比较启用
•
ASSIST
模式
安全开关: 已启用
•
ASIC 电磁线圈驱动电路: 已启用
•
近邻实际值 RPDO 的时间监控启用
•
设置点 RPDO 的时间监控启用
•
11070179 | BC00000068zh-CN0503 | 59

技术样本
PVED-CX 系列 4 电液驱动器
状态机
•
•
•
•
•
PVED-CX 手动运行模式
•
•
•
•
•
•
•
•
•
PVED-CX 与控制分区和主设备通信。
阀门使用预先编程的值转出
设置点和实际值的比较启用
近邻模块模拟和数字实际值的比较启用
近邻设置点和近邻实际值(模拟)的比较启用。
安全开关: 已启用
ASIC 电磁线圈驱动电路: 已禁用
近邻实际值 RPDO 的时间监控启用
设置点 RPDO 的时间监控禁用
PVED-CX 设备发送实际值 PDO。
PVED-CX 不控制阀芯。使用手柄控制阀门。
自身设置点和实际值的比较禁用
近邻阀门模拟和数字实际值的比较启用
近邻设置点和近邻实际值(模拟)的比较禁用
PVED-CX 完全运行模式
在此状态下,所有功能均启用。
安全开关: 已启用
•
ASIC 电磁线圈驱动电路: 已启用
•
近邻实际值 RPDO 的时间监控启用
•
设置点 RPDO 的时间监控启用
•
PVED-CX 在 CAN 总线上发送实际值 PDO
•
PVED-CX 按照设置点值的定义控制阀芯
•
自身设置点和实际值的比较启用
•
近邻阀门模拟和数字实际值的比较启用
•
近邻设置点和近邻实际值(模拟)的比较启用
•
ASSIST 模式
安全开关: 已启用
•
ASIC 电磁线圈驱动电路: 已启用
•
近邻实际值 RPDO 的时间监控启用
•
设置点 RPDO 的时间监控启用
•
PVED-CX 与控制分区和主设备通信。
•
阀门使用预先编程的值转出
•
设置点和实际值的比较启用
•
近邻模块模拟和数字实际值的比较启用
•
近邻设置点和近邻实际值(模拟)的比较启用。
•
60 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
状态机
FAULT_REACTION 状态:
这是 CANopen 主节点和网络上其他节点截获的即时的瞬时状态。PVED-CX 设备从此处立即变为故障
暂停或故障状态。
故障暂停状态:
发生某些警告类型的故障且不存在重要或严重类型故障时,PVED-CX 设备将进入此状态
发送 EMCY 帧
•
•
•
•
•
•
•
•
•
安全开关: 已启用
ASIC 电磁线圈驱动电路禁用
近邻实际值 RPDO 的时间监控启用
主设备设置点 RPDO 的时间监控禁用(手动运行模式)或启用(完全运行模式),具体取决于所
选择的“设备模式”。
PVED-CX 设备发送实际值 PDO
PVED-CX 不控制阀芯。
自身设置点和实际值的比较禁用
近邻阀门的模拟和数字实际值比较禁用(手动运行模式)或启用(完全运行模式),具体取决于
所选择的“设备模式”。
近邻设置点和近邻实际值(数字)的比较禁用(手动运行模式)或启用(完全运行模式),具体
取决于所选择的“设备模式”。
故障状态:
状态变换
系统中发生重要或严重类型故障时,PVED-CX 设备进入此状态。它发出相应的 EMCY 帧。PVED-CX 设
备需要重启才能退出故障状态。
安全开关: 已禁用
•
ASIC 电磁线圈驱动电路禁用
•
PVED-CX 不控制阀芯。
•
近邻实际值 RPDO 的时间监控启用
•
主设备设置点 RPDO 的时间监控禁用
•
PVED-CX 设备上在 CAN 总线上发送实际值 PDO
•
自身设置点和实际值的比较禁用
•
近邻阀门模拟和数字实际值的比较启用
•
近邻设置点和近邻实际值(数字)的比较禁用
•
执行从故障保持到暂停状态的变换时,PVED-CX 设备会检查系统中是否有活动错误。如果有活动错
误,则不会发生此变换。
从故障状态到禁用状态的变换已删除,并且状态变换不适用于 PVED-CX 设备
对于从主设备触发的任何无效变换,PVED-CX 设备都会响应成功 SDO 写入响应帧,但会发出一个
EMCY 帧,表明设备状态机相关错误,如设备控制错误,并变换为故障暂停状态。另外,索引
0x6041 处的设备状态词汇不会更新。
©
Danfoss | 2017 年 6 月
从启动状态进入禁用状态之前,PVED-CX 设备需要处于“运行”状态,否则会被视为无效变换
PVED-CX 设备针对各种 LSS 标识和查询服务的响应会使用相同的消息 ID 和数据内容进行发送。这可
能会在总线上同时产生多个具有相同消息 ID 和数据内容的消息。例如,总线上默认配置的多个
11070179 | BC00000068zh-CN0503 | 61

技术样本
PVED-CX 系列 4 电液驱动器
状态机
PVED-CX 和主设备尝试执行“识别未配置的远程从服务”。此类情况下,CAN 总线上可能会发生冲
突。
需要主设备将 PVED-CX 设备从启动状态(启动之后)带入活动设备模式,一直到禁用和暂停状态,
因此让 PVED-CX 阀门进入完全运行状态。
当 DSM 进入启动状态,如重新加载默认值“设备专用参数”时,PVED-CX 会重置“设备专用区域”
内的参数。“通信”和“制造商专用”区域内的参数值保持不变。
62 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
限制和已知软件问题
•
•
•
•
•
•
•
•
•
设置点范围为 ±127。不建议使用 –128 至 +127,因为此输入不对称。
建议在阀门处于禁用状态时对其执行保存和重新加载运行。
事件计时器实施
PVED-CX 设备会对事件计时器值进行上下限修正。因为根据 CANopen 规范的规定,事件计时
‒
器对象的值范围为 0 - U16Max,其中 0 为用于禁用时间监控的特殊值,无法对 SDO 运行的这
些子索引分别设置 30 ms 和 250 ms 的实际上下限值。因此,如果主设备对事件计时器子索引
配置 1 到 29 ms 之间的任何值,则会执行下限修正,并开始以 30 ms 的超时值执行时间监
控。与之类似,如果主设备对事件计时器子索引配置超过 250 ms 的任何值,则会执行上限修
正,并开始以 250 ms 的超时值执行时间监控。
LSS
PVED-CX 只有处于 NMT 已停止状态或启动时带有无效 Self-NodeID 值 0xFF 时才会处理 LSS 命
‒
令。
– LSS 从设备(如正在配置的 PVED-CX)无法验证是否还有其他 LSS 从设备也处于配置状
‒
态。这就意味着,LSS 主设备负责 LSS 服务请求的修正和顺序。
– PVED-CX 对于各种 LSS 表示和查询服务的响应使用相同的消息 ID 发送,且具有相同的数据
‒
字节内容。这可能会在 CAN 总线上同时产生多个具有相同消息 ID 和数据内容的消息。例如,
总线上默认配置的多个 PVED-CX 和主设备尝试执行“识别未配置的远程从服务”。此类情况
下,CAN 总线上可能会发生冲突。
设备控制 RxPDO -
如果主设备同时更改设备控制 RxPDO 中的设备控制词汇和设备模式值,PVED-CX 设备会接
‒
受。PVED-CX 设备首先处理新的设备模式,然后处理新的设备控制词汇。
默认 PDO 映射不完全符合 CiA-408
‒
TPDO 不支持异步循环传输类型
‒
PVED-CX 设备充当 EMCY 使用方,处理发送给它的、消息 ID 为 0x81 的 EMCY 消息。收到 COB-ID
为 0x81 的消息中错误代码为 0x1000 的 EMCY 时,PVED-CX 设备进入 NMT 已停止状态。
该应用程序设计能够处理大于 90% 的总线负载,但建议最高总线负载为 70%。
当设备在 CAN 总线上传输其阀芯位置相关 TxPDO 时,可能会在更改传输类型时丢失其当前同步
时间段,因为它们不再侦听同步消息。一旦成功配置并响应了新的传输时间之后,设备则开始沿
用新的同步时间段。建议更改传输类型时停止同步消息。
死区补偿: 主设备更改死区补偿时应谨慎,因为考虑到 IR,主设备不应将其配置为低于 101 和高
于 214(约 1.5 mm)的值。
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 63

W
技术样本
PVED-CX 系列 4 电液驱动器
警告
PVED-CX 警告
使用 PVED-CX 无法保证系统获得 SIL 2 认证,因为这是系统集成商的责任。
具有 PVG 32 和 PVED-CX 的应用只能在整个应用获得认证时才具有 SIL 分类。
只有符合本产品样本中的条件的情况下,带 PVED-CX 的 PVG 才能根据其 SIL 分类执行。
SIL 2 仅在控制分区中验证。本产品不保证控制分区之外的通信和交互。
尤其在环境暴露应用中,建议采用防护罩。
当 PVED-CX 处于故障相关设备模式时,模块报告的有效性受故障类型的限制。
安装部件时不使用推荐扭矩可能损害性能和模块。
请勿调节位置传感器 (LVDT),因为这样会影响校准,从而影响安全性和性能。LVDT 的任何损坏或部
分/完全固定 LVDT 也可能造成此类影响。
所有品牌和类型的方向控制阀(包括比例阀)都有可能发生故障,造成严重伤害。因此,全面分析
该应用非常重要。由于比例阀用于许多不同应用并且在不同操作条件下使用,因此机器生产商/系统
集成商应负责最终选择产品,确保达到应用的各项性能、安全与警告要求。
更换 PVE 时,必须关闭电气和液压系统,释放油压。
液压油可能导致环境损坏和人员受伤。
模块更换可能会向系统内引入污染和错误。务必保持作业区域的洁净,组件应轻拿轻放。
更换模块和线缆之后,必须通过 ASSIST 验证接线质量。在低于标称值 11V 的电压下进行 PVED 驱动
时,PVG 性能会下降。
使用 PVED-CX 的电压超过标称值的时间在每小时内不能超过 5 分钟,也不能超过运行时间的 10%。
在低于 0°C [32°F] 的 PCB 温度下运行时,由于阀芯监控导致到故障模式的变换会延迟。
如果存在故障条件,PVED-CX 将进入安全状态。
先导油的障碍可能会对阀芯控制产生直接影响。
先导压力不足会对阀芯控制造成限制。先导压力过高可能损坏系统。
线缆专门用于 PVED-CX。在 0°C [32°F] 以下温度处理线缆时,避免扭曲和粗暴拿放。
警告
64 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
索引 1 • 常用名称: 保留
对象 库 索引 0x2000
CANopen 名称:保留
错误代码:ID 0x8200
严重度:0
错误寄存器:0x11
错误类型:0
筛选:无
发现:保留
问题:保留
可能根本原因:保留
对应措施:更换模块
取消激活:不可用。
索引 2 • 常用名称: 电压过高
对象 库 索引 0x2001
CANopen 名称:电压过高
错误代码:ID 0x3411
严重度:警告
错误寄存器:0x5
错误类型:应用
筛选:是
发现:PVED 中的 AD 变压器显示 Vbat 或 Vbat2 上的电压超过 35,5 V 的时间长于 500ms。基于采样时
间的电压,受计数器控制。采样时间的过电压会将计数器加 1,否则计数器减 1。50 次时引发故障。
问题:内部计算可能出现错误的参考电压
可能根本原因 A: 供应电压超过 35,5 V。
B: uC 内出现内部错误
对应措施 A: 电源电压降低到 32V 以下。
--- 如果采取了高电压控制措施仍然多次发生,则更换模块
取消激活:故障消失时模块可运行。当低于 35.5V 电压的采样总数(减去高电压采样数)为 50 时,
则表示故障消失。
索引 3 • 电压过低
©
Danfoss | 2017 年 6 月
对象 库 索引 0x2002
CANopen 名称:电压过低
错误代码:ID 0x3412
严重度:警告
错误寄存器:0x5
错误类型:应用
11070179 | BC00000068zh-CN0503 | 65

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
筛选:是
发现:PVED 中的 AD 变压器显示 Vbat 或 Vbat2 上的电压低于 9V 的时间长于 500ms。基于采样时间
的电压,受计数器控制。采样时间的欠电压会将计数器加 1,否则计数器减 1。
50 次时引发故障。
问题:模块中的电流过高,造成过热。电子元件无法正常运行
可能根本原因 A: 供应电压低于 9 V。
B: uC 内出现内部错误
对应措施 A: 将供电电压调整到 11V 以上。
--- 如果采取了高电压控制措施仍然多次发生,则更换模块
取消激活:故障消失时模块可运行。过程同上。
索引 4 • 非法状态命令
对象 库 索引 0x2003
CANopen 名称:设备控制
索引 5 • 被零除,非法软件运算
错误代码:ID 0x5200
严重度:警告
错误寄存器:0x21
错误类型:应用
筛选:无
发现:DSM 尝试切换到某个状态,但由于状态机变换无法完成, 如启动->暂停,或故障->暂停。此
错误的另一个原因可能是发出了从故障到禁用的变换请求,但一个活动错误阻止了此变换。
问题:非法命令违反安全概念
可能根本原因 A: PVED 启动一个安全相关开关的同时主设备发出了状态变换命令。
B: 在活动错误期间发出了状态变换命令。
C: 来自主设备的状态变换命令非法。
对应措施 A: 验证非法命令。
B: 发送合法事务。
C: 重置应用程序。
--- 如果多次发生则更换模块。
取消激活:发送合法状态事务。
66 | © Danfoss | 2017 年 6 月
对象 库 索引 0x2004
CANopen 名称:被零除
错误代码:ID 0x6201
严重度:严重
错误寄存器:0x81
错误类型:应用
筛选:无
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
发现:用于除数的表值或输入值为 0。
问题:运算将 uC 置于故障模式
可能根本原因:电气输入超出范围,组件中发生电气干扰或故障
对应措施 A: 重启模块。
--- 如果多次发生,则更换模块
取消激活:重新通电
索引 6 • 内部表值损坏,非法软件运算
对象 库 索引 0x2005
CANopen 名称:需求值生成
错误代码:ID 0x6202
严重度:严重
错误寄存器:0x81
错误类型:应用
索引 7 • 错误数据解释,值截短
筛选:无
发现:设置点或校准的内部表值超出范围
问题:计算无法信任
可能根本原因:组件中发生电气干扰或故障
对应措施 A: 重启模块。--- 如果多次发生,则更换模块
取消激活:重新通电
对象 库 索引 0x2006
CANopen 名称:变量截短
错误代码:ID 0x6203
严重度:严重
错误寄存器:0x81
错误类型:应用
筛选:无
发现:计算结果超出范围软件错误,表明(不希望)发生了变量截短。
问题:计算无法信任
可能根本原因:组件中发生电气干扰或故障
对应措施 A: 重启模块。--- 如果多次发生,则更换模块
取消激活:重新通电
索引 8 • 内插法错误,非法软件运算
对象 库 索引 0x2007
CANopen 名称:内插法错误
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 67

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
错误代码:ID 0x6204
严重度:严重
错误寄存器:0x81
错误类型:应用
筛选:无
发现:使用了外推法代替了内插法,或者内插坐标互相重叠
问题:计算无法信任
可能根本原因 A: 发现或参数值无法提供所需值。
B: 组件中发生电气干扰或故障
对应措施 A: 重启模块。--- 如果多次发生,则更换模块
取消激活:重新通电
索引 9 • 与 uC 之间无握手
对象 库 索引 0x2008
索引 10 • 监控器未启动
CANopen 名称:监控器握手
错误代码:ID 0x6205
严重度:严重
错误寄存器:0x81
错误类型:应用
筛选:无
发现:PVED 微控制器未获取输入。针脚 3 和 4 未从监控器识别预期输入
问题:计算无法信任
可能根本原因:组件中发生电气干扰或故障
对应措施 A: 重启模块。--- 如果多次发生,则更换模块
取消激活:重新通电
对象 库 索引 0x2009
CANopen 名称:监控器开机自检
错误代码:ID 0x6206
严重度:严重
68 | © Danfoss | 2017 年 6 月
错误寄存器:0x81
错误类型:应用
筛选:无
发现:监控器的启动顺序无法识别为正确顺序
问题:缺少安全系统部分正确启动确认
可能根本原因:组件中发生电气干扰或故障。或者同一个固件下载了两次,然后模块重启速度不够
快。
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
对应措施 A: 重启模块。--- 如果多次发生,则更换模块
取消激活:重新通电
索引 11 • RTOS 错误
对象 库 索引 0x200A
CANopen 名称:RTOS 错误
错误代码:ID 0x6207
严重度:严重
错误寄存器:0x81
错误类型:应用
筛选:无
发现:操作系统运行不正常。任务创建、任务挂起或缓冲区访问等问题
问题:系统无法信任
可能根本原因:组件中发生电气干扰或故障
索引 12 • LVDT 验证错误
对应措施 A: 重启模块。--- 如果多次发生,则更换模块
取消激活:重新通电
对象 库 索引 0x200B
CANopen 名称:传感器模块 LVDT
错误代码:ID 0x5231
严重度:重要
错误寄存器:0x21
错误类型:应用
筛选:是
发现:在 500ms 以上的时间内未检测到一个或多个有效的 LVDT 测试参数
问题:阀芯位置无法信任
可能根本原因:LVDT 强制离开位置,组件中发生电气干扰或故障
对应措施 A: 验证 LVDT 的外部影响。
B: 重置应用程序。
--- 如果多次发生,则更换模块
索引 13 • 近邻 LVDT 故障
©
Danfoss | 2017 年 6 月
取消激活:重置应用程序
对象 库 索引 0x200C
CANopen 名称:传感器近邻 LVDT
错误代码:ID 0x5232
严重度:重要
11070179 | BC00000068zh-CN0503 | 69

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
错误寄存器:0x21
错误类型:应用
筛选:无
发现:近邻 LVDT 的模拟输入不在规格范围内
问题:无法进行近邻监控和反应
可能根本原因 A: 模块未连接活动近邻。
B: 接线故障。
C: 近邻发送的信号无效。
D: 模块未读取电压。
对应措施 A: 连接活动近邻。
B: 检查接线。
C: 将近邻与其他模块相连,或验证输出电压。
D: 连接其他模块。
索引 14 • 温度传感器故障
索引 15 • RAM 故障
取消激活:重置应用程序
对象 库 索引 0x200D
CANopen 名称:传感器: 模块温度
错误代码:ID 0x5233
严重度:重要
错误寄存器:0x21
错误类型:应用
筛选:无
发现:温度传感器的输入不在规格范围之内
问题:无法进行温度监控
可能根本原因:组件中发生电气干扰或故障
对应措施 A: 重置应用程序。--- 如果多次发生,则更换模块
取消激活:重置应用程序
对象 库 索引 0x200E
70 | © Danfoss | 2017 年 6 月
CANopen 名称:RAM: 启动检测
错误代码:ID 0x5511
严重度:严重
错误寄存器:0x81
错误类型:应用
筛选:无
发现:发现 iRAM 和 xRAM 检测失败。RAM 单元在 0 或 1 处存储
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
问题:计算无法信任
可能根本原因:组件中发生电气干扰或故障
对应措施 A: 重启模块。--- 如果多次发生,则更换模块
取消激活:重新通电
索引 16 • 平均温度过高
对象 库 索引 0x200F
CANopen 名称: PCB 平均温度过高
错误代码:ID 0x4223
严重度:警告
错误寄存器:0x9
错误类型:应用
筛选:无
发现:PCB 的平均温度计算值过高 高于 85oC
索引 17 • 代码内存检查错误
问题:电子元件的有效性受到威胁
可能根本原因:模块过热
对应措施:系统通电超过 6 分钟时冷却模块
取消激活:重置应用程序
对象 库 索引 0x2010
CANopen 名称:FLASH 程序内存 CRC16
错误代码:ID 0x5521
严重度:严重
错误寄存器:0x81
错误类型:应用
筛选:无
发现:构建源文件时 FLASH(程序内存)的 CRC16 在线计算与 CRC 校验和工具计算和在映像中戳记
的内容不匹配。
问题:PVED 的程序内存可能损坏
可能根本原因:组件中发生电气干扰或故障
对应措施:重新通电
索引 18 • 保留
©
Danfoss | 2017 年 6 月
--- 如果多次发生则更换模块。
取消激活:重新通电
对象 库 索引 0x2011
CANopen 名称:ERR_RESERVED_2
11070179 | BC00000068zh-CN0503 | 71

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
错误代码:ID 0x5531
严重度:保留
错误寄存器:0x81
错误类型:保留
筛选:无
发现:保留
问题:保留
可能根本原因:保留
对应措施:保留
取消激活:保留
索引 19 • EEPROM 写入故障
对象 库 索引 0x2012
CANopen 名称:EEPROM 已验证写入单元
索引 20 • EEPROM 内容错误
错误代码:ID 0x5532
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:未能识别 EEPROM 写入验证
问题:EEPROM 的内容可能不正确,因此 PVED 可能运行不正常
可能根本原因:组件中发生电气干扰或故障
对应措施 A: 如果与 EDS 更改有关,则重新执行更改。
B: 重置应用程序。
--- 如果多次发生,则更换模块
取消激活:重置应用程序
对象 库 索引 0x2013
CANopen 名称:EEPROM CRC16 错误
错误代码:ID 0x5533
严重度:严重
72 | © Danfoss | 2017 年 6 月
错误寄存器:0x81
错误类型:应用
筛选:无
发现:EEPROM CRC 值无法识别为预期值 此故障仅在启动时发生。
问题:EEPROM 的内容可能不正确或 uC 发生故障,因此 PVED 可能运行不正常
可能根本原因:组件中发生电气干扰或故障
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
对应措施 A: 重启模块。
--- 如果多次发生,则更换模块
取消激活:重新通电
索引 21 • EEPROM 镜像故障
对象 库 索引 0x2014
CANopen 名称:EEPROM 回退到旧数据
错误代码:ID 0x5534
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:主分区和镜像分区的 EEPROM 不一致,但其中一个的 CRC 值正确
问题:EEPROM 的副本不完全相同,因此一个 CRC 有效版本替代了不正确的版本。因此,旧值可能
更换了新值。
可能根本原因:EEPROM 写入过程中发生断电
索引 22 • 死区参数超出范围
对应措施 A: 如果与 EDS 更改有关,则验证内容。
B: 重置应用程序。
--- 如果多次发生,则更换模块
取消激活:重置应用程序
对象 库 索引 0x2015
CANopen 名称:参数误差死区补偿
错误代码:ID 0x6321
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:正向一侧的死区超出 [0, 1000] 范围,或负向一侧的死区超出 [-1000, 0] 范围
问题:某个安全设置禁止了运行
可能根本原因:设置错误
对应措施:定义范围之内的死区
索引 23 • 保留
©
Danfoss | 2017 年 6 月
取消激活:重置应用程序
对象 库 索引 0x2016
CANopen 名称:ERR_RESERVED_3
11070179 | BC00000068zh-CN0503 | 73

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
错误代码:ID 0x8110
严重度:保留
错误寄存器:0x11
错误类型:保留
筛选:无
发现:保留
问题:保留
可能根本原因:保留
对应措施:保留
取消激活:保留
索引 24 • CAN 错误帧警告
对象 库 索引 0x2017
CANopen 名称:CAN 处于错误被动模式下
错误代码:ID 0x8120
严重度:警告
错误寄存器:0x11
错误类型:通信
筛选:无
发现:CAN 收发器错误计数超过警告水平 96,CAN 芯片正在进入被动模式
问题:PVED 可能进入错误的被动模式。
可能根本原因 A: 总线上的通信非法。
B: 接线故障。
C: 组件中发生电气干扰或故障
对应措施:评估通信和组件。如果模块停止发送,则重置通信。
取消激活:通过通信停止,重置通信(应用)
索引 25 • 丢失来自主设备的信号
对象 库 索引 0x2018
CANopen 名称:运行保护心跳故障,主设备无心跳消息监控,因此未使用故障代码
错误代码:ID 0x8130
严重度:警告
74 | © Danfoss | 2017 年 6 月
错误寄存器:0x11
错误类型:0
筛选:0
发现:未引发故障
问题:没有来自主设备的信号
可能根本原因:通信中断
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
对应措施 A: 验证主设备信号
B: 验证通信线路
--- 如果多次发生且未发现外部故障,则更换模块。
取消激活:0
索引 26 • 从总线关闭恢复
对象 库 索引 0x2019
CANopen 名称:从总线关闭恢复
错误代码:ID 0x8140
严重度:警告
错误寄存器:0x11
错误类型:通信
筛选:无
发现:模块曾经处于 CAN 被动模式,但现在已不处于该模式。
索引 27 • 命令信号错误
问题:来自模块的 CAN 通信已中断,但 PVED 现已开始重新传输
可能根本原因:CAN 线路发生干扰
对应措施:无 仅供参考。调查干扰源
取消激活:不可用
对象 库 索引 0x201A
CANopen 名称:由于长度错误,PDO 未处理
错误代码:ID 0x8210
严重度:严重
错误寄存器:0x11
错误类型:通信
筛选:无
发现:某个 PDO 不符合标准,收到的 PDO 长度不正确。
问题:命令被忽略
可能根本原因:控制器发送了未定义的消息
对应措施:验证控制信号格式
索引 28 • 保留
©
Danfoss | 2017 年 6 月
取消激活:重新通电
对象 库 索引 0x201B
CANopen 名称:ERR_RESERVED_5
错误代码:ID 0x8303
严重度:保留
11070179 | BC00000068zh-CN0503 | 75

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
错误寄存器:0x81
错误类型:保留
筛选:无
发现:保留
问题:保留
可能根本原因:保留
对应措施:保留
取消激活:保留
索引 29 • 保留
对象 库 索引 0x201C
CANopen 名称:ERR_RESERVED_6
错误代码:ID 0x8304
严重度:保留
索引 30 • 阀芯未在设置点
错误寄存器:0x81
错误类型:保留
筛选:无
发现:保留
问题:保留
可能根本原因:保留
对应措施:保留
取消激活:保留
对象 库 索引 0x201D
CANopen 名称:CL 监控: 严重变化
错误代码:ID 0x8305
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:是
76 | © Danfoss | 2017 年 6 月
发现:LVDT 显示发现超出设置点位置。超过 0,84 mm,时间长于 500 ms。此故障只会与流量命令同
时发生。
问题:流量不正确。阀芯位置与反馈中的报告相同。
可能根本原因 A: PVM 已推动。
B: 油液粘度过高 – 阀芯行程减小速度不够快。
C: 污染使得先导油系统运行不正常。
对应措施 A: 验证阀芯是否能够自由移动。
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
B: 等待粘度符合规格范围。
--- 如果多次发生则更换模块。
取消激活:重置应用程序
索引 31 • 阀芯超出中位
对象 库 索引 0x201E
CANopen 名称:CL 监控: 阀芯意外移动
错误代码:ID 0x8306
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:是
发现:LVDT 反馈显示阀芯超出中位 1.0 mm 的时间超过自检 TWM 超时时间。此故障只会与流量命令
同时发生。
问题:流量不符合要求。
索引 32 • 启动时阀芯超出中位
可能根本原因 A: PVM 已推动。
B: 污染使得先导油系统运行不正常。
对应措施 A: 验证阀芯是否能够自由移动。--- 如果多次发生则更换模块。
取消激活:重置应用程序
对象 库 索引 0x201F
CANopen 名称:CL 监控: 启动时主阀芯不在中位
错误代码:ID 0x8307
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:LVDT 反馈显示启动时阀芯超出中位 1.0 mm
问题:阀芯位置无法信任
可能根本原因 A: PVM 已推动。
B: 污染使得先导油系统运行不正常。
索引 33 • 电子元件温度过高
©
Danfoss | 2017 年 6 月
对应措施:验证阀芯是否能够自由移动。
--- 如果多次发生则更换模块。
取消激活:重置应用程序
对象 库 索引 0x2020
11070179 | BC00000068zh-CN0503 | 77

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
CANopen 名称: 电子元件瞬时温度过高
错误代码:ID 0x4224
严重度:重要
错误寄存器:0x9
错误类型:应用
筛选:无
发现:板载温度传感器的读数显示瞬时温度超过 100 °C 的时间长于 80 ms。
问题:电子元件可能不稳定
可能根本原因 A: 过热。
B: 传感器故障
对应措施 A: 冷却系统。
B: 验证温度测量的准确度。--- 如果多次发生则更换模块。
取消激活:重置应用程序
索引 34 • 来自近邻的 CAN 阀芯位置丢失
对象 库 索引 0x2021
CANopen 名称:监控器近邻超时实际值
错误代码:ID 0x8001
严重度:警告
错误寄存器:0x91
错误类型:通信
筛选:无
发现:模块在监控时间内未收到来自近邻的阀芯位置,该时间默认值为 100ms
问题:近邻监控有故障
可能根本原因 A: 接线故障。
B: 近邻无法发送
C: 模块无法接收
D: 近邻节点 ID 配置不正确
对应措施 A: 检查接线。
B: 重置通信或应用程序。
C: 检查配置的近邻节点 ID 是否正确以及是否映射到了组内的物理阀门 --- 如果多次发生则更换模块。
取消激活:重置两个模块的通信(应用程序)
索引 35 • 近邻 CAN 阀芯位置故障
对象 库 索引 0x2022
CANopen 名称:监控器近邻数据完整性
错误代码:ID 0x8002
严重度:重要
78 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
错误寄存器:0x91
错误类型:通信
筛选:无
发现:来自近邻的 CAN 总线阀芯位置报告有故障。位置和反向值不匹配。
问题:通信无法信任。
可能根本原因 A: 近邻发送的信号有错误。
B: 模块 CAN 解释有错误
对应措施 A: 重置应用程序。--- 如果多次发生则更换模块。切换位置以辨别有故障模块。
取消激活:重置应用程序
索引 36 • 无设置点
对象 库 索引 0x2023
CANopen 名称:设置点时间监控
错误代码:ID 0x8003
索引 37 • CAN 堆栈错误
严重度:警告
错误寄存器:0x91
错误类型:通信
筛选:无
发现:模块在监控时间内未识别到来自主设备的设置点,该时间默认值为 100ms
问题:丢失命令信号
可能根本原因 A: 接线故障。
B: 主设备无法发送。
C: 模块无法接收
对应措施 A: 检查主设备状态。
B: 检查接线。
C: 重置通信。
D: 重启系统 --- 如果多次发生则更换模块或接线。
在超时期内重新开始收到设置点消息时自动取消激活
对象 库 索引 0x2024
CANopen 名称:CANopen 堆栈错误
©
Danfoss | 2017 年 6 月
错误代码:ID 0x8201
严重度:严重
错误寄存器:0x11
错误类型:通信
筛选:无
发现:CANopen 协议堆栈中出现软件错误
11070179 | BC00000068zh-CN0503 | 79

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
问题:通信无法信任。
可能根本原因:组件中发生电气干扰或故障
对应措施:重新通电。--- 如果多次发生,则更换模块。
取消激活:重新通电
索引 38 • DSM 初始化失败
对象 库 索引 0x2025
CANopen 名称:设备专用: DSM 错误
错误代码:ID 0xFF01
严重度:严重
错误寄存器:0x11
错误类型:通信
筛选:无
发现:设备的内部设备状态机初始化不正确
索引 39 • A/D 变压故障
问题:无法控制 PVED
可能根本原因:组件中发生电气干扰或故障
对应措施 A: 重启模块。--- 如果多次发生则更换模块
取消激活:不可用。
对象 库 索引 0x2026
CANopen 名称:A/D 转换错误
错误代码:ID 0x5234
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:PVED 微控制器引发了一个内部 AD 转换错误标志
问题:PVED 无法评估模拟输入,如阀芯位置
可能根本原因:组件中发生电气干扰或故障
对应措施 A: 重置应用程序。--- 如果多次发生则更换模块。
索引 40 • ASSIST 状态故障
80 | © Danfoss | 2017 年 6 月
取消激活:重置应用程序
对象 库 索引 0x2027
CANopen 名称:ASSIST: 运行错误
错误代码:ID 0xFF10
严重度:严重
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
错误寄存器:0x81
错误类型:应用
筛选:无
发现:ASSIST 运行状态不是预期状态。内部 ASSIST 状态机。
问题:ASSIST 无法执行
可能根本原因:组件中发生电气干扰或故障
对应措施:重新通电。--- 如果多次发生则更换模块。
取消激活:重新通电
索引 41 • ASSIST 计时故障
对象 库 索引 0x2028
CANopen 名称:ASSIST: 总是时间监控
错误代码:ID 0xFF11
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:模块未收到最终的 ASSIST 成功消息
问题:ASSIST 无法执行
可能根本原因:组件中发生电气干扰或故障
对应措施:重置应用程序。--- 如果多次发生则更换模块。
取消激活:重置应用程序
索引 42 • 近邻 阀芯在启动时超出中位
对象 库 索引 0x2029
CANopen 名称:近邻的 CL 监控: 启动时主阀芯不在中位
错误代码:ID 0x8308
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:是
发现:近邻模块阀芯在启动时未处于中位。
©
Danfoss | 2017 年 6 月
问题:近邻阀芯可能不遵循命令。可能存在非预期流量风险。
可能根本原因:近邻未引发“启动时阀芯超出中位”故障。
A: 接线故障。
B: 近邻中的计算错误。
C: 模块中的计算故障。
对应措施 A: 检查接线。
11070179 | BC00000068zh-CN0503 | 81
技术样本
PVED-CX 系列 4 电液驱动器
错误代码
B: 重置应用程序。– 如果多次发生则更换模块。
取消激活:重置应用程序
索引 43 • ASSIST 近邻报告故障
对象 库 索引 0x202A
CANopen 名称:ASSIST: 模拟和 CAN 总线阀芯位置之间存在差异
错误代码:ID 0xFF12
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:ASSIST 模式下的近邻模拟和数字阀芯位置报告不匹配。
问题:ASSIST 无法执行
可能根本原因 A: 接线故障。
B: 电气干扰
C: 组件故障
对应措施 A: 检查接线。
B: 重置应用程序。--- 如果多次发生则更换模块。
取消激活:重置应用程序
索引 44 • ASSIST 阀芯未返回中位
对象 库 索引 0x202B
CANopen 名称:ASSIST: 阀芯不自行返回中位
错误代码:ID 0xFF13
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:Vbat2 关闭时阀芯未返回中位
问题:安全系统无法信任
可能根本原因 A: 机械故障阻挡阀芯返回
索引 45 • ASSIST 步骤故障
82 | © Danfoss | 2017 年 6 月
B: 安全开关无法中断。
对应措施 A: 检查阻断的 PVM。
B: 重置应用程序。--- 如果多次发生则更换模块
取消激活:重置应用程序
对象 库 索引 0x202C
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
CANopen 名称:ASSIST: 步骤完成消息检查失败
错误代码:ID 0xFF14
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:执行 ASSIST 时在 CAN 消息中收到的步骤顺序不正确
问题:ASSIST 无法执行
可能根本原因:组件中发生电气干扰或故障
对应措施:重置应用程序。--- 如果多次发生则更换模块。
取消激活:重置应用程序
索引 46 • ASSIST 近邻阀芯无法转出
对象 库 索引 0x202D
CANopen 名称:ASSIST: 近邻阀芯无法转出
错误代码:ID 0xFF15
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:ASSIST 模式 - 模块执行 ASSIST 时近邻无法移动阀芯
问题:近邻无法从受监控模块获取正确的阀芯位置反馈
可能根本原因:如果阀芯移动,近邻无法捕获此移动。
A: 接线问题, B: 近邻节点 ID 配置问题
对应措施 A: 检查接线。
B: 重置应用程序。--- 如果多次发生则更换模块。
取消激活:不可用。
索引 47 • ASSIST 近邻阀芯未返回中位
对象 库 索引 0x202E
CANopen 名称:ASSIST: 近邻阀芯未返回中位
错误代码:ID 0xFF16
©
Danfoss | 2017 年 6 月
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:Vbat2 关闭时近邻阀芯未返回中位
问题:安全系统无法信任
11070179 | BC00000068zh-CN0503 | 83

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
可能根本原因 A: 机械故障阻挡阀芯返回
B: 安全开关无法中断。
C: 近邻监控运行不正常
对应措施 A: 检查阻断的 PVM。
B: 重置应用程序。--- 如果多次发生则更换模块
取消激活:重置应用程序
索引 48 • ASSIST: A 油口流量过高
对象 库 索引 0x202F
CANopen 名称:ASSIST: A 油口的阀芯移动太多
错误代码:ID 0xFF17
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:在 ASSIST 模式下,测试此油口的阀芯移动时阀芯在 A 油口的移动距离超过了所需的 143IR (±7)
~ 1mm
问题:流量不符合命令要求。
可能根本原因:组件中发生电气干扰或故障
对应措施:重置应用程序或重新通电。--- 如果多次发生则更换模块
取消激活:重置应用程序
索引 49 • ASSIST: B 油口流量过高
对象 库 索引 0x2030
CANopen 名称:ASSIST: B 油口的阀芯移动太多
错误代码:ID 0xFF18
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:在 ASSIST 模式下,测试此油口的阀芯移动时阀芯在 B 油口的移动距离超过了所需的 143IR (±7)
~ 1mm
问题:流量不符合命令要求。
可能根本原因:组件中发生电气干扰或故障
对应措施:重置应用程序或重新通电。--- 如果多次发生则更换模块
取消激活:重置应用程序
索引 50 • ASSIST: A 油口流量过低
对象 库 索引 0x2031
84 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
CANopen 名称:ASSIST: A 油口的阀芯移动太少
错误代码:ID 0xFF19
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:在 ASSIST 模式下,测试此油口的阀芯移动时阀芯在 A 油口的移动距离少于所需的 143IR (±7) ~
1mm
问题:流量不正确。
可能根本原因 A: 阀芯被阻挡
B: 污染使得先导油系统运行不正常。
对应措施:验证阀芯是否能够自由移动。重置应用程序或重新通电。--- 如果多次发生则更换模块
取消激活:重置应用程序
索引 51 • ASSIST: B 油口流量过低
对象 库 索引 0x2032
CANopen 名称:ASSIST: B 油口的阀芯移动太少
错误代码:ID 0xFF1A
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:无
发现:在 ASSIST 模式下,测试此油口的阀芯移动时阀芯在 B 油口的移动距离少于所需的 143IR (±7) ~
1mm
问题:流量不正确。
可能根本原因 A: 阀芯被阻挡
B: 污染使得先导油系统运行不正常。
对应措施:验证阀芯是否能够自由移动。重置应用程序或重新通电。--- 如果多次发生则更换模块
取消激活:重置应用程序
索引 52 • 近邻 阀芯超出中位
对象 库 索引 0x2033
©
Danfoss | 2017 年 6 月
CANopen 名称:近邻的 CL 监控: 阀芯意外移动
错误代码:ID 0x8309
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:是
发现:近邻模块阀芯未根据命令要求保持于中位。
11070179 | BC00000068zh-CN0503 | 85

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
问题:近邻阀芯可能不遵循命令。可能存在非预期流量风险。
可能根本原因:近邻未引发“阀芯超出中位”故障。
A: 由于温差导致超时不同。
B: 设置点的极端变化。
C: 验证线缆安装是否正确
D: 近邻中的计算错误。
E: 模块中的计算故障。
对应措施 A: 检查接线。
B: 重置应用程序。
--- 如果多次发生则更换模块。
取消激活:重置应用程序
索引 53 • 近邻 阀芯未在设置点
对象 库 索引 0x2034
CANopen 名称:近邻的 CL 监控: 严重变化
错误代码:ID 0x830A
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:是
发现:近邻模块阀芯未沿用对应的设置点。
问题:近邻阀芯可能不遵循命令
可能根本原因:近邻未引发“阀芯未处于设置点”故障。
A: 由于温差导致超时不同。
B: 设置点的极端变化。
C: 接线故障。
D: 近邻中的计算错误。
E: 模块中的计算故障。
对应措施 A: 评估阀门运行。
B: 检查接线。
C: 重置应用程序。
--- 如果多次发生则更换模块。
取消激活:重置应用程序
索引 54 • 近邻 阀芯位置报告故障
对象 库 索引 0x2035
CANopen 名称:近邻的 CL 监控: 模拟和 CAN 总线阀芯位置之间存在差异
错误代码:ID 0x830B
86 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
错误代码
严重度:重要
错误寄存器:0x81
错误类型:应用
筛选:是
发现:CAN 总线上的近邻模块阀芯位置报告和模拟不匹配
问题:近邻阀芯位置无法信任
可能根本原因 A: 设置点的极端变化。
B: 接线故障。
C: 近邻中的计算错误。
D: 模块中的计算故障。
对应措施 A: 评估阀门运行。
B: 检查接线。
C: 重置应用程序。
索引 55 • 参考电压故障
索引 56 • 节点 ID 故障
--- 如果多次发生则更换模块。
取消激活:重置应用程序
对象 库 索引 0x2036
CANopen 名臣:ADC 参考电压或 SMPS 偏移
错误代码:ID 0x3111
严重度:重要
错误寄存器:0x5
错误类型:应用
筛选:是
发现:模拟到数字转换器的参考电压或模块 SMPS 的控制器不在限制范围 [2.25, 2.75]V 内
问题:LDVT、温度传感器、外部电池电压读数无法信任
可能根本原因:组件中发生电气干扰或故障
对应措施 A: 重置应用程序。--- 如果多次发生则更换模块。
取消激活:重置应用程序
©
Danfoss | 2017 年 6 月
对象 库 索引 0x2037
CANopen 名称:节点 ID 和组 ID 的配置
错误代码:ID 0x8004
严重度:严重
错误寄存器:0x81
错误类型:应用
筛选:无
11070179 | BC00000068zh-CN0503 | 87
技术样本
PVED-CX 系列 4 电液驱动器
错误代码
发现:PVED 检测到配置的近邻节点 ID 与其不属于同一个组
问题:PVED 无法运行。
可能根本原因 A: 节点和近邻不属于同一个 ID 组。
B: 节点和近邻的 ID 相同。
C: 节点和/或近邻 ID 无效。
对应措施:评估编号。设置有效编号。
取消激活:设置有效编号
索引 57 • EEPROM 地址错误
对象 库 索引 0x2038
CANopen 名称:EEPROM 地址无效
错误代码:ID 0x5535
严重度:严重
错误寄存器:0x81
索引 58 • 错误代码缓冲区
错误类型:应用
筛选:无
发现:向 EEPROM 读写期间,发生地址错误。应用程序尝试向低于 500 地址的 EEPROM 引导扇区写
入。
问题:系统无法信任
可能根本原因:组件中发生电气干扰或故障
对应措施:重新通电。--- 如果多次发生则更换模块。
取消激活:重新通电
对象 库 索引 0x2039
CANopen 名称:缓冲区溢流
错误代码:ID 0x6208
严重度:严重
错误寄存器:0x81
错误类型:应用
筛选:无
发现:错误代码软件缓冲区溢流。
88 | © Danfoss | 2017 年 6 月
问题:PVED 无法正常运行。
可能根本原因 A: 故障高发。
B: 组件中发生电气干扰或故障
对应措施:重新通电。--- 如果多次发生则更换模块。
取消激活:重新通电
11070179 | BC00000068zh-CN0503
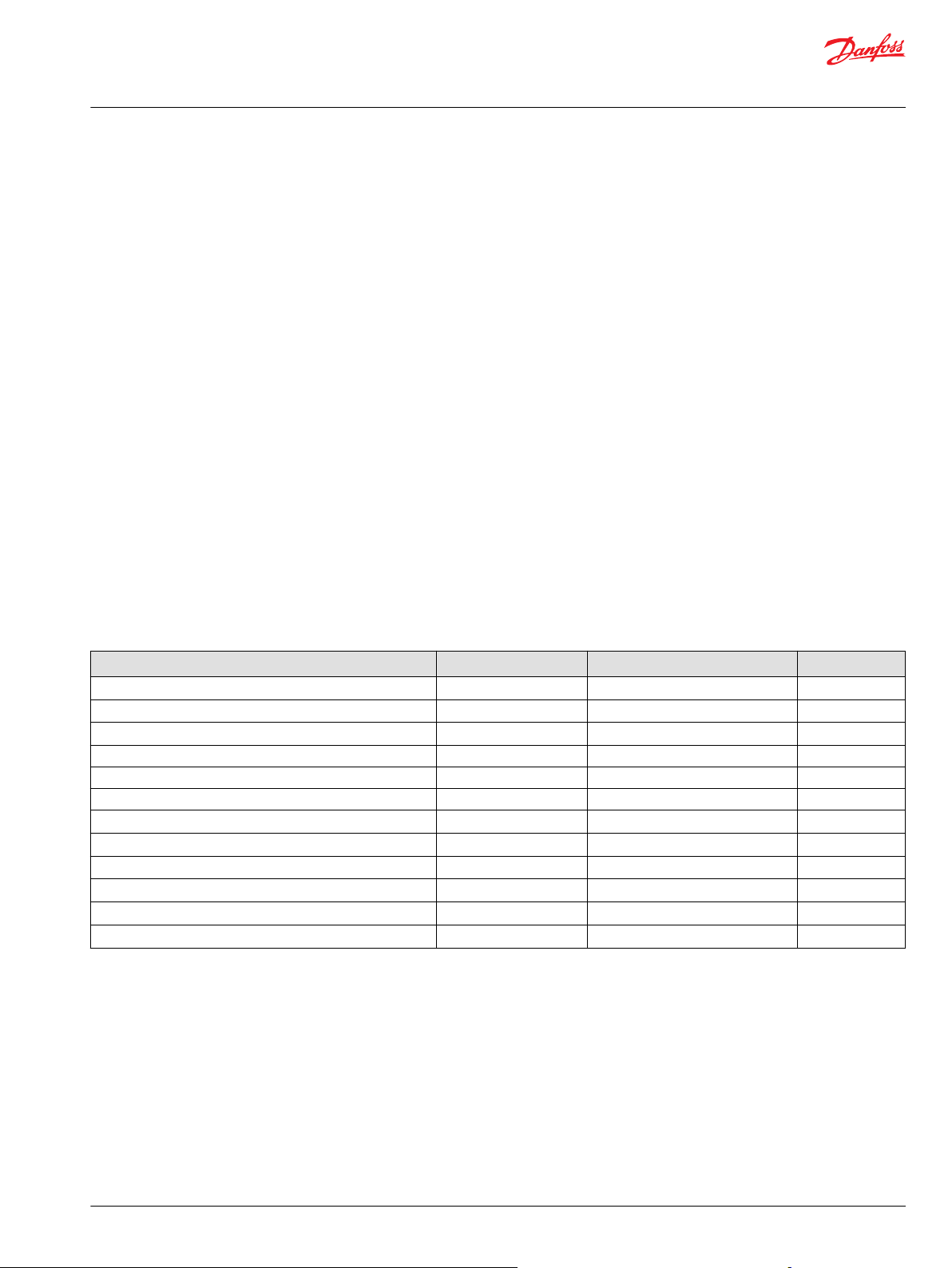
技术样本
PVED-CX 系列 4 电液驱动器
订购信息
设置协议
订购带 PVED-CX 的 PVG 32 时,必须发送设置协议和装置规格。协议形式可以为:
•
•
对于带 PVED-CX 的 PVG32 必须进行液压检测。
参数协议模板
客户 OEM 参数列表 - PVED-CX 的 OEM 数据
协议签订方
客户名称:
PVG 业务部门:丹佛斯
填表:
客户代表:
SD 销售代表:
用于一个规格的具体协议
PVG 的一般协议
日期:
备件 PVED-CX 的出厂设置
EDS 中的可配置参数,同图 31
名称 默认值 范围 索引,子索引
节点 ID
EMCY 禁止时间
生产商心跳时间
设置点时间监控
近邻阀芯位置时间监控
vpoc_neighbor_monitoring _additional_tolerence_in_IRCAN 3)200 0 - 1000 0x2101, -
自 TWM 超时
近邻 TWM 超时
同步消息事件计时器
设备说明
死区补偿 A
死区补偿 B
1)
CAN 上发布的两个 EMCY 之间的最短时间.
2)
参见“心跳消息”。
3)
位置和模拟位置之前的距离。
4)
从阻断设置点到情况好转监控的时间
5)
从上次同步到强制暂停状态的时间。
1)
2)
4)
5)
0xFF
0xC8
0x0
0x64 0x0 - 0xFA 0x1400, 5
0x64 0x0 - 0xFA 0x1402, 5
0xC8 0x0 - 0x1F4 0x2102, 1
0xC8 0x0 - 0x1F4 0x2102, 2
0x32 0x0 - 0xFA 0x2103, CANopen_R5.31
186 100 - 1000 0x6343, 1
-186 (-100) - (-1000) 0x6344, 1
参见图 26
0x64 - 0xC8,DEC 100 毫秒的倍数
如果不使用则为 0。
自由选择 32 个 ASCII
0x1015, 0x1017, -
0x6053, -
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 89

技术样本
PVED-CX 系列 4 电液驱动器
订购信息
用于 PVG 的 PVED-CX 设置协议
用于 PVG 的 PVED-CX 设置协议
PVED 1 PVED 2 PVED 3 PVED 4 PVED 5 PVED 6 PVED 7 PVED 8
节点 ID
近邻节点 ID
EMCY 禁止时间
生产商心跳时间
设备说明
死区补偿 A
死区补偿 B
0x10 0x11 0x12 0x13 0x14 0x15 0x16 0x17
0x17 0x10 0x11 0x12 0x13 0x14 0x15 0x16
0xC8 0xC8 0xC8 0xC8 0xC8 0xC8 0xC8 0xC8
0x0 0x0 0x0 0x0 0x0 0x0 0x0 0x0
CANopen
_R5.10
186 186 186 186 186 186 186 186
-186 -186 -186 -186 -186 -186 -186 -186
PVED 1 是离 PVP 最近的 PVED。所有更改的单元格均带有淡灰色阴影和粗体字体。该列表可扩展到十
二个模块 - 必须应用控制分区的关系。
控制分区概览
Ctrl sec
1 0x10 0x11 0x12 0x13 0x14 0x15 0x16 0x17
2 0x18 0x19 0x1A 0x1B 0x1C 0x1D 0x1E 0x1F
3 0x20 0x21 0x22 0x23 0x24 0x25 0x26 0x27
4 0x28 0x29 0x2A 0x2B 0x2C 0x2D 0x2E 0x2F
5 0x30 0x31 0x32 0x33 0x34 0x35 0x36 0x37
6 0x38 0x39 0x3A 0x3B 0x3C 0x3D 0x3E 0x3F
CANopen
_R5.10
节点 ID 和近邻节点 ID 组合
CANopen
_R5.10
CANopen
_R5.10
CANopen
_R5.10
CANopen
_R5.10
CANopen
_R5.10
CANopen
_R5.10
线缆接头关系
线缆组件中节点 ID 和近邻节点 ID 之间的关系
插头
近邻接头
示例
节点 ID
近邻节点 ID
J1 J2 J3
JN J1 J2
20 21 22
26 20 21
节点 ID 和功能之间的关联列表。
- 0x10 = 摆动等
- 0x11 = 扩展部分等
- 0x12 = …
- 0x13 =
- 0x14 =
- 0x15 =
- 0x16 =
- 0x17 =
- 0x18 =
- 0x19 =
- 0x1A =
- 0x1B =
- 0x1C =
- 0x1D =
- 0x1E =
- 0x1F =
…
…
…
…
JN
JN-1
26
25
90 | © Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503

技术样本
PVED-CX 系列 4 电液驱动器
订购信息
PVE-CX 代码
PVE-CX 代码
名称 描述 代码
PVED-CX
线缆组件 CX,AMP,2 个分区,4 m,不带端子
密封组件 用于 PVED-CX 的 O 形圈
用于 CANopen 的 PVED-CX
CX,AMP,3 个分区,4 m,不带端子
CX,AMP,4 个分区,4 m,不带端子
CX,AMP,5 个分区,4 m,不带端子
CX,AMP,6 个分区,4 m,不带端子
CX,AMP,7 个分区,4 m,不带端子
CX,AMP,8 个分区,4 m,不带端子
CX,AMP,5 个分区,1 m,J5 中带 120 Ohm 端子
CX,AMP,6 个分区,1 m,J6 中带 120 Ohm 端子
CX,AMP,7 个分区,1 m,J7 中带 120 Ohm 端子
CX,AMP,8 个分区,1 m,J8 中带 120 Ohm 端子
157B4960
11060924
11017564
11017565
11017566
11017567
11017568
11017569
11030722
11030723
11030724
11030725
157B4997
相关 EDS 文件的示例通过您的丹佛斯销售代表提供。
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503 | 91

Danfoss
Power Solutions GmbH & Co. OHG
Krokamp 35
D-24539 Neumünster, Germany
Phone: +49 4321 871 0
Danfoss
Power Solutions ApS
Nordborgvej 81
DK-6430 Nordborg, Denmark
Phone: +45 7488 2222
Danfoss
Power Solutions US Company
2800 East 13th Street
Ames, IA 50010, USA
Phone: +1 515 239 6000
Danfoss
Power Solutions
(Shanghai) Co., Ltd.
Building #22, No. 1000 Jin Hai Rd
Jin Qiao, Pudong New District
Shanghai, China 201206
Phone: +86 21 3418 5200
我们提供的产品包括:
Comatrol
www.comatrol.com
Schwarzmüller-Inverter
www.schwarzmuellerinverter.com
Turolla
www.turollaocg.com
Valmova
www.valmova.com
Hydro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss
www.daikin-sauer-danfoss.com
斜轴式发动机
•
闭路轴向柱塞泵和发动机
•
显示器
•
电液压动力转向器
•
电液压
•
液压动力转向器
•
集成系统
•
操纵杆和控制手柄
•
微控制器和软件
•
开路轴向柱塞泵
•
摆线马达
•
PLUS+1® GUIDE
•
比例阀
•
传感器
•
转向装置
•
搅拌式运料车
•
丹佛斯动力系统是一家全球化的制造商和供应商,生产并提供高品质的液压及电子元件。
我们为客户提供前沿的技术及解决方案,尤其专注于工况恶劣的非公路行走设备领域。基
于我们丰富成熟的应用经验,我们和客户紧密合作,确保采用我们产品的诸多非公路车辆
具备卓越的性能。
在全球范围内,我们帮助主机厂加速系统的研发、降低成本并使机器能更快的推向市场。
丹佛斯动力系统 — 行走液压领域强有力的合作伙伴。
有关更多产品信息,请访问 www.powersolutions.danfoss.cn
有非公路车辆工作的地方,就有丹佛斯动力系统。在全球范围内,我们为客户提供专业的
技术支持,最佳解决方案以实现卓越的机器性能。通过遍布世界的授权服务网络,针对所
有丹佛斯动力系统的产品,我们为客户提供综合的全球化服务。
请就近联系丹佛斯动力系统代表。
请联系:
丹佛斯对商品目录、手册和其他印刷材料中可能存在的错误概不负责。丹佛斯保留更改其产品的权利,恕不另行通知。这也适用于已订购的产品,但前提是在不影响既定规格的情况下才能做出此
类更改。
本材料的所有商标均属各自公司的财产。丹佛斯和丹佛斯标识都是丹佛斯公司的商标。保留所有权利。
©
Danfoss | 2017 年 6 月
11070179 | BC00000068zh-CN0503
 Loading...
Loading...